Block L-D2 LiDAR 3rd Quality Assessment Report...2.7 Computing the RMSE (z) 18 2.8 Visual Assessment...
55
Block L-D2 LiDAR 3 rd Party Quality Assessment Report Prepared for the: Prepared by: 6901 East Fish Lake Road Suite 140 Maple Grove Minnesota 55369 September 10, 2010 International Water Institute Red River Basin LiDAR Mapping Initiative 1301 12 th Avenue North Box 5057 Fargo, North Dakota 58105 www.houstoneng.com
Transcript of Block L-D2 LiDAR 3rd Quality Assessment Report...2.7 Computing the RMSE (z) 18 2.8 Visual Assessment...

Block L-D2 LiDAR 3rd
Party
Quality Assessment Report
Prepared for the:
Prepared by:
6901 East Fish Lake Road Suite 140 Maple Grove Minnesota 55369
September 10, 2010
IInntteerrnnaattiioonnaall WWaatteerr IInnssttiittuuttee
RReedd RRiivveerr BBaassiinn
LLiiDDAARR MMaappppiinngg IInniittiiaattiivvee
1301 12th Avenue North Box 5057 Fargo, North Dakota 58105
www.houstoneng.com

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
i.
CERTIFICATION
I hereby certify that this plan, specification, or report, was prepared by me or under my direct
supervision, and that I am a duly licensed professional under the laws of the State of Minnesota
or the State of North Dakota.
Curtis A. Skarphol, RLS Mark R. Deutschman, P.E.
Minn. Reg. No. 42303 Minn. Reg. No. 41259
North Dakota Reg. No. 4723
Quality assurance oversight has been provided by me during the completion of this project.
I certify that I have reviewed the work products in accordance with the specifications and criteria
contained herein.
Mr. Brian Fischer, CFM
GIS Project Manager
Date: September 10, 2010
Houston Engineering, Inc.
6901 East Fish Lake Road, Suite 140
Maple Grove, Minnesota 55369
763.493.4522 (Phone)
763.493.5572 (Fax)
and
Houston Engineering, Inc.
1401 21st Avenue North
Fargo, ND 58102
701.237.5065 (Phone)
701.237.5101 (Fax)
www.houstonengineeringinc.com

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007
September 10, 2010 I.
Table of Contents
Page
Section 1.0 Project Overview 1
Section 2.0 Quality Assurance Considerations 4
2.1 References and Applicable Methods 4
2.2 Performance Specifications for LiDAR Products
Established by the Contract 5
2.3 Quality Assurance Process 6
2.4 Quality Assurance Unit 8
2.5 Collection of Known Elevations in the Field 8
2.6 Chain of Custody 18
2.7 Computing the RMSE(z) 18
2.8 Visual Assessment 18
2.9 Criteria for Acceptance 19
Section 3.0 Quality Assurance Results and Conclusions for Block L-D2 20
3.1 Block Description 20
3.2 Results 20
3.2.1 Vertical Accuracy 20
3.2.2 Visual Assessment 26
3.2.3 Concurrence with the Specification 27

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007
September 10, 2010 II.
Table of Contents (continued)
List of Figures
Figure 1. LiDAR Collection Areas and Blocks 3
Figure 2. Land Use Within the LiDAR Project Area 11
Figure 3. Monument and Control Locations Used to Establish
Checkpoints 12
Figure 4. Check Point Locations within the Project Area 13
Figure 5. Land Use within Block L-D2 22
Figure 6. Control Points within Block L-D2 23
Figure 7. Checkpoints within Block L-D2 24
Figure 8. RMSE(Z) by Land Class in Block L-D2 25
Figure 9. Histogram of Residual Differences within Block L-D225 26
Figure 10. Histogram of Absolute Value of the Residuals
Across All Land Use Classes in Block L-D2 27
Figure 11. Checkpoint Results and Blunders 28
Figure 12. Delivery Block L-D2 Tiles Reviewed 29
List of Tables
Table 1. Numbered Checkpoints by Block 14
Table 2. Vertical Accuracy Statistics by Land Class for Block L-D2 21
List of Appendices
Appendix A: Chain of Custody Form 30
Appendix B: Vertical Accuracy Computations by HEI Checkpoints 32
Appendix C: Comparison of Vertical Accuracy by Block 38
Appendix D: Visual Assessment Screenshots 39
Appendix E: CD-ROM containing an ESRI Shapefile of HEI
Checkpoints and Photos 51

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 1 of 51
SECTION 1.0
PROJECT OVERVIEW
The International Water Institute (IWI) has secured funding for a high-resolution digital
elevation data collection project in the United States portion of the Red River of the North
watershed. The Red River Basin Mapping Initiative (RRBMI) includes all or portions of 45
counties in North Dakota, Minnesota, and South Dakota (i.e., the Project Area). The size of the
proposed collection area is approximately 45,000 square miles. In the spring of 2008, the IWI
selected Fugro-Horizons as the vendor to collect and process the LiDAR data. The United States
Army Corps of Engineers (COE) has entered into a cost share agreement with the Minnesota Red
River Watershed Management Board and the North Dakota Red River Joint Water Resource
District to contribute funding and resources towards the project. The COE is also using Fugro-
Horizons to collect and process LIDAR data.
The Project Area is divided into 14 delivery blocks as shown on Figure 1. Fugro-
Horizons is under contract to deliver the final products by Block (A thru O), using 2000 x 2000
meter tiles. The blocks that have been completed are as follows:
Block A delivered in late August 2008;
Block B delivered November 29, 2008;
Block C delivered February 4, 2009;
Block H and the western portion of Block D were combined to form Block H-D1.
The eastern portion of Block D has not been collected as of this date. The
remaining portion of Block D will be combined with Block L into a QA report
called Block L-D2;
Block G delivered on May 8, 2009;
Block O delivered on August 11th
, 2009;
Block E delivered on November 23rd
2009; and
Block L-D2 delivered on January 12 2010, which is the focus of this current
quality assurance review. This revised report now contains portions of Big Stone
County that was flown in the Spring of 2010. The report now includes all of the
original area known as L-D2.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 2 of 51
The IWI selected Houston Engineering, Inc. to conduct the 3rd party Quality Assessment
(QA) review of select LiDAR deliverables. By passing the QA review, final acceptance of the
data by the IWI is possible. Houston Engineering is primarily responsible for assessing the
vertical accuracy1 of the data using Global Positioning Survey (GPS) checkpoints.
1 Horizontal accuracy and orthoimagery are excluded from this QC process.

!.
!.
Marshall Roberts
Sargent
Ransom
Richland
Cass
Barnes
Stutsman
Foster
Traill
SteeleGriggs
EddyWells
Sheridan
GrandForksNelson
Benson
Walsh
Ramsey
Pierce
McHenry
RoletteTowner
Cavalier Pembina
Pierce
BigStone
Stevens
Traverse
Grant
Wilkin OtterTail
BeckerClay
Hubbard
MahnomenNorman
ItascaRedLake
Clearwater
Pennington
Polk
Beltrami
Marshall
Koochiching
RoseauKittsonLakeof the
Woods
J
I
K
L-D2
O
N
M
G
H-D1
C
B
A
F
E
Figure 1. LiDAR Collection Areas and Blocks
!. Fargo!. Grand Forks
RiversLiDAR Delivery BlocksMN DNR Project Boundary
South Dakota CountiesNorth Dakota CountiesMinnesota Counties
0 25 50 7512.5 MilesFigure 1
LiDAR Collection Blocks
´Sources: MN DOT, MN DNR, ND GIS Hub, US TIGER Data
August 31, 2010Block L-D2 3rd Party Quality Assessment ReportHEI Project No. 4875-007
lvue
Typewritten Text
lvue
Typewritten Text
Page 3 of 51

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 4 of 51
SECTION 2.0
Quality Assurance Considerations
2.1 REFERENCES AND APPLICABLE METHODS
The processes and methods used to QA the LiDAR products are largely based upon
guidance, established by various federal agencies/entities including the Federal Emergency
Management Agency (FEMA) and the Federal Geographic Data Committee (FGDC). Portions
of the following references form the basis for the QA process:
American Society for Photogrammetry and Remote Sensing (ASPRS) Guidelines,
Vertical Accuracy Reporting for LiDAR Data, Version 1.0, Released May 24,
2004, ASPRS LiDAR Committee, 20 p.
Federal Geographic Data Committee, 1996. Content Standards for Digital
Geospatial Metadata (version 2.0), FGDC-STD-001-1998: Washington, D.C.,
Federal Geographic Data Committee, 9 p.
Federal Geographic Data Committee, 1998, Part 3: Geospatial Positioning
Accuracy Standards, FGDC-STD-007.3-1998: Washington, D.C., Federal
Geographic Data Committee, 25 p.
Federal Emergency Management Agency, 2003, Guidelines and Specifications for
Flood Hazard Mapping Partners, Appendix A: Guidance for Aerial Mapping and
Surveying [February 2002], 57p.
Federal Emergency Management Agency, 2003, Guidelines and Specifications for
Flood Hazard Mapping Partners, Appendix 4B: LIDAR Specifications for Flood
Hazard Mapping, 8p.
The QA process included select portions from these references (primarily to determine
vertical accuracy) as well as visual methods as described within this section. The U.S.
Geological Survey National Geospatial Program is currently soliciting input additional
specifications for the collection of high resolution topographic data using LiDAR
(http://lidar.cr.usgs.gov/USGS-
NGP%20Lidar%20Guidelines%20and%20Base%20Specification%20v13(ILMF).pdf).
However, because these specifications were developed subsequent initiation of this project, they
were not relied upon for completing the quality assurance review.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 5 of 51
2.2 PERFORMANCE SPECIFICATIONS FOR LIDAR PRODUCTS ESTABLISHED BY THE
CONTRACT
The Request for Proposal (RFP) established the following requirements for several
LiDAR Products:
Performance Standards - The performance standards for this project are the Federal
Emergency Management Agency’s (FEMA) “Guidelines and Specifications for
Flood Hazard Mapping Partners, Appendix A” Guidance for Aerial Mapping and
Surveying”. (http://www.fema.gov/pdf/fhm/frm_gsaa02.pdf). At a minimum, all
bare earth digital elevation data delivered shall meet a 15 centimeter root mean
square error (RMSE(z)) vertical and one (1) meter horizontal accuracy.
Mandatory Deliverables - Delivery of the following products shall be required to
satisfy the contract:
All Raw Classified Data
o All raw classified (post calibrated, pre-filtered) data files shall be
delivered for each collection area. Other raw data deliverable
requirements include:
Delivered in Universal Trans-Mercator (UTM) Coordinate System
(Zone 14, NAD 83).
Elevation values (z) provided in orthometric heights in meters with 1
(one) centimeter resolution in the NAVD88 datum.
Classified raw data in LASer (LAS version 1.1) File Format
Exchange format.
Data as a collection of files which are subdivided using 2000m by
2000m tiles.
Filtered Bare-earth Data
o Provide northing, easting, and elevation data for filtered raw data
representing the bare earth – all other elevation points shall be removed
(i.e. bridges, buildings, vegetations, etc). Other filtered bare earth data
requirements include:
Delivered in Universal Trans-Mercator (UTM) Coordinate System
(Zone 14, NAD 83).
Elevation values (z) provided in orthometric heights in integer meters
with 1 (one) centimeter resolution in the NAVD88 datum.
Filtered Bare-earth data in the LAS (version 1.1) format.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 6 of 51
Data as a collection of files which are subdivided using 2000m by
2000m tiles.
Bare-Earth Digital Elevation Model (DEM)
o Provide a raster-based DEM derived from bare-earth points of the filtered
bare-earth data that meets the following requirements:
Horizontal DEM grid spacing of 1 (one) meter in Easting and
Northing.
Delivered in Universal Trans-Mercator (UTM) coordinate system
(Zone 14, NAD 83).
Vertical DEM resolution shall preserve ranging resolution at a
minimum of 1 (one) centimeter resolution in the NAVD88 datum.
Provided in ASCII GRID format.
Data as a collection of files which are subdivided using 2000 meters
by 2000 meters tiles.
Project Completion Report
o This report shall be provided to the IWI in both printed copy and
electronic format (CDROM – Microsoft Word), and shall contain the
information specified in FEMA’s Appendix A, Section A.8.7.2
(http://www.fema.gov/pdf/fhm/frm_gsaa.pdf)
Metadata Record
o For each dataset produced under this contract, the Vendor shall use the
information compiled in the Project Completion Report to deliver a
metadata document compatible with the FGDC Content Standards for
Digital Geospatial Metadata.
(http://www.fgdc.gov/standards/projects/FGDC-standards-
projects/metadata/base-metadata/v2_0698.pdf)
Although several LiDAR products are generated by the current collection effort, this QA
report pertains solely to the bare earth products.
2.3 QUALITY ASSURANCE PROCESS
The QA process is intended to assess whether the LiDAR deliverables meets the
following criteria:
lvue
Typewritten Text

