32 Haagmans

of 132
Transcript of 32 Haagmans
-
8/16/2019 32 Haagmans
1/132
N E T H E R L A N D S G E O D E T I C C O M M I S S I O N
PUBLICATIONS ON GEODESY NE W SERIES
NUMBER
32
NAVGRAV
NAVIGATION
ND
GRAVIMETRIC EXPERIMENT
AT THE NORTH SEA
R. H. N. HAAGMANS
G . J. HUSTI
P. PLUGERS
J.
H . M. SMIT
G. L. STRANG VAN HEES
1988
RIJKSCOMMISSIE VOOR GEODESIE THIJSSEWEG 11 DELFT THE NETHERLANDS
-
8/16/2019 32 Haagmans
2/132
PRINTED
BY
W . D. MEINEMA
B.V.
DELFT THE NETHERLANDS
ISBN 90
6132 237 5
-
8/16/2019 32 Haagmans
3/132
PREF CE
Accurate gr a v i t y in fo rma t ion a t sea can serve many impor tant
purposes i n geodesy, s o l i d ea r t h ph ysic s and oceanography. But
o n l y s in c e t h e e a r l y t w e nt i e s o f t h i s c e nt u ry , t hr ou gh t h e
pi on ee r in g work o f Vening Meinesz 1929) or 1948) g r a v i t y
measurements a t sea became po ss ibl e. The in he ren t com pl ica t io n,
whenever measur ing whi l e moving, i s th e sep ara t ion o f th e
d i s t u r b i n g e f f e c t s o f t h e m ot io n f ro m th e v e r t i c a l a c c e l e r a t i o n
due t o gr av i t y . Meanwhi soph i s t a ted modern gr a v i t y meters
ex is t , see e .g . Be l l and Wat ts , 1986) t h a t l a rg e l y e l im ina te
these dis turba nces. However the re remains an ef f e c t th a t cannot be
e l m inated ins trumen ta l l , t he Eo tvos co r r ec t i on . t can on1 y be
de te rmined accura te l y
i f
v e r y pr e c i se n a v i ga t i on i s a v a i l a b l e .
Wi th t h e excep t ion o f a few areas, where accu ra te rad iop os i t i on in g
i s ava i lab le , t h i s causes a p roblem. Wi th t he estab l ishment o f t he
Global P os i t io n in g System GPS) pr ec ise nav iga t io n anywhere a t any
t i m e became fe as ib le . Hence around 1984 th e idea was born t o
i n v e s t i g a t e t h e p o t e n t i a l o f GPS f o r t h i s p urp os e i n t h e N o r t h
Sea, where severa l p rec ise rad io po s i t i on in g sys tems are av a i la b l e
f o r compar i on. Si nce such an exp er iment re q u i r e d GPS as we1 l as
sea grav imet ry ,
i t
was on1 y lo gi ca l t o broaden the scope o f th e
exper iment by address ing a t the same t ime o ther in te re s t in g i tems
i n the f i e l d s o f nav iga t ion and sea grav imet ry. The exper iment was
named NAVGRAV.
On one hand t he t e s t o f f e re d t he opp or tu n i t y t o t ake a c lose r
l oo k a t t h e p r e c i s i o n , r e p e a t a b i l i t y and r e s o l u t i o n o f s ea
g r a v i me t r y and i t s t r a d e - o f f w i t h s a te 1
l
e a1 t i m e t r y d e r i ve d
gravity. For these purposes two modern sea gravimeters were
measur ing s imu l taneous ly . Severa l s h ip t ra cks o f an e a r l i e r
exp erim ent i n 1979 Str an g van Hees, 1983) were repe ated , and
SEASAT a l t i m e t r y data were analysed. On th e other hand ve ry l i t t l e
exper ie nce was present i n the area o f GPS i n the Nether lands
around 1984. Thus, th e exper iment gave op po rt un i t y t o in vo lve as
many fu tu re p o te n t i a l use rs f rom pr i v a te companies, government
a g en ci es and u n i v e r s i t i e s , t o g a i n e xp er ie n ce on t h e c a p a b i l i t i e s
of GPS a t sea and t o compare
it
w i t h t h e e s t a bl i sh e d r a d i o
p os i t io n i n g sys tems i n a v a r i e ty o f experiments. pre para tory GPS
-
8/16/2019 32 Haagmans
4/132
-
8/16/2019 32 Haagmans
5/132
-
8/16/2019 32 Haagmans
6/132
Nether1ands Navy, t h e commander o f Hr. Ms. Tydeman K t z . G R. van
Hengel and h i s o f f i c e r s and crew.
The experime nts y ie l de d an enormous amount o f na vi ga ti on and
g r av i t y in fo rma t ion and a l o t o f exper ience. Th is re po r t g ives the
r e s ul ts o f th e NAVGRAV pr o j ec t as they a re obta ined u n t i l now.
t
i s o ur imp re ss io n t h a t t h e a va i l a b le da ta co u ld s t i l l be u se d f o r
fu tu re inve s t ig a t io ns and fo r s tuden t p ro je c ts . The da ta and the
re qu ir ed documentation can be made av ai la b l e t o any in te re st ed
group
D e l f t . December 1988
Reiner Rumme
l
eferences
Be1l R E., A B. Watts 1986): Ev alu ati on o f the BGM-3 sea g r a v i t y
meter system on board R/V Conrad. Geophysi CS, vol. 51, no.
7.
St ra ng van Hees, G.L. 1983): G r a v i ty Survey o f th e No rth Sea.
Mar ine Geodesy, vo l . 6, no. 2.
Vening Meinesz, F.A. 1929): Theory and P r a c ti c e o f Pendulum
Observat ions a t Sea. Nether l nds Geodet i Commi s s i on,
Technische Boekhandel Waltman, D e l f t .
Vening Meinesz, F.A. 1948): G r a v i ty Ex pe dit ion s a t Sea 1923-1938.
De l f t se U i tgeve rs Maatschapp ij , De l f t .
-
8/16/2019 32 Haagmans
7/132
Contents
Preface
R Rummel
Acknowledgements
NAVGRAV Navigation and gravimetric experiment
at the North Sea
G L Strang van Hees
GPS and terrestrial radiopositioning sy s t e m
G J Husti and P Plugers
Gravity measurements at the North Sea
G
L
Strang van Hees and P Plugers
Using GP S ship velocity estimates
for ~ o t v o s orrection
J
M
Smit
Altimetry derived gravity compared
with NAVGRAV observed gravity
R
H
N
Haagmans
Appendix A
-
8/16/2019 32 Haagmans
8/132
-
8/16/2019 32 Haagmans
9/132
S UM M RY
In April
1986
extented test measurements were executed with
GPS instruments on board of the Dutch Navy vessel Hr. Ms. Tydeman.
The GPS positions were compared with the best available
terrestrial radio navigation systems, under variable conditions.
The precision of GPS turned out to be
10
to
15
m in absolute
position, and better than
3
m in differential mode.
Gravity measurements were carried out with two sea
gravimeters. The differences between the instruments were less
than mgal for random errors. However systematic errors occured
on some lines up to a few mgal, probably due to errors in the
cross-coupling corrections. Also a comparison was made with
results of a similar project in
1979.
Only minor differences are
present. Remarkable is the rather irregular shape of the gravity
field, although the sea bottom is very flat. significant gravity
anomal appears at latitude
55 13 ,
longitude
5 38
This anomaly
is caused
by
a mass disturbance due to mantle material intruded
into the crust.
In sea gravimetry the realizable accuracy is limited
by
EOt os correct on errors. To determine EOtvos correct ons bet t r
than
0.5
mgal, ship velocity estimation with an accuracy of
5
cm/s
or
0.1
knot is necessary. The possibilities of obtaining ship
velocity estimates with high accuracy
by
using GPS pseudorange
code measurements and carrier phase measurements are investigated.
The comparison of Eotvos correct ons computed with ship veloci
y
estimates from GPS pseudoranges, Doppler smoothed pseudoranges,
carrier phase measurements and Syledis and Hyperfix positions
shows no discrepancies. Best results are obtained from the GPS
Doppler smoothed pseudorange method. This justifies the conclusion
that the effect of Eotvos correction errors in sea gravimetry can
be reduced significantly.
Gravity anomalies as derived from ship measurements were
compared with gravity anomalies computed from SEASAT altimetry.
Altimetry provides, after correction for various disturbances,
accurate sea surface heights. Wi th good approximation one can
identify the latter with geoid heights neglecting those parts of
-
8/16/2019 32 Haagmans
10/132
the sea surface
topography for which no models are available . Two
alternative methods were applied for the estimation of point
gravity anomalies from the altimeter derived geoid heights. One
method was least squares collocation, the other a very fast
but theoretically less sound technique based on Fourier
transformation. In both cases the long wavelength part was dealt
with using the
GEMlO
set of potential coefficients. Collocation
yielded better results. The agreement with shipborne point gravity
anomalies is on the mgal level with no significant bias. This
proves that altimeter derived gravity is well suited for a
preliminary inspection of the gravity field structure of an area
of interest.
cknowledgements
The au tho rs w i sh t o thank
M r
M G G J Ju t t e f o r d raw ing some
maps and mak ing the headers o f t h e a r t i c l e s M r
A B.
Sm i t s f o r t h e
photog raph ica l rep rod uct io n o f a1 graphs Mrs . W G Coops-Luyten
and Mrs.
W
van L i ng en f o r t y p i n g p a r t s o f t h e m a nu sc ri pt .
-
8/16/2019 32 Haagmans
11/132
N VGR V
N VIG TION N D GR VIMETRIC EXPERIMEN T
T T HE N OR T H S E
G L Strang van Hees
Delft University of Technology
Faculty of Geod esy
l Introduction
The NAVGRAV p r o j e c t was a combi ne d NAVi g a t n and GRAVi met r
expe r imen t a t t h e No r th Sea. Fo r t h i s p ro j e c t t h e oceanographi c
vessel H.
M
Tydeman o f t h e Royal Dutch Navy was made av ai l a b l e . The
ex pe d i t i on took p lac e f rom Ap r i l 23 t o May 13 , 1986. The experiment
was d i v id ed in t o two pa r t s . The f i r s t week f rom Apr 23 t o 30 was
d e v ot e d t o a t e s t o f t h e p e r s p e c t i v e s o f modern n a v i g a t i o n s y s te ms .
Du r i ng t he second pe r i od fr om Ap r i l 30 t o May 13 t he p r im a ry goa l
was t h e eva lua t i on o f t he pe rsp ec t i ve s o f modern sea g ra v ime t r y .
