Karakterisatie en optimalisatie van de hysteresismotor...
95
Kristof Van Cutsem Karakterisatie en optimalisatie van de hysteresismotor Academiejaar 2007-2008 Faculteit Ingenieurswetenschappen Voorzitter: prof. dr. ir. Jan Melkebeek Vakgroep Elektrische energie, systemen en automatisering Burgerlijk werktuigkundig-elektrotechnisch ingenieur Scriptie ingediend tot het behalen van de academische graad van Begeleider: Guillaume Crevecoeur Promotoren: prof. dr. ir. Luc Dupré, dr. ir. Peter Sergeant
Transcript of Karakterisatie en optimalisatie van de hysteresismotor...
Kristof Van Cutsem
Karakterisatie en optimalisatie van de hysteresismotor
Academiejaar 2007-2008Faculteit IngenieurswetenschappenVoorzitter: prof. dr. ir. Jan MelkebeekVakgroep Elektrische energie, systemen en automatisering
Burgerlijk werktuigkundig-elektrotechnisch ingenieurScriptie ingediend tot het behalen van de academische graad van
Begeleider: Guillaume CrevecoeurPromotoren: prof. dr. ir. Luc Dupré, dr. ir. Peter Sergeant

Kristof Van Cutsem
Karakterisatie en optimalisatie van de hysteresismotor
Academiejaar 2007-2008Faculteit IngenieurswetenschappenVoorzitter: prof. dr. ir. Jan MelkebeekVakgroep Elektrische energie, systemen en automatisering
Burgerlijk werktuigkundig-elektrotechnisch ingenieurScriptie ingediend tot het behalen van de academische graad van
Begeleider: Guillaume CrevecoeurPromotoren: prof. dr. ir. Luc Dupré, dr. ir. Peter Sergeant

Toelating tot bruikleen
De auteur geeft de toelating deze scriptie voor consultatie beschikbaar te stellen en delenervan te kopieren voor persoonlijk gebruik. Elk ander gebruik valt onder de beperkingen vanhet auteursrecht, in het bijzonder met betrekking tot de verplichting uitdrukkelijk de bron tevermelden bij het aanhalen van resultaten uit deze scriptie.
Gent, juni 2008
Kristof Van Cutsem
i

ii
Overzicht algemene gegevens
Karakterisatie en Optimalisatie van de Hysteresismotor
door Kristof Van Cutsem
Scriptie ingediend tot het behalen van de academische graad vanBurgerlijk Ingenieur in de Werktuigkunde-Elektrotechniek optie
Elektrische Energietechniek
Academiejaar 2007-2008
Promotoren: prof. dr. ir. Luc Dupre, dr. ir. Peter SergeantBegeleider: ir. Guillaume Crevecoeur
Vakgroep Elektrische Energie, Systemen en AutomatiseringVoorzitter: prof. dr. ir. Jan Melkebeek
Samenvatting
In deze thesis werd de mogelijkheid bekeken of de hysteresisring van een hysteresismotor kanvervangen worden door een ring van gietijzer. Een inductiemotor werd aangekocht waarvande rotor werd vervangen. Uit twee soorten gietijzer, GG25 en GG40, werd het beste mate-riaal gekozen aan de hand van een testopstelling die de hysteresislussen opmeet. Op dezemotor werden verschillende testen uitgevoerd: een snelheidsmeting bij nullast, een statischekoppelmeting en een stroommeting. Vervolgens werd een eindige-elementenmodel met Mat-lab en Comsol opgesteld voor de verificatie van deze proeven. Een differentieel model werdgecreeerd zodat het koppel in functie van de lasthoek kon berekend worden door verschilstro-men in te voeren. Hierbij werd de motor als permanente-magneetmotor gesimuleerd. Daarnawerd het model uitgebreid door het hysteresisgedrag te implementeren. Dit laatste modelkan in toekomstig onderzoek worden gebruikt voor het optimaliseren van de geometrie enmateriaaleigenschappen van de motor met het oog op het verhogen van het koppel.
Trefwoorden
Hysteresismotor, eindige elementen, optimalisatie, magnetische materialen.

Voorwoord
De meest gestelde vraag, naarmate ik langer aan deze thesis werkte, was tegelijk de lastigsteom te beantwoorden: ’En, hoe staat het eigenlijk met je thesis ?’ Mijn reactie, ook als ikmezelf die vraag stelde, was doorgaans een variatie op het thema ’bijna af’. Nooit gewetendat een mens daar zo’n rekbaar begrip van kan maken. Maar nu is het dan toch zover. Hetis echt af.
Een andere lastige vraag om te beantwoorden was: ’Wat is nu ook alweer het onderwerp vanje thesis?’ Wel, al de mensen die mij deze vraag gesteld hebben: voor jullie ligt het resultaatvan een academiejaar werken. Dit werk kon ik natuurlijk niet alleen vervolledigd hebben.Gelukkig heb ik beroep kunnen doen op verschillende personen die mij hierbij enorm hebbenbijgestaan, en deze personen wil ik hierbij ook bedanken.
Vooreerst wens ik mij promotoren, Prof. Dr. Ir. Luc Dupre en Dr. Ir. Peter Sergeant, tebedanken voor hun deskundige begeleiding. Hun kennis omtrent motoren, magnetisme eneindige-elementensimulaties hebben mij enorm geholpen bij het werken aan deze thesis.
Verder bedank ik ook de techniekers van het labo, Stefaan en Tony, voor de hulp bij hetmaken van de hysteresismotor en de proefopstelling.
Tenslotte wens ik ook mijn ouders te bedanken voor hun steun tijdens dit eindwerk en mijnhele academische carriere. Zonder hen was dit zeker niet gelukt.
Deze thesis is voor mij niet alleen de afsluiter van mijn opleiding burgerlijk ingenieur. Het istevens het slotpunt van mijn studentenleven. De mooiste tijd van het leven, zegt men mij.Met pijn in het hart moet ik hiervan afscheid nemen, maar het is nu eenmaal zo. Het is tijdvoor verandering.
iii

Characterization and Optimization of the HysteresisMotor
Kristof Van Cutsem
Supervisor(s): Luc Dupre, Peter Sergeant
Abstract— In this article the possibility of replacing the hysteresis ringof a hysteresismotor with cast iron is investigated. Two sorts of cast ironwere measured and the best cast iron was used to transform an inductionmotor into a hysteresis motor. Various tests were carried out on this motor.Then a finite elementmodel was created to verify the measurements of thetorque. Therefore a differential model was developed to calculate the torqueby using differential currents. At the end the model was extended to accountfor the hysteresis of the cast iron.
Keywords—Hysteresis motor, finite elements, optimization, magnetic ma-terials.
I. INTRODUCTION
THE hysteresis motor is generally regarded as a synchronousmotor, selfstarting in an asynchronous regime of operation.
Usually the motor uses a rotor ring made of a magnetically semi-hard magnetic material. These materials are quite expensive andit’s a lot of work to create a ring out of those materials. A lot ofmagnetic materials are already used and tested [1], but nobodyhas ever considered to use cast iron for the hysteresis ring. Also,the most hysteresis motors are very small and have a low poweroutage [2]. It is already shown that it is possible to build largehysteresis motors with efficiencies and power factors similar tothose of induction motors [3].
For this paper an induction motor was converted into a hys-teresismotor with the hysteresis ring made of cast iron. To ver-ify the measurements made on the motor, a finite elementmodel(FEM) was created. This model uses differential currents and adifferential permeability.
II. METHODOLOGY
A. Characterization of cast iron
The hysteresis loops of two types of cast iron, GG25 andGG40, were measured to determine the material with the largestcoercive field. A large coercive field is an indication for the en-ergy of the material and thus of the motor. Figure 1 shows thatGG25 is the best material with a coercive field of 700 A/m, whileGG40 only reaches 280 A/m. GG25 was then used to create ahysteresis ring.
From the measured hysteresis loops an Everett map is gener-ated that is used in the extended FEM.
B. Differential FEM without hysteresis
First a set of three phase currents is imported into the FEM tocalculate B and H (x- and y-component) at a time k. Then, at atime k + 1, differential currents are introduced into the model,
K. Van Cutsem is with the Department of Electrical Energy, Systems and Au-tomation, Ghent University, Sint-Pietersnieuwstraat 41, 9000 Gent, Belgium.E-mail: [email protected] .
Fig. 1. BH-loops for GG25 and GG40
with A the amplitude of the currents and ω the rotation speed ofthe motor.
Iu (k) = A (cos (ωk) − cos (ω (k − 1)))
Iv (k) = A
(cos
(ωk +
2π3
)− cos
(ω (k − 1) +
2π3
))
Iw (k) = A
(cos
(ωk +
4π3
)− cos
(ω (k − 1) +
4π3
))
For these currents the model calculates the resulting ∆B and∆H and adds these up to the B en H of the previous step k:
H(k + 1) = H(k) + ∆HB(k + 1) = B(k) + ∆B
The rotation speed is chosen in a way that one timestep corre-sponds with a rotation of the rotor of 1°, which is a variation ofthe load angle by 1°. The model adds each ∆B and ∆H up tothe previous result until the desired load angle is reached.
The torque is also calculated by this procedure, but in a differ-ent manner. The calculation is based on the Maxwellstressten-sor. Therefore the normal and tangential component of H is re-quired on the edge of the rotor. The model calculates, as above,the difference in Hn and Ht between step k and k+1, thus ∆Ht
and ∆Hn. The new components of H are:
Hn(k + 1) = Hn(k) + ∆Hn
Ht(k + 1) = Ht(k) + ∆Ht
From the new values of H the torque for a given load angle isgiven by:
σt = µ0 · Hn · Ht
T = mean(σt) · (2π · r1) · r1 · lax
with σt the tangential component of the Maxwellstress, r1 theradius of the rotor and lax the axial length of the rotor. Theintegration of σt is calculated by its mean value multiplied bythe circumference of the rotor.
C. Differential FEM with hysteresis
This model uses the methods described in the previous para-graph, but in order to account for the hysteresis the initial mag-netic state has to be calculated with the use of a differential per-meability. The differential permeability µd is described by theclassical scalar Preisach model. For the studied material, an Ev-erett map is generated by measuring a high number of hystere-sis loops. For a sequence of scalar H values, the correspondingscalar differential permeabilities are calculated by the deriva-tives of the Everett map.
The hysteresis ring was segmented into 8 equal parts, so eachsegment could be initialized separately. The initialization isdone by magnetizing each segment to saturation, followed bya reduction in magnetization until the applied current reacheszero. Figure 2 shows the initialization of one segment.
Fig. 2. The initialization of one segment.
III. SIMULATIONS AND EXPERIMENTS
A. Validation of the model
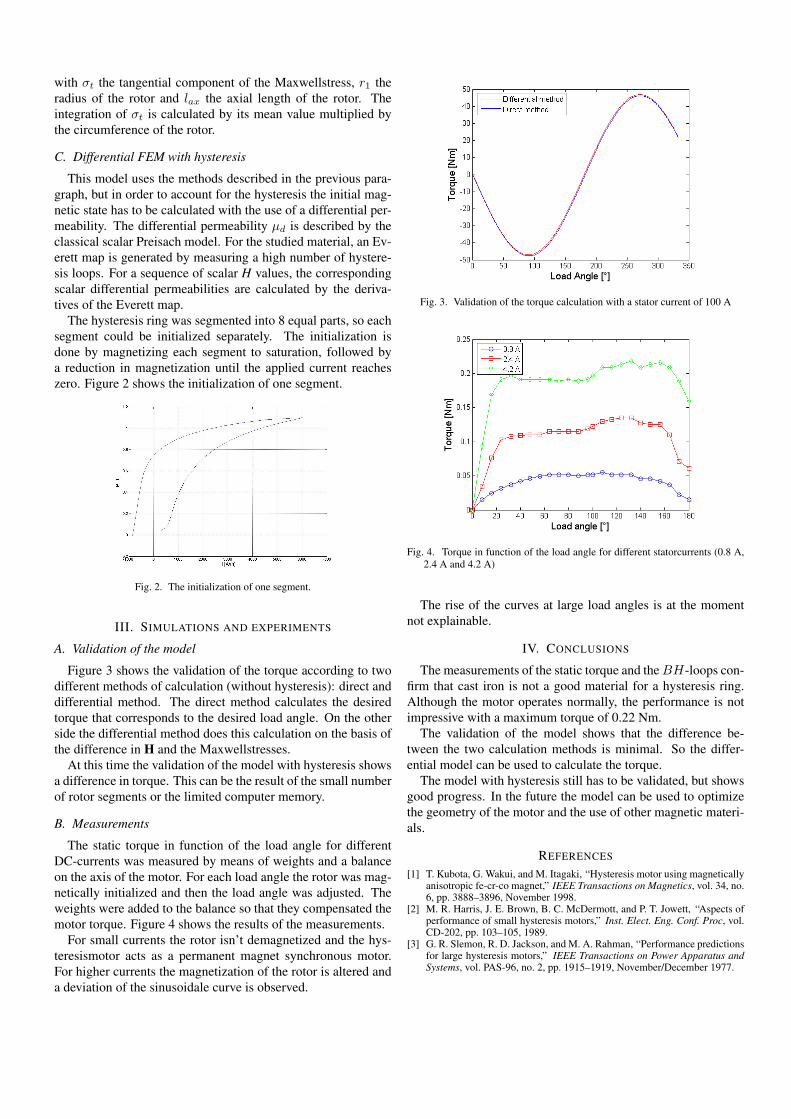
Figure 3 shows the validation of the torque according to twodifferent methods of calculation (without hysteresis): direct anddifferential method. The direct method calculates the desiredtorque that corresponds to the desired load angle. On the otherside the differential method does this calculation on the basis ofthe difference in H and the Maxwellstresses.
At this time the validation of the model with hysteresis showsa difference in torque. This can be the result of the small numberof rotor segments or the limited computer memory.
B. Measurements
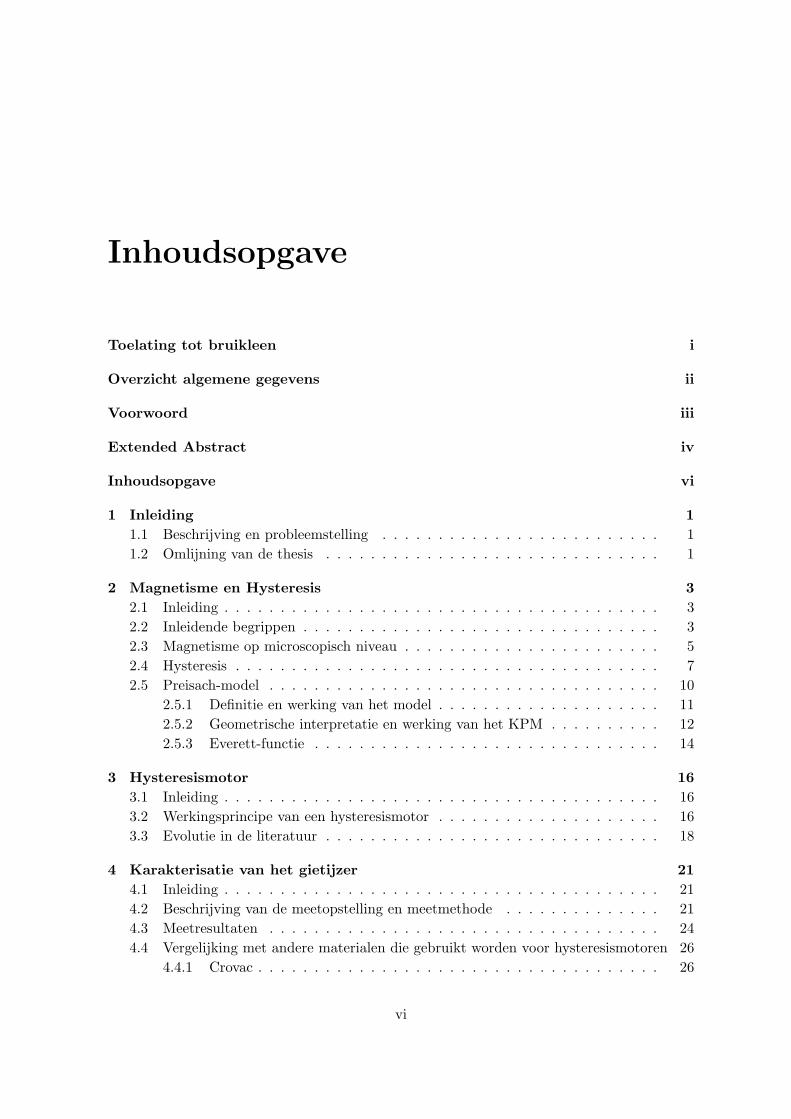
The static torque in function of the load angle for differentDC-currents was measured by means of weights and a balanceon the axis of the motor. For each load angle the rotor was mag-netically initialized and then the load angle was adjusted. Theweights were added to the balance so that they compensated themotor torque. Figure 4 shows the results of the measurements.
For small currents the rotor isn’t demagnetized and the hys-teresismotor acts as a permanent magnet synchronous motor.For higher currents the magnetization of the rotor is altered anda deviation of the sinusoidale curve is observed.
Fig. 3. Validation of the torque calculation with a stator current of 100 A
Fig. 4. Torque in function of the load angle for different statorcurrents (0.8 A,2.4 A and 4.2 A)
The rise of the curves at large load angles is at the momentnot explainable.
IV. CONCLUSIONS
The measurements of the static torque and theBH-loops con-firm that cast iron is not a good material for a hysteresis ring.Although the motor operates normally, the performance is notimpressive with a maximum torque of 0.22 Nm.
The validation of the model shows that the difference be-tween the two calculation methods is minimal. So the differ-ential model can be used to calculate the torque.
The model with hysteresis still has to be validated, but showsgood progress. In the future the model can be used to optimizethe geometry of the motor and the use of other magnetic materi-als.
REFERENCES
[1] T. Kubota, G. Wakui, and M. Itagaki, “Hysteresis motor using magneticallyanisotropic fe-cr-co magnet,” IEEE Transactions on Magnetics, vol. 34, no.6, pp. 3888–3896, November 1998.
[2] M. R. Harris, J. E. Brown, B. C. McDermott, and P. T. Jowett, “Aspects ofperformance of small hysteresis motors,” Inst. Elect. Eng. Conf. Proc, vol.CD-202, pp. 103–105, 1989.
[3] G. R. Slemon, R. D. Jackson, and M. A. Rahman, “Performance predictionsfor large hysteresis motors,” IEEE Transactions on Power Apparatus andSystems, vol. PAS-96, no. 2, pp. 1915–1919, November/December 1977.
Inhoudsopgave
Toelating tot bruikleen i
Overzicht algemene gegevens ii
Voorwoord iii
Extended Abstract iv
Inhoudsopgave vi
1 Inleiding 11.1 Beschrijving en probleemstelling . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Omlijning van de thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Magnetisme en Hysteresis 32.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Inleidende begrippen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3 Magnetisme op microscopisch niveau . . . . . . . . . . . . . . . . . . . . . . . 52.4 Hysteresis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.5 Preisach-model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5.1 Definitie en werking van het model . . . . . . . . . . . . . . . . . . . . 112.5.2 Geometrische interpretatie en werking van het KPM . . . . . . . . . . 122.5.3 Everett-functie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Hysteresismotor 163.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2 Werkingsprincipe van een hysteresismotor . . . . . . . . . . . . . . . . . . . . 163.3 Evolutie in de literatuur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Karakterisatie van het gietijzer 214.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.2 Beschrijving van de meetopstelling en meetmethode . . . . . . . . . . . . . . 214.3 Meetresultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.4 Vergelijking met andere materialen die gebruikt worden voor hysteresismotoren 26
4.4.1 Crovac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
vi
Inhoudsopgave vii
4.4.2 Magnetoflex . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.4.3 Vergelijking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.5 Everettmap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Eindige-elementenmodel 315.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.2 Algemeen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2.1 Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.2.2 Meshing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.2.3 Fysische eigenschappen . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.3 Differentieel model zonder hysteresis . . . . . . . . . . . . . . . . . . . . . . . 375.3.1 Uitleg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.3.2 Validatie van het differentieel model . . . . . . . . . . . . . . . . . . . 415.3.3 Voorbeelden van simulaties . . . . . . . . . . . . . . . . . . . . . . . . 45
5.4 Differentieel model met hysteresis . . . . . . . . . . . . . . . . . . . . . . . . . 505.4.1 Scalaire t.o.v. vector hysteresismodellen . . . . . . . . . . . . . . . . . 505.4.2 Opbouw van de magnetische toestand . . . . . . . . . . . . . . . . . . 515.4.3 Koppelberekening . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.4.4 Validatie van het model . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6 Experimentele Proeven 566.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566.2 Snelheidsmeting bij nullast . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.2.1 Beschrijving van de meetopstelling . . . . . . . . . . . . . . . . . . . . 576.2.2 Meetresultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.3 Stroommeting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596.3.1 Beschrijving van de meetopstelling . . . . . . . . . . . . . . . . . . . . 596.3.2 Meetresultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.4 Statische koppelmeting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 606.4.1 Beschrijving van de meetopstelling . . . . . . . . . . . . . . . . . . . . 606.4.2 Meetresultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.5 Bepalen van het aantal windingen van een fasewikkeling . . . . . . . . . . . . 63
7 Conclusies 66
A Varia 67A.1 Enkele magnetische en mechanische eigenschappen van de materialen uit sectie
4.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67A.2 Berekening van het koppel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
B Tabellen met meetresultaten 69B.1 Snelheidsmeting bij nullast . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69B.2 Stroommeting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71B.3 Statische koppelmeting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Inhoudsopgave viii
B.4 LCR-meting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Bibliografie 78
Lijst van figuren 81
Lijst van tabellen 82

Hoofdstuk 1
Inleiding
1.1 Beschrijving en probleemstelling
Een hysteresismotor heeft een bewikkelde stator zoals een inductie- of synchrone machine,en een niet-bewikkelde rotor. De rotor bestaat uit een meestal zacht magnetische kern metdaarrond een hysteresisring uit hard magnetisch materiaal. Dit hard magnetisch materiaalheeft een BH-karakteristiek vergelijkbaar met die van permanente magneten. Doordat derotor volledig glad en homogeen is, heeft de hysteresismotor de volgende kenmerken:
• een vrijwel perfect vlak koppelprofiel
• een lage geluidsproductie
• een nagenoeg trillingsvrije werking
Verder kan de hysteresismotor schokvrij asynchroon aanlopen (zoals een inductiemachine)dankzij het constant hysteresiskoppel en zal vervolgens automatisch synchroniseren (zoalseen synchrone machine).
De hysteresismotor werd in het verleden relatief weinig toegepast omwille van de hoge prijsen de slechte bewerkbaarheid van de hysteresisring en omwille van de slechte verhouding ge-wicht/koppel. Recentelijk zijn echter veel betere hard magnetische materialen op de marktverschenen, tegen lagere kostprijs. Dit heeft geleid tot een explosie van onderzoek op perma-nent magneet synchrone machines, maar ook de hysteresismotor wordt opnieuw het bestude-ren waard.
1.2 Omlijning van de thesis
Allereerst werd een eindige elementenmodel ontwikkeld van een hysteresismotor. Dit wasmogelijk met behulp van Comsol en Matlab. Hiervoor werd eerst een differentieel model
1

Hoofdstuk 1. Inleiding 2
zonder hysteresis opgesteld om het koppel te berekenen. Om het koppel van de motor teberekenen was een hysteresismodel vereist voor de hysteresisring op de rotor. Een dergelijkmodel was beschikbaar aan de vakgroep.
In tweede instantie werd een hysteresismotor vervaardigd. Een inductiemotor werd aange-kocht waarvan de rotorkooi werd verwijderd van de as. Op die as kwam een hysteresisring uitgietijzer. Voor gietijzer was er de keuze tussen twee soorten: GG25 en GG40. Van elke soortwerd een staaf aangekocht waaruit een kern werd gemaakt. Deze twee kernen werden opge-meten om de hysteresislussen van elke soort te bepalen. Zo kon een keuze gemaakt wordenom het beste materiaal te gebruiken voor het maken van een rotor. Uit deze metingen werdenook de Everettmaps gecreeerd die gebruikt worden in de eindige-elementenberekeningen.
Via een regeltransformator werd de motor gevoed uit het elektrisch net. Zoals verwacht werktede motor en was bovendien vrij stil. Zo kon de motor ook inlopen met het oog op verderemetingen. Vervolgens werd op deze motor een statisch koppelmeting uitgevoerd. Om dezemetingen te kunnen doen werd een testopstelling gecreerd. De rotor werd gemagnetiseerd envervolgens werd een lasthoek ingesteld. Door een balans op de as te plaatsen kon het statischkoppel gemeten worden.

Hoofdstuk 2
Magnetisme en Hysteresis
2.1 Inleiding
In dit hoofdstuk worden enkele fundamentele zaken besproken omtrent magnetisme en meerbepaald hysteresis. Op het einde van dit hoofdstuk wordt ook het Preisach-model uitgelegd,dat gebruikt zal worden bij het eindige elementenmodel. Vele van de volgende begrippenzullen doorheen deze thesis terugkeren.
2.2 Inleidende begrippen
Beschouw een stroom I(t) (tijdsafhankelijk en met eenheid Ampere [A]) die door een geleidervloeit. Deze zal in elk punt van de ruimte een magnetische veldsterktevector H(x, y, z, t) (inAmpere per meter [A/m]) opwekken. Deze veldsterktevector geeft op haar beurt aanleidingtot de magnetische fluxdichtheid of inductie B(x, y, z, t) (in Tesla [T]).
Tussen beide vectorgrootheden H en B bestaat er een relatie afhankelijk van het beschouwdemedium. In vacuum bijvoorbeeld geldt B = µ0H met µ0 de magnetische permeabiliteitvan vacuum en gelijk aan 4π · 10−7. Indien er echter materie aanwezig is, magnetiseert develdsterkte H deze materie. Dit geeft aanleiding tot de magnetisatievector M(x, y, z, t) [A/m].In dit geval wordt het verband:
B = µ0(H + M) (2.1)
Praktisch alle materialen zijn tot op zekere hoogte magnetisch. Materialen die een sterk mag-netisch veld kunnen veroorzaken worden ferromagnetisch genoemd. Plaatst men een kernvan ferromagnetisch materiaal in een solenoıde dan wordt het veld een factor µr (de rela-tieve permeabiliteit) vergroot. De niet-ferromagnetische materialen laten zich onderverdelenin diamagnetische en paramagnetische materialen. Paramagnetische stoffen hebben een re-latieve permeabiliteit die iets groter is dan 1 en kunnen dus beschouwd worden als ’zwakkeferromagneten’. Diamagnetisch stoffen daarentegen hebben een relatieve permeabiliteit die
3

