Thesis Wijshoff
185
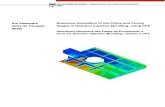
Structure- and fluid-dynamics in piezo inkjet printheads
-
Upload
herb-endricott -
Category
Documents
-
view
33 -
download
8
Transcript of Thesis Wijshoff

Structure- and fluid-dynamics in piezo inkjet
printheads

Samenstelling promotiecommissie:
Prof. dr. ir. L. van Wijngaarden, voorzitter Universiteit TwenteProf. dr. rer. nat. D. Lohse, promotor Universiteit TwenteProf. dr. rer. nat. F. G. Mugele Universiteit TwenteProf. dr. ir. H. Tijdeman Universiteit TwenteProf. dr. ir. J. Huetink Universiteit TwenteProf. dr. ir. M. E. H. van Dongen Technische Universiteit EindhovenProf. dr. F. Toschi Technische Universiteit EindhovenProf. dr. ir. D. J. Rixen Technische Universiteit DelftIr. H. Reinten, referent Oce Technologies B.V.
The research described in this thesis was carried out at the Research and Devel-opment department of Oce Technologies B.V.
Nederlandse titel:Dynamica van constructies en vloeistoffen in piezo inkjet printkoppen
Publisher:Herman Wijshoff, Oce Technologies B.V., Venlo,P.O. Box 101, 5900 MA Venlo, The Netherlandswww.oce.comCover design: Herman WijshoffBackground cover illustration: A MEMS-based printhead structure, the future.Front cover illustration: The models describing the complete printhead operation,the upper two represent the solid mechanics and the lower two the fluid mechanicspart of the thesis.Back cover illustration: Cover of the oldest publication in this field, anno 1749.Print: Gilde Print B.V., Enschede
c© Herman Wijshoff, Venlo, The Netherlands 2008
No part of this work may be reproduced by printphotocopy or any other means without the permissionin writing from the publisher.ISBN 978-90-365-2582-4

Structure- and fluid-dynamics in piezo inkjet
printheads
PROEFSCHRIFT
ter verkrijging vande graad van doctor aan de Universiteit Twente,
op gezag van de rector magnificus,prof. dr. W. H. M. Zijm,
volgens besluit van het College voor Promotiesin het openbaar te verdedigen
op vrijdag 25 januari 2008 om 16.45 uur
door
Herman Wijshoffgeboren op 3 september 1961
te Grevenbicht

Dit proefschrift is goedgekeurd door de promotor:
prof. dr. rer. nat. Detlef Lohse

Contents
1 Introduction 1
1.1 Historical overview on inkjet technology . . . . . . . . . . . . . . . 1
1.2 Printing principles . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Printhead operation . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.1 Working principle . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.2 Printhead testing . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4 Guide through the thesis . . . . . . . . . . . . . . . . . . . . . . . . 17
2 Structure dynamics 19
2.1 Actuating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.1 Piezoelectricity . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.2 Bump mode actuation . . . . . . . . . . . . . . . . . . . . . 22
2.1.3 Actuation efficiency . . . . . . . . . . . . . . . . . . . . . . 26
2.2 Local cross-talk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2.1 Electrical cross-talk . . . . . . . . . . . . . . . . . . . . . . 27
2.2.2 Direct cross-talk . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.3 Pressure-induced cross-talk . . . . . . . . . . . . . . . . . . 31
2.3 Printhead dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3.1 Modeling setup . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3.2 Structural resonances . . . . . . . . . . . . . . . . . . . . . 35
2.4 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3 Channel acoustics 41
3.1 Narrow channel theory . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.1.1 Governing equations . . . . . . . . . . . . . . . . . . . . . . 41
3.1.2 Frequency characteristics . . . . . . . . . . . . . . . . . . . 44
3.1.3 Traveling wave principle . . . . . . . . . . . . . . . . . . . . 48
3.2 Nozzle boundary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2.1 Nozzle pressure . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2.2 Drop size and speed . . . . . . . . . . . . . . . . . . . . . . 54
3.3 Cross-talk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.3.1 Local cross-talk . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.3.2 Printhead resonances . . . . . . . . . . . . . . . . . . . . . . 59
i

ii CONTENTS
3.3.3 Acoustic cross-talk . . . . . . . . . . . . . . . . . . . . . . . 62
3.4 Residual vibrations . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.4.1 Refill . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.4.2 Drop on demand frequency oscillations . . . . . . . . . . . . 68
3.4.3 Interaction with local cross-talk . . . . . . . . . . . . . . . . 70
3.5 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4 Drop dynamics 73
4.1 Drop formation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.1.1 Drop shape and properties . . . . . . . . . . . . . . . . . . 73
4.1.2 Impact on acoustics . . . . . . . . . . . . . . . . . . . . . . 77
4.2 Break-off mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2.1 Impact of ink properties . . . . . . . . . . . . . . . . . . . . 81
4.2.2 Secondary tail . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.2.3 Tail-end speed . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.3 Satellite drop formation . . . . . . . . . . . . . . . . . . . . . . . . 87
4.3.1 Mist of droplets . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.3.2 Rayleigh breakup . . . . . . . . . . . . . . . . . . . . . . . . 89
4.3.3 Fast satellites . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.3.4 Slow satellites . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.4 Drop size modulation . . . . . . . . . . . . . . . . . . . . . . . . . . 94
4.4.1 Pulse width and fill-before-fire-level . . . . . . . . . . . . . 94
4.4.2 Acoustic resonances . . . . . . . . . . . . . . . . . . . . . . 96
4.4.3 Break pulses . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4.4.4 Meniscus and drop formation oscillations . . . . . . . . . . 99
4.5 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5 Wetting dynamics 103
5.1 Wetting of the nozzle plate . . . . . . . . . . . . . . . . . . . . . . 103
5.1.1 Origin of wetting . . . . . . . . . . . . . . . . . . . . . . . . 103
5.1.2 Wetting regimes and visualization . . . . . . . . . . . . . . 106
5.2 A wetted nozzle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.2.1 Jetting nozzle . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.2.2 Non-jetting nozzle . . . . . . . . . . . . . . . . . . . . . . . 111
5.3 A wetted nozzle plate . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.3.1 Long-range phenomena . . . . . . . . . . . . . . . . . . . . 114
5.3.2 Driving mechanisms . . . . . . . . . . . . . . . . . . . . . . 115
5.3.3 Complete wetting . . . . . . . . . . . . . . . . . . . . . . . . 118
5.3.4 Marangoni flow . . . . . . . . . . . . . . . . . . . . . . . . . 120
5.4 Impact on drop formation . . . . . . . . . . . . . . . . . . . . . . . 121
5.4.1 Drop properties . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.4.2 Channel acoustics . . . . . . . . . . . . . . . . . . . . . . . 122
5.5 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 123

CONTENTS iii
6 Bubble dynamics 1256.1 Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
6.1.1 Dirt and air entrapment . . . . . . . . . . . . . . . . . . . . 1256.1.2 Acoustic detection of air bubbles . . . . . . . . . . . . . . . 126
6.2 Air entrainment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1286.2.1 Wetting layer . . . . . . . . . . . . . . . . . . . . . . . . . . 1286.2.2 Small dirt particles . . . . . . . . . . . . . . . . . . . . . . . 129
6.3 The oscillating bubble . . . . . . . . . . . . . . . . . . . . . . . . . 1346.3.1 Size dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . 1346.3.2 Impact on channel acoustics . . . . . . . . . . . . . . . . . . 1346.3.3 Impact on drop formation . . . . . . . . . . . . . . . . . . . 136
6.4 The moving bubble . . . . . . . . . . . . . . . . . . . . . . . . . . . 1396.4.1 Balance of forces . . . . . . . . . . . . . . . . . . . . . . . . 1396.4.2 Net displacements . . . . . . . . . . . . . . . . . . . . . . . 140
6.5 The growing bubble . . . . . . . . . . . . . . . . . . . . . . . . . . 1416.5.1 Rectified diffusion and dissolution . . . . . . . . . . . . . . 1416.5.2 Influence of the actuation . . . . . . . . . . . . . . . . . . . 1436.5.3 Impact on channel acoustics . . . . . . . . . . . . . . . . . . 1456.5.4 Impact on drop formation . . . . . . . . . . . . . . . . . . . 146
6.6 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 147
7 Conclusions 149
References 153
Summary 165
Samenvatting 169
Acknowledgements 173
List of publications 175
About the author 177

iv CONTENTS

Chapter 1
Introduction
In this chapter an overview is presented of the main inkjet developments to clarifythe importance of inkjet technology as key-technology for today’s industry. Besidesprinting onto paper, many other application have emerged the last years. The re-quirements to meet the needs in many areas justify the intensive research program.The basic printing principles are outlined and the main printhead operation issuesare presented. Finally a guide through the chapters of this thesis is given.
1.1 Historical overview on inkjet technology
Inkjet printing is an important technology in color document production [133].The rapid development of inkjet technology started off around the late fifties.Since then, many inkjet devices have seen the light of day. In this overview, theattention is mainly restricted to the development towards the most importantinkjet concepts of today, namely continuous, piezoelectric, and thermal inkjet.
The first inkjet-like recording device, using electrostatic forces, was inventedby William Thomson, later Lord Kelvin, in 1858. This was the Siphon recorder asshown in figure 1.1. The apparatus was used for automatic recordings of telegraphmessages and was patented in 1867 (UK Patent 2147/1867). A siphon produces acontinuous stream of ink onto a moving web of paper and a driving signal movesthe siphon horizontally back and forth. The first experiments on manipulating astream of droplets even goes back to 1749. That year, Abbe Nollet published hisinvestigations on the effects of static electricity on a drop stream [122, 123].
In 1822 the equations to describe the motion of fluids were formulated bythe French engineer and physicist Claude Navier [121], seventy years after Eulerhad published his equation for ideal liquids without viscosity [53]. Navier alsoformulated the general theory of elasticity in a mathematically usable form in1821. George Stokes introduced his equations for the motion of liquids in 1845[145]. Hence the name Navier-Stokes equations for the application of classicalmechanics to a continuum under the assumption of a stress that is linear with thestrain rate.
1

2 CHAPTER 1. INTRODUCTION
(a) (b)
Figure 1.1: (a) The Siphon recorder is the first practical continuous inkjet de-vice. It was used for automatic recordings of telegraph messages and invented byWilliam Thomson in 1858 (UK Patent 2147/1867). (b) An illustration from AbbeNollet showing the first experiments on the effect of static electricity on a dropstream, published in 1749 [122].
The foundation of modern inkjet technology is attributed to the Belgian physi-cist Joseph Plateau and English physicist Lord Rayleigh. Plateau was the veryfirst to publish on this field with his article On the recent theories of the consti-tution of jets of liquid issuing from circular orifices in 1856 [132]. He derived therelationship of jet diameter to drop size in 1865. Lord Rayleigh published a seriesof founding papers starting with Instability of jets in 1878 [136]. The experimentalfoundation of this work started in 1833, when Savart published his observationson drop break-up [138]. He was the first one who recognized that the break-upof liquid jets is governed by laws, independent of the circumstance under whichthe jet is produced. He used acoustic energy to form uniform drops. What wasmissing in his work was the realization that surface tension is the driving forcebehind drop break-up. The groundwork for the description of the role of surfacetension forces was laid by Young in 1804 [172] and Laplace in 1805 [96].
Still, it took many decades before applications of the physical principles ofdrop formation were used in commercial working devices. In 1951, Elmqvist of theSiemens-Elema company patented the first practical continuous inkjet device (USPatent 2,566,433), which was based on the Rayleigh breakup [97]. This resulted

1.1. HISTORICAL OVERVIEW ON INKJET TECHNOLOGY 3
in the Mingograph, which was released in 1952. Instead of being an inkjet printer,it was merely a medical voltage recorder (e.g. for ECG and EEG). The deflectingof the drops was driven through analog voltages from a sensor, quite similar tocurrent seismic apparatus.
In the early 1960s Sweet of Stanford University demonstrated that, by apply-ing a pressure wave pattern to an orifice, the ink stream could be broken intodroplets of uniform size and spacing [147]. When the drop break-up mechanismwas controlled, the drops could be charged selectively and reliably as they emergedout of the continuous ink stream. The charged drops were deflected, when pass-ing through an electric field, to form an image on the substrate. The unchargeddrops were captured by the gutter and re-circulated in the system. This versionof the printing process is known as the Continuous Inkjet (CIJ) printing process(US Patent 3,596,275), with the Inkjet Oscillograph as first device. This devicewas elaborated for use by the Stanford Research Institute (SRI) for inkjet bar cod-ing work for Recognition Equipment Incorporated (REI). The A.B. Dick Companyelaborated Sweets invention to be used for character printing. With their Videojet9600 in 1968, it was the first commercial CIJ printing product.
Figure 1.2: Classification of inkjet printing technologies, adapted from [97].
The binary deflection was further developed, not only for bar code printing, butalso for advertising purposes, with the so-called DIJIT printer, introduced in 1973by the Mead company. Developments were boosted by the huge research effortsof IBM in the 1970s, which resulted in 1976 in the IBM 6640, a word processinghardcopy-output peripheral application [27]. Two companies were involved inthe multiple drop deflection, the Sharp and the Applicon company. The formerreleased their Jetpoint in 1973, the latter their color image printer in 1977. Inthe same period Hertz of the Lund University of Technology in Sweden developed

4 CHAPTER 1. INTRODUCTION
several continuous inkjet techniques, which enabled gray-scale printing by varyingthe number of drops per pixel. His methods were adopted by Iris Graphics andStork to produce high-quality color images for the prepress color hardcopy market[69].
Instead of continuously firing drops it is also possible to create drops only whenan actuation pulse is provided: drop-on-demand. Major advantages of drop-on-demand (DOD) printers over CIJ printers include the fact that there is no needfor break-off synchronization, charging electrodes, deflection electrodes, guttering,and re-circulation systems, high pressure ink-supplies and complex electronic cir-cuitry. The first pioneering work in that direction was performed in the late 1940sby Hansell of the Radio Corporation of America (RCA), who invented the firstdrop-on-demand device as shown in figure 1.3. By means of a piezoelectric disc,pressure waves could be generated that caused a spray of ink drops. However, thisinvention, intended for use as a writing mechanism in a pioneering RCA facsimileconcept, was never developed into a commercial product [133].
Figure 1.3: Drawing of the first drop-on-demand piezo inkjet device, which waspatented in 1950 but not further developed into a commercial product (US Patent2,512,743). A piezoelectric disc (5) generates pressure waves in the solid cone (1),which cause a spray of ink drop from the nozzle (2).
The first DOD technique, that really emerged, was the electrostatic pull inkjetin the 1960s. The basic working principle comprises the following. Conductiveink is held in a nozzle by negative pressure. By application of a high voltagepulse to an electrode located outside the nozzle, a charged droplet of ink is pulledout. By application of the appropriate deflection field, the droplet can be locatedon the substrate. Companies developing electrostatic pull inkjet devices were theCasio, Teletype, and Paillard company. The Inktronic Teletype machine in thelate 1960s was marketed by the Teletype company. With the model 500 Typuter,the Casio company released a printer of this type in 1971. In the 1970s, the

1.1. HISTORICAL OVERVIEW ON INKJET TECHNOLOGY 5
DOD electrostatic pull principle was abandoned due to poor printing quality andreliability, although research activities continues until today [153, 154].
Generally, the basis of piezoelectric inkjet (PIJ) printers is attributed to threepatents in the 1970s. Common denominator of these three patents is the use ofa piezoelectrical unit to convert an electrical driving voltage into a mechanicaldeformation of a ink chamber, which generates the pressure required for the dropformation from a nozzle. The first one is that of Zoltan of the Clevite company in1972 (US Patent 3,683,212), proposing a squeeze mode of operation [28]. In thismode, a hollow tube of piezoelectric material is used. When a voltage is appliedon the piezoelectric material, the ink chamber is squeezed and a drop is forced outof a nozzle.
Figure 1.4: Classification of piezo inkjet (PIJ) printhead technologies by the de-formation mode used to generate the drops.
The second patent of Stemme of the Chalmers University in 1973 (US Patent3,747,120) utilizes the bend mode of piezoelectric operation. In this mode, thebending of a wall of the ink chamber is used to eject a drop. The third patentof Kyser and Sears of the Silonics company in 1976 (US Patent 3,946,398) alsoused the bend mode operation. Both bend-mode patents were filed in the sameyear. The minor difference between the two is that Stemme used a flat disc ofpiezoelectric material to deform a rear wall of an ink chamber and that Kyser andSears used a rectangular plate to deform the roof of an ink chamber. The firstPIJ printer to reach the market was in 1977 with the Siemens PT-80, which usedthe squeeze mode. Silonics was the second company to introduce a piezoelectric

6 CHAPTER 1. INTRODUCTION
DOD printer, namely the Quietype in 1978, which used the bend mode The bendmode is also referred to as bimorph or unimorph mode. Obviously, the maindiscriminator between the PIJ patents is the used dominating deformation modeof the piezoelectric material, together with the geometry of the ink channels.
The patent of Stuart Howkins (US Patent 4,459,601) of the Exxon company in1984, describing the push mode version, and the patent of Fischbeck (US Patent4,584,590), who proposed the shear mode, completed the now commonly adaptedcategorization of printhead configurations. With the push mode, also referredto as bump mode, a piezo electric element pushes against an ink chamber wallto deform the ink chamber. In the shear mode the strong shear deformationcomponent in piezo electric materials is used to deform a ink chamber wall. So ingeneral, four types of PIJ printheads are distinguished, the squeeze, push, bend,and shear mode, see figure 1.4.
With sudden steam printing, figure 1.5, a researcher from the Sperry RandCompany basically invented another DOD technique, thermal inkjet printing, inthe 1960s. By boiling aqueous ink at certain time instances, a drop of ink could begenerated. The strength of this design clearly was not immediately acknowledged,since the company did not elaborate this idea into a commercial product. Theidea was abandoned until the late 1970s when Canon and Hewlett Packard (HP)picked it up.
Figure 1.5: Sudden steam printing, the first drop-on-demand thermal inkjet de-vice, which was patented in 1965, but not further developed into a commercialproduct (US Patent 3,179,042). An electric current from the electrodes (102 and104) passes through a portion of the ink (116). The ink is preheated (132) nearlyto its boiling temperature and the extra heat from electric current generates thesteam that ejects the drops form the nozzle.
In 1979 Endo and Hara of the Canon company re-invented the drop-on-demandprintheads actuated by a water vapor bubble, called bubblejet, with the firstprinter launched in 1981. In the same period also HP developed their thermalinkjet technology leading to the first successfull low-cost inkjet printer in 1984.

1.1. HISTORICAL OVERVIEW ON INKJET TECHNOLOGY 7
The invention of thermal inkjet (TIJ) fundamentally changed inkjet research. Bythe replacement of the piezoelectric by a thermal transducer, the main bottle-neck concerning miniaturization was resolved. The thermal transducer became asimple, small, and cheap resistor, figure 1.6.
Figure 1.6: Side view of HP’s SPT printhead, showing the state of the art tech-nology in thermal inkjet printing [8]. The outlet diameter of the nozzle is 18 µm,the ink chamber height is 18 µm. The nozzle pitch in a single row is 42.3 µm andboth nozzle rows are shifted a half nozzle pitch with respect to each other. Thisresults in a nozzle resolution of 1200 npi.
TIJ can be manufactured using mass-production based on IC manufacturingtechnologies. This made the cost per nozzle much lower than the cost per nozzle ofa piezoelectric printhead. Both the fact that inkjet printers now could be minia-turized and its low cost of manufacturing made TIJ the superior inkjet technologyat that time. HP solved the reliability problem of the thermal drop on demandprintheads by the concept of disposable heads and increased the performance oftheir thermal printheads continuously as shown in figure 1.7. HP claims that TIJjets everything that nucleates like toluene, silver suspensions, and even functionalproteins. Currently thermal inkjet, with top-shooters of HP, Canon, Lexmarkand Olivetti and side-shooters of Canon (the first series) and Xerox, dominatesthe low-end home/office color printer market. Oce also applies thermal drop-on-demand inkjet in its wide format color printing systems with printheads of variousmanufacturers.
After the introduction and immense success of TIJ, PIJ research efforts werelargely diminished. However, critical in TIJ is the spreading and intercolor bleed-ing of water based inks. This requires special coatings on the media surface. Athigh productivity cockling and drying of the media is another problem. Therefore,solid inks (hot-melt or phase-change ink), which require piezo actuation, remainedimportant.
Only a few companies continued their research into PIJ. New initiatives witha bump-mode design were taken in 1984 by Howtek and Exxon, later acquired by

8 CHAPTER 1. INTRODUCTION
Figure 1.7: HP Moores law: inkjet printhead performance as printhead drops persecond (the number of nozzles times the maximum drop-on-demand frequency)doubles every 18 months for the past 20 years. It started with 12 nozzles in asingle color glass chip in 1984. Via different printer series (the different markers),this evolved into the 3900 nozzles in a six color single silicon chip in 2006, theScalable Printhead Technology (SPT).
Dataproducts. Now the bump mode actuation is used by Hitachi (which acquiredDataproducts), Trident, Brother and Epson [155]. The bend mode is used byTektronix (acquired by Xerox), Brother/Kyocera and Epson [119, 175]. The shear-mode design came into the field in 1984 with Spectra, a with Xerox licenses formedcompany, and later with Brother. Spectra is acquired by Markem, later by Dimatixand finally by FujiFilm [114, 118]. A special version of the shear mode is the sharedwall design of Xaar. This company started in 1990 for commercializing the workof the Cambridge researchers [15, 95, 109, 111, 173, 174]. Other companies whichuse this concept are Brother/Kodak, ToshibaTEC and MicroFab [3].
At present, both TIJ and PIJ printing have evolved into the two most impor-tant technologies when it comes to printing. The initial advantages of TIJ over PIJhave been leveled over the years by further development of the PIJ technology. Afundamental strength of the PIJ technology is its ability to deposit a wide varietyof materials on various substrates in well-defined patterns. Recently many otherapplications than printing onto paper emerged [13, 106, 116, 140, 142, 167, 168].
In the display market, inkjet technology is used to manufacture Flat PanelDisplays (FDP), Liquid Crystal Displays (LCD), color filters (a part of LCDs),Polymer Light Emitting Diodes (PLED), and flexible displays. The accompanyingperformance criteria are among the major driving forces behind much research anddevelopment efforts [11, 67]. Within the chemical market, the inkjet technology ismainly used as tool for research purposes. The unique capacity of the technologyfor dispensing small doses of liquids makes it very useful for this market. Appli-cations include material and substrate development as well as coating purposes[92, 120, 127].

1.2. PRINTING PRINCIPLES 9
In the electronic market, inkjet printheads are used to create functional electri-cal traces using conductive fluids on both rigid and flexible substrates. One of thefirst applications of inkjet technology within this field was that for the productionof Printed Circuit Boards (PCB). Other applications include the fabrication ofelectric components and circuits such as Radio Frequency Identification (RFID)tags, wearable electronics, solar cells, fuel cells, and batteries. Challenges for theinkjet technology within this field include the spreading of the ink and the requiredguarantees of continuity of the jetted lines [68, 91, 99, 148].
Three-dimensional mechanical printing claims the inkjet technology as tool forrapid prototyping, small volume production, and the production of small sensors[158, 160, 170]. Jetting of UV-curable optical polymers is a key technology forthe cost-effective production of micro-lenses. These tiny lenses are used in devicesfrom fiber optic collimators to medical systems. The ability of inkjet technology toprecisely jet spheres in variable, but consistent, drop sizes provides opportunitiesfor the cost reduction of existing optical components and innovative new designs[16, 36, 41].
The life science market is rapidly expanding with new requirements for precisedispensing of DNA and protein substances [6]. The high costs of these fluids makeinkjet technology with its precision placement and tight flow control an excellentdispensing tool. Applications include the use for DNA research, various medicalpurposes such as dosing of drugs, and food science. A quite futuristic applicationis the use of inkjet printing for the fabrication of living tissue [31, 32, 40, 79, 135].
1.2 Printing principles
The graphic printing applications require certain performance criteria to be met.For an inkjet printhead, an important set of requirements is related to the resultingdrop properties, namely:
• Drop-speed: the resulting droplets are required to have a certain speed,typically several m/s. A high drop speed results in a short time of flight. Thesensitivity for disturbing influences like variations in the printhead-substratedistance will be less, thus the dot position errors will be smaller.
• Drop-volume: depending on the application under consideration, the per-formance requirement concerning volume typically varies now from 2 to 32picoliter. For some applications, it is required that the drop-size can be var-ied during operation. For example, for large areas that need to be coveredlarge drops are desired, whereas for high resolution printing small drops aredesirable. This is referred to as drop-size modulation.
• Drop speed and volume consistency: the variations in drop volume and speedmust stay within a certain percentage band, typically around 2 percent. Thisis to avoid irregularities in the printed object.

10 CHAPTER 1. INTRODUCTION
• Drop-shape: the shape of the dots on a substrate is negatively influenced bythe formation of tails or satellite drops. These are highly undesirable for thequality of the print.
• Jet straightness: the droplets have to be deposed in a straight line towardsthe substrate, typically within 10 mrad accuracy.
Productivity and stability are important requirements, which are closely re-lated to the jetting process. The productivity of an inkjet printhead is mainlydetermined by the jetting frequency, defined as the number of drops that a chan-nel jets within a certain time fdod, and by the number of nozzles Nnoz, definedby the integration density or nozzles per inch and the printhead width. A highintegration density has a lot of consequences for the functionality and the pro-ducibility. For the productivity of an inkjet printer, the firing power Pjet of theprintheads is the key number. The productivity in m2/s is given by:
Pjet =Nnozfdod
dpi2× (24.4 · 10−3)2 (1.1)
with dpi the number of dots per inch [2]. This results in a print time tprint for anarea Aprint of a printer of:
tprint =Aprint
ηPjet(1.2)
with η the efficiency of the printer, which plays a very important role in a scanningsystem. Most inkjet printers use a carriage with several printheads which movesover the full width of the paper. Between the strokes of the carriage, or printswaths, the paper is transported over a certain distance to cover the full area.At higher frequencies the carriage turn-time and the paper step give more andmore limitations. These limitations result in an optimum DOD-frequency for theproductivity of scanning printer systems [26]. For productivity the maximumapplicable DOD-frequency for 600 dpi prints in most scanning printer concepts is30 − 40 kHz.
High productivity single pass printing requires a page-wide array with thou-sands of nozzles as explored by Spectra [152, 179] and Brother-Kyocera [75], andused by Xerox/Tektronix in their Phaser printer series. Another way to increasethe number of nozzles is to use multiple nozzles per channel as explored by Trident[180].
The number of dots per inch is important for print cost and print quality. Printcost is directly related to the thickness of the ink layer or amount of ink/m2. Asa first order approximation, the required drop volume for a 600 dpi dot is about32 pl and for a 1200 dpi dot about 4 pl, since volume scales as the third powerof the spatial resolution. The total volume for a 600 dpi dot with four 1200 dpidrops becomes 16 pl instead of 32 pl with a single 600 dpi drop. Print quality isbetter with smaller dots at a high resolution. Finer detail can be represented andalso the graininess of the print is much less with small dots. For water based inks

1.3. PRINTHEAD OPERATION 11
the less amount of ink with smaller drops results in shorter drying time, anotherdrive to move towards smaller drops. So there is a trade-off between productivityand print quality/cost. Drop size modulation is a way to meet both requirements.The small drops are used for achieving a high print quality and the large dropsfor productivity.
Stability of the jetting process is one of the most important performance re-quirements for inkjet printheads. Typically, it is required that at most one failureoccurs per certain number of jetted drops. For printing onto paper this is typicalone billion, but in some industrial applications no failure at all is allowed.
Additional, more general, requirements include the lifespan of the printhead(typically more than ten billion actuations per channel, a fundamental strengthof PIJ over TIJ), the materials compatibility (a wide variety of inks must bedeposable (again a strength of PIJ over TIJ), the maintainability, and the cost ofproduction and manufacturability of the printhead (a weakness of PIJ).
1.3 Printhead operation
1.3.1 Working principle
The final goal of the printhead operation is firing billions of drops. Before a dropis fired, a lot of processes must take place. In the case of hotmelt inks it startswith the melting of the ink in the melting unit (a), figure 1.8. This unit musthave enough capacity. A good heat transfer and draining of the melted ink at agiven maximum temperature like 135 C is necessary, taking into account someovershoot and time delay. Another task is filtering (b) the ink. The next unit is thereservoir (c), which must have enough volume, while keeping the total printheaddimensions within certain limits. Important aspects concerning the reservoir are:
• filtering with non-woven filters with high dirt holding capacity
• removal of air bubbles
• temperature control
• closing static pressure, for example supplied with hose (d)
• ink-level sensing.
The lower part of the printhead is the central part (e) where drop formationtakes place. This part is the subject of this thesis and is shown in more detail infigure 1.9. The main components in the central part are:
• a last filter (k), to remove the dirt particles from the ink
• the channel block (h), in which the ink channels (l) are made
• the nozzle plate (g), where the drops are formed

12 CHAPTER 1. INTRODUCTION
Figure 1.8: 3D CAD drawing of a printhead prototype showing (a) the meltingunit, (b) the filter units, (c) the reservoir, (d) the static pressure hose, (e) thecentral part, and (f) the electronic driving supply.
• the actuator foil (i), which covers the ink channels in the channel block. Thefoil is also connected to:
• the actuator plate with piezo elements and substrate (j). Here the drivingforce for the drop formation process is generated. The required electricvoltage is supplied by the electronic flex (f), figure 1.8.
The ink path from the reservoir and last filter to the nozzle can be dividedinto a supply channel, a pressure channel and a connection channel. The actuationtakes place in the pressure channel, which is shown in figure 1.9 in a front view ofa channel. When a voltage is applied on a piezo element, this element will changeits shape. This deforms the ink channel, which generates the pressure waves tofire a drop. The reaction force is supplied by the substrate, which is connected tothe channel block via passive piezo elements.
Typical dimensions are length 5−20 mm for the total ink channel with a cross-section of 0.01 − 0.05 mm2. The channel block material is graphite with shapedchannels, or a metal like brass or silicon with etched channels. The actuator foil hasa thickness of 5−50 µm and we use poly-imide, metal, glass, or silicon as material.The actuator plate is a piezo-ceramic material with a height of typical 500 µmwith diced elements. In most cases we use a substrate to support the elementstructure. The substrate is several millimeter longer than the piezo elements, to

1.3. PRINTHEAD OPERATION 13
Figure 1.9: Side view of channel structure and front view with actuation principleas explained in section 2.1.2., with (c) the reservoir, (g) the nozzle plate, (h) thechannel block, (i) the actuator foil, (j) the actuator with piezo elements and thesubstrate, (k) a last filter, and (l) the ink channel.
enable the connection of the electronic flex. The nozzle plate thickness rangesfrom 30− 125 µm and nozzle diameters from 18− 50 µm. Different nozzle shapesare made in nozzle plates of nickel, tantalum, poly-imide or silicon.
A long ink channel with a nozzle at the right side and a large reservoir atthe left side is the simplified geometry of the inkjet device like in [17], figure1.10. A piezo actuator element drives each channel. To fire a droplet, an electricvoltage is applied and the channel cross-section will be deformed by the inversepiezo-electric effect. This results in a negative pressure wave inside the channel.The pressure waves propagates in the channel direction and will be reflected whenthe characteristic acoustic impedance Z of the channel changes. The acousticimpedance of the channel depends on the size of the channel cross-section A andthe speed of sound c as:
Z =ρc
A(1.3)
with ρ the density of the ink. The speed of sound is influenced by the complianceof the channel cross-section, see section 3.1.3. The reflection and transmissioncoefficients at the interface between domain 1 and domain 2 are:
R =Z2 − Z1
Z1 + Z2T =
2Z2
Z1 + Z2(1.4)
When the compliance does not change, the following relationship holds:
R =A1 − A2
A1 + A2T =
2A1
A1 + A2(1.5)
At the large reservoir (A2 ≫ A1) the transmission coefficient is zero and the reflec-tion coefficient equals −1. This means that the pressure wave will be completelyreflected and the amplitude of the wave will change from a negative to a positivepressure wave.

14 CHAPTER 1. INTRODUCTION
Figure 1.10: Schematic drawing of the actuation principle. An electric voltage ona piezo element enlarges the channel and a negative pressure is generated. Afterreflection at the reservoir this becomes a positive pressure pressure wave. Thepositive pressure wave is amplified by the second slope of the driving waveform toget a large positive pressure peak at the nozzle, which fires a drop.
The charging of the piezo element (a) enlarges the channel cross-section andthe resulting negative pressure wave will be reflected at the reservoir at the left (b).The large reservoir acts as an open-end and the acoustic wave returns as a positivepressure wave (c). The de-charging of the piezo element reduces the channel cross-section to its original size. This will amplify the positive pressure wave when tunedto the travel time of this acoustic wave (d). The channel structure and drivingpulse are designed to get a large incoming positive pressure peak at the nozzle(e), which drives the ink through the nozzle. Acceleration of the ink movement inthe small cross-section of the nozzle (conservation of mass and incompressibility)results in drop formation.
1.3.2 Printhead testing
Droplets are measured by means of optical methods [1] like stroboscopic illumi-nation at drop formation rate and high-speed camera recordings up to 160,000images/sec with a Phantom V7 camera from Vision Research or up to 1 millionimages/sec with a Shimadzu HPV-1 camera. The basic setup for the optical mea-surements is outlined in figure 1.11. The setup can be divided into a part whichcontrols the printhead and a part to visualize the droplets.
The required reference temperature is reached by a PID controller (Eurotherm2408), which measures the temperature of the printhead with thermocouples andcontrols the input voltages for the heating elements. The printhead is mountedin vertical direction with the nozzles faced down, similar to its position in aninkjet printer. To avoid that the ink simply flows out of the nozzles under theinfluence of gravity, an air pressure unit (TS 9150G) makes sure that the pressure

1.3. PRINTHEAD OPERATION 15
in the ink reservoir remains 8 mbar below the ambient pressure. The setup isconnected to a personal computer that is equipped with National InstrumentsIMAQ PCI 1409 and PCI GPIB cards for image capturing and processing and forcommunication, respectively. A Newport MM3000 motion controller is used forautomatic positioning of the printheads in the measuring positions with Newportxy-tables.
Figure 1.11: Outline of experimental setup with printhead control, driving elec-tronics and optical recording equipment.
We use Labview software to control the measurements and the measuring re-sults can be directly exported to for example Excel for further analysis. Afterdefining the actuation signal, it is sent to an arbitrary waveform generator (PhilipsPM 5150/Wavetek 75A). The waveform generator sends the signal to an amplifier(Krohn-Hite 7602). From the amplifier, the signal is fed to a so-called switch-board. The switch-board is controlled by the personal computer and determineswhich channels are provided with the appropriate actuation signals.
We use a standard CCD-camera (for example Sony SSC-M370CE or WatekLCL902K) to capture the images from an Olympus SZH-10 microscope of thedrop formation with a frame rate 25 images/sec. A led produces flashes of 100 nsand the strobe frequency is the same as the drop repetition rate or DOD-frequency.We will only see the reproducible part of the drop formation, because the imagesare integrated over many (depending on the DOD-frequency up to several hun-dred) droplets. Drop properties can be derived very easily from these images. Thedrop speed is calculated from the distance of adjacent drops and the known repe-tition time. The drop size is calculated from the number of pixels, or by weightinga certain number of captured drops. Drop direction is calculated from the cen-ters of mass. To capture non-reproducible phenomena we use high-speed camerarecordings. In a certain time frame (up to typical 1 s) all drops are recorded with

16 CHAPTER 1. INTRODUCTION
1-10 µs time intervals, using a trigger signal to read back the relevant time frame.
With laser-Doppler interferometry (Ono Sokki laser vibrometer LV1500) werecord meniscus movements without drop formation. The measuring principle isbased on mixing an undisturbed and a Doppler-shifted laser beam. The Dopplereffect, the frequency shift ∆f , of the reflected beam is given by:
f =2v
cf0 =
2v
λ(1.6)
with f0 the frequency of the undisturbed laser beam, λ the wavelength of the laserbeam, c the speed of light, and v the normal speed of the surface which reflectsthe laser beam. The meniscus speed is derived from the interference pattern ofthe reflected beam with the reference beam and the frequency characteristics arerecorded with a HP 3585A spectrum analyzer. With laser-Doppler it is also possi-ble to measure actuator displacements with an accuracy of 20 nm [178]. Anothersetup for the latter is a speckle interferometer.
All these measurements give details on the ink flow outside the printheadand the deformations of the exterior of the printhead. The phenomena inside thechannels are difficult to measure. Only when using special transparent printheads,e.g. channels in or covered by a glass plate, and flow tracing particles the flowinside can be measured [117]. The only suitable method for the opaque heads usesthe actuator also as a sensor. As generally known, a piezo can be used as actuatoror as sensor, see e.g. [159]. For that, one uses the piezos inverse (actuator) anddirect (sensor) piezo-electric effect. The former comprises the following. If anelectrical voltage V is applied to the piezo unit, a displacement y of the piezo unitresults. The latter refers to the following phenomenon. If a force F is appliedto a piezos surface, an electric charge Q results. Together, this behavior can bedescribed as:
[
yQ
]
=
[
d 1/kC d
] [
VF
]
(1.7)
with C the capacity, d the piezoelectric charge constant, and k the stiffness of thepiezo, see chapter 2 for more details.
Switching the piezo elements from the electronic driving circuit to a measuringcircuit gives an accurate recording of the average pressure inside the ink channel,which we from now on call the ”Paint” signal (Piezo-Acoustic sensing of INkchannels in the Time domain), figure 1.12. First the driving waveform is applied,which takes 5 − 20 µs. After that the current from the piezo element can bemeasured until the next actuation cycle starts. The piezo must be completelyde-charged before the acoustic measurement starts. The problem for this setupis that the amplitude of the Paint signal is only 0.1 mA, while the current forcharging and de-charging the piezo is about 10 mA. The acoustic measurementalso enables monitoring of jetting stability [85] and feed-forward control of thedriving waveform [65].

1.4. GUIDE THROUGH THE THESIS 17
from the piezo however.
Paint-signalPiezo-finger
Actuation puls
dt
dFdz
dt
dp
piezo
Figure 1.12: Outline of Paint measurement. Switching the piezo elements betweenan electronic driving circuit and a measuring circuit enables both. The actuationof the channels and the measurement of the pressure variation inside the channels.
1.4 Guide through the thesis
The aim of the research described is this thesis is to explore the processes whichlead to the final goal, the stable and reproducible formation of billions of drops.We need more information on the phenomena preceding the drop formation fora better understanding of the operating principles of the piezo printhead. Thisenables a faster and better development of new printheads [166].
The first step is the actuation. The transformation of an electric voltage toa deformation of the ink channels is described in chapter 2. The deformationsinside the printhead cannot be measured and modeling with the commercial finiteelement code Ansys plays an important role [162]. The deformation of the channelcross-section results in pressure waves.
The acoustic properties of the ink channels are the subject of chapter 3. Thepressure waves play a central role in the printhead operation. They connect theelectrical/mechanical domain of the actuator to the fluid dynamic domain in andoutside the nozzles. Measurements are done with the laser-Doppler setup and theacoustic measurement. Details on ink flow and acoustic pressure waves inside theink channel are available through modeling. The acousto-elastic interaction playsan important role in the ”narrow-channel” model. Acoustic modeling with Ansysgives the details of the interactions with the structure dynamics of the printhead.
Another approach, modeling the complete printhead operation with one modelin a multi-physics approach [177], leads to a very long calculation time and is notconsidered in this thesis.
The drop formation is the final goal of the printhead operation. The pressurewaves in the ink channels are the driving force behind the drop formation process.In chapter 4 the details of the drop formation process are described. Opticalmeasurements and modeling provide the information we need. For the modelingof the free surface flow with surface tension, and its impact on channel acoustics,we use the commercial volume of fluid code Flow3D, an approach used also byDimatix/Spectra [113] and other competitors.

18 CHAPTER 1. INTRODUCTION
Also the flow phenomena on the nozzle plate are important. Wetting of thenozzle plate can influence the drop formation process. The material interactions,which determine the wetting properties, are not known in detail. Therefore, anexperimental study of the wetting phenomena is performed. This is described inchapter 5.
Wetting can also result in air entrainment. Air bubbles play an importantrole in the jetting stability. The theoretical and experimental research on thegeneration and the behavior of air bubbles and their impact on the printheadperformance is the subject of chapter 6. The acoustic measurement is an indirectmeasuring tool for the existence of air bubbles. Transparent heads are developedfor direct visual measurements. Modeling is done with different numerical models.
In the last chapter the results are summarized, conclusions are drawn and anoutlook on further developments is presented.
The experiments are done with printheads developed at Oce Technologies B.V.For the research described in this thesis a transparent test ink is used with aviscosity of about 10 mPa.s at the jetting temperature of 130 C, a surface tensionof 30 mN/m, a density of 1000 kg/m2 and a speed of sound of 1250 m/s.

Chapter 2
Structure dynamics
In this chapter the driving force in piezoelectric printheads is discussed. The actu-ator design for the printhead will be presented, which is based on the bump modeactuation. The deformation of the channels to generate the pressure waves forfiring droplets from the nozzles can also result in local cross-talk effects, like thedirect and the pressure induced cross-talk effect, as will be shown with numericalsimulations. Exciting many channels at the same time excites also resonances inthe printhead structure.
2.1 Actuating
2.1.1 Piezoelectricity
The driving force to fire a droplet with a piezo inkjet printhead is generated bythe actuator, which deforms the structure through the inverse piezo-electric effect.
The piezoelectric effect (electricity from an applied mechanical stress) was firstdiscovered by Pierre and Jacques Curie in 1880. Their experimental demonstrationconsisted of a conclusive measurement of surface charges appearing on speciallyprepared crystals, which were subjected to mechanical stress. In 1881, Lippmanndeduced mathematically the inverse piezoelectric effect (stress in response to anapplied electric field). The Curie brothers immediately confirmed the existenceof this property [25]. In the following years, the twenty natural crystal classes inwhich piezoelectric effects occur and all possible macroscopic piezoelectric coeffi-cients were defined [5].
Barium titanate (BaTiO3), the first piezoelectric ceramic with a perovskitestructure (a tetragonal/rhombohedral structure very close to cubic), was foundaround 1943. S. Roberts detected the piezoelectric effect in BaTiO3 in 1947. In1954, the discovery of the piezoelectric ceramic Pb(ZrxT i1−x)O3, lead zirconatetitanate (PZT), was reported by B. Jaffe (US Patent 2,708,244). In the followingyears PZT became the main industrial product in piezoelectric ceramic materials.
Ceramic perovskites have a cubic structure that is stable at temperatures abovetheir Curie temperature, as seen in figure 2.1. When the temperature decreases
19

20 CHAPTER 2. STRUCTURE DYNAMICS
Figure 2.1: The elementary cell of PZT (a) above the Curie temperature and (b)below the Curie temperature. At a high temperature, the electric charges coincidein a cubic structure and there is no piezo-electricity. Below the Curie-temperaturethe electric charges do not coincide anymore. This results in a piezoelectric effect.
and falls below the Curie temperature, the structure changes and in the caseof PZT, the O2− and the Pb2+ -ions are moved from their cubic positions andthe T i4+ and Zr4+ ions are moved from the center of the cube. The positiveand negative charge sites do not coincide anymore, which results in a dipole anda structure that is no longer cubic but rather tetragonal. An electric field willtherefore tend to deform the structure and this results in the inverse piezo-electriceffect.
In general, a uniform alignment of the electric dipoles only occurs in certainregions of a crystal, while in other regions the polarization may be in the reversedirection. Such regions are called ferroelectric domains. When a ferroelectric ce-ramic is produced, it shows no piezoelectricity. Because of the random orientationof the different domains, there is no net polarization. In order for the material tobecome piezoelectric it has to be poled. Poling is the imposition of a DC-voltageacross the material. The ferroelectric domains align to the field resulting in anet piezoelectric effect. Not all the domains become exactly aligned. Some ofthem align only partially and some do not align at all. The number of domainsthat do align depends upon the electric poling field, the temperature, and thetime the electric field is held on the material. During poling the material perma-nently increases in dimension between the poling electrodes. The material can bede-poled by reversing the poling voltage, increasing the temperature beyond theCurie temperature or by inducing a large mechanical stress.
A ferroelectric hysteresis loop for a piezoelectric ceramic is a plot of the polar-ization P developed against the field E applied to that device at a given frequency.A typical hysteresis loop is shown in figure 2.2. Applying a small electric field,we only get the linear relationship between P and E (1→2), because the field isnot large enough to switch any domain and the sample will behave as a normal

2.1. ACTUATING 21
Figure 2.2: P-E hysteresis loop for a ferroelectric material. A plot of the polariza-tion P developed against the field E applied to that device at a given frequency.(1-2) A small electric field does not align the domains but (3-4) a large electricswitches the domain in one direction resulting in (5) a net polarization of the ma-terial. (6) A large electric field in the opposite direction de-polarizes the materialand (7-8) can even reverse the polarization.
dielectric material. As the electric field strength increases (2→3), a number ofthe negative domains (which have a polarization opposite to the direction of thefield) will be switched over in the positive direction and the polarization will in-crease rapidly until all domains are aligned in the positive direction (4). As thefield strength decreases, the polarization will generally decrease but not returnback to zero. When the field is reduced to zero (5), some of the domains willremain aligned in the positive direction, and the ferroelectric sample will exhibita remnant polarization Pr.
The remnant polarization Pr in a ferroelectric sample cannot be removed untilthe applied field in the opposite (negative) direction reaches a certain value. Thestrength of the field required to reduce the polarization P to zero (6) is called thecoercive field strength Ec. Further increasing of the field in the negative directionwill cause a complete alignment of the dipoles in this direction (7). Reversingthe field direction once again can complete the hysteresis cycle. The piezoelectricPIC251 material has a Curie temperature of 200 C. The coercive field strengthat room temperature is 1.2 kV/m and only the half at an operating temperatureof 130 C.
Balance of angular momentum requires that the stress tensor is symmetric andthe six remaining components of the stress matrix are written as a vector with sixcomponents, T = (τxx, τyy, τzz, τyz , τzx, τxy)T . The same is done for the strainmatrix. We use linear relationships for describing the piezoelectric effect. Thematrices with the piezoelectric coefficients d for the piezoelectric and the inverse

22 CHAPTER 2. STRUCTURE DYNAMICS
piezoelectric effect are equal:
S = d E D = dT T (2.1)
in which D is the electric displacement field (or the charge density), and E is theapplied electrical field. Combining the piezoelectric equations with the equationsdescribing dielectric relation with ε the matrix with the dielectric constants:
D = ε E (2.2)
and the elastic equation with s the compliance matrix:
S = s T (2.3)
we get the matrix equations describing the complete electromechanical behaviorof a material:
S = s T + d E (2.4)
D = dT T + ε E (2.5)
2.1.2 Bump mode actuation
The actuator of the printhead is a bump mode actuator. A side view and a frontview is already given in figure 1.9. The actuation movement is directed along thepolarization of the piezo material and the corresponding axis along the height hp
of the piezo element is the y-axis as shown in figure 2.3. The z-direction is takenin the direction of the channel and the length lp of the piezo element.
2 (=z)
1 (=x)
3 (=y)
1 (=x)
hp
bp
lp
hs
V
Figure 2.3: Configuration of the bump mode actuator with definition of the x-,y- and z-directions. The y-direction is the actuation and polarization direction ofa piezo element with height hp, width bp and length lp, supported by a substratewith thickness hs.
To identify the directions in a piezoelectric ceramic element, the orthogonalaxes are termed 1, 2 and 3. The 3 axis is taken parallel to the direction of

2.1. ACTUATING 23
polarization within the ceramic. For the orthotropic PZT-material the matriceswith the polarization in the y-direction become:
s =
s11 s13 s12 0 0 0s13 s33 s13 0 0 0s12 s13 s11 0 0 00 0 0 s44 0 00 0 0 0 s66 00 0 0 0 0 s44
(2.6)
d =
0 d13 00 d33 00 d13 00 0 d15
0 0 0d15 0 0
ε =
ε11 0 00 ε22 00 0 ε33
(2.7)
The displacement of a free piezo element with height hp, that is without anymechanical stresses, in the y-direction is:
∆y
hp= d33E3 = d33
V
hp(2.8)
with V the driving voltage. So the free displacement is ∆y = d33V see also equa-tion 1.7. With d33 about 400 pm/V for most PZT materials, the displacement ofthe piezo element is 0.4 nm/V . As we will see in chapter 3 the volume displace-ment of the actuator should be about twice the drop volume. To fire a drop of25 pl with a channel of 10 mm length and a width of 250 µm, the displacementof the piezo element should be 20 nm. This requires a driving voltage of 80 V .
For driving electronics, a driving voltage of less than 40 V is preferred. Asimple way to reduce the required driving voltage is to use a multi-layer stackas shown in figure 2.3. The piezo element is divided in n layers with thicknessdlayer = hp/n. So the free displacement is ∆y = nd33V . The required drivingvoltage in the previous example becomes now 80/n.
A limitation is the maximum electric current Imax, which has to be suppliedduring the charging time tp by the driving electronics:
Imax =Q
tp(2.9)
A faster charging of the piezo element, i.e. a smaller tp, is only possible when thetotal charge Q at the electrodes of the piezo element remains within certain limits.The total charge of a free piezo element is:
Q = lp · bp D = ApD = ε33ApE3 =ε33Ap
hpV = CV (2.10)

24 CHAPTER 2. STRUCTURE DYNAMICS
see also equation 1.7. With n layers the total area of the electrodes becomes nAp
and the electric field E3 becomes nV/hp. So the total capacitance of the piezoelement becomes:
C =n2ε33Ap
hp(2.11)
With equations 2.9, 2.10, 2.11, and the fact that the required driving voltage scaleswith 1/n we can see that the maximum electric current increases with n. Thislimits the maximum applicable number of layers within a piezo element.
In order to be capable of deforming an ink channel, the piezo elements haveto be supported by a substrate, which supplies the reaction force. An importantconsequence of this is that mechanical stresses will be generated, which influencethe piezoelectric behavior of the piezo element. The stresses result from the d13 de-formation mode of the piezoelectric material. With a d13 coefficient of -180 pm/V(which is a typical value for many PZT materials), a 10 mm long piezo elementwould have an increase in length of 400 nm, while the actuation displacement isonly 20 nm. Connected to a substrate this elongation will be counteracted.
As a first order approximation we assume that the support by a substrate re-sults in homogeneous mechanical stresses T1 and T2 in the x- and z-direction, re-spectively, throughout the complete piezo element, so the strain in the y-directionbecomes:
S3 = s13T1 + s13T2 + d33E3 = deffE3 (2.12)
Assuming isotropic material properties in the x- and z-directions in the piezoelement and the substrate, T1 = T2, we get for the strain in the x- and z-directionin the piezo element:
S1 = S2 = s11T1 + s12T2 + d13E3 = (s11 + s12)T1 + d13E3 (2.13)
For the strain in the substrate in the x- or z-direction we get with the isotropiccompliances s11 = ss and s12 = −νss of the substrate material:
Ss = ssTs − νsTs = ss(1 − νs)Ts (2.14)
with ν the Poisson ratio of the substrate material. Both materials are connected,so the strain in the x- and z-direction in the piezo element and the substrate areequal. The forces in the piezo element are opposite to the forces in the substrate.For the x-direction this results in:
∑
F1 = 0 = hpT1 + hsTs (2.15)
Substituting equation 2.15 in equation 2.14 we get:
Ss = S1 = −ss(1 − νs)
hshpTs (2.16)

2.1. ACTUATING 25
With equations 2.13 and 2.12 this results in the following equation for the effectivepiezo electric constant:
deff = d33
(
1 − 2d13s13/d33
s11 + s12 + ss(1−νs)hs
hp
)
(2.17)
The substrate is 1 mm thick and the material(AlOx) has an E-modulus of 110 GPaand a Poisson ratio of 0.35. With PZT as piezo material with an E-modulus of60 GPa this results in a loss of about 50 % for the effective piezoelectric constant.This is shown in figure 2.4.
Figure 2.4: Ratio between deff and d33 as function of substrate thickness. Themechanical constraints from the substrate reduce the effective piezo electricity bya factor of two.
One way to reduce the loss in effective piezoelectricity is to make use of theshape factor. At least one dimension in the x- or z-direction of the piezo ele-ment should be much less than the height of the element. Then, the mechanicalconstraints from the substrate only extend over a similar small part of the piezoelement height and the loss in effective piezoelectricity will be much less. The mostextreme version of this approach is used by Trident in their PixelPro printhead[37]. Also Epson uses in their MLP printheads [149] a high aspect ration betweenthe height and the length and width of the piezo elements. In the printheads ofOce the piezo height is 500 µm, the width less than 100 µm and the length sev-eral millimeters to actuate ink channels of the same length. The loss in effectivepiezoelectricity is reduced to 30 %.
The strain in the piezo element is now inhomogeneous and we use finite elementsimulations to solve the complex behavior. To include all structural details likeglue menisci, without getting very large CPU times, we use static linear analysiswith a two-dimensional plain strain model in the x- and y-directions. The com-mercial finite element code Ansys is used with standard full structural PLANE82elements and piezo-electric PLANE13 elements, which solve the above mentionedequations 2.4 and 2.5. The parametric models are written in APDL (Ansys Para-metric Design Language).