2
Navigation
The f o l o w i n g t e r r e s t r i a1 r a d i o p o s i t i o n i n g s ys te ms were
av a i l ab l e : Sy l ed i s , H i f i x and Hype r f i x . On the o th e r hand s i x GPS
re ce iv er s were on our d ispos a l th r ee Texas Ins t rum ents , two Serce l
and one Tr im ble. Four ins t rum ents were p la ce d on board and two on
land as re fe renc e s t a t i on s . To compare t he p rec i s i on o f t h e GPS w i t h
th e t e r r e s t r a1 systems a scheme o f l es were steamed, mai n l y i n
th e a rea cove red by Sy l ed i S s e e f i g u r e 1 S yl e d i S was assumed t o
be t h e most accu ra te t e r r e s t r i a l sys tem. I n t he same a rea H i f i x was
a v a i l a b l e to o , w hich gave a good i n s i g h t i n t o th e r e l i a b i l i t y of t h e
t e r r e s t r i a l sys tems. The t h i r d sys tem, Hyp e r f i x , was used as
r e f e r e n c e s ys te m i n t h e n o r t h e r n p a r t o f t h e m ea su rin g a r ea f i g u r e
1 However th e l a t t e r system was on1 y rec en t l i n s t a l l e d and s t l
i n a t e s t i n g phase . Th i s caused sometimes l ane s l i p s , and a comple te
one day gap when th e system was o ut o f or de r.
Some sp e c i a l t e s t s were c a r r i e d o u t i n or d er t o t e s t t h e
r e l i a b i l i t y o f t h e system s under s p e c ia l c o n d i ti o n s .
-
8/16/2019 32 Haagmans
12/132
steaming around oil platforms in circles with radii of loom SOOm
and 1500m to check the influence of reflections;
suddenly increasing and decreasing of the ships velocity and
sudden changes of the ships direction;
precision of the radio systems in case of a long landpath of the
radi o waves.
However all these experiments caused no measurable deviations.
G.P.S. survey NAVGRAV
23 29 April 986
2
3 4 5
6 7 8
Gravity survey NAVGRAV
23 April 3 M a y l986
2 d 2 5
6
7 8
9
5 7 - +
.m
eln unlvcrs~ty
f
Technology
e~anment f
G eo d esy
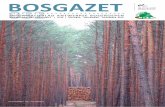
Figure
l
Figure :
Navigation experiment NAVGRAV Gravity survey NAVGRAV
The
GPS
tests were aimed at:
absolute precision compared with terrestrial systems;
relative precision between ship and land receivers;
relative precision between different receivers on board;
relative precision between ship and launch and
velocity determination with GPS.
All data were registrated at seconds intervals.
-
8/16/2019 32 Haagmans
13/132
3 ravity
Dur ing the second pe r io d a rec tangu la r p a t te rn o f l i ne s was
steamed see f i g u r e 2) . As the ava i l ab le nav iga t io n systems were out
o f range i n the nor thern Nor th Sea, another r ad io po s i t i on in g system
was chosen, Pul se 8. The p re c is i o n o f t h i s system was 20
m
which i s
s u f f i c i e n t f o r g r a v i t y s u rv ey needs.
The purpose o f t he sea g r a v i t y measurements was t o dete rmine
th e pr e c is io n o f modern sea grav ime ters . Two gravim eter systems were
i n s ta l e d next t o each other, the sea gr avi meters Bodensee Kss 5 o f
th e D e l f t Un iv er si ty o f Technology and the Bodensee Kss 30 o f the
U ni v er si ty of Hamburg. The d i f fer en ce between th e measured g r a v i t y
o f bo th ins t ruments g ives an in s ig h t in to the in t e rn a l p rec is io n and
b i as o f t he g rav i meters. Ex te rna l e r r o r s
l
e nav iga t ion e r ro r s and
the Eotvos cor rect ion were e l imina ted .
Pa r t o f the reg ion has a l ready been surveyed i n 1979 St rang
van Hees, 1983 ). Some o f th ese
l
nes were remeasured i n order t o
determine the ex terna l p re c i s i on o f g ra v i ty measurements. Add i t io na l
l es were p ut i n between th e pr ev iou s measured l es. Thi
S
g ives
t h e p o s s i b l i t y t o i n ve s t i g at e th e p r ec i si o n o f t h e i n t e r p o l a t i o n o f
g r av i t y anoma lies i n c ross l i n e d i re c t i on . The l i ne s a re about 25
km ap art , which i s chosen i n correspondence wi th t he es t im ated
roughness o f t h e g r a v i t y f i e l d .
Nearly a1 l measurements were c a r ri e d ou t under excel l e n t
weather co ndi t ion s. Therefore the qu a l i t y o f the measurements i s
very good.
The good cooper at ion on board between the s c i e n t i s t s and th e
Royal Net herl and s Navy i s ver y much appr eci ated . Commander K l t z .
G.R. van Hengel of th e H.M. Tydeman and h i s o f f i c e r s and crew gave
a l l suppo rt t o make t h i s exped i t ion succes fu l .
4
List of participating institutes and firms
D e l f t Un iv ers i ty o f Techno logy, Fac u l ty o f Geodesy
- Un iv er s i ty o f Hannover, I n s t i t u t e o f Geodesy
Techn ica l Un iv er s i ty Mun ich, In s t i t u t e o f Astronomica l and
Physical Geodesy
Un iv er s i ty o f Hamburg, I n s t i t u t e o f Geophys ics
-
8/16/2019 32 Haagmans
14/132
U n i v e r s i t y o f U t r e c h t , F a c u l t y o f G e op hy sic s
Hydrographic Se rv ic e o f t he Royal Nethe r lands Navy
Survey Department o f R i j k swa te rs taa t
She1
l
I n t e r n a t i o n a l e P r e t ro l e u m Maa t sc h ap p ij
Osi r is Seaway
I n t e r s i t e S u r v e y s
Radio Hol land
NESA
Nether lands Hydrographic Serv ices
Oretech
- Nortech Surveys
5
eferences
Rummel, R., G.L. Str an g van Hees and H. Ve rs lu i j s 1983): G r a v it y
F i e l d I n v e s t i g a t i o n i n t h e N o r t h Sea. I n : S a t e l l i t e M icrowave
Sensing ed. T.D. Al le n) , John Wi le y 8 Sons, New York.
Salzrnann,
M.A., G.
J. H us ti , G.L. St ra ng van Hees, P.
J . G .
Teunissen
1987
l
NAVGRAV, a comprehens
i
e comb
i
ed nav i ga t
i
on and
g r a v i me t r y e xp er ime nt on t h e N o r t h Sea; o b j e c t i v e s a nd f i r s t
exper iences. Proceedings Int er na t i o na l Symposium on Marine
P o s it io n in g , Reston, October 14-17, 1986.
St ran g van Hees, G.L. 1983): G ra vi ty Survey o f th e No rth Sea.
Mar e Geodesy, vo l 6, no.
2.
-
8/16/2019 32 Haagmans
15/132
PS
N D
TERR ESTRI L R DIOPOSITIONING
SYSTEMS
G J Hust i
P Plugers
Delft University of Technology
Faculty of Geodesy
l
Introduction
One o f t he ob je ct iv es o f th e NAVGRAV p r o je c t was t o
i n v e s t i g a t e t h e s u i t a b i l i t y o f t h e Glo ba l P o s i t i o n i n g System f o r
p o s i t i o n and ve lo c i t y de te rmina t i on a t sea . GPS
w l l
o b v i o u s l y
p l a y an i m po rt an t r o l e i n g r a v i m e t r i c s u r v e yi n g i n t h e n ea r
f u t u r e , where t h e d e s i r e d a c cu ra cy i s a bo ut 2 0 met er i n p o s i t i o n
and
5
cm/sec i n ve lo c i t y . Such an accuracy i s now qu i te p oss ib le
w i t h GPS, bu t co ul d no t be achieved dur in g th e 24 hour non-stop
grav met r survey , because o f th e m ed number o f sa te e s
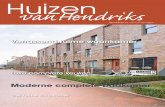
av a i la b l e i n 1986. Each day two observat io n windows were a va i l ab le
f i g u r e
1 :
Date :24C lpr1 986 Stat ion :No rth sea
L a t i t u d e : 54'00'00 Longitude: 4'00'00 Height 5 0 M
T i w of day
Figure
1 GPS
windows in April 24 1986 4
=
54O
h
=
4
-
8/16/2019 32 Haagmans
16/132
f i r s t pe r iod 2: 00 8: 00 hou rs
second p e r io d 13: 00 18: 00 hou rs
For t h i s reas on GPS was used du r in g t h e NAVGRAV p r o j e c t on1 y
f o r var iou s exper imenta l purposes. For th e grav i metr survey
t r ad i t io na l ra d i o po s i t i on in g systems were deployed.
2. quipment
Several p os i t io n i ng systems were on board du r in g both per iods
of surveying, as shown below:
1st period: April 23 29 2nd period: April 3 May 13
GPS receivers GPS receivers
Tri mbl e 4000A Radio Hol lan d) Trim ble 4000A Radio Ho lla nd )
*
Serce l TR5S Ri jk sw ate rs taa t
)
Rubidium cl oc k T.U. Munich)
TI-4100 Un iv er si ty o f Hannover)
TI-4100 Technical Un iv er si ty Munich)
Cesium cl oc k Nor tech Surveys)
Rubid ium cl oc k Technical Un iv er si ty Munich)
Radio positioning systems Radio posi tioning systems
Sy led is O s ir i s Seaway) Pulse 8
H i f i x Hr.Ms. Tydeman) Hype rf Hr . Ms. Tydeman
)
Hyp er f Hr. Ms. Tydeman) Oceanlog Hr. Ms. Tydeman)
*
Loran C R i j ksw a t e r s t a a t
Ocean log Hr.Ms. Tydeman)
* Survey epartment of t he Min istr y of Transp ort and Pu blic Works
D u rin g t h e f i r s t p e r i o d an a d d i t i o n a l TI-4100 r e ce i ve r
Nor tech Surveys) was se t up a t an on-shore s t a t io n . F i r s t a t
Haarlem A p r i l 21 - 251, and a f t e r t h a t a t D e l f t [ A p r i l 25
281,
i n o rde r t o be ab le to pos t-process the da ta i n t rans loca t io n ,
i . e . d i f f e r e n t i a l , mode. For t h i s reason, a l l GPS rec e iv ers were
scheduled to ope rate i n the same mode [P or S code) and t o t ra ck
the same sa te l l i t es .
I n add it io n, GPS measurements c a r ri e d out a t a second
-
8/16/2019 32 Haagmans
17/132
on-shore s t a t n Stavanger Norway) were k dl y prov ded by th e
Norwegian Hydrographic Service, f o r t r an sl oc at io n purposes over a
great er d is tance. Unfor tunate1y, these dat a cou ld no t be used,
because o f a d i f f e r en t s a t e l l i t e obse rva t ion scheme a t S tavanger .
A complete overview o f th e equipment i s shown i n appendices 1
and 2. The instrum ents were set up on board a t two lo cat ion s: i n
th e char troom and i n lab - l , where th e observers kept contact b y
telephone. I n t h e chartroom t he INTERPLOT-200 s oft war e o f
I n t e r s i t e Surveys was runni ng on a HP9920 computer f o r re al - t im e
navig a t ion . A very impor tant sub ject was the t ime synchron i sa t ion
o f a l l th e pos i t io n i ng systems. Th is prob lem was so lved by
sync hroni zing th e c lo ck o f th e He wlet t Packard computer w it h GPS
t im e us in g th e one puls e per second output f rom the TI-4100
rece ive rs .
