Krachten opgewekt door boegschroeven in ondiep water en...
168
Faculteit Ingenieurswetenschappen Vakgroep Mechanische Constructie en Productie Afdeling Maritieme Techniek Krachten opgewekt door boegschroeven in ondiep water en beperkte vaargebieden door Jan Bertrem Promotor : Prof. dr. ir. Marc Vantorre Scriptie ingediend tot het behalen van de academische graad van burgerlijk werktuigkundig-elektrotechnisch ingenieur optie maritieme techniek Academiejaar 2006-2007
Transcript of Krachten opgewekt door boegschroeven in ondiep water en...

Faculteit Ingenieurswetenschappen
Vakgroep
Mechanische Constructie en Productie
Afdeling Maritieme Techniek
Krachten opgewekt door boegschroeven in ondiep water en
beperkte vaargebieden
door
Jan Bertrem
Promotor : Prof. dr. ir. Marc Vantorre
Scriptie ingediend tot het behalen van de academische graad van
burgerlijk werktuigkundig-elektrotechnisch ingenieur
optie maritieme techniek
Academiejaar 2006-2007

WOORD VOORAF i
Woord vooraf
In de maritieme wereld valt de trend op dat de afmetingen van schepen toenemen. Met
deze toename gaat een afname van de manoeuvreerbaarheid gepaard. Het schip wordt
moeilijker handelbaar en de consequenties van een verkeerd manoeuvre worden groter.
Om een schip van richting te veranderen is er een roer voorzien. Dit roer werkt echter
minder goed bij lage snelheid. Een schip zal dus moeilijker kunnen manoeuvreren wanneer
het traag vaart, zoals in een haven of een ander beperkt vaargebied. Daarom zal men
beroep doen op sleepboten om het schip te assisteren. Een schip kan ook worden uitgerust
met boeg- en/of hekschroeven die de manoeuvreerbaarheid terug verbeteren. Op deze
manier kan men besparen op sleepboten en is het schip meer autonoom.
Ik heb voor deze thesis gekozen omdat het onderwerp me interesseerde en een mix is
van scheepshydrodynamica, werktuigkunde, theoretisch en experimenteel onderzoek. Het
voorbije jaar is dan ook erg boeiend, afwisselend en leerrijk geweest. Er zijn tal van mensen
die elk op hun manier, hun steentje hebben bijgedragen om dit werk te maken tot wat het
nu is. Mensen die mij in de loop der jaren gesteund hebben en mij de kans geboden hebben
om kennis te kunnen opdoen.
Graag wil ik dan ook de volgende mensen bedanken. In de eerste plaats bedank ik mijn pro-
motor professor Marc Vantorre en mijn begeleider Guillaume Delefortrie voor hun energie
die ze in mij en deze thesis gestopt hebben, voor de vele vragen te beantwoorden waarmee
ik hen telkens heb lastig gevallen en voor de tijd en moeite die zij gedaan hebben om de
opleiding te maken tot wat ze is. Graag wil ik ook de mensen van het Waterbouwkundig
Laboratorium bedanken voor het ter beschikking stellen van de sleeptank en de ondersteu-
ning gedurende mijn thesis, bedankt Erik Laforce, Evert Lataire, Greet Van Kerkhove en
Luc Van Ostaeyen.
Zonder mijn ouders was dit allemaal niet mogelijk geweest. Zonder hen zou ik nooit de
kans gehad hebben om aan deze opleiding te kunnen beginnen. Ze hebben mij steeds alle
mogelijkheden gegeven om mij te ontplooien, me te verdiepen in mijn interesses, te staan
waar ik nu sta en daar ben ik hen dan ook uiterst dankbaar voor.
Mijn vriendin Elke mag zeker niet ontbreken, ze stond altijd klaar voor me wanneer ik ze
nodig had en is sinds lange tijd mijn grote steun. Ik wil haar dan ook ten zeerste bedanken
voor het frequente nalezen en de grammaticale tips.
Verder wil ik nog een aantal mensen bedanken die hier niet bij naam vermeld zijn maar
toch op een of andere manier voor mij een steun geweest zijn, een uitlaatklep, en mij mee
gemaakt hebben tot de mens die ik nu ben. Bedankt.

TOELATING TOT BRUIKLEEN iii
Toelating tot bruikleen
“De auteur geeft de toelating deze scriptie voor consultatie beschikbaar te stellen en delen
van de scriptie te kopieren voor persoonlijk gebruik.
Elk ander gebruik valt onder de beperkingen van het auteursrecht, in het bijzonder met
betrekking tot de verplichting de bron uitdrukkelijk te vermelden bij het aanhalen van
resultaten uit deze scriptie.”

Krachten opgewekt door
boegschroeven in ondiep water en
beperkte vaargebiedendoor
Jan Bertrem
Scriptie ingediend tot het behalen van de academische graad van
Burgerlijk werktuigkundig-elektrotechnisch ingenieur:
optie maritieme techniek
Academiejaar 2006–2007
Promotor: Prof. dr. ir. M. Vantorre
Scriptiebegeleider: dr. ir. G. Delefortrie
Faculteit Ingenieurswetenschappen
Universiteit Gent
Vakgroep Mechanische Constructie en Productie Afdeling Maritieme Techniek
Voorzitter: Prof. dr. ir. J. Degrieck
Samenvatting
In dit werk worden de krachten opgewekt door een boegschroef in ondiep water en beperktevaargebieden onderzocht. Dit wordt onderzocht aan de hand van een aantal experimen-ten op een schaalmodel van een LNG tanker schip uitgevoerd in de sleeptank van hetWaterbouwkundig Laboratorium te Antwerpen.
Trefwoorden
boegschroef, laterale thruster, beperkt vaargebied, ondiep water
Forces induced by Bow Thrusters in shallow andconfined Water
Jan Bertrem
Supervisor(s): Marc Vantorre, Guillaume Delefortrie
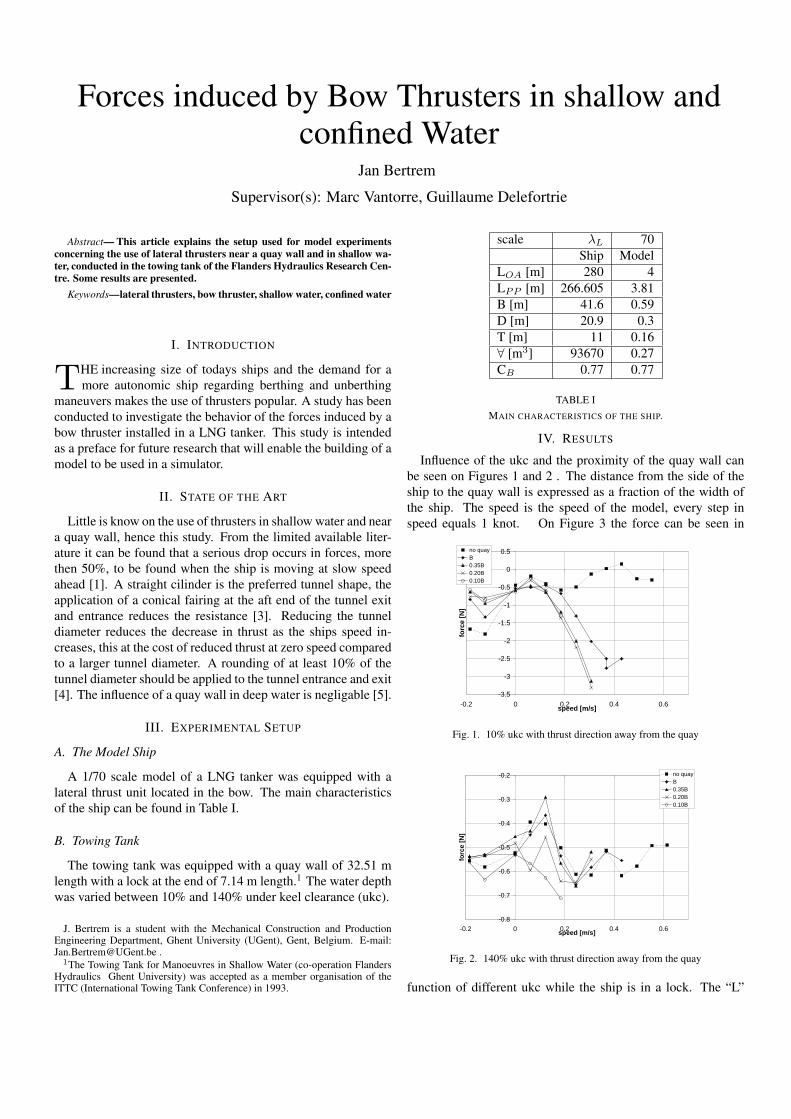
Abstract— This article explains the setup used for model experimentsconcerning the use of lateral thrusters near a quay wall and in shallow wa-ter, conducted in the towing tank of the Flanders Hydraulics Research Cen-tre. Some results are presented.
Keywords—lateral thrusters, bow thruster, shallow water, confined water
I. INTRODUCTION
THE increasing size of todays ships and the demand for amore autonomic ship regarding berthing and unberthing
maneuvers makes the use of thrusters popular. A study has beenconducted to investigate the behavior of the forces induced by abow thruster installed in a LNG tanker. This study is intendedas a preface for future research that will enable the building of amodel to be used in a simulator.
II. STATE OF THE ART
Little is know on the use of thrusters in shallow water and neara quay wall, hence this study. From the limited available liter-ature it can be found that a serious drop occurs in forces, morethen 50%, to be found when the ship is moving at slow speedahead [1]. A straight cilinder is the preferred tunnel shape, theapplication of a conical fairing at the aft end of the tunnel exitand entrance reduces the resistance [3]. Reducing the tunneldiameter reduces the decrease in thrust as the ships speed in-creases, this at the cost of reduced thrust at zero speed comparedto a larger tunnel diameter. A rounding of at least 10% of thetunnel diameter should be applied to the tunnel entrance and exit[4]. The influence of a quay wall in deep water is negligable [5].
III. EXPERIMENTAL SETUP
A. The Model Ship
A 1/70 scale model of a LNG tanker was equipped with alateral thrust unit located in the bow. The main characteristicsof the ship can be found in Table I.
B. Towing Tank
The towing tank was equipped with a quay wall of 32.51 mlength with a lock at the end of 7.14 m length.1 The water depthwas varied between 10% and 140% under keel clearance (ukc).
J. Bertrem is a student with the Mechanical Construction and ProductionEngineering Department, Ghent University (UGent), Gent, Belgium. E-mail:[email protected] .
1The Towing Tank for Manoeuvres in Shallow Water (co-operation FlandersHydraulics Ghent University) was accepted as a member organisation of theITTC (International Towing Tank Conference) in 1993.
scale λL 70Ship Model
LOA [m] 280 4LPP [m] 266.605 3.81B [m] 41.6 0.59D [m] 20.9 0.3T [m] 11 0.16∀ [m3] 93670 0.27CB 0.77 0.77
TABLE IMAIN CHARACTERISTICS OF THE SHIP.
IV. RESULTS
Influence of the ukc and the proximity of the quay wall canbe seen on Figures 1 and 2 . The distance from the side of theship to the quay wall is expressed as a fraction of the width ofthe ship. The speed is the speed of the model, every step inspeed equals 1 knot. On Figure 3 the force can be seen in
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 0 0.2 0.4 0.6speed [m/s]
forc
e [N
]
no quayB0.35B0.20B0.10B
Fig. 1. 10% ukc with thrust direction away from the quay
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.2 0 0.2 0.4 0.6speed [m/s]
forc
e [N
]
no quayB0.35B0.20B0.10B
Fig. 2. 140% ukc with thrust direction away from the quay
function of different ukc while the ship is in a lock. The “L”

and “H” are for 2 settings of the revolutions of the thruster, “L”corresponding to low rpm and “H” corresponding to high rpm.As can be seen, there is a large influence of the water depth onthe force generated by the bow thruster.
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0 20 40 60 80 100 120 140 160ukc [%]
forc
e [N
]
LH
Fig. 3. Force in function of ukc with the ship in a lock.
V. CONCLUSIONS
From the results of the study it can be concluded that there isa rather large effect of the water depth/ukc on the use of a bowthruster. A quay wall has influence on the behavior of a lateralthruster. If the thrust is directed away from the wall, an increasein force and moment delivered from the thruster will occur. Ifthe thrust is directed toward the quay wall then a decrease inforce but an increase in moment can be expected. The use of athruster when sailing with a drift angle seems to be unfavorablecompared to sailing without a drift angle. The forces deliveredby a thruster while in a lock are highly affected by the waterdepth/ukc.
REFERENCES
[1] M.S Chislett and O. Bjorheden, Influence of Ship Speed on the Effectivenessof a Lateral-Thrust Unit, Hydro. and Aerodynamics Laboratory, 1966.
[2] M. Vantorre, Towing tank for manoeuvres in shallow water,http://watlab.lin.vlaanderen.be/
[3] J.W. English, Further considerations in the design of lateral thrust units,volume 14, International shipbuilding progress, 1967.
[4] J.W. English, The design and performance of lateral thrust units for ships -hydrodynamic considerations!, volume 103, Trans IMarE, 1966.
[5] W. Becker, Manoevring Technical Manual., Seehaven Verlag GmbH, 1993.

INHOUDSOPGAVE vii
Inhoudsopgave
Woord vooraf i
Toelating tot bruikleen iii
Overzicht iv
Extended Abstract v
Lijst van afkortingen xi
Lijst van eenheden xiv
1 Boegschroeven 1
1.1 Algemene inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Aanleiding tot het onderzoek . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Doelstellingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Opbouw van de thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 Soorten boegschroeven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.1 Laterale thrusters . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5.2 Roteerbare thrusters . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.6 Beschikbare gegevens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.7 Vermogen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.8 Thruster werking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.9 Schroefperformantie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15

INHOUDSOPGAVE viii
1.10 Literatuur Onderzoek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.10.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.10.2 Relevante werken . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Metingen 40
2.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.1.1 Sleeptank . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.1.2 Modelproeven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.2 Beschrijving van de apparatuur . . . . . . . . . . . . . . . . . . . . . . . . 42
2.2.1 Sleeptank van het Waterbouwkundig Laboratorium . . . . . . . . . 42
2.2.2 Sleepwagen van het Waterbouwkundig Laboratoruim . . . . . . . . 44
2.2.3 Assenstelsels en soorten proeven . . . . . . . . . . . . . . . . . . . . 46
2.2.4 Procedure voor het uitvoeren van proeven . . . . . . . . . . . . . . 49
2.3 Gebruikte opstelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.3.1 Omgeving . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.3.2 Model M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.3.3 IJking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.4 Proevenprogramma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.4.1 Gebruikte snelheden . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.4.2 Afstanden tot de kaaimuur . . . . . . . . . . . . . . . . . . . . . . . 64
2.4.3 Hoeken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.4.4 Toerentallen boegschroef . . . . . . . . . . . . . . . . . . . . . . . . 67
3 Resultaten metingen 68
3.1 Paaltrek proeven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.1.1 In het midden van de tank . . . . . . . . . . . . . . . . . . . . . . . 69
3.1.2 Nabij de kaai met stuwkracht weg van de kaai . . . . . . . . . . . . 70
3.1.3 Nabij de kaai met stuwkracht naar de kaai . . . . . . . . . . . . . . 72
3.1.4 Verdere analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74

INHOUDSOPGAVE ix
3.2 StatX proeven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.2.1 In het midden van de tank . . . . . . . . . . . . . . . . . . . . . . . 80
3.2.2 Nabij de kaai met stuwkracht weg van de kaai . . . . . . . . . . . . 86
3.2.3 Nabij de kaai met stuwkracht naar de kaai . . . . . . . . . . . . . . 93
3.3 PMMPSI proeven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.3.1 35% ksp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.3.2 20% ksp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.3.3 10% ksp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.4 Multi proeven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
3.4.1 Beweging naar de kaai toe . . . . . . . . . . . . . . . . . . . . . . . 104
3.4.2 Beweging weg van de kaai . . . . . . . . . . . . . . . . . . . . . . . 105
3.5 In een sluis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4 Conclusie en aanbevelingen 108
4.1 Conclusie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.2 Aanbevelingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
A ζ waarden 111
B Dimensieanalyse 112
C Karakteristieken voor Y en N voor verschillende schepen 116
D VBA code paaltrek proeven 118
E VBA code statx proeven 122
F Figuren invloed kaai 127
F.1 Nabij de kaai met stuwkracht weg van de kaai . . . . . . . . . . . . . . . . 127
F.1.1 140% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
F.1.2 35% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
F.1.3 20% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131

INHOUDSOPGAVE x
F.1.4 10% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
F.2 Nabij de kaai met stuwkracht naar de kaai . . . . . . . . . . . . . . . . . . 135
F.2.1 140% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
F.2.2 35% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
F.2.3 20% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
F.2.4 10% kielspeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Referenties 143
Lijst van figuren 146
Lijst van tabellen 153
LIJST VAN AFKORTINGEN xi
Lijst van afkortingen
Afkorting Eenheid Benaming
A0 [m2] dwarse oppervlakte tunnel
AA [m2] bovenwater laterale oppervlakte schip
AST Anti Suction Tunnel
AT [m2] oppervlakte doorsnede tunnel
AU [m2] onderwater laterale oppervlakte schip
B [m] breedte
c [NW
] specifieke stuwkracht
C [-] paaltrekcoefficient
CB [-] blokcoefficient
CFD Computational Fluid Dynamics
CMAmax [-] maximale wind moment coefficient
CMW [-] water moment coefficient
CPP Constant Pitch Propeller
D [m] holte, diameter tunnel
d [m] diameter van de naaf
dwt [m3] Deadweight Tonnage
F [N] kracht
FPP Fixed Pitch Propeller
g [kgm/s2] gravitatieconstante

LIJST VAN AFKORTINGEN xii
h [m] hoogte
HP [ft lbs
] Horse Power
J [-] snelheidsgraad
JP [kg.m2] polair traagheidsmoment
KQ [-] koppelcoefficient
ksp [%] kielspeling
KT [-] stuwkrachtcoefficient
LNG Liquified Natural Gas
LOA [m] totale lengte schip
LPP [m] lengte schip tussen de loodlijnen
LWL [m] lengte langs de waterlijn
m [kg], [-] massa, snelheidsratio
MH [N.m] hydrodynamisch moment uitgeoefend op het schip
MP [N.m] moment geproduceerd door de thruster op het schip
MW [N.m] windkoppel op het schip
n [1/s] toerental
P [W], [m] vermogen, spoed
Q [m3
s] debiet
RoRo Roll-on Roll-off
ROV Remote Operating Vehicle
s [ms2
] versnelling
SMCR Selected Maximum Continous Rating
T [m], [N] diepgang, stuwkracht
TEU Twenty feet Equivalent Unit, 1 container heeft volgende
afmetingen LxBxH: 20 ft x 8 ft x 8 ft
tpm toeren per minuut
TT [N] stuwkracht thruster
ULCC Ultra Large Crude Carrier

LIJST VAN AFKORTINGEN xiii
V [ms] snelheid
vj [ms] jet snelheid
VW [ms] windsnelheid
WL Waterbouwkundig Laboratorium
Y [N] dwarskracht op het schip
z aantal schroefbladen
β [◦] drifthoek
δ [◦] roerhoek
γ [◦] gierhoek
φ [◦] spoedhoek
ψ [◦] koershoek
ρA [kg/m3] densiteit van lucht
ρw [kg/m3] densiteit van de vloeistof
ζ [-] verliesfactor, Bendemann factor
∀ [m3] volumedeplacement

LIJST VAN EENHEDEN xiv
Lijst van eenheden
Onderstaande lijst kan gebruikt bij het omzetten van eenheden die voorkomen in deze
thesis. Verdere informatie over de omzetting van eenheden kan op de volgende webpagina
gevonden worden:
http://en.wikipedia.org/wiki/Conversion_of_units
Eenheid Afkorting SI-waarde
foot ft 0.3048 m
nautical mile nm 1852 m
square foot sq ft 9.290304× 10−2 m2
pound lb 0.5 kg
horse power HP 735.498 W
slug slug 14.59 kg
Fahrenheit F T[◦F] = 1.8 x T[◦C] + 32
knoop kn 0.5144 m/s

BOEGSCHROEVEN 1
Hoofdstuk 1
Boegschroeven
1.1 Algemene inleiding
De schepen van tegenwoordig worden steeds groter en groter. Omdat grote schepen meer
lading kunnen meenemen kan men de vrachtprijzen drukken. Een actueel voorbeeld hiervan
zijn de containerschepen. Deze grote en snelle schepen hebben een enorme groei gekend
de laatste jaren. Neem een schip als de Emma Mærsk. Dit schip heeft een capaciteit
van 11000 TEU (Twenty foot Equivalent Unit). Dat wil zeggen dat de Emma Mærsk in
staat is om 11000 kleine of 5500 grote containers mee te nemen. Ze is 397 meter lang, 56
meter breed en heeft een snelheid van 27 knoop. Om deze hoge snelheid te halen heeft
de Emma Mærsk hiervoor een motor van 109 000 HP (Horse Power of paardenkracht)
[1],[2]1. Samen met deze toenemende groei van de schepen is er een stijgend verlangen naar
schepen die zelfstandig kunnen opereren. Dit komt vooral neer op het zelfstandig kunnen
manoeuvreren in beperkte wateren zoals bijvoorbeeld in havens, in ondiepe wateren, in
kanalen of in sluisen. De enorme groei in afmetingen van schepen maakt manoeuvreren
moeilijker. Een klein schip is meestal goed handelbaar. Een ULCC (Ultra Large Crude
Carrier) olietanker van pakweg 420 meter is niet meer zo vlot handelbaar en men moet daar
heel bedachtzaam mee omspringen. Om deze schepen op een veilige manier in de haven
1nummers tussen [ ] zijn verwijzingen naar referenties

1.1 Algemene inleiding 2
Figuur 1.1: Recente en toekomstige ontwikkeling van de
containerschepen.[3]
te laten aan- en afmeren maakt men gebruik van sleepboten. Deze sleepbootassistentie is
een aanzienlijke kost voor rederijen. Het bouwen van een schip dat zelfstandig kan aan-
en afmeren of minder sleepboten nodig heeft, kan een flinke besparing opleveren. Om dit
manoeuvreerprobleem op te lossen zijn er een aantal mogelijkheden en een daarvan is het
gebruik van boeg- en hekschroeven.
Een klassiek schip heeft achteraan een roer en een propeller. Wanneer het roer niet wordt
aangestroomd, het schip ligt bijvoorbeeld stil in het water, dan levert dit roer geen kracht
en kan het bijgevolg niet gebruikt worden om te manoeuvreren. De doeltreffendheid van
een roer stijgt met de snelheid van het schip. Als men in een haven ligt en niet snel kan of
mag varen dan kan men door het roer een korte tijd met de propeller gepast aan te stromen
toch nog manoeuvreren. Zij het dan wel in beperkte mate want als men het roer te lang
aanstroomt dan begint het schip snelheid te maken. Bij grote schepen is dit kortstondig
belasten van de motor niet vanzelfsprekend. Daarom kan men een schip uitrusten met
boeg- en/of hekschroeven. Dit zijn schroeven die in een tunnel zijn ingebouwd in dwarse
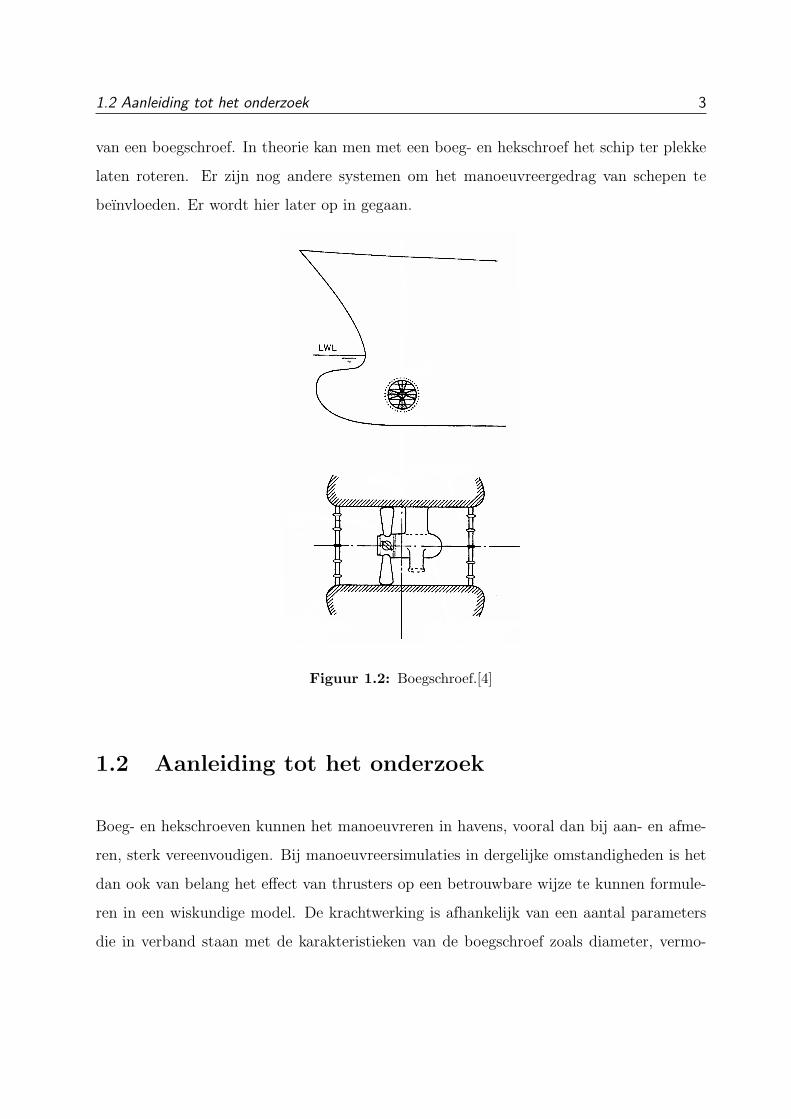
richting van het schip, in plaats van in de langsrichting. Zie Figuur 1.2 voor een voorbeeld
1.2 Aanleiding tot het onderzoek 3
van een boegschroef. In theorie kan men met een boeg- en hekschroef het schip ter plekke
laten roteren. Er zijn nog andere systemen om het manoeuvreergedrag van schepen te
beınvloeden. Er wordt hier later op in gegaan.
Figuur 1.2: Boegschroef.[4]
1.2 Aanleiding tot het onderzoek
Boeg- en hekschroeven kunnen het manoeuvreren in havens, vooral dan bij aan- en afme-
ren, sterk vereenvoudigen. Bij manoeuvreersimulaties in dergelijke omstandigheden is het
dan ook van belang het effect van thrusters op een betrouwbare wijze te kunnen formule-
ren in een wiskundige model. De krachtwerking is afhankelijk van een aantal parameters
die in verband staan met de karakteristieken van de boegschroef zoals diameter, vermo-

1.3 Doelstellingen 4
gen, toerental. Maar ook scheepsparameters zoals lokale breedte, langsscheepse positie,
snelheidscomponenten in het horizontale vlak en omgevingskarakteristieken als diepte, na-
bijheid van kaaimuren kunnen van belang zijn.
De beschikbaarheid van een boegschroefmodule die rekening houdt met deze parameters
zou het realisme en de kwaliteit van gesimuleerde havenmanoeuvres sterk verbeteren. Dit
leidt dan uiteindelijk tot een veiliger en efficienter manoeuvreren in havens of andere be-
perkte vaargebieden.
1.3 Doelstellingen
Het doel van de thesis bestaat erin een proevenreeks op te stellen met een modelschip
uitgerust met een boegschroef. De gegevens worden verzameld en geanalyseerd.
Hiertoe dienen volgende stappen doorlopen te worden:
• Opzoeken van beschikbare kenmerken van boegschroeven;
• Theoretische studie naar de werking van boegschroeven;
• Literatuurstudie naar de effecten van boeg- en hekschroeven in functie van de rele-
vante parameters;
• Opstellen en uitvoeren van een proevenprogramma in de sleeptank van het Water-
bouwkundig Laboratorium te Borgerhout;
• Analyse van de verkregen data.
1.4 Opbouw van de thesis
• Hoofdstuk 1 Boegschroeven: Inleiding,thruster werking en literatuuronderzoek;
• Hoofdstuk 2 Metingen: Gebruikte apparatuur, opstelling en proevenprogramma;
1.5 Soorten boegschroeven 5
• Hoofdstuk 3 Resultaten metingen;
• Hoofdstuk 4 Conclusie en aanbevelingen.
1.5 Soorten boegschroeven
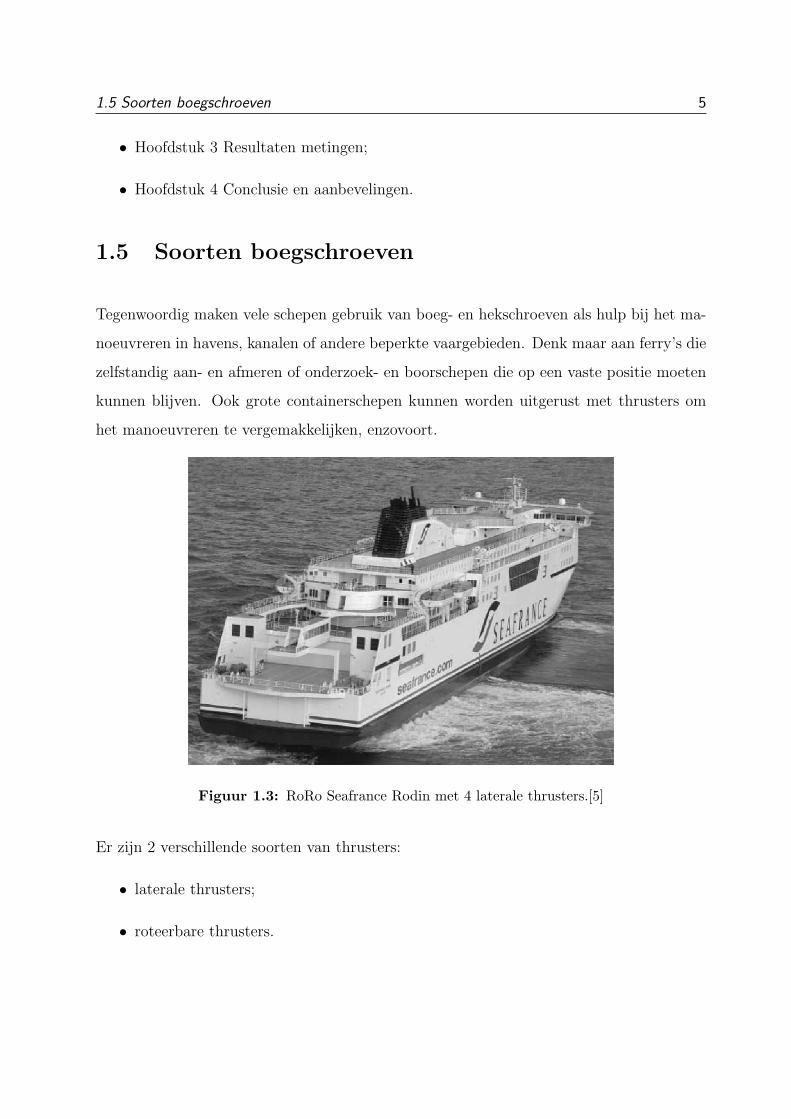
Tegenwoordig maken vele schepen gebruik van boeg- en hekschroeven als hulp bij het ma-
noeuvreren in havens, kanalen of andere beperkte vaargebieden. Denk maar aan ferry’s die
zelfstandig aan- en afmeren of onderzoek- en boorschepen die op een vaste positie moeten
kunnen blijven. Ook grote containerschepen kunnen worden uitgerust met thrusters om
het manoeuvreren te vergemakkelijken, enzovoort.
Figuur 1.3: RoRo Seafrance Rodin met 4 laterale thrusters.[5]
Er zijn 2 verschillende soorten van thrusters:
• laterale thrusters;
• roteerbare thrusters.

