Tethers in Space - A Propellantless Propulsion In-orbit Demonstration
432
Tethers in Space A Propellantless Propulsion In‐Orbit Demonstration Kabels in de ruimte Een demonstratie van stuwstofloze voortstuwing in een baan om de aarde PROEFSCHRIFT ter verkrijging van de graad van doctor aan de Technische Universiteit Delft op gezag van de Rector Magnificus Prof. ir. K.Ch.A.M. Luyben; voorzitter van het College voor Promoties in het openbaar te verdedigen op maandag 30 mei 2011 om 10.00 uur door Michiel Kruijff Ingenieur Lucht en Ruimtevaart geboren te Den Helder.
-
Upload
michiel-kruijff -
Category
Documents
-
view
109 -
download
0
description
Space tethers are cables that connect satellites or other endmasses in orbit. The emptiness of space and the near-weightlessness there make it possible to deploy very long and thin tethers. By exploiting basic principles of physics, tethers can provide propellantless propulsion and enable unique applications such as the provision of comfortable artificial gravity or the removal of space debris. Nevertheless there are still no tether applications in use today - there appears to be a "gap of scepticism".A safe tether and deployer system has therefore been designed and verified with the help of simulation and innovative ground testing equipment. Through a hands-on educational approach, the YES and YES2 low-cost space tether experiments have been launched into orbit. In September 2007, all 32 km of the YES2 tether are deployed in orbit. With the help of this tether, a student-built re-entry capsule is deorbited over Kazakhstan.This work reports this design and analysis effort, with the aim to raise confidence in the use of space tethers.
Transcript of Tethers in Space - A Propellantless Propulsion In-orbit Demonstration
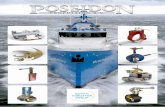
TethersinSpaceAPropellantlessPropulsionInOrbitDemonstrationKabelsinderuimteEendemonstratievanstuwstoflozevoortstuwingineenbaanomdeaardePROEFSCHRIFTterverkrijgingvandegraadvandoctoraandeTechnischeUniversiteitDelftopgezagvandeRectorMagnificusProf.ir.K.Ch.A.M.Luyben;voorzittervanhetCollegevoorPromotiesinhetopenbaarteverdedigenopmaandag30mei2011om10.00uurdoorMichielKruijffIngenieurLuchtenRuimtevaartgeborenteDenHelder.Ditproefschriftisgoedgekeurddoordepromotoren:Prof.dr.W.J.OckelsProf.dr.E.K.A.GillSamenstellingpromotiecommissie:RectorMagnificus voorzitterProf.dr.W.J.Ockels TechnischeUniversiteitDelft,promotorProf.dr.E.K.A.Gill TechnischeUniversiteitDelft,promotorProf.dr.E.Lorenzini UniversitdiPadovaProf.ir.B.A.C.Ambrosius TechnischeUniversiteitDelftProf.C.Nicollier colePolytechniqueFdraledeLausanneDr.P.A.Swan SouthwestAnalyticNetworkDr.C.Menon SimonFraserUniversityProf.dr.ir.J.A.Mulder TechnischeUniversiteitDelft,reservelidDeltaUtecSpaceResearchandConsultancyheeftinbelangrijkematefinancielbijgedragenaandetotstandkomingvanditproefschrift.ISBN9789088912825Cover: ByM.Kruijff&Proefschriftmaken.nl.TheYES&YES2spaceexperimentsandTREXtetherinorbit.YESimagebyM.Kruijff,YES2imagebyESA(S.Corvaja),TREXimagekindlyprovidedbyJAXA.Printedby: Proefschriftmaken.nl||Printyourthesis.comPublishedby: UitgeverijBOXPress,OisterwijkCopyright2011byM.Kruijff.WritteninOpenOffice.PrintedinTheNetherlands.FormyfatherwhoonlycaughtaglimpseandMariawhocaughtmeContents 5ContentsCONTENTS 51 INTRODUCTION 91.1 Sustainabilityandtheappealofspacetethers..............................................................................91.2 Examplesoftetherapplications....................................................................................................101.3 Flighthistoryofspacetethers.......................................................................................................141.4 Objectiveofthisthesis....................................................................................................................171.5 Surveyofthisthesis........................................................................................................................18PARTITETHERSANDTHEIRAPPLICATIONS 212 TETHERDYNAMICS 232.1 Deployingatetherinspace..........................................................................................................232.1.1 Gravitygradienttensionforahangingtetherincircularorbit.......................................232.1.2 Equationsofmotion...............................................................................................................252.1.3 Pendulummotionofaswingingnondeployingtether...................................................262.1.4 Tetherdeployment..................................................................................................................272.1.5 Impactoftetherproperties....................................................................................................282.2 Howthetetherbecomesuseful.....................................................................................................302.2.1 Momentumtransfer................................................................................................................302.2.2 Electrodynamictetherprinciples..........................................................................................332.3 Tethermissionsimulation.............................................................................................................392.3.1 Advancedtethermodels........................................................................................................402.3.2 SimulatorOverview...............................................................................................................412.3.3 Validationandcomparisontoothermodels.....................................................................493 ANALYSISOFTETHERAPPLICATIONS 513.1 Mechanicaltetherapplications.....................................................................................................523.1.1 SpaceMailandwastedisposalfromaSpaceStation.........................................................523.1.2 Tetheredupperstageforalaunchassistandupperstagedeorbit.................................573.1.3 Multipointsensinginthelowerthermosphere.................................................................643.1.4 Artificialgravity.......................................................................................................................693.2 Electrodynamicdeboost.................................................................................................................793.2.1 AssessmentofOMLperformanceinbaretetherelectroncollectiontesting.................803.2.2 Tethereddeboostanddynamicinstability.........................................................................833.2.3 Tethereddeboostandcollisionrisk.....................................................................................893.2.4 ArotatingtetheraroundJupiter..........................................................................................983.3 Responsibleorbitalnichesforuseoftethers............................................................................104PARTIIDEVELOPMENTOFASPACEMAILSYSTEM 1094 DESIGNASPECTSOFASAFETETHER 1114.1 Characterizingthetetherproperties..........................................................................................1114.1.1 Materialselection...................................................................................................................1114.1.2 Braidingofthetethers..........................................................................................................1144.1.3 Breakstrength........................................................................................................................1154.1.4 Stiffnessandviscoelasticeffects..........................................................................................1164.1.5 Damping.................................................................................................................................1204.1.6 Outgassingandextraction...................................................................................................12164.1.7 Frictionbehavior....................................................................................................................1224.1.8 Twistandinternalbraidingtorque....................................................................................1254.1.9 Tetherlengtheffects:shapememory,viscoelasticrecoveryandcreep........................1284.2 Protectingthehostplatform........................................................................................................1294.2.1 Securingseparationfromthedeploymentplatform.......................................................1294.2.2 Understandingrecoil............................................................................................................1314.2.3 Ripstitching.............................................................................................................................1334.2.4 Dissipativeclamping............................................................................................................1394.2.5 Passivetetherreleasesolution.............................................................................................1404.3 Avoidingthreatstotetherintegrity............................................................................................1424.3.1 Debrisandmeteoroidrisk...................................................................................................1424.3.2 Otherdegradationmechanisms.........................................................................................1474.3.3 Thermalloadingduringfrictionbraking..........................................................................1474.3.4 Designsafetyfactors.............................................................................................................1494.4 Reducingcollisionriskbyenvironmentaldisintegration.......................................................1494.4.1 Requirements.........................................................................................................................1504.4.2 Mechanicsofdegradation....................................................................................................1514.4.3 Degradationchemistry.........................................................................................................1524.4.4 Polymerdegradationresearch............................................................................................1544.4.5 Materialselection...................................................................................................................1554.4.6 Explorativetestingofselectedpurematerials..................................................................1564.4.7 UV/VUVexposuretestonenhancedselection.................................................................1624.4.8 Conclusionsandoutlook.....................................................................................................1685 DEPLOYERSYSTEMDEVELOPMENT 1695.1 Introduction...................................................................................................................................1695.1.1 Technologyheritage..............................................................................................................1695.1.2 