Dur ing the second pe r iod o f t he p ro jec t f rom Ap r i l 30 t o May
13 o n l y one Trimb le GPS re ce iv er remained on board and t he Pulse 8
po s i t i on in g system was used as pr imary po s i t i on in g system fo r th e
g rav i me t r i c su rvey. Bo th po s i t ion ing systems y i e lded sa t i s f ac to ry
r e s u l t s d u r i n g t h e e n t i r e p e ri o d.
3. Antenna o f fse t
The in t e rs ec t ion p o i n t o f t h e main mast and the ho r izon t a l
beam was adopted as th e re ference po in t fo r a1 po s i t i on in g
systems. The antenna of fs et s, as determined i n a th re e d imensional
coord ina te system, are g iven i n ta b l e 1 .
GPS re c e i v e r X m) Y m) AH m) remark
TI-4100 Munich) -0.25 +38.8 -5.0 u n t i l Apr.27, 15h
TI -4 100 Hannover -3 .0
0.1 +0.5 u n t i l Apr.27, 15h
TI-4100 Hannover) -0.25 +38.8 -5.0 from Apr. 27, 15h
Tr im bl e 4000A +2.6
+ 0 . 1 +0.8 u n t i l Apr.27, 12h
Trimble 4000A
+O. 4
- 2. 3 +3.8 from Apr.27, 12h
Serce +0.25 +38.8 -5.0
Y = h ea ding d i r e c t i o n
X
=
s t ar b o ar d d i r e c t i o n
AH = ve r t i c a l h e ig h t d i ff e ren ce u p = p o s i t i v e )
Table
l
ntenna offsets
17
-
8/16/2019 32 Haagmans
18/132
The antenna o ff s e t t o th e refere nce p o in t was computed as fol lo ws :
~ O
(
X
s i n
a
- Y cos
a
R
R cos p
where:
= 180 n
R = 6378388 metre
a
= ship course
4. Real - t ime nav igat ion
The re al -ti m e na vi ga tio n dat a was hand led by th e HP9920
computer usi ng t h e INTERPLOT-200 so ftw are , by which t h e Syl ed i
S
Hif and Hyperf x p o s it ons were recorded. The raw data and th e
computed po si t io ns were s imul taneously stor ed on 3.5 dis ke tte s.
The current l most re1 b l e te r r es t r 1 ra di o po s i t i on was
selec ted as pr imary pos i t i on and used f o r the g rav ime tr ic survey.
This pr imary po s i t i on was a lso monitored on the br idge f o r
c o n t r o l l i n g t h e d e s ir e d s a i l i n g r o u t e f o r t h e g r a v i m e t ri c s urve y.
Moreover, th e fo l l o wi ng GPS p os it io n s were computed i n
real - t ime and recorded on 3.5 d is ke t te s or 4 t ra ck tape:
1. TI-4100 (Munich), a f t e r A p r il 27 th e TI-4100 (Hannover)
us ing the Nor tech rea l - t ime nav iga t i on
sof tware
2. Tr imble, usin g th e rece iver software
3. Sercel, us ing the receiver sof tware (n ot involved here)
5.
GPSFIX program
I n order t o post-process th e TI-4100 raw data new soft war e
was developed a t th e F ac ul ty of Geodesy on t he V X 750 computer.
Various s ubro utin es, which had been developed be fo re ( c f . de Jong,
1985 and Viss er, 1988) were u t i l ze d here. However, these
subrou t ines had t o be converted from HP Basic 3.0 t o F or tra n 77.
Th
convers n was necessary, because th e HP computer cou l d no t
-
8/16/2019 32 Haagmans
19/132
handle such la rge amounts o f data w i th in a reasonable pe r io d o f
t ime.
S in ce t h e s t r u c t u r e o f such a n a v i g a t i o n p rogram i s g e n e r a l l y
known, o nl y some main fea tur es are pre sented here. The na vig at i on
program GPSFIX has the fol lowing steps:
1. rea d TI-4100 raw data 8 b i t numbers) i n Hannover or
She1 format
2. decode th e data blo cks ( ephemeris o r measurements )
3 . compute s a t e l l i t e coord in ates f rom Broadcas t Ephemer is
4. compute pseudoranges o r Doppler ai de d pseudoranges, u s in g
e i t h e r P o r S code and app ly i onospher i c co r re c t i on and
t ropospher ic cor rec t ion for a s tandard a tmosphere
5. compute p o s i t i o n and v e l o c i t y ( e i t h e r fr om 4 s a t e l l i t e s o r
fr om 3 s a t e l l i t e s w i t h f i x e d h e i g h t o r f ro m two s a t e l l i t e s
w i t h f i x e d h e i gh t and f i x e d c lo c k o f f s e t )
The menu op t i on s o f th e GPSFIX program are pres ente d below i n
tab le 2 .
RUN
GPSFIX
e n te r r e c e iv e r t yp e ( t i o r t r i m b l e )
t
she1 o r hannover data (1 or 2 2
enter input dataset name
enter output dataset name
un fo rmat ted ou tpu t ( y o r n ) n
s t o r e u s e r s o l u t i o n ( y o r n ) [ n
en te r i t e s t [ no test=O, leve l=1 ,2 ,3 ,4 )
[
0
e nt er l a t i t u d e ( dd,mm,ss)
en te r lo ng it ud e (ddd,mm,ss)
en te r he igh t (m)
e n t e r a p r i o r i s .d . o f l a t i t u d e (m) 1000.001
en te r a p r i o r i s .d . o f l ong i t u de (m) 1000.00 ]
en te r a p r i o r i s .d . o f he i gh t (m) 5 .001
e n t e r a p r i o r i s .d . o f b i a s (m)
[
100000000.00
e nt er a p r i o r i S d. o f pseudoranges (m) [ 4.001
en ter minimum el ev at io n (degr) 5.001
en te r d r y t emperatu re
(c) 15.001
en ter wet temperature (c ) 12.001
en te r p ressu re
(
mbar
)
1012.001
do pp le ra id o r normal (dopp le r o r no rma l ) [ dopp r ]
S
d. o f phase measurements (c yc le s) 0.021
Table
2.
Menu of the GPSFIX program
-
8/16/2019 32 Haagmans
20/132
The unknowns are est ima ted f rom th e f o l lo wi ng equat ion:
where:
dX
=
vec to r of co r r ec t i ons
(
Ap AA Ah AT T
dL
=
vector of observed minus computed pseudoranges
A = d e si g n ma t r i x
P = weigh t ma t r i x o f t h e observa t ions
L
Px = w ei gh t ma t r i x o f t h e unknowns ( f o r f i x i n g t h e h e i g h t
o r f i x i n g t h e h e i gh t and t h e c lo c k o f f s e t )
The c l oc k d r i f t A can be determined f rom the prev ious c lock
o f f s e t s AT b y means o f a r e g r e ss i o n l i n e . Th i s c l o c k d r i f t i s use d
f o r t h e p r e d i c t i o n o f t h e f i x e d c l o c k o f f s e t , when o n l y tw o
s a t e l l i t e s a r e a va i la b le f o r p o s it i on i ng .
The v e l o c i t y can be es t ima ted i n a s im i l a r way us i ng the same
d e si g n ma t r i x ( c f . S mi t, t h i s i s su e ) .
An example o f th e ou tpu t data i s shown i n appendix 3. Each
r e c o r d o f p o s i t i o n f i x c on ta in s t h e f o l l o w i n g d ata :
-dat e [yymmdd] and ti me [ S ]
- l a t i t u d e [ d e g ], l o n g i tu d e [ d e g l, h e i g h t [ m l , cl o c k o f f s e t [ m]
- cl oc k d r i f t w i t h i t s st an da rd d e v i a t i o n [m /sl
-speed [m/sl and headin g [d eg l
-number o f s a t e l l i t e s used f o r t h e p o s i t i o n f i x
-es t imated s tandard dev ia t io ns o f th e unknowns [m]
- t ra cke d sa te l l i t e s (s at el l i t e PRN numbers) and GDOP
6
Transfo rmat io n between
WGS7
and ED5
Tra nsfo rma t i o n between WGS72 and ED50 was c a r r i e d o u t i n a
l o c a l
sys tem us in g seven t rans fo rmat io n parameters accord i ng to :
-
8/16/2019 32 Haagmans
21/132
where:
XWCS7
=
v e c t o r o f GPS c o or d in a te s i n WGS7 (X Y Z IT
= vec tor o f te r r e s t r 1 ED50 coord i na tes (X Y Zpl
X
=
c e n t r e o f t h e s h i f t e d l o c a l syste m
XT
=
vec to r o f t r an s l a t i o n paramete rs (X
T YT
S
= s c a l e f a c t o r
R = d i f f e r e n t i a l r o t a t i o n m a t ri x as fo l lo w s :
The f o l l o w in g values ob ta in ed from th e NEDOC-project (H us t i , 1983)
a re used f o r th e t r ans fo rma t ion pa rameters:
The cen t re o f the lo ca l sys tem i s g i ven by the mean va lues o f th e
Doppler coo rd ina te s of th e NEDOC s ta t io n s (Leeuwarden, Ko ot wi jk,
Her ike rberg, Tongeren, D e l f t , Axel , Herstmonceau and Kessin gland) ,
which were used f o r t he determi na t n of th e above tr a ns f ormat n
parameters:
The inverse t rans f orma t ion can be der ive d f rom equat ion (3) and
i s g i v e n b y:
-
8/16/2019 32 Haagmans
22/132
The p r e c i s i o n o f t h i s t r a ns f o rma t i o n i s es t ima t ed t o b e b e t t e r
th an 1 me tre. The smal l d i f f e r e n ce s between T ra n s i t WGS72 and GPS
WGS72 ar e ne gl ec te d.
The post-p roc ess ing was ca r r i e d ou t on th e VAX 750 a t th e
Fa cu lt y o f Geodesy. The fo l l ow in g prepa rat i ons had t o be done
f i r s t :
a. t he 3 .5 d isk e t te s con ta in i ng r ea l - t im e po s i t io ns and raw
data were tr a n s fe r re d from HP217 t o VAX u si ng a HP con vers ion
program
b. th e GPS raw data (dat a bloc ks wi th 8 b i t numbers) were copied
t o
9
t ra ck tape by She l l and the Hannover U ni ve rs i t y
c . deve lopmen t o f va r ious so ftware , i n o rde r t o ca r r y ou t
t rans fo rma t ions , f i l e se lec t io n , t ran s lo ca t i on and comparison
o f d i f f e r e n t t yp e s o f p o s i t i o n in g systems.
