Neurale plasticiteit: motor babbling - ai.rug.nlkarinz/ICW/ORKI0304/4aneurnetrob.pdf · De ALVINN...
22
Neurale plasticiteit: motor babbling • Leren is een ‘error feedback’ proces • Veel ‘trial & error’ • De natuur geeft het foutsignaal vanzelf
Transcript of Neurale plasticiteit: motor babbling - ai.rug.nlkarinz/ICW/ORKI0304/4aneurnetrob.pdf · De ALVINN...
Neurale plasticiteit: motorbabbling
• Leren is een ‘error feedback’ proces
• Veel ‘trial & error’
• De natuur geeft het foutsignaal vanzelf
Neurale plasticiteit: motorbabbling
Voorbeelden:
– willekeurig trappelende baby in de buik leert eigenspiersysteem kennen door propriocepsis
– na de geboorte: willekeurige armbewegingenbrengen de eigen hand binnen het visuele veld
– het pasgeboren veulen leert snel te staan op basisvan signalen uit het evenwichtsorgaan
Neurale plasticiteit: motorbabbling
• In de jaren tachtig kwamen adaptievetechnieken tot ontwikkeling: ‘neurale’netwerkmodellen
• Hiermee werd het voor het eerst mogelijk omcomplexe robotsystemen ‘zichzelf te lerenkennen’
Een neuron in een NeuraalNetwerkmodel
Gewogen inputs
Sigmoideoverdrachtsfunctie
Output
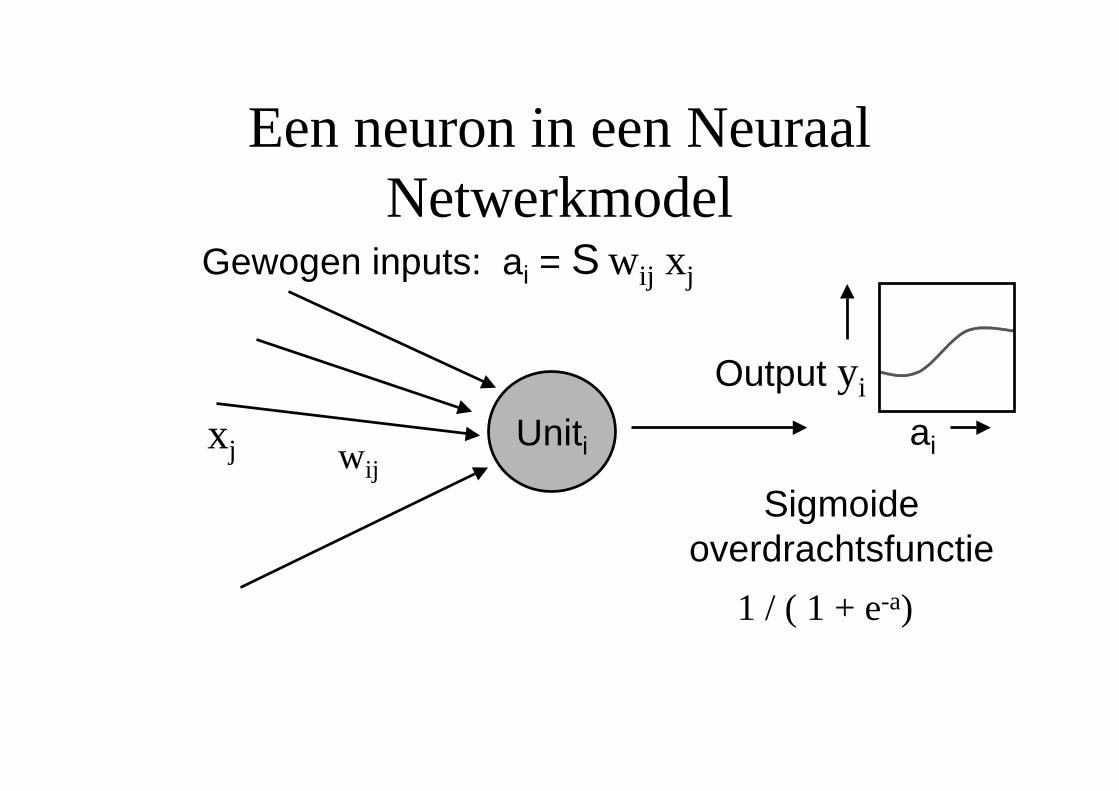
Een neuron in een NeuraalNetwerkmodel
Gewogen inputs: ai = S wij xj
Sigmoideoverdrachtsfunctie
Output yi
Unitixj wij
1 / ( 1 + e-a)
ai
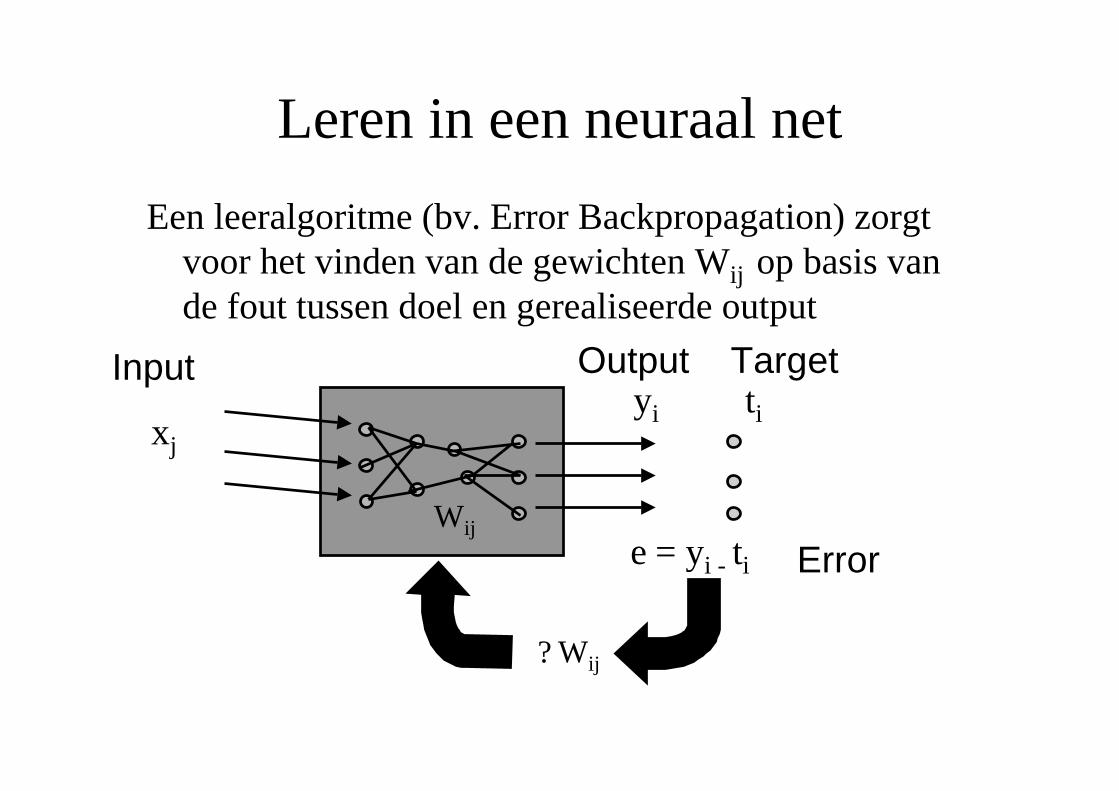