SpaceMailsystemconceptformomentumtransfer........................................................1715.1.3 Overviewofdevelopmentandchallenges........................................................................1725.2 Supportfacilitiesfordevelopmentandtest..............................................................................1735.2.1 Windingmachine..................................................................................................................1735.2.2 Unwindingmachine............................................................................................................1745.2.3 Hardwareemulator..............................................................................................................1815.2.4 Deployersystemtestingoverview.....................................................................................1825.3 Spooldevelopment.......................................................................................................................1825.3.1 Coreandcanister...................................................................................................................1825.3.2 Thelengthdetectionsystem................................................................................................1845.3.3 Tetherwinding.......................................................................................................................1865.3.4 Tiedowns...............................................................................................................................1895.3.5 Flightspoolcharacterizationprocedure............................................................................1905.3.6 Driversofpatternsinunwindingtension.........................................................................1935.3.7 Othersystemdesignimpactsonunwindingtension......................................................1965.3.8 Reproducibilityofunwindingtension..............................................................................2035.3.9 Conclusionsandrecommendations...................................................................................2065.4 Barberpoledevelopment..............................................................................................................2075.4.1 Performancemodeling.........................................................................................................2075.4.2 Development..........................................................................................................................2195.4.3 Spoolbarberpolecharacterizationprocedure..................................................................2245.4.4 Effectofdesignparameters.................................................................................................2265.4.5 Reproducibility......................................................................................................................2315.5 Controllerdevelopment...............................................................................................................2325.5.1 Deploymenttrajectory.........................................................................................................233Contents 75.5.2 Releasetimecontrol..............................................................................................................2395.5.3 Lengthandvelocitydetermination...................................................................................2405.5.4 Feedbackcontrolalgorithms...............................................................................................2435.5.5 Performanceandrobustnesstesting..................................................................................2455.6 Closedloopdeploymenttesting.................................................................................................2485.6.1 FirststagedeploymenttestsusingtheTSEunwindingrig...........................................2485.6.2 FirstandsecondstagetestsonYES2unwindingrig.......................................................2525.6.3 DiscussionandRecommendations.....................................................................................262PARTIIITHEYOUNGENGINEERSSATELLITES 2636 THEFIRSTYESSATELLITE 2656.1 YESanditsobjectives..................................................................................................................2666.2 Missiondesign...............................................................................................................................2666.3 Subsystemsdesign........................................................................................................................2696.3.1 Tetheranddeployersubsystem..........................................................................................2696.3.2 Stabilizationofthesatellitebytethertorque....................................................................2706.3.3 Supportingsystems...............................................................................................................2716.4 MissionSummary.........................................................................................................................2746.4.1 Tetherexperimentcancellation...........................................................................................2746.4.2 ExperimentControlCenter..................................................................................................2776.4.3 Missionoperations................................................................................................................2776.4.4 YESmissiondata...................................................................................................................2796.5 AspectsoftheYESprojectapproach..........................................................................................2806.5.1 Challengeandopportunity..................................................................................................2806.5.2 Conceivingasatellitein8months......................................................................................2816.5.3 Milestonesandmanpower...................................................................................................2846.6 LessonsLearned............................................................................................................................2856.6.1 Failureanalysis......................................................................................................................2856.6.2 Recommendationsforafollowupproject........................................................................2896.6.3 HeritageoftheYEStethersystemdevelopment.............................................................2907 YES2 2937.1 Introduction...................................................................................................................................2937.2 Systemdesign................................................................................................................................2947.2.1 YES2andFoton......................................................................................................................2947.2.2 Keyelements..........................................................................................................................2947.2.3 InterfacestoFoton.................................................................................................................2977.2.4 Systemcharacteristics...........................................................................................................2977.3 Missiondesign...............................................................................................................................2997.3.1 Preparingfordeployment....................................................................................................2997.3.2 Deploymentofthetether.....................................................................................................3007.3.3 Fotinoreentry......................................................................................................................3027.4 Subsystemsdesign........................................................................................................................3057.4.1 Tetherdesign..........................................................................................................................3057.4.2 FLOYD....................................................................................................................................3077.4.3 OBCsoftware.........................................................................................................................3127.4.4 MASS......................................................................................................................................3147.4.5 Fotino......................................................................................................................................3157.5 ManagementoftheYES2project................................................................................................3187.5.1 Systemsengineeringtoolsandapproach..........................................................................3187.5.2 Innovationfromeducation..................................................................................................31987.5.3 Projectphasing.......................................................................................................................3207.5.4 LessonslearnedfromYESandYES2.................................................................................3218 YES2MISSIONANDRESULTS 3258.1 Flightpreparation.........................................................................................................................3258.1.1 Deployercharacterization....................................................................................................3258.1.2 Developingandtestingofthedeploymentalgorithms..................................................3288.1.3 Testingtheflightsoftware...................................................................................................3308.1.4 Testingthesystem.................................................................................................................3318.1.5 Makinglatechanges..............................................................................................................3328.2 Missionsummary..........................................................................................................................3328.3 Dataanalysis..................................................................................................................................3368.3.1 Analysisobjectives...............................................................................................................3368.3.2 Datasourcesandediting......................................................................................................3368.3.3 Deploymentreconstructionandinterpretation...............................................................3488.3.4 Deployerperformance..........................................................................................................3568.4 Tetherdeploymentdatamatchingbysimulation....................................................................3588.4.1 