The f o l lo w in g sof tware was developed i n For t ra n 77:
GPSFIX GPS n av ig a t i on program
TRANS tr ans fo rm a ti on between WGS72 and ED50 i n t h r e e st ep s
1. v,A,h (WGS72)
>
X,Y,Z (WGS72)
2. X,Y,Z (WGS72) > X,Y,Z (ED50)
3. X,Y,Z (ED50) > v,A,(h) (ED50)
SELECT reads var i ous po si t i on f i l e s , checks, se le ct s and
w r i t e s t o a b i n a r y p o s i t i o n f i l e (BPF), w hich can
be read by a l l t he fo l lo w i ng p rograms
READBF reads th e b i na ry po si t i on f i l e s (BPF) and conver ts
them t o ASCII f i l e s
TRANSLOC: pr epa res d i f f e r e n t i a l GPS com puta tion :
1. r e a ds two s imul ta ne ou s b in a r y p o s i t i o n f i l e s f o r
the re fe rence and the moving s ta t ion
2. f i n d s th e correspon ding rec ords and checks whether
f o r ins tance the obse rved s a te l l i t e s and the used
ephemer is da ta a re iden t ica l
3. computes a p o s i t i o n co r r e c t i o n p e r f i x a t t h e
r e fe r en c e s t a t i o n and a p p l ie s t h i s c o r r e c t i o n t o
the mov ing s ta t ion
-
8/16/2019 32 Haagmans
23/132
4. ou tpu t: co r rec ted b i na ry pos i t i on f i l e o f t he
moving stat ion
COMPARE 1. reads two bi na ry p o s it io n f i l e s (BPF) which ar e t o
be compared, and f in d s the corresponding po si ti on s
( i f necessa ry by i n te rpo la t i on )
2. c orr ect s the GPS po si t i on f o r antenna o f f s e t and
transforms from
WGS72 t o ED50
3.
computes the po si t i on di f fer en ces and standard
devi a t ns
4. output: a. p rec i s i on/accuracy anal y s i S
b. p l o t f i l e
f lo w ch ar t o f the post-processing i s presented i n appendix
4. The l e f t hand sid e shows th e pr oces sing o f th e r e a l -time GPS
po si t io ns and the var ious rad io pos i t i on in g systems, such as
Syledis, H i f i x and Hyperf ix. The r i g h t hand sid e shows the
post-processing using the program GPSFIX.
The posi t ion f s obtained f o r t he v ari ous systems can be
compared and analysed by th e program COMPARE. The subjec ts below
w i l l
be t rea ted i n the sequel :
-
zero base l i n e te s t i n Haarlem
-
reference stat ions Haar lem/Delf t
-
comparison of pos i t io ns f rom H i f i x and Syled is
comparison of real- t i me po si t io ns from Tr imble and Syledis
comparison of pos i t io ns f rom TI-4100 t o Syled is ( inc lud ing
t ra ns l oca t i on)
-
t r an s lo c a t io n between two GPS re cei ver s on board of Hr.Ms.
Tydeman
launch exper iment ( in c lu d in g t ransloc at ion )
Some p a rt s o f t he na vig ati on data have already been in ve st ig at ed
( c f . S mit, 1988 or Visser, 1988).
8
Zero base l i n e te s t
i n
Haarlem
On Ap ri l 21 two TI-4100 rece ivers of the Munich Un iv er si ty o f
Technology and No rtech Surveys were se t up a t Haarlem and
-
8/16/2019 32 Haagmans
24/132
connected t o the same antenna u si ng a beam s p l i t t e r . The
ob se rv at io ns were re co rd ed fro m 14:OO t o 18:15 UTC.
The po s i t i on d i f fe r enc es between two rece ive rs , ob ta ined f rom
sep ara te com putations us in g th e program GPSFIX w i th P code non
smoothed pseudoranges are presented i n appendix 5. Dur ing t he
f i r s t hou r, where exact l the same sate1 l e s and ephemer were
used f o r b oth computat ions, the re i s good agreement: th e nois e
lev e l i s approx imate ly 1.2 meter. I n th e next pa r t , when on ly two
s a t e l l i t e s were ava i l ab le and no a tomic c lo ck was used, the re i s a
remarkable c lock d r i f t e f fe c t . S ince each rece ive r uses i t s own
in t e rn a l qua r t z c lock , such a c lock d r i f t can be expec ted.
9
Reference s ta t i on s Haar lem and D e l f t
Dur ing th e f i r s t week o f th e NAVGRAV pr o j e c t one on-shore
TI-4100 r ec ei ve r (Nortech Surveys) was obse rving simu lta neo usl y
wi th th e GPS re ce iv er s on board o f th e Hr. Ms. Tydeman, f i r s t a t
Haarlem (A p r i l 21-25) and then a t De l f t ( Ap r i l 25-28 ), i n o rde r t o
be ab le t o p rocess i n t rans loca t ion mode. The s ing le p o i n t r es u l t s
a re d iscussed he re separate1 y, whi l e t he t rans loca t ion re su l t s
us ing these re fe rence pos i t i ons
w l l be d iscussed i n sec t io n 12.
The known t e r r e s t r i a l coo rdi nat es and th e computed mean value
o f t h e GPS p o s i t i o n s ar e shown i n t a b l e 3. The trans for me d WGS72
coord ina tes are ob ta ined f rom ED50 coord ina tes ( c f . equat ion ( 3 ) ) .
s ta t ion : Haar
l
m D e l f t
ED50
52 23 13.226
( t e r r e s t r i a l )
4 37 05.666
h 17.00 m
I I1
p 52'23 10.44
51'59 10.00
WGS72 4 3 7 0 0 . 1 3
4 23 14.33
(trans form ed) h 66.59 m
77.75 m
I I
52'23 10.36
51 59'09.67
WGS72 4 3 7 0 0 . 6 1
4 23 14.16
(by GPS) h 66.78 m 67.45 m
Table 3 Coordinates of the reference stations
-
8/16/2019 32 Haagmans
25/132
Di f f e re nce s be tween s t a t i on a i r y 3-D po s i t i on s and t h e i r mean
v a l u es a r e p l o t t e d f o r t h e s t a t i o n s H aarlem and D e l f t :
Appendix 6: Stat ion Haar lem:
P
code non-smoothed pseudo range
Appendix
7:
S t a t io n D e l f t
:
P code non-smoothed pseudo range
Appendix
8:
S t a t io n D e l f t
:
P code Dop pler -aid ed pseudorange
Appendix 9:
S t a t io n D e l f t
:
S code non-smoothed pseudorange
The s i n g l e p o i n t p o s i t i o n i n g w i t h P code y i e l d s g e n e r a l l y
e x ce l l e n t r e s u l t s . The o b t a i n e d d i f f e r e n c e s w i t h t h e known v a l u e s
a r e w i t h i n 10
m
(appendices
6
and 7 . Computat ion wi th Doppler
a ide d pseudorange g iv es a lower no i se l ev e l , bu t no improvement i n
accuracy (appendix 8 . The p os i t io n i ng us ing S code g iv es a much
h i g h er n o i s e l e v e l and i n t h i s case sm a ll s y st e m at ic e r r o r s
(appendix 9 ) .
10.
Com parison o f p o s i t i o n s f r o m H i f i x and S y l e d i s
The p r e c i s i o n o f H i f x and S y l e d i s d i s t a n c e o r d i s t a n c e
d i f f e r e n c e measurements i s e s t im a t e d t o be 1 2 metres. However,
bo th sys tems may have much la rg er sys tem at ic p o s i t io n er r o rs due
d i f f e r e n t r e f e r e n c e system s, t o c a l
i
r a t o n e r r o r s and t o t h e
i
f
l
ence o f th e geometr i c
i
t e r s e c t
i
n. Therefore
i i
common
p r a c t i c e t o c a r r y o u t a l o c a l r e - c a l i b r a t i o n b y a p p l yi n g l o c a l
c o r r e c t i o n s , i n o r d e r t o remove t h e s y s te m a ti c e r r o r s and t o
improve the ex terna l accuracy .
comparison between th e two systems, wi th ou t any
r e - c a l
i
r a t
i
n , measured
i
an area o f good coverage,
i
shown
i n appendix 10. Obvious1y t h e r e a lw ay s e x i s t s a c e r t a i n s y s t e m a ti c
e r r o r b etw een t h e t w o p o s i t i o n i n g sys te ms, i n t h i s s p e c i a l c as e an
average o f
6.6 m
i n l a t i t u d e a nd 3. 8 m i n l on g i tu d e . The e r r o r
d i s t r i b u t i o n i n f i g u r e 2 shows th e same sys tem ati c e r ro r s . The
s t an d ar d d e v i a t i o n s o f t h e d i f f er e n c e s a f t e r e l
i i
n a t
i
n o f t h e s e
s y s te m a t ic e r r o r s ar e :
-
8/16/2019 32 Haagmans
26/132
I n th e se s ta n d ar d d e v i a t i o n s t h e i n f l u e n c e o f b o t h S y l e d i s and
H i f i x p o s i t i o n e r r o r s a r e i n v ol v ed . Thus t h e p r e c i s i o n o f each
system may be about 2
metre
i n po s i t i on ) , wh ich seems reasonable .
,numbe of observations ,numbe
of observ tions
Figure
2.
Latitude and longitude differences. Hifix - Syledis
m)
However, th e sys temat ic p os i t io n er r or s , which are expected t o be
a t a 3-5 m etre s l e v e l a r e d i f f i c u l t t o de te rm in e. t should be
p o i n t e d o u t t h a t t h i s p o s i t i o n a cc ur ac y does n o t a1 low t o e v a l u a t e
GPS p o s i t i o n s b e t t e r t h an t h i s l e v e l .
11 Comparison of positions from Trimble and Syledis
The T r imb l e 4000A r e c e i v e r y i e l d e d v e r y s a t i s f a c t o r y r e s u l t s
t h ro u g ho u t t h e w hole p e r i o d and p ro v i d ed r e l i a b l e p o s i t i o n s a t 15
seconds in t er va ls . An example o f these rea l - t im e po s i t i on s
compared t o Sy le d is i s shown i n appendix
11
From the d i f f e rences
i n c l u d i n g s y st e ma t ic e r r o r s ) t h e f o l l o w i n g s ta n da r d d e v i a t i o n s
are ob ta i ned:
T h i s r e s u l t , o b ta i ne d f ro m 911 p o s i t i o n f i x e s a t i n t e r v a l s o f 15
seconds , i s qu i t e good f o r a s in g le f requency rece ive r . The e r r o r
d i s t r i b u t i o n s o f t he se d i f f e r e n c e s ar e shown i n f i g u r e 3.
-
8/16/2019 32 Haagmans
27/132
wnber
of observations
,number
of observat~ons
Figure 3. La t i t ud e and lon gi tu de d i f feren ces. Tr imble-Sy led is
m)
12. Comparison o f po si t i on s from two TI 4100 receivers and Sy led is
number of TI-4100 p os it io n s obtained on board o f th e Hr.Ms.
Tydeman were pos t-pr ocessed w i t h t h e GPSFIX program. The si n g l e
pos it ns obt ain ed by th e Munich and Hannover r ec e iv e rs on Apr
25, i n th e same obser vat ion per iod usin g P code) are compared t o
Syledis, a f t e r re duc t ion o f b oth GPS antenna po si t i on s t o the same
refere nce po int . The d i f fer enc es are p lo t t e d i n appendices 12 and
13 re sp ec t iv ely , showing a pre cis ion o f about 10 metres.
I f
we compare the p o s it io n dif fe re nc es o f th e two GPS
re ce ive rs on board c f . appendix 14) we may conclude t h a t the re i s
no s ign i f i can t d i sc repancy .
