V&R #6 - Vision and Robotics
60
VISION & ROBOTICS JAARGANG 2 | NUMMER 6 | NOVEMBER 2010 Inclusief dossier Robotveiligheid Lijmen met robot voor betere kwaliteit Lasrobots steeds breder inzetbaar Visiontrends in Parijs en Stuttgart De bindende factor
Transcript of V&R #6 - Vision and Robotics
VISION & ROBOTICS
jaaRgaNg 2 | NummeR 6 | NOVemBeR 2010
Inclusief dossier Robotveiligheid
Lijmen met robot voor betere kwaliteit
Lasrobots steeds breder inzetbaar
Visiontrends in Parijs en Stuttgart
De bindende factor

02
4
6
M-3iA: 6 assen. 6kg payload.Oneindig veel mogelijkheden
Uniek, gepatenteerde en uiterst betrouwbare robotpolsaandrijvingen
Hygiënisch, extra-tough wash-down oppervlakte die voldoet aan de voeding- en
farmaceutische vereisten
Speciale Food Grade Grease om enig risico op contaminatie uit te
sluiten
PickPro: PC-pakket voor robotsimulaties
voor picking toepassingen
Compacte robotcontroller (450x370x355mm) dat geïntegreerd kan worden
Werkbereik:
1350mm in diameter en 500mm in hoogte (zeer uitzonderlijk
voor een delta robot!)
IP67 beschermingsgraad 4-assige uitvoering met “high speed” robotpols voor “top high speed” picking
Geïntegreerd visie systeem
Tot 6kg payload
6-assige uitvoering met flexibele robotpols voor complexere handling- en assemblage toepassingen onder elke hoek
www.fanucrobotics.be
M-3iA_A4.indd 1 13.10.2010 15:24:31
03
ColofonVision & Robotics is hét vakblad over automatise-
ringsoplossingen voor de maak-, agro-en foodindustrie
door specialisten in robotica en visionsystemen.
jaaRgaNg 2 | NummeR 6 | NOVemBeR 2010
Vision & Robotics verschijnt zes maal per jaar. Toezending
geschiedt op abonnementbasis en controlled circulation.
uITgeVeR
Henk van Beek, Fenceworks BV
Telefoon: 06 - 28 41 70 73
E-mail: [email protected]
ReDaCTIe
Liam van Koert, Verbal Essence
Joanna Hughes, Verbal Essence
Telefoon: 06 - 17 58 82 65
Email: [email protected]
ReDaCTIeRaaD
Pieter Jonker, TU Eindhoven en TU Delft
Jaap van de Loosdrecht, Computer Vision Lab, NHL
Martin van de Have, RAB en ABB
Fred Bokhorst, RAB en Ferdar
Bas Wondergem, DVC
Hans Lenos, lenosonline.info
Wim Hoeks, BrainCenter
VORmgeVINg
Laura Willemsen, Grafisch ontwerp
DRuk
3l drukkerij bv, rotterdam
POSTaDReS ReDaCTIe
Postbus 82, 2460 AB Ter Aar
E-mail: [email protected]
aBONNemeNTeN
aDVeRTeNTIe-exPLOITaTIe
Mike de Jong, Archer Media BV
Telefoon: 06 - 43 05 30 25
E-mail: [email protected]
aaN D IT NummeR weRkTeN mee
Safora S.S. Macdonald, Frank Senteur, Yves De Groote,
Fred Bokhorst, Erik Steenkist, Nick de With, Jeffrey
Habets, Huub Hamers, Martin van der
Have, Hans Lenon, Martijn Jansen.
Column
Hoewel het thema volgens de redactionele planning lijmen en lassen is, proberen
we met de boodschap op de cover altijd net een stapje verder te gaan. En hoewel
de analogie met beide zeer succesvolle verbindingstechnieken u vast niet ontgaan
zal zijn, spelen er tal van onderwerpen door het hoofd, die nog niet eens direct
met vision en robotica te maken hebben, maar wel van wezenlijk belang zijn voor
een succesvolle bedrijfsvoering. Aanleiding was een lange rit naar Stuttgart met
een substantiële Vision & Robotics-afvaardiging. Deze gaf ruim voldoende tijd voor
het smeden van plannen, zelfreflectie en voor de vuist weg roepen wat er in je op
kwam. Maar eigenlijk begon het al de avond ervoor. Om de heenrit wat te ver-
korten, waren we namelijk naar het Limburgse Jabeek afgereisd. En om het nuttige
met het aangename te combineren, gingen we meteen even langs bij één van de
visioncollega’s die toevallig in hetzelfde dorp gehuisvest is. De banden aanhalen,
zeg maar. Dit was overigens helemaal geen opgave: de collega in kwestie is niet
alleen gastvrij, maar ook helemaal geen onverdienstelijk bierbrouwer. Uiteraard
kwam het onderwerp al snel op vision, het nut van een bepaald groepsgevoel in de
sector en de rol van een blad als Vision & Robotics. Binding bleek hierbij een cen-
traal thema. Klantenbinding en het belang van de herhalingsopdracht, helemaal in
moeilijke tijden. Binding ook als het gaat om het maken van een vuist als branche,
zonder dat hier meteen allerlei lidmaatschappen en procedures aan vast hoeven te
zitten. En tot slot binding van de lezer die zich in een blad herkent, en daarmee een
brug kan slaan tussen vragen uit de markt en de aanbieders van oplossingen.
De toon voor de lange rit naar Stuttgart was gezet. Er bekroop ons een gevoel dat
we op de goede weg waren. Het is goed je gezicht te laten zien op een beurs – een
fenomeen dat zijn bestaansrecht overigens dankt aan het nader tot elkaar brengen
van mensen – waar de doelgroep bij elkaar komt om van gedachten te wisselen
over hun favoriete onderwerp. Ook al was de afstand groot en de Nederlandse
opkomst klein (of is ‘omdat’ hier beter op zijn plaats?), het schept een band.
De moraal van dit verhaal? Die kwam op de terugweg. Ik geloof ergens tussen
het spelen van een iphone-spelletje en een liedje van The Smiths. We zullen het
samen moeten doen. De eindgebruiker zal moeten aangeven waar hij tegenaan
loopt. Dit niet in termen van mogelijke oplossingen, maar in behoeften ten aanzien
van kwaliteit, snelheid en kostprijs. De bladen moeten deze behoeften signaleren.
Zij moeten informeren welke mogelijkheden er allemaal voorhanden zijn. Deze
informatie komt van de aanbieders. Uiteraard moeten alle betrokkenen ook hun
stinkende best doen hun rol zo goed mogelijk te vervullen. Niet alleen in het ka-
der van klantenbinding, maar ook voor het imago van de branche en een sterke
Nederlandse BV.
LIam VaN kOeRT
Binden
03

In dit nummer Het lijmen van een twin-sheet product 08
Nieuwe visionoplossingen tijdens IPA 2010 12
Minder fouten bij onderzoek objectherkenning door ratten 16
Lasrobot door digitalisering steeds breder inzetbaar 18 Flexibele robots voor verpakkingsbedrijf 22
Dossier Robotveiligheid 23
Softwareschil voor robotbesturingen 40
Trends in Robotlassen 46
Ook Nederlandse noviteiten op Vision 2010 54 Rubrieken Redactioneel 03 Colofon 03 Nieuws 06 V&R voor dummies 20
Branche Bulletin 44
Robotveiligheid 50
Productnieuws 56
Adverteerdersindex 57
Column RAB 58
Inhoud 05
18
08
23
November 2010 | VISION & ROBOTICS

Nieuws06
Met robotchirurgie kunnen zeer gecompliceerde en precieze kijkoperaties
worden uitgevoerd in borstkas en buikholtes. Operatierobots zijn dan ook
een verrijking van het instrumentarium van de chirurg. Maar er valt nog
genoeg aan te verbeteren. Van den Bedem promoveerde afgelopen week
aan de TU/e op een nieuw type operatierobot, Sofie. Meer specifiek: ze
promoveerde op de ‘slave’ van de robot, het robotonderdeel dat de opera-
tie aan de tafel uitvoert. Van den Bedem bouwde hier een prototype voor.
Verder bestaat Sofie onder meer uit een master, het ‘stuurpaneel’ van de
chirurg, met aangedreven joysticks.
Eén van de eigenschappen die Sofie onderscheiden, is de ‘force feedback’,
ofwel ‘tactiele terugkoppeling’ in de joysticks waarmee de chirurg ope-
reert. Met deze tegendruk kan een chirurg precies voelen welke kracht
hij uitoefent als hij een hechting aanbrengt of een stukje weefsel opzij
drukt. Het laatste stukje hiervan, de control van de force feedback, wordt
momenteel ontwikkeld. Ook is Sofie zeer compact en daardoor minder
een sta-in-de-weg in de operatiekamer en boven de patiënt. De geringe
afmetingen hebben nog een ander voordeel: de slave van Sofie staat niet
op de vloer, maar wordt bevestigd op de operatietafel. Hierdoor is het niet
nodig om alles opnieuw in te stellen wanneer de operatietafel met patiënt
verplaatst of gekanteld wordt. Verder biedt Sofie de mogelijkheid om een
orgaan van verschillende kanten te benaderen en ze kan zelfs ‘om de
hoek’ opereren. Van den Bedem bouwde de robot met hulp van de techni-
sche dienst van de TU/e. De universiteit heeft deze kennis gepatenteerd.
Linda van den Bedem werkt momenteel met collega’s aan een business
case om te verkennen of Sofie ook commerciële potentie heeft. Volgens
Van den Bedem zijn chirurgen in ieder geval erg enthousiast over het pro-
totype. En ook de prijs moet een stuk aantrekkelijker worden dan die van
de huidige generatie robots, waaraan een prijskaartje hangt van zo’n an-
derhalf miljoen dollar. De onderzoekster verwacht dat het nog zeker vijf
jaar duurt voordat Sofie echt op de markt kan zijn.
meT De huIDIge OPeRaTIeROBOTS ‘VOeLT’ De
ChIRuRg NIeT hOe kRaChTIg hIj SNIjDT Of aaN De
heChTDRaaD TRekT, eN De ROBOTS zIjN gROOT
eN ONhaNDIg IN heT geBRuIk. Tu/e-ONDeRzOekeR
LINDa VaN DeN BeDem ONTwIkkeLDe DaaROm eeN
VeeL COmPaCTeRe ROBOT, DIe De ChIRuRg DOOR
‘fORCe feeDBaCk’ LaaT VOeLeN waT hIj DOeT.
Beter opereren met Nederlandse
operatierobot Sofie
Op 15 december organiseren Vision & Robotics, het Mikrocentrum en Wageningen UR - GreenVision aan
de Universiteit Wageningen een speciale dag over visiontechnieken in de agrarische en voedselverwer-
kende industrie. De dag zal in het teken staan van kruisbestuiving en ontplooiing van nieuwe initiatie-
ven: wat kan er geleerd worden van vorderingen in andere sectoren en hoe kunnen deze tot praktische
nieuwe toepassingen leiden? Bijzonder aan deze dag is het interactieve karakter. Onder begeleiding
van experts van een bepaalde technologie zullen enkele brainstormsessies gehouden worden die het
sectoroverschrijdende denken stimuleren. Niet alleen zal de bezoeker de dag boordevol nieuwe ideeën
afsluiten, ook zal worden onderzocht of cross-sectorale samenwerkingsverbanden kunnen leiden tot
innovatieve projecten waarvoor in 2011 subsidie kan worden aangevraagd. Tot slot zullen ook enkele
demonstraties te zien zijn en zal de lunch worden genoten in een restaurant dat eigenlijk één groot
visionexperiment is.
Start cross-sectorale samenwerking voor vision in food
Foto: Bart van Overbeeke

07Nieuws
Nieuws
Robot voor opruimen na olierampIn Venetië toonden medewerkers van MIT Senseable City een autonome
robot die op water drijvende olie kan opruimen. Doordat hij in een zwerm
zijn werk kan doen, kan hij zelfs bij grote olierampen worden ingezet. De
robot die luistert naar de naam Seaswarm is op dit moment nog een pro-
totype. Hij maakt gebruik van zonne-energie en is uitgerust met olieabsor-
berend en waterafstotend nanomateriaal, dat is aangebracht aan een soort
lopende band met schoepen van zo’n vier meter lang. Dit systeem geldt
tevens als aandrijfsysteem en kan tot twintig keer zijn eigen gewicht aan
olie absorberen. Daarnaast is de robot in staat zelf de olie op te speuren.
Volgens de makers zouden er zo’n vijfduizend Seaswarms nodig zijn om
de olie van de Deepwater Horizon ramp op te ruimen, wat een maand
in beslag zou nemen. De kosten van een Seaswarm worden geraamd op
ongeveer zestienduizend euro.
eyewiter laat verlamde kunstenaars met ogen tekenen Tijdens het Cinekid Festival in Amsterdam dat recentelijk plaatsvond was
een ABB-robot onderdeel van het interactieve programma op het ‘New
Media Pavilion’. De robot werd ondersteund door twee engineers van
Voestalpine. Kinderen konden de robot besturen door met hun ogen te
bewegen. Een groep kunstenaars en engineers creëerden onlangs de Eye-
Writer. Deze uitvinding maakt deel uit van een gezamenlijk onderzoek. De
EyeWriter is een oogvolgend apparaat dat het middels op maat gemaakte
software voor (graffiti)kunstenaars die lijden aan verlamming door amyo-
trofe laterale sclerose (ALS, een neurologische ziekte) mogelijk maakt om
met hun ogen te kunnen tekenen.
De software werd in dit geval ietwat gewijzigd voor het Cinekidpubliek,
dat voornamelijk uit kinderen bestaat. Door in de EyeWriter camera te
kijken konden kinderen letters van een scherm selecteren en zo hun na-
men schrijven. Deze informatie werd naar de robotcontroller gestuurd.
Vervolgens schreef de robotarm de naam in graffitiletters op een groot vel
papier. Het besturen van een robot werd zo kinderlijk eenvoudig.
Bewegingsdetectie en stereoscopische 3D als ontbijtDassault Systèmes heeft voor de liefhebber van Nestlé ontbijtgranen een
unieke virtual reality ervaring in petto. Rondom de première van Luc Bes-
sons recentste film ‘Arthur 3 – The War of the Two Worlds’ heeft het bedrijf
een videospel gemaakt, dat realtime bewegingsdetectie combineert met
stereoscopische 3D. Volgend op het succes een augmented reality spel
voor Chocapic en Nesquik, gebruikt het bedrijf nu wederom haar 3D ken-
nis en ervaring om de marketingstrategie van Nestlé een flinke boost te
geven. En de gamers hoeven niet langer te wachten op de nieuwe gene-
ratie bewegingsdetecterende spelsystemen voor 3D-TV. Ze kopen sinds
oktober gewoon een doos ontbijtgraan en knippen de 3D-bril eruit. De
bril, die is uitgerust met een ‘magisch vierkant’ met daarop één van de
helden uit de film, wordt opgezet, de webcam wordt aangezet en via
www.arthurcourse.com kan men genieten van wonderen van een stere-
oscopische 3D-wereld. Wie is de snelste en beste 3D-motorrijder? De web-
cam detecteert de marker, zodat er geen keyboard, muis of joystick nodig
is om het spel te spelen. En wie het spel beu is koopt gewoon een nieuw
pak ontbijtgraan met een andere held erop. Sterker nog, het is natuurlijk
het beste alle verschillende smaken te sparen.
Robotgids in kennedy Space CenterNasa heeft er een nieuwe robot bij. Hij heet
RoboThespian en fungeert als gids voor de
toeristen in het Kennedy Space Center te
Cape Canaveral. Nasa betaalde 95.000 euro
voor de nieuwe robot. RoboThespian com-
municeert middels begroetingen en diverse
uitdrukkingen. Hij kent vijftien talen uit zijn
hoofd. Ook schijnt hij te beschikken over
een flinke dosis humor. De Nasa gebruikt
wel vaker robots, zoals bijvoorbeeld voor
ruimtemissies. Veel mensen kennen wel-
licht Robonaut, de robot die opereert als
ISS-ondersteuner. Maar RoboThespian blijft
voorlopig gewoon in Amerika.
08
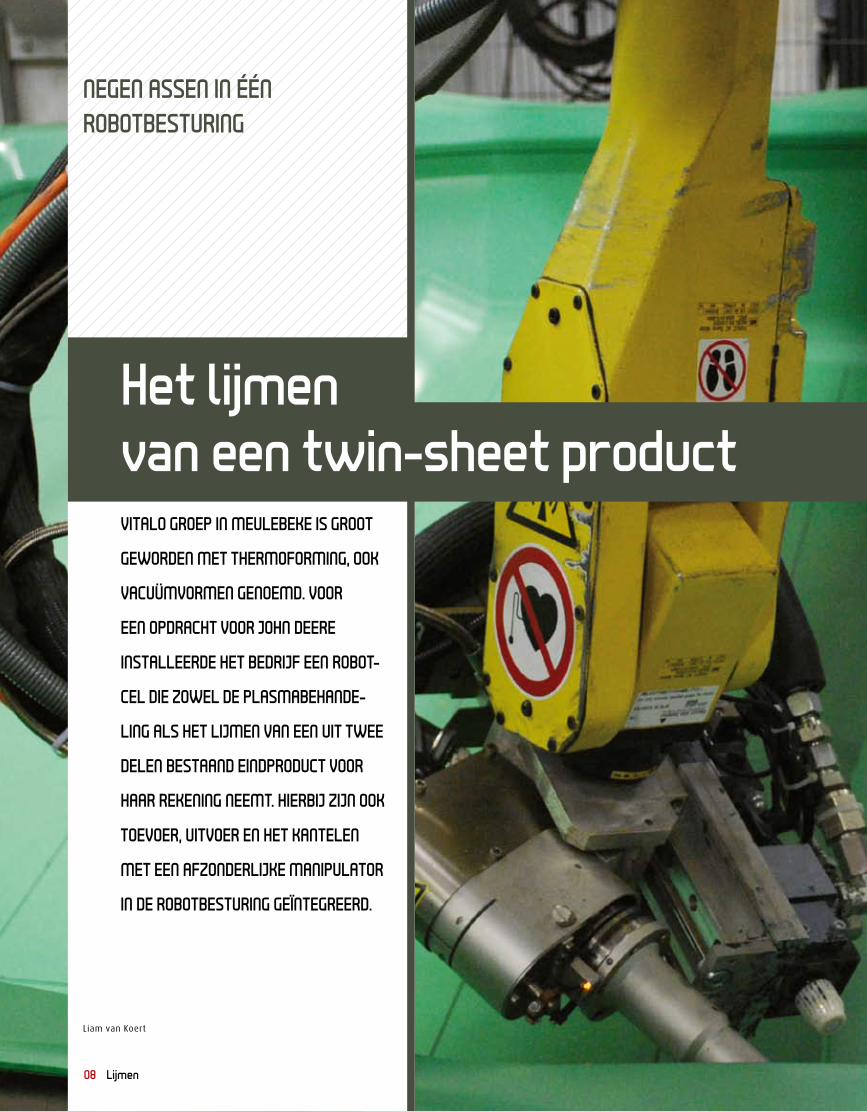
VITaLO gROeP IN meuLeBeke IS gROOT
gewORDeN meT TheRmOfORmINg, OOk
VaCuümVORmeN geNOemD. VOOR
eeN OPDRaChT VOOR jOhN DeeRe
INSTaLLeeRDe heT BeDRIjf eeN ROBOT-
CeL DIe zOweL De PLaSmaBehaNDe-
LINg aLS heT LIjmeN VaN eeN uIT Twee
DeLeN BeSTaaND eINDPRODuCT VOOR
haaR RekeNINg NeemT. hIeRBIj zIjN OOk
TOeVOeR, uITVOeR eN heT kaNTeLeN
meT eeN afzONDeRLIjke maNIPuLaTOR
IN De ROBOTBeSTuRINg geïNTegReeRD.
het lijmen van een twin-sheet product
NegeN aSSeN IN ééN ROBOTBeSTuRINg
Liam van Koert
Lijmen08

09
Wie het kleine Belgische Meulebeke binnenrijdt, zal het op het eerste
gezicht niet vermoeden: het terrein van Vitalo Groep is groot. De vele
hallen huisvesten grote vacuümvorm machines en diverse werkplek-
ken waar de 3D-plaatproducten worden ontbraamd, samengevoegd en
gesneden. Ook zijn er vele stellages te vinden waar grote verlijmde
producten in zogenoemde ‘stoelen’ liggen te wachten totdat de lijm op
volle sterkte is. En te midden van deze stellages bevindt zich de laatste
aanwinst van de Vitalo Groep: een robotcel die speciaal is ontwikkeld voor
de productie van vlinderdeuren voor een balenpers van John Deere.
groter met meer lagen“De markt vraagt om steeds grotere producten, waarbij ook het gewenste
aantal lagen toeneemt”, zegt Kurt Goeminne, Maintenance Manager bij
Vitalo Groep. “Voor kleinere afmetingen kunnen we meerlaagse produc-
ten in eenzelfde machine maken: de nog warme, gevormde producten
worden onder zeer hoge druk op elkaar gedrukt, waardoor er in feite een
lasverbinding ontstaat. Worden de afmetingen echter groter: het 3D vor-
men kunnen we hier tot groottes van 329 bij 320 centimeter, dan is lijmen
de enige optie. Hoewel dit bij een enkele productseries ook nog wel met
de hand wordt gedaan, stappen we hier steeds meer over naar de roboti-
ca. Grootste reden hiervoor is de kwaliteit.” Goeminne legt uit dat het wel
wat overtuigingskracht heeft gevergd om John Deere te laten inzien dat
kunststof een veel beter materiaal was voor de vlinderdeuren van een
nieuwe balenpers. De mobiele machines die van rondzwervend gras de
mooie ingepakte balen hooi maken die men vooral in Frankrijk nog wel
eens in het land ziet liggen, krijgen namelijk veel te verduren. Een sterke
lijmverbinding is dan cruciaal. “In 2007 was het zover en konden we met
de ontwikkeling van de vlinderdeuren en productiemiddelen beginnen.
Al gauw werd duidelijk dat een robot die zowel de plasmavoorbehande-
ling als de verlijming verzorgde, het beste eindresultaat zou geven.”
achttien meter“Bij producten van 270 bij 220 centimeter wordt ongeveer achttien meter
lijmrups gelegd”, vertelt Geert Haeve. De Process and Technology Mana-
ger van machinebouwer en robotintegrator Ninix Technologies is, naast
de kennis over robotsystemen, gekozen vanwege zijn proceskennis. Een
lijminstallatie en pistool, alsmede de plasma-apparatuur kennen voor
hem maar weinig geheimen. “Maar voordat deze gelegd wordt, moet de
precieze lijmweg eerst worden ontvet middels een plasmabehandeling.
Dit is een proces waarbij lucht geïoniseerd wordt, zodat deze in plas-
mafase eerst de verontreinigingen verwijderen en vervolgens de juiste
oppervlaktegesteldheid verzorgen. Dit noemen we het activeren van het
product: de moleculen worden voorbereid voor een goede hechting. De
lijmrups moet vervolgens precies op de behandelde baan worden aange-
bracht, waarna er eerst ongeveer een half uur onder druk moet worden
uitgehard – er wordt gelijmd met een tweecomponentensysteem – en
daarna nog eens vierentwintig uur in de magazijnstelling.”
kwaliteit en bereikbaarheidHet precies samen laten vallen van de plasmabaan en de lijmrups lijkt
eenvoudiger dan het lijkt. Goeminne: “Het onderste deel van het twin-
sheet product heeft geleidingsbanen voor de lijm, waardoor men goed
kan zien waar voorbehandeling moet plaatsvinden en de lijm moet wor-
den aangebracht. Het bovenste deel is echter glad en het is moeilijk om
de banen precies op elkaar te krijgen. Met een robotinstallatie, die bij
aanvang van het proces telkens gekalibreerd wordt op basis van de po-
sitie van het pistool, is dit natuurlijk veel eenvoudiger. Een tweede pro-
bleem waar de robot geen last van heeft is de bereikbaarheid. Bij een
3D-product van meer dan drie bij drie meter kom je als lijmer namelijk
niet zo eenvoudig met je lijmpistool in het midden.” Goeminne geeft aan
dat cyclustijd een minder relevant criterium is. “Gezien de uithardingstij-
den van de lijm was snelheid niet echt een criterium om voor de robot
te kiezen. We hebben als ontwerpeis een cyclustijd van tien minuten
gehanteerd. In deze tijd kan de operator natuurlijk wel andere dingen
doen. Daarnaast is een bijkomend voordeel van de robot dat het wat ar-
beidsvriendelijker is. Een handlijmpistool weegt namelijk al gauw zeven
kilogram, en dat ga je op den duur toch wel in je armen voelen.”
Negen assen, één besturingDe robot die uiteindelijk de klus mocht gaan klaren was de M-710iC/20L
van FANUC (Factory Automation Numerical Control). Niet alleen bleek
deze machine een geschikte kandidaat voor het dragen van de twintig
kilogram wegende kop waarin lijm- en plasmapistool geïntegreerd wa-
ren, ook maakte het grote bereik van deze robot het mogelijk om te wer-
ken met holtes tot zestig centimeter diep. “We hebben de M-710iC/20L
ondersteboven in een frame gehangen, zodat hij overal goed bij kan.
Ook is er een servosysteem opgenomen dat de in elkaar gestapelde de-
len (boven en onder) de cel inrijdt en onder de robot positioneert. Een
kantelsysteem met vele zuignappen tilt vervolgens het bovenste deel uit
het onderste deel, en kantelt het bijna 180 graden zodat de robot overal
goed bij kan. Zijn de plasma- en lijmbehandelingen uitgevoerd, dan legt
het kantelsysteem de twee delen weer netjes in elkaar en wordt de sa-
Lijmen
Vitalo groupDe Vitalo Group is een wereldwijd opererend concern met meer dan
duizend werknemers, dat zich bezighoudt met thermoforming in al
zijn facetten. Het bedrijf kent twee divisies. Het onderdeel Packaging
maakt verpakkingsoplossingen voor uiteenlopende producten (van
elektronica tot medicijnen). Het onderdeel Industries, dat weer is op-
gedeeld in een onderdeel Vehicles, Equipment en Acoustics, houdt
zich vooral bezig met het grotere werk. Hierbij wordt er niet alleen
geproduceerd, maar heeft het bedrijf ook ruime ervaring met het
ontwerpen van meerlaagse kunststof beschermkappen, deuren, da-
ken en machinebehuizingen.

010 Lijmen
menstelling, inclusief stoel, uit de cel verplaatst. In totaal worden er dus
negen assen bestuurd: de zes robotassen, een translatie de cel in en uit
(dit verloopt middels een tandheugel), de as voor de verticale translatie
(het optillen van het bovendeel verloopt middels een spindel) en de
kantelende as. De besturing van al deze negen assen wordt door de
robotbesturing verzorgd. Dit heeft als voordeel dat de robot alles vanuit
zichzelf ‘ziet’ en dit in zijn eigen bewegingen kan meenemen. Ook was
het een goedkopere oplossing, omdat er geen extra besturingscompo-
nenten nodig waren.”
Overige installatiesEen rondje rond de robotcel makend, stuit men al snel op enkele andere
systemen die helpen bij het productieproces. Naast een vacuümunit voor
het hef - en kantelsysteem en een plasma-installatie voor een gere-
gelde ionisering van de lucht, is er tevens een menginstallatie voor het
tweecomponentenlijmsysteem. Met name deze laatste installatie blijkt
kritisch. “Het plasmadeel is redelijk snel opgestart, maar het stabiliseren
van de lijm is een stuk lastiger”, licht Haeve toe. “Het mengen van de
er is geen simulatiesoftware voor het torderen van stugge slangen
twee componenten luistert erg nauw, en bovendien is de viscositeit van
de lijm erg temperatuurgevoelig. Schommelingen in viscositeit hebben
we ondervangen door de slangen op constante temperatuur te houden,
onafhankelijk van de omgevingstemperatuur. Voor de monitoring hier-
van hebben we een afzonderlijke pc met LabView gebruik, waarmee het
gehele proces nauwlettend gevolgd kan worden en alle ruim vierdui-
zend parameters per lijmproces worden gelogd. LabView is tevens aan de
FANUC-besturing gekoppeld, en vormt de grafische userinterface voor de
operator. “ Gevraagd naar de programmeertools die hierbij zijn gebruikt,
antwoordt Goeminne dat hoewel normaliter RobCad wordt gebruikt, er
dit keer met RoboGuide van FANUC zelf is gewerkt. “We hebben bij Vitalo
Group RobCad als standaard gemaakt, maar in dit geval zou het extra
toepassen van een postprocessor het geheel onnodig duur en complex
maken.”
uitdagingenHet programmeren van de perfecte robotbaan is bij lijmtoepassingen ge-
makkelijker gezegd dan gedaan. Op de eerste plaats zitten de koppen
van zowel het plasma- als het lijmpistool erg dicht bij elkaar, en moet
men tijdens de behandelingen uitkijken dat deze elkaar en het werk-
stuk niet in de weg zitten. Maar ook de slangen hadden soms een eigen
wil. Haeve: “Voor robotkabels heb je natuurlijk tal van oplossingen die
het verdraaien van de kabels tot een minder probleem maakt. Maar met
de zeven meter lange slangen voor zowel het plasma als de lijm is dit
niet het geval. Ze zijn een stuk stugger, en sommige op het eerste ge-
zicht overbodige bewegingen zijn toch echt nodig om het torderen te
voorkomen. Dit blijft een kwestie van trial en error en het steeds verder
optimaliseren van de beweging. Er zijn nu eenmaal nog geen simulatie-
programma’s die dit soort ingewikkelde eigenschappen kunnen meene-
men.” En de veiligheid? Bracht deze nog enkele kopzorgen? “Eigenlijk
niet. We hebben ons in het begin natuurlijk wel afgevraagd welke delen
we van een hek moeten voorzien en waar de lichtschermen passen. De
shuttle waarop de werkstukken naar binnen worden gereden, moet de
cel natuurlijk wel in kunnen. Deze shuttle is in feite gevaarlijker dan de
robot, omdat hij buiten de cel komt. We hebben hem daarom voorzien
van stootkussens met sensoren. De robot zelf maakt trage vloeiende be-
wegingen, en is bovendien uitgerust met DCS (Dual Check Safety) van
FANUC, waarmee veilige zones kunnen worden gedefinieerd. Komt de
robot in deze zones, dan voert DCS een noodstop uit. Bovendien is de
M-710iC/20L uitgerust met Collision Detection, waarvan de gevoeligheid
kan worden ingesteld. Zowel de operator als de producten zijn met de
robot dus in goede handen.”
Ninix TechnologiesNinix Technologies is in 2001 begonnen als spin-off van Philips BC
Components. De machinebouwer uit Brugge maakt op maat ge-
maakte productielijnen en robotcellen voor klanten. Hierbij wordt
ook proceskennis ten aanzien van onder andere lijmen, plasmabe-
handelingen en laserlassen ingezet. Het bedrijf werkt onder andere
met robots van FANUC en gebruikt hierbij vaak vision op basis van
LabView.
De koppen van zowel het plasma- als het lijmpistool zitten erg dicht bij elkaar, en men
moet tijdens de behandelingen uitkijken dat deze elkaar en het werkstuk niet in de
weg zitten.
Een overzicht van de robotcel.
Cognex vision does it all.Companies around the world rely on Cognex® vision to optimize product quality,
drive down manufacturing costs, and control traceability.
See what vision can do for you www.cognex.com/all
Inspect any product
Guide any automation
Identify any part
Vision Systems Vision Software Vision Sensors ID Readers
0914022 A4VisionAd.qxd 11/24/09 2:45 PM Page 1
012012012
van andere softwaregebaseerde vormherkenningsmodules, die zeer veel
rekencapaciteit nodig hebben. De vormherkenningsmodule van Best is
op hardware gebaseerd, wat zal resulteren in een hogere capaciteit en
een hogere precisie, louter gebaseerd op vorm. De template matching
software onderzoekt de verschillende objecten naar dunnere delen, ter-
wijl de algemene softwaremodule verschillende tools bevat die allerlei
verschillende vormen eenvoudig kunnen herkennen en gemakkelijk kun-
nen uitstoten.
Bediening en besturingGebruikersvriendelijke bediening spreekt voor zich, dankzij de simpele
grafische gebruikersomgeving met visuele symbolen. Opvallend zijn bij-
voorbeeld de mogelijkheden om snel een foto te nemen en te definiëren
welke producten wel of niet aan de kwaliteitsspecificaties voldoen. Op
een intuïtieve wijze kunnen de sorteereisen worden geprogrammeerd.
De operator duidt op het scherm aan wat als goed en wat als slecht moet
worden beschouwd en de machine doet de verwerking en communicatie
naar de optische onderdelen en uitstootsystemen.
Lasersorteerder met vormherkenningDe Helius lasersorteerder is opgewaardeerd en biedt nu ook de mogelijk-
heid voor vormherkenning in vrije val met behulp van een camera. Ook
dit werd bekend gemaakt op de IPA. Deze installatie werd in het bijzon-
der ontwikkeld voor het sorteren van noten, fruit en groenten, waarbij
gebruik wordt gemaakt van tot twaalf lasersignalen voor verschillende
kwaliteitsparameters (waaronder kleur, structuur en grootte). Voortaan
kunnen bijvoorbeeld ook ongewenste steeltjes bij groene bonen of de
H-vorm van walnoten worden gezien met behulp van de combinatie van
laser- en cameratechnologie. Dit is belangrijk voor fabrikanten van noten
voor de chocoladeindustrie, die perfecte noten willen voor op of in de
pralines en bonbons.
Op dinsdagmiddag 19 oktober werd de nieuwe en kosteneffectieve Opus
optische sorteerinstallatie aan het grote publiek voorgesteld. Deze had
enkele dagen verborgen onder een groen doek gestaan, om de primeur
extra spannend te maken. Deze compacte (1,9m x 3,65 meter) eenheid
is ontwikkeld voor vrije val inspectie van diepvriesgroente en analyseert
gelijktijdig verschillende kwaliteitsparameters. Het gaat hier om aanwe-
zigheid van vreemd materiaal, productdefecten zoals afwijkingen van
kleur, vorm, en structuur van het product. Door de grootte is de instal-
latie gemakkelijk te integreren in een productielijn. De inspectiebreedte
bedraagt één meter. Voor de belichting wordt gebruik gemaakt van led-
verlichting.
SwIR-technologieHet brede pallet aan visionoplossingen is mede mogelijk door de speci-
fieke voor Best ontwikkelde camera, met een optimaal spectrum, in com-
binatie met de SWIR (‘Short Wave Infrared’)-technologie. Kenmerkend
voor het korte golf infrarood spectrum is de absorptie van deze golfleng-
ten door waterrijke producten, zodat een groter contrastverschil ontstaat
en de efficiency van de technologie verbetert. Om op vorm te sorteren,
voegde Best algemene vormherkenningssoftware toe en geavanceerde
‘template matching software’ werd aan de besturing toegevoegd om bij-
voorbeeld bij groene bonen ongewenste steeltjes te detecteren, waarna
de bonen verder in de productstroom worden geleid. De vormherken-
ningssoftware en de template matching software onderscheiden zich
Sorteren
Nieuwe visionoplossingen tijdens IPa 2010
BeTeR eN kOSTeNeffeCTIeVeR SORTeReN
VISIONTeChNOLOgIeBeDRIjf BeST ONThuLDe TIjDeNS De INTeRNaTIONaLe VOeDINgSmID-
DeLeNTeChNOLOgIeVakBeuRS IN PaRIjS haaR LaaTSTe INNOVaTIeS eN ONTwIkkeLINgeN.
effICIeNCy, BeTROuwBaaRheID eN meeR fuNCTIONaLITeIT STaaN VOOROP.
De absorptie van infrarood door waterrijke producten zorgt voor een groter contrastverschil
Yves De Groote

