GEÏNTEGREERDE PROEF - Telenetusers.telenet.be › tjorvenkoek › gip-bundel.pdf · PROVINCIAAL...
128
PROVINCIAAL TECHNISCH INSTITUUT EEKLO Roze 131 9900 Eeklo GEÏNTEGREERDE PROEF Schooljaar 2014 - 2015 Tjorven Koek 6EMa Patronagestraat 32 9060 Zelzate
Transcript of GEÏNTEGREERDE PROEF - Telenetusers.telenet.be › tjorvenkoek › gip-bundel.pdf · PROVINCIAAL...
PROVINCIAAL TECHNISCH INSTITUUT EEKLO
Roze 131 9900 Eeklo
GEÏNTEGREERDE PROEF
Schooljaar 2014 - 2015
Tjorven Koek
6EMa
Patronagestraat 32
9060 Zelzate

PROVINCIAAL TECHNISCH INSTITUUT EEKLO
Roze 131 9900 Eeklo
GEÏNTEGREERDE PROEF
Schooljaar 2014 - 2015
Tjorven Koek
6EMa
Patronagestraat 32
9060 Zelzate
Woord vooraf
In het kader van de Geïntegreerde Proef kregen wij met de volledige klas uit de richting
Elektro-Mechanica de opdracht om een blikjespers te ontwerpen. Het is een didactisch
ontwerp en het bevat veel mogelijkheden die we kunnen gebruiken in de industrie. Zo bevat
dit eindwerk verschillende componenten die je in een bedrijf aantreft, zoals pneumatica,
motoren, een frequentieregelaar en verschillende soorten verbindingstechnieken. Alle
mechanische onderdelen hebben we zelf vervaardigd tijdens de praktijklessen. Sommige
componenten die we gebruikt hebben, heb ik ook teruggevonden op mijn stageplaats.
Daardoor vind ik het interessant dat we er een uitgebreide uitleg over geven zodat we de
werking goed begrijpen en goed kunnen toepassen. Deze blikjespers is opgebouwd uit een
trechter, een transportband, een draaitafel en de pers. Karel Pauwels en ik zijn
verantwoordelijk voor de transportband.
Doorheen het verloop van onze proef kregen we hulp van verschillende personen. Onze
praktijkleerkracht, dhr. Van De Geuchte ben ik zeer dankbaar voor de goede opvolging van
het mechanische gedeelte van de GIP. Het enthousiasme waarmee hij ons altijd steunde
was een enorme motivatie voor de groep. Uiteraard bedank ik onze leerkracht van
elektriciteit, dhr. Schrooten voor de opvolging van het elektrische gedeelte. De leerkrachten
van algemene vakken en technische vakken wil ik ook graag bedanken omdat ze ons toch
altijd gesteund hebben toen we moeilijke dagen hadden. En vooral wil ik de klasgenoten
bedanken voor de goed verlopende samenwerking en het doorzettingsvermogen dat we toch
gedurende het hele jaar getoond hebben. Ten slotte wil ik mijn collega, met wie ik gedurende
het hele project veel tijd heb doorgebracht, bedanken voor de vlotte samenwerking. We
hadden al eens moeilijke momenten, maar we hebben deze problemen toch altijd op een
volwassen manier aangepakt en opgelost.
Inhoudsopgave Woord vooraf ......................................................................................................................................... 2
Inleiding .................................................................................................................................................. 7
1 Technische opgave GIP .............................................................................................................. 8
1.1 Opgave ................................................................................................................................... 9
1.2 Integratie leerstof ................................................................................................................ 10
1.2.1 Mechanica-sterkteleer ................................................................................................ 10
1.2.2 Laboratorium (materialenleer) .................................................................................. 10
1.2.3 Technisch Tekenen Mechanica ................................................................................ 10
1.2.4 Technologie – praktijk mechanica ............................................................................ 10
1.2.5 Laboratorium (meettechniek) .................................................................................... 11
1.2.6 Elektriciteit .................................................................................................................... 11
1.2.7 Elektronica ................................................................................................................... 12
1.2.8 ICT................................................................................................................................. 12
1.2.9 Taalintegratie ............................................................................................................... 18
1.2.10 Samenbundelen van de oplossingen. ..................................................................... 19
2 Voorbereidend studiewerk ......................................................................................................... 21
2.1 Mechanica sterkteleer ........................................................................................................ 22
2.1.1 Boutberekeningen ....................................................................................................... 22
2.1.2 Snelheids- en tijdsberekening blikje bij 3 fasige asynchrone motor ................... 22
2.2 Gebruikte materialen .......................................................................................................... 23
2.2.1 Constructiestaal .......................................................................................................... 23
2.2.2 Band van de transportband ....................................................................................... 26
3 Technisch tekenen ..................................................................................................................... 27
3.1 Constructie ........................................................................................................................... 28
3.1.1 Meeloopplaten ............................................................................................................. 28
3.1.2 Opspanmethode ......................................................................................................... 29
3.1.3 Profielhouders ............................................................................................................. 30
3.1.4 Motoropspanning ........................................................................................................ 31
3.1.5 Plaats motor ................................................................................................................. 32
3.1.6 Beschermkap Blikjespers .......................................................................................... 33
3.2 Technische tekeningen ...................................................................................................... 34
4 Praktijk mechanica ..................................................................................................................... 35
4.1 Werkgangen ........................................................................................................................ 36
4.2 Verbindingen ....................................................................................................................... 36
4.2.1 Bout ............................................................................................................................... 36
4.2.2 Passingen .................................................................................................................... 41
4.2.3 Lassen .......................................................................................................................... 42
4.3 Gebruikte bewerkingstechnieken ..................................................................................... 43
4.3.1 Kotteren ........................................................................................................................ 44
4.3.2 Draaien ......................................................................................................................... 44
4.3.3 Frezen ........................................................................................................................... 45
4.3.4 CNC .............................................................................................................................. 47
5 Meetaspect .................................................................................................................................. 50
5.1 Passingen ............................................................................................................................ 51
5.2 Ruwheden ............................................................................................................................ 52
6 Elektriciteit .................................................................................................................................... 55
6.1 3-fasige asynchrone motor ................................................................................................ 56
6.1.1 Keuze motor ................................................................................................................ 56
6.1.2 Frequentieregelaar ..................................................................................................... 63
6.2 Beveiliging ............................................................................................................................ 76
6.2.1 Noodstopinstallatie ..................................................................................................... 76
6.2.2 Installatiebeveiliging ................................................................................................... 77
6.3 Bediening ............................................................................................................................. 78
6.3.1 Hoofdschakelaar ......................................................................................................... 78
6.3.2 Start/stop ...................................................................................................................... 78
6.3.3 Noodstop ...................................................................................................................... 79
6.4 PLC ....................................................................................................................................... 79
6.4.1 Algemeen ..................................................................................................................... 79
6.4.2 Het programma ........................................................................................................... 80
6.5 Technisch dossier ............................................................................................................... 80
6.5.1 E-plan ........................................................................................................................... 80
7 Elektronica ................................................................................................................................... 81
7.1 Sensoren .............................................................................................................................. 82
7.1.1 capacitieve nabijheidschakelaar ............................................................................... 82
7.1.2 Inductieve nabijheidssensor ...................................................................................... 83
7.1.3 optische sensor ........................................................................................................... 84
7.2 Omvormer ............................................................................................................................ 85
7.2.1 Toepassing .................................................................................................................. 85
7.2.2 De werking van een omvormer: ................................................................................ 86
8 Integratie algemene vakken ...................................................................................................... 87
8.1 Nederlands........................................................................................................................... 88
8.1.1 Zakelijke brief aanvraag stageplaats ....................................................................... 89
8.1.2 Sollicitatiebrief ............................................................................................................. 90
8.1.3 Aanvraag info .............................................................................................................. 91
8.1.4 Curriculicum Vitae ....................................................................................................... 92
CURRICULUM VITAE ....................................................................................................................... 92
Persoonlijke gegevens ................................................................................................................... 92
Opleidingen ...................................................................................................................................... 92
Werkervaring ................................................................................................................................... 92
Bijkomende opleidingen/ diploma’s/ attesten ............................................................................. 92
Computerkennis .............................................................................................................................. 93
Talenkennis ..................................................................................................................................... 93
Varia .................................................................................................................................................. 93
8.2 Engels ................................................................................................................................... 94
8.2.1 Technical text .............................................................................................................. 95
8.2.2 List of difficult word ..................................................................................................... 95
8.2.3 10 Questions and answers about the text............................................................... 95
8.2.4 Outline .......................................................................................................................... 96
8.2.5 Summary ...................................................................................................................... 98
8.3 Frans ..................................................................................................................................... 99
8.3.1 Demander de la documentation ............................................................................. 100
8.3.2 Lire de la documentation technique et consulter un lexique bilingue ............... 101
8.3.3 Traduire un texte technique .................................................................................... 101
9 Bronnen ...................................................................................................................................... 103
10 Figurenlijst .............................................................................................................................. 104
11 Tabellenlijst ............................................................................................................................ 106
12 Besluit ..................................................................................................................................... 107
13 Bijlagen ................................................................................................................................... 109
13.1 Algemeen ........................................................................................................................... 121
13.1.1 Logboek ...................................................................................................................... 122
13.1.2 Planningsdocument .................................................................................................. 126

6-TSO-EM-a Inleiding
Elektromechanica Schooljaar 2014-2015
Inleiding
Mijn Geïntegreerde Proef heeft de naam “Blikjespers” gekregen. Het is een project waarmee
we blikjes sorteren en vervolgens de blikjes persen. De GIP is een uiterst belangrijk
onderdeel bij het behalen van mijn diploma in het laatste jaar Elektro-Mechanica. Een
belangrijk doel van dit eindwerk was voor mij om te bewijzen wat ik kan en om te bepalen
waar mijn grenzen liggen. De blikjespers is niet echt van grote waarde voor de industrie
omdat men eenvoudigere manieren heeft, maar het is een heel mooi project om op
verschillende manieren kennis te maken met sommige componenten. Mijn GIP is in theorie
automatisch uitgewerkt maar praktisch hebben we hem gerealiseerd zodat elk deel
afzonderlijk werkt. De GIP wordt met de volledige klas gerealiseerd. Er zijn vier onderdelen
van de blikjespers: de trechter, de transportband, de draaitafel en tenslotte de pers. Deze
vier onderdelen werden verdeeld onder onze klasgenoten, samen met Karel heb ik de
transportband ontworpen en gerealiseerd in de praktijk. Deze hebben we gemonteerd op de
projecttafel, vervolgens hebben we de elektrische leidingen geplaatst. Het was de bedoeling
dat we ook praktisch alles automatiseren en via PLC aansturen maar wegens tijdgebrek
gaan we een eenvoudig PLC-programma schrijven om alleen de draaitafel aan te sturen
zodat we toch iets geautomatiseerd hebben.
Het werkingsprincipe van de blikjespers is eigenlijk zeer simpel, de blikjes worden eerst in de
trechter geplaatst en komen dan terecht op de transportband. Het blikje gaat via de
transportband naar de draaitafel waardoor het door de hoge snelheid in één van de
verdelingen valt. De draaitafel draait 90° en blaast de blikjes in de pers.
De belangrijkste vakken die aan bod kwamen bij het project waren de mechanische en
elektrische vakken. Deze vind je terug na de kennismaking in het begin van de bundel en
voor de algemene vakken, op het einde van de bundel. Zo vind je bij het vak elektriciteit de
gegevens van onze motor terug en van de componenten in de schakelkast Bij het vak
mechanica werd de nadruk gelegd op het volledige tekenen in 2D van onze GIP en het
uitvoeren ervan, de tekeningen zijn als bijlagen toegevoegd. Er werden ook veel
berekeningen uitgevoerd zoals het berekenen van het vermogen van de motor, de
boutberekeningen, deze staan vermeld bij de vakken mechanica en elektriciteit.
Uiteraard hebben we ook voor de algemene vakken verschillende opdrachten moeten
uitvoeren. Zo hadden we voor het vak Nederlands vooral opdrachten in verband met
solliciteren, zoals. een brief schrijven om een stageplaats aan te vragen en een
sollicitatiebrief. Een van de opdrachten bij Frans was een technische Franse tekst vertalen
naar het Nederlands. Voor Engels was dit een technische Engelse tekst vertalen. Andere
opdrachten waren het opstellen van een woordenlijst, een samenvatting en een schema
waarbij het ook om technische onderwerpen ging, wat wel nuttig is in verband met onze
richting. Deze integratie van de algemene vakken, zoals de taalvakken vind je terug
achteraan in mijn GIP-bundel.
1 Technische opgave GIP
6-TSO-EM-a Technische opgave 9
Elektromechanica Schooljaar 2014-2015
1.1 Opgave
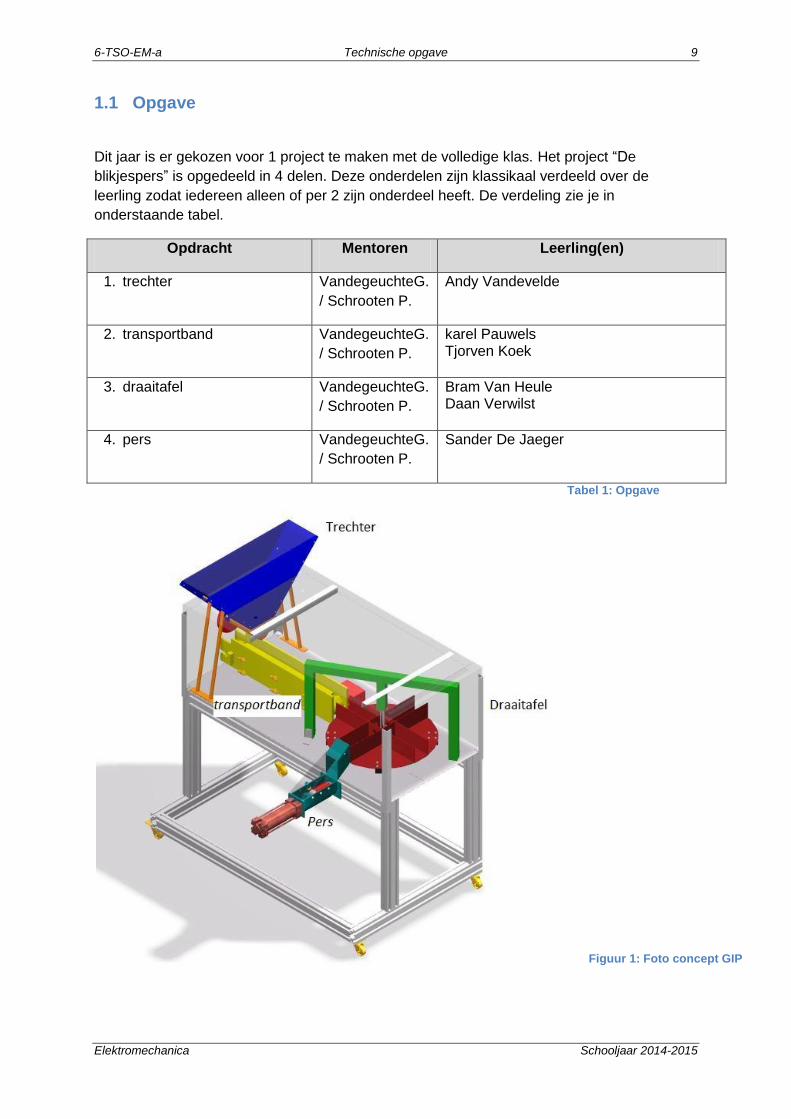
Dit jaar is er gekozen voor 1 project te maken met de volledige klas. Het project “De
blikjespers” is opgedeeld in 4 delen. Deze onderdelen zijn klassikaal verdeeld over de
leerling zodat iedereen alleen of per 2 zijn onderdeel heeft. De verdeling zie je in
onderstaande tabel.
Opdracht Mentoren Leerling(en)
1. trechter VandegeuchteG.
/ Schrooten P.
Andy Vandevelde
2. transportband VandegeuchteG.
/ Schrooten P.
karel Pauwels Tjorven Koek
3. draaitafel VandegeuchteG.
/ Schrooten P.
Bram Van Heule Daan Verwilst
4. pers VandegeuchteG.
/ Schrooten P.
Sander De Jaeger
Tabel 1: Opgave
Figuur 1: Foto concept GIP
6-TSO-EM-a Technische opgave 10
Elektromechanica Schooljaar 2014-2015
1.2 Integratie leerstof
1.2.1 Mechanica-sterkteleer
Bepalen van de nodige componenten, aandrijvingen;
Maak de nodige berekeningen waar nodig.
1 Bepalen vermogen dc motor, berekenen snelheid…
2 Bepalen van de eigenschappen van de gebruikte bouten.
1.2.2 Laboratorium (materialenleer)
Bepalen van de materiaalkeuze van de onderdelen, bevestigingsmaterialen, ...:
Welke functie heeft het stuk in het geheel;
Aan welke belastingen is het stuk onderhevig en welke eigenschappen zijn hiervoor noodzakelijk;
Materiaalaanduiding volgens EN 10020-10025-10027-...;
Samenstelling van het materiaal;
Elasticiteitsgrens, treksterkte, kerfslagwaarde, hardheid, corrosiebestendigheid, bewerkbaarheid, lasbaarheid waar nodig.
1.2.3 Technisch Tekenen Mechanica
Werkgang tekenwerk (3D in Solid Edge):
Tekenen van de principetekening.
Ontwerpen van de samenstelling, hierbij wordt rekening gehouden met de eerder uitgevoerde berekeningen en de esthetische vormgeving van het geheel;
Diverse standaardonderdelen (eventueel te downloaden via www.web2cad.com; www.festo.be, www.traceparts.com, http://www.item-cad.com/, …) plaatsen, rekening houdend met de gemaakte berekeningen.
Van de uiteindelijke samenstelling wordt een 2D samenstellingstekening (evt. voorzien van diverse deelsamenstellingen) gegenereerd met de nodige stukkenlijsten, evt. lasaanduidingen worden eveneens geplaatst;
Van de te vervaardigen onderdelen wordt een werktekening gemaakt met de nodige maataanduidingen, toleranties (evt. lengtetoleranties uitrekenen), vorm-en plaatstoleranties.
1.2.4 Technologie – praktijk mechanica
6-TSO-EM-a Technische opgave 11
Elektromechanica Schooljaar 2014-2015
Van de te maken onderdelen wordt een werkgang opgemaakt.
Uitvoeren van deze onderdelen.
Soorten bewerkingen
1.2.5 Laboratorium (meettechniek)
Opmaken van een meetstaat voor het opmeten van de gemaakte onderdelen
(zie technologie-praktijk mechanica);
Opmeten;
Detailstudie van de gebruikte ISO-toleranties en hun passing met het element
dat erop gemonteerd dient te worden (tandwiel, riemschijf, kettingwiel, lager,
...)
Detailstudie van de gekozen en opgemeten ruwheden;
Opmeten van de afmetingen en vorm & plaatstoleranties op de 3D-meetbank
(optisch of met taster).
1.2.6 Elektriciteit
Eigenschappen van de gekozen motor (zie eerdere mechanische berekeningen):
o Verklaren van de motorkeuze uit de catalogus; o Elektrische gegevens- en motorkarakteristieken:
Koppel- en snelheidskarakteristiek; Vermogen (mechanisch – elektrisch) en rendement; Toerental en aantal poolparen; Klemmenbord lezen.
o Aanloop asynchrone motor (softstarter, frequentieomvormer,…); o Omkeren draaizin; o Motorbescherming – omgevingstemperatuur: thermische classificatie; o Beveiligingsklasse motor; o Opbouwdossier; o …
EMC richtlijnen;
Arbeidsfactor compensatie;
Logica-sturing: analyseer de in- en uitgangen welke voor uw eigen ontwerp kunnen gebruikt worden;
Technisch dossier, bestaande uit: o Situatieschema; o Stuurstroombaanschema; o Hoofdstroombaanschema; o Bedradingsschema van de schakelkast en schakelpunten; o Bepaling van draaddoorsnede; o Aansluitschema met nummering van de geleiders; o Aansluitlijst; o Kabellijst; o Materiaallijst;
6-TSO-EM-a Technische opgave 12
Elektromechanica Schooljaar 2014-2015
o …
Beveiligingen en bedieningen, zoals: o Noodstop installatie; o Sensoren; o Motorbeveiliging – installatiebeveiliging; o Signalisatie; o Bedieningsknoppen; o Afstandsbediening; o Technische fiche; o …
1.2.7 Elektronica
Alle gebruikte elektronica kunnen verantwoorden:
Keuze en opstelling (terug te vinden in de technische tekeningen mechanica) van de sensoren;
Aansluiting van de sensoren in het geheel (stuurschema, PLC, …);
…
1.2.8 ICT
Voor de GIP opdracht maakt je een website. Deze moet volledig af zijn na de
paasvakantie. De links van alle sites worden doorgegeven aan de jury. De website is het
eerste contact van de jury met jou en jouw project. Je kan maar één keer een eerste
indruk maken, het is dus belangrijk dat de site af is, volledig werkt en verzorgd is zonder
taal- of technische fouten.
Algemeen
De site wordt gemaakt in HTML. Als basis wordt enkel met Notepad, Notepad++ of
Aptana gewerkt. Programma’s als Dreamweaver, Frontpage en andere WYSIWYG
(What You See Is What You Get) programma’s zijn niet toegelaten. Het is de bedoeling
dat we begrijpen waar we mee bezig zijn.
In elk geval moeten de HTML tags gekend zijn en toegepast kunnen worden. Je moet de
broncode van je site begrijpen en kunnen aanpassen, je wordt hierop getest.
Het uitlijnen en de opmaak gebeurt met CSS (cascading style sheets).
6-TSO-EM-a Technische opgave 13
Elektromechanica Schooljaar 2014-2015
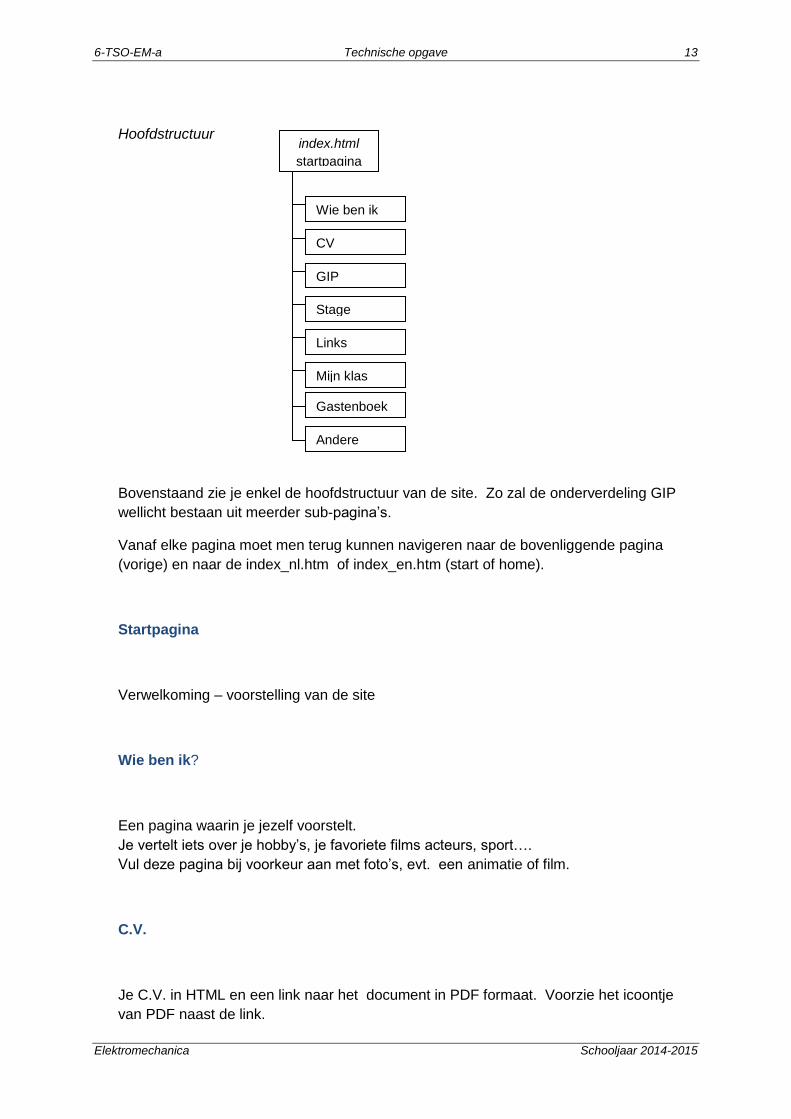
Hoofdstructuur
Bovenstaand zie je enkel de hoofdstructuur van de site. Zo zal de onderverdeling GIP
wellicht bestaan uit meerder sub-pagina’s.
Vanaf elke pagina moet men terug kunnen navigeren naar de bovenliggende pagina
(vorige) en naar de index_nl.htm of index_en.htm (start of home).
Startpagina
Verwelkoming – voorstelling van de site
Wie ben ik?
Een pagina waarin je jezelf voorstelt.
Je vertelt iets over je hobby’s, je favoriete films acteurs, sport….
Vul deze pagina bij voorkeur aan met foto’s, evt. een animatie of film.
C.V.
Je C.V. in HTML en een link naar het document in PDF formaat. Voorzie het icoontje
van PDF naast de link.
index.html
startpagina
Wie ben ik
- Contact
GIP
Stage
Links
Mijn klas
CV
Gastenboek
Andere
6-TSO-EM-a Technische opgave 14
Elektromechanica Schooljaar 2014-2015
GIP
Een korte beschrijving van je GIP met een paar foto’s.
Je voorziet links naar:
PPT presentatie die je gemaakt hebt van je GIP
de volledige GIP bundel in PDF
het planningsdocument
je timing/tijdsgebruik (logboek)
een pagina waarin je met een zelfgeschreven programma iets berekent in Java of javascript. Deze berekening is gerelateerd aan uw GIP opdracht
Stage
Een korte beschrijving van uw stage, bij voorkeur met een paar foto’s en/of filmpje(s), een
link naar de PPT presentatie die u gemaakt hebt van uw stage.
Deze rubriek kan meerdere pagina’s bevatten. Ze bevat in elk geval een link naar uw
stagedagboek.
Links
Een pagina met links naar sites in verband met uw GIP, in elk geval sites die u
interesseren. Vermeld :
- naam van de site - korte beschrijving - gebruikte taal
Mijn klas
Bevat minstens één pagina met een tabel met links naar de collega’s van de klas.
Foto’s van medeleerlingen en foto’s van de klas zijn natuurlijk mooi meegenomen.
Leuke anekdotes (mits bepaalde restricties) kunnen ook.
Gastenboek
Laat hier je collega’s en vrienden iets invullen over je site, je mag hiervoor een bestaand
script gebruiken.
Andere
6-TSO-EM-a Technische opgave 15
Elektromechanica Schooljaar 2014-2015
Vrije pagina over iets dat je interesseert. Laat je fantasie de vrije loop.
Structuur van de site op de Harde schijf
Voorzie een webroot op een willekeurige plaats van uw schijf.
In de webroot staat enkel de index.html. Van hieruit werk je uiteraard met relatieve
adressering.
Onder de webroot bevindt zich één map afbeeldingen en een map documenten.
In de map afbeelding zijn alle foto’s en alle bestanden die gebruikt zijn voor de grafische
opmaak bewaard.
In de map documenten komen de pdf van:
CV
Stageverslag
Volledige GIP
Wat moet er verwerkt zijn
Java-script: bvb teller, klok, … Overdrijf niet, in een aparte beschrijving leg je uit hoe het
programma werkt.
Minimum één zelf bewerkte foto, (in een aparte beschrijving leg je uit wat je gedaan hebt)
Minimum één zelf gemaakt filmpje
Eén link naar uw e-mail adres via een invulformulier met een verborgen e-mail adres (via
een script). We verbergen ons e-mail adres omdat we niet overladen willen worden met
spam.
Een gastenboek. Je mag hiervoor gebruik maken van een externe site: bvb
http://www.tboek.nl/ of je kan natuurlijk ook op Google zoeken naar “free guestbooks”
Eventueel kan je de externe pagina linken met een i-frame!
Onderzoek, denk na en plan voor je begint
6-TSO-EM-a Technische opgave 16
Elektromechanica Schooljaar 2014-2015
Onderzoek welke systemen van lay-out er zijn.
http://designshack.net/articles/layouts/10-rock-solid-website-layout-examples
Kies je voor een vaste resolutie of een variabele? Wat zijn de voor- en nadelen van een
vaste resolutie?
http://www.webgenerator.nl/webdesign-tips-schermresoluties.htm
Welke navigatiemogelijkheden zijn er? Waar plaats ik de navigatiebalk? Welke techniek
gebruik ik voor de navigatie?
Werk ik met een navigatiesysteem dat verwerkt is in de pagina of gebruik ik beter een
extern navigatiesysteem waar alle pagina’s naar verwijzen? Wat zijn de voor- en
nadelen van een extern navigatiesysteem?
Tips
Wees consequent in de naamgeving van je pagina’s. Alles in kleine letters en alles met
dezelfde extensie (.html) Bij voorkeur geen spaties in namen
Let op de leesbaarheid (goede kleurcombinaties).
Geen te grote afbeeldingen (max 50 à 80 kB bewerk de foto’s desnoods met een grafisch
pakket zoals “the gimp”).
Gebruik één stijl, wees consequent in lay-out en kleurgebruik. Vermijdt schreeuwerige
kleuren en drukke achtergronden. Zorg dat je site er “professioneel” uitziet.
Maak gebruik van een externe css (cascading style sheet).
Eerst oriënteren, plannen, dan beginnen.
Leer eerst html, daarna css, maak eerst kleine oefeningen.
Denk na over een duidelijke navigatiesysteem en lay-out. Werk dit eerst uit op papier,
daarna in html. Kies voor vaste breedte of percent, plak d pagina niet tegen de rand van
het scherm!
Maak je eerste pagina index.html, compleet met menu en exerne css, voorzie dummy
tekst bvb lorum ipsum.
6-TSO-EM-a Technische opgave 17
Elektromechanica Schooljaar 2014-2015
Test of de html code geldig is via: http://validator.w3.org/
Test deze pagina in verschillende browsers.
Gebruik deze pagina als sjabloon voor alle andere pagina’s
Zorg dat je mail adres verborgen is zodat spammers geen kans krijgen
Werkwijze
Na de onderzoek en planningsfase maak je één pagina met de gewenste lay-out en
kleurcombinatie. Je bekijkt deze kritisch en past deze aan.
Eens je tevreden bent van deze pagina gebruik je deze pagina als sjabloon.
Bouw de structuur van de site op, zorg dat alle links werken. Plaats de afbeeldingen
direct in de juiste mappen, let op de naamconventies, gebruik direct de juiste
naamgeving.
Vul de pagina’s met hier komt …. en eventueel wat dummy tekst zodat je een zicht hebt
op de lay-out.
Werk dan de pagina’s één voor één inhoudelijk verder af.
Links
Lay-out
http://designshack.net/articles/layouts/10-rock-solid-website-layout-examples
http://sixrevisions.com/web_design/a-guide-on-layout-types-in-web-design/
Ontwerp van je site (tips)
http://www.schoonepc.nl/nieuwsbrief/website_maken.html
http://www.webdesigning.nl/kennisbank/website-bouw-10-tips/website-bouw-tips-hoe-
een-goede-website-te-laten-maken.html
http://www.succesvolle-website-bouwen.com/website_ontwerp.html
Kleuren kiezen
http://kuler.adobe.com/
6-TSO-EM-a Technische opgave 18
Elektromechanica Schooljaar 2014-2015
Links om HTML/CSS te leren
http://www.cursushtml.be/
http://websitemaken.be/
http://www.web-garden.be/cursushtml/cursushtml.html
http://www.sitemasters.be/tutorials/4/1/HTML
http://www.websonic.nl/tutorials.php
http://www.w3schools.com/
Laat je code/webpagina valideren (controleren op geldige code)
http://validator.w3.org/
Referentie (naslag)
http://www.handleidinghtml.nl/
Tools
Menu systemen
http://www.milonic.com/
Fotobewerking
The Gimp: http://www.gimp.org/
Editer
Notepad++: http://notepad-plus-plus.org/
Aptana: http://www.aptana.com/
FTP
Filezilla: : http://filezilla-project.org/
1.2.9 Taalintegratie
1.2.9.1 Nederlands
Verzorging van de algemene lay-out van de bundel, wat betreft: o Woord vooraf, inleiding en besluit; o Inhoudsopgave;
6-TSO-EM-a Technische opgave 19
Elektromechanica Schooljaar 2014-2015
o Bronnen- en figurenlijst (technische tekeningen worden hier niet bijgerekend);
o Decimale nummering hoofdstukken + subrubrieken (let op: tekeningen worden niet opgenomen in de nummering van de bladzijden, de nummering herbegint na de tekeningen);
o Eenvormige structuur betreffende de hoofding voor de goede leesbaarheid;
o Keuze en plaatsing van de leestekens; o Taalzuiverheid.
Korte spreekbeurt betreffende functie (via power-point – zie opgave voor mondelinge verdediging), werking van het ontwerp en keuze van de onderdelen;
Eindcontrole van de afgewerkte bundel qua lay-out en taalgebruik;
Aanvraagbrief voor stageplaats, sollicitatiebrief en CV;
Aanvraag informatie (mail).
1.2.9.2 Engels
Elke leerling krijgt een technische Engelse tekst gekoppeld aan zijn eigen onderwerp. Deze tekst is gekozen door de leerkracht Engels en een technische leerkracht. Hiervan wordt een schema en een samenvatting gemaakt Elke leerling krijgt dan ook nog een technische Engelse tekst die hij moet vertalen.
Aanduiden van de moeilijke woorden in de tekst en opstellen van een verklarende en vertalende woordenlijst.
Opstellen van 10 vragen die aansluiten bij de tekst met telkens een uitgebreid antwoord.
1.2.9.3 Frans
Documentatie aanvragen, zowel schriftelijk (brief volgens BIN-normen) als mondeling (telefoongesprek);
Vakliteratuur begrijpend lezen aan de hand van een bestaande tweetalige woordenlijst, korte fragmenten vertalen en de woordenlijst instuderen;
Zelf een vertalende woordenlijst opstellen aan de hand van tweetalige technische documentatie, de woordenlijst instuderen;
Een stageverslag schrijven en een sollicitatiegesprek voeren waarbij de stageperiode mondeling besproken wordt.
1.2.10 Samenbundelen van de oplossingen.
Van de bekomen resultaten wordt een bundel gemaakt in een uniforme map, gebruik de onderstaande indelingen. Het is evenwel niet de bedoeling dat deze bundel een samenraapsel is van diverse cursussen. Enkel wat je ondernomen hebt om tot het resultaat te komen, wordt hierin opgenomen.
Opgave (deze mag van het netwerk op de g-schijf, Smartschool of van internet gekopieerd worden);
Voorwoord;
Inleiding;
Logboek (uit ‘Smartschool’)
6-TSO-EM-a Technische opgave 20
Elektromechanica Schooljaar 2014-2015
Het voorbereidend studiewerk: o Resultaten van de berekeningen uit vakmodule Mechanica-sterkteleer; o Keuze van de materialen.
Technisch Tekenen mechanica (de tekeningen worden niet opgenomen in de nummering van de bladen):
o Montagetekening; o Onderdelentekeningen, deze worden zoveel mogelijk per nummer
geklasseerd.
Technologie-praktijk mechanica: o Technische tekening van tandwielas; o Werkvoorbereiding;
Meettechniek: o Detailstudie van de gebruikte ISO-toleranties op de as en hun passing
met het te monteren element; o Detailstudie van de gekozen en opgemeten ruwheden; o Detailstudie van de diverse meetopstellingen; o Meetstaat (tabel) waarbij de vereiste afmetingen uit de tekening
vergeleken wordt met de opgemeten en waarbij de nodige conclusie getrokken wordt (goed- of afkeuren);
Elektriciteit – Elektronica: o De resultaten van de verantwoorde motorkeuze en schakeling; o De aansluitschema’s; o PLC-sturing; o Beveiligingen.
Taalintegratie: o Nederlands:
Woord vooraf; Inhoudsopgave; Inleiding; Besluit; Bronnenlijst; Figurenlijst; Aanvraagbrief voor stageplaats, sollicitatie en CV; Zakelijke briefwisseling per brief of mail.
o Engels: Schematiseren en samenvatten van zakelijke tekst; Opstellen van woordenlijst met vertaling; Vragen- en antwoordenlijst bij de zakelijke tekst;
o Frans: Brief voor aanvraag documentatie; Zelf op te stellen vertalende woordenlijst; Kopie van de daarvoor gebruikte documentatie.
2 Voorbereidend studiewerk
6-TSO-EM-a Voorbereidend studiewerk 22
Elektromechanica Schooljaar 2014-2015
2.1 Mechanica sterkteleer
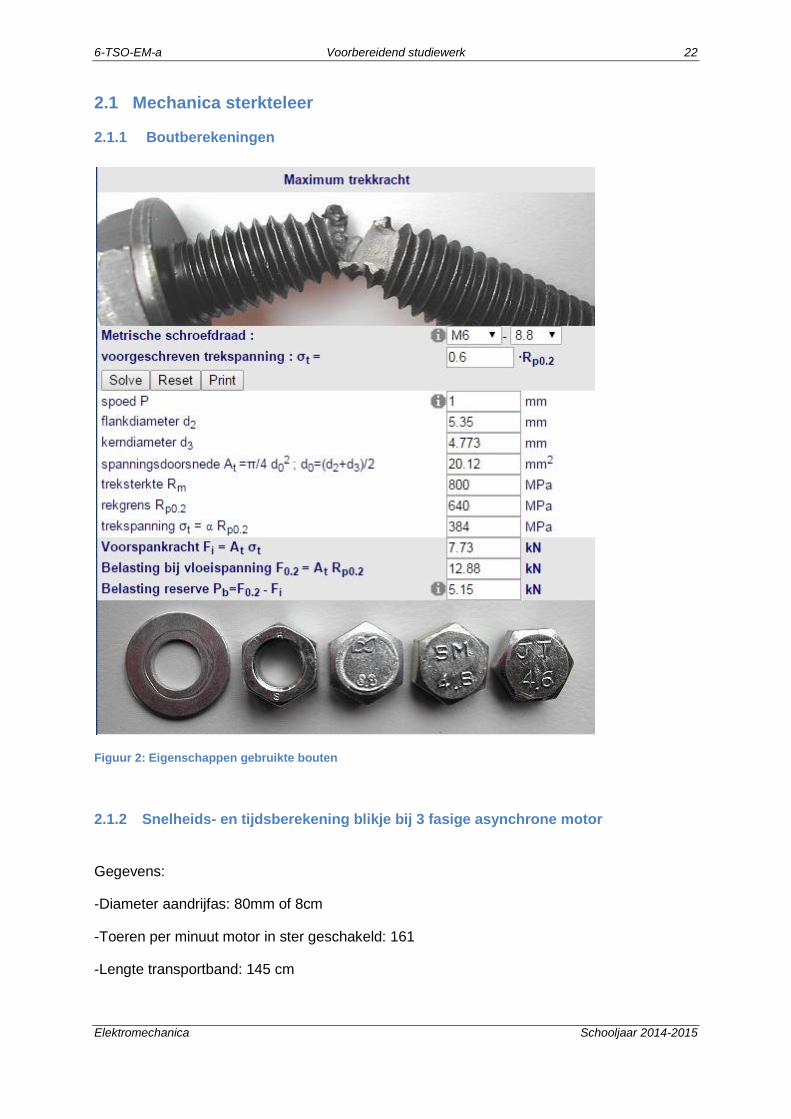
2.1.1 Boutberekeningen
Figuur 2: Eigenschappen gebruikte bouten
2.1.2 Snelheids- en tijdsberekening blikje bij 3 fasige asynchrone motor
Gegevens:
-Diameter aandrijfas: 80mm of 8cm
-Toeren per minuut motor in ster geschakeld: 161
-Lengte transportband: 145 cm
6-TSO-EM-a Voorbereidend studiewerk 23
Elektromechanica Schooljaar 2014-2015
Gevraagd: t blikje op transportband?
Oplossing:
- Ø aandrijfas= 8cm x = 8
- v motor= 161tr/min x 8 = 4046,37 cm/min
- Lengte belastingoppervlakte blikje= 145cm- (8 )= 120cm :2 meeloopplaten= 60cm
- t blikje op transportband= 60 cm / 4046,37cm/min= 0,0148min = 0,89 seconden
2.2 Gebruikte materialen
Het grootste deel van ons eindwerk is vervaardigd uit staal, meer bepaald uit
constructiestaal. Verder gebruiken we nog kunststof in de aanvoer en onze band.
2.2.1 Constructiestaal
2.2.1.1 Algemeen
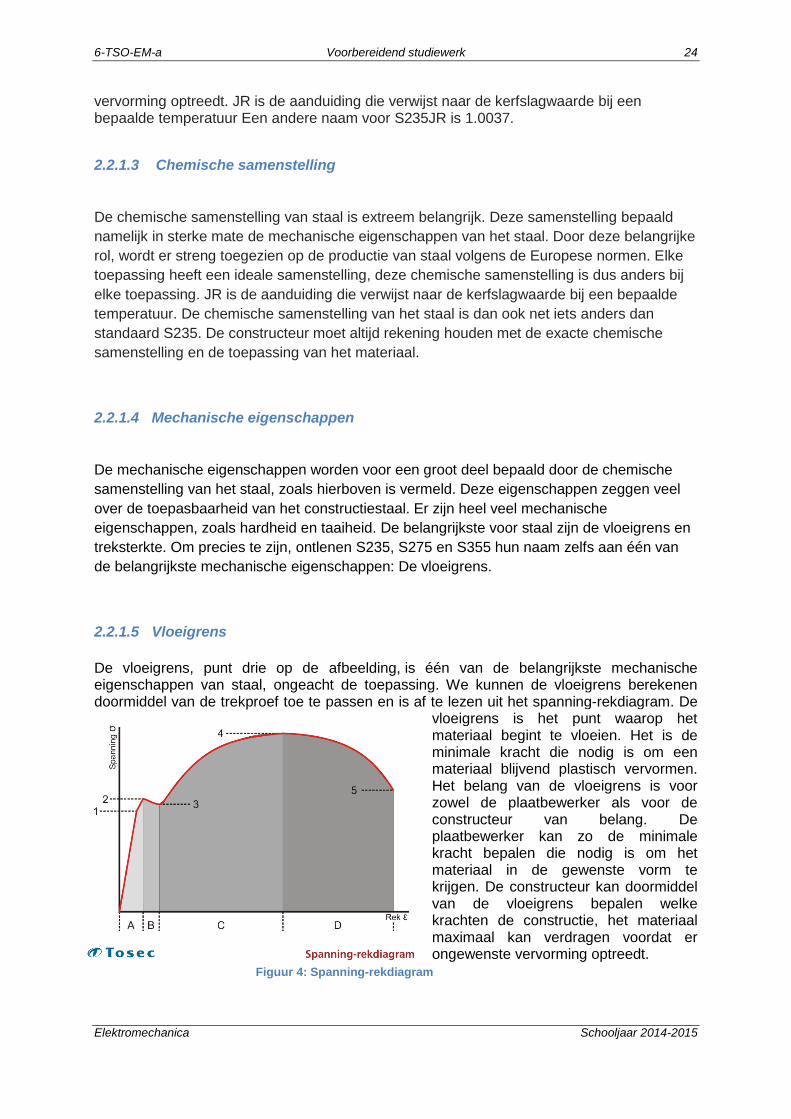
Constructiestaal, ook wel gewoon staal genoemd is vooral terug te vinden bij statische
constructies. Er is maximaal 0,25% koolstof aanwezig, dit is
afhankelijk van de chemische samenstelling en de toepassing
van het materiaal. De meest gebruikte staalsoorten zijn S235,
S275 en S355, toch bestaan er nog veel meer soorten. In
Europa moet staal voldoen aan de kwaliteitseisen volgens de
Europese Standaard EN 10025.
Op de specifieke kenmerken komen we later terug.
Hieronder een opsomming van de globale eigenschappen van
constructiestaal:
Laag koolstofgehalte
Relatief zacht materiaal
Goed koud en warm te vormen
Goede lasbaarheid
Grote rek
2.2.1.2 Uitleg begrip S235
S235 is een samenvatting van een aantal eigenschappen die het materiaal heeft. Zo duidt de S op ”structural”, vrij vertaald constructiestaal of staal. De “235” geeft de vloeigrens in N/mm² aan bij een dikte van 16 mm. Dit is een belangrijke waarde: zodra een trekkracht van 235 N/mm² wordt bereikt zal het staal gaan vloeien, waardoor een blijvend plastische
Figuur 3: Constructiestaal
6-TSO-EM-a Voorbereidend studiewerk 24
Elektromechanica Schooljaar 2014-2015
vervorming optreedt. JR is de aanduiding die verwijst naar de kerfslagwaarde bij een bepaalde temperatuur Een andere naam voor S235JR is 1.0037.
2.2.1.3 Chemische samenstelling
De chemische samenstelling van staal is extreem belangrijk. Deze samenstelling bepaald
namelijk in sterke mate de mechanische eigenschappen van het staal. Door deze belangrijke
rol, wordt er streng toegezien op de productie van staal volgens de Europese normen. Elke
toepassing heeft een ideale samenstelling, deze chemische samenstelling is dus anders bij
elke toepassing. JR is de aanduiding die verwijst naar de kerfslagwaarde bij een bepaalde
temperatuur. De chemische samenstelling van het staal is dan ook net iets anders dan
standaard S235. De constructeur moet altijd rekening houden met de exacte chemische
samenstelling en de toepassing van het materiaal.
2.2.1.4 Mechanische eigenschappen
De mechanische eigenschappen worden voor een groot deel bepaald door de chemische
samenstelling van het staal, zoals hierboven is vermeld. Deze eigenschappen zeggen veel
over de toepasbaarheid van het constructiestaal. Er zijn heel veel mechanische
eigenschappen, zoals hardheid en taaiheid. De belangrijkste voor staal zijn de vloeigrens en
treksterkte. Om precies te zijn, ontlenen S235, S275 en S355 hun naam zelfs aan één van
de belangrijkste mechanische eigenschappen: De vloeigrens.
2.2.1.5 Vloeigrens
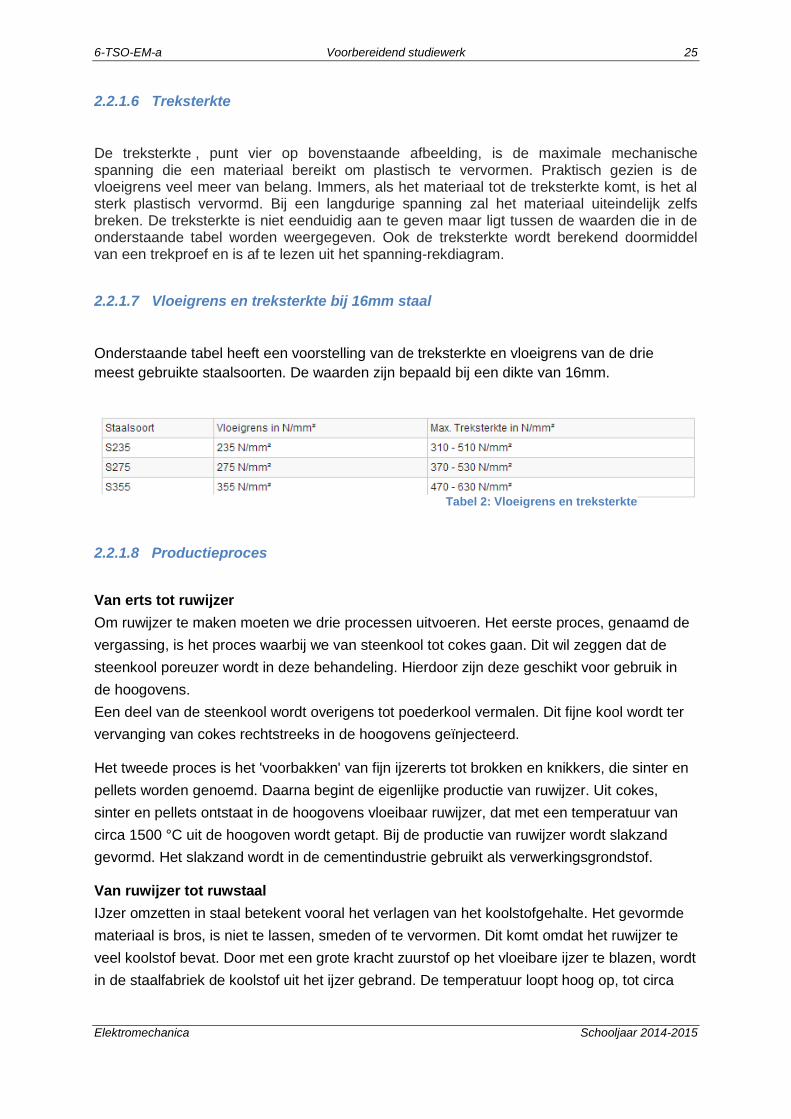
De vloeigrens, punt drie op de afbeelding, is één van de belangrijkste mechanische eigenschappen van staal, ongeacht de toepassing. We kunnen de vloeigrens berekenen doormiddel van de trekproef toe te passen en is af te lezen uit het spanning-rekdiagram. De
vloeigrens is het punt waarop het materiaal begint te vloeien. Het is de minimale kracht die nodig is om een materiaal blijvend plastisch vervormen. Het belang van de vloeigrens is voor zowel de plaatbewerker als voor de constructeur van belang. De plaatbewerker kan zo de minimale kracht bepalen die nodig is om het materiaal in de gewenste vorm te krijgen. De constructeur kan doormiddel van de vloeigrens bepalen welke krachten de constructie, het materiaal maximaal kan verdragen voordat er ongewenste vervorming optreedt. Figuur 4: Spanning-rekdiagram
6-TSO-EM-a Voorbereidend studiewerk 25
Elektromechanica Schooljaar 2014-2015
2.2.1.6 Treksterkte
De treksterkte , punt vier op bovenstaande afbeelding, is de maximale mechanische spanning die een materiaal bereikt om plastisch te vervormen. Praktisch gezien is de vloeigrens veel meer van belang. Immers, als het materiaal tot de treksterkte komt, is het al sterk plastisch vervormd. Bij een langdurige spanning zal het materiaal uiteindelijk zelfs breken. De treksterkte is niet eenduidig aan te geven maar ligt tussen de waarden die in de onderstaande tabel worden weergegeven. Ook de treksterkte wordt berekend doormiddel van een trekproef en is af te lezen uit het spanning-rekdiagram.
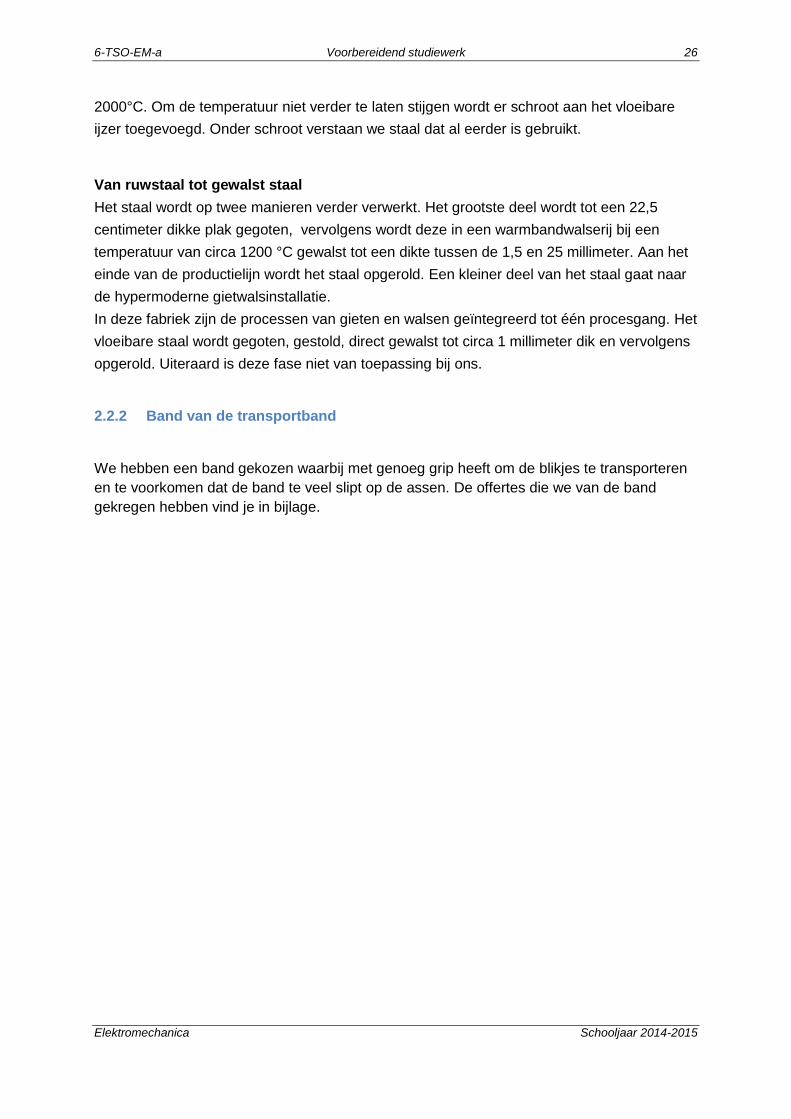
2.2.1.7 Vloeigrens en treksterkte bij 16mm staal
Onderstaande tabel heeft een voorstelling van de treksterkte en vloeigrens van de drie
meest gebruikte staalsoorten. De waarden zijn bepaald bij een dikte van 16mm.
2.2.1.8 Productieproces
Van erts tot ruwijzer
Om ruwijzer te maken moeten we drie processen uitvoeren. Het eerste proces, genaamd de
vergassing, is het proces waarbij we van steenkool tot cokes gaan. Dit wil zeggen dat de
steenkool poreuzer wordt in deze behandeling. Hierdoor zijn deze geschikt voor gebruik in
de hoogovens.
Een deel van de steenkool wordt overigens tot poederkool vermalen. Dit fijne kool wordt ter
vervanging van cokes rechtstreeks in de hoogovens geïnjecteerd.
Het tweede proces is het 'voorbakken' van fijn ijzererts tot brokken en knikkers, die sinter en
pellets worden genoemd. Daarna begint de eigenlijke productie van ruwijzer. Uit cokes,
sinter en pellets ontstaat in de hoogovens vloeibaar ruwijzer, dat met een temperatuur van
circa 1500 °C uit de hoogoven wordt getapt. Bij de productie van ruwijzer wordt slakzand
gevormd. Het slakzand wordt in de cementindustrie gebruikt als verwerkingsgrondstof.
Van ruwijzer tot ruwstaal
IJzer omzetten in staal betekent vooral het verlagen van het koolstofgehalte. Het gevormde
materiaal is bros, is niet te lassen, smeden of te vervormen. Dit komt omdat het ruwijzer te
veel koolstof bevat. Door met een grote kracht zuurstof op het vloeibare ijzer te blazen, wordt
in de staalfabriek de koolstof uit het ijzer gebrand. De temperatuur loopt hoog op, tot circa
Tabel 2: Vloeigrens en treksterkte
6-TSO-EM-a Voorbereidend studiewerk 26
Elektromechanica Schooljaar 2014-2015
2000°C. Om de temperatuur niet verder te laten stijgen wordt er schroot aan het vloeibare
ijzer toegevoegd. Onder schroot verstaan we staal dat al eerder is gebruikt.
Van ruwstaal tot gewalst staal
Het staal wordt op twee manieren verder verwerkt. Het grootste deel wordt tot een 22,5
centimeter dikke plak gegoten, vervolgens wordt deze in een warmbandwalserij bij een
temperatuur van circa 1200 °C gewalst tot een dikte tussen de 1,5 en 25 millimeter. Aan het
einde van de productielijn wordt het staal opgerold. Een kleiner deel van het staal gaat naar
de hypermoderne gietwalsinstallatie.
In deze fabriek zijn de processen van gieten en walsen geïntegreerd tot één procesgang. Het
vloeibare staal wordt gegoten, gestold, direct gewalst tot circa 1 millimeter dik en vervolgens
opgerold. Uiteraard is deze fase niet van toepassing bij ons.
2.2.2 Band van de transportband
We hebben een band gekozen waarbij met genoeg grip heeft om de blikjes te transporteren
en te voorkomen dat de band te veel slipt op de assen. De offertes die we van de band
gekregen hebben vind je in bijlage.

