Mijn site · Web viewIn 1980 ontwikkelde Mercedes-Benz haar eerste zelfrijdende auto. Dit was een...
35
FUTUREROAD CONCEPT 2015 HET DOSSIER FLORES EVERSDIJK, TIMON HOITSMA, TEUN VAN ZUTPHEN EN MAX ZWIEP
Transcript of Mijn site · Web viewIn 1980 ontwikkelde Mercedes-Benz haar eerste zelfrijdende auto. Dit was een...

FUTUREROADCONCEPT
2015
hET DOSSIERFLORES EVERSDIJK, TIMON HOITSMA, TEUN VAN ZUTPHEN EN MAX ZWIEP

InhoudInleiding.......................................................................................................1
Opdrachtgever..........................................................................................1De opdracht..............................................................................................1
Hoe werkt een zelfrijdende auto?................................................................1Het systeem..............................................................................................1Zelfrijdend?...............................................................................................1
Werking automatische systemen.................................................................1Bekende systemen.......................................................................................1
Google Self-Driving Car.............................................................................1Tesla Model S............................................................................................1Scania vrachtwagens................................................................................1
Ontwikkelingsgeschiedenis..........................................................................1Eisen snelweg..............................................................................................1
Breedte van de rijstroken..........................................................................1Breedte van de strepen............................................................................1
Knelpunten analyseren................................................................................1Het weer....................................................................................................1Human Factors..........................................................................................1Wetgeving.................................................................................................1Veiligheid..................................................................................................1Kosten.......................................................................................................1Conclusie...................................................................................................1Begrippen..................................................................................................1Noten........................................................................................................1
Programma van Eisen..................................................................................1Vanuit opdrachtgever...............................................................................1Eigen eisen voor het adviesplan...............................................................1Eigen eisen voor het ontwerpplan.............................................................1
Adviesplan...................................................................................................1Fase 1.......................................................................................................1Fase 2.......................................................................................................1Fase 3.......................................................................................................1Fase 4.......................................................................................................1
1

Ontwerpplan................................................................................................1Korte samenvatting...................................................................................1
FUTUREROAD CONCEPT........................................................................1Werking systemen....................................................................................1
WiCHARGE.............................................................................................1ECOROAD..............................................................................................1MAGIC EYE.............................................................................................1RWScloud...............................................................................................1PRIORITY LANES met TRAFFIC FLOW SYSTEM en DYNAMIC LINES.........1
Maquette...................................................................................................1Script voor de promotie- en informatiefilm..................................................1
Middelen...................................................................................................1Edit........................................................................................................1Opname.................................................................................................1Locatie...................................................................................................1
Scène 1.....................................................................................................1Scène 2.....................................................................................................1Scène 3.....................................................................................................1Scène 4.....................................................................................................1Scène 5.....................................................................................................1Scène 6.....................................................................................................1
Bronnen.......................................................................................................1Bekende systemen....................................................................................1Eisen snelweg...........................................................................................1Ontwikkelingsgeschiedenis.......................................................................1Werking automatische systemen..............................................................1Hoe werkt een zelfrijdende auto...............................................................1
InleidingDe situatie op de weg is aan het veranderen. Auto’s worden steeds slimmer en nemen steeds meer taken van ons over. Zo zijn er al genoeg auto’s die een Lane Departure Warning systeem hebben, een systeem dat je alarmeert als je buiten de lijnen gaat rijden. Ook is de Park Assist al te vinden in de meeste auto’s, een systeem dat de auto voor jou kan fileparkeren. Ondertussen heeft bijna elk merk wel één of meerdere
2

zelfrijdende auto’s in ontwikkeling. Dit zorgt ervoor dat de eisen die gesteld gaan worden aan een weg dus zullen veranderen. OpdrachtgeverOnze opdrachtgever is Laurens Schrijnen, kwartiermaker van de Innovatiecentrale. Dit houdt in dat hij verantwoordelijk is voor de voorbereiding en organisatie van iets geheel nieuws. De innovatiecentrale is een afdeling van Rijkwaterstaat. Rijkswaterstaat is een uitvoeringsorganisatie van de overheid. Rijkswaterstaat heeft als taak de infrastructuur van Nederland te beheren. Rijkswaterstaat zorgt voor zowel de water- als autowegen. Rijkswaterstaat bestaat al ruim 200 jaar. Rijkswaterstaat is al begonnen in 1798 met de oprichting van het Bureau voor den Waterstaat. Toen hielden ze zich vooral bezig met beheer en aanleg van rivieren, wegen en dijken. Dit was de eerste vorm van Rijkswaterstaat zoals we het nu kennen. Rijkswaterstaat is sinds die tijd steeds belangrijker en groter geworden. De opdrachtOnze opdracht is hoe we ervoor kunnen zorgen dat de zelfrijdende auto zich probleemloos met het huidige verkeer kan mengen? En wat is de weg ernaartoe? Welke dingen moeten er zeker nog veranderd worden voordat Nederland helemaal klaar is voor de zelfrijdende auto?Als resultaat van onze opdracht verwachten wij een advies met toelichting voor de opdrachtgever.
3

Hoe werkt een zelfrijdende auto?Het systeemHet systeem van een huidige zelfrijdende auto is dat de auto’s adaptieve cruise control en automatische besturing hebben. De auto blijft dan achter de voorligger rijden en houdt een veilige afstand aan. In files is dit heel handig want de auto kan dan zelf rijden en stoppen. Dit systeem is dus voor een groot deel afhankelijk van een heel uitgebreid GPS-systeem. De auto’s nu hebben een marge nodig van ongeveer 10 meter om te zien op welke weg ze rijden terwijl de zelfrijdende auto maar een afstand van 50 centimeter nodig heeft. Dit systeem moet natuurlijk ook rekening houden met het overige verkeer en hij moet zichzelf daar ook op corrigeren. Sommige bedrijven zijn daarom ook bezig met de ontwikkeling van een systeem dat de omgeving kan lezen door middel van laserstralen die de auto kan uitzenden, een van die bedrijven is lidar. We kennen nu al systemen die ervoor zorgen dat de auto’s binnen de lijnen blijven rijden en verkeersborden kan herkennen.Zelfrijdend?De zelfrijdende auto is eigenlijk nog niet echt zelfrijdend want hij heeft een auto voor zich nodig om echt zelfstandig te kunnen rijden. Het duurt nog heel lang voordat de auto’s echt zelfstandig kunnen rijden. Je kan nu bijvoorbeeld nog niet rustig je mailtje en je krantje lezen als je met de auto naar huis gaat. Ook kan je nog niet gewoon je bestemming intypen en dan niks doen zonder dat er een andere auto voor je rijdt. Dat de auto nu automatisch inparkeert zonder dat je iets hoeft te doen is dan weer niet heel speciaal.
4

