Micromechanical modeling and simulations of transformation-induced plasticity in multiphase
237
Micromechanical modeling and simulations of transformation-induced plasticity in multiphase carbon steels
Transcript of Micromechanical modeling and simulations of transformation-induced plasticity in multiphase

Micromechanical modeling and simulationsof transformation-induced plasticity
in multiphase carbon steels

This work is part of the research program of the Netherlands Institute for Met-als Research (NIMR) and theStichting voor Fundamenteel Onderzoek der Ma-terie (FOM), financially supported by theNederlandse organisatie voor Weten-schappelijk Onderzoek(NWO). The research is carried out under project number02EMM20 of the FOM/NIMR program “Evolution of the Microstructure of Ma-terials” (P-33).

Micromechanical modeling and simulationsof transformation-induced plasticity
in multiphase carbon steels
PROEFSCHRIFT
ter verkrijging van de graad van doctoraan de Technische Universiteit Delft,
op gezag van de Rector Magnificus prof. dr. ir. J.T. Fokkema,voorzitter van het College voor Promoties,
in het openbaar te verdedigen op dinsdag 29 januari 2008 om 10uur
door
Denny Dharmawan TJAHJANTOingenieur toegepaste wiskundegeboren te Cirebon, Indonesie

Dit proefschrift is goedgekeurd door de promotor:Prof. dr. ir. S. van der Zwaag
Toegevoegd promotor:Dr. S.R. Turteltaub
Samenstelling promotiecommissie:Rector Magnificus, VoorzitterProf. dr. ir. S. van der Zwaag, Technische Universiteit Delft, promotorDr. S.R. Turteltaub, Technische Universiteit Delft, toegevoegd promotorProf. dr.-ing. D. Raabe, Max-Planck-Insitut fur EisenforschungProf. dr. ir. M.G.D. Geers, Technische Universiteit EindhovenProf. dr. ir. T. Pardoen, Universite Catholique de LouvainProf. dr. ir. L.J. Sluys, Technische Universiteit DelftDr. ir. A.S.J. Suiker, Technische Universiteit Delft
Dr. ir. A.S.J. Suiker heeft als begelieder in belangrijke mate aan de totstandkomingvan het proefschrift bijgedragen.
Trefwoorden:Martensitic transformation, Crystal plasticity, Transformation-induced plasticity,Thermo-mechanical framework, Consistent stress-update algorithm, Finite ele-ment method, Homogenization scheme, Microstructural properties
Copyright c©2007 by D.D. Tjahjanto
Printed in the Netherlands by PrintPartner IpskampISBN-13: 978-90-9022499-2

To my parents and my brothers


Foreword
This thesis summarizes the four-year research project I have done on the designof optimized multiphase transformation-induced plasticity (TRIP)-assisted steels.The work is part of a joint research program between the Netherlands Institutefor Metals Research (NIMR) and theStichting Fundamenteel Onderzoek der Ma-terie (FOM), which is financially supported by theNederlandse Organisatie voorWetenschappelijk Onderzoek(NWO). The research is performed under projectnumber 02EMM20 of the FOM/NIMR program “Evolution of the Microstructureof Materials” (P-33).
First of all, I would like to gratefully acknowledge Prof. Sybrand van derZwaag as the promotor for the effective support and guidanceduring this re-search, and Dr. Sergio Turteltaub and Dr. Akke Suiker, who have provided anexcellent day-to-day supervision and many inspirations. In addition, I would liketo acknowledge Dr. Pedro Rivera for all discussions and feedbacks on the thermo-dynamical and metallurgical aspects of the models, and Prof. Rene de Borst forthe opportunity to use the research facilities in the Engineering Mechanics (EM)group. Furthermore, I would like to thank Prof. Dierk Raabe,Dr. Franz Rotersand Dr. Philip Eisenlohr for offering me a wonderful place during a three-monthvisit to theMax-Plank-Institut fur Eisenforschung(MPI-E) in Dusseldorf, and fortheir assistance during this visit.
Next, I would like to express my gratitude to Prof. Marc Geers(EindhovenUniversity of Technology), Prof. Thomas Pardoen (Universite Catholique de Lou-vain) and Prof. Bert Sluys (Delft University of Technology)as the members of thedoctoral committee, as well as to Prof. Gijs Ooms (Delft University of Technol-ogy) as the reserve member. Furthermore, I would like to acknowledge the discus-sions with Prof. John Bassani (University of Pennsylvania)on the basic conceptand the implementation of the non-glide stress effect in BCCcrystals. In addition,I address my gratitute to the fellow researchers in the NIMR Cluster 5 and to theCorus Research Development and Technology (RD&T) team for the discussions
vii

FOREWORD
and feedback during this research.I owe many thanks to Carla Roovers, Harold Thung and Laura Chant for the
wonderful assistance to solve administrative and technical issues. In addition, I amindebted to all colleagues and former colleagues at the EM group (Prof. MiguelGutierrez, Dr. Steven Hulshoff, Dr. Harald van Brummelen,Dr. Christian Mich-ler, Dr. Edwin Munts, Dr. DooBo Chung, Dr. Olaf Herbst, Thomas Hille, ClemensVerhoosel, Andre Vaders, Marcela Cid, Juliana Lopez, Wijnand Hoitinga, Gertjanvan Zwieten, Jingyi Shi, Kris van der Zee and Ido Akkerman) and at the Funda-mentals of Advanced Materials (FAM) group (Dr. David San Martin and Dr. DotyRisanti) for creating a pleasant atmosphere and interesting discussions.
Personally, I would like to deeply thank Angelica Tanisia, Fr. Ben Engel-bertink, Rev. Waltraut Stroh and Kasia “my virtual sister” Wac for all support,courage and motivation that were given during the last couple of years. I amalso grateful to the Indonesian community in Delft (particularly, Julius Sumihar,Ferry Permana, Sinar Juliana, Dwi Riyanti, Xander Campman,Nelson Silitonga,Iwan Kurniawan, Henri Ismail, Sandy Wirawan and Yuli Tanyadji) and friends inthe International Student Chaplaincy Delft (especially, Ruben Abellon, Fr. AvinKunnekkadan, Francesca Mietta, Carmen Lai, Ludvik Lidicky, Anna Dall’Acqua,Maria Parra, Henk van der Vaart and Mieke and Reini Knoppers)for sharing a lotof fun during my stay in Delft. Last but not least, I would liketo thank my familyand friends in Indonesia, for their long-distance support and prayers.
All in all, I wish that this thesis gives valuable knowledge and insight to allpeople interested in studying the TRIP effect in steels. Enjoy reading!
viii

Contents
Contents ix
1 Introduction 11.1 Background: Multiphase TRIP-assisted steels . . . . . . . .. . . 2
1.1.1 Two-stage heat-treatment process for TRIP steels . . .. . 31.1.2 Martensitic transformation in low-alloyed carbon steels . . 41.1.3 Microstructural parameters influencing the stability of austen-
ite against transformation . . . . . . . . . . . . . . . . . . 51.1.4 Modeling of TRIP effect in steels: State of the art . . . .. 6
1.2 Objectives and scope . . . . . . . . . . . . . . . . . . . . . . . . 71.3 Thesis outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4 General scheme of notation . . . . . . . . . . . . . . . . . . . . . 9
2 Elasto-plastic deformation of single-crystalline ferrite 112.1 Single crystal elasto-plastic model for ferrite . . . . . .. . . . . . 13
2.1.1 Kinematics and configurations . . . . . . . . . . . . . . . 142.1.2 Thermodynamic formulations . . . . . . . . . . . . . . . 162.1.3 Constitutive relations and Helmholtz energy density. . . 202.1.4 Driving force, non-glide stress and kinetic law . . . . .. 242.1.5 Hardening and evolution of microstrain . . . . . . . . . . 25
2.2 Simulations of elasto-plastic deformation of single-crystalline ferrite 292.2.1 Material parameters and validation . . . . . . . . . . . . . 292.2.2 Sample geometry and boundary conditions . . . . . . . . 312.2.3 Stress-strain response of single-crystalline ferrite . . . . . 33
3 Elasto-plastic-transformation behavior of single-crystalline austenite 473.1 Single crystal elasto-plastic-transformation model for austenite . . 49
3.1.1 Kinematics and configurations . . . . . . . . . . . . . . . 49
ix

CONTENTS
3.1.2 Thermodynamic formulations . . . . . . . . . . . . . . . 533.1.3 Constitutive relations and Helmholtz energy density. . . 573.1.4 Driving forces, nucleation criteria and kinetic laws. . . . 643.1.5 Hardening and evolution of microstrain . . . . . . . . . . 67
3.2 Simulations of elasto-plastic-transformation behavior of single-crystalline austenite . . . . . . . . . . . . . . . . . . . . . . . . . 713.2.1 Material parameters and validation . . . . . . . . . . . . . 713.2.2 Sample geometry and boundary conditions . . . . . . . . 753.2.3 Stress-strain response of single-crystalline austenite . . . . 77
4 Numerical solution algorithm for transformation-plasti city model 894.1 Stress-update algorithm for coupled transformation-plasticity model 90
4.1.1 Discretization of model equations . . . . . . . . . . . . . 914.1.2 Newton-Raphson iteration procedure (return-mapping) . . 964.1.3 Consistency checks for slip and transformation systems . . 1004.1.4 Sub-stepping procedure . . . . . . . . . . . . . . . . . . 102
4.2 Tangent operator . . . . . . . . . . . . . . . . . . . . . . . . . . 1044.2.1 Finite difference approximation for tangent operator . . . 1054.2.2 Tangent operator in the Eulerian setting . . . . . . . . . . 105
4.3 Validation of the numerical solution algorithm . . . . . . .. . . . 1074.3.1 Sample geometry and finite element meshes . . . . . . . . 1074.3.2 Simulation results (mesh refinement analysis) . . . . . .. 108
5 Micromechanical simulation of TRIP-assisted steel 1135.1 Simulation of multiphase TRIP steel at single grain level . . . . . 114
5.1.1 Microstructural sample geometry and boundary conditions 1145.1.2 Strain-strain response of TRIP steel microstructure. . . . 117
5.2 Parametric study of polycrystalline TRIP steel behavior as a func-tion of microstructural properties . . . . . . . . . . . . . . . . . . 1275.2.1 Sample geometry and boundary conditions . . . . . . . . 1285.2.2 Microstructural configuration and model parameters .. . 1285.2.3 Simulation results . . . . . . . . . . . . . . . . . . . . . 133
6 Macroscale simulation of multiphase TRIP-assisted steels 1416.1 Homogenization scheme for multiphase microstructure .. . . . . 143
6.1.1 Weighted-Taylor scheme with iso-work-rate criteria. . . . 143
x

CONTENTS
6.1.2 Preliminary analysis and comparison to direct FEM sim-ulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
6.2 Deep-drawing simulation of multiphase TRIP-aided steel . . . . . 1496.2.1 Sample geometry and boundary conditions . . . . . . . . 1496.2.2 Sample crystallographic orientation distribution function . 1516.2.3 Simulation results and analysis . . . . . . . . . . . . . . . 155
7 Simulation of thermal behavior of multiphase TRIP-assisted steel 1617.1 Single-crystalline thermo-mechanical models for multiphase TRIP-
assisted steel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1627.1.1 Thermo-elasto-plastic-transformation model for austenite . 1637.1.2 Thermo-elasto-plasticity model for ferrite . . . . . . .. . 166
7.2 Simulation of TRIP steel behavior under cooling . . . . . . .. . 1677.2.1 Boundary conditions and model parameters . . . . . . . . 1677.2.2 Analysis of TRIP steel behavior under cooling . . . . . . 1707.2.3 Comparison with experimental results . . . . . . . . . . . 177
A Kinematics of martensitic transformation at lower length-scales 183
B Effective elastic stiffness for martensitic transformation systems 187
C Plastic slip systems for FCC austenite and BCC ferrite 189
References 193
Summary 209
Samenvatting 213
Intisari 217
Curriculum vitae 221
xi

CONTENTS
xii

1Introduction
The improvement of strength in carbon steels is often obtained at the expense ofductility, andvice-versa. A long-standing ambition has been to develop a class ofsteels where both ductility and strength can be simultaneously improved. For thispurpose, transformation-induced plasticity (TRIP)-assisted steels are particularyappealing. TRIP-assisted steels are a class of multiphase steels that exhibit a goodcombination of strength and ductility characteristics. This unique characteristicis attributed to the presence of ametastableaustenitic phase in the microstruc-ture at room temperature. Upon applied thermal and/or mechanical loadings,the metastable retained austenite may transform into a harder martensitic phase,which may increase the effective strength of the material. In addition, transforma-tion from austenite to martensite is accompanied by shape and volume changes,which are accommodated by local plastic deformations in thesurrounding phases,creating the so-called “TRIP-effect” [61]. The additionalplastic deformation dueto the transformation increases the effective work-hardening of the material. Incomparison to similar steels that contain no retained austenite in their microstruc-ture, e.g., dual-phase (DP) steels, TRIP-assisted steels have a similar (ultimate)strength, but exhibit a significantly higher ductility.
1

CHAPTER 1. INTRODUCTION
1.1 Background: Multiphase TRIP-assisted steels
At room temperature, a typical microstructure of TRIP steelconsists of severalphases, i.e., the intercritical ferrite as the most dominant phase, bainite, retainedaustenite and occasionally a small fraction of thermal martensite [8, 34, 42, 64,102, 112, 133]. Intercritical ferrite (sometimes also referred to as pro-eutectoidferrite) occupies up to75 % volume of the microstructure. Ferrite has a body-centered cubic (BCC) lattice and, compared to other constituent phases, is thesoftest phase. Nano-indentation tests performed by Furnemontet al. [42] showedthat the hardness of ferrite in a typical multiphase steel isabout5 GPa. As re-ported in the literature [42, 64], the size of ferritic grains in a typical TRIP steelmicrostructure ranges from5 to 10 µm. Unlike ferrite, bainite does not have asingle-phase structure. The microstructure of bainite consists of an assembly oflayers of iron carbide (cementite) and bainitic ferrite. Bainite is formed duringan isothermal bainitic holding at a temperature between600 and700 K. In gen-eral, bainite is harder than intercritical ferrite due to its smaller grain size and thepresence of carbide precipitations. The typical size of bainitic grains ranges from1 up to 6 µm. In addition, initial bainite can possess a higher dislocation den-sity [64]. In the case of TRIP steels, the chemical composition is chosen such thatthe formation of carbides is restricted (or postponed), which results in a bainitein TRIP steels that is essentially carbon-free, but still has the characteristics ofa fine plate-like structure [42, 61, 64]. The next constituent phase in TRIP steelmicrostructure is retained austenite. In contrast to otherconstituent phases thatare stable, retained austenite is a metastable phase. In general, austenite is a hightemperature phase, which has a face-centered cubic (FCC) structure. Stabilizationof austenite at room temperature is due to local carbon enrichment and the con-straining effect from neighboring grains. Upon the application of thermal and/ormechanical loads, metastable austenite may transform intomartensite and gener-ate the TRIP effect. In some cases, the initial TRIP steel microstructure may alsocontain a small fraction of thermal martensite. Thermal martensite is obtainedwhen austenite is rapidly cooled (or quenched) such that diffusion of carbon is pre-vented during transformation. Martensite has a body-centered tetragonal (BCT)structure that contains supersaturated interstitial carbon atoms, which can createstrain fields that restrict the movement of dislocations in the lattice [23]. Marten-site can also have a high dislocation density resulting froma displacive (or diffu-sionless) transformation mechanism. In comparison to other constituent phases,
2

1.1. BACKGROUND: MULTIPHASE TRIP-ASSISTED STEELS
Tem
per
ature
θ
Δt2
Time t
Δt1
θ1
θ2
Intercriticalannealing
Bainiticholding
Quenching
AF
A
FB
ABF
= Austenite= Bainite= Ferrite
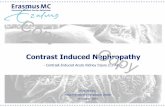
Figure 1.1: Schematic representation of temperature profile of the two-stage heattreatment typically used in low-alloyed TRIP steels processing and the corre-sponding microstructural phases obtained at the end of eachstage.
martensite shows the highest hardness level. Nano-indentation tests by Furnemontet al. [42] indicated that the hardness of martensite can exceed17 GPa. In TRIPsteel microstructures, martensite appears in platelets orneedle-shaped laths.
1.1.1 Two-stage heat-treatment process for TRIP steels
In many cases, the microstructure of multiphase TRIP-assisted steels are producedthrough a two-stage heat treatment process [59–61, 64, 92, 102, 133]. Similar tothe processing route for dual-phase (DP) steels, the first stage of the heat treat-ment process is the intercritical annealing, in which the material is brought to atemperatureθ1 between the intercritical temperaturesA1 andA3. This processtransforms some parts of the initial microstructure into the austenitic phase. As aresult, the microstructure after the intercritical annealing process consists of twophases, i.e., (pro-eutectoid) ferrite and austenite, as schematized in Figure 1.1.While for dual-phase steels the microstructure resulting from the intercritical an-nealing is directly quenched to a room temperature, the intermediate TRIP steelmicrostructure is brought to a bainitic temperatureθ2 for isothermal holding overa period∆t2. During this isothermal holding, a fraction of the austenite formedduring intercritical annealing transforms into bainite, whereas the remaining partof the austenite is further stabilized by the enrichment of carbon expelled fromthe bainite formed. At this stage, the size of the retained austenite grains in the
3

CHAPTER 1. INTRODUCTION
Austenite
Martensite
Ther
mal
(G
ibbs)
fre
e en
ergy G
ΔGA→M(θ) < Gbarrier
Temperature θ
θT
ΔGA→M(Ms) = Gbarrier
GA
GM
θ Ms
Gmech
Figure 1.2: Schematic representation of thermal (or chemical) free energy of theaustenitic and martensitic phases as functions of temperature.
resulting microstructure depends on the bainitic holding temperatureT2 and theholding time∆t2. After the isothermal bainitic holding, the steel is quenched toroom temperature. In general, the phase composition created during the bainiticholding is preserved during the final quenching. Occasionally, a small fractionof retained austenite further transforms into thermal martensite during the finalquenching, particularly in the austenitic regions in whichthe carbon enrichmentwas not sufficient.
1.1.2 Martensitic transformation in low-alloyed carbon steels
Martensitic transformations occur as a consequence of energy minimization amongthe phases in the microstructure. At high temperatures, theaustenitic phase pos-sesses a lower free-energy level than the martensitic phaseand, therefore, is astable phase. Conversely, at low temperature, the martensitic structure becomesmore favorable since it has a lower free-energy level. Figure 1.2 schematicallyillustrates the free-energy of the austenitic and martensitic phases as functions oftemperature. Transformation from austenite to martensitein carbon steels can betriggered either by thermal loading (cooling) or through the application of externalmechanical loading. Upon cooling and in the absence of stress, the transformationfrom austenite to martensite starts to occur at the transformation temperature,Ms,where the difference in thermal energy (sometimes referredto as “chemical en-
4

1.1. BACKGROUND: MULTIPHASE TRIP-ASSISTED STEELS
ergy”) between the austenite and martensite,∆GA→M , is sufficient to overcomethe transformation energy barrier (Gbarrier).
At temperatures higher thanMs, transformation may occur with the assistanceof mechanical stress, such that the mechanical strain energy (Gmech) added to thethermal energy difference is sufficient to overcome the transformation barrier, asshown in Figure 1.2. However, in carbon steels, stress-assisted martensitic trans-formation are irreversible, i.e., reverse transformations (from martensite to austen-ite) cannot occur upon reversal of loading. Transformationfrom martensite toaustenite can only be realized by re-heating. This is in contrast to shape-memoryalloys, where stress-assisted transformations are crystallographically reversible.
1.1.3 Microstructural parameters influencing the stability of austen-ite against transformation
In the final microstructure, the stability of retained austenite grains against trans-formation plays an important role in characterizing the overall performance ofTRIP-assisted steels. Experimental investigations have shown that the stabil-ity of the austenitic grains is influenced by various microstructural parameters,such as (i) the carbon concentration in the retained austenite [8, 34, 64, 102, 112],(ii) the size and shape of the austenitic grains [11, 68, 147], (iii) the morphol-ogy of microstructural phases [63, 64, 151], (iv) the crystallographic orientationof grains (microstructural texture) [72, 91] and (v) the stiffness of the surroundingphases [102, 133].
In TRIP steel microstructures, the volume fraction of the phases, the sizeand shape of the austenitic grains, as well as their local carbon concentrationobtained in the two-stage heat treatment process depend upon the intercriticalannealing and bainitic transformation process conditions, e.g., temperature andholding time [59, 60, 64, 84, 102, 112, 147]. For example, a longer bainitic hold-ing time results in a final microstructure with smaller grains of retained austenite,but with a higher carbon content. Furthermore, the carbon concentration in theretained austenite grains is controlled through the presence of alloying elements,such as silicon, aluminum and phosphor [12]. These elementseffectively pre-vent carbide precipitation during the bainitic holding stage and, thus, enhance thecarbon enrichment in the austenite. For typical TRIP steel microstructures, thecarbon concentration in the retained austenite reportedlyvaries from0.6 wt.% upto 2.3 wt.% [59, 60, 64, 68, 84, 112, 121]. It should be pointed out that the deter-
5

CHAPTER 1. INTRODUCTION
mination of the carbon concentration in the austenitic grains is rather complexand there is no generally accepted method for determining the austenite carbonconcentration. It is generally accepted that the real rangeof austenite carbon con-centrations in multiphase TRIP steels is probably smaller than first indicated.
Besides carbon enrichment, the stability of retained austenite is influencedby the mechanical properties of the surrounding phases. Under external thermo-mechanical loading the stresses experienced by the austenitic grains depend onthe elasto-plastic properties of the surrounding ferriticgrains (e.g., yield stressand strain hardening behavior), which can be controlled by the addition of ele-ments, such as manganese and molybdenum, as well as by changing the ferriticgrains size [43, 66]. In addition, the crystallographic orientation of the austeniticgrains with respect to the loading direction plays an important role in the austen-ite stability against transformation [72, 91]. This information is relevant for themacroscopic behavior of TRIP steels, particulary if the steel is produced througha rolling process, which may induce a microstructural texture, where a large num-ber of grains are oriented in a specific crystallographic direction [144, 149].
1.1.4 Modeling of TRIP effect in steels: State of the art
The modeling of the TRIP effect involves two key aspects [39,64], namely (i)the elasto-plastic deformation in the transforming austenitic region as well as inthe neighboring phases to accommodate shape and volume changes associatedwith the martensitic transformation, which is often referred to as theGreenwood-Johnson effect[45] and (ii) the strong dependency of the martensitic formationupon the crystallographic orientation with respect to the loading axis, also knownas theMagee effect[83]. From a historical point of view, the modeling of marten-sitic phase transformations can be traced back to the pioneering work of Wechsleret al. [148] in 1953, where a crystallographically-based model was proposed to de-scribe the kinematics for a martensitic transformation. This concept was refinedby Ball and James [7] by formulating the model within an energy minimizationframework. During the last decades, various constitutive models for martensitictransformations have been developed for describing the TRIP effect, such as theone-dimensional phase transformation model of Olson and Cohen [93], whichwas extended into a three-dimensional model by Stringfellow et al. [120] andBhattacharyya and Weng [16]. Furthermore, models based on amore complexmicromechanical framework were also proposed. These can befound in the work
6

1.2. OBJECTIVES AND SCOPE
of, e.g., Leblondet al. [75, 76] and Levitaset al. [79, 80]. Following the classicalcrystallographic model of Wechsleret al. [148], Marketz and Fischer [85, 86] pro-posed a model for stress-assisted martensitic transformation for single-crystallineand polycrystalline austenite, see also Tomita and Iwamoto[138, 139]. Further,Diani et al. [32, 33] proposed a model that takes into account the effectof thecrystallographic orientations of grains on the elasto-plastic response using a smallstrain formulation. Similar models can be also found in Cherkaouiet al. [24, 25]and Taleb and Sidoroff [127].
Most of the models mentioned above were developed within a small-strainframework, which can lead to inaccurate predictions since martensitic transfor-mations can locally induce large elasto-plastic deformations, even if the effec-tive macroscopic deformation is relatively small. In addition, an isotropic elasto-plastic response is often assumed, which is a strong simplification, particulary foranalyses at smaller length scales (e.g., at the single-crystal level), where the effectof anisotropy due to crystallographic orientations cannotbe neglected [41, 72, 91].Within the context of a large deformation framework, Turteltaub and Suiker [124,141, 143] have developed a crystallography-based model formartensitic phasetransformations in carbon steels. The model is derived following a multiscale ap-proach, where material parameters, e.g., transformation deformation kinematicsand effective elastic stiffness, at higher length-scales are calculated from lowerscale quantities by means of averaging schemes. In addition, the model is con-structed within a thermo-mechanically consistent framework, where the thermalquantities are derived analogous to the mechanical counterparts. The model ofTurteltaub and Suiker [124, 141, 143] lays the foundation for the work to be pre-sented in this thesis.
1.2 Objectives and scope
Despite of its superior characteristics, there is room for further improvement in theoverall performance of a TRIP-assisted steel. However, this can only be achievedby developing a thorough understanding of the TRIP mechanism. The presentwork is aimed at developing crystallographically-based computational models forsimulating the behavior of TRIP-assisted steels. The underlying goal of the sim-ulations is to study systematically the mechanism of TRIP, particularly the mech-anism of the stress-assisted martensitic transformation in the austenitic grains,as well as the elasto-plastic interactions between the transforming grains and the
7

CHAPTER 1. INTRODUCTION
neighboring phases. The models developed to study these effects are numericallyimplemented within a finite-element framework.
Within a parametric analysis setting, various sets of simulations are performedin order to identify the role of every microstructural property on the austenite sta-bility and, thus, the overall response of the TRIP-assistedsteels under mechanicaland thermal loadings. The analyses cover various length-scales, i.e., from simu-lations at the level of single crystal up to simulations of forming processes at themacroscopic scales. On the whole, the present work will provide a good insightfor further improvement of the performance of TRIP-assisted steels, as well as forthe optimization of the TRIP steel processing parameters.
1.3 Thesis outline
The outline of this thesis is as follows: The elasto-plasticresponses of single-crystalline ferrite are simulated and studied inChapter 2. For this purpose, asingle crystal elasto-plasticity model is adopted. In order to mimic the asym-metric behavior of slip in twinning and anti-twinning senses typically found inBCC metals, the model incorporates the effect of the non-glide stress into thekinetic formulation. The model is derived within a large deformation frame-work. In order to demonstrate the basic features of the model, several simula-tions are performed for various types of elementary deformation modes. Sub-sequently, a crystallography-based model for simulating the behavior of single-crystalline austenite is presented inChapter 3. This model is derived throughcoupling the multiscale martensitic phase transformationmodel of Turteltaub andSuiker [141, 143] to an FCC single-crystal elasto-plasticity model. The couplingbetween the transformation and the plasticity terms is derived systematically usinga thermodynamically-consistent formulation. The model isused to study the re-sponse of single-crystalline austenite, in particular theinteraction between phasetransformation and plastic deformation mechanisms in the austenite under variousloading conditions.
Key aspects of the numerical implementation of the models are presented inChapter 4. The discussion is thereby mainly focussed on the numericalimple-mentation of the elasto-plastic-transformation model forthe austenitic phase. Thenumerical algorithm for the ferrite elasto-plasticity model can be performed anal-ogously through eliminating the terms related to transformation. In addition, anumber of simulations are presented to show the numerical stability and conver-
8

1.4. GENERAL SCHEME OF NOTATION
gence of the implemented algorithm.In Chapter 5, the single-crystalline models presented inChapters 2and3 are
combined to simulate the response of multiphase TRIP-assisted steel microstruc-tural samples. The simulations focus on the interaction between the transformingaustenitic grain and the surrounding ferritic matrix for different combinations ofcrystallographic orientations. In addition, the role of microstructural properties,such as local carbon concentration and austenitic grain size on the overall re-sponses of the TRIP steels are studied in a parametric analysis. In Chapter 6,simulations of TRIP steel behavior at the macroscopic scale, e.g., during deep-drawing process, are shown. For this purpose, the present single-crystalline mod-els for ferrite and austenite are employed in combination with a simple averagingscheme, namely the iso-work-rate weighted-Taylor scheme.A direct reconstruc-tion of orientation distribution functions (ODF) by means of a probabilistic ap-proach is performed in order to replicate the crystalline texture of the samplesduring simulations. Finally, the behavior of multiphase TRIP-assisted steels dur-ing thermal loading is simulated and analyzed inChapter 7. The analyses coverthe thermal behavior of TRIP-assisted steels as a function of microstructural prop-erties, similar to the analyses of the mechanical loading presented inChapter 5.Moreover, the transformation behavior under thermal loading as predicted by thepresent models is compared to experimental observations.
1.4 General scheme of notation
As a general scheme of notation, scalars are written as lightface italic letters,vectors as boldface lowercase letters (e.g.,a, b), second-order tensors as boldfacecapital letters (e.g.,A, B) and fourth-order tensors as blackboard bold capitalletters (e.g.,A, B). For vectors and tensors, Cartesian components are denoted asai, Aij andAijkl. The action of a second-order tensor upon a vector is denotedasAb (in componentsAijbj , with implicit summation on repeated indices) andthe action of a fourth-order tensor upon a second order tensor is designated asAB (i.e.,AijklBkl). The composition of two second-order tensors is denoted asAB (i.e.,AijBjl). The tensor product (dyadic product) between two vectors isdenoted asa ⊗ b (i.e., aibj). All inner products are indicated by a single dotbetween the tensorial quantities of the same order, e.g.,a · b for vectors andA ·B for second-order tensors (in components, respectively,aibi andAijBij). Thetranspose of a tensor is denoted by a superscriptT and its inverse by a superscript
9

CHAPTER 1. INTRODUCTION
−1. A superimposed dot represents a material time derivative.SubscriptsA, M ,andF indicate that the quantities correspond to material properties of austenite,martensite and ferrite, respectively.
10

2Elasto-plastic deformation of
single-crystalline ferrite
In multiphase steels assisted by the TRIP effect, ferrite isthe most dominantphase in terms of its volume. Therefore, although it is not considered as themost important ingredient of TRIP steel microstructure, the elasto-plastic behav-ior of the ferrite-based matrix determines to a large extentthe overall behavior ofthe multiphase steel. Despite of this, little attention hasbeen given to the mod-eling of ferrite in many models for TRIP-assisted steels available in the litera-ture [57, 58, 109, 110, 120], where relatively simple elasto-plasticity models wereused for the non-transforming phase.
Continuum models used to simulate the elasto-plastic behavior at the level of asingle crystal are often based on crystal plasticity theory. The plastic deformationis kinematically described as the result of slip on specific crystallographic planesand in specific directions (i.e., slip systems). The foundations of crystal plastic-ity theory were laid down in the works of Taylor and Elam [129,130] and Tay-lor [128]. The concept was further developed by Rice [108], Hill and Rice [53],Asaro and Rice [6], Asaro and Needleman [5], Peirceet al. [100, 101] Bassaniand Wu [10], Cuitino and Ortiz [30], Gurtin [46] and Gurtin and Anand [48, 49].
11

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
Slip-rate and hardening constitutive relations in some of these models, particu-larly the early ones, have a strong phenomenological nature, whereas more recentmodels attempt to connect the slip mechanism to smaller length scale phenomenathrough dislocation-based constitutive relations.
In general, crystal plasticity models based on the classical Schmid stress (re-solved shear stress) provide satisfactory predictions forcrystalline materials withclose-packed structures, such as face-centered cubic lattices (FCC). However,phases with body-centered cubic lattices (BCC), such as ferrite, require additionalattention for the following reasons: (i) Due to the absence of close-packed planes,there is no clear definition of slip systems in BCC structures. The lack of ex-perimental observations with sufficient resolution has precluded reaching consen-sus among researchers regarding the crystallographic slipplanes that are activeduring plastic flow. This controversy has been aggravated since experimental ob-servations indicate that the trace of slips in BCC metals also depends on tem-perature [99, 113]; (ii) as opposed to FCC lattices, slip in BCC lattices behavesasymmetrically in the twinning and antitwinning directions [36, 54, 55], which, atmacroscopic scales, results in an asymmetric response in tension and compres-sion.
Several crystal plasticity-based models have been proposed for BCC metalswithin single-crystalline and polycrystalline contexts,for example, Nemat-Nasseret al. [90], Stainieret al. [118], Peeterset al. [97, 98] and Maet al. [82]. Thosemodels shared some similarities, e.g., the above models include the families of211 and321 planes as potential slip planes in order to solve the ambiguityof slip traces in BCC metals. On the other hand, the issues of asymmetric behav-ior of slip in the twinning and antitwinning directions is, unfortunately, not welladdressed. Since the model for BCC single crystals proposedhere is part of abigger framework of TRIP steel modeling, the accuracy on theprediction of theferritic stress-strain behavior, particularly the asymmetry in tension-compression,is important. In this chapter, a thermodynamically-consistent elasto-plastic modelfor BCC ferrite is developed. The present model is based on the non-glide stressformulation proposed by Bassaniet al. [9], which allows to predict the twinning-antitwinning asymmetric behavior in BCC crystals. The formulation of the elasto-plasticity model for ferrite single crystal is discussed inSection 2.1. Simulationsof single-crystalline ferrite with elementary loading modes are presented inSec-tion 2.2 in order to illustrate the key features of the present model.
12

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
2.1 Single crystal elasto-plastic model for ferrite
Plastic slip in BCC crystals operates through propagation of screw dislocationsalong the〈111〉 directions. Due to the lack of close-packed planes in BCC struc-tures, there is no clear consensus among researchers on which planes crystal-lographic slip occurs. Experimental observations often indicate slip traces along110, 211 and321 planes, and sometimes along non-crystallographic planes.However, higher resolution micrographs show that slip on321 and higher indexplanes appear in small wavy patterns, which can be interpreted as slip composedof alternating glide contributions along lower index planes [40, 54, 106]. Althoughslip traces along211 planes in BCC ferrite have been reported, particularly atand above room temperature, with the addition of silicon, which is the case forthe ferritic matrix in TRIP-assisted steels, it is observedthat slip occurs predom-inantly along the110 planes [113]. Furthermore, atomistic simulations per-formed by Vitek and co-workers [145, 146] indicate that slipalong211 planescan be constructed of equal segments of slip along alternating 110 planes. Ac-cordingly, it will be assumed in the present formulation that the systems corre-sponding to the110〈111〉 family are sufficient to describe slip in ferrite.
The classical approach in crystal plasticity theory is to assume that glidingalong an individual slip system is solely determined by the Schmid law, in whichthe resolved shear stress is equated with the correspondingcritical value represent-ing resistance against slip. Although this assumption works reasonably well forFCC metals, it cannot be directly applied to BCC crystals. Atomistic simulationsof BCC crystals performed by Duesbery and Vitek [36] have shown that for met-als with a BCC structure, the cores of1
2〈111〉 screw dislocations spread into three110 planes intersecting along the〈111〉 directions. The non-planar spreadingof a dislocation core causes the slip along an individual plane of the110 classto become dependent on resolved stresses acting on or normalto another110plane of the[111] zone, called the “non-glide plane”. The resolved stress act-ing on or normal to the non-glide plane is referred to as non-glide stress. In thepresent model, the effect of non-glide stress is incorporated following the ap-proach developed by Bassaniet al. [9, 145]. Although the non-glide stress modelwas originally derived based on atomistic simulations of BCC molybdenum andtantalum, it is assumed that the plastic slip in BCC ferrite can be described by asimilar mechanism. This assumption is reasonable since theferrite lattice sharesthe same generic features with the lattice of molybdenum andtantalum, e.g. the
13

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
X
mF
nF
x
Fp Fe
Reference configuration
Current configuration
Intermediate (or relaxed) configuration
F(x)
Infinitesimal neighborhood of x
y(x)
Figure 2.1: Schematic representation of the decompositionof deformation gradi-entF . VectorsmF andnF are, respectively, the slip direction and the slip planenormal of BCC ferrite in the intermediate (relaxed) configuration [47].
asymmetry of slip in twinning and antitwinning directions [55]. The validationof this assumption would require atomistic simulations of deformation of BCCferrite; however these fall outside of the scope of the present work.
2.1.1 Kinematics and configurations
Based on a large deformation theory, the total deformation gradientF is decom-posed as [6, 53, 77]
F = Fe Fp , (2.1)
whereFe is the elastic part of the total deformation gradientF , describing thedeformation due to elastic distortion of the lattice, andFp is the plastic part of thetotal deformation gradient representing deformation related to cumulative crys-tallographic slips. It is assumed that the plastic part of the deformation gradient,Fp, does not change the lattice structure and that the elastic properties of the ma-terial remain unaltered during a deformation process. As shown in Figure 2.1,the decomposition of the total deformation gradient can be illustrated through theintroduction of a reference configuration, an intermediate(relaxed) configurationand a current configuration. The plastic deformation gradient Fp maps a materialpoint from the reference configuration to the relaxed intermediate configuration.
14

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
In turn, the elastic deformation gradientFe projects the point from the intermedi-ate configuration to the current configuration. It is worth noting that, in general,the order of the decomposition does not correspond to the actual deformation se-quence and that the elastic and plastic parts do not correspond to the gradientsof globally-defined functions [47]. Furthermore, althoughthe present model isderived to study coupled thermo-mechanical problems, the decomposition of thetotal deformation gradient in (2.1) does not include the effect of thermal expan-sion/contraction. In this chapter, it is assumed that thermal expansion/contractionis relatively small, and thus, may be neglected. Nonetheless, the incorporation ofthe thermal expansion/contraction in the total deformation gradient will be dis-cussed inChapter 7.
The velocity gradient in the current configuration, denotedasL, can be writtenas the sum of the elastic partLe and the plastic partLp, i.e.,
L = F F−1 = FeF−1e + FeFpF
−1p F−1
e := Le + Lp . (2.2)
Note that the velocity gradientsLe andLp are measured in the current configura-tion. In the intermediate (relaxed) configuration, the plastic velocity gradientLp
is determined by the cumulative slip rates on all possible slip systems as
Lp := FpF−1p =
NF∑
i=1
γ(i)F m
(i)F ⊗ n
(i)F , (2.3)
where γ(i)F is the rate of slip on a systemi and the vectorsm(i)
F and n(i)F are,
respectively, unit vectors describing the slip direction and the normal to the slipplane of the corresponding system in the intermediate configuration. In view of(2.3), the rate of change in volume due to plastic slip is given by
d(det Fp)
dt= detFp tr Lp = det Fp
NF∑
i=1
γ(i)F m
(i)F · n(i)
F = 0 , (2.4)
where the last relation follows from the fact that the vectors m(i)F andn
(i)F are
orthogonal to each other for all slip systems, i.e.,m(i)F · n(i)
F = 0. Consequently,if the initial plastic deformation gradient is such thatdet Fp(0) = 1, it followsthatdetFp(t) = 1 for all t ∈ [0, T ], i.e., the plastic deformation is isochoric. Fur-thermore, the total velocity gradient in the current configuration L can be written
15

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
as
L = Le +
NF∑
i=1
γ(i)F m
(i)F ⊗ n
(i)F , (2.5)
wherem(i)F and n
(i)F are, respectively, the slip direction vector and the vector
normal to the slip plane measured in the current configuration, defined by
m(i)F = Fe m
(i)F and n
(i)F = F−T
e n(i)F . (2.6)
Clearly, from (2.6), the vectorsm(i)F andn
(i)F are not unit vectors.
2.1.2 Thermodynamic formulations
Decomposition of entropy density
The objective of formulating the model in a thermo-mechanical framework is toderive a consistent expression of the driving force for plastic slip. In thermo-mechanical processes, the entropy and temperature may be viewed as the thermalanalogues of deformation and stress, respectively [22, 143]. Hence, in analogyto the decomposition of the total deformation gradient in (2.1), the total entropydensity per unit mass,η, is decomposed as
η = ηe + ηp , (2.7)
whereηe represents the conservative (reversible) part of the entropy density andηp is the entropy density related to the plastic deformation process. Similar tothe entropy decomposition in the isotropic elasto-plasticity model of Simo andMiehe [116], the rate of change of the plastic entropy is assumed to be propor-tional to the rate of change of the plastic deformation, which here is measured bythe rate of slipγ(i)
F ,
ηp =
NF∑
i=1
γ(i)F φ
(i)F , (2.8)
whereφ(i)F is interpreted as the entropy density related to plastic deformation per
unit slip in systemi.
16

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
Balance principles and dissipation
Let P be the first Piola-Kirchhoff stress in the reference configuration, bf thebody force per unit reference volume anda the acceleration of a material pointx.Assuming that all variables are continuously differentiable, the balance of linearmomentum per unit volume in the reference configuration is given by
div P + bf = ρ0a , (2.9)
with ρ0 the ferrite mass density in the reference configuration.Furthermore, letǫ be the internal energy density per unit mass,q the heat flux
per unit reference area andr the body heat source per unit reference volume. Thebalance of total energy, combined with the balance of linearmomentum per unitreference volume can be expressed as
ρ0ǫ+ (div q − r) − P · F = 0 , (2.10)
where the termP · F is known as theinternal power.The rate of change of entropy per unit volume in the referenceconfiguration,
Γ, is defined byΓ := ρ0η + div Φ− s , (2.11)
whereΦ ands are, respectively, the entropy flux per unit area and the entropysource per unit volume in the reference configuration,
Φ =q
θand s =
r
θ, (2.12)
with θ the (absolute) temperature. Defining thedissipation densityper unit refer-ence volume asD := Γθ and invoking equations (2.10)-(2.12), the total dissipa-tion can be written as
D = −ρ0ǫ+ ρ0θη + P · F −∇θ ·Φ . (2.13)
Taking the time derivative of the total deformation gradient in (2.1) and combiningit with the expression for the plastic velocity gradient given in (2.3), provides thefollowing expression for the internal power:
P · F = P F Tp · Fe +
NF∑
i=1
τ(i)F γ
(i)F , (2.14)
17

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
whereτ (i)F is referred to as the resolved shear stress (or Schmid stress) for slip
systemi, given by
τ(i)F := F T
e P F Tp ·(
m(i)F ⊗ n
(i)F
)
. (2.15)
From expressions (2.7) and (2.8), the contribution of the term ρ0θη to the totaldissipation can be obtained as
ρ0θη = ρ0θηe +
NF∑
i=1
ζ(i)F γ
(i)F , (2.16)
where the quantityζ(i)F in (2.16) can be interpreted as the thermal analogue of the
resolved shear stress, as given by
ζ(i)F := ρ0θφ
(i)F . (2.17)
Subsequently, the rate of change of the internal energy density ǫ that appearsin (2.13) needs to be determined. The internal energy density in the present modelis decomposed into various mechanical and thermal contributions: The bulk strainenergy density is characterized by the elastic deformationgradientFe while thethermal energy density is dependent of the conservative entropy ηe. Furthermore,a scalar variableβF is introduced to represent the local strains (or distortions) ofthe BCC ferrite lattice associated with the presence of dislocations. Correspond-ingly, a lower length scale strain energy, called the lattice defect energy, can beexpressed as a function of the scalar microstrainβF . The internal energy densityǫ is assumed to be dependent of the state variablesFe, ηe andβF . In accordancewith the Coleman and Noll procedure [29], it is momentarily assumed that theinternal energy densityǫ also depends on the fluxesβF andΦ, i.e.,
ǫ = ǫ(Fe, ηe, βF ; βF ,Φ) . (2.18)
Using (2.14), (2.16) and (2.18), the expression for the total dissipation in (2.13)can be rewritten as
D =
(
P F Tp − ρ0
∂ǫ
∂Fe
)
· Fe + ρ0
(
θ − ∂ǫ
∂ηe
)
ηe
+
NF∑
i=1
(
τ(i)F + ζ
(i)F
)
γ(i)F − ρ0
∂ǫ
∂βFβF − ρ0
∂ǫ
∂βF
βF
−∇θ ·Φ − ρ0∂ǫ
∂Φ· Φ .
(2.19)
18

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
The second law of thermodynamics requires that the local entropy rate must benon-negative during any thermo-mechanical process, i.e.,Γ ≥ 0. This restrictionleads to a non-negative energy dissipation, i.e.D ≥ 0, since the (absolute) tem-peratureθ is strictly positive. Furthermore, the terms in (2.19) thatare multipliedwith the ratesFe, ηe, βF andΦ must vanish since otherwise a process could bespecified for which the dissipation is negative. This requirement results in
P = ρ0∂ǫ
∂FeF−T
p and θ =∂ǫ
∂ηe, (2.20)
and that the internal energy densityǫ does not depend on the fluxesβF andΦ.In anticipation of a constitutive model for hardening and inorder to simplify
the presentation, the rate of change of the scalar microstrain, βF , is taken to belinearly dependent of the rate of change of the plastic slip,γ
(i)F , as follows:
βF =
NF∑
i=1
w(i)F γ
(i)F , (2.21)
where the functionsw(i)F depend on the slip resistance, as will be discussed in
Section 2.1.5. From (2.20) and (2.21), the remaining non-zero terms of thetotaldissipation in (2.13) can be decomposed into the dissipation related to the plasticdeformation,Dp, and the dissipation due to the heat conduction process,Dq, i.e.
D = Dp + Dq , (2.22)
whereDp andDq are, respectively, given by
Dp :=
NF∑
i=1
(
τ(i)F + ζ
(i)F − ρ0
∂ǫ
∂βFw
(i)F
)
γ(i)F and Dq := −∇θ ·Φ . (2.23)
Following the formalism proposed by Onsager for irreversible thermodynamics(see e.g., [2, 22]), for each physical phenomenon where the energy is dissipated,a pair of conjugate quantities can be identified as an affinity(or driving force) andthe corresponding flux. In relation to the dissipation due toplastic deformation,Dp, the driving force for plastic slip along a systemi is defined by
g(i)F := τ
(i)F + ζ
(i)F − ρ0
∂ǫ
∂βFw
(i)F , (2.24)
19

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
whereas the rate of plastic slipγ(i)F is viewed as the corresponding flux. In re-
lation to the dissipation due to heat conduction,Dq, the affinity is given by thetemperature gradient,−∇θ, with Φ as the corresponding flux. In view of thedecomposition of the total dissipation (2.22), the dissipation inequality can bewritten as
D = Dp + Dq ≥ 0 . (2.25)
In the present model, it is assumed that the dissipation inequality holds for theplastic deformation and heat conduction processes independently, which resultsin
Dp ≥ 0 and Dq ≥ 0 . (2.26)
2.1.3 Constitutive relations and Helmholtz energy density
It is common practice to work with the Helmholtz energy density ψ instead ofthe internal energy densityǫ in order to use the temperature as an independentvariable instead of the entropy. The Helmholtz energy density, which depends onthe state variablesFe, θ andβF , can be obtained from the internal energy densityusing the following Legendre transformation1:
ψ(Fe, θ, βF ) = ǫ(Fe, ηe(Fe, θ, βF ), βF ) − θηe(Fe, θ, βF ) . (2.27)
Relations between partial derivatives of the Helmholtz andthe internal energydensities can be obtained by taking derivatives in (2.27) while holding the corre-sponding natural variables fixed, which results in
∂ψ
∂Fe=
∂ǫ
∂Fe,
∂ψ
∂θ= −ηe and
∂ψ
∂βF=
∂ǫ
∂βF, (2.28)
where the relation (2.20)2 was used to obtain (2.28)2.In order to fulfil the principle of material frame indifference, the Helmholtz
energy density (and also the internal energy density) cannot be dependent of thefull elastic deformation gradientFe. Alternatively, the elastic Green-LagrangestrainEe, which is based on the elastic stretch part only, is used instead. Theelastic Green-Lagrange strain is defined by
Ee :=1
2
(
F Te Fe − I
)
, (2.29)
1Note that on the right hand side of (2.27), it uses the productθηe instead of the more classicalexpressionθη, in accordance with the choice of state variables forǫ andψ.
20

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
with I the second-order identity tensor. Correspondingly, an alternative expres-sion for the Helmholtz energy density in terms of the elasticGreen-LagrangestrainEe is introduced such that
ψ(Ee, θ, βF ) = ψ(Fe, θ, βF ) . (2.30)
From the definition of the elastic Green-Lagrange strain in (2.29) and using thechain rule, the relation (2.28)1 becomes
Fe∂ψ
∂Ee=
∂ψ
∂Fe, (2.31)
where the symmetry of the elastic Green-Lagrange strainEe was used. Hence-forth, it is assumed that the Helmholtz energy densityψ can be written as
ψ(Ee, θ, βF ) = ψm(Ee) + ψth(θ) + ψd(βF ) , (2.32)
whereψm, ψth andψd represent the contribution of the bulk strain energy, ther-mal energy density and the lattice defect energy, respectively. Note that in thedecomposition of the Helmholtz energy density (2.32), the termsψm, ψth andψd
are fully decoupled.
Stress-elastic strain constitutive relation
Let S be the second Piola-Kirchhoff stress in the intermediate (or relaxed) con-figuration, which is related to the first Piola-Kirchhoff stressP measured in thereference configuration by
S = F−1e P F T
p . (2.33)
Note that the relation in (2.33) is derived by taking into account the fact thatJp := detFp = 1. From (2.20)1, (2.28), (2.31) and (2.33), the partial derivativeof the Helmholtz energy density with respect to the elastic Green-Lagrange strainis obtained as
∂ψ
∂Ee=
1
ρ0S . (2.34)
The second Piola-Kirchhoff stress in the intermediate configuration,S, andits work-conjugated strain measure, the elastic Green-LagrangeEe, are relatedconstitutively by
S = CF Ee , (2.35)
21

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
whereCF is the fourth-order elasticity tensor of the BCC ferrite. Interms of acommonly used6× 6 matrix representation (Voigt’s notation), the componentsofthe elasticity tensorCF can be written as
[CF ]F =
κF1 κF
2 κF2
κF2 κF
1 κF2
κF2 κF
2 κF1
κF3
κF3
κF3
F
, (2.36)
whereκF1 , κF
2 andκF3 are the elastic moduli of the BCC ferrite. The subindexF
in (2.36) indicates that the stiffness components ofCF are referred to the BCCferrite lattice basis. In the present model it is assumed that the elasticity tensorCF does not depend on the elastic strainEe nor on the temperatureθ. Hence,using the stress-strain constitutive relation (2.35) and through integrating the par-tial derivative (2.34) with respect toEe, the expression of the bulk strain energydensityψm(Ee) can be written as
ψm(Ee) =1
2ρ0CF Ee · Ee . (2.37)
Reversible entropy-temperature constitutive relation
Similar to the stress and elastic strain relation, the reversible part of the entropydensityηe is related constitutively to the temperatureθ as follows [136, 143]:
ηe = hF ln
(
θ
θF
)
+ ηF , (2.38)
wherehF is the specific heat of the BCC ferrite, which, in this case, isassumed tobe a constant (temperature-invariant), andθF andηF are, respectively, a referencetemperature and a reference entropy density. In view of (2.38), the derivative ofthe Helmholtz energy density with respect to temperature in(2.28)2 is given by
∂ψ
∂θ= −hF ln
(
θ
θF
)
− ηF . (2.39)
22

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
Through integrating (2.39) with respect to temperature, the thermal energy densityψth(θ) can be written as
ψth(θ) = −hF θ ln
(
θ
θF
)
+ (hF − ηF ) θ . (2.40)
Lattice defect energy density (cold work)
In addition to the bulk strain energy density, a lower scale elastic strain energydensity is introduced that accounts for the (elastic) distortion of the lattice dueto the presence of dislocations. This energy density term iscalled lattice defectenergyor cold work. The present model does not explicitly resolve the kinematicsand kinetics at the length scale of individual dislocations. Instead, an isotropicphenomenological model that is commonly used in the materials science literatureis adopted. According to this model, the elastic strain energy associated witha single dislocation is proportional toµb2, whereµ is an equivalent (isotropic)shear modulus andb is the magnitude of the Burger’s vector (see e.g., Hull andBacon [55]). Further, the expression for the defect energy per unit volume is givenby 1
2ωµb2ρd, whereρd measures the total dislocation line per unit volume andω
is a scaling factor for strain energy of an assembly of dislocations. For notationalconvenience, it is useful to introduce a strain-like internal variable, i.e.β := b
√ρd
(see also [27]).Adopting the above model, the lattice defect energy per unitmass,ψd, is
defined as a function that depends quadratically on the microstrainβF , i.e.,
ψd(βF ) :=1
2ρ0ωFµFβ
2F , (2.41)
whereωF andµF are, respectively, the scaling factor that accounts for an assem-bly of dislocations and the equivalent isotropic shear modulus of the BCC ferritelattice. The equivalent shear modulusµF can be determined in terms of the elasticmoduliκF
j , with j = 1, 2, 3, following the averaging procedure outlined in [141],which gives
µF =1
10
(
2(
κF1 − κF
2
)
+ 3κF3
)
. (2.42)
Hence, from the decomposition of the Helmholtz energy density (2.32) and using
23

