Mobile Rail Survey System - repository.tudelft.nl
134
M M o o b b i i l l e e R R a a i i l l S S u u r r v v e e y y S S y y s s t t e e m m Een nauwkeurig en betrouwbaar systeem voor spoormetingen? Afstudeerscriptie Jasper Hellemons Augustus 2009
Transcript of Mobile Rail Survey System - repository.tudelft.nl
MMoobbiillee RRaaiill SSuurrvveeyy SSyysstteemm
EEeenn nnaauuwwkkeeuurriigg eenn bbeettrroouuwwbbaaaarr ssyysstteeeemm
vvoooorr ssppoooorrmmeettiinnggeenn??
Afstudeerscriptie Jasper Hellemons
Augustus 2009

J.F.L.Hellemons Email : [email protected] Tel : 06-52034900 Afstudeerhoogleraar TU Delft: Prof. Dr. Ir. R. F. Hanssen Begeleider TU Delft: Dr. Ir. C.C.J.M. Tiberius Technische Universiteit Delft Faculteit Luchtvaart- en Ruimtevaarttechniek Geomatics Engineering
MMoobbiillee RRaaiill SSuurrvveeyy SSyysstteemm
EEeenn nnaauuwwkkeeuurriigg eenn bbeettrroouuwwbbaaaarr ssyysstteeeemm
vvoooorr ssppoooorrmmeettiinnggeenn??
Begeleider ARCADIS: Ir. R. van Noord ARCADIS BV Divisie Mobiliteit Adviesgroep Rail Survey

Voorwoord
ARCADIS v
Voorwoord Voor u ligt mijn afstudeerscriptie met als titel ‘Mobile Rail Survey System; Een nauwkeurig en betrouwbaar systeem voor spoormetingen?’ Deze scriptie is geschreven naar aanleiding van mijn afstudeeronderzoek van de opleiding Geodesie aan de Technische Universiteit Delft. Het onderzoek is uitgevoerd bij ingenieursbureau ARCADIS te Amersfoort, marktgroep railsurvey van de divisie mobiliteit. Het onderzoek is begeleid door de heer van Noord vanuit ARCADIS en door de heren Tiberius, Teunissen en Hanssen vanuit de TU Delft. Bij deze wil ik hen hartelijk bedanken voor het geven van adviezen en tips tijdens mijn afstuderen. Verder wil ik iedereen binnen ARCADIS bedanken voor het geven van adviezen en nog belangrijker de vaak gezellige momenten die hebben geleid tot een mooi vervolg. Ook wil ik alle bedrijven en personen waarmee ik contact heb gehad bedanken voor het voorzien van de benodigde informatie en adviezen. Tot slot wil ik mijn vrienden en natuurlijk mijn familie bedanken. Tijdens deze periode hebben zij veel voor mij geregeld, gedaan, maar ook gelaten… Dank jullie wel en veel leesplezier, Jasper Hellemons Amersfoort, augustus 2009
"Kwaliteit staat op nummer één, maar kwaliteit moet wel altijd in dienst staan van het geheel."
Johan Cruijff

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
vi ARCADIS
Samenvatting
ARCADIS vii
Samenvatting De werkzaamheden van de marktgroep Railsurvey van de divisie Mobiliteit van ARCADIS kunnen worden samengevat als de inwinning en verwerking van geodetische informatie van spoorgeometrie. Deze informatie wordt vervolgens gebruikt voor het ontwerp en realisatie van nieuwbouw, onderhoud en beheer van deze spoorgeometrie. Sinds een aantal jaar wordt deze ruimtelijke informatie veelal vastgelegd in een door ProRail opgesteld systeem, de Permanente Vastlegging Spoorgeometrie (PVS). Vanwege steeds strenger wordende veiligheidseisen is er een groeiende vraag naar een meetsysteem dat aan de gestelde kwaliteitseisen en veiligheidseisen kan voldoen. Doel van het onderzoek is om aan te geven of een dergelijk systeem haalbaar is met behulp van Global Positioning System (GPS), een traagheidsnavigatiesysteem en een laserscanner. Het onderzoek bestaat uit een kwaliteitsanalyse voor het inmeten van spoorgeometrie en een vertaling van eisen in een functioneel systeem. Dit heeft geresulteerd in de volgende hoofdvraag: Welke nauwkeurigheid en betrouwbaarheid is haalbaar met een meetsysteem bestaande uit GPS, INS en een laserscanner voor het meten van spoorgeometrie en hoe vertaalt dit zich in een functioneel model? De onderzoeksvragen zijn beantwoord op basis van literatuuronderzoek, het opstellen van een foutenmodel, het bedenken van een meetopzet en het uitvoeren van berekeningen. Een traagheidnavigatiesysteem is een complexe samenstelling van, in dit geval zes mechanische of optische sensoren. Elk van deze sensoren reageert op fysische effecten van buitenaf, systematische fouten en willekeurige interne ruis die afwijken van de gewenste situatie. Het is daarom belangrijk om deze effecten en foutenbronnen zo goed mogelijk te modelleren door middel van dynamische en stochastische modellen en daar waar mogelijk gebruik te maken van externe waarnemingen zoals GPS waarnemingen. Het model dat gedurende dit onderzoek is gebruikt is het dynamische foutenmodel. Het dynamische foutenmodel beschrijft namelijk de fysische en wiskundige relatie tussen instrumentfouten en de navigatie oplossing. Het foutenmodel is gebaseerd op een foutenafschatting van fysische grootheden en beschrijft hoe sensorfouten zich voortplanten in stand, positie en snelheid. De output van het dynamische foutenmodel is vervolgens gebruikt als input voor het Kalman filter. Het kalman filter is een recursieve kleinste kwadraten methode waarmee drie tijdsproblemen kunnen worden opgelost: de prediction, filtering en smoothing. Tijdens het grootste deel van het onderzoek zijn alleen de prediction en filtering van het Kalman filter gebruikt en het effect van de smoothing is apart onderzocht. De output van het Kalman filter is onder andere een standaardafwijking van stand en positie. De kalman filter output kan vervolgens worden gecombineerd met de specificaties van de laserscanner voor het uitvoeren van een kwaliteitsanalyse zonder gebruik te maken van echte GPS, INS en laserscandata.
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
viii ARCADIS
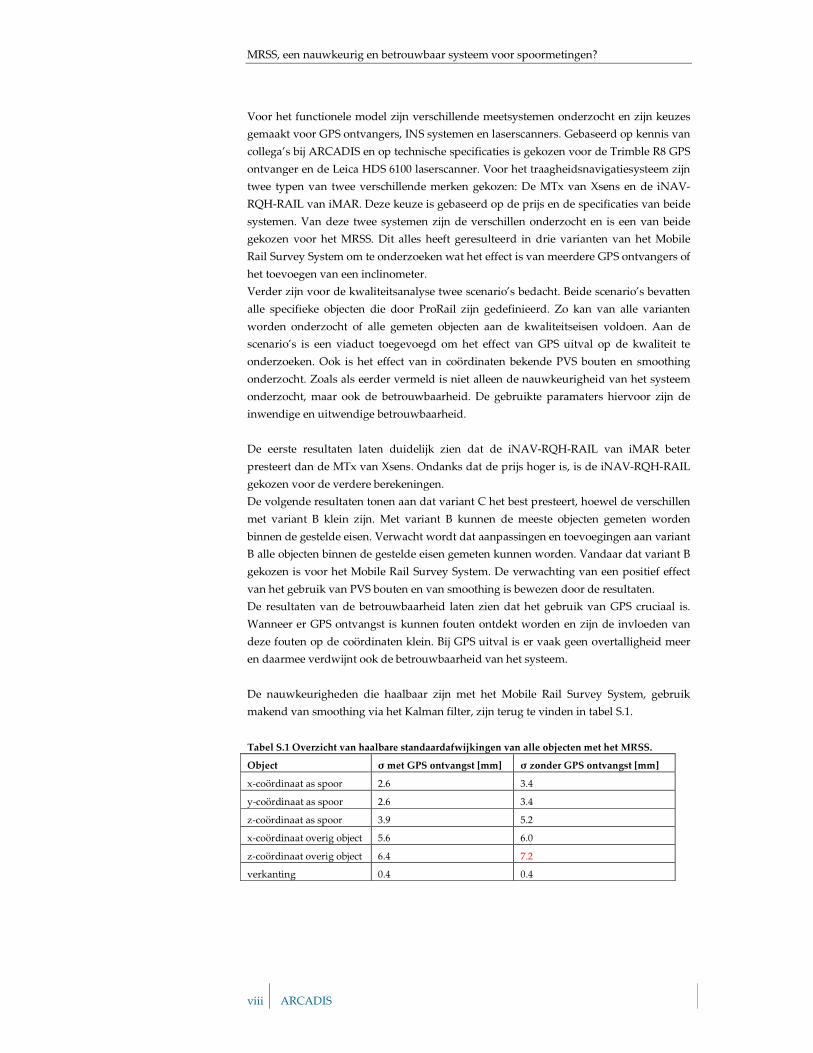
Voor het functionele model zijn verschillende meetsystemen onderzocht en zijn keuzes gemaakt voor GPS ontvangers, INS systemen en laserscanners. Gebaseerd op kennis van collega’s bij ARCADIS en op technische specificaties is gekozen voor de Trimble R8 GPS ontvanger en de Leica HDS 6100 laserscanner. Voor het traagheidsnavigatiesysteem zijn twee typen van twee verschillende merken gekozen: De MTx van Xsens en de iNAV-RQH-RAIL van iMAR. Deze keuze is gebaseerd op de prijs en de specificaties van beide systemen. Van deze twee systemen zijn de verschillen onderzocht en is een van beide gekozen voor het MRSS. Dit alles heeft geresulteerd in drie varianten van het Mobile Rail Survey System om te onderzoeken wat het effect is van meerdere GPS ontvangers of het toevoegen van een inclinometer. Verder zijn voor de kwaliteitsanalyse twee scenario’s bedacht. Beide scenario’s bevatten alle specifieke objecten die door ProRail zijn gedefinieerd. Zo kan van alle varianten worden onderzocht of alle gemeten objecten aan de kwaliteitseisen voldoen. Aan de scenario’s is een viaduct toegevoegd om het effect van GPS uitval op de kwaliteit te onderzoeken. Ook is het effect van in coördinaten bekende PVS bouten en smoothing onderzocht. Zoals als eerder vermeld is niet alleen de nauwkeurigheid van het systeem onderzocht, maar ook de betrouwbaarheid. De gebruikte paramaters hiervoor zijn de inwendige en uitwendige betrouwbaarheid. De eerste resultaten laten duidelijk zien dat de iNAV-RQH-RAIL van iMAR beter presteert dan de MTx van Xsens. Ondanks dat de prijs hoger is, is de iNAV-RQH-RAIL gekozen voor de verdere berekeningen. De volgende resultaten tonen aan dat variant C het best presteert, hoewel de verschillen met variant B klein zijn. Met variant B kunnen de meeste objecten gemeten worden binnen de gestelde eisen. Verwacht wordt dat aanpassingen en toevoegingen aan variant B alle objecten binnen de gestelde eisen gemeten kunnen worden. Vandaar dat variant B gekozen is voor het Mobile Rail Survey System. De verwachting van een positief effect van het gebruik van PVS bouten en van smoothing is bewezen door de resultaten. De resultaten van de betrouwbaarheid laten zien dat het gebruik van GPS cruciaal is. Wanneer er GPS ontvangst is kunnen fouten ontdekt worden en zijn de invloeden van deze fouten op de coördinaten klein. Bij GPS uitval is er vaak geen overtalligheid meer en daarmee verdwijnt ook de betrouwbaarheid van het systeem. De nauwkeurigheden die haalbaar zijn met het Mobile Rail Survey System, gebruik makend van smoothing via het Kalman filter, zijn terug te vinden in tabel S.1. Tabel S.1 Overzicht van haalbare standaardafwijkingen van alle objecten met het MRSS. Object σ met GPS ontvangst [mm] σ zonder GPS ontvangst [mm] x-coördinaat as spoor 2.6 3.4 y-coördinaat as spoor 2.6 3.4 z-coördinaat as spoor 3.9 5.2 x-coördinaat overig object 5.6 6.0 z-coördinaat overig object 6.4 7.2 verkanting 0.4 0.4
Samenvatting
ARCADIS ix
De belangrijkste conclusie die uit deze resultaten volgt is dat: • De standaardafwijkingen van de x- en y- èn z-coördinaten van as spoor altijd
voldoen aan de gestelde kwaliteitseisen, ook bij GPS uitval van 2 minuten. • De standaardafwijkingen van de x- en y-coördinaten van de overige objecten
altijd voldoen. • De standaardafwijkingen van de z-coördinaten van de overige objecten
voldoen aan de eisen, behalve wanneer dit object een dwangpunt is. Dan komt de standaardafwijking net boven de norm van 7 millimeter uit.
Voor de betrouwbaarheid geldt de volgende conclusie: het is mogelijk om van het Mobile Rail Survey System zowel de inwendige als de uitwendige betrouwbaarheid te berekenen. Deze resultaten zijn goed te noemen. Belangrijke factor hierin is de GPS ontvangst. Zodra er geen GPS ontvangst is, daalt de betrouwbaarheid van het MRSS. De belangrijkste aanbeveling is om het in dit onderzoek opgezette theoretische model in de praktijk te testen. Daarvoor moet een aantal gemaakte aannames verder onderzocht worden: Een tweede aanbeveling is om het dynamische foutenmodel dat gebruikt is voor de kwaliteitsanalyse uit te breiden zodat ook dit model meer de realiteit benadert. Een voorbeeld hiervan is om de foutafschattingen van de afgeleiden van de bias, drift en schaalfactoren niet gelijk aan nul te veronderstellen, maar deze op te nemen in het dynamische foutenmodel. Een derde en laatste aanbeveling is om een odometer toe te voegen aan het systeem. Zeker bij het wegvallen van het GPS signaal kan hiervan worden verwacht dat dit een verbetering van de kwaliteit oplevert.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
x ARCADIS

Summary
ARCADIS xi
Summary The work of the Railsurvey department from ARCADIS can be summarized as measuring, calculating of and advising in geodetic information of rail geometry. This information is used for design, construct, maintain and manage this rail geometry. A common used coordinate system for these activities is the so called ‘Permanente Vastlegging Spoorgeometrie’ defined by ProRail, the Dutch railway administrator. Because the regulations for measuring the railway track become more and more stringent the need grows for a measurement system which can cope with these regulations, but can also fulfill the quality demands. The goal of this research is to state whether this need can be fulfilled with a measurement system consisting of Global Positioning System (GPS), Inertial Navigation System (INS) and a laser scanner. The research consists of a quality analysis and transforming the demands into a functional model. This has resulted in the following research question: Which accuracy and reliability can be achieved with a measurement system consisting of GPS, INS and a laser scanner for measuring the rail geometry and how can this be transformed into a functional model? To answer this question a literature study has been carried out, an error model has been engineered, a measurement structure has been invented and at last a quality analysis has been performed. During the research different names passed by, but eventually Mobile Rail Survey System (MRSS) has been chosen for the examined measurement system. The theoretical basis for this research consists of design computations, adjustment and testing theory, the Kalman filter and a dynamic error model. For answering the first part of the research question, all this had to be combined into a mathematical model with which the quality analysis could be performed. An inertial navigation system is a complex system of mechanical and optical sensors, in this case three accelerometers and three gyroscopes. Each sensor reacts on physical influences, systematic errors and random noise. Therefore it is important to model these effects as good as possible and were possible make use of external sensors, for example GPS receivers. The model which has been used in this research is the dynamic error model. As it happens, the Dynamic error model describes the physical and mathematical relation between the instrument errors and the navigation solution. The error model is based on an error perturbation from physical quantities and describes how sensor errors propagate in attitude, position and velocity. The output of the dynamic error model is then used as input for the Kalman filter. The Kalman filter is a recursive least squares method which can solve three problems in time: the prediction, filtering and smoothing. For most of the research only the prediction and filtering steps have been used and the effect of smoothing has been evaluated separately. The output of the Kalman filter is among other things a standard deviation of attitude and position. The Kalman output can now be combined with the laser scanner specifications to perform a quality analysis without having real GPS, INS or laser scan data.
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
xii ARCADIS
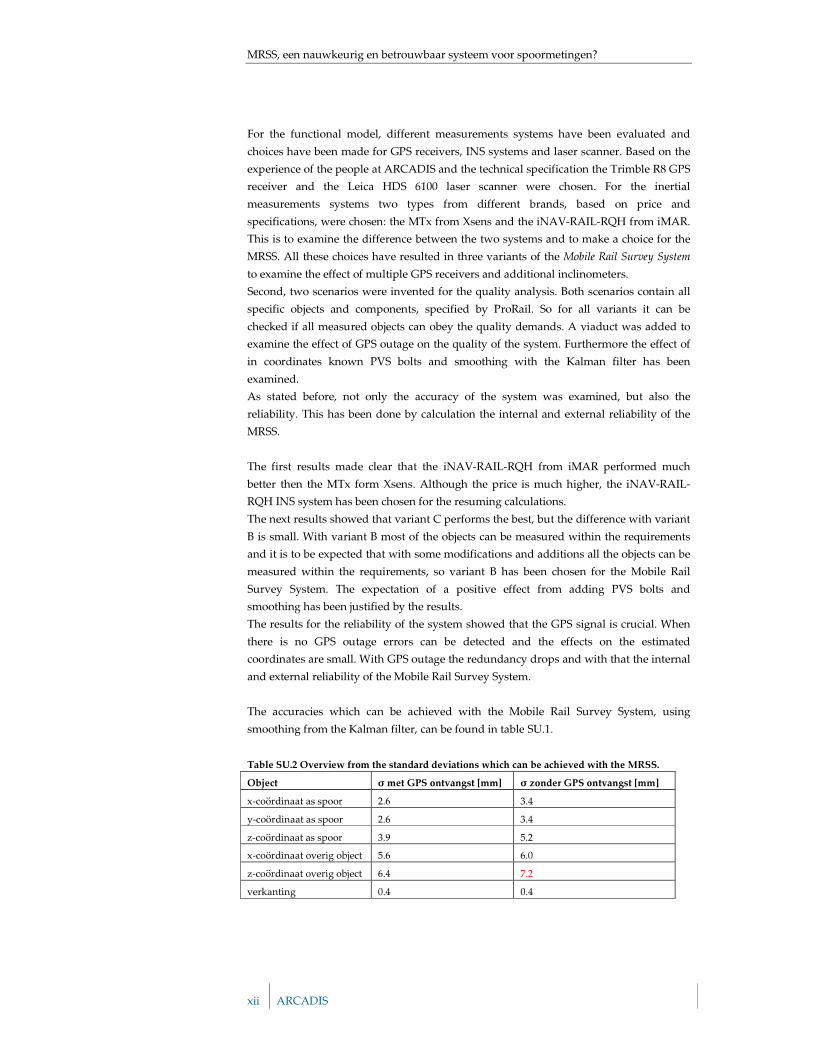
For the functional model, different measurements systems have been evaluated and choices have been made for GPS receivers, INS systems and laser scanner. Based on the experience of the people at ARCADIS and the technical specification the Trimble R8 GPS receiver and the Leica HDS 6100 laser scanner were chosen. For the inertial measurements systems two types from different brands, based on price and specifications, were chosen: the MTx from Xsens and the iNAV-RAIL-RQH from iMAR. This is to examine the difference between the two systems and to make a choice for the MRSS. All these choices have resulted in three variants of the Mobile Rail Survey System to examine the effect of multiple GPS receivers and additional inclinometers. Second, two scenarios were invented for the quality analysis. Both scenarios contain all specific objects and components, specified by ProRail. So for all variants it can be checked if all measured objects can obey the quality demands. A viaduct was added to examine the effect of GPS outage on the quality of the system. Furthermore the effect of in coordinates known PVS bolts and smoothing with the Kalman filter has been examined. As stated before, not only the accuracy of the system was examined, but also the reliability. This has been done by calculation the internal and external reliability of the MRSS. The first results made clear that the iNAV-RAIL-RQH from iMAR performed much better then the MTx form Xsens. Although the price is much higher, the iNAV-RAIL-RQH INS system has been chosen for the resuming calculations. The next results showed that variant C performs the best, but the difference with variant B is small. With variant B most of the objects can be measured within the requirements and it is to be expected that with some modifications and additions all the objects can be measured within the requirements, so variant B has been chosen for the Mobile Rail Survey System. The expectation of a positive effect from adding PVS bolts and smoothing has been justified by the results. The results for the reliability of the system showed that the GPS signal is crucial. When there is no GPS outage errors can be detected and the effects on the estimated coordinates are small. With GPS outage the redundancy drops and with that the internal and external reliability of the Mobile Rail Survey System. The accuracies which can be achieved with the Mobile Rail Survey System, using smoothing from the Kalman filter, can be found in table SU.1. Table SU.2 Overview from the standard deviations which can be achieved with the MRSS. Object σ met GPS ontvangst [mm] σ zonder GPS ontvangst [mm] x-coördinaat as spoor 2.6 3.4 y-coördinaat as spoor 2.6 3.4 z-coördinaat as spoor 3.9 5.2 x-coördinaat overig object 5.6 6.0 z-coördinaat overig object 6.4 7.2 verkanting 0.4 0.4

Summary
ARCADIS xiii
From these results it can be concluded that: • The standard deviations from the all the track coordinates always fulfill the
requirements, even with a two minutes during GPS outage. • The horizontal standard deviations from all the other objects always fulfill the
requirements. • The standard deviations from the vertical component of all other objects fulfill
the requirements, except when this object is a forcing point. (dwangpunt) The conclusion for the reliability is as follows: With the Mobile Rail Survey System it is possible to calculate the internal and external reliability. The results are good and meet the expectations. GPS reception plays an important role in these. As soon as there is no GPS reception, the reliability drops. The main recommendation which has been given is to test this theoretical model in practice and examine the different assumptions which have been made. A second recommendation is to expand the dynamic error model with bias and scale factor error models. It is to be expected that this improves the whole dynamic system. The last recommendation is to add an odometer to the MRSS. The odometer measures a distance and this can be used to improve the redundancy. Especially during GPS outage this can improve the reliability of the system.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
xiv ARCADIS

Inhoudsopgave
ARCADIS xv
Inhoudsopgave Voorwoord..............................................................................................v
Samenvatting ....................................................................................... vii
Summary...............................................................................................xi
1 Inleiding ............................................................................................ 1
2 Coördinaatstelsels en transformaties ................................................ 3 2.1 Coördinaatstelsels 3
2.1.1 Inertiestelsel 3 2.1.2 Aardvaste stelsel 4 2.1.3 Navigatiestelsel 4 2.1.4 Voertuigstelsel 5
2.2 Euler hoeken 6 2.3 Hoeksnelheden 6 2.4 Differentiaalvergelijkingen van transformaties 7 2.5 Specifieke coördinaattransformaties 8
3 GPS, INS en laserscanner ...............................................................11 3.1 Global Positioning System (GPS) 11
3.1.1 Overzicht van GPS 11 3.1.2 Meetmethode 13 3.1.3 Relatief meten met GPS 17 3.1.4 Virtuele Referentie stations 19
3.2 Inertial Navigation System (INS) 20 3.2.1 Principe van traagheidsnavigatie 20 3.2.2 Gyroscoop 21 3.2.3 Versnellingsmeter 24
3.3 Laserscanner 26 3.3.1 Principe van laserscanning 26 3.3.2 Pulsscanner 27 3.3.3 Fasescanner 28
4 Basisvergelijkingen voor traagheidsnavigatie...................................31 4.1 Uniforme aanpak 31 4.2 Navigatievergelijkingen in het inertiestelsel 33 4.3 Navigatievergelijkingen in het aardvaste stelsel 33 4.4 Navigatievergelijkingen in het navigatiestelsel 34
5 Dynamisch foutenmodel...................................................................39 5.1 Linearisatie van het model van de foutenafschatting 39 5.2 Dynamisch foutenmodel in het inertiestelsel 42 5.3 Dynamisch foutenmodel in het aardvaste stelsel 42 5.4 Dynamisch foutenmodel in het navigatiestelsel 43
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
xvi ARCADIS
6 Kwaliteit ...........................................................................................47 6.1 Inleiding 47 6.2 Vereffening 48
6.2.1 Model van waarnemingen 48 6.2.2 Lineaire waarnemingsmodel 49 6.2.3 Verkenningsberekening 50
6.3 Toetsing 50 6.3.1 Inleiding 50 6.3.2 Hypothesen toetsen 51 6.3.3 Interne betrouwbaarheid 52 6.3.4 Externe betrouwbaarheid 53
6.4 Kalman filter 54 6.4.1 Recursieve kleinste kwadraten oplossing 54 6.4.2 Dynamisch model van waarnemingsvergelijkingen 57 6.4.3 Recursieve prediction, filtering en smoothing 58
7 Meetopzet ........................................................................................63 7.1 Eisen en aannames 63
7.1.1 Kwaliteitseisen 63 7.1.2 Inwinningseisen 64 7.1.3 Aandachtspunten bij ontwerp en bouw 65 7.1.4 Gemaakte aannames 65
7.2 Instrumentkeuze 66 7.2.1 GPS ontvangers 66 7.2.2 Traagheidsnavigatiesystemen 67 7.2.3 Laserscanners 67
7.3 Keuze van meetmethode 68 7.3.1 GPS 68 7.3.2 INS 68 7.3.3 Laserscanner 69 7.3.4 Opnamesnelheid 69
7.4 Integratie van verschillende systemen 69 7.5 Scenario’s voor de kwaliteitsanalyse 69 7.6 Varianten van het Mobile Rail Survey System 70
7.6.1 Basisvariant 70 7.6.2 Uitbreidingen van de basisvariant 71
7.7 Berekeningsopties 72 7.7.1 Het gebruik van PVS-bouten als aansluitpunten 72 7.7.2 Het effect van smoothing 72 7.7.3 Betrouwbaarheden 72
7.8 Implementatie in MATLAB 72 7.8.1 Gemaakte aannames 73 7.8.2 Transformatie van Kalman filter output naar coördinaten en verkanting 73 7.8.3 Startwaarden en berekeningsstappen in MATLAB 74
Inhoudsopgave
ARCADIS xvii
8 Kwaliteitsanalyse .............................................................................79 8.1 Is het duurdere INS beter? 79 8.2 Variantenkeuze 82
8.2.1 Basisvariant 82 8.2.2 Variant B 83 8.2.3 Variant C 85 8.2.4 Wordt het variant A, B of C? 86
8.3 Zijn PVS bouten überhaupt wel nodig? 87 8.4 Het effect van smoothing 88 8.5 Betrouwbaarheid van het MRSS 90
8.5.1 Fout in de GPS coördinaten 90 8.5.2 Fout in de PVS coördinaten 93 8.5.3 Fout in de inclinometer 95
8.6 Scenario 2: boog in plaats van een rechtstand 97
9 Conclusies en aanbevelingen ........................................................101 9.1 Conclusies 101 9.2 Aanbevelingen 102
Literatuurlijst .......................................................................................105
Verklarende woordenlijst ....................................................................107
Bijlage A specificaties.........................................................................109
Bijlage B MATLAB scripts...................................................................115

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
xviii ARCADIS
Inleiding
ARCADIS 1
1 Inleiding
De werkzaamheden van de marktgroep Railsurvey van de divisie Mobiliteit van ARCADIS kunnen worden samengevat als de inwinning en verwerking van geodetische informatie van spoorgeometrie. Deze informatie wordt vervolgens gebruikt voor het ontwerp en realisatie van nieuwbouw, onderhoud en beheer van deze spoorgeometrie. Sinds een aantal jaar wordt deze ruimtelijke informatie veelal vastgelegd in een door ProRail opgesteld systeem, de Permanente Vastlegging Spoorgeometrie (PVS). De verschillende metingen die uitgevoerd worden om al deze informatie te verkrijgen zijn:
• Waterpasmetingen. • Tachymetriemetingen. • GPS RTK/FastStatic metingen. • Terrestrische laserscan metingen.
Verder is ARCADIS gekwalificeerd om de eigen spoorwegveiligheid te organiseren en streeft hierbij naar methoden waarbij het werken binnen profiel van vrije ruimte tot een minimum wordt beperkt of zelfs vermeden kan worden. Vanwege steeds strenger wordende veiligheidseisen is er een groeiende vraag naar een meetsysteem dat aan de gestelde kwaliteitseisen en veiligheidseisen kan voldoen. Dit komt neer op een systeem dat snel en betrouwbaar in een buitendienststelling moet meten. Doel van het onderzoek is om aan te geven of een dergelijk systeem haalbaar is met behulp van Global Positioning System (GPS), Inertial Navigation System (INS) en een laserscanner. Het onderzoek bestaat uit een kwaliteitsanalyse voor het inmeten van spoorgeometrie en een vertaling van eisen in een functioneel systeem. Hierbij moet gezegd worden dat dit onderzoek alleen gedaan is vanuit een technisch perspectief en dat de economische en organisatorische aspecten achterwege zijn gelaten. Dit heeft geresulteerd in de volgende hoofdvraag: Welke nauwkeurigheid en betrouwbaarheid is haalbaar met een meetsysteem bestaande uit GPS, INS en een laserscanner voor het meten van spoorgeometrie en hoe vertaalt dit zich in een functioneel model? De zojuist geformuleerde hoofdvraag is opgesplitst in een aantal deelvragen:
1. Welke instrumenten zijn het meest geschikt voor het systeem zodat de gestelde kwaliteitseisen gehaald kunnen worden?
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
2 ARCADIS
Aan de hand van specificaties kan een keuze gemaakt worden welke GPS ontvangers, INS systemen en laserscanners gebruikt kunnen worden. Ook kan hieruit de benodigde informatie over bijvoorbeeld standaardafwijkingen gehaald worden voor de kwaliteitsanalyse.
2. Wat is de meest geschikte meetopzet voor het systeem zodat de gestelde kwaliteits-, inwinnings- en meetsysteemeisen gehaald kunnen worden?
De meetopzet is bepalend voor de kwaliteitsanalyse. Hierin staat onder andere welke meetmethoden gebruikt gaan worden en hoe de instrumenten ten opzichte van elkaar gemonteerd worden.
3. Hoe moeten de verschillende systemen geïntegreerd worden om aan de
gestelde kwaliteitseisen te kunnen voldoen? Omdat de systemen met verschillende frequenties meten is het noodzakelijk om duidelijkheid te verschaffen in de integratie. Zo wordt GPS en INS gebruikt voor de plaatsbepaling en wordt de laserscanner gebruikt om de objecten buiten as spoor te meten. Er dient dus een koppeling te komen tussen de positie van het systeem en de door de laserscanner verkregen puntenwolk.
4. Welke nauwkeurigheid en betrouwbaarheid is uiteindelijk haalbaar met het ontworpen systeem en voldoet het aan de gestelde eisen?
Na het beantwoorden van deze vraag is duidelijk of het ontworpen systeem gebruikt kan worden voor het bepalen van spoorgeometrie zodat aan de gestelde eisen voldaan kan worden. De onderzoeksvragen worden beantwoord op basis van literatuuronderzoek, het opstellen van een foutenmodel, het bedenken van een meetopzet en het uitvoeren van berekeningen. Gedurende het onderzoek zijn verschillende namen voor het meetsysteem de revue gepasseerd, maar uiteindelijk is het systeem ‘gedoopt’ tot Mobile Rail Survey System. De opbouw van dit rapport is als volgt. In hoofdstuk 2 wordt uiteengezet welke coördinaatstelsels en transformaties nodig zijn bij navigatie en achtereenvolgens worden in hoofdstuk 3 de te gebruiken meettechnieken GPS, INS en laserscanning besproken. Daarna worden in hoofdstuk 4 de basisvergelijkingen voor de traagheidsnavigatie behandeld. Deze zullen als basis dienen voor de in hoofdstuk 5 beschreven dynamica van de systeemfouten. Door een afschatting van de fouten te maken kan een foutenmodel opgesteld worden voor de kwaliteitsanalyse. Hoofdstuk 6 beschrijft het begrip kwaliteit. Allereerst wordt de vereffening en toetsing besproken en vervolgens de parameters die gebruikt zijn voor de kwaliteitsanalyse. Hoofdstuk 7 geeft een overzicht van de meetopzet die bedacht is. Hierin komen de gestelde eisen, de gebruikte instrumenten, de gekozen meettechnieken, de koppeling van deze instrumenten en technieken en de bedachte scenario’s en varianten aan bod. In hoofdstuk 8 zijn de resultaten van de uitgevoerde kwaliteitsanalyse te zien en tot slot worden in hoofdstuk 9 conclusies en aanbevelingen gegeven naar aanleiding van het onderzoek. Hiermee wordt de hoofdvraag beantwoord en worden er aanbevelingen gedaan voor eventueel verder onderzoek of voor een mogelijke bouw van een dergelijk systeem.
Coördinaatstelsels en transformaties
ARCADIS 3
2 Coördinaatstelsels en transformaties
Wanneer locaties van punten beschreven worden op of dicht bij het aardoppervlak dan wordt automatisch gekozen voor een stelsel van coördinaten. Het is vervolgens ook noodzakelijk om een algebraïsch coördinaatstelsel te gebruiken wanneer maten, afstanden, oppervlakten of volumes bepaald moeten worden. Wanneer we willen navigeren, zal er vanzelfsprekend een stelsel gedefinieerd moeten worden waarin gemakkelijk de koers en bestemming bepaald kan worden. Er zijn verschillende coördinaatstelsels waaruit gekozen kan worden, elk met zijn eigen eigenschappen voor een bepaalde discipline. In de geodesie hebben we te maken met het bepalen van posities, de wiskunde achter kaartprojecties of het navigeren van een voertuig en voor elke toepassing moet een specifiek coördinaatstelsel worden gedefinieerd. [Jekeli, 2000] Dit hoofdstuk behandelt de verschillende coördinaatstelsels die vooral voor navigatie van belang zijn. Verder komen de verschillende transformaties aan bod die noodzakelijk zijn om coördinaten van het ene stelsel naar het beoogde stelsel te transformeren.
2.1 Coördinaatstelsels Zoals hierboven is vermeld ligt de focus van de te gebruiken coördinaatstelsels op navigatie. Een definitie van navigatie die voor dit onderzoek volstaat, is het bepalen van de kinematische en dynamische positie van punten langs een bepaald traject. [Jekeli, 2000] Meestal wordt navigatie real time uitgevoerd, maar navigatiesystemen kunnen uiteraard ook post processed worden gebruikt. Welke vorm ook wordt gebruikt, er is altijd sprake van beweging en dan zijn direct de natuurkundige wetten van toepassing en we zullen verderop zien dat de zwaartekrachtsversnelling een grote rol zal spelen.
2.1.1 Inertiestelsel Het meest fundamentele coördinaatstelsel is het inertiestelsel (i-stelsel). Dit stelsel is gedefinieerd als het stelsel waarin de bewegingsvergelijkingen van Newton gelden. In een dergelijk systeem zal een massa in rust, in rust blijven wanneer geen externe krachten op deze massa werken. Volgens de tweede wet van Newton geldt dan, met F de kracht die op de massa m werkt en x&& de versnelling op deze massa, dat:
xmF &&= (2.1) Vervolgens is het noodzakelijk om de tweede bewegingswet van Newton aan te passen vanwege de aanwezigheid van een zwaartekrachtsveld:
gmFxm +=&& (2.2)
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
4 ARCADIS
met g als de gravitatieversnelling. Wanneer nu aangenomen wordt dat mFa = , met
a de versnelling die wordt veroorzaakt door een op dit deeltje werkende kracht F, dan geldt:
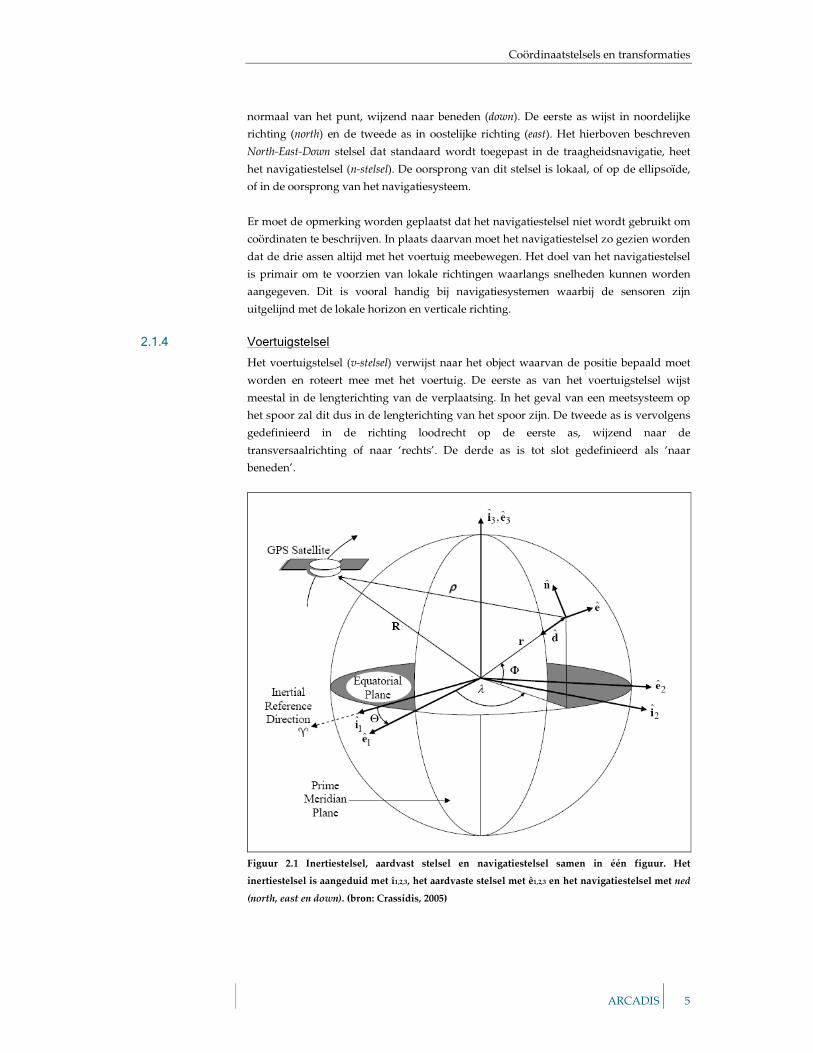
gax +=&& (2.3) Het inertiestelsel is vervolgens gedefinieerd met de oorsprong in het massamiddelpunt van de aarde en de assen zijn ten opzichte van de vaste sterren niet roterend. De eerste as wijst in de richting van het lentepunt1, de derde as is parallel aan de rotatie-as van de aarde en de tweede as completeert een rechterhand orthogonaal stelsel zoals te zien is in figuur 2.1.
2.1.2 Aardvaste stelsel Het volgende stelsel dat aan bod komt is het aardvaste stelsel, ook wel het Earth Centered Earth Fixed stelsel genoemd (ECEF stelsel of e-stelsel). De oorsprong hiervan is ook het massamiddelpunt van de aarde en de eerste as is zo gedefinieerd dat het samenvalt met een lengtegraad van nul graden op de evenaar (de Greenwich meridiaan). De derde as van het aardvaste stelsel is zo gedefinieerd dat het een gemiddelde, vaste poolas is en de tweede as staat loodrecht op de eerste en de derde as. Aardvaste coördinaatstelsels worden gerealiseerd door de definitie van een geodetisch datum, waarin de aangenomen coördinaten van een of meer punten op het aardoppervlak dienen als definitie van de oorsprong van dit aardvaste stelsel.
2.1.3 Navigatiestelsel Het stelsel dat normaal gesproken wordt gebruikt om verplaatsingen van een voertuig te beschrijven is een locaal coördinaatstelsel. Om dit stelsel correct te definiëren wordt eerst het wereld geodetisch referentiestelsel besproken. Conventionele geodetische referentiestelsels bestaan uit de kromlijnige coördinaten ϕ en λ die de richting van de normaal naar een aangenomen omwentelingsellipsoïde definiëren. De parameters van deze ellipsoïde, die de schaal en de vorm ervan definiëren, zijn zo gekozen dat de ellipsoïde het nulniveau van de aarde (de geoïde) benadert. De geodetische breedtegraad ϕ van een punt is de hoek van het meridiaanvlak van de normaal door dit punt en de evenaar, positief noordwaarts en negatief zuidwaarts. De geodetische lengtegraad λ is de hoek in het vlak van de evenaar vanaf de Greenwich meridiaan tot aan het meridiaanvlak van het punt zelf. De ellipsoïdische hoogte is de afstand van de ellipsoïde langs de normaal van dit punt. De coördinaten (ϕ, λ, h) vormen een orthogonale set van coördinaten en deze set coördinaten kan gebruikt worden in plaats van de cartesische ECEF coördinaten. De transformatie tussen beide stelsels wordt verderop in dit hoofdstuk besproken. Het locale systeem van coördinaten kan nu worden gedefinieerd als een set van cartesische coördinaten waarvan de derde as is uitgelijnd langs de ellipsoïdische
1 Het lentepunt is het snijpunt van de schijnbare zonnebaan (ecliptica) door de hemelevenaar en geldt als het nulpunt van het hemelcoördinaatstelsel.
Coördinaatstelsels en transformaties
ARCADIS 5
normaal van het punt, wijzend naar beneden (down). De eerste as wijst in noordelijke richting (north) en de tweede as in oostelijke richting (east). Het hierboven beschreven North-East-Down stelsel dat standaard wordt toegepast in de traagheidsnavigatie, heet het navigatiestelsel (n-stelsel). De oorsprong van dit stelsel is lokaal, of op de ellipsoïde, of in de oorsprong van het navigatiesysteem. Er moet de opmerking worden geplaatst dat het navigatiestelsel niet wordt gebruikt om coördinaten te beschrijven. In plaats daarvan moet het navigatiestelsel zo gezien worden dat de drie assen altijd met het voertuig meebewegen. Het doel van het navigatiestelsel is primair om te voorzien van lokale richtingen waarlangs snelheden kunnen worden aangegeven. Dit is vooral handig bij navigatiesystemen waarbij de sensoren zijn uitgelijnd met de lokale horizon en verticale richting.
2.1.4 Voertuigstelsel Het voertuigstelsel (v-stelsel) verwijst naar het object waarvan de positie bepaald moet worden en roteert mee met het voertuig. De eerste as van het voertuigstelsel wijst meestal in de lengterichting van de verplaatsing. In het geval van een meetsysteem op het spoor zal dit dus in de lengterichting van het spoor zijn. De tweede as is vervolgens gedefinieerd in de richting loodrecht op de eerste as, wijzend naar de transversaalrichting of naar ‘rechts’. De derde as is tot slot gedefinieerd als ‘naar beneden’.
Figuur 2.1 Inertiestelsel, aardvast stelsel en navigatiestelsel samen in één figuur. Het inertiestelsel is aangeduid met î1,2,3, het aardvaste stelsel met ê1,2,3 en het navigatiestelsel met ned (north, east en down). (bron: Crassidis, 2005)