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 7 of 51
The final products are delivered in UTM Coordinate System NAD 83, Zone 14
with elevation values in NAVD 1988 datum (orthometric heights);
Files are named correctly in accordance with the tiling and collection area scheme
and are not corrupt;
Investigation for the presence of blunders based upon the checkpoints. Blunders
are defined as a difference between the measured checkpoint elevation and the
elevation determined from the bare earth products which exceeds 3 times the
standard deviation (as defined by ASPRS Guidelines) as an indicator of potential
for systematic error;
Visual assessment of the raw classified data to ensure proper classification (2
– Ground, 6 – Building, 8 – Model Keypoint, 12 – Overlap Points) and
qualitatively assess the number of unclassified points;
Visual assessment of the filtered bare earth data to assess the homogeneity and
density of points and ensure suitable overlap between the tiles and point density
at the tile seams;
Lack of obvious anomalies as determined from visual audit goal of assessing
5% of the tiles.
o Per FEMA’s Appendix A, Section A.8.3.1, data voids are areas lacking
points exceeding two times the DEM post spacing. For the purpose of
this assessment, voids are functionally defined by an absence of points
within a maximum area of ~ 1,000,000 square meters (~250-acres).
Except within bodies of water, raw data voids cannot exceed 25% of any
given tile.
o Per FEMA’s Appendix A, Section A.8.3.1, artifacts are regions of
anomalous elevations or oscillations or ripples within the DEM data.
Artifacts may consist of elevation spikes or depressions, ridges between
tiles, poor penetration of the LiDAR or processing. Artifact aerial extent
should generally be limited to a maximum area of ~ 1,000,000 square
meters (~250-acres) and less than 25% of any given tile.
Descriptive statistics computed by land use for the elevation difference between
the checkpoint elevation and the LiDAR elevation to verify normality
assumptions used when computing the root mean square error (RMSE(z)) for
fundamental accuracy (mean of ± 2 cm and skewness coefficient of ± 4 cm);
Vertical accuracy expressed as:
o Block RMSE(z) computed from all checkpoints within a block regardless of
land use. The block RMSE(z) is consistent with the vertical accuracy as
described within the contract between the IWI and Fugro-Horizons:

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 8 of 51
o Fundamental vertical accuracy within a block for those checkpoints located
within open terrain where there is a high probability that the sensor detected
the ground surface. The fundamental vertical accuracy is the value by which
vertical accuracy can be equitably assessed and compared among different
datasets. Fundamental vertical accuracy is calculated at the 95-percent
confidence level as a function of the RMSE(z);
o Supplemental vertical accuracy for those check points not located within
open terrain and expressed as the 95th percentile error value;
o Consolidated vertical accuracy computed across land use categories and
expressed as the 95th percentile error value; and
o Absolute and percent difference between the checkpoint and LiDAR
elevation;
Metadata meets accepted standards.
2.4 QUALITY ASSURANCE UNIT
QA procedures were applied to the LiDAR deliverables by block. Each block comprises
an approximate area between 470 square miles and 4,473 square miles and is further subdivided
into tiles approximately 2000 meters by 2000 meters. Generally, a minimum of twenty (20)
known elevations within the dominant land use (i.e., comprising 90% of the total area within a
block) is desired to assess vertical accuracy.
2.5 COLLECTION OF KNOWN ELEVATIONS IN THE FIELD
Known elevations (i.e., checkpoints) within five (5) land use categories were determined
using a Trimble survey grade global positioning system. In some blocks there was insufficient
area to collect checkpoints in a certain land use. In these cases that land use category would not
have any checkpoints collected. If a GPS signal is not possible because of the inability to attain
satellites, (for example, in forested areas) an elevation using the GPS is established in an
adjacent open area and then a total station used to traverse into and out from the area to establish
the checkpoint elevation. Checkpoints were collected within the following land use categories:
Low grass, bare earth;
High grass, weeds, crops;

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 9 of 51
Brush, low trees;
Forested; and
Urban – developed.
Land use was based upon the National Land Cover Dataset (2001) as shown in Figure 2.
Land use categories are consistent with those recommended by various reference documents as
described within Section 2.1.
Houston Engineering performed the checkpoint survey relative to National Spatial
Reference System (NSRS) monuments and generally used the same NSRS monuments and
control points as those used by the contractor for the collection of the LiDAR data. A total of
thirty-six control points were used by Houston Engineering during the checkpoint survey in
Block L-D2. Figure 3 shows the control network used to obtain checkpoint elevations.
Checkpoint locations were generally placed on flat terrain, removed from severe slopes and
breaklines, consistent with National Digital Elevation Program (NDEP) guidelines
(http://www.ndep.gov/TechSubComm.html). The GPS base station was established over these
monument and control points and in some cases, monuments and control points were “checked”
as an additional quality assurance measure.
The quality of a checkpoint can be inferred from the instrument Position Dilution of
Precision (“PDOP”). PDOP can be further broken down into Horizontal Dilution of Precision
(“HDOP”) and Vertical Dilution of Precision (“VDOP”) components. Generally the smaller the
PDOP, HDOP and VDOP numbers, the higher the data quality. HDOP and VDOP values from
the GPS measurements made during the survey of the checkpoints are presented in appendix
section of this report.
A minimum of 20 checkpoints (preferably 30) for each land use category is desirable
(because RMSE(z) computations are based on the assumption of a normality of the errors).
During the RFP process, the collection areas were envisioned as the quality assurance unit.
Subsequent to contract award, specific blocks within the collect areas became the quality
assurance unit. Changing the quality assurance unit to blocks resulted in fewer than 20 points for

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 10 of 51
each land use within a block. A minimum of 20 check points were collected for the dominant
land use (i.e., land use 2, high grass, weeds and crops) typically comprising 90% of the area
within a block (see Table 1). Figure 4 shows the checkpoint locations by land use for the entire
project area. The checkpoints were used to compute the vertical RMSE(z) LiDAR values for
computing the RMSE(z) were obtaining from a triangular irregular network (TIN) derived from
the LiDAR bare earth products.
There is a presumption that the checkpoint survey values are free of error and that
discrepancies between the LiDAR and checkpoint elevations are attributable to the LiDAR
technology. This assumption is considered valid provided the technology used to obtain the
checkpoint elevations yield accuracy at least three times greater than the expected accuracy of
LiDAR. It should be recognized that the checkpoint survey is in fact not free of error - the
PDOP values provide some indication of the quality of the checkpoint elevations.

