Yoann Dieudonné Franck Petit - NPAtixeuil/m2r/uploads/Main/ANET... · 2015-12-08 · Introduction...
43
Introduction Model SSM The Gathering Problem Our protocol Conclusions Self-stabilizing Deterministic Gathering Yoann Dieudonné Franck Petit Université de Picardie Jules Verne, France Rhodes, ALGOSENSORS 2009 Yoann Dieudonné , Franck Petit Rhodes, ALGOSENSORS 2009 1 / 49
Transcript of Yoann Dieudonné Franck Petit - NPAtixeuil/m2r/uploads/Main/ANET... · 2015-12-08 · Introduction...

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Self-stabilizing Deterministic Gathering
Yoann Dieudonné Franck Petit
Université de Picardie Jules Verne, France
Rhodes, ALGOSENSORS 2009
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 1 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Gathering Problem
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 2 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Model SSM
(1)
(1)(2)
(2)
(3)
(1)
(1)(1) (1)
(1)
(5)
(1) Assumption 1Two or more robots can occupythe same point
Assumption 2All the robots can determine thenumber of robots on each point
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 11 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
1 Introduction
2 Model SSM
3 The Gathering Problem
4 Our protocol
5 Conclusions
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 12 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Problem Definition
(1)
(1)(2)
(2)
(3)
(1)
(1)(1) (1)
(1)
(5)
(1)
(18)
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 13 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
In literature
In literatureMainly studied :
In a probabilistic way [Suzuki et al. 99, Gradinariu et al.07,08,09]Starting from a configuration where all the robots areinitially at distinct positions [Suzuki et al. 99, Cieliebak 03,Flocchini et al. 03,...]
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 14 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
In literature
Starting from an arbitrary configuration and in adeterministic way, only the following result
Corollary (Suzuki and yamashita 99)Starting from an arbitrary configuration the gathering problemcannot be solved in SSM in a deterministic way if the number ofrobots is even.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 15 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
In literature
P1 P2
Impossibility of gatheringonly converge in an infinitenumber of steps
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 16 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Results
we provide a deterministic protocol for solving thegathering problem for an odd number of robots startingfrom an arbitrary configuration
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 17 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Results
we provide a deterministic protocol for solving thegathering problem for an odd number of robots startingfrom an arbitrary configurationThe protocol is self-stabilizing because "regarless of theinitial states", it is guaranteed to converge in a finitenumber of steps.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 17 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
1 Introduction
2 Model SSM
3 The Gathering Problem
4 Our protocol
5 Conclusions
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 18 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Our Protocol
(1)
(2)(2)
(3)
(1)
(1)(1) (1)
(1)
(5)
(1)
(5)
Definition (Maximal Points)A point p is maximal⇐⇒ ∀point p′, |p| ≥ |p′|
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 19 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is only one maximal point
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 20 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is only one maximal point
Only the closest robots areallowed to move towardthe maximal point.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 21 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are only one maximal point
The unique maximal point remains uniqueThe number of robots located at the maximal pointincreases in finite timeEvery robot becomes a close robot in finite time
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 22 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are only one maximal point
The unique maximal point remains uniqueThe number of robots located at the maximal pointincreases in finite timeEvery robot becomes a close robot in finite time
LemmaThe deterministic gathering can be solved in SSM for an oddnumber of robots if there exists only one maximal point.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 22 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are exactly 2 maximal points
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 23 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are exactly 2 maximal points
Only the closest robots toone of the two maximalpoints are allowed to move
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 24 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are exactly 2 maximal points
no other maximal point is creatednumber of robots on the two maximal points increasesexactly one maximal point in finite time because thenumber of robots is odd
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 25 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are exactly 2 maximal points
no other maximal point is creatednumber of robots on the two maximal points increasesexactly one maximal point in finite time because thenumber of robots is odd
LemmaThe deterministic gathering can be solved in SSM for an oddnumber of robots if there exist exactly 2 maximal points.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 25 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are at least 3 maximal points
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 26 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are at least 3 maximal points
We consider the smallestenclosing circle
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 27 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there are at least 3 maximal points
Theorem (Meggido 86)The smallest circle enclosing a set of points is unique and canbe computed in linear time
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 28 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
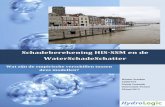
If there is exactly 3 maximal points
2 cases to consider
At least one robot inside SEC No robot inside SEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 29 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
At least one robot inside SEC
the robots inside SEC,move to the center of SEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 30 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
At least one robot inside SEC
the robots inside SEC,move to the center of SECSEC remains invariant
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 30 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
At least one robot inside SEC
A unique maximal mayappear at the center ofSEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 31 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
At least one robot inside SEC
Only the maximal pointsare allowed to movetowards the center
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 32 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
At least one robot inside SEC
A unique maximal mayappear at the center ofSEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 33 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
At least one robot inside SEC
(5)
(1)
(3)
(5)
(2)
(2)
C
(2)
(1)
C
(3)
(3)
(4)
(4)
(1)
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 34 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
Theorem (Chrystal 1885)All the points inside the convex hull are inside SEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 35 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
Theorem (Chrystal 1885)All the points inside the convex hull are inside SEC
LemmaAll the robots inside SEC remains inside SEC even if SECchanges while there exist at least three maximal points
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 35 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
the number of robots insideSEC never increases
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 36 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
the number of robots insideSEC never increases
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 37 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
the number of robots insideSEC never increases
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 38 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
the number of robots insideSEC never increases
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 39 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
Otherwise the number of robots inside SEC increases andwe obtain a unique maximal point in finite time.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 40 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
Otherwise the number of robots inside SEC increases andwe obtain a unique maximal point in finite time.
LemmaThe deterministic gathering can be solved in SSM for an oddnumber of robots if there exist at least 3 maximal points and atleast one robot inside SEC.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 40 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
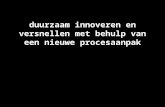
If there is exactly 3 maximal points
No robot inside SEC
there are never somerobots inside SEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 41 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
No robot inside SEC
there are never somerobots inside SEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 42 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
No robot inside SEC
there are never somerobots inside SEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 43 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
If there is exactly 3 maximal points
No robot inside SEC
there are never somerobots inside SEC
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 44 / 49

Introduction Model SSM The Gathering Problem Our protocol Conclusions
Final result
TheoremStarting from an arbitrary configuration the gathering problemcan be solved in SSM in a deterministic way⇐⇒ the number ofrobots is odd.
Yoann Dieudonné, Franck Petit Rhodes, ALGOSENSORS 2009 45 / 49