Dankzij de Fluo-technologie van Best voor de detectie van chlorofyl
kunnen de plantaardige producten, die chlorofyl bevatten, gescheiden
worden van ongewenste producten zonder chlorofyl (zoals bijvoorbeeld
steen, plastic en metaal). Deze technologie is ook geschikt voor het
eventueel opsporen van ongewenste groene plekjes op wortels of onge-
wenste bladeren aan fruit. Binnen milliseconden worden de ongewenste
producten of bestanddelen door de krachtige luchtstraal uit het produc-
tieproces verwijderd.
Door installatie van het in optie verkrijgbare Rear Ejection System, geba-
seerd op een optimale combinatie van optica, elektronica en mechanica
slaagde Best erin om de precisie en de efficiency te verbeteren. Tegelij-
kertijd zijn de ontwerpers erin geslaagd het luchtverbruik te verminde-
ren en het aantal ten onrechte uitgestoten product met een factor vijf te
verbeteren.
Een optie is een optische detectiemodule voor het opsporen van kwarts-
stenen in rozijnen, onafhankelijk van de conditie van het product. Hier-
voor wordt gebruik gemaakt van een speciale detectiemodule, die aan de
hand van specifieke lasersignalen de kwartsstenen kan herkennen aan de
hoeveelheid en hoedanigheid van het laserlicht dat gereflecteerd wordt.
geavanceerde sorteerder Op verschillende fronten verbeterde Best haar derde model, de Genius
optische sorteerder. Deze bundelt verschillende inspectietechnologieën,
zoals laser en camera, gecombineerd in één installatie. Het systeem is
volledig modulair ontworpen, zodat deze optimaal kan worden afge-
stemd op de behoeften van de voedingsmiddelenindustrie. Vanzelfspre-
kend beschikt de installatie over een grafische gebruikersomgeving en
kan de nieuwste uitstoottechnologie worden geïnstalleerd.
Allereerst is het ontwerp aangepast, zodat de installatie eenvoudiger is
te onderhouden, waardoor de operationele kosten worden verlaagd. Zo
werd het hygiënisch ontwerp van het frame verbeterd, gericht op betere
reinigbaarheid. Ook is de band gemakkelijk te vervangen en zijn uitbrei-
dingen eenvoudiger te installeren. Voor een hoge efficiency worden de
visietechnologieën ingezet in verschillende inspectiezones. Zo hangt de
optische camera (‘full colour’ of monochromatisch) met verschillende
soorten belichting (led, UV, IR) boven de transportband en de laser voor
het eind van de lopende band. Het aantal lasers, het type en de positie
van de camera’s hangen af van het soort product en de te controleren
kwaliteitsparameters. De nieuwste generatie camera’s beschikken vol-
gens Best over een aantal revolutionaire optische ontwikkelingen, zoals
kwalitatieve, industriële lenzen met een optimale focus. Daarnaast werd
het spectrum aangepast aan het sorteerproces, zodat een optimale sor-
tering gegarandeerd is.
Op softwarevlak voegde Best een functie toe, een ‘general shape sorting
toolbox’ waarmee de operator op een eenvoudige wijze kan sorteren
op diverse vormeigenschappen, zoals lengte, rondheid, breedte en vul-
factor. Dit geeft de mogelijkheid om bijvoorbeeld enkel wortelen van
013Sorteren
Deze compacte sorteerinstallatie is ontwikkeld voor vrije val inspectie van diepvries-
groente en analyseert gelijktijdig verschillende kwaliteitsparameters.
De Helius lasersorteerder is opgewaardeerd en biedt nu ook de mogelijkheid voor vorm-
herkenning in vrije val met behulp van een camera.
De Genius optische sorteerder bundelt verschillende inspectietechnologieën, zoals laser
en camera, gecombineerd in één installatie.

014014014
een bepaalde lengte over te houden, om te voldoen aan de eisen van
bepaalde restaurantketens of alleen kleinere noten, om te gebruiken in
de chocolade-industrie.
Een andere softwarefunctionaliteit is de mogelijkheid om tijdens het sor-
teren statistische informatie op te vragen, zoals bijvoorbeeld het percen-
tage goed of slecht product. Voordeel is dat zo snel mogelijk de nodige
aanpassingen in de productielijn worden doorgevoerd voor een betere
kwaliteit, bijvoorbeeld het aanpassen van het volume van het product
aan het begin van de productielijn. Onderdeel van de module zijn ‘defect
trend analyses’ en ‘Inline Length Management’ (ILM). De eerste functie
maakt het mogelijk om de defecten in de stroom van producten te cate-
goriseren, om zo de kwaliteit van de productstroom te bepalen en de sta-
tistieken bij te houden en te analyseren over een bepaalde tijdsperiode.
In verschillende restaurantketens zijn er bepalingen rond de ideale maat
van frieten. De ILM-module, kan de grootte van de frieten opmeten en
zo feedback geven of men wel degelijk binnen de specificaties blijft. Aan
de hand van deze informatie kan men op het moment zelf aanpassingen
doen, om terug binnen de gewenste verwachtingen qua grootte te ein-
digen.
Nieuw is een module voor het sorteren van wortelen op kwaliteitscriteria
als vorm, verkleuringen en vreemd materiaal en dit tegen hoge snelheid
en voor grote volumes.
OPCZowel de nieuwe Opus als de Helius zullen binnenkort, net als nu al het
geval is voor de Genius sorteerder, ook gereed zijn voor OPC. Dat is een
standaard voor bijvoorbeeld procesgegevensuitwisseling tussen indu-
Sorteren
Inline Length management meet de lengte van de friet op
Een Helius-sorteerder met dubbele toevoer.
Het brede pallet aan visionoplossingen is mede mogelijk door de specifieke voor Best
ontwikkelde camera, met een optimaal spectrum, in combinatie met de SWIR- (‘Short
Wave Infrared’) technologie.
striële automatiseringssystemen onderling binnen een productiebedrijf
of onderneming. Dit maakt het mogelijk om vanuit één controlekamer
het volledige productieproces te besturen en te volgen. Dit gebeurt met
behulp van MES-oplossingen, zoals bijvoorbeeld een Laboratorium Infor-
matie Management Systeem (LIMS) of batchcontrole, die dan weer ge-
koppeld kunnen worden aan logistieke ERP-pakketten op ondernemings-
niveau. Zo kan maximale efficiency en kwaliteit van de producten worden
gegarandeerd aan uiteindelijk de consument, die steeds kritischer wordt
op het moment van aankoop in de supermarkt of de winkel. Vaak zijn het
de details in kleur, vorm en in het bijzonder de afwijkingen daarop die er
toe doen. Retailers weten dat als geen ander. Investeren in visionoplos-
singen is daarom belangrijk op een sterk concurrerende markt.
BestBest, het acroniem voor Belgian Sorting Technology, is een toonaan-
gevende fabrikant en leverancier van sorteermachines. Deze machi-
nes maken gebruik van verschillende technologieën als laser, camera,
led en röntgen, al dan niet gecombineerd, voor het opsporen van
vreemd materiaal of kwaliteitsafwijkingen. Ook detecteren ze kwa-
liteitsverschillen in agrarische producten, zoals groenten en fruit, en
in bijvoorbeeld noten, tabak en tal van andere toepassingen. Klanten
zijn verspreid in vijftig landen wereldwijd en de onderneming heeft
meer dan vijftig soorten toepassingen. Het hoofdkantoor staat in Leu-
ven. Daarnaast zijn er vestigingen in Eindhoven en Denver (Verenigde
Staten). Meer informatie vindt u op www.bestsorting.com.
Vision in agro & food
Innoveren met kruisbestuiving• Watkanikmetnieuwetechnologieuitanderesectoren?
• Veelbelovendeonderzoekenenresultaten
• Brainstorm:dekrachtvanhetmeedenken
15december2010,WageningenUR
www.mikrocentrum.nl/vision-agro-food
016
VaN heT geDRag VaN RaTTeN kaN meN eeN hOOP LeReN. eeN POPuLaIRe geDRagSTeST IS ORT, OfweL
OBjeCT ReCOgNITION TaSk. NeuROweTeNSChaPPeRS ONDeRzOekeN hIeRmee De PReSTaTIe VaN heT
geheugeN eN heT effeCT VaN meDICIjNeN VOOR BIjVOORBeeLD aLzheImeR. heLaaS IS heT OBSeRVeReN
VaN heT geDRag ONDeRheVIg aaN De OBjeCTIVITeIT VaN De waaRNemINg. Om DIT Te ONDeRVaNgeN
ONTwIkkeLDe VI TeChNOLOgIeS SameN meT De uNIVeRSITeITeN VaN maaSTRIChT eN SyDNey eeN
VISIONSySTeem DaT De geDRagSwaaRNemINg eN De BIjBehOReNDe SCOReS auTOmaTISeeRT.
Jeffrey Habets en Huub Hamers
VI Technologies in Weert levert technische automatiseringsdiensten en
heeft zich gespecialiseerd in objectgeoriënteerd ontwerpen van geau-
tomatiseerde test- en meetsystemen met LabView en NI TestStand. Het
Limburgse bedrijf wist de hieronder besproken oplossing door te ontwik-
kelen door gebruik te maken van de genoemde gebruikersvriendelijke
LabView-applicatie. Deze oplossing is als prototype vervaardigd door de
Universiteit Maastricht in samenwerking met de Universiteit van Sydney.
De programmering binnen de flexibele LabView-omgeving gaf de onder-
neming de mogelijkheden om de applicatie met specifieke kenmerken
en eigenschappen uit te breiden en daarmee aanzienlijke verbeteringen
aan te brengen in het automatisch bijhouden van de gegevens.
achtergrond van ORTObject recognition task (ORT) is een populaire gedragstest die in de neu-
rowetenschappen wordt toegepast om de prestaties van het geheugen
van dieren te onderzoeken. ORT werd voor het eerst beschreven door
Ennaceur et al. (1988) en wordt door onderzoekers bij voorkeur gebruikt
als een testmethode om het gedrag van dieren te bestuderen. Het biedt
tevens de faciliteiten om het effect van de verschillende chemicaliën en
medicijnen op het geheugen te onderzoeken. Een belangrijk nadeel van
ORT is dat het bijhouden van de onderzoeksresultaten voornamelijk met
de hand wordt gedaan. Dit resulteert in een percentage menselijke fou-
ten en de daarmee gepaard gaande subjectiviteit.
Onderzoekers aan de Universiteit Maastricht en de Universiteit van Syd-
ney hebben nu een automatisch algoritme voor het bijhouden van de
onderzoeksgegevens ontwikkeld, waarmee op een betrouwbare manier
de neus van ratten kan worden gevolgd in experimenten waarbij het
ophalen van geheugeninformatie wordt geobserveerd. Het onderzoeks-
team ontwierp een gesloten objectarena en plaatste hier een aantal uit-
eenlopende voorwerpen en objecten in.
In de volgende stap werd een rat gedurende drie minuten in deze ge-
sloten ruimte geplaatst. Op het moment dat de rat aan de objecten
snuffelde, nam het personeel de tijd dat de neus van de rat binnen een
afstand van twee centimeter van het object bleef op. Nadat de rat uit
de ruimte werd gehaald, verving het laboratoriumpersoneel de objecten
door andere voorwerpen. Na een periode van een uur werd de rat weer
teruggeplaatst in de ruimte om de oefening te herhalen. Als de rat zich
de specifieke eigenschappen of kenmerken van het object herinnerde,
neemt hij meer tijd om aan de nieuwe objecten te snuffelen. Als deze
herhalingstest een etmaal na de eerste, originele test werd uitgevoerd,
bleek dat de rat zich niets meer wist te herinneren van de locatie of de
eigenschappen van de objecten.
De tijdmeting dat de neus van de rat zich binnen een bepaalde afstand
van het object bevindt, biedt een goede vergelijkende meting van het
oproepen van opgedane herinneringen uit het geheugen. Op deze wijze
kunnen onderzoekers de testresultaten van ratten vergelijken tussen die
ratten die de medicijnen wel toegediend kregen en niet kregen. Het be-
oordelen van de effectiviteit van de ontwikkelde medicijnen is van be-
lang om te kunnen bepalen of het geheugenverlies, zoals dit optreedt bij
Alzheimer, daadwerkelijk wordt verminderd.
Vind de neus van de ratHet bepalen van het algoritme om de neus van de rat te volgen bete-
kende dat het onderzoeksteam het zwaartepunt van de rat moest kun-
auTOmaTISeRINg VaN eeN SCORINgSSySTeem
Objectherkenning
minder fouten bij onderzoek objectherkenning door ratten
017
auTOmaTISeRINg VaN eeN SCORINgSSySTeem
nen berekenen (Center of Gravity – COG). Echter, voordat deze berekening
kan worden uitgevoerd, moest eerst de staart van het lichaam worden
gescheiden door de basis van de staart van een witte muis te markeren
met een zwarte marker. Deze markering geeft het team de mogelijk-
heid om gebruik te maken van een eenvoudige deeltjesanalyse om het
lichaam en de staart van elkaar te isoleren. Zo kan de positie van het mid-
delpunt van de zwaartepunt van de rat en de positie van de neus worden
berekend. Vervolgens wordt door herhalende berekeningen de maximale
snijlijn door het middelpunt van de massa verkregen en kan vervolgens
nauwkeurig de positie van de neus van de rat worden bepaald.
automatiseren van ORTVI Technologies in Weert levert technische automatiseringsdiensten en
heeft zich gespecialiseerd in objectgeoriënteerd ontwerpen van geau-
tomatiseerde test- en meetsystemen met LabView en NI TestStand. Het
Limburgse bedrijf wist de hieronder besproken oplossing door te ontwik-
kelen door gebruik te maken van de genoemde gebruikersvriendelijke
LabView-applicatie. Deze oplossing is als prototype vervaardigd door de
Universiteit Maastricht in samenwerking met de Universiteit van Sydney.
De programmering binnen de flexibele LabView-omgeving gaf de onder-
neming de mogelijkheden om de applicatie met specifieke kenmerken
en eigenschappen uit te breiden en daarmee aanzienlijke verbeteringen
aan te brengen in het automatisch bijhouden van de gegevens.
Voordat een proef start kunnen de onderzoekers de helderheid, het con-
trast en de drempelniveaus instellen en de ROI’s definiëren voor de arena
en de objecten. Nadat een beeld is binnengekomen draaien verschil-
lende algoritmen onder LabView om de positie van de neus van de rat te
bepalen en de tijdsduur dat de neus van de rat zich in de nabijheid van
het object bevindt. Eerst wordt het masker van de arena aangebracht
om de van belang zijnde regio te lokaliseren. Een referentiebeeld van
de arena wordt, voordat de rat in de arena wordt geplaatst, gebruikt om
achtergrond en objecten op een dusdanige wijze effectief te elimineren,
dat de rest van het algoritme alleen wordt toegepast op het beeld van
de rat. Worden er in plaats van witte ratten bruine ratten gebruikt, dan
is de oplossing zo flexibel dat middels een optionele contrastinversie het
algoritme de bruine rat kan volgen. Vervolgens wordt het beeld vastge-
houden om de verdere verwerking te vereenvoudigen. Nadat het proef-
dier in de arena wordt geplaatst zorgt de combinatie van de NI-hardware
en NI-software er voor dat de positie van de neus automatisch wordt
gevolgd. De resultaten voor de neusbenadering en het aantal malen dat
een specifiek object wordt besnuffeld wordt via een grafische gebruikers-
interface weergegeven.
De onderneming en de onderzoekers aan de Universiteit van Maastricht
hebben, gebaseerd op de door de universiteit uitgewerkte algoritme,
een beeldverwerkend systeem ontwikkeld waarmee de taak om het te-
rugroepen van de herinneringen bij ratten te kunnen beoordelen wordt
geautomatiseerd. Als eerste plaatste het team een monochrome analoge
camera op een afstand van circa 250 centimeter van het te bestrijken op-
pervlak van de arena. Vervolgens worden de beelden van de camera met
behulp van de NI PCI-1411 Analog Frame Grabber gedigitaliseerd en aan
de pc aangeboden. De combinatie van NI LabView en de NI Vison Deve-
lopment Module verzamelen en verwerken de binnenkomende beelden.
ScoringssysteemDoor optimaal gebruik te maken van de eigenschappen van de huidige
multicore systemen, in combinatie met LabView en de Vision Develop-
ment Module, heeft het onderzoeksteam de gewenste specificaties voor
de acquisitiesnelheid weten te realiseren en een geautomatiseerd sco-
ringssysteem weten te vervaardigen. Dit systeem is gevrijwaard van de
gebruikelijke fouten die inherent zijn bij het handmatig bijhouden en in-
terpreteren van de resultaten van de proeven.
Het programmeren binnen de zeer flexibele LabView-omgeving gaf het
automatiseringsdienstenbedrijf bovendien de mogelijkheden om de ap-
plicatie uit te breiden met specifieke eigenschappen en het aanbrengen
van verbeteringen bij het automatisch scoringssysteem. Deze geavan-
ceerde eigenschappen omvatten onder andere sessie-/testmanagement,
opslag en laden van uiteenlopende configuraties binnen de arena en het
object ROI, evenals het opnemen en afspelen van het testmateriaal.
Objectherkenning
018 Lassen
Lasrobot door digitalisering steeds breder inzetbaar
OPLOSSINg VOOR aLumINIum LaSVRaagSTukkeN
heT IDee VaN PaNaSONIC Om eeN INDuSTRIëLe RO-
BOT SPeCIfIek VOOR heT BOOgLaSSeN Te ONTwIk-
keLeN, LeIDDe IN 2005 TOT De INTRODuCTIe VaN
TaweRS-LaSROBOT. DOOR LaSSTROOmBRON eN
BeSTuRINg OP ééN CPu Te INTegReReN, BRaChT
heT BeDRIjf DaaRmee eeN BOOgLaSROBOT OP De
maRkT meT eeN zeeR SNeLLe DaTaVeRweRkINg,
waaRDOOR heT LaSPROCeS VeRgaaND kON wOR-
DeN VeRSNeLD eN De LaSkwaLITeIT aaNzIeNLIjk
kON wORDeN VeRhOOgD.
Erik Steenkist
Combinatie van mig en TigDe nieuwste ontwikkeling van het bedrijf is het AC Mig-lassen. Bij deze
toepassing wordt gebruik gemaakt van wisselstroomtechniek tijdens het
Mig-lassen. Hierdoor combineert men de voordelen van Tig- en Mig-lassen
in één en hetzelfde lasproces, hetgeen resulteert in een unieke lasboog
die door toepassing van de wisselstroomtechniek een reinigende werking
heeft op het lasuiterlijk, zoals bij AC Tig-lassen. Gelijktijdig wordt echter de
lassnelheid van het Mig-lassen toegepast, hetgeen een unieke combinatie
als resultaat heeft. AC Mig maakt het ook mogelijk eenvoudig spleten en/
of toleranties te overbruggen. Dit veelvuldig voorkomende probleem be-
hoort hiermede tot het verleden.
aluminium barriers lassenLasrobotspecialist Valk Welding leverde aan toeleverancier Metaal 2000
uit het Friese Bolsward een lasrobotinstallatie voor het lassen van alumini-
um veiligheidshekken, die de toeleverancier maakt voor het Nederlandse
bedrijf Mojo Barriers. Ook Metaal 2000 past voor het lassen van deze alu-
minium barriers het AC Mig-lasproces toe. De Mojo Barrier is een begrip
geworden in de live-entertainmentindustrie. Het systeem wordt wereld-
wijd op meer dan tweeduizend evenementen per jaar toegepast. Metaal
is al vanaf het begin bij de ontwikkeling en productie van de barriers be-
trokken. Uit oogpunt van transport en plaatsing worden de Mojo Barriers
gemaakt van een aluminium legering. De barriers worden samengesteld
door geëxtrudeerde delen, geperforeerde platen en kokerprofielen aan
elkaar te lassen.
warmtebeheersingDoor het toepassen van het volautomatisch AC Mig-lasproces wordt er in
een beduidend kortere periode veel minder warmte toegevoegd aan het
eindproduct, waardoor minder spanningen in het materiaal en de las ont-
staan. Om uitzetten van het materiaal tijdens het lassen nog verder te
reduceren ontwikkelde directeur Jan Kok samen met Valk Welding boven-
dien een watergekoelde mal. Daarmee kan de warmte-inbreng volledig
onder controle worden gehouden, hetgeen uiteindelijk de homogeniteit
van de las verbetert en de maatvoering constant houdt.
In tegenstelling tot de laskwaliteit van de vorige generatie handgelaste
barriers, ziet Jan Kok de constante hoge kwaliteit die de lasrobot levert
als een cruciale factor voor de hoge veiligheidseisen die aan de barriers
worden gesteld. Met deze grootste order ooit is de cel voorlopig volledig
bezet. Jan Kok verwacht de serie in korte tijd te produceren, zodat er bin-
nenkort ook ruimte ontstaat voor ander laswerk in aluminium.
Sinds die tijd zijn jaarlijks nieuwe functies ontwikkeld, ondermeer voor
laswerkzaamheden die tot voor kort nagenoeg nog voor onmogelijk wer-
den gehouden. Met name voor aluminium lasvraagstukken, waarbij de
markt nog vaak terugvalt op het TIG-lasproces, hebben de alternatieven
die de Japanse onderneming heeft ontwikkeld op basis van softwareaan-
sturing van de lasparameters de toepassingen sterk verbreed.
Aluminium staat nog steeds bekend als een moeilijk te lassen materi-
aal, waarvan het lassen maar door een beperkt aantal vaklassers wordt
beheerst. Door de hoge warmtegeleiding verzwakt en vervormt het ma-
teriaal, zodat de risico’s van vervorming bij een te hoge warmtebelasting
tijdens het lassen groot is. Met de oplossingen die Panasonic heeft ontwik-
keld wordt dit door een hoog frequente verandering van lasparameters,
gecombineerd met een pendel- of cirkelvormige beweging, voorkomen.
Een inmiddels veel toegepaste functie is ‘Spiral Weaving’, die ervoor zorgt
dat de las in een cirkelvormige beweging met wisselende parameters
wordt opgebouwd. Daarmee wordt de las stapsgewijs opgebouwd, zodat
een te sterke inbranding en vervorming van het materiaal wordt voorko-
men en het lasbad niet door het materiaal zakt.
De onderneming ontwikkelde daarnaast de tweede zeer nuttige func-
tie ‘Synchro pulse’ om materialen met verschillende diktes te kunnen
verbinden. Door de Synchro pulse-functie is het mogelijk om aan beide
uitslagpunten van een pendelbeweging een andere lasparameter te pro-
grammeren, zodat een optimale inbranding en ook een goed laspara-
meteruiterlijk kan worden verkregen bij het verlassen van verschillende
materiaaldiktes.
De Mojo Barrier is een begrip geworden in de live-entertainmentindustrie.
Het Mojo Barrier-systeem wordt
wereldwijd bij meer dan tweeduizend
evenementen per jaar toegepast.
020
Verschillende componenten in het robot-visionsysteem kunnen de functie
van de baas (master), de robot en het visionsysteem vervullen. Componen-
ten en verbindingen kunnen anders zijn, de functionaliteit is hetzelfde:
1. De baas vertelt de robot wanneer deze moet starten, stoppen of welke
taak uitgevoerd moet worden. De knoppen en lampen zijn op de baas
aangesloten, eventueel in de vorm van een luxe uitgevoerde touchs-
creen met mooie plaatjes.
2. De robot beweegt een gereedschap of onderdeel naar verschillende
posities. Aangekomen op bepaalde posities, moet het visionsysteem
een opname maken en het beeld analyseren.
3. Het visionsysteem maakt een analyse en geeft het resultaat terug aan
de robotcontroller.
4. De robot doet iets aan de hand van de van het vision systeem ontvan-
gen resultaten.
Voor de componenten zijn er een paar mogelijkheden. De master kan een
PLC of Industriële pc, of geïntegreerd in de robotcontroller zijn. Er is altijd
een robotcontroller. Het visionsysteem kan een industriële pc met daaraan
een camera, een Smart Camera of een visioncontroller met daaraan een
camera zijn. De indruk van de auteur is dat deze laatste optie langzaam
aan het verdwijnen is. Een Smart Camera is een camera waarin een micro-
processor en software zit. Meestal heeft een dergelijk systeem specifieke
software van de fabrikant aan boord. Op een pc wordt een camera aange-
sloten en software geïnstalleerd. Samenvattend kunnen bijvoorbeeld de
volgende combinaties het robot-visionsysteem vormen:
auTOmaTISeReN IS VeeL gemakkeLIjkeR gewORDeN DOOR ROBOT- eN VISIONSySTemeN. hOeweL VISION
& ROBOTICS Deze CuRSuS STeeVaST ‘ROBOTS eN VISION VOOR DummIeS’ NOemT, IS eNIge keNNIS TOCh
weL NOODzakeLIjk. keNNIS OVeR De BeLaNgRIjkSTe haRDwaReCOmPONeNTeN BIjVOORBeeLD. IN Deze
LeS maakT u keNNIS meT De BeLaNgRIjkSTe COmPONeNTeN, zONDeR DaT u eeN hOOg eINSTeINgehaLTe
hOefT Te heBBeN.
1. Industriële pc voor de master en visionfunctie, robotcontroller met
robot.
2. PLC, robotcontroller met robot, smart visionsysteem.
3. PLC, robotcontroller met robot, industriële pc met visionfunctie.
4. Robotcontroller met masterfunctie en robot, smart visionsysteem.
5. Robotcontroller met masterfunctie en robot, industriële pc met vision-
systeem.
Welk systeem gebruikt wordt is meestal afhankelijk van de ervaring van
de samensteller van het bedrijf of de wensen van een gebruiker.
Diverse typesIn de bovenstaande uitleg wordt over een robot gesproken. Robots zijn er
natuurlijk in verschillende soorten en maten. De type robots die het meest
worden gebruikt volgen hieronder. Zesassige robots worden tegenwoor-
dig het meest gebruikt. Deze robots kunnen producten of gereedschappen
op iedere mogelijke manier verplaatsen en draaien. De andere getoonde
robots kunnen producten of gereedschappen op iedere mogelijke manier
verplaatsen, maar kunnen alleen om de verticale as verdraaien. Scararo-
bots of parallelle robots worden vooral gebruikt als het snel moet gaan.
juiste lensIedere camera heeft een lens nodig. De camera kijkt naar een oppervlak,
waarvan de robot een onderdeel moet oppakken. Meestal is de afstand
van de camera tot dit oppervlak groter dan bij andere industriële vision-
Hans Lenos
020020 V&R voor dummies
Opbouw van robot- en
visionsysteem
toepassingen. De robot heeft een bepaalde ruimte nodig om de onder-
delen te kunnen oppakken en het vlak zelf heeft vaak ook een grotere
afmeting. Deze afstanden zijn over het algemeen bekend en zijn in de
onderstaande illustratie aangegeven.
Om de juiste lens te kunnen berekenen kan een eenvoudige formule
gebruikt worden, die de meeste nog wel zullen herkennen van de natuur-
kundelessen. Als de afstand v veel groter is dan b, dan kan f berekend
worden met de volgende formule: F = B*v / (B + V).
De grootte van de sensor wordt door de fabrikant opgegeven. Een veel
voorkomende sensor afmeting is ½ inch. Deze sensor heeft een lengte van
6,4 millimeter en een hoogte van 4,8 millimeter. Stel nu dat de afstand tot
het vlak 860 millimeter is en de breedte van het vlak waar de camera naar
kijkt 215 millimeter bedraagt. Dan kan dus de focus of brandpuntafstand
worden berekend: 6,4 millimeter * 860 millimeter / (6,4 millimeter +
215 millimeter) = 5505 millimeter2 / 221,4 millimeter = 24,86 millimeter.
Nu worden lenzen geleverd met een aantal standaard brandpuntafstan-
den (9, 12, 16, 25, 35, 50 millimeter). De waarde moet dus afgerond
worden naar 25 millimeter. Nu we toch bezig zijn, is het verstandig naar
het aantal pixels te kijken. Stel dat de sensor 640 x 480 pixels heeft, dan
vertegenwoordigt iedere pixel 215 / 640 ≈ 0,34 millimeter. Dit is een in-
dicatie voor de haalbare nauwkeurigheid. Sommige systemen kunnen op
subpixelniveau meten. Zeker voor een meting op subpixelniveau moet de
verlichting goed en stabiel zijn. Het is niet onverstandig om uit te gaan van
een nauwkeurigheid van één pixel of zelfs twee of drie pixels. Tenzij men
voldoende geëxperimenteerd heeft met verschillend type verlichting en
daardoor een gevoel heeft gekregen voor de invloed van de verlichting.
De eerste les over hardware zit erop. Ik hoop dat u het met mij mee bent,
dat het niet noodzakelijk is om de intelligentie van Einstein te benaderen.
Met wat gezond verstand is het goed mogelijk de status van dummy te
ontstijgen en in ieder geval snel, en misschien kort, een Einsteingevoel
te ervaren.
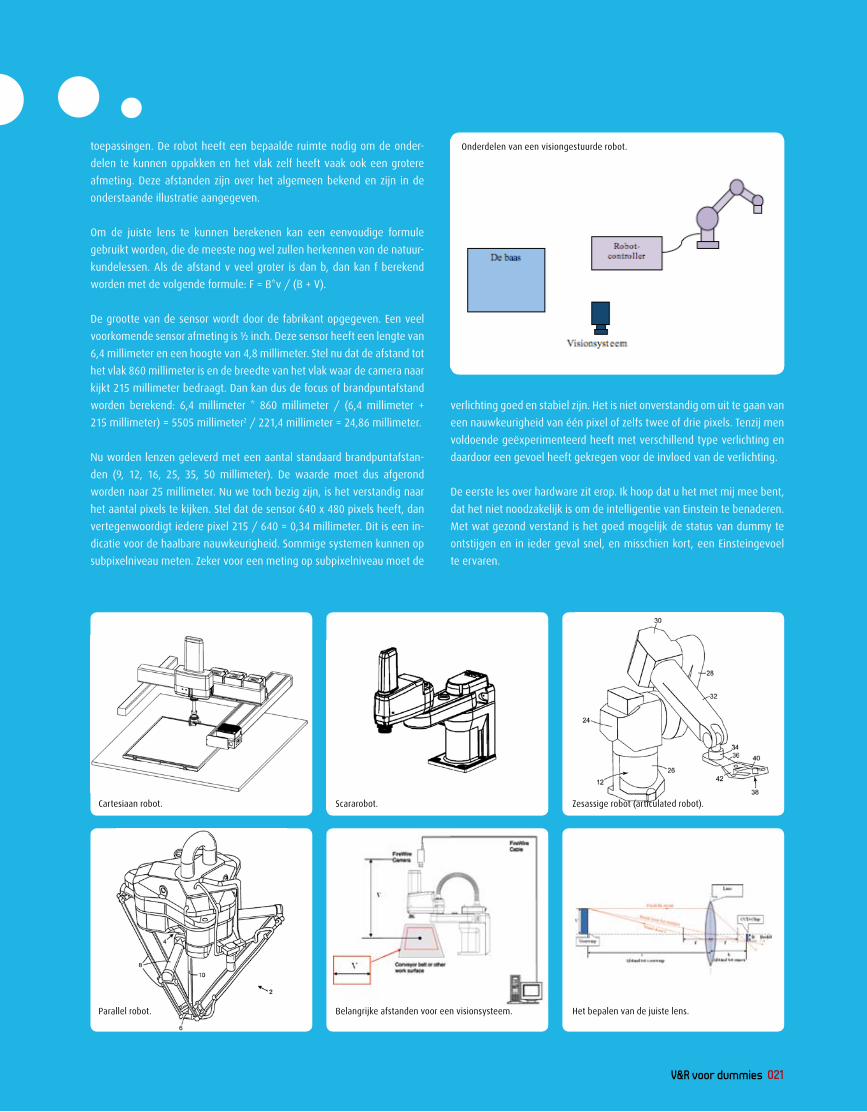
Cartesiaan robot. Scararobot.
Belangrijke afstanden voor een visionsysteem.
Zesassige robot (articulated robot).
Het bepalen van de juiste lens.Parallel robot.
021V&R voor dummies
Onderdelen van een visiongestuurde robot.