26 CHAPTER 2. STRUCTURE DYNAMICS
2.1.3 Actuation efficiency
The efficiency is defined as the volume displacement in the ink chamber per voltdriving amplitude on the electrodes of the piezo element. The volume displace-ment per volt must be as high as possible. The effective piezo electric coefficientgives the change in channel height as function of the electric voltage, equation2.17. Mechanical constraints result not only from the substrate but also fromthe channels, which are covered with a foil. Some basic actuator design rulescan be derived with simple formulas for the stiffness in the actuation direction ofblock-shaped components with height h0, width b0 and length l0. The equationsfor the elongation ke, bending kb and shear stiffness ks in the y-direction of thecomponents with elasticity modulus E and Poisson ratio ν are:
ke =Eb0l0
h0kb =
Eh30l0
b30
ks =Gh0l0
b0(2.18)
with the shear modulus G = E/2(1 + ν). The elongation stiffness is importantfor the piezo elements . The stiffness increases proportional to the piezo width bp
and varies from 100-200 MN/m for 85-170 µm piezo width of an element of 500µm height and 10 mm length.
For the 25 µm tantalum foil between the actuating piezo and the channel wall,see figure 2.5a, the bending stiffness and the shear stiffness are both important.The bending and shear stiffness can be considered as two springs acting in series.The width of the foil between the piezo element and the channel spacing is bf =(bch − bp)/2. The bending stiffness is the lowest for a large distance between thepiezo element and channel wall. The bending stiffness determines mainly the totalstiffness, which varies therefore with the third power of the piezo width. For asmall foil width (bf <
√2(1 + ν)hf ) the shear stiffness is the lowest. The total
stiffness is mainly determined by the shear stiffness, which varies proportional tothe piezo width. For a 220 µm wide channel the stiffness of the foil varies from100 MN/m to 500 MN/m, with the bending stiffness the lowest with a 85 µmwide piezo element and the shear stiffness the lowest with a 170 µm wide piezoelement. For a 270 µm wide channel the foil stiffness varies from 40 MN/m to150 MN/m.
The stiffness of the piezo element and the foil increases with the width of thepiezo element. For a large displacement the stiffness of the foil must be low andthe stiffness of the piezo element must be high. This means that there will be anoptimum in piezo width for the efficiency as shown in figure 2.5b. The calculatedvolume displacement in a 10 mm long channel is shown as function of piezo elementwidth for a double layer PZT element. For a 220 µm wide channel the optimumpiezo element width is about 90 µm and for a 270 µm wide channel about 150 µm.The efficiency is not the only criterion. The influence on neighboring channels isanother important design criterion. The will be discussed in the next subsection.

2.2. LOCAL CROSS-TALK 27
(a)
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
20 70 120 170 220 270
Piezo width [um]
Dis
pla
ce
me
nt
[pl/
V]
220 channel
270 channel
(b)
Figure 2.5: (a) Drawing of a single piezo element supported by a substrate andconnected via a foil to an ink channel. (b) Calculated volume displacement in a220 µm and a 270 µm wide channel, covered with a 25 µm tantalum foil. Thechannel length is 10 mm. The double-layer piezo element height is 500 µm. Theresults of the Ansys calculations show the optimum piezo element width.
2.2 Local cross-talk
2.2.1 Electrical cross-talk
The use of a passive support reduces the effective piezoelectric constant in thebump mode actuator. A high aspect ratio between the height of the piezo elementsand the other dimensions reduces this loss. Another way to reduce the loss ineffective piezoelectricity is to use a substrate of the same piezoelectric material.The external electrodes are the ground electrodes to prevent electrical effects inthe other parts of the printhead. The voltage is applied to the inner electrodeon the interface between the two piezo layers, figure 2.6. The strain from the d13
mode is the same in both piezo layers so no mechanical stresses are generated inthe xz-plane. There will be no loss in effective piezoelectricity.
The calculated distribution of the electric field and the resulting deformationare shown in figure 2.6. A voltage of 100 V is applied on the inner electrode ofthe piezo element in the middle. All outer electrodes and the inner electrodesof the other piezo element are kept at 0 V . 100 V on one element of PZT59material results in a contraction of that piezo element in the y-direction of 54 nm.The height of the piezo elements is 500 µm, diced to get distinct elements, on a1000 µm piezo layer, which acts as the substrate.
The electric field is not restricted to one element. As a consequence also thesubstrate and the neighboring piezo elements will deform because of the inversepiezoelectric effect and this results in a large cross-talk effect. The substrateand the neighboring elements are lifted 10 nm in the y-direction, opposite to

28 CHAPTER 2. STRUCTURE DYNAMICS
(a) V (b) uy
Figure 2.6: (a) Calculated electric potential in the xy-plane of an actuator withpiezo material as substrate and 75 elements per inch (element width and spacingis 169 µm, which results in a pitch of 338 µm). (b) The resulting displacementin the y-direction uy. The electric voltage is applied on the electrode betweenthe central element and the substrate. The electric field is not restricted to oneelement and this results in a large cross-talk effect.
the actuation direction. The remaining displacement of the foil of the actuatedchannel is reduced to 44 nm. This loss in net actuation displacement and the largecross-talk effect of 23% on both neighboring elements are the reason that for thesubstrate a passive material is used.
The expansion of the electric field towards the neighboring elements via theferroelectric substrate is just one example of electrical cross-talk. Other electricalcross-talk effects from for example parasitic capacitances in the electronic drivingcircuit have to be avoided too.
2.2.2 Direct cross-talk
To prevent electrical cross-talk an actuator is used with 500 µm high PZT elementson a 1 mm AlOx substrate. The actuator is attached to a channel block withchannels at the same resolution as the piezo elements. With a resolution of 75channels per inch the reasonable channel width bch varies between 170 µm and270 µm. The stiffness of a 25 µm tantalum foil, which covers a 220 µm widechannel, is 150 MN/m for a 10 mm long channel. This foil has to be displacedover several tens of nanometers.
With the 169 µm wide piezo elements supported by a substrate, the reactionforce of the substrate will be guided to the non-actuated elements. The channelsthat are not actuated will deform too, as shown in figure 2.7a. for a 120 µm highchannel, made in brass. This results in a direct cross-talk effect.
The resulting deformation of the neighboring channels is opposite to the de-

2.2. LOCAL CROSS-TALK 29
formation which is necessary for firing a drop. In figure 2.7a the actuation resultsin a displacement of 27 nm of the foil of the actuated channel, but the foil inthe first neighboring channels lifted over 13 nm in the opposite direction, whichmeans a cross-talk effect of almost 50%. The drop speed will be lower when aneighboring channels is actuated simultaneously. This is shown in figure 2.7b fora 270 µm wide channel. The resulting measured drop-speed of channel zero isdepicted when in turn neighboring channels are actuated. When the neighboringchannel at the right of channel zero is actuated, the drop-speed of channel zerodrops from 5 to 2.2 m/s.
A thin substrate results in an even larger cross-talk effect on the first neigh-boring channels, but the cross-talk effect is now restricted to only a few channels.The total stiffness (bending and shear) of a 1 mm thick substrate with a lengthof 10 mm over a distance of eight elements (2.7 mm), as calculated with equa-tions 2.18, is about 150 MN/m. This is of the same order as the stiffness of thefoil, which covers the channel. The stiffness of a 0.5 mm substrate is the sameover a distance of 4 elements. So the range of the direct cross-talk effect can beestimated by the balance between the stiffness of the substrate and the stiffnessof the foil. The total cross-talk effect is about the same with a thin or a thicksubstrate. Actuating all channels simultaneously would results in a complete fallout of the drop formation.
(a)
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
-5 -4 -3 -2 -1 0 1 2 3 4 5Neighbouring channel nr.
Dro
p s
pe
ed
[m
/s]
1.0 mm substrate
0.5 mm substrate
(b)
Figure 2.7: (a) Front view of the channel structure and the calculated deformationof the channel structure. The color scale light→dark is 13 nm → −27 nm, thedeformation is magnified 2000 times in the plot of the deform ed structure. Thereaction force of the substrate is guided to the neighboring elements and thisresults in an opposite deformation of the neighboring channels. (b) The measuredresulting lowering of the drop speed for a 1 mm and a 0.5 mm thick substrate. Athin substrate results in a more localized cross-talk effect.
The reaction force of the substrate has to be guided to another part of theprinthead to suppress the direct cross-talk effect. A simple way is to use thechannel spacings. With 220 µm wide channels there is enough space for doubling

30 CHAPTER 2. STRUCTURE DYNAMICS
the piezo element resolution. The number of piezo elements is doubled by reducingthe piezo element width and spacing from 169 µm to 84.5 µm. One half of thepiezo elements is used as actuators and the other half as supports against thechannel walls. This creates a force loop as already shown in figure 1.9.
The stiffness of the force loop must be much higher than the stiffness of thechannel structure, which has to be deformed. With 220 µm wide channels made ingraphite, which has an E-modulus of 14 GPa, the stiffness of the channel spacingsbecomes comparable with the stiffness of the piezo elements. This results in astiffness of the force loop of 100 MN/m. The distance between the piezo elementsand the channel spacing is 68 µm. The stiffness of a 25 µm tantalum foil isof the same order as the stiffness of force loop. The resulting lowering in dropspeed when a neighboring channel is actuated simultaneously is shown in figure2.8a. The stiffness of a 50 µm silicon foil is 200 MN/m and the stiffness of a20 µm poly-imide foil, which has an E-modulus of only 9 GPa, is 10 MN/m. Theconsequences for the lowering in the drop speed are also shown in figure 2.8a.
With a 10 µm thin polyimide foil the stiffness of the foil in the actuationdirection becomes less than 1 MN/m and the direct cross-talk effect can even beeliminated. This is shown in figure 2.8b. The actuation of piezo element resultsin 40 nm displacement of the foil of the actuated channel. The displacements inthe neighboring channels are less than 1 nm.
2
2.5
3
3.5
4
4.5
5
5.5
6
-5 -4 -3 -2 -1 0 1 2 3 4 5Neighbouring channel nr.
Dro
p s
pe
ed
[m
/s]
20 µm PI
25 µm Ta
50 µm Si
(a) (b)
Figure 2.8: (a) The resulting lowering of the drop speed with a double piezo el-ement resolution for a 50 µm silicon foil, a 25 µm tantalum foil, and a 20 µmpoly-imide foil. (b) Front view of the channel structure and the calculated defor-mation, of 220 µm wide channels in graphite, covered with a 10 µm poly-imidefoil. The color scale corresponds to a displacement range of 0 nm to 60 nm. Thedeformations are in the plot magnified 2000x. The reaction force of the substrateis guided to the channel walls and this eliminates the direct cross-talk effect.

2.2. LOCAL CROSS-TALK 31
2.2.3 Pressure-induced cross-talk
The actuation of a channel results in pressure waves with an amplitude of 1-2 baras we will see in chapter 3. These pressure waves deform the structure, too. Infigure 2.9a, the deformation is shown of 220 µm wide channels in graphite, coveredwith a 25 µm tantalum foil. A positive pressure inside the actuated channel resultsin a deformation of all channels, which is called the pressure induced cross-talkeffect.
The deformation of the channels has two main components, an elongationand a bending component. The actuator is pushed away from the channels, anaction, which is counteracted by the piezo elements, which are connected to thechannel walls. The elongation stiffness in the y-direction of this force loop is about100 MN/m with 10 mm long channels. The elongation component of the channeldeformation results in an enlargement of all channels, thus in a lowering of thechannel pressure and the drop speed is lowered for all channels.
(a)
6.8
6.9
7
7.1
7.2
7.3
7.4
7.5
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6Neighbouring channel nr.
Dro
p s
pe
ed
[m
/s]
160 µm
120 µm
(b)
Figure 2.9: (a) Front view of the channel structure and the calculated deforma-tion, magnified 10000 times, of 220 µm wide channels in graphite covered with a25 µm tantalum foil. The pressure in the middle channel is 1 bar. The resultingdisplacement of the foil in the y-direction is about 2 nm/bar. (b) The measuredresulting lowering of the drop speed with a 10 µm poly-imide foil for a channelheight of 120 µm and 160 µm. The bending of a high channel walls in the firstneighboring channels can compensate for the elongation of the channel spacing.This results in an increase of the drop speed with 160 µm high channels.
The amount of elongation depends on the stiffness in the y-direction of thefoil between the piezo elements and the channel spacings. A 25 µm tantalum foilhas a stiffness comparable to the elongation stiffness of the piezo elements and thechannel spacings. The channel spacings and piezo elements will be deformed a lotas shown in figure 2.9a. With a 10 µm poly-imide foil, the stiffness of the foil ismuch lower. The pressure waves will deform mainly the foil of the channel itself.The resulting lowering of the drop speed is only 0.1− 0.2 m/s, as shown in figure

32 CHAPTER 2. STRUCTURE DYNAMICS
2.9b.
The deformation of the thin flexible poly-imide foil is large and this results ina very compliant channel cross-section. For the actuated channels the complianceof the channel has a large impact on the channel acoustics as we will see in chapter3. The efficiency will be reduced and the effective speed of sound in the ink willbe much lower.
For the pressure induced cross-talk effect the bending stiffness in the x-directionof the channel wall is important too. The bending stiffness in the x-direction ofthe piezo elements is negligible. For a channel spacing of 120x120 µm the bendingstiffness is about 70 MN/m. This bending component reduces the cross-sectionof the first neighboring channel and can compensate the effect of the elongationdeformation component as shown in figure 2.9b for a 160 µm high channel. Thebending component has a larger effect in the first neighboring channel than theelongation component and this results in an increase of the drop speed, when thefirst neighboring channel is actuated at the same time.
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8
-10 -5 0 5 10Neighbouring channel nr.
Dro
p s
peed
[m
/s]
single
cumulative
(a)
2 5.84 4.52 7.26 7.11 4.57
5 5.38 3.86 6.6 6.6 3.91
6 5.79 4.47 7.21 7.06 4.57
7 5.94 4.57 7.32 7.16 4.62
1 5.69 4.47 7.21 7.06 4.47
6 5.64 4.42 7.16 7.01 4.22
6 5.59 4.47 7.21 7.06 4.42
1 5.49 4.32 7.11 7.01 4.11
1 5.38 4.32 7.16 7.01 4.17
6 5.59 4.37 7.26 5.59 4.42
6 5.54 4.37 7.21 7.06 4.42
6 5.38 4.17 7.06 7.01 4.27
6 5.49 4.11 7.06 7.06 4.11
1 5.38 4.17 7.01 6.96 4.06
6 5.54 4.06 7.01 5.89 4.06
1 5.54 4.01 7.01 7.06 4.01
3
4
5
6
7
8
1 21 41 61 81 101 121Channel nr
Sp
eed
[m
/s]
single channel
many channels
(b)
Figure 2.10: (a) The measured lowering of the velocity of the drop with oneneighboring channel firing simultaneously and the cumulative effect of firing morechannels simultaneously. (b) Total measured lowering of the drop speed whenall channels in an array of 128 channels are firing simultaneously. Depicted forall channels are the drop speed when only one channel is actuated (solo) andwhen all channels are actuated (many). The channels are 220 µm wide, made ingraphite and covered with a 20 µm poly-imide foil. The lowering in drop speed of0.1 − 0.5 m/s, with one neighboring channel firing at the same time, will add toa total decrease in drop speed of about 3 m/s when all channels are firing.
The lowering in drop speed will add to a total decrease in drop speed of severalm/s, when more channels are firing simultaneously. In figure 2.10a the loweringof the drop speed of a 220 µm wide channel covered with a 20 µm poly-imidefoil is shown. When only one neighboring channel is firing simultaneously thelowering in the drop speed is 0.1 − 0.5 m/s. The cumulative effect of actuating

2.3. PRINTHEAD DYNAMICS 33
more channels simultaneously leads to a lowering in the drop speed of 3 m/s. Themaximum effect is also shown in 2.10b, with all 128 channels of the array firingsimultaneously. The drop speed of the outmost channels decreases less becausethere are less neighboring channels.
The actuation of a piezo element does not only change the channel cross-sectionof the actuation channel, but also the channel cross-sections of the neighboringchannels. The dynamic deformation of the piezo element can also excite resonancesin the printhead structure. The effect of the actuation will than be spread overthe whole printhead, as will be discussed in the next section.
2.3 Printhead dynamics
To generate pressure waves in the ink channels, the speed of the deformation ofthe printhead must be on the same time scale as the channel acoustics. In chapter3 we will see that this requires a driving waveform at frequencies of several tensof kilohertz. However, the fast movement of the piezo elements can also exciteresonances in the printhead structure.
The 8 mm long ink channels are located at both sides of a channel block, seefigure 1.9. In figure 2.11, the response of a meniscus surface on the actuation ofall 128 channels at the other side of the channel block is depicted. The channelsare actuated with a sinusoidal driving waveform with an amplitude of 10% of thenominal driving amplitude. The speed of the meniscus movement in a nozzle inthe middle of printhead is measured with the laser-Doppler equipment.
17 0.23384 0.23384 0.229841 0.010306 0.012786 0.010053
17.5 0.241365 0.241712 0.23587 0.008753 0.013778 0.011593
18 0.254197 0.253829 0.24699 0.009397 0.015955 0.013112
18.5 0.270039 0.268871 0.262 0.007991 0.011835 0.007677
19 0.281543 0.281543 0.27356 0.00894 0.011223 0.011458
19.5 0.296518 0.295236 0.284803 0.013968 0.014902 0.01741
20 0.313183 0.313183 0.302116 0.01065 0.013022 0.021045
20.5 0.331264 0.331264 0.320941 0.012195 0.013867 0.025205
21 0.346375 0.344887 0.332221 0.009566 0.017638 0.029539
21.5 0.360621 0.358038 0.342408 0.015974 0.01934 0.034756
22 0.383637 0.381439 0.365845 0.01494 0.02012 0.030395
22.5 0.399423 0.398841 0.384742 0.019445 0.020527 0.03013
23 0.41824 0.420055 0.405786 0.022766 0.024326 0.03113
23.5 0.434808 0.437949 0.4243 0.023814 0.026743 0.030916
24 0.447512 0.448151 0.434184 0.027731 0.031425 0.034165
24.5 0.461234 0.455308 0.433561 0.022499 0.029492 0.030464
25 0.477446 0.465922 0.431066 0.015552 0.023064 0.031453
25.5 0.5116 0.494229 0.446213 0.016187 0.022188 0.033785
26 0.522767 0.502836 0.452687 0.029357 0.02408 0.033856
26.5 0.528812 0.505027 0.452034 0.037265 0.022937 0.028352
27 0.534933 0.513817 0.455962 0.038971 0.017912 0.022259
27.5 0.545035 0.522017 0.471301 0.035195 0.016238 0.011976
28 0.568253 0.549767 0.499946 0.021137 0.017915 0.015331
28.5 0.579828 0.56419 0.51455 0.015884 0.01566 0.023648
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 50 100 150 200 250 300 350 400
Frequency [kHz]
Men
iscu
s s
peed
[m
/s]
Figure 2.11: The meniscus speed as function of the frequency of the harmonicactuation of all 128 channels at the other side of the channel block. The meniscusspeed of nozzle 64 is measured with laser-Doppler. The actuation of many piezoelements results in resonances in the printhead structure, especially at frequenciesup to 200 kHz.
Exciting many channels at one side of the printhead influences the movement of

34 CHAPTER 2. STRUCTURE DYNAMICS
the meniscus surface of a nozzle at the other side of the channel block. Especiallyat frequencies around 35 kHz and at a frequency range between 60 kHz and180 kHz. This can only be caused by resonances in the printhead structure.
2.3.1 Modeling setup
The deformations inside the printhead cannot be measured. Therefore, the dy-namic response of the printhead structure is simulated with a 3D model of thecomplete printhead structure. A 3D CAD model of the printhead without themelting unit, the filters and the electronic driving supply, see figure 1.8, is im-ported into Ansys as basis of the finite element model. Because of the very smalland thin parts in the structure, a very fine grid would be required and the numberof grid elements would be very large. So a first simplification of the model isto strip all the small parts. It is not likely that these small parts will have anyeffect. Secondly, the meshing with the Ansys SOLID45 (standard full structuralelements) and SOLID5 (including piezo-electricity) is simplified by replacing smallround geometries with rectangular geometries.
F is the load vector and m, c and k are the structural mass, damping andstiffness matrices. The equation of motion for the displacement vector x is:
F = m x + c x + k x (2.19)
However, solving this equation in a full transient analysis with a model of thecomplete printhead would require a huge computational effort. Therefore, westart with a modal analysis and perform a mode superposition analysis to get thecomplete transient behavior.
From experience we know that the amount of damping in the printhead struc-ture is much less than the damping in the ink channels. The damping will beneglected in the modal analysis of the printhead structure. For a linear system,free vibrations will be harmonic of the form x = φ
icos(ωit), where φ
iis the shape
of the eigenmode at angular frequency ωi. The equation of motion without a loadvector, which resolves the eigenmodes, reduces for each mode to:
(−ω2i m + k)φ
i= 0 (2.20)
The mesh element sizes are maximized with the frequency range as criterion.Only modes with a frequency less than 250 kHz are expected to have an impacton the channel acoustics and the drop formation. The corresponding minimumwavelengths of the relevant modes are about 1 mm. With the criterion that atleast 10 elements are required to capture the shape of the modes, the maximumelement size becomes 100 µm. The smallest elements are necessary to describethe smallest details, e.g. the foil, which has a thickness of 25 µm.
The voltage on all electrodes is set to zero in the modal analysis. With themodal analysis all resonances in the printhead structure are identified. Now wehave to calculate which modes are excited the most. First the deformation, which

2.3. PRINTHEAD DYNAMICS 35
results from the electrical loading (the voltage applied on the piezo elements)and the mechanical loading (the constraints from the substrate and the channelblock), is translated into a pure mechanical loading. This is done, because a mode-superposition analysis is in Ansys not possible with piezo-electric elements. Thedeformation S as the sum of the mechanical and piezoelectric strain (equation2.4), is translated into an elastic stress T with:
T = s−1 S (2.21)
Only the components of the stress acting in the actuation direction on the top andthe bottom of the piezo elements have a significant contribution. These normalcomponents of the elastic stress are multiplied with the surface area to get theload vector F .
The displacement x in the printhead structure can be written as:
x =∑
i
ξiφi(2.22)
with ξi the modal coordinates, or the contribution of every eigenmode to theresulting deformation of the printhead. With the orthogonal condition:
φTjm φ
i= 0 j 6= i (2.23)
φTjk φ
i= 0 j 6= i (2.24)
and the normalization:φT
im φ
i= 1 (2.25)
The modal coordinates can be resolved in the time domain with the followingequation:
ξi + ω2i ξi = fi (2.26)
where fi is defined as:fi = φT
i· F (2.27)
After resolving the modal coordinates ξi and the eigenmodes φi, the transient
response of the printhead structure can be resolved with equation 2.22, the modesuperposition analysis.
2.3.2 Structural resonances
The modal analysis of the complete model results in about 1000 modes with fre-quencies less than 250 kHz. To reduce the calculation time, the printhead is madesymmetric with respect to the xz- and yz-plane in the middle of the head. Thisrequires only some minor changes in small exterior parts of the printhead body,which will not affect the dynamic behavior. Modal analysis with the completemodel show that all modes can be described with a 1/4 model with symmetricand anti-symmetric boundary conditions on the xz- and yz-planes in the middle

36 CHAPTER 2. STRUCTURE DYNAMICS
of the head. Four analyses with a 1/4 model take much less CPU time than asingle analysis with a complete model.
The modes with the lowest resonance frequency are the bending modes aroundthe x- and z-axis of the complete printhead at frequencies of 2 − 6 kHz. Thebending around the z-axis is shown in figure 2.12a. When actuating all channelsthe maximum displacement with this mode is 1 nm.
(a) (b)
Figure 2.12: (a) The bending of the printhead around the z-axis in the middleof the printhead. The upper-left quarter of the printhead is shown (the completeprinthead model is visible in figure 2.14). The frequency of this mode is 6 kHz andthe color range (light → dark) indicates the displacement of 0 → 1 nm when allchannels are actuated. (b) The participation of the free bending of the substrateat 33 kHz has a maximum displacement of 77 nm.
The mode with the largest amplitude of the participation is the free bendingof the substrate. The substrate is 4 mm longer than the piezo elements to facil-itate the electric connection. The base mode of the free bending resonance hasa frequency of 33 kHz and is shown in figure 2.12b. Higher harmonics of thismode can be found at 40, 52, 69 and 93 kHz. The free bending of the substrate isexcited very strongly because this mode is not hindered by any other parts of theprinthead structure. The maximum displacement with the base mode at 33 kHzwhen actuating all channels is 77 nm.
At frequencies around 100 kHz a range of bending modes can be found. Theshape of the base mode at 60 kHz is shown in figure 2.13a. Higher order modesof this resonance have frequencies of 60 − 150kHz and amplitudes ranging froma few nanometers up to almost twenty nanometers. Especially the modes around100 kHz are strongly excited.
These modes are excited because of the shape of the actuation, see figure2.13b. The piezo elements not only contract in the y-direction because of thed33 mode, but also tend to elongate in the x- and z-directions because of thed13 mode. Without a substrate, this elongation would become in the z-directionabout 100 nm. With a 1 mm substrate of AlOx this elongation is now restricted

2.3. PRINTHEAD DYNAMICS 37
(a) (b)
Figure 2.13: (a) The bending of the actuator at a frequencies 60 kHz. The bendingmodes of the actuator cover a frequency range of 60 − 150 kHz. The modes areexcited well because of the shape of the actuation. (b) The shape of the actuationin the yz-plane. The 4 mm long extension of the substrate and the reservoir atthe right are deleted to make the bimorph shape of the actuation clearly visible.
to 30 nm. This reduces the effective dielectric constant as described in section2.1.2. Another effect is that the whole structure bends, which is the bimorph effect.This effect is used in other printhead designs as the primary actuation mode [134],but in our case this effect is hindering the actuation. The y-displacement fromthe bending alone is 12 nm, reducing the actuation displacement from 44 nm to32 nm, a reduction of almost 30 %.
Furthermore, because of the bimorph shape of the actuation, resonances witha bending component of the substrate are excited very effectively when actuatingall piezo elements. When actuating only a few elements, the bimorph shape ofthe actuation and the excitation of the bending resonances diminishe and only therange of free bending modes of the substrate remains as relative strongly excitedmodes.
To calculate the transient behavior of the printhead a transient mode super-position analysis is performed. However, in Ansys a mode superposition analysisis only possible with standard structural elements. Therefore, the piezoelectricdeformation is replaced by a thermal deformation. The complete strain matrixwith the structural elements in Ansys reads:
S = s T + kP + α∆T (2.28)
and with:
α∆T = d E (2.29)
we find for the thermal expansion coefficients:
αx,z = d13/hp αy = d33/hp (2.30)

38 CHAPTER 2. STRUCTURE DYNAMICS
to get |∆T | = |V |. The temperature is imposed homogeneous on the completepiezo element and thermal conductivity is set to zero. The only difference withthe real ferroelectric case is that the d15 shear mode is lacking and that there isno coupling as described by equation 2.5. Modal analysis with the two cases showthat the differences are very small. The maximum deviations remain within 2-5%amplitude variations and a maximum shift in frequency of 0.3 kHz.
(a) (b)
Figure 2.14: (a) The free bending of the substrate with a maximum displacementof 77 nm dominates the deformation of the printhead. The maximum deformationis magnified 5000 times in the drawing. Depicted are the channel block withreservoir and actuator with jetting direction towards the lower left corner. (b)The measured displacement of the substrate as response of a small sinusoidalactuation at 33 kHz in a 12x32 mm2 area in the xy-plane, which covers about3/4 of the substrate surface. The measured displacement pattern matches withthe calculated shape of the free bending resonance of the substrate at 33 kHz.
The deformation of the printhead at 16 µs after the start of the actuation isshown in figure 2.14. The free bending of the substrate dominates the picture ofthe transient deformation of the complete printhead.
The displacement of an outer surface can also be measured with speckle-interferometry. The measured displacement of the outer substrate surface is shownin figure 2.14b for an area of 25x32 mm2, which covers about the half of the totalsubstrate. The actuation in this measurement is done with a small sinusoidal sig-nal at all piezo elements with a frequency of 33 kHz, the resonance frequency ofthe free bending mode. The shape of this mode is clearly visible in the measureddisplacement of the substrate surface.
The measurement of the influence of the printhead resonances on the meniscusmovement shows the largest effects at frequencies of 60 − 150 kHz, figure 2.11.Most likely the bending modes of the actuator are causing the meniscus movement.

2.4. CONCLUDING REMARKS 39
We need to model the acoustic pressure waves inside the ink channels to confirmthis.
2.4 Concluding remarks
In this chapter, we have seen that with a piezoelectric bump mode actuator de-sign an efficient transformation of electric potential to mechanical deformations ispossible. Mechanical constraints result from the channel structure and the sub-strate. The channels must be deformed to generate the pressure waves, which haveto drive the drop formation process. The substrate provides the reaction force.The mechanical constraints result in a complicated deformation pattern with lo-cal cross-talk as negative consequence. Doubling the number of piezo elementsreduces the local cross-talk. The extra piezo elements can guide the reaction forceto the channel walls. When actuating many channels simultaneously, resonancesin the printhead structure can be excited. These resonances can have an influenceon the printhead performance. To resolve the possible influence of local cross-talkand printhead resonances on the functional behavior of the printhead, the acous-tics in the ink channels must be taken into account. The channel acoustics are thesubject of the next chapter.

40 CHAPTER 2. STRUCTURE DYNAMICS

Chapter 3
Channel acoustics
In this chapter the pressure waves inside in the ink channels are discussed. Theacoustic properties of the ink channels play a central role in the printhead opera-tion. The dynamics of the printhead structure are coupled through the acousticsto the drop formation process in the nozzle. The derivation of the governing equa-tions of the channel acoustics is given and the resulting frequency characteristicsand the application of the traveling wave principle is presented. The interfacewith the nozzle, treated here as a boundary condition, is the starting point of thenext chapter on drop formation. In this chapter the required pressure, the acousticcoupling and the resulting drop size and drop speed of the printhead are presented.The coupling with local cross-talk effects and printhead resonances is described,i.e. the interaction with the printhead structure. Other cross-talk effect describedin this chapter are restricted to the ink domain, i.e. acoustic cross-talk, refill andresidual vibrations.
3.1 Narrow channel theory
3.1.1 Governing equations
The Navier-Stokes equation of motion and the continuity equation are the startingpoint for the derivation of the narrow channel equations. The derivation is similarto the derivation of the narrow gap equations [150], which was originally developedfor rigid rectangular plates [9], but now extended for acoustic domains restrictedin two directions [10]. Instead of using the more general solutions of the referencesfor the specific problem given by the inkjet channel configuration, the underlyingequations can also be simplified using the specific geometry constraints of thechannel in the printhead.
The continuity equation results from the balance between the change in massand the flux of mass in a control volume:
∂ρ
∂t+ ∇ · (ρu) = 0 (3.1)
41

42 CHAPTER 3. CHANNEL ACOUSTICS
with ρ the density and u the velocity vector.The Navier-Stokes equation is the continuum version of Newton’s second law,
with on the left side the inertial acceleration terms (unsteady acceleration andconvective acceleration) and on the right side the external forces and internalforces:
ρ
(
∂u
∂t+ u · ∇u
)
= f + ∇ · T (3.2)
with f the external forces and T the stress tensor. Without any other externalforces only gravity remains. The diameter d of the channel is about 100 µm. TheBond number, expressing the balance of gravity and capillary effects, is very small:
Bo =g∆ρd2
γ= 3 · 10−3 (3.3)
with the difference in density between the ink and air ∆ρ ≈ 1000 kg/m3 andthe surface tension γ ≈ 30 mN/m. This means that gravity is negligible withrespect to the surface tension forces. The Galileo number, expressing the balanceof gravity and viscous effects, is small, too:
Ga =gd3ρ2
η2= 9 · 10−2 (3.4)
with the viscosity η ≈ 10mPa.s. This means that gravity is also small with respectto viscous forces. Finally, the Froude number, expressing the balance of inertiaand gravity, is large:
Fr =u√gd
= 30 (3.5)
even with an ink speed u ≈ 1 m/s in a 100 µm cross-section. This means thatgravity is also negligible with respect to inertia. So for the channel acoustics wecan neglect gravity.
For the ink properties we take isotropic homogeneous properties with a New-tonian (shear rate independent) viscosity. The internal forces in the Navier-Stokesequation can be split into a pressure term, a deformation term and a dilatationterm [7]:
ρ(∂u
∂t+ u · ∇u) = −∇p + η∇2u +
1
3η∇(∇ · u) + (
2
3η + λ)∇(∇ · u) (3.6)
with p the pressure and λ the second viscosity coefficient (ξ = 23η+λ is also referred
to as volume or bulk viscosity). The dilatational term can be neglected for flowthrough narrow channels. Without mean flow and the convective accelerationplaying no role [10], the equation of motion reduces to:
ρ∂u
∂t= −∇p + η∇2u +
1
3η∇(∇ · u) (3.7)
The pressure p is considered as an acoustic variation around a zero static value.With only small perturbations of the density around the mean value only the linear

3.1. NARROW CHANNEL THEORY 43
terms will be used (ρ = ρ0 + ∆ρ, and ∆ρ ≪ ρ0)). With the adiabatic modulus ofa fluid ρc2, the linearized approach with small perturbations of the density resultsin:
p = (ρ0 + ∆ρ)c20
∆V
V0= ρ0
∆V
V0c20 = ρc2
0 (3.8)
With a channel cross-section much smaller than the length of the channels, theflow components perpendicular to the channel direction are very small and can beneglected. The equation of motion reduces to one component of the velocity uz inthe z-direction, which is taken along the channel [150]:
ρ0∂uz
∂t= −∂p
∂z+ η
(
∂2uz
∂x2+
∂2uz
∂y2
)
(3.9)
With only a significant pressure change in the channel direction (p = p(z)), thecontinuity equation reduces to:
∂p
∂t+ ρ0c
20
(
∂ux
∂x+
∂uy
∂y+
∂uz
∂z
)
= 0 (3.10)
Substituting harmonic perturbations for u and p:
u = ueiωt p = peiωt (3.11)
we obtain two differential equations in the frequency domain. From the conserva-tion of momentum we find:
iωρ0uz = −∂p
∂z+ η
(
∂2uz
∂x2+
∂2uz
∂y2
)
(3.12)
From the conservation of mass we get:
iωp + ρ0c2o
(
∂ux
∂x+
∂uy
∂y+
∂uz
∂z
)
= 0 (3.13)
Now we write the components of the velocity in the z-direction as:
uz = −∂p(z)
∂zH(x, y) (3.14)
with H(x, y) describing the shape of the velocity profile in the channel cross-section. After substitution of equation 3.14 in equation 3.12, we get a partialdifferential equation (PDE) for the velocity profile:
iωρ0H(x, y) − η
(
∂2H(x, y)
∂x2+
∂2H(x, y)
∂y2
)
= 1 (3.15)
Now we define a function Bch as the integral of the velocity profile over the channelcross-section Ach:
Bch =iωρ0
Ach
∫
Ach
H(x, y)dAch (3.16)

44 CHAPTER 3. CHANNEL ACOUSTICS
and integrate equation 3.13 over the channel cross-section to get the narrow chan-nel equation for the pressure [10]:
Bch∂2p
∂z2+
ω2
c20
p = −ρ0ω2 ∆A
A0(3.17)
The solution of Bch for rectangular cross-sections in the frequency domain is [10]:
Bch =iωρ0
η
∞∑
n=1,3,...
8
(nπk)2
(
2(1 − cosh(kh0))
kh0 sinh(kh0)+ 1
)
(3.18)
with
k2 =
(
iωρo
η+ (
nπ
b0)2)
(3.19)
and h0 the channel height and b0 the channel width.
3.1.2 Frequency characteristics
The narrow channel equations 3.17-3.19 are used for the actuation principle, de-scribed in figure 1.10. Therefore the channel cross-sections are transformed torectangular cross-sections with the same area A and contour length C. The ef-fective channel height h0 and channel width b0 in the hypothetical rectangularcross-section geometry can be calculated as:
h0 =1
4
(
C −√
C2 − 16A)
b0 =1
4
(
C +√
C2 − 16A)
(3.20)
with a square cross-section as the geometry with the smallest contour length.
Figure 3.1: Side view on the yz-plane in the middle of an ink channel. (1) Thenozzle, (2) the 1 mm long connection channel, (3) the 8 mm long pressure channel,(4) the supply channel, and (5) the reservoir. The nozzle, connection channel andthe last part of the pressure channel are shown in more detail in figure 3.2.
The geometry of the ink channel has not only different shapes of the cross-section but also slanting channel section and corners at various angles. In figure3.1 the complete ink domain in the reservoir and channel block is shown. These

3.1. NARROW CHANNEL THEORY 45
geometric variations cannot be modeled with the one dimensional narrow channelequations.
Therefore, acoustic calculations are done with a 3D finite element model ofthe ink domain in Ansys. The ink domain is modeled with FLUID80 elements.These elements are standard structural elements, extended with an extra equationto incorporate viscous stresses. The cross-sections are made rectangular too. Themesh resolution is adapted to the velocity profile as predicted by the shear wavenumber [10] to keep the CPU time as low as possible.
By using a symmetry boundary condition at the middle of the channel in theyz-plane, only half of the channel geometry has to be modeled. The other yz-wallis taken as a rigid boundary. To minimize the CPU time, only the nozzle, theconnection channel, and the pressure channel segments are taken of one channel,with zero pressure as boundary condition on the external xy-planes. That are, themeniscus in the nozzle and the start of the supply channel at the other side. Onthe upper xz-plane of the pressure channel spring elements are used to add thechannel compliance as calculated with a 2D model in the xy-plane, section 2.1.2.The lower xz-plane moves in accordance with the deformation, which results fromthe actuation, section 2.2.3.
The acoustic analysis with the 3D ink domain model in Ansys show that dif-ferent shapes of the 1 mm long connection channel (as shown in figure 3.2) onlyhave influence at frequencies above 1 MHz. These high frequencies can be ne-glected regarding the drop formation process. All printheads have a 1 mm longconnection channel.
(a) (b) (c)
Figure 3.2: The connection channel geometries as tested with the 3D ink domainmodel in Ansys. The last part of the pressure channel, the 1 mm long connectionchannel and the nozzle at the lower left corner are shown. (a) in line, (b) themostly used connection channel at an angle of 45 degrees, which is also shown aspart of the total printhead model in figure 3.1, and (c) a connection channel withcorners. The different shapes have no significant effect on the channel acoustics.
The change in channel cross-section results from the actuation with an electricvoltage V applied on the piezo element, see section 2.1.2, and from the pressureamplitude p in the channel, see section 2.2.3. The actuation efficiency α and the

46 CHAPTER 3. CHANNEL ACOUSTICS
compliance β of the channel cross-section are defined as:
∆A
A0= αV + βp (3.21)
From now on the symbol p is used for the pressure amplitude in the frequencydomain. The narrow-gap equation 3.17 becomes:
Bch∂2p
∂z2+
(
ω2
c20
+ ρ0ω2β
)
p = −ρ0ω2αV (3.22)
At the large reservoir and in the small nozzle, with the meniscus as free surface,the change in pressure is zero (p = 0). The response of the meniscus movementresulting from a small sinusoidal actuation of the piezo element, 10 % of thenominal driving amplitude, is shown in figure 3.3.
f(kHz) na ijking gemidd. sgn. 274sim 170sim
15 0.196636 0.166096 0.012783 0.012376
eq frcs009 frcs013.asc 15.5 0.206804 0.172639 0.031915 0.030541
2 0.001826 0.001768 16 0.214984 0.178193 0.052549 0.049944
4 0.004559 0.004363 16.5 0.220621 0.184707 0.074053 0.070048
6 0.007507 0.007135 17 0.23101 0.194017 0.096373 0.090853
8 0.010579 0.010007 17.5 0.236736 0.199922 0.119706 0.112574
10 0.013768 0.012979 18 0.24507 0.20547 0.144457 0.1356
12 0.017101 0.016082 18.5 0.255499 0.213947 0.171082 0.160352
14 0.020637 0.019371 19 0.264139 0.220211 0.200059 0.187269
16 0.02444 0.022907 19.5 0.272598 0.229874 0.231928 0.21685
18 0.02858 0.026753 20 0.281355 0.23625 0.267327 0.249687
20 0.033133 0.030979 20.5 0.291673 0.244214 0.307038 0.286504
22 0.03819 0.03567 21 0.302789 0.252047 0.352062 0.328245
24 0.043863 0.040929 21.5 0.312102 0.262817 0.403745 0.376213
26 0.050295 0.046892 22 0.321207 0.270089 0.463867 0.432158
28 0.057678 0.053745 22.5 0.334417 0.280349 0.534801 0.49848
30 0.066267 0.061737 23 0.345203 0.29064 0.619767 0.57853
32 0.0764 0.071211 23.5 0.357297 0.300037 0.723163 0.677075
34 0.088538 0.082647 24 0.368794 0.311459 0.850976 0.80094
36 0.103309 0.096725 24.5 0.380095 0.321925 1.011052 0.959651
38 0.121568 0.11442 25 0.394061 0.333711 1.212365 1.164772
0.0
0.5
1.0
1.5
2.0
2.5
0 50 100 150 200 250 300 350 400
Frequency [kHz]
Me
n.m
ov
em
en
t [m
/s]
Narrow channel
Laser Doppler
,
Figure 3.3: The maximum meniscus speed as function of the frequency of a smallsinusoidal actuation with an amplitude of 10 % of the nominal driving ampli-tude. The pressure channel length is 6.7 mm and the nozzle has a diameter of35 µm nozzle in a 100 µm thick electroformed nickel nozzle plate. The calcu-lated results agree well with the experimental results, which are measured withthe laser-Doppler equipment.
The strongest peak in figure 3.3 is the main channel resonance between thenozzle and the reservoir at a frequency of f = 54 kHz. This frequency scaleswith the total channel length (pressure and connection channel segments), withthe nozzle as one boundary and the reservoir with supply channel as the otherboundary. In figure 3.4a the variation of the main frequency with pressure channellength is shown.
At low frequencies the ink domain acts more as a 12λ resonator. The pressure
waves are reflected with a p=0 boundary condition at the meniscus surface in thenozzle and at the large reservoir with supply channel. The first mode has one

