eduweb.hhs.nl15035492/portfolio/bestanden/jaa… · Web viewomdat het gewicht meer naar voren...
49
DE HAAGSE HOGESCHOOL SQUAT MODEL Groep S: Lieke Zantman, Merel Remeijn, Stijn Tetteroo, Job de Nijs en Kim
Transcript of eduweb.hhs.nl15035492/portfolio/bestanden/jaa… · Web viewomdat het gewicht meer naar voren...

De Haagse Hogeschool SQUAT MODEL
Groep S: Lieke Zantman, Merel Remeijn, Stijn Tetteroo, Job de Nijs en Kim Rooijmans

Onderzoeksverslag project ergonomisch ontwerpen
De squat
Den Haag, 25-01-2016
Modulegroep S:Lieke Zantman 15013626Merel Remeijn 15008096Stijn Tetteroo 15060446Job de Nijs 15035492Kim Rooijmans 15015270
In opdracht van:
1

Voorwoord
De afgelopen 9 weken van module 2 heeft groep S gewerkt aan het volgende project: het bouwen van een squatmodel. Dit project is gemaakt in naam van de Haagse Hogeschool, opleiding HBO Bewegingstechnologie.Groep S bestaat uit: Stijn Tetteroo, Kim Rooijmans, Lieke Zantman, Job de Nijs en Merel Remeijn.
Door dit onderzoek hebben wij kennis opgedaan over het maken van een model in Excel. Dit was in het begin van het project lastig, omdat dit het eerste onderzoeksverslag is dat wij hebben gemaakt voor de opleiding Bewegingstechnologie. Dat bracht moeilijkheden met zich mee, maar met goede communicatie en overleg is dit goed gekomen.
Hierbij willen wij graag onze studenttutor Merel Steeghs en docenttutor Karin van Stein Callenfels heel erg bedanken voor het ondersteunen bij het maken van deze opdracht. Verder willen wij graag al onze docenten bedanken, omdat zij ons van de nodige kennis hebben voorzien, waardoor wij dit project tot een goed einde hebben kunnen brengen.
2

InhoudsopgaveOnderzoeksverslag project ergonomisch ontwerpen.............................................................................1
Voorwoord.............................................................................................................................................2
Samenvatting..........................................................................................................................................4
1. Inleiding..........................................................................................................................................5
2. Methode.........................................................................................................................................6
2.1 De gewrichtshoeken.....................................................................................................................6
2.2 De input........................................................................................................................................6
2.2.1 Lichaamsafmetingen..............................................................................................................6
2.2.2 Gewicht.................................................................................................................................7
2.2.3 Gewrichtshoeken...................................................................................................................7
2.2.4 Model met Rugzak.................................................................................................................7
2.3 De output.....................................................................................................................................7
2.4 Het steunvlak................................................................................................................................7
2.5 Eisen en Wensen..........................................................................................................................8
2.6 De squat.......................................................................................................................................8
2.7 Het model.....................................................................................................................................9
2.7.1 modelregels...........................................................................................................................9
2.8 Het meetprotocol.......................................................................................................................16
3. Resultaten....................................................................................................................................19
3.1 Resultaten model zonder rugzak................................................................................................19
Resultaten met rugzak......................................................................................................................21
4. Discussie.......................................................................................................................................22
5. Conclusie......................................................................................................................................24
5.1 Model zonder rugzak..............................................................................................................24
5.2 Model met rugzak...................................................................................................................24
5.3 Aanbeveling............................................................................................................................24
6. Literatuurlijst................................................................................................................................25
7. Bijlage...........................................................................................................................................26
7.1 lichaamsafmetingen...................................................................................................................26
7.2 Opgemeten lichaamshoeken en Trochantor major hoogte........................................................27
7.3 Gegevens validatie......................................................................................................................30
3

4

SamenvattingIn dit onderzoeksverslag staat beschreven hoe een model gemaakt wordt, door middel van het programma Excel, om een squatbeweging na te bootsen die zo goed mogelijk de werkelijkheid weergeeft.
Hiervoor is de volgende hoofdvraag opgesteld: “De minimale hoogte van de Trochantor major zal hoger blijven bij een squat met een dorsaalflexie beperking in vergelijking met een squat zonder dorsaalflexiebeperking”. Om deze hoofdvraag te beantwoorden zijn de volgende hypotheses opgesteld:
De kniehoek zal groter blijven met een dorsaalflexie beperking. De heuphoek zal kleiner worden met een dorsaalflexie beperking.
Voor het model met de rugzak is de volgende hoofdvraag opgesteld:” Wat is het effect van een extra gewicht op de romp op de diepte van de squat’’.Om de hoofdvraag te beantwoorden van de rugzak zijn de volgende hypotheses opgesteld
Er zal dieper gesquat kunnen worden, omdat het gewicht meer naar voren wordt gebracht, het lichaamszwaarte punt gaat dus naar voren.
Er zal dieper gesquat kunnen worden met rugzak zonder beperking dan met rugzak met beperking, dit komt omdat er met een enkelbeperking minder diep gesquat kan worden.
Om tot dit model te komen is er onderzoek gedaan en zijn er verschillende stappen doorlopen. Eerst moesten de gewrichtshoeken, enkelhoek, kniehoek en heuphoek gedefinieerd worden, zodat dit goed in het model verwerkt kan worden. Vervolgens is de input bepaald; onder input vallen de lichaamsafmetingen, gewicht en gewrichtshoeken. Ook werd het steunvlak en zwaartepunt beschreven en bepaald, zodat het duidelijk werd wanneer het model om zou vallen. Daarna is de output beschreven; hieronder valt de hoogte van de squat, of ook wel de hoogte van de Trochantor major. Hieruit zijn eisen en wensen opgesteld waaraan het model moet voldoen. De modelregels zijn beschreven en het model is in Excel gemaakt. Het model is onderzocht met de werkelijkheid. Hiervoor is een meetprotocol opgesteld zodat 6 proefpersonen onder dezelfde omstandigheden gemeten konden worden. De gemeten data is verwerkt met Kinovea. De data is verwerkt in het model om te zien of de diepte van de squat in het model overeenkwam met de werkelijkheid. Uit resultaten blijkt dat procentueel de werkelijkheid redelijk goed overeenkomt met het model. In de scatterplot kwam een correlatie coëfficiënt van ongeveer 0,82.
In de discussie zijn de hypotheses over de hoeken beantwoordt. Hieruit blijkt dat de kniehoek bij een squat met dorsaalflexie beperking groter blijft dan bij een squat zonder dorsaalflexie beperking. De heuphoek zal kleiner worden voor de compensatie van de dorsaalflexie beperking in de enkel. Verder zullen er in de discussie fouten uit het onderzoek worden besproken.
In de conclusie wordt de hoofdvraag beantwoord. Er kan geconcludeerd worden dat dorsaalflexie beperking invloed heeft op de diepte van de squat en er minder diep gesquat kan worden met een dorsaalflexie beperking in de enkel dan zonder een dorsaalflexie beperking in de enkel. Het gemiddelde procentuele verschil tussen de squat met beperking en squat zonder beperking is 8.3%.
Ook is er een onderzoek gedaan naar het effect van een rugzak bij een beperkte dorsaalflexie beperking. Hierbij is gebruik gemaakt van Kinovea. Zo zijn er hypotheses opgesteld die worden beantwoord in de discussie en is er een hoofdvraag opgesteld die
5

wordt beantwoord in de conclusie. Voor het model van de squat met rugzak is hetzelfde model gebruikt als bij de squat zonder rugzak, alleen is er een rugzak toegevoegd.
6

