ROBOTICS Bedieningshandleiding Algemeneveiligheidsinformatie · 2019-02-26 ·...
60
ROBOTICS Bedieningshandleiding Algemene veiligheidsinformatie
Transcript of ROBOTICS Bedieningshandleiding Algemeneveiligheidsinformatie · 2019-02-26 ·...
ROBOTICS
BedieningshandleidingAlgemene veiligheidsinformatie

Trace back information:Workspace R18-1 version a11Checked in 2018-03-25Skribenta version 5.2.025

BedieningshandleidingAlgemene veiligheidsinformatie
IRC5
Document-ID: 3HAC031045-009Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
De informatie in deze handleiding kan zonder voorafgaande melding wordenonderworpen aan veranderingen en mag niet als een verplichting van ABB wordenopgevat. ABB kan niet verantwoordelijk worden gesteld voor fouten die in dezehandleiding kunnen voorkomen.Tenzij dit uitdrukkelijk is aangegeven, mag niets uit deze handleiding als een garantieof waarborg door ABB voor verlies, schade aan personen of zaken, geschiktheidvoor een specifiek doel e.d. worden beschouwd.ABB kan onder geen enkele omstandigheid aansprakelijk worden gesteld voorincidentele of bijkomende schade door gebruik van deze handleiding en productendie erin worden beschreven.Deze handleiding en delen daarvan mogen niet worden gereproduceerd of gekopieerdzonder schriftelijke toestemming van ABB.Bewaren voor toekomstig gebruik.Extra exemplaren van deze handleiding zijn verkrijgbaar bij ABB.
Vertaling van de oorspronkelijke gebruiksaanwijzing.
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.ABB AB, Robotics
Robotics and MotionSe-721 68 Västerås
Zweden
Inhoud7Overzicht van deze handleiding .......................................................................................................
111 De robot111.1 Algemene informatie ..........................................................................................111.1.1 Aansprakelijkheidsbeperking .....................................................................141.1.2 Toegepaste normen .................................................................................161.2 Veiligheidsterminologie ......................................................................................161.2.1 Veiligheidssignalen in de handleiding .........................................................181.2.2 Veiligheidssymbolen op productlabels ........................................................241.2.3 Symbolen op veiligheidslabels ...................................................................281.3 Veilig werken ....................................................................................................281.3.1 Beschermende stop en noodstop ...............................................................301.3.2 Veiligheidsvoorzieningen ..........................................................................311.3.3 Over de automatische modus ....................................................................331.3.4 Over de handmatige modus ......................................................................361.4 Veiligheidsacties ...............................................................................................361.4.1 Veiligheidsrisico's tijdens installatie en onderhoudswerk op robots ..................381.4.2 Brandblussen .........................................................................................391.4.3 Zorg ervoor dat de hoofdvoeding is uitgeschakeld .........................................401.4.4 Risico's die verband houden met elektrische onderdelen onder spanning ..........421.4.5 De eenheid is gevoelig voor ESD ...............................................................431.4.6 Vrijgavevoorziening en vasthoudfunctionaliteit .............................................441.4.7 Herstel van noodstoppen ..........................................................................
452 De manipulator452.1 Bewegende robots zijn mogelijk dodelijk ...............................................................462.2 De eerste testsessie kan letsel of schade veroorzaken .............................................472.3 Werken binnen het bereik van de robot .................................................................482.4 Hete onderdelen kunnen brandwonden veroorzaken ................................................492.5 Remtest ...........................................................................................................502.6 Veiligheidsrisico's bij het gebruik van batterijen ......................................................512.7 Veiligheidsrisico's tijdens werkzaamheden met tandwielkastolie (olie of vet) ................
533 De robotcontroller533.1 Sluit de kastdeur ...............................................................................................543.2 Risico van uitschakeling van de functie "Beperkte snelheid 250 mm/s" .......................553.3 Gebruik van FlexPendant ....................................................................................
57Index
Bedieningshandleiding - Algemene veiligheidsinformatie 53HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
Inhoud
Deze pagina is opzettelijk blanco gelaten
Overzicht van deze handleidingOver deze handleiding
Deze handleiding bevat alle veiligheidsinstructies voor de manipulatoren en decontrollers. Deze handleiding is vertaald naar meer talen dan deproducthandleidingen met de onderhoudsinstructies.Bij het gebruik van manipulators ontstaan de meeste ongelukken doordat debasisveiligheidsregels en voorzorgsmaatregelen niet worden opgevolgd. Doorpotentieel gevaar vroeg te erkennen kunnen ongelukken vaak worden voorkomen.Onjuiste inbedrijfstelling en bediening van het manipulatorsysteem is gevaarlijken kan leiden tot ernstig letsel en zelfs de dood.Voor het werken aan of met de robot moeten de veiligheidsinstructies in dezehandleiding en de Bedieningshandleiding - Informatie overnoodbeveiliging-handleiding zorgvuldig worden gelezen en opgevolgd. Dezeinstructies bieden basisregels voor veiligheidsmaatregelen. De veiligheidslabelsop de robot bevatten verdere veiligheidsinformatie voor de herkenning van specifiekgevaar.
GebruikDeze handleiding biedt belangrijke informatie die nodig is voor een veilige bedieningvan de robot. Personeel dat met de robot werkt moet eenvoudig toegang hebbentot deze handleiding. Bewaar deze handleiding daarom bij de robot.Voor alle werkzaamheden aan de robot moet u de informatie in deze handleidinggebruiken. Dat betekent dat u deze handleiding moet gebruiken terwijl u met eenindustriële manipulator en/of de IRC5-controller van ABB Robotics werkt. Ook alsu de robottoepassingen gebruikt, moet u voordat u met uw werk begint, ervoorzorgen dat u de veiligheidsverwante informatie hebt gelezen.
Opmerking
Deze handleiding moet altijd voor eenvoudige toegang samen met de robotworden opgeslagen!
Opmerking
De robot is gebouwd met geavanceerde componenten volgens erkendeveiligheidsnormen. Het gebruik kan echter leiden tot ernstig letsel of de doodvan de bediener en kan schade veroorzaken aan de robot of ander eigendom.De robot mag alleen worden gebruikt waar het voor bedoeld is en alleen als derobot in foutloze staat verkeert, als er rekening is gehouden met deveiligheidsmaatregelen en als de instructies in de gebruikershandleidingenworden opgevolgd. Kwesties die de veiligheid in gevaar kunnen brengen moetendirect worden opgelost. Tijdens deze periode mag de robot niet worden gebruikt.
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 73HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
Overzicht van deze handleiding
Voor wie is deze handleiding bedoeld?Deze handleiding is bedoeld voor:
• Operateurs• Servicetechnici• Iedereen die de robot gebruikt of er mee werkt
VoorwaardenOnderhouds-/reparatie-/installatiepersoneel dat met een ABB-robot werkt, moet:
• zijn opgeleid door ABB en over de vereiste kennis beschikken vanmechanisch en elektrisch installatie-/reparatie-/onderhoudswerk.
• de handleiding lezen voordat hij enig installatie- of onderhoudswerk aan derobot uitvoert.
ReferentiesIn de onderstaande documenten wordt de robot gedetailleerd beschreven, inclusiefmontage-, onderhouds- en veiligheidsinstructies. Alle documenten staan in hetdocumentatiepakket en in myABB (klantportaal van ABB).
Document-IDReferentie
3HAC027098-009Bedieningshandleiding - Informatie over noodbeveiliging
Producthandleiding voor de robot-besturingseenheid
Product manual for the manipulator
3HAC027097-009Bedieningshandleiding - Van start, IRC5 en RobotStudio
3HAC050941-009Bedieningshandleiding - IRC5 met FlexPendant
3HAC020738-009Bedieningshandleiding - Probleemoplossing IRC5
Opmerking
De vermelde documentnummers voor softwaredocumenten zijn geldig voorRobotWare 6. Equivalente documenten zijn beschikbaar voor RobotWare 5.
Herzieningen
BeschrijvingHerziening
Eerste herziening-
Wijzigingen/correcties zijn aangebracht in het hoofdstuk De IRC5-controller.A
De volgende wijzigingen en correcties zijn aangebracht:• Zie voor de lijst met bijgewerkte standaarden Toegepaste normen op
pagina 14.• Bijgewerkte afbeeldingen voor veiligheidssignalen voor de niveaus
Gevaar en Waarschuwing, vindt u onder Veiligheidssignalen in dehandleiding op pagina 16.
• Nieuwe veiligheidslabels op de manipulators, zie Veiligheidssymbolenop productlabels op pagina 18.
• Herziene terminologie: robot vervangen door manipulator.• IRC5 Compact Controller toegevoegd.
B
Vervolg op volgende pagina8 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
Overzicht van deze handleidingVervolg
BeschrijvingHerziening
De volgende wijzigingen en correcties zijn aangebracht:• Verduidelijking voor VS en Canada met betrekking tot Handmatige
modus voor volledige snelheid (100%). Zie Werken binnen het bereikvan de robot op pagina47 en Over de handmatige modus op pagina33.
• Zie voor een uitleg van de stops Beschermende stop en noodstop oppagina 28.
• Zie voor een uitleg van Dual Cabinet ControllerZorg ervoor dat dehoofdvoeding is uitgeschakeld op pagina 39.
C
De volgende wijzigingen en correcties zijn aangebracht:• Veiligheidslabel toegevoegd voor ketensling met inkorthaak, zie Veilig-
heidssymbolen op productlabels op pagina 18.
D
De volgende wijzigingen en correcties zijn aangebracht:• Verduidelijking over de controle of de beveiligingsfuncties van de
FlexPendant na een schok werken, zie Gebruik van FlexPendant oppagina 55.
• Kleine correcties.
E
Kleine correcties.F
Veiligheidsrisico's bij het gebruik van batterijen op pagina 50toegevoegd.G
De handleiding wordt bijgewerkt met de nieuwe hoofdcomputer (DSQC1000),zie De robotcontroller op pagina 53.
H
De volgende wijzigingen en correcties zijn aangebracht:• Bijgewerkte beschrijvingen van stops in sectie Beschermende stop en
noodstop op pagina 28.• Zie voor extra informatie over risico's als de robot hoog is geïnstalleerd
Veiligheidsrisico's tijdens installatie en onderhoudswerk op robots oppagina 36.
• Zie voor extra informatie over de werkingsmodi Over de automatischemodus op pagina 31 en Over de handmatige modus op pagina 33.
• Extra informatie over het T10 jog-apparaat.• Zie voor extra informatie over labels op de controller Symbolen op vei-
ligheidslabels op pagina 24.
J
Informatie toegevoegd over collaboratieve robots.K
Versie 17.1.• Toegevoegde sectie Herstel van noodstoppen op pagina 44.• Bijgewerkte beschrijvingen van stops in sectie Beschermende stop en
noodstop op pagina 28.
L
Versie 17.2.• Kleine correcties.
M
Versie 18.1.• De inhoud van de handleiding is gedeeltelijk geherstructureerd. De in-
houd in sectie Het joggingapparaat is verplaatst naar secties De robotop pagina 11 en De robotcontroller op pagina 53.
N
Bedieningshandleiding - Algemene veiligheidsinformatie 93HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
Overzicht van deze handleidingVervolg
Deze pagina is opzettelijk blanco gelaten
1 De robot1.1 Algemene informatie
1.1.1 Aansprakelijkheidsbeperking
Beperking van aansprakelijkheidInformatie in deze handleiding met betrekking tot de veiligheid mag in geen gevalals een garantie van ABB worden opgevat dat de industriële robot geen letsel ofschade zal veroorzaken, zelfs als alle veiligheidsvoorschriften worden nageleefd.De informatie heeft geen betrekking op het ontwerp, de installatie en de bedieningvan een compleet systeem, noch op alle randapparatuur die van invloed kan zijnop de veiligheid van het gehele systeem.Er kan met name geen aansprakelijkheid worden aanvaard als letsel of schadeveroorzaakt werd om een van de volgende redenen:
• Gebruik van de robot op andere manieren dan bedoeld.• Onjuiste bediening of onderhoud.• Werking van de robot wanneer de veiligheidsvoorzieningen defect zijn, zich
niet op de beoogde locatie bevinden of op een andere manier niet werken.• Wanneer de instructies voor bediening en onderhoud niet worden opgevolgd.• Niet-geautoriseerde ontwerpwijzigingen in of rond de robot.• Reparaties uitgevoerd door onervaren of niet-gekwalificeerd personeel.• Vreemde voorwerpen.• Overmacht.
Land-/regiospecifieke regelsOm het personeel te beschermen, moet het complete systeem worden ontworpenen geïnstalleerd in overeenstemming met de veiligheidseisen die zijn vastgelegdin de normen en voorschriften van het land waar de robot is geïnstalleerd.
Te observeren door de leverancier van de het complete systeemDe integrator is ervoor verantwoordelijk dat de veiligheidsvoorzieningen die nodigzijn om het personeel dat met het robotsysteem werkt te beschermen, correctontworpen en geïnstalleerd werden.Bij integratie van de robot met externe apparaten en machines:
• De leverancier van het volledige systeem moet ervoor zorgen dat alle in deveiligheidsfunctie gebruikte kringen onderling verbonden zijn, inovereenstemming met de voor deze functie toepasselijke normen.
• De leverancier van het volledige systeem moet ervoor zorgen dat alle in denoodstopfunctie gebruikte kringen op een veilige manier onderling verbondenzijn, in overeenstemming met de voor deze noodstopfunctie toepasselijkenormen.
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 113HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.1.1 Aansprakelijkheidsbeperking
De integrator van de definitieve aanvraag moet een beoordeling van de gevarenen risico's (HRA) uitvoeren.
Opmerking
De integrator is verantwoordelijk voor de veiligheid van de uiteindelijketoepassing.
Veilige toegangHet robotsysteem moet zodanig ontworpen zijn dat een veilige toegang mogelijkis tot alle ruimten waar interventie nodig is tijdens bediening, afstelling enonderhoud.Wanneer het nodig is om taken uit te voeren binnen de beveiligde ruimte dan moeter veilige en adequate toegang zijn tot de taaklocaties.Vóór de werkruimte van de robot moeten veiligheidszones worden ingesteld diemoeten worden doorkruist om toegang te krijgen tot de werkruimte van de robot.Hiervoor zijn lichtstralen of gevoelige vloermatten geschikt.Om de operator buiten de werkruimte van de robot te houden moeten draaitafelsof iets dergelijks worden gebruikt.Er wordt een veiligheidshek aanbevolen om een veilige ruimte te garanderen. Ermoet voldoende ruimte rond de manipulator zijn om degenen die ermee werkente beschermen tegen gevaren zoals pletgevaar.Het hek of de behuizing moet zo worden afgepast dat het de kracht kan weerstaandie ontstaat wanneer een door de robot gehanteerde last valt of metmaximumsnelheid wordt losgelaten. De maximumsnelheid wordt bepaald op basisvan de maximumsnelheid van de robotassen en de plaats waar de robot werkzaamis in de werkcel (zie sectie Robotbeweging in de Productspecificatie).Houd ook rekening met de maximaal mogelijke impact van een gebroken of slechtfunctionerend draaiend gereedschap of een ander op de robot aangeslotenapparaat.