Werking automatische systemenIn de auto’s die nu op de markt zijn, zitten al veel automatische systemen. Sommige zijn ingewikkelder dan andere. Van welke technieken maken deze systemen gebruik? En hoe werken ze?Een redelijk nieuw automatisch systeem in een auto is het automatisch inparkeren. Je vindt het tegenwoordig in veel auto’s van allerlei verschillende merken. Automatisch inparkeren is een voorbeeld van een actief parkeerhulp systeem. Actieve parkeerhulp systemen vervangen of helpen de bestuurder doormiddel van meetinstrumenten. Deze meetinstrumenten maken gebruik van ultrasone of elektromagnetische sensoren. Ultrasone sensoren maken gebruik van geluidstrillingen die niet hoorbaar zijn voor mensen. De sensoren zitten meestal in de voor- en achterkant van een auto. De sensoren zenden ultrasone geluidstrillingen uit en een apparaatje in de sensor meet de tijd die het kost voor het geluid om terug te kaatsen van voorwerpen in de buurt. Zo berekent het systeem de afstand naar het voorwerp. Kom je dicht bij het voorwerp, dan krijgt de bestuurder een waarschuwing in de vorm van een pieptoon. Als het waarschuwingssignaal harder en sneller piept, betekent het dat je het voorwerp nadert en het bijna gaat raken. Elektromagnetische sensoren maken gebruik van elektromagnetische stralen. Ze werken hetzelfde als ultrasone sensoren. Behalve dat in plaats van geluidstrillingen die niet waarneembaar zijn voor ons gehoor, wordt er gebruik gemaakt van elektromagnetische stralen die niet waarneembaar zijn voor onze ogen. Een ander meetinstrument is lidar. Dat staat voor Laser Imaging Detection And Ranging. Lidar werkt bijna hetzelfde als een radar. Er wordt een signaal uitgezonden en dit signaal wordt even later weer teruggekaatst. Zo wordt de afstand tot een voorwerp bepaalt. Het enige verschil tussen de radar en lidar is dat er bij lidar, de naam zegt het al, gebruik wordt gemaakt van lichtstralen en bij radar worden radiogolven gebruikt. Dit heeft als voordeel dat veel kleinere objecten ‘gezien’ kunnen worden. Dat komt omdat de golflengte van laserstralen variëren tussen de 10 µm en 250 nm, 10 micrometer en 250 nanometer. De golflengte van radiogolven is ongeveer 1 cm. In vergelijking veel groter en dus onnauwkeuriger. Met deze systemen kan de auto een parkeerplek als het ware ‘zien’ en de automobilist een signaal geven dat hier geparkeerd kan worden. De auto kan zelf vooruit en achteruit rijden en ook zelf sturen. Zo wordt de auto geparkeerd en hoeft de bestuurder vrijwel niets te doen.Deze systemen zouden gebruikt kunnen worden in een zelfrijdende auto. Natuurlijk moet het automatisch inparkeren een optie zijn, maar de ultrasone en elektromagnetische sensoren kunnen ook gebruikt worden
5

om andere rijdende auto’s te herkennen in het verkeer. Zo kan de zelfrijdende auto reageren op wat de andere auto’s doen.
6

Bekende systemenGoogle Self-Driving CarDe Google Self-Driving Car is een project van Google waarbij er technologie ontwikkeld wordt voor zelfrijdende auto’s. Het model van Google maakt gebruik van een lidar-systeem. Op het dak zit een ronddraaiende laser waarmee de auto een driedimensionale kaart maakt van de omgeving en deze combineert met hoge resolutie kaarten, waardoor de auto een model kan maken waarmee de auto weet hoe die moet rijden. Het nieuwste systeem houdt rekening met de hoogte van verkeerslichten en maakt gebruik van computers in de auto en buiten de auto om data te berekenen.Tesla Model SDe Tesla model S is een voorbeeld van een auto die al heel erg ver ontwikkeld is als een deels zelfrijdende auto. Sinds september 2014 hebben alle nieuwe Tesla model S auto’s een camera aan de bovenkant van de voorruit, een radar in het onderste rooster en in allebei de bumpers een supersonische geluidssensor die een omgeving van 360 graden rond de auto dekken. Daarbovenop heeft de auto ook Adaptive Cruise Control en Lane Departure Warning. Als je een Tech Package koopt, kan de auto ook deels zelf rijden en automatisch inparkeren, en vanaf oktober 2015 krijgen de nieuwe auto’s een functie waarmee je in veel situaties handsfree kan rijden. Later wordt ook een update verwacht waarmee de auto vanzelf in en uit een garage kan rijden.Scania vrachtwagensHet bedrijf Scania heeft een tijd geleden een konvooi zelfrijdende vrachtwagens over de snelweg laten rijden. Deze vrachtwagens maken gebruik van een systeem dat “Platooning” heet. De vrachtwagens worden door bestuurders bestuurd totdat ze zich aansluiten bij een konvooi. Dan wordt de vrachtwagen vanzelf verbonden met de andere vrachtwagens en rijdt deze vanzelf achter zijn voorganger aan. De voorste vrachtwagen dient als leider van het konvooi. Als deze vrachtwagen remt, remmen de andere vrachtwagens ook met dezelfde dosering. De chauffeur heeft altijd controle over zijn eigen wagen en kan elk moment zelf beslissen of hij het konvooi verlaat.
7