3 Technisch tekenen
6-TSO-EM-a Transportband 28
Elektromechanica Schooljaar 2014-2015
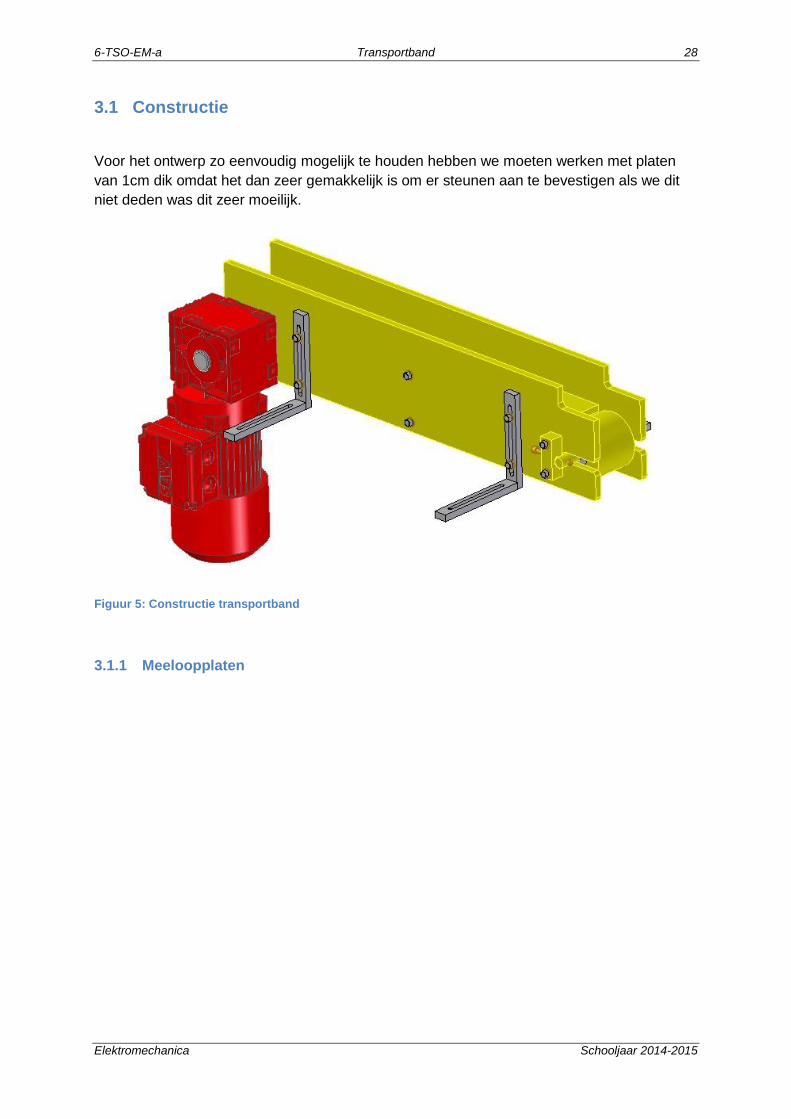
3.1 Constructie
Voor het ontwerp zo eenvoudig mogelijk te houden hebben we moeten werken met platen
van 1cm dik omdat het dan zeer gemakkelijk is om er steunen aan te bevestigen als we dit
niet deden was dit zeer moeilijk.
Figuur 5: Constructie transportband
3.1.1 Meeloopplaten
6-TSO-EM-a Transportband 29
Elektromechanica Schooljaar 2014-2015
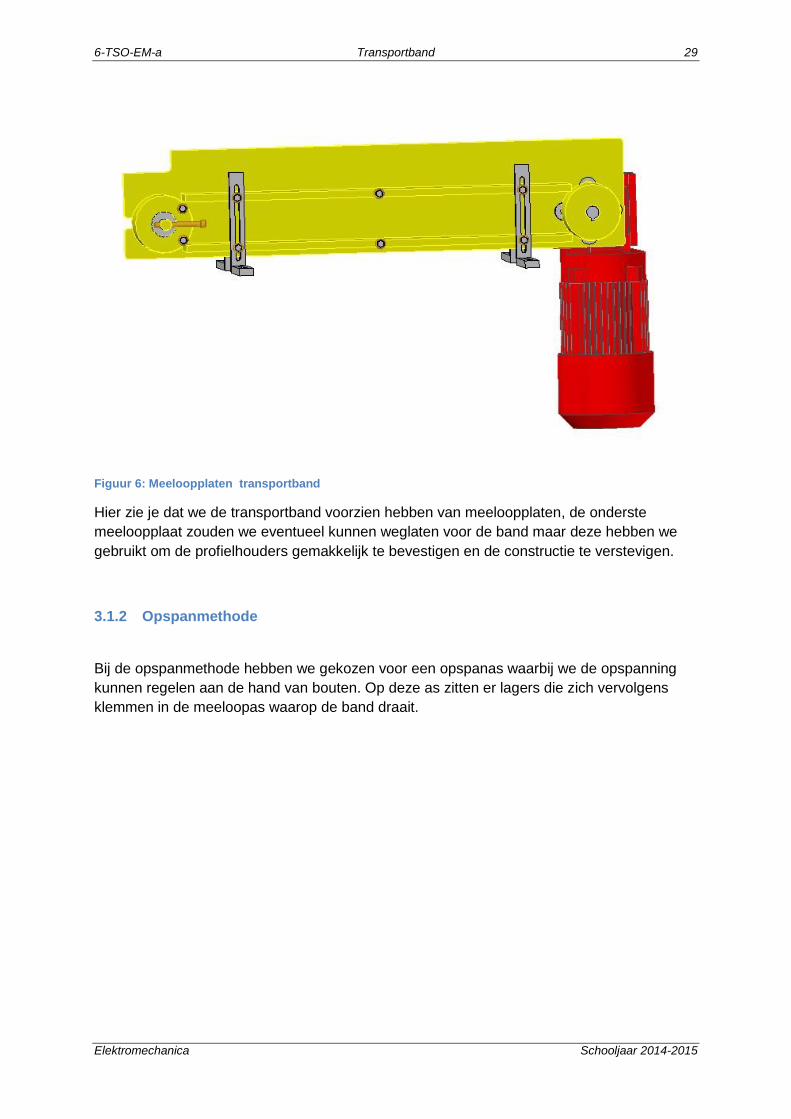
Figuur 6: Meeloopplaten transportband
Hier zie je dat we de transportband voorzien hebben van meeloopplaten, de onderste
meeloopplaat zouden we eventueel kunnen weglaten voor de band maar deze hebben we
gebruikt om de profielhouders gemakkelijk te bevestigen en de constructie te verstevigen.
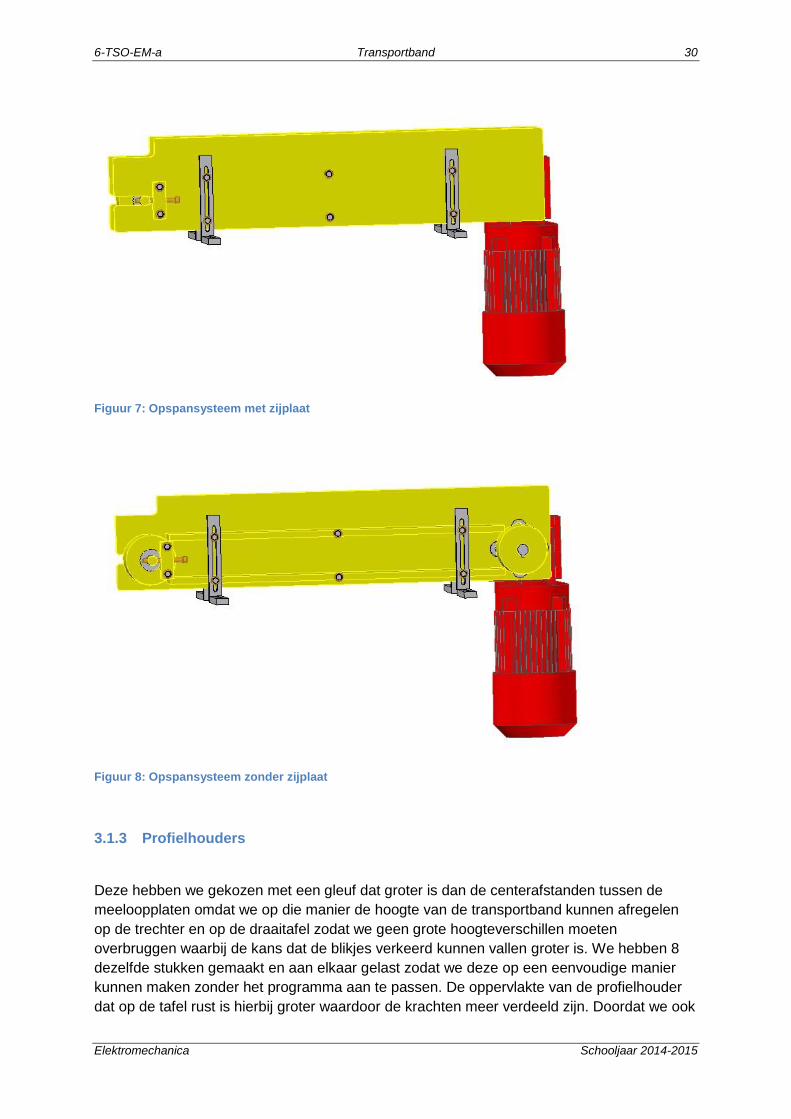
3.1.2 Opspanmethode
Bij de opspanmethode hebben we gekozen voor een opspanas waarbij we de opspanning
kunnen regelen aan de hand van bouten. Op deze as zitten er lagers die zich vervolgens
klemmen in de meeloopas waarop de band draait.
6-TSO-EM-a Transportband 30
Elektromechanica Schooljaar 2014-2015
Figuur 7: Opspansysteem met zijplaat
Figuur 8: Opspansysteem zonder zijplaat
3.1.3 Profielhouders
Deze hebben we gekozen met een gleuf dat groter is dan de centerafstanden tussen de
meeloopplaten omdat we op die manier de hoogte van de transportband kunnen afregelen
op de trechter en op de draaitafel zodat we geen grote hoogteverschillen moeten
overbruggen waarbij de kans dat de blikjes verkeerd kunnen vallen groter is. We hebben 8
dezelfde stukken gemaakt en aan elkaar gelast zodat we deze op een eenvoudige manier
kunnen maken zonder het programma aan te passen. De oppervlakte van de profielhouder
dat op de tafel rust is hierbij groter waardoor de krachten meer verdeeld zijn. Doordat we ook
6-TSO-EM-a Transportband 31
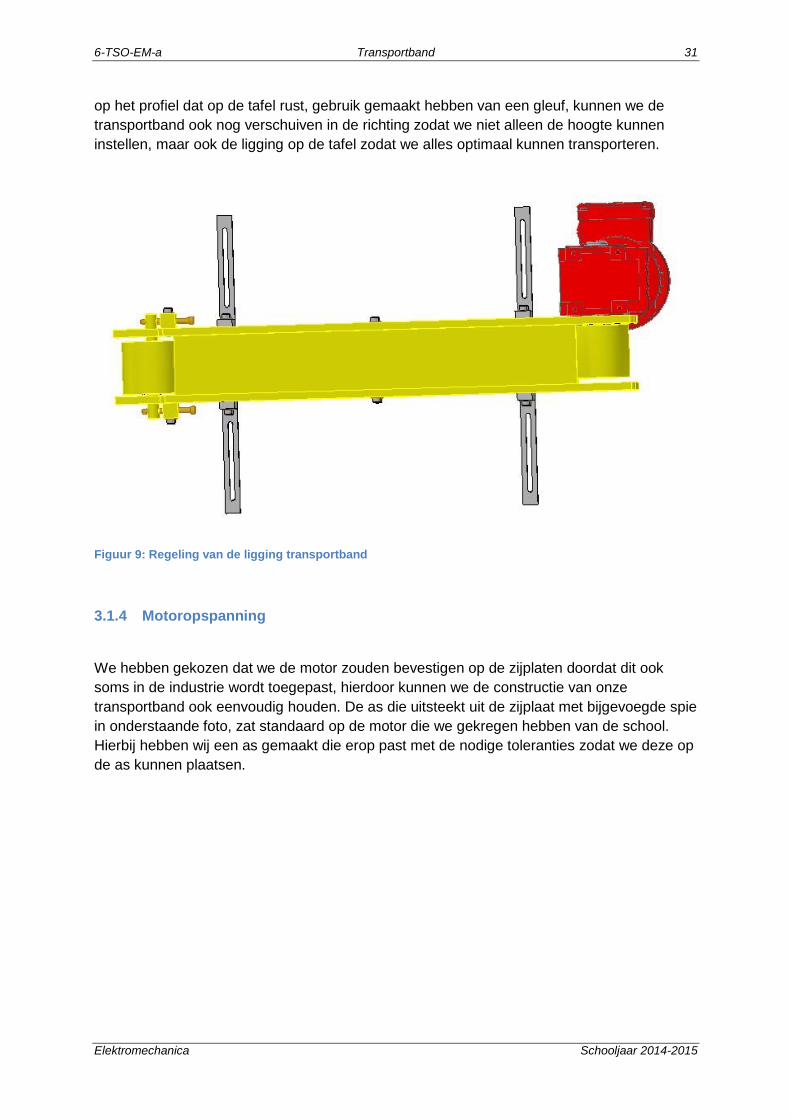
Elektromechanica Schooljaar 2014-2015
op het profiel dat op de tafel rust, gebruik gemaakt hebben van een gleuf, kunnen we de
transportband ook nog verschuiven in de richting zodat we niet alleen de hoogte kunnen
instellen, maar ook de ligging op de tafel zodat we alles optimaal kunnen transporteren.
Figuur 9: Regeling van de ligging transportband
3.1.4 Motoropspanning
We hebben gekozen dat we de motor zouden bevestigen op de zijplaten doordat dit ook
soms in de industrie wordt toegepast, hierdoor kunnen we de constructie van onze
transportband ook eenvoudig houden. De as die uitsteekt uit de zijplaat met bijgevoegde spie
in onderstaande foto, zat standaard op de motor die we gekregen hebben van de school.
Hierbij hebben wij een as gemaakt die erop past met de nodige toleranties zodat we deze op
de as kunnen plaatsen.
6-TSO-EM-a Transportband 32
Elektromechanica Schooljaar 2014-2015
Figuur 10: Motoropspanning
3.1.5 Plaats motor
Doordat de motor normaal altijd moet trekken aan het oppervlakte waar er belasting is,
plaatsen we de motor voor de draaitafel. Dit doen we zodat hij kan trekken aan de belasting
want als we de motor laten duwen en de band is niet goed opgespannen, kan er zich een
bobbel vormen waarbij de band gemakkelijker ergens tussen kan draaien.
6-TSO-EM-a Transportband 33
Elektromechanica Schooljaar 2014-2015
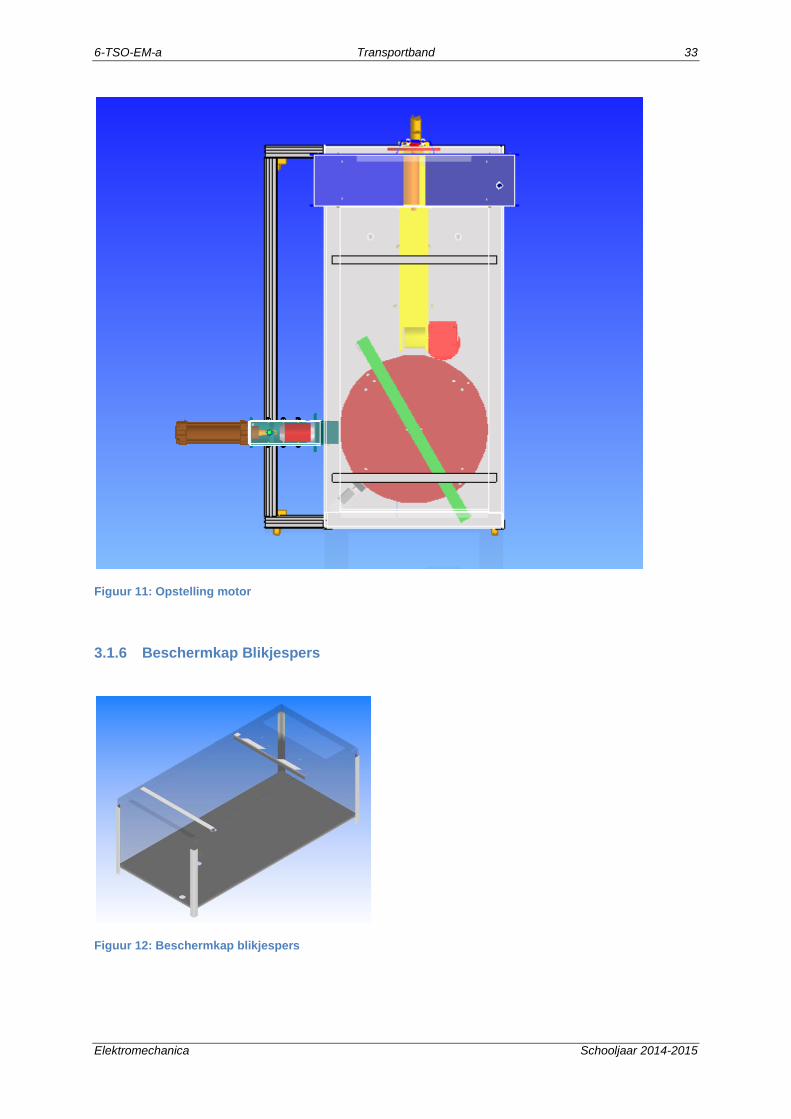
Figuur 11: Opstelling motor
3.1.6 Beschermkap Blikjespers
Figuur 12: Beschermkap blikjespers
6-TSO-EM-a Transportband 34
Elektromechanica Schooljaar 2014-2015
Figuur 13: Inductieve sensor voor beschermkap
Onze blikjespers beschikt over een kunststof beschermkap. Wij hebben gekozen voor een volledige afscherming zodat alle bewegende delen zich vanbinnen bevinden. Dit reduceert de kans op ongevallen. Deze beschermkap moet ervoor zorgen dat niemand aan 1 van de onderdelen kan komen terwijl deze in werking staan. Om ervoor te zorgen dat alle onderdelen toch snel te bereiken zouden zijn is er een groot deksel voorzien. Dit deksel is beveiligd door een inductieve sensor. Vanaf dat deze sensor een 0 signaal geeft, valt de machine stil. De machine zal pas terug geactiveerd worden als er opnieuw op start gedrukt is en het deksel terug gesloten is.
3.2 Technische tekeningen
De technische tekeningen vind je in bijlage.

