QnPHCPU/QnPRHCPU MITSUBISHI
276
QnPHCPU/QnPRHCPU 프로그래밍 매뉴얼 미쓰비시 범용 PLC Q MITSUBISHI ( ) 프로세스 제어 명령편
Transcript of QnPHCPU/QnPRHCPU MITSUBISHI

QnPHCPU/QnPRHCPU
프로그래밍 매뉴얼
미쓰비시범용 PLC
Q
MITSUBISHI( )프로세스 제어 명령편
QnPHCPU/QnPRHCPU
P
● 안전상의 주의 ●(사용하시기 전에 반드시 읽어 주십시오.)
본제품을 사용하실 때는 본 매뉴얼 및본 매뉴얼에서 소개하고 있는 관련 매뉴얼을잘 읽고,안전
에 대해서 충분한 주위를기울여올바르게취급해주실 것을당부 드립니다.
●안전상의 주의●에서는 안전 주의 사항의 등급을「위험」, 「주의」로써 구분하고있습니다.
주의취급을 잘못하였을경우에위험한 상황이 일어날 수 있고, 사망또는 중상을
입을 가능성이 예상되는 경우.
위험취급을 잘못하였을경우에위험한 상황이 일어날 수 있고, 중간정도의 상해
나 경상을입을 가능성이 예상되는 경우 및 물적 손해정도만 발생할 가능성
이 예상되는 경우.
또한, 주의로써 기재한 사항이라도, 상황에 따라서는 중대한 결과로 이어질 가능성이 있습니다.
모두중요한 내용을 기재하고 있으므로 반드시 지켜 주십시오.
본 매뉴얼은필요한 때에 읽을수 있도록 소중히보관하시고, 반드시 최종 사용하시는 분까지전달
될 수 있기를부탁드립니다.
개 정 이 력
※ 취급 설명서 번호는 본 설명서의 뒤표지의 왼쪽 아래에 기재되어 있습니다.
인쇄일자 ※취급 설명서 번호 개 정 내 용
2002년 1월 SH(명)-080265-A 초판 인쇄
2004년 5월 SH(명)-080265-B 매뉴얼 명칭 변경
QnPHCPU 프로그래밍 매뉴얼(프로세스 제어 명령편)
→QnPHCPU/QnPRHCPU 프로그래밍 매뉴얼(프로세스 제어 명령편)
용어 변경
DVL:변화율 제한값→편차 제한값
일부 수정
관련 매뉴얼, 2.2.1항, 2.2.3항, 3.3.5항, 7장, 8.5절, 9.18절,
9.21절, 10.1절, 10.2절, 부2.3, 부2.7
추 가
본 매뉴얼에서 사용하는 총칭 및 약칭
2005년 3월 SH(명)-080265-C 일부 수정
8.2절, 8.5절, 9.1절, 9.2절, 9.3절, 9.4절, 9.5절, 9.8절
본 서에 의해서 공업 소유권 기타 권리의 실행에 대한 보증 또는 실행권을 허락하는 것은 아닙니다.
또한 본 서 게재 내용의 사용에 기인하는 공업 소유권상의 여러 문제에 대해서 당사는 책임지지 않습니다.
2002 MITSUBISHI ELECTRIC CORPORATION
안 내
차 례
미쓰비시 범용 PLC MELSEC-Q 시리즈를 구입해 주셔서 대단히 감사합니다.
사용하시기 전에 본 매뉴얼을 잘 읽고, Q 시리즈 PLC의 기능ㆍ성능을 충분히 이해하신 후에 올바르게
사용해 주실 것을 당부 드립니다.
안전상의 주의 A- 1
개정 이력 A- 2
차례 A- 3
매뉴얼에 대해 A- 7
본 매뉴얼에서 사용하는 총칭 및 약칭 A- 7
2 프로세스제어 명령의 구성과조합 2- 1~2- 6
2.2 디바이스 내 데이터의 지정 방법 2- 2
2.2.2 워드(16비트) 데이터의 경우 2- 2
2.2.3 더블 워드(32비트) 데이터의 경우 2- 3
2.2.4 실수 데이터(부동 소수점 데이터)의 경우 2- 3
2.2.5 프로세스 제어 명령의 연산 에러 2- 4
2.3 프로세스 제어 명령의 조합에 의한 기본적인 루프 타입 2- 5
3 프로세스제어 명령으로 사용하는 데이터와지정 방법 3- 1~3- 9
3.1 프로세스 제어 명령과 데이터 구성 3- 1
3.3 프로세스 제어 명령으로 사용하는 데이터 3- 4
3.3.5 루프 태그 메모리의 할당 내용 3- 7
1 개 요 1- 1~1- 9
1.1 특 징 1- 1
1.2 PID 제어의 개요 1- 4
1.3 정동작과 역동작 1- 5
1.4 PID 제어 1- 6
1.4.1 비례 동작(P동작) 1- 6
1.4.2 적분 동작(I동작) 1- 7
1.4.3 미분 동작(D동작) 1- 8
1.4.4 PID 동작 1- 9
2.1 명령의 구성 2- 1
2.2.1 비트 데이터의 경우 2- 2
2.2.6 명령의 실행 조건 2- 4
2.2.7 스텝수 2- 4
2.2.8 인덱스 수식 2- 5
3.2 로컬 워크 메모리 3- 3
3.3.1 루프 메모리 3- 4
3.3.2 입력 데이터 3- 5
3.3.3 블록 메모리 3- 6
3.3.4 연산 정수 3- 6
...........................................................................
...............................................................................
...........................................................................
....................................................................
....................................................................
...........................................................................
...............................................................
...............................................................
...............................................................
.......................................................................
.........................................................................
......................................................
..............................................................
......................................................
.................................................
..................................................
..........................................
.................................
................................................................
..........................................................................
.....................................................................
....................................................
....................................................................
..............................................
.....................................................................
.....................................................................
.....................................................................
.......................................................................
....................................................
....................................................................................
...........................................................................
.....................................................
4 프로세스 제어 명령의 실행 방법 4- 1~4- 2
4.1 실행 주기와 제어 주기 4- 1
4.2 프로그램 작성 방법 4- 2
5 실행 조건의전환과기능 5- 1~5- 3
5.1 실행 조건의 전환 5- 1
5.1.1 루프 RUN/STOP 5- 1
5.2 기 능 5- 2
5.2.1 트래킹 기능 5- 2
5.2.2 캐스케이드 루프의 트래킹 5- 2
8.2 모드 전환 출력 처리 1(S.OUT1) 8- 6
8.3 모드 전환 출력 처리 2(S.OUT2) 8-12
5.2.3 루프 Selector의 트래킹 5- 3
6 명령일람 6- 1~6-5
6.1 명령 일람표 사용 방법 6- 1
6.2 명령 일람 6- 2
6.2.1 입출력 제어 명령 6- 2
6.2.2 제어 연산 명령 6- 2
6.2.3 보정 연산 명령 6- 4
6.2.4 산술 연산 명령 6- 5
6.2.5 비교 연산 명령 6- 5
6.2.6 오토 튜닝 명령 6- 5
7 명령설명내용 보는 방법 7- 1~7-4
8 입출력 제어명령 8- 1~8-36
8.1 아날로그 입력 처리(S.IN) 8- 1
8.4 수동 출력(S.MOUT) 8-17
8.5 시간 비례(S.DUTY) 8-21
8.6 배치 카운터(S.BC) 8-28
8.7 펄스 적산(S.PSUM) 8-32
9 제어연산명령 9- 1~9-113
9.1 기본 PID(S.PID) 9- 1
9.2 2 자유도 PID(S.2 PID) 9- 9
9.3 위치형 PID(S.PIDP) 9-18
9.4 샘플 PID(S.SPI) 9-27
9.5 I-PD 제어(S.IPD) 9-35
9.6 블렌드 PI 제어(S.BPI) 9-43
9.7 비율(S.R) 9-50
9.8 상하한 경보(S.PHPL) 9-55
9.9 진행 지연(S.LLAG) 9-61
9.10 적분(S.I) 9-63
..............................................................
.................................................................
...................................................................
.......................................................
..................................................................
.........................................................
.............................................................................
....................................................................
...........................................................
.....................................................
.....................................................
..................................................................
..................................................................
..................................................................
..................................................................
..............................................................
....................................................................
..........................................................................
..............................................................
...............................................................
.................................................................
.................................................................
....................................................................
.................................................................
...................................................................
.................................................................
..........................................................................
..................................................................
.................................................................
..............................................................
.................................................................
................................................................
..........................................................................
9.11 미분(S.D) 9-65
9.12 불감 시간(S.DED) 9-67
9.13 High Selector(S.HS) 9-70
9.14 Low Selector(S.LS) 9-72
9.15 중간값 선택(S.MID) 9-74
9.16 평균값(S.AVE) 9-77
9.17 상하한 리미터(S.LIMT) 9-79
9.18 변화율 리미터 1(S.VLMT1) 9-81
9.19 변화율 리미터 2(S.VLMT2) 9-83
9.20 2 위치 ON/OFF(S.ONF2) 9-85
9.21 3 위치 ON/OFF(S.ONF3) 9-91
9.22 불감대(S.DBND) 9-97
9.23 프로그램 설정기(S.PGS) 9-99
9.24 루프 Selector(S.SEL) 9-104
9.25 범프리스 트랜스(S.BUMP) 9-110
9.26 아나로그 메모리(S.AMR) 9-112
10 보정 연산명령 10- 1~10-15
10.1 꺾은선(S.FG) 10- 1
10.2 역꺾은선(S.IFG) 10- 3
10.3 표준 필터(S.FLT) 10- 5
10.4 적산(S.SUM) 10- 8
10.5 온도 압력 보정(S.TPC) 10-10
10.6 공학값 변환(S.ENG) 10-12
10.7 공학값 역변환(S.IENG) 10-14
11 산술 연산 명령 11- 1~11-12
11.1 덧셈(S.ADD) 11- 1
11.2 뺄셈(S.SUB) 11- 3
11.3 곱셈(S.MUL) 11- 5
11.4 나눗셈(S.DIV) 11- 7
11.5 제곱근(S.SQR) 11- 9
11.6 절대값(S.ABS) 11-11
12 비교 연산 명령 12- 1~12-10
12.1 비교(S.>) 12- 1
12.2 비교(S.<) 12- 3
12.3 비교(S.=) 12- 5
12.4 비교(S.>=) 12- 7
12.5 비교(S.<=) 12- 9
13 오토튜닝 13- 1~13-12
13.1 오토 튜닝(S.AT1) 13- 4
14 에러코드 14- 1~14- 2
14.1 에러 코드 일람 14- 1
.........................................................................