OntwikkelingsgeschiedenisJe zou het niet verwachten, maar de eerste zelfrijdende auto is al ontwikkeld in 1925! Dit was dus al een kleine 40 jaar nadat de eerste auto met verbrandingsmotor de weg op kwam. Dit eerste systeem werkte nog vrij eenvoudig. De zelfrijdende auto was uitgerust met antennes op het dak, en werd bestuurd door een tweede auto die erachter reed. Deze auto zond radiogolven uit die werden ontvangen door de zelfrijdende auto. Deze golven gaven signalen door aan kleine elektromotoren die de richting waarin de zelfrijdende auto reed aanstuurden. In 1939 werd er ook een mooi voorbeeld getoond van een zelfrijdende auto. Dit was op de wereldtentoonstelling in New York City. Dit concept maakte gebruik van elektromagnetische velden die waren ingebouwd in het wegdek. Hierdoor konden de auto’s weten wat ze moesten doen. In 1953 ging men weer wat verder. Toen lukte het RCA Labs, een onderzoeksinstituut, om een miniatuurauto te bouwen en deze te besturen door kabels die in een bepaald patroon in het wegdek waren ingebouwd. In 1958 werd er een levensgrote variant gedemonstreerd, over een stuk wegdek van 121 meter lang. De ingebouwde circuits in het wegdek waren geschikt om golven naar de zelfrijdende auto te zenden en deze hiermee te besturen. De circuits in het wegdek konden metalen herkennen om zo aan te geven of er een auto op het wegdek aanwezig was. Men verwachtte dat dit systeem in 1975 breed uitgerold zou kunnen worden. Rond deze tijd begon ook in Groot-Brittannië de ontwikkeling van zelfrijdende auto’s. Het ‘Transport and Road Research Laboratory’ was het gelukt om een Citroën DS zelf te laten rijden met behulp van magnetische kabels in het wegdek. Deze auto kon zelfs een snelheid bereiken van 130 km/h! In 1970 gingen ze zelfs nog verder en bouwden ze een systeem voor cruise control in, wat geactiveerd werd door bepaalde signalen ingebouwd in de kabels. In 1980 ontwikkelde Mercedes-Benz haar eerste zelfrijdende auto. Dit was een busje, ontwerpen door een team van de Universiteit München. Dit busje behaalde een snelheid van 63 km/h op een straat zonder ander verkeer. In dezelfde tijd ontstond het DARPA-project ALV. De DARPA is een R&D afdeling van het Amerikaanse ministerie van Defensie. Zij geven vaak opdrachten aan bedrijven om bepaald product te ontwikkelen. ALV staat voor ‘Autonomous Land Vehicle’. Dit project was het eerste dat gebruik maakte van LIDAR en een gerobotiseerd aandrijfsysteem. Dit voertuig had een topsnelheid van 31 km/h. Maar dit voertuig kon ook op moeilijk begaanbaar terrein (steile hellingen, ravijnen, grote rotsen en veel planten). Over een traject van 610 meter had het voertuig een gemiddelde snelheid van 3,1 km/h. In 1991 begon de echte doorbraak. Toen werd er door het Amerikaanse Congres een plan gepresenteerd, dat als kern had om in 1997 een zelfrijdende auto en bijbehorend snelwegsysteem te presenteren. Dat
8

lukte. In San Diego werd in 1997 een demonstratie gegeven met ongeveer twintig zelfrijdende voertuigen, zoals bussen, auto’s en vrachtwagens. Hier werd ook het begrip platooning geïntroduceerd. Dit betekent dat een aantal voertuigen in een konvooi op kort afstand achter elkaar rijden, met alleen in het voorste voertuig een chauffeur. Hierdoor wordt de capaciteit van de weg vergroot, waardoor er meer voertuigen kunnen rijden. Dit verkleint weer de kans op files. Vanaf dat moment gaan meer organisaties zich bezighouden met zelfrijdende auto’s. In 1995 slaagt de ‘Carnegie Mellon University’ erin om een reis van 5000 km te voltooien waarbij het voertuig ruim 98% van de tijd zelf reed, waarbij alleen het gas- en rempedaal door een persoon werden bestuurd.
Een voorbeeld dichterbij huis is de Park Shuttle van Connexxion. Dit is een geleide busdienst. Dit betekent dat er geen chauffeur in de bus zit maar dat het voertuig zelf weet waar hij heen moet door middel van een elektronisch spoor, waarbij gebruik wordt gemaakt van FROG-technologie (Free Ranging on Grid, wat een besturingssysteem is voor geleide voertuigen). Een andere voorbeeld van zo’n busdienst was de Phileas in Eindhoven. Dit
systeem heeft het uiteindelijk wegens kostenbesparingen, fouten in het ontwerpproces en omdat de reizigers het niet prettig vonden dat er geen chauffeur achter het stuur zat niet gehaald. Nu is het in Eindhoven dus gewoon een bus met chauffeur. In Rotterdam heeft de Park Shuttle het wel gehaald. Deze ‘Lijn 500’ bestaat uit een klein wagentje, zonder chauffeur, dat op en neer rijdt tussen de twee eindstations. Het voertuig heeft ook een eigen rijstrook, zodat incidenten met andere voertuigen zijn uitgesloten. Als er een kruising is met andere rijstroken, wordt er gebruik gemaakt van slagbomen, om te voorkomen dat het automatische wagentje wordt aangereden door een andere voertuig. Nu zijn er steeds meer autobedrijven die zich bezighouden met de ontwikkeling van een zelfrijdende auto. Google, General Motors, Ford, Mercedes-Benz, Nissan, Audi, BMW, Volvo en Scania bijvoorbeeld. De meeste van deze bedrijven zijn ook al aan het testen op de openbare weg. Zo heeft Google nu al in vier staten toestemming om daar de zelf-ontwikkelde autonome auto te testen. Google heeft nu minstens tien prototypes, waarvan zes keer een Toyota Prius, één keer een Audi TT en drie keer een Lexus RX450h.Google heeft in december 2014 een nieuw prototype gepresenteerd. Dit prototype heeft géén pedalen, stuur en handrem. De enige manier waarop
9