1. Inleiding
Squatten wordt als één van de belangrijkste oefeningen gezien in de sportwereld, omdat de squat beweging een compound oefening is. Een compound oefening is een oefening waarbij meerdere spiergroepen bij een oefening gebruikt en getraind worden. Voor deze bewegingen is het wel belangrijk dat de oefening goed uitgevoerd wordt, omdat anders de spiergroepen verkeerd getraind worden en er een blessure opgelopen kan worden. Deze compound oefening wordt vaak gebruikt voor de revalidatie, omdat er direct veel spiergroepen getraind worden.Tijdens het squatten zijn de minimale gewrichtshoeken van belang, want hoe kleiner de minimale hoeken zijn, hoe dieper de persoon kan squatten. Doordat een persoon met een beperking in het dorsaal flecteren van het enkelgewricht een minder kleine minimale hoek kan maken, moet dit door de knie- en de heuphoek worden opgevangen.
De hoofdvraag voor dit PEO project luidt als volgt: Wat is het effect van een beperkte dorsaalflexie in het enkelgewricht met betrekking tot de diepte van de squat?
Om antwoord te krijgen op de hoofdvraag zijn de volgende hypotheses opgesteld en is er onderzoek gedaan. Hypothese hoofdvraag: De minimale hoogte van de Trochantor major (=het punt waarvan de diepte van de squat wordt gemeten) zal hoger blijven bij een squat met een dorsaalflexie beperking in vergelijking met een squat zonder dorsaalflexiebeperking, omdat de kniehoek als enige de hoogte van de Trochantor major kan beïnvloeden en die zal dus groter blijven. Hypothese over hoeken:Knie:De kniehoek zal groter worden met een dorsaalflexie beperking, omdat de dorsaalflexie ervoor zorgt dat het zwaartepunt naar voren zal verplaatsen en door de beperking kan dit niet volledig. De kniehoek zorgt ervoor dat het zwaartepunt zich naar achter zal verplaatsen. Dus er wordt verwacht dat door de dorsaalflexie beperking de kniehoek groter blijft, want anders zal het zwaartepunt achter het steunvlak vallen.Heup: De heuphoek zal kleiner worden met een dorsaalflexie beperking, omdat door de dorsaalflexie beperking het zwaartepunt niet genoeg naar voren gebracht kan worden. Hierbij wordt de heuphoek gebruikt om het zwaartepunt meer naar voren te brengen zodat, de dorsaalflexie beperking meer gecompenseerd kan worden. In het onderzoek wordt er gebruik gemaakt van een eigen gemaakt model in Excel die het beeld weergeeft van hoe een persoon squat. Dit model moet een squat kunnen weergeven voor alle personen, met en zonder dorsaalflexie beperking. Hierom moet in het model de enkelhoek, kniehoek en de heuphoek verstelbaar zijn, omdat dit per persoon verschillend is.Hieruit volgt de volgende doelstelling: Er moet een model worden gemaakt die een zo realistisch mogelijke voorspelling kan geven over hoe diep een persoon met of zonder dorsaalflexie beperking kan squatten.
Ook is er onderzocht hoe diep er wordt gesquat met en zonder dorsaalflexie beperking met een rugzak op de rug. Bij het onderzoek hiernaar zijn precies dezelfde stappen gevolgd als bij het squatten zonder en met beperking zonder rugzak. Ook hier is een hoofdvraag en hypotheses voor opgesteld. De hoofdvraag luidt als volgt: ‘’Wat is het effect van een extra gewicht op de romp op de diepte van de squat.’’ De hypotheses luiden als volgt: “ Er zal dieper gesquat kunnen worden, omdat het gewicht verder naar voren word gebracht, het lichaamszwaartepunt gaat hierdoor in de squat verder naar voren.” De andere hypothese luidt: “Er zal dieper gesquat kunnen worden met rugzak zonder beperking, dan met rugzak
7

met beperking.”
2. Methode
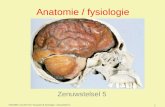
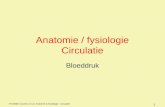
2.1 De gewrichtshoekenHier volgt een korte uitleg hoe de gebruikte hoeken gedefinieerd worden. Zie figuur 1.
Enkelhoek (hoek E = α):De enkelhoek bepaalt de hoeveelheid dorsaalflexie in de enkel, uitgedrukt in graden. De enkelhoek is de hoek tussen de ventrale zijde van het Tibia tot en met een horizontale lijn ter hoogte van de enkel, dus als de persoon recht opstaat is de enkelhoek 90˚.Kniehoek (hoek K = β + α):De kniehoek bepaalt de hoeveelheid flexie in de knie, uitgedrukt in graden.De kniehoek is de hoek tussen de dorsale zijde van het Femur tot en met de dorsale zijde van de Tibia. De kniehoek wordt gemeten vanuit de verticale as, dus als de persoon met gestrekte benen staat is de hoek tussen Femur en Tibia 180˚. Heuphoek (hoek H = β + Ɣ):De heuphoek bepaalt de anteflexie in de heup, uitgedrukt in graden.De heuphoek is de hoek tussen de ventrale zijde van de romp tot en met de ventrale zijde van het Femur. De heuphoek wordt gemeten vanuit de verticale as, dus als de persoon met gestrekte benen en romp loodrecht ten opzichte van de grond staat, is de hoek tussen romp en femur 180˚.
2.2 De inputOm een goed werkend model te maken, zijn er verschillende variabelen nodig. Deze worden ook wel de inputparameters van het model genoemd. Met behulp van de inputparameters en het model wordt een uitkomst gegenereerd wat ook wel de outputparameters genoemd worden. De inputparameters zijn ingedeeld in lichaamsafmetingen, gewicht en gewrichtshoeken welke hieronder beschreven worden.
2.2.1 Lichaamsafmetingen Er is gekozen om het lichaam in te delen in de onderstaande segmenten. Bij elk segment wordt vermeld welke lichaamspunten worden genomen voor het bepalen van de lengte.
Voet De voetlengte is van meest distale punt van de Digiti Halucis tot aan de achterkant van de Tuber Calcanei. Deze afstand is niet gelijk aan het steunvlak. Het steunvlak wordt verder behandeld in hoofdstuk 2.4. De voethoogte loopt loodrecht vanuit de grond tot de meest distale rand van de Malleolus lateralis.
Onderbeen De onderbeenlengte wordt gemeten vanaf de meest distale rand van de Malleolus Lateralis tot de Caput Fibula.
Bovenbeen De lengte van het bovenbeen is vanaf de laterale Condylus van het Femur tot meest proximale punt van de Trochantor major.
Romp De romp loopt van het meest proximale punt van de Trochantor major tot aan het meest proximale punt van het Acromion (1,2) (top lateraal, craniaal van het Scapula).
Nek en Hoofd
8
Figuur 1, Definitie hoeken squatmodel

De lengte van de nek en het hoofd is vanaf het meest proximale puntje van het Acromion (top lateraal, craniaal van het Scapula) tot het meest craniale punt van de schedel.
9

Bovenste extremiteiten De bovenste extremiteiten bestaan uit de bovenarm, onderarm en de hand. Deze worden bij het model op de rug gehouden, om eventuele correcties voor het zwaartepunt te minimaliseren. De lengte van de bovenste extremiteiten wordt daarom net zoals de romp, van de kop van de Trochantor major tot het meest proximale punt van het Acromion.
2.2.2 GewichtHet gewicht van de proefpersoon is een inputparameter voor het model. Om het lichaamszwaartepunt te berekenen zijn het gewicht, de gewichtsverdeling en de lengte van de segmenten (voet, romp, hoofd plus nek, onderbeen en bovenbeen) nodig. Het gewicht per lichaamsdeel is te berekenen met vaststaande percentages. De berekeningen hiervan in het model zijn te vinden in hoofdstuk 2.6 Zwaartepunt. Voor het onderzoek squatten met rugzak is de rugzak ook gewogen. Dit gewicht wordt ook meegenomen in het model met rugzak.
2.2.3 GewrichtshoekenOm te bepalen of een dorsaalflexie beperking in de enkel invloed heeft op de diepte van de squat, worden de heuphoek, de kniehoek en de enkelhoek gebruikt. De enkelhoek en heuphoek worden gebruikt om het zwaartepunt naar ventrale zijde te verschuiven en de kniehoek wordt gebruikt om de diepte van de squat te bepalen en om het zwaartepunt naar de dorsale zijde te verplaatsen.
2.2.4 Model met RugzakIn het model met rugzak is een extra gewicht op de rug toegevoegd door middel van een rugzak. De afmetingen en het gewicht hiervan moeten instelbaar zijn. De rugzak loopt parallel met de rug, waardoor deze hoeken hetzelfde berekend kunnen worden als de romp.
2.3 De outputVoor de output van het model is de volgende waarde genomen:
Diepte van de squat Voor de diepte van de squat wordt de hoogte van de Trochantor major als referentiepunt genomen. Dit omdat tijdens de video-analyse in de evaluatiefase goed vast is te stellen wat de hoogte van de Trochantor major is ten opzichte van de grond is.
2.4 Het steunvlak Om in evenwicht te kunnen blijven, moet het zwaartepunt van de massa binnen het steunvlak vallen..Dit is in het model als voorwaarde is gesteld. Er wordt met het staan/steunen op de voeten geen gebruik gemaakt van de volledige voet, omdat mensen het risico op omvallen niet nemen. Hierdoor is het steunvlak dus kleiner dan de volledige lengte van de voet. Voor de toepassing in het model zie hoofdstuk 2.7.1 Steunvlak in model.
10

2.5 Eisen en WensenHet gemaakte model moet minstens aan de volgende eisen voldoen en het liefst ook aan alle wensen. De gestelde eisen en wensen zijn:
Eisen WensenHet lichaamszwaartepunt moet boven
het steunvlak vallen.Er komt een waarschuwing als het
lichaamszwaartepunt buiten het steunvlak valt.
De knie-, enkel- en heuphoek moeten instelbaar zijn.
In het model moet duidelijk af te lezen zijn wat welke lijn is.
De lengtes van de segmenten moeten instelbaar zijn.
Nog een extra beperking toegebracht kan worden bijvoorbeeld een rugzak of
gewicht.De coördinaten van de segmenten
moeten zichtbaar zijn.Het gewicht en de afmetingen van de
rugzak moeten aangepast kunnen worden.
Het gewicht moet aangepast kunnen worden.
De diepte van de squat moet duidelijk af te lezen zijn.
2.6 De squatEr zijn veel verschillende mogelijkheden om een squat uit te voeren. De squatbeweging lijkt in wezen het meeste op de beweging hoe mensen op een stoel gaan zitten. Daarom moet om elke soort squat goed uit te voeren, de beweging van hoe iemand op een stoel gaat zitten worden nagebootst. Tijdens een squatbeweging treedt er in het bovenste spronggewricht dorsaalflexie op, in het kniegewricht flexie en door het achterover kantelen van het bekken treedt er in het heupgewricht anteflexie op. Dit komt doordat de romp naar voren kantelt en het Femur op zijn plek blijft, hierdoor wordt de hoek tussen de romp en het Femur kleiner.Tijdens de beweging is het belangrijk dat de rug recht blijft en het hoofd in het verlengde van de rug zit (dus niet met een gebogen hoofd). Bij enkele varianten van de squat mogen ‘’de knieën niet voorbij de tenen komen’’, maar dat is niet bij alle varianten zo. In het model wordt er vanuit gegaan dat de knieën wel voorbij de tenen mogen komen, om zo de diepst mogelijke squat mogelijk te maken.
Hoe dieper een squat uitgevoerd wordt, hoe beter de spieren getraind worden, omdat de gewrichtshoeken groter worden naarmate de squat dieper is.De volgende spieren worden getraind tijdens het squaten:
De quadriceps ( M. Rectus Femoris, M. Vastus lateralis, M. Vastus medialis, M. Vastus intermedius)
De bilspieren (M. Gluteus maximus, M. Gluteus medius, M. Piriformis) De hamstrings ( M. Biceps Femoris, M. Semitendinosus, M. Semimembranosus ) De kuitspieren ( M. Gastrocnemius, M. Soleus ) De rugspier ( M. Erector Spinea(1,2) ) De buikspieren*
*De buikspieren worden vaak aangespannen om samen met de rugspieren ervoor te zorgen dat de romp beter recht blijft.
11

