Lokale filedetectie en...
81
LOKALE FXX,EE>ETECTXE Eisr -BEVEILIGING DVK-NOTA Rijkswaterstaat 86-10 Dienst Verkeerskunde dd.3-2-*88 Afdeling CXR Tweede vers i e F. de Haes P. de Jong J. Markus F. van Nistelrooy
Transcript of Lokale filedetectie en...

LOKALEFXX,EE>ETECTXEEisr-BEVEILIGING
DVK-NOTA Rijkswaterstaat86-10 Dienst Verkeerskundedd.3-2-*88 Afdeling CXRTweede vers i e
F. de HaesP. de JongJ. MarkusF. van Nistelrooy

Voorwoord
In deze tweede versie van de nota lokale filedetectieen -beveiliging zijn een aantal verbeteringenaangebracht. Deze zijn gebaseerd op ervaringen met eenlokaal filebeveiligingssysteem op de A12 bijVelperbroek en een filemeetpunt voor eenverkeersregelinstallatie bij het verkeerspleinHooggelegen. Beide installaties zijn ontworpen op basisvan de specificatie beschreven in de eerste nota lokalefiledetectie- en beveiliging dd 29-12-86.De ervaringen zijn beschreven in hoofdstuk 7.Verbeteringen zijn aangebracht in de functionele entechnische specificaties.Tevens is een hoofdstuk toegevoegd met een beschrijvingvan de instelling van de parameters en tabellen.

Inhoud:
1. Inleiding 2
2. Categorie indeling 3
3. Filedetectie voor categorie A1 en A2 4
4. Filedetectie-algorithme voor deoverige categorieën 5
4.1 Inleiding 54.2 Doelstellingen 54.3 Detectie-configuratie 64.4 Lokaties 74.5 Metingen 74.6 Gewenste filewaarschuwingen 74.7 Beschrijving van de algorithmes 94.7.1 Opbouw van de algorithmes 94.7.2 Snelheidskenmerk V1 104.7.3 Snelheidskenmerk V2 114.7.4 Snelheidskenmerk V3 124.7.5 Rijtijdkenmerk R1 134.7.6 Bezettingsgraadkenmerk B1 144.7.7 Bezettijdkenmerk B2 154.8 Performance 164.9 Parameterinstelling 174.10 Analyse performancegegevens 184.10.1 Vergelijking metingen van dezelfde lokaties 184.10.2 Vergelijking van de algorithmes per lokatie 184.10.3 Verschil V1 en R1 234.10.4 Combinatie van kenmerken in een algorithme 244.11 Conclusie 24
5. Beschrijving beveiligingssysteem 25
6. Criteria voor plaatsing 26
7. Ervaringen met het filedetectiesysteem 287.1 Rijstrookafzetting 287.2 Filemelding voor een vri 288. Instellen van de parameters 308.1 Initiële instelling 308.2 Optimaliseren van de instelling 31
Bijlagen:1. Verkeerstechnische specificatie van een lokaal
filebeveiligingssysteem2. Algemene, administratieve en technische besteks-
bepalingen voor een lokaal filebeveiligingssysteem3. Verkeerstechnische specificatie van een
filemeetpunt4. Aanvullende besteksbepalingen (op de Eisen
verkeersregelinstallaties 1985) voor eenfilemeetpunt
- 1 -

1. INLEIDING
In het wegennet doen zich veel situaties voor waar deintensiteit van het gemotoriseerde verkeer tijdelijkhoger is dan de afrijcapaciteit. Voorbeelden vandergelijke situaties kunnen zijn: bruggen, spoorweg-overgangen, verkeersregelinstallaties, toeritten bijASW enz.Bij dergelijke discontinuiteiten ontstaan de bekendefile's die niet alleen de automobilisten zorgen barenmaar tevens de wegbeheerders.Binnen RWS heeft deze problematiek reeds jarenlang deaandacht. Met name de signaleringsprojecten op enkelevan de drukste autosnelwegen in de randstad zijnopgezet om op die wegen de gevolgen vandiscontinuiteiten zoveel mogelijk op te vangen. Daarmeeis echter nog lang niet alle fileproblematiekbehandeld.Elders in het ASW-net zijn nog genoeg plaatsen aan tewijzen waar file's optreden. Het verschijnsel is danechter zodanig beperkt van omvang of treedt zodanigincidenteel op dat het niet gerechtvaardigd is daarvooreen signaleringsproject op te zetten.Ook in het niet-primaire wegennet komen file's op veelplaatsen voor.Voor tal van dit soort situaties zijn met wisselendsucces filedetectiesystemen en filebeveiligings-systemen toegepast. Bij RWS bestond de behoefte dekennis die er ten aanzien van deze materie aanwezig waste bundelen om verder onderzoek te doen om zo te komentot een of meer filedetectoren en een eenduidige aanpakbij beveiliging van lokale file's. Deze nota trachthierin te voorzien.Allereerst is een categorie-indeling gecreëerd voor deverschillende situaties waarbij file's optreden.Per categorie is gezocht naar de beste manier vandetecteren.Daarna is aangegeven welke maatregelen getroffen kunnenworden na het detecteren van file.Vervolgens worden criteria aangegeven waar en wanneertot plaatsing van een dergelijk systeem kan wordenovergegaan.In het volgende hoofdstuk worden de ervaringenbeschreven met een filebeveiligingssysteem op de A12bij Velperbroek en een filemeetpunt voor eenverkeersregelinstallatie bij het verkeerspleinHooggelegen.Tot slot wordt een beschrijving gegeven van deinstelling van de parameters en tabellen van hetfiledetectie-algorithme.
- 2 -

2. CATEGORIE-INDELING
De wijze waarop file's ontstaan, bestaan en verdwijnis sterk afhankelijk van de discontinuiteit inverkeersafwikkeling die de file veroorzaakt.De wijze waarop een file gedetecteerd kan wordenmede afhankelijk van het aankomstpatroon van hverkeer dat de file nadert.Er wordt daarom uitgegaan van de volgende indelingen:
! Afvoer ii
!
! A ! gestagneerd (b.v. brug)! B ! beperkt (b.v. capaciteitsprobleem) •! C ! pulserend a.g.v. vri i! ! i
Aanvoer ii
! ! 1! 1 ! uniform verdeeld !! 2 ! pulserend a.g.v. vri !
J l !_Combinatie van deze punten leidt tot 6 categoriewaarvan hieronder enkele voorbeelden worden gegeven.Categorie A1 komt voor bij een geopende bruggesloten spoorwegovergang zowel bij ASW als NASW. Vocategorie A2 geldt dat eveneens echter met uitzonderivan ASW.Categorie B1 kan voorkomen bij rijbaanversmallingen-samenvoegingen. Een voorbeeld voor categorie B2 is etoerit waarop het verkeer wordt toegelaten d.m.v. evri.Categorie C1 kan overal voorkomen waar een geregekruispunt overbelast is b.v. bij een afrit. CategorC2 tenslotte kan alleen in een geregeld netwerk vNASW voorkomen.De overgang tussen de verschillende categorieënminder scherp dan de hierboven gegeven indeling dovermoeden.Dit wordt veroorzaakt door het feit dat de invloed veen discontinuiteit of een vri op het verkeersgedrvermindert naarmate men er verder van verwijderd is.In deze nota zal aangegeven worden tot waar nog vbeinvloeding kan worden gesproken. Tevens wordt er vuitgegaan dat het gedrag overeenkomt met dat vcategorie B1.
- 3 -

3. FILEDETECTIE VOOR CATEGORIE A1 EN A2
Indien het filemeetpunt in de directe nabijheid van hetobstakel wordt gelegd (niet verder dan lOOm) kan t.b.v.het vaststellen van de aanwezigheid van file gebruikgemaakt worden van de informatie dat de afvoer gestremdis en het verkeer dus niet meer kan rijden. Heteigenlijke detecteren kan dan beperkt blijven tot hetbepalen van de aanwezigheid van stilstaand verkeer.Andere verkeerskenmerken zoals aankomstsnelheid eninvloed vri zijn niet meer bepalend.Volstaan kan worden met een aanwezigheidsdetector dieconstateerd of er tijdens stagnatie van de afvoergedurende langere tijd continu verkeer boven dedetectielus aanwezig is, waarmee wordt aangenomen dathet verkeer dan stilstaat.De lengte van de detectielus wordt bepaald door tweefactoren:-> bij stilstaand verkeer mag de lus niet tussen twee
stilstaande voertuigen invallen-> bij normaal rijdend verkeer mag niet continu
aanwezigheid van verkeer gedetecteerd worden.In de praktijk blijkt een lengte van 7 a 8m hieraan tevoldoen. De duur van de aanwezigheid van verkeer kanbepaald worden met een instelbare tijd die telkensherstart bij het opnieuw opkomen van een melding van dedetector.Indien het filemeetpunt verder van het obstakel moetworden gelegd kan geen gebruik meer gemaakt worden vande informatie daarvan. Tevens mag verwacht worden dathet file-gedrag op een grote afstand van het obstakelanders is dan waarvan hierboven is uitgegaan. Zo'nsituatie kan zich voordoen bij een brug metvoorwaarschuwingen (bord R W nr. 79) wanneer de filezich kan uitstrekken tot voorbij de laatstevoorwaarschuwing en men voor dit gedeelte wilterugvallen op filebeveiliging.In deze nota wordt er van uitgegaan dat bij afstandengroter dan 300m geen relatie meer gelegd mag worden methet vaste obstakel.
- 4 -

4 FILEDETECTIE-ALGORITHME VOOR DE OVERIGE CATEGORIEËN
4.1 INLEIDING
De files bij de categorieën Al en All zijn eenvoudig teherkennen. Het is minder eenvoudig om een file tekunnen herkennen voor de overige categorieën BI, Bil,Cl, CII. In dit hoofdstuk is het onderzoek beschrevernaar filedetectie-algorithmes, die toegepast kunnerworden voor het detecteren van files die voorkomen bijde overige categorieën.Ervaringen met het instellen van de parameters van hetautomatische incident detectie mechanisme van hetautosnelwegsignaleringssysteem (MCSS) hebben aangetooncdat ingewikkelde mechanismes moeilijk instelbaar erbeheersbaar zijn. Daarom is in dit onderzoek gebruihgemaakt van reeds bestaande eenvoudige algorithmes ofvarianten daarvan en is niet getracht om een geheeJnieuw filedetectie-algorithme te ontwikkelen. Dehoofdkenmerken van deze algorithmes zijn snelheid,rijtijd van eerste naar tweede detectielus,bezettingsgraad en bezettijd van de lusconfiguratie.Zes verschillende algorithmes zijn met elkaaivergeleken, waarvan drie varianten gebaseerd ojsnelheid en een variant gebaseerd op elk van de anderegenoemde hoofdkenmerken.Allereerst zijn in dit hoofdstuk de doelstellingerbeschreven waar het detectie-algorithme aan moetvoldoen. Daarna wordt een beschrijving gegeven van dewerkopzet, de gebruikte algorithmes, het onderzoek erde analyse van de gegevens.
4.2 DOELSTELLINGEN
Bij het vaststellen van een filedetectie-algorithmtdient met een aantal doelstellingen rekening te wordergehouden. Deze doelstellingen zijn:
- Uniformiteit en eenvoud:In het kader van de standaardisatie vaiRWS-apparatuur is het gewenst om een beperkt aanta:filedetectie-algorithmes toe te passen die geschikizijn voor lokale filebeveiliging van de verschillend*categorieën.Tevens is het gewenst om het algorithme zo eenvoudi<mogelijk te houden, zodat het instellen van dtparameters, beheer en onderhoud op eenvoudige manie:kunnen geschieden.
- Trefzeker en stabiel detecteren van files:Het filedetectie-algorithme dient alleen te reagerejindien er daadwerkelijk iets aan de hand is, zodaeen goede geloofwaardigheid van het filebeveiligingssysteem wordt bereikt. Het detectiealgorithm*
- 5 -

dient zo snel mogelijk maar met zo weinig mogelijkfoutmeldingen te reageren. Echter voorkomen moetworden dat de detectie van file leidt totkortstondige meldingen ten behoeve van defilewaarschuwing. Ingeval van een signaal naar eenVRI is een dergelijke stabiliteit minder urgent,aangezien de VRI een eigen vertragingsmechanisme kanhebben.
- Goed reageren onder alle omstandigheden:Het filedetectie-algorithme mag geen aanleiding geventot een zodanige waarschuwing aan het verkeer dat degeloofwaardigheid van het systeem wordt aangetast endient onder alle omstandigheden ( zoals bijzonderevormgeving en alignement, slechte weersomstandighedenen bij licht en donker) goed te reageren.Tevens dienen voorzieningen aanwezig te zijn, zodathet mogelijk is rekening te houden met tijdelijkeaanpassingen van de geometrie van de weg zoals bijwerk in uitvoering, waarbij een rijstrook onttrokkenwordt aan het verkeer.
- In- en uitschakelen of defect raken van het systeem:
Het filedetectie-algorithme dient bestand te zijntegen het defect raken (van delen) van het systeem.Het in- en uitschakelen van het systeem mag geenaanleiding geven tot verkeerde acties.
4.3 DETECTIE-CONFIGURATIE
Voor het onderzoek is een speciale detectieconfiguratietoegepast, zodat de detectie-algorithmes met hunverschillende kenmerken met elkaar kunnen wordenvergeleken. Voor bezettingsgraad en bezettingstijd iseen detectielus van 8 m lengte gewenst en voorsnelheidsberekening een dubbellusconfiguratie. Dezewensen kunnen worden gecombineerd in de vorm van eendrielus-configuratie met 1 lus van 3 m en 2 lussen van1.5 m met een onderlinge afstand van 1m. De totalelengte van de lusconfiguratie is 8 m, waarbij tevenseen standaard RWS dubbellus-configuratie aanwezig is.
'l ! ! ! ! 1.8! ! ! ! 1
! 3 1 1 1 1 . 5 1 1 1 1 . 5 !1 8 m !
De detectiegegevens zijn met behulp van de meetwagenvan de DVK en deze configuratie verzameld. De tijd (inms) van het opkomen en afvallen van elke detectielus enhet detectornummer zijn daarbij geregistreerd.
- 6 -