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
6 ARCADIS
2.2 Euler hoeken Er bestaan meerdere manieren om transformaties tussen verschillende coördinaatstelsels te definiëren, maar van groot belang is de relatieve oriëntering tussen beide. Het kan zijn dat er een translatie toegepast moet worden, maar dat is eenvoudig een vector van coördinaatverschillen en in het algemeen is er ook geen noodzaak voor het toepassen van een schaalfactor. Er kan dan ook worden volstaan met drie hoeken om de relatieve oriëntering tussen de stelsels te beschrijven, omdat de voor dit onderzoek gebruikte stelsels orthogonaal zijn. Voor dit onderzoek is gekozen voor het gebruik van Euler hoeken in plaats van bijvoorbeeld quaternionen. De relatieve oriëntering tussen twee willekeurige stelsels kan worden beschreven als een serie van rotaties rondom bepaalde assen. De rotatiematrices voor elk van de assen wordt beschreven door:
−=
θθθθθ
cossin0
sincos0
001
)(1R ;
−=
θθ
θθθ
cos0sin
010
sin0cos
)(2R ;
−=
100
0cossin
0sincos
)(3 θθθθ
θR (2.4)
)(θjR beschrijft een rotatie rondom de j-de as met een hoek θ en is orthogonaal,
dus )()(1 θθ Tjj RR =
− en )()(1 θθ −=−
jj RR . Een rotatie rondom de eerste as met een hoek α, een rotatie om de tweede as met een hoek β en een rotatie rondom de derde as met hoek γ levert de volgende rotatiematrix op:
−++−−+−+
=αβαββ
αγαβγαγαβγβγαγαβγαγαβγβγ
αβγcoscossincossin
sincoscossincoscoscossinsinsincossin
sinsincossincoscossinsinsincoscoscos
)()()( 123 RRR (2.5)
2.3 Hoeksnelheden Wanneer coördinaatstelsels roteren ten opzichte van elkaar dan zijn deze rotaties functies van tijd. Dat wil zeggen dat er snelheden aan de hoeken zijn verbonden. Stel nu,
( )T321 ωωωω = is een vector met hoeksnelheden rond de drie assen van een stelsel. Een simpel voorbeeld van een dergelijke vector is de rotatievector van de draaiing van de aarde. Als de drie assen van een stelsel uitgelijnd zijn met de rotatie-as van de aarde dan geldt: ( )Teωω 00= , waarin eω de hoeksnelheid van de aardrotatie voorstelt. De hoeksnelheid van stelsel t ten opzichte van stelsel s, met coördinaten in het t-stelsel wordt genoteerd als t
stω en omdat hoeksnelheden vectoren zijn is de relatie tussen beide stelsels als volgt:
Coördinaatstelsels en transformaties
ARCADIS 7
sts
ts
sst
ts
tst CC ωωω −== (2.6)
Ook geldt dat:
[ ] tst
tst Ω=×ω waarin
−−
−=Ω
0
0
0
12
13
23
ωω
ωω
ωωtst (2.7)
2.4 Differentiaalvergelijkingen van transformaties Wanneer twee stelsel ten opzichte van elkaar draaien verandert hun relatieve oriëntering gedurende de tijd. Om dit te beschrijven in termen van rotatietransformaties is het noodzakelijk om een uitdrukking te vinden voor de afgeleide van de transformatiematrix ten opzichte van de tijd: s
tC& . [Jekeli, 2000] De afgeleide van de rotatiematrix s
tC als functie van de tijd,τ , wordt gegeven door:
δττδττ
δτ)()(
0lim
st
sts
t
CCC
−+= →
& (2.8) De verandering op tijdstip δττ + is het resultaat van de verandering tot aan tijdτ gevolgd door een kleine verandering van het s-stelsel gedurende het tijdsintervalδτ . Dit wordt uitgedrukt als:
)()( τδδττ st
sst CCC =+ (2.9)
De rotatie met kleine hoeken kan ook worden geschreven als:
ss IC Ψ−=δ (2.10) Substitueren van vergelijking 2.9 en 2.10 in vergelijking 2.8 geeft het volgende resultaat:
δτττ
δτ)()()(
0lim
st
st
sst
CCIC
−Ψ−= →&
)()(
0lim
0lim τ
δτδττ
δτδτst
sst
sst C
CC
Ψ=Ψ= →→& (2.11)
st
sts
st CC Ω−=&
Vergelijking 2.11 kan worden herschreven, gebruik makend van het feit dat s
tssst ωω −= en dat t
sts
ts CACA = tot:
tst
st
st CC Ω=& (2.12)
Stel, s
tC is de transformatiematrix van het t-stelsel naar het s-stelsel, dan geldt:
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
8 ARCADIS
tst
s xCx = (2.13) De afgeleide van vergelijking 2.13 is dan:
)( ttst
tst
s
tst
tst
s
xxCx
xCxCx
Ω+=
+=&&
&&&
(2.14)
Wanneer vergelijking 2.14 voorvermenigvuldigen met t
sC dan levert dit de bekende wet van Coriolis op:
ttst
tsts xxxC ×+= ω&& (2.15)
De linkerkant van de vergelijking is een vector in het t-stelsel, maar de afgeleide naar tijd vindt plaats in het s-stelsel. Dit in tegenstelling tot de rechterkant van de vergelijking, daar vindt de afgeleide naar tijd plaats in het t-stelsel. De wet van Coriolis laat dan ook duidelijk zien dat het stelsel waarin wordt afgeleid met zorg moet worden gedefinieerd. [Jekeli, 2000]
2.5 Specifieke coördinaattransformaties Om van coördinaatstelsel te veranderen dienen de transformaties tussen deze stelsels bekend te zijn. In deze paragraaf worden de transformaties behandeld tussen de coördinaatstelsels die in paragraaf 2.1 zijn besproken.
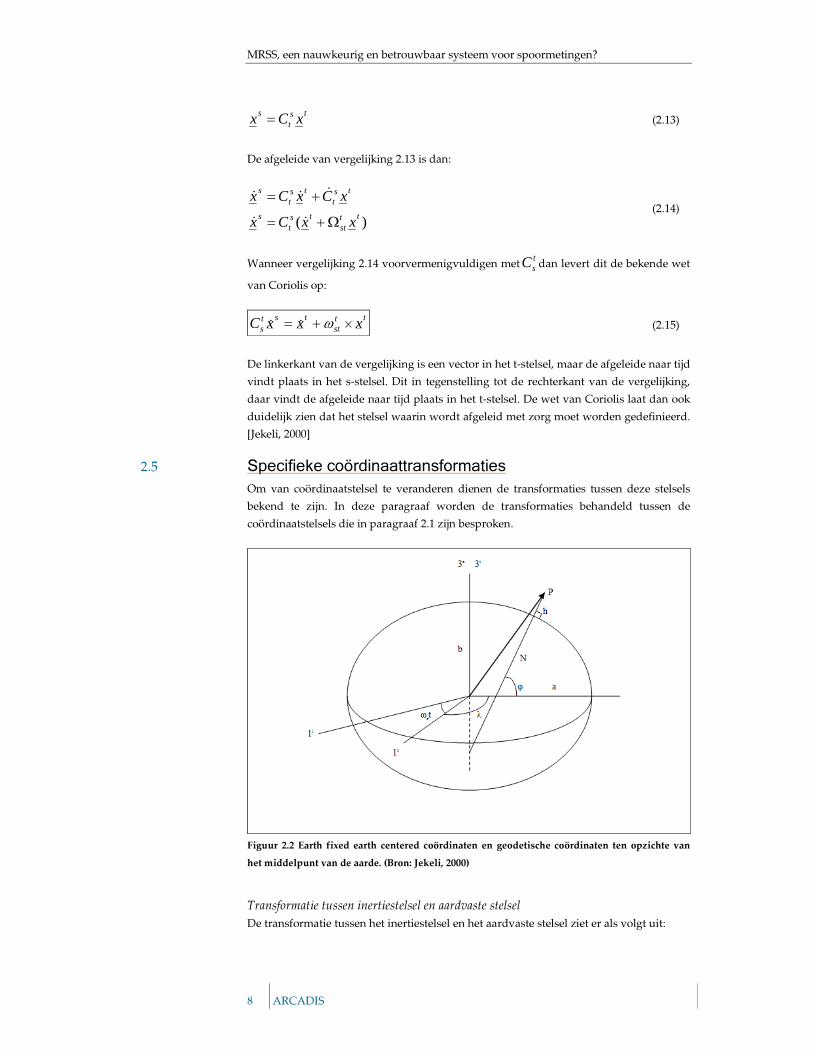
Figuur 2.2 Earth fixed earth centered coördinaten en geodetische coördinaten ten opzichte van het middelpunt van de aarde. (Bron: Jekeli, 2000) Transformatie tussen inertiestelsel en aardvaste stelsel De transformatie tussen het inertiestelsel en het aardvaste stelsel ziet er als volgt uit:

Coördinaatstelsels en transformaties
ARCADIS 9
−=
100
0cossin
0sincos
tt
tt
C ee
eeei ωω
ωω
, (2.16)
waarin teω de hoek tussen het inertiestelsel en het aardvaste stelsel is, eω is de rotatiesnelheid van de aarde en t is de tijd. (zie figuur 2.2). Transformatie van ellipsoïdische naar aardvaste coördinaten De aardvaste positievector kan getransformeerd worden naar geodetische breedtegraad ϕ, lengtegraad λ en hoogte. De aarde wordt bij deze transformatie benaderd door een ellipsoïde en een gebruikelijk model voor deze ellipsoïde is die van het WGS-84 systeem. De parameters die de ellipsoïde van het WGS-84 systeem beschrijven zijn de volgende:
• Halve lange as a = 6378137 m. • Halve korte as b = 6356752.3142 m. • Excentriciteit e = 0.0818.
De transformatie van ellipsoïdische coördinaten naar aardvaste coördinaten is vrij eenvoudig:
ϕλϕλϕ
sin))1((
sincos)(
coscos)(
2 heNz
hNy
hNx
+−=
+=
+=
(2.17)
Met N als de kromtestraal van de ellipsoïde in het verticale vlak tussen de loodlijn uit P en het vlak loodrecht op de meridiaan:
ϕ22 sin1 e
aN
−
= (2.18)
Voor de volledigheid wordt ook de formule voor M, de kromtestraal van het meridiaanvlak, gegeven die verder in paragraaf 4.4 gebruikt zal worden:
23
)sin1(
)1(22
2
ϕe
eaM
−
−= (2.19)
Transformatie van aardvaste naar ellipsoïdische coördinaten De transformatie van aardvaste coördinaten naar geodetische coördinaten is veel minder eenvoudig. Hieronder wordt een directe methode beschreven, welke geschikt is voor een rekenprogramma, zoals MATLAB. Dit is de methode van Bowring. [Strang van Hees, 1997]
ϕϕϕ
λµµϕ
22
32
32
sin1sincos
arctan
cos
sin'arctan(
eazrh
x
y
aer
bez
−−+=
=
−
+=
, (2.20)

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
10 ARCADIS
met
=rb
zaarctanµ , 22 yxr += en
2
222'
b
bae
−= (2.21)
Transformatie tussen het aardvaste stelsel en het navigatiestelsel De transformatie van aardvaste coördinaten naar coördinaten in het navigatiestelsel betreft een rotatiematrix die afhankelijk is van de bekende geodetische lengte- en breedtegraad [Kusche en Tiberius, 2005]:
−
−−=
ϕϕλϕλλϕλϕλλϕ
sin0cos
sincoscossinsin
coscossincossinneC (2.22)
De hoeksnelheden kunnen nu bepaald worden aan de hand van vergelijking 2.7 en 2.12 en vanwege het feit dat n
ene
nen CC &=Ω :
( )Tn
en ϕλϕϕλω sincos &&& −−= (2.23) De hoeksnelhedenϕ& enλ& zijn de veranderingen in lengte- en breedtegraad van een voertuig dat beweegt parallel aan het ellipsoïdische oppervlak. Deze kunnen worden geconverteerd naar north en east snelheden door gebruik te maken van de lokale kromtestralen van de ellipsoïde. Dit wordt in hoofdstuk 4 verder uitgewerkt. Voor de volledigheid worden nu ook de hoeksnelheden van het navigatiestelsel gegeven met betrekking tot het inertiestelsel:
( )Teenin ϕωλϕϕωλω sin)(cos)( +−−+= &&& (2.24)
Transformatie tussen voertuigstelsel en het navigatiestelsel De laatste transformatiematrix die gegeven wordt is de rotatiematrix van het voertuigstelsel naar het navigatiestelsel [Kusche en Tiberius, 2005]:
−−++−
=rpprp
rpyrypyrpyry
rpyrypyrpyry
C nv
coscossinsincos
cossincossinsincoscossinsincoscossin
cossinsinsincoscossinsinsinsincoscos; (2.25)
waarin r,p en y respectievelijk de roll, pitch en yaw hoeken voorstellen. Deze roll, pitch en yaw hoeken zijn de oriëntatiehoeken van het voertuigstelsel ten opzichte van het navigatiestelsel en worden indirect verkregen uit de gyroscoopdata. Nu bekend is welke coördinaatstelsels en rotatiematrices gebruikt zijn voor het onderzoek is het in het volgende hoofdstuk de beurt aan de verschillende meetsystemen.
GPS, INS en laserscanner
ARCADIS 11
3 GPS, INS en laserscanner
Dit hoofdstuk beschrijft de meettechnieken die voor het Mobile Rail Survey System gebruikt worden. In paragraaf 3.1 wordt het Global Positioning System besproken dat wordt gebruikt voor de plaatsbepaling van het te ontwikkelen systeem. Vervolgens wordt in paragraaf 3.2 het principe van traagheidsnavigatie uitgelegd. Tot slot wordt in paragraaf 3.3 de werking van een laserscanner behandeld die voor het meten van objecten buiten as spoor gebruikt kan worden.
3.1 Global Positioning System (GPS) In deze paragraaf wordt uiteengezet wat GPS is en hoe het gebruikt kan worden om nauwkeurig posities te bepalen. Allereerst wordt een globaal overzicht gegeven en twee alternatieven voor GPS. Vervolgens komt het meetprincipe aan bod, daarna het principe van differentieel GPS meten en tot slot het gebruik van virtuele referentie stations.
3.1.1 Overzicht van GPS GPS is een plaatsbepalingsysteem dat op afstandsmetingen naar satellieten is gebaseerd. De afstanden worden berekend uit gemeten looptijden van radiogolven. Het is een militair systeem dat door de Verenigde Staten is ontwikkeld om continu, onder alle omstandigheden en overal dienst te doen, zodat het leger te allen tijde de plaats van haar troepen kan bepalen. Dit militaire systeem wordt door de Amerikaanse overheid kosteloos aan civiele gebruikers ter beschikking gesteld, ook buiten de Verenigde Staten. Echter, voor civiele gebruikers zijn twee beperkingen opgelegd, Selective Availability (SA) en Anti-Spoofing (A-S). Deze beperkingen hebben consequenties voor de nauwkeurigheid van het systeem. Op 1 mei 2000 heeft de Amerikaanse overheid besloten om de SA af te schaffen. Ook is er een aantal mogelijkheden om het negatieve effect van A-S te omzeilen. [Husti, 2000] De opbouw van GPS kan het duidelijkst worden omschreven aan de hand van drie segmenten: het ruimtesegment, het besturingssegment en het gebruikerssegment. Ruimtesegment
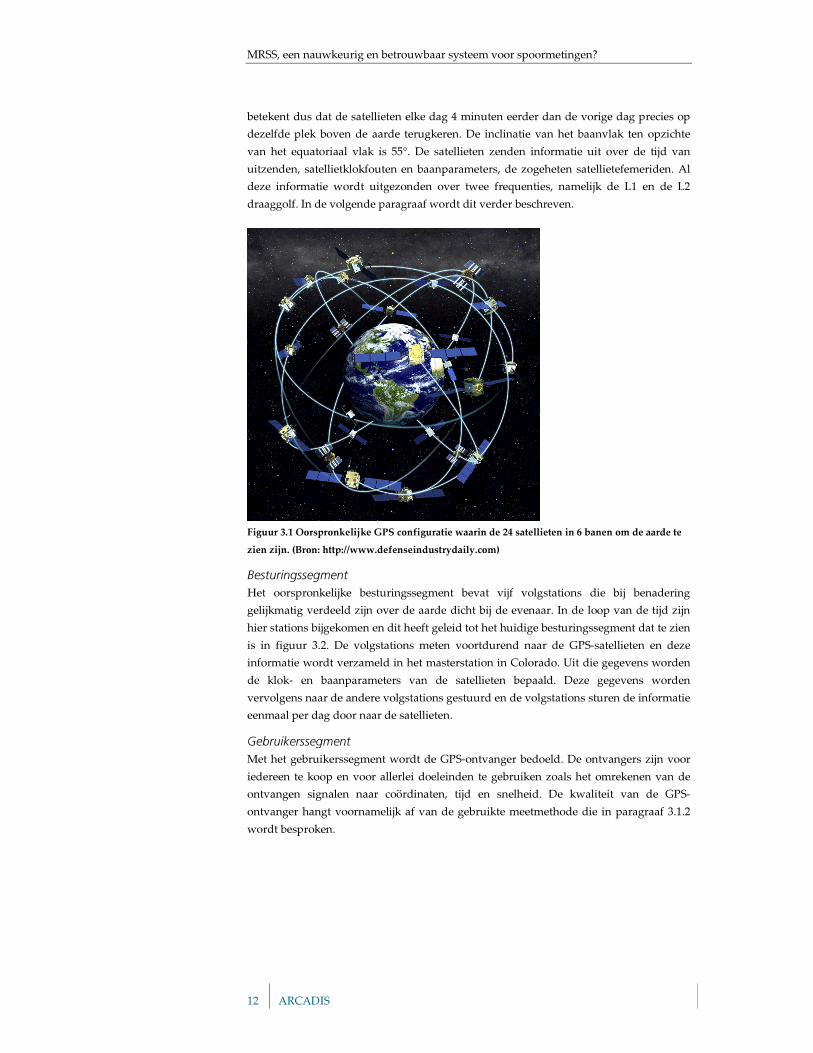
Om over de hele wereld dekking te hebben moeten overal ter wereld voldoende satellieten kunnen worden waargenomen om de positie via GPS te bepalen. Oorspronkelijk is gekozen voor een satellietconfiguratie van 24 satellieten verdeeld in zes baanvlakken, zoals te zien is figuur 3.1. Tegenwoordig zijn er 29 actieve satellieten aanwezig, deels omdat er satellieten zijn die langer meegaan dan verwacht en deels omdat er extra satellieten bij zijn gekomen omdat men een constellatie van meer dan 30 actieve satellieten wil hebben. (www.navcen.uscg.gov) Deze satellieten vliegen in een bijna cirkelvormige baan op een hoogte van ongeveer 20.000 km rond de aarde. De omlooptijd is een halve siderische dag, dat wil zeggen 11 uur en 56 minuten. Dit
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
12 ARCADIS
betekent dus dat de satellieten elke dag 4 minuten eerder dan de vorige dag precies op dezelfde plek boven de aarde terugkeren. De inclinatie van het baanvlak ten opzichte van het equatoriaal vlak is 55°. De satellieten zenden informatie uit over de tijd van uitzenden, satellietklokfouten en baanparameters, de zogeheten satellietefemeriden. Al deze informatie wordt uitgezonden over twee frequenties, namelijk de L1 en de L2 draaggolf. In de volgende paragraaf wordt dit verder beschreven.
Figuur 3.1 Oorspronkelijke GPS configuratie waarin de 24 satellieten in 6 banen om de aarde te zien zijn. (Bron: http://www.defenseindustrydaily.com)
Besturingssegment
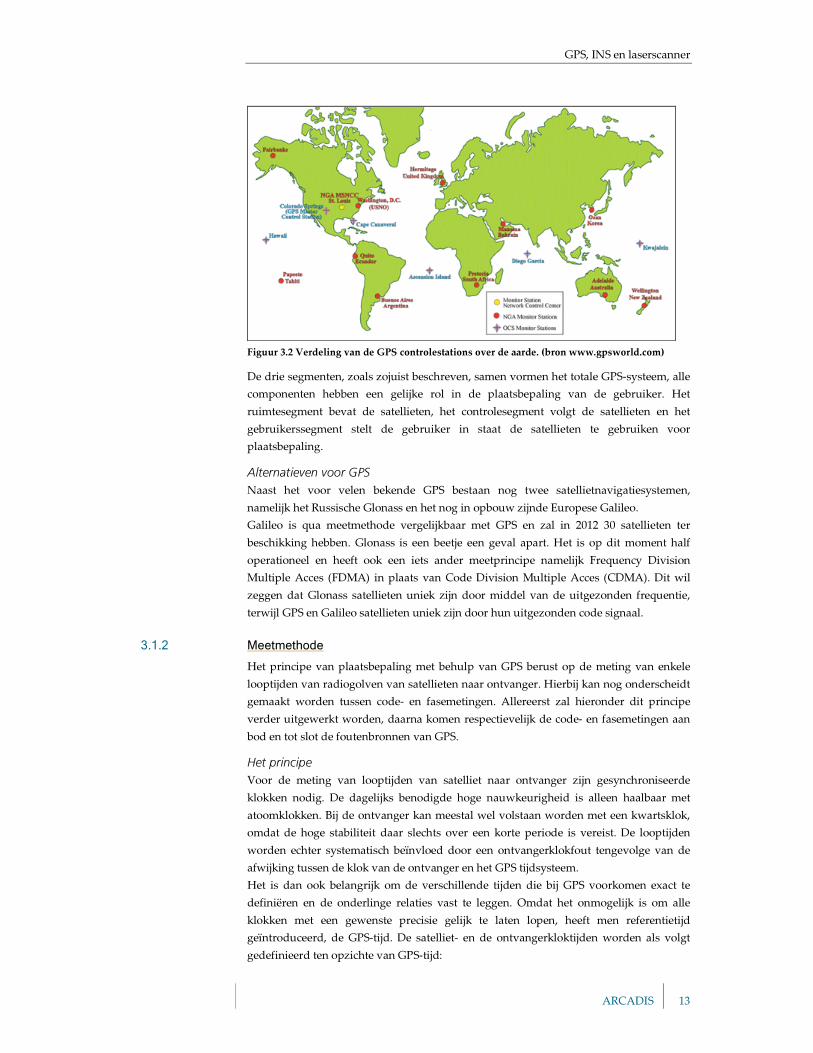
Het oorspronkelijke besturingssegment bevat vijf volgstations die bij benadering gelijkmatig verdeeld zijn over de aarde dicht bij de evenaar. In de loop van de tijd zijn hier stations bijgekomen en dit heeft geleid tot het huidige besturingssegment dat te zien is in figuur 3.2. De volgstations meten voortdurend naar de GPS-satellieten en deze informatie wordt verzameld in het masterstation in Colorado. Uit die gegevens worden de klok- en baanparameters van de satellieten bepaald. Deze gegevens worden vervolgens naar de andere volgstations gestuurd en de volgstations sturen de informatie eenmaal per dag door naar de satellieten. Gebruikerssegment
Met het gebruikerssegment wordt de GPS-ontvanger bedoeld. De ontvangers zijn voor iedereen te koop en voor allerlei doeleinden te gebruiken zoals het omrekenen van de ontvangen signalen naar coördinaten, tijd en snelheid. De kwaliteit van de GPS-ontvanger hangt voornamelijk af van de gebruikte meetmethode die in paragraaf 3.1.2 wordt besproken.
GPS, INS en laserscanner
ARCADIS 13
Figuur 3.2 Verdeling van de GPS controlestations over de aarde. (bron www.gpsworld.com) De drie segmenten, zoals zojuist beschreven, samen vormen het totale GPS-systeem, alle componenten hebben een gelijke rol in de plaatsbepaling van de gebruiker. Het ruimtesegment bevat de satellieten, het controlesegment volgt de satellieten en het gebruikerssegment stelt de gebruiker in staat de satellieten te gebruiken voor plaatsbepaling. Alternatieven voor GPS
Naast het voor velen bekende GPS bestaan nog twee satellietnavigatiesystemen, namelijk het Russische Glonass en het nog in opbouw zijnde Europese Galileo. Galileo is qua meetmethode vergelijkbaar met GPS en zal in 2012 30 satellieten ter beschikking hebben. Glonass is een beetje een geval apart. Het is op dit moment half operationeel en heeft ook een iets ander meetprincipe namelijk Frequency Division Multiple Acces (FDMA) in plaats van Code Division Multiple Acces (CDMA). Dit wil zeggen dat Glonass satellieten uniek zijn door middel van de uitgezonden frequentie, terwijl GPS en Galileo satellieten uniek zijn door hun uitgezonden code signaal.
3.1.2 Meetmethode Het principe van plaatsbepaling met behulp van GPS berust op de meting van enkele looptijden van radiogolven van satellieten naar ontvanger. Hierbij kan nog onderscheidt gemaakt worden tussen code- en fasemetingen. Allereerst zal hieronder dit principe verder uitgewerkt worden, daarna komen respectievelijk de code- en fasemetingen aan bod en tot slot de foutenbronnen van GPS. Het principe
Voor de meting van looptijden van satelliet naar ontvanger zijn gesynchroniseerde klokken nodig. De dagelijks benodigde hoge nauwkeurigheid is alleen haalbaar met atoomklokken. Bij de ontvanger kan meestal wel volstaan worden met een kwartsklok, omdat de hoge stabiliteit daar slechts over een korte periode is vereist. De looptijden worden echter systematisch beïnvloed door een ontvangerklokfout tengevolge van de afwijking tussen de klok van de ontvanger en het GPS tijdsysteem. Het is dan ook belangrijk om de verschillende tijden die bij GPS voorkomen exact te definiëren en de onderlinge relaties vast te leggen. Omdat het onmogelijk is om alle klokken met een gewenste precisie gelijk te laten lopen, heeft men referentietijd geïntroduceerd, de GPS-tijd. De satelliet- en de ontvangerkloktijden worden als volgt gedefinieerd ten opzichte van GPS-tijd:

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
14 ARCADIS
)()(
)()(
ttttt
ttttt
rr
ss
δδ+=
+= (3.1)
waarin )(tt sδ de satellietklokfout is en )(ttrδ de ontvangerklokfout. Echter, uit formule (3.1) blijkt dat de klokfouten slechts op een gegeven moment gelden. Bij het opstellen van het waarnemingsmodel dient hiermee rekening gehouden te worden. De satellietklokfouten worden met de efemeriden meegezonden met behulp van drie klokparameters. Voor de ontvangerklokfout geldt dat deze voor ieder epoche opnieuw als onbekende moet worden meegenomen in de modellering. De gemeten looptijden worden vervolgens omgerekend in afstanden door deze tijden te vermenigvuldigen met de voortplantingssnelheid van radiogolven. Door de klokfout hebben alle afstanden op een gegeven moment ook een zelfde afwijking, vandaar de naam ‘pseudo-afstand’. Uit de pseudo-afstanden en de corresponderende satellietcoördinaten kan men de vier onbekenden (x-, y- en z-coördinaat en de ontvangerklokfout) bepalen. De oplossing is het snijpunt van drie bollen, nadat de stralen zijn gecorrigeerd voor de ontvanger klokfout, oftewel naar dezelfde lengte zijn gecorrigeerd. Dit principe is te zien in figuur 3.3. Dit betekent dus dat met minimaal vier satellieten de plaats bepaald kan worden.
Figuur 3.3 Snijpunt van drie bollen om de positie te berekenen, nadat de stralen zijn gecorrigeerd voor de klokfout. GPS-satellieten genereren elk een uniek signaal dat wordt uitgezonden op twee draaggolven, elk met een eigen frequentie, namelijk:
• De L1 draaggolf. L1 bevat zowel de C/A code (Course acquisition) als de P-code (Precise Positioning Service) en heeft een frequentie van 1575.42 MHz.
• De L2 draaggolf. Deze draaggolf bevat alleen de P-code en heeft een frequentie van 1227.60 MHz.
De golflengtes van L1 en L2 die horen bij de genoemde frequenties zijn respectievelijk, 19.05 cm en 24.45 cm. Het signaal wordt verder nog aangevuld met informatie over de satellietbaan, de atmosferische toestand, gegevens over de atoomklok en ten slotte de algemene gezondheid van de satelliet. Een GPS-ontvanger kan twee soorten metingen uitvoeren: de zogenaamde codemeting en de fasemeting. Met beide metingen kan de
GPS, INS en laserscanner
ARCADIS 15
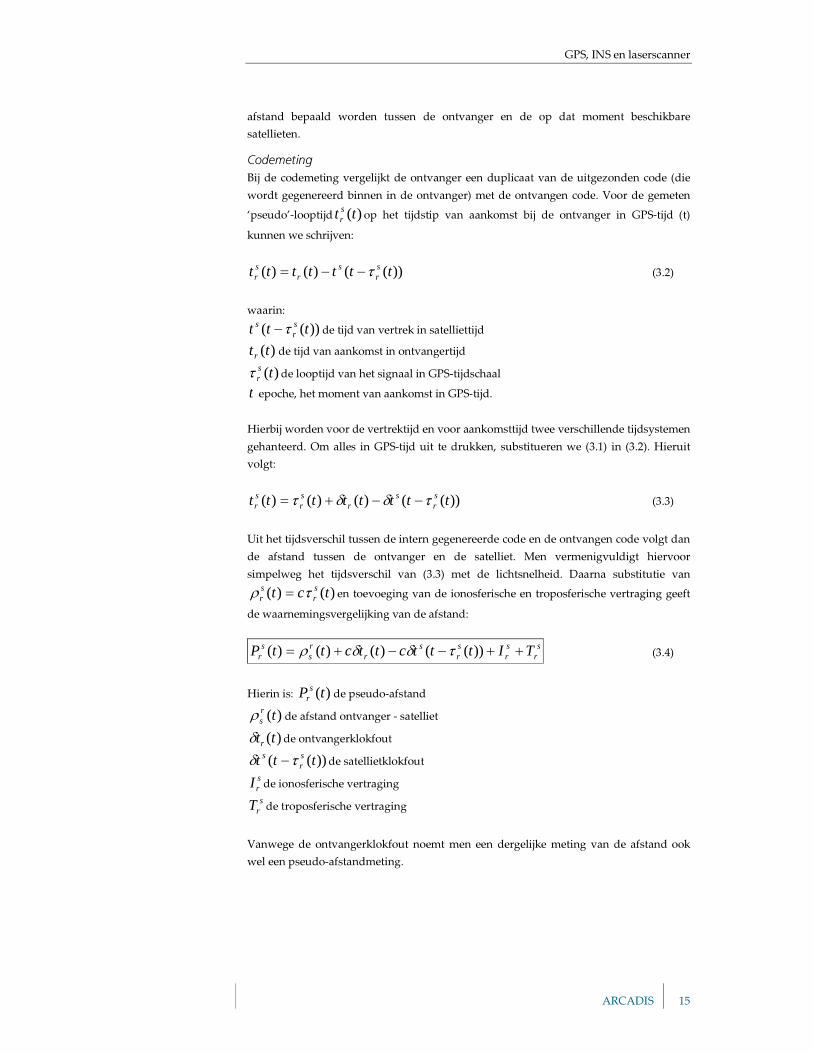
afstand bepaald worden tussen de ontvanger en de op dat moment beschikbare satellieten. Codemeting
Bij de codemeting vergelijkt de ontvanger een duplicaat van de uitgezonden code (die wordt gegenereerd binnen in de ontvanger) met de ontvangen code. Voor de gemeten ‘pseudo’-looptijd )(tt s
r op het tijdstip van aankomst bij de ontvanger in GPS-tijd (t) kunnen we schrijven:
))(()()( ttttttt sr
sr
sr τ−−= (3.2)
waarin:
))(( ttt sr
s τ− de tijd van vertrek in satelliettijd )(tt r de tijd van aankomst in ontvangertijd )(ts
rτ de looptijd van het signaal in GPS-tijdschaal t epoche, het moment van aankomst in GPS-tijd. Hierbij worden voor de vertrektijd en voor aankomsttijd twee verschillende tijdsystemen gehanteerd. Om alles in GPS-tijd uit te drukken, substitueren we (3.1) in (3.2). Hieruit volgt:
))(()()()( tttttttt sr
sr
sr
sr τδδτ −−+= (3.3)
Uit het tijdsverschil tussen de intern gegenereerde code en de ontvangen code volgt dan de afstand tussen de ontvanger en de satelliet. Men vermenigvuldigt hiervoor simpelweg het tijdsverschil van (3.3) met de lichtsnelheid. Daarna substitutie van
)()( tct sr
sr τρ = en toevoeging van de ionosferische en troposferische vertraging geeft
de waarnemingsvergelijking van de afstand:
sr
sr
sr
sr
rs
sr TItttcttcttP ++−−+= ))(()()()( τδδρ (3.4)
Hierin is: )(tP s
r de pseudo-afstand )(tr
sρ de afstand ontvanger - satelliet )(ttrδ de ontvangerklokfout
))(( ttt sr
s τδ − de satellietklokfout srI de ionosferische vertraging s
rT de troposferische vertraging Vanwege de ontvangerklokfout noemt men een dergelijke meting van de afstand ook wel een pseudo-afstandmeting.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
16 ARCADIS
verzonden GPS signaal ontvangen GPS signaal
Figuur 3.4 Thermische ruis. Het linkerbeeld laat een duidelijk binair uitgezonden signaal zien terwijl in het rechterbeeld een duidelijk vervormd ontvangen signaal te zien is. Dit vervormingseffect heet thermische ruis en heeft een meetonnauwkeurigheid tot gevolg. Vanwege thermische ruis (zie figuur 3.4) sluipt er een kleine fout in de codemeting. Bij gebruik van de C/A code is de nauwkeurigheid van de meting 3 meter, bij gebruik van de P-code bedraagt de nauwkeurigheid 30 cm. Fasemeting
De meer geperfectioneerde ontvangstapparatuur bezit de capaciteit om na het uitvoeren van de codemeting de binaire code van het gemoduleerde signaal af te halen om zo de oorspronkelijke draaggolven te reconstrueren. Dit veronderstelt natuurlijk dat de structuur van de binaire code bekend is binnen in de ontvanger. Bij de fasemeting meet men het verschil in fase tussen ontvangen draaggolf (L1 en/of L2) en een intern gegenereerde golf in de ontvanger. De fase-afstand wordt als volgt geschreven:
sr
sr
sr
sr Ntttt +−−= ))(()()( τϕϕϕ (3.5)
waarin:
))(( tt sr
s τϕ − de fase van de draaggolf vanuit de satelliet, op het tijdstip van uitzenden;
)(trϕ de fase van de draaggolf van de ontvanger op het tijdstip van aankomst; )(ts
rτ de looptijd van het signaal van satelliet tot ontvanger; srN het aantal gehele golflengten (integer getal).
De fase afstand wordt uit twee componenten samengesteld:
• Het faseverschil, sr ϕϕ − , dit is een fractie van de golflengte.
• Het aantal gehele golflengtes of cycles. Voor de fase van de satelliet en de ontvanger kunnen we schrijven:
))()(()()()(
))())((())(()())((
000
000
ttttfttftt
tttttftttfttt
rrrr
ssr
ssr
ssr
s
δδϕϕδτδτϕτϕ
−+−+=
−−+−−+=− (3.6)
waarin )( 0t
sϕ en )( 0trϕ de initiële fasen en f de frequentie van één van de GPS draaggolven zijn. Substitutie van (3.5) in (3.6) geeft de gemeten fase in cycles:
sr
sr
sr
sr
sr Atttfttftft +−−+= ))(()()()( τδδτϕ (3.7)

GPS, INS en laserscanner
ARCADIS 17
waarin:
)()()()( 0000 ttftttftNA ssrr
sr
sr δϕδϕ +−−+= (3.8)
De grootheid s
rA is de zogenaamde ambiguity term. Deze term is geen geheel getal want met uitzondering van s
rN hebben alle termen een reële waarde. Vergelijking (3.7) kan in afstand worden omgezet door vermenigvuldiging met fc /=λ . Met toevoeging van de ionosferische en troposferische vertragingen volgt de waarnemingsvergelijking van de fasemeting:
sr
sr
sr
sr
sr
sr
sr TIAtttcttcttp +−+−−+= λτδδρ ))(()()()( (3.9)
Hierbij kan worden opgemerkt dat de vergelijkingen (3.4) en (3.9) veel op elkaar lijken. Echter, de ionosferische vertraging heeft een tegengesteld teken. Het tekenverschil wordt veroorzaakt door het feit dat de code bij het passeren van de ionosfeer wordt vertraagd, terwijl de draaggolf juist wordt versneld. De grootte van de vertraging en de versnelling is vrijwel gelijk. Vergelijking 3.9 heeft voor elke satelliet een onbekende meerduidigheid. Zoals eerder vermeld in deze paragraaf zijn de golflengtes van L1 en L2 19.05 cm en 24.45 cm. Volgens een vuistregel geldt dat een meetresolutie of nauwkeurigheid mogelijk is van 1 tot 2 procent van deze golflengten. De nauwkeurigheid voor de fasemetingen is dan ongeveer gelijk aan 3 mm. [van der Marel, 2003] Foutenbronnen van GPS
De nauwkeurigheid van de GPS positie uit code-afstanden en fase-afstanden wordt door een aantal factoren beïnvloed. De voornaamste foutenbronnen zijn:
• Satellietbanen. • Klokparameters. • Atmosfeer (ionosfeer en troposfeer). • Antenne. • Fasemeerduidigheden. • Multipath.
3.1.3 Relatief meten met GPS Zoals vermeld in de vorige paragraaf wordt de nauwkeurigheid van GPS posities beïnvloed door een aantal factoren. Een paar van deze foutenbronnen kunnen geëlimineerd worden door relatieve plaatsbepaling uit te voeren in plaats van single point positioning. Dat wil zeggen dat over een relatief korte afstand twee of meerdere GPS ontvangers tegelijkertijd gebruikt worden zodat deze ontvangers dezelfde satellieten ontvangen. De foutenbronnen die door deze methode geëlimineerd kunnen worden zijn satellietklokfout, satellietbaanfout en atmosferische invloeden.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
18 ARCADIS
De verschillen van relatieve plaatsbepaling ten opzichte van single point positioning zijn dat:
• Verschilvectoren of basislijnen in plaats van positievectoren gegeven worden. • Goede benaderingen voor tenminste/minstens één van de ontvangers nodig is,
in het referentiesysteem van de satellieten. • Extra logistieke overhead, omdat de metingen die uitgevoerd worden door
meerdere ontvangers gesynchroniseerd moeten worden zodat min of meer in hetzelfde epoche gemeten wordt.
De uiteindelijke eliminatie van de foutenbronnen gebeurt door simpelweg de fasemetingen van de verschillende ontvangers van elkaar af te trekken, de zogenaamde single difference meting. Hierbij wordt verondersteld dat de ionosferische en troposferische vertraging voor ontvanger A en B hetzelfde zijn en dus van elkaar afgetrokken kunnen worden. Het model van de single difference meting ziet er voor de stations A en B met satelliet j als volgt uit:
jB
jB
jB
jB
jB
jB
jB
jA
jA
jA
jA
jA
jA
jA
TIAtttcttcttp
TIAtttcttcttp
+−+−−+=
+−+−−+=
λτδδρλτδδρ
))(()()()(
))(()()()(
- j
ABABj
ABjAB Attcttp λδρ ++= )()()( (3.10)
waarin )()()( tptptp j
BjA
jAB −= enz.
Omdat de looptijd voor beide ontvangers ongeveer gelijk is en de satellietklokken zeer stabiel zijn, geldt dat de klokfouten voor de satellieten gelijk zijn en dus geëlimineerd worden wanneer deze van elkaar worden afgetrokken. Voor de atmosferische effecten geldt dat deze verwaarloosbaar klein zijn, zolang de afstand tussen de ontvangers niet te groot wordt. Wanneer nu deze single differences voor twee verschillende satellieten van elkaar worden afgetrokken levert dit een double difference op. De double difference waarnemingsmethode is een veelgebruikte methode in GPS plaatsbepaling. Het elimineert namelijk ook de ontvangerklokfout, zoals te zien is in vergelijking (3.11) waarin de twee single differences voor de satellieten j en k van elkaar zijn afgetrokken:
jABAB
jAB
jAB Attcttp λδρ ++= )()()(
kABAB
kAB
kAB Attcttp λδρ ++= )()()(
- j
ABjkAB
jAB
jkAB
jkAB NtAttp λρλρ +=+= )()()( (3.11)
In deze vergelijking refereren alle grootheden op hetzelfde epoche (t) en de gecombineerde meerduidigheid is tijdsonafhankelijk en een geheel getal. Een veel gebruikte vorm van relatieve plaatsbepaling is GPS Real Time Kinematic (GPS-RTK). Met GPS-RTK wordt één ontvanger gebruikt als basisstation en één als rover. Via een datalink, bijvoorbeeld GSM, GPRS of UMTS, worden de waarnemingen van het basisstation doorgezonden naar de rover. Daar wordt de data real-time verwerkt tot WGS-84 coördinaten die weer getransformeerd kunnen worden naar elk willekeurig ander coördinatenstelsel. De voordelen van GPS-RTK zijn dat men direct de beschikking
GPS, INS en laserscanner
ARCADIS 19
heeft over coördinaten in het veld en men heeft ook een kwaliteitscontrole van de meting. Per basisstation kunnen meerdere ontvangers actief zijn. Deze methode is vooral geschikt het meten van detailpunten en voor uitzetten van punten.
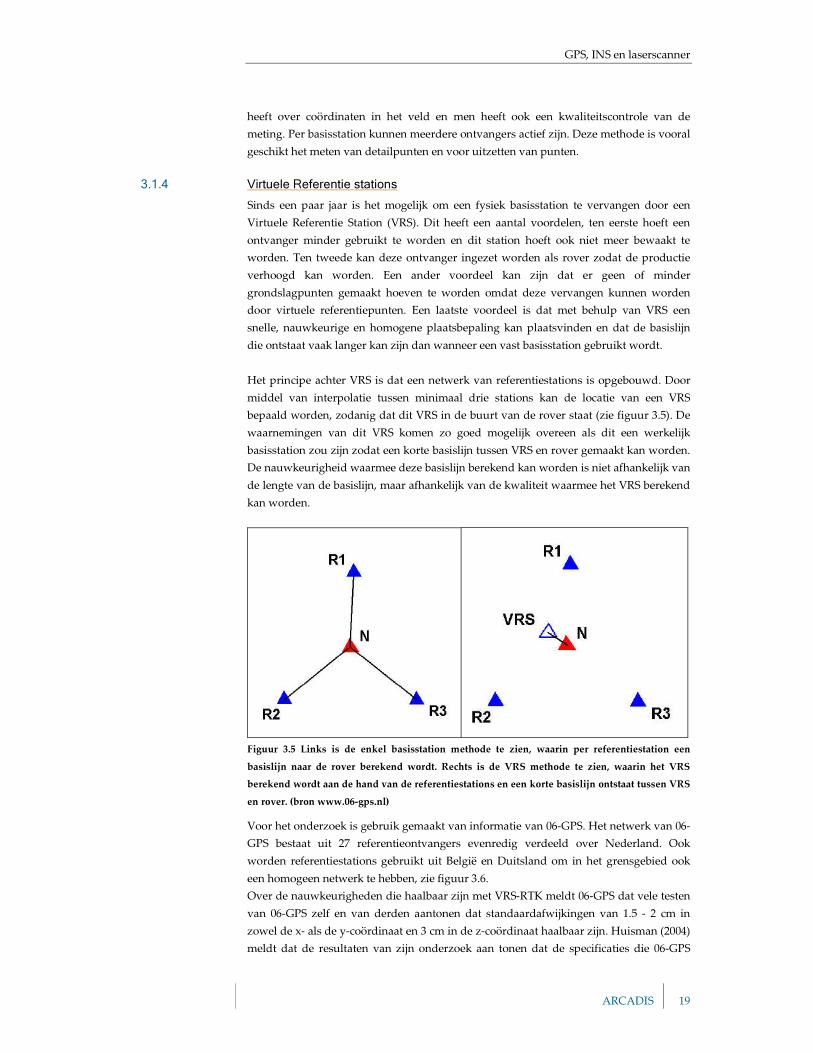
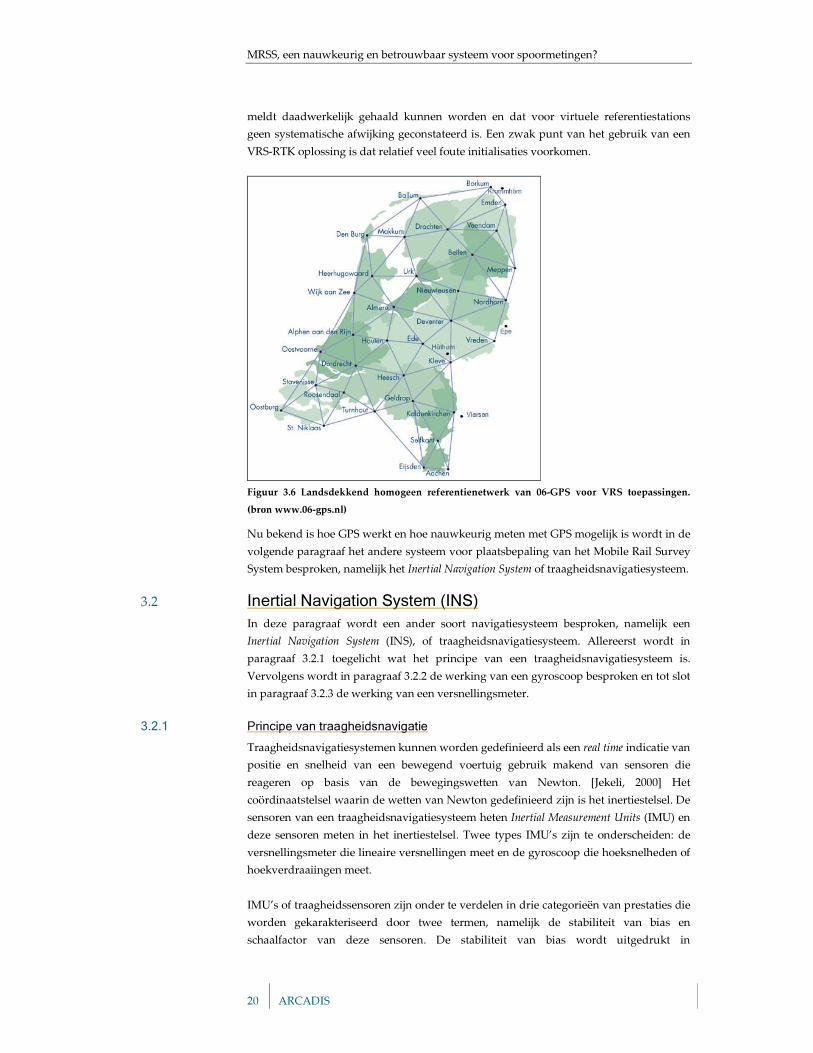
3.1.4 Virtuele Referentie stations Sinds een paar jaar is het mogelijk om een fysiek basisstation te vervangen door een Virtuele Referentie Station (VRS). Dit heeft een aantal voordelen, ten eerste hoeft een ontvanger minder gebruikt te worden en dit station hoeft ook niet meer bewaakt te worden. Ten tweede kan deze ontvanger ingezet worden als rover zodat de productie verhoogd kan worden. Een ander voordeel kan zijn dat er geen of minder grondslagpunten gemaakt hoeven te worden omdat deze vervangen kunnen worden door virtuele referentiepunten. Een laatste voordeel is dat met behulp van VRS een snelle, nauwkeurige en homogene plaatsbepaling kan plaatsvinden en dat de basislijn die ontstaat vaak langer kan zijn dan wanneer een vast basisstation gebruikt wordt. Het principe achter VRS is dat een netwerk van referentiestations is opgebouwd. Door middel van interpolatie tussen minimaal drie stations kan de locatie van een VRS bepaald worden, zodanig dat dit VRS in de buurt van de rover staat (zie figuur 3.5). De waarnemingen van dit VRS komen zo goed mogelijk overeen als dit een werkelijk basisstation zou zijn zodat een korte basislijn tussen VRS en rover gemaakt kan worden. De nauwkeurigheid waarmee deze basislijn berekend kan worden is niet afhankelijk van de lengte van de basislijn, maar afhankelijk van de kwaliteit waarmee het VRS berekend kan worden.
Figuur 3.5 Links is de enkel basisstation methode te zien, waarin per referentiestation een basislijn naar de rover berekend wordt. Rechts is de VRS methode te zien, waarin het VRS berekend wordt aan de hand van de referentiestations en een korte basislijn ontstaat tussen VRS en rover. (bron www.06-gps.nl) Voor het onderzoek is gebruik gemaakt van informatie van 06-GPS. Het netwerk van 06-GPS bestaat uit 27 referentieontvangers evenredig verdeeld over Nederland. Ook worden referentiestations gebruikt uit België en Duitsland om in het grensgebied ook een homogeen netwerk te hebben, zie figuur 3.6. Over de nauwkeurigheden die haalbaar zijn met VRS-RTK meldt 06-GPS dat vele testen van 06-GPS zelf en van derden aantonen dat standaardafwijkingen van 1.5 - 2 cm in zowel de x- als de y-coördinaat en 3 cm in de z-coördinaat haalbaar zijn. Huisman (2004) meldt dat de resultaten van zijn onderzoek aan tonen dat de specificaties die 06-GPS
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
20 ARCADIS
meldt daadwerkelijk gehaald kunnen worden en dat voor virtuele referentiestations geen systematische afwijking geconstateerd is. Een zwak punt van het gebruik van een VRS-RTK oplossing is dat relatief veel foute initialisaties voorkomen.
Figuur 3.6 Landsdekkend homogeen referentienetwerk van 06-GPS voor VRS toepassingen. (bron www.06-gps.nl) Nu bekend is hoe GPS werkt en hoe nauwkeurig meten met GPS mogelijk is wordt in de volgende paragraaf het andere systeem voor plaatsbepaling van het Mobile Rail Survey System besproken, namelijk het Inertial Navigation System of traagheidsnavigatiesysteem.
3.2 Inertial Navigation System (INS) In deze paragraaf wordt een ander soort navigatiesysteem besproken, namelijk een Inertial Navigation System (INS), of traagheidsnavigatiesysteem. Allereerst wordt in paragraaf 3.2.1 toegelicht wat het principe van een traagheidsnavigatiesysteem is. Vervolgens wordt in paragraaf 3.2.2 de werking van een gyroscoop besproken en tot slot in paragraaf 3.2.3 de werking van een versnellingsmeter.
3.2.1 Principe van traagheidsnavigatie Traagheidsnavigatiesystemen kunnen worden gedefinieerd als een real time indicatie van positie en snelheid van een bewegend voertuig gebruik makend van sensoren die reageren op basis van de bewegingswetten van Newton. [Jekeli, 2000] Het coördinaatstelsel waarin de wetten van Newton gedefinieerd zijn is het inertiestelsel. De sensoren van een traagheidsnavigatiesysteem heten Inertial Measurement Units (IMU) en deze sensoren meten in het inertiestelsel. Twee types IMU’s zijn te onderscheiden: de versnellingsmeter die lineaire versnellingen meet en de gyroscoop die hoeksnelheden of hoekverdraaiingen meet. IMU’s of traagheidssensoren zijn onder te verdelen in drie categorieën van prestaties die worden gekarakteriseerd door twee termen, namelijk de stabiliteit van bias en schaalfactor van deze sensoren. De stabiliteit van bias wordt uitgedrukt in
GPS, INS en laserscanner
ARCADIS 21
meter/seconde kwadraat voor de versnellingsmeters en in graden per uur voor de gyroscopen. De stabiliteit van de schaalfactoren wordt uitgedrukt in parts per million (PPM) De drie categorieën traagheidssensoren zijn:
• Sensoren voor militaire doeleinden, hebben de hoogste nauwkeurigheid. • Sensoren voor navigatiedoeleinden, iets minder nauwkeurig. • Sensoren voor commerciële doeleinden, vooral een gunstige prijs-
kwaliteitverhouding en voor een erg korte periode nauwkeurig. De essentie van traagheidsnavigatie is de integratie naar tijd van de gemeten versnelling om de snelheid te verkrijgen en een dubbele integratie naar tijd om de plaatsvector te verkrijgen. Echter, eenvoudigweg een aantal versnellingsmeters installeren op een voertuig is niet toerijkend voor de meeste navigatiedoeleinden omdat de versnellingsmeters niet overeenkomen met de drie richtingen van het navigatie stelsel. Dit stelsel is in het algemeen geen inertiestelsel en daarom moet rekening gehouden worden met de coriolis en centrifugaal versnelling, veroorzaakt door de rotatie van de aarde ten opzichte van het inertiestelsel. Voor een 3D positievector zijn dus drie versnellingsmeters nodig en drie gyroscopen om de versnellingsmeters te oriënteren ten opzichte van het inertiestelsel. In totaal zijn dus zes IMU’s noodzakelijk voor de meeste traagheidsnavigatiedoeleinden.
3.2.2 Gyroscoop De term gyroscoop vindt zijn oorsprong halverwege de 19e eeuw doordat Foucault een draaiende schijf gebruikte om aan te tonen dat de aarde draait. Zijn demonstratie was gebaseerd op het feit dat bij afwezigheid van werkende krachten op de schijf, de rotatie-as niet moet bewegen ten opzichte van het inertiestelsel. Door de draaiing van de aarde lijkt het namelijk of de gyroscoop in een etmaal om zijn as draait. Omdat de gyroscoop ten opzichte van de "ruimte" stilstaat moet de aarde dus wel om zijn as draaien. [Grewal, e.a., 2001] Gyroscopen kunnen zo gebruikt worden om relatieve standbepaling, oriëntatie en in sommige gevallen absolute richtingen, dus traagheidsnavigatie te bepalen. Gyroscopen meten hoeksnelheden of hoekverdraaiingen en worden dan ook vaak toegepast daar waar rotatiestabiliteit of nauwkeurige hoekregistratie noodzakelijk is. Mechanische gyroscoop
De eerste gyroscopen waren mechanisch en gebaseerd op het concept van behoud van impulsmoment van een draaiende proefmassa in de inertieruimte. Om gyroscopen onafhankelijk te maken van rotaties van het platform waarop ze zijn geïnstalleerd, worden ze geïnstalleerd op een gimbaled platform. Dit platform is een cardanische ophanging zodat de versnellingsmeters binnenin deze ophanging in alle dimensies vrij kunnen draaien, zie figuur 3.7. Door deze constructie wordt het platform in een lokaal stelsel gehouden zodat de versnellingsmeters uit zichzelf georiënteerd zijn in het navigatie stelsel. Deze lokale stabilisatie wordt uitgevoerd door gyroscopen waarvan de oriëntatie ten opzichte van het inertiestelsel veranderd kan worden in overeenstemming met de rotatie van de aarde en de beweging van het voertuig. Deze methode heeft echter twee grote nadelen voor dit soort traagheidsnavigatiesystemen, namelijk de grote technische complexiteit en daardoor een hoge kostprijs. [Kusche en Tiberius, 2005]

