De One-Man-Operated Bridge aan boord van sleephopperzuigers
139
HOGERE ZEEVAARTSCHOOL ANTWERPEN Onderwijseenheid 1: Navigatie en Navigatiemiddelen De One-Man-Operated Bridge aan boord van sleephopperzuigers Ben De Backer Scriptie voorgedragen tot het behalen Promotor: Kapt. Ynse Janssens van de graad van master in de nautische wetenschappen academiejaar 2009-2010
Transcript of De One-Man-Operated Bridge aan boord van sleephopperzuigers

HOGERE ZEEVAARTSCHOOL ANTWERPEN
Onderwijseenheid 1: Navigatie en Navigatiemiddelen
De One-Man-Operated Bridge aan
boord van sleephopperzuigers
Ben De Backer
Scriptie voorgedragen tot het behalen Promotor: Kapt. Ynse Janssens
van de graad van
master in de nautische wetenschappen academiejaar 2009-2010


HOGERE ZEEVAARTSCHOOL ANTWERPEN
Onderwijseenheid 1: Navigatie en Navigatiemiddelen
De One-Man-Operated Bridge aan
boord van sleephopperzuigers
Ben De Backer
Scriptie voorgedragen tot het behalen Promotor: Kapt. Ynse Janssens
van de graad van
master in de nautische wetenschappen academiejaar 2009-2010

Woord vooraf
In september 2009 heb ik in het kader van een stage bij DEME voor het
eerst voet gezet op een baggerschip dat uitgerust was met een One-
Man-Operated Bridge. Tijdens deze stage op de 'Brabo' groeide mijn
interesse voor dit onderwerp elke dag en ik heb dan ook beslist om er
mijn eindverhandeling over te schrijven. Zonder een aantal mensen had
deze thesis echter nooit tot stand kunnen komen. In de eerste plaats
gaat mijn dank uit naar mijn promotor, kapitein Ynse Janssens.
Verder ben ik tijdens mijn zoektocht naar informatie zeer veel
interessante en hulpvaardige mensen tegengekomen. Ik druk mijn
erkentelijkheid uit aan:
De heer Steven Quintijn, opleidingsteam Jan De Nul,
de heer Geert Vanneste, hoofd DT&S van DEME,
de heer Wouter Blaas, ingenieur bij IHC Merwede,
de heer Roland Nagtegaal, ingenieur bij IHC Merwede,
kapitein Pierre Woinin, voormalig PSC-inspecteur,
de heer Bart Wackenier, ambtenaar bij de scheepvaartcontrole,
de volledige bemanning van de 'Brabo' en de 'Breydel',
mevrouw Viviane Tilliard, die de taalkundige aanpassingen heeft
verzorgd.
De heer Marc Van de Velde, kapitein van de 'Leiv Eiriksson', zou ik graag
bedanken voor zijn waardevolle tips en kritiek.
In het bijzonder bedank ik de heren François Mullenders en Steven
Vandepoele, die beiden eerste stuurman op de 'Breydel' zijn. Zij hebben
me tot op de laatste momenten enorm geholpen en waren ook
zo vriendelijk om elk hoofdstuk na te lezen en te bekritiseren.

Inhoudstafel
1 HET ONTSTAAN VAN DE ONE-MAN-OPERATED BRIDGE 3
1.1 DE TECHNISCHE MOGELIJKHEID 3
1.1.1 PLC-SYSTEMEN 5
1.1.1.1 Beschrijving 5
1.1.1.2 Instructies en informatie vòòr de komst van PLC 6
1.1.1.3 Instructies en informatie na de komst van PLC 7
1.1.2 SCADA-SYSTEMEN 7
1.2 DE AANLEIDING TOT ÉÉNMANSBEDIENING 12
1.2.1 COMMUNICATIEPROBLEMATIEK 12
1.2.2 VEILIGHEID 14
1.2.3 EFFICIËNTIE 15
1.3 DEELBESLUIT 17
2 WETGEVINGEN 19
2.1 HET ONTWERP VAN DE BRUG EN DE VERPLICHTE APPARATUUR:
DE SYS-NEQ1-NOTATIE 19
2.1.1 SITUERING 19
2.1.2 DE INTERNATIONAL MARITIME ORGANIZATION (IMO) 23
2.1.2.1 STCW '95-conventie 23
2.1.2.2 MSC-circulaire 982 25
2.1.2.3 MSC-circulaire 566 26
2.1.2.4 IMO-resolutie A.694(17) 27
2.1.2.5 IMO-resolutie A.708(17) 28
2.1.2.6 SOLAS-conventie 28
2.1.2.7 IMO Performance Standards 29
2.1.3 DE INTERNATIONAL ORGANIZATION FOR STANDARDIZATION (ISO) 34

2.2 BESCHRIJVING VAN DE OMOB AAN DE HAND VAN DE
NAUT-OSV-REGELS 34
2.2.1 DE VERSCHILLENDE WERKPLATFORMEN 35
2.2.2 DE HOOFDCONSOLE OP OMOB-SCHEPEN 40
2.2.2.1 Het gezichtsveld 41
2.2.2.2 De indeling van de instrumenten en apparatuur 44
2.2.2.3 De stoelen van de hoofdconsole 47
2.2.2.4 Het CCTV-systeem 48
2.2.2.5 De Human Machine Interface 48
2.2.3 DE RADIOCONSOLE 51
2.2.4 DE CONSOLE VOOR ROUTEPLANNING 52
2.2.5 DE EXTRA CONSOLE EN DE BAGGERAFSTANDSBEDIENING 53
2.3 DEELBESLUIT 55
3 HET DREDGER CONTROL SYSTEM (DCS) 56
3.1 INLEIDING 56
3.2 DE OPVOLGFUNCTIE 57
3.3 DE INSTRUCTIEFUNCTIE 58
3.4 DE AUTOMATISERINGSFUNCTIE 58
3.5 DE HOOFDPAGINA'S VAN DE SCADA HMI 59
3.5.1 TRAIL 59
3.5.2 DUMP 60
3.5.3 DISCHARGE 60
3.5.4 PIPE AND WINCHES 61
3.5.5 DREDGE SETUP 61
3.5.6 JET SETUP 61
3.5.7 CALIBRATION 61
3.5.8 DIAGNOSTICS 62
3.5.9 AUTOMATION 62

3.6 UITGEBREIDE BESCHRIJVING VAN DE AUTOMATISERINGSFUNCTIES 62
3.6.1 AUTOMATED LIGHT MIXTURE OVERBOARD (ALMO) 62
3.6.2 AUTOMATIC PUMP CONTROL (APC) 64
3.6.3 AUTOMATIC DRAGHEAD WINCH CONTROL (ADWC) 65
3.6.4 AUTOMATISCHE BEDIENING VAN HET VIZIER 66
3.6.5 AUTOMATIC DRAUGHT CONTROL (ADC) 67
3.6.6 AUTOMATIC PIPE SYSTEM SEQUENCE (APSS) 68
3.6.7 AUTOMATIC DREDGE SYSTEM SEQUENCE (ADSS) 71
3.6.8 AUTOMATIC JET SYSTEM SEQUENCE (AJSS) 72
3.7 KLEURCODES 74
3.7.1 IDENTIFICATIE VAN AFSLUITERS MET EINDSCHAKELAARS 74
3.7.2 IDENTIFICATIE VAN AFSLUITERS MET ANALOGE POSITIE-INDICATIE 76
3.7.3 IDENTIFICATIE VAN DE OVERIGE APPARATUUR 76
4 VEILIGHEID 78
4.1 BEMANNING 78
4.1.1 SITUERING VAN DE BEMANNINGSVOORSCHRIFTEN 78
4.1.2 WERK- EN RUSTTIJDEN 79
4.1.3 MINIMUMBEMANNING 81
4.1.4 VERGELIJKING VAN DE BEMANNING VAN EEN OMOB-SCHIP MET EEN
GELIJKWAARDIG NIET-OMOB-SCHIP 82
4.1.5 WERKDRUK 85
4.1.5.1 De taken van de officier van de brugwacht 85
4.1.5.2 Leerling-stuurmannen op OMOB-schepen 88
4.2 OMOB VERSUS BESTAANDE VEILIGHEIDSWETGEVINGEN 89
4.3 SENSOREN 92
4.4 DEELBESLUIT 94
5 BESLUIT 95

Lijst van figuren en tabellen
FIGUUR 1: KRUISMETER 4
FIGUUR 2: BAGGERSTAND 'AMERIGO VESPUCCI' 6
FIGUUR 3: BAGGERSTAND 'JAMES COOK' 8
FIGUUR 4: BAGGERSTAND 'J.S. DE ELCANO' 10
FIGUUR 5: BNWAS CONTROL PANEL EN 'WATCH ALARM RESET' KNOP 32
FIGUUR 6: MOGELIJKE VERDELING WERKPLATFORMEN 37
FIGUUR 7: LAY-OUT VAN DE BRUG VAN DE 'ARTEVELDE' 39
FIGUUR 8: HORIZONTAAL GEZICHTSVELD HOOFDCONSOLE 41
FIGUUR 9: VERTICAAL GEZICHTSVELD VOORWAARTS 42
FIGUUR 10: ZICHT VANAF HOOFDCONSOLE RICHTING BEUN 43
FIGUUR 11: ZONE-AANDUIDING VAN DE HOOFDCONSOLE VAN DE OMOB 46
FIGUUR 12: REGELKNOPPEN HOOFDCONSOLE 49
FIGUUR 13: GEZICHTSVELD RADIOCONSOLE 52
FIGUUR 14: BAGGERAFSTANDSBEDIENING 54
FIGUUR 15: ZICHT OVER HET ACHTERSCHIP VAN DE 'BREYDEL' VANAF DE
SCADA-MONITOR VAN DE EXTRA CONSOLE 55
FIGUUR 16: TRAIL PAGINA 60
FIGUUR 17: ALMO 63
FIGUUR 18: APC 65
FIGUUR 19: ZUIGBUIS EN LIMIETEN VAN DE HORIZONTALE HOEK 66
FIGUUR 20: 'MANUAL FIXED' BEDIENING VAN HET VIZIER 67
FIGUUR 21: SCHEMATISCHE VOORSTELLING VAN WELKE ACTIES
ONDERNOMEN WORDEN TUSSEN DE MACROKNOPPEN 70
FIGUUR 22: DRUKKNOPPEN VAN VERSCHILLENDE MODI VAN ADSS 71
FIGUUR 23: VERSCHILLENDE OPSTELLINGEN VAN DE BAGGERAFSLUITERS 72
FIGUUR 24: VERSCHILLENDE OPSTELLINGEN VAN DE JETAFSLUITERS 74
FIGUUR 25: AFSLUITERS RESETTEN 75
FIGUUR 26: 'MAJORITY VOTING LOGIC' SYSTEEM 93
TABEL 1: Vergelijking bemanning OMOB-schip en niet-OMOB-schip 83

Lijst van afkortingen
ABS American Bureau of Shipping
ADC Automatic Draught Control
ADSS Automatic Dredge System Sequence
ADWC Automatic Draghead Winch Control
AIS universal Automatic Identification System
AJSS Automatic Jet System Sequence
ALMO Automated Light Mixture Overboard
AMCS Alarm Monitor and Control System
AMOB Arm Mengsel Overboord
APC Automatic Pump Control
APSS Automatic Pipe System Sequence
ARPA Automatic Radar Plotting Aid
ATS Alarm Transfer System
BNWAS Bridge Navigational Watch Alarm System
BV Bureau Veritas
CAO Collectieve Arbeidsovereenkomst
CCTV Closed-Circuit Television
COLREGS International Regulations for Preventing
Collisions at Sea
DCC Density Chart Computer
DCS Dredger Control System
Deico Deiningscompensator
DEME Dredging, Environmental and Marine
Engineering

DGLONASS Differential Global Navigation Satellite System
DGPS Differential Global Positioning System
DLM Draught and Load Monitoring
DNV Det Norske Veritas
DP/DT Dynamic positioning/Dynamic Tracking
DT&S Dredging Training & Support
ECDIS Electronic Chart Display and Information System
ETA Estimated Time of Arrival
FOC Flags Of Convenience
GLONASS Global Navigation Satellite System
GMDSS Global Maritime Distress and Safety System
GPS Global Positioning System
HCS Heading Control System
HMI Human Machine Interface
IACS International Association of Classification
Societies
IEC International Electrotechnical Commission
IHC Industriële Handelscombinatie
ILO International Labour Organization
IMC Integrated Monitor and Control system
IMO International Maritime Organization
ISO International Organization for Standardization
ITU International Telecommunication Union
LOA Length Over All
MSC Maritime Safety Committee
NAVTEX Navigational Telex

OMBO One-Man-Bridge Operation
OMOB One-Man Operated Bridge
OOW Officer Of the Watch
PLC Programmable Logic Controller
PS Port Side
PSC Port State Control
RADAR Radio Detecting and Ranging
RFU Ready For Use
SB Starboard
SCADA Supervisory Control And Data Acquisition
SDME Speed Distance and Measuring Equipment
SOLAS International Convention for the Safety of Life at
Sea
STCW International Convention on Standards of
Training, Certification and Watchkeeping for
seafarers
STPM Suction Tube Position Monitoring
THD Transmitting Heading Device
VDR Voyage Data Recorder
WHO World Health Organization

Verklarende woordenlijst
amendement Aanvullingen of veranderingen aan conventies,
protocollen en bijlagen nadat deze van kracht
zijn gegaan.
assembly Dit is de hoogste bestuurstak van de IMO. De
assembly bevat alle leden van de IMO. Ze
vergaderen om de twee jaar, of als het
hoogdringend is.
beun Het ladingsgedeelte van een sleephopperzuiger.
Nadat het mengsel wordt opgezogen, komt het
hierin terecht.
circulaire Een publicatie die aanvullingen, richtlijnen of
andere maatregelen bekend maakt die afkomstig
zijn van de verschillende IMO-comités.
classificatie- Particuliere instelling die een klasse toekent aan
maatschappij een schip en het zodanig certificeert. De klasse
is een indicatie voor de zeewaardigheid en
betrouwbaarheid van het schip. De meeste
classificatiemaatschappijen zijn aangesloten bij
de IACS.
conning positie De positie van de officier als hij aan de navigatie-
console staat. Op ECDIS-systemen vertrekt de
vector van het eigen schip uit deze positie.
console De opbouw of stand van het materiaal waar
de werkplatformen zijn ingebouwd.
conventie Verplichte wettekst voor de geratificeerde IMO-
leden die handelt over een maritiem aspect.

conventioneel Sleephopperzuiger die niet is uitgerust met een
baggerschip OMOB.
dwell time De tijd die de waarnemer nodig heeft om
op het betreffende beeldscherm of aanwijs-
instrument te kijken, hierop informatie te
verzamelen en deze te interpreteren.
eindschakelaar In het Engels is dit 'limit switch'. Het is een
schakelaar die begint of eindigt met werken
vanaf er een bepaalde, vooraf ingestelde, waarde
bereikt wordt.
GLONASS Global Navigation Satellite System. Dit is de
Russische variant van GPS.
inlaat De opening in de romp waar de zuigbuis op
aansluit bij het baggeren. Zie bijlage 1.
integratie Integratie is het proces waarbij verschillende
systemen aan boord worden gecombineerd tot
één platform, zodat instrumenten, of systemen,
onderling kunnen communiceren. Deze
communicatie kan met of zonder tussenkomst
van een operator plaatsvinden of beoordeeld
worden.
jetnozzle Deze vindt men terug aan het uiteinde van
verscheidene jetleidingen in de beun. Deze tuiten
laten toe om jetwater in de beun te injecteren
onder hoge druk. Op deze manier wordt het
mengsel verdund zodat het beter de beun kan
verlaten via de bodemdeuren of via de
baggerpomp om naar de wal te worden gestuurd.
knik Het gedeelte van de zuigbuis ter hoogte van de
hoek tussen de boven- en onderpijp.

OMBO One-Man Bridge Operation. Afkorting die
gebruikt wordt door de IMO. Men bedoelt
hiermee de navigatie van een schip door één
persoon, het duidt niet op baggerschepen in het
bijzonder.
OMOB One-Man-Operated Bridge. Afkorting die gebruikt
wordt door DEME. Als men deze afkorting
gebruikt, bedoelt men de brug van een OMOB-
schip
OMOB-schip Een sleephopperzuiger die is uitgerust met een
OMOB: het bagger- en navigatieproces kan
geregeld worden vanuit één console door één
persoon.
P&I club Protection & Indemnity club. Meerdere rederijen
kunnen zich aansluiten bij een P&I club. Ze
betalen allen een bepaalde som aan de club en in
ruil daarvoor krijgen ze een maritieme
aansprakelijkheidsverzekering die hen beschermt
tegen claims afkomstig van derden.
repeater Een 'slave-toestel' dat gelinkt is aan een 'master-
toestel'. Het slave-toestel herhaalt de info die
wordt geproduceerd door het master-toestel.
resolutie Een publicatie die amendementen en richtlijnen
bekend maakt.
set value Een bepaalde waarde die door de operator wordt
ingesteld.
stortbak Deze geperforeerde bakken zorgen ervoor dat
het mengsel afkomstig van de baggerpomp
evenwichtig wordt verdeeld over de gehele beun.

transit Men bedoelt hiermee alle aspecten van het
varen:routeplanning,vermijden van aanvaringen,
navigatie, manoeuvreren, interne en externe
communicatie.
werkplatform plaats op de brug waar één of meerdere
processen uitgevoerd kunnen worden, en waar
tevens de nodige informatie aanwezig is om deze
processen op een veilige manier uit te voeren.
X-band radar Radar die een frequentie gebruikt van ongeveer
9 GHz. De tegenhanger van X-band is S-band.
Deze radar gebruikt een frequentie van ongeveer
3 GHz. De golflengte van de S-band is langer dan
deze van de X-band.

1
Inleiding
De One-Man-Operated Bridge (OMOB) aan boord van sleephopperzuigers
is het begin van een nieuw tijdperk voor baggerschepen: nog nooit
werden de handelingen aan boord van deze schepen op dergelijke schaal
geautomatiseerd. De komst van de OMOB maakt het technisch mogelijk
om het bagger- en navigatieproces te laten uitvoeren door slechts één
stuurman. Hoe de OMOB uiteindelijk is kunnen ontstaan, wordt uitgelegd
in hoofdstuk 1: Het ontstaan van de One-Man-Operated Bridge.
Het ontwerp van de brug van een sleephopperzuiger heeft grote
veranderingen moeten ondergaan om het OMOB-concept praktisch
realiseerbaar te maken. Het was een uitdaging voor DEME, de bedenkers
van de OMOB, om hun idee om te zetten in de praktijk. IHC merwede,
de scheepsbouwer, heeft hen daarbij geholpen. Ze hebben rekening
moeten houden met de bestaande wetgevingen aangaande de bouw, het
ontwerp en de verplichte uitrusting van de brug om het concept van
éénmansbediening op sleephopperzuigers te kunnen realiseren.
Hoofdstuk 2 geeft een overzicht van de wetgevingen en richtlijnen die
belangrijk geweest zijn bij de uitwerking van het OMOB-concept. Tevens
wordt de lay-out van de brug hier in detail besproken, zodat het duidelijk
wordt hoe de stuurman het bagger- en het navigatieproces kan beheren
vanaf één console.
Wat OMOB-schepen echter zo uniek maakt, is dat het baggerproces ook
volledig automatisch bediend kan worden dankzij het Dredger Control
System (DCS). Dit systeem vervangt de pijpman van conventionele
sleephopperzuigers door bijna al zijn taken over te nemen. Welke
handelingen er nu juist allemaal geautomatiseerd zijn en hoe de
stuurman ze kan bedienen, wordt beschreven in hoofdstuk 3.

2
Tijdens het schrijven van deze scriptie heb ik gemerkt dat de meningen
over de OMOB erg verdeeld zijn. De voorstanders vinden het een knap
concept en een sterk staaltje techniek, terwijl de tegenstanders vinden
dat het onverantwoord is om het bagger- en navigatieproces te laten
uitvoeren door één stuurman. In hoofdstuk 4 bespreek ik bondig enkele
punten in verband met de veiligheid aan boord van OMOB-schepen, in de
hoop dat voor- en tegenstanders hun mening over de OMOB beter zullen
kunnen onderbouwen na het lezen van deze scriptie.

3
1 Het ontstaan van de One-man-Operated Bridge
1.1 De technische mogelijkheid
Doorheen de jaren heeft de brug van een sleephopperzuiger diverse
technische evoluties gekend. Het is interessant om de verschillende
stappen van deze automatiseringsevolutie te bekijken, zo wordt het
duidelijk dat de OMOB tot op heden de laatste ontwikkeling is in het
automatisatie- en integratieproces van de brug op een sleephopperzuiger.
De werkzaamheden op baggerschepen zijn complexer, omvangrijker en
veelzijdiger dan de meeste mensen denken. Automatisatie van
verschillende onderdelen van het proces was een kwestie van tijd. Het
doel van de automatisering is het bereiken van een zo hoog mogelijk
rendement van werktuig en bemanning. Het tijdrovend en belastend
proces van menselijke interpretatie van procesparameters is een
primaire factor die geleid heeft tot de ontwikkeling van instrumentatie en
de automatisering in de baggerindustrie.
Experimentele gegevens op het gebied van beeldschermscanning door
menselijke waarnemers heeft aangetoond dat het visueel verzamelen
van informatie afkomstig van beeldschermen zeer tijdrovend is. De tijd
die de waarnemer nodig heeft om op het betreffende beeldscherm of
aanwijsinstrument te kijken, informatie te verzamelen en interpreteren,
wordt de dwell time genoemd.
Door informatie gecombineerd weer te geven, reduceert de dwell time,
zodat de snelheid van reageren van de waarnemer verhoogt.