1.5 Soorten boegschroeven 6
Er bestaan hiervoor verschillende fabrikanten. Enkele grote namen zijn onder andere
Wartsila, Brunvoll, Rolls Royce, Schottel, Hatlapa, Ulstein, Kawasaki, . . . . 2 .
Deze 2 verschillende soort thrusters zijn in de loop der geschiedenis soms anders benoemd.
In deel 1.10.1 wordt hier verder op ingegaan en een lijst gegeven van de gebruikte bena-
mingen voor elke soort van thruster, zie Tabel 1.2.
1.5.1 Laterale thrusters
Laterale thruster is de algemene benaming voor wat men doorgaans kent als boeg- en/of
hekschroef. Het is een schroef die geplaatst is in een tunnel onder water die loopt van
bakboord tot stuurboord. Deze tunnel bevindt zich meestal zo ver mogelijk vooraan in het
schip, vaak nog voor het voorpiekschot. In dit geval spreekt men van een boegschroef. Een
schip kan ook een hekschroef hebben. Dan bevindt de tunnel zich zo ver mogelijk achteraan
in het schip. Een combinatie van boeg- en hekschroeven of meerdere boegschroeven is
mogelijk. Zie Figuur 1.2 voor een doorsnede van een boegschroef.
Van deze systemen zijn er meerdere mogelijke opties en varianten. Enkele mogelijke opties
zijn:
• demonteerbaar zonder dokken;
• lage geluidshinder;
• met of zonder motorondersteuning;
• propeller met verstelbare spoed of vaste spoed.
Figuur 1.4(b) toont een schip dat is uitgerust met 2 laterale thrusters met tussenin een
zuigbuis. Deze buis heeft tot doel de zuigkracht op de romp te verminderen en daardoor
de performantie te verhogen. Dit wordt in een later deel nog toegelicht.
2Meer informatie kunt u vinden op de websites van de fabrikanten via Internet
1.5 Soorten boegschroeven 7
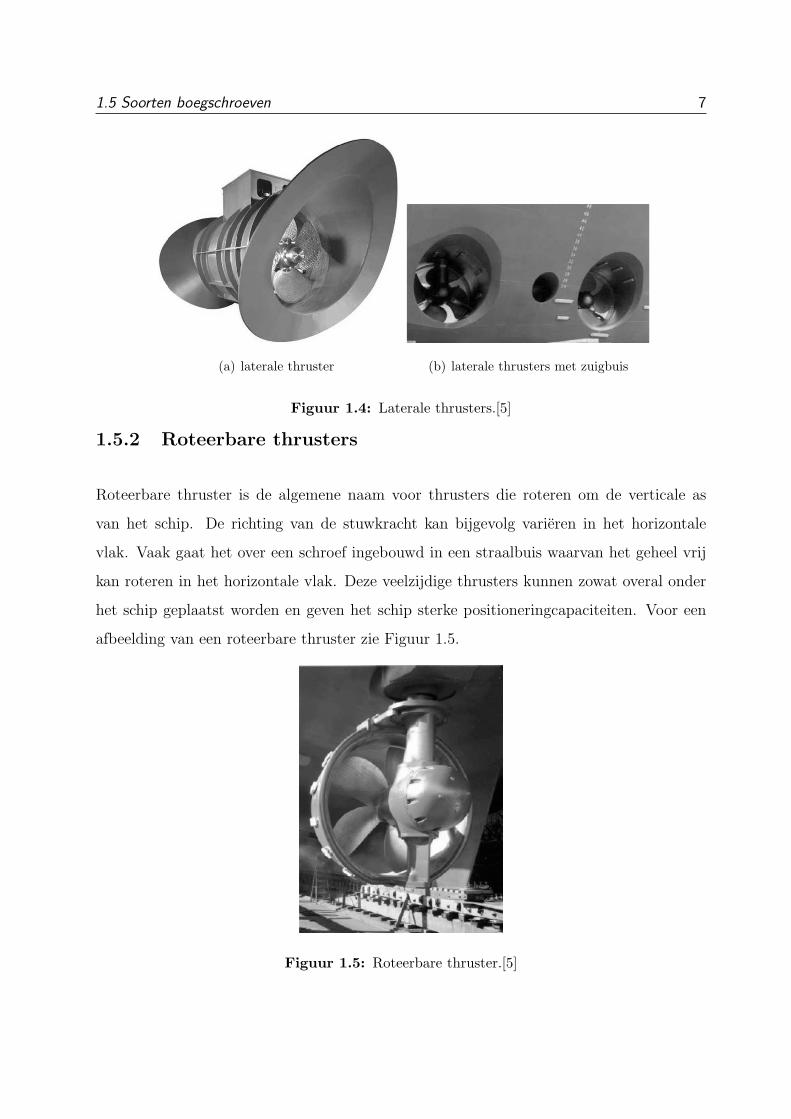
(a) laterale thruster (b) laterale thrusters met zuigbuis
Figuur 1.4: Laterale thrusters.[5]
1.5.2 Roteerbare thrusters
Roteerbare thruster is de algemene naam voor thrusters die roteren om de verticale as
van het schip. De richting van de stuwkracht kan bijgevolg varieren in het horizontale
vlak. Vaak gaat het over een schroef ingebouwd in een straalbuis waarvan het geheel vrij
kan roteren in het horizontale vlak. Deze veelzijdige thrusters kunnen zowat overal onder
het schip geplaatst worden en geven het schip sterke positioneringcapaciteiten. Voor een
afbeelding van een roteerbare thruster zie Figuur 1.5.
Figuur 1.5: Roteerbare thruster.[5]

1.6 Beschikbare gegevens 8
Bij roteerbare thrusters zijn er allerlei systemen op de markt. Enkele mogelijkheden zijn
thrusters:
• met of zonder straalbuis;
• met een propeller met verstelbare spoed of vaste spoed;
• inklapbaar in de bodem van het schip om zo de weerstand te verminderen;
• demonteerbaar zonder te dokken.
Roteerbare thrusters worden vaak gebruikt wanneer er zeer hoge positioneringseisen gesteld
worden. Ze komen frequent voor in offshore supply/production vessels, Remote Operating
Vehicles (ROV), sleepboten, researchschepen, . . . .
1.6 Beschikbare gegevens
Bronnenonderzoek, [5][6][7][8], wijst uit dat de volgende parameters beschikbaar zijn:
• Diameter van de thruster in functie van het vermogen;
• Geometrie van de thruster eenheid;
• Gewicht van de eenheid;
• Nominale toerental van de aandrijfeenheid voor de thruster;
• Schroef met verstelbare spoed of schroef met vaste spoed ;
• Aandrijving van de propeller. Meestal is er keuze tussen elektrisch of met diesel
motor, maar er zijn ook systemen die met stoom werken (eerder zeldzaam).
De keuzes die men moet maken bij de aanschaf van een bepaald systeem zijn niet evident
en er speelt vaak een economische factor mee. Zo is een systeem dat gebruik maakt van
een vaste spoed, verder afgekort tot FPP (fixed pitch propeller), goedkoper dan dat met

1.7 Vermogen 9
een verstelbare spoed, verder afgekort tot CPP (constant pitch propeller). Maar men
mag niet vergeten dat wanneer men gebruik maakt van een FPP systeem dat men ook
de aandrijving en hulpsystemen in rekening moet brengen. Dit moet een aandrijving zijn
met variabele snelheid en omkeerbaar van richting. Terwijl dit voor een CPP systeem een
aandrijving met een vast toerental is die niet omkeerbaar hoeft te zijn. Dit maakt de kost
van de propeller en de hulpsystemen groter voor FPP. Tegenwoordig valt in nieuwbouw
situaties de keuze meestal op een elektrische aandrijving. Dit wordt ook bevestigd door [9].
Wanneer een bestaand schip wordt uitgerust met een boegschroef dan wordt deze keuze
gebaseerd op de beschikbare krachtbronnen en kan men niet op voorhand zeggen of het
een elektrische motor of diesel motor wordt.
1.7 Vermogen
Het beschikbare vermogen is in de loop der jaren sterk toegenomen. Tegenwoordig zijn de
grootste beschikbare vermogens voor thrusters 4 megawatt. Dit is mogelijk door de tech-
nologische vooruitgang in het gebied van de mechanica en elektro-mechanica, voornamelijk
dan in het domein van tandwiel overbrengingen, afdichtingen en aandrijvingen. Op Figuur
1.6 is de verhouding vermogen tot diameter van de thruster te zien.
Figuur 1.6: Tunnel thruster range Rolls-Royce.[6]
1.7 Vermogen 10
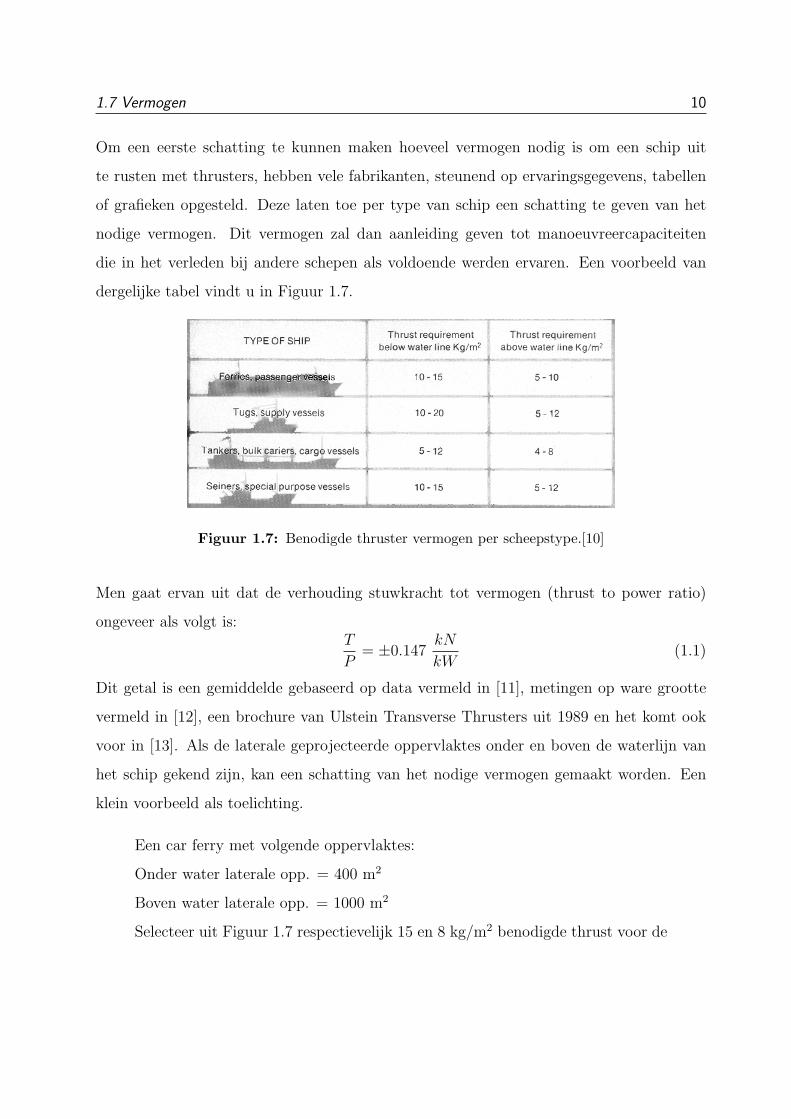
Om een eerste schatting te kunnen maken hoeveel vermogen nodig is om een schip uit
te rusten met thrusters, hebben vele fabrikanten, steunend op ervaringsgegevens, tabellen
of grafieken opgesteld. Deze laten toe per type van schip een schatting te geven van het
nodige vermogen. Dit vermogen zal dan aanleiding geven tot manoeuvreercapaciteiten
die in het verleden bij andere schepen als voldoende werden ervaren. Een voorbeeld van
dergelijke tabel vindt u in Figuur 1.7.
Figuur 1.7: Benodigde thruster vermogen per scheepstype.[10]
Men gaat ervan uit dat de verhouding stuwkracht tot vermogen (thrust to power ratio)
ongeveer als volgt is:T
P= ±0.147
kN
kW(1.1)
Dit getal is een gemiddelde gebaseerd op data vermeld in [11], metingen op ware grootte
vermeld in [12], een brochure van Ulstein Transverse Thrusters uit 1989 en het komt ook
voor in [13]. Als de laterale geprojecteerde oppervlaktes onder en boven de waterlijn van
het schip gekend zijn, kan een schatting van het nodige vermogen gemaakt worden. Een
klein voorbeeld als toelichting.
Een car ferry met volgende oppervlaktes:
Onder water laterale opp. = 400 m2
Boven water laterale opp. = 1000 m2
Selecteer uit Figuur 1.7 respectievelijk 15 en 8 kg/m2 benodigde thrust voor de

1.8 Thruster werking 11
onder en boven water oppervlakte. Vul dit in in de volgende formule om een
schatting voor het vermogen te krijgen:
P =(1000 m2 × 8 kg/m2) + (400 m2 × 15 kg/m2)
15 kg/kW= 934 kW (1.2)
Dit vermogen kan verdeeld worden over een boeg- en hekschroef.
1.8 Thruster werking
Een laterale thruster is te vergelijken met een axiale pomp. Door toepassen van de 2e wet
van Newton zijn volgende resultaten af te leiden [13]:
F = ms (1.3)
met:
• F [N] de som van de inwerkende krachten;
• m [kg] een massa;
• s [m/s2] een versnelling.
We kunnen deze vergelijking ook onder de volgende vorm schrijven:
F =d
dt(ms) = s
dm
dt+m
ds
dt(1.4)
Wanneer de snelheid s = v een constante is dan krijgen we deze vergelijking:
F = vm (1.5)
Met m = ρQ een massadebiet dat aanleiding zal geven tot een reactiekracht T die er als
volgt uit ziet:
T = ρQvj (1.6)
De parameters zijn:
• ρ [kg/m3] de massadichtheid van de vloeistof;

1.8 Thruster werking 12
• T [N] de stuwkracht van de thruster;
• Q [m3/s] het debiet van de vloeistof;
• vj [m/s] de jet snelheid.
Beschouw het eenvoudige thruster systeem van Figuur 1.8.
Figuur 1.8: Stroming door een laterale thruster.
Aangezien er continuıteit van de stroom moet zijn, is het massadebiet constant en kunnen
we (1.6)3 schrijven als
T = ρAOv2j (1.7)
Waarin AO de oppervlakte is van de doorsnede van de tunnel. Het hydraulisch vermogen
van de pomp waardoor deze jet ontstaat is:
PN = Q∆p = Qρg∆h (1.8)
Hierin zijn:
• PN [W] hydraulisch vermogen;
• Q [m3/s] debiet;
• ρ [kg/m3] massedichtheid van de vloeistof;
• g [m/s2] de gravitatieconstante;
• ∆h [m] de opvoerhoogte;
3cijfers tussen ronde haken zijn verwijzingen naar een formule
1.8 Thruster werking 13
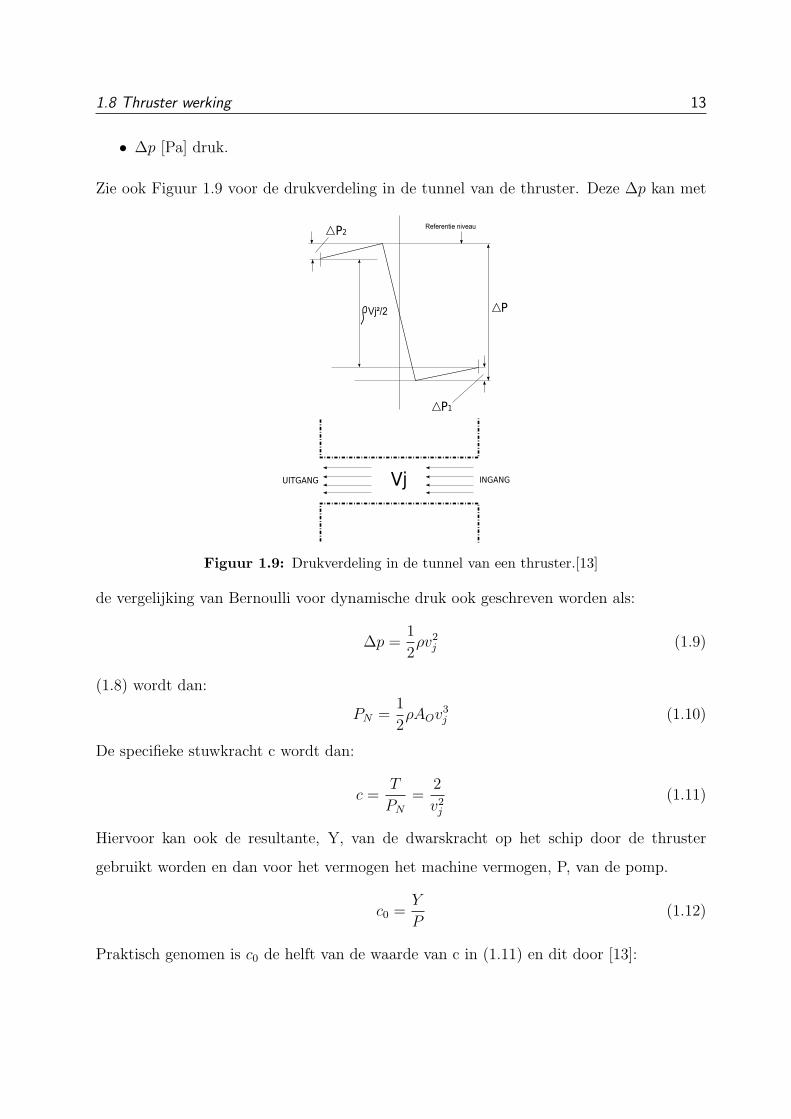
• ∆p [Pa] druk.
Zie ook Figuur 1.9 voor de drukverdeling in de tunnel van de thruster. Deze ∆p kan met
Figuur 1.9: Drukverdeling in de tunnel van een thruster.[13]
de vergelijking van Bernoulli voor dynamische druk ook geschreven worden als:
∆p =1
2ρv2
j (1.9)
(1.8) wordt dan:
PN =1
2ρAOv
3j (1.10)
De specifieke stuwkracht c wordt dan:
c =T
PN=
2
v2j
(1.11)
Hiervoor kan ook de resultante, Y, van de dwarskracht op het schip door de thruster
gebruikt worden en dan voor het vermogen het machine vermogen, P, van de pomp.
c0 =Y
P(1.12)
Praktisch genomen is c0 de helft van de waarde van c in (1.11) en dit door [13]:

1.8 Thruster werking 14
• ongelijkmatige stroming;
• propeller efficientie;
• wrijvings- en drukverliezen aan de tandwieloverbrengingen en aan de in- en uitgang
van de tunnel;
• verliezen door afscheiding van de stroming;
• efficientie van de motor en overbrenging.
Bovenstaande afleiding voor de specifieke stuwkracht c houdt geen rekeningen met verlie-
zen. J.W. English [14] heeft een uitvoerige analyse gemaakt waaruit blijkt dat in het ideale
geval van geen verliezen de totale stuwkracht gelijkwaardig verdeeld is tussen de schroef
en een zuigkracht die inwerkt op de romp. De schroef levert slechts de helft van de totale
stuwkracht. Vergelijking (1.14) is voor het ideale geval.
T = TS + TR (1.13)
ρAOv2j =
1
2ρAOv
2j +
1
2ρAOv
2j (1.14)
met
• TS de stuwkracht geleverd door de schroef;
• TR de stuwkracht geleverd door interactie met de romp.
In [11] wordt een formule gegeven voor het niet-ideale geval namelijk:
T =1
2ρAOv
2j +
1
2ρAOv
2j (ζingang + ζuitgang) (1.15)
Met ζingang en ζuitgang de verliezen aan in- en uitgang van de tunnel. Het nodige vermogen
kan dan op volgende manier geschreven worden:
P =12ρAOv
2j (1 + ζingang + ζuitgang)
ηp(1.16)
Met ηp het rendement van de pomp. [11] geeft enkele waarden voor ζ, deze zijn terug te
vinden in Bijlage A.

1.9 Schroefperformantie 15
1.9 Schroefperformantie
De gebruikelijke manier om het rendement van een propeller uit te drukken is met volgende
vergelijking [15]:
ηO =TVA2πnQ
=J
2π
KT
KQ
(1.17)
met
• T [N] de stuwkracht;
• VA [m/s] de aanstroomsnelheid van de propeller;
• n [1/s] het toerental;
• Q [Nm] het askoppel;
• J = VA
nDde snelheidsgraad met D de diameter van de schroef;
• KT = Tρn2D4 de stuwkrachtcoefficient;
• KQ = Qρn2D5 de askoppelcoefficient.
Deze vergelijking geeft het rendement van de schroef in open water. Dit rendement gaat
naar nul als de snelheidsgraad naar nul gaat. De schroef blijft weliswaar nog stuwkracht
produceren. Een andere manier is dus nodig om het rendement uit te drukken. Dit kan
met de paaltrekcoefficient C en de Bendemann factor ζ voor statische stuwkracht, als volgt
gedefinieerd:
C =T
PD
√T
ρAO=
K3/2T
π3/2KQ
(1.18)
ζ =KT
K2/3Q
1
π21/3(1.19)
De Bendemann factor vergelijkt de stuwkracht geleverd door de schroef ten op zichte
van de stuwkracht geleverd door de schroef in een ideale vloeistof. De factor is dan ook
maximaal gelijk aan 1. Bovenstaande vergelijkingen zijn afkomstig uit de impulstheorie

1.10 Literatuur Onderzoek 16
voor schroefwerking, zie [15], en kunnen in het ideale geval maximum C =√
2 en ζ = 1
worden voor schroeven zonder straalbuis. Wanneer de schroef in een straalbuis geplaatst
wordt kunnen deze coeffienten maximaal C = 2 en ζ = 3√
2 worden. Er bestaat volgende
relatie tussen de 2 coeffienten:
C = ζ3/2√
2 (1.20)
Opmerking:
In de literatuur is er discussie over de Bendemann factor,[9]. Strikt volgens de definitie
kan de factor niet groter worden dan de eenheid. Wanneer de factor toegepast wordt op
schroeven in een straalbuis zou deze moeten aangepast worden zodat ze maximaal 1 kan
worden. Dit wordt echter niet gedaan en men gebruikt in het algemeen de definitie van in
(1.19).
1.10 Literatuur Onderzoek
1.10.1 Inleiding
Historische ontwikkeling van de boegschroef
“The subject is, my Lords, the power of turning a ship so as to direct her head
to any given point, independently of rudder and sails - a desideratum so long
felt by practical seamen, and which, if possessed, would have prevented a long
list of disasters recorded in your annals ...”
Met deze woorden begon Foulerton zijn brief aan de Lords of the Admiralty in 1846 om
zijn idee van een laterale thruster te promoten. Hiermee was Foulerton de pionier.
De eerste praktische test met een installatie om het manoeuvreergedrag van een schip te
verbeteren was reeds in 1844 op het schip de Stockton Collier. Kort daarna volgde een
2e schip de Barge die uitgerust was met Foulerton’s “Ship Manoeuvrer”. Men zag toen al
het tactische voordeel van een schip met goede manoeuvreereigenschappen en rustte een
1.10 Literatuur Onderzoek 17
fregat, de St. Lawrence, uit met de Ship Manoeuvrer. De eerste testen werden uitgevoerd
op 24 mei 1845, “... the thirty-two points of the compass were then made in twenty-five
minutes by the winch handles only, against a tide of three miles an hour...” Op de officiele
testen bijgewoond door Admiral Sir Edward King, kon de St. Lawrence slechts gedraaid
worden over 23 punten van zijn kompas. De gekozen locatie was ongunstig op vlak van
wind en stroming. De proeven werden dan ook als mislukt beschouwd [9].
Figuur 1.10: Manoeuvrer
Tot de jaren 1880 was er geen interesse meer in boegschroeven, maar vanaf dan zijn er
verschillende patenten ingediend voor boegschroeven en andere installaties die het ma-
noeuvreren zouden verbeteren. De ene al beter dan de andere. Toch heeft het meer dan
een eeuw geduurd om vanaf Foulerton zijn eerste experimenten met de “Ship Manoeuvrer”
tot de praktische toepassing van boegschroeven te komen zoals we ze nu kennen. Men
meent dat dit toe te schrijven is aan het feit dat het idee van een boegschroef als ma-
noeuvreerhulp, bedacht is in een tijd waar men de nodige kennis en technologie nog niet
had om tot bevredigende resultaten te komen. Er was kennistekort over tandwielen voor
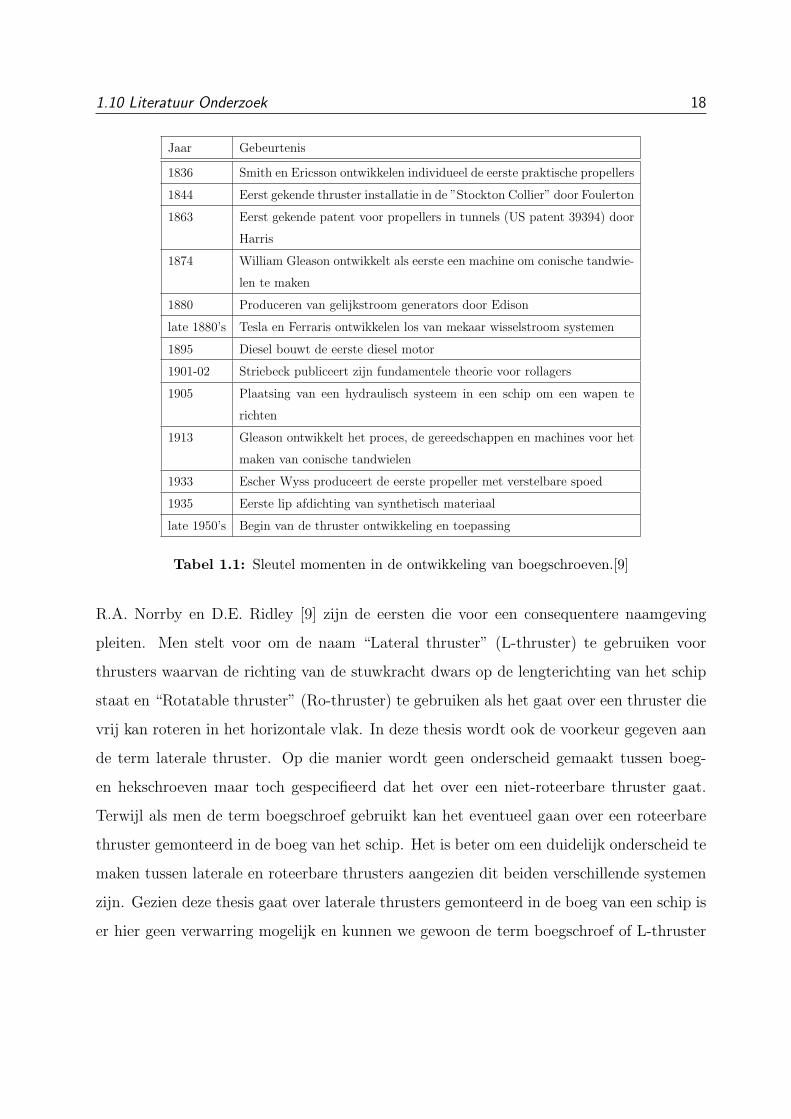
haakse overbrengingen, lageringen, afdichtingen en aandrijvingen. In Tabel 1.1 vindt u een
overzicht van de belangrijkste ontwikkelingen met betrekking tot boegschroeven.
Een overzicht van de gebruikte naamgeving voor thrusters die in de literatuur vaak terug
te vinden is staat in Tabel 1.2.
1.10 Literatuur Onderzoek 18
Jaar Gebeurtenis
1836 Smith en Ericsson ontwikkelen individueel de eerste praktische propellers
1844 Eerst gekende thruster installatie in de ”Stockton Collier” door Foulerton
1863 Eerst gekende patent voor propellers in tunnels (US patent 39394) door
Harris
1874 William Gleason ontwikkelt als eerste een machine om conische tandwie-
len te maken
1880 Produceren van gelijkstroom generators door Edison
late 1880’s Tesla en Ferraris ontwikkelen los van mekaar wisselstroom systemen
1895 Diesel bouwt de eerste diesel motor
1901-02 Striebeck publiceert zijn fundamentele theorie voor rollagers
1905 Plaatsing van een hydraulisch systeem in een schip om een wapen te
richten
1913 Gleason ontwikkelt het proces, de gereedschappen en machines voor het
maken van conische tandwielen
1933 Escher Wyss produceert de eerste propeller met verstelbare spoed
1935 Eerste lip afdichting van synthetisch materiaal
late 1950’s Begin van de thruster ontwikkeling en toepassing
Tabel 1.1: Sleutel momenten in de ontwikkeling van boegschroeven.[9]
R.A. Norrby en D.E. Ridley [9] zijn de eersten die voor een consequentere naamgeving
pleiten. Men stelt voor om de naam “Lateral thruster” (L-thruster) te gebruiken voor
thrusters waarvan de richting van de stuwkracht dwars op de lengterichting van het schip
staat en “Rotatable thruster” (Ro-thruster) te gebruiken als het gaat over een thruster die
vrij kan roteren in het horizontale vlak. In deze thesis wordt ook de voorkeur gegeven aan
de term laterale thruster. Op die manier wordt geen onderscheid gemaakt tussen boeg-
en hekschroeven maar toch gespecifieerd dat het over een niet-roteerbare thruster gaat.
Terwijl als men de term boegschroef gebruikt kan het eventueel gaan over een roteerbare
thruster gemonteerd in de boeg van het schip. Het is beter om een duidelijk onderscheid te
maken tussen laterale en roteerbare thrusters aangezien dit beiden verschillende systemen
zijn. Gezien deze thesis gaat over laterale thrusters gemonteerd in de boeg van een schip is
er hier geen verwarring mogelijk en kunnen we gewoon de term boegschroef of L-thruster

1.10 Literatuur Onderzoek 19
gebruiken. Bij gebruik van een ander systeem zal dit steeds duidelijk vermeld worden.
Athwartship Thrust Direction Arbitrary Horizontal Thrust Direction
Athwartship Bow Steering Propeller Azimuth Thruster
Bow Jets Maneuvering Propeller
Bow Propeller Multi-Directional Thruster
Bow Steering Propeller Rotatable Thruster
Bow Thruster Steerable Thruster
Lateral Thrust Unit Swinging Propeller
Lateral Thruster Swivel Thruster
Lateral Thrusting Bow Propeller
Manoeuvrer
Rigth-Angle Steering Propeller
Ship Steering Propeller
Side Thruster
Steering Propeller
Stern Thruster
Transverse Bow Thruster
Tunnel Thruster
Tabel 1.2: Verschillende namen voor thrusters.[9]
1.10.2 Relevante werken
In de literatuur is het aantal werken over boegschroeven dun bezaaid. Bovendien is de
literatuur vaak gedateerd of niet vrij beschikbaar, vandaar de noodzaak aan nieuw on-
derzoek. Een klein overzicht van hetgeen men in de literatuur terugvindt in verband met
boegschroeven.
J.S. Carlton heeft in zijn boek Marine Propellers and Propulsion een hoofdstuk geschreven
over “Transverse and azimuthing thrusters”[4]. Hij splitst het ontwerpproces op in volgende
onderdelen:
1. Bepalen van de nodige hoeveelheid stuwkracht, dus vermogen van de thruster eenheid;
2. Ontwerpen van een geschikte geometrie.

1.10 Literatuur Onderzoek 20
Bepalen van de nodige hoeveelheid stuwkracht Hiervoor worden 2 methoden ge-
geven. De eerste methode bepaalt het vermogen op basis van uitvoerige berekeningen,
modeltesten van scheepsweerstand (lateraal en rotationeel, eventueel bij een range van
stromingen), metingen van de windweerstand, . . . . Dit vraagt een grote inspanning en
de nodige financien. Daarom stelt Carlton een 2e methode voor die gebaseerd is op een
pseudo-empirische formulering van het manoeuvreerprobleem gekoppeld aan ervaringsge-
gevens met gelijkaardige schepen. Het vertrekpunt is volgende vergelijking:
Jpd2ψ
dt2= MH +MW +MP (1.21)
Hierin zijn:
• Jp [kg.m2] het polair traagheidsmoment van het schip;
• d2ψdt2
[rad/s2] de rotatieversnelling van het schip;
• MH [N.m] het hydrodynamische moment uitgeoefend op het schip;
• MW [N.m] een koppel teweeggebracht door de wind op het schip;
• MP [N.m] het moment geproduceerd door de thruster.
Wanneer men in een toestand van stationair gieren verkeert, valt het linkerlid van verge-
lijking (1.21) weg. Men stelt dan voor dat het hydrodynamische moment MH een functie
is van (ψ)2, MW een functie is van sin(2ψ) en MP een constante is. Vergelijking (1.21)
wordt nu:
k1(dψ
dt)2 + k2sin(2ψ) + k3 = 0 (1.22)
met
• k1 = 12ρWAUL
3CMW
• k2 = 12ρAAALV
2WCMAmax

1.10 Literatuur Onderzoek 21
Hier zijn ρW [kg/m3] en ρA [kg/m3] respectievelijk de densiteit van (zee)water en lucht,
AU [m2] en AA [m2] respectievelijk de laterale oppervlaktes van het schip onder en boven
water, L [m] de lengte van het schip, VW [m/s] de windsnelheid, CMW en CMAmax zijn de
respectievelijke water en maximale wind moment coeffienten. Vergelijking (1.22) kan nu
als volgt geschreven worden:
dψ
dt= −
√k2sin(2ψ) + k3
k1
(1.23)
Men kan hieruit makkelijk de tijd bepalen die nodig is om het schip 90◦ te laten draaien
als volgt:
t90◦ =
∫ π/2
0
dt
dψdψ (1.24)
Figuur 1.11 geeft opgemeten rotatiesnelheden weer in functie van het deplacement die als
acceptabel beschouwd worden.
Figuur 1.11: Rotatiesnelheid vs. deplacement.[4]
Ontwerpen van een geschikte geometrie Eenmaal het vermogen van de boegschroef
bepaald is kan men beginnen met het bepalen van de geometrie. Voor het bepalen van
de schroefgeometrie worden resultaten gegeven van proeven uitgevoerd door Taniguchi, zie
Figuur 1.12 met:
• d de diameter van de hub, dit is de diameter van de aandrijfinrichting van de schroef
die zich aan de naaf bevindt;
• CF de coeffient van de kracht op de romp uitgeoefend door het water;

1.10 Literatuur Onderzoek 22
• Ae/AO de verhouding van geexpandeerde oppervlakte tot de oppervlakte van de
schroefschijf;
• z het aantal schroefbladen.
(a) effect van Ae/AO (b) effect van het aantal schroefbla-
den
(c) effect van de bladvorm (d) effect van de hub diameter
Figuur 1.12: Test data van CPP thrusters.[4]
De effecten van cavitatie kunnen gezien worden in Figuur 1.13. Naast het selecteren van
een gepaste schroef is ook de plaats van de boegschroef in de romp en de geometrie van
de romp een belangrijk aspect. Op Figuur 1.14 zijn grafieken te zien van proeven met een
variabele geometrie van de romp

1.10 Literatuur Onderzoek 23
Figuur 1.13: Effecten van cavitatie op boegschroeven.[4]
(a) invloed tunnel lengte (b) effect van inzinking van de
schroef
(c) effect van de geometrie van de tun-
nel ingang
(d) effect van de hellingsgraad van de
romp
Figuur 1.14: Effecten van de tunnel locatie, afronding van de tunnel ingang en vorm van de
romp op modelschaal.[4]
M.S. Chislett en O. Bjorheden hebben de invloed van voorwaartse snelheid op de effec-
tiviteit van een laterale thruster bestudeerd [16]. Ze hebben testen gedaan op een model
van een tanker (60,000 ton deadweight) die uitgerust was met een laterale thruster. Hun

1.10 Literatuur Onderzoek 24
bevindingen waren dat de kracht en moment bij nulsnelheid opgewekt door de boegschroef
exact evenredig is met het kwadraat van het toerental van de propeller. De effectiviteit
van de boegschroef zakt tot een minimum wanneer het schip snelheid begint te maken om
vervolgens bij toenemende snelheid zich te herstellen. Zie Figuur 1.15.
Figuur 1.15: Resultaten metingen van Chislett.[16]
Er wordt hiervoor een fysische verklaring gegeven. De jet die gemaakt wordt door de boeg-
schroef zorgt voor interactie met de romp. Dit leidt tot het ontstaan van een tegenwerkende
zuigkracht op de romp waarvan het aangrijpingspunt zich snel naar achter verplaatst wan-
neer de snelheid van het schip toeneemt. Deze interactie ontstaat door het afbuigen van
de jet ontwikkeld door de thruster, zie Figuur 1.16.
Figuur 1.16: Illustratie afbuigen thruster jet.[16]

1.10 Literatuur Onderzoek 25
Door het afbuigen van de jet vormt zich een lage druk zone vlak achter de thruster. Het
is op deze zone dat een zuigbuis (verder afgekort tot AST - Anti Suction Tunnel) inspeelt.
Op Figuur 1.17 is te zien hoe een AST werkt en zijn tevens de resultaten te zien van een
AST bij een ferry en sleepboot.
Figuur 1.17: Illustratie AST.[4]
Tabel 1.3 geeft de mogelijke verbetering in performantie wanneer men een AST plaatst in
de boeg [8]:
Voorwaartse snelheid [kn] 0 2 4 6 8
Verbetering [%] 0 20 40 54 50
Tabel 1.3: AST performantie.[8]
J.W. English en B.N. Steele hebben het effect van verlies aan performantie van een late-
rale thruster onderzocht bij voorwaartse snelheid en bij gebruik naast een kaaimuur [17].
Hiervoor werd gebruik gemaakt van data uit de aerodynamica en modelproeven uitgevoerd

1.10 Literatuur Onderzoek 26
in het National Physics Laboratory in Groot-Brittannie. Aan de hand van de gekende de-
finities van KT en KQ wordt de stuwkracht berekend op basis van vermogen en diameter
van de eenheid.
T = C(PD)2/3 (1.25)
met
• T de stuwkracht in lbs;
• C een constante;
• P het vermogen in HP;
• D de diameter van de schroef in ft.
Deze formule is echter ontoereikend om de stuwkracht te voorspellen bij een schip dat
vaart. Ze introduceren de snelheidsratio m die de verhouding is van de jet snelheid tot de
voorwaartse snelheid van het schip:
m =VJV
(1.26)
Deze parameter is een handige manier om het afbuigen van de jet voor te stellen. De expe-
rimenten werden uitgevoerd bij verschillende waarden voor m. Er werd gebruik gemaakt
van drukmetingen om de zuigkracht, zie Chislett et al [16], en dus het verlies aan effectivi-
teit, te begroten. Er werd geconcludeerd dat een uitgestrekte lage drukzone zich achter de
thruster bevindt en dat de effectiviteit van een thruster nabij een kaaimuur sterk aangetast
wordt. Zie Figuur 1.18 voor een afbeelding van de resultaten van de drukmetingen.

1.10 Literatuur Onderzoek 27
Figuur 1.18: Drukmetingen [17].
Opmerking:
• De snelheidsratio m gedefinieerd zoals in (1.26) wordt oneindig groot wanneer het
schip stil ligt. Daarom wordt in latere werken m steeds op volgende wijze gedefinieerd:
m =V
VJ(1.27)
• De gebruikte proefopstelling was zeer eenvoudig. Hierdoor werd de complexe 3 di-
mensionale vorm die een schip kan aannemen sterk vereenvoudigd. English en Steele
erkennen dit ook en maken de aanbeveling om een modelschip uit te rusten met een
boegschroef.
J.W. English heeft het krachtenspel van een laterale thruster geanalyseerd [14]. Hij kwam
tot de conclusie dat een diffunderende thruster meer stuwkracht zou kunnen leveren. Dit
is praktisch niet mogelijk om meerdere redenen:
1. Een diffusieproces is vaak niet efficient.