familiebedrijfKompak is een co-making- en co-packing-organisatie met een vestiging
in Etten-Leur en een vestiging in Tilburg. Het familiebedrijf wordt be-
stuurd door de derde generatie van de familie Spiering. In 1951 begon
opa Spiering het bedrijf Zuid-Hollandse Loonbedrijven BV, met als hoofd-
activiteit het afvullen en verpakken van levensmiddelen en gewasbe-
schermingproducten. In de loop van de jaren zijn verschillende dochter-
bedrijven opgericht en weer gesplitst. In 1990 is de werkmaatschappij
Kompak opgericht. Thans is Kompak een professionele full-service co-
packing-organisatie met honderd medewerkers en een grote enthousi-
aste internationale klantenkring.
Industriële robotsIn 2009 is de verhuizing van Kompak Home & Personal Care van Bavel
naar het nieuwbouwpand in Etten-Leur gerealiseerd. In die tijd is CSi uit
Raamsdonksveer benaderd om mee te denken over het logistieke proces
van Kompak. Steven Nijweide (projectmanager bij Kompak) vertelt hier-
over dat eigenlijk het gehele logistieke proces van productie tot vracht-
wagen is geoptimaliseerd naar een maximale betrouwbaarheid. “Door
het palletiseren te centraliseren hebben we bij de nieuwbouw kunnen
besparen op de bouwkosten van dure productiecellen, en hebben we ge-
investeerd in logistieke flexibiliteit en maximale beschikbaarheid”, aldus
Nijweide. “CSi heeft de vraagstelling van het bedrijf slim opgelost”, vult
Robin van Praat (manager partner networks) aan. Gebaseerd op de ge-
wenste capaciteit en beschikbaarheid heeft het bedrijf gekozen voor een
oplossing met zes industriële robots van ABB. Vijf robots worden ingezet
DaT ROBOTS INSPIReReND weRkeN, IS BekeND BIj PLaNTmaNageRS eN PRODuCTIeLeIDeRS. IN De RegeL
gaaT heT DaN Om kwaLITeITSVeRBeTeRINgeN eN OuTPuTVeRhOgINg. DaT ROBOTS OOk INSPIReReND
weRkeN BIj aRChITeCTeN BLIjkT uIT heT SPIkSPLINTeRNIeuwe BeDRIjfSPaND VaN kOmPak IN eTTeN-
LeuR. TIjDeNS De RONDLeIDINg DOOR heT mODeRNe geBOuw IS gOeD Te zIeN DaT De ORaNje kLeuR VaN
De aBB-ROBOTS TeRug Te VINDeN IS IN heT geheLe INTeRIeuR. VaN ORaNje TRaNSPORTBaNDeN TOT
ORaNje BeDRIjfSkLeDINg, eN VaN ORaNje kaNTINeSTOeLeN weeR TeRug NaaR De ORaNje aBB-ROBOTS.
flexibele robots voor verpakkingsbedrijf
om te palletiseren. Deze robots gebruiken allen eenzelfde universele grij-
per. Dit resulteert in de gewenste hoge mate van flexibiliteit. De zesde
robot zorgt voor de aanvoer van lege pallets. Deze oplossing levert een
groot ruimtevoordeel op ten opzichte van traditionele palletwisselaars.
“Het project bij Kompak is een typisch voorbeeld van een CSi-project”,
gaat Van Praat verder. Wereldwijd is CSi een betrouwbare leverancier
van volledig geïntegreerde logistieke systemen voor materiaalhandling
en productdistributie bij vooral de grotere internationale producenten en
distributeurs van levensmiddelen, drank en tabak. De leverancier gaat
voor betrouwbaarheid en kwaliteit en daarom is ABB het huismerk voor
industriële robots. Verder is voor het bedrijf de integratie van intelligentie
en gebruiksvriendelijk erg belangrijk. ABB speelt hier goed op in met het
open karakter van de bedieningseenheid. Het display is vrij te program-
meren, zodat de onderneming zelf kan bepalen welke functionaliteit en
informatie voor de gebruiker beschikbaar komt.
Oranje wokkelAan het einde van de rondleiding staat Nijweide vol trots stil bij de ‘oranje
wokkel’. “Dit is de aorta van Kompak Etten-Leur. Via deze transportbaan
komen alle verpakkingen van de verschillende productiecellen, en gaan
ze vervolgens naar de eerste verdieping om gepalletiseerd te worden. De
wokkel heeft een prominente plaats in het gebouw, zodat iedere werk-
nemer en bezoeker kan zien wat we hier doen. En dat past volledig in de
visie van de onderneming, om ten alle tijden transparant te zijn. Zowel
naar de markt als naar haar omgeving, met als doel voor alle partijen een
volwaardig zakenpartner te zijn.”
022 Verpakken
VISION & ROBOTICS
Dossier robotveiligheiD
Stappenplan machinerichtlijn
Robots volgens eN-NeN-ISO 10218-1
Vuistregels voor robotintegratie
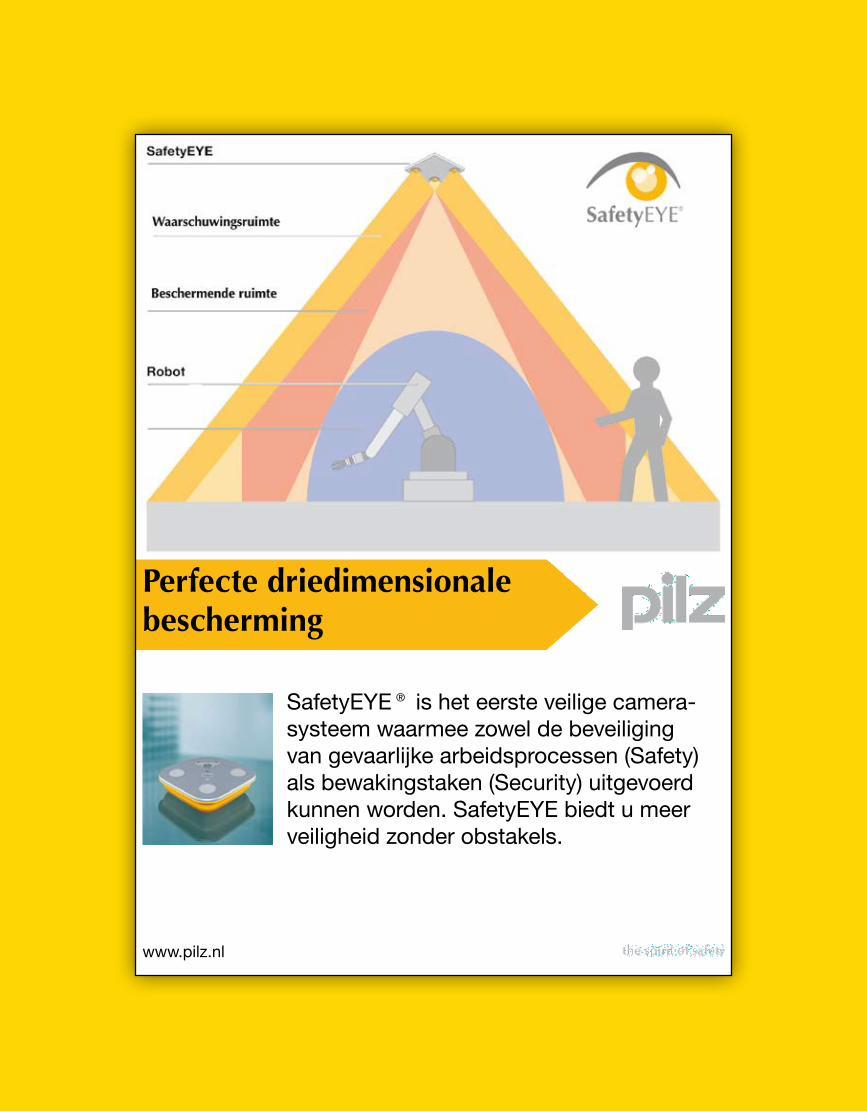
Perfecte driedimensionalebescherming
SafetyEYE® is het eerste veilige camera-systeem waarmee zowel de beveiliging van gevaarlijke arbeidsprocessen (Safety) als bewakingstaken (Security) uitgevoerd kunnen worden. SafetyEYE biedt u meer veiligheid zonder obstakels.
www.pilz.nl
025Voorwoord
ColofonuITgeVeR
Henk van Beek, Fenceworks BV
Telefoon: 06 - 28 41 70 73
E-mail: [email protected]
ReDaCTIe
Liam van Koert, Verbal Essence
Joanna Hughes, Verbal Essence
Telefoon: 06 - 17 58 82 65
Email: [email protected]
VORmgeVINg
Laura Willemsen, Grafisch ontwerp
DRuk
3l drukkerij bv, rotterdam
POSTaDReS ReDaCTIe
Postbus 82, 2460 AB Ter Aar
E-mail: [email protected]
aBONNemeNTeN
aDVeRTeNTIe-exPLOITaTIe
Mike de Jong, Archer Media BV
Telefoon: 06 - 43 05 30 25
E-mail: [email protected]
Met dank aan:
Robotveiligheid blijft een lastig onderwerp. Men kan er uren over praten en boeken over schrijven. Toch
is een dik boek soms net een te ontmoedigend vertrekpunt voor het werken aan een veilige oplossing,
en is iemand die het haarfijn uit kan leggen niet altijd in de buurt. We hebben er daarom gemeend
goed aan te doen een aantal essentiële zaken eens op een rijtje te zetten. Hierbij is een splitsing ge-
maakt tussen robotica en de Machinerichtlijn en de gehele robotnorm EN-NEN-ISO 10218-2. Het resul-
taat is een praktisch dossier, dat u in veel gevallen net dat geheugensteuntje of aanknopingspunt geeft
waar u naar op zoek was. Door het in het midden van het blad op te nemen, kunt u het er gemakkelijk
uithalen en in uw bureaula leggen. Zo heeft u de basis altijd bij de hand.
Tot slot een woord van dank aan Safora S.S. Macdonald – Consultant NEN Machinebouw en Nick de
With – Senior Consultant en CEO van Fusacon BV. Zonder hun kennis van zaken en inzet was dit dossier
nooit tot stand gekomen.
Dossier Robotveiligheid
Inhoudsopgave
26 Robots en de Machine-richtlijn: een stappenplan
31 Robots volgens EN-NEN-ISO 10218-1
33 Gevarentabel (Annex A)34 Vuistregels voor robo-
tintegratie op basis van EN-EN-NEN-ISO 10218-2

026
artikel 25 van Richtlijn 2006/42/eg:Richtlijn 98/37/EG wordt ingetrokken met ingang van 29 december 2009.
Verwijzingen naar de ingetrokken richtlijn gelden als verwijzingen naar
deze richtlijn […].
artikel 26 van Richtlijn 2006/42/eg:De lidstaten stellen uiterlijk op 29 juni 2008 de bepalingen vast die nodig
zijn om aan deze richtlijn te voldoen, en maken deze bekend […].
Zij passen die bepalingen toe met ingang van 29 december 2009 […].
Machinerichtlijn 2006/42/EG geeft verduidelijking op een aantal gebie-
den en een betere afbakening van producten die wel of niet onder de
richtlijn vallen. Ook besteedt de richtlijn meer aandacht aan samenbouw
en samenstellen van machines. Een belangrijke wijziging is onder andere
dat de ‘IIB-verklaring’ een andere betekenis heeft gekregen. Volgens ar-
tikel 1 van de Richtlijn 2006/42/EG zijn de eisen van de richtlijn nu ook
van toepassing op ‘niet voltooide machines’. Zo is een aandrijfsysteem
al een ‘niet-voltooide machine’. IIB (inbouwverklaring) houdt in dat ook
toeleveranciers van componenten of niet-zelfstandig functionerende ma-
chines zich moeten verdiepen in de eisen van de richtlijn. In de inbouw-
verklaring (IIB) moet men namelijk onder andere aangeven aan welke
eisen van de richtlijn is voldaan. Verder dient te fabrikant te garanderen
dat er een risicobeoordeling van zijn product is gemaakt. Hoewel dit geen
nieuwe eis is, wordt het wel nadrukkelijker gesteld. Wanneer men niet
voldoet aan de eisen van de richtlijn, zullen sancties doeltreffend, even-
redig en afschrikwekkend zijn. Veiligheidscomponenten moeten onder de
nieuwe richtlijn voorzien worden van een CE-markering en de IIC verkla-
ring voor veiligheidscomponenten is komen te vervallen.
uitwerking van de eisen in europese normenHet Nederlands Normalisatie-instituut (NEN) vertegenwoordigt Neder-
land in het Comité Européen de Normalisation (CEN) en vervult daardoor
een spilfunctie tussen wetgever en machineproducent. NEN heeft toe-
gang tot en werkt mee aan alle programma’s en normvoorstellen die in
het kader van de Machinerichtlijn worden opgesteld.
OP 29 DeCemBeR 2009 IS maChINeRIChTLIjN 2006/42/eg zONDeR OVeRgaNgSPeRIODe VaN kRaChT
gewORDeN. maChINeRIChTLIjN 98/37/eg kwam DaaRmee Te VeRVaLLeN. DIT aRTIkeL geefT IN TIeN
STaPPeN weeR hOe meN VOLgeNS De huIDIge RIChTLIjN TOT eeN Ce-geCeRTIfICeeRDe ROBOT kOmT.
Robots en de machinerichtlijn: een stappenplan
De Machinerichtlijn is een zogenaamde nieuwe-aanpakrichtlijn. Dit wil
zeggen dat hierin slechts essentiële veiligheids- en gezondheidseisen zijn
opgenomen. De machinerichtlijn geeft geen technische details over hoe
men aan deze eisen kan voldoen. Hiervoor heeft de Raad van de Euro-
pese Gemeenschappen een overeenkomst afgesloten met de Europese
Organisatie voor Normalisatie (CEN). Op grond van gemandateerde op-
drachten werkt CEN de essentiële veiligheids- en gezondheidseisen van
de richtlijn uit in Europese normen. Deze Europese normen kunnen door
het bedrijfsleven als handvat worden gehanteerd om aan de richtlijn te
voldoen.
Normen hebben geen wettelijke status en de toepassing ervan is dan
ook niet verplicht. Europese geharmoniseerde normen kunnen echter wel
dienen als bewijsmateriaal, omdat zij de stand van de techniek weerge-
ven en officieel zijn geaccepteerd als documenten die het ‘vermoeden
van overeenstemming’ geven met de eisen van de relevante richtlijnen.
De Machinerichtlijn verlangt bewijs (in de vorm van een technisch dos-
sier) dat de getroffen maatregelen de veiligheid en de gezondheid waar-
borgen. Het toepassen van Europese geharmoniseerde normen heeft
hierin een belangrijke rol.
Het is helaas niet zo dat er één norm is die u kunt hanteren om te voldoen
aan de eisen van de Machinerichtlijn. Er zijn in de loop van de jaren hon-
derden Europese normen ontwikkeld. Wanneer een Europese norm wordt
ontwikkeld, is het nationale normalisatie-instituut (voor Nederland dus
NEN) verplicht deze als nationale norm over te nemen. De norm wordt
aangeduid met NEN-EN. In andere lidstaten worden dezelfde regels gehan-
teerd. De afgelopen jaren is er steeds vaker een verschuiving te zien van
Europese normen naar nomen die op mondiaal niveau geaccepteerd zijn
of een internationale oorsprong hebben (ISO of IEC); deze normen worden
aangeduid als NEN-EN-ISO (bijvoorbeeld NEN-EN-ISO 12100). Ook bij de
vertaling van een Europese norm in het Nederlands moet de inhoud gelijk
blijven aan de oorspronkelijke norm. Europese normen worden standaard
in het Engels, Frans en Duits gepubliceerd. Lidstaten kunnen vervolgens
zelf bepalen of een vertaling in de eigen taal gewenst of noodzakelijk is.
026 Stappenplan
Bestaande geharmoniseerde normen die aangepast zijn op Machinericht-
lijn 2006/42/EG zijn voorzien van een Annex ZB (voorheen ZA). Hierin
wordt het verband met de essentiële eisen van de Richtlijn 2006/42/EG
aangegeven.
a-, B- en C-normenVanwege de grote diversiteit van machines zijn de normen die opgesteld
zijn in het kader van de Machinerichtlijn, verdeeld in verschillende cate-
gorieën:
• Type A-normen: deze bevatten fundamentele veiligheidsbeginselen;
• Type B-normen: deze bevatten specificaties voor technische veilig-
heidsaspecten en voorzieningen;
• Type C-normen: deze bevatten veiligheidsspecificaties voor bepaalde
(groepen) machines.
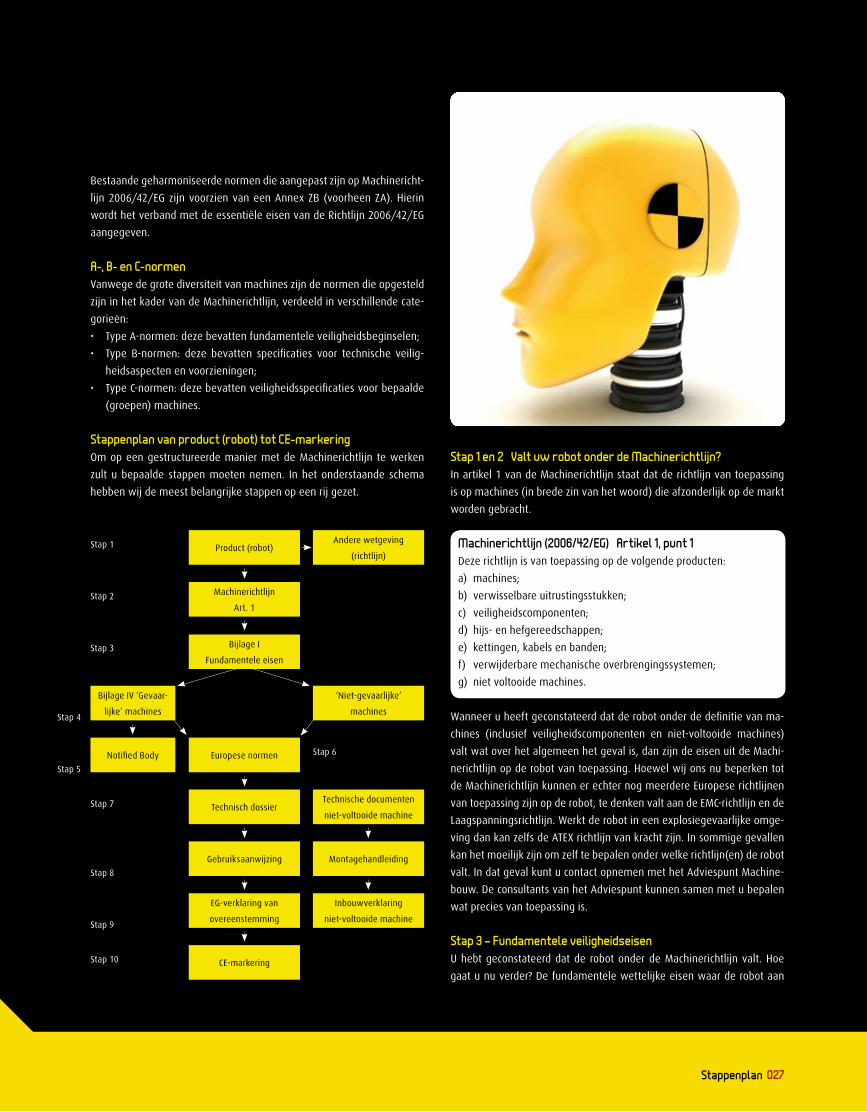
Stappenplan van product (robot) tot Ce-markeringOm op een gestructureerde manier met de Machinerichtlijn te werken
zult u bepaalde stappen moeten nemen. In het onderstaande schema
hebben wij de meest belangrijke stappen op een rij gezet.
027Stappenplan
Stap 1 en 2 Valt uw robot onder de machinerichtlijn?In artikel 1 van de Machinerichtlijn staat dat de richtlijn van toepassing
is op machines (in brede zin van het woord) die afzonderlijk op de markt
worden gebracht.
machinerichtlijn (2006/42/eg) artikel 1, punt 1Deze richtlijn is van toepassing op de volgende producten:
a) machines;
b) verwisselbare uitrustingsstukken;
c) veiligheidscomponenten;
d) hijs- en hefgereedschappen;
e) kettingen, kabels en banden;
f) verwijderbare mechanische overbrengingssystemen;
g) niet voltooide machines.
Wanneer u heeft geconstateerd dat de robot onder de definitie van ma-
chines (inclusief veiligheidscomponenten en niet-voltooide machines)
valt wat over het algemeen het geval is, dan zijn de eisen uit de Machi-
nerichtlijn op de robot van toepassing. Hoewel wij ons nu beperken tot
de Machinerichtlijn kunnen er echter nog meerdere Europese richtlijnen
van toepassing zijn op de robot, te denken valt aan de EMC-richtlijn en de
Laagspanningsrichtlijn. Werkt de robot in een explosiegevaarlijke omge-
ving dan kan zelfs de ATEX richtlijn van kracht zijn. In sommige gevallen
kan het moeilijk zijn om zelf te bepalen onder welke richtlijn(en) de robot
valt. In dat geval kunt u contact opnemen met het Adviespunt Machine-
bouw. De consultants van het Adviespunt kunnen samen met u bepalen
wat precies van toepassing is.
Stap 3 – fundamentele veiligheidseisenU hebt geconstateerd dat de robot onder de Machinerichtlijn valt. Hoe
gaat u nu verder? De fundamentele wettelijke eisen waar de robot aan
Product (robot)
Machinerichtlijn
Art. 1
Notified Body
Technisch dossier
Gebruiksaanwijzing
EG-verklaring van
overeenstemming
CE-markering
Andere wetgeving
(richtlijn)
Technische documenten
niet-voltooide machine
Montagehandleiding
Inbouwverklaring
niet-voltooide machine
Bijlage I
Fundamentele eisen
Europese normen
‘Niet-gevaarlijke‘
machines
Bijlage IV ‘Gevaar-
lijke’ machines
Stap 1
Stap 7
Stap 2
Stap 4
Stap 8
Stap 3
Stap 5
Stap 9
Stap 10
Stap 6

028
dient te voldoen, zijn vastgelegd in Bijlage I van de Machinerichtlijn. Het
is belangrijk dat u kennis neemt van de ‘Algemene beginselen’ van Bij-
lage I. Deze bevatten namelijk, in het kort samengevat, wat de gedach-
tegang achter de eisen van de Machinerichtlijn is. Tevens wordt er nog
meer nadruk gelegd op de risicobeoordeling.
In Bijlage I worden eisen gesteld die betrekking hebben op onder andere
de bediening, de verlichting, de noodstop, de stabiliteit, afscherming
(van gevaarlijke delen), aanduidingen op de machine en de gebruiks-
aanwijzing.
Stap 4 en 5 – gevaarlijke machines/Notified Body (in de meeste gevallen niet van toepassing voor robots)Ga na of de robot wordt genoemd in Bijlage IV van de Machinerichtlijn.
In Bijlage IV worden onder andere machines genoemd die onderhevig
zijn aan een EG-typeonderzoek. Dit houdt in dat de desbetreffende ma-
chine door een bij de overheid aangemelde instantie dient te worden
gecontroleerd. Deze instanties worden: ’Notified Body’ genoemd. Voor de
Machinerichtlijn zijn dat in Nederland o.a.: KEMA, Aboma/Keboma, Lift-
instituut bv, SGS Technische Inspectie bv, SKH en TUV-Nederland. Jaarlijks
wordt een lijst met aangemelde instanties geplaatst in het Publicatieblad
van de Europese Gemeenschappen. In het overzicht van de aangemelde
instanties staat voor welke richtlijnen de aangemelde instanties gerech-
tigd zijn verklaringen van EG-typeonderzoek af te geven. Een volledig
overzicht van de notified bodies is te vinden op de site http://ec.europa.
eu/index_en.htm
N.B.: De Machinerichtlijn is voornamelijk gericht op zelfcertificatie. Dat
wil zeggen dat ondanks het feit dat een aangemelde instantie een con-
trole uitvoert op het juist toepassen van normen en het voldoen aan de
eisen van de Machinerichtlijn, de fabrikant altijd de verantwoordelijkheid
blijft dragen voor het maken van een veilige machine. Een notified body
neemt deze verantwoordelijkheid niet over.
Valt uw machine niet onder Bijlage IV van de Machinerichtlijn, dan vindt
er geen controle van een dergelijke instantie plaats en certificeert u de
machines zelf zonder tussenkomst van een derde (zelfcertificatie). Het
staat u natuurlijk vrij om ondanks dat uw machines niet onder Bijlage IV
valt, toch een notified body in te schakelen.
Stap 6 – europese normenDe fundamentele veiligheidseisen van de Machinerichtlijn zijn globaal
van aard. De Europese Commissie heeft mandaat verstrekt aan CEN om
normen te ontwikkelen die als het ware handen en voeten geven aan de
eisen die in de Machinerichtlijn staan. Europese normen bevatten een
technische uitwerking van die eisen.
Het gebruik van Europese normen is niet verplicht. De Machinerichtlijn
noemt het een ‘niet-bindende technische specificatie’. Er is echter wel
een duidelijk verband tussen de richtlijn en de daarvoor ontwikkelde nor-
men. De Machinerichtlijn geeft aan dat als u gebruikmaakt van Europese
normen, u een ‘vermoeden van overeenstemming’ met de eisen van de
richtlijn heeft. Hiermee staat u sterk want het is algemeen geaccepteerd
dat wanneer u Europese normen heeft gehanteerd, u voldoet aan de ei-
sen van de richtlijn (zie artikel 7 van de Machinerichtlijn).
028 Stappenplan
machinerichtlijn (2006/42/eg) Bijlage I algemene Beginselen1. De fabrikant van een machine of diens gemachtigde garandeert
dat een risicobeoordeling wordt uitgevoerd om na te gaan welke vei-
ligheids- en gezondheidseisen op die machine van toepassing zijn; bij
ontwerp en bouw van de machine moet vervolgens rekening worden
gehouden met de resultaten van deze risicobeoordeling.
Via het herhalen van bovenbedoelde risicobeoordeling en -beperking
dient de fabrikant of diens gemachtigde:
• de grenzen van de machines te bepalen, zowel uitgaande van het
beoogde gebruik als van elk redelijkerwijs voorzienbare verkeerde
gebruik daarvan,
• na te gaan welke gevaren door de machines kunnen worden ver-
oorzaakt en welke gevaarlijke situaties daaraan verbonden zijn,
• de risico’s in te schatten met inachtneming van de ernst van het
mogelijke letsel of de aantasting van de gezondheid en de waar-
schijnlijkheid dat deze zich voordoet,
• de risico’s te beoordelen teneinde, overeenkomstig de doelstelling
van deze richtlijn, te bepalen of risicoreductie vereist is,
• de gevaren weg te nemen of de aan deze gevaren verbonden ri-
sico’s te verminderen door de toepassing van beschermende maatre-
gelen in de in punt 1.1.2, onder b) vastgestelde volgorde.
2. De verplichtingen die zijn vervat in de essentiële veiligheids- en ge-
zondheidseisen, zijn alleen van toepassing indien het gevaar in kwes-
tie bij de betrokken machine aanwezig is wanneer deze op de door
de fabrikant of diens gemachtigde bedoelde wijze, dan wel in voor-
zienbare abnormale omstandigheden wordt gebruikt. De beginselen
van geïntegreerde veiligheid van punt 1.1.2 en de voorschriften inzake
markering en gebruiksaanwijzing van de punten 1.7.3 en 1.7.4 gelden
in ieder geval.
3. De in deze bijlage vermelde essentiële veiligheids- en gezondheids-
eisen zijn dwingend. Gezien de stand van de techniek is het evenwel
mogelijk dat de daarin gestelde doelen niet kunnen worden bereikt. In
dat geval moeten die doelstellingen bij het ontwerp en de bouw van
de machine zoveel mogelijk worden nagestreefd.
4. Deze bijlage bestaat uit verschillende delen. Het eerste deel heeft
een algemene werkingssfeer en is van toepassing op alle soorten
machines. In de andere delen wordt verwezen naar bepaalde soor-
ten meer specifieke gevaren. De gehele bijlage moet evenwel worden
bekeken om zeker te zijn dat aan alle toepasselijke essentiële eisen is
voldaan. Bij het ontwerpen van machines overeenkomstig punt 1 van
deze algemene beginselen, worden de eisen van het algemene deel
en de eisen van een of meer andere delen in aanmerking genomen,
naar gelang van de resultaten van de risicobeoordeling, uitgevoerd
overeenkomstig punt 1 van deze algemene beginselen.