Simulateddeploymentwithmatchingvelocityprofile..................................................3588.4.2 Controllerperformance........................................................................................................3618.4.3 Tetheroscillations..................................................................................................................3628.5 FailureanalysisandextrapolationoftheYES2missionresults.............................................3668.5.1 Failureinvestigation.............................................................................................................3668.5.2 ComparisonYES2toSEDSmissiondataandanalysis...................................................3758.5.3 Simulatorapplicabilityandrepresentationofflightperformancebytests.................3788.5.4 FotinoandtheSpaceMailpotential....................................................................................3808.5.5 Lessonslearned......................................................................................................................3849 DISCUSSION 391REFERENCES 397SUMMARY 405EPILOGUETOWARDSSUSTAINABLESPACETRANSPORTATION 413SAMENVATTING 417LISTOFAUTHORSPUBLICATIONS 426CURRICULUMVITAE 429ACKNOWLEDGMENTS 430Introduction 91IntroductionGivenshipsorsailsadaptedtothebreezesofheaven,therewillbethosewhowillnotshrinkfromeventhatvastexpanse.JohannesKepler,lettertoGalileo,1610Tether:acordthatsecuressomethingtosomethingelseTether propulsion systems: proposals to use long, very strong cables to change the orbits ofspacecraft.Spaceflightusingthisformofspacecraftpropulsionmaybesignificantlylessexpensivethanspaceflightusingrocketengines.DefinitionsasfoundonWikipedia,Jan.2008In this section the thesis objective is defined following a review that exposes the gapbetweenpotentialtetherapplications,ononeside,andtheflightexperiencesofar,ontheother.Asurveyofthethesisstructureisthenprovided.1.1 SustainabilityandtheappealofspacetethersMankindsexplorationofspacehassofarbeenseverelylimitedbythedifficultytoreachEarthorbit.Ourwayintospaceismuchthesametodayasitwasoriginallyin1957,whenthefirstsatelliteSputnikwascarriedinto space bytheR7rocket. TheSoyuz rocketthatdeliverscosmonautstotheInternationalSpaceStationtodayisadirectdescendentofthatoriginalR7andstillsimilartoalargedegree.Allrocketsprovidepropulsionbyexpulsionofmatter,andhaveprovensofartobeahighlyinefficientmeansoftransport.Whereasashipsailinganoceaniskeptafloatbybuoyancyalone,itrequiresagreatdealofenergytogetarocketintoorbitandbalancetheEarthsgravityduringitsascent.Rocketscienceistoprepackallthisenergyintoadrumandreleaseitinacontrolledmanner.Whereasasailingshipexploitsthewindtopropelitself,arocketcarriesitsenergyalong,plowsthroughtheatmosphere and hardly benefits from the opportunities that the environment provides.Worse,forthisgargantuanandnontrivialtasktosucceed,agreatdealofadditionalenergyandeffortisrequiredtobuilduptheinfrastructurefordesign,productionandtransportofthatrocket.Onceweareinspace,formostpurposesitbecomessomewhateasiertotravelaround,andtherearenumerousconcepts,provenorunderdevelopment,toridethebreezesofheaven.Thesametypeofhighthrust(orimpulsive)rocketenginescouldbeemployedoncemore.Alternatively,ionenginesusethesameprincipleofexpulsionbuttheyarecharacterizedbycontinuous,lowthrustlevels.Moreliterally,solarsails,or,indeed,spacetetherscanridethebreezesofheaven.Solarsailsarepropelledbytheminutepressureexertedbytheimpactof10 Chapter1sunlight. They are especially promising for use in interplanetary space where, over time,lowaccelerationcanaccumulatetoobtainsignificantchangesinvelocity.Spacetethersarelong thin cables, primal structures that, like solar sails, can be used for essentiallypropellantlesspropulsion,butalsotobuildformationsthatwouldbeverycostlyifcreatedinanotherway.Spacetethersprovideauniqueoutlookforsustainablespacetransportation,becauseenergyandmomentumarenotlostthroughexhaustgases.Thismayexplaintheirperceivedeleganceandappeal.Thresultingattractivenesshasmadetethersanacademicfavorite.Aswillbeillustratedinthefollowingsections,excitingconceptsandthesometimeselusivetetherdynamicshavebeencloselystudiedfordecadesbyagreatmanyscientists.Yetdespiteallthiseffort,thereislittleflightexperienceandnotetherapplicationisinusetoday.1.2 ExamplesoftetherapplicationsThe potential for space tethers to create a paradigm shift in the way we travel to andthrough space is probably best exemplified by the space elevator. This still futuristicconceptwascreatedin1960byYuriN.Artsutanov[Artsutanov1960]whenheproposedtophysicallyconnectEarthtospacebytether.TheideawasanimprovementofthevisionaryorbitaltowerconceptasconceptualizedbyTsiolkovskyalreadyin1895[Tsiolkovsky1895].Aselfbalancingconnectionwouldbenecessary,i.e.averticaltetherinorbitaroundandcorotatingwithEarthwhilejusttouchingitssurface.Alargeendmassonthespaceendofthe tether, beyond geostationary orbit, could be used to achieve such a balance.Alternatively a tether of 144,000km length and without endmass would fulfill theserequirements[Pearson1975].In order to obtain access to space using the space elevator one would simply board adeliveryvehicleontheEarthsurface,exertsomepatienceasthevehicleclimbsthetether,thendisembarkatthealtitudematchingthedesiredorbit.Themostpopularorbitswouldlikelybegeostationaryandinterplanetaryorbits,althoughellipticalonesapproachingEarthin perigee would also be a possibility. The delivery vehicle would take onboard anyreturningcargoanddescendbacktotheEarthsurfacetopickupthenextpassengers.The space elevator shouldofferaccess tospaceata costorders of magnitudelowerthanpossibletoday,changingtheappearanceandscopeofspacetravelitself.Theelevatorhastwomajorconceptualadvantagesoverrocketsthatshouldloweroperationalcost.Firstly,theenergyrequiredtoclimbthetetherdoesnothavetobestoredonboardofthedeliveryvehicle,butcanbee.g.transmittedfromthegroundbylaserorbyelectricalpowerthroughthecable.Secondly,theenergyspentcanbepartiallyrecoveredasthedeliveryvehicleanditsreturncargodescends.Asaresultofthesteepdropincost,rapiddevelopmentscouldbeexpected, as have happened in recent years for personal computers and mobilecommunication. For large multistage rockets it would mean they would become all butobsolete.Theuseofsatellitesforanypurposewouldhoweverbecomecommonplace,andsowouldcommercializationofspaceaswellashumanexplorationofthesolarsystem.Introduction 11Manytechnicalchallengesarestilltobedealtwithbeforewecanactuallybuildthespaceelevator.Workisneededtocoverdynamicissues,deliveryvehicleconcept,powersupplyandrecovery,atmosphericinteractionchallenges,deploymentandoperationalissues,andsoon.Nottheleastofthedevelopmentsrequiredisthatofhighstrengthlowdensitytethermaterialssuchascarbonnanotubes[Edwards2000,2003].Fortunately,tetherscanalsobeusediftheyaremuchshorterandinorbitwithoutaphysicalconnection to Earth. A large number of applications for space tethers has in fact beenproposed, ranging all the way from modest systems tailored for niche markets to grandenablingsolutions[foranoverview,seee.g.Cosmo1997,Cartmell2008,Pelt2009].Tetherlengths range from hundreds of meters to hundreds of kilometers. These applicationsgenerally make use of the tether as longdistance mechanical connection, and they mayexploittheabilityofconductivetetherstointeractwiththeEarthmagneticfield.One of the more futuristic of the proposed mechanical tether applications uses multiplerotatingtethersystems,orbolos,inorbitaroundEarthandtheMoonorMarstocreateaninterplanetarytransportationsystem.PermanenthabitationofMarsorminingoftheMoonforraremineralsandrawmaterialscouldthenbecomeapossibility.Eachsystemwouldbea hundred kilometers or more in length and feature a tip velocity with respect to thesystems center of mass of at least 1.0km/s. The direction of tether rotation would beprograde, i.e. identical to that of the orbital direction. By careful timing a payload on asuborbitalvehiclecouldbegrabbedfromthetipofaloworbitingtetherasitapproachestheEarth atmosphere and temporarily matches the suborbital vehicles position and velocity.Halfaturnofthetethersystemlaterthepayloadcouldbereleasedandhurledintospace.The system would provide the payload with an altitude increase of twice the distancebetweentipandsystemcenterofmassandwithavelocityincreaseoftwicethe(relative)tipvelocity.Next,a similarandsynchronizedsystemwouldcapturethepayloadandhurlitonward.EventuallythepayloadscouldbedeliveredallthewaytotheMoonorMars.Thesame infrastructure would be used to return cargo from those remote celestial bodies toEarth.Inthisway,theenergybalancewouldbelargelymaintainedandahighdegreeofefficiencycouldbeachieved,beitthatsignificantinitialinvestmentwouldberequiredtodeveloptheinfrastructure[Hoyt1999.I,Forward1999].Advanced mechanical tether concepts have also been recognized as some of the morefeasiblealternatives to cleanthe busy lowerregionsofspacearoundEarth [Bade 1993,Bonnal2005].Hundredsofpiecesoflargedebris,mostlyspentstages,canbefoundinLowEarthOrbit(LEO).Ifnotremoved,suchdebrisislikelytoeventuallybreakupincollisionwithapieceoftheevenmorenumeroussmallerdebrisor,insomecases,withafunctionalsatellite. Not only would a functional satellite be almost certainly destroyed by such anincident,thesecondarydebrisgeneratedinthecollisionwouldincreasetheincidencerateoffurthercollisions.Atravelingsystemwithaswingingorrotatingtethercouldmovefromdebristodebris,captureeachpiecewiththehelpofasuitablegrapplesystemanddeorbititsubsequentlybymomentumtransfer.12 Chapter1The above concepts could be significantly enhanced by using also a conductive tethermaterial.WithintheEarthsmagneticfieldandplasmasphereitispossibletoconvertsolarenergy to orbital energy without the use of propellant. Using the electrical potentialgeneratedbye.g.solarpanelsacurrentcanbedriventhroughthetether:electronscanbecollected from the Earths plasma on one end and be expelled on the other end. In themagneticfieldoftheEarthaLorentzthrustwillresultactingovertheconductingpartofthetetherandcreatinganelectrodynamicformofpropulsion[Johnson1998,Estes2000.I].Theorbital lifetime of large rotating tethers in LEO could be increased by using this Lorentzthrust for atmospheric drag compensation. The MXER concept for example is anelectrodynamicallyenhanced bolo system [Sorensen 2001]. The abovementioned debrisremover systems could be moved from one debris object without propellant by properlymodulatingtheLorentzthrustsuchthatitwouldinawaysailtheEarthsmagneticfield[Pearson2000].Electrodynamic tether performance is dependent on the orbital, magnetic and plasmaenvironmentwhichprovidesalimitationbutalsocreatesopportunities. AroundJupiterorSaturn with their strong magnetic fields, high orbital energies and fast rotating, denseplasmas unique conditions exist in which a tether could effectively convert the planetsrotationalenergyintobothorbitalandelectricalenergywithouttheneedforsolarpower[Gallagher 1998]. An electrodynamic tether could also be combined with an electricpropulsion system, which would act as efficient provider of electrons, such that thedependencyontheplasmadensityaroundtheEarthwouldbereduced[Ockels2004].Such applications require significant investment in tether infrastructure. Furthermore, formostofthemareliablerendezvousanddockingsystemwouldhavetobedeveloped.Thetethersorbitwouldhavetobekeptclearofdebrisandothersatellitestoavoidcollisions.Although