4 Praktijk mechanica
6-TSO-EM-a Transportband 36
Elektromechanica Schooljaar 2014-2015
4.1 Werkgangen
De werkgangen vind je in bijlage.
4.2 Verbindingen
4.2.1 Bout
Een bout bestaat uit een cilindervormig deel waaromheen een schroefdraad is aangebracht. Aan één einde heeft een bout een verbreding, de kop.
4.2.1.1 Inleiding Boutverbinding en Borging
Schroefdraadverbindingen worden ingedeeld naar belasting. Men onderscheidt:
4.2.1.1.1 Licht belast
Er worden geen hoge eisen aan de verbinding gesteld. De montage kan met standaard gereedschap worden uitgevoerd.
4.2.1.1.2 Zwaar belast (kritisch)
Er worden hoge eisen aan voorspankracht en borging gesteld. De montage moet zorgvuldig en met speciale gereedschappen worden uitgevoerd. Vooral bij dynamisch belaste boutverbindingen moet men nauwkeurig te werk gaan. Dit i.v.m. mogelijk verlies van voorspanning en uit elkaar vallen. (denk aan de tapeinden van een bromfietscilinder en bevestigings-bouten van een vliegtuigmotor)
4.2.1.2 Verbindingselementen
Hier worden schroeven en bouten toegepast.
4.2.1.3 Bevestigingsartikelen en borgmiddelen
Schroefdraadverbindingen worden als volgt toegepast: • schroefverbindingen: voor lichte, niet kritische verbindingen • boutverbindingen: voor zwaardere, kritische verbindingen
6-TSO-EM-a Transportband 37
Elektromechanica Schooljaar 2014-2015
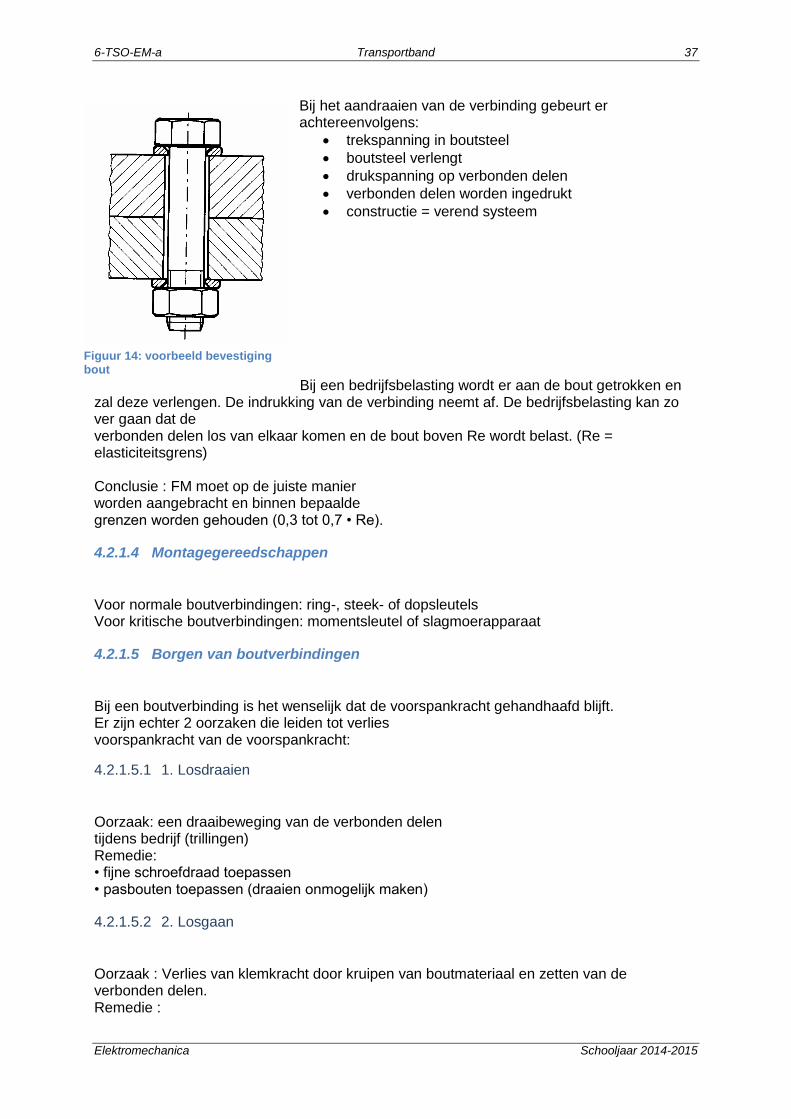
Bij het aandraaien van de verbinding gebeurt er achtereenvolgens:
trekspanning in boutsteel
boutsteel verlengt
drukspanning op verbonden delen
verbonden delen worden ingedrukt
constructie = verend systeem
Bij een bedrijfsbelasting wordt er aan de bout getrokken en
zal deze verlengen. De indrukking van de verbinding neemt af. De bedrijfsbelasting kan zo ver gaan dat de verbonden delen los van elkaar komen en de bout boven Re wordt belast. (Re = elasticiteitsgrens) Conclusie : FM moet op de juiste manier worden aangebracht en binnen bepaalde grenzen worden gehouden (0,3 tot 0,7 • Re).
4.2.1.4 Montagegereedschappen
Voor normale boutverbindingen: ring-, steek- of dopsleutels Voor kritische boutverbindingen: momentsleutel of slagmoerapparaat
4.2.1.5 Borgen van boutverbindingen
Bij een boutverbinding is het wenselijk dat de voorspankracht gehandhaafd blijft. Er zijn echter 2 oorzaken die leiden tot verlies voorspankracht van de voorspankracht:
4.2.1.5.1 1. Losdraaien
Oorzaak: een draaibeweging van de verbonden delen tijdens bedrijf (trillingen) Remedie: • fijne schroefdraad toepassen • pasbouten toepassen (draaien onmogelijk maken)
4.2.1.5.2 2. Losgaan
Oorzaak : Verlies van klemkracht door kruipen van boutmateriaal en zetten van de verbonden delen. Remedie :
Figuur 14: voorbeeld bevestiging bout
6-TSO-EM-a Transportband 38
Elektromechanica Schooljaar 2014-2015
• verbinding kritisch berekenen; • indien mogelijk, bouten nemen met de slankheid L ³ 5 d ; • neem een hogere voorspanning en een betere kwaliteit bouten; • verhoog het elastisch vermogen door de bout te verjongen; • pas zware spanschijven of schotelveren toe; • gebruik flensbouten met onderleg-ringen om het contactoppervlak te vergroten _ grotere voorspankracht mogelijk
4.2.1.6 Borgingen / Borgmethoden
Als er geen constructieve oplossing tegen losdraaien mogelijk is, dan moet men een borgmiddel toepassen. Er zijn 3 groepen borgmiddelen:
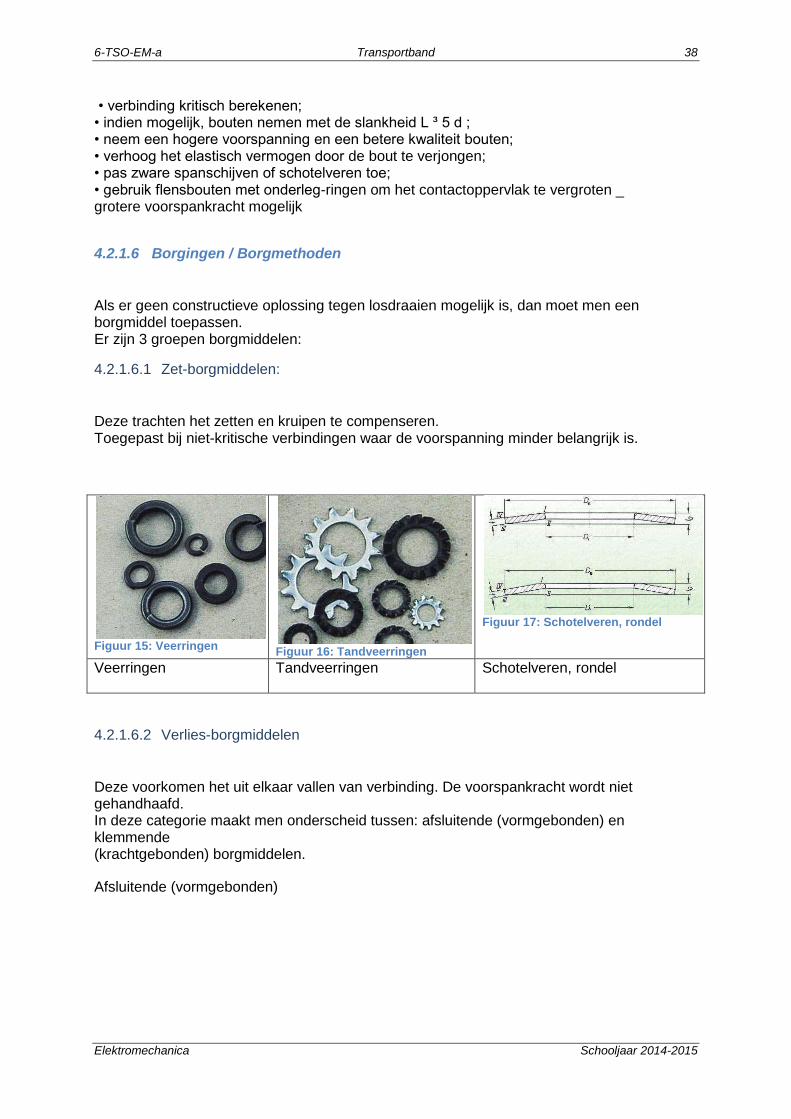
4.2.1.6.1 Zet-borgmiddelen:
Deze trachten het zetten en kruipen te compenseren. Toegepast bij niet-kritische verbindingen waar de voorspanning minder belangrijk is.
Figuur 15: Veerringen
Figuur 16: Tandveerringen
Figuur 17: Schotelveren, rondel
Veerringen Tandveerringen Schotelveren, rondel
4.2.1.6.2 Verlies-borgmiddelen
Deze voorkomen het uit elkaar vallen van verbinding. De voorspankracht wordt niet gehandhaafd. In deze categorie maakt men onderscheid tussen: afsluitende (vormgebonden) en klemmende (krachtgebonden) borgmiddelen.
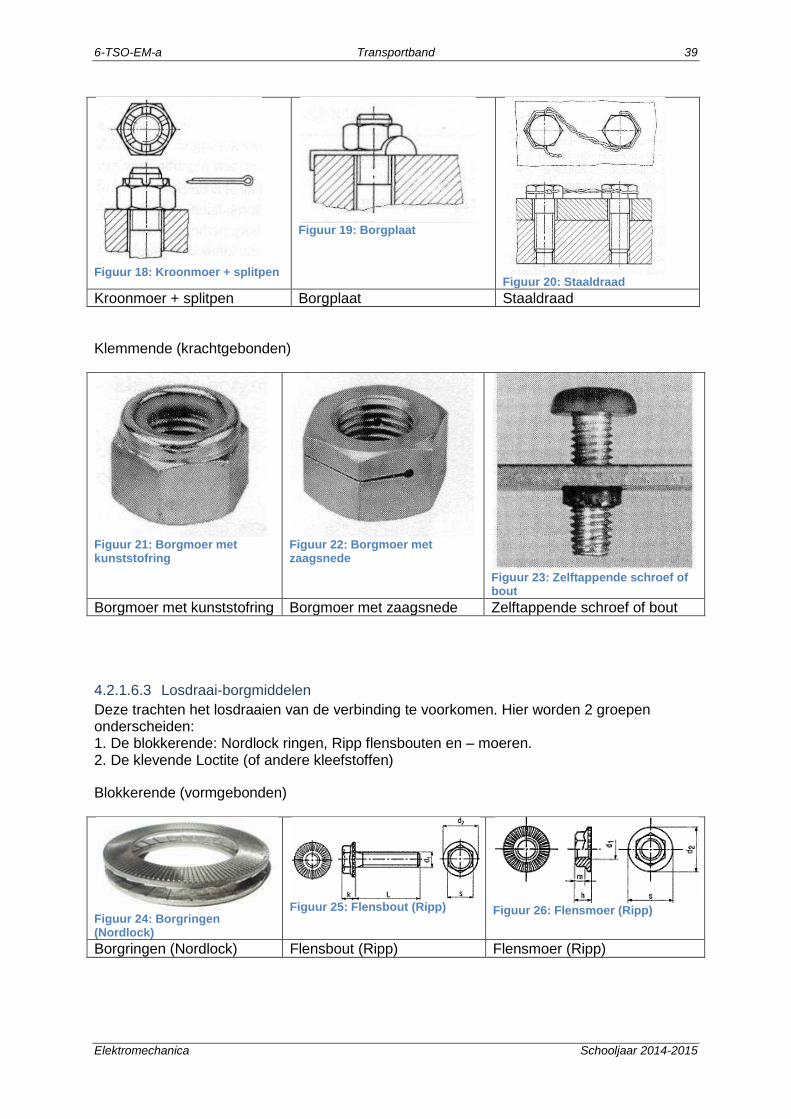
Afsluitende (vormgebonden)
6-TSO-EM-a Transportband 39
Elektromechanica Schooljaar 2014-2015
Figuur 18: Kroonmoer + splitpen
Figuur 19: Borgplaat
Figuur 20: Staaldraad
Kroonmoer + splitpen Borgplaat Staaldraad
Klemmende (krachtgebonden)
Figuur 21: Borgmoer met kunststofring
Figuur 22: Borgmoer met zaagsnede
Figuur 23: Zelftappende schroef of bout
Borgmoer met kunststofring Borgmoer met zaagsnede Zelftappende schroef of bout
4.2.1.6.3 Losdraai-borgmiddelen
Deze trachten het losdraaien van de verbinding te voorkomen. Hier worden 2 groepen onderscheiden: 1. De blokkerende: Nordlock ringen, Ripp flensbouten en – moeren. 2. De klevende Loctite (of andere kleefstoffen)
Blokkerende (vormgebonden)
Figuur 24: Borgringen (Nordlock)
Figuur 25: Flensbout (Ripp)
Figuur 26: Flensmoer (Ripp)
Borgringen (Nordlock) Flensbout (Ripp) Flensmoer (Ripp)
6-TSO-EM-a Transportband 40
Elektromechanica Schooljaar 2014-2015
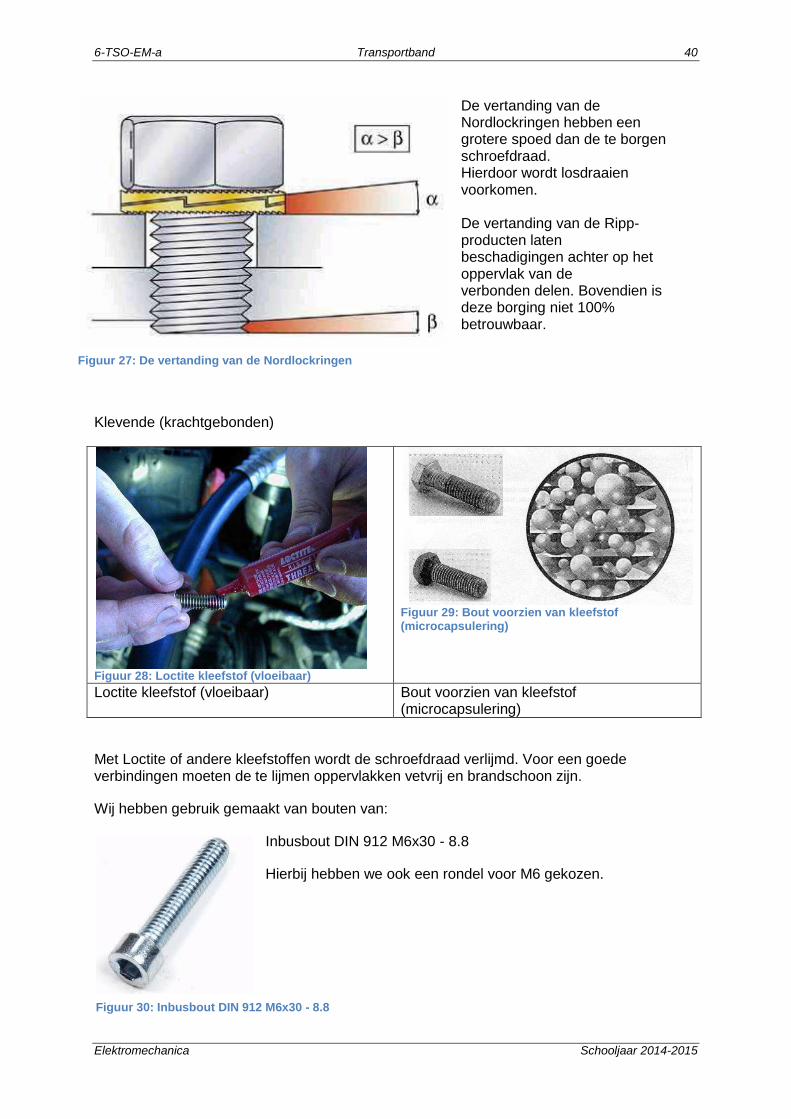
De vertanding van de Nordlockringen hebben een grotere spoed dan de te borgen schroefdraad. Hierdoor wordt losdraaien voorkomen. De vertanding van de Ripp-producten laten beschadigingen achter op het oppervlak van de verbonden delen. Bovendien is deze borging niet 100% betrouwbaar.
Klevende (krachtgebonden)
Figuur 28: Loctite kleefstof (vloeibaar)
Figuur 29: Bout voorzien van kleefstof (microcapsulering)
Loctite kleefstof (vloeibaar) Bout voorzien van kleefstof (microcapsulering)
Met Loctite of andere kleefstoffen wordt de schroefdraad verlijmd. Voor een goede verbindingen moeten de te lijmen oppervlakken vetvrij en brandschoon zijn.
Wij hebben gebruik gemaakt van bouten van:
Inbusbout DIN 912 M6x30 - 8.8
Hierbij hebben we ook een rondel voor M6 gekozen.
Figuur 27: De vertanding van de Nordlockringen
Figuur 30: Inbusbout DIN 912 M6x30 - 8.8
6-TSO-EM-a Transportband 41
Elektromechanica Schooljaar 2014-2015
verzonken schroef DIN 7991 M6x12 – 8.8
Voor deze hebben wij gekozen omdat we deze in de platen
kunnen draaien zodat ze niet tegen de aandrijfas lopen, want bij
ons dragen ze de motor.
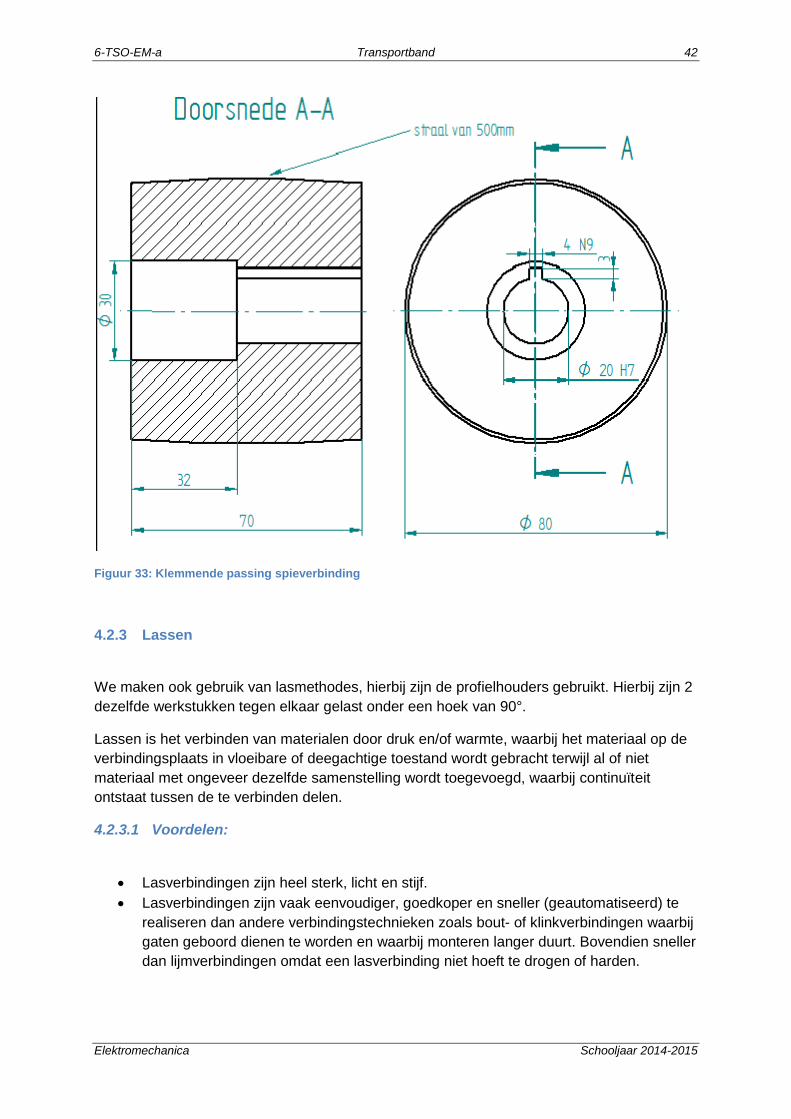
4.2.2 Passingen
Wij gebruiken passingen bij de aandrijfas en ons meeloopas.
Bij de meeloopas gebruiken we roulementen en deze moeten tot op een honderdste
gedraaid worden want als de boring te groot is er kans dat ze te veel gaan slippen, is ze te
klein gaat ze te veel geklemd worden waardoor er beschadeging kan zijn aan de
roulementen. De tolerantielijst wordt bijgevoegd in bijlage.
Figuur 32: Passing meeloopas
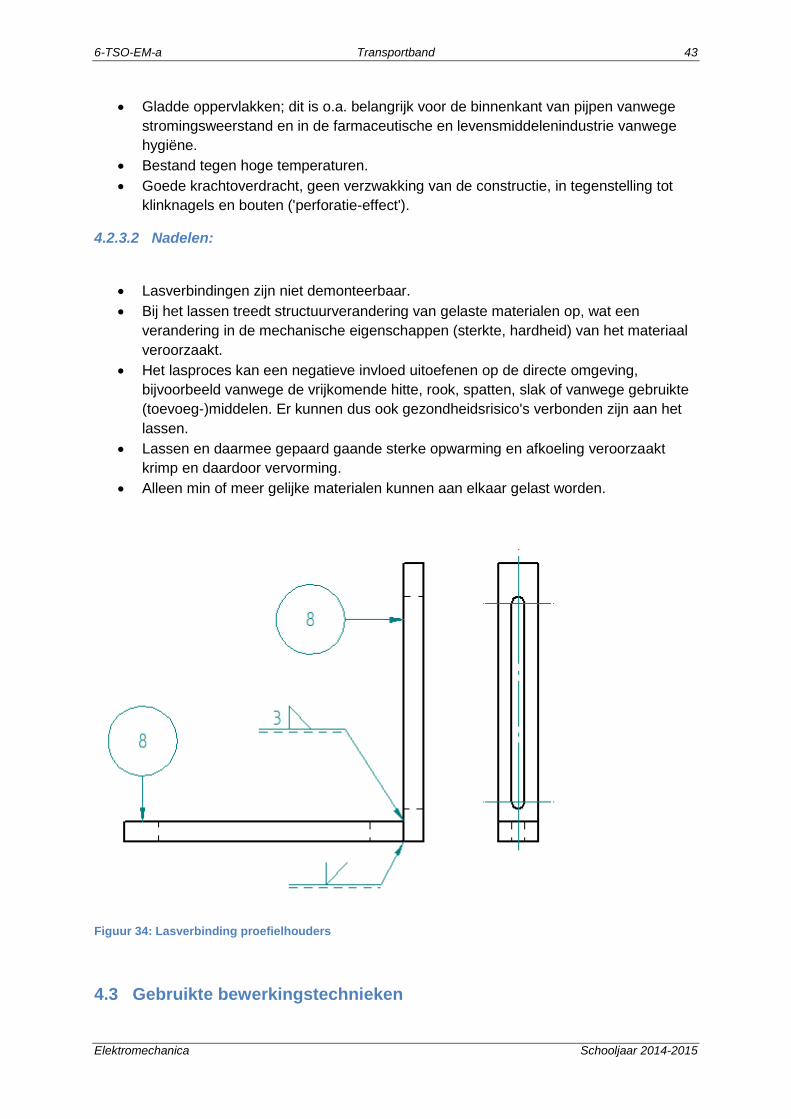
Bij de aandrijfas maken we gebruik van een passing met een spie om te zorgen dat de
aandrijfas niet slipt, want deze is rechtstreeks aangesloten op de motoras. Zo is de
verbinding ook uitneembaar.
Bij de aandrijfas zorgen we ook voor een afronding zodat de band mooi in het midden blijft
liggen en zodat deze niet van rechts naar links kan slaan. De zijkant van de as is 1,23mm
kleiner dat de grootste diameter op de aandrijfas.
Figuur 31: verzonken schroef DIN 7991 M6x12 – 8.8
6-TSO-EM-a Transportband 42
Elektromechanica Schooljaar 2014-2015
Figuur 33: Klemmende passing spieverbinding
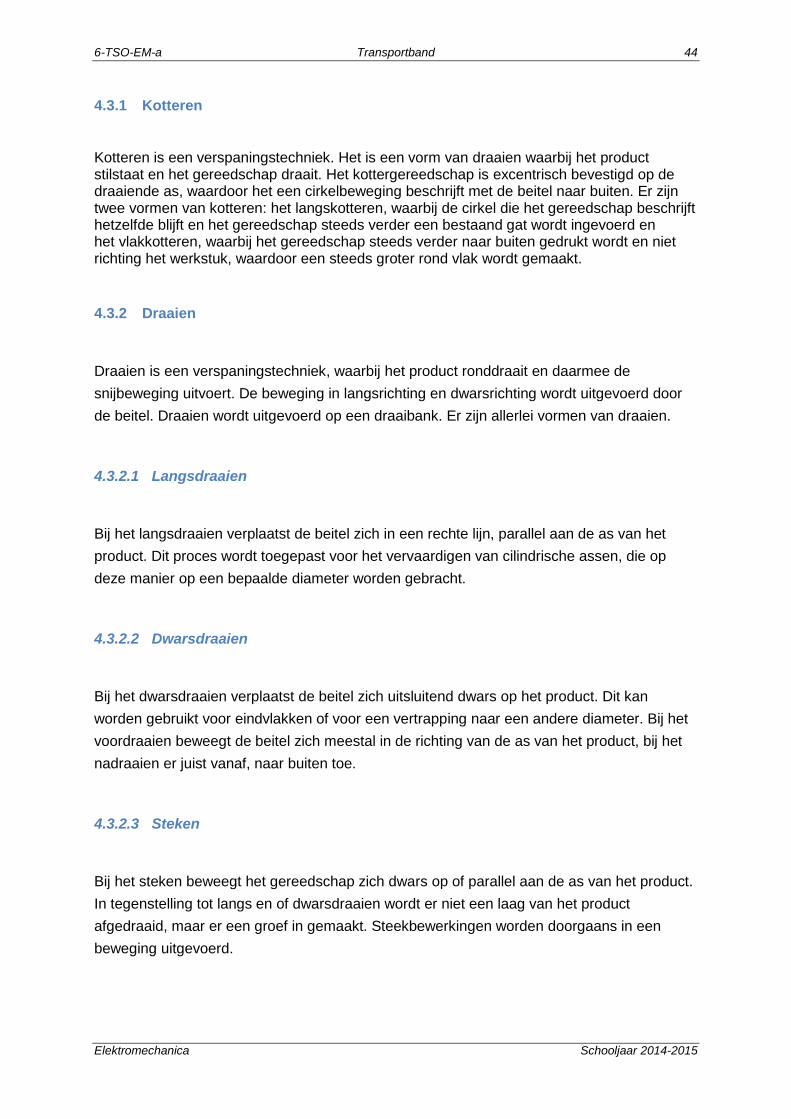
4.2.3 Lassen
We maken ook gebruik van lasmethodes, hierbij zijn de profielhouders gebruikt. Hierbij zijn 2
dezelfde werkstukken tegen elkaar gelast onder een hoek van 90°.
Lassen is het verbinden van materialen door druk en/of warmte, waarbij het materiaal op de
verbindingsplaats in vloeibare of deegachtige toestand wordt gebracht terwijl al of niet
materiaal met ongeveer dezelfde samenstelling wordt toegevoegd, waarbij continuïteit
ontstaat tussen de te verbinden delen.
4.2.3.1 Voordelen:
Lasverbindingen zijn heel sterk, licht en stijf.
Lasverbindingen zijn vaak eenvoudiger, goedkoper en sneller (geautomatiseerd) te
realiseren dan andere verbindingstechnieken zoals bout- of klinkverbindingen waarbij
gaten geboord dienen te worden en waarbij monteren langer duurt. Bovendien sneller
dan lijmverbindingen omdat een lasverbinding niet hoeft te drogen of harden.
6-TSO-EM-a Transportband 43
Elektromechanica Schooljaar 2014-2015
Gladde oppervlakken; dit is o.a. belangrijk voor de binnenkant van pijpen vanwege
stromingsweerstand en in de farmaceutische en levensmiddelenindustrie vanwege
hygiëne.
Bestand tegen hoge temperaturen.
Goede krachtoverdracht, geen verzwakking van de constructie, in tegenstelling tot
klinknagels en bouten ('perforatie-effect').
4.2.3.2 Nadelen:
Lasverbindingen zijn niet demonteerbaar.
Bij het lassen treedt structuurverandering van gelaste materialen op, wat een
verandering in de mechanische eigenschappen (sterkte, hardheid) van het materiaal
veroorzaakt.
Het lasproces kan een negatieve invloed uitoefenen op de directe omgeving,
bijvoorbeeld vanwege de vrijkomende hitte, rook, spatten, slak of vanwege gebruikte
(toevoeg-)middelen. Er kunnen dus ook gezondheidsrisico's verbonden zijn aan het
lassen.
Lassen en daarmee gepaard gaande sterke opwarming en afkoeling veroorzaakt
krimp en daardoor vervorming.
Alleen min of meer gelijke materialen kunnen aan elkaar gelast worden.
Figuur 34: Lasverbinding proefielhouders
4.3 Gebruikte bewerkingstechnieken
6-TSO-EM-a Transportband 44
Elektromechanica Schooljaar 2014-2015
4.3.1 Kotteren
Kotteren is een verspaningstechniek. Het is een vorm van draaien waarbij het product stilstaat en het gereedschap draait. Het kottergereedschap is excentrisch bevestigd op de draaiende as, waardoor het een cirkelbeweging beschrijft met de beitel naar buiten. Er zijn twee vormen van kotteren: het langskotteren, waarbij de cirkel die het gereedschap beschrijft hetzelfde blijft en het gereedschap steeds verder een bestaand gat wordt ingevoerd en het vlakkotteren, waarbij het gereedschap steeds verder naar buiten gedrukt wordt en niet richting het werkstuk, waardoor een steeds groter rond vlak wordt gemaakt.
4.3.2 Draaien
Draaien is een verspaningstechniek, waarbij het product ronddraait en daarmee de
snijbeweging uitvoert. De beweging in langsrichting en dwarsrichting wordt uitgevoerd door
de beitel. Draaien wordt uitgevoerd op een draaibank. Er zijn allerlei vormen van draaien.
4.3.2.1 Langsdraaien
Bij het langsdraaien verplaatst de beitel zich in een rechte lijn, parallel aan de as van het
product. Dit proces wordt toegepast voor het vervaardigen van cilindrische assen, die op
deze manier op een bepaalde diameter worden gebracht.
4.3.2.2 Dwarsdraaien
Bij het dwarsdraaien verplaatst de beitel zich uitsluitend dwars op het product. Dit kan
worden gebruikt voor eindvlakken of voor een vertrapping naar een andere diameter. Bij het
voordraaien beweegt de beitel zich meestal in de richting van de as van het product, bij het
nadraaien er juist vanaf, naar buiten toe.
4.3.2.3 Steken
Bij het steken beweegt het gereedschap zich dwars op of parallel aan de as van het product.
In tegenstelling tot langs en of dwarsdraaien wordt er niet een laag van het product
afgedraaid, maar er een groef in gemaakt. Steekbewerkingen worden doorgaans in een
beweging uitgevoerd.