de inzittenden (van een bestuurder kun je tenslotte al niet meer spreken) kunnen ingrijpen is door op een ‘paniek-knop’ te drukken. De voertuigen hebben al bijna overal in de staat Californië gereden, ook langs bekende attracties zoals de Golden Gate Bridge en om Lake Tahoe. Sinds Google is gestart met de ontwikkeling van de zelfrijdende auto hebben ze al meer dan 1,1 miljoen kilometers afgelegd (april 2014). Dit geeft dus ook aan hoe serieus Google de zelfrijdende auto neemt.Mercedes-Benz heeft de huidige S-klasse (die door enkele experts de beste auto van dit moment wordt genoemd) zo op de markt gebracht, met bepaalde functies, dat hij zonder al te veel aanpassingen al zelf kan rijden. Maar deze technologie is dus ook al beschikbaar voor de consumenten die nu zo’n auto kopen. De S-klasse bijvoorbeeld, beschikt over onderstaande systemen:
ADAPTIVE BREAK met wegrijhulp voor hellingen en HOLD-functie Actieve motorkap: als de auto een aanrijding met een fietser of
voetganger detecteert wordt de motorkap automatisch met 8 cm verhoogd
ABS voorkomt blokkering van de remmen ASR is een antislipregeling ATTENTION ASSIST houdt de vermoeidheid van de bestuurder in de
gaten en waarschuwt wanneer de concentratie wegvalt en de bestuurder in slaap dreigt te vallen
BAS is een systeem dat extra remkracht uitoefent als de bestuurder remt in noodsituaties, waardoor de remweg wordt verkort. Het BAS PLUS systeem is uitgerust met een kruispunt assistent, waarmee ook het kruisende verkeer in de gaten wordt gehouden en de auto zelf kan remmen.
COLLISION PREVENTION ASSIST waarschuwt de bestuurder als deze een frontale botsing dreigt te hebben met het voertuig wat ervoor rijdt. Het systeem zal eerst de bestuurder waarschuwen, maar mocht deze niets doen kan het systeem ook zelf remmen.
ESP is het elektronisch stabiliteitsprogramma
10

PRE-SAFE is een systeem dat de gordels aanspant in het geval van een frontale botsing. Bij een dreigende botsing tot 200 km/u kan de auto zelf remmen.
Zijwind assistent corrigeert de auto als er sprake is van sterke windstoten, waardoor de auto uit koers raakt.
LED ILS is een systeem dat gebruikt maakt van adaptief grootlicht, wat inhoudt dat je altijd grootlicht kunt voeren en de auto zelf de tegenliggers uit de bundel licht houdt, waardoor deze niet worden verblindt.
Nachtzichtassistent die waarschuwt voor overstekende mensen en dieren in het donker. De persoon of het dier zal dan ook met een speciale lichtstraal worden verlicht, zodat deze zelf ook weet dat er een auto aankomt, en de bestuurder op de persoon of het dier attent wordt gemaakt.
DISTRONIC PLUS is een adaptief cruise control systeem, dat automatisch een vaste afstand tot de voorganger volgt. Dit betekent dus dat de auto zal accelereren als de auto die ervoor rijdt dat ook doet (tot de maximum snelheid natuurlijk) en de auto ook zal afremmen als de auto die ervoor rijdt dat doet. Hierbij is ook een stuurhulp die bij lage snelheden de auto zelf kan sturen.
Actieve spoor assistent houdt de wegmarkeringen in de gaten. Als de auto over de markering gaat terwijl er geen richtingaanwijzer wordt gebruikt, grijpt de auto zelf in door middel van remingrepen aan een kant van de auto (waardoor de auto gecorrigeerd wordt).
Actieve dodehoek assistent houdt de dode hoeken in de gaten en kan eveneens de auto corrigeren (op dezelfde manier als hierboven).
Het is belangrijk en fijn om te weten dat er al zoveel systemen zijn ontwikkeld. En in de toekomst zullen daar nog vele systemen bijkomen, die het rijden voor ons een stuk makkelijker en veiliger maken. De zelfrijdende auto is dus echt niet iets van de laatste jaren. Er wordt al sinds 1920 onderzocht hoe we het de mens makkelijker kunnen maken. Maar nu zitten we wel in de tijd waarin de zelfrijdende auto zijn doorbraak zal beleven.
11

12

Eisen snelwegAls wij de introductie van de zelfrijdende auto willen versoepelen of veiliger willen maken, moeten we mogelijk de vormgeving van de snelweg aanpassen. Hierbij moeten we wel rekening houden met de eisen en richtlijnen die aan snelwegen worden gesteld.Hier volgen enkele voorbeelden van eisen die aan snelwegen worden gesteld:Breedte van de rijstrokenEen snelweg heeft minimaal 4 rijstroken waarvan 2 in elke richting. De gemiddelde breedte van een rijstrook met de functie ‘rijden’ is 3,50 meter, maar rijstroken op andere snelwegen kunnen ook 3,25 meter breed zijn. De breedte van de rijstrook met de functie vluchten, ook bekend als vluchtstrook, moet minimaal 2,50 meter zijn maar in Nederland zijn de vluchtstroken vaak 3,15 meter breed.
13
Hoe breed moet de strook zijn?

Het grootste deel van de vormgeving zal hetzelfde blijven. De opbouw van het asfalt en de vormgeving van bochten zullen niet hoeven te veranderen. Wegmeubilair en –markeringen op en langs de weg, zoals lijnen en borden, zouden wel kunnen veranderen. Hierbij moeten we bijvoorbeeld rekening houden met de eisen voor de breedte van de lijnen of voor de zichtbaarheid van de borden.In ons plan zullen we toch, mogelijk, de wetgeving moeten veranderen. Voor de invoering van zelfrijdende auto’s moet sowieso de wetgeving veranderen, maar als de vormgeving van de weg verandert mogelijk nog meer.
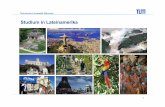
Knelpunten analyserenVoordat we gaan ontwerpen en na gaan denken over dé oplossing, is het eerst belangrijk om te weten waar de knelpunten liggen voor de
14
Schematische weergave van een weg in de breedte