indeed carbonnanotube materials could eventually offer extremely strong andlightweighttethersolutionsandreducethemassoverheadandthustheinvestmentcost,thequestion remains whether emerging alternative technologies with equivalent capabilitieswillbedevelopedfirst,atlowercostandrisk.However,notallproposedtetherapplicationsaresoremote.Forexample,arotatingtethersystemwithabaselineofaboutakilometerisabletogenerateacomfortablelevelofartificialgravitythroughthe(apparent)centrifugalforce.Exposuretolong periods of weightlessness has important reversible and irreversible effects on thehumanphysique.HumanstravelingtoMarsforsixmonthsormorewouldbenefitfromanartificiallygeneratedgravitylikeforcetosecuretheirphysicalfitnessuponarrival.Littleornoviablealternativeexiststotethersforartificialgravity[Clark1960,Stone1973,Cramer1985].Fororbitaltransferlessambitiousthanthebolosystemsonecanavoidtherequirementofspinupthatisinherenttoarotatingtethersystem.Apendulummotioncanbesufficientinsomecasesanditisreadilyachievedasasideeffectofdeployment.Awelltimedpayloadreleasefromaswingingratherthanrotatingtethercanbeaneffectivewayofchangingorbitforbothendmassesthroughtheprincipleofmomentumtransfer.AnexampleisthedeliveryIntroduction 13ofsamplesfromaSpaceStationbacktoEarth,orSpaceMail.Thintethersofsomekilometerstotensofkilometerscouldbeusedtofrequentlydeorbitsmallcapsulesfromamannedorunmanned station returning data, biological, medical or material samples for detailedinvestigation on the ground [Aerospatiale 1986, Ockels 1995, Heide 1996.I]. At the sametime,theorbitoftheSpaceStationwouldberaisedandtheamountofpropellantrequiredfor its orbit maintenance would thus be reduced. A similar system could be used toefficientlyremovewastefromtheInternationalSpaceStation[AleniaSpazio1995].Averticallyhangingtetherwithoutpendulummotionormomentumtransfercouldalsobeofuse,e.g.toinvestigatetheEarthsthermosphereinmultiple,coordinatedpoints,assistingscientistsinadvancingitsthreedimensionalunderstanding[Heelis1998].Suchcoordinatedinsitumeasurementsforthisaltituderegimeareverydifficultorevenimpossibletoobtainwithconventionaltechniquessuchas(EarthObservation)satellitesorballoons.Electrodynamic tether applications also have been proposed for the short term. The MirElectrodynamicTetherSystem(METS)hasbeendesignedtoconvertsolarpowerintothrustandcompensatefortheMirStationsatmosphericdrag.Itwouldhavesignificantlyreducedthestationsorbitmaintenancecost,andwouldhaveallowedMirtoorbitatloweraltitudeinahigherdragenvironment,reducingcostofaccessbyconventionalmeans[Levin2007].AlthoughMETShasreachedanadvancedstateofdevelopment,itwasneverlaunchedduetothedecisiontodeorbitMirin2001.Nevertheless,thesamesystemcouldbeemployedforfuture stations or other large objects in a highatmospheric drag environment [Vas 2000,Blumer2001].An electrodynamic tether in LEO to which no electrical power is applied can still beequippedtoconductacurrent,fedbytheEarthsplasmaanddrivenbytheelectromotiveforce(emf),thelatterinducedbytheorbitalmotioninsidetheEarthsmagneticfield.Thiscurrentwouldgenerateelectrodynamicdrag(andelectricalpower)ratherthanthrust.Sucha simple drag tail or Terminator Tether could be used to deorbit a satellite after itsnominal lifetime and help maintain the cleanliness of the orbital environment [Forward1998,Hoyt1999.II,Vannaroni1999,Dobrowolny2000].Whatthesevarioustetherapplications,mechanicalorelectrodynamic,distantormoreshortterm, have in common, is that with respect to conventional (rocketbased) solutions theywould significantly reduce the need for propellant, as they tend to keep energy andmomentumwithinthesystemofinterestratherthanlosethosethroughexpulsionofmass.In addition, for some cases tether technology may indeed be enabling, e.g. for artificialgravity, applications in highdrag environments, orbital debris removal or an operationalinterplanetarytransportsystem.Thephysicalprinciplestheseconceptsarebasedonappeartobesimple,whereasthecostofconventionalalternativeshassofarproventobeandarelikelytoremainprohibitive.Thequestionnaturallyariseswhethertherealapplicationoftethersystemswillbeaselegantandtechnologicallysimpleastheirconceptualdescriptionappearstoimplyandtherefore,whethertheinvestmentsrequiredtomakethemoperationalareindeedworthmaking.14 Chapter11.3 FlighthistoryofspacetethersTable 1 provides anoverviewof themajor suborbitaland orbitaltetherexperimentsthathavebeenbuiltand(inmostcases)flowntodate,aswellasrelevantreferencesforeach.Forconvenience the list includes the Young Engineers Satellites, YES and YES2, which aresubject of this work, as well as the recent TREX experiment to which the author alsoparticipated.Theearliestexperimentstookplaceinthesixties.Intwoseparateexperimentsin1966,theGemini 11 and 12 manned capsules were connected by a 36m cable to their respectiveAgena upper stage. With considerable difficulty the astronauts manually controlled thetetheredsystemtheywereapartofusingcoldgasthrusters,inordertobringthesystemfirst in a gravity gradient stabilized position and then in rotation. During the Gemini 11missionabout1mgeeofartificialgravitywascreatedbya0.15rpmrotation.TheGemini12crewsucceededtoachieveasomewhatstabilizedverticalorientation.The complexdynamicsencountered during theseboldtrials withshorttethers may havebeen the reason it took 14 years before tethers were deployed in space again. Tetherexperimentation in the eighties and early nineties was dominated by modest shortsuborbitalflights.Japanese,USandlateralsoCanadiansoundingrocketexperimentsusedconducting tethers to investigate their interaction with the Earth ionosphere. The firstTethered Payload Experiments (TPE) suffered from deployment problems, but withassistancefromcoldgasthrustersthevariousCHARGE(CooperativeHighAltitudeRocketGun Experiment) and OEDIPUS (Observations of Electricfield Distribution in theIonosphericPlasmaaUniqueStrategy)missionswerecompletedsuccessfully,withtetherlengthsrangingfrom400mto1174m.Fromthesetechnicallymodestexperimentsitwasalargesteptothe19.6km,2mmthickandlayeredelectriccablethatwasdeployedfromtheSpaceShuttlein1992aspartoftheAmericanItalianTetheredSatelliteSystem(TSS).ObjectivewastodeploythetetherupwardoutoftheShuttle,collectelectronsatthefarendusinga1.6mdiameterendmassasanodeandstudythetetherelectrodynamicsasaresultofthecurrentflowingthroughthetether.Thecomplex,activelycontrolledreelsystemgotstuckafter268mofdeployment,butthetetheredsatellitecouldbesuccessfullyretrievedandreturnedtoEarth.In1996,duringtheTSS1R reflight of the same equipment 19.6km of tether was deployed exposing theendmasstoanemfofasmuchas3500V.AcurrentofseveralAmperescausedsignificantdynamicsinthetether,andasignificantLorentzdragforcemusthaveactedontheSpaceShuttle.Aclearskipropemotionwasobservedinthetether.Theexperimentalsoprovideda wealth of information concerning the electron collection behavior of large chargedspheres in a plasma. Unfortunately, the tether was severed near the Shuttle end due tosparkingafterdamageduetodebrisormeteroidimpact[Chobotov1999].Thiscutprovidedtheaccidentalopportunitytowitnessthedynamicsofthefreetetherinspace.Itwasseentocreate its own, artificial, lower endmass due to tether recoil in the lowtension end. TheIntroduction 15tetherwastrackedandreenteredwithinafewweeks,providingafirstdatapointontetherorbitallifetime.A less ambitious orbital electrodynamic tether experiment was performed in 1993, thePlasma Motor Generator (PMG), a 500m tether attached to a Delta upper stage. PMGsucceededindemonstratingthattheLorentzdragforcecanbeturnedaroundintoathrustforce,byactivelysendingelectronsupwardthroughthecable.HighlysuccessfulmechanicaltetherexperimentswereNASAsSmallExpendableDeployerSystemmissions,SEDS1andSEDS2.Theyeachdeployeddownward20kmofa0.78mmline braided from a special polyethylene fiber material, Spectra, again from a Deltaupperstage. A small subsatellite as endmass transmitted dynamics data to the groundwhereas the deployed length and tension were measured on the Delta side. SEDS1deployed the tether with an openloop control and ended in a swing and subsequentreleaseandreentryofthetetherandsubsatellite.SEDS2tookastepfurtherwithaclosedloop controlled deployment to a stable vertical position of the tether. Unexpectedly, theSEDS2 tether was severed just 3.7 days after successful completion of the mission, mostprobablybyadebrisparticle.ThankstoSpectrashighreflectivity, theSEDS2tetherwasobservedfromthegroundwiththebareeye[Carroll1995.I],passingthroughtheskyasabrightthinobjectwithanangulardimensionsimilartothatoftheMoon.TheunexpectedcutoftheSEDS2tetherincreasedconcernswithregardstothelimitedinorbitlifetimeoftethers.TethersUnlimitedInc.(TUI)providedareactionwiththeconceptoftheHoytether,awebbedtetherbelievedtoresistmultipleimpactsandsecuringverylonglifetimeinspace[Forward1995].ThelastofthelargeUStetherexperimentsflownsofar,theATeX(AdvancedTethereXperiment)bytheNationalReconaissanceOffice(NRO),intendedtodemonstrateameteoroidimpactresistanttapeshapedtether.Unfortunately,theactivelydrivenreeldeploymentofATeXfailed.RecentdataindicateshoweverthattheSEDS2cutmusthavebeenananomaly.TheNavalResearchLabs4kmlong,2mmthicktetherofTiPS(TetherPhysicsandSurvivability)wasunwoundinMay1996,usingalsoSEDSdeployertechnology.Ithasbeenorbitingforoveradecade in vertical orientation, with a slight oscillation, to be cut only in July 2006[VSO2010].Nevertheless, especially the TSS1R and SEDS2 tether severings have resulted in theevidently false, but widelyheld belief that tethers in space are severely prone to failure.Increasingly,thefearofaccidentallyseveredtethersmovinguncontrollablythroughspaceandcollidingwithothersatellitesoreventheSpaceStation,leadtomissioncancellations.In1997,theYoungEngineersSatellite(YES)waslaunched,butthetetherdeploymentwasnotinitiatedforfearofpotentialcollision[Kruijff1998].Theimplementationofatetheraspartof the Shuttlebased SEDSAT [Lorenzini1995] was cancelled. The electrodynamicPropulsiveSEDSexperimentProSEDSwasbuilt,butnotlaunched[Vaughn2004].Intheirwakenewtetherproposalsbecamelessfrequentandlessambitious.Theworkreportedinthisthesiswasperformedinthiscontext.16 Chapter1Year Experiment Length[km]Technology Objective Success Remark Ref.19661966Gemini11Gemini120.0360.04MechanicallinkbetweenGeminiandAthenaupperstageArtificialgravityGravitygradientstabilizationYESMOSTLYSpinstable0.15rpmMannedwithmanualcontrolNASA196719801981198319851992TPE1TPE2Charge1Charge2Charge2B0.04of0.40.07of0.40.4180.4260.4ConductiveColdgasassistedPlasmainteractionandVHFwavegenerationPARTLYPARTLYMOSTLYYESYESSuborbitalSasaki1987Sasaki199419891995OedipusAOedipusC0.9591.174ConductiveColdgasassistedPassivereelIonosphericscience YESYESSuborbital Tyc1995Vigneron199719921996TSS1TSS1R0.268of19.619.6Conductive,activereeldeploymentElectrodynamicPowergenerationNOMOSTLYShuttlemissions.TetherjammedTetherbrokeaftersciencesuccessDobrowolny1994Gilchrist19981993 PMG 0.5 Conductiveinsulatedtether,passivespoolPowerandthrust YES 7hrsexperimentpiggybackonDeltaMcCoy199519931994SEDS1SEDS22019.7Mechanical,brake+spoolSwing&cutControlleddeploymentYESYESSEDS2probablycutbydebrisaftermissioncompletionCarroll1993Carroll1995.I1996 TiPS 4 Mechanical,passivespoolStudysurvivalandstabilityYES Cutafter1decadeinorbitBarnds19982005 ProSEDS (13.1) Bareconductive/mechanical,brake+spoolThrust CancelledforISSsafetyJohnson20031997 YES (35) Mechanical,doublestrand,brake+spoolRotation,reentry