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(2.37), (2.40) and (2.41), the Helmholtz energy density perunit mass is given by
ψ(Ee, θ, βF ) =1
2ρ0CF Ee · Ee +
1
2ρ0ωFµFβ
2F
− hF θ ln
(
θ
θF
)
+ (hF − ηF ) θ .(2.43)
2.1.4 Driving force, non-glide stress and kinetic law
Using the expression of the Helmholtz energy density given in (2.43) and in viewof (2.28)3, the driving force for plastic slip in systemi in (2.24) can be reformu-lated as
g(i)F = τ
(i)F + ζ
(i)F − ωFµFβFw
(i)F , (2.44)
with τ (i)F andζ(i)
F given by (2.15) and (2.17), respectively. Using (2.33),τ(i)F can
be written in terms of the second Piola-Kirchhoff stress as
τ(i)F = F T
e FeS ·(
m(i)F ⊗ n
(i)F
)
. (2.45)
As mentioned earlier in this chapter, the non-planar spreading of the cores of12〈111〉 screw dislocations causes the slip along an individual plane of the110class to become dependent on resolved stresses acting on or normal to the non-glide plane, i.e. another110 plane of the[111] zone. In accordance with themodel proposed by Bassaniet al. [9] (see also, Viteket al. [145]), the non-glidestressτ (i)
F corresponding to a slip systemi is defined as a resolved shear stressparallel to the slip direction acting on the non-glide plane, i.e.,
τ(i)F = F T
e FeS ·(
m(i)F ⊗ n
(i)F
)
, (2.46)
wheren(i)F is the unit vector perpendicular to the corresponding non-glide plane.
The choice of the non-glide plane for each slip systemi follows from the resultsof atomistic simulations [36, 146], which determines the asymmetry of slips. Forexample, the slip system[111](011) corresponds to the non-glide plane(110)whereas the opposite slip system[111](011) relates to the non-glide plane(101).The expression (2.46) for the non-glide stress is formally similar to the expression(2.45) for the Schmid stress, wheren
(i)F plays an equivalent role asn(i)
F . In accor-dance with the model of Bassaniet al. [9], the contributions of non-glide stressesacting perpendicular to the slip direction are not accounted for.
24

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
The effect of the non-glide stress on the evolution of plastic slip can be mod-eled by incorporating this term into the “effective” resistance against plastic slip,
s(i)F = s
(i)F − a(i)τ
(i)F , (2.47)
which includes the slip resistances(i)F and the effect of the non-glide stressτ (i)F ,
with a(i) a factor that determines the net contribution of the non-glide stress to the“effective” slip resistance.
In a rate-dependent crystal plasticity formulation, the evolution of plastic slipin a slip systemi is described using a kinetic law, which relates the driving forceg(i)F to the rate of slipγ(i)
F . The kinetic law must be defined such that it satisfiesthe requirement of non-negative energy dissipation. In thepresent model, thepower law kinetic relation proposed by Cuitino and Ortiz [30] is adopted, i.e.,(see also [88])
γ(i)F =
γF0
(
g(i)F
s(i)F
)(1/pF )
− 1
if g(i)F > s
(i)F ,
0 otherwise ,
(2.48)
whereγF0 andpF are, respectively, the reference slip rate and the rate-sensitivity
exponent. Both parameters have positive values. The kinetic law (2.48) will re-duce to a rate-independent model asγF
0 → ∞ and/orpF → 0 (see Figure 2.2).Notice that the above kinetic relation gives a distinction between the elastic
and plastic regimes explicitly. Furthermore, the power lawequation (2.48) alwaysleads to a non-negative plastic slip rate so that positive and negative senses of slipare accounted for separately. Plastic slip is initiated as soon as the driving forceof a slip system exceeds a critical value, i.e.,
g(i)F ≥ s
(i)F . (2.49)
2.1.5 Hardening and evolution of microstrain
In general, the magnitude of the slip resistances(i)F evolves during plastic de-
formations, which is defined through a hardening model. In the present work,
25

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(b)(a)
Plastic driving force gF(i)
Rat
e of
pla
stic
sli
p γ
F
(i)
.
Rat
e of
pla
stic
sli
p γ
F
(i)
.
Plastic driving force gF(i)
gF(i) = sF
(i)ˆ gF(i) = sF
(i)ˆ
increasing γ0
.
decreasing pFF
γ 0 →
∞
. F pF →
0
Figure 2.2: Rate of change of plastic slip as a function of plastic driving forceaccording to the kinetic relation (2.48) with variations of(a) reference slip rateand (b) rate-sensitivity exponent.
the evolution of the slip resistances(i)F is computed using the phenomenologicalmodel proposed by Peirceet al. [101],
s(i)F =
NF∑
j=1
H(i,j)F γ
(j)F , (2.50)
whereH(i,j)F is a matrix containing the hardening moduli with the diagonal terms
referring to self-hardening and the off-diagonal terms referring to cross-hardening,i.e.,
H(i,j)F =
k(j)F for i = j ,
qF k(j)F for i 6= j .
(2.51)
Here,qF defines the ratio between cross- and self-hardening moduli on each slipsystem, called thelatent hardening ratio, andk(j)
F is the single-slip hardeningmodulus of a slip systemj. The evolution law for the single-slip hardening mod-ulus is described by a power law equation proposed by Brownet al. [20], i.e.,
k(j)F = kF
0
(
1 − s(j)F
sF∞
)uF
, (2.52)
with kF0 a reference hardening modulus,sF
∞ the saturation value of the slip resis-tance, assumed to be identical for all slip systems, anduF the hardening exponent.
26

2.1. SINGLE CRYSTAL ELASTO-PLASTIC MODEL FOR FERRITE
In addition, the initial value of the slip resistances(i)F is given by
s(i)F (t = 0) = sF
0 . (2.53)
In the present model, the initial value for the slip resistance,sF0 , is assumed to be
the equal for all slip systems.When introducing the microstrain variableβF in Section 2.1.2, it was as-
sumed beforehand that the rate of change of the microstrain parameter was con-nected to the rate of change of plastic slip through the functionsw(i)
F (c.f., equation(2.21)). In line with the model proposed by Clayton [27], thestate variableβF
is constitutively related to the average value of the slip resistance, which in a rateform can be written as
cFµF βF =1
NF
NF∑
i=1
s(i)F , (2.54)
with cF a scaling factor that accounts for average hardening. The assumption ofisotropy in (2.54) is adopted for reasons of simplicity. Substituting (2.50) into(2.54) leads to the following expression for the rate of change of the microstrainβF :
βF =1
cFµFNF
NF∑
i=1
NF∑
j=1
H(i,j)F γ
(j)F . (2.55)
The functionsw(i)F can be related to the hardening moduli matrixH(j,i)
F by com-paring the expressions (2.55) and (2.21), which results in
w(i)F =
1
cFµFNF
NF∑
j=1
H(j,i)F . (2.56)
Summary of single crystal elasto-plasticity model for ferrite
For convenience, the main ingredients of the elasto-plasticity model for single-crystalline ferrite are summarized as follows: The decompositions of the defor-mation gradient (2.1) and the entropy density (2.7) are, respectively,
F = FeFp and η = ηe + ηp .
27

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
The evolution of the plastic parts of the deformation gradient, Fp, and of theentropy density,ηp, are, respectively, described by
Lp = FpF−1p =
NF∑
i=1
γ(i)F m
(i)F ⊗ n
(i)F and ηp =
NF∑
i=1
γ(i)F φ
(i)F .
The constitutive relations between conjugated variables,i.e., stress-elastic strain(2.35) and temperature-reversible entropy (2.38), are
S = CF Ee and ηe = hF ln
(
θ
θF
)
+ ηF .
The relation between plasticity driving force and the rate of plastic slip (kineticrelation) is given by
γ(i)F =
γF0
(
g(i)F
s(i)F
)(1/pF )
− 1
if g(i)F > s
(i)F ,
0 otherwise ,
where the driving force for plastic slipg(i)F includes the contributions of the re-
solved shear stress (Schmid stress), the plastic entropy density and the defect en-ergy, i.e,
g(i)F = F T
e FeS ·(
m(i)F ⊗ n
(i)F
)
+ ρ0θφ(i)F − ωFµFβFw
(i)F ,
and the “effective” slip resistances(i)F = s(i)F − a(i)τ
(i)F , which accounts for the
contribution of the “classical” slip resistance and the effect of the non-glide stress
τ(i)F = F T
e FeS ·(
m(i)F ⊗ n
(i)F
)
.
Finally, the evolution laws for the slip resistances(i)F (hardening model) and themicrostrainβF are, respectively, given by
s(i)F =
NF∑
j=1
H(i,j)F γ
(j)F and βF =
NF∑
i=1
w(i)F γ
(i)F ,
whereH(i,j)F andw(i)
F are, respectively given by (2.51) and (2.56).
28

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
[100]F-loaded [110]F-loaded [111]F-loaded
e1
F
e2
F e3
F
e1
F
e2
F
e3
F
e1
F
e2
F
e3
Ff1
f2
f3 Global axis
(0˚,0˚,0˚) (45˚,0˚,0˚) (45˚,35.26˚,0˚)
Figure 2.3: Schematic representation of the crystallographic orientation of theferrite single crystal samples with respect to the global basisf1,f2,f3.
2.2 Simulations of elasto-plastic deformation of single-crystalline ferrite
In order to illustrate the basic features of the crystal plasticity model for BCCferrite, the mechanical behavior of a single crystal ferritic sample is studied bymeans of numerical simulations. In the present work, three elementary loadingmodes are considered, namely (i) uniaxial tension and compression, (ii) simpleshear and (iii) plane-stress equibiaxial stretch. Furthermore, the analyses arecarried out considering three different crystallographicorientations, which, ex-pressed in terms of the “323”-Euler rotation (about the global basis with cartesianunit vectorsf1,f2,f3), are(0, 0, 0), (45, 0, 0) and(45, 35.26, 0), re-spectively, The above orientations are chosen such that theglobal f1-axis corre-sponds to, respectively, the[100]F , [110]F and[111]F directions, where the Millerindices refer to the basis of the BCC lattice, as illustratedin Figure 2.3.
2.2.1 Material parameters and validation
The parameters used in the crystal plasticity model with thenon-glide stress ef-fect for the BCC ferrite are discussed in this section. The elastic moduli forthe BCC ferrite used in (2.36) are obtained from the data reported in Kurdju-mov and Khachaturyan [73], i.e.,κF
1 = 233.5, κF2 = 135.5 andκF
3 = 118.0[GPa]. With these data, the equivalent (isotropic) shear modulus is obtained from(2.42) asµF = 55.0 GPa. The mass density of the ferrite (in the reference con-figuration) is assumed to be equal to the characteristic density of a typical car-
29

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
0
200
400
600
800
1200
1000
Ax
ial
Cau
chy s
tres
s T
11 [
MP
a]
0 0.025 0.050 0.075 0.100 0.125 0.150
Axial nominal strain ε11
Polycrystal model (Taylor average)
Experimental data
(75% ferrite + 25% bainite)
Figure 2.4: Axial stress-strain response of a Taylor-type polycrystalline samplefitted to experimental data of Jacqueset al. [63] for ferrite-based material.
bon steel,ρ0 = 7800 kg·m−3. For simplicity, it is assumed that the values ofthe weight parameters for the non-glide stress contribution used in (2.47) are thesame for all slip systems, i.e,a(i) = a. The value fora is calibrated from the dataof uniaxial tensile tests on single crystal BCC ferrite presented in [40], particu-larly, the data on the asymmetry of the resolved shear stressτ on the110 and211 (twinning and antitwinning) planes. Following the procedure highlightedin Bassaniet al. [9], the magnitude ofa is obtained by fitting the following curve:τ = τcr/[cos φ + a cos(φ + 60)] to the experimental data [40]. In this case,τcris the critical resolved shear stress on the maximum resolved shear stress plane(MRSSP), the angleφ defines the orientation of the MRSSP with respect to theslip plane anda is a parameter that characterizes the asymmetry ofτ in the twin-ning and antitwinning senses. This calibration procedure results ina = 0.12.
Furthermore, the parameters for the power-law kinetic model (2.48), i.e.,γF0
andpF , are chosen such that the overall response under quasi-static loading con-ditions is close to a rate-independent response. The purpose of introducing a smallrate-dependency is to avoid numerical singularity problems often encountered inrate-independent crystal plasticity models [88]. For thisreason, the parametersfor the kinetic model are taken asγF
0 = 0.001 s−1 andpF = 0.02, which fallwithin the typical range of values used in rate-dependent crystal plasticity models(see, e.g., [30, 88]).
The hardening parameters used in (2.52) and the initial slipresistance are
30

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
calibrated from the experimental uniaxial stress-strain data of a polycrystallineferrite-based material reported in [63]. Note that in this case the material used asa reference for the polycrystalline ferrite is a dual-phasematerial that consists of75% ferrite and25% bainite, which is representative of a typical (ferrite-based)matrix of multiphase TRIP-assisted steels. The influence ofthe bainite, whichitself is a fine mixture of ferrite and cementite, is implicitly lumped into the fer-rite. Ideally, a separate model for the bainite would be required, however this fallsoutside the scope of the present work. In the calibration procedure, the polycrys-talline response is simulated by combining the present crystal plasticity modelwith a Taylor averaging procedure (see Figure 2.4), which results inkF
0 = 1.9
GPa,sF∞ = 412 MPa,uF = 2.8 ands(i)F,0 := s
(i)F (t = 0) = sF,0 = 154 MPa (the
initial value for slip resistance is taken to be identical for all systems). In addition,the (isotropic) latent hardening ratio,qF = 1, is used.
The thermal part of the driving force is assumed the same for all slip sys-tems and its value is set toζ(i)
F = ρ0θφ(i)F = 10 MPa at the ambient temperature
(θ = 300 K). The values for parametersωF in (2.44) andcF in (2.54), which arerelated to the defect energy contribution, are obtained from the following heuristicapproach: The value forωF is chosen such that in the inelastic regime the orderof magnitude of the defect energy remains a relatively smallfraction of the bulkstrain energy, which leads toωF = 7.
The termscF is chosen such that the contribution of the defect energy to thedriving force is about10 % of the initial value of the critical resistance againstslip, which givescF = 5. In addition, it is assumed that the initial value for themicrostrain parameter,βF,0 = βF (t = 0), is related to the (common) initial slipresistance throughsF,0 = cFµFβF,0, which givesβF,0 = 5.6·10−4. The summaryof the parameters used in the BCC ferrite crystal plasticitymodel is presented inTable 2.1 and the list of the vectors of the slip directions, the vector normal to theslip planes and the vector normal to the non-glide planes forthe BCC ferrite canbe found inAppendix C.
2.2.2 Sample geometry and boundary conditions
The three elementary deformation (or loading) modes of the single-crystallineferritic samples studied in this section (i.e., uniaxial, simple shear and plane-stressequibiaxial stretch) are illustrated in Figure 2.5.
The single crystal ferrite is represented by a cubic sample with sides of length
31

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
Table 2.1: Summary of the material parameters used in the crystal plasticity modelfor the BCC ferrite.
Parameter(s) Value(s) Equation(s)
Elastic moduli κF1 = 233.5, κF
2 = 135.5, (2.36)κF
3 = 118.0 [GPa]Non-glide parameter a = 0.12 (2.47)Plastic kinetic law γF
0 = 0.001 s−1, pF = 0.02 (2.48)Hardening law sF
∞= 412, sF,0 = 154 [MPa] (2.51)-(2.52)
kF0 = 1.9 GPa,uF = 2.8, qF = 1
Thermal driving force ζ(i)F = ρ0θφ
(i)F = 10 MPa (2.44)
Defect energy βF,0 = 5.6 · 10−4, ωF = 7 (2.44),(2.55)cF = 5, µF = 55.0 GPa
Mass density ρ0 = 7800 kg·m−3
l (see Figure 2.5). In the first loading case, this cubical sample is subjected toa uniaxial tensile loading up to a nominal strain2 in the axial direction ofǫ11 =±0.25 along thef1-axis using a straining rate of10−4 s−1, which is obtained byimposing the following boundary conditions: (i) the displacement normal to theface is set to zero on three mutually perpendicular faces of the cubic sample; (ii)the normal displacementu1 is applied to the top surface, which is prescribed as
u1 =
10−4lt for tension,−10−4lt for compression,
(2.57)
with time t running from0 to 2500 s; (iii) the two remaining faces and the di-rections not specified above are traction-free. Due to anisotropy in the materialproperties of the sample, the above loading condition does not exactly correspondto a uniaxial tension (or compression). Nevertheless, the deviation from an aver-age uniaxial stress state is found to be negligible.
In the second loading case, the simple shear deformation is obtained by ap-plying a deformationz = z(x), which, with respect to the global basis, can bewritten in components as
z1(x) = x1 + γx2 , z2(x) = x2 , z3(x) = x3 , (2.58)
2The nominal strain tensor is defined asǫ := V − I , whereV is the left stretch tensor in thepolar decomposition of the total deformation gradientF .
32

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
Plane-stress biaxial stretchSimple shear deformationUniaxial tensile loadingf
1
f2
f3
f1
f2
f3
f1
f2
f3
l
γl
u1 u1
u2
Figure 2.5: Boundary conditions (loading modes) applied tothe single crystalferrite samples, i.e., uniaxial tensile loading, simple shear deformation and plane-stress equibiaxial stretch.
whereγ represents the amount of shear applied to the sample, described byγ =10−4t, with time t running from0 to 2500 s.
In the last loading case, the sample is subjected to plane-stress equibiaxialstretch boundary conditions, which are defined as follows: (i) on three mutuallyperpendicular faces intersecting at the origin, the displacement normal to eachof these faces is set to zero; (ii) normal displacementsu1 andu2 are applied,respectively, to the top face and to the front face (that is perpendicular to thef2-axis), as follows:
u1 = u2 =
10−4lt for tension,−10−4lt for compression,
(2.59)
with time t running from0 to 1200 s (up to nominal strainsǫ11 = ǫ22 = 0.12);(iii) the remaining face and the directions not specified above are traction-free. Foreach of the above cases, three different crystallographic orientations described inthe beginning of this section are simulated and analyzed.
2.2.3 Stress-strain response of single-crystalline ferrite
Prior to the discussion of the results, it is useful to introduce the total accumulatedplastic slipγF , defined as the sum of the accumulated plastic slip of all systemsi,i.e,
γF :=
N∑
i=1
γ(i)F . (2.60)
33

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1)
(3)
(2)
(3)
(1)
(2)
(4)
(4)
-1200
-900
-600
-300
0
1200
900
600
300C
auch
y s
tres
s T
11 [
MP
a]
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(4) Polycrystal
-0.20 -0.15 -0.10 -0.05 0 0.05 0.10 0.15 0.20
Logarithmic strain e11
Figure 2.6: Cauchy stressT11 depicted against logarithmic straine11 of single-and polycrystalline ferrite samples undergoing uniaxial tension and compression.
and the logarithmic strain measure,e, defined as
e := ln V , (2.61)
whereV is the left stretch tensor in the polar decomposition of the total deforma-tion gradientF , i.e.,F = V R, with R the rotation tensor. The logarithmic strainis a convenient measure in large deformation simulations due to the followingreasons [69]: (i) it preserves tension-compression symmetry, (ii) its volumetric-deviatoric decomposition is additive, and (iii) the logarithmic strains of two sub-sequent deformations with the same principal stretch directions are additive.
Uniaxial tension and compression
Figure 2.6 shows the Cauchy stress componentT11 in the axial direction plottedagainst the corresponding axial logarithmic straine11 of the single-crystalline fer-ritic samples loaded under uniaxial tension and compression. It can be observedthat the sample loaded in the[111]F direction gives the highest level of stress ofthe three crystallographic orientations (about980 MPa in tension and−930 MPain compression measured at an axial logarithmic strain of±0.2). In uniaxial ten-sion, the sample loaded in the[110]F direction shows a higher level of stress thanthe[100]F -loaded sample whereas an opposite trend is observed in uniaxial com-pression. These results were obtained including the effectof the non-glide stress
34

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(2)
(3)
(1)
(3)
200
0
1200
1000
800
600
400
Cau
chy s
tres
s T
11 [
MP
a]
0 0.05 0.10 0.15 0.20
Logarithmic strain e11
-1000
-1200
0
-200
-400
-600
-800
Cau
chy s
tres
s T
11 [
MP
a]
-0.20 -0.15 -0.10 -0.05 0
Logarithmic strain e11
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1)* (2)*
(1)
(3)*
(3)*
(1)* (2)*
(2)
(b)(a)
Figure 2.7: Comparison of the axial stress-strain responses between the results ofsimulation with non-glide stress effect and the classical Schmid law (plotted inthinner lines and their labels are indicated with an asterisk) in (a) uniaxial com-pression and (b) uniaxial tension.
in (2.47). In comparison, the classical crystal plasticitymodel (Schmid law, witha set to zero in (2.47)) predicts thesamestress-strain behavior for the[100]F -and [110]F -loaded samples, both in tension and compression, as shown in Fig-ures 2.7a and b (curves with an asterisk). The difference between the predictionsof the present BCC crystal plasticity model with the non-glide effect and those ofthe classical Schmid law for the[100]F -loaded sample in tension and the[110]F -and [111]F -loaded samples in compression is due to the fact that in these threecases the non-glide stresses for the active slip systems arepositive (and equal forall active systems). Consequently, the magnitude of the effective slip resistances(i)F is smaller than the magnitude ofs(i)F that solely determines the resistance
against slip in the classical Schmid law. Furthermore, Figure 2.6 shows that forthe (Taylor-type) polycrystalline sample, the magnitude of the stress in uniaxialtension is about5 % higher than the magnitude of stress in uniaxial compression.The asymmetry of the stress-strain response in tension and compression for thepolycrystalline sample is in agreement with the yield surface reported in [145].
Figure 2.8 shows the evolution of the amount of plastic slipγF as a functionof the axial logarithmic straine11. The results of the present model with non-glide stress effect incorporated are plotted in thick lines, whereas the results ofthe corresponding samples simulated using the classical Schmid law are printedin thinner lines. It can be observed from Figure 2.8 that the simulations using
35

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1) (2)
(1)* (2)*
(1) (2)
(1)* (2)*
(3) (3)*
(3) (3)*
0
0.150
0.300
0.450
0.900
0.750
0.600
-0.20 -0.15 -0.10 -0.05 0 0.05 0.10 0.15 0.20
Logarithmic strain e11
Am
ount
of
pla
stic
sli
p γ
F
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
Figure 2.8: Evolution of the accumulated plastic slipγF as a function of logarith-mic straine11 of single-crystalline ferrite during uniaxial tension andcompres-sion, simulated using the non-glide stress model and the classical Schmid law.
the classical Schmid law and the model with the non-glide stress included re-sult in a virtually similar prediction in terms of the total amount of plastic slip(constructed from the same number of active slip systems with equal contributionfrom each system). This result confirms that upon uniaxial tension and compres-sion, the asymmetry in the axial stress-strain response is only related to the effectof the non-glide stress. Furthermore, the highest amount ofplastic slip is ob-served for the[111]F -loaded sample, both in tension and compression. For thesamples loaded in the[100]F and[110]F directions, the total amounts of slip arenearly identical, despite of the difference in the stress-strain curve, see Figure 2.6.The simulations further indicate that there are eight equally active slip systems inthe [100]F -loaded sample during uniaxial tension and compression, whereas the[110]F -loaded sample shows the trace of only four equally active slip systems,but with twice the amount of slip per system generated in comparison to the othersamples. For the[111]F -loaded sample, six equally active slip systems are ob-served during uniaxial tension and compression. In all cases, the slip systemsactive during uniaxial compression are, in fact, the mirrorof those activated inuniaxial tension.
Figure 2.9 depicts the defect energyψd relative to the bulk elastic strain en-ergyψm during uniaxial tension and compression. In this case, the defect energyis calculated using (2.41), while the bulk strain energy is computed from (2.37). It
36

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1)
(3)
(2)
(1)
(3)
(2)
0
0.05
0.10
0.15
0.30
0.25
0.20
-0.20 -0.15 -0.10 -0.05 0 0.05 0.10 0.15 0.20
Logarithmic strain e11
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loadedD
efec
t-to
-str
ain e
ner
gy r
atio
ψd /ψ
m
Figure 2.9: Ratio between defect energyψd and bulk elastic strain energyψm
as a function of logarithmic straine11 of single-crystalline ferrite during uniaxialtension and compression.
can be observed that the magnitude of the defect energy (in the inelastic regime)is a relatively small fraction (about0.10 up to 0.25) of the bulk strain energy.Note that the magnitude of the defect-to-bulk strain energyratio goes to infinityat zero strain, due to the fact that the bulk strain energyψm → 0 at e11 = 0. Ingeneral, the defect-to-bulk strain energy ratio shows a plateau-type response dur-ing the later stage of deformation (in the inelastic regime). This result suggeststhat the increase in the defect energy is virtually proportional to the bulk strainenergy. During plastic deformation, the magnitude of the slip resistances(i)F in-creases (the mechanism of hardening). The microstrain parameterβF increasesin accordance with (2.54). Conversely, in the absence of thenon-glide effect andfor a steady set of active slip system, the stress level (and thus, the elastic strain)increases with increasing resistance against slip. As a result, the ratio between thedefect energy and the bulk strain energy is constant during plastic deformation,since both energies increase with the slip resistances
(i)F (almost) linearly. Fur-
thermore, as can be seen from Figure 2.9, the[110]F -oriented sample gives thehighest defect-to-bulk strain energy ratio in both tensionand compression. This isdue to the[110]F -oriented sample having a relatively low bulk strain energywhencompared to other samples ([100]F - and[111]F -oriented), whereas in terms of theamount of defect energy, all three samples show relatively similar values.
37

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(3)
(1)
(2)
0 0.05 0.10 0.15 0.20 0.250
200
400
1000
800
600
Amount of shear γ
Cau
chy s
tres
s T
12 [
MP
a]
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1)*
(2)*(3)*
Figure 2.10: Cauchy stressT12 as a function of the amount of shearγ of single-crystalline ferrite samples undergoing simple shear deformation. The stress-strainresponses resulting from the corresponding simulations using the classical Schmidlaw are depicted in thinner lines and their labels are markedwith an asterisk.
Simple shear deformation
Figure 2.10 illustrates the Cauchy stress componentT12 plotted against the amountof shearγ for single crystal ferritic samples under simple shear deformation.Thick-line curves represent the prediction of the present BCC single crystal plas-ticity model with the non-glide stress effect included and thin-line curves labeledwith an asterisk correspond to the curves obtained using a classical crystal plastic-ity model (Schmid law). Under simple shear deformation, thehighest stress-strainresponse is shown by the[100]F -oriented sample (curves1 and1∗) whereas thelowest stress-strain response is given by the[111]F -oriented sample (curves3 and3∗). The initial yield stress of the three samples predicted using the crystal plastic-ity with non-glide stress effect is lower than that obtainedby the classical Schmidlaw, as indicated in Figure 2.10. In terms of the strain hardening behavior, thepresent BCC elasto-plasticity model predicts a similar hardening rate comparedto the prediction of the classical Schmid law for the[100]F - and[111]F -orientedsamples. In contrast, for the[110]F -oriented sample, the hardening rate predictedby the present model (curve2) is significantly higher than that obtained fromthe classical Schmid law (curve2∗). This difference stems from the fact thatthe model with the non-glide stress effect gives a differentset of active slip sys-
38

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1) (1)*
(2)*(3)
(3)*
(2)
0
0.150
0.300
0.900
0.750
0.600
0.450
0 0.05 0.10 0.15 0.20 0.25
Amount of shear γ
Am
ount
of
pla
stic
sli
p γ
F
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
Figure 2.11: Evolution of the accumulated plastic slipγF as a function of theamount of shearγ of single-crystalline ferrite samples during simple shearde-formation, simulated using the non-glide stress model and the classical Schmidlaw.
tems during plastic deformation than that with the classical Schmid law. For the[110]F -oriented sample, during the initial stage of plastic deformation, two activeslip systems are observed for both models. However, the non-glide stress modelshows that four additional slip systems are activated in thesubsequent deforma-tion stage, whereas the number of active slip systems remains constant with theclassical Schmid model. For the[100]F -oriented sample, this results in the sim-ulation with the non-glide stress effect incorporated predicting a higher effectivestress-strain response than that using the classical Schmid law.
In addition, the evolution of the accumulated plastic slipγF for the simula-tions with the non-glide stress effect is presented in Figure 2.11. For comparison,the corresponding results from the classical Schmid law arepresented in the samefigure, plotted with thinner lines. In general, the results of the simulations us-ing both models are similar, except for the[110]F -oriented sample, where thenon-glide stress model shows a larger amount of plastic slipthan that predictedwith the classical Schmid law. This is due to the fact that thenon-glide stressmodel activates more slip systems during the plastic deformation than the classi-cal Schmid law. Nevertheless, in terms of the effect of crystallographic orienta-tion, both models show a similar trend; the largest amount ofaccumulated plasticslip corresponds to the[100]F -oriented sample while the[111]F -oriented sample
39

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1)
(3)
(2)
0
0.10
0.20
0.30
0.60
0.50
0.40
0 0.05 0.10 0.15 0.20 0.25
Amount of shear γ
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
Def
ect-
to-s
trai
n e
ner
gy r
atio
ψd /ψ
m
Figure 2.12: Ratio between defect energyψd and bulk elastic strain energyψm
as a function of the amount of shearγ of single-crystalline ferrite during simpleshear.
gives the smallest amount of slip.
The evolution of defect energyψd relative to the bulk strain energyψm dur-ing simple shear is presented in Figure 2.12 as a function of the amount of shearγ. The [111]F -oriented sample shows a significantly high defect-to-bulkstrainenergy ratio (above0.40) during simple shear deformation, whereas the othersamples show much lower defect-to-bulk strain energy ratio(below 0.15). Thisremarkable result is due to the fact that the[111]F -oriented sample gives the low-est shear stress, as shown in Figure 2.10. Since the corresponding component ofthe elastic stiffness is relatively high, there is only limited amount of elastic shearstrain, as a result of which the bulk strain energy is remarkable low. Similar tothe previous cases for uniaxial tension and compression, the ratio between thedefect energy and the bulk strain energy is, in general, constant during plastic de-formation, which is indicated by a plateau-type response. However, a significantdecrease ofψd/ψm is observed for the[110]F -oriented sample in the early stageof deformation. This behavior coincides with the activation of four additional slipsystems, which eventually gives rise to a rapid increase in the shear stress (andthus, the elastic strain energy), while the defect energy increases more gradually.
40

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1) (2)T
11=T
22
(4)T11
=T22
(4)T11
=T22
(3)T11
(3)T22
(1) (2)T
11=T
22
(3)T11
(3)T22
-1200
-900
-600
-300
0
1200
900
600
300C
auch
y s
tres
s T
11 a
nd T
22 [
MP
a]
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(4) Polycrystal
-0.100 -0.075 -0.050 -0.025 0 0.025 0.050 0.075 0.100
Logarithmic strain e11
Figure 2.13: Cauchy stressesT11 andT22 depicted against logarithmic straine11of single- and polycrystalline ferrite samples in plane-stress equibiaxial stretch.
Plane-stress equibiaxial stretch
The stress-strain responses, i.e., the Cauchy stress componentsT11 andT22 plot-ted against the logarithmic straine11 of the single-crystalline austenitic samplesunder plane-stress equibiaxial stretch, are shown in Figure 2.13. It can be ob-served that the response of the[100]F - and[110]F -loaded samples (curves1 and2) are identical. As mentioned at the beginning of this section, the crystallo-graphic orientation of the[110]F -oriented sample is defined by a rotation of45
about thef3-axis. Therefore, due to the symmetry with respect to the loading, the[100]F - and[110]F -oriented samples are identical under equibiaxial stretch(rota-tional symmetry in thef1-f2 plane). Hence, for the[100]F - and[110]F -orientedsamples, the stress componentsT11 andT22 are equal to each other. For these twoorientations, the stress-strain response in tension is higher than in compression,e.g.,T11 = T22 = 635 MPa in tension andT11 = T22 = 550 MPa in compressionat an axial logarithmic strain ofe11 = ±0.1. For the[111]F -oriented sample, thestress componentsT11 andT22 are different from each other due to a lack of sym-metry in the crystal orientation and the loading. In that case, the initial yield stressfor the T11 component is significantly higher than that for theT22 component,both in tension and compression. Further, while the strain hardening in theT22
stress component duringcompressionis relatively low, there is a more significanthardening duringtension. For a (Taylor-type) polycrystalline sample, the stress
41

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(3)
(1) (2)
(3)
(3)
(1) (2)
200
0
1200
1000
800
600
400
Cau
chy s
tres
s T
11 [
MP
a]
0 0.025 0.050 0.075 0.010
Logarithmic strain e11
-1000
-1200
0
-200
-400
-600
-800
Cau
chy s
tres
s T
11 [
MP
a]
-0.100 -0.075 -0.050 -0.025 0
Logarithmic strain e11
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1)* (2)*
(3)*
(3)*
(1)* (2)*
(1)
(2)
(b)(a)
(d)(c)
200
0
1200
1000
800
600
400
Cau
chy s
tres
s T
22 [
MP
a]
0 0.025 0.050 0.075 0.010
Logarithmic strain e11
-1000
-1200
0
-200
-400
-600
-800
Cau
chy s
tres
s T
22 [
MP
a]
-0.100 -0.075 -0.050 -0.025 0
Logarithmic strain e11
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1)* (2)*
(3) (3)*
(3)*
(1)* (2)*
(1)
(2)
T11
tension
T11
compression
T22
tensionT22
compression
Figure 2.14: Comparison of the stress componentsT11 andT22 predicted by themodel with non-glide stress effect and the classical Schmidlaw (plotted in thinnerlines and indicated with an asterisk) under plane-stress equibiaxial stretch.
componentsT11 andT22 are equal to each other, as shown in Figure 2.13. Further,the simulations indicate that the strength of the polycrystalline sample in tension isslightly lower than that in compression (e.g., ate11 = 0.1, T11 = T22 = 725 MPain tension andT11 = T22 = 740 MPa in compression). As for the case of uniax-ial deformation, the equibiaxial tension/compression asymmetric response of thepolycrystalline sample is in agreement with the yield surface reported in [145],which shows that the yield stress in equibiaxial tension islower than in equibiax-ial compression.
To investigate the role played by the non-glide stress, the response predictedby the BCC crystal plasticity model with the non-glide stress effect included iscompared to that of a model with the classical Schmid law, seeFigures 2.14a-d.
42

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1) (2)
(1)* (2)*
(1) (2)
(1)* (2)*
(3) (3)* (3)
(3)*
0
0.150
0.300
0.450
0.900
0.750
0.600
-0.100 -0.075 -0.050 -0.025 0 0.025 0.050 0.075 0.100
Logarithmic strain e11
Am
ount
of
pla
stic
sli
p γ
F
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
Figure 2.15: Evolution of the accumulated plastic slipγF as a function of logarith-mic straine11 of single-crystalline ferrite samples during plane-stress equibiaxialstretch, simulated using the model with non-glide stress effect and the classicalSchmid law.
As can be observed in Figures 2.14b and d, the stressesT11 andT22 for the[100]F -and[110]F -oriented samples calculated with and without non-glide stress effectsare identical. This situation arises since the non-glide stresses corresponding toall active slip systems intensionare zero. Differences can be observed in thestress-strain response during equibiaxialcompressionshown in Figures 2.14a andc, where the present model with the non-glide stress effect shows relatively softerresponses (curves1 and2) than the responses related to the classical Schmid law(curves1∗ and2∗). For the[111]F -oriented sample, the model with the non-glidestress effect (curve3) predicts lower stresses than those obtained from the classicalmodel (curve3∗), except for the stress componentT22 in compression, where bothmodels give similar predictions.
Figure 2.15 shows the evolution of the total amount of plastic slip γF as a func-tion of the logarithmic straine11. It can be observed that, similar to those underuniaxial tension and compression, the amount of plastic slip γF for each sampleobtained with the non-glide stress model is virtually identical to the correspondingresult using the classical Schmid law. From this result (andalso from Figure 2.8for the case of uniaxial tension/compression), it can be concluded that upon sym-metric deformations (e.g., uniaxial tension/compressionand equibiaxial stretch),the number of activated slip systems and the magnitude of slip in each slip sys-
43

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
(1) (2)
(3)
(3)
(1) (2)
0
0.03
0.06
0.09
0.18
0.15
0.12
-0.100 -0.075 -0.050 -0.025 0 0.025 0.050 0.075 0.100
Logarithmic strain e11
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loadedD
efec
t-to
-str
ain e
ner
gy r
atio
ψd /ψ
m
Figure 2.16: Ratio between defect energyψd and bulk elastic strain energyψm asa function of logarithmic straine11 of single-crystalline ferrite during plane-stressequibiaxial stretch.
tem are characterized solely by the deformation kinematics, while the effect of thenon-glide stress gives the asymmetry in the stress-strain response. Furthermore,the evolution of plastic slipγF for the samples oriented in[100]F and[110]F di-rections are identical, since both have the same crystallographic orientation withrespect to the applied loading. Among the three crystallographic orientations con-sidered in the present simulations, the[111]F -oriented sample (curve3) gives thehighest magnitude of accumulated plastic slip, both in tension and compression.
Figure 2.16 illustrates the ratio between the defect energydensityψd and thebulk strain energy densityψm as a function of the axial straine11 for single-crystalline ferritic samples under plane-stress equibiaxial stretch. As shown inthis figure, the[100]F - and [110]F -oriented samples show virtually identical re-sponses, since under the present equibiaxial stretch, these two samples are equiv-alent from a crystallographic point of view. Although it is not shown here, allsamples give a similar bulk strain energy level during tension. Since the[111]F -oriented sample shows a higher magnitude of accumulated slip γF (and thus,largerβF , see (2.54)) as indicated in Figure 2.15, the defect-to-bulk strain en-ergy ratio in the[111]F -oriented sample is higher than that in the other samplesduring tension, and lower during compression. On the whole,the defect-to-bulkstrain energy ratio for ferritic samples during plane-stress equibiaxial stretch isrelatively low (i.e., around0.10) in tension and compression, in comparison with
44

2.2. SIMULATIONS OF ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
the other loading cases (uniaxial tension/compresion and simple shear).
Summary of the elasto-plastic deformation of single-crystalline ferrite
A crystal plasticity model has been used to simulate the elasto-plastic behavior ofsingle-crystalline BCC ferrite. The model includes the effect of non-glide stressesin order to capture the twinning-antitwinning asymmetric response, which gener-ates the characteristic tension-compression asymmetry experimentally observedin BCC metals [36, 54, 55]. The kinematics of the model are formulated withina large deformation framework and the constitutive model isderived from a ther-modynamically consistent formulation.
In order to highlight the basic features of the model, elementary simulationshave been performed for single-crystalline ferritic samples, where three loadingcases have been considered, namely, uniaxial loading, simple shear deformationand plane-stress equibiaxial stretch. The results are compared with the predictionsusing a classical crystal plasticity model with the Schmid law. The comparisonsshow that the non-glide stress effect gives a significant contribution, particularyfor the single-crystalline samples loaded under uniaxial tension/compression andequibiaxial stretch. Under uniaxial loading, the model predicts that the compres-sive yield stress for the (Taylor-type) polycrystalline samples is higher than theyield stress under tension. In contrast, the polycrystalline yield stress in equibi-axial compression is lower than in equibiaxial tension. In simple shear deforma-tion, the most prominent result of the non-glide stress model is the prediction ofa higher hardening rate for the[110]F -loaded sample. The asymmetric responsefor ferrite has been neglected in some models found in the literature based on theargument that it gives only a secondary effect (see, e.g., [118]). Although thismight be a reasonable argument for polycrystalline samplescomposed of ferriteonly, the simulations presented in this chapter indicate that this effect is importantat the level of a single crystal. Consequently, the asymmetry is relevant for mul-tiphase materials that have a non-random texture, such as TRIP-assisted steels,where the behavior of grains of austenite depend on the individual response ofadjacent ferritic grains in the matrix.
45

CHAPTER 2. ELASTO-PLASTIC DEFORMATION OF SINGLE-CRYSTALLINE FERRITE
46

3Elasto-plastic-transformation behavior of
single-crystalline austenite
The presence of metastable retained austenite grains is thought to be responsi-ble for the superior strength-ductility characteristics of TRIP-assisted multiphasesteels [64]. Upon the application of mechanical and/or thermal loadings, thegrains of retained austenite can transform into martensiteand generate the TRIPeffect. The investigation of the TRIP effect was initiated by Greenwood and John-son [45] in 1965, where in a test specimen, irreversible plastic deformations wereobserved at a stress lower than the theoretical yield stressof the material. It hasbeen suggested that the additional plastic deformation of the material is inducedby the volumetric growth accompanying the transformation of retained austen-ite into martensite (see, e.g., Fischeret al. [39]). In the same year, Patel andCohen [96] observed that during transformation martensitedevelops in a pre-ferred orientation that maximizes the transformation driving force. Accordingly,to understand these two mechanisms in more detail, the modeling of the TRIPeffect should focus on (i) the elasto-plastic accommodation in the transforming(austenitic) region as well as in the neighboring phases and(ii) the effect of thecrystalline orientation on the transformation of austenite to martensite [39, 64].
47

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
In the pioneering work of Wechsleret al. [148], a crystallography-based modelwas proposed to describe the kinematics for a martensitic transformation. Thisconcept was refined by Ball and James [7], who further developed the modelingconcept within the energy minimization landscape. During the last decades, vari-ous constitutive models for martensitic transformations have been developed, suchas the one-dimensional transformation model of Olson and Cohen [93], whichwas extended into a three-dimensional model by Stringfellow et al. [120]. Fur-ther, more complex micromechanical models were proposed, such as those ofLeblondet al. [75, 76], Bhattacharyya and Weng [16], Marketz and Fischer[85,86], Tomita and Iwamoto [138, 139], Dianiet al. [32, 33], Cherkaouiet al. [24,25], Levitaset al. [79, 80], Taleb and Sidoroff [127] and Rompaeyet al. [109,110]. These models have been used, particularly, for simulating the mechanismof irreversible martensitic transformations in TRIP-assisted steels. In addition,related models have been developed for describing martensitic phase transforma-tions in shape-memory alloys (SMAs) (see, e.g., Thamburajaand Anand [132],Govindjee and Miehe [44] and Anand and Gurtin [3]). Despite the fact that themartensitic transformation in SMAs is reversible upon reversal of loading andthat plastic deformations in SMAs remain absent, the mechanisms are similar to inTRIP steels. However, the models mentioned above have some critical drawbacks;most of the models were developed within a small-strain framework, which canlead to inaccurate predictions since martensitic transformations can induce locallylarge elastic and plastic deformations, even if the effective macroscopic deforma-tion is relatively small. This aspect can be important, particularly in the modelingof the TRIP effect. Further, often the assumption of an isotropic elasto-plasticresponse is applied for. This assumption may be quite strong, particulary for anal-yses at smaller length scales (e.g., at the single-crystal level), where the effect ofanisotropy due to crystallographic orientations cannot beneglected. Experimentalobservations clearly show that the elasto-plastic deformation and the transforma-tion behavior of austenite are dependent upon the crystallographic orientation ofthe austenite grain [41, 72, 91].
In the present chapter, a crystallography-based model for describing the elasto-plastic-transformation behavior of single-crystalline austenite is developed. Theelasto-plastic-transformation model is constructed within the finite deformationframework, and is derived by coupling the martensitic phasetransformation modelof Turteltaub and Suiker [141, 143] with an elasto-plasticity model for singlecrystal austenite. The formulation of the elasto-plastic-transformation model for
48

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
austenite is discussed inSection 3.1. Simulations of elementary loading modesare presented inSection 3.2, which illustrate the key-features of the elasto-plastic-transformation model.
3.1 Single crystal elasto-plastic-transformation model foraustenite
A constitutive model that describes the elasto-plastic-transformation behavior ofsingle-crystalline austenite is developed from thermo-mechanical considerations.For the derivation of this constitutive model, the multiscale martensitic phasetransformation model developed by Turteltaub and Suiker [141, 143] is adopted,which describes the transformation of austenite to martensite in absence of plasticdeformation in the austenitic phase. The model of Turteltaub and Suiker [141,143] is thus intended for modeling the constitutive behavior of multiphase carbonsteels and for shape-memory alloys where the generation of plastic deformation inthe austenitic phase does not contribute significantly to the overall response. Thecrystallographic information for this model follows from the theory of martensitictransformations [7, 148]. For the transformation from face-centered cubic (FCC)austenite to body-centered tetragonal (BCT) martensite, the crystallographic the-ory of martensitic transformations predicts the habit planes1 as well as the ori-entations of the martensitic variants for each of the24 possible transformationsystems. Furthermore, this information is used to estimatethe effective stiffnessand the transformation evolution at the grain level. The martensitic transforma-tion model is integrated with a single crystal plasticity model for FCC austeniteto account for the development of plastic deformations in the austenitic parentphase. The coupling between transformation and plasticityis formulated within athermo-mechanically consistent framework.
3.1.1 Kinematics and configurations
In this section, the kinematic description of the elasto-plastic-transformation de-formation of single-crystalline austenite is formulated within a finite deformation
1A habit plane is a plane that defines the interface between theaustenitic parent phase andmartensitic product phase.
49

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
X
Fp
Fe
Reference configuration
Current configuration
Intermediate I configuration
F(x)
Infinitesimal neighborhood of x
y(x)
mA
nA
Ftr
Intermediate II configuration
Martensitic plate (transf. system)
bd
x
Figure 3.1: Schematic representation of the decompositionof deformation gradi-entF . Vectorsb andd are, respectively, the transformation shape-strain vectorand the habit plane normal measured in the reference configuration, whereasmA
andnA defines the slip direction and the slip plane normal of austenite in thesecond intermediate configuration.
theory, where the total deformation gradientF is multiplicatively decomposed as
F = Fe Fp Ftr , (3.1)
with Fe, Fp andFtr the effective elastic, plastic and transformation contributionsto the total deformation gradient, respectively. The triple decomposition (3.1)relates to the four configurations illustrated in Figure 3.1. A material point inthe reference configuration, denoted byx, is assumed to encompass an infinites-imal microstructural neighborhood, where in addition to anelastic deformation,an austenitic sub-domain may deform plastically and/or transform to one or moremartensitic transformation systems. Although a detailed multiscale analysis isoutside of the scope of the present model, it is assumed that lower-scale defor-mations are captured in an average sense inFe, Fp andFtr in the decomposition(3.1). The transformation deformation gradientFtr maps a material point fromthe reference configuration to the first intermediate configuration and, in turn, theplastic deformation gradientFp maps the point from the first intermediate config-uration to the second intermediate configuration. Finally,the elastic deformation
50

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
gradientFe defines the mapping of the point from the second intermediateconfig-uration to the current configuration. It is important to notethat the decompositionof the deformation gradient (3.1) does not necessarily reflect the actual sequenceof the deformation process. Although the present model is derived for a coupledthermo-mechanical problem, the decomposition of total deformation gradient in(3.1) does not take into account the effect of thermal expansion/contraction. Theincorporation of thermal stretches in the total deformation gradient will be dis-cussed inChapter 7.
For the kinematic description of the transformation, lowerlength-scale crys-tallographic information derived from the theory of martensitic transformation isincorporated. A detailed derivation of the kinematic description of the transfor-mation can be found inAppendix A. The effective transformation deformationgradientFtr visualized in Figure 3.1 is given by the volume average of thetrans-formation deformation gradients over all active martensitic transformation sys-tems,
Ftr = I +
M∑
α=1
ξ(α)b(α) ⊗ d(α) , (3.2)
whereξ(α) = ξ(α)(x, t) represents the volume fraction of transformation systemα measured over a neighborhood centered at a material pointx in the referenceconfiguration, the vectorsb(α) andd(α) are, respectively, the transformation shapestrain vector and the normal to the habit plane of transformation systemα (mea-sured in the reference configuration) andI is the second-order identity tensor. Thevolume fractionsξ(α) satisfy the following requirements:
0 ≤ ξ(α) ≤ 1 , 0 ≤M∑
α=1
ξ(α) ≤ 1 and ξA = 1 −M∑
α=1
ξ(α) , (3.3)
whereξA defines the volume fraction of the austenite measured in the referenceconfiguration, withM the total number of possible transformation systems. Fur-ther, the vectorsb(α) and d(α) are assumed to remain constant throughout thedeformation, i.e., the present model does not account for phenomena such as de-twinning. Correspondingly, the material time derivative of the transformation de-formation gradient (3.2) is given by
Ftr =
M∑
α=1
ξ(α)b(α) ⊗ d(α) , (3.4)
51

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
whereξ(α) denotes the rate of change of the volume fraction of the martensitictransformation systemα.
The evolution of the plastic deformation is described by theeffective plasticvelocity gradient in the second intermediate configuration, Lp, defined by
Lp := FpF−1p . (3.5)
In carbon steels, the martensitic phase typically is brittle with low dislocationactivity, presumably due to the high level of interstitial carbon that prevents plas-tic slip. Hence, plastic deformations only evolve in the austenitic phase and notin the martensitic phase. Plastic deformations that occurred in the martensiticsub-domains prior to transformation (if any) are assumed tobe inherited in themartensitic phase. Accordingly, the effective plastic velocity gradientLp in a vol-ume element is computed as the weighted value of the plastic velocity gradient ofthe austenitic phase,
Lp = ξALpA , (3.6)
where the weighting factor is taken as the volume fraction ofaustenite in thesecond intermediate configuration, denoted asξA. In accordance with the crystalplasticity theory (c.f.,Section 2.1.1), the plastic velocity gradient of the FCCaustenite can be expressed as the sum of slip rates in all possible slip systems, i.e.,
LpA =
NA∑
i=1
γ(i)A m
(i)A ⊗ n
(i)A , (3.7)
where γ(i)A is the rate of slip on a systemi and the vectorsm(i)
A and n(i)A are,
respectively, unit vectors describing the slip direction and the normal to the slipplane of the corresponding system in the FCC austenite, measured in the secondintermediate configuration. Furthermore, for each slip system i the vectorsm(i)
A
andn(i)A are orthogonal to each other.
In the second intermediate configuration, the volume fractions of the marten-sitic transformation systems and the volume fraction of theaustenite are, respec-tively, given by
ξ(α) =(1 + δtr)
Jtrξ(α) and ξA =
1
JtrξA , (3.8)
whereδtr gives the volumetric growth associated to each transformation systemα,in accordance withδtr = b(α) · d(α) andJtr := det Ftr. Note that the volumetric
52

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
growthδtr is identical for all martensitic transformation systems (α = 1, . . . ,M ).The above expressions are derived based on the fact that plastic deformation isisochoric, i.e.,det Fp = 1 (c.f., (2.4)). Combining equations (3.6)-(3.8)1 resultsin the effective plastic velocity gradient in the second intermediate configurationas
Lp =
NA∑
i=1
γ(i)m(i)A ⊗ n
(i)A , (3.9)
whereγ(i) can be interpreted as the “effective” plastic slip rate of the austeniticslip systemi, which is given by
γ(i) =ξAJtr
γ(i)A . (3.10)
3.1.2 Thermodynamic formulations
Decomposition of entropy density
In analogy with the triple decomposition of the total deformation gradient in (3.1),the total entropy density per unit mass, denoted asη, can be decomposed as
η = ηe + ηp + ηtr , (3.11)
whereηe represents the conservative (reversible) part of the entropy density, andηp andηtr are, respectively, the entropy densities related to plastic deformationand phase transformation processes.
LetθT be the transformation temperature at which transformationfrom austen-ite to martensite occurs at a constant temperature (isothermal process), zero stress,no dissipation and in the absence of an internal energy barrier. Note that in real-ity, transformations in metals and alloys do not occur at thetemperatureθT dueto, e.g., the presence of an internal energy barrier. The entropy density (per unitmass) related to phase transformations is defined by
ηtr :=
M∑
α=1
ξ(α)λ(α)T
θT, (3.12)
whereλ(α)T is the latent heatof a transformation systemα, which measures the
heat required per unit mass during a complete transformation at the transformation
53

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
temperatureθT and zero stress. For the steels considered in the present study, theentropy of the austenitic parent phase is always higher thanthe entropy of themartensitic product phase, and thus, the latent heatλ
(α)T is negative. Furthermore,
the rate of change of the transformation entropy density canbe simply obtainedfrom (3.12) as
ηtr =
M∑
α=1
ξ(α)λ(α)T
θT. (3.13)
In analogy with the effective plastic velocity gradientLp, the rate of changeof the effective plastic entropy density,ηp, is obtained as a weighted value of thecorresponding entropy rate of the austenitic phaseηpA i.e.,
ηp = ξAηpA . (3.14)
Note that in (3.14)ξA is used as a weighting parameter, since the entropy densitiesare defined per unit mass and, therefore, do not depend on a specific configuration.Similar to the model of BCC ferrite, the rate of change of plastic entropy densityin the FCC austenite is defined as (see, e.g., Simo and Miehe [116])
ηpA =
NA∑
i=1
γ(i)A φ
(i)A , (3.15)
whereφ(i)A is interpreted as the entropy density related to plastic deformation per
unit slip in systemi. Combining (3.10), (3.14) and (3.15) results in the rate ofchange of the plastic entropy density as
ηp = ξA
NA∑
i=1
γ(i)A φ
(i)A = Jtr
NA∑
i=1
γ(i)φ(i)A . (3.16)
Balance principles and dissipation
As shown in (2.13), the dissipation density per unit reference volume is given by
D = −ρ0ǫ+ ρ0θη + P · F −∇θ ·Φ . (3.17)
Similar to the approach used inChapter 2, the goal is to obtain the total dissi-pationD expressed in terms of a product between fluxes and affinities (driving
54