4
Een bekend en eenvoudig voorbeeld hiervan uit de baggerindustrie is de
productiemeter of kruismeter1. Deze combineert de informatie van de
mengseldichtheid en mengselsnelheid.
Een secundaire factor die geleid heeft tot de ontwikkeling van
instrumentatie en de automatisering in de baggerindustrie is het continu
moeten bedienen van de verschillende subsystemen door een operator2.
Naargelang de schepen steeds vergrootten, werden deze subsystemen
talrijker en ingewikkelder. Sommige hiervan moesten dus worden
overgenomen door machines.
De toenemende graad van automatisering kan het best worden
beschreven door te kijken naar de verschillende stappen van de evolutie
van de vloot van een baggermaatschappij. Als voorbeeld nemen we de
vloot van Jan De Nul.
De verschillende stappen zijn achtereenvolgens:
de komst van de PLC-systemen,
de ontwikkeling van de SCADA-systemen,
de integratie van verschillende systemen.
1 Allen R.W., Clement W. en Jex H.R. (1970), Research on display scanning, sampling and reconstruction using separate, main and secondary tracking tasks,s.l.,NASA, CR-1569
2 Instrumentatie en automatisering van baggerwerktuigen (s.a.), IHC publication, p.17
Bron: Schippershandleiding 'Ham318'
Figuur 1: kruismeter

5
1.1.1 PLC-systemen
1.1.1.1 Beschrijving
De echte automatiseringsrevolutie is begonnen met de komst van de
Programmable Logic Controller systemen (PLC's). Deze systemen doen,
kort samengevat, het volgende3:
ze nemen ingangsinformatie- en instructies op via het
bedieningspaneel of een andere signaalgever,
ze combineren deze ingangsinformatie- en instructies volgens een
bepaalde vooraf ingestelde logica. Deze logica ligt vast in het
gebruikersprogramma,
uit dit programma worden uitgangsbevelen afgeleid. Dit is
de werkelijke actie.
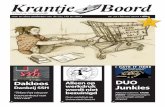
Op de volgende pagina toont figuur 2 de baggerstand van de 'Amerigo
Vespucci'. Deze stand omvat twee afzonderlijke systemen. Het linkse
gedeelte is de PLC-sturing waarmee de bediening van de bagger-
uitrusting mogelijk wordt gemaakt. Het betreft een PLC van de eerste
generatie. Ze dateert van de nieuwbouw van het schip in 1985. Het
rechtse gedeelte is bijgebouwd in 1996. Het bedient de
ontgassinginstallatie die pas later werd geïnstalleerd.
3 Maes, R. (2009), Cursus Automatisatie, Antwerpen, Hogere Zeevaartschool, niet gepubliceerde cursus.

6
Figuur 2: Baggerstand 'Amerigo Vespucci'
1.1.1.2 Instructies en informatie vòòr de komst van PLC4
De instructies werden vanuit de brug doorgegeven naar het
specifieke onderdeel: één instructie voor één doel. Men had
bijvoorbeeld een aparte bediening per afsluiter en elke lier werd
elektrisch gestuurd door een afzonderlijk circuit. Dit had als gevolg
dat de systemen destijds zeer groot en zeer onderhoudsintensief
waren.
De informatie was ook op de brug aanwezig, maar deze werd
analoog verkregen en gepresenteerd. Er was niet veel feedback,
procentuele weergave van standen van apparatuur zoals afsluiters
was onbestaande: op de brug kon men enkel zien of een afsluiter
open of gesloten was. '20 procent geopend' was ondenkbaar.
4 Cotteleer, B. (2004), De baggerinstallatie bij moderne sleephopperzuigers, Antwerpen, Hogere Zeevaartschool, niet gepubliceerde verhandeling.
Bron: Jan De Nul

7
1.1.1.3 Instructies en informatie na de komst van PLC
De instructies worden verzameld en naar een PLC-sturing
verzonden. Daarna worden ze van daaruit naar de afzonderlijke
onderdelen verstuurd.
De informatie wordt ook naar een PLC-sturing verzonden, wordt
daar verwerkt, eventueel beoordeeld en gedigitaliseerd.
De PLC-sturingen maken het mogelijk om de informatie overzichtelijker
en efficiënter voor te stellen. PLC's kunnen meer dan enkel informatie
weergeven, ze kunnen ze ook beoordelen. Een beoordeling kan leiden tot
het starten of vermijden van een bepaalde actie. Zo zal het bijvoorbeeld
onmogelijk zijn om een pomp te starten als de dieselmotor voor de
aandrijving van deze pomp aan een te hoog toerental draait. Op deze
manier wordt schade voorkomen. PLC-sturingen zorgen ervoor dat een
veelvoud aan informatie verwerkt en geïntegreerd kan worden.
1.1.2 SCADA-systemen
Een tweede stap in de evolutie van de automatisering op een
sleephopperbrug was de ingebruikname van 'Supervisory Control And
Data Acquisition systems', kortweg SCADA-systemen. Dit zijn
automatiseringssystemen die worden gebruikt voor bediening,
visualisatie en gegevensverzameling in proces- en productieomgevingen5.
Een SCADA-systeem communiceert met een controllerlaag, zoals de
hiervoor beschreven PLC's, en kan zodoende proceswaarden uit de
omgeving inlezen of commando's en parameters naar de omgeving
sturen.
5 Control-IT (2002), SCADA: een introductie, http://www.control-it.nl/SCADA/WATIS/SCWIDEF.htm, 9 maart 2010.

8
Bron: Jan De Nul
Het verloop van het proces wordt grafisch weergegeven op een
computerscherm. Bovendien is het mogelijk om dankzij de onderliggende
PLC-controllerlaag onnodige informatie te filteren en deze dus zodoende
niet weer te geven aan de operator indien dit niet gepast is. De
persinformatie zal bijvoorbeeld tijdens het baggerproces worden
weerhouden. De operator zal rechtstreeks werken met het SCADA-
systeem, vandaar dat men het een 'Human Machine Interface' (HMI)
noemt. SCADA communiceert vervolgens met de PLC-controllerlaag.
Deze laag stuurt de individuele baggeronderdelen aan.
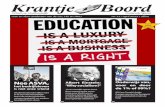
Op figuur 3 is de baggerstand van de 'James Cook' afgebeeld. Dit schip
is uitgerust met de eerste generatie van SCADA-systemen. De operator
kan net zoals op een thuiscomputer via een toetsenbord en eventueel
een muis onderwerpen selecteren en aanklikken op de computer-
schermen om zo het baggerproces aan te sturen.
Figuur 3: Baggerstand 'James Cook'

9
SCADA-systemen werken meestal op professionele platformen van
Microsoft zoals Windows NT, Windows XP en Windows 7. IHC Merwede 6
verkiest de besturingssystemen van Microsoft, omdat deze wereldwijd
het meest verspreid zijn voor tal van toepassingen. Het vereenvoudigt
tevens de communicatie en uitwisseling van informatie tussen
verschillende deelsystemen. Op de laatst gebouwde OMOB-schepen zijn
de schermen waar SCADA op wordt gevisualiseerd allemaal touchscreens.
Het gebruik van de SCADA-systemen werd tijdens deze stap van de
evolutie enkel gebruikt voor de baggerautomatisering. Men noemt dit
systeem in die context een IMC (Integrated Monitor and Control System).
Het laat de operator toe om op een eenvoudige en veilige manier de
baggerinstallatie te bedienen en het baggerproces op te volgen. Tijdens
deze stap is er dus nog geen sprake van een link tussen de navigatie- en
baggerinstallatie van het schip. Een dergelijke link zou het werk van de
stuurman en de pijpman aanzienlijk kunnen vereenvoudigen. Dit brengt
ons tot de volgende stap in de evolutie naar de OMOB: integratie.
1.1.3 Integratie
Volgens van Dale kunnen we integratie definiëren als:
'het maken van, of opnemen in, een groter geheel'.
Toegepast in de context van deze verhandeling zou integratie als volgt
beschreven kunnen worden:
Integratie is het proces waarbij verschillende systemen aan boord
worden gecombineerd tot één platform, zodat instrumenten, of systemen,
onderling kunnen communiceren. Deze communicatie kan met of zonder
tussenkomst van een operator plaatsvinden of worden beoordeeld.
6 IHC Merwede is een Nederlands bedrijf dat onder andere baggerschepen bouwt. Al de OMOB-schepen die in de vaart zijn op het moment van schrijven zijn hier gebouwd.

10
Een voorbeeld van een sleephopperzuiger waarbij differente systemen
geïntegreerd zijn, is de 'Juan Sebastian de Elcano'.
Op figuur 4 ziet men een platform waar zowel informatie afkomstig van
de survey (links), als informatie van het baggerproces (rechts) te zien is.
Deze informatie is met elkaar gelinkt: bepaalde parameters worden van
het ene systeem naar het andere gestuurd. Het getij, dat afkomstig is
van het surveysysteem, kan bijvoorbeeld worden doorgestuurd naar het
SCADA-systeem van het baggerproces. In de andere richting kan het
SCADA-systeem bijvoorbeeld de informatie van de diepte van de
sleepkop doorsturen naar het surveysysteem. Op deze manier worden
parameters van verschillende systemen geïntegreerd en kan men er
bijgevolg actief rekening mee houden.
Doordat de informatie wordt weergegeven op één scherm, verkleint de
dwell time aanzienlijk en verhoogt de efficiëntie van de operator. In
principe kan men zeer veel verschillende systemen combineren, of
integreren, tot één werkplatform.
Figuur 4: Baggerstand 'J.S. de Elcano'
Bron: Jan De Nul

11
Zulk platform kan bijvoorbeeld volgende systemen omvatten7:
IMC (SCADA),
AMCS (Alarm Monitor and Control System).
Dit is een apart systeem dat als doel heeft om alle mogelijke
alarmsignalen te verwerken,
RADAR (Radio Detecting and Ranging),
ECDIS,
DP/DT (Dynamic Positioning/Dynamic Tracking),
surveysysteem,
…
Integratie is de laatste stap in het proces van de automatisering van
systemen op de brug van een baggerschip. Zoals hiervoor reeds
aangehaald, kan men zeer ver gaan met deze integratie.
We leven momenteel in een tijdperk waarin al de nodige technologische
kennis en techniek verzameld zijn om, puur theoretisch gesteld, een
baggerschip te kunnen ontwikkelen dat voor honderd procent
geautomatiseerd is. Hoe ver een baggermaatschappij wil gaan met de
automatisatie van haar schepen, is nu een puur strategische kwestie
geworden waar veel andere aspecten bij komen kijken. Bemanning,
productie, veiligheid en efficiëntie zijn slechts enkele factoren waarmee
topmanagers en ingenieurs van de nieuwbouwafdeling van deze
maatschappijen rekening moeten houden om de grenzen van de
automatisatie te kunnen stellen.
7 De Lille, R., Antwerpen, Jan De Nul, eigen interview, 3 maart 2010

12
1.2 De aanleiding tot éénmansbediening
Eens alle technische mogelijkheden er waren om het ontstaan van OMOB
mogelijk te maken, was het eigenlijk enkel nog wachten tot iemand op
het idee zou komen. De bedenking en uitwerking van dit concept is
verwezenlijkt door de nieuwbouwafdeling van de Belgische firma DEME.
De nieuwbouwafdeling van DEME heeft beslist om over te gaan tot het
bouwen van OMOB-schepen om volgende 3 redenen8:
de communicatieproblematiek tussen stuurman en pijpman,
veiligheid,
efficiëntie.
Ik zou graag nogmaals willen benadrukken dat de drie bovenstaande
redenen aangehaald worden door de nieuwbouwafdeling van een
commercieel bedrijf.
1.2.1 Communicatieproblematiek
Alvorens de problematiek over de communicatie tussen stuurman en
pijpman op een niet-OMOB schip te beschrijven, is een minimumkennis
vereist over de operaties die plaats vinden op de brug tijdens het
baggerproces.
Er zijn in principe zeven concrete situaties waarin de pijpman en de
stuurman professioneel met elkaar moeten communiceren tijdens het
baggerproces9:
8 One-Man-Operated Bridge (2007), Ports and Dredging, volume 167, p. 14-21.
9 Men zou hier de opmerking kunnen maken dat stuurman en pijpman in feite met elkaar moeten communiceren bij elke handeling die invloed heeft op het baggerproces.

13
1. als de zuigbuis overboord geplaatst moet worden,
2. als de zuigbuis mag dalen tot voor de inlaat,10
3. als de zuigmond mag dalen tot hij net boven zeebodem hangt,
4. als het effectieve zuigen mag beginnen,
5. bij een draaimanoeuvre,
6. als de zuigbuis terug naar boven mag komen,
7. als de zuigbuis terug aan boord gebracht mag worden.
In elk van deze situaties moet de pijpman een instructie opvolgen die
door de stuurman wordt gegeven, of kan de stuurman een suggestie van
de pijpman volgen. Bijvoorbeeld in de vijfde situatie, waar het schip
moet draaien, zal de stuurman de instructie 'draaien over stuurboord', of
iets dergelijks, geven. De pijpman moet dan weten dat hij de
bakboordzuigmond11 een beetje moet liften, zodat deze niet onder het
schip terecht komt bij het maken van het draaimanoeuvre. Hij wordt ook
verondersteld om in deze situatie de hoek van de andere zuigbuis op te
volgen, zodat deze geen limieten overschrijdt. Met andere woorden: de
pijpman moet de instructie van de stuurman opvolgen. Hoewel het altijd
van de stuurman verwacht wordt dat hij de pijpman controleert of
opvolgt, kan het gebeuren dat hij hiervoor weinig of geen tijd heeft,
omdat hij zelf bezig is met het uitvoeren van een manoeuvre, het
scheepvaartverkeer op te volgen, de VHF uit te luisteren, enzovoort. Er
bestaat een reëel gevaar dat de pijpman de instructie van de stuurman
verkeerd begrijpt, of erger nog, niet gehoord heeft. In de praktijk
herhaalt de pijpman echter altijd de instructie die door de stuurman
gegeven wordt, hierdoor wordt de communicatieproblematiek deels
beperkt.
10 In bijlage 1 kan men een foto terugvinden van de inlaat van de 'Breydel'.
11 Dit voorbeeld handelt over een sleephopperzuiger met twee zuigbuizen: één aan stuurboord, en één aan bakboord.

14
Er zijn al verscheidene kleine ongevallen en 'near-misses' gebeurd door
miscommunicatie. 12 Het vermijden van dit gevaar is volgens de
nieuwbouwafdeling van DEME de hoofdreden van het ontstaan van de
OMOB op sleephopperzuigers. Doordat de stuurman op een OMOB-schip
volledige controle heeft over zowel het bagger- als het navigatieproces,
wordt het risico op communicatiefouten fors verminderd. Er is immers
geen pijpman meer die instructies foutief kan interpreteren of herhalen.
Toegepast in de context van het vorige voorbeeld betekent dit dat de
stuurman bij het uitvoeren van een draaimanoeuvre zowel het liften van
de zuigkop als het draaimanoeuvre zelf, volledig zelfstandig zal uitvoeren.
Hoe dit concreet in zijn werk gaat, wordt uitvoeriger beschreven in
hoofdstuk 3: Het Dredger Control System (DCS).
Communicatieproblemen waren echter niet de enige reden waarom de
nieuwbouwafdeling van DEME heeft beslist om onderzoek te voeren naar
de mogelijkheid van OMOB-schepen naar eigen zeggen.
1.2.2 Veiligheid
Volgens DEME zou de veiligheid aan boord van sleephopperzuigers
verbeteren met de komst van de OMOB. Doordat er op de brug minder
bemanningsleden rondlopen, is er een kleinere kans dat de officier van
wacht wordt afgeleid door conversaties met andere bemanningsleden die
niet gerelateerd zijn aan het werk. Hierdoor zou de officier zich beter op
zijn taak kunnen focussen. Helaas zijn er tot op heden nog geen interne
studies uitgevoerd die dit standpunt kracht zouden kunnen bijzetten.
Voor meer uitgebreide informatie betreffende de OMOB en veiligheid:
zie hoofdstuk 4.
12 Vertrouwelijke informatie verkregen van DEME.

15
1.2.3 Efficiëntie
Doordat noch de crew van een sleephopperzuiger, noch het management
van een baggerorganisatie 100 procent efficiënt kan zijn, is men
begonnen met het automatiseren van verscheidene onderdelen van het
baggerproces om zo de efficiëntie op te krikken. Automatisatie verhoogt
in vele gevallen immers de efficiëntie, denk bijvoorbeeld aan het
produceren van auto's met behulp van een lopende band. In de
baggerwereld vermenigvuldigt de productieafdeling de efficiëntie met
een factor die rekening houdt met de verliezen van efficiëntie door de
werkomgeving, de kwaliteit van het management van de
baggerorganisatie en de crew aan boord. Men noemt deze factor de
operationele factor ƒ0.13 Er is een tabel opgesteld voor deze factor, deze
is terug te vinden in bijlage 2. Zo zal men de efficiëntie bijvoorbeeld
vermenigvuldigen met 0,82 in het geval van een goede crew, een goed
management en een goede werkomgeving. Men probeert dit verlies aan
efficiëntie te minimaliseren door op een OMOB zoveel als mogelijk te
automatiseren.
Voor een beter begrip van 'efficiëntie' te verkrijgen, moeten we naar de
algemene formule hiervan kijken. Men kan het wiskundig als volgt
uitdrukken14:
Voor deze formule geldt:
Standard outputs = een schatting van wat de
productie zou moeten zijn ten opzichte van een
referentievlak
13 Bray, R.N., Bates A.D., Land J.M. (1996), Dredging, a handbook for engineers, Londen, Butterworth-Heinemann.
14 Handfield, R.B. en Bozarth, C.C. (2008), Introduction to Operation and Supply Chain Management, 2de herziene druk, New Jersey, Pearson Education.

16
Actual outputs = de effectieve productie ten
opzichte van dit zelfde referentievlak
Indien we dit vertalen naar de baggerindustrie, krijgen we volgende
formule:
Het 'opgelegd volume te baggeren sediment per tijd' kan bijvoorbeeld
opgegeven zijn door de productiedienst van een baggermaatschappij om
te voldoen aan de eisen van de klant of om een bepaalde deadline te
halen.
Uit de formule kunnen we afleiden dat de efficiëntie verhoogt als men op
een kortere tijdspanne meer bruikbaar materiaal kan baggeren, of met
andere woorden, als het baggerproces geoptimaliseerd wordt.
In dit kader citeer ik hier graag de eindconclusie van de bachelorscriptie
van collega-student Bart Van De Velde: 15
"Het is zéér belangrijk om de productie-capaciteit van beun, pomp en
sleepkop met elkaar overeen te stemmen, in functie van een optimale
bezinking in de hopper."
Men kan hieruit afleiden dat de belangrijkste parameters van het
baggerproces steeds nauwlettend in de gaten moeten worden gehouden
om zo het proces te optimaliseren. In dit opzicht kan de automatisatie
van het baggerproces een belangrijk voordeel bieden om de efficiëntie te
verhogen. Bij de OMOB worden de parameters immers niet meer door
een pijpman geanalyseerd maar door een intelligent en geautomatiseerd
systeem: het DCS. Zie hoofdstuk 3 voor meer informatie hierover.
15 Van De Velde, B. (2009), Optimalisatie van het baggerproces op TSHD tijdens het sleepzuigen, Antwerpen, Hogere Zeevaartschool, niet gepubliceerde bachelorscriptie.

17
Op een niet-OMOB schip hangt de efficiëntie van het baggerproces vooral
af van de pijpman. Bij baggeraar Jan De Nul houdt men rekening met
het feit dat de pijpman zijn aandacht moet verdelen over twee
zuigbuizen of niet. Men gaat ervan uit dat de efficiëntie van een pijpman
op een schip met twee zuigbuizen ongeveer 20 procent minder is dan op
een schip met één zuigbuis16. Dit komt doordat de pijpman twee reeksen
van parameters in de gaten moet houden en twee zuigbuizen effectief
moet bedienen. Ook hier kan men direct het nut inzien van een
geautomatiseerd baggerproces.
1.3 Deelbesluit
Dankzij de evolutie van de automatiseringstechnieken is de uitvoering
van het OMOB-concept technisch realiseerbaar geworden. De introductie
van de PLC-systemen heeft alles in een stroomversnelling doen belanden.
Dankzij deze sturingen zijn de SCADA-systemen kunnen ontstaan. Zij
hebben de automatisering vereenvoudigd en hebben er tevens voor
gezorgd dat het geheel gebruiksvriendelijker geworden is. Het IMC-
systeem maakt het makkelijker voor de operator om in een oogwenk al
de belangrijke informatie af te lezen zodat de dwell time aanzienlijk
vermindert. Het was echter afwachten tot de afzonderlijke functies van
het baggermechanisme en -systeem, het AMCS, het surveysysteem en
andere systemen geïntegreerd konden worden tot het DCS.
Zoals in vele evoluties in de scheepvaart is het idee van dit nieuwe
concept voortgevloeid uit een reeks van ongevallen en 'near-miss'
situaties. Het merendeel van deze gevaarlijke situaties is ontstaan door
een miscommunicatie tussen stuurman en pijpman.
16 Rekenregel die gehanteerd wordt bij de productieafdeling van Jan De Nul. Hiervan zijn echter geen tabellen of iets dergelijks opgemaakt.

18
Dit gevaar is onbestaande op OMOB-schepen, doordat er simpelweg
geen pijpman meer is: de stuurman is verantwoordelijk voor het
navigatie- en het baggerproces. De brug is zo ingericht dat de stuurman
er helemaal alleen op kan staan. Op deze manier kan hij zich volledig
concentreren op zijn werk en zal hij niet afgeleid worden door andere
personen die op de brug rondlopen. Dit is de hoofdreden waarom DEME
stelt dat de OMOB veilig is17.
17 Zie ook hoofdstuk 4: Veiligheid.