2.7 Het model
2.7.1 modelregelsOm uit een model een output te krijgen heeft het model rekenregels nodig om de verkregen input te kunnen verwerken. Dit zijn in dit model voornamelijk de coördinaten van de gewrichten en segmenten, de coördinaten van de deelzwaartepunten en de hoekdefinities. In een tweede model is een rugzak met massa als extra beperking toegevoegd. De rugzak wordt in het model gezien als een massa die parallel met de rug meebeweegt.
Steunvlak in modelZoals in paragraaf 2.4 beschreven wordt voor het steunvlak niet de gehele voet genomen. Dit heeft als gevolg dat dit in het model ook niet zo beschouwd kan worden. Aan de voor- en achterkant is in het model 1 cm, aan beide kanten, afgenomen om een realistischer steunvlak te kunnen creëren. Een goede beschouwing van het steunvlak is ook van belang om een realistische beweging te kunnen creëren. Als deze beweging realistisch gevisualiseerd kan worden, kunnen er ook conclusies uit getrokken worden. We hebben in het model een aantal waarschuwingen verwerkt, dit omdat het model zelf niet om zal vallen maar het zwaartepunt zich, zonder dat je het soms door hebt, wel buiten het steunvlak bevindt.
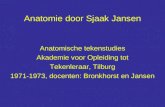
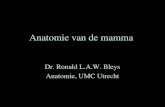
HoekdefinitiesHet model bevat wiskundige Z-hoeken, hierdoor kon de SOSCASTOA-methode toegepast worden om in combinatie met het ontbinden van de lijnen, in x en y richting, de lengte van de segmenten en de coördinaten van de segmenten worden berekend. De bijgevoegde afbeelding geeft meer duidelijkheid over de hoeken. Zie figuur 2.
Enkelhoek De enkelhoek wordt gedefinieerd als hoek E (= α) in figuur 2, deze hoek geeft weer hoe het onderbeen staat ten opzichte van de x-as. Om te berekenen hoe groot de hoek tussen het onderbeen en de x-as(hoek α) is, wordt de volgende formule gebruikt:Enkelhoek(E) + ( 2 * ( 90 – Enkelhoek )).
Kniehoek De kniehoek wordt gedefinieerd als hoek K (= β + α) in figuur 2, deze hoek geeft weer hoe het bovenbeen staat ten opzichte van het onderbeen. Om de positie van het bovenbeen ten opzichte van de x-as (hoek β) te krijgen moet de volgende formule gebruikt worden:Kniehoek(K) – alpha.
Heuphoek De heuphoek wordt gedefinieerd als hoek H (= β + Ɣ) in figuur 2, deze hoek geeft weer hoe de romp staat ten opzichte van het bovenbeen. Om de positie van de romp ten opzichte van de x-as(hoek Ɣ) te krijgen moet de volgende formule gebruikt worden:Heuphoek(H) – bèta.
12
Figuur 2: gewrichtshoeken

Coördinaten van de segmenten en gewrichten Enkel
Om alles vanuit één punt te kunnen berekenen, is voor de enkel een vaste x-waarde genomen en voor de y-waarde de gemeten voethoogte van de proefpersoon. Vanuit deze x- en y-waarden wordt er telkens doorgerekend. In het model is de x-coördinaat vast gezet op 45, zodat het gehele model in de grafiek past. Voor de y-coördinaat van de enkel, wordt de voethoogte van de proefpersoon genomen die op het moment met het model vergeleken wordt. In het model is de y-coördinaat dus instelbaar.
Voet De voet wordt opgedeeld in twee segmenten, de hiel en de voorvoet. Om deze twee segmenten uit te kunnen rekenen is de voetlengte van belang. De voetlengte is instelbaar gemaakt, zodat er voor elke proefpersoon een andere lengte ingevuld kan worden. Hoe de coördinaten van de voorvoet en hiel berekend worden, wordt hieronder besproken.
Voorvoet Om de x- coördinaat van de voorvoet te berekenen is de voetlengte, de x-
coördinaat van de enkel en de volgende formule: x-coördinaat enkel –(lengte voet*23 )
nodig. De formule komt tot stand doordat de voet opgedeeld kan worden in stukken. Er wordt dan vanuit gegaan dat de enkel op twee derdedeel van de voet zit. De y-coördinaat van de voorvoet is een vaste waarde en in het model is dit vastgesteld op 0.
Hiel Om de x- coördinaat van de hiel te berekenen is de voetlengte, de x-coördinaat van
de enkel en de volgende formule: x-coördinaat enkel+(lengte voet * 13 ) nodig. De
formule komt tot stand doordat de voet opgedeeld kan worden in stukken. De enkel is hier het middelpunt van en ligt dan op twee derdedeel van de voet er ligt dus nog één derde deel van de voet achter de enkel. De y-coördinaat van de hiel is ook een vaste waarde en ligt op dezelfde hoogte als die van de voorvoet en is dus 0.
Knie Om de x-en y-coördinaten van de knie te berekenen is de onderbeenlengte, de x- en y-coördinaten van de enkel en de hoek die het onderbeen met de x-as maakt in radialen nodig. Deze zijn dan in te vullen in de volgende formules:x-coördinaat enkel +(cosinus(hoek element met pos. x-as in radialen) * onderbeenlengte).y-coördinaat enkel +(sinus(hoek element met pos x-as in radialen)*onderbeenlengte).Uit deze formules rollen dan de x- en y-coördinaten van het kniegewricht.
Heup Om de x- en y-coördinaten van de heup te berekenen is de bovenbeenlengte, de x- en y-coördinaten van de knie en de hoek die het bovenbeen met de x-as maakt in radialen nodig. Deze zijn dan in te vullen in de volgende formules:x-coördinaat knie + (cosinus(hoek element met pos. x-as in radialen) * bovenbeenlengte).y-coördinaat knie + (sinus(hoek element met pos x-as in radialen)*bovenbeenlengte).Uit deze formules rollen dan de x-en y-coördinaten van het heupgewricht.
Top romp Om de x- en y-coördinaten van de top van de romp te berekenen zijn de romplengte, de x- en y-coördinaten van de heup en de hoek die de romp met de x-as maakt in radialen nodig. Deze zijn dan in te vullen in de volgende formules:x-coördinaat heup - (cosinus(hoek element met pos x as in radialen)*romplente).y-coördinaat heup + (sinus(hoek element met pos x as in radialen)*romplengte).Uit deze formules rollen dan de x- en y-coördinaten van de top van de romp.
13

Hoofd en nek Om de x- en y-coördinaten van het hoofd + nek te berekenen zijn de volgende formules nodig:x-coördinaat heup - ( cosinus(hoek element met pos x as in radialen) * ((0,5 * hoofd + nek) + romp).y-coördinaat heup + ( sinus(hoek element met pos x as in radialen) * ((0,5 * hoofd + nek) + romp).
Rugzak onderkant Om de x- en y-coördinaten van de onderkant van de rugzak te berekenen zijn de volgende formules nodig:x-coördinaat heup - (cosinus(hoek element met pos x as in radialen)*rugzaklengte) + 5.y-coördinaat heup - (sinus(hoek element met pos x as in radialen)*rugzaklengte) + 5.
Rugzak top Om de x- en y-coördinaten van top van de rugzak te berekenen zijn de volgende formules nodig:x-coördinaat top romp - (cosinus(hoek element met pos x as in radialen) * rugzaklengte) + 5.y-coördinaat top romp - (sinus(hoek element met pos x as in radialen)*rugzaklengte) + 5.
ZwaartepuntHet zwaartepunt is het punt waar de zwaartekracht aangrijpt. De zwaartekracht is de kracht die de aarde op een massa uitoefent. De plaats van de aangrijping van het zwaartepunt is afhankelijk van de lengte, de massa en de gewichtsverdeling van deze massa. In dit geval is de massa waar de zwaartekracht op aangrijpt het menselijk lichaam.
Door het lichaamszwaartepunt richting de grond te projecteren zal door het model bepaald worden of een persoon bij bepaalde enkel-, knie- en heuphoek om zal vallen of niet. Hiervoor is de voorwaarde dat het lichaamszwaartepunt boven het steunvlak blijft.
In het model met de rugzak wordt bij het lichaamszwaartepunt ook het deelzwaartepunt van de rugzak meegerekend.
DeelzwaartepuntOp het menselijk lichaam heeft ieder deel een eigen aangrijpingspunt, waarbij ze even sterk tot de aarde aangetrokken worden. Deze aangrijpingspunten kunnen samengebundeld worden in een aangrijpingspunt, het lichaamszwaartepunt. Het lichaamszwaartepunt kan niet direct uit deze kleine deelaangrijpingspunten herleid worden, maar wordt afgeleid uit de aangrijpingspunten vanuit verschillende segmenten van het lichaam.
Bij het model is het lichaam in de volgende segmenten verdeeld: Het hoofd en de nek De romp De bovenste extremiteiten (onderarm, bovenarm en hand) Het bovenbeen Het onderbeen De voet
En als toevoeging aan het 2e model: De rugzak met massa
14