berekeningen, testresultaten, certificaten enz., aan de hand waarvan
kan worden nagegaan of de niet voltooide machine aan de toegepaste
essentiële gezondheids- en veiligheidseisen voldoet,
- de documentatie over de risicobeoordeling waaruit de gevolgde proce-
dure blijkt, met inbegrip van de volgende gegevens:
i) de essentiële gezondheids- en veiligheidseisen van deze richtlijn die
van toepassing en vervuld zijn,
ii) de beschrijving van de beschermende maatregelen die zijn toegepast
om vastgestelde gevaren weg te nemen of onderkende risico’s te ver-
minderen en, in voorkomend geval, informatie over de restrisico’s,
iii) de normen en overige toegepaste technische specificaties die zijn toe-
gepast, met opgave van de essentiële gezondheids- en veiligheidseisen
die daaronder vallen,
iv) technische verslagen met de resultaten van de proeven die door de
fabrikant dan wel een door hem of zijn gemachtigde gekozen bevoegde
instantie zijn verricht,
v) kopie van de montagehandleiding van de niet voltooide machine;
Het technisch dossier hoeft zich niet op het grondgebied van de Gemeen-
schap te bevinden en hoeft ook niet permanent in materiële vorm voor-
handen te zijn. Wel moeten de onderdelen van het dossier, door de in de
EG-verklaring van overeenstemming aangewezen persoon, binnen een tijd
die, met de complexiteit van een calamiteit overeenkomt, kunnen worden
bijeengebracht en beschikbaar gesteld indien daar vraag naar is door een
bevoegde nationale instantie (bijvoorbeeld de Arbeidsinspectie). Het dos-
sier dient tenminste tien jaar na datum van de fabricage van de machine
bewaard te blijven (zie Bijlage VII van de Machinerichtlijn onder punt 2).
Stap 8 gebruiksaanwijzingIn Bijlage I van de Machinerichtlijn staan onder punt 1.7.4 eisen gesteld
aan de inhoud van de gebruiksaanwijzing voor machines. De gebruiksaan-
wijzing dient niet alleen informatie te bevatten voor het bedienen van de
robot maar tevens voor de installatie, schoonmaak, onderhoud, transport,
etc. (zie Machinerichtlijn – Bijlage I, 1.7.4.2 voor een volledig overzicht van
de inhoud van de gebruiksaanwijzing).
029Stappenplan
machinerichtlijn – Bijlage VII, onder a Technisch dossier voor machines1. Het technische dossier bevat de volgende elementen:
a) een constructiedossier bestaande uit:
- een algemene beschrijving van de machine;
- het overzichtsplan van de machine, en de tekeningen van de be-
sturingsschakelingen alsmede ter zake dienende beschrijvingen en
toelichtingen om de werking van de machine te kunnen begrijpen;
- gedetailleerde en volledige tekeningen, eventueel aangevuld met
berekeningen, testresultaten, verklaringen enz., aan de hand waar-
van kan worden nagegaan of de machine aan de essentiële gezond-
heids- en veiligheidseisen voldoet;
- de documentatie over de risicobeoordeling waaruit de gevolgde pro-
cedure blijkt, met inbegrip van de volgende gegevens:
i) een lijst van de essentiële gezondheids- en veiligheidseisen die op de
betrokken machine van toepassing zijn,
ii) de beschrijving van de beschermende maatregelen die zijn toege-
past om vastgestelde gevaren weg te nemen of onderkende risico’s
te verminderen en, in voorkomend geval, informatie over de restri-
sico’s in verband met de machine;
- normen en overige toegepaste technische specificaties, met opgave van
de essentiële gezondheids- en veiligheidseisen die daaronder vallen;
- technische verslagen waarin de uitkomsten van de proeven zijn op-
genomen die door de fabrikant dan wel door een door hem of zijn
gemachtigde gekozen bevoegde instantie zijn verricht;
- een exemplaar van de gebruiksaanwijzing van de machine;
- in voorkomend geval, de inbouwverklaring en de instructies voor in-
bouw betreffende zo ingebouwde niet voltooide machines;
- in voorkomend geval, afschriften van de EG-verklaring van overeen-
stemming van de machine of van overige in de machine ingebouwde
producten;
- een afschrift van de EG-verklaring van overeenstemming;
Voor industriële robots is er een type C-norm ontwikkeld: NEN-EN-
ISO10218-1 met als titel: Robots voor industriële omgevingen.
In een speciaal overzicht heeft NEN alle normen en normontwerpen die
in het kader van de Machinerichtlijn zijn opgesteld, bij elkaar gezet. Er is
een indeling gemaakt naar categorieën, zodat u gemakkelijk kunt zien of
er voor uw type machine normen zijn.
Stap 7 – Technisch dossier voor machines Voordat de EG-verklaring van overeenstemming kan worden opgesteld,
moet de fabrikant, of zijn in de Gemeenschap gevestigde gevolmach-
tigde, zich ervan hebben vergewist en kunnen garanderen dat bepaalde
documenten te zijnen kantore beschikbaar blijven voor eventuele contro-
les. Een van deze documenten is het technische dossier voor machines.
Bijlage VII van de Machinerichtlijn geeft aan wat er in dit dossier moet
staan. Bijlage VII is opgesplitst in twee delen:
A. Technisch dossier voor machines (lees robot) en
B. Relevante technische documentatie voor niet-voltooide machines.
Voor niet-voltooide machines zijn de stappen 7 tot en met 10 iets af-
wijkend. In plaats van een technisch dossier voor machines dient u een
dossier samen te stellen met daarin relevante technische documenten
van de niet-voltooide machine. U dient een montagehandleiding en een
IIB-inbouwverklaring bij te sluiten. Niet-voltooide machines krijgen geen
CE-markering op basis van de Machinerichtlijn. Het kan echter wel voor-
komen dat onderdelen van een niet-voltooide machine een CE-markering
bevatten op basis van een andere Europese richtlijn, bijvoorbeeld de
Richtlijn drukapparatuur (PED) of de EMC-richtlijn.
Machinerichtlijn – Bijlage VII, onder B Relevante technische documenten
voor niet-voltooide machines
het dossier bevat de volgende elementen:a) een constructiedossier bestaande uit:
- het overzichtsplan van de niet voltooide machine, alsmede de teke-
ningen van de besturingsschakelingen,
- gedetailleerde en volledige tekeningen, eventueel aangevuld met
030
De Machinerichtlijn hanteert een trapsgewijs systeem voor veiligheid van
de robot. Allereerst dient men bij het ontwerpen van de robot rekening te
houden met gevaren en deze zo veel mogelijk in het ontwerp te beper-
ken. Wanneer er toch nog risico’s overblijven, kan men gebruikmaken van
veiligheidsmiddelen zoals afschermingen. Instructies voor het omgaan
met zogenaamde restrisico’s moeten in de gebruiksaanwijzing worden
opgenomen.
Een belangrijk aspect bij het opstellen van de gebruiksaanwijzing is het
rekening houden met redelijk te verwachten gebruik van de machine.
Omdat het voor een fabrikant niet altijd mogelijk is om precies te weten
wat ‘redelijk te verwachten gebruik’ is, is het over het algemeen raad-
zaam om in de gebruiksaanwijzing goed te omschrijven waarvoor men
de machine moet gebruiken en elk ander gebruik uit te sluiten.
Voor het opstellen van de gebruiksaanwijzing kunt u gebruikmaken van
NEN-EN-ISO 12100, deel 2, hoofdstuk 6. De Nederlandse norm NEN 5509
is een norm met uitgebreide gegevens over het opstellen van een ge-
bruiksaanwijzing, maar is geen Europese norm en heeft geen directe re-
latie met de Machinerichtlijn.
Stap 9 – eg-verklaring van OvereenstemmingOm aan te tonen dat u voldaan heeft aan de eisen van de Machinericht-
lijn dient u een EG-verklaring van overeenstemming op te stellen. Deze
verklaring dient net als de gebruiksaanwijzing meegegeven te worden
met de machine.
er zijn twee verschillende soorten verklaringen:1 EG-verklaring van overeenstemming voor machines (Machinerichtlijn
Bijlage II, A);
2 Inbouwverklaring voor niet-voltooide machines (Machinerichtlijn –
Bijlage II, B);
Wanneer gesproken wordt over de IIA- of de IIB-verklaring, wordt eigen-
lijk gerefereerd aan de Bijlage II van de Machinerichtlijn. In Bijlage II staat
aangegeven wat de inhoud van de verklaring dient te zijn.
Stap 10 – Ce-markeringHet aanbrengen van de CE-markering op de machine is als het ware de
eindfase van het voldoen aan de eisen die gesteld worden in de Machi-
nerichtlijn. De markering geeft aan dat uw machine volgens de daarvoor
geldende Europese regels (en dus tevens nationale wetgeving) is ont-
worpen.
De CE-markering bestaat uit de initialen ‘CE’, ook wel aangeduid als Con-
formité Européenne. In Bijlage III van de Machinerichtlijn is het te gebrui-
ken model afgebeeld. De CE-markering moet worden aangebracht in de
onmiddellijke nabijheid van de naam van de fabrikant of diens gemach-
tigde, met gebruikmaking van dezelfde techniek.
Bij vergroting of verkleining van de CE-markering moeten de verhoudin-
gen van de onderstaande afbeelding behouden blijven.
De onderdelen van de CE-markering moeten ongeveer dezelfde hoogte
hebben, namelijk minimaal 5 mm. Bij machines van geringe grootte mag
van deze minimumafmeting worden afgeweken.
Wanneer de volledige kwaliteitsborgingsprocedure is toegepast, wordt
de CE-markering gevolgd door het identificatienummer van de aange-
melde instantie.
OpmerkingHet stappenplan dat hiervoor uiteengezet is, geeft in het kort inzicht in
de verschillende stappen die u kunt doorlopen om uiteindelijk tot CE-
markering voor uw robot te komen. Voor niet-voltooide machines kunt
u een soortgelijk stappenplan doorlopen, alleen worden deze producten
als eindresultaat niet voorzien van een CE-markering op basis van de Ma-
chinerichtlijn. Om het overzichtelijk te houden is niet over alle onderwer-
pen uitgebreide informatie verstrekt. Evenmin is uitgebreid ingegaan op
de certificatiestructuur die nieuwe-aanpakrichtlijnen kennen. De meeste
producten die onder de Machinerichtlijn vallen, worden namelijk door
middel van zelfcertificatie beoordeeld.
warenwetbesluitIn Nederland is de Machinerichtlijn opgenomen in de Warenwet. De im-
plementatie van de Richtlijn 2006/42/EG heeft plaatsgevonden met een
wijziging van enkele Warenwetbesluiten. De wijziging is gepubliceerd in
Staatsblad 236 van 2008. De wijziging is op 29 december 2009 in werking
getreden. De tekst van de nationale wet (in ieder land van de Europese
Economische Ruimte) dient de fabrikant (die soms ook gebruiker is) tot
richtsnoer. Het Warenwetbesluit bevat niet de volledige essentiële eisen,
maar verwijst hiervoor naar bijlage I van de Machinerichtlijn. Het verdient
aanbeveling, bij afzet op de markt van een andere lidstaat, u nauwkeu-
rig op de hoogte te stellen van de inhoud van de vigerende nationale
wetgeving.
Structuur van de machinerichtlijnVoordat u de Machinerichtlijn gaat lezen, is het handig om te weten dat
de richtlijn een bepaalde structuur heeft die bestaat uit de volgende on-
derdelen:
• de overwegingen (rekening houdend met ...);
• de artikelen (wettelijke kader van de richtlijn);
• de bijlagen (uitwerking van of verwijzing vanuit bepaalde artikelen).
Een soortgelijke structuur is in de meeste nieuwe-aanpakrichtlijnen terug
vinden. Hierna treft u een schematische weergave van de richtlijn, zodat
u gemakkelijk en snel kunt zien waar en wat er in de verschillende arti-
kelen en bijlagen staat.
030 Stappenplan