19
2 Wetgevingen
Zoals aangetoond in hoofdstuk één is het technologisch gezien perfect
mogelijk om een baggerschip te laten bedienen door één stuurman.
Hierdoor is het noodzakelijk dat de scheepsbouwers de brug optimaal
indelen, zodat de stuurman te allen tijde een goed overzicht kan
bewaren. De functionaliteit, het onderhoud en de indeling van de
navigatie- en baggeruitrusting zijn van essentieel belang om de
veiligheid te garanderen.
2.1 Het ontwerp van de brug en de verplichte apparatuur:
de SYS-NEQ1-notatie
2.1.1 Situering
Als een reder beslist om een nieuw schip te bouwen, dient hij rekening te
houden met tal van reglementeringen en regels. Volgende internationale
kaderorganisaties bepalen de wetgeving in verband met het ontwerp en
de verplichte apparatuur op de brug van een sleephopperzuiger,
rekening houdend met het OMOB-concept18:
de International Association of Classification Societies (IACS),
de International Maritime Organization (IMO),
de International Organization for Standardization (ISO).
Bovenop de regels van deze internationale kaderorganisaties zijn de
nationale autoriteiten, de scheepseigenaars en administraties vrij om
bijkomende regels op te leggen.
18 International Association of Classification Societies (1992), One-Man Bridge Operated (OMBO) ships, publicatie UR N1. Deze richtlijnen en regels gelden enkel indien de reder kiest voor een classificatiemaatschappij die aangesloten is bij de IACS.

20
De verschillende wetgevingen in verband met het ontwerp van de brug
en de bijhorende verplichte apparatuur van de IMO en ISO zijn
gebundeld door de IACS en worden uitgegeven door de verschillende
classificatiemaatschappijen die lid zijn van de IACS. Op deze manier
worden de regels en wetten makkelijker toegankelijk voor de
scheepsbouwers.
Voor de reder een schip gaat bouwen, moet hij kiezen bij welke
classificatiemaatschappij hij het schip zal laten certificeren. Afhankelijk
van deze keuze zullen bepaalde regels strenger zijn dan deze opgelegd
door de IACS. De OMOB-schepen van DEME worden allemaal gekeurd
door 'Bureau Veritas' (BV). De regels voor het bouwen van stalen
schepen onder toezicht van Bureau Veritas kunnen we vinden in
'The Rules for the Classification of Steel Ships'. Bij andere classificatie-
maatschappijen vinden we gelijkaardige publicaties19.
De regels hebben vijf onderverdelingen:
part A: Classification and Surveys,
part B: Hull and Stability,
part C: Machinery, Electricity, Automation and Fire Protection,
part D: Service Notations,
part E: Additional Class Notations.
Voor de bespreking van OMOB zijn vooral de wetgevingen van deel E
belangrijk. Deel A, B, en C zijn van toepassing op alle schepen die de
SOLAS-wetgeving moeten naleven.
19 Ter vergelijking: bij 'American Bureau of Shipping (ABS)' wordt de regelgeving weergegeven in de 'Steel Vessel rules 2010'. Deze regels zijn eveneens gebaseerd op de jaarlijkse uitgave van de IACS.

21
OMOB-schepen hebben dezelfde klasse als andere sleephopperzuigers,
namelijk deze van ' Hopper Dredger' 20 . Men noemt dit de 'service
notation'. De bijkomende vereisten voor dit type schip kunnen we
terugvinden in hoofdstuk 13 van deel D: 'Ships for dredging activity'.
Classificatiemaatschappijen reiken onder andere klassencertificaten uit
aan schepen in functie van de klassennotatie. ' HULL' is een voorbeeld
van een verplichte notatie. Dit is een 'Main Class Symbol'. Als een schip
voldoet aan de regels en eisen van deel A kan deze notatie bekomen
worden.
Zoals de titel van deel E al doet vermoeden, zijn de klassennotaties
onder dit deel van de regels optioneel. Het meest bekende voorbeeld van
een bijkomende klassennotatie is de 'ice class' notatie.
OMOB-schepen hebben twee bijkomende klassennotaties:
SYS-NEQ1,
AUT-UMS.21
Bovenstaande benamingen worden enkel gebruikt door Bureau Veritas.
Andere classificatiemaatschappijen gebruiken een andere terminologie
voor dezelfde concepten. Bijlage 3 geeft hiervan een schematisch
overzicht. De regels en wetgevingen waarnaar verwezen wordt, zijn
echter dezelfde. De IACS heeft er immers voor gezorgd dat deze
geharmoniseerd zijn.
20 Het maltezerkruis ( ) verzekert dat de constructie van het schip verlopen is onder toezicht van een gecertificeerde surveyor van een classificatiemaatschappij. Het symbool wordt tegenwoordig gebruikt door meerdere classificatiemaatschappijen die lid van de IACS zijn. Een streepje onder het kruis wil zeggen dat een bepaald schip onder toezicht van een andere maatschappij die lid is van de IACS gebouwd is, alvorens het bij de huidige maatschappij kwam. Indien er geen maltezerkruis voor de notatie staat, wil dit zeggen dat het schip niet gebouwd is onder toezicht van een lid van de IACS.
21 AUTomation systems - Unattended Machinery Spaces. Deze notatie zorgt ervoor dat de machinekamer tijdelijk onbemand kan en mag zijn. De installaties hiervoor aangebracht, moeten ervoor zorgen dat het schip te allen tijde dezelfde veiligheidsgraad heeft als een schip met een bemande machinekamer, ook tijdens het manoeuvreren.

22
De SYS-NEQ-notatie is een bijkomende klassennotatie voor schepen
die uitgerust zijn met een centraal gelegen systeem dat toelaat om het
navigatieproces te beheren en te evalueren. Dit systeem moet ervoor
zorgen dat de normale navigatie en het manoeuvreren van het schip
kunnen gebeuren door twee samenwerkende personen22.
De SYS-NEQ1 is een notatie die enkel te verkrijgen is indien het schip
al uitgerust is volgens de SYS-NEQ-regels. Deze notatie eist dat de
normale navigatie en het manoeuvreren van het schip kunnen gebeuren
door één persoon onder normale condities en dit volgens een
wachtsysteem waarbij telkens één persoon wordt afgelost door een
andere. Deze notatie bevat specifieke eisen om ongevallen te vermijden
die veroorzaakt worden door het niet alert zijn van de stuurman.
Bij het bovenstaande kunnen we enkele opmerkingen maken:
er is geen duidelijke definitie van 'normale' condities beschreven in
de regels van BV. Men gaat ervan uit dat deze condities duidelijk
beschreven staan in de 'operations manual' van het schip. Deze
handleiding moet altijd worden goedgekeurd door de vlaggenstaat
waarbij het schip geregistreerd is. Het wachtensysteem is evenmin
gedefinieerd,
losstaand van deze regels moet de brug altijd worden bemand
volgens de wetgeving van het land van registratie en de wetgeving
van de wateren waar het schip werkzaam is.
De richtlijnen en wetgevingen van voornoemde kaderorganisaties in
verband met het ontwerp van de brug en de verplichte apparatuur zijn
allemaal opgenomen in de SYS-NEQ1-notatie.
22 Bureau Veritas (2010), The Rules for the Classification of Steel Ships, Part E, Chapter 4:
Integrated Ship Systems, Section 1: Centralised Navigation Equipment (SYS-NEQ).

23
Sommige classificatiemaatschappijen kiezen ervoor om bepaalde
richtlijnen niet integraal over te nemen, maar slechts delen hiervan23. Er
wordt dan van hen verwacht dat ze deze specifieke richtlijnen
beschrijven in een eigen publicatie. Maar indien een classificatiebureau,
bijvoorbeeld BV, verwijst naar een document met richtlijnen, moeten de
scheepsbouwers wel degelijk al deze richtlijnen volgen indien ze een
bijkomende klassennotatie zoals SYS-NEQ1 wensen te behalen.
2.1.2 De International Maritime Organization (IMO)
De IMO is een internationale organisatie die wetten, regels en richtlijnen
oplegt om het scheepvaartverkeer veilig en milieubewust te laten
verlopen. Voor het ontwerp en de verplichte apparatuur van de brug
dient rekening te worden gehouden met bepaalde conventies, circulaires,
en resoluties om de SYS-NEQ1-notatie te kunnen bekomen.
2.1.2.1 STCW '95-conventie24
Deze conventie is onderverdeeld in Sectie A en Sectie B:
Sectie A bevat verplichte eisen waaraan al de leden van de
conventie moeten voldoen,
Sectie B bevat aanbevelingen en richtlijnen. De leden van de
conventie mogen hiervan echter verplichte regels maken.
23 Bijvoorbeeld: Det Norske Veritas (DNV) doet dit met de NAUT-OSV-notatie.
24 International Maritime Organization (1995), International Convention on Standards of
Training, Certification and Watchkeeping for seafarers (STCW), amended version of 2006,
London.

24
Uiteraard moet er rekening gehouden worden met al de regels van
Sectie A, maar er staan enkele specifieke passages in deze sectie die
zeker voor een uitdaging hebben gezorgd bij het ontwerp van de OMOB:
Sectie A, hoofdstuk 8, deel 3-1, paragraaf 12:
'The officer in charge of the navigational watch is the master's
representative and is primarily responsible at all times for the safe
navigation of the ship and for complying with the International
Regulations for Preventing Collisions at Sea [COLREGS], 1972'
Er staat dus duidelijk in de STCW-conventie beschreven dat de
hoofdbezigheid van de stuurman te allen tijde het navigatieproces
moet zijn. Deze passage maakt het baggerproces rechtstreeks van
ondergeschikt belang ten opzichte van het navigatieproces. Uit
deze paragraaf kunnen we afleiden dat de baggerconsole zo
geplaatst moet worden dat de stuurman direct toegang moet
kunnen hebben tot de bedieningsorganen van het navigatieproces.
Zie punt 2.2.2.2 voor meer informatie hierover.
Men vermeldt ook de COLREGS. Uiteraard moet er tijdens de
ontwerpfase van de brug rekening worden gehouden met de
zichtbaarheidsectoren die nodig zijn om de COLREGS te kunnen
toepassen. Deze grenzen worden beschreven in MSC-circulaire
982 (zie verder).
Sectie A, hoofdstuk 8, deel 3-1, paragraaf 26:
'The officer in charge of the navigational watch shall not be
assigned or undertake any duties which would interfere with the
safe navigation of the ship'

25
Deze paragraaf maakt duidelijk dat een éénmansbediening op
sleephopperzuigers enkel en alleen mogelijk gemaakt kon worden
door het baggerproces quasi volledig te automatiseren. Enkel op
deze manier kan de stuurman de vereisten nakomen die door
deze paragraaf worden gesteld.
2.1.2.2 MSC-circulaire 982
De titel van deze circulaire is:
'Guidelines on ergonomic criteria for bridge equipment and lay-
out'
De bedoeling van deze richtlijnen is om de brug zo ergonomisch
en efficiënt mogelijk in te richten, zodat het navigatieproces
veiliger wordt. Ze zijn echter niet specifiek bedoeld voor
éénmansbediening. Dit betekent dat DEME en IHC Merwede, de
scheepsbouwer, deze richtlijnen niet 100 % gevolgd hebben. Ook
de SYS-NEQ1-notatie beschrijft de ergonomische criteria voor de lay-
out en de apparatuur voor een éénmansbediende brug. Deze regels zijn
echter niet zeer gedetailleerd. Daarom hebben DEME en IHC Merwede
besloten om ook de regels en richtlijnen van de NAUT-OSV-
notatie 25 van Det Norsk Veritas (DNV) te volgen. Deze regels
leunen zeer sterk aan bij deze MSC-circulaire.
Een andere reden waarom men hiervoor geopteerd heeft, is dat er
in de IMO-publicaties enkel over de veiligheid van het navigatie-
proces wordt gesproken.
25 Det Norsk Veritas (2010), Joint Industry Project: Bridge Design Offshore Service Vessels
( NAUT-OSV), HØvik.

26
Men heeft gekozen de richtlijnen van offshore werkschepen zo
veel als mogelijk te volgen, omdat deze het dichtst aanleunen bij
de unieke situatie van OMOB26. Op deze manier wordt ook het
baggerproces veiliger gemaakt. Voor de bespreking van NAUT-
OSV verwijs ik naar 2.2.
2.1.2.3 MSC-circulaire 56627
De titel van deze circulaire is:
'Provisional guidelines on the conduct of trials in which the officer of the
navigational watch acts as the sole look-out in periods of darkness'
De STCW-code voorziet de mogelijk om trials of experimenten in
de code op te nemen: meerbepaald in Sectie A, hoofdstuk I, deel 13:
'Conduct of trials'. In Sectie B, hoofdstuk I, deel 13 staan hierover nog
aanvullende richtlijnen: 'Guidance regarding the conduct of trials'. In de
originele versie van de STCW-code van 24 juli 1995 waren deze delen
nog blanco. Ze zijn later via een amendement in de vorm van een
circulaire opgevuld.
Het is opmerkelijk dat de SYS-NEQ1-notatie op dit moment van
schrijven, anno 2010, nog steeds rekening houdt met MSC-circulaire
566. Ze is immers al sinds 27 mei 1998 nietig verklaard door de MSC-
circulaire 867 met als titel:
'Officer of the navigational watch acting as the sole look-out during
periods of darkness'28
26 Nagtegaal, R., Sliedrecht, IHC Merwede, eigen interview, 27 juli 2010
27 International Maritime Organization (1991), Maritime Safety Committee (MSC), circular 566, London.
28 Men kan deze circulaire terugvinden in bijlage 4.

27
De reden waarom circulaire 566 nog steeds wordt opgenomen, is dat er
nog altijd rekening wordt gehouden met de lay-out van de brug zoals ze
in deze circulaire beschreven staat. Hoewel One-Man-Bridge Operation
(OMBO) tijdens periodes van duisternis niet meer toegelaten is, kan de
brug nog wel worden ingericht voor OMBO, maar dan voor gebruik
overdag29.
2.1.2.4 IMO-resolutie A.694(17)
Deze resolutie van de Assembly met nummer 694, die tijdens de 17de
sessie werd goedgekeurd, heeft als titel:
'Recommendation on general requirements for shipborne radio
equipment forming part of the Global Maritime Distress and Safety
System (GMDSS) and for electronic navigational aids'
Men spreekt in deze resolutie over de installatievoorwaarden, het
ontwerp, de regels aangaande stroomtoevoer, de mogelijke storingen
met andere apparaten en het onderhoud van de GMDSS-apparatuur. In
de SOLAS wordt er rechtstreeks verwezen naar deze resolutie.
SYS-NEQ1 bevat strengere eisen aangaande de stroomtoevoer dan de
A.694(17). Zo moet er bijvoorbeeld een aparte stroomtoevoer voor de
navigatietoestellen en voor de radio-installatie worden voorzien. Elk
apparaat moet worden uitgerust met twee stroombronnen: één van het
hoofdnet en één van het noodnet.
29 De afkorting 'OMBO' wordt door de IMO gebruikt. Men bedoelt hiermee de navigatie van een schip door één persoon. 'OMOB' wordt door DEME gebruikt: hiermee bedoelt men baggerschepen waarbij het navigatie- en baggerproces bediend wordt door één persoon.

28
2.1.2.5 IMO-resolutie A.708(17)
Deze resolutie handelt over de:
'Navigation Bridge Visibility and Functions'
In deze resolutie wordt onder andere vermeld dat de maximale
blinde sector voor de boeg vanaf de 'conning positie' op de brug
maximaal 500 meter of twee maal de LOA mag zijn. De kortste
afstand geldt. Er wordt bijvoorbeeld ook gesproken over de
eigenschappen die de ramen op de brug moeten hebben. Doordat
al deze regels ook zijn opgenomen in de NAUT-OSV-notatie van
DNV verwijs ik nogmaals naar 2.2.
2.1.2.6 SOLAS-conventie30
Enkele belangrijke passages van deze conventie in verband met
het ontwerp van de brug en de bijhorende verplichte apparatuur,
in het bijzonder diegene die hier verder beschreven worden, zijn
terug te vinden in hoofdstuk V: 'Safety of Navigation'.
Regulation 15: 'Principles relating to bridge design, design and
arrangement of navigational systems and equipment and bridge
procedures'31.
In deze regel staan eerder algemene voorschriften.
30 International Maritime Organisation (1974), International Convention for the Safety of Life at Sea (SOLAS), amended version of 2009, London.
31 Zie bijlage 5

29
Er staat onder andere vermeld dat de informatie van het
navigatieproces gemakkelijk toegankelijk moet zijn voor de
bemanning en de loods, en dat de uitrusting zo ontworpen moet
worden dat er geen overbodige moeite door de bemanning of
loods gedaan moet worden om deze informatie te verkrijgen. In
geen geval mag de uitrusting de communicatie tussen de loods en
de bemanning bemoeilijken.
Regulations 17-20, 22, en 2532
Deze regels bevatten voorschriften en richtlijnen aangaande de
elektromagnetische comptabiliteit van de apparatuur die op de
brug aanwezig is (17), de prestatiestandaard die elk afzonderlijk
apparaat dat geïnstalleerd wordt minstens moet hebben (18), de
instrumenten die de brug minimaal moet bevatten naargelang het
type schip (19 en 20), de zichtbaarheidssector van de brug (22)
en de vereisten aangaande de stuurmachine (25).
In de SYS-NEQ1-regels wordt vooral veel aandacht besteed aan
Regulation 18. De verwijzingen naar de richtlijnen van de 'IMO
Performance Standards' die hierin beschreven staan, zijn bijna allemaal
geïntegreerd in SYS-NEQ1.
2.1.2.7 IMO Performance Standards
Deze standaarden beschrijven de meeste instrumenten die verplicht zijn
op de brug.33
32 Zie bijlage 6 voor de titels van deze regels.
33 Volgens de SYS-NEQ1-notatie.

30
De standaard van elk instrument wordt door een afzonderlijke resolutie
beschreven.34 Deze handelen vooral over:
de omgevingsomstandigheden die het apparaat moet kunnen
verdragen,
de bouw van het apparaat: de lichtsterkte van de display, de
stroomvoorziening, de mogelijkheid tot reparatie, verplichte
alarmen, enzovoort,
interferentiestoornissen met andere apparaten,
extra specifieke eigenschappen per instrument. Bijvoorbeeld de
'range scales' bij de echosounder of de beschrijving van de
'compass card' bij het magnetisch kompas.
De meeste instrumenten en apparaten die hierna vernoemd worden
moeten voldoen aan de IMO performance standaarden. Om de SYS-
NEQ1-notatie te kunnen behalen, moet de brug minstens uitgerust zijn
met volgende instrumenten en apparaten:
magnetische kompassen (standaardkompas + reservekompas),
gyrokompas (+ voorligging repeater + peiling repeater),
RADARS (twee, waarvan minstens één X-band radar die uitgerust
is met ARPA),
apparatuur dat de snelheid en afgelegde weg kan meten. Dit
wordt ook wel eens 'Speed Distance and Measuring Equipment'
(SDME) genoemd. Dit systeem moet snelheid en afgelegde weg
over de grond en over het water kunnen meten,
echo-sounder,
ECDIS met back-up systeem,
elektronische hulpmiddelen voor de navigatie. Dit kan een
eenvoudige computer zijn die bijvoorbeeld uitgerust is met
Microsoft Excel.
34 Zie bijlage 7 voor een lijst van alle apparaten en hun bijhorende IMO-resoluties.

31
Merkwaardig is dat er verwezen wordt naar resolutie A.574 (14).
Deze resolutie is reeds in 1991 vervangen door resolutie A.694
(17). Na navraag bleek dit effectief een foute verwijzing te zijn die
in de toekomst zal worden aangepast,35
VHF-radio-installatie (+ VHF 'watchkeeping' ontvanger),
Heading Control System (HCS),
rate-of-turn aanwijzer,
track control system,
Transmitting Heading Device (THD) of voorligging aanwijzer,
apparatuur waarmee de positie van het schip nauwkeurig
bepaald kan worden met de hulp van satellieten. Dit kan via
een GPS-ontvanger, een GLONASS-ontvanger,
een DGPS-ontvanger of een DGLONASS-ontvanger,
universal Automatic Identification System (AIS),
installatie die geluid kan ontvangen en versterken. Dit is in
overeenstemming met de COLREGS. Deze installatie versterkt
geluidsseinen van buiten de brug, zodat ze binnen hoorbaar zijn,
Bridge Navigational Watch Alarm System (BNWAS). Men
noemt dit ook wel eens 'bridge safety system' of 'vigilance system'.
Dit systeem is niet verplicht voor de tweemansbediening van de
SYS-NEQ-notatie. Het is specifiek ontworpen om ervoor te
zorgen dat er op de brug te allen tijde minstens één alerte officier
aanwezig is. Het systeem moet zo in elkaar zitten, dat enkel de
kapitein toegang heeft tot de instelfunctie van het regelbare
interval van het alarm. Het mag uiteraard het gewone
navigatieproces niet belemmeren en het moet verbonden zijn met
het 'Alarm Transfer System' (ATS). Aan boord van OMOB-schepen
spreekt men van een 'dodemansalarm’36. Het controlepaneel van
dit alarm bevindt zich op de hoofdconsole aan stuurboord.
35 Hellemans, R., Antwerpen, Bureau Veritas, eigen interview, 29/07/2010
36 Vandepoele, S., Antwerpen, 1e stuurman 'Breydel', eigen interview, 23/07/2010

32
De intervaltijd is instelbaar tot 12 minuten. De instellingen kunnen
worden vergrendeld met een sleuteltje. Enkel de kapitein heeft
hiervan een exemplaar. Het alarm kan men accepteren op het
controlepaneel zelf, of via de 'watch alarm reset' knop. Dit is een
drukknop die zich nabij de stuurman bevindt. Het alarm geeft een
zacht signaal wanneer het ingestelde interval verlopen is. Indien
dit alarm niet wordt geaccepteerd binnen de 30 seconden, zorgt
het ATS ervoor dat er een alarm afgaat in de kajuit van de kapitein
en in de publieke ruimtes. De kapitein kan er ook voor kiezen om
het alarm te laten afgaan in de kajuit van een 'back-up navigator'.
Dit kan bijvoorbeeld de eerste stuurman van de andere ploeg zijn,
alarm transfer system. Dit systeem mag niet draadloos zijn. De
enige uitzondering hierop mag de verbinding tussen de back-up
navigator en de officier van wacht zijn maar enkel op voorwaarde
dat deze back-up navigator in dezelfde shift loopt als de OOW. Hij
moet dan ook voorzien zijn van een draagbare VHF of UHF om te
kunnen communiceren met de OOW,
central alarm panel. Er moet een controlepaneel aanwezig zijn
waar alle alarmen beheerd kunnen worden,
Voyage Data Recorder (VDR). De 'zwarte doos' van de
scheepvaart,
NAVTEX,
Figuur 5: Links: BNWAS control panel met sleuteltje, Rechts: 'watch alarm reset' knop
Bron: Steven Vandepoele, opname aan boord van de 'Breydel'

33
GMDSS-apparatuur. Deze is afhankelijk van het gebied waar het
schip vaart. De meeste OMOB-schepen zijn uitgerust met
apparatuur die geschikt is voor het 'A4' zeegebied,
weerfax. Deze moet de mogelijkheid hebben om kaartjes af te
drukken,
windsnelheid- en windrichtingaanwijzer,
afstandsbediening om de propulsie-eenheid te bedienen,
afstandsbediening om de fluit te bedienen. Deze moet volgens
de SOLAS en de COLREGS een geluidssein kunnen produceren met
een grondfrequentie die tussen de 70 en 700 Hz ligt,
afstandsbediening om de ruitenwissers te bedienen,
controlepaneel om de scheepslichten te bedienen,
controlepaneel om de stuurpompen en stuurmodus te
selecteren,
een intern communicatiesysteem. Men moet vanaf de brug alle
mogelijk locaties aan boord kunnen bereiken: kajuiten,
pompkamer, messroom, enzovoort.
systeem dat de temperatuur op de brug kan regelen.
SYS-NEQ1 eist dat de afstandsbediening van de propulsie-eenheid, de
fluit en de ruitenwissers, de controlepanelen van de lichten en de
stuurpompen, de VHF-radio-installatie en het intern communicatie-
systeem te bedienen zijn vanaf een zittende en een staande positie van
de stuurman. Voor meer informatie over de specifieke indeling van de
navigatie- en baggerconsole, ook wel de hoofdconsole genoemd: zie 2.2.