Veilig hanterenGebruikers worden niet blootgesteld aan gevaren, waaronder uitglijden, struikelenen vallen.Het moet mogelijk zijn om gereedschappen zoals frezen, enz., veilig uit te schakelen.Zorg dat de beschermkappen geloten blijven totdat de frees stopt met draaien.Onderdelen moeten via handmatige bediening (kleppen) kunnen wordenvrijgemaakt.
Veilig ontwerpEr moeten noodstopknoppen op gemakkelijk toegankelijke plaatsen wordengeplaatst, zodat de robot snel kan worden gestopt. Als een van de knoppen nietalle bewegingen van de robotcel blokkeert, moet elke noodstopknop wordengemarkeerd, als er meer dan één is voorzien, teneinde de aangewezenveiligheidsfunctie aan te geven.
Vervolg op volgende pagina12 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.1.1 AansprakelijkheidsbeperkingVervolg

Grijpers/eindaanpassingen moeten worden ontworpen zodat zij in geval van eenstroomstoring of een storing bij de besturingseenheid, de werkstukken kunnenvasthouden.Onbevoegde wijzigingen van de oorspronkelijk geleverde robot zijn verboden.Zonder toestemming van ABB is het verboden om extra onderdelen te bevestigendoor te lassen, klinken of nieuwe gaten te boren in de behuizing. De sterkte kanhierdoor worden beïnvloed.
Voorzichtig
Zorg er bij gebruik van een grijper voor dat de grijper geen werkstuk kan latenvallen.
Bedieningshandleiding - Algemene veiligheidsinformatie 133HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.1.1 Aansprakelijkheidsbeperking
Vervolg
1.1.2 Toegepaste normen
Opmerking
De vermelde normen gelden ten tijde van de openbaarmaking van dit document.Uitgefaseerde en vervangen normen worden verwijderd uit de lijst wanneer nodig.
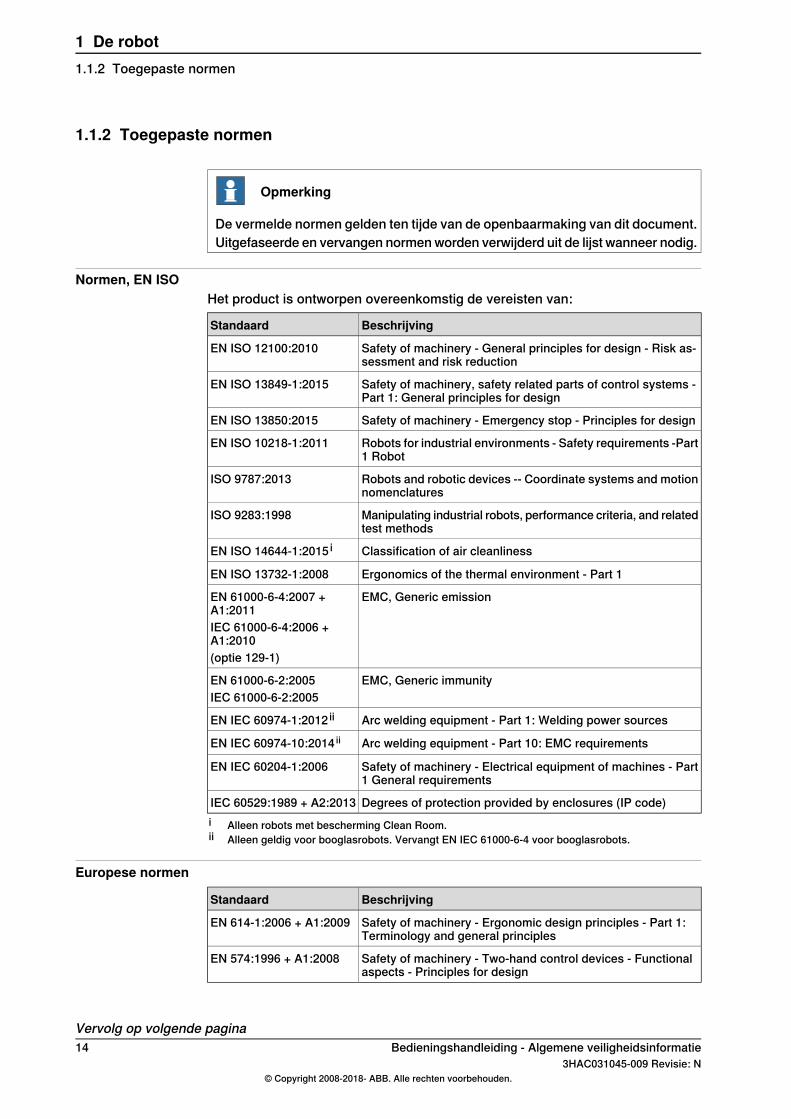
Normen, EN ISOHet product is ontworpen overeenkomstig de vereisten van:
BeschrijvingStandaard
Safety of machinery - General principles for design - Risk as-sessment and risk reduction
EN ISO 12100:2010
Safety of machinery, safety related parts of control systems -Part 1: General principles for design
EN ISO 13849-1:2015
Safety of machinery - Emergency stop - Principles for designEN ISO 13850:2015
Robots for industrial environments - Safety requirements -Part1 Robot
EN ISO 10218-1:2011
Robots and robotic devices -- Coordinate systems and motionnomenclatures
ISO 9787:2013
Manipulating industrial robots, performance criteria, and relatedtest methods
ISO 9283:1998
Classification of air cleanlinessEN ISO 14644-1:2015 i
Ergonomics of the thermal environment - Part 1EN ISO 13732-1:2008
EMC, Generic emissionEN 61000-6-4:2007 +A1:2011IEC 61000-6-4:2006 +A1:2010(optie 129-1)
EMC, Generic immunityEN 61000-6-2:2005IEC 61000-6-2:2005
Arc welding equipment - Part 1: Welding power sourcesEN IEC 60974-1:2012 ii
Arc welding equipment - Part 10: EMC requirementsEN IEC 60974-10:2014 ii
Safety of machinery - Electrical equipment of machines - Part1 General requirements
EN IEC 60204-1:2006
Degrees of protection provided by enclosures (IP code)IEC 60529:1989 + A2:2013i Alleen robots met bescherming Clean Room.ii Alleen geldig voor booglasrobots. Vervangt EN IEC 61000-6-4 voor booglasrobots.
Europese normen
BeschrijvingStandaard
Safety of machinery - Ergonomic design principles - Part 1:Terminology and general principles
EN 614-1:2006 + A1:2009
Safety of machinery - Two-hand control devices - Functionalaspects - Principles for design
EN 574:1996 + A1:2008
Vervolg op volgende pagina14 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.1.2 Toegepaste normen
Andere normen
BeschrijvingStandaard
Safety requirements for industrial robots and robot systemsANSI/RIA R15.06
Safety standard for robots and robotic equipmentANSI/UL 1740
Industrial robots and robot Systems - General safety require-ments
CAN/CSA Z 434-14
Bedieningshandleiding - Algemene veiligheidsinformatie 153HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.1.2 Toegepaste normen
Vervolg
1.2 Veiligheidsterminologie
1.2.1 Veiligheidssignalen in de handleiding
Inleiding op veiligheidssignalenDeze sectie beschrijft alle gevaren die kunnen optreden bij het uitvoeren van dewerkzaamheden, zoals beschreven in de handleidingen. Elk gevaar bestaat uit:
• Een bijschrift met het gevaarniveau (GEVAAR, WAARSCHUWING ofVOORZICHTIG) en het soort gevaar.
• Een korte omschrijving van wat er gebeurt als de operator/hetservicepersoneel het gevaar niet uitsluit.
• Een instructie voor het elimineren van het gevaar om het werk tevereenvoudigen.
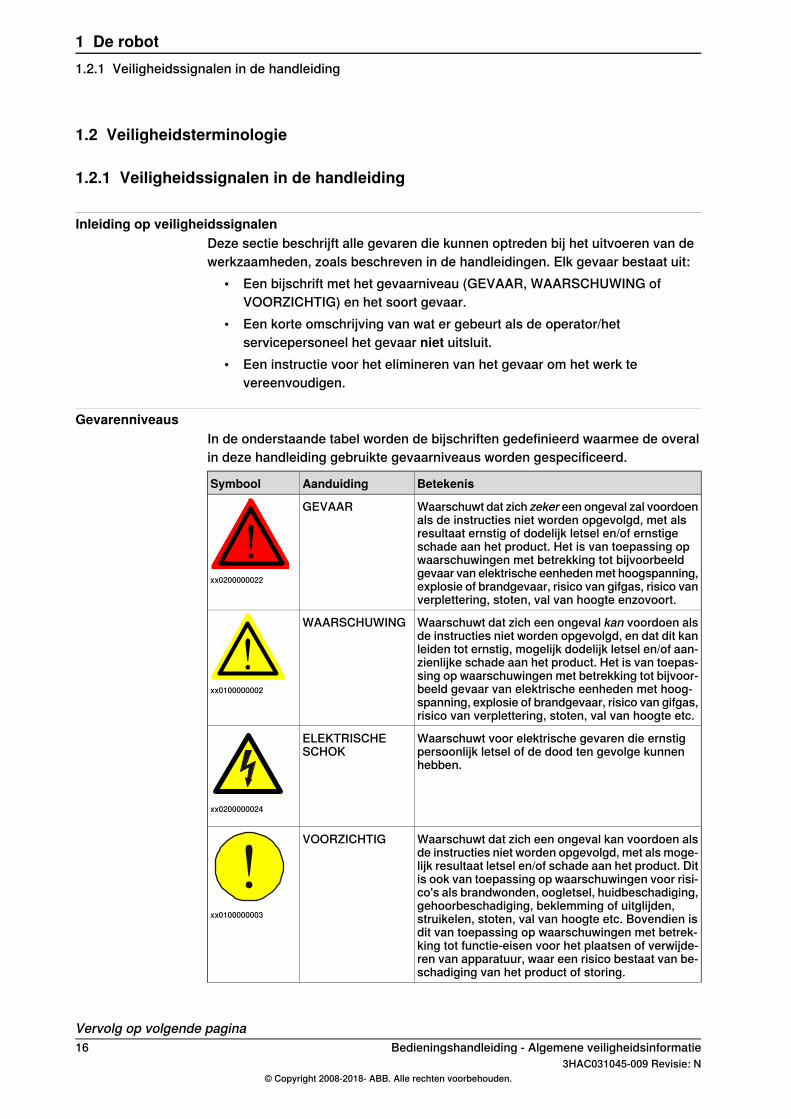
GevarenniveausIn de onderstaande tabel worden de bijschriften gedefinieerd waarmee de overalin deze handleiding gebruikte gevaarniveaus worden gespecificeerd.
BetekenisAanduidingSymbool
Waarschuwt dat zich zeker een ongeval zal voordoenals de instructies niet worden opgevolgd, met alsresultaat ernstig of dodelijk letsel en/of ernstigeschade aan het product. Het is van toepassing opwaarschuwingen met betrekking tot bijvoorbeeldgevaar van elektrische eenheden met hoogspanning,explosie of brandgevaar, risico van gifgas, risico vanverplettering, stoten, val van hoogte enzovoort.
GEVAAR
xx0200000022
Waarschuwt dat zich een ongeval kan voordoen alsde instructies niet worden opgevolgd, en dat dit kanleiden tot ernstig, mogelijk dodelijk letsel en/of aan-zienlijke schade aan het product. Het is van toepas-sing op waarschuwingen met betrekking tot bijvoor-beeld gevaar van elektrische eenheden met hoog-spanning, explosie of brandgevaar, risico van gifgas,risico van verplettering, stoten, val van hoogte etc.
WAARSCHUWING
xx0100000002
Waarschuwt voor elektrische gevaren die ernstigpersoonlijk letsel of de dood ten gevolge kunnenhebben.
ELEKTRISCHESCHOK
xx0200000024
Waarschuwt dat zich een ongeval kan voordoen alsde instructies niet worden opgevolgd, met als moge-lijk resultaat letsel en/of schade aan het product. Ditis ook van toepassing op waarschuwingen voor risi-co's als brandwonden, oogletsel, huidbeschadiging,gehoorbeschadiging, beklemming of uitglijden,struikelen, stoten, val van hoogte etc. Bovendien isdit van toepassing op waarschuwingen met betrek-king tot functie-eisen voor het plaatsen of verwijde-ren van apparatuur, waar een risico bestaat van be-schadiging van het product of storing.
VOORZICHTIG
xx0100000003
Vervolg op volgende pagina16 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.1 Veiligheidssignalen in de handleiding
BetekenisAanduidingSymbool
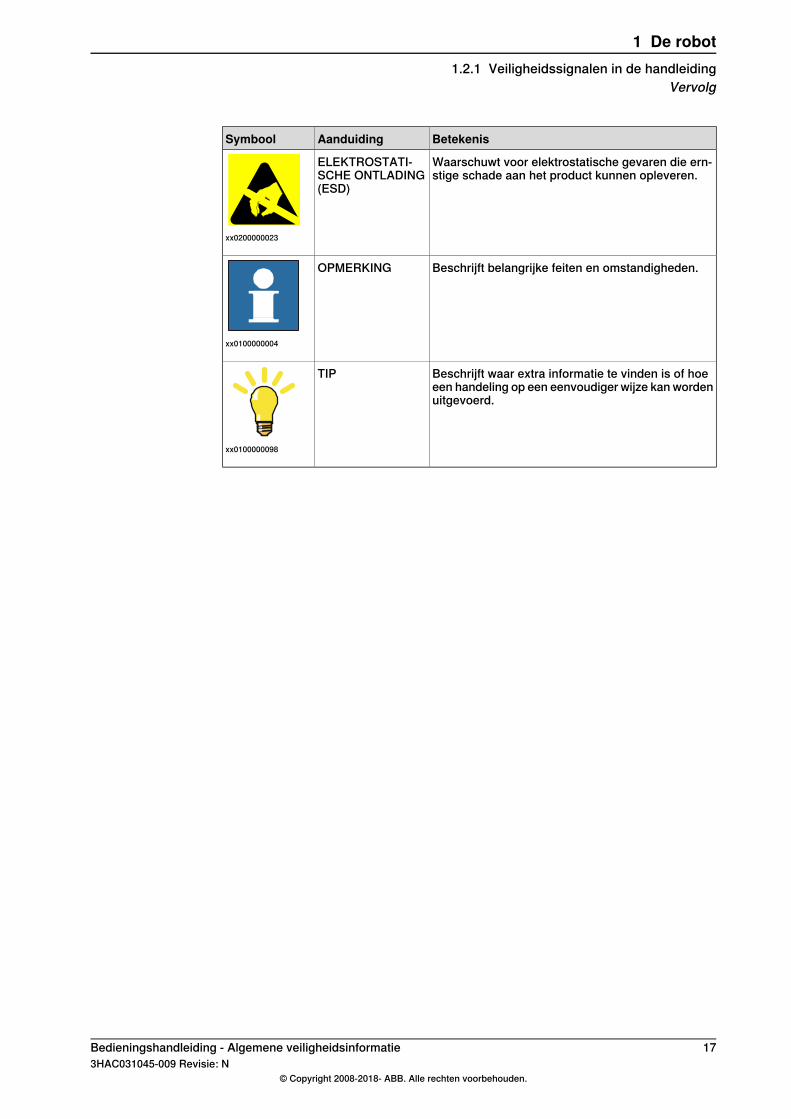
Waarschuwt voor elektrostatische gevaren die ern-stige schade aan het product kunnen opleveren.