§̈¦94
§̈¦29
§̈¦94
J
I
K
L-D2
O
N
M
G
H-D1
C
B
A
F
E
´0 30 60 90 12015 Miles
InterstateDelivery BlocksLow Grass, Bare EarthHigh Grass, Weeds, CropsBrush, Low TreesForestedUrban - DevelopedWater
Sources:National Land Cover Dataset 2001MN DOTND GIS HubUS TIGER Data Figure 2
Figure 2. Land Use Within the LiDAR Project Area
August 31, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-007
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
Page 11 of 51

GFGFGF
GF
GF
GF
GFGFGF
GF
GFGF
GFGFGFGFGFGF
GF
GF
GF
GF
GF
GFGF
GFGF
GF
GFGFGF
GF
GFGF
GFGFGFGFGFGFGFGF
GF
GFGF
GFGF
GFGF
GF
GFGFGF
GF
GF
GF
GFGFGF GF
GFGFGF
GFGFGFGFGFGFGF
GF
GF
GFGF
GFGFGF
GFGFGFGFGF
GF
GF GF
GF
GFGFGF
GFGFGFGFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGFGF
GFGF
GF
GF
GFGFGF
GF
GFGF
GFGFGF
GF
GF
GF GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GFGF
GF
GF
GFGF
GFGFGF
GFGFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GFGF
GF
GF
GFGF
GF
GF
GFGFGF
GFGFGF
GFGF
GFGF
GFGFGF
GF
GFGFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GFGFGF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GFGF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GFGF
GF
GF
GF
GFGFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GFGF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GFGFGF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF GF
GF
GF
GF
GF
GFGF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GFGF
GF
GF
GF
GF GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GFGF
GF
GFGF
GF GF
GF GF
GF
GFGF GF
GF
GF
GF
GF
GFGF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GFGF
GFGF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GFGF GF
GF GF
GFGF
GFGF GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GFGF
GF
GFGF
GF
GF
GF
GFGF
GF
GFGF
GF
GFGF
GF
GFGF
GF
GF
GF
GF
GFGF
GF
GFGF
GF
GFGF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF GF
GF GF
GF
GFGF
GF
GF GF
GFGFGFGF
GF GF
GFGFGF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
GF
GFGF
GF
GF
GF
GF
GF
"/
"/
"/
"/ "/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/"/
"/"/
"/
"/
"/
"/
"/
"/
"/
GFGF
GFGF
GFGF
GF
I
J
F
AE
O
K
B
C
G
N
L-D2
H-D1
M
§̈¦I 29
·
Legend"/ Mn DOT VRS CORS StationsGF HEI_Control_PTSGF MN_HARN_PTSGF ND_HARN_PTSGF SD_HARN_PTSGF FURGO CONTROL PTS
Five Mile Buffer
RiversLakesInterstatesMnDNR LIDAR Collect BoundaryLiDAR Delivery Blocks
Monument and Control LocationsUsed to Establish Checkpoints* Lettered polygons are Horizon - Furgo's
LIDAR delivery blocks
Figure 3
August 31, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-007
Figure 3. Monument and Control Locations
used to Establish Checkpoints
§̈¦94
§̈¦29
§̈¦29
Fargo
GrandForks
lvue
Typewritten Text
lvue
Typewritten Text
Page 12 of 51

!!
!!!
!!!!
!!!!!!
!
!!!!!
!!!!!!
!!!
!!!!!
!!!
!!!!
!!!!!!
! !
!!!!
!!!!!
!!
!!!!
!!!!!!
!!!!!!!
!!! !!!!!
!
!
!!!
! !!!!!!!!!!!!!
!!!!
!!!!!
!
!!!!!
!!!!!!!!
!!!
!!!!
! !!
!!! !!
!!
!!!
!!!
!!!!!
!!!!
!!!!
!!!!!
!!!
!!!
!!!
!!!!!
!
!!!!
!!!!!!
!!
!
!!!!!
!
!!
!
!!
!
!!
!!
!!
!!!
!!!
!!! !
!!!
!
!
!!
! !
^^^̂^̂^̂̂^̂^̂̂^̂^
^̂̂^^̂̂̂̂̂̂̂̂^̂̂̂̂̂̂̂̂̂̂̂̂̂̂̂̂^
^^̂̂̂^̂^̂̂̂̂^̂̂̂̂̂^̂̂̂̂^^̂̂̂̂̂̂^̂̂̂̂̂̂̂̂
^̂̂̂̂̂^̂̂̂^̂
^̂̂̂̂^̂̂^̂^̂
^̂̂^̂̂^̂̂^̂^̂̂^̂^̂^̂̂^̂^̂̂̂^̂̂̂^̂̂̂̂
^̂̂̂̂̂̂^̂̂
^^
^̂̂̂̂
^^̂̂̂
^̂^̂
^̂^^
^^̂^̂^̂̂̂̂^̂̂̂
^̂^^^^̂̂̂̂̂̂̂̂̂̂̂̂̂ ^̂̂
^̂^^̂̂^̂
^̂^̂^̂̂^̂^̂
^̂̂^̂^̂̂^ ^̂^̂̂^^̂̂^̂̂
^̂̂̂^̂
^^̂̂^̂^^̂̂̂^̂^̂
^̂̂̂^̂̂̂̂̂^̂̂̂̂̂^^̂̂
^^^̂̂^̂̂
^̂̂̂̂^̂^̂^̂̂^
^̂^̂̂^ ^̂^^̂̂^̂^
^̂̂̂̂̂̂̂̂̂^̂^^̂^̂
^̂̂̂̂̂̂̂̂
^
^̂^^
^̂̂̂̂̂̂^^̂̂ ^̂^̂
^^^^
^̂
^ ^
^̂
^̂̂̂
^̂̂̂̂
^̂̂̂̂̂^̂̂
^̂^^̂̂̂^̂̂^
^̂̂^̂^̂̂̂̂̂̂̂^̂
^̂
^̂̂̂̂̂̂̂̂̂^̂^^̂̂̂
^^^̂̂̂̂̂̂̂̂^̂̂ ^̂
^̂^̂̂̂̂̂̂̂̂̂̂̂̂^
^^ ^^̂
^̂̂̂̂̂̂̂̂^^̂
^^̂̂
^^̂
^̂^̂^̂̂̂̂^̂̂^^^
^^̂^̂̂^^
^̂^̂̂̂^^̂^
^^^^^
^̂
^̂^̂^̂̂^̂̂^^̂^̂̂^̂̂̂^̂̂̂^
^̂̂^̂^̂
^̂^̂ ^̂^̂̂̂̂̂
^̂^̂̂^
^̂̂̂^^
^̂^
^
^̂̂̂^
^̂̂^̂
!
!!!
!!
!
!
!
!!!
!!!
!!!
!
!!
!!!!
!!
!!!! !!
!!!
!! ! !!!
!
!
!!
!!
!
!!
! ! !!!
!
!!
!! !!!!!!!!! !
!!!
!
!!
!
!!
!!!!!!
!!
!!
! !!
! !
!!!
!!!
!!
!!
!
!
!!
!
!!!
!
!
!
!!
!!!
!
!!
!
!
!
!!
!
! !!! !
!!
!!! !
! ! !
!
!
!
!!
!!
!!
!!!!!!
!!
!
!!
!!
!!!!
!!!! !
!!!!!! !
!!
!!!
!!!! !!
!
!! !!
!
!
!!
!!
!
! !
!!!!!
!
!
!!!
!!! !! !
!!
!!! !!!
!!!!
!!
!!
!!!
! !!
!!!!
!!
!
!!!! !
!!!!!!!!
!!!
!!!
!
!!
!!!
! !!!!!
!
!
!!
! !!
!
!!! ! ! !!!
!!!! !!
!!
!!!
! !!!!!
!!!
!!!
!! !!!
!! !!
!
!!!
!
! ! ! ! !
!!!
! !
!
! !
!
!!!
!!!!!!!!
!
!
!
!!
!!
!!!!!!
!!
!!
!
!!
!
!
! !!
!
!
!
!
!
!
!!
!
!!!
!! !
!!
!!!!
!!!!
!!
! !!
!!
!
!!!
! !!
!!
!!!
!!!
!!
!!!
!!!!!
!!!! !
!!!!!
! !!
!!
!
!
!
!!
!
!!!
!!
!!
!
!!!
! !
!
!
!
!
!!
!!!
! ! ! ! ! !
!!
!!!!!
!!!
!!
! !
!
!!
!
!!! ! !!
!!
!
!!
!
!
!
!!
!! !!
! !! !!!
!
!!!!!!!
!
!
! !
!!
! ! ! !
!
!!
!!
!
!!
!
!!!
!
!!
!!
!!
!
!!
!!
!!!!
!!!!
!
!!
!
!!!
!! !!
!
!
!
!! ! !!
!
!!
!
!
!
!
!!
!! !!
!
!
!!!
!!
!
!
!
!!
!!
!
!!
!
!
!
!
!!!
!!
!!!!!
! ! !
!
!!!!
!!
!! !!!
!
!!!!!!!!
!!
!!
!!
!
!
! ! !
!
!! !
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!!
!
!
! !
!
!!!
!
!!
!
!!
!!!
!!
!!!
!!! !
!
!
!
!!!!!
!!!!
!!
!!
!
!
!!
!
!
!
!! ! !
! !!! !
!!! !!
!
!!!!!
!
!
!
!!!!!
!
!!
!! !!!!
!!!!!
!!!
!
! ! !!!
!!!!
!
!
!!
! !
!
!!!!
!!
!
!
!!
!
!
!
Lake of the Woods
Lower Red Lake
Upper Red Lake
Devils Lake
I
JF
AE
K
B
C
O
G
N
L-D2
H-D1
M
Legend^ MnDNR LIDAR Check Points (approx. 456)^ Fargo LIDAR Check Points (appox. 160)
HEI Check Points! Low Grass, Bare Earth! High Grass, Weeds, Crops! Brush, Low Trees! Forested! Urban - Developed
InterstateLiDAR Delivery BlocksRivers
MN DNR LIDAR ProjectLakes
GrandForks
*Lettered polygons are Horizon - Furgo's LIDAR delivery blocks
Figure 4
Figure 4. Check Point Locations within the Project Area
August 31, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-007
Fargo§̈¦94
§̈¦94
§̈¦29
§̈¦29
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
Page 13 of 51

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 14 of 51
Table 1 Number of Checkpoints by Land Use and Block
Block A Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 14 0.70% 20.29% Low Grass, Bare Earth
2 24 89.73% 34.78% High Grass, Weeds, Crops
3 5 0.23% 7.25% Brush, Low Trees
4 12 3.99% 17.39% Forested
5 14 5.11% 20.29% Urban - Developed
Sub-Total 69
Block B
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 12 0.14% 28.57% Low Grass, Bare Earth
2 8 91.48% 19.05% High Grass, Weeds, Crops
3 7 0.00% 16.67% Brush, Low Trees
4 7 1.04% 16.67% Forested
5 8 6.25% 19.05% Urban - Developed
Sub-Total 42
Block C
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 12 2.16% 24.49% Low Grass, Bare Earth
2 21 86.26% 56.76% High Grass, Weeds, Crops
3 3 0.03% 8.11% Brush, Low Trees
4 7 2.77% 18.92% Forested
5 6 7.04% 16.22% Urban - Developed
Sub-Total 49