GTO.NotdeployedduetounsafeorbitKruijff1999.II2007 YES2 31.7 Mechanical,brake+spoolAccuratereentryofascientificcapsuleMOSTLY Fulltwostagedeployment.Overdeployed.Kruijff2009.I,II1998 ATeX 0.02of6.2 Mechanical,tape,reel,activeStability&control NO S/WstoppeddeploymentZedd19982000 METS (5) Bareconductivetape/mechanical,passivereelThrust(Mirstation) CancelledasMirwasdeorbitedLevin20072007 MAST 0?of1.0 MultistrandplusinspectorcrawlerStudytethersurvivabilityNO MinimaldeploymentHoyt20032010 TREX 0.3 Conductivebaretethertape,passivefoldedDeploymentandcurrentcollectiondemonstratorMOSTLY SuborbitalSuccessfullydeployed,videoFujii2009Table 1. Overview of major tether experiments to date, by chronology of experiment family.Experimentswithlengthbetweenbracketswerenotlaunchedordeploymentwasnotstarted.Introduction 17Onlyrecently,nearlyadecadeafterATeX,newtetherexperimentshavebeenlaunched,alldeveloped in educational context, and with mixed results. The MAST university project(MultiApplicationSurvivableTether)attemptedin2007todeployatetherbetweenlightweightcubesatsbutapparentlywithoutsuccess.Inthesameyear,asreportedinthisthesis,theEuropeanSpaceAgencys2ndYoungEngineersSatellite(YES2)deployeda32kmtetherintwostagesaspartofaSpaceMaildemonstration.Thissuccessformechanicaltetherswascomplementedin2010astheTetheredRocketExperiment(TREX)ofTokyoMetropolitanUniversityfeaturedthefirstandsofaronlydeploymentofabareelectrodynamictether.Aninnovativepassivedeployersystemsuccessfullyunfoldeda300mtape.Ofthe22experimentslistedinTable1,19wereinfactflownandagoodmajority,namely14of those, can be considered largely or fully successful. The flight experiments involvedessentiallyfourtypesofdeployers:theactivereel,thepassivereel,thepassivespoolandtheTREX (passive) unfolding system. An active reel deployer unwinds the tether from amotorized drum, in a direction perpendicular to the drum shaft. This in contrast to thedeploymentfromapassivespool,whichisinaxialdirectionovertheheadofthespool.Themorecomplexexperimentsbasedonactivereeldeployers,TSSandATeX,haveencounteredsignificantdeployment problems.Virtuallyallthepassivesystems haveleadtocompletedeploymentsofar,withanotablygoodtrackrecordforthecompanyTetherApplicationsresponsible for SEDS1,SEDS2, PMG andTiPS. The few spoolfailures(TPEand MAST)suffered from a shared problem, i.e. insufficient initial momentum in relation to thedeploymentfriction.Theimportanceofproperdesignchoicesisthereforeapparent.Basedon flight heritage there is a strong case to move forward with the more simple, passivedeploymentsystems.1.4 ObjectiveofthisthesisToday,theconceptofusingtethersinspaceisstillinnovativebutcertainlynotunexplored.True, consideringthe currentstateoftether materialsandtechnologies,sustainable spacetransportationbasedontetherassistedlaunchorbolobasedinterplanetaryinfrastructuresiscertainlystillremote.However,tethershavebeenstudiedformanyyears,fundamentalprinciples have been demonstrated in orbit and several attractive applications have beenidentifiedfortheshortterm.Smalldevelopmentstepsalongthelinesofsuchapplicationscouldbringtethertechnologyforwarduntilademandarisesformoreambitioussystems.Nevertheless it has proven difficult to move beyond theory and concept demonstrationtowardsafirsttrueapplication.Partlythisisbecausedevelopmentandoperationalrisksaregenerallyjudgedtobehigh.Thereisaneedtodemonstratethattetherapplicationscanbeeffective, affordable, predictable and safe. Due to the very nature of tethers theirperformance cannot be fully demonstrated in ground testing. Without a first inorbitdemonstrationofanactualtetherapplicationitseemshardtomakeaconvincingcase.18 Chapter1Thoseperceivedobstaclesmaybeovercomethrough a systematicand targeted approachover the full width of the matter. This approach should include a suitable applicationselection,asolidmissionanalysis,afullsystemunderstandingandqualification,athoroughcoverageofsafetyaspectsand,enabledbytheresults,anaffordable,applicationorientedinorbit demonstration. By going through this process, first a deeper insight is to be gainedaboutthechallengescurrentlyfacedbytetherinitiatives.Thatachievedinsightshouldnextallowtoclosethecircleandshedlightontheinitialquestionregardingtheeffectiveness,affordability, predictability and safety of tether applications and lead to crediblerecommendations regarding near term tether initiatives on the road towards the firstapplicationsand,eventually,asustainablespacetransportation.Theobjectiveofthisthesisistoachieveandexploitthisinsightaccordingly.Theapproachcanbethoughttoconsistofthreesteps:1. definitionoftherequiredtoolsandasuitabletetherapplicationfordemonstration,2. developmentofanadequatetetherdeploymentsystem,3. evaluationofitsperformanceandextractionoflessonslearnedfromtheevaluationprocessanditsresults.Followingthislogic,theremainderofthisthesisisstructuredinthreeparts,onepartforeachoftheabovementionedsteps.1.5 SurveyofthisthesisThe three parts of this thesis consider respectively the definition, development andevaluationofatetherapplication.Part I of this thesis, the definition, provides the physics background and an analysis ofvariousconceptsthatcouldbecandidateforashorttermimplementation.Chapter2firstdescribestheprinciplesoftethersinspace,bothmechanicalandelectrodynamic,providinginsightintothephysicsbehindtheirpotentialuses.Inordertostudypotentialapplicationsmoreclosely,anextensivetethermissionsimulatorhasbeendeveloped.Chapter3analyzesanddiscussessomeofthecandidateapplications,theirbenefitsandtheirlimitations.Specialattentionisgiventotheseeminglyambiguousrolethattethersmayplaybothincreationand reduction of orbital debris. To take the step from concept to an applicationorienteddemonstrationfocuswillbeontechnologythatisbothlowriskandlowcost,andforwhichsignificantheritageexists.PartII,thedevelopment,thereforenarrowsdownontheSpaceMailapplication.Itfocuseson the design, development and qualification of a tether system for a demonstrationmission. Chapters4 is concerned with the development and assessment of a suitablematerialandtetherdesign.Astetherinducedcollisionriskhasbeenidentifiedasaprimaryshow stopper for past mission proposals, particular attention is paid to the designsimplications for safety. Possibilities are explored to decrease risk both during and afterIntroduction 19deployment,forexampleriskofentanglementwiththedeploymentplatform,andriskofcollision with other satellites after tether release. With the tether design eventuallyconsolidated, Chapter5 continues by reporting on the development of the hardware andsoftwarerequiredforcontrolleddeploymentofthattether. Itincludesthetetherwindingand unwinding facilities development, as well as SEDSinspired designs for spool andbrake. Furthermore the chapter describes the deployment control algorithms, simulationsand groundbased deployment testing. Simulated performance versus actual deploymentresultsarecompared.Part III, the evaluation, final part of this thesis, reports on the construction of two spacetetherexperiments,theanalysisofmissiondataandtheextractionoflessonslearnedfromthe exercise of actual implementation and from the mission results. Chapters6 and 7describe respectively the process leading to the development of the Young EngineersSatellite (YES) and the Second Young Engineers Satellite (YES2). These space tetherexperimentsdemonstratethefeasibilityofactuallybuilding,qualifyingand,incaseofYES2,operating the proposed system. Significant challenges had to be met, beyond the mereproductionofthetetheranddeployer,inordertobringtheexperimentsintospace,andtofinallyperformatetherdeployment.AnoverviewoftheYESandYES2systemsandofthemanagement processes followed provide insight into these challenges. The YES2 missionpreparation, tether deployment results and problems encountered are analyzed andevaluated in Chapter8. A comparison of the flight data is provided against simulationresults,groundtestsaswellastheearlierSEDSmissions.Thesuitabilityofthedevelopedtether system for the SpaceMail application is analyzed. Finally, the work is placed in abroadercontext.InChapter9,conclusionsareformulatedandfromtheintegratedfindings,recommendations are derived for further development, as well as implications for tetherapplicationsinthenearfuturethataretoleadtoamoresustainabletransportationinspace.The Epilogue touches upon the same items, but more from the authors personalperspective.Following Chapter 9, a summary of the thesis is provided in both English and Dutchlanguage.20 Chapter1PartITethersandtheirapplicationsAdastraperligamentum.RobertForward,sciencefictionauthor,engineerandtetheradvocate,atthebottomofhisemailsPartIofthisthesisprovidesadescriptionoftetherbasicsandatetherdynamicssimulatorthathasbeen developed. Armed with these tools, a number of possible nearterm tether applications isanalyzedtofinallymakeastatementonthesafenichesthatexistfortethersinspace.TetherDynamics 232TetherDynamicsbx+ay=acaxx+byy=bccChristiaanHuygens,on29October1651,writesdownwhatmaybethefirsteverphysicsformulae,andwillshortlyaftercorrectlydefinetheconservationlawsofmomentumandenergyinDemotucorporumexpercussione,1652.This chapterintroducesthereader tothe physicalprinciples of tetherdynamicsinspace.The fundamentals behind the applications of mechanical and electrodynamic tethers areworkedout. Anewlydevelopedtoolisfinallydescribedforsimulationofdetailedtetherbehaviorandrealworldaspectsthataredifficulttotakeintoaccountinanalyticalmodels.2.1 DeployingatetherinspaceThis section discusses basic models for the dynamics of a hypothetical tether that ismassless,straightandnonconducting.2.1.1 GravitygradienttensionforahangingtetherincircularorbitTheorbitalperiodofanobjectorbitingamassivebodydependsontheorbitssemimajoraxis a.Alargersemimajoraxismeansalargerorbitalperiod,asise.g.obviousfromtheMoonsorbitaroundtheEarthinabout28days(a384400km) ascomparedtothatoftheSpaceShuttle,inapproximately90minutes(a6700km).Inthesimpleexampleofacircularorbitthiscanbeeasilyunderstood. Themotionofanobject in an orbit with constant radius r=a, around a homogeneous spherical body withgravitationalconstantifviewedinacorotatingframecanbethoughttobesubjectedtoabalancebetweenagravitationalforceFg andacentrifugalforceFc,whichisapparentinthat frame. Whereas the force of gravity decreases quadratically with increasing r, thecentrifugalforceisproportionalwiththeproductofrandthesquareoftheangularvelocityaroundthecentralbody.Inordertoobtainsaidbalanceforanorbitwithalargerradius,theangularvelocitymustthereforebedecreased,seeEqs.(2.1)and(2.2).22mrrm = = =c gF F(2.1)3rue = (2.2)Theimplicationisthatiftwoobjectsareconnectedbyaradiallyorientedtether,thesesocalled endmasses are each forced to orbit with an angular rate different from thatbelongingtothelocalcircularorbitaccordingtoEq.2.2.Gravityforceandcentrifugalforce24 Chapter2ontheendmassescanthusnotbeinbalance.Supposetwoendmassesm1andm2incircularorbitatrespectiveradii r1 andr2,withr2>r1asdepictedin Figure1. Endmassm2 willorbittheEarthfasterthanitsnontetheredcompanionsatthesameradiusr2,whereassimilarlythelowermassm1willbemovingsloweratr1thanitsnontetheredcompanionsthere.BothendmasseswillsharethesameangularrateO matchingthatofacircularorbitatapointbetweenthemasses,thecenteroforbitrCO,23O=uCOr, (2.3)wherethetermu/O2canbederivedfromthebalancebetweengravityforceandcentrifugalforceforthesystemasawhole, O =2121dd22rrrrm rrm, (2.4)suchthatforamasslesstether22 221 12 2 1 13/ / r m r mr m r mrCO++=. (2.5)Forcomparison,theradiusofthecenterofmassrCMis2 12 2 1 1m mr m r mrCM++=. (2.6)ForaverticaltetherwithlengthL, r1=r2L,itfollowsthat rCO3/rCM3=1+O(L/r2)2.Centerofmass andcenteroforbit canthereforebeassumed to coincideforavertical tether, ifthetetherlengthisamerefractionoftheradius,Lr2.Thisassumptionremainstrueforanonzerotethermass[Newlands1994].TheforcerequiredtohavetheendmassesorbitattheangularrateofthecenteroforbitisthetethertensionT.Itcanbeexpressedintermsofdistancel fromm1 tothatcenteroforbit,l=rcor1(seeFigure1).BysubstitutingthisdefinitionoflandEq.2.3intotheforcebalanceonthemassmoneobtainsforthetensioninthetetheranexpressionforT,212 2122121213 ) ( 3) 1 () 1 () () (O ~ O + O =||||.|