1.10 Literatuur Onderzoek 28
2. De opening in de romp zou groter uitvallen en leiden tot meer weerstand.
3. Aan de zuigzijde zou de druk te veel dalen en cavitatie op de schroef sterk in de hand
werken.
Hieruit leidde English af dat een rechte cilindrische tunnel de beste keuze is. Op deze manier
wordt de kracht geleverd door de laterale thruster evenredig verdeeld in een kracht geleverd
door de schroef en een zuigkracht op de romp. Het belang van een goed ontworpen tunnel
geometrie komt hier naar voor. De romp levert een belangrijke bijdrage tot de kracht
geleverd door de thruster en het afronden van tunnel openingen is hier een belangrijke
factor in. English toont aan dat het combineren van weinig extra scheepsweerstand en
goede thruster werking niet goed samen gaan. Het aanbrengen van deuren om de tunnel
openingen af te sluiten wordt dan ook aanbevolen. Een andere oplossing is het aanbrengen
van een conische afronding van de achterste helft van de tunnel opening om de weerstand
te verminderen.
Figuur 1.19: Conische afronding
J.W. English heeft ook verder onderzoek verricht naar het verlies van stuwkracht bij voor-
waartse snelheid gebaseerd op modelproeven en data van een schip op ware grootte [18].
Hij concludeert dat het reduceren van de tunneldiameter een gunstig effect heeft op het
verlies van de stuwkracht bij voorwaartse snelheid, weliswaar ten koste van minder stuw-
kracht bij nulsnelheid. Het plaatsen van de tunnel zo dicht mogelijk bij het basisvlak heeft
een positieve invloed op de stuwkracht bij voorwaartse snelheid. Dit is tevens gunstig uit
het standpunt van cavitatie. De tunnel openingen moeten een afronding hebben die min-
stens 10% bedraagt van de tunneldiameter. Om de toename van de scheepsweerstand te
beperken kan men deuren plaatsen om de tunnel af te sluiten. Het conisch afronden van de

1.10 Literatuur Onderzoek 29
achterste helft van de tunnel opening is een alternatief voor tunnel deuren. Het gebruik van
contra-roterende propellers wordt aangeraden omdat deze bij een kleinere tunnel diameter
dezelfde hoeveelheid stuwkracht kunnen leveren. Door een kleinere tunneldiameter wordt
de snelheidsratio m = VVJ
kleiner en vermindert de tegenwerkende zuigkracht. De propeller
moet zich ten minste 1 tunneldiameter onder water bevinden om een gunstige instroom
te kunnen krijgen. De afstand tussen de kaaimuur en de uitgang van een laterale thruster
bedraagt minimaal 2 tunneldiameters om geen stuwkracht te verliezen.
R.A. Norrby en D.E. Ridley hebben een samenvattend werk gemaakt over laterale en
roteerbare thrusters in 1980 [9]. Ze bespreken zowel het mechanische als het hydrodyna-
mische aspect van thrusters. Gebaseerd op resultaten van experimenten met schroeven
uitgevoerd in het Nagasaki Technical Institute concluderen ze dat een 4-bladige schroef
van het KAPLAN type in een rechte cilindrische tunnel de voorkeur draagt.
Figuur 1.20: Schroeftypes [9].
G.R. Stuntz en R.J. Taylor hebben de invloed van laterale thrusters op de scheepsweer-
stand onderzocht [19]. Ze hebben hiervoor meerdere modelproeven gedaan met verschillen-
de configuraties van de tunnel openingen. Het aanbrengen van een raster voor de tunnel
openingen heeft een gunstige invloed op de scheepsweerstand. Op basis van hun experi-

1.10 Literatuur Onderzoek 30
menten geven ze een gemiddelde waarde voor de extra weerstand door de tunnel:
Ctunnel = 0.07 (1.28)
Rtunnel =1
2CtunnelρAOV
2 (1.29)
met
• ρ de massadichtheid van water, 1.9905 slugs/ft3 voor zeewater aan 59◦ F;
• AO de dwarse oppervlakte van de tunnel opening in sq ft;
• V 2 = (1.689Vknots)2, de scheepssnelheid in ft/s.
Er zijn ook testen uitgevoerd naar het verlies aan stuwkracht bij voorwaartse snelheid.
Men heeft slechts een verlies vastgesteld van 7% aan stuwkracht tussen 0 en 3 knoop.
Opmerkingen:
• Men heeft 2 tunnel configuraties getest, namelijk A en B. Wanneer de testen met
configuratie B gedaan waren en men het schip terug ombouwde naar configuratie A
kon men niet meer dezelfde resultaten produceren als voorheen met configuratie A.
Dit schrijft men toe aan instabiele afscheiding van de stroming aan de tunnel opening.
• Bij de testen voor het verlies aan stuwkracht werd gebruik gemaakt van een onvolledig
scheepsmodel, enkel de boeg sectie. Het is mogelijk dat hierdoor de testen andere
resultaten geven dan met volledige scheepsmodellen.
D.E. Ridley heeft onderzoek verricht naar het effect van de tunnel ingang configuratie op
de performantie van de thruster [20]. Volgende formule berekent de stuwkracht in functie
van onder andere de rotatiesnelheid:
kTT =1
2CHρAU [
LPP2
]2ψ2 (1.30)
met

1.10 Literatuur Onderzoek 31
• k de afstand vanuit het midden van het schip gedeeld door LPP ;
• TT de stuwkracht in lb;
• CH rotationele hydrodynamische weerstandscoeffient
CH = (0.30− 0.0023)LPP
T;
• LPP de lengte tussen de loodlijnen in ft;
• T de diepgang in ft;
• ρ de massadichtheid in lb sec2/ft4;
• AU de onderwater laterale oppervlakte in sq ft
AU = LPP × T
• ψ de steady-state rotatiesnelheid in rad/sec.
Deze formule geeft waarden voor de stuwkracht van een tunnelconfiguratie met scherpe
randen. Data van schepen op ware grootte met afgeronde tunnel ingangen wordt hiertegen
vergeleken. Zijn conclusies zijn dat het afronden van de tunnel ingang een gunstige invloed
heeft. Een conische afronding gunstig is voor de stuwkracht en de scheepsweerstand. Het
effect van de tunnel ingang op de scheepsweerstand kan door middel van stromingsstudies
voorspeld worden.
J.L Beveridge geeft een overzicht van de toen voorhanden kennis in verband met boeg-
schroeven (1972) [21]. Beveridge geeft een methode om een laterale thruster te selecteren.
De methode bestaat uit 6 stappen.
Vertrek van een schip met volgende afmetingen:
• ∆ = 3× 103 ton;
• L = 83.82 meter;
• B = 16.46 meter;

1.10 Literatuur Onderzoek 32
• H = 5.18 meter;
Er is een tunnellengte van l = 3.66 meter beschikbaar op afstand 0.15L. Aan een
snelheid van 3 knoop moet het schip nog 80% van het effectieve draaimoment
aan nulsnelheid hebben. Volgende stappen worden doorlopen:
1. Stel de tunneldiameter gelijk aan D = 12l = 1.83 meter. Het middel-
punt van de tunnel bevindt zich op een afstand I = D van het basisvlak.
Veronderstel dat de diameter nog kan varieren tussen Dmax = 2.44 m en
Dmin = 1.22 m; S is de afstand van het wateroppervlak tot het middelpunt
van de tunnel. Bekijk volgende tabel met gegevens:
D [m] I [m] S [m] l/D
2.44 2.44 2.74 1.5
1.83 1.83 3.35 2
1.22 1.22 3.96 3
Tabel 1.4: Voorbeeld thruster selectie.
2. Kies uit Figuur 1.11 op pagina 21 een rotatiesnelheid die overeenkomt
met het deplacement, neem bijvoorbeeld ω = 0.68 graden/sec. De nodige
stuwkracht wordt dan:
TT =ωL3H
XM2= 7883.44kg (1.31)
Met een waarde voor M = 97 afkomstig uit Figuur 1.21 . Omdat Figuur
1.21 gebaseerd is op angelsaksische eenheden moet M nog vermenigvuldigd
worden met een factor X = 0.1379.
3. Bereken de jetsnelheid:
VJ =
√TTρAO
= 9.8013/D (1.32)
Voor een snelheid van 3 knoop geeft dit volgende tabel:
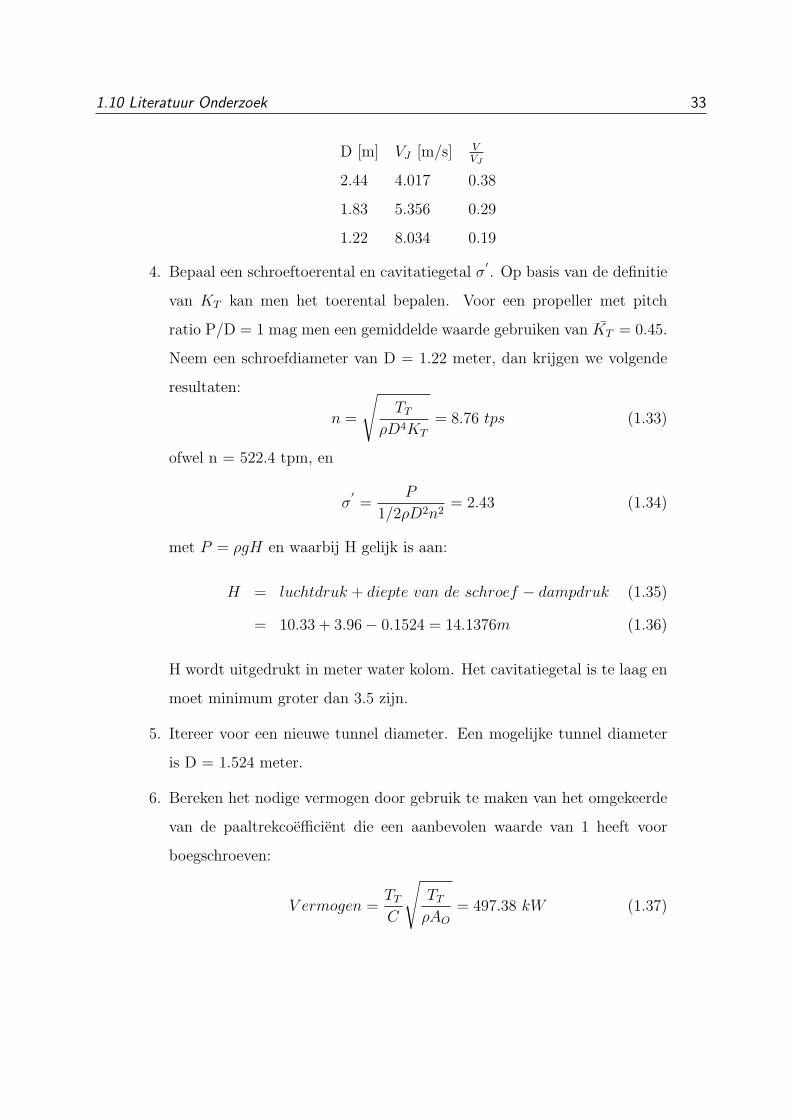
1.10 Literatuur Onderzoek 33
D [m] VJ [m/s] VVJ
2.44 4.017 0.38
1.83 5.356 0.29
1.22 8.034 0.19
4. Bepaal een schroeftoerental en cavitatiegetal σ′. Op basis van de definitie
van KT kan men het toerental bepalen. Voor een propeller met pitch
ratio P/D = 1 mag men een gemiddelde waarde gebruiken van KT = 0.45.
Neem een schroefdiameter van D = 1.22 meter, dan krijgen we volgende
resultaten:
n =
√TT
ρD4KT
= 8.76 tps (1.33)
ofwel n = 522.4 tpm, en
σ′=
P
1/2ρD2n2= 2.43 (1.34)
met P = ρgH en waarbij H gelijk is aan:
H = luchtdruk + diepte van de schroef − dampdruk (1.35)
= 10.33 + 3.96− 0.1524 = 14.1376m (1.36)
H wordt uitgedrukt in meter water kolom. Het cavitatiegetal is te laag en
moet minimum groter dan 3.5 zijn.
5. Itereer voor een nieuwe tunnel diameter. Een mogelijke tunnel diameter
is D = 1.524 meter.
6. Bereken het nodige vermogen door gebruik te maken van het omgekeerde
van de paaltrekcoefficient die een aanbevolen waarde van 1 heeft voor
boegschroeven:
V ermogen =TTC
√TTρAO
= 497.38 kW (1.37)

1.10 Literatuur Onderzoek 34
Figuur 1.21: Draaipunt en rotatie snelheidsconstante [21].
D.E. Ridley heeft de performantie van thrusters bij voorwaartse snelheid vergeleken bij
schepen op ware grootte met model data [12]. Hij gebruikt daarvoor de rotatiesnelheid die
hij vergelijkt met de rotatiesnelheid wanneer het schip stilligt. De data van de modelproe-
ven worden gebruikt in volgende formule om rotatiesnelheden mee te berekenen:
ψ =F (p− a cosδ)±N
M ′vcga cos(β)(1.38)
met:
• ψ [rad/s] de rotatiesnelheid;
• F [N] de normaalkracht op het roer;
• p [m] de afstand tussen de kracht F en het zwaartepunt van het schip;
• a [m] de afstand tussen het aangrijpingspunt van de hydrodynamische krachten tot
het zwaartepunt van het schip;
• δ [rad] de roerhoek;
• vcg [m/s] de snelheid van het zwaartepunt;

1.10 Literatuur Onderzoek 35
• M′[kg] de massa van het schip plus de toegevoegde massa van het water;
• N [N.m] een extra moment, bijvoorbeeld door de boegschroef.
• β [rad] de drifthoek
Door vergelijken van de data van de modellen met de data op ware grootte besluit Ridley
dat er een goeie correlatie bestaat tussen de beide. Verder besluit hij dat een laterale
thruster zeer effectief is bij het achteruit varen en dat de positie van de thrustereenheid
best zo ver mogelijk voorwaarts ligt omdat:
• De krachtsarm groter wordt waardoor het moment groter wordt.
• Bij achteruit varen wordt er een kleiner stuk van de romp blootgesteld aan de tegen-
werkende zuigkracht.
Verder concludeert hij nog dat het effect van het gecombineerd gebruik van roer en thruster
additief is.
Opmerking:
Ridley baseert zich voor dit artikel op gegevens van 7 schepen maar er wordt nergens
vermeld welke schepen dit zijn, hun karakteristieken en hoe men deze data heeft verzameld.
W. Becker heeft een samenvattend werk gemaakt over thrusters (1993)[13]. Hij hanteert
een eenvoudige formule om de rotatiesnelheid te berekenen:
ψ = k
√TT
ρL3PPT
(1.39)
met:
• ψ[◦/s] de rotatiesnelheid;
• TT [N] de stuwkracht van de thruster;
• LPP [m] de lengte tussen de loodlijnen;

1.10 Literatuur Onderzoek 36
• T [m] de diepgang;
• ρ [kg/m3] de densiteit van de vloeistof;
• k [◦] een constante in graden afhankelijk van de vorm van het voorschip:
– k = 190 graden als gemiddelde waarde;
– k = 160 graden voor slanke schepen, schepen met 2 roeren en laterale thrusters
op grote afstanden van de loodlijnen;
– k = 220 graden voor schepen met het roer in het midden of een doodhout, volle
schepen met laterale thrusters nabij de loodlijnen.
Maak gebruik van volgende formule:
f(N/m2) =TT
LPPT(1.40)
Hiermee is (1.39) nu als volgt te schrijven:
ψ =k
LPP
√f
ρ(1.41)
Figuur 1.22 toont een overzicht van rotatiesnelheden van verschillende schepen.
Figuur 1.22: Laterale thruster design diagram.[13]
Volgende relaties bestaan:
TT ∼ n2 (1.42)
1.10 Literatuur Onderzoek 37
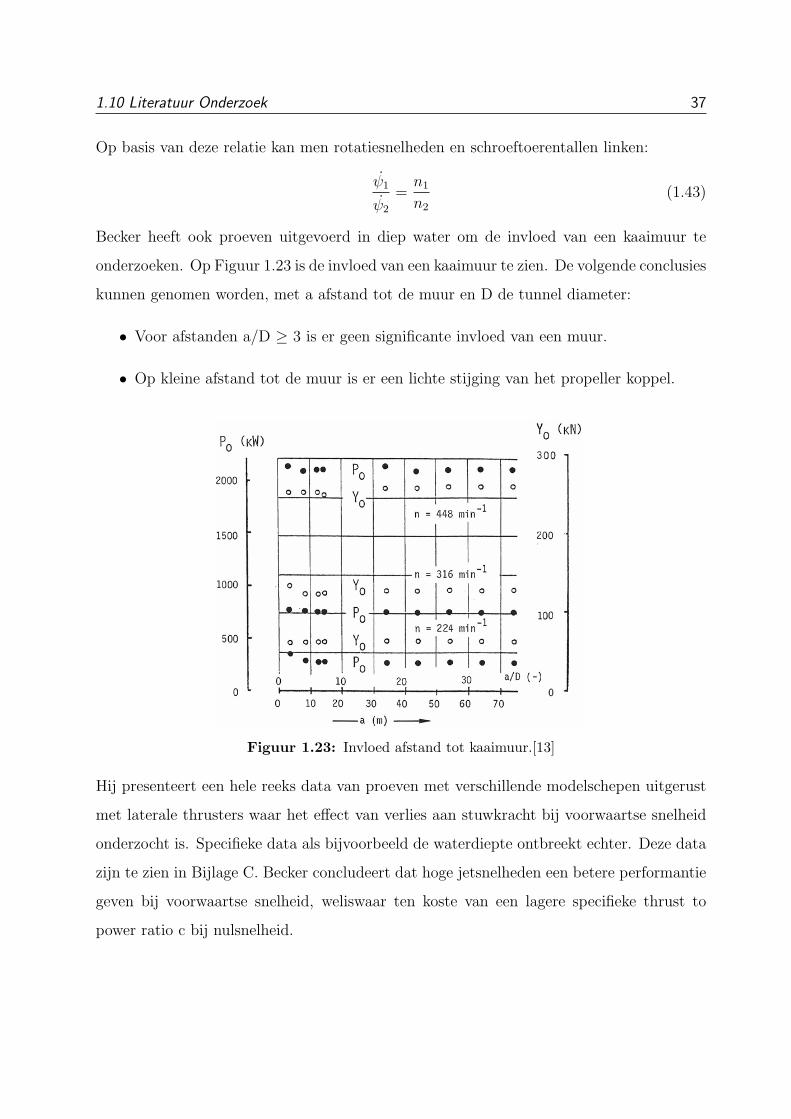
Op basis van deze relatie kan men rotatiesnelheden en schroeftoerentallen linken:
ψ1
ψ2
=n1
n2
(1.43)
Becker heeft ook proeven uitgevoerd in diep water om de invloed van een kaaimuur te
onderzoeken. Op Figuur 1.23 is de invloed van een kaaimuur te zien. De volgende conclusies
kunnen genomen worden, met a afstand tot de muur en D de tunnel diameter:
• Voor afstanden a/D ≥ 3 is er geen significante invloed van een muur.
• Op kleine afstand tot de muur is er een lichte stijging van het propeller koppel.
Figuur 1.23: Invloed afstand tot kaaimuur.[13]
Hij presenteert een hele reeks data van proeven met verschillende modelschepen uitgerust
met laterale thrusters waar het effect van verlies aan stuwkracht bij voorwaartse snelheid
onderzocht is. Specifieke data als bijvoorbeeld de waterdiepte ontbreekt echter. Deze data
zijn te zien in Bijlage C. Becker concludeert dat hoge jetsnelheden een betere performantie
geven bij voorwaartse snelheid, weliswaar ten koste van een lagere specifieke thrust to
power ratio c bij nulsnelheid.

1.10 Literatuur Onderzoek 38
Hij besluit dat je de krachten van de thruster mag superponeren wanneer het schip met
een drifthoek β vaart. De kracht van de thruster zonder drifthoek kan opgeteld worden bij
de hydrodynamische krachten van het schip dat met een drifthoek vaart.
Figuur 1.24: Invloed drifthoek.[13]
Verder geeft Becker de opmerking dat het uitvoeren van modelproeven met betrekking tot
laterale thrusters steeds op volledige scheepsmodellen moeten uitgevoerd worden.
Volgende artikels zijn minder uitgebreid besproken omdat enkel het abstract beschikbaar
was.
K. Maekawa, K. Kijima en K. Karasuno hebben een methode ontwikkeld om de invloed
van voorwaartse snelheid op de performantie van een laterale thruster bij een vissersschip
te voorspellen [22]. K. Kijima en T. Hirakawa hebben een functie ontwikkeld om theo-
retisch de invloed van voorwaartse snelheid op de performantie van laterale thrusters te
schatten [23]. M. Endo en K. Yokoi hebben modelproeven uitgevoerd op het trainings-
schip WAKASHIO-MARU IV waar een boeg- en hekschroef in werd geınstalleerd [24]. Ze
bespreken de data van de modelproeven en een hydrodynamisch mathematisch model van
laterale thrusters. D.-a. Sheng, X.-n Ma en H.-b Mao hebben berekeningen gemaakt in
verband met het manoeuvreergedrag van grote schepen uitgerust met laterale thrusters

1.10 Literatuur Onderzoek 39
[25]. Ze hebben 2 mathematische modellen gemaakt, een met 3 vrijheidsgraden en een met
2 vrijheidsgraden. K. Kijima en Y. Furukawa hebben een methode om de performantie
van laterale thrusters bij een offshore platform te schatten aangepast aan het gebruik bij
schepen [26]. J.O. Flower heeft een methode ontwikkeld om het draaien van schepen met
laterale thrusters bij nulsnelheid mathematisch te beschrijven [27].

METINGEN 40
Hoofdstuk 2
Metingen
2.1 Inleiding
In het kader van deze thesis werden er modelproeven uitgevoerd met de sleeptank van het
Waterbouwkundig Laboratorium (verder afgekort tot WL)1 te Borgerhout. Deze instel-
ling bestaat al sinds 1933 en werd opgericht als onderdeel van de Antwerpse Zeediensten.
Het doel was inzicht te verwerven over de invloed van baggerwerken op de diepten in de
Schelderivier en over de invloed van getijstromingen in het Scheldebekken. Later werd dit
uitgebreid tot onderzoeken in verband met andere rivieren en hydraulische constructies. In
1987 werd een sectie Nautische studies opgericht waarbij het onderzoek werd toegespitst
op de manoeuvreerbaarheid van schepen.
1Het WL is een afdeling van het Departement Mobiliteit en Openbare Werken van de Vlaamse Overheid
Waterbouwkundig Laboratorium
Berchemlei 115
B-2140 Antwerpen
http://watlab.lin.vlaanderen.be/

2.1 Inleiding 41
2.1.1 Sleeptank
Een sleeptank is simpel voorgesteld een groot lang rechthoekig bassin met water waar men
met een scheepsmodel proeven kan in doen, zie Figuur 2.1. Deze proeven zijn meestal
gedwongen proeven. Dit wil zeggen dat via een uitwendig mechanisme, de sleepwagen,
een bepaald traject wordt opgelegd aan het model en de krachten die daartoe nodig zijn
worden opgemeten. Dit opgelegde traject wordt zodanig gekozen dat tijdens een proef een
of meerdere parameters worden gewijzigd, terwijl de andere parameters constant worden
gehouden. Op deze manier kan de invloed van de interactie tussen 2 parameters nagegaan
worden.
2.1.2 Modelproeven
Modelproeven zijn goed ingeburgerd in de scheepshydrodynamica. Het is een efficient mid-
del om op kwalitatieve wijze inzicht te krijgen in de complexe hydrodynamica van schepen.
Er zijn tegenwoordig weliswaar krachtige CFD (Computational Fluid Dynamics) pakket-
ten op de markt maar omdat er zoveel parameters in rekening te brengen zijn en omdat
berekeningen nog steeds moeten bevestigd worden door waarnemingen in de realiteit, zijn
modelproeven tot op de dag vandaag nog steeds een vast gebruik.
In een sleeptank wordt aan een scheepsmodel een gedwongen beweging opgelegd. Dit
model is perfect geometrisch gelijkvormig aan een bepaald schip op ware grootte. Het
scheepsmodel is uitgerust met tal van krachten- en positiemeters zodat men dan aan de
hand van de verkregen data een model kan opstellen. Men kan met de modelwetten de
gemeten data omzetten naar krachten, snelheden, tijden, . . . , in realiteit, weliswaar met de
gekende correlatie problemen omdat men niet tegelijk aan de wet van Froude en de wet van
Reynolds kan voldoen. Zie Bijlage B voor verdere uitleg en een uitgebreide dimensieanalyse.
2.2 Beschrijving van de apparatuur 42
2.2 Beschrijving van de apparatuur
2.2.1 Sleeptank van het Waterbouwkundig Laboratorium
Figuur 2.1: Sleeptank Waterbouwkundig Laboratorium.[28]
Het WL beschikt over een scheepsmanoeuvreertank die ter beschikking stond voor deze
thesis. Deze sleeptank wordt voornamelijk gebruikt voor manoeuvreerproblemen en on-
derzoek naar het gedrag van schepen in ondiep water. Dit onderzoek spitst zich onder
andere toe op de volgende onderwerpen:
• bepalen van wiskundige modellen ten behoeve van manoeuvreersimulatie door ge-
dwongen manoeuvreerproeven (voornamelijk manoeuvres met lage snelheid);
• manoeuvres in beperkte wateren;
• gedwongen zeegangproeven;
• invloed van schip-schip interactie;
• nautische bodem;
• oeverzuigingseffecten.

2.2 Beschrijving van de apparatuur 43
De tank van het WL heeft de volgende karakteristieken [28]:
• lengte: 88 m, (67 m voor proeven), breedte: 7 m;
• de waterdiepte is beperkt tot 0.5 m;
• de lengte van de scheepsmodellen is ongeveer 4 m (schaal 1:50 tot 1:85);
• de sleepwagen beweegt over de lengte van de tank, het planar motion mechanisme,
bestaande uit een dwarswagen en een draaitafel, laat dwarsverplaatsingen over 5.5 m
en verdraaiingen over 355◦ toe;
• een scheepsmodel dat met dit mechanisme verbonden is, wordt gedwongen een op-
gegeven traject in het horizontale vlak te volgen. In verticale zin kan het model zich
vrij bewegen;
• een golfgenerator kan zowel regelmatige als onregelmatige golven opwekken, om de
verticale bewegingen te bestuderen die een schip uitvoert onder invloed van golven;
• de uitrusting wordt gestuurd door een boordcomputer. Het stuursysteem laat een
onbemande werking toe (24 uur op 24, 7 dagen op 7);
• een hulpwagentje kan een tweede scheepsmodel volgens een rechte koers voortbewe-
gen (bepaling van de krachten op een schip bij ontmoetende en oplopende vreemde
schepen).
Op Figuur 2.2 zijn de belangrijkste afmetingen van de sleeptank van het WL te zien. Aan
het begin van de tank heb je een haven om makkelijk aan de modellen te kunnen werken.
De tank is uitgevoerd in gewapend beton en gefundeerd op de wanden van de waterreser-
voirs, die in de proefhal de vloer ondersteunen. De bodem van de tank is zo vlak mogelijk
gemaakt: de tolerantie bedraagt ± 1 mm. Zeker voor zeer ondiep water is deze vlak-
heid van groot belang. Op de randen van de sleeptank werden twee rails aangebracht,
die nauwkeurig werden uitgelijnd. Het gaat om een looprail en een geleidingsrail waarop
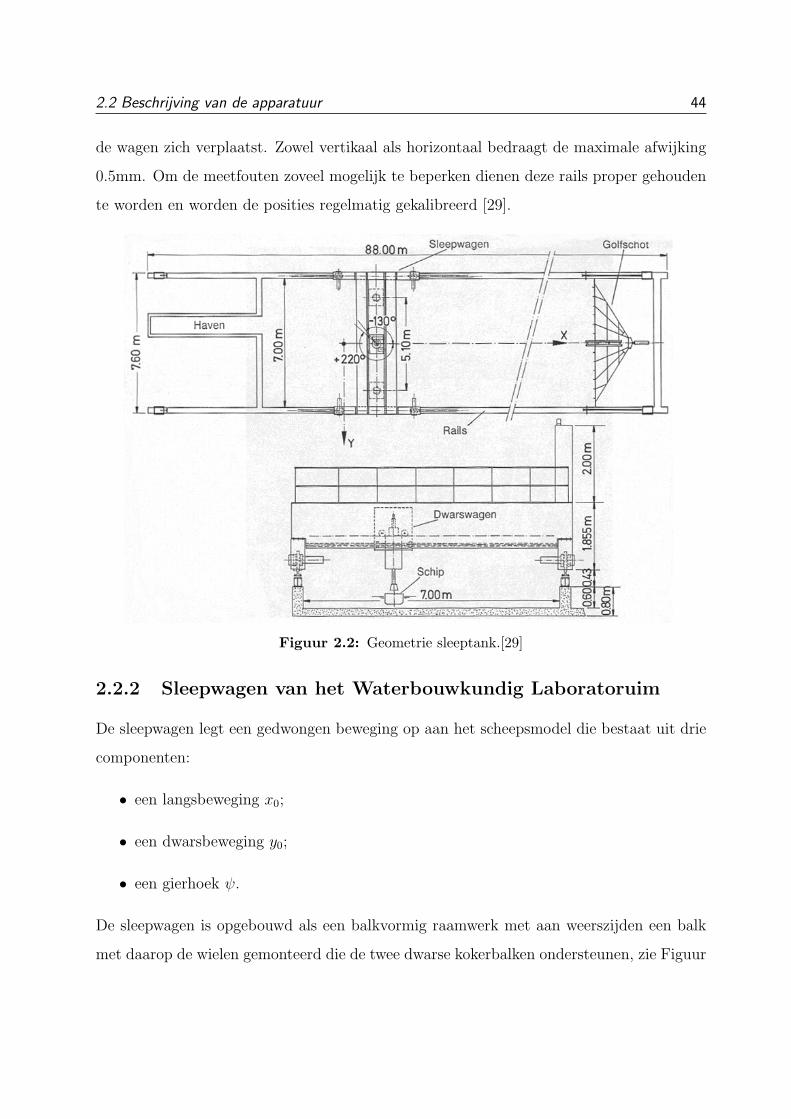
2.2 Beschrijving van de apparatuur 44
de wagen zich verplaatst. Zowel vertikaal als horizontaal bedraagt de maximale afwijking
0.5mm. Om de meetfouten zoveel mogelijk te beperken dienen deze rails proper gehouden
te worden en worden de posities regelmatig gekalibreerd [29].
Figuur 2.2: Geometrie sleeptank.[29]
2.2.2 Sleepwagen van het Waterbouwkundig Laboratoruim
De sleepwagen legt een gedwongen beweging op aan het scheepsmodel die bestaat uit drie
componenten:
• een langsbeweging x0;
• een dwarsbeweging y0;
• een gierhoek ψ.
De sleepwagen is opgebouwd als een balkvormig raamwerk met aan weerszijden een balk
met daarop de wielen gemonteerd die de twee dwarse kokerbalken ondersteunen, zie Figuur