I n ad di
t
n, th e observat ns co l
l
cted by the Hannover
receiver on Apr i l 25 ar e als o processed as Doppler aide d
pseudoranges, compared
w i t h Syl ed i
S
and p1otted appendi
X
15.
Thi
S
gi ve s some mprovement i n p r e ci s io n and accuracy. Compared
w it h th e s ta ti on ar y measurement shown i n appendix
8, it has a
higher no ise leve l pos s ib l y caused by Sy led is .
The Hannover rec ei ve r observa tions o f Apri l 25 were also
p rocess ed i n t r ans l oc a t i on mode r e l a t i v e t o t h e s ta t i o n D e l f t . The
d i f f e r enc es w i t h t he Sy l ed is po s i t i ons a r e p l o t t e d i n appendix 16.
f these r e s u l t s are compared w i t h those of appendix 13, i t
appears th a t some improvement o f th e accuracy i s obtained i n
-
8/16/2019 32 Haagmans
28/132
tr an sl oc at io n mode sin ce the slopes are removed. The nois e le ve l
inc lud ing Syled is) i s now below 3 m The gaps i n the p l o t i n
appendix 16 are caused by the f a c t t h a t no t always th e same
s a t e l l i t e conf igura t ion was observed by both rece ive rs. I n case of
d i f f e r en t sate1 l i t e con f igu ra t ions o r ephemeris o f d i f f e r en t ages,
th e p o s i t i o n f i x e s ar e ign ore d by program TRANSLOC.
13.
Launch experiment
On Apr 24 a l unch exp eri ment was c a r r i e d ou t. A TI-4100
rece ive r and a H i f i x rece iver were i ns ta l l e d i n the launch, which
was s a i l i n g near th e Hr.Ms. Tydeman a t dist anc es of up t o 4 km.
t
was intended t o inv es t ig at e the accuracy of d i f f e r e n t ia l GPS
between two moving vessels a t s hort di st an ce . Thus, we have a GPS
posi
t
n d i
f f
erence and a corresponding Hi
f
pos i t n d i f f e rence
between the Hr.Ms. Tydeman and the launch, which can be compared.
Th exper ment was, however, no t successf U l because the T I 41 00
re ce iv er on board o f th e H r. Ms. Tydeman was se t t o
S
code
operato r mistake), wh i le the TI-4100 rec eive r on the launch set
t o P code. The re su l t s o f
the computations were very poor.
The launch po si ti on s obtain ed from the TI-4100 data were
compared i n the fo ll ow in g way:
a. The s in gl e GPS po si ti on s a re compared t o t he H i f i x
po s it io ns , both measured on board o f th e launch. The
re s u l ts shown i n appendix 17 are very sa t i s f ac to ry s ince
a preci s ion i n l a t i tu de and long i tude of about 2 metre and
systemat ic er r or s o f 4 .1
m
and 13.6
m
respect i ve ly a re
achieved. These system atic e rr o r s are of co urse caused by
both H i f and GPS.
b. Next the GPS po si ti on s are improved by tr an sl oc at io n
re la t i v e t o the s t a t ion Haarlem and compared t o H i f i x
po si ti on s. The re s u lt s presented i n appendix 18 show no
signi f icant improvement.
14. Conclusions
The Sy ledis and H i f i x po si t i on in g systems, used as a
re fe rence dur ing the p ro jec t , y ie ld a p rec is ion o f about
2
m i n
l a t i t u d e and longitu de. However, th e systematic e rr or may be 3 -
5
-
8/16/2019 32 Haagmans
29/132
metres. Thus th e GPS p o s it i o n s can on ly be eva luat ed wi th th e same
accuracy leve l .
The Tr mbl e 4000A in te rn al softwa re pro v ide d re a l - t ime
r e 1 a b l e p o s i t i o n s w i t h a s t an d ar d d e v i a t i o n o f 10 - 20 m b y S
code c o n t r i b u t i o n o f H y f i x / S yl e d i s i s in c lu d e d) .
The T I-4100 rece ive rs p rov ided good re su l t s a f t e r
post -processing. The s tandard dev ia t i on fo r a po s i t i on w i thou t
t r a n s l o c a t i o n i s es ti m at ed t o 10
m
us in g P code, and 10
-
20 m
u s i n g S code c o n t r i b u t i o n o f H y f i x /Sy l e d i s i s i nc l u d e d) . The
t ra ns loc a t io n mode y i e l ds a s tandard dev ia t i on o f about 3
m
i n c l u d i n g Sy l e d i s n o is e.
15
L i t e r a t u r e
Hatch, R. R. 1986) : Dynamic d i f f e r e n t i a l GPS a t th e cent imeter
lev e l . P roceedings o f the Four th In t e rn a t io na l Geode ti c
Symposium on S a t e l l i t e Po si t io nin g, Aust in , Texas.
Jong, C.D. de 198 5): P r a c t i c a l Work on GPS. Tr ai ne e Re po rt,
D e l f t Un ive rs i t y o f Techno logy , Fac u l ty o f Geodesy.
Lachapel le, G. and N. Beck 19 82 ): NAVSTAR GPS S in g le P o i n t
Po s i t i on in g a t She l tech Canada
-
Pre l im ina ry Resu l ts . The
Canadian Surve yor, vo l. 36, no. 1.
Lachapel le , G.
W
Falkenberg,
M
Casey 198 7): Use o f Phase Dat a
f o r Ac c ur ate D i f f e r e n t i a l GPS K in e ma ti c Po s i t i o n i n g . B u l l e t i n
Gbodesi que, vo l. 61 no. 4.
S lu i t e r , P.G. and G.J. Hus t i 1987) : Eva lu at io n o f th e TI -user
s o l u t i o n i n dynamic mode. M arine Geodesy, vo l. 11, no. 1.
Smit, J.H.M. 1988): Sea grav ime try and Eotvos co rr ec t i on .
Graduate thes is , D e l f t Un iv e r s i t y o f Techno logy , Fa cu l ty of
Geodesy.
Vi sse r, J.L.M. 1988): GPS pl aa ts be pa li ng op zee. Graduate th e si s,
Del
f t
Un iv er s i ty o f Technology, Fa cu l ty o f Geodesy.
-
8/16/2019 32 Haagmans
30/132
-
8/16/2019 32 Haagmans
31/132
1 Equipment i n the pe r i od Ap r i l 23-29
2 Equipment i n th e p e ri o d May 1-13
3 Ou tput d ata o f t h e GPSFIX program
4 Flow diagram of th e post-processing
5 Zero base l ine te s t i n Haarlem ( Ap r i l 211
6 Reference sa t i on Haar lem ( A p r i l 24)
7 Re fe re nc e s t a t i o n D e l f t ( A p r i l 2 5)
8 Re fe re nc e s t a t i o n D e l f t [ D o pp l er a i d e d ] ( A p r i l 2 5)
9 Re fe re nc e s t a t i o n D e l f t [ S c od e ] ( A p r i l 2 6)
10 Comparison H i f i x t o Sy led is (A p r i l 241
11 Comparison Tr imble t o Sy l ed is (A p r i l 24)
12 Tydeman: GPS (TI/M) S yl ed is ( A p r i l 25)
13 Tydeman: GPS (TI/ H) S yl ed is ( A p r i l 25)
14 Tydeman: GPS (TI/M) GPS(TI/H) ( A p r i l 25 )
15 Tydeman: GPS (TI /H/Doppler a ided ) - Sy l e d i s ( Ap r i l 2 5 1
16 Tydeman: GPS tT I/H /tr an slo c) S yl ed is ( A p r i l 25)
17 Launch: GPS tTI /H )
-
H i f i x
18 Launch: GPS (T I/ H/ tr an sl oc ) - H i f i x
-
8/16/2019 32 Haagmans
32/132
G
c
e
3
5
f
o
N
e
N
d
s
d
v
s
w
e
N
o
d
a
H
l
o
n
D
g
d
a
C
u
m
t
a
e
d
f
e
R
d
a
a
s
a
d
r
a
d
a
N
e
s
m
a
n
m
s
t
C
H
A
R
T
R
O
O
M
s
e
e
G
c
e
H
I
n
e
e
Y
P
o
T
m
N
e
s
u
o
d
s
d
v
G
a
P
d
a
o
n
3
5
f
o
d
s
d
v
P
o
S
e
s
6
p
o
n
N
g
o
c
e
I
N
O
i
n
o
m
a
o
2
H
H
x
m
a
S
eQ
f
a
T
V
d
d
s
a
f
o
n
g
o
o
h
b
d
N
e
s
u
o
a
p
s
p
s
C
G
T
O
d
n
N
G
O
e
m
e
o
W
o
b
d
H
M
T
m
a
8
s
a
d
d
a
o
n
p
n
e
o
q
o
i
n
o
m
a
o
G
c
e
I
[
T
o
d
s
d
v
d
a
o
n
R
W
i
n
e
n
t
a
d
v
f
o
g
a
y
R
m
u
d
a
o
n
p
<
o
n
L
A
B
1
G
c
e
H
d
s
d
v
R
G
d
a
H
G
R
A
V
I
T
Y
R
O
O
M
G
r
a
y
m
e
e
T
G
A
p
n
x
E
q
pm
e
n
n
h
p
o
A
p
2
2
-
8/16/2019 32 Haagmans
33/132
-
8/16/2019 32 Haagmans
34/132
-
8/16/2019 32 Haagmans
35/132
-
8/16/2019 32 Haagmans
36/132
-
8/16/2019 32 Haagmans
37/132
-
8/16/2019 32 Haagmans
38/132
-
8/16/2019 32 Haagmans
39/132
-
8/16/2019 32 Haagmans
40/132
-
8/16/2019 32 Haagmans
41/132
-
8/16/2019 32 Haagmans
42/132
-
8/16/2019 32 Haagmans
43/132
-
8/16/2019 32 Haagmans
44/132
-
8/16/2019 32 Haagmans
45/132
-
8/16/2019 32 Haagmans
46/132
-
8/16/2019 32 Haagmans
47/132
-
8/16/2019 32 Haagmans
48/132
-
8/16/2019 32 Haagmans
49/132
changes o f speed and course o f t he ship. The smoothing sp l i n e
program has the advantage th a t i t computes automat ica l ly the
d e r i v a t i v e o f a f u n c t i o n w hich i s i n t h i s case t h e r e q u i r e d speed
o f t h e s h i p i n n o r t h and e as t d i r e c t i o n .
The grav imeter has a s t ro ng magnetic and el ec t r on ic al damping
i n o rd e r t o re duc e t h e i n fl u e nc e o f t h e v e r t i c a l a c c el e ra t io n s o f
th e sh ip. However, t h i s damping causes a s low rea ct io n on course
and speed changes. A f te r a change i t takes about 15 minutes befo re
the g rav i me te r i s t a b i
l
ed ag ai n. The co urs e and speed changes
are o bta in ed f rom the smoothed po s i t on datase t . A l p e r i o d s w i t h
changes are removed f rom the dataset , re su l t in g i n a c lean datase t
w i t h o n l y s t r a i g h t l i n e t ra c ks .
t should be emphasized that
f
i e r i n g and c le a n i n g t h e
p o s i t i o n datase t was a t ime consuming and pr ec is e job. A l l
i r r e g u l a r i t i e s were i ns p ec te d and a na ly ze d i n d i v i d u a l l y . t was
the most
i
mportant p a r t o f th e who1 e computat n, because
u n de te c te d i r r e g u l a r movements o f t h e s h i p r e s u l t i n l a r g e e r r o r s
i n t h e g r a v i t y an omali es , w hich can p o s s i b l y l e a d t o f a l s e
geophys ica l i n t e rp re ta t ions .
