Lineaire Algebra - staff.science.uu.nlzilte001/WISB312_maat_en_integratie... · Hoofdstuk 1...
203
Lineaire Algebra WISB121 F.Beukers 2013 Departement Wiskunde UU
Transcript of Lineaire Algebra - staff.science.uu.nlzilte001/WISB312_maat_en_integratie... · Hoofdstuk 1...
Lineaire Algebra
WISB121
F.Beukers 2013
Departement Wiskunde UU


Inhoudsopgave
1 Vectoren in de ruimte 71.1 Het intuıtieve vectorbegrip . . . . . . . . . . . . . . . . . . . . . 71.2 Vlakke en ruimtelijke meetkunde . . . . . . . . . . . . . . . . . . 91.3 Coordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4 Analytische meetkunde . . . . . . . . . . . . . . . . . . . . . . . . 121.5 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 Inwendige producten 202.1 Inproduct . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2 Inproducten en coordinaten . . . . . . . . . . . . . . . . . . . . . 202.3 Vergelijking van een vlak . . . . . . . . . . . . . . . . . . . . . . . 232.4 Voorbeelden van rekenen met lijnen en vlakken . . . . . . . . . . 242.5 Hoger dimensionale vectorruimten . . . . . . . . . . . . . . . . . 252.6 Meetkunde in dimensie n (optioneel) . . . . . . . . . . . . . . . . 272.7 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3 Matrices en lineaire vergelijkingen 333.1 Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.2 Lineaire vergelijkingen en Gauss eliminatie . . . . . . . . . . . . 353.3 n vergelijkingen in n onbekenden . . . . . . . . . . . . . . . . . . 403.4 Homogene en inhomogene stelsels . . . . . . . . . . . . . . . . . . 443.5 Deelruimten en opspansels . . . . . . . . . . . . . . . . . . . . . . 453.6 Scalairen (optioneel) . . . . . . . . . . . . . . . . . . . . . . . . . 453.7 Coderingstheorie (optioneel) . . . . . . . . . . . . . . . . . . . . . 473.8 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4 Onafhankelijkheid en rang 574.1 Afhankelijkheid . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.2 Dimensie en rang . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.3 Rang van een matrix . . . . . . . . . . . . . . . . . . . . . . . . . 624.4 Dimensies van lineaire deelruimten . . . . . . . . . . . . . . . . . 644.5 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5 Determinanten in dimensies 2,3 695.1 Georienteerd volume in R2 . . . . . . . . . . . . . . . . . . . . . . 695.2 Uitwendig product . . . . . . . . . . . . . . . . . . . . . . . . . . 705.3 Georienteerd volume in R3 . . . . . . . . . . . . . . . . . . . . . . 71
3

4 INHOUDSOPGAVE
5.4 Determinanten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.5 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6 Determinanten 76
6.1 Permutaties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.2 Algemene determinanten . . . . . . . . . . . . . . . . . . . . . . . 78
6.3 Eigenschappen van determinanten . . . . . . . . . . . . . . . . . 80
6.4 De berekening van determinanten . . . . . . . . . . . . . . . . . . 83
6.5 De VanderMonde determinant (optioneel) . . . . . . . . . . . . . 86
6.6 Regel van Cramer . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.7 Geadjungeerde en inverse . . . . . . . . . . . . . . . . . . . . . . 88
6.8 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.9 Extra opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7 Vectorruimten 96
7.1 Axioma’s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.2 Afhankelijkheid . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.3 Lineaire afbeeldingen . . . . . . . . . . . . . . . . . . . . . . . . . 103
7.4 Lineaire afbeeldingen in eindige dimensie . . . . . . . . . . . . . . 107
7.5 Vectorruimteconstructies (optioneel) . . . . . . . . . . . . . . . . 112
7.6 Scalairen (optioneel) . . . . . . . . . . . . . . . . . . . . . . . . . 113
7.7 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
7.8 Extra opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
8 Eigenwaarden en eigenvectoren 122
8.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
8.2 Berekening van eigenwaarden en eigenvectoren . . . . . . . . . . 124
8.3 Basiseigenschappen . . . . . . . . . . . . . . . . . . . . . . . . . . 126
8.4 Polynomen en hun nulpunten (optioneel) . . . . . . . . . . . . . . 129
8.5 Multipliciteiten en Jordan normaalvorm . . . . . . . . . . . . . . 132
8.6 Cayley-Hamilton (optioneel) . . . . . . . . . . . . . . . . . . . . . 133
8.7 Een toepassing, Google’s Pagerank (optioneel) . . . . . . . . . . 134
8.8 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
9 Vectorruimten met inproduct 144
9.1 Inwendige producten . . . . . . . . . . . . . . . . . . . . . . . . . 144
9.2 Orthogonale en orthonormale stelsels . . . . . . . . . . . . . . . . 147
9.3 Orthogonale projecties . . . . . . . . . . . . . . . . . . . . . . . . 152
9.4 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
10 Symmetrische en orthogonale afbeeldingen 161
10.1 Symmetrische afbeeldingen . . . . . . . . . . . . . . . . . . . . . 161
10.2 Orthogonale matrices . . . . . . . . . . . . . . . . . . . . . . . . . 163
10.3 Orthogonale afbeeldingen . . . . . . . . . . . . . . . . . . . . . . 165
10.4 Standaardvorm orthogonale afbeeldingen . . . . . . . . . . . . . . 167
10.5 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
INHOUDSOPGAVE 5
11 Antwoorden 17211.1 Hoofdstuk 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17211.2 Hoofdstuk 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17311.3 Hoofdstuk 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17311.4 Hoofdstuk 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17511.5 Hoofdstuk 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17611.6 Hoofdstuk 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17611.7 Hoofdstuk 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17811.8 Hoofdstuk 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18411.9 Hoofdstuk 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19011.10Hoofdstuk 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
Hoofdstuk 1
Vectoren in de ruimte
1.1 Het intuıtieve vectorbegrip
Het begrip vector komen we tegen in grote delen van de wiskunde en natu-urkunde. Ook komen ze in heel veel verschillende gedaanten voor. Zo wordenbijvoorbeeld krachten en snelheden in de natuurkunde voorgesteld door vec-toren. In de wiskunde gebruiken we vectoren om punten in de ruimte weerte geven, maar later zal blijken dat ook oplossingen van lineaire (differenti-aal)vergelijkingen gezien kunnen worden als vectoren. In het begin gaat hetom grootheden die een richting en een grootte hebben, tegen het eind zullen weook met het abstractere vectorbegrip kennismaken. Wij zullen deze cursus heelaanschouwelijk beginnen en zo de basis leggen voor algemenere vectorbegrippendie we later zullen zien.
We introduceren het begrip vector als een translatie (= verschuiving) van deruimte. Een dergelijke translatie kunnen we ons voorstellen door middel vaneen pijl, die aangeeft in welke richting de verschuiving moet plaatsvinden enover welke afstand de verschuiving plaatsvindt. Daarbij hebben we meerderemogelijkheden om de pijl te tekenen. Het is hopelijk duidelijk dat onderstaandetwee pijlen dezelfde translatie representeren (Ze zijn even lang, parallel, enwijzen in dezelfde richting).
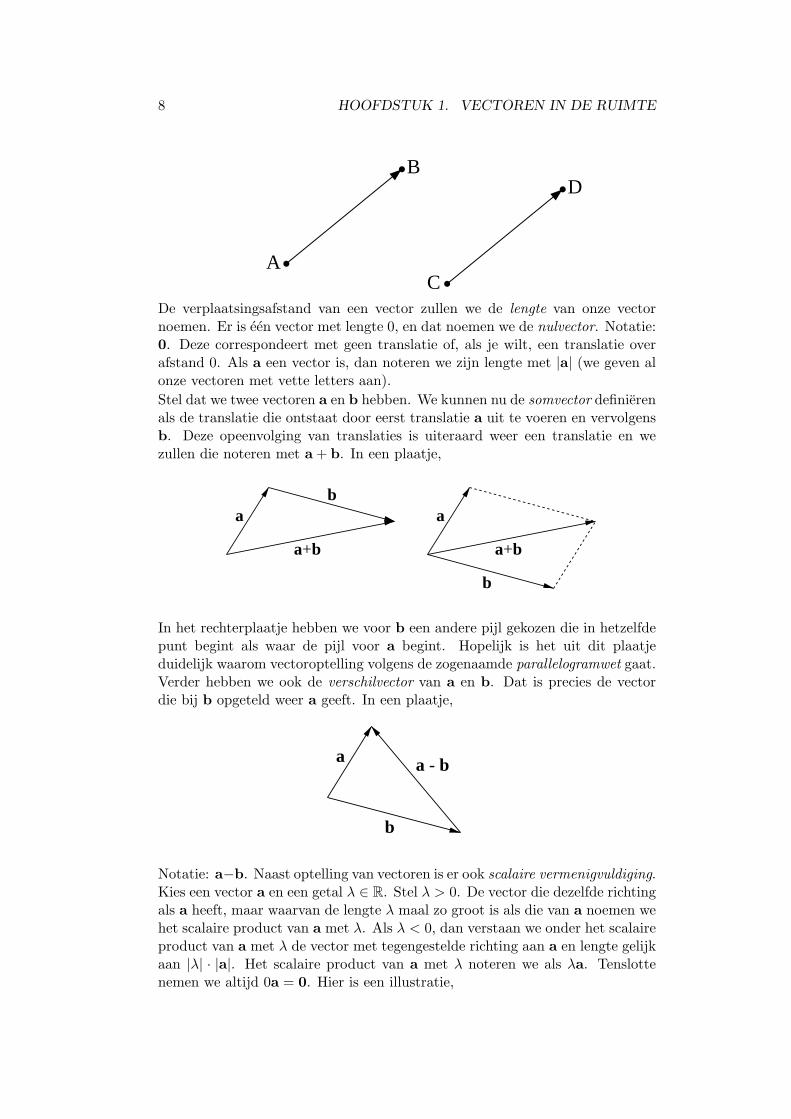
Kies een punt A en een vector v. Dan zal v het punt A naar een ander puntB verschuiven. We zullen de vector v dan ook wel eens als
−−→AB aangeven.
Dezelfde vector v kan ook een punt C naar een ander punt D verplaatsen. Dankunnen we ook schrijven v =
−−→CD . De notaties
−−→AB en
−−→CD stellen in dit geval
dus dezelfde vector voor.
7
8 HOOFDSTUK 1. VECTOREN IN DE RUIMTE
A
B
C
D
De verplaatsingsafstand van een vector zullen we de lengte van onze vectornoemen. Er is een vector met lengte 0, en dat noemen we de nulvector. Notatie:0. Deze correspondeert met geen translatie of, als je wilt, een translatie overafstand 0. Als a een vector is, dan noteren we zijn lengte met |a| (we geven alonze vectoren met vette letters aan).
Stel dat we twee vectoren a en b hebben. We kunnen nu de somvector definierenals de translatie die ontstaat door eerst translatie a uit te voeren en vervolgensb. Deze opeenvolging van translaties is uiteraard weer een translatie en wezullen die noteren met a+ b. In een plaatje,
ab
a+b
a
b
a+b
In het rechterplaatje hebben we voor b een andere pijl gekozen die in hetzelfdepunt begint als waar de pijl voor a begint. Hopelijk is het uit dit plaatjeduidelijk waarom vectoroptelling volgens de zogenaamde parallelogramwet gaat.Verder hebben we ook de verschilvector van a en b. Dat is precies de vectordie bij b opgeteld weer a geeft. In een plaatje,
a
b
a - b
Notatie: a−b. Naast optelling van vectoren is er ook scalaire vermenigvuldiging.Kies een vector a en een getal λ ∈ R. Stel λ > 0. De vector die dezelfde richtingals a heeft, maar waarvan de lengte λ maal zo groot is als die van a noemen wehet scalaire product van a met λ. Als λ < 0, dan verstaan we onder het scalaireproduct van a met λ de vector met tegengestelde richting aan a en lengte gelijkaan |λ| · |a|. Het scalaire product van a met λ noteren we als λa. Tenslottenemen we altijd 0a = 0. Hier is een illustratie,

1.2. VLAKKE EN RUIMTELIJKE MEETKUNDE 9
a a2a
a- a 0a
De optelling en scalaire vermenigvuldiging voldoen aan een aantal min of meervoor de hand liggende regels, die we hier verder niet zullen afleiden, maar welnoemen. Voor elk drietal vectoren a,b, c en elk tweetal getallen λ, µ ∈ R geldende volgende regels,
1. a+ b = b+ a (commutativiteit)
2. a+ (b+ c) = (a+ b) + c (associativiteit)
3. λ(a+ b) = λa+ λb (distributiviteit)
4. (λ+ µ)a = λa+ µa (distributiviteit)
5. λ(µa) = (λµ)a (associativiteit)
Onthoudt deze regels en gebruik ze. Later zullen we de boel op z’n kop zettenen vectoren definieren als objecten die aan bovenstaande rekenregels voldoenen niets anders. Maar voorlopig is het nog niet zover en houden we aan onsmeetkundige vectorbegrip vast.
1.2 Vlakke en ruimtelijke meetkunde
Kies een vast punt O in de ruimte die we de oorsprong noemen. Kies nu eenwillekeurig punt P in de ruimte. De vector die O naar P verplaatst geven weaan met
−−→OP . Omgekeerd, gegeven een vector p, dan zal deze het punt O naar
een ander ruimtelijk punt verplaatsen. Als we dat weer met P aangeven, danzien we dat p =
−−→OP . Op deze manier zie je dat, door keuze van een punt
O als oorsprong, aan elke vector een ruimtelijk punt kan worden toegekend enomgekeerd. Vaak zullen we stilzwijgend van de keuze van een oorspong uitgaanen de begrippen ‘punt in de ruimte’ en ‘vector’ door elkaar gebruiken. Dit geefthopelijk geen verwarring.Met de identificatie punten↔vectoren kunnen we bijvoorbeeld een rechte lijndoor middel van een verzameling vectoren beschrijven.Neem om te beginnen een punt A = O en zij a =
−−→OA . Het zal duidelijk
zijn dat de verzameling vectoren m = {λa|λ ∈ R} precies de lijn door O enA voorstelt. Kies nu een punt P en zij p =
−−→OP . Verschuif de lijn m over
de vector p =−−→OP en noem de verschoven lijn l. Deze loopt evenwijdig aan
m en gaat door het punt P . De punten van de lijn l worden gegeven door deverzameling l = {p+ λa|λ ∈ R}. We noemen p+ λa een parametervoorstellingof vectorvoorstelling van de lijn l. De vector p heet een steunvector van de lijn

10 HOOFDSTUK 1. VECTOREN IN DE RUIMTE
l en a = 0 een richtingvector. Een parametervoorstelling van de lijn die gaatdoor twee verschillende punten P en Q, gegeven door de vectoren p en q, luidtp+ λ(q− p).
Hier is een ander voorbeeld van ‘meetkunde door middel van vectoren’.
Lemma 1.2.1 Kies een oorsprong O en zij P,Q een tweetal punten. Stel p =−−→OP en q =
−−→OQ . Dan wordt het punt precies in het midden van het lijnstuk
PQ gegeven door 12(p+ q).
Bewijs: Beschouw het parallellogram OPQR waarin R het punt correspon-derend met p+ q is. De diagonalen van dit parallellogram snijden elkaar mid-dendoor. Het snijpunt is dus precies het midden van de diagonaal PQ. Tevensis dat het midden van de diagonaal OR. En dat correspondeert met de vector12(p+ q).
2
Hier is een kleine meetkundestelling als toepassing.
Stelling 1.2.2 De zwaartelijnen van een driehoek snijden elkaar in precies eenpunt.
Bewijs: Geef de hoekpunten van de driehoek aan met A,B,C. Kies ergenseen punt O in het vlak en stel a =
−−→OA , b =
−−→OB en c =
−−→OC . Merk nu op dat
het punt Z gegeven door 13(a+ b+ c) op de zwaartelijn door B ligt. Immers,
1
3(a+ b+ c) = b+
2
3(1
2(a+ c)− b)
hetgeen laat zien dat Z ligt op de lijn door B en het midden van het lijnstukAC. Op analoge manier zien we dat het punt Z ook op de zwaartelijnen doorA en C ligt. Dus snijden de zwaartelijnen elkaar in het punt Z. We noemendit punt het zwaartepunt van de driehoek.
2
We kunnen ook parametervoorstellingen van vlakken geven. Een tweetal vec-toren a,b heet onafhankelijk als de een geen scalair veelvoud is van de ander.Anders gezegd, a,b zijn onafhankelijk als ze beide niet 0 zijn en ze wijzen inverschillende en niet-tegengestelde richtingen.Stel dat a,b onafhankelijk zijn en met de punten A resp. B corresponderen.Overtuig je er zelf van dat de verzameling W = {λa + µb|λ, µ ∈ R} precieshet vlak door O,A,B voorstelt. Zij nu P een willekeurig punt in de ruimtemet bijbehorende vector p. Geef het vlak door P , evenwijdig aan W , aan metV . Omdat we V ook kunnen krijgen door W over de vector p te translerenzien we dat V gegeven wordt door de vectoren {p + λa + µb|λ, µ ∈ R}. Wenoemen dit een parametervoorstelling van het vlak V . De vector p noemen weeen steunvector van V en a,b richtingvectoren. Evenals bij de lijnen zijn dezevectoren niet uniek vastgelegd.Stel we hebben drie punten A,B,C in de ruimte, aangegeven met een drietalvectoren a,b, c. We nemen aan dat de punten niet op een lijn liggen, met
1.3. COORDINATEN 11
andere woorden er gaat precies een vlak door deze punten. Een tweetal richt-ingsvectoren wordt bijvoorbeeld gegeven door b − a en c − a. Kiezen we aals steunvector dan wordt een parametervoorstelling van het vlak door A,B,Cgegeven door a+ λ(b− a) + µ(c− a).
1.3 Coordinaten
Om echt met vectoren te kunnen rekenen is het handig om met coordinaten vanvectoren te werken. Dit idee is afkomstig van Descartes (1596-1650) en wordtsindsdien intensief gebruikt.Kies een drietal onderling loodrechte vectoren e1, e2, e3 elk met lengte 1. Danweten we dat we elke vector a kunnen schrijven in de vorm λe1 + µe2 + νe3voor geschikt gekozen getallen λ, µ, ν. Populair gezegd, de vectoren e1, e2 ene3 zouden we respectievelijk kunnen aangeven met ‘1 stap naar voren’, ‘1 stapnaar rechts’ en ‘1 stap naar boven’. De vector λe1 + µe2 + νe3 zou dan deinstructie ‘λ stappen naar voren, µ stappen naar rechts en ν stappen naarboven’ betekenen. Het is duidelijk dat elke vector (= translatie) amet dergelijkeinstructies gevormd kan worden. De getallen λ, µ, ν noemen we de coordinatenof kentallen van de vector a ten opzichte van de basis e1, e2, e3.Zij nu x en y een tweetal vectoren met kentallen respectievelijk x1, x2, x3 eny1, y2, y3. Dan geldt,
x+ y = x1e1 + x2e2 + x3e3 + y1e1 + y2e2 + y3e3
= (x1 + y1)e1 + (x2 + y2)e2 + (x3 + y3)e3
Met andere woorden, de kentallen van x+y zijn x1+y1, x2+y2, x3+y3. Evenzogeldt voor elke λ ∈ R dat
λx = λ(x1e1 + x2e2 + x3e3)
= λx1e1 + λx2e2 + λx3e3
De kentallen van λx zijn dus λx1, λx2, λx3.De ruimte R3 is per definitie de ruimte van geordende drietallen reele getallen,die we de coordinaten van het drietal noemen. In R3 hebben we een coordinaatsgewijzeoptelling en scalaire vermenigvuldiging. Door van elke vector zijn kentallen tenemen, kunnen we de ruimte van vectoren identificeren met R3. Let op dat dezeidentificatie afhankelijk is van de keuze van de basisvectoren ei (i = 1, 2, 3).Het is een gebruik om de elementen van R3 te schrijven als een kolom van driegetallen met haakjes eromheen. Dusx1
x2x3
∈ R3
Dit is de kolomvector notatie. Omdat deze notatie binnen een tekst weer on-handig is, geven we de kolomvector met coordinaten x1, x2, x3 binnen een tekstvaak aan met (x1, x2, x3)
t waarin t (voor transpositie) betekent, dat we van derij een kolom maken.

12 HOOFDSTUK 1. VECTOREN IN DE RUIMTE
1.4 Analytische meetkunde
Door de keuze van een vast punt O in de ruimte, die we de oorsprong zullennoemen, kunnen we een 1-1-duidig verband aanbrengen tussen de punten vande ruimte en vectoren. De vectoren staan weer in 1-1-verband met de puntenvan R3 en dit geeft de welbekende identificatie van de ruimte om ons heenmet R3. We kunnen nu ruimtelijke meetkunde bedrijven door te rekenen metelementen uit R3. Vroeger noemde men dit wel de analytische meetkunde. Hetgebruik van coordinaten voor punten in de ruimte zou je een algebraısering vande meetkunde kunnen noemen, en dit was de grote bijdrage van Descartes.In het verhaal dat nu volgt hebben we een oorsprong O gekozen en identificerenwe vectoren met de punten van de ruimte. Verder zullen we impliciet eenvastgekozen basis e1, e2, e3 voor onze coordinaten aannemen.In een vorige paragraaf hebben we al gezien wat de parametervoorstelling vaneen lijn is, door gebruik van coordinaten kunnen we er ook heel expliciet meerekenen.
Voorbeeld 1.4.1. De rechte lijn door de punten (1, 2,−1)t en (2, 0, 1)t wordtgegeven door de parametervoorstelling 2
01
+ ν(
12−1
−
201
) =
2− ν2ν
1− 2ν
♢
Voorbeeld 1.4.2. Het vlak door de punten (1, 0, 1)t, (1, 1, 0)t, (1, 1, 1)t wordtgegegeven door de parametervoorstelling 1
11
+ λ(
101
−
111
) + µ(
110
−
111
) =
11− λ1− µ
♢
Voorbeeld 1.4.3. We kunnen het snijpunt van bovenstaand vlak en lijnbepalen door oplossing van λ, µ, ν uit de gelijkheid 1
1− λ1− µ
=
2− ν2ν
1− 2ν
.
In feite staat hier het stelsel van lineaire vergelijkingen
1 = 2− ν
1− λ = 2ν
1− µ = 1− 2ν
Uit de eerste vergelijking volgt ν = 1. Na invullen van ν = 1 volgt uit de tweedevergelijking 1− λ = 2 en dus λ = −1. Uit de derde vergelijking 1− µ = −1 en

1.4. ANALYTISCHE MEETKUNDE 13
dus µ = 2. Het snijpunt wordt dus (1, 2,−1)t.♢
Voorbeeld 1.4.4. Gegeven zijn de lijnen met parametervoorstellingen
l : x =
101
+ λ
11−1
, m : x =
234
+ µ
0−12
Hebben deze lijnen een snijpunt? Hiertoe moeten we λ, µ bepalen zo dat
1 + λ = 2
0 + λ = 3− µ
1− λ = 4 + 2µ
Uit de eerste vergelijking volgt λ = 1. Uit de tweede, µ = 3 − λ = 2. Echter,λ = 1, µ = 2 is geen oplossing van de derde vergelijking. De lijnen l,m snijdenelkaar dus niet.Verder zijn de richtingsvectoren (1, 1,−1)t en (0,−1, 2)t geen veelvoud vanelkaar (ze zijn onafhankelijk). Dat betekent dat l,m niet evenwijdig zijn. Wenoemen een tweetal niet-evenwijdige lijnen dat elkaar niet snijdt, kruisend.
♢
Behalve parametervoorstellingen van een vlak kunnen we een vlak ook karak-teriseren door een vergelijking van een vlak . Bijvoorbeeld, beschouw het vlakbestaande uit de punten met coordinaten x1, x2, x3 die gegeven wordt door deparametervoorstellingx1
x2x3
=
131
+ λ
1−1−1
+ µ
−20−1
.
Uitgeschreven,
x1 = 1 + λ− 2µ
x2 = 3− λ
x3 = 1− λ− µ
We elimineren λ, µ uit deze vergelijkingen als volgt. Tel de tweede bij de eersteop en trek de tweede van de derde af,
x1 + x2 = 4− 2µ
x2 = 3− λ
x3 − x2 = −2− µ
Trek nu twee maal de derde van de eerste af,
x1 + 3x2 − 2x3 = 8
x2 = 3− λ
x3 − x2 = −2− µ

14 HOOFDSTUK 1. VECTOREN IN DE RUIMTE
De eerste vergelijking luidt x1+3x2− 2x3 = 8, waaruit λ, µ verdreven zijn. Wenoemen dit een vergelijking van het vlak.Omgekeerd kunnen we uit een vergelijking van een vlak ook weer een parame-tervoorstelling afleiden. Dit kunnen we doen door twee geschikte coordinatenals parameter te kiezen. Bijvoorbeeld, voor het vlak x1+3x2−2x3 = 8 kunnenwe als parameters x2, x3 kiezen. We krijgen danx1
x2x3
=
8− 3x2 + 2x3x2x3
=
800
+ x2
−310
+ x3
201
en dit is een keurige parametervoorstelling met parameters x2, x3. Merk opdat deze parametervoorstelling verschilt van degene waarmee we gestart zijn.Parametervoorstellingen van lijnen en vlakken zijn niet uniek vastgelegd.
Voorbeeld 1.4.5. Met bovenstaande vaardigheden kunnen we ook lastigerproblemen aanpakken. Bijvoorbeeld, gegeven het tweetal kruisende lijnen
l :
210
+ λ
−110
, m :
30−2
+ µ
111
en het punt P met coordinaten (1, 0, 1)t. Bestaat er een lijn door P die l en msnijdt?Voor de oplossing moet je je eerst een meetkundige voorstelling maken van hetprobleem door de twee lijnen en het punt in gedachten te nemen en vervolgenseen strategie te bedenken. De gevraagde lijn moet natuurlijk liggen in het vlakV door P en l. Verder moet de gevraagde lijn m snijden. Dat betekent dathet snijpunt van m en V ook op de gevraagde lijn moet liggen. We bepalen ditsnijpunt en noemen het Q. De lijn door P en Q ligt in V en moet dus ook lsnijden (tenzij de lijn door P,Q en l evenwijdig zijn). Daarmee is de lijn doorP,Q de gevraagde lijn.Nadat we deze strategie hebben bedacht gaan we aan het rekenen. Eerst eenparametervoorstelling van het vlak V . Kies als steunpunt (2, 1, 0) en als richtin-gen dit steunpunt minus P , dus (2, 1, 0)t− (1, 0, 1)t = (1, 1,−1)t, en de richtingvan l: (−1, 1, 0)t. Dus
V :=
210
+ ρ
11−1
+ σ
−110
.
Snijden met de lijn m geeft het stelsel vergelijkingen
2 + ρ − σ = 3 + µ1 + ρ + σ = + µ
− ρ = −2 + µ
Trek de eerste van de tweede en derde af,
2 + ρ − σ = 3 + µ−1 + 2σ = −3−2 − 2ρ + σ = −5
.

1.5. OPGAVEN 15
Uit de tweede vergelijking lezen we af dat 2σ = −2, dus σ = −1. Vul ditin de derde vergelijking in, dan krijgen we ρ = 1 en tenslotte, uit de eerste,µ = 1. Het gevraagde punt Q wordt dus (3, 0,−2)t + (1, 1, 1)t = (4, 1,−1)t. Deparametervoorstelling van de gevraagde lijn met steunpunt P en richting
−−→PQ
wordt 101
+ λ
31−2
.
♢
1.5 Opgaven
In alle opgaven denken we ons een vast gekozen oorsprong O en we identificerenvectoren en punten in de ruimte door middel van O. De vector die A naar hetpunt B transleert geven we kortheidshalve aan met
−−→AB .
Opgave 1.5.1 Zij a,b, c een drietal vectoren. Neem de volgende schets over
b
a
c
Schets zelf in deze figuur de vectoren a+ b, b+ c, (a+ b) + c en a+ (b+ c).Concludeer dat (a+b)+c = a+(b+c) (associativiteit van de vectoroptelling).
Opgave 1.5.2Geef in elk van de volgende onderdelen een parametervoorstellingvan de rechte door de gegeven punten.
1. (1, 3,−5)t en (−2,−1, 0)t
2. (1/2, 1/4, 1)t en (−1, 1, 1/3)t
Opgave 1.5.3 Bepaal de punten die het segment tussen de gegeven punten indrieen delen.
1. (2, 4, 1)t en (−1, 1, 7)t.
2. (−1, 1, 5)t en (4, 2, 1)t.
3. p en q.
Opgave 1.5.4 Ga na of de volgende paren rechten elkaar snijden en zo ja,bepaal het snijpunt,

16 HOOFDSTUK 1. VECTOREN IN DE RUIMTE
1. 234
+ λ
111
,
321
+ µ
31−1
2. 3
45
+ λ
111
,
241
+ µ
23−2
3. 1
01
+ λ
3−12
,
507
+ µ
−222
Opgave 1.5.5 Drie punten heten collineair als ze allen op een rechte liggen.Geef een algemene methode om na te gaan of drie punten collineair zijn. Welkvan de volgende drietallen zijn collineair?
1. (2, 1, 1)t, (1, 2, 3)t, (4,−1,−3)t
2. (2,−4, 1)t, (1, 0, 2)t, (0, 2, 3)t
3. (1,−3, 1)t, (0, 1, 2)t, (−1, 3, 4)t
Opgave 1.5.6 Bepaal de snijpunten van de volgende lijnen en vlakken.
1. x = (2, 3, 1)t + λ(1,−2,−4)t en 3x1 − 2x2 + 5x3 = 11
2. x = (1, 1, 2)t + λ(1,−1,−2)t en 2x1 + x2 − x3 = 5
Opgave 1.5.7 Zij P,Q een tweetal verschillende punten in de ruimte. Kieseen oorsprong O en noem de bijbehorende vectoren p,q. Geef een parameter-voorstelling van de lijn door P en Q in termen van p,q.
Opgave 1.5.8 Zij P,Q,R een drietal punten in de ruimte dat niet op een lijnligt. Kies een oorsprong O en noem de bijbehorende vectoren P,Q,R. Geef eenparametervoorstelling van het vlak door P,Q en R in termen van p,q, r.
Opgave 1.5.9 In de tekst hebben we het gehad over het zwaartepunt van eendriehoek. In deze opgaven laten we de ruimtelijke versie zien.Stel dat de punten A,B,C,D in de ruimte niet in een vlak liggen en stel a =−−→OA ,b =
−−→OB , c =
−−→OC ,d =
−−→OD . Deze punten vormen de hoekpunten van een
viervlak. Als we het zwaartepunt van elk zijvlak verbinden met het overstaandehoekpunt, dan krijgen we vier lijnen. Bewijs dat deze lijnen door een punt gaan.Dit punt noemen we het zwaartepunt van het viervlak en we geven het aan metZ. Druk
−−→OZ uit in de vectoren a,b, c,d.
Opgave 1.5.10 We bekijken hetzelfde viervlak als in de voorgaande opgave.Bewijs dat de drie lijnen die de middens van de overstaande ribben van hetviervlak met elkaar verbinden, elkaar in een punt P snijden. Druk
−−→OP uit in
a,b, c,d.

1.5. OPGAVEN 17
Opgave 1.5.11 Beschouw het parallelle blok EFGHABCD ,
A
B
C
D
E
F
G
H
De lichaamsdiagonaal AG wordt doorsneden door de vlakken BDE en CFHin de punten S respectievelijk T . Stel b =
−−→AB ,d =
−−→AD , e =
−−→AE .
1. Druk−−→AS en
−−→AT uit in b,d, e en leidt hieruit af dat de lijnstukken
AS, ST, TG even lang zijn.
2. Bepaal een parametervoorstelling van ieder der vlakken BDE en CFHen laat zien dat deze vlakken onderling evenwijdig zijn.
Opgave 1.5.12 Zij A = (3, 3, 3), B = (4, 1, 1), C = (1, 2,−1).
1. Bepaal een parametervoorstelling van de lijn l door A en B.
2. Bepaal een parametervoorstelling van het lijnstuk AB.
3. Laat zien dat l niet door C gaat.
4. Bepaal een parametervoorstelling en een vergelijking van het vlak doorA,B,C.
5. Bepaal de punten D zodanig dat A,B,C,D de hoekpunten van een par-allelogram zijn.
Opgave 1.5.13 Bereken de coordinaten van het snijpunt van de lijn l en hetvlak V gegeven door:
l : x =
−472
+ λ
−341
, V : x =
5−11
+ α
210
+ β
1−11
.
Opgave 1.5.14 Hoeveel punten hebben de lijn l en het vlak V gemeen, waarin,
l : x =
111
+ λ
1−10
V : x = α
101
+ β
123
Opgave 1.5.15 Zij
l : x =
1−22
+ λ
111
, m : x =
203
+ µ
1−10

18 HOOFDSTUK 1. VECTOREN IN DE RUIMTE
n : x =
321
+ ν
634
.
Bereken de coordinaten van A op l en B op m zodanig dat AB evenwijdig ismet n.
Opgave 1.5.16 Zij
l : x =
111
+ λ
321
.
Bepaal de vergelijkingen van twee vlakken die l als snijlijn hebben.
Opgave 1.5.17 Bepaal een parametervoorstelling van de snijlijn l van devlakken V : x2 − 2x3 + 1 = 0 en W : x1 − x2 − x3 + 1 = 0.
Opgave 1.5.18 Zij V : x1 − x2 − x3 = 0 en W : x1 + x2 − 3x3 + 2 = 0.
1. Bepaal een parametervoorstelling van de lijn l door het punt O = (0, 0, 0)zodanig dat l evenwijdig is aan de snijlijn van V en W .
2. Bepaal de vergelijking van het vlak door l, evenwijdig aan W .
Opgave 1.5.19 Bereken α zodanig dat de lijn l : x = λ(−2, 3, 2)t evenwijdig ismet het vlak V : x1 − 2x2 + αx3 = β. Mag β iedere waarde aannemen?
Opgave 1.5.20 Zij
l : x =
110
+ λ
101
, m : x =
412
+ µ
01−1
n : x =
3−34
+ ν
1−43
, p : x =
5−13
+ τ
4−65
.
1. Bewijs dat l en m elkaar kruisende lijnen zijn (dat wil zeggen, ze snijdenelkaar niet en zijn ook niet evenwijdig).
2. Bewijs dat n en p elkaar snijdende lijnen zijn en bereken de coordinatenvan hun snijpunt S.
3. Bepaal een vergelijking van het vlak door n en p.
4. Bepaal een parametervoorstelling van de lijn door S die l en m snijdt.
Opgave 1.5.21 Van de vierzijdige pyramide OABCD is het grondvlak ABCDeen parallelogram. De diagonalen AC en BD snijden elkaar in E. Op de lijndoor O en A ligt een punt A1 dat niet met O of A samenvalt. Op analogewijze hebben we de punten B1 (op OB), C1 (op OC) en D1 (op OD). Stel−−−→OA1 = α
−−→OA ,
−−−→OB1 = β
−−→OB ,
−−−→OC1 = γ
−−→OC ,
−−−→OD1 = δ
−−→OD .

1.5. OPGAVEN 19
1. Stel dat de punten A1, B1, C1, D1 in een vlak liggen dat door E gaat.Bewijs dat 1
α + 1γ = 1
β + 1δ = 2.
2. Stel dat 1α + 1
γ = 1β + 1
δ = 2. Bewijs dat de punten A1, B1, C1, D1 in eenvlak liggen dat door E gaat.
Opgave 1.5.22 Gegeven zijn de rechte lijnen,
a : x =
4−2−2
+ λ
1−1−1
, b : x =
−11−3
+ µ
102
c : x =
105
+ ν
0−21
, d :2x1 + x2 + x3 = 4x1 + 2x2 − x3 = −1
1. Bewijs dat a en d onderling evenwijdig zijn.
2. Toon aan dat a en b elkaar snijden. Bereken de coordinaten van hetsnijpunt S van a en b en bepaal de vergelijking van het vlak V door a enb.
3. Bepaal een parametervoorstelling van de lijn l die a, b, c en d snijdt.
Opgave 1.5.23 Gegeven zijn het punt P met coordinaten (1,−2, 1)t en delijnen
l :
20−1
+ λ
110
m :
212
+ µ
001
.
Bepaal een parametervoorstelling van de lijn n door P die zowel l als m snijdt.
Hoofdstuk 2
Inwendige producten
2.1 Inproduct
Tot nog toe hebben we het bij de besprekening van vectoren nog niet gehadover het begrip hoek tussen twee vectoren en het begrip loodrechtheid. Om ditte kunnen doen voeren we het begrip inwendig product of, korter, inproduct in.Zij a en b een tweetal vectoren die we beiden = 0 veronderstellen. Zij ϕ dehoek tussen de richtingen van a en b. De hoek ϕ ligt dus tussen 0 en π radialenin (we meten onze hoeken in radialen). Het inwendig product van a en b is hetgetal |a||b| cosϕ. Notatie: a · b. Deze laatste notatie zorgt ervoor dat we hetinproduct ook wel een dotproduct noemen. In het bijzonder geldt dat als a en bloodrecht op elkaar staan, d.w.z. ϕ = π/2, dan a ·b = 0. Omgekeerd, als a = 0en b = 0, dan volgt uit a · b = 0 dat ϕ = π/2. Als a of b de nulvector is, danis het begrip hoek tussen a en b niet goed gedefinieerd. In dat geval sprekenwe af dat a · b = 0.
2.2 Inproducten en coordinaten
We voeren nu een coordinatenstelsel in dat gegeven wordt door drie onderlingloodrechte vectoren e1, e2, e3. Aan onze vectoren kunnen we nu coordinatentoekennen. Het is nu mogelijk om de lengte van een vector en het inproductvan twee vectoren uit te schrijven in termen van hun coordinaten. De lengtevan x met kentallen x1, x2, x3 wordt, via de Stelling van Pythagoras, gegevendoor
|x|2 = x21 + x22 + x23.
Om het inproduct in coordinaten uit te drukken, maken we gebruik van decosinusregel voor driehoeken.
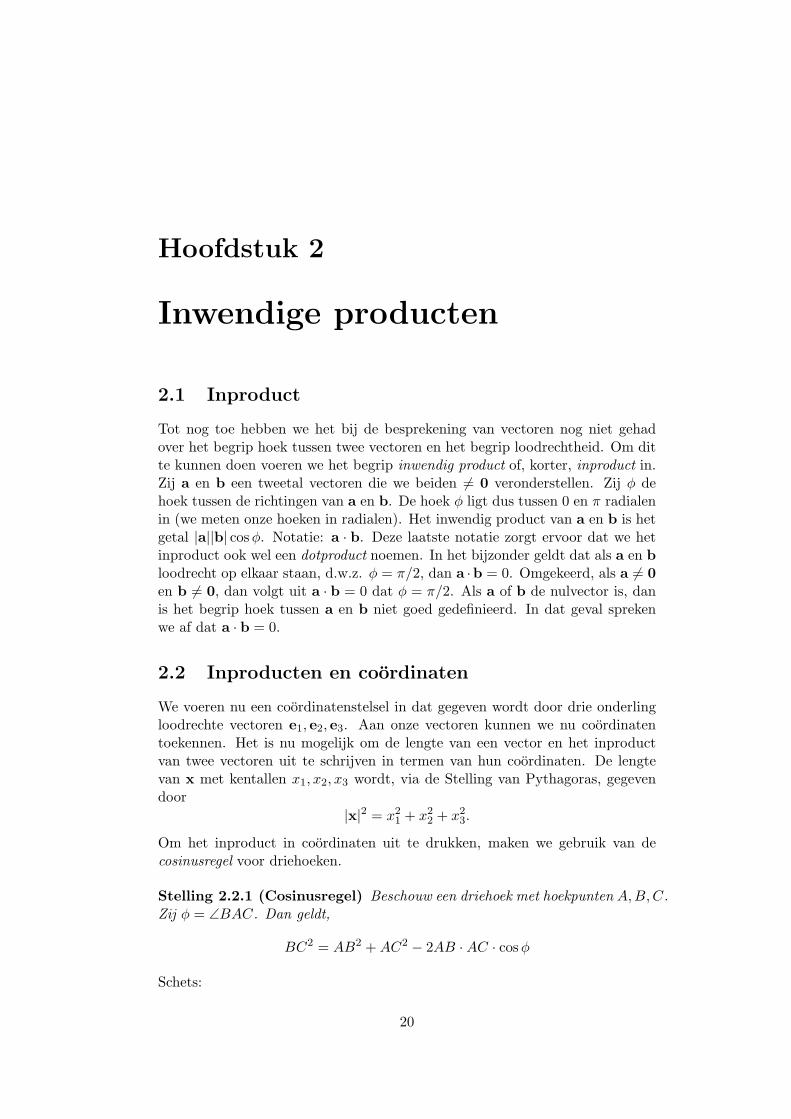
Stelling 2.2.1 (Cosinusregel) Beschouw een driehoek met hoekpunten A,B,C.Zij ϕ = ∠BAC. Dan geldt,
BC2 = AB2 +AC2 − 2AB ·AC · cosϕ
Schets:
20

2.2. INPRODUCTEN EN COORDINATEN 21
y
x
y - xφ
A
B
C
Met behulp van de cosinusregel kunnen we laten zien dat
Stelling 2.2.2 Voor elk tweetal vectoren x,y met kentallen (x1, x2, x3) en (y1, y2, y3)geldt
x · y = x1y1 + x2y2 + x3y3.
Bewijs: In het bovenstaande plaatje identificeren we x met−−→AB en y met−−→
AC . Dan geldt y − x =−−→BC . Uit de cosinus regel volgt dat
|y − x|2 = |x|2 + |y|2 − 2|x||y| cosϕ. (2.1)
We schrijven nu |y − x|2 uit in coordinaten,
|y − x|2 = (y1 − x1)2 + (y2 − x2)
2 + (y3 − x3)2
= x21 + x22 + x23 + y21 + y22 + y23 − 2(x1y1 + x2y2 + x3y3)
= |x|2 + |y|2 − 2(x1y1 + x2y2 + x3y3)
Vergelijken we de laatste gelijkheid met de cosinusregel (2.1) dan concluderenwe dat
2(x1y1 + x2y2 + x3y3) = 2|x||y| cosϕ.
Omdat |x||y| cosϕ = x · y, volgt onze Stelling na deling aan beide zijden door2.
2
In het bijzonder geldt voor de lengte van een vector x dat
|x|2 = x · x = x21 + x22 + x23.
De formule voor het inproduct stelt ons in staat om de hoek tussen twee vectoren= 0 uit te rekenen, gegeven de kentallen van beide vectoren,
cosϕ =x · y|x||y|
=x1y1 + x2y2 + x3y3√
x21 + x22 + x23√
y21 + y22 + y23
In het bijzonder weten we dat de hoek tussen twee vectoren x = 0 en y = 0gelijk is aan 90o precies dan als hun inproduct nul is, m.a.w. x1y1+x2y2+x3y3 =0.We zeggen dat twee vectoren x,y onderling orthogonaal zijn als x · y = 0.Concreet bezien betekent dat ofwel minstens een van de vectoren de nulvectoris, of dat de vectoren niet nul zijn en loodrecht op elkaar staan.Met de formule voor het inproduct kunnen we aantal nuttige eigenschappenvan het inproduct aantonen.

22 HOOFDSTUK 2. INWENDIGE PRODUCTEN
Stelling 2.2.3 Voor het inwendig product op R3 gelden de volgende eigenschap-pen.
1. Voor elk tweetal vectoren x,y geldt x · y = y · x.
2. Voor elk tweetal vectoren x,y en elke λ ∈ R geldt (λx) · y = λ(x · y).
3. Voor elk drietal vectoren x,y, z geldt (x+ y) · z = x · z+ y · z.
4. Voor elke vector x geldt x · x ≥ 0 en x · x = 0 ⇐⇒ x = 0.
Bewijs: Het bewijs van deze stelling volgt door direct uitschrijven van debeweringen. Bijvoorbeeld, eigenschap (3). Er geldt, door haakjes wegwerken,
(x+ y) · z = (x1 + y1)z1 + (x2 + y2)z2 + (x3 + y3)z3
= x1z1 + x2z2 + x3z3 + y1z1 + y2z2 + y3z3
= x · z+ y · z
Eigenschap (4) volgt uit het feit dat x · x = x21 + x32 + x23 en het feit dat eensom van drie kwadraten altijd ≥ 0 is. De som is gelijk aan nul precies dan alsalle kwadraten nul zijn.
Geef zelf het bewijs van de overige twee eigenschappen.2
Hier is nog een meetkundestelling als toepassing.
Stelling 2.2.4 De hoogtelijnen in een driehoek snijden elkaar in precies eenpunt.
Schets:
A
B
C
H
b
c
h
Bewijs: Stel b =−−→AB en c =
−−→AC . Zij H het snijpunt van de hoogtelijnen
door B en C en stel h =−−→AH . Dan geldt dat (h− c) · b = 0 en (h− b) · c = 0
(Ga na!). Na uitwerken, h · b − c · b = 0 en h · c − b · c = 0. Trekken wedeze ongelijkheden van elkaar af, dan houden we over dat h · (b− c) = 0. Metandere woorden, ofwel h = 0, d.w.z. H = A, ofwel h staat loodrecht op c− b.In beide gevallen gaat de loodlijn vanuit A door het punt H.
2

2.3. VERGELIJKING VAN EEN VLAK 23
2.3 Vergelijking van een vlak
We hebben in het vorige hoofdstuk gezien dat een vlak in de ruimte ook kanworden gegeven door een vergelijking. Met behulp van het inproduct krijgenwe een elegante interpretatie van de coefficienten van deze vergelijking. Bij elkvlak hoort een zogenaamde normaalvector welke loodrecht op het vlak staat.Deze is op een scalaire factor na vastgelegd. Kies een normaalvector n van Ven stel p ∈ V .
p
x
n
x - pV
O
Dan zien we dat elk punt x ∈ V de eigenschap heeft dat n · (x−p) = 0. Ofwel,n · x = n · p. In coordinaten uitgeschreven,
n1x1 + n2x2 + n3x3 = n1p1 + n2p2 + n3p3
Hierin zijn n1, n2, n3 en p1, p2, p3 uiteraard de kentallen van n resp. p. We noe-men deze vergelijking voor x1, x2, x3 een vergelijking voor het vlak V . Het is nietmoeilijk om, gegeven een parametervoorstelling van een vlak, een vergelijkingte bepalen.
Voorbeeld 2.3.1. Neem bijvoorbeeld het vlak met parametervoorstellingx1x2x3
=
2−13
+ λ
11−1
+ µ
02−1
We kunnen een vergelijking vinden door eliminatie van λ, µ uit
x1 = 2 + λ
x2 = −1 + λ+ 2µ
x3 = 3− λ− µ
Doe dit en check dat we de vergelijking x1 + x2 + 2x3 = 7 krijgen.Een iets andere manier is om eerst de normaalvector te bepalen, dat wil zeggeneen vector n zo dat
n ·
11−1
= n ·
02−1
= 0.
Uitgeschreven,
n1 + n2 − n3 = 0
2n2 − n3 = 0

24 HOOFDSTUK 2. INWENDIGE PRODUCTEN
We hoeven niet perse alle oplossingen te hebben, een is genoeg. Kies hiertoen2 = 1. Dan volgt uit de tweede vergelijking dat n3 = 2 en daarna uit de eerstedat n1 = 1. Dus n = (1, 1, 2)t is een normaalvector en een vergelijking van hetvlak wordt gegeven door x1 + x2 + 2x3 = (1, 1, 2)t · (2,−1, 3)t = 7.
♢
2.4 Voorbeelden van rekenen met lijnen en vlakken
Door gebruik van coordinaten kunnen we expliciete berekeningen maken.
Voorbeeld 2.4.1. Hoek tussen de vectoren a = (1, 1, 2)t en b = (1,−3, 1)t.a · b = 1 · 1 + 1 · (−3) + 2 · 1 = 0, dus a staat loodrecht op b.
♢
Voorbeeld 2.4.2. Gegeven zijn de lijn l en het punt p,
l : x =
101
+ λ
11−1
, p =
201
Bepaal de (kortste) afstand van P tot de lijn l.Oplossing: De kortste afstand van P tot l is precies de lengte van het lijnstukjedat begint bij p en loodrecht eindigt op l. Noem het voetpunt van de loodlijn x.Dan geldt dat x−p loodrecht staat op de richting van l. Dus (1, 1,−1)·(x−p) =0. Uitgeschreven, x1 + x2 − x3 = 1. Omdat x ook op l ligt moet geldenx1 = 1 + λ, x2 = λ, x3 = 1 − λ. Invullen in de vergelijking van het vlak geeft3λ = 1. En dus λ = 1/3. Het punt x wordt hiermee (4/3, 1/3, 2/3) en deafstand van x tot p,√
(−2 + 4/3)2 + (1/3)2 + (−1 + 2/3)2 =√
2/3.
♢
Voorbeeld 2.4.3. Gegeven is het vlak V : x1 − 2x2 + 3x3 = 5 en het puntr = (2, 2, 2)t. Bepaal de afstand van r tot V .Oplossing: De afstand is precies de lengte van het lijnstuk beginnend in ren eindigend loodrecht op het vlak V . Zij v voetpunt van de loodlijn. Danis r − v een scalair veelvoud van de normaalvector (1,−2, 3)t van V . Dusr− v = λ(1,−2, 3)t. Anders geschreven,
v = r− λ
1−23
=
2− λ2 + 2λ2− 3λ
Omdat v ook in het vlak V ligt, kunnen we λ bepalen door de coordinaten vanv (met λ en al) in de vergelijking in te vullen. We vinden, 2− λ− 2(2 + 2λ) +3(2 − 3λ) = 5. Hieruit volgt, 4 − 14λ = 5 ⇒ λ = −1/14. De afstand is gelijkaan
|r− v| = |λ||(1,−2, 3)t| = 1
14
√12 + 22 + 32 =
1√14

2.5. HOGER DIMENSIONALE VECTORRUIMTEN 25
♢
Voorbeeld 2.4.4. Gegeven zijn de twee kruisende lijnen l,m uit Voorbeeld1.4.4. Bepaal de afstand tussen deze lijnen, dat wil zeggen de lengte van hetkortste verbindingslijnstuk tussen l en m.Oplossing: We bepalen punten P en Q op l respectievelijk m zo dat
−−→PQ
loodrecht op zowel l als m staat. De gevraagde afstand is dan gelijk aan |−−→PQ |.Stel dat P parameterwaarde λ heeft en Q parameterwaarde µ. Dan geldt
−−→PQ =
101
−
234
+ λ
11−1
− µ
0−12
=
−1−3−3
+
λλ+ µ
−λ− 2µ
.
De eis dat deze vector loodrecht op l staat vertaalt zich in−−→PQ · (1, 1,−1)t = 0.
Uitgeschreven, −1 + 3λ+ 3µ = 0. Evenzo volgt uit de orthogonaliteit van−−→PQ
en m dat −3 − 3λ − 5µ = 0. Oplossing van λ, µ uit deze vergelijkingen geeftλ = 7/3 en µ = −2. De punten worden gegeven door P = (10/3, 7/3,−4/3)t
en Q = (2, 5, 0)t. De afstand tussen deze punten is√
32/3.
♢
2.5 Hoger dimensionale vectorruimten
We hebben gezien hoe onze ruimte geıdentificeerd kan worden met de puntenvan R3. Op analoge manier kunnen we de punten binnen een plat vlak identi-ficeren met R2, de geordende paren (x1, x2)
t met x1, x2 ∈ R.In de geschiedenis hebben veel filosofen, natuurkundigen en ook wiskundigenzich afgevraagd of er een vierde dimensie bestaat. Dat wil zeggen een richtingdie loodrecht op de richtingen ‘naar voren’, ‘opzij’ en ‘omhoog’ staat. Van alleantwoorden die op deze vraag gegeven zijn is het wiskundige antwoord noghet meest pragmatische. Of de vierde dimensie nu wel of niet in werkelijkheidbestaat, de wiskundige doet of hij bestaat en hij rekent erin door gewoon metgeordende viertallen (x1, x2, x3, x4)
t te rekenen. De afstand tussen twee punten(x1, x2, x3, x4)
t en (y1, y2, y3, y4)t wordt gegeven door√
(x1 − y1)2 + (x2 − y2)2 + (x3 − y3)2 + (x4 − y4)2
Op deze manier krijgen we echte meetkunde in een ruimte met vier vrijheids-graden, die we als vier dimensies kunnen opvatten.Als we dan toch bezig zijn dan kunnen we net zo goed een voorschot nemenop onze generalisatie van het begrip vectorruimte en de ruimte Rn van geor-dende n-tallen reele getallen zien als een vectorruimte met n dimensies. Deoptelling en scalaire vermenigvuldiging van vectoren in Rn gaan, net als bij R3,coordinaatsgewijs. Ook kunnen we op Rn het begrip inwendig product invoerendoor voor x = (x1, . . . , xn)
t en y = (y1, . . . , yn)t te nemen,
x · y = x1y1 + x2y2 + · · ·+ xnyn

26 HOOFDSTUK 2. INWENDIGE PRODUCTEN
De lengte van de vector x wordt gegeven door
|x| =√x · x
Je kunt zelf met niet al te veel moeite nagaan dat dit inproduct precies deeigenschappen uit Stelling 2.2.3 heeft (Doe dit!).Het inproduct in Rn zou via de formule x · y = |x||y| cosϕ het begrip hoekin Rn een betekenis kunnen geven. Maar dan willen we natuurlijk graag dat| cosϕ| ≤ 1, met andere woorden |x · y| ≤ |x||y|. Deze ongelijkheid blijktinderdaad te gelden en staat bekend als de ongelijkheid van (Cauchy)-Schwarz.
Stelling 2.5.1 (Ongelijkheid van Schwarz) Voor elk tweetal vectoren x,y ∈Rn geldt dat
|x · y| ≤ |x||y|
Hoewel de naam van de stelling verbonden is aan H.A.Schwarz (1843-1921),was hij al eerder bekend bij de Franse wiskundige Cauchy (1789-1857).
Bewijs: Dit is tamelijk verrassend, zoals je zult zien. Als x = 0 dan zijnzowel |x · y| als |x||y| gelijk aan nul en is de stelling waar. Dat was makkelijk.Laten we nu aannemen dat x = 0. Uit de elementaire eigenschappen van hetinproduct weten we dat voor elke λ ∈ R geldt 0 ≤ (λx+y)·(λx+y). Uitwerkingvan het inproduct geeft dat voor elke λ geldt,
0 ≤ (λx+ y) · (λx+ y)
= λ2x · x+ λx · y + λy · x+ y · y= λ2|x|2 + 2λx · y + |y|2
De laatste uitdrukking is een kwadratische functie in λ die ≥ 0 is voor elkekeuze van λ. Dat betekent dat de discriminant van deze functie ≤ 0 is. Dus4(x·y)2−4|x|2|y|2 ≤ 0 Hieruit volgt (x·y)2 ≤ |x|2|y|2, waaruit na worteltrekkende ongelijkheid van Schwarz volgt.
2
Het is illustratief om de ongelijkheid van Schwarz voluit te schrijven. Voor elkex1, . . . , xn, y1, . . . , yn ∈ R geldt,
|x1y1 + x2y2 + · · ·+ xnyn|2 ≤ (x21 + x22 + · · ·+ x2n)(y21 + y22 + · · ·+ y2n)
Dit ziet er geenszins triviaal uit! Ter illustratie kunnen we y1 = · · · = yn = 1nemen. We krijgen,
(x1 + x2 + · · ·+ xn)2 ≤ n(x21 + x22 + · · ·+ x2n).
Delen we aan beide zijden door n2,(x1 + · · ·+ xn
n
)2
≤ x21 + · · ·+ x2nn
.
Met andere woorden, het kwadraat van het gemiddelde van n getallen is altijdkleiner of gelijk aan het gemiddelde van de kwadraten van die getallen. Probeerdit maar eens te bewijzen zonder gebruik van de ongelijkheid van Schwarz.Een direct gevolg van de ongelijkheid van Schwarz is de zogenaamde driehoek-songelijkheid.

2.6. MEETKUNDE IN DIMENSIE N (OPTIONEEL) 27
Stelling 2.5.2 Stel x,y ∈ Rn. Dan geldt
|x+ y| ≤ |x|+ |y|.
Deze ongelijkheid impliceert dat de lengte van de zijde van een driehoek altijdkleiner of gelijk is aan de som van de lengten van de overige zijden. Als driehoekkunnen we een driehoek nemen met hoekpunten A,B,C. Dan geldt AC ≤AB + BC. Om dit te laten zien nemen we x =
−−→AB en y =
−−→BC . Dan geldt
x + y =−−→AC . We moeten dus laten zien dat |x + y| ≤ |x| + |y|. Dit is de
vectorversie van de driehoeksongelijkheid en hier is het bewijs.
Bewijs: Merk op dat
|x+ y|2 = (x+ y) · (x+ y)
= x · x+ 2x · y + y · y
Gebruiken we nu de ongelijkheid van Schwarz, die zegt dat 2x · y ≤ 2 |x||y|,dan krijgen we,
|x+ y|2 ≤ |x|2 + 2 |x||y|+ |y|2 = (|x|+ |y|)2
Na worteltrekken volgt de gewenste ongelijkheid |x+ y| ≤ |x|+ |y|.2
Nu we weten dat het hoekbegrip in Rn zinvol gedefinieerd kan worden, noemenwe een hoek met name. Als x · y = 0 en x,y = 0 dan is die hoek π/2. Wenoemen twee vectoren x,y waarvan het inproduct nul is, orthogonale vectoren.
2.6 Meetkunde in dimensie n (optioneel)
In de vorige paragrafen hebben we een afstand gedefinieerd tussen de puntenvan Rn die bovendien aan de driehoeksongelijkheid voldoet. Hiermee hebbenwe een meetkunde in Rn gevonden. Ter illustratie laten we hier een meetkundigprobleem in Rn zien dat een verrassende oplossing heeft in R8 en R24.
Onder een bol in Rn met centrum a ∈ Rn en straal R verstaan we de verzamelingpunten x gegeven door |x−a| ≤ R. We zeggen dat twee bollen elkaar overlappenals de afstand tussen de centra strikt kleiner is dan de som van de stralen vande bollen. We zeggen dat de bollen raken als de afstand tussen de centra preciesgelijk is aan de som van de stralen. Het probleem luidt nu als volgt.
Probleem 2.6.1 Gegeven een bol B in Rn met straal R. Wat is het maximaleaantal niet overlappende bollen met straal R dat aan B kan raken?
Laten we beginnen in dimensie 2. Bollen in R2 zijn in dit geval gewoon schijven.In het volgende plaatje zien we een schijf B met daaromheen 6 schijven vandezelfde straal die B raken. Ze overlappen elkaar niet.

28 HOOFDSTUK 2. INWENDIGE PRODUCTEN
Deze schijven vormen het begin van een honingraat, de dichtst mogelijke pakkingvan schijven in het vlak. Het is duidelijk dat het antwoord op onze vraag in R2
luidt: 6.We gaan nu naar R3. Denk allereerst aan een stapel sinaasappels bij de groen-teboer. Elke sinaasappel binnen in de stapel wordt omringd door 12 anderesinaasappels, 6 in een laag, 3 extra in de laag erboven, en nog eens drie inde laag eronder. Er zit echter wat bewegingsruimte tussen die 12 omringendesinaasappels, waarbij ze blijven raken aan de centrale sinaasappel. We kunnende 12 sinaasappels zo manoevreren dat hun centra de hoekpunten vormen vaneen zogenaamde icosaeder, ofwel het regelmatige twintingvlak. Deze ziet er zouit.
Er zijn 12 hoekpunten. De afstand tussen twee naburige hoekpunten is 2(1 −1/
√5) = 1.1055 maal de afstand van een hoekpunt tot het centrum van de
icosaeder. Dat houdt in dat we rond een gegeven bol B 12 bollen met dezelfdestraal kunnen laten raken en waarbij de omringende bollen nog zo’n 10 procentextra ruimte hebben. Grote vraag is of we deze bollen niet zodanig kunnenmanoevreren dat er nog een dertiende bij kan. Er is veel gediscussieerd overdeze vraag, maar in 1953 werd aangetoond dat 12 toch echt het maximale aantalis.Het getal waar we naar zoeken wordt ook wel ’kissing number’ genoemd. Het’kissing’-getal voor n = 2 bedraagt dus 6 en voor n = 3 is dat 12. Hopelijkis het duidelijk dat we onze vraag ook als vraag over de centra van de bollenkunnen formuleren, waarbij we aannemen dat de straal van elke bol precies d/2is, en de binnenste bol het punt 0 als centrum heeft.
Probleem 2.6.2 Stel we hebben in Rn een k-tal punten v1, . . . ,vk zo dat |v1| =· · · = |vk| = d en |vi − vj | ≥ d voor elk tweetal i, j met i = j. Wat is demaximale waarde van k?