6-TSO-EM-a Transportband 45
Elektromechanica Schooljaar 2014-2015
4.3.3 Frezen
Frezen is een verspanende bewerking waarbij met gebruik van een roterend gereedschap, de frees, materiaal wordt verwijderd. Frezen is een bewerking die met name wordt gebruikt in de metaal-, hout- en kunststofverwerkende industrie.
Frezen wordt gedaan op een freesmachine, die tegenwoordig vaak computergestuurd is (CNC).
De uitvoeringsvormen van frezen zijn erg divers. Ruwfrezen, spiebaanfrezen, zaagfrezen enz. Ook varianten met hardmetalen inzetplaatjes worden gebruikt. Daarnaast is de koelmethode van de frezen ook afhankelijk van het te bewerken materiaal. Metaal wordt met koelvloeistof gekoeld (koelvloeistof op organische of synthetische basis), kunststof wordt vaak met perslucht gekoeld.
4.3.3.1 Vingerfrezen
Vingerfrezen, of universele frezen, zijn niet (altijd) centrumsnijdend. Dat wil zeggen dat er niet mee geboord kan worden. Deze worden gebruikt om verspaning te doen in horizontale richting. Het centrum van de frees ligt lager dan de snijtanden. Deze frezen zijn meestal gemaakt van HSS, snelstaal of van ander materiaal zoals hard metaal, of werken met verwisselbare snijplaatjes (wisselplaten).
4.3.3.2 Spiebaanfrezen
Spiebaanfrezen worden gebruikt om spiebanen te maken in een as. Als er dan in de tweede as of een naaf ook een spiebaan gemaakt is kan men er een spie tussen steken. Deze zorgt dan dat de rotatie van de ene as wordt overgebracht op een andere as. In sommige gevallen is het zo dat deze spiebaan niet te lang mag zijn (onder andere voor de verzwakking van de as) en in het midden van de lengte van de as ligt. Men moet dus een frees hebben die kan boren en centrumsnijdend is. De spiebaanfrees kan dit omdat de top van de frees hoger ligt dan de rest van het snijvlak van de frees, dus omgekeerd aan de vingerfrees.
4.3.3.3 Meelopend frezen
Men spreekt van meelopend frezen als de rotatie van het gereedschap (frees) en de voeding in dezelfde richting gebeurt (vb: frees draait in uurwijzerzin en de tafel (met het werkstuk) gaat naar links). Spaanafvoer vindt plaats in tegenovergestelde richting van de freesvoeding.
Figuur 35: Meelopend frezen
6-TSO-EM-a Transportband 46
Elektromechanica Schooljaar 2014-2015
Voordelen:
de frees wil het werkstuk niet doen loskomen uit de spanschroef
gemakkelijke spaanafvoer
minder slijtage
betere oppervlakteruwheid dan bij tegenlopend frezen
zuiverder werk
Nadelen:
Moer aandrijfspindel moet minimale speling hebben, anders kunnen de tanden van de frees
te veel materiaal grijpen en afbreken.
4.3.3.4 Tegenlopend frezen
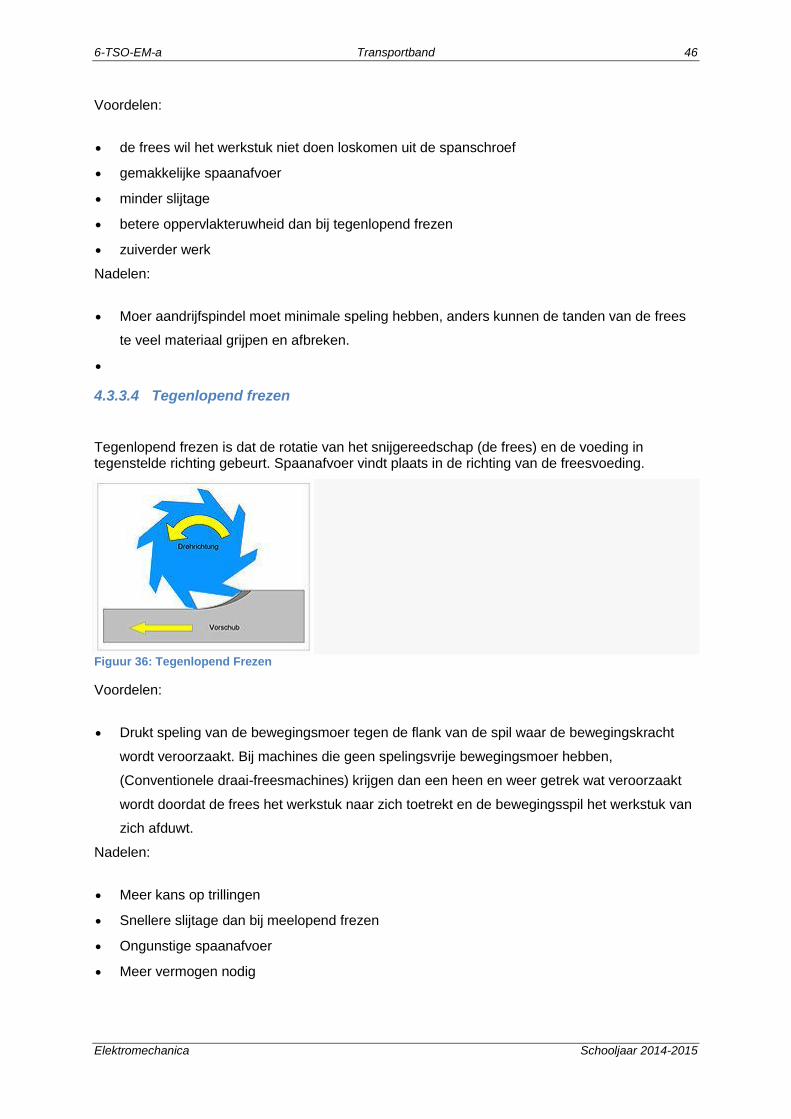
Tegenlopend frezen is dat de rotatie van het snijgereedschap (de frees) en de voeding in tegenstelde richting gebeurt. Spaanafvoer vindt plaats in de richting van de freesvoeding.
Figuur 36: Tegenlopend Frezen
Voordelen:
Drukt speling van de bewegingsmoer tegen de flank van de spil waar de bewegingskracht
wordt veroorzaakt. Bij machines die geen spelingsvrije bewegingsmoer hebben,
(Conventionele draai-freesmachines) krijgen dan een heen en weer getrek wat veroorzaakt
wordt doordat de frees het werkstuk naar zich toetrekt en de bewegingsspil het werkstuk van
zich afduwt.
Nadelen:
Meer kans op trillingen
Snellere slijtage dan bij meelopend frezen
Ongunstige spaanafvoer
Meer vermogen nodig
6-TSO-EM-a Transportband 47
Elektromechanica Schooljaar 2014-2015
4.3.4 CNC
Om bepaalde werkstukken te maken, hebben we gebruikt gemaakt van CNC machines,
hieronder vind je 2 CNC machines die we gebruikt hebben
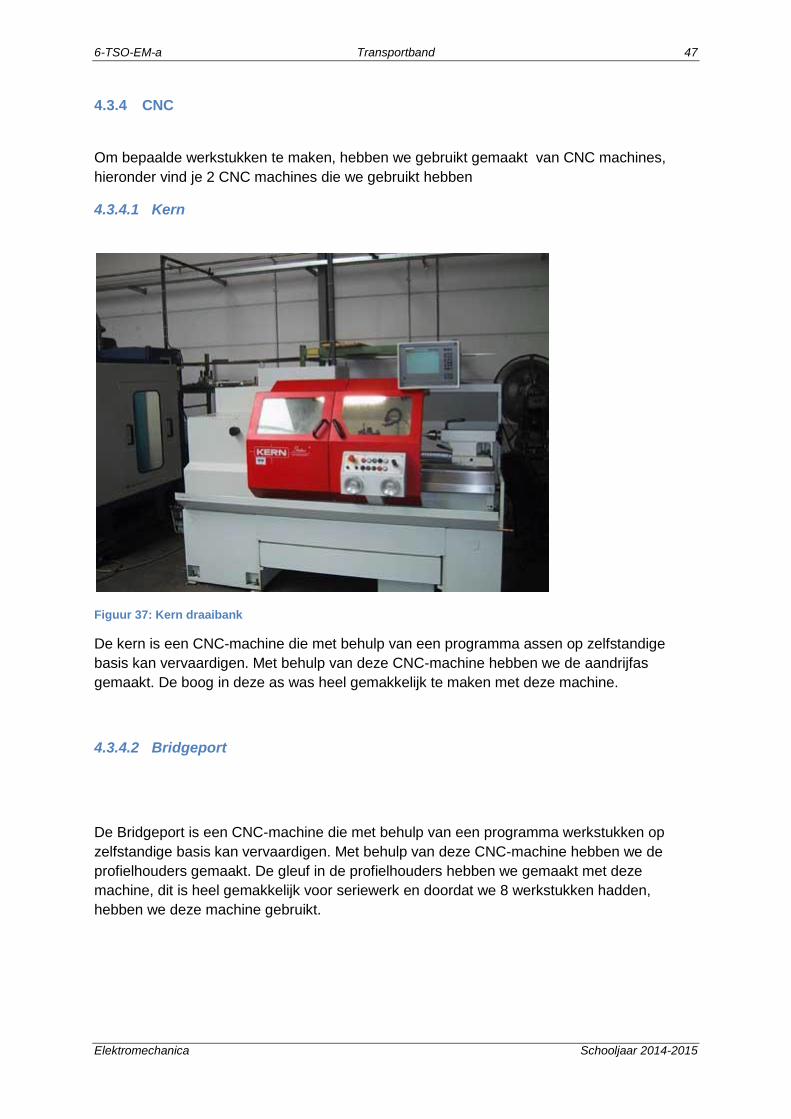
4.3.4.1 Kern
Figuur 37: Kern draaibank
De kern is een CNC-machine die met behulp van een programma assen op zelfstandige
basis kan vervaardigen. Met behulp van deze CNC-machine hebben we de aandrijfas
gemaakt. De boog in deze as was heel gemakkelijk te maken met deze machine.
4.3.4.2 Bridgeport
De Bridgeport is een CNC-machine die met behulp van een programma werkstukken op
zelfstandige basis kan vervaardigen. Met behulp van deze CNC-machine hebben we de
profielhouders gemaakt. De gleuf in de profielhouders hebben we gemaakt met deze
machine, dit is heel gemakkelijk voor seriewerk en doordat we 8 werkstukken hadden,
hebben we deze machine gebruikt.
6-TSO-EM-a Transportband 48
Elektromechanica Schooljaar 2014-2015
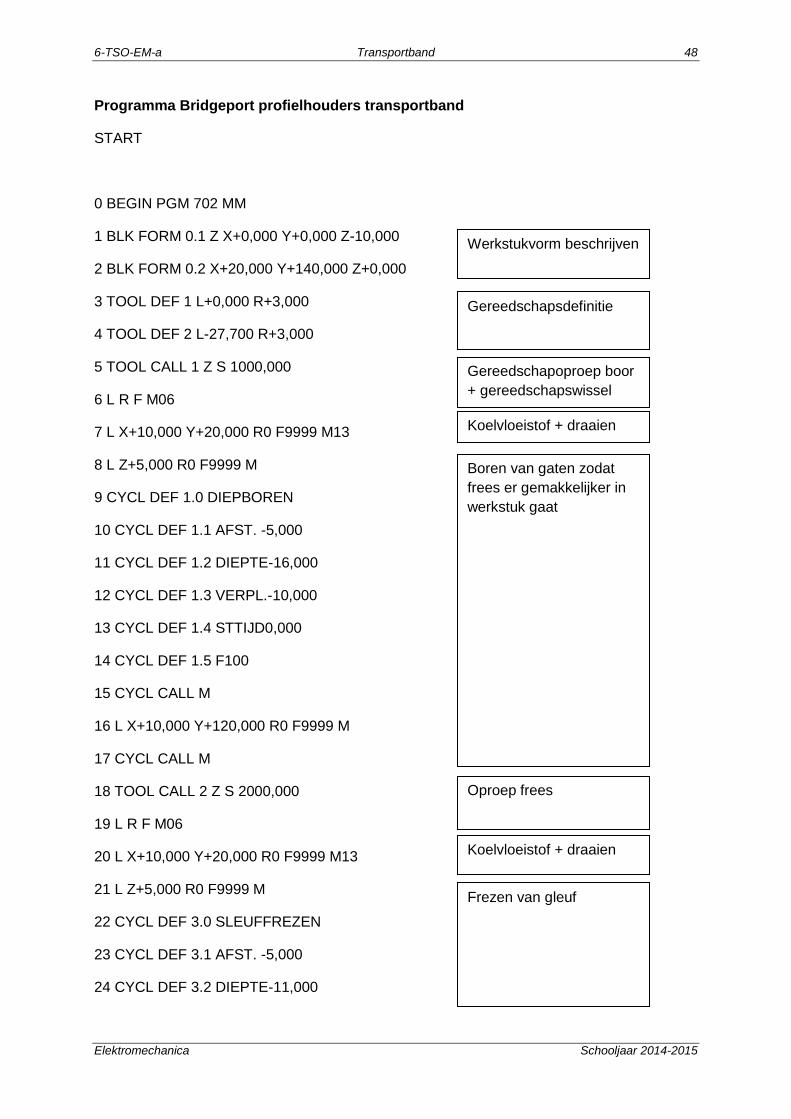
Programma Bridgeport profielhouders transportband
START
0 BEGIN PGM 702 MM
1 BLK FORM 0.1 Z X+0,000 Y+0,000 Z-10,000
2 BLK FORM 0.2 X+20,000 Y+140,000 Z+0,000
3 TOOL DEF 1 L+0,000 R+3,000
4 TOOL DEF 2 L-27,700 R+3,000
5 TOOL CALL 1 Z S 1000,000
6 L R F M06
7 L X+10,000 Y+20,000 R0 F9999 M13
8 L Z+5,000 R0 F9999 M
9 CYCL DEF 1.0 DIEPBOREN
10 CYCL DEF 1.1 AFST. -5,000
11 CYCL DEF 1.2 DIEPTE-16,000
12 CYCL DEF 1.3 VERPL.-10,000
13 CYCL DEF 1.4 STTIJD0,000
14 CYCL DEF 1.5 F100
15 CYCL CALL M
16 L X+10,000 Y+120,000 R0 F9999 M
17 CYCL CALL M
18 TOOL CALL 2 Z S 2000,000
19 L R F M06
20 L X+10,000 Y+20,000 R0 F9999 M13
21 L Z+5,000 R0 F9999 M
22 CYCL DEF 3.0 SLEUFFREZEN
23 CYCL DEF 3.1 AFST. -5,000
24 CYCL DEF 3.2 DIEPTE-11,000
Werkstukvorm beschrijven
Gereedschapsdefinitie
Gereedschapoproep boor
+ gereedschapswissel
Koelvloeistof + draaien
Boren van gaten zodat
frees er gemakkelijker in
werkstuk gaat
Oproep frees
Koelvloeistof + draaien
Frezen van gleuf
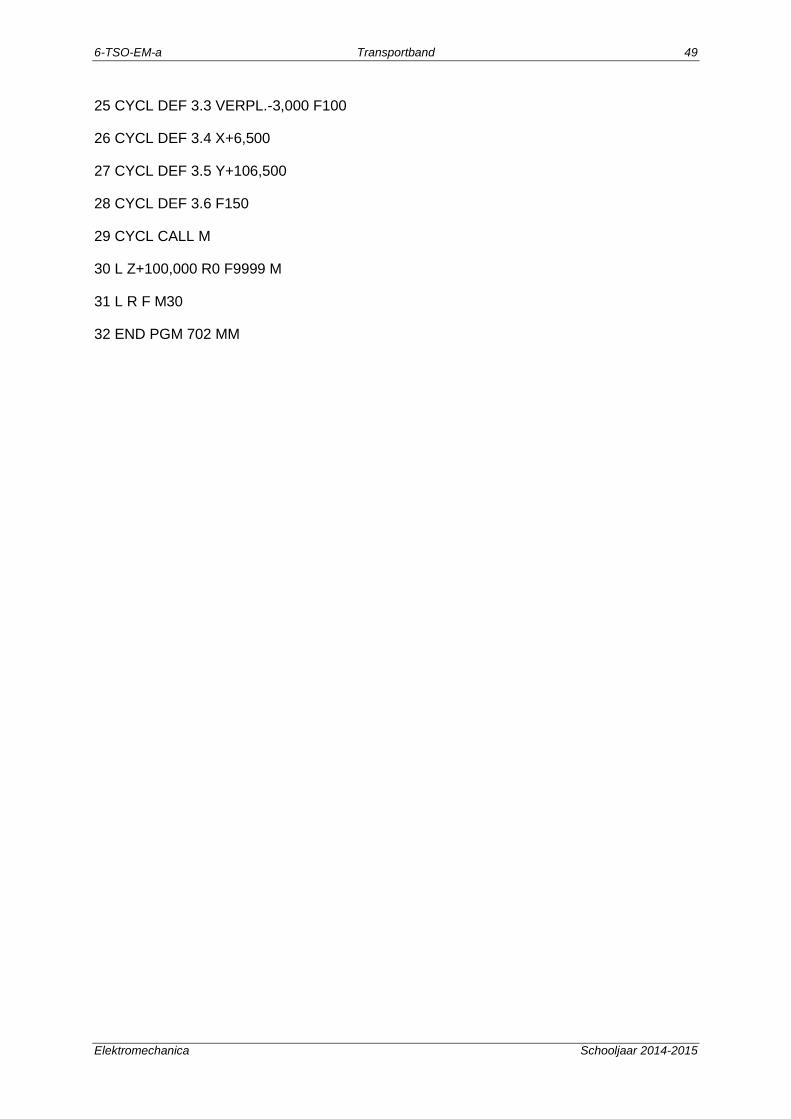
6-TSO-EM-a Transportband 49
Elektromechanica Schooljaar 2014-2015
25 CYCL DEF 3.3 VERPL.-3,000 F100
26 CYCL DEF 3.4 X+6,500
27 CYCL DEF 3.5 Y+106,500
28 CYCL DEF 3.6 F150
29 CYCL CALL M
30 L Z+100,000 R0 F9999 M
31 L R F M30
32 END PGM 702 MM
Elektromechanica Schooljaar 2014-2015
5 Meetaspect
6-TSO-EM-a Meetaspect 51
Elektromechanica Schooljaar 2014-2015
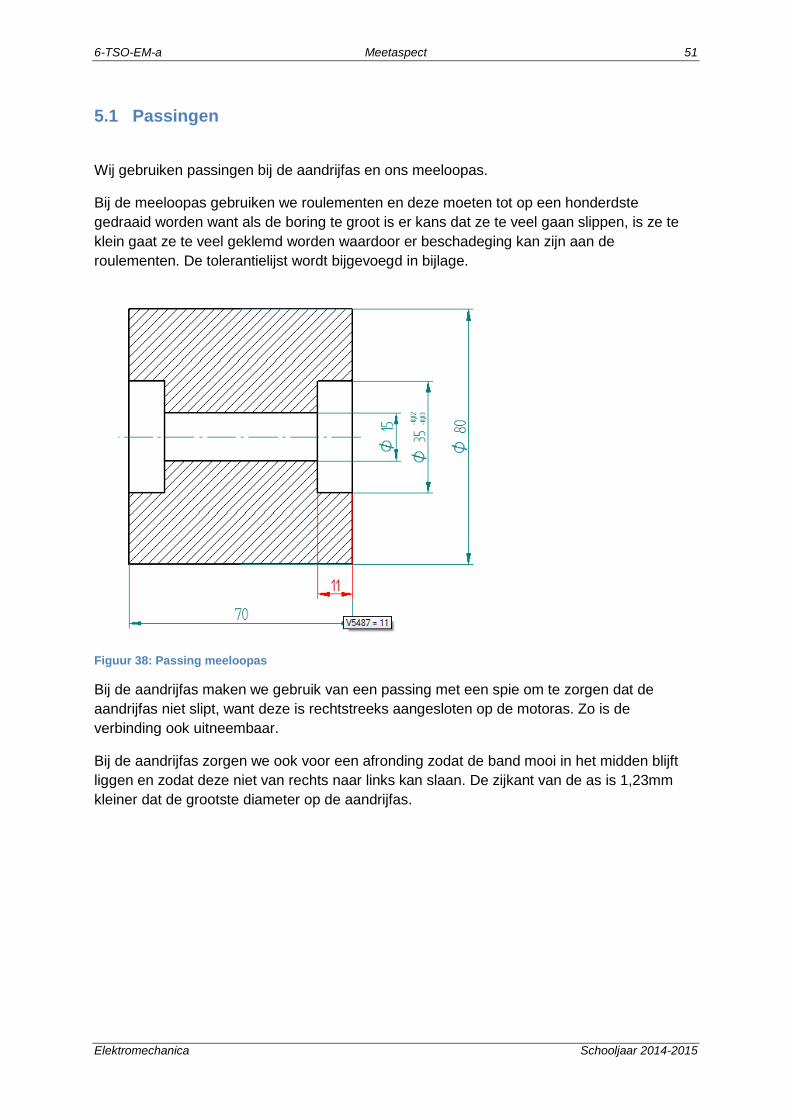
5.1 Passingen
Wij gebruiken passingen bij de aandrijfas en ons meeloopas.
Bij de meeloopas gebruiken we roulementen en deze moeten tot op een honderdste
gedraaid worden want als de boring te groot is er kans dat ze te veel gaan slippen, is ze te
klein gaat ze te veel geklemd worden waardoor er beschadeging kan zijn aan de
roulementen. De tolerantielijst wordt bijgevoegd in bijlage.
Figuur 38: Passing meeloopas
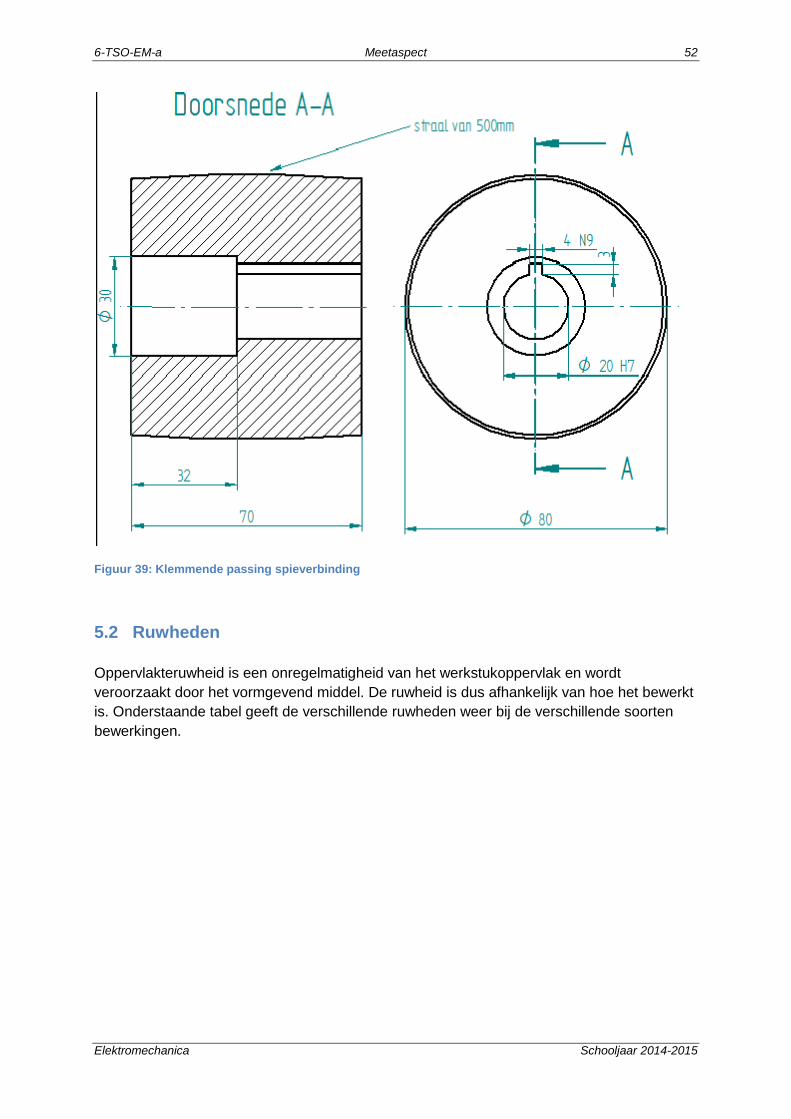
Bij de aandrijfas maken we gebruik van een passing met een spie om te zorgen dat de
aandrijfas niet slipt, want deze is rechtstreeks aangesloten op de motoras. Zo is de
verbinding ook uitneembaar.
Bij de aandrijfas zorgen we ook voor een afronding zodat de band mooi in het midden blijft
liggen en zodat deze niet van rechts naar links kan slaan. De zijkant van de as is 1,23mm
kleiner dat de grootste diameter op de aandrijfas.
6-TSO-EM-a Meetaspect 52
Elektromechanica Schooljaar 2014-2015
Figuur 39: Klemmende passing spieverbinding
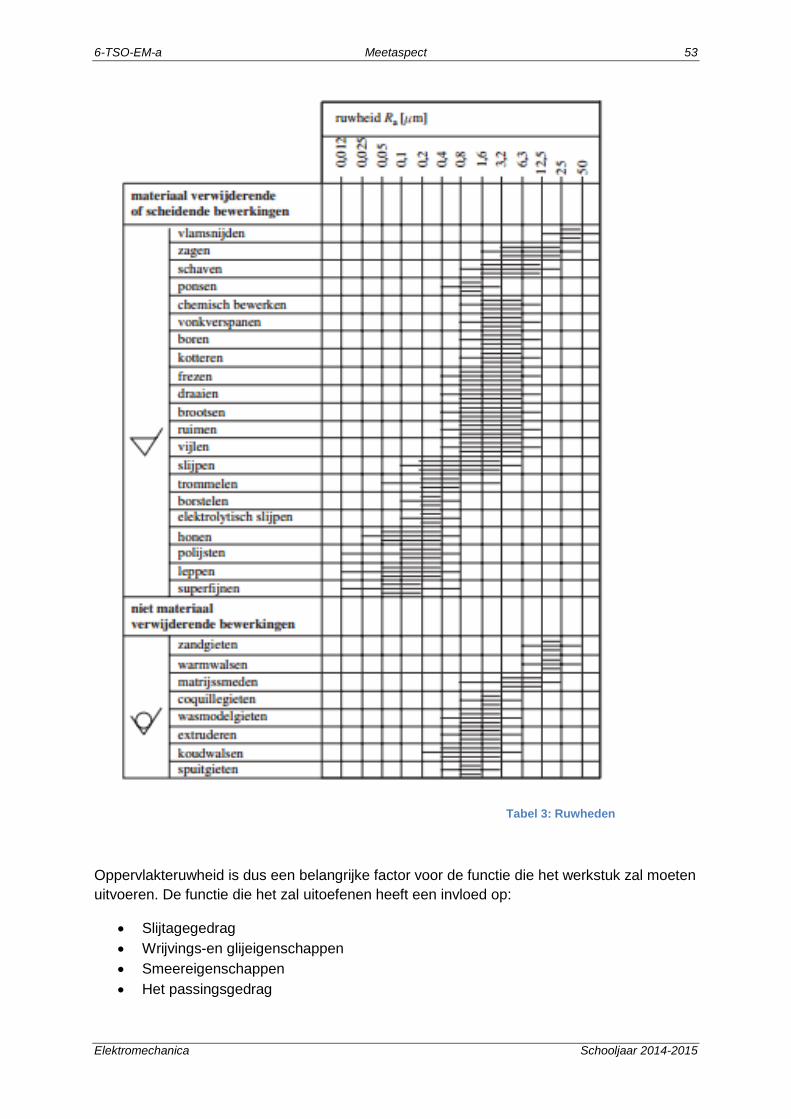
5.2 Ruwheden
Oppervlakteruwheid is een onregelmatigheid van het werkstukoppervlak en wordt
veroorzaakt door het vormgevend middel. De ruwheid is dus afhankelijk van hoe het bewerkt
is. Onderstaande tabel geeft de verschillende ruwheden weer bij de verschillende soorten
bewerkingen.
6-TSO-EM-a Meetaspect 53
Elektromechanica Schooljaar 2014-2015
Tabel 3: Ruwheden
Oppervlakteruwheid is dus een belangrijke factor voor de functie die het werkstuk zal moeten
uitvoeren. De functie die het zal uitoefenen heeft een invloed op:
Slijtagegedrag
Wrijvings-en glijeigenschappen
Smeereigenschappen
Het passingsgedrag
6-TSO-EM-a Meetaspect 54
Elektromechanica Schooljaar 2014-2015
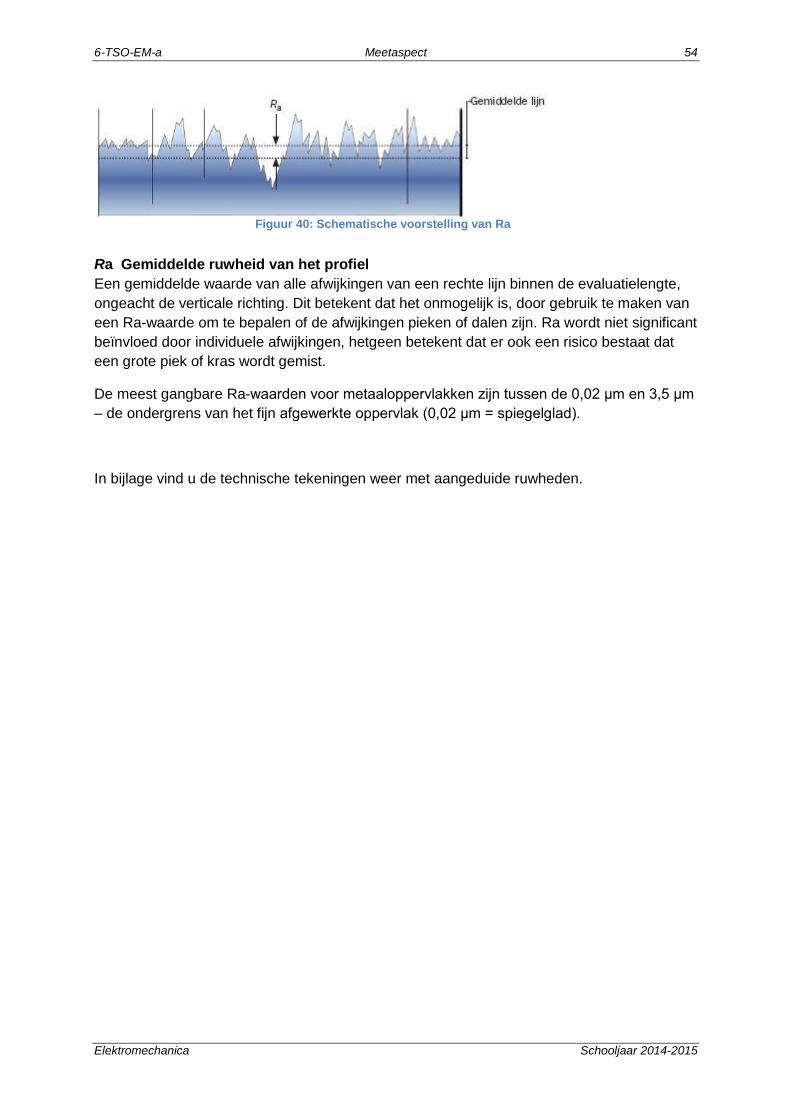
Ra Gemiddelde ruwheid van het profiel
Een gemiddelde waarde van alle afwijkingen van een rechte lijn binnen de evaluatielengte,
ongeacht de verticale richting. Dit betekent dat het onmogelijk is, door gebruik te maken van
een Ra-waarde om te bepalen of de afwijkingen pieken of dalen zijn. Ra wordt niet significant
beïnvloed door individuele afwijkingen, hetgeen betekent dat er ook een risico bestaat dat
een grote piek of kras wordt gemist.
De meest gangbare Ra-waarden voor metaaloppervlakken zijn tussen de 0,02 μm en 3,5 μm
– de ondergrens van het fijn afgewerkte oppervlak (0,02 μm = spiegelglad).
In bijlage vind u de technische tekeningen weer met aangeduide ruwheden.
Figuur 40: Schematische voorstelling van Ra
6 Elektriciteit
6-TSO-EM-a Elektriciteit 56
6.1 3-fasige asynchrone motor
6.1.1 Keuze motor
6.1.1.1 Motoreigenschappen
Tabel 4: Motoreigenschappen
3~motor
Sew Eurodrive
Type
WA20DT63N4B03
Nr.
010362669.3.30.02005 VDE 0530/21
kW 0,18 S1
V 220∆ 380Υ
A 1∆ 0,58 Υ
r/min 1400∆ 161 Υ
Cos ᴕ 0,78
Nm 2,2
Kg 8,929
IM H1A
6.1.1.2 Informatie motorkeuze en toelichting bij GIP
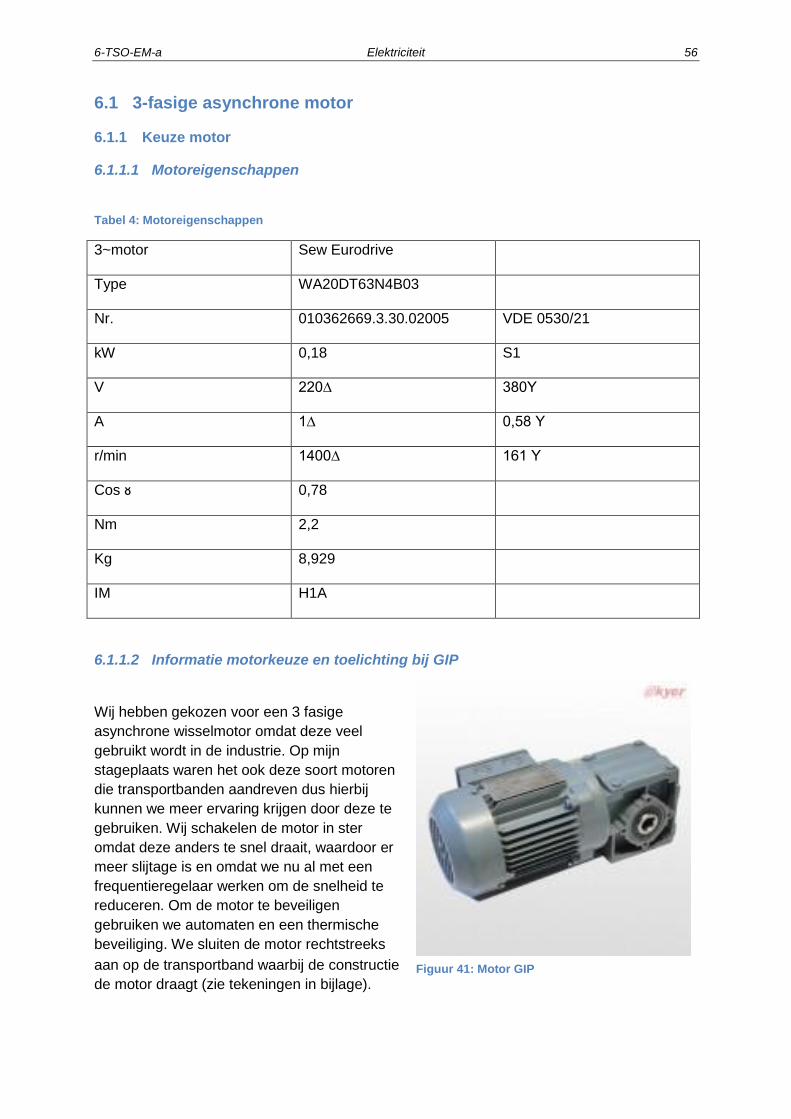
Wij hebben gekozen voor een 3 fasige
asynchrone wisselmotor omdat deze veel
gebruikt wordt in de industrie. Op mijn
stageplaats waren het ook deze soort motoren
die transportbanden aandreven dus hierbij
kunnen we meer ervaring krijgen door deze te
gebruiken. Wij schakelen de motor in ster
omdat deze anders te snel draait, waardoor er
meer slijtage is en omdat we nu al met een
frequentieregelaar werken om de snelheid te
reduceren. Om de motor te beveiligen
gebruiken we automaten en een thermische
beveiliging. We sluiten de motor rechtstreeks
aan op de transportband waarbij de constructie
de motor draagt (zie tekeningen in bijlage). Figuur 41: Motor GIP
6-TSO-EM-a Elektriciteit 57
6.1.1.3 Aansluitingen motor
We schakelen de motor in ster omdat deze anders te snel draait en hierbij steken we
spanning op de klemmen U1,V1 en W1, W2,U2 en V2 verbinden we met plaatjes met elkaar
zodat deze in ster geschakeld is.
Figuur 42: Klemmenverbinding motoraansluiting
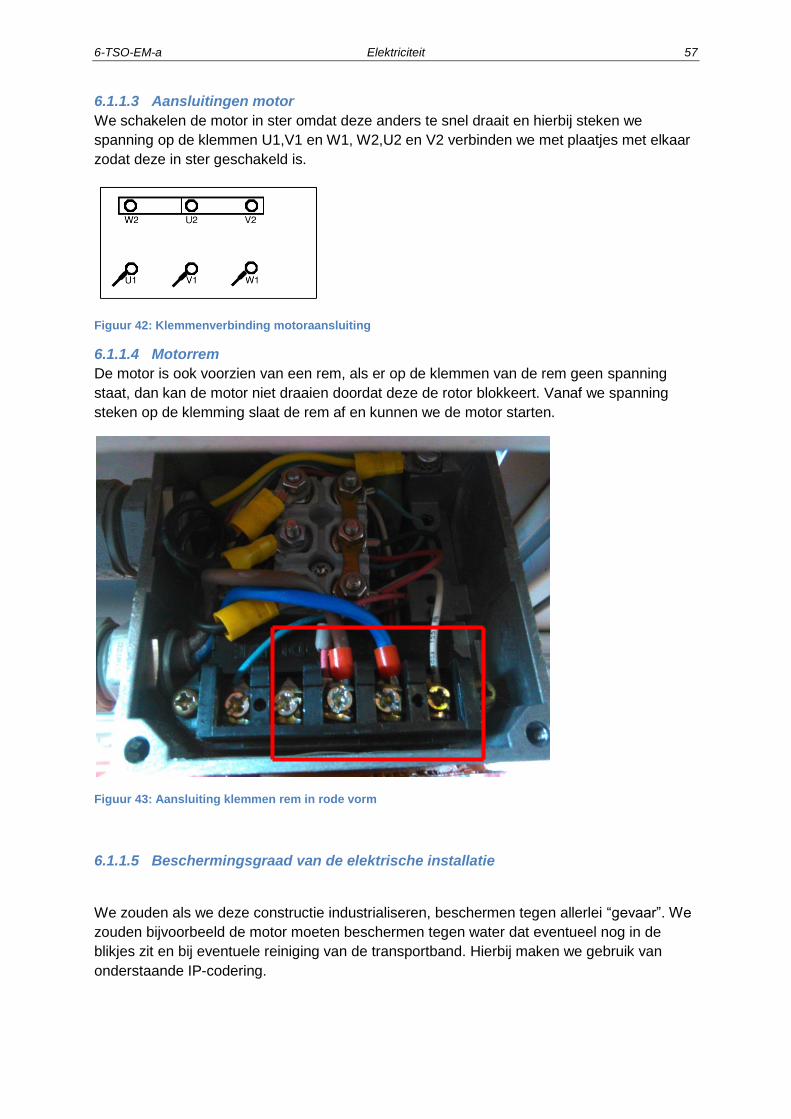
6.1.1.4 Motorrem
De motor is ook voorzien van een rem, als er op de klemmen van de rem geen spanning
staat, dan kan de motor niet draaien doordat deze de rotor blokkeert. Vanaf we spanning
steken op de klemming slaat de rem af en kunnen we de motor starten.
Figuur 43: Aansluiting klemmen rem in rode vorm
6.1.1.5 Beschermingsgraad van de elektrische installatie
We zouden als we deze constructie industrialiseren, beschermen tegen allerlei “gevaar”. We
zouden bijvoorbeeld de motor moeten beschermen tegen water dat eventueel nog in de
blikjes zit en bij eventuele reiniging van de transportband. Hierbij maken we gebruik van
onderstaande IP-codering.
6-TSO-EM-a Elektriciteit 58
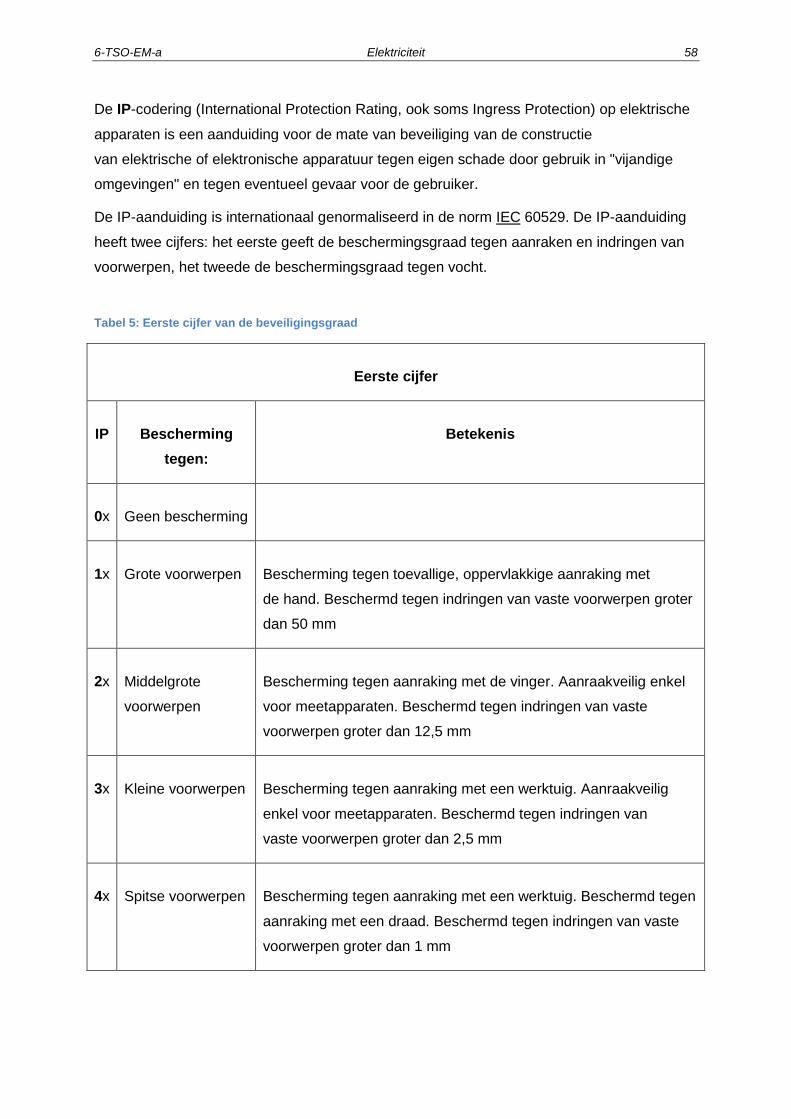
De IP-codering (International Protection Rating, ook soms Ingress Protection) op elektrische
apparaten is een aanduiding voor de mate van beveiliging van de constructie
van elektrische of elektronische apparatuur tegen eigen schade door gebruik in "vijandige
omgevingen" en tegen eventueel gevaar voor de gebruiker.
De IP-aanduiding is internationaal genormaliseerd in de norm IEC 60529. De IP-aanduiding
heeft twee cijfers: het eerste geeft de beschermingsgraad tegen aanraken en indringen van
voorwerpen, het tweede de beschermingsgraad tegen vocht.
Tabel 5: Eerste cijfer van de beveiligingsgraad
Eerste cijfer
IP Bescherming
tegen:
Betekenis
0x Geen bescherming
1x Grote voorwerpen Bescherming tegen toevallige, oppervlakkige aanraking met
de hand. Beschermd tegen indringen van vaste voorwerpen groter
dan 50 mm
2x Middelgrote
voorwerpen
Bescherming tegen aanraking met de vinger. Aanraakveilig enkel
voor meetapparaten. Beschermd tegen indringen van vaste
voorwerpen groter dan 12,5 mm
3x Kleine voorwerpen Bescherming tegen aanraking met een werktuig. Aanraakveilig
enkel voor meetapparaten. Beschermd tegen indringen van
vaste voorwerpen groter dan 2,5 mm
4x Spitse voorwerpen Bescherming tegen aanraking met een werktuig. Beschermd tegen
aanraking met een draad. Beschermd tegen indringen van vaste
voorwerpen groter dan 1 mm
6-TSO-EM-a Elektriciteit 59
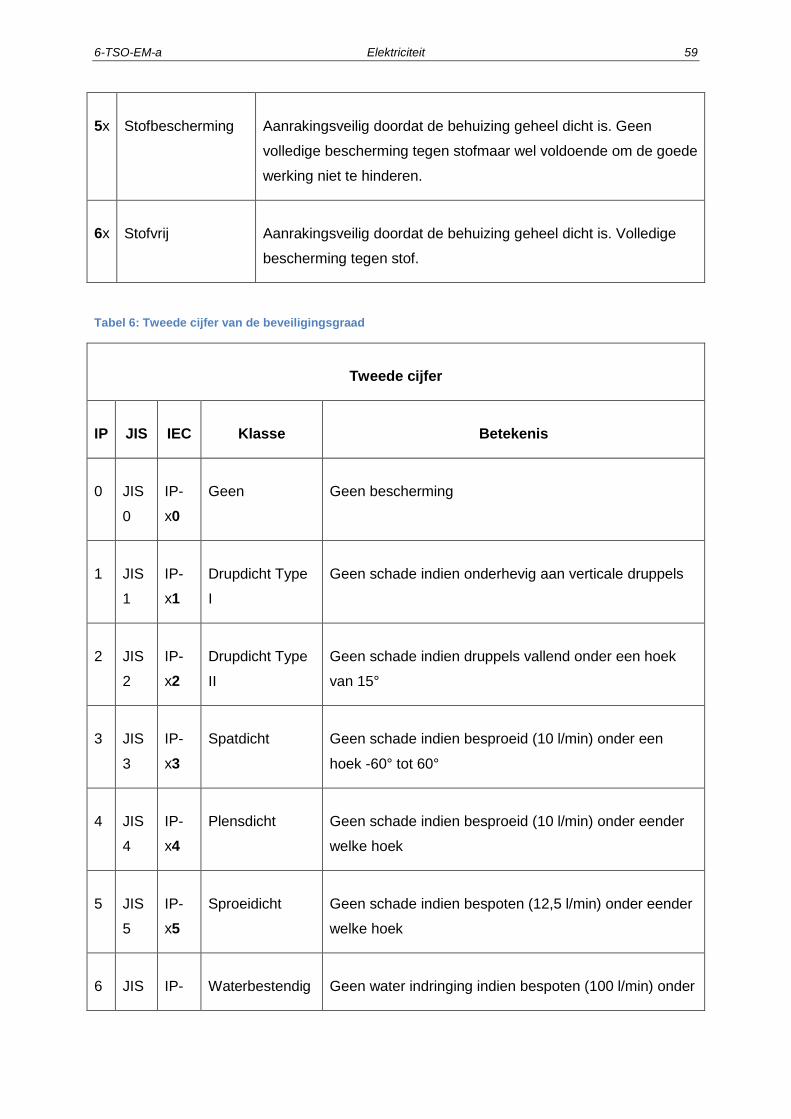
5x Stofbescherming Aanrakingsveilig doordat de behuizing geheel dicht is. Geen
volledige bescherming tegen stofmaar wel voldoende om de goede
werking niet te hinderen.
6x Stofvrij Aanrakingsveilig doordat de behuizing geheel dicht is. Volledige
bescherming tegen stof.
Tabel 6: Tweede cijfer van de beveiligingsgraad
Tweede cijfer
IP JIS IEC Klasse Betekenis
0 JIS
0
IP-
x0
Geen Geen bescherming
1 JIS
1
IP-
x1
Drupdicht Type
I
Geen schade indien onderhevig aan verticale druppels
2 JIS
2
IP-
x2
Drupdicht Type
II
Geen schade indien druppels vallend onder een hoek
van 15°
3 JIS
3
IP-
x3
Spatdicht Geen schade indien besproeid (10 l/min) onder een
hoek -60° tot 60°
4 JIS
4
IP-
x4
Plensdicht Geen schade indien besproeid (10 l/min) onder eender
welke hoek
5 JIS
5
IP-
x5
Sproeidicht Geen schade indien bespoten (12,5 l/min) onder eender
welke hoek
6 JIS IP- Waterbestendig Geen water indringing indien bespoten (100 l/min) onder
6-TSO-EM-a Elektriciteit 60
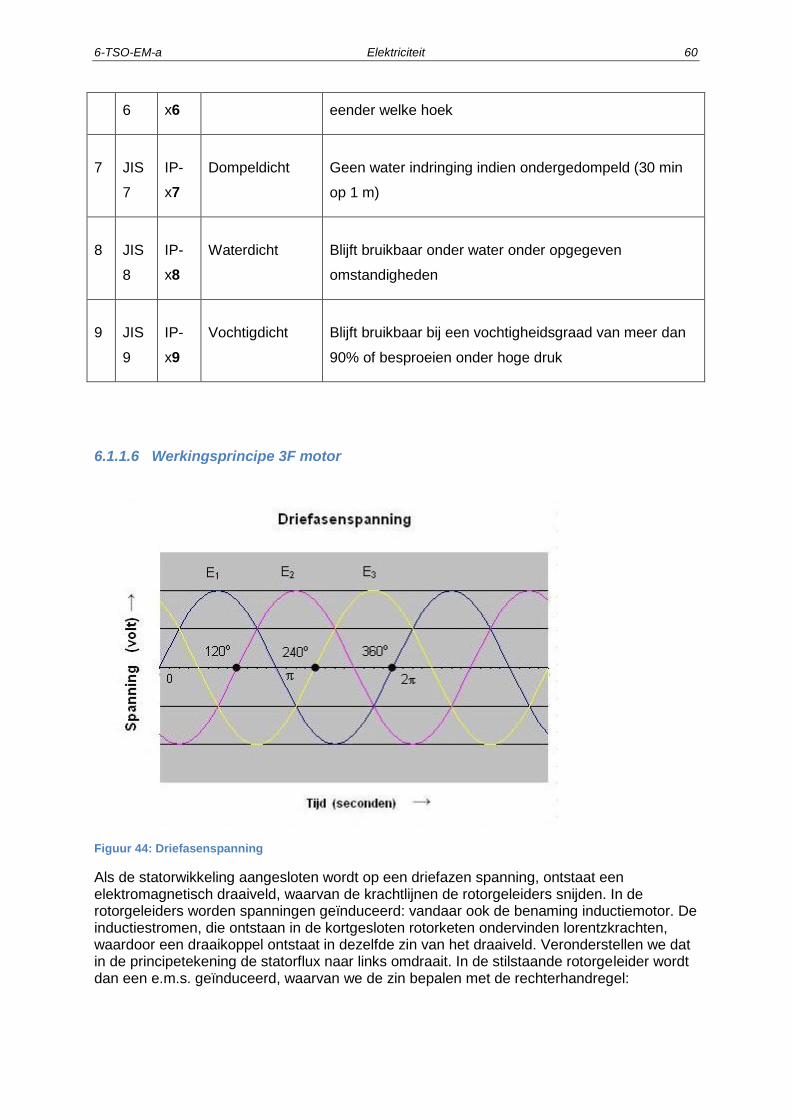
6 x6 eender welke hoek
7 JIS
7
IP-
x7
Dompeldicht Geen water indringing indien ondergedompeld (30 min
op 1 m)
8 JIS
8
IP-
x8
Waterdicht Blijft bruikbaar onder water onder opgegeven
omstandigheden
9 JIS
9
IP-
x9
Vochtigdicht Blijft bruikbaar bij een vochtigheidsgraad van meer dan
90% of besproeien onder hoge druk
6.1.1.6 Werkingsprincipe 3F motor
Figuur 44: Driefasenspanning
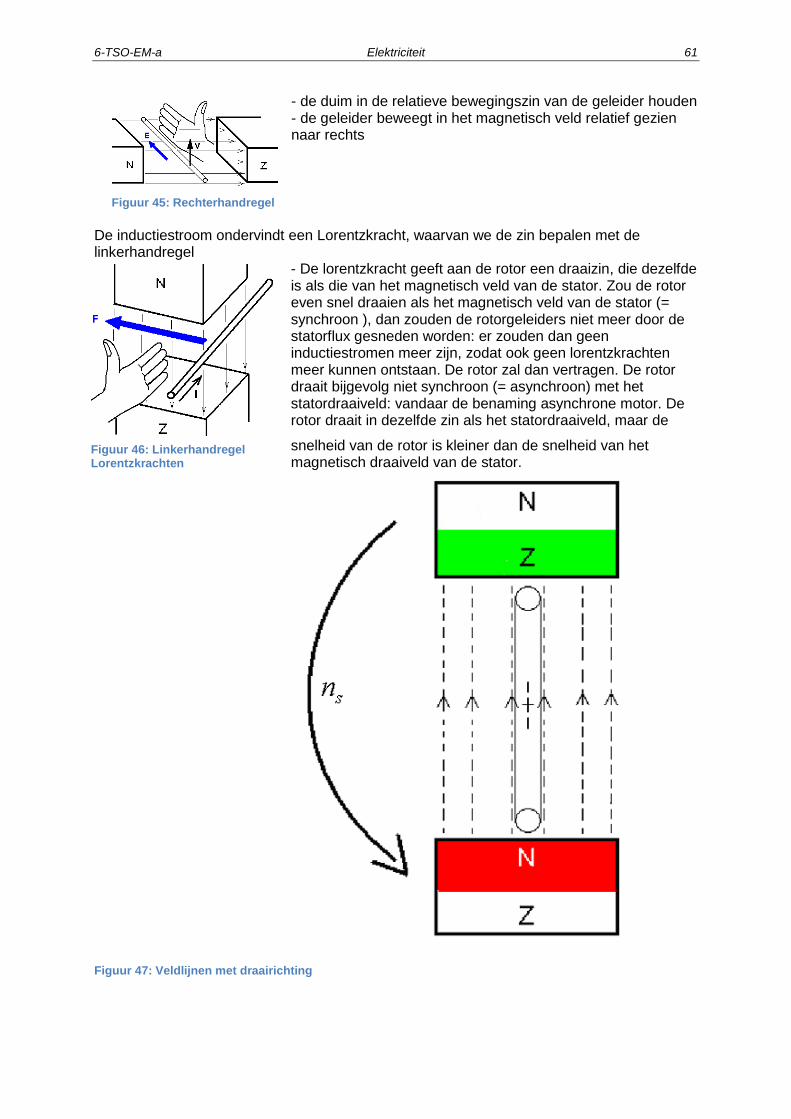
Als de statorwikkeling aangesloten wordt op een driefazen spanning, ontstaat een elektromagnetisch draaiveld, waarvan de krachtlijnen de rotorgeleiders snijden. In de rotorgeleiders worden spanningen geïnduceerd: vandaar ook de benaming inductiemotor. De inductiestromen, die ontstaan in de kortgesloten rotorketen ondervinden lorentzkrachten, waardoor een draaikoppel ontstaat in dezelfde zin van het draaiveld. Veronderstellen we dat in de principetekening de statorflux naar links omdraait. In de stilstaande rotorgeleider wordt dan een e.m.s. geïnduceerd, waarvan we de zin bepalen met de rechterhandregel:
6-TSO-EM-a Elektriciteit 61
- de duim in de relatieve bewegingszin van de geleider houden - de geleider beweegt in het magnetisch veld relatief gezien naar rechts
De inductiestroom ondervindt een Lorentzkracht, waarvan we de zin bepalen met de linkerhandregel
- De lorentzkracht geeft aan de rotor een draaizin, die dezelfde is als die van het magnetisch veld van de stator. Zou de rotor even snel draaien als het magnetisch veld van de stator (= synchroon ), dan zouden de rotorgeleiders niet meer door de statorflux gesneden worden: er zouden dan geen inductiestromen meer zijn, zodat ook geen lorentzkrachten meer kunnen ontstaan. De rotor zal dan vertragen. De rotor draait bijgevolg niet synchroon (= asynchroon) met het statordraaiveld: vandaar de benaming asynchrone motor. De rotor draait in dezelfde zin als het statordraaiveld, maar de
snelheid van de rotor is kleiner dan de snelheid van het magnetisch draaiveld van de stator.
Figuur 47: Veldlijnen met draairichting
Figuur 45: Rechterhandregel
Figuur 46: Linkerhandregel Lorentzkrachten
6-TSO-EM-a Elektriciteit 62
6.1.1.7 Snelheidskoppelkarakteristiek
6.1.1.7.1 Invloed van de arbeidsfactor op het koppel
- Als de faseverschuiving 0° bedraagt dan leveren de geleiders krachten op die allemaal een positief koppel opleveren in de draaizin van de statorflux. Dit levert een maximaal koppel op, terwijl eveneens de arbeidsfactor van de rotorketen 1 is. - Is daarentegen de faseverschuiving 90°, dan leveren de rotorgeleiders krachten op zodanig dat de positief werkende koppels volledig worden opgeheven door de negatief werkende koppels. Het resulterend koppel is bijgevolg nul, alsook de arbeidsfactor van de rotorketen. - Bij een faseverschuiving van 45°, zijn er minder tegenwerkende momenten en meer die meewerkend zijn, zodat het draaikoppel iets meer dan 70% bedraagt van het maximum koppel dat normaal bij een faseverschuiving van 0° wordt gevormd. Dit getal wordt eveneens gevonden door de arbeidsfactor van de rotorketen te berekenen, namelijk cos 45° = 0,707. Een toenemende arbeidsfactor in de rotor van de asynchrone motor, dus een afnemende faseverschuiving jr, heeft een positieve invloed op de grootte van het koppel door de rotor geproduceerd.
6.1.1.7.2 Invloed van de rotorstroom op het koppel
De rotorstromen bepalen eveneens de grootte van de lorentzkrachten. Zelf is de rotorstroom Ir afhankelijk van de inductiespanning Er en de impedantie Zr van de rotor. Een afnemende rotorstroom is dus nadelig voor de productie van het koppel van de asynchrone motor.
6.1.1.7.3 Koppel bij stilstand
Bij een slipwaarde s=1 (stilstand) is de rotorfrequentie fr 50 Hz (en dus maximaal). Daardoor
is de rotorinductantie XLr maximaal en de faseverschuiving jr relatief groot. De rotorketen
bezit een lage arbeidsfactor. Er wordt een zwak aanzetkoppel ontwikkeld, ondanks het feit
dat bij stilstand grote rotorstromen vloeien, vele malen groter dan normaal.
6.1.1.7.4 Koppel tijdens de aanloop
Enerzijds zal naarmate de rotor aanloopt, de faseverschuiving jr afnemen, zodat de arbeidsfactor van de rotorketen zal toenemen en waardoor het koppel bij de aanloop zal vergroten. Anderzijds zal bij toenemende rotorsnelheid de inductiespanning Er in de rotorketen afnemen, waardoor de rotorstromen Ir eveneens zullen dalen. Door de dalende rotorstroom zal het koppel bij de aanloop eveneens afnemen. Beide verschijnselen – toenemende arbeidsfactor en afnemende rotorstroom – hebben duidelijk op het aanloopkoppel een tegengestelde invloed. Zo zal bij de aanloop vanuit stilstand de toenemende arbeidsfactor meer invloed uitoefenen dan de dalende rotorstroom, zodat resulterend het koppel zal toenemen. Bij een bepaalde snelheid zal het kippunt bereikt worden, waar beide invloeden zich even sterk laten voelen. Het koppel in dit kippunt is maximaal. Voor snelheden voorbij het kippunt is de invloed van de toenemende arbeidsfactor van minder invloed dan de dalende rotorstroom, zodat het aanloopkoppel zal afnemen. Tenslotte zal bij synchrone snelheid het koppel nul geworden zijn omdat er nu geen inductiestromen meer voorkomen in de rotorketen.