Hoofdstuk 2. Magnetisme en Hysteresis 4
iets kleiner is dan 1. De reden hiervoor is dat moleculen van een diamagnetische stof geenpermanent magnetisch moment hebben.
In transformatoren en motoren gebruikt men echter ferromagnetisch materiaal. Dergelijkematerialen vertonen eigenschappen zoals niet-lineariteit, verzadiging, anisotropie en hyste-resis. Niet-lineariteit en verzadiging zijn geıllustreerd in figuur 2.1. Voor ferromagnetische,para- en diamagnetische materialen kan formule 2.1 omgevormd worden tot:
B = µ0µrH (2.2)
Figuur 2.1: Niet-lineariteit en verzadiging van een ferromagnetisch materiaal
Bij zeer grote waarden van µr kan men in het lineaire gebied nog steeds formule 2.2 gebruiken.Bij hogere H-waarden moet de niet-lineariteit in rekening gebracht worden door de relatievepermeabiliteit veldsterkte-afhankelijk te maken: µr = µr(H).
Verzadiging is een toestand van magnetische materialen waarbij het materiaal geen grotermagnetisch veld kan absorberen. Met als gevolg dat een toename van de magnetisatie geensignificante wijziging brengt in de magnetische inductie. De magnetisatie bereikt dus eenmaximale waarde en bij een verdere toename van H stijgt B enkel en alleen omwille van determ µ0H in formule 2.1.
Met anisotropie wordt bedoeld: de materiaaleigenschappen hangen af van de magnetisatie-richting. Dit heeft als gevolg dat de H en B niet langer collineair zijn. In dit geval wordt dande permeabiliteitstensor gebruikt.
Hoofdstuk 2. Magnetisme en Hysteresis 5
2.3 Magnetisme op microscopisch niveau
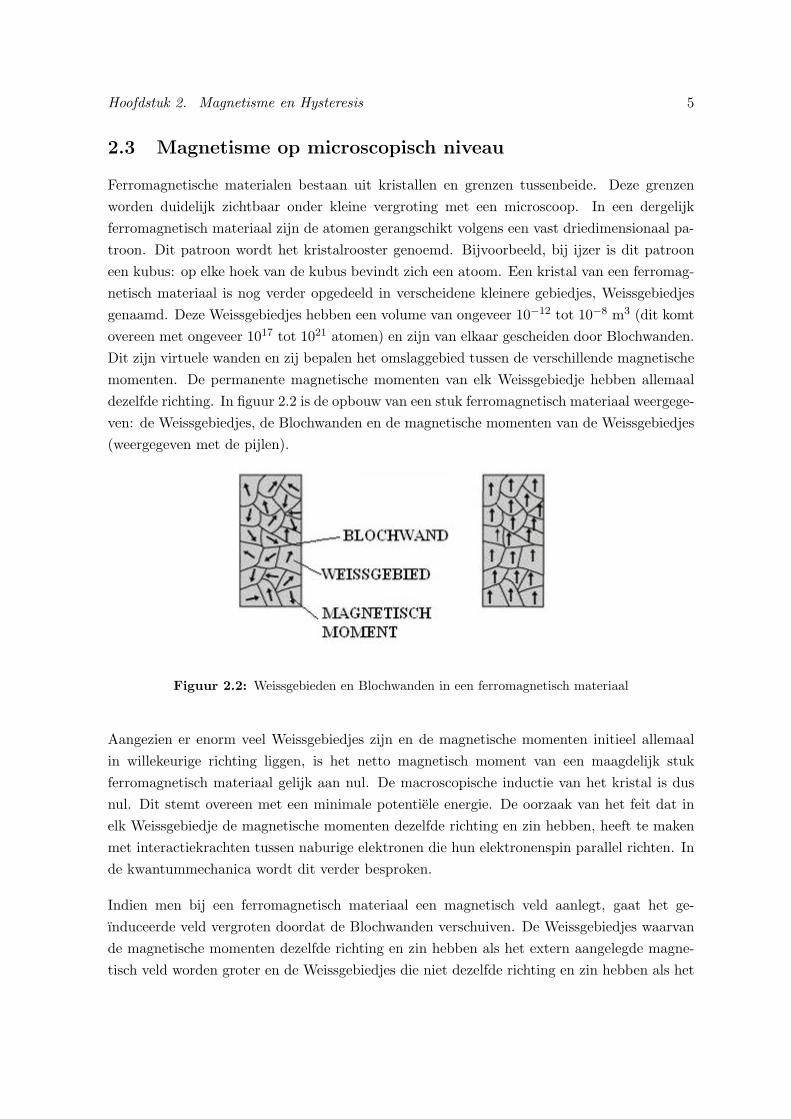
Ferromagnetische materialen bestaan uit kristallen en grenzen tussenbeide. Deze grenzenworden duidelijk zichtbaar onder kleine vergroting met een microscoop. In een dergelijkferromagnetisch materiaal zijn de atomen gerangschikt volgens een vast driedimensionaal pa-troon. Dit patroon wordt het kristalrooster genoemd. Bijvoorbeeld, bij ijzer is dit patrooneen kubus: op elke hoek van de kubus bevindt zich een atoom. Een kristal van een ferromag-netisch materiaal is nog verder opgedeeld in verscheidene kleinere gebiedjes, Weissgebiedjesgenaamd. Deze Weissgebiedjes hebben een volume van ongeveer 10−12 tot 10−8 m3 (dit komtovereen met ongeveer 1017 tot 1021 atomen) en zijn van elkaar gescheiden door Blochwanden.Dit zijn virtuele wanden en zij bepalen het omslaggebied tussen de verschillende magnetischemomenten. De permanente magnetische momenten van elk Weissgebiedje hebben allemaaldezelfde richting. In figuur 2.2 is de opbouw van een stuk ferromagnetisch materiaal weergege-ven: de Weissgebiedjes, de Blochwanden en de magnetische momenten van de Weissgebiedjes(weergegeven met de pijlen).
Figuur 2.2: Weissgebieden en Blochwanden in een ferromagnetisch materiaal
Aangezien er enorm veel Weissgebiedjes zijn en de magnetische momenten initieel allemaalin willekeurige richting liggen, is het netto magnetisch moment van een maagdelijk stukferromagnetisch materiaal gelijk aan nul. De macroscopische inductie van het kristal is dusnul. Dit stemt overeen met een minimale potentiele energie. De oorzaak van het feit dat inelk Weissgebiedje de magnetische momenten dezelfde richting en zin hebben, heeft te makenmet interactiekrachten tussen naburige elektronen die hun elektronenspin parallel richten. Inde kwantummechanica wordt dit verder besproken.
Indien men bij een ferromagnetisch materiaal een magnetisch veld aanlegt, gaat het ge-ınduceerde veld vergroten doordat de Blochwanden verschuiven. De Weissgebiedjes waarvande magnetische momenten dezelfde richting en zin hebben als het extern aangelegde magne-tisch veld worden groter en de Weissgebiedjes die niet dezelfde richting en zin hebben als het
Hoofdstuk 2. Magnetisme en Hysteresis 6
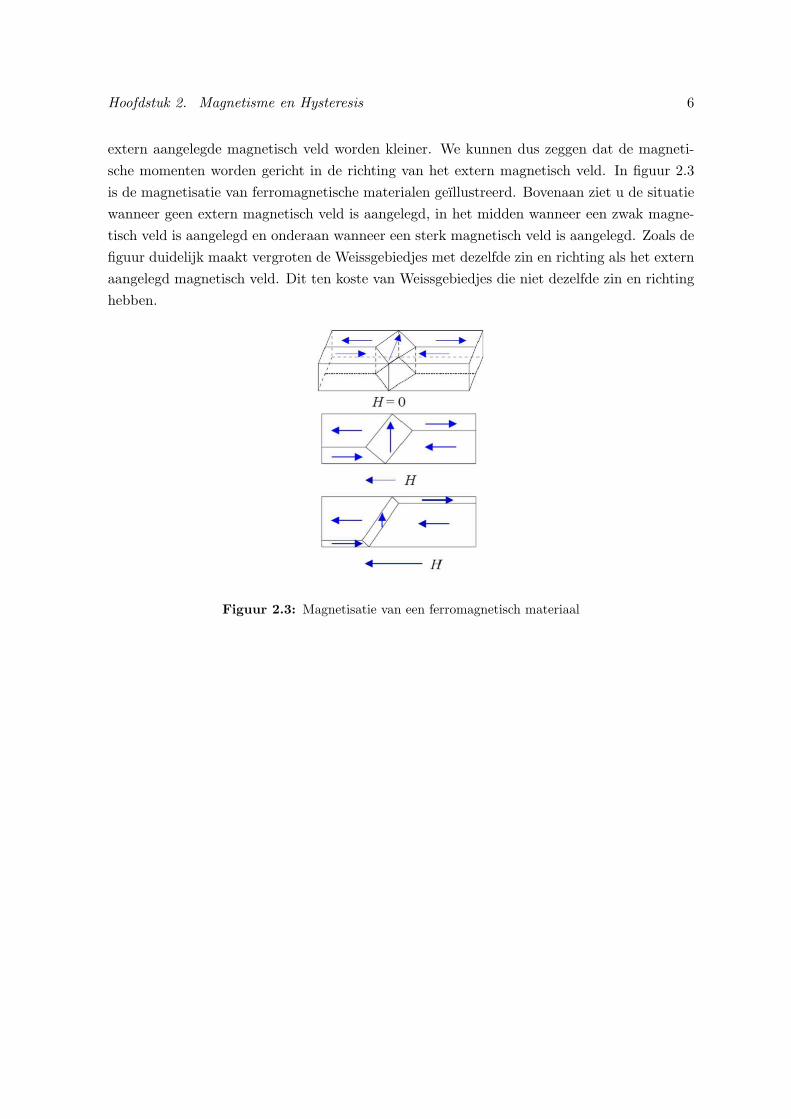
extern aangelegde magnetisch veld worden kleiner. We kunnen dus zeggen dat de magneti-sche momenten worden gericht in de richting van het extern magnetisch veld. In figuur 2.3is de magnetisatie van ferromagnetische materialen geıllustreerd. Bovenaan ziet u de situatiewanneer geen extern magnetisch veld is aangelegd, in het midden wanneer een zwak magne-tisch veld is aangelegd en onderaan wanneer een sterk magnetisch veld is aangelegd. Zoals defiguur duidelijk maakt vergroten de Weissgebiedjes met dezelfde zin en richting als het externaangelegd magnetisch veld. Dit ten koste van Weissgebiedjes die niet dezelfde zin en richtinghebben.
Figuur 2.3: Magnetisatie van een ferromagnetisch materiaal
Hoofdstuk 2. Magnetisme en Hysteresis 7
2.4 Hysteresis
Met hysteresis wordt algemeen bedoeld: een faseverschuiving tussen de ingang en uitgang vaneen systeem bij een verandering van de ingang. Hysteresis komt zowel voor in elektrische alsmagnetische systemen.
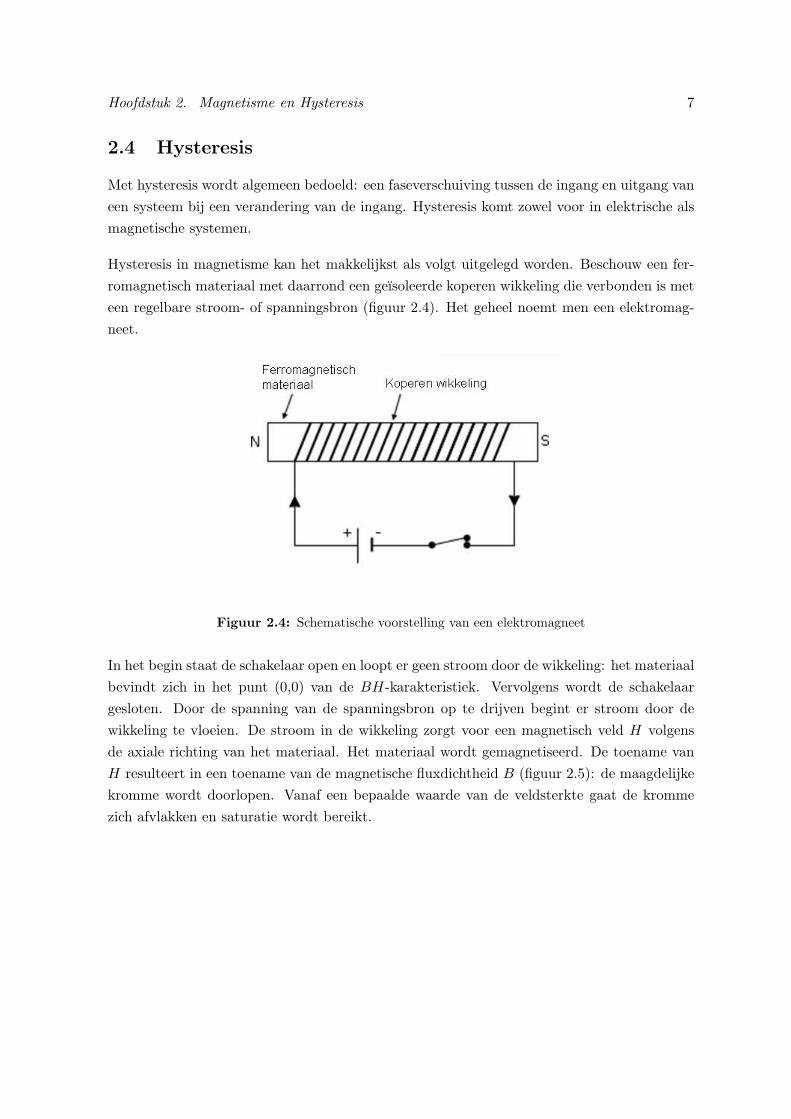
Hysteresis in magnetisme kan het makkelijkst als volgt uitgelegd worden. Beschouw een fer-romagnetisch materiaal met daarrond een geısoleerde koperen wikkeling die verbonden is meteen regelbare stroom- of spanningsbron (figuur 2.4). Het geheel noemt men een elektromag-neet.
Figuur 2.4: Schematische voorstelling van een elektromagneet
In het begin staat de schakelaar open en loopt er geen stroom door de wikkeling: het materiaalbevindt zich in het punt (0,0) van de BH-karakteristiek. Vervolgens wordt de schakelaargesloten. Door de spanning van de spanningsbron op te drijven begint er stroom door dewikkeling te vloeien. De stroom in de wikkeling zorgt voor een magnetisch veld H volgensde axiale richting van het materiaal. Het materiaal wordt gemagnetiseerd. De toename vanH resulteert in een toename van de magnetische fluxdichtheid B (figuur 2.5): de maagdelijkekromme wordt doorlopen. Vanaf een bepaalde waarde van de veldsterkte gaat de krommezich afvlakken en saturatie wordt bereikt.
Hoofdstuk 2. Magnetisme en Hysteresis 8
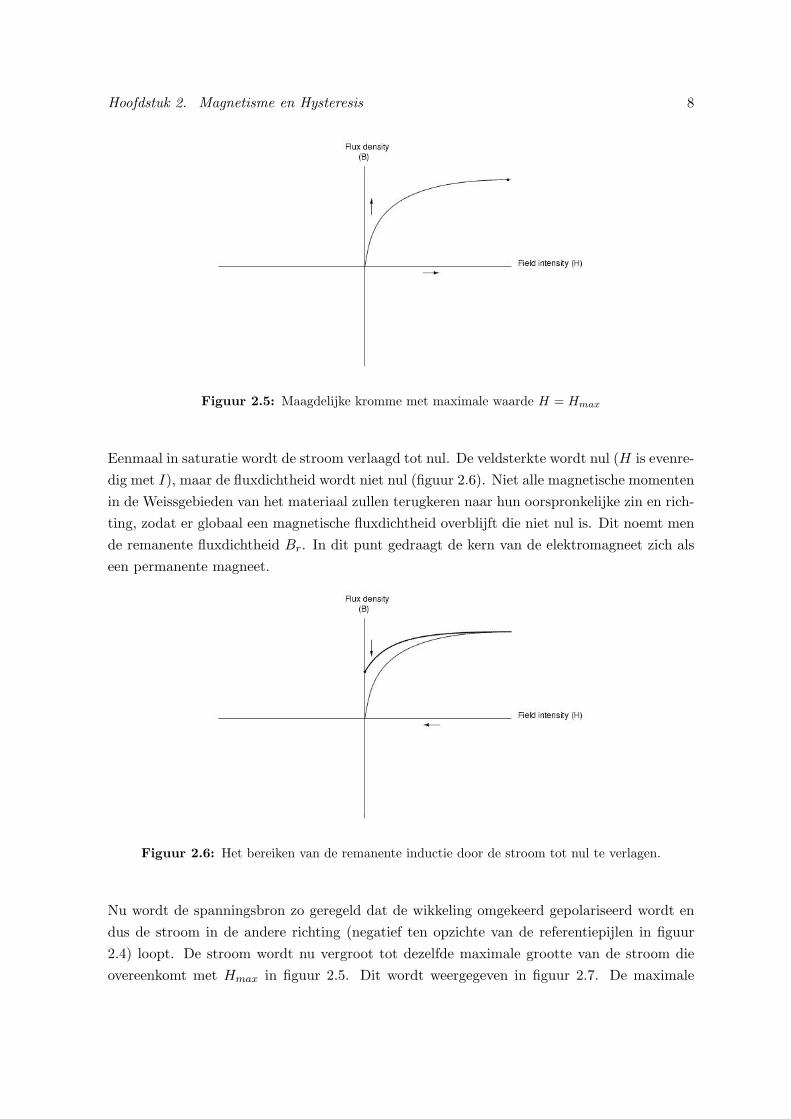
Figuur 2.5: Maagdelijke kromme met maximale waarde H = Hmax
Eenmaal in saturatie wordt de stroom verlaagd tot nul. De veldsterkte wordt nul (H is evenre-dig met I), maar de fluxdichtheid wordt niet nul (figuur 2.6). Niet alle magnetische momentenin de Weissgebieden van het materiaal zullen terugkeren naar hun oorspronkelijke zin en rich-ting, zodat er globaal een magnetische fluxdichtheid overblijft die niet nul is. Dit noemt mende remanente fluxdichtheid Br. In dit punt gedraagt de kern van de elektromagneet zich alseen permanente magneet.
Figuur 2.6: Het bereiken van de remanente inductie door de stroom tot nul te verlagen.
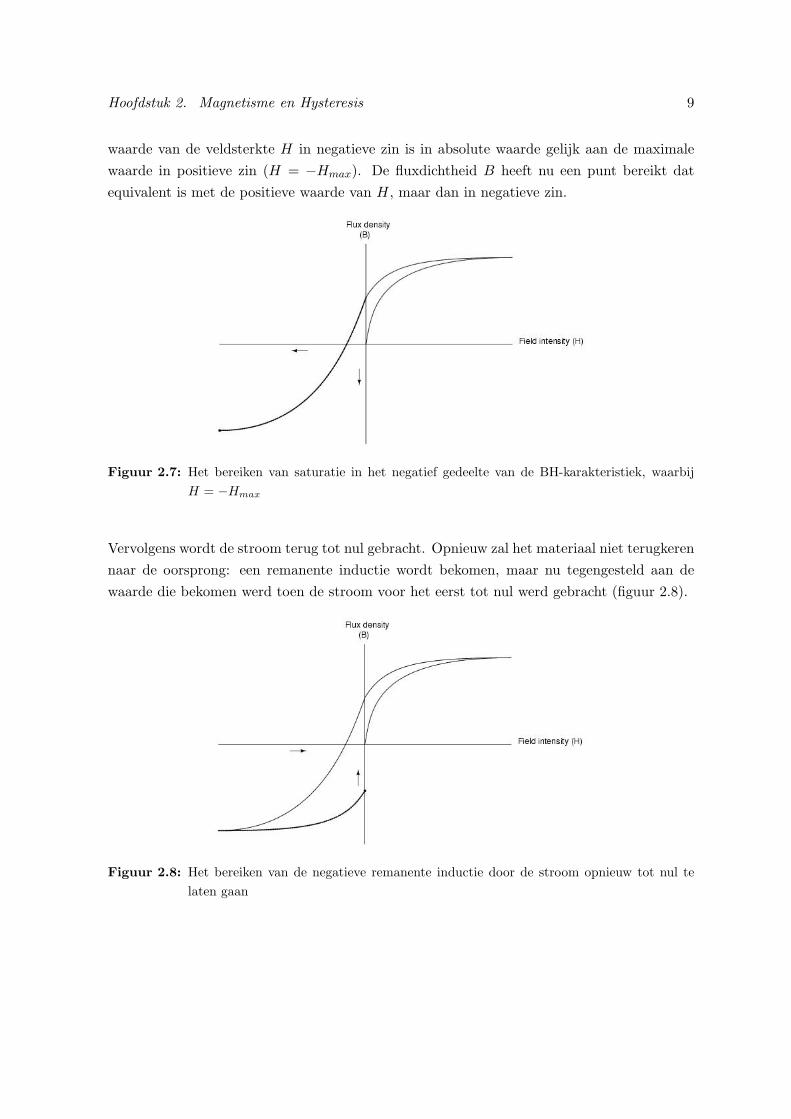
Nu wordt de spanningsbron zo geregeld dat de wikkeling omgekeerd gepolariseerd wordt endus de stroom in de andere richting (negatief ten opzichte van de referentiepijlen in figuur2.4) loopt. De stroom wordt nu vergroot tot dezelfde maximale grootte van de stroom dieovereenkomt met Hmax in figuur 2.5. Dit wordt weergegeven in figuur 2.7. De maximale
Hoofdstuk 2. Magnetisme en Hysteresis 9
waarde van de veldsterkte H in negatieve zin is in absolute waarde gelijk aan de maximalewaarde in positieve zin (H = −Hmax). De fluxdichtheid B heeft nu een punt bereikt datequivalent is met de positieve waarde van H, maar dan in negatieve zin.
Figuur 2.7: Het bereiken van saturatie in het negatief gedeelte van de BH-karakteristiek, waarbijH = −Hmax
Vervolgens wordt de stroom terug tot nul gebracht. Opnieuw zal het materiaal niet terugkerennaar de oorsprong: een remanente inductie wordt bekomen, maar nu tegengesteld aan dewaarde die bekomen werd toen de stroom voor het eerst tot nul werd gebracht (figuur 2.8).
Figuur 2.8: Het bereiken van de negatieve remanente inductie door de stroom opnieuw tot nul telaten gaan
Hoofdstuk 2. Magnetisme en Hysteresis 10
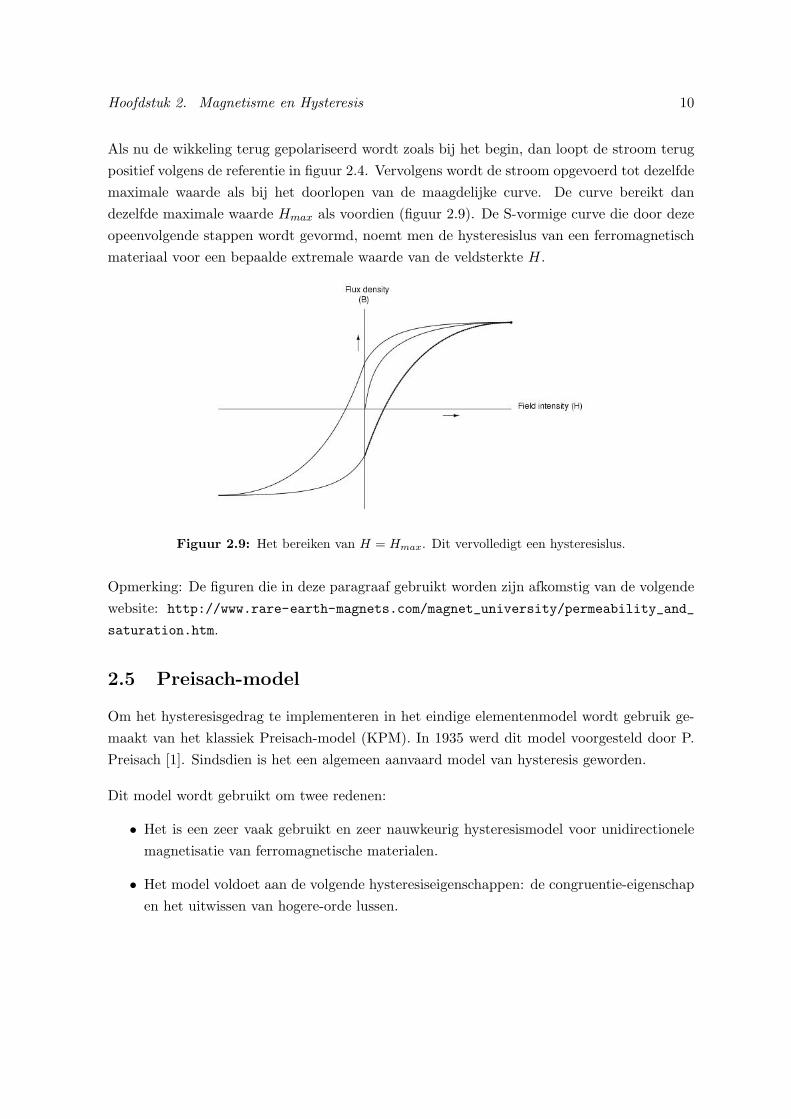
Als nu de wikkeling terug gepolariseerd wordt zoals bij het begin, dan loopt de stroom terugpositief volgens de referentie in figuur 2.4. Vervolgens wordt de stroom opgevoerd tot dezelfdemaximale waarde als bij het doorlopen van de maagdelijke curve. De curve bereikt dandezelfde maximale waarde Hmax als voordien (figuur 2.9). De S-vormige curve die door dezeopeenvolgende stappen wordt gevormd, noemt men de hysteresislus van een ferromagnetischmateriaal voor een bepaalde extremale waarde van de veldsterkte H.
Figuur 2.9: Het bereiken van H = Hmax. Dit vervolledigt een hysteresislus.
Opmerking: De figuren die in deze paragraaf gebruikt worden zijn afkomstig van de volgendewebsite: http://www.rare-earth-magnets.com/magnet_university/permeability_and_
saturation.htm.
2.5 Preisach-model
Om het hysteresisgedrag te implementeren in het eindige elementenmodel wordt gebruik ge-maakt van het klassiek Preisach-model (KPM). In 1935 werd dit model voorgesteld door P.Preisach [1]. Sindsdien is het een algemeen aanvaard model van hysteresis geworden.
Dit model wordt gebruikt om twee redenen:
• Het is een zeer vaak gebruikt en zeer nauwkeurig hysteresismodel voor unidirectionelemagnetisatie van ferromagnetische materialen.
• Het model voldoet aan de volgende hysteresiseigenschappen: de congruentie-eigenschapen het uitwissen van hogere-orde lussen.
Hoofdstuk 2. Magnetisme en Hysteresis 11
2.5.1 Definitie en werking van het model
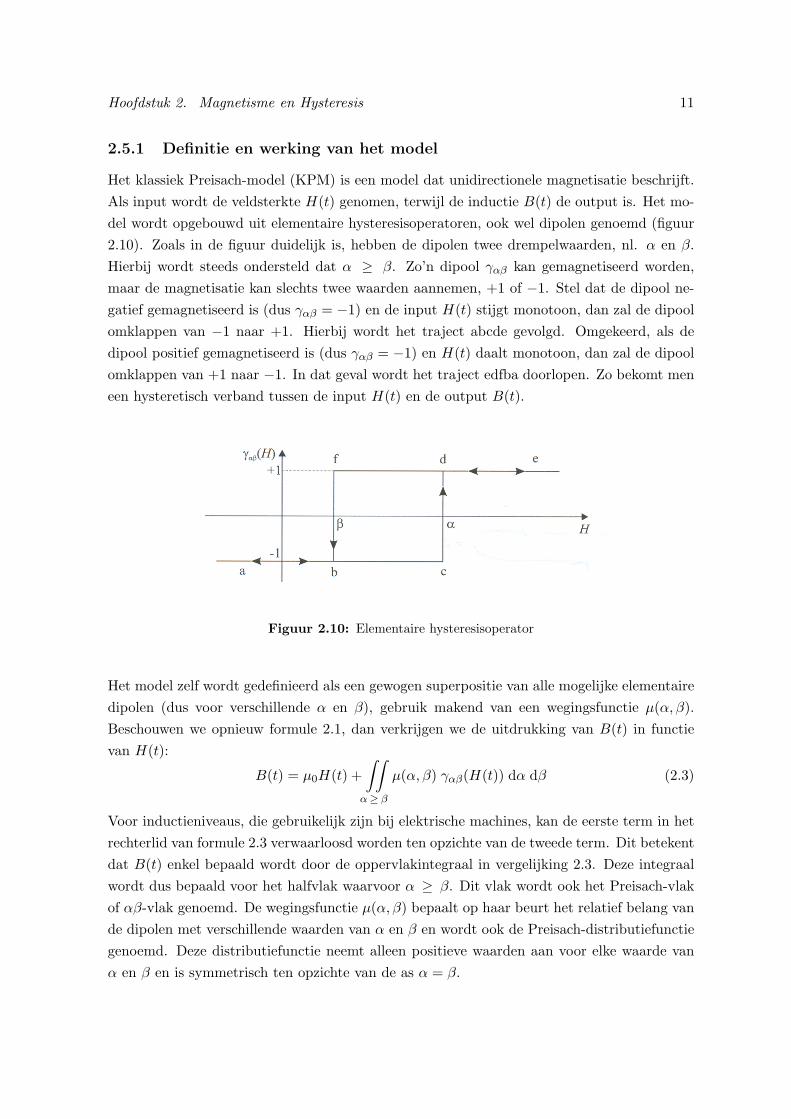
Het klassiek Preisach-model (KPM) is een model dat unidirectionele magnetisatie beschrijft.Als input wordt de veldsterkte H(t) genomen, terwijl de inductie B(t) de output is. Het mo-del wordt opgebouwd uit elementaire hysteresisoperatoren, ook wel dipolen genoemd (figuur2.10). Zoals in de figuur duidelijk is, hebben de dipolen twee drempelwaarden, nl. α en β.Hierbij wordt steeds ondersteld dat α ≥ β. Zo’n dipool γαβ kan gemagnetiseerd worden,maar de magnetisatie kan slechts twee waarden aannemen, +1 of −1. Stel dat de dipool ne-gatief gemagnetiseerd is (dus γαβ = −1) en de input H(t) stijgt monotoon, dan zal de dipoolomklappen van −1 naar +1. Hierbij wordt het traject abcde gevolgd. Omgekeerd, als dedipool positief gemagnetiseerd is (dus γαβ = −1) en H(t) daalt monotoon, dan zal de dipoolomklappen van +1 naar −1. In dat geval wordt het traject edfba doorlopen. Zo bekomt meneen hysteretisch verband tussen de input H(t) en de output B(t).
Figuur 2.10: Elementaire hysteresisoperator
Het model zelf wordt gedefinieerd als een gewogen superpositie van alle mogelijke elementairedipolen (dus voor verschillende α en β), gebruik makend van een wegingsfunctie µ(α, β).Beschouwen we opnieuw formule 2.1, dan verkrijgen we de uitdrukking van B(t) in functievan H(t):
B(t) = µ0H(t) +∫∫
α≥ β
µ(α, β) γαβ(H(t)) dα dβ (2.3)
Voor inductieniveaus, die gebruikelijk zijn bij elektrische machines, kan de eerste term in hetrechterlid van formule 2.3 verwaarloosd worden ten opzichte van de tweede term. Dit betekentdat B(t) enkel bepaald wordt door de oppervlakintegraal in vergelijking 2.3. Deze integraalwordt dus bepaald voor het halfvlak waarvoor α ≥ β. Dit vlak wordt ook het Preisach-vlakof αβ-vlak genoemd. De wegingsfunctie µ(α, β) bepaalt op haar beurt het relatief belang vande dipolen met verschillende waarden van α en β en wordt ook de Preisach-distributiefunctiegenoemd. Deze distributiefunctie neemt alleen positieve waarden aan voor elke waarde vanα en β en is symmetrisch ten opzichte van de as α = β.

Hoofdstuk 2. Magnetisme en Hysteresis 12
Zoals in vele systemen is het noodzakelijk dat een begintoestand (op een tijdstip t = 0)gekend is om de uitgang te bekomen die hoort bij een bepaalde ingang. Bij het KPM is ditniet anders. In dit geval bedoelt men de begintoestand waarin het materiaal zich bevindt.Deze begintoestand bepaalt meteen ook de stand van alle dipolen op t = 0.
2.5.2 Geometrische interpretatie en werking van het KPM
In dit onderdeel wordt een hysteresislus doorlopen en er wordt gekeken hoe het αβ-vlakverandert bij elke stap.
Gedemagnetiseerde toestand
Uit figuur 2.10 blijkt dat bij de gedemagnetiseerde materiaaltoestand een dipool positiefpolariseert wanneer α + β kleiner is dan nul. De polarisatie wordt negatief wanneer α + β
groter is dan nul. Dit geeft voor het αβ-vlak dat de magnetisatie γαβ gelijk is aan −1 wanneerα+β groter is dan nul, en +1 wanneer α+β kleiner is dan nul. De gedemagnetiseerde toestandwordt weergegeven in figuur 2.11.
Figuur 2.11: Voorstelling van de gedemagnetiseerde toestand van het materiaal in het αβ-vlak
Maagdelijke kromme
Wanneer men, vanuit de gedemagnetiseerde toestand, de veldsterkte monotoon laat toenemendan wordt de maagdelijke krommen doorlopen in het BH-vlak (zie sectie 2.4). In het αβ-vlak kunnen we dit fenomeen voorstellen door een verticale rechte, die van links naar rechtsbeweegt en in de oorsprong vertrekt. Deze rechte passeert dipolen die negatief gemagnetiseerdwaren en hierdoor klappen deze dipolen om naar een positieve magnetisatie (zie figuur 2.12).
Hoofdstuk 2. Magnetisme en Hysteresis 13
Figuur 2.12: Voorstelling van het doorlopen van de maagdelijke kromme in het αβ-vlak
Dalende en stijgende takken in de BH-lus
Wanneer de maagdelijke kromme doorlopen is dan wordt een maximale veldsterkte Hmax
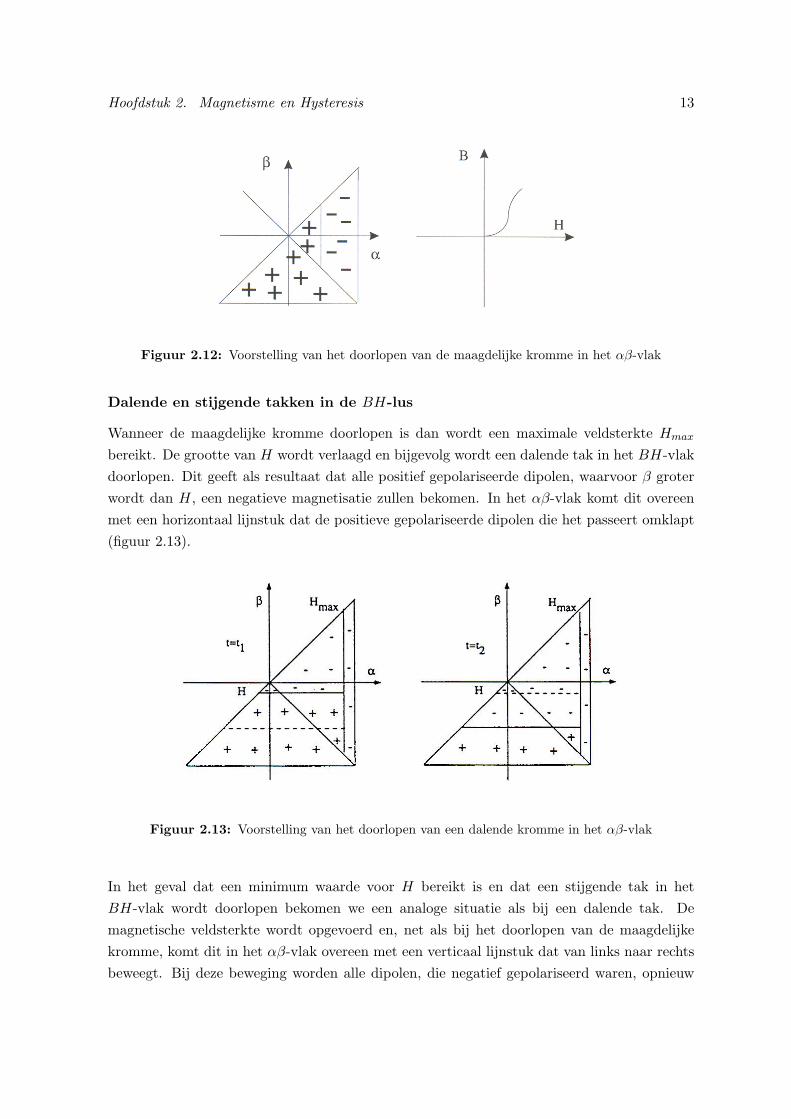
bereikt. De grootte van H wordt verlaagd en bijgevolg wordt een dalende tak in het BH-vlakdoorlopen. Dit geeft als resultaat dat alle positief gepolariseerde dipolen, waarvoor β groterwordt dan H, een negatieve magnetisatie zullen bekomen. In het αβ-vlak komt dit overeenmet een horizontaal lijnstuk dat de positieve gepolariseerde dipolen die het passeert omklapt(figuur 2.13).
Figuur 2.13: Voorstelling van het doorlopen van een dalende kromme in het αβ-vlak
In het geval dat een minimum waarde voor H bereikt is en dat een stijgende tak in hetBH-vlak wordt doorlopen bekomen we een analoge situatie als bij een dalende tak. Demagnetische veldsterkte wordt opgevoerd en, net als bij het doorlopen van de maagdelijkekromme, komt dit in het αβ-vlak overeen met een verticaal lijnstuk dat van links naar rechtsbeweegt. Bij deze beweging worden alle dipolen, die negatief gepolariseerd waren, opnieuw

Hoofdstuk 2. Magnetisme en Hysteresis 14
positief gepolariseerd.
Hierbij moet wel het belang van de extreme waarden van H opgemerkt worden. Om ditduidelijk te maken wordt een voorbeeld beschouwd (figuur 2.14).
Figuur 2.14: Voorbeeld van een functie van H en de representatie hiervan in het αβ-vlak
Op t = 0 wordt de veldsterkte H opgevoerd tot een maximale waarde Hmax. Zoals hierbovenbesproken komt dit in het αβ-vlak overeen met een verticaal lijnstuk dat van links naarrechts gaat. Alle positieve dipolen worden negatief gepolariseerd. Vervolgens zakt H naareen minimale waarde Hmin en een horizontaal lijnstuk laat de positieve dipolen omklappennaar hun negatieve waarde. Wanneer de veldsterkte weer stijgt, loopt er opnieuw een verticaallijnstuk van links naar rechts die alle negatieve dipolen positief maakt. Stel dat nu H eenwaarde bereikt die groter is dan het vroegere Hmax. Hierdoor wordt de opsplitsing vannegatieve en positieve polarisatie niet meer bepaald door de voorbije extremale waardenHmin en Hmax. Het is alsof die vorige extremale waarden nooit bestaan hebben. Dit betekentdat een inwendige lus, bepaald door Hmin en Hmax, uit het geheugen gewist is.
2.5.3 Everett-functie
Men definieert de Everett-functie Ev(H1, H2) als de absolute waarde van de verandering vande magnetische inductie B wanneer de magnetische veldsterkte H varieert van H1 naar H2,waarbij H1 een extremum is in het verloop van H. Voorwaarde is dat er geen extremalewaarden uitgewist worden in het geheugen van het materiaal bij de verandering van H1 naarH2. Deze functie wordt gedefinieerd omdat het volgende verband bestaat tussen de Preisach-distributiefunctie en de Everett-functie:
µ(α, β) = − ∂2Ev(H1, H2)∂H1∂H2
∣∣∣∣ α = H1
β = H2
(2.4)