2.7. OPGAVEN 29
In dimensie 4 hebben we geen meetkundige voorstelling meer, maar we kunnenwel met coordinaten werken. Beschouw alle punten van de vorm(
±1
2,±1
2,±1
2,±1
2
).
We kiezen voor elke coordinaat dus een plus- of minteken. We hebben 24 = 16van deze punten en hun lengte is d = 1. Neem nu de 8 extra punten in R4 diewe krijgen door alle coordinaten 0 te nemen, behalve op een plaats waar we 1of −1 zetten. Deze vectoren hebben ook lengte 1. Het is nu een eenvoudigeoefening om in te zien dat de afstand tussen elk tweetal van deze 24 punten ≥ 1is. Daarmee is het ’kissing’-getal voor n = 4 minstens 24. Het heeft tot 2003geduurd alvorens werd aangetoond dat dit ook het correcte ’kissing’-getal is.Voor dimensies n > 4 is het ’kissing’-getal onbekend, met uitzondering vann = 8, 24 waar iets heel bijzonders gebeurt. In n = 8 bestaat het zogenaamdeE8-rooster, ontdekt in 1867. Het is de verzameling punten geven door
(x1, x2, . . . , x8), x1, . . . , x8 ∈ Z
en
(x1, x2, . . . , x8), x1, . . . , x8 ∈1
2+ Z,
beiden met de extra eigenschap dat∑
i xi een geheel even getal is. Dit is eenverzameling punten met buitengewone symmetrie, waar we hier helaas niet opkunnen ingaan. De kleinste lengte van deze punten is d =
√2. De punten met
deze lengte zijn (±1
2,±1
2, . . . ,±1
2
)waarbij het aantal mintekens even moet zijn, en de punten met alle coordinaten0, behalve op twee plaatsen waar 1 of −1 staat. Van de eerste soort zijn er 128,van de tweede soort 112. De onderlinge afstand tussen deze 240 punten is ≥
√2
en hiermee zien we dat het ’kissing’-getal minstens 240 is. Het is bekend datdit ook de correcte waarde is.Voor n = 24 bestaat er een nog wonderlijker rooster, het zogenaamde Leech-rooster, genoemd naar de ontdekker John Leech (1965). Deze is lastig te beschri-jven, maar dank zij het bestaan van dit rooster weten we dat het ’kissing’-getalin dimensie 24 gelijk is aan 196560. Er is blijkbaar heel veel ruimte in de24-dimensionale ruimte!
2.7 Opgaven
Opgave 2.7.1 Bereken de hoek tussen de lijnen
l : x =
112
+ λ
543
en m : x =
2−10
+ µ
5−34
Opgave 2.7.2 Bepaal de hoek tussen de volgende paren vectoren

30 HOOFDSTUK 2. INWENDIGE PRODUCTEN
1. (2, 1, 4)t en (4,−2, 1)t
2. (1,−2, 1)t en (3, 1, 0)t
3. (5, 1, 1)t en (2, 3,−2)t
Opgave 2.7.3 Bepaal de vergelijking van het vlak waarvan een punt a en denormaal n gegeven zijn.
1. a = (−1, 2,−3)t, n = (2, 4,−1)t
2. a = (2, 5, 4)t, n = (3, 0, 5)t
3. a = (1,−1, 1), n = (3,−1, 1)t
Opgave 2.7.4 Gegeven zijn V : 2x1 + 2x2 − x3 = 5 en W : x1 − x3 = 0.
1. Bereken de hoek tussen V en W .
2. Bepaal, onafhankelijk van elkaar, de vergelijking en een parametervoorstellingvan het vlak loodrecht op V en W dat door het punt (1, 2, 2) gaat.
Opgave 2.7.5 Bereken de hoek tussen de lijn l en het vlak V , waarin
l : x =
123
+ λ
107
, V : x1 + x2 + 2x3 = 5
Opgave 2.7.6 Gegeven is het vlak V : a · x = 9 met a = (2,−3, 6)t. Berekende afstand van O = (0, 0, 0) en P = (1,−2,−1) tot V .
Opgave 2.7.7 Gegeven het vlak V met de vergelijking n ·x = b, waarin n = 0een normaalvector van V is. Zij p een punt in de ruimte. Bewijs dat de afstandvan p tot V gegeven wordt door
|n · p− b||n|
.
Opgave 2.7.8 Gegeven een tweetal lijnen l en m met parametervoorstellingenp+λa respectievelijk q+µb. Stel dat a en b onafhankelijk zijn. Zij n = 0 eenvector die loodrecht op zowel a als b staat. Bewijs dat de afstand tussen l enm gegeven wordt door
|n · p− n · q||n|
.
Opgave 2.7.9 Bereken de afstand van P = (3,−1, 5) tot de lijn x = (0,−1, 2)t+λ(2, 2, 1)t.
Opgave 2.7.10 Bepaal de vergelijking van de bissectricevlakken van V : 2x1+3x2 + x3 = 0 en W : 3x1 − 2x2 + x3 = 6.

2.7. OPGAVEN 31
Opgave 2.7.11 Bepaal een parametervoorstelling van de lijn die de rechten
l : x =
325
+ λ
02−1
, m : x =
4−3−1
+ µ
3−41
loodrecht snijdt en bereken de afstand tussen l en m.
Opgave 2.7.12 Gegeven zijn
l : x =
100
+λ
−12−2
, m : x =
210
+µ
2−12
, n : x =
13−2
+ν
−489
.
Bepaal de vergelijking van het vlak V door de rechte n, dat loodrecht staat ophet vlak door l en m (verifieer eerst dat l en m elkaar inderdaad snijden).
Opgave 2.7.13 Gegeven zijn,
l : x =
100
+ λ
101
, m : x =
010
+ µ
001
.
Bepaal een parametervoorstelling van elk der rechten die l onder een hoek π/3en m onder een hoek π/2 snijden.
Opgave 2.7.14 De orthogonale projectie van de lijn
l : x =
3−106
+ λ
4−97
op het vlak V : x1 − 5x2 + 3x3 = 1 is m. Bepaal twee vergelijkingen waar decoordinaten van de punten van m aan moeten voldoen.
Opgave 2.7.15 Schrijf de vector (5, 2,−3)t als som van twee vectoren, waarvaneen vector loodrecht op het vlak V : x1− 5x2+3x3 = 1 staat, terwijl de andereparallel met V is.
Opgave 2.7.16 Ontbindt de vector (6,−5,−1)t in drie componenten a,b, cdie aan de volgende voorwaarden voldoen: a is afhankelijk van (2, 0, 1)t, b isafhankelijk van (1, 2, 0)t en c is orthogonaal met a en b.
Opgave 2.7.17 Bepaal de vergelijking van de bol met middelpunt (−1, 2, 3) enstraal 3. Schrijf deze vergelijking met behulp van een inproduct.
Opgave 2.7.18 Zij B de bol met middelpunt (3, 2, 1) en straal 3.
1. Toon aan dat P = (1, 0, 2) een punt van de bol is.
2. Bepaal de vergelijking aan het raakvlak in P aan de bol B.
3. Toon aan dat de lijn l gegeven door
x =
030
+ λ
−324
geen snijpunt met B heeft.

32 HOOFDSTUK 2. INWENDIGE PRODUCTEN
4. Bepaal de vergelijking van elk der raakvlakken aan B die door l gaan (zievorige onderdeel).
Opgave 2.7.19 De cirkel C wordt gegeven door het stelsel vergelijkingen |x−x0|2 = r2 en n · x = α, waarin x ∈ R3. Bewijs dat C een niet-lege verzamelingis precies dan als |α− n · x0| ≤ r|n|.
Opgave 2.7.20 Zij p,q ∈ Rn een tweetal vectoren zo dat p = q en p = −q.
1. Bewijs, zonder in coordinaten uit te schrijven, dat (p − q) · (p + q) =|p|2 − |q|2
2. Bewijs, zonder in coordinaten uit te schrijven, dat |p| = |q| ⇐⇒ p −q en p+ q zijn orthogonaal.
3. Bewijs dat in een ruit (=parallelogram waarvan alle zijden dezelfde lengtehebben) de diagonalen elkaar loodrecht snijden.
Opgave 2.7.21 Gebruik de driehoeksongelijkheid |p + q| ≤ |p| + |q| om aante tonen dat
||p| − |q|| ≤ |p− q|
voor alle p,q ∈ Rn (Hint: gebruik |u| = |u− v + v| voor geschikte u,v).

Hoofdstuk 3
Matrices en lineairevergelijkingen
3.1 Matrices
Een m×n-matrix is een mn-tal getallen dat in een rechthoekig patroon van mrijen en n kolommen is gerangschikt. We omlijsten deze rechthoek meestal meteen tweetal kromme haken. De getallen in de matrix noemen we de matrixele-menten. Een m× n-matrix ziet er als volgt uit,
a11 a12 · · · a1na21 a22 · · · a2n...
......
am1 am2 · · · amn
of in kortere notatie, (aij)i=1,...,m;j=1,...,n. De verzameling m×n-matrices gevenwe aan met Mmn. Een speciaal element is de zogenaamde nulmatrix O ∈Mmn waarvan alle elementen nul zijn. Een andere speciale matrix is de n × nidentiteitsmatrix waarvan alle elementen nul zijn, behalve de elementen op dediagonaal, die 1 zijn. Notatie: In.In Mmn kunnen we een optelling en een scalaire vermenigvuldiging definieren.De som A+B van twee matrices krijgen we door optelling van de overeenkom-stige matrixelementen. Als de elementen van A,B gegeven worden door aijresp. bij met i = 1, . . . ,m; j = 1, . . . , n dan worden de elementen van de somgegeven door aij+bij . Het scalaire product λA van een matrix Amet een scalairλ ∈ R is de matrix die we krijgen door elk element van A te vermenigvuldigenmet λ. Voor optelling en scalaire vermenigvuldiging gelden de volgende makke-lijk te verifieren eigenschappen. Voor elk drietal matrices A,B,C en elk tweetalλ, µ ∈ R geldt
1. A+B = B +A
2. (A+B) + C = A+ (B + C)
3. λ(A+B) = λA+ λB
4. (λ+ µ)A = λA+ µA
33

34 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
5. (λµ)A = λ(µA)
Merk op, dat deze eigenschappen volkomen analoog zijn aan de elementaireeigenschappen voor vectoren die in paragraaf 1.1 genoemd zijn. Om deze redenzullen we Mmn later ook gaan zien als een vectorruimte.Een andere belangrijke operatie is die van matrixvermenigvuldiging . Gegeveneen m × n-matrix A = (aij) en een n × p-matrix B = (bij), dan definieren wede m× p product matrix AB als de matrix met elementen
(AB)ik =n∑
j=1
aijbjk, i = 1, . . . ,m; k = 1, . . . , p.
Let op, het product AB van twee matrices A en B kan alleen gedefinieerd wordenals het aantal kolommen van A gelijk is aan het aantal rijen van B.Behalve dat vermenigvuldiging van matrices alleen mogelijk is als aantallen ri-jen en kolommen kloppen, zijn er meer eigenaardigheden die niet voorkomenbij vermenigvuldiging van getallen. Bijvoorbeeld niet-commutativiteit van ver-menigvuldiging. Stel dat A,B een tweetal matrices is zodat m = aantal kolom-men van A = aantal rijen van B en n = aantal rijen van A = aantal kolommenvan B. Dan zijn AB en BA beiden goed gedefinieerd, maar in het algemeen zalgelden dat AB = BA. In de eerste plaats is AB een m×m-matrix en BA eenn× n-matrix. Dus als m = n, dan kunnen AB en BA nooit gelijk zijn. Hier iseen voorbeeld met m = 3, n = 1,
( 2 4 6 )
531
= ( 28 ) ,
531
( 2 4 6 ) =
10 20 306 12 182 4 6
Maar zelfs als m = n dan hoeven A en B nog niet gelijk te zijn. Hier is eenvoorbeeld,
A =
(1 20 1
)B =
(1 02 1
)⇒ AB =
(5 22 1
), BA =
(1 22 5
).
Indien voor twee n × n-matrices geldt dat AB = BA dan zeggen we dat A enB commuteren. Bijvoorbeeld, iedere n× n-matrix commuteert met zichzelf enmet de n× n-identiteitsmatrix In (Controleer!).Matrixvermenigvuldiging voldoet aan een aantal gemakkelijk te verifieren eigen-schappen. Voor elk drietal matrices A,B,C en elke λ ∈ R geldt,
1. A(BC) = (AB)C (associativiteit).
2. A(B + C) = AB +AC en (A+B)C = AC +BC (distributiviteit).
3. (λA)B = A(λB) = λ(AB)
4. IA = A = AI
Uiteraard nemen we bij alle producten aan dat ze gedefinieerd zijn.Bewijs: Het bewijs van bovenstaande eigenschappen is voornamelijk veelschrijfwerk. Ter illustratie laten we hier het bewijs van de regel A(B + C) =

3.2. LINEAIRE VERGELIJKINGEN EN GAUSS ELIMINATIE 35
AB + AC zien. Geef de elementen van A,B,C aan met resp. aij , bij en cij .Dan wordt het matrixelement met indices i, k in A(B + C) gegeven door∑
j
aij(bjk + cjk)
Het element met indices i, k in AB +AC wordt gegeven door∑j
aijbjk +∑j
aijcjk
Dat deze twee sommaties gelijk zijn volgt meteen door haakjes weg te werkenuit de eerste.
2
Tenslotte hebben we nog het begrip getransponeerde van een m× n-matrix A.Dat is de n ×m-matrix B die we uit A krijgen door Bij = Aji te nemen vooralle mogelijke i, j. Notatie B = At. Bijvoorbeeld,
A =
(2 3 1−1 0 1
)At =
2 −13 01 1
of, een ander voorbeeld,
A =
−1 3 20 2 5−3 −1 4
At =
−1 0 −33 2 −12 5 4
.
Een belangrijke eigenschap is de volgende.
Stelling 3.1.1 Zij A,B een tweetal matrices zo dat AB gedefinieerd is. Dangeldt dat
(AB)t = BtAt.
Bewijs: Opgave.2
3.2 Lineaire vergelijkingen en Gauss eliminatie
Een stelsel lineaire vergelijkingen is een verzameling vergelijkingen van de vorm
a11x1 + a12x2 + · · ·+ a1nxn = b1
a21x1 + a22x2 + · · ·+ a2nxn = b2... =
...
am1x1 + am2x2 + · · ·+ amnxn = bm
36 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
in de onbekenden x1, x2, . . . , xn. De getallen aij , bk zijn gegeven. Met behulpvan matrixvermenigvuldiging kunnen we dit stelsel iets anders schrijven als
a11 a12 · · · a1na21 a22 · · · a2n...
......
am1 am2 · · · amn
x1x2...xn
=
b1b2...bn
Door A = (aij), x = (x1, . . . , xn)
t en b = (b1, . . . , bn)t te nemen kunnen we het
stelsel verkort noteren metAx = b
in de onbekende x ∈ Rn. We noemen A de coefficientenmatrix van het stelsel.De matrix (A|b) die we krijgen door de kolom b aan A toe te voegen, noemenwe de uitgebreide coefficientenmatrix .De manier om stelsels lineaire vergelijkingen op te lossen is door zogenaamdeGauss-eliminatie. Dit is niets anders dan een systematische versie van degewone eliminatie zoals je misschien al gewend bent en die je ook in de voor-gaande hoofdstukken gebruikt hebt. Hier is een voorbeeld.
Voorbeeld 3.2.1. Stel we moeten het volgende drietal vergelijkingen in deonbekenden x1, x2, x3 oplossen,
−x1 + x2 + x3 = −1
2x1 − x2 − x3 = 0
3x1 + 2x2 − x3 = 2
Zoals bekend doen we dit door eliminatie van variabelen. Tel 2 maal de eerstevergelijking bij de tweede op, en 3 maal de eerste bij de laatste. We vinden,
−x1 + x2 + x3 = −1
x2 + x3 = −2
5x2 + 2x3 = −1
Merk op dat door de laatste twee vergelijkingen alleen nog maar de onbekendenx2 en x3 bevatten. De onbekende x1 is uit deze vergelijkingen geelimineerd.Trek nu 5 maal de tweede van de laatste af,
−x1 + x2 + x3 = −1
x2 + x3 = −2
−3x3 = 9
Uit de laatste vergelijking volgt, x3 = −3. Uit de tweede volgt, x2 = −2−x3 = 1en uit de eerste, x1 = 1 + x2 + x3 = 1 + 1 − 3 = −1. De oplossing luidt dus,x1 = −1, x2 = 1, x3 = −3. Controleer dat dit inderdaad een oplossing is.
♢
Het kan zijn dat er oneindig veel oplossingen zijn, zoals uit het volgend voor-beeld blijkt.

3.2. LINEAIRE VERGELIJKINGEN EN GAUSS ELIMINATIE 37
Voorbeeld 3.2.2. Het stelsel
x1 − 2x2 − x4 = 22x1 − 3x2 − x3 + x4 = −1−x1 + + 2x3 − x4 = 0
We elimineren eerst x1 uit de tweede en derde vergelijking. Hiertoe trekken wede eerste vergelijking 2 maal van de tweede af, en tellen hem een keer bij dederde op.
x1 − 2x2 − x4 = 2x2 − x3 + 3x4 = −5
− 2x2 + 2x3 − 2x4 = 2
Uit de laatste twee vergelijkingen elimineren we x2 door twee maal de tweedebij de derde op te tellen.
x1 − 2x2 − x4 = 2x2 − x3 + 3x4 = −5
4x4 = −8
Uit de laatste vergelijking volgt dat x4 = −2. De waarde van x3 mogen we zelfkiezen, zeg x3 = t. Dan volgt x2 uit de tweede vergelijking, x2 = x3−3x4−5 =t + 1. De waarde van x1 volgt uit de eerste, x1 = 2x2 + x4 + 2 = 2t + 2. Deoplossing wordt dus gegeven door
x1x2x3x4
=
2t+ 2t+ 1t−2
=
210−2
+ t
2110
.
De variabelen x1, x2, x4 die we gebruikt hebben om eliminaties uit te voerennoemen we pivot variabelen (van het Engelse pivot, scharnier). De niet-pivotvariabele x3 kunnen we vrij kiezen.
♢
Het is ook mogelijk om vergelijkingen aan te geven die helemaal geen oplossinghebben. Triviaal voorbeeld, 0 · x1 = 1. Dit ziet er erg flauw uit, maar ook inalgemenere stelsels zonder oplossing komen we na de eliminatie-procedure altijduit op dit soort onmogelijke vergelijkingen. Stelsels lineaire vergelijkingen diegeen oplossing hebben noemen we strijdig.
Bovenstaande aanpak om vergelijkingen op te lossen is nogal schrijf-intensief.Eigenlijk is het niet nodig om steeds weer x1, x2, x3, . . . op te schrijven. We latenze gewoon achterwege, evenals het ‘=’ teken, en geven de eliminatie schematischweer in de uitgebreide coefficientenmatrix.
Voorbeeld 3.2.3. Noteer het stelsel vergelijkingen uit Voorbeeld 3.2.1 doorde matrix −1 1 1
2 −1 −13 2 −1
∣∣∣∣∣∣−102

38 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
De eerste rij 2 maal bij de tweede en 3 maal bij de derde opgeteld,−1 1 10 1 10 5 2
∣∣∣∣∣∣−1−2−1
De tweede rij 5 maal van derde aftrekken,−1 1 1
0 1 10 0 −3
∣∣∣∣∣∣−1−29
De laatste rij staat schematisch voor de vergelijking −3x3 = 9 en we vindenhier weer x3 = −3 uit. Door de vergelijkingen behorend bij tweede en eerste rijte bekijken vinden we ook weer x2 = −x3 − 2 = 1 en −x1 = −x2 − x3 − 1 = 1,dus x1 = −1.
♢
Uit voorgaande voorbeelden is hopelijk duidelijk dat eliminatie van variabelenin lineaire vergelijkingen neerkomt op manipulaties van de rijen in de uitge-breide coefficientenmatrix. De regels die we bij deze eliminatie hanteren zijn devolgende.
Stelling 3.2.4 De oplossingsverzameling van een stelsel verandert niet als we
1. de volgorde van vergelijkingen verwisselen
2. een vergelijking met een getal = 0 vermenigvuldigen
3. een reeel veelvoud van een vergelijking bij een andere optellen.
In termen van de uitgebreide coefficientenmatrix betekent dit dat de oploss-ingsverzameling van een stelsel niet verandert als we
1. twee rijen verwisselen
2. een rij met een getal = 0 scalair vermenigvuldigen
3. een reeel veelvoud van een rij bij een andere rij optellen
Hier volgt een beschrijving van de algemene Gauss-eliminatie procedure.
Stel we hebben een stelsel (A) van m lineaire vergelijkingen in n onbekendenx1, x2, . . . , xn. Kies de kleinste index i1 zo dat xi1 met coefficient = 0 in min-stens een van de vergelijkingen voorkomt. Kies zo’n vergelijking en verwisseldeze met de eerste vergelijking. Tel daarna veelvouden ervan bij de overige op,op zo’n manier dat in de overige vergelijkingen geen xi1 meer voorkomt. Deeerste vergelijking bevat dan nog xi1 , de andere m− 1 vergelijkingen niet meer.Geef het stelsel van deze m− 1 vergelijkingen met (A’) aan. Herhaal de proce-dure met het stelsel (A’). Dat wil zeggen, we kiezen vervolgens de kleinste indexi2 zo dat xi2 met coefficient = 0 in minstens een van de vergelijkingen uit (A’)voorkomt. Kies wederom zo’n vergelijking en wissel deze met de eerste vergeli-jking van (A’). Tel veelvouden ervan bij de volgende overgebleven vergelijking

3.2. LINEAIRE VERGELIJKINGEN EN GAUSS ELIMINATIE 39
vergelijkingen op, zo dat ze geen xi2 meer bevatten. We gaan zo door tot ergeen vergelijkingen meer over zijn, of dat alle overgebleven vergelijkingen van devorm 0 = b zijn. Als voor minstens een van deze vergelijkingen de rechterzijdeb niet nul is, dan hebben we een strijdig stelsel. Geen enkele keuze van de xikan ervoor zorgen dat 0 = b wordt als b = 0. Er zijn dus geen oplossingen. Stelnu dat het stelsel niet strijdig is. Dan moeten alle overgebleven vergelijkingenvan de vorm 0 = 0 zijn. We kunnen deze triviale vergelijkingen net zo goedweglaten.
Nu kunnen we tot de oplossing overgaan. De variabelen xi1 , xi2 , . . . , xir (meti1 < i2 < · · · < ir) die we gebruikt hebben bij de eliminatie noemen wepivot variabelen. In onze oplossing kunnen we de niet-pivot variabelen eenwillekeurige waarde geven. De laatste vergelijking stelt ons in staat om xir uitte drukken in xi met i > ir. Op zijn beurt stelt de een na laatste vergelijkingons in staat om xir−1 uit te drukken in xi met i > ir−1, etc., tot we de waardevan xi1 hebben.
Als we Gauss-eliminatie in termen van de uitgebreide coefficientenmatrix uit-gevoerd hebben, dan staat deze matrix in zogenaamde rijgereduceerde vorm oftrapvorm . We zeggen dat een matrix in rijgereduceerde vorm staat als voorelke rij, behalve de eerste, een van de volgende eigenschappen geldt,
1. de rij bevat uitsluitend nullen
2. het aantal leidende nullen is strikt groter dan het aantal leidende nullenin de voorgaande rij.
In een dergelijke matrix noemen we het eerste element = 0 in een rij het pivot-element van die rij. Het proces om een matrix in rijgereduceerde vorm tebrengen noemen we rijreductie van de matrix. Merk op dat rijreductie geenuniek bepaald proces is. Bij elke stap kunnen we immers zelf de rij kiezenwaarin het volgende pivot-element voorkomt.
We kunnen de rijreductie nog een stap verder doorvoeren met de Gauss-Jordanreductie. Het Jordan-gedeelte bestaat eruit dat we, na rijreductie, de pivot-elementen door vermenigvuldiging gelijk aan 1 maken en vervolgens met dezeelementen de overige elementen in de kolom vegen. Hier is een voorbeeld, dievoortzetting is van Voorbeeld 3.2.3.
Voorbeeld 3.2.5. We eindigden met−1 1 10 1 10 0 −3
∣∣∣∣∣∣−1−29
.
Vermenigvuldig de laatste rij met −1/3 en de eerste met −1, 1 −1 −10 1 10 0 1
∣∣∣∣∣∣1−2−3
Vegen met de 1 in de derde kolom levert

40 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
1 −1 00 1 00 0 1
∣∣∣∣∣∣−21−3
vegen met de 1 in de tweede kolom geeft, 1 0 0
0 1 00 0 1
∣∣∣∣∣∣−11−3
Merk op dat we meteen de oplossing van ons stelsel kunnen aflezen.
♢
De uiteindelijke uitgebreide coefficientenmatrix komt dan een vorm te staan diewe volledig rijgereduceerd noemen. We zeggen dat een matrix volledig rijgere-duceerd is als hij rijgereduceerd is, als elk pivot-element gelijk aan 1 is, en alselke kolom met een pivot-element verder alleen nullen bevat. Het proces omeen matrix in volledig rijgereduceerde vorm te brengen noemen we volledigerijreductie of Jordanreductie.
3.3 n vergelijkingen in n onbekenden
Stelsels lineaire vergelijkingen waarin het aantal onbekenden even groot is alshet aantal variabelen komen veelvuldig voor. Doorgaans hebben dergelijkestelsels precies een oplossing, maar dat hoeft niet altijd zo te zijn. In dezeparagraaf zoeken we uit hoe dat zit.
Beschouw een stelsel van n vergelijkingen in n onbekenden.
Ax = b
waarin A ∈ Mnn en x,b ∈ Rn. Voor het geval n = 3 kunnen we ons hier eenmeetkundige voorstelling van maken. De drie vergelijkingen kunnen we zienals de vergelijkingen van drie vlakken in R3. Meestal snijdt een drietal vlakkenelkaar in een punt. In dat geval heeft het stelsel precies een oplossing. Maar dathoeft niet. Als twee van de vlakken evenwijdig zijn en ongelijk aan elkaar, zullener geen oplossingen zijn. Het stelsel vergelijkingen is dan strijdig. Maar wekunnen ook de situatie hebben waarin de drie vlakken elkaar in een lijn snijdenof alledrie samenvallen. In dat geval hebben we oneindig veel oplossingen, diemeetkundig gezien een lijn of vlak vormen.
Dergelijke mogelijkheden kunnen ook voor algemene n optreden.
Stelling 3.3.1 Zij A ∈ Mnn en b ∈ Rn. Stel dat A na een rijreductie rpivotelementen bevat. Dan geldt,
1. Als r = n dan heeft het stelsel Ax = b precies een oplossing x ∈ Rn.
2. Als r < n dan heeft het stelsel Ax = b ofwel geen oplossing, ofwel oneindigveel oplossingen x ∈ Rn.

3.3. N VERGELIJKINGEN IN N ONBEKENDEN 41
Omgekeerd, als er een b ∈ Rn bestaat zo dat Ax = b exact een oplossing xheeft, dan geldt dat r = n.
Bewijs: Om deze stelling in te zien passen we Gauss-eliminatie toe op Ax = b.We houden r vergelijkingen over waarin een pivot-variabele voorkomt, en n− rvergelijkingen van de vorm 0 = b′i (i = r + 1, . . . , n).
Als r = n dan ontbreken deze laatste vergelijkingen. Elke variabele is danpivot-variabele en met onze oplossingsmethode van de vorige paragraaf zien wedat er precies een oplossing bestaat.
Als r < n dan kan het zijn dat een van de vergelijkingen 0 = b′i strijdig isdoordat b′i = 0. In dat geval zijn er geen oplossingen. Als echter b′i = 0 voori = r+1, . . . , n dan hebben we alleen te maken met de r vergelijkingen behorendbij elke pivot-variabele. In dat geval zijn er ook niet-pivot variabelen die wewillekeurig kunnen kiezen. Dit levert ons oneindig veel oplossingen op.
De laatste uitspraak volgt onmiddelijk uit het feit dat als r < n zou zijn, geenenkele vergelijking Ax = b exact een oplossing heeft.
2
Een belangrijk begrip bij de oplossing van n×n-vergelijkingen is de inverse vaneen matrix. Ter illustratie lossen we weer vergelijking 3.2.1 op, maar nu meteen rechterzijde die gelijk is aan een willekeurig gekozen y.
Voorbeeld 3.3.2.
−x1 + x2 + x3 = y1
2x1 − x2 − x3 = y2
3x1 + 2x2 − x3 = y3
Tel 2 maal de eerste vergelijking bij de tweede op, en 3 maal de eerste bij delaatste. We vinden,
−x1 + x2 + x3 = y1
x2 + x3 = 2y1 + y2
5x2 + 2x3 = 3y1 + y3
Trek nu 5 maal de tweede van de laatste af,
−x1 + x2 + x3 = y1
x2 + x3 = 2y1 + y2
−3x3 = −7y1 − 5y2 + y3
Het stelsel is gereduceerd, we gaan nu volledige reductie uitvoeren. Vermenigvuldigde eerste vergelijking met −1 en de derde met −1/3,
x1 − x2 − x3 = −y1
x2 + x3 = 2y1 + y2
x3 = 7y1/3 + 5y2/3− y3/3

42 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
Elimineer x3 uit de eerste en tweede vergelijking,
x1 − x2 = 4y1/3 + 5y2/3− y3/3
x2 = −y1/3− 2y2/3 + y3/3
x3 = 7y1/3 + 5y2/3− y3/3
Elimineer nu x2 uit de eerste,
x1 = y1 + y2
x2 = −y1/3− 2y2/3 + y3/3
x3 = 7y1/3 + 5y2/3− y3/3
In matrixvermenigvuldigingsvorm,
x = By, met B =
1 1 0−1/3 −2/3 1/37/3 5/3 −1/3
.
Met andere woorden, ons stelsel kan worden opgelost door gewoon de matrix Bop y los te laten. We noemen B de inverse matrix van de coefficienten matrixvan ons stelsel. Als we de 3×3-matrix van ons oorspronkelijke stelsel aangevenmet A, dan blijft te gelden dat zowel AB = I3 als BA = I3. Controle,
AB =
−1 1 12 −1 −13 2 −1
1 1 0−1/3 −2/3 1/37/3 5/3 −1/3
= I3
en
BA =
1 1 0−1/3 −2/3 1/37/3 5/3 −1/3
−1 1 12 −1 −13 2 −1
= I3.
♢
In de volgende stelling tonen we het bestaan van de inverse matrix en zijneigenschappen op iets formelere manier aan.
Stelling 3.3.3 Zij A ∈ Mnn en stel dat A na rijreductie precies n pivot el-ementen heeft. Dan is er een unieke n × n-matrix B zodanig dat AB = In.Bovendien geldt dat BA = In.
Bewijs: Uit Stelling 3.3.1 weten we dat voor willekeurige y ∈ Rn het stelselAx = y precies een oplossing heeft. Zij voor i = 1, 2, . . . , n de vector bi de(unieke) oplossing van Abi = ei, waarin ei de i-de standaard basisvector vanRn is. Zij B de n×n-matrix met b1,b2, . . . ,bn als achtereenvolgende kolommen.Dan zien we dat AB de n×n-matrix is met de vectoren e1, . . . , en als kolommen.Met andere woorden, AB = In.We gaan nu het stelsel Bx = 0 oplossen. Laat aan beide zijden A los, en wevinden links ABx = Inx = x. Rechts vinden we A0 = 0. Dus x = 0, metandere woorden: Bx = 0 heeft alleen de triviale oplossing. Dat wil zeggen,

3.3. N VERGELIJKINGEN IN N ONBEKENDEN 43
volgens Stelling 3.3.1, dat B na rijreductie ook precies n pivot-elementen heeft.Dus is er, net als bij A, een matrix C zo dat BC = In. Laat nu weer aan beidezijden A erop los. We vinden ABC = A, en omdat AB = In houden we over,C = A. We concluderen dat BA = BC = In.Tenslotte, B is uniek bepaald. Stel namelijk dat er nog een B′ is met AB′ = In.Laat B aan beide zijden van links los, BAB′ = B. Omdat BA = In volgt hieruitdat B′ = B.
2
We noemen de matrix B zo dat AB = In de inverse matrix van A. Notatie,A−1. De oplossing van Ax = b, mits uniek, kan nu ook gevonden worden doorA−1b uit te rekenen.Om de inverse van een gegeven matrix A te bepalen moeten we de vergelijkingenAx = ei oplossen voor i = 1, . . . , n. Met een beetje handigheid kan dit ineen keer gebeuren door meteen alle kolommen ei in de uitgebreide matrix teschrijven. Hier is als voorbeeld de coefficienten matrix van ons doorlopendevoorbeeld 3.2.1.
Voorbeeld 3.3.4. −1 1 12 −1 −13 2 −1
∣∣∣∣∣∣1 0 00 1 00 0 1
De eerste rij 2 maal bij de tweede en 3 maal bij de derde opgeteld,−1 1 1
0 1 10 5 2
∣∣∣∣∣∣1 0 02 1 03 0 1
De tweede rij 5 maal van derde aftrekken,−1 1 1
0 1 10 0 −3
∣∣∣∣∣∣1 0 02 1 0−7 −5 1
Een derde maal de laatste rij bij de eerste en tweede optellen,−1 1 0
0 1 00 0 −3
∣∣∣∣∣∣−4/3 −5/3 1/3−1/3 −2/3 1/3−7 −5 1
Tweede van de eerste aftrekken,−1 0 0
0 1 00 0 −3
∣∣∣∣∣∣−1 −1 0−1/3 −2/3 1/3−7 −5 1
De eerste rij met −1, de derde met −1/3 vermenigvuldigen, 1 0 0
0 1 00 0 1
∣∣∣∣∣∣1 1 0
−1/3 −2/3 1/37/3 5/3 −1/3
De gewenste inverse matrix staat nu in de rechterhelft van de uitgebreide ma-trix.
♢

44 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
3.4 Homogene en inhomogene stelsels
Zij A ∈ Mmn en b ∈ Rm. Beschouw het stelsel
Ax = b
in de onbekende x ∈ Rn. Als b = 0, dan noemen we ons stelsel homogeen, alsb = 0 dan noemen we het stelsel inhomogeen.De oplossingsverzameling van een homogeen stelsel vergelijkingen heeft de vol-gende gemakkelijk te verifieren eigenschappen,
1. Als x en y oplossingen zijn, dan is x + y ook een oplossing. Immers,A(x+ y) = Ax+Ay = 0+ 0 = 0.
2. Als x een oplossing is en λ ∈ R, dan is λx ook een oplossing. Immers,A(λx) = λAx = λ0 = 0.
3. De nulvector 0 ∈ Rn is een oplossing. We noemen dit de triviale oplossing.
In heel veel situaties in de wiskunde zijn we geınteresseerd in niet-trivialeoplossingen van homogene vergelijkingen. De volgende stelling is hierbij vancruciaal belang,
Stelling 3.4.1 Een homogeen stelsel van m lineaire vergelijkingen in n onbek-enden heeft minstens een niet-triviale oplossing als n > m.
Bewijs: Het bewijs volgt uit een goed begrip van de Gauss-eliminatie. Om-dat er m vergelijkingen zijn kunnen er na Gauss-eliminatie hooguit m pivot-variabelen zijn. Omdat het aantal variabelen gelijk is aan n > m, zijn erook niet-pivot variabelen. Deze konden we voor de oplossing van ons stelselwillekeurig kiezen. Laten we de niet-pivot variabelen allemaal 1 kiezen. Dewaarden van de pivot-variabelen volgen hieruit. En dus hebben we een niet-triviale oplossing.
2
Bovenstaande stelling geldt zeker niet voor inhomogene stelsels, getuige hetflauwe stelsel
x1 + x2 + x3 + x4 = 1
x1 = 0
x1 = 1
dat duidelijk strijdig is.Over inhomogene stelsels kunnen we wel een andere algemene opmerking maken.Stel dat we een oplossing x0 van Ax = b hebben. We noemen dit een partic-uliere oplossing . Zij x een andere oplossing. Dan geldt, A(x−x0) = Ax−Ax0 =b − b = 0. Met andere woorden, x − x0 is een oplossing van het homogeengemaakte stelsel Ay = 0. Zij Shom de oplossingsverzameling van het homogeengemaakte stelsel en Sinhom de oplossingsverzameling van Ax = b. Daarnet

3.5. DEELRUIMTEN EN OPSPANSELS 45
zagen we dat bij elke x ∈ Sinhom een y ∈ Shom hoort zo dat x = x0 + y.Omgekeerd, voor elke y ∈ Shom geldt dat x0 + y ∈ Sinhom (ga na!). Conclusie,
Sinhom = {x0 + y | y ∈ Shom}
of korter, Sinhom = x0 + Shom.
3.5 Deelruimten en opspansels
Zoals we in de vorige paragraaf zagen, heeft de oplossingsverzameling W vaneen homogeen stelsel vergelijkingen de volgende eigenschappen:
1. Als x ∈ W en y ∈ W , dan geldt x+ y ∈ W
2. Als x ∈ W en λ ∈ R, dan geldt λx ∈ W .
3. De nulvector 0 is bevat in W .
Deelverzamelingen van vectorrruimten die aan deze eigenschappen voldoen noe-men we (lineaire) deelruimten. Omdat we in deelruimten een optelling enscalaire vermenigvuldiging van vectoren hebben, kunnen we ze zien als eennieuw voorbeeld van vectorruimten.
Een belangrijk voorbeeld van lineaire deelruimten zijn de zogenaamde opspansels.Deze worden als volgt gedefinieerd. Zij v1,v2, . . . ,vr een r-tal vectoren. Eenlineaire combinatie van deze vectoren is een vector van de vorm λ1v1 + λ2v2 +· · ·+ λrvr met λi ∈ R. Het opspansel van v1, . . . ,vr is de verzameling lineairecombinaties van deze vectoren. Notatie: Span(v1, . . . ,vr). Dus
Span(v1, . . . ,vr) = {λ1v1 + · · ·+ λrvr | λi ∈ R}.
Een ander belangrijk voorbeeld van een lineaire deelruimte is de nulruimtevan een matrix. Zij A een m × n-matrix. Dan is, zoals we boven zagen deverzameling vectoren x ∈ Rn met Ax = 0 een lineaire deelruimte. We noemendit de nulruimte van de matrix A. Notatie: Nul(A).
3.6 Scalairen (optioneel)
In de matrices en lineaire vergelijkingen die we tot nu toe bekeken hebben,werden reele getallen als coefficienten gebruikt. Niets houdt ons tegen om ookmatrices en lineaire vergelijkingen in andere getalsystemen te bekijken. Bi-jvoorbeeld de complexe getallen, die we met C aangeven. Alle stellingen enbeschouwingen die we tot nu toe gedaan hebben gaan onverminderd op voorde complexe getallen. We kunnen in al onze stellingen R door C vervangen.Maar in plaats van R kunnen we ook Q nemen. Merk op dat alle tot nutoe behandelde voorbeelden zelfs voorbeelden met coefficienten in Q zijn! Deverzamelingen R,C,Q hebben als gemeenschappelijk kenmerk dat het getalsys-temen zijn waarin we kunnen optellen, aftrekken, vermenigvuldigen en delen

46 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
(behalve door nul) met de gebruikelijke eigenschappen. Dergelijke getalsyste-men heten lichamen. In het tweede jaars college Algebra wordt dieper ingegaanop het wiskundige begrip lichaam. Hier volstaan we slechts met een aantalvoorbeelden.
Er bestaan ook eindige lichamen. We noemen er een van, namelijk F2, hetlichaam bestaande uit de elementen 0, 1 en met de optel- en vermenigvuldig-ingsregels
0 + 0 = 0, 0 + 1 = 1, 1 + 1 = 0, 0× 0 = 0, 1× 0 = 0, 1× 1 = 1.
Eigenlijk is rekenen in F2 hetzelfde als met de gehele getallen modulo 2 rekenen.
Ook in F2 kunnen we lineaire vergelijkingen oplossen. Hier is een voorbeeld.
Voorbeeld 3.6.1.
x1 + x3 + x4 = 1x1 + x2 + x3 + x4 = 0x1 + x4 = 1
De uitgebreide coefficientenmatrix ziet er uit als 1 0 1 11 1 1 11 0 0 1
∣∣∣∣∣∣101
Standaard Gauss-eliminatie geeft 1 0 1 1
0 1 0 00 0 1 0
∣∣∣∣∣∣110
en de oplossing luidt
x3 = 0, x2 = 1, x1 = 1− x3 − x4 = 1− x4 =, x4 ∈ F2
en omdat −1 = 1 in F2,
x3 = 0, x2 = 1, x1 = 1 + x4, x4 ∈ F2.
♢
Merk op, dat Z, de gehele getallen, geen lichaam vormen. Het quotient vantwee gehele getallen hoeft namelijk niet geheel te zijn. Als gevolg daarvan gaanniet alle stellingen uit dit hoofdstuk voor Z op. Bijvoorbeeld, de vergelijking3x = 0 heeft precies een gehele oplossing, namelijk 0. Maar 3x = 1 heeft geenoplossing in Z. Daarom gaat Stelling 3.3.3 met n = 1 niet op als we R door Zwillen vervangen.
De verzamelingen R,C,Q,F2 zullen we in de lineaire algebra lichamen vanscalairen noemen.

3.7. CODERINGSTHEORIE (OPTIONEEL) 47
3.7 Coderingstheorie (optioneel)
Een toepassing van matrices met coefficienten in F2 is de coderingstheorie. Inde digitale wereld vindt communicatie plaats door uitwisseling van rijen nullenen enen. Bijvoorbeeld, muziek en films op onze computer worden vastgelegddoor middel van muziek- en beeldfiles die uit niets anders dan bits (dat wilzeggen de symbolen 0,1) bestaan. Bij de communicatie van zulke data gaathet nog wel eens mis door storingen in het communicatiekanaal. Op een CD,die digitale informatie bevat, kunnen bijvoorbeeld krassen ontstaan. Tijdensde eerste reizen naar Mars door de Mariner’s in de 70-er jaren was de kwaliteitvan de foto’s die over grote afstand tot ons kwamen, uiterst belabberd. In debegintijd van de computers waren storingen in de datatransmissie een grotebron van ergernis.
Om deze problemen tegemoet te komen, deelt men het signaal in blokken vaneen standaardlengte in, en voegt daar een of meer zogenaamde checksums aantoe. Bijvoorbeeld aan een rij bits in een geheugenchip van een computer voegtmen een extra bit toe dat gelijk is aan 0 als het aantal geheugenbits even is, en0 als het aantal bits oneven is. Dus bijvoorbeeld, aan de 8 bits 01100010 voegtmen een 1 toe en slaat deze mee op. Mocht bij uitlezen van het geheugen dechecksum niet meer kloppen, door een storing, dan wordt groot alarm geslagenin de computer door de waarschuwing ’check sum error’. Wat minder technisch,ISBN nummers van boeken worden zo gevormd dat 10 maal het eerste cijfer, 9maal het tweede, etc een getal oplevert dat deelbaar is door 11. Bijvoorbeeld,ISBN 0-306-40615-2 is een geldig nummer omdat
10× 0+9× 3+8× 0+7× 6+6× 4+5× 0+4× 6+3× 1+2× 5+1× 2 = 132
deelbaar is door 11. Het laatste cijfer doet eigenlijk dienst als checksum.
Checksums zijn heel handig om fouten te constateren, maar ze geven geen aan-wijzing over de plaats en de aard van de fout. Richard Hamming introduceerdein de 50-er jaren een methode die dat wel mogelijk maakte. In de begintijd vande computers traden veel fouten op bij bijvoorbeeld het lezen van ponskaarten.Gefrusteerd door de steeds terugkerende problemen bedacht Hamming het vol-gende. Signalen worden opgedeeld in blokjes van 4 bits. Hamming voegde daarzelf 3 checkbits aan toe op een ingenieuze manier. We kunnen deze het bestbeschrijven aan de hand van een stelsel lineaire vergelijkingen. Bekijk de matrix
H =
1 0 1 0 1 0 10 1 1 0 0 1 10 0 0 1 1 1 1
met elementen in F2. Merk op dat kolommen van deze matrix precies alle vec-toren in F3
2 zijn, behalve de nulvector. Verder staan ze precies zo gerangschiktdat elke kolom de tweetallige cijfers van het volgnummer van de kolom bevatten.Ga maar na. De nulruimte van deze matrix heeft als basis
(1, 0, 0, 0, 0, 1, 1)t
(0, 1, 0, 0, 1, 0, 1)t

48 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
(0, 0, 1, 0, 1, 1, 0)t
(0, 0, 0, 1, 1, 1, 1)t
Verder vermelden we als bijzonderheid dat elke niet-triviale vector in de nul-ruimte minstens drie enen bevat. Dit kun je zelf nagan.Stel dat in ons signaal het blok bits a, b, c, d voorkomt. Dan voegen we daaraanto de drie bits gegeven door b+c+d, a+c+d, a+b+d aan toe. Het zo ontstaneblok van 7 bits geeft een vector in de nulruimte vanH. We geven het aangevuldeblok, dat we B noemen, in ons signaal door aan de ontvanger. Stel dat die hetblok C ontvangt. Het kan zijn dat dit B is, in ongeschonden vorm, maar erkunnen ook fouten opgetreden zijn. Als dat zo is dan zal de verschilvector∆ = C −B niet nul zijn. De ontvanger bepaalt als test HC. Deze is gelijk aanH∆. Als C = B dan geldt zeker HC = H∆ = 0. Maar de ontvanger kent Bniet en moet dus een oordeel vellen. Wat als H∆ = 0 en ∆ = 0? Dan zit ∆in de nulruimte en moet minstens drie verschillende enen bevatten. Er zoudendus minstens drie fouten opgetreden moeten zijn. Op een kanaal waar de kansop fouten bijvoorbeeld 10% is, lijkt dit nogal onwaarschijnlijk en de ontvangerkiest ervoor te concluderen dat het signaal ongeschonden is doorgekomen. In0.1% van de gevallen zal dit misschien een onjuiste aanname zijn, maar het iswel een flinke verbetering tav de oorspronkelijke 10% foutenkans.Stel nu dat de ontvanger constateert dat HC = 0. In ieder geval is er een foutopgetreden. Laten we even aannemen dat er precies 1 fout is opgetreden. Zegdat die op de vierde plaats staat. De ontvanger ziet dan dat HC = H∆ =(0, 0, 1)t. Met andere woorden, aangenomen dat er 1 fout is, dan moet het welop plaats 4 zijn, want (0, 0, 1)t is de vierde kolom van H. Vervolgens kan deontvanger het bericht corrigeren door op de vierde plaats het bit te veranderen.Om deze reden noemen Hamming’s code een foutencorrigerende code. Preciezer,het is mogelijk 1 fout recht te zetten.Er zijn ook foutencorrigerende codes die twee of meer fouten kunnen corrigeren.Bij de Mariner-9 expeditie werd een Hadamard code gebruikt die 7 fouten kancorrigeren.
3.8 Opgaven
Opgave 3.8.1 Gegeven zijn de matrices
A =
7 0 −1−1 5 20 1 3
, B =
(−1 4 15 −3 0
)
C =
(1 4−4 0
), D =
(5 0−2 1
), E =
(7−3
)1. Bepaal, indien mogelijk, de volgende matrices:
−2A, A−B, BC, CB, 3C −D, CE, EC, CD, DC
2. Bepaal A− I3 en A− 3I3 waarin I3 de 3× 3-identiteitsmatrix is.
3.8. OPGAVEN 49
3. Laat zien dat I2B = B en dat BI3 = B.
Opgave 3.8.2 Geef twee 2× 2-matrices A,B, beiden niet de nulmatrix, zo datAB = O waarin O de 2× 2-nulmatrix voorstelt.
Opgave 3.8.3 Zij
A =
(3 −4−5 1
), B =
(7 45 k
)Voor welke waarde(n) van k, indien ze bestaan, geldt AB = BA?
Opgave 3.8.4 Zij A,B een tweetal 2×2-matrices. Gaat de volgende gelijkheidaltijd op: (A−B)(A+B) = A2 −B2 ?
Opgave 3.8.5 Los de volgende stelsels lineaire vergelijkingen op:
1.2x1 + 2x2 − 3x3 = 0x1 + 5x2 + 2x3 = 1
−4x1 + 6x3 = 2
2.2x1 + 2x2 − 3x3 = 0x1 + 5x2 + 2x3 = 0
−4x1 + 6x3 = 0
3.2x1 + 2x2 − 3x3 = 0x1 + 5x2 + 2x3 = 0
4.x1 − x3 = 0
−2x1 + 3x2 − x3 = 0−6x1 + 6x2 = 0
5.x1 − x3 = 1
−2x1 + 3x2 − x3 = 0−6x1 + 6x2 = 0
6.x1 + 4x2 + 9x3 + 2x4 = 02x1 + 2x2 + 6x3 − 3x4 = 02x1 + 7x2 + 16x3 + 3x4 = 0
7.2x1 + 4x2 + x3 = 7
x2 + 3x3 = 73x1 + 3x2 − x3 = 9x1 + 2x2 + 3x3 = 11
8.3x1 − 6x2 − x3 + x4 + 5x5 = 0−x1 + 2x2 + 2x3 + 3x4 + 3x5 = 04x1 − 8x2 − 3x3 − 2x4 + x5 = 0

50 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
9.3x1 − 6x2 − x3 + x4 = 5−x1 + 2x2 + 2x3 + 3x4 = 34x1 − 8x2 − 3x3 − 2x4 = 1
Opgave 3.8.6 Schrijf alle gereduceerde 2 × 2-matrices op door de nullen met0 aan te geven, de pivotcoefficienten met pi en de overige elementen met ⋆.Bijvoorbeeld, (
p1 ⋆0 p2
)
Opgave 3.8.7 Zelfde vraag als de vorige, maar nu voor 3 × 3-matrices (Hint:er zijn 8 gevallen).
Opgave 3.8.8 Bepaal voor elk van de volgende stelsels de waarden van b1, b2, b3, b4waarvoor het stelsel een oplossing heeft.
1.x1 − x3 = b1
−2x1 + 3x3 − x3 = b2−6x1 + 6x2 = b3
2.x1 − 2x2 = b12x1 − 4x2 = b2−6x1 + 12x2 = b3
3.x1 + 2x2 − 6x3 = b1
−2x2 − 4x2 + 12x3 = b2
4.x1 − x3 = b1
−2x1 + 3x2 − x3 = b23x1 − 3x2 = b32x1 − 2x3 = b4
Opgave 3.8.9 Laat zien dat het stelsel vergelijkingen
ax1 + 2x2 + ax3 = 5a
x1 + 2x2 + (2− a)x3 = 5
3x1 + (a+ 2)x2 + 6x3 = 15
voor iedere waarde van a oplosbaar is. Los het stelsel op voor die waarden vana waarvoor er meer dan een oplossing is. Geef in ieder van deze gevallen eenmeetkundige interpretatie van het stelsel vergelijkingen en zijn oplossingen.
Opgave 3.8.10 Bepaal de waarden van a waarvoor het stelsel vergelijkingen
x1 − 3x3 = −3
2x1 + ax2 − x3 = −2
x1 + 2x2 + ax3 = −1

3.8. OPGAVEN 51
niet oplosbaar is. Geef voor die waarden van a een meetkundige interpretatie.
Opgave 3.8.11
1. Bepaal de waarde(n) van a waarvoor het stelsel
x1 + 4x2 − 3x3 + 2x4 = 0
2x1 + 7x2 − 4x3 + 4x4 = 0
−x1 + ax2 + 5x3 − 2x4 = 0
3x1 + 10x2 − 5x3 + (a2 + 4a+ 1)x4 = 0
meer dan een oplossing heeft.
2. Voor welke waarde van a is de oplossingsruimte 2-dimensionaal (dwz 2parameters)? Bepaal in dit geval de oplossingsverzameling.
3. Bepaal de waarde van b waarvoor het stelsel
x1 + 4x2 − 3x3 + 2x4 = 2
2x1 + 7x2 − 4x3 + 4x4 = 3
−x1 − 5x2 + 5x3 − 2x4 = b
3x1 + 10x2 − 5x3 + 6x4 = 4
oplosbaar is en bepaal de oplossingsverzameling.
Opgave 3.8.12 Gegeven zijn drie getallen b1, b2, b3.
1. Bewijs dat er een unieke quadratische functie p(x) = ax2+ bx+ c bestaatzo dat p(1) = b1, p(2) = b2, p(3) = b3.
2. Bewijs dat er een unieke quadratische functie p(x) = ax2+ bx+ c bestaatzo dat p(1) = b1, p′(1) = b2, p′′(1) = b3.
Opgave 3.8.13 Bepaal de inverse van elke van de volgende matrices:(cosα sinα− sinα cosα
),
(cosα sinαsinα − cosα
)
Opgave 3.8.14 In deze opgave kijken we naar 3× 3-matrices. In het bijzonderdefinieren we de elementaire 3× 3-matrices
- Eij(λ) als de matrix die we uit I3 krijgen door het element op plaats i, jte vervangen door λ.
- Sij als de matrix die uit I3 ontstaat door de i-de en j-de kolom te verwis-selen.
Schrijf E33(λ), E13(λ), E31(λ) en S12 uit.Zij M een willekeurige 3× 3-matrix.

52 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
1. Geef een omschrijving van de volgende matrixproducten:
E33(λ)M, E13(λ)M, E31(λ)M, S12M
2. Wat is de inverse van E33(λ), E13(λ), E31(λ) en S12?
3. Zij M een matrix die door volledige rijreductie (Jordanreductie) tot deidentiteitsmatrix gereduceerd kan worden. Laat zien dat M geschrevenkan worden als matrixproduct van elementaire matrices.
4. Geef een omschrijving van de volgende matrixproducten:
ME33(λ), ME13(λ), ME31(λ), MS12
Natuurlijk is in bovenstaande opgave de beperking tot 3×3-matrices niet nodig,een analoog verhaal geldt ook voor n× n-matrices.
Opgave 3.8.15 Zij A een m × n-matrix. Stel dat Ax = 0 voor alle x ∈ Rn.Bewijs dat A de m× n nul-matrix is (dwz: alle elementen nul).
Opgave 3.8.16 Zij A,B een tweetal m× n-matrices met matrixelementen aijrespectievelijk bij . Hoe ziet het element op plaats i, j van A+B er uit? En hoeziet het element van At, Bt respectievelijk (A+ B)t op plaats i, j er uit? Laatzien dat (A+B)t = At+Bt. Met M t geven we de getransponeerde aan van dematrix M .
Opgave 3.8.17 Zij A een m× p-matrix en B een p× n-matrix. De elementenvan A,B respectievelijk AB geven we aan met aij , bjk repectievelijk cik waarini = 1, . . . ,m; j = 1, . . . , p; k = 1, . . . , n. Met M t geven we de getransponeerdeaan van de matrix M .Bewijs dat (AB)t = BtAt (Hint: gegeven dat een matrix M matrixelementenmij op plaats i, j heeft dan heeft M t het matrixelement mji op plaats i, j?Gebruik ook de regel cik =
∑pj=1 aijbjk).
Opgave 3.8.18 Een n×n-matrix M heet symmetrisch als M = M t. De matrixM heet anti-symmetrisch als M t = −M .
1. Welk van de volgende matrices zijn symmetrisch, anti-symmetrisch, geenvan beide? (
1 2−2 3
),
(0 −11 0
),
(−20 2121 −22
) 0 3 −1
−3 0 21 −2 0
,
0 1 2−1 0 52 5 0
,
0 0 00 0 00 0 0
2. Laat zien dat de diagonaalelementen van een anti-symmetrische matrix
nul zijn.
3. Stel dat A,B symmetrische n × n-matrices zijn. Bewijs dat AB sym-metrisch is precies dan als AB = BA.
3.8. OPGAVEN 53
4. Zij A een willekeurige n×n-matrix. Bewijs dat A+At symmetrisch is enA−At antisymmetrisch.
5. Bewijs dat elke n × n-matrix geschreven kan worden als som van eensymmetrische en een anti-symmetrische matrix. Illustreer dit aan de handvan de voorbeelden in onderdeel a).
Opgave 3.8.19 Ga na of het volgende stelsel lineaire vergelijkingen oplosbaaris. Zo ja, los het stelsel op.
x1 + 2x2 − 3x3 + x4 = 5
2x1 − x2 + x3 + x4 = −1
4x1 + 3x2 − 5x3 + 3x4 = 9
3x1 + 11x2 − 16x3 + 4x4 = 26
2x1 − 6x2 + 8x3 = −12
Opgave 3.8.20 Zelfde vraag als boven voor het stelsel
x1 + 2x2 + 3x3 = 0
x1 − 6x3 = 0
2x1 + 4x2 + x3 = 0
Opgave 3.8.21 Zelfde vraag als boven voor het stelsel
3x1 − 2x2 = −1
2x1 − 3x2 + x3 = −1
5x2 − 3x3 = 1
Opgave 3.8.22 Zelfde vraag als boven voor het stelsel
3x1 + 10x2 + 14x3 − 6x4 + x5 = 0
x1 + 6x2 + 4x3 + x5 = 0
2x1 + 8x2 + 9x3 − 3x4 + x5 = 0
Opgave 3.8.23 Zelfde vraag als boven voor het stelsel
x1 + x2 + 2x3 + 3x4 − 2x5 = 1
2x1 + 4x2 − 8x5 = 3
−2x2 + 4x3 + 6x4 + 4x5 = 0

54 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
Opgave 3.8.24 Zelfde vraag als boven voor het stelsel
x1 + x2 − 2x3 = 0
2x1 + x2 − 3x3 = 0
4x1 − 2x2 − 2x3 = 0
6x1 − x2 − 5x3 = 0
7x1 − 3x2 − 4x3 = 1
Opgave 3.8.25 Zelfde vraag als boven voor het stelsel
x1 + 2x2 = 0
x1 + 4x2 − 2x3 = 4
2x1 + 4x3 = −8
3x1 + 6x3 = −12
−2x1 − 8x2 + 4x3 = −8
Opgave 3.8.26 Het stelsel lineaire vergelijkingen
3x1 − 5x2 + 7x3 = 11
4x1 − 6x2 + 8x3 = 12
5x1 − 8x2 + 11x3 = α
6x1 − 9x2 + 12x3 = 18
is oplosbaar. Bereken α en bepaal de oplossingsverzameling.
Opgave 3.8.27 Bepaal de waarden voor α waarvoor het stelsel
7x1 − 3x2 − x3 + x4 = αx1
−3x1 + 7x− 2 + x3 − x4 = αx2
−x1 + x− 2 + 7x3 − 3x4 = αx3
x1 − x2 − 3x− 3 + 7x4 = αx4
een niet-triviale oplossing heeft. Los het stelsel voor deze waarden op.
Opgave 3.8.28 Bepaal de inverse van de volgend matrices, indien ze bestaan,(3 64 8
),
(6 78 9
),
(−2 35 −1
).
Opgave 3.8.29 Bepaal de inverse van de volgend matrices, indien ze bestaan, 1 1 −12 0 3−3 1 −7
,
2 1 43 2 50 −1 1
,
−1 2 12 −3 51 0 12
.