..................................................................
...............................................................
................................................................
................................................................
.............................................................
.....................................................................
..........................................................
..........................................................
.............................................................
.............................................................
....................................................................
............................................................
..........................................................
.............................................................
...........................................................
.....................................................................
......................................................................
.......................................................................
..................................................................
......................................................................
.......................................................................
.................................................................
......................................................................
........................................................................
......................................................................
....................................................................
......................................................................
............................................................
....................................................................
......................................................................
............................................................
....................................................................
.................................................................
...................................................................
...............................................................
부 록 부- 1~부-22
부1 프로그램 예 부- 1
부2 루프 태그 메모리 일람 부- 5
부2.1 PID 제어(SPID), 2 자유도 PID 제어(S2PID), 샘플 PI 제어(SSPI 부- 5
부2.2 I-PD 제어(SIPD), 블렌드 PI 제어(SBPI) 부- 7
부2.3 수동 출력(SMOUT), 모니터(SMON) 부- 9
부2.4 모니터 수동 출력(SMWM), PIDP 제어(SPIDP) 부-11
부2.5 2 위치 ON/OFF 제어(SONF2), 3 위치 ON/OFF 제어(SONF3) 부-13
부2.6 배치 카운터(SBC) 부-14
부2.7 비율 제어(SR) 부-16
부3 연산 처리 시간 부-18
부3.1 각 명령의 연산 처리 시간 부-18
부3.2 2 자유도 PID 제어 루프의 연산 처리 시간 부-21
......................................................................
............................................................
..................
........................................
...............................................
.........................
.....................................
.............................................................
................................................................
...................................................................
.....................................................
......................................
매뉴얼에 대해
본 제품에 관련하는 매뉴얼은 다음과 같습니다.
필요에 따라서 본 표를 참고로 하여 의뢰 주십시오.
관련 매뉴얼
매뉴얼 명칭매뉴얼 번호
(형명 코드)
QCPU 사용자 매뉴얼(하드웨어 설계ㆍ보수 점검편)
CPU 모듈, 전원 모듈, 베이스 모듈, 증설 케이블 및 메모리 카드 등의 사양을 설명
하고 있습니다.
(별매)
SH-080472
(13 JP56)
QCPU 사용자 매뉴얼(기능 해설ㆍ프로그램 기초편)
CPU 모듈에서 프로그램을 작성하는데 필요한 기능, 프로그래밍 방법, 디바이스 등에
대해 설명하고 있습니다.서(별매)
SH-080473
(13JP57)
QCPU(Q모드)/QnACPU 프로그래밍 매뉴얼(공통 명령편)시퀀스 명령, 기본 명령, 응용 명령 및 마이컴 프로그램의 사용 방법에 대해 설명
하고 있습니다.
서
(별매)
SH-080021
(13JC00)
QCPU(Q모드)/QnACPU 프로그래밍 매뉴얼(SFC편)
MELSAP3의 시스템 구성, 성능 사양, 기능, 프로그래밍, 디버그 및 에러 코드 등에
대해 설명하고 있습니다.서
(별매)
SH-080023
(13JC02)
QCPU(Q모드)프로그래밍 매뉴얼(MELSAP-L편)MELSAP-L 형식의 SFC 프로그램의 작성에 필요한 프로그래밍 방법, 사양, 기능 등에
대해서 설명하고 있습니다.(별매)
SH-080072
(13JC03)
본매뉴얼에서 사용하는 총칭및 약칭에 대해
본 매뉴얼에서는 특별히 명기하는 경우를 제외하고 아래의 총칭 및 약칭을 사용
하여 설명하고 있습니다.
총칭/약칭 총칭ㆍ약칭의 내용
QnPHCPU Q12PHCPU, Q25PHCPU의 약칭.
QnPRHCPU Q12PRHCPU, Q25PRHCPU의 약칭.
1 개 요
본 매뉴얼은 QnPHCPU/QnPRHCPU에 탑재되어 있는 프로세스 제어 명령에 대해 설
명하고 있습니다.
1.1 특 징
프로세스 제어 명령은 아래와 같은 특징을 갖고 있습니다.
부동 소수점형 실수 데이터를 취급할 수 있기 때문에, 광범위하고 정밀도가
높은 연산을 할 수 있습니다.
(1) 부동 소수점 데이터의 사용이 가능
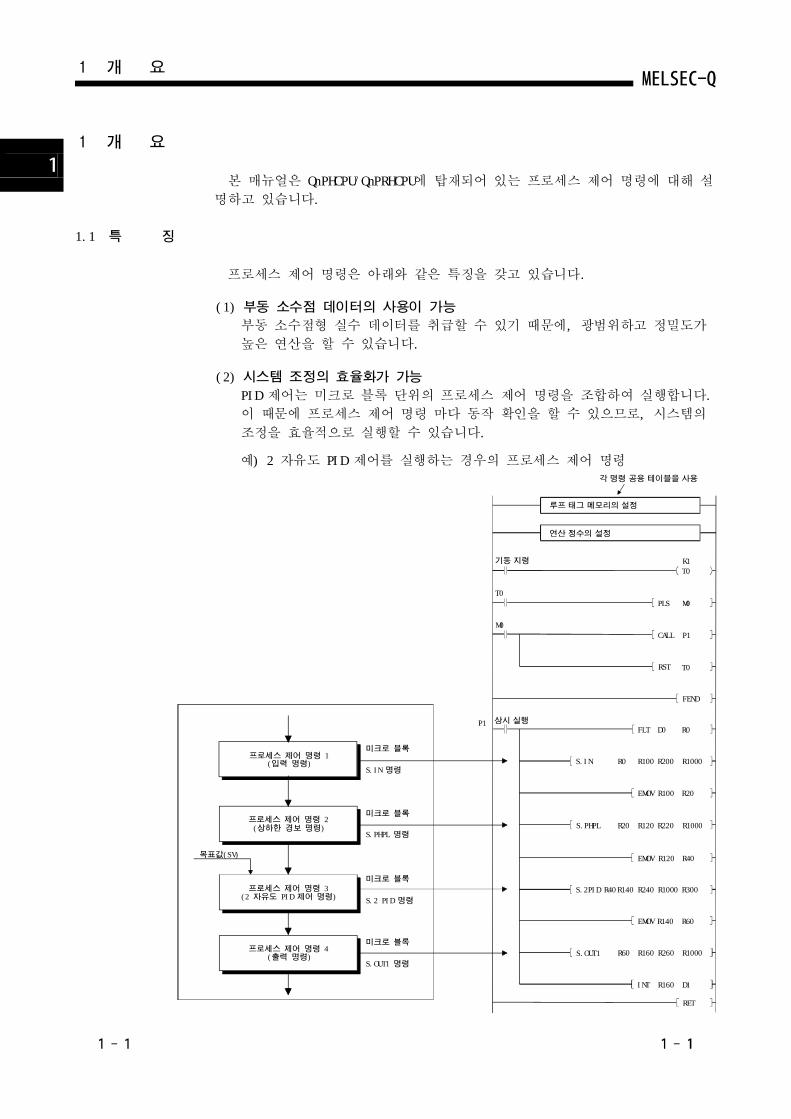
(2) 시스템 조정의 효율화가 가능
PID 제어는 미크로 블록 단위의 프로세스 제어 명령을 조합하여 실행합니다.
이 때문에 프로세스 제어 명령 마다 동작 확인을 할 수 있으므로, 시스템의
조정을 효율적으로 실행할 수 있습니다.