3. G r a v i m e t e r r e g i s t r a t i o n
The grav imeter outpu t o f th e Kss-5 grav imeter D e l f t l was
recorded on a HP9845 computer , toge ther w i t h th e p o s i t io n s and
t ime. Every 10 seconds the grav imeter obs ervat i on was rea d by the
computer and th e mean va lu e over one min ute 6 re ad in gs ) was
recorded on magnet ic tape. Th is gave t he p o s s i b i l i t y t o
immed ia tel y de tec t and e l im ina te g ross e r r o r s i n t he read ings ,
s i nc e the 6 read ings shou ld be c lo se tog eth er . The same technique
was used f o r th e po s i t io ns and t ime. The t ime as rece iv ed from the
main cloc k on board was compared w i th t h e in te rn a l computer clo ck.
f
t he d i f f e r en ce was t oo b i g t he e r ro r was us ua l l y caused by t he
da ta t ransmiss ion and cou ld be co r rec ted f o r .
The g ra v i t y read ings were a l so s l i g h t l y smoothed by t he
smoothing spl i e program. The program i s used ma inl y t o t e s t on
e r r o r s i n t h e g r a v i t y r e g i s t r a t i o n . T h is way e r r o r s c o u l d be
c o r r e c t e d f o r .
The Hamburg g ra v i meter Kss-30 da ta was pro ces sed
-
8/16/2019 32 Haagmans
50/132
i
dependent . The ou tp ut was rec ord ed on magnetic tape , to ge th er
w i t h t he s h ip s gy ro and log . The p re l im ina ry g r a v i t y anomal ies
were computed a t once.
4
omputation of the gravity anomalies
The g ra v i t y va lues ( i n mgal 1 are computed w i t h t he f o l ow ing
formula:
aR
g = S - ( R
--•r
t dgE ~ . tC H
where:
g = g r a v i t y
S = c a l i b r a t i o n c on s ta n t o f t h e g r av i me t er = 1 060
R = read ing o f t he g ravime ter
aR = change o f read ing per t ime u n i t , computed f om the
sp l ine program
= t ime-cons tant o f the grav imeter , 200 seconds
AgE
=
Eotvos co r rec t ion
D
=
d r i f t o f t he g rav ime te r computed f rom a ha rbour
connect ion before and af ter the measurements
t = t i me s i n c e b e g in n i n g o f t h e c r u i s e
C = cross -cou pl in g co rr ec t i on computed f rom measured
hor izo nta l acce lera t ions and beam mot ion
H
= harbour connect ion.
H i s computed fr o m t h e g r a v i t y v a l u e i n t h e h a rb ou r, t h e
g r av ime te r r e a d i n g i n t h e h a rb ou r a nd t h e h e i g h t d i f f e r e n c e
between the ha rbour g r av i t y s t a t io n and t he wa te r l ev e l . Th is
c o r r e c t i o n re du ce s t h e c omputed g r a v i t y v a l ue s t o t h e h e i g h t o f
t he water l ev e l .
S t r i c t speak ing t he g ra v i t y va lues shou ld a1 so be reduced
f o r t i d e s , however t h i s c o r r e c t i o n i s u s u a l l y s ma l le r th a n mgal
and i s neg lec ted.
The harbour conn ect io n i n Den Helder can be computed w i t h equ at ion
( 2 ) u s i n g t h e go and R v al ue s a s p re se nt ed i n t a b l e 1.
-
8/16/2019 32 Haagmans
51/132
Date and tim e 23 A p r il 1986, 11.00 h.
Gr av i t y value on th e j e t t y : 981323.93 mgal
Cor r ec t ions t o water leve l 0 .86 mgal
Grav
i
y on water
l
ve
l
981324.79 mgal
=
g
0
Gravimeter re ad ing 4328.5
=
R
Table
l
H
=
go - S-R.
=
981324.79 - 1.060 4328.5
=
976736.58 mgal ( 2 )
On
r e t u r n a f t e r t h e f i r s t p e r i o d on 29 Ap ri
l
1986, 12.00 h. t h e
. ..
.---
g ra vi meter re aa i ng was 4 3 ~ ~
.
The d r i f t i s 4329.0
-
4328.5
=
0.5 mgal i n 6 days. Before s t a r t o f
t h e second pe rio d, 30 Apr i 17.00 h. t he re ad in g was 4329.0 and
a f t e r re t u r n on 13 May, 11.00 h. : 4328.8, thus a d r i f t o f 0.2 mgal
i n 14 days. For both per iod s the d r i f t may be neglected, so D was
se t t o zero dur ing the whole per iod.
The Eotvos co rr ec ti on i s computed by:
2 2
v v
AgE
=
2 V s i n a cosfp - = 2 v
R
cosfp
e a s t
e e
where:
AgE
=
Eotvos cor re c t i o n
=
ea r th s angu la r v e l o c i t y
v = s h ip v e l o c i t y
a
=
ship course
fp
=
l a t i t u d e
R =
ea r th r ad i us
e
The ve lo c i t y v i s ob ta ined d i r e c t l y f rom the sp l i n e program.
east
The
free air anomalies
Ag were computed b y su b tr a ct in g t h e
norma
l
grav i y f rom th e computed gr av i t y . The Geodeti Reference
System 1967 i s used f o r the redu ct ion, i n which the normal g ra v i ty
i
def
i
ed as:
=
978 031.85 5185.88 s in 2 fp
-
5.74 s i n 2fp mgal
4
-
8/16/2019 32 Haagmans
52/132
and a f r ee a i r g r av i t y anomaly as:
The
Bouguer anomalies
ar e computed by th e sim ple Bouguer pl a t e
r ed u ct io n . The Bouguer p l a t e i s an i n f i n i t e f l a t p l a t e w i t h a
th ickness o f t he loc a l depth and a dens i t y equa l t o the d i f f e re nce
i n de ns it y between th e cr us t 2670 kg/m3) and th e seawater
3
[
1030 kg/m3 1 so p = 1640 kg/m . The Bouguer anoma l s are:
= ASFA
nGpd
= AgFA 0.0687 d mga l
where d i s the depth i n meters.
As t he bot tom o f th e North Sea i s ve ry smooth and the depth
varies between about 30 m and 60 m,
t
i s no t necessary t o compute
topograph ic cor rect ions.
5. Computat ion o f th e cross-over po in ts
An independent check on th e pr ec is io n o f t he measurements i s
obta i ned a t th e cross-over po in ts and on some repeated l i ne s. The
NAVGRAV p r o j e c t cont ain ed 350 cross-over p oi n ts . A problem was t o
d evelop an e f f i c i e n t method t o f i n d t h e cr oss- over p o in t s . T h i s i s
so lved as fo l lows .
The whole area was devided i n t o 1 X 1 km bl o cks and each
b lock was un ique l y numbered. F i r s t , the whole a rea i s d i v i de d in t o
9
blocks, numbered 1 t o
9
[ see f i gu re 11. Each b lock i s subd iv ided
a g a i n i n t o 9 b loc ks and so on . The smal les t b loc k i s 1 X 1 km
.
The advantage o f t h i s method i s th a t th e same numbering can be
used t o compute mean b lock anomal ies f o r b loc ks w i th d i f fe re n t
si de lengths, inc rea sin g wi th a fac to r 3 each t ime, so 1 km, 3 km,
9
km, 27 km, 81 km and 243 km.
The b loc k numbers cons is t o f s i x d ig i ts , e .g. 254268 i s a b lock
o f 1 X
1
km. The f i r s t
5
d i g i t s : 25426 i s t h e 3 X 3 km bl o ck and
2542 i s t h e
X
9 km b lo ck i n which t h e p o in t i s s i t u a t e d .
E ve ry g r a v i t y o b se rv a ti o n i s l a b e l l e d w i t h a s p e c i f i c b l oc k
number.
-
8/16/2019 32 Haagmans
53/132
F ig u re l Bloc k numbering
Wit h a ve ry f a s t s o r t i n g r o u t i n e a1
l
measurements to ge th er w i t h
t h e i r l i n e numbers) are so rte d i n sequence o f the b locknumber. The
bloc ks con ta i n in g measurements f rom d i f f e r e n t l i n e s were
considered as cross-over poi nts . The observat ion in te rv al a lon g a
l i n e i s about
300
m
so u su a l l y
3
p o i n t s o f a l i n e a re s i t u a t ed
2
i ns i de one b lock o f
X
1 km.
The mean va lue o f the se th re e p o i n ts was compared w i t h t he
mean va lue o f the th ree po i n t s o f th e o ther ne . The d i f fe r enc e
i s the c ross -ove r po i n t d i f f e re nce and g ives an impression o f t he
precision of the measurements.
The NAVGRAV p r o j e c t co nt ai ne d
350
cross-over poi nts . The ro ot
mean square o f t h e di ff er en ce s was 1.08
mgal
w hich i s ve ry
s a t i s f y i n g . A h is to gram o f t he se d i f f e re n ce s i s g ive n i n f i g u re 2.
59 o f t h e ob served d i f f e re nce s i s le ss t h an m i l l i g a l w hich
i s be t t e r than expected on beforehand. As th e s tandard dev ia t ion
o f a d i ff e r e n c e
i s
i
t ime s t h e s t a n d a rd d e v ia t i o n o f t h e g ra v i t y
measurements t h e
s ta nd ard d e v i a t i o n o f a s i n g l e g ra v i t y c ro ss -o ve r
p o in t i s
1.08/f i = 0.76
mgal
As these cross-over p oi nt d if fe re nc es a re caused by random noi se
t
i s no t necessary t o co r rec t t h e g r av i t y va lues between the
cross-over po in ts . The same method i s used t o compute th e
-
8/16/2019 32 Haagmans
54/132
cross-over po i n t s f o r th e measurements f rom a s im i l r p r o j ec t i n
1979. The cross-over d i f fe re nc es of 1979 ar e presented i n th e
h i s to g r am o f f i g u r e 3 . t conta ins 188 cross-over po in ts w i th a
standard dev ia t ion o f 1 .57 mgal.
Next t h e NAVGRAV measurements ar e compared w i t h t h e g r a v i t y
measurements observed i n 1979 i n th e same area. One ob je c t i v e o f
t h e who le p r o je c t was t o s t u d y t h e r e p e a t a b i l i t y and t h e e x t e r n a l
accuracy o f th e g r a v i t y measurements. Ther efore some l es, which
were measured i n 1979, have been repeated i n 1986 r e s u l t i n g i n
1453 check p o in ts both a long t r ac k and cross-over po in ts .