3.1. NARROW CHANNEL THEORY 47
0
10
20
30
40
50
60
70
80
0 5 10 15 20Channel length [mm]
Fre
qu
en
cy
[k
Hz]
narrow channel
measured
(a)
0
50
100
150
200
250
300
350
1 3 5 7Resonance number
Fre
qu
en
cy [
kH
z]
narrow channel
1/2 lambda
1/4 lambda
(b)
Figure 3.4: (a) The calculated and the measured resonance frequency of the firstmode as function of the length of the pressure channel. (b) The frequencies of thefirst 7 modes of a 8 mm long pressure channel and the 1
2λ assumption startingwith the first mode and the 1
4λ assumption ending with the seventh mode.
large pressure peak (anti-node) over the whole length of the pressure channel andthe connection channel. This shape fits very well with the shape of the actuation.The major part of the ink domain, the pressure channel, is actuated over the fulllength.
The second mode however has two pressure anti-nodes over the whole lengthof the pressure and connection channel. With an actuation over the full lengthof the pressure channel the positive and negative anti-nodes will cancel out. Thesecond harmonic is therefore hardly excited. At higher harmonics the wavelengthwill be more comparable with the length of the connection channel and the wholepicture becomes more complicated. Another important effect plays a large role athigh frequencies, that is the increase of the acoustic impedance of the nozzle. Theacoustic impedance of the nozzle at the end of the channel Z(ω) is defined as theratio of the pressure at the entrance of the nozzle pn over the average speed uch
in the channel:
Z(ω) =pn
uch(3.23)
With the continuity equation:
uchAch = unAn (3.24)
and with equations 3.14 and 3.16:
u =1
A
∫
Au = − 1
A
∂p
∂z
∫
AH(x, y)dA =
iB
ωρ0
∂P
∂z(3.25)

48 CHAPTER 3. CHANNEL ACOUSTICS
we get after the linearization of the pressure gradient over the length of the nozzle,∂P∂z = pn
Ln, for the acoustic impedance of the nozzle:
Z(ω) = −Ach
An
ωρ0Ln
iBn(3.26)
So at higher frequencies the nozzle will act more and more as a closed boundarybecause of the increasing acoustic impedance. The higher modes shift towards a14λ resonator. This is shown in figure 3.4b for the first seven modes of a 8 mmlong pressure channel and a straight nozzle with a diameter of 32 µm and a lengthof 36 µm.
With the specific impedance as a criterion, various nozzle shapes can be de-scribed with straight nozzles with the same diameter, but with a length adaptedto get the same impedance. The concave nozzle shapes in electroformed nickel,with the curvature the same as the nozzle plate thickness, the length becomes36 µm for nozzles in a 100 µm nozzle plate and 21 µm for nozzles in a 50 µmnozzle plate.
The anti-resonances at 125 kHz and 250 kHz in figure 3.3 are a result of adestructive interference. The whole actuator can be considered as a range of pointsources. When the wavelength of the pressure wave is the same as the lengthof the actuator, these sources can be grouped as pairs at 1
2λ distance of eachother. Pressure waves from these pairs of sources will have a phase difference ofa half oscillation period at positions outside the actuation region. The pressurewaves will cancel each other out and no pressure waves are transmitted into thechannel outside the actuation region. So no meniscus movement is visible at thesefrequencies after a few cycles, when the initial effects are faded away because ofdamping.
3.1.3 Traveling wave principle
The most efficient and direct way to generate a high pressure amplitude at the en-trance of the nozzle is not to use the channel resonance, described in the previoussection, but to amplify the first negative pressure wave after this wave is reflectedat the reservoir boundary of the pressure channel. This principle is already de-scribed in section 1.3.1 and illustrated in figure 1.10. For maximum efficiency, thewidth of a trapezoidal shaped driving waveform must be tuned to the travel timeof the pressure wave from the center of the active piezo length to the end of thepressure channel at the reservoir side and back. The most efficient pulse width asfunction of the channel length is shown in figure 3.5.
A consequence of the compliance β of the channel cross-section is the reductionof the effective speed of sound ceff , which follows directly from equation 3.22:
ceff = c√
Bch =√
Bch
√
c20
1 + ρc20β
(3.27)

3.1. NARROW CHANNEL THEORY 49
0
2
4
6
8
10
12
14
16
18
20
0 5 10 15 20Channel length [mm]
Pu
lse
wid
th [
µs
]
narrow channel
measured
(a)
90
95
100
105
110
115
120
125
130
5 6 7 8 9 10 11 12 13 14Pulse width [µs]
Dri
vin
g v
olt
ag
e [
rel]
V 7 m/s
(b)
Figure 3.5: (a) The most efficient driving pulse width as function of the lengthof the pressure channel. (b) The measured driving voltage to get a drop speed of7 m/s with an 8 mm long pressure channel as function of the pulse width, showingthe most efficient pulse width.
The Bch term has only a very small effect on the effective speed of sound, soonly the channel compliance has to be taken into account [46]. This results withβ ≈ 7.5 ·10−10m2/N for channels of 220x120 µm in graphite covered with a 25 µmpoly-imide foil in a typical effective speed of sound inside the channel of 850 m/sinstead of 1250 m/s (the speed of sound of the ink itself). The effective speed ofsound can also be derived from figure 3.5. The optimal pulse width is 9.5 µs witha 8 mm long channel, which results with ceff = Lch/ttravel in an effective speedof sound of 842 m/s. Also from the minimum in the frequency characteristics asshown in figure 3.3 we can derive the effective speed of sound. With a minimumat 120 kHz with a 6.7 mm channel, which corresponds to the wavelength, we getwith c = f · λ a speed of sound of 838 m/s.
To get the acoustic pressure in the time domain, the frequency characteris-tics are multiplied with the actuation driving waveform in the frequency domain.Then, with inverse Fourier transform we get the pressures inside the channel asfunction of time, figure 3.6a. Direct measurements of this pressure are not pos-sible. Only with the Paint measurement, see section 1.3.2, we can get a measureof the pressure inside the ink channel after the voltage of the driving waveformis zero again. Using the piezo element as a sensor we get a charge proportionalto the total force on the piezo element, equation 1.7. The total force is generatedby the pressure inside the channel integrated over the area of the piezo element.This charge is measured as an electrical current through the measuring circuit asshown in figure 3.6b.
The differences between the measurement and the simulation of the Paintsignal are mainly in the high frequency range i.e. f > 200 kHz. In the narrow

50 CHAPTER 3. CHANNEL ACOUSTICS
(a)
-0.0321 -0.0309 5.18E-05 492594 51.3
-0.0305 -0.0261 5.27E-05 461771 52.2
-0.0245 -0.0205 5.37E-05 415227 53.2
-0.0193 -0.0189 5.47E-05 350183 54.2
-0.0189 -0.0153 5.57E-05 252599 55.2
-0.0165 -0.0157 5.66E-05 130696 56.2
-0.0181 -0.0145 5.76E-05 13641.8 57.1
-0.0161 -0.0137 5.86E-05 -88482.9 58.1
-0.0165 -0.0117 5.96E-05 -187218 59.1
-0.0165 -0.0133 6.05E-05 -274349 60.1
-0.0153 -0.0097 6.15E-05 -345594 61.0
-0.0133 -0.0093 6.25E-05 -392995 62.0
-0.0089 -0.0045 6.35E-05 -393499 63.0
-0.0061 -0.0001 6.45E-05 -348155 64.0
-0.0037 -0.0001 6.54E-05 -279882 64.9
-0.0025 0.0011 6.64E-05 -205046 65.9
-0.0009 0.0003 6.74E-05 -119552 66.9
-0.0013 0.0011 6.84E-05 -23737 67.9
0.0007 0.0003 6.93E-05 67763.3 68.8
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
25 35 45 55
Time [µs]
Pa
int
sig
na
l [m
A]
measurement
narrow channel
(b)
Figure 3.6: (a) The calculated pressure inside the ink channel as function of timeand position. The reservoir is located at the lower right corner and the nozzleat the upper left corner. (b) Measured and calculated Paint signal. There is areasonable agreement between the calculation and the Paint measurement.
channel model a constant compliance of the channel cross-section is assumed.This is only valid when the deformation of the channel structure by the actuationand the acoustics is small and slower than the dynamic effects of the printheadstructure itself. However, in section 2.3, we have seen that this is not always thecase and that dynamic effects of the printhead structure can influence the acousticsinside the ink channels.
The most important effect on single channel level is the limited deformationspeed in the printhead structure. With a speed of sound of typically 1000-5000m/s for most solids it will take 0.1-1 µs to deform the channel structure with theactuation force loop over the whole cross-sectional area of 300x2000 µm. In figure3.7a the calculated dynamic change of the channel cross-section is shown. At t=0an electric voltage step is applied to the piezo element. The calculations are donewith a 2D Ansys model in the xy-plane of the channel structure, see section 2.1.2.
The change in channel cross-section dA can be described with an exponentialrelaxation:
dA =(
1 − e−t/τ)
dAstat (3.28)
with a relaxation time τ of 0.15 µs for the best fit. The high frequency oscillationsare neglected. With the 3D Ansys models of the ink domain, it is also possibleto apply a relaxation time as boundary condition by using COMBIN14 elementsat the upper channel wall. The upper channel wall is then fixed via parallelspring and dashpot elements, by which the compliance and the relaxation canbe defined. The effect of a relaxation time on the pressure at the entrance of the

3.2. NOZZLE BOUNDARY 51
(a) (b)
Figure 3.7: (a) The calculated change of the channel cross-section after an electricvoltage is applied at t=0. This is calculated with a 2D Ansys model in the xy-planeof the printhead structure. (b) The impact of a relaxation time on the calculatedpressure at the entrance of the nozzle. This is calculated with the 3D Ansys modelof the ink domain. A longer relaxation time results in lower pressure amplitudesand more damping.
nozzle is shown in figure 3.7b. The most important effect is the increased damping.This also explains the major part of the differences between the measured and thecalculated frequency characteristics of the meniscus movement as shown in figure3.3. The meniscus movement is driven by the pressure at the entrance of thenozzle.
3.2 Nozzle boundary
3.2.1 Nozzle pressure
Ink movement in the nozzle is driven through the pressure at the entrance of thenozzle. The required pressure for firing a drop with a speed of 7 m/s from anozzle with a diameter of 32 µm in a 100 µm electroformed nickel nozzle plate isshown in figure 3.8a. In this case the piezo element is charged during 5 µs, whichenlarges the channel cross-section and a negative pressure is generated. Thisnegative pressure wave also reaches the nozzle. After 10 µs the charge from thepiezo element is removed, which reduces the channel cross-section to its originalsize. Meanwhile the negative pressure wave is reflected at the reservoir and isbecame a positive pressure wave. This pressure wave will be amplified and a largepositive pressure peak is generated, which reaches the nozzle after 10-15 µs. Thislarge positive pressure peak will drive the ink through the nozzle. The resulting

52 CHAPTER 3. CHANNEL ACOUSTICS
meniscus speed and position are shown in figure 3.6b.
6 -62159.8 7.81E-06 -3.29257 7.8125 -0.621598
6 -55144 8.79E-06 -3.43654 8.78906 -0.55144
6 -55286.3 9.77E-06 -3.54911 9.76562 -0.552863
5 -26943.3 1.07E-05 -3.49013 10.7422 -0.269433
5 21536.9 1.17E-05 -2.80587 11.7188 0.215369
5 66709 1.27E-05 -1.58614 12.6953 0.66709
5 106960 1.37E-05 -0.00609 13.6719 1.0696
5 143935 1.46E-05 1.82337 14.6484 1.43935
5 149731 1.56E-05 3.64967 15.625 1.49731
5 131042 1.66E-05 4.91468 16.6016 1.31042
5 115909 1.76E-05 5.72212 17.5781 1.15909
5 105549 1.86E-05 6.18146 18.5547 1.05549
5 94737.3 1.95E-05 6.49804 19.5313 0.947373
5 56367.5 2.05E-05 6.34677 20.5078 0.563675
5 21426.3 2.15E-05 5.69306 21.4844 0.214263
5 -16598.2 2.25E-05 4.63769 22.4609 -0.165982
5 -51089.9 2.34E-05 3.28233 23.4375 -0.510899
5 -79984.3 2.44E-05 1.69104 24.4141 -0.799843-1.5
-1
-0.5
0
0.5
1
1.5
2
0 20 40 60 80 100
Time [µs]
Pre
ssu
re [
bar]
nozzle pressure
actuation pulse
(a)
5 -76512.7 2.54E-05 0.281871 25.3906 -0.765127
5 -75931.4 2.64E-05 -0.793698 26.3672 -0.759314
5 -69767.9 2.73E-05 -1.62915 27.3438 -0.697679
5 -70550.8 2.83E-05 -2.27931 28.3203 -0.705508
5 -56738.4 2.93E-05 -2.73891 29.2969 -0.567384
5 -47530.2 3.03E-05 -2.90448 30.2734 -0.475302
5 -43921.8 3.13E-05 -3.00454 31.25 -0.439218
5 -37219.7 3.22E-05 -3.01374 32.2266 -0.372197
5 -25588.4 3.32E-05 -2.89344 33.2031 -0.255884
5 -23248.5 3.42E-05 -2.68829 34.1797 -0.232485
5 -15299.3 3.52E-05 -2.50282 35.1562 -0.152993
5 2274.3 3.61E-05 -2.11677 36.1328 0.022743
5 15883.9 3.71E-05 -1.5923 37.1094 0.158839
5 24332.1 3.81E-05 -0.994708 38.0859 0.243321
5 26505.4 3.91E-05 -0.475952 39.0625 0.265054
5 36149.1 4.00E-05 0.048103 40.0391 0.361491
5 42058.7 4.10E-05 0.593004 41.0156 0.420587
5 43946.1 4.20E-05 1.09436 41.9922 0.439461
5 43383.5 4.30E-05 1.49438 42.9687 0.433835
-6
-4
-2
0
2
4
6
8
0 50 100
Time [µs]
Men
iscu
s s
peed
[m
s]
-30
-20
-10
0
10
20
30
40
Men
iscu
s p
osit
ion
[µ
m]
meniscusspeedmeniscusposition
(b)
Figure 3.8: The calculated pressure at the entrance of the nozzle. The shape ofthe driving waveform is depicted with the dotted line. (b) The resulting averagemeniscus speed and position. The channel length is 8 mm and the nozzle diameteris 32 µm. Actuation is done with a 10 µs wide trapezoidal pulse with a rise timeof 5 µs.
To fire droplets, the average meniscus speed u must be of the same order asthe final drop speed, typically 5-10 m/s. To generate a drop, the pressure at theentrance of the nozzle has to overcome steady and unsteady inertia, the viscousforces and forces resulting from the surface tension of the ink. An estimation forthe required pressure to overcome inertia is given by the Bernoulli pressure pb:
pb =1
2ρu2 (3.29)
With the density of the ink ρ = 1000 kg/m−3, the Bernoulli pressure becomesabout 0.25 bar. The ink accelerates in 5 µs (the rise time of the driving waveform)to the required speed. The unsteady pressure pi (Newton’s second law):
pi = ρLndu
dt(3.30)
generated during this pressure is about 0.5 bar. The surface tension of the ink γgenerates a capillary pressure pc:
pc =2γcosθ
Rn(3.31)
with cosθ equal to 1 at the nozzle exit with sharp edges. This gives a pressureof 0.05 bar. The viscous resistance can be estimated assuming a Poiseuille flow

3.2. NOZZLE BOUNDARY 53
profile, which results is a pressure term of:
pv =8πηLnu
An(3.32)
With the viscosity of the ink η = 10 mPa.s, this pressure becomes 0.7 bar. Thetotal nozzle pressure pn = pb+pi+pc+pv is roughly 1.5 bar, in agreement with thepressure peak in figure 3.8, which is calculated with the narrow channel equations.
The shape of the pressure peak is affected by the acoustic coupling. For anapproximation we start with an incoming pressure wave p+ with a constant am-plitude. At the nozzle entrance, a nozzle pressure pn (the transmitted pressurewave), and a reflected pressure wave p− are generated:
pn = p+ + p− = ρc(u+ − u−) (3.33)
where we used the plane wave relation between pressure and speed, p = ρcu. Withuch = u+ + u− and the continuity equation 3.24 we get for the nozzle pressure:
pn = ρc
(
2u+ − unAn
Ach
)
= ρLn∂un
∂t(3.34)
The last term is Newton’s second law describing the acceleration of the ink in thenozzle. The solution for the nozzle pressure reads:
pn = 2p+e−t/τ τ =Ln
c
Ach
An(3.35)
This result indicates that at t=0 the incoming pressure wave will be reflectedas at a closed boundary because the ink in the nozzle is at rest. The nozzlepressure starts to move the ink, which results in less reflection. The nozzle pressuredecreases with a characteristic time τ to zero. For a straight nozzle with a diameterof 32 µm and a length of 36 µm, the acoustic equivalent of the nozzle used in figure3.8, the characteristic time is about 1 µs.
For nozzles with a small diameter, the characteristic time increases. The shapeof the nozzle pressure peak changes as shown in figure 3.9a. Here the pressurepeak at the beginning of nozzles in a 50 µm electroformed nickel nozzle plate isshown. The nozzle diameter varies from 19 µm to 38 µm. For nozzles with adiameter of 20 µm, the shape of the pressure peak becomes almost the same asthe shape of the amplified pressure wave, which results directly from the shapeof the driving waveform. The nozzle acts more as a closed boundary. For nozzleswith a diameter of 30 µm, the pressure is the same during the first microsecond,but decreases then exponentially to zero.
For a maximum efficiency in terms of required driving voltage for a givenmeniscus or drop speed, there are two important effects. First, a smaller nozzlearea will accelerate the ink movement more, according to the continuity equation3.24. This would result in a continuously decreasing driving voltage when thenozzle area becomes smaller. The second effect is the acoustic coupling. The

54 CHAPTER 3. CHANNEL ACOUSTICS
2 50 µm NP
0
67
14
45
88
87
94
35
95
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0 5 10 15 20 25 30Time [µs]
No
zzle
pre
ssu
re [
bar]
300 µm2
400 µm2
500 µm2
600 µm2
700 µm2
1100 µm2
(a) (b)
Figure 3.9: (a) The calculated pressure at the entrance of the nozzle. The nozzlearea varies from 300 µm2 to 1100 µm2 and the driving voltage is kept constant.(b) The calculated minimum acoustic pressure and the required driving voltagefor a drop speed of 7 m/s as function of the nozzle area. The measurements ofthe driving voltage are also shown. The pressure channel length is 8 mm and theactuation is done with a 10 µs wide pulse with a rise time of 5 µs. There is anoptimal nozzle area of 450 µm2.
transmission coefficient of plane waves, see also equation 1.5, is proportional tothe nozzle area for nozzles which are much smaller than the channel cross-section.This would result in a continuously increasing driving voltage when the nozzlearea becomes smaller. Both effects together result in an optimal nozzle area withrespect to the required driving voltage as shown in figure 3.9b.
The amplitudes of the acoustic pressure waves at the minimum driving voltageare also minimal. This results in the smallest negative acoustic pressure, with theoptimal nozzle area. This is important for the jetting stability, as we will see inchapter 6.
3.2.2 Drop size and speed
For an estimate of the drop size range with the current printhead design andthe traveling wave principle, we take a cylinder as the shape of the ink columntransported outside. The volume of this column is equal to the nozzle area timesthe length of the cylinder. So the nozzle area is the first parameter. The lengthof the cylinder equals the drop speed times drop formation time. So drop speedis the next parameter. Parameters for the drop formation time are the widthof the driving waveform (which is for maximum efficiency tuned to the traveltime of the acoustic wave), the nozzle shape (through its impact on the acousticimpedance) and ink properties as viscosity and surface tension. The travel

3.2. NOZZLE BOUNDARY 55
time of the acoustic wave is given by the channel length, the inlet geometryof the supply (because of the phase shift of the reflected wave, in our case a halfperiod) and the effective speed of sound inside the channel. The effective speedof sound is given by the speed of sound of the ink itself and the complianceof the channel cross-section, see equation 3.27. These parameters can be usedfor defining an empirical relationship which contains all relevant parameters. Asimilar approach can be found in [137].
A simple calculation of the drop size and speed, based on the speed of theink in the nozzle as derived with acoustic calculations, is given by Dijksman in[48]. The ink outside the nozzle is assumed to keep moving with the same speedas the ink inside the nozzle. The criterion for drop formation is that a drop isformed when the kinetic energy of the ink volume outside the nozzle becomesequal to the integral over time of the kinetic energy at the nozzle exit, minusthe surface energy of the ink outside the nozzle. The drop size is calculated asnozzle area times the integral over time of the average ink speed, which is basedon acoustic calculations. The drop speed is calculated from the resulting kineticenergy with corrections for breakup and the viscous losses to form a sphericaldrop. A comparable approach, which is based on a balance of forces, can be foundin [39]. An even simpler approach is based on a range of numerical calculationswith Flow3D as used in chapter 4 of this thesis [54]. In this reference, the drop sizeis taken as a constant fraction, typical 0.8-0.9, of the amount of ink transportedoutside the nozzle during the whole drop formation cycle.
In chapter 4 detailed numerical simulations of the drop formation process willbe presented. In this section we will compare the measurements with calculationsbased on the energy balance of Dijksman and the narrow channel model. Themeasured and the calculated drop sizes as a function of drop speed, channel lengthand nozzle area are shown in figure 3.10. The channel cross-section is 220x120 µmfor all geometries, shaped in a graphite channel-block and covered with a 25 µmpoly-imide foil. The pulse width is in all cases the most efficient pulse width.The channels are always connected via an 1 mm long connection channel witha diameter of 250 µm to a nozzle in a 50 or 100 µm electroformed nickel nozzleplate.
In figure 3.10a we see a good match between the calculations and measurementsat a drop speed of 5 m/s and a repetition rate of 2 kHz. The drop size increasesabout 3 pl when the nozzle area increases with 100 µm2. With an increase indrop speed from 5 m/s to 7 m/s the drop size increases with 25 %. The drivingvoltage varies with 10 % for each m/s change in drop speed. Measurements ata repetition rate of 10 kHz show 2 − 5 pl larger drop sizes as predicted by thecalculations. In section 3.4.1 we will see that the deviation at 10 kHz is causedby a refill effect.
The measurements at 10 kHz further show no difference between the nozzlesin a 100 µm nozzle plate and a 50 µm nozzle plate. The nozzles in the thick nozzleplate have a higher acoustic impedance. This results in a higher driving voltageto get the same drop speed, but at the same drop speed there is no effect of the

56 CHAPTER 3. CHANNEL ACOUSTICS
(a) (b)
Figure 3.10: The calculated and measured drop volumes with a repetition fre-quency of 2 kHz and 10 kHz at a drop speed of 5 m/s or 7 m/s with differentnozzle areas and channel lengths. (a) The drop volume as function of the nozzlearea in a 50 µm and a 100 µm electroformed nickel nozzle plate for a channellength of 8 mm. (b) The drop volume at a repetition rate of 2 kHz and a dropspeed of 5 m/s as function of the channel length for different nozzle areas between300 µm2 and 1120 µm2. The calculations are done with the narrow channel modeland the energy balance of the drop formation.
nozzle shape on the drop volume.
The measured drop volumes at a repetition rate of 2 kHz and a drop speedof 5 m/s are shown in the second figure 3.10b. The channel length varies from3 mm to 14 mm and the nozzle area varies from 300 − 1100 µm2. This resultsin a drop size range of 5 − 55 pl. The calculated results are only shown for anozzle area of 600 µm2. From the calculations with the narrow channel modelalso the volume displacements by the actuator are known. The correspondingactuator displacements vary from 10 pl for the smallest drop sizes to 100 pl forthe largest drop sizes. The actuator displacement is about two times the resultingdrop volume for the whole drop size range.
These calculations translate the actuation of a channel to the resulting dropsize and drop speed. The same approach can also be used to take into accountthe cross-talk effects as we will see in the next sections.
3.3 Cross-talk
3.3.1 Local cross-talk
The change in channel cross-section ∆A can be expressed as function α of theactuation voltage V and as function β of the pressure in the channel p, see section

3.3. CROSS-TALK 57
3.1.2, equation 3.21. The actuation efficiency and the channel compliance arecalculated with a 2D Ansys model in the xy-plane, see chapter 2. Not only theactuated channel is deformed but also the neighboring channels deform. Theresulting deformations of all channel cross-sections ∆Ai can be written as the sumof all contributions of the neighboring channels from the direct cross-talk effectαij, see section 2.2.2, and the pressure induced cross-talk effect βij , see section2.2.3:
∆Ai
A0=∑
j
αijVj + βijpj (3.36)
Using this expression in the narrow channel equation 3.17, we get a set of Mcoupled partial differential equations for an array of M channels. All individualchannels are divided in N segments, so we have to solve a NxM matrix of coupledpartial differential equations. The coupling between the M channels is given byequation 3.36 and the coupling between the N segments of a channel is given bypressure and flux boundary conditions.
5 -2.7343 0.456076 0.262652 0.181834 0.119699
5 -2.99262 0.357009 0.261038 0.188695 0.128546
5 -2.91111 0.216894 0.184392 0.154367 0.120756
5 -2.74035 0.122716 0.099371 0.083803 0.068228
5 -2.60714 0.07935 0.04138 0.028383 0.018981
5 -2.51641 0.065216 0.048973 0.025254 0.010616
5 -2.25541 -0.009297 0.041048 0.038621 0.032368
5 -1.88643 -0.06795 0.02038 0.026762 0.031234
5 -1.4261 -0.205931 -0.037127 -0.008315 0.007418
5 -0.907023 -0.304281 -0.115265 -0.057037 -0.016951
5 -0.403577 -0.370391 -0.164391 -0.09905 -0.052177
5 0.010288 -0.387015 -0.219171 -0.140053 -0.08139
5 0.313332 -0.388565 -0.223771 -0.167007 -0.112987
5 0.731163 -0.454495 -0.228358 -0.159864 -0.107717
5 1.22625 -0.508402 -0.262646 -0.169911 -0.101353
5 1.66792 -0.494592 -0.302469 -0.196333 -0.119187
5 1.81943 -0.37004 -0.304996 -0.225448 -0.154884
5 1.72339 -0.23628 -0.249368 -0.210594 -0.16963
-8
-6
-4
-2
0
2
4
6
8
0 50 100
Delay time [µs]
Men
iscu
s s
peed
[m
/s]
actuated channel
neighbor.channel, enhanced 10 times
(a)
0 69,067 67,919 68,349 68,911 69,360
2 69,074 68,017 68,406 68,774 69,084
4 68,939 68,893 69,144 69,258 69,455
6 69,564 70,123 69,845 70,076 69,804
8 70,090 71,239 70,523 70,229 69,999
0 70,654 71,474 71,106 70,684 70,336
2 70,307 71,286 70,683 70,658 70,090
4 70,213 70,479 70,439 70,340 70,270
6 70,356 70,099 70,457 70,288 70,141
8 69,950 69,933 70,054 70,252 69,865
0 69,899 69,716 69,841 69,967 70,076
2 69,834 69,377 69,471 69,670 69,818
4 69,760 68,825 69,187 69,618 69,430
6 69,516 69,034 69,176 69,260 69,341
8 69,371 69,006 68,935 69,415 69,352
0 69,305 69,404 69,395 69,879 69,842
2 69,896 69,922 70,296 70,070 69,890
4 70,349 70,451 70,324 70,228 70,139
5.5
6
6.5
7
7.5
8
8.5
-20 -10 0 10 20 30 40 50Delay time [µs]
Dro
p s
peed
[m
/s]
measurements
narrow channel model
(b)
Figure 3.11: (a) The calculated meniscus speed as function of time in the nozzleof the actuated channel and the neighboring channel. The meniscus speed in theneighboring channel is 10 times enhanced in the picture to show more clearly thatthis meniscus moves in the opposite direction. This results in a lower drop speedwhen both channels are actuated simultaneously. (b) Calculated and measuredeffect on drop speed of a delay time between the reference and the first neighboringchannel. The delay time has a large impact on the local cross-talk. The channellength is 8 mm and the nozzle diameter is 32 µm.
After solving this set of partial differential equations, we get the speed of themeniscus in all channels. Not only in the nozzle of the actuated channel butalso in the non-actuated neighboring channels. This is shown in figure 3.11a.The meniscus in the neighboring channel moves approximately in the opposite

58 CHAPTER 3. CHANNEL ACOUSTICS
direction of the meniscus in the actuated channel, which explains the lower dropvelocities when more channels are firing simultaneously, see figures 2.9 and 2.10.The channel cross-section of the 8 mm long pressure channel is 220x120 µm,shaped in a graphite channel-block and covered with a 25 µm poly-imide foil. Thenozzle has a diameter of 32 µm in a 50 µm electroformed nickel nozzle plate.
The meniscus speed in all channels resonates with the channel resonance fre-quency. With a time delay between the start of the actuation in neighboringchannels we get a large effect on the drop speed as shown in figure 3.11b. Witha time delay corresponding to a half period of the channel resonance, 11 µs foran 8 mm channel with a resonance frequency of 44 kHz, the meniscus movementin the neighboring channel will be in-phase with the meniscus movement in theactuated channel and even a higher drop velocity will result from the local cross-talk effect. A time delay corresponding to one fourth of a period of the channelresonance eliminates the effect of local cross-talk on drop speed. Hitachi uses thisto minimize the dot positioning errors on the paper [77]. The positioning errorsof the dots in a scanning printer concept are proportional to the differences in thespeed of the drops.
2 0.3555 0.0113 0.1695
4 0.4 0.0133 0.1995
6 0.4018 0.012 0.18
8 0.3658 0.0094 0.141
0 0.3188 0.0072 0.108
2 0.2769 0.0056 0.084
4 0.2435 0.0045 0.0675
6 0.2177 0.0038 0.057
8 0.1978 0.0032 0.048
0 0.1823 0.0028 0.042
2 0.1703 0.0025 0.0375
4 0.1609 0.0022 0.033
6 0.1536 0.002 0.03
8 0.1481 0.0018 0.027
0 0.1443 0.0017 0.0255
2 0.1418 0.0016 0.024
4 0.1408 0.0016 0.024
6 0.1411 0.0017 0.0255
0
0.1
0.2
0.3
0.4
0.5
0 100 200 300 400
Frequency [kHz]
Men
iscu
s m
ovem
en
t [m
/s]
0.2x actuated channel
first neighbor
(a)
1 1.503344 0.155841 0.101056 1.316872 0.149464
5 1.562865 0.168679 0.109072 1.363151 0.160156
2 1.588486 0.179963 0.118051 1.40096 0.171864
5 1.630905 0.192001 0.12649 1.443922 0.184149
3 1.713679 0.204551 0.134966 1.483973 0.195061
5 1.753654 0.214807 0.141733 1.518538 0.206326
4 1.797277 0.22558 0.148406 1.553909 0.217608
5 1.836389 0.235874 0.154954 1.58552 0.226556
5 1.839012 0.244525 0.160854 1.61779 0.235874
5 1.870513 0.252763 0.166513 1.638866 0.243459
6 1.931393 0.260518 0.170881 1.657847 0.250567
5 1.976055 0.268491 0.175114 1.67704 0.255301
7 1.990315 0.273564 0.178674 1.68918 0.259001
5 1.999003 0.27634 0.180492 1.696464 0.262376
8 2.007625 0.279131 0.180486 1.696464 0.262753
5 2.016247 0.280335 0.180484 1.696464 0.262753
9 2.016247 0.278733 0.179186 1.696464 0.262753
5 1.980842 0.277127 0.177642 1.696464 0.259001
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0 100 200 300 400
Frequency [kHz]
Me
nis
cu
s m
ov
em
en
t [m
/s]
(b)
Figure 3.12: (a) The maximum meniscus speed as function of the frequency ofa small sinusoidal actuation with an amplitude of 1 % of the nominal drivingamplitude at the piezo element of the same channel and at the piezo element ofthe first neighboring channel. The amplitude of the actuated channel is reduced5 times in the picture to make a comparison more easily. (b) The measuredmeniscus speed of the first neighboring channel. The meniscus response of thefirst neighboring channels shows more higher frequency components.
There are more high frequency components visible in the meniscus speed ofthe neighboring channel. This is better visible in the frequency characteristicsas shown in figure 3.12. In figure 3.12a the calculated frequency response ofthe meniscus movement is shown. Depicted is the maximum meniscus speed as

3.3. CROSS-TALK 59
function of the frequency of a small sinusoidal actuation with an amplitude of1 % of the nominal driving amplitude. Both at the piezo element of the samechannel and at the piezo element of the first neighboring channel. The latteris also measured with the laser Doppler equipment, figure 3.12b, which showsa reasonable agreement. The main resonance frequencies remain the same, butthe higher frequencies are excited more effective. The dynamic behavior of theprinthead structure is not incorporated in the calculations so far. This will bedone in the next section.
3.3.2 Printhead resonances
The dynamic behavior of the printhead structure plays a role on single channellevel, on local cross-talk level and on total printhead level. This is not incorporatedin the narrow channel model. The first example was the finite deformation speedof the printhead, section 3.1.3, which results in a relaxation time in the change ofthe channel cross-section. As a consequence of this, there is more damping in thechannel acoustics, see figure 3.7.
(a) (b)
Figure 3.13: (a) Modular setup of the 3D Ansys model of a single channel geom-etry, including the ink domain and the printhead structure. (b) The impact ofprinthead resonances on the pressure at the entrance of the nozzle. This pressureis either calculated with the ink domain only (dotted line) or and with the inkdomain extended with the corresponding part of the printhead structure (solidline). The resonances in the printhead structure on single channel scale results ina high frequency (f = 1 MHz) distortion, which will have no impact on the dropformation.
On single channel level also structural resonances are excited. This can bemodeled with a 3D Ansys model of a single channel. This is the ink domainmodel described in section 3.1.2, extended with the printhead structure at thatlevel, i.e. the corresponding part of the channel plate, foil and actuator. The model

60 CHAPTER 3. CHANNEL ACOUSTICS
is composed with modules of a half channel geometry with boundary conditionson the yz-plane at the center of the channel and actuating piezo element and atthe yz-plane at the center of the channel spacing and supporting piezo element,see figure 3.13a. The pressure at the entrance of the nozzle is now calculated withthe ink domain model and the extended version, see figure 3.13b. The channellength is 8 mm, and the nozzle has a diameter of 32 µm nozzle in a 100 µm thickelectroformed nozzle plate. Only a small high frequency distortion (f = 1 MHz)on the pressure at the entrance of the nozzle is visible, so printhead resonances atsingle channel level have only a minor contribution. This will have no influenceon the meniscus movement and the drop formation.
.2 11.9 8.01 11.8 13.61 7.64
.3 11.9 8.01 12.7 18.95 7.64
.4 11.9 8.01 13 13.65 7.64
.5 11.9 8.01 12 9.74 7.64
.6 11.9 8.01 11.9 15.39 7.64
.7 11.9 8.01 12.4 13.39 7.64
.8 11.9 8.01 11.6 0.97 7.64
.9 11.9 8.01 10.3 -1.86 7.64
6 11.9 8.01 10.4 3.02 7.64
.1 11.9 8.01 10.8 -2.1 7.64
.2 11.9 8.01 10.1 -8.1 7.64
.3 11.9 8.01 9.8 -0.66 7.64
.4 11.9 8.01 10.7 5.64 7.64
.5 11.9 8.01 10.8 0.94 7.64
.6 11.9 8.01 10 2.09 7.64
.7 11.9 8.01 10.3 11.87 7.64
.8 11.9 8.01 11.5 10.31 7.64
.9 11.9 8.01 11.2 1.37 7.64
-10
-5
0
5
10
15
20
25
0 2 4 6 8 10Time [µs]
dA
[10-1
2 m
2]
10 times dA_next
(a)
2 0.285885 0.132465 0.222077 0.110609 0.152691
4 0.279377 0.131624 0.215479 0.121972 0.147584
6 0.269597 0.129266 0.206413 0.134648 0.143033
8 0.258223 0.126115 0.196203 0.148705 0.139014
0 0.246493 0.12273 0.1858 0.164111 0.1355
2 0.235183 0.119477 0.175785 0.180657 0.132462
4 0.224714 0.116572 0.166458 0.197858 0.129872
6 0.215274 0.114126 0.157941 0.214861 0.127706
8 0.206915 0.112194 0.150253 0.230432 0.125934
0 0.199617 0.110794 0.143356 0.243113 0.124526
2 0.193327 0.10993 0.137191 0.251586 0.123437
4 0.187981 0.109601 0.131688 0.255109 0.122599
6 0.183518 0.10981 0.126779 0.253778 0.121898
8 0.179883 0.110564 0.122402 0.248432 0.121138
0 0.177034 0.11188 0.118499 0.240291 0.119989
2 0.174942 0.113785 0.115021 0.230569 0.11793
4 0.173592 0.116321 0.111924 0.220244 0.114217
6 0.172984 0.119546 0.109171 0.209988 0.107996
0
0.1
0.2
0.3
0.4
0 100 200 300 400
Frequency [kHz]
Me
nis
cu
s m
ov
em
en
t [m
/s]
5 mm, full
3 mm back
3 mm front
(b)
Figure 3.14: (a) The dynamic change in the channel cross-section of the firstneighboring channel after an electric voltage is applied stepwise at t=0. Thechannel dimensions are 220x120 µm in graphite, covered with a 25 µm poly-imidefoil. (b) The maximum meniscus speed as function of a small sinusoidal actuationwith an amplitude of 1 % of the nominal driving voltage. The channel length is5 mm and the nozzle diameter is 24 µm in a 50 µm thick electroformed nozzleplate. Actuation is done over the full length, over 3 mm at the supply side ofthe channel (back), and at the nozzle side of the channel (front). The length overwhich the channel is actuated has a large effect on the frequency characteristicsof the meniscus movement.
On local cross-talk level, resonance frequencies become more important. Thiscan be seen in the change in the channel cross-section of the first neighboringchannel. To get a first indication, the change in channel cross-section of the firstneighboring channel as a response to a stepwise increase of the driving voltageis calculated with a 2D Ansys model in the xy-plane of the channel structure,figure 3.14a. Not only a relaxation time is visible, (similar to the same calculationfor the actuated channel in figure 3.7), but also oscillations with frequencies of100− 400 kHz are visible. This is the main reason for the differences between the

3.3. CROSS-TALK 61
measurement and the narrow channel calculation in figure 3.11.
The frequency characteristics of the channel are also important for the acousticcoupling between resonances of the printhead structure and their impact on themeniscus movement and drop formation. The frequency characteristics of themeniscus movement are strongly affected by the length over which the pressurechannel is actuated. To demonstrate this, the frequency response of the meniscusmovement is calculated with the narrow channel model, figure 3.14b. The channelis actuated over the full length (5 mm), over only 3 mm at the beginning ofthe channel, and over 3 mm at the end of the channel. This results in completedifferent frequency characteristics.
The frequency characteristics are important for the acoustic coupling withthe resonances in the printhead structure. In section 2.3.2 the resonances in thestructure of the printhead are calculated. To model the impact of the resonancesin the printhead structure on the pressure waves inside the ink channels, we use the3D Ansys model of the ink domain, see section 3.1.2. Normally, the deformation ofthe channel cross-section by the actuated piezo element is the boundary conditionfor the lower xz-plane of the ink domain model. Now, the deformation of thechannel walls from the modal analysis and the mode superposition analysis isused as boundary condition. The resulting pressure at the entrance of the nozzlefrom the mode superposition analysis is shown in figure 3.15. During one actuationcycle a pressure of almost 0.05 bar at the entrance of the nozzle is generated by theexcited printhead resonances. Inside the channel the maximum pressure becomeseven higher.
(a) (b)
Figure 3.15: (a) The pressure at the entrance of the nozzle from the mode super-position analysis. The resonances in the printhead structure, excited during onedrop formation cycle, generate a maximum pressure of 0.05 bar. (b) The pressureover the channel length at 28 µs after the start of the actuation. The beginningof the supply channel is the origin at the right side and the nozzle is located at9 mm at the left side. The maximum pressure inside the ink channel is 0.07 bar.

62 CHAPTER 3. CHANNEL ACOUSTICS
To determine which modes are contributing to this pressure the resultingchannel wall deformations per mode are now taken as boundary condition. Thestrongest excited mode, the free bending of the substrate with a frequency of33 kHz has almost no contribution, whereas the bending modes around 100 kHzhave the largest contribution. The cause of that can be seen in figure 3.16. Herethe acceleration of the walls of the pressure channel segment is depicted for thesetwo modes.
(a) (b)
Figure 3.16: The acceleration of the channel walls from (a) the free bending modeat 33 kHz and (b) from a bending mode at 102.7 kHz. Only the deformation inthe pressure channel segment is shown with the supply at the right. The free bend-ing mode deforms the channel only near the supply, whereas the bending modesaround 100 kHz deform the pressure channel segment over the whole length.
The free bending of the substrate results in a channel deformation only veryclose to the supply channel. This is very close to the compliant supply channel,section 3.3.3, and therefore almost no pressure waves are generated. The bendingmodes around 100 kHz deform the pressure channel over the whole length andthis generates pressure waves inside the channel very effectively. This explains theobserved high amplitude of the meniscus movement around 100 kHz as shown infigure 2.11.
So far the crosstalk effect from other parts of the printhead structure on thepressure waves in a single channel are discussed. Crosstalk effects can also resultfrom other parts of the ink domain (acoustic cross-talk) or from the ink channelitself (refill and residual vibrations). This will be discussed in the next sections.
3.3.3 Acoustic cross-talk
With the traveling wave principle, a complete reflection of the pressure waves atthe supply is very important. Without a complete reflection of the pressure waves,a part of the pressure waves will travel through the supply and the reservoir. This

3.3. CROSS-TALK 63
transmitted part of the pressure waves will also reach the neighboring channels,leading to an acoustic cross-talk effect. Therefore, the acoustic impedance of thesupply must be as low as possible.
Since the acoustic impedance is inversely proportional to the cross sectionof the channel, the supply channel must have much larger dimensions than thepressure channel. A first step is not to use separate supply channels for all indi-vidual channels, but one large supply for all channels. The 3D Ansys model ofthe ink domain is based on modules of half channel segments (nozzle, connectionchannel, pressure channel and supply channel). With these modules one model isgenerated. This model contains multiple channels, connected to each other via acommon supply, figure 3.17.
Figure 3.17: The 3D Ansys model of the ink domain with multiple channels con-nected via an ink supply slit. Depicted are 6 half channel modulus generatingtwo complete and two half channels, with symmetry at outer yz-planes of the halfchannels. The nozzles are located at the left.
The minimal height of the supply in order to reduce the acoustic cross-talk iscalculated with this model. When only a few channels are actuated, a 1 mm highsupply is sufficient to get an almost complete reflection, see figure 3.18a. Whenall channels are actuated, a significant part of the pressure wave is transmittedto the supply as shown in figure 3.18b-d. Only the difference in height betweenthe pressure channel and the supply can now contribute to a difference in acousticimpedance. For channel cross-sections of 220 µm x 120 µm the height of thesupply must be of the order of 10 mm to reduce the transmitted pressure wave toless than 1 % of the incoming wave. This is not possible, since the dimensions ofthe printhead must remain within certain limits.
In figure 3.19b the pressure wave from acoustic cross-talk is shown when half ofthe channels with a 1 mm high supply slit are actuated. In the actuated channels,the pressure wave is generated over the whole length of the pressure channel, figure3.19a. With acoustic cross-talk, the transmitted, negative, pressure waves fromthe actuated channels will enter all other channels as a traveling wave from thesupply side of the channels, figure 3.19c. The amplitude of the pressure wave fromacoustic cross-talk with all channels actuated is about 10 % of the amplitude of

64 CHAPTER 3. CHANNEL ACOUSTICS
(a) 1 mm supply (b) 1 mm supply
(c) 0.5 mm supply (d) 2 mm supply
Figure 3.18: The acoustic pressure p at 4 µs after the start of the actuation inthe 5 mm supply, 8 mm pressure, and 1 mm connection channel. The reservoir islocated at 0 mm and the nozzle 14 mm at the left. (a) 1 of 4 channels actuated,(b-d) all channel actuated. The height of the supply must be more than 2 mm toprevent acoustic cross-talk, when all channels are actuated.
the pressure from the actuation. This has an impact of about 1 m/s on the dropspeed.
Another way to reduce the impedance of the supply is to increase the compli-ance of the supply, see equations 1.3 and 3.27. The most simple way to increase thecompliance is to cover the supply with a thin foil. The compliant foil will deformwhen a pressure wave reaches the supply. With a supply of 1 mm height at anangle of 45 degrees, the compliant foil covers a gap of 1.4 mm. A 25 µm poly-imidefoil deflects 300 nm when a pressure wave with an amplitude of 0.8 bar reaches thesupply, figure 3.20a. This movement can compensate the complete displacementof the acoustic pressure wave, eliminating the acoustic pressure (as would happenwith a very large supply). A compliant foil is also used by Dimatix/Spectra toprevent acoustic cross-talk [50, 115].
The effect of the compliance is the same as adding extra volume Vc to thevolume of the supply channel Vs. With the bulk compliance ρc2 of the liquid inthe supply and the compliance defined with respect to the undeformed volume ofthe supply Vs we get for the added volume:
Vc = βρc2Vs (3.37)
With a 25 µm poly-imide foil over a gap of 1.5 mm, the compliance is 4·10−9m2/N ,and the extra volume from the compliance Vc is six times larger than the volumeof the supply Vs itself.
Another option is to use a closed boundary. With a very small inlet at thesupply, acoustic cross-talk can be eliminated, too. In figure 3.20b the dimensionsof a restriction at the beginning of the pressure channel are shown, which transmit

3.4. RESIDUAL VIBRATIONS 65
(a) (b)
Figure 3.19: The acoustic pressure p in the pressure and connection channel at4, 7, and 10 µs after the start of the actuation. (a) In the actuated channelwithout acoustic cross-talk and (b) the acoustic pressure in the first neighboringchannel with 1 of 2 channels actuated and a 1 mm high supply. The pressurewaves with normal actuation are generated over the whole length of the pressurechannel. The pressure waves from acoustic cross-talk enters the channel throughthe supply channel.
1 % of the pressure waves. The cross-sectional area of the inlet must be smalleror the length must be larger to prevent acoustic cross-talk. This option is usedby Xerox/Tektronix [29] in their pagewide array’s [12, 30], by Epson [90], by Di-matix/Spectra in their M-class heads [18, 101, 146] and by Hitachi [124]. A smallinlet at the beginning of the pressure channel leads to complete other acousticproperties. Standing waves or Helmholtz resonances as described in [49] are thepreferred acoustic principle in these devices.
3.4 Residual vibrations
3.4.1 Refill
In order to fire many drops continuously, the nozzle has to get filled again after onedrop formation cycle. At short time scales, that is as long as the acoustic pressurewaves are not damped out, the asymmetric acceleration of the ink in the nozzle isthe main driving force behind the refill of the nozzle. Before a positive pressurepeak reaches the nozzle, the meniscus surface is retracted, and the small mass ofink in the nozzle gets a large acceleration outward. Before a negative pressurepeak reaches the nozzle, the meniscus surface is displaced outward, and the largemass of ink in the nozzle gets a small acceleration inward. This results in a netdisplacement outward, which fills the nozzle at a short time scale. With a 8 mmlong pressure channel this refill mechanism plays a role during the first 100 µs,