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 15 of 51
Table 1 Number of Checkpoints by Land Use and Block
Block E
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 21 4.22% 32.31% Low Grass, Bare Earth
2 22 87.38% 33.85% High Grass, Weeds, Crops
3 2 0.00% 3.08% Brush, Low Trees
4 9 2.73% 13.85% Forested
5 11 4.31% 16.92% Urban - Developed
Sub-Total 65
Block F
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 15 7.23% 21.74% Low Grass, Bare Earth
2 25 82.72% 36.23% High Grass, Weeds, Crops
3 5 0.00% 7.25% Brush, Low Trees
4 12 0.98% 17.39% Forested
5 12 4.25% 17.39% Urban - Developed
Sub-Total 69
Block G
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 12 6.48% 20.00% Low Grass, Bare Earth
2 20 85.34% 33.33% High Grass, Weeds, Crops
3 0 0.01% 0.00% Brush, Low Trees
4 14 1.06% 23.33% Forested
5 14 4.43% 23.33% Urban - Developed
Sub-Total 60

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 16 of 51
Table 1 Number of Checkpoints by Land Use and Block
Block H-D1
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 16 11.71% 21.92% Low Grass, Bare Earth
2 26 79.11% 35.62% High Grass, Weeds, Crops
3 2 0.01% 2.74% Brush, Low Trees
4 15 1.19% 20.55% Forested
5 14 4.20% 19.18% Urban - Developed
Sub-Total 73
Block L-D2
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 20 1.96% 22.99 Low Grass, Bare Earth
2 29 83.51% 33.33 High Grass, Weeds, Crops
3 9 0.30% 10.34 Brush, Low Trees
4 11 3.44% 12.64 Forested
5 18 5.56% 20.69% Urban - Developed
Sub-Total 87
Block N
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 12 14.42% 21.05% Low Grass, Bare Earth
2 20 78.65% 35.09% High Grass, Weeds, Crops
3 4 0.00% 7.02% Brush, Low Trees
4 8 2.93% 14.04% Forested
5 13 3.99% 22.81% Urban - Developed
Sub-Total 57

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 17 of 51
Table 1 Number of Checkpoints by Land Use and Block
Block O
Land Use Collected Points within the block NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 11 15.18% 18.97% Low Grass, Bare Earth
2 25 70.91% 43.10% High Grass, Weeds, Crops
3 3 0.00% 5.17% Brush, Low Trees
4 8 0.40% 13.79% Forested
5 11 4.22% 18.97% Urban - Developed
Sub-Total 58
Total***
Land Use Collected Points within the block Average NLCD Proportion of Area (%)* % of Block** Land Use Descriptions
1 144 9.72% 23.15% Low Grass, Bare Earth
2 217 83.52% 34.89% High Grass, Weeds, Crops
3 40 0.03% 6.43% Brush, Low Trees
4 102 1.99% 16.40% Forested
5 119 4.85% 19.13% Urban - Developed
Sub-Total 622
* Data based on National Land Cover Dataset (2001)
** The percent of checkpoints within the block.
*** Blocks K, J, M, and I have not yet completely collected. Totals are planned total checkpoints.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 18 of 51
2.6 CHAIN OF CUSTODY
The work flow process for quality assuring the LIDAR products included following
chain-of-custody procedures to ensure data integrity, a visual assessment of the LIDAR bare
earth product for select tiles, completeness checks, and computing the RMSE(z) for vertical
accuracy. Upon receipt of the LiDAR products, Houston Engineering checks for completeness
of files and ensures naming conventions conformed to the tile naming convention. The Chain of
Custody Form (see Appendix A) tracks progress through the QA process.
2.7 COMPUTING THE RMSE(Z)
The vertical accuracy calculations were generated using Coherent’s LP360 software
program. The LiDAR surface elevations are calculated by interpolating from the bare earth LAS
files delivered by the vendor. A Triangular Irregular Network (TIN) is created around each
checkpoint, using LiDAR points. Then the triangle that covers the checkpoint location
horizontally is selected. The location on the surface of this triangle that matches the sample
location then provides the elevation. This elevation is a linear interpolation of the elevations of
the 3 triangle vertices; or more simply, it is the point in 3D on the TIN triangle at the sample
location’s X and Y. The RMSE(z) is computed as:
n
RMSE(z) = Sqrt [(∑ (ZLidar(i) – Zcheckpoint(i))2)/n] where n is the total number of checkpoints and i
i=1
represents any given checkpoint
2.8 VISUAL ASSESSMENT
The goal of the visual assessment is to inspect for three general issues; data voids greater
than 1,000,000 sq. meters, appropriate LiDAR point classification and anomalies in the bare
earth products. Anomalies include penetration problems, spikes, and vegetation artifacts.
Houston Engineering randomly selected a minimum 5% of the tiles within each block and
visually reviewed the bare earth point LAS files using the LP360 software.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 19 of 51
2.9 CRITERIA FOR ACCEPTANCE
The sole criteria for acceptance of the LiDAR product is a per block RMSE(z) of 15 cm or
less for the bare earth data as defined within the Request for Proposal for those checkpoints
collected by Houston Engineering, Inc. Any other issues that are identified by the assessment
will be reported in the report for informational purposes.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 20 of 51
SECTION 3.0
Quality Assurance Results
and
Conclusions for Block L-D2
3.1 BLOCK DESCRIPTION
High grass, weeds and crops comprise approximately 83% of the land use within Block
L-D2. Urban (5.6%), forested (3.4%), low grass and bare earth (2%) and brush and low trees (<
1%) comprise the remaining land uses within Block L-D2 (Figure 5). Control points used to
collect checkpoints used within Block L-D2 numbered thirty-six as shown in Figure 6. Control
points utilized by the checkpoint survey included National Geodetic Survey (NGS), Minnesota
Department of Transportation (MnDOT) and HEI control networks. Eighty-seven checkpoints
were collected within Block L-D2 and used during completion of the QA process (Figure 7).
The hatched area shown in Figure 7 depicts the Big Stone County portion of the block that was
appended to this report.
3.2 RESULTS
3.2.1 Vertical Accuracy
Table 2 shows the block RMSE(z) derived from all checkpoints across all land uses and
by land use. Table 2 also shows the PDOP values as an index of the quality of the individual
quality assurance checkpoints. Figure 8 graphically presents the RMSE(z) values by land class.
Appendix B shows the difference in elevation between each checkpoint and the elevation
derived from the LiDAR bare earth TIN. Appendix C provides a summary of vertical accuracy
across all Blocks collected to date.
Table 2 shows the block RMSE(z) derived from all checkpoints across all land uses and
by land use. Calculation of the RMSE(z) assumes that the vertical errors are normally distributed
with a mean of zero. The mean difference is 3.8 cm and the skewness coefficient is +1.6 cm
which indicates the vertical errors are positive and skewed right. Table 2 shows that the
normality of the errors seems reasonable for Block L-D2 based on the small skewness value.
Figure 8 graphically presents the RMSE(z) values by land use.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No. R09.4875-007 September 10, 2010 Page 21 of 51
Table 2 Vertical Accuracy Statistics per NSSDA/FEMA Guidelines by Land Class for Block L-D2
Land Class
# of
Check
Points
Mean
Absolute
Difference
(cm)
Median
Absolute
Difference
(cm)
Skew
Std. Dev.
(cm)
Min
Absolute
Difference
(cm)
Max
Absolute
Difference
(cm)
Mean
Difference
(cm)
95%
Confidence
Interval
Value (cm)
95th
Percentile
Value RMSE(z)
(cm)
Low Grass,
Bare Earth 20 4.6 3.1 1.1 4.4 0.0 14.9
1.9 +/-12.3
14.0 6.3
High Grass,
Weeds, Crops 29 10.2 10.7 0.4 6.5 0.3 22.8
8.9 +/-23.5
21.7 12.0
Brush,
Low Trees 9 14.6 12.2 1.1 8.1 6.4 29.9
9.5 +/-32.2
28.1 16.4
Forested 11 6.1 6.7 -1.1 2.8 0.4 9.2 4.3 +/-13.0 8.8 6.7
Urban 18 7.8 5.6 2.9 8.5 1.3 38.1 -5.6 +/-22.3 19.3 11.4
All Points
87 8.3 6.6 1.6 7.0 0.0 38.1
3.8 +/-21.2
21.6 10.8

#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0 #0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0 #0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
¬«9
¬«27
¬«29
¬«55
¬«28
¬«210
¬«40 ¬«23
¬«371
¬«24
¬«78
¬«104
¬«238
¬«114
¬«119
¬«287
¬«79
¬«54
¬«235
¬«115
¬«106
¬«237
¬«127
¬«294
¬«301
¬«302
¬«124
¬«297
¬«309¬«322
Albany
Alberta
Aldrich
Alexandria
Annandale
Appleton
Ashby
Atwater
Avon
Barrett
Barry
BattleLake
Baxter
Beardsley
Belgrade
Bellingham
Benson
Bertha
Bowlus
Brandon
Breckenridge
Brooten
Browerville
BrownsValley
Buckman
Burtrum
Campbell
Carlos
Chokio
Clarissa
ClearLake
Clearwater
Clinton
Clitherall
Clontarf
Cokato
ColdSpring
Correll
Cyrus
Dalton
Danvers
DarwinDassel
De Graff
DeerCreek
Donnelly
Doran
Dumont
EagleBend
EdenValley
ElbowLake
Elizabeth
Elmdale
Elrosa
Evansville
Farwell
FergusFalls
Flensburg
Forada
FortRipley
Foxhome
Freeport
Garfield
Genola
Gilman
Glenwood
Graceville
Greenwald
GreyEagle
GroveCity
Hancock
Harding
Henning
Herman
Hewitt
Hoffman
Holdingford
Holloway
HowardLake
Johnson
Kandiyohi
Kensington
Kent
Kerkhoven
Kingston
LakeHenry
Lastrup
Litchfield
LittleFalls
LongBeach
LongPrairie
Louisburg
Lowry
MapleLake
MeireGrove
Melrose
Milan
MillervilleMiltona
Minnesota, State of
Morris
Motley
Murdock
Nashua
Nelson
NewLondon
NewMunich
Norcross
Odessa
Ortonville
Osakis
Ottertail
ParkersPrairie
Pennock
Pierz
Pillager
PleasantLake
Randall
Regal
Rice
Richmond
Rockville
Roscoe
Royalton
SaintAnthony
SaintCloudSaint
Joseph
SaintMartin
SaintRosa Saint
Stephen
Sartell
SaukCentre
SaukRapids
Sedan
Sobieski
SouthHaven
Spicer
SpringHill
Staples
Starbuck
Sunburg
Swanville
Tenney
Tintah
ToddCounty
Underwood
Upsala
Urbank
Verndale
Villard
Vining
WaitePark
Watkins
Wendell
WestUnion
Westport
Wheaton
Willmar
ColfaxAbercrombie
Dwight
Wahpeton
Fairmount
GreatBend
Hankinson
Mantador
Mooreton
´
0 9 184.5Miles
August 31, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-007
Figure 5. Landuse Within
Block L-D2¬«29
¬«78§̈¦94
£¤59
¬«27
£¤75
£¤59¬«27
¬«55
¬«127
¬«11
¬«7
£¤12
¬«9
#0 CitiesInterstateUS HighwaysState HighwaysRiversCounties
Low Grass, Bare EarthHigh Grass, Weeds, CropsBrush, Low TreesForestedUrban - DevelopedWater
Figure 5. Landuse Within Block L-D2Scale: Drawn by: Checked by: Project No.: Date: Sheet:AS SHOWN SMW 4875-007 8/31/2010 1 of 1
lvue
Typewritten Text
Page 22 of 51