F igu re 4 shows the h is togram o f a l l c ross-over po in ts o f 1979
and 1986. 54 o f th e measurements show di f f er en ce s o f le ss than 1
mgal and th e s tandard dev i a t ion i s 1 .47 mgal. Th is va lue can s t i l l
be reduced i systemat i errors some
l
es ar e removed. The
rem ain in g standard de vi at io n becomes 1.20 mgal As t h i s va lue i s
the re s u l t o f t he d i f f e re nce i n two obse rva t ions , each obse rva t ion
1
has a r .m.s. o f 1 .20 = 0.85 mgal.
6. Comparison o f t he two grav imet ers Kss-5 nd Kss-30
I n or d e r t o check t h e p r e c i s i o n o f t h e g r a vimet er s , a p a r t
f rom ex te rna l in f luences as e r ro rs i n the pos i t ion , speed and
course o f the sh ip , bo th g rav imeters were se t up next t o each
oth er. One Bodensee Kss-5 gravi mete r, belon ging t o th e D e l f t
Un iv er si ty o f Technology and one Bodensee Kss-30 o f t he U n iv er si ty
o f Hamburg. The comparison i s made on 8908 measured g r a v i t y
po in ts . F igu re
5
shows a h is togram o f th e d i f fe ren ces.
Cur i us l y t he re i a systemat i d i f ference of 1 mgal between
bo th ins trumen ts , p robab ly caused by a d i f f e ren ce i n the
connec t ion t o the ha rbou r po in t . The s tanda rd dev ia t ion o f a l l
d i f f e r e n ce s i s 1.12 mgal
Apart f rom t h i s some l i n e s show a systemat ic d i f f er en ce , caused by
inaccuracy o f t he cross-coupl ing e f fec t as a re s u l t o f bad weather
cond i t ions .
f
t hese sys tema tic e r ro rs a re co r rec ted fo r , t h e
r e ma inin g st an d ar d d e v ia t i o n o f t h e d i f f e r e n ce s i s o n l y 0 .61 mgal
Thi s means th a t bo th g rav imeters cor respond in cr ed ib ly we l l .
F igu re 6 shows t h e d i f f e r e n ce s a f t e r co r r e c t i n g f o r s ys te ma t ic
e r r o r s .
-
8/16/2019 32 Haagmans
55/132
7.
The g r a v i t y anomalies
The f re e a i r gr a v i ty anomalies are computed w i th the
te r n a t nal g r a v i t y form ula 1967. Iso-anomal y maps have been
drawn o f th e 1979 measurements ( f i g u r e 7) and th e 1986
measurements ( f i g u r e 8 ) . As these maps a re based on complete1y
independent data they give a good
im pre ssio n o f t h e r e l i a b i l i t y o f
t h e r e s u l t s .
Comparison o f the two maps shows th a t a1 l main features of
the gr a v i ty f i e l d are the same i n both maps. Only minor
d i f fe ren ces a re present . Remarkable i s the ra th er i r re gu la r shape
of the g r av i t y f i e ld , a l though the bottom o f the North Sea i s very
f l a t . The i r r eg u l a r i t i e s a re caused by s t r uc tu r es i ns i de t he ea r t h
c r u s t beneath th e sediment lay er . The North Sea Graben ru nn ing
from North-West t o South-East can c l e a r ly be id en t i f i e d .
The g r a v i t y map of th e North Sea shows a very d e ta i l e d
p i c t u r e . t prov ides va luable in form at ion fo r geophysica l
i n t e r p r e t a t i o n , f o r o i l a nd gas e x p l o ra t i o n and f o r s c i e n t i f i c
research.
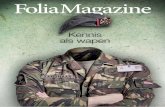
The most remarkable g r a v i t y anomaly s i tu a t e d a t l a t i t u d e
55 13 , lon gi tu de 5 38 ( f ig u re 9) . T his anomaly i s very sharp.
Gravity changes 50 m l g a l wi th in 20 km dist anc e. The to t a l mass
d is tu rbance cor respond ing t o t h i s anomaly i s equ iva len t w i th a
cube w it h s id e le ng th o f 10 km and an anomalous de n si ty o f 500
kg/m On geologica l maps a mass in t r us io n i s ind ic ate d on t h i s
p lace. Mantle mate r ia l has ascended in to the cr us t up t o a depth
o f 10 t o 15 km. However the s iz e of th e in t r us io n is , accord ing t o
th e measurements, pro bably bigg er th an in di ca te d i n the map.
Bes ides the con tour represe n ta t i on g r av i t y p r o f i l e s have been
p lo t t e d showing the f r e e a i r and Bouguer anomal ies. The p ro f e s
r e f l e c t t h e d e t a i l e d s t r u ct u r e o f t h e g r a v i t y f i e l d and ar e s u it e d
f o r smal l scal e stu di es ( c f . appendi X A).
7.1.
Mean block anomalies
I n the da taset a1
l
po in t anomal ie s are s tor ed together w i th
the coord inates and block numbers, which are descr ibed i n sec t io n
5 f
t h e d a ta s et i s s o r te d f o r i ns ta nc e on t h e f i r s t o f 4
d i g i t s of the blocknumbers, we get a1
l
the measurements inside
-
8/16/2019 32 Haagmans
56/132
each
9
X
9
km bl oc k. The mean va lu e of t h e measurement in s l d e
each blo ck i s th e mean bloc k anomaly. I n t h e same way t i s easy
t o ob ta in mean b lock anoma li es o f b lock s i zes wh ich a re a
m u l t i p l e o f 3 t i m es t h e u n f t b l o c k s i z e . F or o t h e r b l o c k s i z e s t h e
b lo ck numbers should be recomputed which i s an easy job w i t h t he
e x i s t i n g computer programs.
navgrav 9 8 6
gr vity differences on cross points
millig l
EZGB 3 5 0 points
l O S st dev
igure
56
-
8/16/2019 32 Haagmans
57/132
gravity 979
g r a v i t y d i f f e r e n c e s o n c r o s s p o i n t s
number o f po ints
Figure
mil l iga l
E B B
1 8 8
points
1 . 5 7 st.dev
navgrav 986
+
9 7 9
g ra v i t y d i f f erences o n cro s s po i n t s
number of points
o 0 r
Figure 4
mil l iga l
ZZl 1 4 5 3 points
1 . 4 7
st.dev
-
8/16/2019 32 Haagmans
58/132
N A V G R A V D e l f t H am bu rg
g r a v i t y d i f f e r e n c e s
number of points
Figure
milligal
EZZ 8908 points
l 2 st dev
N A V G R A V D e l f t H a mb ur g
s m o o t h e d g r a v i t y d i f f e r e n c e s
Figure 6
number of points
milligal
EZB 8930 points
0 6 st dev
-
8/16/2019 32 Haagmans
59/132
Figure 7. Free air gravity anomalies in mgal measured in 1979
-
8/16/2019 32 Haagmans
60/132
Figure
8.
Free air gravity anomalies in mgal measured in
1986
6
-
8/16/2019 32 Haagmans
61/132
N O R T H S E R : G R R V I T Y R N O M R L Y L 5 5 3
D IS TA NC E I N
K M
F U L L L I N E : F R EE A I R RNOM RLY
L I N E : L 5 5 1 3
OPEN I E BOUGUER RNUMRL f
ORl E: WRY l 9 8
S I R R I F I N I S H
W E H . w . S . : 1 5 4 4 5 6 2 9 45
U.1.W. COOROINRTES X 7 8 8 4 4 4 U 2 7 7 7 5
c 6 1 2 8 7 3 0
6 1 1 9 7 8 5
CEOGRRPHICRL COOROINRTES P H I:
5 5 . 2 1 9 5 5 . 2 1 8
LRWBOR:
7 . 5 3 5 1 . 86 5
N O R T H S E R : D E P T H L 5 5 3
O IS TA NC E I N
K M
Figure 9 The largest gravity anomaly
-
8/16/2019 32 Haagmans
62/132
8. Literature
Col lette,
B.
J. 1960): The gravity field of the North Sea. Gravity
expedi t ons 1948-1 958, v01 V, part
I I
Nether lands Geodet
c
Commission.
Fleischer,
U.
1974): Seegravimetrie. Journal of Geophysics, vol.
40, no. 1.
Strang van Hees, G.L. 1983): Gravity survey of the North Sea.
Marine Geodesy, vol.
6
no. 2.
Vening Meinesz, F.A. 1932, 1934, 1941, 1948): Gravity expeditions
at sea. Vol.
I 1 1 1 1 1
IV, Netherlands Geodetic Commission.
-
8/16/2019 32 Haagmans
63/132
USING GP S SHIP VELOCITY ESTIM TES
FOR EOTVOS CORRECTION
J H M Smit
Delft University of Technology
Faculty of Geodesy
l
Introduction
I n sea g rav ime t ry the nowadays re a l i z ab le accuracy i s l i m i t ed
by Eo tvos co r rec t ion e r ro r s . The Eo tvos e f fe c t i s caused by the
m ot io n o f t h e s h i p r e l a t i v e t o t h e r o t a t i n g e a rt h . T h i s mo ti on
re su l t s i n a c o r i o l i s a cce le ra t i o n which must be co r re c te d f o r . To
determine the Eo tvos co r re c t io n t o be t te r than 0 .5 mgal s h ip
v e l o c i ty e st im at io n w i th an accuracy o f 0 .1 knot (approx imate1 y 5
cm/s) i s necessa ry . H igh p rec is io n HF o r MF te r r e s t r i a l nav iga t ion
systems of f e r such accuracy, b u t on1 y near shore. For ocean
gr av i t y surveys the G lobal Pos i t io n in g System i s a lmost th e on ly
p o ss ib i l t y t o o b t a i n h i g h p r e c i s i o n s h i p v e l o c i t y e st im at es .
The NAVGRAV na v ig a t i o n dat a was used t o compare Eo tvo s
co rre ct ion s computed f rom Syl ed is and Hyper f i x v e l oc i t y est imates
w it h those f rom GPS v e l o c i ty es t imates (Smit , 1988).
2 ~ o t v o s orrect ion
The Eotvos corr ec t io n can be wr i t t en :
2
v
AgE = wv
E
cosp
r
i n which i s t h e e a r t h s r o t a t i o n a ng ula r v e l o c i t y , v t h e s h i p
E
veloci ty east component,
p
t h e l a t i t u d e , v t h e s h i p v e l o c i t y and r
t h e e a r t h r a d iu s . When t h e sh ip ve lo c i t y i s gi ven i n kn ot s, t h e
Eo tvos co r rec t ion i n mgal i s :
AgE = 7.503-v cosp + 0.00415-v2
E
(2 )
F ormula ( 2 ) g i ve s t h e co r re c t i o n t o b e added t o t h e g r a v i t y
measurements. For th e s h i p heading east the g r a v i t y read i ng
becomes to o smal and the Eotvos co rr ec t io n po s i t i ve . When th e
eas t ve lo c i t y component i s exa c t l y zero, i . e . when the sh ip i s
headi ng no r th o r south, t he Eotvos co r rec t ion p rac t a l l zero.