66 CHAPTER 3. CHANNEL ACOUSTICS
(a)
20
40
60
80
100
60 80 100 120 140 160 180 200Width [µm]
Heig
ht
[µm
]
250 µm length
500 µm length
1000 µm length
(b)
Figure 3.20: (a) Deformation of the compliant foil when a pressure wave reachesthe supply, calculated with a 3D Ansys model of a single channel. A 25 µm poly-imide foil covers a gap of 1.4 mm and bends almost 300 nm when an acousticpressure wave of with an amplitude of 0.8 bar reaches the supply. This results in acomplete reflection of the acoustic pressure wave. The ink domain is deleted fromthe plot to make the movement of the foil clearly visible. (b) The maximum cross-sectional area of a small inlet between the supply and the pressure channel, toreduce the acoustic cross-talk to less than 1 %. Another option to reduce acousticcross-talk is to apply a small inlet instead of a large supply. The calculations witha 3D Ansys model of the ink domain with multiple channels are done for an inletlength of 250 µm, 500 µm, and 1000 µm.
the time period over which the pressure waves come to rest, see for example figure3.8.
In the narrow channel equations, the nozzle is considered to be completelyfilled the whole time. The mass of ink in the nozzle remains constant. For astraight nozzle with length Ln, and area An, the simple expression ρLnAn givesthe mass of ink in the nozzle. The acceleration inward and outward is the same,and there is no refill of the nozzle. There is also no drop formation. The resultingdrop properties are calculated as postprocessing of the acoustic calculations.
In order to take into account the variable mass of the ink inside the nozzle,we have to solve the following expression for the meniscus position zn(t), which isNewton’s second law applied on the mass of ink inside the nozzle:
pn(t) = ρAn(Ln + zn(t))∂2zn(t)
∂t2(3.38)
The position zn(t) is zero at the nozzle exit and −Ln at the entrance of the nozzle.The capillary pressure, see equation 3.31, is another driving force behind the
refill of the nozzle. This pressure will drive the meniscus surface to its equilibrium

3.4. RESIDUAL VIBRATIONS 67
position. Assuming a Poiseuille flow profile, equation 3.32, we get the Washburnequation for the meniscus position:
∂zn(t)
∂t=
γRncosθ
4η(Ln + zn(t))(3.39)
with Rn the nozzle radius. Both equations are used to calculated the meniscusposition. The nozzle pressure from the narrow channel model is the input for thesecalculations. In figure 3.21a the meniscus position is shown for different channellengths and nozzle areas. The refill mechanism from the asymmetric accelerationof the variable mass of ink inside the nozzle results in an overfilling of the nozzle,which disappears slowly after the pressure waves are faded away.
The overfilling disappears more quickly with short channels, because the pres-sure waves are damped out on a shorter time scale. With a smaller nozzle areathere is less overfilling. Because of the increased damping, as we will see in thenext section, there are less ongoing pressure waves to overfill the nozzle throughthe variable mass effect.
In figure 3.21b a top-view of a firing nozzle at a repetition rate of 10 kHz (cycletime of 100 µs) is shown, showing the overfilled nozzle. A accurate quantitativemeasurement of the amount of overfilling is not possible.
7 7.23 58.82353 7.23 58.82353
2 6.92 58.13953 6.92 58.13953
4 6.77 57.47126 6.77 57.47126
6 6.42 56.81818 6.42 56.81818
8 6.17 56.17978 6.17 56.17978
8 5.99 55.55556 5.99 55.55556
2 6 54.94505 6 54.94505
4 6.11 54.34783 6.11 54.34783
6 6.11 53.76344 6.11 53.76344
8 6.13 53.19149 6.13 53.19149
9 6.42 52.63158 6.42 52.63158
2 6.55 52.08333 6.55 52.08333
4 6.64 51.54639 6.64 51.54639
6 6.87 51.02041 6.87 51.02041
8 6.97 50.50505 6.97 50.50505
0 7.11 50 7.11 50
2 7.21 49.50495 7.21 49.50495
4 7.36 49.01961 7.36 49.01961
-30
-20
-10
0
10
20
30
0 50 100 150 200 250 300
Time [µs]
Men
iscu
s p
osit
ion
[µ
m]
8 mm
5 mm
3 mm
28 µm
24 µm
(a) (b)
Figure 3.21: (a) The calculated meniscus position as function of time for a channellength of 8, 5 and 3 mm and a nozzle with a diameter of 32 µm in a 50 µ nozzleplate. The 3 mm channel length is also calculated with 28 µm and 24 µm nozzles.(b) Top-view of a firing 32 µm nozzle at a cycle time of 100 µs with an 8 mmchannel. The overfilling results in a rim of ink, accumulated around the nozzleopening (b).
The overfilling results in larger and faster drops if the next drops are firedbefore the meniscus has reached its equilibrium position. This is shown in figure

68 CHAPTER 3. CHANNEL ACOUSTICS
3.22. With a 8 mm long channel and a 32 µm nozzle, the drop size increases with 7pl from 27.5 to 34.5 pl and the drop speed increases by about 1 m/s. The narrowchannel model predicts no refill, since the nozzle is assumed to be completelyfilled at all times. The refill model predicts the global trend very well. The dropproperties are calculated with the energy balance as postprocessing of the narrowgap calculations, with the nozzle length adapted to the position according to thecalculations with the refill model.
At a cycle time of about 200 µs, the measured drop speed is almost 0.5 m/sslower. The refill model does not predict this minimum in drop speed at 200 µs.The minimum is related to the shape of the meniscus surface as we will see insection 4.1.2. In the refill model only the average position of the meniscus surfaceis taken into account.
5.5
6.0
6.5
7.0
7.5
8.0
8.5
80 130 180 230 280 330 380
Time [µs]
Dro
p s
peed
[m
/s]
22
25
28
31
34
37
40
Dro
p s
ize [
pl]
drop speed
drop size
(a)
1 7.41 47.61905 7.41 47.61905
2 7.57 47.16981 7.57 47.16981
4 7.57 46.72897 7.57 46.72897
6 7.84 46.2963 7.84 46.2963
8 7.95 45.87156 7.95 45.87156
2 8.24 45.45455 8.24 45.45455
2 8.13 45.04505 8.13 45.04505
4 8.02 44.64286 8.02 44.64286
6 8.43 44.24779 8.43 44.24779
8 8.31 43.85965 8.31 43.85965
3 8.74 43.47826 8.74 43.47826
2 8.74 43.10345 8.74 43.10345
4 8.62 42.73504 8.62 42.73504
6 8.83 42.37288 8.83 42.37288
8 8.83 42.01681 8.83 42.01681
4 8.83 41.66667 8.83 41.66667
2 9.04 41.32231 9.04 41.32231
4 9.04 40.98361 9.04 40.98361
5.5
6
6.5
7
7.5
8
8.5
80 130 180 230 280 330 380
Time [µs]
Dro
p s
peed
[m
/s]
Measurements
Narrow Channel
Refill Model
(b)
Figure 3.22: (a) Measured drop size and drop speed as function of the cycle time(the time between consecutive drops), for a 8 mm long channel and a nozzle witha diameter of 32 µm. Because of overfilling, the drop size increases by 7 pl andthe drop speed increases by 1 m/s at a short cycle time. (b) The measured andcalculated resulting drop speed for an 8 mm channel with a 32 µm nozzle asfunction of the cycle time. The narrow channel predicts no refill at all and therefill model predicts the major trend well.
3.4.2 Drop on demand frequency oscillations
The gradual change in drop size and drop speed at a time interval of 100− 400 µsbetween consecutive drop is related to the meniscus position as shown in theprevious section. Another effect appears when the next droplet is fired before theacoustic pressure waves have come to rest. In figure 3.8 we can see that this takesabout 100 µs for a 8 mm long channel. The next drop formation cycle will thenstart with a non-zero velocity of the meniscus surface. Depending on whether

3.4. RESIDUAL VIBRATIONS 69
the residual movement of the meniscus is in-phase or out-of-phase with the nextdrop formation cycle, the drop speed of the next droplet will be higher or lower,respectively. This results in an oscillation in drop speed and drop size at a timescale below 100 µs. This can also be seen in figure 3.22, but it is better shown infigure 3.23a. In this figure, the drop speed is shown as a function of the repetitionrate for a 8 mm long pressure channel.
33 4.57 4.74 4.853333
33.5 4.4 4.74 4.74
34 4.9 5.43 4.9
34.5 5.08 5.43 4.9
35 5.26 5.61 5.14
35.5 5.26 5.99 5.14
36 5.44 6.17 5.2
36.5 6.02 6.59 5.396667
37 6.02 6.21 5.456667
37.5 6.4 7.15 5.643333
38 6.64 7.62 6.253333
38.5 6.64 7.82 6.446667
39 6.84 7.82 6.773333
39.5 7.32 8.33 7.32
40 7.32 7.92 7.586667
40.5 7.32 8.13 7.856667
41 7.83 8.68 8.326667
41.5 7.83 8.89 8.326667
42 7.83 8.89 8.326667
0
2
4
6
8
10
12
14
0 10 20 30 40 50 60 70 80DOD freq [kHz]
Dro
p s
peed
[m
/s]
(a)
4 7.06 1.14 0.8505 24.4 9.17
6 7.06 1 0.7105 24.6 9.17
8 7.24 1.35 1.0605 24.8 9.53
5 7.24 1.04 0.7505 25 9.53
2 7.11 1.27 0.9805 25.2 9.53
4 7.29 1.02 0.7305 25.4 9.77
6 7.16 1.53 1.2405 25.6 9.64
8 7.03 1.43 1.1405 25.8 9.51
6 7.22 0.93 0.6405 26 9.49
2 6.82 1.46 1.1705 26.2 9.36
4 6.15 1.72 1.4305 26.4 9.09
6 6.15 1.13 0.8405 26.6 8.69
8 6.04 1.46 1.1705 26.8 8.51
7 5.77 0.91 0.6205 27 8.1
2 5.63 1.29 1.0005 27.2 7.83
4 5.5 1 0.7105 27.4 7.76
6 5.22 1.18 0.8905 27.6 7.48
8 5.08 1.61 1.3205 27.8 7.2
3
4
5
6
7
8
0 5 10 15 20 25 30DOD freq [kHz]
Dro
p s
peed
[m
/s]
800 µm2
400 µm2
(b)
Figure 3.23: (a) Measured drop speed as function of the drop repetition (dropon demand (DOD) frequency). The largest peak corresponds to the channel res-onance frequency. The pressure channel length is 8 mm with a cross-section of240x100 µm2 and covered with a 25 µm ploy-imide foil. The nozzle diameter is32 µm in a 50 µm thick electroformed nickel nozzle plate. (b) The impact ofa smaller nozzle area, showing smaller amplitudes in the oscillation because ofincreased damping from the viscous dissipation in the nozzle.
The frequency at which the drop speed reaches the highest value corresponds tothe channel resonance frequency. The other peaks are found at fractions ( 1
n , n =1, 2, 3...) of the resonance frequency, corresponding to a time period between theconsecutive drops of n resonance periods respectively. The channel resonancefrequency scales with the channel length as shown in figure 3.4a and is almost50 kHz for this 8 mm pressure channel geometry.
The amplitude of the oscillations is mainly determined by the amount of damp-ing in the channel acoustics. The most important contribution to the damping isthe viscous dissipation in the nozzle, when a pressure wave reflects at the nozzleside. Traveling through the channels gives only a minor contribution because thespeed of the ink in the large channel cross-section is much lower than the speedin the small nozzle cross-section. Therefore, the nozzle area and the nozzle lengthhave a large impact on damping, thus on the amplitude of the oscillations in dropspeed. In figure 3.23b the impact of a smaller nozzle area is shown. The amplitudeof the oscillation in the drop speed at a frequency of 25 kHz is 2.5 m/s with the

70 CHAPTER 3. CHANNEL ACOUSTICS
large nozzle area and 1.5 m/s with the small nozzle area.12.6 4.987329 32.5 5.95 10.28334
12.8 5.000694 33 5.97 10.4389
13 4.97859 33.5 5.94 10.38888
13.2 4.919474 34 5.93 10.15783
13.4 4.856245 34.5 6.16 9.860421
13.6 4.858816 35 6.12 9.853593
13.8 4.85933 35.5 6.12 9.697871
14 4.929755 36 6.1 9.813339
14.2 5.036678 36.5 5.92 9.383278
14.4 5.033593 37 5.9 9.094896
14.6 4.953401 37.5 5.86 8.920145
14.8 4.907137 38 5.68 8.594347
15 4.665018 38.5 5.66 8.416053
15.2 4.727219 39 5.42 8.248997
15.4 4.868583 39.5 5.32 8.194277
15.6 4.891715 40 5.08 8.158368
15.8 4.89 40.5 4.94 8.015352
16 4.934895 41 4.76 8.037387
16.2 4.913305 41.5 4.6 8.142489
2
3
4
5
6
7
8
9
10
0 10 20 30 40 50 60 70 80 90
DOD freq [kHz]
Dro
p s
peed
[m
/s]
6
7
8
9
10
11
12
13
14
Dro
p v
olu
me [
pl]
Dropspeed
Dropvolume
(a)
42 7.83 8.89 8.326667
42.5 7.62 8.68 8.186667
43 7.73 7.51 8.536667
43.5 7.95 9.06 8.536667
44 7.73 8.83 8.61
44.5 8.31 8.77 9.006667
45 8.54 0 8.54
45.5 8.77 0 8.233333
46 9.24 0 8.195
8.08
8.345
4
5
6
7
8
9
10
0 10 20 30 40DOD freq [kHz]
Dro
p s
peed
[m
/s]
23
26
29
32
35
38
41
Dro
p s
ize [
pl]
Drop speed Drop size
(b)
Figure 3.24: (a) Measured drop speed and drop volume as function of the droprepetition or drop on demand (DOD) frequency. The pressure channel length is4.5 mm with a cross-section of 200x140 µm2 and covered with a 15 µm ploy-imidefoil. The pressure channel is connected via a 1 mm connection channel to a nozzlewith a diameter of 24 µm in a 50 µm thick electroformed nickel nozzle plate. Thedrop volume shows another dependency on frequency, which is not predicted bythe narrow channel model and energy balance of the drop formation, the resultsof which are depicted in figure (b).
The drop size shows another dependence on the drop repetition rate. In figure3.24a, the dependence of drop speed and drop volume is shown for a 4.5 mmpressure channel with a cross-section of 200x140 µm2 covered with a 15 µm poly-imide foil. The nozzle has a diameter of 24 µm. The drop speed shows two largepeaks at 60 and 75 kHz, whereas the drop volume only has one peak at 72 kHz.So apparently the drop formation process itself is also affected. For the modelingof this effect we have to resolve the complete fluid dynamic behavior like thedrop formation process itself as is done in the next chapter. The narrow channelmodel with the energy balance for a first order approximation of the resulting dropproperties gives an identical dependence for the drop speed and the drop volumeas shown in figure 3.24b. Only a meniscus speed effect is then taken into accountand the model shows a more harmonic shape of the peaks. The measurementsshow a more asymmetric and triangular shape of the peaks in the drop speed.
3.4.3 Interaction with local cross-talk
The impact of residual vibrations on the drop properties is also influenced by localcross-talk effects. In figure 3.25a the drop speed as function of drop repetition rateis shown for a single channel and for the same channel when many other channels

3.4. RESIDUAL VIBRATIONS 71
are firing simultaneously. If many channels are firing simultaneously, the peaksare shifted by 5 kHz to lower frequencies. This is a direct consequence of thelarger compliance when the neighboring channels are also actuated, as reflectedby equation 3.36. The larger compliance results in a lower effective speed of soundas given by equation 3.27.
4
6
8
10
12
14
16
18
0 10 20 30 40 50 60 70 80
DOD freq [kHz]
Dro
p s
peed
[m
/s]
single channel many channels
(a)
441.4056 3.19E+01 2265.49 2.26549
440.4297 3.19E+01 2270.51 2.27051
439.4523 3.19E+01 2275.56 2.27556
438.4773 3.19E+01 2280.62 2.28062
437.5008 3.19E+01 2285.71 2.28571
436.523 3.19E+01 2290.83 2.29083
435.5477 3.19E+01 2295.96 2.29596
434.571 3.19E+01 2301.12 2.30112
433.5931 3.19E+01 2306.31 2.30631
432.6176 3.19E+01 2311.51 2.31151
431.641 3.19E+01 2316.74 2.31674
430.6632 3.19E+01 2322 2.322
429.688 3.19E+01 2327.27 2.32727
428.7117 3.19E+01 2332.57 2.33257
427.7343 3.19E+01 2337.9 2.3379
426.7577 3.19E+01 2343.25 2.34325
425.7819 3.19E+01 2348.62 2.34862
424.8052 3.19E+01 2354.02 2.35402
423.8276 3.19E+01 2359.45 2.35945
2
3
4
5
6
7
8
9
10
11
12
0 10 20 30 40DOD freq [kHz]
Dro
p s
peed
[m
/s]
solo
10 µs delay
(b)
Figure 3.25: (a) The measured drop speed as function of the drop repetition ratefor a single channel and the same channel with many channels firing simultane-ously. The peaks are shifted by about 5 kHz to lower frequencies because of theincreased compliance when many channels are actuated. (b) The measured effectof one neighboring channel fired at a delay time corresponding to one fourth ofthe channel resonance period. This eliminates the effect of local cross-talk at lowdrop repetition rates. However, residual vibrations and local cross-talk do influ-ence each other, which still can give large differences in drop speed at high droprepetition rates.
With only one neighboring channel firing, with a time delay correspondingwith one fourth of the channel resonance period, the effect of local cross-talk canbe eliminated as described in section 3.3.1. There should be no difference betweena single channel and the same channel with the neighbor also firing. However, theresidual vibrations and local cross-talk do influence each other. This results in alarge difference of 2 m/s in drop speed at 25 kHz between a single channel andthe same channel with the neighbor firing as well. The channel length is 8 mmand the nozzle has a diameter of 32 µm, A similar effect is described by Spectrafor their printheads [50].

72 CHAPTER 3. CHANNEL ACOUSTICS
3.5 Concluding remarks
In chapter 2 is descried how an electric voltage results in a deformation of the inkchannels. The deformation of the channels results in pressure waves, which is thesubject of chapter 3. The traveling wave principle is used as an efficient acousticmechanism to generate the required pressure for the drop formation process. Manyeffects play a role. The compliance of the channel cross-section influences theeffective speed of sound of the traveling pressure waves. The acoustic impedanceof the nozzle must match with the acoustic impedance of the channel. A thin foil,which results in a high compliance of the ink supply, eliminates the acoustic cross-talk. Local cross-talk and resonances in the printhead structure result in variationsof the pressure waves. The residual vibrations and the variable mass of ink in thenozzle result in a strong refill mechanism. However, the residual vibrations havean influence on the drop properties at high drop repetition rates. The variations ofthe drop properties can become large when the residual vibrations interfere withlocal cross-talk effects. The parameters that determine the resulting drop size arepresented. The drop formation process itself is the subject of the next chapter.The pressure at the entrance of the nozzle, as determined in this chapter, is thelink to the next chapter.

Chapter 4
Drop dynamics
In this chapter, the flow phenomena outside the ink channel are discussed. Thefree surface flow, resulting in drop formation, is the ultimate goal of the inkjetprocess. The dynamics of the drop formation process and their impact on channelacoustics will be discussed. The details of the tail break-off, which lead to the dropformation, show the formation of long tails and secondary tails with a large impactof ink properties as viscosity and surface tension. Surface tension is the drivingforce behind most of the phenomena encountered in this chapter. The disturbingsatellite drop formation mechanisms are discussed i.e. the mist of droplets fromthe secondary tail, the satellite drops from the Rayleigh break-up of the long tails,the fast satellite drop from a supercritical acceleration, and the slow satellite dropsfrom a bad distribution of mass. Finally, an important application is shown, thedrop size modulation. Eight mechanisms for drop size modulation will be identifiedat the end of this chapter.
4.1 Drop formation
4.1.1 Drop shape and properties
The traveling wave principle to generate drops is discussed in the previous chap-ter. First a negative acoustic pressure is generated, which retracts the meniscus,see figure 3.8. This action is also known as the fill-before-fire action. Anotherdescription found in literature is pull-push action [119, 149], which refers directlyto the movement of the meniscus surface. The negative pressure wave from thefirst rise time of the driving pulse retracts the meniscus, the pull action, and inkis attracted from the reservoir, the fill action. The negative pressure wave re-flects at the reservoir and becomes positive. The de-charging of the piezo elementamplifies the positive pressure wave, section 3.1.3. The resulting large positivepressure peak drives the drop formation, which is the push or fire action. With a8 mm long channel the fill-before-fire action takes 15 − 20 µs. This time periodcorresponds to the total travel time of this pressure wave.
73

74 CHAPTER 4. DROP DYNAMICS
After 15 − 20 µs the head of the drop appears outside the nozzle with a highspeed. This can be seen in figure 4.1, where the measured drop formation is shownfor an 8 mm long channel. The speed of the head when the ink is just comingoutside the nozzle is the same as the meniscus speed, which is then at its maximumspeed of 20 m/s. The head of the drop drags a long tail along. This slows downthe head of the drop to the final drop speed of 7 m/s. The tail breaks off after55 − 60 µs resulting in a several hundred micrometers long tail. The drop size inthis case is 32 pl.
Figure 4.1: Measured drop formation at 10, 20 . . . 80 µs after the start ofthe actuation. The channel is 8 mm long channel and the nozzle has a diameterof 32 µm. The drop drags a long tail along, which slows down the speed of thehead from the initial maximum meniscus speed of 20 m/s to a final drop speed of7 m/s.
To model the details of the drop formation process we use the volume of fluid(VOF) method [76] as implemented in the commercial code Flow3D(R) [164]. Thecore of the Flow3D code solves the continuity and the momentum equations anduses an extra variable, which specifies the fraction of fluid within the elements.The code uses a structured Eulerian grid and a finite difference discretizationmethod. The Reynolds transport theorem is used to transfer the equations fromthe Lagrangian approach by control mass (the mesh coupled to the particles likein the finite element code Ansys) to the control volume field approach.
To reduce the CPU time we use a 2D rotational symmetric model with symme-try on the nozzle axis. So we only consider perpendicular firing jets. The modelis restricted to a single nozzle with the last 300 µm of the connection channel.The channel pressure at the beginning of the last 300 µm of the channel serveas one-way coupling between the acoustic modeling and the modeling of the dropformation. The pressure is calculated with the narrow channel model or the An-sys acoustic models, chapter 3. The space outside the nozzle is treated as a void.The only interaction of the ink with the surrounding air is the surface tension of

4.1. DROP FORMATION 75
the ink. With a speed of sound of the ink of 1250 m/s, the wavelengths of theacoustic waves for frequencies less than 1 MHz is more than 1 mm, much morethan the spatial dimensions involved, so the flow is treated as incompressible. Atthe channel and nozzle walls the no-slip condition is used.
In Flow3D, typically 10 grid cells are required for an accurate simulation of thespatial details. The nozzle diameters vary from 18 µ to 50 µm, but the smallestspatial dimensions result from the fluid flow itself. The viscous length scale Lγ isthe characteristic length scale of the internal flow properties [52]:
Lη =η2
ργ(4.1)
with γ the surface tension, η the viscosity, and ρ the density. For the transparenttest ink, the viscous length scale is only 3 µm. To capture the internal flowproperties with Flow3D simulations a grid size of 0.3 µm is required.
(a) (b) (c) (d) (e) (f) (g) (h)
Figure 4.2: Calculated drop formation at 10, 20 . . . 80 µs after the start ofthe actuation. The channel length is 8 mm and the nozzle diameter 32 µm. Thecalculated drop formation correlates well with the measured drop formation. Nowalso information on the retracted meniscus and the internal distribution of inkspeed is available.
This grid resolution results in typical 105 − 106 elements and the CPU timefor one drop formation cycle is of the order of several hours on a dual core 64 bitsplatform. The calculated drop formation for an 8 mm long channel, figure 4.2,looks identical to the measured drop formation, figure 4.1. The correlation is alsogood for multiple drop formation cycles at a high repetition rate. In [85] we showan example at a repetition rate of 20 kHz.
The simulations also provide information on the retracted meniscus and the in-ternal flow properties, like the distribution of the velocity. Also the overfilling just

76 CHAPTER 4. DROP DYNAMICS
after one drop formation cycle is visible. For a comparison with an experimentalrecording of the overfilled meniscus shape see figure 3.21b in section 3.4.1.
0
5
10
15
20
25
0 200 400 600 800Distance [µm]
past
100 µ
m a
vera
ge s
peed
[m/s
]7 m/s
5 m/s
(a)
-10
-5
0
5
10
15
20
-100 100 300 500
Distance [µm]
actu
al
sp
eed
[m
/s]
FLOW3D 6 m/s
(b)
Figure 4.3: (a) The measured speed of the head of the drop as function of thedistance to the nozzle with a final drop speed of 5 m/s and 7 m/s. The valuesare averaged over a distance of 100 µm. (b) The calculated speed of the head ofthe drop as function of the distance to the nozzle for a final drop speed of 6 m/s.The speed of the head is at its maximum 2 to 3 times higher than the final dropspeed. The calculations show also that the meniscus retracts almost 50 µm witha maximum speed of −7 m/s.
The speed of the head of the drop is important for the dot positioning. Notonly the final drop speed, but the variation of the drop speed as a function ofthe distance to the nozzle is important, since this will determine the total time offlight of the drop. The measured speed of the head of the drop as a function ofthe distance to the nozzle with a final drop speed of 5 and 7 m/s is given in figure4.3a. In figure 4.3b the calculated results are depicted for a final drop speed of6 m/s.
The speed of the drop varies gradually. The high frequency components inthe pressure signal are smoothed out. Only frequency components of the pressuresignal lower than 200 kHz have an influence on the drop formation process. Thespeed at the beginning of the drop formation is 2 to 3 times higher than the finaldrop speed. The lowering of the speed of the head is mainly caused by the dragfrom the tail and by the flow of ink from the tail to the head. The tail itself ismoving with a lower speed of about 6 m/s, see also section 4.2.3. When ink fromthe tail flows to the head of the drop, the head will slow down.
During the fill-before-fire action, the meniscus surface moves 47 µm inwardswith a maximum speed of −7 m/s. The meniscus retraction, which takes 15 −20 µs, also contributes to the total time of flight i.e. the time required to reach a

4.1. DROP FORMATION 77
certain distance. The time of flight for a distance of 1 mm with a final drop speedof 6 m/s is 150 µs and varies with 50 µs per m/s drop speed. In many applicationsthe printhead moves with a speed of typical 1 m/s with respect to the substrate.Therefore, a variation in drop speed of 1 m/s results in a dot positioning errorof 50 µm. Compare this with the dot size of 42 µm in 600dpi prints, a commonprint resolution in high quality document printing. So the variations in the dropspeed must be much smaller than 1 m/s to have good dot positioning.
4.1.2 Impact on acoustics
The mass of ink in the nozzle has a direct impact on the acoustic properties. Moreink in the nozzle results in a higher acoustic impedance of the nozzle. The reflectionof the acoustic pressure waves will change towards a reflection at a closed end. Therefill, as described in section 3.4.1, and of course the drop formation itself, willchange the amount of ink. The impact on the acoustic properties is not includedin the acoustic modeling used in chapter 3. With the acoustic modeling the nozzleis completely filled all the time. There is only an one-way coupling to the models,which calculate the resulting drop properties.
To model the effect of refill and the drop formation on the acoustic properties,an acoustic model is also developed in Flow3D. This model includes the averageposition, which determines the refill, the movement, which determines the effectof residual vibrations, and the shape of the meniscus surface.
The pressure channel, the connection channel and the nozzle are a part of theacoustic Flow3D model, see figure 4.4. A 2D rotational symmetric model is notpossible. The keep the number of grid elements in the 3D model within reasonablelimits, the grid size is taken as large as possible. In the nozzle the minimum gridelement size is taken 0.1 times the nozzle diameter, which results in a lower gridsize limit of 3 µm. This is enough to describe the shape of the meniscus surfacein the nozzle and the resulting drop outside the nozzle, with an accuracy of about10 % of the actual volume displacements. The grid resolution is not fine enoughto capture the details of the complete drop formation process. Therefore the dropformation has to be calculated again with the drop formation model, but the two-way coupling, i.e. the impact of the flow phenomena in the nozzle on the acousticproperties of the channel, are now incorporated in the pressure signal.
The upper grid size limit is set to 0.1 times the minimum channel length. Witha 1 mm connection channel this results in an upper grid element size of 100 µm.The pressure channel, connection channel and the nozzle are put in one line witha symmetry plane in the middle. Now only one half of the geometry has to bemodeled.
The acoustic pressure waves are simulated in the Flow3D model by addingan extra equation to the continuity and momentum equations. This equation isbased on the adiabatic modulus of a fluid, see also equation 3.8:
∂ρ
∂t=
1
c2
∂p
∂t(4.2)

78 CHAPTER 4. DROP DYNAMICS
(a)
(b)
Figure 4.4: The acoustic Flow3D model. (a) From left to right the 3 − 8 mmlong pressure channel, the 1 mm long connection channel, and the nozzle. Theamplitude of the pressure wave in the channel is visible as a variation in thegrey scale. (b) The pressure channel, with a moving lower wall as actuator anda flexible upper wall. The compliance β of the channel cross-section is takeninto account through locally pressure dependent adjustments op the upper wallsegment positions. Actuation is done with a movement of the lower wall accordingto the driving voltage and actuation efficiency α.
The acoustic waves are generated with a moving wall, the lower wall in figure 4.4.This wall is the actuator in this model, which moves according to the shape of thedriving waveform, with driving amplitude V :
z − z0
h0= αV (4.3)
with h0 the height of the channel and z0 the position of the lower wall withoutactuation. The actuation efficiency α is defined in section 3.1.1, equation 3.21.
The compliance of the channel cross-section has a very large impact on channelacoustics however, see section 3.1.3. However, the Flow3D code cannot handlephysical properties of solids such as wall flexibility. In order to incorporate wallflexibility, a user routine is written for the Flow3D model, which applies a movingwall boundary condition to the upper pressure channel wall. This routine movesthe upper wall to its new equilibrium position z:
z − z0
h0= βp (4.4)
with z0 the position at ambient pressure and β the compliance of the channel.To enable a local pressure dependent deformation of the upper wall, this wallis divided into segments of 100 − 200 µm length. On each segment the movingboundary condition is applied independently.

4.1. DROP FORMATION 79
Instead of moving the upper wall within one time step to the position corre-sponding to the pressure and channel compliance, the movement is spread overseveral time steps. Like with the acoustic models in the finite element code Ansys,see section 3.1.3, a relaxation time τ is therefore introduced as:
∂z
∂t=
βph0 − z0
τ(4.5)
The limited speed of the upper channel wall results in a change in channel cross-section dA according to:
dA =
(
t/τ
1 + t/τ
)
dAstat (4.6)
This equation gives with a value of τ = 0.1 µs a comparable change of the channelcross-section as the exponential relation 3.28 used in the Ansys acoustic modelswith 0.15 µs. These values give the best fit for the dynamic behavior of theprinthead structure, see section 3.1.3.
52) = 4.9804710E-05 , pbct( 52 , 5) =
53) = 5.0781280E-05 , pbct( 53 , 5) =
54) = 5.1757840E-05 , pbct( 54 , 5) =
55) = 5.2734400E-05 , pbct( 55 , 5) =
56) = 5.3710960E-05 , pbct( 56 , 5) =
57) = 5.4687520E-05 , pbct( 57 , 5) =
58) = 5.5664100E-05 , pbct( 58 , 5) =
59) = 5.6640700E-05 , pbct( 59 , 5) =
60) = 5.7617200E-05 , pbct( 60 , 5) =
61) = 5.8593800E-05 , pbct( 61 , 5) =
62) = 5.9570300E-05 , pbct( 62 , 5) =
63) = 6.0546900E-05 , pbct( 63 , 5) =
64) = 6.1523500E-05 , pbct( 64 , 5) =
65) = 6.2500000E-05 , pbct( 65 , 5) =
66) = 6.3476600E-05 , pbct( 66 , 5) =
67) = 6.4453200E-05 , pbct( 67 , 5) =
68) = 6.5429700E-05 , pbct( 68 , 5) =
69) = 6.6406300E-05 , pbct( 69 , 5) =
70) = 6.7382800E-05 , pbct( 70 , 5) =
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0 20 40 60 80 100
Time [µs]
No
zzle
pre
ssu
re [
bar]
no filling
with filling
(a)
5 8.19E+04 8.19E+04 1.16E+05 1.28E+05 9.71E+04
5 8.52E+04 8.52E+04 1.16E+05 1.36E+05 1.03E+05
5 1.06E+05 1.06E+05 1.36E+05 1.52E+05 1.29E+05
5 1.26E+05 1.26E+05 1.52E+05 1.63E+05 1.42E+05
5 1.03E+05 1.03E+05 1.21E+05 1.29E+05 1.18E+05
5 1.85E+04 1.85E+04 2.83E+04 3.17E+04 2.78E+04
5 -7.32E+04 -7.32E+04 -6.88E+04 -6.78E+04 -6.78E+04
5 -1.40E+05 -1.40E+05 -1.38E+05 -1.38E+05 -1.34E+05
5 -1.53E+05 -1.53E+05 -1.51E+05 -1.49E+05 -1.47E+05
5 -1.43E+05 -1.43E+05 -1.40E+05 -1.32E+05 -1.30E+05
5 -1.13E+05 -1.13E+05 -1.02E+05 -9.75E+04 -1.04E+05
5 -6.21E+04 -6.21E+04 -5.93E+04 -4.66E+04 -5.87E+04
5 -4.83E+03 -4.83E+03 -1.35E+04 -9.54E+03 -1.32E+04
5 3.68E+04 3.68E+04 1.53E+04 1.04E+04 2.73E+04
5 5.49E+04 5.49E+04 4.05E+04 3.19E+04 5.57E+04
5 5.71E+04 5.71E+04 5.24E+04 4.80E+04 5.92E+04
5 3.93E+04 3.93E+04 4.18E+04 3.94E+04 4.29E+04
5 1.62E+04 1.62E+04 1.43E+04 1.49E+04 1.64E+04
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0 100 200 300Time [µs]
No
zzle
pre
ss
ure
[b
ar]
(b)
Figure 4.5: The calculated pressure at the entrance of a nozzle with a diameter of28 µm in a 50 µm electroformed nickel nozzle plate with a 6.7 mm long pressurechannel. (a) The effect of the variable filling of the nozzle during one drop forma-tion cycle. The variable filling results in a lower positive pressure peak. (b) Theeffect of the overfilling of the nozzle during the first six drop formation cycles ata repetition rate of 20 kHz. The pressure amplitude increases with 20%.
In figure 4.5a the effect of the variable filling of the nozzle is shown. Thepressure at the entrance of the nozzle is calculated during one drop formationcycle. The curve without the filling effect is calculated with a small amplitudeof the driving waveform, so the nozzle remained almost completely filled all thetime. In a postprocessing step, the resulting pressure is multiplied with the sameratio. Now we compare it with the pressure resulting from a normal actuation.

80 CHAPTER 4. DROP DYNAMICS
The first negative pressure peak remains the same, because the meniscus sur-face is at rest when the first negative pressure wave reaches the nozzle. The firstpositive pressure peak gets a lower amplitude, because the meniscus is retractedwhen the positive pressure wave reaches the nozzle. The smaller mass of ink resultsin a more open reflection of this pressure wave, thus in a lower pressure amplitude.When the second negative pressure wave reaches the nozzle, the meniscus is movedoutside the nozzle. The larger mass of ink results in a more closed reflection of thispressure wave, so the next negative pressure peak becomes larger. The asymmet-ric reflection of the pressure waves is the main cause for the non-harmonic shapeof the peaks in the measured curves of drop speed versus repetition rate in section3.4.2.
Just after one drop formation cycle the nozzle will be overfilled. The effectof the larger mass of ink in the nozzle is shown in figure 4.5b. The amplitudeof the pressure at the entrance of the nozzle increases 20 % during the first dropformation cycles at a repetition rate of 20 kHz. This would result in an increase indrop speed of 2 m/s, see section 3.2.2. However, the larger amount of ink resultsalso in a higher resistance against the movement, mainly because of inertia. Thenet increase in drop speed, which remains, is about 1 m/s, in agreement with themeasured refill effect shown in section 3.4.1.
(a) t = 100− 150 µs (b) t = 150− 250 µs (c) t > 250 µs
Figure 4.6: The calculated shape of the meniscus, after the pressure waves havecome to rest. Only the last 30 µm of the nozzle shape is shown. The nozzle plateis 100 µm thick. (a) The shape at 100-150 µs after start of the last actuationcycle. (b) The shape during the transition from overfilling towards the equilibriumposition at 150-250 µs. (c) The shape of the equilibrium position after 250 µs.The shape of the free surface during the transition from overfilling to equilibriumresults in a minimum drop speed at a repetition rate of 5 kHz.
With an 8 mm long pressure channel it takes 100 µs before the pressure wavesare faded away. At repetition rates higher than 10 kHz, the ongoing movementof the ink in the nozzle results in oscillations in the drop speed, see section 3.4.2.Just after the pressure waves are faded away, the meniscus protrudes outside thenozzle plate surface because of the overfilling of the nozzle, as shown in figure 4.6a.A good quantitative measurement is not available, but in figure 3.21b the rim of

4.2. BREAK-OFF MECHANISM 81
ink around the nozzle during the drop formation at 10 kHz is clearly visible. Theequilibrium shape, figure 4.6c, is bent inwards because of the static pressure of8 mbar below the ambient pressure to prevent leakage of ink.
Before the meniscus returns to its equilibrium position, the surface in the centerof the nozzle is already almost at this position while there is still a considerableamount of ink accumulated as a rim around the nozzle opening, figure 4.6b. Inthe transition phase, the pressure waves are almost normal again, because thepressure waves are reflected mainly at the mass of ink inside the nozzle. Thereis no larger pressure amplitude anymore, but the extra amount of ink around thenozzle opening results in an increased resistance for the drop formation process.This causes the minimum in the drop speed as shown in figure 3.22. So not only theaverage position of the meniscus has influence, but also the shape of the meniscus.
4.2 Break-off mechanism
4.2.1 Impact of ink properties
A drop is formed when the tail pinches off from the meniscus in the nozzle. Tailproperties and pinch-off are mainly determined by ink properties, such as surfacetension, density and viscosity. Surface tension is the driving force behind pinch-offand viscosity is the most important parameter for the characteristic length scaleof the internal flow phenomena in the fluid. The shape of the tail is affected by theviscosity of the ink, and not by the shape of the driving waveform or the channeland nozzle geometries [52]. Highly viscous inks show long symmetric tail shapeswith the minimum neck radius somewhere in the middle of the tail, moderatelyviscous inks show long asymmetric tail shapes with the minimum neck radius closeto the meniscus or head of the drop, and low viscous inks show only short tails.
Pinch-off will occur at the position with the largest curvature because at thisposition the capillary pressure is the largest. One principle radius of curvaturecorresponds to the radius of the tail, which remains almost constant over the lengthof the tail. The tail itself has a conical shape with a very large second principleradius of curvature. The capillary pressure is relative low in this part of the tail.The second principle radius of curvature becomes also small at the transitions ofthe tail to the meniscus or to the head of the drop. There is a large curvatureat the transition to the head of the drop and at the transition to the meniscusin the nozzle. The capillary pressure will be the largest at these two positions.With drop-on-demand inkjet the radius of the head of the drop is smaller than thenozzle radius, thus the largest curvature is at the transition to the meniscus in thenozzle. Pinch-off will occur at the meniscus, as shown in figures 4.1 and 4.2. Witha large drop falling from a faucet or drops forming from a jet, like in continuousinkjet, the largest curvature is at the transition from the tail to the head of thedrops. Pinch-off will occur at the head of the drops in these cases [176].
The pinch-off time shifts with channel length: 45 µs (52 µs, 59 µs) for headswith channel length of 3 mm (5 mm, 8 mm). With these channel lengths the head

82 CHAPTER 4. DROP DYNAMICS
of the drop appears at 9 µs (12 µs, 16 µs) after the start of the actuation. Thismeans that at drop repetition rates above 28 kHz (25 kHz, 23 kHz), respectively,the next drop appears before the tail of the previous drop has been pinched off.At slightly higher repetition rates, the tail of the previous drop will be capturedby the next drop as shown in figure 4.7. The point of largest curvature is nolonger at the meniscus, but at one of the heads of the two consecutive drops, likein continuous inkjet. The head of the first drop is larger, because ink flows fromthe tail to the head of the drops. The curvature will be larger at the head of thefirst drop and the tail now breaks off from the head of the first drop.
(a)
40
50
60
70
80
90
100
0 5 10 15 20
Viscosity [mPas]
Pin
ch
-off
tim
e [
µs
]
(b)
Figure 4.7: (a) Measured drop formation at a drop repetition rate of 28 kHz witha 8 mm long channel showing the capturing of the tail by the next drop. The inkviscosity is 10 mPas and the surface tension is 22 mN/m. (b) Measured influenceof ink viscosity and surface tension on pinch-off-time. The black markers are forinks with γ = 35 mN/m and the open markers for inks with γ = 22 mN/m.Pinch-off time is longer with a higher viscosity or a lower surface tension of theink.
The driving waveform, the channel cross-sectional geometry, and the nozzlegeometry have no influence on the pinch-off time. Ink properties such as viscosityand surface tension do have an influence. This influence can be described by meansof the characteristic time scales of the fluid flow i.e. the capillary and viscous timescales tγ and tη:
tγ =
√
ρL3
γtη =
ρL2
η(4.7)
At tail break-off the characteristic length is determined by the viscous length scaleLη [52], see equation 4.1. With L = Lη, both time scales of the fluid flow are equal:
tγ = tη =η3
ργ2(4.8)
With the transparent test ink, the characteristic time scale at break-off is typically

4.2. BREAK-OFF MECHANISM 83
1 µs. A higher viscosity or a lower surface tension will result in a longer char-acteristic time scale and pinch-off time will be longer, as shown in figure 4.7 fora range of modified inks. In this example, the characteristic time scale increasesfrom 0.5 µs to 4.5 µs with the high surface tension inks and from 0.5 µs to 7 µsfor the low surface tension inks.
4.2.2 Secondary tail
At pinch-off, a secondary tail is formed [165], see figure 4.8. The diameter ofthe secondary tail is about 1 µm, which is close to the optical resolution of themeasurement setup. The secondary tail is visible during 5-10 µs between the maintail and the meniscus in the nozzle. The small secondary tail first breaks off at themeniscus and then at the end of the main tail. The small secondary is generatedbecause ink cannot flow from the main tail into the secondary tail, which has aradius much smaller than the viscous length scale [94].
To capture the formation of the secondary tail with Flow3D calculations, avery small grid size is necessary. The secondary tail has a width smaller than theviscous length scale. A grid size of 0.1 µm is necessary to capture the formationof the secondary tail. The correlation with the measurements is good. However,the CPU time is very large, because of the large amount of grid cells and the verysmall time steps required to resolve the motion of liquid through a 0.1 µm grid.The formation of a secondary tail is also reported for large drops dripping froma faucet [94], but in that case the secondary tail is visible between the tail andthe head of the drop. Also in the reference the diameter of the secondary tail isabout 1 µm. It is not known which mechanisms are determining this value. Anyinfluence of the surrounding air can be ruled out for tail diameters larger than0.05 µm [103].
(a) (b)
Figure 4.8: Measured and calculated formation of a secondary tail at 56 µs, 58 µs,60 µs, 62 µs, and 64 µs after the start of the actuation of a 8 mm long pressurechannel. The grey scale range light-dark indicate a velocity range of 0 − 6 m/s.
At tail break-up for a large drop falling from a faucet sometimes even a cas-cade of structures can be seen as described in [141]. The flow regime determineswhat kind of drop formation is observed. From low to high flow rates the drop

84 CHAPTER 4. DROP DYNAMICS
formation regimes are: dripping drops, drops on demand, continuous drops andatomization. The cascade of structures with dripping drops can be character-ized by the different length scales involved [20, 35]. In our experiments only theformation of a secondary tail is observed.
The thinning of the tail is characterized by three flow-regimes with differentdominating forces. In the analysis of the break-off mechanism the minimum tailradius Rmin is the key number and a power-law relationship is often used [78]:
Rmin = k(t0 − t)m (4.9)
with t0 the pinch-off time and k and m constants. When the tail is just formedonly viscous forces and surface tension forces play a role like in high viscous flows.A high viscous flow shows a long tail with a minimum radius somewhere in themiddle and a low value of the exponent m ≤ 0.5 in the power-law relationship 4.9.Sometimes even a plateau shows up in the curve of Rmin versus time [105, 131].The minimum tail radius decreases slowly.
At some point before break-off inertia will become important at the positionof the minimum tail radius. Three forces play a role now [34] and the fluid entersthe inertial-viscous flow regime at this position. In the one-dimensional analysisof Eggers [52] the symmetric similarity solution for high viscous flow with Re = 0transients into the asymmetric asymptotic solution for moderate viscosity withRe = 1. The relationship for the minimum neck radius becomes in these analysis:
Rmin = 0.0304Lη(to − t)
tη(4.10)
which is also the only experimentally observed relationship by others [21]. Thetail radius decreases much faster now, with the exponent m = 1 in the power-lawrelationship 4.9.
The last microseconds before pinch-off, only surface tension forces and inertiaare important [130]. The viscous flow regime becomes an inviscid or potentialflow regime [125]. The exponent m in the power-law relationship 4.9 can now bederived from the Weber number We = ρu2R/γ as non-dimensional grouping ofthe balance of the two remaining forces. The scaling for the speed u can be derivedfrom the transformation of a sphere with radius R to a cylinder with radius R andlength L = u · t. Conservation of mass requires both volumes to be equal:
4
3πR3 = πR2u · t (4.11)
which results in a scaling for the speed u = R/t [47]. The Weber number with thespeed u replaced by R/t becomes:
We =ρu2R
γ∝ ρR3
γt2(4.12)
This results in m = 23 for the exponent in the power-law relationship 4.9. This
indicates a slow decrease in tail width. That the inviscid flow regime applies for the

4.2. BREAK-OFF MECHANISM 85
last microseconds before pinch-off is reported be many others. The most strikingevidence of an inviscid flow regime is the observation of a double cone structure.The surface with the largest curvature overturns in the potential flow regime,which results in a larger cone-shaped free surface around the smaller cone-shapedtail [47, 51]. This is also reported for viscous liquids [125]. However, this structureis smaller than the optical resolution of our measurement setup. Modeling withFlow3D would require even smaller grid cells than needed to resolve the secondarytail. This is not pursued because of the excessive long calculation time. Onlyspecial Navier-Stokes solvers developed for handling very small details can resolvethe double cone structure [34].
4.2.3 Tail-end speed
After pinch-off, the end of the tail moves away with a certain speed as predictedby the scaling laws of Eggers. The double cone structure at pinch-off cannot beresolved with the one-dimensional analysis like the one of Eggers [51, 52]. Butexcept for the pinch-off moment itself the one-dimensional modeling is capableof predicting the shape of the tails and even of complete drops. These analysisshow the inviscid decline of the minimum tail radius until a singularity occurs [22].After pinch-off the shape of the tail can also be described by these analysis.
Because the initial tip is very small, the capillary pressure is very high. Theend of the tail moves away with a high speed. The tip of the tail becomes larger,thus the capillary pressure becomes lower. The speed of the end of the tail slowsdown according to the formula [52]:
vtip = 3c
√tη
2√
t(1 + tη/Lη)(4.13)
with t the time after pinch-off. The constant c = 17.452 for the side with thesmallest curvature before pinch-off and c = 0.4476 for the side with the largestcurvature before pinch-off. In our sequence, the end of the tail is first the tip of thesecondary tail which pinched-off from the meniscus surface. The end of the tail isthe side with the smallest curvature before pinch-off. A few microseconds later thesecondary tail breaks off from the main tail. The end of the tail is now the tip ofthe main tail, which is the side with the largest curvature before pinch-off. Bothevents, and the resulting speed of the end of the tail as calculated with equation4.13, are shown in figure 4.9a, together with the results of a Flow3D calculation.
The tail-end moves with the speed of the ink in the nozzle before pinch-off.At t = 0 µs the secondary tail pinches off from the meniscus. The tail-end ofthe secondary tail accelerates to the speed predicted by equation 4.13 for the sidewith smallest curvature before pinch-off. At t = 4 µs the main tail pinch off fromthe secondary tail. The tail-end of the main tail tends to slow down to the speedpredicted for the side with largest curvature before pinch-off. After t = 6 µs theend of the tail accelerates again because of the formation of a drop at the tail-end.The speed of the end of the tail averaged over a time period of at least 15 µs,

86 CHAPTER 4. DROP DYNAMICS
91.14009755 15.1900163 0.38993395 11.3925122
105.2395197 13.15494 0.33769271 9.86620497
117.66136 11.766136 0.30204154 8.824602
128.891562 10.7409635 0.27572494 8.05572263
139.2187986 9.9441999 0.25527169 7.45814993
148.8311561 9.30194725 0.2387848 6.97646044
157.8592796 8.76995998 0.22512847 6.57746998
166.3982911 8.31991455 0.21357562 6.23993592
174.52 7.93272727 0.20363636 5.94954545
182.2801951 7.59500813 0.19496697 5.6962561
189.7232423 7.29704778 0.18731821 5.47278583
196.8851132 7.03161118 0.18050434 5.27370839
203.7954536 6.79318179 0.17438376 5.09488634
210.4790394 6.57746998 0.16884635 4.93310249
216.9568279 6.38108317 0.16380502 4.78581238
223.2467341 6.20129817 0.15918987 4.65097363
229.3642156 6.03590041 0.15494404 4.52692531
235.32272 5.883068 0.15102077 4.412301
241.1340326 5.74128649 0.14738118 4.30596487
0
2
4
6
8
10
12
14
16
18
20
0 5 10 15 20 25 30 35
Time [µs]
Tail
sp
eed
[m
/s]
Flow3D
Small curvature
Large curvature
(a) (b)
Figure 4.9: (a) Calculated speed of the end of the tail after pinch-off. The Flow3Dresults are shown together with the results of Eggers’ scaling laws (denoted as”Large curvature” and ”Small curvature”). The scaling laws are applied first forthe side with the smallest curvature before pinch-off (the secondary tail after 0 µs)and then for the side with largest curvature before pinch-off (the main tail after4 µs). (b) Flow3D simulation of the formation of a tail-end-drop. The wholesequence of events results in a constant tail-end speed, when averaged over a timeperiod of at least 15 µs.
which corresponds to a distance of 100 µm, becomes constant at about 6 m/s.This is in agreement with the measurements.
This whole sequence is an independent behavior of the end of the tail. As aconsequence of this, at higher driving voltage the velocity of the head increases butthe tail is not affected at all. This can be seen in figure 4.10, where the position ofthe end of the tail remains the same while the faster head is moved further away.This is also in agreement with observations by others [105, 131].
This means that with a speed of the head of the drop of more than 6 m/s, verylong tails will be formed. With a lower speed of the head, the tail will catch up andthis can be seen in the measured speed of the head in figure 4.10c. After 800 µmthe tail with the tail-end-drop merges with the head of the drop and increases thespeed of the head by more than 1 m/s.
So far the regular drop formation process is described, i.e. the formation ofa drop as a result of the actuation of a piezo element. We will look now at theformation of extra drops, which are called satellite drops.