6-TSO-EM-a Elektriciteit 63
6.1.2 Frequentieregelaar
Wij hebben voor een frequentieregelaar gekozen voor de transportband zodat we
onbeperkt aantal mogelijkheden hebben om de snelheid, aanlooptijd, uitlooptijd te
regelen. We konden ook voor een tandwielreductiekast kiezen maar dan hadden we
deze mogelijkheden niet en een frequentieregelaar is ook interessant om te kennen in
praktijk voor in de industrie.
Figuur 48: Frequentieregelaar
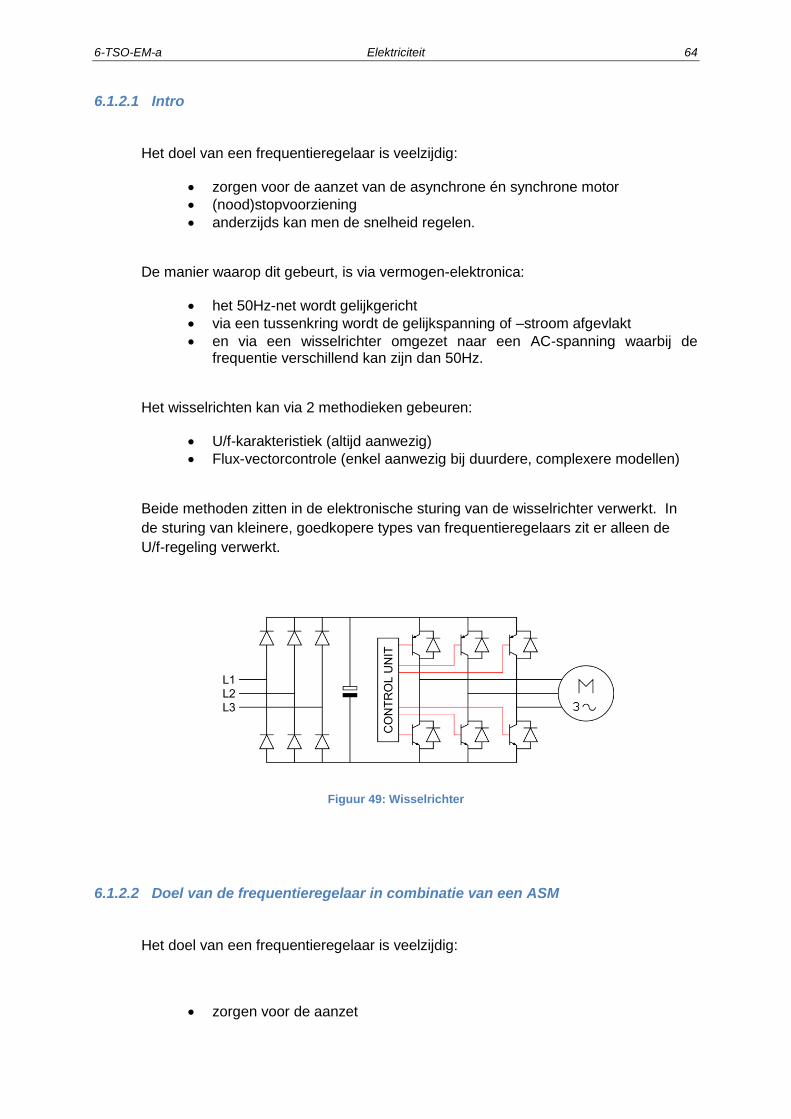
6-TSO-EM-a Elektriciteit 64
6.1.2.1 Intro
Het doel van een frequentieregelaar is veelzijdig:
zorgen voor de aanzet van de asynchrone én synchrone motor
(nood)stopvoorziening
anderzijds kan men de snelheid regelen.
De manier waarop dit gebeurt, is via vermogen-elektronica:
het 50Hz-net wordt gelijkgericht
via een tussenkring wordt de gelijkspanning of –stroom afgevlakt
en via een wisselrichter omgezet naar een AC-spanning waarbij de frequentie verschillend kan zijn dan 50Hz.
Het wisselrichten kan via 2 methodieken gebeuren:
U/f-karakteristiek (altijd aanwezig)
Flux-vectorcontrole (enkel aanwezig bij duurdere, complexere modellen)
Beide methoden zitten in de elektronische sturing van de wisselrichter verwerkt. In
de sturing van kleinere, goedkopere types van frequentieregelaars zit er alleen de
U/f-regeling verwerkt.
Figuur 49: Wisselrichter
6.1.2.2 Doel van de frequentieregelaar in combinatie van een ASM
Het doel van een frequentieregelaar is veelzijdig:
zorgen voor de aanzet
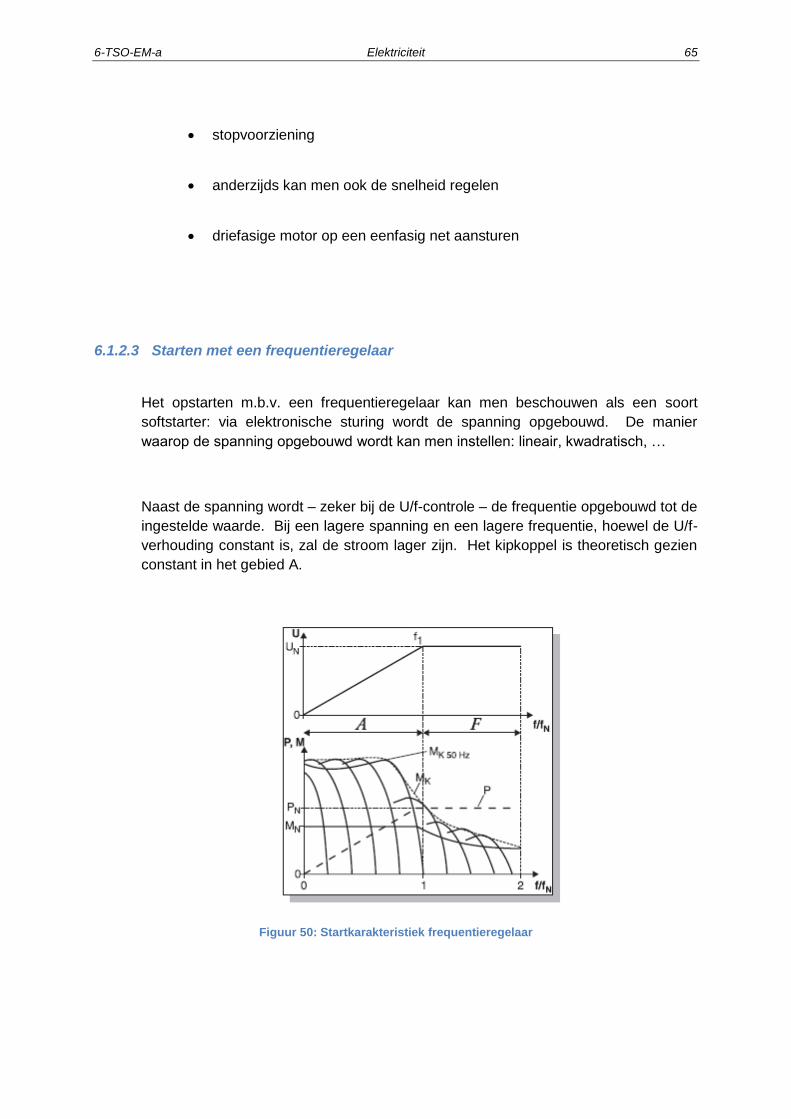
6-TSO-EM-a Elektriciteit 65
stopvoorziening
anderzijds kan men ook de snelheid regelen
driefasige motor op een eenfasig net aansturen
6.1.2.3 Starten met een frequentieregelaar
Het opstarten m.b.v. een frequentieregelaar kan men beschouwen als een soort
softstarter: via elektronische sturing wordt de spanning opgebouwd. De manier
waarop de spanning opgebouwd wordt kan men instellen: lineair, kwadratisch, …
Naast de spanning wordt – zeker bij de U/f-controle – de frequentie opgebouwd tot de
ingestelde waarde. Bij een lagere spanning en een lagere frequentie, hoewel de U/f-
verhouding constant is, zal de stroom lager zijn. Het kipkoppel is theoretisch gezien
constant in het gebied A.
Figuur 50: Startkarakteristiek frequentieregelaar
6-TSO-EM-a Elektriciteit 66
6.1.2.4 Remmen met een frequentieregelaar
Het stoppen met behulp van een frequentieregelaar is niet eenduidig te situeren.
Men kan bij verschillende types verschillende manieren vinden om de motor af te
remmen. Hier wordt zeer kort een aantal voorbeelden aangehaald:
Manieren van stoppen (gebruiken) o fast stop o normale stop
Stopmethodieken (technisch) o Normaal uitlopen door spanning weg te nemen o Spanning (en frequentie) reduceren o DC-remmen
DC-injectie
Voorzieningen: (in de vermogenkring) o Vaak is er een remweerstand nodig! Deze remweerstand zorgt
voor de opname van gelijkspanning en –stroom bij het generatorisch werken van de aangesloten motor. Nadeel hiervan is het energieverlies en de warmteontwikkeling.
o Sommige frequentieregelaars kunnen hun overtollige energie in de DC-kring terug naar het net sturen. De gelijkrichterbrug is dan ook een wisselrichterbrug (of ze zijn allebei aanwezig).
6.1.2.5 Snelheid regelen met een frequentieregelaar
De snelheid van een asynchrone motor is gedeeltelijk afhankelijk van de belasting –
dit bij een bepaalde, aan de motor aangelegde frequentie. Die aangelegde frequentie
is dus een belangrijke parameter in het regelen van de snelheid van een motor.
Een aantal voordelen kunnen van belang zijn bij het regelen van de frequentie bij een
proces: (II)
6-TSO-EM-a Elektriciteit 67
Controleren van de versnelling en de vertraging van de motor.
Verschillende snelheden/toerentallen voor verschillende processen
Aanpassen van het proces aan veranderende procesvariabelen o O.a. Aanpassing van de productiesnelheid
Lage toerentallen voor installatie- en afregeldoeleinden
Toepassen van nauwkeurige positionering
Regelen van koppel en trekkracht
6.1.2.6 Koppelen van een driefasige motor op een 1fasig net.
Een aantal frequentieregelaars (bijvoorbeeld de VAT20 en de ATV16) moet men
éénfasig aan het voedingsnet aansluiten.
Deze frequentieregelaars staan wel toe om driefasige motoren aan te zetten, te
stoppen en te veranderen van snelheid. Deze twee laatste mogelijkheden duiden het
voordeel van de frequentieregelaar t.o.v. de steinmetzschakeling.
6.1.2.7 Opmerking: Aanzetten van een synchrone machine
Een synchrone machine zet niet uit zichzelf aan. Er bestaan een aantal
opstartmethoden, waaronder het aanzetten m.b.v. een frequentieregelaar. Door de
snelheid van het draaiveld te reduceren is de kans groter dat het magnetisch veld van
de rotor zich koppelt aan het draaiveld in de stator.
6.1.2.8 Interne werking van de frequentieregelaar
De manier waarop de frequentie verandert, hangt af van regelaar zelf. De
frequentieregelaar kan scalair sturen of vectorieel. In het eerste geval variëren U en f
in functie van elkaar; in het tweede geval worden de stromen gestuurd i.f.v. een
aantal motor parameters en stroommetingen. Deze tweede sturing is véél complexer
dan de eerste.
6.1.2.9 Scalaire sturing
De frequentieregelaar van het scalaire type is een indirecte omvormer. Er is met
andere woorden een hulpsignaal nodig om de schakelende halfgeleiders te doen
geleiden. Dit hulpsignaal wordt door een IC-sturing geleverd.
Er zijn 2 types terug te vinden bij het scalaire type:
6-TSO-EM-a Elektriciteit 68
VSI-type (voltage sourced invertor)
CSI-type (current sourced invertor)
6.1.2.9.1 Indirecte omvormer VSI-type
Het geproduceerde signaal is een PBM-golf of PWM-wave.
PBM: puls breedte modulatie
PWM: puls width modulation.
Bij de creatie van een PWM-signaal wordt een zaagtandgolf vergeleken met een
sinusgolf.
6.1.2.10 Elektrische voeding, Motoraansluiting en Remweerstand
6.1.2.10.1 Elektrische voeding
De elektrische voeding L1, L2, L3 wordt aan de voorziene klemmen aangesloten. Bij
éénfasig aan te sluiten regelaars is dit enkel L1 en N. Merk op in het aangehaalde
geval dat - hoewel men de regelaar éénfasig aansluit – de regelaar toch een
driefasige motor kan aandrijven. Het vermogen is in deze gevallen kleiner.
6.1.2.10.2 Motoraansluiting
De motor sluit men aan de voorziene klemmen U,V,W (T1, T2, T3) aan. De manier
waarop men de motor schakelt is afhankelijk van de maximale uitgang van de
frequentieregelaar.
Stel dat de motorkenplaat het volgende vermeldt: 230/400V.
Als de maximumspanning van de frequentieregelaar 380V is, dan moet men de motor in ster plaatsen.
Is de maximumspanning echter 230V dan kan de motor in driehoek geschakeld worden.
Opmerking:
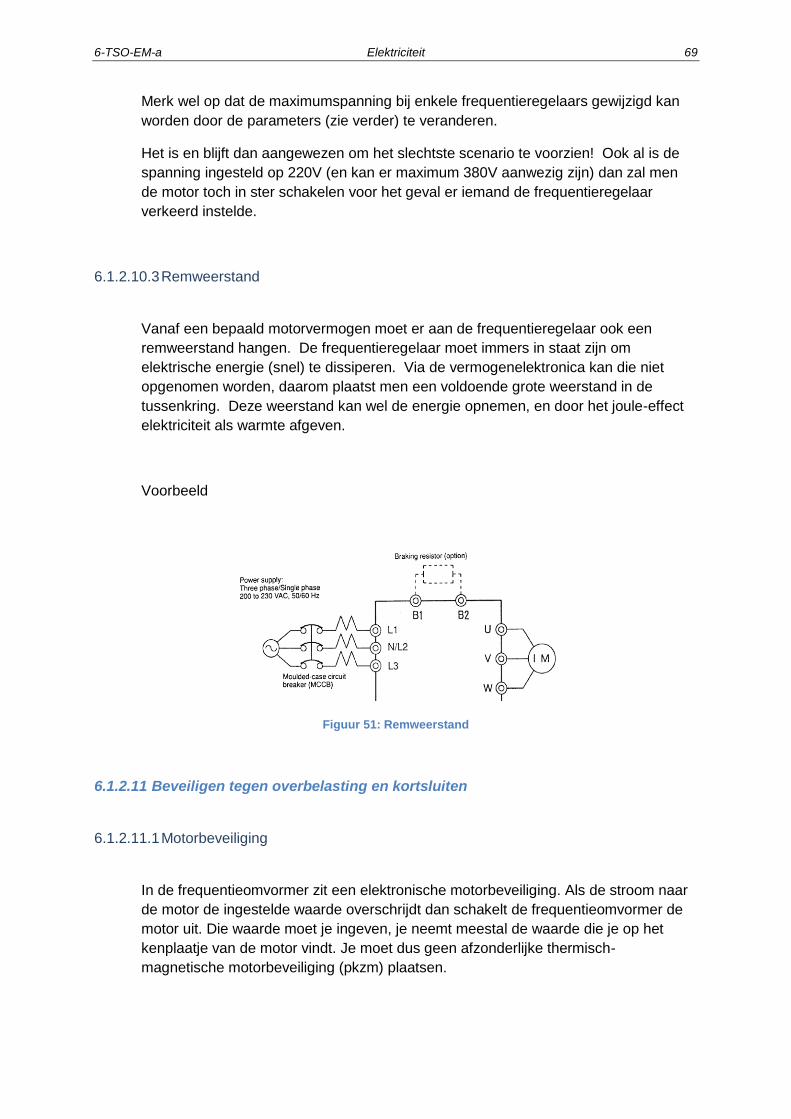
6-TSO-EM-a Elektriciteit 69
Merk wel op dat de maximumspanning bij enkele frequentieregelaars gewijzigd kan
worden door de parameters (zie verder) te veranderen.
Het is en blijft dan aangewezen om het slechtste scenario te voorzien! Ook al is de
spanning ingesteld op 220V (en kan er maximum 380V aanwezig zijn) dan zal men
de motor toch in ster schakelen voor het geval er iemand de frequentieregelaar
verkeerd instelde.
6.1.2.10.3 Remweerstand
Vanaf een bepaald motorvermogen moet er aan de frequentieregelaar ook een
remweerstand hangen. De frequentieregelaar moet immers in staat zijn om
elektrische energie (snel) te dissiperen. Via de vermogenelektronica kan die niet
opgenomen worden, daarom plaatst men een voldoende grote weerstand in de
tussenkring. Deze weerstand kan wel de energie opnemen, en door het joule-effect
elektriciteit als warmte afgeven.
Voorbeeld
Figuur 51: Remweerstand
6.1.2.11 Beveiligen tegen overbelasting en kortsluiten
6.1.2.11.1 Motorbeveiliging
In de frequentieomvormer zit een elektronische motorbeveiliging. Als de stroom naar
de motor de ingestelde waarde overschrijdt dan schakelt de frequentieomvormer de
motor uit. Die waarde moet je ingeven, je neemt meestal de waarde die je op het
kenplaatje van de motor vindt. Je moet dus geen afzonderlijke thermisch-
magnetische motorbeveiliging (pkzm) plaatsen.
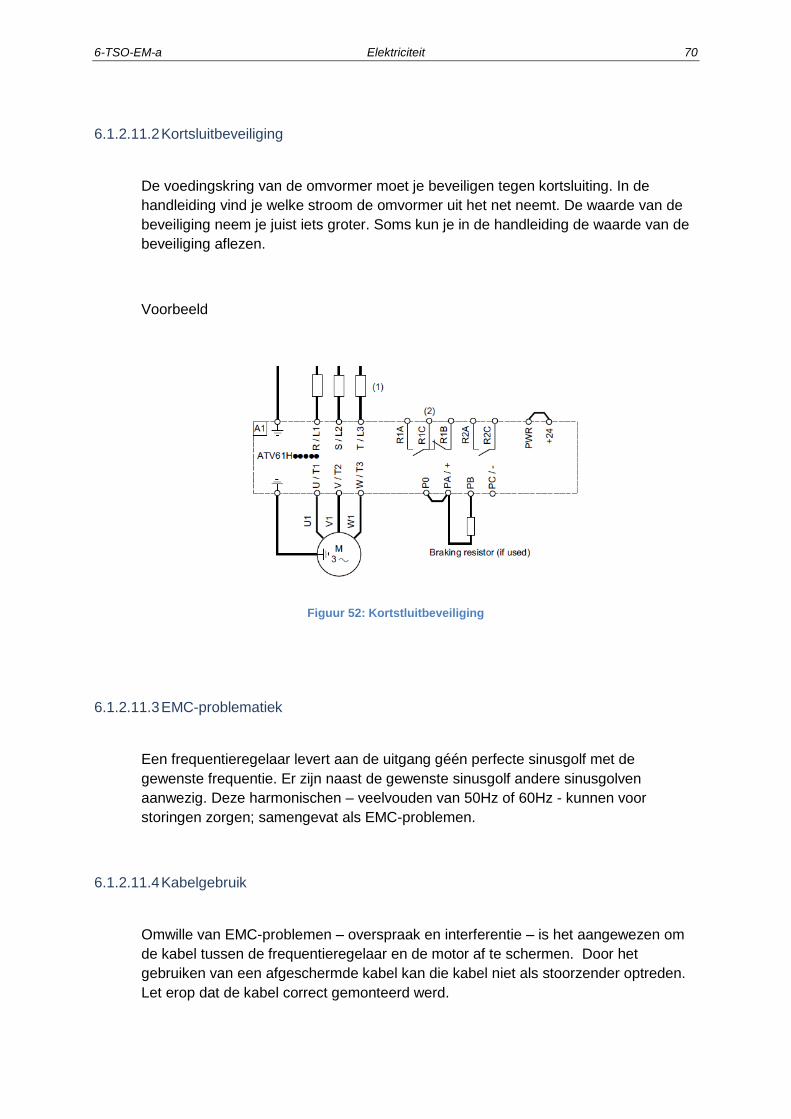
6-TSO-EM-a Elektriciteit 70
6.1.2.11.2 Kortsluitbeveiliging
De voedingskring van de omvormer moet je beveiligen tegen kortsluiting. In de
handleiding vind je welke stroom de omvormer uit het net neemt. De waarde van de
beveiliging neem je juist iets groter. Soms kun je in de handleiding de waarde van de
beveiliging aflezen.
Voorbeeld
Figuur 52: Kortstluitbeveiliging
6.1.2.11.3 EMC-problematiek
Een frequentieregelaar levert aan de uitgang géén perfecte sinusgolf met de
gewenste frequentie. Er zijn naast de gewenste sinusgolf andere sinusgolven
aanwezig. Deze harmonischen – veelvouden van 50Hz of 60Hz - kunnen voor
storingen zorgen; samengevat als EMC-problemen.
6.1.2.11.4 Kabelgebruik
Omwille van EMC-problemen – overspraak en interferentie – is het aangewezen om
de kabel tussen de frequentieregelaar en de motor af te schermen. Door het
gebruiken van een afgeschermde kabel kan die kabel niet als stoorzender optreden.
Let erop dat de kabel correct gemonteerd werd.
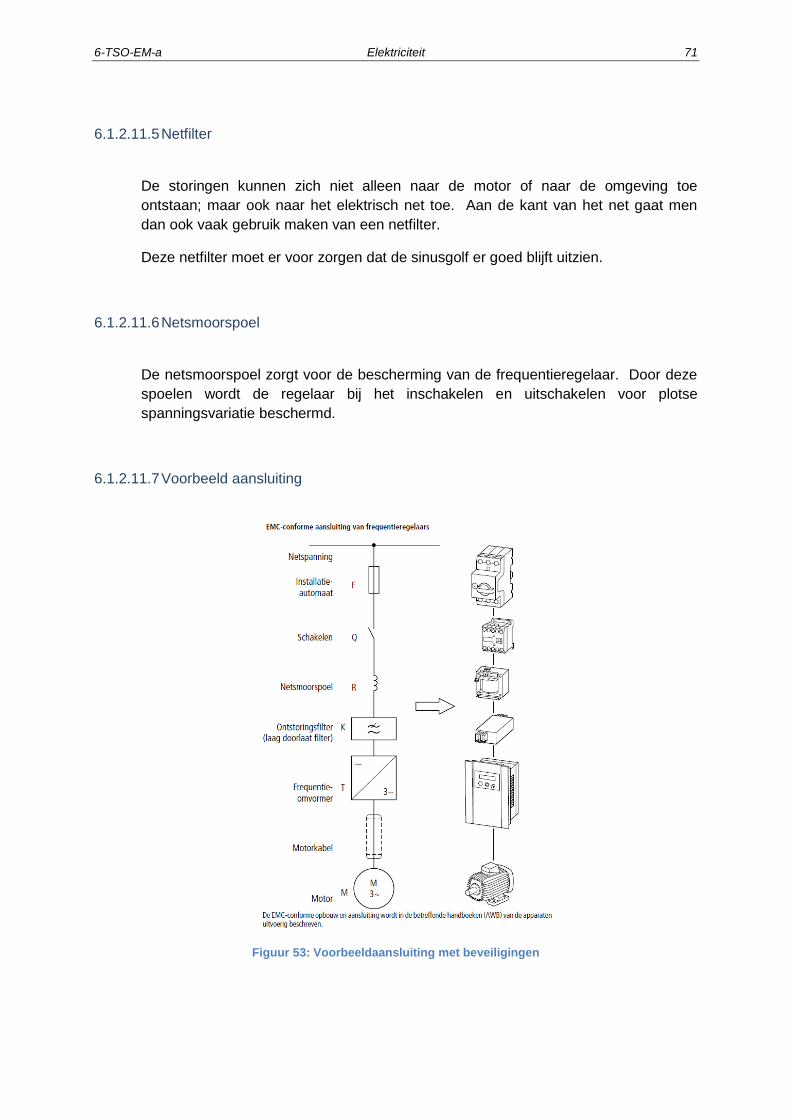
6-TSO-EM-a Elektriciteit 71
6.1.2.11.5 Netfilter
De storingen kunnen zich niet alleen naar de motor of naar de omgeving toe
ontstaan; maar ook naar het elektrisch net toe. Aan de kant van het net gaat men
dan ook vaak gebruik maken van een netfilter.
Deze netfilter moet er voor zorgen dat de sinusgolf er goed blijft uitzien.
6.1.2.11.6 Netsmoorspoel
De netsmoorspoel zorgt voor de bescherming van de frequentieregelaar. Door deze
spoelen wordt de regelaar bij het inschakelen en uitschakelen voor plotse
spanningsvariatie beschermd.
6.1.2.11.7 Voorbeeld aansluiting
Figuur 53: Voorbeeldaansluiting met beveiligingen
6-TSO-EM-a Elektriciteit 72
6.1.2.12 Inschakelen
De frequentieregelaar wordt ingeschakeld door één of ander systeem:
- hoofdschakelaar
- contactor Hoofdcontactor Hoofdcontactors die tevens de veiligheid waarborgen.
De motor die met de frequentieregelaar verbonden is, kan dan:
- opstarten na bedienen van Operator panel Geïnstalleerde drukknoppen
- direct starten na opstart frequentieregelaar (zie instellen parameters!)
6.1.2.13 Operator panel
De frequentieregelaar kan men meestal – niet altijd – via een display en een aantal
drukknoppen bedienen.
De parameters of functies krijgen dan een waarde toegekend. De soorten
parameters worden verder in deze bundel besproken.
Figuur 54: Bedieningspaneel frequentieregelaar
Opmerking:
Het is handig om de datasheets bij de hand te hebben van de frequentieregelaar; niet
alle regelaars hebben een tekstdisplay. Bij deze regelaars zijn de parameters enkel
cijfers; zoals de VAT20. Zonder datasheet is het dan quasi onmogelijk om functies in
te stellen.
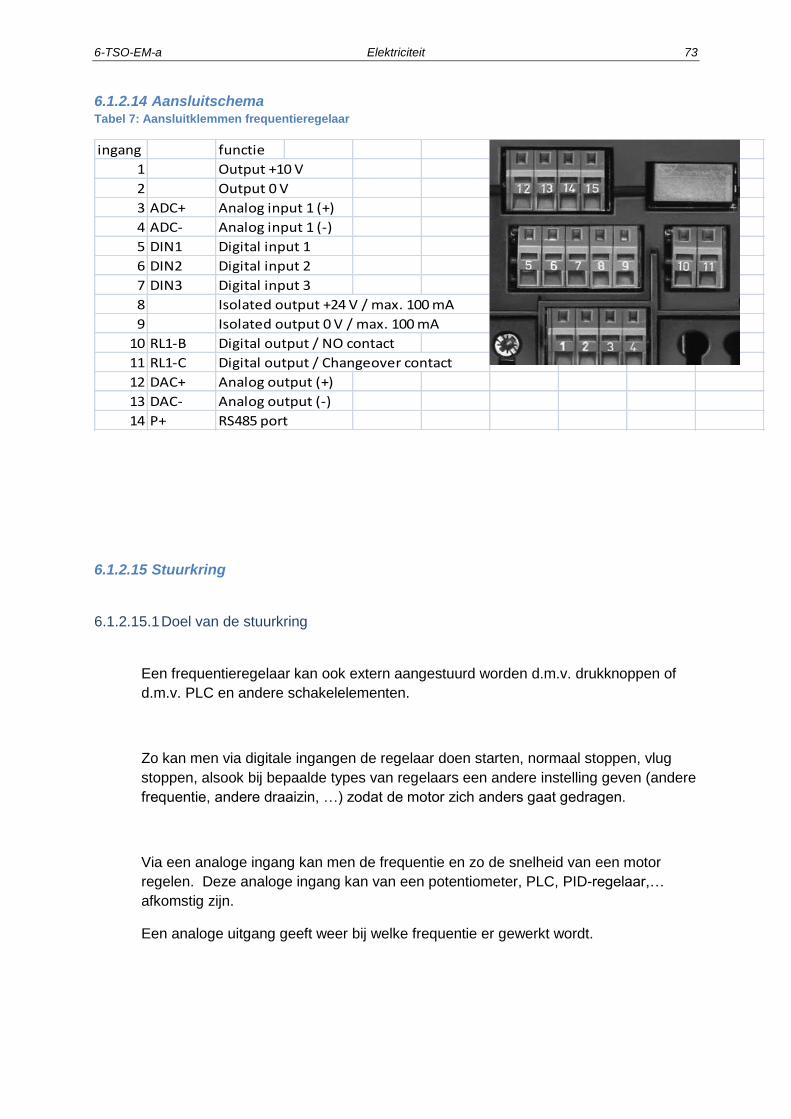
6-TSO-EM-a Elektriciteit 73
6.1.2.14 Aansluitschema Tabel 7: Aansluitklemmen frequentieregelaar
ingang functie
1 Output +10 V
2 Output 0 V
3 ADC+ Analog input 1 (+)
4 ADC- Analog input 1 (-)
5 DIN1 Digital input 1
6 DIN2 Digital input 2
7 DIN3 Digital input 3
8 Isolated output +24 V / max. 100 mA
9 Isolated output 0 V / max. 100 mA
10 RL1-B Digital output / NO contact
11 RL1-C Digital output / Changeover contact
12 DAC+ Analog output (+)
13 DAC- Analog output (-)
14 P+ RS485 port
6.1.2.15 Stuurkring
6.1.2.15.1 Doel van de stuurkring
Een frequentieregelaar kan ook extern aangestuurd worden d.m.v. drukknoppen of
d.m.v. PLC en andere schakelelementen.
Zo kan men via digitale ingangen de regelaar doen starten, normaal stoppen, vlug
stoppen, alsook bij bepaalde types van regelaars een andere instelling geven (andere
frequentie, andere draaizin, …) zodat de motor zich anders gaat gedragen.
Via een analoge ingang kan men de frequentie en zo de snelheid van een motor
regelen. Deze analoge ingang kan van een potentiometer, PLC, PID-regelaar,…
afkomstig zijn.
Een analoge uitgang geeft weer bij welke frequentie er gewerkt wordt.
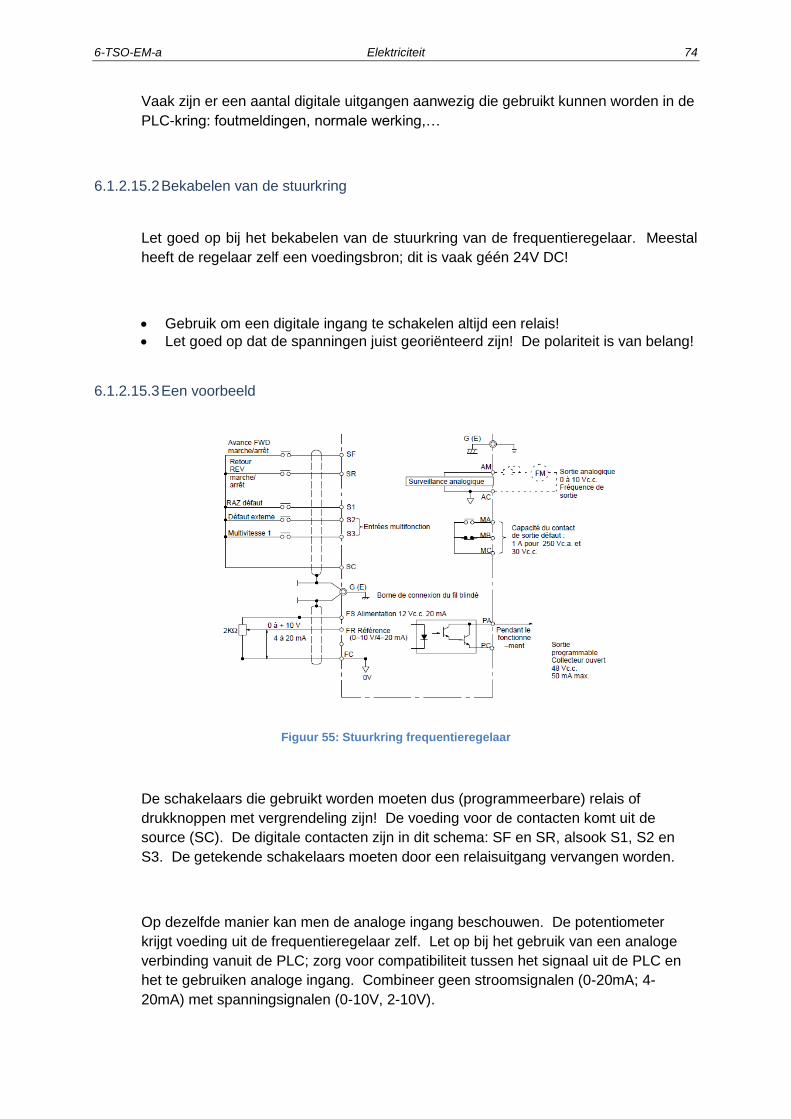
6-TSO-EM-a Elektriciteit 74
Vaak zijn er een aantal digitale uitgangen aanwezig die gebruikt kunnen worden in de
PLC-kring: foutmeldingen, normale werking,…
6.1.2.15.2 Bekabelen van de stuurkring
Let goed op bij het bekabelen van de stuurkring van de frequentieregelaar. Meestal
heeft de regelaar zelf een voedingsbron; dit is vaak géén 24V DC!
Gebruik om een digitale ingang te schakelen altijd een relais!
Let goed op dat de spanningen juist georiënteerd zijn! De polariteit is van belang!
6.1.2.15.3 Een voorbeeld
Figuur 55: Stuurkring frequentieregelaar
De schakelaars die gebruikt worden moeten dus (programmeerbare) relais of
drukknoppen met vergrendeling zijn! De voeding voor de contacten komt uit de
source (SC). De digitale contacten zijn in dit schema: SF en SR, alsook S1, S2 en
S3. De getekende schakelaars moeten door een relaisuitgang vervangen worden.
Op dezelfde manier kan men de analoge ingang beschouwen. De potentiometer
krijgt voeding uit de frequentieregelaar zelf. Let op bij het gebruik van een analoge
verbinding vanuit de PLC; zorg voor compatibiliteit tussen het signaal uit de PLC en
het te gebruiken analoge ingang. Combineer geen stroomsignalen (0-20mA; 4-
20mA) met spanningsignalen (0-10V, 2-10V).
6-TSO-EM-a Elektriciteit 75
6.1.2.16 Communicatie
Een andere optie die men soms bij frequentieregelaars terugvindt, is de mogelijkheid om
het toestel in te stellen. Als deze optie aanwezig is, dan hangt de manier waarop de
instellingen ingeladen worden af van toestel tot toestel.
6.1.2.16.1 Serieel
De frequentieregelaar wordt rechtstreeks aan een PC gehangen. Dit gebeurt via een
seriële of via een USB-kabel.
Een programma draait op de PC. In dit programma stelt men de diverse parameters
en functies in. Als men klaar is, zendt men de gegevens naar de frequentieregelaar.
De verandering van de data is m.a.w. statisch. Tijdens het proces kan er niet veel
veranderd worden; eenmaal de FR ingesteld is, kan men niets meer wijzigen.
6.1.2.16.2 Buscommunicatie
Een iets duurdere uitvoering van frequentieregelaar is de mogelijkheid om deel te
nemen aan een bussysteem: ethernet, TCP/IP-based protocol, Profibus, ModBus,
Asi,…
Een aantal Pc’s, Plc’s en andere busdeelnemers zoals een frequentieregelaar
vormen samen een industrieel netwerk. Hierbij is er continue uitwisseling van data
mogelijk tussen de verschillende busdeelnemers.
In een Plc-programma kan men verwijzingen maken naar de parameters van de FR;
afhankelijk van de situatie in een bepaald proces.
6.1.2.16.3 Voordelen van bussystemen:
- Het eerste voordeel is dat men alle parameterschering via het gekozen netwerk gedaan wordt. Hierdoor moet men niet telkens met de laptop naar de desbetreffende machine lopen.
- Minder bekabeling nodig indien echte communicatie tussen PLC en FR gewenst is.
6-TSO-EM-a Elektriciteit 76
6.1.2.16.4 Nadelen van bussystemen:
- Software nodig
- Gesofisticeerde Plc’s nodig: ze moeten immers een busadapter hebben.
- De kostprijs is hoger
6.1.2.16.5 Uit de praktijk: Spaflessen verpakking
Men kan een aantal opeenvolgende transportbanden m.b.v. een busgekoppelde PLC
en busgekoppelde frequentieregelaars zo op elkaar afstemmen dat de snelheid
optimaal is. Bijvoorbeeld als er één stilvalt dan vallen de transportbanden er voor stil,
maar de transportbanden er na niet.
6.1.2.17 Parameters en gebruikshandleiding frequentieomvormer
Dit bestand is in bijlage beschikbaar.
6.2 Beveiliging
6.2.1 Noodstopinstallatie
Elke machine moet voorzien zijn van één of meer noodstopvoorzieningen waarmee een
onmiddellijk dreigende of gevaarlijke situatie kan worden vermeden.
Deze inrichting moet:
- duidelijke herkenbare, goed zichtbare en snel bereikbare bedieningsorganen hebben.
- stopzetting van een gevaarlijk proces binnen de kortst mogelijke tijd bewerkstelligen zonder
extra risico's te scheppen.