Hoofdstuk 2. Magnetisme en Hysteresis 15
Wanneer het verloop van H(t) met opeenvolging van zijn extremale waarden gekend is en ergestart wordt vanuit een gedemagnetiseerde toestand, dan kan op basis van de Everett-functiede bijhorende hysteresislus bepaald worden. Bij het doorlopen van de maagdelijke kromme(in dit geval zijn er geen extrema in het geheugen) geldt:
|B(t)| = 12Ev(−H(t), H(t)) (2.5)
Indien er minimaal een extremum in het geheugen aanwezig is, dan geldt er:
∣∣B(t)−Bextr(t)∣∣ = Ev(Hextr(t), H(t)) (2.6)
Hierbij steltHextr(t) een extremale waarde vanH voor die de geheugentoestand op het tijdstipt aangeeft. De extremale waarde Bextr(t) is dan de inductie die overeenstemt met Hextr(t).
De Everett-functie wordt ook wel de Everettmap genoemd. Ze heeft de eigenschap punt-symmetrisch te zijn ten opzichte van de oorsprong en symmetrisch ten opzichte van de asH1 = H2.
De Everett-functie kan rechtstreeks opgemeten worden door de verzameling van de eerste-orde-transitiekrommen. Deze krommen worden verkregen op de volgende manier. Eerst gaatmen vanuit de positieve verzadigingstoestand de veldsterkte monotoon laten dalen. Vervol-gens laat men vanaf een bepaald punt Hextr
i de veldsterkte opnieuw monotoon stijgen tot menterug de positieve verzadiging bereikt heeft. Zo wordt elke transitiekromme gevormd. Indienmen enkel stijgende transitiekrommen beschouwt dan wordt slechts het halfvlak waarvoorH1 > H2 opgemeten. Het andere halfvlak volgt ofwel uit de symmetrie van de functie ofweluit het opmeten van dalende transitiekrommen.
Een andere manier om de Everettmap te bepalen is het opmeten van de symmetrische hoofd-lussen. Dit is de manier die in deze thesis gevolgd is. Voor meer uitleg wordt verwezen naarhoofdstuk 4: Karakterisatie van het gietijzer.
Opmerking: De tekst in secties 2.1 en 2.5 is gebaseerd op tekst uit de cursus Magnetismeen Magnetische Materialen[2]. Eventuele figuren gebruikt in deze secties komen uit dezelfdecursus.
Hoofdstuk 3
Hysteresismotor
3.1 Inleiding
In dit hoofdstuk wordt uitgelegd wat een hysteresismotor juist is en hoe zo’n motor werkt.Verder werd bekeken wat er in de academische onderzoekswereld al over hysteresismotorenonderzocht is.
3.2 Werkingsprincipe van een hysteresismotor
Wanneer men de werking van een klassieke inductiemotor analyseert, wordt vaak aangeno-men dat enkel de rotorwikkeling zorgt voor de omzetting van het primair draaiveldvermogenPd1 van stator naar rotor. Dit is echter niet zo in werkelijkheid: een deel van dit primairdraaiveldvermogen gaat ook via het ijzer over naar de rotor. Bij een van nul verschillendeslip zijn er in het rotorijzer namelijk zowel wervelstroomverliezen als hysteresisverliezen. Bijeen gegeven slip s geldt:
Pd1 = (1− s) · Pd1 + s · Pd1 (3.1)
= Pmech + s · Pd1 (3.2)
= Pmech + Pj2 + Pf2 + Ph2 (3.3)
met
Pd1 = het primair draaiveldvermogen
Pmech = het mechanisch vermogen
Pj2 = het jouleverlies in de rotorwikkeling
Pf2 = het wervelstroomverlies in het rotorijzer
Ph2 = het hysteresisverlies in het rotorijzer
16
Hoofdstuk 3. Hysteresismotor 17
Het jouleverlies is, bij voldoende lage slip, evenredig met het kwadraat van de slip. Hieruitvolgt dat de hiermee overeenkomstige koppelcomponent evenredig is met de slip.
Het wervelstroomverlies is op zijn beurt evenredig met het kwadraat van de inductie en hetkwadraat van de frequentie. Voor de rotor wordt de frequentie de slipfrequentie s · f . Ditgeeft een koppelcomponent dat evenredig is met de slip.
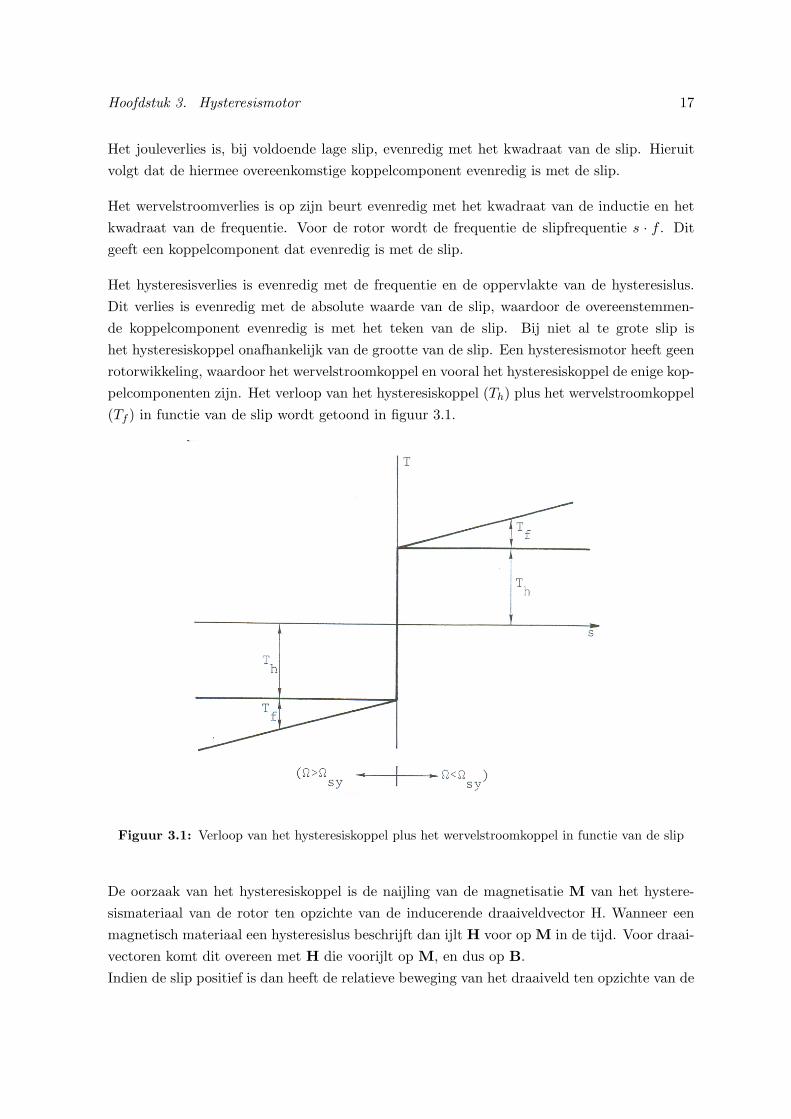
Het hysteresisverlies is evenredig met de frequentie en de oppervlakte van de hysteresislus.Dit verlies is evenredig met de absolute waarde van de slip, waardoor de overeenstemmen-de koppelcomponent evenredig is met het teken van de slip. Bij niet al te grote slip ishet hysteresiskoppel onafhankelijk van de grootte van de slip. Een hysteresismotor heeft geenrotorwikkeling, waardoor het wervelstroomkoppel en vooral het hysteresiskoppel de enige kop-pelcomponenten zijn. Het verloop van het hysteresiskoppel (Th) plus het wervelstroomkoppel(Tf ) in functie van de slip wordt getoond in figuur 3.1.
Figuur 3.1: Verloop van het hysteresiskoppel plus het wervelstroomkoppel in functie van de slip
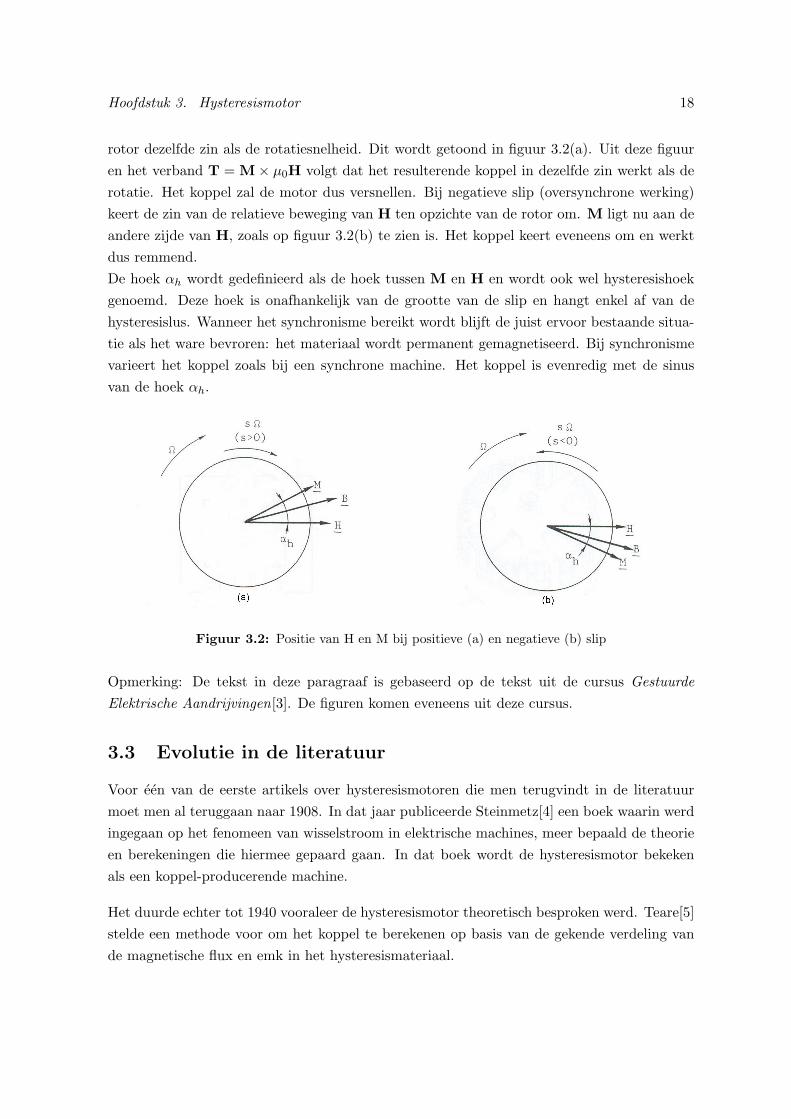
De oorzaak van het hysteresiskoppel is de naijling van de magnetisatie M van het hystere-sismateriaal van de rotor ten opzichte van de inducerende draaiveldvector H. Wanneer eenmagnetisch materiaal een hysteresislus beschrijft dan ijlt H voor op M in de tijd. Voor draai-vectoren komt dit overeen met H die voorijlt op M, en dus op B.Indien de slip positief is dan heeft de relatieve beweging van het draaiveld ten opzichte van de
Hoofdstuk 3. Hysteresismotor 18
rotor dezelfde zin als de rotatiesnelheid. Dit wordt getoond in figuur 3.2(a). Uit deze figuuren het verband T = M× µ0H volgt dat het resulterende koppel in dezelfde zin werkt als derotatie. Het koppel zal de motor dus versnellen. Bij negatieve slip (oversynchrone werking)keert de zin van de relatieve beweging van H ten opzichte van de rotor om. M ligt nu aan deandere zijde van H, zoals op figuur 3.2(b) te zien is. Het koppel keert eveneens om en werktdus remmend.De hoek αh wordt gedefinieerd als de hoek tussen M en H en wordt ook wel hysteresishoekgenoemd. Deze hoek is onafhankelijk van de grootte van de slip en hangt enkel af van dehysteresislus. Wanneer het synchronisme bereikt wordt blijft de juist ervoor bestaande situa-tie als het ware bevroren: het materiaal wordt permanent gemagnetiseerd. Bij synchronismevarieert het koppel zoals bij een synchrone machine. Het koppel is evenredig met de sinusvan de hoek αh.
Figuur 3.2: Positie van H en M bij positieve (a) en negatieve (b) slip
Opmerking: De tekst in deze paragraaf is gebaseerd op de tekst uit de cursus GestuurdeElektrische Aandrijvingen[3]. De figuren komen eveneens uit deze cursus.
3.3 Evolutie in de literatuur
Voor een van de eerste artikels over hysteresismotoren die men terugvindt in de literatuurmoet men al teruggaan naar 1908. In dat jaar publiceerde Steinmetz[4] een boek waarin werdingegaan op het fenomeen van wisselstroom in elektrische machines, meer bepaald de theorieen berekeningen die hiermee gepaard gaan. In dat boek wordt de hysteresismotor bekekenals een koppel-producerende machine.
Het duurde echter tot 1940 vooraleer de hysteresismotor theoretisch besproken werd. Teare[5]stelde een methode voor om het koppel te berekenen op basis van de gekende verdeling vande magnetische flux en emk in het hysteresismateriaal.
Hoofdstuk 3. Hysteresismotor 19
Een gedetailleerde studie en analyse van de hysteresismotor kwam er pas in 1963 met eenhet eerste deel van een drieledig artikel van M. A. Copeland en C. R. Slemon[6]. Door mid-del van een paar veronderstellingen en benaderingen slaagden zij erin een een geıdealiseerdehysteresismotor voor te stellen met een eenfasig equivalent magnetisch circuit. Op basis vanhun analyse voorspelden ze de motorprestaties bij stilstand. Hun analyse werd uitgebreid inde twee andere delen[7][8] door rekening te houden met eddy currents en parasitaire hyste-resisverliezen, en dit zowel bij radiale als tangentiale flux hysteresismotoren. Een rigoureuzemathematische analyse werd in 1969 uitgevoerd door Robertson en Zaky[9].
In de literatuur spreekt men voornamelijk over kleine hysteresismotoren[10], maar ook gro-te hysteresismotoren, met efficienties en arbeidsfactoren gelijkaardig aan die van inductie-motoren, behoren tot de mogelijkheden. Dit werd voorgesteld door Slemon, Jackson enRahman[11]. In hun artikel gaan ze na wat de invloed is van motorparameters (afmetingenvan de motor) en verschillende materiaalkarakteristieken op de motorprestaties. Op basis vanproeven op een 3 kW hysteresismotor voorspelden ze het gedrag van een 200 kW hysteresis-motor.
Zoals in sectie 3.2 reeds uitgelegd werd loopt de hysteresismotor asynchroon aan, net als eeninductiemotor. Schieber[12] onderzocht dit aspect in 1975 en zijn werk werd verder uitgebreiddoor Gavril en Mor in 1982[13].
Met de komst van numerieke modellen voor hysteresis vanaf de jaren ’70 werd het mogelijkpreciezere rotormodellen te gebruiken[14]. Zo kon men de prestaties van hysteresismotoren(eigenlijk motoren in het algemeen) accurater simuleren en voorspellen.
Een van de voornaamste toepassingen van een hysteresismotor is als aandrijving van eengyroscoop[15][16]. Volgens de Encarta encyclopedie1 is een gyroscoop of gyrostaat een snel-draaiend rotatiesymmetrisch lichaam (rotor) dat cardanisch is opgehangen en draaibaar is omdrie assen die door het zwaartepunt van het lichaam gaan, waardoor dit een nagenoeg vastestand in de ruimte zal willen behouden. Het toerental van de aandrijvende motor varieertvan 6000 omw/min tot 24000 omw/min.
De laatste jaren probeert men permanente magneet hysteresismotoren te bouwen[17]. Zo’nmotor combineert de voordelen van de hysteresismotor en de permanente magneetmotor. Hetprobleem bij permanente magneetmotoren is dat bij het aanlopen de permanente magneteneen tegenwerkend koppel veroorzaken en zo het startkoppel verkleinen. Dit negatief effect kangecompenseerd worden door de hysteresismotor, aangezien deze een hoog startkoppel heeft.
Dynamisch moet een motor ook stabiel zijn. Een dynamische analyse van de hysteresismotorwordt onderzocht door Badeeb[18], waarbij wordt gekeken naar de stabiliteit van de motor
1http://www.encarta.com
Hoofdstuk 3. Hysteresismotor 20
bij verschillende werkingstoestanden.
Een van de voornaamste problemen die bij hysteresismotoren voorkomt is ’hunting’[19]. Wan-neer een motor draait, dan fluctueert z’n snelheid rond de gewenste synchrone frequentie. Dezefluctuatie gebeurt sinusoıdaal bij een snelheid die veel lager ligt dan de synchrone snelheid.Deze frequentievariatie rond de gewenste frequentie noemt men hunting. Dit probleem doetzich voor ten gevolge van vervorming van de voedingsspanning en heeft een frequentie van 3tot 5 Hz. Een methode om dit effect te onderdrukken wordt gegeven in [20].
Dit alles behalve volledig overzicht toont aan dat al veel bekend is over de hysteresismotor,maar bijlange nog niet zoveel als inductiemotoren of synchrone motoren. Vandaar de opzetvan deze thesis.

Hoofdstuk 4
Karakterisatie van het gietijzer
4.1 Inleiding
Om het hysteresisgedrag van het gietijzer in het eindige elementenmodel te implementeren, ishet nodig het gietijzer te karakteriseren aan de hand van zijn BH-lussen. Deze lussen wordenopgemeten door een opstelling die in het labo EELAB aanwezig is. Uit deze lussen wordtdan de Everettmap gecreeerd, die in het simulatiemodel door middel van het Preisachmodelkan gebruikt worden. De metingen werden uitgevoerd op twee soorten gietijzer: GG25 enGG40. Om het gietijzer op te meten werd van elke soort een staaf met een diameter 95 mmaangekocht. De kernen werden dan vervaardigd door dunne schijfjes van deze staven af tezagen. Ook werden een excitatie- en meetwikkeling aangebracht. Uit de meetresultatenwerd dan het beste gietijzer (met het grootste coercitieve veld) gekozen om een rotor uitte vervaardigen. Ook werden de soorten gietijzer vergeleken met andere materialen die inaanmerking komen voor de constructie van de rotor van een hysteresismotor.
4.2 Beschrijving van de meetopstelling en meetmethode
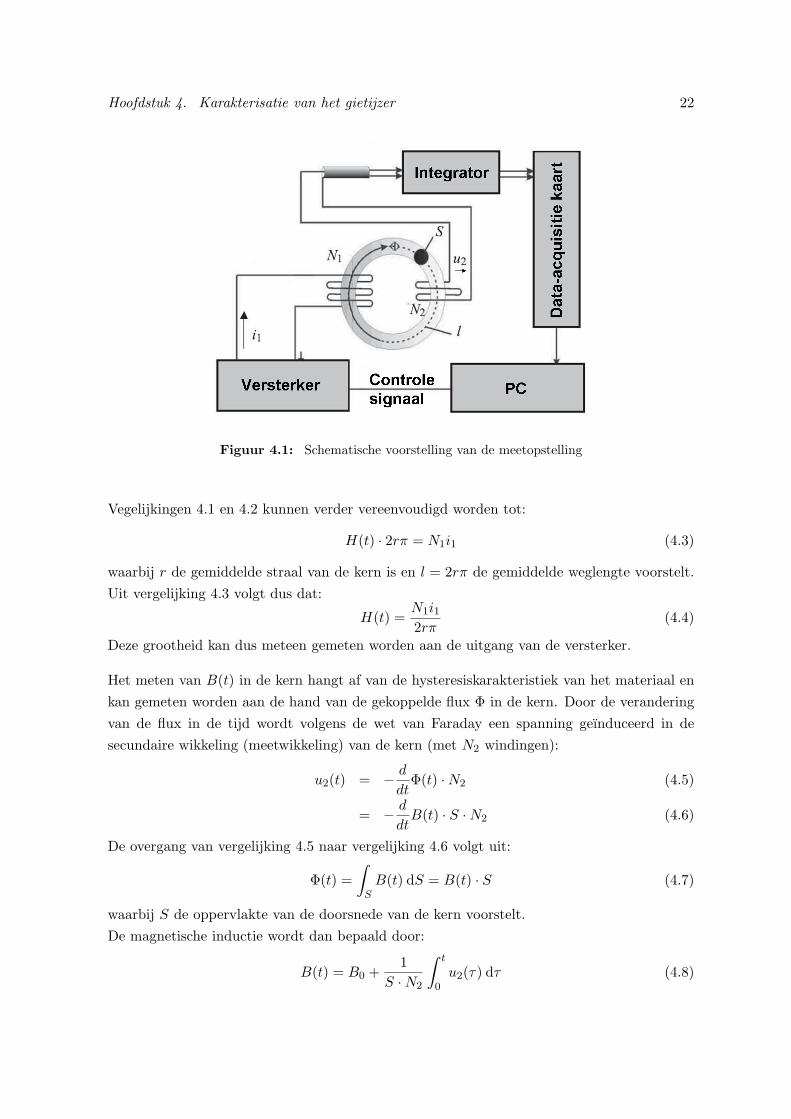
De BH-lussen van de verschillende soorten gietijzer worden opgemeten door de opstelling diein figuur 4.1 schematisch wordt voorgesteld.
Het systeem bestaat uit een computer met LabView die een versterker aanstuurt. De ver-sterker stuurt een stroom i1 door de primaire wikkeling (met N1 windingen) van de kern. Ditwordt ook wel excitatiewikkeling genoemd. Deze stroom wekt een magnetische veldsterkte Hop in de kern. Het meten van H(t) in de kern gebeurt op basis van de wet van Ampere:
∮
lH(t) dl =
∫
AJ(t) dA (4.1)
waarbij in dit geval geldt: ∫
AJ(t) dA = N1i1 (4.2)
21
Hoofdstuk 4. Karakterisatie van het gietijzer 22
Figuur 4.1: Schematische voorstelling van de meetopstelling
Vegelijkingen 4.1 en 4.2 kunnen verder vereenvoudigd worden tot:
H(t) · 2rπ = N1i1 (4.3)
waarbij r de gemiddelde straal van de kern is en l = 2rπ de gemiddelde weglengte voorstelt.Uit vergelijking 4.3 volgt dus dat:
H(t) =N1i12rπ
(4.4)
Deze grootheid kan dus meteen gemeten worden aan de uitgang van de versterker.
Het meten van B(t) in de kern hangt af van de hysteresiskarakteristiek van het materiaal enkan gemeten worden aan de hand van de gekoppelde flux Φ in de kern. Door de veranderingvan de flux in de tijd wordt volgens de wet van Faraday een spanning geınduceerd in desecundaire wikkeling (meetwikkeling) van de kern (met N2 windingen):
u2(t) = − d
dtΦ(t) ·N2 (4.5)
= − d
dtB(t) · S ·N2 (4.6)
De overgang van vergelijking 4.5 naar vergelijking 4.6 volgt uit:
Φ(t) =∫
SB(t) dS = B(t) · S (4.7)
waarbij S de oppervlakte van de doorsnede van de kern voorstelt.De magnetische inductie wordt dan bepaald door:
B(t) = B0 +1
S ·N2
∫ t
0u2(τ) dτ (4.8)
Hoofdstuk 4. Karakterisatie van het gietijzer 23
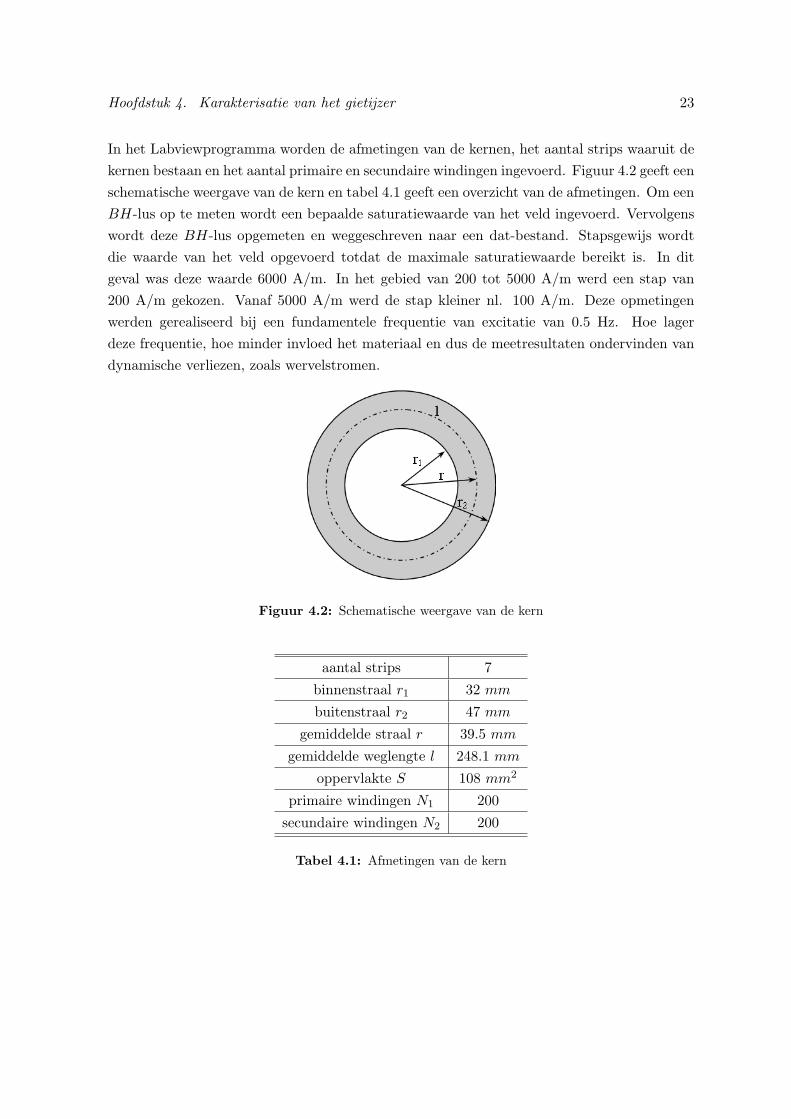
In het Labviewprogramma worden de afmetingen van de kernen, het aantal strips waaruit dekernen bestaan en het aantal primaire en secundaire windingen ingevoerd. Figuur 4.2 geeft eenschematische weergave van de kern en tabel 4.1 geeft een overzicht van de afmetingen. Om eenBH-lus op te meten wordt een bepaalde saturatiewaarde van het veld ingevoerd. Vervolgenswordt deze BH-lus opgemeten en weggeschreven naar een dat-bestand. Stapsgewijs wordtdie waarde van het veld opgevoerd totdat de maximale saturatiewaarde bereikt is. In ditgeval was deze waarde 6000 A/m. In het gebied van 200 tot 5000 A/m werd een stap van200 A/m gekozen. Vanaf 5000 A/m werd de stap kleiner nl. 100 A/m. Deze opmetingenwerden gerealiseerd bij een fundamentele frequentie van excitatie van 0.5 Hz. Hoe lagerdeze frequentie, hoe minder invloed het materiaal en dus de meetresultaten ondervinden vandynamische verliezen, zoals wervelstromen.
Figuur 4.2: Schematische weergave van de kern
aantal strips 7
binnenstraal r1 32 mm
buitenstraal r2 47 mm
gemiddelde straal r 39.5 mm
gemiddelde weglengte l 248.1 mm
oppervlakte S 108 mm2
primaire windingen N1 200
secundaire windingen N2 200
Tabel 4.1: Afmetingen van de kern
Hoofdstuk 4. Karakterisatie van het gietijzer 24
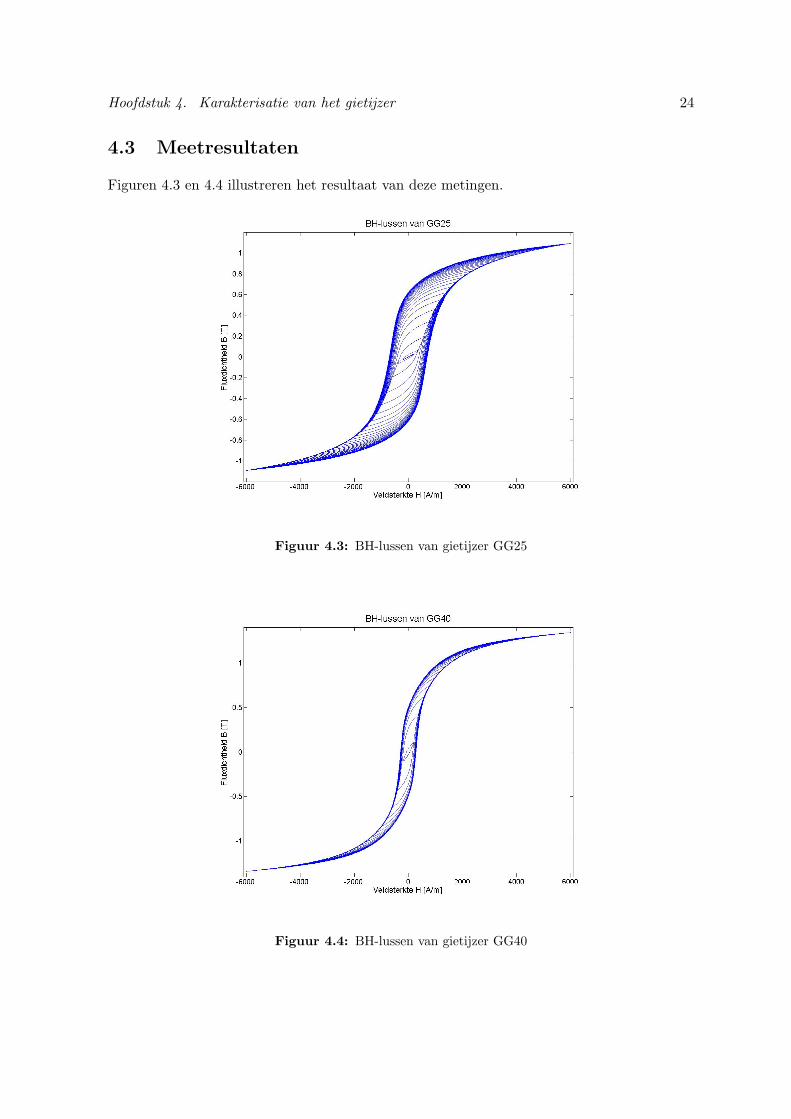
4.3 Meetresultaten
Figuren 4.3 en 4.4 illustreren het resultaat van deze metingen.
Figuur 4.3: BH-lussen van gietijzer GG25
Figuur 4.4: BH-lussen van gietijzer GG40
Hoofdstuk 4. Karakterisatie van het gietijzer 25
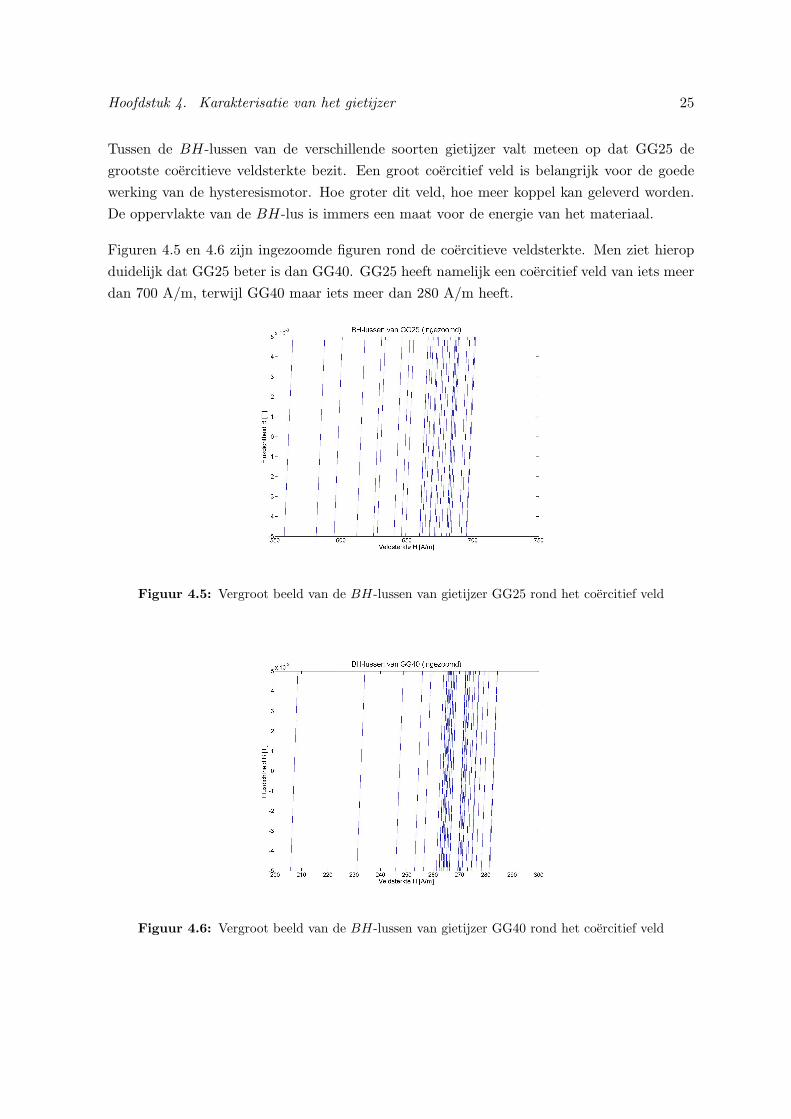
Tussen de BH-lussen van de verschillende soorten gietijzer valt meteen op dat GG25 degrootste coercitieve veldsterkte bezit. Een groot coercitief veld is belangrijk voor de goedewerking van de hysteresismotor. Hoe groter dit veld, hoe meer koppel kan geleverd worden.De oppervlakte van de BH-lus is immers een maat voor de energie van het materiaal.
Figuren 4.5 en 4.6 zijn ingezoomde figuren rond de coercitieve veldsterkte. Men ziet hieropduidelijk dat GG25 beter is dan GG40. GG25 heeft namelijk een coercitief veld van iets meerdan 700 A/m, terwijl GG40 maar iets meer dan 280 A/m heeft.
Figuur 4.5: Vergroot beeld van de BH-lussen van gietijzer GG25 rond het coercitief veld
Figuur 4.6: Vergroot beeld van de BH-lussen van gietijzer GG40 rond het coercitief veld
Hoofdstuk 4. Karakterisatie van het gietijzer 26
4.4 Vergelijking met andere materialen die gebruikt worden
voor hysteresismotoren
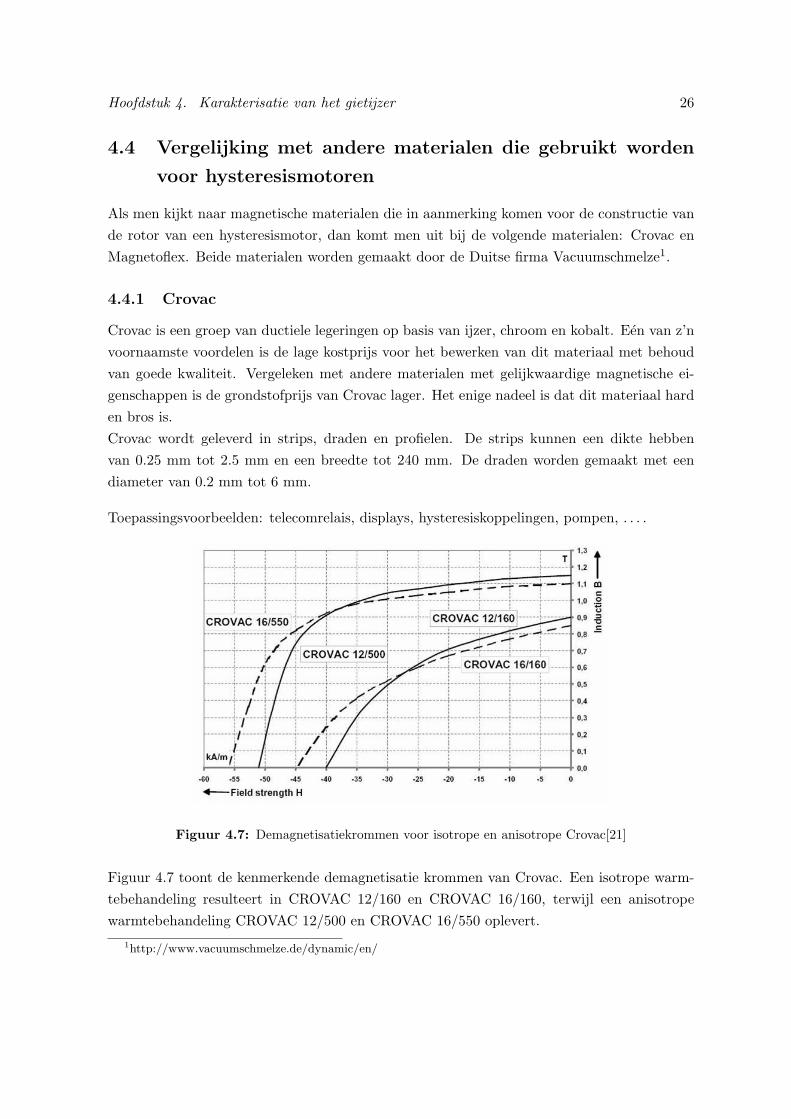
Als men kijkt naar magnetische materialen die in aanmerking komen voor de constructie vande rotor van een hysteresismotor, dan komt men uit bij de volgende materialen: Crovac enMagnetoflex. Beide materialen worden gemaakt door de Duitse firma Vacuumschmelze1.
4.4.1 Crovac
Crovac is een groep van ductiele legeringen op basis van ijzer, chroom en kobalt. Een van z’nvoornaamste voordelen is de lage kostprijs voor het bewerken van dit materiaal met behoudvan goede kwaliteit. Vergeleken met andere materialen met gelijkwaardige magnetische ei-genschappen is de grondstofprijs van Crovac lager. Het enige nadeel is dat dit materiaal harden bros is.Crovac wordt geleverd in strips, draden en profielen. De strips kunnen een dikte hebbenvan 0.25 mm tot 2.5 mm en een breedte tot 240 mm. De draden worden gemaakt met eendiameter van 0.2 mm tot 6 mm.
Toepassingsvoorbeelden: telecomrelais, displays, hysteresiskoppelingen, pompen, . . . .
Figuur 4.7: Demagnetisatiekrommen voor isotrope en anisotrope Crovac[21]
Figuur 4.7 toont de kenmerkende demagnetisatie krommen van Crovac. Een isotrope warm-tebehandeling resulteert in CROVAC 12/160 en CROVAC 16/160, terwijl een anisotropewarmtebehandeling CROVAC 12/500 en CROVAC 16/550 oplevert.
1http://www.vacuumschmelze.de/dynamic/en/