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
forces). First, computing the time derivative of the total deformation gradientgiven in (3.1) and combining the result with (3.4) and (3.9) gives the internalpower as
P · F = P P TtrF
Tp · Fe +
NA∑
i=1
τ (i)p γ(i) +
M∑
α=1
τ(α)tr ξ(α) , (3.18)
whereτ (i)p and τ (α)
tr are referred to as the resolved shear stress for plastic slipsystemi and the resolved stress for transformation systemα, respectively, as givenby
τ (i)p := F T
e P F TtrF T
p ·(
m(i)A ⊗ n
(i)A
)
, (3.19)
τ(α)tr := F T
p F Te P ·
(
b(α) ⊗ d(α))
. (3.20)
Second, the contribution of the temperature-entropy rate (ρ0θη) to the total dissi-pation can be elaborated as
ρ0θη = ρ0θηe +
NA∑
i=1
ζ(i)p γ(i) +
M∑
α=1
ζ(α)tr ξ(α) , (3.21)
whereζ(i)p andζ(α)
tr can be interpreted as the thermal analogues toτ(i)p andτ (α)
tr ,respectively. Using (3.13) and (3.16), these terms can be written as,
ζ(i)p = Jtrρ0θφ
(i)A and ζ
(α)tr = ρ0θ
λ(α)T
θT. (3.22)
In order to define the internal energy density (per unit mass)ǫ and its timederivative ǫ, a specification of the relevant state variables is required. In thepresent model, it is assumed that the internal energy density ǫ can be decom-posed into various mechanical and thermal contributions: The bulk strain energyis characterized by the elastic deformation gradientFe whereas the thermal energydensity can be expressed as a function of the reversible entropy ηe. A lower scalestrain energy density associated with the presence of dislocations is described interms of a scalar microstrainβ. Furthermore, the evolution of martensitic trans-formation is monitored by the martensitic volume fractionsξ(α), which can becollected asξ := ξ(α)|α = 1, . . . ,M.
55

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
In accordance with the Coleman and Noll procedure [29], it ismomentarilyassumed that the internal energy density functionǫ depends also on the fluxesβ,ξ andΦ, i.e.,
ǫ = ǫ(Fe, ηe, β, ξ; β, ξ,Φ) . (3.23)
Note that the volume fraction of austenite,ξA is not accounted as an independentstate variable since it is related toξ via (3.3)3. Using (3.18), (3.21) and (3.23), theexpression for the total dissipation (3.17) becomes
D =
(
P P TtrF
Tp − ρ0
∂ǫ
∂Fe
)
· Fe + ρ0
(
θ − ∂ǫ
∂ηe
)
ηe
+
NA∑
i=1
(
τ (ı)p + ζ(i)
p
)
γ(i) − ρ0∂ǫ
∂ββ − ρ0
∂ǫ
∂ββ
+M∑
α=1
(
τ(α)tr + ζ
(α)tr − ρ0
∂ǫ
∂ξ(α)
)
ξ(α) − ρ0
M∑
α=1
∂ǫ
∂ξ(α)ξ(α)
−∇θ ·Φ − ρ0∂ǫ
∂Φ· Φ .
(3.24)
Following the same approach as for the ferritic phase (seeSection 2.1.2),the rate of change of the effective scalar microstrain,β, is taken to be linearlydependent of the rate of change of the effective plastic slip, γ(i), as
β =
NA∑
i=1
w(i)γ(i) , (3.25)
where the functionsw(i) depend on the slip resistance (the exact expressions forw(i) will be provided inSection 3.1.5).
Following the Coleman and Noll procedure [29], the terms multiplied by theratesFe, ηe, β, ξ and Φ must vanish since these terms do not depend on thecorresponding rates, otherwise a process can be specified for which the dissipationis negative. These restrictions lead to
P = ρ0∂ǫ
∂FeF−T
p F−Ttr and θ =
∂ǫ
∂ηe, (3.26)
and to the fact that the internal energy density functionǫ is independent of thefluxes β, ξ andΦ. It is assumed that the remaining non-zero terms of the total
56

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
dissipation in (3.24) can be decomposed as
D = Dp + Dtr + Dq , (3.27)
whereDp, Dtr andDq are dissipations due to plastic deformation, phase transfor-mation and heat conduction processes, respectively, givenby
Dp :=
NA∑
i=1
g(i)γ(i) , Dtr :=M∑
α=1
f (α)ξ(α) and Dq := −∇θ ·Φ . (3.28)
In the above expression, the termsg(i) andf (α) are the driving forces for plasticityand transformation, respectively, i.e.,
g(i) = τ (i)p + ζ(i)
p − ρ0∂ǫ
∂βw(i) and f (α) = τ
(α)tr + ζ
(α)tr − ρ0
∂ǫ
∂ξ(α). (3.29)
In view of the decomposition of the total dissipation (3.27), the dissipation in-equality can be written as
D = Dp + Dtr + Dq ≥ 0 , (3.30)
and it is further assumed that the dissipation inequality holds for the plastic defor-mation, phase transformation and heat conduction processes independently, i.e.,
Dp ≥ 0 , Dtr ≥ 0 and Dq ≥ 0 . (3.31)
3.1.3 Constitutive relations and Helmholtz energy density
For further elaboration, it is convenient to use the Helmholtz energy densityψinstead of the internal energy densityǫ. Assuming a one-to-one correspondencebetween the temperatureθ and the reversible entropy densityηe, the Helmholtzenergy density can be derived from the internal energy density using the followingLegendre transformation:
ψ(Fe, θ, β, ξ) = ǫ(Fe, ηe(Fe, θ, β, ξ), β, ξ) − θηe(Fe, θ, β, ξ) , (3.32)
in which, for generality,ηe is assumed to be a function of all state variables.Taking the partial derivative of (3.32) with respect to eachstate variable and using(3.26)2 results in
∂ψ
∂Fe=
∂ǫ
∂Fe,
∂ψ
∂θ= −ηe ,
∂ψ
∂β=∂ǫ
∂βand
∂ψ
∂ξ=∂ǫ
∂ξ. (3.33)
57

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
From the requirement of material frame indifference, the elastic deformationgradientFe cannot be arbitrarily used as a state variable in the Helmholtz energydensityψ, as well as in the internal energy densityǫ. An elastic strain measurebased purely on the stretch part of the deformation must be used instead. For thispurpose, the elastic Green-Lagrange strainEe is used, given by
Ee :=1
2
(
F Te Fe − I
)
. (3.34)
Accordingly, an alternative expression for the Helmholtz energy density, desig-nated asψ, is introduced, i.e.,
ψ(Ee, θ, β, ξ) = ψ(Fe, θ, β, ξ) . (3.35)
Applying the chain rule results to the partial derivative (3.33)1, and using (3.35),leads to
Fe∂ψ
∂Ee=
∂ψ
∂Fe. (3.36)
Stress-elastic strain constitutive relation
The work conjugated stress measure associated to the elastic Green-Lagrangestrain Ee is the second Piola-Kirchhoff stressS measured in the second inter-mediate configuration, which is related (by definition) to the first Piola-KirchhoffstressP as
S =1
JtrF−1
e P F TtrF T
p . (3.37)
The above expression already accounts for the fact that the plastic deformation isisochoric, i.e.,Jp := det Fp = 1. From (3.26)1, (3.32)1 and (3.35), the derivativeof the Helmholtz energy densityψ with respect toEe is related to the secondPiola-Kirchhoff stressS via
S = ρ∂ψ
∂Ee, (3.38)
whereρ = ρ0/Jtr is the mass density in the second intermediate configuration.Furthermore, the effective second Piola-Kirchhoff stressin the second intermedi-ate configurationS is constitutively related to the elastic Green-Lagrange strainEe via
S = CEe , (3.39)
58

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
whereC is theeffectivefourth-order elasticity tensor, which has the form [141,143]
C =1
Jtr
(
ξACA + (1 + δtr)
M∑
α=1
ξ(α)C
(α)
)
, (3.40)
whereCA andC(α) are, respectively, the elasticity tensor of the austenite and the
martensitic transformation systemα. Note that the effective elasticity tensorC
evolves with the volume fractionsξ during the deformation process.In terms of a6×6 matrix representation (Voigt’s notation), the elasticitytensor
of austenite,CA, can be written as
[CA]A =
κA1 κA
2 κA2
κA2 κA
1 κA2
κA2 κA
2 κA1
κA3
κA3
κA3
A
, (3.41)
whereκA1 , κA
2 andκA3 are the elastic moduli of the austenite. The subindex “A”
in (3.41) indicates that the stiffness components ofCA are referred to the FCCaustenite lattice basis. Similarly, the elasticity tensorC
(α) of the martensitictransformation systemα depends on six independent elastic moduliκM
j , withj ∈ 1, 2, . . . , 6, as well as on the proportions and orientations of the twin-related BCT martensitic variants. Details on the construction of the elasticitytensorC(α) can be found inAppendix B.
From (3.38) and (3.39), the derivative of the Helmholtz energy density withrespect to the elastic Green-Lagrange strainEe is given by
∂ψ
∂Ee=Jtr
ρ0CEe . (3.42)
Integrating (3.42) with respect toEe, the Helmholtz energy density functionψcan be written as
ψ(Ee, θ, β, ξ) = ψm(Ee, ξ) + ψ1(θ, β, ξ) , (3.43)
whereψm(Ee, ξ) describes the bulk strain energy part of the Helmholtz energydensity, defined by
ψm(Ee, ξ) :=1
2ρ0Jtr(ξ)C(ξ)Ee · Ee , (3.44)
59

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
and ψ1(θ, β, ξ) includes the terms of the Helmholtz energy density that are notincluded in the bulk strain energy (i.e., the integration constants).
Reversible entropy-temperature constitutive relation
Analogous to the effective stress-elastic strain relationship (3.39), the effective re-versible entropy density (per unit mass)ηe is constitutive related to the (absolute)temperatureθ. In the present model, the constitutive law for the reversible entropyηe and temperatureθ is similar to that of the model for the ferritic phase (2.38),(adopted from Turteltaub and Suiker [143]), i.e.,
ηe = h ln
(
θ
θT
)
+ ηT , (3.45)
whereθT and ηT are, respectively, the transformation temperature and there-versible entropy at the corresponding transformation temperature. In the aboveexpression,h represents the “effective” specific heat, given by
h = ξAhA +
M∑
α=1
ξ(α)h(α) , (3.46)
with hA andh(α) the specific heat of the austenite and the martensitic transfor-mation systemα, respectively. Clearly, the expression (3.46) indicates that theeffective specific heath evolves with the volume fractionsξ during the deforma-tion process.
Using the constitutive law (3.45), the derivative of the Helmholtz energy den-sity with respect to temperature, shown in (3.33)2, is given by
∂ψ
∂θ= −h(ξ) ln
(
θ
θT
)
− ηT . (3.47)
Integrating (3.47) with respect to temperature results in the expression of theHelmholtz energy density functionψ as
ψ(Ee, θ, β, ξ) = ψth(θ, ξ) + ψ2(Ee, β, ξ) , (3.48)
whereψth(θ, ξ) is the thermal energy density contribution to the Helmholtzen-ergy density, defined by
ψth(θ, ξ) := −h(ξ)θ ln
(
θ
θT
)
+ (h(ξ) − ηT ) θ , (3.49)
60

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
andψ2(Ee, β, ξ) includes the terms of Helmholtz energy density that are not partof the thermal energy densityψth(θ, ξ).
Lattice defect energy density (cold work)
In line with the model for the ferritic phase, in addition to the bulk elastic strainenergy densityψm, a lower-scale elastic strain energy is introduced. This lower-scale strain energy density (i.e., the defect energy or coldwork) accounts for theelastic distortion of the lattice associated with the presence of dislocations. Simi-lar to the model for the ferritic phase, see (2.41), the lattice defect energy density,denoted asψd, in an austenitic/martensitic material point can be written as
ψd(β, ξ) :=1
2ρωAµ(ξ)β2 =
1
2ρ0Jtr(ξ)ωAµ(ξ)β2 , (3.50)
whereωA is the scaling factor for the defect energy in the austenitic/martensiticphase andβ := b
√ρd is a strain-like internal variable. The equivalent shear
modulusµ in (3.50) is a function of the volume fractionξ since it accounts forthe fact that the microstructural volume element is a mixture of austenite andmartensite. Similar to the effective elasticity tensorC given in (3.40), the effectiveequivalent shear modulusµ is expressed as
µ =1
Jtr
(
ξAµA + (1 + δtr)M∑
α=1
ξ(α)µ(α)
)
, (3.51)
with µA andµ(α) the equivalent isotropic shear moduli of the austenite and themartensitic transformation systemα, respectively. The equivalent isotropic shearmoduli µ(α) are taken the same for all martensitic transformation systems, i.e.,µ(α) = µM . Furthermore, in view of (3.43) and (3.48), the Helmholtz energydensityψ can be formulated as
ψ(Ee, θ, β, ξ) = ψd(β, ξ) + ψ3(Ee, θ, ξ) , (3.52)
whereψ3(Ee, θ, ξ) represents the contributions to the Helmholtz energy densitythat are not accounted for by the defect energy densityψd(β, ξ).
At this point, there are three equivalent expressions for the Helmholtz energy,given by (3.43), (3.48) and (3.52). Differentiating these expressions with respect
61

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
to θ andβ gives the partial derivatives ofψ1
∂ψ1
∂θ=∂ψth
∂θand
∂ψ1
∂β=∂ψd
∂β. (3.53)
Consequently, integrating (3.53) with respect toθ andβ, respectively, results inthe energy density functionψ1 as follows:
ψ1(θ, β, ξ) = ψth(θ, ξ) + ψd(β, ξ) + ψ4(ξ) , (3.54)
whereψ4 summarizes the integration constant, which depends only onthe marten-sitic volume fractionsξ. Equivalently, following a similar procedure, the expres-sion for the energy densitiesψ2 andψ3 can be obtained as
ψ2(Ee, β, ξ) = ψm(Ee, ξ) + ψd(β, ξ) + ψ4(ξ) , (3.55)
ψ3(Ee, θ, ξ) = ψm(Ee, ξ) + ψth(θ, ξ) + ψ4(ξ) . (3.56)
Hence, using expressions (3.54)-(3.56), the Helmholtz energy densityψ can bewritten as
ψ(Ee, θ, β, ξ) = ψm(Ee, ξ) + ψth(θ, ξ) + ψd(β, ξ) + ψ4(ξ) . (3.57)
Surface energy density
In the present model, the remaining undetermined term in theHelmholtz energydensity (3.57) is related to a surface energy term. This surface energy density re-flects the amount of energy associated with a local deformation field required tomaintain a coherent interface between the austenitic parent phase and the marten-sitic transformation system. The present model does not resolve the kinematicsat that length-scale. Instead, the formulation for the surface energy term (per unitreference volume) is defined in accordance with the following phenomenologicalmodel [141–143]:
ψs(ξ) :=χ
ℓ0ρ0
M∑
α=1
ξ(α)(
1 − ξ(α))
, (3.58)
whereχ is an interfacial energy per unit area andℓ0 is a length-scale parameterrepresenting the volume-to-surface ratio of a circular platelet of martensite within
62

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
a spherical grain of austenite. Note that the expression (3.58) results in no surfaceenergy contribution when the whole representative volume element is fully occu-pied by the parent austenitic phase or a single martensitic transformation system.
With the above expression for the surface energy contribution, the energy den-sity functionψ4 can be written as
ψ4(ξ) = ψs(ξ) + ψ⋆(ξ) , (3.59)
whereψ⋆ is an energy density function that includes energy contributions relatedonly to the state variableξ, which are not yet included in the surface energy den-sity.
From the dissipation related to the phase transformation processDtr, givenby (3.28)2, the condition for a dissipation-free transformation is obtained whenthe driving forcef (α) = 0, sinceξ(α) > 0 during the transformation process. Inaddition, a dissipation-free transformation process occurs at zero stress and in theabsence of energy barrier; and the surface energy and defectenergy contributionsto the transformation vanish, i.e.,χ→ 0 andβ = 0. Hence, in the theoretical limitof a dissipation-free transformation process at the transformation temperatureθT ,the driving force for transformationf (α) must satisfy the following condition:
f (α)|Ee=0,θ=θT ,β=0,χ→0 = 0 , (3.60)
for all α = 1, . . . ,M . Note that the zero stress condition is reflected via a zeroelastic strainEe. Using (3.20), (3.22)2, (3.29)2, (3.33)4, (3.37), (3.44), (3.49),(3.50), (3.58) and (3.59), the condition (3.60) yields to
λ(α)T −
(
h(α) − hA
)
θT − ∂ψ⋆
∂ξ(α)= 0 , (3.61)
for all α = 1, . . . ,M . Through integration with respect toξ(α) and using theexpression for the effective specific heat (3.46), the energy density functionψ⋆ isobtained as
ψ⋆(ξ) = −h(ξ)θT +
M∑
α=1
ξ(α)λ(α)T . (3.62)
Finally, using (3.44), (3.49), (3.50), (3.57)-(3.59) and (3.62), the full-expression
63

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
for the Helmholtz energy densityψ can be written as
ψ(Ee, θ, β, ξ) =1
2ρ0Jtr(ξ)C(ξ)Ee · Ee +
1
2ρ0Jtr(ξ)ωAµ(ξ)β2
+ h(ξ)
(
θ − θT − θ ln
(
θ
θT
))
− ηT θ +M∑
α=1
ξ(α)λ(α)T
+χ
ℓ0ρ0
M∑
α=1
ξ(α)(
1 − ξ(α))
.
(3.63)
3.1.4 Driving forces, nucleation criteria and kinetic laws
Driving force, nucleation and kinetic law for transformati on
From (3.20), (3.22)2, (3.29)2, (3.33)4, (3.37) and (3.63), the expression for thetransformation driving force related to a martensitic systemα can be written inthe following form:
f (α) = f (α)m + f
(α)th + f
(α)d + f (α)
s , (3.64)
where the (bulk) mechanical partf (α)m comprises the contribution of the resolved
stress for transformation systemα and the mismatch of elasticity stiffness betweenthe martensite product phase and the austenite parent phase, i.e.,
f (α)m = JtrF
Tp F T
e FeSF−Tp F T
tr ·(
b(α) ⊗ d(α))
+1
2
(
CA − (1 + δtr)C(α))
Ee · Ee .(3.65)
The thermal partf (α)th describes the contribution of the latent heat as well as the
mismatch of specific heat between the martensite product phase and the austeniteparent phase, i.e.,
f(α)th = ρ0
(
hA − h(α))
(
θ − θT − θ ln
(
θ
θT
))
+ ρ0λ
(α)T
θT(θ − θT ) , (3.66)
andf (α)d andf (α)
s reflect the contributions of the defect energy and surface energy,respectively, given by
f(α)d =
ωA
2
(
µA − (1 + δtr)µ(α))
β2 and f (α)s =
χ
ℓ0
(
2ξ(α) − 1)
. (3.67)
64

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
f (α) = fcr
(α)
increasing ξ0
.
decreasing ν
f (α) = fcr
(α)
ν →
0
(b)(a)
Transformation driving force f (α)
Rate
of
tran
sform
ation ξ
(α
)
.
Transformation driving force f (α)
Rate
of
tran
sform
ation ξ
(α
)
.Figure 3.2: Rate of transformation as a function of transformation driving forceaccording to the kinetic relation (3.68) with variations of(a) the maximum valueof transformation rate and (b) viscosity-like parameter.
The defect energy contribution to the transformation driving force in (3.67)1 ap-pears as the difference in equivalent isotropic shear moduli between the martensiteand austenite, analogous to the elastic stiffness mismatchin the bulk mechanicalpart.
A martensitic transformation systemα starts to nucleate when the transforma-tion driving force of the corresponding system exceeds a critical value, denotedasf (α)
cr . Furthermore, the evolution of the martensitic volume fraction ξ(α) is re-lated to the driving forcef (α) via a (phenomenological) kinetic law formulated asfollows:
ξ(α) =
ξ0 tanh
(
f (α) − f(α)cr
νf(α)cr
)
if f (α) > f(α)cr ,
0 otherwise ,
(3.68)
whereξ0 sets the maximum value for the transformation rateξ(α) andν is a di-mensionless, viscosity-like parameter (see Figure 3.2). In view of (3.68), the ratesξ(α) are always non-negative, which implies that the martensitic transformation isan irreversible process, i.e., the transformation occurs one-way (from austenite tomartensite). In carbon steels, martensite can transform back into austenite onlyupon re-heating (see, e.g., [15, 39]). This is in contrast with martensitic transfor-mations in shape-memory alloys in which martensite transforms back to austeniteupon unloading.
65

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
Driving force and kinetic law for plasticity
As shown in (3.28)1, the dissipation related to plastic deformations can be ex-pressed as a product between the driving force for plasticity and the rate of changeof the effective plastic slip. However, since it is assumed that plastic deformationevolves only in the austenite, it is natural to attribute theevolution of plastic slip tothe austenitic sub-region. Correspondingly, the plastic dissipation in (3.28)1 canbe reformulated in terms of the plastic slip rateγ(i)
A and the driving forceg(i)A in
the austenitic sub-region, i.e.,
Dp =
NA∑
i=1
g(i)γ(i) = ξA
NA∑
i=1
g(i)A γ
(i)A . (3.69)
Essentially, the term∑NA
i=1 g(i)A γ
(i)A measures the plastic dissipation per unitausten-
ite volume in the reference configuration. Hence, when multiplied withξA it givesthe “effective” plastic dissipation measured per unit total volume. Using (3.10),the driving force for plasticity in the austenite can be obtained as
g(i)A =
1
Jtrg(i) . (3.70)
Subsequently, the driving force for plastic slip in the austenite can be computedusing (3.19), (3.22))1, (3.29)1, (3.63) and (3.70), which leads to
g(i)A = g(i)
m + g(i)th + g
(i)d , (3.71)
whereg(i)m is the (bulk) mechanical part of plasticity driving forceg(i)
A , which hasthe form
g(i)m = F T
e FeS ·(
m(i)A ⊗ n
(i)A
)
, (3.72)
andg(i)th andg(i)
d correspond to the thermal and defect energy contributions,re-spectively, given by
g(i)th = ρ0θφ
(i)A and g
(i)d = −ωAµβw
(i) . (3.73)
Plastic slip occurs along a slip systemi in the austenite when the plasticitydriving force exceeds a critical value corresponding to theresistance against slip.
66

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
The rate of change of plastic slip in the austenite is connected to the plasticitydriving force through a power-law kinetic relation, i.e., [30, 88]
γ(i)A =
γA0
(
g(i)A
s(i)A
)(1/pA)
− 1
if g(i)A > s
(i)A ,
0 otherwise ,
(3.74)
wheres(i)A is the resistance against plastic slip in systemi, with γA0 andpA, re-
spectively, the reference slip rate and the rate-sensitivity exponent. The kineticlaw (3.74) will reduce to a rate-independent model asγA
0 → ∞ and/orpA → 0.
3.1.5 Hardening and evolution of microstrain
In this section, the evolution of the resistance against slip in the austenite is for-mulated. Adopting the phenomenological model originally proposed by Peirceetal. [101] (see also, Kalidindiet al. [70]), the rate of change of the slip resistance,s(i)A , is related to the slip rateγ(i)
A through
s(i)A =
NA∑
j=1
H(i,j)A γ
(j)A , (3.75)
whereH(i,j)A represents the hardening moduli matrix with the diagonal terms de-
scribing the self-hardening effect and the off-diagonal terms referring to cross-hardening, i.e.,
H(i,j)A =
k(j)A for i = j ,
qAk(j)A for i 6= j ,
(3.76)
whereqA is the latent hardening ratio reflecting the ratio between cross- and self-hardening moduli on each slip system, andk(j)
A is the single-slip hardening mod-
ulus of slip systemj. For simplicity, the initial value of the slip resistances(i)A istaken the same for all slip systems, i.e.,
s(i)A (t = 0) = sA
0 . (3.77)
67

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
Moreover, the evolution of the single-slip hardening modulus is supposed to fol-low a power law model of Brownet al. [20], i.e.,
k(j)A = kA
0
(
1 − s(j)A
sA∞
)uA
, (3.78)
wherekA0 is a reference hardening modulus,sA
∞ is the saturation value of the slipresistance (assumed to be identical for all slip systems) and uA is the hardeningexponent.
In addition to the above hardening model, it is important to note that marten-site platelets formed within the austenitic grain during transformation create newgrain boundaries that can be viewed as obstacles for the movement of dislocationsin the (untransformed) austenite, which eventually increase the effective hard-ening behavior. However, this effect is not straightforward to quantify since itrequires to resolve the dislocation movements, which involves a much smallerlength scale (see, e.g., Shiet al. [114]). For simplicity reasons, this effect is notexplicitly taken into account in the present work.
To complete the formulation of the model, a constitutive relation for the evo-lution of the microstrain variableβ and the specification of the functionw(i) in(3.25) are required. Since it is assumed that new dislocations are only generatedin the austenitic sub-region, the rate of change of the “effective” microstrainβ ina volume element can be expressed, in analogy to (3.6), as
β = ξAβA =ξAJtr
βA , (3.79)
where βA is the time derivative of the microstrain associated to the austeniticdomain andξA is the volume fraction of austenite in the second intermediate con-figuration, given by (3.7). Similar to the model proposed by Clayton [27], theevolution of the state variableβA is constitutively related to the evolution of theslip resistances(i)A through the rate form
cAµAβA =1
NA
NA∑
i=1
s(i)A , (3.80)
whereµA is the equivalent isotropic shear modulus of the austenite and cA isa scaling factor that accounts for average hardening. In terms of the elasticity
68

3.1. SINGLE CRYSTAL ELASTO-PLASTIC-TRANSFORMATION MODELFOR AUSTENITE
moduli κAj , with j = 1, 2, 3, the equivalent elastic shear modulusµA can be
obtained as [141]
µA =1
10
(
2(
κA1 − κA
2
)
+ 3κA3
)
. (3.81)
Substitutings(i)A in (3.80) by (3.75) and using (3.10) and (3.79) leads to the ex-pression for the rate of change of the effective microstrain, β, as
β =1
cAµANA
NA∑
i=1
NA∑
j=1
H(i,j)A γ(j) . (3.82)
By comparing the expression (3.82) to the expression (3.25), the functionsw(i)
can be written as
w(i) =1
cAµANA
NA∑
j=1
H(j,i)A . (3.83)
Summary of single crystal elasto-plastic-transformationmodel for austenite
To close the discussion on the derivation of the elasto-plastic-transformation modelfor single crystal austenite, the model key-equations are summarized. The de-compositions of the deformation gradient (3.1) and entropydensity (3.11) are,respectively,
F = FeFpFtr and η = ηe + ηp + ηtr .
The transformation parts of the above decompositions are, respectively, given by(3.2) for the transformation deformation gradient and (3.12) for the transformationentropy density, i.e.,
Ftr = I +
M∑
α=1
ξ(α)b(α) ⊗ d(α) and ηtr =
M∑
α=1
ξ(α)λ(α)T
θT,
whereas the evolution of the plastic deformation gradientFp (given in terms of theplastic velocity gradientLp) and of the plastic entropy densityηp are, respectively,described by
Lp = FpF−1p =
NA∑
i=1
γ(i)m(i)A ⊗ n
(i)A and ηp =
NA∑
i=1
γ(i)φ(i)A .
69

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
The constitutive relations between conjugated variables,i.e., stress-elastic strain(3.39) and temperature-reversible entropy (3.45), are
S = CEe and ηe = h ln
(
θ
θT
)
+ ηT ,
where the effective elasticity tensorC and the effective specific heath are, re-spectively, given by (3.40) and (3.46). The kinetic relations for transformationand plasticity in the austenite are given, respectively, by(3.68) and (3.74), i.e.,
ξ(α) =
ξ0 tanh
(
f (α) − f(α)cr
νf(α)cr
)
if f (α) > f(α)cr ,
0 otherwise ,
γ(i)A =
γA0
(
g(i)A
s(i)A
)(1/pA)
− 1
if g(i)A > s
(i)A ,
0 otherwise ,
where the driving force for plasticityg(i)A in the austenite can be obtained from
(3.71)-(3.73) as
g(i)A = F T
e FeS ·(
m(i)A ⊗ n
(i)A
)
+ ρ0θφ(i)A − ωAµβw
(i) ,
and the driving force for phase transformationf (α) can be obtained from (3.64)-(3.67) as
f (α) = JtrFTp F T
e FeSF−Tp F T
tr ·(
b(α) ⊗ d(α))
+χ
ℓ0
(
2ξ(α) − 1)
+1
2
(
CA − (1 + δtr)C(α))
Ee · Ee +ωA
2
(
µA − (1 + δtr)µ(α))
β2
+ ρ0
(
hA − h(α))
(
θ − θT − θ ln
(
θ
θT
))
+ ρ0λ
(α)T
θT(θ − θT ) .
The evolutional laws for the slip resistances(i)A in the austenite and the effectivemicrostrainβ are
s(i)A =
NA∑
j=1
H(i,j)A γ
(j)A and β =
NA∑
i=1
w(i)γ(i) ,
70

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
[100]A-loaded [110]A-loaded [111]A-loaded
e1
A
e2
A e3
A
e1
A
e2
A
e3
A
e1
A
e2
A
e3
Af1
f2
f3 Global axis
(0˚,0˚,0˚) (45˚,0˚,0˚) (45˚,35.26˚,0˚)
Figure 3.3: Schematic representation of the crystallographic orientations of theaustenite single crystal samples with respect to the globalbasisf1,f2,f3.
where the expression for the matrix of hardening moduliH(i,j)A and the functions
w(i) are the provided in (3.76) and (3.83), respectively.
3.2 Simulations of elasto-plastic-transformation behaviorof single-crystalline austenite
In order to illustrate the basic features of the elasto-plastic-transformation model,the mechanical behavior of a single crystal austenite is studied by means of numer-ical simulations for three elementary loading modes, namely (i) uniaxial tensionand compression, (ii) simple shear and (iii) volumetric expansion and contraction.Furthermore, the analyses are carried out considering three different crystallo-graphic orientations, which, expressed in terms of the “323”-Euler rotation (aboutthe global basis), are(0, 0, 0), (45, 0, 0) and(45, 35.26, 0), respectively.The above orientations are chosen such that the globalf1-axis corresponds to,respectively, the[100]A, [110]A and [111]A directions, where the Miller indicesrefer to the austenite lattice basis, as illustrated in Figure 3.3.
3.2.1 Material parameters and validation
In the present work, the simulations are performed under isothermal conditions atan ambient temperature ofθ = 300 K. The mass density of the austenite parentphase is assumed to be equal to the characteristic mass density of a typical carbonsteel,ρ0 = 7800 kg·m−3. The material parameters used in the simulations are
71

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
representative for retained austenite in multiphase carbon steels. The local car-bon concentration in the austenite (and martensite) is taken as1.4 wt.%, whichis within the range of values measured experimentally in high-strength TRIP-assisted steels [62, 122]. The vectorsb(α) andd(α) of the 24 martensitic transfor-mation systems are obtained from the theory of martensitic transformations (seee.g. [14, 50]), where the Kurdjumov-Kaminsky relations areapplied to calculatethe lattice parameters of the austenite and martensite corresponding to the abovecarbon concentration. More details on this procedure and the list of the vectorsb(α) andd(α) for the austenite carbon concentration of1.4 wt.% can be found inAppendix A. Furthermore, the transformation volume dilatation is computed asδtr = b(α) · d(α) = 0.0391 and the magnitude of the transformation shape strainvector is||b(α)|| = 0.1809, which are the same for all transformation systems.
Due to the lack of experimental data on the anisotropic elastic properties ofaustenite and martensite, the elastic moduli of the FCC austenite and BCT marten-site are derived following a heuristic interpretation of nano-indentation tests per-formed by Furnemontet al. [42] for a TRIP steel with an austenite carbon con-centration of0.92 wt.%. Details on this procedure can be found in Turteltauband Suiker [141]. This procedure results in the following elastic moduli for FCCaustenite:κA
1 = 286.8, κA2 = 166.4 andκA
3 = 145.0 [GPa], and the elastic moduliof the BCT martensite:κM
1 = 372.4, κM2 = 345.0, κM
3 = 191.0, κM4 = 508.4,
κM5 = 201.9 andκM
6 = 229.5 [GPa]. InAppendix B, it is demonstrated howthese elastic coefficients construct the effective elasticity tensorC(α), which ap-pears in (3.40). In addition, the isotropic equivalent shear moduli for austenite andmartensite can be obtained as, respectively,µA = 67.5 andµ(α) = µM = 98.4[GPa]. Note that the above values represent austenite and martensite with a carbonconcentration of1.4 wt.%.
The parameters for the plasticity kinetic model (3.74), i.e., γA0 andpA, are cho-
sen such that the overall response under quasi-static loading conditions is close toa rate-independent response. For simplicity, the parameters for the plasticity ki-netic model are chosen the same as those used in the almost rate-independentkinetic model for the ferrite, i.e.,γA
0 = 0.001 s−1 andpA = 0.02. Furthermore,the parameters used in the kinetic law for transformation (3.68), i.e.,ξ0 andν, arecalibrated based on preliminary computations of a single crystal material pointsubjected to a quasi-static straining rate of10−4 s−1, where the correspondingstress-deformation response must follow a weak rate-dependent behavior indi-cated by a “plateau”-like response during transformation.Based on this calibra-
72

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
0
250
500
750
1000
1500
1250
Ax
ial
Cau
chy s
tres
s T
11 [
MP
a]
0 0.025 0.050 0.075 0.100 0.125 0.150
Axial nominal strain ε11
Polycrystalline ferrite (pure-iron)
Ideal polycrystalline austenite
(scaled of ferrite)
Polycrystalline, non-transforming
austenite model (Taylor average)
Figure 3.4: Axial stress-strain response of a polycrystalline, non-transformingaustenite, described by a Taylor-type model that has been calibrated to stress-strain response of an “ideal” austenite (as obtained by scaling the axial stress-strain response of a pure iron [19]).
tion, the values forξ0 andν are chosen asξ0 = 0.003 andν = 0.17.Since metastable retained austenite in a multiphase carbonsteel cannot be
tested separately from its ferritic matrix, it is difficult to obtain experimental datato characterize the plastic behavior of the austenite, particularly the initial yieldstrength and hardening behavior. Furthermore, since transformation and plasticdeformation can occur simultaneously, it is not a straightforward procedure to ex-clude the individual effects related to each of these coupled mechanisms from ex-perimental data. An additional complication comes from thelack of experimentaldata on the stress-strain curve of single crystal austenite. To overcome these prob-lems, the material parameters related to the plastic behavior of the austenite in thepresent model are calibrated using a stress-strain curve that is assumed to representa purely elasto-plastic behavior (i.e., a curve were the phase transformation mech-anism is momentarily neglected). Furthermore, the curve isassumed to be repre-sentative of a randomly-oriented polycrystalline response. Such an ideal curve isobtained by scaling the elasto-plastic stress-strain response of pure iron reportedin [19], as shown in Figure 3.4. In this case, the scaling factor is obtained by aheuristic approach based on the nanohardness of individualferritic and austeniticphases reported by Furnemontet al. [42], which giveseAF := HA/HF ≈ 2,with HA andHF the nanohardnesses of austenite and ferrite, respectively. In this
73

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
case, the mechanical properties of the reference ferrite are assumed to be similar tothose of pure iron, since ferrite has a very low carbon content. However, the abovescaling factor is representative for austenite with a carbon concentration of0.92wt.% [42]. Assuming that for an austenite with a carbon concentration of 0 wt.%the scaling factor from ferrite to austenite is given byeAF = 1, the actual scalingfactor for austenite carbon concentration of1.4 wt.% can be computed from a lin-ear extrapolation, which results ineAF = 2.4. Subsequently, the present model isapplied to simulate the ideal non-transforming, randomly-oriented austenite poly-crystal through employing a Taylor-type averaging scheme.In order to obtainthe ”plasticity-only” response, the transformation mechanism is suppressed in thesimulation by adopting an artificially-high transformation barrier. This calibrationprocedure leads to the parameters used in the single slip hardening model (3.78)asuA = 2.8, kA
0 = 3.0 GPa andsA∞ = 579 MPa. The initial slip resistance is
taken to be identical for all slip systems,s(i)A,0 := s(i)A (t = 0) = sA,0 = 188 MPa.
In addition, the isotropic latent hardening ratio,qA = 1, is applied in the abovecalibration procedure.
In the present work, analyses are restricted to isothermal processes at roomtemperatureθ = θ∗ = 300 K, which imply that the thermal part of the transfor-mation driving force becomes a constant. However, data of the specific heatsh(α)
andhA, the temperatureθT and the latent heatλ(α)T are not readily available in
the literature at the scale of interest. Instead, the thermal part of the transforma-tion driving force is estimated using the following approach (see, Turteltaub andSuiker [141]): For simplicity, it is assumed that the specific heats for all transfor-mation systems are the same,h(α) = hM , for all α = 1, . . . ,M . Moreover, thespecific heats for austenite and martensite are assumed to beequal, i.e.,hA = hM .The value for the thermal part of the transformation drivingforce for austenitecarbon concentration of1.4 wt.% is chosen to be equal for all transformation sys-tems, i.e.,f (α)
th = 207 MPa, whereas the critical value for the transformationdriving force is taken asfcr = 227 MPa.
The parameters related to the surface energy are chosen asχ = 0.2 J/m2 [26]andℓ0 = 0.05 µm, which corresponds to an austenite grain size of (mean diame-ter)d0 = 2 µm [141]. In addition, the parameters related to the defect energy aretaken asωA = 10 andcA = 5, and through the same assumption as used in theferritic model (seeSection 2.2.1), the initial value for the (austenitic) microstrainparameter is taken asβ0 = βA,0 = 5.6 · 10−4. In addition, the thermal part of
the plasticity driving force is computed asg(i)th = ρθφ
(i)A = 12 MPa, where the
74

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
Table 3.1: Summary of the material parameters for the FCC austenite and BCTmartensite used in the elasto-plastic-transformation model.
Parameter(s) Value(s) Equation(s)
Elastic moduli austenite κA1 = 286.8, κA
2 = 166.4, (3.40),(3.41)κA
3 = 145.0 [GPa]Elastic moduli martensite κM
1 = 372.4, κM2 = 345.0, (3.40),
κM3 = 191.0, κM
4 = 508.4, (B.1)-(B.3)κM
5 = 201.9, κM6 = 229.5 [GPa]
Transformation kinetic law ξ0 = 0.003 s−1, ν = 0.17 (3.68)
f(α)cr = 227 MPa
Plasticity kinetic law γA0 = 0.001 s−1, pA = 0.02 (3.74)
Thermal driving forces f(α)th = 207 MPa (3.64)
g(i)th = ρ0θφ
(i)A = 12 MPa (3.71)
Defect energy βA,0 = 5.6 · 10−4, ωA = 10 (3.51),(3.65),cA = 5, µA = 67.5 GPa (3.67)1,(3.73)2,µ(α) = µM = 98.4 GPa (3.83)
Surface energy χ = 0.2 J·m−2, ℓ0 = 0.05 µm (3.67)2Hardening law austenite sA
∞= 579, sA,0 = 188 [MPa] (3.76)-(3.78)
kA0 = 3.0 GPa,uA = 2.8, qA = 1
Mass density ρ0 = 7800 kg·m−3
estimation of this parameter follows a similar procedure asused for the model ofBCC ferrite (seeSection 2.2.1). The summary of the material parameters used inthe austenite elasto-plastic-transformation model is presented in Table 3.1. Thelist of the crystallographic vectors indicating the slip directions and the normalsto the slip planes can be found inAppendix C.
3.2.2 Sample geometry and boundary conditions
The behavior of the single-crystalline austenitic samplesis studied for three ele-mentary deformation modes, i.e., (i) uniaxial tension and compression, (ii) simpleshear and (iii) volumetric expansion and contraction (see Figure 3.5). The singlecrystal austenite is represented by a cubic sample with sides of lengthl. In thefirst loading case, this cubical sample is subjected to a uniaxial tensile loading up
75

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
Volumetric dilatation Simple shear deformation Uniaxial tensile loading f
1
f2
f3
f1
f2
f3
f1
f2
f3
l
γl
u1 u1
u2 u3
Figure 3.5: Boundary conditions (loading modes) applied tothe single crystalaustenite samples, i.e., uniaxial tensile loading, simpleshear deformation and vol-umetric dilatation.
to a nominal strain in the axial direction ofǫ11 = ±0.13 along thef1-axis using astraining rate of10−4 s−1, which is obtained by imposing the following boundaryconditions: (i) The displacement normal to the face is set tozero on three mutu-ally perpendicular faces of the cubic sample. (ii) The normal displacementu1 isapplied to the top surface, which is prescribed as
u1 =
10−4lt for tension,−10−4lt for compression,
(3.84)
with time t running from0 to 1300 s. (iii) The two remaining faces are traction-free.
In the second loading case, the sample is subjected to a simple shear deforma-tion through imposing the following deformationz = z(x), which, with respectto the global basis, can be written as (in components)
z1(x) = x1 + γx2 , z2(x) = x2 , z3(x) = x3 , (3.85)
whereγ represents the amount of shear applied to the sample, described byγ =10−4t, with time t running from0 to 2500 s.
In the third loading case, the sample is subjected to boundary conditions rep-resenting volumetric expansion/contraction through applying the following defor-mation:
z1(x) = x1 , z2(x) = x2 , z3(x) = x3 , (3.86)
where represents the principal stretch, with > 1 for expansion and < 1 forcontraction. The ratio between the current volumeV and the initial volumeV0
76

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
(1)
(3)
(2)
(1)
(3)
(2)
-1600
-1200
-800
-400
0
1600
1200
800
400C
auch
y s
tres
s T
11 [
MP
a]
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
-0.12 -0.09 -0.06 -0.03 0 0.03 0.06 0.09 0.12
Logarithmic strain e11
Figure 3.6: Cauchy stressT11 as a function of logarithmic straine11 of single-crystalline austenite samples undergoing uniaxial tension and compression.
is given byV/V0 = 3. The applied rate of deformation is= 10−4 s−1. Foreach loading case, three different crystallographic orientations described in thebeginning of this section are assigned to the sample.
3.2.3 Stress-strain response of single-crystalline austenite
Prior to the discussion of the results, it is convenient to introduce two parametersthat are used in the presentation of the results, namely, (i)the total martensiticvolume fraction, denoted asξM , which is defined as the sum of the volume frac-tions of all transformation systemsξ(α) in the reference configuration, and (ii) thetotal accumulated plastic slip, denoted asγ, which is defined as the sum of the(effective) accumulated plastic slips over the whole domain, i.e,
ξM :=M∑
α=1
ξ(α) and γ :=N∑
i=1
γ(i) . (3.87)
In addition, the definition of the logarithmic strain used inthe presentation of theresult is provided by (2.61) inSection 2.2.3.
77

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
Uniaxial tension and compression
Figure 3.6 shows the axial Cauchy stressT11 plotted against the axial logarith-mic straine11. It can be observed that the stress-strain response of the samplesare composed of three stages, which can be identified by abrupt changes in theslope of the curves, both in tension and compression. Initially the austenite de-forms elastically, until the level of the stress reaches either the plastic yield stress,g(i)A = s
(i)A , and/or the transformation threshold,f (α) = f
(α)cr , for some slip sys-
tems i or some transformation systemsα. Subsequently, an inelastic (plasticand/or transformation) deformation stage follows, which finally turns back intoan elastic stage when the austenite has fully transformed into martensite. An ex-ception to this general trend is the case of[111]A-loaded austenite in compression,where the third stage (elastic deformation as martensite) is not observed, whichindicates that transformation has not yet finished, at least, up to about an axiallogarithmic strain of0.12. In uniaxial tension, the[111]A-loaded sample showsthe highest stress at the onset of inelastic (plastic and/ortransformation) deforma-tion and the lowest strain level at “transformation completion”, while the[100]A-loaded sample shows the lowest stress at the onset of inelastic deformation and thehighest strain level at transformation completion. This result is qualitatively in ac-cordance with experimental observations in TRIP-assistedsteels [72, 91]. Further-more, in uniaxial compression, the[111]A-loaded sample shows the highest levelof (compressive) stress at the onset of inelastic deformation, while for the[110]A-and [100]A-loaded samples, the inelastic deformation starts at a relatively simi-lar (compressive) stress level. In contrast to the behaviorunder uniaxial tension,the [110]A-loaded sample shows a higher (compressive) strain at transformationsaturation than the[100]A-loaded sample.
Both the[110]A- and [111]A-loaded samples show that, when the loading isincreased beyond the initial plastic yield level, the stress in the austenitic phasepredicted by the model increases due to the mechanism of plastic hardening. Ata certain stage, the transformation driving force in one or more transformationsystems eventually exceeds the critical transformation threshold, and the marten-sitic transformation is then initiated. Although initially the transformation processtakes place at a relatively low rate (see Figure 3.7), it gradually starts to domi-nate the overall response, as indicated by the appearance ofa stress-plateau in thestress-strain response. From this point of view, the mechanism of plastic deforma-tion in the austenitic phase delays the onset and the completion of transformation.
78

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
0.050
0
0.300
0.250
0.200
0.150
0.100
Mar
tenis
tic
volu
me
frac
tion ξ
(α)
-0.12 0 0.04 0.12
Logarithmic strain e11
0.025
0
0.150
0.125
0.100
0.075
0.050
Mar
tenis
tic
volu
me
frac
tion ξ
(α)
Logarithmic strain e11
(b)(a)
0.2
0
1.2
1.0
0.8
0.6
0.4
Mar
tenis
tic
volu
me
frac
tion ξ
M
Logarithmic strain e11
0.030
0
0.018
0.015
0.012
0.090
0.060
Mar
tenis
tic
volu
me
frac
tion ξ
(α)
Logarithmic strain e11
(d)(c)
-0.08 -0.04 0.08-0.12 0 0.04 0.12-0.08 -0.04 0.08
-0.12 0 0.04 0.12-0.08 -0.04 0.08-0.12 0 0.04 0.12-0.08 -0.04 0.08
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
(1)
(1)
(2)(2)
(3)(3)
[100]A-loaded [110]
A-loaded
[111]A-loaded
α = 17,18,19,20,21,22,23,24
α = 3,4,7,8,11,12,15,18
α = 1,4,13,15,22,24
α = 5,6,7,8α = 9,14,18,21
α = 10,13,17,22
Figure 3.7: Volume fractionξ(α) of martensitic transformation systems for (a)[100]A-, (b) [110]A- and (c) [111]A-loaded single crystal austenite, and (d) thetotal martensitic volume fraction during uniaxial tension/compression.
Figures 3.7a-c indicate the evolution of the volume fraction of the individ-ual transformation systems during uniaxial tension and compression, while Fig-ure 3.7d depicts the total martensitic volume fraction plotted against the axiallogarithmic straine11. For the[100]A-loaded sample, there are eight transforma-tion systems activated with equal volume fractions during both uniaxial tensionand compression (see Figure 3.7a). For the[110]A-loaded sample, two groupsof transformation systems are activated during uniaxial tension, where each groupconsists of four transformation systems. During uniaxial compression, the[110]A-loaded sample shows only four systems contributing to the transformation, asshown in Figure 3.7b. For the[111]A-loaded sample, Figure 3.7c indicates that notransformation is observed in uniaxial compression, whereas six transformation
79

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
0
0.075
0.150
0.225
0.300
0.600
0.525
0.450
0.375
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
-0.12 -0.09 -0.06 -0.03 0 0.03 0.06 0.09 0.12
Logarithmic strain e11
(1)
(3)
(2) (1) (2)
(3)
Am
ount
of
pla
stic
sli
p γ
Figure 3.8: Evolution of the accumulated plastic slipγ as a function of the loga-rithmic straine11 in the single crystal austenite during uniaxial tension andcom-pression.
systems are simultaneously activated with equal volume fractions during uniaxialtension. In Figure 3.7d, the onset of transformation is indicated by the point wherethe martensitic volume fractionξM becomes non-zero. The point whereξM = 1relates to the stage of transformation completion.
Figure 3.8 depicts the evolution of the accumulated plasticslip γ as a functionof the axial logarithmic straine11. Figure 3.8 indicates that plastic slip activitiesare observed mostly in the[111]A-loaded sample, whereas the sample loaded in[100]A direction shows no trace of plastic slip activity. It can be observed thatthe amount of plastic slip increases up to the level of strainwhere the martensitictransformation mechanism starts to dominate the overall deformation. For the[110]A-loaded sample, the plastic slip activity stops at about an axial logarithmicstrain of0.025 in uniaxial tension and−0.04 in uniaxial compression, while forthe [111]A-loaded sample, the plastic slip activity stops at about0.06 axial loga-rithmic strain in uniaxial tension. These values correspond to the points when astress-plateau starts to appear in the stress-strain curves.
In order to analyze the role of the plastic deformation in theaustenite, theresults shown in Figure 3.6 are reproduced in Figures 3.9a and b, and comparedto the responses where the effect of plasticity in the austenite is neglected (usingthe elasto-transformation model of Turteltaub and Suiker [124, 141, 143]) duringuniaxial tension and compression. The thick lines relate tothe present elasto-
80

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
(2)
(3)
(3)
(2)
(1) (1)*
(1) (1)*
250
0
1500
1250
1000
750
500
Cau
chy s
tres
s T
11 [
MP
a]
0 0.03 0.06 0.09 0.12
Logarithmic strain e11
-1250
-1500
0
-250
-500
-750
-1000
Cau
chy s
tres
s T
11 [
MP
a]
-0.12 -0.09 -0.06 -0.03 0
Logarithmic strain e11
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-
loaded
(2)* (3)*
(3)*
(2)*
(b)(a)
Figure 3.9: Axial stress-strain responses obtained from the present model in com-parison to the results of the model with no plasticity in the austenite (plotted inthinner lines with their labels indicated with an asterisk)in (a) compression and(b) tension.
plastic-transformation model and the thin lines correspond to the model resultwhere the effect of plasticity in the austenite is not taken into account. For thesample loaded in the[100]A direction, the responses related to the transforma-tion models with and without plasticity coincide (i.e., curves 1 and 1∗), whichindicates that for this crystallographic orientation plasticity does not occur underuniaxial tension and compression. This feature of the[100]A-loaded sample isdue to the transformation developing at a considerable lower stress level than theinitial plastic yield stress of the austenite. For the[110]A-loaded sample, plasticdeformation occurs when the stress level reaches the initial plastic yield stress forthat orientation. In this case, the plastic deformation starts prior to transforma-tion, as indicated by the plastic yield stress of curve2 being lower than the initialtransformation stress of curve2∗, both in tension and compression. A similar situ-ation applies to the[111]A-loaded sample in tension, where the initial plastic yieldstress is even much lower than the corresponding initial transformation stress (seecurves3 and3∗). Nonetheless, the stress level at completion of transformationpredicted by the models with and without plasticity is virtually the same. Forthe [111]A-loaded sample subjected to uniaxial compression, virtually no trans-formation occurs, which essentially means that it is energetically more favorableto deform plastically in the austenitic phase than to transform into martensite. Infact, the elasto-transformation model predicts a purely elastic deformation during
81

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
(2)
(3) (3)*
(3)
(2)
(1) (1)* (1)
(1)*
0.2
0
1.2
1.0
0.8
0.6
0.4
Mar
tenis
tic
volu
me
frac
tion ξ
M
0 0.03 0.06 0.09 0.12
Logarithmic strain e11
0.2
0
1.2
1.0
0.8
0.6
0.4
Mar
tenis
tic
volu
me
frac
tion ξ
M
-0.12 -0.09 -0.06 -0.03 0
Logarithmic strain e11
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
(2)*
(3)*
(2)*
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
(b)(a)
Figure 3.10: Total martensitic volume fractions predictedby the present modelcompared to results of the model with no plasticity in the austenite (plotted inthinner lines with their labels indicated by an asterisk) in(a) compression and (b)tension.
uniaxial compression (curve3∗).In comparison with the results of the simulations with the “transformation-
only” model [124, 141, 143], the largest influence of the plastic deformation in theaustenite on the transformation behavior is observed in the[111]A-loaded sample,particulary under uniaxial tension. From curve3 (with plasticity) and curve3∗
(without plasticity) in Figure 3.10b, it can be observed that the plastic deformationin the austenite delays the onset of transformation in tension up to approximately0.012 axial strain and delays the completion of transformation upto about0.063axial strain. Although not shown here, theindividual martensitic transformationsystems active during transformation are the same for both transformation mod-els, with and without plasticity in the austenite. However,it is important to notethat the number of activated transformation systems for the[111]A-loaded sam-ple under uniaxial tension are somewhat different from those reported in [141].The difference stems from a different crystallographic orientation in the lateraldirection.
Simple shear deformation
The stress-strain behavior and the evolution of the total martensitic volume frac-tion for the single-crystalline austenite samples subjected to a simple shear defor-
82

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
(3)
(1)
(2) (3) (1)
(2)
(1)*
(2)*
(3)*
0.20
0
1.20
1.00
0.80
0.60
0.40
Mar
tenis
tic
volu
me
frac
tion ξ
M
0 0.05 0.10 0.20 0.25
Amount of shear γ
0
1500
1200
900
600
300
Cau
chy s
tres
s T
12 [
MP
a]
0 0.05 0.10 0.15 0.25
Amount of shear γ
0.150.20
(1)*
(2)*(3)*
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
(b)(a)
Figure 3.11: Overall response of single-crystalline austenite samples undergoingsimple shear deformation in terms of (a) Cauchy stressT12 and (b) total marten-sitic volume fraction depicted against the amount of shearγ. The result for thetransformation-only model is shown in thinner lines.
mation are presented in Figures 3.11a and b. The thick-line curves relate to the re-sults of the simulations using the present elasto-plastic-transformation model andthe thin-line curves correspond to the results of the elasto-transformation modelof Turteltaub and Suiker [124, 141, 143] that neglects the plasticity in the austen-ite. The stress-strain curves shown in Figure 3.11a for the elasto-transformationmodel (without plasticity) indicate a significantly stronger response. This is dueto the fact that the transformation mechanism, which involves volumetric dilata-tion, is not ideally-suited to accommodate the imposed simple shear deformation,which is an isochoric deformation mode. To preserve the (overall) isochoric de-formation, a complex internal distribution of elastic strains is required to balancethe volumetric expansion due to transformation.
Figures 3.12a-c, which illustrate the evolution of the normal components ofthe Cauchy stress,T11, T22 andT33, in the austenite during the simple shear defor-mation, show that the “transformation-only” model predicts a relatively high com-pressive stress in the austenitic samples, which corresponds to a relatively largeamount of elastic (compressive) strain in order to compensate for the volumetricexpansion due to transformation. In general, the[100]A-oriented sample (curve1) shows lower normal stresses compared to the other samples (curves2 and3),which indicates that plastic slips dominate the overall deformation mechanism forthe [100]A-oriented sample in simple shear. Although transformationis not an
83

