2009 Kapuria Buckling

of 17
-
Upload
himanshu-varshney -
Category
Documents
-
view
219 -
download
0
Transcript of 2009 Kapuria Buckling
-
8/3/2019 2009 Kapuria Buckling
1/17
Assessment of third order smeared and zigzag theories for buckling and vibration
of flat angle-ply hybrid piezoelectric panels
P.C. Dumir, P. Kumari, S. Kapuria *
Department of Applied Mechanics, IIT Delhi, Hauz Khas, New Delhi 110016, India
a r t i c l e i n f o
Article history:
Available online 29 March 2009
Keywords:
Angle-ply
Hybrid panel
Non-linear
Buckling
Forced vibration
a b s t r a c t
A recently developed improved third order theory (ITOT) for angle-ply hybrid piezoelectric plates incylindrical bending is extended to include geometric non-linearity in the Von Karman sense. The trans-
verse deflection is approximated non-uniformly to explicitly account for the transverse strain due to tem-
perature and electric potential. The coupled non-linear equations of motion and the boundary conditions
are derived using the extended Hamiltons principle. The non-linear theory is used to obtain the buckling
and free vibration response of symmetrically laminated hybrid angle-ply panels under inplane electro-
thermomechanical loading. This theory and the third order zigzag theory with additional layerwise terms
for inplane displacements are assessed in direct comparison with the exact 2D piezothermoelasticity
solutions for forced harmonic response, buckling and free vibration response under initial inplane elec-
tro-thermomechanical loading. The comparison establishes the accuracy of the results of the zigzag the-
ory and its superiority over the ITOT for the dynamic and buckling response of angle-ply hybrid panels.
2009 Elsevier Ltd. All rights reserved.
1. Introduction
Angle-ply composite and sandwich laminates with embedded
or surface-bonded piezoelectric layers acting as sensors and actu-
ators are widely used in adaptive structures for active vibration
suppression, acoustic control, shape control, etc. Reviews of vari-
ous laminate theories developed for thermoelectrical response of
laminated smart composite structures have been presented in Refs.
[1,2]. Analytical coupled 2D piezothermoelasticity solutions for
cylindrical bending of angle-ply hybrid piezoelectric simply sup-
ported flat panels under electro-thermomechanical load has been
presented for static [3], dynamic [4] and buckling [5] response.
These solution have revealed that there is significant effect of
transverse shear stress, layerwise distortion of midplane normal
and coupling due to piezoelectric and pyroelectric effects. The clas-
sical laminate theory (CLT)[6], first order shear deformation theory
(FSDT) [79] and third order theory (TOT) [1013] have been pre-
sented based on single expression of displacements across the
thickness. These theories do not account for the slope discontinu-
ities in inplane displacements, and violate shear stress continuity
conditions at the layer interfaces. This discontinuity has been
incorporated in discrete layerwise theories (DLT) [14], which are
accurate but inefficient as the number of variables increases in pro-
portion to the number of layers. Kapuria and his coworkers have
presented efficient zigzag theories (ZIGT) for dynamic and bucklingof hybrid beams [15] and plates [16,17] in which the expressions
are taken layerwise and the transverse normal strain due to tem-
perature and potential is directly accounted for in the approxima-
tion of deflection. The number of variables are reduced to those of
the smeared TOT by satisfying interface and boundary conditions
on transverse shear stresses. These theories yield very accurate re-
sults for hybrid cross-ply laminates.
Recently, the author presented an improved TOT (ITOT) consid-
ering the deformability of thickness due to thermoelectric field and
assessed this theory and the ZIGT for static and free vibration re-
sponse of angle-ply hybrid plates in cylindrical bending. The ITOT
was found to be an improvement over the conventional TOT based
on uniform approximation of deflection across the thickness, but
the ZIGT is found to be superior to the ITOT for static electrome-
chanical response of angle-ply hybrid composite and sandwich
panels. Neither the results based on the analytical solution of the
ITOT and ZIGT nor the assessment of their accuracy with respect
to the exact 2D piezothermoelasticity solution are available in
the literature for the forced vibration and thermoelectromechani-
cal buckling response of angle-ply hybrid plates. The analytical re-
sults of the ITOT and ZIGT are also needed for validating the finite
element solution of the corresponding theory.
The present study is aimed to fill this void in the literature. The
objective herein is to extend the linear ITOT [19] for hybrid panels
to include geometric non-linearity due to deflection in the sense of
Von Karman and use the theory to obtain the initial buckling
response of symmetrically laminated hybrid angle-ply panels
0263-8223/$ - see front matter 2009 Elsevier Ltd. All rights reserved.doi:10.1016/j.compstruct.2009.03.019
* Corresponding author. Fax: +91 11 26581119.
E-mail address: [email protected] (S. Kapuria).
Composite Structures 90 (2009) 346362
Contents lists available at ScienceDirect
Composite Structures
j o u r n a l h o m e p a g e : w w w . e l s e v i e r . c o m / l o c a t e / c o m p s t r u c t
mailto:[email protected]://www.sciencedirect.com/science/journal/02638223http://www.elsevier.com/locate/compstructhttp://www.elsevier.com/locate/compstructhttp://www.sciencedirect.com/science/journal/02638223mailto:[email protected] -
8/3/2019 2009 Kapuria Buckling
2/17
under inplane electro-thermomechanical loading. This theory and
the ZIGT of Kapuria and Achary [18] are assessed by direct compar-
ison with the available 2D exact solution for forced vibration re-
sponse [20] under electromechanical loading and buckling
response [5] under inplane electro-thermomechanical loading of
simply supported hybrid angle-ply flat panels of highly inhomoge-
neous, composite and sandwich laminates.
2. Formulation of ITOT
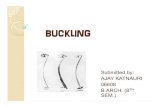
Consider an angle-ply L-layered hybrid piezoelectric flat panel
(Fig. 1) of span a along axis x, thickness h along zaxis and of infinite
length alongy axis. The midplane of the panel is at z 0. The layers
can be orthotropic elastic with a principal material axis along z, or
piezoelectric with orthorhombic class mm2 symmetry with poling
along principal material axis z. The material symmetry direction 1
of the kth layer from bottom is at an angle hk to the x-axis and the
z-coordinate of its bottom surface is denoted as zk1. Thus, the bot-
tom face of the first layer is at z z0 h=2 and the top face of the
Lth layer is at z zL h=2. The interface between the kth and the
k 1th layer is named as the kth interface with z zk.