Hoofdstuk 4. Karakterisatie van het gietijzer 27
De remanente inductie en het coercitief veld zijn afhankelijk van het soort Crovac dat wordtgebruikt. Voor deze toepassing is het eerder gebruikelijk isotroop materiaal te kiezen. Derotor heeft dan geen specifieke voorkeursrichting voor magnetisatie. Zoals in figuur 4.7 tezien heeft isotrope Crovac een remanente inductie van 0.80 T tot 0.95 T en een coercitief veldvan 36 kA/m tot 45 kA/m. Voor andere magnetische en mechanische eigenschappen wordtverwezen naar tabel A.1 in de bijlagen.
4.4.2 Magnetoflex
Magnetoflex is de verzamelnaam voor legeringen op basis van kobalt, ijzer en vanadium. Dezematerialen worden gemaakt in de vorm van strips en draden. De strips (Magnetoflex 35U)kunnen een dikte hebben van 0.05 mm tot 0.6 mm en een breedte tot 240 mm. De draden(Magnetoflex 93) worden gemaakt met een diameter van 0.3 mm tot 4 mm.
Toepassingsvoorbeelden zijn: hysteresiskoppelingen, hysteresismotoren, kompasnaalden, snel-heidsmeters, . . . .
Figuur 4.8: Demagnetisatiekrommen voor Magnetoflex[21]
Figuur 4.8 toont de kenmerkende demagnetisatiekrommen van Magnetoflex. Enkel Magne-toflex 35U is van belang, want Magnetoflex 93 kan enkel in draden gemaakt worden. Zoalsop de figuur duidelijk af te lezen valt heeft Magnetoflex 35U een remanente inductie van 0.80T tot 0.90 T en een coercitief veld van 25 kA/m tot 30 kA/m. Voor andere magnetische enmechanische eigenschappen wordt opnieuw verwezen naar tabel A.1 in de bijlagen.
Hoofdstuk 4. Karakterisatie van het gietijzer 28
4.4.3 Vergelijking
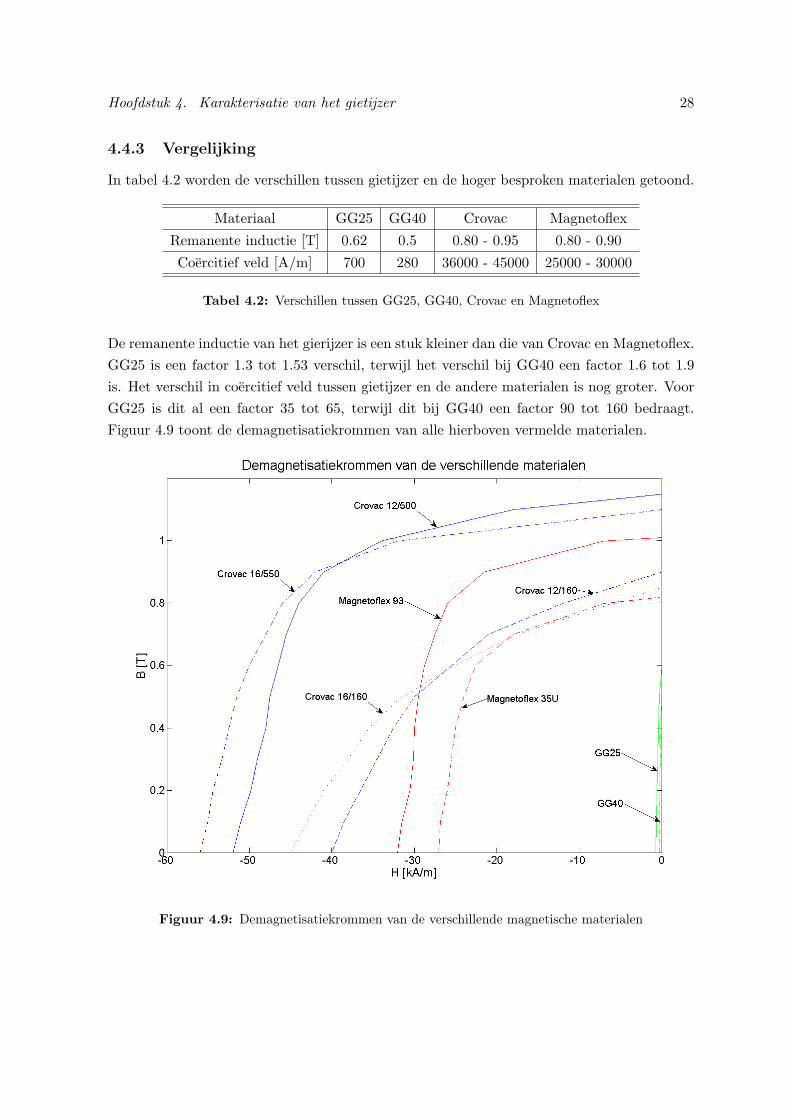
In tabel 4.2 worden de verschillen tussen gietijzer en de hoger besproken materialen getoond.
Materiaal GG25 GG40 Crovac Magnetoflex
Remanente inductie [T] 0.62 0.5 0.80 - 0.95 0.80 - 0.90
Coercitief veld [A/m] 700 280 36000 - 45000 25000 - 30000
Tabel 4.2: Verschillen tussen GG25, GG40, Crovac en Magnetoflex
De remanente inductie van het gierijzer is een stuk kleiner dan die van Crovac en Magnetoflex.GG25 is een factor 1.3 tot 1.53 verschil, terwijl het verschil bij GG40 een factor 1.6 tot 1.9is. Het verschil in coercitief veld tussen gietijzer en de andere materialen is nog groter. VoorGG25 is dit al een factor 35 tot 65, terwijl dit bij GG40 een factor 90 tot 160 bedraagt.Figuur 4.9 toont de demagnetisatiekrommen van alle hierboven vermelde materialen.
Figuur 4.9: Demagnetisatiekrommen van de verschillende magnetische materialen
Hoofdstuk 4. Karakterisatie van het gietijzer 29
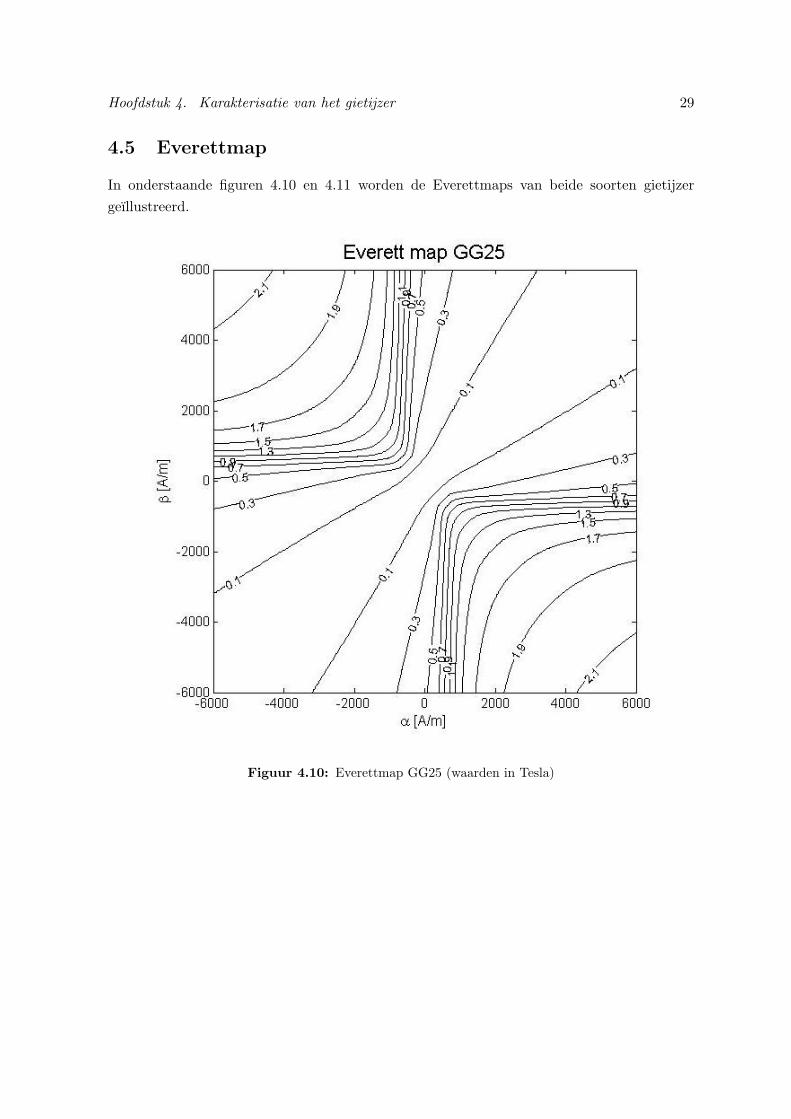
4.5 Everettmap
In onderstaande figuren 4.10 en 4.11 worden de Everettmaps van beide soorten gietijzergeıllustreerd.
Figuur 4.10: Everettmap GG25 (waarden in Tesla)
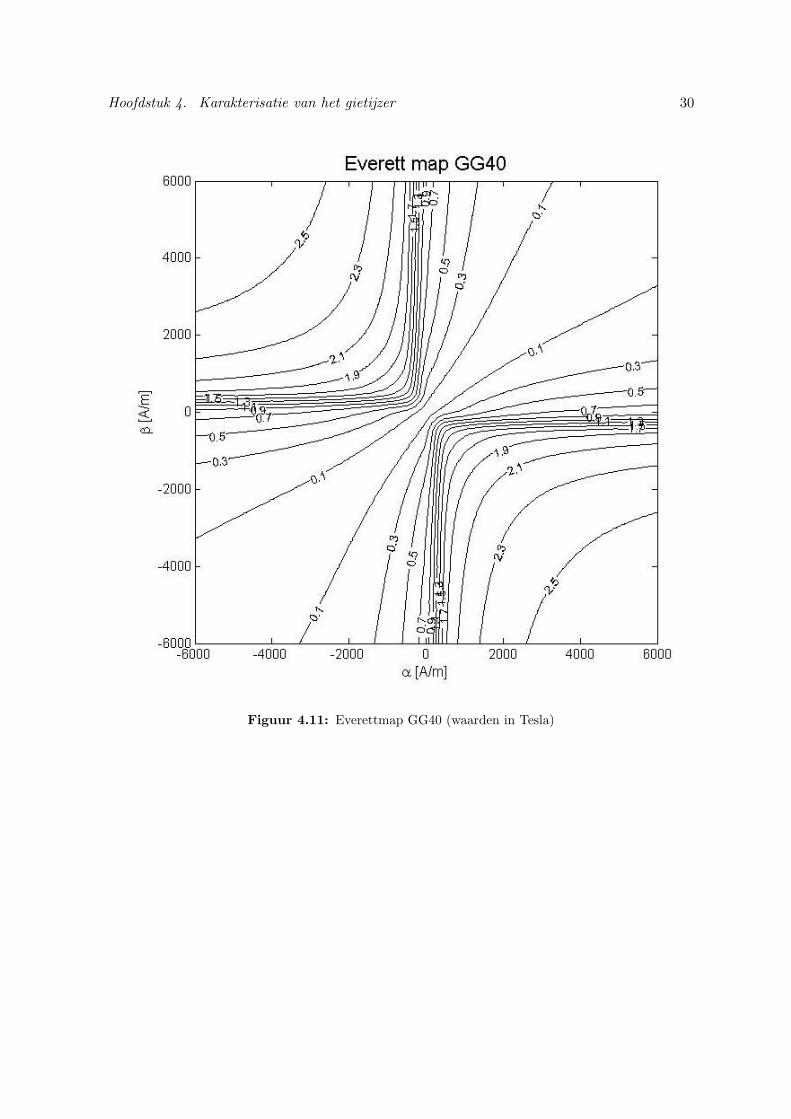
Hoofdstuk 4. Karakterisatie van het gietijzer 30
Figuur 4.11: Everettmap GG40 (waarden in Tesla)
Hoofdstuk 5
Eindige-elementenmodel
5.1 Inleiding
In dit hoofdstuk wordt het eindige-elementenmodel uitgelegd. Eerst wordt algemeen ingegaanop de vorming van de geometrie met een opsomming van de afmetingen van de motor. Som-mige van deze afmetingen konden opgemeten worden, terwijl andere geschat moesten worden.Vervolgens wordt het meshen van de motor in Comsol uitgelegd. Daarna worden de fysischeeigenschappen toegelicht die het model nodig heeft: conductiveit, externe stroomdichtheid enpermeabiliteit. Ten slotte gaat het laatste deel over het differentieel model dat gebruikt werd.Dit wordt onderverdeeld in twee stukken: het model zonder hysteresis, waarin het principevan het differentieel model en de koppelvorming uitgelegd wordt, en het model met hysteresis,waarbij dieper wordt ingegaan op de opbouw van de magnetische toestand in de rotor en deberekening van het koppel.
5.2 Algemeen
In de eerste sectie van dit hoofdstuk wordt een woordje uitleg gegeven over de geometrie,het meshen en de fysische eigenschappen van het eindige-elementenmodel. Dit wordt apartbeschouwd, omdat deze onderdelen bij elke berekening verschillende keren opgeroepen worden.Indien er verder van deze onderdelen wordt afgeweken of er wijzigingen gebeuren voor eenbepaalde simulatie, dan zal dit vermeld worden.
5.2.1 Geometrie
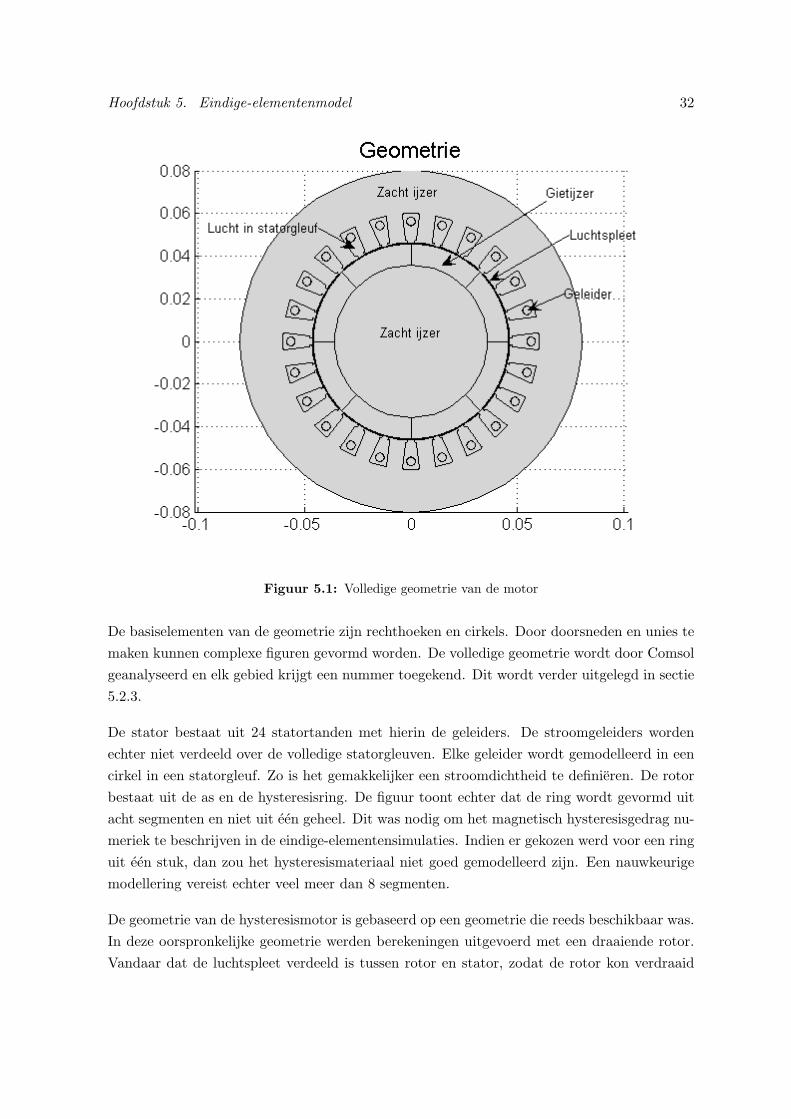
Voor het simuleren van een draaiende machine wordt de geometrie slechts een maal opge-bouwd. In geval men geometrische parameters wijzigt, moet de geometrie opnieuw wordengeconstrueerd. De volledige geometrie van de motor wordt getoond in figuur 5.1.
31
Hoofdstuk 5. Eindige-elementenmodel 32
Figuur 5.1: Volledige geometrie van de motor
De basiselementen van de geometrie zijn rechthoeken en cirkels. Door doorsneden en unies temaken kunnen complexe figuren gevormd worden. De volledige geometrie wordt door Comsolgeanalyseerd en elk gebied krijgt een nummer toegekend. Dit wordt verder uitgelegd in sectie5.2.3.
De stator bestaat uit 24 statortanden met hierin de geleiders. De stroomgeleiders wordenechter niet verdeeld over de volledige statorgleuven. Elke geleider wordt gemodelleerd in eencirkel in een statorgleuf. Zo is het gemakkelijker een stroomdichtheid te definieren. De rotorbestaat uit de as en de hysteresisring. De figuur toont echter dat de ring wordt gevormd uitacht segmenten en niet uit een geheel. Dit was nodig om het magnetisch hysteresisgedrag nu-meriek te beschrijven in de eindige-elementensimulaties. Indien er gekozen werd voor een ringuit een stuk, dan zou het hysteresismateriaal niet goed gemodelleerd zijn. Een nauwkeurigemodellering vereist echter veel meer dan 8 segmenten.
De geometrie van de hysteresismotor is gebaseerd op een geometrie die reeds beschikbaar was.In deze oorspronkelijke geometrie werden berekeningen uitgevoerd met een draaiende rotor.Vandaar dat de luchtspleet verdeeld is tussen rotor en stator, zodat de rotor kon verdraaid

Hoofdstuk 5. Eindige-elementenmodel 33
worden. Uiteindelijk werd beslist dit in deze thesis niet te doen, maar toch de opdeling vande luchtspleet te behouden. In plaats van de rotor te laten draaien werd ervoor gekozen destromen in te stator te verdraaien. Zo lijkt het of de stator draait ten opzichte van de rotor.Voor de berekening van het koppel maakt dit geen verschil uit. Deze werkwijze is volkomencorrect bij een hystersismotor omwille van zijn gleufloze rotor. Bij andere machines met eenniet-axisymmetrische rotor kan men dit niet doen omdat de gleuven van rotor en stator ookfysisch t.o.v. elkaar moeten verdraaien. Bij b.v. inductiemachine zou deze werkwijze welverschil maken bij berekening van het koppel.
De afmetingen van de geometrie worden bepaald door een reeks parameters die door hetmodel worden opgeroepen. Door deze parametrisatie is het eenvoudig om bepaalde afmetingen(breedte van de luchspleet, dikte van de hysteresisring, . . . ) aan te passen, zodat het effectvan deze verandering op het koppel kan bekeken worden. De belangrijkste parameters wordengetoond in tabel 5.1.
Type inductiemachineCast Iron Motors
W21 LineIP 55 Multivoltage Motors
Buitenstraal stator 80 mm
Binnenstraal stator 46.3 mm
Buitenstraal rotor 45.7 mm
Binnenstraal rotor 34.7 mm
Axiale lengte 95.3 mm
Aantal statortanden 24
Aantal polen 2
Aantal windingen per gleuf en per fase1 48
Aantal rotorsegmenten 8
Tabel 5.1: Kenmerken van de geometrie van de motor
De buitenstraal van de stator is een geschatte waarde: deze waarde is immers niet meetbaar.Hiervoor zou de motor in twee gezaagd moeten worden. Dit was echter geen optie. Debinnenstraal van de rotor is eigenlijk de straal van de as. Vanaf deze afstand begint dehysteresisring tot de buitenstraal van de rotor.
5.2.2 Meshing
Het meshen van een tweedimensionale geometrie betekent essentieel het verdelen van dezegeometrie in driehoekige elementen. De elementen mogen enkel een volledige zijde of een
1Dit werd bepaald in sectie 6.5
Hoofdstuk 5. Eindige-elementenmodel 34
hoekpunt gemeen hebben. Er mogen dus geen meshknopen in een zijde van een meshelementliggen. De elementen moeten de volledige geometrie bedekken zonder te overlappen en eenelement moet volledig in een domein liggen. Voor elke verschillende geometrie moet een meshopgesteld worden. Wanneer de geometrie constant is en enkel de rotorstromen veranderen,moet de mesh bij elke berekening maar een maal gecreeerd worden.
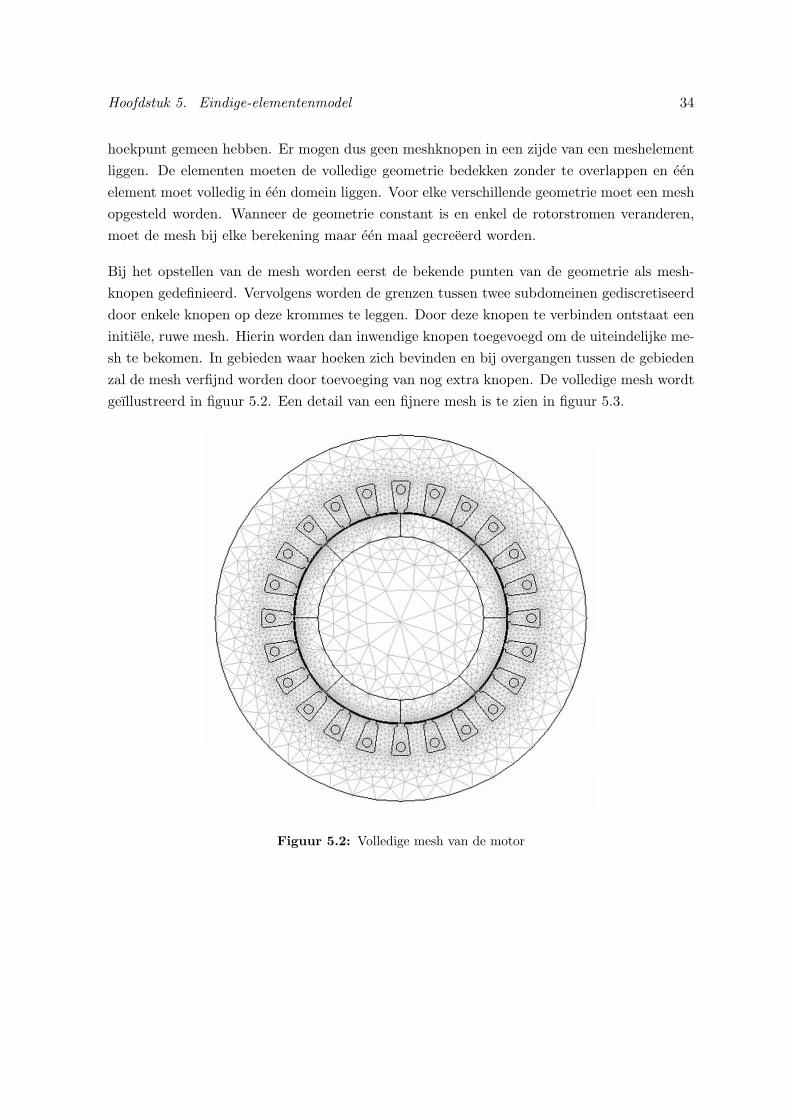
Bij het opstellen van de mesh worden eerst de bekende punten van de geometrie als mesh-knopen gedefinieerd. Vervolgens worden de grenzen tussen twee subdomeinen gediscretiseerddoor enkele knopen op deze krommes te leggen. Door deze knopen te verbinden ontstaat eeninitiele, ruwe mesh. Hierin worden dan inwendige knopen toegevoegd om de uiteindelijke me-sh te bekomen. In gebieden waar hoeken zich bevinden en bij overgangen tussen de gebiedenzal de mesh verfijnd worden door toevoeging van nog extra knopen. De volledige mesh wordtgeıllustreerd in figuur 5.2. Een detail van een fijnere mesh is te zien in figuur 5.3.
Figuur 5.2: Volledige mesh van de motor

Hoofdstuk 5. Eindige-elementenmodel 35
Figuur 5.3: Detail van de mesh
5.2.3 Fysische eigenschappen
Eenmaal de geometrie gegenereerd is moeten aan de verschillende delen ervan fysische eigen-schappen toegekend worden. Deze eigenschappen worden echter toegekend aan zogenaamdesubdomeinen, en niet aan geometrische gebieden. Elk subdomein krijgt een eigen nummertoegewezen door Comsol zelf. Daarom is het van belang de volgorde van de nummering tecontroleren bij elke wijziging van de geometrie. Elk subdomein wordt in een vector van indicesgeplaatst, zodat de geometrische gebieden bestaan uit de correcte subdomeinen met de juisteeigenschappen. De stator bestaat zo uit 26 subdomeinen: het statorijzer, de 24 stroomgelei-ders en de luchtspleet, terwijl de rotor uit 10 subdomeinen opgebouwd is, namelijk de as, deluchtspleet en de 8 rotorstukken.
De fysische eigenschappen van elk subdomein worden meegegeven via een matrix die ingeladenwordt bij elke eindige-elementenberekening (eigenschappen.m). Elke kolom stemt overeen meteen subdomein. Elke rij in deze matrix is een vector die voor elk subdomein een bepaaldeeigenschap definieert. Deze eigenschappen zijn:
• σ: de conductiviteit
• µr: de relatieve permeabiliteit
• Jz: de externe stroomdichtheid
De externe stroomdichtheid in de gebieden die de bekrachtigingswindingen van de statorvoorstellen wordt berekend op basis van formule 5.1. Hierin is n het aantal windingen, I destroom en Sgeleider de oppervlakte van de wikkelingsdoorsnede.
J =n · I
Sgeleider(5.1)