예) 2 자유도 PID 제어를 실행하는 경우의 프로세스 제어 명령
프로세스 제어 명령 1( )입력 명령
프로세스 제어 명령 2( )상하한 경보 명령
프로세스 제어 명령 3(2 PID )자유도 제어 명령
프로세스 제어 명령 4( )출력 명령
목표값(SV)
미크로 블록
S.IN 명령
미크로 블록
S.PHPL 명령
미크로 블록
S.2 PID 명령
미크로 블록
S.OUT1 명령
각 명령 공용 테이블을 사용
루프 태그 메모리의 설정
연산 정수의 설정
기동 지령
상시 실행
1 개 요
T0
T0
T0
M0
M0PLS
R0D0FLT
R1000R200R100R0S.IN
R20R100EMOV
R1000R220R120R20S.PHPL
R40R120EMOV
R300R1000
R1000
R240
R260
R140
R160
S.2PID R40
R60
R60R140EMOV
P1
P1
K1
S.OUT1
D1R160INT
RET
CALL
RST
FEND
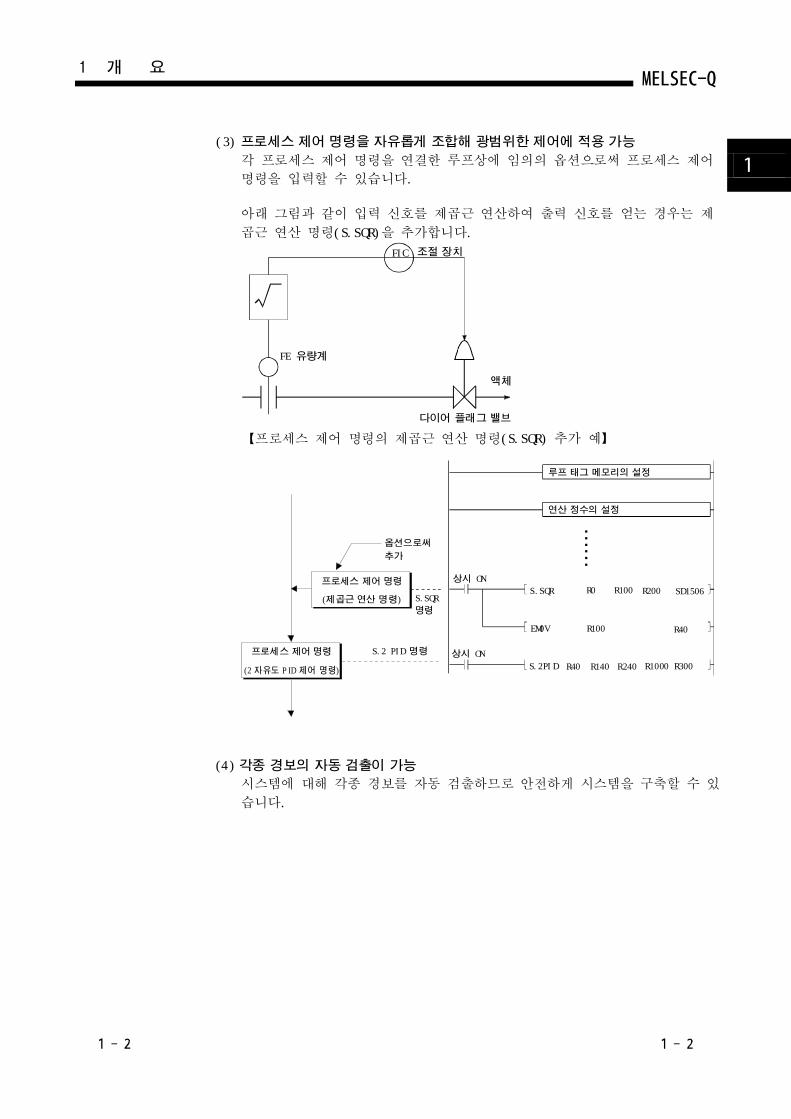
(3) 프로세스 제어명령을자유롭게 조합해 광범위한제어에 적용가능
각 프로세스 제어 명령을 연결한 루프상에 임의의 옵션으로써 프로세스 제어
명령을 입력할 수 있습니다.
아래 그림과 같이 입력 신호를 제곱근 연산하여 출력 신호를 얻는 경우는 제
곱근 연산 명령(S.SQR)을 추가합니다.
조절 장치
FE 유량계
액체
다이어 플래그 밸브
【프로세스 제어 명령의 제곱근 연산 명령(S.SQR) 추가 예】
루프 태그 메모리의 설정
연산 정수의 설정
옵션으로써
추가
프로세스 제어명령
( 자유도 PID 제어 명령)2
S.SQR
명령
상시 ON프로세스 제어 명령
(제곱근 연산 명령)
S.2 PID 명령 상시 ON
(4) 각종 경보의 자동 검출이 가능
시스템에 대해 각종 경보를 자동 검출하므로 안전하게 시스템을 구축할 수 있
습니다.
1 개 요
FIC
R40R100
R1000 R300
EM0V
S.2PID R40 R140 R240
SD1506R200R100R0S.SQR
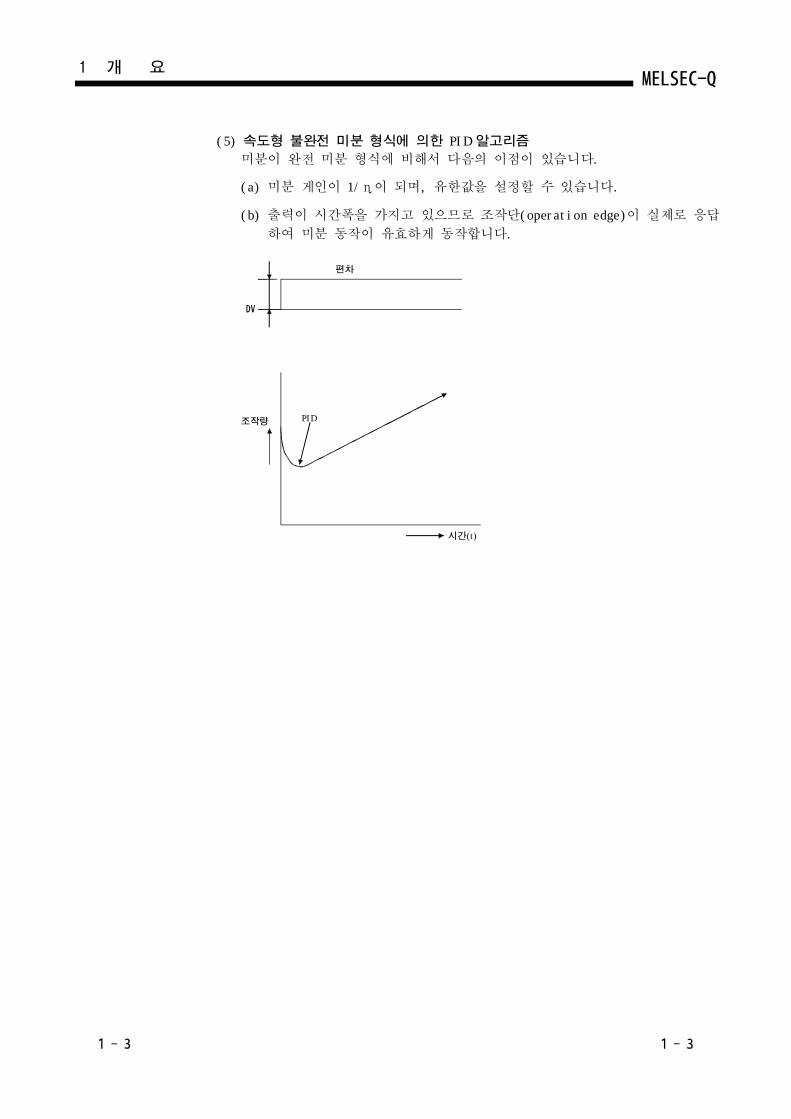
(5) PID속도형 불완전 미분 형식에 의한 알고리즘
미분이 완전 미분 형식에 비해서 다음의 이점이 있습니다.
(a) 미분 게인이 1/η이 되며, 유한값을 설정할 수 있습니다.
(b) 출력이 시간폭을 가지고 있으므로 조작단(operation edge)이 실제로 응답
하여 미분 동작이 유효하게 동작합니다.
편차
조작량 PID
시간(t)
1 개 요
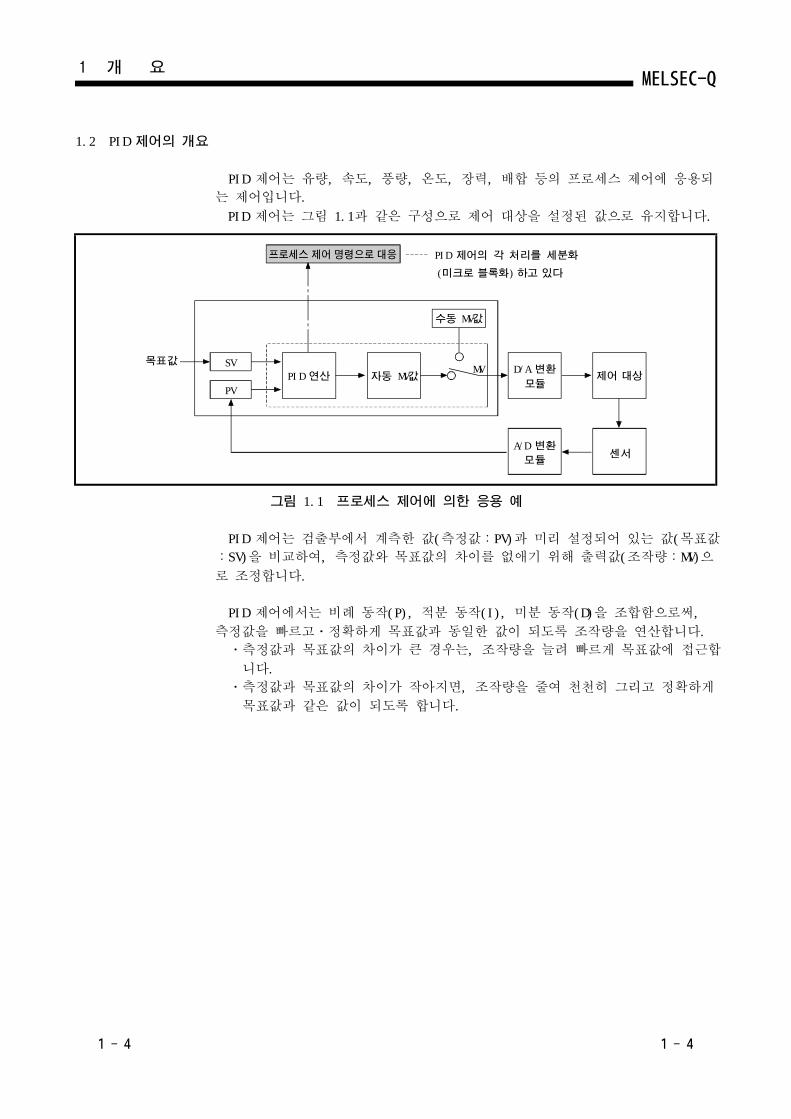
1.2 PID 제어의 개요
PID 제어는 유량, 속도, 풍량, 온도, 장력, 배합 등의 프로세스 제어에 응용되
는 제어입니다.
PID 제어는 그림 1.1과 같은 구성으로 제어 대상을 설정된 값으로 유지합니다.