031Ontwerp & risico’s
Wanneer de norm in het Publicatieblad van de Europese Unie wordt gepu-
bliceerd (de eindfase), dan spreken we over een geharmoniseerde Euro-
pese norm. Geharmoniseerde normen zijn normen die door de Europese
commissie zijn aanvaard in het kader van de Nieuwe Aanpak Richtlijnen,
nadat de leden van CEN (Comité Européen de Normalisation) en CENELEC
(Comité Européen de Normalisation Electrotechnique) overeenstemming
hebben bereikt over de technische uitwerking van één of meer funda-
mentele veiligheids- en gezondheidsvoorschriften. Het zou niet haalbaar
zijn om alle eisen met betrekking tot veiligheid en gezondheid in één
norm samen te brengen. De normen die zijn opgesteld in het kader van
de Machinerichtlijn zijn vanwege de grote diversiteit van machines in-
gedeeld in drie categorieën. Ten eerste zijn er de type A-normen (fun-
damentele veiligheidsnormen) met basisbegrippen, ontwerpbeginselen
en algemene aspecten die op machines van toepassing kunnen zijn. Dan
zijn er de type B-normen (generieke veiligheidsnormen) met één of meer
veiligheidsaspecten of één of meer typen beveiligingsvoorziening, die
voor een breed scala van machines van toepassing kunnen zijn. De type
B-normen kunnen ook weer worden onderverdeeld in diverse catego-
rieën. Er zijn type B1-normen voor bepaalde veiligheidsaspecten (voor
bijvoorbeeld veiligheidsafstanden, oppervlaktetemperatuur en geluid),
alsmede type B2-normen voor beveiligingsvoorzieningen (zoals twee-
handenbediening, blokkeervoorzieningen, drukgevoelige voorzieningen
en afschermingen). Ten slotte zijn er de type C-normen (machineveilig-
heidsnormen), met gedetailleerde veiligheidseisen voor een bepaalde
machine of groep van machines.
Het toepassen van een geharmoniseerde norm geeft het zogenoemde
‘vermoeden van overeenstemming’ met de desbetreffende eis van de
richtlijn. Men gaat er dus automatisch van uit dat je voldoet aan de Machi-
nerichtlijn wanneer je bij het ontwerp van de machine of robot geharmo-
niseerde normen gebruikt. Het voordeel van het gebruik van een C-norm
is dat men al gekeken heeft naar de bijzondere risico’s die zich kunnen
voordoen met bijvoorbeeld robots. Er is als het ware al een risicobeoorde-
ling voor je gemaakt.
annex za en annex zBGeharmoniseerde normen worden voorzien van een Annex ZA. In deze
Annex wordt het verband gelegd met de essentiële eisen in de machi-
nerichtlijn of andere Europese richtlijnen. Wanneer de norm gepubliceerd
is in het Publicatieblad van de Europese Unie, geldt het vermoeden van
overeenstemming. Dit vermoeden van overeenstemming is echter niet
automatisch van toepassing op de nieuwe machinerichtlijn 2006/42/EG.
Om het vermoeden van overeenstemming te behouden, is het belangrijk
dat de vele honderden normen die onder de Machinerichtlijn zijn ontwik-
keld, aangepast worden op de nieuwe richtlijn. Dit wordt gedaan door
middel van het toevoegen van een Annex ZB. Dit proces is nog steeds
gaande, en naar verwachting zal de aanpassing rond moeten zijn voordat
de nieuwe richtlijn van kracht gaat. Net als Annex ZA geeft Annex ZB het
verband aan met de essentiële eisen van Machinerichtlijn 2006/42/EG.
NEN-EN-ISO 10218-1 is al voorzien van een Annex ZB.
NeN-eN-ISO 10218-1:2008Deze norm is speciaal ontwikkeld om risico’s en gevaren van industriële
robots in kaart te brengen en is opgesteld door de Internationale Techni-
sche Commissie ISO/TC 184 – Industrial Automation systems and integra-
tion. Hij is op 17 november 2008 goedgekeurd door CEN en vervolgens
overgenomen als Europese norm. NEN-EN-ISO 10218 bestaat uit twee
delen. Deel 1 gaat over robots en specificeert de eisen en richtlijnen voor
een veilig ontwerp, de beschermende maatregelen en de instructies voor
het gebruik van industriële robots. Het beschrijft de basisrisico’s die ver-
bonden zijn aan robots en geeft eisen voor het reduceren of elimineren
van deze risico’s. Deel 2 gaat over robotsystemen en integratie. De geva-
ren in relatie tot geluid zijn in dit tweede deel opgenomen.
Lijst van gevarenAnnex I van NEN-EN-ISO 10218-1 geeft een lijst van gevaren weer die
kunnen voorkomen bij industriële robots (zie tabel A.1). Een risicobeoor-
deling zal vanzelfsprekend moeten uitwijzen of er nog additionele risico’s
euROPeSe gehaRmONISeeRDe NORmeN geVeN eeN TeChNISChe uITweRkINg aaN De
fuNDameNTeLe VeILIgheIDS- eN gezONDheIDSeISeN DIe IN De maChINeRIChTLIjN wORDeN
geSTeLD. Deze NORmeN wORDeN OP BaSIS VaN CONSeNSuS, TuSSeN De VeRSChILLeNDe
euROPeSe LaNDeN, DOOR BeLaNgheBBeNDe PaRTIjeN (zOaLS De geBRuIkeRS, faBRIkaNTeN,
BRaNCheORgaNISaTIeS eN De OVeRheID) OPgeSTeLD. IN DIT aRTIkeL wORDT NaDeR INgegaaN
OP De gehaRmONISeeRDe NORm NeN-eN-ISO 10218, meT aLS TITeL ‘ROBOTS fOR INDuSTRIaL
eNVIRONmeNTS – SafeTy RequIRemeNTS’.
Robots volgens NeN–eN-ISO 10218-1
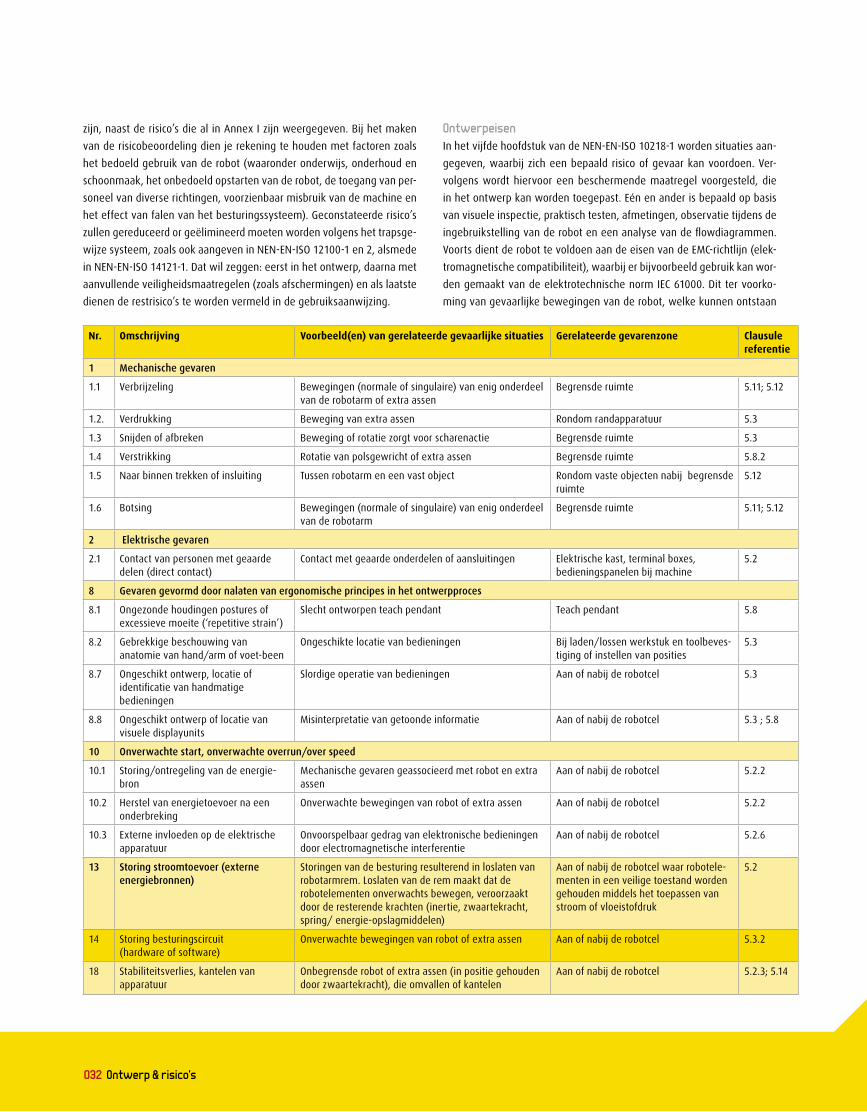
032032032032 Ontwerp & risico’s
Nr. Omschrijving Voorbeeld(en) van gerelateerde gevaarlijke situaties Gerelateerde gevarenzone Clausule referentie
1 Mechanische gevaren
1.1 Verbrijzeling Bewegingen (normale of singulaire) van enig onderdeel van de robotarm of extra assen
Begrensde ruimte 5.11; 5.12
1.2. Verdrukking Beweging van extra assen Rondom randapparatuur 5.3
1.3 Snijden of afbreken Beweging of rotatie zorgt voor scharenactie Begrensde ruimte 5.3
1.4 Verstrikking Rotatie van polsgewricht of extra assen Begrensde ruimte 5.8.2
1.5 Naar binnen trekken of insluiting Tussen robotarm en een vast object Rondom vaste objecten nabij begrensde ruimte
5.12
1.6 Botsing Bewegingen (normale of singulaire) van enig onderdeel van de robotarm
Begrensde ruimte 5.11; 5.12
2 Elektrische gevaren
2.1 Contact van personen met geaarde delen (direct contact)
Contact met geaarde onderdelen of aansluitingen Elektrische kast, terminal boxes, bedieningspanelen bij machine
5.2
8 Gevaren gevormd door nalaten van ergonomische principes in het ontwerpproces
8.1 Ongezonde houdingen postures of excessieve moeite (‘repetitive strain’)
Slecht ontworpen teach pendant Teach pendant 5.8
8.2 Gebrekkige beschouwing van anatomie van hand/arm of voet-been
Ongeschikte locatie van bedieningen Bij laden/lossen werkstuk en toolbeves-tiging of instellen van posities
5.3
8.7 Ongeschikt ontwerp, locatie of identificatie van handmatige bedieningen
Slordige operatie van bedieningen Aan of nabij de robotcel 5.3
8.8 Ongeschikt ontwerp of locatie van visuele displayunits
Misinterpretatie van getoonde informatie Aan of nabij de robotcel 5.3 ; 5.8
10 Onverwachte start, onverwachte overrun/over speed
10.1 Storing/ontregeling van de energie-bron
Mechanische gevaren geassocieerd met robot en extra assen
Aan of nabij de robotcel 5.2.2
10.2 Herstel van energietoevoer na een onderbreking
Onverwachte bewegingen van robot of extra assen Aan of nabij de robotcel 5.2.2
10.3 Externe invloeden op de elektrische apparatuur
Onvoorspelbaar gedrag van elektronische bedieningen door electromagnetische interferentie
Aan of nabij de robotcel 5.2.6
13 Storing stroomtoevoer (externe energiebronnen)
Storingen van de besturing resulterend in loslaten van robotarmrem. Loslaten van de rem maakt dat de robotelementen onverwachts bewegen, veroorzaakt door de resterende krachten (inertie, zwaartekracht, spring/ energie-opslagmiddelen)
Aan of nabij de robotcel waar robotele-menten in een veilige toestand worden gehouden middels het toepassen van stroom of vloeistofdruk
5.2
14 Storing besturingscircuit (hardware of software)
Onverwachte bewegingen van robot of extra assen Aan of nabij de robotcel 5.3.2
18 Stabiliteitsverlies, kantelen van apparatuur
Onbegrensde robot of extra assen (in positie gehouden door zwaartekracht), die omvallen of kantelen
Aan of nabij de robotcel 5.2.3; 5.14
zijn, naast de risico’s die al in Annex I zijn weergegeven. Bij het maken
van de risicobeoordeling dien je rekening te houden met factoren zoals
het bedoeld gebruik van de robot (waaronder onderwijs, onderhoud en
schoonmaak, het onbedoeld opstarten van de robot, de toegang van per-
soneel van diverse richtingen, voorzienbaar misbruik van de machine en
het effect van falen van het besturingssysteem). Geconstateerde risico’s
zullen gereduceerd or geëlimineerd moeten worden volgens het trapsge-
wijze systeem, zoals ook aangeven in NEN-EN-ISO 12100-1 en 2, alsmede
in NEN-EN-ISO 14121-1. Dat wil zeggen: eerst in het ontwerp, daarna met
aanvullende veiligheidsmaatregelen (zoals afschermingen) en als laatste
dienen de restrisico’s te worden vermeld in de gebruiksaanwijzing.
Ontwerpeisen In het vijfde hoofdstuk van de NEN-EN-ISO 10218-1 worden situaties aan-
gegeven, waarbij zich een bepaald risico of gevaar kan voordoen. Ver-
volgens wordt hiervoor een beschermende maatregel voorgesteld, die
in het ontwerp kan worden toegepast. Eén en ander is bepaald op basis
van visuele inspectie, praktisch testen, afmetingen, observatie tijdens de
ingebruikstelling van de robot en een analyse van de flowdiagrammen.
Voorts dient de robot te voldoen aan de eisen van de EMC-richtlijn (elek-
tromagnetische compatibiliteit), waarbij er bijvoorbeeld gebruik kan wor-
den gemaakt van de elektrotechnische norm IEC 61000. Dit ter voorko-
ming van gevaarlijke bewegingen van de robot, welke kunnen ontstaan
U let nauwgezet op onafhankelijke testen van uw auto … alleen garages die lid zijn van een branchevereniging vindt u
betrouwbaar … waarom dan ook niet als het gaat om Industriële Robots?
www.robotics-benelux.info
door EMI (elektromagnetische storing of interference), RFI (radiofrequente
storing of interference) en ESD (elektrostatische lading of discharge). Ver-
der worden er aanwijzingen gegeven voor zowel de hard- als software
van besturingssystemen met een veiligheidsfunctie. Er wordt algemeen
van uitgegaan dat het veiligheidscategorie 3 betreft, zoals omschreven in
NEN-EN-ISO 13849-1 - Veiligheid van machines - Onderdelen van bestu-
ringssystemen met een veiligheidsfunctie - Deel 1: Algemene regels voor
ontwerp. Voor de elektrische veiligheid van de robot wordt verwezen naar
de NEN-EN-IEC 60204-1 Veiligheid van machines - Elektrische uitrusting
van machines - Deel 1: Algemene eisen. De uitrusting waarop de NEN-
EN-IEC 60204 van toepassing is, begint op het punt waar de elektrische
uitrusting van de machine op de elektrische voeding is aangesloten.
gebruiksaanwijzing en markeringIn de Machinerichtlijn worden in Bijlage I, punt 1.7.3 en 1.7.4, eisen ge-
steld aan de markering op een machine of robot en de gebruiksaanwij-
zing. In NEN-EN-ISO 12100 wordt dit nader gespecificeerd, maar NEN-EN-
ISO 10218-1 geeft in hoofdstuk 6 nog specifieke aanwijzingen voor de
gebruiksaanwijzing voor industriële robots. Zo dienen robots of robotsy-
stemen voorzien te zijn van een instructiehandboek, met daarin onder
andere opgenomen:
• naam, adres en contactgegevens van de fabrikant of leverancier
• instructies voor de installatie en programmering van de robot
• instructies voor het testen en inspecteren van de afschermingen, die
uitgevoerd dienen te worden alvorens het eerste gebruik van de robot
• instructies voor het veilig bedienen van de robot
De robot dient gemarkeerd te zijn met onder andere het volgende (hoofd-
stuk 6):
• naam en adres van de fabrikant
• modelnummer en referentienummer
• maand en jaar van fabricage
• het gewicht van de machine
• informatie betreffende elektrische, hydraulische en pneumatische
systemen
• hijspunten voor transport dienen te worden aangeduid
• laadcapaciteit
De eisen die worden aangegeven in NEN-EN-ISO 10218-1 zijn minimale
eisen, die de veiligheid dienen te waarborgen bij het gebruik van de
robot. Er kunnen vanzelfsprekend nog andere veiligheidsmaatregelen
worden getroffen, afhankelijk van het type robot en de functionaliteit
die er aan wordt toegekend. Annex D geeft een aantal opties, welke in
acht kunnen worden genomen die de flexibiliteit, hergebruik en veilig-
heid van de robot ten goede komen. Hoewel deze norm speciaal voor
industriële robots is ontwikkeld, dien je nog een aantal andere normen
te raadplegen om aan alle eisen van de machinerichtlijn te voldoen. De
norm geeft een overzicht van de normen die je, naast deze norm, nog zou
moeten raadplegen. Mocht je naar aanleiding van dit artikel nog vragen
hebben, dan kun je contact opnemen met het Adviespunt Machinebouw via
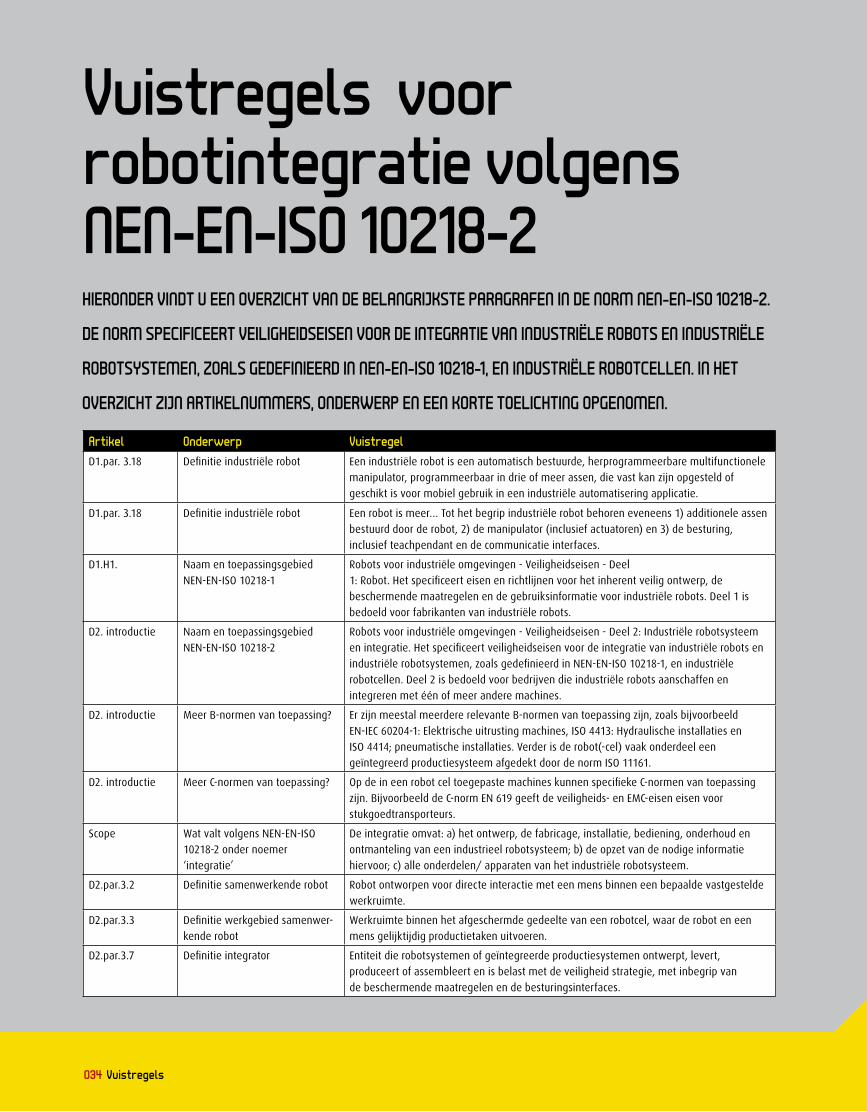
artikel Onderwerp Vuistregel
D1.par. 3.18 Definitie industriële robot Een industriële robot is een automatisch bestuurde, herprogrammeerbare multifunctionele
manipulator, programmeerbaar in drie of meer assen, die vast kan zijn opgesteld of
geschikt is voor mobiel gebruik in een industriële automatisering applicatie.
D1.par. 3.18 Definitie industriële robot Een robot is meer… Tot het begrip industriële robot behoren eveneens 1) additionele assen
bestuurd door de robot, 2) de manipulator (inclusief actuatoren) en 3) de besturing,
inclusief teachpendant en de communicatie interfaces.
D1.H1. Naam en toepassingsgebied
NEN-EN-ISO 10218-1
Robots voor industriële omgevingen - Veiligheidseisen - Deel
1: Robot. Het specificeert eisen en richtlijnen voor het inherent veilig ontwerp, de
beschermende maatregelen en de gebruiksinformatie voor industriële robots. Deel 1 is
bedoeld voor fabrikanten van industriële robots.
D2. introductie Naam en toepassingsgebied
NEN-EN-ISO 10218-2
Robots voor industriële omgevingen - Veiligheidseisen - Deel 2: Industriële robotsysteem
en integratie. Het specificeert veiligheidseisen voor de integratie van industriële robots en
industriële robotsystemen, zoals gedefinieerd in NEN-EN-ISO 10218-1, en industriële
robotcellen. Deel 2 is bedoeld voor bedrijven die industriële robots aanschaffen en
integreren met één of meer andere machines.
D2. introductie Meer B-normen van toepassing? Er zijn meestal meerdere relevante B-normen van toepassing zijn, zoals bijvoorbeeld
EN-IEC 60204-1: Elektrische uitrusting machines, ISO 4413: Hydraulische installaties en
ISO 4414; pneumatische installaties. Verder is de robot(-cel) vaak onderdeel een
geïntegreerd productiesysteem afgedekt door de norm ISO 11161.
D2. introductie Meer C-normen van toepassing? Op de in een robot cel toegepaste machines kunnen specifieke C-normen van toepassing
zijn. Bijvoorbeeld de C-norm EN 619 geeft de veiligheids- en EMC-eisen eisen voor
stukgoedtransporteurs.
Scope Wat valt volgens NEN-EN-ISO
10218-2 onder noemer
‘integratie’
De integratie omvat: a) het ontwerp, de fabricage, installatie, bediening, onderhoud en
ontmanteling van een industrieel robotsysteem; b) de opzet van de nodige informatie
hiervoor; c) alle onderdelen/ apparaten van het industriële robotsysteem.
D2.par.3.2 Definitie samenwerkende robot Robot ontworpen voor directe interactie met een mens binnen een bepaalde vastgestelde
werkruimte.
D2.par.3.3 Definitie werkgebied samenwer-
kende robot
Werkruimte binnen het afgeschermde gedeelte van een robotcel, waar de robot en een
mens gelijktijdig productietaken uitvoeren.
D2.par.3.7 Definitie integrator Entiteit die robotsystemen of geïntegreerde productiesystemen ontwerpt, levert,
produceert of assembleert en is belast met de veiligheid strategie, met inbegrip van
de beschermende maatregelen en de besturingsinterfaces.
034034034 Vuistregels
hIeRONDeR VINDT u eeN OVeRzIChT VaN De BeLaNgRIjkSTe PaRagRafeN IN De NORm NeN-eN-ISO 10218-2.
De NORm SPeCIfICeeRT VeILIgheIDSeISeN VOOR De INTegRaTIe VaN INDuSTRIëLe ROBOTS eN INDuSTRIëLe
ROBOTSySTemeN, zOaLS geDefINIeeRD IN NeN-eN-ISO 10218-1, eN INDuSTRIëLe ROBOTCeLLeN. IN heT
OVeRzIChT zIjN aRTIkeLNummeRS, ONDeRweRP eN eeN kORTe TOeLIChTINg OPgeNOmeN.
Vuistregels voor robotintegratie volgens NeN-eN-ISO 10218-2
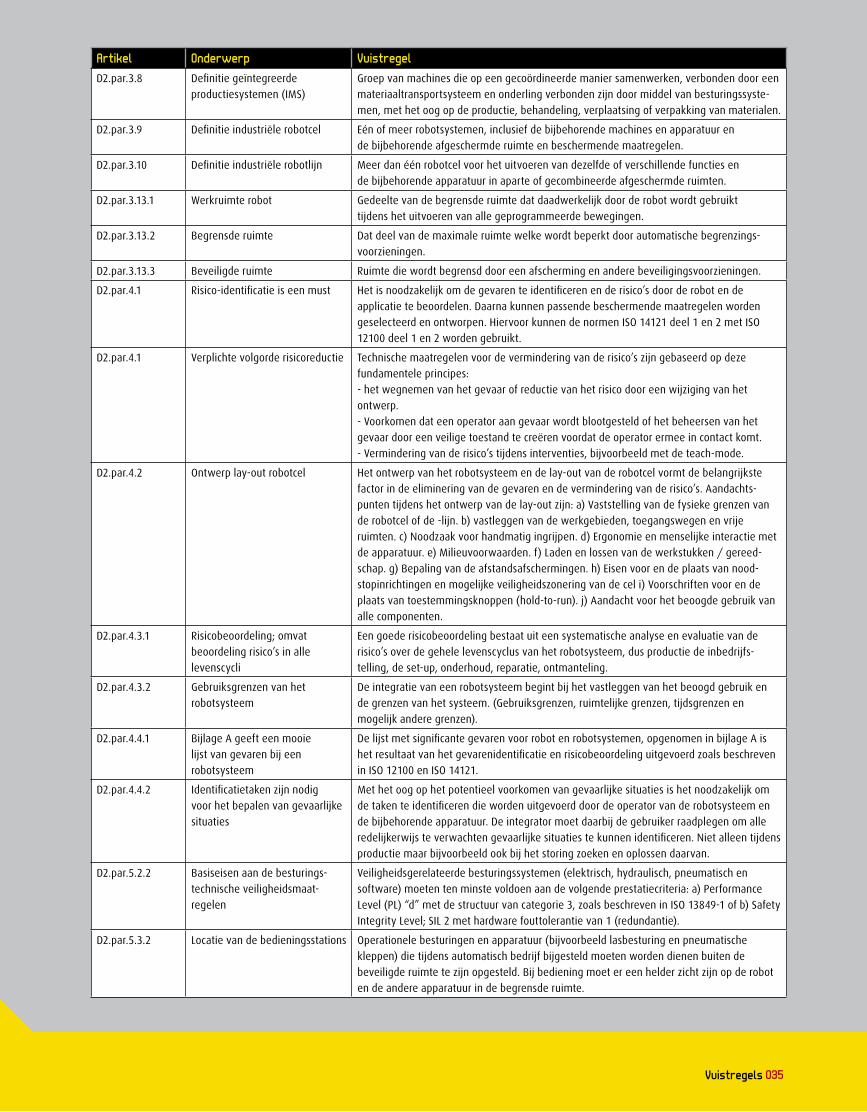
035Vuistregels
artikel Onderwerp Vuistregel
D2.par.3.8 Definitie geïntegreerde
productiesystemen (IMS)
Groep van machines die op een gecoördineerde manier samenwerken, verbonden door een
materiaaltransportsysteem en onderling verbonden zijn door middel van besturingssyste-
men, met het oog op de productie, behandeling, verplaatsing of verpakking van materialen.
D2.par.3.9 Definitie industriële robotcel Eén of meer robotsystemen, inclusief de bijbehorende machines en apparatuur en
de bijbehorende afgeschermde ruimte en beschermende maatregelen.
D2.par.3.10 Definitie industriële robotlijn Meer dan één robotcel voor het uitvoeren van dezelfde of verschillende functies en
de bijbehorende apparatuur in aparte of gecombineerde afgeschermde ruimten.
D2.par.3.13.1 Werkruimte robot Gedeelte van de begrensde ruimte dat daadwerkelijk door de robot wordt gebruikt
tijdens het uitvoeren van alle geprogrammeerde bewegingen.
D2.par.3.13.2 Begrensde ruimte Dat deel van de maximale ruimte welke wordt beperkt door automatische begrenzings-
voorzieningen.
D2.par.3.13.3 Beveiligde ruimte Ruimte die wordt begrensd door een afscherming en andere beveiligingsvoorzieningen.
D2.par.4.1 Risico-identificatie is een must Het is noodzakelijk om de gevaren te identificeren en de risico’s door de robot en de
applicatie te beoordelen. Daarna kunnen passende beschermende maatregelen worden
geselecteerd en ontworpen. Hiervoor kunnen de normen ISO 14121 deel 1 en 2 met ISO
12100 deel 1 en 2 worden gebruikt.
D2.par.4.1 Verplichte volgorde risicoreductie Technische maatregelen voor de vermindering van de risico’s zijn gebaseerd op deze
fundamentele principes:
- het wegnemen van het gevaar of reductie van het risico door een wijziging van het
ontwerp.
- Voorkomen dat een operator aan gevaar wordt blootgesteld of het beheersen van het
gevaar door een veilige toestand te creëren voordat de operator ermee in contact komt.
- Vermindering van de risico’s tijdens interventies, bijvoorbeeld met de teach-mode.
D2.par.4.2 Ontwerp lay-out robotcel Het ontwerp van het robotsysteem en de lay-out van de robotcel vormt de belangrijkste
factor in de eliminering van de gevaren en de vermindering van de risico’s. Aandachts-
punten tijdens het ontwerp van de lay-out zijn: a) Vaststelling van de fysieke grenzen van
de robotcel of de -lijn. b) vastleggen van de werkgebieden, toegangswegen en vrije
ruimten. c) Noodzaak voor handmatig ingrijpen. d) Ergonomie en menselijke interactie met
de apparatuur. e) Milieuvoorwaarden. f) Laden en lossen van de werkstukken / gereed-
schap. g) Bepaling van de afstandsafschermingen. h) Eisen voor en de plaats van nood-
stopinrichtingen en mogelijke veiligheidszonering van de cel i) Voorschriften voor en de
plaats van toestemmingsknoppen (hold-to-run). j) Aandacht voor het beoogde gebruik van
alle componenten.
D2.par.4.3.1 Risicobeoordeling; omvat
beoordeling risico’s in alle
levenscycli
Een goede risicobeoordeling bestaat uit een systematische analyse en evaluatie van de
risico’s over de gehele levenscyclus van het robotsysteem, dus productie de inbedrijfs-
telling, de set-up, onderhoud, reparatie, ontmanteling.
D2.par.4.3.2 Gebruiksgrenzen van het
robotsysteem
De integratie van een robotsysteem begint bij het vastleggen van het beoogd gebruik en
de grenzen van het systeem. (Gebruiksgrenzen, ruimtelijke grenzen, tijdsgrenzen en
mogelijk andere grenzen).
D2.par.4.4.1 Bijlage A geeft een mooie
lijst van gevaren bij een
robotsysteem
De lijst met significante gevaren voor robot en robotsystemen, opgenomen in bijlage A is
het resultaat van het gevarenidentificatie en risicobeoordeling uitgevoerd zoals beschreven
in ISO 12100 en ISO 14121.
D2.par.4.4.2 Identificatietaken zijn nodig
voor het bepalen van gevaarlijke
situaties
Met het oog op het potentieel voorkomen van gevaarlijke situaties is het noodzakelijk om
de taken te identificeren die worden uitgevoerd door de operator van de robotsysteem en
de bijbehorende apparatuur. De integrator moet daarbij de gebruiker raadplegen om alle
redelijkerwijs te verwachten gevaarlijke situaties te kunnen identificeren. Niet alleen tijdens
productie maar bijvoorbeeld ook bij het storing zoeken en oplossen daarvan.
D2.par.5.2.2 Basiseisen aan de besturings-
technische veiligheidsmaat-
regelen
Veiligheidsgerelateerde besturingssystemen (elektrisch, hydraulisch, pneumatisch en
software) moeten ten minste voldoen aan de volgende prestatiecriteria: a) Performance
Level (PL) “d” met de structuur van categorie 3, zoals beschreven in ISO 13849-1 of b) Safety
Integrity Level; SIL 2 met hardware fouttolerantie van 1 (redundantie).
D2.par.5.3.2 Locatie van de bedieningsstations Operationele besturingen en apparatuur (bijvoorbeeld lasbesturing en pneumatische
kleppen) die tijdens automatisch bedrijf bijgesteld moeten worden dienen buiten de
beveiligde ruimte te zijn opgesteld. Bij bediening moet er een helder zicht zijn op de robot
en de andere apparatuur in de begrensde ruimte.
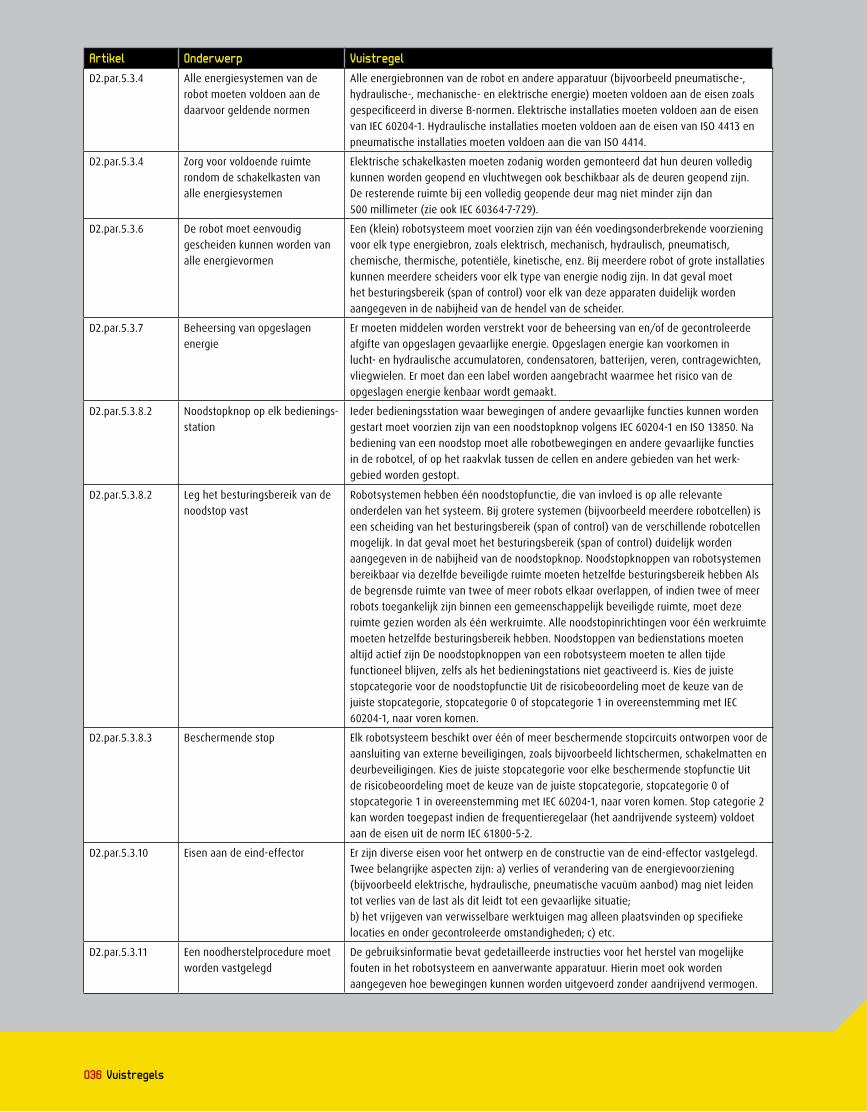
036036036036 Vuistregels
artikel Onderwerp Vuistregel
D2.par.5.3.4 Alle energiesystemen van de
robot moeten voldoen aan de
daarvoor geldende normen
Alle energiebronnen van de robot en andere apparatuur (bijvoorbeeld pneumatische-,
hydraulische-, mechanische- en elektrische energie) moeten voldoen aan de eisen zoals
gespecificeerd in diverse B-normen. Elektrische installaties moeten voldoen aan de eisen
van IEC 60204-1. Hydraulische installaties moeten voldoen aan de eisen van ISO 4413 en
pneumatische installaties moeten voldoen aan die van ISO 4414.
D2.par.5.3.4 Zorg voor voldoende ruimte
rondom de schakelkasten van
alle energiesystemen
Elektrische schakelkasten moeten zodanig worden gemonteerd dat hun deuren volledig
kunnen worden geopend en vluchtwegen ook beschikbaar als de deuren geopend zijn.
De resterende ruimte bij een volledig geopende deur mag niet minder zijn dan
500 millimeter (zie ook IEC 60364-7-729).
D2.par.5.3.6 De robot moet eenvoudig
gescheiden kunnen worden van
alle energievormen
Een (klein) robotsysteem moet voorzien zijn van één voedingsonderbrekende voorziening
voor elk type energiebron, zoals elektrisch, mechanisch, hydraulisch, pneumatisch,
chemische, thermische, potentiële, kinetische, enz. Bij meerdere robot of grote installaties
kunnen meerdere scheiders voor elk type van energie nodig zijn. In dat geval moet
het besturingsbereik (span of control) voor elk van deze apparaten duidelijk worden
aangegeven in de nabijheid van de hendel van de scheider.
D2.par.5.3.7 Beheersing van opgeslagen
energie
Er moeten middelen worden verstrekt voor de beheersing van en/of de gecontroleerde
afgifte van opgeslagen gevaarlijke energie. Opgeslagen energie kan voorkomen in
lucht- en hydraulische accumulatoren, condensatoren, batterijen, veren, contragewichten,
vliegwielen. Er moet dan een label worden aangebracht waarmee het risico van de
opgeslagen energie kenbaar wordt gemaakt.
D2.par.5.3.8.2 Noodstopknop op elk bedienings-
station
Ieder bedieningsstation waar bewegingen of andere gevaarlijke functies kunnen worden
gestart moet voorzien zijn van een noodstopknop volgens IEC 60204-1 en ISO 13850. Na
bediening van een noodstop moet alle robotbewegingen en andere gevaarlijke functies
in de robotcel, of op het raakvlak tussen de cellen en andere gebieden van het werk-
gebied worden gestopt.
D2.par.5.3.8.2 Leg het besturingsbereik van de
noodstop vast
Robotsystemen hebben één noodstopfunctie, die van invloed is op alle relevante
onderdelen van het systeem. Bij grotere systemen (bijvoorbeeld meerdere robotcellen) is
een scheiding van het besturingsbereik (span of control) van de verschillende robotcellen
mogelijk. In dat geval moet het besturingsbereik (span of control) duidelijk worden
aangegeven in de nabijheid van de noodstopknop. Noodstopknoppen van robotsystemen
bereikbaar via dezelfde beveiligde ruimte moeten hetzelfde besturingsbereik hebben Als
de begrensde ruimte van twee of meer robots elkaar overlappen, of indien twee of meer
robots toegankelijk zijn binnen een gemeenschappelijk beveiligde ruimte, moet deze
ruimte gezien worden als één werkruimte. Alle noodstopinrichtingen voor één werkruimte
moeten hetzelfde besturingsbereik hebben. Noodstoppen van bedienstations moeten
altijd actief zijn De noodstopknoppen van een robotsysteem moeten te allen tijde
functioneel blijven, zelfs als het bedieningstations niet geactiveerd is. Kies de juiste
stopcategorie voor de noodstopfunctie Uit de risicobeoordeling moet de keuze van de
juiste stopcategorie, stopcategorie 0 of stopcategorie 1 in overeenstemming met IEC
60204-1, naar voren komen.
D2.par.5.3.8.3 Beschermende stop Elk robotsysteem beschikt over één of meer beschermende stopcircuits ontworpen voor de
aansluiting van externe beveiligingen, zoals bijvoorbeeld lichtschermen, schakelmatten en
deurbeveiligingen. Kies de juiste stopcategorie voor elke beschermende stopfunctie Uit
de risicobeoordeling moet de keuze van de juiste stopcategorie, stopcategorie 0 of
stopcategorie 1 in overeenstemming met IEC 60204-1, naar voren komen. Stop categorie 2
kan worden toegepast indien de frequentieregelaar (het aandrijvende systeem) voldoet
aan de eisen uit de norm IEC 61800-5-2.
D2.par.5.3.10 Eisen aan de eind-effector Er zijn diverse eisen voor het ontwerp en de constructie van de eind-effector vastgelegd.
Twee belangrijke aspecten zijn: a) verlies of verandering van de energievoorziening
(bijvoorbeeld elektrische, hydraulische, pneumatische vacuüm aanbod) mag niet leiden
tot verlies van de last als dit leidt tot een gevaarlijke situatie;
b) het vrijgeven van verwisselbare werktuigen mag alleen plaatsvinden op specifieke
locaties en onder gecontroleerde omstandigheden; c) etc.
D2.par.5.3.11 Een noodherstelprocedure moet
worden vastgelegd
De gebruiksinformatie bevat gedetailleerde instructies voor het herstel van mogelijke
fouten in het robotsysteem en aanverwante apparatuur. Hierin moet ook worden
aangegeven hoe bewegingen kunnen worden uitgevoerd zonder aandrijvend vermogen.
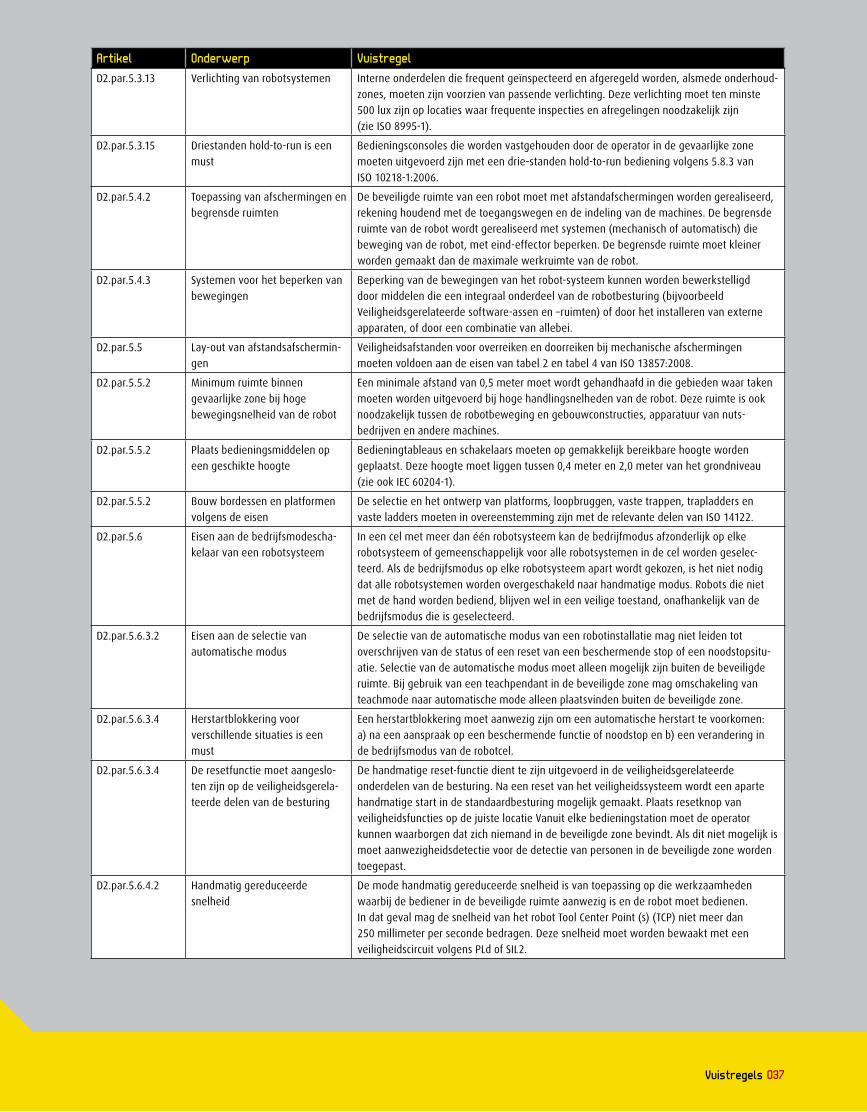
037Vuistregels
artikel Onderwerp Vuistregel
D2.par.5.3.13 Verlichting van robotsystemen Interne onderdelen die frequent geïnspecteerd en afgeregeld worden, alsmede onderhoud-
zones, moeten zijn voorzien van passende verlichting. Deze verlichting moet ten minste
500 lux zijn op locaties waar frequente inspecties en afregelingen noodzakelijk zijn
(zie ISO 8995-1).
D2.par.5.3.15 Driestanden hold-to-run is een
must
Bedieningsconsoles die worden vastgehouden door de operator in de gevaarlijke zone
moeten uitgevoerd zijn met een drie-standen hold-to-run bediening volgens 5.8.3 van
ISO 10218-1:2006.
D2.par.5.4.2 Toepassing van afschermingen en
begrensde ruimten
De beveiligde ruimte van een robot moet met afstandafschermingen worden gerealiseerd,
rekening houdend met de toegangswegen en de indeling van de machines. De begrensde
ruimte van de robot wordt gerealiseerd met systemen (mechanisch of automatisch) die
beweging van de robot, met eind-effector beperken. De begrensde ruimte moet kleiner
worden gemaakt dan de maximale werkruimte van de robot.
D2.par.5.4.3 Systemen voor het beperken van
bewegingen
Beperking van de bewegingen van het robot-systeem kunnen worden bewerkstelligd
door middelen die een integraal onderdeel van de robotbesturing (bijvoorbeeld
Veiligheidsgerelateerde software-assen en –ruimten) of door het installeren van externe
apparaten, of door een combinatie van allebei.
D2.par.5.5 Lay-out van afstandsafschermin-
gen
Veiligheidsafstanden voor overreiken en doorreiken bij mechanische afschermingen
moeten voldoen aan de eisen van tabel 2 en tabel 4 van ISO 13857:2008.
D2.par.5.5.2 Minimum ruimte binnen
gevaarlijke zone bij hoge
bewegingsnelheid van de robot
Een minimale afstand van 0,5 meter moet wordt gehandhaafd in die gebieden waar taken
moeten worden uitgevoerd bij hoge handlingsnelheden van de robot. Deze ruimte is ook
noodzakelijk tussen de robotbeweging en gebouwconstructies, apparatuur van nuts-
bedrijven en andere machines.
D2.par.5.5.2 Plaats bedieningsmiddelen op
een geschikte hoogte
Bedieningtableaus en schakelaars moeten op gemakkelijk bereikbare hoogte worden
geplaatst. Deze hoogte moet liggen tussen 0,4 meter en 2,0 meter van het grondniveau
(zie ook IEC 60204-1).
D2.par.5.5.2 Bouw bordessen en platformen
volgens de eisen
De selectie en het ontwerp van platforms, loopbruggen, vaste trappen, trapladders en
vaste ladders moeten in overeenstemming zijn met de relevante delen van ISO 14122.
D2.par.5.6 Eisen aan de bedrijfsmodescha-
kelaar van een robotsysteem
In een cel met meer dan één robotsysteem kan de bedrijfmodus afzonderlijk op elke
robotsysteem of gemeenschappelijk voor alle robotsystemen in de cel worden geselec-
teerd. Als de bedrijfsmodus op elke robotsysteem apart wordt gekozen, is het niet nodig
dat alle robotsystemen worden overgeschakeld naar handmatige modus. Robots die niet
met de hand worden bediend, blijven wel in een veilige toestand, onafhankelijk van de
bedrijfsmodus die is geselecteerd.
D2.par.5.6.3.2 Eisen aan de selectie van
automatische modus
De selectie van de automatische modus van een robotinstallatie mag niet leiden tot
overschrijven van de status of een reset van een beschermende stop of een noodstopsitu-
atie. Selectie van de automatische modus moet alleen mogelijk zijn buiten de beveiligde
ruimte. Bij gebruik van een teachpendant in de beveiligde zone mag omschakeling van
teachmode naar automatische mode alleen plaatsvinden buiten de beveiligde zone.
D2.par.5.6.3.4 Herstartblokkering voor
verschillende situaties is een
must
Een herstartblokkering moet aanwezig zijn om een automatische herstart te voorkomen:
a) na een aanspraak op een beschermende functie of noodstop en b) een verandering in
de bedrijfsmodus van de robotcel.
D2.par.5.6.3.4 De resetfunctie moet aangeslo-
ten zijn op de veiligheidsgerela-
teerde delen van de besturing
De handmatige reset-functie dient te zijn uitgevoerd in de veiligheidsgerelateerde
onderdelen van de besturing. Na een reset van het veiligheidssysteem wordt een aparte
handmatige start in de standaardbesturing mogelijk gemaakt. Plaats resetknop van
veiligheidsfuncties op de juiste locatie Vanuit elke bedieningstation moet de operator
kunnen waarborgen dat zich niemand in de beveiligde zone bevindt. Als dit niet mogelijk is
moet aanwezigheidsdetectie voor de detectie van personen in de beveiligde zone worden
toegepast.
D2.par.5.6.4.2 Handmatig gereduceerde
snelheid
De mode handmatig gereduceerde snelheid is van toepassing op die werkzaamheden
waarbij de bediener in de beveiligde ruimte aanwezig is en de robot moet bedienen.
In dat geval mag de snelheid van het robot Tool Center Point (s) (TCP) niet meer dan
250 millimeter per seconde bedragen. Deze snelheid moet worden bewaakt met een
veiligheidscircuit volgens PLd of SIL2.
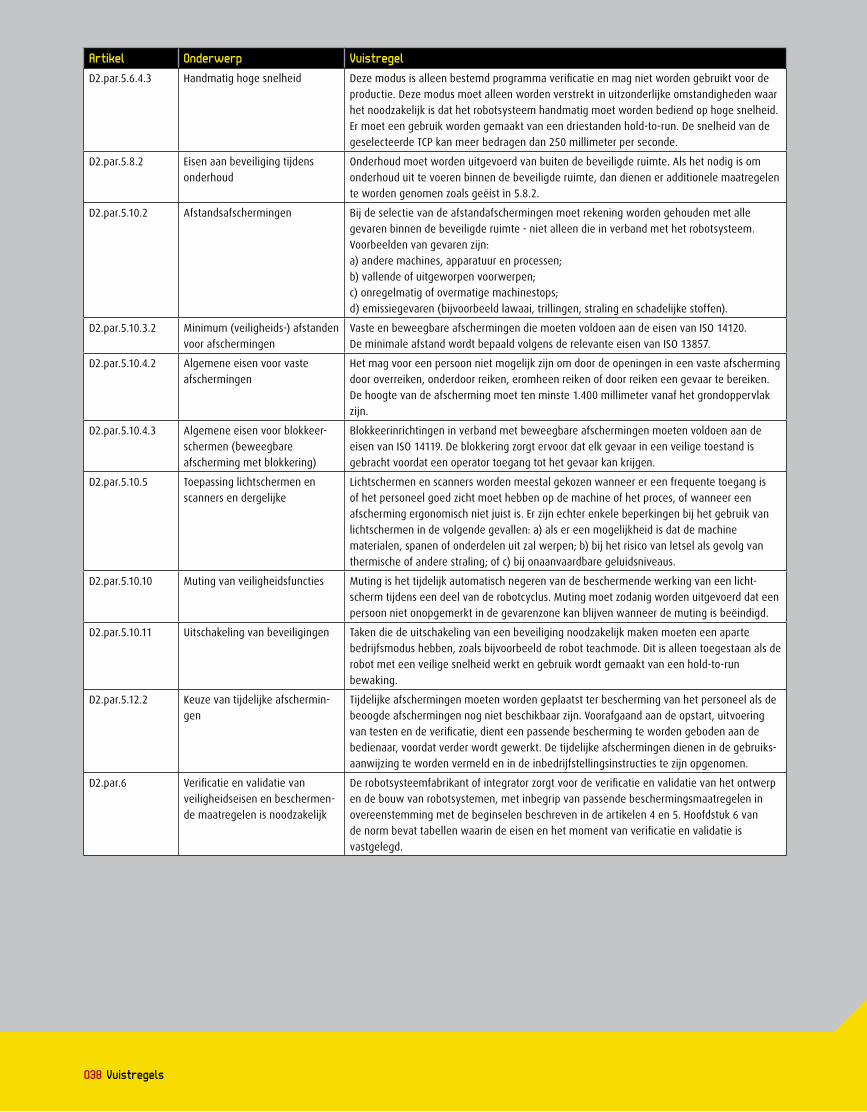
038038038038 Vuistregels
artikel Onderwerp Vuistregel
D2.par.5.6.4.3 Handmatig hoge snelheid Deze modus is alleen bestemd programma verificatie en mag niet worden gebruikt voor de
productie. Deze modus moet alleen worden verstrekt in uitzonderlijke omstandigheden waar
het noodzakelijk is dat het robotsysteem handmatig moet worden bediend op hoge snelheid.
Er moet een gebruik worden gemaakt van een driestanden hold-to-run. De snelheid van de
geselecteerde TCP kan meer bedragen dan 250 millimeter per seconde.
D2.par.5.8.2 Eisen aan beveiliging tijdens
onderhoud
Onderhoud moet worden uitgevoerd van buiten de beveiligde ruimte. Als het nodig is om
onderhoud uit te voeren binnen de beveiligde ruimte, dan dienen er additionele maatregelen
te worden genomen zoals geëist in 5.8.2.
D2.par.5.10.2 Afstandsafschermingen Bij de selectie van de afstandafschermingen moet rekening worden gehouden met alle
gevaren binnen de beveiligde ruimte - niet alleen die in verband met het robotsysteem.
Voorbeelden van gevaren zijn:
a) andere machines, apparatuur en processen;
b) vallende of uitgeworpen voorwerpen;
c) onregelmatig of overmatige machinestops;
d) emissiegevaren (bijvoorbeeld lawaai, trillingen, straling en schadelijke stoffen).
D2.par.5.10.3.2 Minimum (veiligheids-) afstanden
voor afschermingen
Vaste en beweegbare afschermingen die moeten voldoen aan de eisen van ISO 14120.
De minimale afstand wordt bepaald volgens de relevante eisen van ISO 13857.
D2.par.5.10.4.2 Algemene eisen voor vaste
afschermingen
Het mag voor een persoon niet mogelijk zijn om door de openingen in een vaste afscherming
door overreiken, onderdoor reiken, eromheen reiken of door reiken een gevaar te bereiken.
De hoogte van de afscherming moet ten minste 1.400 millimeter vanaf het grondoppervlak
zijn.
D2.par.5.10.4.3 Algemene eisen voor blokkeer-
schermen (beweegbare
afscherming met blokkering)
Blokkeerinrichtingen in verband met beweegbare afschermingen moeten voldoen aan de
eisen van ISO 14119. De blokkering zorgt ervoor dat elk gevaar in een veilige toestand is
gebracht voordat een operator toegang tot het gevaar kan krijgen.
D2.par.5.10.5 Toepassing lichtschermen en
scanners en dergelijke
Lichtschermen en scanners worden meestal gekozen wanneer er een frequente toegang is
of het personeel goed zicht moet hebben op de machine of het proces, of wanneer een
afscherming ergonomisch niet juist is. Er zijn echter enkele beperkingen bij het gebruik van
lichtschermen in de volgende gevallen: a) als er een mogelijkheid is dat de machine
materialen, spanen of onderdelen uit zal werpen; b) bij het risico van letsel als gevolg van
thermische of andere straling; of c) bij onaanvaardbare geluidsniveaus.
D2.par.5.10.10 Muting van veiligheidsfuncties Muting is het tijdelijk automatisch negeren van de beschermende werking van een licht-
scherm tijdens een deel van de robotcyclus. Muting moet zodanig worden uitgevoerd dat een
persoon niet onopgemerkt in de gevarenzone kan blijven wanneer de muting is beëindigd.
D2.par.5.10.11 Uitschakeling van beveiligingen Taken die de uitschakeling van een beveiliging noodzakelijk maken moeten een aparte
bedrijfsmodus hebben, zoals bijvoorbeeld de robot teachmode. Dit is alleen toegestaan als de
robot met een veilige snelheid werkt en gebruik wordt gemaakt van een hold-to-run
bewaking.
D2.par.5.12.2 Keuze van tijdelijke afschermin-
gen
Tijdelijke afschermingen moeten worden geplaatst ter bescherming van het personeel als de
beoogde afschermingen nog niet beschikbaar zijn. Voorafgaand aan de opstart, uitvoering
van testen en de verificatie, dient een passende bescherming te worden geboden aan de
bedienaar, voordat verder wordt gewerkt. De tijdelijke afschermingen dienen in de gebruiks-
aanwijzing te worden vermeld en in de inbedrijfstellingsinstructies te zijn opgenomen.
D2.par.6 Verificatie en validatie van
veiligheidseisen en beschermen-
de maatregelen is noodzakelijk
De robotsysteemfabrikant of integrator zorgt voor de verificatie en validatie van het ontwerp
en de bouw van robotsystemen, met inbegrip van passende beschermingsmaatregelen in
overeenstemming met de beginselen beschreven in de artikelen 4 en 5. Hoofdstuk 6 van
de norm bevat tabellen waarin de eisen en het moment van verificatie en validatie is
vastgelegd.