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
(1)
(3)(2)(2)*
(1)
(3)
(2)
(2)*-1500
1000
500
0
-500
-1000
Cau
chy s
tres
s T
22 [
MP
a]
0 0.05 0.10 0.15 0.25
Amount of shear γ
-1500
1000
500
0
-500
-1000
Cau
chy s
tres
s T
11 [
MP
a]
0 0.05 0.10 0.15 0.25
Amount of shear γ
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1)*
(3)*
(b)(a)
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
0.20 0.20
(1)*
(3)*
(1)
(3)
(2)
(2)*
(c)
-1000
-1500
1000
500
0
-500
Cau
chy s
tres
s T
33 [
MP
a]
0 0.05 0.10 0.15 0.25
Amount of shear γ
0.20
(1) [100]F-loaded
(2) [110]F-loaded
(3) [111]F-loaded
(1)*
(3)*
Figure 3.12: Normal stress components (a)T11, (b) T22 and (c)T33 during sim-ple shear obtained from the elasto-plastic-transformation model compared to thetransformation-only model (thinner lines).
optimal deformation mechanism for simple shear, it is stillmore favorable thana purely elastic deformation, and consequently, the elasto-transformation modelpredicts that transformation does occur, albeit at a relatively slow rate comparedto, for instance, uniaxial tension. Since the transformation rate under simple sheardeformation is relatively low, a stress-plateau for the transformation-only modelis not observed.
In terms of the evolution of the martensitic volume fraction, Figure 3.11bshows that the transformation rates predicted by the present model (curves1, 2and 3) are significantly lower than those predicted by the transformation-onlymodel, as represented by curves1∗, 2∗ and3∗. This indicates that the inelasticdeformation occurring during simple shear is dominated by the (isochoric) plastic
84

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
0
0.075
0.150
0.225
0.300
0.600
0.525
0.450
0.375
0 0.05 0.10 0.15 0.20 0.25
Amount of shear γ
Am
ount
of
pla
stic
sli
p γ
(1)
(2)(3)
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
Figure 3.13: Evolution of the accumulated plastic slipγ as a function of theamount of shearγ for a single-crystalline austenite samples during simple sheardeformation.
deformation in the austenitic phase. Hence, the martensitic transformation processis suppressed by the plastic deformation mechanism. As shown in Figure 3.11b,atγ = 0.25, the largest volume fraction of martensite observed in the simulationswith the elasto-plastic-transformation model isξM ≈ 0.12 for the sample orientedin the[110]A direction, whereas the transformation-only model predicts completetransformations (i.e.,ξM = 1) at γ = 0.25 for all three samples. Accordingly,for the crystallographic orientations and the strain rangeconsidered in the presentanalysis, the responses under simple shear deformation from the present elasto-plastic-transformation model are in fact close to the predictions of a classicalelasto-plastic model for an FCC single crystal, and show significantly lower stresslevels than the corresponding curves for the transformation-only model.
Figure 3.13 illustrates the evolution of the effective accumulated plastic slipγ as a function of the amount of shearγ of single-crystalline austenite samplesduring a simple shear deformation. It can be seen that the highest plastic slipactivity is observed in the[100]A-oriented sample (curve1), whereas the othersamples (oriented in[110]A- and [111]A direction) show a similar behavior interms of the evolution of the amount of accumulated slipγ (curves2 and3). Thisresult shows that plasticity is indeed the favorable mechanism under simple shear,in particular for the[100]A-oriented sample. Although it is not shown here, theevolution of the accumulated plastic slipγ for all samples depicted in Figure 3.13
85

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
(1) (2)
(3)
T11
=T22
=T33
(1) (2)
(3)
T11
=T22
=T33
-1200
-900
-600
-300
0
1200
900
600
300C
auch
y s
tres
s T
11, T
22, T
33 [
MP
a]
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
0.94 0.96 0.98 1.00 1.02 1.04 1.06
Volume ratio V/V0
Figure 3.14: Cauchy stressesT11, T11 andT33 depicted against the volume ratioV/V0 of single-crystalline austenite samples subjected to volumetric expansionand contraction.
is similar to that obtained from an FCC single crystal plasticity model.
Volumetric expansion and contraction
The results of the simulations of single-crystalline austenite samples subjected tovolumetric expansion and contraction are presented in Figures 3.14 and 3.15, interms of the normal components of the Cauchy stress,T11, T22 andT33 (note thatin this caseT11 = T22 = T33), and the total martensitic volume fractionξM asfunctions of the volume ratioV/V0. It can be observed that the responses of theaustenitic samples under volumetric expansion and contraction are independentof the crystallographic orientation of the sample. During volumetric expansion(V/V0 > 1), the austenitic samples respond elastically, and eventually transforminto martensite when the transformation threshold is reached. The phase transfor-mation occurs at constant stress, as indicated by the stress-plateau in Figure 3.14.At this stage, the transformation proceeds at a constant rate, where the increaseof the martensitic volume fraction is proportional to the overall volume increaseimposed through the boundary conditions (see Figure 3.15).All transformationsystemsα = 1, . . . ,M are activated equally and no trace of plastic deforma-tion is observed during the volumetric expansion. The absence of plastic slip canbe ascribed to the fact that the deviatoric part of the loading, which drives the
86

3.2. SIMULATIONS OF ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
(1) (2)
(3)
(1) (2)
(3)
0
0.20
0.40
1.20
1.00
0.80
0.60
Mar
tenis
tic
volu
me
frac
tion ξ
M
(1) [100]A-loaded
(2) [110]A-loaded
(3) [111]A-loaded
0.94 0.96 0.98 1.00 1.02 1.04 1.06
Volume ratio V/V0
Figure 3.15: Evolution of martensitic volume fraction as a function of the vol-ume ratioV/V0 of single-crystalline austenite samples during volumetric expan-sion/contraction.
mechanism of plastic deformation, is equal to zero. When thetransformation iscomplete, the stress raises significantly in accordance with the elastic propertiesof the martensite product phase. In addition, neither transformation nor plasticityoccurs in the samples subjected to volumetric contraction;the samples remain inthe austenitic phase and contract elastically. The absenceof transformation is dueto the fact that a martensitic transformation is always accompanied by volumetricgrowth, a mechanism that clearly cannot take place during volumetric contraction.
Summary of the elasto-plastic-transformation behavior ofsingle-crystallineaustenite
A crystallography-based model has been developed that can be used for simulat-ing the elasto-plastic-transformation behavior of single-crystalline austenite. Themodel combines the multiscale martensitic phase transformation model with asingle-crystal plasticity model for the FCC lattice. The coupling between thesemodels occurs by means of a thermodynamically-consistent formulation within alarge deformation framework. The simulations of elementary loading cases forsingle-crystalline austenitic samples show a strong interaction between the phasetransformation and plastic deformation processes. The intensity of this interactiondepends on (i) the deformation mode and (ii) the crystallographic orientation of
87

CHAPTER 3. ELASTO-PLASTIC-TRANSFORMATION BEHAVIOR OF SINGLE-CRYSTALLINE AUSTENITE
the sample. During uniaxial tension and compression, the plastic deformation inthe austenite generally delays the transformation process, where the magnitudeof the delay depends on the crystallographic orientation ofthe sample. Nonethe-less, the austenite has completely transformed into martensite at deformationsless than0.12 axial strain, except for the[111]A-loaded sample, where transfor-mation is hardly observed. In contrast, under simple shear deformation most ofthe deformation is due to the development of plasticity in the austenite, and only arelatively small amount of austenite transforms into martensite. Under volumetricexpansion, the phase transformation is the only inelastic deformation mechanism,whereas neither plasticity nor transformation is observedduring volumetric con-traction.
88

4Numerical solution algorithm for
transformation-plasticity model
In this chapter, the numerical algorithm of the elasto-plastic transformation modelfor austenite is presented. The numerical framework is based upon the implemen-tation presented in Suiker and Turteltaub [124] for an elasto-transformation model(without the effect of plasticity). The stress-update algorithm is formulated basedon a fully-implicity Euler backward scheme. The corresponding coupled non-linear system of equations is solved using a Newton-Raphsoniteration procedure.The computational procedure is equipped with robust searchalgorithms that areutilized to identify the active sets of slip and transformation systems during de-formation process (see, e.g., [30, 124]). Furthermore, a sub-stepping (cut-back)procedure is applied in order to improve the convergence behavior of the numer-ical algorithm. The computation of the consistent tangent operator is performedusing a numerical differentiation method, since the derivation of a closed-formexpression for the consistent tangent operator is relatively complex, if not im-possible, for the present model. The numerical differentiation of the consistenttangent operator is carried out employing a first-order accurate, finite-differencescheme, similar to the approach used by Perez-Foguet [103,104] for small-strain
89

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
inelastic models, and by Miehe [87] for large-strain inelastic models. This nu-merical algorithm is implemented as a “user-material” subroutine within the finiteelement program ABAQUS [1].
In the present chapter, the elasto-plastic-transformation model is mainly usedto study the mechanical behavior of the austenitic phase under isothermal con-ditions (i.e., at constant temperature). The study of the response of TRIP steelsunder thermal loading will be presented inChapter 7. Hence, in this chapter, thediscussion on the numerical implementation of the elasto-plastic-transformationmodel is focussed on the mechanical part of the thermo-mechanical formulation,and the thermal-related quantities are discussed in more detail if necessary.
This chapter is organized as follows: The numerical algorithm to update thestress and other state variables is presented inSection 4.1. Subsequently, the dis-cretization of the essential equations of the elasto-plastic-transformation modeland some special treatments used to optimize the stress-update algorithm are dis-cussed. The procedure to compute the numerical tangent operator is shown inSection 4.2. Finally, several numerical examples are shown inSection 4.3to val-idate the numerical implementation. Although not presented here, the numericalimplementation of the elasto-plasticity model in the ferritic region can be derivedin a similar fashion as for the austenite elasto-plastic-transformation model, bysuppressing all terms that are related to the transformation mechanism.
4.1 Stress-update algorithm for coupled transformation-plasticity model
The algorithmic treatment for the numerical solution procedure of the elasto-plastic-transformation model is outlined in this section.For any given time in-terval [tn, tn+1] ∈ R+, the unknown variables at timetn+1 are calculated fromthe values of the corresponding variables at timetn, which mathematically, canbe formulated as
Fn,Fp,n,Ftr,n, βn, ξn, sA,n → Fn+1,Fp,n+1,Ftr,n+1, βn+1, ξn+1, sA,n+1 ,(4.1)
wheresA := s(i)A | i = 1, . . . , NA represents the set of resistances against slipfor all systemsi in the austenite andξ := ξ(α)|α = 1, . . . ,M is the set ofthe martensitic volume fractions. The values of all model variables at timetn,i.e., Fn,Fp,n,Ftr,n, βn, ξn, sA,n are known from the deformation history. In
90

4.1. STRESS-UPDATE ALGORITHM FOR COUPLED TRANSFORMATION-PLASTICITY MODEL
this case, subscripts “n” and “n + 1” indicate that the values of the variablesare evaluated at timetn andtn+1, respectively. Furthermore, in a displacement-controlled finite element method, the update of the stress and other state variablesis driven by the increment of the total deformation gradient∆F , i.e.,
Fn+1 = Fn + ∆F . (4.2)
The update of (4.1) can be determined by solving the set of incremental equationsformulated in the next section.
4.1.1 Discretization of model equations
The governing equations of the elasto-plastic-transformation model presented inChapter 3 are discretized using a fully-implicit time-integration scheme (or back-ward Euler scheme) [17, 94, 124]. From the material time derivative of the trans-formation deformation gradient in (3.4), the increment of the transformation de-formation gradient, denoted as∆Ftr, can be written as
∆Ftr =
M∑
α=1
∆ξ(α)b(α) ⊗ d(α) , (4.3)
where∆ξ(α) is the incremental martensitic volume fraction associatedwith trans-formation systemα. The updated transformation deformation gradientFtr,n+1 isthen obtained as
Ftr,n+1 = Ftr,n + ∆Ftr = Ftr,n +
M∑
α=1
∆ξ(α)b(α) ⊗ d(α) . (4.4)
Furthermore, the volume fractionξ(α)n+1 of martensitic transformation systemα
and the volume fraction of austenite,ξA,n+1, are, respectively, given by
ξ(α)n+1 = ξ(α)
n + ∆ξ(α) and ξA,n+1 = 1 −M∑
α=1
ξ(α)n+1 , (4.5)
for α = 1, . . . ,M . In addition, from the definition of the plastic velocity gradient(3.5), the expression for the effective plastic velocity gradient (3.9) and the effec-tive slip rate (3.10), the increment of the plastic deformation gradient, denoted as
91

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
∆Fp, is given by
∆Fp = Lp,n+1Fp,n+1∆t =
(
ξAn+1
Jtr,n+1
NA∑
i=1
∆γ(i)A m
(i)A ⊗ n
(i)A
)
Fp,n+1 , (4.6)
whereJtr,n+1 = detFtr,n+1 and∆γ(i)A denotes the plastic slip increment of slip
systemi in the austenite. The updated plastic deformation gradient, Fp,n+1, canbe written as
Fp,n+1 = Fp,n + ∆Fp , (4.7)
from which the expression forFp,n+1 can be obtained by substituting (4.6) for∆Fp, which results in
Fp,n+1 =
(
I − ξAn+1
Jtr,n+1
NF∑
i=1
∆γ(i)A m
(i)A ⊗ n
(i)A
)−1
Fp,n . (4.8)
Furthermore, the accumulated plastic slipsγ(i)n+1 evaluated at timetn+1 can be
written as
γ(i)n+1 = γ(i)
n + ∆γ(i) = γ(i)n +
ξA,n+1
Jtr,n+1∆γ
(i)A , (4.9)
where (3.10) has been used.Using (4.2), (4.4) and (4.8), the elastic deformation gradient Fe,n+1 can be
obtained from the decomposition of the deformation gradient (3.1), i.e.,
Fe,n+1 = Fn+1F−1tr,n+1F
−1p,n+1 . (4.10)
Subsequently, the elastic Green-Lagrange strainEe,n+1 at timetn+1 is calculatedthrough (3.34), i.e.,
Ee,n+1 =1
2
(
F Te,n+1Fe,n+1 − I
)
. (4.11)
From the constitutive law (3.39), the second Piola-Kirchhoff stressSn+1 mea-sured in the second intermediate configuration is computed as
Sn+1 = Cn+1Ee,n+1 , (4.12)
92

4.1. STRESS-UPDATE ALGORITHM FOR COUPLED TRANSFORMATION-PLASTICITY MODEL
whereCn+1 is the fourth-order elasticity tensor, which, as shown in (3.40), de-
pends on the volume fractionsξ(α)n+1, i.e.,
Cn+1 =1
Jtr,n+1
(
ξA,n+1CA + (1 + δtr)M∑
α=1
ξ(α)n+1C
(α)
)
. (4.13)
From (3.64)-(3.67), the driving force for transformation,f (α)n+1, can be ex-
pressed as follows:
f(α)n+1 = f
(α)m,n+1 + f
(α)th,n+1 + f
(α)d,n+1 + f
(α)s,n+1 . (4.14)
In the above expression, the bulk-mechanical contributionf(α)m,n+1 to the transfor-
mation driving force has the form
f(α)m,n+1 = Jtr,n+1F
Tp,n+1F
Te,n+1Fe,n+1Sn+1F
−Tp,n+1F
Ttr,n+1 ·
(
b(α) ⊗ d(α))
+1
2
(
CA − (1 + δtr)C(α))
Ee,n+1 · Ee,n+1 , (4.15)
whereFtr,n+1, Fp,n+1, Fe,n+1, Ee,n+1 andSn+1 are given by (4.4), (4.8), (4.10),(4.11) and (4.12), respectively. Under isothermal conditions, the thermal contri-bution to the transformation driving force is constant for all time t ∈ [0,∞), sincethe temperature is constant, i.e.,
f(α)th,n+1 = f
(α)th,n = f
(α)th . (4.16)
In addition, the defect energyf (α)d,n+1 and surface energy contributionsf (α)
s,n+1 canbe written as
f(α)d,n+1 =
ωA
2
(
µA − (1 + δtr)µ(α))
β2n+1 , (4.17)
f(α)s,n+1 =
χ
ℓ0
(
2ξ(α)n+1 − 1
)
. (4.18)
The microstrain variableβn+1 is obtained using the definition of the effective sliprate (3.10) and the microstrain evolutional law (3.75) as
βn+1 = βn + ∆β = βn +ξA,n+1
Jtr,n+1
NA∑
i=1
w(i)n+1∆γ
(i)A . (4.19)
93

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
Furthermore, from (3.64)-(3.67), the driving force for plastic slip g(i)A,n+1 in slip
systemi can be expressed as
g(i)A,n+1 = g
(i)m,n+1 + g
(i)th,n+1 + g
(i)d,n+1 , (4.20)
where the bulk mechanical contribution to the plastic driving force,g(i)m,n+1, can
be written as
g(i)m,n+1 = F T
e,n+1Fe,n+1Sn+1 ·(
m(i)A ⊗ n
(i)A
)
, (4.21)
and the thermal contribution to the plastic driving force,g(i)th,n+1, is obtained as
(for isothermal processes)
g(i)th,n+1 = g
(i)th,n = g
(i)th . (4.22)
The contribution to the plastic driving force related to thedefect energy,g(i)d,n+1,
is given byg(i)d,n+1 = −ωAµn+1βn+1w
(i)n+1 . (4.23)
In the above expression, the effective equivalent (isotropic) shear modulusµn+1
can be computed from (3.51) as
µn+1 =1
Jtr,n+1
(
ξA,n+1µA + (1 + δtr)
M∑
α=1
ξ(α)n+1µ
(α)
)
. (4.24)
The kinetic law that connects the incremental martensitic volume fraction∆ξ(α) to the transformation driving forcef (α)
n+1 is calculated from (3.68) as
∆ξ(α) =
ξ0∆t tanh
(
f(α)n+1 − f
(α)cr
νf(α)cr
)
if f (α)n+1 > f
(α)cr ,
0 otherwise .
(4.25)
Similarly, from (3.74), the kinetic relation that connectsthe plasticity driving forceto the amount of slip in a slip systemi may be discretized as
∆γ(i)A,n+1 =
γA0 ∆t
g(i)A,n+1
s(i)A,n+1
(1/pA)
− 1
if g(i)
A,n+1 > s(i)A,n+1 ,
0 otherwise .
(4.26)
94

4.1. STRESS-UPDATE ALGORITHM FOR COUPLED TRANSFORMATION-PLASTICITY MODEL
Additional computations not presented here have demonstrated that the conver-gence behavior of the model with the plastic kinetic relation (4.26) is relativelypoor. The convergence behavior can be improved if, instead of (4.26), the in-verted form is used [30, 88], as expressed by
g(i)A,n+1 = s
(i)A,n+1
∆γ(i)A,n+1
γA0 ∆t
+ 1
pA
, (4.27)
where∆γ(i)A,n+1 ≥ 0. Furthermore, the value for the slip resistances
(i)A,n+1 can be
computed from (3.75) as
s(i)A,n+1 = s
(i)A,n + ∆s
(i)A = s
(i)A,n +
NA∑
j=1
H(i,j)A,n+1∆γ
(j)A . (4.28)
In the above expression, the hardening moduli matrixH(i,j)A,n+1 can be derived from
(3.76) and (3.78) as
H(i,j)A,n+1 =
k(j)A,n+1 for i = j ,
qAk(j)A,n+1 for i 6= j ,
wherek(j)A,n+1 = kA
0
1 −s(j)A,n+1
sA∞
uA
.
(4.29)Furthermore, using (3.83), the parametersw
(i)n+1 can be calculated from the hard-
ening moduli matrix as
w(i)n+1 =
1
cAµANA
NA∑
j=1
H(j,i)A,n+1 . (4.30)
In addition to the second Piola-Kirchhoff stress in the second intermediateconfiguration,Sn+1, two alternative stress measures can be calculated, namelythefirst Piola-Kirchhoff stress in the reference configuration, Pn+1, and the Cauchystress in the current configuration,Tn+1, as given by
Pn+1 = Jtr,n+1Fe,n+1Sn+1F−Tp,n+1F
−Ttr,n+1 , (4.31)
Tn+1 =1
Je,n+1Fe,n+1Sn+1F
Te,n+1 , (4.32)
95

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
with Je,n+1 := det Fe,n+1. The first Piola-Kirchhoff stressPn+1 will be used inthe calculation for the numerical tangent operator inSection 4.2and the CauchystressTn+1 is the stress measure that is required by the finite element programABAQUS as output in order to compute the internal force vector at the globallevel.
4.1.2 Newton-Raphson iteration procedure (return-mapping)
Essential equations and primary variables
To compute the incremental update of the state variables in (4.1), a set of primaryvariables needs to be identified. Leta be the vector of primary variables, whichis divided into three groups, i.e.,a = aI,aII ,aIII T , where
aI := ∆ξ , aII := ∆γA , aIII := ∆sA , (4.33)
with ∆ξ := ∆ξ(α)|α = 1, . . . ,M, ∆γA := ∆γ(i)A | i = 1, . . . , NA and
∆sA := ∆s(i)A | i = 1, . . . , NA. The choice of the above primary variables isrelated to the fact that all transformation-related variables, i.e., the transforma-tion deformation gradientFtr,n+1 and the effective elasticity tensorCn+1, can bedetermined as functions of the martensitic volume fractionincrements∆ξ. Sim-ilarly, all plasticity-related variables, i.e., the plastic deformation gradientFp,n+1
and the effective microstrainβn+1, are dependent of the plastic slips∆γA. Even-tually, the elastic strain and the stress can be calculated when all transformation-and plasticity-related variables are known. In addition, the variables∆sA needto be included in the set of primary variables in order to obtain the actual valueof the slip resistance within a fully implicit scheme. In agreement with the vec-tor of primary variablesa, three sets of essential equations are constructed into aresidual format [95, 123], namely,r = rI , rII , rIII T , where the solution of theseequations is obtained by requiring
r = r(a) = 0 . (4.34)
The first set of essential equations is related to the (incremental) kinetic law forphase transformations (4.25), which can be written in a residual formatrI as
r(α)I :=
∆ξ(α) − ξ0∆t tanh
(
f(α)n+1 − f
(α)cr
νf(α)cr
)
if f (α)n+1 > f
(α)cr ,
∆ξ(α) otherwise ,
(4.35)
96

4.1. STRESS-UPDATE ALGORITHM FOR COUPLED TRANSFORMATION-PLASTICITY MODEL
for α = 1, . . . ,M , where the transformation driving force is a function of theprimary variables∆ξ and∆γA, i.e.,fn+1 = fn+1(∆ξ,∆γA). The second set ofessential equations is associated with the (inverted) power-law kinetic relation forplastic slip (4.26). The residualsrII related to the second set of essential equationscan be expressed as
r(i)II :=
g(i)A,n+1 − s
(i)A,n+1
∆γ(i)A,n+1
γA0 ∆t
+ 1
pA
if g(α)A,n+1 > s
(i)A,n+1 ,
∆γ(i) otherwise ,
(4.36)
for i = 1, . . . , NA. In the above expression, the driving force for plasticityg(i)A,n+1 = g
(i)A,n+1(∆ξ,∆γA) is a function of the primary variables∆ξ and∆γA,
whereas the slip resistancesA,n+1 is related to the primary variables∆sA through(4.28). The residualsrIII that correspond to the third set of essentials equationsare related to the update of the slip resistance in the austenite given in (4.28), i.e.,
r(i)III := ∆s
(i)A −
NA∑
j=1
H(i,j)A,n+1∆γ
(j)A , (4.37)
where the hardening moduli matrixH(i,j)A,n+1 = H
(i,j)A,n+1(∆sA) is a function of
the slip resistance update∆sA. The system of coupled non-linear equations de-fined in (4.34)-(4.37) is solved in an iterative scheme usinga Newton-Raphsonprocedure.
Trial state and primary variables update
To initialize the Newton-Raphson iteration procedure, theinitial guess (or predic-tor) of the primary variables, called the “trial state” is required. Let the trial statefor the vector of primary variables be defined asatrial = aI,trial,aII,trial ,aIII,trial T .The trial state is assumed to relate to a fully elastic state,i.e.,
aI,trial = ∆ξtrial = 0 , aII,trial = ∆γA,trial = 0 , aIII,trial = ∆sA,trial = 0 . (4.38)
In fact, the above trial state is obtained assuming the totaldeformation gradientincrement∆F to be elastic, in accordance with
Fe,trial = Fn+1F−1tr,nF−1
p,n and Strial = CtrialEe,trial , (4.39)
97

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
whereCtrial = Cn (and accordingly,µtrial = µn). In addition, the trial transfor-mation and plastic deformation gradients areFtr,trial = Ftr,n andFp,trial = Fp,n,
respectively. The driving forcesf (α)trial andg(i)
A,trial related to the trial state can beobtained by substituting (4.38) and (4.39) into (4.14)-(4.18) and (4.30) for thetransformation part, as well as into (4.20)-(4.24) and (4.30) for the plasticity part.From (4.28), the trial slip resistance becomessA,trial = sA,n and, from (4.19), themicrostrain isβtrial = βn.
If the L2-norm of the vector of residuals, denoted as‖rtrial‖, is smaller than aprescribed tolerance,
‖rtrial‖ < εmax , (4.40)
then the incremental solution for the update (4.1) is fully elastic. Otherwise, thetrial state must be updated iteratively until the vector of residualsr satisfies theconvergence criterion (4.40), where the value for the tolerance follows from
εmax = max εrel‖rtrial‖, εabs , (4.41)
with εrel andεabs the relative and absolute tolerances, respectively, whichare cho-sen asεrel = 10−6 andεabs= 10−10.
Let ak be the vector of primary variables at the iteration step “k” and ak+1
be the updated vector of primary variables at iteration step“k + 1” during theNewton-Raphson iteration. The update of the vector of primary variables is thenprovided by
ak+1 = ak −(
drk
dak
)−1
rk , (4.42)
whererk is the vector of residuals and drk/dak is theJacobianmatrix, whichis the derivative of the residuals with respect to the primary variables at iterationk. An analytical expression of the Jacobian matrix is difficult, if not impossibleto obtain, particularly because of the complex constitutive models. Alternatively,the Jacobian matrix can be obtained numerically using a finite difference approx-imation [87, 103, 104], where the Jacobian matrix is obtained as follows:
drki
dakj
(ak) ≈ rki (ak + hej) − rk
i (ak)
h, (4.43)
with h the perturbation parameter andej a unit vector (that has the same dimen-sion asak), which value is equal to one at thej-th component and zero elsewhere.
98

4.1. STRESS-UPDATE ALGORITHM FOR COUPLED TRANSFORMATION-PLASTICITY MODEL
Table 4.1: Newton-Raphson iteration algorithm for updating the primary variablesin the elasto-plastic transformation model.
1. Define the elastic trial stateak(∆ξ,∆γA,∆sA) := atrial.2. Calculate the second Piola-Kirchhoff stressSk
n+1.
3. Evaluate the driving force for transformationf (α),kn+1 , the driving
force for plasticityg(i),kA,n+1, and the resistance against slips(i),kA,n+1.
4. Compute the residualsrk(ak).5. Calculate the norm of residuals‖rk‖ and check if‖rk‖ < εmax. If
so, exit with the converged solution. Else, continue to the next step.6. Compute the residuals of perturbed variablesrk(ak + hej) and
construct the Jacobian matrix(drk/dak).7. Obtain the updateak+1 = ak − (drk/dak)−1rk.8. Return to step 2.
Note that the optimum value of the parameterh should be around the square-rootof the numerical accuracy [31]. Since the numerical determination of the Jaco-bian matrix is computationally relatively expensive, it isimportant to note that thenumber of primary variables should be minimized in order to reduce the compu-tational time as much as possible.
Summary: Return-mapping algorithm
To close the discussion on the numerical solution procedurefor the elasto-plastic-transformation model, the Newton-Raphson iteration algorithm (return-mappingalgorithm) is summarized in Table 4.1. For the numerical examples presentedlater in this chapter, the above Newton-Raphson algorithm generally results in aconverged solution in less than six iteration steps. However, it may happen thatthe Newton-Raphson algorithm fails to converge due to several reasons, e.g. thestep-size is too large, resulting in a slow convergency. In general, the conver-gence behavior of Newton-Raphson iterations depends on theinitial guess and thenon-linearity of the problem. The convergence behavior of the Newton-Raphsonprocedure can be improved by using a sub-stepping (or cut-back) procedure [124],which will be discussed inSection 4.1.4.
99

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
4.1.3 Consistency checks for slip and transformation systems
As mentioned in the previous section, the computational time of the model de-pends strongly on the size of the vector of primary variablesa. One possible wayto minimize the size of this vector is by reducing the number of transformationsystems and slip systems that are involved in the Newton-Raphson iteration, sincenot all systems are active during deformation. Accordingly, a search algorithmfor determining which systems are activated during the Newton-Raphson iterationproposed by Cuitino and Ortiz [30] is adopted (see also [124]). In this approach,the Newton-Raphson iteration uses to the set ofpotentially activesystems only.The set of potentially active slip and transformation systems at the beginning ofthe time steptn+1 is set equal to the set of active slip and transformation systemsof the last converged solution (at time steptn), i.e., S0,n+1 := Sn for the slipsystems andT0,n+1 := Tn for the transformation systems. In this case, the sub-script “0” refers to the initial state in the search algorithm. The Newton-Raphsoniteration (discussed in the previous section) is employed to calculate the updatefor these prescribed set of slip systemsS0,n+1 and transformation systemsT0,n+1.
Consequently, after the Newton-Raphson iteration, it is required to check ifthe systems in the prescribed sets are still active, i.e, forall slip systemsi ∈Sp,n+1, the plastic slip increments and the plastic driving forcesshould satisfy,respectively, that
∆γ(i)A > 0 and g
(i)A,n+1 > s
(i)A,n+1 , (4.44)
and for all transformation systemsα ∈ Tq,n+1, the martensitic volume fractionincrements and the transformation driving forces should satisfy, respectively, that
∆ξ(α) > 0 and f(α)n+1 > f (α)
cr . (4.45)
As mentioned inSection 3.1.4, the transformation from austenite to martensite inTRIP-assisted steels is irreversible. Consequently, negative incremental volumefractions are physically meaningless, and therefore, are strictly prohibited. Sub-scripts “p” and “q” in Sp,n+1 andTq,n+1, respectively, refer to the steps in thenested loops in the search algorithm for the slip system check and transformationsystem check. Theseconsistency checksare performed after the Newton-Raphsonprocedure has converged. If there is any slip systemi ∈ Sp,n+1 that violates theconditions (4.44), the systemi⋆ with the corresponding driving force,
(
g(i⋆)A,n+1 − s
(i⋆)A,n+1
)
= mini∈Sp,n+1
(
g(i)A,n+1 − s
(i)A,n+1
)
, (4.46)
100

4.1. STRESS-UPDATE ALGORITHM FOR COUPLED TRANSFORMATION-PLASTICITY MODEL
is removed from the set of active slip systems,Sp,n+1, and the Newton-Raphsoniteration is restarted with the new setSp+1,n+1 = Sp,n+1 − i⋆. Similarly, ifthere is any transformation systemα ∈ Tq,n+1 that violates (4.45), the systemα⋆
with the corresponding driving force
f(α⋆)n+1 = min
α∈Tq,n+1
f(α)n+1 , (4.47)
is removed from the setTq,n+1, and the Newton-Raphson iteration is restarted withthe updated set of potentially active transformation systemsTq+1,n+1 = Tq,n+1 −α⋆. Subsequently, consistency checks are performed for the potentially inactivesystems. If there is any slip systemi /∈ Sp,n+1 such that
g(i)A,n+1 > s
(i)A,n+1 , (4.48)
then the systemi∗, where(g(i∗)A,n+1 − s
(i∗)A,n+1) = maxi/∈Sp,n+1
(g(i)A,n+1 − s
(i)A,n+1),
is added to the set of active systems, i.e.,Sp+1,n+1 = Sp,n+1 + i∗. Similarly, ifthere is any transformation systemα /∈ Tq,n+1 such that
f(α)n+1 > f (α)
cr , (4.49)
then the systemα∗, wheref (α∗)n+1 = maxα/∈Tq,n+1
f(α)n+1, is added to the set of
active systems, i.e.,Tq+1,n+1 = Tq,n+1 + α∗. This procedure is repeated untilall active and inactive slip systems meet the requirements
∆γ(i)A > 0 and g(i)
A,n+1 > s(i)A,n+1 ∀i ∈ Sp,n+1 , (4.50)
g(i)A,n+1 ≤ s
(i)A,n+1 ∀i /∈ Sp,n+1 , (4.51)
and all active and inactive transformation systems satisfythe following conditions:
∆ξ(α) > 0 and f (α)n+1 > f
(α)cr ∀α ∈ Tq,n+1 , (4.52)
f(α)n+1 ≤ f
(α)cr ∀α /∈ Tq,n+1 . (4.53)
Unfortunately, during the consistency checks, a situationmay be encountered,where one particular system (either slip system or transformation system), at aconverged Newton-Raphson loop, is removed from the set of the active systemsand in the next converged loop is added again to the set of active systems. With-out any precaution, this “ping-pong” situation can last foran infinite number of
101

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
times. In order to avoid this situation, the number of loops in the search algo-rithm is set to a maximum, and if the search algorithms reaches this maximum,the stress-update procedure is restarted with a reduced step-size following from asub-stepping procedure.
4.1.4 Sub-stepping procedure
For a material point with a complex constitutive behavior, relatively small step-sizes may be required to obtain a proper convergence in the Newton-Raphsoniteration procedure. However, in order to maintain a large time step in the globaltime-integration procedure, a smaller step-size (or cut-back) is applied only tomaterial points as required. In the present implementation, the sub-stepping pro-cedure proposed in Suiker and Turteltaub [124] has been adopted, which work asfollows: Let∆F be the (original) increment of the total deformation gradient and∆t be the corresponding increment of time. If for the specified time and deforma-tion increments, the return-mapping algorithm for calculating the state variablesencounters one of the following situations: (i) It fails to converge within a pre-scribed maximum number of iterations, (ii) the norm of the residual,‖rk‖ exceedsa prescribed maximum tolerance (in this case equal to104), or (iii) the consis-tency checks for the slip and transformation systems updateexceed the maximumnumber of allowable loops (ping-pong situation), then the sub-stepping proceduredivides the original increments∆F and∆t into (smaller) sub-steps
∆F ⋆ = ϑ∆F and ∆t⋆ = ϑ∆t , (4.54)
whereϑ is a proportionality factor that falls within the range0 < ϑ ≤ 12 . If a con-
vergent solution is obtained for a sub-increment then the stress-update algorithmcontinues with the next sub-increment. Otherwise, the sub-increment is furtherdivided and the stress-update procedure is restarted from the last converged sub-step. This procedure continues until the total sum of sub-steps is equal to the orig-inal step-size. It is important to note that, in general, a sub-stepping procedure im-proves the convergence behavior of the Newton-Raphson iteration algorithm. Inall simulations presented in this thesis, the sub-steppingprocedurealwaysleads toa convergent Newton-Raphson iteration within a reasonablenumber of cut-backs.
In addition, the sub-stepping procedure is also used to check the condition forcompletion of transformation. The transformation processis completed when theaustenite has fully transformed into martensite, which, inaccordance with (4.3),
102

4.1. STRESS-UPDATE ALGORITHM FOR COUPLED TRANSFORMATION-PLASTICITY MODEL
corresponds toM∑
α=1
ξ(α)n+1 = 1 . (4.55)
However, it is possible that the converged solution resulting from the Newton-Raphson iteration overshoots the above condition, since norestriction has beenimplemented to prevent this situation to happen. In order toavoid this, a sub-stepping procedure is applied to the increment∆t = tn+1 − tn at any materialpoint for which the corresponding sum of the martensitic volume fractions satis-fies the conditions
M∑
α=1
ξ(α)n < 1 and
M∑
α=1
ξ(α)n+1 > 1 , (4.56)
which indicates that the prescribed increment size is too large. In this case, theoriginal step-size is divided into smaller sub-increments. If in a sub-time-steptn+ϑ ∈ [tn, tn+1], the total martensitic volume fraction reaches
1 ≤M∑
α=1
ξ(α)n+ϑ ≤ 1 + εvol , (4.57)
with εvol an absolute tolerance (in this case equal to10−4), the transformationis said to be completed, and in the next sub-increment, all transformation sys-temsα and all slip systemsi are set inactive, i.e.,Tq,n+1 = ∅ andSp,n+1 = ∅,respectively, since there is no more austenite available for neither the phase trans-formation nor the plastic deformation in the correspondingmaterial point.
Summary of stress-update algorithm for elasto-plastic-transformation model
To summarize the time-integration procedure for the elasto-plastic transformationmodel, the complete procedure of the stress-update algorithm is presented in Ta-ble 4.2. This procedure incorporates several nested loops,where the most innerloop is the Newton-Raphson procedure summarized in Table 4.1. The subsequentloops correspond to the consistency checks for slip and transformation systems,respectively, and the outer-most loop relates to the sub-stepping procedure.
103

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
Table 4.2: Stress-update algorithm for elasto-plastic-transformation model, in-cluding the nested-loops for consistency checks and the sub-stepping procedure.
1. Define the increments∆F and∆t (from ABAQUS main program).2. Initialize the set of active slip systemsS0,n+1 = Sn and the set of active
transformation systemsT0,n+1 = Tn.3. Perform theNewton-Raphson iteration for the increments∆ξ, ∆γA and
∆sA. If convergence occurs then continue, otherwise go to step 6.4. Consistency checks for active and inactive slip systems:
If ∀i ∈ Sp,n+1, (4.44) holds then continue, otherwise remove a system ac-cording to (4.46), update the setSp+1,n+1 and return to step 3.If ∃i /∈ Sp,n+1 such that (4.48) is true then add the most active system toSp+1,n+1 and return to step 3, otherwise continue.
5. Consistency checks for active and inactive transformationsystems:If ∀α ∈ Tq,n+1, (4.45) holds then continue, otherwise remove a system ac-cording to (4.47), update the setTq+1,n+1 and return to step 3.If ∃α /∈ Tq,n+1 such that (4.49) is true then add the most active system toTq+1,n+1 and return to step 3, otherwise continue.
6. Sub-stepping procedure (cut-backs):If (i) the Newton-Raphson iteration fails to converge or (ii) the consistencychecks reach the maximum number of loops or (iii) the transformation iscompleted but (4.57) is violated, then reduce the current step-size into halfand return to step 2, otherwise update all variables.If tn+ϑ < tn+1 then return to step 2 for the next sub-step, otherwise continue.
7. Return the updated stress (at timetn+1) to the ABAQUS main program.
4.2 Tangent operator
Because of the use of an implicit finite element discretization, in addition to theupdated Cauchy stress,Tn+1, the finite element program ABAQUS requires thecomputation of thetangent operator. The tangent operator reflects the tangen-tial relation between the discrete increment in stress and the discrete incrementin deformation, which can be derived by means of consistent linearization of theupdated stress [31, 117]. As mentioned previously, the iterative stress-update pro-cedure is driven by the total deformation gradientFn+1. The energetically con-jugated stress of the total deformation gradientFn+1 is the first Piola-KirchhoffstressPn+1 measured in the reference configuration, which is related tothe sec-
104

4.2. TANGENT OPERATOR
ond Piola-Kirchhoff stress in the second intermediate configuration,Sn+1, via(4.31). The constitutive relation between the first Piola-Kirchhoff stress rate andthe rate of total deformation gradient can be written as
P = AF , (4.58)
with A a fourth-order constitutive tensor (tangent operator).
4.2.1 Finite difference approximation for tangent operator
In the present work, the tangent operator required by the finite element programABAQUS is computed using a numerical perturbation technique, similar to theprocedure outlined in Suiker and Turteltaub [124]. Accordingly, let An+1 be thefourth-order tangent operator evaluated at time-steptn+1, defined as
An+1 :=
(
dP
dF
)
n+1
. (4.59)
Using a finite difference approximation, the above tangent operator, written incomponents, can be calculated as
(Aijkl)n+1 =
(
dPij
dFkl
)
n+1
≈ Pij(Fn+1 + hek ⊗ el) − Pij(Fn+1)
h, (4.60)
whereek andel are, respectively, thek-th andl-th unit vectors, withh the per-turbation parameter. Obviously, the above numerical differentiation technique iscomputationally expensive since it requires to perform thestress-update iterationprocedure for every perturbed deformation gradient (Fn+1 + hek ⊗ el) in orderto obtain the values of the first Piola-Kirchhoff stress related to the perturbed de-formation gradient, i.e.,Pij(Fn+1 + hek ⊗ el). However, this technique offers alarge flexibility in modifying the material constitutive behavior and it simplifiesthe numerical implementation considerably.
4.2.2 Tangent operator in the Eulerian setting
The finite element program ABAQUS uses a tangent operator in the Eulerian set-ting, which relates the time derivative of Cauchy stress to the stretching tensor
105

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
D. The stretching tensorD is given by the symmetric part of the total velocitygradientL = F F−1, i.e.,
D :=1
2
(
L + LT)
. (4.61)
Note that in this section all quantities are evaluated at time tn+1. In order tosimplify the notation, the sub-indexn+ 1 has been deliberately omitted.
Unfortunately, in the update procedure, the material time derivative of theCauchy stress,T , cannot be used directly since it does not satisfy the materialobjectivity condition. To overcome this problem, the Kirchhoff stress, denoted asτ , is introduced, whereτ = J T = P F T = F P T , with J = detF . The stresstime derivatives that satisfy the material objectivity condition are given by theOldroyd’s rate (or Lie’s derivative) and the Jaumann’s derivative of the Kirchhoffstress, which are defined as, respectively,
τ := τ − Lτ − τLT and
τ := τ − Wτ − τW T , (4.62)
whereW is the spin tensor, which is the anti-symmetric part of the total velocitygradient tensorL, i.e.,
W :=1
2
(
L − LT)
. (4.63)
The constitutive relations that connect the above objective rates of the Kirchhoffstress to the stretching tensorD are
τ = BD and
τ = HD , (4.64)
where, written in components, the tangent operatorB is related to the tangentoperator in the Lagrangian framework,A, in accordance with [115]
Bijkl = FjmFlnAimkn − FimPkmδjl , (4.65)
whereδjl is the Kronecker delta. Furthermore, the tangent operatorH that relatesthe Jaumann’s derivative of the Kirchhoff stress to the stretching tensor is givenby [69]
Hijkl = Bijkl +1
2(τjlδik + τikδjl + τjkδil + τilδjk) . (4.66)
Thus, using (4.65) and (4.66) the tangent operators in the Eulerian framework,B and H, can be directly obtained from the corresponding Lagrangian tangentoperatorA. Since the Cauchy stressT = J−1τ , the tangent operator required bythe ABAQUS main program [1] to construct the global stiffness matrix isJ−1H.
106

4.3. VALIDATION OF THE NUMERICAL SOLUTION ALGORITHM
Austenite(13%)
Face 4 (u1 = 10-4lt)
f1
f2
f3
Face 3(u3 = 0)
Face 2 (u2 = 0)
Face 1 (u1 = 0) Ferrite (87%)
Finite element mesh(2499 elements)
Matrix(2021 elements)
Inclusion(478 elements)
l
(b)(a)
Figure 4.1: A cubic sample consisting of an austenitic inclusion embedded in aferritic matrix, with (a) the imposed boundary conditions simulating a uniaxialtensile loading and (b) the representation of the finite element mesh.
4.3 Validation of the numerical solution algorithm
4.3.1 Sample geometry and finite element meshes
In order to demonstrate the applicability of the present numerical solution algo-rithm, a series of simulations are performed in this section. In these simulations,a sample composed of a single grain of austenite embedded in aferritic-basedmatrix is analyzed. The numerical solution algorithm presented in the previoussection is applied to the austenitic grain. The sample is subjected to boundary con-ditions representing a uniaxial tensile loading with a straining rate of10−4 s−1, asshown in Figure 4.1. The sample is discretized using linear tetrahedral elements.To study the convergence behavior of the numerical solutionunder mesh refine-ment, five different finite element meshes are considered. The number of elementsof these meshes ranges from a relatively coarse mesh of approximately1250 ele-ments up to a fine mesh of about20000 elements, as summarized in Table 4.3.
In the simulations, the model parameters for the austenite are the same asthose used in the single-crystalline austenitic simulations discussed inChapter 3(see Table 3.1). The behavior of the matrix is simulated using the single crystalelasto-plasticity model for BCC ferrite presented inChapter 2. As already men-
107

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
Table 4.3: Number of elements for the five different meshes used in the numericalsimulations.
Number of elements in Austenite Ferrite Total
FE mesh 1 (coarse mesh)227 1036 1263
FE mesh 2 478 2021 2499
FE mesh 3 973 4054 5027
FE mesh 4 2024 8717 10741
FE mesh 5 (fine mesh) 4095 17003 21098
tioned in the beginning of this chapter, the numerical discretization of the BCCsingle crystal elasto-plasticity model has been done in an analogous fashion as thediscretization of the elasto-plastic-transformation model for austenite. The modelparameters for the ferrite are in correspondence with the values presented in Ta-ble 2.1, which were used for the single-crystalline ferriteanalysis. In the presentanalysis, two samples of different crystallographic orientations are considered:“Sample A”, where the austenitic and ferritic grains are, respectively, orientedsuch that the loading axisf1 is parallel to the lattice vectors of the[100]A andthe[100]F directions, and “Sample B”, with the loading axis parallel to the latticevectors of the[110]A and [110]F directions (see, Figures 2.3 and 3.3). The sim-ulations are carried out using the finite element program ABAQUS [1], with thestress-update algorithms for the austenitic elasto-plastic transformation model andthe ferritic elasto-plasticity model implemented as ‘user-material’ subroutines.
4.3.2 Simulation results (mesh refinement analysis)
The results of the simulations are presented in terms of the effective axial Cauchystress,T11, and the martensitic volume fraction,ξM , as functions of the (applied)axial nominal strainε11. The effective axial stressT11 and the martensitic volumefraction ξM are defined as, respectively,
T11 :=1
|Ωt|
∫
Ωt
T11(y)dvy and ξM :=1
|Ω0|
∫
Ω0
ξM (x)dvx , (4.67)
108

4.3. VALIDATION OF THE NUMERICAL SOLUTION ALGORITHM
(A2)
(A3)
(A4)(A5)
250
0
1000
750
0 0.04 0.08 0.12
(b)(a)
0.16
Nominal strain ε11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
0
0.16
0.12
0.08
0.04
0 0.04 0.08 0.12 0.200.16
Nominal strain ε11
_
Mar
tensi
tic
volu
me
frac
tion ξ
M_
0.20
500
(A2)
(A3)
(A4)
(A5)
(A1)
(A1) Mesh 1
(A2) Mesh 2
(A3) Mesh 3
(A4) Mesh 4
(A5) Mesh 5
(A1)
(A1) Mesh 1
(A2) Mesh 2
(A3) Mesh 3
(A4) Mesh 4
(A5) Mesh 5
Figure 4.2: Effective responses of TRIP steel samples in terms of (a) axial stressand (b) martensitic volume fraction as functions of the applied axial nominal strainfor [100]A-[100]F -loaded sample.
whereΩ0 andΩt are the overall domain in the reference configuration and in thecurrent configuration, respectively, andξM (x, t) is defined by
ξM (x) =
M∑
α=1
ξ(α)(x) for x ∈ ΩA0 ,
0 for x ∈ ΩF0 ,
(4.68)
with ΩA0 andΩF
0 the domains in the reference configuration occupied by austeniticand ferritic phases, respectively. In addition, the evolution of the microstrain pa-rameterβ is analyzed, which is related to the dislocation density evolution in thelattice, averaged over the individual phases (i.e.,β for the austenitic/martensiticphase andβF for the ferritic phase). In this case,β andβF are, respectively, givenby
β :=1
|ΩAt |
∫
ΩAt
β(y)dvy and βF :=1
|ΩFt |
∫
ΩFt
βF (y)dvy , (4.69)
whereΩA0 andΩF
0 are, respectively, the domains occupied by austenitic/martensiticand ferritic phases in the current configuration.
The results of the numerical simulations for the[100]A-[100]F -oriented sam-ple (sample A) with different meshes are shown in Figures 4.2a and b in terms
109

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
5.8e-4
5.6e-4
6.4e-4
6.2e-4
0 0.04 0.08 0.12
(b)(a)
0.16
Nominal strain ε11
_
Au
sten
itic
/mar
tensi
tic
mic
rost
rain
β
0.0006
0.0014
0.0012
0.0010
0.0008
0 0.04 0.08 0.12 0.200.16
Nominal strain ε11
_
Fer
riti
c m
icro
stra
in β
F
0.20
6.0e-4
(A1) Mesh 1
(A2) Mesh 2
(A3) Mesh 3
(A4) Mesh 4
(A5) Mesh 5
(A2)
(A3)(A4)
(A5)
(A1) (A1) (A2)
(A3)
(A4) (A5)
_
_
(A1) Mesh 1
(A2) Mesh 2
(A3) Mesh 3
(A4) Mesh 4
(A5) Mesh 5
Figure 4.3: Lattice microstrain averaged over (a) the austenitic/martensitic inclu-sion and (b) the ferritic matrix plotted against the appliedaxial nominal strain for[100]A-[100]F -loaded sample.
of the effective stress-strain curve and the evolution of the effective martensiticvolume fraction, respectively. Figure 4.2a illustrates a large scatter in the stress-strain curves at the final stage of deformation. The highest stress-strain responseis observed for the coarsest mesh (A1). The hardening rate significantly decreaseswith an increasing number of elements (i.e., with an increasing mesh density).Furthermore, it can be observed that the coarse meshes underpredict the effectivetransformation rate, which results in the completion of transformation occurringat a larger axial strain level, as indicated in Figure 4.2b. Nonetheless, the overallresponses (i.e, the stress-strain curve and the transformation evolution) seem toconverge for an increasing number of elements.
Figures 4.3a and b show the evolution of the austenitic/martensitic lattice mi-crostrainβ and the lattice microstrain parameter in the ferritic region, βF , of the[100]A-[100]F -oriented samples for different mesh densities. As shown inFig-ure 4.3a, the plastic deformation in the austenitic region remains small, which isindicated by a nearly constant value ofβ throughout the deformation process1.This is due to the fact that, upon uniaxial tensile loading, the inelastic deforma-tions in the[100]A-oriented austenitic grain are mainly due to the transformation
1The rate of change of the lattice microstrainsβ andβF are constitutively related to the plasticslip rates via (2.55) and (3.82), respectively, and therefore can be used as indicators for the evolutionof plastic deformations of the individual phases.
110

4.3. VALIDATION OF THE NUMERICAL SOLUTION ALGORITHM
(B2)
(B3)
(B4)
(B5)
200
0
800
600
0 0.04 0.08 0.12
(b)(a)
0.16
Nominal strain ε11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
0
0.12
0.09
0.06
0.03
0 0.04 0.08 0.12 0.200.16
Nominal strain ε11
_
Mar
tensi
tic
volu
me
frac
tion ξ
M_
0.20
400
(B1) Mesh 1
(B2) Mesh 2
(B3) Mesh 3
(B4) Mesh 4
(B5) Mesh 5
(B1)
(B1) Mesh 1
(B2) Mesh 2
(B3) Mesh 3
(B4) Mesh 4
(B5) Mesh 5
(B2)
(B3)
(B4)
(B5)
(B1)
Figure 4.4: Effective responses of TRIP steel samples in terms of (a) axial stressand (b) martensitic volume fraction as functions of the applied axial nominal strainfor [110]A-[110]F -loaded sample.
mechanism (c.f. the results presented inSection 3.2.3). Nonetheless, the curvesA1-A5 in Figure 4.3a suggest that the response converges upon mesh refinement.Furthermore, as depicted in Figure 4.3b, the evolutions of the microstrain param-eter βF for simulations with different mesh densities are nearly identical. Thisdemonstrates that, for the above range of mesh densities, the response of the fer-ritic matrix is nearly mesh independent.
The result of the simulations for sample B with the[110]A-oriented austeniticgrain is presented in Figures 4.4a and b. In contrast to the previous case, the dif-ference in the effective stress-strain response is relatively small, see Figure 4.4a,whereas a larger variation is observed in the transformation evolution curves, seeFigure 4.4b. However, despite of a larger scatter in the transformation curves, itcan be observed that the trend is similar to that for the[100]A-[100]F -orientedsample, i.e., a lower transformation rate is observed in thesimulation with acoarser mesh. Furthermore, the result suggests that in terms of mesh density thecurves B4 and B5 are already close to the “exact” solution. From Figure 4.5a,it can be observed that the simulations with coarse meshes overpredict the mag-nitude of the austenitic/martensitic lattice microstrainβ. Similar to the previousresults, the evolution ofβF in the ferritic region is nearly identical for the differentmesh densities.
111