3.8. OPGAVEN 55
Opgave 3.8.30 Bepaal de inverse van de volgend matrices, indien ze bestaan,2 0 0 0 00 −3 0 0 00 0 5 0 00 0 0 −11 00 0 0 0 3
,
0 0 0 0 70 0 0 −4 00 0 3 0 00 1 0 0 0−9 0 0 0 0
.
Opgave 3.8.31 Zij A,B een tweetal n×n-matrices zo dat AB = In. Laat ziendat Ax = 0 alleen de triviale oplossing heeft.
Opgave 3.8.32 Zij A,B een tweetal inverteerbare n× n-matrices. Bewijs datAB dan ook inverteerbaar is, en dat de inverse wordt gegeven door B−1A−1.
Opgave 3.8.33 ZijA een inverteerbare matrix. Bewijs datAt ook inverteerbaaris. Wat is zijn inverse?
Opgave 3.8.34 Een n× n-matrix heet nilpotent als er een gehele r bestaat zodat Ar de nulmatrix is.
1. Geef een voorbeeld van een niet-triviale, nilpotente 2× 2-matrix.
2. Zij A een inverteerbare n× n-matrix. Laat zien dat A niet nilpotent is.
3. (Lastig) Stel A een nilpotente n×n-matrix is. Laat zien dat er een geheler bestaat, met 0 ≤ r ≤ n zo dat Ar = O.
Opgave 3.8.35 We vervolgen onze vragen over nilpotente matrices (zie voor-gaande opgave).
1. Laat zien dat 0 a1 a2 a30 0 b2 b30 0 0 c30 0 0 0
nilpotent is.
2. Bovenstaande matrix is voorbeeld van een bovendriehoeksmatrix (alleenniet-triviale elementen in rechterbovendriehoek). Zo zijn er ook benedendriehoeksmatrices (alleen niet-triviale elementen in de linker- beneden-hoek). Laat zien dat er nilpotente 4× 4-matrices zijn, die noch beneden-noch bovendriehoeksmatrix zijn.
Opgave 3.8.36 Zij S = {v1, . . . ,vr} ⊂ Rn een eindige verzameling vectoren.Laat zien dat het opspansel van S een lineaire deelruimte van Rn is.Stel dat W ⊂ Rn een deelruimte is, die S bevat. Laat zien dat W dan ookSpan(S) bevat.
Opgave 3.8.37 Zij V,W een tweetal deelruimten van Rn.

56 HOOFDSTUK 3. MATRICES EN LINEAIRE VERGELIJKINGEN
1. Bewijs dat de doorsnijding V ∩W ook een deelruimte is.
2. Bewijs dat de vereniging V ∪W is een deelruimte precies als V ⊂ W ofW ⊂ V .
Hoofdstuk 4
Onafhankelijkheid en rang
In dit hoofdstuk behandelen we een aantal begrippen die fundamenteel voor delineaire algebra zijn. Bij de vectoren waarover we het in dit hoofdstuk hebbendenken we in de eerste plaats aan vectoren in Rn. Echter, de stellingen indit hoofdstuk zijn zo geformuleerd, dat ze ook bruikbaar zijn in algemenerevectorruimten die we later in zullen voeren.De afleiding van de hoofdresultaten in dit hoofdstuk berusten allen op Stelling3.4.1 over homogene lineaire vergelijkingen, die hiermee centraal in de lineairealgebra komt te staan.
4.1 Afhankelijkheid
Zij v1,v2, . . . ,vr een r-tal vectoren. Een som van de vorm λ1v1+· · ·+λrvr noe-men we een lineaire combinatie van v1, . . . ,vr. We noemen een vector w lineairafhankelijk van v1, . . . ,vr als hij geschreven kan worden als lineaire combinatievan v1, . . . ,vr.De vectoren v1, . . . ,vr zelf noemen we een (lineair) afhankelijk stelsel als min-stens een van de vi een lineaire combinatie is van de overige. We noemenhet stelsel v1, . . . ,vr onafhankelijk als geen van de vi van de overige vectorenafhangt.Het begrip lineaire onafhankelijkheid kunnen we iets eleganter formuleren intermen van lineaire relaties. We zeggen dat er tussen de vectoren v1, . . . ,vr
een lineaire relatie bestaat, als er getallen λ1, . . . , λr ∈ R zijn zo dat
λ1v1 + λ2v2 + · · ·+ λrvr = 0.
Dat zo’n relatie altijd bestaat zien we door alle λi nul te kiezen. We noemendit de triviale relatie . Een relatie heet niet-triviaal als λi = 0 voor minstenseen i. Er geldt,
Stelling 4.1.1 Het stelsel v1,v2, . . . ,vr is afhankelijk precies dan als er eenniet-triviale relatie tussen v1, . . . ,vr bestaat.
Voorbeeld 4.1.2. Zij a,b, c ∈ Rn een drietal vectoren. Stel we weten data = 2b − c. Dan is a afhankelijk van b, c, met andere woorden, a,b, c is eenafhankelijk stelsel. Een niet-triviale relatie volgt onmiddelijk, 0 = −a+2b− c.
57

58 HOOFDSTUK 4. ONAFHANKELIJKHEID EN RANG
Stel omgekeerd dat er een niet-triviale relatie is, bijvoorbeeld 2a−3b+4c = 0.Dan volgt hieruit dat a = 3b/2− 2c, dus a is afhankelijk van b, c.
♢
Het algemene bewijs gaat helemaal analoog.
Bewijs: We moeten eerst laten zien dat uit afhankelijkheid het bestaan vaneen niet-triviale relatie volgt. Stel dat vi afhankelijk is van de overige vj , j = i.Dus er zijn λ1, . . . , λi−1, λi+1, . . . , λr zo dat
vi = λ1v1 + · · ·+ λi−1vi−1 + λi+1vi+1 + · · ·+ λrvr
Door nu vi naar rechts te brengen zien we dat we een relatie krijgen met λi =−1. Hiermee hebben we een niet-triviale relatie gevonden.Omgekeerd moeten we laten zien dat uit het bestaan van een niet-triviale relatieafhankelijkheid volgt. Stel dat 0 = λ1v1 + · · · + λrvr en stel dat λi = 0 voorzekere i. Door nu de term λivi naar links te brengen en aan beide zijden door−λi te delen krijgen we vi als lineaire combinatie van v1, . . . ,vi−1,vi+1, . . . ,vr.
2
Bovenstaande stelling kunnen we ook op een iets andere manier formuleren. Gazelf na dat het volgende geldt.
Stelling 4.1.3 Het stelsel v1, . . . ,vr is onafhankelijk precies dan als tussenv1, . . . ,vr alleen de triviale relatie bestaat.
Deze laatste vorm gebruiken we veelal om (on)afhankelijkheid van vectoren aante tonen.
Voorbeeld 4.1.4. Zijn de vectoren 1−20
211
051
342
afhankelijk? Om dit te beantwoorden lossen we het homogene stelsel lineairevergelijkingen 1 0 2 3
−2 5 1 40 1 1 2
∣∣∣∣∣∣000
op. Na Gauss-eliminatie houden we het volgende stelsel over 1 0 2 3
0 1 1 20 0 0 0
∣∣∣∣∣∣000
Dit stelsel heeft niet-triviale oplossingen en dus is ons stelsel van vier vectorenafhankelijk.We zien nog meer in dit voorbeeld. De pivotvariabelen in onze eliminatie zijnx1 en x2. Kiezen we x3 = −1 en x4 = 0 dan volgt uit de vergelijkingen dat

4.2. DIMENSIE EN RANG 59
x1 = 2, x2 = 1. Bij de keuze x3 = 0 en x4 = −1 volgt x1 = 3, x2 = 2automatisch. We vinden daarmee de relaties 2
11
= 2
1−20
+
051
,
342
= 3
1−20
+ 2
051
Bovendien zijn de eerste twee vectoren onafhankelijk omdat er geen niet-trivialerelaties met x3 = x4 = 0 zijn.
♢
Hier is nog een stelling voor later gebruik.
Stelling 4.1.5 Stel b1, . . . ,br onafhankelijk en v is afhankelijk van de bi. Dankan v precies op een manier geschreven worden als lineaire combinatie vanb1, . . . ,br.
Bewijs: Stel dat v op twee manieren geschreven kan worden als lineairecombinatie van b1, . . . ,br. Zeg,
v = λ1b1 + · · ·+ λrbr = µ1b1 + · · ·+ µrbr.
Na aftrekken volgt, (λ1 − µ1)b1 + · · · + (λr − µr)br = 0. Omdat b1, . . . ,br
onafhankelijk zijn concluderen we hieruit dat λi − µi = 0 voor i = 1, . . . , r endus λi = µi voor alle i.
2
4.2 Dimensie en rang
Definitie 4.2.1 Zij S een niet lege verzameling vectoren. Het grootste getalr, zo dat S een r-tal onafhankelijke vectoren bevat, noemen we de rang van S.Notatie: rang(S).
In het bijzonder, als S = {0}, dan zeggen we dat rang(S) = 0.
Als S een deelruimte is dan noemen we de rang van S ook wel dimensie. Notatie:dim(S).
Als r niet bestaat, dan zeggen we dat de rang (of dimensie) van S oneindig is.
We kunnen alleen r = ∞ hebben als S voor elke positief gehele r een r-talonafhankelijke vectoren bevat. Zolang we met vectoren in Rn werken zal ditniet gebeuren. Later, vanaf Hoofdstuk 7, krijgen we wel te maken met oneindigdimensionale vectorruimten.
De volgende stelling kunnen we zien als de hoofdstelling van de lineaire algebra.
Stelling 4.2.2 (Hoofdstelling) Zij S een verzameling vectoren en stel dat Sbevat is in het opspansel van n vectoren b1, . . . ,bn. Dan geldt dat rang(S) ≤ n.

60 HOOFDSTUK 4. ONAFHANKELIJKHEID EN RANG
Een gevolg is dat bijvoorbeeld elke deelverzameling S ⊂ Rn een rang ≤ n heeft,want Rn is het opspansel van de standaard basisvectoren e1, . . . , en.
Bewijs: Het bewijs van de stelling krijgen we door aan te tonen dat iedern+1-tal vectoren in S afhankelijk is. Daarmee bestaat elk onafhankelijk stelselvectoren in S uit hooguit n vectoren. En dus rang(S) ≤ n.Kies s1, s2, . . . , sn+1 ∈ S. Elk van de si is afhankelijk van b1, . . . ,bn. Dat wilzeggen, er zijn aij zo dat
s1 = a11b1 + a12b2 + · · ·+ a1nbn
......
sn+1 = an+1,1b1 + an+1,2b2 + · · ·+ an+1,nbn
De rijen (ai1, ai2, . . . , ain), i = 1, 2 . . . , n+1 kunnen gezien worden als elementenvan Rn. Er zijn n+1 van deze rijen en dus bestaat er volgens Stelling 3.4.1 eenniet-triviale oplossing λ1, . . . , λn+1 van het stelsel
λ1a11 + λ2a21 + · · ·+ λn+1an+1,1 = 0
...
λ1a1n + λ2a2n + · · ·+ λn+1an+1,n = 0
Als gevolg hiervan geldt dat
λ1s1 + · · ·+ λn+1sn+1 = (λ1a11 + · · ·+ λn+1an+1,1)b1 +
...
+(λ1a1n + · · ·+ λn+1an+1,n)bn
= 0 · b1 + · · ·+ 0 · bn = 0.
Dus s1, . . . , sn+1 zijn lineair afhankelijk.2
Om de rang van een verzameling te kunnen bepalen en ermee te rekenen voerenwe het begrip basis in.
Definitie 4.2.3 Zij S een verzameling vectoren. Een eindige deelverzamelingB ⊂ S heet een basis van S als
1. B onafhankelijk is, en
2. elke v ∈ S afhankelijk is van B.
Het bekendste voorbeeld is natuurlijk de standaardbasis e1, . . . , en van Rn.Samen met Stelling 4.1.5 volgt dat als B een basis van S is en v ∈ S, devector v op precies een manier geschreven kan worden als lineaire combinatievan vectoren uit B.
Een ander voorbeeld, 1−20
211
332
4.2. DIMENSIE EN RANG 61
is een basis van de verzameling S = R3. Leg uit waarom dit zo is!Het zal blijken dat een basis van R3 altijd uit drie vectoren bestaat. Hier volgtde karakterisatie van een basis.
Stelling 4.2.4 Zij S een verzameling vectoren van rang n. Dan geldt:
1. Elke basis van S bestaat uit n vectoren.
2. Elk onafhankelijk stelsel vectoren uit S bestaande uit n vectoren is eenbasis van S.
Bewijs: Stel we hebben een basis B met m elementen. Omdat n = rang(S)het maximum van alle mogelijke aantallen onafhankelijke vectoren is, geldtm ≤ n. Anderzijds, S is bevat in het opspansel van de vectoren uit B. Dus,volgens de eerste hoofdstelling, n ≤ m. Conclusie: m = n.Zij B een deelverzameling van S bestaande uit n onafhankelijke elementen.Stel v ∈ S. Als v onafhankelijk van de vectoren B is, dan zouden we n + 1onafhankelijke vectoren in S hebben, in tegenspraak met rang(S) = n. Weconcluderen dat v afhankelijk van B is. Daarmee is B een basis van S.
2
Voorbeeld 4.2.5. We nemen nog even het stelsel S van vectoren uit Voorbeeld4.1.4, 1
−20
211
051
342
.
Om afhankelijkheid aan te tonen, losten we het homogene stelsel lineaire vergeli-jkingen 1 0 2 3
−2 5 1 40 1 1 2
∣∣∣∣∣∣000
op. Na Gauss-eliminatie hielden we het stelsel 1 0 2 3
0 1 1 20 0 0 0
∣∣∣∣∣∣000
over. We zagen uit deze gereduceerde vorm dat de derde en vierde vectorlineaire combinaties zijn van de eerste twee, en dat de eerste twee vectorenonafhankelijk zijn. We concluderen dat de eerste twee vectoren een basis vanons viertal vormen en dat de rang gelijk is aan 2.
♢
Dit voorbeeld illustreert de volgende handige regel.
Stelling 4.2.6 Zij gegeven een n-tal kolomvectoren b1, . . . ,bn ∈ Rm. Zij B dem×n-matrix met de vectoren bi als kolommen. Zij i1, i2, . . . , ir de verzamelingkolomindices corresponderend met de pivot-elementen na een rijreductie van B.Dan is bi1 , . . . ,bir een basis van het stelsel b1, . . . ,bn. In het bijzonder is derang van dit stelsel gelijk aan het aantal pivot-elementen.

62 HOOFDSTUK 4. ONAFHANKELIJKHEID EN RANG
Stelling 4.2.7 Zij S, S′ ⊂ Rn een tweetal verzamelingen vectoren met S ⊂ S′.Dan geldt,
1. Elke basis van S kan worden uitgebreid tot een basis van S′.
2. rang(S) ≤ rang(S′).
Bewijs: Stel dat we een basis b1, . . . ,bs van S hebben. We kunnen dan eenbasis van S′ construeren door een vector bs+1 ∈ S′ te kiezen die onafhankelijkis van b1, . . . ,bs, vervolgens bs+2 onafhankelijk van de voorgaande, etcetera.Dit proces breekt af omdat er niet meer dan n onafhankelijke vectoren in S′
kunnen zitten. We houden een basis van S′ over, die de basis b1, . . . ,bs van Sbevat.Het feit dat rang(S) ≤ rang(S′) volgt uit de definitie van het rangbegrip.
2
Tenslotte vermelden we een paar nuttige feiten. Geef zelf een bewijs hiervoor.
Stelling 4.2.8 Zij S een verzameling vectoren. De rang van S verandert nietals
1. we een vector v ∈ S vervangen door λv, waarin λ = 0
2. we een vector v ∈ S vervangen door v+ λw, waarin w ∈ S, w = v en λeen willekeurige scalair is.
4.3 Rang van een matrix
Beschouw een m× n-matrix A. We kunnen op twee manieren de matrix A eenrang toekennen. Namelijk de rang van de rijvectoren van A en de rang van dekolomvectoren van A. We noemen dit rijenrang respectievelijk kolommenrangvan A. We hebben de volgende verrassende stelling.
Stelling 4.3.1 De rijenrang van een matrix is gelijk aan zijn kolommenrang.
Bewijs: Noem de matrix A. Voer een rijreductie op A en noem de gere-duceerde matrix A. Stel dat A precies r pivotelementen bevat. Omdat bijrijreductie de relaties tussen de kolommen niet veranderen, geldt dat de kolom-menrang van A en A gelijk zijn aan r (zie ook Stelling 4.2.6).Verder volgt uit Stelling 4.2.8 dat bij rijreductie de rijenrang van A en A het-zelfde zijn. Omdat A in de trapvorm staat zien we dat de rijen die een pivot-element bevatten een onafhankelijk stelsel vormen. De overige rijen bestaanalleen uit nullen. De rijenrang van A is dus r en dit is tevens gelijk aan derijenrang van A.We concluderen dat de rijenrang en kolommenrang van A beiden gelijk zijn aanr.
2
In de vorige paragraaf, Stelling 4.2.6, zagen hoe we de rang van een stelselkolomvectoren konden uitrekenen. Hiermee zien we dat de rang van een matrix

4.3. RANG VAN EEN MATRIX 63
gelijk is aan het aantal pivot-variabelen dat optreedt bij rijreductie van dematrix.Ten slotte hebben we het begrip nulruimte van een matrix A. Dit is niets andersdan de oplossingsverzameling van het homogene stelsel lineaire vergelijkingenAx = 0. Notatie: Nul(A).Na al het voorgaande is het niet meer lastig om de volgende Stelling in te zien.
Stelling 4.3.2 Zij A een m × n-matrix. Dan is de dimensie (of rang) vanNul(A) gelijk aan n− rangA.
Bewijs: Bij oplossing van het stelsel door Gauss-eliminatie vinden we eengereduceerd stelsel vergelijkingen met r pivot-variabelen en n − r niet-pivotvariabelen. Uit de opmerking boven weten we dat r = rangA. Verder krijgenwe de volledige oplossingsverzameling door elk van de niet-pivot variabelen eenwillekeurige waarde te geven. Hierdoor krijgt de oplossingsverzameling rang (ofdimensie, de oplossingsverzameling is een lineaire deelruimte) n − r. En dit isgelijk aan n− rangA.
2
Hier is een toepassing.
Stelling 4.3.3 Bij elke lineaire deelruimte V van Rn bestaat een m×n-matrixA zo dat V de nulruimte van A is. Bovendien kunnen we m = n − dim(V )kiezen.
Bewijs: Kies een basis van V en schrijf de basisvectoren in rijvorm op alseen dim(V ) × n-matrix die we B noemen. Kies een basis van de nulruimtevan B. Deze bestaat uit n − dim(V ) elementen. Schrijf deze basisvectoren alskolommen in een matrix C. Dus BC = 0. Na transponeren, CtBt = 0. Stel nuA = Ct. We hebben de volgende feiten, rang(A) = rang(C) = n − dim(V ) enV is bevat in de nulruimte van A wegens ABt = CtBt = 0. Verder,
dim(Nul(A)) = n− (n− dim(V )) = dim(V ).
Hieruit volgt dat: Nul(A) = V (zie Opgave 4.5.10).2
Voorbeeld 4.3.4. Zij V de deelruimte in R4 opgespannen door de vectoren(2, 0,−3, 1)t en (3, 4, 2, 2)t. Zij B de matrix met deze vectoren als rijvectoren.Dus
B =
(2 0 −3 13 4 2 2
).
Ga zelf na dat de nulruimte van deze matrix wordt opgespannen door (0,−2, 1, 3)t
en (4, 1, 0,−8)t. De deelruimte V is dus nulruimte van bijvoorbeeld(0 −2 1 34 1 0 −8
).
♢

64 HOOFDSTUK 4. ONAFHANKELIJKHEID EN RANG
4.4 Dimensies van lineaire deelruimten
Stel dat we een tweetal lineaire deelruimten U, V ⊂ Rn gegeven hebben. Wekunnen nu de somruimte definieren als
U + V = {u+ v|u ∈ U, v ∈ V }.
Ga zelf na dat U +V weer een deelruimte van Rn is. Het is niet altijd zo dat dedimensie van U + V gelijk is aan de som van de dimensies van U en V . Als webijvoorbeeld U = V zouden nemen, dan geldt natuurlijk U +V = U = V en wehebben een voorbeeld waarvoor geldt dat dim(U + V ) = dim(U) = dim(V ) =dim(U) + dim(V ) (mits dim(U) > 0). Ook als de som van de dimensies van Uen V groter dan n is, kan de dimensie van U + V (die altijd kleiner of gelijkn is) nooit gelijk zijn aan de som dim(U) + dim(V ) (die groter is dan n). Wehebben wel de volgende stelling.
Stelling 4.4.1 Met dezelfde notatie als hierboven geldt
dim(U + V ) = dim(U) + dim(V )− dim(U ∩ V ).
Bewijs: Stel p = dim(U), q = dim(V ) en r = dim(U ∩ V ). We beginnen eenbasis w1, . . . ,wr te kiezen voor U ∩ V . Vul deze basis met ur+1, . . . ,up aantot een basis van U en met vr+1, . . . ,vq aan tot een basis van V . Elke vectoruit U + V kan nu geschreven worden als lineaire combinatie van w1, . . . ,wr,ur+1, . . . ,up, vr+1, . . . ,vq. Wij beweren dat deze vectoren onafhankelijk zijnen daarmee per definitie een basis van U + V vormen. Stel dat we een relatie
λ1w1 + · · ·+ λrwr + µr+1ur+1 + · · ·+ µpup + νr+1vr+1 + · · ·+ νqνq = 0
hebben. De som νr+1vr+1 + · · ·+ νqvq is nu bevat in zowel V als U via boven-staande relatie. Dus is de vector bevat in U ∩ V en kan geschreven worden alslineaire combinatie van w1, . . . ,wr. Dus zijn coefficienten κ1, . . . , κr zo dat
νr+1vr+1 + · · ·+ νqvq = κ1w1 + · · ·+ κrwr.
We hebben nu een lineaire relatie tussen w1, . . . ,wr,vr+1, . . . ,vq en aangeziendeze vectoren onafhankelijk zijn (ze vormen een basis van V ) moet gelden datalle coefficienten nul zijn. In het bijzonder νr+1 = · · · = νq = 0. Van de relatiewaarmee wij begonnen houden wij nu over dat
λ1w1 + · · ·+ λrwr + µr+1ur+1 + · · ·+ µpup = 0.
Omdat de vectoren w1, . . . ,wr,ur+1, . . . ,up lineair onafhankelijk zijn (ze vor-men een basis van U), concluderen we dat λ1 = · · · = λr = µr+1 = · · · = µp = 0.We hebben nu een basis van U + V gevonden en er geldt dat
dim(U+V ) = r+(p−r)+(q−r) = p+q−r = dim(U)+dim(V )−dim(U ∩V ).
2

4.4. DIMENSIES VAN LINEAIRE DEELRUIMTEN 65
In het bijzonder volgt uit deze Stelling en het feit dim(U + V ) ≤ n, dat als desom dim(U) + dim(V ) groter dan n is, de doorsnijding U ∩ V niet triviaal is,dat wil zeggen, positieve dimensie moet hebben.
In de praktijk, als we een deelruimte U opgespannen door p vectoren u1, . . . ,up ∈Rn en een deelruimte V opgespannen door q vectoren v1, . . . ,vq ∈ Rn hebben,dan kunnen we als volgt een basis van U ∩ V bepalen. Hiertoe bepalen we allevectoren x die zowel in de vorm x = λ1u1+ · · ·+λpup als x = µ1v1+ · · ·+µqvq
geschreven kunnen worden. Met andere woorden, we moeten het stelsel vergeli-jkingen
λ1u1 + · · ·+ λpup = µ1v1 + · · ·+ µqvq
oplossen in λ1, . . . , λp, µ1, . . . , µq. Kies een basis van de oplossingen en bepaalvoor elke oplossing uit deze basis λ1u1+ · · ·+λpup (of µ1v1+ · · ·+µqvq, wat ophetzelfde neerkomt). Oplossing van het stelsel vergelijkingen gebeurt door eenn× (p+ q)-matrix op te stellen met de ui,vj als kolommen en het bijbehorendehomogene stelsel vergelijkingen op te lossen.
Voorbeeld 4.4.2. Beschouw de matrix
A =
1 1 1 0 −1−2 1 −1 4 −20 3 0 3 −21 −2 1 1 −3
.
De deelruimte opgespannen door de eerste twee kolommen van A geven we aanmet U , de deelruimte opgespannen door de laatste drie kolommen van A gevenwe aan met V . Gevraagd wordt om een basis van U ∩ V te bepalen. We lossenhet homogene stelsel met coefficientenmatrix A op. Gewone rijreductie van Alevert ons het rijgereduceerde stelsel met matrix
1 1 1 0 −10 3 1 4 −40 0 −1 −1 20 0 0 4 −4
op (Controleer dit!!). We zie dat er een 1-dimensionale oplossingsruimte is, dusheeft U ∩V dimensie 1. Een basis voor de oplossingsruimte wordt gegeven door(1/3,−1/3, 1, 1, 1) (controleer!). Hieruit volgt dat U ∩ V wordt opgespannendoor
1
3
1−201
+−1
3
113−2
=
011−1
.
Tevens zien we uit bovenstaande berekening ook dat de pivotvariabelen van dereductie horen bij de eerste vier kolommen. De eerste vier kolommen vormendus een basis van U + V , die in dit voorbeeld natuurlijk gelijk is aan R4.
♢
Stel dat U, V een tweetal deelruimten van Rn is en stel dat U ∩V = {0}. In datgeval geldt dim(U+V ) = dim(U)+dim(V ). Verder volgt uit Opgave 4.5.19 dat

66 HOOFDSTUK 4. ONAFHANKELIJKHEID EN RANG
in dit geval iedere vector uit U + V op precies een manier geschreven wordenals lineaire combinatie van een element uit U en een element uit V . In ditgeval geval zeggen we dat U + V een directe som is van U en V en noteren desomruimte met U ⊕ V .
4.5 Opgaven
Opgave 4.5.1 Bepaal voor de volgende matrices achtereenvolgens: a) de rangvan de matrix, b) een basis van de rijen, c) een basis van de kolommen, d) eenbasis van de nulruimte.
(2 0 −3 13 4 2 2
) 5 −1 0 21 2 1 03 1 −2 40 4 −1 2
0 1 2 1
2 1 0 20 2 1 1
.
Opgave 4.5.2 Bepaal de rang en een basis van elk der volgende stelsels vec-toren:
1−20−2
,
2−31−2
,
4−176
,
0112
,
−10−2−2
en
−2−402−8−2
,
36−13112
,
312−2410
,
524−3817
,
44301111
,
001011
Opgave 4.5.3 Bepaal voor elke waarde van α de rang van het volgende stelselvectoren,
230
α− 3
,
0α00
,
24α1
,
α− 1100
Opgave 4.5.4 Bewijs Stelling 4.2.8.
Opgave 4.5.5Geef een tweetal 2×2-matricesA,B zo dat rang(AB) = rang(BA).
Opgave 4.5.6 Zij A,C een tweetal matrices waarvan het product AC bestaat.
1. Laat zien dat rang(AC) ≤ rang(A).
2. Geef een voorbeeld waarin rang(AC) ≤ rang(A).
3. Geldt altijd rang(AC) ≤ rang(C) ? Zo niet, geef een tegenvoorbeeld.

4.5. OPGAVEN 67
Opgave 4.5.7 (Lastig) Zij A een n × n-matrix. Laat zien dat rang(AtA) =rang(A).
Opgave 4.5.8 Zij A een n × n-matrix van rang 1. Laat zien dat er getallena1, a2, . . . , an en b1, b2, . . . , bn bestaan, zo dat voor elke i, j het matrixelementvan A op plaats i, j gegeven wordt door aibj .
Opgave 4.5.9 Zij S een verzameling vectoren. Laat zien dat de rang van Sgelijk is aan de dimensie van Span(S).
Opgave 4.5.10 Zij S, S′ ⊂ Rn en stel dat S ⊂ S′. Bewijs:
rang(S) = rang(S′) ⇐⇒ Span(S) = Span(S′).
Opgave 4.5.11Zij V,W een tweetal deelruimten van Rn en stel dat W ⊂ V .Bewijs dat dim(W ) = dim(V ) ⇒ V = W .
Opgave 4.5.12 Zij gegeven een drietal vectoren u,v,w ∈ Rn en dat het stelselu,v onfhankelijk is en het stelsel u,v,w afhankelijk. Bewijs dat w is hetopspansel van u en v zit.
Opgave 4.5.13 Bepaal een matrix A zo dat de nulruimte van A gelijk is aande ruimte opgespannen door de kolommen van
B =
1 1 10 2 00 0 02 1 0
Opgave 4.5.14 Bepaal een matrix A zo dat de nulruimte van A gelijk is aande ruimte opgespannen door de rijen van
B =
1 1 1 2 −10 2 0 0 40 0 0 2 2
Opgave 4.5.15 Gegeven is de matrix
A =
1 1 1 2 −10 2 0 0 40 0 0 2 2
Zij U de deelruimte opgespannen door de eerste 3 kolommen van A en V dedeelruimte opgespannen door de laatste twee kolommen van A. Onder U + Vverstaan we de deelruimte U + V = {u+ v | u ∈ U,v ∈ V }.Bepaal een basis voor U, V, U + V en U ∩ V .
Opgave 4.5.16 Gegeven is de matrix
A =
1 0 1 1 10 2 0 0 10 0 1 2 20 0 0 1 1

68 HOOFDSTUK 4. ONAFHANKELIJKHEID EN RANG
Zij U de deelruimte opgespannen door de eerst drie kolommen van A en V dedeelruimte opgespannen door de laatste drie kolommen van A. Bepaal een basisvoor U, V, U + V en U ∩ V .
Opgave 4.5.17 Gegeven is de matrix
A =
1 2 1 0 1 00 −1 1 −1 0 00 0 −2 2 −1 00 1 1 −1 1 00 1 0 1 1 1
Zij U de deelruimte opgespannen door de eerste drie kolommen van A en Vde deelruimte opgespannen door de laatste drie kolommen van A. Bepaal eenbasis voor U, V, U + V en U ∩ V .
Opgave 4.5.18 (opm: dit is Stelling 4.4.1) Zij U, V een tweetal deelruimtenvan Rn en U + V de somruimte U + V = {u+ v | u ∈ U,v ∈ V }. Bewijs dat
dim(U + V ) = dim(U) + dim(V )− dim(U ∩ V ).
Opgave 4.5.19 Zij U, V een tweetal deelruimten van Rn en U+V de somruimte(zien voorgaande opgave). Stel dat U ∩ V = {0}. Bewijs dat iedere vector uitU + V op precies een manier geschreven kan worden als som van een vector uitU en een vector uit V .
Opgave 4.5.20 (lastig) Zij nu U, V,W een drietal deelruimten van Rn. Bewijsdat
dim((U + V ) ∩W ) ≥ dim(U ∩W ) + dim(V ∩W )− dim(U ∩ V ∩W ).
Bewijs met behulp van een voorbeeld dat de beide zijden van de ongelijkheidniet gelijk hoeven zijn. Bewijs vervolgens dat
dim(U + V +W ) ≤ dim(U) + dim(V ) + dim(W )
−dim(U ∩ V )− dim(U ∩W )− dim(V ∩W ) + dim(U ∩ V ∩W ).
Opgave 4.5.21 Zij A een n× n-matrix met de eigenschap dat A2 = O.Bewijs dat rang(A) ≤ n/2.
Opgave 4.5.22 Zij A een n× n-matrix met de eigenschap dat A2 = A.Bewijs dat rang(In − A) = n − rang(A), waarin In de n × n identiteitsmatrixis.
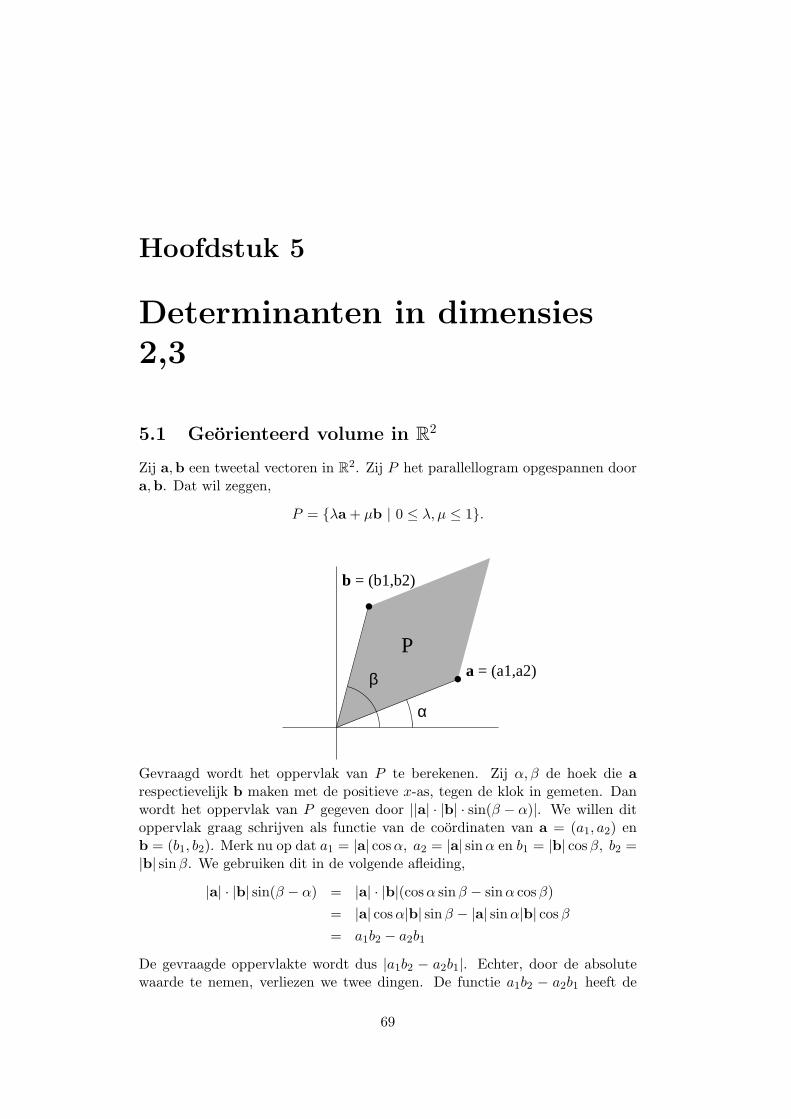
Hoofdstuk 5
Determinanten in dimensies2,3
5.1 Georienteerd volume in R2
Zij a,b een tweetal vectoren in R2. Zij P het parallellogram opgespannen doora,b. Dat wil zeggen,
P = {λa+ µb | 0 ≤ λ, µ ≤ 1}.
Pa = (a1,a2)
b = (b1,b2)
β
α
Gevraagd wordt het oppervlak van P te berekenen. Zij α, β de hoek die arespectievelijk b maken met de positieve x-as, tegen de klok in gemeten. Danwordt het oppervlak van P gegeven door ||a| · |b| · sin(β − α)|. We willen ditoppervlak graag schrijven als functie van de coordinaten van a = (a1, a2) enb = (b1, b2). Merk nu op dat a1 = |a| cosα, a2 = |a| sinα en b1 = |b| cosβ, b2 =|b| sinβ. We gebruiken dit in de volgende afleiding,
|a| · |b| sin(β − α) = |a| · |b|(cosα sinβ − sinα cosβ)
= |a| cosα|b| sinβ − |a| sinα|b| cosβ= a1b2 − a2b1
De gevraagde oppervlakte wordt dus |a1b2 − a2b1|. Echter, door de absolutewaarde te nemen, verliezen we twee dingen. De functie a1b2 − a2b1 heeft de
69

70 HOOFDSTUK 5. DETERMINANTEN IN DIMENSIES 2,3
eigenschap dat hij lineair is in a1, a2 en lineair in b1, b2. Ten tweede, de functiea1b2 − a2b1 is positief als sin(β − α) > 0 en negatief als sin(β − α) < 0. Merkop dat sin(β − α) precies dan positief is als 0 < β − α < π. Meer meetkundiggezegd, als we a over de kortst mogelijke hoek naar de richting van b draaien,moeten we tegen de klok in draaien. Dit is extra informatie, die we zoudenverliezen als we de absolute waarde zouden nemen. We noemen a1b2 − a2b1het georienteerde oppervlak van het blok opgespannen door het geordende paarvectoren a,b. Notaties,
∆(a,b)
∣∣∣∣ a1 b1a2 b2
∣∣∣∣ .We zeggen dat het geordende paar a,b positief georienteerd is als ∆(a,b) > 0en negatief georienteerd als ∆(a,b) < 0. Merk op dat onze standaard basise1, e2 ook positief georienteerd is.
5.2 Uitwendig product
Zij nu een tweetal vectoren a,b ∈ R3 gegeven en zij P het parallellogramopgespannen door a = (a1, a2, a3) en b = (b1, b2, b3). Wederom vragen wenaar het oppervlak van P uitgedrukt in de coordinaten van a en b. Zij ϕ deingesloten hoek tussen a en b. Dan geldt,
Opp(P )2 = |a|2|b|2(sinϕ)2
= |a|2|b|2 − |a|2|b|2(cosϕ)2
= |a|2|b|2 − (a · b)2
= (a21 + a22 + a23)(b21 + b22 + b23)− (a1b1 + a2b2 + a3b3)
2
= (a2b3 − a3b2)2 + (a3b1 − a1b3)
2 + (a1b2 − a2b1)2
Het blijkt dus dat het gevraagde oppervlak gelijk is aan de lengte van de vector
(a2b3 − a3b2, a3b1 − a1b3, a1b2 − a2b1).
We noemen deze vector het uitwendig product van a en b. Notatie: a× b. Dituitwendig product heeft de volgende eigenschappen.
Stelling 5.2.1 Zij a,b ∈ R3. Dan geldt,
1. a×b is orthogonaal met a en b, dat wil zeggen, a·(a×b) = b·(a×b) = 0.
2. a× b = −b× a.
3. a× (λb) = (λa)× b = λ(a× b) voor elke λ ∈ R.
4. a× (b+ c) = a× b+ a× c voor elke c ∈ R3.
5. Het oppervlak van het parallellogram opgespannen door a en b is gelijkaan de lengte van a× b.

5.3. GEORIENTEERD VOLUME IN R3 71
De eerste vier eigenschappen zijn direct na te rekenen. De laatste eigenschaphebben we boven afgeleid. We zien uit de laatste eigenschap ook dat a en bafhankelijk zijn (dat wil zeggen in dezelfde of tegengestelde richting wijzen)precies dan als a × b = 0. Het oppervlak van het parallellogram is immersprecies dan nul als a en b afhankelijk zijn.Als a en b onafhankelijk zijn, dan wordt a × b bijna gekarakteriseerd doorhet feit dat zijn lengte vastligt en het feit dat het uitproduct loodrecht op aen b staat. Er zijn precies twee onderling tegengestelde vectoren die aan dezeeisen voldoen. De juiste richting van a×b wordt vastgelegd door de zogenaamdekurketrekkerregel (wordt op college uitgelegd). Ook hier krijgen we dus te makenmet orientatie-kwesties.
5.3 Georienteerd volume in R3
Zij nu a,b, c een drietal vectoren in R3 en zij B het blok opgespannen doordeze vectoren. dat wil zeggen,
B = {λa+ µb+ νc | 0 ≤ λ, µ, ν ≤ 1}.
We willen het volume van B berekenen in termen van de coordinaten van a,b, c.Laten we het vlak opgespannen door a,b beschouwen als grondvlak. Geef denormaalvector van dit vlak met lengte 1 aan door n. De hoogte van het blok isdan gelijk aan |c ·n|. Het volume van het blok is gelijk aan de oppervlakte vanhet grondvlak maal de hoogte van het blok. Het oppervlak is gelijk aan |a×b|en omdat n = (a× b)/|a× b|, is de hoogte gelijk aan |(a× b) · c|/|a× b|. Hetvolume wordt dus,
Vol(B) = |a× b| |(a× b) · c||a× b|
= |(a× b) · c|.
Stel nu a = (a1, a2, a3),b = (b1, b2, b3), c = (c1, c2, c3). Dan geldt
(a× b) · c = a1b2c3 − a1b3c2 + a2b3c1 − a2b1c3 + a3b1c2 − a3b2c1.
Deze laatste uitdrukking noemen we het georienteerde volume van het blokopgespannen door a,b, c. Notaties:
∆(a,b, c)
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ .Merk op dat ∆(a,b, c) een lineaire functie is in elk van zijn argumenten. Ditis een eigenschap die we zouden verliezen bij de functie |∆(a,b, c)|. Ook hierloont het dus de moeite het georenteerde volume te beschouwen in plaats van hetpositieve volume. Bovendien krijgen we met het voorteken van het georienteerdevolume extra informatie over de orientatie van de vectoren a,b, c. We zeggendat het geordende drietal vectoren a,b, c positief georienteerd is als ∆(a,b, c) >0. Meetkundig gezien is het geordende drietal a,b, c positief georienteerd, als zegeorienteerd zijn via de kurketrekkerregel. Belangrijk hierbij is dat de geordendestandaard basis e1, e2, e3 ook georienteerd is via de kurketrekkerregel. Tenslotteis het georienteerde volume ∆(a,b, c) gelijk aan nul als een van de vectoren ligtin het vlak opgespannen door de twee andere vectoren.

72 HOOFDSTUK 5. DETERMINANTEN IN DIMENSIES 2,3
5.4 Determinanten
Historisch gezien kwamen de formules voor georienteerde volumes op een heelandere manier tot stand, namelijk bij het oplossen van stelsels van n lineairevergelijkingen in n onbekenden. Beschouw bijvoorbeeld het stelsel vergelijkin-gen
a11x1 + a12x2 = b1
a21x1 + a22x2 = b2
in de onbekenden x1, x2. In het algemeen luidt de oplossing als volgt.
x1 =b1a22 − b2a12a11a22 − a21a12
, x1 =−b1a21 + b2a11a11a22 − a21a12
.
Anders geschreven,
x1 =
∣∣∣∣ b1 a12b2 a22
∣∣∣∣∣∣∣∣ a11 a12a21 a22
∣∣∣∣ , x2 =
∣∣∣∣ a11 b1a21 b2
∣∣∣∣∣∣∣∣ a11 a12a21 a22
∣∣∣∣ .De oplossing van het stelsel
a11x1 + a12x2 + a13x3 = b1
a21x1 + a22x2 + a23x3 = b2
a31x1 + a32x2 + a33x3 = b3
ziet er uiteraard ingewikkelder uit. Na veel rekenwerk komt de waarde van x1uit op
x1 =b1a22a33 − b1a23a32 + b2a32a13 − b2a12a33 + b3a12a23 − b3a22a13
a11a22a33 − a11a23a32 + a21a32a13 − a21a12a33 + a31a12a23 − a31a22a13.
Anders geschreven,
x1 =
∣∣∣∣∣∣b1 a12 a13b2 a22 a23b3 a32 a33
∣∣∣∣∣∣∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣met een analoge formule voor x2 en x3. De volumefunctie wordt in deze gevallenook wel de determinant van de coefficientenmatrix genoemd. In Hoofdstuk 6zullen we het determinantbegrip uitbreiden naar n× n-matrices.
5.5 Opgaven
Opgave 5.5.1 Bepaal het oppervlak van de driehoek in R2 met hoekpunten(−1, 4), (3, 2), (0, 1).

5.5. OPGAVEN 73
Opgave 5.5.2 Bepaal het oppervlak van de driehoek in R2 met hoekpunten(6, 1), (1, 2), (−3, 1).
Opgave 5.5.3 Bepaal het oppervlak van de driehoek in R3 met hoekpunten(1, 1, 1), (0,−1, 2), (1, 3, 4).
Opgave 5.5.4 Bepaal het oppervlak van de driehoek in R3 met hoekpunten(1, 0,−1), (2, 3,−1), (1, 2, 5).
Opgave 5.5.5 Bepaal het volume van het viervlak in R3 met hoekpunten(1, 0, 0), (2, 3, 4), (−1, 0, 2), (3, 2,−1).
Opgave 5.5.6 Zij a,b, c,d ∈ R3 en λ ∈ R. Bewijs de volgende eigenschappenvan de determinantfunctie ∆, gebruik hiervoor de definitie ∆(a,b, c) = (a×b)·c(dus niet verder uitschrijven, maar uitsluitend de regels voor in- en uitproductengebruiken, dwz Stellingen 2.2.3 en 5.2.1) .
1. Lineariteit in het eerste argument:
(a) ∆(λa,b, c) = λ∆(a,b, c)
(b) ∆(a′ + a′′,b, c) = ∆(a′,b, c) + ∆(a′′,b, c).
2. Lineariteit in het laatste argument:
(a) ∆(a,b, λc) = λ∆(a,b, c)
(b) ∆(a,b, c′ + c′′) = ∆(a,b, c′) + ∆(a,b, c′′).
3. ∆(a,a,b) = 0.
4. ∆(a,b, c) = −∆(b,a, c).
5. ∆(a,b,b) = 0.
6. ∆(a,b, c) = −∆(a, c,b) (hint: werk ∆(a,b− c,b− c) = 0 uit).
7. Stel a = λb+ µc dan geldt ∆(a,b, c) = 0.
Opgave 5.5.7 Bewijs dat ∆(a,b, c) = ∆(b, c,a) = ∆(c,a,b). (cyclische ver-wisseling van a,b, c). Gebruik hiervoor opgave 5.5.6 onderdelen (4) en (6).
Opgave 5.5.8 Bepaal de volgende determinanten,∣∣∣∣−1 35 1
∣∣∣∣ , ∣∣∣∣−1 00 8
∣∣∣∣ , ∣∣∣∣ 3 4−1 2
∣∣∣∣ .Opgave 5.5.9 Bepaal de volgende determinanten,∣∣∣∣∣∣
2 1 34 −1 0−7 2 1
∣∣∣∣∣∣ ,∣∣∣∣∣∣1 −1 23 1 −21 2 3
∣∣∣∣∣∣ .

74 HOOFDSTUK 5. DETERMINANTEN IN DIMENSIES 2,3
Opgave 5.5.10 Bewijs dat∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ =∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ .Gebruik hiervoor de 6-terms formule voor de determinant.
Opgave 5.5.11 Zij a,b, c,d ∈ R3. Toon de volgende eigenschappen aan:
1. ∆(a,b,a× b) = |a× b|2.
2. a× (b× c) = (a · c)b− (a · b)c
3. (a× b) · (c× d) = (a · c)(b · d)− (a · d)(b · c)
4. a× (b× c) + b× (c× a) + c× (a× b) = 0 (Jacobi’s identiteit).
Opgave 5.5.12 Zij A,B,C een drietal punten in de ruimte en neem aan dat zeniet op een rechte liggen. Zij a,b, c het drietal bijbehorende vectoren. Bewijsdat de vergelijking van het vlak door A,B,C gegeven wordt door
∆(x,b, c) + ∆(x, c,a) + ∆(x,a,b) = ∆(a,b, c).
Opgave 5.5.13 Gegeven een drietal punten A,B,C in R2 met coordinaten(a1, a2), (b1, b2), (c1, c2). Laat zien dat het oppervlak van ∆ABC gelijk is aande absolute waarde van de determinant
1
2
∣∣∣∣∣∣a1 b1 c1a2 b2 c21 1 1
∣∣∣∣∣∣ .Opgave 5.5.14 Stel we hebben drie punten in R3 gegeven door de vectorena,b, c. Bewijs dat de punten op een lijn liggen precies dan als
a× b+ b× c+ c× a = 0.
Opgave 5.5.15 In R3 hebben we een punt P gegeven door de vector p en eenrechte lijn l gegeven door de parametervoorstelling p+ λa. Stel dat P niet opl ligt. Bewijs dat een vergelijking van het vlak door P en l gegeven wordt door
∆(x,b,p− a) = ∆(a,b,p).
Opgave 5.5.16 In R3 hebben we twee rechte lijnen l,mmet parametervoorstellin-gen p+ λa en q+ µb. Neem aan dat a en b onafhankelijk zijn. Laat zien datde afstand tussen l en m gegeven wordt door
|∆(a,b,p− q)||a× b|
.

5.5. OPGAVEN 75
Opgave 5.5.17 Bewijs onderdelen (1),(2),(3),(4) van Stelling 5.2.1 uit het dic-taat. Gebruik hierbij de definitie
a× b = (a2b3 − a3b2, a3b1 − a1b3, a1b2 − a2b1).
Bewijs verder ook dat a× a = 0 voor alle a ∈ R3.
Hoofdstuk 6
Determinanten
6.1 Permutaties
Determinanten van n × n-matrices kunnen er ingewikkeld uitzien. Voor eengoed begrip van het onderliggende patroon van determinanten is het begrippermutatie van cruciaal belang.Een permutatie van 1, 2, 3, . . . , n is een herrangschikking van de getallen 1, 2, 3, . . . , n.Later, bij Algebra, zul je een iets andere definitie van een permutatie aan-leren. Echter, voor de eenvoud hanteren we hier het begrip permuatie als her-rangschikking. Hier volgt een lijstje met permutaties van 1, 2, 3,
1 2 32 3 13 1 21 3 23 2 12 1 3
Schrijf zelf alle permutaties van 1, 2, 3, 4 op. Je zult zien dat het er 24 zijn. In hetalgemeen zijn er n! permutaties van 1, 2, . . . , n. Een paarswisseling is een oper-atie waarmee twee elementen verwisseld worden en de anderen vastgelaten Elkepermutatie kan door een opeenvolging van paarswisselingen gevormd worden.Bijvoorbeeld de permutatie 3, 5, 1, 2, 4 bereiken we als volgt vanuit 1, 2, 3, 4, 5.Eerst 1, 3 verwisselen geeft 3, 2, 1, 4, 5, vervolgens 2, 4 verwisselen: 3, 4, 1, 2, 5 entenslotte geeft 4, 5 verwisselen onze permutatie. Het zal duidelijk zijn dat eenpermutatie op vele manieren door paarswisselingen samengesteld kan worden.Het aantal benodigde paarswisselingen kan daarbij zelfs varieren. Wat echterniet varieert is de pariteit (even of oneven zijn) van het aantal paarswisselingen.We vatten dit in de volgende stelling samen.
Stelling 6.1.1 Het aantal paarswisselingen nodig om een gegeven permutatiesamen te stellen is altijd even of altijd oneven.
Later, bij Algebra, zal deze stelling bewezen worden. We noemen een per-mutatie even als we er een even aantal paarswisselingen voor nodig hebben,oneven als we er een oneven aantal paarswisselingen voor nodig hebben. We
76

6.1. PERMUTATIES 77
noteren de pariteit met de signum functie sign. Als een permutatie σ even is,zetten we sign(σ) = 1 en als σ oneven is, sign(σ) = −1. Controleer zelf datsign(1, 2, 3) = 1 en sign(3, 2, 1) = −1.
Een andere, grafische manier om de pariteit te bepalen, illustreren we aan dehand van ons voorbeeld 3, 5, 1, 2, 4.
1 2 3 4 5
In dit plaatje is wordt 1 naar plaats 3 verschoven, 2 naar plaats 4, etc. Deverbindingslijnen zijn losjes getekend om ervoor te zorgen dat niet verbind-ingslijnen in een punt snijden. Tellen we nu het totale aantal snijpunten vande verbindingsstukjes dan komen we op 7. Dit is een oneven getal, preciesovereenkomend met het oneven zijn van onze permutatie.
Hier geven we bij de permutaties van 1, 2, 3 aan welke even (met +) en welkeoneven (met −) zijn,
1 2 3 +2 3 1 +3 1 2 +1 3 2 −3 2 1 −2 1 3 −
Laten we nu eens kijken naar de algemene 3× 3-determinant
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣welke gelijk is aan
a11a22a33 − a11a32a23 + a21a32a13 − a21a12a33 + a31a12a23 − a31a22a13.
Een dergelijke determinant zijn we in Hoofdstuk 5 al tegengekomen. De zestermen zijn zodanig opgeschreven dat de kolom-indices op de volgorde 1, 2, 3staan. Merk nu op dat elk van de zes termen overeenkomt met een permutatievan de rij-indices 1, 2, 3. Bovendien komt het voorteken dat bij elke term staatprecies overeen met de pariteit van de permutatie van de rij-indices. Dit zal inde volgende paragraaf het algemene patroon in een n× n-determinant zijn.

78 HOOFDSTUK 6. DETERMINANTEN
6.2 Algemene determinanten
Zij gegeven de n× n-matrix
A =
a11 a12 . . . a1na21 a22 . . . a2n...
......
an1 an2 . . . ann
De determinant van A wordt gedefinieerd door∑
i1,i2,...,inij =ik
sign(i1, i2, . . . , in) ai11ai22 · · · ainn (6.1)
Notaties:
det(A),
∣∣∣∣∣∣∣∣a11 a12 . . . a1na21 a22 . . . a2n...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣ .Indien we de kolommen van A aangeven met a1,a2, . . . ,an dan noteren we dedeterminant ook wel als
det(a1,a2, . . . ,an).
Hoewel de determinantdefinitie er ingewikkeld uitziet, heeft deze functie eenaantal elegante eigenschappen. Het zal blijken dat vrijwel alleen deze afgeleideeigenschappen bij determinantberekeningen gebruikt worden. De oorspronkeli-jke definitie wordt in de praktijk nauwelijks gebruikt.
Allereerst vermelden een drietal fundamentele eigenschappen.
Stelling 6.2.1 (Basiseigenschappen determinant) Neem de notatie zoalsnet geschetst. Dan geldt,
1. De functie det is lineair in elk van zijn argumenten. Dat wil zeggen, voorelke r, 1 ≤ r ≤ n geldt
(a) Voor elke (n+ 1)-tal a1, . . . ,an,a′,a′′ ∈ Rn geldt,
det(a1, . . . ,a′+a′′, . . . ,an) = det(a1, . . . ,a
′, . . . ,an)+det(a1, . . . ,a′′, . . . ,an)
waarbij a′,a′′,a′ + a′′ allen op de r-de plaats staan.
(b) Voor elke a1, . . . ,an ∈ Rn en λ ∈ R geldt,
det(a1, . . . , λar, . . . ,an) = λdet(a1, . . . ,ar, . . . ,an)
2. det(a1, . . . ,an) = 0 als ar = as voor zekere r = s.
3. det(e1, . . . , en) = 1, waarin ei de standaardbasis vectoren van Rn zijn.Anders gezegd, det(In) = 1.

6.2. ALGEMENE DETERMINANTEN 79
Bewijs: Eigenschap (1) volgt vrijwel direct uit de definitie. Immers,∑i1,i2,...,in
ij =ik
sign(i1, . . . , in)ai11 . . . (a′irr + a′′irr) . . . ainn
is gelijk aan∑i1,i2,...,in
ij =ik
sign(i1, . . . , in) ai11 . . . a′irr . . . ainn+
∑i1,i2,...,in
ij =ik
sign(i1, . . . , in) ai11 . . . a′′irr . . . ainn
Verder,∑i1,i2,...,in
ij =ik
sign(i1, . . . , in) ai11 . . . (λairr) . . . ainn = λ∑
i1,i2,...,inij =ik
sign(i1, . . . , in) ai11 . . . ainn
Eigenschap (2) is iets subtieler. Stel dat r < s. Kies een permutatie i1, i2, . . . , invan 1, 2, . . . , n en beschouw de sommand
sign(i1, . . . , ir, . . . , is, . . . , in) ai11 · · · airr · · · aiss · · · ainn.
Beschouw ook de sommand
sign(i1, . . . , is, . . . , ir, . . . , in) ai11 · · · aisr · · · airs · · · ainn.
In ieder geval geldt dat
sign(i1, . . . , ir, . . . , is, . . . , in) = −sign(i1, . . . , is, . . . , ir, . . . , in)
omdat de twee permutaties een paarswisseling verschillen. Omdat ar = as,geldt ook dat ai11 · · · airr · · · aiss · · · ainn = ai11 · · · aisr · · · airs · · · ainn. Met an-dere woorden de som van de twee termen is 0. Omdat de termen in de determi-nant kunnen opgedeeld worden in dergelijke paren, is de determinant zelf ook0.Eigenschap (3) volgt uit het feit dat de elementen aij van de identiteitsmatrixalleen ongelijk nul zijn als i = j. In dat geval is de waarde 1. Van de termen inde determinant blijft dus alleen de term sign(1, 2, . . . , n) a11a22 · · · ann over, endeze is gelijk aan 1.
2
Bovenstaande eigenschappen hadden we in Hoofdstuk 5 al voor het geval n =2, 3 gezien. Hoewel de definitie van de determinant er vrij ingewikkeld uitziet,is het toch een natuurlijke voortzetting van het begrip georienteerd volume datwe in dimensies 2 en 3 gezien hebben. Dit blijkt uit de volgende stelling.
Stelling 6.2.2 Zij ∆ een functie die aan ieder geordend n-tal a1,a2, . . . ,an ∈Rn een waarde ∆(a1,a2, . . . ,an) ∈ R toekent met de volgende eigenschappen,
1. ∆ is lineair in elk van zijn argumenten. Dat wil zeggen, voor elke r, 1 ≤r ≤ n geldt

80 HOOFDSTUK 6. DETERMINANTEN
(a) Voor elke a1, . . . ,an,a′,a′′ ∈ Rn geldt,
∆(a1, . . . ,a′+a′′, . . . ,an) = ∆(a1, . . . ,a
′, . . . ,an)+∆(a1, . . . ,a′′, . . . ,an)
waarbij a′a′′,a′ + a′′ allen op de r-de plaats staan.
(b) Voor elke a1, . . . ,an en λ ∈ R geldt,
∆(a1, . . . , λar, . . . ,an) = λ∆(a1, . . . ,ar, . . . ,an)
2. ∆(a1, . . . , . . . ,an) = 0 als ar = as voor zekere r = s.
3. ∆(e1, . . . , en) = 1, waarin ei de standaardbasis vectoren van Rn zijn.
Dan geldt, ∆ = det.
Hoewel het niet lastig is, zullen we geen bewijs van deze stelling geven. Wel laatdeze stelling zien dat als we het bestaan van een volumefunctie aannemen dielineair is in elk van zijn argumenten en die nul is als twee vectoren hetzelfde zijn,we automatisch op het door ons gedefinieerde determinantbegrip terechtkomen.
6.3 Eigenschappen van determinanten
We leiden eerst een aantal andere nuttige eigenschappen van determinanten af.
Stelling 6.3.1 (Afgeleide eigenschappen determinant) Zij det de deter-minantfunctie. Dan geldt,
1. De waarde van det(a1, . . . ,an) verandert niet als we ai vervangen doorai + λaj met λ ∈ R en j = i.
2. De waarde van det(a1, . . . ,an) gaat in zijn tegengestelde over bij verwis-seling van ai en aj met i = j.
3. det(a1, . . . ,an) = 0 als a1, . . . ,an een afhankelijk stelsel is.
Deze stelling zegt dus dat de waarde van een determinant niet verandert bijvegen en dat de determinant in zijn tegengestelde verandert bij verwisselingvan twee kolommen. Uit Stelling 6.2.1(1b) wisten we al dat de determinantmet λ vermenigvuldigt als we een kolom met λ vermenigvuligen.
Bewijs: Eerst bewijzen we eigenschap (1).
det(a1, . . . ,ai + λaj , . . . ,an) = det(a1, . . . ,ai, . . . ,an) + det(a1, . . . , λaj , . . . ,an)
= det(a1, . . . ,ai, . . . ,an) + λdet(a1, . . . ,aj , . . . ,an)
Deze twee regels volgen uit de lineariteitseigenschap van det. De laatste det-waarde is nul omdat de vector aj tweemaal als argument voorkomt. Dit volgtuit eigenschap (2) van Stelling 6.2.1. We houden dus over,
det(a1, . . . ,ai + λaj , . . . ,an) = det(a1, . . . ,ai, . . . ,an)

6.3. EIGENSCHAPPEN VAN DETERMINANTEN 81
Eigenschap (2) kunnen we inzien door herhaalde toepassing van eigenschap (1),
det(a1, . . . ,ai, . . . ,aj , . . . ,an) = det(a1, . . . ,ai − aj , . . . ,aj , . . . ,an)
= det(a1, . . . ,ai − aj , . . . ,ai, . . . ,an)
= det(a1, . . . ,−aj , . . . ,ai, . . . ,an)
= −det(a1, . . . ,aj , . . . ,ai, . . . ,an)
De laatste gelijkheid volgt weer uit de lineariteit van det.Eigenschap (3) volgt direct uit eigenschap (1). Stel bijvoorbeeld dat a1 =λ2a2 + · · ·+ λnan dan geldt,
det(a1,a2, . . . ,an) = det(a1 − λ2a2 − · · · − λnan,a2, . . . ,an)
= det(0,a2, . . . ,an) = 0
2
Merk op dat het bewijs van Stelling 6.3.1 vrij direct volgt uit de eigenschappenvan Stelling 6.2.1. Hier volgt nog een tweetal eigenschappen die direct uit dedeterminantdefinitie volgen.
Stelling 6.3.2 Zij A een n× n-matrix. Dan geldt, det(A) = det(At).
Bewijs: Stel A = (aij)i,j=1,...,n. Dan geldt,
det(A) =∑
i1,i2,...,inil =ik
sign(i1, i2, . . . , in)ai11ai22 · · · ainn
Deze schrijfwijze is zo gekozen dat de rij-indices in de factoren aij in de oplopendevolgorde 1, 2, . . . , n staan. We gaan nu de factoren aij in elke term zodanig vanvolgorde verwisselen dat de tweede indices in de volgorde 1, 2, . . . , n. We krijgendan ai11ai22 · · · ainn = a1j1a2j2 · · · anjn en nu staan de eerste indices in de per-mutatie j1, j2, . . . , jn. Merk op dat sign(i1, i2, . . . , in) = sign(j1, j2, . . . , jn). Hetaantal paarswisselingen nodig om j1, . . . , jn uit 1, 2, . . . , n te vormen is immerseven groot als het aantal paarswisselingen nodig om 1, 2, . . . , n uit i1, . . . , in tevormen. Verder, als we over de indices i1, . . . , in met il = ik sommeren, kunnenwe net zo goed over de indices j1, . . . , jn sommeren. Dus,
det(A) =∑
j1,j2,...,jnjl =jk
sign(j1, j2, . . . , jn)a1j1a2j2 · · · anjn
Deze laatste uitdrukking is echter precies de determinant van de getransponeerdematrix At. Dus det(A) = det(At).
2
Als gevolg van deze Stelling kunnen we de rol van rijen en kolommen in eenmatrix verwisselen. Samen met eigenschappen (1),(2) van Stelling 6.3.1 en (1b)van 6.2.1 geeft dit de volgende observatie.