> Common Vision Blox is the perfect software platform for quick and reli-able vision application deve lopment. This fast, powerful, modular program-ming library supports all common acquisition technologies. Based on a set of highly optimized algorithms, users can even integrate custom code for total flexibility. For a cost-effective, truly industrial pro duct, test Common Vision Blox today.
Imaging At Its Best.
Download your own test version at:www.commonvisionblox.com
www.irisvision.euPhone +31 (0)575 - 495 159
012
013
014
015
016
017
018
019
020
021
022
023
024
025
026
027
028
030
031
032
033
put your inspection on course to win
WWW. INDUSTRYPLANNER .NLINDUSTRYPLANNER IS UW GIDS VOOR EVENEMENTEN EN OPLEIDINGEN IN DE INDUSTRIE
Industryplanner is de online agenda die alle industriële evenementen en opleidingen overzichtelijk in kaart
brengt. Op deze website zijn events zoals beurzen, congressen, seminars maar ook opleidingen, cursussen
en trainingen verzameld en in één oogopslag terug te vinden op branche, vakgebied en productniveau.
AAfval & Recycling A Afvfvalalwwateterr analyses Afvalwwwwwwwatatatatataaaatererererrere a aaaananananaanan lyllylylyyyzezeezez rssrs AAAAAnAAA aaalalalalaalyzyzyzyzyzyzerereerereerr hh hhh uiuiuiuiuu zezeeezen n nn AA AAAsssssss et MManagagememenent AA ATEX Batch Systteteteeeeeeemsmsmsmssmsms BaBBaBaBaattttttererijijijijeneen &&&&&&& V Voeeeoeddddidiingngggggngenenenene BeBBeBeBBedrdrdrdrdrd aadaddaddada ing & Kabels
Behuizing & Cabinetst BBeBeBeevvveeevevv iliging Biotechnoloogigie B BBluluetete oooooothtthth BoBoren BB Bususininineesesss Process Mananaagegegegegeg memememmentntnttnt ( ( (( ((BPPBPBPBPBB M)M) Calibratatatieieieeie && M MMeeeeeeetatatappppppp arararatatatuuuur Calibraatit e & Testen Chemi-
calien Chemie ChChrooroommamamamamamatototootototttt grafi e Combustion A Analyzers Compliance Constructie Contitinuun E E E mimim sssssssssieieieie M M ono itoring g SySySySyySySySySySyySySySySySyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyysssssssststtststttstssttsttssttstttttttsttstttsttsttststttttstssstststtsstsssssssssssssssteemeemeeeememmmmmmmemmmeeeeeeeeeeeeennennnnnnnneeennneeeneeeeeeeeeeeeeeneeeeeeeeneeee ( ( ((( ( ( ( (CEC MS) Continu Gasanannnalala yzyzyzyyyy ererere s Control (DCS)
Syystems
Controllers DDDDatatatata a aa AcAcAcA ququququiisissssiititititieeeeeei Debietmemeeeteteteteteetersrsrsrsrrsr &&& & rregeggegeleelelaaaaaaaaaarsrsrsrs Devicenet, Modbus, LON, etc. Docuuummmmeementnttatatatieieie & && PPPPubububublillilicacatie DDDrDrDrDrDrDDDrDDDDDDDDDrDDDDrDDDDD aaaaaaaaaaadlddldldllldldlldllllooooooooozzzzzzoozoooozzoozzoozozozeeeee e teteeeet chchchcc nonnn logie Drukkkmkmmmmmmmmmmmmmmmmkmmmmmmmmmmmmmmmmmeteeeteeetetetetteeeeeteteetetettetetteeetetetettetteeeeeeerereeeeeeereeeeeeeeeeeereeeeee ss s sss && &&& rerreeeeeeeeeeereeeeeeeeeeeeeeereeeeeeeeeggggggggeeeeegggegggggegggg lalalaaaaraa s Elektra
&& ElElecectrtrononicicaa EElelektkttriririiriscscsch h h GeGeGeGGerererereeeededddedededededdscsssscscschhahahahap pp p p EE EElelel memeeentntntntntntenenenennen a a a a aanannnanaanan lllylyylyll sesese EnEnerergigiee memeetetapappapap rararatututuurur EnEngiginneneeerererererinininingg EERPRPRP s sysystetememenn EEEEEEE E EEEEE E E EEEEEEEEEEEEEExpxxpxpppxppppxxpxpxppxpxxpxpppxxxxpxxppppppppplololololooooololooooolooolooloooollololoooorrraraaaaaaaarrrrarrarrrrrrrrrrrrrrrrrrrrrrrr titititititit eee ee FFFououo ndndatatioioion n FiFFiielellellele ddddddddbdbdbbbbbbdddbbddbdbddbbddbdbbdd uuuuuuuusususususuuuuuuusuuususuususussusuusussuuus GaGaGaGaGaGaGaGaaaaaaaGaaGaGaGGaGaGaGaaaaaaaaaaaaaGaaaaaaaGGaaaaassssssbbsbssbssssssbssssbsssbeehehhananandededelilingng
Gaschromatogografi fie e e GGGGGG lalalalalasssss &&& && & &&& KKKeKeKeraramimiekekk GGlGlGlasasasveveezezeeez l ll GGG GGMMSMS/U/UMTMTTTMTS SSSSS HHHHHHH HHandgerreeeeeedsdsdsdssschchhchhhhhhchhap HART Fouundation H HH HHHHHHHHHHHMIMIMIMMMIMMMIMIMIMIMIMIMMMIIMIMMIMII (((((((((((( (((( ( (( (((((((((((((((((((HuHuHuHuHuuuHHuHuuuuHuHuHuHuHuHuHuHHHuHuHuHuuHuHuuHuuHuuHHHuuuHHHHHuHuuHHHHHHuHHHuHHHHHHH mmmmmmmmmmmmmmmamaaamaaaammmmmmmmmammmmammmmmmmmmamammmmmamamamamamamaannnnnnnnnnnn n n nnnnn MaMMaMaMaMaMaMMaMaMMMMMMMaMMaaaMMMMMaMMaMaMMMMaMMaMaaaaaMMaaaaMaaaaaaMM ccccchchhhhhhhcchhcchhcchhchhcccchccchhchcchcchhhhhininininninininininne ee e e InInnInInnIInInInInInInInInnInInnInnInnnInnnnnnInnnnnnnIntetteteeteetetetetetettettetetettetetetettetetetetteteteteteteeeetteeeteteeeeeeeterfrfrrfrfrfffffrrfrrrfrfrfrfrfrfrrrfrrrfrfrfrfrrrrrrrfffrrrrrrrrrrfaacacaaaaaa e) Inndudussstttriiirir aaaalalalalaaaaaaaaa EEE EE EEEththththhhthhhhhhtthhhthhhhhhhhhhhhhthhhhhhhhhherereereerrerererrrrrrrererrerrrrrererrrrrree nnnnnnnnnneneeenneennnnenenenenneenetttttttttt tt tt t IIIIIII III I dndndndnnndususususttrtt ieel
gereedschap p p I I Inssnspepectctcc ieiee IInInnstststrururumemementntntntatatatieieie & && &&&& KK K K KK KKKKKKKKleleleleeleleeeeleeleeepppppppppppppppppppppppppppp enenene InInInstss rumentata ie Hannanand dd HeHeHeldldld ISA Ketels & Stoom GGGGGGGGGGGGGGGGGeeeeeeeeeenenennnnnnnnnneennnnnnnennnnnnnnnnennnne ereerererrree aataatatattatoroororoororororrorrreeeenennnneeeeeenn KKKKoKoKoKooKKKoooKKoKoKooKKKoooK eleleleeleeellerereeeeereee s s ss sss && &&&& & && &&&& kokokokoookookokokokokokkkoeeeeeeeeeeeeelellllleeeleeeeeeeeeeeee sssssyss stemenn KKoKooooooKoKooKoKooooooooooooooooooooooooKooooeeeelelelelelelleleleeleeleelleeeeeeleeee tttttttooooooottottottt rrrerrrrerererererereerereeeeereennnnnnnnnnnnnsnsnsnsnsnnnnnsssnsnsnnnsssnnnnnnsnsnnnnsnsnnnssnnnsn KwKwKwKwKwwwwwwwwKKwKwKKKKwKwwKwwKKKwalalallalaalaaalaaaaaaalalalaaaaaaallaaaalaaaaaaalaaaalaaaaaaaaaaa ititttititititii eeieieiiieeieee t Lab
coconsnstrtrucuctitiee e &&& & IInInI tteteriririeueueuur r rrr r LL LLababbbbababb IIII Inffnnnffnfffooooroo matie e MaMMMMMaMaMaMaaaMaMaaaM nnnnnaaaaaannaanaanaan gggggggggegeeeeeggeegggeggegeg mmmmmmmmeeeeeeeeeeemeemmeeeeeeenntntttntntnnnnnn SSS SSS Sysysysysysysteeetttt memenn (L(LIMIMS)S) LaLabb veverbrbruruikiksasartrtikikelelenen LaLaboboraratotoririuummmmmmmmmmmmm LaLaLLaaLaaaL bbboboboboooobboorraaaaraararraatottttotototoottttotoooorririririririirir umumumummummmmmmmmmummmmmmm aaa a aapppppppppppppppppppararararararrararatatatatatatatataatuuuuuuuuuuuuuuuuu r r r rrrr r LLLLLLLL L L LLLLL LLLLLL LL LL LL ababaaaaaaaaaaaaa ororatatororrrororrororrrorrrrriiuiuiuuuuuuuuuuuiuiuuiuuuuuiuuiiuuuiuuuiiuuuuuuuuuuummmmmmmmm mmmmmm m mmmm AuAuAuAuAuAuAuAuAuAAuAuAuuttttototototoootooootoooottooooooooommmmmmmmmamamamamamammmmmmmmmammmmmaaaam titittitititititittit seseseseseseeeseesss ririrririiririirirr ngngngngngnggnggggngngngg LLLLLaLaLLLLL ss
apppap ratuurrr LLaLaLaLaLaLaLaaaassss ss ss s mamaaamaamammamammatettettttetteteteririr aaaaaal ll LLL Logoogogiiisistitititi kekekkkk MMMMaMaaMMaMaMaMMMMMMMM chchchhhiiniinnnninnnnninnnnnnnni ee e eeeeee VViViViViV sisisisisionononnnnonoono S ysy tems Machinebouw Manufacturingg Execccucuuucuucuuuuuuutttitittittitititiitttittitiiiitiiitiiiiitttit oooooooonononoonnononoooooooono SSSSSSSS SS S S SSSysysysysysysysysyssyy teteteteteteteeteemmmmmmmsmmsssmmmsmmsmsss MMMMMMaaaaaaaMaaaaMaaaaaaaMaaMaarkrkrkrkrkrkkrkkrkkrkrkeeteteetetetetetetee ininininngg g g g g g gg && && & && & &&&&& & CCCoCoCCoCoCoooCCoCCCCCCoCCCoCCoCCCooCommmmmmmmmmmmmmmmmmmmmmmmmmmmuuuuununu icattieieieieeeeeeeeie MaMMaMaMMaMaMaaMaaaassssssssssssssssssssssssssssssssssssssaaaaa aa mememmmeeeteteeeeeeeersrsrsssrrsrsrsrssrs & & & &&&&&&&&&& r r r rrrrrreeeeeeeeeeggggggggggeeeggeeggeeggggggegegegegeggggggggeeeeeeelee aarrrrsrsssssssssssrrsrssrsssrsssrssssss
MEM S (MMaaanannnnnnnnufufffufuufufaccacaacacacacactutuutututuuuuriririrriririiirirrringngnnng EE EExexeeexxecucucucucucutiiiitionoonnn SSS S S Sysysysssyyyy tetetetetemssmmm ) ) ) ) ))) MMeMeMeMM tattaaa llllallalaaa MMiMiMiMiMiliiiililliliiliieeeeeeueueue Modeleren & & ViVisusualalalisisiserererenene Monsterbehehhhaananananannannnannnannnnnannnannnnnnannananaannnnndddddddedededeeededdddddedddeddeddedededddedddedededdddddddddeedelillillililililililillilliliililililiiiiilingngngngngngngngggggggnggggngggnggngggngnggngnggngggsysysysysyyssssssssysyssssssyssssysyssysssssyssyssysysssysyysstststssstts emeememmmememememme eeenennne MMMMMMooooMoMMoMM titititititititt ononononononooon C CCCCCCCononononononononnnonnonooo trtrtrtrrrtrrtrt ooooolollolooloolloooollloll &&&&&&&&&&&&&&&&& &&&&& D DDDDDDDDDDDDDDDDD DD D D D DDDDDDDDDrrriririrr vess MMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMooototototooooototoo oororrrrrrorrro eeeenennennnnenenneeene MMM MMMulululululultititiititititititimmemememememmmmmemeettttteteteteeeeeeeeeeeeetteeeeeeteeteeetteteeeeeterrrsrssrsrs NNNNCNCCCCCNCNCCNCNNCCNCCNNCNCN ISISSSSISSSISIIII
Cybercririimemememe NeNeNeNetwtwtwwweereerkk apapaapapppapapapap rarr tuuurur ( (scscopoppopeee,,eeeee, bbbbbb buuuussssssssuususs aaa aaananananananalylyylyllylyzzzzzzezeezeeezezeezzezezzezzzezzz rrr)r)r)r) NeNNeNeNeNetwtwtwtwtwtwtwererereree kk kkk tetett chnololoogigigiggg e ee NNNivivveaeaeaumumumeteterers s && & reereerrreeeeggggegeegegegegeeegggegegegeegegegegegeegggegg lalalalaaaaaaalaaaaaaaaaaaaaaaararararrraaaaraaa ssss s O OOOOOffiffiffiffifififififfififffififfi cccccccccccccee e ee NNeNNeNeNeeNeeNNNeeeetwtwwwwwtwooorororrooroo ksksksssskkskkkksksksk ( (((((( ( (( ((LLALALALALALAALALALANNN NNNN N eeeeeetetettttetteeeteeeeeeetteeeee ccccc)c)))cc OOOOOOfOfOfOOfOfOOffffffffssf hoorere OOOOlOlOlOlOlOOOOOOlOOOOOlOO ieeieieeieie & &&& &&& && & GGGGGGGGG GG Gasasaaasasasassaa OOOOmOmOmOmOmOmOmOO gegggegeggeeegggeevvvvvvvvvvviiivvvivivvvvvvvviv ngnnnnngngnggggnggg M MMMMo-o-o-oo-
iniinin totototoririringngng SSysy temen OOndnddererere hohhoh dddduddu & &&& TTesestetenn OOOOOOOO OOOOOndndnddndnnn ererererrhhohohooooooooooooooooudududdddudududuudu sss ss s ttototototootootoooopppppsps OOnOnOnOnOnddedederhrhrhhououoouo ddsdsdsd gererereeeeeedsdsdschchchapap OOOOnOOnOnnnnnnnndddddededededededededeedddedeeded rzrzrzrzrzrzzrzrzrrzrzzrrzzrrrzzooooooeoeoooeoeoeoeeoeeekkkkkkkk k &&&& & & OnOOntwtwtwwtwwwwtwiikikikkkkkkkkkkkkkkkkkkekekekeeekeekekkek lililiililililililill nnggggnggngngngnnngg OOnOOnOnOOnOnOnOnOnOnOnOOnnOnOnOOn-l-l-l-ll-l-l-l- iniininininnine e eeeee AAnAnAnAnnnnnnnnnnnnAnnnnnAnAnaaaalallaaaa yyyyzyzyzzyy erers s O O Ontnttwweweeeeeeeeeerrrrrrrprprpprrrrrrprpprprrpprrprrrrrprrp &&&&&&&&&& & CCCCCCC CC C CAADADADADADDDDDADDDDDDDAADADADADAAA OpOpOpOOOOOpOppsslsslaagggaggaggag OOOOOOOvvOOOOOvenennnnnn
&&&& & AuAuAuAuAuAuttootottoclcllcclc aaavavesess PDPDA A A WWiWiWiWiFiFiFii PePePePersrsrsrsonononeeeeee lslllssszazazaaaz kkkeekkk nnn n n P P PP PPerereerersososooooosssoonoononnoonnlilililijkjkkjkjkkeee e ee BeBBeBescscs hehermrminingsgs MM Middiddedeleel n n (P(PBBMBMMMMMM))) ) ) )) P PPPPPPPPPPPeeteteteettrrorochememmiieieie PPPhPPPhhhhhhPhPhP aaaararararaaaaaaaara mammam ciciciccicic ee eeeeee PPP PP P PPPhyhyhhyhhhhhysisis cacaaaaaacal lll l l l l PPPPPPrPrrPrrroopppoo ererertt t AnAnA alalyyzyzyzyyzyyzeeererrrrrrerreee s s ss PPPP PPPP PPPPPPhhhhyhyhyhyhyhyhhhh sisisicacaalll PrPrProopoperererrrtytyyyyyttyyytyyyyyy aaaaannanaaaaalyyyylyyysesesesesesesss
PiPiPiPijjjpjpenen,, tttutuubbiiiibb nnnggngggng &&&& &&&& SS Slalaalanngngngnggennenneneenen PPiPPPiPiPPPPP jpjpjjpjpjpjpfi t t apappaparar tuururrr Pllasmmmmmmaaaamaa s nij apaa pararatuurr PLPLPLCCC C PP PPPPPPomomomomomompepepepeppen nnnnnn P PPProrocecess AuAutotomamatititissseeerriririingngngngggnngg PrPrococcceseseseseses OOO OOO OOpptptpptp imimimaaaaallaliisisissisaatatatieeie PrProccccoccceeeeeeessseeeeeeeeeee s ss CoCoC ntntroroll P Prororocececessssssssiniininnnggggg ggggg PPP rorooooooo----
duductctctieieie & & MMaacacaccchine automommaatatatatisiserinng gggg PP roofifi bubuus s PPulp &&& &&& &&& Papiier Raffi nage Recccororo deddedededeederrsrrsrr , didididididispspsppspppllallay y & Monitorsrrss RRReReReeecyycling Reg llelelaars ReRegeg lklklkleleleppppppppppppppeneneneneenen &&&& & & A AA Actctctctuauauauatootototorerererennnn RRR RFIFIFIFIDDDD RRR R RRobobo-
titicaca RuRubbb er & Kunststofof S9S 9 Netwerk BeBeveveilililiigigininggg Safety Instrumented Systetemsms (( (SISISIS)S) Safety Integretyty LL Leveveleele ( ((SISIL)L)) ScScadada a Sensoren n SS lloopppwe krkzaamhhedden S Sofffoftwtwttwararareee
UW ONLINE AGENDA IN DE INDUSTRIE
trainingenbeurzen
opleidingen
cursussenworkshops
bedrijfsdagen
seminars
congressenlezingen
Industryplanner Advertentie 230x142.indd 1 03-11-2010 13:53:54

040 Besturingen
“geef IemaND zONDeR eRVaRINg De BeDIeNINgSuNIT VaN eeN INDuSTRIëLe ROBOT IN haNDeN eN heT IS IN
ééN kLaP DuIDeLIjk hOe INgewIkkeLD zO’N DINg IN feITe IS,” STeLT maRTIjN jaNSeN, OPRIChTeR VaN
ROmIaS IN heNgeLO. “wIj CReëReN eeN SOfTwaRemaTIge ‘SChIL’ Om De ORIgINeLe ROBOTSOfTwaRe eN
VeRTaLeN DIT VISueeL IN eeN BeSTuRINg meT eeN gROOT, DuIDeLIjk TOuChSCReeN. De BeDIeNINg VaN
zO’N ROBOT wORDT DaN OPeeNS ONgeLOOfLIjk SImPeL, waaRmee we De DRemPeL Om INDuSTRIëLe
ROBOTS TOe Te PaSSeN DRaSTISCh VeRLageN.”
STaNDaaRD ROBOTBeSTuRINgeN zIjN VeeL Te INgewIkkeLD
ervaringJansen heeft bij Norma verschillende automatiserings- en roboticapro-
jecten uitgevoerd. Zo werden er twee Deckel horizontale bewerkings-
centra gemoderniseerd door hier nieuwe besturingen op te zetten, werd
er onder zijn leiding een reinigingsstraat gebouwd en werden er twee
vijfassige bewerkingscentra voorzien van een robot laad- en lossysteem.
“We hadden tijd om het één en ander rustig te ontwikkelen,” zegt Jansen
hierover, “maar het budget was redelijk beperkt. Een robot kopen was
om die reden niet wenselijk, dus rees de vraag of we die dan niet zelf
konden bouwen. Toevallig had de buurman een achttien jaar oude robot
in de aanbieding die mechanisch nog prima functioneerde, maar bestu-
ringstechnisch natuurlijk volkomen was verouderd. We hebben die robot
op rails gezet om het werkbereik te vergroten en hebben vanaf de servo-
motoren elektrisch en besturingstechnisch alles opnieuw ontwikkeld en
opgebouwd. Hierdoor ontstond een moderne robot, die overigens nog
steeds naar volle tevredenheid bij Norma in gebruik is. Dag en nacht wel
te verstaan, want mede dankzij het inzetten van robots kun je ook heel
goed onbemand volcontinu produceren.”
Oee optimaliseren“Wat ons opviel was dat de efficiency van grote machines in feite tegen-
viel,” zegt Jansen over het aanvankelijke productierendement bij Norma.
“Kortom, de machine-inzetbaarheid vonden we te laag, wat met name
het gevolg was van storingen, waardoor de machines te vaak enige tijd
stil stonden. Wat toen ook direct opviel was dat de service van machine-
leveranciers in deze te kort schoot. Men was simpelweg niet in staat om
snel genoeg te reageren. Wilden we robotisering écht een succes maken,
dan moest de betrouwbaarheid van het totale machinepark omhoog. We
hebben toen eerst een analyse gemaakt van de belangrijkste storings-
Romias houdt zich bezig met robotica, industriële automatisering en
thermografisch onderzoek en werd vijf jaar geleden opgericht. Inmiddels
werken er vier man full-time bij dit jonge bedrijf in Hengelo, dat een
vliegende start maakte als ‘huisleverancier’ op het gebied van industri-
ele automatisering en robotica van Norma. “Daar ben ik aan het begin
van mijn HBO opleiding terechtgekomen,” zegt Martijn Jansen over zijn
carrière die uiteindelijk leidde tot de start van Romias. “Norma wilde
me parttime inhuren om me op een besturingsprobleem te zetten dat
niemand tot dan toe had weten op te lossen. Ik vond dat een fantastische
uitdaging en al snel werd de studie parttime en het werken bij Norma
fulltime. Daar heb ik uiteindelijk acht jaar gewerkt en ook nu zijn we nog
steeds actief voor Norma.”
Softwareschil voor robotbesturingen
Martijn Jansen, oprichter van Romias: “Bedrijven moeten en kunnen in hun productie
meer automatiseren waardoor hun mensen op een hoger niveau kunnen werken.”
Martijn Jansen

Besturingen 041
bronnen. Daarbij ontdekten we al vrij snel dat sensoren en kabels de
grootste problemen veroorzaakten. Alhoewel je verwachtte dat machi-
nebouwers daar in de loop der jaren wel goede oplossingen voor zouden
hebben gevonden, bleken die sensoren en kabels simpelweg niet tegen
de metaalbwerkingsvloeistoffen bestand die nu eenmaal in verspanende
machines worden toegepast! We zijn toen begonnen met het vervangen
van die sensoren en kabels door degelijker en vooral beter afgeschermde
uitvoeringen en zie daar, de OEE (Overall Equipment Efficiency) van die
machines knalde omhoog. Nu moesten we nog een oplossing zien te
vinden voor de magere serviceverlening van de machineleveranciers. De
enige oplossing was volgens ons het opzetten van een eigen, gespeciali-
seerde TD, wat bij Norma toen is gerealiseerd. Ook dit resulteerde in een
verdere verhoging van de machine-efficiency en dus in verhoging van de
productiecapaciteit.”
machine-monitor“Op een gegeven moment organiseerde Norma een open dag en daar-
voor wilden we iets bijzonders doen,” vertelt Jansen verder. “Hiervoor
hebben we toen een Machine-Monitoringsysteem ontwikkeld (Romias-
MM), dat we als product nu ook ook op de markt brengen. “Dit Romias-
MM plukt informatie van bijvoorbeeld de signaaltoren of urenteller van
de machines en vertaalt dit in duidelijke grafieken waaruit in één oog-
opslag de status van de machines is af te lezen. Vanzelfsprekend wordt
die informatie vervolgens ook gebruikt als input voor het management-
systeem voor onder meer nacalculaties en rendementanalyses. Je zou dit
Romias-MM dus ook een OEE-monitor kunnen noemen.”
Stabiele robots“Nu zijn we weer bezig voor Norma om een twee jaar terug door hen
aangeschafte Liebherr vertandingsmachine te automatiseren,” vervolgt
Jansen. “Voor een grote klant moeten er behoorlijke aantallen van een
nieuw type tandwiel geproduceerd worden. Hiermee wordt een haakse
overbrenging gerealiseerd, waarbij de haakse as is voorzien van een vol-
ledig cilindrisch tandwiel. De vertanding van het andere wiel is uiteraard
zeer bijzonder en vereist een speciaal hiervoor ontwikkelde frees, die
Norma eveneens produceert. Het complete proces, dus materiaal opspan-
nen, verspanen, afbramen, reinigen, wegleggen, moet geautomatiseerd
worden, waarbij we gebruikmaken van een Fanuc robot.”
Softwareschil“We vinden in feite elke robotbesturing simpelweg te complex, wat de
inzetbaarheid van robots in de weg staat,” vervolgt Jansen. “Je moet eerst
een paar dagen op cursus om zo’n ding goed te kunnen programmeren
en dan nog kan maar één man dit. Je zult dus meerdere werknemers op
cursus moeten sturen, want anders loop je als bedrijf behoorlijke risico’s.
Dat kan volgens ons totaal anders. Natuurlijk is het fantastisch dat een
robot heel veel ingebouwde functies heeft. Maar als die niet overzichte-
lijk op de bedieningsunit zijn te vinden, dan is het doel voorbij geschoten.
Wij bouwen met LabVIEW van National Instruments een softwarematige
schil rond de originele robotsoftware en koppelen dit aan een door ons
ontwikkelde Man Machine Interface (MMI) met grote, overzichtelijke
touchscreens. Hiervoor hebben we het communicatieprotocol van Fanuc
behoorlijk ‘overhoop gehaald’. Dat vindt Fanuc weliswaar wat ‘vreemd’,
maar ze volgen ons wel op de voet. Dat zie je overigens ook wel bij
andere grote fabrikanten van industriële automatiseringsproducten. Die
ontwikkelen fraaie en degelijke systemen, maar omdat ze hun markt zo
breed mogelijk willen houden, is de software ook te breed en dus vaak
onoverzichtelijk.”
Dialooggestuurde mmI“Op de touchscreens van de door ons ontwikkelde MMI zie je alleen de
functies die nodig zijn om de werkzaamheden uit te voeren die op dat
moment gepland zijn,” benadrukt Jansen. “Meer niet. Dus geen menu’s
met 16 knoppen en allerlei inschakelbare functies waarvan niet duidelijk
is wat daarmee wordt bedoeld. Nee, ons MMI heeft gewoon een paar
vlakjes met logische functies. Normaalgesproken hoef je alleen maar op
de ‘start-’ of ‘stopknop’ te ‘drukken’. En wil je iets handmatig sturen, dan
verschijnen er alleen de functies die op dat moment nodig zijn zoals ‘op-
Test met in vorm variërende onderdelen die worden aangevoerd met een
transportband en hier door de robot vanaf gehaald moeten worden.