2.1. Approximations fore, r, T, /, w, u
Consider cylindrical bending of the panel under electro-
thermomechanical load, wherein all entities are independent of
y. Let uxx;z; t; uyx;z; t be the inplane displacements and
wx;z; t be the transverse displacement. The Lagrangian strains
ex; ey; ez; cxy; cyz; czx are related to the displacements, includinggeometric non-linearity due to the deflection w0x; t w0x; 0; t
of the midplane, by
ex ux;x 1
2w2
0;x; ey 0; ez w;z
cxy uy;x; cyz uy;z; czx ux;z wx1
A subscript comma denotes differentiation. Let / be the electric
potential and Ex /;x; Ey 0; Ez /;z, be the components of
the electric field. Unlike most other studies, the inplane electric
field Ex is not considered as zero, since it may be applied by actu-
ation or may be induced by the piezoelectric coupling. The linear
constitutive equations of orthorhombic piezoelectric material of
class mm2 symmetry with poling along z-direction for the stresses
rx; ry; sxy; syz; szx and electric displacements Dx; Dz, using theassumption of transverse normal stress rz 0, are given by
r Qe eT3/;z
bT; s bQc e/;xry Q12ex Q26cxy e32/;z b2T
Dx eTc g11/;x; Dz e3e g33/;z p3T
2
where
e excxy
" #; c
czxcyz
" #; r
rxsxy
!; s
szxsyz
!
Q
Q11 Q16
Q16 Q66" #; eT3 e31e36 !; b b1
b6" #bQ Q55 Q45
Q45 Q44
" #; e
e15
e14
! 3
Qij; eij; bi and gii for axes x; y, at angle hk to the principal mate-rial axes 1, 2, are related to the reduced modulii Qij, piezoelectric
strain constants eij, stresstemperature coefficients bi and electric
permittivitiesgii for the principal material axes 1, 2. The tempera-ture T and the potential / are approximated as piecewise linear
across the thickness in terms of values Tl at nT points at
zlT; l 1; 2; . . . ; nT; and values /j at n/ points at z
j/, j 1; 2; . . . ; n/,
respectively:
T WlTzTlx; t; / Wj/z/jx; t 4
Nomenclature
A; A; A; Al; Al panel stiffness and thermomechanical matricesa; h; L length, thickness, number of pliesc1 damping coefficientDx; Dy; Dz; Ex; Ey; Ez electric displacements and electric fielddij; eij piezoelectric strain and stress constants
F1; F2 stress resultants
F3; Fj6 mechanical and electric loads
bF3; bFj6 mechanical and electric damping loads
Gj; Hj resultants ofDz; DxGij; Yi; mij; Qij shear modulii, elastic modulii, Poissons ratios, re-
duced stiffenessesI; Il; I; Il inertia matricesk0; u0x; u0y; w0x; w0y mid-surface layer and its displacement
variablesL; L; bL; Ln matrices of differential operatorsK; M; KG stiffness matrix, mass matrix, geometric stiffness ma-
trixNx; Mx; Px; S
jx; Nxy; Pxy stress resultants ofrx and sxy
N0
x
; N0
xy
initial stress resultants
P; bP load vectorsp1z; p
2z force applied per unit area on the top and bottom sur-
facesU; Un vector of primary variables, nth Fourier components of
U
p3; p3 pyroelectric constantsqji charge density on the actuated surface
Rk; Rkj; Rkl 2 2 matrices of cubic layerwise functions
S thickness ratio a=h
u; v; w; T; / displacements, temperature, potentialVx; Qx; Q
jx; V
jx; Qy stress resultants ofszx and syz
zk1 zcoordinate of bottom ofkth layerai; bi thermal expansion coefficients, stresstemperature
coefficientsbj
0
; bj; bjw; bjl; bjl; cl panel electromechanical and electrother-mal matrices
cjl; Ejj0
; Ejj panel pyroelectric and dielectric matricesgii; gii electric permittivitiesr; s; e; c stresses and strainse0x ; e
0y ; c
0xy; T0; /
j00 initial uniform strains, temperature and po-tential
Wj/; WlT; W
j/; W
lT interpolation functions and related integral
functionsxn natural frequency for nth spatial mode
U0s ; U0a unknown output voltages, known input voltages
differentiation w.r.t. time
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 347
-
8/3/2019 2009 Kapuria Buckling
3/17
where WlTz; Wj/z are linear interpolation functions for T and /,
and summation convention is used for indices l and j. w is
approximated by integrating constitutive equation for ez, by includ-ing only the predominant thermal and potential contributions due
to expansion coefficient a3 and piezoelectric coefficient d33, i.e.,ez w;z d33/;z a3T )
w w0x; t Wj/z/
jx; t WlTzTlx; t 5
where Wj/z Rz
0d33W
j/;zz dz is a piecewise linear function and
WlTz Rz
0a3W
lTz dz is a piecewise quadratic function.
For the improved third order theory ITOT, the inplane displace-
ments ux and uy are approximated as
u u0x; t zw0d zw0x; t z2nx; t z3gx; t 6
where
u ux
uy
!; u0
u0x
u0y
" #; w0
w0x
w0y
" #; n
nx
ny
!;
g gxgy
" #; w0d
w0;x
0 !7
Using Eqs. (5) and (6) in Eq. (2)2 yields
s bQkw0 2zn 3z2g ekWj/z bQkWj/z/jdbQkWlTzTld 8
The conditions of zero transverse shear stresses at bottom and
top surfaces are imposed to express n and g in terms ofu0 and w0.
w0 2z0n 3z2
0g Dj
1/jd D
l3Tld; w0 2zLn 3z
2
Lg
Dj2/jd
Dl4Tld 9
where
D
j
1 Wj
/z0I2 ~e
1
Wj
/z0; Dj
2 Wj
/zLI2 ~eL
Wj
/zL~e1 bQ11e1; ~eL bQL1eLDl
3 WlTz0I2; D
l4
WlTzLI2
10
I2 is a 2 2 identity matrix. The solution of Eqs. (9) gives n and g as
n C1w0 C/
j1/jd C
Tl1T
ld; g C2w0 C
/
j2/jd C
Tl2T
ld 11
where
C1 z2
0 z2L I2=2D; C2 zL z0I2=3D; D z0zLzL z0
C/j1 z2
LDj1
z20Dj
2=2D; C/j2 z0D
j2
zLDj1
=3D
CTl1 z2
0Dl
4 z2LD
l3
=2D; CTl2 zLDl3
z0Dl4
=3D
12
It results in the following expression ofu for ITOT which is of
the same form as in zigzag theory of Kapuria and Achary [17], viz.,
u u0x; t zw0d x; t Rkzw0x; t R
kjz/jdx; t RklzTldx; t
13
where unlike Ref. [17], the functions Rkz; Rkjz; Rklz for ITOT are
the same for all the layers:
Rkz zI2 z2C1 z
3C2; Rkjz z2C/j1 z
3C/j2;
Rklz z2CTl1 z3CTl2 14
The ITOT and the existing theory ZIGT can henceforth be pre-
sented in unified manner. Eqs. (5) and (13) can be written as
u f1zu1 Rkl1 zTl;x; w f2zu2 WlTzTl 15
with
u1 uT0 w0;x wT
0/j;x
h iT; u2 w0 /
j T
f1z I2 zI1 Rkz Rkj
1z
h i; f2z 1 W
j/z
h i 16where I1; R
kj1 ; R
kl1 are the first column of the matrices I2; R
kj; Rkl:
I1 1
0 !; Rkj1 Rkj11
Rkj21
" #; Rkl1 Rkl11Rkl
21
" # 17The elements with indices j mean a sequence of elements with
j 1 to n/. Substituting u; w from Eq. (15) in Eq. (1) yields
e f1ze1 Rkl1
zTl;xx 1
2w2
0;xI1; c f3ze2 CklzTl;x 18
where Cklz Rkl1;zz WlTzI1 and
e1 u1;x; e2 wT
0/j;x
h iT; f3z R
k;zz R
kj1;zz W
j/zI1
h i19
2.2. Governing non-linear differential equations
Let p1z; p2
z be the forces per unit area applied on the bottom and
top surfaces of the panel. Let the idealised distributed linear vis-
cous resistance acting on the top surface of the panel, possibly
due to viscous resistance of the surrounding medium, be
c1 _wx;zL; t per unit area. Let Aji be an internal surface z zji/, where
/ji is prescribed and qji is the extraneous surface charge density on
this surface. The total number of such prescribed potentials is n/.