2.2 Beschrijving van de apparatuur 45
2.1. De constructie is zeer stijf gemaakt om de doorbuiging onder het eigengewicht zoveel
mogelijk te beperken, om de metingen niet te beınvloeden. Tussen de kokerbalken beweegt
de dwarswagen. Op deze dwarswagen is tevens een draaitafel voorzien om het schip te
kunnen laten gieren. De dwarswagen kan in vertikale richting 0.4 m bewegen. Dit is nodig
om variaties van het waterniveau in rekening te nemen. Het scheepsmodel wordt aan de as
van de draaitafel bevestigd. Dit gebeurt door een mechanisme dat de vertikale bewegingen
(stampen en dompen) van het model toelaat. Het slingeren kan worden toegelaten of
verhinderd. Zie Figuur 2.3 voor een detail van dit mechanisme.
Figuur 2.3: Instrumentatie scheepsmodel.[30]
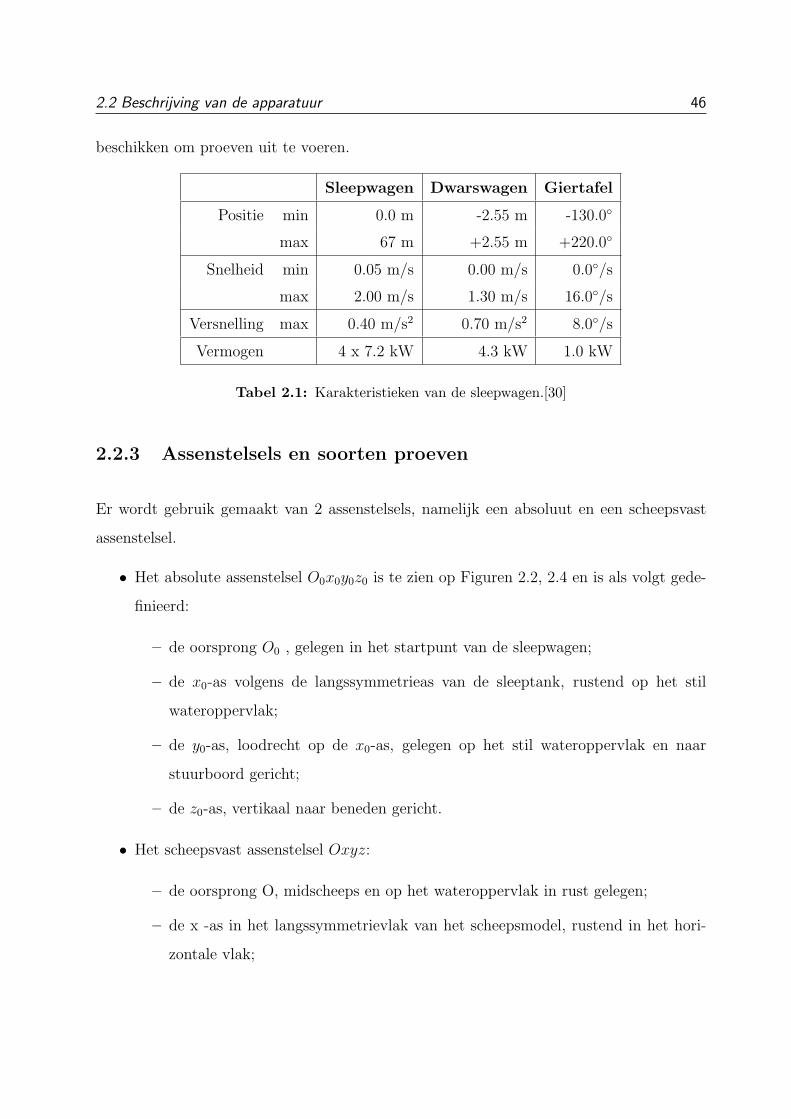
In Tabel 2.1 staan verdere gegevens over de sleepwagen.
De sleepwagen is volledig geautomatiseerd en kan, eenmaal alles in de tank is ingebouwd,
onbemand zijn proeven uitvoeren. Enkel de waterstanden moeten handmatig veranderd
worden. Op deze manier kan men dag en nacht, 7 dagen op 7 proeven uitvoeren. Zo is men
minder beperkt door een werkdag van “slechts” 8 uren en weekends of verlof. Om dergelijk
niveau van automatisatie te kunnen halen moet men over strenge en degelijke procedures
2.2 Beschrijving van de apparatuur 46
beschikken om proeven uit te voeren.
Sleepwagen Dwarswagen Giertafel
Positie min 0.0 m -2.55 m -130.0◦
max 67 m +2.55 m +220.0◦
Snelheid min 0.05 m/s 0.00 m/s 0.0◦/s
max 2.00 m/s 1.30 m/s 16.0◦/s
Versnelling max 0.40 m/s2 0.70 m/s2 8.0◦/s
Vermogen 4 x 7.2 kW 4.3 kW 1.0 kW
Tabel 2.1: Karakteristieken van de sleepwagen.[30]
2.2.3 Assenstelsels en soorten proeven
Er wordt gebruik gemaakt van 2 assenstelsels, namelijk een absoluut en een scheepsvast
assenstelsel.
• Het absolute assenstelsel O0x0y0z0 is te zien op Figuren 2.2, 2.4 en is als volgt gede-
finieerd:
– de oorsprong O0 , gelegen in het startpunt van de sleepwagen;
– de x0-as volgens de langssymmetrieas van de sleeptank, rustend op het stil
wateroppervlak;
– de y0-as, loodrecht op de x0-as, gelegen op het stil wateroppervlak en naar
stuurboord gericht;
– de z0-as, vertikaal naar beneden gericht.
• Het scheepsvast assenstelsel Oxyz:
– de oorsprong O, midscheeps en op het wateroppervlak in rust gelegen;
– de x -as in het langssymmetrievlak van het scheepsmodel, rustend in het hori-
zontale vlak;
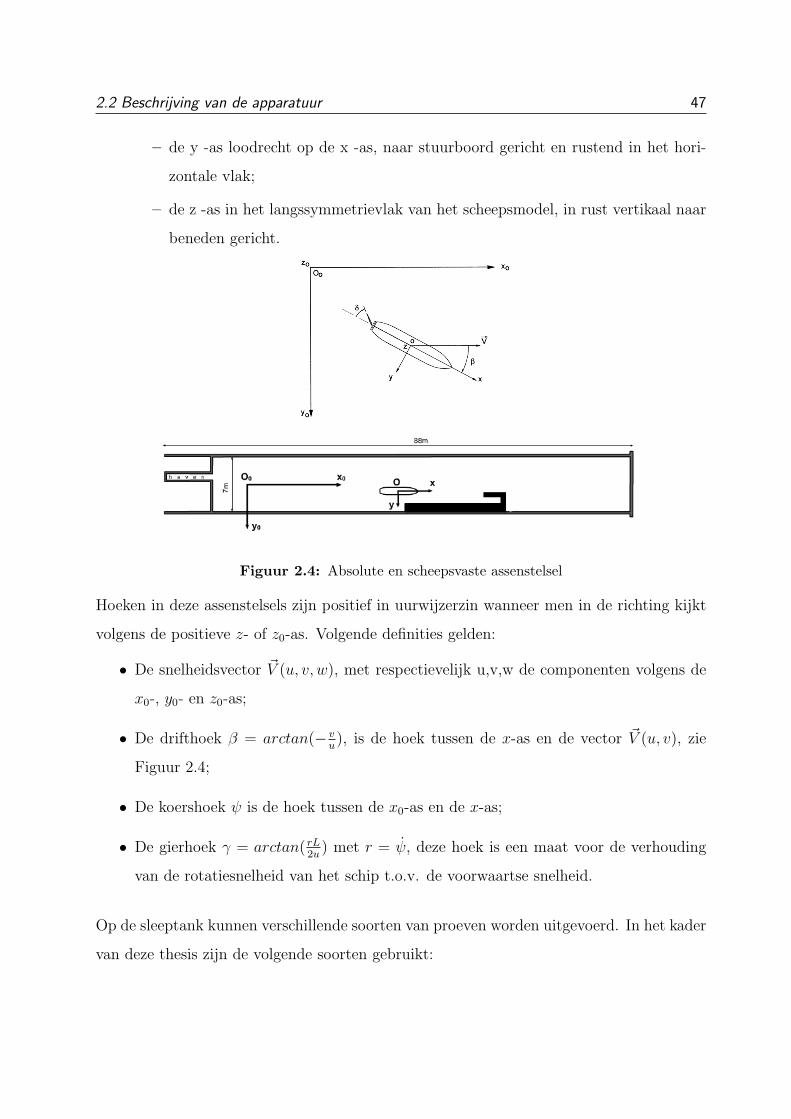
2.2 Beschrijving van de apparatuur 47
– de y -as loodrecht op de x -as, naar stuurboord gericht en rustend in het hori-
zontale vlak;
– de z -as in het langssymmetrievlak van het scheepsmodel, in rust vertikaal naar
beneden gericht.
Figuur 2.4: Absolute en scheepsvaste assenstelsel
Hoeken in deze assenstelsels zijn positief in uurwijzerzin wanneer men in de richting kijkt
volgens de positieve z- of z0-as. Volgende definities gelden:
• De snelheidsvector ~V (u, v, w), met respectievelijk u,v,w de componenten volgens de
x0-, y0- en z0-as;
• De drifthoek β = arctan(− vu), is de hoek tussen de x-as en de vector ~V (u, v), zie
Figuur 2.4;
• De koershoek ψ is de hoek tussen de x0-as en de x-as;
• De gierhoek γ = arctan( rL2u
) met r = ψ, deze hoek is een maat voor de verhouding
van de rotatiesnelheid van het schip t.o.v. de voorwaartse snelheid.
Op de sleeptank kunnen verschillende soorten van proeven worden uitgevoerd. In het kader
van deze thesis zijn de volgende soorten gebruikt:
2.2 Beschrijving van de apparatuur 48
• PAALTREK;
• STATX;
• MULTI1;
• PMMPSI2.
De eerste 10 seconden van iedere proef ligt het schip stil en beginnen de metingen. Deze
10 seconden worden gebruikt om iedere proef apart te kalibreren. Daarna begint de proef.
Tussen 2 proeven door moet telkens 2000 seconden gewacht worden zodat het water in de
tank terug voldoende stil is. Bij een paaltrek proef wordt dit 1500 seconden omdat het
water minder verstoord wordt.
PAALTREK
Een paaltrek proef is een stationaire proef. De sleepwagen begeeft zich naar een gekozen
vaste x0 en y0 positie en de draaitafel neemt een vooraf bepaalde hoek ψ aan. De boeg-
schroef treedt in werking en de krachten worden gemeten. Dit type proef is gekenmerkt
door de letter “A”, zie verder.
STATX
Een statx proef, stationair volgens de x0-as, is een proef waarbij op de sleepwagen een
vaste y0-positie en hoek ψ worden ingesteld. De wagen beweegt zich langs de x0-as met
constante snelheid waarbij de krachten worden gemeten. Dit type proef is gekenmerkt door
de letter “C”, zie verder.
MULTI1
Een multi1 proef, een multimodale harmonische proef, is gebruikt om het schip zuiver te
laten verzetten. Een vaste x0-positie en hoek ψ worden ingesteld. Het schip voert een

2.2 Beschrijving van de apparatuur 49
beweging uit volgens de y0-as, een lineaire versnelling tot een constante snelheid die wordt
aangehouden totdat het schip terug moet afremmen. Dit type proef is gekenmerkt door de
letter “M”, zie verder. Een kleine opmerking, deze beschrijving voor multi proeven is enkel
geldig binnen het bereik van deze thesis, algemeen worden er gedurende een multi-modale
proef een of meerdere parameters harmonisch gevarieerd.
PMMPSI2
Een pmmpsi2 proef, een planar motion mechanism gierproef, is gebruikt om het schip
een zuivere gierbeweging op te leggen. Een gemiddelde y0-waarde wordt opgegeven, een
snelheid in x0-richting, een amplitude voor de gierhoek en een periode. Het schip zal zich
met een constante snelheid langs de x0- en y0-as verplaatsen en dit met een harmonisch
oscillerende giersnelheid. Dit type proef is gekenmerkt door de letter “G”, zie verder.
Overzicht lettercodes type proef
Iedere proef heeft dus een specifieke lettercode. De codes voor de gebruikte types proeven
worden in volgende tabel nog eens samengevat:
Type proef Lettercode
PAALTREK A
STATX C
MULTI1 M
PMMPSI2 G
Tabel 2.2: Lettercodes type proef.
2.2.4 Procedure voor het uitvoeren van proeven
Er is een vaste naamgeving voor alle bestanden van proeven. Deze naamgeving bestaat
steeds uit een combinatie van in totaal 4 letters (hier aangeduid met X). Afhankelijk van

2.2 Beschrijving van de apparatuur 50
het type bestand volgen na deze 4 letter ook nog 2 of 4 cijfers (hier niet aangeduid). Na
deze 4 letter en eventuele 2 of 4 getallen volgt een punt en dan de 3 letters die het soort
bestand weergeven, zie verder. Het cijfer onder de X komt overeen met onderstaande
nummering.
X X X X . ∗
1 2 3 4
1. Letter die het gebruikte modelschip weergeeft, steeds “M”, zie 2.3.2 Model M;
2. Letter voor de gebruikte waterdiepte in de proef, zie Tabel 2.5 op pagina 62;
3. Letter afhankelijk van het type proef, zie Tabel 2.2 op pagina 49;
4. Letter afhankelijk van de snelheid gebruikt in de proef, zie Tabel 2.6 op pagina 63.
Eenmaal de naamgeving vast ligt kan men beginnen met het opstellen van een proevenreeks.
Voor het opstellen, uitvoeren en verwerken van proeven op een geautomatiseerde manier
zijn de volgende procedures ontwikkeld door het WL [31].
1. Genereren van trajecten;
2. Valideren en visualiseren van trajectbestanden;
3. Uitwerken van documentatiebestanden;
4. Genereren van datapointbestanden;
5. Berekenen van hydrodynamische afgeleiden;
6. Verkorten van documentatiebestanden.

2.2 Beschrijving van de apparatuur 51
Genereren van trajecten
Dit is het opstellen van het te volgen gedwongen traject van het scheepsmodel in de
sleeptank. Hiervoor zijn verschillende types van proeven ter beschikking. Bijvoorbeeld
“STATX” voor proeven waarbij enkel de x-positie van de sleepwagen verandert, “PAAL”
voor een stationaire proef, . . . . Vanuit een “∗.GEG” bestand dat afhankelijk van het type
proef een vaste vorm heeft en waarin alle randvoorwaarden van de proeven omschreven
zijn, worden door middel van een trajectgeneratie-programma een reeks proefbestanden
“∗.PRF” en trajectbestanden “∗.TRA” gemaakt. Per waterdiepte, type proef (STATX,
PAAL, . . . ), snelheid en te varieren parameter (bijvoorbeeld het schroeftoerental) is er
een ∗.GEG bestand waarin alle proeven staan. In een ∗.GEG bestand kan de te varieren
parameter wel meerdere waarden aannemen. Zo kan bijvoorbeeld het schroeftoerental in
een proef varieren van 0 naar een laag en hoog toerental. Er zijn dan per proef 3 condities.
Valideren en visualiseren van trajectbestanden
Als de ∗.TRA bestanden aangemaakt zijn dienen deze gevalideerd te worden door het
validatie programma. Dit programma gaat na of het traject wel degelijk kan uitgevoerd
worden rekening houdend met:
• de uiterste waarden voor posities, snelheden en versnellingen van de wagen en schip;
• contact tussen het schip en een eventueel ingebouwde omgeving in de sleeptank.
Indien alles in orde verloopt wordt het traject gevalideerd en wordt er onderaan het ∗.TRA
bestand een lijn toegevoegd ter bevestiging van de positieve validatie. Het validatie pro-
gramma genereert ook een batch bestand “∗.BTC” dat door de computer van de sleepwagen
kan uitgevoerd worden en toelaat de proeven in batch uit te voeren.
2.2 Beschrijving van de apparatuur 52
Uitwerken van documentatiebestanden
Na het uitvoeren van de proef op de sleepwagen wordt een documentatiebestand “∗.DOC”
aangemaakt waarin men alle gegevens over de proef, het schip en de geregistreerde meet-
gegevens terugvindt. Er wordt tevens een “∗.RES” bestand gemaakt waarin de hoofd-
parameters van de proef terug te vinden zijn, en per meetkanaal en per conditie van de
parameter een gemiddelde waarde en/of een beperkte harmonische analyse bevat.
Genereren van datapointbestanden
De grootheden die de resultatenbestanden bevatten, zijn niet steeds rechtstreeks bruikbaar
voor het opstellen van wiskundige manoeuvreermodellen. Er kunnen zich bijvoorbeeld
transiente verschijnselen voordoen. Om deze reden werd een reeks zogenaamde selectiepro-
gramma’s ontwikkeld, waarmee datapointbestanden “∗.DPT” aangemaakt worden. Voor
stationaire proeven bevat een dergelijk bestand per conditie een lijn waarin de voornaams-
te kinematische en sturingsparameters en dynamische grootheden in een geschikte vorm
vermeld staan. Voor proeven met een niet-stationair karakter wordt elke proef op dezelfde
wijze weergegeven door een aantal momentopnamen. Deze gegevens zijn dan gebaseerd op
een gemiddelde waarde van bijvoorbeeld 30% tot 90% van de regimetijd per conditie.
Berekenen van hydrodynamische afgeleiden
Uit de resultaten van harmonische proeven kunnen sommige hydrodynamische afgeleiden
die in een vooropgesteld mathematisch manoeuvreermodel voorkomen, rechtstreeks bere-
kend worden. Hiertoe werden een aantal programma’s ontwikkeld, die vanuit een reeks
∗.RES bestanden een coefficientenbestand “∗.COE” genereren.
Verkorten van documentatiebestanden
Omdat de ∗.DOC zeer veel informatie bevatten, werd er een programma ontwikkeld dat
door een gemiddelde met een vooropgestelde factor, de gegevens in het ∗.DOC handelbaar

2.3 Gebruikte opstelling 53
maakt. Dit programma maakt dan een “∗.KRT” bestand aan. De gebruikte factor in deze
proeven is voor STATX proeven een gemiddelde van de metingen om de 10 centimeter
volgens de langspositie van de sleepwagen en voor de andere proeven een gemiddelde van
10 lijnen van het .∗.DOC bestand. Voor stationaire proeven (type PAAL) wordt er geen
∗.KRT bestand aangemaakt.
2.3 Gebruikte opstelling
2.3.1 Omgeving
Voor deze proevenreeks werd een kaaimuur van 0.702 meter breed en 39.65 meter lang
in de tank gebouwd. Informatie over de gebruikte omgeving in de sleeptank is terug te
vinden in figuur 2.5 (figuur op schaal 1/75, afstanden in millimeter). Er werd ook een sluis
ingebouwd op het einde van de kaaimuur.
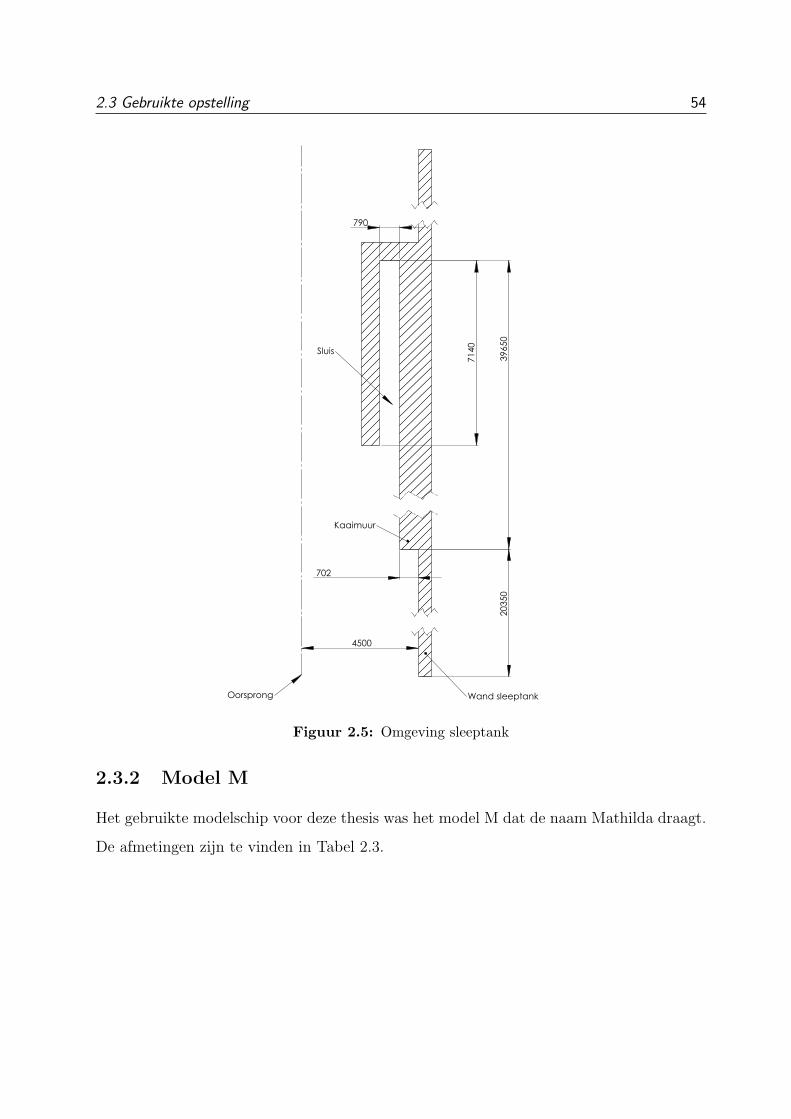
2.3 Gebruikte opstelling 54
39650
790
20350
702
7140
4500
Oorsprong
Sluis
Kaaimuur
Wand sleeptank
Figuur 2.5: Omgeving sleeptank
2.3.2 Model M
Het gebruikte modelschip voor deze thesis was het model M dat de naam Mathilda draagt.
De afmetingen zijn te vinden in Tabel 2.3.

2.3 Gebruikte opstelling 55
schaal λL 70
Schip Model
LOA [m] 280 4
LPP [m] 266.605 3.81
B [m] 41.6 0.59
D [m] 20.9 0.3
T [m] 11 0.16
∀ [m3] 93670 0.27
CB 0.77 0.77
Tabel 2.3: Afmetingen schip.
Het schip is een model van een LNG (Liquified Natural Gas) tanker. Het werd uitgerust
met een roer en een boegschroef, geen hoofdpropeller, en is te zien op Figuur 2.6. De lijnen
van het schip zijn te zien in Figuur 2.7. Het inbouwen van dergelijke boegschroef installatie
op zo’n beperkte ruimte is geen makkelijke opdracht. Bepaalde compromissen moeten dan
ook gesloten worden. Verschillende ontwerpen werden overwogen. Het ontwerp van de
verschillende onderdelen wordt toegelicht in de volgende stukken.
Figuur 2.6: Model M

2.3 Gebruikte opstelling 56
Figuur 2.7: Lijnen schip M
De schroef
De schroef, zie Figuur 2.8, is door het WL zelf ontworpen. Ze is 3-bladig en heeft een P/D
(spoed/diameter) verhouding van 1. Dit betekent dat de schroefbladen een spoedhoek φ
hebben van [15]:
φ = arctan(P
πD) = 17.66◦ (2.1)
De schroef zelf heeft bladen die verbreden naar de tip toe, Kaplan type. Carlton geeft
grafieken in verband met het ontwerp van een boegschroef [4]. Zie het literatuur onderzoek
1.10.2. De schroef heeft een diameter van 32 mm. De buitendiameter van de ring rond de
schroef is 40 mm.
Figuur 2.8: Schroef

2.3 Gebruikte opstelling 57
De schroef werd vervaardigd met FDM -Fused Deposition Modelling- technologie 2. Deze
techniek laat toe om complexe vormen laag per laag op te bouwen door middel van een
thermoplastisch materiaal en dit rechtstreeks vanuit een CAD programma. De dikte van
deze lagen varieert van +/- 0.127 tot 0.254 mm.
Inbouw in het schip
Er is uit praktische overwegingen gekozen om de boegschroef aan de hand van een module
in te bouwen in een tunnel in de boeg van het schip, te zien op Figuur 2.9.
Figuur 2.9: Boegschroef module
De schroef is ingebouwd in de koker van de module die in de tunnel van het schip geschoven
en afgedicht wordt. Deze tunnel bevindt zich op 1.777 meter ten opzichte van het midden
van het schip. In Tabel 2.4 is verdere informatie te vinden over de inbouw van de tunnel
in het schip.
2http://www.materialise.be/materialise/view/en/91787-Fused+Deposition+Modelling.html

2.3 Gebruikte opstelling 58
diameter tunnel 0.032 m
lengte tunnel 0.104 m
afstand basisvlak tot middelpunt tunnel 0.0485 m
afstand waterlijn tot middelpunt tunnel 0.1085 m
afstand midden van het schip tot middelpunt tunnel 1.777 m
Tabel 2.4: Gegevens locatie boegschroef.
De module bestaat uit 2 compartimenten, namelijk een deel in contact met water en een deel
dat niet in contact staat met water. De schroef wordt aangedreven door een riem rond de
uitwendige vertanding van de schroef, zie Figuur 2.8. Deze riem maakt een verbinding met
een hoger gelegen tandwiel dat via een afgedichte as verbonden is met het compartiment
dat niet in contact komt met het water. Deze afgedichte as wordt aangedreven door de
elektromotor door middel van een riemoverbrenging. De overbrengingsverhouding is 2:1.
Dus de schroef doet dubbel zoveel toeren als de uitgaande as van de motor. Deze verhouding
was nodig om het toerental te kunnen opdrijven zodat de dwarskracht groter en meetbaar
zou worden. Een foto van het geheel in werking is te vinden op Figuur 2.10.
Figuur 2.10: Werking boegschroef

2.3 Gebruikte opstelling 59
De constructie zorgde voor veel luchtbelletjes in de stroming van de boegschroef. Er werd
eerst gedacht dat dit door cavitatie van de schroef was. Testen van de schroef in open water
bewees het tegendeel. De belletjes moesten dus afkomstig zijn van de riemoverbrenging
rond de schroef. In hoeverre deze luchtbelletjes effect hebben op de proeven is niet meteen
duidelijk. Ze zijn duidelijk zichtbaar op Figuur 2.10. In een poging dit effect te verminderen
werd er aan weerszijden een stuk buis, met dikte gelijk aan deze van de ring rond de schroef,
in de tunnel geplaatst. Deze buisjes werden ook afgerond aan de zijden naar de romp toe.
Afronden van de tunnel in- en uitgang heeft een gunstig effect op de stuwkracht, dit is
welgekend zie [4], [13], [14], [18], [19], [20], [21].
(a) zonder buisjes (b) met buisjes
Figuur 2.11: Boegschroef, correctie dmv buisjes.
Een foto van de buisjes ingebouwd is te zien op Figuur 2.11. De aanpassing van de con-
structie op deze wijze bracht een verbetering met zich mee en er werd voor gekozen de
buisjes te laten zitten voor de proeven.
Aan de openingen van de tunnel werden kleine gaatjes voorzien voor injectie van kleurstof
(kaliumpermanganaat, KMnO4) in het water om de stroming te visualiseren. Deze injectie
gebeurde niet permanent, om de metingen niet te beınvloeden, maar slechts bij een beperkt
aantal proeven.

2.3 Gebruikte opstelling 60
2.3.3 IJking
Vooraleer de proeven van start kunnen gaan moet de meetapparatuur geijkt worden. Het
ijken gebeurd via een vaste procedure ontwikkeld door het WL. Dit gebeurt door het
aanbrengen van gekende krachten op het model en deze te vergelijken met de metingen.
Met deze gegevens kan de meetapparatuur gekalibreerd worden.
Het aanbrengen van de krachten gebeurd door middel van een hefboom die nauwkeurig
op welbepaalde plaatsen aan de hand van gekalibreerde gewichten krachten opgelegd, zie
Figuur 2.12. De gemeten krachten worden ingevuld in een speciaal ontworpen Excel blad,
wat informatie geeft over de nauwkeurigheid. Het resultaat van de ijking met betrekking
tot de Y-krachten is te zien op Figuur 2.13.
Figuur 2.12: IJking

2.4 Proevenprogramma 61
y = 0.0317x + 0.0211R2 = 1
-5
-4
-3
-2
-1
0
1
2
3
4
5
-200 -150 -100 -50 0 50 100 150 200
Kracht [N]
Vo
lt [
V]
Ijking
Lineair (Ijking)
Figuur 2.13: Resultaat ijking Y-krachten.
2.4 Proevenprogramma
Het proevenprogramma omvatte volgende proeven:
• in het midden van de tank;
• op verschillende afstanden van de kaaimuur;
• met een gierhoek/drifthoek;
• zuiver verzetproeven;
• zuiver gierproeven.
Deze proeven werden uitgevoerd bij volgende waterdiepte:
• 0.016 m = 10% ksp;
• 0.031 m = 20% ksp;
• 0.055 m = 35% ksp;

2.4 Proevenprogramma 62
• 0.220 m = 140% ksp.
Bij 140% ksp werden enkel proeven in het midden van de tank en op verschillende afstanden
tot de kaaimuur gedaan en dit zonder gierhoek/drifthoek. ksp is de afkorting van kielspeling
en is als volgt gedefinieerd:
ksp =h− T
T× 100 (2.2)
met
• h de waterdiepte;
• T de diepgang van het schip.
De gebruikte lettercodes voor de waterdiepte zijn te zien in Tabel 2.5, zie ook sectie 2.2.4:
ksp [%] Lettercode
10% K
20% L
35% M
140% N
Tabel 2.5: Lettercodes waterdiepte.
Hierna volgt telkens een stuk met verdere toelichting over de gebruikte snelheden, afstanden
tot kaaimuur, gierhoeken, . . . .
2.4.1 Gebruikte snelheden
Volgende snelheden zijn gebruikt bij de statx proeven:
-3,-2,1,2,3,4,5,6,7,8,9,10 knoop
De snelheden zijn opgegeven in knopen voor het schip op ware grootte en positief in richting
van de positieve x0-as. Voor snelheid 0 wordt een paaltrek gebruikt.
Bij de zuiver verzetproeven zijn volgende snelheden gebruikt:

2.4 Proevenprogramma 63
-0.75,-0.50,0.50,0.75 knoop
Het schip heeft hier geen voorwaartste snelheid en verplaatst zich enkel dwars, volgens de
y0-richting. Positieve snelheden zijn volgens de positieve y0-as.
In Tabel 2.6 zijn alle gegevens terug te vinden over de gebruikte snelheden, het aantal
condities per proef en over welke lengte dit is gebeurd. De gebruikte lettercodes zijn ook
terug te vinden in deze tabel, zie ook sectie 2.2.4.
letter A B C D E F G H I J K M N
u [kn] 0 1 2 3 4 5 6 7 8 9 10 -2 -3
u [m/s] 0.0615 0.1230 0.1844 0.2459 0.3074 0.3689 0.4304 0.4919 0.5533 0.6148 -0.1230 -0.1844
optrek [m] 1.50 3.01 4.51 6.01 7.51 9.02 10.52 12.02 13.53 15.03 -3.01 -4.51
optrek [m] 2 3 5 6 8 10 11 11 11 11 3 5
afrem [m] 2 2 5 6 8 7 7 7 7 7 3 5
som 4 5 10 12 16 17 18 18 18 18 6 10
Lbeschikbaar [m] 46 45 40 38 34 33 32 32 32 32 44 40
Lconditie [m] 15 14 13 12 11 11 16 16 16 16 14 13
condities 3 3 3 3 3 3 2 2 2 2 3 3
Tabel 2.6: Tabel met gegevens over de gebruikte snelheden.
Opmerking:
1. Voor de snelheden gebruikt bij de verzetproeven worden de letters P en Q zowel voor
positieve als negatieve snelheden gebruikt. Q komt overeen met de snelheden -0.75
knoop en 0.75 knoop, P komt overeen met de snelheden -0.5 knoop en 0.5 knoop.
2. De snelheden 6,8,9 knoop zijn pas na evaluatie van de resultaten van waterdiepte
35% ksp toegevoegd.
3. Bij 35% ksp zijn ook proeven uitgevoerd aan een toerental van 2500 tpm, dit bleek
echter te laag om een voldoend grote kracht te kunnen opwekken. Voor de proeven
bij 35% is volgende tabel geldig:

2.4 Proevenprogramma 64
letter A B C D E F G H I J K M N
u [kn] 0 1 2 3 4 5 6 7 8 9 10 -2 -3
u [m/s] 0.0615 0.1230 0.1844 0.2459 0.3074 0.3689 0.4304 0.4919 0.5533 0.6148 -0.1230 -0.1844
optrek [m] 1.50 3.01 4.51 6.01 7.51 9.02 10.52 12.02 13.53 15.03 -3.01 -4.51
optrek [m] 2 3 5 6 8 10 11 11 11 11 3 5
afrem [m] 2 2 5 6 8 7 7 7 7 7 3 5
som 4 5 10 12 16 17 18 18 18 18 6 10
Lbeschikbaar [m] 46 45 40 38 34 33 32 32 32 32 44 40
Lconditie [m] 11 11 10 12 11 11 16 16 16 16 11 10
condities 4 4 4 3 3 3 2 2 2 2 4 4
Tabel 2.7: Tabel met gegevens over de gebruikte snelheden bij 35% ksp.
2.4.2 Afstanden tot de kaaimuur
Om de invloed van een kaaimuur te onderzoeken zijn proeven gebeurd met verschillende
afstanden van het schip tot deze muur. De afstand wordt gemeten vanaf de zij van het
schip tot de zijkant van de kaaimuur, zie Figuur 2.14.
Figuur 2.14: Afstand tot de kaaimuur.
De afstand tussen het schip en de kaaimuur is gekozen als een percentage van de scheeps-
breedte. In Tabel 2.8 zijn de percentages te zien in de kolom “Afkorting”. De volgende
afstanden zijn beproefd, met L de afstand tussen de zij van het schip en de muur:

2.4 Proevenprogramma 65
Afkorting Lmodel [m] Lware grootte[m] y0-coordinaat [m]
midden 2.852 199.63 -0.351
1B 0.594 41.6 1.907
0.35B 0.208 14.56 2.293
0.20B 0.119 8.32 2.382
0.10B 0.059 4.16 2.441
Tabel 2.8: Afstanden kaaimuur.
Zoals te zien in Tabel 2.8 zijn de proeven aangeduid met de afkorting “midden” niet
uitgevoerd in het “echte” midden van de sleeptank maar op positie -0.351 meter. Dit is te
wijten aan de kaaimuur die zorgt voor een assymmetrie in de tank. Om een symmetrische
situatie te krijgen, nodig voor het uitvoeren van proeven zonder kaaimuur, verplaatst het
midden over -0.351 meter.
2.4.3 Hoeken
De gebruikte hoeken, die ingesteld werden op de draaitafel van de sleepwagen, zijn gekozen
in functie van percentages van de afstand van het voorschip (Yf) en achterschip (Ya) tot de
kaaimuur, zie Figuur 2.15. Het schip werd benaderd als een rechthoekige bak met breedte
B = 0.66 meter.
Figuur 2.15: Keuze hoeken.
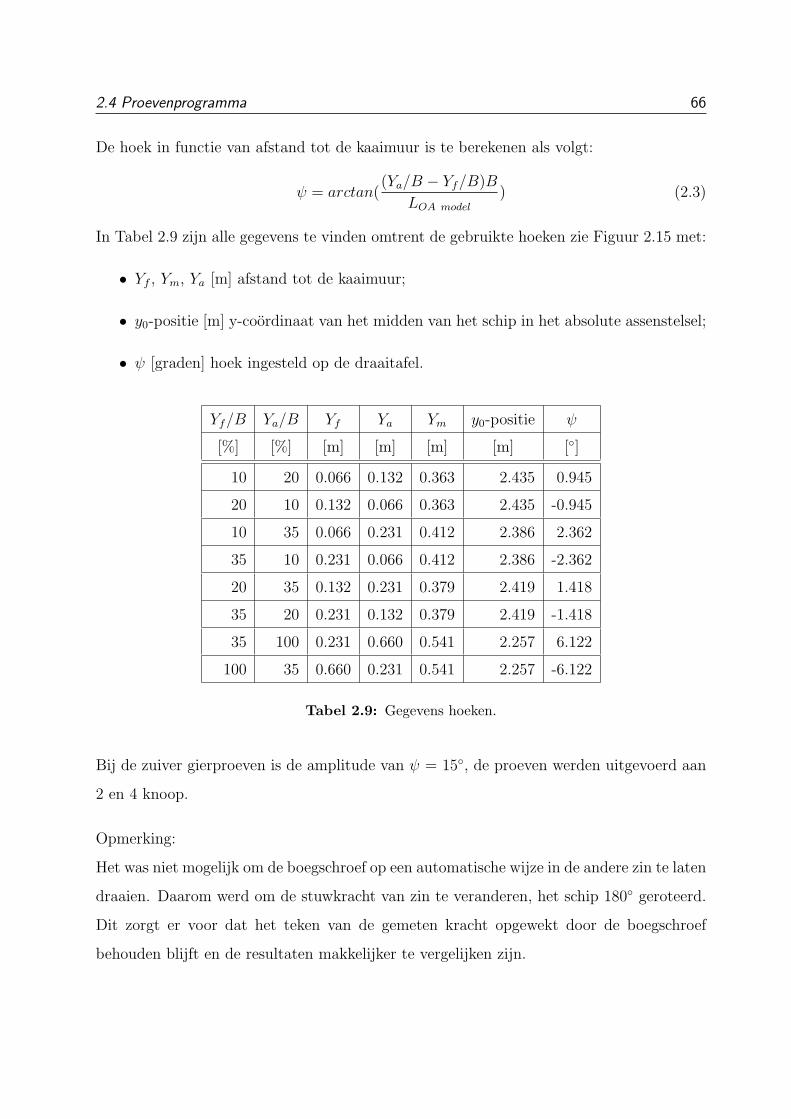
2.4 Proevenprogramma 66
De hoek in functie van afstand tot de kaaimuur is te berekenen als volgt:
ψ = arctan((Ya/B − Yf/B)B
LOA model
) (2.3)
In Tabel 2.9 zijn alle gegevens te vinden omtrent de gebruikte hoeken zie Figuur 2.15 met:
• Yf , Ym, Ya [m] afstand tot de kaaimuur;
• y0-positie [m] y-coordinaat van het midden van het schip in het absolute assenstelsel;
• ψ [graden] hoek ingesteld op de draaitafel.
Yf/B Ya/B Yf Ya Ym y0-positie ψ
[%] [%] [m] [m] [m] [m] [◦]
10 20 0.066 0.132 0.363 2.435 0.945
20 10 0.132 0.066 0.363 2.435 -0.945
10 35 0.066 0.231 0.412 2.386 2.362
35 10 0.231 0.066 0.412 2.386 -2.362
20 35 0.132 0.231 0.379 2.419 1.418
35 20 0.231 0.132 0.379 2.419 -1.418
35 100 0.231 0.660 0.541 2.257 6.122
100 35 0.660 0.231 0.541 2.257 -6.122
Tabel 2.9: Gegevens hoeken.
Bij de zuiver gierproeven is de amplitude van ψ = 15◦, de proeven werden uitgevoerd aan
2 en 4 knoop.
Opmerking:
Het was niet mogelijk om de boegschroef op een automatische wijze in de andere zin te laten
draaien. Daarom werd om de stuwkracht van zin te veranderen, het schip 180◦ geroteerd.
Dit zorgt er voor dat het teken van de gemeten kracht opgewekt door de boegschroef
behouden blijft en de resultaten makkelijker te vergelijken zijn.

2.4 Proevenprogramma 67
2.4.4 Toerentallen boegschroef
Het toerental van de boegschroef was aanvankelijk 2500, 3750 en 5000 tpm. Na analyse
van de eerste gegevens bleken de krachten bij 2500 tpm te klein en zijn deze resultaten niet
in rekening gebracht. Bij de eerste proeven was er geen meting van het toerental en werd
het toerental, bij het begin van de proeven, handmatig gecontroleerd door een tachymeter.
In verdere proeven gebeurde de meting en het loggen van het toerental automatisch door
de motor. Uit deze metingen bleek dat het hoge toerental van 5000 tpm niet gehaald werd.
Wanneer van alle paaltrek en statx proeven het gemiddelde en een standaardafwijking
wordt genomen voor het lage en hoge toerental krijgt men volgende gegevens:
L [tpm] H [tpm]
gemiddelde 3692 4703
standaardafwijking 42 58
Tabel 2.10: Toerentallen proeven.