82 HOOFDSTUK 6. DETERMINANTEN
Gevolg 6.3.3 Zij A een n× n-matrix. Dan geldt,
De waarde van det(A) verandert niet als we een veelvoud van een rij ofkolom optellen bij een andere rij, respectievelijk kolom.
De waarde van det(A) gaat in zijn tegengestelde over als twee rijen ver-wisselen, of twee kolommen verwisselen.
De waarde van det(A) wordt met λ vermenigvuldigd als we een rij ofkolom met λ vermenigvuldigen.
Een tweede belangrijke eigenschap is de volgende.
Stelling 6.3.4 Zij A,B een tweetal n× n-matrices. Dan geldt
det(AB) = det(A)det(B).
Bewijs: Geef de elementen van B aan met bij . De j-de kolomvector van Ageven we aan met aj voor j = 1, 2, . . . , n. Ga nu zelf na dat de i-de kolomvectorvan AB gegeven wordt door b1ia1+ b2ia2+ · · ·+ bnian ofwel
∑j bjiaj . We gaan
nu de lineariteit van de determinantfunctie gebruiken,
det(AB) = det
(∑i1
bi11ai1 , . . . ,∑in
binnain
)=
∑i1,i2,...,in
bi11 · · · binndet(ai1 , . . . ,ain)
De waarde det(ai1 , . . . ,ain) is nul als ik = il voor zekere k = l. Als alle ikverschillend zijn, is ai1 , . . . ,ain een permutatie van a1, . . . ,an en we hebbendet(ai1 , . . . ,ain) = sign(i1, . . . , in)det(a1, . . . ,an). Conclusie,
det(AB) =∑
i1,i2,...,in
sign(i1, . . . , in)bi11 · · · binndet(a1, . . . ,an)
= det(B)det(a1, . . . ,an) = det(B)det(A)
2
Tenslotte geeft een determinant van een matrix A een numeriek criterium omte zien of A al of geen maximale rang heeft.
Stelling 6.3.5 Zij A een n×n-matrix. Dan zijn de volgende beweringen equiv-alent,
1. rang(A) = n
2. A is inverteerbaar
3. det(A) = 0

6.4. DE BEREKENING VAN DETERMINANTEN 83
Bewijs: Dat (2) uit (1) volgt hadden we al eerder gezien bij het oplossen vanlineaire vergelijkingen. Stel nu dat A inverteerbaar is. Dan is er een n × n-matrix B zo dat In = AB. Neem aan beide zijden de determinant. We vinden1 = det(AB) = det(A)det(B). Hieruit zien we dat det(A) = 0. Dus deel (2)impliceert deel (3). Stel tenslotte dat det(A) = 0. Dan kunnen de rijen van Anooit afhankelijk zijn want Stelling 6.3.1(3) zegt dat de determinant nul is indat geval. Conclusie, rang(A) = n en de implicatie (3)⇒(1) is bewezen.
2
6.4 De berekening van determinanten
De snelste methode om een determinant te berekenen is met behulp van Gevolg6.3.3 waarmee we een Gauss-Jordan-eliminatie kunnen nabootsen. Om te latenzien wat we bedoelen geven we hier een illustratie.We gaan
∆ =
∣∣∣∣∣∣∣∣1 −1 0 20 2 3 −1−1 0 1 20 2 −2 −1
∣∣∣∣∣∣∣∣ (6.2)
berekenen. We kunnen veelvouden van rijen bij andere rijen kunnen optellenzonder dat de waarde verandert. Tel de eerste bij de derde rij op. We krijgen
∆ =
∣∣∣∣∣∣∣∣1 −1 0 20 2 3 −10 −1 1 40 2 −2 −1
∣∣∣∣∣∣∣∣We verwisselen de tweede en derde rij en gebruiken de nieuwe tweede rij om dederde en vierde rij te vegen,
∆ = −
∣∣∣∣∣∣∣∣1 −1 0 20 −1 1 40 0 5 70 0 0 7
∣∣∣∣∣∣∣∣ (6.3)
Let op, het −teken is ontstaan door de rijverwisseling. Tenslotte kunnen we deelementen boven de diagonaal nul maken door Gauss-Jordan-reductie,
∆ = −
∣∣∣∣∣∣∣∣1 0 0 00 −1 0 00 0 5 00 0 0 7
∣∣∣∣∣∣∣∣We gebruiken nu de lineariteit van de volumefunctie en vinden,
∆ = −(−35)
∣∣∣∣∣∣∣∣1 0 0 00 1 0 00 0 1 00 0 0 1
∣∣∣∣∣∣∣∣ = 35.

84 HOOFDSTUK 6. DETERMINANTEN
Als we daarmee tot een sneller resultaat komen, kunnen we gedurende dit pro-ces ook veelvouden van kolommen bij andere kolommen optellen, of kolommenverwisselen.Als we er goed over nadenken, zien we dat we vanaf formule (6.3) kunnen zienwat de determinant gaat worden. De matrix staat in bovendriehoeksvorm ende determinant wordt gewoon het product van de diagonaalelementen van debovendriehoeksmatrix. We vatten dit expliciet samen.
Stelling 6.4.1 Zij A een n × n bovendriehoeksmatrix met op de diagonaal deelementen a11, a22, . . . , ann. Dan geldt
det(A) = a11a22 · · · ann.
Dezelfde uitspraak geldt voor een benedendriehoeksmatrix.
Een tweede manier om determinanten uit te rekenen is door ontwikkeling naareen rij of kolom. We geven eerst een beschrijving van dit proces.
Stelling 6.4.2 Zij gegeven een n × n-matrix A. Voor elke i, j geven we metAij de (n− 1)× (n− 1)- matrix aan, die we krijgen als we uit A de i-de rij enj-de kolom wegstrepen. Dan,
1. Voor elke i geldt dat det(A) =∑n
j=1(−1)i+jaijdet(Aij)
2. Voor elke j geldt dat det(A) =∑n
i=1(−1)i+jaijdet(Aij)
In het eerste geval spreken we van ontwikkeling van de determinant naar dei-de rij (de kolom-index j laten we immers lopen) in het tweede geval sprekenvan een ontwikkeling naar de j-de kolom (nu loopt de rij-index i op).
Voorbeeld 6.4.3. Hier volgt als voorbeeld de ontwikkeling van onze voor-beelddeterminant (6.2) naar de tweede rij,
−0
∣∣∣∣∣∣−1 0 20 1 22 −2 −1
∣∣∣∣∣∣+2
∣∣∣∣∣∣1 0 2−1 1 20 −2 −1
∣∣∣∣∣∣−3
∣∣∣∣∣∣1 −1 2−1 0 20 2 −1
∣∣∣∣∣∣+(−1)
∣∣∣∣∣∣1 −1 0−1 0 10 2 −2
∣∣∣∣∣∣Elk van de drie bij drie determinanten kunnen we weer naar een rij of kolomontwikkelen en we gaan zo door tot we alleen een bij een determinanten hebben,m.a.w. getallen.
♢
Bewijs: De reden dat we determinanten naar hun kolommen kunnen on-twikkelen berust op het feit dat∣∣∣∣∣∣∣∣∣∣
1 a12 . . . a1n0 a22 . . . a2n0 a32 . . . a3n...
...0 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣a22 . . . a2na32 . . . a3n...
...an2 . . . ann
∣∣∣∣∣∣∣∣ = det(A11) (6.4)

6.4. DE BEREKENING VAN DETERMINANTEN 85
Dit kunnen we direct uit formule (6.1) zien. We zijn nu in het geval dat ai11 =1 als i1 = 1 en ai11 = 0 als i1 = 1. Alleen de termen met i1 = 1 gevendus een bijdrage. De overige indices i2, i3, . . . , in zijn dus een permutatie van2, 3, . . . , n en sign(1, i2, . . . , in) = sign(i2, . . . , in). We houden de formule voorde determinant det(A11) over.
Stel nu dat we de determinant van een matrix willen hebben waarvan de j-dekolom nullen bevat, op de i-de plaats na, waar een 1 staat.
∆ij :=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 . . . a1,j−1 0 a1,j+1 . . . a1na21 . . . a2,j−1 0 a2,j+1 . . . a2n...
......
...ai1 . . . ai,j−1 1 ai,j+1 . . . ain...
......
...an1 . . . an,j−1 0 an,j+1 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣We verwisselen nu de j-de kolom met de j − 1-de kolom, vervolgens met dej − 2-de kolom enzovoorts, tot hij helemaal links staat,
∆ij := (−1)j−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
0 a11 . . . a1,j−1 a1,j+1 . . . a1n0 a21 . . . a2,j−1 a2,j+1 . . . a2n
......
......
1 ai1 . . . ai,j−1 ai,j+1 . . . ain...
......
...0 an1 . . . an,j−1 an,j+1 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣Vervolgens verwisselen we de i-de rij met de i − 1-de rij, dan de i − 2-de,enzovoorts, tot deze rij bovenaan staat,
∆ij := (−1)i+j−2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 ai1 . . . ai,j−1 ai,j+1 . . . ain0 a11 . . . a1,j−1 a1,j+1 . . . a1n...
......
......
0 ai−1,1 . . . ai−1,j−1 ai−1,j+1 . . . ai−1,n
0 ai+1,1 . . . ai+1,j−1 ai+1,j+1 . . . ai+1,n...
......
......
0 an1 . . . an,j−1 an,j+1 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣Merk op dat deze determinant weer de gedaante van (6.4) heeft, met de ma-trix Aij in het rechteronder deel. Deze determinant is dus gelijk aan ∆ij =(−1)i+jdet(Aij).
Stel nu dat we een willekeurige determinant det(A) moeten uitrekenen. Gebruikmakend van de lineariteit van de determinant in de j-de kolom vinden we dat
det(A) = a1j∆1j + a2j∆2j + · · ·+ anj∆nj
Met bovenstaande afleiding voor ∆ij geeft dit,
det(A) = (−1)j+1a1jdet(A1j)+(−1)j+2a2jdet(A2j)+ · · ·+(−1)j+nanjdet(Anj).

86 HOOFDSTUK 6. DETERMINANTEN
Hiermee hebben we de algemene ontwikkeling van een determinant naar de j-dekolom. Op dezelfde manier kunnen we aantonen dat we determinanten naar eenrij kunnen ontwikkelen.
2
Met bovenstaande notaties noemen we det(Aij) de onderdeterminant van Abehorend bij de plaats i, j. Het element ∆ij = (−1)i+jdet(Aij) noemen we deminor van A behorend bij plaats i, j.
6.5 De VanderMonde determinant (optioneel)
In de praktijk gebeurt het heel vaak dat de determinant van een matrix meteen regelmatig patroon een verrassend eenvoudig antwoord heeft. Het bestevoorbeeld hiervan is de VanderMonde determinant .
Stelling 6.5.1 Voor elke x1, x2, . . . , xn geldt,∣∣∣∣∣∣∣∣∣∣∣
1 1 . . . 1x1 x2 . . . xnx21 x22 . . . x2n...
......
xn−11 xn−1
2 . . . xn−1n
∣∣∣∣∣∣∣∣∣∣∣=∏i<j
(xj − xi).
Bewijs: Het bewijs van deze stelling gaat met volledige inductie naar n. Voorn = 2 is de Stelling duidelijk, we berekenen direct∣∣∣∣ 1 1
x1 x2
∣∣∣∣ = x2 − x1.
Stel nu n > 2 en dat de Stelling waar is voor (n − 1) × (n − 1) VanderMondedeterminanten. In de n × n-determinant trekken we nu xn maal de n − 1-derij van de n-de rij af. Vervolgens xn maal de n − 2-de rij van de n − 1-de rijenzovoort. Als laatste trekken we xn maal de eerste rij van de tweede af. Wehouden de volgende determinant over,∣∣∣∣∣∣∣∣∣∣∣
1 1 . . . 1 1x1 − xn x2 − xn . . . xn−1 − xn 0
x21 − xnx1 x22 − xnx2 . . . x2n−1 − xnxn−1 0...
......
...xn−11 − xnx
n−21 xn−1
2 − xnxn−22 . . . xn−1
n−1 − xnxn−2n−1 0
∣∣∣∣∣∣∣∣∣∣∣De laatste kolom bestaat uit nullen, behalve op de eerste plaats, waar een 1staat. De determinant is dus gelijk aan de (n− 1)× (n− 1)-determinant
(−1)n
∣∣∣∣∣∣∣∣∣x1 − xn x2 − xn . . . xn−1 − xn
x21 − xnx1 x22 − xnx2 . . . x2n−1 − xnxn−1
......
...xn−11 − xnx
n−21 xn−1
2 − xnxn−22 . . . xn−1
n−1 − xnxn−2n−1
∣∣∣∣∣∣∣∣∣

6.5. DE VANDERMONDE DETERMINANT (OPTIONEEL) 87
Merk nu op dat alle termen van de eerste kolom deelbaar zijn door x1 − xn.De termen van de tweede kolom zijn allen deelbaar door x2 − xn, enzovoort.We gebruiken nu de lineariteit van de determinant in de kolommen om dezefactoren eruit te halen. We krijgen,
(xn − x1)(xn − x2) · · · (xn − xn−1)
∣∣∣∣∣∣∣∣∣∣∣
1 1 . . . 1x1 x2 . . . xn−1
x21 x22 . . . x2n−1...
......
xn−11 xn−1
2 . . . xn−1n−1
∣∣∣∣∣∣∣∣∣∣∣De laatste determinant is een (n − 1) × (n − 1) VanderMonde determinant.Volgens onze inductieveronderstelling is deze gelijk aan
∏1≤i<j≤n−1(xj − xi).
Onze n× n- determinant wordt hiermee
(xn − x1) · · · (xn − xn−1)∏
1≤i<j≤n−1
(xj − xi) =∏
1≤i<j≤n
(xj − xi).
Hiermee is de inductiestap voltooid.2
De VanderMonde determinant komt op veel verschillende plaatsen in de wiskundevoor. Hier is een kleine toepassing. Onder een polynoom of veelterm verstaan weeen functie van de vorm P (x) = pnx
n+pn−1xn−1+ · · ·+p2x
2+p1x+p0, waarinde pi reele of complexe getallen zijn. We nemen aan dat pn = 0. We zeggendan dat P (x) graad n heeft. Een nulpunt van P (x) is een reeel of complex getala zo dat P (a) = 0. Je weet dat een kwadratisch (=tweede graads) polynoomnooit meer dan 2 nulpunten kan hebben. Dit geldt ook in het algemeen.
Stelling 6.5.2 Zij P (x) een polynoom van graad n. Dan heeft P (x) niet meerdan n verschillende nulpunten.
Bewijs: Stel namelijk dat P (x) meer dan n nulpunten heeft. Neem daarvann+ 1 stuks en noem ze a1, a2, . . . , an+1. Dan geldt
pnani + pn−1a
n−1i + · · ·+ p2a
2i + p1ai + p0, i = 1, 2, . . . , n+ 1.
We kunnen nu de zaak omdraaien door de punten a1, . . . , an+1 als gegeven tebeschouwen en de vergelijkingen als een stelsel van n+1 lineaire vergelijkingenin de n+ 1 onbekenden pn, . . . , p1, p0 te zien. Omdat pn = 0 voor ons gegevenpolynoom, bestaat er een niet-triviale oplossing. Dit betekent volgens Stelling6.3.5 dat de coefficientendeterminant nul is. Met andere woorden,∣∣∣∣∣∣∣∣
an1 an−11 . . . a1 1
an2 an−12 . . . a2 1
......
...ann+1 an−1
n+1 . . . an+1 1
∣∣∣∣∣∣∣∣ = 0
Anderzijds is deze determinant een VanderMonde determinant, waarvan dewaarde gelijk is aan
∏1≤i<j≤n+1(aj − ai). Omdat de nulpunten ai allen ver-
schillend zijn, is dit product ongelijk nul. Dit is in tegenspraak met het nul

88 HOOFDSTUK 6. DETERMINANTEN
worden van de coefficientendeterminant. We concluderen dat we niet meer dann nulpunten kunnen hebben.
2
6.6 Regel van Cramer
In de eerste paragraaf hebben we erop gewezen dat determinanten van oudsheroptreden bij de oplossing van n lineaire vergelijkingen in n onbekenden,
a11x1 + a12x2 + · · ·+ a1nxn = b1
a21x1 + a22x2 + · · ·+ a2nxn = b2...
...
an1x1 + an2x2 + · · ·+ annxn = bn
De coefficientenmatrix van dit stelsel geven we aan met A. De i-de kolomvectorvan A geven we aan met ai. De kolom bestaande uit de bi geven we aan metb. De oplossing van ons stelsel wordt door de volgende stelling gegeven.
Stelling 6.6.1 (Regel van Cramer) Stel det(A) = 0. Dan heeft het stelselvergelijkingen een unieke oplossing x1, x2, . . . , xn gegeven door
xi =det(a1, . . . ,ai−1,b,ai+1, . . . ,an)
det(a1,a2, . . . ,an)
voor i = 1, 2, . . . , n.
Bewijs: Omdat det(A) = 0 weten we dat er een unieke oplossing x1, x2, . . . , xnbestaat. Dat wil zeggen, b = x1a1 + x2a2 + · · ·+ xnan. Merk nu op dat
det(a1, . . . , ai−1 ,b,ai+1, . . . ,an)
= det(a1, . . . ,ai−1, x1a1 + x2a2 + · · ·+ xnan,ai+1, . . . ,an)
= det(a1, . . . ,ai−1, xiai,ai+1, . . . ,an)
= xidet(a1, . . . ,ai−1,ai,ai+1, . . . ,an)
De tweede gelijkheid volgt uit het feit dat we xj maal de j-de kolom kunnenaftrekken van de i-de kolom voor elke j = i. Uit de laatste regel volgt onzeformule voor xi direct.
2
6.7 Geadjungeerde en inverse
Stel dat A een n× n-matrix is met det(A) = 0. Geef, net als in de vorige para-graaf, de kolommen aan met a1, . . . ,an. Kies j en los het stelsel vergelijkingenAx = ei op. Volgens de regel van Cramer wordt de oplossing gegeven door
xj =det(a1, . . . ,aj−1, ei,aj+1, . . . ,an)
det(A), j = 1, 2 . . . , n.

6.7. GEADJUNGEERDE EN INVERSE 89
Merk nu op dat de determinant in de teller precies de minor ∆ij van A is opplaats i, j. De oplossingsvector wordt dus gegeven door
1
det(A)(∆i1,∆i2, . . . ,∆in)
t.
Tevens is de oplossingsvector voor het stelsel Ax = ei precies de i-de kolom vanA−1. Conclusie, de inverse matrix van A wordt gegeven door de formule
A−1 =1
det(A)
∆11 ∆21 · · · ∆n1
∆12 ∆22 · · · ∆n2...
...∆1n ∆2n · · · ∆nn
.
We hebben de volgende stelling bewezen.
Stelling 6.7.1 Zij A een inverteerbare n × n-matrix. Dan wordt het elementvan A−1 op plaats i, j gegeven door
∆ji/det(A) = (−1)i+jdet(Aji)/det(A).
Let op, de indices i, j zijn verwisseld in deze formule! De matrix met hetelement (−1)i+jdet(Aji) op plaats i, j noemen we de geadjungeerde matrix vanA. Notatie: Ad(A). Er geldt het volgende.
Stelling 6.7.2 Zij A een n×n-matrix en Ad(A) zijn geadjungeerde. Dan geldtdat AAd(A) = Ad(A)A = det(A)In.
Voorbeeld 6.7.3. Stel, we willen de inverse van
A =
2 0 1−1 1 21 2 4
bepalen met behulp van de geadjungeerde. De determinant van A is −3. Deeerste rij van Ad(A) vinden we door de onderdeterminanten te bepalen behorendbij de eerste kolom van A en die van ± te voorzien. Dat worden:∣∣∣∣ 1 2
2 4
∣∣∣∣ = 0, −∣∣∣∣ 0 12 4
∣∣∣∣ = 2,
∣∣∣∣ 0 11 2
∣∣∣∣ = −1.
De tweede rij van de geadjungeerde krijgen we door de tweede kolom van A afte lopen:
−∣∣∣∣−1 21 4
∣∣∣∣ = 6,
∣∣∣∣ 2 11 4
∣∣∣∣ = 7, −∣∣∣∣ 2 1−1 2
∣∣∣∣ = −5.
En tenslotte de derde rij van Ad(A):∣∣∣∣−1 11 2
∣∣∣∣ = −3, −∣∣∣∣ 2 01 2
∣∣∣∣ = −4,
∣∣∣∣ 2 0−1 1
∣∣∣∣ = 2.

90 HOOFDSTUK 6. DETERMINANTEN
We concluderen dat de inverse van A wordt gegeven door
A−1 =−1
3
0 2 −16 7 −5−3 −4 2
.
Het kan zijn dat je er sneller uit was gekomen als je veegprocedure had toegepast,maar dat hangt helemaal van de situatie af waarin we verkeren. Het is in elkgeval goed om op de hoogte te zijn van het bestaan van een formule voor deinverse van een matrix.
♢
6.8 Opgaven
Opgave 6.8.1 Bepaal de volgende determinanten door in zelfgekozen rijen ofkolommen te ontwikkelen,∣∣∣∣∣∣
2 −3 21 4 00 1 −5
∣∣∣∣∣∣ ,∣∣∣∣∣∣0 1 24 0 33 2 1
∣∣∣∣∣∣Opgave 6.8.2 Bepaal de volgende determinanten door in zelfgekozen rijen ofkolommen te ontwikkelen,∣∣∣∣∣∣∣∣
−1 1 2 32 0 −5 00 0 0 −13 −3 1 4
∣∣∣∣∣∣∣∣ ,∣∣∣∣∣∣∣∣−1 −2 2 10 0 −1 00 0 1 −11 −1 1 −1
∣∣∣∣∣∣∣∣Opgave 6.8.3 Bepaal de volgende determinanten door in zelfgekozen rijen ofkolommen te ontwikkelen,∣∣∣∣∣∣
a b 00 a ba 0 b
∣∣∣∣∣∣ ,∣∣∣∣∣∣0 a 0b c d0 e 0
∣∣∣∣∣∣Opgave 6.8.4 Er is gegeven dat∣∣∣∣∣∣
a b cd e fg h i
∣∣∣∣∣∣ = 4.
Bepaal de volgende determinanten∣∣∣∣∣∣2a 2b 2cd e fg h i
∣∣∣∣∣∣ ,∣∣∣∣∣∣3a −b 2c3d −e 2f3g −h 2i
∣∣∣∣∣∣ ,∣∣∣∣∣∣
a b c2d− 3g 2e− 3h 2f − 3i
g h i
∣∣∣∣∣∣

6.8. OPGAVEN 91
∣∣∣∣∣∣a− b a+ b cd− e d+ e fg − h g + h i
∣∣∣∣∣∣∣∣∣∣∣∣a d g
b+ 2a e+ 2d h+ 2g−c −f −i
∣∣∣∣∣∣Opgave 6.8.5 Bereken de volgende determinanten∣∣∣∣∣∣∣∣
5 2 1 01 −1 4 13 0 2 11 0 2 1
∣∣∣∣∣∣∣∣ ,∣∣∣∣∣∣∣∣0 1 4 −12 3 1 21 4 1 −31 1 −4 1
∣∣∣∣∣∣∣∣ .
Opgave 6.8.6 Bereken de volgende determinant∣∣∣∣∣∣∣∣∣∣∣∣
1 2 0 −1 2 46 2 8 1 −1 14 2 1 2 2 −54 5 4 5 1 21 2 0 −1 2 41 0 1 8 1 5
∣∣∣∣∣∣∣∣∣∣∣∣.
Opgave 6.8.7 Stel n ≥ 2. Ga na van de volgende uitspraken na of hij waar ofonwaar is voor elke tweetal n× n-matrices A en B
1. det(AB) = det(A)det(B).
2. det(A+B) = det(A) + det(B).
3. det(Ak) = det(A)k voor elke gehele k ≥ 0.
4. det(A−1) = det(A)−1 (mits det(A) = 0).
5. det(λA) = λdet(A).
Opgave 6.8.8 Bereken de determinant∣∣∣∣∣∣∣∣∣∣1 0 2 0 03 −1 1 0 01 2 2 0 00 0 0 4 50 0 0 2 3
∣∣∣∣∣∣∣∣∣∣.
Opgave 6.8.9 Bovenstaande determinant heeft het volgende patroon. Eenn×n matrix A met overal nullen, behalve op de plaats van een r×r deelmatrix

92 HOOFDSTUK 6. DETERMINANTEN
R en een s× s deelmatrix S, zodat r + s = n en R en S hebben geen gemeen-schappelijke rijen of kolommen. Verder liggen de diagonalen van R en S op dievan A. Bewijs dat det(A) = det(R)det(S)
Opgave 6.8.10 In R2 is een drietal rechte lijnen gegeven door vergelijkingenvan de vorm aix + biy = ci voor i = 1, 2, 3, waarbij (ai, bi) = (0, 0) voori = 1, 2, 3. Bewijs: als de drie lijnen door een punt gaan, dan geldt∣∣∣∣∣∣
a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ = 0.
De omkering geldt niet altijd: geef een drietal lijnen waarvoor bovenstaandedeterminant nul is, maar die niet door een punt gaan.
Opgave 6.8.11 Gebruik de regel van Cramer om de volgende stelsels lineairevergelijkingen op te lossen,
1.x1 + x2 = 3x1 − x2 = −1
2.x1 + 3x2 = 4x1 − x2 = 0
3.x1 − 2x2 + x3 = −1x1 + x3 = 3x1 − 2x2 = 0
4.x1 + x2 + x3 = 2x1 + 2x2 + x3 = 2x1 + 3x2 − x3 = −4
5.x1 + x2 + x3 = a
x2 + x3 = bx3 = c
Opgave 6.8.12 Bepaal de geadjungeerde en inverse (indien deze bestaat) vande volgende matrices. (
1 23 4
),
(a bc d
) 1 0 1
2 1 21 1 2
,
0 1 43 1 26 1 0
2 1 0
3 0 10 1 1

6.9. EXTRA OPGAVEN 93
Opgave 6.8.13 Laat zien dat de volgende determinanten nul zijn (door handigte redeneren)∣∣∣∣∣∣
0 a b−a 0 c−b −c 0
∣∣∣∣∣∣ ,∣∣∣∣∣∣
1 1 1a b c
b+ c a+ c a+ b
∣∣∣∣∣∣ ,∣∣∣∣∣∣
a b ca+ x b+ x c+ xa+ y b+ y c+ y
∣∣∣∣∣∣Opgave 6.8.14 Zij A een n×n-matrix met gehele getallen coefficienten. Bewijs
A−1 heeft gehele coefficienten ⇐⇒ det(A) = ±1.
Opgave 6.8.15 De vergelijking van een cirkel in het platte vlak met middelpunt(a, b) en straal r luidt: (x− a)2+(y− b)2 = r2. Uitgeschreven: x2+ y2− 2ax−2by + a2 + b2 − r2 = 0.Stel we hebben vier punten (xi, yi) met i = 1, 2, 3, 4 waarvan we weten dat zeop een cirkel liggen. Bewijs dat∣∣∣∣∣∣∣∣
x21 + y21 x1 y1 1x22 + y22 x2 y2 1x23 + y23 x3 y3 1x24 + y24 x4 y4 1
∣∣∣∣∣∣∣∣ .Geldt de omkering ook, dat wil zeggen als de determinant nul is, liggen de vierpunten (xi, yi) dan op een cirkel?
6.9 Extra opgaven
Opgave 6.9.1 (Lastig) Zij a = (a1, a2, . . . , an),b = (b1, b2, . . . , bn) een tweetalvectoren in Rn. Stel dat het oppervlak O van het parallellogram opgespannendoor a en b gelijk is aan |a| · |b| · | sinϕ| waarin ϕ de hoek is tussen a en b. Laatzien dat
O2 =∑
1≤i<j≤n
(aibj − ajbi)2.
Opgave 6.9.2 Bereken∣∣∣∣∣∣∣∣∣∣1 2 3 4 52 3 4 5 13 4 5 1 24 5 1 2 35 1 2 3 4
∣∣∣∣∣∣∣∣∣∣en
∣∣∣∣∣∣∣∣x2 ax x 1b2 ab b 1a2 bc x 1d2 ad d 1
∣∣∣∣∣∣∣∣Opgave 6.9.3 Bereken (met gebruikmaking van volledige inductie) de volgenden× n-determinanten,∣∣∣∣∣∣∣∣∣∣
1 1 1 . . . 11 2 2 . . . 21 2 3 . . . 3...
......
...1 2 3 . . . n
∣∣∣∣∣∣∣∣∣∣,
∣∣∣∣∣∣∣∣∣∣
1 + a2 a 0 . . . 0a 1 + a2 a . . . 00 a 1 + a2 . . . 0...
......
0 0 . . . a 1 + a2
∣∣∣∣∣∣∣∣∣∣

94 HOOFDSTUK 6. DETERMINANTEN
∣∣∣∣∣∣∣∣∣∣∣∣∣
1 −1 0 0 . . . 0 01 0 −2 0 . . . 0 00 1
2 0 −3 . . . 0 0...
......
......
...0 0 0 0 . . . 0 −(n− 1)0 0 0 0 . . . 1
n−1 0
∣∣∣∣∣∣∣∣∣∣∣∣∣Opgave 6.9.4 Bereken de n× n-determinanten∣∣∣∣∣∣∣∣∣∣
λ 1 1 · · · 11 λ 1 11 1 λ · · · 1...
...1 1 1 · · · λ
∣∣∣∣∣∣∣∣∣∣en
∣∣∣∣∣∣∣∣∣∣
x x x · · · x1 x x · · · x1 1 x · · · x...
...1 1 1 · · · x
∣∣∣∣∣∣∣∣∣∣Opgave 6.9.5 Zij gegeven de n× n-determinant
∆n =
∣∣∣∣∣∣∣∣∣∣∣∣
x 1 0 · · · 01 x 1 · · · 00 1 x · · · 00 0 1 · · · 0...
...0 0 · · · 1 x
∣∣∣∣∣∣∣∣∣∣∣∣Bewijs dat ∆n = x∆n−1 −∆n−2.
Opgave 6.9.6 Het Kroneckersymbool δij wordt gegeven door δij = 1 als i = jen δij = 0 als i = j. Zij x1, · · · , xn een willekeurig n-tal scalairen. Zij M den × n-matrix met op plaats i, j het element δij + xixj . Bewijs dat det(M) =1 + x21 + x22 + · · ·+ x2n.
Opgave 6.9.7 Bewijs,∣∣∣∣∣∣∣∣∣∣∣∣∣
x b12 b13 b14 . . . b1,n−1 1a1 x b23 b24 . . . b2,n−1 1a1 a2 x b34 . . . b3,n−1 1...
......
......
...a1 a2 a3 a4 . . . x 1a1 a2 a3 a4 . . . an−1 1
∣∣∣∣∣∣∣∣∣∣∣∣∣=
n−1∏k=1
(x− ak).
Opgave 6.9.8 Stel n ≥ 3. Bewijs dat voor elke keuze van ai, bj geldt:∣∣∣∣∣∣∣∣a1 + b1 a1 + b2 a1 + b3 . . . a1 + bna2 + b1 a2 + b2 a2 + b3 . . . a2 + bn
......
......
an + b1 an + b2 an + b3 . . . an + bn
∣∣∣∣∣∣∣∣ = 0.

6.9. EXTRA OPGAVEN 95
Opgave 6.9.9 Bewijs,∣∣∣∣∣∣∣∣0 x y zx 0 z yy z 0 xz y x 0
∣∣∣∣∣∣∣∣ = (x+ y + z)(x− y − z)(x+ y − z)(x− y + z).
Opgave 6.9.10 Bewijs dat als a1a2 · · · an = 0,∣∣∣∣∣∣∣∣∣∣
1 + a1 1 1 . . . 11 1 + a2 1 . . . 11 1 1 + a3 . . . 1...
......
...1 1 1 . . . 1 + an
∣∣∣∣∣∣∣∣∣∣= a1a2 · · · an(1 +
1
a1+
1
a2+ · · ·+ 1
an).

Hoofdstuk 7
Vectorruimten
7.1 Axioma’s
Tot nu toe hebben we het uitsluitend over Rn gehad. In de geschiedenis vande wiskunde blijkt dat veel andere verzamelingen ook gezien kunnen wordenals vectorruimten. Met name oplossingsverzamelingen van lineaire differenti-aalvergelijkingen. Misschien is dit niet een-twee-drie duidelijk, maar we zullener later in dit hoofdstuk op terugkomen. Voorbeelden waarvan je je misschienwel kunt voorstellen dat ze Rn generaliseren zijn bijvoorbeeld de oneindige ri-jtjes reele getallen, aan te geven met R∞.
Een andere generalisatie is om de reele getallen los te laten en in anderegetalsystemen te rekenen. Bijvoorbeeld, we kunnen naar verzameling vec-toren (x1, . . . , xn) met xi ∈ C kijken en deze ruimte Cn noemen. Matrixver-menigvuldiging, oplossing van lineaire vergelijkingen, lineaire deelruimten, de-terminanten, dit alles zou even goed kunnen plaats vinden met complexe getallen.Ook gaan onze stellingen over rang en dimensie onveranderd door. Evenzo kun-nen we kijken naar Qn. Om niet alles tegelijk te generaliseren beperken we onsvoorlopig tot vectorruimten met scalairen R.De belangrijkste idee is dat we vectoren zien als objecten die los staan van hunbeschrijving door coordinaten, vaak hebben we die niet eens nodig. We con-centreren ons op de belangrijkste eigenschappen van vectoren, namelijk dat ereen optelling en scalaire vermenigvuldiging bestaan. De rest, zoals coordinaten,komt later als dat nodig mocht blijken.
Een vectorruimte over R is een niet-lege verzameling V met daarin een optellingx,y ∈ V 7→ x + y en een scalaire vermenigvuldiging λ ∈ R,x ∈ V 7→ λx dievoldoet aan de volgende eigenschappen.
1. Voor alle x,y ∈ V geldt x+ y = y + x.
2. Voor alle x,y, z ∈ V geldt (x+ y) + z = x+ (y + z).
3. Bij elke x,y ∈ V is er een uniek bepaalde z ∈ V zo dat x+ z = y.
4. Voor alle λ, µ ∈ R en x ∈ V geldt λ(µx) = (λµ)x.
5. Voor alle λ ∈ R en alle x,y ∈ V geldt λ(x+ y) = λx+ λy.
96

7.1. AXIOMA’S 97
6. Voor alle λ, µ ∈ R en alle x ∈ V geldt (λ+ µ)x = λx+ µx
7. Voor alle x ∈ V geldt 1 · x = x.
De elementen van V noemen we vectoren. Allereerst een aantal belangrijkeopmerkingen.
1. We noemen de oplossing z in eigenschap (3) het verschil van de vectoreny en x. Notatie: y − x.
2. Er is een uniek bepaald element 0 ∈ V zo dat x+ 0 = x voor alle x ∈ V .Om te zien dat zo’n element bestaat kiezen we v ∈ V (dat kan, V isimmers niet leeg) en nemen 0 = v−v. Dus v+0 = v. Zij nu x willekeurigen tel aan beide zijden x−v op. We vinden (x−v)+v+0 = (x−v)+v.Per definitie geldt dat (x− v) + v = x. Onze gelijkheid gaat dus over inx+ 0 = x. Het element 0 heeft dus de gewenste eigenschap.
Nu moeten we ons er nog van overtuigen dat er maar een element is metdeze eigenschap. Stel dat er nog een element 0′ is zo dat x+ 0′ = x vooralle x ∈ V . Dan geldt in het bijzonder dat 0+0′ = 0. Anderzijds, omdat0 ook de rol van nulelement speelt, geldt dat 0′ + 0 = 0′. We zien dat desom 0+ 0′ gelijk is aan zowel 0 als 0′. Dus zijn deze gelijk 0′ = 0.
3. Voor elke x ∈ V geldt 0 · x = 0. Dit zien we uit het feit dat x + 0 · x =(1 + 0)x = 1 · x = x. Aangezien 0 de unieke vector is met de eigenschapdat x+ 0 = x concluderen we dat 0 · x = 0.
4. Voor elke x,y ∈ V geldt y− x = y+ (−1) · x. Stel z = y+ (−1) · x. Dangeldt x + z = x + y + (−1) · x = y + (1 − 1)x = y + 0 · x = y. Hieruitzien we dat ook z = y − x.
Voortaan noteren we 0− x als −x. In het bijzonder geldt −x = (−1) · x.
Hier zijn een aantal voorbeelden van vectorruimten. Ga van elk van de voor-beelden na dat ze inderdaad een vectorruimte vormen.
1. De intuıtieve vectoren uit onze inleiding.
2. De verzamelingen Rn (eindige rijen van lengte n van elementen uit R,R∞ (oneindige rijen) en R∞
0 (oneindige rijen met eindig veel termen = 0)vormen vectorruimten over R. Optelling en scalaire vermenigvuldigingzijn de gebruikelijke coordinaatsgewijze bewerkingen.
3. De verzameling van m× n-matrices met elementen uit R en gebruikelijkeoptelling en scalaire vermenigvuldiging vormen een vectorruimte over R.
4. De verzameling van polynomen
{akXk + ak−1Xk−1 + · · ·+ a1X + a0 | ai ∈ R}
met de voor de hand liggende optelling en scalaire vermenigvuldiging.Notatie: R[X]

98 HOOFDSTUK 7. VECTORRUIMTEN
5. Zij I ⊂ R een interval. De verzameling van continue functies f : I → Rvormen een vectorruimte over R als we optelling en scalaire vermenigvuldig-ing als volgt kiezen:
(f + g)(x) = f(x) + g(x) (λf)(x) = λf(x).
Notatie: C0(I).
6. In plaats van bovenstaand voorbeeld kunnen we natuurlijk ook de verza-meling van continu differentieerbare functies, (C1(I)) oneindig vaak dif-ferentieerbare functies (C∞(I)), of willekeurige functies nemen.
7. De complexe getallen vormen een vectorruimte over R als we gebruikelijkeoptelling en scalaire vermenigvuldiging nemen.
Definitie 7.1.1 (Deelruimte) Zij V een vectorruimte over R en W ⊂ V eendeelverzameling. We noemen W een (lineaire) deelruimte van V als de volgendeeigenschappen gelden:
1. 0 ∈ W .
2. Als x,y ∈ W dan x+ y ∈ W .
3. Als λ ∈ R en x ∈ W dan λx ∈ W
Stelling 7.1.2 Een lineaire deelruimte W van een vectorruimte V is zelf ookeen vectorruimte als we de optelling en scalaire vermenigvuldiging uit V nemen.
Bewijs: Zij W een deelruimte van V . Uit de definitie van deelruimte volgtdat we in W een optelling en scalaire vermenigvuldiging van vectoren hebben.Omdat deze optelling en vermenigvuldiging aan de axioma’s voor de ruimteV voldoen, voldoen ze zeker ook als we ons beperken tot de vectoren in W .Daarmee is W zelf ook een vectorruimte.
2
Voorbeelden van deelruimten.
1. V = Rn en W is oplossingsverzameling van een stelsel homogene lineairevergelijkingen Ax = 0 in x ∈ Rn. (Deze kenden we al).
2. Zij I ⊂ R een interval en V = C0(I). Dan zijn C1(I) en C∞(I) voor-beelden van lineaire deelruimten.
3. Zij V = R[X]. Dan zijn de volgende deelverzamelingen ook deelruimten
(a) Kies n ∈ N. De polynomen met graad ≤ n. Notatie: R[X]n.
(b) De verzameling p(X) ∈ R[X] met p(1) = 0. Of algemener, kies a ∈ Ren neem als W de verzameling polynomen met p(a) = 0.
4. V = R∞. Ga na dat de volgende deelverzamelingen lineaire deelruimtenzijn:

7.2. AFHANKELIJKHEID 99
(a) R∞0 : de verzameling van alle (x1, x2, . . .) ∈ R∞ met xn = 0 als n
groot genoeg is.
(b) l∞: de verzameling (x1, x2, . . .) ∈ R∞ zo dat limn→∞ xn = 0.
(c) l2: (lastig) de verzameling (x1, x2, . . .) ∈ R∞ zo dat limn→∞ x21 +x22 + · · ·+ x2n bestaat.
Ga tevens na dat we in dit voorbeeld de inclusies
R∞0 ⊂ l2 ⊂ l∞ ⊂ R∞
hebben.
5. Gegeven een vectorruimte V over R en een eindige verzameling vectorenv1, . . . ,vn. Het opspansel van deze vectoren gegeven door
Span(v1, . . . ,vn) = {λ1v1 + · · ·+ λnvn|λ1, . . . , λn ∈ R}
is een lineaire deelruimte van V .
6. Gegeven een vectorruimte V over R en een willekeurige deelverzamelingS ⊂ V . De verzameling van alle (eindige) lineaire combinaties van ele-menten uit S noemen we het opspansel van S. Notatie: Span(S). Merkop dat Span(S) ook een lineaire deelruimte van V is.
Verder geldt voor elke deelruimte W ⊂ V met de eigenschap S ⊂ W , datalle lineaire combinaties van elementen uit S ook in W bevat moeten zijn.Met andere woorden, Span(S) ⊂ W . Op deze manier kunnen we Span(S)zien als de kleinste deelruimte die een gegeven verzameling S omvat.
7.2 Afhankelijkheid
Ook in onze abstracte vectorruimten hanteren we het begrip (on)afhankelijkheid.Stel we hebben een vectorruimte V over het lichaam R en zij v1,v2, . . . ,vr eenr-tal vectoren in V . Een lineaire combinatie van v1,v2, . . . ,vr is een vector vande vorm
λ1v1 + λ2v2 + · · ·+ λrvr
waarin λ1, . . . , λr ∈ R. Onder een (lineaire) relatie tussen v1,v2, . . . ,vr ver-staan we een lineaire combinatie die de nulvector oplevert.
Definitie 7.2.1 Zij V een vectorruimte over het lichaam R. Een r-tal vectorenv1,v2, . . . ,vr ∈ V noemen we (lineair) onafhankelijk als de enige relatie
λ1v1 + λ2v2 + · · ·+ λrvr = 0
met λ1, λ2, . . . , λr ∈ R de triviale is, dat wil zeggen λ1 = λ2 = · · · = λr = 0.We noemen de vectoren (lineair) afhankelijk als er een niet-triviale relatiebestaat.
We kunnen ook lineaire onafhankelijkheid voor willekeurige verzamelingen definieren(dus ook oneindige verzamelingen).

100 HOOFDSTUK 7. VECTORRUIMTEN
Definitie 7.2.2 Zij V een vectorruimte over het lichaam R. Een deelverza-meling S ⊂ V heet (lineair) onafhankelijk als elke eindige deelverzameling vanS onafhankelijk is.
We kunnen nu ook het begrip rang invoeren.
Definitie 7.2.3 Zij V een vectorruimte en S ⊂ V een niet lege verzamelingvectoren. Het grootste getal r, zo dat S een r-tal onafhankelijke vectoren bevat,noemen we de rang van S. Notatie: rang(S).
In het bijzonder, als S = {0}, dan zeggen we dat rang(S) = 0.
Als S een deelruimte is dan noemen we de rang van S ook wel dimensie. Notatie:dim(S).
Als r niet bestaat, dan zeggen we dat de rang (of dimensie) van S oneindig is.
We kunnen alleen r = ∞ hebben als S voor elke positief gehele r een r-talonafhankelijke vectoren bevat.
De volgende stelling hebben we ook al in Hoofdstuk 4 gezien. Het bewijs gaatop precies dezelfde manier, dus zullen we dat niet herhalen.
Stelling 7.2.4 (Hoofdstelling) Zij V een vectorruimte en S ⊂ V een verza-meling vectoren en stel dat S bevat is in het opspansel van n vectoren b1, . . . ,bn.Dan geldt dat rang(S) ≤ n.
Het begrip basis hebben we ook in Hoofdstuk 4 gezien, met als enige subtiliteitdat hier een basis uit oneindig veel elementen kan bestaan.
Definitie 7.2.5 Zij V een vectorruimte S ⊂ V een verzameling vectoren. Eendeelverzameling B ⊂ S heet een basis van S als
1. B onafhankelijk is, en
2. elke v ∈ S afhankelijk is van B (dat wil zeggen v is een lineaire combinatievan een eindig aantal elementen uit B).
In deze definitie hebben we het woord eindig onderstreept om duidelijk te makendat we in dit stadium niet kunnen spreken over lineaire combinatie van eenoneindig aantal elementen. Om over oneindige sommen te kunnen sprekenhebben we ook een convergentiebegrip nodig. In een aantal gevallen zullen wedeze later zien. Vooralsnog hebben oneindige sommen geen betekenis in delineaire algebra.
Bij abstracte vectorruimten kan het gebeuren dat er helemaal geen eindigebasis bestaat. In dat geval bevat de vectorruimte een oneindige onafhankelijkedeelverzamneling en waarmee de dimensie van V oneindig is. In dergelijkegevallen kan het gebeuren dat we een oneindige basis kunnen aanwijzen, maarveel vaker gebeurt het dat er helemaal geen basis aangegeven kan worden.
Twee mooie voorbeelden worden gegeven door R∞ bestaande uit de oneindigerijen reele getallen, en R∞
0 , bestaande uit de oneindige rijen reele getallen die

7.2. AFHANKELIJKHEID 101
vanaf zeker moment nul zijn. De vectoren
(1, 0, 0, 0, . . .)
(0, 1, 0, 0, . . .)
(0, 0, 1, 0, . . .)
. . .
vormen een basis van R∞0 . Ga zelf na dat dit zo is. Begrijp je ook waarom
bovenstaand stelsel geen basis van R∞ is?Analoog, en met het zelfde bewijs als in Stelling 4.2.4 kunnen we hier ookeindige bases karakteriseren.
Stelling 7.2.6 Zij S een verzameling vectoren van rang n. Dan geldt:
1. Elke basis van S bestaat uit n vectoren.
2. Elk onafhankelijk stelsel vectoren uit S bestaande uit n vectoren is eenbasis van S.
Hier volgt een aantal voorbeelden van (on)afhankelijke verzamelingen en eventuelebases van vectorruimten.
Voorbeeld 7.2.7. Beschouw de vectorruimte over R bestaande uit de reeelwaardigecontinue functies op ]0, 1[. We geven deze aan met C0(]0, 1[). De rol van de nul-vector in deze ruimte wordt gespeeld door de constante functie 0. Als voorbeeldlaten we zien dat 1/x, 1/x2, 1/(1− x) onafhankelijk zijn. Stel namelijk
a1
x+ b
1
x2+ c
1
1− x≡ 0
voor zekere a, b, c ∈ R. Met het ≡-teken geven we hier nog een keer extra aandat het om een gelijkheid van functies gaat. Dat wil zeggen dat de gelijkheidgeldt voor alle keuzen van x.Om onafhankelijkheid aan te tonen kunnen we een aantal waarden van x kiezen.Neem bijvoorbeeld achtereenvolgens x = 1/3, 1/2, 2/3. We vinden dan,
3a+ 9b+ 3c/2 = 0
2a+ 4b+ 2c = 0
3a/2 + 9b/4 + 3c = 0
Oplossing van dit stelsel leert dat a = b = c = 0. Met andere woorden, alleende triviale relatie geldt, en de functies zijn onafhankelijk.
♢
Voorbeeld 7.2.8. De ruimte C(R) van continue functies op R. De nulvector indeze ruimte is de triviale functie 0. Beschouw de functies f0, f1, f2, . . . gegevendoor fm(x) = emx. Wij beweren dat de functies f0, f1, . . . , fn onafhankelijk zijnvoor elke gehele n. Stel dat er a0, a1, . . . , an ∈ R bestaan, zo dat
anfn + an−1fn−1 + · · ·+ a1f1 + a0f0 = 0

102 HOOFDSTUK 7. VECTORRUIMTEN
Anders gezegd,ane
nx + an−1e(n−1)x + · · ·+ a1e
x + a0
is identiek gelijk nul voor alle keuzen van x. Anders geschreven, P (ex) = 0 vooralle x, waarin
P (X) = anXn + an−1X
n−1 + · · ·+ a1X + a0.
Anders gezegd, het polynoom P (X) heeft oneindig veel verschillende nulpunten,namelijk X = ex met x ∈ R willekeurig. Als P (X) een niet-triviaal polynoomzou zijn, dan kunnen er hooguit n nulpunten zijn. We moeten dus concluderendat P (X) het triviale polynoom is. Met andere woorden, an = an−1 = · · · =a1 = a0 = 0.In het bijzonder zien we dat het opspansel van f0, f1, f2, . . . in C(R) een oneindigdi-mensionale deelruimte van C(R) is.
♢
Voorbeeld 7.2.9. Oplossingen van een homogene lineaire differentiaalvergeli-jking
dn
dxny + pn−1(x)
dn−1
dxn−1y + · · ·+ p1(x)
d
dxy + p0(x)y = 0
waarin de pi(x) voldoende vaak differentieerbare functies in het open interval(−1, 1) zijn (je kunt natuurlijk ook andere open intervallen kiezen). We kunnende vergelijking iets korter schrijven door
y(n) + pn−1(x)y(n−1) + · · ·+ p1(x)y
′ + p0(x)y = 0.
Zij V de verzameling oplossingen van deze vergelijking. Ga zelf het volgendena: als y1, y2 twee oplossingen zijn en λ ∈ R, dan zijn y1 + y2 en λy1 ookoplossingen. Met andere woorden, V is een vectorruimte ten aanzien van degewone optelling en scalaire vermenigvuldiging van functies.Uit de theorie van de lineaire differentiaalvergelijkingen volgt dat de dimensievan V gelijk is aan n. Met andere woorden, er bestaan n onafhankelijke oplossin-gen y1, . . . , yn van onze differentiaalvergelijking zo dat iedere iedere oplossingin de vorm λ1y1 + · · ·+ λnyn te schrijven is met λi ∈ R voor alle i.Hier volgen een paar specifieke voorbeelden.
1.dn
dxny = 0.
De verzameling oplossingen bestaat uit alle polynomen van graad < n,
λ0 + λ1x+ λ2x2 + · · ·+ λn−1x
n−1.
2.d2
dx2y − 3
d
dxy + 2y = 0.
Laten we een oplossing van de vorm y = eλx voor nog nader te bepalen λ ∈R proberen. Invullen in de vergelijking geeft (λ2−3λ+2)eλx = 0, waaruitvolgt λ2 − 3λ+ 2 = 0 en dus λ = 1 of 2. Twee oplossingen zijn dus ex ene2x en volgens de theorie spannen deze de volledige oplossingsverzamelingop.

7.3. LINEAIRE AFBEELDINGEN 103
3.d2
dx2y − xy = 0.
Deze vergelijking is niet met de ons bekende klassieke functies op te lossenen we moeten oneindige Taylorontwikkelingen in de strijd gooien. Ditzullen we hier niet doen, maar wel opmerken dat desondanks de oploss-ingsruimte een vectorruimte over R van dimensie 2 is.
♢
Voorbeeld 7.2.10. De vectorruimte van complexe getallen over R. Elk com-plex getal kan op unieke manier geschreven worden als a+ b
√−1. Hieruit volgt
dat 1,√−1 een basis van onze vectorruimte is. De dimensie van C over R is
dus twee.♢
7.3 Lineaire afbeeldingen
Van bijzonder belang zijn afbeeldingen tussen vectorruimten die de vector-ruimtestructuur intact laten. Om wat preciezer te zijn, zij V,W een tweetalvectorruimten over het scalairenlichaam R. Een lineaire afbeelding A : V → Wis een afbeelding met de volgende eigenschappen
1. Voor elke x,y ∈ V geldt A(x+ y) = A(x) +A(y).
2. Voor elke λ ∈ R,x ∈ V geldt A(λx) = λA(x).
Om wat houvast te hebben, matrixvermenigvuldiging is het standaardvoor-beeld van een lineaire afbeelding. Preciezer, zij M een m× n-matrix met reelecoefficienten. De afbeelding Rn → Rm die aan x ∈ Rn de vector Mx ∈ Rm
toekent, is een lineaire afbeelding. Uit de elementaire regels van matrixver-menigvuldiging volgt immers dat
M(x+ y) = Mx+My
en
M(λx) = λMx.
In het volgende hoofdstuk zal blijken dat lineaire afbeeldingen tussen eindigdi-mensionale vectorruimten allemaal kunnen worden teruggebracht tot matrixver-menigvuldiging met een matrix M waarvan met coefficienten in R.Alvorens verdere voorbeelden te bespreken, maken we een aantal opmerkingenen voeren wat begrippen in.
Lemma 7.3.1 Zij V,W een tweetal vectorruimten over het scalairenlichaam Ren A : V → W een lineaire afbeelding. Dan geldt,
1. Voor elk tweetal x,y ∈ V en λ, µ ∈ R geldt A(λx+µy) = λA(x)+µA(y).

104 HOOFDSTUK 7. VECTORRUIMTEN
2. A(0) = 0.
Geef zelf een bewijs voor dit Lemma.
Een belangrijke ruimte die bij een lineaire afbeelding hoort is de kern. Zijf : V → W een lineaire afbeelding, dan is de kern van f de verzameling vanalle x ∈ V met f(x) = 0. Notatie: ker(f).
In het voorbeeld van matrixvermenigvuldiging x 7→ Mx wordt de kern gegevendoor de nulruimte van de matrix M .
Lemma 7.3.2 De kern van een lineaire afbeelding f : V → W is een lineairedeelruimte van V .
Geef ook van dit Lemma zelf een bewijs. Verder geldt,
Stelling 7.3.3 Zij V,W een tweetal vectorruimten en A : V → W een lineaireafbeelding. Dan is A injectief precies dan als ker(A) = {0}.
Bewijs: Dit is niet lastig in te zien. Stel namelijk dat A injectief is. Dan geldtx ∈ ker(A) ⇒ A(x) = 0 = A(0) en wegens injectiviteit van A volgt hieruit datx = 0. Dus ker(A) = {0}.Stel anderzijds dat ker(A) alleen uit de nulvector bestaat. Dan volgt uit Ax =A(y) dat A(x− y) = 0 wegens de lineariteit van A. Omdat de kern triviaal isimpliceert dit x− y = 0 en dus x = y. Met andere woorden, A is injectief.
2
Hier zijn een aantal voorbeelden van lineaire afbeeldingen.
1. Als vectorruimte V nemen we de intuıtieve vectoren in de ruimte, waarmeewe dit college begonnen. Meetkundig realiseren we deze ruimte door depunten in de driedimensionale ruimte met gegeven oorsprong O. Let op:we voeren geen coordinaten in! Beschouw nu de volgende twee specialevoorbeelden.
(a) Zij W een vlak door O met normaalvector n. De loodrechte projectieP van V op W is een voorbeeld van een lineaire afbeelding. Zijnamelijk v ∈ V . De loodrechte projectie van v op W is dat punt opde lijn x = v+λnmet de eigenschap dat x·n = 0. Dus (v+λn)·n = 0waaruit volgt v · n+ λ|n|2. Dus λ = −v · n/|n|2 en
P (v) = v − v · n|n|2
n. (7.1)
Dat P lineair is volgt uit:
P (x+ y) = x+ y − (x+ y) · n|n|2
n
= x+ y − x · n|n|2
n− y · n|n|2
n
= P (x) + P (y)

7.3. LINEAIRE AFBEELDINGEN 105
en
P (λx) = λx− (λx) · n|n|2
n
= λx− λx · n|n|2
n
= λP (x)
De kern bestaat uit alle vectoren die naar 0 geprojecteerd worden,in dit geval alle vectoren die loodrecht op het vlak W staan.
2. Zij V = R[X], de ruimte van polynomen. Dan is differentiatie naar X eenlineaire afbeelding van V naar V . Immers,
d
dX(λf(X)) = λ
d
dXf(X).
end
dX(f(X) + g(X)) =
d
dXf(X) +
d
dXg(X).
De enige polynomen die na differentiatie nul worden, zijn de constantepolynomen. Deze constante polynomen vormen dus de kern.
3. Zij V = C(R) de ruimte van continue functies op R. Integratie van eencontinue functie over het interval [0, 1] (of een ander interval) geeft eenlineaire afbeelding van V naar R. Immers,∫ 1
0(f(x) + g(x))dx =
∫ 1
0f(x)dx+
∫ 1
0g(x)dx
en ∫ 1
0λf(x)dx = λ
∫ 1
0f(x)dx.
De kern wordt gegeven door alle functies waarvan de integraal nul is.
4. Zij M2,2 de ruimte van 2× 2-matrices met elementen in R. De afbeeldingM2,2 → R4 gegeven door (
a bc d
)7→ (a, b, c, d)t
is lineair. Ga dit na!
We noemen twee vectorruimten V,W isomorf als er een bijectieve lineaire af-beelding A : V → W bestaat. Er geldt:
Stelling 7.3.4 Zij A : V → W een bijectieve lineaire afbeelding tussen tweevectorruimten V,W . Dan is de inverse afbeelding A−1 : W → V ook lineair.

106 HOOFDSTUK 7. VECTORRUIMTEN
Bewijs: Zij x,y ∈ W . Kies u,v ∈ V zo dat A(u) = x en A(v) = y. Dangeldt, wegens lineariteit van A, dat A(u+ v) = A(u) +A(v) = x+ y. Gevolg:A−1(x + y) = u + v = A−1(x) + A−1(y). Hiermee is het eerste kenmerk vanlineariteit aangetoond.Kies nu x ∈ W en λ ∈ R. Stel v zo dat x = A(v). Dan geldt dat A(λv) =λA(v) = λx. Dus A−1(λx) = λv = λA−1(x).
2
We kunnen isomorfe vectorruimten zien als twee incarnaties van dezelfde vector-ruimte structuur. De 1-1-duidige correspondentie tussen de twee wordt gegevendoor de bijectie A. Hier zijn een paar voorbeelden.
1. Zij M2,2 de ruimte van 2× 2-matrices met elementen in R. De afbeeldingM2,2 → R4 gegeven door (
a bc d
)7→ (a, b, c, d)t
is een bijectieve lineaire afbeelding tussen M2,2 en R4. Goed beschouwdmaakt het ook niet uit of we de vier componenten van vectoren uit R4 ineen rij, kolom of vierkantsvorm opschrijven.
2. Zij R een oneindig lichaam. De ruimten R[X] van polynomen en R∞0 zijn
isomorf via de lineaire bijectie
a0 + a1X + a2X2 + · · ·+ anX
n 7→ (a0, a1, a2, . . . , an, 0, 0, 0, 0, . . .).
Hier is nog een algemene opmerking.
Lemma 7.3.5 Zij V,W een tweetal vectorruimten en A : V → W een lineaireafbeelding. Dan is A(V ) een lineaire deelruimte van W .
Opgave 7.3.6 Geef zelf een bewijs van dit Lemma.
Tenslotte wijzen we erop dat een eindigdimensionale vectorruimte over R altijdisomorf is met Rn. Dit gaat als volgt Zij V een eindigdimensionale vectorruimteover R en B = {b1, . . . ,bn} een geordende basis. Elke vector x ∈ V kanop unieke manier geschreven worden als x = x1b1 + x2b2 + · · · + xnbn metxi ∈ R. We noemen x1, x2, . . . , xn de coordinaten van x ten opzichte van B.De kolom bestaande uit deze coordinaten noemen we de coordinatenkolom vanx ten opzichte van B. We geven deze aan met xB.
Opgave 7.3.7 Laat zien dat de toekenning
x 7→ xB
een bijectieve lineaire afbeelding tussen V en Rn geeft.
We zien hieruit dat alle eindigdimensionale vectorruimten over R isomorf zijnmet Rn voor zekere n. Men zou dus kunnen zeggen dat, wat betreft eindigdi-mensionale vectorruimten, alles weer bij het oude is. In de praktijk blijkt hetechter vaak onhandig of omslachtig een basis te kiezen. Vaak is zo’n keuzehelemaal niet voor de hand liggend. In zulke gevallen is het veel eleganterom coordinaatvrij te werken. Dit is de kracht van een axiomatische opzet vanvectorruimten.