4.3. SATELLITE DROP FORMATION 87
(a) (b)
0
2
4
6
8
10
12
14
16
18
0 200 400 600 800 1000
Distance [µm]
Dro
p s
pe
ed
[m
/s]
(c)
Figure 4.10: (a) Measured and (b) calculated shape of the drop at the same timeafter the start of the actuation with different actuation amplitudes. The head ofthe drop has moved further away at higher driving amplitude because of the higherdrop speed. The tail-end remains at the same position, showing the independentbehavior of the tail. (c) The measured speed of the head of the drop as functionof the distance to the nozzle plate. The tail merges with the head of the drop ata distance of 800 µm. The tail-end has a higher speed than the head of the drop.This results in an increase in the drop speed when the tail-end merges with thehead of the drop.
4.3 Satellite drop formation
4.3.1 Mist of droplets
For most applications it is very important that only a single drop is generated.However, occasionally extra drops are generated. These drops are called satellitedrops. The first satellite drops are generated from the secondary tail, immediatelyafter pinch-off from the main tail. Droplets of less than 1 pl are formed within1-2 µs. This can be seen in figure 4.11a-e, where a high speed camera recordingis shown with 1 million frames per second.
The micro-droplets are dragged along with the main drop formation, as shownin figure 4.11f-k, with only one of every five frames shown. In the recording offigure 4.11 there are five micro-droplets as indicated with the white boxes in frame(f). These drops are dragged along with the main drop formation. The micro-droplets will result in a mist of droplets around the main drop on the substrate.For graphical printing applications this is no problem because the resulting micro-dots are too small to be visible.
The drag force results from an induced air flow along with continuous jetted

88 CHAPTER 4. DROP DYNAMICS
(a)t− t0 = 1 µs
(b)2 µs
(c)3 µs
(d)4 µs
(e)5 µs
(f)10 µs
(g)15 µs
(h)20 µs
(i)25 µs
(j)30 µs
(k)35 µs
Figure 4.11: The measured generation of micro-droplets from the secondary tail.The frame rate of the Shimadzu HPV-1 camera recording is 1 Mfps. In (a)-(e)every frame is depicted showing the formation of a micro-droplet within 1-2 µs.In (f)-(k) only one of five frames is depicted illustrating that the micro-dropletsare dragged along with the main drops. The drop speed is only 3 m/s, so themain tail merges with the head of the drop at 35 µs after pinch-off.
drops [98, 139]. This air flow also influences the drop flight of large drops. Infigure 4.12, which is taken from [14], the impact on drops of the same size as thejetted drops is shown. Drops of 32 pl are jetted at a repetition rate of 20 kHzwith a drop speed of 7 m/s. These drops transfer momentum to the surroundingair and the air will be accelerated along with the jetted drops. This can de seenin the high speed camera recording with 10.000 frames per second. Two dropsof the same size pass by slowly and horizontally. One drop is very close to thejetted drops, it is nearly in focus. The depth of field in this high speed camerarecording is only 20 µm. The other drop is out of focus, thus not so close to thejetted drops. Each frame shows two successive jetted drops in vertical direction.The induced air flow drags the drop, which is close to the jetted drops, along withthe jetted drops.
The horizontally moving drop which is in focus, is at a distance of at most20 µm from the jetted drops. From analysis of the captured images we get amaximum acceleration ad of the horizontally moving drops of about 1000 m/s2.With Stokes’ law for the drag force FD on a sphere with radius rd:
FD = 6πηa(va − vd)rd = mdad (4.14)
with ηa the viscosity of air (0.02 mPa.s) and va and vd the velocities of the air andthe drop with mass md, respectively. The resulting air speed is 4 m/s. This is 60% of the jetted drop velocity of 7 m/s.

4.3. SATELLITE DROP FORMATION 89
Figure 4.12: The measured drag of horizontally passing drops. The frame rate ofthe Phantom V7 high speed camera recording is 10 kfps. Drops of the same sizeare jetted continuously. Each frame show two successive jetted drops in verticaldirection. This induces an air flow. Based on the limited depth of field it isdetermined that the drop which comes close to the jetted drops (continuous line)is dragged along more than the drop further away (dashed line). Taken from [14].
4.3.2 Rayleigh breakup
A second satellite drop formation mechanism results from the long tail itself. Theend of the tail moves with an averaged speed of 6 m/s, see section 4.2.3. Formany applications a high drop speed is required, so long tails will be formed at adrop speed higher than 6 m/s. However, a long tail will not be stable. We take acylinder with radius R and length L as the tail. This tail will break-up in n dropswith radius r with the same volume as a cylinder:
n4
3πr3 = πR2L (4.15)
The total surface energy of the n drops becomes smaller than the surface area ofthe cylinder when:
n · 4πr2 < 2πRL (4.16)
This is the case when the radius r of the drops becomes at least 1.5 times the radiusof the cylinder [63]. The total surface energy will be reduced when a cylinder ofliquid breaks up into several droplets which have a radius of at least 1.5 times theradius of the cylinder or tail. A liquid column will therefore always breakup atsome time into drops with a radius of at least 1.5 times the radius of the column.
The break-up process is initiated by thermal noise. The noise excites surfacetension driven capillary waves. The surface tension driven capillary waves have toovercome inertia and viscous forces to break-up the tail in many small droplets.This break-up process is well known as the Rayleigh instability. For inviscid fluidswith a one-dimensional analysis of the balance between internal pressure and the

90 CHAPTER 4. DROP DYNAMICS
pressure from surface tension and the principal radii of curvature the optimalreduced wave number for Rayleigh instability can be derived [52]:
XR =2πR
λ= 0.697 (4.17)
This results in an optimal wavelength for the Rayleigh instability of about 9R.The radius of the satellite becomes 1.9 times the radius of the tail.
For viscous liquids another expression for the optimal reduced wave number isderived [52]:
XR =1
(2 +√
18/Re)(4.18)
In our case the Reynolds number, which is based on the nozzle radius, variesbetween 2 and 20. The optimal wavelength becomes 14R-24R and the radiusof the satellite becomes 2.2-2.6 times the radius of the tail. The measured andcalculated Rayleigh break-up is shown in figure 4.13.
(a) (b) (c) (d) (e)
Figure 4.13: The break-up of a long tail. The drop speed is 7 m/s and the taillength about 400 µm. (a) The shape of the drop recorded with a stroboscopicillumination. This recording shows the average of many drops. (b-d) Recording ofsingle drops with 100 ns flashes and the same camera. These recordings show thenon-reproducible break-up of the long tail. (e) The calculated shape of the tail,which breaks up in small droplets. The calculation was done with Flow3D for thesame geometry. A channel with a length of 8 mm and a nozzle with a diameterof 32 µm.
With the often used stroboscopic illumination at the drop repetition rate thepictures consist of averages of several hundred drops. The CCD camera captures25 frames per second and the drop repetition rate is 10kHz. The non-reproducible

4.3. SATELLITE DROP FORMATION 91
break-up process appears now as a smooth tail as shown in figure 4.13a. By record-ing single drops the real non-reproducible nature of the break-up becomes visible,figure 4.13b-d. The recordings are now made with the stroboscopic illuminationat camera frame rate. Another option is to use high-speed camera recordings.The flow3D calculations show a good correlation with the experimental observedbreakup, figure 4.13e. The Rayleigh break-up in the calculations is initiated bynumerical noise. The real nature of the noise source is not important. The noiseonly initiates the Rayleigh break-up, and is responsible for the non-reproduciblenature of the breakup process.
With visco-elastic fluids, the satellite droplets become even larger [60]. In par-ticle laden fluids such as pigment based inks new break-up modes can be observed[55, 56]. With our transparent Newtonian test inks, these effects do not play arole. In continuous inkjet a controlled break-up of the jet is used. One way isthrough thermal modulation of the surface tension, which results in Marangoniflow. Then, the jet breaks up at well defined points of minimum surface tensionand not at the non-reproducible points resulting from the thermal noise [57, 58].
4.3.3 Fast satellites
The third type of satellite drop formation occurs at a high drop speed. A partof the drop moves away in front of the head of the drop. This is a reproducibleprocess as can be seen in figure 4.14. The mist of droplets from the secondarytail and the droplets from Rayleigh break-up of the long main tail are formednon-reproducible.
(a)40 µs
(b)50 µs
(c)60 µs
(d)70 µs
(e)80 µs
(f)90 µs
(g) 20 µs
Figure 4.14: (a-f) The reproducible formation of a fast satellite drop at 40, 50.. . 90 µs after the start of the actuation. The recordings are made with astroboscopic illumination at drop repetition rate. (g) The calculated distributionof the speed in the z-direction at 20 µs after the start of the actuation. This showstwo maxima inside the drop. The normal maximum right behind the head of thedrop and another right in front of the head, indicating that this part of the headkeeps moving away.

92 CHAPTER 4. DROP DYNAMICS
The formation of a fast satellite out of the head of the drop results from asupercritical acceleration at the start of the drop formation process. When theink starts to come out of the nozzle, the acceleration of the ink has to stay belowa critical level. When the first acceleration of the ink exceeds this level, surfacetension forces are no longer capable of holding the ink together. This can be seenin figure 4.14g. In the figure the distribution of the speed in the jetting directioninside the drop is given. Normally, a maximum occurs only behind the head ofthe drop, meaning that ink flows from the tail into the head of the drop to forma spherical drop. However, with a supercritical acceleration, a maximum in thedistribution remains also at the front of the head. This indicates that this part ofthe head keeps moving away from the rest of the drop. With a 8 mm long channel,the first ink comes out of the nozzle at 15-20 µs after the start of the actuation.At this point it is already determined whether a fast satellite drop will be formedor not.
The speed above which fast satellite drops are formed, the splitting speed,depends on the shape of the driving waveform. The driving waveform consistsof a rise time of 1, 3 or 5 µs during which the piezo element is charged. Thevoltage remains then a certain time at the same value and 7-13 µs after the startof the actuation, the electrical charge is removed during the same time periodas the charging time. The pulse width is time difference between the start ofthe charging and the de-charging. For a simple single trapezoidal shaped drivingwaveform the influence of the rise time and pulse width is shown in figure 4.15a.
A pulse width close to the most efficient pulse width results in the lowestsplitting speed. A shorter rise time of the trapezoidal-shaped driving waveformalso result in a lower splitting speed. The influence of the driving waveform can beexplained with variation of the pressure at the entrance of the nozzle. A shorterrise time of the driving waveform result in a faster increase of the positive pressurepeak, with more initial acceleration as an important effect. This causes a lowersplitting speed. The first negative pressure peak, which determines the amount ofink at the start of the outward movement of the ink, and the amplitude of the mainpositive pressure peak determine the fast satellite drop formation mechanism.
With a longer pulse-width, the amplitude of the positive pressure peak de-creases as shown in figure 4.15b. This would result in less acceleration and ahigher splitting speed. However, the meniscus retraction increases with a longerpulse-width, as shown in figure 4.17a. The smaller mass of ink at the beginningof the outward movement would result in a larger initial acceleration and a lowersplitting speed. Together, both effects result in a minimum in the splitting speedas function of driving pulse width.
4.3.4 Slow satellites
Another satellite drop formation mechanism results in slow satellites, formed re-producibly from the tail of the drop when the distributions of mass and momentumin the tail of the drop are not optimal, figure 4.16. Now the tail breaks off from

4.3. SATELLITE DROP FORMATION 93
-1R#66
1x1 3x3 5x5 1x5 5x1
1
2 2.2 5
3 2.1 7 4.7
4 7.2 6.9 4.9
5 6.5 7.1 5.3
6 6.7 6.1 7.4 5.8
7 6 6.1 7
8 5.6 6.9
9 5.6 7.4
10 6.4 7.4 5.6
10.01 6.4 6.4 5.6
0 5 10
1x5
5x1
3
4
5
6
7
8
9
5 6 7 8 9 10 11 12 13 14
Pulse width [µs]
Sp
litt
ing
sp
eed
[m
/s]
1 µs
3 µs
5 µs
(a)
-41045.4 1.95E-06 -0.191312 1.95313 -0.410454 -0.1
-92950.8 2.93E-06 -1.15203 2.92969 -0.929508 -1
-107036 3.91E-06 -2.4184 3.90625 -1.07036 -
-92728.2 4.88E-06 -3.32887 4.88281 -0.927282 -3
-76179 5.86E-06 -3.89835 5.85938 -0.76179 -3
-29451.3 6.84E-06 -3.94107 6.83594 -0.294513 -3
27169.1 7.81E-06 -3.11652 7.8125 0.271691 -3
44583.4 8.79E-06 -1.92577 8.78906 0.445834 -1
28093.1 9.77E-06 -1.08238 9.76562 0.280931 -1
26234.4 1.07E-05 -0.61333 10.7422 0.262344 -0
76814.2 1.17E-05 0.180211 11.7188 0.768142 0.1
145982 1.27E-05 1.86468 12.6953 1.45982 1
166176 1.37E-05 3.87453 13.6719 1.66176 3
159433 1.46E-05 5.48347 14.6484 1.59433 5
135256 1.56E-05 6.58823 15.625 1.35256 6
61975.7 1.66E-05 6.72702 16.6016 0.619757 6
-19096.8 1.76E-05 5.59281 17.5781 -0.190968 5
-46769.7 1.86E-05 3.93316 18.5547 -0.467697 3-1.5
-1
-0.5
0
0.5
1
1.5
2
0 20 40 60 80 100
Time [µs]
Pre
ssu
re [
bar]
5 µs
9 µs
14 µs
(b)
Figure 4.15: (a) Measured splitting speed as function of the driving pulse widthwith a rise time of 1, 3 and 5 µs. The channel length is 8 mm and the nozzlediameter is 28 µm in a 100 µm electroformed nickel nozzle plate. (b) The calcu-lated pressure at the entrance of the nozzle for a drop speed of 7 m/s. The risetime is 3 µs and the pulse width 5, 9 and 14 µs. The calculations are done withthe narrow-channel model. The amplitude of the positive pressure peak is one ofthe two parameters, which determines the splitting speed.
the head and forms a slower moving satellite droplet.
The shape of the pressure wave after the main positive pressure peak is im-portant for this mechanism. When after the first positive pressure peak a largesecond positive pressure peak is generated, a minimum in the tail width is gen-erated. This minimum in the tail width is now localized somewhere between thehead of the drop and a part further on the tail. Due to the higher capillary pres-sure at this minimum tail width, the tail will pinch-off at this position. This leadsto the separation of the main part of the tail from the head of the drop.
This situation occurs for example with a very long driving pulse, as shown infigure 4.16. Normally, the de-charging of the piezo element amplifies the positivepressure wave from the charging of the piezo element. This generates one bigpositive pressure peak, see section 3.1.3. With a very long pulse, the de-chargingcomes too late. The negative pressure wave from the charging of the piezo isalready reflected at the reservoir and has reached the nozzle as a positive pressurepeak. The positive pressure wave from the de-charging of the piezo element reachesthe nozzle now as a second positive pressure peak.
So there are four satellite drop formation mechanisms. Satellite drops canhave a negative impact on the print quality. The generation of satellite dropsmust be avoided as much as possible. With the knowledge of the drop formationmechanisms it is not only possible to suppress the formation of satellite drops, butalso the options for changing the drops size can be identified [163]. For graphical

94 CHAPTER 4. DROP DYNAMICS
(a)70 µs
(b)80 µs
(c)90 µs
(d)100 µs
(e)110 µs
(f)120 µs
(g)130 µs
(h)140 µs
Figure 4.16: The measured reproducible formation of a slow satellite drop. The8 mm long channel is actuated with a 18 µs long driving pulse. The main drophas a speed of 7 m/s and the satellite drop has a speed of 5 m/s.
printing applications, changing the drop size fired with the same printhead geom-etry, drop size modulation, is an important option to improve the print qualityand productivity. The drop size modulation mechanisms are described in the nextsection.
4.4 Drop size modulation
4.4.1 Pulse width and fill-before-fire-level
The first option is already mentioned in section 3.1.3. By changing the timedelay between the rise time and the fall time of a trapezoidal shaped drivingwaveform, the drop formation time is modulated. With a larger width of thedriving waveform, the time over which ink is transported outward increases, seefigure 4.17a. The resulting drop size will become larger. However, when the timingof the rise time and the fall is not tuned to the travel time of the acoustic wave,the pressure wave will be less effectively amplified. This results in higher drivingvoltages for the same drop speed.
In figure 4.17b, the measured drop size at a drop speed of 7 m/s and therelative driving voltage (driving voltage with most efficient pulse width is 100 V )are shown. The channel length is 8 mm and the nozzle diameter is 36 µm. Thedrop size increases by almost 2 pl for each µs pulse width. The drop volume canbe changed from 36 pl to 54 pl by increasing the pulse width from 5 µs to 14 µs.The increase of the driving voltage remains within 20%. For a head with a 5 mmlong channel and a nozzle with a diameter of 24 µm, the drop size can be adjustedbetween 10 and 16 pl at a drop speed of 6 m/s. The pulse width varies from 3 µs

4.4. DROP SIZE MODULATION 95
-37463.1 1.95E-05 2.6153 19.5313 -0.374631 2
-34243.3 2.05E-05 1.7084 20.5078 -0.342433 1
-53194.7 2.15E-05 0.818154 21.4844 -0.531947 0.8
-64008.2 2.25E-05 -0.187728 22.4609 -0.640082 -0.1
-54011.5 2.34E-05 -0.951207 23.4375 -0.540115 -0.9
-54053.9 2.44E-05 -1.4858 24.4141 -0.540539 -1
-49742.5 2.54E-05 -1.94718 25.3906 -0.497425 -1.
-25894.5 2.64E-05 -2.07767 26.3672 -0.258945 -2.
-15700.5 2.73E-05 -1.90289 27.3438 -0.157005 -1.
-26041.5 2.83E-05 -1.8389 28.3203 -0.260415 -1
-28635.3 2.93E-05 -1.92055 29.2969 -0.286353 -1.
-17103.5 3.03E-05 -1.89722 30.2734 -0.171035 -1.
-3894.1 3.13E-05 -1.66371 31.25 -0.038941 -1.
-9918.29 3.22E-05 -1.43035 32.2266 -0.099183 -1.
-24511.2 3.32E-05 -1.46446 33.2031 -0.245112 -1.
-19632.6 3.42E-05 -1.55681 34.1797 -0.196326 -1.
-9651.67 3.52E-05 -1.47228 35.1562 -0.096517 -1.
-626.843 3.61E-05 -1.28924 36.1328 -0.006268 -1.
25927.2 3.71E-05 -0.871832 37.1094 0.259272 -0.8
-40
-30
-20
-10
0
10
20
30
40
0 50 100
Time [µs]
Men
iscu
s p
osit
ion
[µ
m]
5 µs
9 µs
14 µs
(a)
90
95
100
105
110
115
120
125
130
5 6 7 8 9 10 11 12 13 14Pulse width [µs]
Dri
vin
g v
olt
ag
e [
rel]
34
37
40
43
46
49
52
55
58
Dro
p s
ize [
pl]
voltage
volume
(b)
Figure 4.17: (a) The meniscus position with a 5, 9 and 14 µs wide driving pulse(the rise time is 3 µs). The calculations are done with the narrow-channel model.A larger pulse width results in a longer time period during which the ink is trans-ported outward. (b) Measured driving voltage and drop volume for a drop speedof 7 m/s as function of the pulse width. The channel length is 8 mm and thenozzle diameter 36 µm. The drop volume increases with a larger pulse width andthe driving voltage increases when the pulse width is not tuned to the travel timeof the pressure wave.
to 8 µs with this case. With this 5 mm geometry the other options for drop sizemodulation are further investigated.
With only two slopes in a driving waveform, as described in the previoussections, a maximum fill-before-fire action is achieved. The meniscus is retractedas much as possible when the positive pressure peak, which fires the drop, reachesthe nozzle. This results in a minimum mass of ink in the nozzle when the ink startsto move outward to form a drop. The volume of the generated drop is relativesmall. Both slopes have the same contribution to the required amplitude of thepositive pressure peak.
With a smaller amplitude of the first slope, the fill-before-fire action will beless. The smaller amplitude of the first slope must be compensated with a largeramplitude of the second slope to generate the same amplitude of the positivepressure peak. The electric voltage on the actuator changes in sign after the secondslope. This results in a double-sided driving waveform amplitude and the totalamplitude (peak-peak amplitude) of the driving waveform increases. The variationof the fill-before-fire level also requires a third slope in the driving waveform toremove the electric voltage from the actuator. The shape of a double-sided drivingwaveform is shown in figure 4.18a.
The variation of the fill-before-fire level is often used for a better control ofthe meniscus movement [88]. The variation can also be used for changing the

96 CHAPTER 4. DROP DYNAMICS
drop size. With a lower fill-before-fire level, the meniscus retraction will be lesswhen the positive pressure peak reaches the nozzle. This is shown in figure 4.18a.Because of the larger amount of ink in the nozzle when the ink starts to moveoutward, the drop size will be larger.
(a)
3
8
6
1
1
7
2
1
5
4
8
6
2
1
5
3
6
1
4
4.5
5
5.5
6
6.5
7
7.5
8
8.5
0 10 20 30 40 50 60 70 80
DOD frequency [kHz]D
rop
sp
eed
[m
/s]
double
single
(b)
Figure 4.18: (a) The meniscus position with a single- and a symmetric double-sided driving waveform. The calculations are done with the narrow-channel modelfor one drop formation cycle. The meniscus retraction with the double waveformis much smaller. (b) The measured drop speed as function of the drop repetitionrate (drop on demand (DOD) frequency) with a single- and a double-sided drivingwaveform. The double-sided driving waveform results in more variations of thedrop speed at higher drop repetition rates. The channel length is 5 mm and thenozzle diameter is 24 µm.
With the negative driving amplitude as large as the positive driving amplitude,a symmetric two-sided driving waveform, the total driving amplitude becomes50 % higher. With a 5 mm long channel, the drop size range can be extendedfrom 10-16 pl to 10-22 pl when applying the symmetric two-side driving waveform.
With the maximum fill-before-fire the main channel resonance is excited duringonly a half time period. With the symmetric two-sided driving waveform, themain channel resonance is excited during the complete time period. The acousticresonances in the ink channel are much more excited. The higher level of residualvibrations, section 3.4.2, leads to more variations of the drop speed at higher droprepetition rates as shown in figure 4.18b.
4.4.2 Acoustic resonances
Pre-actuation of the meniscus with a small driving waveform (typical 1 % of thenominal driving amplitude) can be used for conditioning the ink by mixing theink components [88]. Pre-actuation with driving waveforms of order 10 % of the

4.4. DROP SIZE MODULATION 97
nominal driving amplitude can be used for reducing the required driving voltage[45]. A small pulse before the main actuation pulse can also create extra ink justin front of the nozzle. This amount of ink will be dragged along with the maindrop formation process as shown in figure 4.19. A pre-pulse increases the totaldrop volume up to 10 pl when the timing of the pre-pulse is in phase with thechannel resonance. With the 5 mm channel geometry the drop size range can beextended to 10-26 pl.
(a)10 µs
(b)20 µs
(c)30 µs
(d)40 µs
(e)50 µs
(f)60 µs
(g)70 µs
(h)80 µs
Figure 4.19: The measured formation of a large drop after pre-actuation of themeniscus at 10, 20. . . 80 µs after the start of the actuation. The channel lengthis 5 mm and the nozzle diameter is 24 µm. With a small pulse before the mainpulse extra ink in front of the nozzle is created. This amount of ink is draggedalong with the main drop formation, which results in up to 10 pl larger drops.The head of the drop deforms a lot when colliding with the extra amount of ink,as can be seen in frame c.
When the main drop collides with the extra amount of ink in front of thenozzle, the head of the drop deforms a lot. The head of the drop recovers itsspherical shape within a few microseconds. With a pre-pulse, the required drivingvoltage for larger drops does not increase as with the variation of the pulse-widthor fill-before-fire level. However, the driving waveform will be longer and will notfit in the time window of high drop repetition rates. This is also the case with thenext option.
When firing drops at a high repetition rate, the acoustic waves of the precedingdrop formation cycle will not come to rest when the next cycle starts. The residualvibrations result in drop speed variations, see figure 3.23. When firing the nextdrop at a timing, which corresponds to a maximum in the frequency-speed curve,the next drops will move faster and merge with the first drop as shown in figure4.20.
The driving waveforms will be long. For the 5 mm channel geometry the timingbetween the multiple pulses must be 13.5 µs, which corresponds to the highestmaximum in the frequency-volume curve and a local maximum in the frequency-

98 CHAPTER 4. DROP DYNAMICS
speed curve, figure 3.24. We can extend the drop size range to drop sizes of 36,50 or 65 pl with bursts of 2, 3 or 4 drops. However, the length of the drivingwaveform must fit in the time window of the drop repetition rate. Depending onthe maximum drop on demand frequency, the length of the burst will be limited.With the timing of the 5 mm channel geometry, four drops can be fired within aburst up to a frequency of 20 kHz, and up to 40 kHz only a burst of two dropscan be fired.
Figure 4.20: The measured drop formation at 10, 20. . . 100 µs after the start ofthe actuation when firing a burst of three drops. For the 5 mm channel geometrythe timing between the adjacent drops is 13.5 µs corresponding to a maximum inthe DOD frequency-drop volume relationship and the three drops merge to onebig drop after 95 µs.
4.4.3 Break pulses
The opposite of pre-actuation is the use of a break pulse just after the main pulse.This can be a pulse of the same polarity after a half period of the channel resonanceor of the opposite sign after a whole period. This dampens the residual vibrations[156]. When a break pulse starts when the main part of the drop is still leavingthe nozzle, several pl of drop volume can be held back. With a break pulse aftera half period with an amplitude of 50% of the main pulse, the smallest drop sizewith the 5 mm channel geometry can be reduced from 10 pl to 7 pl with a dropformation which looks the same as the normal drop formation.
A break pulse also reduces residual vibrations, especially when there is onlyone dominant frequency in the channel acoustics. For more complex situationswith more than one important frequency, iterative learning control can identifysuitable break waveforms [64]. A disadvantage of a strong break pulse is thatrefill of the nozzle will be less. Refill is driven by the variable mass effect andthe channel acoustics, see section 3.4.1. With more damping less pressure wavesremain to drive the filling of the nozzle.
Another way the generate smaller drop is to use the fast satellite drop for-mation mechanism as described in section 4.3.3. First actuation pulse is applied,

4.4. DROP SIZE MODULATION 99
which generates a fast satellite drop, the so-called split pulse. This pulse generatesa supercritical acceleration at the beginning of the drop formation, section 4.3.3.The best way is to use a short rise time for the split pulse. The first part of theink cannot be captured anymore by the surface tension forces. With a 5 mm longchannel this is the case after 15 µs. Then we start with a second counter pulsethat blocks the main drop formation. As a result only the fast satellite drop willbe jetted away as a small drop with a volume of 7 pl. This is shown in figure 4.21.
Figure 4.21: The measured drop formation at 5, 10, 15. . . 60 µs after the start ofthe actuation with a split pulse, followed by a counter pulse. The channel lengthis 5 mm and the nozzle diameter is 24 µm. The counter pulse blocks the maindrop formation, which is visible close to the nozzle plate surface. The fast satellitecannot be captured and remains as a small drop.
With these mechanisms the drop size range with the 5 mm channel geometryis 7-36 pl with a maximum drop on demand frequency of 40 kHz, 7-50 pl witha maximum frequency of 30 kHz, and 7-65 pl with a maximum frequency of 20kHz.
4.4.4 Meniscus and drop formation oscillations
Exciting resonances in the meniscus surface can result in a higher order dropformation. This results in small drops when using the third mode of the meniscusresonance [29].
In order to excite a higher order meniscus resonance, the second strong peakin the frequency characteristics of the meniscus movement in our printheads isused, see figure 3.3. With a 8 mm long geometry this peak is at a frequency of170 kHz and with the 5 mm long channel at 220 kHz.
In a 8 mm long channel, a burst of three pulses at 170 kHz excites the thirdmode resonance, which results in 3 pl drops with a speed of 3 m/s. This is shown infigure 4.22. Numerical simulations with Flow3D show the same results. However,

100 CHAPTER 4. DROP DYNAMICS
the jetting stability is poor. Only at a very low drop speed (below 4 m/s), thedrop formation remains stable. In addition, there are problems with wetting andsatellite drop formation. With the 5 mm channel geometry the drop size looked tobe of order 1 pl, but the jetting performance was too poor to get good quantitativedata.
(a) (b) (c)
Figure 4.22: The measured drop formation 25 µs after the start of the actuation.The channel length is 8 mm and the nozzle diameter 32 µm. (a) Withe the normaldriving waveform. (b) With a triple burst at 170 kHz, which results in a 3 pl dropinstead of a 32 pl drop. (c) The calculated drop formation with the triple burstat 170 kHz.
Finally, exciting oscillations in nozzle flow of the drop formation process is alsoa possibility for firing small droplets from a large nozzle [33]. For this mechanismthe Ohnesorge number, balancing the viscous effects on one side and inertial andsurface tension effects on the other side, should be of order 0.1 and the rise timeof the driving waveform about 0.03 times the capillary time scale. The capillarytime scale is about 10 µs in our case. Under these conditions an oscillation inthe flow inside the nozzle generates small drops. In the reference [33] a drop sizereduction by a factor of 10 was reported for a default drop size of 40 pl. In ourprinthead geometries the capacitance of the piezo-electric actuator is too high toapply a rise time of order of 0.3 µs.
4.5 Concluding remarks
In the previous chapter we have seen how pressure waves inside the ink channelsare generated. These pressure waves drive the drop formation process, which isdescribed in this chapter.
The traveling wave principle leads to a drop formation process, which takesseveral tens of microseconds. Because of the viscosity of the ink, a tail is formed,

4.5. CONCLUDING REMARKS 101
which slows down the speed of the head of the drop from 20 to 7 m/s. At tailbreak-off a secondary tail is formed. The secondary tail forms a mist of verysmall droplets. The mist of droplets is dragged along with the main drop forma-tion, because of an induced air flow. The resulting tail-end behavior is mainlydetermined by the ink properties. The actuation amplitude has no impact on thetail-end speed. The tail breaks off after 45 − 60 µs and long tails will be formedwhen the speed of the head exceeds the tail-end speed. The long tail will break-upnon-reproducible in small satellite droplets by the Rayleigh break-up.
The fill-before-fire action retracts the meniscus during the first 10 − 20 µs.The small mass of ink in the nozzle can result in a supercritical acceleration. Thisresults in the reproducible formation of a fast satellite drop out of the head ofthe drop. The formation of slow satellites out of the tail of the drop is anothersatellite drop formation mechanism. This occurs when the distribution of mass inthe tail has a minimum between the head of the drop and a point in the middleof the tail.
An important application is drop size modulation. With the knowledge of thedrop formation process up to eight drop size modulation techniques are identified.The mechanisms are varying the driving pulse width and the fill-before-fire level,using pre-actuation, multiple drops or break pulses, the fast satellite drop forma-tion mechanism with a split pulse and a block pulse, exciting meniscus oscillationsand drop formation oscillations. With a selection from these mechanisms we canvary the drop size by a factor of ten.
The four satellite drop formation mechanisms, which are discussed in this chap-ter, are an example of possible disturbing phenomena in inkjet printing. Anotherdisturbing phenomenon is the wetting of the nozzle plate. This is the subject ofthe next chapter.

102 CHAPTER 4. DROP DYNAMICS

Chapter 5
Wetting dynamics
In this chapter the wetting phenomena on the nozzle plate are discussed. Wetting ofthe nozzle plate is determined by the material interactions between the ink and thenozzle plate material, which result either in a partial wetting regime or a completewetting regime. Detailed knowledge of the material interactions is not available.Therefore, a phenomenological investigation of the flow phenomena is performed.The flow patterns in the ink layer and the influence of the actuation of the nozzleswill be described. In the jetting situation with a wetted nozzle, two flow patternsare observed. A Couette flow and a sink flow, with sometimes de-wetting of thenozzle plate. In the non jetting situation no activity is seen at very low drivingvoltages, a source flow at moderate driving voltages, a small sink flow regime athigh repetition rates, and a dipole flow at driving voltages just below the jettingthreshold. Then, the flow patterns at nozzle plate scale will be described. Theprecursor film and Marangoni flow, resulting from the changing surface tension ofthe ink, determine the flow patterns. Finally, the effect of the ink layer aroundthe nozzle on the drop formation and the channel acoustics is discussed.
5.1 Wetting of the nozzle plate
5.1.1 Origin of wetting
Free surface flow in the nozzle and the acoustics in the ink channels are designedto give a good refill of the nozzle. This makes high drop repetition rates possi-ble. However, a strong refill process results also in overfilling of the nozzle, seesection 3.4.1. Overfill of the nozzle can result in wetting of the nozzle plate, espe-cially when the area around the nozzles has mechanical and chemical defects likescratches or depositions of ink components. Large grooves and a lot of dirt aroundthe nozzle opening can even result in excessive wetting and have to be avoided.In this thesis the excessive wetting is not investigated further. A printhead with8 mm long channels and nozzles with a diameter of 30 µm in an electroformednickel nozzle plate without any defects is used to study the dynamics of a layer ofink on the nozzle plate.
103

104 CHAPTER 5. WETTING DYNAMICS
A source for wetting of the nickel nozzle plate can result from failure of thedrop formation process as shown in figure 5.1. Often when the drop formationfails, the drop speed decreases slowly. When the drop speed becomes lower thana certain critical level, the adjacent drops will merge and a large amount of ink iscollected just below the nozzle plate. The normal jetting direction is downwards,and gravity is pulling the ink away from the nozzle plate. However, after a while,this large amount of ink is attracted towards the nozzle plate. This whole sequencetakes about 1000-10000 drop formation cycles, corresponding to 0.05− 0.5 s witha drop repetition rate of 20 kHz.
Figure 5.1: The recorded failure of the drop formation process during the lastthousand drop formation cycles. As the drop speed decreases below a criticallevel, the adjacent drop will merge and a large amount of ink collects just belowthe nozzle opening. This large amount of ink is finally attracted to the nozzleplate and this results in wetting of the nozzle plate.
Several mechanisms can result in the attraction of the large blob of ink. First,the continuous firing of drops results in an increase of the blob radius which canbe faster as the net displacement of the large amount of ink. So the surface of theblob grows towards the nozzle plate.
The second mechanism is the attraction force resulting from the surface tensionof the ink. The tail does not pinch off anymore when the distance between theblob surface and the nozzle is short. The surface tension forces will then tend tomerge the blob with the meniscus.
At some point the large blob of ink covers the whole nozzle opening and athird mechanism starts to play a role. The variable filling of the nozzle, whichis the driving force behind the refill mechanism, changes to a complete filling ofthe nozzle. The asymmetric nozzle shape, which is now completely filled fromthe inside and the outside, starts to act as a micro-pump as long as long as theactuation continues. The micro-pump action of an asymmetric micro-channel ina changing pressure field is described in [128, 144]. The pumping direction isinwards, so that the large blob is attracted to the nozzle.
When the ink comes into contact with the nozzle plate surface around thenozzle opening, the wetting properties of the surface generate another force whichattracts the ink to the nozzle plate. The observed contact angles of the ink on anozzle plate are less than 20 degrees. The contact angle results from the balance of

5.1. WETTING OF THE NOZZLE PLATE 105
forces at the contact line, figure 5.2a. The forces result from the surface tensionsat the ink-air interface γl, the solid-air interface γs and the solid-ink interface γsl.The contact angle is defined by the Young equation:
γs = γlcosθ + γsl (5.1)
The capillary length scale is much larger than the nozzle diameter, section 4.1.1,so gravity plays no role on this scale. Without gravity, the drop has the shape ofa sphere, and on a flat substrate the drop gets the shape of a spherical cap, cut-offat the contact angle. Using standard trigonometric formulas for the volume of asphere and the volume of a spherical cap and making both volumes the same, weget for the spreading ratio SR, i.e. for the ratio between the contact radius Rc ofthe spherical cap on the substrate and the radius of the drop Rd:
SR =Rc
Rd=
(
4sinθ(1 + cosθ)
(1 − cosθ)(2 + cosθ)
)1
3
(5.2)
The spreading ratio according to this formula is depicted as function of the contactangle in figure 5.2b. For contact angles less than 20 degrees the drop will spreadover a large area.
(a)
69 1.204242 1.496641
68 1.186789 1.508551
67 1.169336 1.520559
66 1.151883 1.532671
65 1.134431 1.544894
64 1.116978 1.557234
63 1.099525 1.569698
62 1.082072 1.582295
61 1.064619 1.595032
60 1.047167 1.607916
59 1.029714 1.620958
58 1.012261 1.634165
57 0.994808 1.647548
56 0.977356 1.661116
55 0.959903 1.674881
54 0.94245 1.688852
53 0.924997 1.703043
52 0.907544 1.717465
0
1
2
3
4
5
6
7
8
0102030405060708090
Contact angle [degrees]
Sp
read
ing
Facto
r
(b)
Figure 5.2: (a) At the contact line the balance of forces from the surface tensionsat the ink-air interface γl, the solid-air interface γs and the solid-ink interface γsl
results in a contact angle θ. (b) The spreading ratio of a spherical cap as functionof the contact angle. For contact angles less than 20 degrees, the drop will spreadover a large area.

106 CHAPTER 5. WETTING DYNAMICS
5.1.2 Wetting regimes and visualization
It is found that after a period of jetting (at least several seconds) a thin ink layeris formed on the nozzle plate [87]. The thickness of the layer is of the order of10 µm, so we have to deal with the dynamics of thin films as described in [63, 129].With our ink the Bond number g∆ρL2/η and the Galileo number gL3∆ρ2/η2 areboth very small, meaning that gravity can be neglected with respect to viscousand surface tension forces. The observed velocities of the ink movement on thenozzle plate are of the order of 1 mm/s [14]. With our ink the Reynolds numberρuL/η and the Weber number ρu2L/γ are both very small, too, meaning that alsoinertia can be neglected with respect to viscous and surface tension forces. So,the flow phenomena are dominated by viscous and surface tension forces.
The wetting properties of a surface are determined by the surface energies ofthe ink and the nozzle plate material, but most of all by the interaction between theink and the nozzle plate material [62]. An important parameter is the spreadingcoefficient S:
S = γs − γsl − γl (5.3)
which give the energy difference between a dry and a wet surface. With a posi-tive spreading coefficient, the nozzle plate and the ink are in a complete wettingregime, and with a negative one in a partial wetting regime. In a complete wettingregime the contact angle will become zero and a thin layer of liquid will be formed,the precursor film. In the partial wetting regime, drops exist with a certain con-tact angle. However, detailed knowledge of the energies involved is not present.Especially the data on interactions between the ink and the nozzle plate, whichshould be described with van-der-Waals interactions and polar interactions (forexample comprised to Lewis acid-base interactions [171]) are missing. Therefore, aphenomenological investigation of the flow patterns on a nozzle plate is performed.
The nozzle plate has two arrays of nozzles. The nozzles within one row are ata spacing of 340 µm. The two arrays are located near the long edges of the nozzleplate and the distance between the two arrays is 8 mm, figure 5.3. The circularareas around the nozzles are due to a difference in material structure, which isfound to be irrelevant for this study.
The flow pattern on the nozzle plate are visualized with a standard 25 fps videocamera as with the visualization of the drop formation. Instead of a stroboscopicillumination, now an continuous light source (Olympus Highlight 3001) is used.A mirror is mounted at 45 just below the nozzle plate to obtain a top view ofthe nozzle plate. With a needle a localized air flow is applied to bend to dropsaway from the mirror without influencing the flow pattern on the nozzle plate.Particle Tracking Velocimetry with 2 µm melamine tracer particles with a densityof 1510 kg/m3 is used to measure the velocities in the ink layer. The density of theink is 1090 kg/m3. For the measurements of the flow phenomena in the ink layeraround a single nozzle, the ink is directly deposit on the nozzle and actuationis started after the ink has reached an equilibrium situation, see [14] for moreinformation.

5.2. A WETTED NOZZLE 107
Figure 5.3: Drawing of the top view of the nozzle plate with two arrays of nozzleswith a distance between the array of 8 mm. The distance between the nozzles is340 µm and the nozzles have a diameter of 30 µm.
5.2 A wetted nozzle ∗
5.2.1 Jetting nozzle
With normal actuation, drops are jetted continuously, and measurements are per-formed up to a drop repetition rate of 30 kHz.
At a repetition rate of 20 kHz, a bi-directional flow pattern is visible as shownin figure 5.4a. The arrows are drawn following the movement of the tracer particles,the circular area around the nozzle has a diameter of 130 µm. The edge of thenozzle-plate is located at left side, so the ink layer is mainly present at the rightside of the nozzle and the neighboring nozzles are disturbing the flow patternabove and below the jetting nozzle. So most tracer particle are moving at theright side of the nozzle.
The video recording shows that both directions occur at the same position,indicating a depth dependence of the velocity. The depth dependence of the ve-locity profile is measured by recording the nozzle plate surface also at an angle of45. Since the light is reflected on the nozzle plate surface, also the mirror imagesof the tracer particles are visible. From the distance between the particles them-selves and the mirror images, the depth profile can be determined. It turns outthat particles close the nozzle plate surface are moving away from the nozzle andparticles near the ink-air interface are moving towards the nozzle. The resultingCouette velocity profile is shown in figure 5.4b.
∗Part of this subsection has been published as: B. Beulen, J. de Jong, H. Reinten, M. van denBerg, H. Wijshoff, and R. van Dongen, Flows on the nozzle plate of an inkjet printhead, Exp.Fluids 42, 217 (2007).