Hoofdstuk 5. Eindige-elementenmodel 36
Het aantal windingen is niet meteen op het zicht te bepalen, tenzij de wikkelingen wordendoorgeknipt. Dit is echter geen optie, want op deze manier kan geen gebruik meer gemaaktworden van de stator. Het aantal windingen van een fase wordt bepaald aan de hand vande zelfinductie van de winding. Uit de berekende en gemeten zelfinductie blijkt dat eenfasewikkeling 48 windingen heeft. Voor deze berekening wordt verwezen naar sectie 6.5.
In Comsol wordt gebruik gemaakt van een bepaalde routine om de berekeningen uit te voeren.Deze routine wordt Magnetostatics genoemd en maakt deel uit van de module Electromagne-tics. Via deze routine is het mogelijk allerlei voorwaarden op te geven en de hierboven fysischeeigenschappen eenvoudig te implementeren. Een van die voorwaarden is dat de externe stro-men loodrecht op het vlak staan, wat meteen ook betekent dat alle inducties en veldsterktesin het vlak van de geometrie liggen. Verder wordt vooropgesteld dat alle materialen isotroopzijn en dat alle velden en eigenschappen constant zijn in de tijd.
Comsol lost dan de wetten van Maxwell en de constitutieve wetten op:
∇ ·B = 0 (5.2)
∇×H = J (5.3)
∇×E = −∂B∂t
(5.4)
B = µH (5.5)
J = σE (5.6)
Men definieert een magnetische vectorpotentiaal A zodat B = ∇×A. Hierdoor is automatischvoldaan aan 5.2. Uit al deze vergelijkingen volgt dan:
∇×(
1µ∇×A
)= Je − σ
(∂A∂t
)(5.7)
waarin de stroomdichtheid is opgesplitst in enerzjds de extern opgedrongen stroomdichtheidJe, en anderzijds de geınduceerde stroomdichtheid −σ
(∂A∂t
). Uitgaande van de veronderstel-
ling dat alle stromen loodrecht op het vlak staan, en B en H dus in het vlak liggen, zal devectorpotentiaal A loodrecht op dit vlak staan. De vectorpotentiaal heeft bij gevolg enkeleen z-component en kan dus weergegeven worden als een scalaire grootheid: A = Az = ‖A‖.In deze thesis worden enkel statische stromen beschouwd, zodat de afgeleide naar de tijd vande vectorpotentiaal verwaarloosd wordt. De stroomdichtheid bestaat dan enkel uit de externopgedrongen stromen en heeft enkel een z-component Je = ‖Je‖. Vergelijking 5.7 kan metbovenstaande vereenvoudiging herschreven worden tot:
∂
∂x
(1µ
∂
∂xA(x, y)
)+
∂
∂y
(1µ
∂
∂yA(x, y)
)= Je (5.8)
In de meeste eindige-elementenberekeningen wordt vergelijking 5.7 opgelost naar de vectorpo-tentiaal. In deze thesis wordt voor bepaalde berekeningen de afgeleide van deze vergelijking
Hoofdstuk 5. Eindige-elementenmodel 37
opgelost. Er worden enkel verschilstromen in het model gestoken en enkel het verschil in Ben H, dus ∆B en ∆H, wordt opgevraagd. In plaats van de relatieve permeabiliteit µr wordtdan ook de differentiele permeabiliteit µd gebruikt:
µd =∆B∆H
(5.9)
In de volgende secties wordt dit verder uitgelegd.
5.3 Differentieel model zonder hysteresis
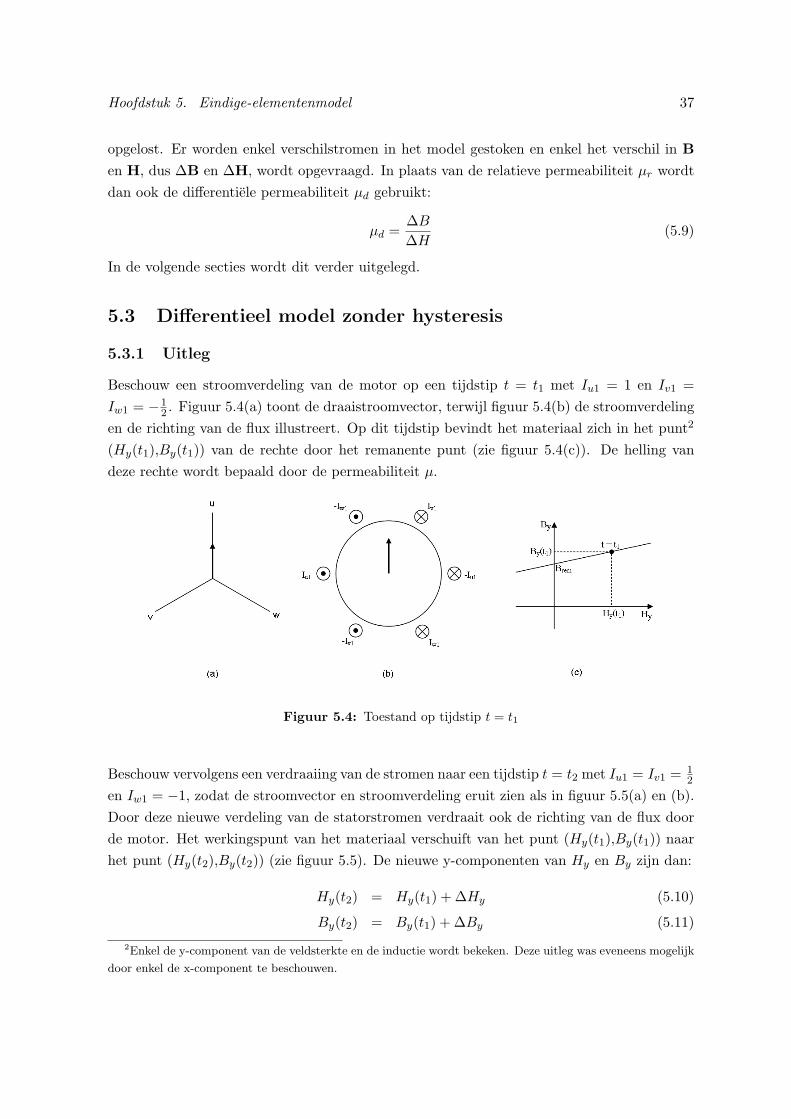
5.3.1 Uitleg
Beschouw een stroomverdeling van de motor op een tijdstip t = t1 met Iu1 = 1 en Iv1 =Iw1 = −1
2 . Figuur 5.4(a) toont de draaistroomvector, terwijl figuur 5.4(b) de stroomverdelingen de richting van de flux illustreert. Op dit tijdstip bevindt het materiaal zich in het punt2
(Hy(t1),By(t1)) van de rechte door het remanente punt (zie figuur 5.4(c)). De helling vandeze rechte wordt bepaald door de permeabiliteit µ.
Figuur 5.4: Toestand op tijdstip t = t1
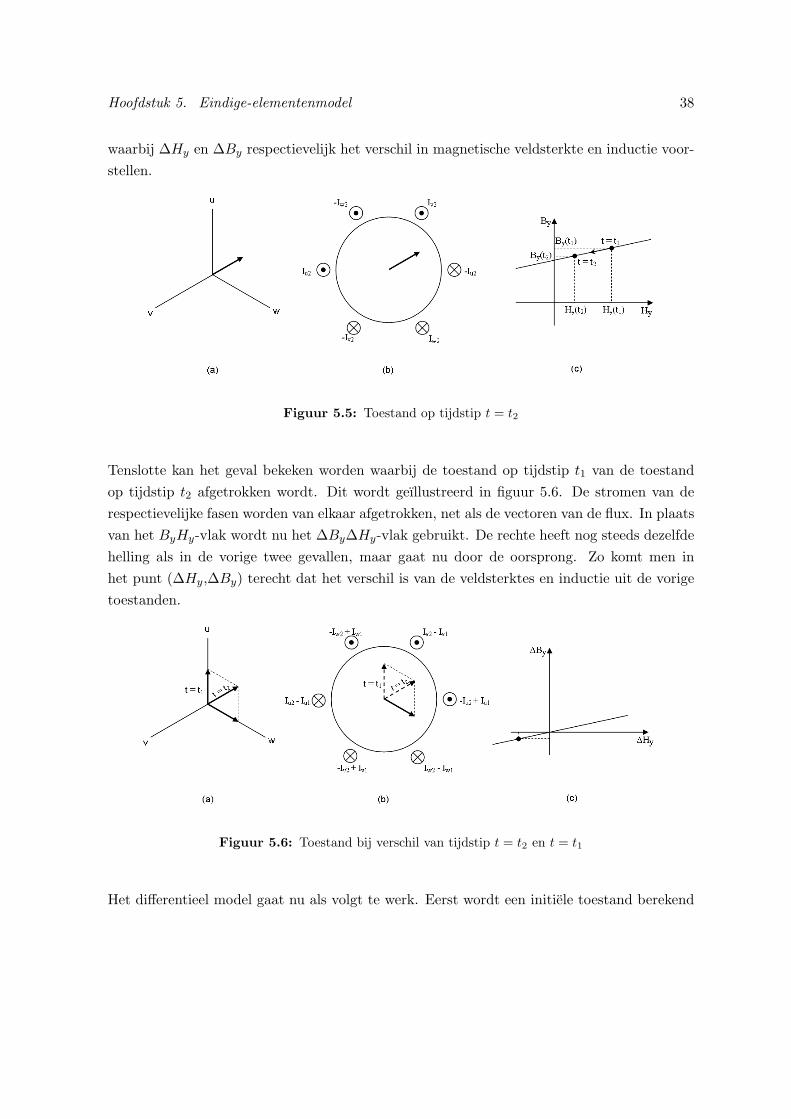
Beschouw vervolgens een verdraaiing van de stromen naar een tijdstip t = t2 met Iu1 = Iv1 = 12
en Iw1 = −1, zodat de stroomvector en stroomverdeling eruit zien als in figuur 5.5(a) en (b).Door deze nieuwe verdeling van de statorstromen verdraait ook de richting van de flux doorde motor. Het werkingspunt van het materiaal verschuift van het punt (Hy(t1),By(t1)) naarhet punt (Hy(t2),By(t2)) (zie figuur 5.5). De nieuwe y-componenten van Hy en By zijn dan:
Hy(t2) = Hy(t1) + ∆Hy (5.10)
By(t2) = By(t1) + ∆By (5.11)
2Enkel de y-component van de veldsterkte en de inductie wordt bekeken. Deze uitleg was eveneens mogelijk
door enkel de x-component te beschouwen.
Hoofdstuk 5. Eindige-elementenmodel 38
waarbij ∆Hy en ∆By respectievelijk het verschil in magnetische veldsterkte en inductie voor-stellen.
Figuur 5.5: Toestand op tijdstip t = t2
Tenslotte kan het geval bekeken worden waarbij de toestand op tijdstip t1 van de toestandop tijdstip t2 afgetrokken wordt. Dit wordt geıllustreerd in figuur 5.6. De stromen van derespectievelijke fasen worden van elkaar afgetrokken, net als de vectoren van de flux. In plaatsvan het ByHy-vlak wordt nu het ∆By∆Hy-vlak gebruikt. De rechte heeft nog steeds dezelfdehelling als in de vorige twee gevallen, maar gaat nu door de oorsprong. Zo komt men inhet punt (∆Hy,∆By) terecht dat het verschil is van de veldsterktes en inductie uit de vorigetoestanden.
Figuur 5.6: Toestand bij verschil van tijdstip t = t2 en t = t1
Het differentieel model gaat nu als volgt te werk. Eerst wordt een initiele toestand berekend

Hoofdstuk 5. Eindige-elementenmodel 39
met een driefasige stroom op een bepaald tijdstip (zoals in het eerste geval):
Iu (t) = A · cos (ωt) (5.12)
Iv (t) = A · cos(ωt+
2π3
)(5.13)
Iw (t) = A · cos(ωt+
4π3
)(5.14)
waarbij A de amplitude van de stroom voorstelt. De rotor wordt hierbij beschouwd als eenpermanente magneet. Voor deze stromen worden de veldsterkte Hy en inductie By berekendin een bepaald punt. In een volgende stap worden verschilstromen ingevoerd (zoals in hetlaatste geval):
Iu (t) = A · (cos (ωt)− cos (ω (t− 1))) (5.15)
Iv (t) = A ·(cos
(ωt+
2π3
)− cos
(ω (t− 1) +
2π3
))(5.16)
Iw (t) = A ·(cos
(ωt+
4π3
)− cos
(ω (t− 1) +
4π3
))(5.17)
Voor deze berekening wordt de rotor als lucht gemodelleerd. Deze verschilstromen gevenaanleiding tot een differentiele veldsterkte ∆Hy en inductie ∆By. De nieuwe Hy en By volgendan respectievelijk uit vergelijkingen 5.10 en 5.11. Dit verklaart meteen ook waarom heteindige-elementenmodel opgelost wordt naar de afgeleide van de vectorpotentiaal: enkel dedifferentiele veldsterkte en inductie zijn van belang. Nu is de omwentelingssnelheid ω zogekozen dat een tijdstap overeenkomt met een hoekverdraaiing van 1:
ω =2π60· 60
360= 0.01745 rad/s (5.18)
Om tot een bepaalde hoekverdraaiing te komen is het enkel nodig de eindhoek op te geven.Via een for-lus wordt het differentieel model uitgevoerd totdat die eindhoek bereikt is. Naelke stap wordt de veldsterkte en de inductie geupdatet.
De koppelvorming wordt eveneens via deze procedure berekend, maar dit verloopt niet he-lemaal hetzelfde zoals de berekening van de veldsterkte en inductie. De koppelberekeninggebeurt op basis van Maxwellspanningen (zie bijlage A.2 voor meer uitleg). Voor deze bere-kening moeten de normale (Hn) en tangentiale (Ht) component van H gekend zijn op de randvan de rotor. In de eerste stap wordt, net zoals in vorige paragraaf, een driefasige stroomopgelegd en de functie dat(fem, n) berekent Hn en Ht op de rand van de rotor. De inputn stelt daarbij het aantal punten per rotorsegment voor waar deze componenten moeten be-paald worden. Omdat een accurate berekening gewenst is, werd voor n 1000 gekozen. Deandere input, fem, is de oplossing van de laatste eindige-elementenberekening.
In een volgende stap worden de verschilstromen ingevoerd. Hiervoor berekent de functiekoppel(p, fem,Hn, Ht, n) eerst differentiele componenten van H, namelijk ∆Hn en ∆Ht. Ver-

Hoofdstuk 5. Eindige-elementenmodel 40
volgens worden de normale en tangentiale component geupdatet. Hieruit worden de Maxwell-spanningen bepaald en het koppel berekend. Het koppel wordt echter niet berekend met eenintegraal van een functie zoals in bijlage A.2, maar via een numerieke integratie. Uit Comsolworden enkel waarden van Hn en Ht opgevraagd, en niet een functie die kan geıntegreerdworden. Deze waarden zitten in vectoren die het veldbeeld in discrete punten onderverdelen.Het integreren van de tangentiale spanning komt in dit geval overeen met het gemiddelde tenemen van deze spanning en deze te vermenigvuldigen met de omtrek van de rotor:
T = mean(σt) · (2π · r1) · r1 · lax (5.19)
waarbij r1 de straal van de rotor is en lax de axiale lengte voorstelt.
De input p is de parameter die alle afmetingen van de motor bevat om de geometrie op te bou-wen: binnen- en buitenstralen van de rotor en stator, het aantal rotorsegmenten, axiale lengtevan de motor, . . . . Hierin worden ook enkele elektomagnetische parameters gedefinieerd: deomwentelingssnelheid (ω), de amplitude en frequentie van de stroom en het aantal windingenvan een fasewikkeling. Tenslotte zit in p nog een aantal controleparameters (booleans) voorhet eindige-elementenmodel. Er is er bijvoorbeeld een boolean (p.geomsh) die ervoor zorgtdat de geometrie en de mesh wel of niet opnieuw gevormd worden. Zo was het mogelijk enkelbij de eerste stap van een berekening de geometrie en de mesh te laten creeren. Dit zorgtvoor een kortere berekeningssnelheid. Een andere boolean (p.adapt) laat het model toe eenadaptieve mesh te gebruiken, zodat een fijnere mesh gevormd wordt, indien dit op bepaaldeplaatsen nodig zou zijn, en de berekening accurater worden. Een nadeel hiervan is dat deberekeningstijd verhoogt.
De inputs n en fem zijn dezelfde als bij de functie dat(fem, n).
Voor dit volledig systeem werd de functie test(p, k, z, koppelberekening,A) geschreven. Hier-bij is A de amplitude van de stroom. De boolean koppelberekening bepaalt of de output vandeze functie ofwel het koppel is ofwel de veldsterkte en inductie in een bepaald punt zijn.De input k stelt de eindhoek voor, terwijl z een parameter is die bepaald welke proceduregevolgd wordt:
• z = 1: Het model wordt uitgevoerd met de initiele stromen en, afhankelijk van dewaarde van koppelberekening, worden veldsterkte en inductie of koppel bepaald. k
doet er dan niet toe.
• z = 2: De vorige stap (z = 1) wordt uitgevoerd, maar tevens uitgebreid met differentielestromen. Deze stromen worden ingevoerd totdat de eindhoek k bereikt is.
• z = 3: Dit is eigenlijk het testgedeelte van de hele functie. Er wordt nagegaan ofde waarden van H en B of koppel bij het differentieel gedeelte (z = 2) gelijk zijn
Hoofdstuk 5. Eindige-elementenmodel 41
aan de waarden als de berekening wordt gedaan bij de eindhoek. Hiervoor worden deeindstromen meteen in het model gestoken. k moet dan ook gelijk gesteld worden aande laatste waarde van t bij z = 2.
5.3.2 Validatie van het differentieel model
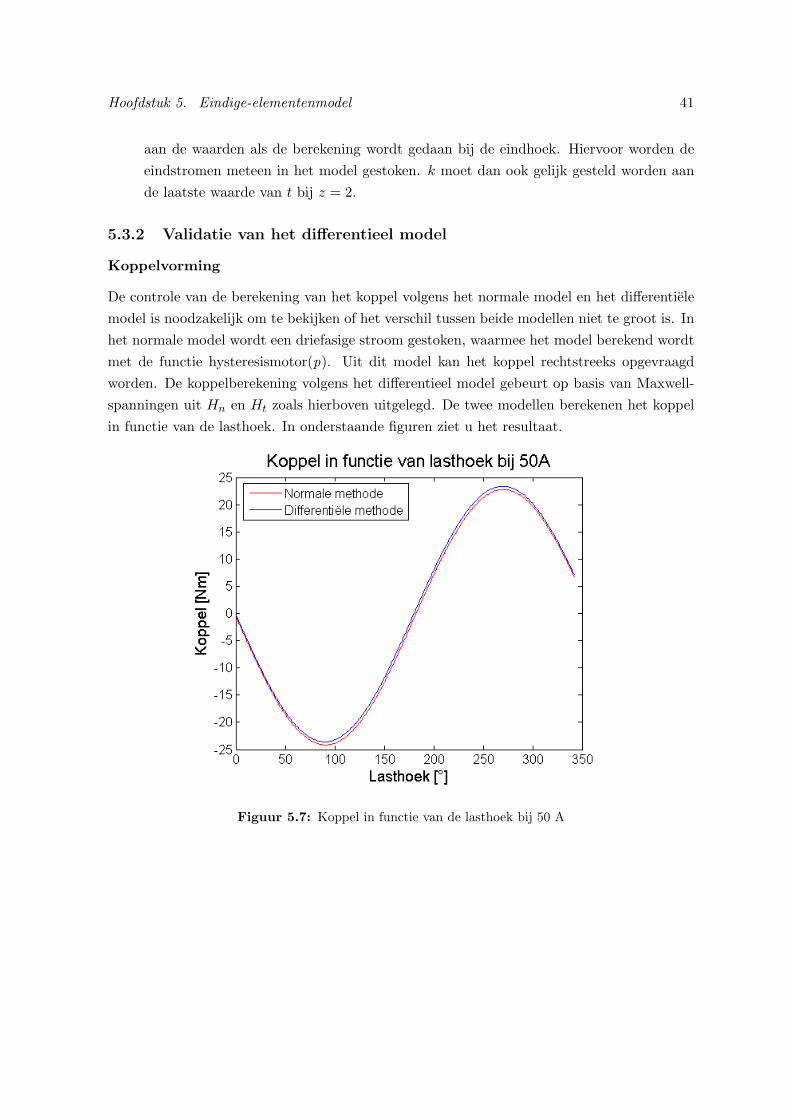
Koppelvorming
De controle van de berekening van het koppel volgens het normale model en het differentielemodel is noodzakelijk om te bekijken of het verschil tussen beide modellen niet te groot is. Inhet normale model wordt een driefasige stroom gestoken, waarmee het model berekend wordtmet de functie hysteresismotor(p). Uit dit model kan het koppel rechtstreeks opgevraagdworden. De koppelberekening volgens het differentieel model gebeurt op basis van Maxwell-spanningen uit Hn en Ht zoals hierboven uitgelegd. De twee modellen berekenen het koppelin functie van de lasthoek. In onderstaande figuren ziet u het resultaat.
Figuur 5.7: Koppel in functie van de lasthoek bij 50 A
Hoofdstuk 5. Eindige-elementenmodel 42
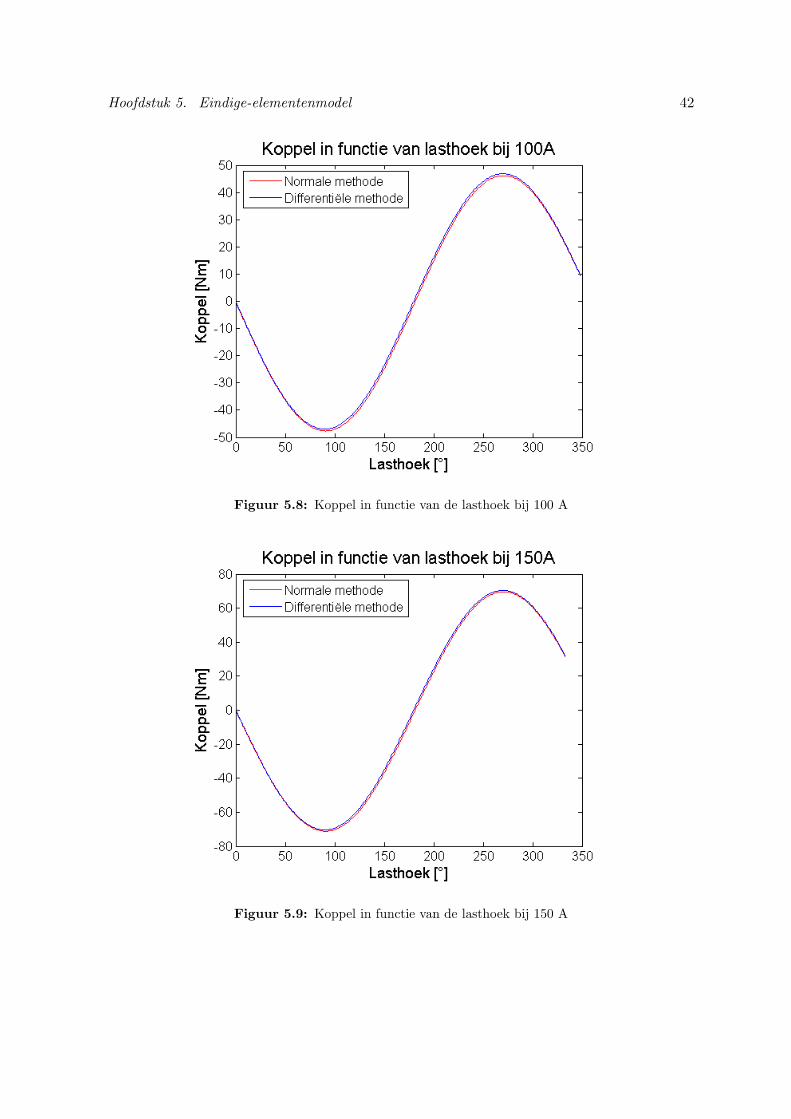
Figuur 5.8: Koppel in functie van de lasthoek bij 100 A
Figuur 5.9: Koppel in functie van de lasthoek bij 150 A
Hoofdstuk 5. Eindige-elementenmodel 43
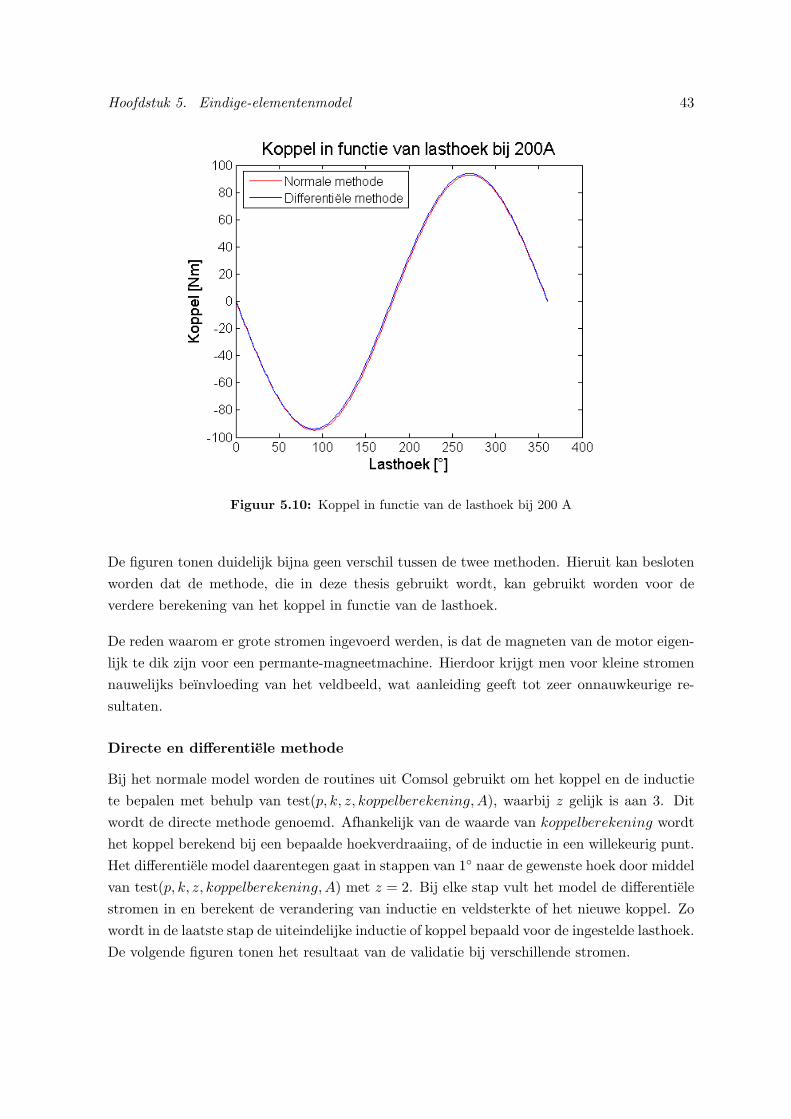
Figuur 5.10: Koppel in functie van de lasthoek bij 200 A
De figuren tonen duidelijk bijna geen verschil tussen de twee methoden. Hieruit kan beslotenworden dat de methode, die in deze thesis gebruikt wordt, kan gebruikt worden voor deverdere berekening van het koppel in functie van de lasthoek.
De reden waarom er grote stromen ingevoerd werden, is dat de magneten van de motor eigen-lijk te dik zijn voor een permante-magneetmachine. Hierdoor krijgt men voor kleine stromennauwelijks beınvloeding van het veldbeeld, wat aanleiding geeft tot zeer onnauwkeurige re-sultaten.
Directe en differentiele methode
Bij het normale model worden de routines uit Comsol gebruikt om het koppel en de inductiete bepalen met behulp van test(p, k, z, koppelberekening,A), waarbij z gelijk is aan 3. Ditwordt de directe methode genoemd. Afhankelijk van de waarde van koppelberekening wordthet koppel berekend bij een bepaalde hoekverdraaiing, of de inductie in een willekeurig punt.Het differentiele model daarentegen gaat in stappen van 1 naar de gewenste hoek door middelvan test(p, k, z, koppelberekening,A) met z = 2. Bij elke stap vult het model de differentielestromen in en berekent de verandering van inductie en veldsterkte of het nieuwe koppel. Zowordt in de laatste stap de uiteindelijke inductie of koppel bepaald voor de ingestelde lasthoek.De volgende figuren tonen het resultaat van de validatie bij verschillende stromen.
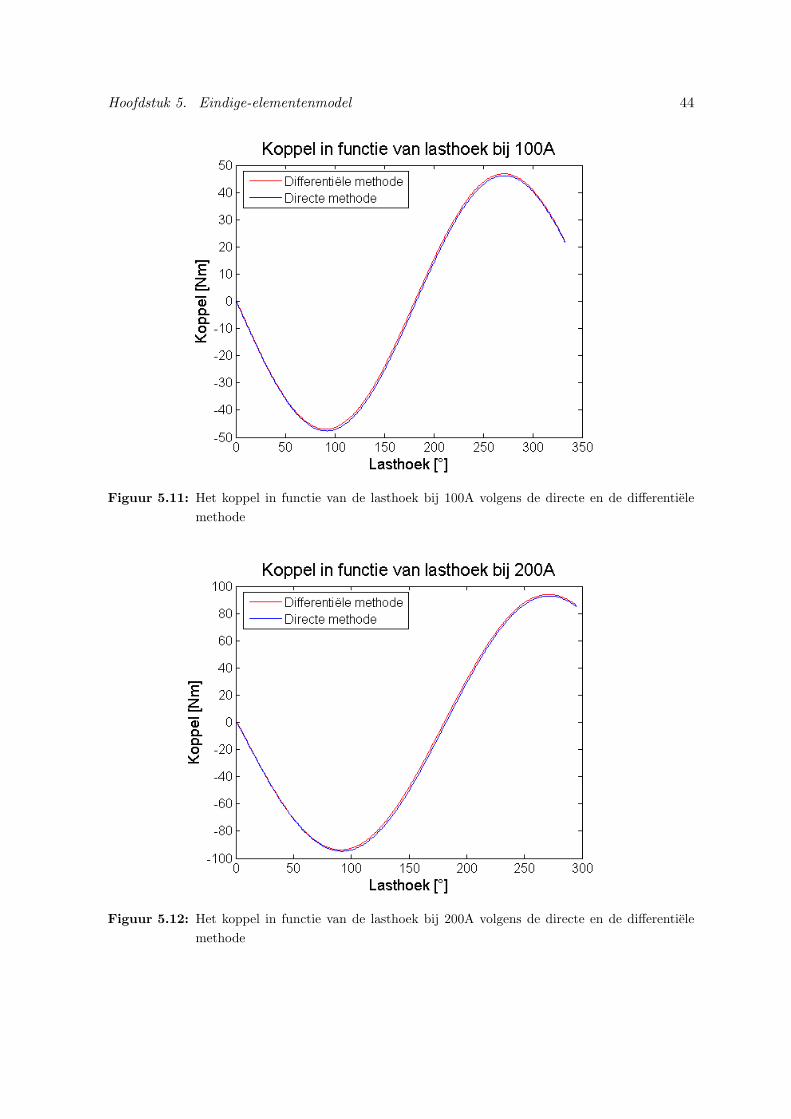
Hoofdstuk 5. Eindige-elementenmodel 44
Figuur 5.11: Het koppel in functie van de lasthoek bij 100A volgens de directe en de differentielemethode
Figuur 5.12: Het koppel in functie van de lasthoek bij 200A volgens de directe en de differentielemethode