7.4. LINEAIRE AFBEELDINGEN IN EINDIGE DIMENSIE 107
7.4 Lineaire afbeeldingen in eindige dimensie
In deze paragraaf geven we aan wat het verband is tussen lineaire afbeeldin-gen en matrixvermenigvuldiging. Zij V,W een tweetal vectorruimten overhet scalairenlichaam R en A : V → W een lineaire afbeelding. We nemenaan dat V,W eindigdimensionaal zijn met dimensies n respectievelijk m. ZijB = {b1,b2, . . . ,bn} een geordende basis van V en C = {c1, c2, . . . , cm} eengeordende basis van W . We geven de coordinatenkolom van x ∈ V ten opzichtevan B aan met xB. En evenzo is yC de coordinatenkolom van y ∈ W tenopzichte van C.
Stelling 7.4.1 Gegeven V,W , hun geordende bases B,C, en A : V → W alsdaarnet. Stel x ∈ V,y ∈ W zo dat y = A(x). Zij AB
C de m × n-matrix die wekrijgen door als i-de kolom de coordinatenkolom van A(bi) ten opzichte van Cte nemen. Dan geldt:
yC = ABCxB.
Bewijs: De volgende stappen spreken hopelijk voor zich. We beginnen mety = A(x). Neem nu de coordinatenkolommen ten opzichte van C,
yC = (A(x))C
= (n∑
i=1
xiA(bi))C
=
n∑i=1
xiA(bi)C
= ABCxB
2
Hier is een viertal voorbeelden van de vorm A : V → V , dus W = V . We kiezenin beide copieen van V dezelfde basis B = C.
Voorbeeld 7.4.2. We nemen de projectie afbeelding (7.1) op pagina 104 metn = (1, 1, 2) ten opzichte van de standaard basis e1, e2, e3 die we aangeven metE. Er geldt
P (e1) = e1 −e1 · n|n|2
n =
100
− 1
6
112
=
5/6−1/6−1/3
.
Evenzo volgt
P (e2) =
−1/65/6−1/3
, P (e3) =
−1/3−1/31/3
.
De matrix van P ten opzichte van E wordt dus gegeven door
PEE =
5/6 −1/6 −1/3−1/6 5/6 −1/3−1/3 −1/3 1/3
.
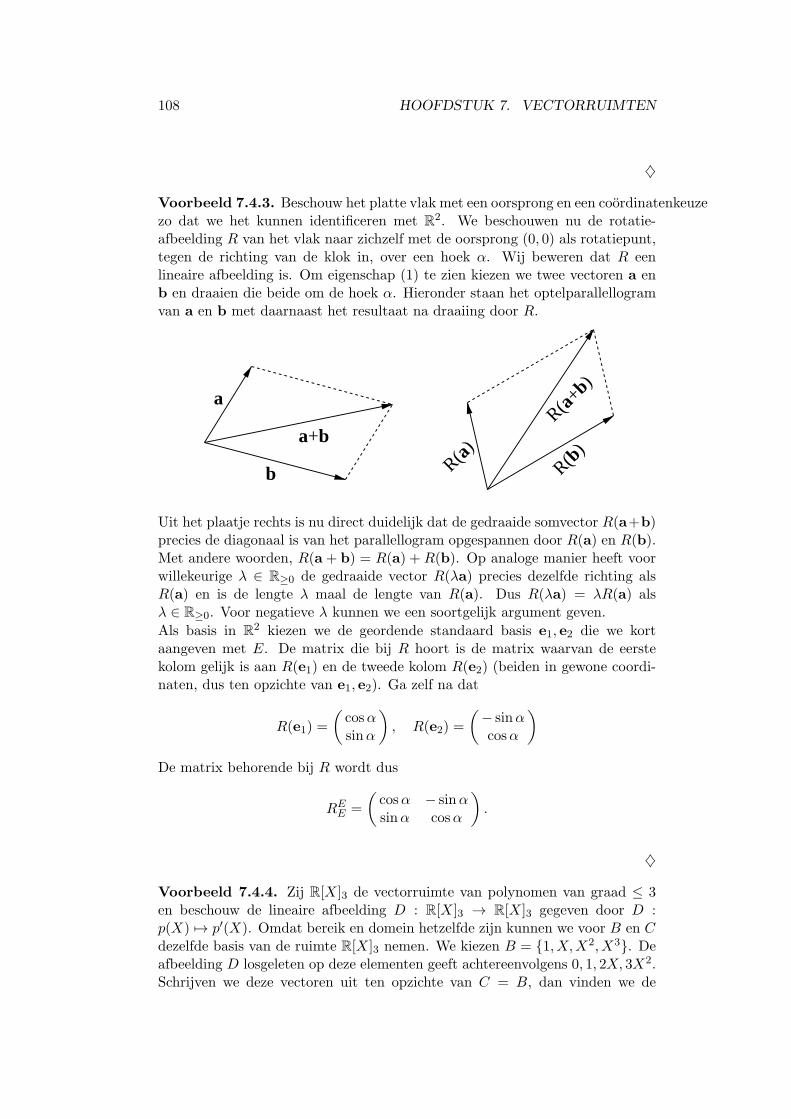
108 HOOFDSTUK 7. VECTORRUIMTEN
♢
Voorbeeld 7.4.3. Beschouw het platte vlak met een oorsprong en een coordinatenkeuzezo dat we het kunnen identificeren met R2. We beschouwen nu de rotatie-afbeelding R van het vlak naar zichzelf met de oorsprong (0, 0) als rotatiepunt,tegen de richting van de klok in, over een hoek α. Wij beweren dat R eenlineaire afbeelding is. Om eigenschap (1) te zien kiezen we twee vectoren a enb en draaien die beide om de hoek α. Hieronder staan het optelparallellogramvan a en b met daarnaast het resultaat na draaiing door R.
a
b
a+b
R(a)
R(b)
R(a+b)
Uit het plaatje rechts is nu direct duidelijk dat de gedraaide somvector R(a+b)precies de diagonaal is van het parallellogram opgespannen door R(a) en R(b).Met andere woorden, R(a+ b) = R(a) + R(b). Op analoge manier heeft voorwillekeurige λ ∈ R≥0 de gedraaide vector R(λa) precies dezelfde richting alsR(a) en is de lengte λ maal de lengte van R(a). Dus R(λa) = λR(a) alsλ ∈ R≥0. Voor negatieve λ kunnen we een soortgelijk argument geven.
Als basis in R2 kiezen we de geordende standaard basis e1, e2 die we kortaangeven met E. De matrix die bij R hoort is de matrix waarvan de eerstekolom gelijk is aan R(e1) en de tweede kolom R(e2) (beiden in gewone coordi-naten, dus ten opzichte van e1, e2). Ga zelf na dat
R(e1) =
(cosαsinα
), R(e2) =
(− sinαcosα
)De matrix behorende bij R wordt dus
REE =
(cosα − sinαsinα cosα
).
♢
Voorbeeld 7.4.4. Zij R[X]3 de vectorruimte van polynomen van graad ≤ 3en beschouw de lineaire afbeelding D : R[X]3 → R[X]3 gegeven door D :p(X) 7→ p′(X). Omdat bereik en domein hetzelfde zijn kunnen we voor B en Cdezelfde basis van de ruimte R[X]3 nemen. We kiezen B = {1, X,X2, X3}. Deafbeelding D losgeleten op deze elementen geeft achtereenvolgens 0, 1, 2X, 3X2.Schrijven we deze vectoren uit ten opzichte van C = B, dan vinden we de

7.4. LINEAIRE AFBEELDINGEN IN EINDIGE DIMENSIE 109
coordinaten kolommen0000
,
1000
,
0200
,
0030
.
De matrix van D ten opzichte van B wordt dus
DBB =
0 1 0 00 0 2 00 0 0 30 0 0 0
.
♢
Voorbeeld 7.4.5. Zij C de vectorruimte van complexe getallen over R. Kiesa+ bi ∈ C. De afbeelding µ : C → C geven door µ : z 7→ (a+ bi)z is linear. Wekiezen de natuurlijke basis B = {1, i} van C. Deze basisvectoren gaan onder µover in a+ bi,−b+ ai. De coordinaatkolommen van deze vectoren ten opzichtevan C = B zijn, (
ab
),
(−ba
).
De matrix van µ ten opzichte van B wordt dus(a −bb a
).
Controle, als we het complexe getal x+ iy met a+ bi vermenigvuldigen krijgenwe ax− by + (bx+ ay)i. Matrixvermenigvuldiging levert(
a −bb a
)(xy
)=
(ax− bybx+ ay
).
Vergelijk de resultaten!Merk op ook dat de gevonden matrix precies
√a2 + b2 maal de draaiingsmatrix
1√a2 + b2
(a −bb a
)=
(cosϕ − sinϕsinϕ cosϕ
)waarin ϕ het argument van a+ bi is.
♢
Een speciaal geval van Stelling 7.4.1 is het geval dat W = V en A de identiekeafbeelding I : V → V gegeven door I : x → x. De stelling toegepast op y = xluidt nu als volgt.
Gevolg 7.4.6 Zij B,C een tweetal geordende bases van V en IBC de n × n-matrix die we krijgen door als i-de kolom de coordinaten ten opzichte van Cvan de vector bi te nemen. Dan geldt
xC = IBC xB.

110 HOOFDSTUK 7. VECTORRUIMTEN
Dit gevolg is te interpreteren als de relatie tussen de B-coordinaten en C-coordinaten van x. We noemen dit een coordinatentransformatie .
Lemma 7.4.7 Met de notaties als boven geldt dat IBC = (ICB )−1.
Bewijs: Als we in Gevolg 7.4.6 B en C verwisselen dan zien we dat xB =ICBxC . Anderzijds volgt door inverteren ook dat xB = (IBC )−1xC . We conclud-eren dat ICB = (IBC )−1.
2
Voorbeeld 7.4.8. Gegeven de vector v = (1, 1, 0)t in R3. Beschouw nu degeordende basis F van R3 bestaande uit f1 = (1, 2, 0)t, f2 = (0, 1, 1)t, f3 =(1, 0, 1)t. Gevraagd wordt de coordinaten van v ten opzichte van F te bepalen.Laten we de standaardbasis van R3 aangeven met E.
We zullen het eerst doen zonder de expliciete coordinatentransformaties aan tegeven. Er wordt gevraagd naar getallen y1, y2, y3 zo dat 1
10
= y1
120
+ y2
011
+ y3
101
=
1 0 12 1 00 1 1
y1y2y3
.
Hieruit volgt dat y1y2y3
=
1 0 12 1 00 1 1
−1 110
=
2/3−1/31/3
.
De 3 × 3-matrix van daarnet is precies de matrix IFE . Volgens onze formulesgeldt IFE = (IEF )−1 en vF = IFEvE . Voeren we deze berekening uit,
vF = IEF vE = (IFE )−1
110
=
2/3−1/31/3
.
Kijk goed naar de parallel tussen de aanpak boven en de formules.♢
Het zal duidelijk zijn dat de matrix van een lineaire afbeelding sterk afhangt vande bases ten opzichte waarvan deze wordt uitgeschreven. Zij V,W en A : V →W als aan het begin van deze paragraaf. In plaats van B,C kiezen we een twee-tal andere geordende bases B′, C ′ van V respectievelijk W . Het verband tussenAB
C en AB′C′ kan bepaald worden door de coordinatentransformatieformules uit
Gevolg 7.4.6. Er geldt
Stelling 7.4.9 Met de notaties als boven,
AB′C′ = ICC′AB
CIB′B .

7.4. LINEAIRE AFBEELDINGEN IN EINDIGE DIMENSIE 111
Bewijs: Dit is een kwestie van uitschrijven. Kies een vector x ∈ V . Wemoeten laten zien dat de matrix aan de rechterkant, losgelaten of xB′ decoordinatenkolom A(x)C′ geeft. Dit gaat in stapjes. We laten eerst IB
′B los
op xB′ . Dit geeft xB volgens Gevolg 7.4.6 toegepast op B = B′ en C = B. Dematrix AB
C losgelaten op xB geeft A(x)C , de coordinatenkolom van A(x) tenopzichte van C. laten we hier tenslotte ICC′ op los dan eindigen we met A(x)C′ ,zoals we wilden.
2
Stelling 7.4.9 wordt het meest gebruikt bij lineaire afbeeldingen van een eindigdi-mensionale vectorruimte V naar zichzelf. We kiezen daarbij C = B en C ′ = B′.
Gevolg 7.4.10 Zij V een eindigdimensionale vectorruimte en A : V → V eenlineaire afbeelding. Zij B, B′ een tweetal geordende bases van V en gebruikverder de notaties zoals boven. Geef bovendien de coordinatentransformatiematrix IB
′B aan met S. Dan geldt,
AB′B′ = S−1AB
BS.
Het bewijs volgt door Stelling 7.4.9 toe te passen met C = B,C ′ = B′.
Zij V een eindigdimensionale vectorruimte enA : V → V een lineaire afbeelding.Kies een geordende basis B van V en zij AB
B de matrix van A ten opzichte vanB. Dan geldt dat det(AB
B) onafhankelijk van de keuze van B is. Om dit tezien maken we gebruik van de regels dat als M een n × n-matrix is en S eeninverteerbare n×n-matrix, dan det(SMS−1) = det(M). Passen we dit toe metGevolg 7.4.10 en S = IBB′ ,M = AB
B dan vinden we
det(AB′B′) = det(IBB′AB
BIB′B ) = det(IBB′AB
B(IBB′)−1) = det(AB
B).
We noemen det(ABB) determinant van de lineaire afbeelding A : V → V . Later
zal blijken dat ook het spoor (=som van de diagonaalelementen) van ABB on-
afhankelijk is van de keuze van B. We kunnen dus ook spreken van het spoorvan de afbeelding A : V → V .
Tenslotte nog een aantal opmerkingen over het verband tussen lineaire af-beeldingen en hun matrices. Stel A : V → W een lineaire afbeelding met V,Weindigdimensionaal en geordende bases B = (b1, . . . ,bn) en C = (c1, . . . , cm).Zij A de matrix van A ten opzichte van deze twee bases. Het beeld A(V ) wordtopgespannen door de vectoren A(b1), . . . , A(bn). De coordinatenkolommen tenopzichte van C van de vectoren in A(x) worden opgespannen door de kolommenA(b1)C , . . . , A(bn)C . Dit zijn precies de kolommen van de m×n-matrix A. Weconcluderen,
rang(A) = dim(A(V )).
Zij nu n1, . . . ,nr een basis van de kern van A. Dan vormen hun kolomvectorenten opzichte van C, (n1)C , . . . , (nr)C een basis van de nulruimte van A. Weconcluderen,
rang(Nul(A)) = dim(ker(A)).
112 HOOFDSTUK 7. VECTORRUIMTEN
Uit Stelling 4.3.2 weten we dat
n = dim(Nul(A)) + rang(A).
Hieruit volgt meteen de volgende belangrijke stelling.
Stelling 7.4.11 (Dimensiestelling) Stel we hebben een lineaire afbeelding A :V → W met dim(V ) en dim(W ) eindig. Dan geldt,
dim(V ) = dim(ker(A)) + dim(A(V )).
Merk op deze stelling geheel vrij is van eventuele basiskeuzen die we maken.
7.5 Vectorruimteconstructies (optioneel)
Gegeven een aantal vectorruimten, dan is het vaak mogelijk om daaruit opabstracte wijze nieuwe vectorruimten te creeren. Met deze constructies zullenwe als beginners in de lineaire algebra niet veel in aanraking komen. Laterzullen ze evenwel van steeds groter belang worden in de algebra, meetkunde enanalyse.
1. Zij V,W een tweetal vectorruimten over R. De directe som van V en W isde vectorruimte bestaande uit alle geordende paren (v,w), v ∈ V,w ∈ Wmet als optelling (v1,w1) + (v2,w2) = (v1 + v2,w1 + w2) en scalairevermenigvuldiging λ(v,w) = (λv, λw). Notatie V ⊕W .
2. Zij V een vectorruimte enW een deelruimte. We zeggen dat twee vectorenv1,v2 ∈ V equivalent zijn moduloW als v1−v2 ∈ W . De verzameling vanvectoren die equivalent modulo W zijn met een gegeven vector v noemenwe de equivalentieklasse van v. Notatie: v(mod W ). Merk op, als v1 ∈ Ven v2 ∈ V niet equivalent zijn modulo W dan zijn de klassen v1(mod W )en v2(mod W ) disjunct. Als ze namelijk een element W gemeenschap-pelijk zouden hebben, dan v1 − w ∈ W en v2 − w ∈ W . Na verschilnemen, v1 − v2 ∈ W en we hebben een tegenspraak. De ruimte V kandus opgedeeld worden in een disjuncte vereniging van equivalentieklassenmodulo W .
Zij v1(mod W ) en v2(mod W ) een tweetal klassen modulo W en w1,w2
een tweetal elementen in de respectievelijke klassen. Dan geldt w1−v1 ∈W en w2−v2 ∈ W . Na optelling, (w1+w2)−(v1+v2) ∈ W . Met anderewoorden, kiezen we twee elementen uit v1 (mod W ) respectievelijk v2
(mod W ) dan zal hun som altijd in de klasse v1 + v2 (mod W ) liggen.Hiermee hebben we een optelling gedefinieerd op de equivalentieklassenmodulo W . Op dezelfde manier kunnen we een scalaire vermenigvuldig-ing invoeren, en daarmee krijgen de klassen modulo W een vectorruimtestructuur die we de quotientruimte zullen noemen. Notatie: V/W .
3. Zij V,W een tweetal vectorruimten over R. De verzameling lineaire af-beeldingen A : V → W vormen een vectorruimte als we optelling en
7.6. SCALAIREN (OPTIONEEL) 113
scalaire vermenigvuldiging als volgt definieren: (A + B)x = Ax + Bxvoor alle x ∈ V en (λA)x = λ(Ax) voor alle λ ∈ R,x ∈ V . NotatieHom(V,W ).
4. Nemen we in het bijzonder in voorgaand voorbeeld W = R, dan krijgenwe de vectorruimte Hom(V,R), die we de duale vectorruimte noemen.Notatie: V d. Een lineaire afbeelding V → R noemen we ook wel eenlineaire vorm op V . De duale vectorruimte is dus de ruimte van lineairevormen op V .
5. Zij V,W een tweetal vectorruimten over R. Het tensorproduct van V,Wbestaat uit alle (eindige) lineaire combinaties van symbolen v ⊗ w metv ∈ V,w ∈ W die voldoen aan de volgende relaties
(a) λ(v ⊗w) = (λv)⊗w = v ⊗ (λw) voor alle v ∈ V,w ∈ W,λ ∈ R.(b) (v1 + v2)⊗w = v1 ⊗w + v2 ⊗w voor alle v1,v2 ∈ V,w ∈ W .
(c) v ⊗ (w1 +w2) = v ⊗w1 + v ⊗w2 voor alle v ∈ V,w1,w2 ∈ W .
Notatie: V ⊗ W . In het bijzonder, als V,W eindigdimensionaal zijn ene1, . . . , en is een basis van V en f1, . . . , fm een basis van W , dan is ei ⊗ fjmet i = 1, 2, . . . , n; j = 1, 2, . . . ,m een basis van V ⊗W .
7.6 Scalairen (optioneel)
De verzamelingen R en C zijn voorbeelden van zogenaamde lichamen. Dat zijnverzamelingen waarin we een optelling en vermenigvuldiging met de gebruike-lijke regels hebben en waarbij we door elk element ongelijk aan nul kunnen de-len. De gehele getallen Z = {. . . ,−2,−1, 0, 1, 2, . . .} vormen bijvoorbeeld geenlichaam, want deling van een geheel getal door een ander geheel getal levert nietaltijd een geheel getal op. Daarentegen vormen de rationale getallen (breuken)Q wel een lichaam. Een ander voorbeeld van een lichaam is de verzameling van2 elementen {0, 1} met als optelling
0 + 0 = 0 1 + 1 = 0 0 + 1 = 1
en vermenigvuldiging
0 · 0 = 0 0 · 1 = 0 1 · 1 = 1.
We geven dit lichaam aan met F2.We kunnen de vectorruimte axiomas en alle daarop volgende begrippen ookhanteren als we een ander scalairenlichaam in plaats van R nemen. Vrijwel allesuit dit hoofdstuk gaat op precies dezelfde manier door. Hier is een voorbeeld.De reele getallen vormen een vectorruimte met als scalairen Q als we gebruike-lijke optelling en scalaire vermenigvuldiging (met elementen uit Q) nemen.Beschouw de reele getallen 1,
√2. Wij beweren dat ze lineair onafhankelijk
over Q zijn. Stel namelijk dat er a, b ∈ Q, niet beide nul, bestaan zo data + b
√2 = 0. Er geldt natuurlijk b = 0, want anders zou uit de relatie volgen

114 HOOFDSTUK 7. VECTORRUIMTEN
dat a ook nul is. Dus√2 = −a/b, met andere woorden,
√2 is een rationaal
getal (een breuk). We weten echter dat dit niet zo is. Dus onststaat er eentegenspraak en we moeten concluderen dat 1,
√2 onafhankelijk over Q zijn.
We zien hier een voorbeeld waarin lineaire onafhankelijk van getallen over Qneerkomt op irrationaliteitseigenschappen van getallen.
Het is zelfs mogelijk om oneindige verzamelingen reele getallen aan te geven dielineair onafhankelijk over Q zijn. Het bewijs hiervan is echter bijzonder lastig.Voorbeelden zijn,
{1, e, e2, e3, . . .}
{1, π, π2, π3, . . .}
{1,√2,√3,√5,√7,√11, . . .}
Het laatste voorbeeld bestaat uit de wortels van alle priemgetallen.
Hier is iets wat je wellicht wel kunt aantonen:
1. Laat zien dat de verzameling {√n} met n positief geheel, afhankelijk is
over Q.
2. Laat zien dat de verzameling
{log 2, log 3, log 5, log 7, log 11, . . .}
de logaritmen van de priemgetallen, onafhankelijk is over Q.
7.7 Opgaven
Een aantal van de opgaven hieronder zijn ontleend aan het boekje ”LineaireAlgebra”van Paul Igodt en Wim Veys.
Opgave 7.7.1 Controleer of de verzameling R2 = {(x, y)|x, y ∈ R} een vector-ruimte is met de optelling en scalaire vermenigvuldiging gedefinieerd als volgt:
1. (x1, y1) + (x2, y2) = (x1 + x2 − 1, y1 + y2 − 1) en λ(x, y) = (λx, λy).
2. (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2) en λ(x, y) = (λx, λy).
3. (x1, y1) + (x2, y2) = (x1 + 2x2, y1 + 2y2) en λ(x, y) = (λx, λy).
4. (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2) en λ(x, y) = (λx, y/λ) als λ = 0 en0(x, y) = (0, 0).
Opgave 7.7.2 Definieer voor x,y ∈ Rn twee bewerkingen ⊕ en · als volgt:
x⊕ y = x− y, λ · x = −λx
waarbij de bewerkingen in de rechterleden het gewone verschil en de gewonescalaire vermenigvuldiging zijn. Aan welke vectorruimte axiomas voldoen dezebewerkingen? en welke niet?
Opgave 7.7.3 Welk van de volgende verzamelingen met de voor de handliggende optelling en scalaire vermeningvuldiging vormen een vectorruimte?

7.7. OPGAVEN 115
1. De reele continue functies op het gesloten interval [0, 1].
2. De reele niet-negatieve functies op [0, 1].
3. De verzameling polynomen met coefficienten in R van exacte graad n.
4. De symmetrische n× n-matrices met elementen in R.
Opgave 7.7.4 Geef in de voorbeelden van pagina 97 van het dictaat de nul-vector aan.
Opgave 7.7.5 Laat in de voorbeelden op pagina 98 van het dictaat zien datde gegeven ruimten inderdaad lineaire deelruimten zijn.
Opgave 7.7.6 Welk van de volgende verzamelingen zijn deelruimten van degegeven vectorruimte over R? Leg uit.
1. W1 = {(x, y, z) ∈ R3|xyz = 0}
2. W2 = {(x, y, z) ∈ R3|x2 + y2 − z2 = 0}
3. W3 = {(x, y, z) ∈ R3|x, y, z ∈ Q}
4. W4 = {(x, y, z) ∈ R3|x2 + y2 + z2 ≤ 1}
5. W5 = {A ∈ M3,3(R)|∑3
i,j=1Aij = 0}
6. W6 = {A ∈ M3,3(R)|det(A) = 0}
7. W7 = {A ∈ M3,3(R)|At = A}
8. W8 = {A ∈ M3,3(R)|At = −A}
9. W9 = {(x, y, z) ∈ R3|x = 0 of y = 0}
10. W10 = {f : R → R|f(0) = 1}
11. W11 = {f : R → R|f(−x) = −f(x)}
12. W12 = {f : R → R|f is integreerbaar en∫ 10 f(x)dx = 0}
13. W13 = Q ⊂ R
Opgave 7.7.7 Beschouw de functies f : R → R gegeven door
f(x) = cos2 x, g(x) = sin2 x, h(x) = 1, exp(x) = ex
als elementen van de vectorruimte van alle functies R → R. Bewijs dat f, g, h, explineair onafhankelijk over R zijn.
Opgave 7.7.8Welk van de volgende verzamelingen vectoren zijn onafhankelijk?
1. {(1, 2, 0), (2,−1, 1), (1, 7,−1)} in R3
2.
{(−1 10 0
),
(1 10 0
),
(0 01 0
),
(0 00 1
)}in M2,2(R).

116 HOOFDSTUK 7. VECTORRUIMTEN
3. {X3 + 2X2,−X2 + 3X + 1, X3 −X2 + 2X − 1} in R[X].
Opgave 7.7.9 Laat zien dat {X +1, X2+1, X2+X} een basis is van R[X]≤2,de vectorruimte over R van polynomen van graad ≤ 2. Bepaal de coordinatenvan elk van de vectoren 1, X,X2 ten opzichte van deze basis.
Opgave 7.7.10 Zijn V de vectorruimte van symmetrische 2 × 2-matrices metcoefficienten in R. Bewijs dat de geordende drietallen
B1 =
((1 00 0
),
(0 00 1
),
(0 11 0
))en
B2 =
((1 11 1
),
(−1 11 0
),
(0 11 2
))elk een basis van V vormen.Bepaal van elk element van B2 de coordinaten ten opzichte van B1.Bepaal van elk element van B1 de coordinaten ten opzichte van B2.
Opgave 7.7.11 Beschouw de verzameling V gegeven door de rijen (xn)n≥1
(termen in R) die voldoen aan de differentievergelijking xn+1 = xn + xn−1 voorn ≥ 2.
1. Schrijf de eerste vijf termen op van de rij beginnend met (0, 1, . . .).
2. Schrijf de eerste vijf termen op van de rij beginnend met (1, 0, . . .).
3. Laat zien dat met de voor de hand liggende optelling en scalaire ver-menigvuldiging V een vectorruimte is van dimensie 2.
4. Stel η = (1 +√5)/2 en η′ = (1 −
√5)/2. Laat zien dat de rijen (ηn)n≥1
en (η′n)n≥1 voldoen aan de differentievergelijking.
5. Zij (un)n≥1 de oplossing van de differentievergelijking met begintermen0, 1. Dit is de rij van Fibonacci. Geef een formule voor un in termen vanηn en η′n.
Opgave 7.7.12 Zijn de volgende uitspraken juist of onjuist? Bewijs of geef eentegenvoorbeeld.
1. Als S, T onafhankelijke deelverzamelingen zijn van een vectorruimte V ,dan is S ∪ T ook onafhankelijk.
2. Als U,W deelruimten zijn van een vectorruimte V en BU een basis van Uen BW een basis van W , dan is BU ∩BW een basis van U ∩W .
3. Als U een deelruimte is van een vectorruimte V en v, w ∈ V zo datv + w ∈ U dan is v ∈ U en w ∈ U .
4. Zij V een n-dimensionale vectorruimte en deelruimten Ui ⊂ V voor i =1, . . . , r zo dat
U1 ⊂ U2 ⊂ · · · ⊂ Ur.
Als r > n+ 1 dan is er een index i zo dat Ui = Ui+1.

7.7. OPGAVEN 117
5. Zij V een vectorruimte met basis {b1,b2,b3}. Zij W = Span(b1,b2).Dan is er een basis van v1,v2,v3 van V met vi ∈ W voor i = 1, 2, 3.
Opgave 7.7.13 Beschouw de verzameling V = R>0×R>0 met een optelling �en scalaire vermenigvuldiging ⊙ gedefineerd door
(x1, y1)� (x2, y2) = (x1x2, y1y2), λ⊙ (x, y) = (xλ, yλ).
Is V met deze bewerkingen een vectorruimte over R?
Opgave 7.7.14 Welk van de volgende afbeeldingen zijn lineair? Bepaal de kernen het beeld van de lineaire afbeeldingen en controleer de dimensiestelling.
1. L1 : R → R gegeven door L1 : x 7→ 2x+ 1
2. L2 : R2 → R gegeven door L2 : (x, y) 7→ x+ y
3. L3 : R2 → R gegeven door L3 : (x, y) 7→ |x− y|
4. L4 : R2 → R3 gegeven door L4 : (x, y) 7→ (sinx, 7y, xy)
5. L5 : R3 → R2 gegeven door L5 : (x, y, z) 7→ (3y + z, x− y − z)
6. L6 : M2,2(R) → R gegeven door L6 : A 7→ det(A)
7. L7 : M2,2 → M2,2 gegeven door L7 : A 7→ At
8. L8 : R → R gegeven door L8 : x 7→ xn voor n > 1
9. L9 : R[X] → R[X] gegeven door L9 : Q(X) 7→ P (X)Q(X) voor vastgegeven P (X) ∈ R[X].
10. L10 : F(R) → R gegeven door L10| : f 7→ f(a) voor vast gegeven a ∈ R(hier is F(R) de vectorruimte van reele functies met R als domein.
11. L11 : R → R gegeven door L11 : x 7→ ex.
Opgave 7.7.15 Bepaal de matrix van de lineaire afbeelding T : R[X]≤3 →R[X]≤3 gegeven door T : f 7→ f ′′ − 4f ′ + f ten opzichte van de geordende basis(X, 1 +X,X +X2, X3).
Opgave 7.7.16 Beschouw de lineaire afbeelding L : R[X]≤4 → R2 gegevendoor
L : a+ bX + cX2 + dX3 + eX4 7→ (a+ b, c+ d+ e)
en de geordende basis α = (1, 1+X, (1+X)2, (1+X)3, (1+X)4) voor R[X]≤4
en de geordende basis β = e1 + e2, e1 − e2) van R2.
1. Bepaal de coordinatentransformatie matrix van vectoren ten opzichte vande basis α naar de standaardbasis 1, X,X2, X3, X4.
2. Bepaal de coordinaten van de vector X + X3 + X4 ten opzichte van debasis α.

118 HOOFDSTUK 7. VECTORRUIMTEN
3. Bepaal de matrix van L ten opzichte van de standaardbases 1, X,X2, X3, X4
en e1, e2
4. Bepaal de matrix van L ten opzichte van de bases α en β.
Opgave 7.7.17 Beschouw de vectorruimte
R[X,Y ]≤2 = {aX2 + bXY + cY 2 + dX + eY + f | a, b, c, d, e, f ∈ R}
met de voor de hand liggende optelling en scalaire vermenigvuldiging. DefinieerL : R[X,Y ]≤2 → R[X]≤2 door
L : f(X,Y ) 7→ f(X, 2).
1. Toon aan dat L lineair is.
2. Geef de matrix van L ten opzichte van de geordende bases (X2, XY, Y 2, X, Y, 1)en (X2, X, 1).
3. Bepaal kern, beeld en rang van L.
Opgave 7.7.18 Beschouw de volgende deelverzameling in de ruimte M2,2(R)van twee bij twee matrices
V =
{(a b0 c
)|a, b, c ∈ R
}.
Bewijs dat V een deelruimte van M2,2(R) is, die isomorf is met R3.
Opgave 7.7.19 Bepaal twee onafhankelijke oplossingen van de lineaire differ-entiaalvergelijking
d2
dx2y + 3
d
dxy − 4y = 0.
(hint: probeer oplossingen eλx met nader te bepalen λ.
Opgave 7.7.20 Bepaal twee onafhankelijke oplossingen van de lineaire differ-entiaalvergelijking
d2
dx2y +
3
x
d
dxy − 3
x2y = 0.
(hint: probeer oplossingen y = xa voor nader te bepalen a).
Opgave 7.7.21 De lineaire afbeelding A : R3 → R3 wordt gegeven door
A
1−11
=
54−4
, A
2−11
=
62−2
, A
112
=
342
.
1. Bereken de matrix van A ten opzichte van de standaardbasis van R3.

7.7. OPGAVEN 119
2. Zij gegeven de geordende basis
f1 =
12−2
, f2 =
−210
, f3 =
245
van R3. Bepaal de matrix van A ten opzichte van f1, f2, f3.
Opgave 7.7.22 Zij V en W een tweetal vectorruimten met geordende basese1, e2, e3 respectievelijk f1, f2, f3. De lineaire afbeelding A : V → W wordtgedefinieerd door A(e1) = f1 + f2, A(e2) = 2f2 − f3, A(e3) = 4f1 + 2f2 − f3.
In V is een tweede basis e′1 = 3e1+e3, e′2 = e1+2e2+e3, e
′3 = −e1+2e2+2e3
gegeven, en in W een tweede basis f ′1 = f2, f ′2 = 3f1 + 2f2 + 3f3, f ′3 = −3f1 +f2 + 2f3.
1. Bereken de matrix van A ten opzichte van de bases e1, e2, e3 en f1, f2, f3.
2. Bereken de matrix van A ten opzichte van de bases e′1, e′2, e
′3 en f ′1, f
′2, f
′3.
3. Bewijs dat A een bijectieve afbeelding is en bereken de matrix van A−1
ten opzichte van e1, e2, e3 en f1, f2, f3.
Opgave 7.7.23 In R3 zijn de vectoren
e1 =
110
, e2 =
101
, e3 =
111
, f1 =
112
, f2 =
221
, f3 =
122
gegeven.
1. Bewijs dat E = e1, e2, e3 en F = f1, f2, f3 een tweetal bases van R3 is.
2. Bereken de overgangsmatrix IEF .
3. De lineaire afbeelding A : R3 → R3 heeft ten opzichte van E de matrix 1 1 22 2 13 1 2
.
Bereken de matrix van A ten opzichte van F .
Opgave 7.7.24 Zij e1, e2, e3 de standaard basis van R3. De afbeelding A :R3 → R3 wordt gegeven door A(x) = (e1 + e2 + e3)× x voor elke x ∈ R3.
1. Bewijs dat A een lineaire afbeelding is.
2. Bereken de matrix van A ten opzichte van de standaard basis.
3. Zij f1 = e1, f2 = e1 + e2, f3 = e1 + e2 + e3. Bereken de matrix van A tenopzichte van f1, f2, f3.

120 HOOFDSTUK 7. VECTORRUIMTEN
Opgave 7.7.25 Zij W1,W2 een tweetal deelruimten van een vectorruimte V .Laat zien dat W1 ∩W2 een deelruimte van V is.
Opgave 7.7.26 Zij W1,W2 een tweetal deelruimten van de vectorruimte V .Laat zien dat W1 ∪W2 een deelruimte is precies dan als W1 ⊂ W2 of W2 ⊂ W1.
Opgave 7.7.27 Zij W1,W2 een tweetal eindigdimensionale deelruimten van eenvectorruimte V . Laat zien dat W1 +W2 eindigdimensionaal is en dat
dim(W1 +W2) = dim(W1) + dim(W2)− dim(W1 ∩W2).
(Hint: breidt een basis van W1 ∩W2 uit tot een basis van W1 en van W2).
Opgave 7.7.28 Als S1, S2 niet-lege deelverzamelingen van een vectorruimte Vzijn, dan geven we met S1 + S2 de verzameling {x+ y|x ∈ S1,y ∈ S2} aan.Stel dat W1,W2 deelruimten van V zijn. Laat zien dat W1+W2 een deelruimtevan V is die W1,W2 omvat. Laat ook zien dat W1 +W2 de kleinste deelruimtevan V is die W1 en W2 omvat (dat wil zeggen, elke deelruimte die W1 en W2
bevat moet ook W1 +W2 bevatten).
Opgave 7.7.29 Zij V,W een tweetal vectorruimten en A : V → W een lineaireafbeelding.
1. Bewijs, als dim(V ) < dim(W ), dan is A niet surjectief.
2. Bewijs, als dim(V ) > dim(W ), dan is A niet injectief.
7.8 Extra opgaven
(Optioneel) NB: De meeste opgaven zijn aangegeven met optioneel en lastig.Ze horen niet tot de standaard(=tentamen)stof en behandelen ook het begripdirecte som. Ze zijn er alleen voor degenen die meer willen doen of extrauitdaging nodig hebben.
Opgave 7.8.1 (Optioneel) Gegeven is een vectorruimte V en twee deelruimtenW1,W2 met de eigenschappen dat V = W1 + W2 en W1 ∩ W2 = {0}. Bewijsdat V isomorf is met de directe som W1 ⊕ W2. (hint: bekijk de afbeeldingW1 ⊕W2 → V gegeven door w1 ⊕ w2 7→ w1 + w2).
Opgave 7.8.2(Optioneel) Gebruik Opgave 7.8.1 om de volgende vragen tebeantwoorden.
1. Laat zien dat Rn de directe som is van de deelruimten
W1 = {(a1, a2, . . . , an) ∈ Rn|an = 0}
enW2 = {(a1, a2, . . . , an) ∈ Rn|a1 = a2 = · · · = an−1 = 0}.
2. Beschouw de ruimte van polynomen R[X] en de deelruimtenW1 = {P (X)|P (x) =P (−X)} (even polynomen) en W2 = {P (X)|P (X) = −P (X)} (onevenpolynomen. Laat zien dat R[X] = W1 ⊕W2.
7.8. EXTRA OPGAVEN 121
Opgave 7.8.3(Optioneel) Zij W1 een deelruimte van een eindigdimensionalevectorruimte V . Laat zien dat er een deelruimte W2 van V bestaat zo datV = W1 ⊕W2.(Opmerking: als V oneindig-dimensionaal is dan is dit helemaal niet voor dehand liggend. Neem als voorbeeld W1 = C1(I) de ruimte van differentieerbarefuncties op I = (0, 1) en V = C0(I) de ruimte van continue functies op I =(0, 1).)
Opgave 7.8.4 (Lastig) Laat zien dat 1,√2,√3,√6 lineair onafhankelijk zijn
over de rationale getallen. Hint: bewijs eerst dat 1,√2,√3 onafhankelijk over
Q zijn.
Opgave 7.8.5 (Lastig) Laat zien, dat voor elke n de functies 1, cos(x), cos(2x), ..., cos(nx)lineair onafhankelijk over R zijn (Om de gedachten te bepalen: neem eerst hetgeval n = 2 en gebruik differentiatie).
Opgave 7.8.6(Optioneel) Zij L een lineaire afbeelding van een vectorruimte Vnaar zichzelf. Toon aan dat L2 = L ⇒ V = ker(L)⊕ Im(L).

Hoofdstuk 8
Eigenwaarden eneigenvectoren
8.1 Inleiding
In Voorbeeld 7.4.2 hebben we gekeken naar de loodrechte projectie P van R3 ophet vlak gegeven door x+ y+2z = 0. De matrix ten opzichte van de standaardbasis van R3 werd gegeven door 5/6 −1/6 −1/3
−1/6 5/6 −1/3−1/3 −1/3 1/3
.
Hoewel de projectie P meetkundig gezien heel eenvoudig is, kunnen we dit nietmeteen aan de matrix aflezen. Dat we te maken hebben met een projectie blijktpas als we opmerken dat de vector (1, 1, 2)t naar de nulvector wordt afgebeelden de vectoren (1,−1, 0) en (2, 0,−1), die in het vlak liggen, naar zichzelf. Dezevectoren spelen dus een speciale rol ten aanzien van de projectie, en door hungedrag onder P de projectie zelf gekenmerkt. Ten opzichte van de geordendebasis F gegeven door f1 = (1, 1, 2)t, f2 = (1,−1, 0)t, f = (2, 0,−1)t zou onzeprojectie P de matrix
PFF =
0 0 00 1 00 0 1
hebben. Een stuk eenvoudiger dus.
Voor de studie van de werking van een willekeurige lineaire afbeelding is hetvan belang dergelijke bijzondere vectoren op te sporen. Dit is het onderwerpvan dit hoofdstuk.
Zij V een vectorruimte over R en A : V → V een lineaire afbeelding. Een vectorv ∈ V heet eigenvector van A als
1. v = 0
2. er is een scalair λ ∈ R is, zo dat A(v) = λv.
122

8.1. INLEIDING 123
We noemen λ de eigenwaarde van A behorend bij v. In ons voorbeeld zou(1, 1, 2) een eigenvector van P zijn met eigenwaarde 0 en (1,−1, 0) en (2, 0,−1)eigenvectoren met eigenwaarde 1.
Voorbeeld 8.1.1. Hier is nog een voorbeeld, de afbeelding A : R2 → R2
gegeven door matrixvermenigvuldiging met
Q =
(3 4−1 −2
).
Merk op dat
Q
(−41
)= 2
(−41
)en Q
(1−1
)= −1
(1−1
).
De afbeelding A heeft dus een eigenvector met eigenwaarde 2 en een eigen-
vector met eigenwaarde −1. Merk op dat ook ieder veelvoud van
(−41
)een
eigenvector met eigenwaarde 2 is, en ieder veelvoud van
(1−1
)eigenvector
met eigenwaarde −1. We zullen zien dat er geen andere eigenvectoren van Abestaan.
♢
Voorbeeld 8.1.2. Voor V nemen we de vectorruimte C∞(R), de oneindig vaakdifferentieerbare functies op R en als lineaire afbeelding D kiezen we differenti-atie: D : f 7→ f ′. Het is duidelijk dat de exponentiele functie eax voor willeurigea een eigenfunctie is met eigenwaarde a. Immers, d
dx(eax) = aeax. Tevens zijn
deze vectoren, en hun veelvouden, de enige eigenvectoren.♢
Voorbeeld 8.1.3. Neem V = R[X] en als lineaire afbeelding P (X) 7→ XP ′(X).Eigenvectoren zijn de monomen Xn en hun veelvouden (met eigenwaarde n).
♢
Stelling 8.1.4 Zij V een vectorruimte over R en A : V → V een lineaireafbeelding. Zij λ ∈ R een gegeven scalair. Dan vormt de verzameling
Eλ := {x ∈ Rn | Mx = λx}
een lineaire deelruimte van Rn.
Het bewijs van deze stelling bestaat uit een eenvoudige controle. Voer deze con-trole uit! De ruimte Eλ, indien deze niet alleen uit de nulvector bestaat, noemenwe de eigenruimte van A behorend bij de eigenwaarde λ. In ons voorbeeld vande projectiematrix P zien we dat de vectoren loodrecht op het projectievlak deeigenruimte met eigenwaarde 0 vormen, en het projectievlak zelf is de eigen-ruimte behorend bij eigenwaarde 1.
124 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
8.2 Berekening van eigenwaarden en eigenvectoren
In het algemeen is de berekening van eigenwaarden en eigenvectoren van eenlineaire afbeelding een lastige klus als we te maken hebben met oneindig dimen-sionale vectorruimten. Veel trillingsverschijnselen (trommels, snaren, atomen)in de natuurkunde zijn terug te brengen tot eigenvector/waarde problemen vandifferentiaaloperatoren op functieruimten. Vaak komt hier ook nogal wat anal-yse bij kijken.Hier stellen we ons wat bescheidener op en berekenen alleen eigenwaarden eneigenvectoren in eindig dimensionale gevallen. We beginnen met het specialegeval van matrixvermenigvuldiging in Rn met een n × n-matrix M . De eigen-vectoren en eigenwaarden van de lineaire afbeelding gegeven door M zullen weook wel gewoonweg de eigenvectoren en eigenwaarden van M noemen.Hier volgt het principe van de berekening van eigenvectoren en eigenwaardenvan M . Stel dat λ een eigenwaarde is. De vergelijking Mx = λx in x ∈ Rn
kunnen we zien als een stelsel lineaire vergelijkingen in de n componenten vanx. We herschrijven de rechterkant als λInx en brengen deze naar links. Wevinden,
(M − λIn)x = 0.
Opdat dit stelsel van n vergelijkingen in n onbekenden een niet-triviale oplossingheeft, is het nodig en voldoende dat de coefficientendeterminant nul is. Metandere woorden,
det(M − λIn) = 0 (8.1)
Deze vergelijking staat bekend als de eigenwaardevergelijking van M . Het poly-noom det(M − λIn) in λ noemen we ook wel het karakteristieke polynoom vanM . Stel
M =
m11 m12 . . . m1n
m21 m22 . . . m2n...
......
mn1 mn2 . . . mnn
dan luidt de eigenwaardevergelijking uitgeschreven,∣∣∣∣∣∣∣∣
m11 − λ m12 . . . m1n
m21 m22 − λ . . . m2n...
......
mn1 mn2 . . . mnn − λ
∣∣∣∣∣∣∣∣ = 0.
Oplossing van deze polynoom geeft ons een eindig aantal oplossingen. Gegeveneen oplossing λ0 van deze vergelijking, dan is het bepalen van de bijbehorendeeigenruimte slechts een kwestie van oplossing van het lineaire stelsel vergelijkin-gen
(M − λ0In)x = 0 (8.2)
Voorbeeld 8.2.1. Hier berekenen we eigenwaarden en eigenvectoren van dematrix Q uit de vorige paragraaf. De eigenwaardevergelijking luidt∣∣∣∣ 3− λ 4
−1 −2− λ
∣∣∣∣ = 0

8.2. BEREKENING VAN EIGENWAARDEN EN EIGENVECTOREN 125
Uitgeschreven, λ2−λ− 2 = 0. De oplossingen zijn λ = −1, 2. De eigenvectorenbij elk van deze λ’s vinden we door oplossing van het lineaire stelsel(
3− λ 4−1 −2− λ
)(xy
)=
(00
).
Dus bij λ = −1, (4 4−1 −1
)(xy
)=
(00
)
met als oplossingen t
(1−1
), t willekeurig. Bij λ = 2 vinden we het stelsel
(1 4−1 −4
)(xy
)=
(00
)
met als oplossingen t
(4−1
), t willekeurig.
♢
Voorbeeld 8.2.2.Elk eigenwaarde probleem A : V → V met dim(V ) < ∞ kanworden teruggebracht tot de bepaling van eigenwaarden en -vectoren van eenn× n-matrix, waarin n = dim(V ).
Neem bijvoorbeeld V = R[X]≤2 de polynomen van graad ≤ 2 en de lineaireafbeelding A : P (X) mapsto (X + 1)P ′(X). We bepalen de matrix van A tenopzichte van de basis 1, X,X2.
A(1) = 0, A(X) = X + 1, A(X2) = 2X2 + 2X.
De matrix van A wordt 0 1 00 1 20 0 2
.
Eigenwaardevergelijking,
0 =
∣∣∣∣∣∣−λ 1 00 1− λ 20 0 2− λ
∣∣∣∣∣∣ = −λ(λ− 1)(λ− 2).
De eigenwaarden zijn dus 0, 1, 2. Eigenvectoren bij λ = 0 zijn µ(1, 0, 0)t, eigen-vectoren bij λ = 1 zijn µ(1, 1, 0)t en eigenvectoren bij λ = 2 zijn µ(1, 2, 1)t. Deeigenvectoren in hun polynoomnotatie worden dus
λ = 0 : µ, λ = 1 : µ(X + 1), λ = 2 : µ(X2 + 2X + 1) = µ(X + 1)2.
♢

126 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
8.3 Basiseigenschappen
Stelling 8.3.1 Zij A : V → V een lineaire afbeelding van een vectorruimte Vnaar zichzelf. Zij v1,v2, . . . ,vr een r-tal eigenvectoren van A met verschillendeeigenwaarden λ1, λ2, . . . , λr. Dan zijn v1,v2, . . . ,vr onafhankelijk.
Bewijs: We voeren inductie naar r uit. Als r = 1 dan is er een eigenvectorv1 is. Omdat deze niet de nulvector is, is v1 een onafhankelijk stelsel.Stel nu r > 1 en dat elk r− 1-tal eigenvectoren met verschillende eigenwaardenonfahankelijk is. We gaan nu µ1, . . . , µr oplossen uit de relatie
µ1v1 + µ2v2 + · · ·+ µrvr = 0.
Laat de afbeelding A op beide zijden los. We vinden de nieuwe relatie
µ1λ1v1 + µ2λ2v2 + · · ·+ µrλrvr = 0.
Trek hiervan λr maal de oorspronkelijke relatie af. We vinden,
µ1(λ1 − λr)v1 + µ2(λ2 − λr)v2 + · · ·+ µr−1(λr−1 − λr)vr−1 = 0.
Omdat v1, . . . ,vr−1 onafhankelijk zijn, geldt µi(λi−λr) = 0 voor i = 1, 2, . . . , s−1. We hadden aangenomen dat λi = λr voor i < r. Gevolg, µi = 0 voori = 1, 2, . . . , r − 1. De relatie tussen v1, . . . ,vr impliceert nu dat µrvr = 0.Omdat vr = 0 volgt hieruit dat µr = 0. Met andere woorden, alleen de trivialerelatie bestaat tussen v1,v2, . . . ,vr. Conclusie: v1,v2, . . . ,vr zijn onafhanke-lijk.
2
Voorbeeld 8.3.2.Van Stelling 8.3.1 kunnen we slim gebruik maken om on-afhankelijkheid van vectoren aan te tonen in bijvoorbeeld functieruimten. NeemV = C∞(R), de oneindig vaak differentieerbare functies op R. Kies de functiesf1 = ex, f2 = e2x, . . . , fn = enx. We hadden in Voorbeeld 7.2.8 de lineaire on-afhankelijkheid van deze functies aangetoond. Nu is dat heel simpel te zien. Defuncties fi (i = 1, . . . , n) zijn immers eigenfuncties van de lineaire afbeeldingf 7→ f ′ met de verschillende eigenwaarden 1, 2, . . . , n.
♢
Laten we teruggaan naar een eindigdimensionale vectorruimte V van dimensien en een lineaire afbeelding A : V → V . We zeggen dat A een basis vaneigenvectoren heeft als er een basis v1, . . . ,vn van V is, zodat v1, . . . ,vn tevenseigenvectoren van A zijn. Stel dat A een basis F van eigenvectoren v1, . . . ,vn
heeft met eigenvectoren λ1, . . . , λn. Dan wordt de matrix van A ten opzichtevan de basis B gegeven door
AFF =
λ1 0 . . . 00 λ2 . . . 0...
...0 0 . . . λn
.

8.3. BASISEIGENSCHAPPEN 127
We zeggen dat we A gediagonaliseerd hebben.
Voorbeeld 8.3.3.We gaan weer terug naar de lineaire afbeelding A : Rn → Rn
gegeven door matrixvermenigvuldiging met een n× n-matrix M . Merk op datM gewoon de matrix van A is ten opzichte van de standaard basis E van Rn.Dus M = AE
E . Stel dat A een basis van eigenvectoren v1, . . . ,vn heeft meteigenwaarden λ1, . . . , λn. Noem deze basis F . Dan geldt
AFF =
λ1 0 . . . 00 λ2 . . . 0...
...0 0 . . . λn
.
Deze matrix staat dus in diagonaalvorm. We weten ook dat AFF = S−1MS
is waarin S = IFE de coordinatentransformatie matrix tussen E,F . Als dematrix M een basis van eigenvectoren toelaat, dan is M geconjugeerd met eendiagonaalmatrix. En omgekeerd.
♢
Voorbeeld 8.3.4.We behandelen een speciaal geval met de 2× 2-matrix
Q =
(3 4−1 −2
).
We hadden al eerder gezien dat
Q
(−41
)= 2
(−41
)en Q
(1−1
)= −1
(1−1
),
dus we hebben een basis van eigenvectoren. We schrijven bovenstaande ietsanders,
Q
(−4 11 −1
)=
(−8 −12 1
)=
(−4 11 −1
)(2 00 −1
).
En hieruit zien we dat
S−1QS =
(2 00 −1
), met S =
(−4 11 −1
).
Dus Q is geconjugeerd met een diagonaalmatrix. De conjugatie gebeurt met decoordinatentransformatie matrix S.
♢Een belangrijk gevolg van Stelling 8.3.1 is het volgende.
Gevolg 8.3.5 Als een n × n-matrix n verschillende eigenwaarden heeft, danheeft M een basis van eigenvectoren.
Bewijs: Noem de eigenwaarden λ1, . . . , λn en kies bij elk eigenwaaarde eeneigenvector v1, . . . ,vn. Omdat de eigenwaarden verschillend zijn, volgt uitStelling 8.3.1 dat v1, . . . ,vn onafhankelijk zijn. Ze vormen dus een basis vanRn.
2
Hier volgen nog een paar eigenschappen van conjugatie.
128 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
Lemma 8.3.6 Zij S een inverteerbare n× n-matrix en M een n× n- matrix.Dan hebben M en S−1MS hetzelfde karakteristieke polynoom
Bewijs: Dit volgt direct uit de volgende afleiding
det(S−1MS − λIn) = det(S−1MS − λS−1InS)
= det(S−1(M − λIn)S)
= det(S)−1det(M − λIn)det(S) = det(M − λIn)
2
Een andere belangrijke observatie is de volgende. Het karakteristieke polynoomvan een n× n-matrix M heeft de gedaante
det(M − λIn) = (−λ)n + a1(−λ)n−1 + · · ·+ an−1(−λ) + an (8.3)
De coefficienten ai zijn natuurlijk functies van de matrixelementen van M .Voor de meeste coefficienten zien deze functies er nogal ingewikkeld uit. Hetblijkt echter dat de coefficienten a1 en an een eenvoudige interpretatie hebben.Daartoe definieren we het spoor van een n × n-matrix A als de som van dediagonaalelementen van A. Notatie: Spoor(A).
Stelling 8.3.7 Met de zojuist ingevoerde notaties geldt:
an = det(M), a1 = Spoor(M).
Bewijs: De eerste bewering volgt door in (8.3) links en rechts λ = 0 in tevullen. We vinden dan det(M) = an. Dit was onze eerste bewering. Om detweede bewering in te zien bepalen we de coefficient van (−λ)n−1 in det(M−λIn)We bepalen deze door uitschrijven van de somformule voor
det(M − λIn) =
∣∣∣∣∣∣∣∣m11 − λ m12 . . . m1n
m21 m22 − λ . . . m2n...
...mn1 mn2 . . . mnn − λ
∣∣∣∣∣∣∣∣ .Bij uitschrijven van deze determinant blijkt dat het enige product dat bijdraagttot de coefficient van (−λ)n−1 het product van de diagonaalelementen (m11 −λ)(m22−λ) · · · (mnn−λ) is. De bijdrage is precies gelijk aan m11+m22+ · · ·+mnn. We concluderen nu dat
a1 = m11 +m22 + · · ·+mnn.
2
Een direct gevolg van bovenstaande Stelling is dat we bij een diagonaliseerbarematrix direct het product en de som van de eigenwaarden in de matrix M terugkunnen zien.

8.4. POLYNOMEN EN HUN NULPUNTEN (OPTIONEEL) 129
Stelling 8.3.8 Zij M een diagonaliseerbare n × n-matrix met eigenwaardenλ1, λ2, . . . , λn. Dan geldt
λ1λ2 · · ·λn = det(M) λ1 + λ2 + · · ·+ λn = Spoor(M).
Bewijs: We gebruiken hiervoor Stelling 8.3.7 en het feit dat
(λ1 − λ) · · · (λn − λ) = λ1 · · ·λn − · · ·+ (λ1 + · · ·+ λn)(−λ)n−1 + (−λ)n.
De constante coefficient is nu det(M) = an = λ1 · · ·λn en de coefficient van(−λ)n−1 is Spoor(M) = a1 = λ1 + · · ·+ λn.
2
Helaas is niet iedere n × n matrix diagonaliseerbaar. Er zijn twee belangrijkeobstructies die we aan de hand van een voorbeeld aangeven. Neem als eerste
voorbeeld de 2 × 2-matrix
(0 −11 0
), die een rotatie om 90o voorstelt. Het is
duidelijk dat er bij een rotatie in het vlak geen eigenvectoren kunnen zijn. Ditwordt ook duidelijk als we de eigenwaardevergelijking opstellen.∣∣∣∣−λ −1
1 −λ
∣∣∣∣ = λ2 + 1 = 0.
Deze vergelijking heeft geen reele oplossingen, en dus vinden we ook geen reeleeigenvectoren. De eerste obstructie is dus dat de eigenwaardevergelijking nietvoldoende oplossingen in R heeft.De tweede obstructie treedt op als we eigenwaarden met hogere multipliciteit
hebben. Neem bijvoorbeeld de matrix
(1 10 1
). De eigenwaarde vergelijking
luidt ∣∣∣∣ 1− λ 10 1− λ
∣∣∣∣ = (1− λ)2 = 0.
Er is een eigenwaarde, namelijk λ = 1. Berekenen we de bijbehorende eigen-ruimte, dan vinden we de veelvouden van (1, 0). De eigenruimte is dus 1-dimensionaal en aangezien er geen andere eigenwaarden dan 1 zijn, zijn dit deenige eigenvectoren. In dit geval is er dus ook geen basis van eigenvectoren.Beide obstructies zullen we in de komende paragrafen nader bekijken. Eerstvertellen we iets over nulpunten van polynomen.
8.4 Polynomen en hun nulpunten (optioneel)
Zij gegeven een polynoom of veelterm. Dat is een functie van de vorm
P (x) = pnxn + pn−1x
n−1 + · · ·+ p1x+ p0
met pi ∈ R of in C. Als pn = 0 dan noemen we pn de kopcoefficient en nde graad van het polynoom P . Notatie: deg(P ). De graad van een constantpolynoom= 0, zoals 1 of 2 is nul. Merk op dat de graad van het trivialepolynoom 0 niet gedefinieerd is. Een eenvoudige doch nuttige eigenschap is devolgende,

130 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
Stelling 8.4.1 Zij P,Q een tweetal niet-triviale polynomen. Dan geldt deg(PQ) =deg(P ) + deg(Q).
Met andere woorden, de graden van twee polynomen tellen op als we ze ver-menigvuldigen.We noemen een element a een nulpunt van P als P (a) = 0. We hadden reedsgezien in Stelling 6.5.2 dat P (x) niet meer dan n verschillende nulpunten kanhebben. Verder geldt,
Stelling 8.4.2 Zij a een nulpunt van het polynoom P (x). Dan is er een poly-noom Q(x) zo dat P (x) = (x− a)Q(x).
Bewijs: Allereerst merken we op dat elk polynoom van de vorm xm − am alsvolgt ontbindt,
xm − am = (x− a)(xm−1 + axm−2 + · · ·+ am−2x+ am−1).
We schrijven nu P (x) even uit
P (x) = pnxn + pn−1x
n−1 + · · ·+ p1x+ p0
en trekken daar 0 = P (a) = pnan+pn−1a
n−1+ · · ·+p1a+p0 vanaf. We krijgen
P (x) = pn(xn − an) + pn−1(x
n−1 − an−1) + · · ·+ p1(x− a).
Elk van de termen xm − am rechts is deelbaar door x− a en dus ook hun som.Daarmee is P (x) deelbaar door x − a. Met andere woorden er bestaat eenpolynoom Q(x) zo dat P (x) = (x− a)Q(x).
2
Het kan wel eens gebeuren dat als een polynoom P het nulpunt a heeft, hetpolynoom P meerdere factoren x−a bevat. Bijvoorbeeld P (x) = x4−x3+x2−3x + 2 heeft x = 1 als nulpunt. We kunnen nu schrijven P (x) = (x − 1)Q(x)waarin Q(x) = x3 + x− 2. Maar het polynoom Q(x) heeft ook een nulpunt inx = 1. Dus Q(x) = (x−1)(x2+x+2). We vinden dus P (x) = (x−1)2(x2+x+2)en de laatste factor heeft geen nulpunten x = 1 meer. We zeggen dat x = 1een nulpunt van multipliciteit 2 is. In het algemeen, stel dat P (x) een nulpunta heeft en zij k het grootste getal zo dat P (x) = (x − a)kQ(x) voor een zekerpolynoom Q(x). Dan noemen we k de multipliciteit van het nulpunt x = a.Het is lang niet altijd zo dat een polynoom een nulpunt heeft, denk maar aanP (x) = x2 + 1, dat geen nulpunten in R heeft. Als we echter over de complexegetallen werken, dan zijn er wel altijd nulpunten.
Stelling 8.4.3 (Hoofdstelling van de algebra) Zij P (x) een niet-triviaal poly-noom met reele of complexe coefficienten. Dan is er een complex getal a zo datP (a) = 0.
We zullen deze stelling hier niet bewijzen, maar vermelden wel het belangrijkstegevolg.