34
2.1.3 De International Organization for Standardization (ISO)
Dit is een internationale organisatie die wereldwijd standaarden voor
diensten en producten bepaalt 37 . Deze standaarden, of normen, zijn
vastgelegd in documenten die door deze organisatie worden uitgegeven.
In verband met het ontwerp van de brug en de bijhorende apparatuur in
het kader van de SYS-NEQ1-notatie geldt er één specifieke ISO-
publicatie: de ISO-8468:2007. Deze heeft als titel:
'Ship's bridge lay-out and associated equipment. Requirements and
guidelines.'
Deze publicatie is zeer vergelijkbaar met MSC-circulaire 982 en de regels
die beschreven staan in de NAUT-OSV-notatie van DNV.
2.2 Beschrijving van de OMOB aan de hand van de
NAUT-OSV-regels
Zoals eerder vermeld, hebben DEME, IHC Merwede en Bureau Veritas
ervoor gekozen om ook rekening te houden met de regels en richtlijnen
die voorgeschreven zijn in deze publicatie van DNV. Ze is hoofdzakelijk
gebaseerd op volgende, eerder vermelde regels:
IMO-resolutie A.708(17),
SOLAS hoofdstuk V, regulation 15,
MSC-circulaire 982,
ISO 8468:2007.
Deze publicaties vermelden allemaal min of meer dezelfde informatie.
Waarom heeft DEME er dan voor gekozen om ook de NAUT-OSV-
regelgeving te volgen? Het antwoord hierop is eenvoudig: veiligheid.
37 International Organization for Standardization (2010), About ISO, www.iso.org, 28/07/2010.

35
Door de regels van offshore schepen toe te passen op OMOB-schepen,
verhoogt de veiligheid van het werkaspect. Bovenstaande publicaties
focussen vooral op de veiligheid van het nautische aspect.
De combinatie van de NAUT-OSV-regels en de SYS-NEQ1-notatie
maakt het hele gebeuren veiliger. Inspecteurs van de Port State Control
(PSC) of van de classificatiemaatschappijen mogen schepen die volledig
voldoen aan de klasse-eisen toch afkeuren, indien ze de zaak niet veilig
genoeg vinden. Het volgen van de regels en richtlijnen van BV en DNV
moet dit voorkomen.
2.2.1 De verschillende werkplatformen
De bruggen van OMOB-schepen zijn onderverdeeld in verschillende
werkplatformen. Hiermee bedoelen we plaatsen op de brug waar één of
meerdere processen uitgevoerd kunnen worden en waar tevens de
nodige informatie aanwezig is om deze processen op een veilige manier
uit te voeren. De plaats op de brug en de functionele indeling van deze
platformen moeten ervoor zorgen dat de officier van wacht zich te allen
tijde een goed beeld kan vormen van wat er allemaal rond hem gebeurt.
Zijn zogeheten 'situational awareness' moet altijd optimaal zijn: dit
betekent dat de brug optimaal ingedeeld moet zijn om in dit kader veilig
te kunnen communiceren, navigeren, baggeren en dumpen. Volgens de
NAUT-OSV-regels bestaat de brug uit twee delen:
het navigatiegedeelte: vanaf dit gedeelte van de brug
moet men kunnen: afmeren, zoekacties uitvoeren en het
transitproces38 uitvoeren,
het operationele gedeelte: vanaf dit gedeelte kan men de
'offshore-operaties' uitvoeren. Dit moet men lezen als het
baggerproces in de context van OMOB-schepen.
38 Men bedoelt hiermee alle aspecten van het varen: routeplanning, vermijden van aanvaringen door het verkeer te observeren, navigatie, manoeuvreren, interne en externe communicatie en toezicht houden over interne veiligheidssystemen.

36
Voorgaande functies worden verdeeld over meerdere werk-
platformen. Voor offshore schepen zijn er regels voorzien voor
deze verplichte werkplatformen:
Het navigatiegedeelte moet minstens bevatten:
1. werkplatform om het verkeer te observeren en het
navigatie- en manoeuvreerproces uit te voeren,
2. werkplatform voor navigatieondersteuning,
3. werkplatform voor routeplanning,
4. werkplatform voor meeroperaties.
Het operationele gedeelte moet minstens bevatten:
5. werkplatform om het schip te beheren39,
6. werkplatform voor het opvolgen en uitvoeren van cargo-
operaties.40
Vele functionele eisen van deze werkplatformen komen overeen.
De NAUT-OSV voorziet dan ook de mogelijkheid om bepaalde
werkplatformen te combineren. Zo is het mogelijk om 3 met 1 of
2 te combineren en 4 mag deel uitmaken van 1 en/of 5. Er zijn
ook regels voorzien voor bijkomende werkplatformen die andere
functies hebben dan diegene die onder het navigatiegedeelte of
het operationele gedeelte van de brug vallen. Een werkplatform
voor communicatie en een werkplatform voor veiligheid en
noodoperaties zijn bijvoorbeeld bijkomende werkplatformen. Deze
zijn combineerbaar en overigens ook verplicht op alle schepen die
vernoemd worden in NAUT-OSV.
39 'Workstation for shiphandling'.
40 'Workstation for aft support'.

37
Een console kan meerdere werkplatformen bevatten. Met console
wordt de opbouw, of de stand, van het materiaal bedoeld waar de
werkplatformen zijn ingebouwd. Als we alle voorvernoemde
combinatiemogelijkheden bekijken, zien we dat er minstens drie
consoles gebouwd moeten worden om al de werkplatformen in te
voorzien. Onderstaande afbeelding geeft een idee over hoe de
brug er dan zou kunnen uitzien:
Op deze mogelijke brugconfiguratie vinden we vijf consoles terug:
console 1 bevat het werkplatform om het verkeer te
observeren en het navigatie- en manoeuvreerproces uit te
voeren, het werkplatform voor navigatieondersteuning en/of
het werkplatform voor routeplanning en/of het werkplatform
voor meeroperaties,
Figuur 6: Mogelijke verdeling werkplatformen
Bron: NAUT-OSV-publicatie van DNV

38
console 2 bevat het werkplatform voor veiligheid en nood-
operaties, het werkplatform voor communicatie en/of het
werkplatform voor routeplanning,
console 3 bevat het werkplatform om het schip te beheren, het
werkplatform voor het opvolgen en uitvoeren van cargo-operaties
en/of het werkplatform voor meeroperaties,
console 4 en 5 bevat de werkplatformen voor reddingsoperaties.
Deze zijn enkel verplicht op reddingsschepen.
De conventionele sleephopperzuigers hebben een vergelijkbare lay-out
van de brug. De pijpman zit in dat geval aan console 3.
Omdat er geen specifieke richtlijnen bestaan voor OMOB-schepen 41 ,
hebben DEME en IHC Merwede onder het toeziend oog van BV, aan de
hand van de regels en richtlijnen van de NAUT-OSV-notatie van DNV,
de consoles zo veel mogelijk proberen te integreren met elkaar.
Anders geformuleerd: OMOB-schepen bevatten alle voornoemde
werkplatformen, maar deze zijn anders verdeeld over de consoles.
De afbeelding op de volgende pagina van de brug van de
'Artevelde' geeft een schematisch overzicht van de aanwezige
consoles op een OMOB-schip:
41 Er was op het moment van schrijven geen enkele classificatiemaatschappij die de service notation 'OMOB Hopper Dredger' voorzien had in haar regelgeving.

39
Het valt direct op: het navigatiegedeelte en het operationele gedeelte
lopen door elkaar. De console waar de pijpman zit op conventionele
sleephopperzuigers is verdwenen: de stuurman neemt immers zijn
functies over. Al de functies die aan deze console uitgevoerd werden,
zijn nu dus geïntegreerd in de voorste console. Een samenvatting van de
werkplatformen per console:
console 1, ook wel de hoofdconsole genoemd, bevat het
werkplatform om het verkeer te observeren en het
navigatie- en manoeuvreerproces uit te voeren, het werk-
platform voor navigatieondersteuning, het werkplatform voor
meeroperaties, het werkplatform om het schip te beheren, het
werkplatform voor het opvolgen en uitvoeren van cargo-operaties
en het werkplatform voor veiligheid en noodoperaties. In theorie
zou hier ook de routeplanning kunnen gebeuren,
Figuur 7: Lay-out van de brug van de 'Artevelde'
Bron: IHC Merwede

40
console 2, ook wel de radioconsole genoemd, bevat het
werkplatform voor communicatie. Hier is de GMDSS-apparatuur
gelokaliseerd. Er is ook een kaartentafel gemaakt maar deze is niet
bedoeld om routes te plannen. Hier kan men bijvoorbeeld de
kaarten die afkomstig zijn van de survey bekijken. Deze kaarten
duiden het baggergebied aan en zijn meestal in A1- of soms zelfs
in A0-formaat,
console 3 bevat het werkplatform voor routeplanning.
Bovenop deze drie consoles is er ook nog een extra console voorzien
waaraan gewerkt kan worden. Deze is voorzien van een SCADA-monitor.
Het baggerproces kan dus worden gevolgd en in principe ook deels
worden gestuurd vanaf deze touchscreen monitor. Aan deze console is er
ook een monitor voorzien voor CCTV. De videobeelden van CCTV kunnen
ook worden weergegeven op één van de monitors van de hoofdconsole.
Zie punt 2.2.2.4 voor een verdere beschrijving van het CCTV-systeem.
2.2.2 De hoofdconsole op OMOB-schepen
Deze console bevat zes werkplatformen.42 In de NAUT-OSV-notatie
zijn er aparte regels en voorschriften voorzien voor elk van deze
werkplatformen. Ik zou graag nogmaals aanhalen dat deze zijn
gebruikt als extra hulpmiddel om de OMOB zo veilig en
ergonomisch mogelijk in te delen, sommige regels zijn eerder als
richtlijn beschouwd. De regels die uiteindelijk wel zijn gevolgd om
de hoofdconsole te kunnen realiseren, zijn hierna weergegeven.
42 We houden geen rekening met het werkplatform voor routeplanning: dit heeft immers een aparte toegewijde console op OMOB-schepen.

41
2.2.2.1 Het gezichtsveld
Om de officier toe te laten om te handelen volgens de COLREGS, moet
hij minstens een horizontaal gezichtsveld hebben dat zich over een boog
van 225° graden strekt. Dat betekent: van recht vooruit tot 22,5°
achterlijker dan dwars aan beide zijden van het schip, en dit vanaf de
staan- en zitpositie aan de hoofdconsole.
Om een veilige uitkijk te garanderen worden blinde sectoren tot een
minimum beperkt. De som van deze sectoren mag in geen geval 30°
overschrijden. In deze som zitten onder andere de spaties tussen de
ramen en het mechanisme van de boegkoppeling.
De officier van wacht moet een horizontaal gezichtsveld van 360°
kunnen verkrijgen door maximaal naar twee verschillende posities langs
elke kant van de hoofdconsole te wandelen. Deze posities mogen
maximaal 15 meter uit elkaar liggen.
Figuur 8: Horizontaal gezichtsveld hoofdconsole
Bron: eigen bewerking van de NAUT-OSV-publicatie

42
Wat het verticale gezichtsveld voorwaarts betreft: de blinde sector
gerekend vanaf het voorste punt van het schip, mag maximaal twee
scheepslengtes (LOA) of 500 meter bedragen. De kortste afstand geldt.
De horizontale grenzen van deze blinde sector gelden vanaf dit punt tot
10° aan elke kant van de doorgetrokken lijn door dit punt, die
evenwijdig is aan de lijn door kiel en stevens. Deze horizontale grenzen
zijn geïllustreerd op figuur 8.
Naar deze regels wordt ook verwezen in de SYS-NEQ1-notatie. In die
notatie staan echter geen voorschriften over de operationele brug. Die
worden beschreven in de NAUT-OSV-regels. Zo wordt er hierin onder
andere geëist dat, om het schip te beheren, de operator van het
werkplatform een zicht over het achterdek moet hebben dat zich strekt
over een boog van 180°. Dus 90° vanaf het midden van het achterschip
tot dwars van het werkplatform aan elke kant van het schip. Dit
verklaart meteen waarom veel baggerschepen een 'uitstulping' aan de
achterkant van de brug hebben op de plaats waar de baggerconsole
staat. De operator moet dat gezichtsveld kunnen behouden bij alle
weersomstandigheden. Daarom zijn er eisen over de maximale hoogte
van deze console en de plaats tussen het plafond en de bovenkant van
de ramen.
Figuur 9: Verticaal gezichtsveld voorwaarts
Bron: Eigen bewerking tekening 'Breydel', IHC Merwede

43
Een gezichtsveld over een boog van 180° over het achterdek is helaas
technisch gezien niet te realiseren op een OMOB. DEME en IHC Merwede
hebben echter toch geprobeerd om zo goed mogelijk te voldoen aan
deze eisen. Zo hebben ze de ramen die zicht geven op de beun volledig
vanaf het plafond tot de grond van het navigatiedek laten doorlopen. De
tussenschotten tussen de ramen op de plaats achter de hoofdconsole zijn
geminimaliseerd. De operator kan op deze manier de beun en het
volledige achterschip goed zien.
In de NAUT-OSV-regels staan meerdere eisen voor de ramen op de
brug beschreven. Om reflecties van instrumenten en andere apparaten
van binnenuit te vermijden, moeten de meeste ramen in een bepaalde
hoek worden geplaatst. Deze hoek moet minimaal 15° en mag maximaal
25° ten opzichte van de verticale zijn. Men moet alle ramen die op deze
manier geplaatst kunnen worden, ook effectief zo plaatsen.
Om de reflecties van buitenaf tegen te gaan, moeten alle ramen die
binnen het hiervoor vernoemde verplichte gezichtsveld vallen, worden
voorzien van een verwijderbaar zonnescherm.
Figuur 10: Zicht vanaf hoofdconsole richting beun
Bron: Eigen opname aan boord van de 'Brabo'

44
Uiteraard moeten ze ook worden voorzien van sterke ruitenwissers en
een spoelsysteem met zoet water. Om hieraan te kunnen werken, is een
gangboord rondom de ramen verplicht.
2.2.2.2 De indeling van de instrumenten en apparatuur
De instrumenten en apparatuur die toebehoren aan de verschillende
werkplatformen van de hoofdconsole, zijn niet zomaar willekeurig
ingedeeld. Er wordt een onderscheid gemaakt tussen instrumenten die
gebruikt worden voor primaire navigatiedoeleinden en instrumenten en
apparatuur voor het baggerproces. In het geval van OMOB zijn deze
allemaal verzameld in de hoofdconsole die door één operator bemand
kan worden. Volgens de SYS-NEQ-regels moeten hier ook echter twee
officieren samen kunnen werken.
In de NAUT-OSV-notatie komt de term 'hoofdwerkpositie' meermaals
voor. Hiermee bedoelt men de plaats waarvan men de X-band radar al
zittende kan bedienen. Deze radar is uitgerust met ARPA en is dus een
belangrijke hulp voor de navigatie.
De overige instrumenten die bedoeld zijn voor de primaire
navigatiedoeleinden, moeten allemaal binnen handbereik zijn van de
hoofdwerkpositie. De afstandsbediening voor de propulsie-eenheid en de
besturing van het roer dienen zittend bedienbaar zijn, terwijl de
boegschroef staand bediend mag worden. Het idee hierachter is dat
enkel de instrumenten die een hulp zijn om aanvaringen en strandingen
te vermijden, al zittend bedienbaar moeten zijn. De ECDIS moet zowel
vanuit zittende, als vanuit staande positie duidelijk leesbaar en
interpreteerbaar zijn. Manoeuvreren dient volgens deze logica enkel al
staande kunnen: DEME en IHC Merwede hebben er echter voor gekozen
om dit ook vanuit de zittende positie mogelijk te maken.

45
Als gevolg van de NAUT-OSV-regels zijn de instrumenten en
apparatuur van de hoofdconsole op OMOB-schepen verdeeld over
verschillende prioriteitszones. Er zijn vier zones:
1. de 'Hand-grasp' zone bevat de instrumenten en apparatuur die
de operator moet kunnen bedienen als hij zijn armen naar het
voorschip strekt, vanuit de zittende positie, met de stoel maximaal
naar voor geschoven. De bediening van het vizier en de waterflap
vallen bijvoorbeeld in deze zone,
2. de 'On hand' zone bevat instrumenten en apparatuur die vanuit
de zittende positie binnen het grensgebied van de gestrekte armen
van de operator vallen, zowel zijdelings, als voorwaarts. De
macroknoppen en de bediening van de lieren van de zuigmondbok,
middenbok en bochtbok liggen bijvoorbeeld in deze zone 43,
3. de 'Within easy reach' zone bevat de apparatuur en
instrumenten die de operator nog moet kunnen bedienen vanuit
zijn stoel, al zal hij hiervoor meer moeite moeten doen dan bij de
'On hand' zone. Mogelijk zal hij op het randje van zijn stoel moeten
gaan zitten om bij deze instrumenten te kunnen. Voorbeelden
hiervan zijn de boegschroef, het controlepaneel om de
stuurpompen en stuurmodus te selecteren en de dodemansknop
van het wachtalarm,
4. de 'Within reach' zone bevat de overige instrumenten en
apparatuur van de console. Om deze te kunnen bedienen moet de
operator zijn stoel verplaatsen, of rechtstaan. In deze zone bevindt
zich vooral de bediening van het werkplatform van veiligheid en
noodoperaties. Zo kan je hier bijvoorbeeld de 'emergency fire
pump' en de ventilatie van de accommodatie bedienen.
43 Zie hoofdstuk 3 voor een beschrijving van deze onderdelen.

46
Ook de indicators zijn onderverdeeld in twee klassen:
A-klasse indicatoren moeten 'gemakkelijk leesbaar' zijn. Dit
houdt in dat ze zich moeten bevinden binnen een horizontale
sector van 70° van het oog van de zittende operator 44: dit wil
zeggen tussen 35° links en 35° rechts van de ogen van de
operator. De verticale grenzen zijn maximaal 60° boven ooghoogte
en 55° eronder,
B-klasse indicatoren moeten 'leesbaar' zijn. De horizontale
sector waarin deze indicatoren zich moeten bevinden, is hier 190°.
Verticaal gezien mogen ze 60° boven en 90° beneden de
ooghoogte worden geplaatst.
44 Men neemt als ooghoogte van een zittende operator 1400 mm boven het doorlopende dek van de brug.
Figuur 11: Zone-aanduiding van de hoofdconsole van de OMOB
Bron: Eigen bewerking plan hoofdconsole van de 'Artevelde', IHC Merwede

47
Een lijst van instrumenten, indicatoren en apparatuur met hun
individuele prioriteit kan men vinden in bijlage 8.
2.2.2.3 De stoelen van de hoofdconsole
In de NAUT-OSV-notatie worden de specificaties waaraan de stoelen
moeten voldoen, zeer gedetailleerd beschreven. Voor de hoofdconsole
van de OMOB is het belangrijk dat:
er minstens twee, verplaatsbare exemplaren zijn45,
ze beide volledig wegneembaar zijn om comfortabel met twee
stuurmannen staand te werken,
de verticale stand regelbaar is, zodat een ooghoogte van 1400 mm
bekomen kan worden,
de armleuningen beweegbaar zijn, zodat ze niet in de weg zitten
om instrumenten en apparatuur te bedienen.
Doordat de stoel verplaatsbaar is, kan de stuurman snel naar de beun
gaan kijken mocht dit nodig zijn. In de praktijk heeft de stuurman echter
reeds een goed overzicht door simpelweg naar achter te kijken: er staan
geen obstructies tussen de hoofdconsole en de ramen aan de achterkant
van de brug. Doordat deze doorlopend zijn van plafond tot dek, wordt
het gezichtsveld gemaximaliseerd. Daarbovenop kan hij ook nog rekenen
op het CCTV-systeem.
45SYS-NEQ eist dat er twee stuurmannen tezelfdertijd zittend kunnen samenwerken aan de
hoofdconsole.