4.4 LOKATIES
Voor elke te onderzoeken categorie is een lokatibepaald die zo goed mogelijk overeenkomt met dicategorie. Op al deze lokaties is in elke rijstrook ddrielus-configuratie aangebracht.De lokaties zijn:
N50 bij Terlet (BI): beide rijrichtingen, 1 rijstrocper rijrichting
Toerit Alexanderpolder A20N (Bil): 2 rijstrokestroomafwaarts van VRI
Diemen A1 (Cl): 2 rijstroken stroomopwaarts van VRIToerit Oud-Beyerland A29 (CII): Zowel stroomopwaart
als -afwaarts van VRI's
4.5 METINGEN
Getracht is om voor elke lokatie twee metingen mefileverkeer te verzamelen.Van de lokaties Terlet, Diemen en Oud-Beyerland zijtwee metingen verricht, waarbij file is opgetrederVoor wat betreft de lokatie Alexanderpolder is helaamaar 1 meting van de 3 uitgevoerde metingen geslaagd.
4.6 GEWENSTE FILEWAARSCHUWINGEN
Het is noodzakelijk de effekten van de verschillendalgorithmes met elkaar te kunnen vergelijken. Daartczijn deze effekten in zodanige vorm omgezet, dat e«eenvoudige keuze mogelijk is. Een reeds beproefdmethode hiervoor is: de filewaarschuwing als resultaévan een filedetectie-algorithme vergelijken met cfilewaarschuwingen zoals deze zouden moeten zijrHierdoor is het mogelijk om de effekten van calternatieven ten opzichte van elkaar te vergelijktmet als referentie de gewenste filewaarschuwing.Van alle filemetingen is een afbeelding gemaakt met e<tekenmachine, waarin de actuele snelheid en h<passeertijdstip per voertuig per rijstrookaangegeven (zie figuur 1). Op deze tekeningen zijn <congestieperiodes te herkennen. Een aantal mens*hebben onafhankelijk van elkaar in deze tekening*aangegeven hoe de gewenste filewaarschuwingen z<kunnen zijn. Gezamenlijk is daarna de gewensfilewaarschuwing vastgesteld voor alle metingen mibehulp van deze afbeeldingen.Indien het waarschuwingsbord op ongeveer 600 meter vo<het detectiepunt wordt geplaatst, dan is de reistivanaf het waarschuwingsbord tot aan het detectiepumet een snelheid van 70 km/u ongeveer 30 s.vastgestelde gewenste filewaarschuwing is daarzodanig aangepast dat de filewaarschuwing 30 s vroegstart dan de file volgens de meting begint.
- 7 -

0 6 10 16 20 26 30 35 4U
1 | I I I I I I I I I 1 I I J I I 1 1 i I 1 I I I 1 I I I I I I I I I I I I 1 I I I [ I6U t ' .
i j J j i i i t i i i i I aKm/u
oo_
120_
110_
IOÜ_
eo_
6 'O IS 20 26 Jo i', 4ü 46
_U_LLI n i l l l l l l l iJ-i-t-i-U-t_U-Li^..J_l.j_i.t,i.ij_i_i_tJ
« 0 _I
7 0 _
6 0 -
6 0 _
4 0 _
3 0 _
20 _
10_
eerste meting Diemen (A1)
1 voertuig op linker rijstrook
2- voertuig op rechter rijstrook
TTT1
TARTTUD
rrrn i i i i i i i i i i 11 i i i i i 111 11 i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i 111 Jii11iiii i i i m i i i i i i i m6 10 16 20 26 30 36 40 46 60 66 ' 6 10 16 20 26 30 3630 36
gewenste rilewaarschuwirij;
nn T ITI
1 JD
J 3-j
_1ZU
_)10
_'00
-j>o
*\ v.
Jio
-J0
1 _60
_£0
J u
_20
_IU
(M1NJ
I i ^ u u i ' 1 : Ac l .uu le s n f t l h e i d en pasüuüi- t . i j t l a t i p p e r v o e r t u i g , w a a r b i j aangegeven de gewenste f i lewi-jcir'ücl'iuwineen

4.7 BESCHRIJVING VAN DE ALGORITHMES
4.7.1 DE OPBOUW VAN DE ALGORITHMES
De algorithmes zijn gelijk van opbouw en bestaan iverschillende fases. Deze opbouw maakt het mogelijkeen groot aantal variabelen te onderzoeken. Ind.blijkt dat bepaalde variabelen of fases overbodig zikan nadat het onderzoek is afgerond eventueelvereenvoudiging van het algorithme worden overgegaan
De opbouw van de algorithmes is als volgt:
Selectie detectiedata:De detectorgegevens worden zodaniggeselecteerd dat alleen correctevoertuiggegevens overblijven. Degeselecteerde voertuigen wordenvervolgens gebruikt voor verdereverwerking.
Classificatie van een kenmerk:In de algorithmes kunnen verschil-lende kenmerken zoals snelheid enbezettingsgraad of een combinatievan kenmerken worden aangebracht.De geselecteerde voertuiggegevensworden gebruikt om per rijstrookeen waarde voor elk gewenst ken-merk te berekenen.De waarde van elk kenmerk wordtof na elk voertuig of na eeningestelde tijdsperiode vergele-ken met een onder- en bovengrens,waaruit een classificatie laag,midden of hoog volgt.
Waardering:Indien meer kenmerken in eenalgorithme worden toegepast, danworden de classificaties van dekenmerken gecombineerd tot eenwaardering per rijstrook (filetwijfel of vrij)
Actie:De waardering van de verschillen-de aanwezige rijstroken wordengecombineerd in een actietabel,waarin de uit te voeren actieszijn aangegeven. Deze actie kanbestaan uit blank(-), No change(handhaaf vorige actie) en file-waarschuwing aan(DF)
selectievoertuige
•!v
berekenenwaarde vakenmerk
vwaarde kevergelijkonder- engrens
Classifichoog, midlaag
combinereclassificper rijst
waarderirtwijfel,
!v
combinerewaarderirrijbaan
•v
actie: bJNo Changewaarsehm
- 9 -

4.7.2 SNELHEIDSKENMERK V1
De Snelheid van hetlaatst gepasseerde voer-tuig wordt vergeleken meteen maximum- en minimum-grens en eventueel bijover- of onderschrijdingaan een van de grenzengelijk gesteld. Eenafvlakfaktor(SMOT) wordtbepaald door de Snelheidte vergelijken met deafgevlakte snelheid(SA).Afhankelijk van eenpositief of negatiefverschil krijgt deafvlakfaktor(SMOT) eenbepaalde waarde ( of ).De Snelheid wordtexponentieel afgevlakt.De afgevlakte snelheid(SA) wordt vergeleken meteen onder-(OG) en boven-grens(BG), waaruit Clas-sificatie volgt ( Laag,Midden of Hoog).
SR>BG < c ^ l
I T I l l l rUotrtuig
1 I I I I I I T TViid
- 10 -

4.7.3 SNELHE1DSKENMERK V2
De Snelheid van hetlaatst gepasseerde voer-tuig {!) wordt vergelekenmet een onder-(OG) enbovengrens(BG) en inge-deeld in een klasse (Laag, Midden of Hoog).Een Teller voor dezeKlasse wordt met 1verhoogd. Het totaalaantal voertuigen van detellers tezamen isconstant(N). Dit wordtbereikt door de Tellervan de Klasse die Nvoertuigen geleden met 1werd opgehoogd met 1 teverlagen.De Teller met de hoogstetellerstand wordt na elkvoertuig bepaald. Indientellers een gelijketellerstand hebben, danwordt gehandeld alsof deTeller van de laagsteklasse de hoogstetellerstand heeft.De Classificatie isgelijk aan de Klasse metde hoogste tellerstand(Laag, Midden of Hoog).
II T<K<
i
i
>>*•*•-M>
T<KC
>=T<
i
K
kM-^U
-BI
-Ol
I I I I rUoertuig
i r i i i t r i . i r .tu
- n -

4.7.4 SNELHEIDSKENMERK V3
De Snelheid van hetlaatst gepasseerde voer-tuig wordt vergeleken meteen onder-(OG), midden-(MG) en bovengrens(BG),waaruit een Waarde volgt.Deze Waarde kan positiefen negatief zijn (a,b,c,d). Een Teller wordtverhoogd met deze Waarde.De Teller wordtvergeleken met eenmaximum- en minimumgrens(0) en eventueel bijover- of onderschrijdingaan een van deze grenzengelijk gesteld. De Tellerwordt vergeleken met eenonder-(OGT) en bovengrens(BGT), waaruit Classi-ficatie volgt (Laag,Midden of Hoog).
_O6<s<rfir=i
jMG<s<jgr=J-f* X
S >BG
T = T + W
W= a U
M= b
W= cf-»
-*\ M= Jl>
___T >max —I
—1 •
T = M
T=e
a x
l —*_ j
T ^
OGT
I I I I I I I I I fkn/u
I I I I I I I I I I I I T+ = voertuig Ti1^
- X B O
• • X- M O
O G• 3
M
- 12 -

4.7.5 RIJTIJDKENMERK R1
Dit kenmerk is bijnagelijk aan kenmerk V1. Inplaats van snelheid(9OOO/(T2-T1)) wordtgerekend met de Rijtijdvan de eerste naar detweede lus van de dubbel-lusconfiguratie (T2-T1).De Rijtijd van het laatstgepasseerde voertuigwordt vergeleken met eenmaximum- en minimum-grens en eventueel bijover- of onderschrijdingaan een van de grenzengelijk gesteld. Eenafvlakfaktor(SMOT) wordtbepaald door de Rijtijdte vergelijken met deafgevlakte rijtijd(RA).Afhankelijk van eenpositief of negatiefverschil krijgt deafvlakfaktor(SMOT) eenbepaalde waarde ( of ).De Rijtijd wordtexponentieel afgevlakt.De afgevlakte rijtijd(RA) wordt vergeleken meteen onder-(OG) en boven-grens (BG), waaruit Clas-sificatie volgt ( Laag,Midden of Hoog).
R —»-
SMOT=B_L
__R >n9x_JZ.^^—
R < mijjUZ:^-
Rfl=SMOT
n"
<OG
Rfi<
iRH
*R + (1-SMO
_I^=—»| C = L j
jB&=^-»j C = M
>BG * C = H |
t i j d
I I I I I=• SMOT*R + <Xl-SMOlT>*RR
B G
O O
t i j d
- 13 -

4.7.6 BEZETTINGSGRAADKENMERK BI
Onder bezettingsgraad wordt hier verstaan: hetpercentage van een vaste meetperiode(T), dat minstenseen van de lussen van de drielus-configuratie bezet is.Gedurende een in te stellen meetperiode(T) wordt debezettijd van de combinatie van lussen gemeten. Bij elktijdstip van opkomen of afvallen van een der lussenwordt de bezettingsgraad bepaald t.o.v. de meetperiode(T). Deze bezettingsgraad wordt vergeleken met eenonder-(OG) en bovengrens(BG), waaruit een classificatie(Hoog, Midden of Laag volgt). Alleen indien dezeclassificatie hoger is dan de vorige classificatiewordt de classificatie aangepast. Tijdens demeetperiode(T), kan de classificatie dus alleen wordenaangepast als deze leidt tot een hogere classificatie.Aan het einde van de meetperiode(T) wordt deuiteindelijke bezettingsgraad van de meetperiodebepaald en weer vergeleken met de onder-(OG) enbovengrens(BG). Hieruit volgt een nieuwe classificatie,die ook lager kan zijn dan de vorige classificatie.
mmL.9w
N
11
1
«JiI I I
1 «• T •
ÉHT T 1
• T •
1
Ii2
4-
I9S9S52
PÜ
1 11 1
1 11 1
I I n! • T •
BG
OG
tijd
- 14 -

4.7.7 BEZETTIJDKENMERK R2
Onder bezettijd wordt hier verstaan: de tijd dat d>drielus- configuratie ononderbroken bezet is. Op hemoment dat de bezettijd de de onder-(OG) of bovengren(BG) overschrijdt wordt een nieuwe klasse (midden ohoof) bepaald. Indien deze klasse hoger is dan ogelijk is aan de geldende classificatie, dan wordt dezklasse de nieuwe classificatie en vanaf dit tijdstiwordt een klok gestart of herstart. Indien de klok nasec afloopt dan wordt de classificatie laag.
hoogniddtn
uiut3
«IN
eo
t i j d
- 15 -
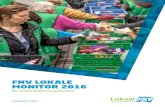
4.8 PERFORMANCE
Een "performanceprogramma" is beschikbaar om dealgorithmes met elkaar te kunnen vergelijken. Ditprogramma vergelijkt de file-waarschuwingen alsresultaat van de filedetectie-algorithmes met de voorafbepaalde file-waarschuwingen van een of meer metingen.Uit deze vergelijking volgt een tabel waarin hetpercentage vals alarm (foute melding), percentage geenalarm, gemiddelde tijd te laat, te vroeg, te kort en telang en de frekwentie van de tijdsduur van debeeldtoestanden (file-waarschuwing aan resp. uit)aangegeven staan (zie figuur 2).
TOT4AL r Afli> Lr N c r o E N T T u
l 1 TUI
J_rt IJB T « 4 j
SUL 1 S 2 Ï U
A L A * M L J ? E'•1 i r t j
_ i_
* E J _L *lJST"u<t«<A Mi r A L_ I '1 C l Q É.Ü L££.: L<t_
M 1 L A K "t I0 X I T
TE—LAATIJ.C S E *
I TF KüRTITLJD GEM.I
.LH ü j i ii_
.I_FRE<«i =L_ ü
• i U : r
'J -i
ü" J * ' . I
u T^T I> :
1 I L I " ! 1 1.2.» l J s i 3I _ 2 _ l ^7S 3 .1 I 302"
7.<4 I i ? 2 *it . 2 iC«t4596.
I_7_ 1 P i ? 7 . i 1 i 1 •! ?L_4 I 222* i t . 1 i 2U1
. 11 Th iu^J- '7 .0
L I u - l _ 12Z<L _ •3.2 i i i ? o
?2 . *i-J.5? 1 . l1J .71 v . i1i.2'-.1
U.ij
4 2'! 'Jo. L -11? -a. 17 H « 62 1 i«niS119 i.
494 3Q 17-.tt 62. 1
11.jQ 0,) j .
737 61v u l 7561J 51 L
S u ü »<: ioao 57 i-i? -1 i
i 1iaZ- 7t 1-11I3-g2 i i"3<f 7o i 135 11 i 1
f 5r'5C5/5r575r5^5r5(-5
u.5 Lu^S. L_u.i 1._
U.3 L-
•j.i L- l.u—1 J 'J--4.5 I u
ii.
|-o S a I3e <.<£ 1HU... ie. I37 <.» I3Ï_ 4 o . I3.L So. J.3_i_ - .^-12 i _ 7v I
? i Su _L
Figuur 2: Voorbeeld van een performancetabel
De hoogte van het percentage vals alarm, het percentagegeen alarm en de frekwentie zijn afhankelijk van detijdsduur en het aantal van de "gewenstefile-waarschuwingen". Het kan zijn dat bij de enemeting of combinatie van metingen een percentage valsalarm van 5 zeer slecht is, terwijl dat voor een anderemeting juist goed is. Door de resultaten per meting ofcombinatie van metingen met elkaar te vergelijken kanworden bepaald welk algorithme beter is dan een ander.Door aan de belangrijkste waarden uit deperformancetabel een gewicht toe te kennen en deze danbij elkaar op te tellen, kan een "performance-index"worden vastgesteld. De performance-index kan dan wordengebruikt om de verschillende resultaten met elkaar tevergelijken, waarna kan worden vastgesteld welkalgorithme en welke parameterinstelling daarvan tot de"beste" resultaten leidt. Tevens kan worden bepaald ofde resultaten van beide metingen van een lokatie
- 16 -

ongeveer met elkaar overeenkomen en welk algorithvoor de lokatie uiteindelijk de beste resultaten geef
4.9 PARAMETERINSTELLINGEN
Om de algorithmes met elkaar te kunnen vergelijkenhet noodzakelijk om per algorithme een parameteinstelling vast te stellen die tot de "bestresultaten leidt voor het algorithme.Voor elk algorithme is een set van standaaparameterinstellingen bepaald, die voor elke metingtoegepast.Per meting en per algorithme is de standaard instellimet de "beste" performance-index verder uitgewerkt vcdat algorithme en voor die meting.Indien meer metingen op een lokatie zijn uitgevoerdook een optimale instelling bepaald voor de combinatvan metingen per lokatie.
- 17 -