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
22 ARCADIS
Figuur 3.7 Mechanische gyroscoop met cardanische ophanging. (bron: www.encarta.msn.com) Om de technische complexiteit, en dus ook de kosten, te reduceren kan gebruik gemaakt worden van een ander soort inertiesysteem, het strapdown system. Bij dit systeem zitten de sensoren fysiek vast aan het voertuig waarvoor de navigatie wordt uitgevoerd. Dit houdt in dat de oriëntering nu volledig berekend moet worden aan de hand van gyroscoopdata, die de versnellingsmeters output transformeert van het sensor stelsel naar het navigatiestelsel. Optische gyroscoop
Optische gyroscopen zijn gebaseerd op een heel ander meetprincipe dan de mechanische gyroscopen, namelijk meer kinematisch dan dynamisch. Ondanks het feit dat er geen draaiende proefmassa aanwezig is, kan de term gyroscoop gehandhaafd worden door verandering van afspraken. Licht treedt op als sensor element in de optische gyroscoop en omdat er geen massa aanwezig is, is de gyroscoop niet beïnvloed door de dynamica van de omgeving, waarin de gyroscoop zich bevindt. Daarom is het een natuurlijk alternatief voor de mechanische gyroscoop in een niet stabiele omgeving, de strapdown mechanisatie. De optische gyroscoop heeft één enkele vrijheidsgraad, waardoor drie gyroscopen, met gevoeligheid loodrecht in alle drie de richtingen, noodzakelijk zijn voor een driedimensionale referentie voor standbepaling. De klasse optische gyroscopen die voor dit onderzoek gebruikt is, is die van de interferometric fiber-optic gyroscopen (I-FOG). Interferometrische fiber-optic gyroscopen bevatten geen bewegende delen, hebben weinig stroom nodig en zijn erg betrouwbaar dus goed geschikt voor ruwe, dynamische omgevingen. De voornaamste componenten van een I-FOG zijn geïllustreerd in figuur 3.8, waarin te zien is dat een laser een lichtstraal genereert die zowel met de klok mee, als tegen de klok in gaat en beweegt rond een loop van glasvezel. Inertierotaties van het apparaat in het vlak van dit papier zullen een verandering van de lengte van het effectieve pad van de lichtstralen teweegbrengen (Sagnac principe), die een effectieve relatieve faseverandering veroorzaakt bij de detector. De interferometrische fase tussen de twee tegengestelde stralen wordt gemeten door de detector, maar in dit geval is het output faseverschil evenredig met de hoekverdraaiing. Fase modulatie in het optische pad kan nog gebruikt worden om de effectieve output te verbeteren.

GPS, INS en laserscanner
ARCADIS 23
Figuur 3.8 Schematische weergave van een interferometrische Fiber optic gyroscoop. De rotatiegevoeligheid van de optische gyroscoop is gebaseerd op het Sagnac principe, dat optreedt wanneer een lichtstraal zich voortplant rond een gesloten weg in een stelsel dat roteert ten opzichte van het inertiestelsel. [Jekeli, 2000] Beschouw twee lichtstralen, W1 en W2, die een tegengestelde weg afleggen rondom een oppervak A, zoals te zien is in figuur 3.9. Zonder draaiing van het oppervlak A arriveren W1 en W2 op hetzelfde tijdstip bij punt 2. Echter, wanneer A roteert met hoeksnelheid Ω, komen W1 en W2 op verschillende tijdstippen aan bij punt 2. De waarneming die door een optische gyroscoop gedaan wordt, is een looptijdverschil tussen 2 lichtstralen.
Figuur 3.9 Het Sagnac principe. Door de draaiing van oppervlak A komen de lichtbundels niet meer op hetzelfde tijdstip aan in punt 2. (bron: www.iqo.uni-hannover.de) De voordelen van dit principe zijn dat:
• Het looptijdverschil proportioneel is met de grootte van oppervlak A. Het idee is dan om A zo groot te maken zodat het de gevoeligheid van de meting van het looptijdverschil groter wordt.
• Het looptijdverschil onafhankelijk is van de vorm van het gevolgde pad. • Het rotatiemiddelpunt is willekeurig binnen het vlak A, wat impliceert dat ook
de locatie van de rotatie-as is ook willekeurig zolang deze loodrecht staat op het rotatievlak.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
24 ARCADIS
Foutenbronnen van de interferometric fiber-optic gyroscoop
Een typisch foutenmodel voor de I-FOG kan worden beschreven door een fout in de schaalfactor, driftfouten en willekeurige ruis. De algemene vorm ziet er als volgt uit:
)()1()( 0 kwb
k tsfdt εωω +++= , (3.12) waarin, )( ktω de gemeten waarde voor de hoeksnelheid, 0d de drift, sf de schaalfactor, bω de werkelijke waarde voor de hoeksnelheid en )( kw tε de ruis van de meting voorstelt. [Kusche en Tiberius, 2005]
3.2.3 Versnellingsmeter De eerste versnellingsmeter was in feite een zwaartekrachtmeter, namelijk een pendule, daterend uit de tijd van Christiaan Huygens. Dit type versnellingsmeter was natuurlijk alleen in staat om maar één type versnelling te meten en daardoor niet te gebruiken op een bewegend voertuig. [Jekeli, 2000] Door de lengte van de arm en de looptijd van de pendule te bepalen was men in staat om de totale zwaartekrachtsversnelling te bepalen. Door de metingen van de pendule te vergelijken met nauwkeurige klokken, werd gedemonstreerd dat de zwaartekrachtsversnelling varieerde ten opzichte van de breedtegraad. De huidige gravimeters zijn gebaseerd op het principe van een massaveersysteem. Een gangbaar ontwerp van een versnellingsmeter is gebaseerd op ditzelfde principe waarin de mechanische veer is vervangen door een elektromagnetisch opgewekt koppel. Hierbij wordt gebruik gemaakt van het principe dat de kracht die nodig is om de proefmassa weer in het nulpunt te brengen, een maat is voor de verandering van versnelling. Een ander gangbaar type versnellingsmeter is gebaseerd op de verandering in resonantie-frequentie van een trillend element met spanningsverschil veroorzaakt door een verandering van de versnelling van de proefmassa. Bij beide types wordt de versnelling beïnvloed door een traagheidsmassa en beschrijven de bewegingswetten van Newton de dynamica van het meetmechanisme.
Figuur 3.10 Principe van een versnellingsmeter. (bron: Chatfield, 1997)

GPS, INS en laserscanner
ARCADIS 25
Zoals te zien is in figuur 3.10 bestaat een versnellingsmeter schematisch gezien uit een proefmassa bevestigd aan een veer, die weer bevestigd is aan een omhullende doos. De proefmassa kan zonder frictie alleen in de richting, gedefinieerd door de veer, bewegen en de doos heeft een schaalverdeling om de relatieve plaats aan te duiden. De stijfheid van de veer wordt als constant verondersteld. Wanneer nu een kracht F werkt op de doos veroorzaakt deze een constante versnelling a van de doos, binnen het referentiestelsel. Deze kracht uit zich op de proefmassa via de veer die indrukt en een kracht sF overbrengt op de proefmassa. Als nu X de positie van de proefmassa is ten opzichte van de doos en bx de positie van de doos in het externe referentiestelsel, dan is de positie van de proefmassa in dit referentiestelsel:
Xxx b += (3.13) De enige kracht die werkt op de proefmassa is te wijten aan de indrukking van de veer en wordt gegeven door de wet van Hooke:
XkF s −= (3.14) en dus volgt hieruit dat de tweede wet van Newton kan worden geschreven als:
XkFxm s −==&& (3.15) waarin m de massa van de proefmassa is. Vervangen we nu (3.15) in de linkerkant van (3.13) en opmerken dat axb =&& , volgt dat:
aXm
kX −=+&& (3.16)
Dit is de welbekende vergelijking van een harmonische oscillator met de bekende oplossing:
( )
−−=
m
kt
k
amtX cos1 (3.17)
Verondersteld in (3.17) zijn wel de volgende randvoorwaarden:
( ) ( ) 00,00 ==== tXtX & (3.18) Duidelijk wordt nu dat de gemiddelde positie van de proefmassa relatief ten opzichte van de box direct proportioneel is ten opzichte van de ondervonden versnelling met constante m/k en daardoor is dit inderdaad een versnellingsmeter. Foutenbronnen van versnellingsmeters
Veel van de foutenbronnen van versnellingsmeters hebben hetzelfde karakter als de foutenbronnen van gyroscopen, ondanks dat de mechanica verschillend is. De bias en schaalfactor in het bijzonder zijn identiek aan het foutenmodel van een gyroscoop, vergelijk formule 3.12:
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
26 ARCADIS
)()1()( 0 kwb
k tasfbta ε+++= , (3.19) waarin, )( kta de gemeten waarde voor de versnelling, 0b de bias, sf de schaalfactor,
ba de werkelijke waarde voor de versnelling en )( kw tε de ruis van de meting voorstelt. [Kusche en Tiberius, 2005]
3.3 Laserscanner In de vorige twee paragrafen zijn achtereenvolgens GPS en INS besproken als systemen voor de plaatsbepaling van het Mobile Rail Survey System. In deze paragraaf wordt het principe van een laserscanner behandeld. Laserscanning is een relatief nieuwe methode voor het inmeten van 3D objecten. Op dit moment worden laserscanners vooral gebruikt voor industriële toepassingen zoals het inmeten van complexe fabriekshallen. Echter, ook in de geodetische wereld wordt de laserscanner steeds vaker ingezet voor complexe 3D metingen zoals complete stations en emplacementen. Allereerst wordt in paragraaf 3.3.1 het principe van een laserscanner behandeld. Laserscanners zijn er in twee verschillende soorten, een pulsscanner en een fasescanner. In paragraaf 3.3.2 wordt het principe en nauwkeurigheid van de pulsscanner besproken en vervolgens komt in paragraaf 3.3.3 de fasescanner aan bod.
3.3.1 Principe van laserscanning Laserscanners bepalen de richting en afstand tussen scanner en object met behulp van laserlicht. Elk gescand punt wordt hierdoor in 3D bepaald in het stelsel van de laserscanner. Omdat de scanner met een hoge frequentie werkt is het mogelijk om in een korte tijd zeer veel punten te scannen. De complete verzameling van alle gescande punten wordt ook wel een puntenwolk genoemd. De werking van een laserscanner is als volgt: een laserstraal wordt door bewegende spiegels in een bepaalde richting afgebogen op een object en vervolgens wordt deze reflectie terugontvangen door de scanner, zie figuur 3.11. De scanner meet de intensiteit van de terugontvangen puls en deze waarde moet boven een grenswaarde komen om in aanmerking te komen als echo van de uitgezonden puls. Behalve de intensiteit meet de scanner ook de verticale richting, de horizontale richting en de afstand tussen scanner en het object. [van Ree, 2006] Vanuit de afstand en de richting kan vervolgens de coördinaten van het gescande punt bepaald worden.
Figuur 3.11 Meetprincipe van een laserscanner. (Bron: Boehler and Marbs, 2002)
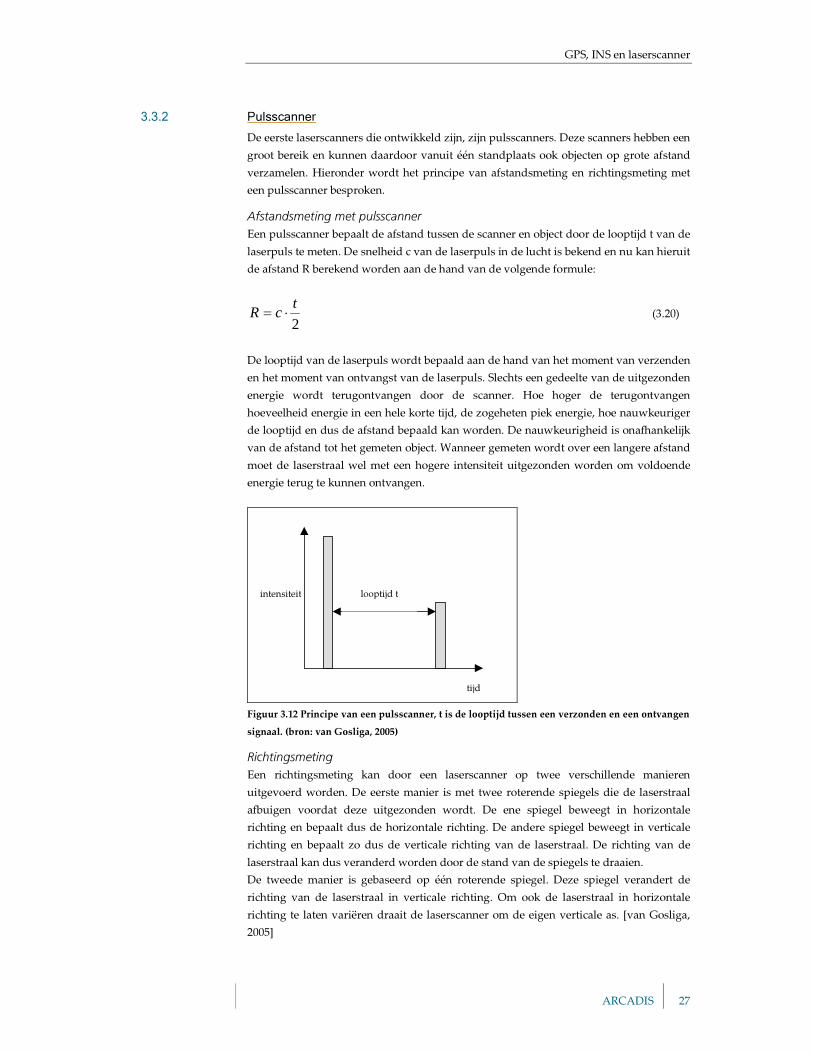
GPS, INS en laserscanner
ARCADIS 27
3.3.2 Pulsscanner De eerste laserscanners die ontwikkeld zijn, zijn pulsscanners. Deze scanners hebben een groot bereik en kunnen daardoor vanuit één standplaats ook objecten op grote afstand verzamelen. Hieronder wordt het principe van afstandsmeting en richtingsmeting met een pulsscanner besproken. Afstandsmeting met pulsscanner
Een pulsscanner bepaalt de afstand tussen de scanner en object door de looptijd t van de laserpuls te meten. De snelheid c van de laserpuls in de lucht is bekend en nu kan hieruit de afstand R berekend worden aan de hand van de volgende formule:
2
tcR ⋅= (3.20)
De looptijd van de laserpuls wordt bepaald aan de hand van het moment van verzenden en het moment van ontvangst van de laserpuls. Slechts een gedeelte van de uitgezonden energie wordt terugontvangen door de scanner. Hoe hoger de terugontvangen hoeveelheid energie in een hele korte tijd, de zogeheten piek energie, hoe nauwkeuriger de looptijd en dus de afstand bepaald kan worden. De nauwkeurigheid is onafhankelijk van de afstand tot het gemeten object. Wanneer gemeten wordt over een langere afstand moet de laserstraal wel met een hogere intensiteit uitgezonden worden om voldoende energie terug te kunnen ontvangen.
intensiteit
tijd
looptijd t
Figuur 3.12 Principe van een pulsscanner, t is de looptijd tussen een verzonden en een ontvangen signaal. (bron: van Gosliga, 2005)
Richtingsmeting
Een richtingsmeting kan door een laserscanner op twee verschillende manieren uitgevoerd worden. De eerste manier is met twee roterende spiegels die de laserstraal afbuigen voordat deze uitgezonden wordt. De ene spiegel beweegt in horizontale richting en bepaalt dus de horizontale richting. De andere spiegel beweegt in verticale richting en bepaalt zo dus de verticale richting van de laserstraal. De richting van de laserstraal kan dus veranderd worden door de stand van de spiegels te draaien. De tweede manier is gebaseerd op één roterende spiegel. Deze spiegel verandert de richting van de laserstraal in verticale richting. Om ook de laserstraal in horizontale richting te laten variëren draait de laserscanner om de eigen verticale as. [van Gosliga, 2005]

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
28 ARCADIS
Nauwkeurigheid
De nauwkeurigheid van pulsscanners is tot op zekere hoogte onafhankelijk van de afstand. Dit houdt in dat tot een afstand van ongeveer 100 meter een constante nauwkeurigheid gehaald kan worden. Een groot nadeel van dit grote bereik is dat de meettijd erg lang wordt omdat de wachttijd op het terugontvangen signaal erg lang is.
3.3.3 Fasescanner Fasescanners zijn snelle scanners, het kost weinig tijd om een object te scannen en een extra voordeel is dat deze scanners met een nihile toename van de hoek kunnen meten. Hierdoor kunnen punten op zeer korte afstand van elkaar worden gemeten. Hieronder wordt besproken hoe een dergelijke afstandsmeting bij een fasescanner werkt. Afstandsmeting met fasescanner
Een fasescanner bepaalt de afstand tussen scanner en object door het faseverschil te meten tussen het uitgezonden en het terugontvangen signaal. De fasescanner zendt een laserpuls uit met een bepaalde fasehoek die varieert in tijd. Op het moment dat een gereflecteerde puls ontvangen wordt, kan het faseverschil met de uitgezonden puls bepaald worden. Hieruit kan de afstand tussen scanner en object berekend worden. Omdat de fasehoeken van zowel de ontvangen als de verzonden puls continu verschillen, kan de scanner ook continu de afstand bepalen. In tegenstelling tot een pulsscanner hoeft een fasescanner niet te wachten op een echo van een ontvangen puls. Dit spaart een hoop tijd en maakt de fasescanner een stuk sneller dan een pulsscanner. Het faseverschil tussen een verzonden en ontvangen puls wordt bepaald aan de hand van een modulatie van de laserpuls met een harmonische golf2. In de huidige scanners wordt een bi- of trimodulatie gebruikt. Dat betekent dat de draaggolf wordt gemoduleerd door twee of drie verschillende harmonische golven. Het principe van modulatie van een laserpuls is te zien in figuur 3.13.
Figuur 3.13 Voorbeeld van fasemodulatie (bron: van Gosliga, 2005)
2 Een harmonische golf is een golf die beschreven kan worden als een (co-)sinusfunctie met constante amplitude en periode

GPS, INS en laserscanner
ARCADIS 29
Richtingsmeting
De methode die gebruikt wordt voor de richtingsmeting van een fasescanner is hetzelfde als voor een pulsscanner. Nauwkeurigheid
De meetnauwkeurigheid van een fasescanner is in grote mate afhankelijk van de afstand. Het precieze verloop van de nauwkeurigheid is onbekend, maar men veronderstelt een exponentiële toename van de onnauwkeurigheid ten opzichte van de afstand. Dit betekent dat een meting dicht bij de scanner zeer nauwkeurig is, maar dat een meting op grotere afstand steeds minder nauwkeurig wordt in vergelijking met een pulsscanner. [van Gosliga, 2005] In het volgende hoofdstuk wordt de wiskundige link gelegd tussen de in dit hoofdstuk beschreven meetsystemen en de in hoofdstuk 2 genoemde coördinaatstelsels. Hoofdstuk 4 behandelt namelijk de basisvergelijkingen voor traagheidsnavigatie.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
30 ARCADIS
Basisvergelijkingen voor traagheidsnavigatie
ARCADIS 31
4 Basisvergelijkingen voor traagheidsnavigatie
Navigatie of plaatsbepaling met behulp van een traagheidsnavigatiesysteem is gebaseerd op het integreren van de gemeten versnellingen naar tijd. Wiskundig gezien betreft het een oplossing van een differentiaalvergelijking die de gemeten versnellingen relateert aan de tweede afgeleide van de positie. Een voorbeeld hiervan is vergelijking 2.3 uit paragraaf 2.1.1 die in vergelijking 4.1 explicieter wordt beschreven.
iiii axgx += )(&& (4.1)
ix is hierin de positievector in het inertiestelsel, ig is de versnelling veroorzaakt door het zwaartekrachtsveld in dit stelsel en is afhankelijk van de positievector en ia is de specifieke kracht die wordt waargenomen door de versnellingsmeter. Voor het oplossen van deze vergelijkingen wordt verondersteld dat de versnelling veroorzaakt door het zwaartekrachtveld bekend is. Voor stelsels niet gelijk aan het inertiestelsel kunnen ook dergelijke vergelijkingen op worden gesteld en deze vormen de basisvergelijkingen voor traagheidsnavigatie. Zoals ook vermeld is in paragraaf 2.4 moet bij stelsels die draaien ten opzichte van het inertiestelsel rekening worden gehouden met de Coriolis versnelling. Het effect van deze versnelling op het navigatiestelsel is dat de differentiaalvergelijkingen gecompliceerder worden en niet meer lineair zijn.
4.1 Uniforme aanpak Omdat alle navigatieoplossingen zijn gebaseerd op de bewegingsdynamica in de vorm van bewegingswetten, zoals de bewegingswet van Newton, is het mogelijk een uniforme oplossing te geven van de bovengenoemde differentiaalvergelijkingen. De oplossing wordt uitgewerkt aan de hand van een willekeurig stelsel, het w-stelsel. Dit stelsel draait ten opzichte van het inertiestelsel met een rotatiesnelheid w
iwω . Het doel is nu om een vergelijking op te stellen zoals vergelijking 4.1, maar dan voor posities in het w-stelsel. Een vector in het w-stelsel heeft coördinaten in het i-stelsel door:
wiw
i xCx = , (4.2) waarin i
wC de transformatiematrix is van het w-stelsel naar het i-stelsel. De afgeleide van deze matrix is:

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
32 ARCADIS
wiw
iw
iw CC Ω=& , (4.3)
waarin w
iwΩ een scheefsymmetrische matrix voorstelt met de elementen van wiwω :
[ ]×=Ω wiw
wiw ω (4.4)
Vervolgens is ook de tweede afgeleide van de transformatiematrix nodig en die wordt beschreven door:
wiw
wiw
iw
wiw
iw
iw CCC ΩΩ+Ω= &&& (4.5)
Ook van de positievector is de tweede afgeleide nodig:
wiw
wiw
wiw
w xCxCxCx &&&&&&& ++= 2 ww
iwwiw
wiw
iw
wwiw
iw
wiw
w xCxCxCx )(2 ΩΩ+Ω+Ω+= &&&&&& (4.6) Wanneer nu vergelijking 4.6 wordt opgelost voor de positievector in het w-stelsel en gecombineerd wordt met vergelijking 4.1, levert dit de volgende systeemdynamica voor de positie op voor het w-stelsel:
wwwwiw
wiw
wiw
wwiw
w gaxxx ++ΩΩ+Ω−Ω−= )(2 &&&& (4.7) Hierbij is gebruik gemaakt van de orthogonaliteit van i
wC en het feit dat:
iiw
w aCa = en iiw
w gCg = (4.8) Het systeem van de drie tweede orde differentiaalvergelijkingen kan getransformeerd worden naar een systeem van zes eerste orde differentiaalvergelijkingen door het introduceren van nieuwe variabelen, namelijk de snelheden wx& : [Jekeli, 2000]
ww
wwwwiw
wiw
wiw
wwiw
w
xxdt
d
gaxxxdt
d
&
&&&
=
++ΩΩ+Ω−Ω−= )(2 (4.9)
Vergelijking 4.9 worden ook wel de navigatievergelijkingen voor het w-stelsel genoemd. De bepalende factoren in deze vergelijkingen zijn de gemeten versnellingen en de zwaartekrachtversnelling. In de strapdown mechanisatie, zie paragraaf 3.2.2, zijn de versnellingen gemeten in het voertuigstelsel, ofwel v-stelsel, dus deze moeten getransformeerd worden via:
vwv
w aCa = (4.10)
Basisvergelijkingen voor traagheidsnavigatie
ARCADIS 33
Door het integreren van de hoeksnelheden vwvω kan de transformatiematrix w
vC worden bepaald. Hierbij moet worden opgemerkt dat deze hoeksnelheden niet direct door de gyroscoop gemeten worden, maar dat deze worden gemeten ten opzichte van het inertiestelsel. Om gemeten hoeksnelheden in het inertiestelsel te transformeren naar het w-stelsel geldt onderstaande vergelijking:
wiw
vw
viv
vwv C ωωω −= (4.11)
4.2 Navigatievergelijkingen in het inertiestelsel In het geval dat het w-stelsel gelijk is aan het inertiestelsel, is 0=Ωi
ii . De navigatievergelijkingen 4.9 worden dan vereenvoudigd en zijn dan vergelijkbaar met die van vergelijking 4.1.
ii
iii
xxdt
d
gaxdt
d
&
&
=
+=
(4.12)
Bij het gebruik van strapdown mechanisatie wordt de transformatiematrix direct opgebouwd uit de gemeten hoeksnelheden en dus geldt:
viv
iv
iv CC Ω=& (4.13)
Vergelijkingen 4.12 en 4.13 stellen de totale dynamica van het strapdown systeem voor in termen van een set van differentiaalvergelijkingen in het inertiestelsel.
4.3 Navigatievergelijkingen in het aardvaste stelsel Voor het geval dat het w-stelsel is gedefinieerd als het e-stelsel, dan geldt dat 0=Ωe
ie& .
De navigatievergelijkingen voor het e-stelsel zijn dan als volgt:
ee
eeeeie
eie
eeie
e
xxdt
d
gaxxxdt
d
&
&&
=
++ΩΩ−Ω−= 2 (4.14)
De scheefsymmetrische matrix e
ieΩ kan worden bepaald uit de vector van de hoeksnelheden ( )Te
eie ωω 00= .Voor de transformatiematrix e
vC geldt:
vev
ev
ev CC Ω=& . (4.15)
In termen van gemeten hoeksnelheden geldt:
eie
ve
viv
vev C ωωω −= (4.16)

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
34 ARCADIS
4.4 Navigatievergelijkingen in het navigatiestelsel Om de navigatievergelijkingen te verkrijgen in het n-stelsel kan men geneigd zijn om simpelweg de ‘w’ te vervangen door een ‘n’ in vergelijking 4.9. Helaas kan dit niet zomaar gedaan worden omdat de integratie plaats vindt in een vast stelsel en we willen de benodigde snelheden altijd in een draaiend lokaal stelsel hebben. Het n-stelsel definieert lokale richtingen voor de snelheidsvector die is bepaald in een stelsel waarin het voertuig beweging heeft (dit kan het aardvaste stelsel zijn). De gewenste snelheidsvector is de snelheidsvector van het e-stelsel gecoördineerd in een stelsel evenwijdig aan het n-stelsel, genoteerd als nv en wordt gegeven door:
ene
n xCv &= (4.17) Hierbij moet direct de opmerking worden gemaakt dat nn xv &≠ . nv is een notatie die wordt gebruikt voor een vector van snelheidscomponenten, terwijl nx& een tijdsafgeleide van een vector is. Dit geldt ook voor de versnelling, na is een vector, terwijl nx&& de tweede afgeleide van een vector is. We weten dat deze afgeleiden geen normale afgeleiden zijn omdat ze vanwege de wet van Coriolis niet transformeren als vectoren. [Jekeli, 2000] De navigatievergelijkingen in het n-stelsel worden verkregen door een aanpak te volgen die de nadruk legt op het aardvaste stelsel waarin de navigatievergelijkingen worden geïntegreerd. Dit wordt gedaan door de navigatievergelijkingen in het e-stelsel (4.14) direct te vervangen in het n-stelsel door gebruik te maken van ne
ne vCx =& (4.17). Dit
samen met het feit dat nen
en
en CC Ω=& geeft voor de linkerkant van de eerste vergelijking
van (4.14):
Ω+= nnen
nen
nen vv
dt
dCvC
dt
d (4.18)
Aan de rechterkant van vergelijking 4.14 gebruiken we vergelijking 4.17 en het feit dat
en
eie
en
nie CC Ω=Ω en dit resulteert in:
ee
ieeie
en
nnnen
nie
nn xCgvavdt
d ΩΩ−+Ω+Ω−= )2( (4.19) De laatste twee termen zijn respectievelijk de gravitatieversnelling en de centrifugale versnelling veroorzaakt door de draaiing van de aarde en samen vormen zij de zwaartekrachtsvector:
eeie
eie
en
nnxCgg ΩΩ−= (4.20)
Ook de term voor de snelheidsvector aan de rechterkant in vergelijking 4.19 kan worden herschreven:

Basisvergelijkingen voor traagheidsnavigatie
ARCADIS 35
nie
nin
nen
nie Ω+Ω=Ω+Ω )2( (4.21)
Vervangen van vergelijkingen 4.20 en 4.21 in 4.19 levert de gewenste vorm van de navigatievergelijkingen in het n-stelsel op:
nnnie
nin
nn gvavdt
d +Ω+Ω−= )( (4.22) Vergelijking 4.17 kan dienen als de differentiaalvergelijking voor de positievector geschreven als:
nen
e vCxdt
d= (4.23)
Normaal gesproken wordt vergelijking 4.23 geformuleerd in geodetische lengtegraad ϕ, breedtegraad λ en hoogte h in plaats van cartesische coördinaten in het aardvaste stelsel. Om de snelheidscomponenten uit te kunnen drukken in verhouding van de geodetische coördinaten starten we met het herhalen van vergelijking 2.17:
+−++
=ϕλϕλϕ
sin))1((
sincos)(
coscos)(
2 heN
hN
hN
xe (4.24)
Nu is het vrij eenvoudig om aan te tonen dat:
ϕϕϕϕ
sin)()coscos)(( hMhNd
d+−=+ (4.25)
en dat:
ϕϕϕ
sin)()sin))1((( 2 hMheNd
d+=+− . (4.26)
Dus met ϕϕ &)/(/ dddtd = , enzovoorts, kunnen we vergelijking 4.24 herschrijven als: [Jekeli, 2000]
++++++−++−+−
=ϕϕϕ
λϕλϕλλϕϕλϕλϕλλϕϕ
sincos)(
sincoscoscos)(sinsin)(
coscossincos)(cossin)(
hhM
hhNhM
hhNhM
x e
&&
&&&
&&&
& (4.27)
Nu is aan te tonen dat met de transformatiematrix n
eC vergelijking 4.17 kan worden geschreven als:

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
36 ARCADIS
−+
+=
h
hN
hM
v n
&
&
&
ϕλϕ
cos)(
)( (4.28)
Ook hier is weer te zien dat de snelheidscomponenten van de nv vector verwijzen naar de aardvaste vector ex& , maar dan georiënteerd langs richtingen die zijn gedefinieerd door het navigatiestelsel. Om een voorbeeld te geven: de eerste component, de snelheid noordgericht, is het lokale coördinaatverschil per epoche noordgericht langs de tangent van de meridiaan. Uiteindelijk kunnen ook de hoeksnelheden van vergelijking 4.19 naar ratio uitgedrukt worden in lengte- en breedtegraad. Het schrijven van vector n
inω in matrix vorm resulteert in:
++−+−−+
=Ω0cos)(
cos)(0sin)(
sin)(0
ϕωλϕϕωλϕωλ
ϕϕωλ
e
ee
e
nin
&&
&&
&&
(4.29)
Vergelijking 2.22 samen met ( )Te
eie ωω 00= geeft:
−−=Ω=Ω
0cos0
cos0sin
0sin0
ϕωϕωϕω
ϕω
e
ee
e
en
eie
ne
nie CC (4.30)
De expliciete vorm van de hoeksnelheden coëfficiëntenmatrix van nv ziet er dan als volgt uit:
++−+−−+
=Ω+Ω0cos)2(
cos)2(0sin)2(
sin)2(0
ϕωλϕϕωλϕωλ
ϕϕωλ
e
ee
e
nie
nin
&&
&&
&&
(4.31)
Wanneer nu de snelheidsvector nv , de gemeten versnellingen na en de zwaartekracht-vector ng worden ontbonden in de north, east en down componenten geef dit:
=
d
e
nn
v
v
v
v ;
=
d
e
nn
a
a
a
a ;
=
d
e
nn
g
g
g
g (4.32)
Vervolgens wordt vergelijking 4.31 gesubstitueerd in vergelijking 4.19 en gebruik makend van 4.32 geeft:

Basisvergelijkingen voor traagheidsnavigatie
ARCADIS 37
−−−++++++
−+−+=
NEEeDD
DDDeNeEE
EDEeNN
d
e
n
vvvga
vvvvga
vvvga
v
v
v
dt
d
ϕϕλϕωϕλϕλϕωϕω
ϕλϕϕω
&&
&&
&&
coscos2
cossincos2sin2
sinsin2 (4.33)
−+
+=
D
E
N
vhN
vhM
v
hϕλ
ϕcos)(
)(
&
&
&
(4.34)
Door ook vergelijking 4.28 te formuleren als vergelijking 4.34 ontstaat er een set van zes differentiaalvergelijkingen bestaande uit de variabelen ),,,,( , hvvv DEN λϕ die geïntegreerd kunnen worden om aardvaste coördinaten en snelheden in het navigatiestelsel te krijgen. [Jekeli, 2000] Voor de transformatiematrix geldt:
nnb
nb
nb CC Ω=& (4.35)
met n
innb
bib
nnb C ωωω −= . (4.36)
De in dit hoofdstuk beschreven vergelijkingen voor traagheidsnavigatie worden in het volgende hoofdstuk gebruikt voor het opstellen van een dynamisch foutenmodel. Met dit model kan berekend worden wat het effect is van een fout in de gemeten versnelling of hoeksnelheid op de snelheid of positie.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
38 ARCADIS

Dynamisch foutenmodel
ARCADIS 39
5 Dynamisch foutenmodel
Een traagheidnavigatiesysteem is een complexe samenstelling van meestal zes mechanische of optische sensoren. Elk van deze sensoren reageert op fysische effecten van buitenaf, systematische fouten en willekeurige interne ruis die afwijken van de gewenste situatie. Het is daarom belangrijk om deze effecten en foutenbronnen zo goed mogelijk te modelleren door middel van dynamische en stochastische modellen en daar waar mogelijk gebruik te maken van externe waarnemingen zoals GPS waarnemingen. [Jekeli, 2000] Dit hoofdstuk beschrijft de fysische en wiskundige relaties tussen de instrumentfouten en de daaruit volgende navigatieoplossingen. Dit resulteert in een wiskundig, dynamisch foutenmodel, dat gebaseerd is op een foutenafschatting van fysische grootheden en beschrijft hoe sensorfouten zich voortplanten in stand, positie en snelheid.
5.1 Linearisatie van het model van de foutenafschatting Voor een uniforme aanpak van het dynamische foutenmodel wordt eerst een foutenafschatting van de algemene navigatievergelijkingen van vergelijking 4.9 gemaakt. Deze foutenafschatting is niet lineair en in deze paragraaf wordt deze gelineariseerd door gebruik te maken van een Taylor reeks. Dit algemene gelineariseerde model kan vervolgens gebruikt worden voor verschillende coördinaatstelsels zoals benoemd in hoofdstuk 2. De differentiaalafschatting van vergelijking 4.9 levert het volgende resultaat op:
ww
wwwwwiw
wiw
wiw
wwiw
wiw
wiw
wiw
wiw
wwiw
wwiw
w
xxdt
d
gax
xxxxdt
d
&
&
&&&&
δδ
δδδ
δδδδδδ
=
++Γ−ΩΩ+Ω−
ΩΩ+ΩΩ+Ω−Ω−Ω−=
)(
)(22
(5.1)
In bovenstaande vergelijkingen is www xg ∂∂=Γ / de tensor van zwaartekracht-gradiënten in het w-stelsel. De afschatting wgδ is de verstoringvector van de zwaartekracht. Elk van de differentialen w
iwΩ& , wiwΩ en waδ kunnen differentialen van de
positie, snelheid, oriëntering, gemeten versnelling en gemeten hoeksnelheid bevatten. Wanneer de differentiaal van sw
sw aCa = wordt bepaald, geeft dat:

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
40 ARCADIS
sws
sws
w aCaCa δδδ += (5.2) Ook kan de transformatiematrix van het s-stelsel naar het w-stelsel ontbonden worden in:
is
wi
ws CCC = (5.3)
De differentiaal w
sCδ uit vergelijking 5.2 wordt veroorzaakt door oriëntatiefouten van het s-stelsel ten opzichte van het w-stelsel en heeft dus een dynamisch karakter. Om deze dynamica te beschrijven is het nodig om w
sCδ weer te geven in kleine hoekfouten:
( )Twwww321 ψψψψ = (5.4)
Deze fouten kunnen worden weergegeven in de scheefsymmetrische matrix wΨ :
−−
−=Ψ
0
0
0
12
13
23
ww
ww
ww
w
ψψψψψψ
(5.5)
De berekende transformatiematrix w
sC is vervolgens opgebouwd uit de werkelijke transformatiematrix gevolgd door de transformatie van de fouten van deze hoeken:
ws
wws CIC )(ˆ Ψ−= (5.6)
Hieruit volgt dat:
ws
wws
ws
ws
ws
CC
CCC
Ψ−=−=
δδ ˆ
(5.7)
Door vergelijking 5.7 te substitueren in vergelijking 5.2 ontstaat:
wwsws
w
sws
sws
ww
aaCa
aCaCa
ψδδδδ
×+=
+Ψ= (5.8)
Vervolgens wordt vastgesteld dat het dynamische gedrag van de hoekfouten wψ ook te herleiden is naar een differentiaalvergelijking, analoog aan vergelijking 5.1. Om dit te bereiken wordt de differentiaal van w
sC& gegeven zoals vergelijking 2.12:
sws
ws
sws
ws
ws
sws
ws
ws
CCC
CC
Ω+Ω=Ω=
δδδδδ
&
& )( (5.9)

Dynamisch foutenmodel
ARCADIS 41
Waarin de afschatting van de hoeksnelheid swsΩδ wordt geïnterpreteerd als de fout in de
overeenkomstige berekende waarde swsΩ :
sws
sws
sws Ω−Ω=Ω ˆδ (5.10)
Differentiëren van het rechterdeel van vergelijking 5.7 en door dit resultaat te vergelijken met het rechterdeel van vergelijking 5.9 geeft:
sws
ws
sws
ws
sws
ws
wws
w CCCC Ω+Ω=ΩΨ−Ψ− δδ& (5.11) Substitutie van w
swCΨ door w
sCδ uit vergelijking 5.7 en oplossen voor wΨ& geeft: s
wsws
ws
w CC Ω−=Ψ δ& (5.12) Of in het geval van vectoren:
sws
ws
w C ωδψ −=& (5.13) waarin s
wsωδ de fout in de hoeksnelheid van het s-stelsel voorstelt ten opzichte van het w-stelsel. Hieronder wordt besproken hoe deze fout gescheiden kan worden in de gyroscoop fouten en in eventuele oriënteringsfouten van het w-stelsel. De gyroscoop meet hoeksnelheden in het s-stelsel ten opzichte van het inertiestelsel, s
isω , welke de som is van hoeksnelheid van het s-stelsel ten opzichte van het w-stelsel en die van het w-stelsel ten opzichte van het i-stelsel:
sws
siw
sis ωωω += (5.14)
Een foutenafschatting van deze vergelijking, waarin eerst s
iwω wordt vervangen door wiw
swC ω levert de volgende vergelijking op:
sws
wiw
sw
wiw
wsw
sis
sws
wiw
sw
wiw
sw
sis
CC
CC
ωδωδωωδωδωδωδωδ++Ψ=
++= (5.15)
Door s
wsωδ te isoleren in vergelijking 5.15 en te substitueren in vergelijking 5.13 geeft dit het dynamische foutenmodel voor de hoeken in de transformatie van het systeemstelsel naar een willekeurig stelsel:
wiw
sis
ws
wwiw
w C ωδωδψωψ +−×=& (5.16) Nu van alle navigatievergelijkingen het dynamische foutenmodel bekend is voor elk willekeurig stelsel wordt achtereenvolgens in paragraaf 5.2, 5.3 en 5.4 het dynamisch

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
42 ARCADIS
foutenmodel voor het inertiestelsel, het aardvaste stelsel en als laatste het navigatiestelsel behandeld.
5.2 Dynamisch foutenmodel in het inertiestelsel Voor het dynamische foutenmodel in het inertiestelsel hoeft alleen in vergelijking 5.1 de ‘w’ te worden vervangen door een ‘i’ en hetgeen dan overblijft is:
iiiii gaxxdt
d δδδδ ++Γ=& (5.17) Dit komt omdat 0=Ωi
ii en dus ook 0=Ωiiiδ . Wanneer nu de fouten van de
versnellingsmeter worden vervangen door die van vergelijking 5.8 in vergelijking 5.17, gecombineerd met vergelijking 5.15 dan geeft dit het volledige dynamische foutenmodel:
ii
isis
iiiii
sis
is
i
xxdt
d
gaCaxxdt
d
C
&
&
&
δδ
δδψδδωδψ
=
++×+Γ=
=
(5.18)
Dit model kan ook in matrixvorm worden geschreven:
[ ]
−+
Γ×=
s
s
sis
is
is
i
i
i
ii
i
i
i
g
aIC
C
x
x
I
a
x
xdt
d
δδδω
δδψ
δδψ
000
0
00
00
0
000
&& (5.19)
5.3 Dynamisch foutenmodel in het aardvaste stelsel In het aardvaste stelsel geldt dat 0=e
ieδω en 0=eieω . De afschatting van de snelheid
van vergelijking 5.1 voor ea ≡ is dan:
eeeeeie
eie
eeie
e gaxxxdt
d δδδδδ ++Γ−ΩΩ−Ω−= )(2 && (5.20) Vervangen van vergelijking 5.8 in vergelijking 5.17 gecombineerd met vergelijking 5.15 geeft direct het complete dynamische foutenmodel voor het aardvaste stelsel:
ee
eses
eeiieie
eie
eeie
e
sis
es
eeie
e
xxdt
d
gaCaxxxdt
d
C
&
&&
&
δδ
δδψδδδωδψψ
=
++×+Γ−ΩΩ−Ω−=
−Ω−=
)(2 (5.21)