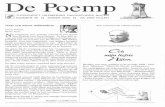
\| O = O = =l m Trll mrlrrlrm l r ml rmTCOCOCOCOCOCOCOuc gF F(2.7)Asimilarresultcanbeobtainedforthetensiononmassm2.Asatypicalexample,a10kgmasssuspendedfromamassiveplatform(m2m1) orbitingat400kmbyamassless10kmtether would generate a tension of 0.38N. This tension is commonly but not fullydescriptively known as the gravity gradient tension. In fact it results from the stabilityconditionforasystemforwhichwithincreasingradiusnotonlythegravityforcedecreases,but also the centrifugal force increases. In magnitude, the gravity gradient tension isTetherDynamics 25approximatelyequal tothreetimes thatpart of thecentrifugal forcethatresultsfromtheseparation between endmass and center of orbit, under the orbital angular motion. Theequivalentgravitygradientisresponsibleforthetendencyforatetherinorbittoassumeavertical orientation and can help to drive a tether deployment, once an initial verticalseparationbetweenendmasseshasbeenachieved.Figure1.Forcebalanceinaverticaltether.2.1.2 EquationsofmotionInordertoobtainafirstinsightintomechanicaltetherdynamicsandtetherdeployment,asetofsimpleequationssuffices. Forthispurposeitisassumedherethat m2isamassiveplatformM fromwhichamuchlighterendmassm isdeployedindownwarddirection,orm2=Mm1=m.TheorbitofMisnotaffectedbythedeployment.Suchaplatformcoincideswiththecenteroforbit,withconstantradiusr2=rCO=RandangularrateO. Furthermore,itisassumedthetetherisastraightlinewithoutflexibility, andits masscanbeignoredwithrespecttotheendmassm.Finallyitisassumedthatthetetherdynamicstakeplaceinsidetheorbital plane only. The dynamics of the system are thus defined by the endmass m, thetetherlengthL=l anditsangletothelocalnadiru,asmeasuredfromManddepictedinFigure2.Thegeneralizedforceonthissysteminudirectioniszero(noperpendicularforcesareexertedbythetether),inldirectionitisthetensionT.Ignoringhigherorderterms,thefollowingequationscanbederived,forexamplingusingtheLagrangian [e.g.Crellin1994,Heide1996.I]:0 2 sin23) ( 22= O + O + u u u ll (2.8)( ) ) cos 3 1 ( ) (2 2 2u u O O + = l lmT (2.9) r1rcor2FcFcFgFgTTl Lm1m2 m2m1CenterofEarthFreebodydiagrams26 Chapter2 OMmlRuCenterofEarthFigure2.Simplemodelfortetherdynamics.Theseequationsdescribetherelativemotionofobjectsinorbitclosetogether,expressedinpolarcoordinates,inthefamiliarformofthesocalledrendezvousequations[e.g.Lorenzini1996] however with the only force of influence being the tension between the masses. InEq.2.8aCoriolistermandacomponentofthegravitygradientperpendiculartothetethercan be discerned. Note that from Eq.2.9, for a nondeploying vertical tether) 0 , 0 , 0 , 0 ( = = = = u u l l Eq.2.7 follows once more. The effect of rotation or swing on thetension in a nondeploying tether can be recognized in a term of Eq.2.9 relating to thecentrifugalforceontheendmass.Thegravitygradientcontributionontensioncanbeseentodecreasewithincreasingu duetothedecreasingdifferenceinradiusbetweenmandMandthereducingcomponentofthegravitygradientforcealongthetetherdirection.2.1.3 PendulummotionofaswingingnondeployingtetherEq.2.8 describesthe inplaneangular motionofthe tether. The hangingtetherof Section2.1.1 isa specialcase,whereas,inabsenceofdeployment, anoscillationaroundthe localvertical represents a more general situation, be it intentionally or accidentally achieved.Such oscillation is driven by the gravity gradient force that acts to accelerate the tethertowardsaradialorientation.Forsmallangulardeviationsbetweentetherandthelocalnadirdirection,thisoscillationfollowscloselyapendulummotion.If 1 , 0 , 0 \3Or3 is required in order to endup in arotation rather than an oscillation (Eq.2.10). On the other hand, much of the initial rimvelocitycaninprinciplebeobtainedfromtheswingobtainedduringdeployment,savingsomepropellant.Tomakefulluseofthispossibilitywouldrequireselectionofanoptimalvaluefork valueforeachgloadcase,andamorecriticaldeploymentcontrol. Theoearthglevelwouldbeobtainedwithk=2.2(max.70kgpropellantratherthan30),omarswithk=3.6(max.110kgpropellantmassratherthan80kg).Alternatively,anoutofplanerotationcanbeconsideredwithfreechoiceofk.Stabilityanddynamicsforthiscasehavenotyetbeeninvestigated.Thetethermassisheavilydependentontheminimalrimspeedselected,butforamultimissionscenarioitisnotthedominantfactor.TheOverdeploymentmethodisthereforebaselinedfortheinitialdesignofasuitabledeployer.TetheranddeployerA tether and deployer design for a LEO demonstrator has been made for DeltaUtec byLansdorp[Lansdorp2004]basedontheOverdeploymentscenario.ThetetherisassumedtobemadeofDyneema,ahighstrengthfiberproducedbyDSMintheNetherlands. Thetether is proposed to be a very flat tether of ~1mm thickness and ~1m width. Such aDyneema UD tether can be produced using standard sheet production methods(operationalatDSM).Itisasafelifedesigntopreventseriousdamagebyspacedebrisandmeteoroids and is compatible with the proposed deployer, as it provides a large area ofcontact,thusreducingpressureloads.Dyneemahasafibertensilestrengthof3.9GPaanda density of only 975kg/m3. Because of losses in the UD design2, it will have a tensilestrength of 1.3GPa and a density of 634kg/m3. A safety factor FS=6 for the tether waschosenastheproductofanumberofcontributions[Lansdorp2003.II],seealsoSection4.3.4.Resultingtotaltethermassis622kg.2C. Dirks, M. Jacobs, J. Kersjes, Personal correspondence, Meeting at DSM, Heerlen, the Netherlands, 2003.AnalysisofTetherApplications 79Thetetherdeployerhasthetasktoreelthetetherinandout,beforeandaftereachcrewswap.Therequirementsonthedeployerarequitesevere.Theselecteddeploymentstrategydemands that it must reel the tether while artificial gravity is being generated by therotation of the system. The most severe conditions occur during the oneg mission: thetensioninthetether,justbeforethereelingphaseisover,equals400kN,comparabletotheperformanceofamediumsizedcrane.Anunconventionaldeployerdesignisproposedtosimultaneously meet the requirements of high tension and low mass. A system has beenworked out for which no tribology or transmission is required. Instead a solution withstructuralhingesisproposedandhighforcelineartranslatorsareused.Thestoragesystemisalwaysdecoupledfromthetethertension. Figure24 illustratestwoseparatesetsofflatfrictionplatesthatautomaticallysqueezethetetherwhentensionisapplied,asocalledselfbraking structure. As one pair of plates is squeezed and moves the tether in the desireddirection,theotherpairmovesinpositiontotakeover.Thereelthatcollectsthetetherisinthiswaynotexposedtoa(significant)tetherloadandcanbelightweight.Afirstdesignofthe deployer indicates that the deployer mass will be comparable to the tether mass, i.e.some600kg[Lansdorp2004].TheMARSgsystemcombinescomfortandcapabilityofmultipledeploymentandretrievalsunderfullgload,withamassofonlysome3%ofthetotalsystem,orsome2400kg(basedon14cycles).Propellanttomaintainstabilityoftheendmassisnotincludedinthisanalysis.Figure24.Hingelessmovingplatehighloadtapedeployerconcept(seetext)3.2 ElectrodynamicdeboostElectrodynamictethersareabletoprovidepropulsionwithlittleornoconsumables,astheyconduct electrical current and interact with a planetary magnetic field. If equipped withappropriate power supply, they can provide continuous thrust that can be modulated tochange any of the orbital parameters [Cosmo1997, Levin2007]. These capabilities make80 Chapter3them attractive for demanding long term applications such as repetitive deorbiting ofdefunctsatellitesoratmosphericdragcompensationofaspacestation.Someuncertaintiesaretoberesolvedbeforesuchapplicationscanbereliablyimplemented.Bare tether design and confirmation of electron collection performance is one aspect thatwillbedescribedbelow.Beyondthat,acrucialchallengeforelectrodynamictethersisthatof longterm stability, in particular with reference to light systems where electrodynamicforces may become comparable to gravity gradient forces. Simulations have beenundertaken to find out how system design can help provide sufficient stability. Twoexampleapplicationsforrelativelysimplesystems,withouthighvoltagesource,andthusorientedatdeboostonly,arestudiedinmoredetail.Theeffectivenessofanelectrodynamictetherformitigationofdebrisrelatedriskiscriticallyconsidered.Anapplicationofanevensimplersystemisanalyzed,afullypassiveelectrodynamictethersystem,whichmayproveusefulinorbitaroundJupiter.3.2.1 AssessmentofOMLperformanceinbaretetherelectroncollectiontestingNo inorbit data is available for long bare tether performance at this time. To supportrepresentativenessoftheETBSimsimulations,aseriesofelectroncollectiontestshasbeendefinedandperformed[Kruijff2001.I]withthefollowingobjectives: totestthevalidityoftheOMLtheory, toassessorbitaltethercurrentcollectioncapabilityfromplasma,and toassesstheapplicabilityoftheOMLmodeltotetherswithotherthancylindricalgeometry.The approach applied exists essentially in measuring the IV characteristics of severalspecimens of tethers, with various geometrical shapes and dimensions, exposed to asimulatedspaceenvironmentofionosphericparameters.ThespecimensofvariousshapesandsizesaresummarizedinTable13.Thisselectionhasbeenmadetorepresentvariousdesignoptions:asimplecylindricaltether,atapeforincreasedmassefficiencyandadualstrand tether (for increased resistance against micrometeoroids and orbital debris). Allsamplesare10cminlength,somuchlargerthanthesamplediameter.Eachspecimenhasbeen placed between two guards of equal dimensions, such that the measurements aremadeinacylindricalplasmageometrywithoutsignificantedgeeffects.The experimentshave been designed to investigate the impact on the current collection caused byperturbationsduetoboththeambientgeomagneticfieldandthemagneticfieldselfinducedbythecurrentflowinginthetether,neitherofwhichisincludedinthederivationoftheOML model. They are compared to those of Gilchrist e.a., who has performed electroncollectiontestson(unguarded)cylindricalandtapesamplesof1030cmlength,inaplasmageneratedbyaHallthruster,howeverwithoutgeomagneticandselfinducedfieldeffects[Gilchrist2002].ThelargeplasmachamberfacilityofIFSICNRhasbeenselectedasasuitablefacilityfortheproposed tests. The tests were designed, performed and analyzed by F. de Venuto & G.Vannaroni[Kruijff2001.I],theresultsaresummarizedhere.AnalysisofTetherApplications 81Typeofelectrode DimensionsSinglewire Diameter0.8mmSinglewire Diameter2mm(withcurrentcarryingwireincenter)Bifilarwire Diameter0.8mm,centertocenter2.8mmTape Width3.6mm,Thickness0.05mmTable13.DimensionsoftethersamplesusedintheplasmatestsTestchambergeometryandconditionsareprovidedinTable14 