4.10 ANALYSE PERFORMANCEGEGEVENS
4.10.1 VERGELIJKING METINGEN VAN DEZELFDE LOKATIE
Per lokatie en per meting is vastgesteld welkparameterinstelling per algorithme de "beste"resultaten geeft volgens de in de vorige paragraafbeschreven methode.Grafieken 1 t/m 3 geven per meting per lokatie deperformancegegevens (vals alarm, geen alarm gemiddeldetijd te laat en totaal aantal meldingen file-waarschuwing aan resp. uit) en een performance-indexvan de optimale parameterinstelling per algorithme.Tussen de performanceresultaten van de optimaleparameterinstellingen per meting van een lokatie zijngeen grote verschillen te vinden. De gevondenverschillen hebben geen invloed op de keuze van eenbepaald algorithme.
Grafiek 1: Performance van de metingen van Terleteerste meting Terlet tweede meting Terlet
D=X- vals alarmO=X. geen alarmX»tijd te laat <s>•«aantal meldingenaan/uit
•=Ind»x <I1>
2ea
180
168
140~
120'
10ft
8 8_
6 0j
48-
20—
* x
200.
188
160
148
120
10
ee_60J
48-
20—
^ï U 2 U 3 R 1 BI B2
S o Xo
Xo
UI U2~uT RI BI B
X
5
- 18 -

Grafiek 2: Performance van de metingen van Diemen
5Sa.t. meting Diemen tweede m«tinff m — . .
100
90_!
88 J78-168-
58-
48 J
30 J
28-
18-
XO
X
O
o•
X
ao
a
200,
188
168'
148
128'
180
8 8_
6 8_
40-i
2 8 -
U l V2 U 3 R 1 BI 8 2
X X
9 9
X
O
.4
l3
Ml U2 U^ R*l B
Grafiek 3: Performance van de metingen Oud-Beyerlanc
eerste meting Oud-Beyerl. tweede meting Oud-Bevgr
C2—y- v a l s a l ar-mO=3L geen »l»fmX=ti jd te laat <s>-aanta l «eldingen
aan/uit
•«Index <I1>
200.
188
168'
148
120
188
88 J
68_!
48-1
28- OD
Xn9 25
'•v.5
280
188'
168
148
128'
180
8©J
69_
48-
28—
UI U
OX-
'2 vb Ri BI B2 UI U1 x • -
ÏTÜb Rl
- 19 -

tleUlllli* C°™leS '«» — - » Per?o™an=e-i„aex11 = 5*VA + 4*GA + TL + N12 = 10*VA + 4*GA + TL + N
2 213 = VA + (0.5*GA) + TL + N
I =VA =GA =:TL =:N =:
performance-index% vals alarm% geen alarmgemiddelde tijd te laat (s)aantal meldingen (aan resp. uit)
Grafiek 4: Performance Terlet Grafiek 5: Performance Alexanderp.
n=X. vals al ar-m
X=t i jd te laat <s>
O O
100
99-
88_
68-
58
30—
20—
1 0 -
%V
U I U 2 U 3 R I B 1 B 2
180
9eJ
88-
78 J
68 J
58-1
4 8-1
3 8 J
28^
18-
q
• -.o-y 'i
••i
.,x-"• '
1
a
-.. ——O
"• ^ - xi i
"••--.
/
/i
•-••..
.-.••
a'4' \
/y
l
a
or
*
UI U2 U3 RI BI B2
- 20 -

Grafiek 6: Performance Diemen Grafiek 7: Performanc
Q=7.. vals al ar-m0=7.- 9«en al ar-mX = t i j d te laat <s>»=aantal meldingen
aan/ui t
188
98 J
88 J
78_!
68_
5 8 -
40
30—
2 8 -
10-
V*- * * B<\g-
UI U2 U3 R I B I B2 C
180
9 8 _I
8 0-1
70_!
6 8 -
5 8 -
4 0—
3B-
23 —
1 8 -
a\
\ ..V•I1 \
f?//"
Ui U2
•/ • • - ,
,••'
•'
Ku'3
""'••
- » :
R l
Grafiek 8: Performance-index Grafiek 9: PerformancTerlet Alexanderp
G=5*Ufl+4*Gfl+TL+NX=18*Ufl+4*Gfl+TL+N
• =Uf l2+<8.5*Gf l ) + T L ^
2 88
188'
168'
148'
128'
180
8 8_!
6 8J
4 8 -
28—
280
188"
168'
148
128'
10ft
48
28-
Ul± U2 ub Rl BI 82
• X* v***,«/
U 1 U 2 U 3 RJL
- 21 -

Grafiek 10: Performance-index Grafiek 11: Performance-indexDiemen Oud-Beyerland
•=5*yfl+4*Gfl+TL+NX=18*Ufl+4*Gfi+TL+N
2 2•=Ufl + ( .5 *Gf l ) +TL+M
148
128'
1881
6 8 -
4 8 -
2 8 -
Xa
148.
120
188
88-
6 0_
48-
28-
/ o x
a
UI U2 U3 R l 81 8 2 C P1U2 U3 R l 81 8 2
Bij de analyse kan onderscheid worden gemaakt tussengoede, redelijke en slechte resultaten. In deonderstaande tabel staat dit onderscheid gebaseerd opde resultaten per lokatie aangegeven.
! Oud Beyerland! Alexanderpolder! Diemen
! Terlet
i!21•j
GOEDV1V2B2
VI
,R1,V3,
,V3,
R1
R1
REDELIJKV3V1V1R1V2
,B1
,V2,B1
B2
.V3,
SLECHT !V2B1
BI
,B2 1
,B2 i
Het rijtijdkenmerk geeft de beste resultaten voor allelokaties tezamen.
Het bezettijdkenmerk geeft goede resultaten voor delokatie Diemen en voor de lokatie Oud Beyerland wordteen redelijk resultaat behaald. Beide lokaties zijnstroomopwaarts van een verkeersregelinstallatie. Deresultaten van het bezettijdkenmerk zijn zeerafhankelijk van de cyclustijd van de regeling. Destabilisator van dit kenmerk (tijd waarbinnen declassificatie niet lager kan worden) dient gelijk tezijn aan de cyclustijd van de regeling. Bij de lokatievan Diemen is tijdens de metingen sprake van een starreregeling van 100 s. Bij de optimale instelling blijktdat de stabilisator ook 100 s is. Bij Oud Beyerland isniet sprake van een starre regeling en komt bovendienhet verkeer pulserend aan als gevolg van een vristroomopwaarts.
- 22 -
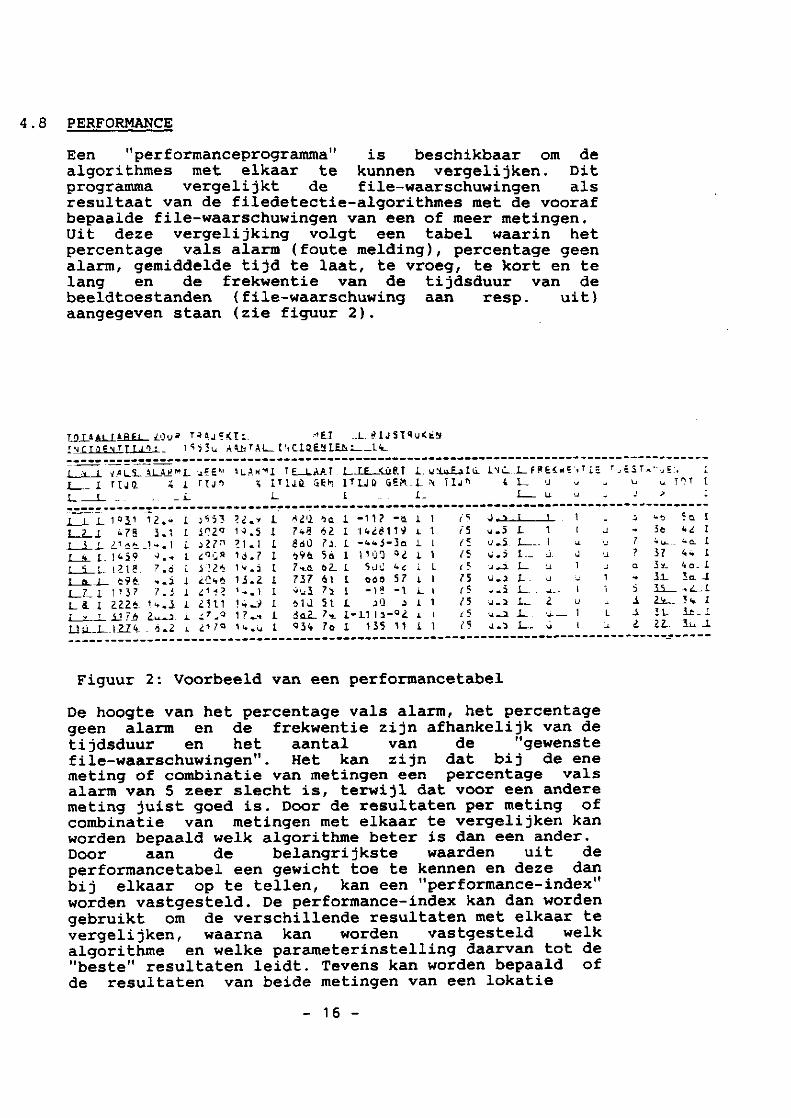
4.10.3 VERSCHIL VI EN Rl
Het algorithme R1 geeft resultaten die beter zijn daivan het algorithme V1, ondanks dat deze algorithme.'bijna identiek zijn. Dit verschil is te verklaren uilhet feit dat bij het principe van exponentieelafvlakken hoge waarde een relatief groot effect hebbeiop het resultaat en kleine waarden een relatief kleiieffect. Een korte rijtijd komt overeen met een hogtsnelheid en een lange rijtijd komt overeen met een lag<snelheid. Het verschil van afvlakken van rijtijd eisnelheid is te zien in de onderstaande figuur 3. Bieen gelijke afvlakfaktor voor snelheid en rijtijd za.het algorithme met rijtijd sneller reageren OJlangzame rijdende voertuigen en trager reageren o]voertuigen met hoge snelheid dan het algorithme mesnelheid. Met name in situatie waar veel schokgolveikort achter elkaar voorkomen zoals in de buurt vaiVRI's (optrekken en afremmen) kan dit positief werkendoordat snel wordt gereageerd bij het begin van de fiLen dat minder snel wordt gereageerd op (kortstondi<optreden van) sneller rijdende voertuigen.
Skn/u
SR* 9.25*S + 8.75*SRRR= 8.23*R + 0.?5*RR
•«startwaarde SR en RR
90100113129150188225308450900
90-88_70_60_30-40_
28_
*•_
* SRx "t
X •
4-x ".* X X x X ,
-
S=28 kn/u
SRt . - •• "
" X
-• X
X
• X
x RRX
XX
•
S=100 kn/u
Figuur 3: Verschil van afvlakken van R1 en V1
- 23 -

4.10.4 COMBINATIE VAN KENMERKEN IN EEN ALGORITHME.
Overwogen kan worden om meer kenmerken in 1 algorithmete combineren. De enige zinnige combinatie is die vaneen snelheids- of rijtijdkenmerk met bezettingsgraad-of bezettijd- kenmerk. Het heeft geen zin om kenmerkenmet elkaar te combineren die volgens dezelfde principeszijn samengesteld. Zo zal de combinatie van snelheids-kenmerken niet tot substantiële verbeteringen leiden.Dit geldt ook voor het rijti jdkenmerk met eensnelheidskenmerk aangezien snelheid = afstand/rijtijd.Echter uit de resultaten blijkt dat voor de lokatiesTerlet en Alexanderpolder met het bezettijd- enbezettingsgraadkenmerk de file slecht gewaarschuwdwordt. Voor deze lokaties zal het dan ook geen of zeerweinig verbetering geven indien deze gecombineerdzouden worden met een snelheids- of rijtijdkenmerk.
Voor de Lokatie Diemen is bekeken of combinatie van hetrijtijdkenmerk en het bezettijdkenmerk tot substantiëleverbetering leidt. De resultaten hiervan zijn te vindenin grafiek 3 en 7 onder kenmerk C. Uit de grafiekblijkt dat combinatie van deze kenmerken niet leidt toteen beter resultaat.
4.12 CONCLUSIE
Op basis van de resultaten kan geconcludeerd worden,dat het algorithme met het kenmerk Rijtijd voor allesituaties goed toepasbaar is en dat combinatie vankenmerken geen zin heeft.Dit leidt tot een filedetectiealgorithme dat algemeentoepasbaar is en dat voor alle situaties identiek is,waarbij alleen de parameters per situatie dienen teworden ingesteld.De keuze van dit algorithme is uitgevoerd op basis vanvergelijking van trefzeker detecteren en een stabielbeeld in de tijd.In het onderzoek is niet beschouwd of het algorithmeook goed werkt tijdens bijzondere omstandigheden zoalsweer en tijd. Het snelheidsalgorithme dat toegepastwordt in het signaleringssysteem, blijkt tijdensbijzondere omstandigheden ook redelijk te functioneren.Gezien het feit dat het rijtijdalgorithme volgensdezelfde principes werkt als dit snelheidsalgorithme,kan worden aangenomen dat het rijtijdalgorithme ooktijdens bijzondere omstandigheden redelijk files zalblijven detecteren.
- 24 -

5. BESCHRIJVING BEVEILIGINGSSYSTEEM
In een aantal gevallen, b.v. in categorie Al, A2, BC1 en C2, zal de file-informatie veelal bedoeld zivoor de verkeersregeling. De informatie wordt inverkeersregelinstallatie gebruikt om de regelstrategaan te passen aan de optredende file. De maatregeldie daarvoor kunnen worden genomen worden hier verdniet behandeld.In andere gevallen, b.v. B1 en C1 is de file-informatgewenst om een voorziening aan te sturen die hachteropkomend verkeer waarschuwt voor de file een z.filebeveiligingssysteem.Een lokaal filebeveiligingssysteem bestaat uitvolgende onderdelen:
een meetpunteen filewaarschuwing eneen regeltoestel
Het meetpunt en de filewaarschuwing zijn m.b.v. kabeverbonden met het regeltoestel. Het meetpunt bevinzich op een bepaalde doorsnede van de weg. hfilemeettoestel bevindt zich in de nabijheid van hmeetpunt. De filewaarschuwing bevindt zich in edoorsnede van de weg die zich in de rijrichting gezienkele honderden meters stroomopwaarts bevindt t.o.de doorsnede van het meetpunt.E.e.a. wordt vastgelegd op een tekening die behoort hhet betreffende beveiligingssysteem. Het meetpunt dieom de file te kunnen detecteren. De filewaarschuwiwaarschuwt het verkeer tegen de optredende file. Dewaarschuwing ziet er als volgt uit:Bord R W nr. 94a wordt aangebracht op een rechthoekachtergrond schild met in de 4 hoekpunten 4 geknipperlichten.Als deze waarschuwing aan gaat, verschijnt het R W bcen gaan de 4 gele knipperlichten knipperen. Zie vercvoor een gedetailleerde beschrijving de betrefferspecificatie.
o
Ao
O
O
figuur 4: waarschuwingsteken
- 25 -