CHAPTER 4. NUMERICAL SOLUTION ALGORITHM FOR TRANSFORMATION-PLASTICITY MODEL
0.0008
0.0006
0.0014
0.0012
0 0.04 0.08 0.12
(b)(a)
0.16
Nominal strain ε11
_
Au
sten
itic
/mar
tensi
tic
mic
rost
rain
β
0.0006
0.0014
0.0012
0.0010
0.0008
0 0.04 0.08 0.12 0.200.16
Nominal strain ε11
_
Fer
riti
c m
icro
stra
in β
F
0.20
0.0010
(B1) Mesh 1
(B2) Mesh 2
(B3) Mesh 3
(B4) Mesh 4
(B5) Mesh 5
(B1) Mesh 1
(B2) Mesh 2
(B3) Mesh 3
(B4) Mesh 4
(B5) Mesh 5
(B2)
(B3)
(B4)
(B5)(B1)
(B1) (B2)
(B3)
(B4) (B5)
_
_
Figure 4.5: Lattice microstrain averaged over (a) the austenitic/martensitic inclu-sion and (b) the ferritic matrix plotted against the appliedaxial nominal strain for[110]A-[110]F -loaded sample.
Summary of the mesh refinement analysis
The numerical solution algorithms for the austenitic elasto-plastic-transformationmodel and for the ferritic elasto-plasticity model have been implemented in thefinite element program ABAQUS. The simulations have been performed for TRIPsteel samples with two different configurations of crystallographic orientations,within a mesh refinement analysis setting. From the results of the simulations,it can be generally concluded that, for the range of mesh densities consideredin the present analysis, the behavior of the TRIP samples converges upon meshrefinement, where the austenite elasto-plastic-transformation model has a strongermesh dependency than the ferrite elasto-plasticity model.
112

5Micromechanical simulation of
TRIP-assisted steel
TRIP-assisted steels are a class of multiphase carbon steels that have interestingmechanical characteristics due to the presence of a metastable austenitic phase(i.e., a high-temperature phase) in their microstructure at room temperature. Uponan applied thermo-mechanical loading, the retained austenite grains may trans-form into martensite, which strongly influences the overallmechanical perfor-mance of the steels. Over the past few years, experimental observations haveshown that the stability of the retained austenite against transformation, and there-fore the overall mechanical response of TRIP steels, is influenced by various mi-crostructural parameters, such as the carbon concentration in the austenite, thecrystallographic orientations (microstructural texture) and the flow stress of thematrix surrounding the retained austenite grains (see, e.g., [8, 11, 34, 63, 64, 68,72, 91, 102, 112, 133, 147, 151, 152]). In this chapter, the effects of the microstruc-tural parameters on the austenite stability and the overallmechanical performanceof the steels are studied in relation to the TRIP steel processing parameters. Inmost cases, the analyses are performed in terms of the effective response at themacroscopic scale. However, in order to develop a thorough understanding of the
113

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
TRIP effect in multiphase steels, it is also important to study the mechanism ofTRIP at the level of single grains. Unfortunately, there areonly a few publicationsin the literature (e.g., [42, 68]) that study the TRIP effectat the level of single andmultiple grains. In terms of testing, technical difficulties in experimental mea-surements at the level of individual grains form the main reason for the limitednumber of such studies.
In this section, the behavior of TRIP steels is studied by means of numer-ical simulations using the micromechanical models presented in previous chap-ters. The elasto-plastic-transformation model presentedin Chapter 3 is appliedto the austenitic grains, and the elasto-plasticity for BCCsingle crystal discussedin Chapter 2 is used for the ferritic region. Numerical simulations are performedfor several sets of TRIP steel microstructural samples, which aim at studying theeffect of the variation of microstructural parameters on the effective stress-strainresponse and the transformation behavior in the samples at single- and polycrys-talline levels. InSection 5.1, the overall responses of TRIP steel single-crystallinesamples under uniaxial tensile loading are presented and analyzed, highlightingthe role of crystallographic orientations of both the austenitic and ferritic grains.The effect of different microstructural properties, e.g.,the carbon concentrationin the austenite and the strength of the ferritic matrix, on the overall response ofTRIP steel polycrystalline samples are studied inSection 5.2by means of para-metric analyses.
5.1 Simulation of multiphase TRIP steel at single grainlevel
The mechanical behavior of a TRIP-assisted steel is simulated for a uniaxiallyloaded microstructural sample composed of a single austenitic grain surroundedby a matrix of ferritic grains. The purpose of the present simulation is to studythe TRIP effect as a function of crystallographic orientations, i.e., the orientationof the austenitic and ferritic grains with respect to the applied load as well as theorientation mismatch between neighboring grains.
5.1.1 Microstructural sample geometry and boundary conditions
In the present analysis, a cubic sample that represents a single grain of austenitesurrounded by six grains of ferrite is considered (see Figure 5.1). The austenitic
114

5.1. SIMULATION OF MULTIPHASE TRIP STEEL AT SINGLE GRAIN LEVEL
Austeniticgrain
Ferritic matrix
Face 1 (u1 = 10-4lt)“Ferrite grain 1”
f1
f2
f3
Face 3 (u3 = 0)“Ferrite grain 3” Face 5 (u2 = 0)
“Ferrite grain 5”
Face 2 (u1 = 0)“Ferrite grain 2”
Face 6“Ferrite grain 6”
Face 4“Ferrite grain 4”
l
l23_
l13_
l12_
Figure 5.1: Geometry of a cubic sample representing TRIP steel microstructurethat consists of one grain of austenite in a ferrite-based matrix with the appliedboundary conditions corresponding to uniaxial tensile loading.
grain, which is located at the center of the cubic sample, is modeled as a polyhe-dron composed of two half-pyramids. The sides of the cubic sample have a length“ l”, which corresponds to3 µm. The square base of the austenite polyhedronhas a side length of23 l, the top square has a side length of1
3 l and the height ofthe polyhedron is12 l. In the undeformed state, this polyhedron occupies approxi-mately13 % of the total volume of the cubic sample. The polyhedral austenite isrepresentative for a grain with a size of2 µm.
The sample is initially stress-free and is subsequently subjected to a uniaxialtensile loading, which is prescribed through the followingboundary conditions(see, Figure 5.1): (i) The normal displacement and the tangential traction on theexternal faces 2, 3 and 5 are set to zero. (ii) The normal displacement on the ex-ternal face 1 equals tou1 = 10−4lt, with time interval0 < t ≤ 2000 s, and thetangential traction is set to zero. (iii) The remaining faces (4 and 6) are traction-free. The applied boundary conditions correspond to an axial straining rate of10−4 s−1. The simulation is performed at a constant temperature of300 K. Theparameters used in the model for the ferritic grains are the same as those used inthe ferrite single crystal simulations inChapter 2 (see, Table 2.1) and the param-eters for the austenite are the same as those used inChapter 3 (see, Table 3.1),
115

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
Table 5.1: Orientations of the ferritic grains expressed interms of the323-Eulerrotation angles for the samples containing an austenitic grain surrounded by aferritic matrix of multiple orientations.
Grain Ferrite multiple orientations MO1 Ferrite multiple orientations MO2
1 (0.0, 0.0, 0.0) (45.0, 17.63, 0.0)
2 (45.0, 0.0, 0.0) (22.5, 0.0, 0.0)
3 (45.0, 35.26, 0.0) (45.0, 0.0, 0.0)
4 (22.5, 0.0, 0.0) (22.5, 17.63, 0.0)
5 (22.5, 17.63, 0.0) (45.0, 35.26, 0.0)
6 (45.0, 17.63, 0.0) (0.0, 0.0, 0.0)
which are calibrated from a TRIP steel with an austenite carbon concentration of1.4 wt.% and an average austenitic grain size of2 µm. The simulations are car-ried out using the finite element program ABAQUS [1], where the cubic sampleis discretized using “Mesh 2”, see Table 4.3, with approximately 500 tetrahedralelements in the austenitic region and2000 tetrahedral elements in the ferritic re-gion.
In the simulations, two different TRIP steel microstructures are considered,namely (i) an austenitic grain surrounded by a uniformly-oriented ferritic matrix,which represents an intra-ferritic (or isolated-type) austenitic grain and (ii) anaustenite grain surrounded by six ferritic grains with different crystallographic ori-entations, which represents an inter-ferritic (or interstitial-type) austenitic grain.For the first type of microstructural simulations, three crystallographic orienta-tions for the ferritic matrix are considered, namely[100]F -, [110]F - and [111]F -loaded ferritic grain, where the global axisf1 corresponds to, respectively, the[100]F , [110]F and[111]F directions. The subscript “F ” indicates that the Millerindices refer to the ferrite lattice basis. Each orientation of the ferritic matrix iscombined with three orientations of the austenitic grain, i.e.,[100]A-, [110]A- and[111]A-loaded orientations. Here, the subscript “A” indicates the local austenitelattice basis. For the second type of microstructural simulations, the orientationsof the ferritic grains are chosen such that they are evenly distributed in the ori-entation space. Similar to the first type of microstructuralsimulations, three dif-ferent orientations of the austenite grain are analyzed, i.e., [100]A-, [110]A- and[111]A-loaded grains. Two different ferrite configurations are defined, indicated as
116

5.1. SIMULATION OF MULTIPHASE TRIP STEEL AT SINGLE GRAIN LEVEL
“MO1” and “MO2”. The orientations of the ferritic grains forthe MO1 and MO2matrices are shown in Table 5.1 in terms of the323-Euler rotation angles (seeFigure 5.1 for the corresponding location of the ferritic grains). As observed inTable 5.1, the ferritic matrices MO1 and MO2 are composed of grains with similarcrystallographic orientations, but with the spatial arrangement of the grains beingdifferent1. For comparison, simulation results for a sample with an isotropic fer-ritic matrix, using aJ2 elasto-plasticity model, are also presented.
5.1.2 Strain-strain response of TRIP steel microstructure
For the graphical representation of the simulation results, the effective CauchystressT11 and logarithmic straine11 are introduced as, respectively,
T11 :=1
|Ωt|
∫
Ωt
T11(y)dvy and e11 :=1
|Ω0|
∫
Ω0
e11(x)dvx , (5.1)
whereT11 is the local axial Cauchy stress in the neighborhood of a point y inthe current configuration ande11 is the local axial logarithmic strain in the neigh-borhood of a pointx in the reference configuration, withΩ0 andΩt the com-putational domains evaluated in the reference configuration and in the currentconfiguration at timet, respectively (see Figures 2.1 and 3.1). In addition, the ef-fective austenitic volume fractionξA is computed by averaging the local austeniticvolume fractionξA in the reference configuration, i.e.,
ξA :=1
|Ω0|
∫
Ω0
ξA(x)dvx , (5.2)
where the local austenitic volume fractionξA(x, t) for any material pointx in thereference configuration is given by
ξA(x) =
1 − ξM (x) for x ∈ ΩA0 ,
0 for x ∈ ΩF0 ,
(5.3)
whereξM represents the local martensitic volume fraction defined in(3.87), withΩA
0 andΩF0 the domains occupied by, respectively, austenitic and ferritic phases
1The two spatial arrangements of the six ferritic grains, arbitrarily chosen among the720 possi-ble combinations, are meant to be illustrative rather than comprehensive.
117

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
in the reference configuration. Furthermore, the average axial Cauchy stressTP11
and the axial logarithmic straineP11 of the phaseP are introduced as,
TP11 :=
1
|ΩPt |
∫
ΩPt
T11(y)dvy and eP11 :=1
|ΩP0 |
∫
ΩP0
e11(x)dvx , (5.4)
for material pointsy ∈ ΩPt andx ∈ ΩP
0 , whereP = A refers to the austeniticgrain andP = F to the ferritic matrix.
Effective response of an austenitic grain embedded in a uniformly-orientedferritic matrix
For the TRIP steel samples containing a single austenitic grain in a uniformly-oriented ferritic matrix, the simulation results, in termsof the effective axial stressT11 and the evolution of austenitic volume fractionsξA as functions of the effec-tive axial straine11 are shown in Figures 5.2a-f. As illustrated in Figures 5.2a,c and e, for all considered orientations of the austenitic grain the highest stressresponses to an imposed strain are experienced by the samples with a [111]F -oriented ferritic matrix (samples A3, B3 and C3), whereas the lowest effectivestress-strain responses are, in general, generated in the samples with a[100]F -oriented ferritic matrix (samples A1, B1 and C1). This result is due to the factthat upon uniaxial tensile loading, the[111]F -oriented ferrite corresponds to the“strongest” and the[100]F -oriented ferrite to the “weakest” of the three ferriteorientations considered in the present analysis (seeSection 3.2.3).
Furthermore, Figure 5.2a illustrates that, for[100]A-oriented austenitic grains,the sample A2 (with a[110]F -oriented ferritic matrix) shows a stronger hardeningbehavior than the other two samples (samples A1 and A3), particularly at largerdeformations, where the effective flow stress increases rapidly. In contrast, forthe [110]A- and [111]A-oriented austenitic grains, the samples with the[110]F -oriented ferritic matrix (samples B2 and C2) show a weaker hardening behaviorthan the other samples. These results prove that the effective stress-strain be-havior of a TRIP steel sample cannot be predicted solely by superimposing thestress-strain responses of the individual constituent phases using a simple ruleof mixtures. As reported in Turteltaub and Suiker [141], dueto the volumetricdilatation and shear displacements accompanying the transformation, the overallresponse of a TRIP steel microstructure not only depends on the orientations ofthe individual grains with respect to the loading direction, but also on the rela-
118

5.1. SIMULATION OF MULTIPHASE TRIP STEEL AT SINGLE GRAIN LEVEL
(A3)
(A1)
(A2)
300
0
1500
1200
900
600
0 0.04 0.08 0.12
(b)(a)
0.16
(A1) [100]A-[100]
F
(A2) [100]A-[110]
F
(A3) [100]A-[111]
F
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
(A3)
(A1) (A2)0.03
0
0.15
0.12
0.09
0.06
0 0.04 0.08 0.12 0.200.16
(A1) [100]A-[100]
F
(A2) [100]A-[110]
F
(A3) [100]A-[111]
F
Logarithmic strain e11
_
Aust
enit
ic v
olu
me
frac
tion ξ
A_
(B3)
(B1)
(B2)
300
0
1500
1200
900
600
0 0.04 0.08 0.12 0.20
(d)(c)
0.16
(B1) [110]A-[100]
F
(B2) [110]A-[110]
F
(B3) [110]A-[111]
F
Logarithmic strain e11
_
Cau
chy
str
ess T
11 [MP
a]
_
(B3)
(B1)
(B2)
0.03
0
0.15
0.12
0.09
0.06
0 0.04 0.08 0.12 0.200.16
(B1) [110]A-[100]
F
(B2) [110]A-[110]
F
(B3) [110]A-[111]
F
Logarithmic strain e11
_
Aust
enit
ic v
olu
me fr
acti
on ξ
A_
(C3)
(C1)
(C2)
(C1) [111]A-[100]
F
(C2) [111]A-[110]
F
(C3) [111]A-[111]
F
(f)(e)
0
1500
1200
900
600
300
Cau
chy s
tres
s T
11 [MP
a]
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
_
(C3)
(C1)(C2)
0
0.15
0.12
0.09
0.06
0.03
Aust
enit
ic v
olu
me fr
acti
on ξ
A
0 0.04 0.08 0.12 0.200.16
(C1) [111]A-[100]
F
(C2) [111]A-[110]
F
(C3) [111]A-[111]
F
Logarithmic strain e11
_
_
0.20
Figure 5.2: Effective stress-strain response (a,c,e) and evolution of austenitic vol-ume fraction (b,d,f) of samples consisting of an austeniticgrain embedded in auniformly-oriented ferritic matrix.
119

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
(b)(a)
(d)(c)
(f)(e)
(A3)F
(A1)F
(A2)F(A3)A
(A1)A
(A2)A
300
0
1500
1200
900
600
0 0.04 0.08 0.12 0.200.16
Log. strain e11 of individual phaseP
(A3)F
(A1)F (A2)F
(A3)A
(A1)A
(A2)A
0.04
0
0.20
0.16
0.12
0.08
0 0.04 0.08 0.12 0.200.16
(A1) [100]A-[100]
F
(A2) [100]A-[110]
F
(A3) [100]A-[111]
F
Logarithmic strain e11
_
Log. st
rain
e11 o
f in
div
id. phas
esP
(B3)F
(B1)F
(B2)F
(B3)A
(B1)A
(B2)A
300
0
1500
1200
900
600
0 0.04 0.08 0.12 0.200.16
(B1) [110]A-[100]
F
(B2) [110]A-[110]
F
(B3) [110]A-[111]
F
(B1)A
(B2)A
(B3)A
(B1)F
(B2)F (B3)F
0.04
0
0.20
0.16
0.12
0.08
0 0.04 0.08 0.12 0.200.16
(B1) [110]A-[100]
F
(B2) [110]A-[110]
F
(B3) [110]A-[111]
F
Logarithmic strain e11
_
(C3)F
(C1)F
(C3)A
(C1)A
(C2)F
(C2)A
0
1500
1200
900
600
300
0 0.04 0.08 0.12 0.200.16
(C1) [111]A-[100]
F
(C2) [111]A-[110]
F
(C3) [111]A-[111]
F
(C3)A
(C1)A
(C1)F (C3)F
(C2)F
(C2)A
0
0.20
0.16
0.12
0.08
0.04
0 0.04 0.08 0.12 0.20
Logarithmic strain e11
0.16
(1C) [111]A-[100]
F
(2C) [111]A-[110]
F
(3C) [111]A-[111]
F
_
Log. st
rain
e11 o
f in
div
id. phas
esP
Log. st
rain
e11 o
f in
div
id. phas
esP
Log. strain e11 of individual phaseP
Log. strain e11 of individual phaseP
Str
ess T
11 o
f in
div
id. ph
ase
[MP
a]P
Str
ess T
11 o
f in
div
id. ph
ase
[MP
a]P
Str
ess T
11 o
f in
div
id. ph
ase
[MP
a]P
Figure 5.3: Distribution of axial strain (a,c,e) and stress-strain response (b,d,f) inindividual austenitic (thick-lines) and ferritic (thin-lines) phases in samples con-sisting of an austenitic grain embedded in a uniformly-oriented ferritic matrix.
120

5.1. SIMULATION OF MULTIPHASE TRIP STEEL AT SINGLE GRAIN LEVEL
tive orientation of the transformation austenitic grain with respect to each of theneighboring grains.
By comparing Figures 5.2a, c and e, it can be observed that, for a specificcrystallographic orientation of the ferritic matrix, the highest effective initial yieldstress is obtained for the samples with a[111]A-oriented austenitic grain (samplesC1-C3), whereas the lowest effective yield strength corresponds to the sampleswith [100]A-oriented austenitic grain (samples A1-A3). This result isin agree-ment with experimental observations for TRIP-assisted steels [72, 91]. The effec-tive stress-strain response of the samples A1-3 increases rapidly during the laststage of deformation, due to the fact that the austenitic grain oriented in[100]Adirection in the TRIP steel samples transforms significantly faster than those ori-ented in[110]A and[111]A directions, as indicated in Figures 5.2b, d and f.
In comparison to the transformation behavior of the “unconstrained” single-crystalline austenite loaded in uniaxial tension presented in Section 3.2.3, thetransformation of[110]A- and [111]A-oriented austenitic grains embedded in aferritic matrix occurs significantly slower. In the unconstrained cases, the[110]A-and [111]A-loaded austenitic grains were fully transformed at about0.07 axialstrain, whereas, for the corresponding austenitic grains embedded in a ferriticmatrix, the transformation is still far from complete at theend of the loadingprocess. The significant reduction in the amount of martensite produced duringloading can be attributed to the following contributions: (i) The constraint im-posed by the ferritic matrix opposes the shape and volumetric changes from thetransforming austenitic grain and (ii) a reduction of the available driving force fortransformation due to plastic dissipation in the ferrite, as well as in the untrans-formed austenite. Among the samples with the same austenitic grain orientation,the highest transformation rates are observed in the austenitic grain embedded in a[111]F -oriented ferritic matrix (cases A3, B3 and C3), while the slowest transfor-mations are related to the austenitic grain embedded in a[110]F -oriented ferriticmatrix (cases A2, B2 and C2). Interestingly, for the sample C3, i.e., a[111]A-oriented austenitic grain in a[111]F -oriented ferritic matrix, the transformationstops at about0.12 axial strain although there is still a relatively large volumefraction of austenite left (about4 % from an initially 13 %). This result suggeststhat plasticity in the austenite is here energetically morefavorable than transfor-mation into martensite. A similar behavior has been also observed experimentally(see, e.g., [152]).
The axial strain of the austenitic and ferritic phases,eA11 andeF11 as a function
121

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
of the overall axial straine11 is depicted in Figures 5.3a, c and e, whereas the axialstress-strain response of the individual phases is plottedin Figures 5.3b, d and ffor samples with different austenitic and ferritic crystallographic orientations. Inthese figures, the superscripts “A” and “F ” indicate the austenitic and ferriticphases, respectively. The response of the austenitic phaseis plotted with a thick-line, and a thin-line curve corresponds to the response of the ferritic phase. Inaddition, the diagonal dotted-lines in Figures 5.3a, c and erepresent theequal-strain lines.
As shown in Figure 5.3a, in the early stage of deformation (upto about0.08axial strain), the strain curves of the austenite lie above the equal-strain line, whichimplies that the[100]A-oriented austenitic grain in the samples A1-A3 carries alarger axial deformation than the overall axial deformation. This result is due tothe fact that (i) the austenitic grain loaded in the[100]A direction has a large capa-bility to accommodate the (imposed) axial deformation by means of the stress-freetransformation strain and (ii) the austenite-to-martensite transformation occurs ata relatively low stress level, as mentioned previously inSection 3.2.3. As a result,the [100]A-oriented austenitic grain behaves as a “soft” inclusion. Figure 5.3bfurther shows that, for all three cases (samples A1-A3), theaxial stress in theaustenitic grain is in fact lower than that in the ferritic matrix. Conversely, at alater stage of deformation the austenitic grain has (almost) fully transformed intomartensite, where the grain experiences a very limited amount of axial deforma-tion. This is, since there is no more transformation strain available to accommo-date the imposed deformation and the grain is now in a harder martensitic state.
Furthermore, Figure 5.3c indicates that the axial deformation of the [110]A-oriented austenitic grain in the samples B1-B3 is similar tothe overall axial de-formation. In contrast, for the samples C1-C3 plotted in Figure 5.3e, the[111]A-oriented austenitic grain experiences a smaller deformation in the axial directioncompared to the overall deformation of the samples, since the [111]A-orientedaustenitic grain is stronger than the ferritic matrix, irrespective of the ferritic crys-tallographic orientation, as shown in Figure 5.3f.
Effective response of an austenitic grain surrounded with amultiple orienta-tion ferritic grains
In this section, TRIP steel microstructural samples are studied, containing a singleaustenitic grain embedded in a ferritic matrix of multiple orientations (either MO1
122

5.1. SIMULATION OF MULTIPHASE TRIP STEEL AT SINGLE GRAIN LEVEL
(b)(a)
(d)(c)
(f)(e)
(C6)
(C4)
(C5)
0
1500
1200
900
600
300
0 0.04 0.08 0.12 0.200.16
Cau
chy s
tres
s T
11 [
MP
a]
Logarithmic strain e11
_
_
(C4) [111]A-MO1
(C5) [111]A-MO2
(C6) [111]A-J
2Plast
(C4)
(C6)
(C5)
0
0.15
0.12
0.09
0.06
0.03
0 0.04 0.08 0.12 0.200.16
Aust
enit
ic v
olu
me
frac
tion ξ
A
Logarithmic strain e11
_
_
(C4) [111]A-MO1
(C5) [111]A-MO2
(C6) [111]A-J
2Plast
(B6)
(B4)
(B5)
300
0
1500
1200
900
600
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
(B4) [110]A-MO1
(B5) [110]A-MO2
(B6) [110]A-J
2Plast
(B4)
(B6)
(B5)0.03
0
0.15
0.12
0.09
0.06
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
Aust
enit
ic v
olu
me
frac
tion ξ
A_
(B4) [110]A-MO1
(B5) [110]A-MO2
(B6) [110]A-J
2Plast
(A6)
(A4)
(A5)
300
0
1500
1200
900
600
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
(A4) [100]A-MO1
(A5) [100]A-MO2
(A6) [100]A-J
2Plast
(A6) (A4)(A5)0.03
0
0.15
0.12
0.09
0.06
0 0.04 0.08 0.12 0.20
Logarithmic strain e11
0.16_
Aust
enit
ic v
olu
me
frac
tion ξ
A_
(A4) [100]A-MO1
(A5) [100]A-MO2
(A6) [100]A-J
2Plast
Figure 5.4: Effective stress-strain response (a,c,e) and evolution of austenitic vol-ume fraction (b,d,f) of samples consisting of an austeniticgrain surrounded bymultiple orientation ferritic grains.
123

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
(b)(a)
(d)(c)
(f)(e)
(A6)A
(A5)A
(A4)A
(A5)F
(A4)F(A6)F
300
0
1500
1200
900
600
0 0.04 0.08 0.12 0.200.16
Str
ess T
11 o
f in
div
id.
ph
ase
[MP
a]P
0.04
0
0.20
0.16
0.12
0.08
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
(A4)A
(A6)A (A5)A
(A4)F (A5)F (A6)F
(A4) [100]A-MO1
(A5) [100]A-MO2
(A6) [100]A-J
2Plast
(B6)A
(B5)A
(B4)A
(B5)F
(B4)F
(B6)F
300
0
1500
1200
900
600
0 0.04 0.08 0.12 0.200.16
0.04
0
0.20
0.16
0.12
0.08
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
(B6)A (B4)A
(B5)A(B4)F (B5)F (B6)F
(B4) [110]A-MO1
(B5) [110]A-MO2
(B6) [110]A-J
2Plast
(B4) [110]A-MO1
(B5) [110]A-MO2
(B6) [110]A-J
2Plast
(C6)A
(C5)A
(C4)A
(C5)F
(C4)F
(C6)F
0
1500
1200
900
600
300
0 0.04 0.08 0.12 0.200.160
0.20
0.16
0.12
0.08
0.04
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
(C4)A
(C5)F (C6)F
(C4)F
(C6)A (C5)A
(C4) [111]A-MO1
(C5) [111]A-MO2
(C6) [111]A-J
2Plast
(C4) [111]A-MO1
(C5) [111]A-MO2
(C6) [111]A-J
2Plast
Log. strain e11 of individual phaseP
Log. st
rain
e11 o
f in
div
id.
phas
esP
Log. strain e11 of individual phaseP
Log. st
rain
e11 o
f in
div
id.
phas
esP
Log. strain e11 of individual phaseP
Log. st
rain
e11 o
f in
div
id.
phas
esP
Str
ess T
11 o
f in
div
id.
phas
e [M
Pa]
PS
tres
s T
11 o
f in
div
id.
phas
e [M
Pa]
P
Figure 5.5: Distribution of axial strain (a,c,e) and stress-strain response (b,d,f)in individual austenitic (thick-lines) and ferritic phases (thick-lines) in samplesconsisting of an austenitic grain surrounded by multiple orientation ferritic grains.
124

5.1. SIMULATION OF MULTIPHASE TRIP STEEL AT SINGLE GRAIN LEVEL
or MO2), or embedded in an isotropic ferritic matrix. Figures 5.4a-f depict theeffective axial stressT11 and the austenitic volume fractionξA as functions of theoverall axial straine11. From Figures 5.4a, c and e, it can be seen that the sampleswith an isotropic ferritic matrix (samples A6, B6 and C6) show a slightly higherinitial yield strength than the corresponding samples withan anisotropic (multipleorientations) ferritic matrix. However, the hardening rate of the samples with anisotropic matrix is lower than the samples with an anisotropic matrix, particularlyat the later stage of deformation. The responses of the samples with an isotropicmatrix are, in general, relatively close to those with an anisotropic matrix, sincethe specified grain orientations mimic the behavior of an isotropic, polycrystallinematrix already quite closely [137].
For a given austenitic grain orientation, the effective stress-strain responses ofthe samples with the ferritic matrix MO1 show a strong similarity to those withthe ferritic matrix MO2, particularly at small deformations (compare, samplesA4 and A5 in Figure 5.4a, samples B4 and B5 in Figure 5.4b and samples C4and C5 in Figure 5.4c). Only during the final stage of deformation, the sampleswith the ferritic matrix MO1 (samples A4, B4 and C4) show a stronger hardeningbehavior than the corresponding samples with the ferritic matrix MO2. At theend of the loading process, the differences in the effectivestrength between thesamples A4-A5, B4-B5 and C4-C5 are about30, 80 and120 [MPa], respectively.These differences are attributed to the fact that the austenitic grains embedded inthe ferritic matrix MO1 transform at a relatively higher rate than those embeddedin the ferritic matrix MO2, particularly for the orientations [110]A and[111]A, asshown in Figures 5.4b, d and f. This implies that at a specific strain level, thesamples A4, B4 and C4 contain more martensite than the samples A5, B5 and C5,respectively. Consequently, the effective stress response of the samples A4, B4and C4 is eventually higher than that of the samples A5, B5 andC5, respectively.
The rate of transformation of the[100]A-oriented austenitic grain in the sam-ples with an anisotropic ferritic matrix is similar to that of the unconstrainedaustenite presented inSection 3.2.3, whereas the rates of transformation of the[110]A- and [111]A-oriented austenitic grains are significantly lower. This re-sult indicates that the constraining effects from the surrounding ferritic matrix aremore effective for the austenitic grains oriented in the[110]A and [111]A direc-tions. Nonetheless, the transformation evolution is, in general, quite similar forthe two different ferritic matrices MO1 and MO2.
Figures 5.5a, c and e depict the distribution of strain in theaxial direction
125

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
averaged over individual phases (eA11 and eF11) plotted against the overall straine11. Additionally, Figures 5.5b, d and f illustrate the axial stress of the individualphases (TA
11 andTF11) plotted as functions of the corresponding axial strain. Here,
the superscripts “A” and “F ” indicate that the corresponding curves refer to theaustenitic and ferritic phases, respectively. The response of the austenitic phase isindicated by a thick line, whereas a thin line is used for indicating the response ofthe ferritic phase. Figure 5.5a shows that for all cases (A4)A-(A6)A, the [100]A-oriented austenitic grain initially experiences most of the axial deformation, asindicated by the fact that the curves of the austenitic response fall above the diago-nal dotted-line (i.e., theequal-strainline). This illustrates that the austenitic grainoriented in the[100]A direction is “softer” than the ferritic matrix upon uniax-ial tensile loading. As mentioned previously, the[100]A-oriented austenitic grainhas a relatively large capability to accommodate the externally imposed deforma-tion without increasing its stress level, which occurs by means of the stress-freetransformation strain. As shown in Figure 5.5b, the stress-strain responses of theaustenitic phase show a plateau-type behavior during transformation. At about0.10 overall axial strain, the transformation is completed, after which the stressincreases rapidly since the grain has become fully martensitic.
From Figures 5.5c and e, it can be observed that the[110]A- and [111]A-oriented austenitic grains in the samples B4-6 and C4-6, respectively, experienceless deformation in the axial direction than the corresponding ferritic matrix. Thisresult shows that the[110]A- and[111]A-oriented austenitic grains have a higherstrength than the anisotropic ferritic matrix (and the isotropic matrix), as indicatedin Figures 5.5d and f.
Summary of TRIP steels microstructural behavior at the single grain level(the effect of crystallographic orientations)
The crystallography-based elasto-plastic-transformation model for austenite andthe single crystal elasto-plasticity model for ferrite have been used to simulate theoverall mechanical behavior of multiphase TRIP-assisted steel microstructures.Several simulations of TRIP steel microstructural samplessubjected to uniaxialtensile loading have been performed. The samples contain a single austeniticgrain embedded in a matrix of six ferritic grains, which are either uniformly ori-ented or have multiple orientations. The results of the simulations show that theeffective stress-strain response and the transformation behavior of a TRIP steel
126

5.2. PARAMETRIC STUDY OF POLYCRYSTALLINE TRIP STEEL BEHAVIOR AS A FUNCTION OF MICROSTRUCTURAL PROPERTIES
microstructure strongly depend on the crystallographic orientations of the indi-vidual austenitic and ferritic grains. The TRIP steel samples containing a[111]A-oriented austenitic grain show, in general, a higher initial effective strength thanthe samples with an austenitic grain oriented in other directions. Nonetheless, atlarger deformations the response of the sample with a[100]A-oriented austeniticgrain shows the strongest hardening behavior due to a relatively fast martensitictransformation. Furthermore, the transformation processis delayed and occasion-ally arrested due to the constraining effect of the ferriticmatrix; the magnitude ofthis effect varies depending on the crystallographic orientation of the austeniticand ferritic grains with respect to the loading axis, as wellas the orientation mis-match between the austenitic grain and the neighboring ferritic grains.
5.2 Parametric study of polycrystalline TRIP steel be-havior as a function of microstructural properties
The stability of retained austenite against transformation has a strong effect onthe overall strength of TRIP-assisted steels and, therefore, is considered to bean important factor in the mechanical performance of steels. As highlightedin Section1.1.3, experimental investigations show that the stability of retainedaustenite is influenced by various microstructural parameters, such as the initialvolume fractions (morphology) of the phases [63, 64, 151], the austenite carbonconcentration [8, 34, 64, 102, 112], the austenitic grain size [11, 68, 147] and theconstraining effect from the phases surrounding the retained austenite grain [102,133]. However, in most cases it is difficult to directly measure the specific contri-butions of these parameters to the retained austenite stability, since in a physicalexperiment microstructural parameters cannot be varied independently. In thissection, the overall mechanical behavior of polycrystalline TRIP-assisted steels isnumerically simulated. The simulations are performed in a parametric analysessetting; the effective mechanical responses (in terms of the effective stress-strainresponse and the evolution of martensitic transformation)are studied for selectedsets of microstructural configurations [135]. The results provide important infor-mation for further development of the mechanical performance of TRIP steels aswell as for the optimization of TRIP steel processing routes.
127

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
Ferritic matrix(81 grains)
Austenitic inclusion(27 grains)
f1
f2
f3
(b)(a)
Face 2 (u1 = 0)
Face 4(u3 = 0) Face 3
(u2 = 0)
Face 1 (u1 = 10-4lt)
l
f2
f3
Ferrite ⟨100⟩F pole figure
f2
f3
Austenite ⟨100⟩A pole figure
Figure 5.6: A polycrystalline TRIP steel sample consistingof 27 grains of austen-ite and81 grains of ferrite undergoing a uniaxial tensile loading (a)and the orien-tations of the austenitic and ferritic grains shown in〈100〉 pole figures (b).
5.2.1 Sample geometry and boundary conditions
The TRIP steel sample used in the present parametric study isdepicted in Fig-ure 5.6a. This sample represents a TRIP microstructure consisting of 27 grainsof retained austenite evenly distributed in a ferritic matrix composed of81 grainswith different orientations. The orientations of the austenitic and ferritic grains arechosen randomly in accordance with the〈100〉 pole figures plotted in Figure 5.6b.The cubic sample, which has a side-length ofl, is subjected to displacement-controlled boundary conditions simulating a uniaxial tensile loading at an ambienttemperature of300 K (seeSection 5.1.1for more details). The cubic sample isdiscretized using approximately8000 tetrahedral elements (about1000 elementsin the austenitic region and7000 elements in the ferritic region).
5.2.2 Microstructural configuration and model parameters
Microstructural configuration for the reference sample
In the present analysis, the first sample to be considered is indicated as therefer-encesample, for which the retained austenite initially occupies 13 % of the total
128

5.2. PARAMETRIC STUDY OF POLYCRYSTALLINE TRIP STEEL BEHAVIOR AS A FUNCTION OF MICROSTRUCTURAL PROPERTIES
Table 5.2: Summary of microstructural properties for the reference sample (i.e.,austenite carbon concentration, strength of the ferritic matrix, austenitic grain sizeand initial volume fractions of phases).
Microstructural property Value
Initial phases volume fraction 13 % austenitic87 % ferritic
Austenite carbon concentration 1.4 wt.%Austenitic grain size 2 µmFerrite initial yield stress,σy 415 [MPa]Ferrite strength at0.14 axial strain,σ14 730 [MPa]
volume and has a carbon concentration of1.4 wt.%. The chosen initial austenitevolume fraction is within the range of experimentally-observed values reportedfor various TRIP-assisted steels [8, 52, 63, 64, 119, 122] and the austenite carbonconcentration of1.4 wt.% is close to experimental values for cold-rolled, high-strength TRIP steels [52, 119, 122]. The parameters used in the ferrite elasto-plasticity model are the same as those used in the ferrite single crystal simulationsin Chapter 2 and the parameters for the austenite elasto-plastic-transformationmodel are the same as those used inChapter 3, which are representative of TRIPsteel microstructures with properties listed in Table 5.2.
Selected microstructural parameter variations
The influence of specific microstructural parameters on the effective mechanicalresponse of TRIP steels is investigated. The four microstructural parameters ana-lyzed in this chapter are (i) the initial austenitic volume fraction, (ii) the austenitecarbon concentration, (iii) the austenitic grain size and (iv) the strength of theferritic matrix.
Initial austenitic volume fraction . To study the effect of the phase morphol-ogy on the overall TRIP steel behavior, simulations are carried out for sampleswith different initial austenitic volume fractions. In addition to the reference sam-ple (which relates to an initial austenitic volume fractionof 13 %), four other sam-ples are considered, corresponding to initial austenitic volume fractions of5.0 %8.5 %, 18.5 % and25.0 %. These samples are referred to as “1A”, “2A”, “3A”and “4A”, respectively, see also Table 5.3. The above valuesfor initial austenitic
129

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
Table 5.3: Selected values of initial austenitic and ferritic volume fractions incomparison with those for the reference sample.
Case 1A 2A Ref 3A 4A
Initial aust. vol. frac. [%] 5.0 8.5 13.0 18.5 25.0
Initial fer. vol. frac. [%] 95.0 91.5 87.0 81.5 75.0
Table 5.4: Selected values of the austenite carbon concentration and the corre-sponding model parameters (including the reference sample).
Case 1B 2B Ref 3B 4B
Aust. carbon content [wt.%] 1.0 1.2 1.4 1.8 2.2
fcr − f(α)th [MPa] 0 10 20 40 60
sA,0 [MPa] 144 172 188 222 254
sA∞
[MPa] 471 525 579 693 831
δtr = b(α) · d(α) 0.0421 0.0406 0.0391 0.0359 0.0326
||b(α)|| 0.1920 0.1864 0.1809 0.1700 0.1594
κA1 [GPa] 271.6 279.3 286.8 302.0 317.4
κM1 [GPa] 338.9 355.5 372.4 405.6 438.9
volume fractions are within the range of experimental values observed in multi-phase TRIP steels [8, 52, 63, 64, 105, 119, 122]. These samples are modelled byprescribing the relative size of the austenitic domain withrespect to the total vol-ume, while maintaining their geometrical aspect, spatial arrangement and absolutegrain size.
Austenite carbon concentration. In addition to the reference sample with1.4wt.% austenite carbon concentration, four other samples with different austenitecarbon concentrations are considered, namely1.0, 1.2, 1.8 and2.2 wt.%, whichare referred to as samples “1B”, “2B”, “3B” and “4B”, respectively. This range ofaustenite carbon concentrations is in accordance with experimental data on TRIPsteels [56, 59, 64, 84, 105, 112, 121]. The variation of austenite carbon concentra-tion is taken into account through adapting the following model parameters: Thethermal part of the transformation driving forcef (α)
th in (3.64), the critical valuefor the transformation driving forcefcr in (3.68), and the parameters related tothe plastic slip hardening in the austenitic phase in (3.76)-(3.78), i.e.,uA, kA
0 ,
130

5.2. PARAMETRIC STUDY OF POLYCRYSTALLINE TRIP STEEL BEHAVIOR AS A FUNCTION OF MICROSTRUCTURAL PROPERTIES
Table 5.5: Selected values of austenitic grain size, including the reference sam-ple, and the corresponding model parameters altered from the values used for thereference sample.
Case 1C 2C Ref 3C 4C
Austenitic grain size [µm] 0.5 1.0 2.0 4.0 8.0
ℓ0 [µm] 0.0125 0.025 0.05 0.1 0.2
sA,0 [MPa] 218 203 188 176 164
sA∞
[MPa] 623 601 579 545 512
kA0 [GPa] 3.6 3.3 3.0 2.7 2.4
sA,0 andsA∞. For the above-selected austenite carbon concentrations,the differ-
ence between the thermal part of the transformation drivingforce and the criticalvalue for the transformation driving force is estimated asfcr − f
(α)th = 0, 10,
40 and60 MPa, respectively. For the above values of carbon concentration, theestimated scaling factor used for calibrating the hardening parametersuA, kA
0 ,sA,0 andsA
∞ from the response of a polycrystalline (non-transforming)austeniteare eAF = 2.0, 2.2, 2.8 and 3.2, respectively (seeSection 3.2.1for more de-tails on the calibration procedure). The list of the selected values of the austenitecarbon concentration and the corresponding model parameters are summarized inTable 5.4. In addition to these parameters, the corresponding elastic moduli forthe austenite and the martensitic transformation systems,the shape-strain vectorsb(α) and the habit plane normalsd(α), are computed for the different austenite car-bon concentrations, in accordance with the procedure outlined inAppendices Aand B. In Table 5.4, only the elastic moduliκA
1 andκM1 are shown, whereas the
values for the other moduli follow from proportionally scaling the values listed inTable 3.1.
Austenitic grain size. In addition to the phase morphology and the austenitecarbon concentration, the effect of the austenitic grain size on the overall TRIPsteel response is studied. For this purpose, a number of TRIPsteel samples withdifferent austenitic grain sizes are considered, in addition to the reference samplewith an austenitic grain size of2.0 µm. Considering that the grains of retainedaustenite in multiphase TRIP steels are within the range of0.5 µm up to a fewmicrons [42, 64, 67], the present analysis is carried out forfour TRIP steel sam-ples, which contain austenitic grains of sizes0.5, 1.0, 4.0 and8.0 µm, and are
131

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
0
200
400
600
800
1200
1000
Ax
ial
Cau
chy s
tres
s T
11 [
MP
a]
0 0.025 0.050 0.075 0.100 0.125 0.150
Axial nominal strain ε11
(A)(B)
(C)
(D) (A) σy= 200, σ
14= 350 [MPa]
(B) σy= 200, σ
14= 750 [MPa]
(Ref) σy= 415, σ
14= 730 [MPa]
(C) σy= 600, σ
14= 750 [MPa]
(D) σy= 600, σ
14= 1150 [MPa]
Strength of ferritic matrix
(Ref)
Figure 5.7: Axial stress-strain responses of the ferritic matrix, used as input inthe simulations to study the effect of the ferrite strength on the overall TRIP steelbehavior.
referred to as samples “1C”, “2C”, “3C” and “4C”, respectively. For the aboveselected austenitic grain sizes, the corresponding model parameterℓ0 (which isa characteristic length-scale parameter) used in the simulations is0.0125, 0.025,0.1 and0.2 µm, respectively, see (3.67)2 and [142] for more details on the relationbetween this length scale parameter and the austenitic grain size. Furthermore, themodel parameters related to the austenite hardening behavior (i.e.,uA, kA
0 , sA,0
andsA∞) are also re-calibrated, in order to account for the effect of the grain size
on the austenite elasto-plastic behavior. This is done in accordance with the clas-sical Hall-Petch relation (see, e.g., [43, 66]). The list ofthe selected values for theaustenitic grain size and the corresponding model parameters, which are differentfrom those used in the reference sample, are summarized in Table 5.5.
Strength of the ferritic matrix . The constraining effect of the ferritic ma-trix on the transforming austenitic grains in multiphase TRIP steels is examinedthrough a variation of the parametersσy (the initial yield stress) andσ14 (theaxial strength at 0.14 nominal axial strain). In conjunction with an exponentially-saturating hardening curve, these two parameters fully characterize the effectiveplastic behavior of the ferritic matrix. The correspondingparameters in the single-crystalline elasto-plasticity model for the ferrite aresF,0 andsF
∞ (while maintain-ing the values for the parameterskF
0 anduF constant), where a Taylor-type poly-crystalline representation has been used to calibrate these values. Apart from the
132

5.2. PARAMETRIC STUDY OF POLYCRYSTALLINE TRIP STEEL BEHAVIOR AS A FUNCTION OF MICROSTRUCTURAL PROPERTIES
Table 5.6: Selected values of the initial yield stress (σy) and the strength at0.14axial strain (σ14), including the values for reference case, and the correspondingmodel parameters for the ferrite hardening evolution.
Case 1D 2D Ref 3D 4D
Fer. yield stressσy [MPa] 200 200 415 600 600
Fer. axial strengthσ14 [MPa] 350 750 730 750 1150
sF,0 [MPa] 72 72 158 216 216
sF∞
[MPa] 178 442 412 404 758
reference sample, four samples are selected, namely “1D”, “2D”, “3D” and “4D”,which represent combinations of a low/high initial yield stress with a low/highhardening rate, as shown in Table 5.6. The axial stress-strain curves correspond-ing to these combinations of parameters are plotted in Figure 5.7. The envelope ofthese curves provides realistic bounds for the elasto-plastic behavior of the ferritic(and bainitic) grains typically present in carbon steels [19].
5.2.3 Simulation results
The results of the simulations are discussed for the parameter variations presentedin the previous section. The strength of the sample during uniaxial tensile loadingcan be determined from its effective stress-strain response. The rate of transforma-tion follows from the slope of the curve of the austenitic volume fraction plottedagainst the overall axial strain.
Effect of initial austenitic volume fraction (phase morphology)
The results of the simulations for samples with different initial austenitic volumefractions are shown in Figures 5.8a and b, depicting the effective axial stress-strainresponses and the evolutions of the austenitic volume fractions against the axialstrain. Note that the magnitude of the austenitic volume fraction has been nor-malized with respect to the initial value. For comparison, the stress-strain curveof the random polycrystalline ferrite is also depicted in Figure 5.8a. As can beobserved in this figure, the effective responses of all TRIP samples 1A-1D areinitially similar to that of the ferrite-only material, buteventually show a highereffective hardening behavior, as the martensitic volume fraction in the sample in-
133

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
250
0
1500
1250
1000
750
0 0.04 0.08 0.12
(b)(a)
0.16
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
0.40
0
1.20
1.00
0.80
0.60
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
Norm
aliz
ed a
ust
enit
ic v
olu
me
frac
tion ξ
A/ξ
A,0
_0.20
500
0.20
(1A)
(1A)
(1B)
(1B)
(Ref)
(Ref)
(1C)
(1C)
(1D)
(1D)
Ferrite-only
_
(1A) 5.0% Aust. + 95.0% Fer.
(1B) 8.5% Aust. + 91.5% Fer.
(Ref) 13.0% Aust. + 87.5% Fer.
(1C) 18.5% Aust. + 81.5% Fer.
(1D) 25.0% Aust. + 75.0% Fer.
Figure 5.8: Effect of the initial austenitic volume fraction in the microstructureon (a) the axial stress-strain response and (b) the evolution of austenitic volumefraction as a function of the axial strain.
creases. This results is due to the fact that there are two competing mechanismcontributing to the overall hardening behavior of the sample: (i) The presence ofa relatively stiff martensite can potentially increase theeffective flow stress of thesample, while (ii) the development of a stress-free transformation strain bringsthe overall stress down. During the initial deformation stage, these two effectsgive relatively equal contribution, which results in the effective strength of theTRIP steel samples being similar to that of the ferrite-onlymaterial. Only at thelater stage of deformation (more than0.08 axial strain), when the transformationprocess is near saturation (hence, the availability of the stress-free transformationstrain is limited and the sample already contains a sufficiently large fraction ofmartensite), the first mechanism becomes more dominant. Figure 5.8a further in-dicates that the increase of the effective hardening behavior is proportional to theinitial austenitic volume fraction of the sample, since a sample with a larger initialaustenitic volume fraction eventually has more martensitein the microstructure.The phenomenon described above has also been observed experimentally by Zrnıket al. [151, 152] and Jacqueset al. [62], where the effect of the initial austeniticvolume fraction on the effective stress-strain response ofTRIP steels was mea-sured by neutron diffraction analyses.
134

5.2. PARAMETRIC STUDY OF POLYCRYSTALLINE TRIP STEEL BEHAVIOR AS A FUNCTION OF MICROSTRUCTURAL PROPERTIES
250
0
1500
1250
1000
750
0 0.04 0.08 0.12
(b)(a)
0.16
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
0.050
0
0.150
0.125
0.100
0.075
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
Aust
enit
ic v
olu
me
frac
tion ξ
A_0.20
500
0.025
Ferrite-only
(2A) Aust. carbon1.0 wt.%
(2B) Aust. carbon 1.2 wt.%
(Ref) Aust. carbon 1.4 wt.%
(2C) Aust. carbon 1.8 wt.%
(2D) Aust. carbon 2.2 wt.%
(2A)(2B)
(Ref)
(2C)
(2D)
(2B)
(2A)
(2D)
(Ref)
(2C)
Figure 5.9: Effect of the austenite carbon concentration on(a) the axial stress-strain response and (b) the evolution of austenitic volume fraction as a function ofthe axial strain.
Figure 5.8b depicts the evolution of the (normalized) austenitic volume frac-tion as a function of axial strain. As can be observed, samples with a larger initialaustenitic volume fraction, in general, correspond to a higher rate of transfor-mation (as indicated by the slope of the curves). For initialaustenitic volumefractions larger than18.5 %, the effect on the transformation behavior does notreally change anymore, as shown by the similarity in the transformation evolutionfor samples 1C and 1D.
Effect of austenite carbon concentration
The effect of the austenite carbon concentration on the overall axial stress-strainresponse and the transformation behavior as functions of the axial strain and theaxial stress are shown in Figures 5.9a and b. From the effective stress-strain curvesplotted in Figure 5.9a, it can be observed that during the initial stage of deforma-tion the highest stress level is obtained for sample 2D (withan austenite carbonconcentration of2.2 wt.%), whereas the lowest stress level, which is even lowerthan that of the ferrite-only material, corresponds to sample 2A (with austenitecarbon concentration of1.0 wt.%). This is due to the fact that the austenitic grainwith higher carbon concentration possesses (i) a higher initial plastic yield stress,
135

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
250
0
1500
1250
1000
750
0 0.04 0.08 0.12
(b)(a)
0.16
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
0.050
0
0.150
0.125
0.100
0.075
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
Aust
enit
ic v
olu
me
frac
tion ξ
A_0.20
500
0.025
Ferrite-only
(3A) Aust. grain size 0.5 μm
(3B) Aust. grain size 1.0 μm
(Ref) Aust. grain size 2.0 μm
(3C) Aust. grain size 4.0 μm
(3D) Aust. grain size 8.0 μm
(3A)
(3B)
(Ref)
(3C)
(3D)
(3A)(3D)
(Ref)(3C)
(3B)
Figure 5.10: Effect of the austenitic grain size on (a) the axial stress-strain re-sponse and (b) the evolution of austenitic volume fraction as a function of theaxial strain.
(ii) a higher stability against transformation, and (iii) ahigher elastic stiffness.However, the order is reversed at larger deformations. A sample with a loweraustenite carbon concentration shows a more rapid increaseof stress (a higher ef-fective hardening rate). This is, since austenite with lower carbon concentrationtransforms faster during loading, as indicated in Figure 5.9b. As further illustratedin this figure, the highest transformation is observed for the sample with the low-est carbon concentration (sample 2A). Essentially, the rate of transformation isinversely proportional to the carbon concentration in the austenite. This behavioris in accordance with experimental data presented in, e.g.,[8, 34, 112].
Effect of austenitic grain size
The results of the simulations for the samples with different austenitic grain sizeare presented in Figures 5.10a and b, depicting the effective axial stress-strainresponse and the evolution of the austenitic volume fraction against the axial strainand axial stress, respectively. In addition, the stress-strain response of a ferrite-only material, which is used as the matrix for the TRIP steel samples, is providedfor comparison. As shown in Figure 5.10a, during the initialdeformation stagethe effective strength of the sample slightly increases with decreasing grain size.
136

5.2. PARAMETRIC STUDY OF POLYCRYSTALLINE TRIP STEEL BEHAVIOR AS A FUNCTION OF MICROSTRUCTURAL PROPERTIES
250
0
1500
1250
1000
750
0 0.04 0.08 0.12
(b)(a)
0.16
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
0.050
0
0.150
0.125
0.100
0.075
0 0.04 0.08 0.12 0.200.16
Logarithmic strain e11
_
Aust
enit
ic v
olu
me
frac
tion ξ
A_0.20
500
0.025
(4A)
(4A)(4B)
(4B)
(Ref)
(Ref)
(4C)
(4C)
(4D)
(4D)
(4A) σy= 200, σ
14= 350
(4B) σy= 200, σ
14= 750
(Ref) σy= 415, σ
14= 730
(4C) σy= 600, σ
14= 750
(4D) σy= 600, σ
14= 1150
Figure 5.11: Effect of the initial yield stress and hardening behavior of the ferriticmatrix on (a) the axial stress-strain response and (b) the evolution of austeniticvolume fraction as a function of the axial strain.
The small influence by the grain size on the overall stress-strain response is alsothe reason of the strong similarity with the response of the ferrite-only material.However, at larger deformations, the differences between the individual curvesbecome significant, where the highest stress level eventually is reached in sample“Ref” and the lowest stress level corresponds to sample 3A. In other words, thesesamples, respectively, show to have the highest and the lowest effective hardeningcapacity.
In relation to their hardening capacity, the samples “Ref” and 3A show thehighest and the lowest rate of transformation, respectively (see Figure 5.10b).Nonetheless, the grain size effect on the transformation rate is significant only forsamples with relatively small austenitic grains, and becomes less prominent forlarger austenitic grains. A similar trend is observed experimentally for TRIP steelsamples subjected to thermal loading (cooling), as reported by Jimenez-Moleroetal. [68].
Effect of strength of the ferritic matrix
Figures 5.11a and b show the results of the simulations, in terms of the effectivestress-strain response and the evolution of austenitic volume fraction as a function
137