RESULTATEN METINGEN 68
Hoofdstuk 3
Resultaten metingen
In dit hoofdstuk worden de meetresultaten bekeken en besproken. Wanneer in de legende
van een grafiek de letters “L” en “H” staan dan duiden die op het toerental. L staat
voor laag en komt overeen met het toerental van 3750 tpm. H staat voor hoog en komt
overeen met het toerental van 5000 tpm, zie ook sectie 2.4.4. Afstanden tot de kaaimuur
worden aangeduid als volgt: midden, 1B, 0.35B, 0.20B, 0.10B. Zie sectie 2.4.2 voor verdere
informatie over deze afstanden. De boegschroef levert steeds een stuwkracht die het schip
naar bakboord doet roteren, dit is dus in negatieve zin, zie hierover ook de opmerking in
sectie 2.4.3.
3.1 Paaltrek proeven
Een serie paaltrek proeven werd uitgevoerd waarvan de resultaten in onderstaande secties
zullen besproken worden. 3 soorten paaltrek proeven worden bekeken:
1. in het midden van de tank;
2. met stuwkracht weg van de kaaimuur;
3. met stuwkracht naar de kaaimuur.

3.1 Paaltrek proeven 69
Bij deze proeven wordt de ksp, afstanden tot de kaaimuur, de koershoek en het toerental
gevarieerd.
3.1.1 In het midden van de tank
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160
kielspeling [%]
krac
ht
[N]
LH
(a) Dwarskracht
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160
kielspeling [%]
mo
men
t [N
m]
LH
(b) Giermoment
Figuur 3.1: Paaltrek in het midden van de tank, invloed ksp.
Op Figuur 3.1 zijn de resultaten te zien van een serie proeven in het midden van de tank.
Figuur 3.1(a) geeft de dwarskracht weer die opgewekt werd door de boegschroef. Er is een
duidelijk onderscheid tussen het hoge en lage toerental te zien. De hoge en lage toerental
curves vertonen echter niet dezelfde trend. Bij 20% ksp vertoont het hoge toerental een
plotse toename van de dwarskracht terwijl dit bij het lage toerental niet zo is. Meer hierover
in sectie 3.1.4. Het giermoment, Figuur 3.1(b) vertoont dezelfde trend als de dwarskracht.
Figuur 3.2 toont de dwarskracht van paaltrek proeven uitgevoerd met een koershoek en
bij verschillende ksp. De figuur geeft dezelfde trend als Figuur 3.1(a) weer. Er is geen
grote invloed van de ksp voor het lage toerental maar wel een duidelijke invloed bij het
hoge toerental. Voor de kleinste kielspeling treedt er enige spreiding op in de resultaten,
zie hiervoor naar 3.1.4. Het giermoment gedraagt zich analoog aan de dwarskracht.

3.1 Paaltrek proeven 70
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4°H
6.1° L 6.1° H
(a) Dwarskracht
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4°H
6.1° L 6.1° H
(b) Giermoment
Figuur 3.2: Paaltrek in het midden van de tank met koershoek, invloed ksp.
3.1.2 Nabij de kaai met stuwkracht weg van de kaai
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
krac
ht
[N]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(a) Dwarskracht
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
mo
men
t [N
m]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(b) Giermoment
Figuur 3.3: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht weg
van de kaai.
Figuur 3.3(a) geeft de dwarskracht bij paaltrek weer in functie van de ksp en dit voor
verschillende afstanden tot de kaai en voor 2 toerentallen. De boegschroef leverde een
stuwkracht met orientatie weg van de kaaimuur. Er is een duidelijke invloed van de kiel-
speling waarvan de invloed stijgt bij het naderen van de kaaimuur. Ten opzichte van de
kracht in het midden van de tank krijgt men een stijging van respectievelijk 66.8% en 40%
van de dwarskracht voor 3750 tpm en 5000 tpm wanneer men tot op 0.10B afstand van de
kaai nadert. In absolute waarden en opgeschaald voor het echte schip geeft dit een stijging

3.1 Paaltrek proeven 71
van de dwarskracht met respectievelijk 5.98 ton en 6.26 ton voor 3750 tpm en 5000 tpm.
Dit resultaat had men intuıtief al kunnen aanvoelen omdat wanneer men de kade nadert,
de boegschroef zich als het ware kan “afzetten” tegen de kade - er zijn veel havens die het
gebruik van boegschroeven zo dicht tegen de kade niet goed keuren en dan ook consequent
verbieden omdat men bang is voor schade aan de kaaimuren wanneer bijvoorbeeld een
boegschroef van 3.5 megaWatt gebruikt wordt op 4 meter van de kaai. Dit effect is alleen
maar terug te vinden bij een kielspeling van 10%. Bij een grotere kielspeling is het effect
omgekeerd. Men krijgt een verlies aan kracht, dit verlies aan kracht is het grootst voor
een afstand van 20% en 35% afstand van de kaai en is toch vrij aanzienlijk. Bij 35% ksp
en 35% afstand van de kaai verliest men 21.1% van kracht bij het maximum toerental ten
opzichte van de kracht in het midden van de tank.
Figuur 3.4 toont de invloed van een negatieve koershoek. De resultaten voor de dwarskracht
sluiten goed aan bij mekaar, een trend is duidelijk, namelijk een toename van de kracht
en moment bij afnemende ksp. Het giermoment gedraagt zich afwijkend ten opzichte van
de dwarskracht. Een mogelijk antwoord hiervoor is dat voor deze proeven elke koershoek
gekoppeld is aan een bepaalde afstand tot de kaaimuur, zie hiervoor naar 2.4.3.
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(a) Dwarskracht
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(b) Giermoment
Figuur 3.4: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht weg
van de kaai negatieve koershoek.
Op Figuur 3.5 is de invloed te zien van een positieve koershoek. Het effect hiervan op de

3.1 Paaltrek proeven 72
krachten is groot. Bij toenemende koershoek verminderen de krachten, dit is het sterkst
bij 10% ksp, daar is er een daling van maar liefst 66% te meten voor het hoge toerental als
de koershoek van 0.9◦ naar 6.1◦ verandert.
-0.5
-0.45
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(a) Dwarskracht
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(b) Giermoment
Figuur 3.5: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht weg
van de kaai positieve koershoek.
3.1.3 Nabij de kaai met stuwkracht naar de kaai
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
krac
ht
[N]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(a) Dwarskracht
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
mo
men
t [N
m]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(b) Giermoment
Figuur 3.6: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht naar
de kaai.
Zoals te zien is op Figuur 3.6, is de invloed heel wat minder in vergelijking met de vorige
situatie. Bij de lage toerentallen liggen alle metingen dicht bij mekaar en vormen haast
een rechte lijn. Bij de metingen aan het hogere toerental doet er zich een dip voor bij 35%

3.1 Paaltrek proeven 73
ksp.
Op Figuur 3.7 is de invloed van een negatieve koershoek te zien. De metingen liggen terug
dicht bij mekaar en een trend is duidelijk. Toename van de krachten bij afnemende ksp.
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(a) Dwarskracht
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(b) Giermoment
Figuur 3.7: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht naar
de kaai, negatieve koershoek.
Figuur 3.8 toont de invloed van een positieve koershoek. De figuur is haast identisch aan
Figuur 3.7.
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(a) Dwarskracht
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(b) Giermoment
Figuur 3.8: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht naar
de kaai, positieve koershoek.

3.1 Paaltrek proeven 74
3.1.4 Verdere analyse
Analyse van deze paaltrek gegevens toont dat er zich transiente verschijnselen voordoen.
Het krachtenspel komt niet in regime toestand en men mag deze gegevens dan ook niet
vergelijken met de rest van de data die wel gebaseerd is op regime toestanden. In deze
analyse worden transienten aan het licht gebracht door bepaling van de standaardafwijking
van een zwevend gemiddelde van 20 metingen op de meetresultaten. Zie Bijlage D voor
de gebruikte macro code. Wanneer de standaardafwijking op dit zwevend gemiddelde
merkelijk groter is dan dat van andere proeven en men er de grafiek bijhaalt, is er over het
algemeen een transient verschijnsel. Als men bijvoorbeeld op Figuur 3.3(a) het punt op
0.20B afstand van de kaai bij hoog toerental en 10% ksp onderzoekt, krijgt men de grafiek
van Figuur 3.9 te zien.
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 20 40 60 80 100 120
tijd [s]
krac
ht
[N]
Figuur 3.9: Transiente paaltrek proef
Hier is het duidelijk dat er geen regime toestand bereikt wordt. Deze gegevens mogen niet
vergeleken worden met de andere data. Bekijken van dezelfde proef als in Figuur 3.9 maar
dan uitgevoerd bij een ksp van 140 % geeft de volgende grafiek.
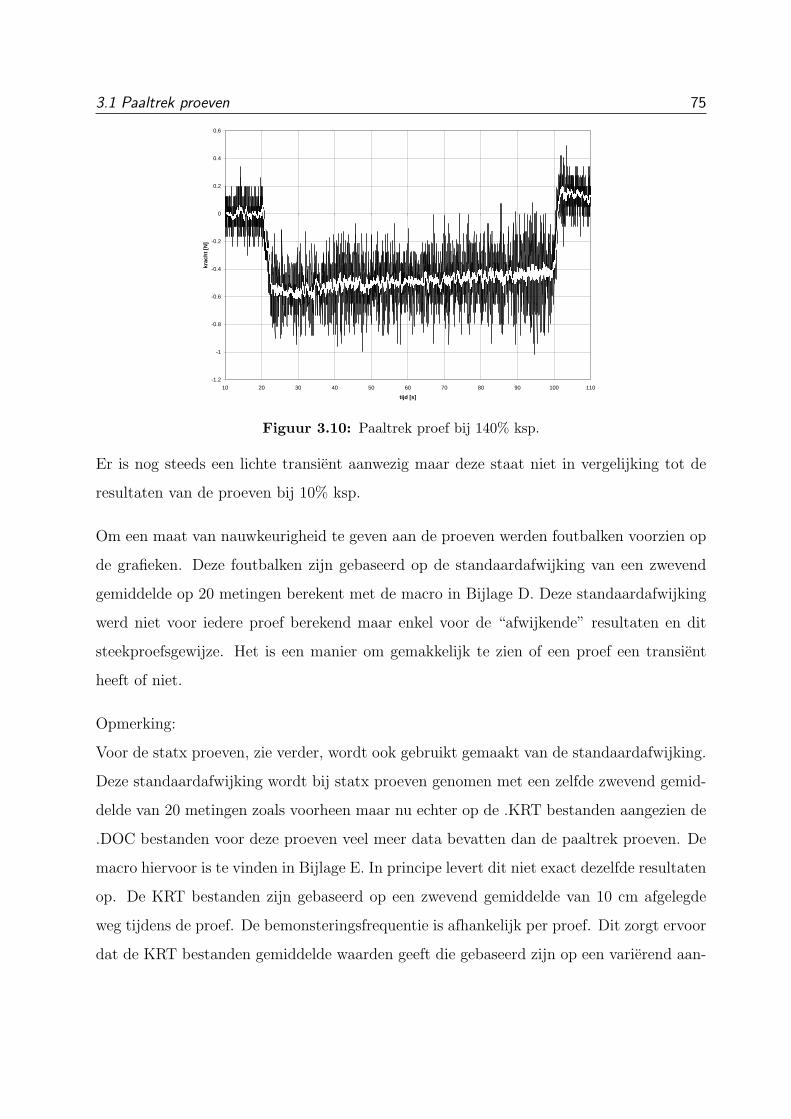
3.1 Paaltrek proeven 75
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
10 20 30 40 50 60 70 80 90 100 110
tijd [s]
krac
ht
[N]
Figuur 3.10: Paaltrek proef bij 140% ksp.
Er is nog steeds een lichte transient aanwezig maar deze staat niet in vergelijking tot de
resultaten van de proeven bij 10% ksp.
Om een maat van nauwkeurigheid te geven aan de proeven werden foutbalken voorzien op
de grafieken. Deze foutbalken zijn gebaseerd op de standaardafwijking van een zwevend
gemiddelde op 20 metingen berekent met de macro in Bijlage D. Deze standaardafwijking
werd niet voor iedere proef berekend maar enkel voor de “afwijkende” resultaten en dit
steekproefsgewijze. Het is een manier om gemakkelijk te zien of een proef een transient
heeft of niet.
Opmerking:
Voor de statx proeven, zie verder, wordt ook gebruikt gemaakt van de standaardafwijking.
Deze standaardafwijking wordt bij statx proeven genomen met een zelfde zwevend gemid-
delde van 20 metingen zoals voorheen maar nu echter op de .KRT bestanden aangezien de
.DOC bestanden voor deze proeven veel meer data bevatten dan de paaltrek proeven. De
macro hiervoor is te vinden in Bijlage E. In principe levert dit niet exact dezelfde resultaten
op. De KRT bestanden zijn gebaseerd op een zwevend gemiddelde van 10 cm afgelegde
weg tijdens de proef. De bemonsteringsfrequentie is afhankelijk per proef. Dit zorgt ervoor
dat de KRT bestanden gemiddelde waarden geeft die gebaseerd zijn op een varierend aan-

3.1 Paaltrek proeven 76
tal metingen. Dit zorgt ervoor dat het zwevende gemiddelde waar de standaardafwijking
wordt op gebaseerd, niet op hetzelfde aantal metingen is gebaseerd voor proeven met een
andere snelheid. Dit verschil is echter bijzonder klein zodat het achterwege gelaten wordt.
Invoeren van de foutbalken levert volgende resultaten op, de afwijkende proeven zijn aan-
geduid door een grijs gebied.
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160
kielspeling [%]
krac
ht
[N]
LH
(a) Dwarskracht
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160
kielspeling [%]
mo
men
t [N
m]
LH
(b) Giermoment
Figuur 3.11: Paaltrek in het midden van de tank, invloed ksp met foutbalken.
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4°H
6.1° L 6.1° H
(a) Dwarskracht
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4°H
6.1° L 6.1° H
(b) Giermoment
Figuur 3.12: Paaltrek in het midden van de tank met koershoek, invloed ksp met foutbalken.
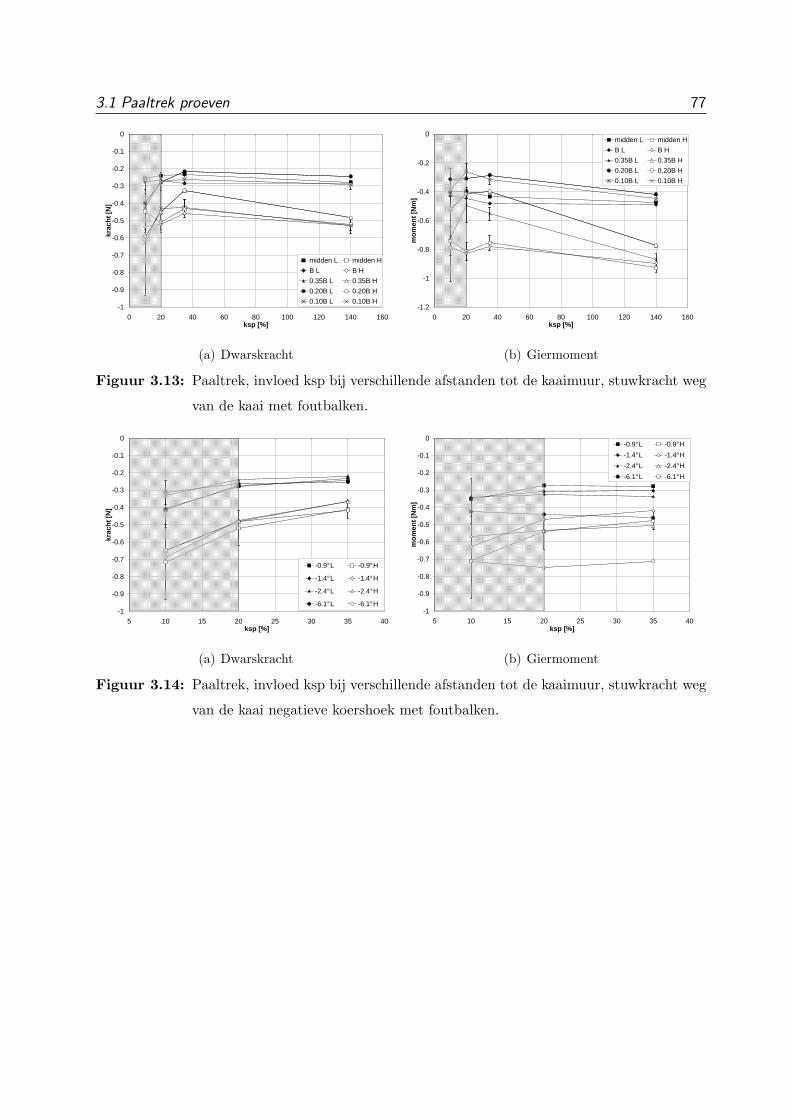
3.1 Paaltrek proeven 77
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
krac
ht
[N]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(a) Dwarskracht
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0 20 40 60 80 100 120 140 160ksp [%]
mo
men
t [N
m]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(b) Giermoment
Figuur 3.13: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht weg
van de kaai met foutbalken.
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(a) Dwarskracht
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(b) Giermoment
Figuur 3.14: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht weg
van de kaai negatieve koershoek met foutbalken.

3.1 Paaltrek proeven 78
-0.5
-0.45
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(a) Dwarskracht
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(b) Giermoment
Figuur 3.15: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht weg
van de kaai positieve koershoek met foutbalken.
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
krac
ht
[N]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(a) Dwarskracht
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
mo
men
t [N
m]
midden L midden H
B L B H
0.35B L 0.35B H
0.20B L 0.20B H
0.10B L 0.10B H
(b) Giermoment
Figuur 3.16: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht naar
de kaai met foutbalken.
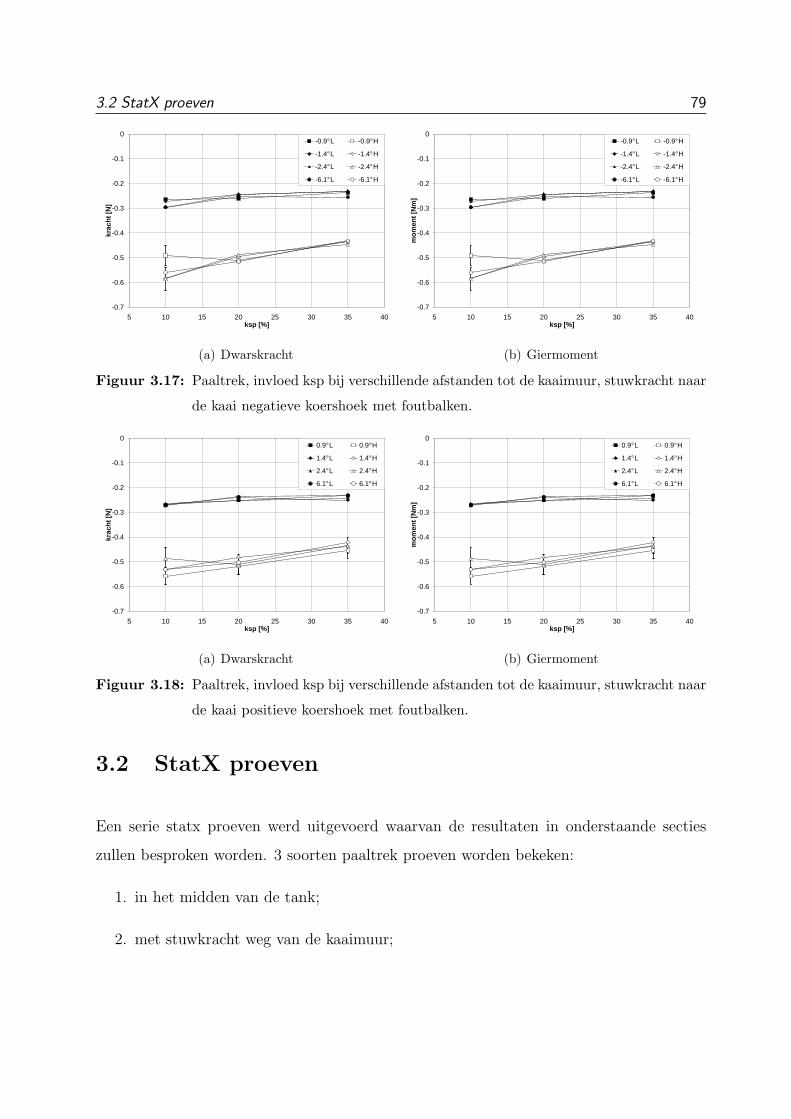
3.2 StatX proeven 79
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(a) Dwarskracht
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
-0.9° L -0.9° H
-1.4° L -1.4° H
-2.4° L -2.4° H
-6.1° L -6.1° H
(b) Giermoment
Figuur 3.17: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht naar
de kaai negatieve koershoek met foutbalken.
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(a) Dwarskracht
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
0.9° L 0.9° H
1.4° L 1.4° H
2.4° L 2.4° H
6.1° L 6.1° H
(b) Giermoment
Figuur 3.18: Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuwkracht naar
de kaai positieve koershoek met foutbalken.
3.2 StatX proeven
Een serie statx proeven werd uitgevoerd waarvan de resultaten in onderstaande secties
zullen besproken worden. 3 soorten paaltrek proeven worden bekeken:
1. in het midden van de tank;
2. met stuwkracht weg van de kaaimuur;
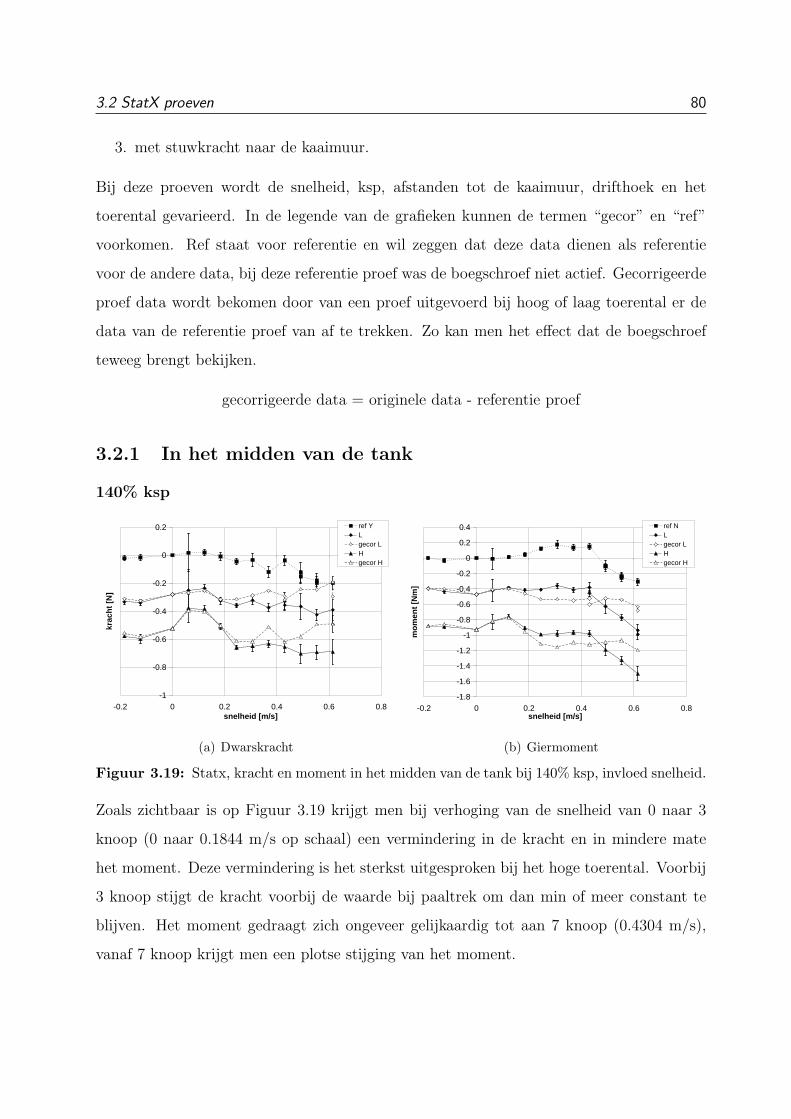
3.2 StatX proeven 80
3. met stuwkracht naar de kaaimuur.
Bij deze proeven wordt de snelheid, ksp, afstanden tot de kaaimuur, drifthoek en het
toerental gevarieerd. In de legende van de grafieken kunnen de termen “gecor” en “ref”
voorkomen. Ref staat voor referentie en wil zeggen dat deze data dienen als referentie
voor de andere data, bij deze referentie proef was de boegschroef niet actief. Gecorrigeerde
proef data wordt bekomen door van een proef uitgevoerd bij hoog of laag toerental er de
data van de referentie proef van af te trekken. Zo kan men het effect dat de boegschroef
teweeg brengt bekijken.
gecorrigeerde data = originele data - referentie proef
3.2.1 In het midden van de tank
140% ksp
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
krac
ht
[N]
ref YLgecor LHgecor H
(a) Dwarskracht
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
mo
men
t [N
m]
ref NLgecor LHgecor H
(b) Giermoment
Figuur 3.19: Statx, kracht en moment in het midden van de tank bij 140% ksp, invloed snelheid.
Zoals zichtbaar is op Figuur 3.19 krijgt men bij verhoging van de snelheid van 0 naar 3
knoop (0 naar 0.1844 m/s op schaal) een vermindering in de kracht en in mindere mate
het moment. Deze vermindering is het sterkst uitgesproken bij het hoge toerental. Voorbij
3 knoop stijgt de kracht voorbij de waarde bij paaltrek om dan min of meer constant te
blijven. Het moment gedraagt zich ongeveer gelijkaardig tot aan 7 knoop (0.4304 m/s),
vanaf 7 knoop krijgt men een plotse stijging van het moment.

3.2 StatX proeven 81
Het gebruik van een boegschroef bij achteruit varen gaat gepaard met een sterke toename
van de dwarskracht. Het moment kent een zeer lichte daling t.o.v. dat bij paaltrek.
Duidelijk zichtbaar is dat de referentie proef sterker afwijkt van zijn nul waarde bij toene-
mende snelheid. Deze afwijking wordt sterker bij kleinere kielspeling (zie verder) en is toe
te schrijven aan wervelvorming. Dit is experimenteel bevestigd geweest door injectie van
kleurstof via de boegschroef en is zichtbaar in de resultaten. De krachten opgewekt door
deze wervels verstoren de metingen. Vanaf snelheden van 5 a 6 knoop (0.3074 a 0.3689 m/s
op schaal) en hoger neemt de invloed hiervan sterk toe op de metingen. Bij lage snelheid
zijn de krachten opgewekt door deze wervels klein, de krachten opgewekt door de boeg-
schroef overtreffen deze. De grootte van de foutbalken neemt ook toe bij hogere snelheden.
Bij 1 knoop (0.0615 m/s) zijn tevens grote foutbalken waarneembaar.
35% ksp
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
krac
ht
[N]
ref YLgecor LHgecor H
(a) Dwarskracht
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
mo
men
t [N
m]
ref NLgecor LHgecor H
(b) Giermoment
Figuur 3.20: Statx, kracht en moment in het midden van de tank bij 35% ksp, invloed snelheid.
Figuur 3.20 geeft hetzelfde weer als de vorige figuur maar nu bij 35% ksp. De vermindering
in kracht bij lage snelheid is minder sterk uitgesproken. Enkel nog bij het hoge toerental
doet er zich een kleine vermindering voor bij 1 knoop. Vanaf daar neemt de kracht toe tot
een snelheid van 6 knoop (0.3689 m/s). Tussen 7 en 10 knoop worden vreemde resultaten
verkregen. Kracht en moment wisselen zelfs van teken. Het is duidelijk dat in dit bereik

3.2 StatX proeven 82
van snelheden de krachten opgewekt door de wervelvorming overheersen en de metingen al
behoorlijk beınvloeden.
Op Figuur 3.21 is de invloed van een drifthoek op de werking van de boegschroef te zien
in functie van de snelheid. De data in Figuur 3.21 is gecorrigeerd met referentie data, dus
op de figuur is het effect van zuiver de boegschroef te zien.
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht laag toerental
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment laag toerental
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht hoog toerental
-1.2
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment hoog toerental
Figuur 3.21: Statx, kracht en moment in het midden van de tank met verschillende drifthoeken
bij 35% ksp, invloed snelheid.
Bekijken van de dwarskracht toont een stijging bij 1 knoop en een daling bij 2 knoop t.o.v.
de kracht zonder drifthoek. Bij achteruit varen levert een positieve drifthoek iets meer
kracht op en bij vooruit varen levert een negatieve drifthoek iets meer kracht.

3.2 StatX proeven 83
20% ksp
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
krac
ht
[N]
ref YLgecor LHgecor H
(a) Dwarskracht
-2
-1.5
-1
-0.5
0
0.5
1
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
mo
men
t [N
m]
ref NLgecor LHgecor H
(b) Giermoment
Figuur 3.22: Statx, kracht en moment in het midden van de tank bij 20% ksp, invloed snelheid.
Op Figuur 3.22 is zeer duidelijk de invloed van de wervelvorming te zien. De referentie
proef begint na 5 knoop (0.3074 m/s op schaal) zeer sterk af te wijken van nul en vertoont
als het ware 2 “takken”. Tussen -2 en 5 knoop doet zich min of meer hetzelfde voor als bij
35% ksp met dat verschil dat de krachten haast geen dip meer kennen aan 1 knoop en dat
de krachten allemaal net iets groter uitvallen.
Figuur 3.23 toont de invloed van een drifthoek bij verschillende snelheden. Dwarskracht
en moment bij achteruit varen kennen een fikse toename t.o.v. deze bij 35% ksp. Bij
voorwaartse snelheid is het varen met een drifthoek nadelig voor de dwarskracht t.o.v.
zonder drifthoek, bij een drifthoek van 6.1◦ aan 1 knoop wordt de kracht bijna nul. Het
moment is groter voor positieve drifthoeken bij achteruit varen en negatieve drifthoeken
bij vooruit varen.

3.2 StatX proeven 84
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht laag toerental
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment laag toerental
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht hoog toerental
-1.4
-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment hoog toerental
Figuur 3.23: Statx, kracht en moment in het midden van de tank met verschillende gierhoeken
bij 20% ksp, invloed snelheid.
10% ksp
Figuur 3.24 toont de invloed van de snelheid op de dwarskracht en moment. Figuur 3.24
verschilt in grote mate met Figuren 3.20 en 3.22. Bij 10% ksp doet zich ongeveer hetzelfde
voor als bij 140% ksp met dat verschil dat kracht en moment niet stijgen na 3 knoop maar
instabiel worden door sterke wervelvorming. Zo is er aan 10 knoop bij laag toerental een
verschil van 2 Newton tussen 2 identiek dezelfde metingen. In realiteit zou dit overeen
komen met een verschil van kracht van ±70 ton.
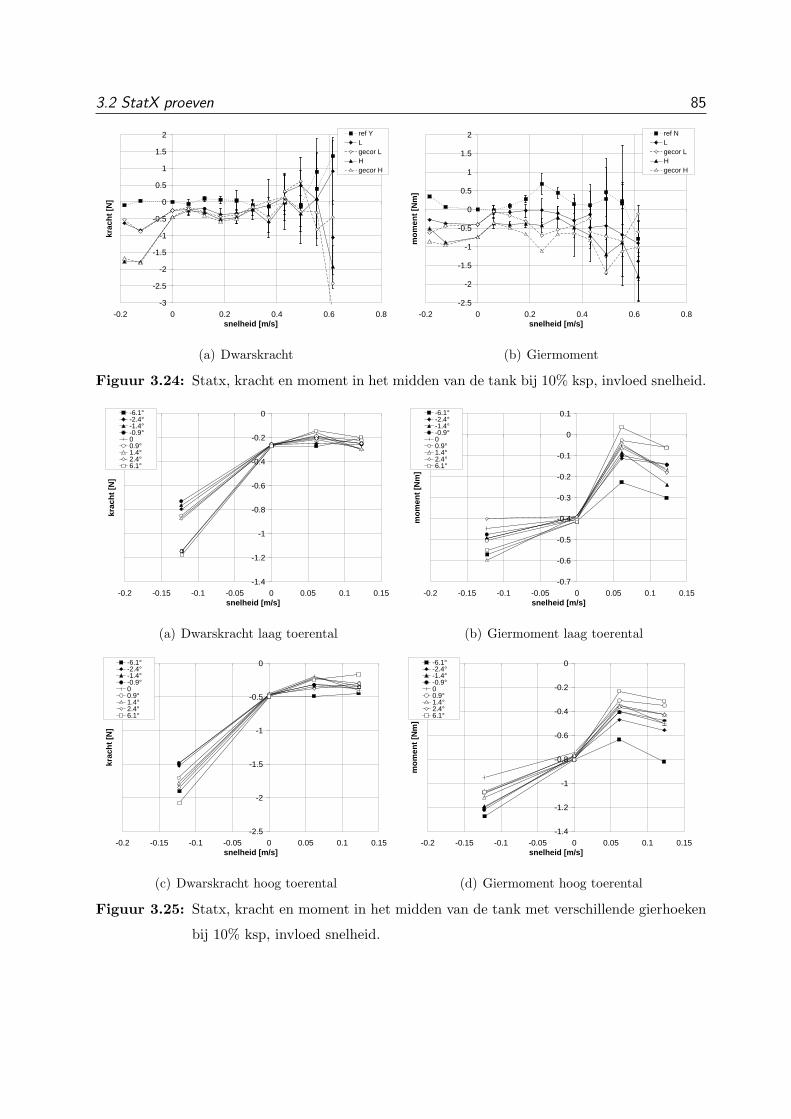
3.2 StatX proeven 85
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
krac
ht
[N]
ref YLgecor LHgecor H
(a) Dwarskracht
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 0 0.2 0.4 0.6 0.8snelheid [m/s]
mo
men
t [N
m]
ref NLgecor LHgecor H
(b) Giermoment
Figuur 3.24: Statx, kracht en moment in het midden van de tank bij 10% ksp, invloed snelheid.
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht laag toerental
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment laag toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht hoog toerental
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment hoog toerental
Figuur 3.25: Statx, kracht en moment in het midden van de tank met verschillende gierhoeken
bij 10% ksp, invloed snelheid.