6. PLAATSINGSASPECTEN VAN EEN FILE-BEVEILIGINGSSYSTEEM
In deze nota is een filebeveiligingssysteem ontwikkeldwat tot doel heeft het naderende verkeer voorverstoringen in de verkeersafwikkeling te waarschuwen.In deze paragraaf wordt ingegaan op de criteria voor deplaatsing van een dergelijk lokaal file-beveiligingssysteem .
Indien de vraag zich voordoet of in een bepaaldesituatie een filebeveiligingssysteem kan wordengeplaatst, dan zal die situatie op de volgende puntenmoeten worden beoordeeld:
- Ongevallen
Het aantal ongevallen dat zich in een bepaalde situatievoordoet vormt een objectief criterium voor deplaatsing van een filebeveiligingssysteem. Indien hetaantal ongevallen groter is dan dat voor soortgelijkesituaties zonder filevorming als "normaal" mag wordenbeschouwd kan tot plaatsing worden overgegaan.Gezien de grote diversiteit aan filegevoelige situatieskan ten aanzien van het 'normaal' aantal ongevallen paseen uitspraak gedaan worden nadat een opsplitsing incategorieën heeft plaatsgevonden en per categorie eenongevallen-analyse is uitgevoerd.
- Vormgeving
De vormgeving van een situatie kan aanleiding zijn voorhet plaatsen van een file-beveiligingssysteem. Indieneen onderdeel van het horizontaal of verticaalallignement de staart van een eventuele file buiten hetzicht van het naderende verkeer houdt kan tot plaatsingworden overgegaan. Hierbij dient o.a. gedacht te wordenaan bochten, heuvels, bruggen of tunnels.Waarschijnlijk zullen dergelijke situaties al eenbeveiliging behoeven op basis van het criteriumongevallen. Indien dat echter niet het geval is, zaleen beveiliging zeker op zijn plaats zijn vanwege desubjectieve onveiligheid en de kans op schrikreacties.
- Filelengte
Een lokaal filebeveiligingssysteem, bestaande uit eendetectie-meetpunt kan enkel van nut zijn als met eenaan zekerheid grenzende waarschijnlijkheid de staartvan de file kan worden vastgesteld. Indien de lengtevan een file een grote spreiding kent is het moeilijkom de juiste ligging van de detectie vast te stellen.Als criterium voor plaatsing van eenfile-beveiligingssysteem geldt daarom tevens dat, nadatde file is ontstaan, de lengte van de file geen groterespreiding kent dan "500m". Is dit wel het geval dan kangedacht worden aan het installeren van meer
- 26 -

detectiemeetpunten.
- Frequentie van de filevorming
Via de radioverkeersinformatie worden weggebruikerelke dag op de hoogte gehouden van de verkeerssituatiop het Nederlandse wegennet. Een onderdeel daarvan zi;de filemeldingen. Enkele komen dagelijks voor, andereslechts enkele keren per jaar. Het zal duidelijk zi;dat een file regelmatig dient op te treden alvorens hete verantwoorden is een investering te doen voor caanleg van een filebeveiligingssysteem.
Zoals uit het bovenstaande mag blijken is het niedirect aan te geven in welke situaties tot plaatsirvan een file-beveiligingssysteem kan worden overgegaarGetracht is enkel die items aan te geven die in iedtgeval in een beslissing dienen te worden meegenomeiUiteindelijk zal iedere wegbeheerder voor elke situatiopnieuw een afweging moeten maken en moeten concludercof een investering in een file-beveiligingssyste«verantwoord is.
- 27 -

7. ERVARINGEN MET HET FILEDETECTIESYSTEEM
Bij het uitgaan van deze tweede versie van de nota isreeds een filebeveiligingssysteem (Velperbroek) en eenfilemeetpunt voor een verkeersregelinstallatie(Hooggelegen) geplaatst. Bij de eerste ervaringen bleekdat er nog een aantal aanvullingen gewenst zijn op hetsysteem.
7.1 RIJSTROOKAFZETTING
In de oorspronkelijke opzet was het de bedoeling dat dekantonnier zorg zou dragen voor het met de handuitschakelen van de detectoren van een afgezetterijstrook in geval van werk in uitvoering om tevoorkomen dat een langzaam rijdende werkwagen eenfilemelding zou veroorzaken. Bij het verwijderen van deafzetting zouden de detectoren weer aangeschakeldmoeten worden. Dit aan- en uitschakelen bleek nietaltijd goed te functioneren.Dit probleem is (gedeeltelijk) opgelost door elkdetectorpaar te voorzien van een timer (instelbaartijdelement TIJDi). Indien deze timer een ingesteldegrenswaarde (Q) overschrijdt dan wordt de waarderingvan die rijstrook gelijk aan 'X'. Dit houdt in dat dierijstrook (tijdelijk) wordt uitgeschakeld voor hetbepalen van de filemelding.Gedurende de tijd dat er nog geen ingesteld aantalvoertuigen (A) over het detectorpaar is gepasseerdworden de detectiemeldingen wel verwerkt in het model,maar leiden niet tot een nieuwe waardering. Pas als hetingesteld aantal voertuigen (A) zijn gepasseerd wordtweer een nieuwe waardering bepaald. Deze (A) voertuigendienen wel een kleinere volgtijd te hebben dan deingestelde grenswaarde (Q), anders dient opnieuw hetaantal ingestelde voertuigen (A) te passeren voordat dewaardering kan worden aangepast.In geval van een afgezette rijstrook zal de waarderingvan die rijstrook veranderen in X indien TIJDi dewaarde Q overschrijdt. De enkele keer dat een voertuigover die rijstrook rijdt zal geen aanleiding geven toteen nieuwe waardering. Pas als de rijstrook weer vrijwordt gegeven zal na een aantal voertuigen een nieuwewaardering worden bepaald.Indien ondanks bovenstaande (een colonne)werkvoertuigen toch aanleiding geven tot eenfilemelding, zal de kantonnier toch moeten overgaan tothet handmatig uitschakelen van de detectoren.
7.2 FILEMELDING VOOR EEN VERKEERSREGELINSTALLATIE
Bij ervaringen van het filemeetpunt bij verkeerspleinHooggelegen bleek het volgende:
- 28 -

De detectielussen van het filemeetpunt liggen op zeekorte afstand van de stopstreep (op ongeveer 125 m)Dit als gevolg van de korte afstand tussen dautosnelweg en de stopstreep. Een filemelding wordt agegeven bij een wachtrij van 8 tot 12 voertuigen vocde stopstreep.Een filemelding gaat pas weg als een aantal voertuigeharder rijdt dan de ingestelde bovengrens. Nu bleek dabij het wegrijden van de wachtrij voor de stopstreep cfilemelding niet altijd verdween, omdat de optrekkendvoertuigen niet hard genoeg reden of voor een langextijd geen nieuw aankomende voertuigen werdegedetecteerd. Ondanks dat er geen file meer was bleede filemelding in dit geval gehandhaafd.Door naaast een continu signaal een kort signaal tgeven wanneer een voertuig over de detector rijdt kédit probleem worden opgelost. Het filemeetpunt zal :dit geval bij elk voertuig testen of er een file worcgemeten of niet. Indien file wordt gemeten, wordt eekort signaal gegeven aan de regelautomaat. Zolang edus geen voertuigen over de detectoren van hcfilemeetpunt passeren zal er ook geen signaal aan cautomaat worden gegeven.In de regelautomaat kan wordebepaald wanneer de puls aanleiding geeft tot een act:in de automaat en hoelang de filemelding minima;aanwezig moet blijven.
- 29 -

8. INSTELLEN VAN DE PARAMETERS
Het filedetectiealgorithme kent een aantal parametersen tabellen die ingesteld moeten worden. In dezeparagraaf wordt aangegeven wat de initiële instellingzou kunnen zijn en wat verder nog kan geschieden om deinstelling te optimaliseren.
8.1 INITIËLE INSTELLING
In het in deze nota beschreven onderzoek is per lokatienaar een optimale instelling gezocht.De optimale instellingen zijn:Lokatie gemiddelde Vmin Vmax Alpha Betta Vbg Vog
snelheid
Oudbeyer-landAlexander-polderDiemen
Terlet
Velper-broek*
50
60
70
80
100
km/u
km/u
km/u
km/u
km/u
15
15
15
15
15
100
100
100
100
100
25
20
25
15
35
15
30
25
50
25
35
40
35
50
45
45
45
50
55
55
*Optimale instelling van het reeds geinstalleerdesysteem Velperbroek (A12)
De actietabel is bij alle instellingen als volgtingevuld:
FTWVF
XXXF
FTWF V
TWTWTWV
VV
XXXXXXXXX
XXXXXXXXX
W-aanNW-uitW-aanW-aanW-aanNNW-uit
Gezien de resultaten en de ervaringen met het file-detectiealgorithme van het verkeerssignaleringssysteemdat op ongeveer gelijke wijze werkt kan het volgendegeadviseerd worden t.a.v. een initiële instelling vande parameters en tabellen zonder dat dit aanleidinggeeft tot ongewenst veel vals alarm:
Gemiddeldesnelheid>75 km/u65-75 km/u50-65 km/u
Vmin Vmax Alpha Betta Vog Vbg
151515
100100100
25%25%25%
25%25%25%
403535
555045
- 30 -

Op lokaties met lagere gemiddelde snelheden zijn geenmetingen verricht. Echter de volgende algemene regelskunnen worden gebruikt voor de initiële instelling:- Vbg ongeveer 5-10 km onder de gemiddelde snelheid meteen maximum van 55
- Vog ongeveer op 3/4 van de Vbg- Alpha en Betta beide op 25%- V-max=100 en V-min=15 of 5 km lager de Vog- De actietabel kan als volgt worden ingevuld:.op minstens 1 rijstrook waarde F—>actie=W-aan of DF.op minstens 1 rijstrook waarde TW en op geen vande rijstroken waarde F —>actie=N.op alle rijstroken waarde V of X—>actie=W-uit of -
- De filtergrenzen VG = 200 km/u, ZG = 0.2 s
- Met de grenswaarde Q van TIJDi zijn nog geenervaringen opgedaan. Indien dit mechanisme wordtgebruikt om te kunnen bepalen of een rijstrook isafgezet, dan zal een waarde van 60 s niet onredelijkzijn. In een situatie waarbij stilstand kanvoorkomen ( vri, brug e.d.) dient Q minimaal gelijkte zijn aan de maximum wachttijd (maximum wachttijdvoor brug, maximum roodtijd) om te voorkomen dat indie situatie de filewaarschuwing ongewenst wordtuitgeschakeld.
- A zou kunnen worden ingesteld op 2. Dit houdt in datbij het derde voertuig een nieuwe waardering bepaaldkan worden, uitgaande van de situatie dat dewaarderimg van die rijstrook gelijk is aan 'X' en devolgtijd van de eerste drie voertuigen kleiner isdan Q.In de situatie dat file verwacht kan worden zullenhiaattijden van 60 s of langer nauwelijks of nietvoorkomen.
8.2 OPTIMALISEREN VAN DE INSTELLING
Een optimalisatie van de parameterinstelling kan wordeiverkregen door dezelfde methode toe te passen die i.gebruikt voor het onderzoek beschreven in deze nota.Deze methode houdt in:
- een aantal files meten op de lokatievoor de gemeten files aangegeven wat de gewenst,filemelding zou moeten zijnsimuleren van het filedetectiealgorithme met d
gemeten files waarbij de parameterinstellingen wordegevarieerd
- de filemeldingen van de simulatie vergelijken met dgewenste filemeldingen
- op basis van het resultaat (% vals alarm, % geealarm, gemiddelde tijd te laat, frekwentie van he
- 31 -

aantal meldingen) een keuze maken voor de meestoptimale instelling.
De programmatuur (Intunepakket) voor deze simulatie envergelijking is beschikbaar bij de DienstVerkeerskunde.
•*••
- 32 -

Bijlage 1
Rijkswaterstaat
Dienst Verkeerskunde
Verkeerstechnische specificatie van
een lokaal filebeveiligingssysteea.
Inhoud
1. Algemene beschrijving
1.1 Het meetpunt
1.2 De filewaarschuwing
1.3 Het filemeettoestel
2. Specificatie van de filemeting
2.1 Specificatie voor één rijstrook
2.2 Specificatie voor andere rijstroken
2.3 Actietabel

- 1 -
1. Algemene beschrijving
Ben lokaal filebeveiligingssysteem bestaat uit de volgende onderde-
len:
- één meetpunt
- één filewaarschuwing en
- één filemeettoestel.
Het meetpunt en de filewaarschuwing zijn met behulp van kabels ver-
bonden met het filemeettoestel. Het meetpunt bevindt zich ter hoogte
van één bepaalde doorsnede van de weg. Het filemeettoestel bevindt
zich in de nabijheid van het meetpunt. De filewaarschuwing bevindt
zich ter hoogte van een andere doorsnede van de weg die zich in de
rijrichting gezien enkele honderden meters stroomopwaarts bevindt ten
opzichte van de doorsnede van het meetpunt.
Een en ander is vastgelegd op een tekening die behoort bij het be-
treffende filebeveiligingssysteem.
1.1 Het meetpunt
Het meetpunt bestaat uit een aantal in het wegdek aangebrachte detec-
tielussen. Per rijstrook voor de te bemeten rijrichting worden twee
lussen aangebracht zoals aangegeven in fig. 1.
1* detectielus2 e detectielus
/ Zrijrichting v
1.5-rf-
1.5
het midden van
een rijstrook
maten in m
fig. 1 : detectieconfiguratie

- 2 -
Elke rijstrook van de betreffende rijrichting heeft een
detectieconfiguratie. De meldingen van de bij deze lusse
detectoren worden in deze specificatie als volgt aangeduic
- het opkomen van de 1e detector met ti;
- het opkomen van de 2e detector met tj;
- het afvallen van de 1e detector met t3;
- het afvallen van de 2e detector met t4;
In deze specificatie wordt gebruik gemaakt van de meldinc
t2» t3, t4 (zie fig. 2).
melding 1e detector
J ' melding 2e detector
t1 t2 t3 t4
fig. 2 : meldingenreeks
1.2 De filewaarschuwing
De filewaarschuwing bestaat uit één of meerdere waarschuw
Een waarschuwingsteken bestaat uit het bord nr. 94a (uit
II van het R W ) aangebracht op een rechthoekig achtergrot
in de vier hoekpunten van dit schild 4 gele knipper lichte
wordt uitgevoerd in een verdwijnuitvoering.
fig. 3: waarschuwingsteken
Het geheel wordt aangebracht op een mast naast de weg of
legger of een portaal boven de weg. Waar het waarschuwing
aangebracht, kunnen meerdere van dergelijke combinaties
plaatst b.v. links en rechts van de weg of boven el kt

- 3 -
Een en ander bli]kt uit de tekening van het betreffende f ilebevei1L-
g i.nyssysteem. Alle waarschuwi-gstekens van de f ilewaarschuwing gaan
steeds tegelijkertijd aan en uit.
Aan betekent in dit verband:
- het RW-bord wordt zichtbaar en
- de vier gele knipperlichten gaan alternerend knipperen waarbij de
bovenste twee en de ondecste twee paarsgewijs tegelijkertijd aan en
uit zijn, bij toepassing van meerdere waarschuwingstekens valt het
branden van alle bovenste c.q. alle onderste knipperlichten steeds
samen.
Uit betekent:
- het RW-bord wordt onzichtbaar en de gele knipperlichten doven.
1.3 Het filemeettoestel
Het filemeettoestel bevindt zich in de nabijheid van het meetpunt en
bestaat uit een kast waarin de volgende elementen zijn samengebracht.
- voedingen vooc het gehele systeem (netaansluiting);
- detectoren voor de aansturing van de detectielussen;
- een microprocessor die de logische verwerking en bewerking van de
detectiemeldingen verzorgt en op grond daarvan de aansturing van de
filewaarschuwing commandeert;
- communicatie-apparatuur om bediening van het toestel mogelijk te
maken;
- de aansturing van de filewaarschuwing;
- verlichting;
- documentatie e.d.
Hoofdstuk 2 beschrijft verder het programma van de microprocessor.
Deze beschrijving ziet er in grote lijnen als volgt uit. Per rij-
strook worden binnenkomende detectiemeldingen eerst geselecteerd op
een juiste volgorde. Vervolgens vindt een selectie plaats op grond
van de realiteitswaarde van de meting. Dan wordt aan de hand van de
meting van een actueel voertuig volgens een bepaald algoritme de "mo-
delwaarde" bepaald. De modelwaarde wordt voortdurend aangepast. Elke
goede melding levert een nieuwe modelwaarde op. Deze modelwaarde
wordt als criterium gebruikt voor het bepalen van een waardering.
Tot slot worden de waarderingen van verschillende rijstroken samen
gebracht in één actietabel ten behoeve van de aansturing van de file-
waarschuwing.