6-TSO-EM-a Elektriciteit 77
6.2.2 Installatiebeveiliging
6.2.2.1 Differentieelschakelaar
6.2.2.1.1 Algemeen
Om onze installatie te beveiligen maken we gebruik
van een differentieelschakelaar (ook gekend als
verliesstroom schakelaar of aardlekschakelaar). De
differentieelschakelaar beschermt jou en anderen tegen
elektrische schokken bij rechtstreekse of
onrechtstreekse aanraking van onder spanningstaande
delen.
Een verliesstroom schakelaar is een automatisch
werkende schakelaar die een elektrische installatie
spanningsloos maakt zodra een verliesstroom van een
bepaalde grootte optreedt.
6.2.2.1.2 Plaatsing
Een differentieelschakelaar wordt geplaatst bij het begin van de installatie of kring.
6.2.2.2 Automaat
6.2.2.2.1 Algemeen
1. Figuur 57: Automaat
Een zekering wordt ook wel overstroombeveiliging of installatieautomaat genoemd. Het is een automatische stroomkringonderbreker die ervoor zorgt dat de stroom uitvalt bij overbelasting of kortsluiting. Dit gebeurt thermisch bij overbelasting en elektromagnetisch tegen kortsluiting.
Figuur 56: Differentieelschakelaar