108 CHAPTER 5. WETTING DYNAMICS
(a) (b)
Figure 5.4: (a) The streamlines in an ink layer around a nozzle, jetting at 20 kHz.Particles are moving in a radial pattern towards the nozzle and away from thenozzle, indicating a bi-directional flow. (b) The velocity profile in the ink layernear the nozzle. Ink is moving from the nozzle into the ink layer because of theoverfilling of the nozzle and is dragged towards the nozzle by the induced air flow.
In section 3.4.1, we have seen that during normal operation the refill of thenozzle during jetting results in an overfilling of the nozzle. This overfilling resultsin a net ink flow from the nozzle into the ink layer near the nozzle plate surface.In section 4.3.1 we have seen that the momentum transfer to the surrounding airby the continuously jetted drop induces an air flow of several m/s along with thejetted drops. This induced air flow causes an acceleration of the surrounding airand subsequently a suction of air towards the jetted drops. So there is not onlyan air flow along with the jetted drops, but also an air flow towards the jettingnozzle. This drags the ink at the ink-air interface towards the nozzle [14]. Bothmechanisms result in the observed Couette flow.
The radial velocity vr and the circumferential velocity vθ of the tracer particlesare shown in figure 5.5 as a function of their distance r to the nozzle. The radialpattern results in circumferential velocities much lower than the radial velocities,only 0± 0.05 mm/s. The radial velocities decrease from a maximum of 0.1 mm/sat a distance of 50 µm from the center of the nozzle to 0.05 mm/s at a distanceof 400 µm from the nozzle. The velocities of the traces particles are split intoa group with a positive speed (towards the nozzle) and a group with a negativespeed (away from the nozzle).
At a drop repetition rate of 25 kHz, a radial flow pattern is visible, too, butnow only in one direction, towards the nozzle, figure 5.6a. The recorded speedis much higher, namely 0.4 mm/s at a distance of 400 µm and up to 0.7 mm/sat a distance of 250 µm. The tracer particles cannot be tracked completely upto the nozzle because their velocities become too high to be resolved with the

5.2. A WETTED NOZZLE 109
Figure 5.5: The radial velocity component vr and the circumferential velocitycomponent vθ of the flow in the ink layer around a nozzle, which fires drops at arepetition rate of 20 kHz. The radial flow properties are confirmed, as vθ ≪ vr.The radial velocity distribution shows a group tracer particles moving away fromthe nozzle and another group moving towards the nozzle.
employed camera. In figure 5.6b the velocity amplitude |v| =√
v2r + v2
θ is plotted
on a double logarithmic scale as a function of the distance to the center of thenozzle. The cloud of data points is formed by rows of data points representing arecorded streamline.
From these data the r-dependency of the tracer particle velocities is determinedfor each streamline separately. The gives a relationship of |v| ∝ rn with n = −1.3with a standard deviation of 0.3. For an ideal 2D sink flow, vθ = 0 and vr becomes|v|. The value of n can be derived directly from conservation of mass and flux atthe velocity potential lines, which are perpendicular to the radial streamlines. Thecircumference of the potential lines scales with r, so the velocity must scale withr−1 to keep the flux constant. The small deviations are caused by the non-uniformlayer thickness.
There is only a flow towards the nozzle. This means that there is no flowfrom the nozzle to the ink layer anymore. The overfilling is too weak or evenvanished. The overfilling is driven by the variation of the mass of ink inside thenozzle. The meniscus retraction is the cause of the variation of mass. However,with an ink layer, during the meniscus retraction ink will flow from the ink layerinto the nozzle. When the meniscus protrudes, ink will flow from the nozzle intothe ink layer. The variation of the mass of ink in the nozzle, which is the drivingforce behind the refill, will be less. The refill mechanism will be less strong andcan even vanish completely.
When the ink layer is so thick that the nozzle area remains covered all thetime, the nozzle will start to act as a micro-pump with the flow directed inwards,section 5.1.1. The ink layer thickness must be larger than 40 µm, as we will seein section 6.2.1. This can become an extra driving force and the flow in the ink

110 CHAPTER 5. WETTING DYNAMICS
(a) (b)
Figure 5.6: (a) The streamlines in an ink layer around a nozzle, jetting at 20 kHz.Particles are moving in a radial pattern towards the nozzle, indicating a sink flow.
(b) The velocity amplitude |v| =√
v2r + v2
θ of the flow in the ink layer. The tracer
particles follow a |v| ∝ rn dependency with n = −1.3 with a standard deviationof 0.3.
layer towards the nozzle can become very strong.
A quantitative analysis of the weakening of the refill effect and the onset of themicro-pump action requires accurate data on the ink layer thickness distribution.However, these are not available. What is known, is that the ink layer thicknessvaries between 10-20 µm. The thickness of the ink layer is estimated by thenumber of fringes that arise from narrow-band LED illumination (λ = 545 nm)placed under an angle of 45. The larger amount of ink is towards the middle ofthe nozzle plate, which is at the right of the actuated nozzle with the orientationshown in the figures.
At a drop repetition rate of 15 kHz the sink flow is very strong (vr > 1 mm/s),resulting in dewetting of the area around the nozzle as shown in figure 5.7. Withina few seconds an area of several hundred micrometers is depleted of ink. The drysurroundings even extend over the neighboring nozzles.
Measurements at a drop repetition rate of 5 and 10 kHz show a weak sinkflow towards the nozzle, qualitatively comparable to the sink flow observed at 25kHz. The observed flow pattern at the different drop repetition rates are now:
5 kHz: Weak sink flow, vθ = 0, vr ≈ 0.1 mm/s
10 kHz: Very weak sink flow, vθ = 0, vr < 0.1 mm/s
15 kHz: Very strong sink flow, vθ = 0, vr > 1 mm/s
20 kHz: Couette flow, vθ = 0, vr ≈ ±0.1 mm/s
25 kHz: Normal sink flow, vθ = 0, vr ≈ 1 mm/s

5.2. A WETTED NOZZLE 111
(a) 0 s (b) 1 s (c) 2 s
(d) 4 s (e) 8 s (f) 16 s
Figure 5.7: The dewetting of the area around the nozzle because of a very strongsink flow in the ink layer around the nozzle, when the nozzle jets with a repetitionrate of 15 kHz. The pictures (a-f) are taken at 0, 1, 2, 4, 8 and 16 seconds afterstart of the jetting process.
5.2.2 Non-jetting nozzle
In this section, the flow patterns are observed in the non-jetting actuation regime.Reducing the actuation amplitude below the threshold for drop formation resultsin a meniscus movement only. The threshold for drop formation is about 50% ofthe nominal driving amplitude for a drop speed of 5 m/s. Without drop formation,there is no induced air flow anymore, which drags the ink towards the nozzle.
The measurements are performed at actuation frequencies up to 30 kHz. Atvery low driving voltages, less than 10% of the nominal driving amplitude for adrop speed of 5 m/s, no activity is seen. At moderate driving amplitude a sourceflow is observed at all actuation frequencies, most likely driven by the refill effect.The amplitude of the meniscus movement is now big enough to cause a significantvariation of the mass of ink in the nozzle. This leads to overfilling of the nozzle

112 CHAPTER 5. WETTING DYNAMICS
(a) (b)
Figure 5.8: (a) The streamlines in an ink layer around a nozzle, actuated at 20 kHzwithout drop formation. The tracer particles are moving in a dipole flow pattern.
(b) The velocity amplitude |v| =√
v2r + v2
θ of the flow in the ink layer. The tracer
particles follow a |v| ∝ rn dependence with n = −2.3 with a standard deviationof 0.3. Taken from [14].
and ink can flow from the nozzle into the ink layer around the nozzle.
At driving amplitudes just below the drop formation threshold, a dipole flowis observed for almost all driving frequencies. In figure 5.8a the streamlines of theflow in the ink layer with the nozzle actuated at a frequency of 20 kHz are shown.The direction of the dipole is along the gradient in the ink layer thickness. Left ofthe nozzle there is almost no ink and right of the nozzle there is a lot of ink. Thevelocity amplitudes are comparable with the sink and Couette flow in the jettingsituation.
In figure 5.8b the velocity amplitude is plotted as a function of the distanceto the center of the nozzle, in a double logarithmic plot. The r-dependency showsa |v| ∝ rn relationship with n = −2.3 with a standard deviation of 0.3. For anideal 2D dipole flow n should be -2. The deviation is most likely caused by thegradients in the ink layer thickness. So a vibrating meniscus can act as a sourcefor a dipole flow.
At least two possible mechanisms can be responsible for this. First, the vi-brating meniscus in the nozzle can excite capillary waves. When these wave areabsorbed by viscous dissipation, flow patterns can be generated by acoustic stream-ing [102, 110, 143]. The driving force is the transfer of the time average momentumin an acoustic beam to either an increase of the time average pressure in the inklayer or a decrease of the layer thickness. Under ideal circumstances this leadsto quadrupole like flow field, but the time average spatial distribution of the inklayer thickness, which is not known quantitative, will have a large impact.
A second mechanism results from possible variations in the surface tensionof the ink. Gradients in the surface tension will lead to a Marangoni flow since

5.2. A WETTED NOZZLE 113
Figure 5.9: The observed flow pattern with a non-jetting nozzle (source, sink anddipole flow) as function of actuation amplitude and frequency. Taken from [14].The actuation amplitude Vrel is given relative to the nominal driving amplitude.
the surface of the liquid tries to minimize the surface energy. In the next sectionwe will see that the surface tension of the ink can change. The ink consists ofa mixture of organic compounds in a polymer based resin and local changes insurface tension can occur through selective evaporation or through exposing sucha liquid to a surface vibration [161]. The actuated nozzle acts as a source forvibration but also continuously supplies the ink layer with homogeneous mixedink compounds.
In figure 5.9 an overview of the observed flow pattern is given. The mea-surements are performed with increasing driving amplitude from zero to jettingamplitudes for frequencies up to 30 kHz. At frequencies of 19 kHz and higher,a sink flow is observed at driving amplitudes just between the source flow regimeand the dipole flow regime.
With these measurements the ink is deposit directly at the nozzle area to getmore or less constant conditions for the experiments. Normally the nozzles arewetted by ink coming from the nozzle itself or form other places at the nozzleplate. We will look now at the wetting patterns on nozzle plate scale.

114 CHAPTER 5. WETTING DYNAMICS
5.3 A wetted nozzle plate †
5.3.1 Long-range phenomena
(a) (b)
Figure 5.10: (a) Schematic drawing of a top view on the nozzle plate and thecentral ink band. This is the normal starting situation when jetting starts. (b)Developed ink flow from the central ink band to a row of nozzles when sevennozzles are jetting with a repetition rate of 30 kHz.
Under normal operation conditions, the nozzle plate is prepared before theactual printing starts. It is impossible to remove all the ink from the nozzle plate.Therefore, there is always some ink at the nozzle plate, which accumulates in themiddle of the nozzle plate in a stationary central ink band as shown in figure5.10a. The thickness of the central ink band varies between 1 µm and 10 µm.This situation is the starting point for the observations on nozzle plate scale [87].
When a row of nozzles is jetting, an ink flow from the central ink band tothe jetting nozzles is visible, figure 5.10b. This trunk flow even develops whena single nozzle is actuated without jetting i.e. at a low driving amplitude. Thedevelopment of the ink flow from the central ink band towards a single actuated,but not jetting, nozzle is shown in figure 5.11. When the nozzle is actuated witha driving amplitude just below the jetting threshold, the central band starts todeform slowly and after a few minutes a streamer is developed which protrudes inthe direction of the actuated nozzle. After the trunk has been formed it elongatesrapidly and reaches the actuated nozzle within 0.2 s [87].
The measurement of the position of the front of the trunk is based on thefringes, which are visible with the narrowband (λ = 545 nm) LED illumination
†Part of this subsection is published as: J. de Jong, H. Reinten, H. Wijshoff, M. van den Berg,K. Delescen, R. van Dongen, F. Mugele, M. Versluis, and D. Lohse, Marangoni flow on an inkjet
nozzle plate, Appl. Phys. Lett 91, 204102 (2007).

5.3. A WETTED NOZZLE PLATE 115
Figure 5.11: The development of the trunk flow from the central ink band towardsan actuated, but non-jetting, nozzle. The central ink band is located just at thetop of the pictures and a row of 9 nozzles with the middle nozzle actuated islocated at the bottom of the pictures. Actuation is at a repetition rate of 30 kHzwith an amplitude of 47.5 % of the nominal driving voltage. A similar picturewith a jetting nozzle can be found in [87].
at an angle of 45. The ink front position is defined through a layer thickness of150 nm. Its position as a function of time after the streamer has developed isdepicted in figure 5.12, together with an non-jetting actuation at only 40 % of thenominal driving amplitude and a jetting actuation. The position of the ink frontfollows a power law relationship with an exponent of 0.46 ± 0.06 for all three cases[87]. Only the pre-factor depends on the amplitude of the actuation.
y = c(t0 − t)0.46±0.06 (5.4)
The error in the value of the exponent corresponds to a displacement error of10 µm. The speed at which the front of the trunk moves is typical 5-10 µm/s.
5.3.2 Driving mechanisms
The question is what are the possible driving mechanisms for the trunk flow. Thediscussion below includes air flow, nozzle plate vibrations, electrostatic effects,

116 CHAPTER 5. WETTING DYNAMICS
Figure 5.12: The position of the ink front with a jetting actuation (a and b-squares)and with non-jetting actuation at 47.5 % (b-circles) and at 40 % (b-pluses) of thenominal driving amplitude. In the loglog plot also the corresponding power lawfits are drawn. The nozzle is located at y = 0 and t0 is the time when the frontarrives at the nozzle (≈ 280 s). Taken from [87].
pressure differences, gravitational effects, thermal effects, and variations in surfacetension from variations in nozzle plate composition or ink composition.
(i) Air flow as a driving force towards the nozzle. The air flow is induced bythe drop formation process and accelerates the surrounding air towards the jettingnozzle, see section 4.3.1. Although this air flow drags the ink in a layer around thejetting nozzle towards the jetting nozzle [14], it can be ruled out as driving forceon nozzle plate scale since the non-jetting cases shows almost the same velocity ofthe trunk flow.
(ii) Nozzle plate vibrations. The actuation with piezo elements can exciteresonances in the printhead structure, section 2.3. The maximum amplitude ofthe nozzle plate vibrations, found with the finite element analysis of the dynamicbehavior of the printhead structure, is about 5 nm. This is confirmed with mea-surements with a speckle interferometer. These oscillations could results in a netflow of ink. The average speed uy of an ink layer with thickness h at a distance lis given by [7]:
uy =1
12
a2ω2ρh
2ηl(5.5)
with a the amplitude of the vibration (maximum 5 nm) with angular frequency ω.With frequencies up to 100 kHz the maximum speed becomes about 10 nm/s ata distance of 1 mm, much lower than the observed velocities of almost 10 µm/s.As a final check experiments are performed with sealed nozzles. Even with manynozzles actuated, there is no ink flow observed anymore. So nozzle plate vibrationsdon’t play any role of significance.
(iii) Electrostatic effects. The electrical resistivity of the nickel nozzle plateand the graphite based body of the printhead is measured to be less than 40 Ω.

5.3. A WETTED NOZZLE PLATE 117
This low value indicates that there are no thick and insulating oxide layers on thenickel nozzle plate. The resistivity of the ink is only 8 kΩm. These low valuesexclude electro-wetting as a possible source for the ink flow.
(iv) When there is an ink layer between the ink in the middle of the nozzle plateand the nozzle, a pressure difference can drive the ink towards the nozzle. Thisink layer must have a thickness less than 100 nm, the lower limit of the opticalrecordings. Pressure differences can result directly from the refill effect and amicro-pump action of the nozzle, or from changing capillary pressures because ofa variation in the curvature of the surface. The speed in a liquid film of thickness hdriven by a pressure difference ∆p over length l can be derived easily from Stokes’law, when applying the boundary condition of uy = 0 at the solid interface and∂u/∂z = 0 at the air interface:
uy =h2∆p
3ηl(5.6)
To get the observed speed of 10 µm/s in an layer with a thickness of maximum100 nm, the pressure difference over 1 mm should be at least 10 bar, which isnot realistic. For capillary pressure driven flow the pressure variation results fromdifferences in curvature (∆p ∝ γ∆R−1), which leads with ∆R−1 ∝ h/l2 to a h3
dependency:
uy ∝ γh3
ηl3(5.7)
and also unrealistic curvatures to get a speed of 10 µm/s over a distance of 1 mm.So pressure differences are not the main driving force behind the observed flowphenomena.
(v) Gravitational effects. on mm-scale the Bond number and the Galileo num-ber are not very small anymore, meaning that gravity indeed cannot be neglected.This is also expressed in the capillary length Lγ , (equation 4.1), which is 1.7 mmwith the transparent test ink. The gravitational forces with the nozzle plate inits normal position, upside down, can result in a pendant drops because of theRayleigh-Taylor instability, which has a most unstable wavelength λ∗ of [63]:
λ∗ = 2π√
2Lγ (5.8)
This wavelength is 16 mm in our case, more than the width of the nozzle plate.Drops can become unstable and will detach from the nozzle plate when the diame-ter becomes larger than 2πLγ [63], which is still larger than the width of the nozzleplate. So drops will not detach from the nozzle plate. The question is however,are gravitational forces the driving forces behind the observed flow phenomena?Therefore, an experiment is performed with the head turned upside down. Thishad no effect, the observed flow patterns remained the same, qualitative and quan-titative. So gravitational forces seem not to be responsible for the observed flowphenomena

118 CHAPTER 5. WETTING DYNAMICS
(vi) Thermal effects. Surface tension is temperature dependent and a thermalgradient can therefore result in differences in surface tension. Thermal measure-ments of the nozzle plate surface show a maximum difference in temperature of4 K. For most liquids a typical relative surface tension dependency on tempera-ture is found to be of order −10−3 K−1 [107]. With the nozzles, which are locatednear the long edges of the nozzle plate, at the lowest temperature, this would re-sult in a flow towards the nozzles. However, the measured temperature differencesresult in surface tension differences of only a few percent, which is not enoughto generate any strong flow effects. Furthermore, the actuation of the nozzle hasno influence on the temperature. So the observed temperature differences cannotplay any role.
(vii) Differences in nozzle plate composition or ink composition can result insurface tension gradients which can drive an ink flow. This is called Marangoniflow [44, 80, 81, 112, 169]. Contact angle measurements on different places on thenozzle plate show no differences. So only differences in surface tension of the inkremain as possible driving force. The average speed resulting from a difference∆γ over a distance l is [129]:
uy =h∆γ
6ηl(5.9)
The speed scales linearly with the layer thickness. Also for this driving force theremust be a layer of ink between the middle of the nozzle plate and the nozzles.For a speed of 10 µm/s at a distance of 1 mm in an ink layer with a maximumthickness of 100 nm, the required difference in surface tension is only 6 mN/m.This is possible with our ink, which consists of a mixture of multiple organiccompounds in a polymer based-resin.
As a check, additional measurements were done with silicone oil. The siliconeoil, which is used, is a pure single component liquid, not vulnerable to surfactantsand selective evaporation of certain components. Therefore, the surface tension isconstant within the oil film. With the silicone oil, which also shows good wettingon the nozzle plate, no surface flow is observed at all. This indicates that surfacetension gradients are the main driving forces behind the observed flow phenomena.
With only surface tension gradients as possible driving force there must be away of communication between the nozzle and the band of ink in the middle of thenozzle plate, i.e. a thin ink layer with a thickness less than the minimum visuallyobservable thickness of 100 nm.
5.3.3 Complete wetting
The existence of an ink layer with a thickness less than 100 nm can only resultfrom a complete wetting regime, i.e. a precursor film. A striking evidence thatthere is a precursor film together with macroscopic drops is demonstrated throughthe following experiment: A drop is deposit close to an array of nozzles on thenozzle plate without a visible ink layer, figure 5.13. The drop has a diameter of130 µm and a thickness of 720 nm. The drop remains visible as a macro drop

5.3. A WETTED NOZZLE PLATE 119
with a contact angle of 15. The arrows indicate the flow direction of the dropand the circles indicate which nozzle is actuated. As soon as a certain nozzle isactuated the drop moves towards the actuated nozzle and deforms.
Figure 5.13: Pictures of a moving drop near an array of nozzles. The drop movescontinuously. The flow direction is indicated by the arrows. The direction of themovement is determined by the fact whether a nozzle is actuated or not. Theframes are in chronological order. (a, c, h) Without actuation the drop movestowards the middle, which is located at the upper side of the pictures. (b, d, e,f, g) The drop moves towards the actuated nozzle, which is indicated by a whitecircle. The communication between the drop and the nozzles is facilitated by aprecursor film.
Without actuation, the drop moves towards the middle of the nozzle plate.This explains the existence of a central band of ink, because often the nozzles arenot actuated for a long time. So most of the time, there is a flow of ink in theprecursor film towards the middle of the nozzle plate, which maintains the centralink band.
For a direct observation of the precursor film ellipsometry is performed. Theresult is, that there is an ink layer with a thickness of only 13 ± 1 nm on the entirenozzle plate surface. This film facilitates the communication between the nozzles

120 CHAPTER 5. WETTING DYNAMICS
near the long edges of the nozzle plate and the ink band in the middle of the nozzleplate and also Marangoni flow is enabled by the precursor film [66, 70, 157].
5.3.4 Marangoni flow
The most likely cause for creating a surface tension gradient are surfactants. Thefollowing discussion is adapted from [87]. When the meniscus in the nozzle oscil-lates, two effects can decrease the surfactant concentration at the surface. First,a moving meniscus will have on the average a larger surface area, between theminimum area of πR2
n and a maximum area of 2πR2n in the non-jetting case. The
oscillation frequency of several tens kHz is too high for the surfactant concen-tration to equilibrate [107]. The surface will be on the average more depletedwith surfactant molecules. A second effect is that an oscillating flow in the noz-zle will mix the components of the ink. The surfactant molecules will be mixedmore homogeneously with the other ink components. This reduces also the sur-factant concentration on the surface. Hence, the surface tension will increase inan actuated nozzle.
Figure 5.14: Drawing of the ink on the nozzle plate. The distance of the ink to thenozzle is y. The equilibrium surface tension of the ink is γ0, the surface tension ofthe ink in the nozzle γn and γm for the ink in the middle of the nozzle plate.
So when a nozzle is actuated, the surface tension of the ink in the nozzleincreases while the surface tension of the ink in the precursor film remains at itslow equilibrium position, see also figure 5.14. This effect will be more pronouncedfor larger actuation. The resulting Marangoni flow is directed towards the nozzle.To get an expression for the speed of the ink front, we integrate equation 5.9similar to [42, 43, 62, 161] to obtain:
y(t) =
√
h∆γ
3η(t0 − t)
1
2 (5.10)
This equation is consistent with the experimental observations shown in figure5.12 and described with equation 5.4. To match the pre-factor of equation 5.10

5.4. IMPACT ON DROP FORMATION 121
with the experimental data, the differences in surface tension become 20 mN/mwith the actuation at 40 % of the nominal driving amplitude, 30 mN/m withthe actuation at 47.5 % and 40 mN/m for the jetting case. These differencesare rather high, but the order of magnitude is realistic, taking into account thesimplicity of this model.
Without actuation, there is a movement towards the middle of the nozzle plate.This must be caused by the fact that the ink in the middle of the nozzle plategets also a higher surface tension. Evaporation of the more volatile surfactantmolecules results in an increase is surface tension of the ink which is for a longertime on the surface of the nozzle plate i.e. the ink in the middle of the nozzleplate. Both situations are depicted in figure 5.14, with the surface tension γm ofthe ink in the middle of the nozzle plate always larger than the surface tension γ0
of the ink in the precursor film. Furthermore, γ0 is less than the critical surfacetension with a complete wetting regime as consequence, and γm is larger than thecritical surface tension with partial wetting regime as consequence. The ink in themiddle of the nozzle plate remains visible as a macro-drop. The surface tensionγn of the ink in the nozzle is only higher than γ0 when the nozzle is actuated.
5.4 Impact on drop formation
5.4.1 Drop properties
A layer of ink on the nozzle plate around a nozzle has a large effect on the dropformation process. In figure 5.15a-c the effect of an ink layer with increasingthickness on the drop formation is shown. The ink is supplied via static pressurethrough neighboring nozzles, see also [85]. During one second, a higher ambientpressure of 100 mbar is applied to the ink reservoir inside the printhead. Thishigher ambient pressure is much smaller than the acoustic pressure amplitudesgenerated by the actuation. The jetting nozzle keeps jetting with almost thesame drop speed. From the non-actuated nozzles ink will flow out and spreadover the nozzle plate, see also figure 6.2. As the ink layer reaches the jettingnozzle and the thickness of the layer around the jetting nozzle increases, the dropvelocity decreases. The pictures are taken with a Phantom high speed camera.A quantitative measurement of the ink layer thickness is not possible, so theexperiments can show only the general trends.
An ink layer results in a larger mass of ink at the nozzle. More mass of inkat the nozzle results in more inertia, which slows down the speed of the drop.The drop formation with different ink layer thickness is calculated with Flow3D,figure 5.15b. The pressure at the beginning of the nozzle is kept the same in thesecalculations, to demonstrate the effect of the ink layer around the nozzle on thedrop formation process itself. The resulting drop speed decreases with 0.5 m/sper micrometer ink layer thickness and ceases at an ink layer thickness of 10 µm.

122 CHAPTER 5. WETTING DYNAMICS
(a) (b) (c) (d) (e) (f) (g) (h) (i)
Figure 5.15: (a) The measured effect of an increasing ink layer thickness on thedrop formation. The ink is supplied via a static pressure through neighboringnozzles at t = 0 [85]. (b, c) As the ink layer thickness increases after 35 and 40ms, the drop speed decreases. (d-i) The calculated effect of an ink layer with athickness of 0, 2, 4, 6, 8 and 10 µm. The pressure at the beginning of the nozzleis kept the same in the Flow3D calculations. The pictures show the drop shapeat 60 µs after the start of the actuation. The drop speed is 7.5 to 6.5, 5.6, 4.7, 2.9and 0 m/s respectively.
5.4.2 Channel acoustics
The extra mass of ink at the nozzle also changes the pressure waves inside theink channels. Like with overfilling because of the refill effect, section 3.4.1, theimpedance of the nozzle increases. The reflection of the pressure waves at thenozzle will result in higher pressure amplitudes. The effect is much stronger now.In figure 5.16a the effect of a disappearing ink layer on the pressure at the entranceof the nozzle is shown. With an ink layer thickness of 10 µm or more the pressureamplitude increases more than 50%. This compensates partly the effect of theincreased resistance for the drop formation process. The drop speed decreases lessslowly and the drop size increases because a part of the ink from the ink layer isdragged along with the drop formation. With a 50% higher pressure amplitude atthe entrance of the nozzle, the drop formation fails only with an ink layer thicknessmore than 20 µm in the Flow3D simulation.
The impact of an ink layer around the nozzle is also visible in the Paint signal,see section 1.3.2. More ink around the nozzle results in a smaller amplitude of thePaint signal, figure 5.16.

5.5. CONCLUDING REMARKS 123
5.20E-05 -1.59E+04 5.20E+01 -1.59E-01 7.78E-02
5.30E-05 -3.55E+04 5.30E+01 -3.55E-01 1.04E-01
5.40E-05 -5.62E+04 5.40E+01 -5.62E-01 1.23E-01
5.50E-05 -7.92E+04 5.50E+01 -7.92E-01 1.35E-01
5.60E-05 -9.95E+04 5.60E+01 -9.95E-01 1.06E-01
5.70E-05 -1.09E+05 5.70E+01 -1.09E+00 7.92E-02
5.80E-05 -1.00E+05 5.80E+01 -1.00E+00 5.32E-02
5.90E-05 -8.79E+04 5.90E+01 -8.79E-01 2.62E-02
6.00E-05 -7.58E+04 6.00E+01 -7.58E-01 -1.81E-03
6.10E-05 -5.67E+04 6.10E+01 -5.67E-01 -2.74E-02
6.20E-05 -2.35E+04 6.20E+01 -2.35E-01 -1.07E-01
6.30E-05 1.32E+04 6.30E+01 1.32E-01 -1.68E-01
6.40E-05 7.60E+04 6.40E+01 7.60E-01 -2.13E-01
6.50E-05 1.37E+05 6.50E+01 1.37E+00 -1.84E-01
6.60E-05 1.80E+05 6.60E+01 1.80E+00 -1.56E-01
6.70E-05 1.77E+05 6.70E+01 1.77E+00 -1.29E-01
6.80E-05 1.66E+05 6.80E+01 1.66E+00 -1.02E-01
6.90E-05 1.50E+05 6.90E+01 1.50E+00 -7.13E-02
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0 100 200 300 400Time [µs]
No
zzle
pre
ssu
re [
bar]
(a)
7.00E-05 1.35E+05 7.00E+01 1.35E+00 -3.66E-02
7.10E-05 1.23E+05 7.10E+01 1.23E+00 -9.87E-04
7.20E-05 8.84E+04 7.20E+01 8.84E-01 2.67E-02
7.30E-05 2.60E+04 7.30E+01 2.60E-01 4.23E-02
7.40E-05 -3.70E+04 7.40E+01 -3.70E-01 4.78E-02
7.50E-05 -8.64E+04 7.50E+01 -8.64E-01 5.21E-02
7.60E-05 -9.86E+04 7.60E+01 -9.86E-01 6.07E-02
7.70E-05 -9.72E+04 7.70E+01 -9.72E-01 7.15E-02
7.80E-05 -8.66E+04 7.80E+01 -8.66E-01 7.80E-02
7.90E-05 -7.75E+04 7.90E+01 -7.75E-01 7.82E-02 -
8.00E-05 -7.15E+04 8.00E+01 -7.15E-01 7.24E-02 -
8.10E-05 -6.52E+04 8.10E+01 -6.52E-01 6.35E-02 -
8.20E-05 -5.52E+04 8.20E+01 -5.52E-01 5.54E-02 -
8.30E-05 -3.44E+04 8.30E+01 -3.44E-01 4.84E-02 -
8.40E-05 -1.23E+04 8.40E+01 -1.23E-01 3.96E-02 -
8.50E-05 -3.29E+02 8.50E+01 -3.29E-03 2.54E-02 -
8.60E-05 -6.02E+03 8.60E+01 -6.02E-02 6.30E-03 -
8.70E-05 -1.24E+04 8.70E+01 -1.24E-01 -1.21E-02 -
8.80E-05 -1.14E+04 8.80E+01 -1.14E-01 -2.58E-02 -
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
0 100 200 300 400
Time [µs]
Pain
t sig
nal
[mA
]
(b)
Figure 5.16: The effect of a decreasing ink layer thickness. Eight drop formationcycles with a repetition rate of 20 kHz are simulated with Flow3D. The ink layerthickness is 20 µm at the start of the first drop formation cycle and decreases to16, 12, 8, 4, 3, 2 and 1 µm at the beginning of the next cycles. (a) The nozzlepressure decreases from 1.75 MPa to 1.10 MPa and (b) the amplitude of thePaint signal increases.
5.5 Concluding remarks
In the previous chapters the actuation, the generation of the pressure waves andthe drop formation process are discussed. In chapter 4 the satellite drop formationwas a disturbing mechanism. This chapter is completely dedicated to anotherdisturbing mechanism, i.e. the wetting of the nozzle plate.
The strong refill mechanism results in overfilling of the nozzle, with a risk oninducing wetting. Also the failure of the drop formation process can result inwetting of the nozzle plate. An ink layer around a jetting nozzle disturbs the dropformation. The drop formation is even blocked when the ink layer becomes morethan 20 µm. A jetting nozzle induces several flow patterns in the ink layer. Thecontinuous jetting of drops induces an air flow towards the nozzle. This air flowdrags the outer part of the ink layer always towards the nozzle. As a consequencea strong sink flow can be visible or a Couette type of flow, when the overfillingof the nozzle adds ink to the inner part of the ink layer. Also an actuated, butnon-jetting, nozzle induces all kind of flow phenomena. Dipole, source and sinkflow patterns complete the observed phase diagram of possible flow pattern in theink layer around an actuated nozzle.
The nickel nozzle plate and the ink are in a complete wetting regime. Olderink on the nozzle plate has other properties which results in a partial wettingregime. This older ink accumulates in the middle of the nozzle plate. The dynamicmovement of the ink in an actuated nozzle results also in an increase of the surface

124 CHAPTER 5. WETTING DYNAMICS
tension. The precursor film of fresh ink, which was measured to be 13 nm inthickness, provides a way of communication between the nozzles and the centralband of ink. A trunk flow drives the ink from the middle of the nozzle platetowards actuated nozzles. Marangoni flow is the driving mechanism behind thisflow pattern.
An ink layer can also have a negative impact on the jetting stability. This willbe discussed in the next chapter.

Chapter 6
Bubble dynamics
In this chapter the main factors which determine the jetting stability are discussed.Even after removing large dirt particles and air bubbles from the ink, there aresometimes air bubbles generated during the drop formation process. We will seethat because of the low acoustic pressures in the printheads, air entrainment is theonly mechanism for the generation of air bubbles. Wetting and small dirt particlesplay a crucial role in this process. There is a critical ink layer thickness, whichresults directly in air entrainment. Dirt particles with a size of 20 µm disturb thedrop formation and can also induce the generation of air bubbles. Air bubbles canbe measured directly in special transparent heads. The effect of air bubbles on thechannel acoustics can be measured by using the piezo actuator also as a sensor.Then it will be discussed that a small air bubble oscillates at its natural frequencyafter the collapse. These oscillations are visible with the acoustic measurementand can even enhance the drop speed. If an air bubble can dissolve or be jettedout, no problem is generated. However, at the end of this chapter, we will seethat an air bubble can also grow in an acoustic field by rectified diffusion. Theair bubbles grow to a size comparable to the displacement by the acoustic pressurewaves. A large air bubble will not oscillate at its natural frequency but counteractsthe pressure build-up and the drop formation process ceases completely.
6.1 Stability
6.1.1 Dirt and air entrapment
A major requirement for todays productive drop-on-demand inkjet printers is thestability of the droplet jetting process. Large dirt particles can block a nozzleopening completely and there will be no drop formation at all. A nozzle can alsobe partial blocked by a large dirt particle. This results in severe deviations of thedrop speed and size, the jetting angles and the drop shape, see figure 6.1. Theparticles can originate from the head itself (e.g. graphite particles), dragged alongwith the ink (e.g. no good enough filtering or non-compatible ink components),or can come from outside (e.g. paper fibres and common dust). Under normal
125

126 CHAPTER 6. BUBBLE DYNAMICS
operating conditions large dirt particles will be removed. This is not furtherinvestigated in this thesis.
Figure 6.1: High speed camera recordings with (a) the undisturbed drop formationin the left picture. The drop formation with partial blocked nozzles are shown inthe other pictures, (b) with drops still jetted away and (c) without jetted drop.The recordings are made with a Phantom V7 high speed camera at 60 µs afterthe start of the actuation.
Air bubbles will influence the acoustics and the drop formation process andcan results in nozzle failure as we will see in this chapter. The ink can contain alot of air bubbles before the drop formation starts. This air can originate from theink manufacturing process or from failures in the ink supply system. For normalprinthead operation these sources have to be eliminated and also these sourcesof instability are not a topic in this thesis. The research is concentrated on thegeneration of air bubbles during normal printhead operation.
Two possible sources for the generation of air bubbles during normal print-head operation are cavitation and air entrainment at the nozzle. Cavitation takesplace when the negative acoustic pressure exceeds the Blake threshold at thecavitation nuclei. Cavitation can take place at small air bubbles, at non-wettedchannel/nozzle-walls, at non-wetted dirt particles, or at inclusions by surfactants[100]. The acoustic design of the printheads is such that the acoustic negativepressure remains always above the threshold for cavitation. So air entrainmentat the nozzle during printhead operation remains as only possible source for thegeneration of air bubbles.
6.1.2 Acoustic detection of air bubbles
The disturbance or the failure of the drop formation process itself is not suitablefor quantitative measurements of the behavior of the bubble. The printheads

6.1. STABILITY 127
developed for application in a printer are opaque. A direct observation of airbubbles in these printheads is not possible. Only in a special transparent head, adirect observation of air bubbles is possible [83, 84, 86]. A way to measure the effectof air bubbles in the opaque heads is to use the piezo actuator also as a sensor.This is the Paint measurement, see section 1.3.2. With the Paint measurement,the electric current from the piezo elements is measured. The Paint current Ip
from a piezo element with area Ap is given by the equation:
Ip =dQ
dt= Ap
dD3
dt(6.1)
with D3 the electric displacement or charge density in the polarization and actu-ation direction of the piezo element, see section 2.1. With equation 2.5 we get:
Ip = d33ApdT3
dt+ ǫ3Ap
dE3
dt(6.2)
The normal stress component T3 is generated by the pressure P in the ink channel.The electric field is in the actuation direction E3 = V/hp, with hp the height ofthe piezo element. With V the voltage on the electrodes, this equation becomes:
Ip = d33ApdP
dt+
ǫ3Ap
hp
dV
dt(6.3)
The capacitance of the piezo element is given by Cp = ǫ3Ap/hp. After integratingthe pressure, which can show local variations, over the length lp of the piezoelement we get:
Ip = CpdV
dt+ d33bp
∫ lp
0
dP
dtdz (6.4)
with bp the width of the piezo element. The Paint current is now known in terms ofthe actuator voltage and the channel pressure. With the solution for the acousticchannel pressure in the frequency domain:
P (z, t) = Prei(ωt−kz) + Ple
i(ωt+kz) (6.5)
we can express the Paint current or signal in terms propagating waves towards thenozzle and coming from the nozzle with wave number k and frequency ω. Insertingthis equation in equation 6.4 results in:
Ip = iωCpV + d33bpω
k
(
Pleiklp − Pre
−iklp)
(6.6)
Not only the drop formation, the refill and the wetting of the nozzle plate changesthe reflection of the acoustic pressure wave, but also an air bubble has a largeinfluence on the pressure waves Pl coming from the nozzle.

128 CHAPTER 6. BUBBLE DYNAMICS
6.2 Air entrainment
6.2.1 Wetting layer
Air entrainment is directly linked to the presence of an ink layer on the nozzleplate [14, 85–87]. An ink layer around the nozzle results in a lower drop speed,sections 5.4. Flow3D simulations show that the drop speed decreases with ink layerthickness up to 20 µm and the nozzle ceases to fire drops at ink layer thicknessabove 20 µm. The experiment with adding a layer of ink through the neighboringchannels showed the same impact on the drop formation.
The same experiment also shows the formation of air bubbles. Four stages ofthis experiment are shown in a top view in figure 6.2a-d. First the normal jettingsituation is depicted. In the second frame the supply of an ink layer throughneighboring channels is shown. The stopping of the drop formation is shown inthe third frame. Finally, the creation of air bubbles is depicted. After the dropformation has failed, small air bubbles are visible in the ink layer as indicated.
(a) t = 0 ms (b) t = 15 ms (c) t = 45 ms (d) t = 180 ms
Figure 6.2: Top view of an experiment where ink is supplied at t = 0 ms throughthe neighboring nozzles via a static pressure. The pictures are taken with a high-speed camera with 10 kfps. The first frame shows the regular jetting. The secondframe is taken at the moment when the ink layer reaches the jetting nozzle. Thethird frame shows the moment when jetting stops. The last frame shows the airbubbles, which are created. These bubbles are inside the white circle.
The ink layer is applied during 1 s. The ink layer covers a large part ofthe nozzle plate and is very thick. The drop formation fails, but the actuationcontinues at a repetition rate of 20 kHz. Air bubbles are visible in the ink layerafter 0.2 s. After 1 s, the ink supply stops and the ink layer thickness decreases.After 1.5 s, jetting starts again. It turns out that an air bubble is also entrappedin the jetting nozzle [85].
Flow3D simulations are used for a qualitative check whether air entrainmentcan be induced by an ink layer on the nozzle plate. With an ink layer thicknessof 0− 20 µm, only the drop speed is lowered. With an ink layer thickness of morethan 20 µm, no drops are generated anymore. In a simulation with an ink layerthickness of 30 µm on the nozzle plate air entrainment is visible as shown in figure

6.2. AIR ENTRAINMENT 129
6.3a-d. With this simulation it is assumed that the influence of the ink layer onthe pressure waves inside the printhead is negligible. Two actuation cycles at arepetition rate of 20 kHz are modeled. During the first cycle, which started withno fluid movement at all, no air is entrained. Air is entrained during the secondcycle. The actual air entrainment occurs when the meniscus is pulling back andink is already flowing into the nozzle. The void is then closed at the top, becauseof a lot of ink flows in from the layer around the nozzle. At an ink layer thicknessof more than 40 µm, only a net inflow of ink is visible without a large deflectionof the free surface.
(a) t = 0 µs (b) t = 55 µs (c) t = 60 µs (d) t = 65 µs
Figure 6.3: (a) Flow3D simulation with an ink layer of 30 µm on the nozzle plate.(b-d) During the second actuation cycle, which started 50 µs after the first cycle,an air bubble is entrapped. Taken from [85]
.
The experiment with an ink layer supplied through the neighboring channelsshows the formation of multiple bubbles in the ink layer. Because the ink layerthickness varies slowly on a seconds time scale, the critical ink layer is presentduring multiple drop actuation cycles. Each cycle air can be entrained. To deter-mine the critical layer thickness, experiments are performed with additional nickelplates to create a well defined ink layer thickness around the jetting nozzle [85].By firing only three drops in one sequence, the amount of ink around the nozzleis not changed significantly. The critical layer thickness turned out to be between30 µm and 40 µm, in agreement with the simulations.
6.2.2 Small dirt particles ‡
With a wetted nozzle plate, in most cases a flow towards the nozzle is observedduring jetting, section 5.2.1. Relative small dirt particles, caught in the ink layer,are likely to reach the jetting nozzle and this can results in a distortion of the dropformation. This distortion also influences the Paint signal. Therefore the acousticsinside the ink channels are continuously monitored with the Paint signal. At arepetition rate of 20 kHz a time interval of 30 µs between the actuation pulses istaken for further analysis of the Paint signal. The amplitude of the current from
‡Part of this subsection has been published as: J. de Jong, H. Reinten, M. van den Berg, H.Wijshoff, M. Versluis, G. de Bruin and D. Lohse, Air entrapment in piezo-driven inkjet printheads,J. Acoust. Soc. Am. 120, 1257 (2006).

130 CHAPTER 6. BUBBLE DYNAMICS
the piezo element I(t) during that time interval T is calculated, also called theamplitude of the Paint signal, is defined as §:
σ2 =1
T
∫ T
0[I(t)]2 dt (6.7)
Figure 6.4: The amplitude of the Paint signal. During 25 drop formation cyclesbefore and after a distortion the variance varies less than 0.5 %, the distortionleads to a deviation of 5-10 %.
The amplitude of the Paint signal varies by 5−10 %, figure 6.4. The amplitudeof the Paint signal over 25 drop formation cycles before and after the distortionvaries by less than 0.5 %. The influence of the distortion on the Paint signal is usedto trigger a high-speed camera to record the drop formation when the distortiontakes place [104]. The correlation between the distorted drop formation and thevariation in the Paint signal is published in more detail in [85].
The deviation of the amplitude can not only trigger a high-speed camera butalso a piezo electric device that can move 60 µm within 1 ms. This device,with a tiny metal chisel attached to it, was placed under the nozzle plate at adistance of a few micrometers from the stream of jetted drops. When triggered,this device moves into the stream of drops to capture them, see figure 6.5. Atthe same trigger signal also the actuation is stopped, and only the last few dropsare captured for further analysis. It turns out that the captured droplets containrelative large particles with a diameter of about 20 µm. These particles are notfound in captured drops where no distortion occurred.
A variation of a few micrometers in the position of the meniscus results ina comparable variation of the Paint signal, see also section 3.4.1. To explainthat the Paint amplitude is first several percent lower and then several percentlarger, the meniscus must first be protruded out of the nozzle and second themeniscus must be retracted. Also a variation in the drop speed is observed duringa distortion. The first droplet is 0.1-0.2 m/s faster and the second droplet up to0.4 m/s slower, with often a deviating shape and jetting angle [85]. The variationin the drop speed, as a result of the different meniscus positions (because of a
§Note that in the published article σ2− σ2
ref is plotted in the figures.

6.2. AIR ENTRAINMENT 131
Figure 6.5: High-speed camera recording of the capture of the last jetted dropsafter a disturbance triggered the piezo electric device. A piezo element with a tinymetal chisel is visible at the left of the drop stream. After the trigger signal, thepiezo electric device moves into the stream of drops. The times are given relativeto the trigger moment. Four droplets, indicated with C, D, E and F, are caught.Jetting was stopped after droplet F.
variation in the refill level, section 3.4.1), corresponds to the observed variationsduring the distortion of the Paint signal.
The dirt particles itself can also be the source of the observed variations in dropspeed. For a qualitative check, the drop formation is simulated with dirt particlesat different positions. In figure 6.6 two examples are shown with a sphericalparticle at 10 µm and at 30 µm under the meniscus surface. The drop speedvaries with the particle at different positions under the surface. With respect tothe undisturbed drop speed, the variations are:
• at 5 µm, 1.9 m/s slower and particle is jetted away
• at 7.5 µm, 2.8 m/s slower and particle is jetted away
• at 10 µm, 1.3 m/s faster
• at 10 µm, 0.9 m/s faster
• at 30 µm, 0.4 m/s slower
• at 40 µm, 0.5 m/s faster

132 CHAPTER 6. BUBBLE DYNAMICS
From the capturing of the drops, visually and with the piezo electric element, weknow that the last drop in the distortion drags along the dirt particle. In thesimulation this happens too, when the dirt particles are very close to the surface.
(a) (b) (c) (d) (e) (f) (g) (h)
Figure 6.6: Simulation of the effect of a spherical particle with a diameter of 20µm on the drop formation. The pressure in the channel is kept the same andthe starting position of the meniscus is also at its original position. The dropformation is shown at 0, 15, 30 and 45 µs after start of the actuation. First withthe particle at 10 µm under the meniscus surface (a,b,c,d) and second with theparticle at 30 µm under the surface (e,f,g,h).
The variation of the amplitude of the Paint signal, shown in figure 6.4, is themost common example of a distortion. After the disturbance occurred, jettingkeeps going on as usual. But sometimes after a disturbance, an air bubble isentrapped, which becomes later visible as a larger deviation of the Paint signal.After that, there is also a disturbance of the drop formation visible, with finallyeven the complete break down of the drop formation process. This will be shownin the next subsections. The entrainment of an air bubble is always preceded by adistortion. No air bubbles are detected without a distortion preceding it. So thedescribed distortion is a necessary but not sufficient condition for air entrainment[85].
The exact mechanism of how air is entrained is still not known. In realitythe dirt particle have irregular shapes, mostly in the shape of flakes. The dropformation model is a 2D model rotational symmetric model. To simulate irregularshapes a full 3D model is required, which leads to a very long calculation time.The particles are relative large. The particle size is typical 20 µm, the nozzlediameter is 30 µm. Partial blocking of the nozzle opening could be the origin ofthe air entrainment process. To check this, experiments are done with a 400 µmthick teflon wiper. During the jetting of a single nozzle, the 1 mm wide wiperpartially moves over the nozzle with a speed of 3 µm/µs. So the nozzle is partially

6.2. AIR ENTRAINMENT 133
Figure 6.7: High-speed camera recording of the effect of a partial covering ofthe nozzle opening with a teflon wiper. Shown are the drop formation before,during (the wiper moves away from the camera), and after the covering. The dropformation during the partial coverage is distorted a lot. After the distortion, thedrop formation is normal again.
blocked for several actuation cycles. The drop formation is distorted a lot duringthis period, figure 6.7. If partial blocking of the nozzle is the mechanism behindair entrainment, the experiment should lead to a deterministic generation of airbubbles. However, this is not the case.
(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 6.8: Simulation of the effect of a partial coverage of the nozzle opening.The nozzle opening, which has a diameter of 28 µm, is covered over 20 µm fromthe left. In the picture only the ink domain over the last 30 µm of the nozzle lengthis shown. Although the drop formation is distorted a lot as in the experiments,the meniscus retraction does not show an increased possibility to entrain air.
This is also qualitative confirmed with Flow3D simulations with a 3D dropformation model with a partial covered nozzle opening. In all the simulationsthe drop formation is also distorted a lot, with a large deviation of the jettingdirections, but air entrainment is not seen. The asymmetric retraction of themeniscus does not give any clues on a larger chance to entrain air. In figure 6.8

134 CHAPTER 6. BUBBLE DYNAMICS
an example is shown with the nozzle covered over 20 µm. Only a circle segmentwith a maximum width of 10 µm at the right remains as nozzle opening.
So the exact mechanism how air is entrained is not clear, but a distortion witha dirt particle with a size of typical 20 µm is necessary to have a chance that airis entrained.
6.3 The oscillating bubble
6.3.1 Size dynamics
The radius of an air bubble changes in an acoustic field. For a bubble in an infinitelarge volume the bubble radius R of a bubble with radius R0 at ambient pressureis given by the Rayleigh-Plesset equation [19]:
RR +3
2R2 =
1
ρ
(
(
p0 +2γ
R0− pν
)(
R0
R
)3ζ
+ pν − 2γ
R− 4ηR
R− p∞
)
(6.8)
The pressure pν is the vapor pressure, p∞ is the imposed pressure at a distancewhere the pressure due to the inertia of the radial flow field around the bubble isnegligible with respect to the imposed pressure fluctuations. It is assumed thatthe bubble oscillates isothermally, so that the polytropic index ζ = 1 [71]. Theimposed pressure fluctuation are calculated with the narrow channel model, seesection 3.1. The resulting dynamic changes in bubble size for bubbles with adiameter of 20 µm and a 40 µm are shown in figure 6.9.
In figure 6.9 we can see that the bubble radius increases twice, at 9 µs andat 30 µs. This corresponds to the negative pressure peaks in the pressure at theentrance of the nozzle, see also figure 3.8. When the imposed pressure becomeshigher than the ambient pressure, the bubbles collapses. After the collapse thebubble resonates with its natural frequency. The collapse and resonance of abubble occurs when the frequency of the imposed pressure field is much lowerthan the natural frequency of the bubble [73]. The channel frequency of the 8 mmlong pressure channel is 50 kHz and the natural frequencies of the bubbles are150 and 300 kHz for the 40 µm and the 20 µm bubbles, respectively. The collapseof air bubbles plays an important role in sonoluminescense [23] and can be usedfor driving a micro-pump [89]. In our case, the oscillating bubble influences thechannel acoustics and the drop formation.
6.3.2 Impact on channel acoustics
When air is entrained, the amplitude of the Paint signal will show an increasingdeviation after the distortion, instead of remaining at the same value as shown infigure 6.4. At a repetition rate of 20 kHz, the variance will deviate more than 10%within 100 drop formation cycles , figure 6.10a. It turns out that the deviation iscaused by a typical pattern. When looking at the shape of the Paint signal, figure

6.3. THE OSCILLATING BUBBLE 135
Figure 6.9: The change in bubble size (as normalized radius Rn = R(t)/R0) ofbubbles with a diameter of 20 µm (black) and 40 µm (grey). The calculations aredone with the Rayleigh-Plesset equation and the pressure from the narrow channelmodel. The imposed pressure variation is large enough to generate a collapse withan oscillation after the collapse [72].
6.10b, it turns out that the deviation is caused by a distortion with a frequencyof 170 kHz [85].
The acoustic waves, emitted by an oscillating bubble, are recorded as a 170 kHzdistortion, figure 6.10b. We see the oscillation of a bubble as a 170 kHz distor-tion because this frequency is next to the basic channel resonance at 50 kHz thenext strong peak in the frequency characteristics of this head. The frequencycharacteristics describe the relation between the electric activity in the actuatorand the meniscus movement. This characteristic acts also as a filter for the Paintmeasurements.
The natural frequency f0 of a free bubble, neglecting surface tension, viscosity,vapor pressure and advection, is called the Minnaert frequency [100]:
fM0 =
1
πD0
√
3ζp0
ρ(6.9)
The resonance frequency of 170 kHz corresponds to a bubble diameter of 36 µm.However, an air bubble in an inkjet printhead is not a free bubble. The bubble islocated within a confined space. The confined space is the semi-closed connectionchannel with a diameter of 250 µm and a small nozzle opening. The resonancefrequency will be reduced by 30-50 % for a bubble with a diameter of 20-40 µm[61, 126]. So the diameter of the bubble causing the 170 kHz resonance is 18-25µm. The volume of the air bubble is 2 − 8 pl, much smaller than the volumedisplacement by the acoustic pressure field. This means that the results of the

136 CHAPTER 6. BUBBLE DYNAMICS
(a) (b)
Figure 6.10: (a) The amplitude of the Paint signal when a distortion occurs beforecycle 20 and air is entrained. The amplitude of the Paint signal deviates morethan 10 % within 100 drop formation cycles at a repetition rate of 20 kHz. Theactuation amplitude is the nominal driving amplitude for a drop speed of 7 m/s.(b) The shape of the Paint signal without an air bubble (dotted line 1), with an airbubble (continuous line 2), and the difference between the two signals (continuousline 3). This shows a 170 kHz distortion after 100 drop formation cycles.
calculations without a two-way coupling to the channel acoustics, as shown infigure 6.9, give a good approximation.
When a bubble shows a collapse in the response to the imposed pressure field,also thermal and acoustic damping should be taken into account [23, 38]. Thismakes the description of the dynamical behavior of a bubble in an acoustic fieldrather complicated. This is not further investigated in this thesis.
6.3.3 Impact on drop formation ¶
The experiments with the opaque heads show no variation of the drop speed duringthe first 100 drop formation cycles [85]. In these heads, relative small bubbles witha diameter less than 20 µm, radiate sound waves, which give a deviation of theacoustic pressure inside the channel of more than 10%, figure 6.10a. However, thishas no impact on the drop formation process.
A transparent head is developed for a direct visualization of the behavior ofthe air bubble [83], see also figure 6.12. A nozzle plate and a connection channelare made with powder-blasting out of glass plates. The transparent connectionchannel has a length of 400 µm and a hourglass shaped cross-section with a di-ameter between 80 µm and 250 µm. The 70 µm long conical shaped nozzle has
¶Part of this subsection has been published as: J. de Jong, R. Jeurissen, H. Borel, M. van denBerg, H. Wijshoff, H. Reinten, M. Versluis, A. Prosperetti and D. Lohse, Entrapped air bubbles in
piezo-driven inkjet printing: their effect on the droplet velocity, Phys. Fluids 18, 121511 (2006).