Voor ieder segment zijn de coördinaten per deelzwaartepunt met de volgende twee formules berekend:
1. Xcg=Xproximaal+Rproximaal×(Xdistaal−Xproximaal)Waarin Xcg de X-coördinaat van het aangrijpingspunt van het segment is, Xproximaal de X-coördinaat van het gewricht van dat segment zo dicht mogelijk bij de romp, Rproximaal een gegeven is uit de tabel van Dempster, en Xdistaal het coördinaat van het segment wat het verste verwijderd is van de romp.
2. Ycg=Yproximaal+Rproximaal×(Ydistaal−Yproximaal )Waarbij Ycg de Y-coördinaat van het aangrijpingspunt van dat segment is, Yproximaal de hoogte van het meest richting het lichaam liggende deel van dat segment is, Rproximaal gegeven is in de tabel van Dempster en Ydistaal de hoogte geeft van het deel wat het verste van de romp verwijderd is.
De formules uitgewerkt per segment: Hoofd en nek
1. Het X-coördinaat van het deelzwaartepunt van het hoofd en de nek wordt berekend door: x-coördinaat Acromion (proximaal) + 1,000 (R) * (x-coördinaat craniale punt van de schedel (distaal) – x-coördinaat Acromion (proximaal)). Hierbij er vanuit gaande dat het hoofd ten allen tijden in het verlengde ligt van de romp.
2. Het Y-coördinaat wordt op dezelfde manier berekend, maar hierbij worden de Y-coördinaten van de bovengenoemde punten genomen. Ook de R is hetzelfde als bij het X-coördinaat. Je krijgt in woorden dan de formule: Acromion (proximaal) +1,000 (R) * (craniale punt van de schedel (distaal) – Acromion (proximaal)).
Romp1. Van de romp wordt het X-coördinaat van het deelzwaartepunt berekend door de
formule: X-coördinaat Acromion (proximaal) + 0,500 * (x- coördinaat Trochantor major (distaal) – X-coördinaat Acromion (proximaal)). Hierbij wordt het bot punt Acromion als proximaal genomen omdat deze dichter richting het hart ligt. Als de formule omgedraaid wordt zou hier, in dit geval, hetzelfde uit moeten komen.
2. Voor het Y-coördinaat te berekenen wordt de formule als volgt: Y-coördinaat Acromion (proximaal) + 0,500 * (Y-coördinaat Trochantor major (distaal) – Y-coördinaat Acromion (proximaal). Ook bij het Y-coördinaat zou, in dit geval, het niet uit moeten maken welke waarde voor distaal en proximaal genomen worden.
Bovenste extremiteiten (bovenarmen, onderarmen, handen)Bij de bovenste extremiteiten moet rekening gehouden worden met de positie en de houding van de armen. Deze kunnen namelijk op verschillende manieren gehouden worden. Ook moet erbij de berekening van de massa van het deelsegment en het lichaamszwaartepunt, rekening gehouden worden dat beide armen worden meegerekend. In het model wordt er vanuit gegaan dat de armen op de rug gehouden worden, waardoor zij dezelfde proximale en distale waarde hebben als de romp.1. Het X-coördinaat van het deelzwaartepunt van de bovenste extremiteiten wordt
berekend met een R-waarde van 0,530. De formule wordt dan: X-coördinaat Acromion (proximaal) + 0,530 * (x- coördinaat Trochantor major (distaal) – X-coördinaat Acromion (proximaal)).
2. De formule voor het deelzwaartepunt van het Y-coördinaat wordt gegeven door: Y-coördinaat Acromion (proximaal) + 0,530 * (Y-coördinaat Trochantor major (distaal) – Y-coördinaat Acromion (proximaal).
15

Bovenbeen1. Voor het bovenbeen is het meest proximale punt de Trochantor major en voor het
meest distale punt wordt de laterale Condylus van het Femur genomen. De R-waarde wordt gegeven door 0,433. De formule voor het X-coördinaat wordt dan: X-coördinaat Trochantor major (proximaal) + 0,433 * (X-coördinaat laterale Condylus Femoris (distaal) – X-coördinaat Trochantor major (proximaal)).
2. Het Y-coördinaat wordt dan gegeven door de volgende formule: Y-coördinaat Trochantor major (proximaal) + 0,433 * (Y-coördinaat laterale Condylus Femoris (distaal) – Y-coördinaat Trochantor major (proximaal)).
Onderbeen1. Voor dit segment is de formule voor het X-coördinaat gegeven door de formule:
X-coördinaat laterale Condylus van de Tibia (proximaal) + 0,433 * (X-coördinaat Malleolus lateralis(distaal) - X-coördinaat laterale Condylus van de Tibia (proximaal)).
2. Het bijbehorende Y-coördinaat voor dit segment wordt gegeven door de formule: Y-coördinaat laterale Condylus van de Tibia (proximaal) + 0,433 * (Y-coördinaat Malleolus lateralis(distaal) - Y-coördinaat laterale Condylus van de Tibia (proximaal)).
Voet1. Het proximale punt van de voet wordt, bij het X-coördinaat, gedefinieerd als de
het meest ventrale punt op het Tuber Calcanei. Als distale punt wordt genomen de Digiti Halucis. De formule, met R-waarde 0,500 wordt: X-coördinaat ventrale punt Tuber Calcanei (proximaal) + 0,500 *( X-coördinaat Digiti Halucis (distaal) - X-coördinaat ventrale punt Tuber Calcanei (proximaal)).
2. Het Y-coördinaat van dit segment wordt, anders dan de andere segmenten, het proximale punt anders gedefinieerd dan het X-coördinaat. Bij het Y-coördinaat wordt als het proximale punt de Malleolus lateralis genomen en als distale punt het ventrale punt van het Tuber Calcanei. De formule wordt dan: Y-coördinaat Malleolus lateralis (proximaal) + 0,500 * (Y-coördinaat ventrale zijde Tuber Calcanei (distaal) - Y-coördinaat Malleolus lateralis (proximaal).
De rugzak1. Van de romp wordt het X-coördinaat van het deelzwaartepunt berekend door de
formule: X-coördinaat Acromion (proximaal) + 0,500 * (x- coördinaat Trochantor major (distaal) – X-coördinaat Acromion (proximaal)) + 5. Hierbij wordt het bot punt Acromion als proximaal genomen omdat deze dichter richting het hart ligt. Als de formule omgedraaid wordt zou hier, in dit geval, hetzelfde uit moeten komen.
2. Voor het Y-coördinaat te berekenen wordt de formule als volgt: Y-coördinaat Acromion (proximaal) + 0,500 * (Y-coördinaat Trochantor major (distaal) – Y-coördinaat Acromion (proximaal) + 5. Ook bij het Y-coördinaat zou, in dit geval, het niet uit moeten maken welke waarde voor distaal en proximaal genomen worden.
GewichtsverdelingDe gewichtsverdeling per segment is belangrijk voor het berekenen van het lichaamszwaartepunt, omdat er rekening gehouden moet worden met het aandeel wat een segment heeft in het totale zwaartepunt. Er kan niet gezegd worden dat het gemiddelde van de coördinaten genomen kan worden, omdat alle segmenten een ander gewicht hebben, wat ook meetelt in de positie van het lichaamszwaartepunt. Om de gewichtsverdeling te berekenen wordt er gebruikt gemaakt van de tabel van Dempster(3)
. Hierin staat gegeven welk percentage van de totale massa de massa is van een bepaald segment. Hiermee moet wel rekening gehouden worden met het feit dat deze gegevens gemiddelden zijn.
16