zelfrijdende auto. Op deze manier weten we ook beter waar we op moeten letten bij het opstellen van onze eisen.In de vorige hoofdstukken hebben we al aangegeven hoe de zelfrijdende auto werkt, welke systemen er zijn, hoe de zelfrijdende auto zich heeft ontwikkeld en welke auto’s er op de markt zijn. De informatie die we daarbij hebben opgedaan kunnen we heel goed gebruiken bij het analyseren van de knelpunten. Het weerTen eerste speelt het weer een belangrijke factor. In heftige weersomstandigheden, zoals zware regen en sneeuw, kan het zicht van de zelfrijdende auto worden beperkt. Ook kan de wegmarkering zijn bedekt waardoor de zelfrijdende auto niet meer kan inschatten waar hij rijdt op de rijbaan. Dit kan een gevaar opleveren voor de verkeersveiligheid van andere weggebruikers en de veiligheid van de inzittenden. Human FactorsDaarnaast spelen Human Factors een belangrijke rol. Hoe oplettend zijn mensen in een zelfrijdende auto? Reageert de mens snel genoeg om in geval van het uitvallen van het systeem in te kunnen grijpen om een ongeluk te voorkomen3? Kunnen mensen accepteren dat ze geen invloed hebben op de route en de besturing van de auto? Kunnen mensen hun (eventuele) angst overwinnen om in de zelfrijdende auto te stappen? Je zou dit kunnen vergelijken met een lift. Dit was in het begin ook spannend, maar nu stappen de meeste mensen zonder problemen in. Hier moesten we ons ook overgeven aan de techniek. Maar de knelpunten liggen niet alleen bij de inzittenden. Ook de invloed van het overige wegverkeer speelt een belangrijke rol. De zelfrijdende auto weet precies wat die van plan is. Dit zou hij ook van andere zelfrijdende auto’s kunnen weten door middel van onderlinge communicatie. Maar de ‘normale’, niet-zelfrijdende auto’s hebben een onvoorspelbaar weggedrag. Hier zitten namelijk nog gewoon menselijke bestuurders in. Deze kunnen soms een manoeuvre uitvoeren waar de zelfrijdende auto misschien geen antwoord op heeft. En wat als de zelfrijdende auto moet uitwijken voor een obstakel. Er moeten natuurlijk geen ongevallen ontstaan. De andere weggebruikers moeten hier natuurlijk aan wennen. Maar dit zou ook een probleem ook kunnen leveren. Er zullen altijd individuen blijven die in hun eigen niet-zelfrijdende auto misbruik gaan maken van de functies van de zelfrijdende auto. Zullen ze bijvoorbeeld gevaarlijker gaan rijden omdat ze er vanuit mogen gaan dat de zelfrijdende auto hier toch wel op anticipeert? WetgevingTen derde is de wetgeving nog een probleem. Met name de aansprakelijkheid is nu nog een heikel punt. Wie is aansprakelijk in het geval van een incident (met al dan niet een dodelijke afloop)? Is dat de inzittende van de zelfrijdende auto? Maar die inzittende heeft geen invloed op het gedrag van de auto. Zou dan de fabrikant van de auto verantwoordelijk zijn? De auto is tenslotte daar ontwikkeld, gebouwd en
15

uitgebreid getest. En als de fabrikant alle testen al heeft uitgevoerd, zou dan de RDW aansprakelijk zijn? Alle auto’s die in Nederland op de weg komen zijn tenslotte getest en gekeurd door deze instantie.Dit zal niet anders zijn bij zelfrijdende auto’s. Kan bij een incident dan de RDW aansprakelijk worden gesteld? En bij de goedkeuring spelen natuurlijk ook een aantal factoren een belangrijke rol1. De mate van automatisering, de verwachtingen die de autofabrikant wekt van het systeem en of er sprake is van communicatie met ander verkeer en/of de infrastructuur. Want tot nu toe is de bestuurder nog steeds aansprakelijk bij incidenten tijdens het testen met zelfrijdende auto’s2.Maar de aansprakelijkheid is niet het enige knelpunt op het gebied van de wetgeving. De huidige wetgeving is simpelweg nog niet klaar voor de komst van de zelfrijdende auto. De wetgeving blokkeert nu de vooruitgang van de zelfrijdende auto. In de Wegenverkeerswet staat bijvoorbeeld dat de bestuurder van een voertuig dat met een snelheid van meer dan 10 km/h rijdt, altijd het stuur moet vasthouden. Maar afgelopen jaar is er door de minister van Infrastructuur en Milieu een speciale regeling geïntroduceerd, waardoor Nederland aantrekkelijker wordt voor fabrikanten die zelfrijdende auto’s willen testen. Hiervan zijn er al een aantal testen geweest, zoals het ‘Platooning’ project van Scania op de A28 bij Zwolle en de testen van DAVI waar de minister zelf ook achter het stuur heeft gezeten 1. Deze regeling is al een mooi voorschot op de toekomstige wetten die er nodig zijn om de zelfrijdende auto in Nederland toe te laten. Met diezelfde wetten kunnen we er straks ook voor zorgen dat de efficiëntie van de zelfrijdende auto niet meer hoeft te worden beperkt en dat de bestuurder niet altijd meer zijn/haar handen aan het stuur hoeft te houden.VeiligheidTen vierde is de veiligheid natuurlijk cruciaal. Het moet zeker zijn dat de zelfrijdende auto heel erg veilig moet is. Daarom is het nu ook zo belangrijk dat er jaren wordt getest om ervan uit te kunnen gaan dat de zelfrijdende auto op alle mogelijke verkeerssituaties kan reageren. Op maandag 11 mei kwam via persbureau AP naar buiten dat er in de staat Californië vier keer een incident had plaatsgevonden met zelfrijdende auto’s van Google en Delphi Automotive6. Dit hebben de bedrijven niet zelf gebracht en is dus gelekt. Zeker om straks de veiligheid van de inzittenden te kunnen waarborgen is het van een groot belang dat de organisaties die bezig zijn met de ontwikkeling van hun zelfrijdende auto openheid van zaken geven. Het is daarbij wel belangrijk om te vermelden dat de schuld van de incidenten niet bij de auto zelf lag en dat de auto’s niet harder reden dan 16 km/u ten tijde van het incident. Heeft de zelfrijdende auto dan invloed op het weggedrag van anderen?Diezelfde veiligheid is ook op cybervlak van belang. Het is te verwachten dat er in de toekomst een ‘Internet of Things’ zal ontstaan, waarbij alle met het internet verbonden apparaten met elkaar zullen communiceren5. Hierdoor zou er een centrale database kunnen ontstaan met alle digitale informatie over niet alleen ons wegennet, maar nog veel meer. Het zou
16