- 4 -
2. Specificatie van de filemeting
In deze specificatie wordt gebruik gemaakt van de
aanduidingen:
A aantal voertuigen voor initialiseren
Ai voertuigteller
n index behorende bij het actuele voertuig
n-1 index behorende bij het voertuig voorafgaand*
actuele voertuig
n+1 index behorende bij het voertuig komende na h
voertuig
R rijtijd (in ms)
Z volgtijd (in 100 ms)
T tijdstip (in ms)
RG grenswaarde van R (in ms)
ZG grenswaarde van Z (in 100 ms)
RMAX maximum waarde van R (in ms)
RMIN minimum waarde van R (in ms)
RA afgevlakte rijtijd (in ms); RAn is de zg modelwa<
SMOT of fl
c< vermenigvuldigingsfactor
13 idem
OG ondergrens van RA (in ms)
BG bovengrens van RA (in ms)
F waardering van de verkeerstoestand file
TW waardering van de verkeerstoestand twijfel
V waardering van de verkeerstoestand vrij
X geen waardering (mogelijk)
W-aan commando voor aansturing waarschuwingsteken
W-uit idem
N idem
VG grenssnelheid (in km/h)
VMIN minimumsnelheid (in km/h)
VMAX maximumsnelheid (in km/h)
VBG bovengrenssnelheid (in km/h)
VOG ondergrenssnelheid (in km/h)
TIJDi instelbaar tijdelement
Q ingestelde waarde van TIJDi

- 5 -
De volgende variabelen dienen als volgt instelbaar te zijn.
.
1
1AVG
ZG
VMIN
VMAX
IQi
I O C
10
VBG
VOG
max.
1
10
100
1
5
1
0,
0,
5
5
stapgrootte
voertuig
km/h
ms
km/h
km/h
S
05
05
km/h
km/h
min
0
100
0
0
60
0
0
0
20
0
1. instelbereik
10 voertuigen
- 200 km/h 11
- 2000 ms
30 km/h
- 200 km/h
- 600 S
1 I
1
80 km/h
60 km/h
De variabelen A, VG, ZG, VMIN, VMAX en Q gelden voor alle rijstroken
van het meetpunt. Elke rijstrook van het meetpunt kent echter een ei-
gen <X, fl VBG en VOG.
De ingestelde waarden van de bovengenoemde variabelen worden als
volgt verwerkt.
9000 : VG = RG (in ms)
9000 : VMIN = RMAX (in ms)
9000 : VMAX » RMIN (in ms)
9000 : VBG = OG (in ms)
9000 : VOG = BG (in ms)
Alle bewerkingen dienen verder in ms nauwkeurig te worden uitgevoerd.
Bij het opstarten van het systeem wordt voor alle rijstroken de vol-
gende waarden bepaald:
RA - 90, Z - 200 ms, waardering = X en Ai • O
2.1 Specificatie voor één rijstrook
a. Indien een of beide detectoren van een rijstrook niet (goed)
functioneren, worden de binnenkomende detectiemeldingen van die
rijstrook niet verwerkt.
De volgende waarden worden dan als volgt bepaald:
RA * 90, Z = 200 ms, waardering » X en Aj= 0
Als beide detectoren goed functioneren worden de detectiemeldin-
gen van die rijstrook verwerkt volgens onderstaande procedure.

- b -
Indien TIJDi (zie C) de ingestelde tijd Q overschrij
de volgende waarden als volgt bepaald:
RA = 90, Z = 200 ms, waardering = X en Ai = O
Van binnenkomende detectiemeldingen worden tijdstip
en t2 hebben plaatsgevonden als T-| en T2 vastge
nauwkeurigheid van tenminste 1 ms. Bij iedere d<
wordt TIJDi gereset en gestart.
Binnenkomende detectormeldingen dienen geselecteerd
een bruikbare reeks.
Deze selectie vindt als volgt plaats:
Telkens na t-| wordt gekeken of vervolgens t2» t^,
ti, t4 in deze volgorde op elkaar volgen. Indien di'
dan worden Ti en T2 behorende bij t1 (de eerst ge
verder in behandeling genomen. Het bijbehorende v
dan als het actuele voertuig (n) gedefinieerd.De t\
t-) wordt beschouwd als ti van een volgende reeks \
als hierboven wordt getest, waarbij t4 (de tweede <
ten beschouwing wordt gelaten.
Meldingen en bijbehorende tijdstippen van een n
reeks worden niet langer bewaard. Nadat alle noodza
kingen voor het actuele voertuig zijn uitgevoerd w<
tuig niet langer als het actuele beschouwd en woc
een volgende bruikbare reeks.
Van voertuig n worden Rn en Zn bepaald:
Rn is het verschil tussen T-\ en T2 van voertuig n.
Zn is het verschil tussen Ti van voertuig n-1 en T
n.
Voertuig n wordt niet verder in behandeling genomen
Rn < RG of indien Zn < ZG.
Indien voertuig n niet vecder in behandeling wordt
den Ti en T2 van dat voertuig niet langer bewaard
tuig n wel verder in behandeling wordt genomen
voertuig n-1 en T2 van voertuig n niet langer bewaa
Rn wordt gewijzigd indien
Rn > RMAX; Rn wordt dan gelijkgesteld aan RMAX of
Rn < RMIN; Rn wordt dan gelijkgesteld aan RMIN.
RAn wordt als volgt bepaald:
RAn = SMOT x Rn + (1-SMOT) x RA (n-1)
SMOT = o<. indien Rn < RA(n-1)
SMOT = fl indien Rn ^RA(n-i)

- 7 -
i. De voertuigteller Ai wordt met 1 opgehoogd (Ai(n) = Ai(n-1) + 1
j. Indien Ai(n) > A dan wordt een nieuwe waardering als volgt be-
paald:
RAn wordt als volgt gewaardeerd.
Indien RAn < OG dan krijgt de rijstrook de waardering V (vrij)
Indien OG ^ RAn .$ BG dan krijgt de rijstrook de waardering TW
(twijfelachtig)
Indien BG < RAn dan krijgt de rijstrook de waardering F (file)
Deze waardering is een gevolg van het verwerken van voertuig n en
blijft van kracht totdat voertuig n+1 als het dan actuele voer-
tuig een nieuwe waardering bewerkstelligt.
2.2 Specificatie voor andere rijstroken
Voor elke rijstrook van de betreffende rijrichting wordt een bewer-
king van de detectiemeldingen uitgevoerd, zoals in hoofdstuk 2 en 2.1
is beschreven. Elke rijstrook heeft daartoe een eigen set grootheden
en variabelen zoals aangegeven is hoofdstuk 2, echter met uitzonde-
ring van A, VG, ZG, VMIN, VMAX en Q die éénmalig voor alle rijstroken
gelden.
2.3 Actietabel
De van kracht zijnde waarderingen worden vergeleken met een actieta-
bel die aangeeft wanneer de filewaarschuwing moet worden aangestuurd.
Elke nieuwe waardering leidt onmiddellijk tot een nieuwe vergelij-
king.
De actiekant van de tabel dient per regel instelbaar te zijn met
W-aan, W-uit of N. De waarderingskant van de tabel dient alle moge-
lijke combinaties van waarderingen te kennen.
Er kunnen drie acties zijn: W-aan, W-uit en N, hetgeen betekent:
W-aan = filewaarschuwing aanzetten tenzij reeds aan;
W-uit = filewaarschuwing uitzetten tenzij reeds uit;
N = situatie ongewijzigd laten.
De actie die staat opgegeven bij die combinatie van waarderingen die
van kracht zijn wordt onmiddellijk uitgevoerd.
Hieronder volgt een voorbeeld van een ingevulde actietabel voor twee
rijstroken.

- o -
waarder ingen
rijstrook 1
F
F
F
F
TW
TW
TW
TW
V
V
V
V
X
1 X
1 x
1 X
rijstrook 2
F
TW
V
X
F
TW
V
X
F
TW
V
X
F
TW
V
X
1actie
11i1
w-aan
W-aan 11
N j1
W-aan
W-aan i1
N 1
N
N 1N 1IN
W-uit 1
W-uit
W-aan
N |i
W-uit |
W-uit

- 1 -
Bijlage 2
Rij kswaterstaat
Dienst Verkeerskunde
Algeaene administratieve en technische besteksbepalingen voor een
lokaal filebeveiligingssystï
Inhoud
1. Algemene en administratieve bepalingen
2. Technische bepalingen voor een lokaal filebeveiligingssysteem
2.1. Filemeettoestel
2.1.1. Algemeen
2.1.2. De kasten
2.1.3. Nadere eisen
2.1.4. De programmering
2.1.5. De communicatie
2.1.6. Detectoren
2.2. Research
2.3 . Wegmeubilair, kabels en leidingen, grondwerk en verhar-
dingen
2.4. Filebord

- 2 -
1. Algeaene en adninistratieve bepalingen
Van toepassing zijn de algemene en administratieve bepalingen
(Hoofdstuk 1) van de "Eisen verkeersregelinstallatie 1985".

- 3 -
2. Technische bepalingen voor een lokaal filebeveiligi
2.1. Filemeettoestei
2.1.1 Algemeen
De (eiektro)technische voorwaarden in de norm NEN 3
sche regeltoestellen zijn van overeenkomstige toepas
filemeettoestel.
2.1.2 De kasten
1. De toegankelijkheid van alle onderdelen van de
filemeettoestel dient gewaarborgd te zijn door mi
minste twee afzonderlijke buitendeuren.
2. De toegankelijkheid van alle onderdelen van de
voeding van het filebord dient gewaarborgd te ziji
van ten minste een buitendeur.
3. De afzonderlijke deuren van de kast dienen te t
van verschillende cilindrische sloten, met sloti
en deugdelijke windhaken. De sleutel van het weg)
deelte dient een moedersleutel te zijn.
4. De kasten (inclusief de buitendeuren) moeten sta
ook in geopende toestand bij normaal gebruik ni
verwringen.
5. De kastvoet dient te worden gemaakt van beton,
dient tenminste 0,06 m te bedragen.
6. Vanaf ten minste 0,3 m onder de onderkant van de
aan het maaiveld dient de grond onder en in de ka
staan uit schoon grof zand.
7. De onderkant van de kastvoet dient zich ten minst
het maaiveld te bevinden.
8. De bovenkant van de kastvoet moet minimaal 0,08
0,12 m boven het maaiveld uitsteken.
9. In de kastvoet dienen voorzieningen te worden g
de kabelinvoer, op 0,6 m onder het maaiveld.
10. De kasten dienen druipwaterdicht en waterpas op
te worden geplaatst.
11. De kleur van de kasten dient grijs te zijn (RA
7034).

- 4 -
12. Voor verfwerk van de kasten en stalen kastdelen is het gestel-
de in artikel 2.3.2 lid 2 onder c en d van de Eisen verkeers-
regelinstallaties 1985 van dienovereenkomstige toepassing.
13. Het gestelde onder punt 7.1.3.b. van de norm is voor de kast
van de voeding van het filebord niet van toepassing.
14. In het wegbeheerdersgedeelte dient een opbergvak voor de docu-
mentatie aanwezig te zijn.
15. In de kast van het filemeettoestel dient ten behoeve van het
onderbrengen van het logtoestel (ES09) een ruimte met ten min-
ste de afmetingen: breed 482 mm (19") , diep 500 mm en hoog 177
mm aanwezig te zijn.
2.1.3 Nadere eisen
1. De spanningsvoorziening bevindt zich in een afzonderlijke
ruimte die toegankelijk is door middel van één van de in arti-
kel 2.1.2 lid 1 genoemde deuren.
2. De groepenverdeelkast dient minimaal uit 3 groepen te bestaan
(signalering, wandcontactdoos en interne voeding).
3. De wandcontactdoos moet beveiligd zijn door een afzonderlijke
maximumschakelaar.
4. De hulpapparatuur voor bijvoorbeeld verwarming en verlichting
dient door dezelfde groep als de wandcontactdoos te worden ge-
schakeld.
5. Alle in het filemeettoestel aanwezige elektrische apparatuur
mag niet worden gevoed door middel van de aanwezige wandcon-
tactdoos .
6. Op elke aansluitklem ten behoeve van de aansluiting van buiten
het filemeettoestel komende leidingen mag slechts één ader
worden bevestigd.
7. In het filemeettoestel dient een voorziening aanwezig te zijn
om de lichtsterkte van de filewaarschuwing te kunnen reduce-
ren. Het buiten bedrij fstellen van deze voorziening moet ran-
geerbaar zijn. De mate van reductie dient overeenkomstig de
specificatie (H 2.3) van het filebord te geschieden. Het meten
van de lichtsterkte dient in de nabijheid van het filebord te
geschieden. Het meten van de lichtsterkte dient door middel
van een foto-elektrische inrichting plaats te vinden.