프로세스 제어명령으로대응 PID 제어의 각 처리를 세분화
(미크로 블록화) 하고 있다
수동 값MV
목표값
PID 연산 자동 값MVD/A 변환
모듈제어 대상
A/D 변환
모듈센서
그림 프로세스 제어에 의한 응용 예1.1
PID 제어는 검출부에서 계측한 값(측정값:PV)과 미리 설정되어 있는 값(목표값
:SV)을 비교하여, 측정값와 목표값의 차이를 없애기 위해 출력값(조작량:MV)으
로 조정합니다.
PID 제어에서는 비례 동작(P), 적분 동작(I), 미분 동작(D)을 조합함으로써,
측정값을 빠르고ㆍ정확하게 목표값과 동일한 값이 되도록 조작량을 연산합니다.
ㆍ측정값과 목표값의 차이가 큰 경우는, 조작량을 늘려 빠르게 목표값에 접근합
니다.
ㆍ측정값과 목표값의 차이가 작아지면, 조작량을 줄여 천천히 그리고 정확하게
목표값과 같은 값이 되도록 합니다.
1 개 요
MVSV
PV
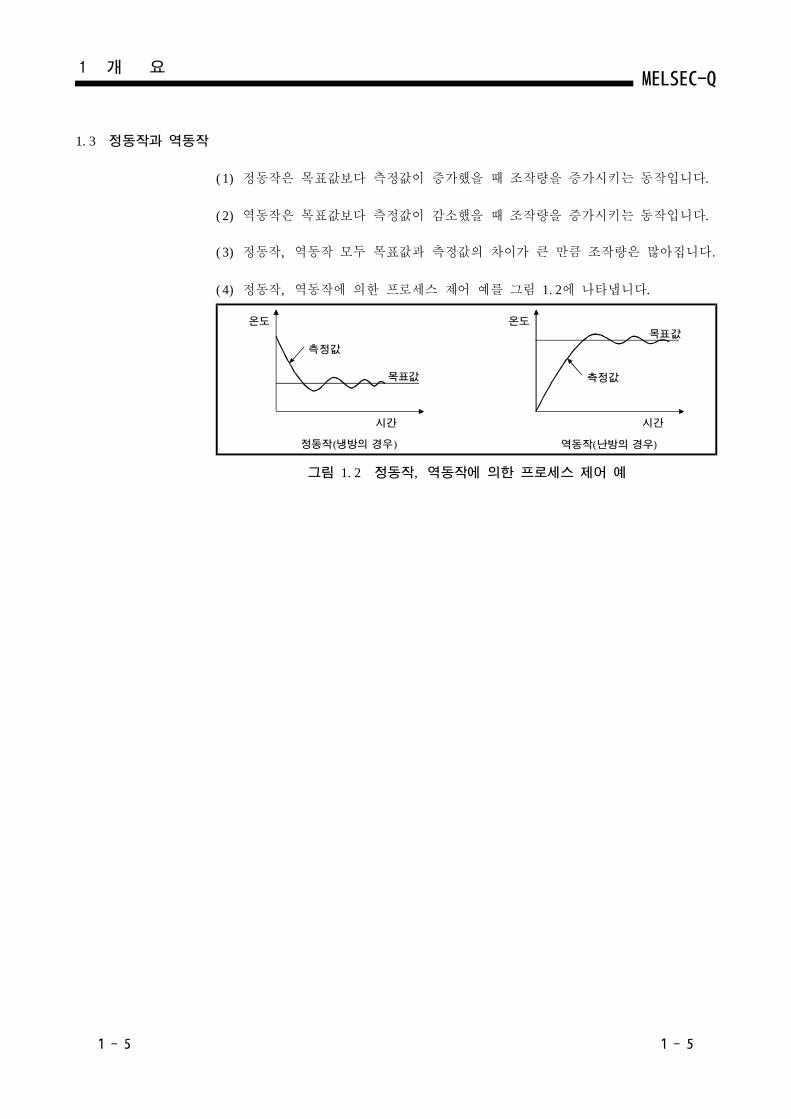
1.3 정동작과 역동작
(1) 정동작은 목표값보다 측정값이 증가했을 때 조작량을 증가시키는 동작입니다.
(2) 역동작은 목표값보다 측정값이 감소했을 때 조작량을 증가시키는 동작입니다.
(3) 정동작, 역동작 모두 목표값과 측정값의 차이가 큰 만큼 조작량은 많아집니다.
(4) 정동작, 역동작에 의한 프로세스 제어 예를 그림 1.2에 나타냅니다.
온도
측정값
목표값
정동작(냉방의 경우)
온도목표값
측정값
시간시간
역동작(난방의 경우)
그림 정동작 역동작에 의한 프로세스 제어 예1.2 ,
1 개 요
1.4 PID 제어
프로세스 제어 명령으로 PID 제어를 실행하는 경우의 “비례 동작”, “적분 동
작”, “미분 동작”에 대해 설명합니다.
1.4.1 (P )비례 동작 동작
비례 동작에 있어서의 제어 방법에 대해 설명합니다.
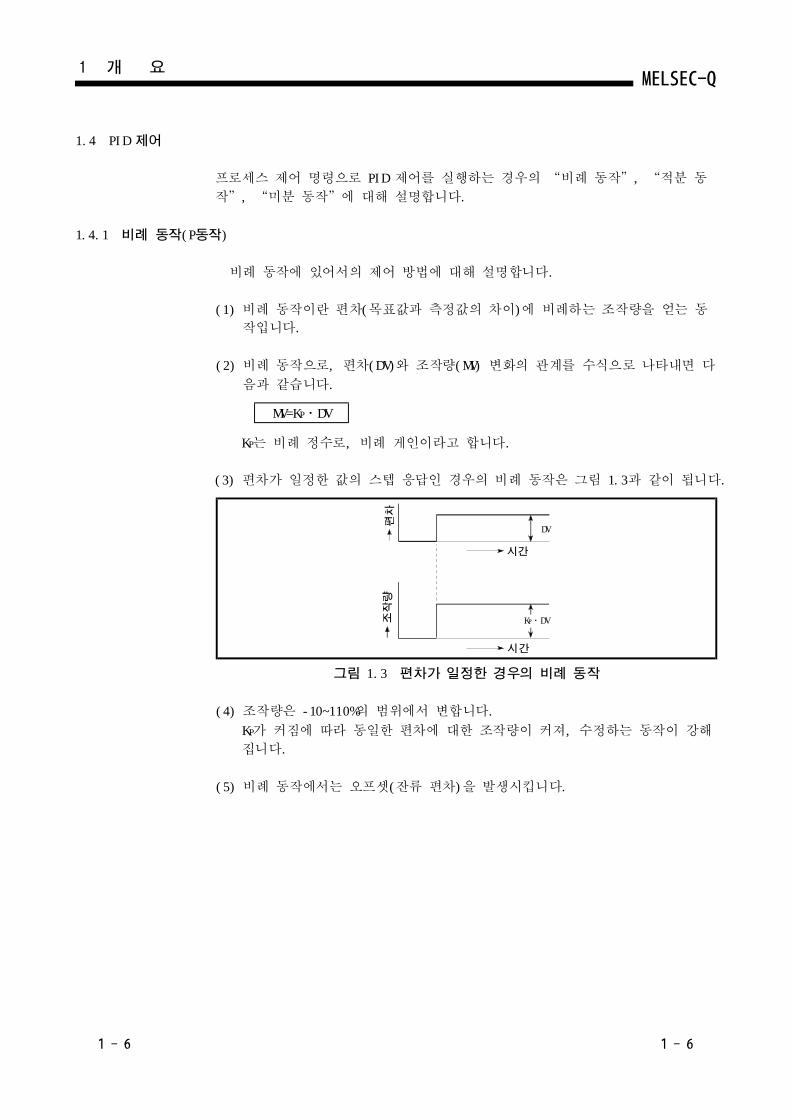
(1) 비례 동작이란 편차(목표값과 측정값의 차이)에 비례하는 조작량을 얻는 동
작입니다.
(2) 비례 동작으로, 편차(DV)와 조작량(MV) 변화의 관계를 수식으로 나타내면 다
음과 같습니다.
MV=K ㆍDVP
K 는 비례 정수로, 비례 게인이라고 합니다.P
(3) 편차가 일정한 값의 스텝 응답인 경우의 비례 동작은 그림 1.3과 같이 됩니다.
시간
시간
그림 편차가 일정한 경우의 비례 동작1.3
(4) 조작량은 -10~110%의 범위에서 변합니다.
K 가 커짐에 따라 동일한 편차에 대한 조작량이 커져, 수정하는 동작이 강해
집니다.
P
(5) 비례 동작에서는 오프셋(잔류 편차)을 발생시킵니다.
1 개 요
DV
K DVPㆍ
1.4.2 (I )적분 동작 동작
적분 동작에 있어서의 제어 방법에 대해 설명합니다.