andFigure25.TheDebyelengthDisafundamentalplasmascalingparameterintermsofwhichtheOMLvaliditycanbeexpressed[Sanmartin1999].ThetestconditionscanbeconsideredtypicalforaLowEarthOrbittetheroperation.Althoughthevoltagebiasapplied(200V)islowerthanthetypicalpotentialofkilovoltsforspaceapplications,itisstillhighlysuprathermalwithrespecttotheenergy of ionospheric electrons (~ 0.2eV), and therefore can be considered representativefortheelectroncollectionprocessinhighpotentialregimes(seealsoEq.2.29).TheresultingIVcharacteristics(Figure26, Figure27)showthecollectedcurrentIexp attheapplied bias voltage V, normalized to theelectronthermal current Ith (Eq.2.30), Inorm=Iexp/Ith.Duetotheproportionalityofbothcurrentswithbothplasmadensitynpl andtheelectrodesurfacethisnormalizationeliminatestheeffectsassociatedtotheplasmadensityvariationresulting from the samples current collection as well as the effects due to differentdimensions of the various tether samples. Two curves (in solid lines) indicate the OMLuncertainty(Eq. 2.29)duetothespreadoftheelectrontemperature.Afirstobservationisthatthereseemstobe asystematic tendencytoexceed thepredictionsofthe model.Thediscrepancyfromtheorycanbeapproximatelyevaluatedabout25%,thelargestdeviationbeingassociatedtothetapesample.Thetapeandmultistrandtethershavebeeninitiallyoriented with minimum crosssection towards the plasma beam. When orientedperpendiculartotheflow,thetapeshowsa20%reductionincurrent,probablyduetowakeeffects. Gilchrist e.a. observe quite a similar trend, with up to 15% increased collectionefficiencywithrespecttoOMLabove50V.Theyfindhoweverthattheperpendiculartapecollects510%morethantheparallel,possiblyduetosampleendeffects,duetothelackofguards,orsourcedrainage,whichseemstoparticularlyeffecttheparallelsample.In any case, the OML does provide a good first guess estimate of electron collectionperformance,foralltestedtethershapes,includingtapesandmultistrandtethers,atleastforasamplewidthlessthanorequalto23D.Ausefullessonfromthisisthatmultiple(n)wire tethers of diameter d can be treated (as far as electron collection is concerned) as asinglewireofdiametern*d.NotethatGilchriste.a.haveperformedteststoasmuchas15Dtapewidth,andalthoughsomereductioninefficiencyisobserved,possiblyduetosourcedrainage,theresultsforthesesamplesdonotgomorethan12%undertheOMLpredictionat300V[Gilchrist2002].82 Chapter3Facility SIM.PL.EXatIFSICNRAmbientplasmaelectrontemperature 2000KAmbientplasmadensity5e12m3SamplebiasforIVcurvemeasurement 0200VAmbientgeomagneticfieldB 0and0.3e4T(orthogonaltobothplasmaflowandtethersample)DebyelengthD~1.4mmCurrentforselfinducedfieldtest 010ASamplelength 10cm(plus10cmguardoneitherside)Sampledistancetoplasmasource 2.25mPlasmareferencemonitoring LangmuirProbeforplasmadensity,electrontemperatureandplasmapotentialRetardingPotentialAnalyzer(RPA)forionbeamenergyIonsourceSynthesisA+acceleratedto~8km/sElectronsource FilamentheatedatthermoionictemperaturesTable14.Testconditions LPRRPAChambermainaxisPl asmaSourcePlasmaflow25cm17 cm15 cm225cmGUARD
SAMPLE
GUARDZYX10 cm
10 cm
10 cmFigure25.ExperimentalsetupofplasmatestsFigure26.IVcharacteristicsatB=0(left)andB=0.3104T(right)AnalysisofTetherApplications 83Figure27.IVcharacteristicsatvariousDCtethercurrents.Thegeomagneticfieldisfoundtonotperturbsignificantlythecurrentcollectionfromtheplasma, which is plausible when considering that the electron gyroradius at LEOenvironmental conditions (about 5cm) is appreciably larger than the crosssectionaldimensions of the tethers under test [Sanmartin1999]. For large tapes (centimeter scale)additionaltestsarerequired,butintheSIM.PL.EX.facilitysuchalargesamplewouldleadtodrainingoftheelectronsource.Asfarastheselfinducedfieldisconcerned,theeffectofselfinducingDCcurrenthasbeentestedinthe2mmcylindersample.AreductionproportionaltotheDCcurrentisfoundofabout10%atitsmaximum level (10A) correspondingtothemaximumpotential(190V).Such a reduction is in line with expectations: the current produces a crossed system ofmagneticandelectricfields,causinganE B electrondriftalongthetetherthattendstoreduce the collected current. For likely mission currents of 1or2A this effect can beconsiderednegligible.3.2.2 TethereddeboostanddynamicinstabilityOccurrence of long term instability of electrodynamic tethers has been evidenced innumericalsimulations[Estes2000.IV],connectedwiththeProSEDSmission.Itisfoundduetothelongitudinalcomponentofthemagneticfieldandincreaseswithinclination.Severalinvestigations[e.g.Levin1987,Pelaez2000.I,II,Dobrowolny2002.I,II,Levin2007]havebeenundertaken with the aim of clarifying the various underlying instability mechanisms forelectrodynamictethers.Energyiscontinuallypumpedintothesystem,whichcauseslateraloscillations and eventually tether slackness or uncontrolled motion. The long terminstabilityseverelylimitsmasscriticalelectrodynamictetherapplications.Forthesecasesitmust be characterized and appropriately tackled, either by system design or by activecontrolmethods.Dobrowolny developed a linearized analytical model, simplifying the environmentalconditionsanddecouplingtransversemodesfromendmasslibrations[Dobrowolny2002.I].The modeled system is operating at maximum obtainable current level following OMLtheory. Aninstability is observed,as anexponentialgrowthintransversemodes. Outofplaneendmasslibrations,coupledtoinplanelibrations,showawavepacketbehavior.Theresultindicatethatthereisamaximumcurrentlevelforstability.84 Chapter3Forcomparison,asimulationofthesamesystemwasperformedbyETBSim,whichisbasedon a more general, nonlinear model (Section2.3.2). The environment was initially set tomatch the Dobrowolny simulations, featuring a simplified dipole magnetic field andsinusoidal plasma density. As in Dobrowolnys findings, ETBsim produces inplane andoutof plane endmass librations [Kruijff2001.I]. General behaviour is similar, e.g. wavepacketmodulationisrecognizedandthelibrationseemsstable,althoughtheamplitudeandmodulation period differ. These differences are thought to originate in severalsimplificationsintheappliedlineartheorywithrespecttothenumericalsimulation,suchasseriestruncation.Inaddition,crosscouplingbetweenlibrationandtransversemodeswasfoundtobesignificant(e.g.Figure29).Attheintegrationtimestepsused,itwasfoundthatthesystembecomesinstablebeyondnumericalaccuracywithinabout2weeks,althoughthelibrationmodeisasyethardlyexcited.FluctuationsofelectrondensityandmagneticfieldstrengthastheyoccurinorbitaroundEarthfurtherworsenthesituation.Foratypicalcase(7km,1mmbaretether,h=1000km,i=50. 700kg and 15kg endmasses) including also the ionospheric irregularities (IRI95model)andtheEarths436kmmagneticdipoleoffset,ETBSimshowsthatwithinaboutadaystime,transverse wavesseverelyaffecttethertension, whichdoes notoccur withouttheseeffects.Theseresultstriggerthequestionwhethersystemdesignchoicesorothersolutionscanbeidentifiedthatcontributetostabilityforthefulldurationofatypicalelectrodynamictetherapplication.Simulationresultsaddressingavarietyofdesignoptionsareheredescribed.As a case study, a relatively simple deboost application has been selected, intended forsatellitesthathavefailedorcompletedtheirnominalmission(defunct,Section2.2.2).Itisinitiallyassumedthatthetetherendmassisdeployeddownward.Theendmasscontainsnotonly acathode but allactive systems includingthetether deployeritself.In thiswaytheinterface to the defunct satellite is minimized. The tether is assumed bare. Based on testsimulationsthefollowingreferencetetherisdefined(usedforallsimulationsinthissectionunlessspecifiedotherwise): 6kmfailsafemechanicalpart,1.2kg. 6km failsafe conductive part, built out of two strands bare aluminum (each0.32mmdiameter,treatedforo=c=0.3),twomechanicalstrands,total5.3kg.Stability was investigated for tethered deboost of a defunct satellite of 700kg at 700kminitial altitude and 11.5 degree inclination. A lightweight endmass of 15kg has beenassumed initially. As a practical, objective measure for instability, the (simulated)occurrenceoftetherslacknessisproposed(i.e.zerotension),whichisassumedtocoincidewithlossofcontrol(Figure32).Thisoccurrencecanbeexpressedinmissiontime,howeverthemorepragmaticmeasurementusedhere,referringtothemissionobjective,isthedropinaltitudeachieved.Forthefullrangeofparametersettingsreportedhere,evenatcurrentslimitedtoaslittleas0.2A,thesimulationsshowedaprocessofexcitationofskiprope(combinationof first inAnalysisofTetherApplications 85planeandoutofplanetransversemodes).Thetethereventuallystartstoresembleawhipwiththelightendmassonitstip,cyclicallyinducingtensionshocksandfurthertransversewaves, that finally cause the tether to become slack. Such behavior has also been notedduring the simulations carried out for ProSEDS3. Consequently, all simulations show anearlyidenticaltensiondevelopment,whereonlytheonsetoftheinstabilitydiffersintimefromonesimulationtoanother.A typical example for the deorbit behavior is shown in Figure 28, which highlights theimpactofinclination.Therunsarestoppedatoccurrenceoftetherslackness.Shownistheinplane transverse mode. It is measured in degrees as the angle from the line betweenendmasses to the line between defunct satellite and middle of the tether. At largerinclinationtheonsetofinstabilityisdelayedduetothelowerelectrodynamicforceresultingfromalowerperpendicularmagneticcomponent.Descentrateisalsoreducedforthesamereason. Despite the fact that outofplane dynamics are more pronounced at higherinclination,thetetherinsuchahighlyinclinedorbitachievesasomewhatgreateraltitudedropbeforeinstabilityoccurs.Figure28.Effectofinclinationonstability(1sttransversemodeandachievedSMAdrop)Simple control laws do not reduce the onset of instability, due to the coupling betweenlibrationsandtransversemodes,asillustratedinFigure29.Acurrentcontrolisappliedtodampen the inplane librations. The control is an antiphased current modulationsuperimposed on a constant current (0.3A), assuming perfect knowledge of the inplaneand outofplane angles (e.g. through GPS or phase reconstruction from tensionmeasurements).Althoughthecontrolis,briefly,effectiveindampingtheinplanelibration,thefirsttransversemodeisexcitedandeventuallycrossexcitestheinplanelibrationmodebeyondcontrolaswell.Similarlywhenacurrentcontrolisappliedthatdampensbothinplane libration and first transverse mode, the second transverse mode is excited, withsimilardisturbingresultsonthelowermodes.NotethatinrecentyearsLevinhasdevelopedamethodbasedontethermodesandphaseestimation that, although not able to fully subdue the instability appears successful atpostponingitsignificantly[Levin2007].3 Enicro Lorenzini, Private communications, February 200186 Chapter3Libration-4-2024680 5000 10000 15000 20000 25000 30000Time [s]Amplitude [deg]libration damping controlno controlFirst lateral mode-25-20-15-10-505101520250 5000 10000 15000 20000 25000 30000Time [s]Amplitude [deg]libration damping controlno controlFigure29.Dampingofinplanelibration(left)excitesfirsttransversemode(right).Insupportofsuchactivecurrentcontrolfurtherdesignoptionswereconsidered.Mostofthesystemadaptationsthattendtoimprovetimetoinstabilityincreasetheratiooftension(Eq.2.16)versusLorentzforce(Eq.2.28),althoughnotalwaystheachievedaltitudelossisimprovedaswell.CurrentlimitationforexamplereducesthecyclicvariationoftheLorentzforceandofitsdistributionoverthelengthofthetether.Thisisparticulartrueifatalevelsustainablebythe lowest plasma density within one orbit. Most simulated cases ran at such a level, of0.2A.Thecurrentlevelcanbeincreasedastheorbitgetslowerduetoincreasingplasmadensity,suchthatthedeorbitrateimproves.Inthesimulations,tethercurrentisassumedlimited