Considering unit width of the panel in direction y and using the
notation hi PL
k1
Rzk
zk1
. . .dz, the extended Hamiltons principle
can be expressed asZa0
hqduTu qdw w deTr dcTs Dxd/;x Dzd/;zi
p1
zdwx;z0; t fp2
z c1_
wx;zL; tgdwx;zL; t Dzx;z0; td/
1 Dzx;zL; td/n/ qjid/
ji dx
hduTr szxdw Dxd/ija0
0
8 du0; dw0; dw0; d/j 20
Using Eqs. (15) and (18), the inertia and strain energy terms in
Eq. (20) are expressed as
hqduTu qdw w deTr dcTsi
duT1
Iu1 IlTl;x du
T
2Iu2 I
lTl deT1F1 de
T
2F2
w0;xdw0;xNx 21
The inertia matrices I; Il; I; Il are defined by
I; Il
hqfT
1 zf1z;Rkl1 zi; I; I
l
hqfT
2 zf2z;WlTzi 22
I
I11 I12 I13 I14 I15 Ij0
16
I21 I22 I23 I24 I25 Ij0
26
I31 I32 I33 I34 I35 Ij0
36
I41 I42 I43 I44 I45 Ij0
46
I51 I52 I53 I54 I55 Ij0
56
Ij61
Ij62
Ij63
Ij64
Ij65
Ijj0
66
2666666666666664
3777777777777775; Il
Il1
Il2
Il3
Il4
Il5
Ijl6
266666666666664
377777777777775;
II33 I
j0
36
Ij63 Ijj0
6624 35; Il
Il3
Ijl624 35 23
348 P.C. Dumir et al./ Composite Structures 90 (2009) 346362
-
8/3/2019 2009 Kapuria Buckling
4/17
The stress resultants F1 and F2 are defined by
F1 hfT
1zri NT Mx P
T SjT
x
h iT; F2 hf
T
3zsi QT Qj
T
x
h iT24
N NxNxyT
hri; Mx hzrxi; Vx hszxi
P PxPxyT hRkzTri; Sjx hR
kj1
zTri
Q QxQyT hRk;zz
Tsi and
Qjx hfRkj1;zzg
T Wj/zIT
1si
25
Using Eq. (4), the electric field terms in Eq. (20) are expressed in
terms of resultants Hj; Gj as
hDxd/;x Dzd/;zi d/j;xH
jx d/
jGj; Hjx hWj/zDxi;
Gj hWj/;zzDzi 26
The loading terms in Eq. (20) are expressed as
F3 bF3dw0 Fj6 bFj6d/j Nxdu0x Nxydu0y Vxd w0 Mxdw0;x Pxdw0x Pxyd
w0y Sjxd
/j;x Hjx V
j/d
/jja0
27
where an over-bar in this expression means values at the ends,Vj/ hW
j/zszxi. The loads F3; F
j6;
bF3; bFj6, are defined byF3 p
1
z p2
z;bF3 c1 _w0 cj0/ _/j0 clT _Tl;bFj
6 cj/ _w0 c
jj0
/_/j
0
cjlT_Tl;
Fj6
p1zWj/z0 p
2
zWj/zL DzLdjn/ Dz0dj1 qjidjji 28
with
cj/ c1Wj/zL; c
lT c1W
lTzL
cjj0
/ c1Wj/zLW
j0
/zL; cjlT c1W
j/zLW
lTzL
29
and dij is Kroneckers delta. Using Eqs. (21), (26) and (27) in Eq. (20)
yields the following equations of motion
I11u0x I12u0y I13 w0;x I14 w0x
I15w0y Ij0
16/j
0
;x Il1Tl;x Nx;x 0
I21u0x I22u0y I23 w0;x I24 w0x
I25w0y Ij0
26/j
0
;x Il2Tl;x Nxy;x 0
I31u0x ;x I32u0y ;x I33 w0;xx I33 w0 I34 w0x ;x
I35w0y ;x Ij0
36/j
0
;xx Ij0
36/j
0
Il3Tl;xx I
l3Tl
Mx;xx Nx;xw0;x Nxw0;xx F3 bF3 0I41u0x I42u0y I43 w0;x I44 w0x I45w0y
Ij0
46/j
0
;x Il4Tl;x Px;x Qx 0
I51u0x I52u0y I53 w0;x I54w0x I55
w0y
Ij056/j0;x Il5Tl;x Pxy;x Qy 0
Ij61u0x ;x I
j62u0y ;x I
j63
w0;xx Ij63
w0 Ij64
w0x ;x
Ij65
w0y ;x Ijj0
66/j
0
;xx Ijj0
66/j
0
Ijl6Tl;xx I
jl6Tl
Qjx;x Sjx;xx H
jx;x G
j Fj6
bFj6
0
30
and boundary conditions which are prescribed values of one factor
in the following products:
u0xNx; u0yNxy; w0;xMx; w0xPx; w0yPxy; /j;xS
jx
w0Mx;x I31u0x I32u0y I33 w0;x I34w0x
I35w0y Ij0
36/j
0
;x Il3Tl;x Nxw0;x
/jIj
61u0x I
j62u0y I
j63
w0;x Ij64
w0x Ij65
w0y
Ijj066
/j0;x Ijl61Tl;x S
jx;x Q
jx H
jx
31
2.3. Electromechanical dynamic equations in terms of primary field
variables
Using e; c; T; / from Eqs. (18) and (4) into Eq. (2) yieldsr; s; Dx; Dz, which are then substituted in Eqs. (24) and (26) toobtain the following constitutive equations of the panel:
F1Ae
1
bj
0
/j0
AlTl
;xx c
lTl
1
2
Aw2
0;x
F2 Ae2 bj0/j
0
;x AlTl;x
Gj bjT
e1 Ejj0/j
0
bjlTl;xx cjlTl
1
2bjww2
0;x
Hjx bj
T
e2 Ejj0/j
0
;x bjlTl;x
32