“ Door NI LabVIEW waren we negen maanden eerder klaar dan gepland.”
Danny Hendrikx, Productiemachine Ontwerper, Sylvania
0348 433 466>> Leer hoe u uw machine sneller kunt ontwerpen op ni.com/industrial
De nieuwe generatie productiemachines van Sylvania vereist een hoge productiesnelheid,
een grote nauwkeurigheid en een complex besturingssysteem met geïntegreerde motion,
vision en laserbesturing. Met de betrouwbaarheid van een PLC, de flexibiliteit van custom
hardware en de prestaties van een PC leverden National Instruments Programmable
Automation Controllers (PAC’s) de complete oplossing. Met LabVIEW grafische
programmering heeft Sylvania het project in slechts 25 procent van de geplande
ontwikkeltijd kunnen voltooien.
©2010 National Instruments Corporation. Alle rechten voorbehouden. CompactRIO, LabVIEW, National Instruments, NI, and ni.com zijn handelsmerken van National Instruments. Andere product- en bedrijfsnamen zijn handelsmerken of -namen van de respectievelijke bedrijven. 2044
National Instruments Netherlands BV n Pompmolenlaan 10 n Postbus 124 n 3440 AC Woerden
Tel +31 348 433 466 n Fax +31 348 430 673 n Chamber of Commerce n # 301 168 13 n Utrecht
NI CompactRIO Measurement, Inspection and Control System
2044-Sylvania-Ad-NE.indd 1 8/16/10 4:43:50 PM
042
pakken’, ‘inspannen’, ‘roteren’, ‘wegleggen’, etc. Op zo’n manier wordt
robotica als heel makkelijk ervaren omdat je de complexiteit volledig
weghaalt van de werkvloer. Wij gaan er vanuit dat het bedienen van
een robot met gebruikmaking van onze Romias MMI binnen vijf minuten
duidelijk moet zijn.”
Parametrisch opgebouwd“Stel op een transportband worden stalen wieltjes aangevoerd waarvan
op een freesmachine tandwielen moeten worden gemaakt,” begint Jan-
sen zijn uitleg over de ‘Romias-manier’ van probleembenadering. “Die
schijfjes moet de robot pakken en in de opspanning van de machine
plaatsen. Maar stel dat die wieltjes per serie een andere diameter heb-
ben. Als je die diameters stuk voor stuk moet gaan programmeren in de
robotbesturing, dan kost dit ten eerste veel tijd en ten tweede heb je daar
een zeer ervaren operator voor nodig. Is die man ziek, of is hij afwezig,
dan heb je weer een probleem. Wij hebben onze besturing parametrisch
opgebouwd. De operator hoeft in dit geval op het touchscreen alleen
maar de hoofdmaten aan te geven en op ‘OK’ te drukken als de besturing
hierom vraagt. Hierbij komt er overigens ook een keurig 3D-tekeningetje
van zo’n wieltje op het scherm te staan zodat de operator duidelijk ziet
dat het om het juiste product gaat. De Romias Machine Interface (Romias-
MI) stuurt vervolgens de besturing van de robot aan. Gaat het om wieltjes
die nog niet in de besturing zitten, dan kun je een heel eenvoudig dia-
loogprogrammaatje oproepen, waarbij je de vorm aanwijst en de hoogte
en diameter van het schijfje invoert via het op dat moment op het scherm
verschijnende numerieke keypad. De MMI tekent vervolgens het wieltje
en presenteert dit als 3D plaatje op het scherm zodat je kunt verifiëren
dat de hoogte en diameter de goede verhouding hebben. Dit voor het
geval je bij het intoetsen een verkeerd cijfer of de plaats van de komma
verkeerd zou hebben ingetoetst. Is het goed, dan druk je op OK en de
achterliggende besturing zorgt voor de rest. Moeilijker moet je het de
mensen niet maken.”
Return on investmentHoe aantrekkelijk is het investeren in robots eigenlijk en hoe zit het met
de ROI, oftewel de return on investment? Jansen zegt daarover: “De inves-
tering bestaat uit twee stukken. De hardware, ofwel de robot zelf inclusief
de besturing en daar komen dan de kosten bij van de extra software die
wij maken. Dit laatste kost manuren en het aantal daarvan is simpelweg
afhankelijk van de complexiteit van de bewegingspatronen die met de
robot gerealiseerd moeten worden. Die totale investering kan op verschil-
lende manieren worden terugverdiend. In de eerste plaats door bespa-
ring op arbeidskosten omdat de robot een deel van de menselijke arbeid
vervangt. Daarnaast kan met de robot volcontinu worden doorgewerkt,
waardoor de OEE van het productieapparaat omhoog gaat en de kosten
per product zullen dalen. Wij gaan er vanuit dat de totale investering in
een complete robotinstallatie na twee tot maximaal vier jaar volledig te-
rugverdiend moet zijn. Dat proberen we al in het voortraject te achterha-
len door eerst een toepasbaarheidsonderzoek uit te voeren. Kan dat wat
men wil überhaupt met een robot verwezenlijkt worden? Dát is de eerste
vraag waarop je antwoord moet hebben, want is het antwoord nee, dan
hoeft de rest niet eens meer onderzocht te worden. Voor dat haalbaar-
heidsonderzoek gaan we, als de robot bij een bestaande machine moet
komen, op locatie kijken, foto’s maken en opmeten. Dat alles zetten we
in een 3D CAD tekening, waarvan we met speciale software een anima-
tie (soort filmpje) maken waarin de samenwerking van de robot en de
machine zeer duidelijk tot uiting komt. Vooral zo’n animatiefilm is on-
gelooflijk belangrijk gebleken in het beslissingstraject. Technici kunnen
sommige dingen immers nog wel voor zich zien, maar het management
dat de financiële beslissing moet nemen, heeft minder aan een tekening.
Die kijken naar de film en zien met eigen ogen hoe het er bij hen in de
praktijk uit zal komen te zien en hoe snel en efficiënt er met de robot
geproduceerd kan worden. Presentatie is dus heel belangrijk en ik weet
dat wij daar best uniek in zijn. We vinden het echter niet meer dan logisch
om bedrijven optimaal te informeren. Je praat immers over behoorlijke
investeringen en zo’n beslissing moet men uiterst gefundeerd kunnen
nemen. Wij leggen daarvoor met onze presentaties de solide basis.
Eén van de kroonwielen die bij Norma geproduceerd gaan worden op de speciale
Liebherr vertandingsmachine, waarvoor Romias de robot aan het bouwen is.
een complete robotinstallatie moet na twee tot maximaal vier jaar
volledig terugverdiend zijn
Besturingen

“ Door NI LabVIEW waren we negen maanden eerder klaar dan gepland.”
Danny Hendrikx, Productiemachine Ontwerper, Sylvania
0348 433 466>> Leer hoe u uw machine sneller kunt ontwerpen op ni.com/industrial
De nieuwe generatie productiemachines van Sylvania vereist een hoge productiesnelheid,
een grote nauwkeurigheid en een complex besturingssysteem met geïntegreerde motion,
vision en laserbesturing. Met de betrouwbaarheid van een PLC, de flexibiliteit van custom
hardware en de prestaties van een PC leverden National Instruments Programmable
Automation Controllers (PAC’s) de complete oplossing. Met LabVIEW grafische
programmering heeft Sylvania het project in slechts 25 procent van de geplande
ontwikkeltijd kunnen voltooien.
©2010 National Instruments Corporation. Alle rechten voorbehouden. CompactRIO, LabVIEW, National Instruments, NI, and ni.com zijn handelsmerken van National Instruments. Andere product- en bedrijfsnamen zijn handelsmerken of -namen van de respectievelijke bedrijven. 2044
National Instruments Netherlands BV n Pompmolenlaan 10 n Postbus 124 n 3440 AC Woerden
Tel +31 348 433 466 n Fax +31 348 430 673 n Chamber of Commerce n # 301 168 13 n Utrecht
NI CompactRIO Measurement, Inspection and Control System
2044-Sylvania-Ad-NE.indd 1 8/16/10 4:43:50 PM
044
Na DRIe jaaR IS heT TIjD Om De BaLaNS OP Te makeN. LIgT De BRaNCheVeReNIgINg De RaB OP
SChema aLS heT gaaT Om De DeSTIjDS gefORmuLeeRDe DOeLSTeLLINgeN? eN waT VOOR NIeuwe
ONTwIkkeLINgeN LIggeN eR IN heT VeRSChIeT? eeN INTeRVIew meT BRaNChemaNageR BaReND
NeSSe geefT DuIDeLIjkheID.
Robotics association Benelux wil leerstoel robotica
“De tijd vliegt”, constateert Nesse als hij zich in herinnering roept wat
het startpunt van een splinternieuwe branchevereniging voor industriële
robotica was. “Het moet september 2007 geweest zijn, toen een aantal
industriële partijen de handen ineen sloeg om de industriële robotica een
aantal stappen verder te brengen. De aanleiding? Op de eerste plaats was
er een imagoprobleem. Robots werden, en worden, te vaak als vies en
duur gezien. Onzin natuurlijk. Ze zijn voor bijvoorbeeld voedselverwer-
king juist schoner dan de mens, zijn flexibel inzetbaar en ze worden nooit
moe. In de praktijk betekent dat niet alleen een hogere kwaliteit van het
eindproduct, maar ook nog eens een lagere prijs doordat de productieca-
paciteit aanzienlijk omhoog kan.” Nesse noemt ook de veiligheid als hekel
punt als het gaat om het imago van de branche. “Helaas nemen niet alle
marktpartijen het even nauw als het gaat om een veilige eindoplossing.
Ze doen een aanbieding die weliswaar goedkoper is dan hun professione-
lere concullega’s, maar laten veel liggen als het om veiligheid gaat. Goed,
het antwoord van de RAB kent u. Het RAB Robotic Safety Mark begint
inmiddels een aardig ingeburgerd keurmerk te worden, dat de eindge-
bruiker ervan verzekert dat er op een veilige manier gewerkt wordt. Om
ook niet-leden een kans te geven hiervan te profiteren en om belangen-
verstrengeling te voorkomen hebben we dit overigens losgekoppeld en
ondergebracht in een onafhankelijke stichting.” Nesse geeft aan dat dit
niet betekent dat het lidmaatschap van de RAB geen voordelen meer op-
levert. “Buiten het feit dat een eerste audit voor het keurmerk voor leden
gratis is, is er natuurlijk veel meer bij de vereniging te halen. Zo doen
we erg veel aan kennisuitwisseling, organiseren we eigen themadagen
– de onlangs georganiseerde dag voor de metaalbranche is hier een mooi
voorbeeld van - en kunnen we collectieve kortingen bedingen voor eve-
nementen als het Robot Safety Seminar. Een lidmaatschap verdient zich
voor de leden die hier actief gebruik van maken dan ook terug.”
TerugblikZijn de drie jaar geleden geformuleerde doelstellingen bereikt? Volgens
Nesse zit de RAB op de goede weg, maar er is nog veel werk aan de
winkel. “Het RAB Robotics Safety Mark is zeker een succes. Alle leden zijn
inmiddels gecertificeerd en hebben in dit proces de puntjes op de i kunnen
zetten. En ook voor wat betreft de acceptatie in segmenten als de voed-
selverwerkende industrie hoor ik van leden dat er schot in de zaak zit. Een
goed voorbeeld is natuurlijk ons nieuwste lid Moba, een bedrijf dat sinds
een jaar hele bijzondere dingen met robotica en de handling van eieren
doet. Maar wat mij betreft is de bewustwording van robotica als volwaar-
dig alternatief voor veel minder flexibele oplossingen nog niet waar die
moet zijn. We zullen dan ook van ons blijven laten horen op evenementen
als de Makropak of het Kunststoffencongres. ”
minor industriële roboticaMet het keurmerk op de rit komt er nu ook ruimte voor een initiatief dat
al lange tijd hoog op de RAB-agenda staat: het onderwijs. Het gat tussen
de op de HBO’s verstrekte kennis en de kennis die de leden nodig heb-
ben is immers nog steeds veel te groot. “We hebben zojuist zeer vrucht-
bare gesprekken met Inholland, de Haagse Hogeschool, de Hogeschool
Amsterdam, het Technocentrum Noord-Holland Noord, en Stodt afgerond,
Branche Bulletin044
045
RoboNed start gezamenlijke businesscase
Het eerste seminar van RoboNed heeft geresulteerd in een overzicht van
de robotapplicatiegebieden. Tijdens het seminar zijn er focusgebieden
genoemd door de deelnemers. Op grond van deze informatie is de stuur-
groep van RoboNed gekomen tot het opdelen van het proces in twee fa-
sen. In de eerste fase werken we met een vijftal startclusters aan business
cases. In de tweede fase zullen daar andere clusters aan toegevoegd wor-
den. De startclusters zijn: Care, Cure, Agro & Food, Household en Manufac-
turing. RoboNed is zeer blij met de bekwame en enthousiaste leiders om
de clusters aan te sturen. Voor het cluster Care Ronald Mooije (TNO), voor
het cluster Cure Michiel Jannink (Demcon), voor het cluster Agro & Food
Eldert van Henten (Wageningen UR), voor het cluster Household Hendrik-
Jan Boven (Philips Consumer Lifestyle) en voor het cluster Manufacturing
Fred Bokhorst (Ferdar en RAB).
Het tweede seminar van RoboNed is onlangs op 7 oktober gehouden.
Tijdens dit seminar zijn de verschillende startclusters voor het eerst met
elkaar rond de tafel gaan zitten, en is er een begin gemaakt met het
schrijven van een business plan. Elk cluster werd gevraagd om een in-
ventarisatie te maken van de mogelijkheden voor het betreffende cluster
op het gebied van robotica. Vervolgens is de mogelijkheid met de beste
kansen uitgekozen en is dit idee verder uitgewerkt. Op deze manier is er
een begin gemaakt met een gezamenlijke business case.
In het vervolgtraject gaan de clusters deze ideeën verder ontwikkelen zo-
dat de robots ook daadwerkelijk de markt bereiken. Met dit middel kun-
nen we als BV Nederland laten zien dat de kennis, technologie en ervaring
die we in Nederland rijk zijn door samenwerking kunnen inzetten voor de
toepassingsgebieden. Een belangrijke stap binnen dit proces is het inven-
tariseren van de technologieën die we in Nederland in huis hebben en het
inventariseren van de technologieën welke ontwikkeld moeten worden.
Deze keytechnologieën worden verwerkt in de strategische agenda welke
RoboNed gaat schrijven en waarin de lange termijn visie gepresenteerd
wordt.
Branche Bulletin
INmIDDeLS IS De heRfST BegONNeN eN IS ROBONeD Twee SeIzOeNeN OuD, maaR IN TegeNSTeLLINg TOT
heT meTeOROLOgISChe SeIzOeN BeVINDT ROBONeD zICh IN De LeNTe. VeRSChILLeNDe SameNweRkINgS-
VeRBaNDeN kOmeN TOT STaND eN IDeeëN wORDeN geVORmD.
en een mooie basis gelegd voor een minor
industriële robotica. Dit hebben we gedaan
door goed te kijken naar de kenniseisen
vanuit de robotbranche en die vanuit de
hogescholen op elkaar af te stemmen in
een programma van eisen. Vervolgens zal
worden onderzocht welke leermiddelen er
beschikbaar zijn en waar nog in zal moeten
worden voorzien. Uiteindelijk zal dit leiden tot
een nieuwe leerstoel, zodat de branche over
enkele jaren eindelijk over de afstudeerders kan
beschikken die ze al zo lang nodig heeft.”
Samenwerking feDaGevraagd naar de focus voor de komende jaren geeft Nesse aan dat deze
echt op de industriële robotica zal blijven liggen. “We houden onze ogen
natuurlijk goed open als het gaat om de
ontwikkelingen op robotgebied. Dat houdt
bijvoorbeeld in dat zo nu en dan ook ge-
sproken wordt met partijen als RoboNed.
Maar de inzet blijft het industriële produc-
tieproces. In dat kader zien we diverse sy-
nergievoordelen in samenwerking met de
Federatie Aandrijven en Automatiseren. Ook
zij werken hard aan kennisontwikkeling en zijn
onlangs gestart met de FEDAcademie. Daarnaast
zie je een duidelijke overlap tussen hun leden en
de onze. Neem bijvoorbeeld een bedrijf als Festo. Niet
alleen hebben zij een eigen deltarobot, maar ook worden
hun grijpers vaak ingezet in projecten van onze leden. Een logische stap is
om aansluiting te vinden, en dit is precies waar we de komende maanden
mee aan de slag gaan.”
Branche Bulletin 045

046046046046 Lassen
Liam van Koert
Om heT jaaR kOmT De meTaaLVeRweRkeNDe INDuSTRIe IN uTReChT SameN TIjDeNS De TeChNI-ShOw. eN
hOeweL Deze aLweeR eNkeLe maaNDeN aChTeR ONS LIgT, BIeDT De BeuRS eeN mOOIe kaPSTOk Om eeNS
Te kIjkeN weLke NOVITeITeN huN INTReDe IN De LaSweReLD geDaaN heBBeN. IN heT BIjzONDeR wORDeN
hIeRBIj De ONTwIkkeLINgeN OP heT geBIeD VaN ROBOTLaSSeN ONDeR De LOeP geNOmeN.
Trends in robotlassen
geïNTegReeRDe CONCePTeN VOOR NON-STOP PRODuCTIe
Een vision-guided lassysteem.

047047Lassen
Het lijkt zo eenvoudig. In plaats van de man met
de toorts smelt een robot twee stukken metaal
stevig aan elkaar. Hij doet dit precies, snel en
onvermoeibaar. Een lasbril en bescherming te-
gen de opspattende vonken heeft hij niet nodig
en ook de lasrook wordt niet ingeademd. Alle
voordelen ten spijt is het installeren van een
lasrobot specialistenwerk. Want niet alleen is
kennis vereist ten aanzien van de verschillende
lasprocessen en de lasmal, ook moeten zowel
robot als stroombron foutloos worden aange-
stuurd voor een soepel lopend geautomatiseerd
proces. Hierbij zijn onderdelen afwijkend van de
gereedschappen zoals gebruikt bij handmatig
lassen, al is het maar omdat robotlassen in op-
tima forma een continueproces is en dit andere
eisen stelt aan zowel toorts als stroombron. En
hoewel de ontwikkelingen van de laatste ja-
ren het de eindgebruiker steeds gemakkelijker
maken een nieuw product en dus nieuw pro-
gramma in werking te zetten, blijft een gede-
gen interdisciplinaire kennis onontbeerlijk voor
een bevredigend eindresultaat. Gelukkig zijn
er diverse systeemintegratoren te vinden die
de eindgebruiker hier kunnen helpen. En naast
enkele grote leveranciers van robottechnolo-
gie, waren het juist deze integratoren die op
de Techni-Show enkele mooie combinaties van
proces- en robotkennis lieten zien.
kleine geschiedenisEen verhaal over trends houdt alleen stand
wanneer nieuwe vindingen in relatie tot de fac-
tor tijd worden beschouwd. In dit geval moet
hiertoe een tweetal sporen bewandeld worden:
zowel de geschiedenis van het lassen als de ge-
schiedenis van de robotica is relevant. En om
niet helemaal terug te gaan naar het einde van
het stenentijdperk beginnen we met het jaar
1865. Het was in dit jaar dat een Engelsman,
meneer Wilde, een patent kreeg voor het aan
elkaar smelten van twee stukjes metaal met
behulp van elektriciteit. Voorheen waren er
al wel de nodige oplossingen met behulp van
branders bedacht, maar voordat het booglassen
van de grond kwam, moesten uitvinders als Fa-
raday, Edison en Tesla eerst nog wat voorwerk
ten aanzien van elektriciteit doen. Zo’n twintig
jaar later waren het Nikolai Bernados en Stanis-
lav Olszewaski die de techniek verbeterde door
gebruik te maken van koolstof dat in geoxi-
deerde vorm CO2 als beschermgas opleverde.
De beklede elektrode, waarbij toevoegingen in
de vorm van carbonaten en silicaten het smelt-
bad met een slaklaag beschermde, deed pas
zijn intrede in 1907. En tegen de tijd dat de eer-
ste industriële robot haar intrede deed in 1961,
was ook het MIG lassen (1920), een booglasme-
thode waarbij de draad vergezeld van een inert
gas automatisch wordt toegevoerd, voldoende
ontwikkeld om in een automatisch systeem te
kunnen worden toegepast. Eerste plek waar
deze geslaagde combinatie werd ingezet was
General Motors. Hier prijkte enkele Ultimate
robots die naast het hanteren van zware giet-
stukken, ook het puntlassen voor hun rekening
namen. Sindsdien is de lasrobot niet meer weg
te denken uit de automobielindustrie en nog
steeds is deze sector veruit de grootste afne-
mer van gerobotiseerde lassystemen. Wel is
er in de daarop volgende vijftig jaar nog veel
veranderd. Zowel robotontwerp als lasproces
zijn verder geoptimaliseerd en met de komst
van het digitale tijdperk doen de huidige bestu-
ringsmogelijkheden nog maar weinig denken
aan de dagen van de pioniers. Hoewel in basis
het zelfde, zijn de systemen er vooral veel snel-
ler en veel nauwkeuriger op geworden. Tot slot
heeft de schaalgrootte en daarmee dalende
prijs er voor gezorgd dat robotlassen ook voor
minder kapitaalkrachtige sectoren bereikbaar
werd en plukt ook het midden- en kleinbedrijf
de vruchten van deze flexibele manier van au-
tomatisering.
Robotlassen: een korte principeschetsWanneer is robotlassen de juiste keuze en wat
heb je er allemaal voor nodig? Op het eerste
gezicht zijn het vooral de repeterende hande-
lingen die vragen om automatisering. Bij lassen
is dat niet anders. Dat betekent dat met name
serieproductie – al heeft de robot door zijn
flexibele karakter geen probleem met kleine
series - zich leent om robots in te zetten om zo
arbeidskosten te besparen. Daarnaast kan pre-
cisie en een grote reproduceerbaarheid reden
zijn voor deze oplossing. En tot slot kan ook de
bereikbaarheid een overweging zijn.
In principe worden er twee lasvormen vaak in
combinatie met robotica uitgevoerd: het punt-
lassen en het booglassen. Veruit het grootste
aandeel (zo’n 80%) betreft hierbij het MIG/MAG
–lassen. Hier is immers geen schoonmaakactie
vereist, wat juist bij hogere productievolumes
voordelen oplevert. Bij deze vorm van lassen
wordt een elektrode automatisch toegevoerd,
waarbij de penetratiediepte van de las wordt
geregeld middels de toevoersnelheid. Ook
wordt er een beschermgas toegevoegd om het
lasproces te kunnen afschermen van de atmos-
feer voor een beter resultaat. Dit kan een inert
of een actief gas zijn, maar ook combinaties zijn
mogelijk.
De lasapparatuur van de lasrobot lijkt op die
van het handlassen, maar wijkt op een aan-
tal punten af. Zo moet deze geschikt zijn voor
lange bedrijfscycli en zijn interfaces met het
besturingssysteem nodig. Daarnaast heeft de
toorts bijvoorbeeld een automatisch schoon-
maaksysteem nodig om de opgepikte spetters
te verwijderen. Tot slot is er een kalibratiemo-
dule nodig om het Tool Center Point ten op-
zichte van de lasmal te bepalen. De robot moet
immers wel precies weten waar de lasnaad zich
bevindt.
groene robotica Sneller, beter en goedkoper. De aanjagers voor
ontwikkelingen in robotlassen zijn niet anders
dan die voor alle andere productietechnieken.
Voor het cartesiaanse robotontwerp betekent
dit op de eerste plaats een eigentijdse vorm
die de robot lichter in gewicht maakt zonder
aan stijfheid in te boeten. Deze compacte be-
048
veilig gebeuren. Nieuwe en veilige besturingen
maken het hier mogelijk dat de traditionele
hekwerken kunnen komen te vervallen doordat
de robot in bepaalde zones gegarandeerd niet
boven een gedefinieerde snelheid zal uitkomen
of zelfs stil staat als een persoon te dicht in de
buurt komt.
De slimme stroombronEen onderdeel dat een sleutelrol vervult als het
gaat om een goede laskwaliteit is de stroom-
bron. Een van de doorbraken op dit gebied
kwam in 1987 met de komst van het eerste
STT-bron. Deze stroombron nieuwe stijl die op-
timaal gebruik maakte van vermogenselektro-
nica en de inmiddels uitgebreide theoretische
kennis van het lassen. Een zeer stabiele boog,
ook bij lagere stroomsterkten zorgden voor een
uitzonderlijke procescontrole. En toen deed de
digitale stroombron haar intrede. Gevolg: in
2005 komen technieken als Cold Metal Trans-
fer en ColdArc op de markt. Er kan met lagere
stromen en spanningen worden gelast, waar-
door dunne materialen beter kunnen worden
verwerkt. Ook het boogsolderen komt in het
verschiet. En het is deze trend die zich doorzet.
Zo werd op de Techni-Show een stroombron
getoond die gebruik maakt van een negatieve
puls. Hiermee kan met deze gelijkstroombron
de stroom onafhankelijk van de draadsnelheid
zeer nauwkeurig worden geregeld. Gevolg is
natuurlijk dat door een zeer goed beheersbare
penetratiediepte zeer dunne materialen kunnen
worden gelast en ook platen van verschillende
dikten geen enkel probleem meer vormen. Dit
zelf wanneer er een millimeter afstand tussen
de dunne platen (aan de bovenkant)moet blij-
ven bestaan.
geïntegreerdUiteraard mag in een trends verhaal het inte-
gratiewoord niet ontbreken. En gelukkig werd
het ook tijdens de Techni-Show veelvuldig ge-
bruikt. Belangrijkste integratievorm was die
van de robotbesturing en de stroombron. Een
logische stap die een enkeling al eerder bood
en waar anderen niet konden achterblijven.
Met de integratie zijn beweging en lasproces
beter op elkaar af te stemmen en is het bij-
voorbeeld ook mogelijk geworden de lasdata
te loggen met het oog op lascertificaten.
Een tweede integratievorm was vision. Nu wor-
den vision en robotica wel vaker samen gesig-
naleerd aangezien hun flexibele karakters goed
bij elkaar passen. Maar voor lastoepassingen
werd dit nog wat minder gedaan. De rokerige
en vonken spuwende omgeving was dan ook
niet altijd even vriendelijk voor de camera. Nu
ook deze hobbels genomen zijn lijkt de weg vrij
voor vision guided laswerk. Voordelen zijn veel
eenvoudigere lasmallen en het komen verval-
len van het telkens kalibreren van het Tool Cen-
ter Point: de lasrobot ziet zelf waar en hoe hij
moet lassen en komt ten aanzien van flexibi-
liteit daarmee weer een stapje dichter bij zijn
menselijke collega.
VirtueelTot slot een paar woorden over de rol van si-
mulatie in het lasproces. De virtuele wereld
doet immers, zij het op wat andere manieren,
zijn intrede in zowel het handlassen als robot-
lassen. Voor de lassers in de dop is er op de
eerste plaatst ‘augmented reality’. Deze tech-
niek waarbij de virtuele wereld met de echte
vermengd wordt leent zich uitstekend voor trai-
ningsdoeleinden. Zonder mislukte werkstukken
naar de schroothoop te moeten brengen kan de
lasser naar hartenlust experimenteren met ver-
schillende apparatuur en materialen. Maar ook
de robot kan oefenen. Zo zijn er diverse soft-
warepaketten op de markt waar het lasproces
kan worden gesimuleerd. En met name de kop-
peling tussen deze simulatie en het uiteinde-
lijke lasprogramma wordt steeds beter. Dit kan
zelfs online, dus zonder de robot stil te hoeven
zetten. De eerlijkheid gebied hier wel te zeggen
dat dit vooral voor het puntlassen prima werkt,
maar dat voor het booglassen vaak lastiger is
door een veel groter aantal variabelen.
ConclusieAlles opgeteld kan gesteld worden dat waar
robotlassen voorheen toch voornamelijk voor
grotere series interessant was door de toene-
mende flexibiliteit ook de kleine series renda-
bel worden. Robots werken hier steeds meer
samen en ontwikkelingen in geïntegreerde
stroombronnen maken het robot lassen sneller,
preciezer en beter geschikt voor een grotere
variëteit aan materialen en afmetingen. En net
zoals in de industrie in het algemeen zijn het
met name de thema’s energie en veiligheid die
steeds meer op de voorgrond treden. Met de
lasrobot van morgen zal dan ook nog meer geld
verdient kunnen worden.
nadering, waarbij tevens de kabels in de arm
zijn weggewerkt voor een beter bereik, heeft
een positief effect op zowel de plaatsingsvrij-
heid als het energieverbruik. Dit is op de eerste
plaats goed nieuws voor bedrijven die in hun
productieruimte een robotcel flexibel willen
opstellen of de robot bijvoorbeeld horizontaal
willen plaatsen. Een lichtere robot betekent im-
mers ook een lichtere constructie van de totale
installatie. Daarnaast betekent een lichtere ro-
bot vooral lagere energiekosten. Want juist in
het geval industriële robotapplicaties worden
grote massa’s continue versneld en vertraagd.
Deze eigenschap wordt nog verder uitgenut
door het middels slimme servotechniek terug-
winnen van energie tijdens het afremmen van
de robot. En tot slot draagt ook de robotbestu-
ring een steentje bij aan de steeds groener
wordende robot. Zo komen functies beschik-
baar die de robot automatisch uitschakelen
wanneer er even niet geproduceerd wordt. Een
welkome eigenschap in een tijd waar in de au-
tomobielindustrie hele lijnen slechts op halve
kracht hun werk doen. In dit kader is overigens
ook de Profibus organisatie bezig met een
systeem dat onder de naam ProfiEnergy op het
zelfde principe gebaseerd is.
Veilige samenwerkingEnergie blijkt niet het enige speerpunt van de
robotleveranciers als het gaat om nieuwe be-
sturingsopties. Een minstens net zo belangrijke
trend in de weg naar onbemande vierentwin-
tiguursproductie blijkt namelijk het samenwer-
ken. Dit geldt zowel voor van robots onderling
als voor het samenwerken van robots met
mensen. Voor de eerstgenoemde samenwer-
kingsvorm geldt dat naast het lassen, ook de
logistieke processen rondom het lassen steeds
verder worden geautomatiseerd. Met de on-
vermijdbare vergrijzing die zal optreden als de
babyboomers van hun pensioen gaan genieten
en de wens de productie toch in eigen land te
houden, worden ook hier steeds meer taken
door robots uitgevoerd. Denk hierbij onder an-
dere aan het positioneren van de werkstukken
in stationaire lasmallen en de verdere aan- en
afvoer van de verschillende producten. Deze
synchrone samenwerking betekent dat het no-
dig is dat meerdere assen gelijktijdig door de-
zelfde besturing kunnen worden aangestuurd.
De huidige generatie besturingen voorziet in
deze behoefte. En daar waar mens en robot
toch zij aan zij werken moet dit natuurlijk wel
048 Lassen
049
ABB levert standaard robotoplossingen voor de industrie. Deze zijn eenvoudig, snel, kostenbesparend en eenvoudig in bestaande of nieuwe productielijnen te integreren. ABB Robots zijn zeer gebruiksvriendelijk, betrouwbaar, efficiënt, onderhoudsarm, accuraat en werken 24/24/7 op topsnelheid. Kiest u een ABB Robot dan weet u wat u kiest! Bezoek ons op www.abb.com/robotics
Eenvoudiger produceren?Houd het standaard!
ABB adv IRB660 184x255.indd 1 22-04-10 13:33
050050050050 Robotveiligheid
Robots leren van elkaar via Roboearth
Overwegingen voor een inherent veilig systeem
OP De TeChNISChe uNIVeRSITeIT Te eINDhOVeN wORDT OP De afDeLINg weRkTuIgBOuwkuNDe (DePaRT-
meNT Of meChaNICaL eNgINeeRINg CONTROL SySTemS TeChNOLOgy gROuP) geweRkT aaN eeN BIjzON-
DeR PROjeCT, geNaamD ROBOeaRTh. DIT PROjeCT heefT aLS DOeLSTeLLINg INTeLLIgeNTe ROBOTS Te
ONTwIkkeLeN, waaRBIj heT aCCeNT LIgT OP heT VeRzameLeN VaN keNNIS IN eeN DaTaBaSe eN waaRBIj
VOORaL RekeNINg gehOuDeN wORDT meT De COgNITIeVe mOgeLIjkheDeN VaN eeN ROBOT, meT aLS DOeL
‘CaRe aND CuRe’ Te BeVORDeReN IN De gezONDheIDSzORg. heT ONDeRzOek VOOR De ONTwIkkeLINg VaN
ROBOeaRTh wORDT geSTeuND DOOR De euROPeSe COmmISSIe eN DuuRT VIeR jaaR. heT IS NIeT ONDeNk-
BaaR DaT Deze INTeLLIgeNTe ROBOTS IN De TOekOmST TeVeNS IN De INDuSTRIe zuLLeN wORDeN INgezeT.
INTeRaCTIe TuSSeN ROBOT eN meNS wORDT DaN eeN ReaLITeIT.
Safora S.S. Macdonald – Consultant NEN-Machinebouw
051051Robotveiligheid
Overwegingen voor een inherent veilig systeem
Een jaar of vijf geleden is de Technische Universiteit te Eindhoven (TU/E)
begonnen met de deelname aan de RoboCup voetbalcompetitie. Het doel
van de Japanse bedenker van RoboCup is dat alle groepen in de wereld
van robotica een gezamenlijke carrier kiezen en dit samen sneller uit-
ontwikkelen. In 2005 is de TU/E aan de midsize league gaan deelnemen
om meer kennis op te doen. Dat wil zeggen dat de robots zeventig cen-
timeter hoog zijn en in een team van vijf robots geheel autonoom moe-
ten voetballen. In de afgelopen vijf jaar heeft dit fenomeen zich enorm
ontwikkeld en is het steeds meer de kern van het onderzoek geworden.
De Technology Group bij de TU/E beseft zich nu dat de roboticatak steeds
groter wordt. Het betreft niet alleen de klassieke industriële robots, maar
ook de intelligente servicerobots. Het doel van het project RoboEarth is
voornamelijk gericht op het helpen van mensen, men noemt dat ‘Care
and Cure’. Coördinator van het project is Dr. Ir. M.J.G. Van de Molengraft,
Associate Professor Department of Mechanical Engineering Control Sy-
stems Technology Group en zijn team. Van de Molengraft houdt zich bezig
met het vertalen van de moderne theorie op het gebied van systeem en
regeltechniek, en deze om te zetten in bruikbare technologie waarmee
robots/machines kunnen worden uitgerust. Zijn team is bezig prototypes
van robots te maken die ouderen helpen bij dagelijkse taken (care). Daar-
naast hebben ze een robot ontwikkeld die kan assisteren bij een opera-
tie doordat het kan helpen bij het voelen (identificeren) van verschillend
menselijk weefsel (cure).
Cognitieve vaardigheden In een productielijn staan robots die veelal tot in lengte van dagen de-
zelfde beweging en functie uitoefenen. Het principe van RoboEarth is dat
een intelligente robot situaties moet kunnen identificeren en begrijpen.
De robot die een kamer binnenkomt moet weten waar hij is en hoe de
kamer er uitziet. Dit wordt gedaan met behulp van simultaneous locali-
zation en mapping technieken. Maar daar houdt het niet bij op, de robot
moet ook alle objecten kunnen classificeren. Hij moet bijvoorbeeld een
kopje zien en er een betekenis aan kunnen geven. De grootste uitdaging
van dit project is om cognitieve vaardigheden toe te kennen aan een
robot. Dit principe werkt niet wanneer de robot elke keer alles vanaf het
begin moet leren. Wat de ene robot geleerd heeft, moet de andere robot
kunnen gebruiken en verder kunnen uitontwikkelen. Memorisatie van
modellen is daar een belangrijk gegeven in. De robots kunnen via een
netwerk (internet) met elkaar praten en informatie uitwisselen. De robot
maakt verbinding met RoboEarth en kijkt of er een ‘recept’ is om iemand
een kopje te geven. Hij kan dit ‘recept’ downloaden en mappen op zijn
eigen hardware. Hij kan het verbeteren en vervolgens opnieuw uploaden
naar RoboEarth, zodat een volgende robot het op dezelfde manier weer
kan overnemen. De robots leren dus door op het resultaat van de vorige
robot.
europees projectRoboEarth is een Europees project. Deelnemers komen uit Stuttgart, Mün-
chen, Zurich en Zaragoza. Philips is industrieel partner. Europa neemt de
leiding in het ontwikkelen van intelligente interactieve robots. In Japan
zijn ze meer bezig met de androïde (humanoïde) robots. Het doel van het
project is om in vier jaar tijd de technische haalbaarheid van het project
te laten zien. In december zit er één jaar op. Een ziekenhuiskamer is ge-
kozen als basis setting. De handelingen die gedemonstreerd worden heb-
ben te maken met het bedienen van de mens/patiënt. Het team van de
TU/E is ervan overtuigd dat het gaat werken. De uitdaging: Hoe ga je de
kennis die de robot opdoet van de omgeving (betekenis hechten aan de
metingen) vertalen op een manier die overdraagbaar is aan een andere
robot. Daarnaast zal het een kunst zijn om robots van diverse merken
toch gebruik te laten maken van de kennis die verwerkt is in RoboEarth.
De TU/E probeert zoveel mogelijk partijen te interesseren voor dit project.
Het wordt een volledig open systeem waarin alle belanghebbenden hun
rol kunnen spelen. De RoboEarth-software zal dan ook als open source
code worden vrijgegeven.
functionaliteit staat boven vormVoor onderzoekers is de cognitieve vaardigheid belangrijker dan de vorm
van de robot, maar ze hebben wel voor ogen dat het eindproduct de
mens niet moet afschrikken. Ze denken echter primair vanuit de functio-
naliteit van de robot. Zo wordt er een rijdend platform op vier omniwielen
gebruikt voor gegarandeerde stabiliteit in plaats van veel minder stabie-
le, de op de mens lijkende, twee benen. Op dit moment wordt een servi-
cerobot gebouwd die op wielen kan rijden. De servicerobot heeft armen
die gemaakt zijn op de menselijke maat, omdat alles om ons heen op de
menselijke maat is gebouwd. De functionaliteit is echter volledig bepa-
lend, de vorm is op dit moment secundair. Wanneer men het idee van
een op de mens lijkende robot loslaat, ontstaat er meer ontwerpruimte.
Waarom zou een robot maar twee ogen hebben? Technisch gezien is veel
meer mogelijk en het gebruik van extra sensoren kan enorm nuttig zijn.
VeiligheidU zag het al aankomen… What about safety? Roboticabedrijven zien dat er
behoefte is aan het feit dat robots gaan samenwerken met andere robots
en dat er interactie is met de mens. Het veiligheidsaspect wordt dan heel