#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0 #0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0 #0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
Albany
Alberta
Aldrich
Alexandria
Annandale
Appleton
Ashby
Atwater
Avon
Barrett
Barry
BattleLake
Baxter
Beardsley
Belgrade
Bellingham
Benson
Bertha
Bowlus
Brandon
Breckenridge
Brooten
Browerville
BrownsValley
Buckman
Burtrum
Campbell
Carlos
Chokio
Clarissa
ClearLake
Clearwater
Clinton
Clitherall
Clontarf
Cokato
ColdSpring
Correll
Cyrus
Dalton
Danvers
DarwinDassel
De Graff
DeerCreek
Donnelly
Doran
Dumont
EagleBend
EastGullLake
EdenValley
ElbowLake
Elizabeth
Elmdale
Elrosa
Evansville
Farwell
FergusFalls
Flensburg
Forada
FortRipley
Foxhome
Freeport
Garfield
Genola
Gilman
Glenwood
Graceville
Greenwald
GreyEagle
GroveCity
Hancock
Harding
Henning
Herman
Hewitt
Hillman
Hoffman
Holdingford
Holloway
HowardLake
Johnson
Kandiyohi
Kensington
Kent
Kerkhoven
Kingston
LakeHenry
Lastrup
Litchfield
LittleFalls
LongBeach
LongPrairie
Louisburg
Lowry
MapleLake
MeireGrove
Melrose
Milan
MillervilleMiltona
Minnesota, State of
Morris
Motley
Murdock
Nashua
Nelson
NewLondon
NewMunich
Norcross
Odessa
Ortonville
Osakis
Ottertail
ParkersPrairie
Pennock
Pierz
Pillager
PleasantLake
Randall
Regal
Rice
Richmond
Rockville
Roscoe
Rothsay
Royalton
SaintAnthony
SaintCloudSaint
Joseph
SaintMartin
SaintRosa Saint
Stephen
Sartell
SaukCentre
SaukRapids
Sedan
Sobieski
SouthHaven
Spicer
SpringHill
Staples
Starbuck
Sunburg
Swanville
Tenney
Tintah
ToddCounty
Underwood
Upsala
Urbank
Verndale
Villard
Vining
Wadena
WaitePark
Watkins
Waverly
Wendell
WestUnion
Westport
Wheaton
Willmar
#*#*
#*
#*
#*
#*
#*
#* #*#*
#*
#*
#*
#*
#*
#*#*#*
#*#*
#*#*
#*
#*
#*
#*
#*
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
"/
ColfaxAbercrombie
Dwight
Wahpeton
Fairmount
GreatBend
Hankinson
Mantador
Barney Mooreton
Todd
Stearns
Swift
Pope
Otter Tail
Grant
Morrison
Douglas
Stevens
Traverse
Wilkin
Big Stone
MeekerKandiyohi
Benton
Crow Wing
Wright
Cass
Lac Qui Parle
Sherburne
0 10 205Miles
January 21, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-005
¬«29¬«78
§̈¦94
£¤59
¬«27
£¤75
£¤59¬«27
¬«55
¬«127
¬«11
¬«7
£¤12
¬«9
Figure 6. Control Points Within
Block L-D2
"/ Mn DOT VRS CORS Stations#0 Cities
InterstateUS HighwaysState HighwaysBlock L-D2Rivers
Checkpoints (Based Stations Used)! DAKOMIN! DUMONT! MUSTINKA! MnDOT 0608F! VRS BASE! WHAPPORT! WHEAPORT! Z 103
Base Stations#* 0608 A#* 0608E#* 0608F#* 2614 C#* DAKOMIN#* DUMONT#* J108 RESET#* LOYD#* MNDOT 0608 T#* MNDOT 0609 AC#* MNDOT 0609 D#* MNDOT 0609 Q#* MNDOT 12 JKP
#* MNDOT 2609 K#* MNDOT 2609AB#* MNDOT 5603 W#* MNDOT 7501 B1#* MNDOT 7503 G RESET#* MNDOT ALMORA 2#* MNDOT KARP#* MNDOT POST OFFICE#* MNDOT SILVER#* MNDOT UNDERWOOD#* MUSTINKA#* WHAPPORT#* WHEAPORT#* Z 103
Note: Several checkpoints utilized the MN DOT CORS/VRS Network.The MN DOT CORS/VRS Base Stations and Checkpoints using the CORS/VRS network are depicted on the map.
¬«28
¬«9
Figure 6. Control Network Within Block L-D2Scale: Drawn by: Checked by: Project No.: Date: Sheet:AS SHOWN SMW 4875-007 9/1/2010 1 of 1
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
Page 23 of 51

!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
! !
!
!
!
!
!
!
!!
!!
!
!!
!
!!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!!
!
!! !
!
!
!
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0 #0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0 #0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
¬«9
¬«27
¬«29
¬«55
¬«28
¬«210
¬«40 ¬«23
¬«371
¬«24
¬«78
¬«104
¬«238
¬«114
¬«119
¬«287
¬«79
¬«54
¬«235
¬«115
¬«106
¬«237
¬«127
¬«294
¬«301
¬«302
¬«124
¬«297
¬«309¬«322
Albany
Alberta
Aldrich
Alexandria
Annandale
Appleton
Ashby
Atwater
Avon
Barrett
Barry
BattleLake
Baxter
Beardsley
Belgrade
Bellingham
Benson
Bertha
Bowlus
Brandon
Breckenridge
Brooten
Browerville
BrownsValley
Buckman
Burtrum
Campbell
Carlos
Chokio
Clarissa
ClearLake
Clearwater
Clinton
Clitherall
Clontarf
Cokato
ColdSpring
Correll
Cyrus
Dalton
Danvers
DarwinDassel
De Graff
DeerCreek
Donnelly
Doran
Dumont
EagleBend
EdenValley
ElbowLake
Elizabeth
Elmdale
Elrosa
Evansville
Farwell
FergusFalls
Flensburg
Forada
FortRipley
Foxhome
Freeport
Garfield
Genola
Glenwood
Graceville
Greenwald
GreyEagle
GroveCity
Hancock
Harding
Henning
Herman
Hewitt
Hoffman
Holdingford
Holloway
HowardLake
Johnson
Kandiyohi
Kensington
Kent
Kerkhoven
Kingston
LakeHenry
Lastrup
Litchfield
LittleFalls
LongBeach
LongPrairie
Louisburg
Lowry
MapleLake
MeireGrove
Melrose
Milan
MillervilleMiltona
Minnesota, State of
Morris
Motley
Murdock
Nashua
Nelson
NewLondon
NewMunich
Norcross
Odessa
Ortonville
Osakis
Ottertail
ParkersPrairie
Pennock
Pierz
Pillager
PleasantLake
Randall
Regal
Rice
Richmond
Rockville
Roscoe
Royalton
SaintAnthony
SaintCloudSaint
Joseph
SaintMartin
SaintRosa Saint
Stephen
Sartell
SaukCentre
SaukRapids
Sedan
Sobieski
SouthHaven
Spicer
SpringHill
Staples
Starbuck
Sunburg
Swanville
Tenney
Tintah
ToddCounty
Underwood
Upsala
Urbank
Verndale
Villard
Vining
WaitePark
Watkins
Wendell
WestUnion
Westport
Wheaton
Willmar
Abercrombie
Dwight
Wahpeton
Fairmount
GreatBend
Hankinson
Mantador
Mooreton
´
0 10 205Miles
September 1, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-007
Figure 7. Checkpoints Within
Block L-D2
Note: The majority of Block L-D2 was delivered in January 2010. The remaing portion of Big Stone County was delivered in Spring of 2010.
The Union of these two installments is the focus of this report.
¬«29¬«78
§̈¦94
£¤59
¬«27
£¤75
£¤59¬«27
¬«55
¬«127
¬«11
¬«7
£¤12
¬«9 G r a n t G r a n t
O t t e r t a i lO t t e r t a i l
S t e v e n sS t e v e n s
B i g S t o n eB i g S t o n e
W i l k i nW i l k i n
T r a v e r s eT r a v e r s e
R o b e r t s
R o b e r t sR
ichl
and
Ric
hlan
d
Figure 7. Checkpoints Within Block L-D2Scale: Drawn by: Checked by: Project No.: Date: Sheet:AS SHOWN SMW 4875-007 9/1/2010 1 of 1
#0 CitiesBlock L-D2 - Currently Collected
! LOW GRASS, BARE EARTH (1)! HIGH GRASS, WEEDS, CROPS (2)! BRUSH, LOW TREES (3)! FORESTED (4)! URBAN/DEVELOPED (5)
Big Stone County - Collected Spring 2010 (added to report)InterstateUS HighwaysState HighwaysRivers
lvue
Typewritten Text
lvue
Typewritten Text
lvue
Typewritten Text
Page 24 of 51

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 25 of 51
Based upon the quality assurance review, the data for this Block exhibit the following
characteristics:
2 Fundamental Vertical Accuracy (cm) 12.3
3 Supplemental Vertical Accuracy (cm) 22.6
4 Consolidated Vertical Accuracy (cm) 21.6
5 Number of Blunders 5
2 Equal to the 95-percentile confidence interval value for low grass and bare earth land class.
3 Equal to the 95-percentile error value for all land classed excluding low grass and bare earth.
4 Equal to the 95-percentile error value for all land classes.
5 Blunder defined as specific error value exceeding 3 times the standard deviation.
Figure 8 RMSE(z) by Land Class in Block L-D2