where A; A; A are the panel stiffnesses, Al; Al are the panel ther-
momechanical coefficients, bj0
; bj0
; bjw are the panel electrome-
chanical coupling matrices, bjl; bjl; cl are the panel electro-thermal matrices, cjl is the panel pyroelectric matrix, and Ejj
0
; Ejj0
are the panel dielectric elements. These are defined in terms of
the material constants by [21]
A;Al;A hfT
1zQf1z;R
kl1
z; I1i; bjl hWj/ze
TCklzi
A;Al hfT3 zbQf3z;Cklzi; bjl hWj/;zze3Rkl1 zibj0 hfT
1zeT
3Wj
0
/;zzi; cjl hp3W
j/;zzW
lTzi
cl hfT1
zbWlTzi;bj
0
hfT3
zeWj0
/zi
Ejj0
hg33Wj/;zzW
j0
/;zzi; Ejj0 hg11W
j/zW
j0
/zi
bjw he3Wj/;zI1i
33
The panel constitutive Eqs. (32) are substituted into Eq. (30) to
yield the coupled non-linear electromechanical equations in terms
of primary variables u0x ; u0y ; w0; w0x ; w0y and /j:
LU::
bL _U LU LnU PbP 34where
U u0x u0y w0 w0x w0y /1 /2 . . . /n/
h iTP P1 P2 P3 P4 P5 P
1
6P2
6. . . P
n/6
TbP bP1 bP2 bP3 bP4 bP5 bP16 bP26 . . . bPn/6h iT
35
L and L are symmetric matrices of linear differential operators in
x. bL contains damping related terms. L; L and bL are given byL11 A11;xx; L34 A34;xxx A12;x
L12 A12;xx; L35 A35;xxx A13;x
L13 A13;xxx; L44 A22 A44;xx
L14 A14;xx; L45 A23 A45;xx
L15 A15;xx; L55 A33 A55;xx
L22 A22;xx; L1;5j0 Aj0
16;xxx b
j0
1;x
L23 A23;xxx; L2;5j0 Aj0
26;xxx b
j0
2;x
L24 A24;xx; L3;5j0 Aj0
36;xxxx A
j0
14 bj
0
3 bj
0
1;xx
L25 A25;xx; L4;5j0 Aj0
46;xxx A
j0
24 bj
0
2 bj
0
4;x
L33 A33;xxxx A11;xx
L5;5j0 Aj0
56;xxx A
j0
34 bj
0
3 bj
0
5;x
L5j;5j0 Ajj0
66;xxxx A
jj0
44 bjj
0
6 bj
0j6
bjj0
4 bj
0j4
Ejj0
;xx Ejj0
36
for j;j
0
1; . . . ;n/. L
n
U are non-linear terms due to geometric non-linearity, which are given by
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 349
-
8/3/2019 2009 Kapuria Buckling
5/17
LnU1
1
2A11w
2
0;x;x
LnU3
Nxw0;xx Nx;xw0;x 1
2A31w
2
0;x;xx
LnU2
1
2A21w
2
0;x;x;
Ln
U4 1
2A41w2
0;x;x
LnU5
1
2A51w
2
0;x;x;
LnU5j
1
2bjww2
0;x 1
2Aj61
w20;x;xx
37
The non-zero elements of load vectors P and the bP are given byP1 I
l1Tl;x A
l1Tl;xxx c
l1Tl;x
P2 Il2Tl;x A
l2Tl;xxx c
l2Tl;x
P3 F3 Il3Tl;xx I
l3Tl Al
3Tl;xxxx c
l3Tl;xx A
l1Tl;xx
P4 Il4Tl;x A
l4Tl;xxx c
l4
Al2
Tl;x
P5 Il5Tl;x A
l5Tl;xxx c
l5
Al3
Tl;x
Pj6
Fj6
Ijl6Tl;xx I
jl6Tl Ajl
4 bjl bjl cjl
6Tl;xx
cjlTl Ajl6Tl;xxxxbP3 clT _TlbPj
6 cjlT
_Tl
38
3. Analytical solution for simply supported angle-ply panels
3.1. Linear dynamic response
Analytical solution for the linear dynamic response is obtained
for a simply supported angle-ply panel in cylindrical bending for
the following boundary conditions at x 0; a:
Nx 0; Nxy 0; w0 0; Mx 0; Px 0;
Pxy 0; /j 0; Sjx 0; j 1; . . . ; n/ 39
The solution of Eq. (34), without the non-linear terms, satis-
fying the boundary conditions (39), is expanded in Fourier series
as:
w0;/j; T;Nx;Nxy;Mx; Px;Pxy; S
jx;G
j;piz;qj
X1n1
w0;/j; T;Nx;Nxy;Mx; Px; Pxy; S
jx;G
j;piz; qjn sin nx
u0x ; u0y ;w0x ;w0y ;Vx;Qx;Qy;Qjx;H
jx
X1n1
u0x ;u0y ;w0x ;w0y ;Vx;Qx;Qy;Qjx;Hjxn cos nx
40
with n np=a. Substitution of the above expansions in Eq. (34)yields governing equations of motion for the nth Fourier compo-
nent, which are solved for steady state response under harmonic
electromechanical loading following the procedure discussed in
Ref. [16]. The transverse shear stresses s are calculated by integrat-ing the 3D equations of motion.
Fig. 1. Geometry of a hybrid angle-ply infinite panel.