- 5 -
8. De twee knipper automaten ten behoeve van het ge
van de knipperlichten dienen in het filemeettoest
aangebracht.
9. Indien een verwarmingselement wordt aangebracht
meettoestel dan dient dit te worden geschakeld do'
een thermostaat.
10. Ten behoeve van het bedienen van de bedieningsoi
filemeettoestel dient vastopgestelde verlichting
zijn.
11. In de ruimte voor de wegbeheerder dient een (de
aanwezig te zijn om de desbetreffende verlichti
schakelen. Indien alle buitendeuren gesloten zi
inwendige verlichting in het filemeettoestel niet
In de afzonderlijke ruimte waar de spanningsvoorz
dergebracht behoeft geen verlichting te zijn aang
12. De gele knipperlichten dienen alternerend te knip
de bovenste twee lichten en onderste twee lichte
tijd aan, respectievelijk uit zijn.
De lampen dienen bij een licht-donkerverhouding
knipperfrequentie te hebben die ligt in het gebii
1 Hz (40 tot 60 onderbrekingen per minuut).
Deze knipperfrequentie dient rangeerbaar te zijn.
13. In het filemeettoestel dient een autonome voorzie
te zijn die controleert of het uitgangssignaal va
automaten niet continu aanwezig is. De toegestai
het constateren van het verschil tussen een knipp
een continuspanning bedraagt 0,7 s. Na constate
hierboven bedoelde continu aanwezig zijn van het
gangssignaal dient er een storingsmelding "geel
ziening defect" te worden gegenereerd.
14. Voor de bewaking van het juist functioneren van
dient er een autonome voorziening aanwezig te
minste elke 1 S controleert of de stroomketen
gangssignaal ten behoeve van het aansturen van de
het RW-bord nog in tact is. Deze stroomketen
niet meer in tact te zijn indien geen enkele lamj
Deze voorziening dient werkzaam te zijn tijdens
heid van spanning op het uitgangssignaal.
- 6 -
Na constatering van het niet meer in tact zijn van de hierbo-
ven bedoelde stroomketen, met inachtname van de gestelde marge
dient er een storingsmelding "lampen filebord defect" te wor-
den gegenereerd.
15. Alle van en naar het filemeettoetstel gaande en komende signa-
len dienen galvanisch te zijn gescheiden van de logica in het
filemeettoestel. Het gestelde in de norm NEN 3384 onder het
hoofdstuk elektrische beproeving (7.3) is hierop van dien
overeenkomstige toepassing. De in deze norm onder punt 7.3.2
genoemde uitzondering is hierop echter niet van toepassing.
16. Bij toepassing van electronische schakelaars voor de aanstu-
ring van het filebord en de gele knipperlichten dienen deze
schakelaars beveiligd te zijn tegen kortsluitstromen.
2.1.4. De programmering
1. Het toestel dient, voor wat betreft het programma te worden
geprogrammeerd volgens de verkeerstechnische specificatie van
een lokaal filebeveiligingssysteem van de Dienst Verkeerskunde
van de Rijkswaterstaat.
2. Alle instelbare parameters van het programma dienen afzonder-
lijk instelbaar te zijn tijdens het in bedrijf zijn van het
filemeettoestel.
3. Voor wat betreft de instelbaarheid van de te gebruiken instel-
bare parameters en hun karakteristieken wordt verwezen naar de
verkeerstechnische specificatie en artikel 2.1.6.
4. De bewerkingen, die in hoofdstuk 2.1 onder a t/m d van de ver-
keerstechnische specificatie staan vermeld dienen in het file-
meettoestel binnen 0,2 sec. te worden afgehandeld.
5. Voor de nauwkeurigheid van de te meten rijtijd R wordt verwe-
zen naar artikel 2.1.6 lid 7.
6. Bij spanningsuitval dienen de laatst ingestelde waarden van de
instelbare parameters ten minste een week te worden bewaard.
7. Ten behoeve van de bewerkingen zoals weergegeven in de ver-
keerstechnische specificatie dient bekend te zijn of een de-
tector al dan niet (goed) functioneert.
Onder het niet (goed) functioneren wordt verstaan:

- 7 -
8.
a. kortsluiting of onderbreking van de detecti
2.1.6. lid 3)
b. de stand uit van de detectorschakelaar (zie ar
6)
c. de detectie foutbit is gegenereerd (zie art. 2
Het filemeettoestel dient voor maximaal vier
kunnen worden toegepast.
2.1.5. De communicatie
1. Voor de communicatie met het filemeettoestel di
tend de in dit artikel genoemde schakelaars aanw
die, als in onderstaande tabel is aangegeven, hie
rangschikt moeten worden. Met de aanduiding hië
veau wordt bedoeld dat de werking van een schak
hoger nummer afhankelijk is van de stand van de £
een lager nummer.
functionele instantie
hiërar-
chisch
niveau
verkeers-
I technische
funcies
1
2
3
energie-
bedrijf
hoofdscha-
kelaar
werkscha-
kelaar
j
wegbeheerder
doven
automatisch bedrij
buiten werking
- test filebord
- resetstoringen
- detectoren

- 8 -
De hoofdschakelaar en de werkschakelaar dienen zich in te be-
vinden bij de spanningsvoorziening.
2. De schakelaars genoemd in de kolom wegbeheerder dienen uit-
sluitend toegankelijk te zijn voor de wegbeheerder.
3. De schakelaar doven kent de standen doven en niet-doven.
In de stand doven zijn alle signaleringslantaarns gedoofd.
In de stand niet-doven is het beeld dat de signaleringslan-
taarns tonen afhankelijk van de stand van de schakelaars auto-
matisch bedrijf of buiten werking.
4. De schakelaars automatisch bedrijf en buiten werking kennen
allen de standen in en uit. Deze twee schakelaars zijn onder-
ling zodanig vergrendeld dat van deze twee schakelaars er
steeds één ingeschakeld is.
Het inschakelen van één van deze schakelaars heeft automatisch
het uitschakelen van de andere schakelaars tot gevolg. In de
stand uit heeft een schakelaar geen invloed.
Als de schakelaar automatisch bedrijf wordt ingeschakeld dient
het filemeettoestel conform de verkeerstechnische specificatie
te functioneren. Als de schakelaar buiten bedrijf wordt inge-
schakeld is het filemeettoestel niet werkzaam.
5. Ten behoeve van een aantal verkeerstechnische funkties dienen
de volgende schakelaars aanwezig te zijn:
- per detector één schakelaar, deze schakelaars dienen ten
opzichte van elkaar in een logische verkeerstechnische
volgorde te worden gerangschikt
- een terugverende pulsschakelaar testfilebord
- een terugverende pulsschakelaar resetstoringen.
6. De detector schakelaars kennen de standen in en uit. In de
stand in geschieden de detectormeldingen automatisch. In de
stand uit worden geen meldingen doorgegeven.
7. In het wegbeheerdersgedeelte dient een lichtindicatie aanwezig
te zijn waarmee de aansturing van het filebord wordt verklikt.

- 9 -
Deze lichtindicatie functioneert tevens wanneer
in de stand doven staat.
Tevens dient in het wegbeheerdersgedeelte eei
pulsschakelaar aanwezig te zijn waarmee het file
le knipperlichten kunnen worden aangestuurd.
8. De communicatie met het filemeettoestel moet
functionele wijze kunnen plaatsvinden. De voor c
tie benodigde apparatuur wordt geacht onderdee
het te leveren filemeettoestel.
Alle in het bestek genoemde parameters moeten d
een functionele kode worden weergegeven.
De parameters dienen rechtstreeks herkenbaar te
maal gekozen kode voor een bepaalde parameter d
gelijknamige parameters dezelfde te zijn.
9. In het filemeettoestel dient een voorziening aa
ten behoeve van het zichtbaar maken van tenminst
ringsmeldingen. Deze voorziening dient te be
achttal lichtindicatoren, die in het wegbehc
zijn aangebracht. Bij het opkomen van een :
dient de desbetreffende lichtindicator te gaan t
Nabij elke lichtindicator dient in nederlandse
tie te worden weergegeven.
De volgende storingsmeldingen zijn gedefinieerd
- detectie "Tellercontrole" (zie art.
- detectie kortsluiting/onderbreking (zie art.
- geel knippervoorziening defect (zie art.
- lampen filebord defect (zie art.
De overige vier zijn vrij benoembaar.
Tevens dient een voorziening aanwezig te zijn oi
storingsmeldingen te resetten.
Ten behoeve van het zichtbaar maken van bove
ringsmeldingen dient aan de mast van het filebo
dicatie te worden aangebracht (b.v. putsarmatui
gedurende het aanwezig zijn van een storing
lichtindicatie dient vanuit de rijrichting gt
zichtbaar te zijn.

- 10-
10. Door middel van een goed zichtbare lichtindicatie in of nabij
alle in dit artikel vermelde schakelaars, met uitzondering van
de hoofdschakelaar en de werkschakelaar, dient per schakelaar
te worden weergegeven of de schakelaar in de stand in staat.
In aanvulling hierop geldt voor de lichtindicatoren bij de de-
tectorschakelaar dat deze tevens geactiveerd worden, indien de
bijbehorende detector automatisch een melding geeft.
11. Nabij elke schakelaar dient in Nederlandse tekst de functie en
eventuele nummering van deze schakelaar te worden weergegeven.
12. Alle in dit artikel genoemde schakelaars dienen robuust, func-
tioneel en opliggend te worden uitgevoerd.
13. Alle bedieningsorganen dienen op een gemakkelijk toegankelijke
plaats te worden aangebracht.
14. Naast de in dit artikel omschreven communicatievoorzieningen
mogen, ten behoeve van de wegbeheerder, géén andere voorzie-
ningen worden aangebracht, zonder voorafgaand overleg met de
directie.
2.1.6. Detectoren
1. De functie van de detectoren is omschreven in de applicatie-
specificatie (bijlage a van het bestek). Elke detectielus
dient op een afzonderlijke detector te zijn aangesloten en el-
ke detector dient op een afzonderlijke detectie-ingang in het
programma te worden ingevoerd.
2. Elke detector dient na oplevering van het werk zelfinstellend
te zijn.
3. Elke detector dient ten minste elke seconde te controleren of
de op die detector aangesloten detectielus niet gebroken of
kortgesloten is. Bij bedoelde breuk of kortsluiting dient di-
rect een storingsmelding "detectie kortsluiting/onderbreking"
te worden gegenereerd.

- 11-
4. Detectoren mogen elkaar onderling niet beïnvloede
5. De detectoren dienen in het filemeettoestel te wc
bracht.
6. De configuratie en de afmetingen van detectieluss
zaagd overeenkomstig de tekening in de verkeerste
cificatie.
De nauwkeurigheid van de afmetingen van de lusse
cm te bedragen.
7. De rijtijd R (zie verkeerstechnische specificatie
ten te worden met een maximale fout van 7,5 mS.
8. De volgende detectiebewaking dient uitgevoerd t
detectorpaar lopen twee tellers. Teller T (x,1) v
detector en teller T (x,2) voor de tweede detectc
bij het opkomen van de detector wordt de bijbeh
met 1 opgehoogd. Zodra een van de tellers de waai
T (x,1) v T (x,2) » 32 wordt het absolute versch:
tellers vastgesteld en worden de tellers weer op
T (x,1) - T (x,2) = P.
Wanneer na twee opeenvolgende metingen van beide
verschil P groter is dan 10 wordt er een foutbit
Wanneer na twee opeenvolgende metingen het verse
is dan 10 wordt de foutbit weer ingetrokken,
geeft aan het filemeettoestel het niet goed fur
de detector aan (zie art. 2.1.4. lid 7).
Iedere keer als de foutbit wordt gegenereerd wor<
gaande flank van de foutbit een teller met één <
dien deze teller een instelbare referentiewaarde
dient de storingsmelding "detectie tellercontro
gegenereerd.

- 12-
2.2. Research
Ten behoeve van het plegen van research dient het filemeettoestel
een aansluiting te hebben waarop een zogenaamd "log-toestel
(ES09)" kan worden aangesloten. Dit registratie-apparaat kent een
aantal input-meldingen waarvan er één (de "normes" input) wordt
gebruikt. Het door het filemeettoestel aangeboden datablok dient
er als volgt uit te zien.
lengte van het datablok
(in dit geval 4)
1
0
0
0
0
LEN
msb
s
TR
TR
TB
TB
!
LANE
L0W(T1) lsb
HIGH (T2)
LOW
HIGH
spookbit (n.v.t.)
rijstrooknummer (0 t/m 7)
header byte
Rijtijd (14 bits)
Bedektijd (14 bits)
De rijtijd bestaat uit eenheden van 0,5 ms. De bedektijd is in dit
geval niet van toepassing, echter ten behoeve van de verwerking
dient er een vast getal in te staan (bv. 1000).
De aansluiting van het filemeettoestel dient een seriële uitgang
te zijn, RS232, 1200 BAUD, 8 bits, geen parity bit.
Om te kunnen bepalen wanneer het filemeettoestel een filemelding
genereert, dient een potentiaalvrij contact te worden aangeboden
met deze melding (1 = waar, o = niet waar).

- 13-
Hardware
Ten behoeve van het aansluiten van het log-toestel
filemeettoestel dienen op het filemeettoestel de vol
delen te worden aangebracht. Op het filemeettoestel •
- 25 polige RS232 female chassisdeel en een
- 36 polige female chassisdeel te worden aangebracht
Er dienen twee kabels te worden toegeleverd, te wete
- een kabel (I) met een 25-polige female connector e
ge male connector met een lengte van 2 meter
- een kabel (II) met twee 36-polige male connectoren
van 2 meter.
De connectoren dienen met behulp van een mechanische
te worden vastgezet.
Voor de aansluiting van de diverse contacten wordt
onderstaand schema.
filemeettoestel
aan/uit
CXD-
-GNDL
-0/1-
-GND-
3
7
1
17
ES09
kabel (II)
kabel (I)

- 14-
2.3. Wegmeubilair, kabels en leidingen, grondwerk en verhardingen
Voor wat betreft wegmeubilair, kabels en leidingen, grondwerk en
verhardingen wordt verwezen naar hoofdstuk 2.3, 2.4 en 2.5 van
"Eisen verkeersregelinstallaties 1985". De in deze hoofdstukken
vermelde technische bepalingen zijn van toepassing voor zover het
bepaalde betrekking heeft op werkzaamheden en leveringen voort-
vloeiend uit het bestek.

- 15 -
2.4 FILE-BORD
2.4.1 Algeaeen
1 Deze specificatie geeft de voorwaarden waaronder en
waaraan de signaalgevers moeten voldoen weer.
2 De signaalgever zal worden toegepast bij lokale fil
en beveiliging, waarbij deze dient om de weggebruik
del van het signaalbeeld te informeren omtrent de v
atie.
3 De signaalgevers zal worden gemonteerd op een perma
taal, uithouder of een vaste mast naast de weg.
2.4.2 Noraen en richtlijnen
1 Het signaalbeeld van de signaalgever moet duidelijk
zijn op afstanden tussen 35 en 200 meter.
2 De signaalgevers moeten onderling identiek en uitwi
zijn.
2.4.3 Signaalbeeld
1 De signaalgever toont het volgende beeld: fileteker
94 a uit bijlage II van het R.V.V.).
2 Het symbool dient wit van kleur te zijn en gevormd
1ichtgeleidertechnieken. De rand van het bord moet
kleur zijn en dient eveneens gevormd te zijn m.b.v
dertechnnieken. Zie figuur 5.
3 Indien het bord buiten gebruik is mag het symbool )
zichtbaar zijn.

- 16 -
2.4.4 Technische uitvoering
1 Het principe van de signaalgever is, overeenkomstig de meest
recente stand van de techniek, gebaseerd op het gebruik van
lichtgeleidertechnieken (glas of kunststof vezels). Het sig-
naalbeeld wordt uit lichtpuntjes opgebouwd. Vanaf een lichtbron
wordt het licht via lichtgeleiders naar de frontplaat van de
signaalgever geleid.
2 Als lichtbron voor het signaalbeeld moet gebruik gemaakt worden
van lampen met een vermogen van minimaal 40 en maximaal 70
Watt. Het gebruik van transformatoren in de signaalgever is
toegestaan. De voedingsspanning van de signaalgever moet 42 V
bedragen.
3 Het vertonen van een signaalbeeld en/of het reduceren van de
lichtopbrengst mag onder geen beding geschieden door het ge-
bruikmaken van mechanisch bewegende delen.
4 Bij de nominale bedrijfsspanning dient de levensduur van de
lichtbronnen te zijn gebaseerd op tenminste 2000 branduren bij
continue gebruik.
5 De lichtopbrengst van een signaalbeeld zal bij duisternis en/of
onder bepaalde weersomstandigheden moeten kunnen worden geredu-
ceerd tot 10% van de maximale lichtsterkte. Zie figuur 2 en 3.
6 Het schakelen van het signaalbeeld en het reduceren van de
lichtopbrengst geschiedt van buitenaf. De toepassing van scha-
kelelementen in de signaalgever is niet toegestaan.
7 Uit veiligheidsoverweging dient minimaal van 2 lampen gebruik
te worden gemaakt.
8 Bij uitval van een van de lampen mag geen verminking van het
signaalbeeld optreden.
9 De lampen en reflectoren moeten zodanig zijn aangebracht, dat
uitwisseling eenvoudig en zonder gereedschap kan plaatsvinden
en zonder de signaalgever los te nemen van de ophangconstruc
tie.