48
2.2.2.4 Het CCTV-systeem
Dit systeem moet volgens de NAUT-OSV-regels, indien het aanwezig
is, beelden in kleur weergeven. Aan boord van OMOB-schepen zijn
meerdere beweegbare camera's geïnstalleerd. De beelden kunnen
weergegeven worden op een monitor van de hoofdconsole, op de
toegewezen CCTV-monitor van de extra console, en op de SCADA-
monitor van die console 46 . Dit netwerk kan overigens ook worden
aangesloten op het internet. Het idee achter de camera's was dat de
klant het gebeuren aan boord vanop afstand zou kunnen volgen47. De
eerste camera's waren daardoor enkel gericht op de beun en de
overvloei. De laatste OMOB-schepen, waarvan de 'Artevelde' een
voorbeeld is, kunnen dankzij de beweegbare camera's ook de zuigmond
en de zuigbuis in beeld brengen. Als deze boven water komen nadat het
baggerproces is afgelopen, is het mogelijk om dankzij de camera's te
verifiëren of ze vrij van obstakels zijn. Er is ook de mogelijkheid om één
van de camera's te gebruiken bij het aanmeren zodat de stuurman de
naderende kaaimuur vanaf de conning positie kan zien.
2.2.2.5 De Human Machine Interface
Er moet rekening worden gehouden worden met het interpretatie-
vermogen van de menselijke operator tijdens het bouwen en ontwerpen
van instrumenten en apparatuur. In de NAUT-OSV-notatie staan regels
en richtlijnen betreffende het ontwerp van drukknoppen en regelaars,
hendels, software lay-out, verlichting van de apparatuur en hun
bijhorende alarmen. De bedieningsorganen moeten allemaal per functie
worden gegroepeerd.
46 De laatste schepen die uitgerust zijn met OMOB hebben een hoofdconsole met vier monitors. De eerste generatie OMOB-schepen ('Marieke' en 'Reynaert') hebben er vijf.
47 Cleymans E., Zwijndrecht, DEME, eigen interview, 27/07/2010.

49
Het zijn deze regels die de ergonomie op een OMOB aanzienlijk
verhogen. In de SYS-NEQ1-notatie worden hieromtrent geen
vermeldingen gemaakt.
Na het bedienen van een drukknop moet er bijvoorbeeld een duidelijk
feedbacksignaal zijn. Dit kan visueel, maar ook auditief zijn. Rekening
houdend met deze regels heeft DEME de 'macroknoppen' bedacht. Voor
meer informatie hierover, verwijs ik naar 3.6.6.
Indien een proces aangepast kan worden door regelaars, zal de waarde
altijd worden vermeerderd door met de klok mee te draaien en vice
versa. Indien twee knoppen het proces regelen, zal de rechterknop de
waarde verhogen en de linkerknop de waarde verlagen.
Elke actie die een regelaar, knop of hendel teweegbrengt, dient door
middel van een eenvoudige tegenactie ongedaan kunnen worden
gemaakt.
Een operatie moet kunnen worden gestart, onderbroken, voortgezet en
gestopt. Elke identificatie van deze functies zal duidelijk in het Engels in
de nabijheid van het bedieningsorgaan worden vermeld.
Figuur 12: Regelknoppen hoofdconsole: links verminderen, rechts vermeerderen
Bron: Eigen opname aan boord van de 'Breydel' en detail van plan 'Artevelde', IHC Merwede

50
Voor de presentatie van informatie, alarmen en de lay-outs van menu's
in softwaresystemen zijn de NAUT-OSV-regels zeer gedetailleerd.
Vooral volgende regels uit deze publicatie hebben invloed gehad op het
ontwerp van het Dredger Control System48 op de OMOB:
al de informatie die nodig is om een bepaalde operatie uit te
voeren, moet beschikbaar zijn in het desbetreffende venster of
submenu. Tijdens elke stap van het proces moet de operator op
eenvoudige wijze terug naar het initiële scherm kunnen keren,
na het starten van elke actie zal er feedback worden gegeven door
het systeem. Bijvoorbeeld: als de operator een klep wil openen, zal
de HMI een zichtbare indicatie van de actuele stand van de klep
geven,
menu's van softwaresystemen moeten duidelijk zijn gegroepeerd
per operatie,
in geen geval zal de operator informatie moeten onthouden als hij
van de ene pagina naar de andere gaat,
operaties die frequent uitgevoerd worden, moeten bedienbaar zijn
door snelkoppelingen of hardware regelaars. Veel operaties van
het DCS kunnen effectief worden bediend door knoppen die voor of
naast de displays van de hoofdconsole gemonteerd zijn,
de kleur van de tekst die op de displays wordt weergegeven, moet
in hoog contrast staan met de achtergrondkleur. Dit is zeker het
geval voor het DCS: de kleuren van de tekst zijn overwegend wit
en geel, terwijl de achtergrondkleur blauw is,
voor de losstaande indicatoren zijn er ook strenge eisen in verband
met de kleur en lichtsterkte. Deze vindt men terug in de ISO 2412:
'Shipbuilding: colours of indicator lights'. In deze publicatie wordt
onder andere geëist dat alle monitors, indicators en lichtgevende
knoppen gedimd moeten kunnen worden,
48 Zie hoofdstuk 3 voor meer informatie over het DCS.

51
ook de alarmindicaties zijn gestandaardiseerd: een rode,
knipperende waarde is een ongeaccepteerd alarm, gewoon rood wil
zeggen dat het geaccepteerd is, een gele kleur duidt op een
waarschuwing en groen betekent dat alles in orde is.
Verder is er een systeem ontwikkeld dat de monitors van de hoofd-
console onderling met elkaar verbindt. Zo is het mogelijk om een
presentatiepagina op meerdere monitors van de hoofdconsole te tonen.
2.2.3 De radioconsole
Deze console bevat enkel het werkplatform voor de communicatie,
uitgerust volgens de SOLAS-voorschriften 49 . De NAUT-OSV-notatie
vermeldt overigens dat dit werkplatform apart geplaatst moet worden.
De plaats op de brug is niet willekeurig. De officier van wacht moet vanaf
deze console over een gezichtsveld met een boog van 202,5°
beschikken: van dwars aan bakboord, over de boeg van het schip, tot
22,5° achterlijker dan dwars aan stuurboord. Op die manier kan hij
vanaf de radioconsole uitmaken of hij aan een bepaald vaartuig aan de
stuurboordzijde voorrang moet verlenen of niet50. Met andere woorden:
deze console kan enkel aan stuurboord worden geplaatst om te voldoen
aan deze regel.
49 SOLAS hoofdstuk IV: 'Radiocommunications', Deel C: 'Ship Requirments', regels 7-11 en 13. De meeste OMOB-schepen zijn uitgerust voor Sea Area A4.
50 Zie COLREGS.

52
2.2.4 De console voor routeplanning
Het werkplatform voor routeplanning moet zijn uitgerust met een ECDIS
en middelen om navigatieberekeningen, zoals een ETA-calculatie, uit te
voeren. Op de OMOB is er een speciaal netwerk voorzien, waardoor
bepaalde informatie op meerdere monitors kan worden weergegeven. Zo
is het onder andere mogelijk om de informatie van de ECDIS weer te
geven op een monitor van de hoofdconsole en/of op een monitor van de
console voor routeplanning. Men kan dus de planning maken aan de ene
console en de informatie afbeelden op een monitor van een andere. Deze
mogelijkheid is trouwens een vereiste van de NAUT-OSV-notatie.
Figuur 13: Gezichtsveld radioconsole
Bron: Eigen bewerking plan hoofdconsole van 'TSHD Artevelde', IHC Merwede

53
2.2.5 De extra console en de baggerafstandsbediening
Om het concept van de OMOB zo veilig mogelijk te maken, hebben DEME
en IHC Merwede ervoor gekozen om de regels en richtlijnen van twee
classificatiemaatschappijen zo nauwkeurig mogelijk te volgen tijdens het
bouwen van de OMOB-schepen. Daarboven hebben ze ook nog enkele
extra maatregelen genomen, waarover nochtans geen verwijzingen naar
gemaakt worden in de publicaties van BV, DNV, IMO en ISO.
De belangrijkste op de OMOB zijn:
de grote doorlopende ramen aan de achterkant van de brug,
de open ruimte die gecreëerd is op de OMOB,
de extra console,
de baggerafstandsbediening,
Het nut van de grote doorlopende ramen aan de achterkant van de brug
is hiervoor reeds besproken. Daarnaast zorgt de open ruimte die
gecreëerd is er nog meer voor dat het gezichtsveld van de stuurman
geoptimaliseerd wordt.
Hij kan vanaf de hoofdconsole bijna 360° rondom zich heen kijken. Er is
bijna niets dat het zicht belemmerd, behalve de nodige tussenschotten
van de ramen. Volgens de NAUT-OSV-notatie mag dit gezichtsveld
bekomen worden door naar twee verschillende posities langs elke kant
van de hoofdconsole te wandelen. De OMOB-schepen voldoen dus
ruimschoots aan deze eis. De reden dat men dit heeft kunnen realiseren
is dat de sanitaire voorziening niet op navigatiedek is geplaatst. Op
OMOB-schepen is deze gebouwd op het zogenaamde 'topdeck'. Dit is
gelegen tussen het navigatiedek en het A-dek. Op dit dek bevindt zich
ook de 'convertor room' voor de elektronische installatie van het
navigatiedek. Dit is volledig in orde met de regels van de NAUT-OSV-
notatie, die zeggen immers dat er een sanitaire voorziening op of
aanliggend aan de brug moet zijn.

54
Bron: 'Ports and Dredging', editie 167, 2007
De extra console is gericht naar het achterschip en bevindt zich aan de
bakboord zijde van de OMOB. Ze is uitgerust met een multifunctionele
monitor. Deze is onder andere aangesloten op het SCADA-systeem. Het
baggerproces kan dus gevolgd, en deels gestuurd worden vanaf deze
monitor. Bovendien is er de mogelijkheid om te switchen naar het CCTV-
netwerk vanaf deze monitor.
Alle OMOB-schepen hebben een unieke afstandsbediening waarmee een
groot deel van het baggerproces bediend kan worden.
Deze afstandsbediening is volledig draadloos en kan gebruikt worden
over het gehele schip. Een tweede operator kan ze gebruiken in het
geval van slechte weersomstandigheden, extreme verkeersdrukte of
enige andere omstandigheid die dit vereist. Op deze manier wordt het
mogelijk om met twee officieren gelijktijdig op de OMOB te werken,
zonder dat beide aan de hoofdconsole moeten staan of zitten. Als de
tweede operator hiermee plaats neemt aan de SCADA-display van de
extra console kan hij bijna het volledige baggerproces individueel
bedienen. Bovendien kan hij van hieruit de volledige baggerinstallatie
goed zien.
Figuur 14: Baggerafstandsbediening

55
2.3 Deelbesluit
Hoewel er al veel strenge regels en richtlijnen van de IMO en ISO
gevolgd moeten worden indien men de SYS-NEQ1-notatie van BV wil
bekomen, hebben DEME en IHC Merwede er toch voor gekozen om ook
nog eens zo goed als mogelijk de voorschriften van de NAUT-OSV-
regels van DNV te volgen. Deze laatste regels zijn zeer
gedetailleerd over het operationele gedeelte van de brug.
Door de regels van twee classificatiemaatschappijen te volgen
hoopt DEME de ergonomische eigenschappen van de brug te
verhogen, hierdoor kan de 'situational awareness' van de officier
op de OMOB gemaximaliseerd worden.
Figuur 15: Zicht over het achterschip van de 'Breydel' vanaf de SCADA-monitor van de extra console
Bron: Wouter Blaas, IHC Merwede

56
3 Het Dredger Control System (DCS)
3.1 Inleiding
De baggeroperaties aan boord van een sleephopperzuiger met
éénmansbediening worden beheerd door het DCS51. Dit systeem is een
verfijnde versie van het HCS (Hydraulic Control Systeem) dat wordt
gebruikt op conventionele baggerschepen. HCS is het systeem dat de
pijpman toelaat om hydraulische toepassingen te sturen via de SCADA52.
De grootste verschillen tussen HCS en DCS vinden we in de
programmering van de PLC's en de SCADA HMI.
De OMOB is tot stand kunnen komen doordat de taken van de pijpman
werden geautomatiseerd. Het DCS voert allerlei handelingen en stappen
uit via talrijke subroutines, hieraan kan de stuurman geen wijzigingen
brengen. Hij kan echter wel parameters veranderen via de SCADA HMI
om een bepaald proces te optimaliseren.
Het uitgangspunt voor de visualisatie van de SCADA HMI van het DCS
heeft men overgenomen van het HCS. Op conventionele sleephopper-
zuigers beschikt men over een baggerconsole die onder andere bestaat
uit meerdere drukknoppen, toegewezen programmeerbare toetsen-
borden en een drietal beeldschermen. Om alles voor de stuurman
overzichtelijk te houden, werd de SCADA HMI van het DCS op de OMOB
sterk vereenvoudigd. Enkel de informatie die op dat moment relevant is,
wordt nog weergegeven. Zo reduceert men de dwell time en kan de
stuurman zijn aandacht beter verdelen over het bagger- en
navigatieproces.
51 Kieboom, H. (2007), Functional Specification: Dredger Control System, versie 1.1, Sliedrecht, IHC SYSTEMS B.V.
52 Zie 1.1.2

57
Het DCS omvat volgende functies:
de opvolgfunctie (monitoring layer),
de instructiefunctie (control layer),
de automatiseringsfunctie (automation layer),
de human machine interface. Zoals we gezien hebben in hoofdstuk
1, is dit het SCADA-systeem. Bovenstaande functies worden, al
dan niet gecombineerd, gevisualiseerd en gestuurd via de SCADA
HMI.
3.2 De opvolgfunctie
Informatie wordt verzameld door tal van sensoren. Nadat de gegevens
van deze sensoren verwerkt zijn door de PLC-controllerlaag worden ze
via de SCADA HMI aan de stuurman weergegeven. Er zijn vier bronnen
van informatie die belangrijk zijn voor het baggerproces en die dus
opgevolgd dienen te worden.
1. STPM (Suction Tube Position Monitoring): dit is informatie over de
positie van de zuigbuis ten opzichte van het schip. Na een
wiskundige berekening met data afkomstig van verschillende
sensoren wordt de zuigdiepte en de positie van de pijp ten
opzichte van een referentievlak bepaald.
2. DLM (Draught and Load Monitoring): het opvolgen van de
diepgang en de lading van het schip.
3. Productie: dit omvat alle factoren die betrokken zijn bij de
productie, bijvoorbeeld de densiteit, de snelheid en het
vacuümdrukverschil.
4. DCC (Density Chart Computer): dit zijn de gegevens die naar de
surveycomputer gestuurd worden.

58
3.3 De instructiefunctie
Deze laag van het systeem stuurt de instructies naar de verscheidene
toestellen die elk een specifieke taak of functie verrichten. De instructies
zelf worden op de SCADA HMI gevisualiseerd53. Enkele voorbeelden van
deze toestellen zijn:
de hydraulische pompinstallatie: deze kan gestart en gestopt
worden, tevens kan men hiervan de druk en het debiet regelen.
de hydraulische schuiven: deze kunnen meerdere verbruikers
bedienen. De bokken, de lieren, de jet- en baggerafsluiters en de
bodemdeuren zijn hier voorbeelden van.
de pompen: de bagger-, jet-, glandwater- en spoelwaterpompen,
…
3.4 De automatiseringsfunctie
De automatisering van functies is het belangrijkste onderdeel van het
DCS. Het is immers deze laag van het systeem die ervoor gezorgd heeft
dat er op OMOB-schepen geen pijpman meer aanwezig hoeft te zijn.
Dankzij de automatisering van enkele belangrijke onderdelen van het
baggerproces is het mogelijk geworden om de functies van de pijpman
over te dragen aan de stuurman. In feite bestonden veel van deze
automatische systemen al langer maar ze zijn tot de komst van de
OMOB nog nooit op een dergelijk niveau geïntegreerd. Volgende functies
zijn geautomatiseerd54:
het bedienen van de afsluiters die ervoor zorgen dat het mengsel
overboord of binnenboord terechtkomt (ALMO),
het bedienen van de lieren (ADWC),
53 Zie 3.5
54 Zie 3.6 voor meer informatie over de afzonderlijke functies.

59
het bedienen van de baggerpomp (APC),
het bedienen van het vizier op de sleepkop,
het oplijnen van de baggerafsluiters (ADSS),
het oplijnen van de jetafsluiters (AJSS),
het overboord of binnenboord brengen van de zuigbuis (APSS),
het opvolgen van de diepgang tijdens het laadproces (ADC).
De instructies om deze taken uit te voeren worden gestuurd vanuit de
SCADA HMI naar de PLC-controllerlaag.
3.5 De hoofdpagina's van de SCADA HMI
De combinatie van de opvolg-, instructie-, en automatiseringsfuncties
worden hier gevisualiseerd. De symbolen met bijhorende kleurencode
van de baggeruitrusting werden door DEME overgenomen uit eerdere
versies van de SCADA55. De menustructuur en lay-out werden echter
grondig gewijzigd om te kunnen voldoen aan de NAUT-OSV-regels.
De SCADA HMI van het DCS bestaat uit negen hoofdpagina’s, al dan niet
met subpagina’s. Elke pagina heeft een Engelstalige benaming.
3.5.1 Trail
Op deze pagina volgt de stuurman het baggerproces op. De pijp wordt
automatisch gestuurd via de 'macroknoppen'56. Deze pagina combineert
de drie eerder besproken functies. Op de figuur van de volgende
bladzijde is een voorbeeld van deze pagina weergegeven57.
55 Zie 3.7
56 Zie 3.6.6
57 Voor afbeeldingen van de overige pagina's: zie bijlage 9.

60
3.5.2 Dump
De dumppagina is integraal overgenomen van het HCS systeem, er zijn
geen wijzigingen aangebracht. Vanaf deze pagina wordt het dumpproces
gestuurd en opgevolgd.
3.5.3 Discharge
Deze pagina wordt gebruikt tijdens het walpersen of rainbowen.
Walpersen is een complex proces met veel variabele parameters.
Doordat dit proces moeilijk wiskundig kan worden voorspeld, is het niet
mogelijk om het volledig te automatiseren. Tijdens het persen ligt het
schip meestal voor anker: de stuurman kan zich dus bijna voltijds
concentreren op het walpersproces.
Figuur 16: Trail pagina
Bron : eigen opname van het DCS aan boord van 'TSHD Breydel'

61
3.5.4 Pipe and winches
Op deze pagina kan de stuurman alle bokken en lieren van de zuigbuis
opvolgen en sturen. Ook de deklier kan vanaf deze pagina bediend
worden. Deze wordt gebruikt om de drijvende leiding, die nodig is voor
het walpersen, met het schip te verbinden.
3.5.5 Dredge setup
Op deze pagina wordt de volledige baggerinstallatie weergegeven. De
pagina is onderverdeeld in drie delen:
het grootste deel van deze pagina is centraal gelegen. Het laat toe
alle baggerafsluiters op te lijnen, tevens kan men hier ook de
bagger- en spoelwaterpomp bedienen,
linksboven kan men de ontgassinginstallatie bedienen en instellen,
de hydraulische installatie wordt weergegeven in het gedeelte dat
zich rechtsboven op deze pagina situeert. Het betreft hoofdzakelijk
een onderdeel van de opvolgfunctie.
3.5.6 Jet setup
Hier kan men de jetpompen en hun overeenkomstige afsluiters bedienen.
Het is ook mogelijk om de hydraulische installatie te starten vanaf deze
pagina.
3.5.7 Calibration
Op deze pagina kan men de talrijke sensoren kalibreren.

62
3.5.8 Diagnostics
Hier kan men snel een diagnose stellen van verschillende componenten
en toepassingen van de baggerinstallatie. De hydraulische installatie, de
afsluiters en de lieren behoren hier onder andere toe. De condities opdat
bepaalde onderdelen al dan niet gestart kunnen worden zijn eveneens
gedetailleerd weergegeven.
3.5.9 Automation
Verscheidene parameters van de functies die in 3.4 staan beschreven
dienen ingesteld te worden alvorens het DCS de functies automatisch
kan uitvoeren. Deze pagina maakt het grote verschil tussen het SCADA-
systeem van OMOB-schepen en dat van de conventionele baggerschepen.
Men vindt hier ook de voorwaardes terug opdat een volgende stap in een
bepaald proces ondernomen kan worden.
3.6 Uitgebreide beschrijving van de automatiseringsfuncties
3.6.1 Automated Light Mixture Overboard (ALMO)
Om de baggercyclus te optimaliseren is het van belang om een zo hoog
mogelijke densiteit van het mengsel in de beun te bereiken. Om dat te
kunnen verwezenlijken, heeft men op sleephopperzuigers een AMOB-
afsluiter geplaatst. AMOB staat voor Arm Mengsel Overboord. Door het
bedienen van de AMOB-afsluiter wordt specie met een lage densiteit
overboord gepompt: zo komt het dus niet in de beun terecht.