ELEKTROSTATI-SCHE ONTLADING(ESD)
xx0200000023
Beschrijft belangrijke feiten en omstandigheden.OPMERKING
xx0100000004
Beschrijft waar extra informatie te vinden is of hoeeen handeling op een eenvoudiger wijze kan wordenuitgevoerd.
TIP
xx0100000098
Bedieningshandleiding - Algemene veiligheidsinformatie 173HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.1 Veiligheidssignalen in de handleiding
Vervolg
1.2.2 Veiligheidssymbolen op productlabels
Inleiding op labelsIn deze sectie worden veiligheidssymbolen beschreven die op labels (stickers) ophet product staan.Symbolen worden gebruikt in combinaties op de labels, waarbij elke specifiekewaarschuwing wordt beschreven. De beschrijvingen in deze sectie zijn generiek,de labels kunnen extra informatie bevatten zoals waarden.
Opmerking
De veiligheids- en gezondheidssymbolen op de labels van het product moetenin acht worden genomen. Houd ook rekening met aanvullendeveiligheidsinformatie afkomstig van de systeembouwer of integrator.
Soorten labelsZowel de manipulator als de controller zijn met verschillende veiligheids- eninformatielabels gemarkeerd. Deze labels bevatten belangrijke informatiebetreffende het product. De informatie is bijvoorbeeld tijdens installatie, serviceen bediening nuttig voor alle werknemers die de robot gebruiken.De veiligheidslabels zijn taalonafhankelijk, ze bevatten alleen afbeeldingen. ZieSymbolen op veiligheidslabels op pagina 18.De informatielabels kunnen informatie als tekst bevatten (Engels, Duits en Frans).
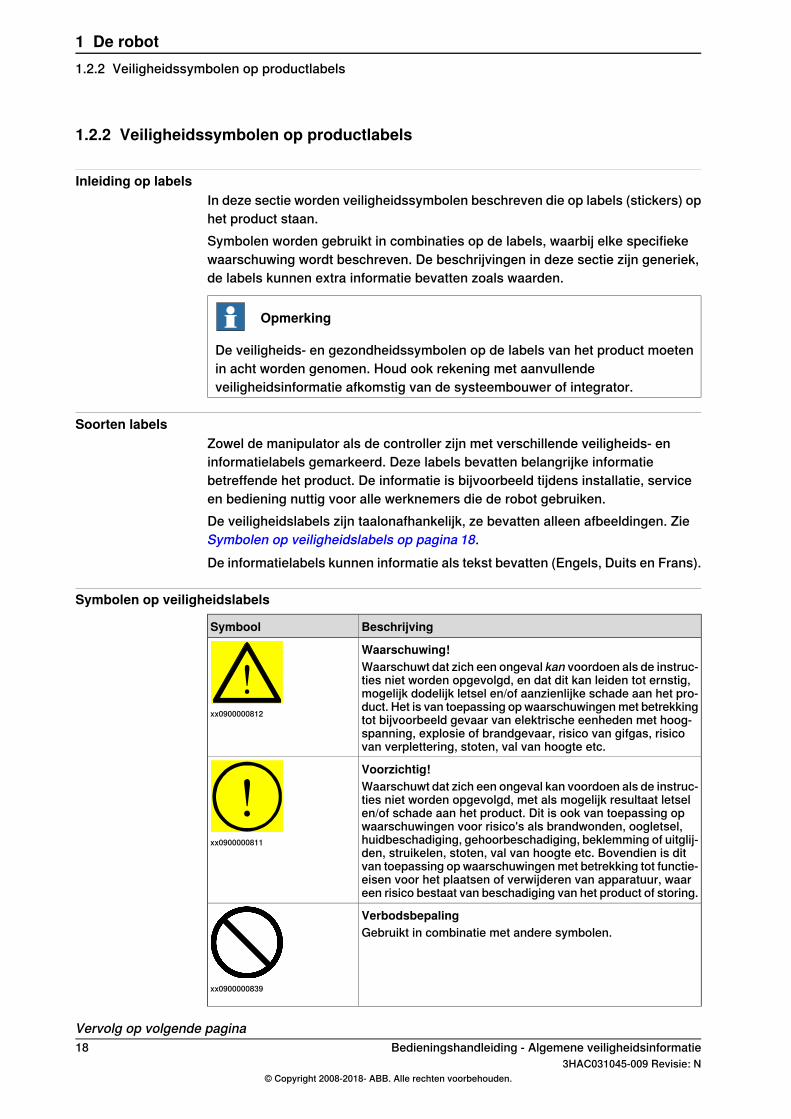
Symbolen op veiligheidslabels
BeschrijvingSymbool
Waarschuwing!
xx0900000812
Waarschuwt dat zich een ongeval kan voordoen als de instruc-ties niet worden opgevolgd, en dat dit kan leiden tot ernstig,mogelijk dodelijk letsel en/of aanzienlijke schade aan het pro-duct. Het is van toepassing op waarschuwingen met betrekkingtot bijvoorbeeld gevaar van elektrische eenheden met hoog-spanning, explosie of brandgevaar, risico van gifgas, risicovan verplettering, stoten, val van hoogte etc.
Voorzichtig!
xx0900000811
Waarschuwt dat zich een ongeval kan voordoen als de instruc-ties niet worden opgevolgd, met als mogelijk resultaat letselen/of schade aan het product. Dit is ook van toepassing opwaarschuwingen voor risico's als brandwonden, oogletsel,huidbeschadiging, gehoorbeschadiging, beklemming of uitglij-den, struikelen, stoten, val van hoogte etc. Bovendien is ditvan toepassing op waarschuwingen met betrekking tot functie-eisen voor het plaatsen of verwijderen van apparatuur, waareen risico bestaat van beschadiging van het product of storing.
Verbodsbepaling
xx0900000839
Gebruikt in combinatie met andere symbolen.
Vervolg op volgende pagina18 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.2 Veiligheidssymbolen op productlabels
BeschrijvingSymbool
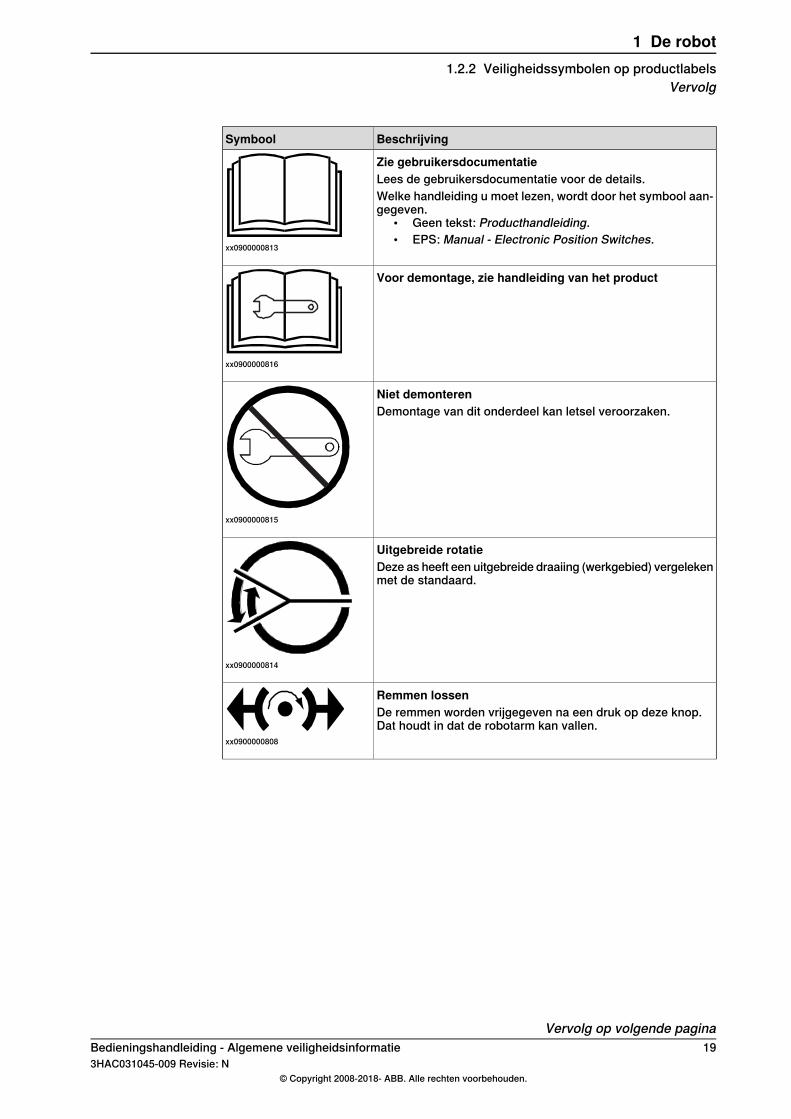
Zie gebruikersdocumentatie
xx0900000813
Lees de gebruikersdocumentatie voor de details.Welke handleiding u moet lezen, wordt door het symbool aan-gegeven.
• Geen tekst: Producthandleiding.• EPS: Manual - Electronic Position Switches.
Voor demontage, zie handleiding van het product
xx0900000816
Niet demonteren
xx0900000815
Demontage van dit onderdeel kan letsel veroorzaken.
Uitgebreide rotatie
xx0900000814
Deze as heeft een uitgebreide draaiing (werkgebied) vergelekenmet de standaard.
Remmen lossen
xx0900000808
De remmen worden vrijgegeven na een druk op deze knop.Dat houdt in dat de robotarm kan vallen.
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 193HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.2 Veiligheidssymbolen op productlabels
Vervolg
BeschrijvingSymbool
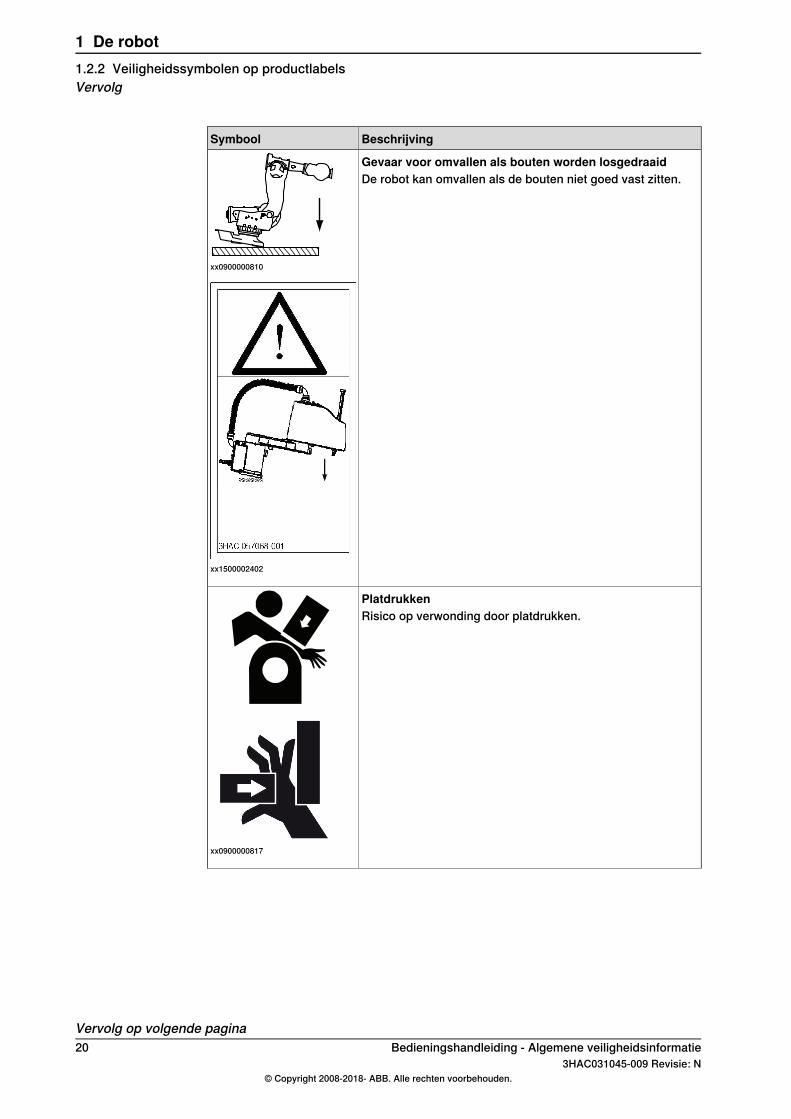
Gevaar voor omvallen als bouten worden losgedraaid
xx0900000810
De robot kan omvallen als de bouten niet goed vast zitten.
xx1500002402
Platdrukken
xx0900000817
Risico op verwonding door platdrukken.
Vervolg op volgende pagina20 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.2 Veiligheidssymbolen op productlabelsVervolg
BeschrijvingSymbool
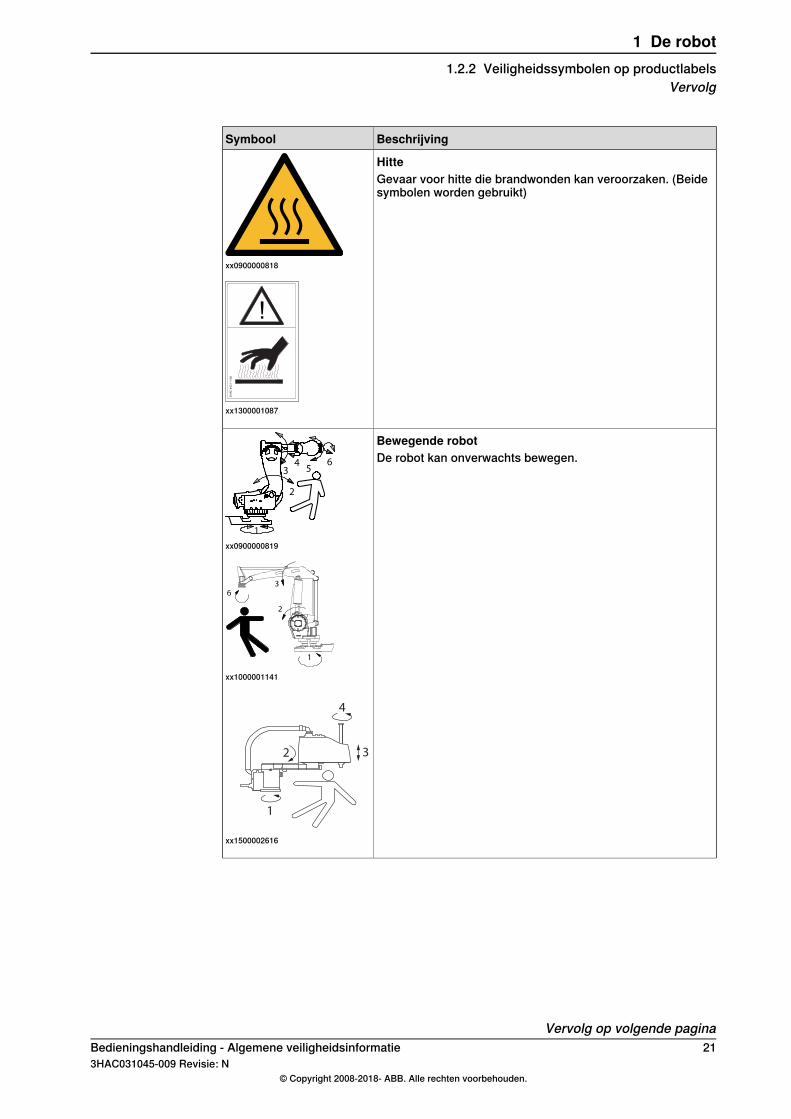
Hitte
xx0900000818
Gevaar voor hitte die brandwonden kan veroorzaken. (Beidesymbolen worden gebruikt)
3H
AC
44
31
-1/0
6
!