- 17 -
De toegang tot de lampen dient via een van de zij ka
onderkant van de signaalgever plaats te vinden. De
plaats dient in overleg met de directie te worden b
10 Bij de constructie dient er rekening mee te worden
dat na lampuitwisseling de signaalgever zonder nade
aan alle eisen moet blijven voldoen.
11 De uiteinden van de vezelbundels moeten mechanisch
frontplaat van de signaalgever worden bevestigd, ze
bundels niet aan enige mechanische spanning onderhe
ders dan tengevolge hun eigen gewicht.
12 Alle lichtgeleiders moeten van een trekontlasting :
waardoor geen krachten op de lenzen komen te staan.
13 Alle te gebruiken isolatie materialen moeten hitteJ
zijn.
14 In de directie nabijheid van de lamp(en) moet door
slagsymbolen worden aangegeven met welk signaalbee.
ponderen.
15 Alle materialen en componenten, met uitzondering v
en reflectoren, moeten zodanig zijn, dat een onder
levensduur van meer dan 12 jaar onder de gespecifi
ties kan worden verwacht.
16 Condensvorming op de frontplaat mag nimmer optrede
17 De afmetingen van de ribben van het beeld dienen v
wegen 1100 mm, en voor de overige wegen 900 mm te
2.4.5 Lichttechnische uitvoering
1 Het symbool dient wit van kleur te zijn met een kJ
tuur tussen 2500* en 3000* Keivin, uitgaande van c
lampspanning.
2 De kleur van de rode rand moet voldoen aan de non

- 18 -
De lichtsterkte (I) van het signaalbeeld voor de rode rand
dient tenminste 400 cd binnen de gespecificeerde minimum hoeken
van + en - 6" ten opzichte van de optische as van de signaalge-
ver (zie lichtverdelingskromme) te bedragen. Deze waarden gel-
den in ongedimde toestand.
De maximale lichtsterkte in de nul as (In) m a9 600 cd bedra-
gen. Zie figuur 1.
De lichtsterkte (I) van het signaalbeeld in de witte kleur
dient tenminste 600 cd binnen de gespecificeerde minimum hoek
van + en - 6* ten opzichte van de optische as van de signaalge-
ver te bedragen (zie lichtverdelingskromme). Zie figuur 2.
Deze waarden gelden in ongedimde toestand.
De maximale lichtsterkte in de nul as (IQ) mag 1200 cd bedra-
gen.
De lichtsterkte tussen twee naast elkaar liggende lenzen van
één enkele kleur mogen onderling niet meer dan 20% verschillen.
Voor het totale teken geldt dat het verschil tussen de absolute
minimale lichtsterkte en de absolute maximale lichtsterkte van
de lenzen van één enkele kleur niet meer dan 60% mag bedragen.
Licht mag alleen waarneembaar zijn via de lensopening van het
getoonde signaalbeeld.
De fantoomluminantie van het voorvlak van de signaalgever in-
clusief reflectie van de lenzen, veroorzaakt door loodrecht op
dit voorvlak invallend licht met een sterkte van 104 lux, moet
minstens 10x kleiner zijn dan de luminantie van een willekeurig
signaalbeeld.
De te volgen meetprocedure moet vooraf door de directie worden
goedgekeurd.
2.4.6 Behuizing
1 De behuizing van de signaalgever moet binnen de volgende bui-
tenmaat blijven: diepte 225 mm.
2 De behuizing moet zijn vervaardigd van zeewaterbestendig alumi-
nium. Bevestigingsmiddelen moeten zijn van roestvrij staal kwa-
liteit RVS 4.
Alle toe te passen materialen moeten worden goedgekeurd door
Rijkswaterstaat.

- 19 -
3 De behuizing moet mat zwart gekleurd zijn met een q'.
van 5% bij 60*.
4 De behuizing wordt aan de voorzijde afgesloten door
geharde glazen ruit van dubbel gelaagd veiligheidsg:
aan de frontplaat van de signaalgever.
5 De behuizing dient te voldoen aan de beschermingscl
IP 54 volgens NEN 10144 en 10162. Ten aanzien van d<
condities moet worden voldaan aan de Britse standaa
deel 2 voor wat betreft de tests Ab, Bb en Procedur
die gelden op de datum van bestelling.
6 Vaste verbindingen moeten verlijmd dan wel gekit zi
7 Uitwendige bevestigingsmiddelen moeten verliesvrij
teerd.
8 De frontplaat moet zijn vervaardigd van mat zwart g
aluminium of een aluminium kunststof sandwich-plaat
maal 6 mm en wordt bevestigd onder een hoek van 90*
te van de as van de signaalgever.
9 Onder alle omstandigheden moeten alle componenten a
behuizing van de signaalgever bedrijfszeker zijn bi
ratuur van -25" tot +80* Celsius.
10 De behuizing moet zijn voorzien van een voldoende «
luchtingsventielen aan de onderzijde en zijkanten.
11 Alle ontluchtingsventielen moeten zijn voorzien vat
rint afdichting met uitwisselbare kunststoffilters.
12 Alle signaalgevers dienen te zijn voorzien van een
van roestvrij staal met een serie- en codenummer, t>
ren na de bestelling bij het vaststellen van de le1
ties.
13 De signaalgever dient voorzien te zijn van een ver
voorkoming van condens. Hij dient te werken op een
spanning van 42 Volt en van voldoende vermogen te

- 20 -
14 Het gebruik van een thermostaat t.b.v. de verwarmingselementen
is niet toegestaan, de verwarmingselementen moeten rechtstreeks
op de connector worden aangesloten.
15 Alle afdichtingen moeten zijn vervaardigd van neopreenrubber of
gelijkwaardig materiaal. Beschadiging t.g.v. inwerking van zon,
water en agressieve stoffen mag niet optreden.
16 Voor het uitwisselen van lampen moet de behuizing gemakkelijk
toegankelijk zijn door middel van onverliesbare luiken met ro-
buuste sluiting. Toepassing van scharnieren is niet toegestaan.
17 De ophanging van de signaalgevers aan de ophangplaat vóór het
achtergrondschild geschiedt d.m.v. drie nokken aan de achter-
zijde van de signaalgever overeenkomstig de tekening op figuur
3 en 6.
18 De behuizing dient te zijn voorzien van een aan de bovenzijde
geplaatst roestvast metalen handvat, dat tevens kan dienen als
aanslagpunt voor hijstransport.
19 Aan de onderzijde van de behuizing dienen aluminium profielen
te worden aangebracht teneinde beschadiging van de sluitingen
bij schuiftransport te voorkomen.
20 Bij de aflevering mogen geen fabricagerestanten in de behuizing
achterblijven.
21 Het gewicht van een signaalgever mag niet meer bedragen dan 50
kilo.
22 Bevestigingskoorden t.b.v. het onverliesbaar maken van zijdeu-
ren en de frontplaat dienen van een elastisch materiaal te
zijn.
23 De constructie van de bevestigingsonderdelen dient zodanig te
worden uitgevoerd, dat het instellen van het file-bord zowel in
horizontale als in verticale richting mogelijk is.

- 21 -
2.4.7 Achtergrondschilden
Achtergrondschilden dienen achter de signaalgever t
aangebracht. Voor wat betreft vorm en afmetingen wo
naar figuur 6.
2.4.8 Electrische uitvoering
1 Zoveel mogelijk moeten alle materialen, toestellen
len van een door de KEMA of gelijkwaardig instituut
zijn.
2 Alle materialen moeten nieuw zijn en ongebruikt.
3 De electrische voeding van alle componenten in de s
geschiedt via een waterdichte, deugdelijke connecto
die moet voldoen aan Mil. spec's of gelijkwaardig,
terzijde van de signaalgever.
4 Voor de electrische verbinding van de signaalgever
de achterzijde twee pluggen worden aangebracht nl.:
- 37-polige, type 3102 E-28-21-P-69 (chassis);
6-polige, type 3102 E-18-12-S-69 (chassis).
De vergrendeling van de plugaansluiting moet aan de
zitten.
Voor de connector-aansluiting wordt verwezen naar h
figuur 4.
5 De lampen moeten elk zijn voorzien van een eigen e]
voedingsaansluiting tot op de connector.
6 De electrische voedingen op de lampen aansluiten d.
"faston" stekkers. Bekabeling binnen de behuizing ;
mate ondersteunen.
7 Alle bekabeling voorzien van siliconen afscherming
isolatie materialen moeten UV-bestendig zijn.
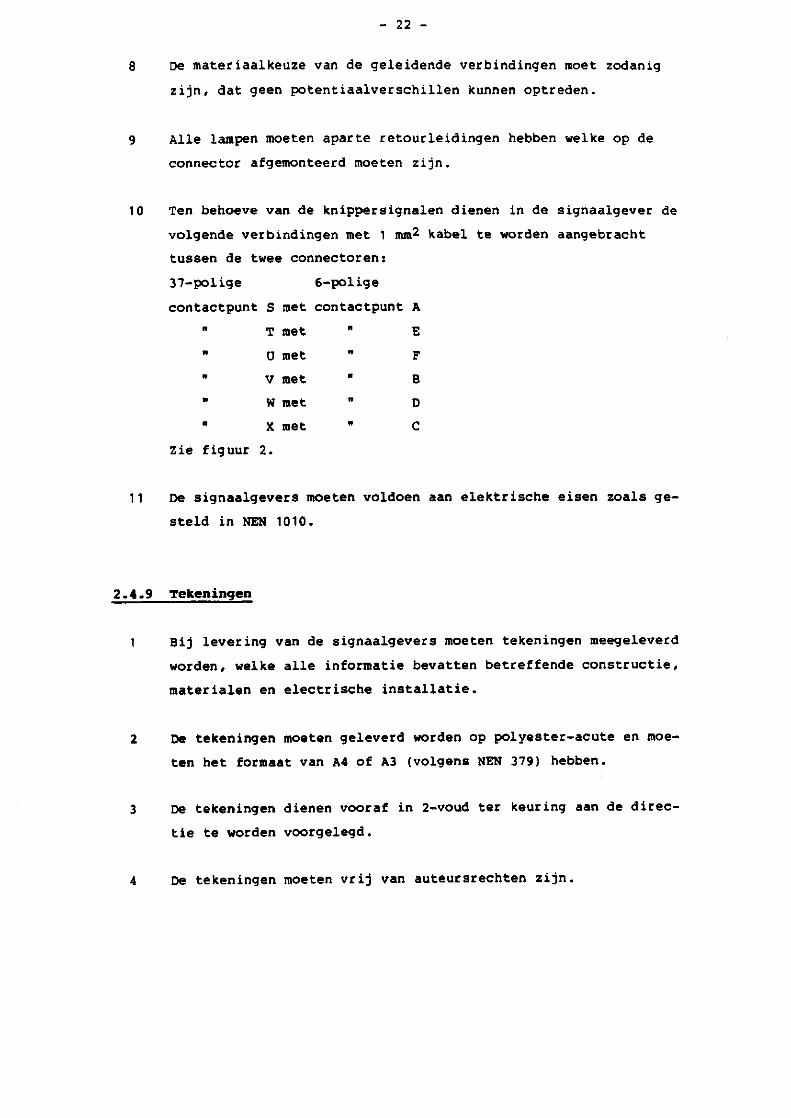
- 22 -
8 De materiaalkeuze van de geleidende verbindingen moet zodanig
zijn, dat geen potentiaalverschillen kunnen optreden.
9 Alle lampen moeten aparte retourleidingen hebben welke op de
connector afgemonteerd moeten zijn.
10 Ten behoeve van de knippersignalen dienen in de signaalgever de
volgende verbindingen met 1 mm2 kabel te worden aangebracht
tussen de twee connectoren:
37-polige 6-polige
contactpunt S met contactpunt A
" T met " E
" U met " F
" V met " B
" W met " D
" X met " C
Zie figuur 2.
11 De signaalgevers moeten voldoen aan elektrische eisen zoals ge-
steld in NEN 1010.
2.4.9 Tekeningen
1 Bij levering van de signaalgevers moeten tekeningen meegeleverd
worden, welke alle informatie bevatten betreffende constructie,
materialen en electrische installatie.
2 De tekeningen moeten geleverd worden op polyester-acute en moe-
ten het formaat van A4 of A3 (volgens NEN 379) hebben.
3 De tekeningen dienen vooraf in 2-voud ter keuring aan de direc-
tie te worden voorgelegd.
4 De tekeningen moeten vrij van auteursrechten zijn.

Lichtsterkteverdeling t.b.v. file indicatoren voor de kleuren ROOS bij een nominale lampspan-ning van 42 V.
De Lichtsterkteverdeling van het signaalbeeld dient binnen het gearceerde gebied te liggen, waarbiimale lichtsterkte van het signaalbeeld alleen mag vookomen in eerv^ebied + of - 1.5' van de hartli
8 ' 6»
270'
180*
90«
rijkswaterstaatdienst verkeerskunde
afd
Ddvk
D
rws
Dalg.D
schaal
tekemngnrTXV 85 0123
g«t d.d
gew dd
projek
nota

Lichtsterkteverdeling t.b.v. fileindicatoren voor de kleur WIT bij een normale lampspanning van 42 V
De hchtsterkteverdeling van ieder signaalbeeld dient binnen het gearceerde gebied te liggen, waarbii de maxi-male lichtsterkte alleen mag voorkomen in een gebied + of - 1,5° van de hartlijn.
6* 5» 4» 3» 2» 1 2« 3» 4» 5« 6 ' 7° 8' 9» 10*
180'
270' •90'
rijkswaterstaatdienst verkeerskunde
atd
Ddvk
D
rws
Dalg
D
schaal
t«k«nmgnrTXV 85 0124
get d.d
gew dd
projektcode
nota
figuur
2

CM
225
(7
-
A
[ b :••::-•!•
7 /~~~~——^^_ plugoonsluitïng ,plug dinmpter 36,6 mm
hart signaalgever
A
271
542 41
ca800
RIJKSWATERSTAAT
)
(M
8«oOu
om-«.
.6
\ O T O
\ UJ n
/ " °*
/
11
WIJZ Aaanduiding plug
specificaties si
DIENST VERKEERSKUNDE
gnaalgever
NOTA 780921 * ^TEK nr. 7».O239 KT " 9 U U f J

37 POLIGE PLUG type MS 3102 E - 28 - 21 - P - 69 (chassis)vooraanzicht
C. J A F G.H = file teken K = verwarmingL P M.N.R.E = retour file teken D = verwarming
S = recht bovenT = rechts onderU = rechts retour
V = links bovenW = links onderX = links retour
KNIPPERLAMPEN
A = rechts bovenE = rechts onderF = rechts retourB r links bovenD = links onderC = links retour
knipperlichten
6 Polige plugtype MS 3102 E -18 • 12 • 5 • 69 (chassis)vooraanzicht
rijkswaterstaatdienst verkeerskunde
afd
Ddvk
D
rws
Dalg
ü
schaal
t«k«ningnr
860021
get d.d
gew dd
7-9-87
proiektcode
nota
FIGUUR
4