Hoofdstuk 5. Eindige-elementenmodel 45
De figuur toont een mooi sinusoıdaal koppelprofiel, wat bewijst dat het model van de hyste-resismotor werkt als hij zich in het synchrone werkingsgebied bevindt.
5.3.3 Voorbeelden van simulaties
In de onderstaande figuren worden de veldbeelden en bijhorende stroomverdeling getoond bijverschillende stromen en lasthoeken. De referentie van de lasthoek (dus waar de lasthoek 0 is)bevindt zich op 22.5 ten opzichte van de verticale. In de figuren is te zien dat inductieniveausboven 2 T voorkomen. Dit is niet erg realistisch, maar is te wijten aan de erg dikke magnetenen de hoge statorstromen die opgedrongen worden.
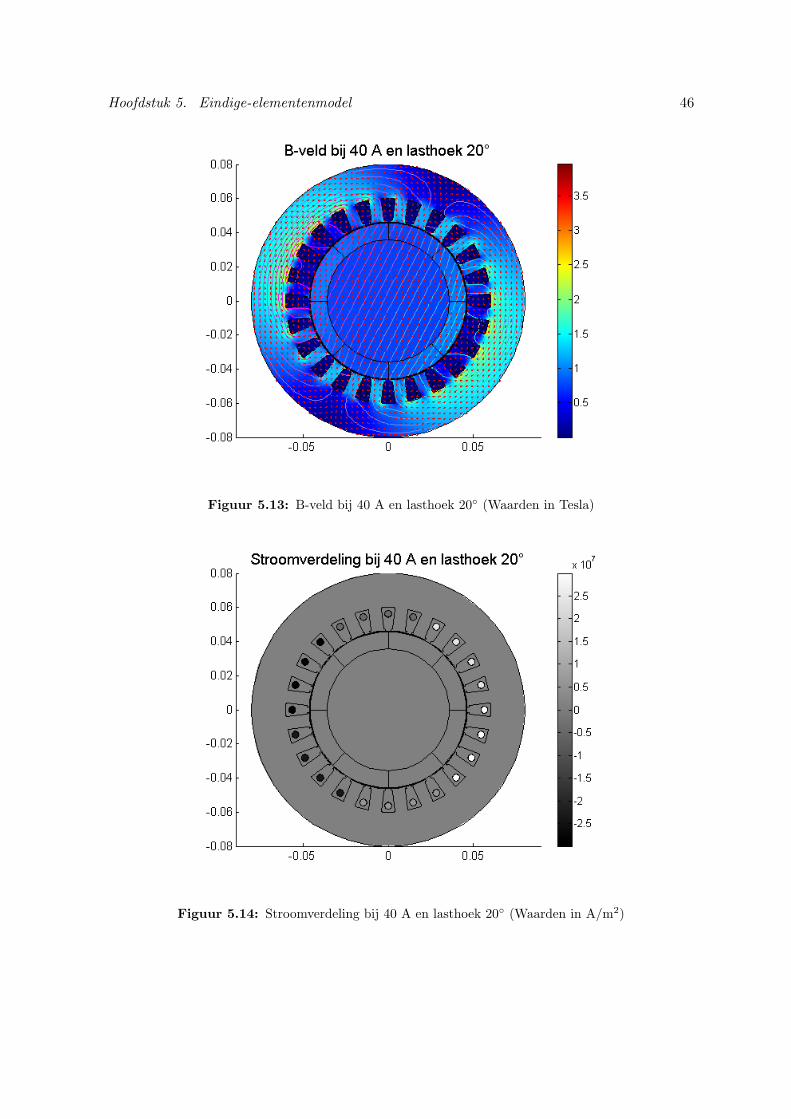
Hoofdstuk 5. Eindige-elementenmodel 46
Figuur 5.13: B-veld bij 40 A en lasthoek 20 (Waarden in Tesla)
Figuur 5.14: Stroomverdeling bij 40 A en lasthoek 20 (Waarden in A/m2)
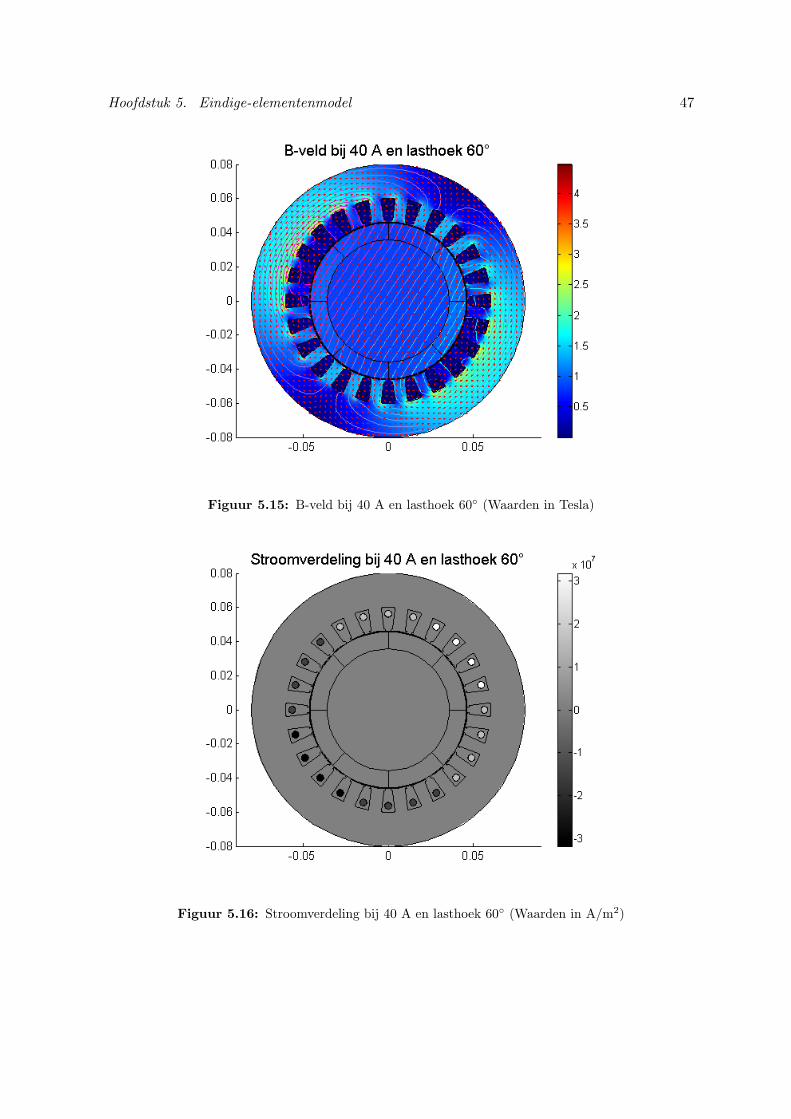
Hoofdstuk 5. Eindige-elementenmodel 47
Figuur 5.15: B-veld bij 40 A en lasthoek 60 (Waarden in Tesla)
Figuur 5.16: Stroomverdeling bij 40 A en lasthoek 60 (Waarden in A/m2)
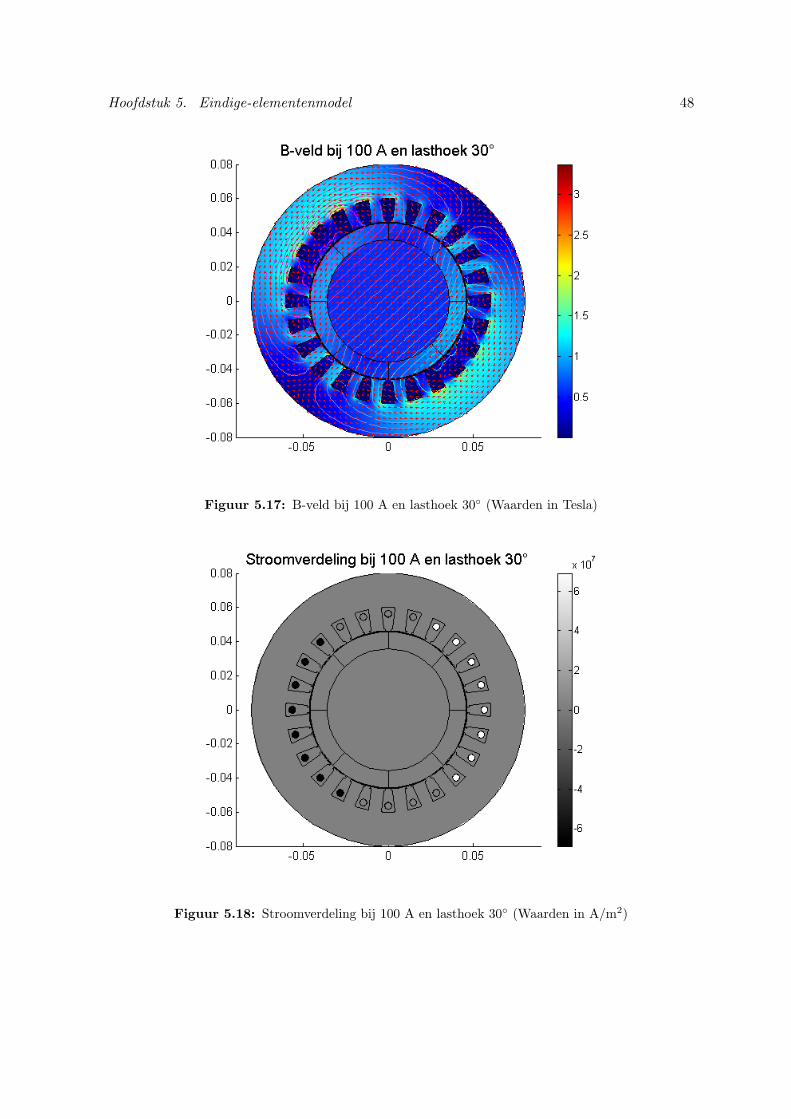
Hoofdstuk 5. Eindige-elementenmodel 48
Figuur 5.17: B-veld bij 100 A en lasthoek 30 (Waarden in Tesla)
Figuur 5.18: Stroomverdeling bij 100 A en lasthoek 30 (Waarden in A/m2)
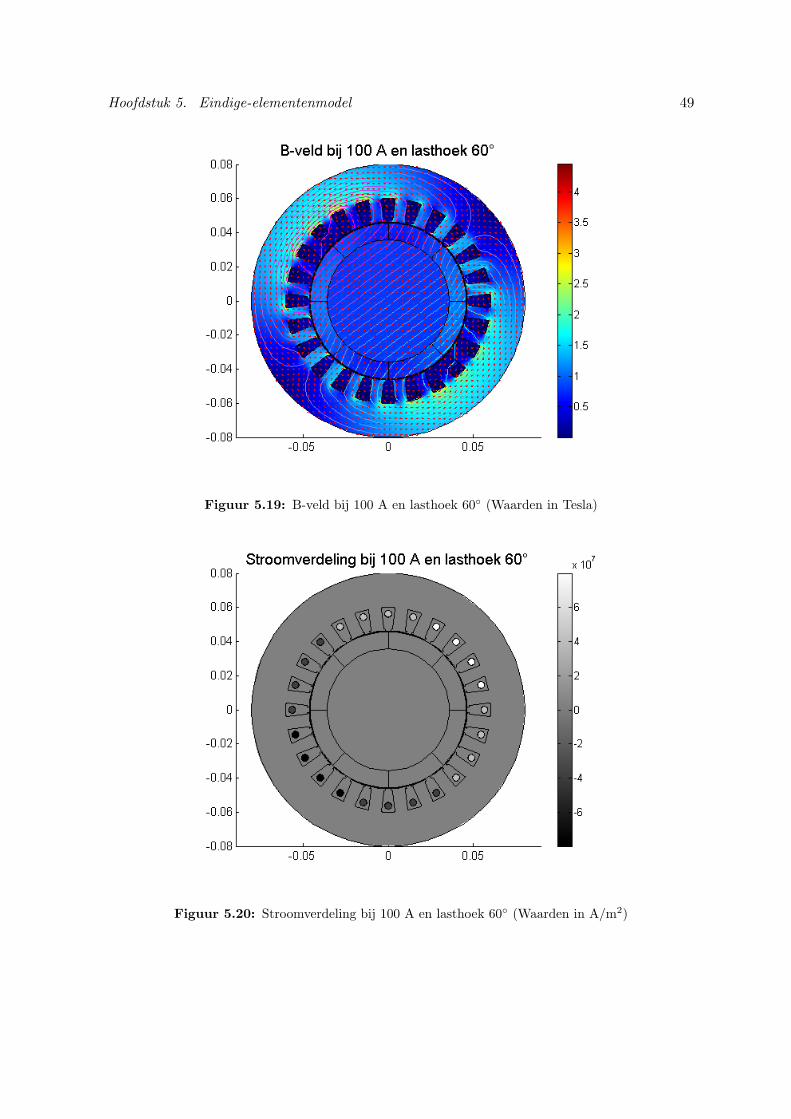
Hoofdstuk 5. Eindige-elementenmodel 49
Figuur 5.19: B-veld bij 100 A en lasthoek 60 (Waarden in Tesla)
Figuur 5.20: Stroomverdeling bij 100 A en lasthoek 60 (Waarden in A/m2)

Hoofdstuk 5. Eindige-elementenmodel 50
5.4 Differentieel model met hysteresis
5.4.1 Scalaire t.o.v. vector hysteresismodellen
Voor de numerieke berekening van hysteresis zijn er twee soorten hysteresismodellen voorhanden: scalaire hysteresismodel en vectorhysteresismodel. Zoals in sectie 2.5 reeds werdtoegelicht, kunnen de Preisach elementen in het scalaire model enkel de waarde +1 of −1aannemen, hetgeen overeenkomt met de richtingen 0 of 180. Wanneer echter het opgedron-gen veld rond draait in het vlak van de motor, dan zal ook de magnetisatie van de hystere-sisring rond draaien, maar wel met een naijling ten opzichte van dit opgedrongen veld. Hetis echter onmogelijk om dit fenomeen met een scalair Preisach-model te simuleren. Daaromwerd een vector hysteresis model uitgewerkt. In dit model zijn de hysteresisoperatoren nietlanger bidirectioneel, maar ze hebben de eigenschap zich te kunnen roteren en hun richtingte memoriseren [22][23] (figuur 5.21).
Figuur 5.21: Vector hysteresisoperator
Een scalair model houdt echter geen rekening met rotationele hysteresis in het materiaalvan de hysteresisring[24]. Rotationele hysteresis is te wijten aan de statorwindingen en hetverschil tussen de magnetisatierichting van elke ringsegment en het totale magnetisch veld.Het probleem komt echter enkel voor bij brede ringen. Hoe dikker de ring wordt, des tegroter de rotationele hysteresis wordt, met als resultaat dat het koppel van de dikke ringkleiner wordt dan het koppel van de dunne ring. In deze thesis werd toch gekozen voor eenscalair hysteresismodel, wegens de simpliciteit van dit model ten opzichte van het andere. Hetvector hysteresismodel met implementatie in eindige elementen en koppelberekening wordtbesproken in [25] en [26].
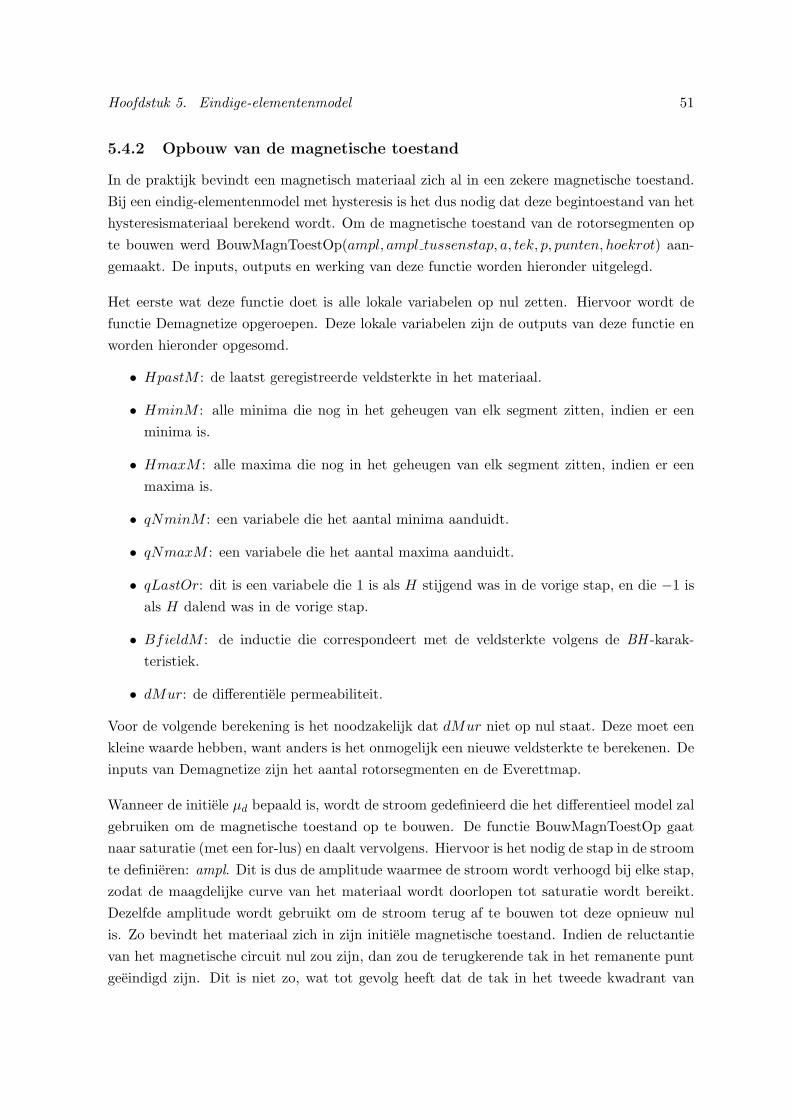
Hoofdstuk 5. Eindige-elementenmodel 51
5.4.2 Opbouw van de magnetische toestand
In de praktijk bevindt een magnetisch materiaal zich al in een zekere magnetische toestand.Bij een eindig-elementenmodel met hysteresis is het dus nodig dat deze begintoestand van hethysteresismateriaal berekend wordt. Om de magnetische toestand van de rotorsegmenten opte bouwen werd BouwMagnToestOp(ampl, ampl tussenstap, a, tek, p, punten, hoekrot) aan-gemaakt. De inputs, outputs en werking van deze functie worden hieronder uitgelegd.
Het eerste wat deze functie doet is alle lokale variabelen op nul zetten. Hiervoor wordt defunctie Demagnetize opgeroepen. Deze lokale variabelen zijn de outputs van deze functie enworden hieronder opgesomd.
• HpastM : de laatst geregistreerde veldsterkte in het materiaal.
• HminM : alle minima die nog in het geheugen van elk segment zitten, indien er eenminima is.
• HmaxM : alle maxima die nog in het geheugen van elk segment zitten, indien er eenmaxima is.
• qNminM : een variabele die het aantal minima aanduidt.
• qNmaxM : een variabele die het aantal maxima aanduidt.
• qLastOr: dit is een variabele die 1 is als H stijgend was in de vorige stap, en die −1 isals H dalend was in de vorige stap.
• BfieldM : de inductie die correspondeert met de veldsterkte volgens de BH -karak-teristiek.
• dMur: de differentiele permeabiliteit.
Voor de volgende berekening is het noodzakelijk dat dMur niet op nul staat. Deze moet eenkleine waarde hebben, want anders is het onmogelijk een nieuwe veldsterkte te berekenen. Deinputs van Demagnetize zijn het aantal rotorsegmenten en de Everettmap.
Wanneer de initiele µd bepaald is, wordt de stroom gedefinieerd die het differentieel model zalgebruiken om de magnetische toestand op te bouwen. De functie BouwMagnToestOp gaatnaar saturatie (met een for-lus) en daalt vervolgens. Hiervoor is het nodig de stap in de stroomte definieren: ampl. Dit is dus de amplitude waarmee de stroom wordt verhoogd bij elke stap,zodat de maagdelijke curve van het materiaal wordt doorlopen tot saturatie wordt bereikt.Dezelfde amplitude wordt gebruikt om de stroom terug af te bouwen tot deze opnieuw nulis. Zo bevindt het materiaal zich in zijn initiele magnetische toestand. Indien de reluctantievan het magnetische circuit nul zou zijn, dan zou de terugkerende tak in het remanente puntgeeindigd zijn. Dit is niet zo, wat tot gevolg heeft dat de tak in het tweede kwadrant van

Hoofdstuk 5. Eindige-elementenmodel 52
de BH-vlak stopt. De bepaling van deze waarde was een afweging tussen enerzijds snelheidvan de berekeningen en anderzijds accuraatheid van het verloop van de berekeningen. Na eenpaar testen werd gekozen voor de waarde 0.25.
Het is echter niet mogelijk de terugkerende tak te laten starten in het punt waar de maagdelijkecurve stopt. Het model berekent immers al de differentiele permeabiliteit voor de volgendestap. De oplossing hiervoor is even terug te keren op de maagdelijke curve. Door het modelnog eens uit te voeren met stromen waarvan de amplitude zeer klein is, is dit mogelijk. Dezeamplitude ampl tussenstap is de tweede input van de functie. Standaard werd de waarde0.001 gebruikt.
Om saturatie te bereiken is het nodig dat een maximale stroom vooropgesteld wordt. Dezestroom wordt bepaald door de parameter a. Dit stelt niet de maximale stroom op zich voor,maar wel het aantal keren dat de stroom verhoogd wordt. De maximale stroom is dan hetproduct van de eerste input, ampl, en deze input, a. Voor a werd de waarde 28 gekozen. Zobekomt men de maximale stroom bij saturatie:
Imax = ampl · a (5.20)
= 0.25 A · 28 (5.21)
= 7 A (5.22)
Veel meer dan 7 A is niet mogelijk, omdat Matlab dan begint vast te lopen en dus verkeerderesultaten weergeeft.
Bij elke stap wordt het model uigevoerd door het aanroepen van de functie hysteresismo-tor. Als inputs gebruikt deze functie de parameterfile p en de differentiele permeabiliteit.Deze functie genereert eerst de geometrie en de mesh en berekent vervolgens het model. Na-dien slaat deze functie alle informatie op in een fem-structuur. Hieruit kunnen de gewensteveldsterktes en inducties in elk punt van de geometrie opgeroepen worden.
Elk segment vereist nu een representatieve waarde van de veldsterkte, en bijhorende inductie,om deBH-karakteristiek van elk segment te kunnen controleren. Hiervoor werd in elk segmenteen aantal punten gedefinieerd met de functie maakPunten. Het aantal punten is een afwegingtussen enerzijds accuraatheid en anderzijds snelheid. Hoe meer punten, hoe correcter degemiddelde waarde, maar dit gaat ten koste van de berekeningssnelheid. Om niet te veel tijdin beslag te nemen werd gekozen voor 12 punten in elk rotorsegment. Deze 12 punten wordenverdeeld over twee reeksen van 6, die op een verschillende straal liggen. Aangezien dit allesgeparametriseerd is, wordt ook een hoek α berekend, die de punten op een gelijke afstandverdeelt in elk segment. Deze functie berekent ook de hoek hoekrot die onder andere wordtgebruikt bij het vormen van de geometrie van de rotor. Figuur 5.22 verduidelijkt dit voor eenrotorsegment. Uiteraard maakt de functie deze punten ook aan voor de andere segmenten
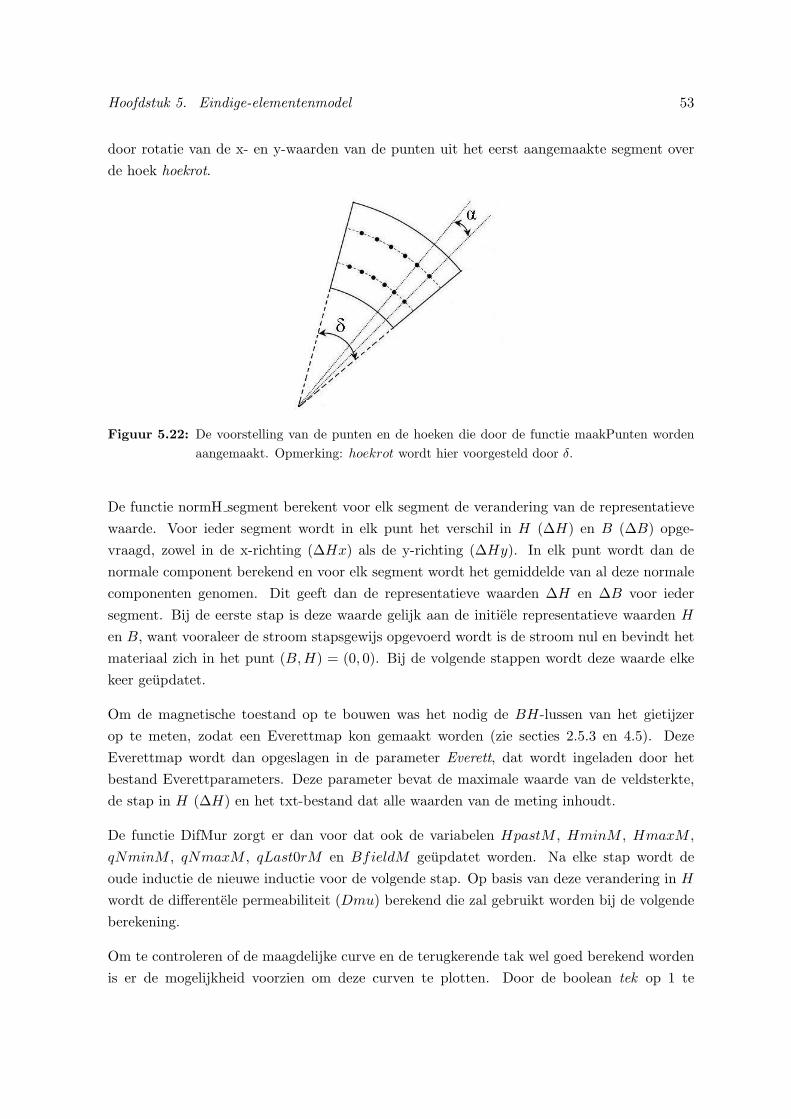
Hoofdstuk 5. Eindige-elementenmodel 53
door rotatie van de x- en y-waarden van de punten uit het eerst aangemaakte segment overde hoek hoekrot.
Figuur 5.22: De voorstelling van de punten en de hoeken die door de functie maakPunten wordenaangemaakt. Opmerking: hoekrot wordt hier voorgesteld door δ.
De functie normH segment berekent voor elk segment de verandering van de representatievewaarde. Voor ieder segment wordt in elk punt het verschil in H (∆H) en B (∆B) opge-vraagd, zowel in de x-richting (∆Hx) als de y-richting (∆Hy). In elk punt wordt dan denormale component berekend en voor elk segment wordt het gemiddelde van al deze normalecomponenten genomen. Dit geeft dan de representatieve waarden ∆H en ∆B voor iedersegment. Bij de eerste stap is deze waarde gelijk aan de initiele representatieve waarden H
en B, want vooraleer de stroom stapsgewijs opgevoerd wordt is de stroom nul en bevindt hetmateriaal zich in het punt (B,H) = (0, 0). Bij de volgende stappen wordt deze waarde elkekeer geupdatet.
Om de magnetische toestand op te bouwen was het nodig de BH-lussen van het gietijzerop te meten, zodat een Everettmap kon gemaakt worden (zie secties 2.5.3 en 4.5). DezeEverettmap wordt dan opgeslagen in de parameter Everett, dat wordt ingeladen door hetbestand Everettparameters. Deze parameter bevat de maximale waarde van de veldsterkte,de stap in H (∆H) en het txt-bestand dat alle waarden van de meting inhoudt.
De functie DifMur zorgt er dan voor dat ook de variabelen HpastM , HminM , HmaxM ,qNminM , qNmaxM , qLast0rM en BfieldM geupdatet worden. Na elke stap wordt deoude inductie de nieuwe inductie voor de volgende stap. Op basis van deze verandering in Hwordt de differentele permeabiliteit (Dmu) berekend die zal gebruikt worden bij de volgendeberekening.
Om te controleren of de maagdelijke curve en de terugkerende tak wel goed berekend wordenis er de mogelijkheid voorzien om deze curven te plotten. Door de boolean tek op 1 te
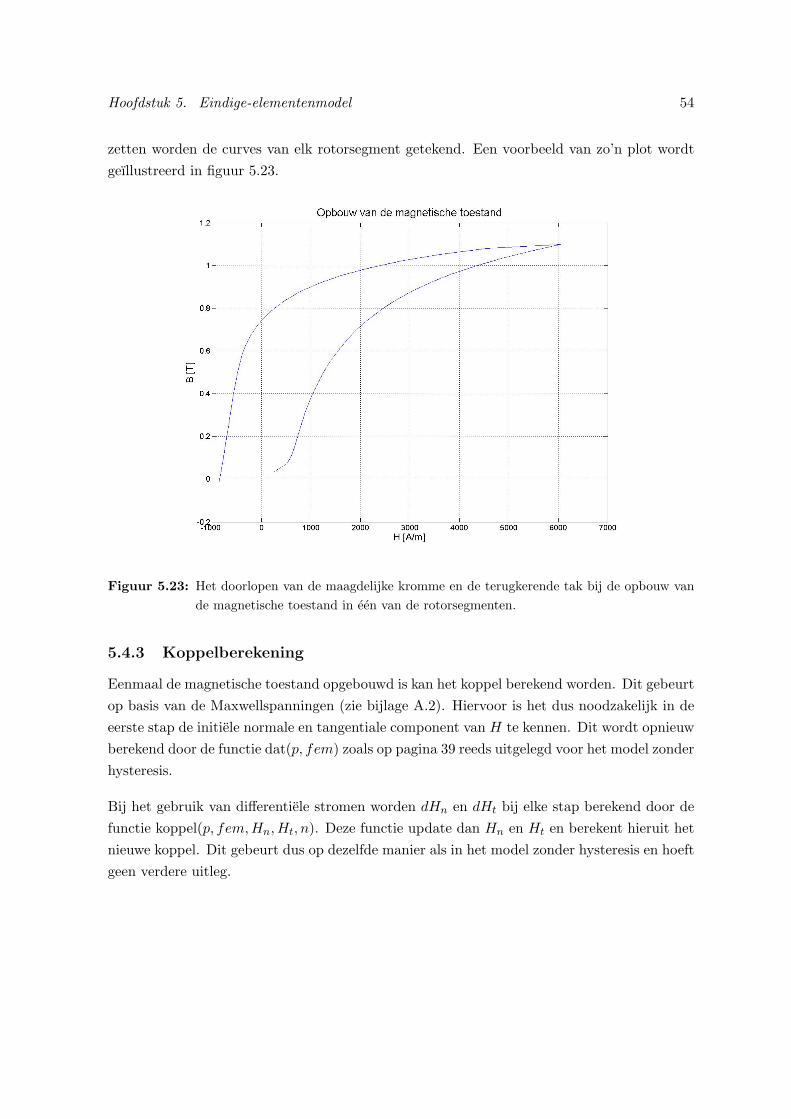
Hoofdstuk 5. Eindige-elementenmodel 54
zetten worden de curves van elk rotorsegment getekend. Een voorbeeld van zo’n plot wordtgeıllustreerd in figuur 5.23.
Figuur 5.23: Het doorlopen van de maagdelijke kromme en de terugkerende tak bij de opbouw vande magnetische toestand in een van de rotorsegmenten.
5.4.3 Koppelberekening
Eenmaal de magnetische toestand opgebouwd is kan het koppel berekend worden. Dit gebeurtop basis van de Maxwellspanningen (zie bijlage A.2). Hiervoor is het dus noodzakelijk in deeerste stap de initiele normale en tangentiale component van H te kennen. Dit wordt opnieuwberekend door de functie dat(p, fem) zoals op pagina 39 reeds uitgelegd voor het model zonderhysteresis.
Bij het gebruik van differentiele stromen worden dHn en dHt bij elke stap berekend door defunctie koppel(p, fem,Hn, Ht, n). Deze functie update dan Hn en Ht en berekent hieruit hetnieuwe koppel. Dit gebeurt dus op dezelfde manier als in het model zonder hysteresis en hoeftgeen verdere uitleg.

Hoofdstuk 5. Eindige-elementenmodel 55
5.4.4 Validatie van het model
Het model met hysteresis werkt op het ogenblik van dit schrijven niet. Het is niet meteenduidelijk waar dit aan ligt. Het verschil tussen werkelijk en berekend koppel is nog te groot.Een van de problemen is echter het beperkte geheugen van Matlab. Na vele berekeningenhad Matlab de neiging om de berekeningen te stoppen en zelfs verkeerde resultaten weer tegeven. De meetresultaten konden dus niet geverifieerd worden met simulaties.