Dynamisch foutenmodel
ARCADIS 43
In matrixvorm wordt dit:
[ ]
−+
Γ−ΩΩ−Ω−×
Ω−=
s
s
sis
es
es
i
i
i
ieie
eie
eie
e
eie
e
e
e
g
aIC
C
x
x
I
a
x
xdt
d
δδωδ
δδψ
δδψ
000
0
00
00
)(2
00
&& (5.22)
5.4 Dynamisch foutenmodel in het navigatiestelsel Het doel van het n-stelsel voor dit onderzoek is om de dynamica van fouten te relateren aan geodetische coördinaten, overeenkomend met de navigatievergelijkingen 4.33 en 4.34. Vanwege de speciale definitie van nv (zie vergelijking 4.17) wordt geen gebruik gemaakt van vergelijking 5.1, maar wordt de navigatievergelijking 4.22 direct afgeschat:
nnnnnnie
nin
nnie
nin
n gpavvvdt
d δδδδδδ +Γ++Ω+Ω−Ω+Ω−= )()( (5.23) In vergelijking 5.23 zijn de gravitatie- en centrifugaalversnelling, net als in vergelijking 4.20, gecombineerd tot de zwaartekrachtsdifferentiaal n
gδ . De matrix nnn
pg δδ /=Γ stelt vervolgens de matrix van de zwaartekrachtgradiënten voor. Net zoals voor de snelheidsvector is er ook voor de positievector een speciale notatie, namelijk: np . Deze notatie wordt gebruikt om de afgeleide van de positievector weer te kunnen geven langs de assen van het navigatiestelsel:
−+
+=
h
hN
hM
p n
δϕδλδϕ
δ cos)(
)( (5.24)
De differentiaal n
gδ is ook wel bekend als de verstoringvector van de zwaartekracht. De zwaartekrachtsgradiënten, nΓ , moeten met de nodige aandacht worden geïnterpreteerd, omdat het n-stelsel per definitie bij benadering roteert met de zwaartekrachtvector. De differentiaal van nv in termen van geodetische coördinaten wordt verkregen uit vergelijking 4.28:
−−+++
+++=
h
hNhN
hMhM
v n
&
&&&
&&
δδϕλϕλϕδλϕδδ
ϕδϕδδδ )sin)(cos(cos)(
)()( (5.25)
En de afgeleide naar tijd is dan:

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
44 ARCADIS
−++−−++
−++−+++
+++++++
=
hhN
hN
hNhNhMhMhMhM
vdt
d n
&&
&&&&&&&&&&
&&&&&
&&&&&&&&
&&&&&&&&&&
δϕϕδλϕλδδϕλϕδϕϕλλδ
ϕϕλϕλδδϕδϕλϕλδλϕλδδ
ϕδϕδδϕδϕδδ
δsin)(cos))(((
)sincos)((
)sincos)((cos)()()()()(
(5.26)
Omdat de termen λδδδδδ &&&& NMNMN ,,,, en ϕδ &&N van de tweede orde of hoger zijn kunnen deze verwaarloosd worden in de lineaire afschatting van het dynamische foutenmodel. Vanwege dezelfde reden kunnen N en M vervangen worden door een straal die gedefinieerd is als het gemiddelde van de kromtestralen bij een bepaalde breedtegraad: NMR =ϕ [Jekeli, 2000] Met deze benaderingen kunnen vergelijkingen 5.25 en 5.26 worden herschreven als:
−−++
++=
h
hRh
hRh
v n
&
&&&
&&
δδϕλϕλϕδλϕδ
ϕδϕδδ ϕ
ϕ
)sin)(cos(cos
)( (5.27)
−++−−++
−+−+++++
=h
hR
hhh
hRhhh
vdt
d n
&&
&&&&&&&&&&
&&&&&&&&&&
&&&&&&&&
δϕϕδλϕλδδϕλϕδϕϕλλδϕϕλϕλδϕδϕλϕλδϕλδ
ϕδϕδϕδϕδδ
ϕ
ϕ
sin)(cos))(((
)sincos()sincos(cos
)(
(5.28)
Dit geeft nu de uitdrukkingen van de afschattingen van de snelheidstermen uit vergelijking 5.23 uitgedrukt in geodetische coördinaatdifferentialen en de afgeleiden naar tijd hiervan. De differentialen van de hoeksnelheden kunnen uit vergelijking 4.31 gehaald worden:
=Ω+Ω )( nie
ninδ
++−++−+−−
−++
0sin)2(cos
sin)2(cos0cos)2(sin
cos)2(sin0
ϕδϕωλϕλδϕδϕδϕωλϕλδϕδϕωλϕλδ
ϕδϕδϕωλϕλδ
e
ee
e
&&&
&&&&
&&&
(5.29)
De afschatting naδ bevat ook oriënteringsfouten. Als nψ de vector van kleine hoeken voorstelt tussen het werkelijke navigatiestelsel en het berekende stelsel uit foutieve geodetische coördinaten, dan geldt:
nnsns
n aaCa ψδδ ×+= (5.30) Ook de dynamica van deze oriënteringsfouten kan worden weergeven als een differentiaalvergelijking:
nin
sis
ns
nnin
n C ωδωδψωψ +−×−=& (5.31)

Dynamisch foutenmodel
ARCADIS 45
met daarin afgeleid van vergelijking 2.24 de afschatting van de vector van de hoeksnelheden van het inertiestelsel ten opzichte van het navigatiestelsel:
+−+
=ϕδϕωλϕλδ
ϕδϕδϕωλϕλδ
ωδcos)(sin
sin)(cos
e
enin
&&
&
&&
(5.32)
Wanneer nu alle fouten van de positie, snelheid en oriëntering in één vector worden gestopt dan levert dit de volgende vector op:
( )Tnnn hh δδλδϕδλδϕδψψψε &&&321= (5.33) Ook de systeemfouten en andere termen die van invloed zijn worden in één vector gestopt:
=
n
s
sis
g
au
δδωδ
(5.34)
Het totale dynamische foutenmodel voor het navigatiestelsel krijgt dan uiteindelijk de volgende vorm:
uGFdt
d nnnn += εε (5.35) Om tot deze vergelijking te komen zijn de vergelijkingen 4.28, 4.31, 5.27, 5.28, 5.29 en 5.30 gesubstitueerd in vergelijking 5.23. Op dezelfde manier wordt ook vergelijking 5.31 herschreven door de vergelijkingen 5.32 en 2.24 hierin te substitueren. Na vele handelingen geeft dit het in vergelijking 5.35 genoemde resultaat en het model dat is ontstaan is analoog aan dat van het aardvaste stelsel. [Jekeli, 2000] De nF matrix uit vergelijking 5.35 ziet er dan als volgt uit:
Γ++Γ−Γ−−−
Γ−−Γ
Γ++
+
−−
Γ++Γ−Γ−−−−−−−
−−−−
=
000100000
000010000
000001000
coscos2sin0cos220
costan2
sectan
tan22
tan2tan2cos
0cos
2sin5.0cos2cos
22sin
20
00cos0sin00cos
000001cos0sin
00sin0cos0sin0
332
22
323122
112
23
1
22
21
111
13
132122111
23
11
11
11
nnnnn
n
n
n
nn
nnn
nn
n
lrrlrlrraa
r
lr
hl
r
l
r
hl
r
a
r
a
r
ll
rl
r
h
r
a
r
a
ll
ll
ll
F
ϕλϕϕϕλϕϕ
ϕλϕϕ
ϕϕλ
ϕϕϕϕϕϕϕ
ϕλϕϕϕλϕϕϕϕϕϕ
ϕϕϕϕϕϕ
&&&&&&&
&&&&
&&
&
&&&&
&&
&&&&&&
&&
&
&&&
&&
&&&
(5.36)

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
46 ARCADIS
en
−= −−
000
0
0011 DCD
C
G ns
ns
n . (5.37)
De matrix D transformeert de positie- en snelheidsfouten van hoeken naar lineaire waarden en keert de verticale as om:
−≈
−+
+=
100
0cos0
00
100
0cos)(0
00
ϕϕ r
r
hN
hM
D . (5.38)
Verder moet nog worden opgemerkt dat de differentiaalvergelijking voor de fouten van de geodetische coördinaten de volgende is:
=
hhdt
d
&
&
&
δλδϕδ
δδλδϕ
(5.39)
Voor dit onderzoek zijn alle elementen behalve n
33Γ van de zwaartekrachtsgradiënt verwaarloosd omdat deze klein zijn en voor dit onderzoek simpelweg gelijk aan nul worden gesteld. Dit alles resulteert in het onderstaande dynamisch foutenmodel dat voor dit onderzoek is gebruikt:
∂∂
+
∂∂Ψ
=
∂∂Ψ
−
sis
sis
ns
ns
a
g
n
nn
a
g
n
n
a
CD
C
b
d
x
xF
b
d
x
x
dt
d ω
λ
λ
λ
λ
00
00
00
00
00
0
0
0000000
0000000
0000000
0000000
0000
0000
00001
&&
(5.40)
Het in dit hoofdstuk behandelde dynamische foutenmodel wordt gebruikt voor de kwaliteitsanalyse van het MRSS. Maar wat wordt precies bedoeld met kwaliteit? In het volgende hoofdstuk wordt hier dieper op ingegaan.
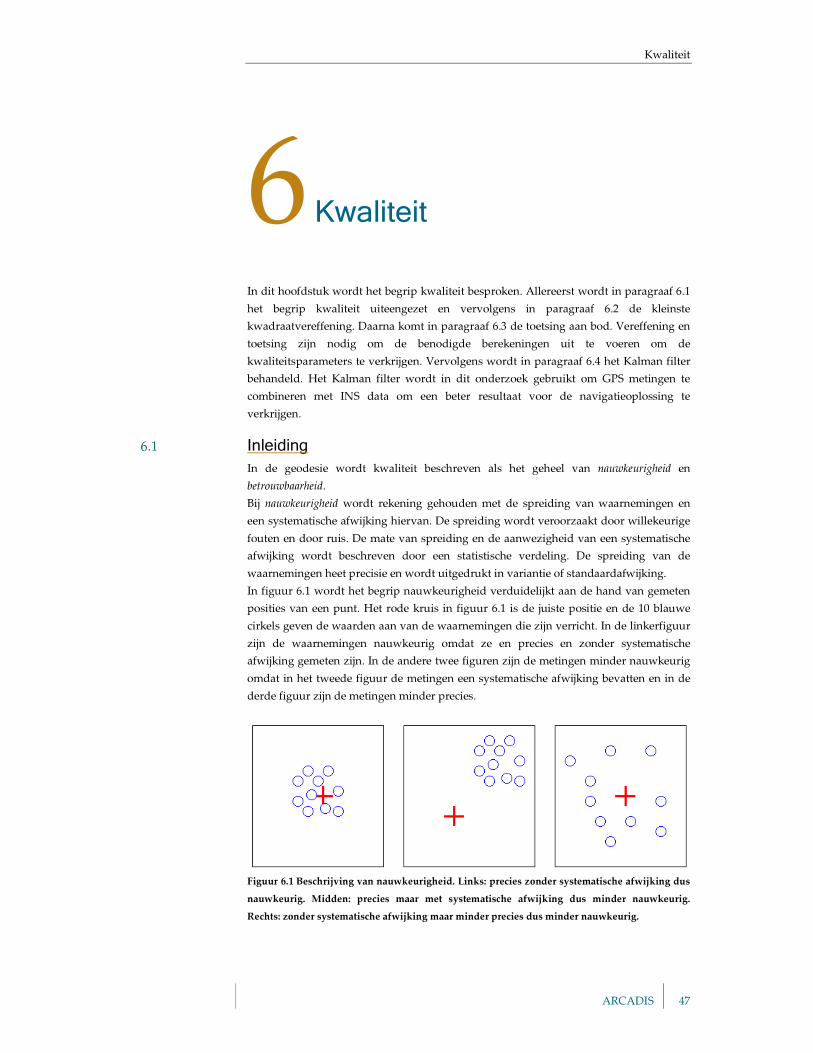
Kwaliteit
ARCADIS 47
6 Kwaliteit
In dit hoofdstuk wordt het begrip kwaliteit besproken. Allereerst wordt in paragraaf 6.1 het begrip kwaliteit uiteengezet en vervolgens in paragraaf 6.2 de kleinste kwadraatvereffening. Daarna komt in paragraaf 6.3 de toetsing aan bod. Vereffening en toetsing zijn nodig om de benodigde berekeningen uit te voeren om de kwaliteitsparameters te verkrijgen. Vervolgens wordt in paragraaf 6.4 het Kalman filter behandeld. Het Kalman filter wordt in dit onderzoek gebruikt om GPS metingen te combineren met INS data om een beter resultaat voor de navigatieoplossing te verkrijgen.
6.1 Inleiding In de geodesie wordt kwaliteit beschreven als het geheel van nauwkeurigheid en betrouwbaarheid. Bij nauwkeurigheid wordt rekening gehouden met de spreiding van waarnemingen en een systematische afwijking hiervan. De spreiding wordt veroorzaakt door willekeurige fouten en door ruis. De mate van spreiding en de aanwezigheid van een systematische afwijking wordt beschreven door een statistische verdeling. De spreiding van de waarnemingen heet precisie en wordt uitgedrukt in variantie of standaardafwijking. In figuur 6.1 wordt het begrip nauwkeurigheid verduidelijkt aan de hand van gemeten posities van een punt. Het rode kruis in figuur 6.1 is de juiste positie en de 10 blauwe cirkels geven de waarden aan van de waarnemingen die zijn verricht. In de linkerfiguur zijn de waarnemingen nauwkeurig omdat ze en precies en zonder systematische afwijking gemeten zijn. In de andere twee figuren zijn de metingen minder nauwkeurig omdat in het tweede figuur de metingen een systematische afwijking bevatten en in de derde figuur zijn de metingen minder precies.
Figuur 6.1 Beschrijving van nauwkeurigheid. Links: precies zonder systematische afwijking dus nauwkeurig. Midden: precies maar met systematische afwijking dus minder nauwkeurig. Rechts: zonder systematische afwijking maar minder precies dus minder nauwkeurig.
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
48 ARCADIS
Betrouwbaarheid beschrijft de vraag, hoe goed fouten in het model of waarnemingen gedetecteerd kunnen worden en hoe gevoelig de uiteindelijke resultaten voor fouten die zijn niet gevonden worden. Betrouwbaarheid is onder te verdelen in twee soorten, interne betrouwbaarheid (internal reliability) en externe betrouwbaarheid (external reliability). Interne betrouwbaarheid beschrijft de kans dat een fout in de waarneming gevonden wordt en de uitwendige betrouwbaarheid beschrijft de invloed van deze fout op de schatters van de onbekenden. [Teunissen, 2000b en 2005]
6.2 Vereffening Nadat in de vorige paragraaf het begrip kwaliteit is uitgelegd kan in deze paragraaf de vereffening besproken worden die het mogelijk maakt waarnemingen om te zetten in schatters voor de onbekenden. Allereerst wordt het mathematische model gegeven samen met de formules voor het berekenen voor de uiteindelijk gewenste schatters van de onbekenden. Omdat waarnemingen vaak niet lineair zijn in de onbekende parameters dienen deze gelineariseerd te worden. De procedure voor de linearisering wordt in paragraaf 6.2.2 behandeld. Tot slot wordt in paragraaf 6.2.3 het begrip verkenningsberekening uiteengezet.
6.2.1 Model van waarnemingen Het algemene waarnemingsmodel ziet er als volgt uit: [Teunissen, 2000a]
1,1
×××
=
nnmm
AxyE ;mmy
mmmm
T QyDAxyAxyE×××
==−− ))(( (6.1)
waarbij, y vector van waarnemingen A ontwerpmatrix x vector van onbekenden e vector van residuen
E mathematische verwachting yQ variantie-covariantie matrix van de waarnemingen
m aantal waarnemingen n aantal onbekenden De formule voor de schatter van de onbekenden is dan:
yQAAQAx yTT
yT 11 )(ˆ −−
= (6.2) Zo ook de formules voor de schatter van de waarnemingen en residuen:
yye
xAy
ˆˆ
ˆˆ
−=
= (6.3)
Voor de variantie-covariantiematrices van de verschillende schatters geldt:

Kwaliteit
ARCADIS 49
yye
Txy
yT
x
QQQ
AAQQ
AQAQ
ˆˆ
ˆˆ
11ˆ )(
−=
=
=−−
(6.4)
6.2.2 Lineaire waarnemingsmodel Waarnemingen zijn in het algemeen niet lineair in de onbekende parameters en daarom moeten deze gelineariseerd worden voor de vereffening Voor het merendeel van de niet lineaire problemen geldt dat dit op te lossen is door een benadering van het originele A-model met een gelineariseerd model. Deze benadering wordt mogelijk gemaakt door de theorie van Taylor. [Teunissen, 2000b] Een belangrijke consequentie van deze theorie is dat de restterm willekeurig klein gemaakt kan worden door de benaderde waarde van x dicht genoeg bij x te kiezen. Veronderstel nu dat de benaderde waarde inderdaad dichtbij x gekozen wordt zodat de restterm naar nul gaat en dus verwaarloosd kan worden. De theorie van Taylor kan dan bij benadering geschreven worden als:
xxfxfxf Tx ∆∂+= )()()( 00
& (6.5) Dus als we 0x dicht genoeg bij x kiezen, kan de niet lineaire functie ℜ→ℜnf : tot een bepaalde graad worden benaderd door de functie xxfxf T
x ∆∂+ )()( 00 die lineair is in x . Deze functie wordt de linearisatie van )(xf in x genoemd. Gebruiken we nu vergelijking 6.5 voor het lineariseren van de A-matrix van (6.1), dan geeft dit:
10
01
1
0
01
)(
)(
)(
)(
)(×
××
∆
∂
∂+
=
n
nm
Tmx
Tx
m
m
x
xa
xa
xa
xa
xA M (6.6)
Vervolgens wordt de m x n matrix omschreven door )( 0xAx∂ en wordt vergelijking (6.6) vervangen in (6.1) zodat geldt:
1
0
10
1
)()(××××
∆∂+=nnm
xmm
xxAxAyE ; mmy
mm
QyD××
= (6.7)
Als nu de constante m-vector )( 0xA naar de linkerkant van de vergelijking brengen en definiëren dat )( 0xAyy −=∆ dan wordt uiteindelijk het gelineariseerde model van waarnemingsvergelijkingen verkregen:
xxAyE x ∆∂=∆ )( 0 ; yQyD =∆ (6.8) De vergelijking voor de kleinste kwadraat schatter wordt dan:
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
50 ARCADIS
yQxAxAQxAx yT
xT
xyT
x ∆∂∂∂=∆ −− 10010 )())()((ˆ (6.9) Met behulp van de in deze paragraaf vermelde formules kan een uitspraak gedaan worden over de nauwkeurigheid van de geschatte onbekenden. Echter, om ook een uitspraak te kunnen doen over de betrouwbaarheid, dient er een toetsing uitgevoerd te worden. In de volgende paragraaf zal deze procedure behandeld worden.
6.2.3 Verkenningsberekening Het komt vaak voor dat men geïnteresseerd is in de kwaliteit van een netwerk, voordat men wil starten met de werkelijke metingen. Een manier om een dergelijke kwaliteitsanalyse uit te voeren is om gebruik te maken van verkenningsberekeningen. Het grote voordeel van een verkenningsberekening is namelijk dat zonder een werkend systeem of metingen, dus zonder kosten te maken, wel informatie over de standaardafwijkingen van de onbekenden berekend kan worden.
6.3 Toetsing Door middel van het uitvoeren van een toetsing is men in staat een uitspraak te doen over zowel de interne als de externe betrouwbaarheid. Samen met de in de vorige paragraaf behandelde vereffening kan een uitspraak gedaan worden over de kwaliteit van het model, de waarnemingen en de geschatte onbekenden.
6.3.1 Inleiding Om de vraag of een bepaald model waar of niet waar is te beantwoorden, kan men proberen een experiment te ontwerpen zodat de uitkomst voorspeld kan worden aan de hand van het veronderstelde model. Nadat het experiment is uitgevoerd kunnen deze uitkomsten vergeleken worden met de theoretisch voorspelde waarden en op basis van deze vergelijking kan geconcludeerd worden of het veronderstelde model of hypothese verworpen dient te worden. Omdat een experiment geen exacte uitkomst geeft, is in de praktijk de toetsing van veronderstelde hypothesen gebaseerd op de toetsing van hypothesen van willekeurige variabelen waarvan de kansdichtheidsverdeling afhangt van het model of veronderstelde hypothese. Daarom worden hypothesen beschouwd als statistische hypothesen. (Teunissen, 2000b) Een statistische hypothese is een aanname over de kansdichtheidsverdeling van een of meer willekeurige variabelen waarvan verondersteld wordt dat een willekeurige waarneming voor handen is. In veel hypothese toetsingsproblemen worden twee soorten hypothesen besproken: de hypothese die wordt getoetst wordt de nulhypothese genoemd en genoteerd als 0H . De tweede wordt de alternatieve hypothese genoemd en genoteerd als aH . De gedachte is dat als de nul hypothese fout is, dat de alternatieve hypothese goed is en omgekeerd. Echter, twee soorten fouten kunnen ontstaan in de toetsing. De eerste fout is een verwerping van 0H terwijl 0H in feite waar is en de tweede fout is een acceptatie van
0H terwijl 0H in feite onjuist is. Tabel 6.1 laat een beslissingstabel zien met de twee soorten fouten.

Kwaliteit
ARCADIS 51
Tabel 6.1 Beslissingstabel waarin de twee verschillende fouten staan die gemaakt kunnen worden bij een toetsing.
0H is juist 0H is onjuist
Verwerp 0H Ky∈
Verkeerd Type I fout
Correct
Accepteer 0H Ky∉
Correct
Verkeerd Type II fout
De grootte van een type I fout wordt gedefinieerd als de waarschijnlijkheid dat een steekproefwaarde van y in het kritieke gebied zit wanneer 0H waar is. Deze waarschijnlijkheid wordt genoteerd als α en heet de grootte of de onbetrouwbaarheid van de toetsing. De grootte van de toetsing kan berekend worden wanneer het kritieke gebied en de kansdichtheidsfunctie van y bekend zijn onder 0H . De grootte van een type II fout wordt gedefinieerd als de waarschijnlijkheid dat een steekproefwaarde van y buiten het kritieke gebied valt terwijl 0H onjuist is. Deze waarschijnlijkheid wordt genoteerd als β. De grootte van een type II fout kan berekend worden wanneer het kritieke gebied en kansdichtheidsfunctie van y is bekend onder aH . Nu bekend is dat bij een toetsing twee typen fouten aanwezig zijn, lijkt het aannemelijk om deze fouten te gebruiken om criteria op te zetten om een beste toetsing te definiëren. Een goede toetsing is een toetsing waarbij α en β zo klein mogelijk zijn en in het ideale geval gelijk zijn aan nul. Echter, in werkelijkheid is dit niet mogelijk. Als α kleiner wordt, wordt β groter en omgekeerd. Het Neyman-Pearson principe beschrijft een werkbare methode om dit probleem te omzeilen. In dit principe wordt voor de type I fout een vaste waarde genomen en wordt de grootte van β geminimaliseerd. Vaak wordt dit principe herschreven omdat het makkelijker is te werken met alleen het kritieke gebied. Daarom wordt vaak 1-β berekend, wat de waarschijnlijkheid is dat de steekproefwaarde in het kritieke gebied zit en dus aH waar is, oftewel de waarschijnlijkheid van terecht verwerpen van 0H . Deze waarschijnlijkheid heet de power van de toets en wordt genoteerd als γ.
6.3.2 Hypothesen toetsen In deze paragraaf worden de formules en afleidingen van de toetsing van hypothesen voor het A-model gegeven. Analoog aan de voorgaande paragrafen wordt verondersteld dat de waarnemingen normaal verdeeld zijn met een bekende variantie matrix. Voor het model van waarmeningen geldt voor de twee verschillende hypothesen:
110 :
×××
=
nnmm
xAyEH tegen 0,:111
≠∇∇+=××××× qqm
ynnmm
A CxAyEH (6.10)
Verondersteld wordt dat de rang van matrix A gelijk is aan n, dat de rang van matrix Cy gelijk is aan q en dat de rang van qnCA y +=)( M .
0H wordt verworpen als:

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
52 ARCADIS
αkeQCCQQQCCQeT y
Tyyyey
Tyyy
Tq >= −−−−−
0111
ˆ11
0 ˆ)(ˆ0
(6.11) Om nu de kritieke waarde αk met grootte α van de toets te berekenen, moet de verdeling van qT bekend zijn. Deze verdeling is onder 0H en AH een 2χ verdeling [Teunissen, 2000b]:
)0,(~: 20 qTH q χ ; ),(~: 2 λχ qTH qA (6.12)
met de niet-centraliteitsparameter:
∇∇=∇∇= −−−
yyeyTy
Ttt
Tt
T CQQQCCQC 1ˆ
11
0λ (6.13) Omdat verondersteld is dat de rang van qnCA y +=)( M , kan q nooit groter zijn dan m-n. Als q wel groter is dan m-n, dan zou de rang van )( yCAM groter zijn dan m en dat is onmogelijk omdat de matrix )( yCAM uit m rijen bestaat. De waarde van q kan niet gelijk aan nul worden gekozen omdat dan de matrix yC niet zou bestaan en dus de twee verschillende hypothesen gelijk zouden zijn. Voor het bereik van q geldt dus:
nmq −≤≤1 (6.14) Nu is het interessant om te kijken naar de twee grensgevallen van het bereik van q: q = 1
Voor het eerste grensgeval, dus q = 1, geldt dat het een belangrijke toepassing is voor het ontdekken van blunders in de waarnemingen. Omdat nooit exact bekend is waar of wanneer een blunder gemaakt is wordt verondersteld dat per keer één blunder aanwezig kan zijn. Zo hoeft in de alternatieve hypothese maar één extra variabele geïntroduceerd te worden en deze methode heet datasnooping. q = m-n
Voor het tweede grensgeval, dus q = m-n, geldt dat het aantal verklarende variabelen die worden toegevoegd aan 0H om tot AH te komen zodanig is dat de overtalligheid van het lineaire model onder AH gelijk is aan nul. Deze test geeft dus een indicatie van de geldigheid van 0H en wordt ook wel de overall model toets genoemd.
6.3.3 Interne betrouwbaarheid In paragraaf 6.3.2 zijn de beide vormen van hypothesen behandeld. De toetsing is gegeven door 0H te verwerpen als:
)0,(2 qq
Tqαχ> of )0,,(2 ∞> qF
q
Tqα (6.15)

Kwaliteit
ARCADIS 53
Hier is een iets andere notatie gebruikt zodat te zien is dat de kritieke waarde berekend moet worden met de 2χ verdeling en de F verdeling, een vaste waarde voor α en het aantal vrijheidsgraden q. De waarden voor de kritieke waarde met vaste waarden voor α en q worden gegeven in standaardtabellen. In geodetische toepassingen is men vooral geïnteresseerd in de modelfout ∇yC die kan worden ontdekt met een bepaalde betrouwbaarheid γ. Vanuit een gekozen γ = 80%, α = 0.01en q = 1 kan de bijbehorende niet-centraliteitsparameter berekend worden en vanuit deze niet-centraliteitsparameter kan de bijbehorende modelfout berekend worden: ∇∇= −−
yyeyTy
T CQQQC 1ˆ
10λ (6.16)
Wanneer ∇ bekend is, dan volgt de modelfout y∇ uit:
11 ×××
∇=∇qqm
ym
Cy (6.17)
De mx1 vector y∇ wordt beschreven als de internal reliability, oftewel de inwendige betrouwbaarheid. De inwendige betrouwbaarheid is dus een maat voor de modelfout die gevonden kan worden met een waarschijnlijkheid van 80 procent. Helaas kan de inwendige betrouwbaarheid niet eenduidig worden bepaald. Daarom worden weer de twee gevallen voor 1=q en nmq −= beschouwd zoals bij de toetsing van hypothesen. Voor 1=q geldt dat de matrix yC gereduceerd wordt tot een mx1 vector yc en dat de qx1 vector ∇ tot een getal wordt gereduceerd. De oplossing voor ∇ kan dan als volgt worden geschreven:
2/1
1ˆ
10
=∇
−−
yyeyTy CQQQC
λ (6.18)
∇ wordt ook de minimal detectable bias (MDB) of grenswaarde genoemd.
Voor het geval nmq −= geldt dat de grenswaarde geschreven kan worden als:
1
2/1
1ˆ
10
1×−−
×
=∇
qyyey
Ty
Tq
ddCQQQCd
λ (6.19)
met d als eenheidsvector van de ruimte qℜ
6.3.4 Externe betrouwbaarheid Zoals beschreven in de vorige paragraaf is de inwendige betrouwbaarheid een maat voor de modelfout die gevonden kan worden met bijvoorbeeld een waarschijnlijkheid van 80 procent. Zo bestaat er ook een maat voor de invloed van een fout op de onbekenden, de externe betrouwbaarheid. De externe betrouwbaarheid is dermate belangrijk omdat men vaak wil weten in hoeverre mogelijke niet ontdekte modelfouten
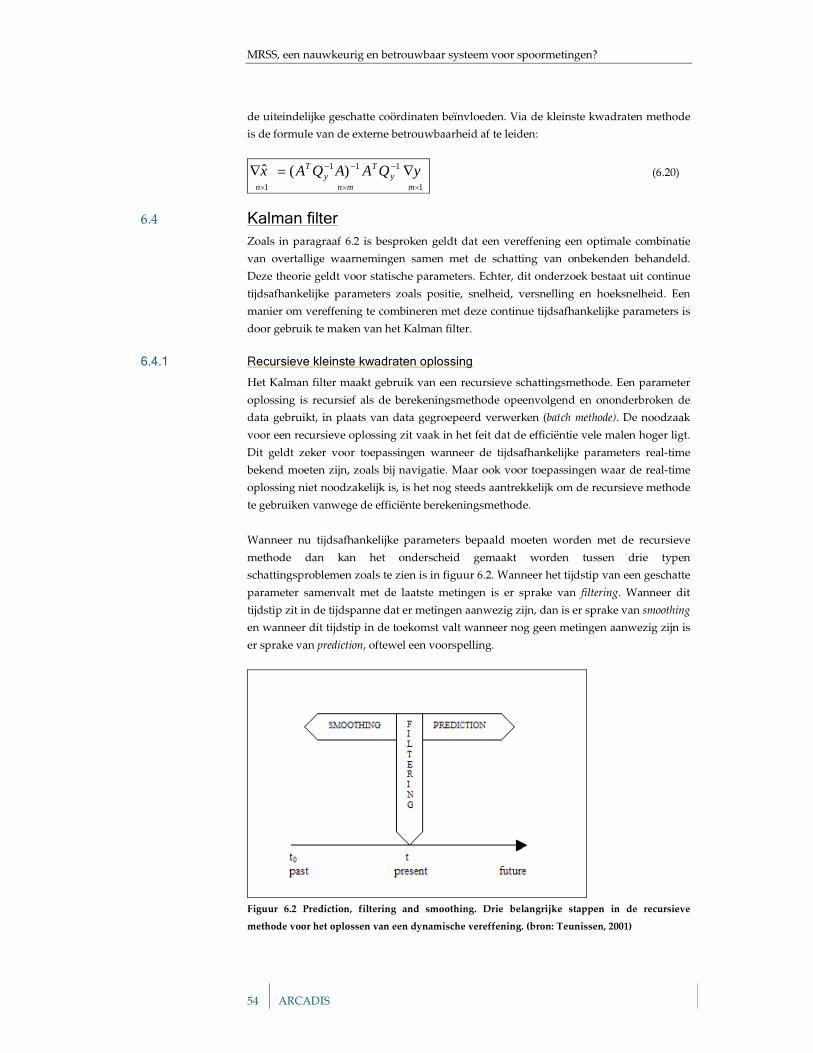
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
54 ARCADIS
de uiteindelijke geschatte coördinaten beïnvloeden. Via de kleinste kwadraten methode is de formule van de externe betrouwbaarheid af te leiden:
1
111
1
)(ˆ××
−−−
×
∇=∇mmn
yT
yT
n
yQAAQAx (6.20)
6.4 Kalman filter Zoals in paragraaf 6.2 is besproken geldt dat een vereffening een optimale combinatie van overtallige waarnemingen samen met de schatting van onbekenden behandeld. Deze theorie geldt voor statische parameters. Echter, dit onderzoek bestaat uit continue tijdsafhankelijke parameters zoals positie, snelheid, versnelling en hoeksnelheid. Een manier om vereffening te combineren met deze continue tijdsafhankelijke parameters is door gebruik te maken van het Kalman filter.
6.4.1 Recursieve kleinste kwadraten oplossing Het Kalman filter maakt gebruik van een recursieve schattingsmethode. Een parameter oplossing is recursief als de berekeningsmethode opeenvolgend en ononderbroken de data gebruikt, in plaats van data gegroepeerd verwerken (batch methode). De noodzaak voor een recursieve oplossing zit vaak in het feit dat de efficiëntie vele malen hoger ligt. Dit geldt zeker voor toepassingen wanneer de tijdsafhankelijke parameters real-time bekend moeten zijn, zoals bij navigatie. Maar ook voor toepassingen waar de real-time oplossing niet noodzakelijk is, is het nog steeds aantrekkelijk om de recursieve methode te gebruiken vanwege de efficiënte berekeningsmethode. Wanneer nu tijdsafhankelijke parameters bepaald moeten worden met de recursieve methode dan kan het onderscheid gemaakt worden tussen drie typen schattingsproblemen zoals te zien is in figuur 6.2. Wanneer het tijdstip van een geschatte parameter samenvalt met de laatste metingen is er sprake van filtering. Wanneer dit tijdstip zit in de tijdspanne dat er metingen aanwezig zijn, dan is er sprake van smoothing en wanneer dit tijdstip in de toekomst valt wanneer nog geen metingen aanwezig zijn is er sprake van prediction, oftewel een voorspelling.
Figuur 6.2 Prediction, filtering and smoothing. Drie belangrijke stappen in de recursieve methode voor het oplossen van een dynamische vereffening. (bron: Teunissen, 2001)

Kwaliteit
ARCADIS 55
De essentie van de recursieve methode is dat het mogelijk wordt gemaakt om de parameter schatters bij te werken voor nieuwe metingen zonder dat alle voorgaande metingen opgeslagen hoeven te worden, de zogeheten measurement update. Zoals eerder vermeld kan het Kalman filter ook gebruikt worden bij tijdsafhankelijke metingen. Een consequentie van deze tijdsafhankelijkheid is dat er naast de measurement update ook sprake is van een time update. Deze time update gebruikt gefilterde schatters van het vorige epoche om de vector van onbekenden van het huidige epoche te schatten. Nu het principe van het Kalman filter bekend is, kan dit verder uitgewerkt worden met formules die van belang zullen zijn voor het berekenen van de onbekenden en de uiteindelijke kwaliteitsanalyse. Wanneer het model van waarnemingen van paragraaf 6.2.1 omgezet wordt naar een model dat tijdsafhankelijk is, dan ziet dit er als volgt uit:
=
)(
)(
)(
0
0
1
0
1
0
1
0
kkktx
tx
tx
A
A
A
y
y
y
EMOM
;
=
ky
y
y
kQ
Q
Q
y
y
y
D
0
0
1
0
1
0
OM(6.22)
Duidelijk is dat de veronderstellingen van dit discrete model niet voldoende zijn voor het schatten van een continue functie )(tx . Model (6.22) maakt het alleen mogelijk om de schatting van )(tx op tijdstip it te maken. Meer informatie is dus nodig om schattingen van x(t) voor alle tijdstippen t mogelijk te maken. Deze informatie is beschikbaar in de volgende lineaire relatie:
)(),()( 00 txtttx Φ= (6.23) De n x n matrix ),( 0ttΦ wordt de transitiematrix genoemd en beschrijft de overgang van )( 0tx naar )(tx voor alle t. De elementen van de transitiematrix worden als bekend verondersteld als functie van t en 0t . Waneer nu de transitiematrix wordt verwerkt in het tijdsafhankelijke model van (6.22) dan geeft dit:
t
tkk
t
t
k
x
A
A
A
y
y
y
E
Φ
ΦΦ
=
,
,11
,00
1
0
MM
;
=
ky
y
y
kQ
Q
Q
y
y
y
D
0
0
1
0
1
0
OM (6.24)
Dit model is het basismodel voor het lineaire transitiemodel voor de schatting van tijdsafhankelijke parameters en de kleinste kwadratenschatter van dit model wordt genoteerd als ktx |ˆ . De eerste index refereert naar de tijd waarna de parameter vector correspondeert en de tweede index geeft aan dat de schatter is gebaseerd op alle waarnemingen kiy
i,...,0,ˆ = .

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
56 ARCADIS
Echter, de transitievergelijking van vergelijking 6.23 impliceert dat kennis van x op een willekeurig tijdstip voldoende is om de complete tijdshistorie van )(tx te bepalen. Met andere woorden, de toestandsvector )(tx kan worden geparametriseerd in termen van een enkele vector )( 0tx . Het is duidelijk dat dit in vele gevallen niet realistisch is voor praktische toepassingen. Verondersteld wordt dat de dynamica van )(tx gemodelleerd kan worden aan de hand van de lineaire tijdsafhankelijke toestandsvergelijking [Teunissen, 2001]:
)()()()()( tztGtxtFtx +=& (6.25) Vervolgens wordt de transitievergelijking van 6.23 vervangen door:
∫Φ+Φ=t
t
dzGttxtttx0
))()(),()(),()( 00 ττττ (6.26)
Het verschil tussen beide transitievergelijkingen wordt gedefinieerd als systeemruis en is dan:
∫Φ=t
t
dzGtttd0
))()(),(),( 0 ττττ (6.27)
Nu de transitievergelijking 6.23 is vervangen door 6.25, wordt het transitiemodel van vergelijking 6.24 vervangen door:
+
Φ
ΦΦ
=
tkk
t
t
t
tkk
t
t
kdA
dA
dA
x
A
A
A
y
y
y
E
,
,11
,00
,
,11
,00
1
0
MMM
=
ky
y
y
kQ
Q
Q
y
y
y
D
0
0
1
0
1
0
OM(6.28)
Duidelijk is dat de informatie uit de waarnemingsvector y niet voldoende is om zowel de onbekende vector x als d te schatten. Er is dus ook informatie over de verschilvector d noodzakelijk om de toestandsvectoren van de verschillende epochen aan elkaar te kunnen relateren. Een manier om aan deze informatie te komen is om de systeemruis te veronderstellen als witte ruis. Witte ruis
Een willekeurig proces wordt een witte ruis proces genoemd als het een stationair proces is en als de willekeurige variabelen voor elk tijdsinterval ongecorreleerd zijn. Dit betekent dat de covariantiefunctie gelijk is aan nul voor elk tijdsinterval, τ, ongelijk aan nul. Vanwege het feit dat witte ruis stationair is, hebben de willekeurige variabelen van het proces identieke gemiddelden en varianties. In formulevorm:
0)( =tzE (6.29) )()()( 2121 ττδττ −= wQzzE . (6.30)
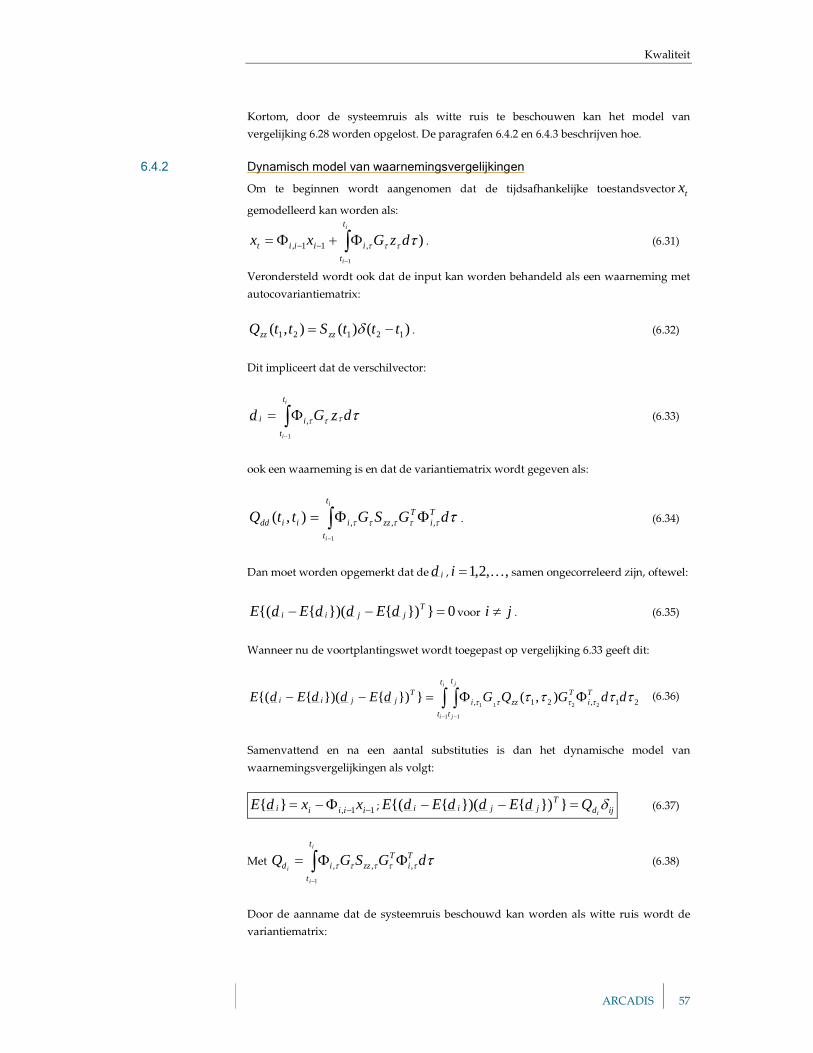
Kwaliteit
ARCADIS 57
Kortom, door de systeemruis als witte ruis te beschouwen kan het model van vergelijking 6.28 worden opgelost. De paragrafen 6.4.2 en 6.4.3 beschrijven hoe.
6.4.2 Dynamisch model van waarnemingsvergelijkingen Om te beginnen wordt aangenomen dat de tijdsafhankelijke toestandsvector tx gemodelleerd kan worden als:
∫−
Φ+Φ=−−
i
i
t
t
iiiit dzGxx1
),11, ττττ . (6.31)
Verondersteld wordt ook dat de input kan worden behandeld als een waarneming met autocovariantiematrix:
)()(),( 12121 tttSttQ zzzz −= δ . (6.32) Dit impliceert dat de verschilvector:
∫−
Φ=i
i
t
t
ii dzGd1
, ττττ (6.33)
ook een waarneming is en dat de variantiematrix wordt gegeven als:
ττττττ dGSGttQ Ti
t
t
Tzziiidd
i
i
,,,
1
),( ΦΦ= ∫−
. (6.34)
Dan moet worden opgemerkt dat de id , ,,2,1 K=i samen ongecorreleerd zijn, oftewel:
0))(( =−−T
jjii dEddEdE voor ji ≠ . (6.35) Wanneer nu de voortplantingswet wordt toegepast op vergelijking 6.33 geeft dit:
21,21, 2
1
21
1
1),())(( ττττ ττττ ddGQGdEddEdE T
i
t
t
Tzz
t
t
iT
jjii
i
i
j
j
ΦΦ=−− ∫ ∫− −
(6.36)
Samenvattend en na een aantal substituties is dan het dynamische model van waarnemingsvergelijkingen als volgt:
11,−−
Φ−= iiiii xxdE ; ijdT
jjiii
QdEddEdE δ=−− ))(( (6.37)
Met ττττττ dGSGQ Ti
t
t
Tzzid
i
i
i ,,,
1
ΦΦ= ∫−
(6.38)
Door de aanname dat de systeemruis beschouwd kan worden als witte ruis wordt de variantiematrix:

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
58 ARCADIS
ττττττ dGQGQ Ti
t
t
Twid
i
i
i ,,,
1
ΦΦ= ∫−
(6.39)
In de praktijk wordt vergelijking 6.38 benaderd door: [Teunissen, 2001 en Jekeli, 2000]
tGGQQ Twd ∆= (6.40)
Omdat bij de implementatie van INS in een Kalman filter t∆ erg klein is (in dit onderzoek is t∆ = 0.1 seconde) kan de transitiematrix worden afgeschat met de volgende numerieke benadering [Shin, 2001 en Jekeli, 2000]:
),()(),( 00 tttFttt
Φ=Φ∂∂ (6.41)
Hieruit volgt dat:
00
00
),(
),()(),(
FtFtt
tttFtt
+∆≈Φ
Φ=Φ ∫ (6.42)
Met IF =0 geldt dat:
ItFtt +∆≈Φ ),( 0 (6.43) Nu de te gebruiken formules voor het transitiemodel en de variantiematrix van de systeemruis bekend zijn, kunnen de drie stappen uit figuur 6.2 besproken worden, namelijk de prediction, filtering en de smoothing.
6.4.3 Recursieve prediction, filtering en smoothing Het complete model van waarnemingsvergelijkingen gebaseerd op de vergelijkingen 6.21 en 6.36 is als volgt:
Φ−
Φ−=
−
−
k
k
k
kk
k
kx
x
x
x
A
I
A
I
A
y
d
y
d
y
E
1
1
0
1,
1
0,1
0
1
1
0
0
MOM
; en
(6.44)
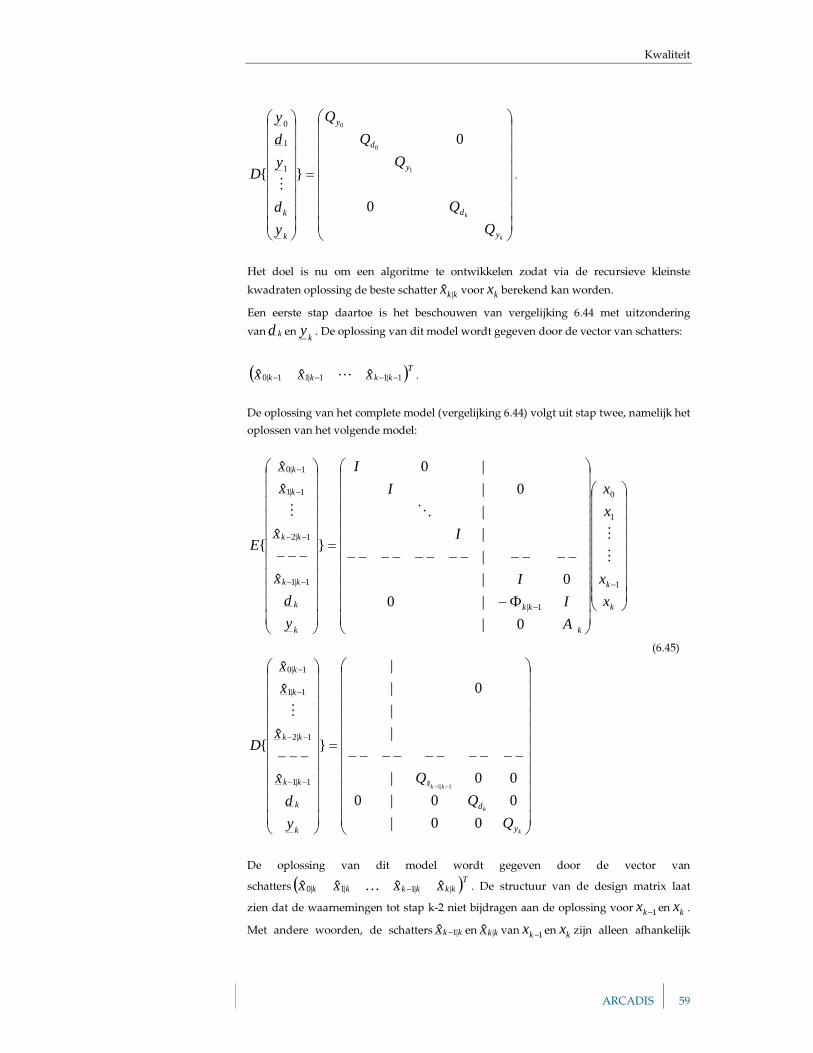
Kwaliteit
ARCADIS 59
=
k
k
y
d
y
d
y
k
k
Q
Q
Q
Q
Q
y
d
y
d
y
D
0
0
1
0
0
1
1
0
M.
Het doel is nu om een algoritme te ontwikkelen zodat via de recursieve kleinste kwadraten oplossing de beste schatter kkx |ˆ voor kx berekend kan worden. Een eerste stap daartoe is het beschouwen van vergelijking 6.44 met uitzondering van kd en
ky . De oplossing van dit model wordt gegeven door de vector van schatters:
( )Tkkkk xxx 1|11|11|0 ˆˆˆ −−−− L . De oplossing van het complete model (vergelijking 6.44) volgt uit stap twee, namelijk het oplossen van het volgende model:
Φ−
−−−−−−−−−−−−=
−−−−
−
−−
−−
−
−
k
k
k
kk
k
k
kk
kk
k
k
x
x
x
x
A
I
I
I
I
I
y
d
x
x
x
x
E
1
1
0
1|
1|1
1|2
1|1
1|0
0|
|0
0|
|
|
|
0|
|0
ˆ
ˆ
ˆ
ˆ
M
M
OM
(6.45)
−−−−−−−−−−=
−−−−−
−−
−−
−
−
k
k
kk
y
d
x
k
k
kk
kk
k
k
Q
Q
Q
y
d
x
x
x
x
D
00|
00|0
00|
|
|
0|
|
ˆ
ˆ
ˆ
ˆ
1|1ˆ1|1
1|2
1|1
1|0
M
De oplossing van dit model wordt gegeven door de vector van schatters ( )Tkkkkkk xxxx ||1|1|0 ˆˆˆˆ −K . De structuur van de design matrix laat zien dat de waarnemingen tot stap k-2 niet bijdragen aan de oplossing voor 1−kx en kx . Met andere woorden, de schatters kkx |1ˆ − en kkx |ˆ van 1−kx en kx zijn alleen afhankelijk

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
60 ARCADIS
van 1|1ˆ −− kkx , kd en kd en daarom kunnen deze schatters berekend worden aan de hand van het volgende model:
−−−−Φ=
−−−−−
−−
k
k
k
kk
k
k
kk
x
x
A
I
I
y
d
x
E 11,
1|1
0
0
ˆ
;
−−−−−−−−=
−−−
−−−−
k
k
kk
y
d
x
k
k
kk
Q
Q
Q
y
d
x
D
|0
0|0
|0
ˆ
1|1ˆ1|1
(6.46)
Ook dit model is weer in twee stappen op te lossen en deze twee stappen heten respectievelijk de prediction en de filtering stap. Prediction
Voor de prediction stap wordt onderstaand model opgelost. Te zien is dat vergelijking 6.47 het bovenste deel is van model 6.46.
Φ−=
−
−
−−
k
k
kkk
kk
x
x
I
I
d
xE 1
1,
1|1 0 ;
=
−−−−
k
kk
d
x
k
kk
Q
Q
d
xD
0
0 1,1ˆ1|1 (6.47)
Voor de oplossing van het model van vergelijking 6.46 betekent dit dat:
kkk dT
kkkkkkx
kkkkkkk
QQQ
dxx
+ΦΦ=
+Φ=
−−−−
−−−−
−1|1|11,ˆ
1|11,1|
1|
ˆˆ (6.48)
De prediction stap wordt ook wel de time update genoemd. Filtering
Tijdens de filtering stap wordt de schatter kkx |ˆ van kx berekend aan de hand van het onderste deel van model 6.46:
kkk
kkx
A
I
y
xE
=
−
1| ;
=
−−
k
kk
y
x
k
kk
Q
Q
y
xD
0
0 1|ˆ1| , (6.49)
en voor de oplossing van het model van vergelijking 6.46 betekent dit dat:
)ˆ(ˆˆ
)()(
)(
1|1||
ˆˆ
1ˆˆ
1||
1|1|
−−
−
−+=
+−−=
+=
−
−−
kkkkkkkkk
Tkyk
Tkkxkkx
yTkxk
Tkxk
xAyKxx
KQKAKIQAKIQ
QAQAAQK
kkkkk
kkkkk
(6.50)
De filtering wordt ook wel measurement update genoemd. Smoothing
Er is sprake van smoothing als de vector van onbekenden wordt geschat voor een vroeger tijdstip nt met metingen die verricht zijn tot en met het huidige tijdstip kt .