Leren in een neuraal net
Een leeralgoritme (bv. Error Backpropagation) zorgtvoor het vinden van de gewichten Wij op basis vande fout tussen doel en gerealiseerde output
Wij
Input
xj
Output Targetyi ti
? Wij
Error e = yi - ti
Cijferherkenning�Gebruiker geeft voorbeelden van cijfers
�De cijfers worden aan het netwerk gepresenteerd
�Het netwerk berekent per cel de gewogen som van de inputs, en geeft output (sigmoide)
�Het verschil tussen gerealiseerde output van een cel in de laatste laag en de gewenste target (nl de Error) kan worden gebruikt om alle Wij aan te passen
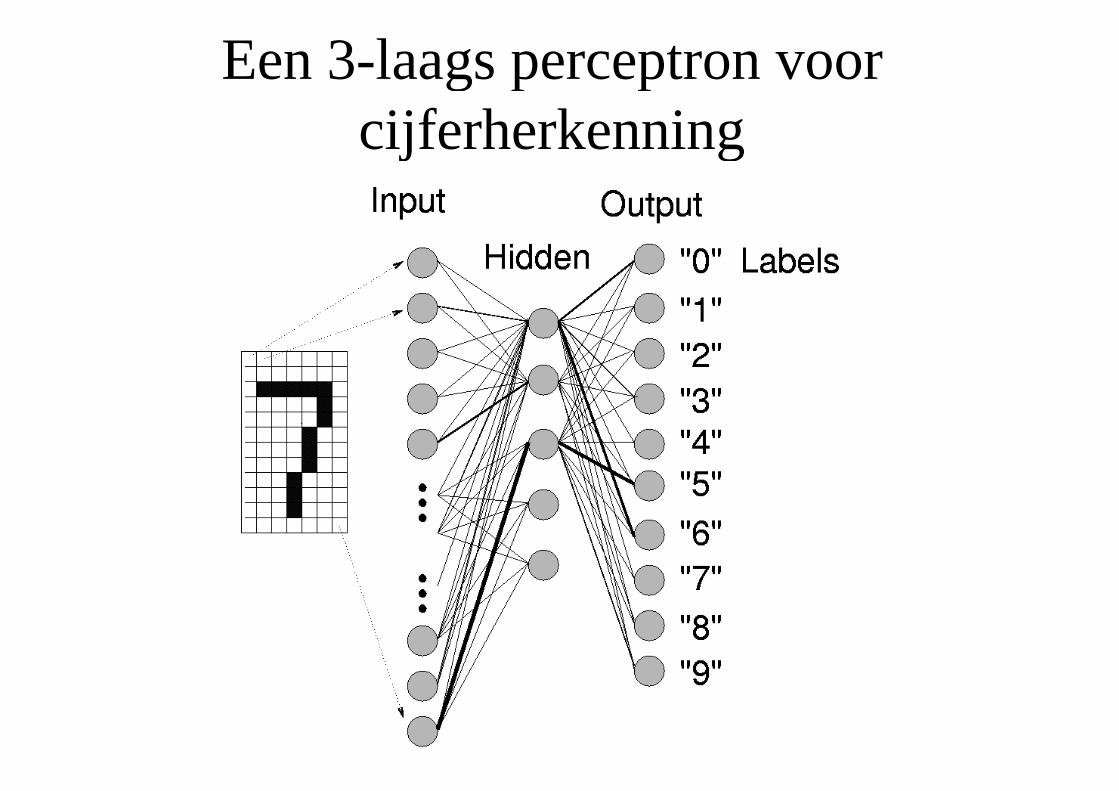
Een 3-laags perceptron voorcijferherkenning