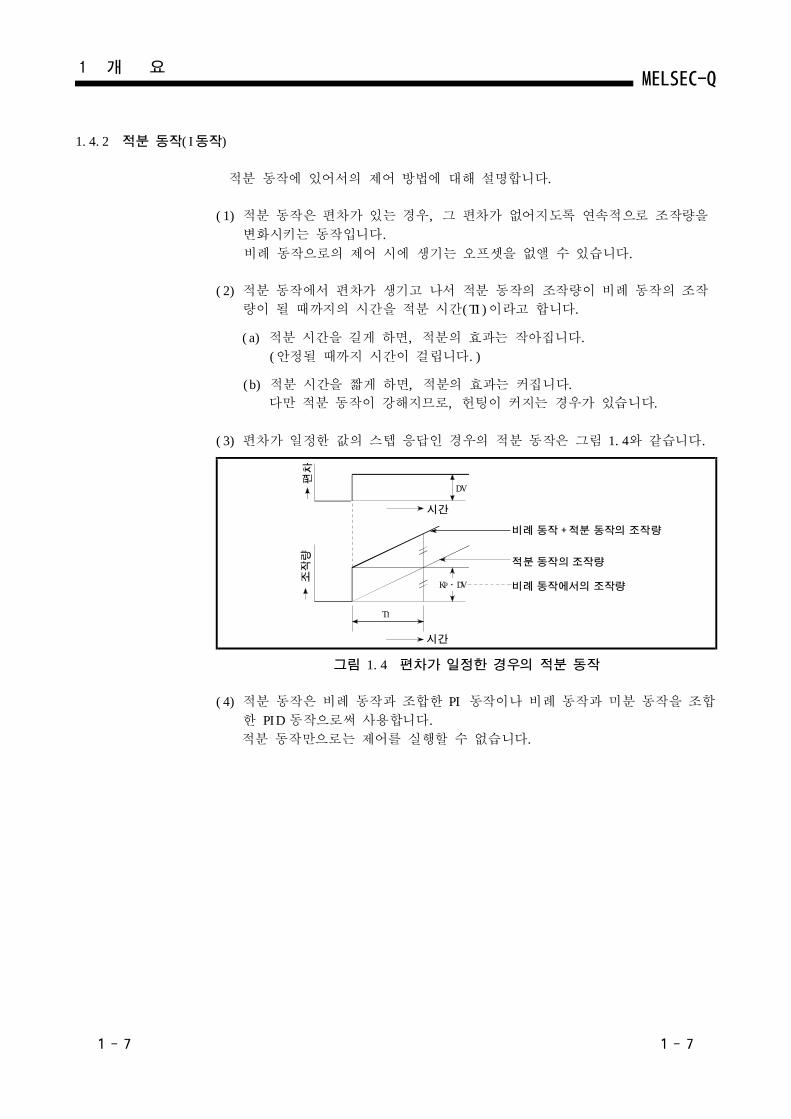
(1) 적분 동작은 편차가 있는 경우, 그 편차가 없어지도록 연속적으로 조작량을
변화시키는 동작입니다.
비례 동작으로의 제어 시에 생기는 오프셋을 없앨 수 있습니다.
(2) 적분 동작에서 편차가 생기고 나서 적분 동작의 조작량이 비례 동작의 조작
량이 될 때까지의 시간을 적분 시간(TI)이라고 합니다.
(a) 적분 시간을 길게 하면, 적분의 효과는 작아집니다.
(안정될 때까지 시간이 걸립니다.)
(b) 적분 시간을 짧게 하면, 적분의 효과는 커집니다.
다만 적분 동작이 강해지므로, 헌팅이 커지는 경우가 있습니다.
(3) 편차가 일정한 값의 스텝 응답인 경우의 적분 동작은 그림 1.4와 같습니다.
시간
비례 동작+적분 동작의 조작량
적분 동작의 조작량
비례 동작에서의 조작량
시간
그림 편차가 일정한 경우의 적분 동작1.4
(4) 적분 동작은 비례 동작과 조합한 PI 동작이나 비례 동작과 미분 동작을 조합
한 PID 동작으로써 사용합니다.
적분 동작만으로는 제어를 실행할 수 없습니다.
1 개 요
DV
K DVPㆍ
TI
·
1.4.3 (D )미분 동작 작동
미분 동작에 있어서의 제어 방법에 대해 설명합니다.
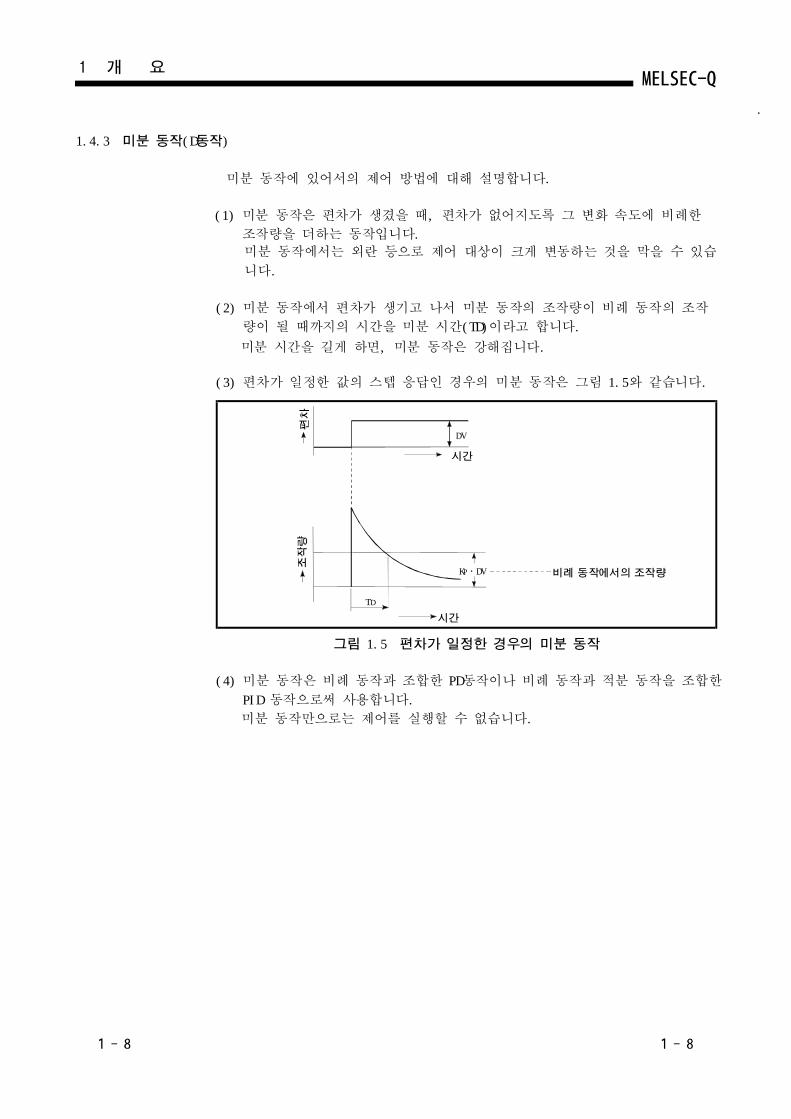
(1) 미분 동작은 편차가 생겼을 때, 편차가 없어지도록 그 변화 속도에 비례한
조작량을 더하는 동작입니다.
미분 동작에서는 외란 등으로 제어 대상이 크게 변동하는 것을 막을 수 있습
니다.
(2) 미분 동작에서 편차가 생기고 나서 미분 동작의 조작량이 비례 동작의 조작
량이 될 때까지의 시간을 미분 시간(TD)이라고 합니다.
미분 시간을 길게 하면, 미분 동작은 강해집니다.
(3) 편차가 일정한 값의 스텝 응답인 경우의 미분 동작은 그림 1.5와 같습니다.
시간
비례 동작에서의 조작량
시간
그림 편차가 일정한 경우의 미분 동작1.5
(4) 미분 동작은 비례 동작과 조합한 PD동작이나 비례 동작과 적분 동작을 조합한
PID 동작으로써 사용합니다.
미분 동작만으로는 제어를 실행할 수 없습니다.
1 개 요
DV
K DVPㆍ
TD
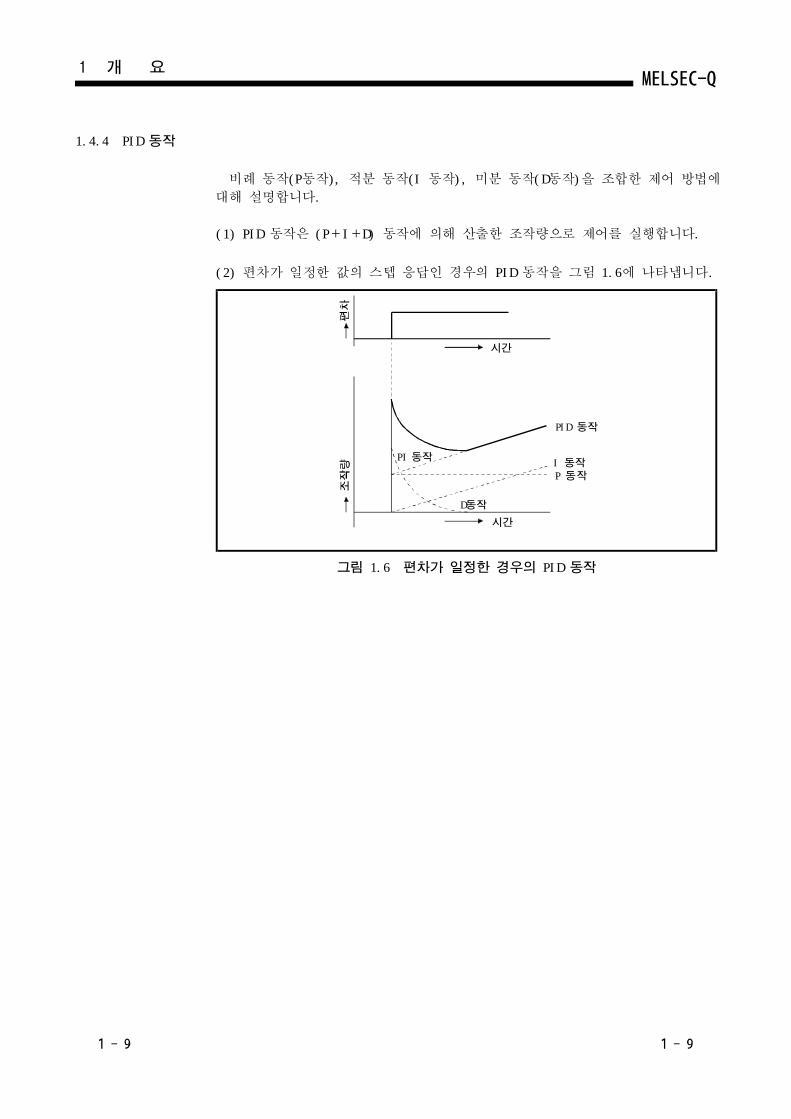
1.4.4 PID 동작
비례 동작(P동작), 적분 동작(I 동작), 미분 동작(D동작)을 조합한 제어 방법에
대해 설명합니다.