6-TSO-EM-a Elektriciteit 78
6.2.2.3 Thermische beveiliging of vermogenschakelaar
Voor de beveiliging van een motor zijn er twee technologieën beschikbaar: beveiliging met behulp van zekeringen (automaten) of met behulp van een vermogenschakelaar. Zekeringen bieden niet zoveel voordelen met betrekking tot de beveiliging van de motor, vandaar dat we ons gaan toeleggen op de vermogenschakelaar.
Een vermogenschakelaar beschermt de motor door het zeer snel uitschakelen van de stroom die bij een kortsluiting de motor dreigt te belasten. Het begrip “uitschakelvermogen” bepaalt de maximale stroom waarbij de vermogenschakelaar verondersteld wordt te schakelen. Deze waarde is functie van de nominale spanning. Wanneer een vermogenschakelaar schakelt, openen zich gelijktijdig de 3 fasen (omnipolair schakelen). De stroomdrempelwaarde bij korstsluiting is over het algemeen
niet instelbaar: in de praktijk schommelt deze waarde tussen 12 en 14 Inominaal.
6.3 Bediening
6.3.1 Hoofdschakelaar
Figuur 59: Hoofdschakelaar blikjespers
Een hoofdschakelaar word gebruikt om de stroomtoevoer te onderbreken waardoor u veilig
kunt werken.
Daarnaast kan er in geval van storing, met 1 schakelaar (=hoofdschakelaar) de gehele stroomtoevoer worden onderbroken.
6.3.2 Start/stop
Figuur 58: Thermische beveiliging

6-TSO-EM-a Elektriciteit 79
Figuur 60: Drukknop voor start transportband
Bij de start/stop maken we gebruik van een drukknop om de transportband te laten draaien.
De transportband stopt pas als je de drukknop voor de draaitafel indrukt zodat men door
aparte bediening geen opstopping kunt krijgen in de draaitafel door een te snelle aanvoer
van de blikjes.
6.3.3 Noodstop
Figuur 61: Noodstop blikjespers
De noodstopknop wordt gebruikt om u machine zeer snel uit te schakelen in gevaarlijke
situatie. Machines en installaties moeten volgens de machinerichtlijn over een
noodstopvoorziening beschikken om in noodsituaties gevaar te kunnen voorkomen of
reduceren. In tegenstelling tot de normale uitschakelprocedure, waarbij bepaalde processen
vaak één voor één worden afgebroken, is de noodstopschakelaar erop gericht om koste wat
het kost alles direct te laten stoppen.
6.4 PLC
6.4.1 Algemeen
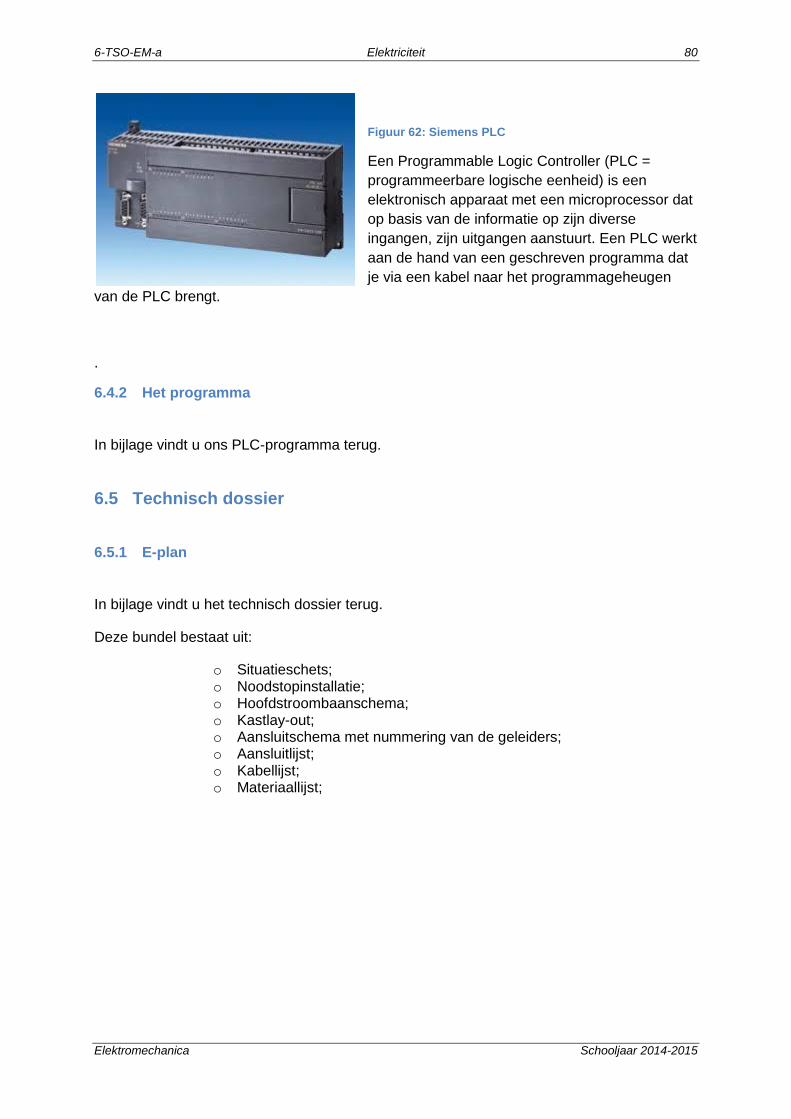
6-TSO-EM-a Elektriciteit 80
Elektromechanica Schooljaar 2014-2015
Figuur 62: Siemens PLC
Een Programmable Logic Controller (PLC =
programmeerbare logische eenheid) is een
elektronisch apparaat met een microprocessor dat
op basis van de informatie op zijn diverse
ingangen, zijn uitgangen aanstuurt. Een PLC werkt
aan de hand van een geschreven programma dat
je via een kabel naar het programmageheugen
van de PLC brengt.
.
6.4.2 Het programma
In bijlage vindt u ons PLC-programma terug.
6.5 Technisch dossier
6.5.1 E-plan
In bijlage vindt u het technisch dossier terug.
Deze bundel bestaat uit:
o Situatieschets; o Noodstopinstallatie; o Hoofdstroombaanschema; o Kastlay-out; o Aansluitschema met nummering van de geleiders; o Aansluitlijst; o Kabellijst; o Materiaallijst;
Elektromechanica Schooljaar 2014-2015
7 Elektronica

6-TSO-EM-a Elektronica 82
Elektromechanica Schooljaar 2014-2015
7.1 Sensoren
Als we meer tijd hadden, zouden we gewerkt hebben met sensoren die blikjes en PET-
flessen scheiden. Nu hebben we gezorgd dat alles manueel werkt, als uitbreiding zouden we
alles automatiseren met deze sensoren maar door het tijdsgebrek is dit niet mogelijk
geweest dit jaar.
7.1.1 capacitieve nabijheidschakelaar
Figuur 63: Capacitieve sensor
Een capacitieve nabijheidschakelaar is
een sensor, die bij het naderen van een
geleidende of niet geleidende tussenstof
(ook vloeistoffen), bewegingsloos, zonder
direct contact met het te detecteren
lichaam reageert of schakelt.
7.1.1.1 Werking
Het hart van deze sensor is een hoogfrequent-oscillator. In "niet bekrachtigde" toestand bouwt zich voor de basis elektrode een capacitief veld op. Dit capacitief veld of diëlecticum is de actieve zone, wanneer dit capacitief veld of diëlectricum verandert, zal de sensor dit detecteren.
Bij beïnvloeding van het capacitief veld door een isolator, is de bereikbare schakelafstand gering (tot ongeveer 40 mm), omdat het onderscheid tussen de diëlektriciteitsconstante van lucht (ca.1) tot de diëlektriciteitsconstante van het te detecteren materiaal gering is.
Bij beïnvloeding van het capacitief veld door een geleider, verhoogt de bereikbare schakelafstand. tot ca. 60-80 mm, omdat het onderscheid tussen de diëlektriciteitsconstante van lucht (ca.1) tot de diëlektriciteitsconstante van het metaal groot is.
Daarom hebben capacitieve nabijheidschakelaars in de regel een instelpotentiometer. Deze sensoren moeten altijd afgeregeld worden. Indien de sensor ingesteld is voor grote gevoeligheid dan neemt de invloed van stoorfactoren zoals luchtvochtigheid en stof toe.
7.1.1.2 Toepassing
Een capacitieve nabijheidsschakelaar detecteert metalen, maar ook niet metalen en vloeibare, korrelige of gepulveriseerde producten zoals b.v. kunststof, hout, steen, olie, water of cement. In de GIP gebruiken we deze om PET-flessen te detecteren.
6-TSO-EM-a Elektronica 83
Elektromechanica Schooljaar 2014-2015
7.1.2 Inductieve nabijheidssensor
Figuur 64: Inductieve sensor
Een inductieve nabijheidsensor is een sensor die werkt volgens het principe van verandering van inductie. Dit type sensor wordt gebruikt als nabijheidsschakelaar. Wanneer deze sensor dicht bij een metalen object komt, verandert de impedantie in de spoel. De verandering van deze impedantie hangt af van de afstand tussen het metalen object en de sensor. Deze sensor heeft als voordeel dat hij niet beïnvloed wordt door niet-geleidende materialen zoals
kunststof of hout.
7.1.2.1 Twee werkingsprincipes
Het eerste werkingsprincipe van inductieve nabijheidsensor detecteert de
verandering van permeabiliteit. Normaal staat er lucht voor de sensor. Wanneer er
een metaal voor komt, verandert de permeabiliteit. Een wisselend continu magnetisch
veld wordt opgewekt met een oscillator door de spoel van de sensor. De kern van
ferriet begeleidt de magnetische veldlijnen naar buiten. Dit magnetisch circuit
probeert zich buiten de sensor te sluiten. Wanneer een metalen object dicht bij de
sensor komt, wordt het magnetische circuit verstoord of worden de veldlijnen op het
externe traject verstoord. De bundel van veldlijnen wordt vervormd. De nabije
metalen plaat zorgt ervoor dat de veldlijnen door de metalen plaat gaan en er meer
veldlijnen terugkeren naar de sensor. Hierdoor wordt de schijnweerstand Z van de
spoel lager. De verandering van de impedantie is niet lineair met de afstand tussen
de sensor en het metalen object.
Het tweede werkingsprincipe werkt met een pulserend veld. De wervelstroomsensor
werkt met behulp van wervelstromen. Een pulserend magnetisch veld wordt
opgewekt door de spoel van de sensor. De kern van ferriet begeleidt de magnetische
veldlijnen naar buiten. Dit magnetisch veld genereert in een passerend metaal een
wervelstroom. eventjes wervelstromen navloeien. Deze stromen wekken nu een
secundair magnetisch veld op in het metalen plaatje dat door de sensor kan
gedetecteerd worden.
7.1.2.2 Toepassingen
De sensor wordt gebruikt voor detectie van het wel of niet aanwezig zijn van een metalen object. Meestal in de vorm van een eindeloopschakelaar. Bijvoorbeeld voor het detecteren of een lift op de juiste etage staat. Bij ons in de GIP wordt het gebruikt
voor blikken te detecterenWanneer het pulserend magnetisch veld nul wordt dan blijven er nog
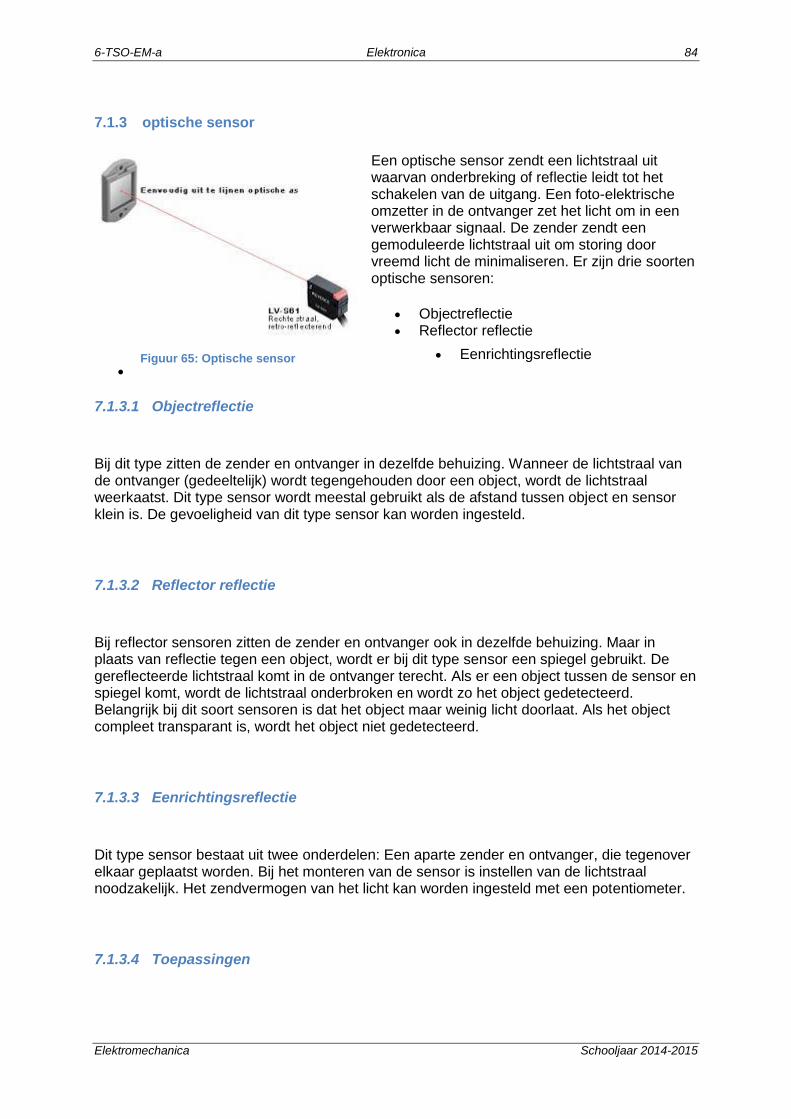
6-TSO-EM-a Elektronica 84
Elektromechanica Schooljaar 2014-2015
7.1.3 optische sensor
Een optische sensor zendt een lichtstraal uit waarvan onderbreking of reflectie leidt tot het schakelen van de uitgang. Een foto-elektrische omzetter in de ontvanger zet het licht om in een verwerkbaar signaal. De zender zendt een gemoduleerde lichtstraal uit om storing door vreemd licht de minimaliseren. Er zijn drie soorten optische sensoren:
Objectreflectie Reflector reflectie
Eenrichtingsreflectie
7.1.3.1 Objectreflectie
Bij dit type zitten de zender en ontvanger in dezelfde behuizing. Wanneer de lichtstraal van de ontvanger (gedeeltelijk) wordt tegengehouden door een object, wordt de lichtstraal weerkaatst. Dit type sensor wordt meestal gebruikt als de afstand tussen object en sensor klein is. De gevoeligheid van dit type sensor kan worden ingesteld.
7.1.3.2 Reflector reflectie
Bij reflector sensoren zitten de zender en ontvanger ook in dezelfde behuizing. Maar in plaats van reflectie tegen een object, wordt er bij dit type sensor een spiegel gebruikt. De gereflecteerde lichtstraal komt in de ontvanger terecht. Als er een object tussen de sensor en spiegel komt, wordt de lichtstraal onderbroken en wordt zo het object gedetecteerd. Belangrijk bij dit soort sensoren is dat het object maar weinig licht doorlaat. Als het object compleet transparant is, wordt het object niet gedetecteerd.
7.1.3.3 Eenrichtingsreflectie
Dit type sensor bestaat uit twee onderdelen: Een aparte zender en ontvanger, die tegenover elkaar geplaatst worden. Bij het monteren van de sensor is instellen van de lichtstraal noodzakelijk. Het zendvermogen van het licht kan worden ingesteld met een potentiometer.
7.1.3.4 Toepassingen
Figuur 65: Optische sensor
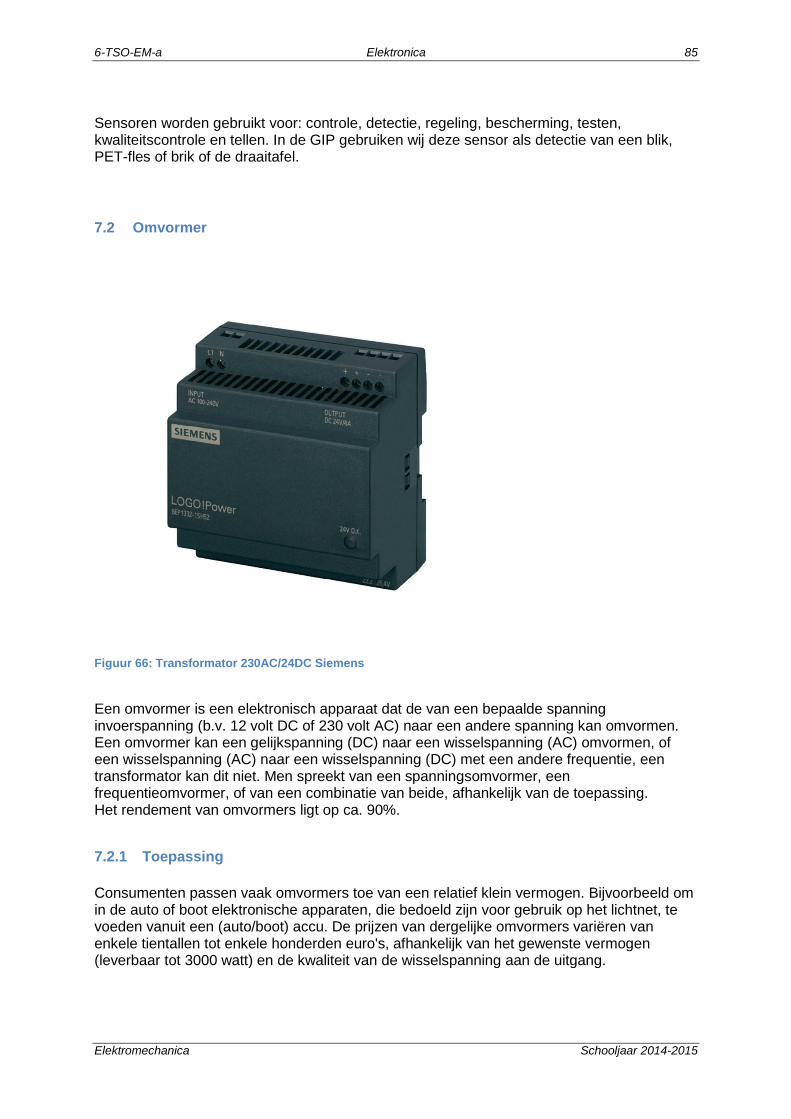
6-TSO-EM-a Elektronica 85
Elektromechanica Schooljaar 2014-2015
Sensoren worden gebruikt voor: controle, detectie, regeling, bescherming, testen, kwaliteitscontrole en tellen. In de GIP gebruiken wij deze sensor als detectie van een blik, PET-fles of brik of de draaitafel.
7.2 Omvormer
Figuur 66: Transformator 230AC/24DC Siemens
Een omvormer is een elektronisch apparaat dat de van een bepaalde spanning invoerspanning (b.v. 12 volt DC of 230 volt AC) naar een andere spanning kan omvormen. Een omvormer kan een gelijkspanning (DC) naar een wisselspanning (AC) omvormen, of een wisselspanning (AC) naar een wisselspanning (DC) met een andere frequentie, een transformator kan dit niet. Men spreekt van een spanningsomvormer, een frequentieomvormer, of van een combinatie van beide, afhankelijk van de toepassing. Het rendement van omvormers ligt op ca. 90%.
7.2.1 Toepassing
Consumenten passen vaak omvormers toe van een relatief klein vermogen. Bijvoorbeeld om in de auto of boot elektronische apparaten, die bedoeld zijn voor gebruik op het lichtnet, te voeden vanuit een (auto/boot) accu. De prijzen van dergelijke omvormers variëren van enkele tientallen tot enkele honderden euro's, afhankelijk van het gewenste vermogen (leverbaar tot 3000 watt) en de kwaliteit van de wisselspanning aan de uitgang.
6-TSO-EM-a Elektronica 86
Elektromechanica Schooljaar 2014-2015
7.2.2 De werking van een omvormer:
De meeste omvormers werken via het volgende principe: de gelijkspanning (DC) wordt met behulp van een wisselrichter, die uit halfgeleiders in een brugschakeling bestaat, omgezet in een wisselspanning (AC). Daarna wordt de wisselspanning (AC) getransformeerd naar de gewenste spanning. Indien de ingangsspanning een wisselspanning AC) is, dan wordt deze gelijkgericht met behulp van een diodebrug; is de gewenste uitgangsspanning een gelijkspanning (DC), dan wordt deze gelijkgericht en daarna afgevlakt met behulp van een laagdoorlaatfilter of een condensator. Apparaten die op deze manier de spanning omzetten worden omvormers (ook wel inverters) genoemd.

8 Integratie algemene vakken

8.1 Nederlands

6-TSO-EM-a Nederlands 89
Elektromechanica Schooljaar 2014-2015
8.1.1 Zakelijke brief aanvraag stageplaats
Tjorven Koek Zelzate 2014-11-02
Patronagestraat 32
9060 Zelzate
0478567099
Ontex International
Korte Moeie 53
9900 EEKLO
Stage aanvraag
Geachte heer
Met deze brief zou ik graag vragen of ik bij jullie stage kan lopen. Indien dit mogelijk is zou dit
van maandag 23 maart tot vrijdag 3 april.
Momenteel ben ik student in het 6de middelbaar en volg ik de richting elektromechanica, zie
bijlage voor alle details van mijn opleiding. U bedrijf is zeer interessant voor mij omdat ik
achter het 6de graag in dezelfde factor als u bedrijf zou willen werken. Ik rijd met een
brommer en ik doe zelf altijd het onderhoud. Mijn opleiding is hier ook zeer geschikt voor.
Meer inlichtingen en persoonlijke gegevens vindt u in het bijgevoegd curriculum Vitae.
Mijn stagecoördinator Gunther Van De Geuchte zal aanvullende informatie over mij en mijn
opleiding geven. Op 23 december zal ik contact opnemen met u bedrijf.
Met hoogachting
Tjorven Koek
Bijlage (1): curriculum vitae
6-TSO-EM-a Nederlands 90
Elektromechanica Schooljaar 2014-2015
8.1.2 Sollicitatiebrief
Van: [email protected]
Aan: [email protected]
Onderwerp: Sollicitatie onderhoudstechnicus
Geachte mevrouw Daeleman
Via de Streekkrant van 7 tot en met 13 januari 2015 kwam ik te weten dat Darling Ingredients
International op zoek is naar een onderhoudstechnicus. Graag stel ik me voor deze
openstaande functie kandidaat.
Het is een eer om voor uw bedrijf te mogen werken dat inzit met het belang van het milieu.
Het milieu is belangrijk voor ons en daarom zou ik graag helpen om het restmateriaal op een
betrouwbare manier onschadelijk te maken en dit te verwerken tot grondstoffen voor de
energiesector en de pet-food industrie. Installaties herstellen en procesproblemen oplossen,
vind ik enorm boeiend. Dit lijkt me een heel mooie job waarmee ik heel graag mijn steentje
zou bijdragen.
Als pas afgestudeerde in de Elektromechanica ben ik vertrouwd met het reilen en zeilen van
de installaties. Hiervoor verwijs ik graag naar mijn eindwerk 'GIP', waarvoor ik onder meer op
verschillende manieren processen heb gemaakt en verbeterd. Daarnaast heb ik ook een half
jaar stage gelopen bij de firma Vandemoortele als onderhoudstechnicus , waar
productiestoornissen oplossen of herstellen en de afgewerkte producten verbeteren voor mij
dagelijkse kost was. Niet alleen door deze stage, maar ook dankzij het jarenlang
onderhouden van brommers, is het geen onbekend terrein voor mij en denk ik bijgevolg
geschikt te zijn voor de functie die u aanbiedt. Dankzij mijn hobby als voetballer en het
maken van een GIP, ben ik gewend om in team te werken, maar ik heb ook geen problemen
om zelfstandig te werken.
Als bijlage vindt u mijn cv, dat ik graag verder zou willen toelichten in een verkennend
gesprek. Ik kijk alvast uit naar uw reactie.
Met vriendelijke groeten
Tjorven Koek
Bijlage: cv
6-TSO-EM-a Nederlands 91
Elektromechanica Schooljaar 2014-2015
8.1.3 Aanvraag info
8.1.3.1 Bouwplan
Alinea 1: Aanleiding voor het verzoek
Alinea 2: Het verzoek zelf
Alinea 3: Details voor het verzoek
Alinea 4: Deadline + dankwoord
8.1.3.2 Mail
Van: [email protected]
Aan: [email protected]
Onderwerp: Informatie veranderingen wachttijd
Geachte heer Regelbrugge
Op dinsdag 11 maart is er in het PTI Eeklo een afstudeermarkt voor leerlingen. Er is door de
regering beslist de wachttijd langer te maken zodat pas afgestudeerden later een
wachtuitkering krijgen als ze geen werk vinden. Daarom het volgende verzoek.
Zou u zo vriendelijk willen zijn brochures door te sturen die meer informatie bevatten over de
veranderingen in de wachttijd? Ik zou deze graag meegeven met de leerlingen zodat ze zich
kunnen informeren over deze wachtuitkering als ze geen werk vinden en beslissen niet
verder te studeren.
Deze brochures zijn voorzien voor alle leerlingen in de hoogste jaren. Er studeren 200
leerlingen in de hoogste jaren, dus ik zou graag 210 brochures bestellen. De resterende
brochures wil ik uitdelen aan leerkrachten zodat ze de leerlingen ook kunnen informeren in
hun les.
Ik ben de hele week aanwezig op het PTI in Eeklo vanaf 8 tot 17 uur, op woensdag en in het
weekend ben ik niet bereikbaar.
Ik hoop dat u mij voor 31 januari contacteert. Alvast bedankt voor uw moeite.
Hoogachtend
T. Koek
Directeur PTI Eeklo
6-TSO-EM-a Nederlands 92
Elektromechanica Schooljaar 2014-2015
8.1.4 Curriculicum Vitae
CURRICULUM VITAE
Persoonlijke gegevens
Naam: Koek
Voornaam: Tjorven
Adres: Patronagestraat 32 – 9060 Zelzate
Gsm-nummer: 0478 56 70 33
E-mailadres: [email protected]
Geboorteplaats: Gent
Geboortedatum: 10/04/1997
Nationaliteit: Belg
Burgerlijke staat: Ongehuwd
Opleidingen
2011 - 2015 Elektromechanica PTI Eeklo
2010 - 2011 ASO Moderne wetenschappen C.O.L.V Ten Doorn
Werkervaring
Stage 23/03/15-03/04/2015
Onderhoudstechnicus Vandemoortele nv
vakantiejob 2013-2014
Keukenhulp Hof ter Vrombaut, Eeklo
Bijkomende opleidingen/ diploma’s/ attesten
2014 VCA-attest
6-TSO-EM-a Nederlands 93
Elektromechanica Schooljaar 2014-2015
Computerkennis
- Grondige kennis Microsoft Office (Word, Excel, PowerPoint)
- Basis AutoCad
- Gevorderd Solid-Edge
- Basis Eplan
- Basis CNC
- Basis PLC-programmeren
- Basis HTML
Talenkennis
Begrijpen Spreken Lezen Schrijven
Nederlands Moedertaal Moedertaal Moedertaal Moedertaal
Engels Goed Goed Goed Goed
Frans Goed Matig Goed Goed
Varia
- Hobby’s
o Voetbal

8.2 Engels
6-TSO-EM-a Engels 95
Elektromechanica Schooljaar 2014-2015
8.2.1 Technical text
Object in annex added.
8.2.2 List of difficult words
Object in annex added.
8.2.3 10 Questions and answers about the text
10 questions (+extended answers) related to the text
1. Where do you plug the XMA2 plug of the plc board into?
-Plug the XMA2 plug of the PLC board into the XMA2 socket of the I/O
terminal of the station.
2. What do you connect to the start-up valve with filter-control valve?
-You connect the compressed air-supply to the start-up valve with filter-control
valve.
3. What is the function of the manual override?
-The manual override is used to check the functioning and operation of the
valves and valve-drive unit combination.
4. What do you need to do before commissioning the station?
-Before commissioning the station make sure that all valves of the valve
terminal are in starting position.
5. What is the voltage of the stations?
-The stations are supplied with 24V DC voltage (max. 5A) via a power supply
unit.
6. How are the PC and the PLC connected with a Siemens Controller?
-You connect the PC and the PLC using the RS232 programming cable with
PC adapter.
7. What means” AS”,”KFA”,”KFAFF”?
-‘AS’ means sequential function chart, ‘KFA’ means Ladder Diagram/Function
block diagram/Instruction list and ‘KFAFF’ means step chain realized with flip-
flop.
8. How are the PC and the PLC connected with a Festo Controller?
-They are connected by means of the TTL- RS232 programming cable.
9. How do you restore the file 01.VE_FEC.zip from the directory
Sources\PLCPrograms\Release C\FEC\ of the CD-ROM supplied?
- You press on ’Project’, then you press on ‘ Restore…’.The next stap is to
open (CD ROM: Sources\PLCPrograms\Release C\FEC) ‘01VE_FEC.zip
6-TSO-EM-a Engels 96
Elektromechanica Schooljaar 2014-2015
Open’. The next stap is ‘Restore Project, Name: 01VE_FEC’. When tis all is
done you press on ‘OK’.
10. What are the steps to download the project to the controller?
-OnlineDownload Project Follow the instructions on the screen.
8.2.4 Outline
PLC
8.2.4.1 Cable connections
a. PLC board – station:
XMA2 plug into XMA2 socket
b. PLC board –control console:
XMG1 plug into XMG1 socket
c. PLC board –power supply unit:
4mm safety plugs into sockets of the power supply unit
d. PC –PLC:
Programming cable
8.2.4.2 Pneumatic connection
e. Observe technical data
f. Connect compressed air supply to start-up valve with filter-control valve
g. Manual override
8.2.4.3 Siemens Controller
h. RS232 programming cable
i. Switch on power supply unit
j. Switch on compressed air supply
k. EMERGENCY-STOP pushbutton
l. Overall reset PLC memory
m. Stop position
n. Start plc programming software
o. Retrieve file
p. Select hardware configuration
q. Select project
r. Download project to controller
s. RUN position
8.2.4.4 Festo Controller
t. TTl-RS232 programming cable
u. Switch on power supply unit
v. Switch on compressed air supply
w. EMERGENCY-STOP pushbutton
x. Test routines
y. Start PLC programming software
z. Restore
aa. Compile
bb. Download to controller

6-TSO-EM-a Engels 97
Elektromechanica Schooljaar 2014-2015
8.2.4.5 Allen Bradley controller
a. TTl-RS232 programming cable
b. Switch on power supply unit
c. Switch on compressed air supply
d. EMERGENCY-STOP pushbutton
6-TSO-EM-a Engels 98
Elektromechanica Schooljaar 2014-2015
8.2.5 Summary
The XMA2 plug connects the PLC board with the station and the XMG1 plug connects the
PLC board with the controle console. The 4mm safety plugs connect the PLC board with the
power supply unit. For a connection between the PC and the PLC you need a programming
cable. The Pneumatic connection observes the technical data and is realised with a filter-
control valve. With a Siemens controller, you first connect the PC and PLC with an RS232
programming cable and then you switch on the power supply unit and the compressed air
supply. You need to release the EMERGENCY-STOP pushbutton and then you reset the
PLC memory. You set the PLC in the STOP position and you can start the PLC programming
software. You retrieve the file, select the hardware configuration and download it to the
controller and turn the mode selector to RUN position.
With a Festo controller, you first connect the PC and PLC with a TTI-RS232 programming
cable and then you switch on the power supply unit and the compressed air supply. You
need to release the EMERGENCY-STOP pushbutton and wait until the PLC has done its
test-routines. You start the PLC programming software, restore the file, compile the project
and download it to the controller. With an Allen bradley controller, you first connect the PC
and PLC en then you switch on the power supply unit and the compressed air supply. You
need to release the EMERGENCY-STOP pushbutton.