350 P.C. Dumir et al./ Composite Structures 90 (2009) 346362
-
8/3/2019 2009 Kapuria Buckling
6/17
3.2. Buckling and free vibration under initial stresses
Consider an angle-ply symmetrically laminated panel subjected
to initial uniform inplane normal strains e0x ; e0
y 0, shear strain c0
xy,
uniform temperature rise T0 and actuation potentials independent
of x, y coordinates. This initial equilibrium state is denoted by
superscript 0
. For the symmetrically laminated panel under sym-metrical loading about x-plane,
w00
0; w0x w0
y 0 41
Considering this, the panel constitutive Eqs. (32) and governing
differential equations (30)6 yield
N0x A11e0
x A12c0
xy bj0
1/j
00 c1T0
N0xy A21e0
x A22c0
xy bj0
2/j
00 c
2T0
Ejj0
/j00 bj
1e0x b
j2c0xy F
j06
cjT0
42
where c1 Pnh
l1cl1; c2
Pnhl1c
l2 and c
j Pnh
l1cjl. Defining
U /1 /2 . . . /n/ T; C c1 c2 . . . cn/
T
bk b1k b2k . . . b
n/k
T; F6 F16 F26 . . . Fn/6 T 43with k 1;2, Eq. (42)4 can be written in matrix form as
EU0 b1e0
x b2c0
xy F0
6 CT0 44
U0 is partitioned into a set of unknown output voltages U0s at zj/s
where / is not prescribed and a set of known input actuation volt-
ages U0a at the actuated surfaces. Accordingly, Eq. (44) is partitioned
and arranged as
Ess Esa
Eas Eaa
!U0s
U0a
" #
b1s
b1a
!e0x
b2s
b2a
!c0xy
F06s
F06a
" #
Cs
Ca
!T0 45
Solving Eq. (45) for U0s and substituting it into Eq.(42) yields the
initial stress resultants N0x ;
N0xy
, in terms of the known loading
parameters
N0x A11 bT
1sE1ss b1se
0
x A12 bT
1sE1ss b2sc
0
xy
bT1a b
T
1sE1ss EsaU
0
a bT
1sE1ss F
0
6s c1 bT
1sE1ss CsT0
N0xy A21 bT
2sE1ss b1se
0
x A22 bT
2sE1ss b2sc
0
xy
bT2a b
T
2sE1ss EsaU
0
a bT
2sE1ss F
0
6s c2 bT
2sE1ss CsT0
46
Let the solution for just after buckling/vibration under initialstresses be denoted by ^ on the entities. The size of the buck-
ling/vibration mode U is described by an arbitrary small parame-ter . Thus, bU U0 Uwith Ugiven by Eq. (35)1. Substituting thissolution into Eq. (34), using Eq. (41), N0xy;y 0, N
0x;x 0, and consid-
ering the first order terms in , yield the following equations for U:
LU::
LU 0 0 N0xw0;xx 0 0 0 T
P 0 0 0 0 0 Fj6
h iT: 47
For a set of zero incremental potential at the actuator locations,
zero incremental electric displacement at the unknown potential
locations and zero incremental temperature, the incremental load
Fj6 is zero for index j corresponding to such surfaces. This yields the
following governing equations for buckling/vibration under initial
stresses:
LU::
LU 0 0 N0xw0;xx 0 0 0 T
0 48
The inertia term is zero for the buckling case. The solution of
Eq. (48) for the nth spatial buckling/vibration mode for the sim-
ply supported panel with boundary conditions Eq. (39) is taken
Fig. 2. Configurations of hybrid panels for numerical study.
Table 1
Exact 2D results [20] for fundamental natural frequency x1 for panels (a)(c).
S Open circuit cond ition Closed circuit condition
(a) (b) (c) (a) (b) (c)
5 5.92813 6.40411 3.05690 5.87107 6.33834 3.02339
10 8.11357 8.03394 4.62089 8.00641 7.93293 4.53374
20 9.25291 8.70043 5.66809 9.11085 8.58158 5.52172
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 351
-
8/3/2019 2009 Kapuria Buckling
7/17
Fig. 3. Distributions of u; w; rx for panel (a) x=x1 :8;c 0:1.
Fig. 4. Distributions of u; w; rx for panel (c) x=x1 :8;c 0:1.
352 P.C. Dumir et al./ Composite Structures 90 (2009) 346362
-
8/3/2019 2009 Kapuria Buckling
8/17
Fig. 5. Amplitude wm and phase j for panel (a) under load cases (H1) and (H2).
Fig. 6. Amplitude wm and phase j for panel (b) under load cases (H1) and (H2).
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 353
-
8/3/2019 2009 Kapuria Buckling
9/17
Fig. 7. Amplitude wm and phase j for panel (c) under load cases (H1) and (H2).
Fig. 8. % error of ZIGT and ITOT for amplitude wm and phase j0 under load case (H1).
354 P.C. Dumir et al./ Composite Structures 90 (2009) 346362
-
8/3/2019 2009 Kapuria Buckling
10/17
as given in Eq. (40), without the summations over n. Substitutingthem in Eq. (48) yields
MUn KUn KGUn 0 49
where Un is the nth Fourier component ofU and KG is the geometric
stiffness matrix with the only non-zero element KG3;3 n2N0
x . K
and Mare the symmetric stiffness and inertia matrices. For synchro-
nous free vibration of natural frequency xn, considering Un Un cosxnt, and partitioning U into the unknown and known partsUs and Ua, Eq. (49) can be written for eUn u0xn u0yn w0n w0xnw0ynU
ns
T as
eK eKG x2n eMeUn0 eK kKG x2n eMeUn0 0 50For the case of free vibration under initial stresses, k 1;
K
G eKG evaluated for the initial stresses, i.e., N0
x and N0
xy. Eq. (50)represents a generalised eigenvalue problem, whose eigenvalues
yield the natural frequencies xn for the nth spatial mode. For thecase of buckling, x 0; KG is evaluated for the initial stresses cor-responding to unit value of the initial loading parameters and the
eigenvalue k gives the buckling load factor. The eigenvalues and
eigenvectors are obtained by QR algorithm after reducing to Heis-
senberg form using NAG subroutines.
4. Numerical results
4.1. Forced vibration
The accuracy of the ZIGT and ITOT for steady state forced
damped response is established by direct comparison with the ex-act 2D piezoelasticity [20] solution for simply supported flat angle-
ply hybrid panels. Three configurations of panels are considered asshown in Fig. 2. Panel (a) is a test panel with layers having highly
inhomogeneous stiffness in tension and shear. Panels (b) and (c)
are composite and sandwich panels. Unless otherwise stated, the
ply-angle h is taken as 15 and 30 for panels (b) and (c), respec-
tively. The interface between elastic substrate and piezoelectric
layer is electrically grounded.
The material constants Y1; Y2; Y3; G12; G23; G31(GPa); m12; m13; m23;q kg=m3; 106a1;a2;a3 K
1); and thermal conductivities
k1; k2; k3 (W/mK) for the materials are:
Material 1: 6.9, 6.9,6.9,2.76,2.76,2.76; 0.25,0.25,0.25,1578;
35.6, 35.6, 35.6; 0.12, 0.12, 0.12
Material 2: 224.25,6.9,6.9, 56.58,1.38,56.58; 0.25, 0.25, 0.25,
1578; 0.25, 35.6, 35.6; 7.2,1.44,1.44Material 3: 172.5,6.9,6.9, 3.45, 1.38, 3.45; 0.25,0.25,0.25,1578;
0.57, 35.6, 35.6; 1.92, 0.96, 0.96
Material 4: 181.0,10.3,10.3,7.17,2.87,7.17; 0.28,0.28,0.33,
1578; 0.02, 22.5, 22.5; 1.5,0.5,0.5
Face: 131.1,6.9,6.9, 3.588,2.3322, 3.588; 0.32, 0.32, 0.49, 1000;
0.0225,22.5,22.5; 1.5,0.5,0.5
Core: 0:0002208; 0:0002001; 2:760; 0:01656;0:4554; 0:5451; 0:99;
3 105; 3 105;70; 30:6;30:6; 30:6; 3:0; 3:0; 3:0
PZT-5A: 61.0, 61.0, 53.2, 22.6, 21.1, 21.1; 0.35, 0.38, 0.38, 7600;
1.5,1.5,2.0; 1.8,1.8,1.8, and d31; d32; d33;
d15; d24pm=V;g11;g22;g33 (nF/m); p3C=m2K 171; 171;
374; 584; 584; 15:3; 15:3; 15:0; 0:0007
Two harmonic load cases are considered for the steady stateforced response:
Fig. 9. % error of ZIGT and ITOT for amplitude wm and phase j0 under load case (H2).