6.3. THE OSCILLATING BUBBLE 137
an entrance diameter of 50 µm and an outlet diameter of 30 µm, see also figure6.9a. These glass plates replace the 50 µm nickel nozzle plate.
The pressure channel of this head has a length of 5 mm and there is also thenormal connection channel with a length of 1 mm. The acoustic properties of thisprinthead are comparable with the opaque head. High speed camera recordingswith a Phantom V7 camera at 40 kfps and a continuous light source behind theglass plates show the relation between the behavior of an entrained air bubble andthe impact on channel acoustics and the drop formation.
In the experiment with the transparent head, the oscillations of a bubble havean effect on the drop speed [86]. This is shown in figure 6.11a for a range ofbubble diameters between 22-38 µm. The driving amplitude is low, which resultsin a drop speed of only 1 m/s without an air bubble. In the experiment thedroplet velocity increases and reaches a maximum of 2.5 m/s. Then the dropletvelocity gradually decreases to 1 m/s at 0.9 s. A small amplitude oscillation withf = 50Hz is superimposed onto the droplet velocity, reflecting the AC frequencyof the devices. This effect is negligible compared to the effect of the entrained airbubble on the drop speed.
The recorded images of the ejected droplets and oscillating bubbles are an-alyzed with a gray-level threshold to determine the location of the edges of thedroplets and bubbles. The images of the bubbles only consist of some tens of pix-els, limiting the accuracy of the size determination. Other sources of errors are theoptical diffraction and the assumed sphericity of the bubbles in the digital imageanalysis. For the ejected drops and for the bubbles within the channel (away fromthe walls) we do not have any indication of deviations from sphericity. However,the air bubbles, when pushed against the glass nozzle plate, seem to be slightlynon-spherical.
The scatter in the bubble radius is found to be quite large, due to the lowcontrast in the images and because multiple bubble radii are measured over oneacoustic cycle. When we compensate for the latter by plotting the average radius(over 40 bubble radii), the bubble growth becomes more obvious. This is usedin figure 6.11b where the two data sets are combined to get the drop speed asfunction of bubble size. The measured drop speed increases to 2.5 m/s withincreasing bubble size until a diameter of 33 µm and than decreases very fast withincreasing bubble size. Finally, jetting fails with a bubble diameter from 38 µmon.
A resonance effect of the bubble oscillation with the meniscus movement resultsin the increase of the velocity. This can be verified with a simple model [82], whichis based on the approach used in [126]. The dynamic behavior of the bubble isbased on the polytropic relation pV ζ = constant between bubble volume andthe pressure. The meniscus movement is based on Newton’s second law with aPoiseuille flow profile in the nozzle. The continuity equation completes the set ofequations. After linearization around the equilibrium volume, a forced harmonicoscillator equation for the meniscus speed is obtained. A sinusoidal velocity isimposed with the main channel resonance frequency, which is also 50 kHz for the

138 CHAPTER 6. BUBBLE DYNAMICS
(a)
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
u drop
[m s
−1 ]
bubble radius [µ m]
(b)
Figure 6.11: (a) Simultaneously measured bubble radius and drop speed with thetransparent head described in [86]. The actuation is started at t = 0 s. Thebubble diameter increases from 22 to 38 µm and the drop speed increases from 1to 2.5 m/s at 0.2 s and decreases again. (b) The resulting relationship betweenbubble diameter and drop speed as measured (solid line) and calculated with thesimple harmonic oscillator model (dashed line). The measured drop speed showsa maximum at a bubble diameter of 33 µm. Jetting fails with a bubble diameterlarger than 38 µm.
transparent head. The diameter of the bubble where the resonance effect takesplace reads according to this model [86]:
Dres0 =
(
6ζρA3np0
πln(ρ2ω2A2n + 64π2η2)
)
1
3
(6.10)
In the model, the conical nozzle shape is replaced by a straight nozzle with thesame outlet diameter as the conical shaped nozzle, i.e. 30 µm. The conical nozzlehas an entrance diameter of 50 µm and a length of 70 µm. This is transformed toa straight nozzle with the same acoustic impedance, see section 3.1.2 and equation3.26. The length of the acoustic equivalent straight nozzle is 32 µm. The resultingdrop speed is shown in figure 6.11b, together with the measured results. The dropspeed is calculated with the energy balance as mentioned in section 3.2.2. Theresults of the simple model agree reasonable with the experimental data. Only thebubble diameter where the resonance effect takes place is a little smaller, 26 µminstead of 33 µm.
The natural frequency of a bubble with diameter D0 which acts as a harmonicoscillator with the meniscus movement of a nozzle is:
fH0 =
√
3ζD2n
8πρlnD30
(6.11)
The natural frequency of a bubble with diameter D0 = 33 µm is 50 kHz, the sameas the main channel resonance frequency.

6.4. THE MOVING BUBBLE 139
For the opaque heads the resonance effect would take place for a bubble di-ameter of 40 µm. The volume of the bubble, 34 pl is than of the same order ofmagnitude as the displacement by the acoustic pressure field. In the calculationsso far, the imposed acoustic pressure is not altered by the bubble. When thevolume of the bubble is of the same order of magnitude as the displacement bythe acoustic pressure, this assumption is not valid anymore. The impact on thechannel acoustics will be very large. A two-way coupling between channel acous-tics and the dynamic behavior of the bubble is necessary in order to get a modelgiving results in agreement with the experimental observations.
6.4 The moving bubble
6.4.1 Balance of forces ‖
Many forces are acting on a bubble in an acoustic pressure field. First there is theprimary Bjerknes force. The force acts in the direction of the acoustic pressuregradient. A small bubble will be pushed towards the pressure node, i.e. the smallbubble will move towards the channel. A very large bubble will have a low naturalresonance frequency and start to oscillate in anti-phase with the acoustic pressurefield. The primary Bjerknes will now act in the opposite direction towards thepressure anti-node, i.e. the bubble will move towards the nozzle.
The secondary Bjerknes forces are generated by the acoustic pressure fieldemitted by the oscillating bubble itself. Due to a mirror effect this force will pushbubbles against a rigid wall. These two forces can explain the main characteristicsof the experimentally observed displacement of a bubble. This is the optical mea-surements with the transparent printhead [84]. A small bubble which is generatednear the nozzle, moves with a speed of 5 mm/s towards the channel, because ofthe primary Bjerknes force, and is attracted against the (transparent) connectionchannel wall, because of the secondary Bjerknes force. After a while this bubblehas grown in size to a diameter of 32 µm. The natural frequency of this bubbleas harmonic oscillator, as described in the previous section, is reduced to 55 kHzand tends to become lower than the frequency of the main channel resonance. Thebubble moves now with a speed of 20 mm/s in the opposite direction towards thenozzle plate.
Especially near the nozzle itself the drag force from the ink flow becomesimportant. This force tends to drag the bubble along with the ink flow, thusalong with the drop formation. Buoyancy or gravity forces play no role in ourcase. Other forces which could play a role are lift forces from the radial flowfield, the added mass and inertia forces and finally the Basset history force whichresults from the absorbed momentum in the boundary layer around the bubble[151]. These forces will results in complicated movement patterns.
‖Part of this subsection has been published as: J. de Jong, M. Versluis, G. de Bruin, D. Lohse,H. Reinten, M. van den Berg, H. Wijshoff and N. de Jong, Acoustical and optical characterization
of air entrapment in piezo-driven inkjet printheads, Proc. IEEE-IUS 2, 1270 (2005).

140 CHAPTER 6. BUBBLE DYNAMICS
(a) (b)
Figure 6.12: (a) The transparent head, used for direct visual measurements ofentrapped air bubbles with the nozzle plate 1, the connection channel 2, an airbubble 3, and a neighboring channel 4. (b) The y-position of the air bubble asa function of the time after the air entrapment. The bubble first moves into thechannel. At t = 52 ms the Bjerknes force reverses sign and the air bubble ispushed back towards the nozzle. Taken from [84].
6.4.2 Net displacements
The forces on the bubble result in a displacement pattern, which can only beresolved numerically for an opaque printhead. In figure 6.13a the net displacementafter one drop formation cycle is shown. The bubble has a diameter of 10 µmat different positions on the nozzle axis. The results are simulated with a 2Drotational symmetric drop formation model in Flow3D. So only bubbles at thenozzle axis can be simulated. The pressure inside the bubble is calculated withthe polytropic equation. The initial pressure inside the bubble is equal to theambient pressure enlarged with the Laplace pressure 2γ/R0. The pressure in theconnection channel at a position 300 µm in the channel in front of the nozzle iskept the same. There is only a one-way coupling between the channel acousticsand the flow phenomena in the nozzle. The bubble cannot influence the pressurewaves in the channels in these simulations.
Depending on the axial position, the bubble is either moved inwards or out-wards after one drop formation cycle. There are four positions where the net axialdisplacement becomes zero. Two positions are unstable because the bubble atlocations around this point moves further away from these positions. That arethe position at 25 µm and 72.5 µm. But, the two axial positions at 62.5 µm and105 µm are stable. The bubble at locations around points moves towards thesepositions. These two positions act as a bubble trap.
At axial positions between the meniscus and 20 µm behind the surface, thebubble is jetted out. Also experiments show that jetting out of an air bubbleis a possible recovery mechanism. In figure 6.13b the amplitude of the Paint

6.5. THE GROWING BUBBLE 141
1.0952E+05 1.30E-06 1.09E+05
1.0950E+05 1.31E-06 1.09E+05
1.0941E+05 1.33E-06 1.09E+05
1.0904E+05 1.37E-06 1.09E+05
1.0894E+05 1.38E-06 1.08E+05
1.0885E+05 1.40E-06 1.08E+05
1.0873E+05 1.41E-06 1.08E+05
1.0863E+05 1.44E-06 1.08E+05
1.0842E+05 1.62E-06 1.06E+05
1.0817E+05 1.63E-06 1.06E+05
1.0809E+05 1.67E-06 1.06E+05
1.0789E+05 1.82E-06 1.06E+05
1.0723E+05 1.86E-06 1.05E+05
1.0697E+05 1.90E-06 1.04E+05
1.0679E+05 1.96E-06 1.04E+05
1.0659E+05 2.00E-06 1.03E+05
1.0479E+05 2.04E-06 1.03E+05
1.0416E+05 2.07E-06 1.02E+05
1.0396E+05 2.11E-06 1.02E+05
1.0383E+05 2.13E-06 1.01E+05
1.0356E+05 2.15E-06 1.01E+05
1.0331E+05 2.19E-06 1.00E+05
-3
-2
-1
0
1
2
32
0
30
40
50
60
65
70
75
80
90
10
0
11
0
12
0
Axial Position [µm]
Bu
bb
le N
et
Tra
ns
po
rt [
um
]
(a) (b)
Figure 6.13: (a) Simulation of the net bubble displacement after one drop forma-tion cycle. Depending on the axial position the bubble with a diameter of 10 µmis moved outward or inward. At axial positions around 62.5 µm and 105 µm thebubble can be trapped. At axial positions between 0 µm and 20 µm the bub-ble is jetted out. (b) Measured amplitude of the Paint signal with distortions atdrop formation cycles 70 and 124, air entrainment after drop formation cycle 70.The jetting out of a bubble is visible at drop formation cycle 155. This is a fastrecovery mechanism, generated by the net displacement pattern inside the nozzle.
signal is shown. At drop formation cycle 70 a distortion occurs followed by airentrainment. At drop formation cycle 124 a second distortion is visible withoutany consequences. With drop formation cycle 155 the amplitude of the Paint signalreturns in one cycle to its normal value, which can only be caused by jetting outof the bubble. The numerical simulation of the jetting out is shown in figure 6.14.
6.5 The growing bubble
6.5.1 Rectified diffusion and dissolution
A bubble in an acoustic pressure field will grow by rectified diffusion when the pres-sure variations are strong enough [19, 59, 71]. At pressure maxima, air is squeezedout of the bubble, but this loss is overcompensated at the pressure minima whenthe bubble expands. This results in a net gas diffusion into the bubble.
In the transparent head growth rates are optically measured. The net growthrate is 0.04 pl/ms when actuating at 10 kHz with a relative low driving amplitudefor a drop speed of 1 m/s [86]. This is a net growth of 0.004 pl/cycle. With avery low non-jetting actuation amplitude at a repetition rate of 20 kHz, the netgrowth rate is 0.39 pl/ms or 0.02 pl/cycle [84].
Without an acoustic field the bubble will dissolve. There is no net transportof ink and the ink around the bubble will saturate with dissolved air and the

142 CHAPTER 6. BUBBLE DYNAMICS
(a) (b) (c) (d) (e) (f) (g) (h)
Figure 6.14: Simulation with Flow3D of the jetting out of a bubble. The bubblehas a diameter of 10 µm at an axial position 20 µm under the meniscus. Theframes show the drop formation with the bubble at 0, 8, 16 . . . 56 µs after startof the actuation. The channel length is 8 mm and nozzle diameter is 32 µm.
dissolution rate will be rather low. In the experiments without actuation with thetransparent head [86], the dissolution rate of a 26 µm bubble is constant at 0.5pl/s until the bubble is completely dissolved. This is shown in figure 6.15. Thedissolution rate is 2 to 3 orders of magnitude slower than the growth by rectifieddiffusion. This can also be seen in the figure, where the bubble size increases muchfaster when the actuation starts again.
The bubble size increases fast and saturates at an equilibrium size of 20 plwithin a second. After 1000-5000 actuation cycles, the growth by rectified diffu-sion is balanced by the dissolution of the bubble. This equilibrium is broken atthe moment when jetting breaks down. Without drop formation the bubble sizesaturates at a much larger size of almost 70 pl.
With jetting, the ink around the bubble will be continuously refreshed. Theink around the nozzle and the air bubble will be less saturated with dissolvedair. This results in higher dissolution rates. The saturation size in the jettingsituations will be smaller than in the non-jetting situations. Experimental dataare only obtained with a transparent head. In the jetting situations the bubblesize saturates always at a diameter of 35-40 µm (20-33 pl) and in the non-jettingsituations at a diameter of 45-50 µm (50-70 pl) [83, 84, 86].
Just after the air entrainment the bubble has a diameter of 12 µm (0.9 pl), asmeasured visually with the transparent heads [84]. In the opaque heads the bubblesize is estimated at 20 µm (4 pl) after 100 drop formation cycles at a repetitionrate of 20 kHz with a nominal driving amplitude for a drop speed of 7 m/s, section6.3.2. We assume that the bubble size is the same as in the transparent heads justafter the air entrainment. This gives an estimation of the net growth rate of 0.62pl/ms or 0.03 pl/cycle.

6.5. THE GROWING BUBBLE 143
(a) (b)
Figure 6.15: Measured bubble size with actuation stopped at t = 0 s until t =165 s. The dissolution rate is 0.46 pl/s. Then the actuator is turned on anddroplets are jetted from the nozzle. The bubble size increases fast and saturatesat an equilibrium size of 20 pl within a second. The equilibrium is broken after 12seconds at the moment jetting breaks down. This is shown in the second figure,which shows only the first 40 s after the actuator is turned on again. Withoutdrop formation the bubble size saturates at a much larger size of almost 70 pl.
6.5.2 Influence of the actuation
When turning off the actuation for a specific time interval, the bubble will eitherbe entirely dissolved or only partly. This can be seen in the Paint signal after theactuation is started again. If the time interval is long enough, the bubble will bedissolved completely, and the Paint signal is normal again. When the time intervalis not long enough, the bubble is dissolved only partly. The bubble is still presentand the modification of the Paint signal by the bubble will still be visible. Thebubble will again grow by rectified diffusion until it saturates at its equilibriumsize.
This is in fact what happens in the experiment with the regular head, wherethe growing and dissolution cannot be measured optically. A bubble is createdduring an actuation at a high drop repetition rate. Then the repetition rate islowered stepwise and the Paint signal is monitored until a new equilibrium isestablished. By lowering the repetition rate the bubble will get more and moretime to dissolve until it is dissolved completely before the next drop is jetted. Theresults of this experiment are shown in figure 6.16.
The analysis of the Paint signal is this figure is as follows. The current from thepiezo element I(t) during a time interval T is compared with a reference I0(t) (i.e.

144 CHAPTER 6. BUBBLE DYNAMICS
Figure 6.16: (a) Measured drop repetition rate at which the air bubble, which iscreated at a repetition rate of 20 kHz, dissolves completely when lowering therepetition rate. At low driving amplitude the rectified diffusion is weak and thebubble dissolves already at a high repetition rate. At a high actuation amplitude,the repetition rate must be lower before the bubble disappears. (b) The decreaseof the deviation of the Paint signal (as variance of the difference with the referencePaint signal). At 22 V the bubble dissolves and the deviation decreases graduallyto zero (upper picture). (c) At 35 V the bubble can be jetted out and the deviationdecreases stepwise to zero (lower picture).
the signal without air bubbles) and the variance σ2 of the difference is calculated:
σ2 =1
T
∫ T
0[I(t) − I0(t)]
2 dt (6.12)
At a low actuation amplitude, the rectified diffusion is slow and the bubbledissolves completely in a relative short time. Lowering the repetition rate to 1-7 kHz is already sufficient at actuation amplitudes of 50-80 % of the nominalamplitude, which is 35 V . At nominal actuation amplitude the repetition ratemust be lowered to 200 Hz before the bubble dissolves completely.
Because of jetting out along with the drop, bubbles can disappear alreadyat 400 Hz at the nominal driving amplitude. This is shown in figure 6.16b+c,where the variance of the difference between the Paint signal and the referencesignal is depicted as a function of the decreasing repetition rate. In figure 6.16b,the decreasing deviation of the Paint signal is shown when a bubble dissolvescompletely between a repetition rate of 6 and 3.5 kHz. In the lower picture thedecreasing deviation is shown when the bubble is jetted out at a repetition rate285 Hz.

6.5. THE GROWING BUBBLE 145
6.5.3 Impact on channel acoustics
At high repetition rates of 10-20 kHz and nominal actuation amplitudes, airbubbles grow during 1000-5000 actuation cycles to a bubble size of 50-70 pl. Thisvolume is comparable to the total volume displacement by the acoustic pressurewave. The volume displacement of acoustic pressure field can be counteracted bythe change in bubble size. This will change the acoustic properties of the channelcompletely.
(a)
1 -2.24E-01 -1.94E-01 -1.56E-01 -1.24E-01 -1.00E-01
1 -2.14E-01 -1.82E-01 -1.47E-01 -1.22E-01 -1.18E-01
1 -1.87E-01 -1.57E-01 -1.26E-01 -1.15E-01 -1.32E-01
1 -1.48E-01 -1.21E-01 -1.02E-01 -1.06E-01 -1.44E-01
1 -1.02E-01 -8.20E-02 -7.67E-02 -9.35E-02 -1.53E-01
1 -5.52E-02 -4.44E-02 -5.41E-02 -8.42E-02 -1.56E-01
1 -1.56E-02 -1.49E-02 -3.76E-02 -8.04E-02 -1.53E-01
1 1.28E-02 3.18E-03 -3.05E-02 -7.79E-02 -1.44E-01
1 2.79E-02 8.90E-03 -3.21E-02 -7.80E-02 -1.30E-01
1 2.83E-02 2.13E-03 -4.09E-02 -8.29E-02 -1.12E-01
1 1.37E-02 -1.59E-02 -5.64E-02 -9.14E-02 -9.14E-02
1 -1.36E-02 -4.27E-02 -7.73E-02 -1.00E-01 -7.10E-02
1 -5.05E-02 -7.58E-02 -1.01E-01 -1.08E-01 -5.30E-02
1 -9.20E-02 -1.11E-01 -1.24E-01 -1.07E-01 -4.11E-02
1 -1.31E-01 -1.42E-01 -1.38E-01 -9.88E-02 -3.66E-02
1 -1.63E-01 -1.63E-01 -1.41E-01 -9.27E-02 -3.84E-02
1 -1.84E-01 -1.73E-01 -1.35E-01 -8.87E-02 -4.58E-02
1 -1.92E-01 -1.71E-01 -1.26E-01 -8.32E-02 -5.71E-02
-0.30
-0.20
-0.10
0.00
0.10
20 40 60 80 100Time [µs]
Pain
t sig
nal
[mA
]
60 µmbubble
50 µmbubble
40 µmbubble
30 µmbubble
nobubble
(b)
Figure 6.17: Measured (a) and calculated (b) effect of a large air bubble on thePaint signal. A large air bubble acts as an open boundary condition for thepressure waves inside the channel. The acoustic properties of the channel shift toa 1
2λ resonator with a frequency of 65 kHz instead of 50 kHz. The frequency andalso the amplitude of the acoustic pressure increase.
Without an air bubble, the nozzle acts as a partial closed boundary conditionfor the pressure waves inside the ink channel, see section 3.1.2. The channel willact almost as a 1
4λ resonator. A large bubble can counteract the pressure build-up. This results in a complete open reflection. The channel will act now as a12λ resonator. The main resonance frequency will increase and also the amplitudeof the pressure wave will increase. This is visible in the measured and in thecalculated Paint signal, figure 6.17.
The variation of the Paint signal in the experiment with lowering of the rep-etition rate contains information on the behavior of a small air bubble and thebehavior of a large air bubble. With FFT-transformation of the Paint signals weget the frequency components in the Paint signal. The amplitude and the phaseof two important frequency components are shown in figure 6.18 as function ofthe drop repetition rate.

146 CHAPTER 6. BUBBLE DYNAMICS
Figure 6.18: The amplitude and phase of the 50 and 170 kHz components in thePaint signal as function of the drop repetition rate. A large air bubble is created athigh drop repetition rate. The Paint signal is measured after a stepwise lowering ofthe repetition rate, when the bubble is saturated at its new equilibrium size. FFT-transformation of the Paint signal results in the depicted amplitude and phase ofthe 50 and 170 kHz components. The 170 kHz component shows an oscillation,especially via the 2π phase shift. The amplitude and phase of the 50 kHz doesnot show an oscillation of the bubble.
A small air bubble will show a collapse and an oscillation at its natural fre-quency, section 6.3.2. With the frequency characteristics of the printhead this ismeasured as a distortion with a frequency of 170 kHz. This frequency componentshows a 2π phase shift in figure 6.18. A large air bubble will change the mainchannel resonance at 50 kHz towards a 1
2λ resonator.
6.5.4 Impact on drop formation
When a distortion leads to air entrainment the bubble diameter is 20 µm afterhundred drop formation cycles. The drop speed remains the same during the first100 drop formation cycles in a regular head. The bubble continues to grow andthe drop speed starts to decrease with 1 m/s during the next 300 drop formationcycles [85].
In the experiments with the transparent head [86] jetting breaks down at abubble diameter of 38 µm. The bubble size is then of the same order as thevolume displacement by the acoustic pressure field. The bubble counteracts theacoustic pressure variation. There is no driving force left for the ink movement inthe nozzle. A large bubble changes the pressure waves inside the ink channel. Fornumerical simulations with Flow3D, we have to use the acoustic model. The dropformation process comes to an end as shown in figure 6.19.
The acoustic Flow3D simulation can only show the main trends for large bub-bles. The minimum applicable grid size with the acoustic calculations is too coarseto model bubble sizes less than 30 µm. For bubbles sizes of 30-60 µm the accuracy

6.6. CONCLUDING REMARKS 147
Figure 6.19: Breakdown of the drop formation process with large air bubbles. Thechannel length is 8 mm and the nozzle diameter 32 m. The drop speed withoutan air bubble is 7 m/s. The simulations of one drop formation cycle for bubblediameters of 30, 40, 50 and 60 µm are done with the acoustic model in Flow3D.Shown is the fraction of fluid. There are no sharp interfaces, because the minimumapplicable grid size is too coarse for an accurate simulation.
is not very good as can be seen in the figure. We need another model to simulatethe behavior of air bubbles and their impact on the acoustic properties of theprintheads.
In [83] a one-dimensional model has been developed. This is based on the nar-row channel theory for the channel acoustics. The bubble dynamics are describedwith a linearized Rayleigh-Plesset equation. Essential in the model is the two-waycoupling between channel acoustics and bubble dynamics. The model shows theimportance of the impact that large bubbles have on the acoustic properties. Theair bubble acts back on the acoustic pressure field in the ink channel, thus on itsown dynamics. An air bubble with a diameter of 46 µm reduces the nozzle pres-sure by a factor of four. This causes the collapse of the drop formation process.The counteraction on the pressure build-up also limits further bubble growth andthus determines the saturation size of the bubble. The model also shows the shiftof the main channel resonance frequency towards the higher frequency of the 1
2λresonator characteristics. Another important result is that the bubble collapsedisappears and that the large bubble oscillates with the same frequency as thechannel acoustics.
6.6 Concluding remarks
In chapter 5 the wetting of the nozzle plate was discussed. The wetting of thenozzle plate is also a source for jetting instability, the subject of this chapter.

148 CHAPTER 6. BUBBLE DYNAMICS
There is a critical layer thickness, which directly leads to air entrainment. Thegeneration of air bubbles is the mechanism, which can lead to nozzle failure. Thewetting layer plays also a role in combination with 20 µm small dirt particles,caught in the ink layer and transported towards the nozzle. The distortion by adirt particle can be detected with an acoustic measurement, which uses the piezoelements also as sensors.
An entrapped air bubble will oscillate in the acoustic pressure field. The acous-tic properties of the ink channel act as a filter for this measurement. Thereforethe oscillations of small air bubbles are recorded as a signal with a frequency of170 kHz. Primary and secondary Bjerknes forces, drag forces and many otherforces result in movement patterns of the air bubble. The movement of an airbubble can result in jetting out, thus in a fast recovery. The movement of airbubbles can be visualized with a special transparent head. Small air bubbles donot have a negative effect on the drop formation process. However, in the pressurefield the bubbles will grow by rectified diffusion. The growth rate is much fasterthan the dissolution rate, the other recovery mechanism. The air bubbles grow inthe pressure field to a size comparable with the drop size and the displacement bythe acoustic pressure waves. The large air bubble will then counteract the pressurebuild-up and the drop formation process ceases completely.

Chapter 7
Conclusions
In the past decades, inkjet technology has evolved into a technology which plays animportant role in the graphical printing industry and in many emerging new indus-trial and medical applications. The piezo inkjet technology has unique capabilitiesdue to its ability to deposit a wide variety of materials on various substrates inwell defined patterns. To comply with the increasing and diverging requirementsfor today’s inkjet technology, a fundamental understanding of the underlying pro-cesses is very important. This justifies the research, reported in this thesis, whichextends over the solid mechanics field and the fluid mechanics field.
The physics behind the chain of processes comprise the two-way coupling fromthe electrical to the mechanical domain through the piezo electric actuator, thecoupling to the acoustic domain inside the ink channels, and the coupling to thefluid dynamic domain, the drop formation process. Furthermore, wetting of thenozzle plate and air bubbles can have a negative influence on the printhead per-formance. The five topics (actuation, channel acoustics, drop formation, wetting,and air bubbles) are the research topics of this thesis.
The first step is the actuation, chapter 2, which implies the transformationof an electric voltage to a deformation of the ink channels. With a piezoelectricbump mode actuator design, an efficient transformation of electric potential tomechanical deformations can be realized. However, mechanical constraints canresult in cross-talk effects, and resonances in the printhead structure can be ex-cited. The deformations inside the printhead cannot be measured. Modeling withthe commercial finite element code Ansys is a way to resolve this. The numericalmodeling provides the design rules for an efficient actuation, without generatingcross-talk effects. The drive towards smaller printheads with more nozzles willpush the balance between the operational demands and the manufacturabilityto its limits. A printhead design is a compromise between the two aspects, thefunctional requirements and the cost of production. The numerical modeling isthe tool to match the often conflicting requirements for the different parts in theprinthead. This leads to an optimal printhead design within known constraints.New actuation principles can also be explored, before starting the expensive and
149

150 CHAPTER 7. CONCLUSIONS
time consuming manufacture of a new printhead design.The deformation of the channel cross-section results in pressure waves. The
pressure waves in the ink channels play a central role in the printhead operation,chapter 3. They connect the electrical-mechanical domain of the actuator to thefluid dynamic domain in and outside of the nozzles. The traveling wave providesan efficient acoustic mechanism to generate the required pressure for the drop for-mation process, when the acoustic impedance of the nozzle matches the impedanceof the ink channel. Also refill, the filling of the nozzle for the next drop formationcycle, is driven by the acoustic pressure waves. However, residual vibrations in theink channel must be as low as possible before the next drop formation cycle starts.Another disturbing effect is acoustic cross-talk, which is the traveling of pressurewaves through the reservoir towards neighboring channels. This can be avoidedwith a thin foil on the ink supply. Measurements are done with the laser-Dopplersetup and an acoustic measurement (Paint), which uses the piezo elements alsoas sensors. Details of the phenomena inside the ink channels, such as local pres-sure variations, are available through modeling. The acousto-elastic interactionplays an important role in the ”narrow-channel” model and acoustic modelingwith Ansys provides the details of the interactions with the structure dynamicsof the printhead. With fundamental knowledge of the acoustic properties, newprinthead concepts can be developed successfully into an operating printhead thatcan fire billions of drops with constant size and velocity and a reliability as highas possible. The flow and pressure at the nozzle sets the boundary condition inthe acoustic modeling. The pressure at the entrance of the nozzle is the couplingto the final stage of the printhead operation, the drop formation.
The application of the traveling wave principle leads to the drop formationprocess, which takes several tens of microseconds. The drop formation processis the subject of chapter 4. Optical measurements and modeling provide theinformation, which leads to its better understanding. The tail break-off processis not affected by the actuation. Up to four satellite drop formation mechanismscan generate extra drops, which have a negative impact on the printing result. Animportant application is drop size modulation. With the knowledge of the dropformation process, eight drop size modulation techniques are identified. For themodeling of the free surface flow with surface tension and its impact on channelacoustics we use the commercial volume of fluid code Flow3D. The calculationsprovide also information on the meniscus retraction, the internal distribution ofthe speed of the ink, and the impact of the drop formation process on the pressurewaves inside the ink channels. The Flow3D software is adapted to incorporateflexible walls, which is not feasible in the standard code. We can predict theresulting drop properties accurately. This will be used to investigate the jettingbehavior of many new liquids, which are used in the different new applications.The critical material properties can be defined and this will be used as a guidefor the development of new jetting materials. The jetting of smaller drops is moresensitive to the influence of the surrounding air. This is a new challenge for themodeling of the drop formation, requiring the development of new models.

151
The flow of ink on the nozzle plate is important. Wetting of the nozzle platecan influence the drop formation and the pressure waves inside the ink channels.The material interactions, which determine the wetting properties, are not knownin detail. Therefore, an experimental study of the wetting phenomena is per-formed with a nickel nozzle plate, chapter 5. An actuated nozzle induces severalflow patterns in an ink layer around the nozzle opening. When jetting, an inducedair flow also influences the flow pattern around a nozzle. The nozzle plate andthe ink are in the complete wetting regime, except for a central band of (older)ink in the middle of the nozzle plate, which is in the partial wetting regime. Theprecursor film provides a means of communication between the central band of inkand the nozzles. Differences in surface tension of the ink result in Marangoni flowover the entire nozzle plate. The experimental observations can be understoodwith theories found in the literature. A numerical model, which can predict thewetting properties, is not available. The molecular interactions have to be takeninto account. However, molecular modeling will only provide the interaction pa-rameters. The parameters must be translated into a macroscopic flow patternwith additional models. This is closely related to the research on the interactionsof ink with the media. The impact, spreading, and solidification of drops onto asolid surface is the final stage of the printing process. New applications require thedepositions of various kinds of liquids on different types of substrates. Numericalmodeling of the wetting phenomena, which can take into account the materialinteractions, would be a very powerful tool in the development of new inkjet ap-plications. The final goal is to control the wetting properties of the nozzle plate.Either a uniform thin layer of ink or no ink layer at all will improve the jettingbehavior of the printhead.
Wetting, without or with dirt particles, can also result in air entrainment. Airbubbles play an important role in the jetting stability. The theoretical and ex-perimental research on the generation and the behavior of air bubbles and theirimpact on the printhead performance is the subject of chapter 6. The resultingdrop properties, the Paint measurement and visualization with a special trans-parent head are the experimental tools. Various aspects of the generation andthe behavior of air bubbles are clarified. An air bubble oscillates in the acousticpressure field. The oscillations can result in an enhanced drop speed and also theacoustic pressure waves are altered, as measured with Paint. Many forces act onan air bubble, which results in complicated movement pattern. The air bubblegrows in the acoustic pressure field by rectified diffusion, with a growth rate muchfaster then the dissolution rate. Large air bubbles disturb the drop formation.The ultimate goal is to prevent the generation of air bubbles, or to control thebehavior of air bubbles. Small air bubbles, which do not have a negative influencethe drop formation, can be manipulated with acoustic pressure waves. Either acontrolled jetting out or a fast dissolution would remove an air bubble before thedrop formation is disturbed. The air bubble also influences the acoustic propertiesof the ink channels. Therefore, a numerical model will have to incorporate a fulltwo-way coupling between the dynamic behavior of an air bubble and the pressure

152 CHAPTER 7. CONCLUSIONS
waves inside the ink channels. Only with numerical modeling the results of theacoustic measurements can be translated into bubble properties such as bubbleradius, position, velocity, etc.
The requirements for the inkjet printing technology will increase. The nearfuture demands for smaller drops, higher drop velocities, higher drop repetitionrates, smaller printhead designs, a maximum jetting stability, complex fluids, etc.To meet these challenges, inkjet research will continue towards high integrationdensities in the printhead, zero cross-talk levels, zero variation of the resulting dropproperties, and the elimination of nozzle failure. This makes the development ofnew inkjet technologies an exciting environment, where scientific research andindustrial development can reinforce each other for many years to come.

References
[1] S. Allaman and G. Desie, Improved ink jet in situ visualization strategies,Proc. IS&T’s NIP20, 383 (2004).
[2] R.R. Allen, Inkjet printing with large pagewide arrays: issues and challenges,Proc. IS&T’s NIP12, 43 (1996).
[3] B.V. Antohe and D.B. Wallace, Acoustic phenomena in a demand-mode piezo-electric inkjet printer, Proc. IS&T’s NIP17, 885 (2001).
[4] B.V. Antohe and D.B. Wallace, Acoustic phenomena in a demand-mode piezo-electric inkjet printer, J. Imaging Sci. & Technol. 46, 409 (2002).
[5] A. Ballato, Piezoelectricity: Old effect, new thrust, IEEE Transactions onUltrasonics, Ferroelectrics and Frequency Control 42, 916 (1995).
[6] O.A. Basaran, Small-scale free surface flows with breakup: Drop formationand emerging applications, AIChE J. 48, 1842 (2002).
[7] G.K. Batchelor, An introduction to fluid dynamics, Cambridge UniversityPress (1970).
[8] R. Beesom, The ABCs of HP’s SPT (Scalable Printhead Technology), IMI13th Annual European Inkjet Conference (2005).
[9] M. Beltman, P. van de Hoogt, R. Spiering, and H. Tijdeman, Air loads on arigid plate oscillating normal to a fixed surface, J. Sound & Vibr. 206, 217(1997).
[10] M. Beltman, Viscothermal wave propagation including acousto-elastic inter-action, PhD thesis, University of Twente, Enschede (1998).
[11] R. Bennett, Precision industrial ink-jet printing technology for full colorPLED display and TFT-LCD manufacturing, Proc. of the 3rd InternationalDisplay Manufacturing Conference, Japan (2003).
[12] S.S. Berger, R.F. Burr, J.D. Padgett, and D.A. Tence, Ink manifold designof phase change piezoelectric ink jets, Proc. IS&T’s NIP13, 703 (1997).
153

154 REFERENCES
[13] W.T. Berggren, M.S. Westphall, and L.M. Smith, Single-pulse nano- electro-spray ionization, Anal. Chem. 74, 3443 (2002).
[14] B. Beulen, J. de Jong, H. Reinten, M. van den Berg, H. Wijshoff, and R. vanDongen, Flows on the nozzle plate of an inkjet printhead, Exp. Fluids 42, 217(2007).
[15] G. Beurer and J. Kretschmer, Function and performance of a shear modepiezo printhead, Proc. IS&T’s NIP13, 621 (1997).
[16] A. Bietsch, J. Zhang, M. Hegner, H.P. Lang, and C. Gerber, Rapid func-tionalization of cantilever array sensors by inkjet printing, Nanotechnology15(8), 873 (2004).
[17] D.B. Bogy and F.E. Talke, Experimental and theoretical study of wave prop-agation phenomena in drop-on-demand ink jet devices, IBM J. Res. Develop.28, 314 (1984).
[18] A.L. Brady, M. McDonald, S.N. Theriault, and B. Smith, The impact ofSilicon MEMS on the future of ink jet printhead design and performance,Proc. IS&T’s NIP21, 264 (2005).
[19] C.E. Brennen, Cavitation and bubble dynamics, Oxford University Press(1995).
[20] M.P. Brenner, X.D. Shi, and S.R. Nagel, Iterated instabilities during dropletfission, Phys. Rev. Letters 73, 3391 (1994).
[21] M.P. Brenner, J.R. Lister, and H.A. Stone, Pinching threads, singularitiesand the number 0.0304. . ., Phys. Fluids 8, 2827 (1996).
[22] M.P. Brenner, J. Eggers, K. Joseph, S.R. Nagel, and X.D. Shi, Breakdownof scaling in droplet fission at high Reynolds number, Phys. Fluids 9, 1573(1997).
[23] M.P. Brenner, S. Hilgenfeldt, and D. Lohse, Single-bubble sonoluminescense,Rev. Mod. Physics 74, 425 (2002).
[24] J.D. Brock, I.M. Cohen, I.P. Ivanov, H.P. Le, and J. Roy, Oscillations of anair bubble in an ink jet, J. Imaging Sci. Technol. 10, 127 (1984).
[25] J. Brunahl, Physics of Piezoelectric Shear Mode Inkjet Actuators, PhD ThesisRoyal Institute of Technology Stockholm (2003).
[26] D. Bruijnen, R. van de Molengraft, A. Draad, and T. Heeren, Productivityanalysis of a scanning inkjet printer, Proc. IS&T’s NIP21, 129 (2005).
[27] W.L. Buehner, J.D. Hill, T.H. Williams, and J.W. Woods, Application ofink-jet technology to a word processing output printer, IBM J. Res. Dev. 21,1968 (1977).

REFERENCES 155
[28] N. Bugdayci, D.B. Bogy, and F.E. Talke, Axisymmetric Motion of RadiallyPolarized Piezoelectric Cylinders Used in Ink Jet Printing, IBM J. Res. De-velop. 27, 171 (1983).
[29] R.F. Burr, D.A. Tence, and S.S. Berger, Multiple dot size fluidics for phasechange piezoelectric ink jets, Proc. IS&T’s NIP12, 12(1996).
[30] R.F. Burr, S.S. Berger and D.A. Tence, Overview of phase change piezoelectricink jet fluids modeling and design, Proc. ASME 239, 545(1996).
[31] J.C. Charter, R.M. Alvis, S.B. Brown, K.C. Langry, T.S. Wilson, M.T.McBride, M.L. Myrick, W.R. Cox, M.E. Grove, and B.W. Colston, Fabri-cating optical fiber imaging sensors using inkjet printing technology: A pHsensor proof-of-concept, Biosens. Bioelectron. 21(7), 1359 (2006).
[32] M. Chee, R. Yang, E. Hubbell, A. Berno, X.C. Huang, D. Stern, J.Winkler,D.J. Lockhart, M.S. Morris, and S.P.A. Fodor, Accessing genetic informationwith high-density DNA arrays, Science 274, 610 (1996).
[33] A.U. Chen and O. Basaran, A new method for significantly reducing dropradius without reducing nozzle radius in drop-on-demand drop production,Physics of Fluids 14, L1 (2002).
[34] A.U. Chen, P.K. Notz, and O.A. Basaran, Computational and experimentalanalysis of pinch-off and scaling, Phys. Rev. Lett. 88, 174501 (2002).
[35] H.H. Chen and M.P. Brenner, The optimal faucet, Phys. Rev. Letters 92,166106 (2004).
[36] T. Chen, W.R. Cox, D. Lenhard, and D.J. Hayes, Microjet printing of highprecision microlens array for packaging of fiber-optic components, Proc. SPIEOptoelectronic Interconnects, Integrated Circuits and Packaging 4652, 136(2002).
[37] T. Chen, Piezoelectric Inkjet Print Head Technology for Precision DispensingApplication, Proc. DF2006, 66 (2006).
[38] X.M. Chen and A. Prosperetti, Thermal processes in the oscillations of gasbubbles in tubes, J. Acoust. Soc. Am. 104, 1389 (1998).
[39] J.M. Cittadino, E. Mendes, and A. Soucemarianadin, A Tool for MonitoringPiezoelectric Micro-pumps, Proc. IS&T’s NIP21, 278 (2005).
[40] P.W. Cooley, D.B. Wallace, and B.V. Antohe, Application of inkjet printingtechnology to biomems and microfluidic systems, Proc. SPIE Conference onMicrofluidics and BioMEMS 4560, 177 (2001).
[41] W.R. Cox, T. Chen, D. Ussery, D.J. Hayes, J.A. Tatum, and D.L. MacFarlane,Microjetted lenslet triplet fibers, Optics Communications 123, 492 (1996).

156 REFERENCES
[42] A.A. Darhuber, W.W. Reisner, and S.M. Troian, Dynamics of capillaryspreading along hydrophilic microstripes, Phys. Rev. 64, 031603 (2001).
[43] A.A. Darhuber, J.M. Davis, W.W. Reisner, and S.M. Troian, Thermocapillaryactuation of liquid flow on chemically patterned surfaces, Phys. Fluids 15,1295 (2003).
[44] A.A. Darhuber and S.M. Troian, Principles of microfluidic actuation by mod-ulation of surface stresses, Ann. Rev. Fluid Mech. 37, 425 (2005).
[45] D.D. Darling, Driving Waveforms to Reduce Voltage Requirements of Inkjets,Proc. IS&T’s NIP20, 851 (2004).
[46] D.D. Darling, Frequency dependent fluidic inductance and resistance in inkjetpassages, Proc. IS&T’s NIP20, 877 (2004).
[47] R.F. Day, E.J. Hinch, and J.R. Lister, Self-similar capillary pinchoff of aninviscis liquid, Phys. Rev. Letters 80, 704 (1998).
[48] J.F. Dijksman, Hydrodynamics of small tubular pumps, J. Fluid. Mech. 139,173 (1984).
[49] J.F. Dijksman, Hydro-acoustics of piezoelectric driven ink-jet print heads,Flow Turb. & Comb. 61, 211 (1999).
[50] T.G. Duby, Performance improvements for commercial piezo prinhead, Proc.IS&T’s NIP17, 328 (2001).
[51] J. Eggers and T.F. Dupont, Drop formation in a one-dimensional approxi-mation of the Navier-Stokes equation, J. Fluid Mech. 161, 205 (1994).
[52] J. Eggers, Nonlinear dynamics and breakup of free-surface flows, Rev. Mod.Phys. 69, 865 (1997)
[53] L. Euler, Principes generaux du mouvementdes fluides, Mem.Acad.Sci.Berlin11, 274 (1755).
[54] J.Q. Feng, A general fluid dynamic analysis of drop ejection in drop-on-demand ink jet devices, J. Imaging Sci. & Techn. 46, 398 (2002).
[55] R.J. Furbank and J.F. Morris, Droplet formation from particulate suspen-sions, Proc. IS&T’s NIP17, 304 (2001).
[56] R.J. Furbank and J.F. Morris, An experimental study of particle effects ondrop formation, Phys. Fluids 16, 1777 (2004).
[57] E.P. Furlani, Temporal instability of viscous liquid microjets with spatiallyvarying surface tension, J. Physics A 38, 263 (2005).

REFERENCES 157
[58] E.P. Furlani, Thermal modulation and instability of Newtonian liquid micro-jets, Proc. Nanotech2005 1, 668 (2005).
[59] M.M. Fyrillas and A.J. Szeri, Dissolution or growth of soluble spherical oscil-lating bubbles, J. Fluid Mech. 277, 381 (1994).
[60] B.J. de Gans, P.C. Duineveld, and U.S. Schubert, Inkjet printing of polymers:state of the art and future developments, Adv. Materials 16, 203 (2004).
[61] X. Geng, H. Yuan, H.N. Oguz, and A. Prosperetti, The oscillation of gasbubbles in tubes: Experimental results, J. Acoust. Soc. Am. 106, 674 (1999).
[62] P.G. de Gennes, Wetting: statics and dynamics, Rev. Mod. Phys. 57(3), 827(1985).
[63] P.G. de Gennes, F. Brochard-Wyart, and D. Quere, Capillarity and wettingphenomena, Spinger, Berlin, 2003.
[64] M.B. Groot Wassink, Enabling higher fetting frequencies for inkjet printheadsusing Iterative Learning Control, Proc. IS&T’s NIP 21, 273 (2005).
[65] M.B. Groot Wassink, Inkjet printhead performance enhancement by feedfor-ward input design based on two-port modeling, PhD thesis, Delft Universityof Technology (2007).
[66] W.B. Hardy, The spreading of fluids on glass, Philosoph. Mag. 38, 49 (1919).
[67] E.I. Haskal, M. Buechel, and J.F. Dijksman, Ink jet printing of passivematrixpolymer light emitting displays, Proc. Int. Symp. Soc. for Information Display33, 776 (2002).
[68] J. Heilmann, The applications of inkjet for the printing of PDLC display cells,Proc. IS&T’s NIP21, 48 (2005).
[69] J. Heinzl, Printing with ink droplets from a multi-nozzle device, Advances innon-impact printing technologies for computer abd office applications, JosephGaynor Ed., 1191 (1981).
[70] F. Heslot, N. Fraysse, and A.M. Cazabat, Molecular layering in the spreadingof wetting liquid drops, Nature 338, 640 (1989).
[71] S. Hilgenfeldt, D. Lohse, and M.P. Brenner, Phase diagrams for sonolu-miniscescing bubbles, Phys. Fluids 8, 2808 (1996).
[72] S. Hilgenfeldt, M. P. Brenner, S. Grossmann, and D. Lohse, Analysis ofRayleigh-Plesset dynamics for sonoluminescing bubbles, J. Fluid Mech. 365,171 (1998).
[73] S. Hilgenfeldt and D. Lohse, Predictions for upscaling sonoluminescence,Phys. Rev. Letters 82, 1086 (1999).