xx1300001087
Bewegende robot
1
2
34
56
xx0900000819
De robot kan onverwachts bewegen.
xx1000001141
1
2 3
4
xx1500002616
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 213HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.2 Veiligheidssymbolen op productlabels
Vervolg
BeschrijvingSymbool
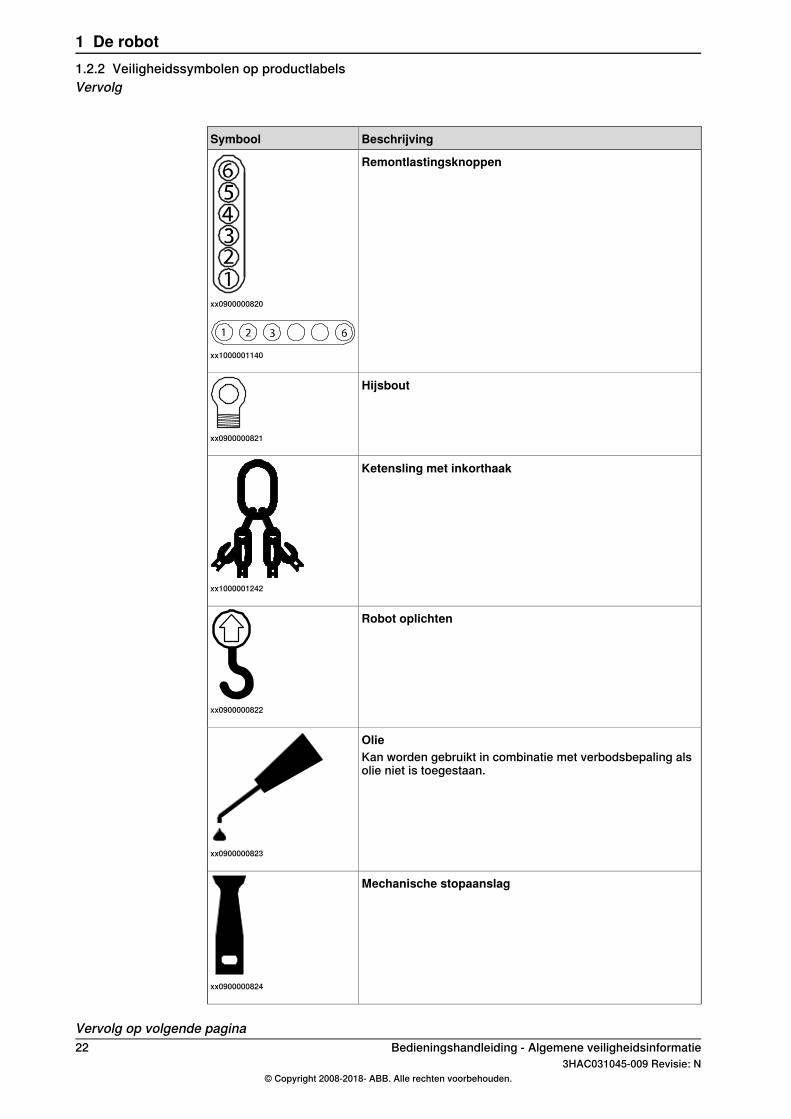
Remontlastingsknoppen
xx0900000820
xx1000001140
Hijsbout
xx0900000821
Ketensling met inkorthaak
xx1000001242
Robot oplichten
xx0900000822
Olie
xx0900000823
Kan worden gebruikt in combinatie met verbodsbepaling alsolie niet is toegestaan.
Mechanische stopaanslag
xx0900000824
Vervolg op volgende pagina22 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.2 Veiligheidssymbolen op productlabelsVervolg
BeschrijvingSymbool
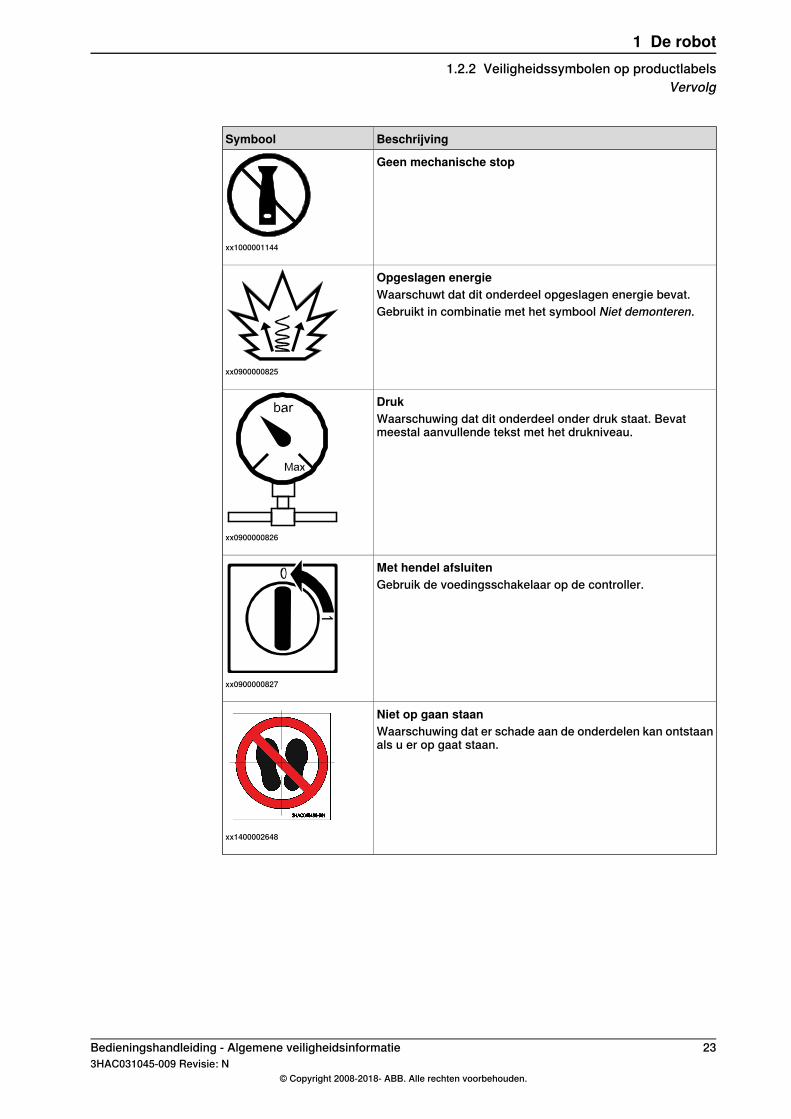
Geen mechanische stop
xx1000001144
Opgeslagen energie
xx0900000825
Waarschuwt dat dit onderdeel opgeslagen energie bevat.Gebruikt in combinatie met het symbool Niet demonteren.
Druk
xx0900000826
Waarschuwing dat dit onderdeel onder druk staat. Bevatmeestal aanvullende tekst met het drukniveau.
Met hendel afsluiten
xx0900000827
Gebruik de voedingsschakelaar op de controller.
Niet op gaan staan
xx1400002648
Waarschuwing dat er schade aan de onderdelen kan ontstaanals u er op gaat staan.
Bedieningshandleiding - Algemene veiligheidsinformatie 233HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.2 Veiligheidssymbolen op productlabels
Vervolg
1.2.3 Symbolen op veiligheidslabels
Inleiding op labelsIn deze sectie worden veiligheidssymbolen beschreven die op labels (stickers) opde controller staan.Symbolen worden gebruikt in combinaties op de labels, waarbij elke specifiekewaarschuwing wordt beschreven. De beschrijvingen in deze sectie zijn generiek,de labels kunnen extra informatie bevatten zoals waarden.
Opmerking
De veiligheids- en gezondheidssymbolen op de labels van het product moetenin acht worden genomen. Houd ook rekening met aanvullendeveiligheidsinformatie afkomstig van de systeembouwer of integrator.
Soorten labelsZowel de manipulator als de controller zijn met verschillende veiligheids- eninformatielabels gemarkeerd. Deze labels bevatten belangrijke informatiebetreffende het product. De informatie is bijvoorbeeld tijdens installatie, serviceen bediening nuttig voor alle werknemers die de robot gebruiken.De informatielabels kunnen informatie als tekst bevatten (Engels, Duits en Frans).
Symbolen op veiligheidslabels
BeschrijvingLabel
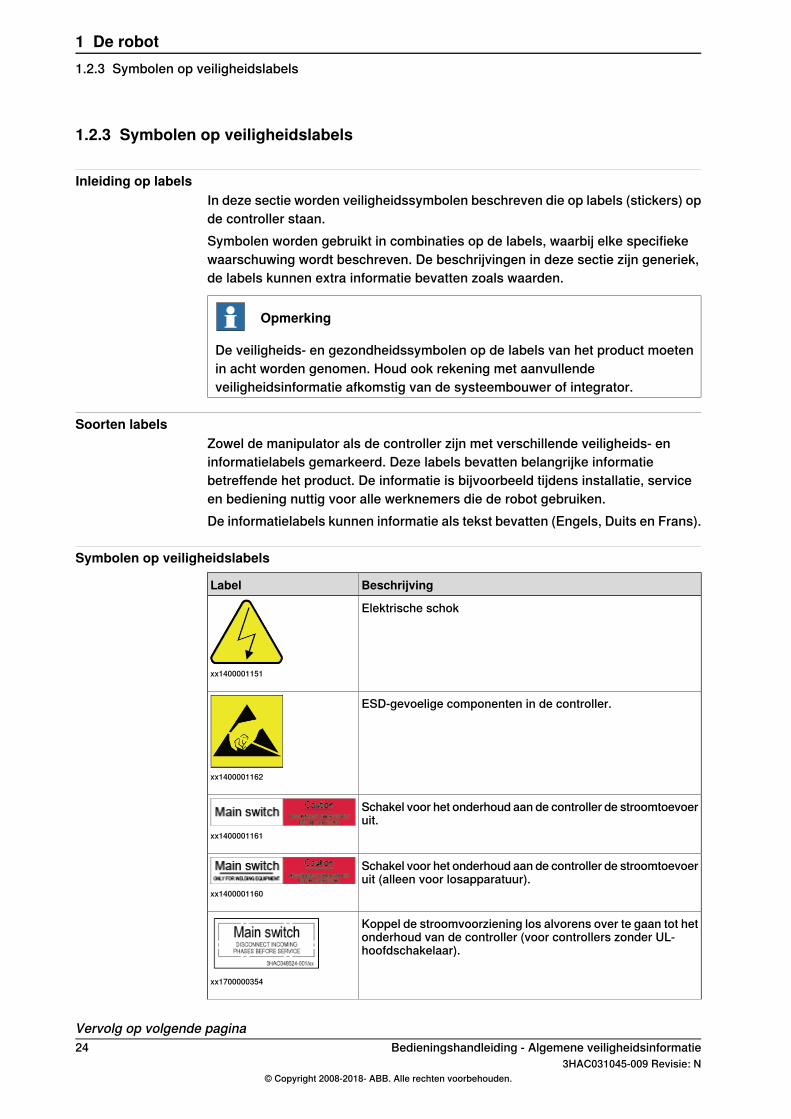
Elektrische schok
xx1400001151
ESD-gevoelige componenten in de controller.
xx1400001162
Schakel voor het onderhoud aan de controller de stroomtoevoeruit.
xx1400001161
Schakel voor het onderhoud aan de controller de stroomtoevoeruit (alleen voor losapparatuur).
xx1400001160
Koppel de stroomvoorziening los alvorens over te gaan tot hetonderhoud van de controller (voor controllers zonder UL-hoofdschakelaar).
xx1700000354
Vervolg op volgende pagina24 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.3 Symbolen op veiligheidslabels
BeschrijvingLabel
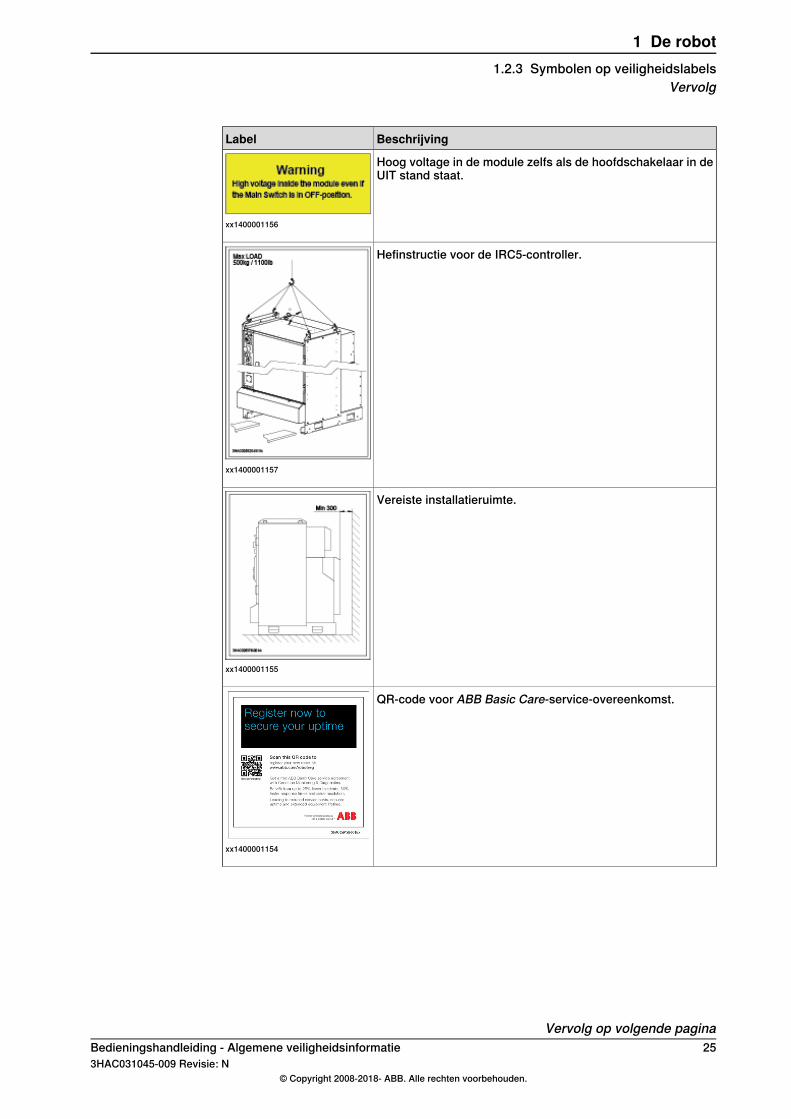
Hoog voltage in de module zelfs als de hoofdschakelaar in deUIT stand staat.