8.4. POLYNOMEN EN HUN NULPUNTEN (OPTIONEEL) 131
Gevolg 8.4.4 Zij P (x) = xn + pn−1xn−1 + · · · + p1x + p0 een polynoom van
graad n met reele of complexe coefficienten. Dan zijn er n complexe getallena1, a2, . . . , an zo dat
P (x) = (x− a1)(x− a2) · · · (x− an).
Bewijs: We zien dit het makkelijkst door inductie naar n. Voor n = 1 isP (x) = x+ p0 meteen al van de vereiste vorm.Stel nu n > 1 en dat ons Gevolg waar is voor polynomen van graad n− 1. Uitde hoofdstelling van de algebra weten we dat ons n-de graads polynoom P (x)een nulpunt an ∈ C heeft. Maar dan bestaat er een polynoom Q(x) van graadn − 1 zo dat P (x) = (x − an)Q(x). Wegens onze inductiehypothese ontbindtQ(x) in n − 1 factoren Q(x) = (x− a1)(x − a2) . . . (x − an−1). We vinden dusP (x) = (x− a1)(x− a2) . . . (x− an), waarmee onze bewering bewezen is.
2
Een ander gevolg van de hoofdstelling van de algebra is dat we ook iets kunnenzeggen over reele polynomen.
Stelling 8.4.5 Zij P (x) = xn + pn−1xn−1 + · · · + p1x + p0 een polynoom van
graad n met coefficienten in R. Dan bestaan er reele getallen a1, a2, . . . , am enparen reele getallen bi, ci (i = 1, . . . , s) met m+ 2s = n en b2i − 4ci < 0 zo dat
P (x) = (x− a1)(x− a2) · · · (x− am)(x2 + b1x+ c1) · · · (x2 + bsx+ cs).
Het kan voorkomen dat m = 0 of s = 0, hetgeen betekent dat er geen lin-eaire factoren of kwadratische factoren hoeven zijn. Ruw samengevat zegt onzestelling dat elk polynoom met reele coefficienten geschreven kan worden alsproduct van lineaire en kwadratische polynomen met reele coefficienten, waar-bij de kwadratische polynomen negatieve discriminant hebben.Bewijs: Deze bewering is een gevolg van Gevolg 8.4.4. Er bestaan namelijkcomplexe getallen a1, . . . , an zo dat
P (x) = (x− a1)(x− a2) . . . (x− an).
Een aantal van de ai, zeg de eerste m kunnen reeel zijn. De overige, niet-reele,nulpunten komen in complex geconjugeerde paren voor. Als namelijk a eencomplex nulpunt van P is, dan geldt, omdat P reele coefficienten heeft, datP (a) = P (a) = 0. Dus a is ook een (complex) nulpunt van P . Het polynoom(x− a)(x− a) is een kwadratisch polynoom met reele coefficienten en negatievediscriminant. Door de paren complex geconjugeerde nulpunten van P (x) bijelkaar te nemen, vinden we de gewenste kwadratische factoren.
2
Gevolg 8.4.6 Een polynoom met coefficienten in R en oneven graad heeft min-stens een reeel nulpunt.
Bewijs: Als de graad oneven is, kan de ontbinding van het polynoom inkwadratische en lineaire factoren niet uitsluitend uit kwadratische factorenbestaan. Er moet een lineaire factor zijn, en dus een reeel nulpunt.
2

132 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
8.5 Multipliciteiten en Jordan normaalvorm
Zoals gezegd wordt afwezigheid van een basis van eigenvectoren van een matrixM deels veroorzaakt door meervoudige nulpunten van het karakteristieke poly-noom van M . Zij λ0 een eigenwaarde van M . De dimensie van de eigenruimteEλ0 noemen we de meetkundige multipliciteit van λ0. De multipliciteit van λ0
als nulpunt van det(M − λIn) noemen we de algebraısche multipliciteit . Dangeldt
Stelling 8.5.1 De algebraısche multipliciteit van een eigenwaarde λ0 is groterof gelijk aan de meetkundige multipliciteit.
Bewijs: Om deze stelling in te zien, stellen we de meetkundige multipliciteitvan λ0 gelijk aan m. Kies een basis v1, . . . ,vm van de eigenruimte van λ0 enbreidt deze uit tot een basis v1, . . . ,vn van Rn. Zij S de matrix met als i-dekolom de kolomvector vi. We schrijven ook wel S = (v1, . . . ,vn). Laat nu dematrix M − λIn van links los op S. Omdat v1, . . . ,vm eigenvectoren van Mzijn, geldt
(M −λIn)S = ((λ0 −λ)v1, . . . , (λ0 −λ)vm,Mvm+1 −λvm+1, . . . ,Mvn −λvn).
Merk op dat de eerste m kolommen van de laatste matrix allen een factor(λ0 − λ) bevatten. Dus
det(M − λIn)det(S) = (λ0 − λ)mQ(λ)
waarin Q(λ) de determinant is die we overhouden na wegdeling van de factorenλ0 − λ. Merk op dat Q(λ) een polynoom in λ is en det(S) een constante = 0.We zien nu dat de algebraısche multipliciteit van λ0 minstens gelijk is aan m,waarmee de stelling bewezen is.
2
Een extreem geval waarin meetkundige en algebraısche multipliciteit uiteen-lopen zijn matrices van de vorm
a 1 0 . . . 00 a 1 . . . 00 0 a . . . 0...
...0 0 0 . . . 10 0 0 . . . a
.
Met andere woorden, matrices met hetzelfde element a op de diagonaal, allemaalenen op de nevendiagonaal erboven en nullen op alle andere plaatsen. Eendergelijke matrix word ook wel Jordan blok genoemd met eigenwaarde a. Zij Jeen n × n Jordan blok met eigenwaarde a. De eigenwaarde vergelijking luidt(a−λ)n = 0 (ga na!). We zien dus dat de algebraısche multipliciteit van a gelijkis aan n. Daarentegen zien we ook dat de rang van J − aIn gelijk is aan n− 1,en dus heeft de eigenruimte bij a dimensie 1. De meetkundige multipliciteit

8.6. CAYLEY-HAMILTON (OPTIONEEL) 133
van a is daarmee 1. We zien dus dat Jordanblokken niet diagonaliseerbaar zijn,tenzij we n = 1 hebben, het 1×1-blok. In het geval n = 1 is het Jordan triviaaldiagonaliseerbaar, het staat immers al in die vorm.Met behulp van Jordanblokken kunnen we ook matrices vormen waarbij voormeerdere eigenwaarden de meetkundige en algebraısche multipliciteit uit elkaarloopt. We doen dit door Jordanblokken als volgt op elkaar te stapelen. Deblokken 3 1 0
0 3 10 0 3
en
(2 10 2
)stapelen we op tot
3 1 0 0 00 3 1 0 00 0 3 0 00 0 0 2 10 0 0 0 2
.
In het algemeen: J1 O . . . OO J2 O...
. . ....
O O . . . Jm
waarin J1, J2, . . . , Jm Jordanblokken van eventueel verschillende afmetingenzijn. De symbolen O staan voor nulmatrices van diverse afmetingen. Eendiagonaalmatrix kunnen we ons opgebouwd denken uit 1 × 1 Jordanblokken.Matrices, opgebouwd uit Jordanblokken, noemen we Jordan matrices.
Stelling 8.5.2 (Jordan normaalvorm) Zij M een n × n-matrix met ele-menten in R resp C, waarvan de eigenwaardevergelijking al zijn oplossingenin R resp. C heeft. Dan is er een inverteerbare matrix S en een Jordan matrixJ zo dat
S−1MS = J.
Bovendien, als de eigenwaarde λ0 van M algebraısche multipliciteit m heeft,dan komt de λ0 precies m maal op de diagonaal van J voor.
8.6 Cayley-Hamilton (optioneel)
Stel dat we een diagonaliseerbare n × n-matrix M hebben. Zij S inverteer-baar zo dat S−1MS een diagonaalmatrix D is. De diagonaal elementen vanD zijn precies de eigenwaarden λ1, . . . , λn van M . Stel dat het karakteristiekepolynoom van M , na vermenigvuldiging met (−1)n, gelijk is aan
λn + a1λn−1 + · · ·+ an−1λ+ an.
De eigenwaarden λi zijn precies de nulpunten van dit polynoom. Dus moet ookgelden,
Dn + a1Dn−1 + · · ·+ an−1D + an = O, (8.4)

134 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
waarin O de n × n nulmatrix is. Merk nu op dat SDS−1 = M , SD2S−1 =M2, . . . SDnS−1 = Mn. Conjugatie van (8.4) levert
SDnS−1 + a1SDn−1S−1 + · · ·+ an−1SDS−1 + an = O
en dus,
Mn + a1Mn−1 + · · ·+ an−1M + an = O.
Deze laatste identiteit is een speciaal geval van de volgende stelling.
Stelling 8.6.1 (Cayley-Hamilton) Zij M een n×n matrix en zij λn+a1λn−1+
· · ·+ an−1λ+ an het karakteristieke polynoom van M . Dan geldt,
Mn + a1Mn−1 + · · ·+ an−1M + an = O.
Het argument dat we boven gaven levert een bewijs van de Stelling van Cayley-Hamilton voor het geval dat M diagonaliseerbaar is. De stelling geldt echtervoor iedere willekeurige n × n matrix M . Het bewijs voor dit algemene gevalvolgt later.
8.7 Een toepassing, Google’s Pagerank (optioneel)
Eigenwaarden en eigenvectoren komen in de praktijk in talloze toepassingenvoor. Met name in de natuurkunde, waarin trillingsverschijnselen en quantum-mechanica allen voorbeelden geven van eigenvectoren in (oneindigdimensionale)vectorruimten en operatoren die erop werken. Ook in de techniek, wiskunde,scheikunde etc. spelen ze een belangrijke rol. In deze paragraaf bespreken wede wiskunde achter een heel eigentijdse toepassing, namelijk de bepaling vande zogenaamde page rank die op gezette tijden door Google wordt opgesteldom een ranglijst naar relevantie van webpaginas over de hele wereld te geven.Hierover zijn veel artikelen op internet te vinden, wij noemen
http://www.ams.org/samplings/feature-column/fcarc-pagerank die je alsachtergrondmateriaal zou kunnen lezen. Wij behandelen hier eerst het wiskundigeidee en geven daarna kort weer hoe het bij Google toegepast wordt. De preciezedetails van de berekening zijn bedrijfsgeheim.
Zij A een m × m matrix en kies een startvector x0. Laat A hier herhaald oplos,
x1 = Ax0, x2 = Ax1, . . . xk+1 = Axk, . . .
De vector xk wordt natuurlijk gegeven door xk = Akx0 voor elke k ∈ Z≥0.Grote vraag is wat er gebeurt met Akx0 als k → ∞. Voor de beantwoordingvan deze vraag zijn eigenvectoren en eigenwaarden van A bijzonder handig.Neem om te beginnen aan dat A een basis van eigenvektoren v1, . . . ,vm heeftmet eigenwaarden λ1, . . . , λm (eventueel over de complexe getallen). Schrijf nux0 als lineaire combinatie van de eigenvectoren, x0 = α1v1 + · · · + αmvm enmerk op, dat
xk = Akx0 = α1λk1v1 + · · ·+ αmλk
mvm. (8.5)

8.7. EEN TOEPASSING, GOOGLE’S PAGERANK (OPTIONEEL) 135
In het bijzonder, als |λi| < 1 voor alle i, dan geldt limk→∞ xk = 0, ongeacht destartvektor x0. Trouwens, ook als er geen basis van eigenvektoren bestaat danblijft deze uitspraak waar.
Stelling 8.7.1 Stel dat de m×m matrix A eigenwaarden heeft die allen kleinerdan 1 zijn in absolute waarde (zowel de reele als complexe). Dan geldt datlimn→∞Ak = 0 d.w.z., voor elke i, j gaat het element met index (i, j) in Ak
naar 0 als k → ∞.
Laten we nu een matrix nemen met eigenwaarde 1 en |λ| < 1 voor alle andereeigenwaarden λ ∈ C. Bijvoorbeeld,
A =1
2
0 1 1−1 −2 5−1 −1 4
.
Deze matrix heeft eigenwaarden 1, 1/2,−1/2 en de eigenwaarde 1 heeft als bi-jbehorende eigenvector (1, 1, 1)t. Voor de 5e en 10e macht van A vinden we, totop vier decimalen,
A5 =
−0.9375 −0.9062 2.8437−0.9687 −1.0000 2.9687−0.9687 −0.9687 2.9375
A10 =
−0.99804 −0.99902 2.9970−0.99902 −0.99804 2.9970−0.99902 −0.99902 2.9980
Het lijkt er dus op dat de kolommen van Ak naar een veelvoud van de eigen-vector (1, 1, 1)t convergeren als k → ∞. A fortiori convergeert Akx0 voor elkestartvector x0 naar een veelvoud van (1, 1, 1)t. De eigenwaarde is de grootstevan de drie eigenwaarden en we noemen het de dominante eigenwaarde. Dezespeelt een belangrijke rol bij de bepaling van Ak als k → ∞.In het algemeen noemen we de eigenwaarde λ van de m × m matrix A eendominante eigenwaarde als λ algebraische multipliciteit 1 heeft en als voor iedereandere eigenwaarde µ, ook de complexe, geldt dat |µ| < |λ|.
Stelling 8.7.2 Stel dat de m×m matrix A een dominante eigenwaarde λ heeft.Zij v een eigenvektor bij λ. Dan is er bij elke x0 ∈ Rm een scalair c(x0) zo dat
limk→∞
(1
λ
)k
Akx0 = c(x0)v.
Merk op dat (1/λ)kAk = (A/λ)k en dat A/λ een matrix met dominante eigen-waarde 1 is. Dit is precies de situatie uit ons voorbeeld.Indien A in Stelling 8.7.2 een basis van eigenvektoren heeft, dan is het bewijsniet lastig. Beschouw (8.5) en stel v1 = v en λ1 = λ. We vinden,
(1/λ)kAkx0 = α1v + α2(λ2/λ)kv2 + · · ·+ αm(λm/λ)kvm.
Omdat |λ1| > |λi| voor alle i > 1 volgt hieruit dat limk→∞(1/λ)kAkx0 = α1v.De coefficient α1 is de scalair c(x0) uit de Stelling. Het bewijs voor het gevaler geen basis van eigenvectoren bestaat is lastiger en laten we hier achterwege.

136 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
In de praktijk hebben de matrices A waarmee we werken elementen die groter ofgelijk aan nul zijn. Aan dergelijke matrices kunnen we een zogenaamde gerichtegraaf toekennen. Voor elke index i = 1, . . . ,m tekenen we een punt in het vlaken trekken een verbindingslijn van punt i naar punt j als het matrix elementaij strikt positief is (dus niet nul). Voorbeeld, de matrix heeft als gerichte graaf
(1) (2)
(3)
Definitie 8.7.3 Onder een pad in de graaf verstaan we een opeenvolging vangerichte lijnstukken, waarbij het eindpunt van de een weer beginpunt van deander is. Een gerichte graaf heet samenhangend als elk punt van de graaf viaeen pad met elk ander punt verbonden is. De graaf heet a-cyclisch als de grootstegemeenschappelijke deler van alle lengtes van gesloten paden gelijk is aan 1.
Merk in het bijzonder op dat de graaf bij een matrix A a-cyclisch is als Aeen positief diagonaal-element aii heeft. De bijbehorende graaf heeft dan eenverbinding van het punt (i) naar zichzelf en dat is een gesloten pad met lengte1.
We hebben nu de volgende klassieke stelling, waarvan we het bewijs niet zullengeven.
Stelling 8.7.4 (Perron-Frobenius) Zij A een m × m-matrix met alle ele-menten ≥ 0. Als de bijbehorende graaf samenhangend en a-cyclisch is, danheeft A een dominante eigenwaarde.
Dat de twee voorwaarden nodig zijn moge blijken uit de volgende simpele voor-
beelden. De graaf van
(2 00 2
)heeft de twee eigenwaarden 2 en dus geen
dominante eigenwaarde. De bijbehorende graaf bestaat uit twee punten diealleen met zichzelf verbonden zijn, maar niet met elkaar. De graaf is dus niet
samenhangend. Een ander voorbeeld is A =
(0 11 0
). De eigenwaarden zijn ±1
en er is dus geen dominante eigenwaarde. De graaf bestaat uit twee punten (1)en (2), waarbij (1) verbonden wordt met (2) en (2) met (1). Het is duidelijk datelk gesloten pad bestaat uit herhaling van (1)→(2)→(1) of van (2)→(1)→(2).Elk gesloten pad heeft even lengte en de graaf is dus niet a-cyclisch.
We gaan nu terug naar Google’s page rank. Het idee is om aan elke webpaginaP een gewicht I(P ) van belangrijkheid toe te kennen. Stel bijvoorbeeld datwebpagina Pj lj links heeft. Als zo’n link naar pagina Pi wijst, dan krijgtdie pagina een bijdrage I(Pj)/lj aan zijn gewicht van webpagina Pj . Als we de

8.8. OPGAVEN 137
verzameling pagina’s die een link naar Pi hebben, aangeven met Bi, dan krijgenwe:
I(Pi) =∑
Pj∈Bi
I(Pj)
lj.
Om de waarden van I(P ) te vinden moeten we dit stelsel lineaire vergelijkingenoplossen. Gezien de grootte van de coefficienten matrix is dit een onmogelijketaak. Het idee is om de oplossing te benaderen door er een eigenwaarde prob-leem van te maken. Stel we hebben N webpaginas. We stellen de N×N -matrixG op door op plaats i, j de waarde 1/lj te zetten als Pj naar Pi wijst en 0 an-ders. Geven we de vector met componenten I(Pi) aan met I dan kunnen webovenstaand stelsel vergelijkingen herschrijven als
I = GI.
Met andere woorden, I is een eigenvector met eigenwaarde 1 van G. We gaanervan uit dat G bekend is, en de opgave is om I te berekenen. We gebruiken nude Stelling van Perron-Frobenius. Kies een startvector I0 en laat G herhaaldlos, I1 = GI0, I2 = GI1, . . . , Ik+1 = GIk, . . .. De opzet is dat de rij Ik naareen stationaire vector, de oplossing van ons probleem, convergeert en dat ditin redelijk snelle tijd gebeurt. Zoals we boven zagen zijn er restricties op dematrix opdat we convergentie krijgen. Die kunnen we forceren door in plaatsvan G de matrix αG+ (1− α)H/N te nemen waarin α een kleine parameter isen H de N ×N -matrix met 1 op elke plaats. Deze maatregel dempt eventueleongewenste fluctuaties. Met een parameterwaarde van 0.85 lijkt het dat er 50tot 100 iteraties nodig zijn om een acceptabele benadering van I te vinden. Eendergelijke berekening duurt enkele dagen. Dat de berekening met de reusachtigematrix G mogelijk is, komt doordat G een zogenaamde sparse matrix is. Datwil zeggen, het merendeel van de coefficienten is nul en hoeft niet meegenomente worden in de berekeningen.Op gezette tijden (eens per maand?) wordt bij Google de benadering van degewichtsvector I bijgewerkt en aangepast aan het veranderende internet.
8.8 Opgaven
Opgave 8.8.1 Bepaal voor de volgende matrices het karakteristieke polynoom,de eigenwaarden en de eigenvectoren.
a)
(1 02 3
), b)
(2 10 −1
)
c)
(2 −1−1 2
), d)
(13 −169 −11
)e)
(1 −11 3
), f)
(2 23 3
)
g)
−6 −1 23 2 0
−14 −2 5
, h)
−2 −1 00 1 1−2 −2 −1

138 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
i)
3 −1 −1−12 0 54 −2 −1
, j)
−7 4 −38 −3 332 −16 13
k)
2 4 40 1 −10 1 3
, l)
6 4 4 14 6 1 44 1 6 41 4 4 6
m)
5 4 1 14 5 1 11 1 4 21 1 2 4
, n)
1 −1 −1 −1−1 1 −1 −1−1 −1 1 −1−1 −1 −1 1
Opgave 8.8.2 Zij A,B een tweetal n×n-matrices. Stel dat λ een eigenwaardevan A is en µ een eigenwaarde van B.
1. Laat met een voorbeeld zien dat λ+µ geen eigenwaarde hoeft te zijn vanA+B.
2. Laat met een voorbeeld zien dat λµ geen eigenwaarde hoeft te zijn vanAB.
3. Stel dat λ en µ behoren bij dezelfde eigenvector. Laat zien dat A + Beigenwaarde λ+ µ heeft en AB eigenwaarde λµ.
Opgave 8.8.3 Zij A een n × n-matrix. Bewijs dat A en At dezelfde eigen-waardevergelijking hebben.
Opgave 8.8.4 Zij A een n×n matrix zo dat de som van de elementen uit elkerij gelijk is aan 1. Bewijs dat A eigenwaarde 1 heeft.
Zij A een n× n-matrix zo dat de som van de elementen uit elke kolom gelijk isaan 1. Bewijs dat A eigenwaarde 1 heeft.
Opgave 8.8.5 Zij A een n× n-matrix en λ een eigenwaarde. Laat zien dat Ak
eigenwaarde λk heeft voor elke k ∈ Z≥1.
Stel bovendien dat A inverteerbaar is. Bewijs dat λ−1 een eigenwaarde is.
Opgave 8.8.6 Zij A een nilpotente n × n-matrix, dat wil zeggen, er is eenk ∈ Z≥0 zo dat Ak = O. Bewijs dat 0 de enige eigenwaarde van A is.
Opgave 8.8.7 Gegeven is
A =
−3 1 −1−7 5 −1−6 6 2
Bereken de eigenwaarden en eigenvectoren. Bepaal een inverteerbare matrix Szo dat S−1AS een diagonaalmatrix is.
Is S uniek bepaald? Geef meerdere mogelijkheden voor S.

8.8. OPGAVEN 139
Opgave 8.8.8 Zelfde vraag als daarnet maar nu voor
A =
1 −2 2−2 −2 42 4 −2
Opgave 8.8.9 Zijn de volgende matrices diagonaliseerbaar? 1 −2 0
−2 0 −20 2 1
,
2 0 01 2 00 1 2
.
Opgave 8.8.10Gegeven is de n×n diagonaal matrix Λ met elementen λ1, . . . , λn
op de diagonaal. Gegeven is dat alle λi verschillend zijn. Zij S een inverteerbaren× n-matrix zo dat S−1ΛS = Λ. Bewijs dat S een diagonaalmatrix is.
Opgave 8.8.11 Zij A een n×n matrix met n verschillende positieve eigenwaar-den. Bewijs dat er een matrix B bestaat zo dat B2 = A. Is B uniek bepaald?
Opgave 8.8.12 Zij A en B een tweetal geconjugeerde n× n-matrices (dwz erbestaat een inverteerbare S zo dat B = S−1AS). Bewijs dat A en B dezelfdeeigenwaarde vergelijking hebben.
Opgave 8.8.13 Zij A,B een tweetal n × n-matrices. Bewijs dat AB en BAdezelfde eigenwaardenvergelijking hebben. (Hint: begin met A of B inverteer-baar en gebruik de voorgaande opgave).Laat ook zien dat Spoor(AB) = Spoor(BA).
Opgave 8.8.14 Gegeven is het polynoom q(t) = tn+an−1tn−1+ · · ·+a1t+a0.
Beschouw de matrix
Q =
−an−1 −an−2 · · · −a1 −a01 0 · · · 0 00 1 · · · 0 0...
...0 0 · · · 0 00 0 · · · 1 0
Bewijs dat det(Q − λIn) = (−1)nq(λ). Met andere woorden, q(λ) = 0 is deeigenwaardevergelijking van Q.
Opgave 8.8.15 Verifieer de Stelling van Cayley-Hamilton aan de hand van hetvoorbeeld
M =
(1 12 3
)
Opgave 8.8.16 Zij A een inverteerbare 2×2-matrix met eigenwaardevergelijk-ing λ2 + aλ+ b = 0. Laat zien dat A−1 gegeven wordt door A−1 = −1
bA− ab I2.

140 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
Opgave 8.8.17 ZijM een n×n-matrix met alleen maar eigenwaarden 0. Bewijsdat M nilpotent is (hint: gebruik Cayley-Hamilton).
Opgave 8.8.18 Beschouw de lineaire afbeelding A : R3 → R3 gegeven door dematrix
M =
1 −2 0−2 0 −20 2 1
.
1. Bereken de eigenwaarden en eigenvectoren van A.
2. Bereken de kern van A.
3. Bepaal een basis van A(R3).
Opgave 8.8.19 De lineaire afbeelding A : R4 → R4 wordt gegeven door dematrix
7 −3 −1 1−3 7 1 −1−1 1 7 −31 −1 −3 7
.
Bereken de eigenwaarden en eigenvectoren van A.
Opgave 8.8.20 Zij α ∈ R. De lineaire afbeelding Aα : R3 → R3 heeft dematrix 1 −α2 + α− 2 0
1 2α− 1 α− 10 4 1
.
1. Bereken de eigenwaarden van Aα.
2. Een eigenwaarde is onafhankelijk van α. Bepaal de eigenruimte behorendbij deze eigenwaarde.
3. Voor welke waarde(n) van α heeft Aα een tweedimensionale eigenruimtein R3 ?
Opgave 8.8.21 De lineaire afbeelding A : R3 → R3 wordt gegeven door dematrix −10 7 11
−6 5 6−6 4 7
.
Bereken de eigenwaarden en eigenvectoren van A.
Opgave 8.8.22 De lineaire afbeelding A : R3 → R3 heeft de eigenwaarden1,−1 en 0. Ten opzichte van de standaardbasis is (1, 1, 1) een eigenvector bijde eigenwaarde 1, (1, 2, 0) een eigenvector bij de eigenwaarde −1 en (3, 0, 1) eeneigenvector bij de eigenwaarde 0. Bereken de matrix van A ten opzichte van destandaardbasis.

8.8. OPGAVEN 141
Opgave 8.8.23 De lineaire afbeelding A : R3 → R3 heeft ten opzichte van destandaardbasis de matrix −3 1 −1
−7 5 −1−6 6 2
.
1. Bereken de eigenwaarden van A en de corresponderende eigenvectoren.
2. Is het mogelijk om een basis e1, e2, e3 te vinden, zo dat de matrix vanA ten opzichte van deze basis een diagonaalmatrix is? Hoeveel van dezebases kunnen gevonden worden?
Opgave 8.8.24 Zelfde opgave als daarnet, maar nu met de matrix 1 −2 2−2 −2 42 4 −2
.
Opgave 8.8.25 Dezelfde vragen als daarnet maar nu twee afbeeldingen B :R3 → R3 en C : R3 → R3 met respectievelijk de matrices 1 −2 0
−2 0 −20 2 1
2 0 01 2 00 1 2
.
Opgave 8.8.26 In een n-dimensionale vectorruimte V zijn A : V → V enB : V → V een tweetal lineaire afbeeldingen.
1. (Lastig als A,B niet inverteerbaar) Bewijs dat de lineaire afbeeldingenAB en BA dezelfde eigenwaarden hebben.
2. Als A een bijectieve afbeelding is en λ een eigenwaarde van A, dan is λ−1
een eigenwaarde van A−1.
3. Bewijs dat, als A een eigenwaarde λ heeft met bijbehorende eigenvectorv, deze vector tevens eigenvector van An is met eigenwaarde λn.
4. Zij A,B en tweetal n×n-matrices. Bewijs dat Spoor(AB) = Spoor(BA).
Opgave 8.8.27 Zij A : Rn → Rn een lineaire afbeelding. Gegeven is datA2 = A. Bewijs dat elke eigenwaarde van A of 0 of 1 is.
Opgave 8.8.28 De lineaire afbeelding A : R2 → R2 heeft de matrix
(α βγ δ
)met γ = 0. Bovendien is gegeven dat A2 = A.
1. Bewijs dat α+ δ = 1 en dat
∣∣∣∣α βγ δ
∣∣∣∣ = 0. Druk β in α en γ uit.
2. Bereken de eigenwaarden van A of beredeneer welke eigenwaarden A heeft.

142 HOOFDSTUK 8. EIGENWAARDEN EN EIGENVECTOREN
Opgave 8.8.29 De lineaire afbeelding A : R3 → R3 heeft de matrix 2 1 −12 2 13 0 3
.
1. Bereken de eigenwaarden van A en bepaal de corresponderende eigen-ruimten.
2. Bepaal de vergelijking van het vlak dat onder A invariant is.
Opgave 8.8.30 Zij M22(C) de vectorruimte van twee bij twee matrices metelementen in C. Een basis van deze vectorruimte wordt gegeven door
f1 =
(1 00 0
), f2 =
(0 10 0
), f3 =
(0 01 0
), f4 =
(0 00 1
).
Definieer de afbeelding T : M22(C) → M22(C) door
T :
(a bc d
)7→ M
(a bc d
)M t,
waarin M =
(2 01 −1
).
1. Bewijs dat T een lineaire afbeelding is.
2. Bepaal de matrix van T ten opzichte van f1, f2, f3, f4.
3. Bepaal de eigenwaarden en eigenvectoren van T .
Opgave 8.8.31 Zij C[X]2 de ruimte van polynomen van graad hooguit 2 metcoefficienten in C. Definieer de afbeelding T : C[X]2 → C[X]2 door T : p(X) 7→p(X + 1).
1. Bewijs dat T lineair is.
2. Bepaal de matrix van T ten opzichte van de basis 1, X,X2.
3. Bepaal de eigenwaarden en eigenvectoren van T .
Opgave 8.8.32 Definieer T : R[X] → R[X] door T : p(X) 7→∫ X0 p(t)dt.
1. Bewijs dat T een lineaire afbeelding is, en dat T injectief, maar nietsurjectief is.
2. Bewijs dat T geen eigenvectoren heeft.
Opgave 8.8.33 Zij R[X]n de vectorruimte van polynomen met graad ≤ n.Definieer T : R[X]n → R[X]n door T : p(X) 7→ p(X) +Xp′(X).
1. Bewijs dat T inderdaad R[X]n naar zichzelf afbeeldt en lineair is.

8.8. OPGAVEN 143
2. Laat zien dat 1, X,X2, . . . , Xn een basis van R[X]n is.
3. Vindt alle eigenwaarden en eigevectoren van T in het geval dat n = 2.
4. Vindt alle eigenwaarden en eigenvectoren in het algemene geval.
Opgave 8.8.34 Definieer T : R[X] → R[X] door T : p(X) 7→ xp′′(X) + p′(X).Bepaal alle eigenwaarden en eigenvectoren van T .
Opgave 8.8.35 Zij R[X]n de vectorruimte van polynomen met graad ≤ n.Definieer T : R[X]n → R[X]n door T : p(X) 7→ −p′′(X) +Xp′(X).
1. Bewijs dat T inderdaad R[X]n naar zichzelf afbeeldt en lineair is.
2. Laat zien dat 1, X,X2, . . . , Xn een basis van R[X]n is.
3. Vindt alle eigenwaarden van T in het geval dat n = 2.
4. Vindt alle eigenwaarden in het algemene geval.
Opgave 8.8.36 Zij R[X]n de vectorruimte van polynomen met graad ≤ n.Definieer T : R[X]2 → R[X]2 door T : p(X) 7→ (X3 − X)p′′(X) + X2p′(X) −4Xp(X).
1. Verifieer dat T de ruimte R[X]2 naar zichzelf afbeeldt en dat T lineair is.
2. Schrijf de matrix van T uit ten opzichte van de geordende basis 1, X,X2.
3. Bepaal de eigenwaarden en eigenvectoren van T .
4. Laat zien dat T de ruimte R[X]3 niet naar zichzelf afbeeldt.
Opgave 8.8.37 Beschouw de lineaire afbeelding A : R∞ → R∞ gegeven doorA : (x1, x2, . . .) 7→ (0, x1, x2, . . .) (’shift operator’). Bewijs dat A geen eigenvec-toren heeft.
Opgave 8.8.38 Bewijs dat de functies sin(kx) voor k = 1, 2, . . . lineair on-afhankelijk zijn door middel van Stelling 8.3.1 en een geschikte lineaire afbeeld-ing van de ruimte C∞(R) naar zichzelf.

Hoofdstuk 9
Vectorruimten met inproduct
9.1 Inwendige producten
Zij V een vectorruimte over R. Een inwendig product op V is een functieV × V → R, genoteerd met x,y 7→ ⟨x,y⟩, die aan de volgende eigenschappenvoldoet.
1. ⟨x,y⟩ = ⟨y,x⟩ voor elke x,y ∈ V .
2. ⟨λx,y⟩ = λ ⟨x,y⟩ voor elke x,y ∈ V en λ ∈ V .
3. ⟨x+ y, z⟩ = ⟨x, z⟩+ ⟨y, z⟩ voor elke x,y, z ∈ V .
4. ⟨x,x⟩ ≥ 0 voor alle x ∈ V en bovendien: ⟨x,x⟩ = 0 ⇐⇒ x = 0.
Eigenschappen (ii) en (iii) laten zien dat een inproduct linear is in het eersteargument. Wegens de symmetrie (i) geldt nu dat een inproduct ook lineair isin het tweede argument. Dat wil zeggen:
⟨x, λy + µz⟩ = λ ⟨x,y⟩+ µ ⟨x, z⟩
voor alle x,y, z ∈ V en λ, µ ∈ R.Hier zijn een aantal voorbeelden.
Voorbeeld 9.1.1. V = Rn met het standaard inproduct of dotproduct♢
Voorbeeld 9.1.2. V = R∞0 , de ruimte van oneindige rijen reele getallen die
vanaf zeker moment nul zijn. Als inproduct kunnen we nemen:
⟨(x1, x2, x3, . . .), (y1, y2, y3, . . .)⟩ = x1y1 + x2y2 + x3y3 + · · ·
♢
Voorbeeld 9.1.3. (optioneel) Iets interessanter is de deelruimte l2 van R∞
bestaande uit alle oneindige rijen (x1, x2, x3, . . .) zo dat de reeks∑∞
i=1 x2i con-
vergent is. Dat l2 een deelruimte is, volgt uit de volgende observaties.
144

9.1. INWENDIGE PRODUCTEN 145
1. 0 = (0, 0, . . .) ∈ l2 want∑∞
i=1 02 = 0.
2. Stel x = (x1, x2, . . .) en λ ∈ R. Dan convergeert de reeks∑∞
i=1 x2i , en dus
ook∑∞
i=1(λxi)2. Dus λx ∈ l2.
3. Stel x = (x1, x2, . . .) en y = (y1, y2, . . .). Dan geldt voor elke n dat∑ni=1(xi+yi)
2 ≤∑n
i=1 2(x2i +y2i ). Omdat de reeksen
∑∞i=1 x
2i en
∑∞i=1 y
2i
convergeren, convergeert∑∞
i=1(xi + yi)2 ook.
Als inproduct van x = (x1, x2, . . .) en y = (y1, y2, . . .) nemen we∑∞
i=1 xiyi.We moeten wel laten zien dat deze reeks convergeert. Deze convergentie blijktzelfs absoluut te zijn. Voor elke n geldt namelijk volgens de ongelijkheid vanSchwarz dat,
n∑i=1
|xiyi| ≤
√√√√ n∑i=1
x2i ·
√√√√ n∑i=1
y2i .
Omdat de reeksen∑∞
i=1 x2i en
∑∞i=1 y
2i convergeren, convergeert
∑∞i=1 |xiyi|
ook.♢
Voorbeeld 9.1.4. V = R2 met
⟨(x1, y1), (x2, y2)⟩ = 2x1y1 + x1y2 + x2y1 + 2x2y2
Opgave: ga zelf na dat dit een inproduct is. We zien hiermee onder anderendat er vele andere inproducten op R2, en ook Rn, zijn naast het gebruikelijkedotproduct.
♢
Voorbeeld 9.1.5. V = C([0, 1]), de verzameling van continue functies op [0, 1]en ⟨f, g⟩ =
∫ 10 f(x)g(x)dx. We zullen eigenschappen (i) tot en met (iv) voor dit
inproduct controleren.
1. ⟨f, g⟩ =∫ 10 f(x)g(x)dx =
∫ 10 g(x)f(x)dx = ⟨g, f⟩.
2. ⟨λf, g⟩ =∫ 10 λf(x)g(x)dx = λ
∫ 10 f(x)g(x)dx = λ ⟨f, g⟩.
3. ⟨f + g, h⟩ =∫ 10 (f(x) + g(x))h(x)dx =
∫ 10 f(x)h(x)dx +
∫ 10 g(x)h(x)dx =
⟨f, h⟩+ ⟨g, h⟩.
4. ⟨f, f⟩ =∫ 10 f(x)2dx ≥
∫ 10 0 · dx = 0. We moeten nu nog laten zien
dat ⟨f, f⟩ = 0 impliceert dat f(x) = 0 voor alle x ∈ [0, 1]. Vaak isdit de lastigste stap in het bewijs dat we met een inproduct te makenhebben. In dit geval maken gebruik van de continuiteit van f(x). Stelnamelijk dat er een punt x0 ∈ [0, 1] is met f(x0) = 0. Dat betekentdat f(x0)
2 > 0. Wegens de continuiteit van f(x)2 is er een δ > 0 zodatf(x)2 ≥ f(x0)
2/2 voor alle x0 ∈ [0, 1] ∩ [−δ, δ]. De lengte van dit laatsteinterval is minstens δ. Dat betekent dat
∫ 10 f(x)2dx groter of gelijk δ maal
f(x0)2/2 is. Conclusie,
∫ 10 f(x)2dx > 0. Dit is in tegenspraak met het
gegeven dat de integraal 0 is. Het kan blijkbaar dus niet gebeuren datf(x0) = 0. Gevolg, f(x0) = 0 voor alle x0 ∈ [0, 1].

146 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
♢
Voorbeeld 9.1.6. V = R[x] met als inproduct ⟨p, q⟩ =∫∞−∞ p(x)q(x)e−x2
dx.Het bewijs dat dit een inproduct is verloopt op analoge wijze als bij het vorigevoorbeeld.
♢
Voorbeeld 9.1.7. Er zijn ook vectorruimten waarbij het helemaal niet duidelijkis of er een inproduct op te definieren valt. Probeer maar eens een inproductte bedenken op R∞, of op C(R), de ruimte van continue functies op R.
♢Stel dat V een vectorruimte met inproduct is. We definieren de lengte van eenvector v ∈ V als
√⟨v,v⟩. Notatie: ||v||. Evenals bij het dotproduct geldt ook
hier de ongelijkheid van Cauchy-Schwarz.
Stelling 9.1.8 Zij V een vectorruimte met inproduct. Dan geldt voor elk twee-tal x,y ∈ V de ongelijkheid
| ⟨x,y⟩ | ≤ ||x|| · ||y||.
Bewijs: Het bewijs kunnen we hier verbatim overnemen van het bewijs voorhet dotproduct. Als x = 0 dan zijn beide zijden van de ongelijkheid nul, endus klopt de ongelijkheid. Stel nu x = 0. Dan geldt ook dat ||x|| > 0. Ditvolgt uit eigenschap (iv) van het inproduct. Voor elke keuze van λ ∈ R geldt0 ≤ ||λx+ y||. Laten we dit uitwerken.
0 ≤ ⟨λx+ y, λx+ y⟩= λ2 ⟨x,x⟩+ 2λ ⟨x,y⟩+ ⟨y,y⟩
De rechterkant kan gezien worden als een kwadratische functie in λ die uitslui-tend waarden ≥ 0 aanneemt. De discriminant is dus ≤ 0. Met andere woorden,
4 ⟨x,y⟩2 − 4 ⟨x,x⟩ ⟨y,y⟩ ≤ 0.
Hieruit volgt dat ⟨x,y⟩2 ≤ ⟨x,x⟩ ⟨y,y⟩ en dus de ongelijkheid van Cauchy-Schwarz.
2
De ongelijkheid van Schwarz in het geval van de ruimte van continue functiesop [0, 1] luidt dus,∣∣∣∣∫ 1
0f(x)g(x)dx
∣∣∣∣2 ≤ (∫ 1
0f(x)2dx
)(∫ 1
0g(x)2dx
).
Het waren ongelijkheden van dit type die door H.A.Schwarz in zijn werk ge-bruikt werden.Stel dat V een vectorruimte over R met een inproduct ⟨., .⟩. Voor elk tweetalelementen x,y kunnen we afstand tussen x en y definieren door ||x−y||. Voordeze afstand geldt,
9.2. ORTHOGONALE EN ORTHONORMALE STELSELS 147
1. Voor alle x,y ∈ V geldt ||x− y|| = ||y − x|| en ||x− y|| ≥ 0.
2. Voor alle x,y, z ∈ V geldt
||x− y|| ≤ ||x− z||+ ||y − z||
(driehoeksongelijkheid).
3. ||x− y|| = 0 ⇐⇒ x = y.
Met de afstandsfunctie ||x−y|| is V een zogenaamdemetrische ruimte geworden.
9.2 Orthogonale en orthonormale stelsels
Zij V een vectorruimte met inproduct. We zeggen dat twee vectoren x,y or-thogonaal zijn ten aanzien van het inproduct als ⟨x,y⟩ = 0. Een verzamelingvectoren S ⊂ V heet orthogonaal stelsel als 0 ∈ S en ⟨x,y⟩ = 0 voor elk tweetalverschillende vectoren x,y ∈ S. Een verzameling S ⊂ V heet orthonormaalstelsel als S een orthogonaal stelsel is en bovendien ||x|| = 1 voor elke x ∈ S.
Stelling 9.2.1 Zij S een orthogonaal stelsel vectoren. Dan is S een onafhanke-lijk stelsel.
Bewijs: Stel dat we een relatie hebben van de vorm
λ1x1 + λ2x2 + · · ·+ λrxr = 0
met xi ∈ S. Kies i en neem aan beide zijden het inproduct met xi. We krijgen,vanwege de lineariteit van het inproduct in zijn eerste argument,
λ1 ⟨x1,xi⟩+ λ2 ⟨x2,xi⟩+ · · ·+ λr ⟨xr,xi⟩ = ⟨0,xi⟩ = 0.
Wegens de orthogonaliteit van de vectoren xj zijn alle inproducten ⟨xk,xi⟩ nul,behalve die met k = i. We houden dus over,
λi ⟨xi,xi⟩ = 0.
Gegeven is dat xi = 0. Dus ⟨xi,xi⟩ > 0 en we concluderen dat λi = 0. Wekunnen alleen maar triviale relaties tussen de elementen van S hebben, en dusis S onafhankelijk.
2
Voorbeeld 9.2.2. (optioneel) Zij V de vectorruimte van continue functies op[−π, π] met als inproduct ⟨f, g⟩ = 1
π
∫ π−π f(x)g(x)dx. Dan is het stelsel functies
1√2, sinx, cosx, sin 2x, cos 2x, . . . , sinmx, cosmx, . . .
een orthonormaal stelsel. Ter illustratie laten we de orthonormaliteit van hetstelsel functies sinmx met m ∈ Z>0 zien. We maken daarbij gebruik van degonio-identiteit
sinmx sinnx =1
2cos(m− n)x− 1
2cos(m+ n)x.
148 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
Stel nu m,n ∈ Z>0. Merk op dat
⟨sinmx, sinnx⟩ =1
π
∫ π
−πsinmx sinnxdx
=1
2π
∫ π
−πcos(m− n)xdx− 1
2π
∫ π
−πcos(m+ n)xdx
Als k ∈ Z en k = 0 dan weten we dat∫ π−π cos kxdx = 0. Dus, als m = n dan
volgt uit bovenstaande berekening dat ⟨sinmx, sinnx⟩ = 0. Als m = n danvinden we dat ⟨sinmx, sinmx⟩ = 1
2π
∫ π−π(sinmx)2 · dx = 1.
We laten het aan de lezer over om orthonormaliteit van het stelsel inclusief deoverige vectoren aan te tonen.
♢
Een orthogonaal respectievelijk orthonormaal stelsel dat tevens basis is van devectorruimte V noemen we een orthogonale basis respectievelijk orthonormalebasis.
Stelling 9.2.3 Zij V een eindigdimensionale vectorruimte met inproduct. Danheeft V een orthonormale basis.
Bewijs: Het bewijs van deze stelling volgt door inductie naar dim(V ). Steldat dim(V ) = 1. In dat geval is de stelling duidelijk, elke vector met lengte 1vormt een orthonormale basis.
Stel nu n = dim(V ) > 1, en neem aan dat de stelling bewezen is voor elkevectorruimte van dimensie n−1. Kies een basis v1,v2, . . . ,vn van V . Definieernu
v∗i = vi −
⟨vi,v1⟩⟨v1,v1⟩
v1
voor i = 2, . . . , n. Dan vormen v1,v∗2, . . . ,v
∗n ook een basis van V en v∗
i isorthogonaal met v1 voor alle i ≥ 2 (controleer dit door uit te rekenen!). Dedeelruimte Span(v∗
2, . . . ,v∗n) heeft dimensie n−1. Volgens de inductiehypothese
heeft deze deelruimte een orthonormale basis. Laten we deze w2, . . . ,wn noe-men. Dan vormen de vectoren v1,w2, . . . ,wn samen een orthonormale basisvan V .
2
In bovenstaand bewijs zit een inductief proces verborgen om daadwerkelijk eenorthormale basis te construeren. Deze constructie staat bekend als het Gram-Schmidt procede.
Gegeven een basis v1,v2, . . . ,vn van een vectorruimte V met inproduct. Vormhieruit de zogenaamde Gram-matrix met als elementen de inproducten ⟨vi,vj⟩.Vul deze Gram-matrix van rechts aan met de vectoren v1, . . . ,vn. Dus,
⟨v1,v1⟩ · · · ⟨v1,vn⟩⟨v2,v1⟩ · · · ⟨v2,vn⟩
......
⟨vn,v1⟩ · · · ⟨vn,vn⟩
∣∣∣∣∣∣∣∣v1
v2...vn
.

9.2. ORTHOGONALE EN ORTHONORMALE STELSELS 149
We brengen nu door rijen te vegen de Gram-matrix in bovendriehoeksvorm. Wemogen hierbij alleen veelvouden van rijen bij andere rijen optellen of aftrekken!Verwisseling van rijen of scalaire vermenigvuldiging met een rij is absoluut ver-boden! Bij het veegproces nemen we ook de vectoren rechts van de Gram-matrixmee. Het resultaat is een nieuwe basis w1,w2, . . . ,wn van V zo dat
⟨w1,v1⟩ · · · ⟨w1,vn⟩⟨w2,v1⟩ · · · ⟨w2,vn⟩
......
⟨wn,v1⟩ · · · ⟨wn,vn⟩
∣∣∣∣∣∣∣∣w1
w2...
wn
,
en wi ∈ Span(v1, . . . ,vi) voor alle i en wi ⊥ vj voor alle i, j met j <i. In het bijzonder volgt hieruit dat wi loodrecht staat op alle vectoren inSpan(v1, . . . ,vi−1) en in het bijzonder, wi ⊥ wj voor alle j = 1, 2, . . . , i−1. Devectoren w1, . . . ,wn vormen een orthogonale basis van V en door de vectorente normaliseren krijgen we een orthonormale basis.Een bijzondere bonus van deze procedure is dat de diagonaalelementen van degereduceerde matrix precies de inproducten ⟨wi,wi⟩ zijn.Voorbeeld 9.2.4. Gevraagd een orthonormale basis van de deelruimteW ⊂ R4
opgespannen door (1, 1, 0, 1), (2, 0, 1, 1), (0, 1,−1, 0). Laten we deze vectorenaangeven met respectievelijk v1,v2 en v3. Als inproduct nemen we het stan-daard inproduct op R4. De Gram matrix wordt ⟨v1,v1⟩ ⟨v1,v2⟩ ⟨v1,v3⟩
⟨v2,v1⟩ ⟨v2,v2⟩ ⟨v2,v3⟩⟨v3,v1⟩ ⟨v3,v2⟩ ⟨v3,v3⟩
=
3 3 13 6 −11 −1 2
.
Samen met de rijvectoren v1,v2,v3 geeft dit de matrix 3 3 13 6 −11 −1 2
∣∣∣∣∣∣1 1 0 12 0 1 10 1 −1 0
.
We passen nu veegoperaties toe zodanig dat de Gram-matrix in bovendriehoeksvormkomt. In de eerste kolom vegen, 3 3 1
0 3 −20 −2 5/3
∣∣∣∣∣∣1 1 0 11 −1 1 0
−1/3 2/3 −1 −1/3
.
In de tweede kolom vegen, 3 3 10 3 −20 0 1/3
∣∣∣∣∣∣1 1 0 11 −1 1 01/3 0 −1/3 −1/3
.
De rijvectoren in het rechterdeel zijn nu orthogonaal geworden en de gevraagdeorthonormale basis wordt gegeven door
1√3(1, 1, 0, 1),
1√3(1,−1, 1, 0),
1√3(1, 0,−1,−1).
150 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
Merk op dat de diagonaalelementen 3, 3, 1/3 precies de lengten in het kwadraatvan de orthogonale basisvectoren zijn.
♢
Voorbeeld 9.2.5. Zij V = R2 met inproduct ⟨(x1, x2), (y1, y2)⟩ = 2x1y1 +x1y2 + x2y1 + 2x2y2. We starten met v1 = (1, 0),v2 = (0, 1). De bijbehorendeGram-matrix is (
2 11 2
).
Samen met v1,v2 geeft dit (2 11 2
∣∣∣∣ 1 00 1
)Vegen in eerste kolom van de Gram-matrix,(
2 10 3/2
∣∣∣∣ 1 0−1/2 1
).
De vectoren (1, 0) en (−1/2, 1) zijn orthogonaal met betrekking van ons inprod-uct. De lengtes zijn
√2 en
√3/2. De orthonormale basis wordt dus
1√2(1, 0),
1√6(−1, 2).
♢
Voorbeeld 9.2.6. Zij V = R[x] met inproduct ⟨p, q⟩ =∫ 10 p(x)q(x)dx. We
nemen v0 = 1,v1 = x,v2 = x2, . . . ,vn = xn, . . . en passen hierop het Gram-Schmidt procede toe. Laten we, om de gedachten te bepalen, beginnen met1, x, x2. De Gram-matrix wordt 1 1/2 1/3
1/2 1/3 1/41/3 1/4 1/5
.
Uitgebreid met de vectoren 1, x, x2 geeft dit 1 1/2 1/31/2 1/3 1/41/3 1/4 1/5
∣∣∣∣∣∣1xx2
.
We vinden achtereenvolgens, 1 1/2 1/30 1/12 1/120 1/12 4/45
∣∣∣∣∣∣1
x− 1/2x2 − 1/3
en 1 1/2 1/3
0 1/12 1/120 0 1/180
∣∣∣∣∣∣1
x− 1/2x2 − x+ 1/6
.

9.2. ORTHOGONALE EN ORTHONORMALE STELSELS 151
We zien dat 1, x−1/2, x2−x+1/6 een orthognaal stelsel vormen en hun lengteszijn 1, 1/
√12, 1/
√180. Het is duidelijk dat we dit proces kunnen voortzetten
met x3, x4, . . .. We vinden de polynomen
P0(x) = 1
P1(x) = x− 1
2
P2(x) = x2 − x+1
6
P3(x) = x3 − 3
2x2 +
3
5x− 1
20...
...
De polynomen die we op deze wijze krijgen zijn, op een factor na, de zogenaamdeLegendre polynomen op het interval [0, 1]. De algemene formule luidt
Pn(x) =1
2n(2n− 1) · · · (n+ 1)
(d
dx
)n
xn(x− 1)n.
Deze polynomen vormen een voorbeeld van zogenaamde orthogonale polynomenen zijn belangrijk in vele, vaak numerieke, toepassingen.Het orthogonalisatieprocede ten aanzien van ⟨p, q⟩ =
∫∞−∞ p(x)q(x)e−x2
dx levertweer een andere klasse van orthogonale polynomen op, de zogenaamde Hermitepolynomen.
♢
Hoewel we gezien hebben dat er op Rn vele inproducten mogelijk zijn, blijkthet in de praktijk wel weer mee te vallen. De volgende stelling is daar verant-woordelijk voor.Een orthonormale basis e1, . . . , en van een eindigdimensionale vectorruimte metinproduct heeft de eigenschap dat
⟨ei, ej⟩ = δij =
{1 als i = j0 als i = j
Het symbool δij staat bekend als de Kronecker delta.
Stelling 9.2.7 Zij V een eindigdimensionale vectorruimte met inproduct enzij e1, . . . , en een orthonormale basis. Van het tweetal vectoren x,y ∈ V gevenwe de coordinaten t.o.v. de geordende basis e1, . . . , en aan met x1, x2, . . . , xnrespectievelijk y1, y2, . . . , yn. Dan geldt:
⟨x,y⟩ = x1y1 + x2y2 + · · ·+ xnyn.
Bewijs: Deze stelling kunnen we afleiden door in ⟨x,y⟩ de expansies x =x1e1 + · · · + xnen en y = y1e1 + · · · + ynen in te vullen en van de lineariteits-eigenschappen van het inproduct gebruik te maken.
⟨x,y⟩ =
⟨n∑
i=1
xiei,
n∑j=1
yjej
⟩

152 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
=
n∑i=1
n∑j=1
xiyj ⟨ei, ej⟩
=n∑
i=1
n∑j=1
xiyjδij
=n∑
i=1
xiyi
= x1y1 + x2y2 + · · ·+ xnyn
2
9.3 Orthogonale projecties
Zij V een vectorruimte met inproduct en W een deelverzameling. Het orthog-onaal complement van W is de verzameling vectoren
{v ∈ V | ⟨v,w⟩ = 0 voor alle w ∈ W}.
Notatie: W⊥.Het zal duidelijk zijn dat iedere vector uit W loodrecht op alle vectoren vanW⊥ staat. Dus W ⊂ (W⊥)⊥. Verder geldt dat W ∩W⊥ = {0}. Stel namelijkx ∈ W en x ∈ W⊥. Dat betekent dat x loodrecht op zichzelf staat, m.a.w.⟨x,x⟩ = 0. Maar dit impliceert dat x = 0.
Stelling 9.3.1 Zij V een vectorruimte met inproduct en W een eindigdimen-sionale deelruimte. Dan bestaat er bij iedere v ∈ V een uniek bepaalde vectorw ∈ W zo dat v −w ∈ W⊥.
Bewijs: We zullen eerst een vector w aangeven die inderdaad de gewensteeigenschap heeft. Neem hiertoe een orthonormale basis e1, . . . , em van W . Danheeft de vector
w = ⟨e1,w⟩ e1 + ⟨e2,w⟩ e2 + · · ·+ ⟨em,w⟩ em
de eigenschap dat v −w ∈ W⊥. Om dit aan te tonen is het voldoende om telaten zien dat v −w ⊥ ei voor i = 1, 2, . . . ,m. En inderdaad,
⟨ei,v −w⟩ = ⟨ei,v⟩ −m∑j=1
⟨ej ,v⟩ ⟨ei, ej⟩
= ⟨ei,v⟩ −m∑j=1
⟨ej ,v⟩ δij
= ⟨ei,v⟩ − ⟨ei,v⟩ = 0
De existentie van een w zo dat v−w ∈ W⊥ is hiermee aangetoond. Nu moetenwe nog laten zien dat w uniek bepaald is. Stel dat we een andere vector w′

9.3. ORTHOGONALE PROJECTIES 153
hebben zo dat v −w′ ∈ W⊥. Dan geldt w −w′ = (v −w′)− (v −w) ∈ W⊥.Anderzijds geldt ook dat w−w′ ∈ W . Omdat W en W⊥ een triviale doorsnedehebben, moet gelden w −w′ = 0, en dus w = w′. Daarmee is ook de uniciteitvan w aangetoond.
2
We noemen de vector w de loodrechte of orthogonale projectie van v op W . Deafbeelding v 7→ w noemen we ook de orthogonale projectie op W en we zullendeze afbeelding aangeven met PW . Als verder e1, . . . , em een orthonormalebasis van W is, dan hebben in bovenstaand bewijs gezien dat
PW (v) = ⟨e1,v⟩ e1 + ⟨e2,v⟩ e2 + · · ·+ ⟨em,v⟩ em. (9.1)
Stelling 9.3.2 Neem notaties zoals hierboven. De afbeelding PW : V → V iseen lineaire afbeelding. Bovendien geldt dat ⟨x, PW (y)⟩ = ⟨PW (x),y⟩ voor elktweetal x,y ∈ V .
Bewijs: Dat PW lineair is volgt direct uit formule (9.1). Omdat x − PW (x)in W⊥ bevat is, geldt dat ⟨x, PW (y)⟩ = ⟨PW (x), PW (y)⟩. Dezelfde redenatiekunnen we ook voor y houden en daarmee zien we dat het laatste inproductgelijk is aan ⟨PW (x),y⟩.
2
Voorbeeld 9.3.3. Zij W een deelruimte van R4 opgespannen door w1 =(1, 1, 0, 2)t en w2 = (1,−1,−1, 1)t. Bepaal de orthogonale projectie van devector a = (1, 0, 0, 1)t op W .Allereerst bepalen we een orthonormale basis van W met het Gram-Schmidtprocede toegepast op w1,w2. Schrijf deze vectoren in rij-vorm, aangevuld metde Gram-matrix van w1,w2(∣∣∣∣ 6 2
2 41 1 0 21 −1 −1 1
).
Veeg de eerste kolom van de Gram-matrix,(∣∣∣∣ 6 20 10/3
1 1 0 22/3 −4/3 −1 1/3
).
De tweede rij vector staat nu loodrecht op de eerste. We krijgen een orthonor-male basis als we de lengtes op 1 normaliseren. Dus een orthonormale basiswordt gegeven door
f1 =1√6(1, 1, 0, 2), f2 =
1√30
(2,−4,−3, 1).
Volgens Stelling ?? wordt de projectie van a = (1, 0, 0, 1)t gegeven door
(a · f1)f1 + (a · f2)f2 =3
6(1, 1, 0, 2)t +
3
30(2,−4,−3, 1)t
=1
10(7, 1,−3, 11)t

154 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
We kunnen ook de matrix van de orthogonale projectie uitrekenen. Dit doenwe bijvoorbeeld door de projectie van de standaard basisvectoren e1, e2, e3, e4van R4 uit te rekenen.
(e1 · f1)f1 + (e1 · f2)f2 =1
10(3,−1,−2, 4)t
(e2 · f1)f1 + (e2 · f2)f2 =1
10(−1, 7, 4, 2)t
(e3 · f1)f1 + (e3 · f2)f2 =1
10(−2, 4, 3,−1)t
(e4 · f1)f1 + (e4 · f2)f2 =1
10(4, 2,−1, 7)t
De matrix van de projectie bestaat uit de beelden van e1 tot en met e4, koloms-gewijs opgeschreven,
1
10
3 −1 −2 4−1 7 4 2−2 4 3 −14 2 −1 7
Merk op dat deze matrix symmetrisch is!
♢
Tevens volgt uit bovenstaande de volgende belangrijke opmerking.
Opmerking 9.3.4 Zij V een eindigdimensionale vectorruimte met inproducten e1, e2, . . . , en een geordende orthonormale basis. Dan worden de coordinatenvan een vector x ∈ V t.o.v e1, . . . , en gegeven door ⟨e1,x⟩ , ⟨e2,x⟩ , . . . , ⟨en,x⟩.
Een tweede belangrijke opmerking betreft matrices van lineaire afbeeldingenten opzichte van orthonormale bases.
Opmerking 9.3.5 Zij V een eindigdimensionale vectorruimte met inproducten e1, e2, . . . , en een geordende orthonormale basis. Zij A : V → V een lineaireafbeelding. Zij A de matrix van A ten opzichte van de basis e1, e2, . . . , en. Zijaij het matrix element van A op plaats i, j. Dan geldt aij = ⟨ei, Aej⟩.
Bewijs: Het matrixelement aij is de i-de coordinaat van Aej ten opzichte vande basis e1, . . . , en. Dus volgt uit voorgaande opmerking dat aij = ⟨ei, Avj⟩
2
Studenten die ook colleges quantummechanica volgen, komen bovenstaanderegels talloze malen tegen.
Voorbeeld 9.3.6. (optioneel) Een mooie toepassing van orthogonale projectieis die van de zogenaamde Fouriersommen. We starten met de continue functiesop het interval [−π, π], dus C([−π, π]), met inproduct ⟨f, g⟩ = 1
π
∫ ππ f(x)g(x)dx.
We projecteren deze loodrecht op de ruimte W opgespannen door
1√2, sinx, cosx, sin 2x, cos 2x, . . . , sinmx, cosmx.