Kwaliteit
ARCADIS 61
Om de smoothed estimator knx |ˆ van nx te berekenen wordt wederom gebruik gemaakt van het Kalman filter tot aan tijstip kt . Dit geeft de beste oplossing voor alle tot dan toe aanwezige informatie. Vervolgens wordt een backwards filter of smoother gebruikt om een schatting terug in de tijd mogelijk te maken. Door zorgvuldig tijdsindices te implementeren kan het Kalman filter gebruikt worden zoals dit ook bij de forward filtering wordt gebruikt. (zie figuur 6.3)
Figuur 6.3 Tijdlijn en notaties voor de schatters van het forward en backward Kalman filter. [bron: Jekeli, 2000] Analoog aan vergelijking 6.50 geeft dit de formules voor de backward update:
Tbyb
Tkbxkbx
bkkbbb
yTkxk
Tkxb
kkkkkkbkkkb
kkkkkkk
kkkbkkbk
KQKAKIQAKIQ
xAyKxx
QAQAAQK
+−−=
−+=
+=
+
++
++
−
)()(
)ˆ(ˆˆ
)(
1||
1|1||
1|1|
ˆˆ
1ˆˆ
(6.51)
en de formules voor de backward prediction:
Tkkxkkx
bkkb
kkbkkb
kkkk
xx
1|ˆ1,ˆ
1,
1|11|
1|11| ˆˆ
++
+
ΦΦ=
Φ=
+++
+++ (6.52)
Merk op dat
1|ˆ +kkbx en1|ˆ +kkbxQ verwijzen naar de schatters net rechts van epoche kt . Met
andere woorden, het resultaat van dit tweede filter is een backward schatter van de toestandsvector waarin de waarnemingen van kt nog niet inzitten. De twee schatters,
kkx |ˆ en1|ˆ +kkbx worden dan als volgt gecombineerd. We beschouwen de schatter, kkx |ˆ als
een ‘a priori’ schatter en beschouwen de backward schatter, 1|ˆ +kkbx als een waarneming
van de totale toestandsvector. In dit geval is de kA matrix gelijk aan de identiteitsmatrix en de ‘a posteriori’ of smoothed schatter is dan: [Jekeli, 2000]
)ˆˆ(ˆ
)(
1|1|1|||
1|||
1ˆ|
1ˆˆ
11ˆ
1ˆˆ
+++
+
−−
−−−
+=
+=
kkkkbkkkkbkk
kkbkkkkb
bxkkxxb
xxx
xQxQQx
QQQ (6.53

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
62 ARCADIS
Meetopzet
ARCADIS 63
7 Meetopzet
Het bepalen van de meetopzet is een belangrijk onderdeel van het onderzoek geweest. Verschillende instrumenten, scenario’s en varianten zijn onderzocht en uiteindelijk zijn keuzes gemaakt om tot een bepaalde meetopzet en berekeningsmethode te komen. Dit hoofdstuk beschrijft dan ook welke keuzes en waarom deze keuzes zijn gemaakt. In paragraaf 7.1 komen de eisen en gemaakte aannames aan bod en in paragraaf 7.2 de instrumentkeuze. Zowel voor GPS ontvangers, traagheidsnavigatiesystemen en laserscanners wordt deze keuze onderbouwd. In paragraaf 7.3 wordt de keuze van de meetmethoden uitgelegd en vervolgens beschrijft paragraaf 7.4 de integratie van al deze systemen. Zaken die hierbij aan bod komen zijn onder andere tijdsynchronisatie en hard- en softwarematige koppeling tussen de diverse systemen. De scenario’s die zijn gebruikt voor het onderzoek worden in paragraaf 7.5 behandeld en in paragraaf 7.6 worden de verschillende varianten die voortkomen uit de voorgaande paragrafen beschreven. Paragraaf 7.7 benoemt de verschillende berekeningsopties en tot slot behandelt paragraaf 7.8 de implementatie van de meetopzet in MATLAB®. Daarin staat onder andere welke startwaarden en standaardafwijkingen zijn gebruikt en welke stappen zijn doorlopen om tot de kwaliteitsanalyse te komen.
7.1 Eisen en aannames Voorafgaand aan het onderzoek is door ARCADIS een aantal eisen gesteld aan het te ontwikkelen meetsysteem. Deze eisen zijn onder te verdelen in kwaliteitseisen aan het systeem, eisen aan wat minimaal gemeten dient te worden en aandachtspunten bij ontwerp en bouw van het systeem. Ook is een aantal aannames gemaakt om het onderzoeksgebied goed af te bakenen.
7.1.1 Kwaliteitseisen Omdat ProRail een grote opdrachtgever met strenge kwaliteitseisen is van ARCADIS, zijn de kwaliteitseisen van ProRail gehanteerd ten aanzien van het te ontwikkelen systeem. Deze eisen zijn gedefinieerd en redelijk beschreven door ProRail. In tabel 7.1 zijn de voor dit onderzoek relevante eisen terug te vinden. De door ProRail opgestelde eisen zijn streng, maar dit heeft een reden. Omdat een kleine verandering in de geometrie van het spoor, direct merkbaar is in de bereidbaarheid van de treinen moet ook deze verandering gemeten kunnen worden met een bijbehorende kwaliteit. Oftewel, spoormetingen eisen een hoge kwaliteit van de metingen. Verder stelt ARCADIS zelf ook een aantal kwaliteitseisen omdat het systeem eventueel ook voor andere doeleinden gebruikt kan gaan worden.
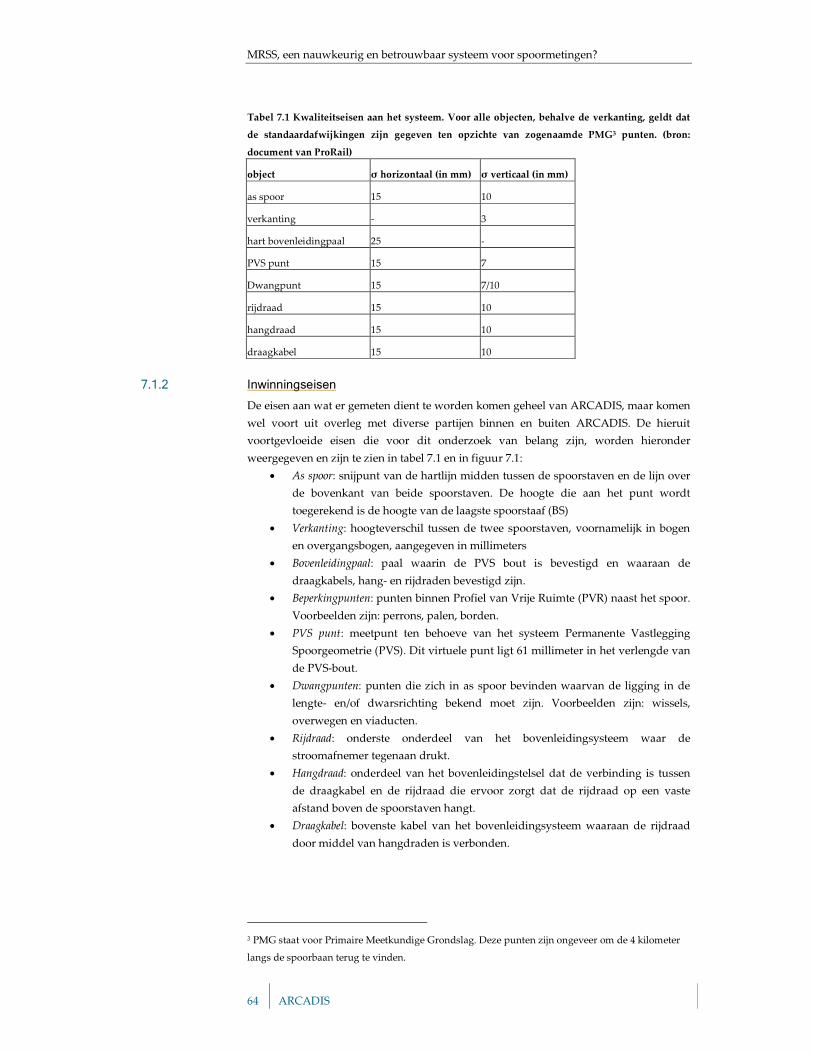
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
64 ARCADIS
Tabel 7.1 Kwaliteitseisen aan het systeem. Voor alle objecten, behalve de verkanting, geldt dat de standaardafwijkingen zijn gegeven ten opzichte van zogenaamde PMG3 punten. (bron: document van ProRail) object σ horizontaal (in mm) σ verticaal (in mm) as spoor 15 10 verkanting - 3 hart bovenleidingpaal 25 - PVS punt 15 7 Dwangpunt 15 7/10 rijdraad 15 10 hangdraad 15 10 draagkabel 15 10
7.1.2 Inwinningseisen De eisen aan wat er gemeten dient te worden komen geheel van ARCADIS, maar komen wel voort uit overleg met diverse partijen binnen en buiten ARCADIS. De hieruit voortgevloeide eisen die voor dit onderzoek van belang zijn, worden hieronder weergegeven en zijn te zien in tabel 7.1 en in figuur 7.1:
• As spoor: snijpunt van de hartlijn midden tussen de spoorstaven en de lijn over de bovenkant van beide spoorstaven. De hoogte die aan het punt wordt toegerekend is de hoogte van de laagste spoorstaaf (BS)
• Verkanting: hoogteverschil tussen de twee spoorstaven, voornamelijk in bogen en overgangsbogen, aangegeven in millimeters
• Bovenleidingpaal: paal waarin de PVS bout is bevestigd en waaraan de draagkabels, hang- en rijdraden bevestigd zijn.
• Beperkingpunten: punten binnen Profiel van Vrije Ruimte (PVR) naast het spoor. Voorbeelden zijn: perrons, palen, borden.
• PVS punt: meetpunt ten behoeve van het systeem Permanente Vastlegging Spoorgeometrie (PVS). Dit virtuele punt ligt 61 millimeter in het verlengde van de PVS-bout.
• Dwangpunten: punten die zich in as spoor bevinden waarvan de ligging in de lengte- en/of dwarsrichting bekend moet zijn. Voorbeelden zijn: wissels, overwegen en viaducten.
• Rijdraad: onderste onderdeel van het bovenleidingsysteem waar de stroomafnemer tegenaan drukt.
• Hangdraad: onderdeel van het bovenleidingstelsel dat de verbinding is tussen de draagkabel en de rijdraad die ervoor zorgt dat de rijdraad op een vaste afstand boven de spoorstaven hangt.
• Draagkabel: bovenste kabel van het bovenleidingsysteem waaraan de rijdraad door middel van hangdraden is verbonden.
3 PMG staat voor Primaire Meetkundige Grondslag. Deze punten zijn ongeveer om de 4 kilometer langs de spoorbaan terug te vinden.
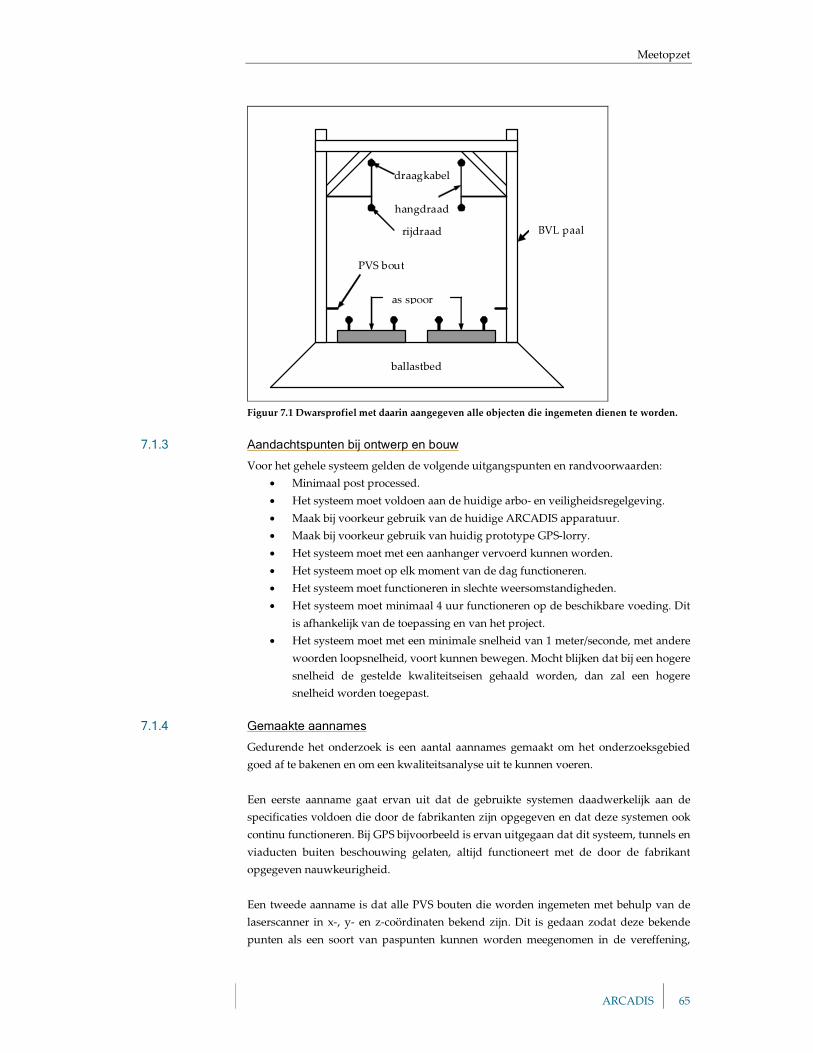
Meetopzet
ARCADIS 65
draagkabel
hangdraad
ballastbed
as spoor
PVS bout
rijdraad BVL paal
Figuur 7.1 Dwarsprofiel met daarin aangegeven alle objecten die ingemeten dienen te worden.
7.1.3 Aandachtspunten bij ontwerp en bouw Voor het gehele systeem gelden de volgende uitgangspunten en randvoorwaarden:
• Minimaal post processed. • Het systeem moet voldoen aan de huidige arbo- en veiligheidsregelgeving. • Maak bij voorkeur gebruik van de huidige ARCADIS apparatuur. • Maak bij voorkeur gebruik van huidig prototype GPS-lorry. • Het systeem moet met een aanhanger vervoerd kunnen worden. • Het systeem moet op elk moment van de dag functioneren. • Het systeem moet functioneren in slechte weersomstandigheden. • Het systeem moet minimaal 4 uur functioneren op de beschikbare voeding. Dit
is afhankelijk van de toepassing en van het project. • Het systeem moet met een minimale snelheid van 1 meter/seconde, met andere
woorden loopsnelheid, voort kunnen bewegen. Mocht blijken dat bij een hogere snelheid de gestelde kwaliteitseisen gehaald worden, dan zal een hogere snelheid worden toegepast.
7.1.4 Gemaakte aannames Gedurende het onderzoek is een aantal aannames gemaakt om het onderzoeksgebied goed af te bakenen en om een kwaliteitsanalyse uit te kunnen voeren. Een eerste aanname gaat ervan uit dat de gebruikte systemen daadwerkelijk aan de specificaties voldoen die door de fabrikanten zijn opgegeven en dat deze systemen ook continu functioneren. Bij GPS bijvoorbeeld is ervan uitgegaan dat dit systeem, tunnels en viaducten buiten beschouwing gelaten, altijd functioneert met de door de fabrikant opgegeven nauwkeurigheid. Een tweede aanname is dat alle PVS bouten die worden ingemeten met behulp van de laserscanner in x-, y- en z-coördinaten bekend zijn. Dit is gedaan zodat deze bekende punten als een soort van paspunten kunnen worden meegenomen in de vereffening,
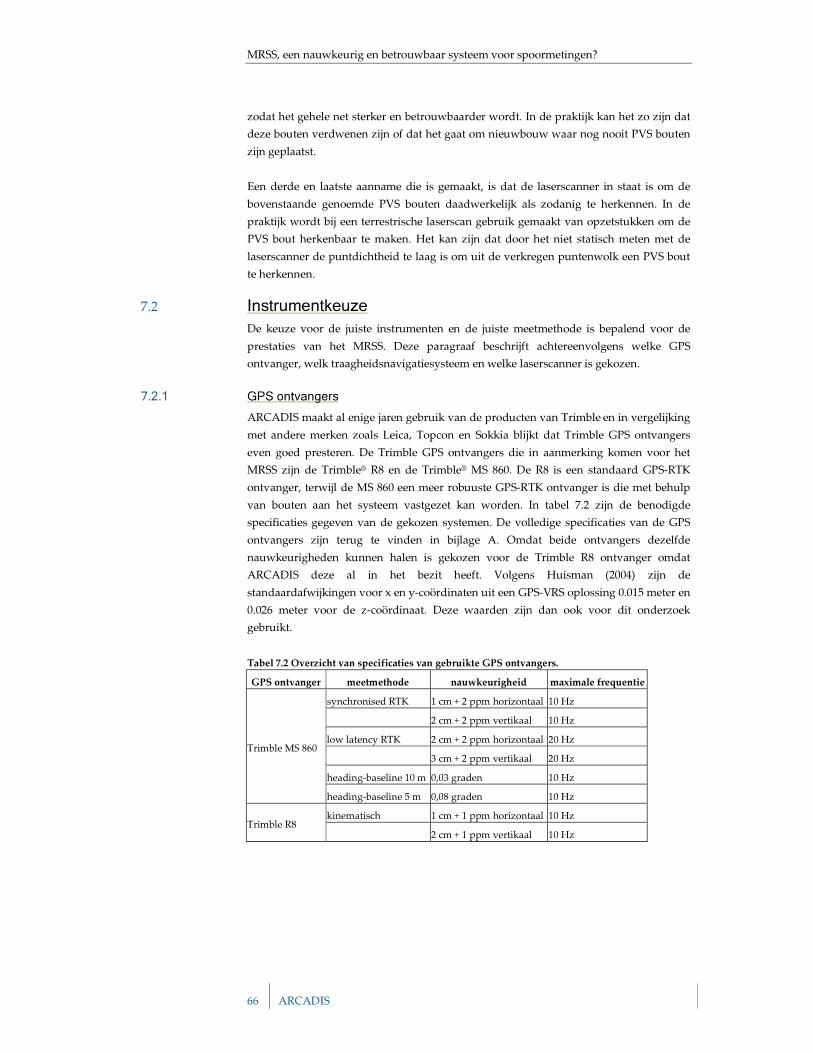
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
66 ARCADIS
zodat het gehele net sterker en betrouwbaarder wordt. In de praktijk kan het zo zijn dat deze bouten verdwenen zijn of dat het gaat om nieuwbouw waar nog nooit PVS bouten zijn geplaatst. Een derde en laatste aanname die is gemaakt, is dat de laserscanner in staat is om de bovenstaande genoemde PVS bouten daadwerkelijk als zodanig te herkennen. In de praktijk wordt bij een terrestrische laserscan gebruik gemaakt van opzetstukken om de PVS bout herkenbaar te maken. Het kan zijn dat door het niet statisch meten met de laserscanner de puntdichtheid te laag is om uit de verkregen puntenwolk een PVS bout te herkennen.
7.2 Instrumentkeuze De keuze voor de juiste instrumenten en de juiste meetmethode is bepalend voor de prestaties van het MRSS. Deze paragraaf beschrijft achtereenvolgens welke GPS ontvanger, welk traagheidsnavigatiesysteem en welke laserscanner is gekozen.
7.2.1 GPS ontvangers ARCADIS maakt al enige jaren gebruik van de producten van Trimble en in vergelijking met andere merken zoals Leica, Topcon en Sokkia blijkt dat Trimble GPS ontvangers even goed presteren. De Trimble GPS ontvangers die in aanmerking komen voor het MRSS zijn de Trimble® R8 en de Trimble® MS 860. De R8 is een standaard GPS-RTK ontvanger, terwijl de MS 860 een meer robuuste GPS-RTK ontvanger is die met behulp van bouten aan het systeem vastgezet kan worden. In tabel 7.2 zijn de benodigde specificaties gegeven van de gekozen systemen. De volledige specificaties van de GPS ontvangers zijn terug te vinden in bijlage A. Omdat beide ontvangers dezelfde nauwkeurigheden kunnen halen is gekozen voor de Trimble R8 ontvanger omdat ARCADIS deze al in het bezit heeft. Volgens Huisman (2004) zijn de standaardafwijkingen voor x en y-coördinaten uit een GPS-VRS oplossing 0.015 meter en 0.026 meter voor de z-coördinaat. Deze waarden zijn dan ook voor dit onderzoek gebruikt. Tabel 7.2 Overzicht van specificaties van gebruikte GPS ontvangers. GPS ontvanger meetmethode nauwkeurigheid maximale frequentie
synchronised RTK 1 cm + 2 ppm horizontaal 10 Hz 2 cm + 2 ppm vertikaal 10 Hz low latency RTK 2 cm + 2 ppm horizontaal 20 Hz 3 cm + 2 ppm vertikaal 20 Hz heading-baseline 10 m 0,03 graden 10 Hz
Trimble MS 860
heading-baseline 5 m 0,08 graden 10 Hz kinematisch 1 cm + 1 ppm horizontaal 10 Hz Trimble R8 2 cm + 1 ppm vertikaal 10 Hz
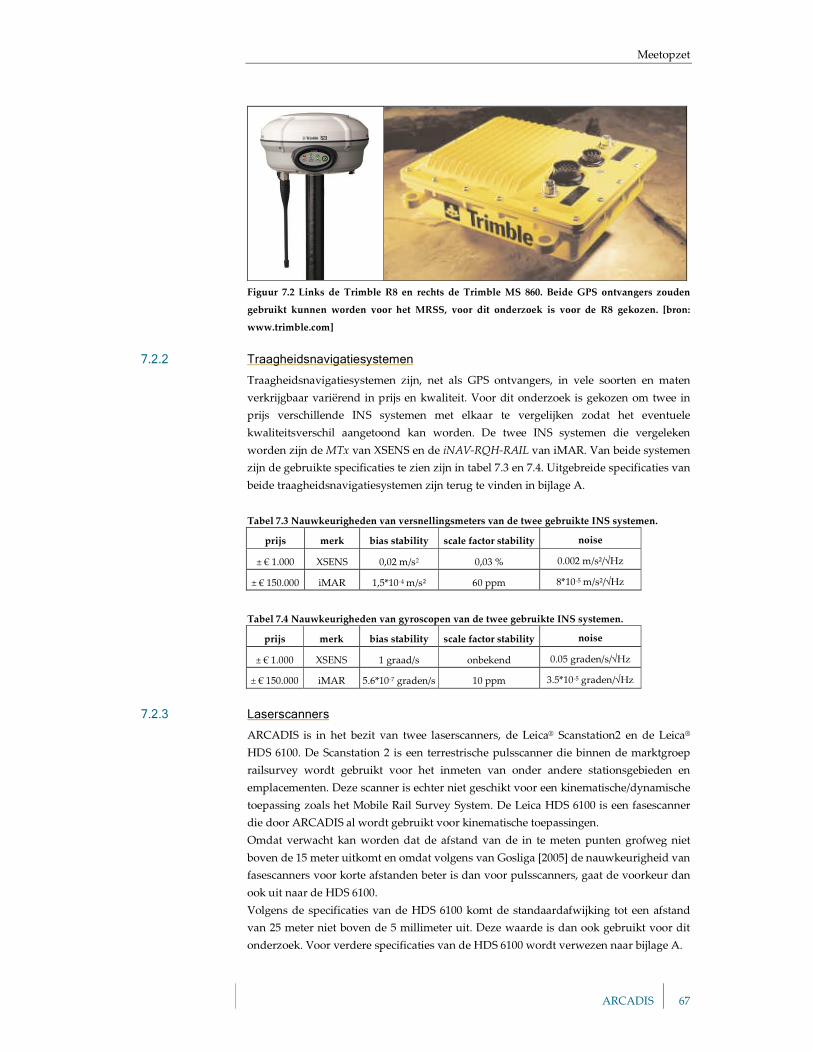
Meetopzet
ARCADIS 67
Figuur 7.2 Links de Trimble R8 en rechts de Trimble MS 860. Beide GPS ontvangers zouden gebruikt kunnen worden voor het MRSS, voor dit onderzoek is voor de R8 gekozen. [bron: www.trimble.com]
7.2.2 Traagheidsnavigatiesystemen Traagheidsnavigatiesystemen zijn, net als GPS ontvangers, in vele soorten en maten verkrijgbaar variërend in prijs en kwaliteit. Voor dit onderzoek is gekozen om twee in prijs verschillende INS systemen met elkaar te vergelijken zodat het eventuele kwaliteitsverschil aangetoond kan worden. De twee INS systemen die vergeleken worden zijn de MTx van XSENS en de iNAV-RQH-RAIL van iMAR. Van beide systemen zijn de gebruikte specificaties te zien zijn in tabel 7.3 en 7.4. Uitgebreide specificaties van beide traagheidsnavigatiesystemen zijn terug te vinden in bijlage A. Tabel 7.3 Nauwkeurigheden van versnellingsmeters van de twee gebruikte INS systemen.
prijs merk bias stability scale factor stability noise ± € 1.000 XSENS 0,02 m/s2 0,03 % 0.002 m/s²/√Hz
± € 150.000 iMAR 1,5*10-4 m/s² 60 ppm 8*10-5 m/s²/√Hz Tabel 7.4 Nauwkeurigheden van gyroscopen van de twee gebruikte INS systemen.
prijs merk bias stability scale factor stability noise ± € 1.000 XSENS 1 graad/s onbekend 0.05 graden/s/√Hz
± € 150.000 iMAR 5.6*10-7 graden/s 10 ppm 3.5*10-5 graden/√Hz
7.2.3 Laserscanners ARCADIS is in het bezit van twee laserscanners, de Leica® Scanstation2 en de Leica® HDS 6100. De Scanstation 2 is een terrestrische pulsscanner die binnen de marktgroep railsurvey wordt gebruikt voor het inmeten van onder andere stationsgebieden en emplacementen. Deze scanner is echter niet geschikt voor een kinematische/dynamische toepassing zoals het Mobile Rail Survey System. De Leica HDS 6100 is een fasescanner die door ARCADIS al wordt gebruikt voor kinematische toepassingen. Omdat verwacht kan worden dat de afstand van de in te meten punten grofweg niet boven de 15 meter uitkomt en omdat volgens van Gosliga [2005] de nauwkeurigheid van fasescanners voor korte afstanden beter is dan voor pulsscanners, gaat de voorkeur dan ook uit naar de HDS 6100. Volgens de specificaties van de HDS 6100 komt de standaardafwijking tot een afstand van 25 meter niet boven de 5 millimeter uit. Deze waarde is dan ook gebruikt voor dit onderzoek. Voor verdere specificaties van de HDS 6100 wordt verwezen naar bijlage A.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
68 ARCADIS
Figuur 7.3 Links de Leica HDS 6100 fasescanner en rechts de Leica Scanstation 2. Alleen de HDS 6100 scanner is geschikt voor het MRSS. [bron: www.leica-geosystems.com]
7.3 Keuze van meetmethode Voor alle meetsystemen moet gekozen worden hoe deze systemen ingezet gaan worden. Een voorbeeld hiervan is de opnamefrequentie voor zowel GPS als voor het traagheidnavigatiesysteem.
7.3.1 GPS Omdat van het MRSS vereist wordt dat het een continu systeem is, is gekozen om voor de GPS metingen een GPS-RTK toepassing te gebruiken. De data zal in de praktijk ingewonnen worden met een frequentie tussen de 1 en 10 Hertz zodat minimaal één keer per seconde de positie met GPS bepaald kan worden. Om tijdens een meting met het MRSS de kwaliteit van GPS data te monitoren kan ervoor gekozen worden om de GPS data real-time op een laptop te tonen. Zoals vermeld is in paragraaf 3.1.4 kan ook het fysieke referentiestation vervangen worden door een VRS. Omdat dit een aantal voordelen biedt en de kwaliteit niet veel onderdoet van fysiek referentiestation is voor dit onderzoek gekozen voor een VRS oplossing met een frequentie van 1 Hertz.
7.3.2 INS Voor het traagheidsnavigatiesysteem is het niet de mogelijk een keuze voor een meetmethode te maken. Een versnellingsmeter meet simpelweg versnellingen en een gyroscoop hoekverdraaiingen. Voor de meetfrequentie kan wel een keuze gemaakt worden omdat deze per merk en type kan variëren van een paar tot een paar honderd Hertz. Voor dit onderzoek is gekozen voor een frequentie van 10 Hz. Enerzijds is hiervoor gekozen omdat dit een frequentie is die 10 keer hoger is dan de gekozen frequentie van GPS en een frequentie van 10 Hz is voor dit onderzoek hoog genoeg om het als een continu systeem te beschouwen. Anderzijds is voor een frequentie van 10 Hz
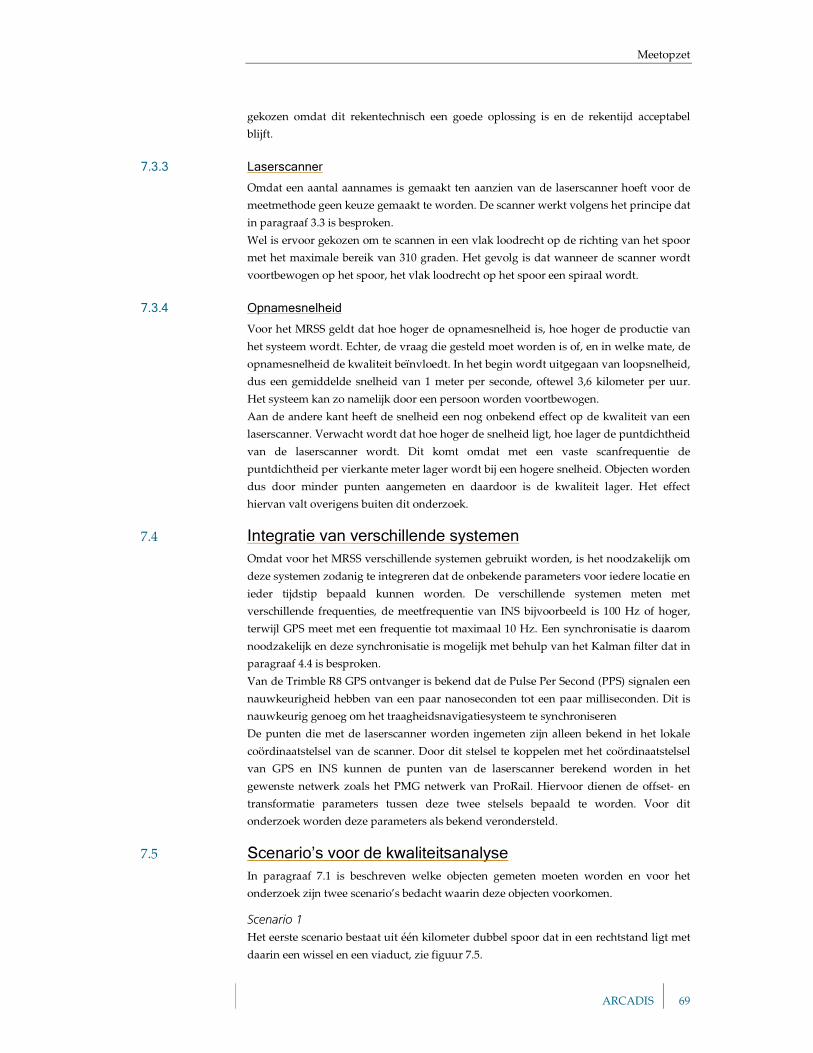
Meetopzet
ARCADIS 69
gekozen omdat dit rekentechnisch een goede oplossing is en de rekentijd acceptabel blijft.
7.3.3 Laserscanner Omdat een aantal aannames is gemaakt ten aanzien van de laserscanner hoeft voor de meetmethode geen keuze gemaakt te worden. De scanner werkt volgens het principe dat in paragraaf 3.3 is besproken. Wel is ervoor gekozen om te scannen in een vlak loodrecht op de richting van het spoor met het maximale bereik van 310 graden. Het gevolg is dat wanneer de scanner wordt voortbewogen op het spoor, het vlak loodrecht op het spoor een spiraal wordt.
7.3.4 Opnamesnelheid Voor het MRSS geldt dat hoe hoger de opnamesnelheid is, hoe hoger de productie van het systeem wordt. Echter, de vraag die gesteld moet worden is of, en in welke mate, de opnamesnelheid de kwaliteit beïnvloedt. In het begin wordt uitgegaan van loopsnelheid, dus een gemiddelde snelheid van 1 meter per seconde, oftewel 3,6 kilometer per uur. Het systeem kan zo namelijk door een persoon worden voortbewogen. Aan de andere kant heeft de snelheid een nog onbekend effect op de kwaliteit van een laserscanner. Verwacht wordt dat hoe hoger de snelheid ligt, hoe lager de puntdichtheid van de laserscanner wordt. Dit komt omdat met een vaste scanfrequentie de puntdichtheid per vierkante meter lager wordt bij een hogere snelheid. Objecten worden dus door minder punten aangemeten en daardoor is de kwaliteit lager. Het effect hiervan valt overigens buiten dit onderzoek.
7.4 Integratie van verschillende systemen Omdat voor het MRSS verschillende systemen gebruikt worden, is het noodzakelijk om deze systemen zodanig te integreren dat de onbekende parameters voor iedere locatie en ieder tijdstip bepaald kunnen worden. De verschillende systemen meten met verschillende frequenties, de meetfrequentie van INS bijvoorbeeld is 100 Hz of hoger, terwijl GPS meet met een frequentie tot maximaal 10 Hz. Een synchronisatie is daarom noodzakelijk en deze synchronisatie is mogelijk met behulp van het Kalman filter dat in paragraaf 4.4 is besproken. Van de Trimble R8 GPS ontvanger is bekend dat de Pulse Per Second (PPS) signalen een nauwkeurigheid hebben van een paar nanoseconden tot een paar milliseconden. Dit is nauwkeurig genoeg om het traagheidsnavigatiesysteem te synchroniseren De punten die met de laserscanner worden ingemeten zijn alleen bekend in het lokale coördinaatstelsel van de scanner. Door dit stelsel te koppelen met het coördinaatstelsel van GPS en INS kunnen de punten van de laserscanner berekend worden in het gewenste netwerk zoals het PMG netwerk van ProRail. Hiervoor dienen de offset- en transformatie parameters tussen deze twee stelsels bepaald te worden. Voor dit onderzoek worden deze parameters als bekend verondersteld.
7.5 Scenario’s voor de kwaliteitsanalyse In paragraaf 7.1 is beschreven welke objecten gemeten moeten worden en voor het onderzoek zijn twee scenario’s bedacht waarin deze objecten voorkomen. Scenario 1
Het eerste scenario bestaat uit één kilometer dubbel spoor dat in een rechtstand ligt met daarin een wissel en een viaduct, zie figuur 7.5.
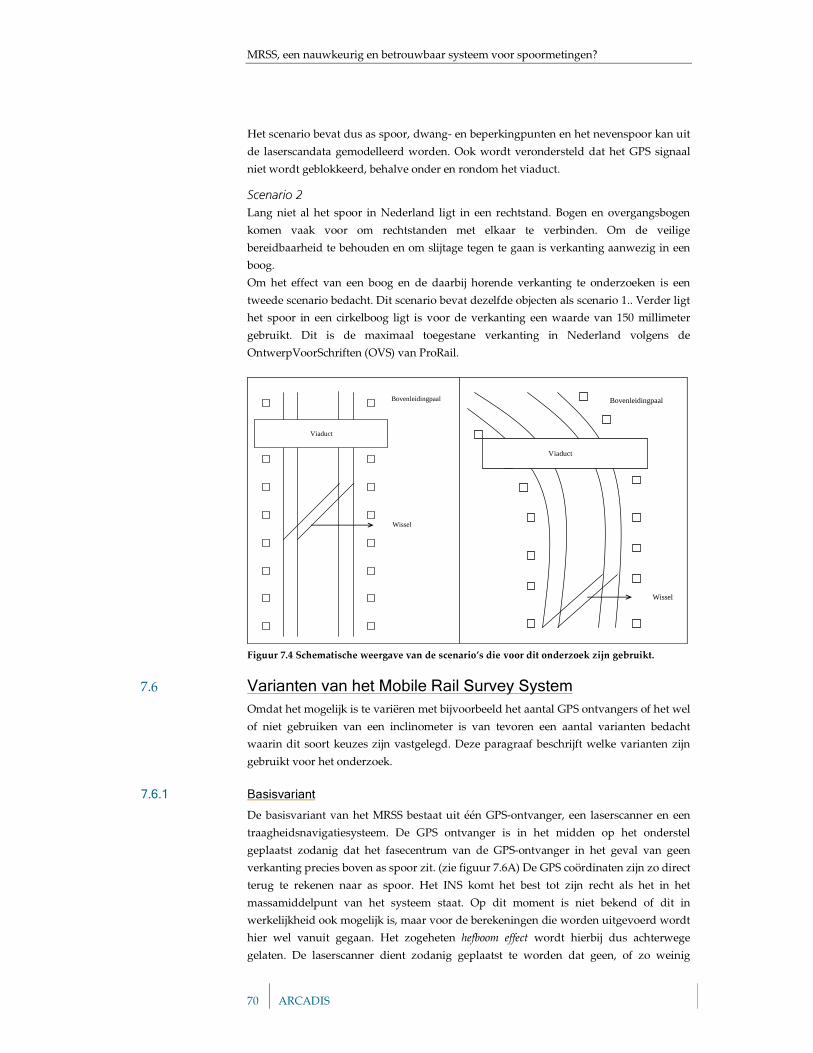
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
70 ARCADIS
Het scenario bevat dus as spoor, dwang- en beperkingpunten en het nevenspoor kan uit de laserscandata gemodelleerd worden. Ook wordt verondersteld dat het GPS signaal niet wordt geblokkeerd, behalve onder en rondom het viaduct. Scenario 2
Lang niet al het spoor in Nederland ligt in een rechtstand. Bogen en overgangsbogen komen vaak voor om rechtstanden met elkaar te verbinden. Om de veilige bereidbaarheid te behouden en om slijtage tegen te gaan is verkanting aanwezig in een boog. Om het effect van een boog en de daarbij horende verkanting te onderzoeken is een tweede scenario bedacht. Dit scenario bevat dezelfde objecten als scenario 1.. Verder ligt het spoor in een cirkelboog ligt is voor de verkanting een waarde van 150 millimeter gebruikt. Dit is de maximaal toegestane verkanting in Nederland volgens de OntwerpVoorSchriften (OVS) van ProRail.
Wissel
Bovenleidingpaal
Viaduct
Wissel
Bovenleidingpaal
Viaduct
Figuur 7.4 Schematische weergave van de scenario’s die voor dit onderzoek zijn gebruikt.
7.6 Varianten van het Mobile Rail Survey System Omdat het mogelijk is te variëren met bijvoorbeeld het aantal GPS ontvangers of het wel of niet gebruiken van een inclinometer is van tevoren een aantal varianten bedacht waarin dit soort keuzes zijn vastgelegd. Deze paragraaf beschrijft welke varianten zijn gebruikt voor het onderzoek.
7.6.1 Basisvariant De basisvariant van het MRSS bestaat uit één GPS-ontvanger, een laserscanner en een traagheidsnavigatiesysteem. De GPS ontvanger is in het midden op het onderstel geplaatst zodanig dat het fasecentrum van de GPS-ontvanger in het geval van geen verkanting precies boven as spoor zit. (zie figuur 7.6A) De GPS coördinaten zijn zo direct terug te rekenen naar as spoor. Het INS komt het best tot zijn recht als het in het massamiddelpunt van het systeem staat. Op dit moment is niet bekend of dit in werkelijkheid ook mogelijk is, maar voor de berekeningen die worden uitgevoerd wordt hier wel vanuit gegaan. Het zogeheten hefboom effect wordt hierbij dus achterwege gelaten. De laserscanner dient zodanig geplaatst te worden dat geen, of zo weinig
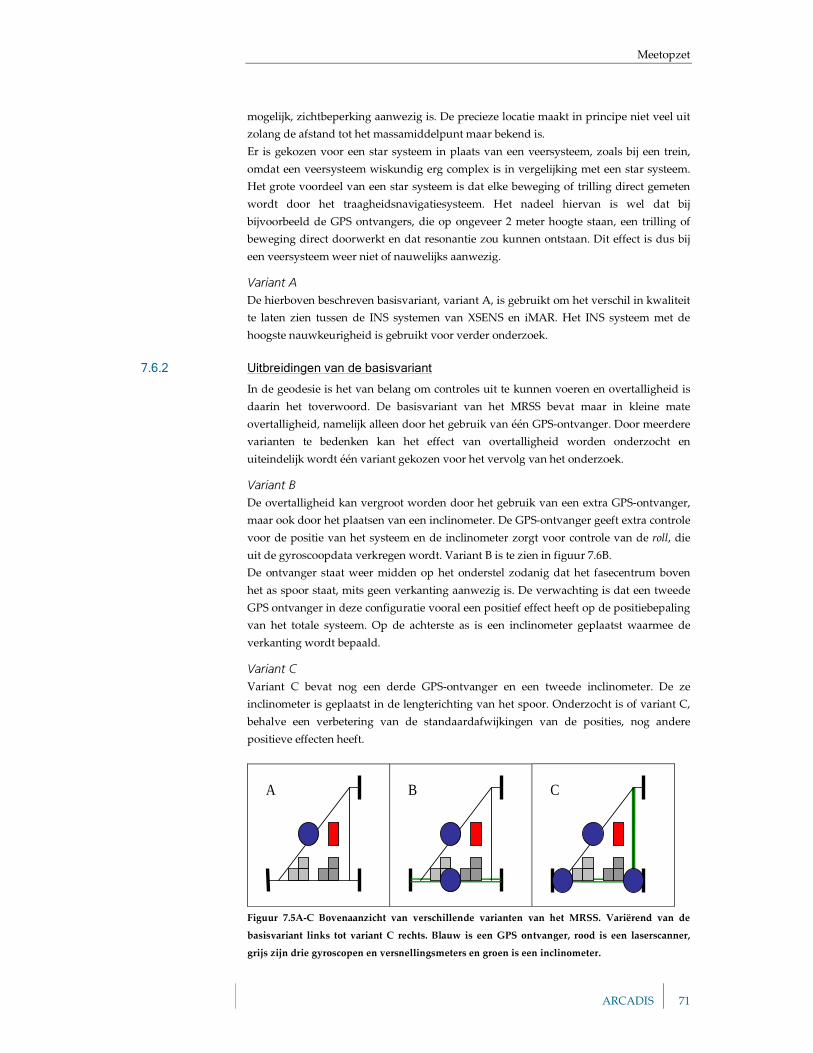
Meetopzet
ARCADIS 71
mogelijk, zichtbeperking aanwezig is. De precieze locatie maakt in principe niet veel uit zolang de afstand tot het massamiddelpunt maar bekend is. Er is gekozen voor een star systeem in plaats van een veersysteem, zoals bij een trein, omdat een veersysteem wiskundig erg complex is in vergelijking met een star systeem. Het grote voordeel van een star systeem is dat elke beweging of trilling direct gemeten wordt door het traagheidsnavigatiesysteem. Het nadeel hiervan is wel dat bij bijvoorbeeld de GPS ontvangers, die op ongeveer 2 meter hoogte staan, een trilling of beweging direct doorwerkt en dat resonantie zou kunnen ontstaan. Dit effect is dus bij een veersysteem weer niet of nauwelijks aanwezig. Variant A
De hierboven beschreven basisvariant, variant A, is gebruikt om het verschil in kwaliteit te laten zien tussen de INS systemen van XSENS en iMAR. Het INS systeem met de hoogste nauwkeurigheid is gebruikt voor verder onderzoek.
7.6.2 Uitbreidingen van de basisvariant In de geodesie is het van belang om controles uit te kunnen voeren en overtalligheid is daarin het toverwoord. De basisvariant van het MRSS bevat maar in kleine mate overtalligheid, namelijk alleen door het gebruik van één GPS-ontvanger. Door meerdere varianten te bedenken kan het effect van overtalligheid worden onderzocht en uiteindelijk wordt één variant gekozen voor het vervolg van het onderzoek. Variant B
De overtalligheid kan vergroot worden door het gebruik van een extra GPS-ontvanger, maar ook door het plaatsen van een inclinometer. De GPS-ontvanger geeft extra controle voor de positie van het systeem en de inclinometer zorgt voor controle van de roll, die uit de gyroscoopdata verkregen wordt. Variant B is te zien in figuur 7.6B. De ontvanger staat weer midden op het onderstel zodanig dat het fasecentrum boven het as spoor staat, mits geen verkanting aanwezig is. De verwachting is dat een tweede GPS ontvanger in deze configuratie vooral een positief effect heeft op de positiebepaling van het totale systeem. Op de achterste as is een inclinometer geplaatst waarmee de verkanting wordt bepaald. Variant C
Variant C bevat nog een derde GPS-ontvanger en een tweede inclinometer. De ze inclinometer is geplaatst in de lengterichting van het spoor. Onderzocht is of variant C, behalve een verbetering van de standaardafwijkingen van de posities, nog andere positieve effecten heeft.
A B C
Figuur 7.5A-C Bovenaanzicht van verschillende varianten van het MRSS. Variërend van de basisvariant links tot variant C rechts. Blauw is een GPS ontvanger, rood is een laserscanner, grijs zijn drie gyroscopen en versnellingsmeters en groen is een inclinometer.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
72 ARCADIS
7.7 Berekeningsopties Naast verschillende scenario’s en verschillende varianten van het MRSS worden ook nog verschillende soorten berekeningen uitgevoerd. Zo is het gebruik van bekende PVS bouten, het effect van smoothing en de betrouwbaarheid van het Mobile Rail Survey System onderzocht.
7.7.1 Het gebruik van PVS-bouten als aansluitpunten Voor een groot deel in Nederland zijn PVS-bouten langs de spoorbaan bekend in coördinaten. Het is interessant om deze PVS-bouten ook te meten en te gebruiken als input voor het Kalman filter: Wat is het effect op de standaardafwijkingen? Kan nu langer zonder GPS gemeten worden om toch aan de eisen te voldoen? En zo ja, hoelang dan? Precies deze vragen zijn onderzocht en de resultaten hiervan zijn terug te vinden in het volgende hoofdstuk. Gemiddeld genomen is de afstand tussen bovenleidingpalen 70 meter en dat is ook de afstand die is gebruikt voor dit onderzoek. Hierbij is ook aangenomen dat in elke bovenleidingpaal een PVS bout zit. Voor de standaardafwijkingen van PVS bouten zijn de volgende waarden gebruikt: 0.015 meter horizontaal en 0.007 meter voor de hoogte.
7.7.2 Het effect van smoothing Een heel andere optie is om gebruik te maken van smoothing. Alle voorgaande varianten maken gebruik van het forward filter in het Kalman filter, maar van het backward filter wordt ook een verbetering verwacht. Het backward filter maakt namelijk gebruik van alle data en zorgt ervoor dat de standaardafwijkingen van de geschatte onbekenden lager zijn. Dit heeft als mogelijk effect dat het MRSS langer zonder GPS ontvangst zou kunnen meten om toch aan de specificaties te kunnen voldoen.
7.7.3 Betrouwbaarheden In paragraaf 7.6.2 werd al de term overtalligheid genoemd. Als je overtalligheid hebt kun je bepaalde toetsen uitvoeren. Je kunt met andere woorden uitspraken doen over de betrouwbaarheid van een systeem of model. Dit hele onderzoek is gebaseerd op verkenningsberekeningen en daarmee kan getoetst worden op inwendige en uitwendige betrouwbaarheid. Tijdens dit onderzoek is gekeken naar het effect van:
• Een fout in de GPS coördinaten. • Een fout in de inclinometer output. • Een fout in de PVS coördinaten.
Met andere woorden in welke maten kunnen deze fouten ontdekt worden en wat is het effect van een dergelijke fout op de coördinaten en verkanting.
7.8 Implementatie in MATLAB Omdat er geen werkelijke data beschikbaar zijn, bestaat de totale berekening uit een grote verkenningsberekening. Zoals vermeld in paragraaf 6.2.3 is het grote voordeel van een verkenningsberekening dat zonder een werkend systeem, dus zonder kosten te maken, wel informatie over de standaardafwijkingen berekend kan worden. Deze verkenningsberekeningen zijn uitgevoerd in MATLAB.