(1) PID 동작은 (P+I+D) 동작에 의해 산출한 조작량으로 제어를 실행합니다.
(2) 편차가 일정한 값의 스텝 응답인 경우의 PID 동작을 그림 1.6에 나타냅니다.
시간
PID 동작
PI 동작I 동작P 동작
D동작
시간
그림 편차가 일정한 경우의 동작1.6 PID
1 개 요
2 프로세스 제어 명령의 구성과 조합
2 프로세스 제어 명령의 구성과 조합
2.1 명령의 구성
프로세스 제어 명령으로 사용할 수 있는 명령의 대부분은 “명령부”와 “디바
이스부”로 나눌 수 있습니다.
명령부와 디바이스부는 다음과 같은 용도를 갖고 있습니다.
ㆍ명령부ㆍㆍㆍㆍㆍ그 명령의 기능을 나타냅니다.
ㆍ디바이스부ㆍㆍㆍ연산에 필요한 데이터 및 연산 결과를 저장할 저장 위치를
나타냅니다.
디바이스부는 “소스”, “데스티네이션”으로 분류됩니다.
(1) 소스(S)
소스(source)에는 연산에서 사용하는 데이터를 저장합니다.
(a) 프로세스 제어 명령에서는 소스 데이터를 저장하고 있는 선두 디바이스를
지정합니다.
(b) 프로세스 제어 명령을 실행하기까지 지정 디바이스에 데이터를 저장해 둘
필요가 있습니다.
(c) 소스 데이터를 변경함으로써, 해당 명령에서 사용하는 데이터를 변경할
수 있습니다.
(2) 데스티네이션(D)
데스티네이션(destination)에는 연산 후의 데이터가 저장됩니다.
(a) 데스티네이션에는 반드시 데이터를 저장하기 위한 디바이스를 설정합니다.
(b) 사용하는 명령에 따라서는 연산하기 전에 데스티네이션에도 연산에서 사
용할 데이터를 저장할 필요가 있습니다.
2.2 디바이스 내 데이터의 지정 방법
프로세스 제어의 각 명령에서 사용하는 데이터에는 아래와 같은 4가지 종류가
있습니다.
프로세스 제어 명령에서 취급할 수 있는 데이터
비트 데이터
수치 데이터 정수 데이터 워드 데이터
더블 워드 데이터
실수(부동 소수점) 데이터
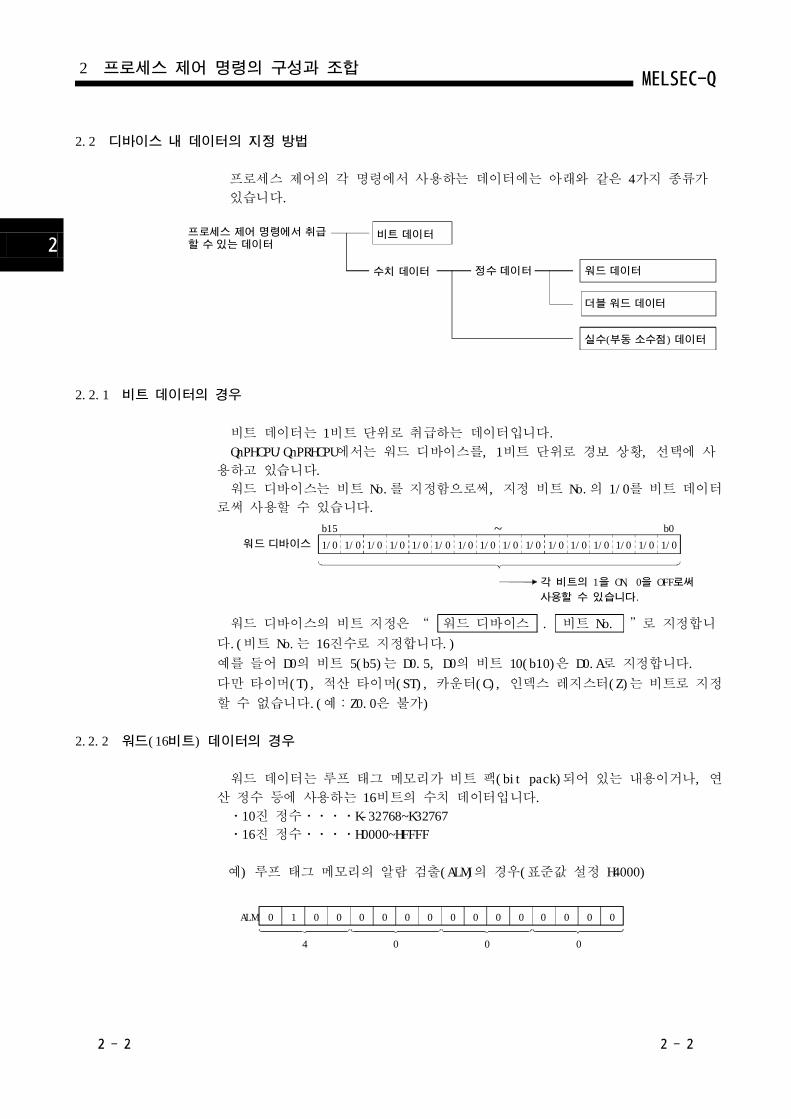
2.2.1 비트 데이터의 경우
비트 데이터는 1비트 단위로 취급하는 데이터입니다.
QnPHCPU/QnPRHCPU에서는 워드 디바이스를, 1비트 단위로 경보 상황, 선택에 사
용하고 있습니다.
워드 디바이스는 비트 No.를 지정함으로써, 지정 비트 No.의 1/0를 비트 데이터
로써 사용할 수 있습니다.
워드 디바이스
각 비트의 을 을 로써
사용할 수 있습니다
1 ON, 0 OFF
.
워드 디바이스의 비트 지정은 “ 워드 디바이스 . 비트 No. ”로 지정합니
다.(비트 No.는 16진수로 지정합니다.)
예를 들어 D0의 비트 5(b5)는 D0.5, D0의 비트 10(b10)은 D0.A로 지정합니다.
다만 타이머(T), 적산 타이머(ST), 카운터(C), 인덱스 레지스터(Z)는 비트로 지정
할 수 없습니다.(예:Z0.0은 불가)
2.2.2 (16 )워드 비트 데이터의 경우
워드 데이터는 루프 태그 메모리가 비트 팩(bit pack)되어 있는 내용이거나, 연
산 정수 등에 사용하는 16비트의 수치 데이터입니다.
ㆍ10진 정수ㆍㆍㆍㆍK-32768~K32767
ㆍ16진 정수ㆍㆍㆍㆍH0000~HFFFF
예) 루프 태그 메모리의 알람 검출(ALM)의 경우(표준값 설정 H4000)
2 프로세스 제어 명령의 구성과 조합
1/0
0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
b15 ~ b0
1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0
0 004
ALM
2.2.3 (32 )더블 워드 비트 데이터의 경우
더블 워드 데이터는 32비트의 수치 데이터입니다.
ㆍ10진 정수ㆍㆍㆍㆍK-2147483648~K2147483647
ㆍ16진 정수ㆍㆍㆍㆍH00000000~HFFFFFFFF
더블 워드 데이터를 사용하는 경우는 하위 16비트로 사용할 워드 디바이스를
지정합니다.
(지정 워드 디바이스 번호)와 ((지정 워드 디바이스 번호)+1)에 32비트 데이터
가 저장됩니다.
예) 더블 워드 데이터를 D10으로 지정하면, D10과 D11을 사용합니다.
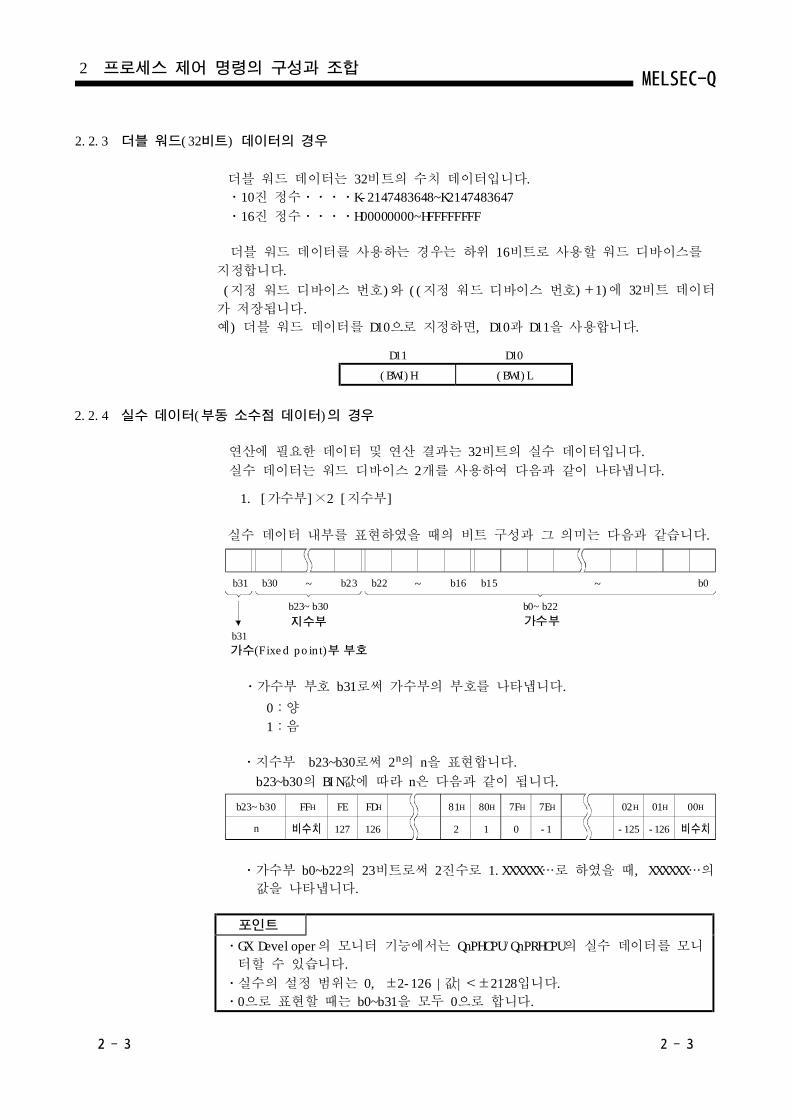
2.2.4 ( )실수 데이터 부동 소수점 데이터 의 경우
연산에 필요한 데이터 및 연산 결과는 32비트의 실수 데이터입니다.