xx1400001156
Hefinstructie voor de IRC5-controller.
xx1400001157
Vereiste installatieruimte.
xx1400001155
QR-code voor ABB Basic Care-service-overeenkomst.
xx1400001154
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 253HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.3 Symbolen op veiligheidslabels
Vervolg
BeschrijvingLabel
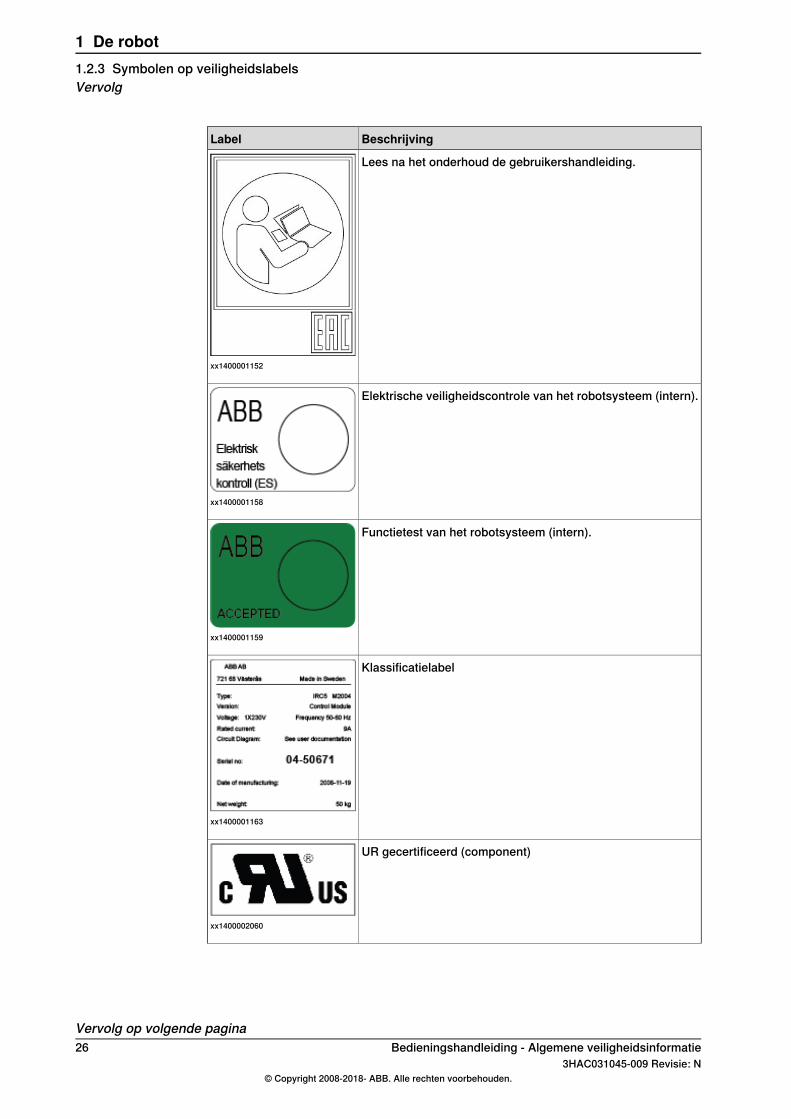
Lees na het onderhoud de gebruikershandleiding.
xx1400001152
Elektrische veiligheidscontrole van het robotsysteem (intern).
xx1400001158
Functietest van het robotsysteem (intern).
xx1400001159
Klassificatielabel
xx1400001163
UR gecertificeerd (component)
xx1400002060
Vervolg op volgende pagina26 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.3 Symbolen op veiligheidslabelsVervolg
BeschrijvingLabel
UL-gecertificeerd (robot met controller)
xx1400002061
SafeMove-label (voor SafeMove Basic- en SafeMove Advan-ced-software).
xx1700000355
Veiligheids-UL-label (voor de Functional Safety-oplossing sa-men met het UL-keurmerk).
xx1700000353
Bedieningshandleiding - Algemene veiligheidsinformatie 273HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.2.3 Symbolen op veiligheidslabels
Vervolg
1.3 Veilig werken
1.3.1 Beschermende stop en noodstop
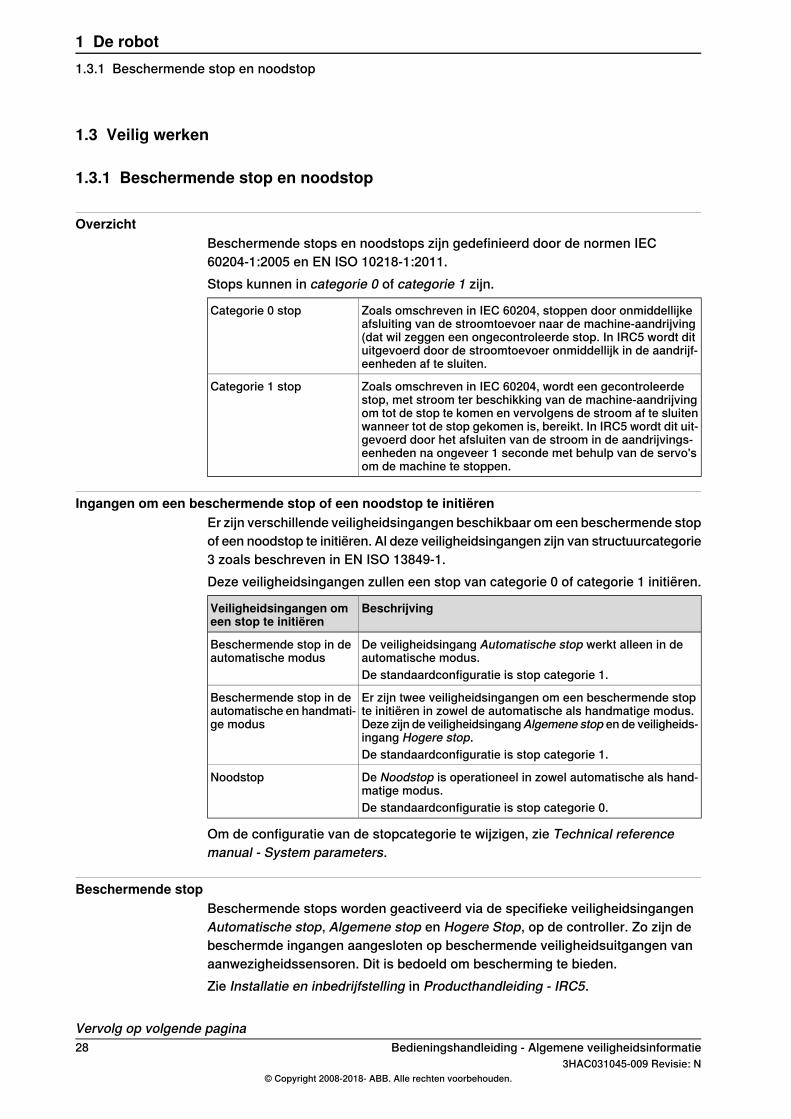
OverzichtBeschermende stops en noodstops zijn gedefinieerd door de normen IEC60204-1:2005 en EN ISO 10218-1:2011.Stops kunnen in categorie 0 of categorie 1 zijn.
Zoals omschreven in IEC 60204, stoppen door onmiddellijkeafsluiting van de stroomtoevoer naar de machine-aandrijving(dat wil zeggen een ongecontroleerde stop. In IRC5 wordt dituitgevoerd door de stroomtoevoer onmiddellijk in de aandrijf-eenheden af te sluiten.
Categorie 0 stop
Zoals omschreven in IEC 60204, wordt een gecontroleerdestop, met stroom ter beschikking van de machine-aandrijvingom tot de stop te komen en vervolgens de stroom af te sluitenwanneer tot de stop gekomen is, bereikt. In IRC5 wordt dit uit-gevoerd door het afsluiten van de stroom in de aandrijvings-eenheden na ongeveer 1 seconde met behulp van de servo'som de machine te stoppen.
Categorie 1 stop
Ingangen om een beschermende stop of een noodstop te initiërenEr zijn verschillende veiligheidsingangen beschikbaar om een beschermende stopof een noodstop te initiëren. Al deze veiligheidsingangen zijn van structuurcategorie3 zoals beschreven in EN ISO 13849-1.Deze veiligheidsingangen zullen een stop van categorie 0 of categorie 1 initiëren.
BeschrijvingVeiligheidsingangen omeen stop te initiëren
De veiligheidsingang Automatische stop werkt alleen in deautomatische modus.
Beschermende stop in deautomatische modus
De standaardconfiguratie is stop categorie 1.
Er zijn twee veiligheidsingangen om een beschermende stopte initiëren in zowel de automatische als handmatige modus.Deze zijn de veiligheidsingangAlgemene stop en de veiligheids-ingang Hogere stop.
Beschermende stop in deautomatische en handmati-ge modus
De standaardconfiguratie is stop categorie 1.
De Noodstop is operationeel in zowel automatische als hand-matige modus.
Noodstop
De standaardconfiguratie is stop categorie 0.
Om de configuratie van de stopcategorie te wijzigen, zie Technical referencemanual - System parameters.
Beschermende stopBeschermende stops worden geactiveerd via de specifieke veiligheidsingangenAutomatische stop, Algemene stop en Hogere Stop, op de controller. Zo zijn debeschermde ingangen aangesloten op beschermende veiligheidsuitgangen vanaanwezigheidssensoren. Dit is bedoeld om bescherming te bieden.Zie Installatie en inbedrijfstelling in Producthandleiding - IRC5.
Vervolg op volgende pagina28 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.1 Beschermende stop en noodstop

NoodstopDe noodstopfunctie mag niet gebruikt worden als een vervanging van debeveiligingsmaatregelen en andere veiligheidsfuncties, maar moet wordenontworpen voor gebruik als een aanvullende beschermingsmaatregel. (Zie ISO13850.)
Opmerking
De noodstop mag niet worden gebruikt voor beschermende stop ofprogrammastops omdat dit extra en onnodige slijtage aan de robot oplevert.Zie voor het uitvoeren van programmastops sectie Programma's stoppen inBedieningshandleiding - IRC5 met FlexPendant.
Afhankelijk van de geselecteerde opties voor de robot, kan het aantal noodstopsvariëren. Zie documentatie voor de robot en de complete machine.
Andere methoden om de robot te stoppenEr zijn ook andere methoden om de robot te stoppen. Zie:
• Installatie en inbedrijfstelling in Producthandleiding - IRC5.• Technical reference manual - System parameters• Technical referencemanual - RAPID Instructions, Functions and Data types.
Bedieningshandleiding - Algemene veiligheidsinformatie 293HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.1 Beschermende stop en noodstop
Vervolg
1.3.2 Veiligheidsvoorzieningen
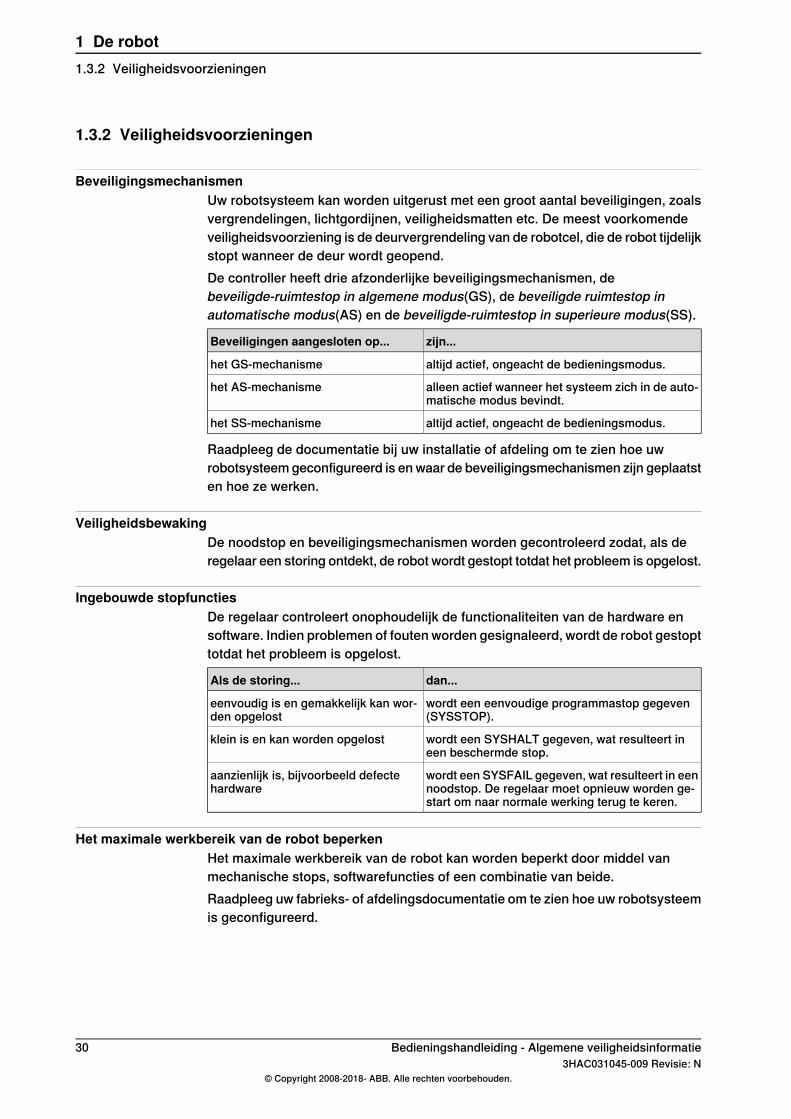
BeveiligingsmechanismenUw robotsysteem kan worden uitgerust met een groot aantal beveiligingen, zoalsvergrendelingen, lichtgordijnen, veiligheidsmatten etc. De meest voorkomendeveiligheidsvoorziening is de deurvergrendeling van de robotcel, die de robot tijdelijkstopt wanneer de deur wordt geopend.De controller heeft drie afzonderlijke beveiligingsmechanismen, debeveiligde-ruimtestop in algemene modus(GS), de beveiligde ruimtestop inautomatische modus(AS) en de beveiligde-ruimtestop in superieure modus(SS).
zijn...Beveiligingen aangesloten op...
altijd actief, ongeacht de bedieningsmodus.het GS-mechanisme
alleen actief wanneer het systeem zich in de auto-matische modus bevindt.
het AS-mechanisme
altijd actief, ongeacht de bedieningsmodus.het SS-mechanisme
Raadpleeg de documentatie bij uw installatie of afdeling om te zien hoe uwrobotsysteem geconfigureerd is en waar de beveiligingsmechanismen zijn geplaatsten hoe ze werken.
VeiligheidsbewakingDe noodstop en beveiligingsmechanismen worden gecontroleerd zodat, als deregelaar een storing ontdekt, de robot wordt gestopt totdat het probleem is opgelost.