3.2 StatX proeven 86
Figuur 3.25 toont de invloed van een drifthoek bij verschillende snelheden. Ook hier is er
een groot verschil met de vorige situatie. De dwarskracht neemt flink toe bij achterwaartse
snelheid terwijl zich bij voorwaartse snelheid de kracht niet meer stijgt bij 2 knoop. Ook
het giermoment is sterk afwijkend van de voorgaande situatie. Er is nu een zeer sterke
afname van het moment bij voorwaartse snelheid. Bij laag toerental verandert zelfs het
teken van het moment. Er is terug een voorkeur voor negatieve hoeken bij voorwaartse
snelheid.
3.2.2 Nabij de kaai met stuwkracht weg van de kaai
De proeven uitgevoerd nabij de kaaimuur hebben iets minder last van de wervelvorming
omdat hier bij de hogere snelheden oeverzuiging optreedt en een dominante kracht vormt.
De wervelvorming is nog steeds aanwezig, dit is experimenteel vastgesteld, maar het effect
ervan op de krachtwerking wordt teniet gedaan door de sterke oeverzuiging. Hoe dichter
bij de kaaimuur en dus hoe sterker de oeverzuiging wordt, hoe minder de wervelvorming
zich uit in de metingen. Om het effect van de boegschroef te kunnen zien wordt de data
gecorrigeerd met referentie data:
gecorrigeerde data = originele data - referentie proef
Op deze wijze is de oeverzuiging niet zichtbaar.
In Bijlage F zijn de figuren per kielspeling apart te zien per afstand tot de kaaimuur.
140% ksp
Op Figuur 3.26 is een versterking van de kracht en moment te zien bij kleiner wordende
afstand tot de kaaimuur. De toename in kracht bij 1 knoop (0.0615 m/s op schaal) op
de grafieken is te wijten aan het feit de referentie kracht waarmee gecorrigeerd werd een
afname kende in kracht bij 1 knoop, zie hiervoor naar de grafieken in Bijlage F.1.1. Voor de
kleinste afstand tot de kaaimuur is deze toename in kracht en moment toch vrij aanzienlijk.
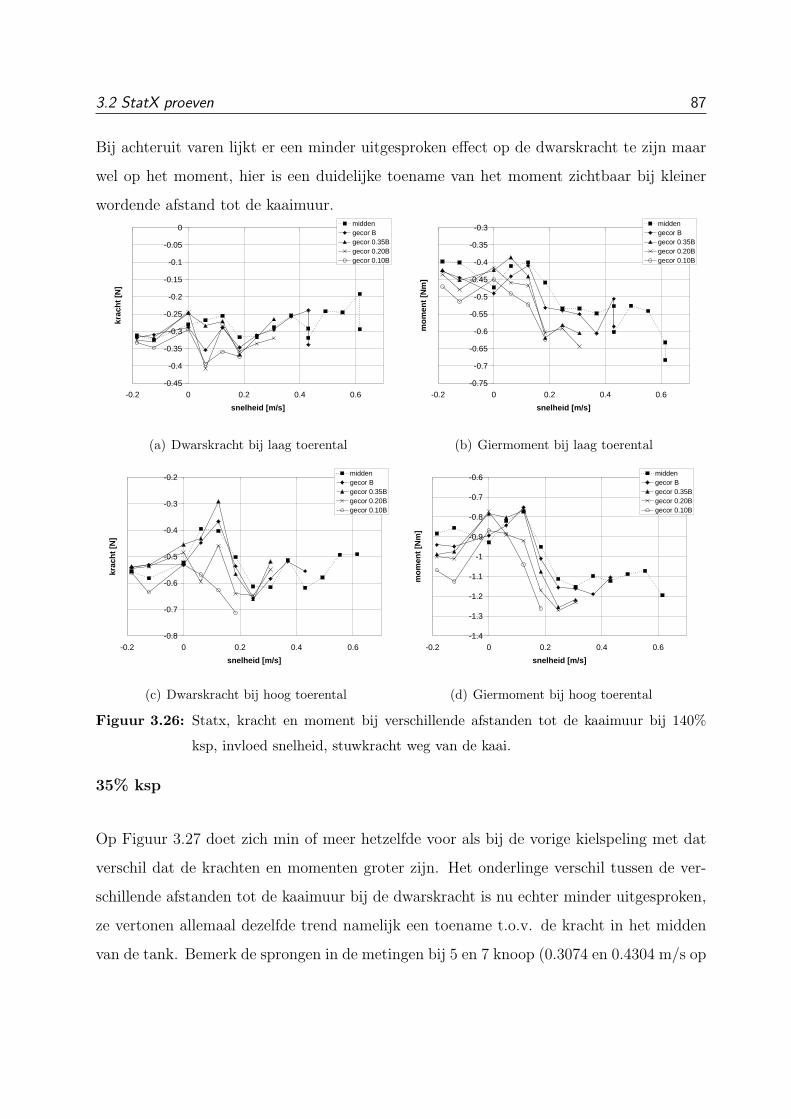
3.2 StatX proeven 87
Bij achteruit varen lijkt er een minder uitgesproken effect op de dwarskracht te zijn maar
wel op het moment, hier is een duidelijke toename van het moment zichtbaar bij kleiner
wordende afstand tot de kaaimuur.
-0.45
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(a) Dwarskracht bij laag toerental
-0.75
-0.7
-0.65
-0.6
-0.55
-0.5
-0.45
-0.4
-0.35
-0.3
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(b) Giermoment bij laag toerental
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(c) Dwarskracht bij hoog toerental
-1.4
-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(d) Giermoment bij hoog toerental
Figuur 3.26: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 140%
ksp, invloed snelheid, stuwkracht weg van de kaai.
35% ksp
Op Figuur 3.27 doet zich min of meer hetzelfde voor als bij de vorige kielspeling met dat
verschil dat de krachten en momenten groter zijn. Het onderlinge verschil tussen de ver-
schillende afstanden tot de kaaimuur bij de dwarskracht is nu echter minder uitgesproken,
ze vertonen allemaal dezelfde trend namelijk een toename t.o.v. de kracht in het midden
van de tank. Bemerk de sprongen in de metingen bij 5 en 7 knoop (0.3074 en 0.4304 m/s op
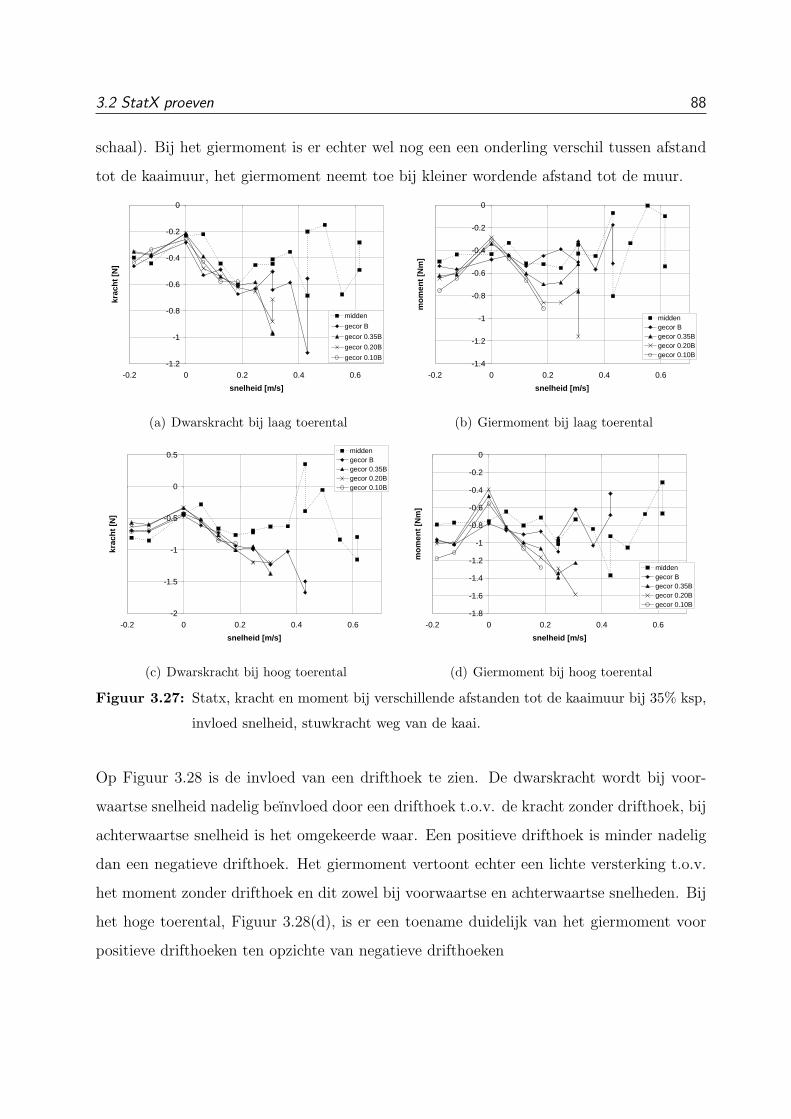
3.2 StatX proeven 88
schaal). Bij het giermoment is er echter wel nog een een onderling verschil tussen afstand
tot de kaaimuur, het giermoment neemt toe bij kleiner wordende afstand tot de muur.
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
midden
gecor B
gecor 0.35B
gecor 0.20B
gecor 0.10B
(a) Dwarskracht bij laag toerental
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(b) Giermoment bij laag toerental
-2
-1.5
-1
-0.5
0
0.5
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(c) Dwarskracht bij hoog toerental
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(d) Giermoment bij hoog toerental
Figuur 3.27: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 35% ksp,
invloed snelheid, stuwkracht weg van de kaai.
Op Figuur 3.28 is de invloed van een drifthoek te zien. De dwarskracht wordt bij voor-
waartse snelheid nadelig beınvloed door een drifthoek t.o.v. de kracht zonder drifthoek, bij
achterwaartse snelheid is het omgekeerde waar. Een positieve drifthoek is minder nadelig
dan een negatieve drifthoek. Het giermoment vertoont echter een lichte versterking t.o.v.
het moment zonder drifthoek en dit zowel bij voorwaartse en achterwaartse snelheden. Bij
het hoge toerental, Figuur 3.28(d), is er een toename duidelijk van het giermoment voor
positieve drifthoeken ten opzichte van negatieve drifthoeken

3.2 StatX proeven 89
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht bij laag toerental
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment bij laag toerental
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht bij hoog toerental
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment bij hoog toerental
Figuur 3.28: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en drifthoe-
ken bij 35% ksp, invloed snelheid, stuwkracht weg van de kaai.
20% ksp
Figuur 3.29 toont terug dezelfde trends als bij de vorige kielspeling, namelijk een toename
van kracht en moment onder invloed van de kaaimuur en snelheid. De krachten zijn terug
groter geworden t.o.v. de vorige kielspeling, het moment kent slechts een kleine stijging.
Enkel in het giermoment is er bij achterwaartse snelheid een duidelijke afhankelijkheid van
de afstand tot de kaaimuur.

3.2 StatX proeven 90
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(a) Dwarskracht bij laag toerental
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(b) Giermoment bij laag toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(c) Dwarskracht bij hoog toerental
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(d) Giermoment bij hoog toerental
Figuur 3.29: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 20% ksp,
invloed snelheid, stuwkracht weg van de kaai.
Figuur 3.30 toont een afname van de dwarskracht bij negatieve drifthoeken en een toename
van de dwarskracht bij positieve drifthoeken ten opzichte van de kracht zonder drifthoek
bij voorwaartse snelheid. Bij achterwaartse snelheid is er een toename van de kracht. Het
punt bij snelheid -0.1230 m/s voor 6.1◦ op Figuur 3.30(c) valt hier bijna samen met dat
voor -6.1◦, dit komt omdat het regime bij 6.1◦ zich niet snel genoeg ingesteld heeft bij het
hoge toerental. Ten opzichte van het moment zonder drifthoek lijken positieve drifthoeken
een toename van het moment te vertonen en negatieve drifthoeken een afname van het
moment.

3.2 StatX proeven 91
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht bij laag toerental
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment bij laag toerental
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht bij hoog toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment bij hoog toerental
Figuur 3.30: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en drifthoe-
ken bij 20% ksp, invloed snelheid, stuwkracht weg van de kaai.
10% ksp
Figuur 3.31 toont een sterke toename van kracht en moment ten opzichte van de andere
kielspelingen. Er is terug een toename van kracht en moment door de nabijheid van de
kaaimuur. Bij het achteruit varen is er een afname van de dwarskracht en een toename
van het giermoment ten op zichte van de kracht en moment in het midden van de tank.
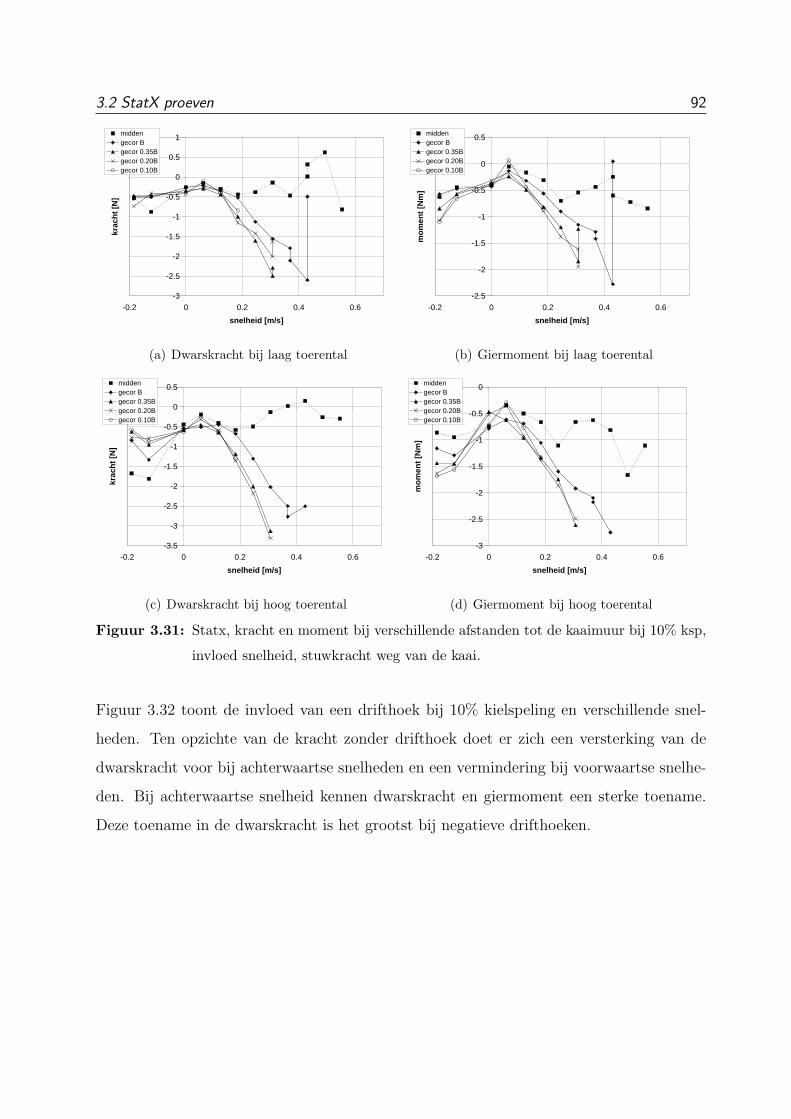
3.2 StatX proeven 92
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(a) Dwarskracht bij laag toerental
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(b) Giermoment bij laag toerental
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
krac
ht
[N]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(c) Dwarskracht bij hoog toerental
-3
-2.5
-2
-1.5
-1
-0.5
0
-0.2 0 0.2 0.4 0.6
snelheid [m/s]
mo
men
t [N
m]
middengecor Bgecor 0.35Bgecor 0.20Bgecor 0.10B
(d) Giermoment bij hoog toerental
Figuur 3.31: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 10% ksp,
invloed snelheid, stuwkracht weg van de kaai.
Figuur 3.32 toont de invloed van een drifthoek bij 10% kielspeling en verschillende snel-
heden. Ten opzichte van de kracht zonder drifthoek doet er zich een versterking van de
dwarskracht voor bij achterwaartse snelheden en een vermindering bij voorwaartse snelhe-
den. Bij achterwaartse snelheid kennen dwarskracht en giermoment een sterke toename.
Deze toename in de dwarskracht is het grootst bij negatieve drifthoeken.

3.2 StatX proeven 93
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht bij laag toerental
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment bij laag toerental
-3
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht bij hoog toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment bij hoog toerental
Figuur 3.32: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en drifthoe-
ken bij 10% ksp, invloed snelheid, stuwkracht weg van de kaai.
3.2.3 Nabij de kaai met stuwkracht naar de kaai
De data die hier wordt voorgesteld is ook gecorrigeerd geweest met referentie data om zo
het effect van de boegschroef duidelijk naar voor te brengen.
gecorrigeerde data = originele data - referentie proef
140% ksp
Op Figuur 3.33 is te zien dat een kaaimuur een nadelig effect heeft op de dwarskracht
t.o.v. wanneer men in het midden van de tank vaart. Bij achteruit varen is er echter een
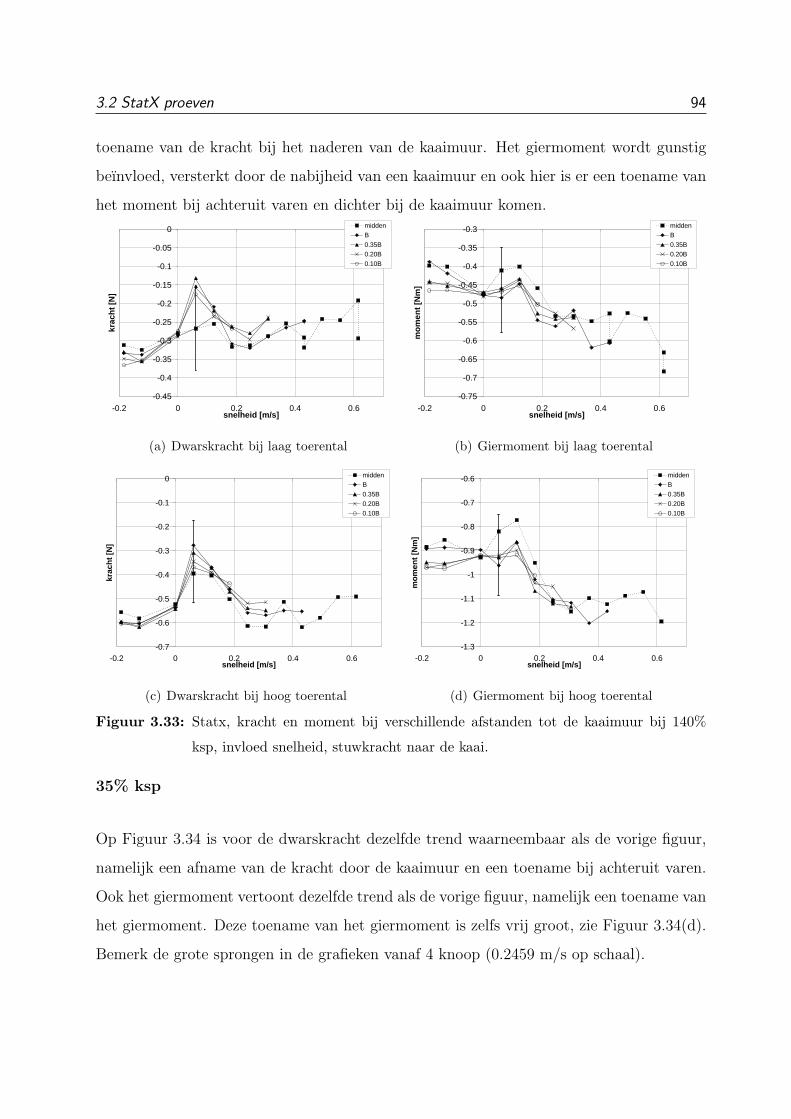
3.2 StatX proeven 94
toename van de kracht bij het naderen van de kaaimuur. Het giermoment wordt gunstig
beınvloed, versterkt door de nabijheid van een kaaimuur en ook hier is er een toename van
het moment bij achteruit varen en dichter bij de kaaimuur komen.
-0.45
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(a) Dwarskracht bij laag toerental
-0.75
-0.7
-0.65
-0.6
-0.55
-0.5
-0.45
-0.4
-0.35
-0.3
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(b) Giermoment bij laag toerental
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(c) Dwarskracht bij hoog toerental
-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(d) Giermoment bij hoog toerental
Figuur 3.33: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 140%
ksp, invloed snelheid, stuwkracht naar de kaai.
35% ksp
Op Figuur 3.34 is voor de dwarskracht dezelfde trend waarneembaar als de vorige figuur,
namelijk een afname van de kracht door de kaaimuur en een toename bij achteruit varen.
Ook het giermoment vertoont dezelfde trend als de vorige figuur, namelijk een toename van
het giermoment. Deze toename van het giermoment is zelfs vrij groot, zie Figuur 3.34(d).
Bemerk de grote sprongen in de grafieken vanaf 4 knoop (0.2459 m/s op schaal).

3.2 StatX proeven 95
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(a) Dwarskracht bij laag toerental
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(b) Giermoment bij laag toerental
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(c) Dwarskracht bij hoog toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(d) Giermoment bij hoog toerental
Figuur 3.34: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 35% ksp,
invloed snelheid, stuwkracht naar de kaai.
Figuur 3.35 toont de invloed van een drifthoek bij verschillende snelheden. De dwarskracht
neemt licht toe onder de invloed van een drifthoek, enkel een grote positieve drifthoek ver-
toont een afname van de kracht. Het giermoment ligt verspreid rond de meting zonder
drifthoek. Positieve drifthoeken versterken het giermoment en negatieve drifthoeken ver-
zwakken het giermoment ten opzichte van het moment zonder drifthoek.

3.2 StatX proeven 96
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht bij laag toerental
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment bij laag toerental
-1.2
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht bij hoog toerental
-1.4
-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment bij hoog toerental
Figuur 3.35: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en drifthoe-
ken bij 35% ksp, invloed snelheid, stuwkracht naar de kaai.
20% ksp
Figuur 3.36 toont een zelfde tendens als Figuur 3.34 die dezelfde gegevens weergeeft maar
dan bij 35% ksp. Namelijk een nadelige beınvloeding van de dwarskracht bij het naderen
van de kaaimuur. Echter bij achterwaartse snelheid treedt een uitgesproken versterking van
de kracht op. Het giermoment vertoont een lichte versterking bij naderen van de kaaimuur
en een zeer sterke toename bij het kleinere afstand tot de kaaimuur bij achterwaartse
snelheid.

3.2 StatX proeven 97
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(a) Dwarskracht bij laag toerental
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(b) Giermoment bij laag toerental
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(c) Dwarskracht bij hoog toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(d) Giermoment bij hoog toerental
Figuur 3.36: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 20% ksp,
invloed snelheid, stuwkracht naar de kaai.
Op Figuur 3.37 is min of meer hetzelfde te zien als op deze bij 35% ksp. Met dat verschil
dat de kracht en moment zijn toegenomen in grootte. Voor de dwarskracht is er een
verschil tussen positieve en negatieve drifthoeken, de krachten bij negatieve drifthoeken
zijn net iets groter. Het giermoment ligt terug verspreid rond de meting zonder drifthoek.
De metingen met positieve drifthoek hebben een iets groter moment t.o.v. deze zonder
drifthoek, de metingen met negatieve drifthoek hebben een iets kleiner moment t.o.v. deze
zonder drifthoek.

3.2 StatX proeven 98
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht bij laag toerental
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment bij laag toerental
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht bij hoog toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment bij hoog toerental
Figuur 3.37: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en drifthoe-
ken bij 20% ksp, invloed snelheid, stuwkracht naar de kaai.
10% ksp
Figuur 3.38 toont dat de nadelige invloed van de kaaimuur op de dwarskracht vermindert
bij kleine kielspeling. Bij hogere snelheden zou er zelfs een versterking optreden. Het is
echter duidelijk te zien dat deze punten fluctueren en dat de wervelvorming en de bijzondere
kleine kielspeling de meting al verstoren. Voor het giermoment is er nog steeds spraken
van een toename over het volledige bereik van snelheden.

3.2 StatX proeven 99
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(a) Dwarskracht bij laag toerental
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(b) Giermoment bij laag toerental
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 0 0.2 0.4 0.6snelheid [m/s]
krac
ht
[N]
middenB
0.35B0.20B
0.10B
(c) Dwarskracht bij hoog toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 0 0.2 0.4 0.6snelheid [m/s]
mo
men
t [N
m]
middenB
0.35B0.20B
0.10B
(d) Giermoment bij hoog toerental
Figuur 3.38: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij 10% ksp,
invloed snelheid, stuwkracht naar de kaai.
Figuur 3.39 vertoont net dezelfde trends als dezelfde figuur bij 20% ksp, zie Figuur 3.37.
Er is wel een toename van kracht en moment onder invloed van de geringe kielspeling.

3.3 PMMPSI proeven 100
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(a) Dwarskracht bij laag toerental
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
mo
men
t [N
m]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(b) Giermoment bij laag toerental
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(c) Dwarskracht bij hoog toerental
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15snelheid [m/s]
krac
ht
[N]
-6.1°-2.4°-1.4°-0.9°00.9°1.4°2.4°6.1°
(d) Giermoment bij hoog toerental
Figuur 3.39: Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en drifthoe-
ken bij 10% ksp, invloed snelheid, stuwkracht naar de kaai.
3.3 PMMPSI proeven
In de volgende grafieken wordt in de legende steeds gebruik gemaakt van 2 letters. De 1e
letter duidt op het toerental van de boegschroef, laag of hoog. De 2e letter duidt op de
snelheid van het schip, L = 2 knoop en H = 4 knoop.
In de grafieken wordt gebruikt gemaakt van een dimensieloze restkracht en een dimensieloos
restmoment. Met behulp van:
restkracht = ∆Y = kracht - referentie proef;

3.3 PMMPSI proeven 101
restmoment = ∆N = moment - referentie proef.
Zijn deze als volgt gedefinieerd:
dimensieloze restkracht =∆Y
12ρ(u2 + ( rL
2)2)LT
(3.1)
dimensieloos restmoment =∆N
12ρ(u2 + ( rL
2)2)LTxT
(3.2)
met r = ψ en xT de langscoordinaat van de boegschroef in het scheepsvast assenstelsel.
3.3.1 35% ksp
-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
-40 -30 -20 -10 0 10 20 30 40gamma [°]
dim
ensi
eloz
e re
stkr
acht
L LH LL HH H
(a) Dimensieloze dwarskracht
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
-40 -30 -20 -10 0 10 20 30 40gamma [°]
dim
ensi
eloo
s re
stm
omen
t
L LH LL HH H
(b) Dimensieloos giermoment
-4
-3
-2
-1
0
1
2
3
0 2 4 6 8 10 12 14afstand [m]
krac
ht
[N]
ref LL LH Lref HL HH H
(c) Dwarskracht
-5
-4
-3
-2
-1
0
1
2
3
4
0 2 4 6 8 10 12 14afstand [m]
mo
men
t [N
m]
ref LL LH Lref HL HH H
(d) Giermoment
Figuur 3.40: Pmmpsi, kracht en moment bij 35% ksp i.f.v. γ en i.f.v. afstand langs de x-as.
Figuur 3.40 toont dat er een effect van de boegschroef is. Er is geen consistentie in de
resultaten.

3.3 PMMPSI proeven 102
3.3.2 20% ksp
Figuur 3.41 toont het resultaat voor 20% ksp. Hier is de proef bij lage snelheid mislukt. De
proeven bij 20% ksp zijn uitgevoerd in het ware midden van de tank en niet in het hydro-
dynamische midden zoals de proeven bij 35% en % 10 ksp. Het effect van de boegschroef
is waarneembaar.
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
-20 -15 -10 -5 0 5 10 15 20gamma [°]
dim
ensi
eloz
e re
stkr
acht
L HH H
(a) Dimensieloze dwarskracht
-0.05
-0.045
-0.04
-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
-20 -15 -10 -5 0 5 10 15 20gamma [°]
dim
ensi
eloo
s re
stm
omen
t
L HH H
(b) Dimensieloos giermoment
-4
-3
-2
-1
0
1
2
3
0 2 4 6 8 10 12 14afstand [m]
krac
ht
[N]
ref HL HH H
(c) Dwarskracht
-8
-6
-4
-2
0
2
4
6
0 2 4 6 8 10 12 14afstand [m]
mo
men
t [N
m]
ref HL HH H
(d) Giermoment
Figuur 3.41: Pmmpsi, kracht en moment bij 20% ksp i.f.v. γ en i.f.v. afstand langs de x-as.
3.3.3 10% ksp
Deze kleine kielspeling levert de vreemde resultaten te zien op Figuur 3.42.
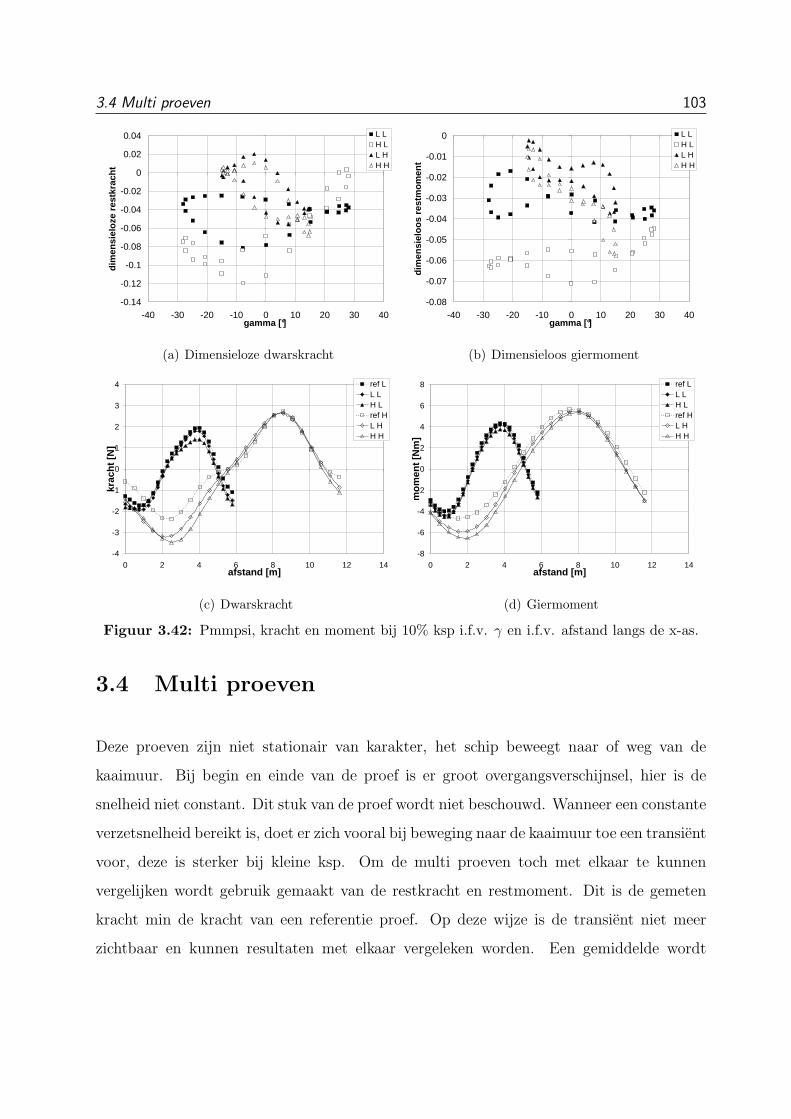
3.4 Multi proeven 103
-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
-40 -30 -20 -10 0 10 20 30 40gamma [°]
dim
ensi
eloz
e re
stkr
acht
L LH LL HH H
(a) Dimensieloze dwarskracht
-0.08
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
-40 -30 -20 -10 0 10 20 30 40gamma [°]
dim
ensi
eloo
s re
stm
omen
t
L LH LL HH H
(b) Dimensieloos giermoment
-4
-3
-2
-1
0
1
2
3
4
0 2 4 6 8 10 12 14afstand [m]
krac
ht
[N]
ref LL LH Lref HL HH H
(c) Dwarskracht
-8
-6
-4
-2
0
2
4
6
8
0 2 4 6 8 10 12 14afstand [m]
mo
men
t [N
m]
ref LL LH Lref HL HH H
(d) Giermoment
Figuur 3.42: Pmmpsi, kracht en moment bij 10% ksp i.f.v. γ en i.f.v. afstand langs de x-as.
3.4 Multi proeven
Deze proeven zijn niet stationair van karakter, het schip beweegt naar of weg van de
kaaimuur. Bij begin en einde van de proef is er groot overgangsverschijnsel, hier is de
snelheid niet constant. Dit stuk van de proef wordt niet beschouwd. Wanneer een constante
verzetsnelheid bereikt is, doet er zich vooral bij beweging naar de kaaimuur toe een transient
voor, deze is sterker bij kleine ksp. Om de multi proeven toch met elkaar te kunnen
vergelijken wordt gebruik gemaakt van de restkracht en restmoment. Dit is de gemeten
kracht min de kracht van een referentie proef. Op deze wijze is de transient niet meer
zichtbaar en kunnen resultaten met elkaar vergeleken worden. Een gemiddelde wordt
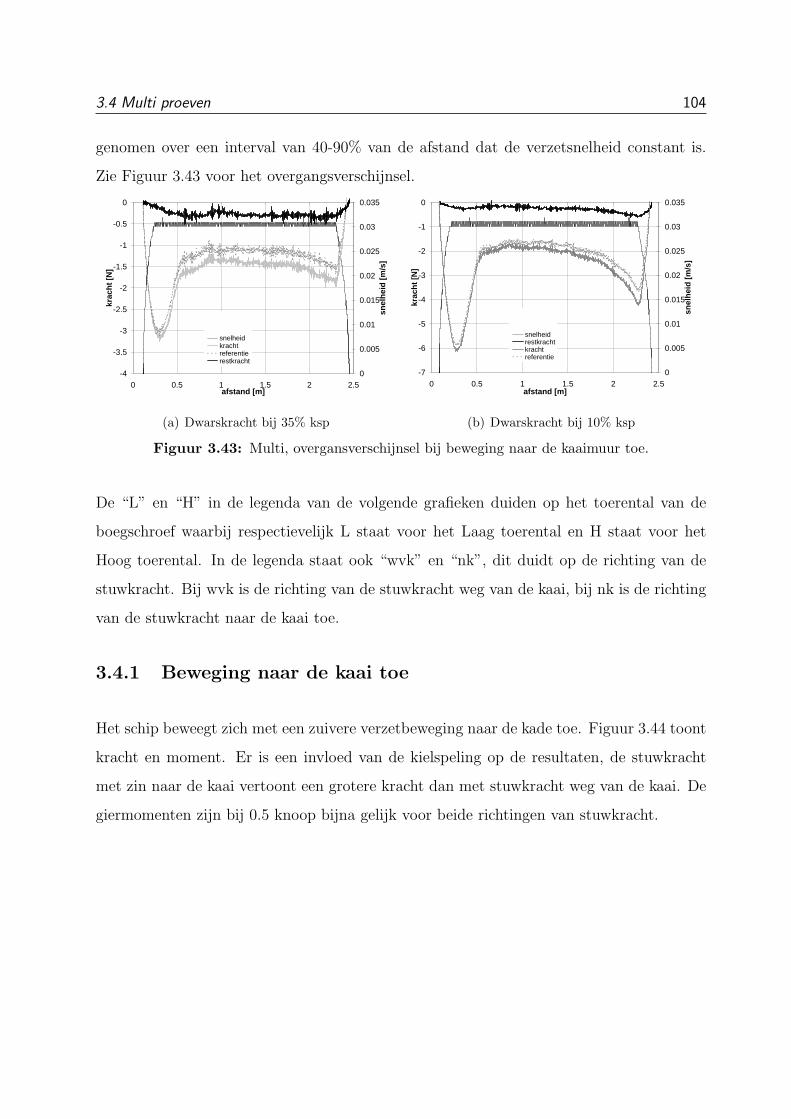
3.4 Multi proeven 104
genomen over een interval van 40-90% van de afstand dat de verzetsnelheid constant is.
Zie Figuur 3.43 voor het overgangsverschijnsel.
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0 0.5 1 1.5 2 2.5afstand [m]
krac
ht
[N]
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
snel
hei
d [
m/s
]
snelheidkrachtreferentierestkracht
(a) Dwarskracht bij 35% ksp
-7
-6
-5
-4
-3
-2
-1
0
0 0.5 1 1.5 2 2.5afstand [m]
krac
ht
[N]
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
snel
hei
d [
m/s
]
snelheidrestkrachtkrachtreferentie
(b) Dwarskracht bij 10% ksp
Figuur 3.43: Multi, overgansverschijnsel bij beweging naar de kaaimuur toe.
De “L” en “H” in de legenda van de volgende grafieken duiden op het toerental van de
boegschroef waarbij respectievelijk L staat voor het Laag toerental en H staat voor het
Hoog toerental. In de legenda staat ook “wvk” en “nk”, dit duidt op de richting van de
stuwkracht. Bij wvk is de richting van de stuwkracht weg van de kaai, bij nk is de richting
van de stuwkracht naar de kaai toe.
3.4.1 Beweging naar de kaai toe
Het schip beweegt zich met een zuivere verzetbeweging naar de kade toe. Figuur 3.44 toont
kracht en moment. Er is een invloed van de kielspeling op de resultaten, de stuwkracht
met zin naar de kaai vertoont een grotere kracht dan met stuwkracht weg van de kaai. De
giermomenten zijn bij 0.5 knoop bijna gelijk voor beide richtingen van stuwkracht.