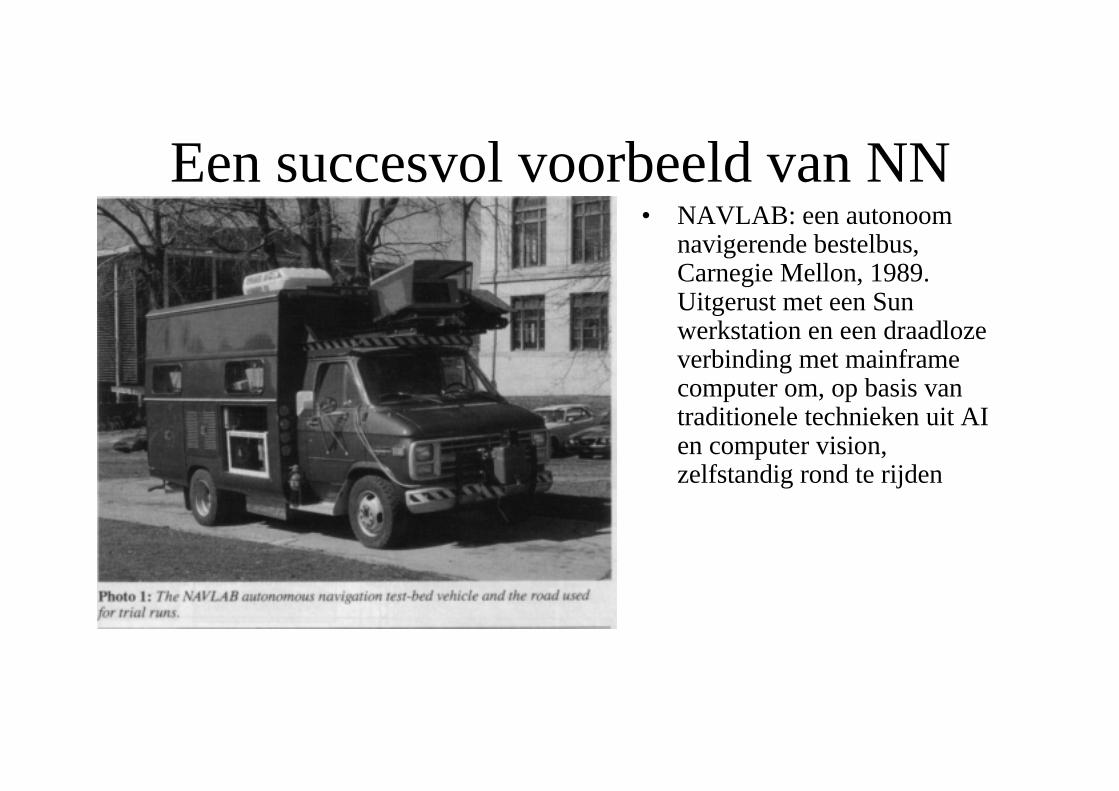
Een succesvol voorbeeld van NN• NAVLAB: een autonoom
navigerende bestelbus,Carnegie Mellon, 1989.Uitgerust met een Sunwerkstation en een draadlozeverbinding met mainframecomputer om, op basis vantraditionele technieken uit AIen computer vision,zelfstandig rond te rijden
Touretzky & Pomerleau: dat moeteenvoudiger
• Gebruik de capaciteit om te leren in eeneenvoudig neuraal netwerkmodel
• Menselijke chauffeur rijdt over de campus, neuraal netwerk kijkt ‘over de schouder’ naar:
Input: 1) camerabeeld, 2) radarbeeld, Output: 3) de stand van het stuur als doel
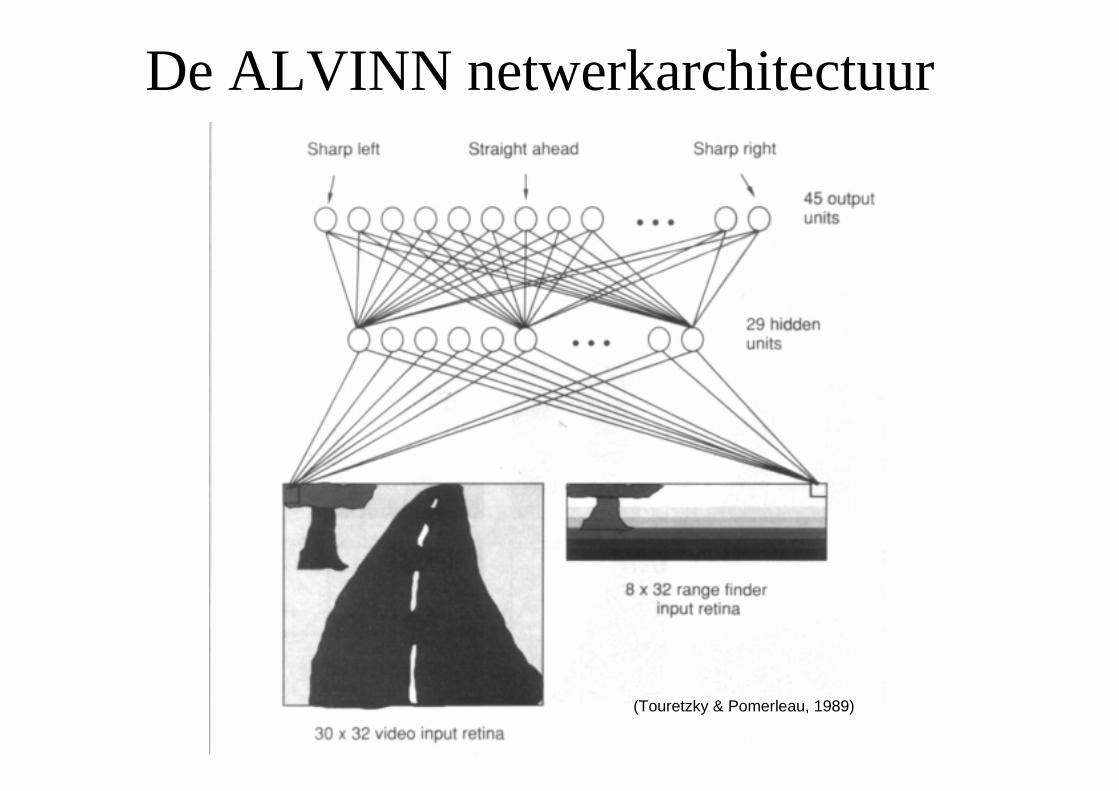