Er wordt dus vanuit gegaan dat alle mensen overal hetzelfde percentage gewicht per segment heeft. Er wordt geen rekening gehouden met een andere lichaamsbouw.
Hierdoor kan er bij een proefpersoon een afwijking zijn met de gewichtsverdeling, omdat deze per persoon een andere gewichtsverdeling heeft, kan het bijvoorbeeld zijn dat een proefpersoon meer massa heeft op de benen dan de tabel van Dempster aangeeft. Hier wordt in het model geen rekening mee gehouden, omdat het niet mogelijk is om per proefpersoon elk segment apart op te wegen.
Verder moet er bij de gewichtsverdeling rekening gehouden worden met het feit dat er in het sagittale vlak maar één voet, onderbeen en bovenbeen en arm ziet, terwijl deze segmenten allen dubbel aanwezig zijn. Deze gewichten worden uiteindelijk dus verdubbeld, om ervoor te zorgen dat deze wel in de goede hoeveelheid meetellen in de positie van het lichaamszwaartepunt. Nb. In het model zijn de armen niet te zien, maar moeten wel worden meegerekend.
Om de gewichtsverdeling te bepalen door middel van Dempster’s body parameter data(3)
wordt de volgende formule gebruikt:
Msegment=Pi×Mtotaal
Waarin Msegement de massa is van het segment, de Pi het percentage van de massa van dat segment van de totale massa en Mtotaal de totale massa van de persoon is, deze is variabel.
Segmenten Pi Percentage (%) van totale massaHoofd en nek 0,081 8,1 Romp 0,497 49,7Bovenste extremiteiten 0,050 5,0Bovenbeen 0,100 10Onderbeen 0,0465 4,65Voet 0,0145 1,45
Tabel 1, De Pi waarden uit de tabel zijn vaste gegevens welke dus per segment verschillend zijn.3
Bij het model met het rugzak is het gewicht in te stellen. Er wordt bij de rugzak vanuit gegaan dat het gewicht over de rugzak verdeeld is.
Lichaamszwaartepunt Wanneer de deelmassa’s en de coördinaten (X, Y) van elk segment bekend zijn, kan het aangrijpingspunt (coördinaten) van het lichaamszwaartepunt berekend worden. Dit kan door middel van de volgende twee formules, een voor de X-coördinaat en een voor de Y-coördinaat.
Xcg=M 1× X 1+M 2×X 2+etc .Mtotaal
Ycg=M 1×Y 1+M 2×Y 2+etc .Mtotaal
Waarin Xcg en Ycg de coördinaten zijn van het lichaamszwaartepunt, M1 en M2 de massa’s zijn van alle segmenten welke worden vermenigvuldigd met hun eigen X- of Y-coördinaat, wat uiteindelijk weer gedeeld wordt door de Mtotaal of wel de totale massa.
17

Voor het model met de rugzak worden de formules uitgebreid door het X- of Y-coördinaat van het deelzwaartepunt erin te zetten. Het gewicht van de rugzak is instelbaar waardoor deze in meerdere of mindere mate meespeelt in de positie van het lichaamszwaartepunt.
Toegepast op het model worden de formules:Xcg =((Massa voet * 2 * X-coördinaat deelzwaartepunt voet)+(Massa onderbeen * 2 * X-coördinaat deelzwaartepunt onderbeen) + (Massa bovenbeen * 2 * X-coördinaat deelzwaartepunt bovenbeen) + (Massa romp * X-coördinaat deelzwaartepunt romp) + (Massa bovenste extremiteiten * 2 * X-coördinaat deelzwaartepunt bovenste extremiteiten) + (Massa hoofd en nek * X-coördinaat deelzwaartepunt hoofd en nek))/ totale massa
Ycg = ((Massa voet * 2 * X-coördinaat deelzwaartepunt voet)+(Massa onderbeen * 2 * X-coördinaat deelzwaartepunt onderbeen) + (Massa bovenbeen * 2 * X-coördinaat deelzwaartepunt bovenbeen) + (Massa romp * X-coördinaat deelzwaartepunt romp) + (Massa bovenste extremiteiten * 2 * X-coördinaat deelzwaartepunt bovenste extremiteiten) + (Massa hoofd en nek * X-coördinaat deelzwaartepunt hoofd en nek))/ totale massa
18

2.8 Het meetprotocolOm het model te kunnen testen of het in de werkelijkheid hetzelfde is als in het model, is een meting vanuit de werkelijkheid nodig. Hiervoor wordt een meetprotocol opgesteld om er voor te zorgen dat vooraf duidelijk is wat en hoe er gemeten wordt. Het meetprotocol bestaat uit:
Beschrijving meetprotocol Benodigdheden Methode dorsaalflexie beperking aanbrengen bij proefpersonen Stappenplan Taakverdeling Verwerking
2.8.1 Beschrijving meetprotocolTijdens de meting zullen er minimaal 5 proefpersonen getest worden. Het gewicht in kilogram en de lichaamsafmetingen in centimeters van de proefpersonen worden vooraf gemeten en in een tabel genoteerd. Zie bijlage 7.1. Het gewicht wordt met een digitale personenweegschaal gemeten en de lichaamsafmetingen met een meetlint. Zie voor definitie lengtematen hoofdstuk 2.2.1 Lichaamsafmetingen.
De proefpersonen zullen vijf keer de squatbeweging uitvoeren met dorsaalflexie beperking en vijf keer zonder dorsaalflexie beperking. Uit de vijf squats van met en zonder dorsaalflexiebeperking worden er 3 squats met en 3 zonder dorsaalflexiebeperking genomen om verder te analyseren. De voorwaarden voor de squat zijn dat de proefpersoon de voeten op heupbreedte zet, voeten plat op de grond houdt gedurende de squats en de handen moeten op de rug houdt met de armen strak langs het lichaam.
Om de squatbeweging te kunnen analyseren is er gekozen voor een videoanalyse. De camera zal hierbij loodrecht op de beweging as worden geplaatst. De squatbeweging zal in het sagittaal vlak gefilmd worden. De achtergrond is egaal gemaakt om het filmen te bevorderen. Op de proefpersonen zullen zes markers geplaatst worden. Er is gekozen voor passieve reflectieve marker met rokje, zie afbeelding 1, waarop een fel licht geschenen wordt, die naast de camera opgesteld wordt.
De markers zullen geplaatst worden op de volgende punten van de rechter lichaamshelft:
Top Tuberositas Metartasalis Quinti Meest distale punt van de Mallelous lateralis Caput Fibula Laterale Epicondyl van het Femur Meest proximale punt van de Trochantor major Meest proximale punt van de Acromion
Er zijn voor de bovenstaande botpunten gekozen omdat deze de minste verplaatsing hebben van de huid tijdens het bewegen en omdat zij makkelijk herkenbaar zijn bij alle proefpersonen. Met deze markers kunnen de enkelhoek, kniehoek en heuphoek bepaald worden door middel van Kinovea, waardoor het model goed vergeleken kan worden met de werkelijkheid.
Bij de squats met rugzak zijn er 2 proefpersonen in plaats van 5 of meer, maar voor de rest is alles hetzelfde, zoals hierboven beschreven staat voor de squat zonder rugzak.
19
Afbeelding 1: marker met rokje(4)

2.8.2 Benodigdheden 5 of meer proefpersonen Weegschaal, meetlint, tape Notitieblok + pen Reflectieve markers met rokje Grote lamp Referentiekader(rechtopstaande paal van 1 meter) Helling voor dorsaalflexie m.b.v. plank Digitale videocamera Computer met Kinovea Bij de squat met rugzak ook nog een rugzak met gewicht
2.8.3 Dorsaalflexie beperking aanbrengenOm de dorsaalflexie beperking aan te brengen is er gekozen voor een plank onder de voorvoet met een hoek van 25˚ (zie afbeelding 2). De hiel staat nog op de grond. De voorvoet en tenen staan op de plank. Hierdoor heeft de proefpersoon een dorsaalflexie beperking gekregen. De plank moet ongeveer 50 cm breed zijn zodat beiden voeten op schouderbreedte op de plank kunnen staan.
2.8.4 Stappenplan1. Zet de video-opstelling klaar (licht, egale achtergrond, plank voor beperking).2. Weeg de proefpersoon op de weegschaal en noteer dit in de tabel.
(weeg ook de rugzak voor het onderzoek met de rugzak)3. Breng de reflectieve marker met rokje op de rechter lichaamshelft aan op de
proefpersoon op de volgende plaatsen:a) Top Tuberositas Metatarsale Quintib) Meest distale punt van de Mallelous lateralisc) Caput Fibula d) Laterale Condyl van Femure) Trochantor majorf) Meest proximale punt van het Acromion
(Plaats ook de rugzak op de rug van de proefpersoon)4. Meet de benodigde lichaamsafmetingen en noteer dit in de tabel (zie bijlage 7.1). 5. Zet de rechtopstaande paal met afmeting 1 meter op gelijke hoogte van de camera
als de proefpersoon6. Zet de digitale videocamera op de gewenste afstand, zodat de camera loodrecht op
de beweging staat en de gehele proefpersoon in beeld is.7. Laat de proefpersoon 5x squatten zonder dorsaalflexie beperking en film dit.
(Laat de proefpersoon 5x squatten met een rugzak zonder dorsaal flexie beperking en film dit).
8. Laat de proefpersoon goed op de plank staan en laat de proefpersoon 5x squatten met dorsaalflexie beperking en film dit.(Laat de proefpersoon goed op de plank staan en laat de proefpersoon 5x squatten met rugzak met dorsaalflexie beperking en film dit).
9. Bepaal met Kinovea de waardes van inputparameters, zodat er gekeken kan worden of het model klopt met de werkelijkheid.
10. Herhaal stap 1 t/m 10 voor de andere proefpersonen
20
Afbeelding 2: plankje voor dorsaalflexie beperking

2.8.5 TaakverdelingPersoon A: Meet en weegt de proefpersonen en noteert gegevens in een tabel.Persoon B: Maakt de video. Persoon C: Geeft proefpersoon aanwijzingen voor een ‘goede’ squat.Persoon D: Zorgt voor goede belichting tijdens het filmen en dat de markers goed zichtbaar op de proefpersonen zitten.
2.8.6 VerwerkingMet behulp van het programma Kinovea worden de inputparameters per proefpersoon geanalyseerd (zie bijlage 7.2 voor de foto’s hoe de gegevens uit de filmpjes zijn gehaald). Deze gegevens van de lichaamsafmetingen, gewicht en de gegevens uit Kinovea worden in het model ingevoerd. Daarna wordt er in het model gekeken wat de hoogte van de Trochantor major is. Deze wordt vergeleken met de gegevens uit de videoanalyse. Dezelfde handelingen worden gedaan met de video’s van de squats met de rugzak.
21