een groot gevaar zijn als deze onderlinge communicatie onderschept zou worden, met alle mogelijke, levensbedreigende gevolgen van dien. Ook heeft eenieder een zeker recht op privacy. Na de bekendmakingen dat de NSA allerlei communicatie heeft afgetapt, is dit zeker ook een factor om rekening mee te houden. KostenHierbij is samenwerking tussen de bedrijven ook nog een aandachtspunt. Op dit moment gebeurt dat op het gebied van de zelfrijdende auto bijna niet. Op deze manier worden de kosten voor het ontwikkelen van de zelfrijdende auto redelijk hoog, terwijl de meeste bedrijven allemaal met iets soortgelijks bezig zijn.En ook is het natuurlijk interessant hoe we ervoor kunnen zorgen dat we de lange en de korte termijn kunnen combineren om tot een goede, definitieve oplossing te komen4? Een oplossing die ook voor de gebruiker van de zelfrijdende auto te personaliseren is5? ConclusieEr zijn dus nog wel wat knelpunten, die ervoor zouden kunnen zorgen dat de lancering en toelating van een zelfrijdende auto in Nederland vertraagd worden. Om de optimale lancering mogelijk te maken is het belangrijk dat de knelpunten van tevoren goed worden geanalyseerd.BegrippenHuman Factors: Het vakgebied human factors houdt zich bezig met het ontwerpen van de omgeving, processen en werkplekken, producten of informatie waarmee wij -de gebruikers- optimaal kunnen functioneren. (https://www.humanfactors.nl/humanfactors)
Platooning: Vrachtwagens die elektronisch aan elkaar gekoppeld zijn rijden achter elkaar. De voorste vrachtauto fungeert als leider voor de andere vrachtauto’s. (http://www.scania.nl/about-scania/media/platooning/)
DAVI: Samenwerkingsorganisatie die streeft naar de ontwikkeling van een zelfrijdende auto. (www.davi.nl)
Internet of Things: Alle apparaten die online met elkaar communiceren. Ze vormen samen een groot ‘internet of things’, oftewel het internet der dingen. (https://www.mediawijsheid.nl/internet-of-things/)
NSA: Een Amerikaanse geheime dienst die is gespecialiseerd in het vergaren, afluisteren en analyseren van elektronische informatie uit communicatie via telefonie, internet en het ontcijferen via cryptoanalyse. (http://nl.wikipedia.org/wiki/National_Security_Agency)
Noten1 Brief aan Tweede Kamer van de minister van Infrastructuur en Milieu, op 23 januari 2015. 31305 nr 212 over Mobiliteitsbeleid.
17

2
http://www.rijksoverheid.nl/onderwerpen/auto/vraag-en-antwoord/aansprakelijk-bij-ongeluk-met-zelfrijdende-auto.html3 Verkeer in Beeld magazine, #06 dec 2013, ‘De ontwikkeling van de zelfrijdende auto’ door Agnes Joostma. 4 Brief aan Tweede Kamer van de minister van Infrastructuur en Milieu, op 4 november 2013. 31305 nr 207 over Mobiliteitsbeleid. 5 Het vervoer van morgen begint vandaag, van Stichting Toekomstbeeld der Techniek. Publicatie nr. 78 in 20136 http://nos.nl/artikel/2035155-zelfrijdende-auto-vier-keer-betrokken-bij-ongeluk.html
18

Programma van EisenOm ervoor te zorgen dat we straks een goed ontwerp en adviesplan kunnen presenteren, maken we gebruik van een Programma van Eisen, ook wel een PvE genoemdVanuit opdrachtgever
Nieuw en innovatief Verkeersveiligheid
Eigen eisen voor het adviesplan Plan met meerdere uitvoerfases met steeds verder gevorderde
automatisering Elke fase heeft een duidelijke uitleg, mogelijkerwijs met
afbeeldingen Voorbereid op de toekomst Duidelijke ‘schets’ van de weg naar volledige automatisering Bestaande wetgeving zo min mogelijk aanpassen
Eigen eisen voor het ontwerpplan Geschikt voor alle weersoorten Goede uitwerking met onderbouwing De veiligheid van de passagiers moet niet in het gedrang komen Het vervoer moet zo efficiënt mogelijk gaan Er moet een koppeling komen tussen de infrastructuur, de
zelfrijdende auto en de passagiers, bijvoorbeeld door een ‘Internet of Things’.
Moet uitvoerbaar zijn Financieel haalbaar De belangrijkste eisen voor een snelweg (zie deelopdracht 2.1)
moeten verwerkt worden in het ontwerpplan De snelweg moet worden aangepast voor geheel zelfrijdende auto’s De snelweg moet een moderne uitstraling hebben Het moet een beleving zijn om over de snelweg te rijden Het systeem moet toegankelijk zijn voor ontwikkelaars
19