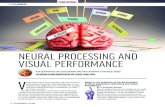
De ALVINN netwerkarchitectuur
(Touretzky & Pomerleau, 1989)
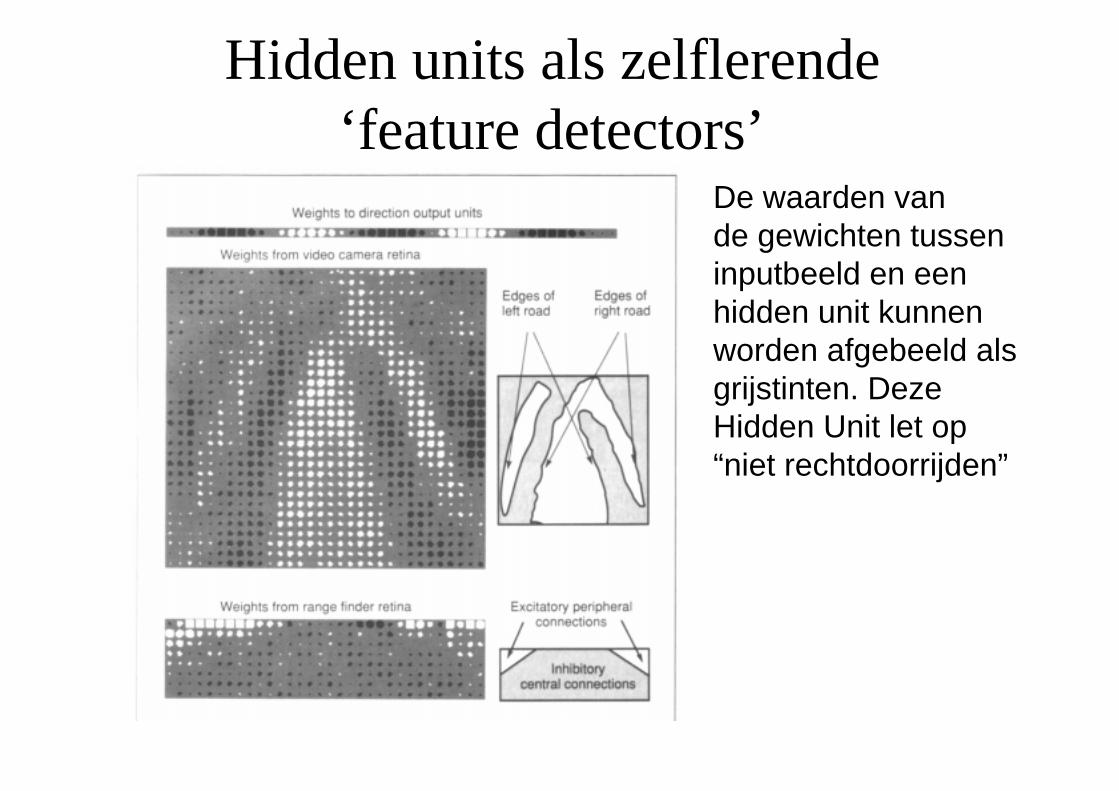
Hidden units als zelflerende‘feature detectors’
De waarden vande gewichten tusseninputbeeld en eenhidden unit kunnenworden afgebeeld alsgrijstinten. DezeHidden Unit let op“niet rechtdoorrijden”
Meer problemen….
• Voortbeweging op basis van navigatie isperceptueel lastig maar motorischeenvoudig (links, rechts, langzaam, snel)
• Armbeweging is een zeer complexprobleem
• Kun je hier ook neurale netwerkengebruiken?
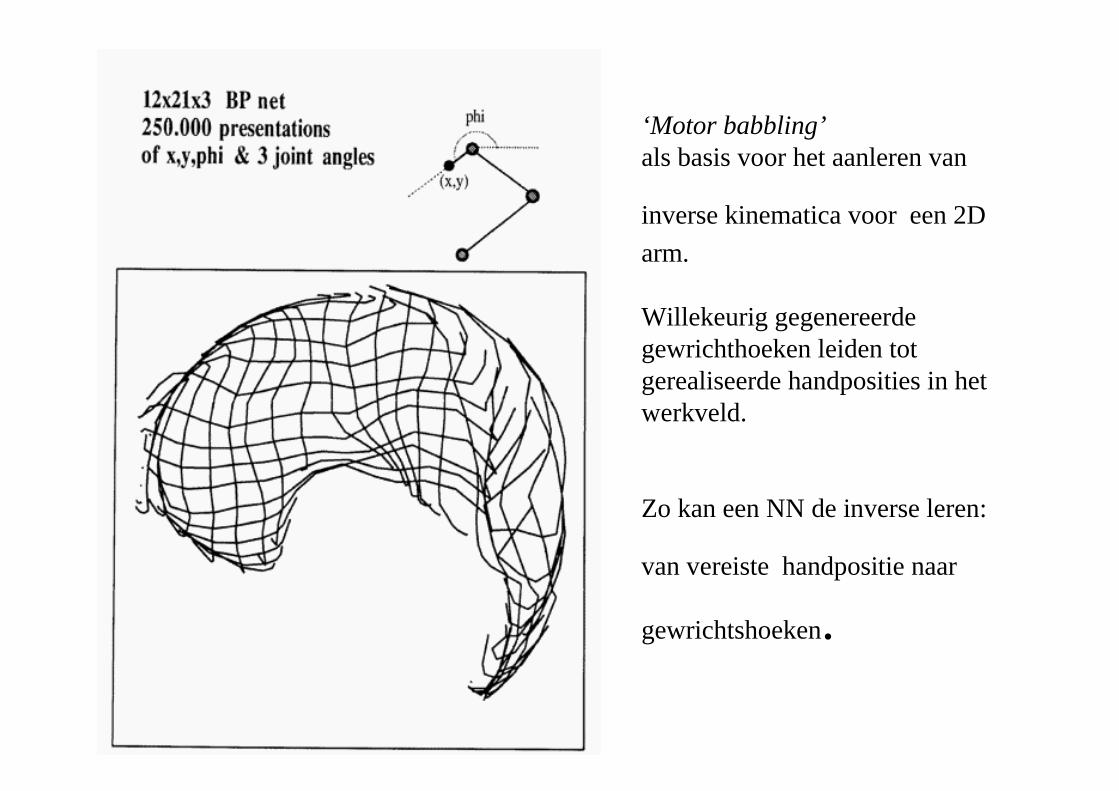
‘Motor babbling’als basis voor het aanleren van
inverse kinematica voor een 2D
arm.