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 355
-
8/3/2019 2009 Kapuria Buckling
11/17
(H1) Pressure p2z p0 sinpx=a cosxt on the top surface whichis under open circuit condition with Dz 0.
(H2) Actuation potential /n/ /0 sinpx=a cosxt applied to thetop surface.
The bottom surface is grounded /1 0 for both load cases.
The results for these two load cases are non-dimensionalized with
S a=h; Y0 6:9 GPa for panels (a), (c) and Y0 10:3 GPa for panel
(b); d0 374:0 1012 CN1 for all panels; q0 1578 kg=m
3 for
panels (a), (b) and q0 1000 kg=m3 for panel (c):
H1: u; w 100u; w=SY0=hS3p0; rx rx=S
2p0H2: u; w u=10; w=S=Sd0/0; rx rxh=Y0d0/0
The dimensionless damping parameter c is defined as cc1S=2q0ax1, where x1 is the fundamental natural frequency. Thenatural frequency is non-dimensionalized as xn xnaSq0=Y0
1=2. The exact 2D results are obtained using given methodology
of Ref. [20] for the dimensionless undamped natural frequency x1for the first bending mode is presented for ready reference in Table
1 for hybrid panels (a)(c) for both open and close circuit condi-
tions of the top surface.
The through-the-thickness distributions of the dimensionless
inplane displacement ux, deflection and inplane normal stress rx,for angle-ply hybrid panels (a) and (c) under both load cases are
plotted in Figs. 3 and 4 for n 1; x=x1 :8; c 0:1 and S 10.The ZIGT accurately predicts the zigzag variation of the inplane dis-
placements and also the non-uniform distribution of deflection
across the thickness in case of potential load case (H2) quite accu-rately. The ITOT in spite of inclusion of the transverse piezoelectric
normal strain is unable to predict these distributions of the dis-placements accurately and yields inaccurate results for displace-
ments and stresses.
The amplitude wm and phase lag j of the mid-surface deflectionat the centre of the panel, for the two load cases are presented for
S 10 in Figs. 57 as a function of the forcing frequency x, for spa-tial mode n 1 for panels (a)(c). The undamped case c 0 and
damped cases with c 0:1; 0:2 are considered. The percentage er-
rors of wm and j in the ZIGT and the ITOT are plotted in Figs. 8 and9 for the two load cases for the damped case of c 0:1 for thick
S 5, moderately thick S 10 and thin S 20 panels. It is ob-
served from Figs. 8 and 9 that the ZIGT predicts the amplitude and
phase of the forced harmonic response very accurately for all pan-
els for all load cases for the whole frequency range except for small
errors for thick S 5 panels in the neighbourhood of the naturalfrequency x1. In contrast, the errors in the ITOT for both amplitudeand phase are quite large in the whole range of frequency for mod-
erately thick and thick panels with the error increasing in the
neighbourhood ofx1. The error is especially large for panels (a)and (c) having layers of drastically different material properties.
In the range ofx > x1, the error in the deflection amplitude forthe ITOT is moderately larger for the potential load case 2 com-
pared to the mechanical load case 1. Even for the thin panels with
S 20, the maximum error in the ITOT for wm is large being 41.2%,
49.3% for load case (H1) and 49.3%, 56.4% for load case (H2) for
panels (a) and (c), respectively, for damping parameter c 0:1.
The error in wm in the ITOT is large since it is the cumulative effect
of the errors in predicting the static deflection, the natural fre-
quency and the dynamic magnification factor for the forcedresponse.
Fig. 10. Variations of exact 2D results of wm and % error in ZIGT and ITOT with ply-angle h for hybrid panel (b) x=x1 :8;c 0:1.
356 P.C. Dumir et al./ Composite Structures 90 (2009) 346362
-
8/3/2019 2009 Kapuria Buckling
12/17
The variation of 2D exact result for amplitude wm and % error ofZIGT and ITOT with the ply-angle h are presented for load cases
(H1) and (H2) in Figs. 10 and 11 for hybrid panels (b) and (c). As
expected, the deflection amplitudexm in both load cases increasesas the ply-angle h increases from 0 to 90, due to reduction in the
stiffness in span direction. It is observed that for the hybrid com-
posite panel, for ply-angle hP 15 (which is mostly the case in
practice) the ZIGT yields more accurate prediction of wm than the
ITOT, the error decreasing with the ply-angle. In contrast, the error
in the ITOT reaches a maximum for ply-angle of around 30 and 40
for load cases (H1) and (H2), respectively and reduces thereafter.
For the hybrid sandwich panel (c), the ZIGT yields very accurate
results for the entire range ofh, while the ITOT results have verylarge error in the whole range ofh.
4.2. Buckling and free vibration
Simply supported hybrid panels of three different symmetric
laminate configurations a1; b1 and (c), as shown in Fig. 2, are
Fig. 11. Variations of exact 2D results of wm and % error in ZIGT and ITOT with ply-angle h for sandwich panel (c) x=x1 :8;c 0:1.
Table 2
Exact 2D results and % errors of ZIGT and ITOT for ecr and Nxcr .
Panel S Exact % error in ecr; Nxcr
ecr Nxcr ZIGT ITOT
a1 5 0.3984 2.9319 0.07 9.84
7.5 0.5052 3.7174 0.06 3.13
10 0.5582 4.1074 0.05 3.28
20 0.6216 4.5740 0.03 0.85
b1 5 0.4127 4.0628 0.57 6.44
7.5 0.5388 5.3048 0.48 4.15
10 0.6068 5.9746 0.34 2.73
20 0.6939 6.8317 0.09 0.79
(c) 5 0.4197 1.6060 0.17 44.96
7.5 0.7079 2.7084 0.05 32.44
10 0.9414 3.6020 0.15 23.04
20 1.3940 5.3337 0.11 7.64
Table 3
Exact 2D results and % errors of ZIGT and ITOT for /cr.