Hoofdstuk 6
Experimentele Proeven
6.1 Inleiding
Een tweepolige inductiemotor werd aangekocht bij CET1 met een nominaal vermogen van3 kW, een nominale spanning van 220 V of 380 V (de motor in driehoek dan wel in stergeschakeld) en een nominale stroom van 5.81 A (bij 400 V). Het nominale koppel is 9.92 Nmen het nominaal toerental bedraagt 3000 rpm. De motor heeft een inertie van 0.00617 kgm2
en weegt 31 kg. Deze data komen uit de catalogus van WEG2, een wereldwijde fabrikant vanelektrische motoren.
De rotor werd uit de stator gehaald en de kooi die op de as bevestigd was, werd verwij-derd op zo’n manier dat de as nog herbruikt kon worden. Uit de metingen van het gietijzerin hoofdstuk 4 werd een cilinder vervaardigd die op de as bevestigd werd door middel vaneen lijmverbinding. Een lijmverbinding was mogelijk, omdat de as geen grote koppels moestverwerken. De rotor werd dan opnieuw in de stator geplaatst, zodat de motor weerom ope-rationeel kon zijn.
Bij aanvang van de eerste testen bleek dat de as nog teveel wrijving ondervond. Een nadereinspectie van de as bracht het probleem aan het licht. Rubberen dichtingen die op de asbevestigd waren om stof uit de lagers (en dus ook uit de motor) te houden, bleken de boos-doeners te zijn. Wanneer deze verwijderd werden, resulteerde dit in een soepelere bewegingvan de as.
Eerst werd de motor gevoed uit het driefasige net om de motor te laten inlopen. Ook desnelheid en fasestroom in functie van de spanning werden bepaald. Vervolgens werd hetkoppel bij stilstand, ook wel het statisch koppel genoemd, opgemeten. Dit hoofdstuk geeftde resultaten weer van deze metingen.
1www.cetmotoren.be2www.weg.net
56
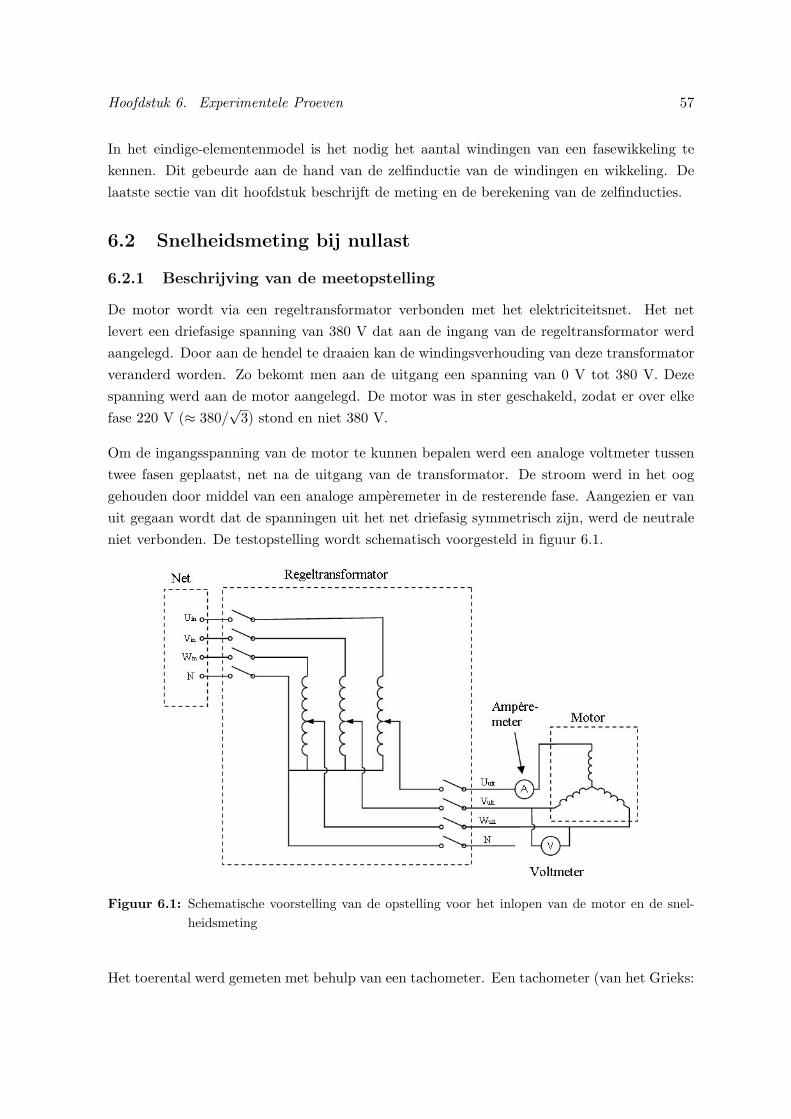
Hoofdstuk 6. Experimentele Proeven 57
In het eindige-elementenmodel is het nodig het aantal windingen van een fasewikkeling tekennen. Dit gebeurde aan de hand van de zelfinductie van de windingen en wikkeling. Delaatste sectie van dit hoofdstuk beschrijft de meting en de berekening van de zelfinducties.
6.2 Snelheidsmeting bij nullast
6.2.1 Beschrijving van de meetopstelling
De motor wordt via een regeltransformator verbonden met het elektriciteitsnet. Het netlevert een driefasige spanning van 380 V dat aan de ingang van de regeltransformator werdaangelegd. Door aan de hendel te draaien kan de windingsverhouding van deze transformatorveranderd worden. Zo bekomt men aan de uitgang een spanning van 0 V tot 380 V. Dezespanning werd aan de motor aangelegd. De motor was in ster geschakeld, zodat er over elkefase 220 V (≈ 380/
√3) stond en niet 380 V.
Om de ingangsspanning van de motor te kunnen bepalen werd een analoge voltmeter tussentwee fasen geplaatst, net na de uitgang van de transformator. De stroom werd in het ooggehouden door middel van een analoge amperemeter in de resterende fase. Aangezien er vanuit gegaan wordt dat de spanningen uit het net driefasig symmetrisch zijn, werd de neutraleniet verbonden. De testopstelling wordt schematisch voorgesteld in figuur 6.1.
Figuur 6.1: Schematische voorstelling van de opstelling voor het inlopen van de motor en de snel-heidsmeting
Het toerental werd gemeten met behulp van een tachometer. Een tachometer (van het Grieks:
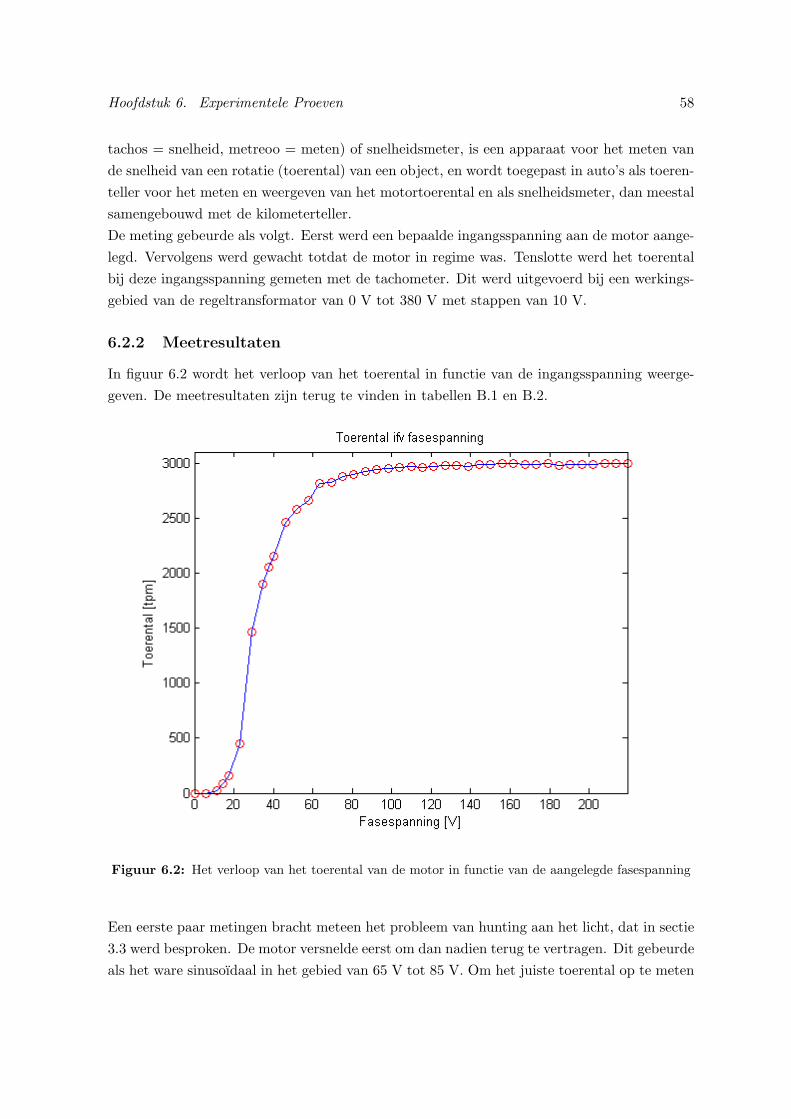
Hoofdstuk 6. Experimentele Proeven 58
tachos = snelheid, metreoo = meten) of snelheidsmeter, is een apparaat voor het meten vande snelheid van een rotatie (toerental) van een object, en wordt toegepast in auto’s als toeren-teller voor het meten en weergeven van het motortoerental en als snelheidsmeter, dan meestalsamengebouwd met de kilometerteller.De meting gebeurde als volgt. Eerst werd een bepaalde ingangsspanning aan de motor aange-legd. Vervolgens werd gewacht totdat de motor in regime was. Tenslotte werd het toerentalbij deze ingangsspanning gemeten met de tachometer. Dit werd uitgevoerd bij een werkings-gebied van de regeltransformator van 0 V tot 380 V met stappen van 10 V.
6.2.2 Meetresultaten
In figuur 6.2 wordt het verloop van het toerental in functie van de ingangsspanning weerge-geven. De meetresultaten zijn terug te vinden in tabellen B.1 en B.2.
Figuur 6.2: Het verloop van het toerental van de motor in functie van de aangelegde fasespanning
Een eerste paar metingen bracht meteen het probleem van hunting aan het licht, dat in sectie3.3 werd besproken. De motor versnelde eerst om dan nadien terug te vertragen. Dit gebeurdeals het ware sinusoıdaal in het gebied van 65 V tot 85 V. Om het juiste toerental op te meten

Hoofdstuk 6. Experimentele Proeven 59
werd ervoor gekozen om vanaf de hoogste ingangsspanning te beginnen meten en geleidelijkaan naar 0 V te evolueren. Zo kon dit probleem vermeden worden.
Op figuur 6.2 kan meteen opgemerkt worden dat er drie gebieden zijn:
• 0 V tot 63.51 VDit is het gebied waarin de motor aanloopt. In het begin stijgt het toerental zeer snelmet stijgende spanning, maar naar het einde toe vlakt dit af. Er is als het ware eendrempelspanning nodig vanaf dewelke het toerental sterk stijgt. Het synchrone toerentalwordt niet bereikt, aangezien de spanning nog niet voldoende is voor de juiste werkingvan de motor.
• 63.51 V tot 150.11 VIn dit gebied slipt de motor, zoals een inductiemotor. Bij de start van dit gebied is ernog een grote slip:
s =3000− 2810
3000= 0.0633
= 6.33%
Terwijl dit op het einde van het slipgebied minimaal is:
s =3000− 2990
3000= 0.0033
= 0.33%
Het toerental stijgt niet zo snel meer als in het eerste gebied. Een grote stap in spanningresulteert in een kleine stap in toerental.
• 150.11 V tot 219.39 VDit gebied komt overeen met de werking van een synchrone motor. Soms is er eenafwijking van het synchrone toerental, maar dit kan te wijten zijn aan meetfouten.
6.3 Stroommeting
6.3.1 Beschrijving van de meetopstelling
Voor deze meting werd dezelfde meetopstelling gebruikt als in sectie 6.2. Door de hendelvan de regeltransformator te verdraaien kon een bepaalde ingangsspanning van de motoringesteld worden. De exacte spanning werd afgelezen op de voltmeter. De fasestroom werdgemeten met de amperemeter. Dit gebeurde in stappen van 5 V. Om dezelfde reden (hunting)als hierboven werd gemeten vanaf de hoogste fasespanning (220 V) tot de laagste spanning(0 V).
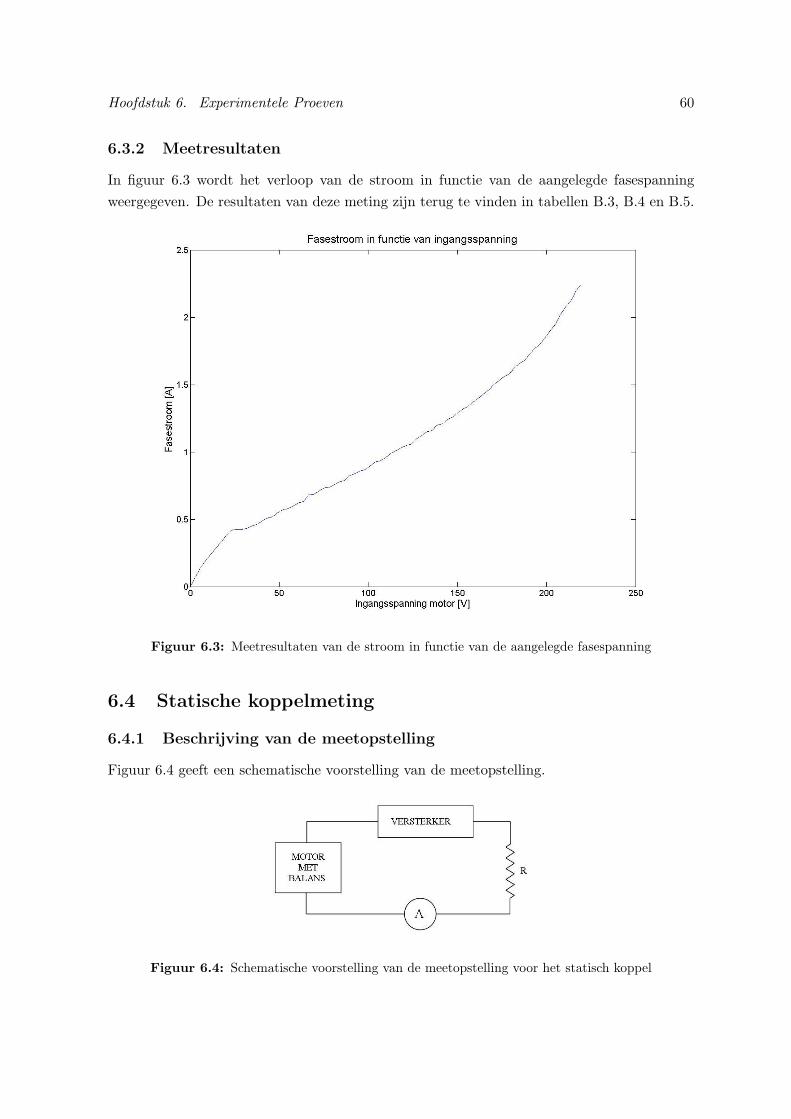
Hoofdstuk 6. Experimentele Proeven 60
6.3.2 Meetresultaten
In figuur 6.3 wordt het verloop van de stroom in functie van de aangelegde fasespanningweergegeven. De resultaten van deze meting zijn terug te vinden in tabellen B.3, B.4 en B.5.
Figuur 6.3: Meetresultaten van de stroom in functie van de aangelegde fasespanning
6.4 Statische koppelmeting
6.4.1 Beschrijving van de meetopstelling
Figuur 6.4 geeft een schematische voorstelling van de meetopstelling.
Figuur 6.4: Schematische voorstelling van de meetopstelling voor het statisch koppel

Hoofdstuk 6. Experimentele Proeven 61
Een versterker leverde de gelijkstroom die door slechts een fase van de motor werd gestuurd.Een voorschakelweerstand werd in serie met de wikkeling van de motor gezet, omdat de weer-stand van een fasewikkeling maar 0.1 Ω bedroeg. Door de totale weerstand van de elektrischekring te vergroten kon de stroom makkelijker ingesteld worden, aangezien de versterker span-ningsgestuurd is. De stroom werd afgelezen met een Amperemeter.
Op de as van de motor werd een schijf bevestigd, die 360 gaten heeft over zijn omtrek. Dezegaten zijn verdeeld over 4 rijen die op een verschillende straal ten opzicht van het midden vande schijf liggen. Elke cirkel bevat dus 90 gaten waarbij er tussen elk gat 4 zit. Om over 360
te kunnen meten is elke cirkel dan nog eens verschoven over 1 ten opzichte van een cirkelmet grotere straal. Op deze schijf werd een aluminium balk, met schaaltjes aan weerszijdenvan de balk, gemonteerd. Deze schalen bevonden zicht op 0.5 m van het midden van de balk.Het midden van de balk werd met een bout bevestigd in het midden van de schijf. In dezebalk werden acht gaten geboord. Door deze gaten konden pennen gestoken worden. Wanneerde schijf bewogen werd, dan volgde de balk dezelfde beweging.
De balans moest eerst worden gekalibreerd ten einde goede metingen te bekomen. Doorstaven van dezelfde grote onder de twee armen van de balk te plaatsen kon de balk horizontaalgepositioneerd worden. Aan de linker- en rechterarm van de balk werden dan verticale balkengeplaatst op dezelfde afstand van het midden van de balk. Hierop werd de evenwichtspositievan de horizontale balk aangeduid door markeringen. Door de wrijving die de as nog steedsondervond was deze kalibratie zeer lastig.
De meting zelf gebeurde als volgt. Een referentiepunt werd gekozen, zodat de rotor bij elkemeting op dezelfde manier werd gemagnetiseerd. Dit werd aangeduid met een streep op deschijf. De rotor werd dan gemagnetiseerd door de stroom van 0 A tot 8 A te laten stijgen envervolgens weer naar 0 A te brengen. Een deel van de hysteresislus wordt hierdoor gevolgd.Zo bleef er een remanente inductie over in het hysteresismateriaal van de rotor. De lasthoek3
werd ingesteld door vervolgens de as met de schijf te verdraaien naar de gewenste hoek (tenopzicht van de referentie). Dit gebeurde in stappen van 8. Door nu de stroom terug op tevoeren leverde de motor een bepaald koppel op de as. Met behulp van gewichten kon ditkoppel tegengewerkt worden, zodat de balans terug in evenwicht kwam. Het totale gewichtdat op de balans geplaatst werd moet nog vermenigvuldigd worden met een factor om hetgewicht om te rekenen naar koppel. Deze factor bedraagt:
k = g · l · p = 9.81Nkg· 0.5 m · 0.001
kgg
= 0.004905Nmg
(6.1)
met g de valversnelling, l de lengte van het centrum van de balk tot waar een schaal vasthangtaan de balk en p de omrekeningsfactor van gram naar kilogram.
3De lasthoek wordt hier gedefinieerd als de hoek tussen de magnetisatierichting van de rotor en de magne-
tisatierichting van de stator.
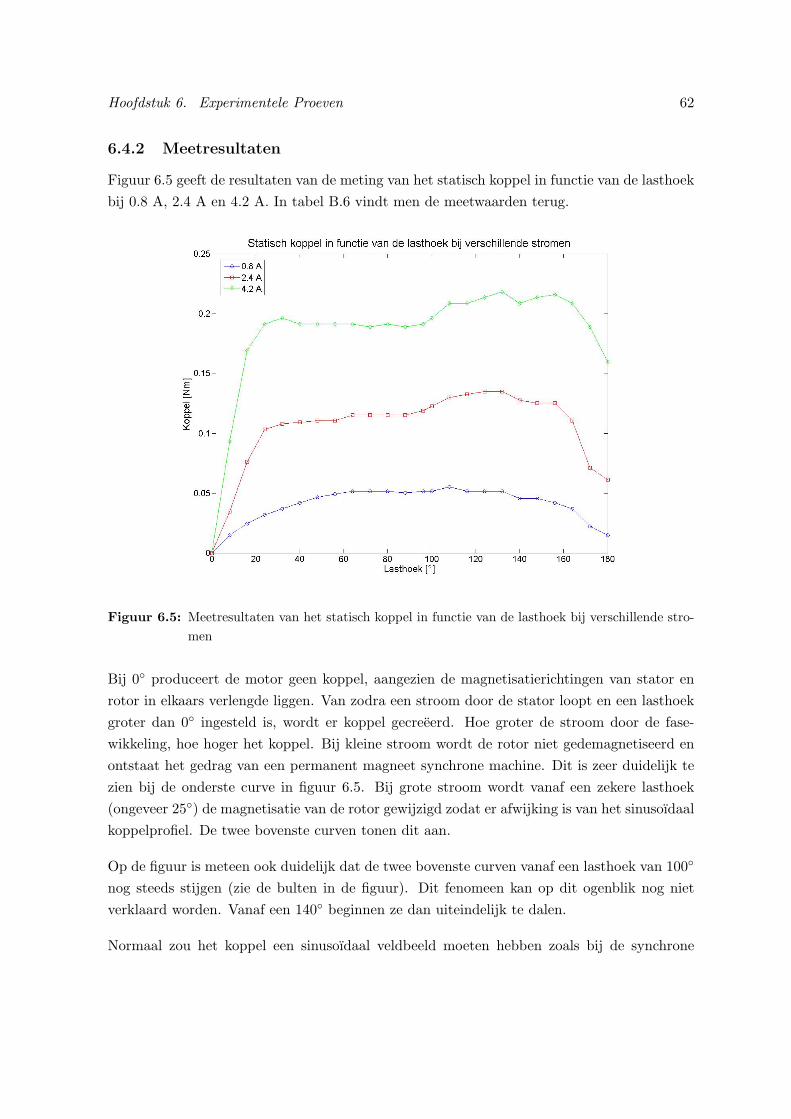
Hoofdstuk 6. Experimentele Proeven 62
6.4.2 Meetresultaten
Figuur 6.5 geeft de resultaten van de meting van het statisch koppel in functie van de lasthoekbij 0.8 A, 2.4 A en 4.2 A. In tabel B.6 vindt men de meetwaarden terug.
Figuur 6.5: Meetresultaten van het statisch koppel in functie van de lasthoek bij verschillende stro-men
Bij 0 produceert de motor geen koppel, aangezien de magnetisatierichtingen van stator enrotor in elkaars verlengde liggen. Van zodra een stroom door de stator loopt en een lasthoekgroter dan 0 ingesteld is, wordt er koppel gecreeerd. Hoe groter de stroom door de fase-wikkeling, hoe hoger het koppel. Bij kleine stroom wordt de rotor niet gedemagnetiseerd enontstaat het gedrag van een permanent magneet synchrone machine. Dit is zeer duidelijk tezien bij de onderste curve in figuur 6.5. Bij grote stroom wordt vanaf een zekere lasthoek(ongeveer 25) de magnetisatie van de rotor gewijzigd zodat er afwijking is van het sinusoıdaalkoppelprofiel. De twee bovenste curven tonen dit aan.
Op de figuur is meteen ook duidelijk dat de twee bovenste curven vanaf een lasthoek van 100
nog steeds stijgen (zie de bulten in de figuur). Dit fenomeen kan op dit ogenblik nog nietverklaard worden. Vanaf een 140 beginnen ze dan uiteindelijk te dalen.
Normaal zou het koppel een sinusoıdaal veldbeeld moeten hebben zoals bij de synchrone

Hoofdstuk 6. Experimentele Proeven 63
motor:T =
3Ω· Ep · V
X· sin(β) (6.2)
met T het koppel, Ω de snelheid, Ep de poolradspanning, X de reactantie van de motor en β delasthoek. Voor kleine lasthoek en kleine stromen is dit ook het geval voor de hysteresismotor.In alle andere gevallen zou dit koppel constant moeten zijn.
Opmerkelijk is het feit dat bij 180 de curven nul niet bereikt hebben. De magnetisatierich-tingen van rotor en stator zijn nochtans gealigneerd. De motor produceert dus nog steeds eenkoppel bij een lasthoek van 180.
Het is eveneens duidelijk dat gietijzer niet echt een goed materiaal is om een hysteresisringvan te maken. Dit was al aangehaald in hoofdstuk 4 en wordt door deze metingen bevestigd.Een maximale waarde van 0.22 Nm werd opgemeten, terwijl het nominale koppel van deinductiemotor, voor de verandering in hysteresismotor, 9.92 Nm bedroeg. Dit is een reductievan het koppel ongeveer met een factor 50.
6.5 Bepalen van het aantal windingen van een fasewikkeling
Het aantal windingen van een fase wordt bepaald aan de hand van de zelfinductie van dewinding. De zelfinductie van een wikkeling Lgemeten (met n windingen) kan opgemeten wor-den met een LCR-meter. De zelfinductie van een winding L1winding kan berekend wordenmet behulp van een eindige-elementenberekening. Uit deze twee zelfinducties kan het aantalwindingen bepaald worden aan de hand van volgende formule:
n =
√LgemetenL1winding
(6.3)
De zelfinductie van een volledige wikkeling wordt gemeten met behulp van een LCR-meter.Dit is een meettoestel die weerstand, capaciteit en inductie kan meten over een frequentie-bereik van 12 Hz tot 200 kHz. Voor de meting van de zelfinductie wordt de rotor uit demotor gehaald zodat de wikkeling een luchtspoel benadert. De klemmen van de LCR-meterworden aan een fase vastgemaakt en de weerstand en zelfinductie worden weergegeven op hetdisplay. De meting werd uitgevoerd bij verschillende frequenties. Bij toenemende frequentiestijgt de weerstand ten gevolge van het skineffect in de geleider, aangezien de stroom bijhoge frequenties naar de rand verdrongen wordt. De zelfinductie daalt echter bij stijgendefrequentie ten gevolge van stroomverdringing in de geleiders. Het resultaat van deze metingwordt geıllustreerd in figuur 6.6. De resultaten van deze meting zijn terug te vinden in tabelB.7 in de bijlagen.

Hoofdstuk 6. Experimentele Proeven 64
Figuur 6.6: Weerstand en zelfinductie van een fasewikkeling
De zelfinductie van een winding kan in het eindige-elementenmodel berekend worden op basisvan de flux door deze winding. De zelfinductie van een winding wordt gedefinieerd als deverhouding van de flux door de winding en de stroom in deze winding:
L1winding =φ
Iu(6.4)
Er wordt enkel een stroom in fase u gestoken: Iu = 1 A. Uit vergelijking 6.4 volgt dan dat dezelfinductie gelijk is aan de flux.
De flux wordt vervolgens berekend uit de vectorpotentialen in de stroomvoerende geleiders:
φ =
(4∑
i=1
Ai −8∑
i=5
Ai
)· lax (6.5)
waarbij Ai voor i = 1 . . . 4 de gemiddelde vectorpotentiaal is van de 4 geleiders met positievestroom, voor i = 5 . . . 8 de gemiddelde vectorpotentiaal is van de 4 geleiders met negatievestroom en lax de axiale lengte van de rotor. Figuur 6.7 toont de vectorpotentialen in de motorbij het bekrachtigen van een fase.

Hoofdstuk 6. Experimentele Proeven 65
Figuur 6.7: Vectorpotentialen in de motor voor het bepalen van de statorzelfdinductie zonder rotor.De rotorgeometrie is getoond, maar de rotor is gemodelleerd als lucht.
Voor de berekening van de vectorpotentiaal wordt de as en de hysteresisring als lucht gemo-delleerd, dus µgietijzer = µas = µ0. In het model wordt flux aangetrokken. In het experimentwordt de flux weggeduwd door wervelstromen in de rotorkooi. Vandaar het verwijderen vande rotor en het modelleren van de rotor als lucht.De zelfinductie van een winding is: L1winding = 4.6487 · 10−6 H
Het aantal windingen (n) volgt dan uit formule 6.3:
n =
√10.79 · 10−3
4.6487 · 10−6(6.6)
= 48.16 (6.7)
Hieruit blijkt dat er 48 windingen per gleuf en per fase zijn.
Hoofdstuk 7
Conclusies
Twee eindige-elementenmodellen werden gecreeerd. Het eerste model houdt geen rekeningmet hysteresis en werd enkel gebruikt bij het testen van de berekening van het koppel optwee verschillende manieren. De validatie van dit model toont aan dat de fout beperktblijft. Het tweede model houdt wel rekening met hysteresis. Dit hysteresismodel toont dejuiste hysteresisverschijnselen in de ring wanneer een stroomprofiel opgedrongen wordt in desimulaties.
Twee soorten gietijzer, GG25 en GG40, werden opgemeten. De hysteresislussen werden be-paald en gebruikt in de eindige-elementenberekeningen. Op basis van deze meetresultaten washet al duidelijk dat gietijzer geen goed hysteresismateriaal zou zijn. De maximale veldsterktebedraagt immers 700 A/m.
Een inductiemotor werd omgebouwd tot een hysteresismotor door de rotorkooi te vervangendoor een gietijzeren ring. Van deze motor werden een aantal karakteristieken bepaald. Opbasis van de koppelkarakteristiek was te zien dat het maximale koppel 0.22 Nm bedraagt.Dit stelt niet veel voor als dit vergeleken wordt met het koppel van inductiemotoren. Dezehebben meestal een nominaal koppel dat een factor 50 hoger ligt. Het vermoeden dat gietijzergeen goed hysteresismateriaal is werd hiermee dus bevestigd.
In de toekomst moet het hysteresismodel verder gevalideerd worden, waarna het kan gebruiktworden voor optimalisatie. Een aantal mogelijkheden voor toekomstig onderzoek zijn deoptimalistie van de dikte van de ring, de breedte van de luchtspleet en het gebruik van anderematerialen.
66
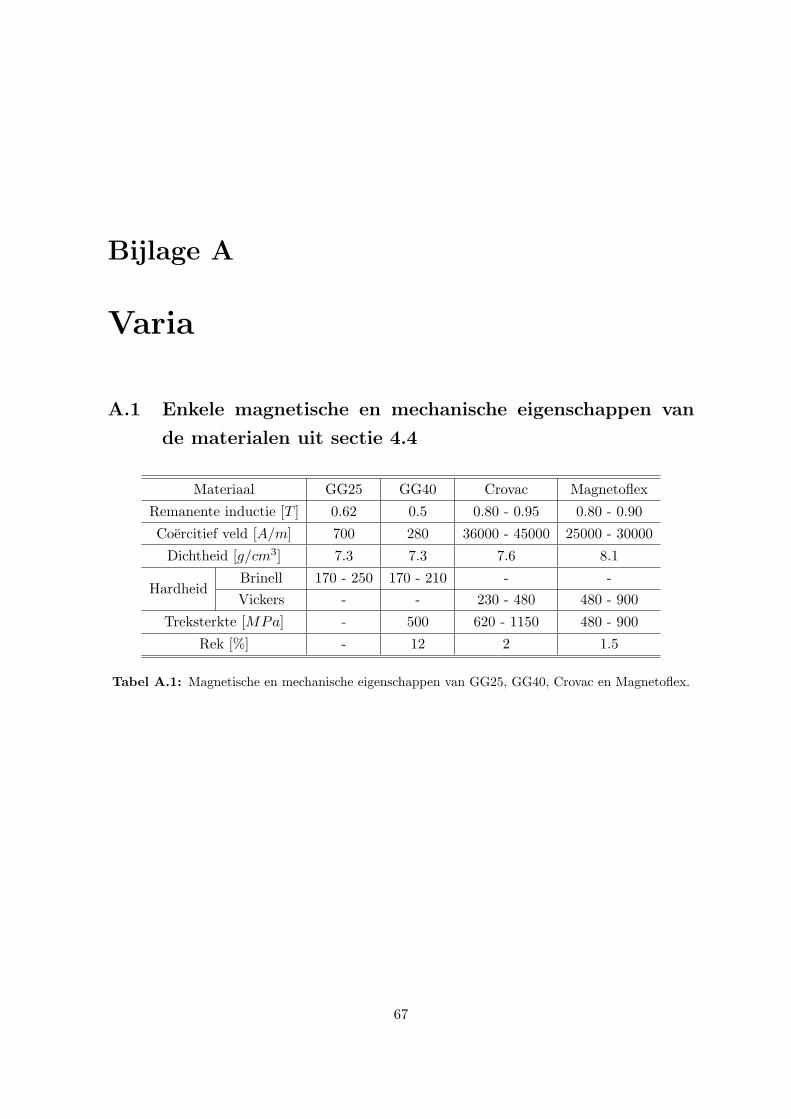
Bijlage A
Varia
A.1 Enkele magnetische en mechanische eigenschappen van
de materialen uit sectie 4.4
Materiaal GG25 GG40 Crovac Magnetoflex
Remanente inductie [T ] 0.62 0.5 0.80 - 0.95 0.80 - 0.90
Coercitief veld [A/m] 700 280 36000 - 45000 25000 - 30000
Dichtheid [g/cm3] 7.3 7.3 7.6 8.1
HardheidBrinell 170 - 250 170 - 210 - -Vickers - - 230 - 480 480 - 900
Treksterkte [MPa] - 500 620 - 1150 480 - 900
Rek [%] - 12 2 1.5
Tabel A.1: Magnetische en mechanische eigenschappen van GG25, GG40, Crovac en Magnetoflex.
67