Willekeurig gegenereerdegewrichthoeken leiden totgerealiseerde handposities in hetwerkveld.
Zo kan een NN de inverse leren:
van vereiste handpositie naar
gewrichtshoeken.
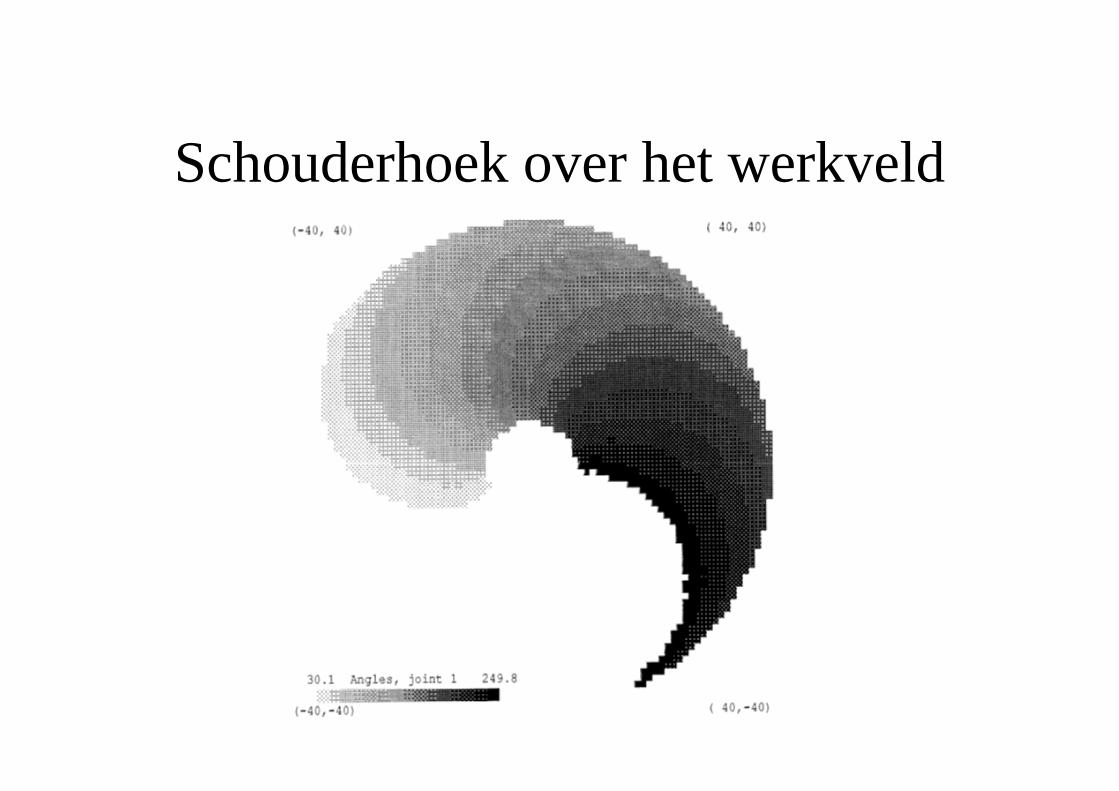
Schouderhoek over het werkveld
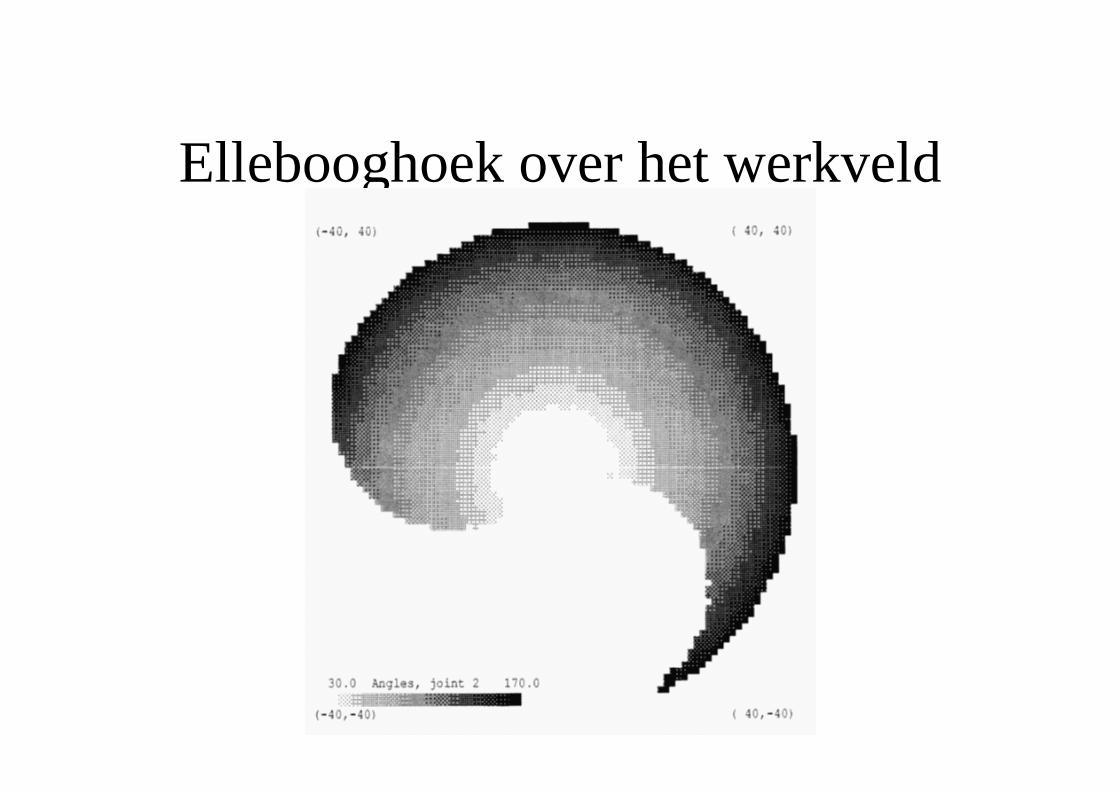
Ellebooghoek over het werkveld
Samenvatting
• We hebben een architectuur (model) datuitgaat van een nauwsluitende koppelingtussen perceptie en motoriek