S Panel a1 Panel b1 Panel (c)
Exact % error Exact % error Exact % error
ZIGT ITOT ZIGT ITOT ZIGT ITOT
5 0.22 87 2 3 .00 1 3.21 0.47 07 5 4 .1 8 1 0.26 0.12 77 9 0.88 4 6.487 .5 0.29 32 4 1 .9 9 7 .4 1 0.62 38 5 2 .5 5 6 .3 0 0.21 62 3 0.76 3 3.38
10 0.32611 1.32 4.59 0.70778 1.66 4.08 0.28814 0.67 23.68
20 0.36638 0.35 1.23 0.81684 0.48 1.18 0.42805 0.30 7.84
Table 4
Exact 2D results and % errors of ZIGT and ITOT for Tcr and Tcr for panels S 20.
Load case Panel 2D exact % error
ZIGT ITOT
Tcr Tcr Tcr T
cr Tcr T
cr
T1 b1 14.9297 13.6266 8.50 0.25 7.87 0.94
(c) 23.3025 20.2656 1 2.85 0.21 6.30 7.74
T2 b1 6.99 64 6 .7 01 6 3.91 0.32 3.23 1.03
(c) 5.3246 5.1522 3.02 0.23 4.87 8.38
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 357
-
8/3/2019 2009 Kapuria Buckling
13/17
Fig. 12. % error of buckling temperature for panels b1 and (c) under load cases (T1) and (T2).
Fig. 13. Distributions of u; rx; szx for critical buckling mode for panel (c) for load case (M).
358 P.C. Dumir et al./ Composite Structures 90 (2009) 346362
-
8/3/2019 2009 Kapuria Buckling
14/17
considered for comparing the results with exact 2D piezothermo-
elasticity solution [5]. Panel a1 is a highly inhomogeneous flat pa-
nel and panel b1 is a hybrid composite panel. Unless otherwisestated, the ply-angle h is taken as 30 for both panels b1 and
(c). The top and the bottom of substrate are grounded.
Four pre-buckling/pre-vibration load cases are considered:
(M) Inplane strain e0x e0 with c0xy 0. The top and bottom sur-
faces are grounded.
(V) Applied actuation potentials at top and bottom surfaces
/zL /z0 /0 with immovable ends e0x c
0xy 0.
(T1) Uniform temperature rise T0 of the panel with top and
bottom surfaces under closed circuit condition /z0
/zL 0 with immovable ends.(T2) Uniform temperature rise T0 with top and bottom surfaces
under open circuit condition Dzz0 DzzL 0 with
immovable ends.
For load case (M), the lowest value of the strain e0 for bucklingis denoted as ecr and the corresponding inplane forces are denotedas Nxcr . For load case (V), the critical value of potential /
0 for
buckling is denoted as /cr. For load cases (T1) and (T2), the critical
Fig. 14. Distributions of u; rx; szx for thermal buckling mode for panel (c) under load case (T2).
Fig. 15. Effect of the ply-angle on Nxcr and/cr and % error in ZIGT and ITOT for panel b1 .
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 359
-
8/3/2019 2009 Kapuria Buckling
15/17
value ofT0 for buckling is denoted as Tcr. The results for these cases
are non-dimensionalized as follows with S a=h; d0 374
1012 CN1; a0 22:5 106 K1 Y0 6:9 GPa for laminates a1
and (c) and 10:3 GPa for laminate b1.
For load cases (M) and (V):
Nxcr NxcrS3=Y0a; ecr ecrS
2; /cr /crd0S3=a
rx rxS2h=Y0 maxw; u; w Su;w= maxw;
szx szxS3h=Y0 maxw
For load cases (T1) and (T2):
Tcr a0TcrS2; u; w Su;w= maxw
rx rxS2h=Y0 maxw; szx szxS
3h=Y0 maxw
where maxw denotes the largest value ofw through the thickness.
In all cases, the lowest buckling parameter corresponds to mode
n 1.
The exact 2D results ofecr and Nxcr and % errors of the ZIGT andITOT for load case (M) are presented in Table 2 for hybrid panels
a1; b1 and (c) for S 5; 7:5; 10 and 20. It is observed that the
ZIGT yields highly accurate results for ecr for all laminate configu-rations with a maximum error of 0.6% even for thick panels with
S 5. In contrast, ITOT results have errors upto 9.8%, 6.4% and
45.0% for panels a1, b1 and (c), respectively. Even for thin panels
with S 20, the error in ITOT is 7.6% for sandwich panel (c). The
exact 2D results and % errors of the 1D theories for the critical elec-
tric potential are presented in Table 3 for the three panel configu-
rations. It is revealed that the maximum error in the ZIGT for
moderately thick panels with S 10 is 1.7% whereas the error in
ITOT is 4.6%, 4.1%, 23.7% for panels a1; b1 and (c), respectively.
The governing equations of motion in the 1D theories do not
incorporate the pre-buckling transverse normal strain e0z, whereasthe exact 2D piezothermoelasticity solution of Ref. [5] formulated
based on the second PiolaKirchhoff stresses incorporates this ef-
fect. To ascertain the effect ofe0z, the 2D results for buckling tem-perature are obtained considering as well as neglecting e0z, whichare denoted as Tcr and T
cr, respectively. These results and the % er-
ror of the ZIGT and ITOT results with respect toTcr and Tcr are listed
in Table 4 for panels b1 and (c) for S 20 for both the thermal
load cases (T1) and (T2). It is observed that the initial e0z can have
significant effect on the buckling temperature, depending on thelaminate configuration. Therefore, for ascertaining the error due
to displacement approximations across the laminate thickness in
the 1D theories, the errors in the 1D theories for the buckling tem-
perature should be considered with respect to 2D results, Tcr,
excluding the effect ofe0z.The variation of % error in buckling temperatures with the
thickness parameter h=a, is presented in Fig. 12 for panels b1
and (c) for the two thermal load cases with close and open circuit
conditions. It is revealed that though the buckling temperatures of
panels under close and open circuit conditions are considerably
different (as can be seen from Table 4), the errors in the 1D theories
in the two cases differ only marginally. The maximum error in the
ZIGT for the buckling temperature is 1.6% for the given cases,
whereas the error in the ITOT is 3.5% and 24.6% for moderatelythick S 10 panels b1 and (c), respectively.
Fig. 16. Effect of the ply-angle on Nxcr and/cr and % error in ZIGT and ITOT for panel (c).