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
of the axial strain, for TRIP steel samples with different strength of the ferriticmatrix. As can be seen from Figure 5.11a, the highest flow stress is experiencedby sample 4D (which contains the “hardest” ferritic matrix), whereas the lowestflow stress is obtained for sample 4A (which contains the “softest” ferritic matrix).In fact, the order of the stress-strain curves for the TRIP steel samples is similarto the order of the curves for the ferrite-only material depicted in Figure 5.7. Thisresult is reasonable, since the ferritic matrix occupies87.0 % of the volume of themicrostructural sample. However, in comparison to the ferrite-only material, thestress-strain response of the TRIP samples show a significantly higher hardeningbehavior, particularly at larger deformations, which highlights the TRIP effect onthe overall stress-strain response of the samples.
Moreover, the evolution of the austenitic volume fraction as a function of axialstrain, as depicted in Figure 5.11b, is also affected by variations of the strengthof the ferritic matrix. The lowest transformation rate is observed for sample A4,whereas sample 4D shows the highest rate of transformation.The difference intransformation rate is related to the phenomenon of strain partitioning, i.e., at thesame level of axial deformation, the austenitic grains in the sample with a stifferferritic matrix experience larger axial strain and, therefore, transform faster thanthose in the sample with a relatively soft matrix (c.f., the results presented inSection5.1.2).
Summary of the effect of microstructural properties on the mechanical be-havior of TRIP-assisted steels
The parametric analyses using the crystallography-based model for TRIP haveshown the influence of various microstructural parameters on the overall mechan-ical response of multiphase TRIP-assisted steels. The mainfeatures followingfrom the present parametric study are summarized below:
• A higher initial austenitic volume fraction in the microstructure does notnecessarily translate to a higher effective strength, particularly during theinitial stage of deformation. The increase in effective strength is only pro-nounced in the later stage of deformation when transformation has reached alevel at which the amount of martensite in the microstructure is sufficientlylarge to substantially contribute to the overall strength of the sample.
• A higher carbon concentration in the austenitic grains increases the effec-tive strength of the sample during the first stage of deformation. However,
138

5.2. PARAMETRIC STUDY OF POLYCRYSTALLINE TRIP STEEL BEHAVIOR AS A FUNCTION OF MICROSTRUCTURAL PROPERTIES
the rate of transformation decreases with increasing carbon concentrationin the austenite, which results in a lower effective hardening rate at largerdeformations.
• A smaller austenitic grain size increases, marginally, theinitial strength ofthe sample but lowers the rate of transformation. However, the effect ofthe variation of the austenitic grain size vanishes for larger austenitic grainsizes.
• The strength properties of the ferritic matrix strongly affect the distributionof stress and strain in the austenitic grains, which determine their stabilityagainst transformation.
The predictions of the present model are representative of TRIP steel microstruc-tural samples, where fracture in the brittle martensitic phase has a minor influenceon the overall response. The effect of crystalline damage inthe martensitic phasehas been accounted for in a recent work of Suiker and Turteltaub [125, 126]. De-spite this restriction, the predictions of the present model show a relatively goodagreement with experimentally observed trends related to the role of various mi-crostructural parameters in TRIP-assisted steels [8, 34, 62, 68, 112, 151, 152].
139

CHAPTER 5. MICROMECHANICAL SIMULATION OF TRIP-ASSISTED STEEL
140

6Macroscale simulation of multiphase
TRIP-assisted steels
Employment of micromechanical models within a finite element analysis on thescale of individual grains is an accurate means but computational far too expen-sive to be used for simulations at macroscopic (or engineering) scales. Therefore,suitable methods to coarse-grain (or homogenize) the effective response from amicrostructural scale to a polycrystalline scale are indispensable. For this pur-pose, mean-field homogenization schemes are most frequently used. The lowerand upper bounds in terms of the elastic composite behavior have been identifiedearly on by Sachs [111] and Taylor [128], respectively, assuming equal stress orequal strain distributions in the constituents. Later, Eshelby [38] suggested anapproach, in which the stress and strain equilibrium of an ellipsoidal inclusion inan elastic matrix subjected to (homogeneous) far-field force or displacement wasderived analytically. Within the framework of homogenization, this approach be-came known as the self-consistent model. During the last decades, self-consistentschemes have been developed for viscoplastic response (see, e.g., [74, 81, 89]).The increased accuracy of the prediction from such implicitformulations en-tails, unfortunately, a significantly higher numerical effort compared to simple,
141

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
explicit homogenization schemes. The classical Taylor scheme that assumes equalstrain (or deformation) distribution in all constituents is the most simple approach,particularly in displacement-controlled simulations. However, this method oftenoverestimates the effective elastic stiffness of the composite response. Clearly, arelaxation of the equal strain distribution assumption maygive a softer responseand, thus, a more accurate prediction, while maintaining its simple characteristics.
In polycrystalline materials, preferential crystallographic orientations or tex-ture plays an important role on determining the overall mechanical behavior ofthe material, particularly in connection to the material anisotropy. Texture infor-mation of a polycrystalline sample is often represented in terms of an orientationdistribution function (ODF). The incorporation of textureinto a finite elementsimulation can be done using deterministic methods, e.g., the texture componentmethod (see, e.g., [107, 150]). In this case, the (original)ODF of the sample isapproximated using a superposition of bell-shaped (component) functions or via aset of discrete values. Alternatively, the reconstructionof the ODF of the samplecan be done using probabilistic approaches [37, 71, 140]. Such approaches are rel-atively simple to implement, when compared to deterministic methods. However,probabilistic approaches may require a larger set of sampleorientations in orderto achieve the same quality as obtained in a deterministic fashion.
In this chapter, a relaxed-Taylor homogenization scheme isproposed for mul-tiphase TRIP-assisted steels. The relaxation is introduced through a scalar weight-parameter that characterizes the distribution of strain (or deformation) in eachconstituent. This relaxation is combined with an assumption in which (mechani-cal) work is equally distributed in all constituents (iso-work condition), see, e.g.,Bouaziz and Buessler [18]. The discussion on the iso-work-rate weighted-Taylorscheme is presented inSection 6.1, where the prediction of the iso-work-rate ho-mogenization scheme is analyzed in comparison to the resultof a direct finiteelement simulation. Together with the elasto-plastic-transformation model foraustenite and the elasto-plasticity model for ferrite, theiso-work-rate homoge-nization scheme is used for simulating the response of TRIP steel during deep-drawing. In this simulation, the crystallographic textureof the sample is approxi-mated using the probabilistic ODF reconstruction. The result of the simulation ispresented inSection 6.2, which may provide relevant information on the charac-teristics of multiphase TRIP steels during forming processes.
142

6.1. HOMOGENIZATION SCHEME FOR MULTIPHASE MICROSTRUCTURE
Xx
Referenceconfiguration
Currentconfiguration
F(x)
y(x)
x*
F(n)(x*)
Single crystalline grain n
Macroscale
Microscale
y*(x*)
Figure 6.1: Deformation gradient of a macroscale material point x that representsa composite microstructure of several grains with distinctmechanical properties.
6.1 Homogenization scheme for multiphase microstruc-ture
6.1.1 Weighted-Taylor scheme with iso-work-rate criteria
Consider a material pointx representing a microstructure that consists of sev-eral grains with a different constitutive behavior. The effective deformation of thematerial point representing this microstructure is described by the deformationgradientF , as shown in Figure 6.1. It is assumed that deformations of individ-ual grains (sub-regions) in the material point can be obtained from scaling theeffective deformation, which in a rate form can be written as[134]
F (n) = λ(n)F for n = 1, . . . , N , (6.1)
where F (n) is the rate of deformation gradient of a material point (at the mi-croscale)x∗ of a grainn andλ(n) is a scalar describing the weight (or the mag-nitude) of the rate of the deformation gradient of grainn with respect to the rateof the effective deformation gradientF . In fact, the expression (6.1) is a gener-alization of the Taylor-type homogenization scheme, wherethe classical Taylorscheme, i.e., the equal-strain condition, is obtained by prescribingλ(n) = 1 forall n. In comparison with the classical Taylor scheme, the assumption (6.1) of-fers more flexibility in distributing the deformation (or strain) over the grains byvarying the parametersλ(n). Furthermore, the rate of the effective deformation
143

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
gradient,F , can be written as a volume average of the rate of the deformationgradient in all sub-regions, following a simple rule of mixture, i.e.,
F =
N∑
n=1
ν(n)F (n) ;N∑
n=1
ν(n) = 1 , (6.2)
with ν(n) the volume fraction of the grainn. Combining (6.1) and (6.2)1 yields tothe (volumetric) restriction for the parametersλ(n) as follows:
N∑
n=1
ν(n)λ(n) = 1 . (6.3)
In the present model, the values for the parametersλ(n) are estimated suchthat each constituent grain carries the same amount of work-rate (iso-work-ratecondition). This criterion is motivated from the fact that work is a product ofstress times deformation, which implies that the softer grain (with lower stresslevel) may carry a larger portion of deformation than the harder grain (with higherstress level) such that the work in all grains is equally distributed. LetP (n) be thefirst Piola-Kirchhoff stress in the reference configurationof sub-regionn, whichis work-conjugated to the rate of the deformation gradientF (n). The criteria ofequal work-rate in all sub-regions leads to
P (n) · F (n) = P (N) · F (N) for n = 1, . . . , N − 1 . (6.4)
For each sub-region, the first Piola-Kirchhoff stressP (n) is a function of the de-formation gradientF (n), which relation is described through the material consti-tutive model. This implies that the first Piola-Kirchhoff stressP (n) is implicitlydependent of the parametersλ(n), i.e.,
P (n) = P (n)(F (n)) = P (n)(F ,λ) , (6.5)
with λ the set of all parametersλ(n), λ = λ(n)|n = 1, . . . , N. From (6.1) and(6.5), the iso-work-rate condition in (6.4) can be written as(
λ(n)P (n)(λ) − λ(N)P (N)(λ))
· F = 0 for n = 1, . . . , N − 1 . (6.6)
The weight parametersλ(n) are obtained by solving the set of non-linear equationsof the iso-work-rate condition (6.6) and the volumetric restriction in (6.3). In
144

6.1. HOMOGENIZATION SCHEME FOR MULTIPHASE MICROSTRUCTURE
Simulation cases
Cases 1, 2: FEM with homogenization scheme
Case 3: Semi-direct FEM simulation
Case 4: Direct FEM simulation
Each element: Austenite (1 IP, 1 grain) Ferrite (7 IPs, 1 grain)
144 elements (= 1152 IPs)
1152 elements Austenite (144 elements) Ferrite (1008 elements)
Case 2
18 elements (= 144 IPs) Each IP:
Austenite (1 grain, 12.5%) Ferrite (1 grain, 87.5%)
Case 4 Case 3 Case 1
Each IP: Austenite (18 grains, 12.5%) Ferrite (18 grains, 87.5%)
1 element (= 8 IPs)
Figure 6.2: Cubical samples representing a polycrystalline TRIP microstructurethat consists of144 austenitic grains and144 ferritic grains (homogenization pro-cedures are applied for cases 1 and 2).
addition, the parametersλ(n) are assumed to be strictly positive1. A Newton-Raphson procedure is applied to computeλ(n) for n = 1, . . . , N . Furthermore,using a rule of mixtures, the effective stress in terms of thefirst Piola-Kirchhoffstress in the reference configuration associated to the material pointx is obtainedas
P =N∑
n=1
ν(n)P (n) . (6.7)
6.1.2 Preliminary analysis and comparison to direct FEM simulation
In order to analyze the prediction of the iso-work-rate weighted-Taylor schemefor multiphase TRIP steels, a set of simulations are performed. The predictionsof the present averaging scheme are compared with those of the classical Taylorscheme, as well as with a “direct” FEM simulation, which is used as a bench-
1For the case of linear elastic materials, it can be proven that the solution for the parametersλ(n)
exists and is unique, ifλ(n) > 0 for all n.
145

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
mark case. The simulations are performed using the single crystalline modelspresented inChapters 2 and3 for describing the material constitutive behaviorof the ferritic and austenitic phases, respectively. The material parameters used inthe ferritic and austenitic models are similar to those shown in Tables 2.1 and 3.1,respectively, which are representative of a multiphase TRIP steel with an austenitecarbon concentration of1.4 wt.%. Furthermore, four distinct samples representinga polycrystalline TRIP steel microstructure are considered. These polycrystallinesamples consist of144 randomly-oriented austenitic grains, which occupy12.5 %of the total volume of the sample, and144 randomly oriented ferritic grains. Thesamples are subjected to uniaxial tensile loading up to0.15 axial nominal strain,with a straining rate of10−4 s−1, at a constant temperature of300 K.
As shown in Figure 6.2, for case 1 the sample is represented bya single hexa-hedral element with eight integration points (IP). To arrive at144 grains of ferriteand144 grains of austenite, each IP is composed of18 grains of austenite and18grains of ferrite (i.e., the number of grains in total isN = 36), with total volumefractions of12.5 and87.5 [%], respectively. The overall response of the sample issimulated using either the iso-work-rate weighted-Taylorscheme or the classicalTaylor scheme. For case 2, the sample is discretized into18 hexahedral elements(144 IPs in total) and, therefore, each IP consists of an austenitic grain and a fer-ritic grain only (i.e.,N = 2). Similar to case 1, the iso-work-rate weighted-Taylorscheme and the classical Taylor scheme are used to calculatethe distribution ofstrain for all grains at each IP. Furthermore, the sample forcase 3 is divided into144 elements. In contrast to the cases 1 and 2, there is no homogenization schemeapplied in this case (semi-direct FEM), since for each element one IP is assignedto an austenitic grain, whereas the other seven IPs correspond to a single ferriticgrain. This IPs assignment corresponds to a volume ratio of12.5 % austeniteand87.5 % ferrite in each element. In case 4, the same polycrystallinesample isdiscretized into1152 elements, where one out of eight clustered elements consti-tutes an austenitic grain, while the other seven elements constitute a single ferriticgrain.
Table 6.1 shows the comparison between computational (CPU)time of simu-lations using the iso-work-rate weighted-Taylor, the classical Taylor scheme andthe direct FEM calculation. It can be seen that, in general, the simulation withthe iso-work-rate weighted-Taylor scheme is more efficientin terms of CPU-timethan that using the direct and semi-direct FEM simulations.However, in compari-son to the analysis using the classical Taylor scheme, the iso-work-rate weighted-
146

6.1. HOMOGENIZATION SCHEME FOR MULTIPHASE MICROSTRUCTURE
Table 6.1: Computational (CPU) time used in the calculationusing different ho-mogenization schemes and direct FEM simulation.
Case Averaging scheme CPU-time [s]
Case 1 Classical Taylor scheme 7106
Case 1∗ Iso-work-rate weighted-Taylor scheme 23544
Case 2 Classical Taylor scheme 7099
Case 2∗ Iso-work-rate weighted-Taylor scheme 8720
Case 3 Semi-direct FEM simulation (element averaging) 23350
Case 4 Direct FEM simulation 211263
Taylor scheme requires more CPU-time, depending on the number of grains perIP. A larger number of grains considered per IP implies a bigger size of the Jaco-bian matrix that needs to be constructed and solved during the Newton-Raphsoniterations, which requires more computational effort.
Furthermore, Figures 6.3a and b depict the effective stress-strain response andthe evolution of austenitic volume fraction of the TRIP samples. At the initialstage of deformation, the predictions of the iso-work-rateweighted-Taylor schemeshow a relatively good correspondence with those obtained using the direct FEMsimulation. However, it can be observed that at the later stage of deformation thestress-strain responses predicted with the iso-work-rateweighted-Taylor schemediffer significantly from the direct FEM prediction (case 4). In particular, theiso-work-rate weighted-Taylor cannot capture the rapid increase in stress as pre-dicted by the direct FEM simulation. The differences are mainly attributed to thekinematical restriction inherited from the present weighted-Taylor scheme, whichassumes that the deformation in each sub-region (grain) is scaled from the macro-scopic deformation, as stated in the assumption (6.1). Thisrestriction leads toa strong underestimation of the amount of transformation, due to the fact thattransformation from austenite to martensite is accompanied by a stress-free trans-formation strain, which comprises the shape and volume changes. In general, thestress-free transformation strain can significantly differ from the macroscopic de-formation, depending on the crystallographic orientationof the grains with respectto the loading axis. The kinematical assumption (6.1) imposes the microscale(or local) deformations in the austenitic grains to be of thesame direction as themacroscopic deformation, which may restrict the amount of transformation. The
147

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
150
0
900
750
600
450
0 0.03 0.06 0.09
(b)(a)
0.12
Logarithmic strain e11
_
Cau
chy s
tres
s T
11 [
MP
a]
_
0.050
0
0.150
0.125
0.100
0.075
0 0.03 0.06 0.09 0.150.12
Logarithmic strain e11
_
Aust
enit
ic v
olu
me
frac
tion ξ
A_0.15
300
0.025
(1) Case 1
(2) Case 2
(3) Case 3
(4) Case 4
(1)* Case 1*
(2)* Case 2*
(1) Case 1
(2) Case 2
(3) Case 3
(4) Case 4
(1)* Case 1*
(2)* Case 2*
(4)
(3)
(2)(1)
(2)*
(1)*
(3)
(2)
(4)
(1)
(2)*(1)*
Figure 6.3: Comparison of (a) the effective stress-strain curves and (b) the evo-lution of austenitic volume fraction of polycrystalline TRIP steels computed withhomogenization schemes and direct FEM simulations.
underestimation of the amount of transformation eventually causes inaccuracy inthe prediction of the effective stress-strain response, since the presence of a hardermartensitic phase increases the effective hardening behavior of the sample.
As indicated in Figure 6.3a, the stress-strain curves predicted using the iso-work-rate weighted-Taylor scheme are virtually very similar to those predictedusing the classical Taylor averaging scheme. However, a more significant differ-ence can be observed for the prediction of the evolution of the austenitic volumefraction, where the iso-work-rate weighted-Taylor schemegives relatively betterpredictions than the classical Taylor scheme (when compared to the predictionfrom the direct FEM simulations). Moreover, Figures 6.3a and b show that theeffective stress-strain curve and the transformation evolution predicted using thesemi-direct FEM simulation (case 3) are comparable to thoseobtained using theiso-work-rate weighted-Taylor scheme (cases 1∗ and 2∗). This is due to the factthat in the semi-direct FEM simulation, a homogenization procedure is implicitlyintroduced through the element formulation (i.e., a linearelement shape functionimposes the condition of iso-strain on the IPs within the element). Consequently,the semi-direct FEM simulation fails to reproduce the same result as that obtainedfrom the direct FEM simulation.
148

6.2. DEEP-DRAWING SIMULATION OF MULTIPHASE TRIP-AIDED STEEL
Punch
Blankholder
Die
Sample (a quarter)(a) (b)
Initial state
Final state
f1 (RD)
f3 (ND)
f2
Figure 6.4: (A quarter of) a circular plate representing a TRIP steel sample under-going deep drawing (a) at the initial state and (b) at the finalstate.
6.2 Deep-drawing simulation of multiphase TRIP-aidedsteel
6.2.1 Sample geometry and boundary conditions
In order to simulate the behavior of a multiphase TRIP-aidedsteels during a deep-drawing process, the micromechanical models for the single-crystalline ferrite andaustenite presented inChapters 2 and 3 are used in combination with the iso-work-rate weighted-Taylor scheme. In the case study a circular plate representinga polycrystalline TRIP steel sample with12.5 % retained austenite is considered.This circular plate has a diameter of100 mm and a thickness of2 mm. Thesample is subjected to the following deformation mechanismto form a circular-based cup: The sample is put on a die with a circular hole with adiameter of61.84 mm. Subsequently, the sample is deformed using a cylindrical punch of adiameter of50 mm, which has a down-speed of10−1 mm·s−1 (see, Figure 6.5a).In addition, a down force of4 kN is imposed to the blank holder in order to holdthe position of the sample, and after300 s, the blank holder is removed. Here,the punch, blank holder and die are assumed rigid, whereas the classical Coulombfriction model is applied in the contact area, with a friction coefficient of0.1.In order to minimize the computational time, the simulationis performed only
149

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
Circular plate: Radius = 100 mmThickness = 2 mm
Sample dimension Punch
Die
Blank holder Sample
25.0 mm
30.92 mm
30.0 mm
50.0 mm 2.0 mm
R 10.0 mm
R 7.0 mm
Holder force = 4 kN
(a) (b)
f1 (RD)
f2
f3 (ND)
f2
ψ
Figure 6.5: Sketches of (a) the configuration of deep-drawing tools, i.e., punch,holder and die, and (b) the finite element mesh of (the quarterof) the circularTRIP steel plate used in the deep-drawing simulation.
for a quarter of the sample, with fixed and roller boundary conditions applied towarrant the symmetry. The simulation is carried out under isothermal conditionsat an ambient temperature of300 K.
The quarter of the sample is discretized into2100 linear hexagonal elementswith eight integration points per element (see, Figure 6.5b). As an input for theiso-work-rate weighted-Taylor scheme, every integrationpoint is composed oftwo grains of retained austenite and two grains of ferrite (i.e.,N = 4, see (6.6)).Each austenitic grain has an initial volume fraction of6.25 % and each ferriticgrain has a volume fraction of43.75 %. Furthermore, the values for the modelparameters summarized in Table 2.1 are used for the ferriticgrains, whereas forthe austenitic grains, the values for the model parameters in Table 3.1 are used,which are representative of austenitic grains in TRIP steelmicrostructures with atypical grain size of2 µm and the carbon concentration of1.4 wt.%. The simula-tion is performed using the finite element program MSC.Marc,where the elasto-plastic-transformation model for austenite and the elasto-plasticity model for theferrite are implemented within the iso-work-rate weighted-Taylor scheme in theuser subroutine “hypela2”.
150

6.2. DEEP-DRAWING SIMULATION OF MULTIPHASE TRIP-AIDED STEEL
6.2.2 Sample crystallographic orientation distribution function
As demonstrated by the results of the simulations at the grain level in the pre-vious chapter, the crystallographic orientations of the grains have an importantrole on the overall behavior of TRIP-assisted steels. On a macroscopic scale, themicrostructural texture generates anisotropy in the material response. Microstruc-tural texture may develop during the processing of the material, e.g., during arolling process, where the crystallographic orientation of the grains is stronglydetermined by the rolling direction [144, 149].
The crystallographic orientation of grains is often represented using a set ofEuler rotation anglesφ = ϕ1,Φ, ϕ2, whereϕ1 ∈ [0, 2π], Φ ∈ [0, π] andϕ2 ∈ [0, 2π]. This set of angles defines the orientation of the crystal with re-spect to the global coordinate system. The first angleϕ1 describes the rotationabout the global axisf3, the second angleΦ gives the rotation about the globalaxisf1, andϕ2 is the rotation angle again with respect to the global axisf3. Thisrepresentation of the crystallographic orientation is sometimes referred to as theBunge notation [21]. The crystallographic texture of a polycrystalline material isdescribed by means of an orientation distribution function(ODF), i.e., the prob-ability density functionf(φ) of the crystallographic orientationsφ. Further, thevolume fraction of a polycrystalline aggregate in the sample that has a specificorientationφ is given by
dV
V= f(φ)dφ , (6.8)
where∮
dV/V = 1. Experimentally, an ODF can be constructed from orientationdata following from electron backscatter diffraction (EBSD) measurements on alarge number of surface grains, or calculated from X-ray diffraction (XRD)-basedpole figures.
In order to study the effect of crystallographic texture on the overall behaviorof a TRIP steel during a deep-drawing process, two samples with different crys-tallographic texture are considered, named samples A and B.The incorporation ofthe crystallographic texture of the sample is done through astatistical reconstruc-tion of the sample ODFs, using a simple probabilistic sampling method (MonteCarlo simulations), as suggested by Eisenlohr and Roters [37] (see, also Toth andvan Houtte [140]). Due to the cubic crystal symmetry of the FCC austenite andBCC ferrite, and the sample symmetry under rolling conditions, the Euler an-gle domain can be reduced to thefundamentalspace[0, π/2]; [0, π/2]; [0, π/2].Accordingly, each ODF, either of the FCC austenite or the BCCferrite, is re-
151

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
Reconstructed ODFExperimentally-observed ODF
φ2 = 60o φ
2 = 75o
φ2 = 30o φ
2 = 45o
φ2 = 0o φ
2 = 15o
φ2 = 60o φ
2 = 75o
φ2 = 30o φ
2 = 45o
φ2 = 0o φ
2 = 15o
φ1 (0o - 90o)
Φ (0o - 90o)
FCC austeniteof sample A2.0
1.6
1.3
1.0
0.8
6.4
5.0
4.0
3.2
2.5
Intensity f (φ1,Φ,φ
2)
Figure 6.6: ODF obtained from a real sample compared to the ODF reconstructedusing Monte Carlo simulations for the FCC austenite of TRIP steel sample A.
constructed using33600 (= 2100 × 8 × 2) sample orientations. The number oforientations follows from modeling (the quarter of) the circular plate by2100 el-ements, where each element contains eight integration points per element, andeach integration point contains two austenitic grains and two ferritic grains. Theresults of the probabilistic ODF reconstruction for samples A and B are illustratedin Figures 6.6 and 6.7 for the austenitic grains and in Figures 6.8 and 6.9 for the
152

6.2. DEEP-DRAWING SIMULATION OF MULTIPHASE TRIP-AIDED STEEL
Experimentally-observed ODF
φ2 = 60o φ
2 = 75o φ
2 = 60o φ
2 = 75o
φ2 = 30o φ
2 = 45o
φ2 = 0o φ
2 = 15o
φ2 = 30o φ
2 = 45o
φ2 = 0o φ
2 = 15o
φ1 (0o - 90o)
Φ (0o - 90o)
FCC austeniteof sample B2.0
1.6
1.3
1.0
0.8
6.4
5.0
4.0
3.2
2.5
Reconstructed ODF
Intensity f (φ1,Φ,φ
2)
Figure 6.7: ODF obtained from a real sample compared to the ODF reconstructedusing Monte Carlo simulations for the FCC austenite of TRIP steel sample B.
ferritic grains. It can be seen that the TRIP steel sample B shows a stronger crys-tallographic texture, as indicated by higher intensities at particular regions in theorientation space of the austenite and ferrite. The ODFs obtained from experi-mental observations are presented also for comparison. These ODFs are obtainedfrom EBSD measurements on two samples of industrial TRIP steels. The chemi-cal composition of these steels is shown in Table 6.2.
153

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
φ1 = 60o
φ1 = 30o
φ1 = 0o φ
1 = 15o
φ1 = 75o
φ1 = 30o φ
1 = 45o
φ1 = 0o φ
1 = 15o
φ1 = 90o
φ1 = 45o
φ1 = 90o
φ2 (0o - 90o)
Φ (0o - 90o)
BCC ferriteof sample A2.5
2.0
1.6
1.3
1.0
8.0
6.4
5.0
4.0
3.2
φ1 = 60oφ
1 = 75o
Experimentally-observed ODF Reconstructed ODF
Intensity f (φ1,Φ,φ
2)
Figure 6.8: ODF obtained from a real sample compared to the ODF reconstructedusing Monte Carlo simulations for the BCC ferrite of TRIP steel sample A.
As shown in Figures 6.6-6.9, the ODFs resulting from the probabilistic re-construction show a relatively good agreement with the corresponding originalODFs. Each sample orientation used in the ODF reconstruction is assigned to asingle crystal of austenite and ferrite in the finite elementmodel, respectively.
154

6.2. DEEP-DRAWING SIMULATION OF MULTIPHASE TRIP-AIDED STEEL
φ1 = 60o
φ1 = 30o
φ1 = 0o φ
1 = 15o
φ1 = 60o φ
1 = 75o
φ1 = 30o φ
1 = 45o
φ1 = 0o φ
1 = 15o
φ1 = 90o
φ1 = 75o
φ1 = 45o
φ1 = 90o
φ2 (0o - 90o)
Φ (0o - 90o)
BCC ferriteof sample B2.5
2.0
1.6
1.3
1.0
8.0
6.4
5.0
4.0
3.2
Experimentally-observed ODF Reconstructed ODF
Intensity f (φ1,Φ,φ
2)
Figure 6.9: ODF obtained from a real sample compared to the ODF reconstructedusing Monte Carlo simulations for the BCC ferrite of TRIP steel sample B.
6.2.3 Simulation results and analysis
Material anisotropy: Earing-height profile
In this section, the results of the finite element simulations of TRIP steel sam-ples undergoing cup-drawing are presented. Cup drawing is astandard test for
155

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
Table 6.2: Chemical compositions (given in wt.%) of multiphase TRIP steel sam-ples used as references for the construction of the austenitic and ferritic ODFs.
C Mn Si Al N P S RA [vol.%]
Sample A 0.177 1.34 0.30 0.30 − 0.016 0.007 13.6
Sample B 0.216 1.64 0.5 0.32 40 ppm 0.033 0.005 10.7
0.96
1.06
1.04
1.02
1.00
0.98
0 15 30 45 90
Angle w.r.t. rolling direction (f1-axis) ψ [deg]
Relat
ive
ear-h
eight z(
ψ)/z
75
(b)(a)
60
0.94
0.96
1.06
1.04
1.02
1.00
0.98
0 15 30 45 90
Angle w.r.t. rolling direction (f1-axis) ψ [deg]
75
Ferrite-onlyAustenite-onlyTRIP steel
60
0.94
Relat
ive
ear-h
eight z(
ψ)/z
Ferrite-onlyAustenite-onlyTRIP steel
Sample A Sample B
Figure 6.10: Normalized earing profiles resulting from a deep-drawing process on(a) TRIP steel sample A and (b) TRIP steel sample B compared tothose of theindividual ferritic and austenitic phases.
the characterization of material anisotropy (e.g., the effect of crystallographic tex-ture). The level of anisotropy can be derived from the earing-height profile; anisotropic material (no texture) results in a cup without earing, whereas a samplewith a stronger crystallographic texture gives a higher earing-height profile. Letψbe the angle with respect to the rolling direction (f1-axis). The normalized earing-height profile for (the quarter of) the TRIP steel samples A and B are shown inFigures 6.10a and b, respectively. For comparison, the earing-height profiles forthe corresponding austenite-only and ferrite-only materials are also plotted. Theearing-height profile,z(ψ), is measured from the bottom of the cup, andz rep-resents the average height of the cup. For TRIP steel sample A, the maximumearing-height is obtained atψ ≈ 30 and the minimum height atψ ≈ 70. Itcan be seen that TRIP steel sample A gives less earing than thecorrespondingferrite-only samples. The reduction in the earing height ofthe TRIP steel sampleis attributed to the effect of the crystallographic textureof the austenite, which
156

6.2. DEEP-DRAWING SIMULATION OF MULTIPHASE TRIP-AIDED STEEL
gives an opposite earing profile to that of the ferrite-only material, as indicated inFigure 6.10a. Despite the difference in earing-height, theshape of the earing pro-file of the TRIP sample is similar to that of the ferrite-only material, since ferrite isthe dominant phase (87.5 vol.%) in the microstructure of the TRIP steel samples.
For the TRIP steel sample B shown in Figure 6.10b, the maximumearingheight is obtained atψ ≈ 35, while the minimum height corresponds toψ ≈ 65.Similar to the TRIP steel sample A, the earing-height profilefor TRIP steel sampleB is lower than that of the corresponding ferrite-only sample. In comparison to theTRIP steel sample A, the TRIP steel sample B gives a higher earing profile. Thisis, since the TRIP sample B has stronger texture, as indicated in Figures 6.6-6.9.
Distribution of martensitic volume fraction
In addition to the earing profile, the distribution of martensite in the TRIP steelsample during deep-drawing is analyzed. Since martensite is a brittle phase, arelatively large amount of martensite in the microstructure may lead to the initia-tion of material damage, e.g., microstructural cracks, particularly upon extensivedeformation, such as during deep-drawing. Figures 6.11a-ddepict the distribu-tion of the martensitic volume fraction in the TRIP steel samples as predictedfrom the deep-drawing simulations. Note that the martensitic volume fraction de-picted in Figures 6.11a-d has been normalized by the initialvolume fraction ofretained austenite in the microstructure,ξA,0. Accordingly, the magnitude “one”corresponds to full-transformation and “zero” means no transformation at all.
As indicated in the figures, martensite appears mostly on theouter surface ofthe cup, and only a small amount of martensite is observed at the inner surface.This is, since during deep-drawing the outer surface of the cup is subjected to ten-sile stress that stimulates the martensitic transformation, whereas the inner surfaceis under compression, which restrains the transformations. Further, Figures 6.11aand c indicate that transformation occurs mostly at the lower edge of the cup, i.e.,the region that experiences the largest tensile stress. Nonetheless, given a rathersignificant underestimation of the martensitic volume fraction formed at largerdeformations in uniaxial tensile loading, as discussed earlier in this chapter, it islikely that the total martensitic volume fraction formed during deep-drawing issignificantly underestimated. Despite this limitation, the results of the simula-tions show a first prediction on the martensitic transformation behavior of TRIPsteel during deep-drawing. Furthermore, by comparing the results for the TRIP
157

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
(d)(c)
f1 f2
f3
ψ = 0°
ψ = 90°
f1f2
f3
ψ = 0°
ψ = 90°
0.5000.4500.4000.3500.3000.2500.2000.1500.1000.0500.000
Normalized martensitic
volume fraction ξM/ξA,0
Outer surface Inner surface
TRIP sample A
TRIP sample B
(b)(a)
f1f2
f3
ψ = 0°
ψ = 90°
f1f2
f3
ψ = 0°
ψ = 90°
Outer surface Inner surface
_ _
Figure 6.11: Distribution of the martensitic volume fraction on the outer and innersurfaces of the TRIP steel sample A (a,b) and the TRIP steel sample B after deep-drawing (c,d).
steel samples A (in Figures 6.11a,b) and B (in Figures 6.11c,d), it can be con-cluded that the effect of crystallographic texture on the distribution of martensiteis small, since the result for samples A and B are similar.
Summary of macroscale behavior of multiphase TRIP-assisted steels
The microstructural models for transformation and plasticity, presented inChap-ters 2 and3, have been used in macroscale simulations through applyingthe iso-work-rate weighted-Taylor scheme. It has been demonstrated that the iso-work-rate weighted-Taylor scheme gives a better prediction thanthe classical Taylorscheme at the expense of a relatively small extra computational cost. However, acomparison with the direct FEM simulation shows that the kinematical constraint
158

6.2. DEEP-DRAWING SIMULATION OF MULTIPHASE TRIP-AIDED STEEL
introduced by the weighted-Taylor assumption may lead to a rather strong under-estimation of the amount of martensite transformed.
The behavior of TRIP steel samples during cup-drawing has been studied. Aprobabilistic ODF reconstruction method has been used to incorporate the crys-tallographic texture properties into the numerical model.The results of the sim-ulations show the effect of crystallographic texture on theearing profile, as wellas the distribution of the martensitic volume fraction in the sample. In general,the simulation results are considered to be qualitatively correct. To investigate thephenomena observed in the simulations in more details, moresystematic exper-imental studies on the influence of crystallographic texture on the formation ofmartensite during deep-drawing of TRIP steels are necessary.
159

CHAPTER 6. MACROSCALE SIMULATION OF MULTIPHASE TRIP-ASSISTED STEELS
160

7Simulation of thermal behavior of
multiphase TRIP-assisted steel
The simulations presented in previous chapters were conducted under isothermalconditions at room temperature and only focussed on the transformation fromaustenite to martensite through the application of mechanical loading. However,other driving forces, such as thermal loading, can also trigger the transformation.These driving forces also affect the free energy differencebetween the metastableaustenitic state and the martensitic state (see Figure 1.2 in Chapter 1). Hence, itis interesting to explore the effect of temperature on the retained austenite stabilitywithin the context of the micromechanical models presentedin Chapters 2and3,and to compare their predictions with other models and experimental data.
In the literature, several empirical and thermodynamically-based models havebeen proposed for predicting the transformation behavior in multiphase TRIPsteels upon cooling (see, e.g., [8, 35, 68, 112, 147, 153]). In these models, the sta-bility of the retained austenite and, thus, the transformation behavior are charac-terized by the (local)Ms temperature as a function of microstructural parameters,such as the concentration of carbon and other alloying elements. The expression
161

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
for theMs temperature proposed in these models is based on the classical empir-ical formulation of Andrews [4]. However, these models haveseveral limitations,i.e., (i) they give theMs temperature at which the transformation is initiated, butdo not provide a kinetic relation that describes the evolution of transformationas a function of temperature, and (ii) the effect of the mechanical properties ofthe surrounding matrix on the transforming grains is not taken into account. Asshown earlier in this thesis, during straining the strengthof the surrounding ferriticmatrix gives a significant effect on the transformation behavior (seeSection 5.2).Conversely, in the context of shape-memory alloys several micromechanical mod-els have been used intensively for simulating the reversible martensitic transfor-mation behavior during thermal and mechanical loadings (see, e.g., Anand andGurtin [3] and Thamburaja [131]). However, in the frameworkof the modelingof TRIP, the micromechanical models found in the literatureare mainly purposedon simulating the mechanically-driven martensitic transformation, without tak-ing into account the effect of temperature variation on the transformation behav-ior [16, 25, 33, 85, 120, 127]. In the present work, the thermo-mechanical modelderived inChapters 2and3 will be applied to study the behavior of TRIP steelsunder thermal loading. To this end, an extension of the models is required toaccount for the thermal expansion/contraction, which was previously neglected.The incorporation of the thermal expansion/contraction effect in the deformationis derived in accordance with the model for shape-memory alloys proposed byAnand and Gurtin [3]. Simulations are performed to analyze the effects of mi-crostructural parameters on the transformation behavior upon cooling.
This chapter is organized as follows: The derivation of the models for cou-pled thermal and mechanical behavior in the austenite and ferrite is discussed inSection 7.1. The results of the simulations of TRIP steel microstructures duringthermal loading are presented inSection 7.2. Furthermore, the predictions of themodel are compared with experimental data.
7.1 Single-crystalline thermo-mechanical models for mul-tiphase TRIP-assisted steel
The elasto-plastic-transformation model for single-crystalline austenite discussedin Chapter 3 and the elasto-plasticity model for single-crystalline ferrite in Chap-ter 2 are derived in accordance with an assumption that the effects of thermal
162

7.1. SINGLE-CRYSTALLINE THERMO-MECHANICAL MODELS FOR MULTIPHASE TRIP-ASSISTED STEEL
expansion/contraction on the overall deformation are relatively small and, there-fore, can be ignored. This assumption is reasonable for simulations of TRIP steelsamples under isothermal or slightly varying thermal conditions. However, in or-der to simulate the behavior of TRIP steel samples subjectedto coupled thermo-mechanical loadings, the above assumption may be too strong. Accordingly, themicromechanical models for austenite and ferrite presented in previous chaptersare extended here in order to account for the effect of thermal deformations. Forconciseness, only the equations that require modification are presented in thischapter, while the other aspects of the models for the ferrite and austenite can befound inChapters 2 and 3, respectively.
7.1.1 Thermo-elasto-plastic-transformation model for austenite
Helmholtz energy densities and constitutive relations
In accordance with the formulation of the Helmholtz energy density presented inSection 3.1.3, the Helmholtz energy densityψ(Fe, θ, β, ξ) can be written as thesum of the (elastic) strain energy densityψm, the thermal energy densityψth, thedefect energy densityψd and the surface energy densityψs, i.e.,
ψ = ψm + ψth + ψd + ψs . (7.1)
In the absence of mechanical loading, the crystalline lattice of metals expe-riences reversible deformation upon changing temperature, which is associatedwith the mechanism of thermal expansion or contraction. Assuming that thestretches due to thermal expansion are proportional to the temperature change(see, e.g., [3, 27, 28]), the elastic deformation gradientFe during a non-isothermaldeformation from an initial temperatureθ0 to a temperatureθ can be expressed as
Fe = F ⋆e (I + A (θ − θ0)) , (7.2)
whereF ⋆e gives the elastic deformation gradient at a temperatureθ, while the ten-
sor I + A(θ − θ0) accounts for the stretch due to thermal expansion. Similarto (3.40), the effective thermal expansion tensorA is obtained as a volume aver-age of the thermal expansion tensor in the austenite and martensite in the secondintermediate configuration, i.e.,
A =1
Jtr
(
ξAAA + (1 + δtr)
M∑
α=1
ξ(α)A(α)
)
, (7.3)
163

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
with AA and A(α) the thermal expansion tensors of austenite and martensitictransformation systemα, respectively. Assuming an isotropic thermal expansionbehavior, these tensors are given byAA = αAI andA(α) = αMI, whereαA andαM are, respectively, the coefficients of thermal expansion ofthe austenite andmartensite. Similar to (3.44), the elastic strain energyψm is defined as a quadraticfunction of the elastic strain. Moreover, it is assumed thatthe thermal stretch doesnot contribute to the elastic strain energy densityψm and, therefore, the elasticstrain energy is defined by
ψm =1
2ρ0JtrCE⋆
e · E⋆e ; E⋆
e =1
2
(
(F ⋆e )T F ⋆
e − I)
. (7.4)
In the above expressions,E⋆e is the elastic Green-Lagrange strain measured at the
temperatureθ, ρ0 stands for the mass density in the reference configuration andC is the effective elasticity tensor, which is expressed by (3.41). In general, theelastic properties of austenite and martensite can be functions of temperature. Inthe present model, these properties are, however, assumed constant in order tosimplify the formulation. Since for metals the components of the thermal expan-sion tensorA are much smaller than the components ofE⋆
e , quadratic terms inAcan be neglected. Hence, the elastic strain tensorE⋆
e can be written in terms ofthe overall elastic Green-Lagrange strainEe and the thermal expansion tensorA
as follows:
E⋆e = Ee − B (θ − θ0) ; B =
1
2
(
(F ⋆e )T F ⋆
e A + A(F ⋆e )T F ⋆
e
)
. (7.5)
In view of (7.5)2, B can be thought of as the thermal expansion tensor with acorrection for the elastic stretch. From (7.4)1 and (7.5)1, the elastic strain en-ergy densityψm can be expressed in terms of the overall elastic strainEe, thetemperatureθ and the martensitic volume fractionsξ, i.e.,
ψm(Ee, θ, ξ) =1
2ρ0Jtr(ξ)C(ξ)Ee · (Ee − 2B (θ − θ0)) . (7.6)
Note that in the above expression the higher-order terms ofB have been ne-glected.
Furthermore, the expressions for the thermal energyψth, the defect energyψd and the surface energyψs can be obtained in accordance with those inSec-tion 3.1.3. Note that the thermal effects in the microstrainβ are assumed to be
164

7.1. SINGLE-CRYSTALLINE THERMO-MECHANICAL MODELS FOR MULTIPHASE TRIP-ASSISTED STEEL
small and, thus, can be neglected. The full expression for the Helmholtz energydensity per unit mass,ψ, can be obtained by assembling the energy densities in(7.6), (3.49), (3.50), (3.57)-(3.59) and (3.62). Further,in accordance with (3.38),the stress-elastic strain constitutive relation can be formulated as (see also Anandand Gurtin [3])
S =ρ0
Jtr
∂ψ
∂Ee= C (Ee − B (θ − θ0)) , (7.7)
whereS is the second Piola-Kirchhoff stress in the second intermediate configu-ration, which is related to the first Piola-Kirchhoff stressin the reference configu-ration,P , via (3.37). Similarly, from (3.33)2, the temperature-reversible entropyconstitutive relation can be written as
ηe = −∂ψ∂θ
= h ln
(
θ
θT
)
+ ηT +Jtr
ρ0CEe · B , (7.8)
with ηe the reversible entropy density. In comparison to the constitutive relations(3.39) and (3.45), where the effect of thermal expansion is not taken into account,the second Piola-Kirchhoff stressS in (7.7) and the reversible entropyηe in (7.8)are now dependent both on the elastic strainEe and on the temperatureθ, whichreflects the coupling between the mechanical and thermal constitutive relations.
Driving forces for transformation and plasticity
Following a similar procedure as used inSection 3.1.4, the transformation drivingforce for a transformation systemα, denoted asf (α), can be expressed as
f (α) = f (α)m + f
(α)th + f
(α)d + f (α)
s , (7.9)
wheref (α)m , f (α)
th , f (α)d andf (α)
s represent the (bulk) mechanical part, the ther-mal part, the defect energy contribution and the surface energy contribution tothe transformation driving force, respectively. The bulk mechanical part of thetransformation driving force is given by (c.f., (3.65))
f (α)m = JtrF
Tp F T
e FeSF−Tp F T
tr ·(
b(α) ⊗ d(α))
+1
2
(
CA − (1 + δtr)C(α))
Ee · (Ee − 2B (θ − θ0))
− CEe ·(
BA − (1 + δtr)B(α))
(θ − θ0) ,
(7.10)
165

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
with BA andB(α) the thermal expansion tensors with the elastic stretch correc-tion of the austenite and martensitic transformation systemα, respectively, definedas
BA =1
2
(
(F ⋆e )T F ⋆
e AA + AA(F ⋆e )T F ⋆
e
)
, (7.11)
B(α) =1
2
(
(F ⋆e )T F ⋆
e A(α) + A(α)(F ⋆e )T F ⋆
e
)
. (7.12)
The bulk mechanical part of the transformation driving forcef (α)m shown in (7.10)
summarizes the contribution of the resolved stress, the difference in elastic stiff-ness and thermal expansion properties between the martensite product phase andthe austenite parent phase. The thermal part of the driving force for transforma-tion, the defect energy and the surface energy contributions to the driving forcefor transformation are, respectively, given by (3.66), (3.67)1 and (3.67)2. Further-more, the criteria for transformation nucleation and the evolution of the marten-sitic volume fractionsξ(α) are described by the kinetic relation in (3.68).
For the plasticity in the austenitic phase, the driving force g(i)A for plastic slip
in systemi is given by (3.71)-(3.73), and the evolution of plastic slipas a functionof the plastic driving force is given by the kinetic relation, in accordance with(3.74).
7.1.2 Thermo-elasto-plasticity model for ferrite
Analogous to (7.2), the elastic deformation gradientFe accounts for the effect ofthermal expansion due to a change in temperature, and is written as
Fe = F ⋆e (I + AF (θ − θ0)) , (7.13)
whereF ⋆e is the elastic deformation gradient measured at a temperatureθ andAF
is the thermal expansion tensor, which is, for a thermally isotropic behavior, givenbyAF = αF I, withαF the thermal expansion coefficient of ferrite. Furthermore,following a similar procedure as for the austenite (Section 7.1.1), the mechanicaland thermal constitutive relations are given by (c.f., (2.35) and (2.38))
S = CF (Ee − BF (θ − θ0)) , (7.14)
ηe = hF ln
(
θ
θF
)
+ ηF +1
ρ0CF Ee · BF , (7.15)
166

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
whereCF , ρ0, hF , θF andηF are, respectively, the elastic stiffness tensor, themass density, the specific heat, the reference temperature and the entropy of BCCferrite. For simplicity, these properties are assumed to beindependent of tem-perature. In addition,S is the second Piola-Kirchhoff stress in the intermediateconfiguration, which is related to the first Piola-Kirchhoffstress in the referenceconfiguration,P , via (2.33),Ee is the elastic Green-Lagrange strain andBF rep-resents the thermal expansion tensor of ferrite with a correction for elastic stretch,i.e.,
BF =1
2
(
(F ⋆e )T F ⋆
e AF + AF (F ⋆e )T F ⋆
e
)
. (7.16)
7.2 Simulation of TRIP steel behavior under cooling
7.2.1 Boundary conditions and model parameters
In the present analysis, a TRIP steel microstructural sample that consists of a sin-gle grain of austenite and six grains of ferrite is simulated. The austenitic grain,situated at the center of the cubic sample, is modeled as a polyhedron composedof two half-pyramids and is embedded in a uniformly-oriented ferritic matrix. Thevolume of the austenitic grain is approximately13 % of the total volume of thesample. Similar to the mesh used inSection 5.1, the sample is discretized into ap-proximately2500 tetragonal elements, with500 elements in the austenitic region.The sample is initially in a stress-free state. Starting from a room temperature ofθ0 = 300 K, the sample is subsequently cooled down to100 K with a cooling rateof θ = 0.02 K·s−1, i.e.,
θ = θ0 − θt = 300 − 0.02t , (7.17)
for 0 ≤ t ≤ 10000 s. The applied rate of cooling is assumed to be sufficiently lowfor the temperature distribution in the sample to remain uniform. Furthermore,it is assumed that a redistribution of carbon atoms does not take place during thecooling process.
As already mentioned, for simplicity, the model parametersrelated to theelasto-plastic behavior of the material, e.g., the elasticmoduli, the initial slip re-sistance and the hardening moduli, are assumed to be temperature-independent.Nonetheless, the plastic yield stress effectively varies with temperature, since thethermal part of the plasticity driving force in the ferrite,given by (2.17), and in
167

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
Face 1 (u1 = 0)
Face 4 (u1 = 0) f1
f2
f3
Face 3 (u3 = 0)
Face 2 (u2 = 0)
Face 5 (u2 = 0)
Face 6 (u3 = 0)
Constrained boundary conditions
Face 1 (u1 = 0)
Traction-free boundary conditions
f3
Austenitic grain
f1
f2
Face 3 (u3 = 0)
Face 2 (u2 = 0)
Ferritic matrix
Temperature: θ = 300 – 0.02t [K]
(b) (a)
Figure 7.1: Mechanical boundary conditions applied to TRIPsteel microstruc-tural samples undergoing thermal loading (cooling): (a) Traction-free and (b)constrained boundary conditions.
the austenite, given by (3.73), are functions of the temperature, i.e.,
ζ(i)F = ρ0θφ
(i)F and g
(i)th = ρ0θφ
(i)A , (7.18)
respectively. In this case, the values forφ(i)F andφ(i)
A (the entropy densities re-lated to plastic slips) are computed in accordance with the thermal driving forcesat the temperatureθ0 = 300 K, see Tables 2.1 and 3.1 for the actual values.This results in the entropy densities being equal toφ
(i)F = 4.27 andφ(i)
A = 5.13m2·K−1·s−2. Furthermore, the coefficient of thermal expansion for the ferrite istaken asαF = 1.3 · 10−6 K−1, whereas the coefficients of thermal expansion forthe austenite/martensite (assumed identical) areαA = αM = 2.1 ·10−6 K−1 [13].
In a similar fashion as for the simulations presented inChapter 5, the over-all behavior of thermally-loaded TRIP-assisted steels is studied for samples withdifferent microstructural properties, i.e., a variation of (i) the austenite carbonconcentration, (ii) the austenitic grain size and (iii) thestrength properties of theferritic matrix. To analyze the effect of the strength of theferritic matrix on theoverall behavior of the TRIP microstructure during cooling, four selected samples(labeled 1D-4D) are considered. The material properties ofthe sample are variedby considering a low/high initial yield stress and a low/high strain hardening be-havior of the ferrite, in accordance with the values listed in Table 5.6. (A more
168

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
detailed list of model parameters used for simulating the ferritic matrix can befound in Table 2.1). In the austenitic region, the model parameters used in thesimulations are representative for an austenite carbon concentration of1.4 wt.%and a grain size of2.0 µm. The samples are subjected to a temperature changedefined by (7.17) in combination with two different types of mechanical bound-ary conditions to investigate their influence on the effective behavior of the TRIPmicrostructure. The first type of boundary condition, called the “traction-free”boundary condition, is defined as follows: (i) The normal displacement is set tozero on the external faces 1-3 and (ii) the remaining faces are traction-free, asshown in Figure 7.1a. In addition to the traction-free case,the same samples (1D-4D) are subjected to the same thermal loading, but the normaldisplacement on allexternal faces is set to zero (see Figure 7.1b). The samples for this “constrained”case are denoted as 1Dc-4Dc, respectively.
For the case of traction-free boundary conditions, the austenite carbon concen-tration and grain size are also varied. In order to study the effect of the austenitecarbon concentration, five samples (labeled as 1B, 2B, Ref, 3B and 4B) repre-senting austenite carbon concentrations of1.0, 1.2, 1.4, 1.8 and 2.2 wt.% aresimulated. The model parameters corresponding to these carbon concentrationscan be found in Tables 3.1 and 5.4, except for the thermal partof the transforma-tion driving force,f (α)
th , which in this case is a function of temperature, given by(3.66). Since the specific heat of the austenite and the martensitic transformationsystems are assumed to be equal,hA = h(α) for all α = 1, . . . ,M , from (3.66)the thermal part of the transformation driving force can be expressed as a linearfunction of temperature, i.e.,
f(α)th (θ) ≈ ρ0
λT
θT(θ − θT ) . (7.19)
Here, the mass density is taken asρ0 = 7800 kg·m−3, which is representative oftypical carbon steels. Furthermore, the values of the latent heatλT (at temperatureθT ) for a transformation from austenite to martensite range from−49.73 (relatingto 1.0 wt.% carbon) to−51.00 kJ·kg−1 (relating to2.2 wt.% carbon), which areobtained from extrapolating the data reported by Leeet al. [78]. The theoretical,barrier-free transformation temperature is approximatedasθT ≈ 633 K. It needsto be mentioned that the values for the latent heat reported in [78] are measured atthe lower intercritical temperatureA1 = 996 K, and the corresponding values forthe latent heat at temperatureθT are estimated following the procedure of linear
169