8.3 Frans
6-TSO-EM-a Frans 100
Elektromechanica Schooljaar 2014-2015
8.3.1 Demander de la documentation
Tjorven Koek 2014-10-23
Patronagestraat 32
BE-9060 ZELZATE
BELGIQUE
+ 32 4 78 56 70 33
MEC France SARL
Z. I. le Blanchon
FR- 01160 PONT D'AIN
FRANCE
Demande de documentation
Madame
Monsieur
Vous serait-il possible de me faire parvenir de la documentation sur vos convoyeurs
pour boîtes et pour bouteilles?
Je suis élève de terminale en section électromécanique, dans un lycée flamand, à
Eeklo, en Belgique. En ce moment, je prépare un travail fin d’études sur un
convoyeur pour boîtes et pour bouteilles. Je cherche notamment un système facile
de changement de chaîne ou de bande. Votre documentation à ce sujet me serait
donc très utile.
Je vous remercie d’avance de la suite favorable que vous pourriez donner à ma
demande.
Veuillez agréer, madame, monsieur, mes sincères salutations.
Tjorven Koek
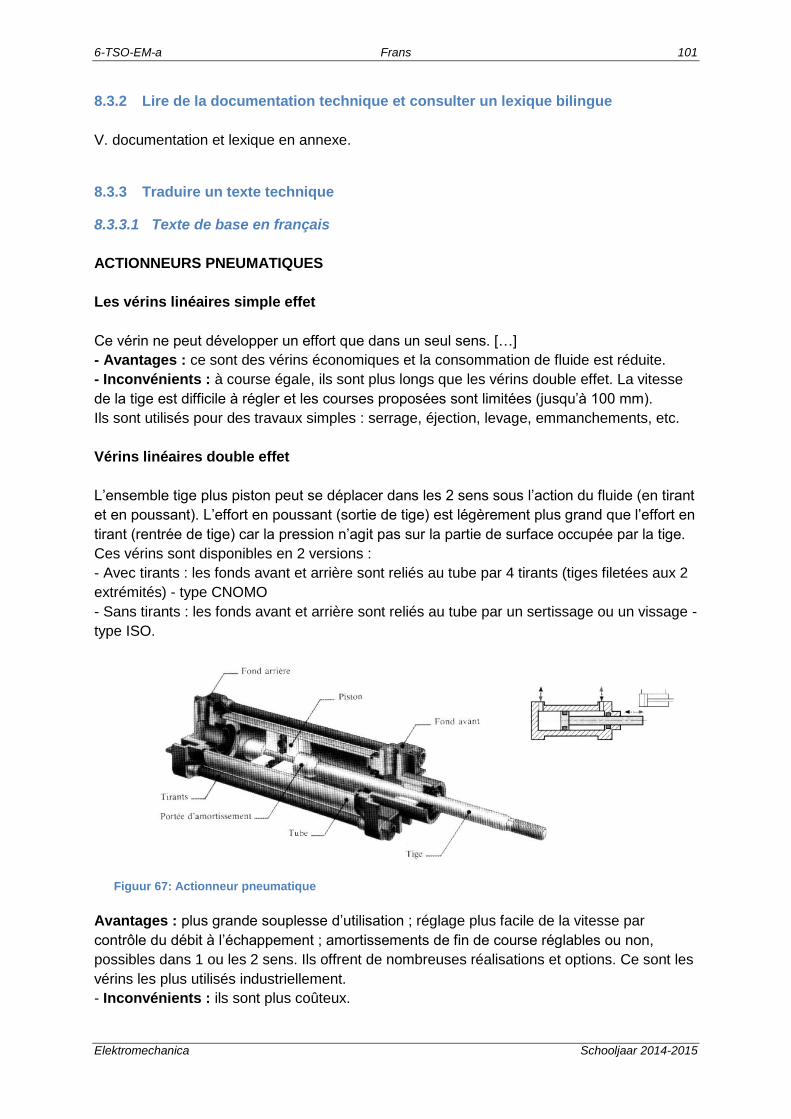
6-TSO-EM-a Frans 101
Elektromechanica Schooljaar 2014-2015
8.3.2 Lire de la documentation technique et consulter un lexique bilingue
V. documentation et lexique en annexe.
8.3.3 Traduire un texte technique
8.3.3.1 Texte de base en français
ACTIONNEURS PNEUMATIQUES
Les vérins linéaires simple effet
Ce vérin ne peut développer un effort que dans un seul sens. […]
- Avantages : ce sont des vérins économiques et la consommation de fluide est réduite.
- Inconvénients : à course égale, ils sont plus longs que les vérins double effet. La vitesse
de la tige est difficile à régler et les courses proposées sont limitées (jusqu’à 100 mm).
Ils sont utilisés pour des travaux simples : serrage, éjection, levage, emmanchements, etc.
Vérins linéaires double effet
L’ensemble tige plus piston peut se déplacer dans les 2 sens sous l’action du fluide (en tirant
et en poussant). L’effort en poussant (sortie de tige) est légèrement plus grand que l’effort en
tirant (rentrée de tige) car la pression n’agit pas sur la partie de surface occupée par la tige.
Ces vérins sont disponibles en 2 versions :
- Avec tirants : les fonds avant et arrière sont reliés au tube par 4 tirants (tiges filetées aux 2
extrémités) - type CNOMO
- Sans tirants : les fonds avant et arrière sont reliés au tube par un sertissage ou un vissage -
type ISO.
Avantages : plus grande souplesse d’utilisation ; réglage plus facile de la vitesse par
contrôle du débit à l’échappement ; amortissements de fin de course réglables ou non,
possibles dans 1 ou les 2 sens. Ils offrent de nombreuses réalisations et options. Ce sont les
vérins les plus utilisés industriellement.
- Inconvénients : ils sont plus coûteux.
Figuur 67: Actionneur pneumatique
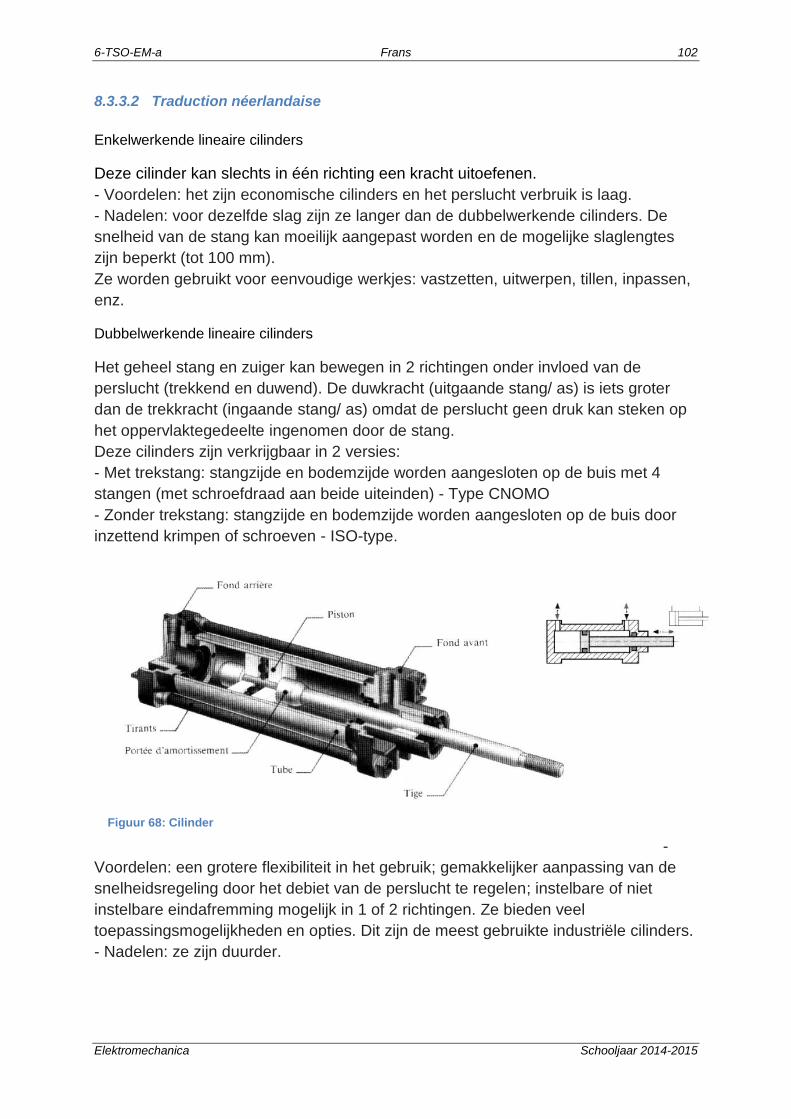
6-TSO-EM-a Frans 102
Elektromechanica Schooljaar 2014-2015
8.3.3.2 Traduction néerlandaise
Enkelwerkende lineaire cilinders
Deze cilinder kan slechts in één richting een kracht uitoefenen.
- Voordelen: het zijn economische cilinders en het perslucht verbruik is laag.
- Nadelen: voor dezelfde slag zijn ze langer dan de dubbelwerkende cilinders. De
snelheid van de stang kan moeilijk aangepast worden en de mogelijke slaglengtes
zijn beperkt (tot 100 mm).
Ze worden gebruikt voor eenvoudige werkjes: vastzetten, uitwerpen, tillen, inpassen,
enz.
Dubbelwerkende lineaire cilinders
Het geheel stang en zuiger kan bewegen in 2 richtingen onder invloed van de
perslucht (trekkend en duwend). De duwkracht (uitgaande stang/ as) is iets groter
dan de trekkracht (ingaande stang/ as) omdat de perslucht geen druk kan steken op
het oppervlaktegedeelte ingenomen door de stang.
Deze cilinders zijn verkrijgbaar in 2 versies:
- Met trekstang: stangzijde en bodemzijde worden aangesloten op de buis met 4
stangen (met schroefdraad aan beide uiteinden) - Type CNOMO
- Zonder trekstang: stangzijde en bodemzijde worden aangesloten op de buis door
inzettend krimpen of schroeven - ISO-type.
-
Voordelen: een grotere flexibiliteit in het gebruik; gemakkelijker aanpassing van de
snelheidsregeling door het debiet van de perslucht te regelen; instelbare of niet
instelbare eindafremming mogelijk in 1 of 2 richtingen. Ze bieden veel
toepassingsmogelijkheden en opties. Dit zijn de meest gebruikte industriële cilinders.
- Nadelen: ze zijn duurder.
Figuur 68: Cilinder
6-TSO-EM-a Bronnen 103
Elektromechanica Schooljaar 2014-2015
9 Bronnen Lagers:
http://www.skf.com/group/products/bearings-units-housings/roller-bearings/cylindrical-roller-
bearings/single-row-cylindrical-roller-bearings/single-
row/index.html?prodid=1410210202&imperial=false
Bouten: http://www.werktuigbouw.nl/calculators/e3_6d.htm
Sensoren:
https://www.festo.com/cat/nl-be_be/products_050000
http://nl.wikipedia.org/wiki/Capacitieve_nabijheidschakelaar
http://nl.wikipedia.org/wiki/Inductieve_nabijheidssensor
http://technotheek.utwente.nl/wiki/Optische_sensoren
Frequentieregelaar:
http://download.solarelektro.nl/TPS/Industrie/Frequentieregelaars/Siemens/Micromaster420_
Manual.pdf
Elektrische beveiligingen:
http://www.schneider-electric.be/documents/schematheque/32NI017N.pdf
http://www.euronorm.net/content/template2.php?itemID=581
6-TSO-EM-a Figurenlijst 104
Elektromechanica Schooljaar 2014-2015
10 Figurenlijst Figuur 1: Foto concept GIP ................................................................................................... 9
Figuur 2: Eigenschappen gebruikte bouten ..........................................................................22
Figuur 3: Constructiestaal .....................................................................................................23
Figuur 4: Spanning-rekdiagram ............................................................................................24
Figuur 5: Constructie transportband .....................................................................................28
Figuur 6: Meeloopplaten transportband ...............................................................................29
Figuur 7: Opspansysteem met zijplaat ..................................................................................30
Figuur 8: Opspansysteem zonder zijplaat .............................................................................30
Figuur 9: Regeling van de ligging transportband...................................................................31
Figuur 10: Motoropspanning .................................................................................................32
Figuur 11: Opstelling motor ..................................................................................................33
Figuur 12: Beschermkap blikjespers .....................................................................................33
Figuur 13: Inductieve sensor voor beschermkap ..................................................................34
Figuur 14: voorbeeld bevestiging bout ..................................................................................37
Figuur 15: Veerringen ...........................................................................................................38
Figuur 16: Tandveerringen ...................................................................................................38
Figuur 17: Schotelveren, rondel ............................................................................................38
Figuur 18: Kroonmoer + splitpen ..........................................................................................39
Figuur 19: Borgplaat .............................................................................................................39
Figuur 20: Staaldraad ...........................................................................................................39
Figuur 21: Borgmoer met kunststofring .................................................................................39
Figuur 22: Borgmoer met zaagsnede ...................................................................................39
Figuur 23: Zelftappende schroef of bout ...............................................................................39
Figuur 24: Borgringen (Nordlock) .........................................................................................39
Figuur 25: Flensbout (Ripp) ..................................................................................................39
Figuur 26: Flensmoer (Ripp) .................................................................................................39
Figuur 27: De vertanding van de Nordlockringen ..................................................................40
Figuur 28: Loctite kleefstof (vloeibaar) ..................................................................................40
Figuur 29: Bout voorzien van kleefstof (microcapsulering) ....................................................40
Figuur 30: Inbusbout DIN 912 M6x30 - 8.8 ...........................................................................40
Figuur 31: verzonken schroef DIN 7991 M6x12 – 8.8 ...........................................................41
Figuur 32: Passing meeloopas .............................................................................................41
Figuur 33: Klemmende passing spieverbinding ....................................................................42
Figuur 34: Lasverbinding proefielhouders .............................................................................43
Figuur 35: Meelopend frezen ................................................................................................45
Figuur 36: Tegenlopend Frezen ...........................................................................................46
Figuur 37: Kern draaibank ....................................................................................................47
Figuur 38: Passing meeloopas .............................................................................................51
Figuur 39: Klemmende passing spieverbinding ....................................................................52
Figuur 40: Schematische voorstelling van Ra .......................................................................54
Figuur 41: Motor GIP ............................................................................................................56
Figuur 42: Klemmenverbinding motoraansluiting ..................................................................57
Figuur 43: Aansluiting klemmen rem in rode vorm ................................................................57
Figuur 44: Driefasenspanning ...............................................................................................60
Figuur 45: Rechterhandregel ................................................................................................61
Figuur 46: Linkerhandregel Lorentzkrachten ........................................................................61
6-TSO-EM-a Figurenlijst 105
Elektromechanica Schooljaar 2014-2015
Figuur 47: Veldlijnen met draairichting ..................................................................................61
Figuur 48: Frequentieregelaar ..............................................................................................63
Figuur 49: Wisselrichter ........................................................................................................64
Figuur 50: Startkarakteristiek frequentieregelaar ..................................................................65
Figuur 51: Remweerstand ....................................................................................................69
Figuur 52: Kortstluitbeveiliging ..............................................................................................70
Figuur 53: Voorbeeldaansluiting met beveiligingen ...............................................................71
Figuur 54: Bedieningspaneel frequentieregelaar ..................................................................72
Figuur 55: Stuurkring frequentieregelaar ..............................................................................74
Figuur 56: Differentieelschakelaar ........................................................................................77
Figuur 57: Automaat .............................................................................................................77
Figuur 58: Thermische beveiliging ........................................................................................78
Figuur 59: Hoofdschakelaar blikjespers ................................................................................78
Figuur 60: Drukknop voor start transportband ......................................................................79
Figuur 61: Noodstop blikjespers ...........................................................................................79
Figuur 62: Siemens PLC ......................................................................................................80
Figuur 63: Capacitieve sensor ..............................................................................................82
Figuur 64: Inductieve sensor ................................................................................................83
Figuur 65: Optische sensor ..................................................................................................84
Figuur 66: Transformator 230AC/24DC Siemens .................................................................85
Figuur 67: Actionneur pneumatique .................................................................................... 101
Figuur 68: Cilinder .............................................................................................................. 102
6-TSO-EM-a Tabellenlijst 106
Elektromechanica Schooljaar 2014-2015
11 Tabellenlijst
Tabel 1: Opgave .................................................................................................................... 9
Tabel 2: Vloeigrens en treksterkte ........................................................................................25
Tabel 3: Ruwheden ..............................................................................................................53
Tabel 4: Motoreigenschappen ..............................................................................................56
Tabel 5: Eerste cijfer van de beveiligingsgraad.....................................................................58
Tabel 6: Tweede cijfer van de beveiligingsgraad ..................................................................59
Tabel 7: Aansluitklemmen frequentieregelaar .......................................................................73
6-TSO-EM-a Besluit 107
Elektromechanica Schooljaar 2014-2015
12 Besluit
De blikjespers was een heel mooi project omdat het verschillende industriële componenten
bevat. Het was een leerrijke ervaring om het te vervaardigen, zeker omdat elk onderdeel
praktisch gerealiseerd is en de onderdelen werken.
De samenwerking tussen de leerlingen en de motivatie om het project af te werken terwijl er
eigenlijk tijdsgebrek was, heb ik als positief ervaren. Hierbij heb ik het bijvoorbeeld over de
samenwerking die er is geweest om de draaitafel te laten draaien want dit was het onderdeel
dat als laatste werkte. Een ander voorbeeld is dat we samen aan het PLC-programma, de
frequentieregelaar en de draaitafel hebben gewerkt, terwijl bepaalde onderdelen niet voor de
groep bedoeld waren die er wel aan heeft meegewerkt.
Er zijn natuurlijk ook wat moeilijkheden geweest, bijvoorbeeld dat we afspraken om tijdens
de middag aan de GIP te werken en er sommige leerlingen niet opdaagden. Maar dit hebben
we op een eenvoudige manier opgelost. Degene die er toen niet waren, hebben we een taak
gegeven om thuis te maken in verband met de GIP. Ook was er bij mijn collega Karel een
probleem, hij had een minder rapport na de examens van het eerste semester en hij zag het
even niet meer zitten om nog te werken aan de GIP omdat hij dacht dat hij niet zou slagen.
Hierbij heb ik hem beloofd dat ik hem zou helpen waar nodig en dat we alles op alles gingen
zetten om te slagen dit jaar. Hij heeft de motivatie teruggevonden en we hebben de
transportband afgewerkt en gaan nu met goede moed richting de examens.
Het project de blikjespers vond ik eigenlijk niet nuttig of praktisch, maar de verschillende
componenten die in het project aanwezig zijn, vond ik wel interessant omdat deze in de
industrie veel gebruikt worden. Ik zou voor een ander project gekozen hebben, maar wel met
dezelfde componenten zoals PLC, pneumatica, elektriciteit, frequentieregelaar, mechanica,
eventueel automatisatie. Daardoor vond ik het project eigenlijk wel geslaagd.
Tijdens het verloop van de GIP heb ik heel veel geleerd over technische handelingen,
creativiteit, technisch inzicht en vooral hoe belangrijk communicatie is met de collega’s. Het
was een heel leuke GIP waarbij ik veel heb geleerd.

13 Bijlagen
Transportband
Technisch Tekenen

Werkgangen
Engels

Technical text
List of difficult words
Frans

Lire de la documentation technique et consulter un lexique bilingue
Elektriciteit
Technisch dossier
Frequentieregelaar
13.1 Algemeen
13.1.1 Logboek
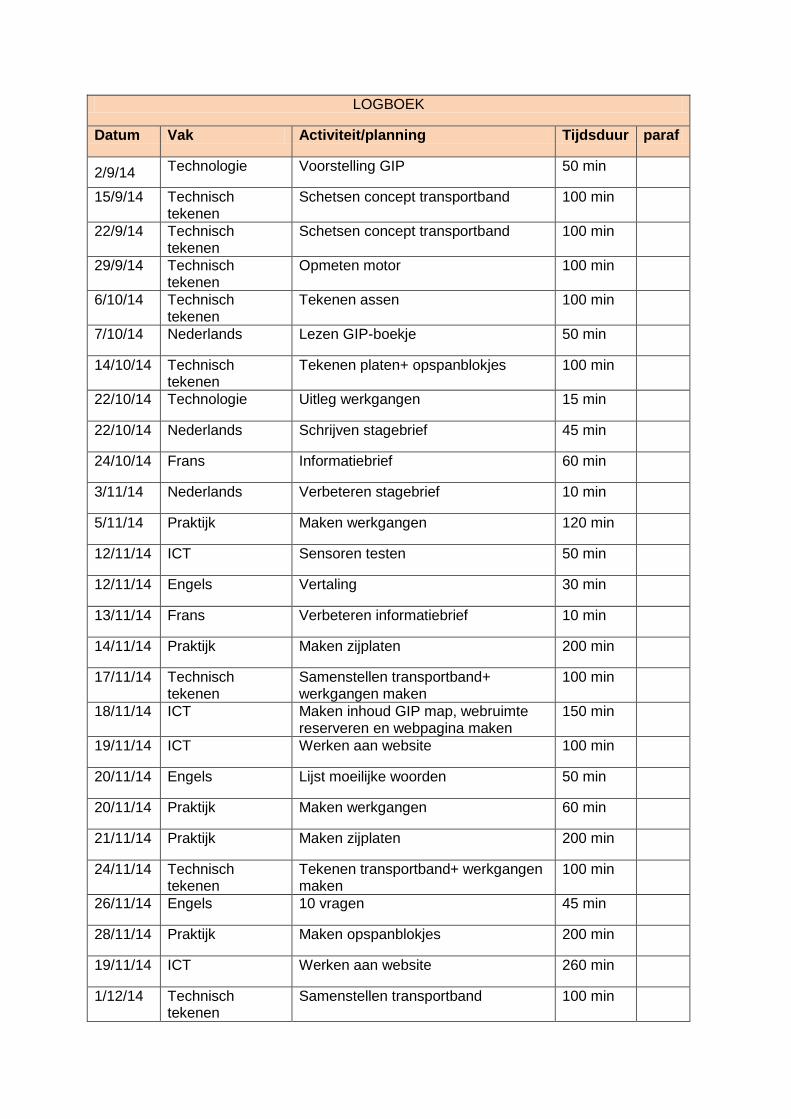
LOGBOEK
Datum Vak Activiteit/planning Tijdsduur paraf
2/9/14 Technologie Voorstelling GIP 50 min
15/9/14 Technisch tekenen
Schetsen concept transportband 100 min
22/9/14 Technisch tekenen
Schetsen concept transportband 100 min
29/9/14 Technisch tekenen
Opmeten motor 100 min
6/10/14 Technisch tekenen
Tekenen assen 100 min
7/10/14 Nederlands Lezen GIP-boekje 50 min
14/10/14 Technisch tekenen
Tekenen platen+ opspanblokjes 100 min
22/10/14 Technologie Uitleg werkgangen 15 min
22/10/14 Nederlands Schrijven stagebrief 45 min
24/10/14 Frans Informatiebrief 60 min
3/11/14 Nederlands Verbeteren stagebrief 10 min
5/11/14 Praktijk Maken werkgangen 120 min
12/11/14 ICT Sensoren testen 50 min
12/11/14 Engels Vertaling 30 min
13/11/14 Frans Verbeteren informatiebrief 10 min
14/11/14 Praktijk Maken zijplaten 200 min
17/11/14 Technisch tekenen
Samenstellen transportband+ werkgangen maken
100 min
18/11/14 ICT Maken inhoud GIP map, webruimte reserveren en webpagina maken
150 min
19/11/14 ICT Werken aan website 100 min
20/11/14 Engels Lijst moeilijke woorden 50 min
20/11/14 Praktijk Maken werkgangen 60 min
21/11/14 Praktijk Maken zijplaten 200 min
24/11/14 Technisch tekenen
Tekenen transportband+ werkgangen maken
100 min
26/11/14 Engels 10 vragen 45 min
28/11/14 Praktijk Maken opspanblokjes 200 min
19/11/14 ICT Werken aan website 260 min
1/12/14 Technisch tekenen
Samenstellen transportband 100 min
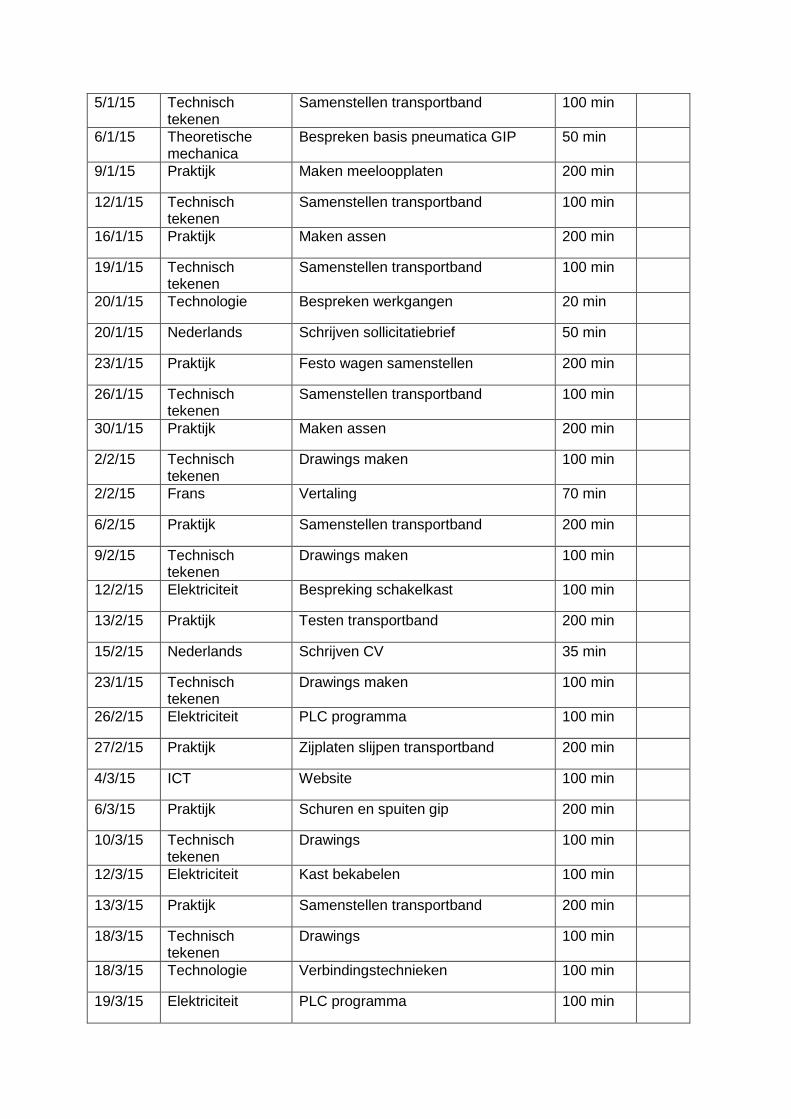
5/1/15 Technisch tekenen
Samenstellen transportband 100 min
6/1/15 Theoretische mechanica
Bespreken basis pneumatica GIP 50 min
9/1/15 Praktijk Maken meeloopplaten 200 min
12/1/15 Technisch tekenen
Samenstellen transportband 100 min
16/1/15 Praktijk Maken assen 200 min
19/1/15 Technisch tekenen
Samenstellen transportband 100 min
20/1/15 Technologie Bespreken werkgangen 20 min
20/1/15 Nederlands Schrijven sollicitatiebrief 50 min
23/1/15 Praktijk Festo wagen samenstellen 200 min
26/1/15 Technisch tekenen
Samenstellen transportband 100 min
30/1/15 Praktijk Maken assen 200 min
2/2/15 Technisch tekenen
Drawings maken 100 min
2/2/15 Frans Vertaling 70 min
6/2/15 Praktijk Samenstellen transportband 200 min
9/2/15 Technisch tekenen
Drawings maken 100 min
12/2/15 Elektriciteit Bespreking schakelkast 100 min
13/2/15 Praktijk Testen transportband 200 min
15/2/15 Nederlands Schrijven CV 35 min
23/1/15 Technisch tekenen
Drawings maken 100 min
26/2/15 Elektriciteit PLC programma 100 min
27/2/15 Praktijk Zijplaten slijpen transportband 200 min
4/3/15 ICT Website 100 min
6/3/15 Praktijk Schuren en spuiten gip 200 min
10/3/15 Technisch tekenen
Drawings 100 min
12/3/15 Elektriciteit Kast bekabelen 100 min
13/3/15 Praktijk Samenstellen transportband 200 min
18/3/15 Technisch tekenen
Drawings 100 min
18/3/15 Technologie Verbindingstechnieken 100 min
19/3/15 Elektriciteit PLC programma 100 min
20/3/15 Praktijk Bevestigen transportband 200 min
13.1.2 Planningsdocument