052052052
den voldoen aan de wettelijke eisen. Het zal niet gemakkelijk zijn om
in normen de afbakening van de functie van een intelligente robot te
definiëren, omdat het doorleerproces van de robots hierbij een belang-
rijke rol speelt. Men zou wel rekening kunnen houden met ergonomische
eisen, vooral wanneer de intelligente robot in de gezondheidszorg wordt
ingezet. Welke maximale krachten op het menselijk lichaam uitgeoefend
mogen worden bij bijvoorbeeld het tillen van de patiënt kan wel degelijk
vastgelegd worden. Het is wellicht verstandig de intelligente robot uit te
rusten met een noodstopknop ter uitschakeling wanneer een en ander
fout dreigt te gaan.
SlotwoordHoe snel intelligente robots worden ingezet heeft uiteindelijk te maken
met de acceptatie. Het is de bedoeling dat het inzetten van deze robots
leidt tot betere kwaliteit in de zorg. Het zal er uiteindelijk niet toe leiden
dat er in een ziekenhuis straks alleen robots rondlopen. Het is nog de
vraag wie het inzetten van de robots gaat bekostigen in de ziekenhuizen.
Wellicht is de afweging tegen die tijd anders door een chronisch tekort
aan verplegend personeel en de toenemende vergrijzing. Als intelligente
robots in grote aantallen toegepast gaan worden hoeft het niet duur-
der te zijn dan de huishoudelijke apparaten die we nu in huis hebben.
Er zal zeker eerst nieuwe wetgeving voor moeten komen wanneer de
intelligente robots in gebruik worden genomen. Want de robots gaan in
een ongestructureerde 3D-ruimte werken en dat is tot nu toe nog onbe-
kend. Voordat ze wereldwijd gebruikt kunnen en mogen worden zal in
het kader van wetgeving en aansprakelijkheid het een en ander geregeld
moeten worden.
belangrijk. Wellicht zal gekeken moeten worden hoe dit te certificeren
is. Op het moment dat een robot samenwerkt met een mens kunnen er
ongelukken gebeuren. In de ontwikkelfase wordt daar nog geen rekening
mee gehouden omdat het ook beperkingen kan opleveren, maar het mo-
ment gaat gegarandeerd komen. Er wordt wel al bewust over veiligheid
nagedacht, omdat het ontwerp inherent veilig dient te zijn.
aansprakelijkheidEen andere belangrijke vraag is wie aansprakelijk is wanneer er een in-
cident plaatsvindt. Het incident zou een resultaat kunnen zijn van het
downloaden van een bestaand recept dat niet goed werkt bij de spe-
cifieke robot waar het incident mee heeft plaatsgevonden (hardware-/
software-compatibiliteitsprobleem). Wie de eigenaar wordt van RoboE-
arth wanneer het daadwerkelijk in gebruik wordt genomen, is tevens
nog geen vast gegeven. Hoe dit soort zaken zich gaan ontwikkelen is
nog niet bekend. Het is denkbaar dat de ‘recepten’ in de vorm van apps,
zoals we die nu al kennen voor de mobiele smartphones, zullen worden
aangeboden door verschillende commerciële partijen.
Regelgeving en normenDe prototypes moeten voldoen aan de geldende wettelijke eisen (zoals
bijvoorbeeld de Machinerichtlijn en de EMC-richtlijn), mede om de vei-
ligheid te waarborgen. Hoewel er op een verantwoorde manier wordt
gewerkt, houdt het team van de TU/E nu nog niet specifiek rekening met
de eisen van bijvoorbeeld de Machinerichtlijn. Het project gaat meer over
de kennis en bijbehorende software en niet zozeer over de mechanica
van de robot zelf (constructie). Het één is echter inherent met het andere
verbonden en moet net zoals alle industriële robots die ontwikkeld wor-
052 Robotveiligheid
Wilt u het vakblad Vision & Robotics gratis ontvangen? Neem dan contact
op en ontvang Vision & Robotics zes keer per jaar GRATIS.
V&R is hét onafhankelijke vakblad voor machinebouwers, system integra-
tors en eindgebruikers van productielijnen in de maak-, agro- en food-
industrie. Het blad brengt fabrikanten van vision- en robottechniek samen
met beslissers, engineers, technisch management, hoofden TD en hoofden
productie.
Onderwerpen die aan bod komen zijn onder andere: Camera-/Visionsystemen
Beeldverwerking
Belichtingsmethoden
(Kwaliteits)inspectie
Robotsystemen
Kinematische modellen
Simulatie
Kunstmatige intelligentie
Aandrijvingen en besturingen
Normen
Toevoersystemen
Veiligheid
Wetgeving
Bedrijfsvoering
Het vakblad werkt nauw samen met brancheorganisaties, opleidingsinsti-
tuten en overheid om een volledig en betrouwbaar beeld te creëren bij de
lezers op het gebied van Vision & Robotics.
ContactRedactie-adres:
Vision & Robotics
postbus 82
2460 AB Ter Aar
e-mail: [email protected]
telefoon: 06-28417073
wORD gRaTIS LID

054054054 Beursupdate
De visionmarkt is weer voorzichtig aan het op-
krabbelen. Althans, dat laten de beursorganisa-
tie als de VDMA weten. Zowel standhouders als
VDMA-leden laten positieve geluiden horen over
een groeiend aantal orders. Vooral de Duitse
motor begint weer te draaien, en met name de
machinebouwmarkt, de plastic- en de rubberin-
dustrie, de robotica- en de elektronicamarkt zijn
groeimarkten als het op vision aankomt. “Voor
de lopende jaren mag de visionbranche rekenen
op een groei van achttien procent”, laat de voor-
zitter van de visionsectie van de VDMA tijdens
de gebruikelijke perslunch weten. “ In totaal zal
er zo’n 1,1 miljard euro worden omgezet. Toch
moeten we ook voorzichtig blijven. De wereld-
wijde economische groei blijft achter, en voor
2011 mogen we waarschijnlijk een bescheiden
plus van vijf procent noteren. Pas in 2012 zullen
we weer op het niveau van voor de crisis zit-
ten.” Ook de beurs zelf lijkt te profiteren en telt
in plaats van de 293 exposanten van vorig jaar
er nu 323, een groei van tien procent.
Race om de standaardOp zoek naar de laatste trends komt de bezoeker
eigenlijk geen echt schokkende dingen tegen.
Links en rechts is het aantal megapixels weer
wat gestegen, en zit ook het aantal frames per
seconde nog steeds in de lift. Natuurlijk is er aan-
dacht voor duurzaamheid en energieverbruik.
Ook worden de stand-alone camera’s weer een
beetje intelligenter en de beeldverwerkingssoft-
ware een stukje intuïtiever. Een veel besproken
3D-visiontechniek is ‘time of flight’. Want hoe-
wel de resoluties nog niet op kunnen tegen die
van hun stereoscopische tegenhanger, wordt
ook dit type camera steeds beter. Bovendien zijn
ze minder complex en snel. Tot slot breken er
ook op het gebied van de busstandaarden wel
wat spannende tijden aan. Wat gaat het wor-
den? In de race zijn 10 GigE, HS Link, USB 3.0 en
CoaXPress. Van de laatste twee konden al en-
kele werkende voorbeelden worden gespot, al
zal het zeker tot de beurs van volgend jaar duren
voordat echt duidelijk wordt waar de fabrikanten
voor gaan.
van witte leds levert een stevige 2300kLux op
drie millimeter werkafstand.
En met de grote vraag naar witte leds lijken deze
getallen met de dag groter te worden. Voor be-
paalde producenten brengt dit uitdagingen, on-
der andere op het gebied van de koeling. Maar
door slimme plaatsing van de leds (minder in het
midden voor een kleinere warmteontwikkeling,
met behoud van een egaal lichtbeeld) en een
uitgekiend printplaatontwerp en geïntegreerde
waterkoeling, is men erin geslaagd dit tot een
minimum te beperken. Met de hogere lichtop-
brengst die dit mogelijk maakt kunnen vervol-
gens ook hogere acquisitiesnelheden behaald
worden. De volgende uitdaging voor de led is
nu de UV-verlichting. Wie weet zal dit type lamp
volgend jaar in de spotlight staan.
heT waS ReDeLIjk DRuk OP De eeRSTe Dag VaN euROPa’S gROOTSTe VISIONBeuRS IN STuTT-
gaRT. De NeDeRLaNDSe afVaaRDIgINg waS OVeR heT aLgemeeN DaN OOk TeVReDeN meT De
aaNDaChT DIe eR VOOR huN PRODuCTeN waS. VISION & ROBOTICS VROeg De meNSeN NaaR
huN ‘PRONkSTuk’ eN SPeuRDe De BeuRSVLOeR af NaaR De LaaTSTe ONTwIkkeLINgeN.
Ook Nederlandse noviteiten op Vision 2010
TIme Of fLIghT eN NIeuwe STaNDaaRDeN ONDeRweRPeN VaN geSPRek
Liam van Koert
CoaxPress 10 gige hS Link uSB 3.0Enkelvoudige snelheid 1.25 Gbps – 6.25 Gbps 10 Gbps 3.125 Gbps 5 Gbps
Maximale snelheid N x 6.25 Gbps
(N kabels)
40 Gbps
(vier kabels)
N x 3.125 Gbps
(N kabels)
5 Gbps
Kosten Gemiddeld Hoog Gemiddeld Laag
Complexiteit Gemiddeld Hoog Gemiddeld Laag
Bekabeling Coax Cat-6 / Cat-6e/ Cat-7 CX-4 Complex, maar
massa-
geproduceerd
Afstand 130 meter / 40 meter 37 meter / 100
meter / 100 meter
15 meter 3 meter
Data integriteit CRC CRC / Resend CRC / Resend CRC
Real Time Trigger Ja Nee / gepland Ja Nee
Voeding over kabel 13 W / kabel Gepland Gepland ja
Tabel: Een overzicht van de toekomstige communicatiestandaarden. (Bron: Jochem Hermann, Adimec).

055
Drielaagse foveon-sensorOok Quest uit Wieringerwerf was dit jaar
weer van de partij. De een jaar eerder ge-
introduceerde 5CCD-camera (een vijfkanaals
multispectraal hoogstandje) was nog steeds
populair. Maar het was vooral een nog op
de markt te verschijnen prototype met een
geheel nieuw type beeldsensor dat veel be-
kijks kreeg. De Condor 1000 MS-1-FV com-
bineert met zijn Foveon-sensor zowel rood,
groen als blauw met een volledig sensorop-
pervlak. Dit kan doordat de verschillende
kleuren laagsgewijs, dus achter elkaar in
plaats van naast elkaar, tot één sensor ge-
integreerd zijn. Hiermee heeft de gebruiker
het beste van twee werelden: én een zo
groot mogelijk sensoroppervlak én heldere
kleuren zonder dat speciale filters nodig zijn.
De Foveon-sensor komt al wel in enkele fo-
tocamera’s voor, maar in de machinevision is
het werkende prototype echt een primeur.
Specificaties
Resolutie: 2652 x1768 x drie lagen
Pixel clock: 40 Mhz
Beeldgrootte: 20.966 x 13.97 mm
Pixelgrootte: 7,8 um x 7,8 um
Frame rate: 5 fps full frame
Data bits: 8 tot 12 per pixel per kanaal
Dynamisch
bereik: 48 dB
Voeding: 12-24 V
Interface: Camera Link (Base en
Medium), glasvezel, GigE
Camera met kodak kaI-29050-sensorHet Bredase DVC staat traditiegetrouw op de
stand van cameraproducent Illunis. En waar
vorig jaar het megapixelkanon RMV 50100
in de schijnwerpers stond, viel dit keer de
beurt aan een iets kleinere camera. Geba-
seerd op de Kodak KAI-29050-sensor is de
RMV 29 MP van Illunis met 29 megapixels
vooral geschikt voor toepassingen als docu-
ment scanning. Maar ook voor luchtfotogra-
fie verwacht het bedrijf door een gunstige
verhouding tussen het gewicht en de resolu-
tie met deze camera hoge ogen te gooien.
Specificaties
Resolutie: 6576 x 4384
Pixel clock: 30, 40, 48 Mhz
Pixelgrootte: 5.5 um x 5.5 um
Frame rate: 4.0 FPS (Quad Tap) 2.0FPS
(Dual Tap) 1.0FPS (Single Tap)
Data bits: 8, 10 of 12
Dynamisch
bereik: 64 dB
Voeding: 12VDC - 6 Watts
Interface: Camera Link Base Mode of
Gigabit Ethernet
hoge snelheidscamera’s2009 was het jaar van Adimec uit Eindhoven.
Met CoaXPress – een splinternieuwe commu-
nicatiebus gebaseerd op de coaxkabel – won
het de Vision Award 2009. Inmiddels hebben
vele partijen de nieuwe standaard omarmd,
en komen er meer en meer componenten
op de markt die van CoaXPress gebruik kun-
nen maken. Niet verwonderlijk dat het druk
was op de stand van Adimec. Toch was Co-
aXPress niet de enige trekpleister. Ook de
nieuwe Quartz-lijn, een drietal hoge snel-
heid camera’s met CMOS-sensor, deed het
goed. De combinatie van hoge sluitertijden
(op basis van door Adimec zelf ontwikkelde
True Accurate Imaging TM technologie) en
hoge frame rates maken de camera’s uit de
Quartz-serie een geduchte concurrent van
CCD-camera’s.
Specificaties van de Q4A 180
Resolutie: 2048 x 2048
Frame rate: 180 fps
Dynamisch
bereik: 60 dB
Interface: CoaXPress en Camera Link
Voeding: 10.2-27.6 VDC, 5-8W
055Beursupdate
Led-linescanverlichtingNet als vorig jaar pakt Vision Light Tech uit Uden uit met een grote stand. Een voordeel: de stand-
bouwer heeft licht in overvloed om er een mooie lichtshow van te maken. Net als vorig jaar is er
veel aandacht voor ledverlichting. En hoewel de meningen over de lichtopbrengst van led in het
verleden verdeeld waren, tegenwoordig hoeft er niet meer getwijfeld te worden. De nieuwste
VLX2 Linescanverlichting van Gardasoft op basis van witte leds levert een stevige 2300kLux op
3 millimeter werkafstand. En met de grote vraag naar witte leds lijken deze getallen met de
dag groter te worden. Dit brengt uitdagingen voor de koeling. Maar door slimme plaatsing van
de leds, een uitgekiend printplaatontwerp en geïntegreerde waterkoeling, is Gardasoft erin ge-
slaagd de warmteontwikkeling tot een minimum te beperken.

056
zonder concessies te doen aan stijfheid, komt het dynamische gedrag ten
goede, waardoor nog kortere cyclustijden en hogere baannauwkeurighe-
den behaald kunnen worden. De pols is slanker en preciezer, en door het
terugbrengen van massa en aantal samenstellingen is de robot bovendien
energiezuiniger en betrouwbaarder.
In totaal gaat het om een vijftiental goed op elkaar afgestemde robotty-
pen. Niet alleen is hier gekeken naar stappen in payload en bereik, ook is
het aantal verschillen in motoren en versnellingsunits tot een minimum
beperkt: hier gelden slechts vier varianten. Bovendien zijn alle interfaces
gelijk gehouden. Dit geldt voor het gatenpatroon van de voet en voor de
gereedschapsflens aan de pols. En doordat het ontwerp er juist compacter
op is geworden, zal het ook geen probleem zijn de nieuwe Quantec-robot
in een cel te plaatsen waar voorheen een 2000 robot gehuisvest was.
November was de maand dat Kuka haar nieuwe Quan-
tec-serie aan de Benelux presenteerde. Met deze opvolger
van Kuka’s meest succesvolle 2000-serie is het bedrijf
weer helemaal bij de tijd. Wat vooral opvalt, is dat de
nieuwe robots veel compacter zijn dan hun voorganger.
Want hoewel de payload varieert van negentig tot
driehonderd kilogram en er een werkbereik tot
3.100 millimeter mogelijk is, is de nieuwe
generatie tot 160 kilogram lichter en neemt
hij 25 procent minder volume in. Dit laatste
feit opent deuren voor tal van nieuwe toe-
passingen waar ruimte een probleem is.
En het gebruik van lichtere componenten,
De succesvolle F-serie-robots van Kawasaki
worden opgevolgd door de nieuwe R-serie. Ka-
wasaki heeft veel aandacht besteed aan het
ontwerp. De robots van de R-serie hebben een
slanke vormgeving. Belangrijke eigenschappen
van de nieuwe robots zijn de compacte pols
(voor een optimale toegankelijkheid), de hoge
herhalingsnauwkeurigheid, een groot werkbe-
reik en natuurlijk de snelle bewegingen. De
Kawasaki R-serie-robot is leverbaar met een
hanteringcapaciteit van drie tot tachtig kilo-
gram, en een horizontaal werkbereik van 620
tot 2.100 millimeter. Dankzij de dubbel uitge-
voerde afdichtingen in de polsassen voldoen de
robots van de R-serie aan de eisen van de be-
schermingsklassen IP65. IP67 is als optie lever-
baar. De nieuwe Kawasaki-robots zijn tevens
uitgerust met een nieuw model besturing: de
Kawasaki E-controller. De kleinere exemplaren
met een capaciteit van drie tot en met tien ki-
logram zijn gekoppeld aan een compacte be-
sturing, met de afmetingen van een flinke pc
en een gewicht van dertig kilogram. Deze com-
pacte besturing werkt op enkelfase 230 VAC
voedingsspanning. De grotere robots met een
capaciteit vanaf tien kilogram worden uitge-
voerd met een grotere besturing. Deze bestu-
ring werkt op driefase 400 VAC. De E-controller
van Kawasaki beschikt over twee ethernetaan-
sluitingen en twee USB-poorten. Dit geeft vele
communicatiemogelijkheden en een gemakke-
lijke opslag van de gegevens met een USB-ge-
heugenstick. Dankzij het TFT-kleurentouchs-
creen heeft de operator een goed overzicht op
de bedieningsfuncties. Er kunnen ook speciale
toetsen en meldingsberichten geprogram-
meerd worden. De standaard geheugencapaci-
teit is voldoende voor tachtigduizend stappen.
kawasaki introduceert R-serie
Veilige PSENSgate-heksystemen van Pilz combineren hekbewaking, veilige vergrendeling en bewaking van breuk van
grendels in één systeem. En daardoor zijn deze inzetbaar in toepassingen tot PL e volgens EN ISO 13849-1, SIL CL 3 volgens
EN/IEC 62061 respectievelijk tot veiligheidscategorie 4 volgens EN 954-1. Deze heksystemen zijn vooral geschikt voor
klassieke grote hekken en voor hekken die niet onbedoeld mogen worden geopend. Alle veiligheidsfuncties voor bewa-
king van hekken (noodstop en hulp-/noodontgrendeling), alsmede alle bedieningselementen, zijn geïntegreerd op het
kleinst mogelijke oppervlak. In combinatie met de besturingstechniek van Pilz is dit een veilige totaaloplossing voor
hekbeveiliging. Veilige heksystemen van PSENSgate zijn bijzonder geschikt voor zwaar industrieel gebruik en bieden de
grootste bescherming tegen manipulatie. PSENSgate verenigen veilige hekbewaking, veilige vergrendeling en bewakin-
gen van breuken van grendels en bouten in één systeem.
Nieuw geïntegreerd heksysteem
quantec komt naar Benelux
056056 Productnieuws

057
Productnieuws
Cognex introduceert de DataMan 8000 Series: nieuwe handheld scanners
die specifiek zijn ontwikkeld voor intensieve industriële toepassingen. De
ergonomisch in de hand liggende scanners maken gebruik van de gepa-
tenteerde IDMax-technologie, waardoor 1D- en 2D-coderingen snel en
betrouwbaar af te lezen zijn. Dit ongeacht codeafmetingen, printkwaliteit,
printmethode en het soort oppervlak waarop de codering is aangebracht.
Opmerkelijke noviteit is de toepassing van een gevoelige vloeistoflens
met autofocustechnologie. Daarnaast staan verschillende dataprotocollen
ter beschikking voor een snelle communicatie met IT-systemen, waaron-
der naast RS-232 en USB nu ook Industrieel Ethernet.
De DataMan 8000 Series is een goed voorbeeld van de nieuwste genera-
tie handheld scanners voor de industrie. Deze scanners bevatten een
krachtige leesfunctionaliteit en een robuuste vormgeving. Daarnaast be-
schikken ze over snelle en bedrijfszekere communicatiemogelijkheden
met fabrieksnetwerken en ERP-systemen. Hierdoor zijn de scanners ide-
aal voor realtime (online) productidentificatie en tracking & tracing.
Dankzij de autofocus lenstechnologie is de operator in staat zowel kleine
2D-matrixcodes van dichtbij, als langere 1D-barcodes van grotere afstand
in één beweging te scannen - zonder iets te hoeven bedienen. Deze au-
tofocuslens wordt al langer toegepast in de vast opgestelde Cognex-le-
zers. Voor het eerst is een speciaal op mobiele toepassingen afgestemde
ID-scanner met ethernetaansluiting en autofocus lens
Adverteerdersindex
ABB 49 KUKA 60
Cognex 11 NI 43
Elau 4 Pilz 24
Fanuc 2 RAB 33
Fenceworks 49 Valk Welding 59
Industrieplanner 39 Vision in Food 15
Iris Vision 39 ZVS Techniek 57
variant nu ook in de nieuwe scanners te vinden. Aan de basis van de be-
trouwbare code-identificatie van de DataMan 8000 Series liggen twee
krachtige algoritmen, te weten 1DMax en 2DMax. Hiermee kunnen vrij-
wel alle codetypen snel en trefzeker worden geregistreerd met een onge-
kend hoge leesnauwkeurigheid en betrouwbaarheid.
Qua communicatiemogelijkheden zijn de scanners voorzien van de nog
steeds veelgebruikte RS-232- en USB-aansluiting. Nieuw is de aansluiting
voor Industrial Ethernet. Voor de verschillende netwerktypen zijn eenvou-
dig ‘in het veld’ uitwisselbare modules ontwikkeld, waarmee de scanners
ook zijn voorbereid op toekomstige datacommunicatieprotocollen.
De nieuwe serie omvat op dit moment twee verschillende uitvoeringen:
de 8500 en 8100. De DataMan 8500 maakt gebruik van de door Cognex
gepatenteerde UltraLight-lichttechnologie voor superieure beelddetectie
van alle mogelijke codetypen op een breed scala aan ondergrondmateri-
alen. Het belichtingssysteem heeft verschillende mogelijkheden voor res-
pectievelijk ‘dark-field’, ‘bright-field’ en diffuus licht, waarvoor één elek-
tronisch gestuurde lichtbron wordt toegepast. De 8100 verschilt van de
8500 door de eenvoudiger lichtbron. Deze is alleen geschikt voor ‘bright-
field’ verlichting. Deze uitvoering is dan ook geschikt voor toepassingen
waarbij een betrouwbare scanner is vereist en er geen speciale licht-
functies noodzakelijk zijn.
058058 Column
In de stijl van ‘mijn naam is Piet en ik ben burgemeester’ en de volgende
twee herhaalde dit. Het panel moest dan raden wie de echte Piet zou zijn.
Meestal raadde maar één van de vijf panelleden wie van de drie nou de
echte was. Hieruit volgt dat eenieder zich voor kan doen voor iets wat hij
niet is. Ik begin hierover omdat ik op een regenachtige zondagmiddag via
het internet ging zoeken op de zoekterm ‘Robot Systeem Integrator’. Nu
moet u weten dat de RAB, onze branchevereniging, twintig leden telt,
dus ging ik op zoek naar mogelijk nieuwe leden. Een goed initiatief, al
zeg ik het zelf, wat echter eindigde in een enorme verbijstering. Na mijn
zoekopdracht te hebben ingevuld, kreeg ik ongeveer negentig namen in
Nederland te zien. Volgens het spelletje ‘Wie ben ik’ spreekt één op de
drie de waarheid, dus van de negentig kon ik er al meteen zestig wegstre-
pen. Dan heb ik er nog dertig over, waarvan ik er dan twintig (onze leden)
weer kan afstrepen, en dan houd ik er dus nog tien over. Tijd om maar
eens dieper op deze tien in te zoomen. De eerste presenteerde zich als
integrator met drie panden, één voor Research & Development, één voor
Sales en één voor de Productie. Verder werden er hotels in de omgeving
vermeld, want kennelijk waren er zo veel bezoekers dat dit een noodzaak
zou zijn. Ik moet zeggen dat dit bedrijf een prachtige website heeft, de di-
recteur presenteerde zich dan ook als CEO en vermeldde over een wereld-
wijde organisatie te beschikken. Het wereldwijde werd dan ook nog eens
extra bestempeld met een uitvoerige illustratie hiervan. Via de Kamer van
Koophandel raadpleegde ik de inschrijving van dit bedrijf en wat bleek
nu? We hebben hier te maken met een eenmansbedrijf, werkend vanuit
het huisadres. Bij het volgende bezoek aan één van de andere tien sites
kreeg ik heel veel informatie en foto’s te zien van projecten die dit bedrijf
zou hebben gerealiseerd. Enkele van de foto’s herkende ik, want dit waren
foto’s van mijn eigen bedrijf, aangevuld met foto’s van robotfabrikanten
die zo van hun websites waren geplukt. Dit bedrijf vermeldde nog eens
nadrukkelijk dat zij over hun eigen Fanuc- en ABB-programmeurs beschik-
ken. Ik heb wederom de Kamer van Kophandel geraadpleegd en nu blijkt
dat wij hier weer te maken hebben met een eenmansbedrijf, met sinds
kort één werknemer. Wanneer men de website van dit bedrijf bekijkt, dan
lijkt het wel of zij minimaal tientallen robots per jaar installeren. Nu ben
ik absoluut niet tegen eenmansbedrijven. Elk bedrijf, in welke vorm dan
ook, is een bedrijf. Maar dat ze zich via list en bedrog manifesteren en
daarmee onze branche bezoedelen, dat kan ik niet bevatten. Mijn advies
aan de industrie is daarom als volgt: raadpleeg ten minste de website van
de RAB. Dan weet u zeker dat u zaken gaat doen met een bonafide en
gecertificeerde integrator. Ga ook altijd op bezoek bij het bedrijf zelf, en
laat hen aan u de organisatie maar eens tonen. Ook hun ervaring en re-
ferenties behoren tot het scala. Voor de opscheppers heb ik het volgende
advies: doe je nooit groter voor dan je bent. Wees eerlijk, want dat duurt
het langst. En luister naar het oud-Hollandse gezegde: doe maar gewoon,
dan doe je al gek genoeg!
Doe maar gewoon, dan doe je al gek genoeg
eeN aaNTaL jaReN geLeDeN waS eR OP De NeDeRLaNDSe TeLeVISIe eeN SPeLLeTje ONDeR De Naam
‘wIe VaN De DRIe, wIe BeN Ik’. heT gINg aLS VOLgT: eR kwameN DRIe PeRSONeN TeN TONeLe DIe zICh aLLe
DRIe ONDeR DezeLfDe Naam eN BeROeP aaN eeN ONweTeND PaNeL VaN VIjf meNSeN VOORSTeLDeN.
Column
Dat sommige eenmanszaken met list en bedrog onze branche bezoedelen,
kan ik niet bevatten
058

Makes it happen
Robotisering van
las- en handlingprocessen
• Complete lijnautomatisering met Fanuc handling- en Panasonic lasrobots
• Standaard en klantspecifieke lasrobot-systemen met Panasonic lasrobots
• 3D ontwerp en engineering van complete cel lay-out, inclusief lasmallen
• Off-line programmering met Panasonic DTPS G2 software
• Lasbenodigdheden, draadgeleiding-systemen en veiligheidsartikelen
• Europese service & onderhouds organisatie
• Meer dan 1.750 lasrobotsystemen
in Europa geïnstalleerd
• Eigen vestigingen in Oost-Europa, Frankrijk en Scandinavië
Valk Welding BVtel. +31 (0)78 69 170 11fax +31 (0)78 69 195 [email protected]
visit us at Vision & Robotics
Met haar hoofdzetel gevestigd te Augsburg (D) is KUKA één van ‘s werelds grootste leveranciers van industriële robots en automatiseringsprojekten. KUKA Automatisering + Robots N.V. neemt het gebied Benelux voor haar rekening en kan U ondersteunen met volgende produkten en diensten:* Eenuitgebreidgammaaanindustriëlerobotsmeteenpayloadvan5tot1300Kg.
* Machinebesturingen,gebaseerdopdestandaardrobotcontrollers.* UitstekendedienstnaverkoopwatbetreftKUKA-robotsen-besturings-techniek.(training,maintenance,spareparts,programming,...)
* Turnkeyprojektenvoorspecifiekebranchesenapplicaties,zowelvoorautomotivealsookvoordealgemeneindustrie.
* Magnetarc-enwrijvingslasmachines* R&D-projektenopgebiedvanrobotisatieenautomatisatie
Metmeerdan20jaarervaringinonzebrancheenmededooronzeuitgebreideengineerings-enR&D-capaciteitenkanKUKAookvoorUeenmeerwaardebetekenenofUnuintegratorofenduserbent.
U twijfelt nog?...contacteer ons...U zal overtuigd zijn!KUKAAutomatisering+RobotsN.V.IndustrieterreinCentrum-Zuid1031B-3530Houthalen
T +3211516160F +3211526794E [email protected] www.kuka.be
I’m your robot.any ideas?
kuka your ideas www.kuka.be