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 26 of 51
Figure 9 Histogram of Residual Difference within Block L-D2
The actual difference between the measured checkpoint elevation and the elevation
derived from the LiDAR TIN is a residual. Figure 9 shows an analysis of the residuals for
Block L-D2 based on the signed difference. The chart shows the residuals are bimodally
distributed about zero. Figure 10 shows the absolute values of the residuals. This figure shows
that the absolute value (and therefore errors), tend to be normally distributed. Figure 11
geographically represents the difference between the checkpoint elevations and the TIN
elevations derived from the bare earth .las files. The figure also shows the locations of blunders
within the block which are defined as a difference between the measured checkpoint elevation
and the elevation determined from the bare earth product which exceeds 3 times the standard
deviation.
3.2.2 Visual Assessment
The visual assessment included a review of 106 tiles (approximately 5 %) of the total
2,101 tiles in the first delivered portion, and 16 of 272 tiles in the Big Stone portion (Figure 12).
In summary, Houston Engineering, Inc. found no major anomalies with the visual assessment. A
few minor anomalies were found and are described below and shown in Appendix D. The
potential anomalies included a few areas where there were data voids of the LiDAR points;
additionally there were was an occurrence of poor penetration of a forested area. There was also
an instance where a few data spikes were present in a given area of a tile.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 27 of 51
3.2.3 Concurrence With the Specification
This quality assurance review shows that the RMSE(z) of 10.8 cm determined for the
Block L-D2 bare earth LiDAR product (Filtered LAS files) is equal to or less than the
specification of 15 cm and therefore achieves the required specification. Appendix B shows the
difference between each checkpoint elevation and the elevation derived from the TIN derived
from the bare earth LiDAR data.
Figure 10 Histogram of Residual Difference Within Block L-D2
1
6
13
7
34
15
5 5
1
0
5
10
15
20
25
30
35
40
0 1 3 5 10 15 20 30 More
Fre
qu
en
cy
Bin
Histogram of Residual DifferenceBetween Measured and TIN Elevation

#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0 #0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0 #0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
!.
!.
!.
!.
!.
!.
!.
!.!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.!.
!.
!.
!. !.
!.
!.
!.
!.
!.
!.
!.!.
!.!.
!.
!.!.
!.
!.!.
!.
!.
!. !.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.
!.!.
!.
!.!.
!.
!.
!.!.
!.
!.!.
!.
!.
!.
!.
kj
kj
kj
kj
kj¬«9
¬«27
¬«29
¬«55
¬«28
¬«210
¬«40 ¬«23
¬«371
¬«24
¬«78
¬«104
¬«238
¬«114
¬«119
¬«287
¬«79
¬«54
¬«235
¬«115
¬«106
¬«237
¬«127
¬«294
¬«301
¬«302
¬«124
¬«297
¬«309¬«322
Albany
Alberta
Aldrich
Alexandria
Annandale
Appleton
Ashby
Atwater
Avon
Barrett
Barry
BattleLake
Baxter
Beardsley
Belgrade
Bellingham
Benson
Bertha
Bowlus
Brandon
Breckenridge
Brooten
Browerville
BrownsValley
Buckman
Burtrum
Campbell
Carlos
Chokio
Clarissa
ClearLake
Clearwater
Clinton
Clitherall
Clontarf
Cokato
ColdSpring
Correll
Cyrus
Dalton
Danvers
DarwinDassel
De Graff
DeerCreek
Donnelly
Doran
Dumont
EagleBend
EastGullLake
EdenValley
ElbowLake
Elizabeth
Elmdale
Elrosa
Erhard
Evansville
Farwell
FergusFalls
Flensburg
Foley
Forada
FortRipley
Foxhome
Freeport
Garfield
Genola
Gilman
Glenwood
Graceville
Greenwald
GreyEagle
GroveCity
Hancock
Harding
Henning
Herman
Hewitt
Hillman
Hoffman
Holdingford
Holloway
HowardLake
Johnson
Kandiyohi
Kensington
Kent
Kerkhoven
Kingston
LakeHenry
Lastrup
Litchfield
LittleFalls
LongBeach
LongPrairie
Louisburg
Lowry
MapleLake
MeireGrove
Melrose
Milan
MillervilleMiltona
Minnesota, State of
Morris
Motley
Murdock
Nashua
Nelson
NewLondon
NewMunich
Norcross
Odessa
Ortonville
Osakis
Ottertail
ParkersPrairie
Pennock
Pierz
Pillager
PleasantLake
Randall
Regal
Rice
Richmond
Rockville
Roscoe
Rothsay
Royalton
SaintAnthony
SaintCloudSaint
Joseph
SaintMartin
SaintRosa Saint
Stephen
Sartell
SaukCentre
SaukRapids
Sedan
Sobieski
SouthHaven
Spicer
SpringHill
Staples
Starbuck
Sunburg
Swanville
Tenney
Tintah
ToddCounty
Underwood
Upsala
Urbank
Verndale
Villard
Vining
Wadena
WaitePark
Watkins
Waverly
Wendell
WestUnion
Westport
Wheaton
Willmar
ColfaxAbercrombie
Dwight
Wahpeton
Fairmount
GreatBend
Hankinson
Mantador
Barney Mooreton
Swift
Pope
Douglas
Lac Qui Parle
Grant
Otter Tail
Stevens
Traverse
Wilkin
Big StoneKandiyohi
´
0 10 205Miles
September 1, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-007
Figure 11. Checkpoint Results and Blunders
Within Block L-D2¬«29
¬«78§̈¦94
£¤59
¬«27
£¤75
£¤59¬«27
¬«55
¬«127
¬«11
¬«7
£¤12
¬«9
Notes:*A Blunder is defined as a difference between the measuredcheckpoint elevation and the elevationdetermined from the bare earth productswhich exceeds 3 times the standard deviation.* The difference (in cm) is computed by taking the checkpoint elevation and subtracting the tin elevation from the bare earth las files. All differences are absolute values.
G r a n t G r a n t
O t t e r t a i lO t t e r t a i l
S t e v e n sS t e v e n s
B i g S t o n eB i g S t o n e
W i l k i nW i l k i n
T r a v e r s eT r a v e r s e
R o b e r t s
R o b e r t sR
ichl
and
Ric
hlan
d
Figure 11. Checkpoints Results and Blunders Within Block L-D2Scale: Drawn by: Checked by: Project No.: Date: Sheet:AS SHOWN SMW 4875-007 9/1/2010 1 of 1
kj Blunder (5)Absolute Difference (in cm)!. 0.0- 15.0!. 15.1 - 38.1#0 Cities
InterstateUS HighwaysState HighwaysRivers
lvue
Typewritten Text
Page 28 of 51

#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0 #0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0
#0
#0
#0
#0
#0#0
#0
#0 #0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
#0
¬«9
¬«27
¬«29
¬«55
¬«28
¬«210
¬«40 ¬«23
¬«371
¬«24
¬«78
¬«104
¬«238
¬«114
¬«119
¬«287
¬«79
¬«54
¬«235
¬«115
¬«106
¬«237
¬«127
¬«294
¬«301
¬«302
¬«124
¬«297
¬«309¬«322
Albany
Alberta
Aldrich
Alexandria
Annandale
Appleton
Ashby
Atwater
Avon
Barrett
Barry
BattleLake
Baxter
Beardsley
Belgrade
Bellingham
Benson
Bertha
Bowlus
Brandon
Breckenridge
Brooten
Browerville
BrownsValley
Buckman
Burtrum
Campbell
Carlos
Chokio
Clarissa
ClearLake
Clearwater
Clinton
Clitherall
Clontarf
Cokato
ColdSpring
Correll
Cyrus
Dalton
Danvers
DarwinDassel
De Graff
DeerCreek
Donnelly
Doran
Dumont
EagleBend
EdenValley
ElbowLake
Elizabeth
Elmdale
Elrosa
Evansville
Farwell
FergusFalls
Flensburg
Forada
FortRipley
Foxhome
Freeport
Garfield
Genola
Gilman
Glenwood
Graceville
Greenwald
GreyEagle
GroveCity
Hancock
Harding
Henning
Herman
Hewitt
Hoffman
Holdingford
Holloway
HowardLake
Johnson
Kandiyohi
Kensington
Kent
Kerkhoven
Kingston
LakeHenry
Lastrup
Litchfield
LittleFalls
LongBeach
LongPrairie
Louisburg
Lowry
MapleLake
MeireGrove
Melrose
Milan
MillervilleMiltona
Minnesota, State of
Morris
Motley
Murdock
Nashua
Nelson
NewLondon
NewMunich
Norcross
Odessa
Ortonville
Osakis
Ottertail
ParkersPrairie
Pennock
Pierz
Pillager
PleasantLake
Randall
Regal
Rice
Richmond
Rockville
Roscoe
Royalton
SaintAnthony
SaintCloudSaint
Joseph
SaintMartin
SaintRosa Saint
Stephen
Sartell
SaukCentre
SaukRapids
Sedan
Sobieski
SouthHaven
Spicer
SpringHill
Staples
Starbuck
Sunburg
Swanville
Tenney
Tintah
ToddCounty
Underwood
Upsala
Urbank
Verndale
Villard
Vining
WaitePark
Watkins
Wendell
WestUnion
Westport
Wheaton
Willmar
Abercrombie
Dwight
Wahpeton
Fairmount
GreatBend
Hankinson
Mantador
Mooreton
´
0 10 205Miles
September 1, 2010Block L-D2 LiDAR 3rd Party Quality Assessment ReportHEI Project No. 4875-007
Figure 12. Delivery Block L-D2
Tiles Reviewed¬«29
¬«78§̈¦94
£¤59
¬«27
£¤75
£¤59¬«27
¬«55
¬«127
¬«11
¬«7
£¤12
¬«9
QC_TILESQC Not Performed on Tile
ReviewedSeam Check Performed on TileSeam Check and QC Performed on TileQC Performed on Tile
#0 CitiesInterstateUS HighwaysState HighwaysRivers
Figure 12. Tiles Reviewed Within Block L-D2Scale: Drawn by: Checked by: Project No.: Date: Sheet:AS SHOWN SMW 4875-007 9/1/2010 1 of 1
lvue
Typewritten Text
Page 29 of 51