Ingebouwde stopfunctiesDe regelaar controleert onophoudelijk de functionaliteiten van de hardware ensoftware. Indien problemen of fouten worden gesignaleerd, wordt de robot gestopttotdat het probleem is opgelost.
dan...Als de storing...
wordt een eenvoudige programmastop gegeven(SYSSTOP).
eenvoudig is en gemakkelijk kan wor-den opgelost
wordt een SYSHALT gegeven, wat resulteert ineen beschermde stop.
klein is en kan worden opgelost
wordt een SYSFAIL gegeven, wat resulteert in eennoodstop. De regelaar moet opnieuw worden ge-start om naar normale werking terug te keren.
aanzienlijk is, bijvoorbeeld defectehardware
Het maximale werkbereik van de robot beperkenHet maximale werkbereik van de robot kan worden beperkt door middel vanmechanische stops, softwarefuncties of een combinatie van beide.Raadpleeg uw fabrieks- of afdelingsdocumentatie om te zien hoe uw robotsysteemis geconfigureerd.
30 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.2 Veiligheidsvoorzieningen
1.3.3 Over de automatische modus
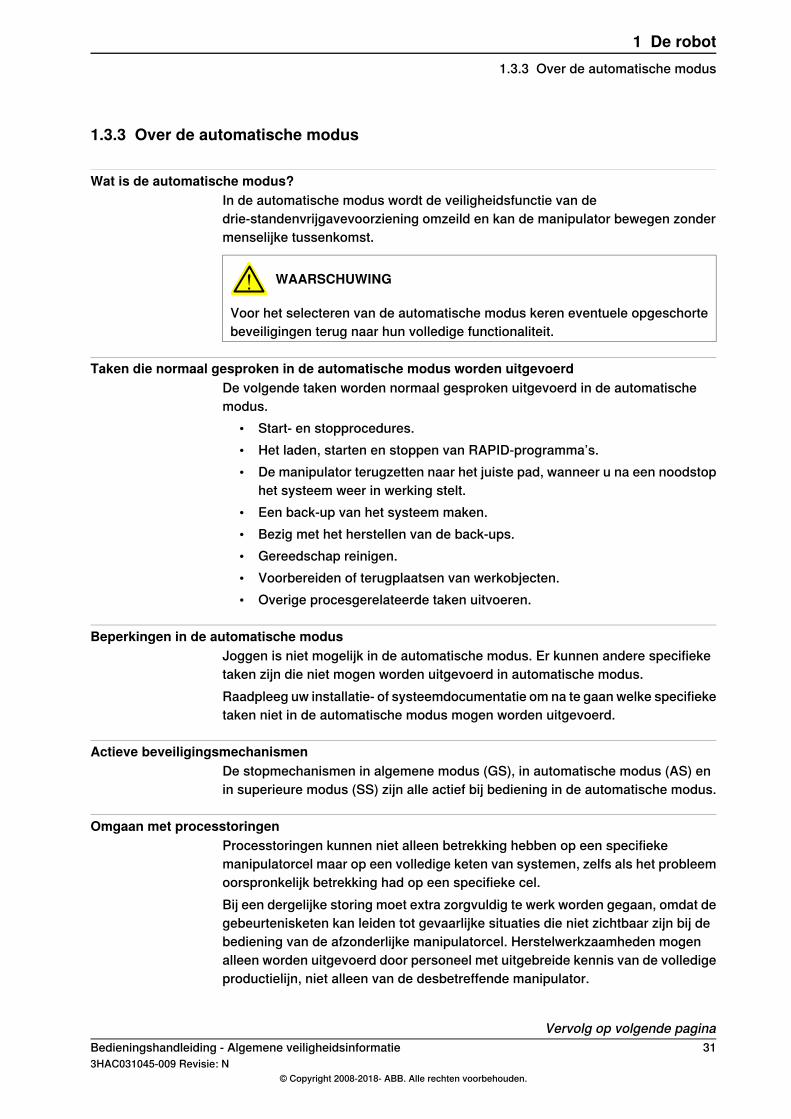
Wat is de automatische modus?In de automatische modus wordt de veiligheidsfunctie van dedrie-standenvrijgavevoorziening omzeild en kan de manipulator bewegen zondermenselijke tussenkomst.
WAARSCHUWING
Voor het selecteren van de automatische modus keren eventuele opgeschortebeveiligingen terug naar hun volledige functionaliteit.
Taken die normaal gesproken in de automatische modus worden uitgevoerdDe volgende taken worden normaal gesproken uitgevoerd in de automatischemodus.
• Start- en stopprocedures.• Het laden, starten en stoppen van RAPID-programma’s.• De manipulator terugzetten naar het juiste pad, wanneer u na een noodstop
het systeem weer in werking stelt.• Een back-up van het systeem maken.• Bezig met het herstellen van de back-ups.• Gereedschap reinigen.• Voorbereiden of terugplaatsen van werkobjecten.• Overige procesgerelateerde taken uitvoeren.
Beperkingen in de automatische modusJoggen is niet mogelijk in de automatische modus. Er kunnen andere specifieketaken zijn die niet mogen worden uitgevoerd in automatische modus.Raadpleeg uw installatie- of systeemdocumentatie om na te gaan welke specifieketaken niet in de automatische modus mogen worden uitgevoerd.
Actieve beveiligingsmechanismenDe stopmechanismen in algemene modus (GS), in automatische modus (AS) enin superieure modus (SS) zijn alle actief bij bediening in de automatische modus.
Omgaan met processtoringenProcesstoringen kunnen niet alleen betrekking hebben op een specifiekemanipulatorcel maar op een volledige keten van systemen, zelfs als het probleemoorspronkelijk betrekking had op een specifieke cel.Bij een dergelijke storing moet extra zorgvuldig te werk worden gegaan, omdat degebeurtenisketen kan leiden tot gevaarlijke situaties die niet zichtbaar zijn bij debediening van de afzonderlijke manipulatorcel. Herstelwerkzaamheden mogenalleen worden uitgevoerd door personeel met uitgebreide kennis van de volledigeproductielijn, niet alleen van de desbetreffende manipulator.
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 313HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.3 Over de automatische modus

Voorbeelden van processtoringenEen manipulator die onderdelen van een transportband pakt, kan buiten werkingworden gesteld door een mechanische storing, terwijl de transportband moet blijvenlopen om de productie in de rest van de productielijn niet te verstoren. Dit betekentuiteraard dat het personeel bij het werken aan de manipulator in de buurt van delopende transportband extra voorzichtig moet zijn.Een lasmanipulator heeft onderhoud nodig. Wanneer de lasmanipulator uit hetproductieproces wordt gehaald, betekent dit ook dat er een werkbank en eenmanipulator voor materiaalhantering uit het proces moeten worden verwijderd omgevaar voor personen te voorkomen.
32 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.3 Over de automatische modusVervolg
1.3.4 Over de handmatige modus
Wat is de handmatige modus?In handmatige modus is de manipulatorbeweging onder handbediening. Dedrie-standenvrijgavevoorziening moet ingedrukt worden om de motoren van demanipulator te activeren, met andere woorden om beweging mogelijk te maken.De handmatige modus wordt gebruikt bij programmeren en voorprogrammaverificatie.Er zijn twee handmatige modi:
• Handmatige modus met verminderde snelheid, meestal ‘handmatige modus’genoemd.
• handmatige modus met volle snelheid (niet beschikbaar in de VS of Canada).
Wat is de handmatige modus verminderde snelheid?In de handmatige modus met verlaagde snelheid is de beweging beperkt tot 250mm/s. Bovendien is er een beperking van de maximaal toegestane snelheid. Dezeasbeperkingen zijn robotafhankelijk en kunnen niet worden gewijzigd.De drie-standenvrijgavevoorziening moet ingedrukt worden om de motoren vande manipulator te activeren.
WAARSCHUWING
Indien mogelijk moet de handmatige bedieningsmodus worden uitgevoerd metalle personen buiten het beveiligde gebied.
Wat is de handmatige modus met volle snelheid?In de handmatige modus met volle snelheid kan de manipulator met degeprogrammeerde snelheid bewegen, maar alleen met handmatige bediening.De handmatige modus met volle snelheid wordt alleen gebruikt voorprogrammaverificatie.In de handmatige modus met volle snelheid is de initiële snelheidslimiet maximaal250 mm/s. Dit wordt bereikt door de snelheid te beperken tot 3% van degeprogrammeerde snelheid. Via handmatige bediening kan de snelhied wordenverhoogd tot 100%.De drie-standenvrijgavevoorziening moet ingedrukt worden om de motoren vande manipulator te activeren en de vasthoudknop met ingedrukt worden om hetprogramma uit te voeren
WAARSCHUWING
Indien mogelijk moet de handmatige bedieningsmodus worden uitgevoerd metalle personen buiten het beveiligde gebied.
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 333HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.4 Over de handmatige modus
Opmerking: de handmatige modus met volle snelheid is optioneel en daarom nietin alle robots beschikbaar.
Opmerking
Zoals aangegeven in de bijgewerkte standaard, ISO 10218-1:2011 Robots androbotic devices – Safety requirements for industrial robots – Part 1 Robots, zijnde volgende aanpassingen gemaakt in de handmatige volledige snelheidsmodus.
• Resetten van de snelheid naar 250 mm/s telkens wanneer dedrie-standenvrijgavevoorziening opnieuw wordt geïnitieerd door het plaatsenvan de schakelaar in de middelste vrijgavepositie ofwel na volledig loslatenof volledig indrukken.
• Het bewerken van RAPID-programma's en het joggen van de manipulatorzijn uitgeschakeld.
Overbrugde beveiligingsmechanismenBeveiligde ruimtestopmechanismen in automatischemodus (AS) worden overbrugdin de handmatige modus.
Drie-standenvrijgavevoorzieningIn de handmatigemodusworden de motoren van de manipulator geactiveerd doorde drie-standenvrijgavevoorziening op de FlexPendant. Op deze manier kan demanipulator enkel bewegen zolang het apparaat wordt ingedrukt.Om een programma uit te voeren in de handmatige volle snelheidsmodus is hetom veiligheidsredenen noodzakelijk om zowel de drie-standenvrijgavevoorzieningen de Start-knop ingedrukt te houden. Deze vasthoudfunctie is ook van toepassingbij het doorlopen van een programma in de handmatige volle snelheidsmodus.De drie-standenvrijgavevoorziening is zo ontworpen zodat de drukknop slechtshalverwege ingedrukt moet worden om de motoren van de manipulator te activeren.Zowel in haar volledig uit- en volledig in-posities zal de manipulator niet bewegen.
De Hold-to-run-functieDe hold-to-run-functie maakt het mogelijk zowel stap voor stap als in één keer eenprogramma uit te voeren in de handmatige modus met volle snelheid. Opmerking:ongeacht de bedieningsmodus is het voor het joggen niet noodzakelijk dehold-to-run-functie te gebruiken. De functie hold-to-run kan ook worden geactiveerdvoor handmatig beperkte snelheden.
Taken normaal uitgevoerd in de handmatige modus verminderde snelheidDe volgende taken normaal uitgevoerd in de handmatige modus verminderdesnelheid.
• De manipulator terugjoggen naar het juiste pad, wanneer u na een noodstophet systeem weer in werking stelt
• De waarde van I/O-signalen corrigeren na fouten• RAPID-programma’s maken en bewerken
Vervolg op volgende pagina34 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.4 Over de handmatige modusVervolg
• De uitvoering van programma's starten, stappen en stoppen bijvoorbeeld bijhet testen van een programma
• Geprogrammeerde posities bijstellen
Taken normaal uitgevoerd in de handmatige modus met volle snelheidOvereenkomstig de norm, ISO 10218-1:2011, de volgende taken kunnen wordenuitgevoerd in de handmatige modus met volle snelheid.
• De uitvoering van programma's starten en stoppen voor de laatsteprogrammaverificatie
• Programma stapsgewijs uitvoeren• Snelheid instellen (0-100 %)• Programma-aanwijzer instellen (naar hoofd, naar routine, naar cursor, naar
serviceroutine, etc.)De volgende taken kunnen niet worden uitgevoerd in de handmatige modus metvolle snelheid:
• De systeemparameterwaarden wijzigen• Systeemgegevens bewerken
Bedieningshandleiding - Algemene veiligheidsinformatie 353HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.3.4 Over de handmatige modus
Vervolg
1.4 Veiligheidsacties
1.4.1 Veiligheidsrisico's tijdens installatie en onderhoudswerk op robots
Vereisten voor personeelAlleen personen die de robot kennen en getraind werden in het bedienen enhanteren van de robot, mogen de robot onderhouden. Personen die onder invloedzijn van alcohol, drugs of andere bedwelmende middelen mogen de robot nietinstalleren, onderhouden, repareren of gebruiken.
• De verantwoordelijken voor de bewerkingen moeten ervoor zorgen dat deveiligheidsinstructies beschikbaar zijn voor de installatie in kwestie.
• De personen die de robot onderhouden moeten de juiste training hebbenvoor de betreffende apparatuur en in alle daarmee verwanteveiligheidskwesties.
• Het personeel moet worden opgeleid om te reageren op nood- of abnormalesituaties
Algemene risico's gedurende installatie en serviceDe instructies in de producthandleiding moeten altijd worden opgevolgd.Schakel de robot nooit in voordat deze op de juiste wijze aan de fundering/steunbevestigd en vastgeschroefd is.Zorg ervoor dat niemand de stroom kan inschakelen naar de controller en robotterwijl u aan het systeem werkt. Een goede werkwijze is de hoofdschakelaar opde controllerkast te vergrendelen met een veiligheidsslot.Zorg ervoor dat niemand anders de stroom naar de controller en robot kaninschakelen terwijl u aan het systeem werkt. Een goede methode is om destroomkabel naar de controller te verwijderen.Als de robot op een hoogte is geïnstalleerd, hangend of anders dan direct staandop de vloer, dan zijn er bijkomende risico's naast de risico's voor een robot diedirect op de vloer staat.Wanneer de robot of delen ervan worden ontmanteld, kan energie vrijkomen dieals tegengewicht voor bepaalde assen in de robot wordt opgeslagen.Gebruik de robot nooit als een ladder, wat betekent dat u niet op de controller,motoren of andere onderdelen mag klimmen tijdens onderhoudswerkzaamheden.Er bestaat gevaar voor uitglijden vanwege de hoge temperatuur van de motorenen olievlekken op de robot. Er bestaat ook een risico dat de robot wordt beschadigd.Om schade aan het product te voorkomen, moet u ervoor zorgen dat er geen losseschroeven, draaispanen of andere onderdelen in het product achtergelaten wordennadat de werkzaamheden uitgevoerd werden.
Veiligheidsrisico's gedurende werkingsstoornissenProblemen mogen uitsluitend worden verholpen door bevoegd personeel datvertrouwd is met de gehele installatie én met de aan de verschillende onderdelenverwante speciale risico's.
Vervolg op volgende pagina36 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.1 Veiligheidsrisico's tijdens installatie en onderhoudswerk op robots
Wanneer het werkingsproces wordt onderbroken moeten specialevoorzorgsmaatregelen worden genomen vanwege risico's die zich bij de normalewerking niet voordoen. Eventueel moet een dergelijke onderbreking handmatigbijgestuurd worden.