9.3. ORTHOGONALE PROJECTIES 155
We zagen eerder dat deze functies een orthormaal stelsel vormen. Ter illustratiestarten we met de functie f(x) = x en projecteren deze op W . Omdat x/
√2 en
x cos kx oneven zijn voor elke k, zien we dat het inproduct van x met 1/√2 en
de functie cos kx, k ∈ Z>0 nul is. We hoeven dus alleen het inproduct van x ensin kx, k ∈ Z>0 uit te rekenen. We doen dit met partiele integratie als volgt.
⟨x, sin kx⟩ =1
π
∫ π
−πx sin kxdx
=1
π[−x(cos kx)/k]π−π +
1
πk
∫ π
−πcos kxdx
= 2 · (−1)k−1/k.
In de een na laatste regel gebruiken we dat de integraal van de symmetrischecos kx nul is. De gevraagde projectie wordt dus:
fm(x) := 2
(sinx
1− sin 2x
2+
sin 3x
3+ · · ·+ (−1)m−1 · sinmx
m
).
Hier zie je een plaatje van de grafieken van x en de projectie f10(x),
-3 -2 -1 1 2 3
-4
-2
2
4
Hier zie je een plaatje van de grafieken van x en de projectie f50(x),
-3 -2 -1 1 2 3
-4
-2
2
4
♢

156 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
Voorbeeld 9.3.7. (optioneel) Een mooie toepassing van loodrechte projec-ties is die van de zogenaamde kleinste kwadraten methode van Gauss. Dezewordt gebruikt om de optimale rechte lijn te bepalen die langs een stel meet-punten gaat bij bijvoorbeeld een fysisch experiment. In zo’n experiment doenwe metingen van een grootheid, zeg y, die met de tijd t varieert. We nemenaan dat de afhankelijkheid van y met de tijd t gegeven wordt door een lin-eaire functie y = at+ b waarvan de coefficienten a, b onbekend zijn. We willengraag de waarden van a, b uit ons experiment willen bepalen. We doen de met-ing op een aantal tijdstippen t1, t2, . . . , tn. De bijbehorende meetwaarden zijny1, y2, . . . , yn. Door allerlei meetfouten, storingen, etc zullen de punten (ti, yi)niet precies op een rechte lijn liggen. De vraag is nu om die a, b te bepalen zodat de punten (ti, yi) gezamenlijk zo dicht mogelijk bij de lijn y = at+ b komente liggen. Door overwegingen van practische aard wordt deze vraag als volgtconcreet gemaakt: Bepaal a, b zodanig dat (−y1+at1+b)2+· · ·+(−yn+atn+b)2
een minimale waarde heeft. Ervan uitgaande dat de meetfouten een statistischnormale verdeling hebben, geeft deze aanpak de meest waarschijnlijke waardenvoor a, b.We kunnen deze vraag een meetkundige interpretatie geven. Gegeven is hetpunt y = (y1, . . . , yn)
t ∈ Rn. Verder hebben we de deelruimte W opgespannendoor t = (t1, . . . , tn)
t en 1 = (1, . . . , 1)t. De som van de kwadraten is gelijk aanhet kwadraat van de afstand | − y + at + b1|. Minimalisatie van deze afstandkomt nu neer op de bepaling van de loodrechte projectie van y op W (zie opgave9.4.8). We moeten dus a, b bepalen zo dat −y+at+b1 loodrecht staat op zowelt als 1. Dit geeft ons twee lineaire vergelijkingen, te weten
0 = (−y + at+ b1) · t = −(y · t) + a(t · t) + b(1 · t)= −t1y1 − · · · − yntn + a(t21 + · · ·+ t2n) + b(t1 + · · ·+ tn)
0 = (−y + at+ b1) · 1 = −(y · 1) + a(t · 1) + b(1 · 1)= −y1 − · · · − yn + a(t1 + · · ·+ tn) + bn
Oplossing van a, b hieruit levert ons(ab
)=
1
t2 − (t)2
(ty − (y)2
(t2)(y)− (t)(ty)
)waarin we de volgende afkortingen gebruiken,
t =1
n(t1 + · · ·+ tn)
t2 =1
n(t21 + · · ·+ t2n)
y =1
n(y1 + · · ·+ yn)
ty =1
n(t1y1 + · · ·+ tnyn)
De methode werd in 1809 door C.F.Gauss gepubliceerd. Een spectaculairetoepassing was het gebruik van de methode in de herontdekking van de destijdspas gevonden planetoıde Ceres. Deze planetoıde was in 1801 door de astronoom

9.4. OPGAVEN 157
G.Piazzi ontdekt. Na 40 dagen verdween Ceres uit het zicht doordat hij achterde zon verdween. Dank zij Gauss’ berekeningen kon hij een jaar later weerworden teruggevonden.
♢
9.4 Opgaven
Opgave 9.4.1 Verifieer in de volgende onderdelen dat de opspannende vectorenvan W orthogonaal zijn en bepaal de projectie van b op W .
1. W = Span((2, 3, 1), (−1, 1,−1)) en b = (2, 1, 4).
2. W = Span((−1, 0, 1), (1, 1, 1)) en b = (1, 2, 3).
3. W = Span((1,−1,−1, 1), (1, 1, 1, 1), (−1, 0, 0, 1)) en b = (2, 1, 3, 1).
4. W = Span((1,−1, 1, 1), (−1, 1, 1, 1), (1, 1,−1, 1)) en b = (1, 4, 1, 2).
Opgave 9.4.2 Vind een orthonormale basis voor de vectoren in de deelruimtegegeven door 2x+ 3y + z = 0.
Opgave 9.4.3 Bepaal een orthonormale basis voor de deelruimte in R4 gegevendoor x1 = x2 + 2x3 en x4 = −x2 + x3.
Opgave 9.4.4 Pas het Gram-Schmidt procede toe op de vectoren (1, 0, 1), (0, 1, 2), (2, 1, 0).
Opgave 9.4.5 Pas het Gram-Schmidt procede toe op de vectoren
(1, 0, 1, 0), (1, 1, 1, 0), (1,−1, 0, 1) ∈ R4.
Opgave 9.4.6 Pas het Gram-Schmidt procede toe op de vectoren
(1,−1, 1, 0, 0), (−1, 0, 0, 0, 1), (0, 0, 1, 0, 1), (1, 0, 0, 1, 1) ∈ R5.
Opgave 9.4.7 Beschouw de lineaire deelruimte W ⊂ R4 gegeven door
x1 + x2 − 2x3 = 0, x1 − 2x2 + x4 = 0.
Hierin zijn x1, x2, x3, x4 de standaard coordinaten in R4.
1. Bepaal een orthonormale basis w1,w2 van W .
2. Bepaal de orthogonale projectie van x = (1, 1, 1, 1)t op W .

158 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
Opgave 9.4.8 Gegeven is een deelruimte W ⊂ Rn en een vector a. Geef meta′ de loodrechte projectie van a op W aan. Bewijs dat voor elke x ∈ W metx = a′ geldt |a − x| > |a − a′|. Met andere woorden, a′ is het unieke puntx ∈ W waarvan de afstand tot a minimaal is.
Opgave 9.4.9 Gegeven is een lineaire deelruimte W ⊂ Rn. Zij P : Rn → Rn
de orthogonale projectie afbeelding op W . Kies een basis a1, . . . ,ar van W . ZijA de matrix met als rijen de vectoren a1, . . . ,ar.
1. Laat zien dat de Gram-matrix van de ai gegeven wordt door het matrix-product AAt.
2. Laat zien dat de matrix van P gegeven wordt door At(AAt)−1A (hint:het beeld van een willekeurige vector in W en van een willekeurige vectorin W⊥).
3. Laat zien dat de matrix van P symmetrisch is.
Opgave 9.4.10Gegeven is de vectorruimte R[X] met inproduct ⟨f(X), g(X)⟩ =∫ 10 f(t)g(t)dt.
1. Bepaal van elk van de vectoren
p1(X) = 1 +X, p2(X) = 1 +X2, p3(X) = X +X2
de lengte. Bepaal ook van elk tweetal de hoek ertussen.
2. Vindt alle polynomen van graad ≤ 2 die loodrecht op p1(X) staan.
Opgave 9.4.11Gegeven is de vectorruimte R[X] met inproduct ⟨f(X), g(X)⟩ =∫ 10 f(t)g(t)dt.
1. Bepaal een polynoom van graad ≤ 2 dat loodrecht staat op alle vectorenXn met n ≥ 1.
2. Toon aan dat het enige polynoom in R[X] dat loodrecht staat op allevectoren Xn met n ≥ 1 het nulpolynoom is. (Hint: er is gegeven dat dedeterminant det(1/(i+ j))i,j=1,...,m = 0 is voor alle m ≥ 1).
Opgave 9.4.12 Zij V de vectorruimte R4 met daarop het standaard inproduct.ZijW ⊂ V de deelruimte opgespannen door de vectoren (1, 1, 1, 1), (5,−1, 5,−1)en (2, 1,−8, 1).
1. Bepaal met behulp van het Gram-Schmidt procede een orthonormale basisvan W .
2. Zij f1, f2, f3 een orthonormale basis vanW die je in onderdeel (a) gevondenhebt. Vul deze basis aan tot een orthonormale basis f1, f2, f3, f4 van R4.
3. De orthogonale spiegeling S : R4 → R4 ten aanzien van de deelruimte Wwordt gegeven door Sfi = fi voor i = 1, 2, 3 en Sf4 = −f4. Bepaal dematrix van S ten opzichte van de standaardbasis van R4.

9.4. OPGAVEN 159
Opgave 9.4.13 Beschouw de vectorruimte Mnn van n × n-matrices met reelecoefficienten.
1. Laat zien dat Spoor(ABt) =∑n
i,j=1AijBij waarin Aij en Bij de matrix-elementen van A resp. B zijn.
2. Bewijs nu dat ⟨A,B⟩ = Spoor(ABt) een inproduct op Mnn is.
Opgave 9.4.14 Gegeven is de vectorruimte Mnn over R bestaande uit n × n-matrices met elementen in R. Als inproduct nemen we ⟨A,B⟩ = Spoor(ABt)(zie Opgave 9.4.13). Verder zijn gegeven de deelruimtenM sym
nn van symmetrischematrices (dwz At = A) en Masym
nn van antisymmetrische matrices (dwz At =−A).
1. Stel dat A een symmetrische matrix is en B een antisymmetrische. Bewijsdat ⟨A,B⟩ = 0.
2. Bewijs dat de doorsnijding van Masymnn en M sym
nn uit de nulvector bestaat.
3. Bewijs dat iedere n×n-matrix te schrijven is als som van een symmetrischeen een antisymmetrische matrix.
4. Bewijs dat M symnn het orthogonaal complement is van Masym
nn .
Opgave 9.4.15
1. Bewijs dat de afbeelding die aan elk tweetal u = (x, y, z),u′ = (x′, y′, z′) ∈R3 het getal
⟨u′,u
⟩= (x′, y′, z′)
2 −1 0−1 2 −10 −1 2
xyz
toekent, een inwendig produkt op R3 is.
2. Bepaal een orthonormale basis van het orthogonale complement van (0, 0, 1)t
met betrekking tot het inwendig produkt uit het voorgaande onderdeel.
Opgave 9.4.16Gegeven is R4 met het standaard inprodukt en standaardcoordinatenx, y, z, u. Zij de P : R4 → R4 de lineaire afbeelding die elke x ∈ R4 afbeeldtnaar zijn loodrechte projektie op het hypervlak x+ y − z + u = 0.
1. Bepaal het beeld van (1, 2, 2, 1)t onder P .
2. Bepaal de eigenwaarden en eigenvektoren van P .
3. Laat zien dat P een symmetrische afbeelding is.
4. Bepaal de matrix van P ten opzichte van de standaardbasis van R4.

160 HOOFDSTUK 9. VECTORRUIMTEN MET INPRODUCT
Opgave 9.4.17 Gegeven is de vectorruimte R[X] met inproduct
⟨f(X), g(X)⟩ =∫ 1
−1f(t)g(t)dt.
Voer de Gram-Schmidt procedure uit op 1, X,X2.
Opgave 9.4.18 Gegeven is de vectorruimte R[X] met inproduct
⟨f(X), g(X)⟩ = 1√π
∫ ∞
−∞f(t)g(t) exp(−t2)dt.
Voer de Gram-Schmidt procedure uit op 1, X,X2. (Hint: er is gegeven dat∫∞−∞ xn exp(−x2)dx gelijk is aan 0 als n oneven en (1/2) · (3/2) · · · (k− 1/2)
√π
als n = 2k even.)
Opgave 9.4.19] Gegeven is de vectorruimte R[X] met inproduct
⟨f(X), g(X)⟩ =∫ 1
−1f(t)g(t)dt.
Verder zijn gegeven de deelruimten R[X]sym bestaande uit de polynomen f(X)met f(−X) = f(X) (symmetrische polynomen) en de deelruimte R[X]asymgegeven door de polynomen f(X) met f(−X) = −f(X) (antisymmetrischepolynomen).
1. Stel f ∈ R[X]sym, g ∈ R[X]asym. Bewijs dat ⟨f(X), g(X)⟩ = 0.
2. Geef een basis van R[X]sym en van R[X]asym.
3. Bewijs dat elk element uit R[X] te schrijven is als som van een sym-metrisch en een antisymmetrisch polynoom.
4. Bewijs dat R[X]sym het orthogonaal complement van R[X]asym is.
Opgave 9.4.20 Zij V een vectorruimte over R met inproduct ⟨., .⟩. Zij W eendeelruimte van V en W⊥ het orthogonaal complement van W in V .
1. Bewijs dat als dim(W ) < ∞ dan V = W ⊕W⊥.
2. Kun je een voorbeeld vinden waarbij V niet gelijk is met W⊕W⊥? (Hint:zie Opgave 9.4.11).

Hoofdstuk 10
Symmetrische en orthogonaleafbeeldingen
10.1 Symmetrische afbeeldingen
Zij V een vectorruimte met inproduct. Een lineaire afbeelding A : V → V heetsymmetrisch als
⟨x, A(y)⟩ = ⟨A(x),y⟩
voor alle x,y ∈ V . Uit Stelling 9.3.2 zien we bijvoorbeeld dat loodrechteprojectie een symmetrische afbeelding is.
Stelling 10.1.1 Zij V een vectorruimte met inproduct en A : V → V eensymmetrische afbeelding. Dan gelden de volgende eigenschappen:
1. Eigenvectoren met verschillende eigenwaarden zijn orthogonaal.
2. Zij v een eigenvector en v⊥ het orthogonaal complement van v. Dan geldtdat A(v⊥) ⊂ v⊥.
3. Zij W een deelruimte van V zo dat A(W ) ⊂ W . Dan geldt voor hetorthogonaal complement W⊥ dat A(W⊥) ⊂ W⊥.
Bewijs: (i) Stel v1,v2 een tweetal eigenvectoren met verschillende eigenwaar-den λ1, λ2. Dan volgt uit ⟨v1, A(v2)⟩ = ⟨A(v1),v2⟩ dat λ1 ⟨v1,v2⟩ = λ2 ⟨v1,v2⟩.Omdat λ1 = λ2 volgt hieruit dat ⟨v1,v2⟩ = 0.(ii) Zij u een vector loodrecht op v. Zij λ de eigenwaarde van v. Dan volgt uit⟨v, A(u)⟩ = ⟨A(v),u⟩ dat ⟨v, A(u)⟩ = λ ⟨v,u⟩ = 0. Dus Au staat ook loodrechtop v.(iii) Zij u ∈ W⊥. We moeten laten zien dat Au loodrecht staat op iederew ∈ W . Dit volgt uit ⟨w, A(u)⟩ = ⟨A(w),u⟩, het feit dat A(w) ∈ W enu ∈ W⊥.
2
Het verband tussen symmetrische matrices en afbeeldingen wordt door de vol-gende stelling gegeven.
161
162HOOFDSTUK 10. SYMMETRISCHE ENORTHOGONALE AFBEELDINGEN
Stelling 10.1.2 Zij V een eindigdimensionale basis met inproduct en e1, . . . , eneen geordende basis. Zij A : V → V een lineaire afbeelding. De matrix van At.o.v. e1, . . . , en geven we aan met A. Dan is A een symmetrische afbeeldingprecies dan als A een symmetrische matrix is.
Bewijs: Stel dat A symmetrisch is. Geef de matrixelementen van A aan metaij . Dan geldt aij = ⟨ei, Aej⟩. Omdat ⟨ei, Aej⟩ = ⟨Aei, ej⟩ = ⟨ej , Aei⟩ = ajivolgt hieruit dat aij = aji voor alle i, j. Dus A is een symmetrische matrix.Stel nu dat A een symmetrische matrix is. Zij x en y een willekeurig tweetalvectoren. Geef de coordinaten van x en y t.o.v. e1, . . . , en aan met x1
...xn
y1...yn
.
Dan geldt
⟨x, Ay⟩ = (x1, . . . , xn)A
y1...yn
.
Omdat A symmetrisch is, is dit precies gelijk aan
(y1, . . . , yn)A
x1...xn
en dit is weer precies gelijk aan ⟨y, Ax⟩ = ⟨Ax,y⟩. Dus is A een symmetrischeafbeelding.
2
De volgende stelling heeft een enorm aantal toepassingen zowel binnen als buitende wiskunde.
Stelling 10.1.3 (Hoofdstelling van de symmetrische afbeeldingen) ZijV een eindigdimensionale vectorruimte met inproduct en A : V → V een sym-metrische afbeelding. Dan is er een orthonormale basis van eigenvectoren vanA met reele eigenwaarden.
Bewijs: Stel n = dim(V ). We zullen een bewijs geven met volledige in-ductie naar n. Voor het geval n = 1 zijn we klaar omdat elke vector in eeneendimensionale V eigenvector is.Stel nu n > 1 is en dat de Stelling waar is voor ruimten van dimensie n − 1.In het Lemma dat hierna komt zien we dat A een reele eigenwaarde λ heeft endus ook een bijbehorende eigenvector v, waarvan we aannemen dat de lengte1 is. Zij nu v⊥ het orthogonaal complement van v. Volgens Stelling 10.1.1(ii)geldt A : v⊥ → v⊥. Omdat de dimensie van v⊥ gelijk is aan n − 1 volgtuit onze inductiehypothese dat v⊥ een orthonormale basis heeft bestaande uiteigenvectoren van A. Samen met v vormt dit een orthormale eigenvectorbasisvan de ruimte V .
2

10.2. ORTHOGONALE MATRICES 163
Lemma 10.1.4 Zij V een eindigdimensionale vectorruimte met inproduct enA : V → V een symmetrische afbeelding. Dan heeft A minstens een reeleeigenwaarde.
Bewijs: We bewijzen dit Lemma door naar symmetrische matrices te kijken.Wegens Stelling 10.1.2 is het voldoende om aan te tonen dat een symmetrischematrix een reele eigenwaarde heeft. Zij A een symmetrisch n× n-matrix. Zij λeen (complex) nulpunt van de eigenwaardenvergelijking. Dan zijn er complexegetallen z1, z2, . . . , zn, niet allen nul, zo dat
A
z1...zn
= λ
z1...zn
.
Vermenigvuldig dit van links met de rijvector (z1, . . . , zn). We vinden,
(z1, . . . , zn)A
z1...zn
= λ(|z1|2 + · · ·+ |zn|2).
Neem aan beide zijden de getransponeerde en de complex geconjugeerde. Do-ordat A een symmetrische matrix is met reele coefficienten, blijft de linkerzijdehetzelfde. De rechterzijde gaat over in λ(|z1|2 + · · ·+ |zn|2). Gevolg,
λ(|z1|2 + · · ·+ |zn|2) = λ(|z1|2 + · · ·+ |zn|2).
Omdat de zi niet allen zijn, geldt |z1|2+ · · ·+ |zn|2 > 0 en dus λ = λ. Conclusie:λ ∈ R.
2
10.2 Orthogonale matrices
Een n×n-matrix U met reele coefficienten heet orthogonale matrix als de kolom-men van U een orthonormaal stelsel vormen ten aanzien van het dotproduct.Geef de matrixelementen van U aan met uij . Orthogonaliteit van U is equiva-lent met
n∑k=1
ukiukj = δij
voor alle i, j. Geven we de matrixelementen van de getransponeerde U t aanmet (ut)ij dan gaat de orthogonaliteitsrelatie over in
n∑k=1
(ut)ikukj = δij .
Links herkennen we de matrixvermenigvuldiging U tU en we kunnen de orthog-onaliteitsrelaties dus ook samenvatten door
U tU = In.

164HOOFDSTUK 10. SYMMETRISCHE ENORTHOGONALE AFBEELDINGEN
Een matrix is dus orthogonaal precies dan als U tU = In. Anders gezegd,U t = U−1.
Uit U tU = In volgt tevens UU t = In. Met andere woorden, U t is ook orthogo-naal en de rijen van U vormen dus een orthonormaal stelsel. Samenvattend:
Stelling 10.2.1 Zij U een n × n-matrix met reele coefficienten. Dan zijn devolgende beweringen equivalent,
1. U is ortogonaal.
2. U tU = In.
3. De rijen van U vormen een orthonormaal stelsel.
Verder hebben orthogonale matrices de volgende eigenschappen:
Stelling 10.2.2 Zij U,U ′ een tweetal orthogonale n× n-matrices. Dan geldt:
1. det(U) = ±1.
2. U−1 is orthogonaal.
3. UU ′ is orthogonaal.
Bewijs: Merk allereerst op dat U tU = In impliceert det(U t)det(U) = 1.Omdat det(U t) = det(U) volgt hieruit dat (det(U))2 = 1 en dus det(U) = ±1.
Als U orthogonaal is, dan is U t ook orthogonaal en dus ook U−1 = U t.
Merk op dat (UU ′)tUU ′ = (U ′)tU tUU ′ = (U ′)tU ′ = In. Dus UU ′ is orthogo-naal.
2
Tenslotte volgt hier nog een uitspraak over de complexe nulpunten van de eigen-waardevergelijking van een orthogonale matrix.
Stelling 10.2.3 Zij U een orthogonale matrix en λ ∈ C een nulpunt van deeigenwaardevergelijking det(U − λIn) = 0. Dan geldt |λ| = 1. In het bijzonderzijn de reele eigenwaarden van een orthogonale matrix ±1.
We kunnen met de gevonden λ ∈ C de bijbehorende complexe eigenvectorbepalen, zeg (z1, z2, . . . , zn)
t met zi ∈ C. Met andere woorden,
U
z1...zn
= λ
z1...zn
.
Neem hiervan de complex geconjugeerde en de getransponeerde,
(z1, . . . , zn)Ut = λ(z1, . . . , zn)

10.3. ORTHOGONALE AFBEELDINGEN 165
Voer hiermee een matrixvermenigvuldiging van links uit op de eerste relatie:
(z1, . . . , zn)UtU
z1...zn
= λλ(z1, . . . , zn)
z1...zn
.
Gebruik nu dat U tU = In en we vinden:
|z1|2 + · · ·+ |zn|2 = |λ|2(|z1|2 + · · ·+ |zn|2).
Omdat niet alle zi nul zijn geldt dat |z1|2 + · · · + |zn|2 > 0 en we concluderenna wegdeling van deze som dat |λ| = 1. 2
10.3 Orthogonale afbeeldingen
Zij V een vectorruimte met inproduct. Een lineaire afbeelding U : V → V heetorthogonale afbeelding als
||Ux|| = ||x||
voor elke x ∈ V . Met andere woorden, een orthogonale afbeelding is een lengte-behoudende lineaire afbeelding.
Stelling 10.3.1 Zij V een vectorruimte met inproduct en U : V → V eenorthogonale afbeelding. Dan geldt:
1. ⟨Ux, Uy⟩ = ⟨x,y⟩ voor alle x,y ∈ V .
2. Als dim(V ) eindig is, dan is U bijectief.
3. De (reele) eigenwaarden van U zijn ±1.
4. Zij v1 en v2 een tweetal eigenvectoren van U met eigenwaarden respec-tievelijk 1 en −1. Dan zijn v1 en v2 orthogonaal.
5. Zij v een eigenvector van U en v⊥ het orthogonaal complement van v.Dan geldt U : v⊥ → v⊥.
6. Zij W ⊂ V een eindig-dimensionale deelruimte zo dat U(W ) ⊂ W . ZijW⊥ het orthogonaal complement van W . Dan geldt U(W⊥) ⊂ W⊥.
Bewijs: (1) Merk op dat ||U(x + y)|| = ||x + y||. Neem het kwadraat aanbeide zijden en werk uit. We vinden:
⟨Ux, Ux⟩+ 2 ⟨Ux, Uy⟩+ ⟨Uy, Uy⟩ = ⟨x,x⟩+ 2 ⟨x,y⟩+ ⟨y,y⟩ .
Omdat ⟨Ux, Ux⟩ = ⟨x,x⟩ en ⟨Uy, Uy⟩ = ⟨y,y⟩ houden we over dat ⟨Ux, Uy⟩ =⟨x,y⟩.(2) Stel dim(V ) eindig. Een lineaire afbeelding A : V → V is in dat gevalbijectief precies dan als de kern triviaal is. Stel Ux = 0. Dan volgt uit ||Ux|| =||x|| dat ||x|| = 0. De kern van U is dus triviaal en U bijectief.
166HOOFDSTUK 10. SYMMETRISCHE ENORTHOGONALE AFBEELDINGEN
(3) Neem een eigenvector v met eigenwaarde λ. Dan geldt ||Uv|| = ||v||. Delinkerzijde is gelijk aan ||λv|| = |λ| · ||v||. Aangezien de rechterzijde gelijk isaan ||v|| > 0 volgt dat |λ| = 1 en dus λ = ±1.
(4) Merk op dat ⟨Uv1, Uv2⟩ = ⟨v1,v2⟩. Gebruik makend van Uv1 = v1 enUv2 = −v2 volgt hieruit dat −⟨v1,v2⟩ = ⟨v1,v2⟩. Conclusie: ⟨v1,v2⟩ = 0
(5) Stel dat w ⊥ v. We moeten laten zien dat Uw ⊥ v. Dit volgt uit⟨Uw, Uv⟩ = ⟨w,v⟩ = 0 en het feit dat ⟨Uw, Uv⟩ gelijk is aan λ ⟨Uw,v⟩.(6) Stel u ∈ W⊥. We moeten laten zien dat Uu ∈ W⊥. Merk op dat voor elkew ∈ W geldt: ⟨Uu, Uw⟩ = ⟨u,w⟩ = 0. De vector Uu staat dus loodrecht opalle vectoren in U(W ). Omdat U beperkt tot W bijectief is (eigenschap (ii)),geldt U(W ) = W en dus staat Uu loodrecht op alle vectoren uit W .
2
Bij eigenschap (2) kunnen we opmerken dat de eis dim(V ) < ∞ essentieel is.Neem bijvoorbeeld de oneindig dimensionale vectorruimte R∞
0 met standaardinproduct. Het is makkelijk te controleren dat de afbeelding
(x1, x2, x3, . . .) 7→ (0, x1, x2, x3, . . .)
orthogonaal is. Maar hij is niet surjectief, en dus ook niet bijectief. Wel volgtuit het bewijs van (2) dat elke orthogonale U : V → V injectief is.
Laten we ons nu beperken tot orthogonale U : V → V met dim(V ) eindig.Het blijkt dat de theorie van orthogonale afbeeldingen gewoon neerkomt op detheorie van orthogonale matrices.
Stelling 10.3.2 Zij V een eindigdimensionale vectorruimte met inproduct ene1, . . . , en een geordende orthonormale basis. Zij U : V → V een lineaireafbeelding. De matrix van U t.o.v. e1, . . . , en geven we aan met U . Dan is Ueen orthogonale afbeelding precies dan als U een orthogonale matrix is.
Bewijs: Neem eerst aan dat U orthogonaal is. Geef de matrixelementen vanU aan met uij . Dan geldt voor elke i dat Uei =
∑nk=1 ukiek. We passen dit
toe op de gelijkheid ⟨Uei, Uej⟩ = ⟨ei, ej⟩ = δij . Uitwerking van de linkerzijdegeeft:
⟨Uei, Uej⟩ =
⟨n∑
k=1
ukiek,
n∑l=1
uljel
⟩
=n∑
k=1
n∑l=1
ukiulj ⟨ek, el⟩
=n∑
k=1
ukiukj
We zien dat orthogonaliteit van U impliceert dat∑n
k=1 ukiukj = δij voor allei, j. Met andere woorden, U is orthogonaal.
Stel omgekeerd dat U orthogonaal is. Stel y = Ux met x ∈ V willekeurig. Wemoeten laten zien dat ||y|| = ||x||. Geef de coordinaten van x t.o.v. e1, . . . , en

10.4. STANDAARDVORM ORTHOGONALE AFBEELDINGEN 167
aan met de coordinaten kolom (x1, . . . , xn)t. Dan worden de coordinaten van y
gegeven door y1...yn
= U
x1...xn
Dus
||y||2 = (y1, . . . , yn)
y1...yn
= (x1, . . . , xn)U tU
x1...xn
en omdat U tU = In volgt hieruit dat
||y||2 = (x1, . . . , xn)
x1...xn
= ||x||2.
2
10.4 Standaardvorm orthogonale afbeeldingen
We bepalen hoe orthogonale afbeeldingen U : V → V er uit zien als dim(V ) =2. Daartoe bepalen we de orthogonale 2 × 2-matrices. Dat wil zeggen, reele
matrices
(a cb d
)met de condities
1. a2 + c2 = 1
2. b2 + d2 = 1
3. ab+ cd = 0
Uit de eerste vergelijking volgt het bestaan van een hoek ϕ zo dat a = cosϕ enc = sinϕ. Uit de derde vergelijking volgt dan b cosϕ + d sinϕ = 0. Oplossinghiervan geeft dat b = −r sinϕ, d = r cosϕ voor zekere r ∈ R. Dit invullenin de tweede vergelijking geeft r2 = 1 en dus r = ±1. We concluderen datorthogonale 2× 2-matrices een van de volgende vormen aanneemt,(
cosϕ − sinϕsinϕ cosϕ
) (cosϕ sinϕsinϕ − cosϕ
)In het eerste type matrix herkennen we de rotatie in het platte vlak om de hoekϕ. In het tweede voorbeeld zien we dat de eigenwaardevergelijking luidt λ2−1 =0. Er zijn dus twee reele eigenwaarden ±1. De bijbehorende eigenvectorenstaan loodrecht op elkaar (Stelling 10.3.1(iv). We hebben dus te maken meteen orthogonale spiegeling.
Merk ook op dat de determinant van de matrix gelijk is aan 1 in het eerstegeval en −1 in het tweede geval. We concluderen:
168HOOFDSTUK 10. SYMMETRISCHE ENORTHOGONALE AFBEELDINGEN
Stelling 10.4.1 Een orthogonale afbeelding U : V → V met dim(V ) = 2 isofwel een draaiing, ofwel een spiegeling. In het eerste geval geldt det(U) = 1,in het tweede geval det(U) = −1.
We onderzoeken nu orthogonale afbeeldingen U : V → V met dim(V ) = 3.De eigenwaardevergelijking heeft graad 3. Er is dus altijd een reele oplossingλ en deze moet dus ±1 zijn. Geef een bijbehorende eigenvector aan met v.Zij W het orthogonaal complement van v. Volgens Stelling 10.3.1 (v) geldtdat U : W → W . Omdat dim(W ) = 2, is U beperkt tot W een draaiing ofspiegeling. We hebben nu vier mogelijkheden:
1. λ = 1 en U : W → W is een draaiing. In dit geval kunnen we U zien alseen draaiing met v als draaiingsas. Merk op dat det(U) = 1.
2. λ = 1 en U : W → W is een spiegeling. In W zijn er eigenvectoren v′
en v′′ met eigenwaarde 1 respectievelijk −1. In dit geval hebben we temaken met een spiegeling. Merk op dat det(U) = −1.
3. λ = −1 en U : W → W is een draaiing. Ditmaal hebben we te makenmet een draaiing in het vlak W rond de as v, gevolgd door een loodrechtespiegeling in het vlak W waarbij v in −v overgaat. We noemen dit eendraaispiegeling. We hebben nu det(U) = −1.
4. λ = −1 en U : W → W is een spiegeling. In het vlak W zijn er tweeonderling loodrechte vectoren v′ en v′′ met eigenwaarden 1 respectievelijk−1. Merk nu op dat we een draaiing om de hoek π in het vlak opgespannendoor v en v′′ hebben. Merk op dat det(U) = 1.
Samenvattend, een orthogonale afbeelding van een driedimensionale ruimte naarzichzelf kan een draaiing of een draaispiegeling zijn. In het eerste geval is dedeterminant 1, in het tweede −1.
Voor eindigdimensionale vectorruimten in het algemeen hebben we de volgendestelling, die we hier niet zullen bewijzen.
Stelling 10.4.2 (Hoofdstelling orthogonale afbeeldingen) . Zij U : V →V een orthogonale afbeelding en dim(V ) = n < ∞. Zij E1 de eigenruimtevan U bij de eigenwaarde 1 en E−1 de eigenruimte bij −1. Dan zijn er eeneindig aantal (mogelijk nul) onderling loodrechte, tweedimensionale deelruimtenW1,W2, . . . ,Ws ⊂ V zo dat
1. Elke Wi staat loodrecht op zowel E1 als E−1.
2. U : Wi → Wi en U beperkt tot Wi is een draaiing.
3. dim(E1) + dim(E−1) + 2s = n.

10.5. OPGAVEN 169
10.5 Opgaven
Opgave 10.5.1 Verifieer dat de onderstaande matrices orthogonaal zijn enbepaal hun inverse,
1√2
(1 1−1 1
),
3/5 0 4/5−4/5 0 3/50 1 0
1
7
2 −3 63 6 2−6 2 3
,1
2
1 −1 1 1−1 1 1 11 1 −1 11 1 1 −1
Opgave 10.5.2 Geef een derde kolom voor de matrix zo dat de matrix orthog-onaal wordt 1/
√3 1/
√2
1/√3 0
1/√3 −1/
√2
,
2/7 3/√13
3/7 −2/√13
6/7 0
Opgave 10.5.3 Zij v ∈ Rn een niet-triviale vector. Bewijs dat In− 2
|v|2vvt een
orthogonale matrix is.
Opgave 10.5.4 Zij Q1 een m× n-matrix waarvan de kolommen een orthonor-maal stelsel vormen en Q2 een n×t-matrix waarvan de kolommen ook orthonor-maal zijn. Bewijs dat de kolommen van Q1Q2 een orthormaal stelsel vormen.
Opgave 10.5.5 Zij U : Rn → Rn een lineaire afbeelding met de eigenschapdat x · y = 0 ⇒ U(x) · U(y) = 0. Met andere woorden de beelden van elktweetal orthogonale vectoren vormen weer een orthogonaal tweetal. Bewijsdat U een scalair veelvoud van een orthogonale afbeelding is (hint: bewijs dat|x|2 = |y|2 ⇒ |U(x)|2 = |U(y)|2).
Opgave 10.5.6 Beschouw R3 met standaard inprodukt en de lineaire afbeeldingA : R3 → R3 met als matrix t.o.v. de standaardbasis,
A =1
7
2 3 63 −6 26 2 −3
1. Toon aan dat A zowel een orthogonale als een symmetrische afbeelding
is.
2. Bewijs, zonder berekening van de eigenwaardevergelijking, dat de eigen-waarden 1,−1,−1 zijn.
3. Bepaal een 3 × 3-matrix Q en een 3 × 3 diagonale matrix D zo datQAQ−1 = D.

170HOOFDSTUK 10. SYMMETRISCHE ENORTHOGONALE AFBEELDINGEN
Opgave 10.5.7 Zij V een reele vectorruimte van dimensie k met inproduct⟨., .⟩. Stel dat a1,a2, . . . ,ak een basis van V is. Zij tenslotte A : V → V delineaire afbeelding gegeven door
A : x 7→ ⟨a1,x⟩a1 + ⟨a2,x⟩a2 + · · ·+ ⟨ak,x⟩ak
a) Bewijs dat A een symmetrische afbeelding is (d.w.z. ⟨Ax,y⟩ = ⟨x, Ay⟩voor alle x,y ∈ V )
b) Bewijs dat ⟨Ax,x⟩ > 0 voor alle x ∈ V met x = 0. Laat vervolgens ziendat λ > 0 voor elke eigenwaarde λ van A.
Stel nu dat A tevens een orthogonale afbeelding is.
c) Laat met behulp van voorgaand onderdeel zien dat alle eigenwaarden vanA gelijk aan 1 zijn.
d) Leidt uit voorgaand onderdeel af dat A de identieke afbeelding is, d.w.z.Ax = x voor alle x ∈ V .
Opgave 10.5.8 Zij M2 de vectorruimte van 2×2-matrices met reele elementenen gebruikelijke optelling en scalaire vermenigvuldiging.Beschouw de funktiedie aan ieder tweetal X,Y ∈ M2 het getal ⟨X,Y ⟩ = Spoor(XY t) toekent.In de volgende onderdelen mag je gebruiken dat Spoor(AB) = Spoor(BA) enSpoor(A) = Spoor(At).
a) Bewijs dat ⟨X,Y ⟩ een inwendig produkt op M2 is.
Zij C een gegeven symmetrische 2× 2-matrix.
b) Bewijs dat de lineaire afbeelding T : M2 → M2 gegeven door T (X) =CX−XC symmetrisch is. (Symmetrisch wil zeggen: ⟨T (X), Y ⟩ = ⟨X,T (Y )⟩voor alle X,Y ∈ M2).
c) Stel dat λ, µ de eigenwaarden van C zijn. Bewijs dat T deeigenwaarden 0, 0, λ− µ, µ− λ heeft.
Opgave 10.5.9 Gegeven is de vectorruimte V over R van alle functies f :[0, 1] → R met de eigenschap dat alle afgeleiden van f bestaan en nul zijn in0, 1. Neem als inproduct ⟨f, g⟩ =
∫ 10 f(t)g(t)dt. Definieer de lineaire afbeelding
A : V → V gegeven door A : f(x) 7→ f ′(x).
1. Bewijs dat ⟨f,A(g)⟩ = ⟨A(f), g⟩ voor alle f, g ∈ V (hint: gebruik partieleintegratie).
2. Bewijs dat A2 : V → V een symmetrische afbeelding is.
3. Bepaal de eigenvectoren van A2.

10.5. OPGAVEN 171
Opgave 10.5.10 Gegeven is de vectorruimte R[X] met inproduct
⟨f(X), g(X)⟩ = 1√π
∫ ∞
−∞f(t)g(t) exp(−t2)dt.
Definieer de lineaire afbeelding A : R[X] → R[X] door A : p(X) 7→ p′(X) −Xp(X). Definieer de lineaire afbeelding B : R[X] → R[X] door B : p(X) 7→Xp(X).
1. Bewijs dat A(p(X)) = exp(X2/2) ddX
(p(X) exp(−X2/2)
).
2. Laat zien dat ⟨p(X), A(q(X))⟩ = −⟨A(p(X), q(X)⟩ voor elk tweetal p, q ∈R[X] (hint: gebruik partiele integratie).
3. Bewijs dat A2 een symmetrische afbeelding is.
4. Laat zien dat A2 geen eigenvectoren heeft.
5. Bewijs dat B een symmetrische afbeelding is.
6. Bepaal de eigenvectoren van A2 −B2 van graad ≤ 2.
Hoofdstuk 11
Antwoorden
In dit hoofdstuk staan antwoorden en ook uitwerkingen van geselecteerde op-gaven. Ze zijn grotendeels het werk van Tom Bannink, studentassistent die hierveel tijd en energie in heeft gestoken. Hulde daarvoor. Omdat de antwoordennog niet dubbel zijn gecontroleerd, is in dit eerste jaar gebruik ervan voor eigenrisico. Mocht je onjuistheden constateren, geef deze dan meteen aan de docentdoor!
11.1 Hoofdstuk 1
1.5.3 (3) 13p+ 2
3q,23p+ 1
3q.
1.5.4 1. (0, 1, 2)t
2. geen
3. (7,−2, 5)t
1.5.5 (1) collineair, (2) niet, (3) niet
1.5.6 (1) (20/13, 51/13, 37/13)t, (2) (7/3,−1/3,−2/3)t.
1.5.9 (a+ b+ c+ d)/4.
1.5.13 (2,−1, 0)t
1.5.14 geen, l is evenwijdig aan V .
1.5.15 A = (−2,−5,−1)t, B = (4,−2, 3)t.
1.5.17 richting van l: (3, 2, 1)t of scalair veelvoud daarvan.
1.5.18 1. richting van l: (2, 1, 1)t of scalair veelvoud daarvan.
2. x1 + x2 − 3x3 = 0.
1.5.19 α = 4. Als β = 0 dan ligt l in het vlak V .
1.5.20 (2) S = (1, 5,−2)t, (3) −2x + 7y + 10z = 13, (4) Gevraagde lijn heeftrichting (1,−2, 2)t of scalair veelvoud daarvan. Hij verbindt de punten(−1, 1,−2) op l en (4,−1, 4)t op m.
172
11.2. HOOFDSTUK ?? 173
1.5.22 (2) S = (1, 1, 1)t, vlak V gegeven door −2x − 3y + z = −4. (3) de lijn lgaat door S en heeft als richtingvector (0, 1,−1)t.
1.5.23 De lijn l gaat door P en heeft richtingsvector (1, 3,−4)
11.2 Hoofdstuk 2
2.7.1 π/3 radiaal
2.7.2 (1) arccos(10/21), (2) arccos(1/(2√15)), (3) arccos(11/(3
√15)).
2.7.3 1. 2x1 + 4x2 − x3 = 9
2. 3x1 + 5x3 = 26
3. 3x1 − x2 + x3 = 5
2.7.4 (1) π/4, (2) vergelijking: 2x− y + 2z = 4.
2.7.5 π/3.
2.7.6 Afstand O tot V : 9/7, afstand P tot V : 1.
2.7.9 3.
2.7.10 5x1 + x2 + 2x3 = 6 en x1 − 5x2 = 6
2.7.11 7
2.7.12 3x1 − 3x2 + 4x3 = −14
2.7.13 (1, 0, 0)t + λ(1,−1, 0)t en (−1, 0,−2)t + λ(1, 1, 0)t (let op, steunvectorenzijn niet uniek bepaald)
2.7.15 (5, 2,−3)t = (−2/5, 2,−6/5)t + (27/5, 0,−9/5)t
2.7.16 a = (6, 0, 3)t, b = (−2,−4, 0)t, c = (2,−1,−4)t
2.7.18 (2) 2x1 + 2x2 − x3 = −1 (4) 4x1 + 3x3 = 0 en 2x1 − x2 + 2x3 = −3.
11.3 Hoofdstuk 3
3.8.3 k = 9.
3.8.5 1. x1 = −13/14, x2 = 1/2, x3 = −2/7
2. x1 = 0, x2 = 0, x3 = 0
3. x1 = 19t, x2 = −7t, x3 = 8t, t ∈ R4. x1 = t, x2 = t, x3 = t, t ∈ R5. geen oplossing
6. x1 = −t, x2 = −2t, x3 = t, x4 = 0, t ∈ R7. x1 = 6, x2 = −2, x3 = 3
174 HOOFDSTUK 11. ANTWOORDEN
8. x1 = −t + 2s, x2 = s, x3 = −2t, x4 = t, x5 = 0, s, t ∈ R (let op,parametervoorstellingen van oplossingsverzamelingen zijn niet uniek,het is dus mogelijk dat je oplossing een andere gedaante heeft). Invectorvorm,
x1x2x3x4x5
= s
21000
+ t
−10−210
9. geen oplossing.
3.8.6 (p1 ⋆0 p2
),
(p1 ⋆0 0
),
(0 p10 0
),
(0 00 0
)3.8.8 1. oplossing als 2b1 − 2b2 + b3 = 0
2. oplossing als b2 = 2b1 en b3 = −6b1
3. oplossing als b2 = −2b1
4. oplossing als b1 = b4/2 en b2 = −b3 + b4/2 (let op, het kan dat jecorrecte antwoord in een andere vorm staat)
3.8.9 a = −2, 0, 1
3.8.10 a = −5, 2
3.8.19 Oplossing in vectorvormx1x2x3x4
=
3/511/500
+ s
1750
+ t
−3−105
, s, t ∈ R
(niet uniek)
3.8.20 x1 = x2 = x3 = 0
3.8.21 Oplossing in vectorvormx1x2x3
=
−1/51/50
+ t
235
, t ∈ R
3.8.22 Oplossing in vectorvormx1x2x3x4x5
= s
−221400
+ t
18−3040
, t ∈ R
(niet uniek)
11.4. HOOFDSTUK ?? 175
3.8.23 geen oplossing
3.8.24 geen oplossing
3.8.25 Oplossing in vectorvormx1x2x3
=
−420
+ t
−211
, t ∈ R
3.8.26 α = 17 en oplossingx1x2x3
=
−3−40
+ t
121
, t ∈ R
3.8.27 α = 4, 8, 12. Oplossingen:
α = 4 : (x1, x2, x3, x4) = t(1, 1, 0, 0)t + s(0, 0, 1, 1)t, s, t ∈ Rα = 8 : (x1, x2, x3, x4) = t(−1, 1,−1, 1)t, t ∈ R
α = 12 : (x1, x2, x3, x4) = t(1,−1,−1, 1)t t ∈ R
3.8.28
geen,
(−9/2 7/24 −3
),
1
13
(1 35 2
)3.8.29
geen,
−7 5 33 −2 −23 −2 −1
,
−36 −24 13−19 −13 73 2 −1
3.8.30
1/2 0 0 0 00 −1/3 0 0 00 0 1/5 0 00 0 0 −1/11 00 0 0 0 1/3
,
0 0 0 0 −1/90 0 0 1 00 0 1/3 0 00 −1/4 0 0 01/7 0 0 0 0
11.4 Hoofdstuk 4
4.5.1 (a) Rangen zijn 2,4,3.
4.5.2 Rangen zijn 2 en 4.
4.5.3 Rang is 3 als a = 0, 1 of 3 en de rang is 4 als a = 0, 1, 3.
4.5.15 Er geldt U + V = R3. Basis van U : eerste 2 kolommen van A, basis vanV : laatste 2 kolommen van A, basis van U ∩ V : (−3, 4, 0)t.

176 HOOFDSTUK 11. ANTWOORDEN
4.5.16 Er geldt U + V = R4. Basis van U : eerste 3 kolommen van A, basis vanV : laatste 3 kolommen van A, basis van U ∩V : (1, 0, 1, 0)t, (0, 1, 0, 0)t (letop: bases zijn niet uniek vastgelegd).
4.5.17 Er geldt rang(U + V ) = 3, basis: kolom 1,2 en 4 van A. Basis van U :eerste 2 kolommen van A, basis van V : kolom 4 van A, basis van U ∩ V :(3,−4, 0)t.
11.5 Hoofdstuk 5
5.5.1 Oppervlakte is 5.
5.5.5 Volume van het vierhoek is 16 maal de determinant van de drie vectoren
die het blok opspannen. Het volume is 16 · 14 = 21
3
5.5.8
∣∣∣∣−1 35 1
∣∣∣∣ = −16,
∣∣∣∣−1 00 8
∣∣∣∣ = −8,
∣∣∣∣ 3 4−1 2
∣∣∣∣ = 10
5.5.10 Schrijf beide kanten uit
5.5.11 1) volgt uit de definitie ∆(a, b, c) = (a× b) · c dus vul in c = a× b.
2) volgt door de definitie van beide kanten uit te schrijven
5.5.14 Merk op dat als a = b de drie punten altijd op n lijn liggen, en in datgeval geldt inderdaad a × b + b × c + c × a = 0. We nemen nu aandat a = b. Schrijf b = a + b′ (dus b′ = 0) en c = a + c′ dan krijgen wea×b+b×c+c×a = b′×c′ door de regels van het uitproduct te gebruiken.Er geldt b′ × c′ = 0 dan en slechts dan als b′ en c′ veelvouden van elkaarzijn, dus c′ = λb′ (hier gebruiken we b′ = 0). We zien dat er dan geldtc = a+ λ(b− a) dus c ligt op de lijn door a en b.
11.6 Hoofdstuk 6
6.8.1
∣∣∣∣∣∣2 −3 21 4 00 1 −5
∣∣∣∣∣∣ = −53 en
∣∣∣∣∣∣0 1 24 0 33 2 1
∣∣∣∣∣∣ = 21
6.8.2
∣∣∣∣∣∣∣∣−1 1 2 32 0 −5 00 0 0 −13 −3 1 4
∣∣∣∣∣∣∣∣ = −14 en
∣∣∣∣∣∣∣∣−1 −2 2 10 0 −1 00 0 1 −11 −1 1 −1
∣∣∣∣∣∣∣∣ = 3
6.8.3
∣∣∣∣∣∣a b 00 a ba 0 b
∣∣∣∣∣∣ = a2b+ ab2 = ab(a+ b) en
∣∣∣∣∣∣0 a 0b c d0 e 0
∣∣∣∣∣∣ = 0
6.8.4 Antwoorden: 8, -24, 8, 8, -4
6.8.7 1. waar, stelling 6.3.4

11.6. HOOFDSTUK ?? 177
2. onwaar, neem bijvoorbeeld
(1 00 0
)+
(0 00 1
)3. waar, volgt met inductie uit 1
4. waar, volgt uit 1 door 1 = detId = det(AA−1) = det(A)det(A−1)
5. onwaar, er geldt det(λA) = λndet(A) omdat elke kolom met λ wordtvermenigvuldigd en er zijn n kolommen
6.8.8
∣∣∣∣∣∣1 0 23 −1 11 2 2
∣∣∣∣∣∣ ·∣∣∣∣ 4 52 3
∣∣∣∣ = 10 · 2 = 20
6.8.9 Schrijf de matrix als A =
(R 00 S
)=
(R 00 Ids
)·(Idr 00 S
)en gebruik
det(AB) = det(A)det(B).
6.8.10 De lijnen gaan door (minstens) n punt dus er zijn x, y zodat ci = aix+biygeldt voor i = 1, 2, 3 (dezelfde x, y voor alle i). Vul dit in de determinant
in:
∣∣∣∣∣∣a1 b1 a1x+ b1ya2 b2 a2x+ b2ya3 b3 a3x+ b3y
∣∣∣∣∣∣ en trek de eerste kolom x maal, en de tweede
kolom y maal, van de laatste kolom af. Zo wordt de laatste kolom 0.
6.8.11 (3): (x1, x2, x3) = (4, 2,−1)
(4) (x1, x2, x3) = (−1, 0, 3)
6.8.12 (1 23 4
)−1
=1
−2
(4 −2−3 1
)(a bc d
)−1
=1
ad− bc
(d −b−c a
) 1 0 1
2 1 21 1 2
−1
=1
1
0 1 −1−2 1 01 −1 1
6.8.13 1. Merk op dat At = −A, en dus det(A) = det(At) = det(−A) =
(−1)ndet(A) = −det(A) dus detA = −detA dus geldt detA = 0.
2. Tel de tweede rij bij de derde op, en trek vervolgens de eerste rij(a+ b+ c) maal van de derde rij af om een rij nullen te krijgen.
3. Trek de eerste rij van de tweede en derde rij af. Als x = 0 dan zijnwe klaar (rij nullen). Als x = 0 trek dan de tweede rij y
x keer van dederde af om een rij nullen te krijgen.
6.9.4 Trek de bovenste rij van alle andere rijen af, en tel vervolgens alle kolom-
178 HOOFDSTUK 11. ANTWOORDEN
men bij de eerste op.∣∣∣∣∣∣∣∣∣∣
λ 1 1 · · · 11 λ 1 · · · 11 1 λ · · · 1...
......
. . ....
1 1 1 · · · λ
∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣∣
λ 1 1 · · · 11− λ λ− 1 0 · · · 01− λ 0 λ− 1 · · · 0
......
.... . .
...1− λ 0 0 · · · λ− 1
∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣
λ+ n− 1 1 1 · · · 10 λ− 1 0 · · · 00 0 λ− 1 · · · 0...
......
. . ....
0 0 0 · · · λ− 1
∣∣∣∣∣∣∣∣∣∣= (λ+ n− 1)(λ− 1)n−1.
Voor de tweede, trek de een-na-laatste kolom van de laatste af, en herhaaldit vervolgens bij de kolommen ervoor.
∣∣∣∣∣∣∣∣∣∣
x x x · · · x1 x x · · · x1 1 x · · · x...
......
. . ....
1 1 1 · · · x
∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣∣∣∣
x x x · · · x 01 x x · · · x 01 1 x · · · x 0...
......
. . ....
...1 1 1 · · · x 01 1 1 · · · 1 x− 1
∣∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣∣∣
x 0 0 · · · 0 01 x− 1 0 · · · 0 01 0 x− 1 · · · 0 0...
......
. . ....
...1 0 0 · · · x− 1 01 0 0 · · · 0 x− 1
∣∣∣∣∣∣∣∣∣∣∣∣= x(x− 1)n−1.
11.7 Hoofdstuk 7
7.7.1 Controleer alle 7 eigenschappen van een vectorruimte
1. nee, λ(x+ y) = λx+ λy
2. ja
3. nee, x+ y = y + x
4. nee, (λ+ µ)x = λx+ µx want y1λ + y1
µ = y1λ+µ
7.7.2 De bewerkingen ⊕ en · voldoen aan 3 en 5 en voldoen niet aan 1,2,4,6,7.
7.7.3 1. ja
2. nee, (−1) · f zit er niet in als f erin zit
3. nee, de som van twee polynomen met graad n kan een polynoom vanlagere graad opleveren
4. ja, als At = A en Bt = B dan (A+B)t = A+B en (λA)t = λA

11.7. HOOFDSTUK ?? 179
7.7.4 1. De vector (0, 0, ..., 0)
2. (0, 0, ...)
3. De nulmatrix
4. Het nulpolynoom P (X) = 0
5. De nulfunctie f(x) = 0
6. De nulfunctie f(x) = 0
7. Het getal 0
7.7.6 De verzamelingenW7,W8,W11,W12 zijn deelruimten, enW1,W2,W3,W4,W6,W9,W10,W13
zijn geen deelruimten.
7.7.7 Merk eerst op dat exp niet afhankelijk kan zijn van f, g, h omdat |f(x)|, |g(x)|, |h(x)| ≤1 voor alle x ∈ R dus als exp = λ1f + λ2g + λ3h dan zou exp(x) ≤|λ1| + |λ2| + |λ3| voor alle x ∈ R en dit kan niet. Nu laten we zien datf, g, h onafhankelijk zijn. Als f, g, h lineair afhankelijk zouden zijn danzou λ1f + λ2g + λ3h = 0 een niet triviale oplossing hebben. Neem aanλ1 cos
2 x + λ2 sin(2x) + λ3 = 0 voor alle x ∈ R. Vul nu enkele waardenvan x in. x = π
2 geeft λ3 = 0. Vul dan x = 0 in, dit geeft λ1 + λ3 = 0 dusλ1 = 0. Vul nu x = π/4 in, dit geeft 1
2λ1 + λ2 + λ3 = 0 oftewel λ2 = 0.We concluderen dat alleen de triviale oplossing bestaat dus f, g, h zijnlineair onafhankelijk. Omdat exp al lineair onafhankelijk van f, g, h wasconcluderen we dat f, g, h, exp lineair onafhankelijk zijn.
7.7.8 1 is afhankelijk, 2 is onafhankelijk, 3 is onafhankelijk
7.7.9 Stel f(X) = X + 1, g(X) = X2 + 1 en h(X) = X2 + X. Laat P (X) =aX2 + bX + c ∈ R[X]≤2 dan
P (X) =1
2(−a+ b+ c)f(X) +
1
2(a− b+ c)g(X) +
1
2(a+ b− c)h(X)
7.7.10 Symmetrische matrices zijn altijd van de vorm S =
(a bb c
). Dit is een
driedimensionale ruimte met de elementen van B1 als basis, immers(a bb c
)= a
(1 00 0
)+ c
(0 00 1
)+ b
(1 00 1
).
Berekening leert dat de elementen van B2 onafhankelijk zijn en dus ookeen basis vormen. De matrix IB2
B1wordt gegeven door 1 −1 0
1 0 21 1 1
.
De kolommen geven de coefficienten van de elementen van B2 ten opzichtevan B1. Om de coordinaten van de elementen van B2 ten opzichte vandie van B1 te vinden bepalen we de inverse van deze matrix,
1
3
2 −1 2−1 −1 2−1 2 −1
.