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
Table 7.1: Selected values of austenite carbon concentration and the correspond-ing model thermal parameters.
Sample 1B 2B Ref 3B 4B
Aust. carbon content [wt.%] 1.0 1.2 1.4 1.8 2.2
fcr [MPa] 204 216 227 249 269
λT [kJ·kg−1] −49.73 −50.21 −50.53 −50.84 −51.00
extrapolation proposed in [141], i.e.,λT ≈ A1λ(A1)/θT . Furthermore, for thechosen austenite carbon concentrations of1.0, 1.2, 1.4, 1.8 and 2.2 wt.%, thecritical values for the transformation driving force,fcr, are estimated as204, 216,227, 249 and269 MPa, respectively. Table 7.1 shows the list of the thermal modelparameters used in the simulations that are not included in Tables 3.1 and 5.4.
Finally, five samples (labeled 1C, 2C, Ref, 3C and 4C) representing differentaustenitic grain sizes (i.e.,0.5, 1.0, 2.0, 4.0 and8.0 µm) are simulated, in orderto study the effect of the austenitic grain size on the TRIP steel behavior underthermal loading. The model parameters associated with these samples can beobtained from Tables 3.1 and 5.5.
7.2.2 Analysis of TRIP steel behavior under cooling
Effect of strength properties of ferritic matrix
Figures 7.2a and b depict the evolution of the austenitic volume fractionξA andthe normal components of the stress in the individual phases, TP
ii , with P = Afor the austenite andP = F for the ferrite, as functions of temperatureθ for thetraction-free samples (1D-4D). As shown in these figures, the martensitic start(Ms) temperature is virtually the same for all samples, which indicates that thevariation of the strength properties of the surrounding ferritic matrix has a negli-gible effect on the stability of the austenitic grains against transformation (whenthe sample is traction-free). The transformation from austenite to martensite isaccompanied by a relatively large volumetric growth, whichmust be accommo-dated by elasto-plastic deformations of the surrounding ferritic region. Conse-quently, the surrounding ferritic matrix can influence the transformation behaviorof the austenitic grains by means of constraining the volumetric growth duringtransformation.
170

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
0
1.20
1.00
0.80
0.40
100 180 220 260
(b)(a)
Temperature θ [K]
No
rmaliz
ed a
ust
enitic
volu
me fr
action ξA/ξA,0
_
-800
-1000
200
0
-200
-600
100 300
Temperature θ [K]C
auchy
str
esses of
phas
e Tii
[MP
a]
300
0.20
140 180 220 260140
P
-4000.60
(1D)(2D)
(3D)(4D)
(1D)A
(1D)F
(2D)F
(3D)F(4D)
F
(4D)A
(2D)A
(3D)A
(1D) Fer. Sy= 200, S
14= 350
(2D) Fer. Sy= 200, S
14= 750
(3D) Fer. Sy= 600, S
14= 750
(4D) Fer. Sy= 600, S
14= 1150
_
(1D) Fer. Sy= 200, S
14= 350
(2D) Fer. Sy= 200, S
14= 750
(3D) Fer. Sy= 600, S
14= 750
(4D) Fer. Sy= 600, S
14= 1150
MS ≈
265 K
Figure 7.2: Normalized austenitic volume fraction and normal stresses of individ-ual phases as functions of temperature for the traction-free samples with differentstrength properties of ferritic matrix under cooling.
During the initial transformation stage (up to about35 % transformed austen-ite), the volumetric expansion due to transformation in theaustenitic grain is ac-commodated by elastic deformations in the neighboring ferritic region. At thisstage, all four samples (1D-4D) show an identical response.Additional simula-tions not presented here have shown that the slope of the transformation curvesis related to the magnitude of the elastic modulus of the ferritic matrix, relativeto the elastic modulus of the austenite; a lower elastic modulus of the ferrite re-sults in a faster transformation. Moreover, in the case of independent austeniticgrains (i.e., grains without a surrounding ferritic matrix), transformation occursextremely fast (within a temperature interval of0.25 K).
For samples 1D and 2D, the stress level in the neighboring ferritic regionreaches the initial plastic yield stress after about35 % austenite has transformed.Hence, subsequent volumetric growth of the austenitic grains induces plastic de-formation in the surrounding ferritic grains. During the formation of these plasticdeformations, the transformation rate is higher if the yield stress of the matrix islower and/or the hardening in the matrix is lower (see Figure7.2). In other words,the transformation rate increases with a decreasingeffective elasto-plasticstiff-ness of the surrounding matrix. Consequently, the transformation in samples 1D
171

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
f1
f2
f3
(2D) Fer. Sy= 200, S
14= 750 [MPa] (3D) Fer. S
y= 600, S
14= 750 [MPa]
(4D) Fer. Sy= 600, S
14= 1150 [MPa]
Microstrain βF
0.0060
0.0065
0.0070
0.0075
0.0080
0.0085
0.0090
0.0095
0.0100
0.0105
0.0110
(1D) Fer. Sy= 200, S
14= 350 [MPa]
Mid-section cut
Ferritic matrix
Austenite Austenite Austenite
Austenite
Ferrite Ferrite Ferrite
Ferrite
Figure 7.3: Development of plastic deformations in the ferritic matrix representedby the microstrainβF (related to the density of dislocations) for samples (1D-4D)at the end of the cooling process.
and 2D proceeds at a higher rate than in samples 3D and 4D, where the ferriticmatrix is still in the elastic regime. In addition, the difference in transformationbehavior between samples 1D and 2D at the later transformation stage is attributedto the fact that the ferritic matrix in sample 2D has a stronger hardening behaviorthan in sample 1D.
Furthermore, the normal stress components in the austenitic and ferritic re-gions for the traction-free samples A1-A4 are depicted in Figure 7.2b as functionsof temperature. Note that the superscripts “A” and “F ” indicate that the curvesare related to the austenite and ferrite, respectively. As shown in this figure, theaustenitic grain suffers a relatively high compressive stress during transformation.This high compressive stress causes the mechanical part of the transformationdriving force,f (α)
m , to become negative, which reduces the total driving force for
172

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
0
1.20
1.00
0.80
0.40
100 180 220 260
(b)(a)
Temperature θ [K]
No
rmaliz
ed a
ust
enitic
volu
me fr
action ξA/ξA,0
_
-800
-1000
200
0
-200
-600
100 300
Temperature θ [K]C
auchy
str
esses of
phas
e Tii
[MP
a]
300
0.20
140 180 220 260140
P
-4000.60
(2D*)
(3D*)(4D*)
(1D*)
(2D*)A
(2D*)F
(1D*)F
(1D*)A
(3D*)A
(4D*)A
(3D*)F(4D*)
F
_
(1D*) Fer. Sy= 200, S
14= 350
(2D*) Fer. Sy= 200, S
14= 750
(3D*) Fer. Sy= 600, S
14= 750
(4D*) Fer. Sy= 600, S
14= 1150
MS ≈
265 K
Figure 7.4: Normalized austenitic volume fraction and normal stresses of indi-vidual phases as functions of temperature for constrained samples with differentstrength of ferritic matrix under cooling.
transformation. The magnitude of the compressive stress inthe austenite, in fact,is connected to the elasto-plastic stiffness in the ferritic matrix; a higher elasto-plastic stiffness in the ferritic matrix implies a higher compressive stress experi-enced by the austenitic grain, which slows the transformation down. Indeed, ascan be observed from Figures 7.2a and b, the compressive stress in the austenitefor samples 1D and 2D is relatively low, which corresponds toa higher rate oftransformation compared to samples 3D and 4D.
Figure 7.3 depicts the distribution of microstrain parameter βF , which is re-lated to the density of dislocations in the ferritic matrix1. As shown in this figure,the density of dislocations in the ferritic region surrounding the austenitic grain ishigher if the yield stress in the ferrite is lower (compare samples 2D to 3D) and/orif the hardening in the ferrite is higher (compare samples 1Dto 2D). Furthermore,it can be observed in this figure that for samples 1D and 2D the ferritic matrixexperiences a relatively large plastic deformation, particularly in the region closeto the grain boundary with the austenite. In contrast, the plastic deformation inthe ferritic matrix for samples 3D and 4D is minimal.
1The parameterβF can be used as an indicator of plastic deformation since it isconstitutivelyrelated to the amount of plastic slip via (2.55).
173

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
(1D-1Dc) Sy= 200, S
14= 350
(2D-2Dc) Sy= 200, S
14= 750
(3D-3Dc) Sy= 600, S
14= 750
(4D-4Dc) Sy= 600, S
14= 1150
(1D-1Dc)
(2D-2Dc)
(3D-3Dc)(4D-4Dc)
0
1.0
0.8
0.6
0.2
0.4
Norm
aliz
ed m
arte
nsi
tic
volu
me
frac
tion ξ
M
(const
rain
ed)
_
0 0.2 0.4 0.6 0.8 1.0
Normalized martensitic volume fraction ξM (traction-free)
_
0
0.100
0.075
0.025
0.050
ξ M (co
nst
rain
ed)
_
0 0.025 0.050 0.075 0.100
ξM (traction-free)
_
(b)(a)
See detailed view (b)
Line of equalvolume fraction
Figure 7.5: Comparison between the martensitic volume fractions in the sampleswith the traction-free and the constrained boundary conditions upon cooling (a)and the detailed view of the beginning of transformation (b).
Figures 7.4a and b depict the evolution of the effective austenitic volume frac-tion and the normal stress components in the individual phases as functions oftemperature for the constrained cases (1Dc-4Dc). In comparison to the resultsof the simulations for the traction-free samples shown in Figure 7.2a, the con-strained samples show a similar trend, except that the transformation occurs moregradually. Apparently, the thermal contribution to the transformation driving forceremains dominant over the mechanical contribution. Depending on the propertiesof the ferritic matrix, in the traction-free cases the transformation occurs within atemperature interval of20 to 40 K, whereas in the constrained cases transforma-tion takes place in a larger temperature interval of approximately60 K. This is,since in the constrained cases, the austenitic grain in samples 1Dc-4Dc shown inFigure 7.4b experiences a higher compressive stress and, thus, is more restricted totransform when compared to the corresponding grain in the samples with traction-free boundary conditions (see Figure 7.2b).
Figure 7.5a depicts the evolution of the martensitic volumefractions of theconstrained samples with respect to those of the traction-free samples. The hor-izontal and vertical axes correspond to the martensitic volume fraction in thetraction-free and the constrained samples, respectively,and the curves are pa-
174

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
rameterized with the applied temperature. Accordingly, ifa curve is below thediagonal line, it indicates that, at a given temperature, more martensite is presentin the traction-free sample than in the corresponding constrained sample, andviceversa. Prior to transformation, the austenitic grain experiences tensile stresses,since the austenite has a higher coefficient of thermal expansion/contraction thanthe ferrite. Due to the constraints imposed at the external boundaries, the ten-sile stress level in the austenitic grain is higher for the constrained samples thanfor the traction-free samples. Consequently, the effective driving force for trans-formation in the constrained samples is larger than in the traction-free samples,which results initially in more transformation in the constrained samples (see thedetailed view in Figure 7.5b). In principle, the differencein the coefficients ofthermal expansion of the austenite/martensite and the ferrite affects the transfor-mation onset (Ms temperature), but the results of the simulations indicate that thiseffect is not significant.
In the subsequent transformation stages, the austenitic grain suffers a com-pressive stress, since the grain tends to expand volumetrically to accommodatefor the transformation dilatation. Here, the austenitic grain in the constrainedsamples experiences a larger compressive stress compared to the austenitic grainin the traction-free samples (compare Figures 7.2b and 7.4b). Consequently, theeffective driving force for transformation in the constrained samples is reducedand, hence, transformation occurs at a lower rate than that in the unconstrainedcase. It is worth mentioning that the results of the simulations represent limitcases for the actual boundary conditions; the traction-free case is somewhat rep-resentative of the grains near the free-surface of a macroscopic specimen and theconstrained case can be related to grains situated at a substantial distance awayfrom the free surface.
Effect of austenite carbon concentration
The effect of the austenite carbon concentration on the transformation behavior ofTRIP steel samples can be observed in Figure 7.6, in which theaustenitic volumefraction is plotted against temperature for different austenite carbon concentra-tions. In terms of the martensitic transformation start temperatureMs, sample 1Bwith an austenite carbon concentration of1.0 wt.% gives the highest transforma-tion temperature, whereas the lowest transformation temperature is obtained bysample 4B with an austenite carbon concentration of2.2 wt.%. Furthermore, the
175

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
(2B)
(Ref)
(3B)
(4B)
0
1.20
1.00
0.80
0.40
0.20
0.60
Norm
aliz
ed a
ust
enit
ic v
olu
me
frac
tion ξ
A/ξ
A,0
__
100 125 150 175 200 225 250 275 300
Temperature θ [K]
(1B) Aust. 1.0wt.%C
(2B) Aust. 1.2wt.%C
(Ref) Aust. 1.4wt.%C
(3B) Aust. 1.8wt.%C
(4B) Aust. 2.2wt.%C
(1B)
MS ≈ 205 K MS ≈ 295 K
Figure 7.6: Evolution of normalized austenitic volume fraction as a functionof temperature for samples with traction-free boundary conditions for differentaustenite carbon concentration.
results of the simulations shown in Figure 7.6 indicate thattheMs temperatureis inversely proportional to the amount of carbon in the austenite. In addition,the elastic stiffness of the austenite increases with carbon concentration, such thatthe ferritic matrix becomes softer relative to the austenitic grain. In principle,this implies that the transformation rate becomes higher with increasing carbonconcentration. However, this effect is negligible as the slopes of the curves inFigure 7.6 are very similar.
Effect of austenitic grain size
The effect of the austenitic grain size on the transformation behavior of TRIPsteel samples upon cooling is shown in Figure 7.7, in which the austenitic volumefraction is plotted against temperature for different austenitic grain sizes. ThelowestMs temperature is observed for sample 1C (with an austenitic grain sizeof d0 = 0.5 µm), whereas the highestMs temperature is observed for sample4C (with a grain size ofd0 = 8.0 µm). Moreover, theMs temperature uponcooling decreases approximately25 K when the grain size reduces from8.0 to0.5 µm. Furthermore, the results indicate that the size of the austenitic grain has asmaller influence on theMs temperature than the austenite carbon concentration.
176

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
(2C)
(Ref)
(3C)
(4C)
0
1.20
1.00
0.80
0.40
0.20
0.60
Norm
aliz
ed a
ust
enit
ic v
olu
me
frac
tion ξ
A/ξ
A,0
__
100 125 150 175 200 225 250 275 300
Temperature θ [K]
(1C) Aust.gr.size 0.5 μm
(2C) Aust.gr.size 1.0 μm
(Ref) Aust.gr.size 2.0 μm
(3C) Aust.gr.size 4.0 μm
(4C) Aust.gr.size 8.0 μm
(1C)
MS ≈ 245 K MS ≈
270 K
Figure 7.7: Evolution of normalized austenitic volume fraction as a functionof temperature for samples with traction-free boundary conditions for differentaustenitic grain size.
The variation inMs temperature due to a change in the austenitic grain size isrelatively large for smaller austenitic grain sizes (samples 1C, 2C and Ref), andbecomes quite small for relatively large grain sizes (samples 3C and 4C).
7.2.3 Comparison with experimental results
In this section, the model predictions for different austenite carbon concentrationsand austenitic grain sizes are compared to experimental results on the transfor-mation behavior of a single austenitic grain, as reported byJimenez-Moleroetal. [68]. For this purpose, the austenitic grain is assumed to have a sphericalshape, with the volume being equal toV0 = π(d0)
3/6, whered0 is to the (mean)diameter of the austenitic grains. The variation of theMs temperature as a func-tion of the austenite carbon concentration and the austenitic grain size (or grainvolume) predicted from the simulations is presented in Figures 7.8a and b.
It can be seen from Figure 7.8a that for a fixed size of the austenitic grain, themartensitic temperatureMs decreases proportionally with increasing carbon con-centration, which is in accordance with Andrews empirical law [4]. Furthermore,Figure 7.8b illustrates that for any austenite carbon concentration, the marten-sitic temperatureMs is linearly dependent on the inverse of an “equivalent” grain
177

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
120
320
280
240
160
0.7 1.3 1.6 1.9
(b)(a)
Carbon concentration xC [wt.%]
Mar
tensi
tic st
art
temper
ature
MS [K]
120
320
280
240
160
Inverse of equivalent radius V0
-1/3 [μm-1]
Mar
tensi
tic st
art
temper
ature
MS [K]
2.51.0
200200
2.2 0 1.0 1.5 2.0 3.00.5 2.5
(1) Aust. 1.0wt.%C
(2) Aust. 1.2wt.%C
(3) Aust. 1.4wt.%C
(4) Aust. 1.8wt.%C
(5) Aust. 2.2wt.%C
(1)
(2)
(3)
(4)
(5)
(1)
(2)
(4)
(5)
Austenitic grain volume V0 [μm3]
1100 0.110
(3)
(1) Aust. gr. 0.5μm
(2) Aust. gr. 1.0μm
(3) Aust. gr. 2.0μm
(4) Aust. gr. 4.0μm
(5) Aust. gr. 8.0μm
Figure 7.8: Calculated martensitic start temperature,Ms, of microstructural sam-ples with different (a) austenite carbon concentrations,xC , and (b) austenitic grainvolumes,V0.
radius, defined asr0 := V1/30 . This dependency corresponds to the following
relation for theMs temperature (see also Jimenez-Moleroet al. [68]):
Ms = Ms0 −AxC −BV−
13
0 [K] , (7.20)
wherexC is the weight percentage of carbon in the austenite andV0 is the volumeof the austenitic grain. The parametersMs0, A andB can be obtained by fittingto the simulation results shown in Figures 7.8a and b, which gives
Ms0 = 380 K ; A = 80 K·wt.%−1 ; B = 10 K·µm−1 . (7.21)
As shown by (7.20), the parameterA essentially describes the dependency ofthe Ms temperature on the carbon concentration in the austenite, whereas theparameterB accounts for the effective contribution of austenitic grain size on theMs temperature.
When using (7.20) for fitting the experimental data of Jimenez-Molero etal. [68], it appears that the calibrated valuesMs0 , A and B are relatively high
178

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
(2)
(3)
(4)
(5)
120
320
280
200
160
240
Mar
tensi
tic
star
t te
mper
ature
MS [K]
0 10 20 30 40 50 60
Austenitic grain volume V0 [μm3]
Model prediction
(1) Aust. 1.0wt.%C
(2) Aust. 1.2wt.%C
(3) Aust. 1.4wt.%C
(4) Aust. 1.8wt.%C
(5) Aust. 2.2wt.%C
(1)
Experimental data
Aust. 0.6–0.7wt.%C
Aust. 0.7–0.8wt.%C
Aust. 0.8–0.9wt.%C
Aust. 0.9–1.0wt.%CModel prediction: MS = 380 – 80 xC –10V0–1/3
Figure 7.9: Martensitic start temperatureMs predicted by the model compared tothe corresponding experimental data reported in Jimenez-Moleroet al. [68].
compared to those in (7.21), i.e.,
Ms0= 702 K ; A = 425 K·wt.%−1 ; B = 475 K·µm−1 . (7.22)
This difference, which is illustrated in more detail in Figure 7.9, can be explainedas follows: The discrepancy in the parametersMs0 andA may be partly ascribedto the fact that the range of carbon concentrations used in the simulations, whichis between1.0 to 2.2 wt.%, is different from that considered in the experiments,which is between0.6 to 1.0 wt.% [68]. In fact, the experimental values of theaustenite carbon concentration reported in [68] are also relatively low compared toother experimental values reported in the literature [56, 59, 64, 84, 105, 112, 121].The above comparison further suggests that for a given valueof carbon concen-tration, the magnitude of the latent heatλT and the transformation critical valuefcr need to be reinterpreted in order to have a better quantitative agreement withthe experimental results of Jimenez-Moleroet al. [68].
The value for the parameterB in (7.18) resulting from the simulations is a fac-tor of 40 smaller than the corresponding experimental value reported in [68]. Thisresult indicates that the values for the surface energy termχ and the characteristiclength-scaleℓ0 are, somehow, not accurate enough to account for the effect of in-terfacial energy formed during transformation. This can bedue to the fact that theinterfacial energy between the two BCT variants forming thetwinned structure in
179

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
the martensitic transformation systems was not taken into account in the currentmodel. In fact, using the present model for surface energy, re-calibration of thesurface energy parametersχ andℓ0, such that the fitting parameterB becomes40 times higher, leads to an unrealistic result that the transformation driving forcebecomes dominated by the surface energy contribution,fs. It can be seen from(3.67)2 that, at the onset of transformation (i.e.,ξ(α) → 0), the value offs is nega-tive (= −χ/ℓ0), which implies thatfs effectively acts as a barrier. Consequently,an increase in the magnitude ofB by a factor of40 makesfs to become40 timeshigher. In that case, transformation can only be occur at an extremely high levelof stress and/or at a very low temperature. Therefore, in addition to a possiblere-calibration of the model parametersχ andℓ0, the present model for the interfa-cial (or surface) energy density may need to be reformulatedin order to provide abetter approximation of the experimental results of Jimenez-Moleroet al. [68].
Summary of TRIP steel behavior under thermo-mechanical loading
The effect of TRIP steel microstructural properties on the behavior of the transfor-mation of retained austenite to martensite upon cooling hasbeen analyzed. Themicrostructural properties considered are (i) the elasto-plastic behavior of the fer-ritic matrix, (ii) the carbon concentration in the austenite and (iii) the austeniticgrain size. The results of the simulations show that the rateof transformation isstrongly related to the stiffness of the ferritic matrix: A higher elastic stiffnessof the matrix leads to a more gradual transformation process. The elasto-plasticproperties of the ferritic matrix hardly affect the onset oftransformation (as re-flected by theMs temperature). In contrast, theMs temperature is strongly de-pendent of the carbon concentration in the austenite and theaustenitic grain size:A higher austenite carbon concentration and/or a smaller austenitic grain size givea lowerMs temperature and, thus, a higher austenite stability against transforma-tion.
The results of the simulations (in terms of theMs temperature) were com-pared with the experimental data of Jimenez-Moleroet al. [68]. This comparisonindicates that, qualitatively, the prediction of the modelgives a similar trend tothat observed experimentally. However, a more quantitative comparison shows arelatively large discrepancy between the prediction of thepresent model and theexperimental data of Jimenez-Moleroet al. [68]. This result suggests that somemodel parameters introduced in the simulation, particularly those related to the
180

7.2. SIMULATION OF TRIP STEEL BEHAVIOR UNDER COOLING
thermal quantities and surface energy density, may need to be re-formulated andre-calibrated, although some discrepancies might also be attributed to the smallrange of carbon concentrations considered in the experiments reported in [68].
181

CHAPTER 7. SIMULATION OF THERMAL BEHAVIOR OF MULTIPHASE TRIP-ASSISTED STEEL
182

AKinematics of martensitic transformation
at lower length-scales
This section is presented in order to illustrate the procedure to calculate the trans-formation shape strain vectorsb(α) and the habit plane normalsd(α) used in theelasto-plastic-transformation model discussed inChapter 3. The discussion in thesection is summarized from the work reported in Turteltaub and Suiker [141, 143].
At the lattice scale, a cubic-to-tetragonal transformation results in three pos-sible variants1. This number follows from the fact that the point group of a cubiclattice is composed of24 rotations and the point group of a tetragonal lattice con-tains8 rotations and, thus, leading to24/8 = 3 variants of tetragonal lattice (seeFigure A.1). The transformation from FCC austenite to a BCT martensite variantϑ = 1, 2, 3 is characterized by a stretch tensorsU (ϑ), which is given as
U (ϑ) = atrI +(
btr − atr
)
eAϑ ⊗ eA
ϑ , (A.1)
1The terminology “variant” is used in accordance with the notion of group theory (see, e.g.,James and Hane [65]).
183

APPENDIX A. KINEMATICS OF MARTENSITIC TRANSFORMATION AT LOWER LENGTH-SCALES
BCT variant 3
aA1
2
__
√
aA
_
aA1
2
__
√_
cM
aM
aM
FCC austenite BCT variant 3
FCC austenite
BCT variant 1BCT variant 2
e1
Ae
2
A
e3
A
Figure A.1: Sketch of three possible BCT martensite variants developed fromFCC austenite lattice and the lattice parameters related tothe FCC and BCT struc-tures.
whereatr and btr define the principal stretches for the transformation from FCCaustenite to BCT martensite, i.e.,
atr =√
2aM
aAand btr =
cM
aA, (A.2)
with aA the lattice parameter of FCC austenite andaM andcM the lattice param-eters of BCT martensite (see Figure A.1).
At a higher length-scale, the transformation from austenite to martensite isreflected by24 distinct transformation systems, where each transformation systemis constructed from two variants of BCT martensite with specific orientations andproportions [7, 50, 148]. Suppose that a martensitic transformation systemα iscomposed of the BCT variantsϑ1 andϑ2, with volumetric proportionsλ(α,ϑ1) andλ(α,ϑ2). In order to obtain a coherent interface between the parent austenite andthe product martensite, the difference between the deformation gradients on eachside of the interface must be a rank-one tensor (the Hadaman jump condition),which leads to the expression for the habit plane (see also Figure A.2), i.e., [65]
F(α)tr − Ftr,A = R(α)
(
λ(α,ϑ1)R(α)U (ϑ1) + λ(α,ϑ2)U (ϑ2))
− I = b(α) ⊗ d(α) ,
(A.3)whereR(α) defines the rotation of variantϑ2 andR(α) gives the relative rota-tion between variantsϑ1 andϑ2. Furthermore, the transformation deformation
184

APPENDIX A. KINEMATICS OF MARTENSITIC TRANSFORMATION AT LOWER LENGTH-SCALES
BCT variant 1
BCT variant 2
e1
A
e2
Ae3
A
b(α)
d (α)
Austenite
Transformation system α(twinned martensite)
Habit plane
Undeformed austenite
e3
(α,1)
e2
(α,1)
e1
(α,1)
e3
(α,2)
e2
(α,2)
e1
(α,2)
Figure A.2: Schematic representation of the habit plane between austenite andtwinned martensite (variants1 and2), with normald(α) and the corresponding(effective) transformation shape strain vectorb(α).
gradient for the transformation systemα can be written as
F(α)tr = I + b(α) ⊗ d(α) . (A.4)
Using the computational procedure proposed by Hane and Shield [50, 51], theshape strain vectorb(α) and the habit plane normald(α) for all α = 1, . . . , 24,including the rotations (R(α) andR(α)) and the proportions (λ(α,ϑ1) andλ(α,ϑ2))can be obtained for any given value of the lattice principal stretchesatr and btr.The list of the BCT martensite variants (ϑ1, ϑ2) constructing the martensitic trans-formation systemsα = 1, . . . ,M , including the corresponding volumetric pro-portion λ(α,ϑ1), the shape strain vectorb(α) and the habit plane normald(α), isgiven in Table A.1. Note that these values are representative of an austenite car-bon concentration of1.4 wt.%. For other carbon concentrations, the same pro-cedure can be applied, where the effect of carbon concentration is accounted forin the lattice parametersaA, aM andcM via the classicalKurdjumov-Kaminskyrelations.
185

APPENDIX A. KINEMATICS OF MARTENSITIC TRANSFORMATION AT LOWER LENGTH-SCALES
Table A.1: List of BCT variants constructing the transformation systemsα(ϑ1, ϑ2), the volumetric proportionsλ(α,ϑ1) (andλ(α,ϑ2) = 1−λ(α,ϑ1)), the shapestrain vectors and the habit plane normals, referred to the austenite lattice basis.These values are representative of an austenite carbon concentration of1.4 wt.%.
α ϑ1, ϑ2 λ(α,ϑ1) Shape strain vectorb(α) Habit plane normald(α)
1 (1, 2) 0.400 (−0.035; 0.114;−0.136) (0.171;−0.567;−0.806)
2 (1, 2) 0.400 (0.035;−0.114;−0.136) (−0.171; 0.567;−0.806)
3 (1, 2) 0.600 (−0.114; 0.035;−0.136) (0.567;−0.171;−0.806)
4 (1, 2) 0.600 (0.114;−0.035;−0.136) (−0.567; 0.171;−0.806)
5 (1, 2) 0.400 (0.035; 0.114;−0.136) (−0.171;−0.567;−0.806)
6 (1, 2) 0.400 (−0.035;−0.114;−0.136) (0.171; 0.567;−0.806)
7 (1, 2) 0.600 (−0.114;−0.035;−0.136) (0.567; 0.171;−0.806)
8 (1, 2) 0.600 (0.114; 0.035;−0.136) (−0.567;−0.171;−0.806)
9 (1, 3) 0.400 (−0.035;−0.136; 0.114) (0.171;−0.806;−0.567)
10 (1, 3) 0.400 (0.035;−0.136;−0.114) (−0.171;−0.806; 0.567)
11 (1, 3) 0.600 (−0.114;−0.136; 0.035) (0.567;−0.806;−0.171)
12 (1, 3) 0.600 (0.114;−0.136;−0.035) (−0.567;−0.806; 0.171)
13 (1, 3) 0.400 (0.035;−0.136; 0.114) (−0.171;−0.806;−0.567)
14 (1, 3) 0.400 (−0.035;−0.136;−0.114) (0.171;−0.806; 0.567)
15 (1, 3) 0.600 (−0.114;−0.136;−0.035) (0.567;−0.806; 0.171)
16 (1, 3) 0.600 (0.114;−0.136; 0.035) (−0.567;−0.806;−0.171)
17 (2, 3) 0.400 (−0.136; 0.035;−0.114) (−0.806;−0.171; 0.567)
18 (2, 3) 0.400 (−0.136;−0.035; 0.114) (−0.806; 0.171;−0.567)
19 (2, 3) 0.600 (−0.136; 0.114;−0.035) (−0.806;−0.567; 0.171)
20 (2, 3) 0.600 (−0.136;−0.114; 0.035) (−0.806; 0.567;−0.171)
21 (2, 3) 0.400 (−0.136;−0.035;−0.114) (−0.806; 0.171; 0.567)
22 (2, 3) 0.400 (−0.136; 0.035; 0.114) (−0.806;−0.171;−0.567)
23 (2, 3) 0.600 (−0.136; 0.114; 0.035) (−0.806;−0.567;−0.171)
24 (2, 3) 0.600 (−0.136;−0.114;−0.035) (−0.806; 0.567; 0.171)
186

BEffective elastic stiffness for martensitic
transformation systems
In accordance with the kinematics of martensitic transformations described inAp-pendix A, the elastic stiffnesses for a transformation system (twinned martensite)α are constructed based on the sub-structural information obtained from the lat-tice scale. Assuming that the elastic deformation is the same in both martensiticvariantsϑ1 andϑ2, the effective elastic stiffness for transformation system α canbe written as
C(α) = λ(α,ϑ1)
E(ϑ1) + λ(α,ϑ2)
E(ϑ2) , (B.1)
whereE(ϑ) represents the elasticity tensor related to the martensitic variantϑ. For
the BCT variantϑ3, the components of the elasticity tensorE(3) can be expressed
187

APPENDIX B. EFFECTIVE ELASTIC STIFFNESS FOR MARTENSITIC TRANSFORMATION SYSTEMS
with respect to its own lattice basise(α,3)i as (in the commonly-used6 × 6 matrix
form)
[E(3)](α,3) =
κM1 κM
2 κM3
κM2 κM
1 κM3
κM3 κM
3 κM4
κM5
κM5
κM6
(α,3)
, (B.2)
whereκM1 , κM
2 , κM3 , κM
4 , κM5 and κM
6 are the elastic moduli related to BCTmartensite. The equivalent expressions to (B.2) for the martensitic variantsϑ1
andϑ2 can be obtained by symmetry, as shown in [141, 143]. In addition, thevolumetric proportions of the BCT variantsλ(α,ϑ1) andλ(α,ϑ2) can be computedusing the algorithm outlined in Hane and Shield [50, 51]. Thevalues ofλ(α,ϑ1)
andλ(α,ϑ2) for an austenite carbon concentration of1.4 wt.% are shown in Ta-ble A.1.
With respect to the (parent) austenite lattice basis, the components of the ef-fective elastic stiffness tensorC
(α) for α = 1, . . . , 24 are given by
(C(α)abcd)A =λ(α,ϑ1)
3∑
i,j,k,l=1
(E(ϑ1)ijkl )(α,ϑ1)Q
(α,ϑ1)ai Q
(α,ϑ1)bj Q
(α,ϑ1)ck Q
(α,ϑ1)dl
+ λ(α,ϑ2)3∑
i,j,k,l=1
(E(ϑ2)ijkl )(α,ϑ1)Q
(α,ϑ2)ai Q
(α,ϑ2)bj Q
(α,ϑ2)ck Q
(α,ϑ2)dl ,
(B.3)
whereQ(α,ϑ1)ai andQ(α,ϑ2)
ai are the components of the rotationsQ(α,ϑ1) andQ(α,ϑ2),respectively. These rotations map the austenite lattice basis to the lattices bases ofthe variantsϑ1 andϑ2 (see Figure A.2), i.e.,
e(α,ϑ1)i = Q(α,ϑ1)eA
i and e(α,ϑ2)i = Q(α,ϑ2)eA
i . (B.4)
Furthermore, the rotationsQ(α,ϑ1) andQ(α,ϑ2) are related to the rotationsR(α)
andR(α) asQ(α,ϑ1) = R(α)R(α) and Q(α,ϑ2) = R(α) , (B.5)
whereR(α) andR(α) are obtained from the algorithm of Hane and Shield [50, 51].A complete list of the rotationsR(α) andR(α) for an austenite carbon concen-tration of 1.4 wt.% and more details on the above procedure can be found inTurteltaub and Suiker [141].
188

CPlastic slip systems for FCC austenite and
BCC ferrite
e1
A
e2
A e
3
A
nA
mA
F e1
e2
F e
3
F
nF
mF
(b)(a)
Figure C.1: Schematic representations of (a) the crystallographic slip systems inthe model for FCC austenite, i.e.,〈110〉111, and (b) the crystallographic slipsystems used in the model for BCC ferrite, i.e.,〈111〉110.
189

APPENDIX C. PLASTIC SLIP SYSTEMS FOR FCC AUSTENITE AND BCC FERRITE
Table C.1: List of slip direction vectors and slip plane normals for the FCC austen-ite. The components of these vectors are given with respect to the austenite latticebasis. The positive and negative senses of slip are counted separately.
Slip directionm(i)A Slip plane normaln(i)
A
i Miller Normalized vector Miller Normalized vector
1 [110] (−0.707; 0.707; 0) (111) (0.577; 0.577; 0.577)
2 [110] (0.707;−0.707; 0) (111) (0.577; 0.577; 0.577)
3 [101] (0.707; 0;−0.707) (111) (0.577; 0.577; 0.577)
4 [101] (−0.707; 0; 0.707) (111) (0.577; 0.577; 0.577)
5 [011] (0;−0.707; 0.707) (111) (0.577; 0.577; 0.577)
6 [011] (0; 0.707;−0.707) (111) (0.577; 0.577; 0.577)
7 [110] (0.707;−0.707; 0) (111) (−0.577; 0.577; 0.577)
8 [110] (−0.707; 0.707; 0) (111) (−0.577; 0.577; 0.577)
9 [101] (−0.707; 0;−0.707) (111) (−0.577; 0.577; 0.577)
10 [101] (0.707; 0; 0.707) (111) (−0.577; 0.577; 0.577)
11 [011] (0;−0.707; 0.707) (111) (−0.577; 0.577; 0.577)
12 [011] (0; 0.707;−0.707) (111) (−0.577; 0.577; 0.577)
13 [110] (−0.707;−0.707; 0) (111) (0.577;−0.577; 0.577)
14 [110] (0.707; 0.707; 0) (111) (0.577;−0.577; 0.577)
15 [101] (0.707; 0;−0.707) (111) (0.577;−0.577; 0.577)
16 [101] (−0.707; 0; 0.707) (111) (0.577;−0.577; 0.577)
17 [011] (0; 0.707; 0.707) (111) (0.577;−0.577; 0.577)
18 [011] (0;−0.707;−0.707) (111) (0.577;−0.577; 0.577)
19 [110] (−0.707; 0.707; 0) (111) (0.577; 0.577;−0.577)
20 [110] (0.707;−0.707; 0) (111) (0.577; 0.577;−0.577)
21 [101] (0.707; 0; 0.707) (111) (0.577; 0.577;−0.577)
22 [101] (−0.707; 0;−0.707) (111) (0.577; 0.577;−0.577)
23 [011] (0;−0.707;−0.707) (111) (0.577; 0.577;−0.577)
24 [011] (0; 0.707; 0.707) (111) (0.577; 0.577;−0.577)
190

APPENDIX C. PLASTIC SLIP SYSTEMS FOR FCC AUSTENITE AND BCC FERRITE
Table C.2: List of slip direction vectors, slip plane normals and the correspondingnon-glide plane normals for the BCC ferrite. The componentsof these normalizedvectors are given with respect to the ferrite lattice basis (positive and negativesenses of slip are counted separately).
i Slip directionm(i)F Slip plane normaln(i)
F Non-glide planen(i)F
1 (0.577; 0.577; 0.577) (0; 0.707;−0.707) (−0.707; 0.707; 0)
2 (−0.577;−0.577;−0.577) (0; 0.707;−0.707) (0.707; 0;−0.707)
3 (0.577; 0.577; 0.577) (−0.707; 0; 0.707) (0;−0.707; 0.707)
4 (−0.577;−0.577;−0.577) (−0.707; 0; 0.707) (−0.707; 0.707; 0)
5 (0.577; 0.577; 0.577) (0.707;−0.707; 0) (0.707; 0;−0.707)
6 (−0.577;−0.577;−0.577) (0.707;−0.707; 0) (0;−0.707; 0.707)
7 (−0.577; 0.577; 0.577) (0;−0.707; 0.707) (0.707; 0; 0.707)
8 (0.577;−0.577;−0.577) (0;−0.707; 0.707) (−0.707;−0.707; 0)
9 (−0.577; 0.577; 0.577) (−0.707; 0;−0.707) (−0.707;−0.707; 0)
10 (0.577;−0.577;−0.577) (−0.707; 0;−0.707) (0; 0.707;−0.707)
11 (−0.577; 0.577; 0.577) (0.707; 0.707; 0) (0; 0.707;−0.707)
12 (0.577;−0.577;−0.577) (0.707; 0.707; 0) (0.707; 0; 0.707)
13 (−0.577;−0.577; 0.577) (0.707; 0; 0.707) (0; 0.707; 0.707)
14 (0.577; 0.577;−0.577) (0.707; 0; 0.707) (0.707;−0.707; 0)
15 (−0.577;−0.577; 0.577) (0;−0.707;−0.707) (0.707;−0.707; 0)
16 (0.577; 0.577;−0.577) (0;−0.707;−0.707) (−0.707; 0;−0.707)
17 (−0.577;−0.577; 0.577) (−0.707;−0.707; 0) (−0.707; 0;−0.707)
18 (0.577; 0.577;−0.577) (−0.707;−0.707; 0) (0; 0.707; 0.707)
19 (0.577;−0.577; 0.577) (0.707; 0;−0.707) (0.707; 0.707; 0)
20 (−0.577; 0.577;−0.577) (0.707; 0;−0.707) (0;−0.707;−0.707)
21 (0.577;−0.577; 0.577) (0; 0.707; 0.707) (−0.707; 0; 0.707)
22 (−0.577; 0.577;−0.577) (0; 0.707; 0.707) (0.707; 0.707; 0)
23 (0.577;−0.577; 0.577) (−0.707;−0.707; 0) (0;−0.707;−0.707)
24 (−0.577; 0.577;−0.577) (−0.707;−0.707; 0) (−0.707; 0; 0.707)
191

APPENDIX C. PLASTIC SLIP SYSTEMS FOR FCC AUSTENITE AND BCC FERRITE
192

Bibliography
[1] ABAQUS. Theory Manual & User’s Manual, Volume III, Version 6.4.Hi-bbitt, Karlsson & Sorensen, Inc., Pawtucket, RI, U.S.A., 2004.
[2] R. Abeyaratne and J.K. Knowles. On the driving traction acting on a surfaceof strain discontinuity in a continuum.J. Mech. Phys. Solids, 38(3):345–360, 1990.
[3] L. Anand and M.E. Gurtin. Thermal effects in the superelasticity of crys-talline shape-memory materials.J. Mech. Phys. Solids, 51:1015–1058,2003.
[4] K.W. Andrews. Empirical formulae for calculation of some transformationtemperatures.J. Iron Steel Inst., 203:721, 1965.
[5] R.J. Asaro and A. Needleman. Texture development and strain hardeningin rate dependent polycrystals.Acta Metall., 33(6):923–953, 1985.
[6] R.J. Asaro and J.R. Rice. Strain localization in ductilesingle crystals.J.Mech. Phys. Solids, 25:309–338, 1977.
[7] J.M. Ball and R.D. James. Fine phase mixtures as minimizers of energy.Arch. Ration. Mech. An., 100(1):13–52, 1987.
[8] L. Barbe, K. Conlon, and B.C. de Cooman. Characterization of themetastable austenite in low-alloy FeCMnSi (TRIP)-aided steel by neutrondiffraction. Z. Metallkd., 93(12):1217–1227, 2002.
[9] J.L. Bassani, K. Ito, and V. Vitek. Complex macroscopic plastic flow aris-ing from non-planar dislocation core structures.Mat. Sci. Eng. A, 319–321:97–101, 2001.
193

BIBLIOGRAPHY
[10] J.L. Bassani and T.Y. Wu. Latent hardening in single crystals. 2. analyticalcharacterization and predictions.Proc. Roy. Soc. London A, 435:21–41,1991.
[11] A. Basuki and E. Aernoudt. Influence of rolling of TRIP steel in the inter-critical region on the stability of retained austenite.J. Mater. Process. Tech.,89–90:37–43, 1999.
[12] H.K.D.H Bhadeshia.Bainite in Steels. The Institute of Materials, London,2nd edition, 2001.
[13] H.K.D.H. Bhadeshia. Developments in martensitic and bainitic steels: Roleof the shape deformation.Mat. Sci. Eng. A, 378:34–39, 2004.
[14] K. Bhattacharya. Comparison of the geometrically nonlinear and linear the-ories of martensitic-transformation.Continuum Mech. Therm., 5(3):205–242, 1993.
[15] K. Bhattacharya, S. Conti, G. Zanzotto, and J. Zimmer. Crystal symmetryand the reversibility of martensitic transformations.Nature, 428:55–59,2004.
[16] A. Bhattacharyya and G.J. Weng. An energy criterion forthe stress-inducedmartensitic transformation in a ductile system.J. Mech. Phys. Solids,42:1699–1724, 1994.
[17] R. de Borst and P.H. Feenstra. Studies in anisotropic plasticity with refer-ence to the Hill criterion.Int. J. Numer. Meth. Eng., 29:315–336, 1990.
[18] O. Bouaziz and P. Buessler. Iso-work increment assumption for heteroge-neous material behavior modelling.Adv. Eng. Mater., 6(1–2):79–83, 2004.
[19] H.E. Boyer. Atlas of Stress-strain Curves. Material Park, ASM Interna-tional, 2nd edition, 2002.
[20] S.B. Brown, K.H. Kim, and L. Anand. An internal variableconstitutivemodel for hot working of metals.Int. J. Plasticity, 5:95–130, 1989.
[21] H.J. Bunge. Texture Analysis in Materials Science. Butterworth-Heinemann, 2nd edition, 1983.
194

BIBLIOGRAPHY
[22] H.B. Callen. Thermodynamics and An Introduction to Thermostatistics.John Wiley & Sons, 2nd edition, 1985.
[23] W.D. Callister Jr. Materials Science and Engineering: An Introduction.John Wiley & Sons, 5th edition, 2000.
[24] M. Cherkaoui, M. Berveiller, and X. Lemoine. Coupling between plasticityand martensitic phase transformation: Overall behavior ofpolycrystallineTRIP steels.Int. J. Plasticity, 16:1215–1241, 2000.
[25] M. Cherkaoui, M. Berveiller, and H. Sabar. Micromechanical modelingof martensitic transformation-induced plasticity (TRIP)in austenitic singlecrystals.Int. J. Plasticity, 14:597–626, 1998.
[26] J.W. Christian.The Theory of Transformations in Metals and Alloys, PartII . Pergamon Press, 3rd edition, 2002.
[27] J.D. Clayton. Dynamic plasticity and fracture in high density polycrystals:Constitutive modeling and numerical simulation.J. Mech. Phys. Solids,53:261–301, 2005.
[28] J.D. Clayton. Modeling dynamic plasticity and spall fracture in high den-sity polycrystalline alloys.Int. J. Solids Struct., 42:4613–4640, 2005.
[29] B.D. Coleman and W. Noll. The thermodynamics of elasticmaterials withheat conduction and viscosity.Arch. Ration. Mech. An., 13(3):167–178,1963.
[30] A.M. Cuitino and M. Ortiz. Computational modelling ofsingle crystals.Modelling Simul. Mater. Sci. Eng., 1:225–263, 1992.
[31] J.E. Dennis and J.E. Schnabel.Numerical Methods for Unconstrained Op-timization and Non-linear Equations. Prentice-Hall, Englewood Cliffs, NJ,1983.
[32] J.M. Diani and D.M. Parks. Effects of strain state on thekinetics of strain-induced martensite in steels.J. Mech. Phys. Solids, 46(9):1613–1635, 1998.
[33] J.M. Diani, H. Sabar, and M. Berveiller. Micromechanical modelling ofthe transformation induced plasticity (TRIP) phenomenon in steels.Int. J.Eng. Sci., 33:1921–1934, 1995.
195

BIBLIOGRAPHY
[34] N.H. van Dijk, A.M. Butt, L. Zhao, J. Sietsma, S.E. Offerman, J.P. Wright,and S. van der Zwaag. Thermal stability of retained austenite in TRIPsteels studied by synchrotron X-ray diffraction during cooling. Acta Mater.,53:5439–5447, 2005.
[35] N.H. van Dijk, L. Zhao, M.Th. Rekveldt, H. Fredrikze, O.Tegus, E. Bruck,J. Sietsma, and S. van der Zwaag. Neutron depolarisation study of theaustenite grain size in TRIP steels.Physica B, 350:e463–e466, 2004.
[36] M.S. Duesbery and V. Vitek. Plastic anisotropy in BCC transition metals.Acta Mater., 46(5):1481–1492, 1998.
[37] P. Eisenlohr and F. Roters. Efficient and highly accurate reconstructionof discrete orientation distribution functions by integral approximation ofrelative probabilities.Comp. Mater. Sci., 2007. Submitted.
[38] J.D. Eshelby. The determination of the elastic field of an ellipsoidal inclu-sion and related problems.Proc. Roy. Soc. London A, 241:376–396, 1957.
[39] F.D. Fischer, G. Reisner, E.A. Werner, K. Tanaka, G. Cailletaud, andT. Antretter. A new view on transformation-induced plasticity (TRIP). Int.J. Plasticity, 16:723–748, 2000.
[40] P. Franciosi. Glide mechanisms in BCC crystals: An investigation of thecase ofα-iron through multislip and latent hardening tests.Acta Metall.,31(9):1331–1342, 1983.
[41] P. Franciosi and A. Zaoui. Multislip in FCC crystals a theoretical approachcompared with experimental data.Acta Metall., 30:1627–1637, 1982.
[42] Q. Furnemont, M. Kempf, P.J. Jacques, M. Goken, and F.Delannay. Onthe measurement of the nanohardness of the constitutive phases of TRIP-assisted multiphase steels.Mat. Sci. Eng. A, 328(1–2):26–32, 2002.
[43] T. Gladman.The Physical Metallurgy of Microalloyed Steels. The Instituteof Metals, London, 1997.
[44] S. Govindjee and C. Miehe. A multi-variant martensiticphase transforma-tion model: Formulation and numerical implementation.Comput. MethodsAppl. Mech. Eng., 191:215–238, 2001.
196

BIBLIOGRAPHY
[45] G.W. Greenwood and R.H. Johnson. The deformation of metals undersmall stresses during phase transformation.Proc. Roy. Soc. London A,283:403, 1965.
[46] M.E. Gurtin. A gradient theory of single-crystal viscoplasticity that ac-counts for geometrically necessary dislocations.J. Mech. Phys. Solids,50:5–23, 2002.
[47] M.E. Gurtin. The burgers vector and the flow of screw and edge disloca-tions in finite-deformation single-crystal plasticity.J. Mech. Phys. Solids,54:1882–1898, 2006.
[48] M.E. Gurtin and L. Anand. A theory of strain-gradient plasticity forisotropic, plastically irrotational materials. part I: Small deformations.J.Mech. Phys. Solids, 53:1624–1649, 2005.
[49] M.E. Gurtin and L. Anand. A theory of strain-gradient plasticity forisotropic, plastically irrotational materials. part II: Finite deformations.Int.J. Plasticity, 21:2297–2318, 2005.
[50] K.F. Hane and T.W. Shield. Symmetry and microstructurein martensites.PMA, 78(6):1215–1252, 1998.
[51] K.F. Hane and T.W. Shield. Microstructure in the cubic to monoclinic tran-sition in titanium-nickel shape memory alloys.Acta Mater., 47(9):2603–2617, 1999.
[52] T.B. Hilditch, J.G. Speer, and D.K. Matlock. Influence of volume changeon plasticity relationships in TRIP sheet steels.Steel Grips, 2(3):209–211,2004.
[53] R. Hill and J.R. Rice. Constitutive analysis of elastic-plastic crystals atarbitrary strain.J. Mech. Phys. Solids, 20:401–413, 1972.
[54] J.P. Hirth and J. Lothe. Theory of Dislocations. Krieger PublishingCompany–John Wiley & Sons, Ltd., 2nd edition, 1982.
[55] D. Hull and D.J. Bacon. Introduction to Dislocations. Butterworth-Heinmann, 4th edition, 2001.
197

BIBLIOGRAPHY
[56] T. Iung, J. Drillet, A. Couturier, and C. Olier. Detailed study of the transfor-mation mechanisms in ferrous TRIP aided steels.Steel Res., 73(6–7):218–224, 2002.
[57] T. Iwamoto and T. Tsuta. Computational simulation of the dependence ofthe austenitic grain size on the deformation behavior of TRIP steels.Int. J.Plasticity, 16:791–804, 2000.
[58] T. Iwamoto, T. Tsuta, and Y. Tomita. Investigation on deformation modedependence of strain-induced martensitic transformationin TRIP steels andmodelling of transformation kinetics.Int. J. Mech. Sci., 40(2–3):173–182,1998.
[59] P. Jacques, E. Girault, T. Catlin, N. Geerlofs, T. Kop, S. van der Zwaag, andF. Delannay. Bainite transformation of low carbon Mn-Si TRIP-assistedmultiphase steels: Influence of silicon content on cementite precipitationand austenite retention.Mat. Sci. Eng. A, 273–275:475–479, 1999.
[60] P.J. Jacques. Transformation-induced plasticity forhigh strength formablesteels.Curr. Opin. Solid St. M., 8:259–265, 2004.
[61] P.J. Jacques.On the control of the interactions between phase transfor-mations and mechanical properties in finely-grained multiphase alloys: Away for sustainable development in materials science. Thesis foragregede l’enseignement superieur, Universite Catholique de Louvain, Louvain-la-Neuve, 2007.
[62] P.J. Jacques, Q. Furnemont, S. Godet, T. Pardoen, K.T.Conlon, and F. De-lannay. Micromechanical characterisation of TRIP-assisted multiphasesteels by in situ neutron diffraction.Philos. Mag., 86(16):2371–2392, 2006.
[63] P.J. Jacques, Q. Furnemont, A. Mertens, and F. Delannay. On the sourcesof work hardening in multiphase steels assisted by transformation-inducedplasticity. Philos. Mag. A, 81(7):1789–1812, 2001.
[64] P.J. Jacques, J. Ladriere, and F. Delannay. On the influence of interac-tions between phases on the mechanical stability of retained austenite intransformation-induced plasticity multiphase steels.Metall. Mater. Trans.A, 32:2759–2768, 2001.
198

BIBLIOGRAPHY
[65] R.D. James and K.F. Hane. Martensitic transformationsand shape-memorymaterials.Acta Mater., 48(1):197–222, 2000.
[66] W. Janiche, W. Dahl, W. Pitsch, and W. Schlutter.Steel: A Handbook forMaterials Research and Engineering. Volume 1. Springer-Verlaag, Berlin,1992.
[67] W.C. Jeong, D.K. Matlock, and G. Krauss. Observation ofdeformation andtransformation behavior of retained austenite in a 0.14C-1.2Si-1.5Mn steelwith ferrite bainite austenite structure.Mat. Sci. Eng. A, 165(1):1–8, 1993.
[68] E. Jimenez-Molero, N.H. van Dijk, L. Zhao, J. Sietsma, S.E. Offerman, J.P.Wright, and S. van der Zwaag. Martensitic transformation ofindividualgrains in low-alloyed TRIP steels.Scripta Mater., 56:421–424, 2007.
[69] M. Jirasek and Z.P. Bazant.Inelastic Analysis of Structures. John Wiley &Sons, Ltd., 2002.
[70] S.R. Kalidindi, C.A. Bronkhorst, and L. Anand. Crystallographic textureevolution in bulk deformation processing of FCC metals.J. Mech. Phys.Solids, 40:537–569, 1992.
[71] U.F. Kocks, J.S. Kallend, and A.C. Biondo. Accurate representation ofgerenal textures by a set of weighted grains.Texture Microstruct., 14–18:199–204, 1991.
[72] S.O. Kruijver, L. Zhao, J. Sietsma, S.E. Offerman, N.H.van Dijk, E.M.Lauridsen, L. Margulies, S. Grigull, H.F. Poulsen, and S. van der Zwaag.In situ observation on the mechanical stability of austenite in TRIP-steel.J. Phys. IV, 104:499–502, 2003.
[73] G.V. Kurdjumov and A.G. Khachaturyan. Nature of axial ratio anomaliesof martensite lattice and mechanism of diffusionlessγ → α transforamtion.Acta Metall., 23(9):1077–1088, 1975.
[74] R.A. Lebensohn and C.N. Tome. A self-consistent anisotropic approachfor the simulation of plastic-deformation and texture development of poly-crystals - application to zirconium alloys.Acta Metall. Mater., 41(9):2611–2624, 1993.
199