AdviesplanFase 1We verwachten dat fase 1 rond 2020 aanbreekt. De eerste zelfrijdende auto's komen op de markt, maar het grote publiek is nog niet geïnteresseerd. Dit komt door de hoge kosten voor de aanschaf van zo'n auto. De zelfrijdende auto zal naar verwachting al binnen tien jaar op de markt komen. Om voor die tijd al een oplossing te construeren, terwijl het aanbod zelfrijdende auto's nog relatief beperkt is, heeft niet heel veel nut. Daarom zullen we in de eerste fase naar totale autonomie alleen de regelgeving aanpassen, en kleine, snel realiseerbare oplossingen doorvoeren om te zorgen dat de zelfrijdende auto geen gevaar is in het verkeer.De wetgeving schrijft nu nog voor dat er altijd iemand achter het stuur moet zitten. Dit gaat we natuurlijk veranderen. Maar de zelfrijdende auto krijgt deze toestemming alleen als hij eerst uitgebreid getest is door de fabrikant, en later door de Rijksdienst voor het Wegverkeer (RDW). Het RDW moet nu al in Nederland alle auto's keuren, en hier zal deze taak bijkomen. Er zullen speciale medewerkers moeten worden opgeleid die zich specifiek bezig houden met deze taak. De aansprakelijkheid in het geval van een incident zal afhankelijk bij de aard van het incident kunnen liggen bij: de eigenaar (achterstallig onderhoud), de fabrikant (grove fouten in de software), de RDW (fout gemaakt bij de toelatingsprocedure) of Rijkswaterstaat (fouten in de infrastructuur). Daarnaast pleiten wij voor een zogeheten 'zwarte doos' in elke zelfrijdende auto. Dit is een belangrijk instrument waardoor men veel meer kan leren over de oorzaak van een eventueel incident. Dit is belangrijk voor de toekomst, omdat we zo kunnen leren van in het verleden gemaakte fouten. Hier kunnen we dan weer eventuele knelpunten in de infrastructuur op aanpassen. Om ervoor te zorgen dat andere weggebruikers zich veilig voelen bij de aanwezigheid van de zelfrijdende auto in het verkeer, zal RWS de mogelijkheid geven tot het volgen van een cursus. Deze cursus zal mensen leren hoe een zelfrijdende auto zich gedraagt in het verkeer, en hoe men ermee om moet gaan. Ook zal er een grootschalige campagne (op meerdere platforms) worden gestart, waarmee dit onder de aandacht wordt gebracht van het grote publiek. Tenslotte zouden wij voor deze fase de opbouw van een subsidiefonds adviseren, zodat de men sneller een zelfrijdende auto zal aanschaffen. Met name omdat de aanschafprijs in het begin nog zeer hoog zal liggen. Door
20

dit subsidiefonds hopen we de opname door het grote publiek te bevorderen.Fase 2We verwachten dat fase 2 in de periode 2025-2030 aanbreekt. De zelfrijdende auto begint populair te worden. Door de ingebruikname van het subsidiefonds beginnen meer burgers de voordelen in te zien van de zelfrijdende auto. De prijs van de zelfrijdende auto begint te zakken. Het wordt belangrijk dat de zelfrijdende auto zijn eigen ruimte krijgt om ervoor te zorgen dat de voordelen van de zelfrijdende auto zo optimaal mogelijk worden benut. Daarom introduceren we in deze fase de PRIORITY LANES. Het systeem hiervan wordt verder uitgelegd bij de werking van de systemen in het ontwerpplan. Deze rijstroken zijn speciaal gemaakt voor de zelfrijdende auto’s. Dit systeem zorgt ervoor dat mensen sneller een zelfrijdende auto gaan kopen omdat je zo veel sneller op de plaats van bestemming bent.Fase 3Fase 3 zal, volgens onze verwachtingen, ongeveer beginnen in 2030. Het verkeer bestaat dan voor ongeveer de helft uit zelfrijdende auto's en de mensen zijn nu al gewend aan het idee van de zelfrijdende auto, er is geen angst meer. Als het nodig is, kan de wetgeving nog aangescherpt worden, en de zelfrijdende auto blijft in populariteit groeien. Verder zal er echter nog niet veel veranderen in deze fase. Fase 4In fase vier zal de meerderheid van alle auto's op de weg zelfrijdend zijn. Omdat de zelfrijdende auto nu de standaard is, kan ook het openbaar vervoer geautonomiseerd worden. Dat hebben wij verwerkt in dit concept:De manier om je in de toekomst te verplaatsen: maak gebruik van de mobiliteitsservice van JourneyPlan. Voer je locatie in op de app en JourneyPlan berekent automatisch de beste vervoersmethode. Dit kan zijn met een autonome auto van JourneyPlan, of met de metro. De reisplanner van JourneyPlan - genaamd JourneyPlanner - laat ook de vertrektijd zien om te zorgen dat je altijd op tijd op je locatie bent.Op de site van JourneyPlan maak je een profiel aan waarmee je altijd jouw vervoersmethode kunt gebruiken. Je schaft een abonnement aan waarmee je kunt reizen. Er zijn verschillende abonnementen voor verschillende frequenties van reizen, die allemaal een ander kostenplaatje hebben. Door het eerder aangemaakte profiel weet JourneyPlan precies wat jouw voorkeuren zijn. Hierdoor kunnen er bijvoorbeeld gepersonaliseerde advertenties worden getoond. Door deze manier van inkomsten zullen de kosten voor de gebruikers van de JourneyPlanner ook worden beperkt. Maar dit biedt ook ruimte voor de adverteerders, die hun advertenties aan een selecter publiek kunnen tonen, wat de effectiviteit van de advertenties vergroot.
21

De vloot van JourneyPlan-voertuigen zal bestaan uit verschillende merken. Wel zullen ze allemaal volledig geautomatiseerd zijn, wat voor de inzittende inhoudt dat deze nergens meer naar om hoeft te kijken.
22

OntwerpplanKorte samenvattingFUTUREROAD CONCEPTDe weg van de toekomst voor de zelfrijdende auto’s is hier. Deze weg vatten we samen in het FUTUREROAD CONCEPT. Deze weg zorgt ervoor dat de voordelen van de zelfrijdende auto optimaal worden benut. Door gebruik te maken van innoverend technologie, kunnen we er ook in de toekomst voor zorgen dat Nederland voorop loopt op het gebied van het gebruik van nieuwe technologie. Werking systemenWiCHARGEDit is een systeem dat ervoor zorgt dat de zelfrijdende auto tijdens het rijden kan worden opgeladen. Dit gebeurt door middel van spoelen die in het wegdek zijn ingebouwd. Hierdoor hoeven de zelfrijdende auto’s van de toekomst, die hoogstwaarschijnlijk een elektrische aandrijflijn hebben, geen accu meer te bevatten. De auto’s kunnen dus lichter en goedkoper worden, wat fijn is voor de consument maar ook voor de fabrikant, die hiermee ontwikkelingskosten bespaart. Door de wegen op deze manier te voorzien van een laadpunt voor zelfrijdende auto’s, wordt het gemak voor de consument om langere afstanden met de zelfrijdende auto af te leggen, verhoogd. Hierdoor hopen we te bereiken dat de implementatie van de elektrisch aangedreven zelfrijdende auto door de consument wordt omarmd.
ECOROADWe hebben besloten om ons wegdek een groene kleur te geven. De groene kleur associeert men met natuur. Daarnaast is het dan meteen
23