Meetopzet
ARCADIS 73
Verder is het van belang te melden dat voor dit onderzoek geen schatters van onbekenden zijn berekend, maar alleen covariantiematrices. Voor een kwaliteitsonderzoek is dit namelijk voldoende omdat we alleen geïnteresseerd zijn in standaardafwijkingen en niet in berekende posities of andere onbekenden.
7.8.1 Gemaakte aannames Voor het uitvoeren van de verkenningsberekeningen moet een aantal aannames gedaan worden. De te meten grootheden zoals versnellingen en hoeksnelheden worden als constant beschouwd (door de meeste grootheden gelijk aan nul te stellen). Door de snelheid als constante te beschouwen kan op ieder willekeurig tijdstip ook de positie worden bepaald omdat de oorsprong zelf gekozen is. De positie moet berekend worden omdat deze in de transitiematrix als bekend wordt verondersteld. Verderop in paragraaf 7.8.3 zullen alle startwaarden nog een keer expliciet genoemd worden.
7.8.2 Transformatie van Kalman filter output naar coördinaten en verkanting De gegevens die uit het Kalman filter komen zijn nog niet de gegevens die nodig zijn voor de kwaliteitsanalyse. Een voorbeeld hiervan is dat het Kalman filter een output in hoeken geeft, terwijl de verkanting in millimeters wordt weergeven. Kortom, er is een transformatie nodig van de Kalman filter output naar de gewenste as spoor coördinaten, coördinaten van de objecten buiten as spoor en verkanting. Via de functie )(xfz = kunnen de Kalman filter output en de laserscan coördinaten worden getransformeerd naar de vector van gewenste coördinaten en verkanting. Na linearisatie van de vergelijking van de verkanting: αsinSWv = , waarin v de verkanting voorstelt, SW de spoorwijdte enα de hoek tussen horizontaal en werkelijke spoorligging, geeft dit de vergelijking xFz = : De voor dit onderzoek gebruikte transformatie ziet er dan als volgt uit:
∆
=
∆ αα
laser
laser
KF
KF
KF
object
object
as
as
as
z
x
z
y
x
SWv
z
x
z
y
x
0cos00000
010100
001001
000100
000010
000001
(7.1)
De input, vector x , bestaat voor een groot deel uit elementen uit het Kalman filter:
• De x-, y- en z-coördinaten via het Kalman filter. • De hoek α via het Kalman filter. • X- en y-coördinaten uit de laserscanner.
De vector van onbekenden, z , bevat de volgende elementen:
• De x-, y- en z-coördinaten van as spoor. • De x-, y- en z-coördinaten van alle overige objecten. • De verkanting.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
74 ARCADIS
De standaardafwijkingen van z kunnen vervolgens berekend worden aan de hand van:
Txzz FFQQ ˆ= (7.2)
7.8.3 Startwaarden en berekeningsstappen in MATLAB Voordat de resultaten van de kwaliteitsanalyse worden getoond vat deze paragraaf samen welke belangrijke formules, parameters met bijbehorende startwaarden en/of standaardafwijkingen en berekeningsstappen zijn gebruikt en uitgevoerd. Allereerst wordt het model van de dynamische foutenafschatting herhaald:
∂∂
+
∂∂Ψ
=
∂∂Ψ
−
sis
sis
ns
ns
a
g
n
nn
a
g
n
n
a
CD
C
b
d
x
xF
b
d
x
x
dt
d ω
λ
λ
λ
λ
00
00
00
00
00
0
0
0000000
0000000
0000000
0000000
0000
0000
00001
&&
(7.3)
De toestandsvector bestaat uit telkens drie elementen voor een fout in:
• De stand. • De snelheid. • De positie. • De drift van de gyroscopen. • De schaalfactor van de gyroscopen. • De bias van de versnellingsmeters. • De schaalfactor van de versnellingsmeter.
De matrices nF , n
sC en 1−D worden voor ieder epoche berekend. De waarden voor de witte ruis voor zowel de gyroscopen als de versnellingsmeters wordt verderop in deze paragraaf behandeld. De volgende formules die van belang zijn, zijn die van de prediction en filtering van het Kalman filter, waarbij de transitiematrix uit matrix nF wordt berekend en waarbij
kdQ uit de opgeven standaardafwijkingen van de witte ruis elementen bestaat:
Tkyk
Tkkxkkx
yTkxk
Tkxk
dT
kkkkkkx
KQKAKIQAKIQ
QAQAAQK
QQQ
kkkkk
kkkkk
kkk
+−−=
+=
+ΦΦ=
−
−−
−
−
−−−−
)()(
)(
1||
1|1|
1|
ˆˆ
1ˆˆ
1|1|11,ˆ
(7.4)
Zoals al eerder vermeld worden de Kalman output samen met de standaardafwijkingen van de laserscandata getransformeerd via:
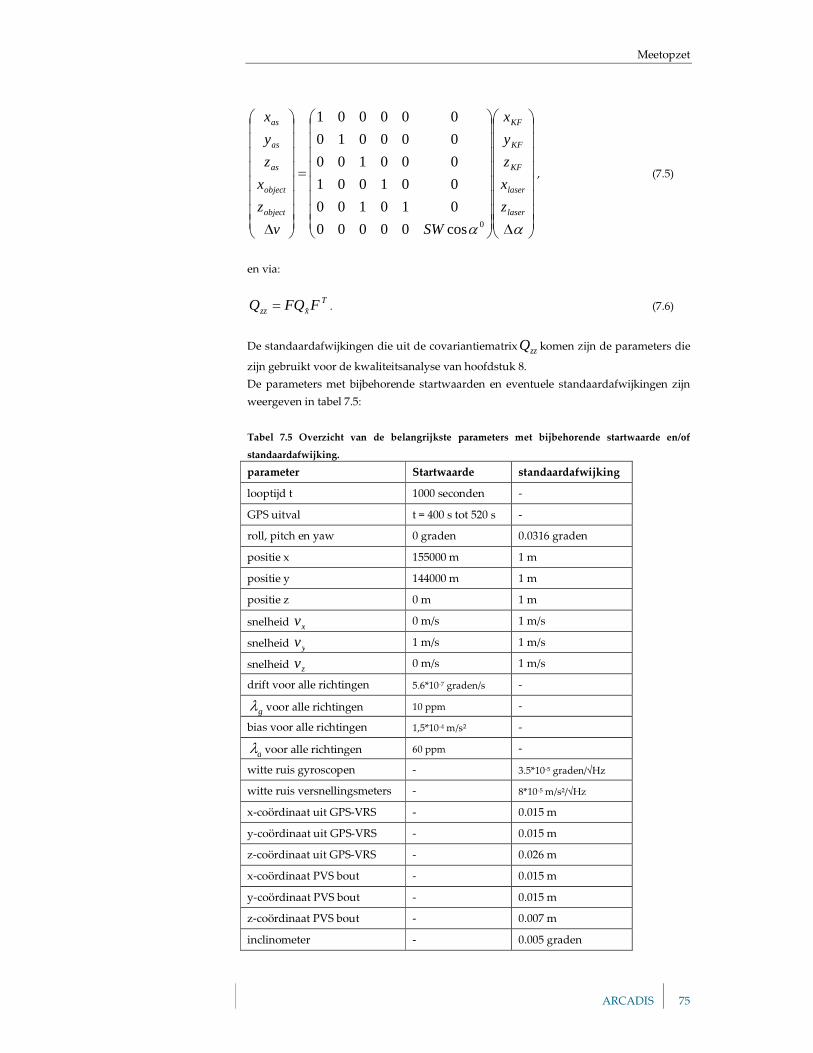
Meetopzet
ARCADIS 75
∆
=
∆ αα
laser
laser
KF
KF
KF
object
object
as
as
as
z
x
z
y
x
SWv
z
x
z
y
x
0cos00000
010100
001001
000100
000010
000001
, (7.5)
en via:
Txzz FFQQ ˆ= . (7.6)
De standaardafwijkingen die uit de covariantiematrix zzQ komen zijn de parameters die zijn gebruikt voor de kwaliteitsanalyse van hoofdstuk 8. De parameters met bijbehorende startwaarden en eventuele standaardafwijkingen zijn weergeven in tabel 7.5: Tabel 7.5 Overzicht van de belangrijkste parameters met bijbehorende startwaarde en/of standaardafwijking. parameter Startwaarde standaardafwijking looptijd t 1000 seconden - GPS uitval t = 400 s tot 520 s - roll, pitch en yaw 0 graden 0.0316 graden positie x 155000 m 1 m positie y 144000 m 1 m positie z 0 m 1 m snelheid xv 0 m/s 1 m/s snelheid yv 1 m/s 1 m/s snelheid zv 0 m/s 1 m/s drift voor alle richtingen 5.6*10-7 graden/s
-
gλ voor alle richtingen 10 ppm
- bias voor alle richtingen 1,5*10-4 m/s²
-
aλ voor alle richtingen 60 ppm
- witte ruis gyroscopen - 3.5*10-5 graden/√Hz
witte ruis versnellingsmeters - 8*10-5 m/s²/√Hz x-coördinaat uit GPS-VRS - 0.015 m
y-coördinaat uit GPS-VRS - 0.015 m z-coördinaat uit GPS-VRS - 0.026 m x-coördinaat PVS bout - 0.015 m y-coördinaat PVS bout - 0.015 m
z-coördinaat PVS bout - 0.007 m inclinometer
- 0.005 graden

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
76 ARCADIS
Figuur 7.6 Stroomdiagram van de berekeningen in MATLAB. Om een indruk te geven welke berekeningsstappen in MATLAB zijn doorlopen geeft figuur 7.6 een overzicht zijn hieronder deze stappen beschreven:
• Allereerst worden in het hoofdprogramma de startwaarden en de verschillende varianten opgegeven. Hierin worden ook de verschillende functies aangeroepen en de figuren aangemaakt.