• We hebben middelen om het leren(adapteren) te kunnen uitvoeren metmachines
• Steeds meer ingredienten voor cognitieverobotica!
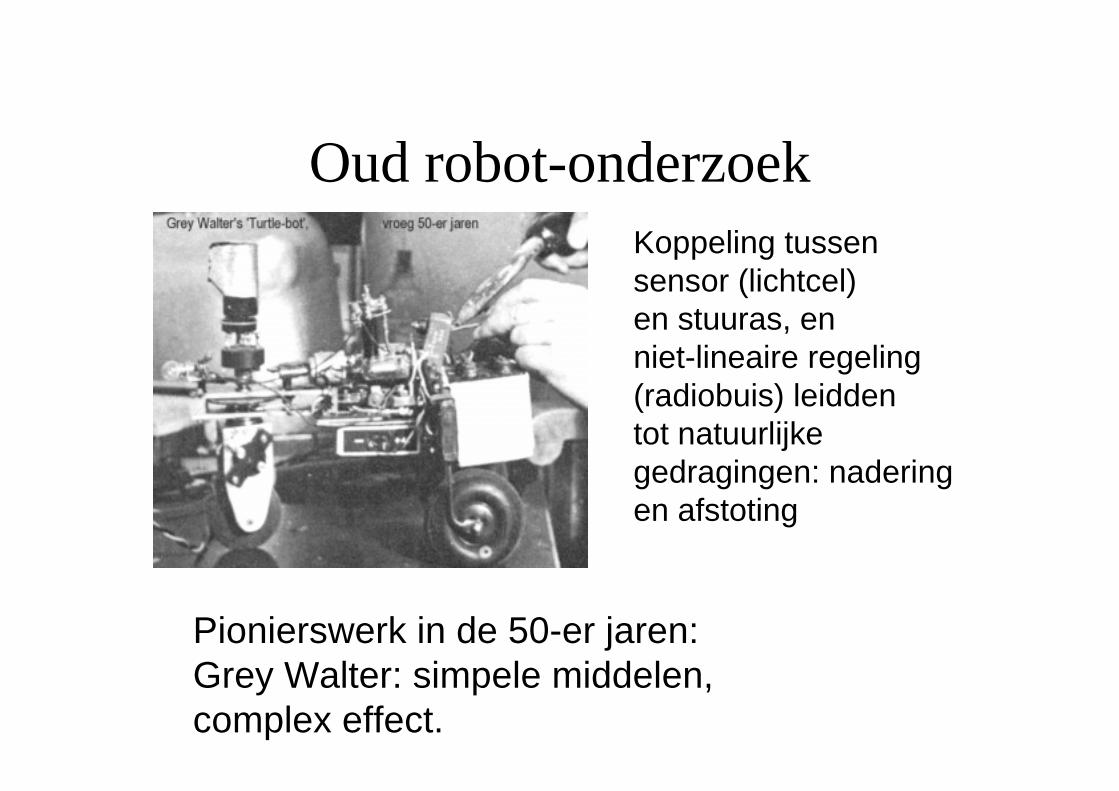
Oud robot-onderzoekKoppeling tussensensor (lichtcel)en stuuras, en niet-lineaire regeling(radiobuis) leidden tot natuurlijke gedragingen: naderingen afstoting
Pionierswerk in de 50-er jaren:Grey Walter: simpele middelen,complex effect.