-
8/16/2019 32 Haagmans
64/132
The Eotvos co r r ec t on s tandard de v ia t io n when ne g l ec t in g
the second t e rm on t he r i g h t hand s id e o f f o rmu la (2 ) :
i n w hic h
a
i s t h e s ta nd a rd d e v i a ti o n o f t h e s h i p e a s t v e l o c i t y .
v
Taking p = 52 and t h e req u i re d Eo tvos co r rec t io n s tandard
d e v i a t i o n a = 0 .5 mgal y i e l d s f o r t h e r e q u i r e d e as t v e l o c i t y
s tandard dev ia t ion :
a
=
0.1 kno t 0.05 ms- l
v
Because o f t he v e l oc i t y accu racy requ i red t he Eo tvos co r re c t i on
a r e s t r i c t i v e fa c t o r i n sea g ra vi me tr y.
The Global Po si t i on in g System, when f u l l y deployed, w i l l
o f f e r h i gh ve lo c i t y accu racy worldw ide, 24 hours pe r day.
Therefore, GPS i s a pro mis ing development fo r sea grav im etry .
3. S h ip v e l o c i t y e s t im a t i o n w i t GPS
Sh ip ve lo c i t y can be es t ima ted w i t h t h e G lobal Pos i t i o n in g
System u s in g pseudorange code measurements, c a r r i e r phase
measurements o r a com bin atio n o f thes e measurement type s. The
pseudorange method and t he combinat ion method y i e l d s h i p p os i t io ns
a t every ( r ec ei ve r dependent) epoch. The po si t i on s can be
c on ve rt ed t o s h i p v e l o c i t i e s b y n um eric al d i f f e r e n t i a t i o n . The
c a r r i e r phase method y i e l d s s h i p v e l o c i t i e s a t e v er y epoch.
3.1. GPS ps eu do rang ing
Pseudorange pos i t io n i ng i s re a l i ze d by th e measurement o f
fo ur pseudoranges between the re ce iv er and fou r s a t e l l i t e s . These
ranges a re de te rmi ned by c ross -co r re l a t g t h e coded s i gnal
t ransmi t t e d by (and un ique f o r ) each sate1 l e , w i t h an i d e n t i c a l
s ig na l generated i n th e re ce ive r . The four unknowns are the
r e c e i v e r c o o r d i n a t e s X, y , z (or
p
h h ) a n d t h e t i me b i a s
between th e r e ce iv er cl oc k and th e GPS t im e frame.
The l i n ea r i z ed model f o r pseudorange s in g l e po in t po s i t i on ing
can be wr i t t en :
d r = ATdx
6
-
8/16/2019 32 Haagmans
65/132
where d r t h e ve ct or o f observed minus computed pseudoranges,
A
t h e d es ig n m a tr i x c o n ta i n i ng t h e p a r t i a l d e r i v a t i v e s o f t h e
pseudoranges w i th respect t o rec e iv er car tes i an coord ina tes and
c lock b ias , T the t rans fo rma t ion ma t r i x f rom geograph ical t o
ca r tes ian coo rdinates, and dx the vec to r o f co r rec t ion s t o the
geographical coordin ates and clo ck b i as.
So lu t i on o f equa t ion 5 ) by a co l lo ca t io n model i s :
1
T T
dx
=
P
+ T ~ ~ P
T) T A P d r
wh ich a l l ows one o r more unknowns t o be he ld f i x e d b y g i v i ng i t a
la rge weigh t f ac to r i n the a p r i o r i we igh t ma t r i x o f unknowns P .
T hi s way any number o f unknowns can be computed l e s s th an o r equal
t o t h e number o f s a t e l l i t e s a v a i l a b l e .
The satel
l
e ca rt es i an co ordinate s are computed f rom a se t
o f o r b i t p ara me te rs , an e xt e ns ion o f t h e s i x Ke p le r i a n o r b i t
parameters. They are found i n the second and t h i r d subframe o f th e
sa te l l i t e nav i ga t i on message Van Dierendonck e t a l . 1978) .
The a lgo r i th m descr ibed above y i e l ds po s i t i on est imates Q, A
h i n a ce r t a i n re ference system a t every rec e iv er dependent )
epoch. The two systems used f o r GPS a re t h e World Geodetic System
1972 and 1984. The p o s i t io n s , i n WGS72 o r WGS84, g iven e. g. every
3
seconds f o r a TI-4100 rec eiv er, must now be conver ted t o
ve lo c i t i es , e .g . every 60 seconds, which i s the observa t ion pe r io d
o f th e gr a v i ty meter. Th is can be done e .g . w i th a le as t squares
second order polynomial i t o f t h e l a t i t u d e and l o n g i t ud e
est imates. The second term o f th e polynomial repre sents th e no rt h
ve lo c i t y and t h e e a st v e l o c i t y a cco rd in g t o :
The mean ~ o t v o s or re ct io n over 60 seconds computed from:
-
8/16/2019 32 Haagmans
66/132
3.2. PS Doppler smoothed pseudoranging
A com bina tion o f pseudorange code measurements and c a r r i e r
phase measurements i s used i n th e case o f Doppler smoothed
pseudoranging, as des cr ibe d by Hatch, 1982). Hatch, 19861, and
Lachapel l e e t a l , 1987). Suppose t h a t pseudorange measurements
ar e ava i bl e on bo th GPS c a r r i e r waves L1 and L2. The L1 c a r r i e r
w it h a frequency o f 1575.42 MHz i s modulated w i th t he C A code,
the P code and th e sate1 e navi ga t io n message. The L2 c a r r i e r
w it h a freque ncy o f 1227.60 MHz i s modulated w it h t he P code and
th e s a t e l l i t e na vi ga ti on message. The P code pseudorange
measurements P and PL2 on the L1 and L2 ca r r ie rs , res pec t ive ly ,
L
ar e combined i n t o a fre que ncy w eighted average measurement:
Wit h a TI-4100 re c ei ve r one f i n d s t h e pseudorange code measurement
centered i n the in te rv a l o f ca r r ie r phase measurement. The c a r r i e r
s t a r t phase measurement preceeds the code measurement which i t s e l f
i s fo l low ed by the c ar r i e r end phase measurement. The in te rv a l o f
c a r r i e r phases i s a constan t 160 m i seconds. Averaging o f
ca r r i e r s t a r t phase and ca r r i e r end phase y i e l d s t h e c a r r i e r
phases
C
and
CL2
on the L1 and L2 carr ier respect ive1y, whichL
are combined by d i f fe renc ing :
The d i f f e re nc in g re su l t s i n a longer wavelength whose i n i t i a l
a mb ig u it y i s ea s ie r t o r e so l ve .
A smoothed pseudorange can be formed by av era gin g t h e
measured pseudorange P wi th i t s pr ed ic ted value
P
i n a r e c u r si v e
f i l t e r :
P = F + C -
C
n l n
C n - l ) . ~
-
8/16/2019 32 Haagmans
67/132
The second te rm on the r i g h t hand s i de o f fo rmula 12) i s the
in te gr at ed Doppler count over the t im e in te rv al between epoch n- l
and n , co nve rt ed t o mete rs b y mu l t i p l y i n g w i t h t h e ve lo c i t y o f
l i g h t c d i v i d e d b y t h e d i f f e r e n c e o f t h e two c a r r i e r f re qu en c ie s
fl and f The var iance o f th e p red i c ted pseudorange i s g iven by:
2
i n w hich
cr
i s t h e va ri a nce o f t h e d i f f e re n ce d ca r r i e r phase
measurement C.
I f a c y c l e s l i p i s d e te ct ed b y e v a lu a t i ng t h e a bs ol ut e v a l ue
o f th e di f f er en ce between t he measured pseudorange P and i t s
2
p r e d i c t i o n b t he f i l t e r i s re se t by ta ki ng
cr2
=
cr
The smoothed pseudoranges are used i n th e l i n e a ri z e d model o f
formula 5) i n th e same way as descr ib ed i n chapter 3.1. again
y i e l d i n g p o s i t i o n e s ti m at es
cp X
h i n WGS72 o r WGS84 a t every
rec ei ve r dependent) epoch. The po si t i on s are converted t o
v el o c i t i e s ev ery 60 seconds by a le as t squares second order
polynomial
f i t
o f l a t i t u d e and long i tude est imates, compare
formula e 7) and
8).
The mean ~ o t v o s or re ct io ns per 60 seconds
can be computed w i t h
9 ) .
3.3.
PS c a r r i e r v e l o c i t i es
The l i ne a r model f o r c a r r i e r f requency ve lo c i t y es t im a t ion
can be wr i t te n, see Kleusberg e t a l , 1985):
i n w hich c i s t he ca r r ie r wavelength, A f i s t he v e ct or o f
o bserve d ca r r i e r f re qu en cy sh i f t s , a a f u n c t i o n o f sa te 1 t e
c a r t e s i a n c oo rd in at es , s a t e l l i t e v e l o c i t y and c l oc k d r i f t , A t h e
d es ig n m a t r i x c o n ta i n i ng t h e p a r t i a l d e r i v a t i v e s o f t h e
pseudoranges w i th respect t o rec e iv er car tes i an coord ina tes and
c lock b ias , T the t rans fo rmat ion ma t r i x f rom geographical t o
-
8/16/2019 32 Haagmans
68/132
car tes i an cbord ina tes and he vec to r o f unknown t ime de r i v a t i ve s
o f geograph ica l coo rd ina tes and unknown rece ive r c lock d r i f t o r
f requency o f f se t :
Here v v v a re t he ve lo c i t y components i n no r th , eas t and
N E H
upward d i re c t io n resp ec t iv e ly . The eas t ve lo c i t y component v must
E
be c o r r e c te d f o r t h e e a r t h r o t a t i o n e f f e c t N+ h)ocosv .
So l u t io n o f equat ion 16 ) by a co l l o ca t io n model i s :
- 1
X = P. T A Ph AfAT) T A Ph Af ao h Af )
wh ich a l l ows one o r more unknowns t o be h e l d f i x e d by g i v i ng i t a
la rg e weight f ac to r i n t he a p r i o r i we ight m a t r i x o f unknowns P.
T hi s way any number o f unknowns can be computed l e ss tha n o r equal
t o t h e n umber o f s a t e l l i t e s a v a i l a b l e . When e s t i ma t i n g s h i p
ve lo c i t i es one can us ua l l y cons t ra i n t he he igh t component t o ze ro
by se l ec t in g a p roper we igh t.
W i th a TI-4100 r e c e i v e r one f i n d s a c a r r i e r v e l o c i t y
measurement cen tered i n t h e in te r va l o f ca r r ie r phase
measurements. The ca r r i e r s t a r t phase measurement preceeds th e
ca r r ie r ve lo c i t y measurement o r ca r r ie r phase t ime de r i v a t i ve )
which i t s e l f i s fo l low ed by th e ca r r ie r end phase measurement. The
in te rv a l o f ca r r ie r phases i s a cons tan t 160 mi l l i se conds compare
chapter 3.2.
1
D i f f e r e n c i n g o f c a r r i e r s t a r t phase and c a r r i e r en d
phase an d d i v i d i n g b y t h e t i me i n t e r v a l o f 160 m i l seconds y ie lds
c a r r i e r v e l o c i t i e s o n L1 and L 2 w hic h a r e b o th eq ua l t o t h e d i r e c t
c a r r i e r