BIBLIOGRAPHY
[75] J.B. Leblond, G. Mottet, and J.C. Devaux. A theoreticaland numericalapproach to the plastic behaviour of steels during phase-transformation - I.derivation of general relations.J. Mech. Phys. Solids, 34:395–409, 1986.
[76] J.B. Leblond, G. Mottet, and J.C. Devaux. A theoreticaland numericalapproach to the plastic behaviour of steels during phase-transformation - II.study of classical plasticity for ideal-plastic phases.J. Mech. Phys. Solids,34:411–432, 1986.
[77] E.H. Lee. Elastic-plastic deformation at finite strains. J. Appl. Mech.ASME, 36:1–6, 1969.
[78] J.L. Lee, J.K. Cheny, T. Pan, and K.C. Hsieh. Evaluationof transformationlatent heat in C-Mn steels.ISIJ Int., 39(3):281–287, 1999.
[79] V.I. Levitas, A.V. Idesman, and G.B. Olson. Continuum modeling ofstrain-induced martensitic transformation at shear-bandintersections.ActaMater., 47(1):219–233, 1999.
[80] V.I. Levitas, A.V. Idesman, and E. Stein. Shape memory alloys: Microme-chanical modeling and numerical analysis of structures.J. Intel. Mat. Syst.Str., 10:983–996, 1999.
[81] Y. Liu, P. Gilormini, and P. Ponte Castaneda. Variational self-consistentestimates for texture evolution in viscoplastic polycrystals. Acta Mater.,51:5425–5437, 2003.
[82] A. Ma, F. Roters, and D. Raabe. A dislocation density based consitutive lawfor BCC materials in crystal plasticity fem.Comp. Mater. Sci., 39:91–95,2007.
[83] C.L. Magee. Transformation kinetics, micro-plasticity and aging ofmartensite in Fe-31 Ni.PhD thesis, Carnegie Institute of Technology, Pitts-burgh, PA, 1966.
[84] J. Mahieu, J. Maki, B.C. de Cooman, and S. Claessens. Phase transforma-tion and mechanical properties of Si-free CMnAl transformation-inducedplasticity-aided steel.Metall. Mater. Trans. A, 33(8):2573–2580, 2002.
200

BIBLIOGRAPHY
[85] F. Marketz and F.D. Fischer. Micromechanical modelling of stress-assistedmartensitic transformation.Modelling Simul. Mater. Sci. Eng., 2:1017–1046, 1994.
[86] F. Marketz and F.D. Fischer. A mesoscale study on the thermodynamiceffect of stress on martensitic transformation.Metall. Mater. Trans. A,26:267–278, 1995.
[87] C. Miehe. Numerical computation of algorithmic (consistent) tangent mod-uli in large-strain computational inelasticity.Comput. Methods Appl. Mech.Eng., 134:223–240, 1996.
[88] C. Miehe and J. Schroder. A comparative study of stressupdate algorithmsfor rate-independent and rate-dependent crystal plasticity. Int. J. Numer.Meth. Eng., 50:273–298, 2001.
[89] A. Molinari, G.R. Canova, and S. Ahzi. A self-consistent approach of thelarge deformation polycrystal viscoplasticity.Acta Metall., 35(12):2983–2994, 1987.
[90] S. Nemat-Nasser, L. Ni, and T. Okinaka. A constitutive model for FCCcrystals with application to polycrystalline OFHC copper.Mech. Mater.,30:325–341, 1998.
[91] E.C. Oliver, P.J. Whithers, M.R. Daymond, S. Ueta, and T. Mori. Neutron-diffraction study of stress-induced martensitic transformation in TRIP steel.Appl. Phys. A-Mater. Sci. Proc., 74:S1143–S1145, 2002.
[92] S. Oliver, T.B. Jones, and G. Fourlaris. Dual phase versus trip strip steels:Microstructural changes as a consequence of quasi-static and dynamic ten-sile testing.Mater. Charact., 58:390–400, 2007.
[93] G.B. Olson and M. Cohen. Kinetics of strain-induced martensitic nucle-ation. Metall. Trans. A, 6(4):791–795, 1975.
[94] M. Ortiz and E.P. Popov. Accuracy and stability of integration algorithmsfor elastoplastic constitutive relations.Int. J. Numer. Meth. Eng., 21:1561–1576, 1985.
201

BIBLIOGRAPHY
[95] M. Ortiz and L. Stainier. The variational formulation of viscoplastic con-stitutive updates.Comput. Methods Appl. Mech. Eng., 171:419–444, 1999.
[96] J.R. Patel and M. Cohen. Criterion for the action of applied stress inmartensitic transformation.Acta Metall., 1(5):531–538, 1953.
[97] B. Peeters, S.R. Kalidindi, P. van Houtte, and E. Aernoudt. A crystal plas-ticity based work-hardening/softening model for BCC metals under chang-ing strain paths.Acta Mater., 48:2123–2133, 2000.
[98] B. Peeters, S.R. Kalidindi, C. Teodosiu, P. van Houtte,and E. Aernoudt. Atheoretical investigation of the influence of dislocation sheets on evolutionof yield surfaces in singe-phase BCC polycrystals.J. Mech. Phys. Solids,50:783–807, 2002.
[99] B. Peeters, Seefeld. M, P. van Houtte, and E. Aernoudt. Taylor ambiguityin BCC polycrystals: A non-problem if substructural anisotropy is consid-ered.Scripta Mater., 45:1349–1356, 2001.
[100] D. Peirce, R.J. Asaro, and A. Needleman. An analysis ofnonuniform andlocalized deformation in ductile single crystals.Acta Metall., 30:1087–1119, 1982.
[101] D. Peirce, R.J. Asaro, and A. Needleman. Material ratedependent and lo-calized deformation in crystalline solids.Acta Metall., 31(12):1951–1976,1983.
[102] E.V. Pereloma, I.B. Timokhina, and P.D. Hodgson. Microstructure andmechanical properties of thermomechanically processed C-Si-Mn steels.Ironmaking and Steelmaking, 28(2):198–202, 2001.
[103] A. Perez-Foguet, A. Rodrıguez-Ferran, and A. Huerta. Numerical differ-entiation for local and global tangent operators in computational plasticity.Comput. Methods Appl. Mech. Eng., 189:277–296, 2000.
[104] A. Perez-Foguet, A. Rodrıguez-Ferran, and A. Huerta. Numerical differ-entiation for non-trivial consistent tangent matrices: Anapplication to theMRS-Lade model.Int. J. Numer. Meth. Eng., 48:159–184, 2000.
202

BIBLIOGRAPHY
[105] U. Prahl, S. Papaefthymiou, V. Uthaisangsuk, W. Bleck, J. Sietsma, andS. van der Zwaag. Micromechanics-based modelling of properties and fail-ure of multiphase steels.Comp. Mater. Sci., 39:17–22, 2007.
[106] D. Raabe, J. Keichel, and G. Gottstein. Investigationof crystallographicslip in polycrystalline Fe3Al using slip trace measurement and microtexturedetermination.Acta Mater., 45(7):2839–2849, 1997.
[107] D. Raabe, Y. Wang, and F. Roters. Crystal plasticity simulation study onthe influence of texture on earing in steel.Comp. Mater. Sci., 34:221–234,2005.
[108] J.R. Rice. Inelastic constitutive relations for solids: An internal-variabletheory and its application to metal plasticity.J. Mech. Phys. Solids, 19:433–455, 1971.
[109] T. van Rompaey, Q. Furnemont, P.J. Jacques, T. Pardoen, B. Blanpain, andP. Wollants. Micromechanical modelling of TRIP steels.Mater. Technol.,74(6):365–369, 2003.
[110] T. van Rompaey, F. Lani, P.J. Jacques, B. Blanpain, P. Wollants, andT. Pardoen. Three-dimensional computational-cell modeling of the mi-cromechanics of the martensitic transformation in transformation-inducedplastictity-aided multiphase steels.Metall. Mater. Trans. A, 37:99–107,2006.
[111] G. Sachs. Zur Ableitung einer Fliessbedingung.Z. Ver. Dtsch. Ing., 72:734–736, 1928.
[112] L. Samek, E. de Moor, J. Penning, and B.C. de Cooman. Influence ofalloying elements on the kinetics of strain-induced martensitic nucleationin low-alloy multi-phase high-strength steels.Metall. Mater. Trans. A,37(1):109–124, 2006.
[113] A. Seeger and W. Wasserbach. Anomalous slip - a feature of high-puritybody-centered cubic metals.Phys. Status Solidi A, 189(1):27–50, 2002.
[114] J. Shi, S. Turteltaub, J.C.C. Remmers, and E. van der Giessen. Discretedislocation-transformation model for austenitic single crystals. 2008. Sub-mitted.
203

BIBLIOGRAPHY
[115] J.C. Simo and T.J.R. Hughes.Computational Inelasticity. Springer-Verlaag, Inc., 1989.
[116] J.C. Simo and C. Miehe. Associative coupled thermoplasticity at finitestrains - formulation, numerical-analysis and implementation. Comput.Methods Appl. Mech. Eng., 98(1):41–104, 1992.
[117] J.C. Simo and R.L. Taylor. Consistent tangent operators for rate-independent elasto-plasticity.Comput. Methods Appl. Mech. Eng., 48:101–118, 1985.
[118] L. Stainier, A.M. Cuitino, and M. Ortiz. A micromechanical model ofhardening, rate sensitivity and thermal softening in BCC single crystals.J.Mech. Phys. Solids, 50:1511–1545, 2002.
[119] A.M. Streicher, J.G. Speer, and D.K. Matlock. Formingresponse of re-tained austenite in a C-Si-Mn high strength TRIP sheet steel. Steel Res.,73(6–7):287–293, 2002.
[120] R.G. Stringfellow, D.M. Parks, and G.B. Olson. A constitutive model fortransformation plasticity accompanying strain-induced martensitic trans-formations in metastable austenitic steels.Acta Metall. Mater., 40(7):1703–1716, 1992.
[121] K-I. Sugimoto, M. Kobayashi, and S.I. Yasuki. Cyclic deformation behav-ior of a transformation-induced plasticity-aided dual-phase steel.Metall.Mater. Trans. A, 28:2637–2644, 1997.
[122] K-I. Sugimoto, K. Mitsuyuki, and S.I. Hashimoto. Ductility andstrain-induced transformation in a high-strength transformation-inducedplasticity-aided dual-phase steel.Metall. Trans. A, 23A:3085–3091, 1992.
[123] A.S.J. Suiker and R. de Borst. A numerical model for thecyclic deteriora-tion of railway racks.Int. J. Numer. Meth. Eng., 57:441–470, 2003.
[124] A.S.J. Suiker and S. Turteltaub. Computational modelling of plasticity in-duced by martensitic phase transformations.Int. J. Numer. Meth. Eng.,63:1655–1693, 2005.
204

BIBLIOGRAPHY
[125] A.S.J. Suiker and S. Turteltaub. Crystalline damage growth during marten-sitic phase transformations.Philos. Mag., 87(32):5033–5063, 2007.
[126] A.S.J. Suiker and S. Turteltaub. Numerical modellingof transformation-induced damage and plasticity in metals.Modelling Simul. Mater. Sci. Eng.,15:S147–S166, 2007.
[127] L. Taleb and F. Sidoroff. A micromechanical modeling of the greenwood-johnson mechanism in transformation induced plasticity.Int. J. Plasticity,19(10):1821–1842, 2003.
[128] G.I. Taylor. Plastic strain in metals.J. Inst. Metals, 62:307–324, 1938.
[129] G.I. Taylor and C.F. Elam. The distortion of an aluminum crystal during atensile test.Proc. Roy. Soc. London A, 102:643–667, 1923.
[130] G.I. Taylor and C.F. Elam. The plastic extension and fracture of aluminumcrystals.Proc. Roy. Soc. London A, 108:28–51, 1925.
[131] P. Thamburaja. Constitutive equations for martensitic reorientation anddetwinning in shape-memory alloys.J. Mech. Phys. Solids, 53:825–856,2005.
[132] P. Thamburaja and L. Anand. Polycrystalline shape-memory materials:Effect of crystallographic texture.J. Mech. Phys. Solids, 49:709–737, 2001.
[133] I.B. Timokhina, P.D. Hodgson, and E.V. Pereloma. Effect of deforma-tion schedule on the microstructure and mechanical properties of a thermo-mechanically processed C-Mn-Si transformation-induced plasticity steel.Metall. Mater. Trans. A, 34:1599–1609, 2003.
[134] D.D. Tjahjanto, F. Roters, and P. Eisenlohr. Iso-work-rate weighted-taylorhomogenization scheme for multiphase steels assisted by transformation-induced plasticity effect.Steel Res. Int., 78(10–11):777–783, 2007.
[135] D.D. Tjahjanto, A.S.J. Suiker, S. Turteltaub, P.E.J.Rivera Diaz del Castillo,and S. van der Zwaag. Micromechanical predictions of TRIP steel behavioras a function of microstructural parameters.Comp. Mater. Sci., 41(1):107–116, 2007.
205

BIBLIOGRAPHY
[136] D.D. Tjahjanto, S. Turteltaub, and A.S.J. Suiker. Crystallographically-based model for transformation-induced plasticity in multiphase carbonsteels.Continuum Mech. Therm., 2007. To appear.
[137] D.D. Tjahjanto, S. Turteltaub, A.S.J. Suiker, and S. van der Zwaag. Mod-elling of the effects of grain orientation on transformation-induced plastic-ity in multiphase steels.Modelling Simul. Mater. Sci. Eng., 14:617–636,2006.
[138] Y. Tomita and T. Iwamoto. Constitutive modeling of TRIP steel and itsapplication to the improvement of the mechanical properties. Int. J. Mech.Sci., 37:1295–1305, 1995.
[139] Y. Tomita and T. Iwamoto. Computational prediction ofdeformation be-havior of TRIP steels under cyclic loading.Int. J. Mech. Sci., 43:2017–2034, 2001.
[140] L.S. Toth and P. van Houtte. Discretization techniques for orientation dis-tribution functions.Texture Microstruct., 19:229–244, 1992.
[141] S. Turteltaub and A.S.J. Suiker. Transformation-induced plasticity in fer-rous alloys.J. Mech. Phys. Solids, 53:1747–1788, 2005.
[142] S. Turteltaub and A.S.J. Suiker. Grain size effects inmultiphase steels as-sisted by transformation-induced plasticity.Int. J. Solids Struct., 43:7322–7336, 2006.
[143] S. Turteltaub and A.S.J. Suiker. A multi-scale thermomechanical model forcubic to tetragonal martensitic phase transformations.Int. J. Solids Struct.,43:4509–4545, 2006.
[144] B. Verlinden, Ph. Bocher, E. Girault, and E. Aernoudt.Austenite textureand bainite/austenite orientation relationship in TRIP steel. Scripta Mater.,273–275:475–479, 1999.
[145] V. Vitek, M. Mrovec, and J.L. Bassani. Influence of non-glide stresses onplastic flow: From atomistic to continuum modeling.Mat. Sci. Eng. A,365:31–37, 2004.
206

BIBLIOGRAPHY
[146] V. Vitek, M. Mrovec, R. Groger, J.L. Bassani, V. Racherla, and L. Yin.Effects of non-glide stresses on the plastic flow of single and polycrystalsof molybdenum.Mat. Sci. Eng. A, 387–389:138–142, 2004.
[147] J.J. Wang and S. van der Zwaag. Stabilization mechanisms of retainedaustenite in transformation-induced plasticity steel.Metall. Mater. Trans.A, 32(6):1527–1539, 2001.
[148] M.S. Wechsler, D.E. Lieberman, and T.A. Read. On the theory of the for-mation of martensite.Appl. Phys. A-Mater., 197(11):1503–1515, 1953.
[149] S. Zaefferer, J. Ohlert, and W. Bleck. A study of microstructure, transfor-mation mechanisms and correlation between microstructureand mechan-ical properties of a low alloyed TRIP steel.Acta Mater., 52:2765–2778,2002.
[150] Z. Zhao, W. Mao, F. Roters, and D. Raabe. A texture optimization studyfor minimum earing in aluminum by use of a texture component crystalplasticity finite element method.Acta Mater., 52:1003–1012, 2004.
[151] J. Zrnık, O. Muransky, P. Lukas, P. Sittner, and Z.Novy. In-situ neutrondiffraction analysis of phase transformation kinetics in TRIP steel. Mat.Sci. Forum, 502:339–344, 2005.
[152] J. Zrnık, O. Muransky, P. Lukas, P. Sittner, Z. Novy, P. Sittner, andP. Hornak. Retained austenite stability investigation inTRIP steel usingneutron diffraction.Mat. Sci. Eng. A, 437:114–119, 2006.
[153] S. van der Zwaag, L. Zhao, S.O. Kruijver, and J. Sietsma. Thermal and me-chanical stability of retained austenite in aluminum-containing multiphaseTRIP steels.ISIJ Int., 42(12):1565–1570, 2002.
207

BIBLIOGRAPHY
208

Summary
The presence of a metastable austenitic phase in the microstructure of low-alloyed,multiphase carbon steels has been identified to be responsible for their good com-bination of strength-ductility characteristics. Metastable austenitic grains maytransform to martensite upon the application of thermal and/or mechanical load-ings. In addition to the improvement of the effective strength due to a hardermartensitic phase, transformation of retained austenite to martensite is accompa-nied by relatively large shape and volume changes, which induces elasto-plasticdeformations in the neighboring region, and generate the so-called transformation-induced plasticity (TRIP) effect. A thorough understanding of the mechanism ofthe TRIP effect is, therefore, important for further improvement of the strengthand ductility performance of multiphase steels. In the present thesis, the mecha-nism of the TRIP effect is systematically studied by means ofmicromechanicalmodeling and simulations. For this purpose, the following two single-crystallinemodels have been developed:
First, a crystal plasticity theory for body-centered cubic(BCC) metals is for-mulated and implemented for describing the elasto-plasticdeformation in the fer-ritic phase, which is presented inChapter 2. The model is constructed withina finite deformation framework. The non-glide stress effectmodel proposed byBassaniet al. (2001, Mat. Sci. Eng. A319–321: 97–101) is adopted, in orderto capture the characteristic features of BCC metals, i.e.,the asymmetric behav-ior of slip in twinning and anti-twinning senses, which, at macroscopic scales,corresponds to a tension-compression asymmetry under uniaxial loading. Single-crystalline simulations are performed for various elementary deformation modes(e.g., uniaxial loading, simple shear and plane-stress equibiaxial stretch). The re-sults of the simulations show various effects of the non-glide stress on the overallresponse of the single-crystalline BCC ferrite. Under uniaxial loading, the modelpredicts asymmetric behavior in tension and compression, where the magnitude of
209

SUMMARY
this effect depends on the crystallographic orientation ofthe sample. In a (Taylor-type) polycrystalline simulation, the yield stress in uniaxial compression is lowerthan in uniaxial tension. The opposite trend is observed forsamples undergoingplane-stress equibiaxial stretch, i.e., the polycrystalline yield stress in equibiaxialcompression is higher than in equibiaxial tension. In general, the non-glide stresseffect is less pronounced in simple shear simulations.
Second, inChapter 3, a single-crystalline elasto-plastic-transformation modelis developed for the austenitic phase. This model is based onthe multiscalemartensitic phase transformation model of Turteltaub and Suiker (2006,Int. J.Solids Struct.43: 4509–4545). In this model, the lower-scale information onmartensite microstructures following from the crystallographic theory of marten-sitic transformation is incorporated. In order to account for plastic deformationsin the austenitic phase, the phase transformation model is coupled to a single crys-tal plasticity model for face-centered cubic (FCC) metals.The coupling betweentransformation and plasticity is derived using a thermo-mechanically-consistentformulation. Similar to the model for the BCC ferrite, the kinematics of elasto-plastic transformation model are formulated within a finitedeformation frame-work. Furthermore, the overall response of single-crystalline austenite is simu-lated for three elementary loading modes, i.e., uniaxial loading, simple shear andvolumetric extension/compression. The results of the simulations show that theinteraction between the transformation and plasticity mechanisms is strongly de-pendent of the loading conditions, as well as the crystallographic orientation ofthe sample. Under uniaxial tension and compression, plasticity in the austeniticphase tends to delay (or postpone) the transformation process, where the magni-tude of the delay varies with the crystallographic orientation of the sample. Fur-thermore, transformation is a less preferable mechanism for samples undergoingsimple shear. The results of the simulations show that only asmall amount ofaustenite transforms to martensite during simple shear deformation. In contrast,transformation dominates the overall deformation processduring volumetric ex-pansion. In addition, neither transformation nor plasticity occurs in the sampleduring volumetric contraction.
The numerical implementation of the above single-crystalline models is dis-cussed inChapter 4. This implementation is based on a robust algorithm for theelasto-transformation model presented in Suiker and Turteltaub (2005,Int. J. Nu-mer. Meth. Eng.65: 1655–1693). The numerical implementation is presented onlyfor the austenitic elasto-plastic-transformation model,since the implementation of
210

SUMMARY
the ferritic elasto-plasticity model can be done in a similar fashion by omitting thetransformation-related parts. The model is discretized using a fully-implicit Eulerbackward scheme, and a Newton-Raphson iteration procedureis applied to solvethe resulting non-linear equations. The procedure is equipped with a robust searchalgorithm for identifying the actives sets of slip and transformation systems. Inaddition, a sub-stepping procedure is applied in order to improve the convergencebehavior of the numerical algorithm. The consistent tangent operator is computedin a numerical fashion by means of a first-order accurate, finite difference scheme.The numerical algorithm has been implemented in a finite element program. Theresults of the simulations show that the finite element solution converges uponmesh refinement, where the convergence behavior of the austenite elasto-plastic-transformation model is somewhat slower than that of the ferrite elasto-plasticitymodel.
In Chapter 5, the response of TRIP steel microstructural samples undergo-ing uniaxial tensile loading is studied by means of numerical simulations usingthe micromechanical models described above. The simulations are performed forseveral samples representing TRIP steels with different microstructural proper-ties, i.e., the initial volume fraction of austenite (phasemorphology), the austenitecarbon concentration, the austenitic grain size, the austenitic and ferritic crystal-lographic orientations (microstructural texture) and thestrength properties of theferritic matrix. The overall response (in terms of the effective stress-strain curveand the transformation evolution) of the TRIP steel samplesis presented as a func-tion of the individual microstructural properties. The results of the microstructuralsimulations show that the transformation behavior dependsnot only on the orien-tation of the austenitic grains, but also on the crystallographic orientation of thesurrounding ferritic matrix. Furthermore, a higher carbonconcentration in theaustenite results in a higher initial strength, but a lower austenite carbon concen-tration leads to a faster transformation and, eventually, to a higher effective hard-ening. The initial austenitic volume fraction only affectsthe overall stress-strainresponse at larger deformations, since a higher initial austenitic volume fractionwill translate into a martensite-richer microstructure that has a higher effectivehardening. Moreover, the austenitic grain size and the strength of the surroundingmatrix affect the effective transformation behavior only marginally.
Simulations of macroscopic TRIP steel samples undergoing deep-drawing arepresented inChapter 6. For this purpose, an efficient averaging scheme basedon a weighted-Taylor assumption has been developed. This averaging scheme is
211

SUMMARY
implemented together with the single-crystalline models into a finite element pro-gram. Information on the crystallographic texture of the sample is incorporatedin the finite element simulations in accordance with a statistical reconstruction ofthe sample orientation distribution function (ODF). The results of the simulationsindicate that transformation occurs mostly at the bottom edge of the cup, whichexperiences the largest tensile deformation. Although theoverall features of thetransformation during deep-drawing are well captured, therate of transformationin the homogenized model falls short to that predicted by thedirect FEM simula-tion. Furthermore, the individual contributions of the austenite and ferrite to theanisotropy of the material can be distinguished from the earing profile.
In Chapter 7, the transformation behavior during thermal loading (or cool-ing) is investigated for samples with different microstructural properties. Accord-ingly, the single-crystalline models described above are modified in order to ex-plicitly account for the effect of thermal expansion/contraction. The predictionof the models shows a qualitatively good agreement with recent experimentally-observed transformation behavior of single austenitic grains in TRIP steel mi-crostructures in the sense that the dependencies on carbon concentration and grainsize are well predicted, but their values are rather different.
In a nutshell, this thesis represents a comprehensive analysis of the microstruc-tural behavior of multiphase TRIP steels. The analyses are performed by means ofmicromechanical modeling and simulations. The results provide valuable insightfor the further development of TRIP-assisted steels.
212

Samenvatting
De aanwezigheid van een metastabiele austenitische fase inde microstructuur vanlaaggelegeerde, meerfasen koolstofstaalsoorten wordt geacht verantwoordelijk tezijn voor de goede combinatie van sterkte- en ductiliteitseigenschappen. Metasta-biele austenitische korrels kunnen transformeren naar martensiet onder thermi-sche en/of mechanische belastingen. De transformatie van het ductiele austenietin een hardere martensitische fase kenmerkt een verbetering van de effectievesterkte. De relatief grote vorm- en volumeveranderingen die plaatsvinden op kor-relnivo genereren elasto-plastische deformaties in de naburige korrels, welk leidentot het zogenaamde transformatie-geınduceerde plasticiteitseffect (TRIP-effect).Een grondig begrip van dit mechanisme is belangrijk voor verdere verbetering vande sterkte- en ductiliteitseigenschappen van meerfasenstaalsoorten. In het huidigeproefschrift is het TRIP-mechanisme systematisch bestudeerd door middel vanmicromechanische modellen en simulaties. Voor dit doel zijn de volgende tweekristallijne modellen ontwikkeld:
Ten eerste is er een een-kristalplasticiteitstheorie geformuleerd voor metalenmet een kubisch ruimtelijk gecenterde (KRR) structuur, welke numeriek is gem-plementeerd voor het beschrijven van elasto-plastische deformaties in de ferriti-sche fase, zoals gepresenteerd inHoofdstuk 2. Het model is geconstrueerd binnenhet raamwerk van grote deformaties. Het niet-glijvlak-spanningseffect beschrevendoor Bassaniet al. (2001,Mat. Sci. Eng. A319–321: 97–101) is toegepast omkarakteristieke eigenschappen van KRR metalen te beschrijven, d.w.z. het asym-metrische gedrag van slip in de tweeling- en anti-tweelingrichtingen, welk opmacroscopische schaal correspondeert met een trek-druk asymmetrie onder uniax-iale belasting. Een-kristallijne simulaties zijn uitgevoerd voor verscheidene ele-mentaire deformatiemodi (bijv. uniaxiale belasting, eenvoudige afschuiving, envlakke-spanning, gelijke biaxiale rek). De resultaten vande simulaties laten eenaantal effecten zien van de niet-glijvlak-spanning op de algehele responsie vaneen een-kristallijn KRR ferriet. Het model voorspelt onder uniaxiale belasting
213

SAMENVATTING
een asymmetrisch gedrag onder trek en druk, waarbij de grootte van het effectafhangt van de kristallografische orientatie van het proefstuk. De vloeispanningonder uniaxiale druk is in een (Taylor-type) poly-kristallijne simulatie lager danonder uniaxiale trek. Een tegengestelde trend is geconstateerd voor proefstukkenonder een vlakke-spanning, gelijke biaxiale rekstoestand, d.w.z., de polykristal-lijne vloeispanning onder gelijke biaxiale compressie is hoger dan onder gelijkebiaxiale trek. In het algemeen is het niet-glijvlak-effectminder aanwezig ondereenvoudige afschuivingscondities.
Ten tweede is inHoofdstuk 3 een een-kristallijn, elasto-plastisch transfor-matiemodel ontwikkeld voor de austenitische fase. Dit model is gebaseerd ophet meerschalige martensitische fasetransformatiemodelvan Turteltaub en Suiker(2006, Int. J. Solids Struct.43: 4509–4545). In dit model is kleinschalige in-formatie van martensitische microstructuren gemplementeerd, welke volgt uit dekristallografische theorie van martensitische transformaties. De plastische defor-maties in de austenitische fase zijn in rekening gebracht door het fasetransfor-matiemodel te koppelen aan een model voor kubisch vlakke gecenterde (KVR)metalen. De koppeling tussen transformatie en plasticiteit is afgeleid door ge-bruik te maken van een thermo-mechanisch consistente formulering. De kinemat-ica van het elasto-plastische transformatiemodel is geformuleerd binnen het raam-werk van grote deformaties, overeenkomstig het model voor KRR ferriet. Verderis de algehele responsie van een-kristallijn austeniet gesimuleerd voor drie ele-mentaire belastingsmodi, d.w.z. uniaxiale belasting, eenvoudige afschuiving, envolumetrische expansie/contractie. De resultaten van de simulaties laten zien datde interactie tussen de transformatie- en plasticiteitsmechanismen sterk afhangtvan de belastingscondities, alsmede de kristallografischeorientatie van het proef-stuk. Plasticiteit leidt tot vertraging (of uitstelling) van het transformatieprocesonder uniaxiale trek en druk, waarbij de grootte van de vertraging varieert met dekristallografische orientatie van het proefstuk. Verder is het transformatiemecha-nisme minder actief voor proefstukken belast onder eenvoudige afschuiving. Deresultaten van de simulaties laten zien dat slechts een klein deel van het austeniettransformeert naar martensiet gedurende eenvoudige afschuiving. Daartegenoverdomineert transformatie het algehele deformatieproces gedurende volumetrischeexpansie. Verder is zowel transformatie als plasticiteit afwezig in een proefstukdat volumetrische contractie ondergaat.
De numerieke implementatie van de hierboven genoemde een-kristallijne mo-dellen is behandeld inHoofdstuk 4. Deze implementatie is gebaseerd op een
214

SAMENVATTING
robuust algoritme voor het elasto-transformatiemodel gepresenteerd in Suiker enTurteltaub (2005,Int. J. Numer. Meth. Eng.65: 1655–1693). De numerieke im-plementatie is alleen behandeld voor het elasto-plastische transformatiemodel,omdat de implementatie voor het ferritische elasto-plasticiteitsmodel eenvoudiggedaan kan worden door het weglaten van de transformatie-gerelateerde gedeel-ten. Het model is gediscretiseerd gebruik makende van een volledig-impliciet,achterwaarts Euler schema, en een Newton-Raphson iteratie-procedure is toege-past voor het oplossen van de resulterende niet-lineaire vergelijkingen. De pro-cedure is uitgerust met een robuust zoekalgoritme voor het identificeren van deactieve groepen van slip- en transformatiesystemen. Aanvullend is een substap-procedure toegepast voor het verbeteren van het convergentiegedrag van het nu-merieke algoritme. De consistente tangent operator is berekend op numerieke wi-jze, door middel van een eerste-orde nauwkeurig, eindige-differentieschema. Hetnumerieke algoritme is geımplementeerd in een eindig-elementenprogramma. Deresultaten van de simulaties laten zien dat de eindige-elementenoplossing con-vergeert onder meshverfijning, waarbij de convergentiesnelheid van het elasto-plastische transformatiemodel voor het austeniet iets lager is dan dat van hetelasto-plasticiteitsmodel voor het ferriet.
Hoofdstuk 5 bestudeert het gedrag van TRIP-staal microstructuren die eenuniaxiale trekbelasting ondergaan. Door middel van eindige-elementensimulaties,waarbij gebruik wordt gemaakt van de micromechanische modellen hierbovenbeschreven, zijn verscheidene TRIP-staal proefstukken onderzocht met variabelemicrostructurele eigenschappen, d.w.z., de aanvankelijke volumefractie van hetausteniet (de morfologie van de fasen), de koolstofconcentratie in the austeniet,de korrelgrootte van het austeniet, de austenitische en ferriti-sche kristallografis-che orientaties (microstructurele textuur), en de sterkteeigenschappen van de fer-ritische matrix. De algehele responsie (in termen van de effectieve spanning-rekcurve en de transformatie-evolutie) van de TRIP-staal proefstukken is gepresen-teerd als een functie van de individuele microstructurele eigenschappen. Het re-sultaat van de microstructurele simulaties laat zien dat het transformatiegedragniet alleen afhangt van de orientatie van de austeniet korrels, maar ook van dekristallografische orientatie van de omringende ferritische matrix. Verder resul-teert een hogere austeniet koolstofconcentratie in een hogere aanvangssterkte,terwijl een largere koolstofconcentratie tot een snelleretransformatie leidt, en,uiteindelijk, tot een hogere algehele versteviging. De aanvankelijke austenitischevolumefractie beınvloedt de algehele spanning-rek responsie alleen bij grotere de-
215

SAMENVATTING
formaties, omdat een hogere aanvankelijke austenitische volumefractie zich ver-taalt in een microstructuur met meer martensiet, wat een hogere effectieve ver-steviging geeft. De austenitische korrelgrootte en de sterkte van de omringendematrix beınvloeden het effectieve transformatiegedrag slechts marginaal.
Simulaties op macroscopische TRIP-staal proefstukken dieworden onder-worpen aan een eenvoudig cylindervormig dieptrekproces zijn gepresenteerd inHoofdstuk 6. Voor dit doel is een efficient middelings-schema ontwikkeld welkis gebaseerd op een gewogen Taylor aanname. Dit schema is ge¨ımplementeerd ineen eindige-elementenprogramma, tezamen met de een-kristallijne modellen. In-formatie betreffende de kristalografische textuur van het proefstuk is geıncludeerdin de eindige-elementensimulaties in overeenstemming meteen statistische recon-structie van de proefstuk-orientatie-distributiefunctie (ODF). De resultaten van desimulaties geven aan dat transformatie het meest optreedt aan de onderrand vande schaal, welk de grootste trekdeformatie ondergaat. Hoewel de algehele eigen-schappen van de transformatie goed worden beschreven, is desnelheid van detransformatie in het gehomogeniseerde model lager ten opzichte van dat voor-speld door directe eindige-elementensimulaties. Verder kunnen de individuele bi-jdragen van het austeniet en het ferriet aan de anisotropie van het material wordenonderscheiden in de oorvorming.
In Hoofdstuk 7 is het transformatiegedrag gedurende thermisch belasten on-derzocht voor proefstukken met verschillende microstructurele eigenschappen.De hiervoven beschreven een-kristallijne modellen zijnaangepast om het effectvan thermische expansie/contractie expliciet in rekeningte brengen. De mo-delvoorspelling laat in kwalitatieve zin een goede overeenstemming zien met re-centelijke experimentele metingen op individuele austenitische korrels in TRIP-staal microstructuren: de afhankelijkheden van koolstofconcentratie en korrel-grootte worden functioneel goed voorspeld, maar de bijbehorende parameterwaar-den wijken af van de experimentele data.
Samengevat behandelt dit proefschrift de analyse van het microstructurelegedrag van meerfasen TRIP-staal. De analyses zijn uitgevoerd door middel vanmicromechanische modellen en simulaties. De resultaten verschaffen inzichtendie waardevol zijn voor de verdere ontwikkeling van TRIP-geassisteerde staal-soorten.
216

Intisari
Fasa austenit metastabil yang terperangkap dalam strukturmikro pada suhu kamardiidentifikasi mampu memperbaiki kekuatan dan keuletan baja karbon multi-fasadengan campuran rendah. Akibat pembebanan termal dan/ataumekanik, butir-butir austenit yang metastabil dapat bertransformasi menjadi martensit. Selainmeningkatkan kekuatan secara keseluruhan karena martensit yang lebih keras,transformasi dari fasa austenit ke martensit juga disertaidengan perubahan bentukdan peningkatan volume. Perubahan bentuk dan volume ini mampu menginduksideformasi elastis dan plastis di daerah sekelilingnya. Mekanisme ini dikenal se-bagai efek plastisitas terimbas transformasi fasa (TRIP,transformation-inducedplasticity). Pemahaman yang mendalam tentang mekanisme efek TRIP sangatdibutuhkan dalam pengembangan kekuatan dan keuletan baja TRIP lebih lanjut.Dalam tesis ini, mekanisme efek TRIP dipelajari secara sistematis melalui pe-modelan dan simulasi mikromekanika. Dua buah model kristal-tunggal (single-crystalline) telah dikembangkan untuk keperluan tersebut.
Pertama, deformasi elastis dan plastis di dalam fasa ferit dimodelkan denganteori plastisitas kristal tunggal (single crystal plasticity) untuk logam berstruk-tur kubus pusat-badan (BCC,body-centered cubic). Penurunan model elasto-plastisitas kristal tunggal untuk fasa ferit ditampilkan padaBab 2. Model ini ditu-runkan dalam kerangka deformasi berhingga (finite deformation). Untuk mensi-mulasi karaterisitik kristal BCC, yaitu slip yang tidak simetris dalam arahtwin-ningdananti-twinningyang dalam skala makro berkaitan dengan ketidaksimetrisandalam pembebanan tarik dan tekan, model efek tegangan tak-luncur (non-glide)yang diusulkan oleh Bassaniet al. (2001,Mat. Sci. Eng. A319–321: 97–101).Simulasi kristal tunggal ferit dilakukan untuk berbagai mode deformasi dasar, an-tara lain pembebanan uniaksial, deformasi geser sederhana(simple shear) danregangan ekuibiaksial dalam kondisi tegangan-bidang (plane-stress equibiaxialstretch). Hasil-hasil simulasi menunjukkan bahwa efek tegangan tak-luncur mem-berikan pengaruh yang bervariasi terhadap perilaku secarakeseluruhan dari BCC
217

INTISARI
ferit kristal tunggal. Dalam pembebanan uniaksial, hasil simulasi menunjukkanbahwa perilaku sampel tidak simetris terhadap pembebanan arah tarik dan tekan,bergantung pada arah orientasi kristalnya. Untuk responsesampel polikristal(menggunakan asumsi perataan Taylor), kekuatan luluh dalam arah tekan lebihrendah daripada kekuatan luluh dalam arah tarik. Hal ini berlawanan dengan per-ilaku sampel dalam regangan ekuibiaksial, dimana untuk sampel polikristal keku-atan luluh arah tekan lebih tinggi daripada kekuatan luluh dalam arah tarik. Akantetapi, efek tengangan tak-luncur tidak terlalu berpengaruh dalam kasus deformasigeser sederhana.
Kedua, padaBab 3, model kristal tunggal untuk elasto-plastisitas dan trans-formasi fasa pada austenit diturunkan berdasarkan model transformasi austenitke martensit yang dikembangan sebelumnya oleh Turteltaub dan Suiker (2006,Int. J. Solids Struct.43: 4509–4545). Dalam model ini, informasi struktur mikromartensit pada skala yang lebih kecil diperoleh melalui teori kristalografi transfor-masi martensit. Untuk memodelkan deformasi plastis pada fasa austenit, modeltransformasi fasa di atas digabungkan dengan teori plastisitas kristal tunggal un-tuk logam berstruktur kubus pusat-muka (FCC,face-centered cubic). Penggabun-gan model elasto-plastisitas dan transformasi fasa dilakukan dalam perumusantermo-mekanika yang konsisten. Selaras dengan model untukelasto-plastisitaspada ferit, model untuk elasto-plastis-transformasi padaaustenit juga dirumuskandalam kerangka deformasi berhingga. Perilaku austenit kristal tunggal disimu-lasikan untuk tiga jenis pembebanan dasar, yaitu pembebanan uniaksial, defor-masi geser sederhana dan ekspansi/kontraksi volumetrik. Hasil-hasil simulasimenunjukkan bahwa jenis pembebanan dan orientasi kristal austenit berpengaruhkuat terhadap interaksi antara mekanisme transformasi fasa dan plastisitas. Dalampembebanan uniaksial tarik dan tekan, deformasi plastis pada fasa austenit cen-derung memperlambat proses transformasi fasa, bergantungpada arah orientasikristalnya. Dalam kasus deformasi geser sederhana, hanya sebagian kecil austenityang bertransformasi menjadi martensit. Hal ini menunjukkan bahwa transfor-masi fasa bukan mekanisme yang cocok terhadap deformasi geser sederhana.Sebaliknya, transformasi fasa mendominasi keseluruhan perilaku sampel dalamekspansi volumetrik. Akan tetapi, dalam kontraksi volumetrik tidak ditemukanadanya deformasi plastis maupun transformasi fasa.
Implementasi numerik model-model kristal tunggal di atas ditampilkan padaBab 4. Implementasi numerik ini didasarkan pada algoritma kokohyang dikem-bangkan oleh Suiker dan Turteltaub (2005,Int. J. Numer. Meth. Eng.65: 1655–
218

INTISARI
1693) untuk model elastisitas dan transformasi fasa. Di sini, hanya implementasinumerik untuk model elasto-plastis-transformasi pada austenit yang ditampilkan,sedangkan implementasi untuk model elasto-plastisitas pada ferit dapat dilakukandengan cara serupa (dengan menghilangkan bagian-bagian yang berhubungan den-gan transformasi). Skema implisit mundur Euler digunakan dalam diskretisasimodel, dan persamaan-persamaan tak-linier yang terkait dipecahkan dengan meng-gunakan prosedur Newton-Raphson. Prosedur ini dilengkapidengan algoritmapencarian yang kokoh untuk mengidentifikasi sistem-sistemslip dan transfor-masi yang aktif. Sebagai tambahan, prosedursub-steppingdipakai untuk mem-perbaiki konvergensi proses iterasi Newton-Raphson. Operator tangen konsisten(consistent tangent operator) diperoleh dengan menggunakan metoda hampiranbeda hingga, akurasi orde pertama. Algoritma solusi numerik ini kemudian di-implementasikan ke dalam metoda elemen hingga dan konvergensi solusi elemenhingga dianalisa terhadap penghalusan mesh. Hasil-hasil simulasi menunjukkanbahwa, meskipun konvergensi solusi model elasto-plastis-transformasi austenitlebih lambat daripada konvergensi solusi model ferit, secara umum solusi metodaelemen hingga konvergen terhadap penghalusan mesh.
Perilaku struktur mikro baja TRIP terhadap pembebanan tarik uniaksial dipela-jari padaBab 5 melalui simulasi-simulasi numerik dengan menggunakan model-model mikro-mekanika di atas. Simulasi-simulasi ini dilakukan untuk beberapaset sampel yang merepresentasikan baja TRIP dengan parameter-parameter struk-tur mikro yang bervariasi, misalnya fraksi volume awal austenit (morfologi fasa),konsentrasi karbon austenit, ukuran butir austenit, orientasi kristal-kristal (tekstur)ferit dan austenit dan kekerasan matriks ferit. Perilaku keseluruhan (yang dita-mpilkan dalam bentuk kurva tegangan-regangan dan evolusi perubahan fasa) sam-pel baja TRIP dianalisa terhadap variasi tiap-tiap parameter struktur mikro. Hasil-hasil simulasi struktur mikro menunjukkan bahwa perilaku transformasi dalambutiran-butiran austenit dipengaruhi, tidak hanya oleh orientasi kristal austenit,tetapi juga oleh orientasi kristal butiran-butiran ferit di sekitarnya. Lebih lanjut,penambahan konsentrasi karbon dalam fasa austenit memberikan kekuatan luluhefektif yang lebih tinggi. Sebaliknya, transformasi fasa menjadi lebih cepat apa-bila konsentrasi karbon yang lebih rendah, yang pada akhirnya mengakibatkantingkat pengerasan efektif yang lebih tinggi. Fraksi volume awal austenit yanglebih besar juga meningkatkan tingkat pengerasan efektif.Hal ini disebabkan olehsemakin banyak austenit yang berubah menjadi martensit. Selebihnya, ukuran bu-tir austenit dan sifat kekuatan matriks ferit juga memberikan pengaruh terhadap
219

INTISARI
perilaku transformasi fasa, meskipun tidak terlalu besar.Selanjutnya, simulasi-simulasi baja TRIP berskala makro selama prosesdeep-
drawingditampilkan padaBab 6. Untuk ini, skema perataan yang efisien dikem-bangkan berdasarkan asumsi Taylor-terbobot. Skema perataan ini diimplemen-tasikan ke dalam program elemen hingga bersama dengan model-model untukkristal tunggal austenit dan ferit. Informasi tentang tekstur-tekstur kristal diser-takan dalam simulasi elemen hingga, bersesuaian dengan rekonstruksi fungsi dis-tribusi orientasi (ODF,orientation distribution function) sampel secara statistik.Hasil-hasil simulasicup-drawingmenunjukkan bahwa sebagian besar martensitterbentuk di tepi dasar mangkuk (cup), yaitu daerah yang mengalami regangantarik terbesar. Meskipun perilaku keseluruhan transformasi selamadeep-drawingdapat ditangkap dengan baik, namun prediksi laju transformasi menggunakanskema perataan masih jauh di bawah hasil yang diperoleh darisimulasi FEMsecara langsung (tanpa skema perataan). Selanjutnya, profil pengupingan yangterbentuk pada tepi mangkuk menujukkan kontribusi dari masing-masing teksturpada butir-butir austenit dan ferit.
PadaBab 7, transformasi dari fasa austenit ke martensit akbiat pembebanantermal (proses pendinginan) dipelajari dalam tesis ini sebagai fungsi dari berba-gai parameter struktur mikro. Untuk ini, modifikasi model-model untuk kristaltunggal austenit dan ferit di atas dilakukan dengan mengikutsertakan efek regan-gan termal secara eksplisit. Secara kualitatif, hasil-hasil perhitungan model diatas menunjukkan keselarasan dengan perilaku transformasi pada kristal tunggalaustenit dalam baja TRIP yang diamati dalam eksperimen baru-baru ini, terutamadalam hal ketergantungan perilaku transformasi terhadap konsentrasi karbon danukuran butir austenit, meskipun secara kuantitatif berbeda.
Singkatnya, tesis ini menyajikan sebuah analisa yang komprehensif tentangperilaku struktur mikro baja TRIP multifasa. Analisa ini dilakukan dengan meng-gunakan metoda pemodelan dan simulasi mikro-mekanika. Hasil-hasil analisa diatas memberikan masukan berharga untuk pengembangan selanjutnya baja TRIP.
220

Curriculum vitae
Denny Dharmawan Tjahjantoborn on 7 October 1978 in Cirebon, Indonesia
Aug 1996 - Jun 2000 B.Sc. in Aerospace Engineering,Institut Teknologi Ban-dung(ITB), Indonesia.
Sep 1998 - May 2000 Student Assistant at the Department of Aerospace Engineer-ing, Institut Teknologi Bandung, Indonesia.
Jun 1999 - Sep 1999 Trainee at PT.Industri Pesawat Terbang Nusantara(IPTN),Bandung, Indonesia.
Aug 2000 - Jul 2001 Design Engineer and Stress Analyst at PT. GECI-Nusantara,Bandung, Indonesia.
Aug 2001 - Jun 2003 M.Sc. (Ingeneur) in Applied Mathematics, University ofTwente, the Netherlands.
Dec 2002 - Jun 2003 Trainee at theNationaal Lucht- en Ruimtevaartlaborato-rium (NLR), Amsterdam, the Netherlands.
Sep 2003 - Nov 2007 Ph.D. candidate, Faculty of Aerospace Engineering, DelftUniversity of Technology, the Netherlands.
Sep 2006 - Nov 2006 Visiting Researcher at theMax-Planck-Institut fur Eisen-forschung(MPI-E), Dusseldorf, Germany.
221

CURICULLUM VITAE
List of publications
1. D.D. Tjahjanto, S. Turteltaub, A.S.J. Suiker, S. van der Zwaag (2006). Modellingof the effects of grain orientation on transformation-induced plasticity in multi-phase steels.Modelling Simul. Mater. Sci. Eng., 14, 617–636.
2. D.D. Tjahjanto, A.S.J. Suiker, S. Turteltaub, P.E.J. Rivera Diaz del Castillo, S.van der Zwaag (2007). Micromechanical predictions of TRIP steel behavior as afunction of microstructural parameters.Comp. Mater. Sci., 41 (1), 107–116.
3. D.D. Tjahjanto, S. Turteltaub, A.S.J. Suiker (2007). Crystallographically-basedmodel for transformation-induced plasticity in multiphase carbon steels. To appearin Continuum Mech. Therm..
4. D.D. Tjahjanto, F. Roters, P. Eisenlohr (2007). Iso-work-rate weighted-Taylorhomogenization scheme for multiphase steels assisted by transformation-inducedplasticity effect.Steel Res. Int., 78 (10–11), 777–783.
5. D.D. Tjahjanto, S. Turteltaub, A.S.J. Suiker, S. van der Zwaag (2007). Thermo-mechanical behavior of multiphase steels assisted by transformation-induced plas-ticity. In preparation.
222

StellingenPropositions
behorende bij het proefschrift “Micromechanical modelingand simulationsof transformation-induced plasticity in multiphase carbon steels”
door D.D. Tjahjanto, 29 January 2008
belonging to the thesis “Micromechanical modeling and simulationsof transformation-induced plasticity in multiphase carbon steels”
by D.D. Tjahjanto, 29 January 2008
1
Het algehele gedrag van meer-fasen TRIP-staal wordt gedomineerd door plastischedeformatie in de ferritische matrix. Echter, de meeste modellen voor TRIP richtenzich op de transformatie, en minder aandacht wordt besteed aan het detailleren vanhet plastische aspect. [Dit proefschrift]
The overall behavior of multiphase TRIP steels is dominatedby plastic deformationof the ferritic matrix. However, most models for TRIP focus on the transformationmechanism, and less effort is spent on detailing the plasticity aspect.[This thesis]
2
In meerfasen TRIP-staal wordt de volledige transformatie van austenitische korrelsnaar martensiet vehinderd door een combinatie van de plastische deformatie in hetausteniet en het opsluitende effect van de ferritische matrix. [Dit proefschrift]
In multiphase TRIP steels, it is the plastic deformation in the austenite, together withthe constraining effect of the matrix, which prevents the austenitic grains to fullytransform into martensite.[This thesis]

3
TRIP-staalsoorten hebben een vergelijkbare sterkte als ferritisch-martensitische staal-soorten. Echter, bij een gegeven sterktenivo ligt de ductiliteit hoger. [Dit proefschrift]
TRIP steels have a comparable strength to Dual-Phase steels. However, for a givenstrength level their ductility is higher.[This thesis]
4
The optimalisatie van zowel de nauwkeurigheid als de rekenefficintie van numeriekeoplosmethoden is vergelijkbaar met die van de sterkte en de ductiliteit in metalen.Een verbetering van het ene aspect geschiedt normaliter tenkoste van het andere.
The optimization of both accuracy and cost-efficiency of numerical solution algo-rithms is comparable to that of strength and ductility of metals. Improvement in oneaspect usually occurs at the expense of the other.
5
In het leven zijn onvervulde verwachtingen een grote bron van teleurstelling. Echter,het hebben van totaal geen verwachtingen maakt het leven zelf een teleurstelling.
Unfulfilled expectations in life are a major source of disappointment. However, hav-ing no expectations at all makes life itself a disappointment.
6
Het probleem van vele beslissingen is niet het besluitvormingsprocess als zodanig,maar het omgaan met de consequenties ervan.
The problem of many decisions is not the decision-making process itself, but livingwith the consequences.
2

7
Bij koken zijn er drie belangrijke aspecten, d.w.z., (i) de eigenschappen van de in-gredinten, (ii) de eigenschappen van het mengsel, en (iii) de verandering in eigen-schappen als gevolg van het kookproces.
There are three important aspects in cooking, i.e., (i) the characteristics of the in-gredients, (ii) the effective characteristics of the mixture, and (iii) the change of itscharacteristics due to processing.
8
Spiegelreflex (SLR) camera’s staan bekend om hun “wat je zietis wat je krijgt” af-beeldingen. Dit is niet volledig waar. SLR camera’s leggen het beeld vast juist op hetmoment dat je het niet ziet.
Single-lens reflex (SLR) cameras are known for their “what you see is what you get”images. This is not completely true. SLR cameras capture theimage exactly at themoment when you do not see it.
9
Voor de knock-out fase van een tournooi is een defensieve strategie in voetbal meergeschikt dan een meer aanvallende strategie. Het spelen meteen aanvallende stijlvereist een groter fysiek uithoudingsvermogen en meer concentratie, en is daardoormoeilijker vol te houden gedurende een tournooi.
In football, a defensive strategy is more suitable for the knock-out stage of a tourna-ment. Playing with an attacking style requires more physical stamina and concentra-tion, and is, therefore, harder to maintain throughout the tournament.
Deze stellingen worden opponeerbaar en verdedigbaar geacht en zijn als zodanig goedgekeurddoor de promotoren Prof. dr. ir. S. van der Zwaag en Dr. S.R. Turteltaub.
These propositions are considered opposable and defendable and as such have been approvedby the supervisors Prof. dr. ir. S. van der Zwaag and Dr. S.R. Turteltaub.
3