3. Resultaten3.1 Resultaten model zonder rugzakOm het model te kunnen valideren is het belangrijk dat de gegevens uit de werkelijkheid worden gemeten en gebruikt zonder tussenkomst van het model om eventuele fouten hieruit te halen. Voor alle metingen is het verschil in hoogte van de Trochantor major wanneer deze persoon rechtop staat en wanneer deze heeft gesquat genomen. Hierna is het verschil als percentage genomen van de rechtopstaande hoogte van de Trochantor major om ervoor te zorgen dat eventuele fouten niet direct als fout gezien worden.
werkelijkheid Pp1 Pp2 Pp3 Pp4 Pp5 Pp6Squat zonder beperking
20.5% 25.5% 26.6% 13.2% 15.6% 11.6%
Squat met beperking 3.8% 15.1% 15.2% 11.8% 10.7% 9.1%Deze gegevens zijn geabstraheerd van de video’s die gemaakt zijn van de proefpersonen. Zie bijlage 7.2 en 7.3 Ze geven weer hoeveel procent de hoogte van de Trochantor major omlaag is gegaan bij de squatbeweging ten opzichte van de Trochantor major in gestrekte houding. Hier zijn de gegevens van alle drie de squats gemiddeld.
Tabel 2 vergelijking squat zonder beperking en squat met beperking in de werkelijkheid
ModelvalidatieOm ervoor te zorgen dat het model klopt met de werkelijkheid zijn de inputgegevens (zie hoofdstuk 2.2) uit de gemaakte video’s, met en zonder dorsaalflexie beperking, gehaald. Ook is de hoogte van de Trochantor major in staande en in squatpositie opgemeten uit de video’s. Als het model procentueel evenveel omlaag gaat als dat de werkelijk aangeeft, dan is het model valide.Alle uit de video gehaalde gegevens behalve de hoogte van de Trochantor major zijn in het model ingevuld en hier kwamen de volgende percentages uit:
werkelijkheid Pp1 Pp2 Pp3 Pp4 Pp5 Pp6Squat zonder beperking
20.5% 25.5% 26.6% 13.2% 15.6% 11.6%
Squat met beperking 3.8% 15.1% 15.2% 11.8% 10.7% 9.1%Model PP1 PP2 PP3 PP4 PP5 PP6Squat zonder beperking
25.1% 24.5% 25.8% 13.9% 13.8% 16.1%
Squat met beperking 13.1% 13.4% 16.3% 9.5% 7.7% 9.3%Tabel 3 vergelijking squat zonder beperking en squat met beperking in het model
Om te bepalen of de werkelijkheid met het model klopt zijn de volledige resultaten in procenten tegen elkaar uitgezet in een zogenoemd ‘scatterplot’. Hierin worden de gegevens van de werkelijkheid uitgezet tegen de gegevens van het model. Hierin is ook een trendlijn te zien, die aangeeft hoe de punten verlopen. In dit geval is er sprake van een positief verloop wat ook betekend dat de correlatie positief zal zijn.
22

5 10 15 20 25 3005
101520253035
TM hoogte model-werkelijkheid in %
Werkelijkheid
Mod
el
Grafiek 1 model vergelijken met werkelijkheid
Om te bepalen hoe goed het model de werkelijkheid weergeeft wordt er gebruik gemaakt van de correlatie. De correlatie geeft aan hoe veel de verschillende punten van elkaar afwijken. De correlatie bij de volledige gegevensreeksen is: 0,823246Nb. Hoe dichter de correlatie bij de 0 ligt, hoe minder samenhang er is tussen de punten. Een negatieve correlatie geeft aan dat er een negatief verband is. Een correlatie tussen de 0 en 1 geven aan dat er een positief verband is tussen de gegevensreeksen.
Om te bepalen hoe betrouwbaar de meting is, wordt de Agreement bepaalt. De agreement is een maat om te bepalen hoe goed de metingen in een lijn liggen. Hoe verder te punten van de nullijn afliggen, hoe minder de agreement is. In dit onderzoek is de agreement, zoals te zien is in grafiek 2, redelijk hoog. De punten liggen redelijk goed rond de nullijn, wat betekend dat het verschil met de werkelijkheid en het model niet al te groot is.
0 5 10 15 20 25 30 35 4002468
1012
Agreement
Grafiek 2 Agreement
23

Resultaten met rugzakHet model met rugzak is hetzelfde geverifieerd als het gewone model. Eerst zijn alle gegevens uit de video in een aangepast model gezet. Ook hier zijn alle gegevens in procenten van de hoogte van de Trochantor major berekent. Zie bijlage 7.2 en 7.3.
PP 1 PP2Werkelijkheid Squat 1 Squat 2 Squat 3 Squat 1 Squat 2 Squat 3Squat zonder beperking 25% 23.8% 26.3% 16.7% 17.9% 17.9%Squat met beperking 15% 16.3% 15% 9.5% 8.3% 9.5%ModelSquat zonder beperking 23.4% 24.5% 25.5% 4.2% 5.2% 3.1%Squat met beperking 13.8% 14.9% 11.7% 4.2% 4.2% 6.3%
Tabel 4 totaal resultaten rugzak
De correlatie bij deze gegevens is 0,795094927
5 10 15 20 25 300
5
10
15
20
25
30
TM hoogte model-werkelijkheid in %
Model
Wer
kelij
khei
d
Grafiek 3 model met rugzak vergelijken met werkelijkheid
Om de hypothese te kunnen beantwoorden zijn er resultaten uit de metingen gehaald. Voor deze resultaten zijn de metingen gebruikt die gedaan zijn met behulp van Kinovea. Het model is hierbij niet gebruikt. Hierbij is er gekeken naar de gemiddelde diepte van de Trochantor major tot de grond (onder kant van de voeten).
24

4. DiscussieResultaten van de meting voor de hypotheses.Voorgaand aan het maken van het model waren de volgende hypotheses opgesteld:
De kniehoek zal groter blijven met een dorsaalflexie beperking. De heuphoek zal kleiner worden met een dorsaalflexie beperking
Om deze hypotheses te kunnen beantwoorden, wordt eerst alleen nog naar de werkelijkheid gekeken en later pas naar de verwachtingen van het model.Uit de resultaten blijkt dat de eerste hypothese klopt en dat de kniehoek inderdaad groter blijft als er een dorsaalflexie beperking toegevoegd wordt. Dit is het gevolg van een dorsaalflexie beperking, hierdoor zal het zwaartepunt minder ver naar voren gebracht kunnen worden. Daardoor kan er minder diep door het kniegewricht gezakt (kniehoek blijft groter) worden. Het is ook geen optie om het zwaartepunt verder naar achteren te brengen, anders valt de proefpersoon om. Het gemiddelde procentuele verschil tussen de squat met beperking en squat zonder beperking is 8.3%De tweede hypothese is dat de heuphoek kleiner zal worden met een dorsaalflexie beperking. Uit de resultaten blijkt dat dit niet geldt voor de meerderheid van de proefpersonen. De meerderheid krijgt bij een dorsaalflexie beperking een grotere heuphoek om de beperking in de enkel op te vangen om vervolgens dieper te kunnen squatten. Degene die dat niet doen hebben bij het gewone squatten een grote kniehoek, omdat ze hierbij minder hoeven te compenseren voor de beperking in de enkel. Bij het squatten met dorsaalflexie beperking krijgen zij dan een kleinere heuphoek om de dorsaalflexie beperking te compenseren en alsnog dieper te kunnen squatten.
Resultaten van de meting in vergelijking met de werkelijkheidUit de resultaten blijkt dat het model niet helemaal klopt met de werkelijkheid. Dit is te zien in de grafieken 1 en 2 in het hoofdstuk resultaten. Hier is te zien dat er een correlatie is van 0,823246. Redenen waarom het model niet overeenkomt met de werkelijkheid worden hieronder één voor één behandeld.
Eén van de fouten waardoor het model niet overeen komt met de werkelijkheid is dat de gewrichtsspleet bij het kniegewricht in het model niet is meegenomen en deze er in de werkelijkheid wel is. Dit zou verholpen kunnen worden door de marker waarmee de lengte van het onderbeen bepaald wordt niet op het Caput fibula te plakken, maar op het Epicondylus Lateralis van het femur.
Een andere fout waardoor het model afwijkt van de werkelijkheid is dat er voor de gewichtsverdeling een standaard gewichtsverdeling is genomen, maar dit is per persoon anders. Personen waarbij er meer gewicht in de benen zit dan in het bovenlichaam zullen dieper kunnen squatten, doordat het zwaartepunt lager en verder naar achter ligt. Hierdoor is er een kans dat in de werkelijkheid de persoon gewoon een squat kan uitvoeren, maar dat het model aangeeft dat de persoon om zou vallen.
Palpatiefouten zijn ook een reden, waardoor het model af kan wijken van de werkelijkheid. Als bij een proefpersoon het meest laterale deel van een punt is genomen en vervolgens bij een tweede proefpersoon juist het meest proximale punt genomen kunnen de gegevens eigenlijk niet met elkaar vergeleken worden, omdat er niet dezelfde punten gebruikt zijn. Nog een palpatiefout kan zijn dat bij sommige proefpersonen het meest proximale deel van een punt dieper ligt, waardoor er net iets harder geduwd moet worden om het goede punt te kunnen vinden. Wordt dit niet gedaan dan ontstaat er een palpatiefout, omdat niet het goede punt genomen wordt om mee verder te rekenen.
Nog een reden waardoor het model niet overeen komt met de werkelijkheid is de meetfout. Wanneer de ledematen opgemeten worden is er altijd een onnauwkeurigheid met aflezen, waardoor er later met de verkeerde lengtes gerekend
25