Figuur

UITSPAKiNGT.B.V AANSLUlTiNG" 1 EN P2
.-?t
VOORAANZICHT VOOR WAARSCHUWING•T.B.V CONNECTORAANSLUITINGEN)
rijkswaterstaatdienst verkeerskunde
afd
Ddvk
rws
D
D
schaal
t«k«mngnrTXV 87 0115
9«t. d.d21-9-87gawdd
proiektcod*
nota '
r'GoU«
6

Bijlage 3
Rij kswatecstaat
Dienst Vee keet steunde
Verkeerstechnische specificatie van een filedetectiepunt.
Inhoud
1. Het meetpunt
2. Specificatie van de filemeting
2.1 Specificatie voor één rijstrook
2.2 Specificatie voor andere rijstroken
2.3 Filetabel

- 1 -
1. Het meetpunt
Het meetpunt bestaat uit een aantal in het wegdek aangebrachte detec-
tielusen. Per rijstrook voor de te bemeten rijrichting worden twee
lussen aangebracht, zoals aangegeven in fig. 1.
i ' detectielus2* detectielus
rijrichting w
±1.5 1 1.5
het midden van
een rijstrook
maten in m
fig. 1 : detectieconfiguratie
Elke rijstrook van de betreffende rijrichting heeft een dergelijke
detectieconfiguratie. De meldingen van de bij deze lussen behorende
detectoren worden in deze specificatie als volgt aangeduid:
- het opkomen van de 1e detector met t^;
- het opkomen van de 2e detector met t2;
- het afvallen van de 1e detector met t3;
- het afvallen van de 2e detector met t4;
In deze specificatie wordt gebruik gemaakt van de meldingenreeks t1f
t2, t3, t4 (zie fig. 2).
tl t2 t3 t4
melding 1e detector
melding 2e detector
fig. 2 : meldingenreeks

- 2 -
2. Specificatie van de filemeting
In deze specificatie wordt gebruik gemaakt van
aanduidingen:
A aantal voertuigen voor initialiseren
Ai voertuigteller
n index behorende bij het actuele voertuig
n-1 index behorende bij het voertuig voorafg
actuele voertuig
n+1 index behorende bij het voertuig komende t
voertuig
R rijtijd (in ms)
Z volgtijd (in ds)
T tijdstip (in ras)
RG grenswaarde van R (in ms)
ZG grenswaarde van Z (in ds)
RMAX maximum waarde van R (in ms)
RMIN minimum waarde van R (in ms)
RA afgevlakte rijtijd (in ms); RAn is de zg mod<
SMOT <^of S
cc vermenigvuldigingsfactor
fl idem
OG ondergrens van RA (in ms)
BG bovengrens van RA (in ms)
F waardering van de verkeerstoestand file
TW waardering van de verkeerstoestand twijfel
V waardering van de verkeerstoestand vrij
X geen waardering (mogelijk)
DF commando voor aansturing filemelding
idem
N idem
VG grenssnelheid (in km/h)
VMIN minimumsnelheid (in km/h)
VMAX maximumsnelheid (in km/h)
VBG bovengrenssnelheid (in km/h)
VOG ondergrenssnelheid (in km/h)
TIJDi instelbaar tijdelement
Q instelbare waarde van TIJDi

- 3 -
De volgende variabelen dienen als volgt instelbaar te zijn,
11A
VG
ZG
VMIN
|VMAX
Q
0
VBG
VOG
max.
1
10
100
1
5
1
0,
0,
5
5
stapgrootte
voertuig
km/h
ms
km/h
km/h
S
05
05
km/h
km/h
min
0
100
0
0
60
0
0
0
20
0
. instelbereik |
10 voertuigen l
- 200 km/h
- 2000 ms
30 km/h
- 200 km/h
- 600 S i
" ' II
" 1 I80 km/h
60 km/h
De variabelen A, VG, ZG, VMIN, VMAX en Q gelden voor alle rijstroken
van het meetpunt. Elke rijstrook van het meetpunt kent echter een ei-
gen ot, Q VBG en VOG.
De ingestelde waarden van de bovengenoemde variabelen worden als
volgt verwerkt.
9000 : VG - RG (in ms)
9000 : VMIN = RMAX (in ms)
9000 : VMAX » RMIN (in ms)
9000 : VBG * OG (in ms)
9000 : VOG = BG (in ms)
Alle bewerkingen dienen verder in ms nauwkeurig te worden uitgevoerd.
Bij het opstarten van het systeem wordt voor alle rijstroken de vol-
gende waarden bepaald:
RA » 90, Z • 200 ms, waardering • X en Ai » O
2.1 Specificatie voor één rijstrook
a. Indien een of beide van de detectoren voor een rijstrook niet
(goed) functioneren dan worden de binnenkomende detectiemeldingen
van die rijstrook niet verwerkt.
De volgende waarden worden dan als volgt bepaald:
RA = 90, Z = 200 ms, waardering • X en Ai• O.
Als beide detectoren goed functioneren dan worden de detectiemel-
dingen van die rijstrook verwerkt volgens onderstaande procedure.

- 4 -
b. Indien TIJDi (zie C) de uitgestelde tijd Q ovei
f^\ worden de volgende waarden als volgt bepaald:
I2p RA = 90, Z = 200 ms, waardering = X en A^='0.
c. Van binnenkomende detectiemeldingen worden tijdstip
en t2 hebben plaatsgevonden als Ti en T2 vastge
nauwkeurigheid van tenminste 1 ms. Bij iedere de
wordt TIJDi gereset en gestart.
d. Binnenkomende detectormeldingen dienen geselecteerd
een bruikbare reeks.
Deze selectie vindt als volgt plaats:
Telkens na ti wordt gekeken of vervolgens t2, t3,
ti, t4 in deze volgorde op elkaar volgen. Indien dit
dan worden Ti en T2 behorende bij t̂ (de eerst ge
verder in behandeling genomen. Het bijbehorende v
dan als het actuele voertuig (n) gedefinieerd.De tv
ti wordt beschouwd als t̂ van een volgende reeks v
als hierboven wordt getest, waarbij t4 (de tweede c
ten beschouwing wordt gelaten.
Meldingen en bijbehorende tijdstippen van een n
reeks worden niet langer bewaard. Nadat alle noodzal
kingen voor het actuele voertuig zijn uitgevoerd wc
tuig niet langer als het actuele beschouwd en wor
een volgende bruikbare reeks.
e. Van voertuig n worden Rn en Zn bepaald:
Rn is het verschil tussen T] en T2 van voertuig n.
Zn is het verschil tussen T^ van voertuig n-1 en T
n.
f. Voertuig n wordt niet verder in behandeling genomen
Rn < RG of indien Zn < ZG.
Indien voertuig n niet verder in behandeling wordt
den Ti en T 2 van dat voertuig niet langer bewaard
tuig n wel verder in behandeling wordt genomen
voertuig n-1 en T2 van voertuig n niet langer bewaa
g. Rn wordt gewijzigd indien
Rn > RMAX; Rn wordt dan gelijkgesteld aan RMAX of
Rn < RMIN; Rn wordt dan gelijkgesteld aan RMIN.

- 5 -
h. RAn wordt als volgt bepaald:
RAn = SMOT x Rn + (1-SMOT) x RA (n-1)
SMOT • cx- indien Rn < RA(n-1)
SMOT = S indien Rn ^.RA(n-1)
i. De voertuigteller Ai wordt met 1 opgehoogd (Ai(n) = Ai(n-1)+1)
j. Indien Ai(n) > A dan wordt een nieuwe waardering als volgt be-
paald :
RAn wordt als volgt gewaardeerd.
Indien RAn < OG dan krijgt de rijstrook de waardering V (vrij)
Indien OG < RAn ^ BG dan krijgt de rijstrook de waardering TW
(twijfelachtig)
Indien BG < RAn dan krijgt de rijstrook de waardering F (file)
Deze waardering is een gevolg van het verwerken van voertuig n en
blijft van kracht totdat voertuig n+1 als het dan actuele voer-
tuig een nieuwe waardering bewerkstelligt.
2.2 Specificatie voor andere rijstroken
Voor elke rijstrook van de betreffende rijrichting wordt een bewer-
king van de detectiemeldingen uitgevoerd, zoals in hoofdstuk 2 en 2.1
is beschreven. Elke rijstrook heeft daartoe een eigen set grootheden
en variabelen zoals aangegeven is hoofdstuk 2, echter met uitzonde-
ring van VG, ZG, VMIN en VMAX die éénmalig voor alle rijstroken gel-
den. J\ s„ <§} <3 , o p i ?
2.3 Filetabel \ x> -=2S3^=~V ^ ' /
De van kracht zijnde waarderingen worden vergeleken met een filetabel
Blke nieuwe waardering leidt onmiddellijk tot een nieuwe vergelij-
king.
Zolang geen waardering aanwezig is of indien één of beide detectoren
niet (goed) functioneren wordt voor de betreffende rijstrook waarde-
r ing X aangehouden.
De filetabel geeft aan bij welke combinaties van waarderingen er een
filemelding moet worden afgegeven en wanneer niet. Een DF wordt op
twee manieren aan het regelprogramma van een verkeersregeltoestel af-
gegeven:
- vanaf het moment dat de waarderingen leiden tot het resultaat "DF"
tot het moment waarop de waarderingen leiden tot het resultaat "-"
en - als korte melding (0,2S) telkens na passage van een voertuig,
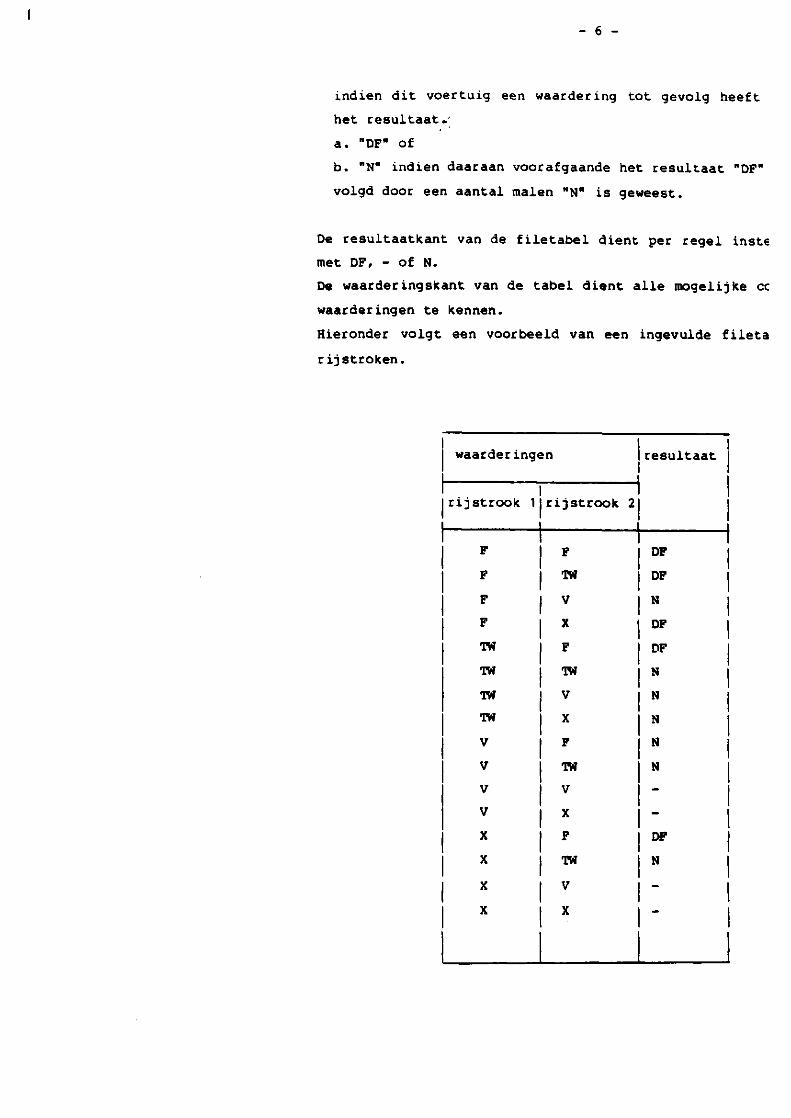
- 6 -
indien dit voertuig een waardering tot gevolg heeft
het resultaat.'
a. "DF" of
b. "N" indien daaraan voorafgaande het resultaat "DF"
volgd door een aantal malen "N" is geweest.
De resultaatkant van de filetabel dient per regel inste
met DF, - of N.
De waarderingskant van de tabel dient alle mogelijke cc
waarderingen te kennen.
Hieronder volgt een voorbeeld van een ingevulde fileta
rijstroken.
waarderingen
rijstrook 1
F
F
F
F
TW
TW
TW
TW
V
V
V
V
X
X
X
X
rijstrook 2
F
TW
V
X
F
TW
V
X
F
TW
V
X
F
TW
V
x
resultaat
DF
DF
N
DF |
DF
N
N
N !N I
N
-
ID F j
!N
|1

Bijlage 4
Rijkswaterstaat
Dienst Verkeerskunde
Aanvullende besteksbepalingen (op de eisen verkeersregelinstallaties
1985) voor een filemeetpunt

Bijlage 4
In afwijking van en/of in aanvulling op het gestelde in de "Eisen
Verkeersregelinstallaties 1985" geldt (ten aanzien van de genoemde
paragrafen/artikelen) het volgende.
Par/
art.
Lid Afwijking en/of aanvulling
2.2.5
2.2.5
2.2.5 10
Het regeltoestel dient, naast het gestelde in
par. 2.2.5 lid 1 tevens geprogrammeerd te worden
volgensbijlage e (verkeerstechnische specificatie
van een filemeetpunt) van het bestek.
Alle instelbare parameters van bovengenoemde
verkeerstechnische specificatie dienen afzonder-
lijk instelbaar te zijn tijdens het in bedrijf
zijn van het verkeersregeltoestel.
Voor wat betreft de instelbaarheid van de te ge-
bruiken instelbare parameters en hun karakteris-
tieken wordt verwezen naar deze specificatie.
De bewerkingen die in hoofdstuk 2.1 onder a t/m
d van bovengenoemde specificatie staan vermeld
dienen binnen 0,2s te worden afgehandeld.

- 2 -
Par/
art.
Lid Afwijking en/of aanvulling
2.2.5
2.2.6
2.2.6
2.2.7
2.2.7
11
13
Ten behoeve van de bewerkingen zoals wee
in de verkeerstechnische specificatie (t
dient bekend te zijn of een detector var
dectectiepunt al dan niet (goed) functie
Onder het niet (goed) functioneren wordt
a. kortsluiting of onderbreking van de c
(zie art. 2.2.7 lid 4)
b. de stand uit van de detectorschakela»
(zie art. 2.2.6 lid 7)
c. de detectie-bewaking is aangesproken
(zie art. 2.2.5 lid 6)
De detectorschakelaar ten behoeve van Dl
de standen in en uit. In de stand in ge:
detectormeldingen automatisch. In de st.
worden geen meldingen doorgegeven.
Er dient een lichtindicatie aanwezig te
mee een filemelding wordt verklikt.
De configuratie en de afmetingen van de
lussen worden gezaagd overeenkomstig de
van bijlage b van het bestek.
De naukeurigheid van de afmetingen van
dient ± 5 mm te bedragen.
De rijtijd R van de verkeerstechnische
bijlage e, dient te worden gemeten met
fout van 7,5ms.