F-NL/Rinus SimonisMastering the basics of electrical drives March 27, 2009 Encoder 1.Een encoder, is...
65
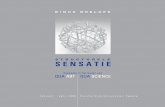
F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 Encoder 1. Een encoder, is een elektromechanisch apparaat dat de stand of beweging van een as naar code omzet. 2. Absolute encoders geven de huidige positie van de as, ze worden ook wel hoek- transducers genoemd. 3. Incrementele encoders geven cyclische signalen als de as wordt gedraaid. Deze signalen kunnen gemakkelijk omgezet worden in aan beweging gerelateerde informatie, zoals snelheid en versnelling en verplaatsing. 4. De optische incrementele encoder wordt het meest toegepast
-
Upload
roeland-bogaerts -
Category
Documents
-
view
212 -
download
0
Transcript of F-NL/Rinus SimonisMastering the basics of electrical drives March 27, 2009 Encoder 1.Een encoder, is...

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
Encoder1. Een encoder, is een elektromechanisch
apparaat dat de stand of beweging van een as naar code omzet.
2. Absolute encoders geven de huidige positie van de as, ze worden ook wel hoek- transducers genoemd.
3. Incrementele encoders geven cyclische signalen als de as wordt gedraaid. Deze signalen kunnen gemakkelijk omgezet worden in aan beweging gerelateerde informatie, zoals snelheid en versnelling en verplaatsing.
4. De optische incrementele encoder wordt het meest toegepast

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
Encoder1. Het feit dat de incrementele encoders
slechts twee sensoren (A en B) bevatten heeft geen invloed op de nauwkeurigheid. Er bestaan incrementele encoders met 10.000 pulsen per omwenteling, of meer.
2. De draairichting kan bepaald worden aan de hand van de signaalvolgorde van de signalen A & B.
3. Vaak wordt een 3e sensor toegevoegd (I) deze geeft 1 puls per omwenteling.
BA
I

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
Encoder
3
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1
Rechtsom:

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
Encoder
4
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 5
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 6
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 7
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 8
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 9
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 10
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 11
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 12
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 13
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 14
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 15
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 16
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 17
Encoder
BA
I
Hoek A B0 1 0
6 1 1
12 0 1
18 0 0
24 1 0
30 1 1
36 0 1
42 0 0
48 1 0
54 1 1
60 0 1
66 0 0
72 1 0
78 1 1
82 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 18
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 19
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 20
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 21
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 22
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 23
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 24
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 25
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 26
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 27
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 28
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 29
Encoder Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 30
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 31
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 32
Encoder
BA
I
Hoek A B88 1 0
94 1 1
100 0 1
106 0 0
112 1 0
118 1 1
124 0 1
130 0 0
136 1 0
142 1 1
148 0 1
154 0 0
160 1 0
166 1 1
172 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 33
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 34
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 35
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 36
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 37
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 38
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 39
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 40
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 41
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 42
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 43
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 44
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 45
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 46
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 47
Encoder
BA
I
Hoek A B180 1 0
188 1 1
194 0 1
200 0 0
206 1 0
212 1 1
218 0 1
224 0 0
230 1 0
236 1 1
252 0 1
258 0 0
264 1 0
270 1 1
276 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 48
Encoder Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 49
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 50
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 51
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 52
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 53
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 54
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 55
Encoder Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 56
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 57
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 58
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 59
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 60
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009 61
Encoder
BA
I
Hoek A B282 1 0
288 1 1
294 0 1
300 0 0
306 1 0
312 1 1
318 0 1
324 0 0
330 1 0
336 1 1
352 0 1
358 0 0
364 1 0
370 1 1
376 0 1

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
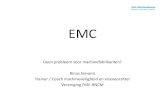
Opgave 0: Encoder
• Monteer de sensoren (A en B) in de voorste schroefgaten van het motorhuis.
• Sluit de sensoren aan op 24V=.
• Noteer de signalen bij rechtsom draaien en linksom draaien in de tabel. Beweeg de motor met de hand.
62
Rechtsom A B
Linksom A B
Rechtsom A B0 0
0 1
1 1
1 0
0 0
Linksom A B0 0
1 0
1 1
0 0

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
Opgave 0a
• Ontwerp in een PLC een positieregistratie en een snelheidsmeting voor de motor. Schrijf de waarde voor snelheid en positie in een register en toon deze waarde eventueel op een HMI display.
• Gebruik de sensoren op het motorhuis (A,B en I) als terugkoppeling van de positie (gemeten waarde).
• Beweeg de motor met de hand.
63
Snelheid:100 omw/min
Positie:300

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
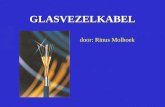
Opgave 0b
• Ontwerp in een PLC een handmatige sturing voor de motor. De motor moet links en rechtsom kunnen draaien met een vaste snelheid. Bedien de motor met behulp van drukknoppen of HMI.
• Combineer dit met de positie en snelheidsmeting van opgave 0a
• Gebruik de sensoren op het motorhuis (A,B en I) als terugkoppeling van de positie (gemeten waarde).
• Stuur de motorcontroller aan met een analoge PLC uitgang. (Zie opgave 3).
64
Snelheid:100 omw/min
Positie:300
Rechtsom
Linksom
Stop

F-NL/Rinus Simonis Mastering the basics of electrical drives March 27, 2009
Opgave 0a
• Ontwerp in een PLC een regelkring voor het servosysteem.
• Gebruik de sensoren op het motorhuis (A,B en I) als terugkoppeling van de positie (gemeten waarde).
• Stuur de motorcontroller aan met een analoge PLC uitgang. (Zie opgave 3).
65