360 P.C. Dumir et al./ Composite Structures 90 (2009) 346362
-
8/3/2019 2009 Kapuria Buckling
16/17
The through-the-thickness distributions of modal inplane dis-
placement u, normal stress rx and transverse shear stress szx forthe critical buckling mode at x locations where they are maximum
are compared in Fig. 13 for the hybrid sandwich panel for load case
(M) for S 5 and 10. Similar distributions for thermal load case
(T2) are presented in Fig. 14 for panel (c) with S 10. It is observed
that the ZIGT distributions are in excellent agreement with the ex-
act modal distributions even for the thick case with S 5. In con-
trast, the distributions obtained from ITOT have large error even
for S 10. The 2D exact results for critical load Nxcr and critical
electric potential /cr and % errors of the 1D theory results are plot-ted against ply-angle h in Figs. 15 and 16 for hybrid composite pa-
nel b1 and sandwich panel (c), respectively. Similar plots for the
buckling temperature Tcr under load case (T1) are presented in
Fig. 17. As expected, Nxcr ;/cr and T
cr for buckling decrease with
the increase in ply-angle. The variations of % error in the 1D theo-
ries for Nxcr ,/cr and Tcr with ply-angle follow similar trend as the
steady state deflection amplitude wm.
The % errors in the ZIGT and the ITOT results for the fundamen-
tal flexural frequency x1 of initially stressed hybrid composite pa-nel b1 and sandwich panel (c) are plotted in Fig. 18 for initial
mechanical load (M) with e0=ecr 0:25; 0:75 and potential loadcase (V) with /0=/cr 0:25; 0:25 and thermal load (T1) with
T0=Tcr 0:25; 0:25. As in the case of Tcr , for the same reasons,
the errors in the 1D theories for the natural frequencies under ini-tial thermal loads are obtained with respect to 2D results, xn,
excluding the effect ofe0z. It is revealed that the ZIGT yields veryaccurate results with a maximum error of 2.7% even for thick pan-
els with S 7:5. In contrast, the error in the ITOT for moderately
thick sandwich panel (c) with S 10 is 13.8%, 13.9% and 16.9%
for load case (M), (V) and (T1), respectively. The error in the 1D
theories for the frequency increases with h=a; e0=ecr;/0=/cr andT0=Tcr.
5. Conclusions
From the numerical study, it is inferred that the efficient ZIGT is
generally the most accurate of the two theories, ZIGT and ITOT,
compared herein, for steady state harmonic, buckling and free
vibration of initially stressed hybrid response for angle-ply panels.
The ZIGT yields very accurate prediction of steady state forced re-
sponse under harmonic electromechanical loads, the critical in-
plane strain, potential and temperature for buckling and the
natural frequencies under initial stresses due to inplane electro-
thermomechanical loads of highly heterogeneous composite as
well as sandwich laminates. In contrast, the ITOT results have quite
large errors even for moderately thick (S 10) and even thinner
panels in case of inhomogeneous composite and sandwich angle-
ply laminates. The inaccuracy in the ITOT results is essentially
due to the absence of layerwise terms in the approximation of in-plane displacement in the theory.
Fig. 17. Effect of the ply-angle on Tcr and % error in ZIGT and ITOT for load case (T1).
P.C. Dumir et al./ Composite Structures 90 (2009) 346362 361
-
8/3/2019 2009 Kapuria Buckling
17/17
References
[1] Saravanos DA, Heyliger PR. Mechanics and computational models forlaminated piezoelectric beams, plates and shells. Appl Mech Rev1999;52:30520.
[2] Tauchert TR, Ashida F, Noda N, Adali S, Verijenko V. Developments inthermopiezoelasticity with relevance to smart composite structures. ComposStruct 2000;48:318.
[3] Dube GP, Upadhyay MM, Dumir PC, Kumar S. Piezothermoelastic solution forangle-ply laminated plate in cylindrical bending. Struct Eng Mech1998;06:52942.
[4] Chen WQ, Ying J, Cai JB, Ye GR. Benchmark solution of imperfect angle-plylaminated rectangular plates in cylindrical bending with surface piezoelectriclayers as actuator and sensor. Comput Struct 2004;82:177384.
[5] Dumir PC, Kapuria S, Kumari P, Nath JK. Two-dimensional benchmark solutionfor buckling and vibration of simply supported hybrid piezoelectric angle-plyflat panel. Z Angew Math Mech 2008;88:4257.
[6] Ishihara M, Noda N. Nonlinear dynamic behaviour of a piezothermoelasticlaminated plate with anisotropic material properties. Acta Mech2003;166:10318.
[7] Chandrashekhara K, Agarwal AN. Active vibration control of laminatedcomposite plates using piezoelectric devices: a finite element approach. JIntell Mater Syst Struct 1993;4:496508.
[8] Varelis D, Saravanos DA. Nonlinear coupled mechanics and initial buckling ofcomposite plates with piezoelectric actuators and sensors. Smart Mater Struct2002;11:3306.
[9] Varelis D, Saravanos DA. Coupled buckling and postbuckling analysis of activelaminated piezoelectric composite plates. Int J Solids Struct 2004;41:151938.
[10] Mitchell JA, Reddy JN. A refined hybrid plate theory for composite laminateswith piezoelectric laminae. Int J Solids Struct 1995;32:234567.
[11] Correia VMF, Gomes MAA, Suleman A, Soares CMM. Modelling and design ofadaptive composite structures. Comput Methods Appl Mech Eng2000;185:32546.
[12] Kapuria S, Achary GGS. A coupled consistent third order theory for hybridpiezoelectric plates. Compos Struct 2005;70:12033.
[13] Shen HS. Thermal postbuckling of shear deformable laminated plates withpiezoelectric actuators under complex loading condition. Int J Solids Struct2001;38:770321.
[14] Heyliger PR, Ramirez G, Saravanos DA. Coupled discrete-layer finite elementsfor laminated piezoelectric plates. Commun Numer Methods Eng1994;10:97181.
[15] Kapuria S. An efficient coupled theory for multilayered beams with embeddedpiezoelectric sensory and active layers. Int J Solids Struct 2001;38:917999.
[16] Kapuria S, Ahmed A, Dumir PC. An efficient coupled zigzag theory for dynamicanalysis of piezoelectric composite and sandwich beams with damping. JSound Vib 2005;279:34571.
[17] Kapuria S, Achary GGS. A coupled zigzag theory for the dynamics ofpiezoelectric hybrid cross-ply plates. Arch Appl Mech 2005;75:4257.
[18] Kapuria S, Achary GGS. Nonlinear zigzag theory for electro-thermomechanicalbuckling of piezoelectric composite and sandwich plates. Acta Mech2006;184:6176.
[19] Kumari P, Nath JK, Dumir PC, Kapuria S. An improved third order theory andassessment efficient zigzag theory for angle-ply flat hybrid panels. ComposStruct 2008;83:22636.
[20] Kumari P, Nath JK, Dumir PC, Kapuria S. 2D exact solutions for flat hybridpiezoelectric and magnetoelastic angle-ply panels under harmonic load. SmartMater Struct 2007;16:111.
[21] Kumari P. 2D exact solutions and third order zigzag theory for hybrid angle-ply flat panels, M.Tech. thesis, IIT Delhi, Department of Applied Mechanics;2007.
Fig. 18. Percent error in x1 of initially stressed hybrid panels b1 and (c).
362 P.C. Dumir et al./ Composite Structures 90 (2009) 346362