63
De ALMO heeft tot doel de bediening van de AMOB-afsluiter te
automatiseren. Op bovenstaande afbeelding wordt een mengsel met een
densiteit van lager dan 1.15 t/m³ automatisch overboord gepompt. De
ALMO-functie kan de AMOB-afsluiter ook aansturen indien de snelheid
van het mengsel een bepaalde vooraf ingestelde waarde overschrijdt. Dit
gebeurt enkel wanneer deze specifieke subroutine geactiveerd wordt58.
Wanneer het DCS een 'open' signaal van de AMOB-afsluiter ontvangt,
zullen de laadafsluiters automatisch gesloten worden: het mengsel wordt
dan rechtstreeks overboord gepompt in plaats van in de beun. Dit
gebeurt totdat de densiteit terug boven de ingestelde waarde stijgt,
en/of de snelheid van het mengsel terug daalt tot onder het 'setpoint'.
Een goede pijpman op een conventionele sleephopperzuiger 'weet' waar
het goed zuigt en waar niet. Hij kan immers vooruitkijken op de monitor
die de beelden van de survey bevat. Op basis van zijn ervaring kan hij
hieruit conclusies trekken. Hij kan dus anticiperen en de AMOB-afsluiter
bedienen nog voor de informatie van de densiteitsmeter hem bereikt.
58 Een plotse stijging in mengselsnelheid kan een indicatie zijn van een arm mengsel op komst. Deze subroutine is echter niet geselecteerd op bovenstaande figuur.
Figuur 17: ALMO
Bron: eigen opname van het DCS aan boord van de 'Breydel'

64
Op deze manier kan een optimale productie bekomen worden: de
afsluiters kunnen immers al in de juiste configuratie gebracht worden
voordat de informatie van de mengsel- en snelheidsmeter doorkomt.
Hierdoor zal de pijpman misschien heel even een mengsel met een arme
densiteit opzuigen, maar hij weet dat er spoedig een hogere densiteit zal
volgen dankzij zijn ervaring en de gegevens van de survey.
Men kan dit met het DCS min of meer nabootsen door een dode tijd in
het systeem te voeren. Dit is echter minder effectief omdat een
computer nu eenmaal (nog) niet de mogelijkheid heeft om vooruit te
kijken zoals een menselijke operator.
Het feit dat de AMOB- en laadafsluiters bediend worden door een
computer heeft nog een nadelig gevolg, zij het onrechtstreeks. De
ALMO-functie is niets anders dan een wiskundig programma dat zeer
veel parameters tegelijkertijd kan analyseren en daardoor te allen tijde
de afsluiters in de meest optimale positie kan zetten om een maximale
productie te verkrijgen. Met andere woorden: de afsluiters veranderen
voortdurend van stand. Veel meer dan wanneer ze door een menselijke
pijpman zouden worden bediend. Men kan dit vergelijken met de
automatische piloot: deze bedient het roer ook bijna constant om de
perfecte koerslijn te kunnen blijven volgen. Doordat de afsluiters zeer
veel van stand veranderen als de ALMO-functie is ingeschakeld, zullen
deze sneller slijten.
3.6.2 Automatic Pump Control (APC)
Bij een baggerpomp met constant toerental zijn het debiet en bijgevolg
ook de mengselsnelheid, een functie van de densiteit: hoe hoger de
densiteit, hoe lager de mengselsnelheid.

65
Recente baggerschepen beschikken over een pomp met een variabel
toerental. De APC-functie past de toeren, dus het debiet, van de pomp
aan op basis van de gegevens van de gemeten densiteit. Op de
afbeelding hieronder kan men zien dat de APC bij een densiteit van 1.20
t/m³ een snelheid van 5 m/s tracht te realiseren. Hierbij draait de pomp
op minimum toerental. Bij een densiteit van 1.40 t/m³ zal de APC-functie
het toerental van de pomp maximaal opvoeren totdat een mengsel-
snelheid van 9 m/s bereikt wordt.
3.6.3 Automatic Draghead Winch Control (ADWC)
De ADWC-functie bedient de bocht-, midden- en zuigmondlier. Eens de
zuigbuis voor de inlaat is gedaald, regelt de zuigmondlier de zuigdiepte.
Ze houdt tevens de onderpijp binnen een bepaalde horizontale hoek ten
opzichte van het schip. De middenlier controleert de verticale hoek
tussen de onderpijp en de bodem, de verticale hoek tussen de onderpijp
en bovenpijp en tevens de horizontale hoek van de middenknik.
Figuur 18: APC
Bron: eigen opname van het DCS aan boord van de 'Breydel'

66
Bij een koerswijziging zal het schip zich verplaatsen ten opzichte van de
sleeppijp: om schade aan de zuigbuis of het schip te voorkomen, zal de
ADWC-functie in dat geval de sleeppijp automatisch terug dichterbij
trekken door de lieren te bedienen.
Wanneer de mengselsnelheid te laag wordt, kan er cavitatie optreden in
de baggerpomp doordat er een groter vacuümdrukverschil aan de ingang
van de pomp ontstaat. Om dit te vermijden dient de zuigmond gehesen
te worden. Deze handeling wordt uitgevoerd door een subroutine van de
ADWC-functie, namelijk 'silt control'. Door het hijsen van de zuigmond
zal er meer water aangezogen worden, waardoor de densiteit en dus de
snelheid van het mengsel zal toenemen. Wanneer het proces terug
gestabiliseerd is, zal de ADWC-functie de zuigmond terug laten dalen.
3.6.4 Automatische bediening van het vizier
Op de zuigmond is een vizier gemonteerd dat hydraulisch bediend wordt.
Het vizier bepaalt de snijdiepte van de zuigmond in de zeebodem. Door
het te openen of te sluiten kan deze diepte gewijzigd worden.
Figuur 19: zuigbuis en limieten van de horizontale hoek
Bron: eigen bewerking van DCS-opname aan boord van de 'Breydel'

67
Indien men de sturing in automatische modus plaatst, zal de snijdiepte
aan de hand van volgende parameters door het DCS aangepast worden:
het toerental van de pomp,
het vacuümdrukverschil voor de pomp,
de hieldruk van de zuigmond,
de druk aan de perskant van de pomp.
Aan deze modus kan de stuurman niets regelen, het is gebaseerd op een
wiskundig model in de PLC-controllerlaag.
Naast de automatische modus zijn er nog twee andere opties om het
vizier te bedienen: de 'free' en de 'manual fixed' stand. Bij 'free' zal het
profiel van de bodem worden gevolgd, terwijl het vizier bij 'manual fixed'
onder een bepaalde hoek ten opzichte van de bodem geplaatst zal
worden.
De stand van het vizier bepaald in grote mate de productie. In de
praktijk gebruiken de meeste stuurlui de automatische optie niet59.
3.6.5 Automatic Draught Control (ADC)
De ADC-functie regelt de diepgang van het schip door het maximale
beunvolume te verlagen. Dit gebeurt door de overvloeikoker te laten
dalen.
59 Mullenders, F., Maracaibo, eerste stuurman 'Breydel', eigen interview, 15/04/2010.
Figuur 20: 'Manual fixed' bediening van het vizier
Bron: eigen opname van DCS aan boord van de 'Breydel'

68
Bij aanvang van het baggeren staat die koker volledig bovenaan, op
deze manier kan een maximale beuninhoud benut worden. Na verloop
van tijd zal het schip inzinken doordat er meer specie in de beun terecht
komt. Wanneer de ingestelde diepgang bereikt wordt, zal ADC de
overvloeikoker laten dalen tot de kelk hiervan net onder de oppervlakte
van het mengsel komt te staan. Door het dalen van de koker zal het
beunvolume virtueel verkleinen. De zwaardere deeltjes van het mengsel
zullen bezinken terwijl het mengseloverschot afgevoerd wordt via de
overvloeikoker.
De stuurman voert de gewenste gemiddelde diepgang en de maximale
inhoud van de beun op voorhand in. Verder is er nog de mogelijkheid
alarmen in te stellen wanneer bepaalde diepgangen bereikt worden.
3.6.6 Automatic Pipe System Sequence (APSS)
APSS is uniek aan de OMOB-schepen. Dankzij APSS wordt het mogelijk
om de zuigbuis bepaalde vooraf ingestelde bewegingen automatisch te
laten uitvoeren. Deze vooraf ingestelde bewegingen worden geactiveerd
door de macroknoppen.
Figuur 6: ADC
Bron: eigen opname van DCS aan boord van de 'Breydel'

69
Zij vervangen de verbale bevelen die de stuurman aan de pijpman geeft
op conventionele sleephopperzuigers60. Het concept van deze knoppen is
bedacht door DEME en gerealiseerd door IHC Merwede. Dergelijke
knoppen bestonden nog niet. DEME heeft hier dan ook een patent op
genomen61.
Elke macroknop bestaat uit twee delen: een omliggende ring en de
drukknop zelf. Beiden kunnen oplichten in een verschillende kleur.
De ring zal oplichten wanneer er voldaan wordt aan bepaalde
operationele condities: de routine die geschreven staat op de drukknop
is bedrijfsgereed. Sommige condities worden door het DCS bepaald,
andere kunnen ingesteld worden door de operator.
Door de drukknop te bedienen, wordt de specifieke routine gestart. Na
het indrukken weerklinkt een geluidssignaal en de drukknop zal
knipperend oplichten. Het knipperen stopt wanneer de actie uitgevoerd
is. Tevens wordt er een geluidssignaal afgespeeld ter bevestiging.
Als er tijdens een routine een fout optreedt, zal er een alarmknop
oplichten. Er zal ook een aanvullend auditief signaal weerklinken.
60 Zie 1.2.1 voor deze 7 communicatiesituaties.
61 Cleymans E., Zwijndrecht, DEME, eigen interview, 1 maart 2010.
Figuur 7: macroknoppen

70
Bron : eigen opname van DCS aan boord van de 'Breydel'
Er zijn zeven macroknoppen:
'In Saddles': zorgt ervoor dat de zuigbuis van overboord terug
aan dek komt,
'Overboard': brengt de zuigbuis boven het water,
'At inlet': brengt de gehele zuigbuis volledig horizontaal onder
water, tot voor de inlaat,
'Off ground': laat de zuigmond en de knik tot een bepaalde
vooraf ingestelde diepte afdalen, enkele meters boven de bodem,
'At ground': brengt de zuigmond naar de bodem en houdt de knik
onder een bepaalde hoek dankzij de ADWC-functie,
'Turn PS': hiermee worden bepaalde horizontale hoeken verkleind
zodat de stuurman het schip naar bakboord kan manoeuvreren,
'Turn SB': doet hetzelfde als de 'Turn PS', maar dan voor een
manoeuvre naar stuurboord.
De eerste vijf knoppen zijn bijzonder omdat er hieraan twee subroutines
gekoppeld kunnen worden. Na deze in te drukken gebeurt er dus meer
dan enkel een beweging van de zuigbuis. De twee subroutines,
beschreven in 3.6.7 en 3.6.8, maken het mogelijk om de bagger- en
jetpompen automatisch op te starten. Tevens kunnen de bijhorende
afsluiters volgens bepaalde modi opgelijnd worden. De subroutines die
gestart worden bij de overgang van de ene macroknop naar de andere
worden door het DCS overzichtelijk weergegeven.
Figuur 21: Schematische voorstelling van welke acties ondernomen worden tussen de macroknoppen

71
3.6.7 Automatic Dredge System Sequence (ADSS)
Deze subroutine heeft zes modi. Hierin kan de baggerpomp gestart of
gestopt worden. Tevens kunnen de baggerafsluiters automatisch worden
opgelijnd. De zes modi zijn:
'sailing': de baggerpomp wordt uitgeschakeld en alle
baggerafsluiters behalve de aanzuigafsluiter worden gesloten,
'trailing': deze modus lijnt de baggerafsluiters op om te kunnen
baggeren, de baggerpomp wordt gestart,
'AMOB': de baggerafsluiters worden opgelijnd zodat het mengsel
overboord gepompt kan worden, de baggerpomp wordt gestart,
'back flush': de baggerpomp wordt gestopt zodat de zuigmond
gespoeld kan worden door de terugspoeling van het water,
'drain hopper': alles wordt opgelijnd om het water uit de beun te
kunnen onttrekken, de pomp wordt gestart,
'fill hopper': deze modus lijnt de baggerafsluiters op om de beun
te kunnen vullen met water, de pomp wordt gestart.
Deze modi kunnen gekoppeld worden aan het APSS. Een bepaalde
modus wordt aangenomen na de instructie van een macroknop. Voorts
vindt men deze nog terug op verschillende pagina’s van de SCADA HMI.
Elke modus heeft ook nog een afzonderlijke drukknop aan de zijkant van
de achterste monitor aan bakboord.
Bron: eigen opname aan boord van de 'Breydel'
Figuur 22: Drukknoppen van de verschillende modi van ADSS

72
Het is echter ook mogelijk om enkel de baggerafsluiters op te lijnen,
zoals op conventionele baggerschepen. De baggerafsluiters kunnen op
zes verschillende manieren automatisch geconfigureerd worden zonder
dat de pomp hierbij betrokken wordt:
'close': alle baggerafsluiters worden gesloten, behalve deze van
de aanzuig,
'de-water': de baggerafsluiters worden opgelijnd om de beun te
ontwateren,
'trail': de baggerafsluiters worden geconfigureerd om te kunnen
baggeren,
'flushing': de baggerafsluiters worden opgelijnd om de beun te
kunnen spoelen tijdens het dumpproces,
'shore': als men wil walpersen wordt deze modus geselecteerd,
alle baggerafsluiters die nodig zijn om dit proces te kunnen starten
worden opgelijnd,
'rainbow': deze modus is vergelijkbaar met 'shore', behalve dat
het mengsel het schip zal verlaten via de 'rainbow nozzle' in plaats
van via de boegkoppeling.
Bovenstaande modi kan men selecteren vanaf de 'dredge setup' pagina.
3.6.8 Automatic Jet System Sequence (AJSS)
Deze subroutine is gekoppeld aan het APSS. AJSS stuurt de jetpompen
en hun afsluiters aan. De werking is vergelijkbaar met ADSS. De OMOB-
schepen van de DEME hebben allemaal twee jetpompen. Deze kunnen in
serie of parallel geschakeld worden, dit hangt af van de opstelling
waarvoor de operator kiest.
Figuur 23: Verschillende opstellingen van de baggerafsluiters
Bron: eigen opname van DCS aan boord van de 'Breydel'

73
Jetpompen zijn centrifugaalpompen: als men ze in serie plaatst, zal er
een hogere druk bekomen kunnen worden. Het plaatsen van jetpompen
in parallel zorgt voor een debietsverhoging.
AJSS heeft vier modi:
'trail': de jetafsluiters worden opgelijnd en de jetpompen worden
gestart. Het jetwater kan naar de zuigmond 62 of naar de
ontgassinginstallatie63 gestuurd worden,
‘standby trail’: de jetafsluiters blijven opgelijnd maar de
jetpompen zullen stoppen,
‘sail’: de pompen stoppen en alle jetafsluiters worden gesloten,
‘drain hopper’: de jetafsluiters en de jetpompen worden zodanig
geconfigureerd dat het laatste water uit de beun onttrokken kan
worden. Dit gebeurt met behulp van de ejectoren die zich in de
leegzuigkanalen bevinden.
Net zoals bij de ADSS kan men hier ook de jetafsluiters oplijnen zonder
dat de pompen gestuurd worden. Deze functie komt ook voor op
conventionele baggerschepen. Volgende opstellingen zijn mogelijk:
'close': alle jetafsluiters worden gesloten,
'trail': de jetafsluiters worden opgelijnd zodat al het jetwater naar
de zuigmond wordt gestuurd,
'de-water': de jetafsluiters worden geconfigureerd zodat het
laatste water uit de beun onttrokken kan worden met behulp van
de ejectoren,
'de-gas': het jetwater wordt naar de ontgassinginstallatie
gestuurd, de jetafsluiters zijn opgelijnd om dit mogelijk te maken,
62 Jetwater wordt tijdens het baggeren onder hoge druk in de bodem gespoten om deze los te woelen.
63 Dankzij de ontgassinginstallatie kan men de cavitatie in de baggerpomp tijdens het baggeren van modder met lage vloeistofoppervlaktespanning beperken.

74
'pre-unload': de jetafsluiters worden opgelijnd zodat er jetwater
naar de straalpijpen ter hoogte van de voorlosdeuren gestuurd
wordt. Men doet dit om het dumpen te vereenvoudigen,
'bottom': de jetafsluiters worden opgelijnd zodat er jetwater naar
de straalbuizen ter hoogte van de bodemdeuren gestuurd wordt,
eveneens om het dumpproces vlotter te laten verlopen,
'shore': het jetwater wordt naar de straalbuizen ter hoogte van de
leegzuigdeuren gestuurd. Dit doet men om het walpersen te
vereenvoudigen,
'trimtank': het jetwater wordt ook gebruikt als ballastsysteem. Na
het selecteren van deze opstelling zullen de jetafsluiters juist
opgelijnd zijn om de trimtank te kunnen vullen.
De verschillende opstellingen van de jetafsluiters kan men selecteren op
de 'jet setup' pagina.
De jetpompen zijn bijna in alle gevallen parallel geschakeld, enkel in de
opstellingen waarbij er jetwater naar de zuigmond wordt gestuurd zijn ze
in serie geschakeld. Bij de zuigmond is immers een hoge druk van het
jetwater nodig, zodat de bodem losgewoeld kan worden.
3.7 Kleurcodes
3.7.1 Identificatie van afsluiters met eindschakelaars
Het symbool van een afsluiter is twee driehoeken omgekeerd tegen
elkaar. De kleuren van elk van deze driehoeken kunnen variëren.
Figuur 24: Verschillende opstellingen van de jetafsluiters
Bron: eigen opname van DCS aan boord van de 'Breydel

75
Figuur 25: Afsluiters resetten
Dit hangt af van de stand van de eindschakelaar en het laatst gegeven
bevel door de operator of door het DCS. Er zijn verschillende combinaties
mogelijk voor bagger- en jetafsluiters:
: de afsluiter is volledig geopend. De eindschakelaar heeft
de 'open' positie bereikt,
: de afsluiter is volledig gesloten. De eindschakelaar heeft
de 'gesloten' positie bereikt,
: de afsluiter wordt verondersteld open te zijn. Het
commando 'open' is gegeven, maar de eindschakelaar heeft
de open stand niet bereikt, wat kan wijzen op een defect,
: de afsluiter wordt verondersteld gesloten te zijn. Het
commando 'sluiten' is gegeven, maar de eindschakelaar
heeft de gesloten stand niet bereikt, wat kan wijzen op een
defect.
Tijdens het openen of het sluiten van een afsluiter zal deze knipperen in
zijn vorige staat. Indien er dus een grijze afsluiter knippert, betekent dit
dat deze wordt geopend. Een afsluiter zal in de veronderstelde stand
blijven staan, totdat de open of gesloten stand werkelijk bereikt is.
Indien de eindschakelaar of sensor niet defect zou zijn, kan een
veronderstelde stand wijzen op een interne fout van het DCS. De
operator kan in dat geval op 'valves reset' klikken. De actuele stand van
alle afsluiters wordt dan opnieuw weergegeven nadat het inputsignaal
van de sensor en eindschakelaar opnieuw wordt gecontroleerd.
Bron: eigen opname van het DCS aan boord van 'TSHD Breydel'

76
3.7.2 Identificatie van afsluiters met analoge positie-indicatie
Deze afsluiters kan men deels openen of sluiten. Zo is het bijvoorbeeld
mogelijk om een afsluiter van dit type slechts 20 procent te openen. Het
DCS beschouwt een afsluiter van dit type als volledig gesloten, wanneer
de stand ervan minder dan vijf percent geopend is. Hij zal dan grijs
kleuren. Anderzijds zal een afsluiter die voor meer dan 95 percent
geopend is worden beschouwd als volledig open. Hij zal dan groen
kleuren. Voor al de overige standen zullen de afsluiters de
kleurcombinatie grijs-groen aannemen. Tijdens het openen of sluiten
zullen ze knipperen in het symbool van hun laatste stand. Er zijn dus
drie symbolen voor de afsluiters met willekeurige standopening:
: volledig geopend (of meer dan 95 percent open),
: volledig gesloten (of minder dan 5 percent open),
: deels gesloten of deels open. Het percentage is in te stellen.
3.7.3 Identificatie van de overige apparatuur
De overige apparatuur zoals de baggerpomp en de lieren hebben
allemaal een soortgelijke kleurcode.
De baggerpomp kan volgende kleuren hebben:
grijs: de pomp is niet in gebruik. Ze is ook niet klaar om in
gebruik genomen te worden,
blauw: de pomp is niet in gebruik. Ze is 'Ready For Use' (RFU),
groen: de pomp is in gebruik,
rood: er is een fout met de pomp.

77
Deze kleurcodes gelden ook voor de hydraulische installatie, de
jetpompen en de gland- en spoelwaterpompen. Zij kunnen echter ook
nog blauw knipperen: dit wil zeggen dat de pomp RFU is, en dat ze
aan het starten is. Dit knipperlicht verschijnt nadat het bevel van 'start'
gegeven is. Voor de overige apparatuur betekent:
grijs dat het apparaat niet in gebruik is,
groen dat het operationeel is,
rood dat er een fout is opgetreden.

78
4 Veiligheid
Volgens de 'domino theorie' van Herbert William Heinrich worden 98
procent van alle ongevallen veroorzaakt door onveilige menselijke daden
en twee procent 'door handelingen van God'. 64 Hoewel deze theorie
ondertussen deels verouderd is, zien we dat de bedenkers van de OMOB
duidelijk dezelfde denkpiste hadden. Automatisatie, allemaal goed en
wel, maar wat zijn de gevolgen op het gebied van de veiligheid?
4.1 Bemanning
4.1.1 Situering van de bemanningsvoorschriften
De IMO heeft richtlijnen opgesteld om schepen veilig te bemannen.65
Elke administratie die lid is van de IMO kan deze richtlijnen gebruiken
om de nationale wetgeving aangaande bemanning van schepen op te
stellen. Dit is echter een complexe materie, omdat er onderscheid
gemaakt wordt in het type vaartuig, de grootte, het vaargebied,
enzovoort. Er wordt in de publicaties van de IMO ook verwezen naar
richtlijnen van andere organisaties:
International Telecommunication Union (ITU),
International Labour Organization (ILO),
World Health Organization (WHO).
Deze handelen over de eisen waaraan officieren moeten voldoen om
GMDSS-apparatuur te mogen bedienen (ITU), de werk- en rusttijden
(ILO) en de voorzieningen die nodig zijn om de gezondheid en hygiëne
van de crew te kunnen garanderen (WHO).
64 Verstraelen, H. (2006), Veiligheidstechniek, Antwerpen, Hogere Zeevaartschool, niet gepubliceerde cursus.
65 IMO-resolutie A.890(21): 'Principles of safe manning' en het amendement hiervan uit 2003: IMO-resolutie A.955(23).