Meetopzet
ARCADIS 77
• De startwaarden van de x-, y- en z-coördinaten worden omgerekend naar geodetische coördinaten. Ook zijn de startwaarden voor de roll, pitch en yaw hoeken opgegeven.
• Vervolgens wordt per epoche de transitiematrix uitgerekend en de bijbehorende G matrix opgegeven.
• Daarna wordt in het Kalman filter de variantiematrix uitgerekend voor de opgegeven variant. Hierbij kan dus gevarieerd worden met het aantal GPS ontvangers en waneer een PVS bout wordt ingemeten. Zo bestaat ook de mogelijkheid om het geheel door te rekenen wanneer GPS uitval aanwezig is.
• De output van het Kalman filter wordt vervolgens getransformeerd naar standaardafwijkingen van as spoor coördinaten, coördinaten van de overige objecten en verkanting.
• Er bestaat ook de mogelijkheid om de interne en externe betrouwbaarheid uit te rekenen.
• De smoothing staat als los element in het stroomdiagram omdat voor de smoothing eerst alle informatie moet worden opgeslagen. De smoothing is dus niet tegelijk met de bovenstaande berekeningen uitgevoerd, maar nadat al deze berekeningen zijn uitgevoerd.
Het volgende en op een na laatste hoofdstuk beschrijft de resultaten van de in dit hoofdstuk behandelde varianten, scenario’s en rekenopties. Ook worden daarin de resultaten geanalyseerd en daar waar nodig bepaalde keuzes gemaakt.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
78 ARCADIS
Kwaliteitsanalyse
ARCADIS 79
8 Kwaliteitsanalyse
De in het vorige hoofdstuk behandelde varianten en scenario’s zijn vervolgens doorgerekend in Matlab. De resultaten hiervan worden in dit hoofdstuk getoond en geanalyseerd. Deze kwaliteitsanalyse is noodzakelijk voor het beantwoorden van de onderzoeksvraag. Paragraaf 8.1 laat zien welk traagheidsnavigatiesysteem het best presteert en paragraaf 8.2 toont welke variant het best tot zijn recht komt en welke variant dan ook gekozen is als de definitieve variant die voor de vervolgberekeningen is gebruikt. In paragraaf 8.3 wordt het gebruik van in coördinaten bekende PVS bouten beschreven en in paragraaf 8.4 komt het effect van smoothing aan bod. Vervolgens beschrijft paragraaf 8.5 de betrouwbaarheid van het MRSS en komt in paragraaf 8.6 scenario 2 aan bod. Tot slot behandelt paragraaf 8.7 het effect van langer GPS uitval.
8.1 Is het duurdere INS beter? Zoals in hoofdstuk 7 is vermeld is voor het Mobile Rail Survey System veel keuze uit traagheidnavigatiesystemen. Om het verschil tussen diverse systemen duidelijk te maken is gekozen om twee merken met elkaar te vergelijken: het type MTx van XSENS en het type iNAV-RQH-RAIl van iMar. Voor de berekeningen is de basisvariant gebruikt omdat we puur geïnteresseerd zijn in de verschillen tussen de twee merken traagheidsnavigatiesystemen. De figuren 8.1 en 8.2 tonen de berekende standaardafwijkingen van achtereenvolgens de hoeken, drift en schaalfactoren gebruik makend van XSENS en iMar gyroscopen. In figuur 8.1 is te zien dat na 1 kilometer afgelegd te hebben met het MRSS de standaardafwijkingen van de hoeken voor alle drie de richtingen oplopen tot ongeveer 1.5 graden voor wat betreft XSENS. De standaardafwijkingen voor zowel de drift als de schaalfactor blijven constant en dat klopt met het dynamische foutenmodel van vergelijking 5.40. Hierin wordt gesteld dat de afgeleide naar tijd van zowel de drift als de schaalfactor gelijk is aan nul en dat dus de standaardafwijkingen van beide parameters constant en gelijk aan de invoerwaarden zijn. In figuur 8.2 is te zien dat de standaardafwijkingen van de hoeken voor alle drie de richtingen oplopen tot ongeveer 1.5 milligraden voor wat betreft iMAR. De standaardafwijkingen voor de drift en schaalfactoren zijn, net als XSENS, constant en gelijk aan de invoerwaarden.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
80 ARCADIS
Figuur 8.1 Resultaten van de XSENS gyroscopen. Te zien zijn standaardafwijkingen van de drie verschillende hoeken, drift en schaalfactoren, berekent met de basisvariant van het MRSS.
Figuur 8.2 Resultaten van de iMAR gyroscopen. Te zien zijn standaardafwijkingen van de drie verschillende hoeken, drift en schaalfactoren, berekend met de basisvariant van het MRSS. Figuur 8.3 laat de resultaten van de Xsens versnellingsmeters zien. De standaard-afwijkingen van de posities bij een GPS uitval van twee minuten lopen op tot ruim 1.5 meter. Voor de snelheden lopen de standaardafwijkingen op tot 0.02 m/s. Voor de bias en schaalfactoren van de versnellingsmeters geldt hetzelfde als voor de drift en schaalfactoren van de gyroscopen. De afgeleide naar tijd van zowel de bias als de schaalfactoren is gelijk aan nul en dus zijn de standaardafwijkingen van beide parameters constant en gelijk aan de invoerwaarden. Verder is te zien dat de standaardafwijkingen van de posities wanneer er wel GPS ontvangst is, schommelen tussen de 9 en 12 millimeter horizontaal en tussen de 15 en 18 millimeter verticaal. Voor de snelheden worden maximale standaardafwijkingen gehaald van 4.2*10-3 m/s horizontaal en 4.7*10-3 m/s verticaal. Wanneer we inzoomen op
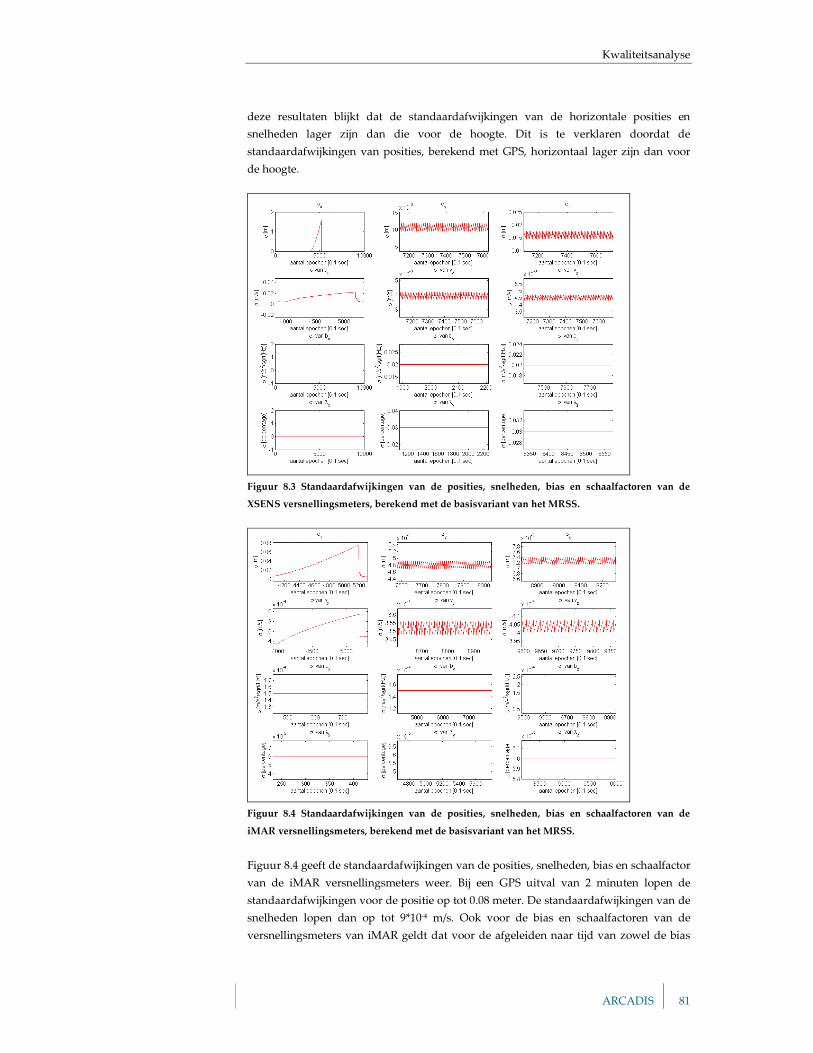
Kwaliteitsanalyse
ARCADIS 81
deze resultaten blijkt dat de standaardafwijkingen van de horizontale posities en snelheden lager zijn dan die voor de hoogte. Dit is te verklaren doordat de standaardafwijkingen van posities, berekend met GPS, horizontaal lager zijn dan voor de hoogte.
Figuur 8.3 Standaardafwijkingen van de posities, snelheden, bias en schaalfactoren van de XSENS versnellingsmeters, berekend met de basisvariant van het MRSS.
Figuur 8.4 Standaardafwijkingen van de posities, snelheden, bias en schaalfactoren van de iMAR versnellingsmeters, berekend met de basisvariant van het MRSS. Figuur 8.4 geeft de standaardafwijkingen van de posities, snelheden, bias en schaalfactor van de iMAR versnellingsmeters weer. Bij een GPS uitval van 2 minuten lopen de standaardafwijkingen voor de positie op tot 0.08 meter. De standaardafwijkingen van de snelheden lopen dan op tot 9*10-4 m/s. Ook voor de bias en schaalfactoren van de versnellingsmeters van iMAR geldt dat voor de afgeleiden naar tijd van zowel de bias
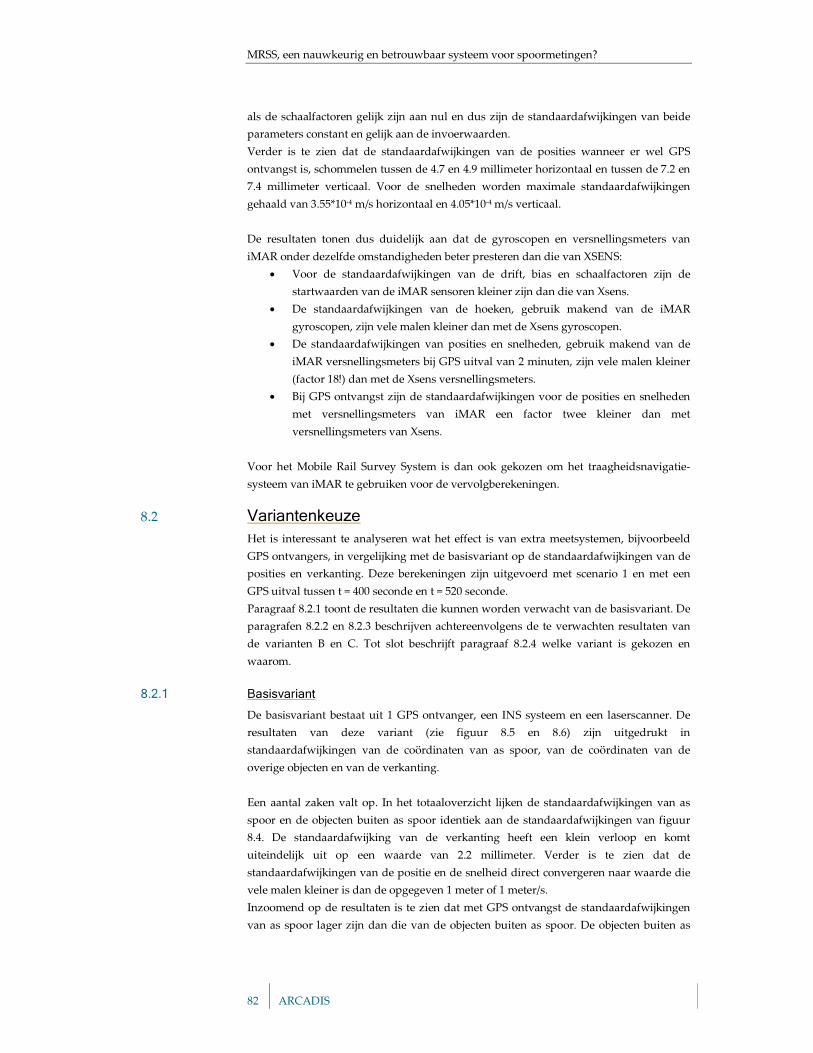
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
82 ARCADIS
als de schaalfactoren gelijk zijn aan nul en dus zijn de standaardafwijkingen van beide parameters constant en gelijk aan de invoerwaarden. Verder is te zien dat de standaardafwijkingen van de posities wanneer er wel GPS ontvangst is, schommelen tussen de 4.7 en 4.9 millimeter horizontaal en tussen de 7.2 en 7.4 millimeter verticaal. Voor de snelheden worden maximale standaardafwijkingen gehaald van 3.55*10-4 m/s horizontaal en 4.05*10-4 m/s verticaal. De resultaten tonen dus duidelijk aan dat de gyroscopen en versnellingsmeters van iMAR onder dezelfde omstandigheden beter presteren dan die van XSENS:
• Voor de standaardafwijkingen van de drift, bias en schaalfactoren zijn de startwaarden van de iMAR sensoren kleiner zijn dan die van Xsens.
• De standaardafwijkingen van de hoeken, gebruik makend van de iMAR gyroscopen, zijn vele malen kleiner dan met de Xsens gyroscopen.
• De standaardafwijkingen van posities en snelheden, gebruik makend van de iMAR versnellingsmeters bij GPS uitval van 2 minuten, zijn vele malen kleiner (factor 18!) dan met de Xsens versnellingsmeters.
• Bij GPS ontvangst zijn de standaardafwijkingen voor de posities en snelheden met versnellingsmeters van iMAR een factor twee kleiner dan met versnellingsmeters van Xsens.
Voor het Mobile Rail Survey System is dan ook gekozen om het traagheidsnavigatie-systeem van iMAR te gebruiken voor de vervolgberekeningen.
8.2 Variantenkeuze Het is interessant te analyseren wat het effect is van extra meetsystemen, bijvoorbeeld GPS ontvangers, in vergelijking met de basisvariant op de standaardafwijkingen van de posities en verkanting. Deze berekeningen zijn uitgevoerd met scenario 1 en met een GPS uitval tussen t = 400 seconde en t = 520 seconde. Paragraaf 8.2.1 toont de resultaten die kunnen worden verwacht van de basisvariant. De paragrafen 8.2.2 en 8.2.3 beschrijven achtereenvolgens de te verwachten resultaten van de varianten B en C. Tot slot beschrijft paragraaf 8.2.4 welke variant is gekozen en waarom.
8.2.1 Basisvariant De basisvariant bestaat uit 1 GPS ontvanger, een INS systeem en een laserscanner. De resultaten van deze variant (zie figuur 8.5 en 8.6) zijn uitgedrukt in standaardafwijkingen van de coördinaten van as spoor, van de coördinaten van de overige objecten en van de verkanting. Een aantal zaken valt op. In het totaaloverzicht lijken de standaardafwijkingen van as spoor en de objecten buiten as spoor identiek aan de standaardafwijkingen van figuur 8.4. De standaardafwijking van de verkanting heeft een klein verloop en komt uiteindelijk uit op een waarde van 2.2 millimeter. Verder is te zien dat de standaardafwijkingen van de positie en de snelheid direct convergeren naar waarde die vele malen kleiner is dan de opgegeven 1 meter of 1 meter/s. Inzoomend op de resultaten is te zien dat met GPS ontvangst de standaardafwijkingen van as spoor lager zijn dan die van de objecten buiten as spoor. De objecten buiten as
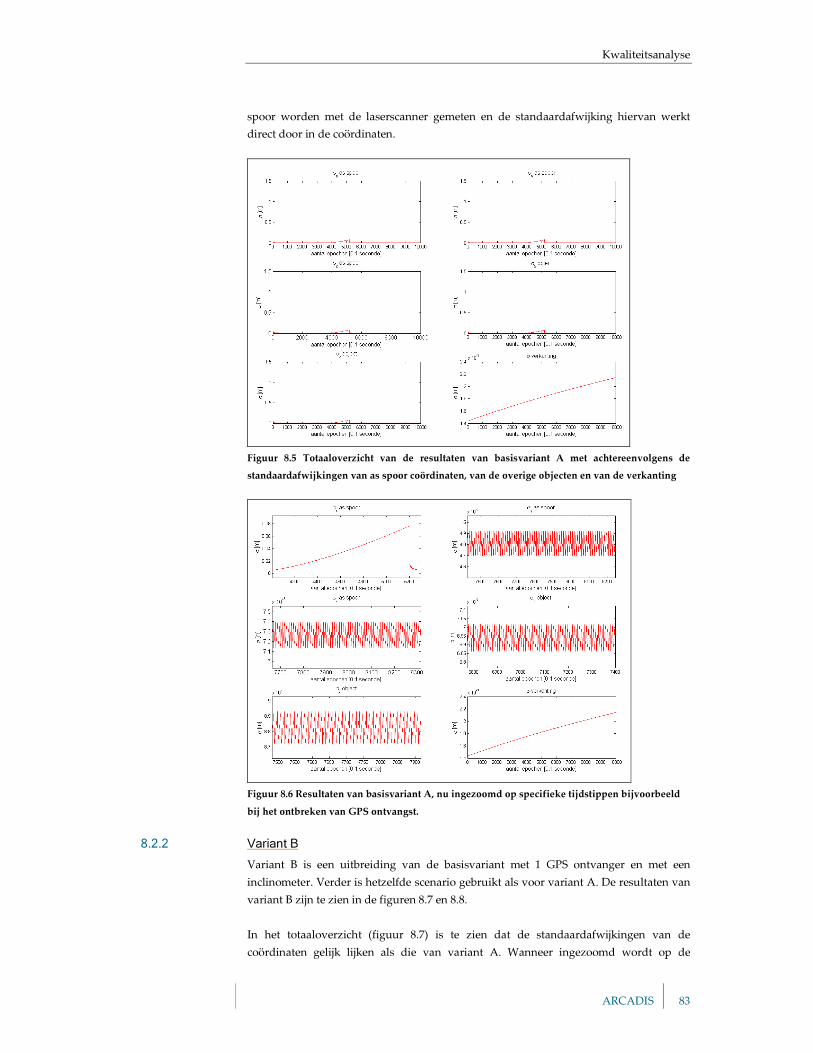
Kwaliteitsanalyse
ARCADIS 83
spoor worden met de laserscanner gemeten en de standaardafwijking hiervan werkt direct door in de coördinaten.
Figuur 8.5 Totaaloverzicht van de resultaten van basisvariant A met achtereenvolgens de standaardafwijkingen van as spoor coördinaten, van de overige objecten en van de verkanting
Figuur 8.6 Resultaten van basisvariant A, nu ingezoomd op specifieke tijdstippen bijvoorbeeld bij het ontbreken van GPS ontvangst.
8.2.2 Variant B Variant B is een uitbreiding van de basisvariant met 1 GPS ontvanger en met een inclinometer. Verder is hetzelfde scenario gebruikt als voor variant A. De resultaten van variant B zijn te zien in de figuren 8.7 en 8.8. In het totaaloverzicht (figuur 8.7) is te zien dat de standaardafwijkingen van de coördinaten gelijk lijken als die van variant A. Wanneer ingezoomd wordt op de
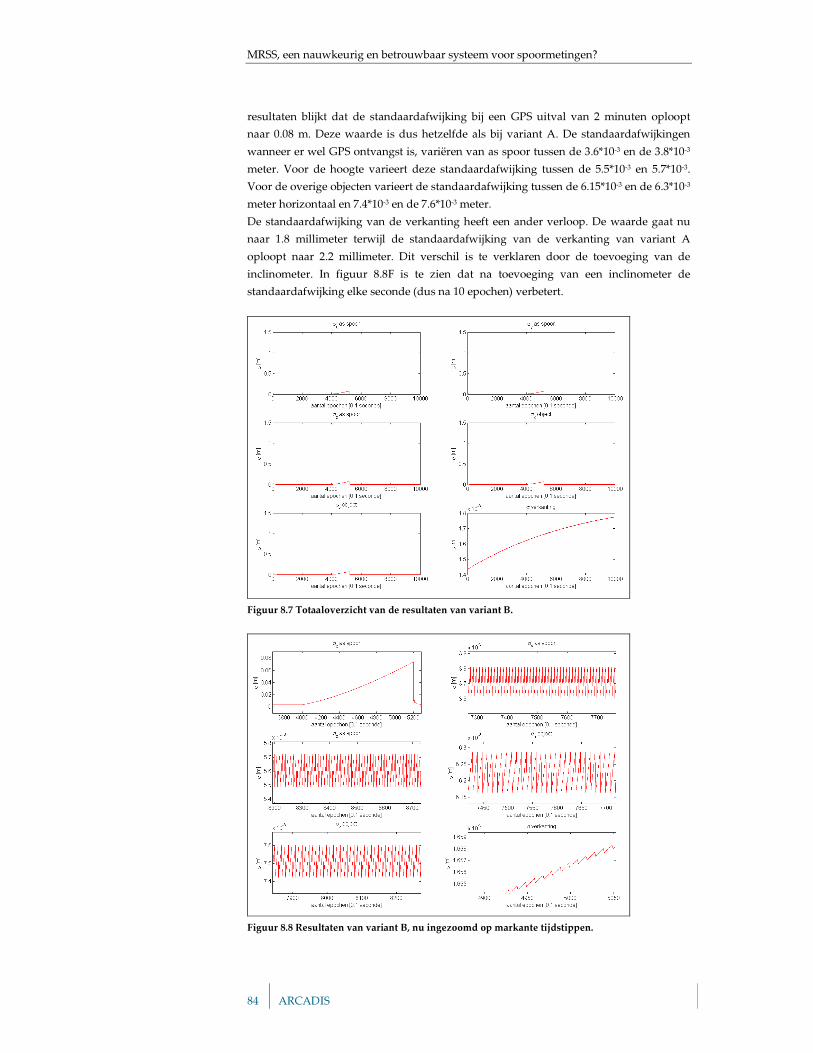
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
84 ARCADIS
resultaten blijkt dat de standaardafwijking bij een GPS uitval van 2 minuten oploopt naar 0.08 m. Deze waarde is dus hetzelfde als bij variant A. De standaardafwijkingen wanneer er wel GPS ontvangst is, variëren van as spoor tussen de 3.6*10-3 en de 3.8*10-3 meter. Voor de hoogte varieert deze standaardafwijking tussen de 5.5*10-3 en 5.7*10-3. Voor de overige objecten varieert de standaardafwijking tussen de 6.15*10-3 en de 6.3*10-3 meter horizontaal en 7.4*10-3 en de 7.6*10-3 meter. De standaardafwijking van de verkanting heeft een ander verloop. De waarde gaat nu naar 1.8 millimeter terwijl de standaardafwijking van de verkanting van variant A oploopt naar 2.2 millimeter. Dit verschil is te verklaren door de toevoeging van de inclinometer. In figuur 8.8F is te zien dat na toevoeging van een inclinometer de standaardafwijking elke seconde (dus na 10 epochen) verbetert.
Figuur 8.7 Totaaloverzicht van de resultaten van variant B.
Figuur 8.8 Resultaten van variant B, nu ingezoomd op markante tijdstippen.
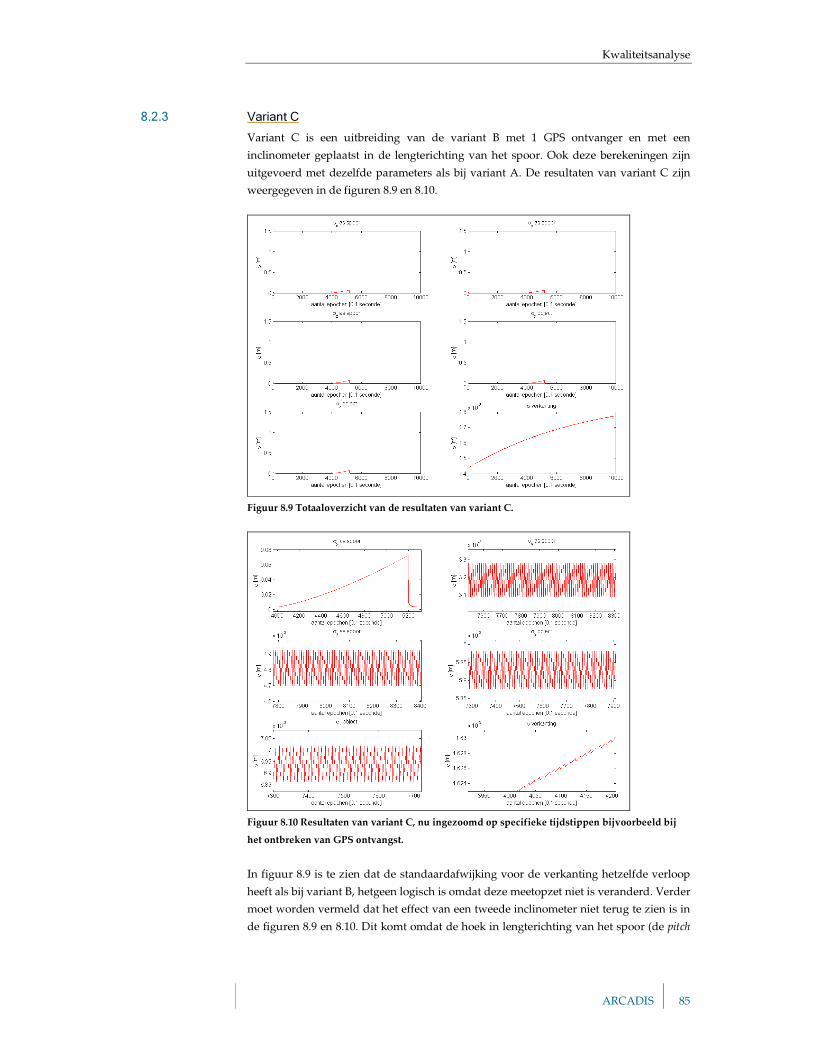
Kwaliteitsanalyse
ARCADIS 85
8.2.3 Variant C Variant C is een uitbreiding van de variant B met 1 GPS ontvanger en met een inclinometer geplaatst in de lengterichting van het spoor. Ook deze berekeningen zijn uitgevoerd met dezelfde parameters als bij variant A. De resultaten van variant C zijn weergegeven in de figuren 8.9 en 8.10.
Figuur 8.9 Totaaloverzicht van de resultaten van variant C.
Figuur 8.10 Resultaten van variant C, nu ingezoomd op specifieke tijdstippen bijvoorbeeld bij het ontbreken van GPS ontvangst. In figuur 8.9 is te zien dat de standaardafwijking voor de verkanting hetzelfde verloop heeft als bij variant B, hetgeen logisch is omdat deze meetopzet niet is veranderd. Verder moet worden vermeld dat het effect van een tweede inclinometer niet terug te zien is in de figuren 8.9 en 8.10. Dit komt omdat de hoek in lengterichting van het spoor (de pitch
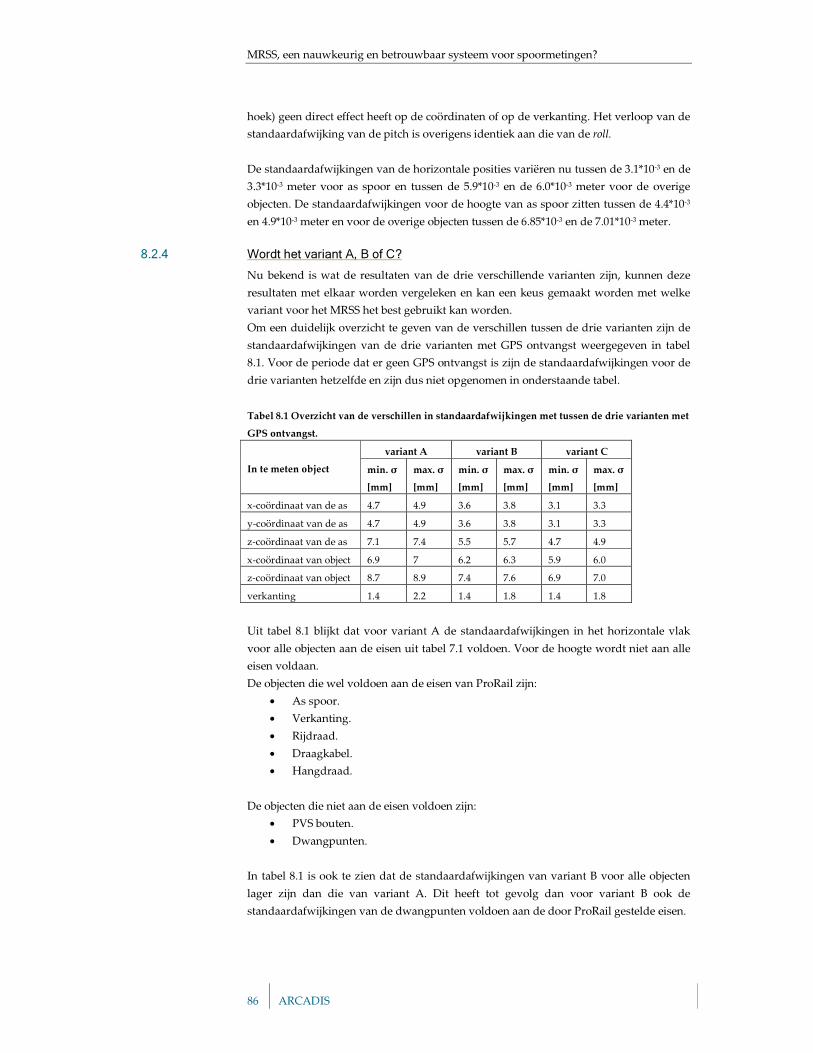
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
86 ARCADIS
hoek) geen direct effect heeft op de coördinaten of op de verkanting. Het verloop van de standaardafwijking van de pitch is overigens identiek aan die van de roll. De standaardafwijkingen van de horizontale posities variëren nu tussen de 3.1*10-3 en de 3.3*10-3 meter voor as spoor en tussen de 5.9*10-3 en de 6.0*10-3 meter voor de overige objecten. De standaardafwijkingen voor de hoogte van as spoor zitten tussen de 4.4*10-3 en 4.9*10-3 meter en voor de overige objecten tussen de 6.85*10-3 en de 7.01*10-3 meter.
8.2.4 Wordt het variant A, B of C? Nu bekend is wat de resultaten van de drie verschillende varianten zijn, kunnen deze resultaten met elkaar worden vergeleken en kan een keus gemaakt worden met welke variant voor het MRSS het best gebruikt kan worden. Om een duidelijk overzicht te geven van de verschillen tussen de drie varianten zijn de standaardafwijkingen van de drie varianten met GPS ontvangst weergegeven in tabel 8.1. Voor de periode dat er geen GPS ontvangst is zijn de standaardafwijkingen voor de drie varianten hetzelfde en zijn dus niet opgenomen in onderstaande tabel. Tabel 8.1 Overzicht van de verschillen in standaardafwijkingen met tussen de drie varianten met GPS ontvangst.
variant A variant B variant C In te meten object min. σ
[mm] max. σ [mm]
min. σ [mm]
max. σ [mm]
min. σ [mm]
max. σ [mm]
x-coördinaat van de as 4.7 4.9 3.6 3.8 3.1 3.3 y-coördinaat van de as 4.7 4.9 3.6 3.8 3.1 3.3 z-coördinaat van de as 7.1 7.4 5.5 5.7 4.7 4.9 x-coördinaat van object 6.9 7 6.2 6.3 5.9 6.0 z-coördinaat van object 8.7 8.9 7.4 7.6 6.9 7.0 verkanting 1.4 2.2 1.4 1.8 1.4 1.8 Uit tabel 8.1 blijkt dat voor variant A de standaardafwijkingen in het horizontale vlak voor alle objecten aan de eisen uit tabel 7.1 voldoen. Voor de hoogte wordt niet aan alle eisen voldaan. De objecten die wel voldoen aan de eisen van ProRail zijn:
• As spoor. • Verkanting. • Rijdraad. • Draagkabel. • Hangdraad.
De objecten die niet aan de eisen voldoen zijn:
• PVS bouten. • Dwangpunten.
In tabel 8.1 is ook te zien dat de standaardafwijkingen van variant B voor alle objecten lager zijn dan die van variant A. Dit heeft tot gevolg dan voor variant B ook de standaardafwijkingen van de dwangpunten voldoen aan de door ProRail gestelde eisen.
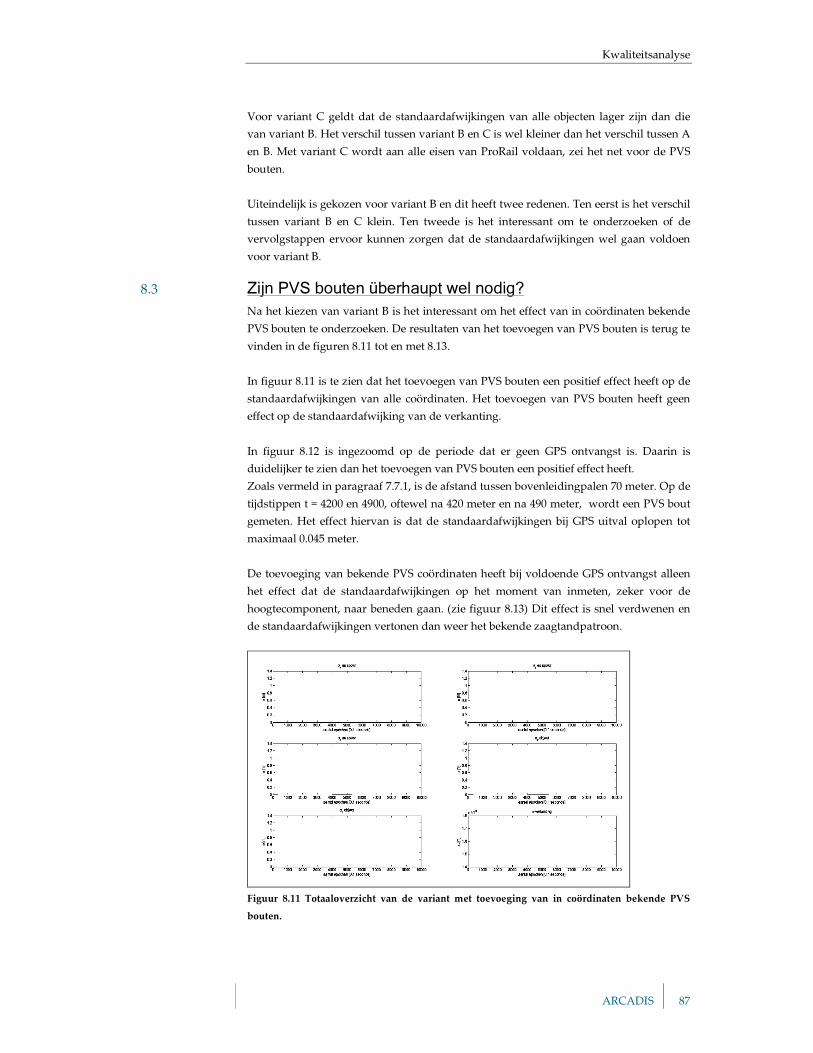
Kwaliteitsanalyse
ARCADIS 87
Voor variant C geldt dat de standaardafwijkingen van alle objecten lager zijn dan die van variant B. Het verschil tussen variant B en C is wel kleiner dan het verschil tussen A en B. Met variant C wordt aan alle eisen van ProRail voldaan, zei het net voor de PVS bouten. Uiteindelijk is gekozen voor variant B en dit heeft twee redenen. Ten eerst is het verschil tussen variant B en C klein. Ten tweede is het interessant om te onderzoeken of de vervolgstappen ervoor kunnen zorgen dat de standaardafwijkingen wel gaan voldoen voor variant B.
8.3 Zijn PVS bouten überhaupt wel nodig? Na het kiezen van variant B is het interessant om het effect van in coördinaten bekende PVS bouten te onderzoeken. De resultaten van het toevoegen van PVS bouten is terug te vinden in de figuren 8.11 tot en met 8.13. In figuur 8.11 is te zien dat het toevoegen van PVS bouten een positief effect heeft op de standaardafwijkingen van alle coördinaten. Het toevoegen van PVS bouten heeft geen effect op de standaardafwijking van de verkanting. In figuur 8.12 is ingezoomd op de periode dat er geen GPS ontvangst is. Daarin is duidelijker te zien dan het toevoegen van PVS bouten een positief effect heeft. Zoals vermeld in paragraaf 7.7.1, is de afstand tussen bovenleidingpalen 70 meter. Op de tijdstippen t = 4200 en 4900, oftewel na 420 meter en na 490 meter, wordt een PVS bout gemeten. Het effect hiervan is dat de standaardafwijkingen bij GPS uitval oplopen tot maximaal 0.045 meter. De toevoeging van bekende PVS coördinaten heeft bij voldoende GPS ontvangst alleen het effect dat de standaardafwijkingen op het moment van inmeten, zeker voor de hoogtecomponent, naar beneden gaan. (zie figuur 8.13) Dit effect is snel verdwenen en de standaardafwijkingen vertonen dan weer het bekende zaagtandpatroon.
Figuur 8.11 Totaaloverzicht van de variant met toevoeging van in coördinaten bekende PVS bouten.
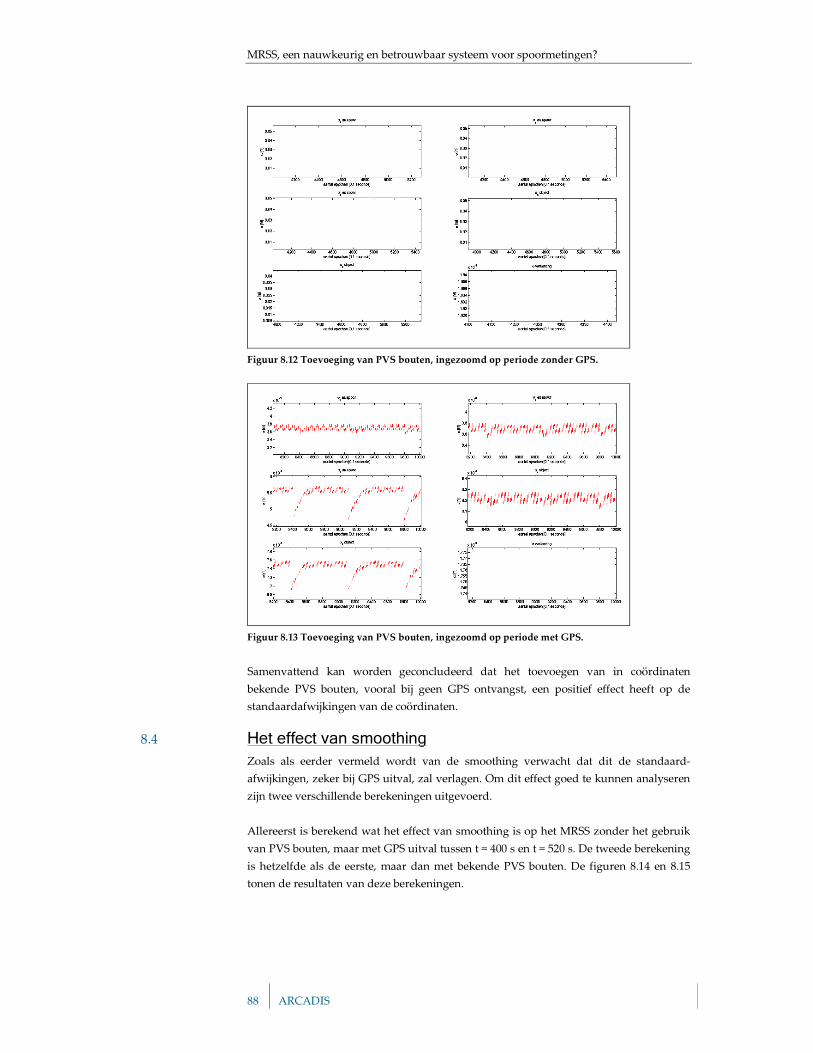
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
88 ARCADIS
Figuur 8.12 Toevoeging van PVS bouten, ingezoomd op periode zonder GPS.
Figuur 8.13 Toevoeging van PVS bouten, ingezoomd op periode met GPS. Samenvattend kan worden geconcludeerd dat het toevoegen van in coördinaten bekende PVS bouten, vooral bij geen GPS ontvangst, een positief effect heeft op de standaardafwijkingen van de coördinaten.
8.4 Het effect van smoothing Zoals als eerder vermeld wordt van de smoothing verwacht dat dit de standaard-afwijkingen, zeker bij GPS uitval, zal verlagen. Om dit effect goed te kunnen analyseren zijn twee verschillende berekeningen uitgevoerd. Allereerst is berekend wat het effect van smoothing is op het MRSS zonder het gebruik van PVS bouten, maar met GPS uitval tussen t = 400 s en t = 520 s. De tweede berekening is hetzelfde als de eerste, maar dan met bekende PVS bouten. De figuren 8.14 en 8.15 tonen de resultaten van deze berekeningen.
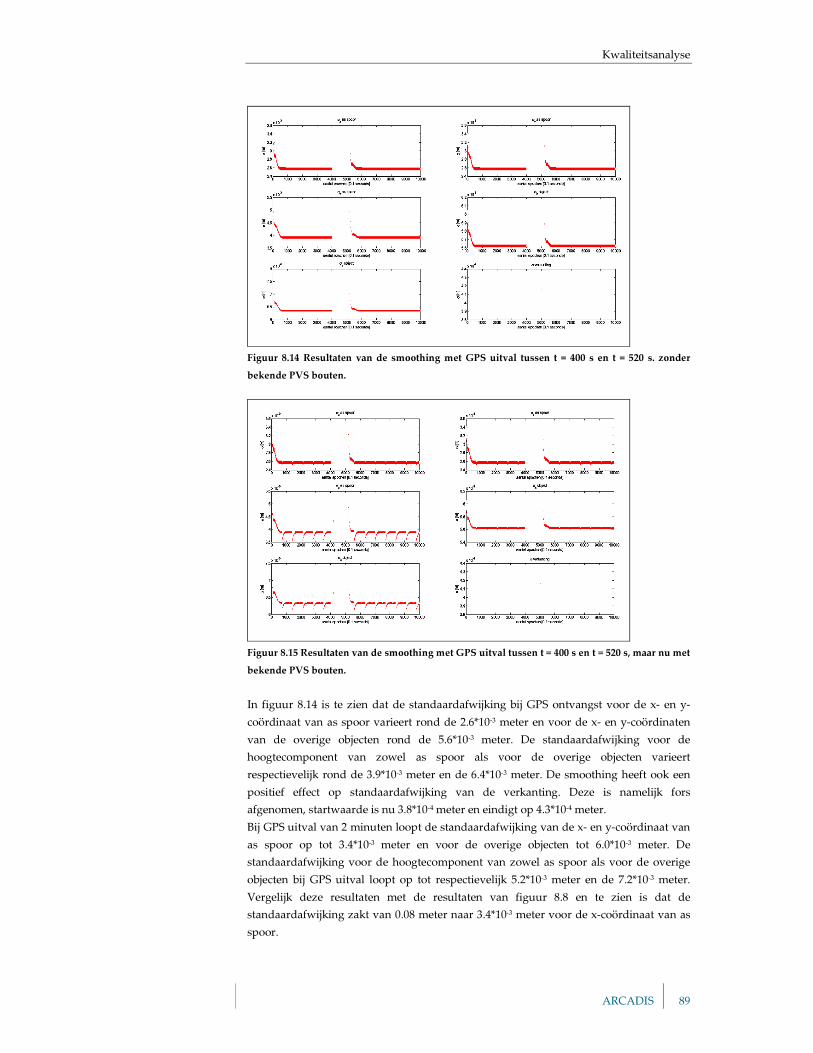
Kwaliteitsanalyse
ARCADIS 89
Figuur 8.14 Resultaten van de smoothing met GPS uitval tussen t = 400 s en t = 520 s. zonder bekende PVS bouten.
Figuur 8.15 Resultaten van de smoothing met GPS uitval tussen t = 400 s en t = 520 s, maar nu met bekende PVS bouten. In figuur 8.14 is te zien dat de standaardafwijking bij GPS ontvangst voor de x- en y-coördinaat van as spoor varieert rond de 2.6*10-3 meter en voor de x- en y-coördinaten van de overige objecten rond de 5.6*10-3 meter. De standaardafwijking voor de hoogtecomponent van zowel as spoor als voor de overige objecten varieert respectievelijk rond de 3.9*10-3 meter en de 6.4*10-3 meter. De smoothing heeft ook een positief effect op standaardafwijking van de verkanting. Deze is namelijk fors afgenomen, startwaarde is nu 3.8*10-4 meter en eindigt op 4.3*10-4 meter. Bij GPS uitval van 2 minuten loopt de standaardafwijking van de x- en y-coördinaat van as spoor op tot 3.4*10-3 meter en voor de overige objecten tot 6.0*10-3 meter. De standaardafwijking voor de hoogtecomponent van zowel as spoor als voor de overige objecten bij GPS uitval loopt op tot respectievelijk 5.2*10-3 meter en de 7.2*10-3 meter. Vergelijk deze resultaten met de resultaten van figuur 8.8 en te zien is dat de standaardafwijking zakt van 0.08 meter naar 3.4*10-3 meter voor de x-coördinaat van as spoor.
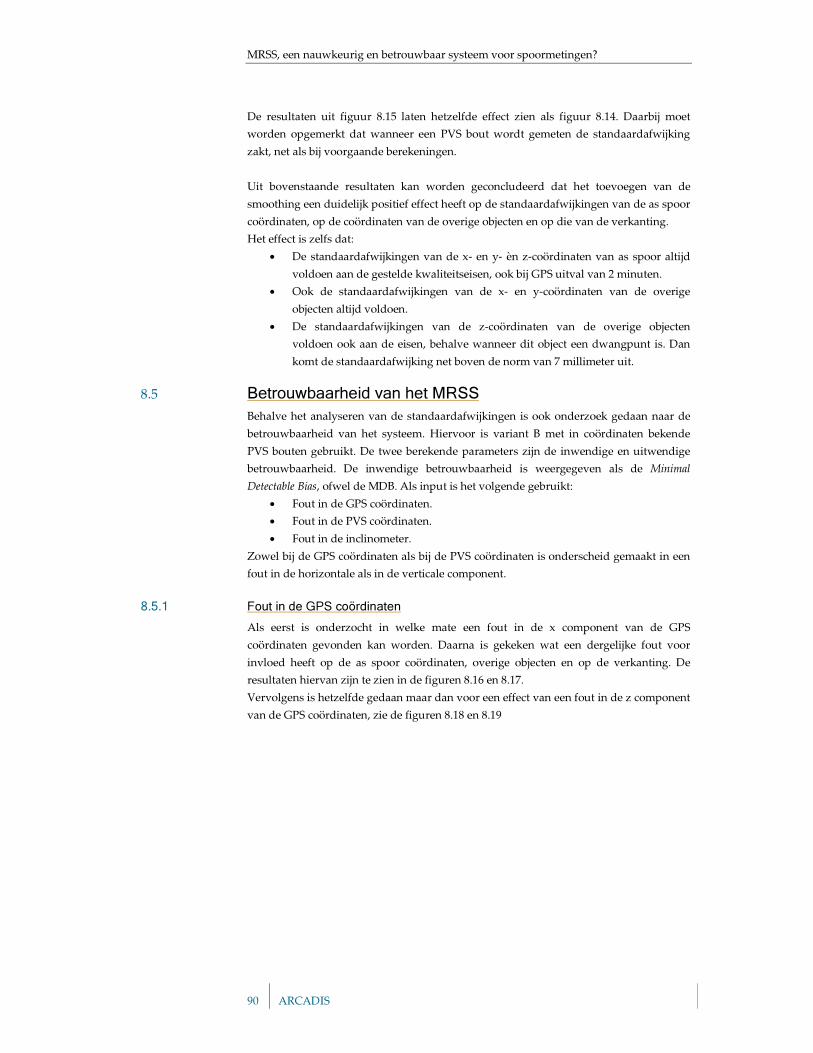
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
90 ARCADIS
De resultaten uit figuur 8.15 laten hetzelfde effect zien als figuur 8.14. Daarbij moet worden opgemerkt dat wanneer een PVS bout wordt gemeten de standaardafwijking zakt, net als bij voorgaande berekeningen. Uit bovenstaande resultaten kan worden geconcludeerd dat het toevoegen van de smoothing een duidelijk positief effect heeft op de standaardafwijkingen van de as spoor coördinaten, op de coördinaten van de overige objecten en op die van de verkanting. Het effect is zelfs dat:
• De standaardafwijkingen van de x- en y- èn z-coördinaten van as spoor altijd voldoen aan de gestelde kwaliteitseisen, ook bij GPS uitval van 2 minuten.
• Ook de standaardafwijkingen van de x- en y-coördinaten van de overige objecten altijd voldoen.
• De standaardafwijkingen van de z-coördinaten van de overige objecten voldoen ook aan de eisen, behalve wanneer dit object een dwangpunt is. Dan komt de standaardafwijking net boven de norm van 7 millimeter uit.
8.5 Betrouwbaarheid van het MRSS Behalve het analyseren van de standaardafwijkingen is ook onderzoek gedaan naar de betrouwbaarheid van het systeem. Hiervoor is variant B met in coördinaten bekende PVS bouten gebruikt. De twee berekende parameters zijn de inwendige en uitwendige betrouwbaarheid. De inwendige betrouwbaarheid is weergegeven als de Minimal Detectable Bias, ofwel de MDB. Als input is het volgende gebruikt:
• Fout in de GPS coördinaten. • Fout in de PVS coördinaten. • Fout in de inclinometer.
Zowel bij de GPS coördinaten als bij de PVS coördinaten is onderscheid gemaakt in een fout in de horizontale als in de verticale component.
8.5.1 Fout in de GPS coördinaten Als eerst is onderzocht in welke mate een fout in de x component van de GPS coördinaten gevonden kan worden. Daarna is gekeken wat een dergelijke fout voor invloed heeft op de as spoor coördinaten, overige objecten en op de verkanting. De resultaten hiervan zijn te zien in de figuren 8.16 en 8.17. Vervolgens is hetzelfde gedaan maar dan voor een effect van een fout in de z component van de GPS coördinaten, zie de figuren 8.18 en 8.19
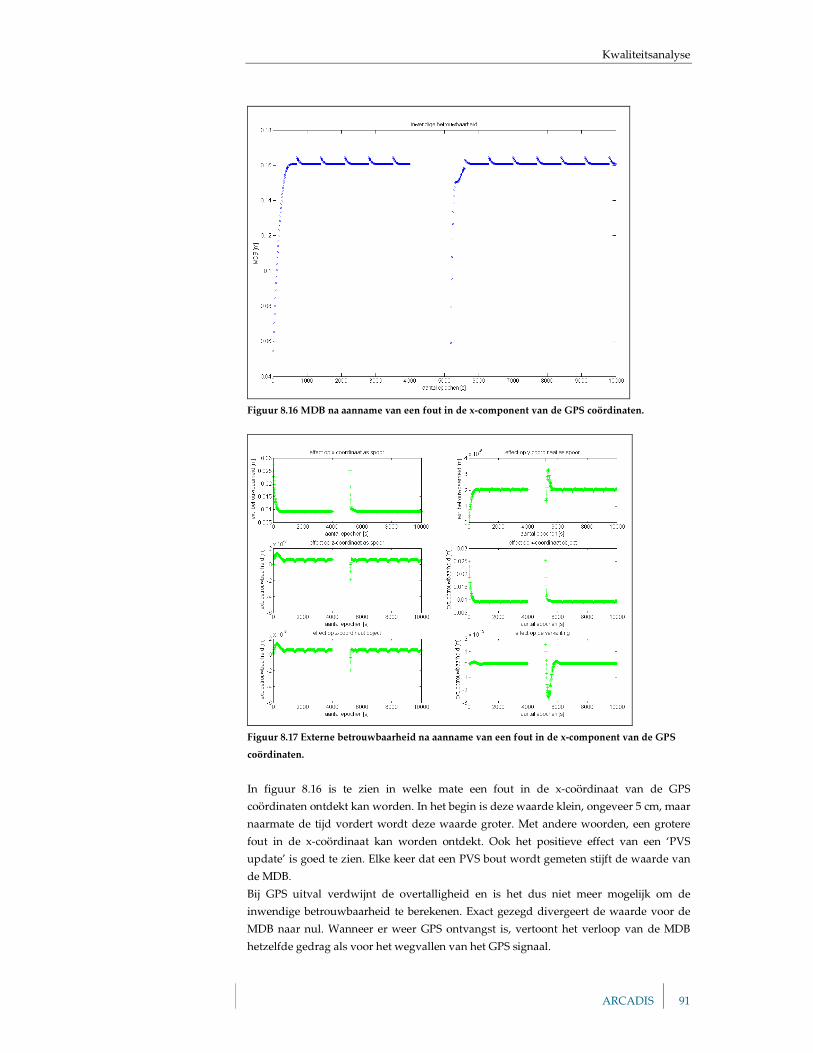
Kwaliteitsanalyse
ARCADIS 91
Figuur 8.16 MDB na aanname van een fout in de x-component van de GPS coördinaten.
Figuur 8.17 Externe betrouwbaarheid na aanname van een fout in de x-component van de GPS coördinaten. In figuur 8.16 is te zien in welke mate een fout in de x-coördinaat van de GPS coördinaten ontdekt kan worden. In het begin is deze waarde klein, ongeveer 5 cm, maar naarmate de tijd vordert wordt deze waarde groter. Met andere woorden, een grotere fout in de x-coördinaat kan worden ontdekt. Ook het positieve effect van een ‘PVS update’ is goed te zien. Elke keer dat een PVS bout wordt gemeten stijft de waarde van de MDB. Bij GPS uitval verdwijnt de overtalligheid en is het dus niet meer mogelijk om de inwendige betrouwbaarheid te berekenen. Exact gezegd divergeert de waarde voor de MDB naar nul. Wanneer er weer GPS ontvangst is, vertoont het verloop van de MDB hetzelfde gedrag als voor het wegvallen van het GPS signaal.
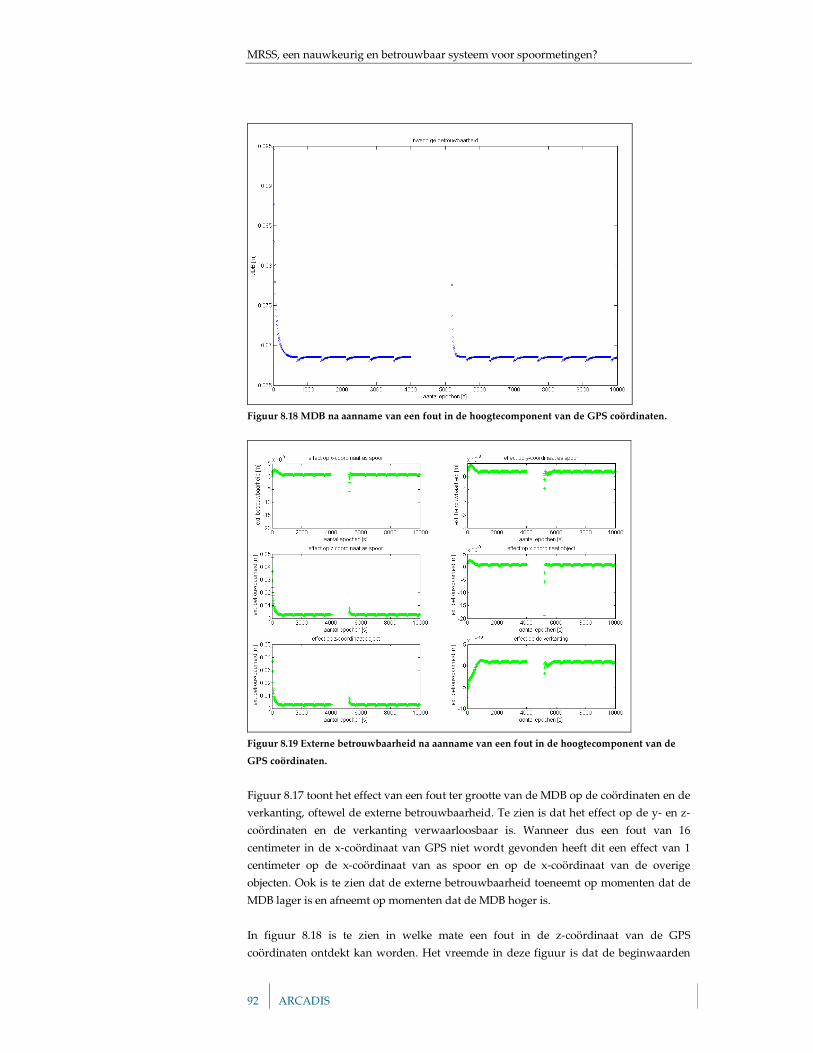
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
92 ARCADIS
Figuur 8.18 MDB na aanname van een fout in de hoogtecomponent van de GPS coördinaten.
Figuur 8.19 Externe betrouwbaarheid na aanname van een fout in de hoogtecomponent van de GPS coördinaten. Figuur 8.17 toont het effect van een fout ter grootte van de MDB op de coördinaten en de verkanting, oftewel de externe betrouwbaarheid. Te zien is dat het effect op de y- en z-coördinaten en de verkanting verwaarloosbaar is. Wanneer dus een fout van 16 centimeter in de x-coördinaat van GPS niet wordt gevonden heeft dit een effect van 1 centimeter op de x-coördinaat van as spoor en op de x-coördinaat van de overige objecten. Ook is te zien dat de externe betrouwbaarheid toeneemt op momenten dat de MDB lager is en afneemt op momenten dat de MDB hoger is. In figuur 8.18 is te zien in welke mate een fout in de z-coördinaat van de GPS coördinaten ontdekt kan worden. Het vreemde in deze figuur is dat de beginwaarden
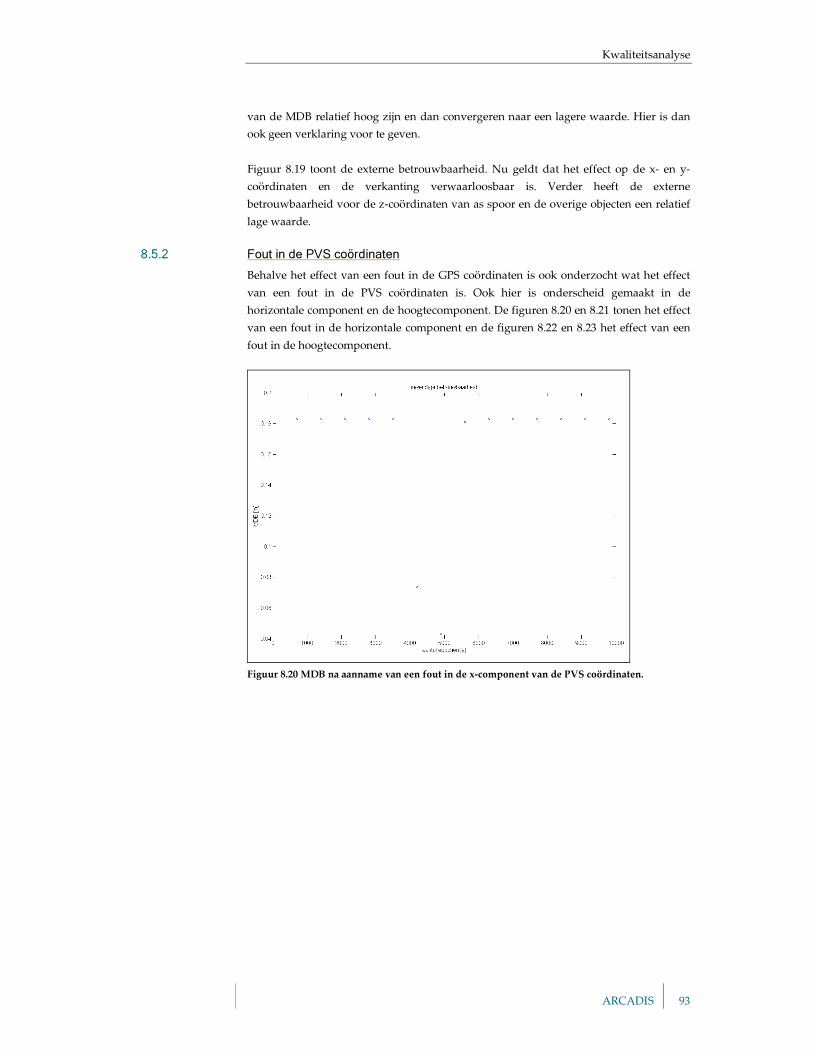
Kwaliteitsanalyse
ARCADIS 93
van de MDB relatief hoog zijn en dan convergeren naar een lagere waarde. Hier is dan ook geen verklaring voor te geven. Figuur 8.19 toont de externe betrouwbaarheid. Nu geldt dat het effect op de x- en y-coördinaten en de verkanting verwaarloosbaar is. Verder heeft de externe betrouwbaarheid voor de z-coördinaten van as spoor en de overige objecten een relatief lage waarde.
8.5.2 Fout in de PVS coördinaten Behalve het effect van een fout in de GPS coördinaten is ook onderzocht wat het effect van een fout in de PVS coördinaten is. Ook hier is onderscheid gemaakt in de horizontale component en de hoogtecomponent. De figuren 8.20 en 8.21 tonen het effect van een fout in de horizontale component en de figuren 8.22 en 8.23 het effect van een fout in de hoogtecomponent.
Figuur 8.20 MDB na aanname van een fout in de x-component van de PVS coördinaten.
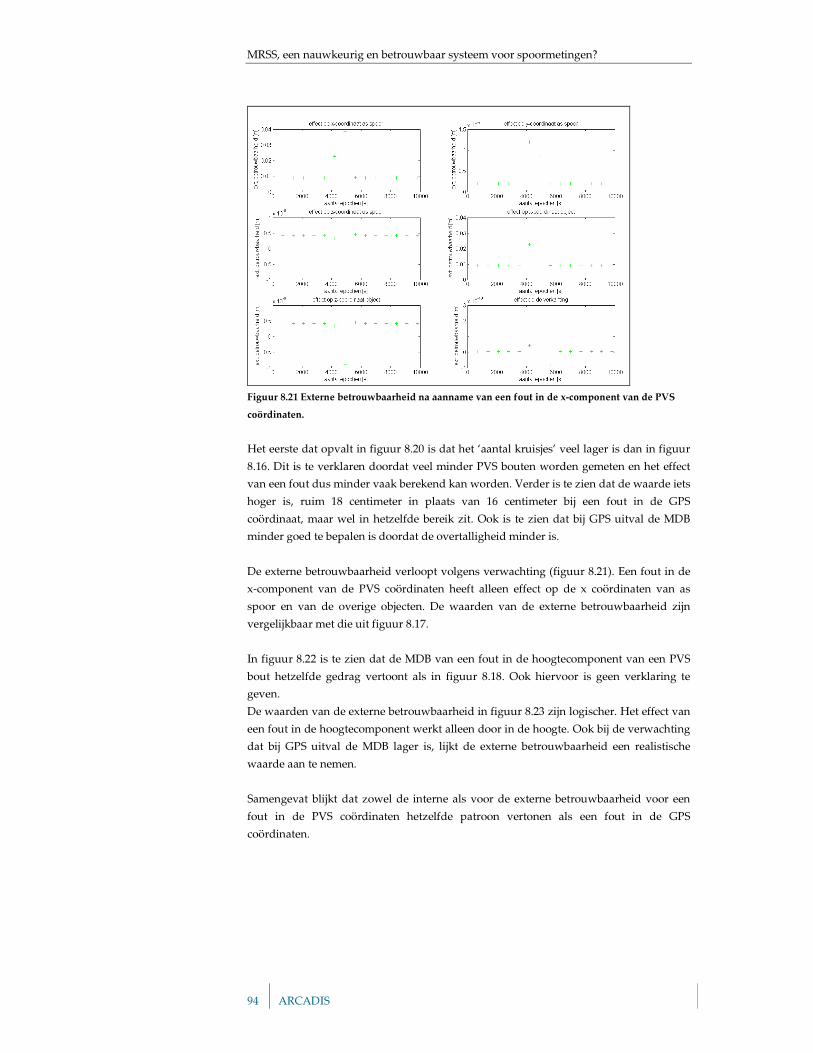
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
94 ARCADIS
Figuur 8.21 Externe betrouwbaarheid na aanname van een fout in de x-component van de PVS coördinaten. Het eerste dat opvalt in figuur 8.20 is dat het ‘aantal kruisjes’ veel lager is dan in figuur 8.16. Dit is te verklaren doordat veel minder PVS bouten worden gemeten en het effect van een fout dus minder vaak berekend kan worden. Verder is te zien dat de waarde iets hoger is, ruim 18 centimeter in plaats van 16 centimeter bij een fout in de GPS coördinaat, maar wel in hetzelfde bereik zit. Ook is te zien dat bij GPS uitval de MDB minder goed te bepalen is doordat de overtalligheid minder is. De externe betrouwbaarheid verloopt volgens verwachting (figuur 8.21). Een fout in de x-component van de PVS coördinaten heeft alleen effect op de x coördinaten van as spoor en van de overige objecten. De waarden van de externe betrouwbaarheid zijn vergelijkbaar met die uit figuur 8.17. In figuur 8.22 is te zien dat de MDB van een fout in de hoogtecomponent van een PVS bout hetzelfde gedrag vertoont als in figuur 8.18. Ook hiervoor is geen verklaring te geven. De waarden van de externe betrouwbaarheid in figuur 8.23 zijn logischer. Het effect van een fout in de hoogtecomponent werkt alleen door in de hoogte. Ook bij de verwachting dat bij GPS uitval de MDB lager is, lijkt de externe betrouwbaarheid een realistische waarde aan te nemen. Samengevat blijkt dat zowel de interne als voor de externe betrouwbaarheid voor een fout in de PVS coördinaten hetzelfde patroon vertonen als een fout in de GPS coördinaten.
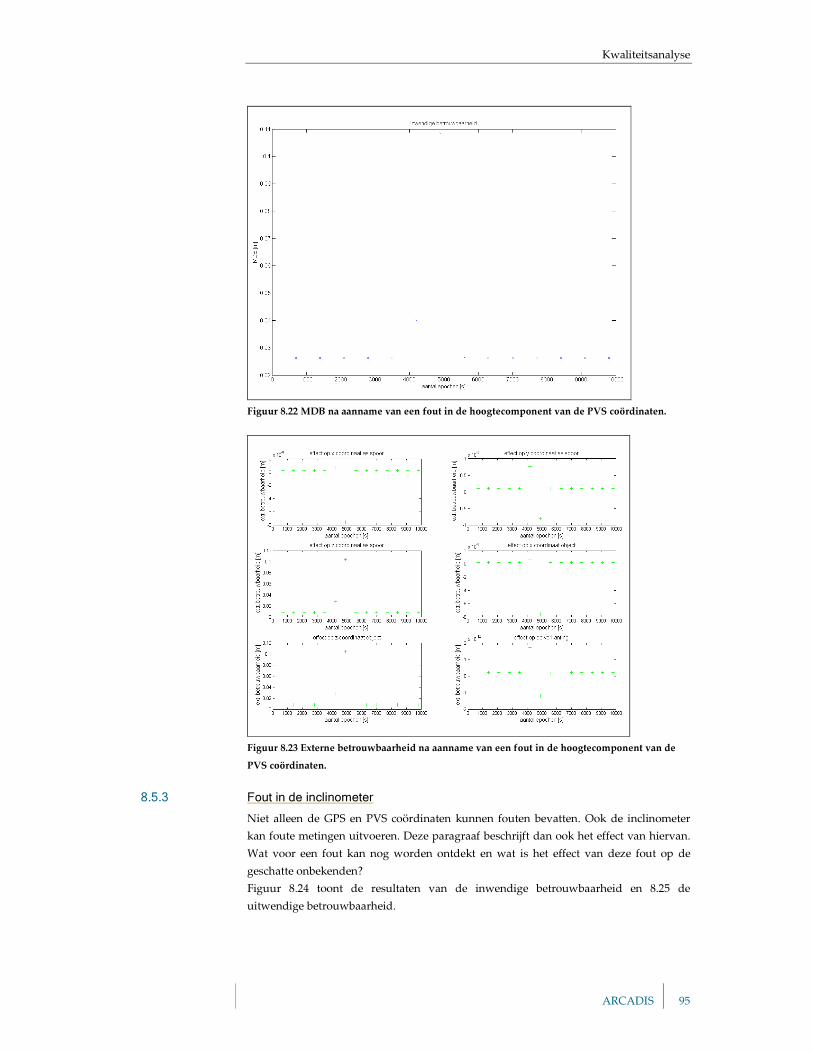
Kwaliteitsanalyse
ARCADIS 95
Figuur 8.22 MDB na aanname van een fout in de hoogtecomponent van de PVS coördinaten.
Figuur 8.23 Externe betrouwbaarheid na aanname van een fout in de hoogtecomponent van de PVS coördinaten.
8.5.3 Fout in de inclinometer Niet alleen de GPS en PVS coördinaten kunnen fouten bevatten. Ook de inclinometer kan foute metingen uitvoeren. Deze paragraaf beschrijft dan ook het effect van hiervan. Wat voor een fout kan nog worden ontdekt en wat is het effect van deze fout op de geschatte onbekenden? Figuur 8.24 toont de resultaten van de inwendige betrouwbaarheid en 8.25 de uitwendige betrouwbaarheid.
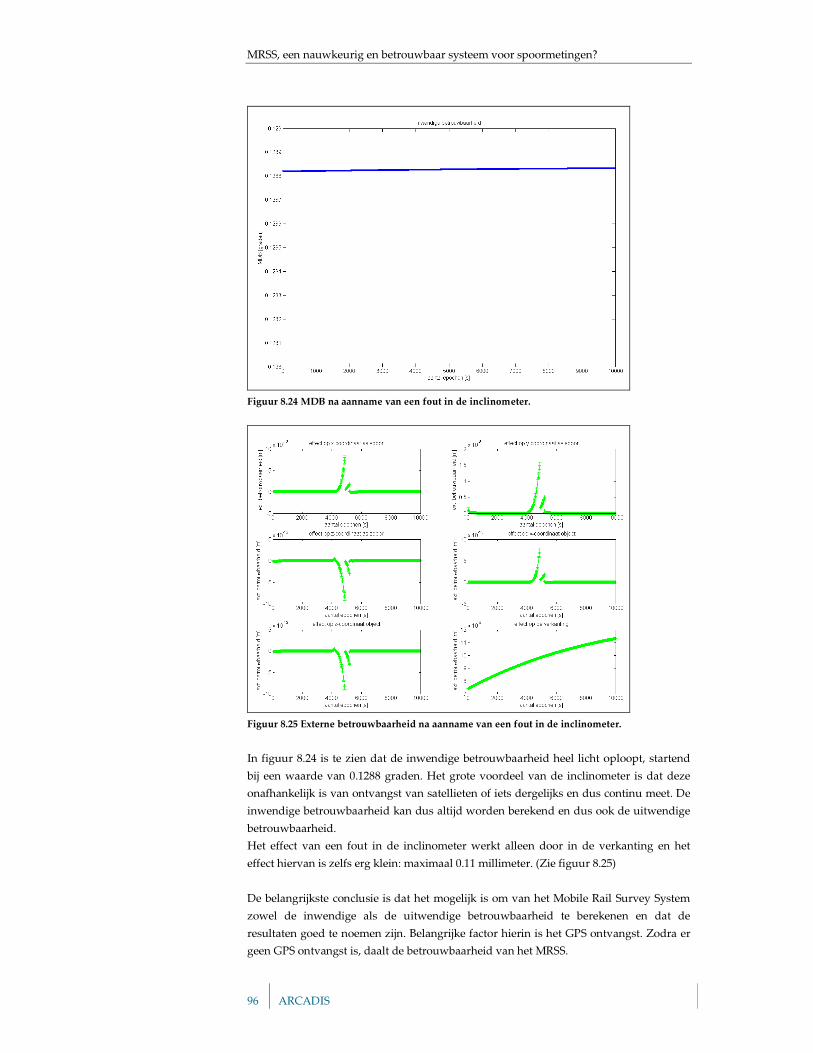
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
96 ARCADIS
Figuur 8.24 MDB na aanname van een fout in de inclinometer.
Figuur 8.25 Externe betrouwbaarheid na aanname van een fout in de inclinometer. In figuur 8.24 is te zien dat de inwendige betrouwbaarheid heel licht oploopt, startend bij een waarde van 0.1288 graden. Het grote voordeel van de inclinometer is dat deze onafhankelijk is van ontvangst van satellieten of iets dergelijks en dus continu meet. De inwendige betrouwbaarheid kan dus altijd worden berekend en dus ook de uitwendige betrouwbaarheid. Het effect van een fout in de inclinometer werkt alleen door in de verkanting en het effect hiervan is zelfs erg klein: maximaal 0.11 millimeter. (Zie figuur 8.25) De belangrijkste conclusie is dat het mogelijk is om van het Mobile Rail Survey System zowel de inwendige als de uitwendige betrouwbaarheid te berekenen en dat de resultaten goed te noemen zijn. Belangrijke factor hierin is het GPS ontvangst. Zodra er geen GPS ontvangst is, daalt de betrouwbaarheid van het MRSS.
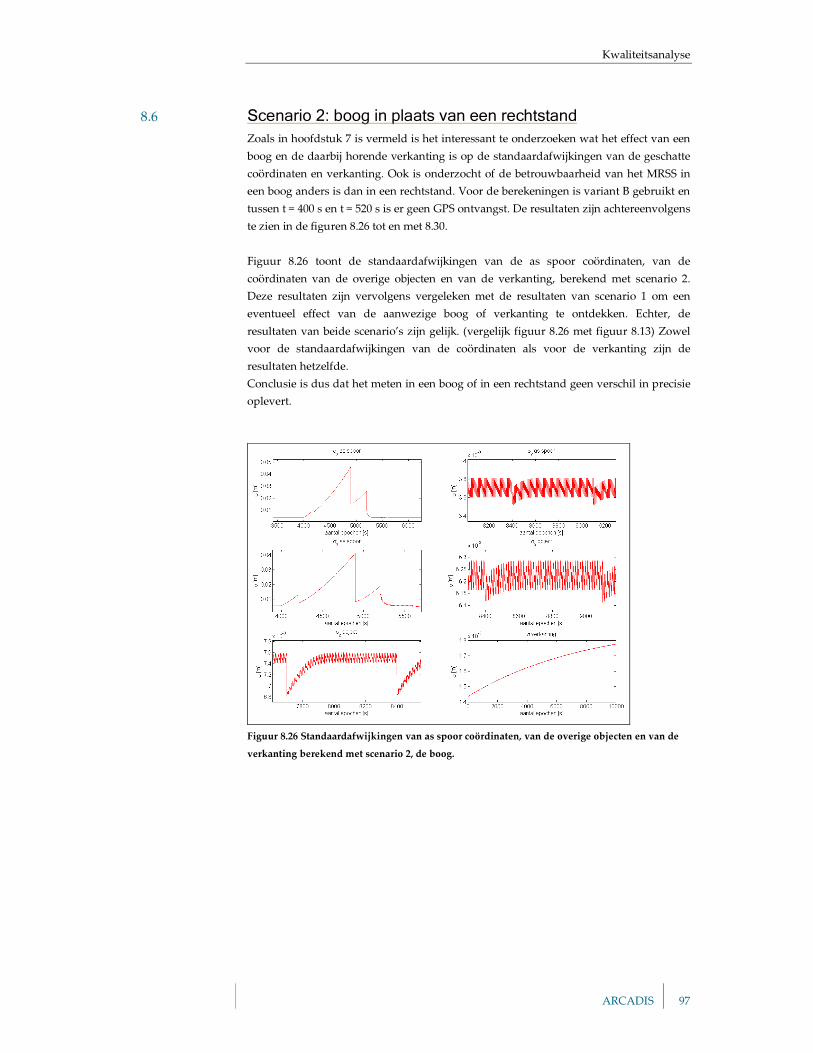
Kwaliteitsanalyse
ARCADIS 97
8.6 Scenario 2: boog in plaats van een rechtstand Zoals in hoofdstuk 7 is vermeld is het interessant te onderzoeken wat het effect van een boog en de daarbij horende verkanting is op de standaardafwijkingen van de geschatte coördinaten en verkanting. Ook is onderzocht of de betrouwbaarheid van het MRSS in een boog anders is dan in een rechtstand. Voor de berekeningen is variant B gebruikt en tussen t = 400 s en t = 520 s is er geen GPS ontvangst. De resultaten zijn achtereenvolgens te zien in de figuren 8.26 tot en met 8.30. Figuur 8.26 toont de standaardafwijkingen van de as spoor coördinaten, van de coördinaten van de overige objecten en van de verkanting, berekend met scenario 2. Deze resultaten zijn vervolgens vergeleken met de resultaten van scenario 1 om een eventueel effect van de aanwezige boog of verkanting te ontdekken. Echter, de resultaten van beide scenario’s zijn gelijk. (vergelijk figuur 8.26 met figuur 8.13) Zowel voor de standaardafwijkingen van de coördinaten als voor de verkanting zijn de resultaten hetzelfde. Conclusie is dus dat het meten in een boog of in een rechtstand geen verschil in precisie oplevert.
Figuur 8.26 Standaardafwijkingen van as spoor coördinaten, van de overige objecten en van de verkanting berekend met scenario 2, de boog.
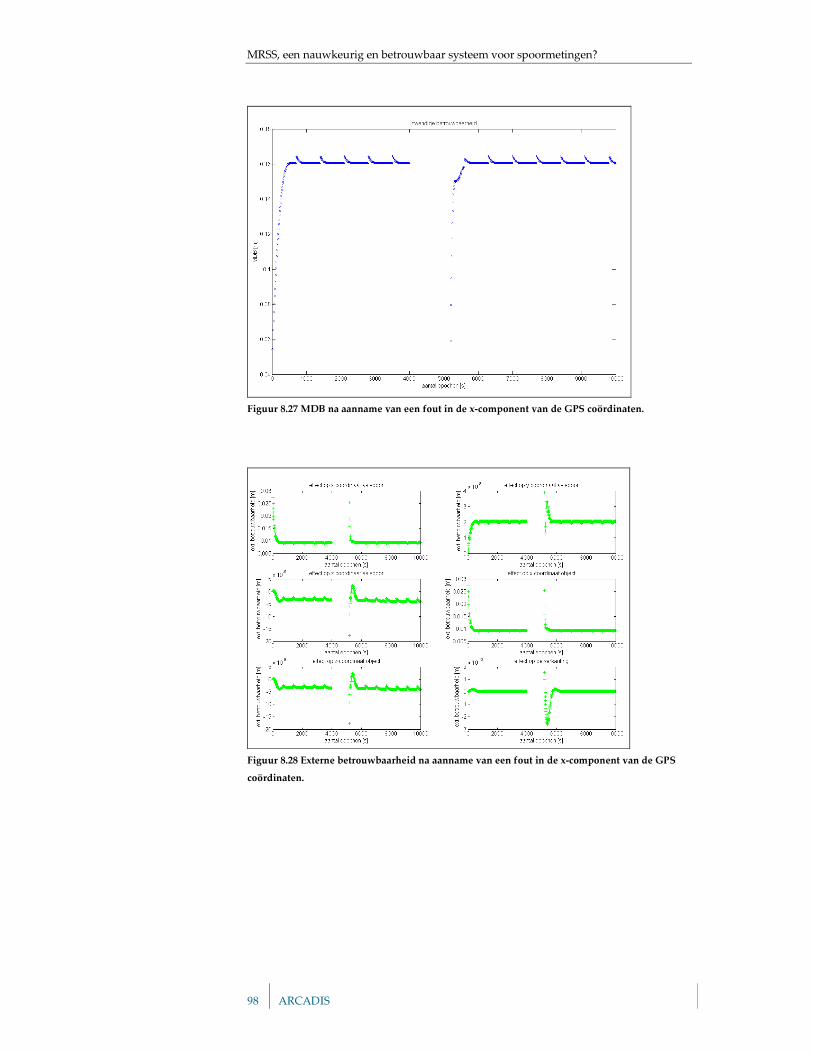
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
98 ARCADIS
Figuur 8.27 MDB na aanname van een fout in de x-component van de GPS coördinaten.
Figuur 8.28 Externe betrouwbaarheid na aanname van een fout in de x-component van de GPS coördinaten.
Kwaliteitsanalyse
ARCADIS 99
Figuur 8.29 MDB na aanname van een fout in de inclinometer.
Figuur 8.30 Externe betrouwbaarheid na aanname van een fout in inclinometer. Wanneer de resultaten uit de figuren 8.27, 8.28, 8.29 en 8.30 worden vergeleken met die uit de figuren 8.16, 8.17, 8.24 en 8.25 blijkt hetzelfde. Ook hier zijn geen verschillen tussen de twee scenario’s. Ook voor de betrouwbaarheid maakt het dus niet uit of het spoor in een rechtstand of in een boog ligt.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
100 ARCADIS
Conclusies en aanbevelingen
ARCADIS 101
9 Conclusies en aanbevelingen
Centraal in dit onderzoek staat de vraag: Welke nauwkeurigheid en betrouwbaarheid is haalbaar met een meetsysteem bestaande uit GPS, INS en een laserscanner voor het meten van spoorgeometrie en hoe vertaalt dit zich in een functioneel model? Deze vraag is vervolgens opgesplitst in een aantal deelvragen om stap voor stap tot een antwoord op de hoofdvraag te komen. De onderzoeksvragen zijn beantwoord op basis van literatuuronderzoek, het opstellen van een foutenmodel, het bedenken van een meetopzet en het uitvoeren van berekeningen. Dit hoofdstuk behandelt de conclusies die uit het onderzoek voortkomen en beschrijft de aanbevelingen die aan de hand van het uitgevoerde onderzoek gedaan kunnen worden.
9.1 Conclusies Om tot een beantwoording van de centrale onderzoeksvraag te komen, is eerst onderzocht welke instrumenten het meest geschikt zijn voor het MRSS. Hieruit blijkt dat voor zowel de GPS apparatuur als voor de laserscanner ARCADIS geschikte apparatuur heeft, namelijk de Trimble R8 GPS ontvanger en de Leica laserscanner HDS 6100. Het traagheidsnavigatiesysteem van iMAR is verkozen boven het systeem van XSENS omdat dit systeem op alle fronten duidelijk beter presteert. Variërend van een factor twee bij GPS ontvangst tot een factor 18 bij GPS uitval van 2 minuten. Een tweede deelvraag die werd gesteld, is wat de meest geschikte meetopzet voor het MRSS zou zijn om aan zoveel mogelijk eisen te kunnen voldoen. Dit heeft geresulteerd in een systeem bestaande uit:
• Twee GPS ontvangers. • Een traagheidnavigatiesysteem, bestaande uit drie versnellingsmeters en drie
gyroscopen. • Een laserscanner. • Een inclinometer.
Verder wordt gebruik gemaakt van een GPS-RTK-VRS oplossing. Daardoor bestaat de mogelijkheid om de verkregen gegevens in het veld te controleren. De derde deelvraag was hoe de verschillende systemen geïntegreerd moeten worden waard het antwoord hierop is als volgt; een Kalman filter zorgt voor de koppeling tussen de GPS ontvangers, het INS en de inclinometer. De posities en hoeken die hieruit
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
102 ARCADIS
komen, worden gebruikt om de laserscandata van het voertuigstelsel naar het gewenste coördinaatstelsel te transformeren. Het antwoord op de belangrijkste vraag: “Welke nauwkeurigheid en betrouwbaarheid is haalbaar met het MRSS en voldoet dit aan de gestelde eisen?” is als volgt: De nauwkeurigheden die haalbaar zijn met het Mobile Rail Survey System, gebruik makend van smoothing via het Kalman filter, zijn terug te vinden in tabel 9.1. Tabel 9.1 Overzicht van haalbare standaardafwijkingen van alle objecten met het MRSS. Object σ met GPS ontvangst [mm] σ zonder GPS ontvangst [mm] x-coördinaat as spoor 2.6 3.4 y-coördinaat as spoor 2.6 3.4 z-coördinaat as spoor 3.9 5.2 x-coördinaat overig object 5.6 6.0 z-coördinaat overig object 6.4 7.2 verkanting 0.4 0.4 Uit deze resultaten valt vervolgens te concluderen dat:
• De standaardafwijkingen van de x- en y- èn z-coördinaten van as spoor altijd voldoen aan de gestelde kwaliteitseisen, ook bij GPS uitval van 2 minuten.
• De standaardafwijkingen van de x- en y-coördinaten van de overige objecten altijd voldoen.
• De standaardafwijkingen van de z-coördinaten van de overige objecten voldoen aan de eisen, behalve wanneer dit object een dwangpunt is. Dan komt de standaardafwijking net boven de norm van 7 millimeter uit.
Voor de betrouwbaarheid geldt het volgende: het is mogelijk om van het Mobile Rail Survey System zowel de inwendige als de uitwendige betrouwbaarheid te berekenen. Deze resultaten zijn goed te noemen. Belangrijke factor hierin is de GPS ontvangst. Zodra er geen GPS ontvangst is, daalt de betrouwbaarheid van het MRSS.
9.2 Aanbevelingen Het hele onderzoek is gebaseerd op theoretische modellen en verkenningsberekeningen. Het grote voordeel hiervan is dat zonder kosten te maken deze berekeningen uitgevoerd konden worden en dat heeft geleid tot bovenstaande conclusies. Een eerste aanbeveling is om het in dit onderzoek opgezette theoretische model in de praktijk te testen. Daarvoor moet een aantal gemaakte aannames verder onderzocht worden:
• Tijdens dit onderzoek is ervan uitgegaan dat alle instrumenten werken vanuit het massamiddelpunt van het MRSS. In de praktijk zal dit nooit het geval zijn en het is dan ook een aanbeveling om het hefboom effect te onderzoeken.
• Een tweede aanname is geweest om de zwaartekracht en snelheid van het systeem constant te veronderstellen. Deze aanname moet in de praktijk worden getoetst.
• Een derde aanname die is gemaakt, is dat het mogelijk is PVS bouten met een laserscanner te meten. Ook deze aanname moet verder worden onderzocht.