180 HOOFDSTUK 11. ANTWOORDEN
7.7.12 1. onjuist, kies S = {a,b} en T = {a + b, c} en stel dat beide verza-melingen onafhankelijk zijn. Maar S∪T = {a,b,a+b, c} is afhanke-lijk.
2. onjuist, kies U = W = {(x, y, 0) ∈ R3} en BU = {(1, 0, 0) , (0, 1, 0)}en BW = {(1, 1, 0) , (−1, 1, 0)}, dan volgt U ∩W = U en BU ∩BW =∅.
3. onjuist, kies U = {0} en w = −v, dan v + w ∈ U maar v, w /∈ U .
4. juist als alle Ui deelruimten zijn anders onjuist. Er geldt dimUi ≤dimUi+1 voor alle i. Stel dat er geen index i is met Ui = Ui+1
dan geldt dimUi < dimUi+1 (strikte ongelijkheid) en als r > n + 1betekent dit dimUr > n. Dit kan niet, dus moet er een index i zijnmet Ui = Ui+1.
5. juist, kies v1 = b1 + b3, v2 = b2 + b3 en v3 = b3, dit vormt een basisen vi /∈ W voor i = 1, 2, 3
7.7.14 De afbeeldingen 2,5,7,9,10 zijn lineair, en 1,3,4,6,8,11 zijn niet lineair.
7.7.16 1. We zoeken de beelden van de eenheidsvectoren in de basis α (dusde basis-elementen van α) uitgedrukt in de basis (1, X,X2, X3, X4).Deze beelden zetten we als kolommen in een matrix
1 1 1 1 10 1 2 3 40 0 1 3 60 0 0 1 40 0 0 0 1
2. We lossen op:
X +X3 +X4 = λ1 · 1 + λ2(1 +X) + λ3(1 +X)2 + λ4(1 +X)3 + λ5(1 +X)5
= λ1 + λ2 + λ3 + λ4 + λ5 + (λ2 + 2λ3 + 3λ4 + 4λ5)X
+(λ3 + 3λ4 + 6λ5)X2 + (λ4 + 4λ5)X
3 + λ5X4
Dit is equivalent met het oplossen van A · x = (0, 1, 0, 1, 1)t waarbijA bovenstaande matrix is.Na enig rekenwerk vinden we λ5 = 1, λ4 = 1 − 4λ5 = −3, λ3 =0 − 6λ5 − 3λ4 = 3, λ2 = 1 − 4λ5 − 3λ4 − 2λ3 = 0 en λ1 = 0 − λ5 −λ4 − λ3 − λ2 = −1. De coordinaten van X +X3 +X4 ten opzichtevan de basis α zijn dus (−1, 0, 3,−3, 1).
3. We bepalen weer de beelden van de eenheidsvectoren: L(1) = (1, 0),L(X) = (1, 0), L(X2) = (0, 1), L(X3) = (0, 1) en L(X4) = (0, 1). Dematrix van L ten opzichte van de standaardbasis 1, X,X2, X3, X4
en e1, e2 wordt dus
L =
(1 1 0 0 00 0 1 1 1
)

11.7. HOOFDSTUK ?? 181
4. Nu zoeken we de beelden van de eenheidsvectoren uit α, uitgedruktin de basis β. We zien L(1) = (1, 0), L(1 + X) = (2, 0), L(1 +X)2 = (3, 1), L(1 + X)3 = (4, 4), L(1 + X)4 = (5, 11). Merk op:(1, 0) = 1
2(e1 + e2)+12(e1 − e2) en (0, 1) = 1
2(e1 + e2) +−12 (e1 − e2).
We drukken de vectoren {(1, 0), (2, 0), (3, 1), (4, 4), (5, 11)} uit in dezebasis en zetten de coordinaten in een matrix:
Lα→β =
(12 1 2 4 812 1 1 0 −3
)7.7.17 1. Schrijf definitie uit.
2. L =
1 0 0 0 0 00 2 0 1 0 00 0 4 0 2 1
3. Het beeld van L is heel R[X]≤2, de rang is 3, en de kern is
abcdef
= s
0−10200
+ t
00−1020
+ u
00−1004
In polynomen is de kern het opspansel van −XY + 2X,−Y 2 +2Y,−Y 2+4. Check dat deze polynomen inderdaad in de kern zitten.
7.7.18 Door de definitie van deelruimte uit te schrijven volgt dat V inderdaadeen deelruimte is. Als isomorfisme nemen we
ϕ : V → R3(a b0 c
)7→
abc
Dit is lineair (ga na) en voor alle (x, y, z) ∈ R3 is er een matrix die op
deze vector wordt afgebeeld, namelijk
(x y0 z
)∈ V .
7.7.19 Probeer eλx. Zo volgt (λ2 + 3λ − 4)eλx = 0 ofwel (λ + 4)(λ − 1) = 0dus λ = 1 of λ = −4. Twee oplossingen zijn dus ex en e−4x en deze zijnonafhankelijk.
7.7.21 1. Uit de drie gelijkheden volgt dat
A
1 2 1−1 −1 11 1 2
=
5 6 34 2 4−4 −2 2
.
Hieruit kunnen we A oplossen door
A =
5 6 34 2 4−4 −2 2
1 2 1−1 −1 11 1 2
−1
182 HOOFDSTUK 11. ANTWOORDEN
en dat is gelijk aan 1 −2 2−2 −2 42 4 −2
2. Stel E = (e1, e2, e3) en F = (f1, f2, f3). De overgangsmatrix IFE
wordt gegeven door
IFE =
1 −2 22 1 4−2 0 5
.
Zij AEE dematrix van A ten opzichte van E en AF
F de matrix tenopzichte van F . Dan geldt, AF
F = (IFE )−1AEEI
FE en dat is gelijk aan−7 0 0
0 2 00 0 2
.
7.7.24 1. We gebruiken de rekenregels van het uitproduct en zo volgt meteendat A lineair is
A(x+ λy) = (e1 + e2 + e3)× (x+ λy)
= (e1 + e2 + e3)× x+ λ((e1 + e2 + e3)× y)
= A(x) + λA(y)
2. We bepalen Aei voor i = 1, 2, 3. Tip: dit kan je met de rechterhan-dregel doen zodat je geen getallen hoeft in te vullen.
Ae1 = (e1 + e2 + e3)× e1 = 0 + e2 × e1 + e3 × e1 = −e3 + e2
Ae2 = (e1 + e2 + e3)× e2 = e1 × e2 + 0 + e3 × e2 = e3 − e1
Ae3 = (e1 + e2 + e3)× e3 = e1 × e3 + e2 × e3 + 0 = −e2 + e1
De matrix van A wordt dus
A =
0 −1 11 0 −1−1 1 0
3. We berekenen Afi, voor i = 1, 2, 3, uitgedrukt in {fi}:
Af1 = −e3 + e2 = −1 · f1 + 2 · f2 − 1 · f3Af2 = −e3 + e2 + e3 − e1 = e2 − e1 = −2 · f1 + 1 · f2 + 0 · f3
Af3 = e2 − e1 − e2 + e1 = 0
Zo vinden we dus
Af =
−1 −2 02 1 0−1 0 0
We kunnen ook de coordinaten transformatieformules gebruiken.

11.7. HOOFDSTUK ?? 183
7.7.25 Stel x, y ∈ W1 ∩W2 en λ ∈ R. Dan x, y ∈ W1 en x, y ∈ W2 en omdat W1
en W2 deelruimten zijn volgt dat x + λy ∈ W1 en x + λy ∈ W2, en dusx+ λy ∈ W1 ∩W2.
7.7.26 Als W1 ⊂ W2, of W2 ⊂ W1, dan W1 ∪ W2 = W2 of W1 ∪ W2 = W1
dus inderdaad een deelruimte. Als W1 ⊂ W2 en W2 ⊂ W1 dan is ereen x ∈ W1 zodat x /∈ W2 en een y ∈ W2 zodat y /∈ W1. Er geldtx, y ∈ W1∪W2 maar x+y /∈ W1∪W2 want stel x+y ∈ W1 of x+y ∈ W2
dan (x + y) − x = y ∈ W1 of (x + y) − y = x ∈ W2 en dat kan niet. Wehebben dus x, y ∈ W1 ∪W2 maar x + y /∈ W1 ∪W2 dus het is inderdaadgeen deelruimte.
7.7.28 Schrijf de regels van deelruimte uit: als x + y , z + w ∈ W1 + W2 metx, z ∈ W1 en y, w ∈ W2 dan x+y+λ(z+w) = (x+λz)+(y+λw) ∈ W1+W2
want x+ λz ∈ W1 en y + λw ∈ W2.Omdat W1 en W2 de nulvector bevatten volgt x+0 ∈ W1+W2 en 0+y ∈W1 +W2 voor x ∈ W1 en y ∈ W2 dus zijn W1 en W2 bevat in W1 +W2.Als een deelruimte W1 en W2 bevat, bevat hij ook sommen van elementenuit W1 en W2 omdat het een deelruimte is, dus bevat de ruimte W1+W2.
7.7.29 Bewijs de opgave eerst voor vectorruimten van endige dimensie. Gebruikhierbij stelling 12.4.6: dim(ker(A)) = n− rang(A) waarbij n = dimV .Merk op: rang(A) is de rang van de matrix die bij de afbeelding A hoort,in een willekeurige basis (de rang is in elke basis hetzelfde). De kolom-men van de matrix A zijn precies de beelden van de eenheidsvectorenei. Het beeld van A, notatie Im(A), wordt opgespannen door de kolom-men van A, en de dimensie van het beeld is dus het aantal onafhankelijkekolomvectoren, oftewel de rang: dim(Im(A)) = rang(A).
1. StelA is surjectief, dus Im(A) = W . Dan geldt rang(A) = dim Im(A) =dimW . Zo volgt dim(ker(A)) = dimV − dimW ≥ 0 (de dimensiekan niet negatief zijn) en dus dimV ≥ dimW . Uit contrapositievolgt dat als dimV < dimW , dan kan A niet surjectief zijn.
2. We gebruiken stelling 12.3.3: A is injectief precies dan als kerA ={0}.Stel A is injectief, dus kerA = {0}, dan dimkerA = 0. Er geldtdan volgens stelling 12.4.6 dus rang(A) = n oftewel dim(Im(A)) =dimV . Het beeld van A is bevat in W per definitie, dus dimW ≥dim(Im(A)) = dimV . We zien dimW ≥ dimV . Uit contrapositievolgt dat als dimW < dimV , dan kan A niet injectief zijn.
In het geval dat V of W oneindige dimensie hebben geldt
1. Neem aan dimV < dimW dan moet dimV < ∞ dus V is eindigdimensionaal. We nemen nu aan dat dimW = ∞. Als e1, ..., en eenbasis is van V (dit kan omdat V eindig dimensionaal is) dan wordtIm(A) opgespannen door Ae1, ..., Aen, en dit opspansel heeft maxi-maal dimensie n, en kan nooit heel W zijn want W heeft oneindigedimensie. We concluderen dat A niet surjectief is.
184 HOOFDSTUK 11. ANTWOORDEN
2. Stel dimV > dimW , dan moet dimW eindig zijn, waarbij we nudus aannemen dat dimV = ∞. Stel dat A injectief is, dan is Abijectief op zijn beeld, dus dan is V isomorf met Im(A) ⊂ W , en dusdimV = dim(Im(A)) < dimW en dit is een tegenspraak: A kan dusniet injectief zijn.
11.8 Hoofdstuk 8
8.8.1 b) Polynoom: λ2 − λ− 2. Eigenvector
(10
)met eigenwaarde 2 en eigen-
vector
(−13
)met eigenwaarde −1
f) Polynoom: λ2 − 5λ. Eigenvector
(23
)met eigenwaarde 5 en eigenvec-
tor
(−11
)met eigenwaarde 0.
h) Polynoom: −λ3 − 2λ2 − λ. Eigenvector
1−12
met eigenwaarde −1,
en eigenvector
1−22
met eigenwaarde 0.
j) Polynoom: −λ3 + 3λ2 − 3λ + 1. Eigenvectoren
−308
,
120
met
eigenwaarde 1.
l) Polynoom: λ4 − 24λ3 + 150λ2 − 200λ − 375. Eigenvector
1111
met
eigenwaarde 15, eigenvectoren
−1001
,
0−110
met eigenwaarde 5 en
eigenvector
1−1−11
met eigenwaarde −1.
n) Polynoom: λ4 − 4λ3 + 16λ − 16. Eigenvector
1111
met eigenwaarde

11.8. HOOFDSTUK ?? 185
−2, en eigenvectoren−1001
,
−1010
,
−1100
met eigenwaarde 2.
8.8.2 1. Kies A =
(1 01 0
)met eigenwaarden 0 en 1, en B =
(0 10 1
)ook met eigenwaarden 0 en 1. Dan geldt A + B =
(1 11 1
)met
eigenwaarden 0 en 2. Merk op dat λ = 0 een eigenwaarde van A is,en µ = 1 een eigenwaarde van B, maar λ + µ = 1 gn eigenwaardevan A+B.
2. Kies A =
(1 00 2
)met eigenwaarden 1 en 2, en B =
(3 00 5
)met
eigenwaarden 3 en 5, dan geldt AB =
(3 00 10
)met eigenwaarden
3 en 10. Merk op dat λ = 2 een eigenwaarde van A is, en µ = 3 eeneigenwaarde van B, maar dat λµ = 6 geen eigenwaarde van AB is.
3. Laat v de gemeenschappelijke eigenvector zijn. Er geldt Av = λv enBv = µv. Er volgt (A+ B)v = Av + Bv = λv + µv = (λ+ µ)v dusλ + µ is een eigenwaarde van A + B. Verder geldt ABv = Aµv =µAv = µλv dus we zien dat λµ een eigenwaarde is van AB.
8.8.3 Dit volgt uit det(M t) = det(M) en (λI)t = λI:
det(A− λI) = det((A− λI)t
)= det(At − (λI)t) = det(At − λI)
8.8.4 Noteer de elementen van A als
A =
a11 · · · a1n...
. . ....
an1 · · · ann
.
Dan geldt∑n
i=1 aki = 1 voor k = 0, .., n.
Beschouw de vector v = (1, 1, ..., 1). Als we A op deze vector loslatenzien we dat het eerste element van de vector Av wordt gegeven coora11 · 1 + a12 · 1 + ...+ a1n · 1 =
∑ni=1 a1i = 1. Op dezelfde manier zien we
dat elk element van Av op deze manier wordt gegeven door∑n
i=1 aki = 1(voor het k-de element). We concluderen Av = (1, 1, ..., 1). We zien datAv = v dus v is een eigenvector met eigenwaarde 1.
Het tweede gedeelte van de vraag volgt uit het resultaat van de vorigeopgave. Als de som van de elementen uit elke kolom van A gelijk is aan 1,volgt dat de som van de elementen uit elke rij van At gelijk is aan 1, dus
186 HOOFDSTUK 11. ANTWOORDEN
weten we dat 1 een eigenwaarde is van At. De eigenwaardevergelijking ishetzelfde als die van A dus zal 1 ook een oplossing van de eigenwaardev-ergelijking van A zijn.
8.8.5 Laat v een eigenvector van A zijn met eigenwaarde λ, dus Av = λv. Webewijzen het gevraagde nu met inductie. Voor k = 1 is het duidelijk. Stelnu dat het waar is voor k ∈ Z≥1 dus Akv = λkv, dan volgt Ak+1v =AkAv = Akλv = λAkv = λk+1v. We concluderen λk is een eigenwaardevan Ak (met dezelfde eigenvector) dus hiermee is de inductiestap com-pleet.
Als A inverteerbaar is kunnen we op Av = λv aan beide kanten A−1
toepassen: A−1Av = A−1λv dus v = λA−1v. We zien dus A−1v = λ−1vdus er volgt dat λ−1 een eigenwaarde is.
8.8.10 Merk op dat de vectoren van de standaard basis van Rn precies de eigen-vectoren van Λ zijn, oftewel Λei = λiei. Verder is gegeven dat alle λi
verschillend zijn. Dit betekent dat als Λv = λkv dan volgt v = µek.Dit zien we als volgt: stel v = µ1e1 + ... + µnen, dan volgt Λv =λ1µ1e1 + ... + λnµnen door de lineairiteit van Λ. Als dit gelijk is aanλkv dan geldt dus
λ1µ1e1 + ...+ λnµnen = λkµ1e1 + ..λkµne1
Omdat e1, ..., en onafhankelijk zijn volgt dat alle coefficienten voor dezelfdebasisvectoren gelijk moeten zijn: λiµi = λkµi (de coefficient voor ei).Gegeven was dat λk = λi als i = k dus volgt µi = 0 als i = k. Ditimpliceert v = µkek zoals gezocht.
We kunnen nu de vraag bewijzen. Er geldt S−1ΛS = Λ dus door beidezijden met S te vermenigvuldigen volgtΛS = SΛ. Als we beide zijden opei toepassen volgt ΛSei = λiSei. We zien dat (Sei) een eigenvector vanΛ is met eigenwaarde λi en dus volgt dat Sei = µei zoals net bewezen.Dit impliceert dat de i-de kolom van S de vector µei is. Dit werkt vooralle i (met verschillende µ) en zo zien we dat S een diagonaal matrix is.
8.8.11 A heeft n verschillende eigenwaarden, en uit gevolg 8.3.5 volgt dan dater een basis van eigenvectoren is. In deze basis uitgedrukt is de matrixvan A een diagonaal matrix (A is diagonaliseerbaar) met de eigenwaardenals diagonaal elementen. Dit betekent A = S−1DS met D een diagonaalmatrix en S een inverteerbare matrix (de transformatie matrix naar debasis van eigenvectoren). Laat λ1, ..., λn de diagonaal elementen van Dzijn. Dit zijn de eigenwaarden van A zoals gezegd. Deze zijn allemaalpositief. Definieer nu de matrix C als een diagonaal matrix met
√λi op
de diagonaal (dit kan want λi > 0). Er geldt dan C2 = D. Nu is B =S−1CS de gezochte matrix. Dit zien we als volgt: B2 = S−1CSS−1CS =S−1CCS = S−1DS = A. We zien B2 = A dus we zijn klaar.
11.8. HOOFDSTUK ?? 187
De matrix B is NIET uniek bepaald. We kunnen namelijk voor C ook−√λi als diagonaal elementen nemen (voor elk element kunnen we + of
− apart kiezen). Dit geeft een andere matrix met dezelfde eigenschappen.
8.8.12 Zie ook Lemma 8.3.6. Stel B = S−1AS dan:
det(B − λI) = det(S−1AS − λI) = det(S−1AS − λS−1IS)
= det(S−1(A− λI)S)
= det(S−1)det(A− λI)det(S) = det(A− λI)
8.8.13 Stel A inverteerbaar, dan geldt BA = A−1A(BA) = A−1(AB)A. Uitde vorige opgave volgt dat BA en BA dezelfde eigenwaarde vergelijkinghebben omdat BA en AB geconjugeerd zijn. Als B inverteerbaar is volgtdit natuurlijk op dezelfde manier.
Er geldt dat Sp(AB) de som van de eigenwaarden is. We weten dat AB enBA dezelfde eigenwaardevergelijking hebben dus zijn hun eigenwaardenhetzelfde.
Als A en B niet inverteerbaar zijn vervangen we A door A−µI met µ ∈ R.We weten dat een matrix A maximaal n eigenwaarden kan hebben, dusdet(A − µI) = 0 geldt voor hooguit n verschillende waarden van µ. Ditbetekent dat voor alle andere µ ∈ R geldt dat det(A−µI) = 0 dus A−µIis inverteerbaar. Nu passen we hetzelfde truukje als hiervoor toe, maardan op A− µI:
det ((A− µI)B − λI) = det((A− µI)B(A− µI)(A− µI)−1 − λ(A− µI)(A− µI)−1
)= det
((A− µI) (B(A− µI)− λI) (A− µI)−1
)= det(A− µI)det(B(A− µI)− λI)det(A− µI)−1
= det(B(A− µI)− λI)
We zien dat (A − µI)B en B(A − µI) inderdaad dezelfde eigenwaardevergelijking hebben. Dit is nu echter alleen aangetoond voor µ ∈ R metµ geen eigenwaarde van A. Het gaat er nu om dat het een gelijkheid isvan twee polynomen die voor alle µ ∈ R geldt behalve een eindig aantaluitzonderingen. Dit impliceert dat de polynomen op heel R gelijk moetenzijn (er kunnen geen discontinuiteiten in zitten) en dus moet het ookvoor µ = 0 gelden. Als we dit invullen vinden we terug det(AB − λI) =det(BA− λI).
8.8.18 1. Het karakteristieke polynoom is −λ3 + 2λ2 − λ = −λ(λ − 1)2. De
eigenwaarden zijn dus 0 en 1. Een eigenvector bij 0 is
−2−12
en
een eigenvector bij eigenwaarde 1 is
−101
.
2. De nulruimte wordt gegeven door
xyz
= λ
−2−12
voor λ ∈ R.

188 HOOFDSTUK 11. ANTWOORDEN
3. Volgens de dimensiestelling heeft het beeld van A dimensie 2. Hetbeeld A(R3) wordt opgespannen door de kolommen van de matrix.De eerste twee kolommen kunnen als pivot-kolommen gekozen wor-
den dus vormen
1−20
en
−202
een basis van A(R3).
8.8.22 Geef de matrix van A ten opzichte van de standaardbasis ook aan met A.dan weten we,
A
111
=
111
, A
120
=
−1−20
, A
301
=
000
.
In matrixvorm,
A
1 1 31 2 01 0 1
=
1 −1 01 −2 01 0 0
.
Oplossen geeft
A =
1 −1 01 −2 01 0 0
1 1 31 2 01 0 1
−1
=1
5
−3 −1 9−4 −3 12−2 1 6
.
8.8.23 1. Eigenwaarde 4 met eigenvector
−129
, eigenwaarde −2 met eigen-
vector
110
en eigenwaarde 2 met eigenvector
−1−14
2. We kunnen de eigenvectoren als basis nemen, dan is de matrix van
A een diagonaal matrix met de eigenwaarden op de diagonaal. Wekunnen de eigenvectoren altijd schalen en wisselen en zo oneindigveel bases vinden.
8.8.27 Stel dat λ een eigenwaarde is met een eigenvector v. (Dit betekent datv = 0). Er geldt Av = λv, en dus ook AAv = Aλv oftewel Av = λAv.Als λ = 0 zijn we klaar. Als λ = 0 dan Av = λv = 0 en dus volgt uitAv = λAv dat λ = 1.
Opmerking: In het algemeen geldt dat als een afbeelding A voldoet aanA2 = A dat het een projectie is.
8.8.31 1. Controleer de definitie van lineaire afbeelding. Er geldt
T ((f + λg)(X)) = (f+λg)(X+1) = f(X+1)+λg(X+1) = T (f(X))+λT (g(X))

11.8. HOOFDSTUK ?? 189
2. We bepalen de beelden van de eenheidsvectoren en nemen deze beeldenals kolommen van de matrix
T =
1 1 10 1 20 0 1
3. De eigenwaardevergelijking van bovenstaande matrix wordt gegeven
door −λ3 + 3λ2 − 3λ + 1 = −(λ − 1)3 = 0. We zien dat λ = 1 de
enige eigenwaarde is. Er is n eigenvector Op een scalair na):
100
die met de constante polynomen correspondeert.
8.8.33 1. Lineair:
T ((f + λg)(X)) = (f + λg)(X) +X · (f + λg)′(X)
= f(X) + λg(X) +X · (f ′(X) + λg′(X))
= f(X) +X · f ′(X) + λ(g(X) +X · g′(X))
= T (f(X)) + λT (g(X))
Om te laten zien dat T inderdaad R[X]n naar zichzelf afbeeldt moetenwe surjectiviteit aantonen. Laat f(X) een willekeurig polynoom inR[X]n zijn: f(X) = anX
n + ... + a1X + a0 met ak ∈ R vaste cof-ficienten. Dan volgt als we T (f(X)) uitschrijven dat T (f(X)) =(n + 1)anX
n + ... + 2a1X + a0. Neem nu het polynoom g(X) =1
n+1anXn + 1
nanXn−1 + ... + 1
2a1X + a0. Dan volgt dat T (g(X)) =f(X) en dus is T surjectief.
2. We kunnen elk polynoom in R[X]n schrijven als anXn+an−1X
n−1+...+a1X+a0. Verder geldt dat 1, X, ...,Xn een onafhankelijk stelselis want als
a0 + a1X + ...+ anXn = 0 (∀X ∈ R)
dan volgt dat ak = 0 voor k = 0, .., n. Dit kunnen we als volgt zien:omdat het polynoom 0 is, zijn al zijn afgeleiden ook 0. Vul X = 0 inde k-de afgeleide in, dan volgt daaruit ak = 0. We concluderen dat1, X, ...,Xn een basis vormt.
3. Door T los te laten op de basisvectoren kunnen we de matrix van Tvinden:
T =
1 0 00 2 00 0 3
We kunnen hier direct aan zien dat 1, 2 en 3 eigenwaarden zijn meteigenvectoren 1, X en X2.
4. We herhalen deel 3 voor algemene n en zo volgt
T =
1 0 · · · 00 2 · · · 0...
.... . . 0
0 0 0 n+ 1

190 HOOFDSTUK 11. ANTWOORDEN
De eigenwaarden van T zijn 1, 2, ..., n + 1 met bijbehorende eigen-vectoren 1, X, ..., Xn.
8.8.37 Stel dat A een eigenvector x = (x1, x2, ...) = (0, 0, ...) heeft met eigen-waarde λ. Dan geldt Ax = λx oftewel
(0, x1, x2, ...) = (λx1, λx2, λx3, ...)
We zien dat λx1 = 0, dus λ = 0 of x1 = 0.
Als λ = 0 volgt dat (0, x1, x2, ...) = (0, 0, 0, ...) dus x = 0 en dus is x geeneigenvector.
Als λ = 0 dan x1 = 0 en dan volgt uit de tweede component dat λx2 = 0dus x2 = 0. Zo volgt uit de derde component dat λx3 = 0 dus x3 = 0enzovoorts. Zo volgt voor alle i dat xi = 0 (door dit i keer te herhalen)en dus x = 0.
We zien dat x geen eigenvector kan zijn.
8.8.38 Neem de afbeelding A : C∞(R) → C∞(R) gedefinieerd door A(f) =f ′′ (dus Af is de tweede afgeleide van f). Deze is goed gedefinieerdomdat functies in C∞(R) oneindig vaak differentieerbaar zijn. Schrijffk(x) = sin(kx) dan geldt f ′′
k (x) = −k2 sin(kx) = −k2fk(x). Dit betekentAfk = −k2fk. We zien dat fk een eigenvector van A is met eigenwaarde−k2.
Beschouw nu sin(kx) voor k = 1, 2, ..., r dan zijn dit r eigenvectoren metverschillende eigenwaarden −1,−4, ...,−r2 en met stelling 13.3.1 volgt nudat de vectoren sin(kx) onafhankelijk zijn voor k = 1, 2, ..., r. Dit werktvoor willekeurige r dus kunnen we concluderen dat de functies sin(kx)onafhankelijk zijn voor k = 1, 2, ....
11.9 Hoofdstuk 9
9.4.1 Neem steeds het inproduct van elk paar vectoren die W opspannen. Ditgeeft steeds 0. Voor de projecties gebruiken we Pb = ⟨a1,b⟩
⟨a1,a1⟩a1 + ... +⟨ak,b⟩⟨ak,ak⟩ak waarbij ai de opspannende vectoren van W zijn. Deze formulewerkt alleen als deze vectoren inderdaad orthogonaal staan.
1. 1114(2, 3, 1) +
−53 (−1, 1,−1) = (6821 ,
2942 ,
10342 )
2. 22(−1, 0, 1) + 6
3(1, 1, 1) = (1, 2, 3)
3. −14 (1,−1,−1, 1) + 7
4(1, 1, 1, 1) +−12 (−1, 0, 0, 1) = (2, 2, 2, 1)
4. 04(1,−1, 1, 1) + 6
4(−1, 1, 1, 1) + 64(1, 1,−1, 1) = (0, 3, 0, 3)
9.4.2 We zoeken eerst twee (omdat de dimensie 2 is) onafhankelijke vectoren inde deelruimte (dus die voldoen aan de vergelijking). Neem bijvoorbeeldv1 = (1, 0,−2) en v2 = (0, 1,−3). Hier passen we nu Gram-Schmidt op
toe: v2 − ⟨v1,v2⟩⟨v1,v1⟩v1 = v2 − 6
5v1 = (−65 , 1,
−35 ). Orthonormaliseren geeft
1√5(1, 0,−2) en 1√
70(−6, 5,−3). (Er zijn natuurlijk meerdere oplossingen
mogelijk)

11.9. HOOFDSTUK ?? 191
9.4.3 De deelruimte is twee dimensionaal (4 vrijheidsgraden met 2 vergeli-jkingen) dus we zoeken twee onafhankelijke vectoren. Kies bijvoorbeeldv1 = (1, 1, 0,−1) en v2 = (2, 0, 1, 1). Nu passen we gram-schmidt doe:
v2− ⟨v1,v2⟩⟨v1,v1⟩v1 = v2− 1
3v1 = (53 ,−13 , 1, 43). Normaliseren geeft 1√
3(1, 1, 0,−1)
en 1√51(5,−1, 3, 4).
?? 1. We zoeken eerst twee onafhankelijke vectoren en passen hier vervol-gens Gram-Schmidt op toe. Neem bijvoorbeeld v1 = (2, 0, 1,−2)
en v2 = (0, 2, 1, 4). Gram-Schmidt: v2 − ⟨v1,v2⟩⟨v1,v1⟩v1 = v2 − −7
9 v1 =
(149 , 2,169 ,
229 ). Normaliseren geeft w1 =
13(2, 0, 1,−2) en w2 =
1√315
(7, 9, 8, 11).
2. We gebruiken de formule Px = ⟨w1, x⟩w1 + ⟨w2, x⟩w2. Dit geeft13w1+
35√315
w2 =19(2, 0, 1,−2)+ 35
315(7, 9, 8, 11) = (1, 1, 1, 1). Het blijkt
dat (1, 1, 1, 1) al in W ligt dus is de projectie gelijk aan de vectorzelf. Het is ook voldoende om direct op te merken dat (1, 1, 1, 1) inW ligt en dus dat de projectie hetzelfde is.
?? 1. Dit volgt door de matrix uit te schrijven en hier de inproducten in teherkennen. Het element op plaats i, j van AAt wordt gevormd doorde i-de rij van A te combineren met de j-de kolom van At. Maardeze laatste is precies de j-de rij van A na traanspositie. Dus staatop plaat i, j het dotproduct ai · aj .
2. Het is voldoende om aan te tonen dat P (ai) = ai voor i = 1, 2 . . . , ren P (b) = 0 voor alle b loodrecht op W .
Merk op dat de componenten van A(x) precies a1 · x, . . . ,ar · x zijn.In het bijzonder geldt voor elke i dat A(ai) = (a1 · ai, . . . ,ar · ai)ten dat is de i-de kolomvector van de Gram-matrix AAt. Daaruitvolgt dat (AAt)−1A(ai) precies de standaard basisvector ei van Rd
is. Laten we hier de matrix At op los, dan krijgen we de i-de kolomvan At en dat is precies de vector ai. Dus At(AAt)−1A(ai) = ai vooralle i.
Als b loodrecht opW staat, danA(b) = 0. En dusAt(AAt)−1A(b) =0.
3. Er geldt (AB)t = BtAt en zo ook (ABC)t = Ct(AB)t = CtBtAt.
Zo zien we dat P t =(At(AAt)−1A
)t= At((AAt)−1)tA. Er geldt
dat (Bt)−1 = (B−1)t (dit was een opgave uit een van de eerstewerkcolleges). Zo volgt ((AAt)−1)t = ((AAt)t)−1 = (AAt)−1 dusP t = At(AAt)−1A = P .
9.4.10 1. ∥p1∥ =√
⟨p1, p1⟩ =√∫ 1
0 (1 + t)2dt =√
73
∥p2∥ =√
⟨p2, p2⟩ =√∫ 1
0 (1 + t2)2dt =√
2815
∥p3∥ =√
⟨p3, p3⟩ =√∫ 1
0 (t+ t)2dt =√
3130
2. Laat f(X) = aX2 + bX + c. Dan
⟨f(X), p1(X)⟩ =
∫ 1
0(at2 + bt+ c)(1 + t)dt

192 HOOFDSTUK 11. ANTWOORDEN
=
∫ 1
0at3 + (a+ b)t2 + (b+ c)t+ c dt
=1
4a+
1
3(a+ b) +
1
2(b+ c) + c
=7
12a+
5
6b+
3
2c = 0
Er moet dus gelden 7a + 10b + 18c = 0. Dit is de vergelijking vaneen vlak. We vinden een twee-dimensionale oplossingsruimte: a
bc
= λ
−1070
+ µ
−1807
.
9.4.11 1. Laat f(X) = aX2 + bX + c. We eisen dat ⟨f(X), Xn⟩ = 0 voor allen ≥ 1. Dit geeft
⟨f(X), Xn⟩ =
∫ 1
0at2+n + bt1+n + ctndt
=a
3 + n+
b
2 + n+
c
1 + n= 0
=(n+ 1)(n+ 2)a+ (n+ 3)(n+ 1)b+ (n+ 2)(n+ 3)c
(n+ 1)(n+ 2)(n+ 3)= 0
Als we voor n de waarden 1, 2 en 3 invullen kunnen we de vergeli-jkingen in een matrix zetten: 1
413
12
15
14
13
16
15
14
∼
14
13
12
0 −160
−115
0 −145
−112
∼
14
13
12
0 −160
−115
0 0 1180
Er zijn alleen pivot variabelen, dus is er alleen een triviale oplossing.Er moet dus gelden a = b = c = 0. Het enige polynoom van graad ≤2 dat loodrecht op Xn staat voor alle n ≥ 1 is dus het nulpolynoom.
2. Laat f(X) = a0 + a1X + ... + akXk een willekeurig k-de graads
polynoom zijn. Dan
⟨f(X), Xn⟩ = a0n+ 1
+a1
n+ 2+ ...+
ak−1
k + n+
akk + n+ 1
= 0
We vullen nu voor n de waarden 1, ..., k, k + 1 in, dan verkrijgen wek + 1 vergelijkingen die er in matrixvorm als volgt uitzien
12
13 · · · 1
k+213
14 · · · 1
k+3...
.... . .
...1
k+21
k+2 · · · 12k+2
Dit is precies een matrix op op plek i, j het getal i + j en zoals inde opgave is aangegeven mogen we gebruiken dat de determinant

11.9. HOOFDSTUK ?? 193
hiervan ongelijk is aan 0. Dit betekent dat het stelsel alleen detriviale oplossing heeft, dus moet gelden a0 = a1 = ... = ak =0. Het enige polynoom loodrecht op alle vectoren Xn is dus hetnulpolynoom.
9.4.12 1. We voeren het Gram-Schmidt procd uit zoals in voorbeeld 14.2.4.Stel v1 = (1, 1, 1, 1), v2 = (5,−1, 5,−1) en v3 = (2, 1,−8, 1) dan ⟨v1, v1⟩ ⟨v1, v2⟩ ⟨v1, v3⟩
⟨v2, v1⟩ ⟨v2, v2⟩ ⟨v2, v3⟩⟨v3, v1⟩ ⟨v3, v2⟩ ⟨v3, v3⟩
=
4 8 −48 52 −32−4 −32 70
Dit geeft de volgende matrix: 4 8 −4 1 1 1 1
8 52 −32 5 −1 5 −1−4 −32 70 2 1 −8 1
Vegen geeft 4 8 −4 1 1 1 1
0 36 −24 3 −3 3 −30 0 50 5 0 −5 0
De rijvectoren aan de rechterkant hoeven nu alleen nog maar genor-maliseerd te worden. Een orthonormale basis van W wordt dusgegeven door
f1 =1
2(1, 1, 1, 1) , f2 =
1
2(1,−1, 1,−1) , f3 =
1√2(1, 0,−1, 0)
2. We zoeken een vector f4 die loodrecht op de drie vectoren hierbovenstaan. Om dit op te lossen kunnen we voor f4 een willekeurige vec-tor (x, y, z, u) nemen en dan eisen fi · f4 = 0 voor i = 1, 2, 3. Ditgeeft drie vergelijkingen waar een 1-dimensionale oplossingsruimteuit volgt. Neem vervolgens de vector met lengte 1 en kies deze alsf4.Een andere mogelijkheid is bijvoorbeeld de vector (0, 0, 0, 1) te bek-ijken. Deze is onafhankelijk van f1, f2, f3 maar niet loodrecht. Ver-volgens passen we hier opnieuw Gram-Schmidt op toe: vi = fi voori = 1, 2, 3 en v4 = (0, 0, 0, 1). Dit geeft
1 0 0 12
12
12
12
12
0 1 0 −12
12
−12
12
−12
0 0 1 0 1√2
0 −1√2
012
−12 0 1 0 0 0 1
Na het vegen vinden we
1 0 0 12
12
12
12
12
0 1 0 −12
12
−12
12
−12
0 0 1 0 1√2
0 −1√2
0
0 0 0 12 0 −1
2 0 12

194 HOOFDSTUK 11. ANTWOORDEN
We concluderen f4 =1√2(0,−1, 0, 1).
3. We kunnen de beelden van de standaardbasis ei bepalen door ei uitte drukken in fi, dan S hierop los te laten en vervolgens de beeldenals kolommen in een te zetten.
e1 =1
2· f1 +
1
2· f2 +
1√2· f3 + 0 · f4
e2 =1
2· f1 +
−1
2· f2 + 0 · f3 +
−1√2· f4
e3 =1
2· f1 +
1
2· f2 +
−1√2· f3 + 0 · f4
e4 =1
2· f1 +
−1
2· f2 + 0 · f3 +
1√2· f4
We passen nu S toe door het teken voor f4 om te keren, en de resul-terende vectoren zetten we als kolommen in een matrix. Dit geeft
S =
1 0 0 00 0 0 10 0 1 00 1 0 0
Een andere mogelijkheid is als volgt: In de basis fi is de matrix vanS gegeven door
1 0 0 00 1 0 00 0 1 00 0 0 −1
Om de matrix van S in de standaard basis te vinden moeten we eencoordinaten transformatie toepassen:
S =
12
12
1√2
012
−12 0 −1√
212
12
−1√2
012
−12 0 1√
2
1 0 0 00 1 0 00 0 1 00 0 0 −1
12
12
1√2
012
−12 0 −1√
212
12
−1√2
012
−12 0 1√
2
−1
Merk op dat de transformatie matrix orthogonaal is, wat betekentdat de inverse simpelweg de getransponeerde is. Als we dit matrix-product uitrekenen komen we op hetzelfde antwoord uit.
9.4.13 1. Het element op plek i, j van AB wordt gegeven door∑n
k=1AikBkj .Dit betekent dat het element op plek i, j van ABt wordt gegevendoor
∑nk=1AikBjk. Het spoort is de som van de diagonaal ele-
menten, dus de som van de elementen op plekken i, i: Spoor(ABt) =∑ni=1
∑nk=1AikBik =
∑ni,j=1AijBij . Bij de laatste stap is de dummy
variabele k hernoemd naar j.
11.9. HOOFDSTUK ?? 195
2. We controleren de vier eigenschappen van een inproduct:⟨A,B⟩ = Spoor(ABt) = Spoor((ABt)t) = Spoor(BAt) = ⟨B,A⟩⟨λA,B⟩ = Spoor(λABt) = λSpoor(ABt) = λ ⟨A,B⟩⟨A+B,C⟩ = Spoor((A+B)Ct) = Spoor(ACt+BCt) = Spoor(ACt)+Spoor(BCt) = ⟨A,C⟩+ ⟨B,C⟩⟨A,A⟩ = Spoor(AAt) =
∑ni,j=1(Aij)
2 ≥ 0 (want de cofficienten zijnreel dus kwadraten zijn niet-negatief). Als de som van alle kwadratennul is, moet dus elk element van de som nul zijn: ⟨A,A⟩ = 0 dan enslechts dan als ∀1 ≤ i, j ≤ n Aij = 0 dus A = 0.
9.4.14 1. We maken gebruik van de volgende regels die voor het spoor gelden,Spoor(P ) = Spoor(At) en Spoor(PQ) = Spoor(QP ). Uit deze regelsvolgt,
⟨A,B⟩ = Spoor(ABt) = Spoor(At(−B)) = −Spoor(AtB) =
= −Spoor((BtA)t) = −Spoor(BtA) = −Spoor(ABt) = −⟨A,B⟩ .Hieruit volgt dat ⟨A,B⟩ = 0.
2. Stel dat M zowel symmetrisch als antisymmetrisch is. Dan geldt datM t = M , maar ook dat M t = −M . Dus M = −M waaruit volgtdat M de nulmatrix is.
3. Laat A een willekeurige n× n matrix zijn. Definieer B = 12(A+At)
en C = 12(A − At). Dan geldt Bt = B en Ct = −C, oftewel B
is symmetrisch en C is antisymmetrisch. Verder zien we A = B +C dus kunnen we iedere n × n matrix schrijven als som van eensymmetrische en een antisymmetrische matrix.
4. We moeten bewijzen dat M symnn = Masym⊥
nn .
We bewijzen eerst de inclusie ⊂. Laat A ∈ M symnn een symmetrische
matrix zijn, dan volgt uit 1 dat ⟨A,B⟩ = 0 voor alle B ∈ Masymnn dus
A ∈ Masym⊥nn .
We bewijzen nu de inclusie ⊃. Laat A ∈ Masym⊥nn , dan ⟨A,B⟩ = 0
voor alle B ∈ Masymnn . Verder volgt uit 3 dat we A kunnen schrijven
als A = Asym + Aasym met Asym ∈ M symnn en Aasym ∈ Masym
nn . Ditbetekent
⟨A,Aasym⟩ = ⟨Asym +Aasym, Aasym⟩ = ⟨Asym, Aasym⟩+⟨Aasym, Aasym⟩
Uit 1 volgt dat ⟨Asym, Aasym⟩ = 0 dus vinden we ⟨A,Aasym⟩ =⟨Aasym, Aasym⟩. Verder weten we dat ⟨A,B⟩ = 0 voor alle B ∈Masym
nn dus ⟨A,Aasym⟩ = 0. Dit betekent ⟨Aasym, Aasym⟩ = 0 en dusAasym = 0, oftewel A = Asym. We concluderen dat A ∈ M sym
nn enhiermee is de inclusie bewezen.
9.4.16 1. De normaal van het hypervlak is (1, 1,−1, 1)t dus we zoeken een puntx = (1, 2, 2, 1)t + λ(1, 1,−1, 1)t dat in het hypervlak ligt: (1 + λ) +(2+λ)− (2−λ)+(1+λ) = 0 dus 4λ+2 = 0 dus λ = −1
2 . Het beeldvan (1, 2, 2, 1)t onder P is dus (12 ,
32 ,
52 ,
12)
t.

196 HOOFDSTUK 11. ANTWOORDEN
2. Laat x = (x, y, z, u)t, dan geldt moet de projectie voldoen aan (x+λ, y+ λ, z− λ, u+ λ)t en dus x+ λ+ y+ λ− z+ λ+ u+ λ = 0 ofwelλ = −x−y+z−u
4 . Invullen geeft dus
Px =1
4(3x− y + z − u , −x+ 3y + z − u , x+ y + 3z + u , −x− y + z + 3u)
Nu lossen we op Px = λx, of Px− λx = 0
1
4(3x− y + z − u , −x+ 3y + z − u , x+ y + 3z + u , −x− y + z + 3u)−λ(x, y, z, u) = 0
Zo hebben we vier vergelijkingen:
(3− 4λ)x− y + z − u = 0
−x+ (3− 4λ)y + z − u = 0
x+ y + (3− 4λ)z + u = 0
−x− y + z + (3− 4λ)u = 0
We zoeken niet-triviale oplossingen, dus de determinant van de bi-jbehorende matrix moet gelijk zijn aan nul:∣∣∣∣∣∣∣∣
3− 4λ −1 1 −1−1 3− 4λ 1 −11 1 3− 4λ 1−1 −1 1 3− 4λ
∣∣∣∣∣∣∣∣ = 0.
Dit uitwerken geeft
λ4 − 3λ3 + 3λ2 − λ = 0
λ(λ− 1)3 = 0
We zien dat λ = 0 en λ = 1 de eigenwaarden zijn. We vullen dit in enlossen de matrix op. Voor λ = 0 geeft dit (1, 1,−1, 1)t en voor λ = 1vinden we de eigenvectoren (−1, 0, 0, 1)t, (1, 0, 1, 0)t en (−1, 1, 0, 0)t.
3. We moeten laten zien ⟨x, Py⟩ = ⟨Px,y⟩. Schrijf x = (x, y, z, u) eny = (x′, y′, z′, u′) dan geldt
⟨x, Py⟩ =1
4
(x(3x′ − y′ + z′ − u′) + y(−x′ + 3y′ + z′ − u′)
+z(x′ + y′ + 3z′ + u′) + u(−x′ − y′ + z′ + 3u′))
⟨Px,y⟩ =1
4
(x′(3x− y + z − u) + y′(−x+ 3y + z − u)
+z′(x+ y + 3z + u) + u′(−x− y + z + 3u))
Als we nu op de onderste regel de termen voor x bij elkaar zetten,en de termen voor y bij elkaar zetten enzovoorts, dan vinden we debovenste regel terug. We concluderen dat P symmetrisch is.

11.9. HOOFDSTUK ?? 197
4. De matrix hebben we eigenlijk al bepaald en is direct af te lezenuit de determinant hierboven. We kunnen ook Pei bepalen en alskolommen in een matrix zetten, dit komt op hetzelfde neer.
P =1
4
3 −1 1 −1−1 3 1 −11 1 3 1−1 −1 1 3
.
9.4.17 We voeren het Gram-Schmidt procd uit. Stel v1 = 1, v2 = X en v3 = X2
dan ⟨v1, v1⟩ ⟨v1, v2⟩ ⟨v1, v3⟩⟨v2, v1⟩ ⟨v2, v2⟩ ⟨v2, v3⟩⟨v3, v1⟩ ⟨v3, v2⟩ ⟨v3, v3⟩
=
2 0 23
0 23 0
23 0 2
5
.
Dit geeft de volgende matrix: 2 0 23 1
0 23 0 X
23 0 2
5 X2
⇒
2 0 23 1
0 23 0 X
0 0 845 X2 − 1
3
We kunnen de polynomen nog normaliseren, dit geeft 1√
2,√
32X en
√458 (X
2−13).
9.4.18 We doen hetzelfde als bij de vorige opgave, maar nu met het andere in-product: ⟨v1, v1⟩ ⟨v1, v2⟩ ⟨v1, v3⟩
⟨v2, v1⟩ ⟨v2, v2⟩ ⟨v2, v3⟩⟨v3, v1⟩ ⟨v3, v2⟩ ⟨v3, v3⟩
=
1 0 12
0 12 0
12 0 3
4
1 0 1
2 10 1
2 0 X12 0 3
4 X2
⇒
1 0 12 1
0 12 0 X
0 0 12 X2 − 1
2
Genormaliseerd: 1,
√2X en
√2(X2 − 1
2).Opmerking: de polynomen die men zo verkrijgt heten de Hermite poly-nomen (die in de praktijk vaak met andere scalaire voorfactoren wor-den gebruikt). Deze vormen oplossingen van een veelgebruikte differenti-aalvergelijking.
9.4.19 1. Het product h(t) = f(t)g(t) is weer een antisymmetrisch polynoom:h(−t) = f(−t)g(−t) = −f(t)g(t) = −h(t). Het is bekend dat eenintegraal van een antisymmetrische functie over een interval [−a, a]gelijk is aan 0, want:
⟨f(X), g(X)⟩ =
∫ 1
−1h(t)dt =
∫ 0
−1h(t)dt+
∫ 1
0h(t)dt
= −∫ 1
0h(s)ds+
∫ 1
0h(s)ds = 0
Hier hebben we een substitutie s = −t gebruikt in de eerste integraal.

198 HOOFDSTUK 11. ANTWOORDEN
2. Laat f(X) = akXk+...+a1X+a0. Als f(X) = f(−X) dan volgt dat
de oneven coefficienten allemaal 0 moeten zijn en als f(X) = −f(X)dan volgt dat de even coefficienten allemaal 0 moeten zijn. Eenbasis voor R[X]sym wordt dus gegeven door {1, X2, X4, ...} en eenbasis voor R[X]asym wordt gegeven door {X,X3, X5, ...}.
3. Laat f(X) ∈ R[X] willekeurig, dus f(X) = akXk + ... + a1X + a0.
We kunnen dit splitsen in fsym(X) = a0 + a2X2 + ... + a2nX
2n enfasym(X) = a1X + a3X
3 + ... + a2n+1X2n+1. Er geldt dan f(X) =
fsym(X) + fasym(X).
4. Te bewijzen: R[X]sym = R[X]⊥asym. Dit bewijs gaat hetzelfde als datvan opgave 9.4.14(4) waar we hetzelfde hebben bewezen voor sym-metrische en antisymmetrische matrices.We bewijzen eerst de inclusie ⊆: Laat f(X) ∈ R[X]sym dan volgtuit vraag 1 dat ⟨f(X), g(X)⟩ = 0 voor alle g(X) ∈ R[X]asym dusconcluderen we f(X) ∈ R[X]⊥asym.
Nu bewijzen we ⊇: Laat f(X) ∈ R[X]⊥asym dan geldt ⟨f(X), g(X)⟩ =0 voor alle g(X) ∈ R[X]asym. Uit 3 volgt dat we f(X) kunnen schri-jven als f(X) = fsym(X)+fasym(X). We nemen nu g(X) = fasym(X)dan geldt dus ⟨f(X), fasym(X)⟩ = 0 en dus ⟨fsym(X), fasym(X)⟩ +⟨fasym(X), fasym(X)⟩ = 0. Uit vraag 1 volgt dat de eerste term 0is, en dus staat er nu ⟨fasym(X), fasym(X)⟩ = 0 en dit impliceertfasym(X) = 0, dus f(X) = fsym(X). We concluderen f(X) ∈R[X]sym.
11.10 Hoofdstuk 10
10.5.1 Bepaal de inproducten tussen de verschillende kolomvectoren en con-troleer dat deze 0 zijn. Bepaal de lengtes van de kolomvectoren en con-troleer dat deze 1 zijn.Een andere mogelijkheid is om U tU te berekenen en te controleren dathier de identiteitsmatrix uitkomt.
10.5.2 Neem a, b, c als derde kolom. Uit de eis voor orthogonaliteit volgt eenstelsel van twee vergelijkingen. Normaliseren geeft vervolgens de goedevector. Merk op dat je ook −a,−b,−c kan kiezen.
1√3
1√2
1√6
1√3
0 −2√6
1√3
−1√2
1√6
27
3√13
12√637
37
−2√13
18√637
67 0 −13√
637
10.5.3 Merk op dat de matrix ook symmetrisch is, want (vvt) is symmetrisch.
We controleren nu dat UU t = U2 = Idn. Er geldt(In − 2
|v|2vvt
)2
= In − 4
|v|2vvt) +
4
|v|4vvtvvt (1)

11.10. HOOFDSTUK ?? 199
Omdat vtv de 1 × 1-matrix met element vtv = |v|2 is, volgt vvtvvt =|v|2(vvt). Daarmee vallen de laatste twee termen van (1) tegen elkaarweg.
Laten we deze matrix los op v dan krijgen we de vector −v. Laten we dematrix los op een vector w ⊥ v, dan komt daar weer w uit. We zien datde matrix hoort bij een loodrechte spiegeling in het hypervlak loodrechtop v¿
10.5.6 1. We zien At = A dus A is symmetrisch (dit is equivalent met dedefinitie ⟨Ax, y⟩ = ⟨x,Ay⟩ ∀x, y volgens stelling 10.1.2)
Volgens stelling 10.3.2 is A een orthogonale afbeelding precies als dematrix A een orthogonale matrix is. We berekenen de inproductentussen de kolommen van A en deze zijn allemaal 0. Verder bereke-nen we de lengtes van de kolomvectoren en deze zijn 1. Hiermeeconcluderen we dat A een orthogonale afbeelding is.
2. Uit stelling 10.1.3 volgt dat A rele eigenwaarden heeft omdat A sym-metrisch is. Volgens stelling 10.3.1(4) zijn de rele eigenwaarden vanA gelijk aan ±1 omdat A orthogonaal is. Alle eigenwaarden zijn reeldus gelijk aan 1 of −1. Dit vertelt ons echt nog niet dat de eigen-waarde 1 n keer voorkomt en de eigenwaarde −1 twee keer voorkomtzoals in de vraag staat. We gebruiken nu dat het spoor van een ma-trix gelijk is aan de som van de eigenwaarden. We zien Spoor(A) =27+
−67 +−3
7 = −1. Dit betekent dat λ1+λ2+λ3 = ±1+±1+±1 = −1.De enige manier waarop dit kan is n keer λ = 1 en tw keer λ = −1.
3. Om A te diagonaliseren moeten we de eigenvectoren berekenen. Webeginnen met λ = 1:
1
7
2− 7 3 6 03 −6− 7 2 06 2 −3− 7 0
⇒ 1
7
−5 3 6 03 −13 2 06 2 −10 0
Vegen geeft 1 −3 0 0
0 −2 1 00 0 0 0
⇒
xyz
= t
312
.
Normaliseren geeft w1 =1√14(3, 1, 2). Hetzelfde voor λ = −1:
1
7
2 + 7 3 6 03 −6 + 7 2 06 2 −3 + 7 0
⇒ 1
7
9 3 6 03 1 2 06 2 4 0
We vegen deze matrix (deel de eerste rij door 3, en de laatste door2) en krijgen 3 1 2 0
0 0 0 00 0 0 0
⇒
xyz
= t
−130
+ s
−203
.

200 HOOFDSTUK 11. ANTWOORDEN
Twee onafhankelijke genormaliseerde eigenvectoren zijn dus (−1, 3, 0)en (−2, 0, 3). We willen echter twee orthonormale vectoren (dit ismakkelijker later) dus we passen Gram-Schmidt doe en zo krijgenwe w2 = 1√
10(−1, 3, 0) en w3 = 1√
35(3, 1,−5). Er geldt nu dat Q−1
de matrix is met w1, w2, w3 als kolomvectoren. Echter omdat we devectoren wi orthogonaal hebben gekozen (w1 stond al orthogonaal opw2, w3 omdat deze bij een andere eigenwaarde hoorde) geldt dat Q−1
een orthogonale matrix is, en dus geldt Q = (Q−1)t. Dit betekentdat Q de matrix is met w1, w2, w3 als rijen Q−1 is de matrix metw1, w2, w3 als kolommen. Er geldt dan QAQ−1 = D met
Q =
3√14
1√14
2√14
−1√10
3√10
03√35
1√35
−5√35
D =
1 0 00 −1 00 0 −1
.
10.5.7 (a) We vullen de definitie in:
⟨Ax, y⟩ = ⟨⟨a1x⟩ a1 + ...+ ⟨ak, x⟩ ak, y⟩= ⟨⟨a1, x⟩ a1, y⟩+ ...+ ⟨⟨ak, x⟩ ak, y⟩ regel 3 inproduct
= ⟨a1, x⟩ ⟨a1, y⟩+ ...+ ⟨ak, x⟩ ⟨ak, y⟩ regel 2 inproduct
⟨x,Ay⟩ = ⟨x, ⟨a1y⟩ a1 + ...+ ⟨ak, y⟩ ak⟩= ⟨⟨a1y⟩ a1 + ...+ ⟨ak, y⟩ ak, x⟩ regel 1 inproduct
= ⟨a1, y⟩ ⟨a1, x⟩+ ...+ ⟨ak, y⟩ ⟨ak, x⟩ regel 2 en 3 inproduct
We zien dat we dezelfde uitdrukking krijgen dus ⟨Ax, y⟩ = ⟨x,Ay⟩.(b) Er geldt ⟨Ax, x⟩ = ⟨a1, x⟩ ⟨a1, x⟩+...+⟨ak, x⟩ ⟨ak, x⟩ = ⟨a1, x⟩2+
...+⟨ak, x⟩2 ≥ 0. De kwadraten zijn allemaal niet-negatief omdathet om een rele vectorruimte gaat. Stel dat λ een eigenwaarde isvan A met eigenvector x = 0, dan Ax = λx. Zo volgt ⟨Ax, x⟩ =λ ⟨x, x⟩ > 0. We weten ⟨x, x⟩ > 0 en dus moet ook gelden λ > 0.
(c) A is orthogonaal dus we kunnen stelling 14.6.1 gebruiken. Dezezegt dat alle eigenwaarden gelijk zijn aan +1 of −1, en omdatde eigenwaarden positief moeten zijn (volgt uit 2) kunnen weconcluderen dat alle eigenwaarden gelijk moeten zijn aan 1.
(d) Gebruik stelling 10.1.3: A is symmetrisch dus er is een orthonor-male basis van eigenvectoren van A. Alle eigenwaarden zijngelijk aan 1, dus alle eigenvectoren behoren tot dezelfde eigen-waarde. Dit betekent dat elke x ∈ V een eigenvector is meteigenwaarde 1 oftewel Ax = x.
10 (a) Zie opgave 9.4.13. Hier is dit voor algemene n × n-matricesbewezen.
(b) We vullen de definitie van symmetrisch in en gebruiken de regelSpoor(AB) = Spoor(BA):
⟨TX, Y ⟩ = ⟨CX −XC, Y ⟩

11.10. HOOFDSTUK ?? 201
= ⟨CX, Y ⟩ − ⟨XC, Y ⟩= Spoor(CXY t)− Spoor(XCY t)
= Spoor(XY tC)− Spoor(XCtY t)
= Spoor(X(CY )t)− Spoor(X(Y C)t)
= ⟨X,CY ⟩ − ⟨X,Y C⟩= ⟨X,CY − Y C⟩ = ⟨X,TY ⟩
(c) Ten eerste geldt T (C) = 0 en dus 0 is een eigenwaarde van Tmet eigenvector C.Verder geldt T (I) = 0 dus de identiteitsmatrix is ook een eigen-vector met eigenwaarde 0.Laat x = (x1, x2) = (0, 0) de eigenvector van C zijn met eigen-waarde λ en y = (y1, y2) = (0, 0) de eigenvector van C bij eigen-waarde µ, dus Cx = λx en Cy = µy.Laat X de matrix zijn met y1x en y2x als kolommen, dus X =(y1x1 y2x1y1x2 y2x2
). Dan geldt datXt als kolommen de vectoren x1y
en x2y heeft. Er geldt Cyix = λyix en dus CX = λX (de ma-trix C werkt op beide kolommen apart). Verder geldt Cxiy =µxiy en daarom CXt = µXt. Zo volgt XC = ((XC)t)t =(CXt)t = (µXt)t = µX. Als we dit combineren krijgen weT (X) = CX − XC = λX − µX = (λ − µ)X. We concluderendat X een eigenvector is van T met eigenwaarde λ− µ.Op dezelfde manier kunnen we een matix Y maken met x1yen x2y als kolommen (dus Y = Xt) en dan krijgen we juistCY = µY en Y C = λY en dus T (Y ) = (µ − λ)Y en zo volgtdat Y een eigenvector is van T met eigenwaarde µ− λ.
Index
afhankelijk, 57afstand, abstract, 146algebraısche multipliciteit, 132
basis, 60basis, abstract, 100
coefficientenmatrix, 36coordinaten, 11coordinatenkolom, 106coordinatentransformatie, 110commuteren, 34cosinusregel, 20
deelruimte, 45determinant, 72, 78determinant afbeelding, 111dimensie, 59dimensie, abstract, 100directe som, 66, 112dominante eigenwaarde, 135dotproduct, 20driehoeksongelijkheid, 26duale vectorruimte, 113
eigenruimte, 123eigenvector, 122eigenwaarde, 123eigenwaardevergelijking, 124even permutatie, 76
Gauss-eliminatie, 36, 38geadjungeerde matrix, 89georienteerd oppervlak, 70georienteerd volume, 71getransponeerde, 35graad, 129Gram-matrix, 148Gram-Schmidt procede, 148
homogeen, 44
inhomogeen, 44inproduct, 20inverse matrix, 43inwendig product, 20, 25isomorf, 105
Jordan blok, 132Jordan matrices, 133Jordanreductie, 40
karakteristieke polynoom, 124kentallen, 11kern, 104kolommenrang, 62kopcoefficient, 129Kronecker delta, 151kurketrekkerregel, 71
lengte, 8, 26linaire vorm, 113lineair afhankelijk, 57lineair onafhankelijk, 57lineaire afbeelding, 103lineaire combinatie, 57lineaire combinatie, abstract, 99lineaire deelruimte, 45lineaire relatie, abstract, 99lineaire relaties, 57
matrixelementen, 33matrixvermenigvuldiging, 34meetkundige multipliciteit, 132minor, 86multipliciteit, 130
negatief georienteerd, 70nilpotent, 55normaalvector, 23nulmatrix, 33nulpunt, 87, 130
202
INDEX 203
nulruimte, 45, 63nulvector, 8
onafhankelijk, 10, 57onderdeterminant, 86oneven permutatie, 76ongelijkheid van Cauchy-Schwarz, ab-
stract, 146ontwikkeling determinant, 84oorsprong, 9, 12opspansel, 45opspansel, abstract, 99orthogonaal, 21orthogonaal complement, 152orthogonaal stelsel, 147orthogonale afbeelding, 165orthogonale basis, 148orthogonale matrix, 163orthogonale projectie, 153orthogonale vectoren, 27orthonormaal stelsel, 147orthonormale basis, 148
parallelogramwet, 8parametervoorstelling, 9, 10particuliere oplossing, 44permutatie, 76pivot variabelen, 39polynoom, 87positief georienteerd, 70, 71
quotientruimte, 112
rang, 59rang, abstract, 100richtingvector, 10rijenrang, 62rijgereduceerde vorm, 39rijreductie, 39
scalaire vermenigvuldiging, 8signum functie, 77somruimte, 64somvector, 8spoor afbeelding, 111spoor matrix, 128steunvector, 9, 10strijdig stelsel, 39
symmetrische afbeelding, 161
tensorproduct, 113trapvorm, 39triviale relatie, 57
uitgebreide coefficientenmatrix, 36uitwendig product, 70
VanderMonde determinant, 86vector, 7vectorruimte, abstract, 96vectorvoorstelling, 9veelterm, 87vergelijking van een vlak, 13vergelijking voor een vlak, 23verschilvector, 8volledig rijgereduceerd, 40volledige rijreductie, 40
zwaartepunt, 10