실수 데이터는 워드 디바이스 2개를 사용하여 다음과 같이 나타냅니다.
1. [가수부]×2 [지수부]
실수 데이터 내부를 표현하였을 때의 비트 구성과 그 의미는 다음과 같습니다.
지수부 가수부
가수(Fixed point)부 부호
ㆍ가수부 부호 b31로써 가수부의 부호를 나타냅니다.
0:양
1:음
ㆍ지수부 b23~b30로써 2 의 n을 표현합니다.n
b23~b30의 BIN값에 따라 n은 다음과 같이 됩니다.
비수치 비수치
ㆍ가수부 b0~b22의 23비트로써 2진수로 1.XXXXXX…로 하였을 때, XXXXXX…의
값을 나타냅니다.
포인트
ㆍGX Developer의 모니터 기능에서는 QnPHCPU/QnPRHCPU의 실수 데이터를 모니
터할 수 있습니다.
ㆍ실수의 설정 범위는 0, ±2-126 |값|<±2128입니다.
ㆍ0으로 표현할 때는 b0~b31을 모두 0으로 합니다.
2 프로세스 제어 명령의 구성과 조합
D11 D10
(BW1)H (BW1)L
b31
b31
b30 b0b23 b16b22 b15
b23 b30~
b23 b30~ FFH FE
127
FDH 81H 80H 7FH 7EH 02H 01H 00H
126 2 1 0 -1 -125 -126n
b0 b22~
~ ~ ~
2.2.5 프로세스 제어 명령의 연산 에러
프로세스 제어 명령에 의한 연산 에러는 다음의 특수 레지스터에 저장됩니다.
또한, 연산 에러 이외에 대해서는 QCPU(Q모드)/QnACPU 프로그래밍 매뉴얼(공통
명령편)에 기재된 에러 코드를 참조하십시오.(특수 레지스터 SD0에 에러 코드가
저장되어 있습니다.)
비 고
연산 에러 이외의 에러는 아래의 내용이 특수 레지스터에 저장됩니다.
에러 No.4100 ㆍㆍㆍ취급할 수 없는 데이터가 있을 때.
4300 ㆍㆍㆍ지정한 명령이 이상할 때.
4301 ㆍㆍㆍ프로세스 제어 명령의 디바이스수가 이상할 때.
4302 ㆍㆍㆍ지정할 수 없는 디바이스를 지정했을 때.
(1) 에러 No.4100의 경우는 상세 정보가 특수 레지스터 SD1502 ~SD1503에 저장
됩니다.
또한, 프로세스 제어 명령의 연산 에러 발생 시 이외에, SD1502, SD1503은
0이 됩니다.SD1502 ㆍㆍㆍ 프로세스 제어 명령에서 발생하는 에러 코드를 나
타낸다.
SD1503 ㆍㆍㆍ 에러가 발생한 각 명령의 처리 번호를 나타낸다.
에러 내용에 대한 설명은 14장을 참조하십시오.
2.2.6 명령의 실행 조건
프로세스 제어 명령은 전부 입력 조건의 ON 중에 실행되는 명령입니다.
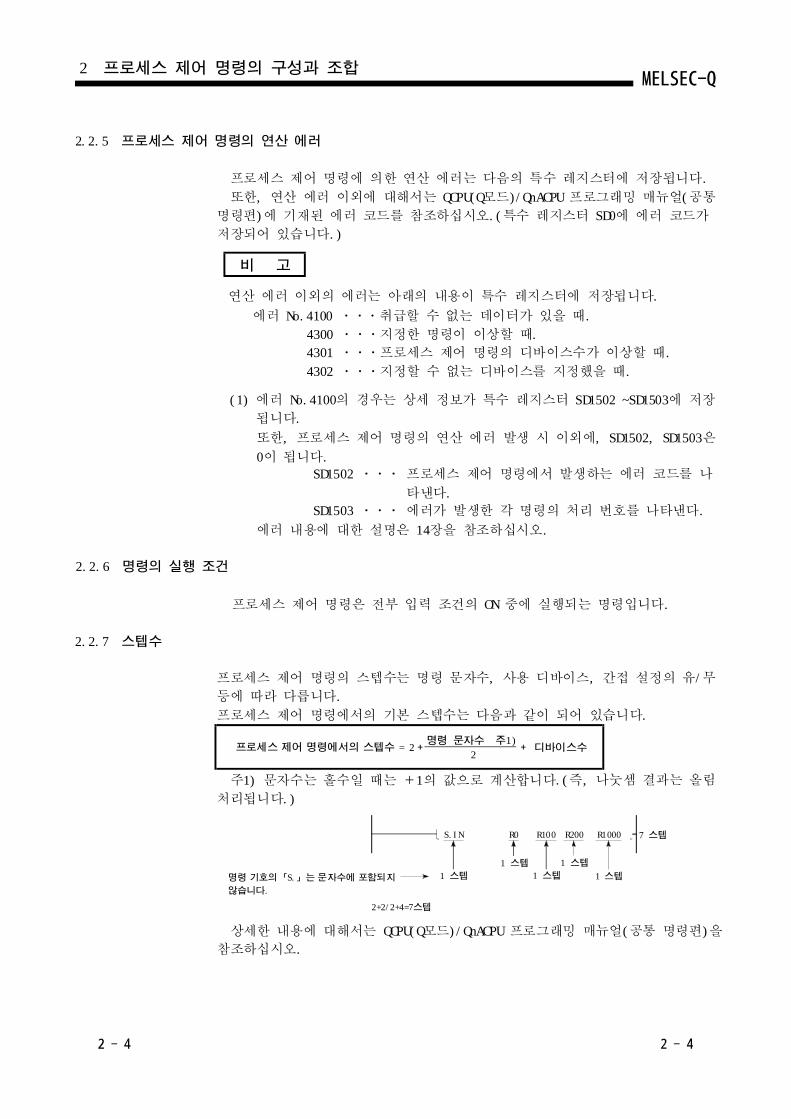
2.2.7 스텝수
프로세스 제어 명령의 스텝수는 명령 문자수, 사용 디바이스, 간접 설정의 유/무
등에 따라 다릅니다.
프로세스 제어 명령에서의 기본 스텝수는 다음과 같이 되어 있습니다.
프로세스 제어 명령에서의 스텝수 = 2+명령 문자수 주1)
+ 디바이스수
주1) 문자수는 홀수일 때는 +1의 값으로 계산합니다.(즉, 나눗셈 결과는 올림
처리됩니다.)
명령 기호의「 」는문자수에 포함되지
않습니다.
S.
1 스텝 1 스텝
1 스텝 1 스텝 1 스텝
7 스텝
상세한 내용에 대해서는 QCPU(Q모드)/QnACPU 프로그래밍 매뉴얼(공통 명령편)을
참조하십시오.
2
2 프로세스 제어 명령의 구성과 조합
S.IN R0 R100 R200 R1000
2+2/2+4=7스텝
2.2.8 인덱스 수식
프로세스 제어 명령에서 사용 가능한 인덱스 수식은 QnPHCPU/QnPRHCPU의 기본 명
령에서 사용할 수 있는 수식과 동일합니다.
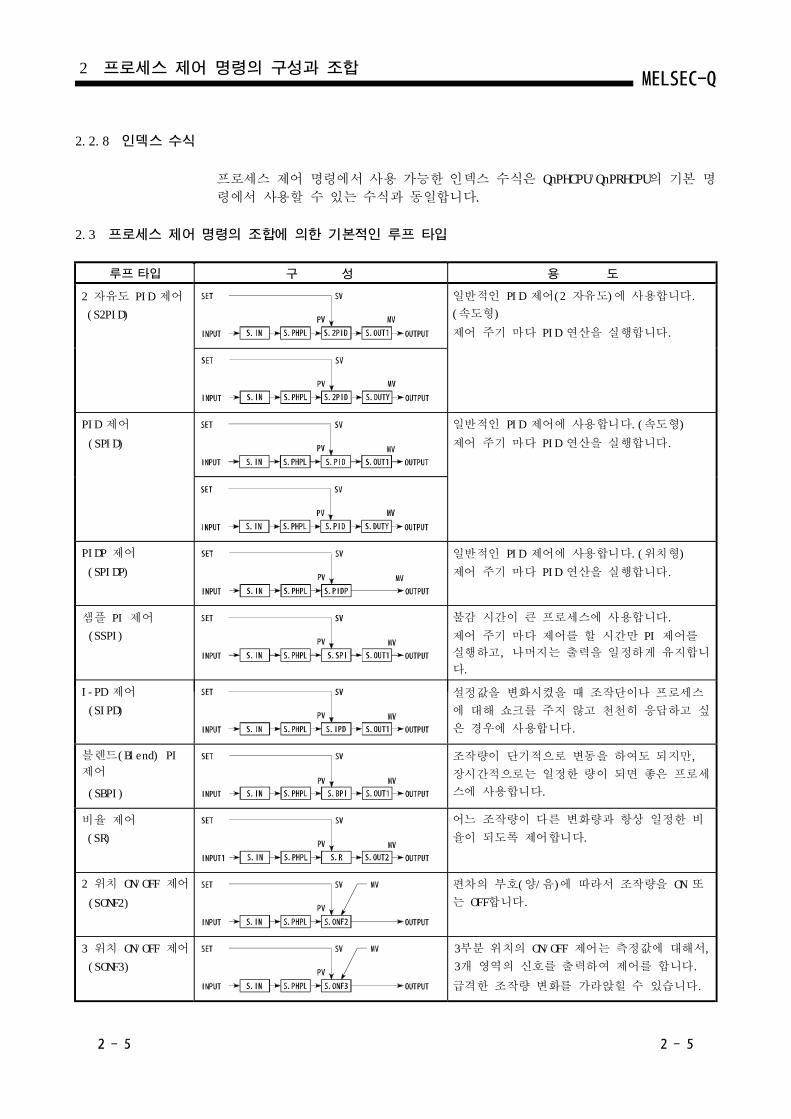
2.3 프로세스 제어 명령의 조합에 의한 기본적인 루프 타입
루프 타입 구 성 용 도
2 자유도 PID 제어
(S2PID)
일반적인 PID 제어(2 자유도)에 사용합니다.