Conclusies en aanbevelingen
ARCADIS 103
Een tweede aanbeveling is om het dynamische foutenmodel dat gebruikt is voor de kwaliteitsanalyse uit te breiden, zodat ook dit model meer de realiteit benadert. Een voorbeeld hiervan is om de foutafschattingen van de afgeleiden van de bias, drift en schaalfactoren niet gelijk aan nul te veronderstellen, maar deze op te nemen in het dynamische foutenmodel. Een derde en laatste aanbeveling is om een odometer toe te voegen aan het systeem. Met een odometer kan de afgelegde afstand worden gemeten en zeker bij het wegvallen van het GPS signaal kan hiervan worden verwacht dat dit een verbetering van de kwaliteit oplevert.
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
104 ARCADIS
Literatuurlijst
ARCADIS 105
Literatuurlijst Boehler, W., Marbs, A., 3D scanning instruments, I3Mainz, Institute for Spatial Information and Surveying Technology, Mainz, 2002 Chatfield, A.B., Fundamentals of high accuracy inertial navigation. Virginia, American Institute of Aeronautics and Astronautics, 1997 Crassidis, J.L., Sigma-Point Kalman filtering for integrated GPS and Inertial Navigation, AIAA Guidance, Navigation, and Control Conference, San Francisco, CA, AIAA Paper #2005-6052, August 2005 Gosliga van, R., Deformatieanalyse van een geboorde tunnel met behulp van terrestrische laserscanning, Afstudeerscriptie, Faculteit Lucht- en Ruimtevaarttechniek, Technische Universiteit Delft, 2005 Grewal, M.S., Weill, L.R., Andrews, A.P., Global Positioning Systems, inertial navigation and integration. New York: John Wiley and Sons Inc., 2001 Huisman, L., Toepassingen van GPS-RTK bij Gemeentewerken Rotterdam. Afstudeerscriptie, Faculteit Geodesie, Technische Universiteit Delft, 2004 Husti, G.J., Global Postioning System, een inleiding. Delft: Delft University Press, 2000 Jekeli C., Inertial navigation systems with geodetic applications. Berlin: Walter de Gruyter, 2000 Kusche, J., Tiberius, C.C.J.M., lecture notes Integrated Positioning, Delft, 2005 Marel van der, H., lecture notes Satellite Positioning, Delft, 2003 Ree van, J.M., Determination of the precision and reliability parameters of terrestrial laser scanners. Afstudeerscriptie, Faculteit Luchtvaart- en Ruimtevaarttechniek, Technische Universiteit Delft, 2006 Shin, E.H., Accuracy improvement of low cost INS/GPS for land applications. Graduation thesis, Department of Geomatics Engineering, University of Calgary, 2001 Teunissen, P.J.G., Adjustment Theory. Delft: Delft University Press, 2000a Teunissen, P.J.G., Testing Theory. Delft: Delft University Press, 2000b Teunissen, P.J.G., Dynamic Data processing. Delft: Delft University Press, 2001 Teunissen, P.J.G., Simons, D.G., Tiberius, C.C.J.M., collegedictaat Probability and Observations Theory. Delft: Technische Universiteit Delft, 2005
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
106 ARCADIS
Websites 06-GPS www.06-gps.nl, laatst bezocht op 14 april 2009 3D Motion tracking: XSENS, hardware specificaties www.xsens.com, laatst bezocht op 17 juli 2009 ARCADIS projectmanagement, adviezen en ingenieursdiensten. www.arcadis.nl, laatst bezocht op 28 juni 2009 iMAR: Solutions in inertial navigation, surveying, stabilization and control, hardware specificaties. www.imar-navigation.de, laatst bezocht op 19 juli 2009 Institute of Quantum Optics www.iqo.uni-hannover.de, laatst bezocht op 2 maart 2008 Leica Geosystems home, hardware specificaties. www.leica-geosystems.com, laatst bezocht op 12 juli 2009 MSN Encarta, Online encyclopedia www.encarta.msn.com, laatst bezocht op 2 maart 2008 Trimble Home, hardware specificaties. www.trimble.com, laatst bezocht op 12 juli 2009 U.S. Coast Guard Navigation Center www.navcen.uscg.gov, laatst bezocht op 25 oktober 2008
Gebruikte software MATLAB®, The langugage of Technical computing. Copyright 1984-2007, The mathworks, Inc. Version 7.5.0.342 (R2007b), August 15, 2007
Verklarende woordenlijst
ARCADIS 107
Verklarende woordenlijst As spoor Het theoretische midden van het spoor, in een boog is dit de
loodrechte projectie van het midden op het horizontale vlak. Beperkingpunten Punten binnen PVR naast het spoor. Voorbeelden zijn:
perrons, seinpalen en borden. Betrouwbaarheid Betrouwbaarheid beschrijft de vraag, hoe goed fouten in het
model of waarnemingen gedetecteerd kunnen worden en hoe gevoelig zijn de uiteindelijke resultaten voor fouten die niet gevonden worden.
Differentiaalrekening Differentiaalrekening is een wiskundige rekenmethode voor
het vaststellen van de veranderingen die functies ondergaan als er in hun argumenten oneindig kleine veranderingen optreden
Dwangpunten Punten die zich in as spoor bevinden waarvan de ligging in
de lengterichting bekend moet zijn. Voorbeelden zijn: wisselbouten, overwegen, viaducten.
Dynamica Het verband tussen kracht(en) en beweging wordt
bestudeerd in de dynamica. De vorm van het object wordt verwaarloosd en geabstraheerd tot een puntmassa.
GPS Global Positioning System, Amerikaans navigatiesysteem
gebaseerd op afstandsmetingen naar satellieten. GPS-RTK GPS Real Time Kinematic is een methode om nauwkeurig
real-time met GPS te meten. Hefboom Een hefboom is een mechanisme waarmee een kleine kracht
in combinatie met een grote beweging wordt omgezet in een kleine beweging die een grote last verplaatst, waarvoor een grote kracht nodig is.
INS Inertial Navigation System of Traagheidsnavigatiesysteem.
Instrument dat hoeksnelheden en versnellingen meet die geïntegreerd in de tijd een 3D positie en stand opleveren.
Kalman filter Het Kalman filter is een rekenmethode waarmee reeksen van
meet- of andere gegevens van willekeurige verstoringen (ruis) kunnen worden ontdaan.
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
108 ARCADIS
Kinematica Onderdeel van de klassieke mechanica die zich bezighoudt met de beweging van objecten. Hierbij worden de krachten die de beweging veroorzaakt buiten beschouwing gelaten.
Laserscanner Instrument dat met behulp van een laser richtingen en
afstanden meet. Het resultaat is een 3D model van de omgeving
MRSS Mobile Rail Survey System. Toekomstig meetsysteem van
ARCADIS? Nauwkeurigheid Nauwkeurigheid is de graad van overeenstemming van een
gemeten of berekende hoeveelheid met zijn ware waarde. Hoe groter de nauwkeurigheid hoe kleiner de totale fout.
PMG Primaire Meetkundige grondslag. Grondslagnetwerk van
ProRail met een dichtheid van maximaal 4 kilometer langs de spoorbaan.
PVR Profiel van Vrije Ruimte is de aanduiding voor de maximale
hoogte en breedte waar binnen zich niets anders mag bevinden dan de trein.
PVS Permanente Vastlegging Spoorgeometrie, referentienetwerk
van het spoor. Database wordt bijgehouden door ProRail. Standaardafwijking is een maat voor de spreiding van een variabele, gedefinieerd
als de wortel uit de variantie. Verkanting Het hoogteverschil tussen twee spoorstaven, meestal in een
boog, aangegeven in millimeters. VRS Virtueel Referentie Station. Het Virtuele Referentie Station
kan gebruikt worden ter vervanging van een eigen basisstation bij GPS-RTK metingen.
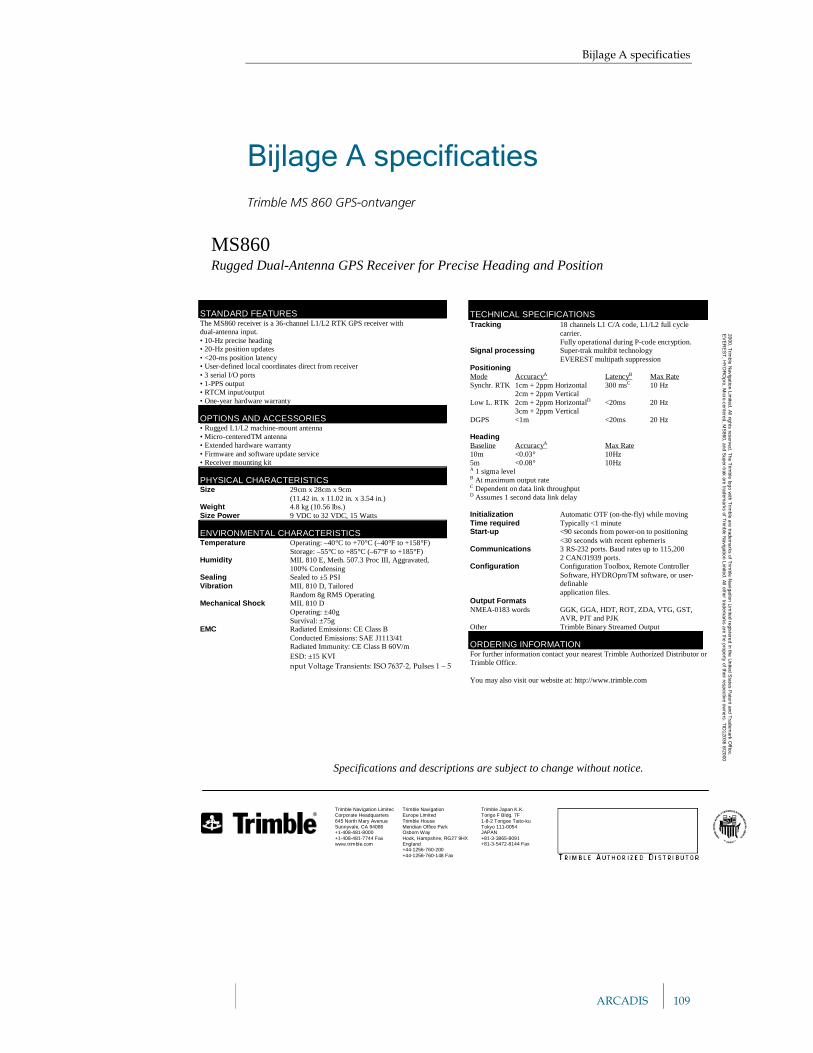
Bijlage A specificaties
ARCADIS 109
Bijlage A specificaties Trimble MS 860 GPS-ontvanger
STANDARD FEATURES The MS860 receiver is a 36-channel L1/L2 RTK GPS receiver with dual-antenna input. • 10-Hz precise heading • 20-Hz position updates • <20-ms position latency • User-defined local coordinates direct from receiver • 3 serial I/O ports • 1-PPS output • RTCM input/output • One-year hardware warranty
OPTIONS AND ACCESSORIES • Rugged L1/L2 machine-mount antenna • Micro-centeredTM antenna • Extended hardware warranty • Firmware and software update service • Receiver mounting kit
PHYSICAL CHARACTERISTICS Size 29cm x 28cm x 9cm
(11.42 in. x 11.02 in. x 3.54 in.) Weight 4.8 kg (10.56 lbs.) Size Power 9 VDC to 32 VDC, 15 Watts
ENVIRONMENTAL CHARACTERISTICS Temperature Operating: –40°C to +70°C (–40°F to +158°F)
Storage: –55°C to +85°C (–67°F to +185°F) Humidity MIL 810 E, Meth. 507.3 Proc III, Aggravated,
100% Condensing Sealing Sealed to ±5 PSI Vibration MIL 810 D, Tailored Random 8g RMS Operating Mechanical Shock MIL 810 D
Operating: ±40g Survival: ±75g
EMC Radiated Emissions: CE Class B Conducted Emissions: SAE J1113/41 Radiated Immunity: CE Class B 60V/m ESD: ±15 KVI nput Voltage Transients: ISO 7637-2, Pulses 1 – 5
TECHNICAL SPECIFICATIONS Tracking 18 channels L1 C/A code, L1/L2 full cycle
carrier. Fully operational during P-code encryption.
Signal processing Super-trak multibit technology EVEREST multipath suppression
Positioning Mode AccuracyA LatencyB Max Rate Synchr. RTK 1cm + 2ppm Horizontal 300 msC 10 Hz
2cm + 2ppm Vertical Low L. RTK 2cm + 2ppm HorizontalD <20ms 20 Hz
3cm + 2ppm Vertical DGPS <1m <20ms 20 Hz Heading Baseline AccuracyA Max Rate 10m <0.03° 10Hz 5m <0.08° 10Hz A 1 sigma level B At maximum output rate C Dependent on data link throughput D Assumes 1 second data link delay Initialization Automatic OTF (on-the-fly) while moving Time required Typically <1 minute Start-up <90 seconds from power-on to positioning
<30 seconds with recent ephemeris Communications 3 RS-232 ports. Baud rates up to 115,200
2 CAN/J1939 ports. Configuration Configuration Toolbox, Remote Controller
Software, HYDROproTM software, or user-definable application files.
Output Formats NMEA-0183 words GGK, GGA, HDT, ROT, ZDA, VTG, GST,
AVR, PJT and PJK Other Trimble Binary Streamed Output
ORDERING INFORMATION For further information contact your nearest Trimble Authorized Distributor or Trimble Office.
You may also visit our website at: http://www.trimble.com
MS860 Rugged Dual-Antenna GPS Receiver for Precise Heading and Position
2000, T
rimble N
avigation Lim
ited. All rig
hts reserved. The T
rimble lo
go w
ith Trim
ble are tradema
rks of Trim
ble Navigation Lim
ited registere
d in the Un
ited States P
atent and Trad
emark O
ffice. E
VE
RE
ST
, HY
DR
Opro, M
icro-centered, MS
860, and Sup
er-trak are tradem
arks of Trim
ble Navigatio
n Limited. A
ll other trademarks are the pro
perty of their respective owne
rs. TID
12036 8/20
00
Specifications and descriptions are subject to change without notice.
Trimble Navigation Limited Corporate Headquarters 645 North Mary Avenue Sunnyvale, CA 94086 +1-408-481-8000 +1-408-481-7744 Fax www.trimble.com
Trimble Navigation Europe Limited Trimble House Meridian Office Park Osborn Way Hook, Hampshire, RG27 9HX England +44-1256-760-200 +44-1256-760-148 Fax
Trimble Japan K.K. Torigo F Bldg. 7F 1-8-2 Torigoe Taito-ku Tokyo 111-0054 JAPAN +81-3-3865-8091 +81-3-5472-8144 Fax
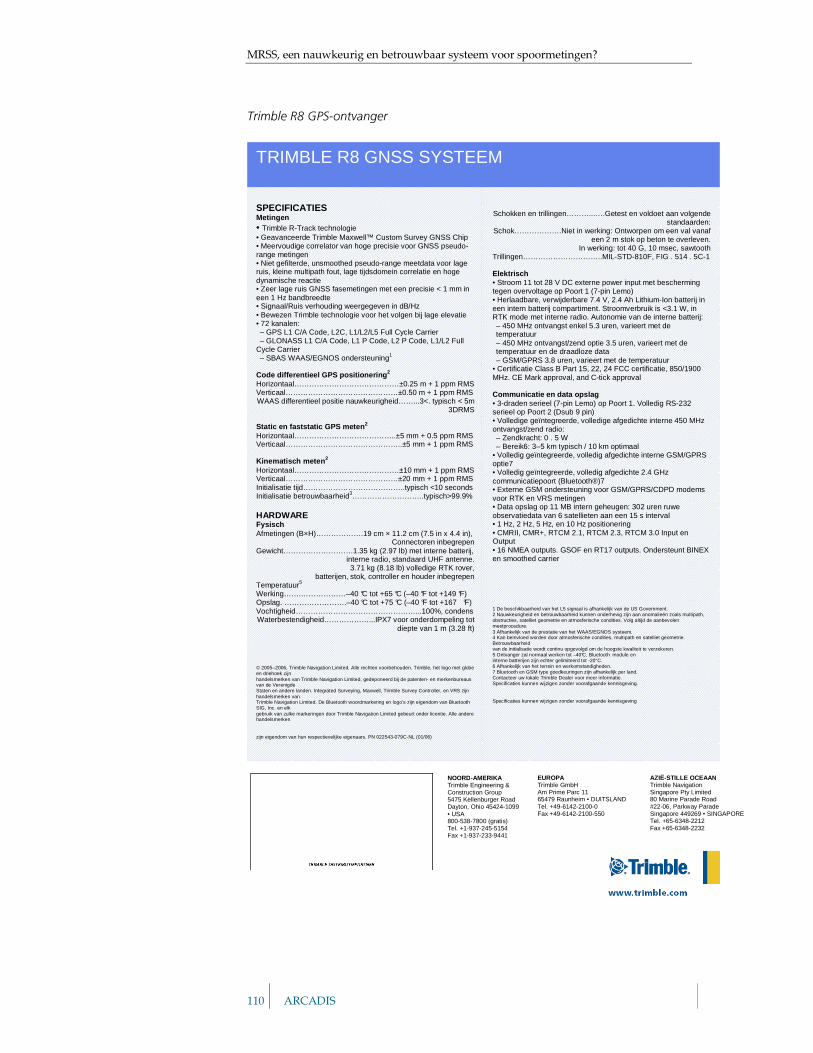
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
110 ARCADIS
Trimble R8 GPS-ontvanger
SPECIFICATIES Metingen • Trimble R-Track technologie • Geavanceerde Trimble Maxwell™ Custom Survey GNSS Chip • Meervoudige correlator van hoge precisie voor GNSS pseudo-range metingen • Niet gefilterde, unsmoothed pseudo-range meetdata voor lage ruis, kleine multipath fout, lage tijdsdomein correlatie en hoge dynamische reactie • Zeer lage ruis GNSS fasemetingen met een precisie < 1 mm in een 1 Hz bandbreedte • Signaal/Ruis verhouding weergegeven in dB/Hz • Bewezen Trimble technologie voor het volgen bij lage elevatie • 72 kanalen: – GPS L1 C/A Code, L2C, L1/L2/L5 Full Cycle Carrier – GLONASS L1 C/A Code, L1 P Code, L2 P Code, L1/L2 Full
Cycle Carrier – SBAS WAAS/EGNOS ondersteuning1
Code differentieel GPS positionering 2
Horizontaal……………………………………±0.25 m + 1 ppm RMS Verticaal………………………………………±0.50 m + 1 ppm RMS WAAS differentieel positie nauwkeurigheid……...3<. typisch < 5m
3DRMS Static en faststatic GPS meten 2
Horizontaal…………………………………..±5 mm + 0.5 ppm RMS Verticaal………………………………………..±5 mm + 1 ppm RMS Kinematisch meten 2 Horizontaal……………………………………±10 mm + 1 ppm RMS Verticaal………………………………………±20 mm + 1 ppm RMS Initialisatie tijd…………………………………..typisch <10 seconds Initialisatie betrouwbaarheid3………………………..typisch>99.9% HARDWARE Fysisch Afmetingen (B×H)……………….19 cm × 11.2 cm (7.5 in x 4.4 in),
Connectoren inbegrepen Gewicht……………………….1.35 kg (2.97 lb) met interne batterij,
interne radio, standaard UHF antenne. 3.71 kg (8.18 lb) volledige RTK rover,
batterijen, stok, controller en houder inbegrepen Temperatuur5
Werking…….………………–40 °C tot +65 °C (–40 °F tot +149 °F) Opslag. …………………….–40 °C tot +75 °C (–40 °F tot +167 °F) Vochtigheid…………………………………………...100%, condens Waterbestendigheid………………...IPX7 voor onderdompeling tot
diepte van 1 m (3.28 ft) © 2005–2006, Trimble Navigation Limited. Alle rechten voorbehouden. Trimble, het logo met globe en driehoek zijn handelsmerken van Trimble Navigation Limited, gedeponeerd bij de patenten- en merkenbureaus van de Verenigde Staten en andere landen. Integrated Surveying, Maxwell, Trimble Survey Controller, en VRS zijn handelsmerken van Trimble Navigation Limited. De Bluetooth woordmarkering en logo’s zijn eigendom van Bluetooth SIG, Inc. en elk gebruik van zulke markeringen door Trimble Navigation Limited gebeurt onder licentie. Alle andere handelsmerken
zijn eigendom van hun respectievelijke eigenaars. PN 022543-079C-NL (01/06)
Schokken en trillingen………...….Getest en voldoet aan volgende standaarden:
Schok……………….Niet in werking: Ontworpen om een val vanaf een 2 m stok op beton te overleven.
In werking: tot 40 G, 10 msec, sawtooth Trillingen…………………………..MIL-STD-810F, FIG . 514 . 5C-1 Elektrisch • Stroom 11 tot 28 V DC externe power input met bescherming tegen overvoltage op Poort 1 (7-pin Lemo) • Herlaadbare, verwijderbare 7.4 V, 2.4 Ah Lithium-Ion batterij in een intern batterij compartiment. Stroomverbruik is <3.1 W, in RTK mode met interne radio. Autonomie van de interne batterij: – 450 MHz ontvangst enkel 5.3 uren, varieert met de temperatuur – 450 MHz ontvangst/zend optie 3.5 uren, varieert met de temperatuur en de draadloze data – GSM/GPRS 3.8 uren, varieert met de temperatuur
• Certificatie Class B Part 15, 22, 24 FCC certificatie, 850/1900 MHz. CE Mark approval, and C-tick approval Communicatie en data opslag • 3-draden serieel (7-pin Lemo) op Poort 1. Volledig RS-232 serieel op Poort 2 (Dsub 9 pin) • Volledige geïntegreerde, volledige afgedichte interne 450 MHz ontvangst/zend radio: – Zendkracht: 0 . 5 W – Bereik6: 3–5 km typisch / 10 km optimaal
• Volledig geïntegreerde, volledig afgedichte interne GSM/GPRS optie7 • Volledig geïntegreerde, volledig afgedichte 2.4 GHz communicatiepoort (Bluetooth®)7 • Externe GSM ondersteuning voor GSM/GPRS/CDPD modems voor RTK en VRS metingen • Data opslag op 11 MB intern geheugen: 302 uren ruwe observatiedata van 6 satellieten aan een 15 s interval • 1 Hz, 2 Hz, 5 Hz, en 10 Hz positionering • CMRII, CMR+, RTCM 2.1, RTCM 2.3, RTCM 3.0 Input en Output • 16 NMEA outputs. GSOF en RT17 outputs. Ondersteunt BINEX en smoothed carrier 1 De beschikbaarheid van het L5 signaal is afhankelijk van de US Government. 2 Nauwkeurigheid en betrouwbaarheid kunnen onderhevig zijn aan anomalieën zoals multipath, obstructies, satelliet geometrie en atmosferische condities. Volg altijd de aanbevolen meetprocedure. 3 Afhankelijk van de prestatie van het WAAS/EGNOS systeem. 4 Kan beïnvloed worden door atmosferische condities, multipath en satelliet geometrie. Betrouwbaarheid van de initialisatie wordt continu opgevolgd om de hoogste kwaliteit te verzekeren. 5 Ontvanger zal normaal werken tot –40°C, Bluetooth module en interne batterijen zijn echter gelimiteerd tot -20°C. 6 Afhankelijk van het terrein en werkomstandigheden. 7 Bluetooth en GSM type goedkeuringen zijn afhankelijk per land. Contacteer uw lokale Trimble Dealer voor meer informatie. Specificaties kunnen wijzigen zonder voorafgaande kennisgeving.
Specificaties kunnen wijzigen zonder voorafgaande kennisgeving
TRIMBLE R8 GNSS SYSTEEM
AZIË-STILLE OCEAAN Trimble Navigation Singapore Pty Limited 80 Marine Parade Road #22-06, Parkway Parade Singapore 449269 • SINGAPORE Tel. +65-6348-2212 Fax +65-6348-2232
EUROPA Trimble GmbH Am Prime Parc 11 65479 Raunheim • DUITSLAND Tel. +49-6142-2100-0 Fax +49-6142-2100-550
NOORD-AMERIKA Trimble Engineering & Construction Group 5475 Kellenburger Road Dayton, Ohio 45424-1099 • USA 800-538-7800 (gratis) Tel. +1-937-245-5154 Fax +1-937-233-9441
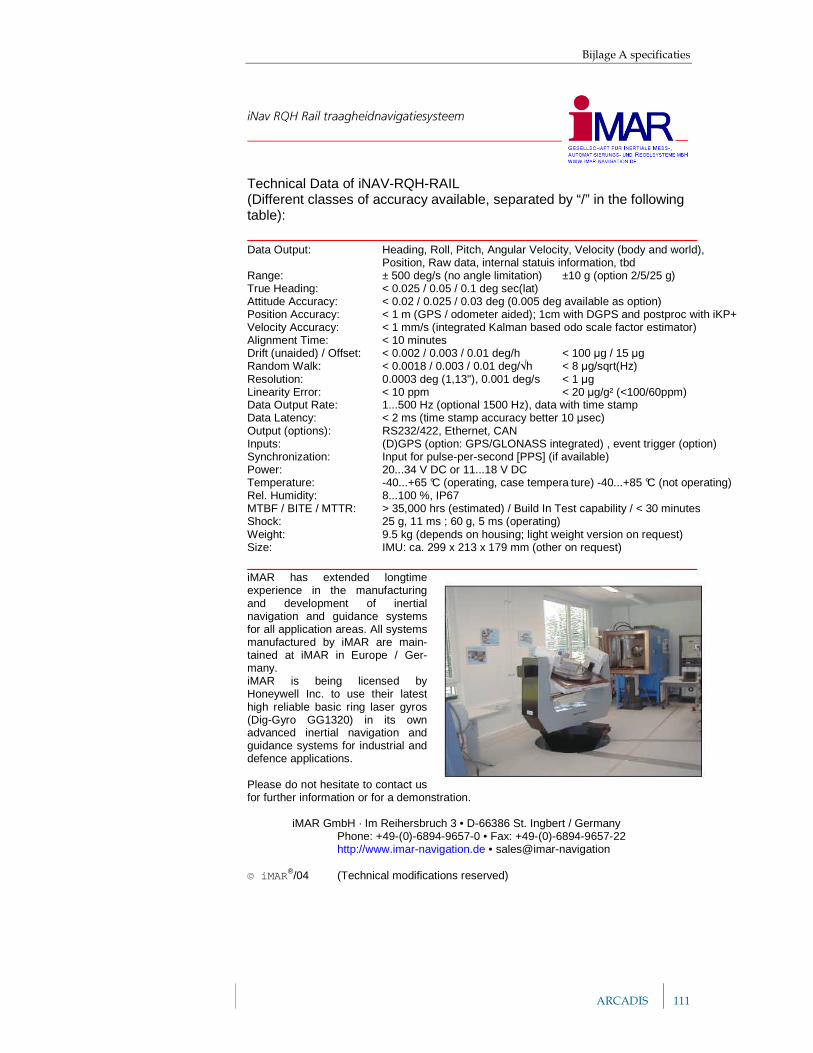
Bijlage A specificaties
ARCADIS 111
iNav RQH Rail traagheidnavigatiesysteem
Technical Data of iNAV-RQH-RAIL (Different classes of accuracy available, separated by “/” in the following table): Data Output: Heading, Roll, Pitch, Angular Velocity, Velocity (body and world),
Position, Raw data, internal statuis information, tbd Range: ± 500 deg/s (no angle limitation) ±10 g (option 2/5/25 g) True Heading: < 0.025 / 0.05 / 0.1 deg sec(lat) Attitude Accuracy: < 0.02 / 0.025 / 0.03 deg (0.005 deg available as option) Position Accuracy: < 1 m (GPS / odometer aided); 1cm with DGPS and postproc with iKP+ Velocity Accuracy: < 1 mm/s (integrated Kalman based odo scale factor estimator) Alignment Time: < 10 minutes Drift (unaided) / Offset: < 0.002 / 0.003 / 0.01 deg/h < 100 µg / 15 µg Random Walk: < 0.0018 / 0.003 / 0.01 deg/√h < 8 µg/sqrt(Hz) Resolution: 0.0003 deg (1,13"), 0.001 deg/s < 1 µg Linearity Error: < 10 ppm < 20 µg/g² (<100/60ppm) Data Output Rate: 1...500 Hz (optional 1500 Hz), data with time stamp Data Latency: < 2 ms (time stamp accuracy better 10 µsec) Output (options): RS232/422, Ethernet, CAN Inputs: (D)GPS (option: GPS/GLONASS integrated) , event trigger (option) Synchronization: Input for pulse-per-second [PPS] (if available) Power: 20...34 V DC or 11...18 V DC Temperature: -40...+65 °C (operating, case tempera ture) -40...+85 °C (not operating) Rel. Humidity: 8...100 %, IP67 MTBF / BITE / MTTR: > 35,000 hrs (estimated) / Build In Test capability / < 30 minutes Shock: 25 g, 11 ms ; 60 g, 5 ms (operating) Weight: 9.5 kg (depends on housing; light weight version on request) Size: IMU: ca. 299 x 213 x 179 mm (other on request)
iMAR has extended longtime experience in the manufacturing and development of inertial navigation and guidance systems for all application areas. All systems manufactured by iMAR are main-tained at iMAR in Europe / Ger-many. iMAR is being licensed by Honeywell Inc. to use their latest high reliable basic ring laser gyros (Dig-Gyro GG1320) in its own advanced inertial navigation and guidance systems for industrial and defence applications. Please do not hesitate to contact us for further information or for a demonstration.
iMAR GmbH · Im Reihersbruch 3 • D-66386 St. Ingbert / Germany Phone: +49-(0)-6894-9657-0 • Fax: +49-(0)-6894-9657-22 http://www.imar-navigation.de • sales@imar-navigation
© iMAR ®/04 (Technical modifications reserved)
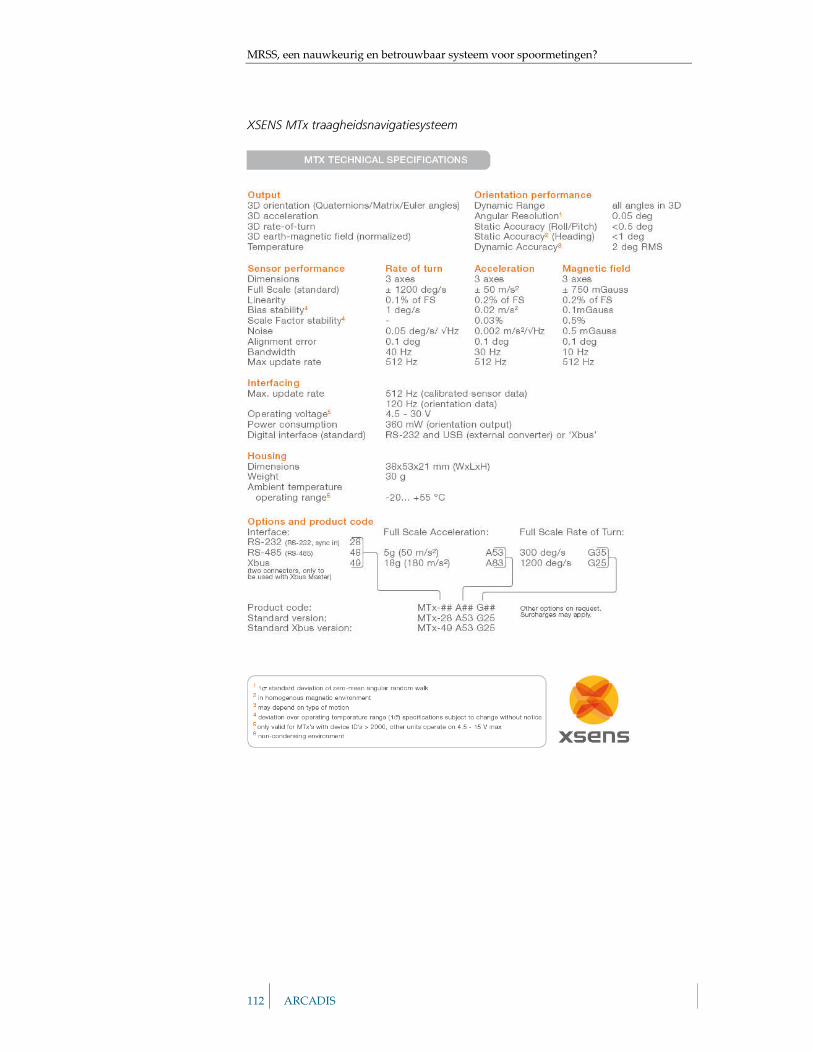
MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
112 ARCADIS
XSENS MTx traagheidsnavigatiesysteem
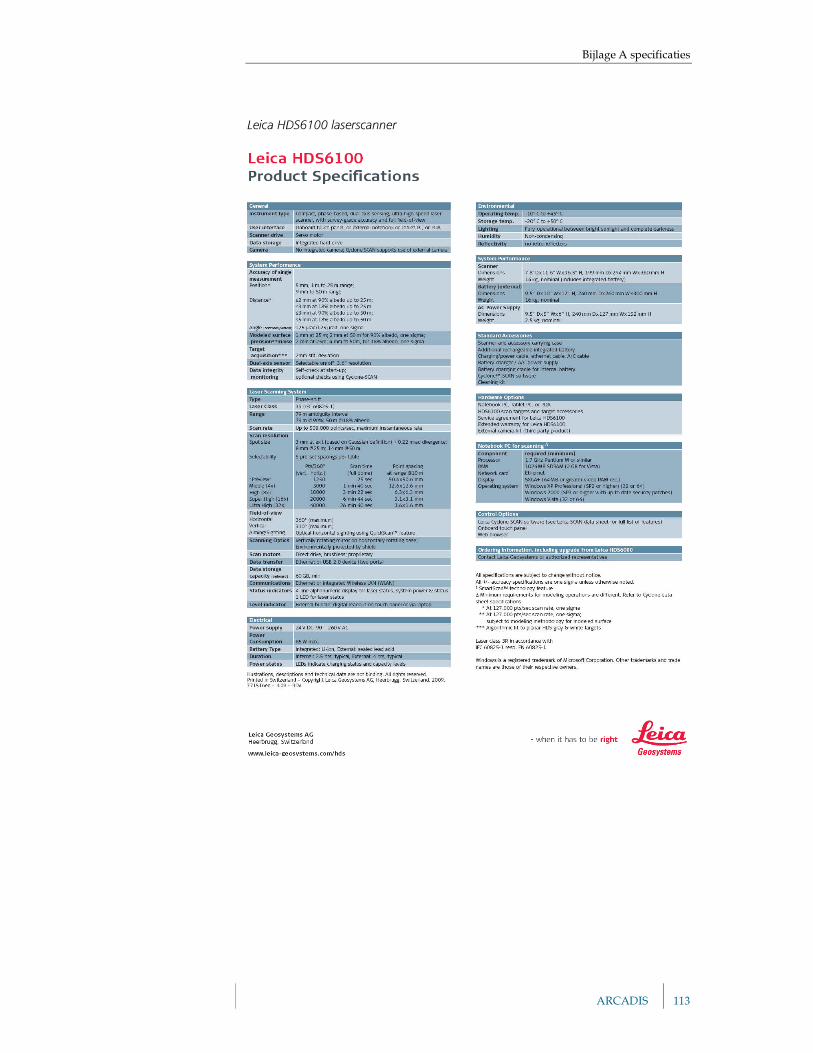
Bijlage A specificaties
ARCADIS 113
Leica HDS6100 laserscanner

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
114 ARCADIS
Bijlage B MATLAB scripts
ARCADIS 115
Bijlage B MATLAB scripts De gebruikte MATLAB scripts staan op de bijgeleverde CD-ROM.

MRSS, een nauwkeurig en betrouwbaar systeem voor spoormetingen?
116 ARCADIS