79
Doordat de IMO richtlijnen in plaats van echte eisen heeft opgesteld, zijn
er behoorlijke verschillen tussen de effectieve wetgevingen van de
verscheidene administraties. Vlaggenstaten zoals Panama of Antigua en
Barbuda zijn kampioen in het omzeilen van de richtlijnen van de IMO.
Men noemt dergelijke administraties ook wel eens 'Flags Of Convenience'
(FOC).
We kunnen echter met zekerheid zeggen dat België geen FOC is. Al de
richtlijnen van de IMO A.890(21) en A.955(23) zijn immers rechtstreeks
overgenomen in de nationale wetgeving66. Dit houdt in dat ook al de
verwijzingen naar de ILO, ITU en WHO in deze publicaties zijn erkend
door de Belgische wetgeving.
4.1.2 Werk- en rusttijden
In de STCW-code wordt er vooral geschreven over de certificering en de
werk- en rusttijden van de bemanning, zodat deze altijd 'fit for duty' is.
Deze tijden, beschreven in sectie A: hoofdstuk VIII/1, worden echter
meer gespecificeerd in conventie 180 van de ILO: 'Seafarers' Hours of
Work and the Manning of Ships'.
Een persoon die werkt op een schip dat geregistreerd is bij een
administratie die de regels van de ILO erkent, is onderworpen aan
volgende limieten onder normale omstandigheden67:
hij mag maximaal 14 uren werken in een periode van 24 uren,
hij mag maximaal 72 uren werken in een periode van zeven dagen,
hij moet minimaal 10 uren rusten in een periode van 24 uren,
66 Koninklijk Besluit van 20 juli 1973: 'Zeevaartinspectiereglement', zoals gewijzigd.
67 International Labour Organization (1996), Convention No. 180 concerning Seafarers' Hours of Work and the Manning of Ships, Genève.

80
hij moet minimaal 77 uren rusten in een periode van zeven dagen,
deze periodes van rust mogen worden opgedeeld in maximaal twee
cycli. Eén van deze periodes moet minstens zes opeenvolgende
uren bevatten en de tijd tussen twee rustperiodes mag maximaal
14 uren bedragen.
Deze werk- en rusttijden verschilden vroeger nogal wat van de regels
van de STCW-conventie. De conferentie van 21-25 juni 2010 in Manilla
heeft echter nieuwe regels in verband met de werk- en rusttijden
goedgekeurd, zodat ze nu wel sterk aanleunen bij deze van ILO 180. Ze
zijn echter enkel van toepassing op officieren die wachten lopen en niet
op alle personen die werk verrichten aan boord, zoals in de ILO-
publicatie. Er worden veel uitzonderingen toegelaten op de regels van
ILO 180 en de STCW-code. De beschrijving van de verplichte werk- en
rusttijden in de ILO wordt voorafgegaan door een verklaring die zegt dat
niets de administratie ervan weerhoudt om CAO's met de werk- en
rusttijden voor zeemannen op te stellen die afwijken van de regels van
ILO 180. Ze moeten echter minstens even 'gunstig'68 zijn.
Op OMOB-schepen van DEME werkt de bemanning 10 uren per dag,
zeven dagen per week. Afhankelijk van de geografische locatie van het
schip is de bemanning één, vier of zes weken aan boord, gevolgd door
één, vier of zes weken 'thuis'. De bemanning heeft twee uur pauze per
werkdag, in de praktijk komt het er op neer dat de werkdag zo wordt
opgesplitst in twee grote blokken: een blok van 5,5 uren in de
voormiddag en een blok van 4,5 uren in de namiddag69. De ILO of de
STCW-code specificeren niet wat de maximale duur van één blok mag
zijn. Zolang de zeeman niet meer als 14 uren per dag werkt en 72 uren
per week is de regeling voldoende 'gunstig'.
68 Vrije vertaling van de Engelstalige term: 'favourable'.
69 Een half uur pauze in de voormiddag, een uur tijdens de middag en een half uur in de namiddag. Voor de nachtploeg gelden er gelijkwaardige regels.

81
4.1.3 Minimumbemanning70
Helaas bestaan er geen regels die het minimum aantal leden van de
bemanning exact vastleggen. De richtlijnen die opgelegd worden aan de
administraties zijn eerder vaag. Resolutie A.890(21) begint met:
"THE ASSEMBLY, […] RECOMMENDS that Governments, in establishing
the minimum safe manning levels for ships flying their countries' flag,
observe the Principles set out in Annex 1 and take into account the
Guidelines set out in Annex 2 […]"
Annex 1 en Annex 2 zijn een opsomming van zeer veel uiteenlopende
taken die een minimumbemanning zeker zou moeten aankunnen. Enkele
voorbeelden hiervan zijn:
het schip veilig afmeren,
de algemene toestand van het schip inspecteren en onderhouden.
De bemanning moet eveneens in staat zijn om reparaties uit te
voeren,
bunkeroperaties,
de elektronische apparatuur en elektrische toestellen onderhouden,
de radioapparatuur gebruiken volgens ITU- en SOLAS-regels,
medische hulp verlenen,
…
Er staan in deze resolutie en haar amendement A.955(23) nog ongeveer
35 soortgelijke opsommingen verspreid over de twee annexen. Behalve
de specifieke taakomschrijvingen voor de bemanning zijn er ook nog
regels gericht aan de rederijen. Deze regels zijn vrij algemeen. Verder
worden er nog verwijzingen gemaakt naar SOLAS hoofdstuk V, regel 14:
'Ships' manning' en de STCW-code. Ook hier zijn geen exacte regels of
tabellen te vinden die het minimale aantal bemanningsleden vastleggen.
70 'Minimum safe manning' in het Engels.

82
In de praktijk komt het erop neer dat de reder aan de administratie een
voorstel voor de minimumbemanning van een schip moet doen. Dit
voorstel moet zodanig zijn uitgewerkt dat het aantoont dat de
bemanning de taken die beschreven worden in IMO-resoluties A.890(21)
en A.955(23) aankan. Bovendien moeten de werk- en rusttijden van
deze bemanning minstens even 'gunstig' zijn als deze van ILO 180.
Alleen dan kan de minimumbemanning worden goedgekeurd door een
ambtenaar van de administratie. In België zijn dit de ambtenaren van de
scheepvaartcontrole.71
4.1.4 Vergelijking van de bemanning van een OMOB-schip met een
gelijkwaardig niet-OMOB-schip
Aangezien de kost van de bemanning op een baggerschip vrij hoog
oploopt, is het logisch dat rederijen hierop willen besparen. Voor elke
officier aan boord van een baggerschip zijn er vier personen nodig. Er
zijn immers vier ploegen per schip waarvan er afwisselend twee
tegelijkertijd aan boord zijn: een nachtploeg en een dagploeg. Als er
dankzij concepten zoals een geautomatiseerde machinekamer of OMOB
bepaalde bemanningsleden kunnen wegvallen, zullen rederijen hier
uiteraard gebruik van maken om de bemanning aan te passen. Dankzij
de komst van OMOB-schepen heeft DEME minder pijpmannen nodig. De
kost die per persoon wordt uitgespaard, is vrij groot: loon,
ziekteverzekering, vliegtuigtickets, voeding en investeringen in
specifieke opleidingen zijn allemaal onkosten die wegvallen.
Bovendien gelden er andere regels voor schepen met een kleinere
bemanning op gebied van veiligheidsuitrusting, aanwezigheid van een
hospitaal, enzovoort.
71 Wackenier B., Oostende, Belgische Scheepvaartcontrole, eigen interview, 30/07/2010.

83
Onderstaande tabel geeft een overzicht van de bemanningen van twee,
nagenoeg identieke sleephopperzuigers. Het grootste verschil tussen
beide is dat de 'Marieke' uitgerust is met een OMOB en de 'Pallieter' niet.
Ze hebben allebei een tijdelijke onbemande machinekamer.
72 Twee pijpmannen en één lasser.
73 Twee lasser-matrozen, één leerling-stuurman.
74 Elektricien
75 Eén leerling 2de werktuigkundige, één elektricien.
Bron: Certificaten van 'minimum safe manning' en lijsten met crewplanning van DEME (zie bijlage 10 en 11)
Bemanning Minimumbemanning Effectieve bemanning
TSHD
Pallieter
(2004)
TSHD
Marieke
(OMOB)
(2006)
TSHD
Pallieter
(2004)
TSHD
Marieke
(OMOB)
(2006)
kapitein 1 1 1 1
1e stuurman 1 1 2 2
stuurman 1 1 2 2
hoofdwerktuigkundige 1 1 1 1
1e werktuigkundige 1 1 2 2
scheepsgezel dek 3 3 2+172 373
scheepsgezel machinekamer 1 0 174 275
2de werktuigkundige 0 0 2 0
kok 0 0 1 1
TOTAAL 9 8 15 14
Tabel 1: Vergelijking bemanning OMOB-schip en niet-OMOB-schip

84
De 'Pallieter' is geregistreerd bij de Belgische administratie, terwijl de
'Marieke' de Luxemburgse vlag voert. Dit verklaart wellicht waarom de
minimumbemanning verschilt.
Als we de effectieve bemanning van beide schepen gaan vergelijken, valt
het op dat ze niet alleen verkleind is, maar de indeling ervan is ook
veranderd. De komst van de OMOB heeft er niet alleen voor gezorgd dat
de pijpmannen verdwijnen. Het is een aanleiding geweest tot een trend
waarbij DEME aanpassingen van de bemanning doorvoert. Op de
'Marieke' zijn er op het moment van schrijven bijvoorbeeld geen 2de
werktuigkundigen: deze twee zijn vervangen door één leerling-
werktuigkundige. Uiteraard is dit nadelig voor het schip: in de plaats van
een ervaren 2de werktuigkundige is er een onervaren leerling-
werktuigkundige gekomen.
In dit voorbeeld valt het op dat er op de 'Marieke' een leerling-stuurman
op de effectieve bemanningslijst staat. Het is geen vaste regel om
personen met deze functie op OMOB-schepen te plaatsen maar in de
praktijk gebeurt het wel vaak. Dit heeft niets met besparingen te maken,
integendeel: een leerling-stuurman verdient meer dan een matroos. We
kunnen dit wijden aan het feit dat er op het moment van schrijven een
acuut dreigend tekort aan stuurlui is. Door matrozen te vervangen door
leerling-stuurmannen hoopt men de toekomst te verzekeren. Helaas is
deze aanpak nadelig voor de veiligheid: de leerling-stuurmannen hebben
in vele gevallen minder ervaring dan matrozen.
Ook op de grotere OMOB-schepen van DEME zoals de 'Breydel' of de
'Brabo' bestaat de bemanning waarmee het schip geëxploiteerd kan
worden uit 14 personen76.
76 De 'Brabo' en de 'Breydel' hebben een LOA van respectievelijk 122,9 en 121,50 meter.

85
Dit betekent dat de reder het schip niet moet voorzien van een toegewijd
hospitaal aan boord. Artikel 11 van ILO C164: 'Health Protection and
Medical Care (Seafarers) Convention, 1987' stelt immers dat dit pas
verplicht is vanaf 15 opvarenden77. Met het aantal opvarenden doelt men
op de bemanning die nodig is om het schip te kunnen exploiteren.
Doordat sleephopperzuigers meestal relatief dicht bij de kust baggeren,
kunnen personen die medische hulp nodig hebben gemakkelijk naar een
walhospitaal gebracht worden. Het behoeft echter geen verdere uitleg
dat het altijd veiliger is om toch ook een hospitaal aan boord te hebben,
in plaats van enkel de verplichte medicijnkast. De afwezigheid van een
hospitaal betekent een lagere nieuwbouwkost voor de reder en
bovendien spaart hij plaats en gewicht uit. Elke kilogram materiaal
waarop bespaard kan worden, betekent immers dat er een extra
kilogram zand vervoerd kan worden. Helaas gaat deze redenering vaak
ten koste van de veiligheid.
4.1.5 Werkdruk
4.1.5.1 De taken van de officier van de brugwacht
De kapitein moet de wachtverdeling opstellen zoals beschreven wordt in
de STCW-code sectie A, hoofdstuk VIII, deel 3-1 paragraaf 16. 78
Wanneer hij de brugwacht samenstelt, moet hij dus rekening houden
met de verkeersdichtheid, de weersomstandigheden, de bijkomende
werklast door de aard van het schip en de overige factoren die hier
beschreven staan.
In de praktijk neemt de eerste stuurman het grootste deel van de
navigatie- en baggerwacht op zich.
77 Zie bijlage 12
78 Zie bijlage 13

86
Hij wordt hierbij afgewisseld door de tweede stuurman of de kapitein.
Wanneer, hoe lang en of dit al dan niet een vast systeem is, bepaalt de
kapitein van het OMOB-schip. De ongeschreven regel aan boord van veel
OMOB-schepen is dat de tweede stuurman vooral instaat voor de
operaties of reparaties die aan dek moeten gebeuren.79
De stuurman van wacht op de brug van een conventioneel baggerschip
moet capabel zijn om vele taken tegelijkertijd uit te voeren en een grote
hoeveelheid informatie te verwerken:
VHF uitluisteren: soms meerdere kanalen tegelijkertijd,
radarbeelden interpreteren,
het schip manoeuvreren,
hij moet ervoor zorgen dat hij in zijn baggerzone blijft. Bovendien
moet hij constant in de gaten houden waar hij moet baggeren: het
is niet de bedoeling dat hij twee keer in hetzelfde spoor baggert,
alle nevenactiviteiten uitvoeren dat het baggerproces met zich
meebrengt. Enkele voorbeelden hiervan zijn het bijwerken van de
gegevens van de survey en het invullen van productierapporten
en het scheepslogboek,
's nachts eventueel de zoeklichten bedienen om navigatiemerken
te herkennen,
…
Op OMOB-schepen komt hier het volledige beheer van het baggerproces
nog eens bij. De stuurman moet in het bijzonder volgende twee
productiegerelateerde parameters in de gaten houden, zodat hij op tijd
kan anticiperen:
79 Eigen ervaringen aan boord van OMOB-schepen 'Brabo' en 'Breydel' en De Ryck, T., Antwerpen, tweede stuurman 'Marieke', eigen interview, 3/08/2010.

87
mengseldichtheid en -snelheid. Deze geven aan of de productie
optimaal verloopt. Indien deze niet voldoende blijkt, zal de
stuurman manueel moeten ingrijpen door onder andere de
knikhoek en de stand van het vizier te veranderen. In de praktijk
moet hij dit bijna constant doen, indien hij een optimale productie
wil halen,80
vacuümdrukverschil. Als de zuigmond verstopt komt te zitten
door een voorwerp of klei zal het vacuümdrukverschil stijgen. Dit
kan nadelige gevolgen hebben voor de productie, de stuurman zal
dus proberen om dit te voorkomen. Vanaf het vacuümdrukverschil
stijgt, zal hij zo snel mogelijk moeten proberen om de zuigmond
terug vrij te krijgen.
De meeste baggerapparatuur is geautomatiseerd en het DCS beheert de
bewegingen van deze apparatuur. De stuurman moet echter constant de
functionaliteit van de baggerinstallatie verifiëren. Een voorbeeld hiervan
is de overvloeikoker. Hoewel het DCS deze automatisch van stand kan
doen veranderen, moet de stuurman toch af en toe visueel controleren
of de sensoren de juiste informatie doorgeven. Bewegende onderdelen
kunnen altijd geblokkeerd raken. Hoewel er in de meeste gevallen een
melding op het DCS zal verschijnen, dient de stuurman toch steeds alert
te zijn. Voor meer informatie over sensoren, zie 4.3.
Het is duidelijk dat de stuurman van wacht op een OMOB-schip een
enorme polyvalente en stressbestendige persoon moet zijn. Hij moet
zeker zijn van zijn stuk wat het navigatie- en manoeuvreerproces
betreft. Er is geen tijd of ruimte om te twijfelen over bepaalde navigatie
manoeuvres: het baggerproces moet immers ook nog beheerd worden.
80 Vandepoele, S., Antwerpen, 1e stuurman 'Breydel', eigen interview, 16/08/2010.

88
Hiervan moet hij overigens een grondige kennis hebben als hij de
handelingen die het DCS uitvoert, wil begrijpen en eventueel wil
bijsturen. Het behoeft geen verdere uitleg dat de werkdruk voor
stuurmannen verhoogd is sinds de komst van de OMOB.
4.1.5.2 Leerling-stuurmannen op OMOB-schepen
OMOB-schepen bestaan nog maar sinds 2006. Dit betekent dat de eerste
stuurmannen aan boord van de eerste OMOB-schepen allemaal zijn
doorgestroomd van conventionele baggerschepen. Bij DEME geldt al
sinds lange tijd de regel dat nieuwe onervaren personeelsleden moeten
beginnen als matroos op conventionele sleephopperzuigers. 81 Daarna
groeien ze door tot pijpman om uiteindelijk stuurman te worden. De
eerste stuurmannen op OMOB-schepen hebben dus allemaal nog als
pijpman gewerkt, waardoor ze de visualisaties en functies van het DCS
goed begrijpen.
We zijn op het moment van schrijven vier jaar later sinds de bouw van
het eerste OMOB-schip. Ondertussen zijn er vijf OMOB-schepen van
DEME in de vaart82. Nieuwe onervaren personeelsleden worden wegens
plaatsgebrek op de conventionele sleephopperzuigers ook geplaatst op
OMOB-schepen. 83 Ze beginnen daar als leerling-stuurman, om
vervolgens door te groeien tot stuurman. Ze slaan dus de tussenstap van
pijpman over want er is er simpelweg geen op OMOB-schepen. De vraag
is of dit de veiligheid aan boord ten goede komt: de pijpman is immers
een waardevolle hulp tijdens eventuele reparaties.
81 Engels, R., Antwerpen, hoofd simulator DEME, eigen interview, 18/10/2010.
82 'Marieke'(2006), 'Reynaert'(2007), 'Brabo'(2007), 'Breydel'(2008) en 'Artevelde'(2009)
83 DEME probeert zo veel mogelijk leerling-stuurmannen op schepen te plaatsen om het dreigend tekort hieraan op te vangen.

89
Zijn hoofdbezigheid naast het baggeren is het onderhoud van de
baggerinstallatie, waardoor hij na verloop van tijd een zeer goede kennis
over de baggerpomp en andere onderdelen opbouwt. Op OMOB-schepen
worden zijn taken uitgevoerd door de stuurmannen, waaronder dus
sommigen die nooit als pijpman hebben gewerkt. Leerling-stuurmannen
op OMOB-schepen moeten zich inwerken in het bagger- én
navigatiegebeuren. Doordat leerling-stuurmannen niet meer als pijpman
varen, beschikken ze niet meer over een grondige kennis van het
baggerproces, alvorens ze aan hun verdere opleiding tot stuurman
beginnen. Bovendien moeten ze hun praktische vaardigheden ook
ontwikkelen, zodat ze later in staat zijn om reparaties te kunnen leiden.
De werkdruk wordt dus nodeloos verhoogt. Men zou dit kunnen oplossen
door leerling-stuurmannen eerst op te leiden op OMOB-simulators. Op
het moment van schrijven zijn er echter nog geen simulators van een
OMOB met DCS.
4.2 OMOB versus bestaande veiligheidswetgevingen
In de STCW-code staan enkele regels die het OMOB-concept moeilijk
realiseerbaar maken op het gebied van veiligheid. Twee daarvan zijn
reeds aangehaald in hoofdstuk 2 bij de bespreking van de SYS-NEQ-
regels, namelijk:
Sectie A, hoofdstuk VIII, deel 3-1, paragraaf 12,
Sectie A, hoofdstuk VIII, deel 3-1, paragraaf 26.
IMO stelt hier dat de primaire aandacht van de officier van wacht
naar de veilige navigatie van het schip en de toepassing van de
COLREGS moet gaan. Tevens verbiedt men hem om tijdens de
wacht andere taken uit te voeren die dat in het gedrang kunnen
brengen.