Reserveonderdelen en speciale apparatuurABB levert geen reserveonderdelen en speciale apparatuur die niet getest engoedgekeurd werd door ABB. De installatie en/of het gebruik van dergelijkeproducten kan de structurele eigenschappen van de robot negatief beïnvloedenen daardoor de actieve of passieve veiligheidswerking beïnvloeden. ABB is nietaansprakelijk voor schade veroorzaakt door het gebruik van niet-originelereserveonderdelen en speciale apparatuur. ABB is niet aansprakelijk voor schadeof letsel veroorzaakt door ongeoorloofde wijzigingen aan de robot.
Aansluiting van externe veiligheidsapparatenNaast de ingebouwde veiligheidsfuncties wordt de robot ook geleverd met eeninterface voor de aansluiting van externe veiligheidsvoorzieningen. Via dezeinterface is een wisselwerking mogelijk tussen externe veiligheidsfuncties enandere machines en randapparatuur. Dit betekent dat stuursignalen kunnen wordengegeven in reactie op veiligheidssignalen van de randapparatuur en van de robotzelf.
Persoonlijke beschermingsmiddelenGebruik altijd geschikte persoonlijke beschermingsmiddelen, op basis van derisicobeoordeling voor de robotinstallatie.
Bedieningshandleiding - Algemene veiligheidsinformatie 373HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.1 Veiligheidsrisico's tijdens installatie en onderhoudswerk op robots
Vervolg
1.4.2 Brandblussen
Opmerking
Gebruik een KOOLDIOXIDE (CO2)-blusser bij brand in de manipulator ofcontroller.
38 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.2 Brandblussen

1.4.3 Zorg ervoor dat de hoofdvoeding is uitgeschakeld
BeschrijvingWerken met hoogspanning is potentieel dodelijk. Personen die in contact komenmet hoogspanning kunnen een hartstilstand, brandwonden of andere ernstigeverwondingen oplopen. Om persoonlijk letsel te voorkomen, schakelt u dehoofdschakelaar van de controller uit voordat u verder gaat.
Opmerking
Schakel alle hoofdstroomschakelaars in een MultiMove-systeem uit.
Bedieningshandleiding - Algemene veiligheidsinformatie 393HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.3 Zorg ervoor dat de hoofdvoeding is uitgeschakeld
1.4.4 Risico's die verband houden met elektrische onderdelen onder spanning
Risico's van elektrische aard, algemeenWerkzaamheden aan de elektrische apparatuur van de robot moeten wordenuitgevoerd door een gekwalificeerd elektromonteur overeenkomstig de elektrischeregelgeving.Hoewel het soms nodig is om problemen op te lossen terwijl de voedingingeschakeld is, moet de robot worden uitgeschakeld (door de hoofdschakelaarop OFF te zetten) bij het verhelpen van storingen, het loskoppelen van elektrischeleidingen en het loskoppelen of aansluiten van apparaten.De robot moet zodanig op de netvoeding worden aangesloten dat deze van buitende werkruimte van de robot kan worden uitgeschakeld.Zorg ervoor dat niemand de stroom kan inschakelen naar de controller en robotterwijl u aan het systeem werkt. Een goede werkwijze is de hoofdschakelaar opde controllerkast te vergrendelen met een veiligheidsslot.De noodzakelijke bescherming van de elektrische apparatuur en robot tijdensinstallatie, inbedrijfstelling en onderhoud is gegarandeerd als de geldigevoorschriften worden opgevolgd.
Risico's van elektrische aard, IRC5-controllerBij de volgende onderdelen bestaat gevaar voor hoogspanning:
• Kijk uit voor opgeslagen elektrische energie (DC-koppeling, ultracondensatorvan bankeenheid) in de besturingseenheid.
• Eenheden zals I/O-mudulen kunnen vanaf een externe bron van stroomworden voorzien.
• De netvoeding/netschakelaar• De transformators• De voedingseenheid• De voeding van de besturingseenheid (230 VAC)• De gelijkrichter (262/400-480 VAC en 400/700 VDC. NB: condensatoren!)• De aandrijfeenheid (400/700 VDC)• De voeding van de aandrijfeenheid (230 VAC)• De servicecontactdozen (115/230 VAC)• De gebruiksvoeding (230 VAC)• De voedingseenheid voor bijkomende werktuigen of de speciale
voedingseenheden voor het machinaal bewerken.• De aan de besturingseenhed verbonden externe spanning blijft aan, zelfs
nadat de robot van het net is ontkoppeld.• Bijkomende aansluitingen.
Risico's van elektrische aard, robotAan de robot is gevaar van laagspanning verbonden in:
• De voeding voor de motoren (tot 800 V DC).
Vervolg op volgende pagina40 Bedieningshandleiding - Algemene veiligheidsinformatie
3HAC031045-009 Revisie: N© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.4 Risico's die verband houden met elektrische onderdelen onder spanning
• De verbindingen voor gebruikers voor gereedschap of andere delen van deinstallatie (max. 230 VAC).
Risico's van elektrische aard, gereedschap, apparatuur voor materiaalbehandeling, enz.Gereedschap, apparatuur voor materiaalhantering, enz. kunnen onder spanningstaan, zelfs als het robotsysteem in de positie OFF is. Voedingskabels die tijdensde werkzaamheden in beweging zijn, kunnen beschadigd raken.
Bedieningshandleiding - Algemene veiligheidsinformatie 413HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.4 Risico's die verband houden met elektrische onderdelen onder spanning
Vervolg
1.4.5 De eenheid is gevoelig voor ESD
BeschrijvingESD (elektrostatische ontlading) is de overdracht van elektrische statische ladingtussen twee lichamen bij verschillende potentialen, ofwel als gevolg van directcontact, ofwel via een opgewekt elektrisch veld. Bij het hanteren van onderdelenof hun verpakkingen kan personeel dat niet geaard is statische ladingenoverbrengen. Als gevolg van deze ontlading kan gevoelige elektronica kapot gaan.
Veilig hanteren
OpmerkingActie
Polsbandjes moeten regelmatig worden getest omte controleren of deze niet beschadigd zijn encorrect werken.
• Producthandleiding - IRC5• Producthandleiding - IRC5 Compact• Producthandleiding - IRC5 Panel Mounted
Controller
Gebruik een polsband. De pols-bandknop bevindt zich in de con-troller.
1
De mat moet geaard zijn via een stroombegrenzen-de weerstand.
Gebruik een vloermat die bescher-ming biedt tegen elektrostatischeontlading.
2
De mat moet zorgen voor een gecontroleerde ont-lading van statische spanningen en moet geaardzijn.
Gebruik een dissipatieve tafelmat.3
42 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.5 De eenheid is gevoelig voor ESD

1.4.6 Vrijgavevoorziening en vasthoudfunctionaliteit
Drie-standenvrijgavevoorzieningDe drie-standenvrijgavevoorziening is een handbediende drukknop met constantedruk die, wanneer continu geactiveerd in slechts één positie, potentieel gevaarlijkefuncties mogelijk maakt, maar ze niet start. In elke andere positie worden gevaarlijkefuncties veilig gestopt.De drie-standenvrijgavevoorziening is van een specifiek type, waarbij u de drukknopslechts halverwege hoeft in te drukken om deze te activeren. In de volledigingedrukte en de volledig uit-positie is het onmogelijk om de robot te bedienen.
Opmerking
De drie-standenvrijgavevoorziening is een drukknop op de programmeereenheiddie, wanneer halverwege ingedrukt, het systeem overschakelt naar MOTORSON. Wanneer de vrijgavevoorziening wordt vrijgegeven of volledig ingedruktwordt, wordt de manipulator naar de stand MOTORS OFF geschakeld.Om een veilig gebruik van de programmeereenheid te verzekeren, moet hetvolgende worden uitgevoerd:
• De dodemansknop mag nooit op enige wijze buiten gebruik worden gesteld.• Zodra er geen reden meer is om de robot te bewegen, moet bij het
programmeren en testen de dodemansknop worden losgelaten.• Iedereen die de werkruimte van de robot betreedt, moet altijd de
programmeereenheid vasthouden. Dit ter voorkoming dat iemand andershet beheer van de robot overneemt zonder zijn of haar medeweten.
Hold-to-run-functieDe hold-to-run-functie maakt bewegingen mogelijk wanneer een knop die aan defunctie is gekoppeld handmatig in werking wordt gesteld, en stopt alle bewegingenonmiddellijk wanneer de knop wordt losgelaten. De hold-to-run-functie kan alleenworden gebruikt in de handmatige modus.De bediening van de functie hold-to-run voor IRC5 is beschreven inBedieningshandleiding - IRC5 met FlexPendant.
Bedieningshandleiding - Algemene veiligheidsinformatie 433HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.6 Vrijgavevoorziening en vasthoudfunctionaliteit
1.4.7 Herstel van noodstoppen
OverzichtHet herstel van een noodstop is een eenvoudige maar belangrijke procedure. Dezeprocedure zorgt er voor dat het manipulatorsysteem niet terugkeert naar deproductie zolang er sprake is van een gevaarlijke situatie.
Plaats de grendel van de noodstopknoppen terugAlle noodstopapparaten in de stijl van drukknoppen hebben eenvergrendelingsfunctie die moet worden vrijgemaakt om de noodstopconditie vanhet apparaat te verwijderen.In veel gevallen is dit mogelijk door drukknop volgens de markering te draaien,maar er zijn ook apparaten waar u de knop uittrekt om de vergrendeling vrij temaken.
Automatische noodstopapparaten opnieuw instellenAlle automatische noodstopapparaten hebben ook een soort vanvergrendelingsfunctie die moeten worden vrijgegeven. Raadpleeg uw installatie-of celdocumentatie voor meer informatie over het configureren van hetrobotsysteem.
Herstel van noodstoppen
Actie
Zorg dat de gevaarlijke situatie die in de noodstopconditie resulteerde, niet meer be-staat.
1
Zoek het apparaat of de apparaten die de noodstopconditie bezorgden en stel dezeopnieuw in.
2
Druk op de knop Motors aan om van de noodstopconditie te herstellen.3
44 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
1 De robot1.4.7 Herstel van noodstoppen
2 De manipulator2.1 Bewegende robots zijn mogelijk dodelijk
BeschrijvingElke bewegende robot kan levensgevaarlijke situaties opleveren.Bij het gebruik kan de robot onverwachte en soms onlogische bewegingen maken.Bovendien worden alle bewegingen met grote kracht uitgeoefend en kunnen zijleiden tot ernstig letsel bij het bedieningspersoneel en/of beschadiging vaneventuele apparatuur die zich binnen het werkbereik van de robot bevindt.
Veilig hanteren
OpmerkingActie
Noodstopvoorzieningen zoals poorten,gevoelige matten, lichtgordijnen etc.
Alvorens de robot te gebruiken, dient u er-voor te zorgen dat alle noodstopvoorzienin-gen correct zijn geïnstalleerd en aangeslo-ten.
1
Het gebruik van de Hold-to-run-functiewordt beschreven in sectieDeHold-to-run-functie gebruiken in deBedieningshandlei-ding - IRC5 met FlexPendant.
Meestal is de hold-to-run-functie alleen inde handmatige modus met volledige snel-heid actief. Om de veiligheid te verhogen,kan de hold-to-run ook met een systeem-parameter voor handmatig verminderdesnelheid worden geactiveerd
2
De hold-to-run-functie wordt gebruikt in dehandmatige modus, niet in de automati-sche modus.
Zorg ervoor dat zich geen personen ophou-den binnen het werkbereik van de robotalvorens op de startknop te drukken.
3
Bedieningshandleiding - Algemene veiligheidsinformatie 453HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.1 Bewegende robots zijn mogelijk dodelijk
2.2 De eerste testsessie kan letsel of schade veroorzaken
BeschrijvingNa de installatie en het uitvoeren van onderhoudsactiviteiten, zijn er verschillendeveiligheidsrisico's waarmee rekening moet worden gehouden vóór de eerstetestsessie.
Veilig hanterenGebruik deze procedure tijdens het uitvoeren van de eerste testsessie na installatie,onderhoud of reparatie.
GEVAAR
Als de robot wordt gebruikt zonder aan de volgende aspecten te voldoen, kandit een risico op letsel met zich meebrengen en ernstige schade aan de robotveroorzaken.
Actie
Verwijder alle gereedschappen en vreemde voorwerpen van de robot en uit hetwerkgebied.
1
Controleer voordat de robot wordt opgestart of hij goed op zijn positie is vastgezetmet alle schroeven.
2
Controleer of alle veiligheidsapparatuur die is geïnstalleerd om de positie vast te zettenof de robotbeweging te beperken tijdens het onderhoud, is verwijderd.
3
Controleer of de bevestiging en het werkstuk stevig vast zitten, indien van toepassing.4
Installeer alle veiligheidsapparatuur op juiste wijze.5
Zorg ervoor dat al het personeel op een veilige afstand van de robot staat en buitenzijn bereik is, achter veiligheidshekken of iets dergelijks.
6
Als onderhoud of reparaties werden uitgevoerd, moet u speciale aandacht bestedenaan de functie van het onderdeel dat werd onderhouden.
7
Gevaar van botsingen
Voorzichtig
Bij het programmeren van de bewegingen van de robot, moeten altijd potentiëlebotsingsrisico's bepaald worden vóór de eerste test.Mechanische aanslagen stoppen niet altijd de bewegingen van de robot volledig.
46 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.2 De eerste testsessie kan letsel of schade veroorzaken
2.3 Werken binnen het bereik van de robot
WAARSCHUWING
Indien binnen het bereik van de robot moet worden gewerkt, moeten de volgendepunten in acht worden genomen:
• Het bedieningspaneel op de controller moet in de handmatige moduspositiestaan om de dodemansknop in werking te stellen, en om de werking vaneen computerkoppeling of extern bedieningspaneel te blokkeren.
• De maximale snelheid van de robot wordt beperkt tot 250 mm/s als dekeuzeschakelaar voor de werkingsmodus in de positie handmatige modusmet verminderde snelheid staat. Dit moet de normale positie zijn wanneerde werkruimte wordt betreden.De positieHandmatigemodusmet volle snelheid (100%)mag alleen wordengebruikt door ervaren personeel dat zich bewust is van de bestaande risico's.Handmatige modus met volle snelheid (100%) is niet beschikbaar in de VSof Canada.
• Let op de draaiende assen van de robot. Blijf uit de buurt van assen zodatuw haar of kleding daar niet in vastraakt. Houd ook rekening met gevarenvan ronddraaiende gereedschappen of andere toestellen, die op de robotof binnen de cel zijn aangebracht.
• Blijf uit de buurt van bewegende delen zodat ledematen, handen of vingersniet bekneld raken of verpletterd worden door de robot.
• Om te voorkomen dat iemand anders de robot gebruikt moet de celdeur meteen veiligheidsslot worden vergrendeld en moet u het sleuteltje meenemenals u de werkruimte betreedt.
WAARSCHUWING
Blijf NOOIT, onder geen enkele omstandigheid, onder een van de assen van derobot staan! De kans is altijd aanwezig dat de robot onverwachts gaat bewegenals de assen tijdens het activeren worden verplaatst, of tijdens ander werk binnenhet werkbereik van de robot.