3.4 Multi proeven 105
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
L wvkH wvkL nkH nk
(a) Dwarskracht bij 0.50 knoop
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
L wvkH wvkL nkH nk
(b) Giermoment bij 0.50 knoop
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
L wvkH wvkL nkH nk
(c) Dwarskracht bij 0.75 knoop
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
L wvkH wvkL nkH nk
(d) Giermoment bij 0.75 knoop
Figuur 3.44: Multi, kracht en moment bij beweging van het schip naar de kade toe.
3.4.2 Beweging weg van de kaai
Het schip beweegt zich met een zuivere verzetbeweging van de kade weg. De kielspeling
heeft terug zijn invloed op de metingen. Hier zijn kracht en moment voor de stuwkracht
met zin weg van de kaai groter dan deze met stuwkracht naar de kaai.

3.4 Multi proeven 106
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0 5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
L wvkH wvkL nkH nk
(a) Dwarskracht bij 0.50 knoop
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
L wvkH wvkL nkH nk
(b) Giermoment bij 0.50 knoop
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0 5 10 15 20 25 30 35 40ksp [%]
krac
ht
[N]
L wvkH wvkL nkH nk
(c) Dwarskracht bij 0.75 knoop
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 5 10 15 20 25 30 35 40ksp [%]
mo
men
t [N
m]
L wvkH wvkL nkH nk
(d) Giermoment bij 0.75 knoop
Figuur 3.45: Multi, kracht en moment bij beweging van het schip weg van de kade.
De grafieken tonen aan dat wanneer stuwkracht en verzetbeweging dezelfde richting hebben,
deze de kracht en het moment versterken.
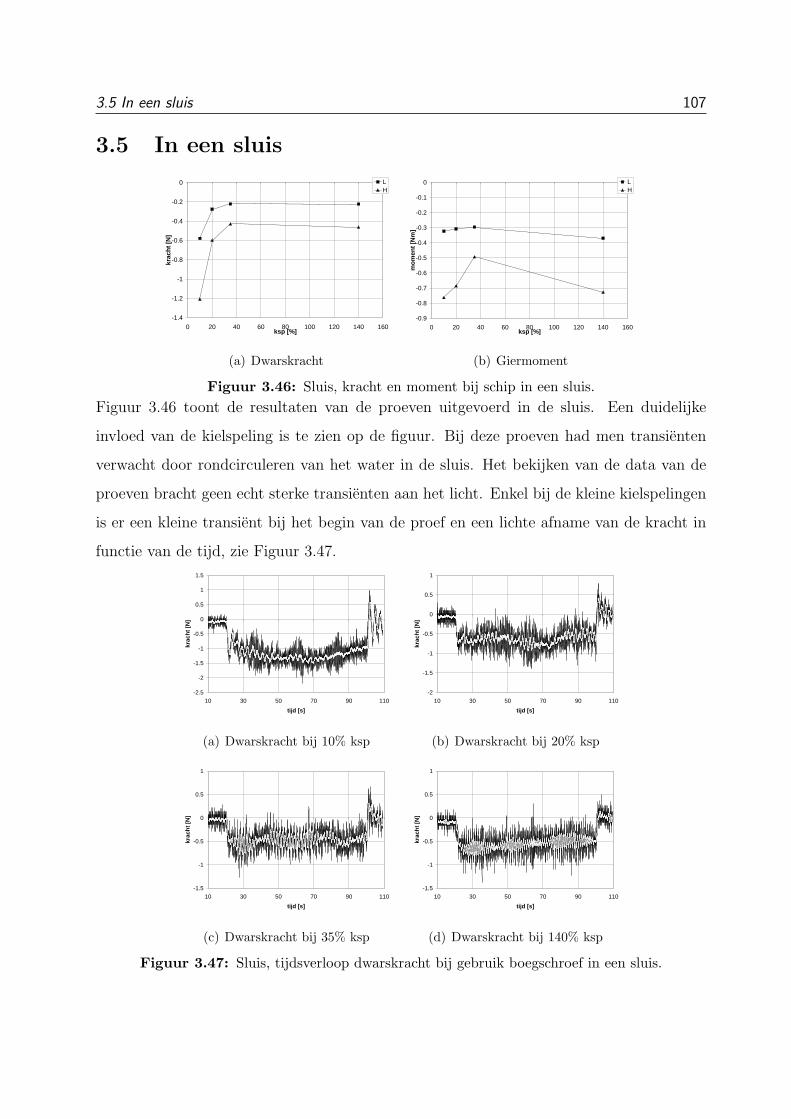
3.5 In een sluis 107
3.5 In een sluis
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0 20 40 60 80 100 120 140 160ksp [%]
krac
ht
[N]
LH
(a) Dwarskracht
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 20 40 60 80 100 120 140 160ksp [%]
mo
men
t [N
m]
LH
(b) Giermoment
Figuur 3.46: Sluis, kracht en moment bij schip in een sluis.Figuur 3.46 toont de resultaten van de proeven uitgevoerd in de sluis. Een duidelijke
invloed van de kielspeling is te zien op de figuur. Bij deze proeven had men transienten
verwacht door rondcirculeren van het water in de sluis. Het bekijken van de data van de
proeven bracht geen echt sterke transienten aan het licht. Enkel bij de kleine kielspelingen
is er een kleine transient bij het begin van de proef en een lichte afname van de kracht in
functie van de tijd, zie Figuur 3.47.
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
10 30 50 70 90 110
tijd [s]
krac
ht
[N]
(a) Dwarskracht bij 10% ksp
-2
-1.5
-1
-0.5
0
0.5
1
10 30 50 70 90 110
tijd [s]
krac
ht
[N]
(b) Dwarskracht bij 20% ksp
-1.5
-1
-0.5
0
0.5
1
10 30 50 70 90 110
tijd [s]
krac
ht
[N]
(c) Dwarskracht bij 35% ksp
-1.5
-1
-0.5
0
0.5
1
10 30 50 70 90 110
tijd [s]
krac
ht
[N]
(d) Dwarskracht bij 140% ksp
Figuur 3.47: Sluis, tijdsverloop dwarskracht bij gebruik boegschroef in een sluis.
CONCLUSIE EN AANBEVELINGEN 108
Hoofdstuk 4
Conclusie en aanbevelingen
4.1 Conclusie
De beschikbare parameters van boegschroeven zijn opgezocht en een theoretische studie
naar de werking van boegschroeven is uitgevoerd. Er is een literatuurstudie uitgevoerd naar
de effecten van laterale thrusters die relevant zijn voor deze thesis. Een proevenprogramma
is samengesteld geweest voor de sleeptank van het Waterbouwkundig Laboratorium. De
data verkregen van de proeven zijn geanalyseerd.
De beschikbare gegevens voor thrusters zijn de diameter, vermogen, geometrie van de
thruster eenheid met betrekking tot installatie in het schip, het gewicht van de eenheid,
het nominaal toerental van de aandrijfmotor, keuze van de schroef tussen FPP of CPP en
het type aandrijving namelijk diesel of elektrisch.
De werking van een thruster valt uit te leggen met de wetten van Newton. De theoretische
beschouwing steunt op de verandering van de hoeveelheid van beweging van de vloeistof
- impulstheorie. De totale reactiekracht te wijten aan de thruster verdeelt zich over een
kracht geleverd door de schroef en een kracht op de romp van het schip. Hieruit volgt
meteen het belang van de tunnel geometrie. Een goede afronding van de tunnel in- en
uitgang is bevorderlijk.

4.2 Aanbevelingen 109
Op basis van een beperkt aantal proeven is gepeild naar de invloed van een kaaimuur, kiel-
speling, drifthoek, snelheid en een sluis. De kielspeling is een dominante parameter die over
het algemeen wanneer deze klein wordt de krachten en momenten versterkt. De snelheid
van het schip heeft een grote invloed op het gedrag van de thruster. Volgens de literatuur
kan men een sterke afname verwachten van kracht en moment bij lage voorwaartse snelheid
van het schip t.o.v. kracht en moment bij nulsnelheid. Deze daling bereikt een minimum,
waarna kracht en moment zich terug herstellen. Dergelijke afname is terug te vinden in
bepaalde proeven maar ze is minder sterk uitgesproken als dat de literatuur voorspelt. Het
gebruik van een boegschroef bij achteruit varen heeft een toename, tot sterke toename van
de kracht en moment tot gevolg. De nabijheid van een kaaimuur heeft een effect op de
boegschroef. Wanneer de stuwkracht weg van de kaaimuur gericht is, is er een stijging
van de kracht en moment ten opzichte van wanneer er geen kaaimuur aanwezig is. Als de
stuwkracht echter naar de kaaimuur gericht is, dan is er een vermindering van de kracht,
het moment kent een toename. Het gebruik van thrusters bij het varen met een drifthoek
heeft vaak een nadelige invloed op de krachten t.o.v. deze zonder drifthoek. Wanneer het
schip zuiver verzet en de stuwkracht heeft dezelfde richting als deze verzetbeweging, dan
neemt de stuwkracht toe. Kracht en moment bij het gebruik van een thruster in een sluis
zijn zeer sterk afhankelijk van de kielspeling. Hoe kleiner de kielspeling, hoe groter kracht
en moment.
Aan hoge snelheid trad er wervelvorming op die de metingen beınvloedde. Deze wervelvor-
ming werd versterkt bij kleinere kielspelingen. Ze treedt op vanaf snelheden van ongeveer
4 a 5 knoop afhankelijk van de kielspeling.
4.2 Aanbevelingen
De constructie van de boegschroef zorgde voor zeer veel kleine luchtbelletjes. De opgewekte
krachten waren klein waardoor het toerental zeer hoog moest worden opgedreven. In welke
mate dit nog overeenkomt met schepen op ware grootte is niet meteen duidelijk. Dit kan de

4.2 Aanbevelingen 110
resultaten niet representatief maken bij schepen op ware grootte. Een nieuw ontwerp van
de boegschroef installatie waarbij dergelijke vorming van luchtbelletjes zich niet voordoet
lijkt aangewezen.
Het gebruik van een ander schip dat geen wervelvorming vertoont bij hogere snelheid wan-
neer het niet is uitgerust met een hoofdpropeller. Proeven waarbij het model M uitgerust
werd met een hoofdpropeller vertonen deze wervelvorming niet, het uitrusten van het model
met een propeller kan dus een verbetering zijn.
Het aanbrengen van afrondingen aan de tunnel in- en uitgang. Dit verhoogt de dwarskracht
geleverd door de boegschroef, zie het literatuur onderzoek.
Opnieuw uitvoeren van de proeven maar dan met minder condities per proef. De tijdsduur
van de paaltrek proeven langer nemen want bij deze proeven traden vaak transienten op.
De proeven enkele keren herhalen ter controle van de reproduceerbaarheid.

ζ WAARDEN 111
Bijlage A
ζ waarden

DIMENSIEANALYSE 112
Bijlage B
Dimensieanalyse
Opdat modelproeven een juist beeld van de werkelijkheid zouden geven, moet er dynami-
sche gelijkvormigheid zijn. Dit houdt het volgende in:
• schip en model dienen geometrisch gelijkvormig te zijn
• de krachten die op het model en op het schip inwerken dienen in een constante
verhouding te staan; dit geldt ook voor de krachten op de vloeistof in de omgeving
van model en schip
De krachten die voorkomen zijn de volgende:
• drukkrachten
• zwaartekracht
• wrijvingskracht
• krachten voortkomend uit de zwaartekracht
• traagheidskrachten
• elastische krachten (verwaarloosbaar)
• oppervlaktespanningen (verwaarloosbaar)

DIMENSIEANALYSE 113
Om een idee te krijgen hoe men deze krachten op een wetenschappelijk correcte manier
moet schalen, kan men gebruik maken van de dimensieanalyse. Dergelijke analyse steunt
op het Buckingham Π-theorema en de wetten van Navier-Stokes [32]. Toepassing van deze
theorie op een scheepshydrodynamisch probleem zijn terug te vinden in [33].
De modelwetten die moeten worden toegepast zijn de volgende:
1. De modelwet van Reech-Froude voor snelheid:
VS√gLS
=VM√gLM
⇔ Fn,S = Fn,M (B.1)
2. De modelwet van Reynolds:
VSLSνS
=VMLMνM
⇔ Rn,S = Rn,M (B.2)
3. Gelijkvormigheid in drukken:pSρSV 2
S
=pM
ρMV 2M
(B.3)
4. Gelijke snelheidsgraad:VASnSDS
=VAMnMDM
(B.4)
Hierin zijn:
• V de scheepssnelheid
• g de gravitatieconstante
• L de scheepslengte
• ν de viscositeit van de vloeistof
• ρ de massadichtheid van de vloeistof
• p de druk
• VA de intreesnelheid

DIMENSIEANALYSE 114
• D de schroefdiameter
• n het schroeftoerental
Opmerkingen:
• In bovenstaande uitdrukkingen duidt de subscript “S” op het schip en “M” op het
model.
• In een sleeptank kan niet voldaan worden aan B.3 omwille van de atmosferische druk.
Bij modelproeven levert dit geen echt bezwaar op tenzij cavitatie optreedt. Om dit
verschijnsel toch op schaal na te bootsen moet men de atmosferische druk volgens de
modelwetten schalen.
• Om praktische redenen kan aan de gelijkvormigheidswet van Reynolds B.2 bij proe-
ven met scheepsmodellen niet worden voldaan. Een scheepsmodel op schaal 1/70 zou
immers moeten gesleept worden met een snelheid die 70 keer deze van het werkelijke
schip bedraagt, wat in de praktijk niet mogelijk is. Het gebruik van een andere vloei-
stof dan water zou een theoretische mogelijkheid zijn, maar dit is evenmin praktisch
uitvoerbaar. Men lost dit op door te voldoen aan de modelwet van Reech-Froude en
door gebruik van zo grote mogelijke modellen het verschil in Reynoldsgetal tussen
schip en model te beperken.
Op basis hiervan liggen nu alle verbanden tussen de parameters vast waaran voldoen moet
worden voor dynamische gelijkvormigheid. Een overzicht:

DIMENSIEANALYSE 115
snelheidschaal λV =√λL
tijdsschaal λt =√λL
versnellingsschaal λa = 1
oppervlakteschaal λS = λ2
volumeschaal λ∀ = λ3L
massaschaal λm = λρλ3L
kinematische viscositeit λν = λµλ−1L
krachtenschaal λF = λρλ3L
vermogenschaal λP = λρλ3.5L
momentenschaal λQ = λρλ4L
schaal voor toerental λn = λ−0.5L
Tabel B.1: Schalen voor gelijkvormigheid
met:
• λL = xS
xMde lengteschaal
• λρ = ρS
ρMde densiteitsschaal
• λµ = µS
µMde schaal voor de dynamische viscositeit
Van deze schalen ligt λρ omwille van praktische redenen (er wordt met zoet water gewerkt)
vast en dus ook λµ alhoewel deze ook van de temperatuur afhankelijk is.
KARAKTERISTIEKEN VOOR Y EN N VOOR VERSCHILLENDE SCHEPEN 116
Bijlage C
Karakteristieken voor Y en N voor
verschillende schepen
Deze gegevens zijn afkomstig uit [13].

KARAKTERISTIEKEN VOOR Y EN N VOOR VERSCHILLENDE SCHEPEN 117
VBA CODE PAALTREK PROEVEN 118
Bijlage D
VBA code paaltrek proeven
Een macro werd geschreven om de resultaten van de paaltrek proeven te onderzoeken op
transiente verschijnselen. De code van deze macro wordt hier weergegeven:

Sub paaltrektest() ' ' paaltrektest Macro ' De macro is opgenomen op 5/04/2007 door Jan Bertrem. ' ' Sheets(1).Select Sheets(1).Name = "data" Columns("A:A").Select Selection.TextToColumns Destination:=Range("A1"), DataType:=xlDelimited, _ TextQualifier:=xlDoubleQuote, ConsecutiveDelimiter:=True, Tab:=True, _ Semicolon:=False, Comma:=False, Space:=True, Other:=False, FieldInfo _ :=Array(Array(1, 1), Array(2, 1)), TrailingMinusNumbers:=True Columns("J:Q").Select Range("J169").Activate Selection.Insert Shift:=xlToRight Range("J171").Select lastrowJ = Worksheets("data").Range("I1").End(xlDown).Row ActiveCell.FormulaR1C1 = "=RC[-1]+RC[-3]" Range("J171").Select Selection.AutoFill Destination:=Range("J171:J4170") Range("J171:J4170").Select Range("J168").Select ActiveCell.FormulaR1C1 = "ijk" Range("J169").Select ActiveCell.FormulaR1C1 = "=AVERAGE(R[2]C:R[402]C)" Range("J170").Select Range("K171").Select ActiveCell.FormulaR1C1 = "=RC[-1]-R169C10" Range("K171").Select Selection.AutoFill Destination:=Range("K171:K4170") Range("K171:K4170").Select Range("K170").Select ActiveCell.FormulaR1C1 = "Y" Range("L170").Select ActiveCell.FormulaR1C1 = "Zwev gem van 20" Range("L190").Select ActiveCell.FormulaR1C1 = "=AVERAGE(R[-19]C[-1]:RC[-1])" Range("L190").Select Selection.AutoFill Destination:=Range("L190:L4170") Range("L190:L4170").Select Range("N172").Select ActiveCell.FormulaR1C1 = "40-80 seconden" Range("N173").Select ActiveCell.FormulaR1C1 = "40" Range("N174").Select ActiveCell.FormulaR1C1 = "80" Range("O173").Select ActiveCell.FormulaR1C1 = "=MATCH(RC[-1],R[-2]C[-13]:R[3997]C[-13],1)"
Range("O173").Select Selection.Copy Range("O174").Select ActiveSheet.Paste Application.CutCopyMode = False ActiveCell.FormulaR1C1 = "=MATCH(RC[-1],R[-3]C[-13]:R[3996]C[-13],1)" Range("O173").Select ActiveCell.FormulaR1C1 = "=MATCH(RC[-1],R[-2]C[-13]:R[3997]C[-13],1)+170" Range("O174").Select ActiveCell.FormulaR1C1 = "=MATCH(RC[-1],R[-3]C[-13]:R[3996]C[-13],1)+170" Range("N177").Select ActiveCell.FormulaR1C1 = "STDEV" Range("N178").Select ActiveCell.FormulaR1C1 = _ "=STDEV(INDIRECT(""L""&R[-5]C[1]):INDIRECT(""L""&R[-4]C[1]))" Range("N179").Select Charts.Add ActiveChart.ChartType = xlXYScatterLinesNoMarkers ActiveChart.SeriesCollection.NewSeries ActiveChart.SeriesCollection(1).XValues = "=data!R171C2:R4170C2" ActiveChart.SeriesCollection(1).Values = "=data!R171C11:R4170C11" ActiveChart.Location Where:=xlLocationAsNewSheet With ActiveChart .HasTitle = True .ChartTitle.Characters.Text = "Dwarskracht" .Axes(xlCategory, xlPrimary).HasTitle = True .Axes(xlCategory, xlPrimary).AxisTitle.Characters.Text = "tijd [s]" .Axes(xlValue, xlPrimary).HasTitle = True .Axes(xlValue, xlPrimary).AxisTitle.Characters.Text = "kracht [N]" End With With ActiveChart.Axes(xlCategory) .HasMajorGridlines = True .HasMinorGridlines = False End With With ActiveChart.Axes(xlValue) .HasMajorGridlines = True .HasMinorGridlines = False End With ActiveChart.Axes(xlCategory).Select With Selection.Border .Weight = xlHairline .LineStyle = xlAutomatic End With With Selection .MajorTickMark = xlOutside .MinorTickMark = xlNone .TickLabelPosition = xlLow End With With ActiveChart.Axes(xlCategory) .MinimumScale = 10

.MaximumScale = 110 .MinorUnitIsAuto = True .MajorUnitIsAuto = True .Crosses = xlAutomatic .ReversePlotOrder = False .ScaleType = xlLinear .DisplayUnit = xlNone End With ActiveChart.SeriesCollection(1).Select ActiveChart.SeriesCollection(1).Trendlines.Add(Type:=xlMovingAvg, Period:= _ 20, Forward:=0, Backward:=0, DisplayEquation:=False, DisplayRSquared:= _ False).Select ActiveChart.ChartArea.Select Sheets("data").Select Selection.End(xlUp).Select ActiveWindow.SmallScroll Down:=-18 Range("K171").Select Range(Selection, Selection.End(xlDown)).Select With Selection.Interior .ColorIndex = 36 .Pattern = xlSolid End With Range("B171").Select Range(Selection, Selection.End(xlDown)).Select With Selection.Interior .ColorIndex = 36 .Pattern = xlSolid End With Range("N177").Select With Selection.Interior .ColorIndex = 3 .Pattern = xlSolid End With Range("N178").Select End Sub

VBA CODE STATX PROEVEN 122
Bijlage E
VBA code statx proeven
Een macro werd geschreven om de resultaten van de statx proeven te onderzoeken op
transiente verschijnselen. De code van deze macro wordt hier weergegeven:

Sub statx() ' ' statx Macro ' De macro is opgenomen op 2/04/2007 door Jan. ' ' Sneltoets: CTRL+j ' Dim lastrowJ As Long Sheets(1).Select Sheets(1).Name = "data" Columns("A:A").Select Selection.TextToColumns Destination:=Range("A1"), DataType:=xlDelimited, _ TextQualifier:=xlDoubleQuote, ConsecutiveDelimiter:=True, Tab:=True, _ Semicolon:=False, Comma:=False, Space:=True, Other:=False, FieldInfo _ :=Array(Array(1, 1), Array(2, 1), Array(3, 1), Array(4, 1), Array(5, 1), Array(6, 1), _ Array(7, 1), Array(8, 1), Array(9, 1), Array(10, 1), Array(11, 1), Array(12, 1), Array(13, 1 _ ), Array(14, 1), Array(15, 1), Array(16, 1), Array(17, 1), Array(18, 1), Array(19, 1), Array _ (20, 1), Array(21, 1), Array(22, 1), Array(23, 1)), TrailingMinusNumbers:=True Columns("J:U").Select Selection.Insert Shift:=xlToRight ' Range("J1").Select lastrowJ = Worksheets("data").Range("I1").End(xlDown).Row ActiveCell.FormulaR1C1 = "=RC[-1]+RC[-3]" Range("J1").Select Selection.AutoFill Destination:=Range("J1:J" & lastrowJ&) Rows("1:1").Select Selection.Insert Shift:=xlDown Range("J1").Select ActiveCell.FormulaR1C1 = "Y" Range("K1").Select ActiveCell.FormulaR1C1 = "Zwev gem" Range("K22").Select ActiveCell.FormulaR1C1 = "=AVERAGE(R[-19]C[-1]:RC[-1])" Range("K22").Select Dim lastrowK As Long lastrowK = Worksheets("data").Range("J22").End(xlDown).Row Selection.AutoFill Destination:=Range("K22:K" & lastrowK&) Range("J2").Select Range(Selection, Selection.End(xlDown)).Select ' Range("J2:J281,B281").Select ' Range("B281").Activate ' Range(Selection, Selection.End(xlUp)).Select ' Range("J3").Select ' Range(Selection, Selection.End(xlDown)).Select ' Range("J3:J281,B281").Select ' Range("B281").Activate ' Range(Selection, Selection.End(xlUp)).Select ' Range("J3:J281,B3:B281").Select
' Range("B281").Activate Charts.Add ActiveChart.ChartType = xlXYScatterLinesNoMarkers ' ActiveChart.SetSourceData Source:=Sheets("data").Range("B3:B281,J3:J281"), ' ActiveChart.SetSourceData Source:=Sheets("data").Range("B3:B" & lastrowJ&, "J3:J" & lastrowJ&), _ ' PlotBy:=xlColumns ActiveChart.SeriesCollection.NewSeries ActiveChart.SeriesCollection(1).XValues = Worksheets("data").Range("B3:B" & lastrowJ&) ActiveChart.SeriesCollection(1).Values = Worksheets("data").Range("J3:J" & lastrowJ&) ActiveChart.Location Where:=xlLocationAsNewSheet With ActiveChart .HasTitle = True .ChartTitle.Characters.Text = "Dwarskracht" .Axes(xlCategory, xlPrimary).HasTitle = True .Axes(xlCategory, xlPrimary).AxisTitle.Characters.Text = "tijd [s]" .Axes(xlValue, xlPrimary).HasTitle = True .Axes(xlValue, xlPrimary).AxisTitle.Characters.Text = "kracht [N]" End With With ActiveChart.Axes(xlCategory) .HasMajorGridlines = True .HasMinorGridlines = False End With With ActiveChart.Axes(xlValue) .HasMajorGridlines = True .HasMinorGridlines = False End With ActiveChart.Axes(xlCategory).Select With Selection.Border .Weight = xlHairline .LineStyle = xlAutomatic End With With Selection .MajorTickMark = xlOutside .MinorTickMark = xlNone .TickLabelPosition = xlLow End With With ActiveChart.Axes(xlCategory) .MinimumScale = 50 .MaximumScaleIsAuto = True .MinorUnitIsAuto = True .MajorUnitIsAuto = True .Crosses = xlAutomatic .ReversePlotOrder = False .ScaleType = xlLinear .DisplayUnit = xlNone End With ActiveChart.SeriesCollection(1).Select ActiveChart.SeriesCollection(1).Trendlines.Add(Type:=xlMovingAvg, Period:= _

20, Forward:=0, Backward:=0, DisplayEquation:=False, DisplayRSquared:= _ False).Select Sheets("data").Select Range("M1").Select ActiveCell.FormulaR1C1 = "plak hieronder de gegevens van de proef" Range("M7").Select ActiveCell.FormulaR1C1 = "interval" Range("N7").Select ActiveCell.FormulaR1C1 = "begin regime" Range("O7").Select ActiveCell.FormulaR1C1 = "eind regime" Range("P7").Select ActiveCell.FormulaR1C1 = "kolom nummer" Range("Q7").Select ActiveCell.FormulaR1C1 = "kolom nummer" Range("M8").Select ActiveCell.FormulaR1C1 = "30-90" Range("N8").Select ActiveCell.FormulaR1C1 = "=(R[-4]C-R[-5]C)*0.3+R[-5]C" Range("N8").Select Selection.AutoFill Destination:=Range("N8:N10"), Type:=xlFillDefault Range("N8:N10").Select Range("O8").Select ActiveCell.FormulaR1C1 = "=(R[-4]C[-1]-R[-5]C[-1])*0.9+R[-5]C[-1]" Range("O8").Select Selection.AutoFill Destination:=Range("O8:O10"), Type:=xlFillDefault Range("O8:O10").Select Range("P8").Select ActiveCell.FormulaR1C1 = "=MATCH(RC[-2],C[-14],1)" Range("P8").Select Selection.AutoFill Destination:=Range("P8:P10"), Type:=xlFillDefault Range("P8:P10").Select Range("Q8").Select ActiveCell.FormulaR1C1 = "=MATCH(RC[-2],C[-15],1)" Range("Q8").Select Selection.AutoFill Destination:=Range("Q8:Q10"), Type:=xlFillDefault Range("Q8:Q10").Select Range("P8:Q10").Select With Selection.Interior .ColorIndex = 38 .Pattern = xlSolid End With Columns("J:K").Select With Selection.Interior .ColorIndex = 36 .Pattern = xlSolid End With Columns("B:B").Select With Selection.Interior .ColorIndex = 36
.Pattern = xlSolid End With Range("M12").Select ActiveCell.FormulaR1C1 = "0" Range("N12").Select ActiveCell.FormulaR1C1 = "=STDEV(INDIRECT(""K""&R[-4]C[2]):INDIRECT(""K""&R[-4]C[3]))" Range("M13").Select ActiveCell.FormulaR1C1 = "L" Range("N13").Select ActiveCell.FormulaR1C1 = "=STDEV(INDIRECT(""K""&R[-4]C[2]):INDIRECT(""K""&R[-4]C[3]))" Range("M14").Select ActiveCell.FormulaR1C1 = "H" Range("N14").Select ActiveCell.FormulaR1C1 = "=STDEV(INDIRECT(""K""&R[-4]C[2]):INDIRECT(""K""&R[-4]C[3]))" Range("M2").Select End Sub
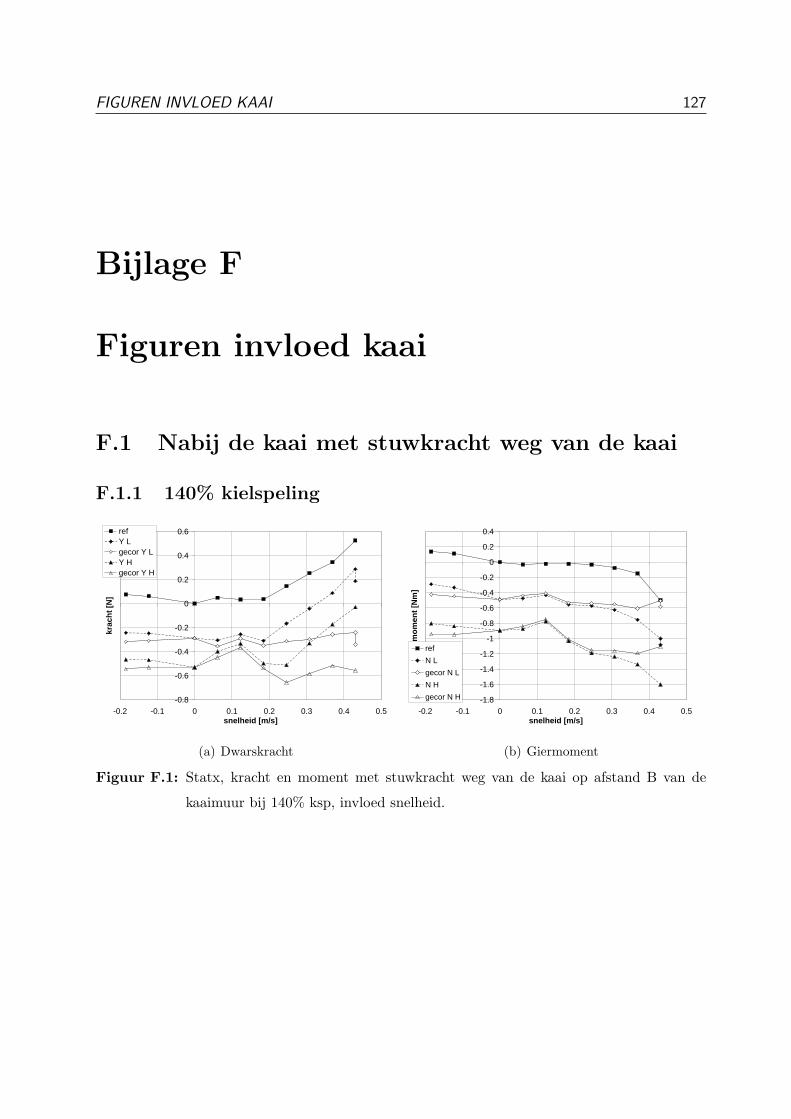
FIGUREN INVLOED KAAI 127
Bijlage F
Figuren invloed kaai
F.1 Nabij de kaai met stuwkracht weg van de kaai
F.1.1 140% kielspeling
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
ref
N L
gecor N L
N H
gecor N H
(b) Giermoment
Figuur F.1: Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van de
kaaimuur bij 140% ksp, invloed snelheid.
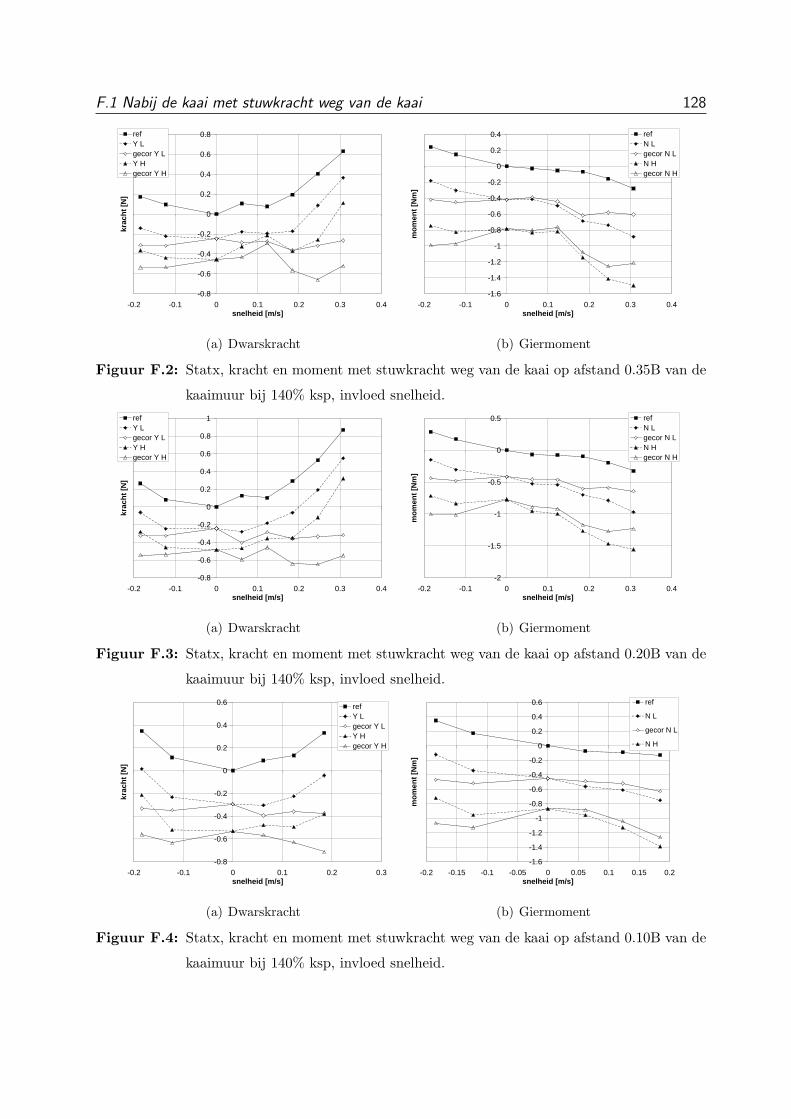
F.1 Nabij de kaai met stuwkracht weg van de kaai 128
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.2: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B van de
kaaimuur bij 140% ksp, invloed snelheid.
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-2
-1.5
-1
-0.5
0
0.5
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.3: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B van de
kaaimuur bij 140% ksp, invloed snelheid.
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2snelheid [m/s]
mo
men
t [N
m]
ref
N L
gecor N L
N H
(b) Giermoment
Figuur F.4: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B van de
kaaimuur bij 140% ksp, invloed snelheid.
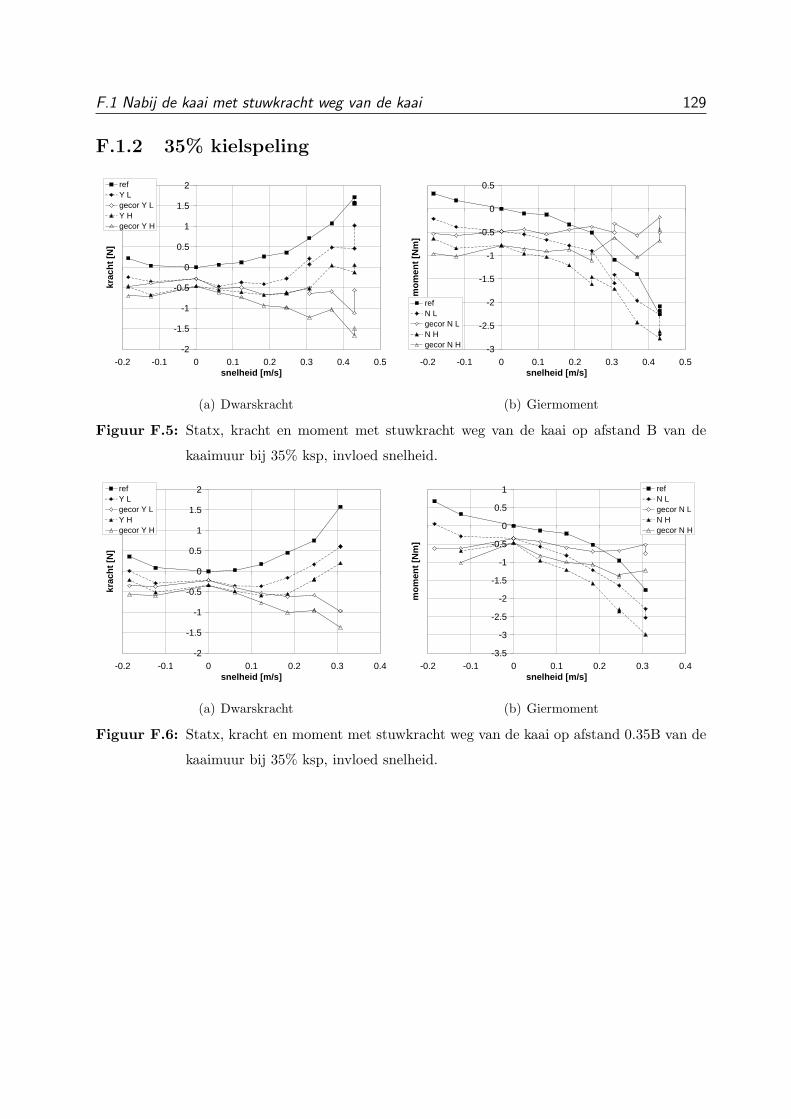
F.1 Nabij de kaai met stuwkracht weg van de kaai 129
F.1.2 35% kielspeling
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.5: Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van de
kaaimuur bij 35% ksp, invloed snelheid.
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.6: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B van de
kaaimuur bij 35% ksp, invloed snelheid.