90
Hoewel het DCS het baggeren quasi volledig automatiseert, blijkt
uit de informatie van 3.6.4 en 4.1.4 dat er toch veel aandacht van
de officier naar het baggergebeuren gaat. Dit staat haaks op de
regels van voornoemde paragrafen van de STCW-code.
Verder is er nog voorschrift 5 van de COLREGS dat als volgt luidt84:
"Elk vaartuig dient te allen tijde goede uitkijk te houden door te kijken
en te luisteren alsook door gebruik te maken van alle beschikbare
middelen die in de heersende omstandigheden en toestanden passend
zijn ten einde een volledige beoordeling van de situatie en van het
gevaar voor aanvaring te kunnen maken."
Een baggerproces beheren, behoort duidelijk niet tot de definitie van een
goede uitkijk. Men kan dit oplossen door een tweede persoon op de brug
te plaatsen die de goede uitkijk verzekert.
Sectie A, hoofdstuk VIII, deel 3-1, paragraaf 15 van de STCW-code
beschrijft de voorwaarden onder welke de officier van wacht overdag de
enige uikijk mag zijn85. 's Nachts is het volgens de MSC-circulaire 867
nooit toegelaten om de brug te bemannen met slechts één officier.86
De Belgische administratie heeft echter nog strengere regels dan deze
opgelegd door de IMO. Het is volgens onze administratie verplicht om op
Belgische schepen die zich niet op Belgische binnenwateren bevinden te
allen tijde de brug te laten bemannen door minstens twee personen:
een officier van wacht die minimaal in het bezit is van een STCW
II/1-vaarbevoegdheidsbewijs,
een scheepsgezel die een STCW II/4-certificaat bezit.
84 Deseck, P. (1996) Internationale Bepalingen ter Voorkoming van Aanvaringen op Zee, vierde uitgave, Oostende, Dill Productions.
85 Zie bijlage 14
86 Zie 2.1.2.3

91
De reder die het voorstel van de minimumbemanning aan de Belgische
administratie doet, moet deze zodanig opstellen dat er voldaan kan
worden aan deze regel. 87 In principe zou er dus op de Beneden-
Zeeschelde gebaggerd mogen worden met één officier op de brug.
Volgens de STCW-code sectie A, hoofdstuk VIII, deel 3-1 paragraaf 16
moet de kapitein bij het bemannen van de brug echter rekening houden
met de verkeersdichtheid van het vaarwater.
Dit betekent dat volgens de bestaande regels van de IMO, de
COLREGS en de Belgische administratie de OMOB op Belgische
schepen in principe niet bemand mag worden door slechts één
officier.88
In praktijk stellen veel administraties additionele eisen in verband met
de bezetting van de brugwacht op sleephopperzuigers. Doordat deze
schepen vaak baggeren in gebieden die normaal enkel toegankelijk zijn
onder begeleiding van een loods, gebeurt het vaak dat de administratie
één of meerdere loodsen permanent aan boord plaatst om de officier
en/of de kapitein bij te staan tijdens de wacht.89 Op deze manier wordt
er voldaan aan de eisen van de IMO, de COLREGS en de Belgische
administratie.
87 Wackenier B., Oostende, Belgische Scheepvaartcontrole, eigen interview, 30/07/2010.
88 Alle OMOB-schepen van DEME zijn geregistreerd bij de Belgische administratie, behalve de 'Marieke'.
89 Tijdens mijn stage aan boord van de 'Breydel' in Maracaibo, Venezuala, waren er permanent drie 'Master assistants' aan boord. Zij waren afwisselend aanwezig op de brug volgens een systeem van zeewachten: vier uren brugwacht gevolgd door acht uren rust.

92
4.3 Sensoren
Door de hoge mate van baggerautomatisering aan boord van OMOB-
schepen wordt heel veel informatie van het baggerproces verzameld
door sensoren. Vervolgens wordt deze samengevat weergegeven aan de
officier via de SCADA HMI. Sensoren kunnen echter falen of erger:
virtueel falen90. Als bepaalde sensoren stuk gaan, kunnen die meestal
via de SCADA HMI worden overbrugd. Hierna kan de baggeroperatie
gewoon automatisch verder gaan. Is dit echter niet het geval, dan zal de
stuurman het baggerproces gedeeltelijk of geheel manueel moeten
overnemen.
Er is ook de mogelijkheid dat een sensor virtueel faalt. Het kan zijn dat
het DCS dit dan niet interpreteert als een sensor die een foutief signaal
doorstuurt, bijgevolg zal er ook geen alarm gegeven worden aan de
operator.
Als voorbeeld van een dergelijke situatie kunnen we de sensor nemen
die moet verifiëren of de zuigbuis al dan niet in het zadel ligt. Als de
operator op de macroknop 'in saddles' drukt, zal de zuigbuis door de
APSS-functie van het DCS automatisch in het zadel aan boord worden
geplaatst. Vanaf het ogenblik dat de zuigbuis effectief in het zadel ligt,
zal de sensor van status veranderen. Het DCS zal er dan voor zorgen dat
de lieren automatisch stoppen met vieren: de zuigbuis ligt immers veilig
in het zadel. Indien deze sensor echter door een bepaalde reden niet van
status verandert als de zuigbuis in het zadel ligt, zullen de lieren
doorgaan met vieren. Als de stuurman dit niet op tijd visueel opmerkt, is
er een probleem.
90 Een sensor faalt virtueel als hij niet van stand veranderd terwijl hij toch niet stuk is. Een magnetische sensor kan bijvoorbeeld virtueel falen doordat er een ijzeren hamer op ligt: de sensor is niet stuk maar hij zal wel een fout signaal doorgeven.

93
Dergelijke situatie kan worden vermeden door sensoren te tripleren. Drie
'redundante sensoren' zullen dan via 'majority voting logic' beslissen of
een toestand al dan niet bereikt is.91 De werking van 'majority voting
logic' kan het best worden uitgelegd aan de hand van een afbeelding:
Met een dergelijk systeem wordt een toestand van een element bepaald
door drie sensoren. Vooraleer de signalen die afkomstig zijn van de
individuele sensoren bij de controllerlaag terechtkomen, moeten ze eerst
een 'majority voter' subsysteem passeren. Dit subsysteem analyseert of
de drie sensoren hetzelfde signaal doorsturen. Indien dit niet het geval
is, doordat een sensor niet van status verandert zoals in het voorbeeld
van de zuigbuis en het zadel, zal het subsysteem dankzij de meerderheid
van de andere twee signalen kunnen vaststellen dat er een sensor stuk
is. Bovendien zal het toch nog de juiste informatie doorsturen naar de
controllerlaag. In het voorbeeld van de zuigbuis zouden de lieren dus wel
stoppen met vieren dankzij dit systeem, ondanks een sensor die virtueel
of volledig faalt.
91 Bruidegom, B. (2001), Logica en Schakelalgebra, Amsterdam, Universiteit Amsterdam, gepubliceerde cursus.
Figuur 26: 'Majority voting logic' systeem
Bron: Ben Bruidegom

94
Het nadeel van dit systeem is dat het erg duur is: elke sensor moet
immers worden getripleerd. Bovendien zou er ook een aanpassing van
de software nodig zijn. Dat is meteen ook de reden waarom het niet
wordt gebruikt aan boord van OMOB-schepen om de stand van
onderdelen zoals de zuigbuis en de overvloeikoker te verifiëren. Het zou
de veiligheid nochtans verhogen.
4.4 Deelbesluit
Ondanks de hoge automatiseringsgraad van de baggerinstallatie blijkt
het dat de stuurman geregeld het baggerproces manueel bijstuurt om de
productie te optimaliseren. Dit heeft ongetwijfeld een invloed op zijn
aandacht voor de navigatie en dus op de algemene veiligheid.
Als de richtlijnen en wetgevingen van hoogaangeschreven kader-
organisaties zoals de IMO en de ILO tot op de letter gevolgd worden,
zien we dat éénmansbediening slechts in weinige gevallen toegelaten is:
om te allen tijde een veilige vaart te houden, is de kapitein er in feite toe
verplicht om altijd minstens twee personen op de brug te plaatsen.
Het is belangrijk om te beseffen dat de menselijke capaciteiten grenzen
hebben. Door nieuwe technologieën zoals de OMOB wordt het voor
leerling-stuurmannen moeilijker om zich in te werken. Bovendien hebben
ze minder tijd om alles onder de knie te krijgen: ze slaan de functie van
pijpman immers over. In combinatie met de reductie van de bemanning
leidt dit tot een verhoogde werkdruk. Het is algemeen bekend dat de
veiligheid aan boord niet positief wordt beïnvloed door een verhoogde
werkdruk.

95
5 Besluit
Kapitein James Cook (1728-1779) had indertijd een interessante
stelling92:
"One man's navigation is always wrong"
Ik denk echter dat het ondertussen veilig is om te stellen dat dit citaat
achterhaald is. Dat wordt ondermeer bevestigd door een hoog
aangeschreven kaderorganisatie zoals de IMO. In de STCW-code staat
immers dat éénmansnavigatie onder bepaalde omstandigheden
toegelaten is.
Dankzij het automatiseren van het baggerproces en het integreren van
verscheidene volautomatische subsystemen tot één geheel, is het in
2006 technisch mogelijk geworden om één stuurman het bagger- én
navigatieproces te laten uitvoeren onder normale omstandigheden.
Hierover is de STCW-code minder bevestigend: ze stelt dat de
hoofdbezigheid van de stuurman te allen tijde het navigatieproces moet
zijn.
Hoewel de baggeroperaties geautomatiseerd zijn door het DCS, moet de
stuurman in de praktijk toch nog geregeld bepaalde handelingen
manueel uitvoeren, indien hij een optimale productie wil bereiken.
Doordat al de informatie verkregen wordt door sensoren die kunnen
falen, kan en mag hij niet blindelings vertrouwen op de alarmen van dit
systeem: de stuurman moet geregeld de werking van bepaalde
baggeronderdelen visueel verifiëren. Om bovenstaande redenen is het
onmogelijk voor hem om zijn aandacht volledig aan het navigatieproces
te wijden.
92 Van De Velde, M. (2008), Incident with TSHD Breydel - damage to suction pipe,
http://www.theartofdredging.com/breydeldamagetopipe.htm, 15/08/2010.

96
Daarom heeft DEME ervoor gekozen om de OMOB-schepen te laten
bouwen volgens de regels van de SYS-NEQ1- en de NAUT-OSV-
regels van respectievelijk BV en DNV. Hierdoor is het ook mogelijk
om het bagger- en navigatieproces door twee operatoren te laten
uitvoeren, zodat er probleemloos voldaan kan worden aan de
eisen van de STCW-code en de COLREGS.
Men kan dan de vraag stellen: wanneer kan een OMOB effectief
worden bemand door één stuurman? Volgens de Belgische
administratie is het antwoord hierop zeer duidelijk: nooit, tenzij
het schip zich op de Belgische binnenwateren bevindt. Volgens de
STCW-code mag het dan weer wel onder bepaalde
omstandigheden. Toen deze code geschreven werd, was er van
OMOB-schepen echter nog geen sprake.
In de praktijk wordt de OMOB bijna nooit bemand door één
persoon. Doordat sleephopperzuigers bijna altijd nabij de kust
baggeren, wordt er door de lokale administraties zeer vaak de
aanwezigheid van een permanente loods of 'assistant-master'
geëist. Hoewel de brug dus in vele gevallen toch bemand wordt
door twee personen, is er nog altijd een financieel voordeel voor
de rederijen: er is geen pijpman meer aan boord. Op
conventionele sleephopperzuigers zou de brug immers worden
bemand door drie personen, indien een permanente loods
verplicht is.
Door de afwezigheid van de menselijke pijpman kan de efficiëntie
van het baggerproces verhogen, doordat de operationele factor ƒ0
zal stijgen. Tevens is de communicatieproblematiek tussen stuurman en
pijpman onbestaande.

97
Het nadeel voor de bemanning aan boord van de OMOB-schepen is dat
ze een persoon minder in hun ploeg hebben. Hoewel het baggerproces
hier niet noodzakelijk onder hoeft te lijden, heeft dit wel zijn gevolgen
tijdens speciale situaties zoals reparaties. Vele handen maken het werk
immers lichter.
Op het moment van schrijven kunnen we echter alleen maar vaststellen
dat het OMOB-concept blijkt te werken: anders zou DEME haar vloot niet
blijven uitbreiden met OMOB-schepen.
De volgende stap in de evolutie van sleephopperzuigers zal ongetwijfeld
de bouw van OMOB-schepen met twee zuigbuizen zijn. Dit verhaal is dus
nog niet afgelopen.

98
Bibliografie
Geschreven bronnen
Allen R.W., Clement W. en Jex H.R. (1970), Research on display scanning, sampling
and reconstruction using separate, main and secondary tracking tasks,s.l.,NASA, CR-
1569.
Bray, R.N., Bates A.D., Land J.M. (1996), Dredging, a handbook for engineers, Londen,
Butterworth-Heinemann.
Bruidegom, B. (2001), Logica en schakelalgebra, Amsterdam, Universiteit Amsterdam,
gepubliceerde cursus.
Bureau Veritas (2010), The Rules for the Classification of Steel Ships, Part E, Chapter
4: Integrated Ship Systems, Section 1: Centralised Navigation Equipment (SYS-NEQ),
versie van juli 2010, Neuilly-sur-Seine, s.n.
Cotteleer, B. (2004), De baggerinstallatie bij moderne sleephopperzuigers, Antwerpen,
Hogere Zeevaartschool, niet gepubliceerde verhandeling.
Deseck, P. (1996) Internationale Bepalingen ter Voorkoming van Aanvaringen op Zee,
vierde uitgave, Oostende, Dill Productions.
Det Norsk Veritas (2010), Joint Industry Project: Bridge Design Offshore Service
Vessels (NAUT-OSV), HØvik, s.n.
Handfield, R.B. en Bozarth, C.C. (2008), Introduction to Operation and Supply Chain
Management, 2de herziene druk, New Jersey, Pearson Education.
IHC Merwede (s.a.) Instrumentatie en automatisering van baggerwerktuigen, IHC
publication, p.17.

99
International Association of Classification Societies (1992), One-Man Bridge Operated
(OMBO) ships, publicatie UR N1, p.1.
International Labour Organization (1996), Convention No. 180 concerning Seafarers'
Hours of Work and the Manning of Ships, Genève.
International Maritime Organisation (1974), International Convention for the Safety of
Life at Sea (SOLAS), amended version of 2009, London.
International Maritime Organization (1991), Maritime Safety Committee (MSC), circular
566, London, s.n.
International Maritime Organization (1995), International Convention on Standards of
Training, Certification and Watchkeeping for seafarers (STCW), amended version of
2006, London, s.n.
Kieboom, H. (2007), Functional Specification: Dredger Control System, versie 1.1,
Sliedrecht, IHC SYSTEMS B.V.
Koninklijk Besluit van 20 juli 1973: 'Zeevaartinspectiereglement', zoals gewijzigd, het
Belgisch staatsblad.
Maes, R. (2009), Cursus Automatisatie, Antwerpen, Hogere Zeevaartschool, niet
gepubliceerde cursus.
One-Man-Operated Bridge (2007), Ports and Dredging, volume 167, p. 14-21.
Van De Velde, B. (2009), Optimalisatie van het baggerproces op TSHD tijdens het
sleepzuigen, Antwerpen, Hogere Zeevaartschool, niet gepubliceerde bachelorscriptie.
Verstraelen, H. (2006), Veiligheidstechniek, Antwerpen, Hogere Zeevaartschool, niet
gepubliceerde cursus.

100
Onlinebronnen
Control-IT (2002), SCADA: een introductie,
http://www.control-it.nl/SCADA/WATIS/SCWIDEF.htm, 9 maart 2010.
International Organization for Standardization (2010), About ISO, www.iso.org,
28/07/2010.
Van De Velde, M. (2008), Incident with TSHD Breydel - damage to suction pipe,
http://www.theartofdredging.com/breydeldamagetopipe.htm, 15/08/2010.
Interviews
Cleymans E., Zwijndrecht, DEME, eigen interview, 27/07/2010.
De Lille, R., Antwerpen, Jan De Nul, eigen interview, 3 maart 2010.
De Ryck, T., Antwerpen, DEME, eigen interview, 3/08/2010.
Engels, R., Antwerpen, DEME, eigen interview, 18/10/2010.
Hellemans, R., Antwerpen, Bureau Veritas, eigen interview, 29/07/2010.
Mullenders, F., Maracaibo, DEME, eigen interview, 15/04/2010.
Nagtegaal, R., Sliedrecht,IHC Merwede, eigen interview, 27 juli 2010.
Vandepoele, S., Antwerpen, DEME, eigen interview, 16 en 23/07/2010.
Wackenier B., Oostende, Belgische Scheepvaartcontrole, eigen interview, 30/07/2010.

I
Lijst van bijlagen
Bijlage 1: foto van de inlaat van de 'Breydel' II
Bijlage 2: tabel van de operationele factor ƒ0 III
Bijlage 3: overeenkomstige benamingen van verscheidene IV
klassennotaties
Bijlage 4: MSC-Circulaire 867 V
Bijlage 5: SOLAS hoofdstuk V, Regulation 15 VI
Bijlage 6: SOLAS hoofdstuk V, titels van de Regulations 17-20, VII
22, en 25
Bijlage 7: IMO Performance Standards for SYS-NEQ1 VIII
Bijlage 8: prioriteit van instrumenten, apparatuur en X
indicatoren op offshore schepen
Bijlage 9: afbeeldingen van de overige pagina's van XII
de SCADA HMI
Bijlage 10: 'Minimum Safe Manning' documenten van 'Pallieter' XVI
en 'Marieke'
Bijlage 11: crewlijsten 'Pallieter' en 'Marieke' XX
Bijlage 12: artikel 11 van ILO C164: Health Protection XXI
and Medical Care (Seafarers) Convention, 1987
Bijlage 13: STCW-code sectie A, hoofdstuk VIII, XXII
deel 3-1 paragraaf 16
Bijlage 14: STCW 1995, Sectie A, hoofdstuk VIII, deel 3-1, XXIII
paragraaf 15

II
Bijlage 1: foto van de inlaat van de 'Breydel'
Bron: Eigen opname van 'Breydel'

III
Bijlage 2: tabel van de operationele factor ƒ0
Bron: Dredging, a handbook for engineers

IV
Bijlage 3: Overeenkomstige benamingen van de verscheidene klassennotaties
Bron: Bureau Veritas

V
Bijlage 4: MSC-Circulaire 867
Bron: IMO

VI
Bijlage 5: SOLAS hoofdstuk V, Regulation 15
Bron: SOLAS, IMO

VII
Bijlage 6: SOLAS hoofdstuk V, titels van de Regulations 17-20, 22, en 25.
17: Electromagnetic compatibility
18: Approval, surveys and performance standards of navigational
systems and equipment and voyage data recorder
19: Carriage requirements for shipborne navigational systems and
equipment
20: Voyage data recorders
22: Navigation bridge visibility
25: Operation of steering gear
Bron: SOLAS, IMO

VIII
Bijlage 7: IMO Performance Standards for SYS-NEQ1
Magnetic compasses (Resolution A.382),
gyrocompasses (Resolution A.424),
performance standards for radar equipment
(Resolution MSC.192(79)),
speed and distance measuring equipment
(Resolution A.478, A.824, MSC.96 (72)),
echo sounding equipment
(Resolution A.224, MSC.74 (69) Annex 4),
electronic navigational aids – general requirements
(Resolution A.574),
VHF Radio installation
(Resolution MSC.68 (68) Annex 1, A.524 (13), A.803 (19)),
heading control systems (HCS)
(Resolution A.342, MSC.64 (67) Annex 3),
rate-of-turn indicators (Resolution A.526),
VHF watchkeeping receiver
(Resolution A.803 (19), MSC.68 (68) Annex 1),
performance standards for track control systems
(Resolution MSC.74 (69) Annex2),
performance standards for marine transmitting heading devices
(THDs) (Resolution MSC.116 (73)),
performance standards for electronic chart display and information
systems (Resolution A.817 (19), MSC.86 (70) Annex 4, MSC.64
(67) Annex 5),
performance standards for shipborne global positioning system
receiver equipment (Resolution A.819 (19)),
adoption of the revised performance standards for shipborne global
positioning system (GPS) receiver equipment
(Resolution MSC.112 (73)),

IX
adoption of the revised performance standards for shipborne
GLONASS receiver equipment (Resolution MSC.113 (73)),
adoption of the revised performance standards for shipborne DGPS
and DGLONASS maritime radio beacon receiver equipment
(Resolution MSC.114(73)),
performance standards for a universal automatic identification
system (AIS) (Resolution MSC.74 (69) Annex 3),
performance standards for an integrated navigation system (INS)
(Resolution MSC.86 (70) Annex 3),
performance standards for sound reception systems
(Resolution MSC.86 (70) Annex 1),
performance standards for the presentation of navigation-related
information on shipborne navigational displays
(Resolution MSC.191(79)),
performance standards for a bridge navigational,
watch alarm system (BNWAS) (Resolution MSC.128(75)),
performance standards for shiphorne voyage data recorders
(VDRs) (Resolution A.861(20) as amended by IMO Resolution
MSC.214(81)).
Bron: IMO

X
Bijlage 8: Prioriteit van instrumenten, apparatuur en indicatoren op offshore schepen

XI
Bron: NAUT-OSV notatie, Det Norsk Veritas

XII
Bijlage 9: afbeeldingen van de overige pagina's van de SCADA HMI
'Dump' pagina
'Discharge' pagina

XIII
'Dredge setup' pagina
'pipe + winche' pagina

XIV
'Jet setup' pagina
'Calibration' pagina

XV
'Diagnostics' pagina
'Automation' pagina
Bron: Eigen opname van het DCS aan boord van de 'Breydel'

XVI
Bijlage 10: 'Minimum Safe Manning' documenten van 'Pallieter' en' Marieke'

XVII

XVIII

XIX
Bron: Personeelsdienst DEME

XX
Bijlage 11:Crewlijsten 'Pallieter' en 'Marieke'
Bron: Personeelsafdeling van DEME
Personeelsdienst DEME

XXI
Bijlage 12: artikel 11 van ILO C164: Health Protection and Medical Care (Seafarers) Convention, 1987
Article 11
1. In any ship of 500 or more gross tonnage, carrying 15 or more seafarers and engaged in a voyage of more than three days' duration, separate hospital accommodation shall be provided. The competent authority may relax this requirement in respect of ships engaged in coastal
trade.
2. In any ship of between 200 and 500 gross tonnage and in tugs this Article shall be applied where reasonable and practicable.
3. This Article does not apply to ships primarily propelled by sail.
4. The hospital accommodation shall be suitably situated, so that it is easy of access and so that the occupants may be comfortably housed and may
receive proper attention in all weathers.
5. The hospital accommodation shall be so designed as to facilitate consultation and the giving of medical first aid.
6. The arrangement of the entrance, berths, lighting, ventilation, heating and water supply shall be designed to ensure the comfort and facilitate the
treatment of the occupants.
7. The number of hospital berths required shall be prescribed by the competent authority.
8. Water closet accommodation shall be provided for the exclusive use of the occupants of the hospital accommodation, either as part of the
accommodation or in close proximity thereto.
9. Hospital accommodation shall not be used for other than medical purposes.
Bron: ILO

XXII
Bijlage 13: STCW-code sectie A, hoofdstuk VIII, deel 3-1 paragraaf 16
Bron: STCW-code, IMO

XXIII
Bijlage 14: STCW 1995, Sectie A, hoofdstuk VIII, deel 3-1, paragraaf 15
Bron: STCW-code, IMO