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 30 of 51
Appendix A
Chain of Custody Form
RRBMI Chain of Custody Form
Project Name: RRBMI Block L-D2 QA / QC Priority Area: 3 Block: L-D2 and Big Stone
# Tiles in Block: 2,373
LiDAR Production Company: Fugro-Horizons Horizontal Coord: UTM 14 NAD83 Vertical Datum: NAVD 88
Correspondence Note Recd./Checked By: Date Correspondence Ref. # Pass
Initial Delivery of LiDAR products for Block SMW 1/19/2010 Y
QC check for file completeness SMW 1/19/2010 Y
QC check for proper naming conventions and completeness
RAW LIDAR (LAS Files) SMW 1/19/2010 Y
Filtered Bare Earth Data (LAS Files) SMW 1/19/2010 Y
Bare Earth DEM 1meter (ASCII GRID Files) SMW 1/19/2010 Y
1st Return LIDAR (LAS Files) SMW 1/19/2010 Y
Metadata Record SMW 1/19/2010 Y
LIDAR Report SMW 1/19/2010 Y
Survey Report SMW 1/19/2010 Y
Flight Logs and JPEGs SMW 1/19/2010 Y
COE Requirement Files SMW 1/19/2010 Y
Hybrid Images (TIFF Files) SMW 1/19/2010 Y
Vertical Accuracy Assessment SMW 1/19/2010 Y

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 31 of 51
Appendix A
Chain of Custody Form (continued)
RRBMI Chain of Custody Form
Project Name: RRBMI Block L-D2 QA / QC Priority Area: 3 Block: L-D2 and Big Stone # Tiles in Block: 2,373
LiDAR Production Company: Fugro-Horizons Horizontal Coord: UTM 14 NAD83 Vertical Datum: NAVD 88
Correspondence Note Recd./Checked By: Date Ending on: Correspondence Ref. # Pass
Visual QA/QC Assessment
Data Voids 8/31/2010
Classification Issues 8/31/2010
Anomalies 8/31/2010
Flight Line Seams 8/31/2010
Metadata Review QC'ed as part of Block A
LIDAR Report Review QC'ed as part of Block A
Pass/Fail Notice Given to LiDAR Vendor TBD
Final LiDAR Products Archived on External Hard Drive TBD
Final LiDAR Products Sent to USGS for Dissemination TBD

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 32 of 51
Appendix B
Vertical Accuracy Computations by HEI Checkpoints (6 pages)
Block L-D2 HEI Survey Checkpoints (UTM 14 NAD83, NAVD 88)
LiDAR Elevation
s Results
PT ID X Coord Y Coord Z Elev.
(m) Landuse Class
Max PDOP Value
Max HDOP Value
Max VDOP Value
*Z from LiDAR Bare
Earth TIN (m)
Delta Z (m)
Absolute Difference
(cm)
Exceed Blunder Criteria
(Y/N)
4005 681442.435 5032379.6 335.369 BARE EARTH 0.0 1.1 1.3 335.385 0.016 1.6 N
4014 722301.183 5042244.656 353.967 BARE EARTH 0.0 1.0 1.4 353.898 -0.069 6.9 N
4030 741475.243 5072026.796 370.682 BARE EARTH 0.0 0.7 1.2 370.658 -0.024 2.4 N
4039 767883.722 5113513.401 444.387 BARE EARTH 0.0 0.8 1.4 444.327 -0.06 6.0 N
4045 791668.053 5127461.099 439.749 BARE EARTH 0.0 1.0 1.2 439.749 0 0.0 N
4047 782685.678 5128120.457 448.374 BARE EARTH 0.0 1.0 1.1 448.373 -0.001 0.1 N
4052 759368.697 5120927.357 434.052 BARE EARTH 0.0 1.2 2.1 434.201 0.149 14.9 N
1043 696789.636 5114390.788 297.409 BARE EARTH 2.8 1.4 2.4 297.4 -0.009 0.9 N
1040 694242.358 5114059.182 296.56 BARE EARTH 2.4 1.2 2.1 296.7 0.14 14.0 N
1035 710007.783 5098406.799 308.187 BARE EARTH 1.7 1.0 1.3 308.25 0.063 6.3 N
1033 689566.097 5088053.185 309.017 BARE EARTH 1.6 1.0 1.3 308.992 -0.025 2.5 N
1024 683521.543 5076754.35 325.314 BARE EARTH 2.4 1.3 2.1 325.323 0.009 0.9 N
1019 693353.276 5078446.511 302.215 BARE EARTH 1.9 1.0 1.7 302.219 0.004 0.4 N
1012 718632.49 5062322.468 329.67 BARE EARTH 2.2 1.1 1.9 329.762 0.092 9.2 N
1007 696372.883 5048066.314 336.57 BARE EARTH 2.3 1.2 1.9 336.552 -0.018 1.8 N
1006 699119.072 5049193.188 336.255 BARE EARTH 3.4 1.8 2.9 336.293 0.038 3.8 N

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 33 of 51
Block L-D2 HEI Survey Checkpoints (UTM 14 NAD83, NAVD 88)
LiDAR Elevation
s Results
PT ID X Coord Y Coord Z Elev.
(m) Landuse Class
Max PDOP Value
Max HDOP Value
Max VDOP Value
*Z from LiDAR Bare
Earth TIN (m)
Delta Z (m)
Absolute Difference
(cm)
Exceed Blunder Criteria
(Y/N)
1009 707224.308 5050077.745 342.109 BARE EARTH 2.2 1.3 1.8 342.048 -0.061 6.1 N
1047 678928.804 5123295.442 292.395 BARE EARTH 2.0 1.0 1.7 292.445 0.05 5.0 N
1000 701851.308 5039257.035 358.757 BARE EARTH 2.5 1.3 2.1 358.769 0.012 1.2 N
1002 700645.386 5043096.663 352.83 BARE EARTH 2.3 1.4 1.8 352.908 0.078 7.8 N
4037 741140.632 5113205.57 399.944 BRUSH, LOW TREES 0.0 0.8 0.9 399.88 -0.064 6.4 N
4044 792519.22 5122142.243 434.252 BRUSH, LOW TREES 0.0 0.8 1.0 434.551 0.299 29.9 Y
4048 774370.399 5128249.824 462.224 BRUSH, LOW TREES 0.0 0.9 1.2 462.349 0.125 12.5 N
4056 728476.823 5125240.521 371.859 BRUSH, LOW TREES 0.0 0.5 0.6 372.024 0.165 16.5 N
1028 715548.198 5084031.074 311.856 BRUSH, LOW TREES 0.0 0.8 1.4 311.978 0.122 12.2 N
1021 692683.248 5075194.956 306.076 BRUSH, LOW TREES 2.0 1.0 1.7 306.008 -0.068 6.8 N
1034 707654.453 5098093.056 304.015 BRUSH, LOW TREES 1.8 1.0 1.4 304.134 0.119 11.9 N
1008 698012.475 5048785.162 330.848 BRUSH, LOW TREES 2.3 1.2 1.9 331.101 0.253 25.3 Y
1046 685528.459 5120043.605 293.849 BRUSH, LOW TREES 2.0 1.1 1.7 293.754 -0.095 9.5 N
4007 697104.57 5028319.521 332.458 FORESTED 0.0 3.1 3.4 332.395 -0.063 6.3 N

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 34 of 51
Block L-D2 HEI Survey Checkpoints (UTM 14 NAD83, NAVD 88)
LiDAR Elevation
s Results
PT ID X Coord Y Coord Z Elev.
(m) Landuse Class
Max PDOP Value
Max HDOP Value
Max VDOP Value
*Z from LiDAR Bare
Earth TIN (m)
Delta Z (m)
Absolute Difference
(cm)
Exceed Blunder Criteria
(Y/N)
4029 742750.122 5080176.245 358.921 FORESTED 0.0 0.7 1.1 358.917 -0.004 0.4 N
4033 746791.687 5084135.397 371.992 FORESTED 0.0 1.1 1.5 372.069 0.077 7.7 N
4040 775339.33 5115829.415 452.208 FORESTED 0.0 1.1 1.7 452.292 0.084 8.4 N
4053 757313.139 5119223.828 414.821 FORESTED 0.0 1.5 2.2 414.913 0.092 9.2 N
1015 700236.975 5066094.05 316.894 FORESTED 1.8 1.1 1.4 316.974 0.08 8.0 N
1001 700733.587 5040315.332 363.014 FORESTED 3.2 1.8 2.6 362.981 -0.033 3.3 N
1027 715386.132 5082429.849 313.786 FORESTED 0.0 4.2 6.4 313.853 0.067 6.7 N
1029 715093.316 5085606.805 311.565 FORESTED 4.4 2.7 3.4 311.631 0.066 6.6 N
1037 709984.92 5102419.356 309.053 FORESTED 5.1 2.9 4.1 309.076 0.023 2.3 N
1042 696577.212 5115717.819 296.915 FORESTED 3.1 1.6 2.6 296.995 0.08 8.0 N
4001 679594.811 5044458.095 341.587 HIGH GRASS, WEEDS, CROPS 0.0 0.8 1.3 341.637 0.05 5.0 N
4002 679615.778 5042847.611 337.539 HIGH GRASS, WEEDS, CROPS 0.0 1.0 1.2 337.674 0.135 13.5 N
4012 722547.596 5012614.662 299.457 HIGH GRASS, WEEDS, CROPS 0.0 1.2 2.1 299.648 0.191 19.1 N
4013 722243.492 5035852.11 337.475 HIGH GRASS, WEEDS, CROPS 0.0 1.1 1.6 337.385 -0.09 9.0 N
4017 729325.633 5050661.083 338.244 HIGH GRASS, WEEDS, CROPS 0.0 1.0 1.4 338.448 0.204 20.4 N
4019 736607.605 5050740.446 344.875 HIGH GRASS, WEEDS, CROPS 0.0 0.8 1.3 345.031 0.156 15.6 N