by ohmic dissipation through a variable resistor near the cathodic end. Such asystemhastheadvantagethat,duetotheohmicvoltagedropthetetherwillbenegativelybiased over a large part of its length (Figure 30). In the negatively biased section noelectronsarecollected,thusresultinginanearlyconstantcurrentovermuchofthetetherlength. Undersuchcurrentlimitation,additionalbaretetherlengthleadstosimultaneousincrease of both gravity gradient and Lorentz force. The fraction of tether that featuresconstantcurrentisalsoincreasedandsimulationsfindstabilityimproved. B0Vm1Im2FLL vI0AeeVemf VRImaxVRFigure30.CurrentlimitationduepotentialdropVRbyresistoratcathodicendAnalysisofTetherApplications 87Increaseofcathodeendmassisacostlysolutionbutcontributestostabilityimprovement.Ifendmassandcurrentarebothincreasedbythesameamount,asexpectedthesystemwillstill drop faster in altitude, but will also outlast the lighter, lowcurrent reference systembeforeinstabilityoccurs.Amechanicaltethersegmenthasbeenincludedinadditiontotheconductivesegmentinthereference design. This has been done for two reasons. On one hand, it ensures a lowdeploymentfrictionduringtheinitialpartofthedeployment.Secondly,althoughinclusionof a mechanical tether segment represents some extra system mass, for the simulatedapplicationitincreasesthetensionandsystemspassivelongtermstabilitymoreeffectivelythananincreaseofendmassbythesameamountwoulddo.Anevenmoreeffectiveuseofextramassisachievedwhenthetetherisdeployedupward,with a dummy endmass the extra mass required for this concept, whereas the cathode,deployer and electronics remain at the defunct satellite, now the lower end of the tethersystem. Insuchacase,forabaretetherormechanical/baretethercombination,thetorquearmaroundthecenterofmass(nearthedefunctsatellite),availabletotheresultingLorentzforce,isreduced.ThecasepresentedinFigure31isbasedonthereference12kmtetherwitha15kgendmasslimitedat0.2A.Thisadaptedsystemiseventuallydestabilizedwhenthesecond transversemodeoverexcites.Notethatitwasfoundthattheelectrodynamictetherneedsnottobedeployedaccuratelytoavertical.Anonzeroinplaneanglebeforecathodeactivationhasnonegativeimpactonstability.Finally,asanalternativeway tomaintain stability, aprograderotating tethersystemhasbeen proposed (see also Section3.2.4). To achieve the desired system spin, the 15kgendmassneedstobeprovidedwithaninitial Vof about30m/sagainstthedirectionoforbital velocity. The spininduced centrifugal force will increase with time as the spinaccelerates due to the Lorentz torque and this increase helps to maintain stability. Thespinning tether solution will operate on the average at a 30% of the Lorentz force of averticaltether,duetotheunfavorableangleofthetetherwithrespecttothemagneticfieldlines during much of the spin. If a second cathode is added on the opposite side of thetether,thisfractionisincreasedtoabout60%.TheadditionalcomplexityandlossinLorentzforcemaybecompensatedforsincecurrentlimitationisnolongerrequired.Apart from these measures that directly affect the balance of Lorentz force and tension,moresubtledesigntradeoffs,suchasfortethermaterialproperties,canhaveasignificanteffectaswell.Alowstiffness/viscosityratiohasbeenfoundtobespecificallypowerfulforpostponinginstability, Figure32.Notethat asignificanteffectoftetherinternal(Coulomb)dampingasevidencedbyTiPS[Barnds1998]willlikelyhaveabeneficialeffectonstabilityalsoifthereisnospringmassoscillation,butisnotrepresentedbyETBSim.Somenontrivialeffectsarereportedin[Kruijff2001.I].Itisforexamplefoundthattethercoolingthatoccursduringtheeclipseperiodofanorbithasafavorableeffectonstability.Adecrease in ohmic resistance duetotethercooling balancesthe negative effecton currentcollectionasaresultofthedecreasedplasmadensityontheeclipsesideoftheEarth.Theequilibriumtemperatureofthetetherdependsontheratioofopticalpropertiesand(Eq.88 Chapter34.30).A ratioof /closeto1withlowvaluesbothfor and,forgradualtemperaturechange,willfurtherincreasethesystemspassivelongtermstability.Figure31Cathodelocationimpactonstability(inplanelibration),Referencehasthecathodeontheendmass,deployeddownwardFigure32.Effect16folddecreasestiffness/viscosityratioontransversemodeandinstability(gray).With the toolbox of possible measures described here tether oscillatory behavior can beconstrainedduringthedurationofthedeboost. Table15 providesanoverview.Themosteffective system design tools are system spinup, upward deployment direction of theendmass,increaseofendmassandmechanicaltetherlength,selectionofapropercurrentlevelthatcanbemaintainedovertetherlengthandtime,highviscosityandlowstiffness.Note that when the high plasmadensity ranges of the ionosphere are reached, below600km,itisnolongerrecommendedtouseatetherfordeorbit,ratherdisconnectthetetheraltogether(Section3.2.3).Adeboostwithlimitedcurrenttakesuptoamonth,duringwhichactive collision avoidance may be required, e.g. by ground control of descent rate. Thebenefitofareleaseatthisaltitudeisnotonlythattotalcollisionriskisreducedbutalsotherequirement for maintaining stability. This less ambitious approach in fact makes thetethereddeboostapplicationbothmoresafeandmorepractical.AnalysisofTetherApplications 89Parameter FindingSystemspin(centrifugalforce) Requiresspinupofendmass.Effectivenessdecreasesby70%(singlecathode)or40%(withsecondcathode)butnocurrentlimitationrequired(Section3.2.4).Tetherrelease Reducesstabilitydurationrequirement.Tetherviscosity/stiffnessratio Dampensmodes.Currentcontrol Stateestimationmethod[Levin2007].Hasnotbeenverifiedinthiswork.Defunct satellite and endmasslocationTorquesarelowerwhenendmassisup,tetherishigherinorbit.Additionalmechanicaltether Increasesgravitygradientforceatlowmasscost.Currentlimitation Limitbelowlevelofminimumwithinorbittoreducefluctuations.Furtherreductionincreasestimetoinstability,butreducestheattainedaltitudedrop.Tetherlength IncreasesgravitygradientforceandLorentzforce.Opticalproperties Reducesdiurnalcycleeffect.Endmass Increasesgravitygradientforcebutincreasessystemmass.Table15. Recommendationsformaintainingstabilityforbaretetherdeboostapplicationwithlightweightnonfunctionalendmass3.2.3 TethereddeboostandcollisionriskTethers can contribute to the debris mitigation effort. In Section 3.1.2, a niche has beenidentifiedformechanicaltethers,particularlyforacombinationoflaunchassistandspentstage deorbit. Electrodynamic tethers however can be employed for active andpropellantless reduction of many types of space debris, including for example defunctconstellationsatellites[Forward1998].Anelectrodynamictethersystemrequiresnodeorbitburnpropellant,and,especiallyifpassive,cankeepthedeorbitmodulesimple.However,alsotheriskthatsuchtethersthemselvesposetoothersatellitesinorbitmustberecognized.Theextendedcollisionareaofatethersweepsthroughasignificantvolumeofthe orbital environment even for fairly brief operations, such as for example a twoweekdeorbitofadefunctsatellite.Considerationoftethercollisionriskhasalreadyledtoseveralcancellationsofmissionsandexperimentsoverthepastdecade(Section1.3).The question rises how benefits and risks compare to each other for the case of debrismitigationbyelectrodynamictether. Inthissectionelectrodynamictetherapplicationsfordeorbit are considered while taking into account the added risks caused by the tethersthemselves.First,theconventionalalternative,deboostbyretrorocket,isbrieflyconsidered.Then,moreextensively,thetethereddeboostnetriskiscomparedtothatoftheBusinessAsUsual(BAU),whichisacompletelypassiveapproach.90 Chapter3The conventional retrorocket deboost system, with little doubt, is superior overelectrodynamictethersintermsofcollisionriskmitigation.Inaworstcase,thesystemwillmalfunctionandthedefunctsatelliteendsupinaBAUsituation,justasthetethersystemcould if deployment fails to initiate. A preference for an electrodynamic tether system, iffound comparably reliable, will thus primarily depend on system mass and cost. Tetherdeorbitsystemsofverylowcomplexityhavebeenproduced,albeitnotdemonstratedyet[Hoyt2000].Alsofromaperspectiveofsystemmassanelectrodynamictethersystemcouldbeofinterest.AsystemmasscomparisonisprovidedbyHeide&Kruijff[Heide2001.I]basedonestimatesfor the tether system mass from Forward & Hoyt [Forward1998] versus a rocket massbasedonSchonenborg regarding anautonomoussystemfortypicalconstellationsatellites[Schonenborg2000]. It is concluded that electrodynamic tethers offer considerable massadvantagefordeorbitofheavyobjects,byuptoanorderofmagnitudeformultitonobjectssuch as spent stages, and even for small satellites of only hundreds of kilograms if theorbitalaltitudeissufficient,largerthan400600km.Giventhechoiceforatetheredsystemoverretrorocketdeorbit,theelectrodynamictethersystem performance shall be compared to Business as Usual. Heide & Kruijff propose asimplifiedmethodologyforsuchacomparisoninwhichthreemajorparametersneedtobeevaluated[Heide2001.I]:1.ProbabilityofbreakupcollisionwithdebrisandnonguidedoperationalsatellitesA collision with debris that would lead to cutting of the tether, no matter what thesecondaryconsequencesmaybe,isassumedtobecatastrophicbyitself.Suchastrictassumption is likely to be imposed for tether operations [APEX1997]4. Tetherrobustness against impacts is to be achieved by failsafe design (multistrand tetherssuchastheCarrollCaduceus[Kruijff1998] orHoytether[Forward1995])orasafelifedesign(tapes,Section4.3.1).Amultistrandtetherwithawidthof10cmisassumed.Catastrophic is considered impact with any debris of diameter >10cm or any nonguidedoperationalsatellite.For comparison to the BAU case, a collision with the defunct satellite is consideredcatastrophiciftheimpactingparticleislargeenoughtoleadtobreakupofthesatellite.Criticalimpactenergyoftheparticleisassumedtobe40kJ/kg,foratypicalcasethisisaparticleofabout10cm[Anselmo1999].Nofurtherriskassessmentisperformedonthepartsafterbreakup.2.ActiveavoidancerequirementIfitisoperationallyviableandthetethersystemdeorbitrateiscontrollable(e.g.byavariableohmicresistance,Section3.2.2),activeavoidancecanbeconsidered.Notethat4Thisisperhapsaconservativeapproach.Itcanbereasonedthatatethercutdoesnotleadtoasignificantlyworsesituation than BAU. The impacting debris may only be superficially damaged due to the tethers low ballisticcoefficient.Ifitisalsoassumedthattheremainsofthetethercanbedisconnectedfromtheendmasseswhenthetetheriscut,thefreefloatingpartswilldeorbitquicklyandriskisthuscontained[Heide2001.II].AnalysisofTetherApplications 91all objects larger than 10cm are being tracked from the ground. If the number ofactionstoavoidtheseobjectsislimited,itmayprovefeasibletoreducetethersystemcollision probability to (near)zero. For active avoidance, a safety box aroundoperational satellites or debris shall be considered. The expected number of tethermaneuversistobedeterminedrequiredtoavoidpassingthroughthesesafetyboxes.Whenconsideringactiveavoidancebytethers,theprobabilityoflossofcontrol,oratransition from the controlled case to the uncontrolled case, should be taken intoaccount,e.g.incaseofanunplannedend




![CALL FOR PAPERS - JSASSCALL FOR PAPERS Asian Joint Conference on Propulsion and Power 2010 The Korean Society of Propulsion Engineering [KSPE] The Japan Society for Aeronautical and](https://static.fdocuments.nl/doc/165x107/5f0673e27e708231d4181156/call-for-papers-jsass-call-for-papers-asian-joint-conference-on-propulsion-and.jpg)