Bijlage A. Varia 68
A.2 Berekening van het koppel
Het berekenen van het koppel gebeurt op basis van de Maxwell spanningstensor. Deze ten-sor wordt gebruikt om de spanningen op objecten in magnetische of elektrische velden teberekenen. De spanningen worden dan ook de Maxwellspanningen genoemd. In eindige-elementenprogramma’s worden ze vaak gebruikt om de kracht op een object te bepalen. Alsde magnetische en elektrische velden gekend zijn op de rand van een object, dan kan de krachtop de rand berekend worden en de totale kracht op het object bepaald. Bij elektrische mo-toren worden de elektrische velden verwaarloosd ten opzichte van de magnetische velden, ende berekeningen gebeuren enkel op basis van de gekende magnetische velden.
Om deze spanningen te bepalen moeten de tangentiale en normale component van H op derand van de rotor bepaald worden. Figuur A.1 visualiseert de componenten van de veldsterkte,Ht en Hn, en de spanningsvectoren, σt en σn, waarbij geldt:
σt = µ0 ·Hn ·Ht (A.1)
σn =12· µ0 ·
(H2n −H2
t
)(A.2)
Het koppel volgt dan uit:
T = r · lax ·2π∫
0
σt dθ (A.3)
waarbij r de straal van de rotor is en lax de axiale lengte van de motor voorstelt.
Normaal gezien moet het veldbeeld in de luchtspleet genomen worden bij de berekening van deMaxwellspanningen. Aangezien het controleren van de Maxwellspanningen in Comsol enkelmogelijk was op de rand van de rotor, werd ervoor gekozen het veldbeeld op de rand van derotor te nemen voor de berekening van het koppel.
Figuur A.1: Koppelvorming via Maxwell-spanningen
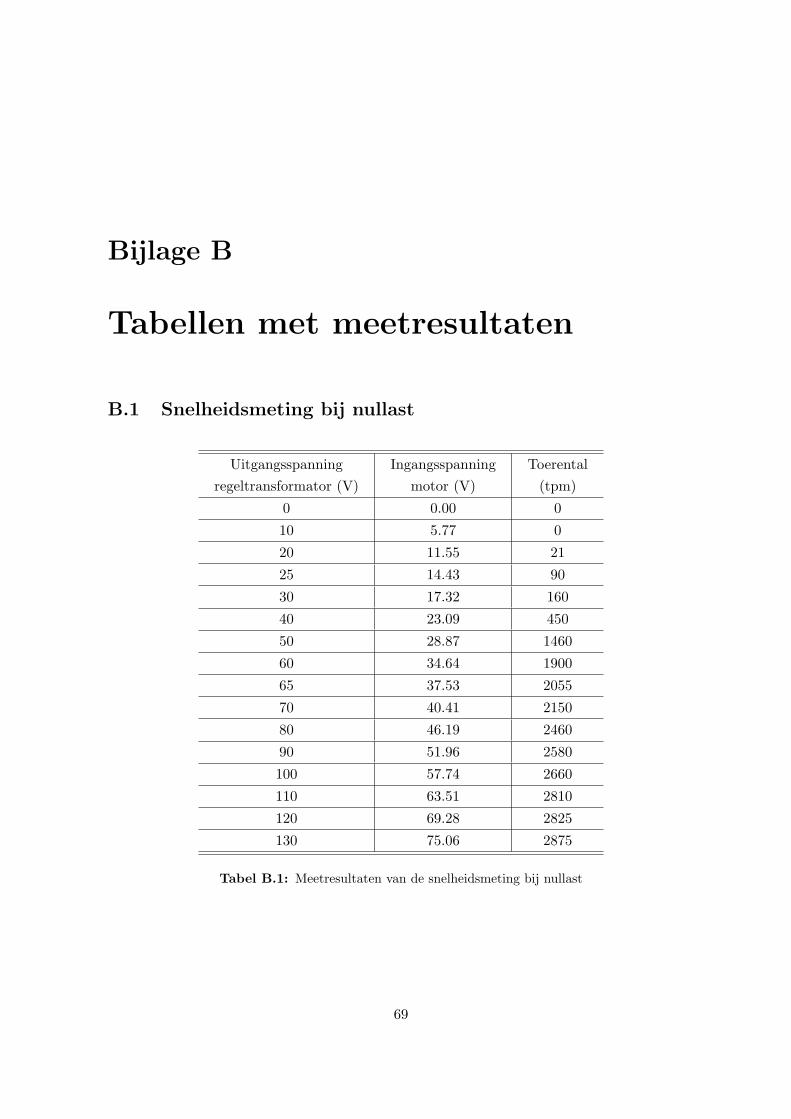
Bijlage B
Tabellen met meetresultaten
B.1 Snelheidsmeting bij nullast
Uitgangsspanningregeltransformator (V)
Ingangsspanningmotor (V)
Toerental(tpm)
0 0.00 0
10 5.77 0
20 11.55 21
25 14.43 90
30 17.32 160
40 23.09 450
50 28.87 1460
60 34.64 1900
65 37.53 2055
70 40.41 2150
80 46.19 2460
90 51.96 2580
100 57.74 2660
110 63.51 2810
120 69.28 2825
130 75.06 2875
Tabel B.1: Meetresultaten van de snelheidsmeting bij nullast
69
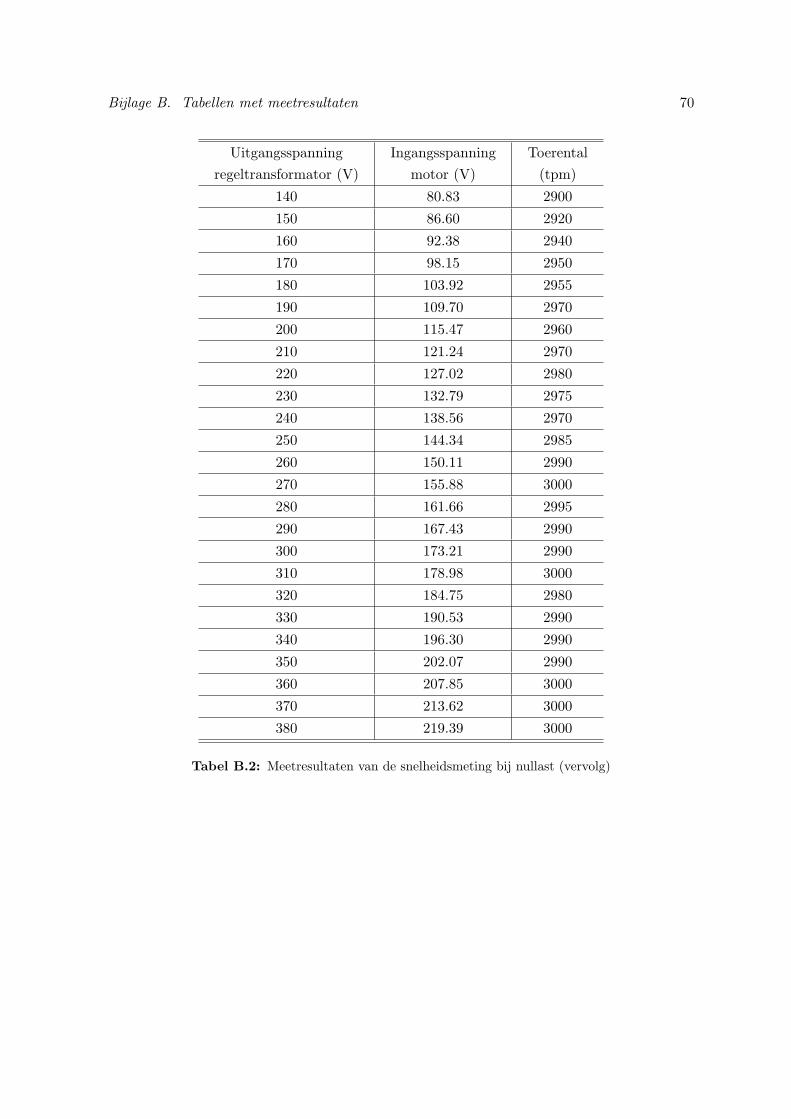
Bijlage B. Tabellen met meetresultaten 70
Uitgangsspanningregeltransformator (V)
Ingangsspanningmotor (V)
Toerental(tpm)
140 80.83 2900
150 86.60 2920
160 92.38 2940
170 98.15 2950
180 103.92 2955
190 109.70 2970
200 115.47 2960
210 121.24 2970
220 127.02 2980
230 132.79 2975
240 138.56 2970
250 144.34 2985
260 150.11 2990
270 155.88 3000
280 161.66 2995
290 167.43 2990
300 173.21 2990
310 178.98 3000
320 184.75 2980
330 190.53 2990
340 196.30 2990
350 202.07 2990
360 207.85 3000
370 213.62 3000
380 219.39 3000
Tabel B.2: Meetresultaten van de snelheidsmeting bij nullast (vervolg)
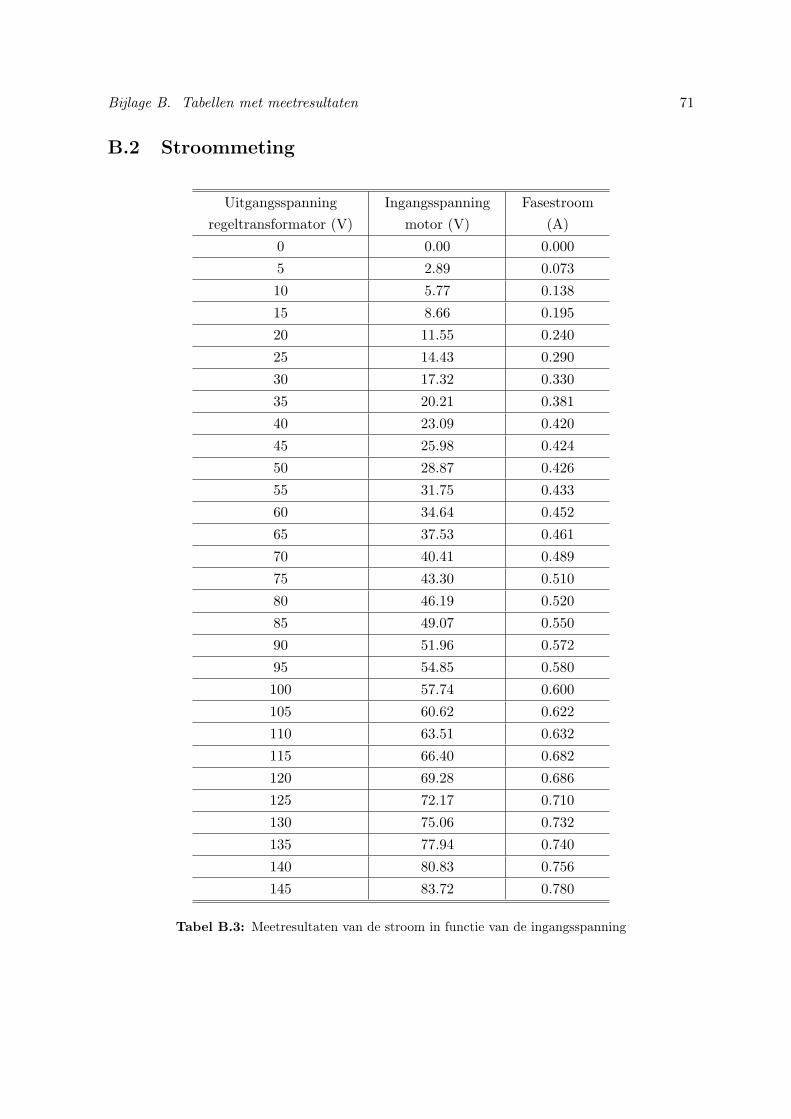
Bijlage B. Tabellen met meetresultaten 71
B.2 Stroommeting
Uitgangsspanningregeltransformator (V)
Ingangsspanningmotor (V)
Fasestroom(A)
0 0.00 0.000
5 2.89 0.073
10 5.77 0.138
15 8.66 0.195
20 11.55 0.240
25 14.43 0.290
30 17.32 0.330
35 20.21 0.381
40 23.09 0.420
45 25.98 0.424
50 28.87 0.426
55 31.75 0.433
60 34.64 0.452
65 37.53 0.461
70 40.41 0.489
75 43.30 0.510
80 46.19 0.520
85 49.07 0.550
90 51.96 0.572
95 54.85 0.580
100 57.74 0.600
105 60.62 0.622
110 63.51 0.632
115 66.40 0.682
120 69.28 0.686
125 72.17 0.710
130 75.06 0.732
135 77.94 0.740
140 80.83 0.756
145 83.72 0.780
Tabel B.3: Meetresultaten van de stroom in functie van de ingangsspanning
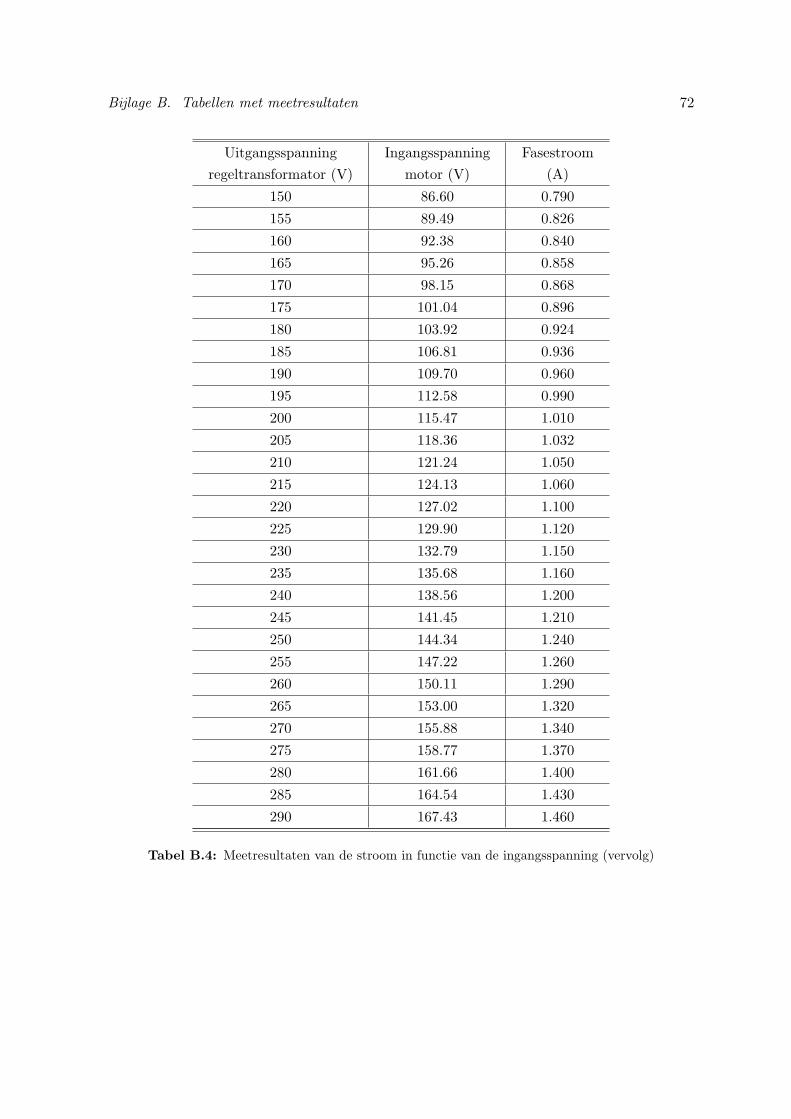
Bijlage B. Tabellen met meetresultaten 72
Uitgangsspanningregeltransformator (V)
Ingangsspanningmotor (V)
Fasestroom(A)
150 86.60 0.790
155 89.49 0.826
160 92.38 0.840
165 95.26 0.858
170 98.15 0.868
175 101.04 0.896
180 103.92 0.924
185 106.81 0.936
190 109.70 0.960
195 112.58 0.990
200 115.47 1.010
205 118.36 1.032
210 121.24 1.050
215 124.13 1.060
220 127.02 1.100
225 129.90 1.120
230 132.79 1.150
235 135.68 1.160
240 138.56 1.200
245 141.45 1.210
250 144.34 1.240
255 147.22 1.260
260 150.11 1.290
265 153.00 1.320
270 155.88 1.340
275 158.77 1.370
280 161.66 1.400
285 164.54 1.430
290 167.43 1.460
Tabel B.4: Meetresultaten van de stroom in functie van de ingangsspanning (vervolg)
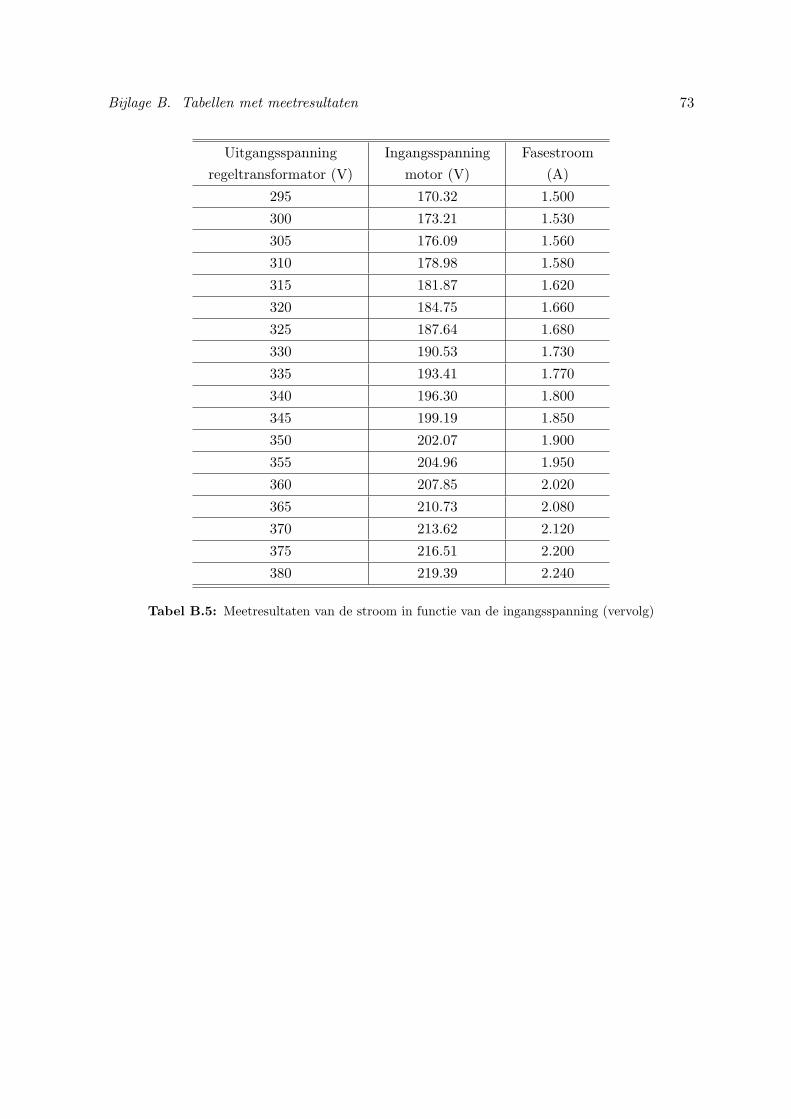
Bijlage B. Tabellen met meetresultaten 73
Uitgangsspanningregeltransformator (V)
Ingangsspanningmotor (V)
Fasestroom(A)
295 170.32 1.500
300 173.21 1.530
305 176.09 1.560
310 178.98 1.580
315 181.87 1.620
320 184.75 1.660
325 187.64 1.680
330 190.53 1.730
335 193.41 1.770
340 196.30 1.800
345 199.19 1.850
350 202.07 1.900
355 204.96 1.950
360 207.85 2.020
365 210.73 2.080
370 213.62 2.120
375 216.51 2.200
380 219.39 2.240
Tabel B.5: Meetresultaten van de stroom in functie van de ingangsspanning (vervolg)

Bijlage B. Tabellen met meetresultaten 74
B.3 Statische koppelmeting
Gewicht [g]
Lasthoek [] 0.8 A 2.4 A 4.2 A
0 0 0 0
8 3 7 19
16 5 15.5 34.5
24 6.5 21 39
32 7.5 22 40
40 8.5 22.25 39
48 9.5 22.5 39
56 10 22.5 39
64 10.5 23.5 39
72 10.5 23.5 38.5
80 10.5 23.5 39
88 10.25 23.5 38.5
96 10.5 24.25 39
100 10.5 25 40
108 11.25 26.5 42.5
116 10.5 27 42.5
124 10.5 27.5 43.5
132 10.5 27.5 44.5
140 9.25 26 42.5
148 9.25 25.5 43.5
156 8.5 25.5 44
164 7.5 22.5 42.5
172 4.5 14.5 38.5
180 3 12.5 32.5
Tabel B.6: Meetresultaten van de gewichten die op de balans gezet werden
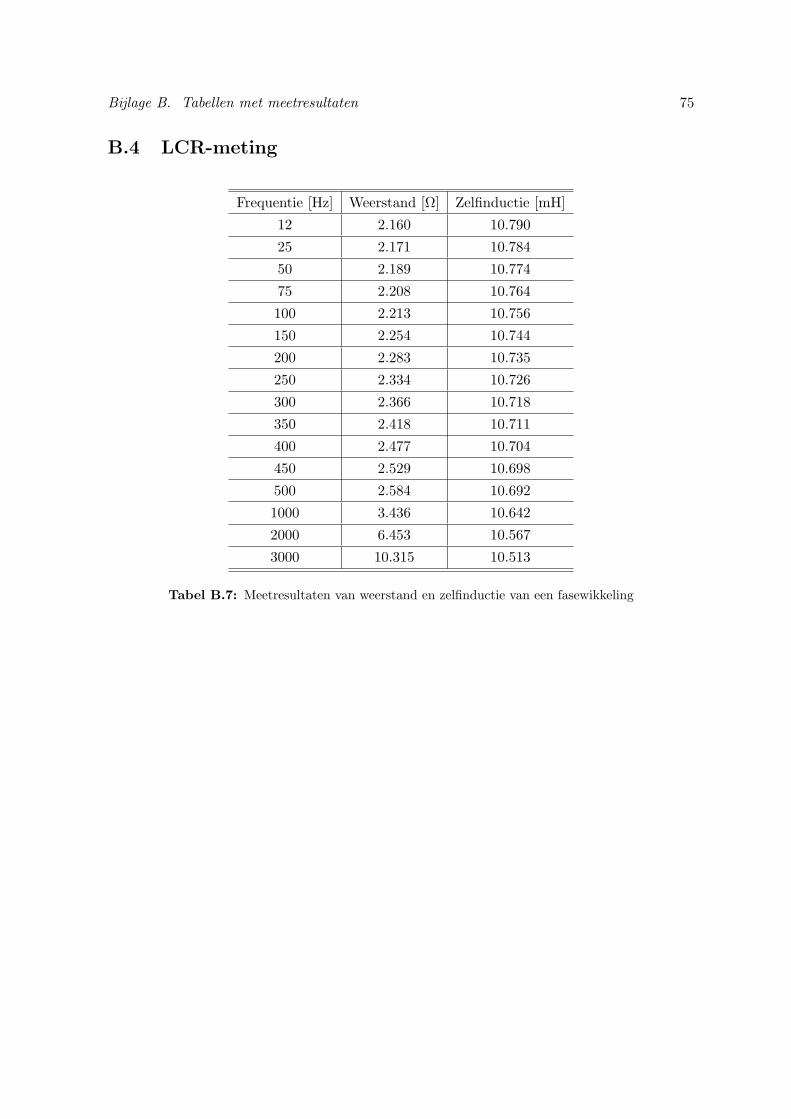
Bijlage B. Tabellen met meetresultaten 75
B.4 LCR-meting
Frequentie [Hz] Weerstand [Ω] Zelfinductie [mH]
12 2.160 10.790
25 2.171 10.784
50 2.189 10.774
75 2.208 10.764
100 2.213 10.756
150 2.254 10.744
200 2.283 10.735
250 2.334 10.726
300 2.366 10.718
350 2.418 10.711
400 2.477 10.704
450 2.529 10.698
500 2.584 10.692
1000 3.436 10.642
2000 6.453 10.567
3000 10.315 10.513
Tabel B.7: Meetresultaten van weerstand en zelfinductie van een fasewikkeling
Bibliografie
[1] P. Preisach. Uber die magnetische nachwirkung. Zeitschrift fur Physik, (94):pp. 277–302,1938.
[2] L. Dupre. Magnetisme en Magnetische Materialen. Syllabus, Gent, 2007-2008.
[3] J. Melkebeek. Gestuurde Elektrische Aandrijvingen. Syllabus, Gent, 2006-2007.
[4] C. P. Steinmetz. Theory and Calculation of Alternating Current Phenomena. McGrawBook Company, Inc, New York, 1908.
[5] B. R. Teare. Theory of hysteresis motor torque. AIEE Transactions, vol. 59:pp. 907–912,1940.
[6] M. A. Copeland and G. R. Slemon. An analysis of the hysteresis machine part 1 -analysis of the idealized machine. IEEE Transactions on Power Apparatus and Systems,vol. 82:pp. 34–42, April 1963.
[7] M. A. Copeland and G. R. Slemon. An analysis of the hysteresis machine part 2 - thecircumferential-flux machine. IEEE Transactions on Power Apparatus and Systems, vol.83:pp. 619–625, June 1964.
[8] M. A. Copeland and G. R. Slemon. An analysis of the hysteresis machine part 3 -parasitic losses. IEEE Transactions on Power Apparatus and Systems, PAS-88(6):pp.954–961, June 1969.
[9] Stuart D. T. Robertson and Safwat Z. G. Zaky. Analysis of the hysteresis machine - part1. IEEE Transactions on Power Apparatus and Systems, PAS-88(4):pp. 474–483, April1969.
[10] M. R. Harris, J. E. Brown, B. C. McDermott, and P. T. Jowett. Aspects of performanceof small hysteresis motors. Inst. Elect. Eng. Conf. Proc, CD-202:pp. 103–105, 1989.
[11] G. R. Slemon, R. D. Jackson, and M. A. Rahman. Performance predictions for largehysteresis motors. IEEE Transactions on Power Apparatus and Systems, PAS-96(2):pp.1915–1919, November/December 1977.
76
Bibliografie 77
[12] D. Schieber. Asynchronous performance of hysteresis motor. J. of the Franklin Institute,299:pp. 433–447, 1975.
[13] S. Gavril and A. Mor. An analysis of the hysteresis motor. Electric Machines andElectromechanics, vol. 7:pp. 203–214, 1982.
[14] Amr A. Adly. Performance simulation of hysteresis motors using accurate rotor mediamodels. IEEE Transactions on Magnetics, vol. 31(6):pp. 3542–3544, November 1995.
[15] K. R. Rajagopal. Design of a compact hysteresis motor used in a gyroscope. IEEETransactions on Magnetics, vol. 39(5):pp. 3013–3015, September 2003.
[16] Paul H. Savet. Gyroscopes: Theory and Design with Applications to Instrumentation,Guidance and Control. Mcgraw-Hill Book Company, 1961.
[17] K. Kurihara and M. A. Rahman. Transient performance analysis for permanent-magnet hysteresis synchronous motor. IEEE Transactions on Industry Applications,vol. 40(1):pp. 135–142, January/February 2004.
[18] Omer M. Awed Badeeb. Investigations of the dynamic performance of hysteresis motorsusing matlab/simulink. Journal of Electrical Engeneering, vol. 56(3-4):pp. 106–109, 2005.
[19] S. P. Clurman. On hunting in hysteresis motors and new damping techniques. IEEETransactions on Magnetics, MAG-7(3):pp. 512–517, September 1971.
[20] Cang Kim Truong. Analysis of Hunting in Synchronous Hysteresis Motor. PhD thesis,Massachusetts Institute of Technology, February 2004.
[21] Catalogus Vacuumschmelze: Ductile Permanent Magnet Alloys and Magnetically Semi-Hard Materials, 1999.
[22] Sun-Ki Hong, Deokgeun Kim, Hoon Jung, and Jongsoo Won. Vector hysteresis model forunoriented magnetic materials. IEEE Transactions on Magnetics, vol. 30(5):pp. 3371–3374, September 1994.
[23] Sun-Ki Hong, Sangwook Lee, and Jongsoo Won. Properties of the vector hysteresis modelfor unoriented magnetic materials. IEEE Transactions on Magnetics, vol. 31(3):pp. 1833–1836, May 1995.
[24] Hong-Kyu Kim, Sun-Ki Hong, and Hyun-Kyo Jung. Finite element analysis of hyste-resis motor using the vector magnetization-dependent model. IEEE Transactions onMagnetics, vol. 34, September 1998.
[25] Sun-Ki Hong, Hong-Kyu Kim, Hyeong-Seok Kim, and Hyun-Kyo Jung. Torque calcula-tion of hysteresis motor using vector hysteresis model. IEEE Transactions on Magnetics,vol. 36(4):pp. 1932–1935, July 2000.

Bibliografie 78
[26] Hong-Kyu Kim, Sun-Ki Hong, and Hyun-Kyo Jung. Analysis of hysteresis motor usingfinite element method and magnetization-dependent model. IEEE Transactions on Mag-netics, vol. 36(4):pp. 685–688, July 2000.
Lijst van figuren
2.1 Niet-lineariteit en verzadiging van een ferromagnetisch materiaal . . . . . . . 42.2 Weissgebieden en Blochwanden in een ferromagnetisch materiaal . . . . . . . 52.3 Magnetisatie van een ferromagnetisch materiaal . . . . . . . . . . . . . . . . . 62.4 Schematische voorstelling van een elektromagneet . . . . . . . . . . . . . . . . 72.5 Maagdelijke kromme met maximale waarde H = Hmax . . . . . . . . . . . . . 82.6 Het bereiken van de remanente inductie door de stroom tot nul te verlagen. . 82.7 Het bereiken van saturatie in het negatief gedeelte van de BH-karakteristiek,
waarbij H = −Hmax . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.8 Het bereiken van de negatieve remanente inductie door de stroom opnieuw tot
nul te laten gaan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.9 Het bereiken van H = Hmax. Dit vervolledigt een hysteresislus. . . . . . . . . 102.10 Elementaire hysteresisoperator . . . . . . . . . . . . . . . . . . . . . . . . . . 112.11 Voorstelling van de gedemagnetiseerde toestand van het materiaal in het αβ-vlak 122.12 Voorstelling van het doorlopen van de maagdelijke kromme in het αβ-vlak . . 132.13 Voorstelling van het doorlopen van een dalende kromme in het αβ-vlak . . . 132.14 Voorbeeld van een functie van H en de representatie hiervan in het αβ-vlak . 14
3.1 Verloop van het hysteresiskoppel plus het wervelstroomkoppel in functie vande slip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Positie van H en M bij positieve (a) en negatieve (b) slip . . . . . . . . . . . . 18
4.1 Schematische voorstelling van de meetopstelling . . . . . . . . . . . . . . . . . 224.2 Schematische weergave van de kern . . . . . . . . . . . . . . . . . . . . . . . . 234.3 BH-lussen van gietijzer GG25 . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.4 BH-lussen van gietijzer GG40 . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.5 Vergroot beeld van de BH-lussen van gietijzer GG25 rond het coercitief veld 254.6 Vergroot beeld van de BH-lussen van gietijzer GG40 rond het coercitief veld 254.7 Demagnetisatiekrommen voor isotrope en anisotrope Crovac[21] . . . . . . . . 264.8 Demagnetisatiekrommen voor Magnetoflex[21] . . . . . . . . . . . . . . . . . . 274.9 Demagnetisatiekrommen van de verschillende magnetische materialen . . . . 28
79

Lijst van figuren 80
4.10 Everettmap GG25 (waarden in Tesla) . . . . . . . . . . . . . . . . . . . . . . 294.11 Everettmap GG40 (waarden in Tesla) . . . . . . . . . . . . . . . . . . . . . . 30
5.1 Volledige geometrie van de motor . . . . . . . . . . . . . . . . . . . . . . . . . 325.2 Volledige mesh van de motor . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.3 Detail van de mesh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.4 Toestand op tijdstip t = t1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.5 Toestand op tijdstip t = t2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.6 Toestand bij verschil van tijdstip t = t2 en t = t1 . . . . . . . . . . . . . . . . 385.7 Koppel in functie van de lasthoek bij 50 A . . . . . . . . . . . . . . . . . . . . 415.8 Koppel in functie van de lasthoek bij 100 A . . . . . . . . . . . . . . . . . . . 425.9 Koppel in functie van de lasthoek bij 150 A . . . . . . . . . . . . . . . . . . . 425.10 Koppel in functie van de lasthoek bij 200 A . . . . . . . . . . . . . . . . . . . 435.11 Het koppel in functie van de lasthoek bij 100A volgens de directe en de diffe-
rentiele methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.12 Het koppel in functie van de lasthoek bij 200A volgens de directe en de diffe-
rentiele methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.13 B-veld bij 40 A en lasthoek 20 (Waarden in Tesla) . . . . . . . . . . . . . . . 465.14 Stroomverdeling bij 40 A en lasthoek 20 (Waarden in A/m2) . . . . . . . . . 465.15 B-veld bij 40 A en lasthoek 60 (Waarden in Tesla) . . . . . . . . . . . . . . . 475.16 Stroomverdeling bij 40 A en lasthoek 60 (Waarden in A/m2) . . . . . . . . . 475.17 B-veld bij 100 A en lasthoek 30 (Waarden in Tesla) . . . . . . . . . . . . . . 485.18 Stroomverdeling bij 100 A en lasthoek 30 (Waarden in A/m2) . . . . . . . . 485.19 B-veld bij 100 A en lasthoek 60 (Waarden in Tesla) . . . . . . . . . . . . . . 495.20 Stroomverdeling bij 100 A en lasthoek 60 (Waarden in A/m2) . . . . . . . . 495.21 Vector hysteresisoperator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.22 De voorstelling van de punten en de hoeken die door de functie maakPunten
worden aangemaakt. Opmerking: hoekrot wordt hier voorgesteld door δ. . . . 535.23 Het doorlopen van de maagdelijke kromme en de terugkerende tak bij de op-
bouw van de magnetische toestand in een van de rotorsegmenten. . . . . . . . 54
6.1 Schematische voorstelling van de opstelling voor het inlopen van de motor ende snelheidsmeting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.2 Het verloop van het toerental van de motor in functie van de aangelegde fase-spanning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.3 Meetresultaten van de stroom in functie van de aangelegde fasespanning . . . 606.4 Schematische voorstelling van de meetopstelling voor het statisch koppel . . . 606.5 Meetresultaten van het statisch koppel in functie van de lasthoek bij verschil-
lende stromen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 626.6 Weerstand en zelfinductie van een fasewikkeling . . . . . . . . . . . . . . . . . 64
Lijst van figuren 81
6.7 Vectorpotentialen in de motor voor het bepalen van de statorzelfdinductie zon-der rotor. De rotorgeometrie is getoond, maar de rotor is gemodelleerd alslucht. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
A.1 Koppelvorming via Maxwell-spanningen . . . . . . . . . . . . . . . . . . . . . 68

Lijst van tabellen
4.1 Afmetingen van de kern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.2 Verschillen tussen GG25, GG40, Crovac en Magnetoflex . . . . . . . . . . . . 28
5.1 Kenmerken van de geometrie van de motor . . . . . . . . . . . . . . . . . . . 33
A.1 Magnetische en mechanische eigenschappen van GG25, GG40, Crovac en Mag-netoflex. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
B.1 Meetresultaten van de snelheidsmeting bij nullast . . . . . . . . . . . . . . . . 69B.2 Meetresultaten van de snelheidsmeting bij nullast (vervolg) . . . . . . . . . . 70B.3 Meetresultaten van de stroom in functie van de ingangsspanning . . . . . . . 71B.4 Meetresultaten van de stroom in functie van de ingangsspanning (vervolg) . . 72B.5 Meetresultaten van de stroom in functie van de ingangsspanning (vervolg) . . 73B.6 Meetresultaten van de gewichten die op de balans gezet werden . . . . . . . . 74B.7 Meetresultaten van weerstand en zelfinductie van een fasewikkeling . . . . . . 75
82