F.1 Nabij de kaai met stuwkracht weg van de kaai 130
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.7: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B van de
kaaimuur bij 35% ksp, invloed snelheid.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.8: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B van de
kaaimuur bij 35% ksp, invloed snelheid.

F.1 Nabij de kaai met stuwkracht weg van de kaai 131
F.1.3 20% kielspeling
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-6
-5
-4
-3
-2
-1
0
1
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.9: Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van de
kaaimuur bij 20% ksp, invloed snelheid.
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-5
-4
-3
-2
-1
0
1
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.10: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B van
de kaaimuur bij 20% ksp, invloed snelheid.

F.1 Nabij de kaai met stuwkracht weg van de kaai 132
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-6
-5
-4
-3
-2
-1
0
1
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.11: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B van
de kaaimuur bij 20% ksp, invloed snelheid.
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.12: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B van
de kaaimuur bij 20% ksp, invloed snelheid.

F.1 Nabij de kaai met stuwkracht weg van de kaai 133
F.1.4 10% kielspeling
-6
-5
-4
-3
-2
-1
0
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-10
-8
-6
-4
-2
0
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.13: Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van de
kaaimuur bij 10% ksp, invloed snelheid.
-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-10
-8
-6
-4
-2
0
2
4
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.14: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B van
de kaaimuur bij 10% ksp, invloed snelheid.

F.1 Nabij de kaai met stuwkracht weg van de kaai 134
-7
-6
-5
-4
-3
-2
-1
0
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-12
-10
-8
-6
-4
-2
0
2
4
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.15: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B van
de kaaimuur bij 10% ksp, invloed snelheid.
-3
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-5
-4
-3
-2
-1
0
1
2
3
4
-0.2 -0.1 0 0.1 0.2snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.16: Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B van
de kaaimuur bij 10% ksp, invloed snelheid.
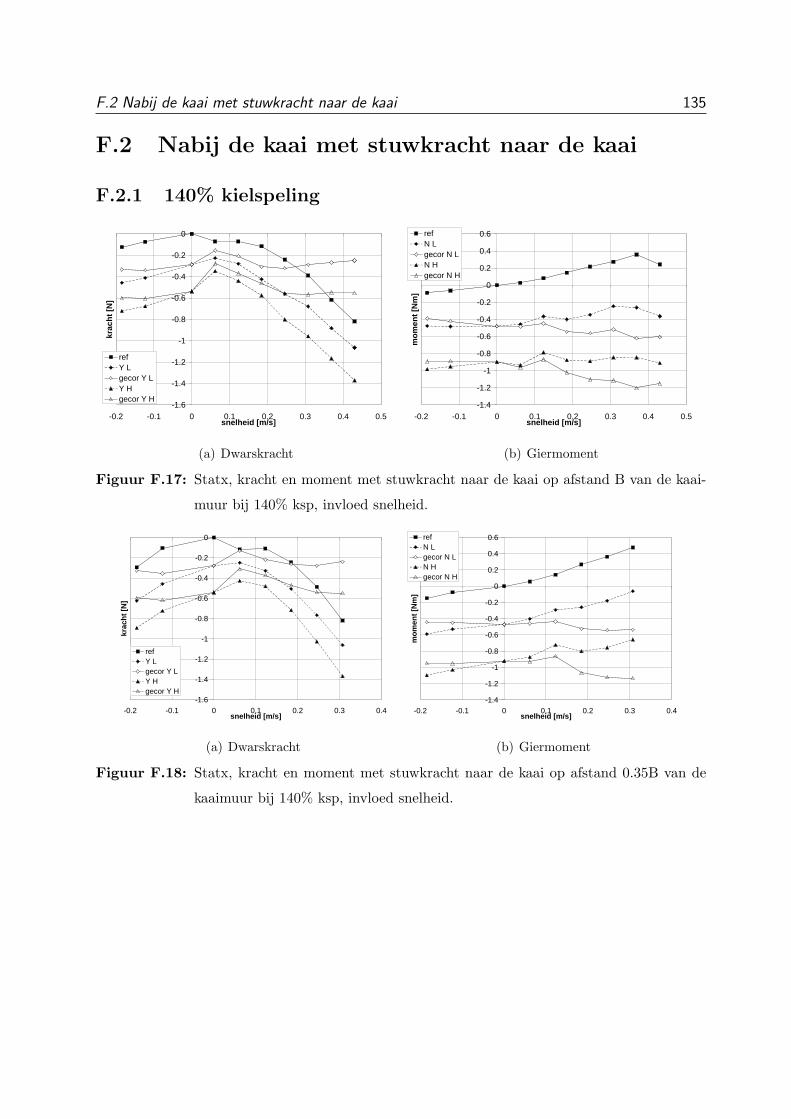
F.2 Nabij de kaai met stuwkracht naar de kaai 135
F.2 Nabij de kaai met stuwkracht naar de kaai
F.2.1 140% kielspeling
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.17: Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de kaai-
muur bij 140% ksp, invloed snelheid.
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.18: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van de
kaaimuur bij 140% ksp, invloed snelheid.
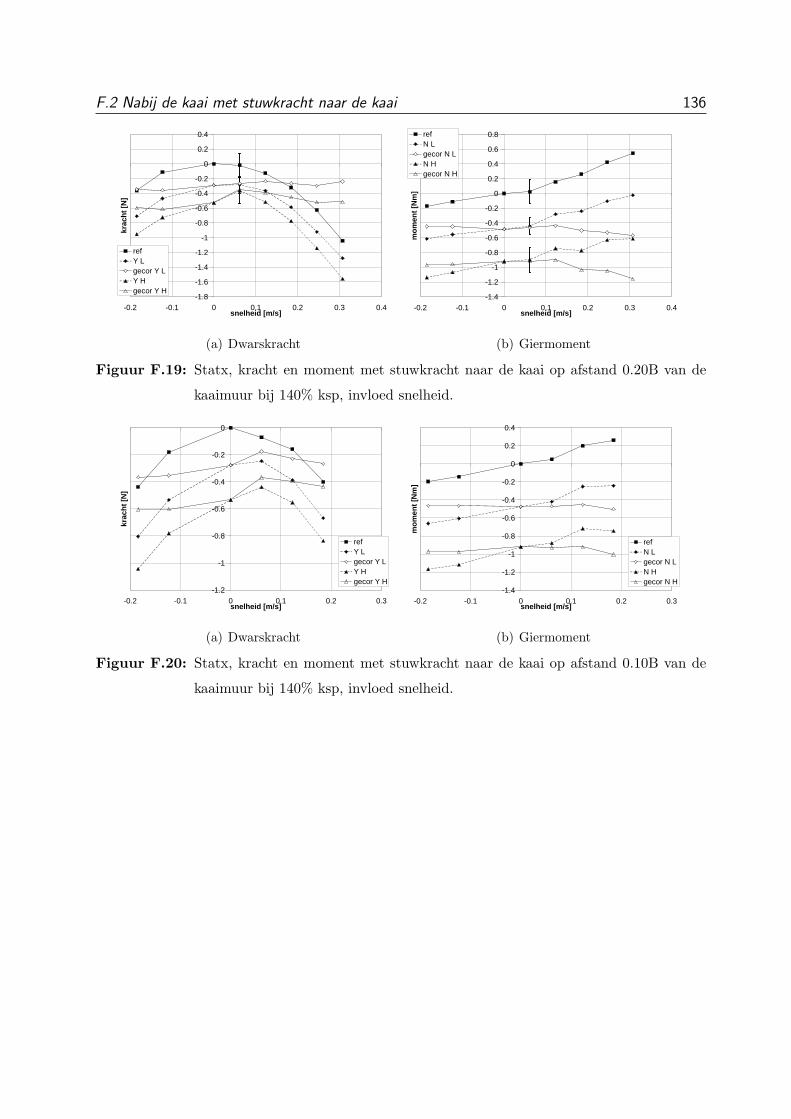
F.2 Nabij de kaai met stuwkracht naar de kaai 136
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.19: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van de
kaaimuur bij 140% ksp, invloed snelheid.
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.20: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van de
kaaimuur bij 140% ksp, invloed snelheid.
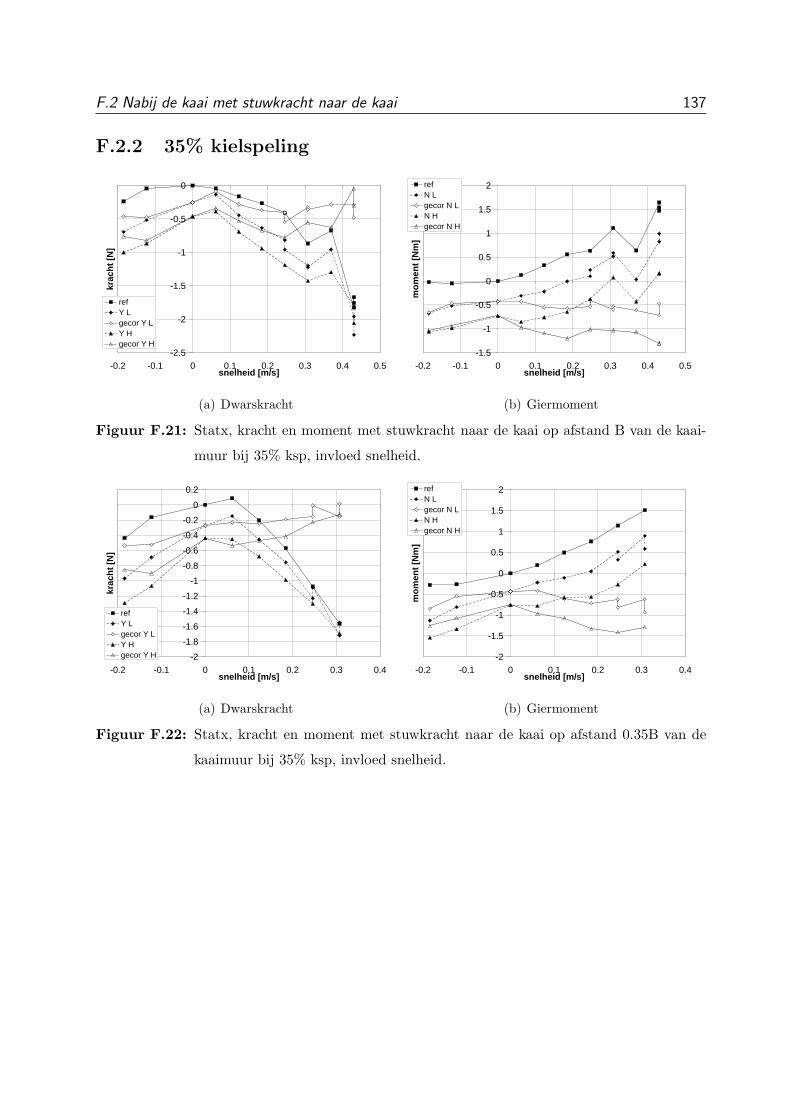
F.2 Nabij de kaai met stuwkracht naar de kaai 137
F.2.2 35% kielspeling
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.21: Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de kaai-
muur bij 35% ksp, invloed snelheid.
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.22: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van de
kaaimuur bij 35% ksp, invloed snelheid.

F.2 Nabij de kaai met stuwkracht naar de kaai 138
-2.5
-2
-1.5
-1
-0.5
0
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.23: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van de
kaaimuur bij 35% ksp, invloed snelheid.
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.24: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van de
kaaimuur bij 35% ksp, invloed snelheid.
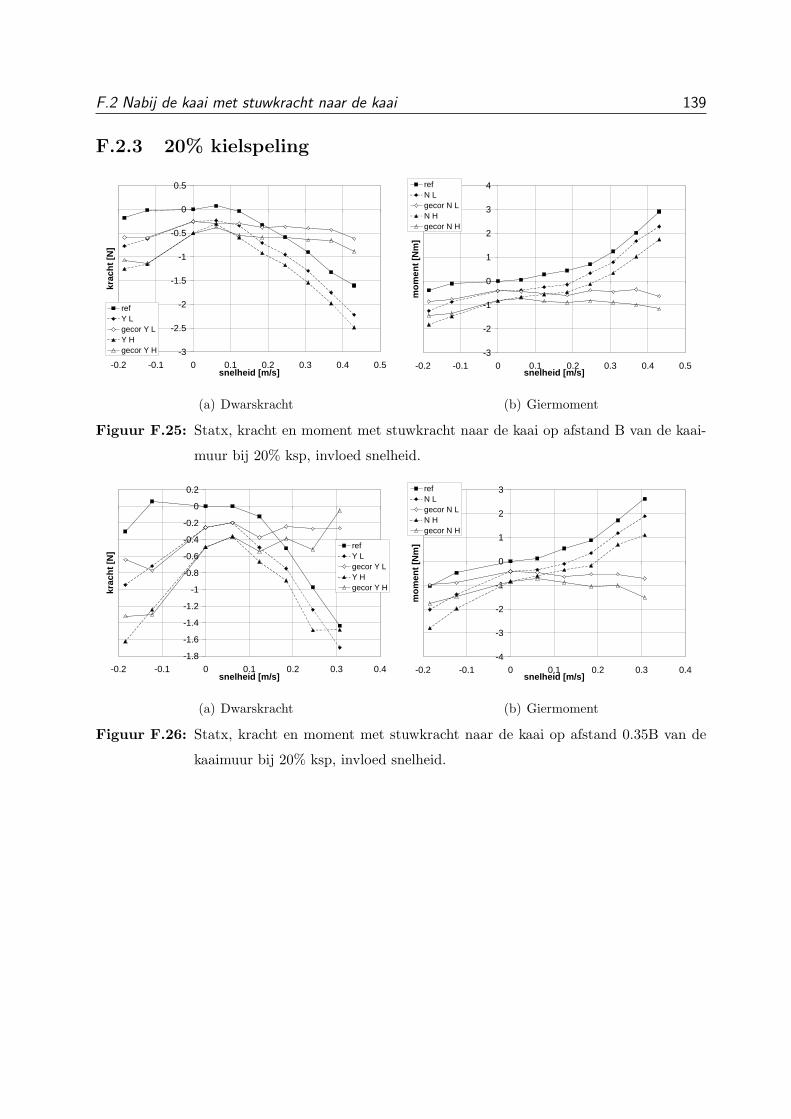
F.2 Nabij de kaai met stuwkracht naar de kaai 139
F.2.3 20% kielspeling
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-3
-2
-1
0
1
2
3
4
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.25: Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de kaai-
muur bij 20% ksp, invloed snelheid.
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-4
-3
-2
-1
0
1
2
3
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.26: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van de
kaaimuur bij 20% ksp, invloed snelheid.

F.2 Nabij de kaai met stuwkracht naar de kaai 140
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-4
-3
-2
-1
0
1
2
3
4
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.27: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van de
kaaimuur bij 20% ksp, invloed snelheid.
-2
-1.5
-1
-0.5
0
0.5
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-4
-3
-2
-1
0
1
2
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.28: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van de
kaaimuur bij 20% ksp, invloed snelheid.
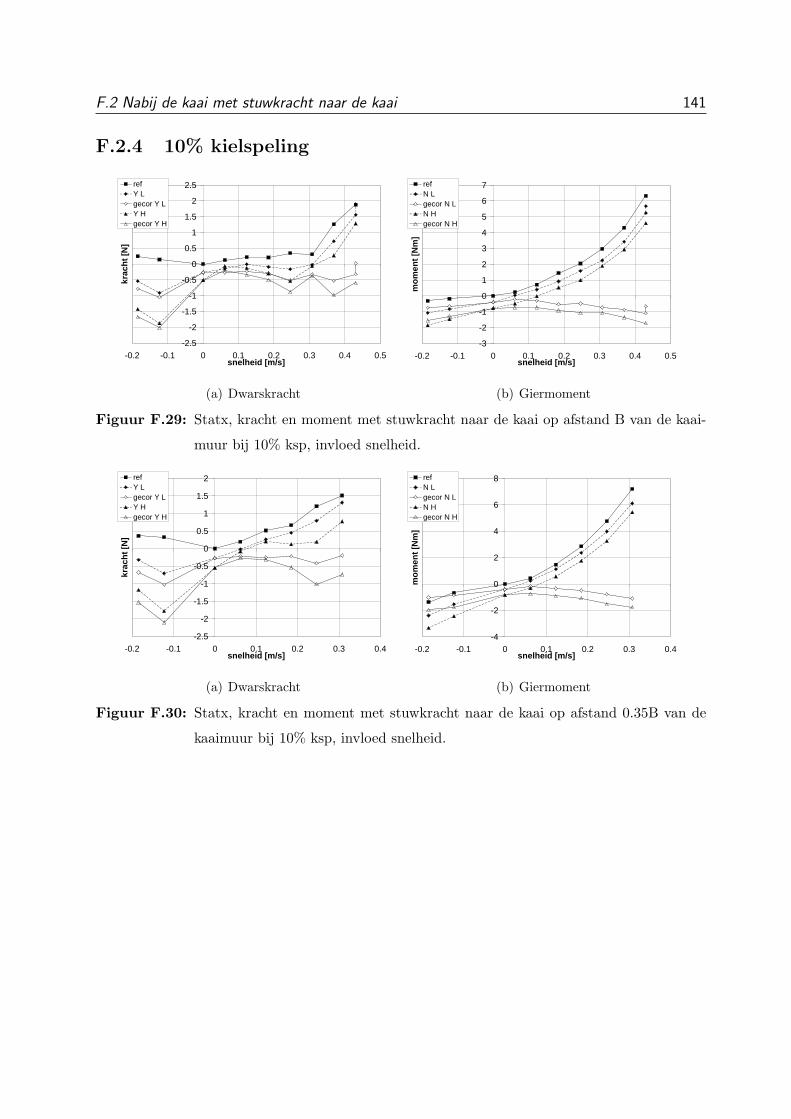
F.2 Nabij de kaai met stuwkracht naar de kaai 141
F.2.4 10% kielspeling
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-3
-2
-1
0
1
2
3
4
5
6
7
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.29: Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de kaai-
muur bij 10% ksp, invloed snelheid.
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-4
-2
0
2
4
6
8
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.30: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van de
kaaimuur bij 10% ksp, invloed snelheid.

F.2 Nabij de kaai met stuwkracht naar de kaai 142
-3
-2
-1
0
1
2
3
4
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-6
-4
-2
0
2
4
6
8
10
12
-0.2 -0.1 0 0.1 0.2 0.3 0.4snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.31: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van de
kaaimuur bij 10% ksp, invloed snelheid.
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
krac
ht
[N]
refY Lgecor Y LY Hgecor Y H
(a) Dwarskracht
-5
-4
-3
-2
-1
0
1
2
3
4
5
-0.2 -0.1 0 0.1 0.2 0.3snelheid [m/s]
mo
men
t [N
m]
refN Lgecor N LN Hgecor N H
(b) Giermoment
Figuur F.32: Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van de
kaaimuur bij 10% ksp, invloed snelheid.

REFERENTIES 143
Referenties
[1] http://www.maerskline.com/, Maart 2007.
[2] http://nl.wikipedia.org/.
[3] http://www.manbw.com/, Maart 2007.
[4] J.S. Carlton. Marine Propellers and Propulsion. Butterworth-Heinemann Ltd, 1994.
Senior Principal Surveyor, Technical Investigation, Propulsion and Environmental En-
gineering Department, Lloyd’s Register.
[5] Wartsila Transverse Thrusters. http://www.wartsila.com/, Augustus 2006.
[6] Rolls-Royce Tunnel Thrusters Fact Sheet. http://www.rolls-royce.com, Februari
2007.
[7] Brunvoll. http://www.brunvoll.no, Augustus 2006.
[8] SCHOTTEL Transverse Thrusters. http://www.schottel.de/, Maart 2007.
[9] R. Norrby and D.E. Ridley. Notes on Thrusters for Ship Manoeuvering and Dynamic
Positioning. S.N.A.M.E, 1980.
[10] Ulstein brochure Tunnel Trusters. http://www.ulsteingroup.com, 1989.
[11] T. van Beek. MT525 Marine propulsion systems. Cursus gedoceerd aan de TU Delft.

REFERENTIES 144
[12] D.E. Ridley. Observations on the Effect of Vessel Speed on Bow Thruster Performan-
ce. New England Section of The Society of Naval Architects and Marine Engineers,
Januari 1970.
[13] W. Becker. Manoevring Technical Manual. Seehaven Verlag GmbH, 1993.
[14] J.W. English. Further considerations in the design of lateral thrust units, volume v14.
International shipbuilding progress, 1967.
[15] M. Vantorre. Hydrostatica en Voortstuwing van Maritieme Constructies, 2006. Cursus
gedoceerd aan de Universiteit Gent.
[16] M.S. Chislett and O. Bjorheden. Influence of Ship Speed on the Effectiveness of
a Lateral-Thrust Unit. Number Hy-8. Hydro. and Aerodynamics Laboratory, April
1966.
[17] J.W. English and B.B. Steele. The Performance of Lateral Thrust Unit for Ships as
Affected by Forward Speed and Proximity of a Wall. Number 28. National Physics
Laboratory - Ship Division, 1962.
[18] J.W. English. The design and performance of lateral thrust units for ships - hydrody-
namic considerations!, volume v103. Trans IMarE, 1966.
[19] G.R. Stuntz and R.J. Taylor. Some Aspects of Bow-Thruster Design, volume v72.
Trans S.N.A.M.E, 1964.
[20] D.E. Ridley. Effect of Tunnel Entrance Configuration on Thruster Performance.
S.N.A.M.E, 1967.
[21] J.L. Beveridge. Design and Performance of Bow Thrusters. Chesapeake Section of The
Society of Naval Architects and Marine Engineers, Januari 1972. Journal of Marine
Technology.
REFERENTIES 145
[22] K. Maekawa, K. Kijima, and K. Karasuno. Prediction of influence of forward speed
on the bow thruster performance installed in a fishing vessel, volume v99. Trans West
Japan Soc Naval Architects, March 2000.
[23] K. Kijima and T. Hirakawa. Theoretical estimation of influence of forward speed on
the performance of bow thruster, volume v96. Trans West Japan Soc Naval Architects,
August 2000.
[24] M. Endo and K. Yokoi. Estimated manoeuvrability of T.S. WAKASHIO-MARU - II.
Side thruster model test, volume v96. Japan Inst Navigation, March 1997.
[25] D.-a. Sheng, X.-n. Ma, and H.-b. Mao. Manoeuvring efficiency calculation of lateral
thrusters for large vessels., volume v8. Journal of Ship Mechanics, April 2004.
[26] K. Kijima and Y. Furukawa. Study on the prediction of the performance of a lateral
thruster on a ship, volume v87. Trans West Japan Soc Naval Architects, March 1994.
[27] J.O. Flower. Thruster turning of ships at zero forward speed, volume v112. Trans
IMarE, 2000.
[28] http://watlab.lin.vlaanderen.be/, Maart 2007.
[29] F. Goerlandt. Wiskundige modellering van squat nabij oevers. 2005.
[30] M. Vantorre. Towing tank for manoeuvres in shallow water.
[31] M. Vantorre. Genereren, valideren en uitwerken van gedwongen manoeuvreer- en
zeegangsproeven. Januari 1997.
[32] J.R. Welty, C.E. Wicks, R.E. Wilson, and G.L. Rorrer. Fundamentals of momentum,
heat and mass transfer. New York, John Wiley and Sons, Inc., 2000.
[33] M. Vantorre. Inleiding tot de Maritieme Techniek, 2005. Cursus gedoceerd aan de
Universiteit Gent.

LIJST VAN FIGUREN 146
Lijst van figuren
1.1 Recente en toekomstige ontwikkeling van de containerschepen. . . . . . . . 2
1.2 Boegschroef . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 RoRo Seafrance Rodin met 4 laterale thrusters . . . . . . . . . . . . . . . . 5
1.4 Laterale thrusters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Roteerbare thruster. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.6 Tunnel thruster range Rolls-Royce. . . . . . . . . . . . . . . . . . . . . . . 9
1.7 Benodigde thruster vermogen per scheepstype. . . . . . . . . . . . . . . . . 10
1.8 Stroming door een laterale thruster. . . . . . . . . . . . . . . . . . . . . . . 12
1.9 Drukverdeling in de tunnel van een thruster. . . . . . . . . . . . . . . . . . 13
1.10 Manoeuvrer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.11 Rotatie snelheid vs. deplacement. . . . . . . . . . . . . . . . . . . . . . . . 21
1.12 Test data van CPP thrusters. . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.13 Effecten van cavitatie op boegschroeven. . . . . . . . . . . . . . . . . . . . 23
1.14 Effecten van de tunnel locatie, afronding van de tunnel ingang en vorm van
de romp op modelschaal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.15 Resultaten metingen van Chislett. . . . . . . . . . . . . . . . . . . . . . . . 24
1.16 Illustratie afbuigen thruster jet. . . . . . . . . . . . . . . . . . . . . . . . . 24
1.17 Illustratie AST. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.18 Drukmetingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.19 Conische afronding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.20 Schroeftypes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29

LIJST VAN FIGUREN 147
1.21 Draaipunt en rotatie snelheidsconstante. . . . . . . . . . . . . . . . . . . . 34
1.22 Laterale thruster design diagram. . . . . . . . . . . . . . . . . . . . . . . . 36
1.23 Invloed afstand tot kaaimuur. . . . . . . . . . . . . . . . . . . . . . . . . . 37
1.24 Invloed drifthoek. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.1 Sleeptank Waterbouwkundig Laboratorium. . . . . . . . . . . . . . . . . . 42
2.2 Geometrie sleeptank. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.3 Instrumentatie scheepsmodel. . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.4 Absolute en scheepsvaste assenstelsel . . . . . . . . . . . . . . . . . . . . . 47
2.5 Omgeving sleeptank . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.6 Model M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.7 Lijnen schip M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.8 Schroef . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.9 Boegschroef module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.10 Werking boegschroef . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.11 Boegschroef, correctie dmv buisjes. . . . . . . . . . . . . . . . . . . . . . . 59
2.12 IJking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.13 Resultaat ijking Y-krachten. . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.14 Afstand tot de kaaimuur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.15 Keuze hoeken. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.1 Paaltrek in het midden van de tank, invloed ksp. . . . . . . . . . . . . . . 69
3.2 Paaltrek in het midden van de tank met koershoek, invloed ksp. . . . . . . 70
3.3 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht weg van de kaai. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.4 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht weg van de kaai negatieve koershoek. . . . . . . . . . . . . . . . . . 71
3.5 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht weg van de kaai positieve koershoek. . . . . . . . . . . . . . . . . . 72

LIJST VAN FIGUREN 148
3.6 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht naar de kaai. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.7 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht naar de kaai, negatieve koershoek. . . . . . . . . . . . . . . . . . . . 73
3.8 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht naar de kaai, positieve koershoek. . . . . . . . . . . . . . . . . . . . 73
3.9 Transiente paaltrek proef . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.10 Paaltrek proef bij 140% ksp. . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.11 Paaltrek in het midden van de tank, invloed ksp met foutbalken. . . . . . . 76
3.12 Paaltrek in het midden van de tank met koershoek, invloed ksp met foutbalken. 76
3.13 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht weg van de kaai met foutbalken. . . . . . . . . . . . . . . . . . . . . 77
3.14 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht weg van de kaai negatieve koershoek met foutbalken. . . . . . . . . 77
3.15 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht weg van de kaai positieve koershoek met foutbalken. . . . . . . . . . 78
3.16 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht naar de kaai met foutbalken. . . . . . . . . . . . . . . . . . . . . . . 78
3.17 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht naar de kaai negatieve koershoek met foutbalken. . . . . . . . . . . 79
3.18 Paaltrek, invloed ksp bij verschillende afstanden tot de kaaimuur, stuw-
kracht naar de kaai positieve koershoek met foutbalken. . . . . . . . . . . . 79
3.19 Statx, kracht en moment in het midden van de tank bij 140% ksp, invloed
snelheid. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.20 Statx, kracht en moment in het midden van de tank bij 35% ksp, invloed
snelheid. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.21 Statx, kracht en moment in het midden van de tank met verschillende drift-
hoeken bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . . . . 82
LIJST VAN FIGUREN 149
3.22 Statx, kracht en moment in het midden van de tank bij 20% ksp, invloed
snelheid. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.23 Statx, kracht en moment in het midden van de tank met verschillende gier-
hoeken bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . . . . 84
3.24 Statx, kracht en moment in het midden van de tank bij 10% ksp, invloed
snelheid. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.25 Statx, kracht en moment in het midden van de tank met verschillende gier-
hoeken bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . . . . 85
3.26 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
140% ksp, invloed snelheid, stuwkracht weg van de kaai. . . . . . . . . . . 87
3.27 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
35% ksp, invloed snelheid, stuwkracht weg van de kaai. . . . . . . . . . . . 88
3.28 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en
drifthoeken bij 35% ksp, invloed snelheid, stuwkracht weg van de kaai. . . 89
3.29 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
20% ksp, invloed snelheid, stuwkracht weg van de kaai. . . . . . . . . . . . 90
3.30 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en
drifthoeken bij 20% ksp, invloed snelheid, stuwkracht weg van de kaai. . . 91
3.31 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
10% ksp, invloed snelheid, stuwkracht weg van de kaai. . . . . . . . . . . . 92
3.32 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en
drifthoeken bij 10% ksp, invloed snelheid, stuwkracht weg van de kaai. . . 93
3.33 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
140% ksp, invloed snelheid, stuwkracht naar de kaai. . . . . . . . . . . . . 94
3.34 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
35% ksp, invloed snelheid, stuwkracht naar de kaai. . . . . . . . . . . . . . 95
3.35 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en
drifthoeken bij 35% ksp, invloed snelheid, stuwkracht naar de kaai. . . . . 96

LIJST VAN FIGUREN 150
3.36 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
20% ksp, invloed snelheid, stuwkracht naar de kaai. . . . . . . . . . . . . . 97
3.37 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en
drifthoeken bij 20% ksp, invloed snelheid, stuwkracht naar de kaai. . . . . 98
3.38 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur bij
10% ksp, invloed snelheid, stuwkracht naar de kaai. . . . . . . . . . . . . . 99
3.39 Statx, kracht en moment bij verschillende afstanden tot de kaaimuur en
drifthoeken bij 10% ksp, invloed snelheid, stuwkracht naar de kaai. . . . . 100
3.40 Pmmpsi, kracht en moment bij 35% ksp i.f.v. γ en i.f.v. afstand langs de
x-as. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.41 Pmmpsi, kracht en moment bij 20% ksp i.f.v. γ en i.f.v. afstand langs de
x-as. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.42 Pmmpsi, kracht en moment bij 10% ksp i.f.v. γ en i.f.v. afstand langs de
x-as. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
3.43 Multi, overgansverschijnsel bij beweging naar de kaaimuur toe. . . . . . . . 104
3.44 Multi, kracht en moment bij beweging van het schip naar de kade toe. . . . 105
3.45 Multi, kracht en moment bij beweging van het schip weg van de kade. . . . 106
3.46 Sluis, kracht en moment bij schip in een sluis. . . . . . . . . . . . . . . . . 107
3.47 Sluis, tijdsverloop dwarskracht bij gebruik boegschroef in een sluis. . . . . 107
F.1 Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van
de kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . 127
F.2 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B
van de kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . 128
F.3 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B
van de kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . 128
F.4 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B
van de kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . 128
LIJST VAN FIGUREN 151
F.5 Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van
de kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 129
F.6 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B
van de kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 129
F.7 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B
van de kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 130
F.8 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B
van de kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 130
F.9 Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van
de kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 131
F.10 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B
van de kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 131
F.11 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B
van de kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 132
F.12 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B
van de kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 132
F.13 Statx, kracht en moment met stuwkracht weg van de kaai op afstand B van
de kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 133
F.14 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.35B
van de kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 133
F.15 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.20B
van de kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 134
F.16 Statx, kracht en moment met stuwkracht weg van de kaai op afstand 0.10B
van de kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . 134
F.17 Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de
kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . . 135
F.18 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van
de kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . 135
LIJST VAN FIGUREN 152
F.19 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van
de kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . 136
F.20 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van
de kaaimuur bij 140% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . 136
F.21 Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de
kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . . . 137
F.22 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van
de kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 137
F.23 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van
de kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 138
F.24 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van
de kaaimuur bij 35% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 138
F.25 Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de
kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . . . 139
F.26 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van
de kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 139
F.27 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van
de kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 140
F.28 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van
de kaaimuur bij 20% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 140
F.29 Statx, kracht en moment met stuwkracht naar de kaai op afstand B van de
kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . . . 141
F.30 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.35B van
de kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 141
F.31 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.20B van
de kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 142
F.32 Statx, kracht en moment met stuwkracht naar de kaai op afstand 0.10B van
de kaaimuur bij 10% ksp, invloed snelheid. . . . . . . . . . . . . . . . . . . 142
LIJST VAN TABELLEN 153
Lijst van tabellen
1.1 Sleutel momenten in de ontwikkeling van boegschroeven. . . . . . . . . . . 18
1.2 Verschillende namen voor thrusters. . . . . . . . . . . . . . . . . . . . . . . 19
1.3 AST performantie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.4 Voorbeeld thruster selectie. . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.1 Karakteristieken van de sleepwagen. . . . . . . . . . . . . . . . . . . . . . . 46
2.2 Lettercodes type proef. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.3 Afmetingen schip. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.4 Gegevens locatie boegschroef. . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.5 Lettercodes waterdiepte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.6 Tabel met gegevens over de gebruikte snelheden. . . . . . . . . . . . . . . . 63
2.7 Tabel met gegevens over de gebruikte snelheden bij 35% ksp. . . . . . . . . 64
2.8 Afstanden kaaimuur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.9 Gegevens hoeken. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.10 Toerentallen proeven. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
B.1 Schalen voor gelijkvormigheid . . . . . . . . . . . . . . . . . . . . . . . . . 115