158 REFERENCES
[74] N.P. Hine, Deaeration system for a high-performance drop-on- demand inkjet, J. Imaging Technol. 17, 223 (1991).
[75] A. Hirota, N. Aichi, and S. Ishikura, Development of drop-on-demand piezo-electric line inkjet printhead, Proc. IS&T’s NIP21, 257 (2005).
[76] C.W. Hirt and B.D. Nichols, Volume of Fluid (VOF) method for the dynamicsof free boundaries, J. Comput. Phys. 39, 201 (1981).
[77] S.D. Howkins, C.A. Willis, and H. Nishimura, Cross-talk reduction by smartdelay firing, Proc. IS&T’s NIP20, 845 (2004).
[78] I.M. Hutchings, G.D. Martin, S.D. Hoath, and R.H. Morgan, Proc. IS&T’sNIP22, 91 (2006).
[79] P. James and R. Papen, Nanolitre dispensing: a new innovation in roboticliquid handling, Drug Discovery Today 3(9), 429 (1998).
[80] O.E. Jensen and J.B. Grotberg, Insoluble surfactant spreading on a thin vis-cous film: shock evolution and film rupture, J. Fluid Mech. 240, 59 (1992).
[81] O.E. Jensen and J.B. Grotberg, The spreading of heat or soluble surfactanton a thin liquid film, Phys. Fluids A5, 58 (1993).
[82] R. Jeurissen, J. de Jong, H. Borel, M. Versluis, M. van den Berg, H. Wijshoff,H. Reinten, A. Prosperetti, and D. Lohse, Sound Absorption of Bubbles inInkjet-printer Microchannels, Proc. 6th EFMC, 340 (2006).
[83] R. Jeurissen, J. de Jong, H, Reinten, M. van den Berg, H. Wijshoff, M.Versluis, and D. Lohse, The effect of an entrained air bubble on the acousticsof an ink channel, J. Acoust. Soc. Am. (in press 2007).
[84] J. de Jong, M. Versluis, G. de Bruin, D. Lohse, H. Reinten, M. van den Berg,H. Wijshoff, and N. de Jong, Acoustical and optical characterization of airentrapment in piezo-driven inkjet printheads, Proc. IEEE-IUS 2, 1270 (2005).
[85] J. de Jong, H. Reinten, M. van den Berg, H. Wijshoff, M. Versluis, G. deBruin, and D. Lohse, Air entrapment in piezo-driven inkjet printheads, J.Acoust. Soc. Am. 120, 1257 (2006).
[86] J. de Jong, R. Jeurissen, H. Borel, M. van den Berg, H. Wijshoff, H. Reinten,M. Versluis, A. Prosperetti, and D. Lohse, Entrapped air bubbles in piezo-driven inkjet printing: their effect on the droplet velocity, Phys. Fluids 18,121511 (2006).
[87] J. de Jong, H. Reinten, H. Wijshoff, M. van den Berg, K. Delescen, R. vanDongen, F. Mugele, M. Versluis, and D. Lohse, Marangoni flow on an inkjetnozzle plate, Appl. Phys. Lett 91, 204102 (2007).

REFERENCES 159
[88] M. Kanaya, MACH for pigment ink, Proc. IS&T’s NIP19, 280 (2003).
[89] B.C. Khoo, E. Klaseboer, and K.C. Hung, A collapsing bubble-induced micro-pump using the jetting effect, Senors and Actuators 118, 152 (2004).
[90] T. Kitahara, Ink jet head with multi-layer piezoelectric actuator, Proc. IS&T’sNIP11, 346 (1995).
[91] A. Knobloch, Printed RFID labels based on polymer electronics, Proc.DF2005, 121 (2005).
[92] H.S. Koo, M. Chen, and P.C. Pan, LCD-based color filter films fabricated bya pigment-based photo resist inks and printing technology, Thin Solid Films515, 896 (2006).
[93] S. Korol and Chr. Greb, Solid ink printing with dynamic drop size modulation,Proc IS&T’s NIP16, 61 (2000).
[94] T.A. Kowalewski, On the separation of droplets from a liquid jet, Fluid. Dyn.Res. 17, 121 (1996).
[95] J. Kretschmer and G. Beurer, Design parameters of a shear mode piezo print-head for a given resolution, Proc. IS&T’s NIP13, 626 (1997).
[96] P.S. Laplace, Mechanique celeste, supplement au X libre, Courier, Paris(1805).
[97] H.P. Le, Progress and trends in ink-jet printing technology, J. Imaging Sci. &Technol. 42, 49 (1998).
[98] H.C. Lee, Boundary layer around a liquid jet, IBM J. Res. Develop. 21, 48(1977).
[99] H.H. Lee, K.S. Chou, and K.C. Huang, Inkjet printing of nanosized silvercolloids, Nanotechnology 16(10), 2436 (2005).
[100] T.G. Leighton, The acoustic bubble, Academic Press London (1994).
[101] W. Letendre, S. Halwawala, and B. Smith, Jetting and Imaging Performanceof the M-300/10 Jet Module, Proc. IS&T’s NIP22, 83(2006).
[102] M.J. Lighthill, Waves in fluids, Cambridge University Press (1978).
[103] J.R. Lister and H.A. Stone, Capillary breakup of a viscous thread surroundedby another viscous fluid, Phys. Fluids 10, 2758 (1998).
[104] D. Lohse, J. de Jong, M. Versluis, M. van den Berg, H. Wijshoff, and H.Reinten, Disturbing bubbles in piezo-acoustic printing, Proc. 6th EFMC, 369(2006).

160 REFERENCES
[105] B. Lopez, D. Vadillo, P. Pierron, and A. Soucemarianadin, Transient phe-nomena during drop formation in DOD printing, Proc. IS&T’s NIP18, 170(2002).
[106] C.Y. Lung, M.D. Barnes, N. Lermer, W.B. Whitten, and J.M. Ramsey,Single-molecule analysis of ultradilute solutions with guided streams of 1-mwater droplets, Appl. Opt. 38, 1481 (1999).
[107] J. Lyklema, Fundamentals of interface and colloid science vol. III: Liquid-fluid interfaces, Academic Press (2000).
[108] E. Manini and A. Scardovi, Experimental evaluation of reflections of acousticwaves in DOD systems, SPSE Proc. Adv. N.I.P Techn, 1092 (1982).
[109] H. J. Manning and R. A. Harvey, Xaar greyscale technology, Proc. IS&T’sNIP15, 35 (1999).
[110] P. Marmottant and S. Hilgenfeldt Controlled vesicle deformation and lysisby single oscillating bubbles, Nature 423, 153 (2003).
[111] G. Martin, Jet formation and late-stage ligament instability in Drop-on-demand printing, Proc. IS&T’s NIP22, 96 (2006).
[112] O.K. Matar, Nonlinear evolution of thin free viscous films in the presence ofsoluble surfactant, Phys. Fluids 14, 4216 (2002).
[113] M. McDonald, Scaling of piezoelectric drop-on-demand jets for high resolu-tion applications, Proc. IS&T’s NIP12, 53 (1996).
[114] M. McDonald, Crosstalk study of a high speed shear mode piezo inkjet print-head, Proc. IS&T’s NIP15, 40 (1999).
[115] M. McDonald, Continuous improvement: Performance and reliability inshear mode piezo ink jet printing, Proc. IS&T’s NIP17, 287 (2001).
[116] J.M. Meacham, M.J. Varady, F.L. Degertekin, and A.G. Fedorov, Dropletformation and ejection from a micromachined ultrasonic droplet generator:Visualization and scaling, Phys. Fluids 17, 100605 (2005).
[117] C.D. Meinhart and H. Zhang, The flow structure inside a microfabricatedinkjet printhead, J. MEMS Systems 9, 67 (2000).
[118] Chr. Menzel, A. Bibl, and P. Hoisington, MEMS solutions for precisionmicro-fluidic dispensing application, Proc. IS&T’s NIP20, 169 (2004).
[119] T. Mimura and S. Sakai, Micro piezoelectric head technology of color inkjetprinter, Proc. DPP2001, 230 (2001).

REFERENCES 161
[120] T. Nakanishi, I. Ohtsu, M. Furuta, E. Ando, and O. Nishimura, DirectMS/MS analysis of proteins blotted on membranes by a matrix-assisted laserdesorption/ionization-quadrupole ion trap-time-of-flight tandem mass spec-trometer, J. Proteome Research 4, 743 (2005).
[121] C.L.M.H. Navier, Memoires sur les lois du movement des fluides,Mem.Acad.Sci.Inst.France 6, 389 (1822).
[122] J.A. Nollet, Reserches sur les causes particulieres des phenomenes elec-triques, Les Freres Guerin, Paris (1749).
[123] J.A. Nollet and Mr. Watson, An examination of certain phenomena in elec-tricity, Philosophical Transactions 46, 368 (1749).
[124] N. Noto, T. Torii, S. Suematsu, and K. Kugai, A new compact high resolua-tion solid ink print head and its application to a plate making printer, Proc.IS&T’s NIP14, 50 (1998).
[125] P.K. Notz, A.U. Chen, and O.A. Basaran, Satellite drops: unexpected dy-namics and change of scaling during pinch-off, Phys. Fluid 13, 549 (2001).
[126] H.N. Oguz and A. Prosperetti, The natural frequency of oscillation of gasbubbles in tubes, J. Acoust. Soc. Am. 103, 3301 (1998).
[127] I. Ohtsu, T. Nakanisi, M. Furuta, E. Ando, and O. Nishimura, Direct matrix-assisted laser desorption/ionization time-of-flight mass spectrometric identi-fication of proteins on membrane detected by western blotting and lectin blot-ting, J. Proteome Research 4, 1391 (2005).
[128] A. Olsson, G. Stemme, and E. Stemme, A valve-less planar fluid pump withtwo pump chambers, Sensors and Actuators A46-47, 549 (1995).
[129] A. Oron, S.H. Davis, and S.G. Bankoff, Long-scale evolution of thin liquidfilms, Rev. Mod. Phys. 69(3), 931 (1997).
[130] D.H. Peregrine, G. Shoker, and A. Symon, The bifurcation of liquid bridges,J. Fluid. Mech. 212, 25 (1990).
[131] P. Pierron, S. Alleman, and A. Soucemarianadin, Dynamics of jetted liquidfilaments, Proc. IS&T’s NIP17, 308 (2001).
[132] J.A.F. Plateau, On the recent theories of the constitution of jets of liquidissuing from circular orifices, Philosophical Magazine 12, 286 (1856).
[133] J.F. Pond, Inkjet Technology and Product Development Strategies, TorreyPines Research (2000).
[134] S.A.N. Prasad Two-port electroacoustic model of a piezoelectric compositecircular plate, PhD Thesis, University of Florida (2002).

162 REFERENCES
[135] D. Radulescu and et al., 3d printing of biological materials for drug deliveryand tissue engineering applications, Proc. DF2005, 96 (2005).
[136] Lord Rayleigh, On the instability of jets, Proc. of the London math. soc. 10,4 (1878).
[137] S. Sakai, Dynamics of Piezoelectric Inkjet Printing Systems, Proc. IS&T’sNIP26, 15 (2000).
[138] F. Savart, Memoire sur la constitution des veines liquides lancees par desorifices circulaires en mince parol, Ann.Chim. 53, 337 (1833).
[139] H. Schlichting, Boundary layer theory, McGraw-Hill book company, NewYork (1979),
[140] M. Schoeppler, Diverging Ink Jet Technologies and Applications, Proc.IS&T’s NIP22, 1 (2006).
[141] X.D. Shi, M.P. Brenner, and S.R. Nagel, A cascade of structure in a dropfalling from a faucet, Science 265, 219 (1994).
[142] D.Y. Shin, P. Grassia, and B. Derby, Oscillatory limited compressible fluidflow induced by the radialmotion of a thick-walled piezoelectric tube, J. Acoust.Soc. Am. 114, 1314 (2003).
[143] T.M. Squires and S.R Quake, Microfluidics: Fluid physics at nanoliter scale,Rev. Mod. Phys 77(3), 977 (2005).
[144] E. Stemme and G. Stemme, A valveless diffuser/nozzle-based fluid pump,Sensors and Actuators A39, 159 (1993).
[145] G.G. Stokes, On the theories of the internal friction of fluids in motion, andof the equilibrium and motion of elastic solids, Trans. Cambr. Phil. Soc. IIX,287 (1849).
[146] J. Sumurel, Digital printing of bioinks, Proc. DF2006, 93 (2006).
[147] R.G. Sweet, High frequency recording with electrostatically deflected ink-jets,Rev. Sci. Instrum. 36, 131 (1965).
[148] J. Szczech, J. Zhang, K. Kalyan, P. Brazis, and D. Gamota, Printed elec-tronic using traditional graphic arts printing technologies, Proc. DF2005, 213(2005).
[149] T. Takahashi, Adaptability of piezoelectric inkjet head, Proc. IS&T’s NIP17,323 (2001).
[150] H. Tijdeman, On the propagation of sound waves in cylindrical tubes, J.Sound and Vibr. 39, 1 (1975).

REFERENCES 163
[151] R. Toegel, S. Luther, and D. Lohse, Viscosity destabilizing sonoluminescingbubbles, Phys. Rev. Letters 96, 114301 (2006).
[152] C. Tracy and D. Grose, The quality plan for the manufacture of an ink jetprint assembly with 1536 jets, Proc. IS&T’s NIP18, 157 (2002).
[153] S. Umezu, H. Suzuki, and H. Kawamoto, Droplet Formation and DroppingPosition Control in Electrostatic Inkjet Phenomena, Proc. IS&T’s NIP21, 283(2005).
[154] S. Umezu, R. Nakazawa, and H. Kawamoto, Cross-Talk of Multi-Nozzle inElectrostatic Inkjet System, Proc. IS&T’s NIP22, 66 (2006).
[155] M. Usui, H. Hayashi, K. Hara, and T. Kitahara, Development of the newMACH (MACH with MLCips, Proc. IS$T’s NIP12, 50, (1996).
[156] M. Usui et al., The Development of Pigment Ink for Plain Paper, Proc.IS&T’s NIP18, 369 (2002).
[157] M.P. Valignat, G. Oshanin, S. Villette, A.M. Cazabat, and M. Moreau,Molecular weight dependence of spreading rates of ultrathin polymeric films,Phys. Rev. Lett. 80, 5377 (1998).
[158] W. Voit, W. Zapka, L. Belova, and K.V. Rao, Application of inkjet technologyfor the deposition of magnetic nanoparticles to form micronscale structures,IEEE Proc Science Measurement and Technology 150(5), 252 (2003).
[159] J.W. Waanders, Piezoelectric Ceramics. Properties and applications, PhilipsComponents, Eindhoven (1991).
[160] D.B. Wallace, W.R. Cox, and D.J. Hayes, Direct write using inkjet tech-niques, Direct-Write technologies for rapid prototyping applications - sensors,electronics, and integrated power sources, 177227. Academic Press, San Diego(2002).
[161] D.T. Wasan, A.D. Nikolov, and H. Brenner, Droplets speeding on surfaces,Science 291, 605 (2001).
[162] H.M.A. Wijshoff, Free surface flow and acousto-elastic interaction in piezoinkjet, Proc. Nanotech2004 2, 215 (2004).
[163] H.M.A. Wijshoff, Manipulating drop formation in piezo acoustic inkjet,Proc. IS&T’s NIP22, 79 (2006).
[164] H.M.A. Wijshoff, Modeling the drop formation process in inkjet printheads,Flow3D News spring2007, 4 (2007). Flow3D is CFD software developed byFlow Science Inc., Santa Fe, New Mexico.

164 REFERENCES
[165] H.M.A. Wijshoff, Drop formation mechanisms in piezo-acoustic inkjet, Proc.Nanotech2007 3, 448 (2007).
[166] H.M.A. Wijshoff, Better printheads via simulation: Flow3D helped doublethe speed of a new wide-format printer without sacrificing quality, DesktopEngineering 13(2), 46 (2007).
[167] Chr. Williams, Ink-jet printers go beyond paper, Phys. World 19, 24 (2006).
[168] J.C. Yang, W. Chien, M. King and W.L. Grosshandler, A simple piezo-electric droplet generator, Exp. Fluids 23, 445 (1997).
[169] L.Y. Yeo, O.K. Matar, E.S.P. Ortiz and G.F. Hewitt, The dynamics ofMarangoni-driven local film drainage between two drops, J. Colloid InterfaceSci. 241, 233 (2001).
[170] W.Y. Yeong, C.K. Chua, K.F. Leong, and M. Chandrasekaran, 3D inkjetprinting for rapid prototyping: development of a physical model, Proc. Int.Conf. Materials Processing for Properties and Performance, 379 (2004).
[171] I. Yildrim, Surface free energie characterization of powders, PhD thesis,Virginia State University (1998).
[172] T. Young, Cohesion of fluids, Phil.Trans.R.Soc.London 95, 65 (1804).
[173] W. Zapka, R. Kaack, W. Voit, M. Schulz, M. Zimmermann, L. Levin and W.Ahlemeir, Large drop volumes from Xaar-type inkjet printheads, Proc. IS&T’sNIP18, 161 (2002).
[174] W. Zapka, M. Crankshaw, W. Voit, J. Brunahl, U. Herrmann and G.Munchow, Increased inkjet printing frequency from offset channel printheads,proc. IS&T’s NIP19, 272 (2003).
[175] J. Zhang, New developments in Epson’s inkjet head technology, Proc. IS&T’sNIP21, 269 (2005)
[176] X. Zhang and O.A. Basaran, An experimental study of dynamics of dropformation, Phys. Fluids 7, 1184 (1995).
[177] Y. Zhou, A coupled field analysis of an ink jet printhead with shear modepiezo transducer, Proc. IS&T’s NIP13, 809 (1997).
[178] Y. Zhou, Measurement of the displacement of a shear mode piezoelectrictransducer using laser Doppler vibrometer, Proc. IS&T’s NIP14, 23 (1998).
[179] Y. Zhou, The application of piezo ink jet technology to high-speed dod singlepass printing, Proc. IS&T’s NIP16, 28 (2000).
[180] Y. Zhou, Recent advances in highle durable piezoelectric inkjet print headtechnology, Proc. IS&T’s NIP20, 855 (2004).

Summary
In the first chapter a general introduction on inkjet is presented, describing thatnot only printing onto paper but many other applications have emerged the lastyears. The drops coming out of the nozzle can be measured with all kind ofoptical measurements. Single drops can even be captured for further analysis.What is happening inside the printhead is much more difficult to measure. Themost important measurement uses the piezo actuator also as a sensor, which isespecially in the research on jetting stability an important measurement. Themeasurement gives only the average pressure inside the ink channels. Therefore,the modeling of the physical phenomena with available commercial codes andthe development of dedicated special models is an essential part of this research.Added to the measurements, the modeling reveals the chain of processes, whichlead to the drop formation. The physics behind the chain of processes comprise(i) the two-way coupling from the electrical to the mechanical domain (i.e., thepiezo electric actuator), (ii) the coupling to the acoustic domain inside the inkchannels, and (iii) finally the coupling to the fluid dynamic domain, i.e. the dropformation. Furthermore, (iv) wetting of the nozzle plate and (v) air bubbles canhave a negative influence on the printhead performance. These are the five researchtopics of this thesis.
In the second chapter, the coupling between the electrical and mechanicaldomain is described. Piezo-electric materials generate an efficient transformationof an electric potential to a mechanical displacement. The bump mode design withthe actuation parallel to the polarization direction of the piezo-electric materialprovide an efficient actuator design. The channel cross-sections must be deformedto generate the pressure waves for firing drops from the nozzles. The substrateprovides the reaction forces. Both mechanical constraints result in a complicateddeformation pattern with local cross-talk as negative consequence. Componentsof local cross-talk are the direct, the pressure induced, and the electric cross-talk.Doubling the number of piezo elements can reduce the local cross-talk, becausethe extra piezo elements can then guide the reaction force to the channel walls.Another disturbing effect is that, when actuating many channels simultaneously,resonances in the printhead structure can be excited. The frequency and shape ofthe resonance modes are important for the amount of excitation.
In the third chapter, the acoustics inside the ink channels are discussed. Theacoustics play a central role in the printhead operation. The dynamics of the print-
165

166 SUMMARY
head structure are coupled through the acoustics to the drop formation process inthe nozzle. The derivation of the governing equations of the channel acoustics isgiven, with the acousto-elastic coupling as an essential part. The elasto-acousticcoupling between the pressure waves inside the ink channel and the flexible chan-nel walls, reduces the effective speed of sound from 1250 m/s to 850 m/s. Theresulting frequency characteristics and the application of the traveling wave prin-ciple are then described. The interface with the nozzle is treated as a boundarycondition: a good acoustic coupling between the nozzle and the ink channel re-sults in low pressure amplitudes and a high velocity of the ink in the nozzle. Theresulting drop size depends mainly on the size of the nozzle cross-section, the dropvelocity, and the channel length. At the other end of the channel, a thin foil re-sults in a high compliance of the ink supply. This reduces the acoustic cross-talk,i.e., the traveling of acoustic waves through the ink reservoir towards neighboringchannels. The residual vibrations inside the ink channel and the variable mass ofink in the nozzle, result in a strong refill, which is necessary to supply the noz-zles with ink for the next drop formation cycle. However, the residual vibrationshave an influence on the drop properties at high drop repetition rates. The varia-tions of the drop speed and the drop volume can become large when the residualvibrations interfere with local cross-talk effects. Furthermore, a spatial and tem-porary overlap between the resonances in the printhead structure and acousticresonances in the ink domain must be avoided to keep the negative influence onthe drop formation process as low as possible.
The topic of chapter four are the flow phenomena outside the printhead. Thefree surface flow, resulting in drop formation, is the ultimate goal of the inkjetprocess. The application of the traveling wave principle leads to a drop formationprocess, which takes several tens of microseconds. The fill-before-fire action re-tracts the meniscus during the first 10-20 µs. Then the head of the drop appearsoutside the nozzle. Because of the viscosity of the ink, a long tail is formed, whichslows down the speed of the head of the drop from 20 m/s to 7 m/s. Importantdrop properties are drop size and speed and the formation of satellites. The tailbreaks off after 45 − 60 µs. At tail break-off a secondary tail is formed. Thesecondary tail forms a mist of very small droplets with a volume less than 1 pl.The mist of droplets is dragged along with the main drops, due to the induced airflow. The resulting dynamics at the end of the tail are mainly determined by theink properties and not by the shape and amplitude of the driving waveform. Longtails will be formed when the speed of the head exceeds the speed of the end ofthe tail. A long tail will break-up in small satellite droplets through the Rayleighbreakup mechanism. Another satellite drop can be generated by the small massof ink in the nozzle, which can result in a supercritical acceleration. This meansthat surface tension forces cannot compete anymore with unsteady inertia. Thisresults in the formation of a fast satellite drop, out of the head of the drop. Theformation of slow satellites out of the tail of the drop is another satellite dropformation mechanism. This occurs when the distribution of mass in the tail has aminimum between the head of the drop and the middle of the tail. An important

167
application is drop size modulation. With the knowledge of the drop formationprocess up to eight drop size modulation techniques are identified. The mecha-nisms are (i) varying the driving pulse width and (ii) the fill-before-fire level, (iii)using pre-actuation, (iv) multiple drops or (v) break pulses, (vi) the fast satellitedrop formation mechanism with split and block pulse, and (vii) exciting meniscusoscillations and (viii) drop formation oscillations.
In chapter five the observed wetting phenomena on the nozzle plate are de-scribed. Wetting of the nozzle plate plays an important role in the printheadperformance. The strong refill mechanism results in overfilling of the nozzle, witha risk on inducing wetting. The failure of the drop formation process can alsoresult in wetting of the nozzle plate. An ink layer around a jetting nozzle disturbsthe drop formation. The drop formation is even blocked when the ink layer thick-ness becomes more than 20 µm. Also observed is that a jetting nozzle inducesseveral flow patterns in the ink layer around the nozzle opening. The continuousjetting of drops induces an air flow towards the nozzle. This air flow drags theouter part of the ink layer always towards the nozzle. As a consequence either astrong sink flow can be visible or a Couette flow, when the overfilling of the nozzleadds ink to the inner part of the ink layer. Also an actuated, but non-jetting,nozzle induces several flow patterns. Dipole, source and sink flow complete theobserved phase diagram of possible flow patterns in the ink layer. The wettingproperties of the nozzle plate are determined by the material interactions betweenthe ink and the nozzle plate material. This results either in a partial wettingregime or a complete wetting regime. The nickel nozzle plate and the ink are in acomplete wetting regime. Older ink on the nozzle plate has other properties whichresults in a partial wetting regime. The older ink accumulates in the middle ofthe nozzle plate. The movement of the ink in an actuated nozzle results also in anincrease of the surface tension. The precursor film of fresh ink, which is measuredto be 13 nm in thickness, provides a way of communication between the nozzlesand the central band of ink. A trunk flow drives the ink from the middle of thenozzle plate towards the actuated nozzles. Differences in the surface tension ofthe ink, which results in Marangoni flow, are the driving mechanism behind thisflow pattern.
In the last chapter of this thesis, the main factors which determine the jettingstability are discussed. The stability of the drop formation process is crucial.Many sources for jetting instabilities can be eliminated by a proper printhead andactuation design. But even then sometimes air is entrained during the normalprinthead operation, with an important role of the ink layer around the nozzle.There is a critical wetting layer thickness, which directly leads to air entrainment.A second mechanism is caused by typical 20 µm small dirt particles, caught in theink layer and transported towards the nozzle. The distortion by a dirt particle canbe detected with the acoustic measurement. An entrapped air bubble oscillates inthe acoustic pressure field, which can also be measured acoustically. The acousticproperties of the ink channel act as a filter for this measurement. Therefore,the oscillations after the collapse of small air bubbles are recorded in the heads

168 SUMMARY
with 8 mm long channels as a signal with a frequency of 170 kHz. Primary andsecondary Bjerknes forces, and drag forces result in a movement of the air bubble.The jetting out of an air bubble is a fast recovery, but in some cases the air bubblestays inside the ink channel. The movement of air bubbles can be visualized witha special transparent head. Small air bubbles do not have a negative effect onthe drop formation process. However, in the pressure field, the bubbles grow byrectified diffusion. The growth rate is much faster than the dissolution rate. Theair bubbles grow to a size comparable to the volume displacement by the acousticpressure waves. The large air bubble will then counteract the pressure buildup.This has a large effect on the drop formation and finally the drop formation processceases completely.

Samenvatting
De laatste jaren zijn naast het printen op papier veel nieuwe inkjet toepassingenontstaan, hetgeen is beschreven in de algemene inleiding in het eerste hoofdstuk.De druppels die uit de nozzles komen, kunnen met allerlei optische technieken wor-den gemeten. Afzonderlijke druppels kunnen zelfs worden opgevangen en verderworden geanalyseerd. Wat binnen in de printkop gebeurt, is echter veel moeil-ijker te meten. Bij de belangrijkste meetmethode wordt de piezo actuator ookals een sensor gebruikt. Deze meting wordt vooral gebruikt bij het onderzoeknaar jetstabiliteit. Deze meetmethode geeft echter alleen maar informatie over degemiddelde druk in het inktkanaal. Daarom zijn het modelleren van de fysischeverschijnselen met commercieel verkrijgbare rekenpakketten, en het ontwikkelenvan speciale rekenmodellen, een essentieel onderdeel van dit onderzoek. Met derekenmodellen als aanvulling op de metingen wordt de reeks van processen, dietot druppelvorming leidt, opgehelderd. De fysica omvat (i) de tweeweg koppelingtussen het elektrische en het mechanische domein in de piezo-elektrische actuator,(ii) de koppeling naar het akoestische domein in de inktkanalen en tenslotte (iii) dekoppeling naar het vloeistof dynamica domein, ofwel de druppelvorming. Verderkunnen (iv) de bevochtiging van de nozzleplaat, en (v) luchtbellen, een negatieveinvloed hebben op het jetgedrag van de printkop. Deze vijf onderzoeksonderwer-pen zijn beschreven in de opeenvolgende hoofdstukken van dit proefschrift.
In het tweede hoofdstuk wordt de koppeling tussen het elektrische en het mech-anische domein beschreven. Elektrische potentialen kunnen met piezo-elektrischematerialen zeer efficient worden omgezet in mechanische verplaatsingen. Eenbump actuator, met de actuatierichting parallel aan de polarisatie richting vanhet piezo-elektrisch material, levert een efficient actuator ontwerp op. De kanaal-doorsnedes moeten worden vervormd om de drukgolven op te wekken, die nodigzijn om druppels uit de nozzles te jetten. Het substraat zorgt voor de reactiekracht.De inklemming van de piezo elementen tussen de kanalen en het substraat leidt toteen gecompliceerd patroon van vervormingen, met lokale overspraak als negatieveconsequentie. De direkte, de indirekte en de elektrische overspraak zijn de driecomponenten van de lokale overspraak. Met het verdubbelen van het aantal piezoelementen kan de lokale overspraak worden verminderd. De extra piezo elementenworden dan gebruikt om de reactiekracht naar de kanaalwanden te leiden. Eenander verstorend effekt is dat, wanneer er zeer veel kanalen tegelijk worden ge-actueerd, er resonanties in de constructie van de printkop kunnen worden aanges-
169

170 SAMENVATTING
lagen. De frequentie en de vorm van de eigentrillingen zijn bepalend voor de matewaarin ze worden aangeslagen.
In het derde hoofdstuk wordt de akoestiek in de inktkanalen besproken. Deakoestiek speelt een centrale rol in de werking van de printkop. De dynamica vande printkop constructie wordt via de akoestiek gekoppeld aan het druppelvorm-ingsproces in de nozzle. De afleiding van de, voor de kanaalakoestiek bepalende,vergelijkingen wordt gegeven, waarbij de elastische-akoestische wisselwerking eenbelangrijke rol speelt. De elastische-akoestische wisselwerking tussen de drukgol-ven in het kanaal en de flexibele wanden van het kanaal verlaagt de effektieve gelu-idsnelheid van 1250 m/s naar 850 m/s. De resulterende frequentie karakteristiekenen de toepassing van het lopende golf principe worden vervolgens beschreven.Het uiteinde met de nozzle wordt beschreven met randvoorwaarden. Een goedeakoestische koppeling tussen de nozzle en het kanaal leidt tot lage drukken in hetkanaal en een hoge snelheid van de inkt in de nozzle. De resulterende druppel-grootte hangt met name af van de nozzle doorsnede, de druppelsnelheid en dekanaallengte. Aan het andere uiteinde van het kanaal verhoogt een dunne folie devervormbaarheid van de inkttoevoer. Dit vermindert de akoestische overspraak,ofwel het door het reservoir heenlopen van drukgolven naar de andere kanalen.De resterende drukgolven in het kanaal leiden samen met de variabele inktmassain de nozzle tot een sterke vulling, hetgeen noodzakelijk is om de nozzle met inktte voorzien voor de volgende druppelvormingscyclus. Echter, de resterende druk-golven kunnen ook de druppeleigenschappen bij hoge jetfrequenties beinvloeden.Wanneer er een wisselwerking is tussen de resterende drukgolven en de effektenvan lokale overspraak, kunnen de variaties in druppel snelheid en volume grootworden. Bovendien moet de overlap in tijd en ruimte tussen de resonanties inde constructie van de printkop en de akoestische resonanties in het inktdomeinworden vermeden om de negatieve invloed op de druppelvorming zo laag mogelijkte houden.
Het onderwerp van het vierde hoofdstuk zijn de stromingsverschijnselen buitende printkop. De vrije-oppervlaktestroming, welke resulteert in druppelvorming, ishet uiteindelijke doel van het inkjet procede. De toepassing van het lopende golfprincipe leidt tot een druppelvormingsproces dat enkele tientallen microsecondesduurt. De ”fill-before-fire” actie trekt de meniscus terug gedurende de eerste10− 20 µs. Dan komt de kop van de druppel naar buiten. Door de viscositeit vande inkt, wordt er een lange staart gevormd, die de snelheid van de kop afremt van20 m/s naar 7 m/s. Belangrijke druppeleigenschappen zijn de druppelgrootte, desnelheid, en de vorming van satelliet druppels. De staart breekt af na 45− 60 µs.Bij het afbreken van de staart ontstaat er een secundaire staart. De secundairestaart vormt een nevel van zeer kleine druppels, met een volume kleiner dan1 pl. De nevel van druppels wordt door een opgewekte luchtstroom meegesleurdmet de hoofddruppels. Het gedrag van het staartuiteinde wordt hoofdzakelijkbepaald door de inkteigenschappen en niet door de vorm en de amplitude van deaanstuur golfvorm. Lange staarten worden gevormd wanneer de snelheid van dekop groter wordt dan de staartsnelheid. Een lange staart vormt vervolgens kleine

171
satelliet druppels vanwege de Rayleigh instabiliteit. Een ander satelliet drup-pelvormingsmechanisme wordt gegenereerd door de kleine inktmassa in de nozzle,welke een bovenkritische versnelling tot gevolg kan hebben. Dit betekent dat deoppervlaktespanningskrachten niet meer in staat zijn om de instationaire traaghei-dskrachten op te vangen. Als gevolg hiervan wordt er een snelle satelliet druppeluit de kop van de druppel gevormd. De vorming van langzame satelliet druppelsuit de staart van de druppel is nog een ander satelliet druppelvormingsmecha-nisme. Dit vindt plaats wanneer de massaverdeling in de staart een minimumheeft tussen de kop van de druppel en het midden van de staart. Een belangrijkeoptie is druppelgrootte modulatie. Met de kennis van het druppelvormingsproceszijn er acht druppelgrootte modulatie technieken geidentificeerd. Deze mecha-nismes zijn (i) het varieren van de pulsbreedte en (ii) het ”fill-before-fire” niveau,(iii) het opslingeren van de actuatie, (iv) het gebruik van meerdere druppels, (v)het gebruik van rempulsen, (vi) het snelle satelliet druppelvormingsmechanismemet een splits en een blokker puls, (vii) het aanslaan van oscillaties in de meniscusen (viii) het aanslaan van oscillaties in de druppelvorming zelf.
In hoofdstuk vijf worden de waargenomen bevochtigingsverschijnselen op denozzleplaat beschreven. De bevochtiging van de nozzleplaat speelt een belangrijkerol in het gedrag van de printkop. Het sterke vulmechanisme leidt tot een overvollenozzle, met een risico op bevochtiging als gevolg. Het falen van het druppelvorm-ingsproces kan ook tot bevochtiging van de nozzleplaat leiden. Een inktlaag rondde nozzle verstoort de druppelvorming. De druppelvorming wordt zelfs geblok-keerd wanneer de inktlaagdikte meer is dan 20 µm. Ook is waargenomen dat eenjettende nozzle verschillende stromingspatronen opwekt in de inktlaag rondom denozzle opening. Het continu jetten van druppels wekt een luchtstroom op in derichting van de nozzle. Deze luchtstroom sleurt het buitenste deel van de inktlaagmee, in de richting van de nozzle. Als gevolg kan er ofwel een sterke afvoerstro-ming zichtbaar zijn ofwel een Couette stroming, wanneer het vullen van de nozzlesterk genoeg is om inkt aan te voeren naar het binnenste deel van de inktlaag.Een geactueerde, maar niet jettende nozzle, wekt ook verschillende stromingspa-tronen op. Dipool, bron en afvoerstromingen maken het plaatje compleet vanwaargenomen stromingspatronen. De bevochtigingseigenschappen van de nozzle-plaat worden bepaald door de materiaal interacties tussen de inkt en het materiaalvan de nozzleplaat. Dit resulteert in ofwel een ”partial wetting” regime ofwel ineen ”complete wetting” regime. De nikkel nozzleplaat en de inkt bevinden zich inhet ”complete wetting” regime. Verouderde inkt heeft andere eigenschappen, het-geen resulteert in een ”partial wetting” regime. De verouderde inkt vloeit samenin het midden van de nozzleplaat. De beweging van de inkt in een geactueerdenozzle resulteert ook in een toename van de oppervlaktespanning. De precursorlaag van verse inkt, welke een gemeten laagdikte heeft van 13 nm, voorziet in eencommunicatie mogelijkheid tussen de nozzles en de centrale inktband. Er ontstaateen stroming die de inkt aanvoert vanuit de centrale inktband naar de geactueerdenozzles. De verschillen in de oppervlaktespanning van de inkt zijn de drijvendekracht achter dit stromingspatroon.

172 SAMENVATTING
In het laatste hoofdstuk worden de belangrijkste factoren besproken die bepal-end zijn voor de jetstabiliteit. De stabiliteit van het druppelvormingsproces is vancruciaal belang. Veel bronnen van jetinstabiliteit kunnen worden weggenomenmet een goed ontwerp van de printkop en de actuatie. Maar zelfs dan, wordt ertijdens de normale printkopwerking soms lucht ingehapt. De inktlaag op de noz-zleplaat speelt hierbij een belangrijke rol. Er bestaat een kritische laagdikte, welkealtijd tot luchtinhappen leidt. Een tweede mechanisme wordt veroorzaakt doortypisch 20 µm grote vuildeeltjes, die, gevangen in de inktlaag, in de richting vande nozzle worden getransporteerd. De verstoring door een vuildeeltje kan wordengemeten met de akoestische meetmethode. Een ingesloten luchtbel oscilleert ineen akoestisch drukveld, wat ook met de akoestische meetmethode kan wordengemeten. De akoestische eigenschappen van het inktkanaal werken als een filtervoor de akoestische metingen. Daarom worden de oscillaties, na het in elkaarklappen van een kleine luchtbel, in printkoppen met 8 mm lange kanalen gemetenals een signaal met een frequentie van 170 kHz. De eerste en tweede Bjerneskrachten en de krachten van de inktstroming verplaatsen de luchtbel. Het naarbuiten jetten is een snel herstelmechanisme, maar in sommige gevallen blijft deluchtbel in het kanaal zitten. De beweging van de luchtbellen kan zichtbaar wordengemaakt met een speciale tranparante printkop. Kleine luchtbellen hebben geennadelige invloed op het druppelvormingsproces. Echter, de luchtbellen groeien ineen akoestisch veld door ”rectified diffusion”. De groeisnelheid is veel sneller dande oplossnelheid. De luchtbellen groeien tot afmetingen die vergelijkbaar zijn metde volume verplaatsing van het akoestisch drukveld. De grote luchtbellen werkendan de drukopbouw tegen. Dit heeft een grote invloed op de druppelvorming enuiteindelijk valt de druppelvorming volledig stil.

Acknowledgements
The research, described in this thesis, is done at the R&D department of OceTechnologies B.V., in close cooperation with the Physics of Fluids research groupof the faculty of Science and Technology of the University of Twente. I want tothank all the people who have contributed to this research. Doing research in anindustrial product development environment is by no means possible without thehelp and support of many people from Oce R&D itself and from other groups.Beforehand I want to apologize to the people who I may have forgotten.
First of all, I would like to thank my promotor Prof. dr. Detlef Lohse for givingme the opportunity to add the scientific aspects to the more product developmentdriven research. I also want to acknowledge the support of Oce Technologies B.V.,allowing me to extend my regular job to become a ”PhD student” and for lettingme using research results for writing this thesis.
Many thanks go to my Oce colleagues, especially Hans Reinten and Marc vanden Berg, for their scientific discussions, experimental expertise, and being personswhich make work a very stimulating and pleasant part of my life. This holdsalso for all other colleagues who directly or indirectly contributed to this work:Henk Stolk, Jan Simons, Mark Groninger, Wim de Zeeuw, Jos Hollands, Pietervan Groos, Jan van Stiphout, Jos Ummels, Frans Blom, Rene Ramekers, HansGollatz, Rob van Loon, Pierre Klerken, Aart Polderman, Rob Koper, VincentPeters, Aswin Draad, Jack Bisshop, Hugo Boesten, Joost Anne Veerman, RonBerghs, and Rob Faessen.
I want to express my gratitude to the people in Enschede for the very inter-esting discussions and meetings we have. This make the journeys to Enschedeanother enjoyable part of my research. In particular, many thanks to Michel Ver-sluis, Gerrit de Bruin, Frieder Mugele, and the PhD students Jos de Jong for hisexperimental work on air bubbles and getting me started with writing a thesis, heis an Oce colleague now, Roger Jeurissen, for his contributions to the modelingaspects and many deep thoughts on the theoretical aspects, and Arjan van derBos, for carrying on the experimental work on bubble dynamics.
Important contributions came also from the master students. Therefore Iwould like to thank them, too. From the University of Twente in chronologicalorder Jos de Jong, Ferdy Migchelbrink, Roger Jeurissen, Huub Borel, and JaccoHettinga. From the Eindhoven University of Technology, Bart Beulen and KoosDelescen, for their research on wetting phenomena. For that, I would also like to
173

174 ACKNOWLEDGEMENTS
thank Rini van Dongen for his significant contributions on this topic.Thanks also to the group of Henk Tijdeman from the University of Twente,
for their work on the narrow-channel model. This was the starting point for manyyears of modeling, which is a very important part of this research.
I want to thank the group of Daniel Rixen of the Technical University Delftfor their work on the streamfunction vorticity model, which was the basis for thedevelopment of the first own numerical models on bubble dynamics.
Tanks also to Mustafa Megahed of Logica-PDV in Bochum (D), for his workon the Flow3D models, Ken Williams of Flow Simulation Services in Albuquerque(NM), for his work on flex-walls in Flow3D, and Wybo Wagenaar of Infinite Sim-ulation Systems in Breda, for his work on the Ansys models.
Writing a thesis also means that you need some people who are willing to readthe text from cover to cover. Without the comments, corrections, and motivatingsuggestions of Detlef, Marc, Jos, Roger, and Hans, this thesis would never bebecome to what it is now. I gratefully appreciate this support, which took a lotof their time.
Finally, I want to thank my wife Jacqueline and my daughters Veerle en Jenske,for their support, love, and most of all, for their patience during the writing of thethesis. Having a man, sitting most of his time behind a laptop, is not always thesame as having an ideal husband and father.

List of publications
2004
• H.M.A. Wijshoff, Free surface flow and acousto-elastic interaction in piezoinkjet, Proc. Nanotech2004 2, 215 (2004).
2005
• J. de Jong, M. Versluis, G. de Bruin, D. Lohse, H. Reinten, M. van denBerg, H. Wijshoff, and N. de Jong, Acoustical and optical characterizationof air entrapment in piezo-driven inkjet printheads, Proc. IEEE-IUS 2, 1270(2005).
• M.A. Groninger, M.J. van den Berg, and H.M.A. Wijshoff, Inkjet system,method of making this system and use of said system, US Patent 20050285908.
2006
• H.M.A. Wijshoff, Piezo inkjet printer, US Patent 20060207332.
• J. de Jong, H. Reinten, M. van den Berg, H. Wijshoff, M. Versluis, G. deBruin, and D. Lohse, Air entrapment in piezo-driven inkjet printheads, J.Acoust. Soc. Am. 120, 1257 (2006).
• H.M.A. Wijshoff, Inkjet printer, US Patent 20060221150.
• J. de Jong, R. Jeurissen, H. Borel, M. van den Berg, H. Wijshoff, H. Reinten,M. Versluis, A. Prosperetti, and D. Lohse, Entrapped air bubbles in piezo-driven inkjet printing: their effect on the droplet velocity, Phys. Fluids 18,121511 (2006).
• H.M.A. Wijshoff, Printing method and printer used for applying this method,US Patent 20060244773.
• R. Jeurissen, J. de Jong, H. Borel, M. Versluis, M. van den Berg, H. Wijshoff,H. Reinten, A. Prosperetti, and D. Lohse, Sound Absorption of Bubbles inInkjet-printer Microchannels, Proc. 6th EFMC, 340 (2006).
175

176 LIST OF PUBLICATIONS
• D. Lohse, J. de Jong, M. Versluis, M. van den Berg, H. Wijshoff, and H.Reinten, Disturbing bubbles in piezo-acoustic printing, Proc. 6th EFMC,369 (2006).
• H.M.A. Wijshoff, Inkjet printhead and inkjet printer containing the sameprinthead, US Patent 0274115.
• H.M.A. Wijshoff, Manipulating drop formation in piezo acoustic inkjet, Proc.IS&T’s NIP22, 79 (2006).
2007
• B. Beulen, J. de Jong, H. Reinten, M. van den Berg, H. Wijshoff, and R.van Dongen, Flows on the nozzle plate of an inkjet printhead, Exp. Fluids42, 217 (2007).
• H.M.A. Wijshoff, Modeling the drop formation process in inkjet printheads,Flow3D News spring2007, 4 (2007).
• H.M.A. Wijshoff, Drop formation mechanisms in piezo-acoustic inkjet, Proc.Nanotech2007 3, 448 (2007).
• H.M.A. Wijshoff, Printhead and inkjet printer comprising such a printhead,US Patent 20070236541.
• H.M.A. Wijshoff, Better printheads via simulation: Flow3D helped doublethe speed of a new wide-format printer without sacrificing quality, DesktopEngineering 13(2), 46 (2007).
• J. de Jong, H. Reinten, H. Wijshoff, M. van den Berg, K. Delescen, R. vanDongen, F. Mugele, M. Versluis, and D. Lohse, Marangoni flow on an inkjetnozzle plate, Appl. Phys. Lett 91, 204102 (2007).
2008
• R. Jeurissen, J. de Jong, H, Reinten, M. van den Berg, H. Wijshoff, M.Versluis, and D. Lohse, The effect of an entrained air bubble on the acousticsof an ink channel, J. Acoust. Soc. Am. (in press 2008).

About the author
Herman Wijshoff was born September 3, 1961, in Grevenbicht, the Netherlands.He graduated from high school (Gymnasium) at ”Het Bisschoppelijk College” inSittard. In September 1979 he started to study Applied Physics at the Eind-hoven University of Technology, the Netherlands. He did his traineeship at thePlasma and Materials Processing group at the university †. In 1986, he receivedhis M.Sc. degree in Physics on the behavior of two dimensional electron gases atsemiconductor heterojunctions ‡. In that same year, he joined the Research andDevelopment department of Oce Technologies B.V. in Venlo, the Netherlands.The main focus was on materials research, especially the viscoelastic behavior ofpolymers and elastomers. Since 1997 he has been involved in the inkjet researchprogram. He has focussed primarily on the modeling of the functional behaviorof inkjet printheads. This research program is in close cooperation with prof. dr.Detlef Lohse.
†Published as: B. van der Sijde, O. Abu-Zeid, and H.M.A. Wijshoff, Measured collisional ra-
diative coefficients of the 4p groups of the argon I and argon II systems, Physics Letters A101(9),491, (1984).
‡Published as: R.G. van Welzenis, H.M.A. Wijshoff, and K. Ploog, Hot electron Hall effect in
a two-dimensional electron gas, Physica B 134B, 347, (1985).
177