wordt, waardoor het model te groot of te klein wordt in vergelijking met de werkelijkheid. Ook vroegtijdig afronden van opgemeten gegevens kan een meetfout veroorzaken, want door vroegtijdige afrondingen kunnen de waardes te groot of te klein uitvallen.
Verdere fouten die gemaakt kunnen worden, zijn tijdens het bepalen van de gegevens uit de filmpjes in Kinovea. Als de verschillende hoeken gemeten worden kunnen de hoekmeters nooit exact op dezelfde plek staan, waardoor er een verschil in meting komt. Hierdoor kunnen de uitslagen van een hoek per meting verschillen, waardoor er weer andere waardes uit de grafiek komen.
Nog een reden waardoor het model van de werkelijkheid verschilt is dat tijdens het opnemen van de gegevens die later verwerkt worden de camera niet helemaal loodrecht op de proefpersoon stond. Hierdoor is niet alleen het sagittale vlak te zien, maar ook een deel van het frontale vlak. Doordat dit gebeurd kunnen de hoeken niet goed opgemeten worden, waardoor er een afwijking optreedt.
Achteraf zijn er tijdens het filmen van de squatbeweging een aantal problemen gesignaleerd die ervoor zorgen dat het model niet overeen komt met de werkelijkheid, namelijk: proefpersonen kwamen met hun hielen van de grond tijdens het squatten. Terwijl in het meetprotocol werd gezegd dat de proefpersoon de squat moet uitvoeren met platte voeten op de grond, omdat het model met een platte voet rekent.Hiernaast is tijdens het filmen van de squat met beperking, de beperking bij sommige proefpersonen niet goed aangebracht, waardoor de beperking niet bij elk proefpersoon hetzelfde is gebleven. De beperking had namelijk onder de hele voorvoet moeten liggen en niet zoals bij sommige proefpersonen alleen onder de tenen.
Om het model beter in de werkelijkheid over te kunnen laten lopen moet er een grotere groep proefpersonen getest worden op het model, want een kleine groep is niet representatief genoeg om een heel model op af te kunnen stemmen.
Resultaten van de meting met rugzakUit de resultaten blijkt dat het model met rugzak niet helemaal klopt met de werkelijkheid. Dit is te zien in de grafiek 3 in het hoofdstuk resultaten. Hier is te zien dat er een correlatie is van 0,795094927. Redenen waardoor het model met rugzak niet klopt in vergelijking met de werkelijkheid is om dezelfde redenen waardoor ook het gewone model niet klopt met de werkelijkheid.In de discussie wordt er antwoord gegeven op de hypotheses. De hypotheses voor de squat met rugzak luiden als volgt:1) Je zal dieper kunnen squatten omdat het gewicht verder naar voren word gebracht, het lichaamszwaartepunt gaat dus in de squat naar voren.2) Er zal dieper gesquat kunnen worden met rugzak zonder beperking, dan met rugzak met beperking.
Uit de resultaten blijkt dat er minder diep gesquat kan worden met een rugzak op. Dit komt omdat het lichaamszwaartepunt naar achter gaat. Proefpersoon 1 kan zonder beperking zonder rugzak 26,6% diep squatten, met rugzak zonder beperking 25%. proefpersoon 2 kan zonder beperking zonder rugzak 13,2% diep squatten, met rugzak zonder beperking .
Dit komt omdat er met een dorsaalflexie beperking niet diep gesquat kan worden. Uit de gegevens zijn de volgende gegevens verkregen. Bij de proefpersonen kwam het volgende uit de meting:Proefpersoon 1 kan met rugzak zonder beperking 24,9% diep squatten en met beperking 15,4%. Proefpersoon 2 kan met rugzak zonder beperking 17,5% diep squatten en met beperking
26

9.1%.
5. ConclusieEr zullen 3 onderwerpen in de conclusie worden behandeld. Ten eerste worden de hypotheses behandeld. Ten tweede wordt er antwoord gegeven op de hoofdvraag en ten derde wordt er een aanbeveling gegeven voor een beter resultaat van het onderzoek.
5.1 Model zonder rugzakBij start van dit onderzoek werd er in het algemeen verwacht dat de kniehoek bij een squat met dorsaalflexie beperking in de enkel groter zou blijven als bij een squat zonder dorsaalflexie beperking in de enkel. Daarmee was ook de verwachting dat de hoogte van de Trochantor major hoger zou zijn wanneer er met dorsaalflexie beperking in de enkel gesquat zou worden in vergelijking tot een squat zonder dorsaalflexie beperking in de enkel.Om toch een diepere squat uit te kunnen voeren was als hypothese gesteld dat de heuphoek kleiner zou worden bij de squat met een dorsaalflexie beperking in de enkel dan bij een squat zonder dorsaalflexie beperking in de enkel.
Op de heuphoek na bleken de hypotheses te kloppen. Verwacht werd dat de heuphoek kleiner zou worden. Achteraf bleek deze bij elke proefpersoon groter te blijven zonder beperking als met beperking. Wel kwam de romp van de proefpersonen tijdens de squat verder naar voren en werd dus de hoek romp met grond kleiner. De hoek tussen de romp en bovenbeen (de heuphoek) bleef groter. Dit kwam doordat het bovenbeen niet verder horizontaal kon roteren, omdat de knie niet verder kon flecteren door de dorsaalflexie beperking in de enkel, anders zou de proefpersoon omvallen. Hierdoor bleef de heuphoek groter. Voor resultaten hiervan zie tabel 2 en 3.
In de hoofdvraag werd afgevraagd wat het effect van een dorsaalflexie beperking in de enkel met betrekking tot de diepte van de squat is. Om hier antwoord op te krijgen zijn bovenstaande hypotheses onderzocht. Daaruit is te concluderen dat een dorsaalflexie beperking in de enkel in de squat zorgt voor een kleinere knie- en heuphoek en daarmee voor een minder diepe squat. Het gemiddelde procentuele verschil tussen de squat met beperking en squat zonder beperking is 8.3%.
5.2 Model met rugzakVervolgens is er een tweede model opgesteld met een extra beperking: een rugzak met massa. Hiervan werd verwacht dat de squat dieper zou zijn met rugzak dan de squat zonder rugzak en dat een squat met rugzak zonder dorsaalflexiebeperking in de enkel dieper zou zijn dan een squat met rugzak met een dorsaalflexie beperking in de enkel. De hypothese dat de squat met rugzak dieper zou zijn dan de squat zonder de rugzak is volgens de resultaten niet het geval. Dit komt omdat het zwaartepunt niet naar voren gaat maar meer naar achteren zal verplaatsen door het gewicht van de rugzak op de rug. De andere hypothese blijkt wel te kloppen. Voor resultaten zie tabel 2 en 4.
In de hoofdvraag met rugzak werd afgevraagd wat het effect is van een extra gewicht op de romp op de diepte van de squat. Om hier antwoord op te krijgen zijn bovenstaande hypotheses onderzocht. Daaruit is gebleken dat de squat met rugzak een minder diepe squat geeft dan de squat zonder rugzak. Voor resultaten zie tabel 2 en 4.
5.3 Aanbeveling De aanbeveling voor de meetmethode is dat de marker op het been bij de knie alleen op het Epicondyl van het Femur wordt geplaatst, zodat er geen probleem is met de gewrichtsspleet. Een andere aanbeveling is dat het aanbrengen van de dorsaalflexie beperking in de enkel het plankje volledig onder de voet wordt geplaatst en zo nodig dit aan de proefpersoon
27

bevestigd. Tenslotte is het aan te bevelen om onderzoek te doen bij een grotere groep proefpersonen om een zo goed representatief mogelijke uitkomst van de meting te verkrijgen.
6. Literatuurlijst
1 Bernard J. Gerritsen en Yvonne F. Heerkens (2013). Anatomie in vivo van het bewegingsapparaat (zesde druk). Amsterdam: Reed Business Education.
2 F.Paulsen en J. Waschke (2011). Sobotta Atlas van de menselijke anatomie deel 1. Algemene anatomie en bewegingsapparaat (vierde druk). Houten: Bohn Stafleu van Loghum.
3 D.A. Winter (1990). Biomechanics and Motor Control of Human Movement (2nd
editon). Toronto:John Wiley & Sons. 4 M.J.A.J. Schrauwen, docent aan HHS HBO Bewegingstechnologie Reader
Biokinematica 1 Videoregistratie versie 16-11-2015.
28

7. Bijlage
7.1 lichaamsafmetingenPP 1 PP 3 PP 2 PP 5 PP 4 PP 6
Geslacht man vrouw Vrouw Vrouw Man ManLichaamslengte 181 166 164 172 176 196Gewicht 79 70 58 101,4voetlengte 25 23 24 23 26 28hoogte voet 7 7 6,5 7 6 7bovenbeen lengte 41,5 35,5 43 39 41 44onderbeen lengte 40 37,5 37 40 37 45romplengte 55 54 47,5 47 56 61hoofd en nek 38,5 30 30 36 36 37ROM enkel 83 80,2 110,9 87,6 91,1 79,4ROM knie 144,4 148,7 149,6 145,8 146 136ROM heup 153 142 160 153 153 139Trochantor hoogte 88,5 80 86,5 86 84 96LL 182 164 164 169 176 194
29