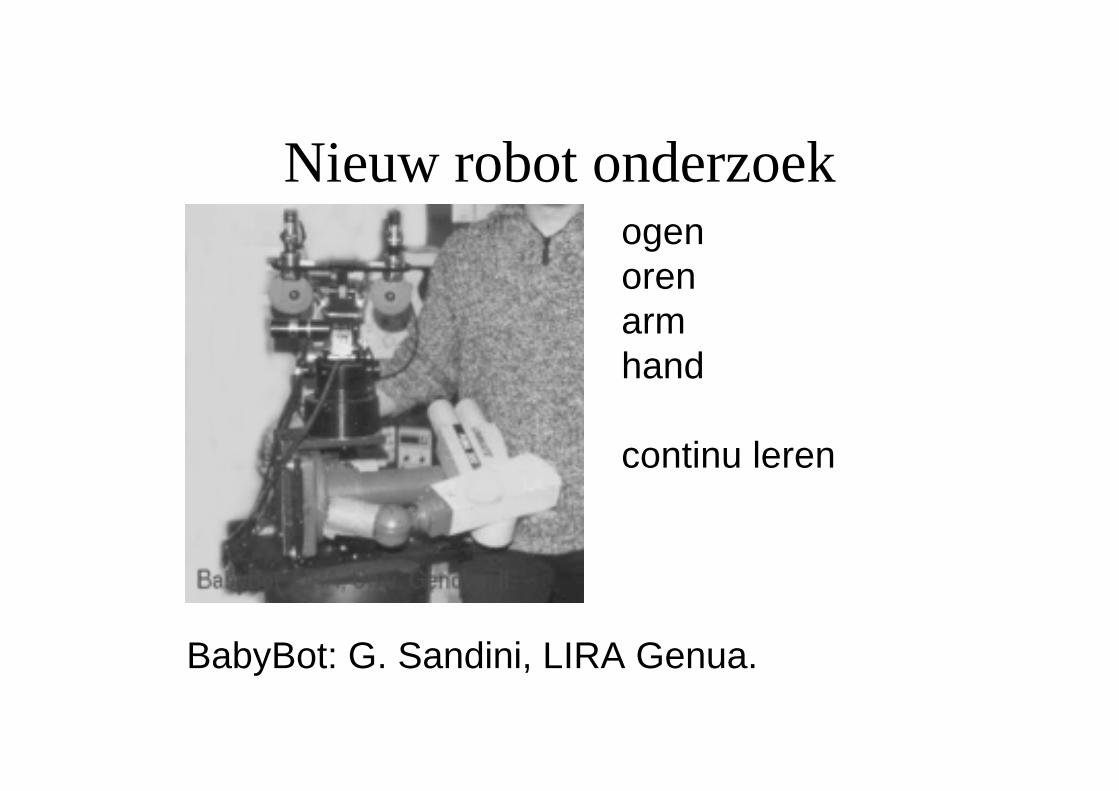
Nieuw robot onderzoek
BabyBot: G. Sandini, LIRA Genua.
ogenorenarmhand
continu leren
Nieuw onderzoek op basis vandeze visie
• 1. Continu lerende systemen, in plaats van eenrobotontwerp voor een specifieke oplossing
• 2. Lezende robots: niet met een ‘scan’ van eentotaalbeeld, en dan alles doorrekenen, maar‘oogsprongen’ met de camera(‘s), om deessentiele informatie op te sporen
• 3. Navigatie in robocup: leer het veld kennen doorrondrijden, botsen en kijken
Conclusies• Perceptie en motoriek kunnen niet los van elkaar
onderzocht en begrepen worden
• De bewegingsproblemen uit de robotica worden inde natuur opgelost met ‘motor babbling’ enneurale adaptatie/plasticiteit
• Uitgaande van deze visie op perceptie, cognitie en motoriek wordenverschillende nieuwe onderzoeken gestart bij KI/RuG: lezende robotsen robotvoetbal.