duidelijk dat het hier gaat om een rijstrook/rijbaan voor de zelfrijdende auto. Het wegdek is ook groen geproduceerd. De productie van asfalt is een belastend proces voor het milieu. We hopen dat we op deze manier een klein beetje kunnen bijdragen aan het tegengaan van het broeikaseffect. Om er tenslotte voor te zorgen dat ons wegdek zo duurzaam mogelijk gebruikt kan worden, hebben we er ook voor gekozen om zonnepanelen in het wegdek aan te brengen. Deze zonnepanelen voorzien het WiCHARGE systeem van elektriciteit, zodat er minder gebruikt hoeft te worden van het al zwaarbelaste elektriciteitsnet. MAGIC EYEDe MAGIC EYE technologie zorgt ervoor dat de verkeerscentrale weet waar alle zelfrijdende voertuigen zich bevinden. Deze technologie is ingebouwd op een chip, die wordt aangebracht in het wegdek. Deze chip zit in een behuizing, die wordt ingebouwd in elke rijstrook, om de 100 meter. Met behulp van deze chip krijgt de zelfrijdende auto zelf ook informatie doorgestuurd, die gebruikt wordt voor het entertainment-systeem. De MAGIC EYE technologie maakt gebruik van Wi-Fi om de data door te sturen. De MAGIC EYE is gekoppeld aan de RWScloud. Door deze koppeling hebben beide partijen hier voordeel van.
RWScloudIn de RWScloud wordt alle data verwerkt die binnenkomt via de zelfrijdende auto. De RWScloud is gekoppeld aan een online verkeerscentrale en de MAGIC EYE technologie. Hierdoor weet deze verkeerscentrale altijd waar het druk is en kan deze de situatie op de weg hierop aanpassen door gebruik te maken van de PRIORITY LANES met FTS en DYNMAIC LINES.
24

Er blijft natuurlijk een reëel gevaar aanwezig van hacking. Als de RWScloud gehackt zou worden, wordt het voor de zelfrijdende auto’s redelijk complex om hun weg te vervolgen. Daarom wordt de RWScloud beveiligd door middel van de hoogste encryptiestandaard die op dat moment aanwezig is. De werking van dit systeem moet vaak worden getest om te voorkomen dat er een storing ontstaat in dit systeem.
25

PRIORITY LANES met TRAFFIC FLOW SYSTEM en DYNAMIC LINESDit systeem is vooral belangrijk in de fases tussen totale autonomie en nu. Dit systeem zorgt ervoor dat er bij een grotere verkeersintensiteit van zelfrijdende auto’s een speciale rijstrook vrijkomt, de zogeheten PRIORITY LANE, die alleen gebruikt mag worden door zelfrijdende auto’s. De maximumsnelheid kan op zo’n moment worde verhoogd, waardoor de zelfrijdende auto’s eerder op hun plaats van bestemming zullen aankomen. Het TRAFFIC FLOW SYSTEM meet de verkeersintensiteit door middel van de informatie die binnenkomt bij de RWScloud. Met deze informatie kijkt het systeem hoeveel auto's er rijden op de snelweg. Het systeem bepaald zo of de PRIORITY LANE geopend of gesloten moet worden. Dit doet het systeem doormiddel van DYNAMIC LINES. Een groot aantal LEDs in het wegdek vormen doormiddel van wit licht een doorgetrokken streep als de PRIORITY LANE gesloten is voor de gewone auto. Als het verkeersaanbod van zelfrijdende auto's relatief laag is, zal het systeem er voor kiezen om de PRIORITY LANE ook te openen voor de gewone auto. Dan gaan een deel van de LEDs uit zodat de doorgetrokken streep een deelstreep wordt.
26

MaquetteOm een duidelijke weergave te kunnen geven van ons, hebben we besloten om een maquette te bouwen. In deze maquette hebben wij alle systemen schematisch weergegeven, om zo een concreet beeld te kunnen geven van ons concept. Hieronder zullen wij wat foto’s plaatsen van de maquette.
27

Script voor de promotie- en informatiefilmMiddelenEdit
Adobe Voice Adobe Premiere Pro Studiomicrofoon
Opname iPhone 5s Nikon P500 Statief
Locatie Brug over A2 bij Huizingalaan A50 tussen Eindhoven en Sint-Oedenrode
Dit is de toelichting op de scènes.Dit is de tekst voor de voice-over.
Dit is de functie van de scène.Dit zijn de middelen die we op het beeld gebruiken.
YouTube link naar filmpje:
https://youtu.be/vMLTQlS67QI
28

BronnenBekende systemen http://en.wikipedia.org/wiki/Google_driverless_car http://en.wikipedia.org/wiki/Lidar http://en.wikipedia.org/wiki/Autonomous_car http://en.wikipedia.org/wiki/Tesla_Model_S http://www.scania.nl/about-scania/media/platooning/Eisen snelweghttp://www.rijkswaterstaat.nl/images/Nieuwe%20Ontwerprichtlijn%20Autosnelwegen%20%28NOA%29_tcm174-325052.pdfOntwikkelingsgeschiedenishttp://en.wikipedia.org/wiki/History_of_autonomous_carwww.mercedes-benz.nl%2Fcontent%2Fnetherlands%2Fmpc%2Fmpc_netherlands_website%2Fnl%2Fhome_mpc%2Fpassengercars%2Fhome%2Fnew_cars%2Fmodels%2Fs-class%2Fw222.html&ei=TbRdVaveB6uv7AaxpYGIDw&usg=AFQjCNEWyH_shj8fhWDy_6nF7lS59xsPBgWerking automatische systemenhttp://nl.wikipedia.org/wiki/Lidarhttp://www.youtube.com/watch?v=9DKP1NIwHTEhttp://en.wikipedia.org/wiki/Parking_sensorshttp://nl.wikipedia.org/wiki/Elektromagnetismehttp://en.wikipedia.org/wiki/Automatic_parkingHoe werkt een zelfrijdende autohttp://www.anwb.nl/auto/nieuws/2015/maart/zelfrijdende-auto
29