7.2 Opgemeten lichaamshoeken en Trochantor major hoogte
PP 1 zonder beperking squat 1 gestrekt 1 squat 2 gestrekt 2 squat 3 gestrekt 3 gem squat gem gestrektenkelhoek 63 125 60 117 65 120 62,66666667 120,6666667kniehoek 99 156 100 160 97 158 98,66666667 158heuphoek 56 158 59 158 55 160 56,66666667 158,6666667schouderdiepte 97 160 98 158 98 161 97,66666667 159,6666667heupdiepte 76 98 78 95 75 96 76,33333333 96,33333333 Met beperking enkelhoek 77 104 74 106 74 104 75 104,6666667kniehoek 126 155 128 158 121 156 125 156,3333333heuphoek 90 148 85 154 88 150 87,66666667 150,6666667schouderdiepte 130 163 126 163 124 160 126,6666667 162heupdiepte 94 98 93 97 90 97 92,33333333 97,33333333PP 2 zonder beperking enkelhoek 50 105 49 117 47 110 48,66666667 110,6666667kniehoek 92 163 98 170 96 165 95,33333333 166heuphoek 60 175 72 171 69 174 67 173,3333333schouderdiepte 85 151 88 150 91 148 88 149,6666667heupdiepte 66 98 70 100 72 95 69,33333333 149,6666667 69,33333333 97,66666667met beperking enkelhoek 62 100 59 103 57 101 59,33333333 101,3333333kniehoek 118 176 120 170 119 174 119 173,3333333heuphoek 93 182 88 179 89 180 90 180,3333333schouderdiepte 105 147 102 148 100 147 102,3333333 147,3333333heupdiepte 80 95 83 93 84 94 82,33333333 94PP 3
30

zonder beperking enkelhoek 52 111 58 112 56 112 55,33333333 111,6666667kniehoek 91 154 93 164 94 160 92,66666667 159,3333333heuphoek 75 166 75 164 72 158 74 162,6666667schouderdiepte 105 152 106 150 102 150 104,3333333 heupdiepte 70 92 69 93 68 95 met beperking enkelhoek 66 104 64 103 68 104 66 103,6666667kniehoek 113 165 112 160 113 159 112,6666667 161,3333333heuphoek 89 168 90 169 81 170 86,66666667 169schouderdiepte 113 153 115 154 111 155 113 154heupdiepte 80 94 81 93 78 94 79,66666667 93,66666667PP 4 zonder beperking enkelhoek 55 108 55 105 55 111 55 108kniehoek 116 157 117 176 116 160 116,3333333 164,3333333heuphoek 128 158 130 160 120 163 126 160,3333333schouderdiepte 143 161 145 162 144 163 144 162heupdiepte 83 96 82 96 85 96 83,33333333 96 met beperking enkelhoek 65 105 66 105 62 106 64,33333333 105,3333333kniehoek 130 169 124 166 126 167 126,6666667 167,3333333heuphoek 114 168 116 170 105 173 111,6666667 170,3333333schouderdiepte 140 162 137 160 135 164 137,3333333 162heupdiepte 86 95 84 93 84 95 84,66666667 94,33333333PP 5 zonder beperking enkelhoek 72 117 75 132 73 120 73,33333333 123kniehoek 120 178 123 181 120 180 121 179,6666667heuphoek 74 170 68 183 70 173 70,66666667 175,3333333schouderdiepte 93 145 88 145 90 145 90,33333333 145heupdiepte 75 90 75 90 78 90 76 90 met beperking enkelhoek 81 112 82 110 85 110 82,66666667 110,6666667kniehoek 141 174 137 174 140 173 139,3333333 173,6666667heuphoek 80 183 74 178 75 180 76,33333333 180,3333333schouderdiepte 100 142 93 87 93 100 95,33333333 109,6666667heupdiepte 80 88 79 146 82 90 80,33333333 108PP 6 zonder beperking
31

enkelhoek 68 111 67 126 64 119 66,33333333 118,6666667kniehoek 115 154 113 169 115 160 114,3333333 161heuphoek 69 161 71 190 70 165 70 172schouderdiepte 113 174 118 178 116 170 115,6666667 174heupdiepte 94 105 93 108 94 105 93,66666667 106 met beperking enkelhoek 76 104 80 126 76 119 77,33333333 116,3333333kniehoek 132 158 135 169 134 160 133,6666667 162,3333333heuphoek 70 160 72 190 72 165 71,33333333 171,6666667schouderdiepte 112 164 122 178 116 170 116,6666667 170,6666667heupdiepte 97 102 95 108 97 105 96,33333333 105Met rugzak PP 1 zonder beperking enkelhoek 57 122 59 116 63 121 59,66666667 119,6666667kniehoek 94 167 98 170 94 174 95,33333333 170,3333333heuphoek 87 175 72 180 70 172 76,33333333 175,6666667schouderdiepte 110 152 98 152 98 150 102 151,3333333heupdiepte 72 96 71 97 71 97 71,33333333 96,66666667met beperking enkelhoek 70 114 68 107 68 110 68,66666667 110,3333333kniehoek 117 165 114 167 116 165 115,6666667 165,6666667heuphoek 84 173 78 170 71 171 77,66666667 171,3333333schouderdiepte 106 153 104 152 100 154 103,3333333 153heupdiepte 81 97 80 96 83 97 81,33333333 96,66666667PP 2 zonder beperking enkelhoek 52 135 53 127 53 130 52,66666667 130,6666667kniehoek 111 179 107 173 108 176 108,6666667 176heuphoek 100 174 95 176 98 175 97,66666667 175schouderdiepte 136 174 130 177 132 175 132,6666667 175,3333333heupdiepte 92 106 91 108 93 106 92 106,6666667met beperking enkelhoek 69 119 70 118 70 117 69,66666667 118kniehoek 130 168 133 175 129 170 130,6666667 171heuphoek 77 171 79 167 76 170 77,33333333 169,3333333schouderdiepte 106 159 104 160 103 158 104,3333333 159heupdiepte 92 100 92 100 94 101 92,66666667 100,3333333
7.3 Gegevens validatie Model Werkelijkheid Squat gestrekt Verschil Percentage Gemiddelde %
32

Proefpersoon 1 89zonder beperking 67 22 24,71910112 25,09363296
68 21 23,5955056265 24 26,96629213
met beperking 77 12 13,48314607 13,1086142379 10 11,2359550676 13 14,60674157
Proefpersoon 2 87zonder beperking 64 23 26,43678161 24,5210728
67 20 22,9885057566 21 24,13793103
met beperking 75 12 13,79310345 13,4099616976 11 12,6436781675 12 13,79310345
Proefpersoon 3 80zonder beperking 59 21 26,25 25,83333333
59 21 26,2560 20 25
met beperking 67 13 16,25 16,2567 13 16,2567 13 16,25
Proefpersoon 4 84zonder beperking 72 12 14,28571429 13,88888889
73 11 13,095238172 12 14,28571429
met beperking 77 7 8,333333333 9,52380952475 9 10,7142857176 8 9,523809524
Proefpersoon 5 82zonder beperking 71 11 13,41463415 13,82113821
71 11 13,4146341570 12 14,63414634
met beperking 77 5 6,097560976 7,72357723675 7 8,53658536675 7 8,536585366
Proefpersoon 6 93zonder beperking 78 15 16,12903226 16,12903226
77 16 17,2043010879 14 15,05376344
met beperking 84 9 9,677419355 9,31899641684 9 9,67741935585 8 8,602150538
Squat Model Squat gestrekt Verschil Percentage Gemiddelde %PP1 96Squat zonder 76 20 20,83333333 20,48611111
33

78 18 18,7575 21 21,875
Squat met 94 2 2,083333333 3,81944444493 3 3,12590 6 6,25
PP2 97Squat zonder 66 31 31,95876289 28,52233677
70 27 27,8350515572 25 25,77319588
Squat met 80 17 17,5257732 15,1202749183 14 14,4329896984 13 13,40206186
PP3 94Squat zonder 70 24 25,53191489 26,59574468
69 25 26,5957446868 26 27,65957447
Squat met 80 14 14,89361702 15,2482269581 13 13,8297872378 16 17,0212766
PP4 96Squat zonder 83 13 13,54166667 13,19444444
82 14 14,5833333385 11 11,45833333
Squat met 86 10 10,41666667 11,8055555684 12 12,584 12 12,5
PP5 90Squat zonder 75 15 16,66666667 15,55555556
75 15 16,6666666778 12 13,33333333
Squat met 80 10 11,11111111 10,7407407479 11 12,2222222282 8 8,888888889
PP6 106Squat zonder 94 12 11,32075472 11,63522013
93 13 12,2641509494 12 11,32075472
Squat met 97 9 8,490566038 9,11949685595 11 10,3773584997 9 8,490566038
Model WerkelijkheidRugzak Squat Gestrekt Percentage Squat Gestrekt PercentageProefpersoon 1 94zonder beperking 60 80 25 72 23,4042553
34

61 23,75 71 24,468085159 26,25 71 24,4680851
met beperking 68 15 81 13,829787267 16,25 80 14,89361768 15 83 11,7021277
Proefpersoon 2 84 96zonder beperking 70 16,66666667 92 4,16666667
69 17,85714286 91 5,2083333369 17,85714286 93 3,125
met beperking 76 9,523809524 92 4,1666666777 8,333333333 92 4,1666666776 9,523809524 90 6,25
35