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 35 of 51
Block L-D2 HEI Survey Checkpoints (UTM 14 NAD83, NAVD 88)
LiDAR Elevation
s Results
PT ID X Coord Y Coord Z Elev.
(m) Landuse Class
Max PDOP Value
Max HDOP Value
Max VDOP Value
*Z from LiDAR Bare
Earth TIN (m)
Delta Z (m)
Absolute Difference
(cm)
Exceed Blunder Criteria
(Y/N)
4022 738849.976 5042930.076 343.16 HIGH GRASS, WEEDS, CROPS 0.0 1.0 1.6 343.143 -0.017 1.7 N
4024 739340.426 5070710.189 370.362 HIGH GRASS, WEEDS, CROPS 0.0 0.9 1.4 370.3 -0.062 6.2 N
4036 740312.851 5114717.404 410.462 HIGH GRASS, WEEDS, CROPS 0.0 0.8 1.0 410.48 0.018 1.8 N
4043 790204.761 5120066.293 436.907 HIGH GRASS, WEEDS, CROPS 0.0 0.8 1.1 437.03 0.123 12.3 N
4051 760130.673 5124739.424 432.884 HIGH GRASS, WEEDS, CROPS 0.0 1.0 1.8 433.083 0.199 19.9 N
1010 707229.817 5050099.818 342.078 HIGH GRASS, WEEDS, CROPS 2.0 1.1 1.7 342.134 0.056 5.6 N
1013 679085.702 5061870.689 336.563 HIGH GRASS, WEEDS, CROPS 2.2 1.2 1.9 336.602 0.039 3.9 N
1016 700389.505 5064093.685 317.728 HIGH GRASS, WEEDS, CROPS 1.7 1.1 1.3 317.817 0.089 8.9 N
1018 693384.193 5077560.695 302.156 HIGH GRASS, WEEDS, CROPS 1.9 1.0 1.6 302.14 -0.016 1.6 N
1020 693277.748 5079757.445 304.07 HIGH GRASS, WEEDS, CROPS 1.9 1.0 1.7 304.291 0.221 22.1 Y
1022 691813.214 5074856.096 301.39 HIGH GRASS, WEEDS, CROPS 2.1 1.0 1.8 301.387 -0.003 0.3 N
1023 688846.423 5071805.182 304.137 HIGH GRASS, WEEDS, CROPS 2.0 1.0 1.7 304.28 0.143 14.3 N

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 36 of 51
Block L-D2 HEI Survey Checkpoints (UTM 14 NAD83, NAVD 88)
LiDAR Elevation
s Results
PT ID X Coord Y Coord Z Elev.
(m) Landuse Class
Max PDOP Value
Max HDOP Value
Max VDOP Value
*Z from LiDAR Bare
Earth TIN (m)
Delta Z (m)
Absolute Difference
(cm)
Exceed Blunder Criteria
(Y/N)
1025 682975.247 5071818.126 300.398 HIGH GRASS, WEEDS, CROPS 2.4 1.3 2.0 300.51 0.112 11.2 N
1030 715562.293 5085717.809 311.811 HIGH GRASS, WEEDS, CROPS 2.2 1.2 1.8 312.039 0.228 22.8 Y
1031 694438.747 5089873.24 308.132 HIGH GRASS, WEEDS, CROPS 1.9 1.1 1.5 308.274 0.142 14.2 N
1032 688247.264 5087956.554 296.722 HIGH GRASS, WEEDS, CROPS 1.7 1.0 1.4 296.78 0.058 5.8 N
1039 694327.691 5117287.15 297.056 HIGH GRASS, WEEDS, CROPS 2.3 1.2 2.0 297.163 0.107 10.7 N
1041 696862.304 5114161.283 297.355 HIGH GRASS, WEEDS, CROPS 2.4 1.2 2.1 297.47 0.115 11.5 N
1044 699509.93 5117385.958 299.818 HIGH GRASS, WEEDS, CROPS 2.1 1.3 1.6 299.926 0.108 10.8 N
1045 712568.564 5116633.342 320.138 HIGH GRASS, WEEDS, CROPS 2.7 1.3 2.3 320.171 0.033 3.3 N
1050 686340.023 5131515.446 294.214 HIGH GRASS, WEEDS, CROPS 2.0 1.2 1.5 294.283 0.069 6.9 N
1004 700577.701 5038463.132 348.264 HIGH GRASS, WEEDS, CROPS 2.3 1.4 1.8 348.371 0.107 10.7 N
1049 683694.453 5129101.015 295.024 HIGH GRASS, WEEDS, CROPS 2.0 1.2 1.5 295.082 0.058 5.8 N
4008 701426.294 5019481.023 334.026 URBAN 0.0 1.0 1.4 334.061 0.035 3.5 N
4010 722959.17 5012578.04 298.904 URBAN 0.0 1.2 2.3 298.969 0.065 6.5 N

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 37 of 51
Block L-D2 HEI Survey Checkpoints (UTM 14 NAD83, NAVD 88)
LiDAR Elevation
s Results
PT ID X Coord Y Coord Z Elev.
(m) Landuse Class
Max PDOP Value
Max HDOP Value
Max VDOP Value
*Z from LiDAR Bare
Earth TIN (m)
Delta Z (m)
Absolute Difference
(cm)
Exceed Blunder Criteria
(Y/N)
4021 740785.574 5052904.147 345.677 URBAN 0.0 1.0 1.9 345.622 -0.055 5.5 N
4025 734059.502 5097611.709 368.434 URBAN 0.0 0.4 0.4 368.305 -0.129 12.9 N
4027 741274.37 5088752.077 354.872 URBAN 0.0 0.6 0.9 354.712 -0.16 16.0 N
4032 748903.848 5080467.726 376.94 URBAN 0.0 0.7 1.2 376.892 -0.048 4.8 N
4035 746067.74 5109205.066 394.407 URBAN 0.0 1.0 1.1 394.323 -0.084 8.4 N
4041 783613.434 5117057.45 445.922 URBAN 0.0 1.5 2.0 445.935 0.013 1.3 N
4055 738045.94 5117986.606 418.498 URBAN 0.0 0.7 1.1 418.117 -0.381 38.1 Y
4057 722171.752 5130201.29 369.734 URBAN 0.0 0.6 0.9 369.659 -0.075 7.5 N
1014 700500.393 5065912.104 317.252 URBAN 2.7 1.6 2.2 317.155 -0.097 9.7 N
1026 717553.98 5083406.714 317.729 URBAN 2.4 1.3 2.0 317.671 -0.058 5.8 N
1038 694192.654 5117552.38 296.937 URBAN 2.2 1.2 1.9 296.954 0.017 1.7 N
1036 707362.035 5098644.513 304.128 URBAN 1.9 1.0 1.6 304.101 -0.027 2.7 N
1017 694290.25 5075401.767 310.573 URBAN 2.0 1.0 1.7 310.558 -0.015 1.5 N
1011 699001.706 5053401.316 332.12 URBAN 4.8 2.9 3.8 332.185 0.065 6.5 N
1005 700263.376 5049637.642 338.963 URBAN 2.2 1.2 1.8 338.908 -0.055 5.5 N
1048 684429.12 5127820.848 293.852 URBAN 3.2 1.8 2.7 293.834 -0.018 1.8 N
*Note: Z from LIDAR was extracted using Coherent's LP360 software using the TIN method. Elevations were extracted from the Bare Earth LAS files.

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 38 of 51
Appendix C
Comparison of Vertical Accuracy by Block
Block
No. of
Checkpoints RMSE(z)
(cm)
Minimum
Absolute
Difference
(cm)
Maximum
Absolute
Difference
(cm)
Median
Absolute
Difference
(cm)
Mean
Absolute
Difference
(cm)
Std.
Dev.
(cm)
Skew 95th
Percentile
Value
95% CI
(cm)
A 69 9.6 0.1 28.6 6.4 9.1 6.2 1.1 19.3 +/-18.9
B 58 13.4 0.2 30.4 9.8 9.9 7.1 0.8 24.3 +/-26.3
C 49 8.4 0.1 17.3 5.4 6.9 4.9 0.6 16.1 +/-16.5
E 65 10.6 0.2 34.3 6.8 8.1 6.9 1.4 22.9 +/-20.7
F Not Completed
G 60 10.3 0.1 42.0 6.2 7.4 7.2 2.4 18.6 +/-20.2
H-D1 73 9.5 0.3 37.5 6.0 7.4 6.1 2.0 16.8 +/-18.7
I Not Completed
J Not Completed
K Not Completed
L-D2 87 10.8 0.0 38.1 6.6 8.3 7.0 1.6 21.6 +/-21.2
M Not Completed
N Not Completed
O 58 9.5 0.1 23.1 6.0 7.7 5.6 0.7 17.2 +/-18.6
All
Blocks Not Completed

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 39 of 51
Appendix D
Visual Assessment Screenshots
This void line runs through most of the block and is between 6 and 7 feet wide
Here is a farm crossing bridge that hasn’t been removed

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 40 of 51
Appendix D
Visual Assessment Screenshots (continued)
Here is a 2009 aerial view of the area in the previous screen capture

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 41 of 51
Appendix D
Visual Assessment Screenshots (continued)
A 3-D view of possible elevation spikes

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 42 of 51
Appendix D
Visual Assessment Screenshots (continued)
A second look at the possible elevation spikes, including a cross sectional view

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 43 of 51
Appendix D
Visual Assessment Screenshots (continued)
Shown is a large data void, the approximate area is 13,128 sq. meters

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 44 of 51
Appendix D
Visual Assessment Screenshots (continued)
Here is another larger area of poor penetration; the total area is approximately 65,753 sq meters

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 45 of 51
Appendix D
Visual Assessment Screenshots (continued)
Here is an area where the point density is low in the forested area

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 46 of 51
Appendix D
Visual Assessment Screenshots (continued)
Shown is the 2009 aerial of the same location as the previous screenshot

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 47 of 51
Appendix D
Visual Assessment Screenshots (continued)
Shown is a smaller data void, the approximate area is 4,051 sq meters

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 48 of 51
Appendix D
Visual Assessment Screenshots (continued)
Big Stone

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 49 of 51
Appendix D
Visual Assessment Screenshots (continued)
Big Stone

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 50 of 51
Appendix D
Visual Assessment Screenshots (continued)
Big Stone

International Water Institute Red River Basin LiDAR Mapping Initiative
Block L-D2 LiDAR 3rd Party Quality Assessment Report
Block L-D2 LiDAR 3rd Party Quality Assessment Report HEI Project No R09.4875-007 September 10, 2010 Page 51 of 51
Appendix E
CD-ROM containing an ESRI Shapefile,
HEI Checkpoints, and Photos


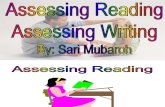






![Peer Assessment[1]](https://static.fdocuments.nl/doc/165x107/557e73b0d8b42a4d108b477b/peer-assessment1.jpg)