Bedieningshandleiding - Algemene veiligheidsinformatie 473HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.3 Werken binnen het bereik van de robot

2.4 Hete onderdelen kunnen brandwonden veroorzaken
BeschrijvingTijdens normaal gebruik worden vele onderdelen heet. Het aanraken van dezehete onderdelen kan brandwonden veroorzaken.Er is ook brandgevaar als brandbare materialen op hete oppervlakken wordengeplaatst.
Veilig hanterenVoordat u de onderdelen feitelijk aanraakt, moet u uw hand op enige afstand vande potentieel hete onderdelen houden, om te controleren of deze warmte afgeven.Wacht tot de potentieel hete onderdelen zijn afgekoeld of verwijderd, of behandelze op een andere manier.Zet niets op hete metalen oppervlakken, bijvoorbeeld papier of plastic.
48 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.4 Hete onderdelen kunnen brandwonden veroorzaken
2.5 Remtest
Wanneer testenGedurende de werking zijn de vasthoudremmen van elke as aan slijtage onderhevig.Er kan een test worden uitgevoerd om te bepalen of de rem nog in staat is zijnfunctie te vervullen.
Hoe testenVan elke asmotor kan als volgt de functie van de vasthoudrem wordengecontroleerd:
1 Draai elke robotas naar een positie waar de combinatie van het gewicht vande robotarm samen met dat van een eventuele last, wordt gemaximaliseerd(maximale statische belasting).
2 Schakel de motor naar de MOTORS OFF.3 Controleer of de as zijn positie vasthoudt.
Wanneer de robot zijn positie bij het uitschakelen van de motoren vasthoudt,werken de remmen goed.
Bedieningshandleiding - Algemene veiligheidsinformatie 493HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.5 Remtest
2.6 Veiligheidsrisico's bij het gebruik van batterijen
BeschrijvingOnder normale gebruiksomstandigheden worden de elektrodematerialen en devloeibare elektrolyt in de batterijen niet aan de buitenlucht blootgesteld,aangenomen dat de integriteit van de batterij gehandhaafd blijft en dat deverzegeling intact blijft.Gevaar van blootstelling is alleen aanwezig in het geval van misbruik (mechanisch,thermisch, elektrisch) waardoor veiligheidskleppen geactiveerd worden en/of debatterijhouder scheurt. Lekkage van elektrolyt, reactie van elektrodematerialenmet vocht/water of batterijontluchting/explosie/brand kan het gevolg zijn, afhankelijkvan de omstandigheden.
Opmerking
De juiste regelgeving inzake afvalverwijdering moet worden nageleefd.
Veilig hanterenGebruik een veiligheidsbril bij de omgang met batterijen.Draag bij lekkage handschoenen en een chemisch schort.Draag in geval van brand een ademhalingsapparaat.Niet kortsluiten, herladen, doorboren, verbranden, verpletteren, onderdompelen,ontlading forceren of blootstellen aan temperaturen boven de vastgesteldebedrijfstemperatuur van het product. Risico op brand of explosie.
50 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.6 Veiligheidsrisico's bij het gebruik van batterijen
2.7 Veiligheidsrisico's tijdens werkzaamheden met tandwielkastolie (olie of vet)
BeschrijvingBij het gebruik van smeermiddelen voor de tandwielkast bestaat het gevaar voorpersoonlijk letsel en productschade. Voordat u werkzaamheden uitvoert met deolie in de tandwielkasten, dient u de volgende veiligheidsinformatie in acht tenemen.
Opmerking
Bij het omgaan met olie, vet of andere chemische substanties moet deveiligheidsinformatie van de fabrikant worden nageleefd.
Opmerking
Bij het omgaan met agressieve middelen moet adequate huidbescherming wordengebruikt. Een veiligheidsbril en -handschoenen worden aanbevolen.
Opmerking
De juiste regelgeving inzake afvalverwijdering moet worden nageleefd.
Opmerking
Wees met name voorzichtig bij het hanteren van heet smeermiddel.
Veilig hanteren
Eliminatie / ActieBeschrijvingWaarschuwing
Draag bij deze werkzaamhedenaltijd een beschermende uitrus-ting (veiligheidsbril, handschoe-nen).
Bij het aftappen en verversenvan tandwielkastolie of -vet kanhet nodig zijn hete olie te hante-ren tot 90°C.
Hete olie of vet
Draag bij deze werkzaamhedenaltijd een beschermende uitrus-ting zoals veiligheidsbril enhandschoenen.
Bij het werken met olie in tand-wielkasten bestaat de kans opallergische reacties.
Allergische reactie
Open voorzichtig de olieplug enblijf uit de buurt van de opening.Vul niet meer tandwielkastoliebij dan nodig.
Bij het openen van een olieplugkan er restdruk in de tandwiel-kast heersen met als gevolg dater olie naar buiten spuit uit deopening!
Mogelijke opbouw vandruk in tandwielkast
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 513HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.7 Veiligheidsrisico's tijdens werkzaamheden met tandwielkastolie (olie of vet)
Eliminatie / ActieBeschrijvingWaarschuwing
Zorg ervoor dat u de tandwiel-kast niet teveel vult wanneer udeze met olie of vet vult.
Als er meer tandwielkastoliewordt bijgevuld dan nodig is, kandit tot interne overdruk binnende tandwielkast leiden. Dit kanhet volgende veroorzaken:
• schade aan afdichtingenen pakkingen
• het volledig uitduwen vanafdichtingen en pakkin-gen
• belemmering in de vrijebeweging van de manipu-lator.
Niet te veel vullen
Controleer na vullen of het peilcorrect is.
Controleer na vullen of het peilcorrect is.
De opgegeven hoeveelheid olieis gebaseerd op het totale volu-me van de tandwielkast. Bij hetverversen van het smeermiddelkan de hoeveelheid bijgevuldsmeermiddel afwijken van deopgegeven hoeveelheid, afhan-kelijk van de hoeveelheid eerderuit de tandwielkast verwijderdsmeermiddel.
Aangegeven hoeveel-heid hangt af van afge-voerde volume
Zorg er bij het afvoeren van deolie voor dat er zo veel mogelijkolie wordt afgevoerd uit deschakelkast. Dit om zoveel mo-gelijk olieslurrie en metaalstuk-jes af te voeren uit de schakel-kast. De magnetische olieplug-gen zorgen voor de resterendemetaalstukjes.
Vervuilde olie in scha-kelkasten
52 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
2 De manipulator2.7 Veiligheidsrisico's tijdens werkzaamheden met tandwielkastolie (olie of vet)Vervolg
3 De robotcontroller3.1 Sluit de kastdeur
BeschrijvingDe kastdeur moet goed worden gesloten wanneer het robotsysteem in productieis. Als een deur niet goed is gesloten, voldoet de kast niet aan de beveiligingsklasse.Het schild voor elektromagnetische compatibiliteit (EMC) wordt ook beïnvloed alsde deur niet goed gesloten is.
Opmerking
Overeenkomstig IP54 moeten alle openingen van de bedieningskast wordenafgedekt. Dit omvat onaangesloten aansluitingen die afdekkappen moetenhebben.
Bedieningshandleiding - Algemene veiligheidsinformatie 533HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
3 De robotcontroller3.1 Sluit de kastdeur

3.2 Risico van uitschakeling van de functie "Beperkte snelheid 250 mm/s"
Opmerking
Transm gear ratio of andere kinetische systeemparameters van de FlexPendantof een pc niet wijzigen. Dit zou de veiligheidsfunctie "Beperkte snelheid 250 mm/s"beïnvloeden.
54 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
3 De robotcontroller3.2 Risico van uitschakeling van de functie "Beperkte snelheid 250 mm/s"
3.3 Gebruik van FlexPendant
Gebruik van FlexPendantDe FlexPendant is een kwalitatief hoogwaardige handterminal die is uitgerust metuiterst gevoelige moderne elektronica. Om storingen of beschadigingen als gevolgvan onjuist gebruik te voorkomen, dient u tijdens de bediening de volgendeinstructies in acht te nemen.De FlexPendant mag alleen worden gebruikt voor de doeleinden die in dezehandleiding worden genoemd. De FlexPendant is ontwikkeld, vervaardigd, getesten gedocumenteerd in overeenstemming met de toepasselijke veiligheidsnormen.Als u de instructies in acht neemt betreffende de veiligheid en het gebruik zoalsbeschreven in deze handleiding, zal het product normaal gesproken noch lichamelijkletsel, noch schade aan machines en uitrusting veroorzaken.
Bediening en reiniging• Ga er voorzichtig mee om.. Laat de FlexPendant niet vallen en gooi of bots
er niet mee. Dat kan breuk of defecten veroorzaken.• Als het FlexPendant wordt blootgesteld aan schokken, controleer dan altijd
of de veiligheidsfuncties (drie-standenvrijgavevoorziening en noodstop)werken en niet beschadigd zijn.
• Hang het apparaat aan de wandhouder wanneer u het niet gebruikt, zodathet niet per ongeluk kan vallen.
• Gebruik en bewaar de FlexPendant altijd op zo'n manier dat de kabel geengevaar voor struikelen oplevert.
• Gebruik nooit scherpe voorwerpen (zoals een schroevendraaier of een pen)om het touch screen te bedienen. Hierdoor kan het touchscreen beschadigdraken. Gebruik in plaats daarvan uw vinger of een stylus (op de achterkantvan een FlexPendant met USB-poort).
• Reinig het touch screen regelmatig. Stof en kleine deeltjes kunnen het touchscreen vervuilen waardoor het slecht functioneert.
• Reinig de FlexPendant nooit met oplosmiddelen, schuurmiddelen ofschuursponsjes. Gebruik een zachte doek en een beetje water of een zachtschoonmaakmiddelZie Producthandleiding - IRC5, sectie De FlexPendant reinigen.
• Sluit altijd de beschermingsdop van de USB-poort als er geen USB-apparaatis aangesloten. De poort kan breken of slecht functioneren bij blootstellingaan stof of vuil.
Voorzichtig
Een afgekoppelde FlexPendant moet zo worden opgeslagen, dat het niet perongeluk als verbonden aan de controller kan worden aangenomen.
Vervolg op volgende paginaBedieningshandleiding - Algemene veiligheidsinformatie 553HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
3 De robotcontroller3.3 Gebruik van FlexPendant
Bekabeling en voeding• Schakel de voeding uit voordat u het gedeelte van de FlexPendant opent
waar de kabel binnenkomt. Anders kunnen de onderdelen worden vernieldof kunnen zich ongedefinieerde signalen voordoen.
• Zorg ervoor dat niemand over de kabel struikelt waardoor het apparaat opde grond valt.
• Zorg ervoor dat de kabel niet beklemd raakt door een ander voorwerp,waardoor de kabel beschadigt.
• Leg de kabel niet over scherpe randen, waardoor de kabelmantel kanbeschadigen.
AfvalverwijderingBij het verwijderen van elektronische onderdelen dienen de desbetreffendelandelijke voorschriften in acht te worden genomen. Wanneer u onderdelenvervangt, dient u de versleten onderdelen op de juiste manier te verwijderen.
Voorzienbaar verkeerd gebruik van de drie-standenvrijgavevoorzieningVoorzienbaar verkeerd gebruik betekent dat het niet is toegestaan om dedrie-standenvrijgavevoorziening vast te zetten in de vrijgavepositie. Hetvoorzienbaar verkeerd gebruik van de vrijgavevoorziening moet worden beperkt.Wanneer men de drie-standenvrijgavevoorziening loslaat en vervolgens opnieuwindrukt, moet men wachten tot het systeem naar de stand Motors Off gaat voordatu opnieuw drukt. Anders krijgt u een foutmelding.
56 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
3 De robotcontroller3.3 Gebruik van FlexPendantVervolg
IndexAaansluiting
externe veiligheidsapparaten, 37automatische modus
beperkingen, 31
Bbatterijen
gebruik, 50beoordeling van gevaren en risico's, 12beperking van aansprakelijkheid, 11beschermende
stop functies, 28beschermende kleding, 37beschermende stop, 28
definitie, 28beschermingsmiddelen, 37beveiliging, 28brand blussen, 38
Ccategorie 0 stop, 28categorie 1 stop, 28controller
symbolen, 24
Ddrie-standenvrijgavevoorziening, 43
gebruiken, 34
EESD
-gevoelige apparatuur, 42schade verwijderen, 42
externe veiligheidsapparaten, 37
FFlexPendant
reiniging, 55
Ggevaarniveaus, 16
Hhandmatige modus
beperkingen, 33over, 33
handmatige volle snelheidsmodusover, 33
hangendhangend geïnstalleerd, 36
hold-to-run, 43gebruiken, 34
hoogtegeïnstalleerd op hoogte, 36
HRA, 12
Kkastslot, 36, 40kastvergrendeling, 36kooldioxideblusser, 38
Llabels
controller, 24
robot, 18land-/regiospecifieke regels, 11
Nnoodstop, 28
knoppen, 29noodstoppen
herstellen, 44normen, 14
ANSI, 15CAN, 15EN, 14EN IEC, 14EN ISO, 14
Oolieverversing
veiligheidsrisico’s, 51op de robot klimmen, 36
Pproductnormen, 14
Rreiniging
FlexPendant, 55remmen
werking testen, 49robot
labels, 18symbolen, 18
Ssignalen
veiligheid, 16stop categorie 0, 28stop categorie 1, 28stops
overzicht, 28symbolen
veiligheid, 16
Ttesten
remmen, 49
Vvaliditeit en verantwoordelijkheid, 11veiligheid
bewegende robots, 45brand blussen, 38ESD, 42noodstop, 29remtest, 49signalen, 16signalen in handleiding, 16symbolen op robot, 18testsessie, 46werkbereik, 47
Veiligheidsymbolen, 16verminderde snelheidsfunctie, 54
veiligheidssymbolen op controller, 24
veiligheidshek, 12veiligheidsrisico
elektrische onderdelen, 40
Bedieningshandleiding - Algemene veiligheidsinformatie 573HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
Index
hete onderdelen, 48installatie, 36olieverversing, 51onderhoudswerk, 36spanning, 40storing tijdens gebruik, 36
veiligheidssignalenin handleiding, 16
veiligheidszones, 12
veiligheisnormen, 14verantwoordelijkheid en validiteit, 11verantwoordelijkheid van de integrator, 11vereisten van systeemintegrator, 11voetstuk
geïnstalleerd op voetstuk, 36vrijgavevoorziening, 43
gebruiken, 34
58 Bedieningshandleiding - Algemene veiligheidsinformatie3HAC031045-009 Revisie: N
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.
Index

ABB AB, RoboticsRobotics and MotionS-721 68 VÄSTERÅS, SwedenTelephone +46 (0) 21 344 400
ABB AS, RoboticsRobotics and MotionNordlysvegen 7, N-4340 BRYNE, NorwayBox 265, N-4349 BRYNE, NorwayTelephone: +47 22 87 2000
ABB Engineering (Shanghai) Ltd.Robotics and MotionNo. 4528 Kangxin HighwayPuDong DistrictSHANGHAI 201319, ChinaTelephone: +86 21 6105 6666
ABB Inc.Robotics and Motion1250 Brown RoadAuburn Hills, MI 48326USATelephone: +1 248 391 9000
abb.com/robotics
3HAC031045-009,Rev
N,nl
© Copyright 2008-2018- ABB. Alle rechten voorbehouden.


