(속도형)
제어 주기 마다 PID 연산을 실행합니다.
PID 제어
(SPID)
일반적인 PID 제어에 사용합니다.(속도형)
제어 주기 마다 PID 연산을 실행합니다.
PIDP 제어
(SPIDP)
일반적인 PID 제어에 사용합니다.(위치형)
제어 주기 마다 PID 연산을 실행합니다.
샘플 PI 제어
(SSPI)
불감 시간이 큰 프로세스에 사용합니다.
제어 주기 마다 제어를 할 시간만 PI 제어를
실행하고, 나머지는 출력을 일정하게 유지합니
다.
I-PD 제어
(SIPD)
설정값을 변화시켰을 때 조작단이나 프로세스
에 대해 쇼크를 주지 않고 천천히 응답하고 싶
은 경우에 사용합니다.
블렌드(Blend) PI
제어
(SBPI)
조작량이 단기적으로 변동을 하여도 되지만,
장시간적으로는 일정한 량이 되면 좋은 프로세
스에 사용합니다.
비율 제어
(SR)
어느 조작량이 다른 변화량과 항상 일정한 비
율이 되도록 제어합니다.
2 위치 ON/OFF 제어
(SONF2)
편차의 부호(양/음)에 따라서 조작량을 ON 또
는 OFF합니다.
3 위치 ON/OFF 제어
(SONF3)
3부분 위치의 ON/OFF 제어는 측정값에 대해서,
3개 영역의 신호를 출력하여 제어를 합니다.
급격한 조작량 변화를 가라앉힐 수 있습니다.
2 프로세스 제어 명령의 구성과 조합
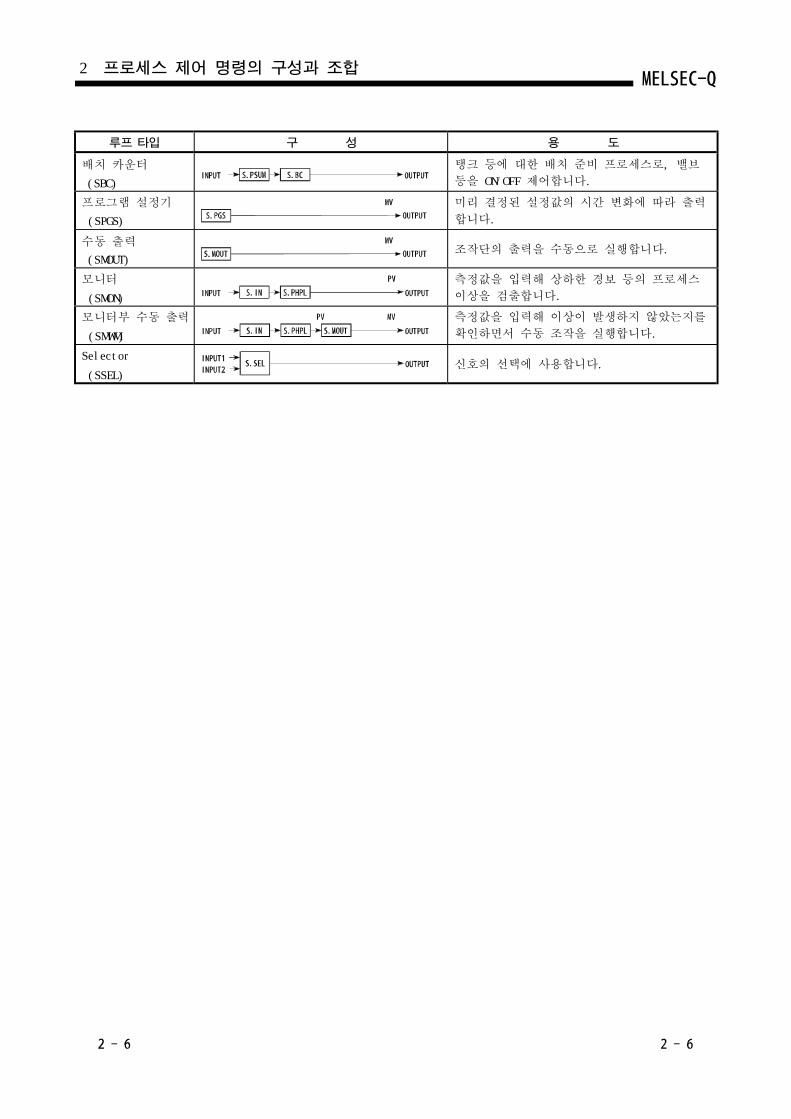
루프 타입 구 성 용 도
배치 카운터
(SBC)
탱크 등에 대한 배치 준비 프로세스로, 밸브
등을 ON/OFF 제어합니다.
프로그램 설정기
(SPGS)
미리 결정된 설정값의 시간 변화에 따라 출력
합니다.
수동 출력
(SMOUT)조작단의 출력을 수동으로 실행합니다.
모니터
(SMON)
측정값을 입력해 상하한 경보 등의 프로세스
이상을 검출합니다.
모니터부 수동 출력
(SMWM)
측정값을 입력해 이상이 발생하지 않았는지를
확인하면서 수동 조작을 실행합니다.
Selector
(SSEL)신호의 선택에 사용합니다.
2 프로세스 제어 명령의 구성과 조합
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
3.1 프로세스 제어 명령과 데이터 구성
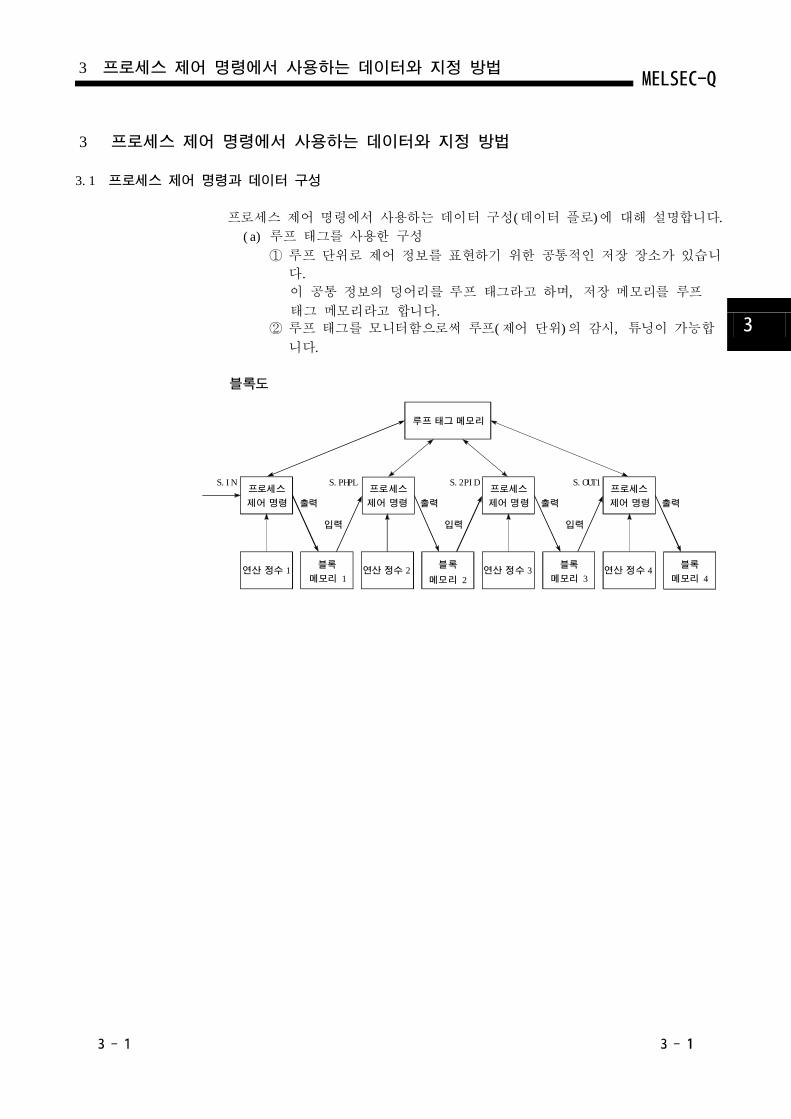
프로세스 제어 명령에서 사용하는 데이터 구성(데이터 플로)에 대해 설명합니다.
(a) 루프 태그를 사용한 구성
① 루프 단위로 제어 정보를 표현하기 위한 공통적인 저장 장소가 있습니
다.
이 공통 정보의 덩어리를 루프 태그라고 하며, 저장 메모리를 루프
태그 메모리라고 합니다.
② 루프 태그를 모니터함으로써 루프(제어 단위)의 감시, 튜닝이 가능합
니다.
블록도
루프 태그 메모리
프로세스
제어 명령
프로세스
제어 명령
프로세스
제어 명령
프로세스
제어 명령출력 출력 출력 출력
입력 입력 입력
연산 정수 1블록
메모리 1연산 정수 2
블록
메모리 2연산 정수 3
블록
메모리 3연산 정수 4
블록
메모리 4
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
S.IN S.PHPL S.2PID S.OUT1
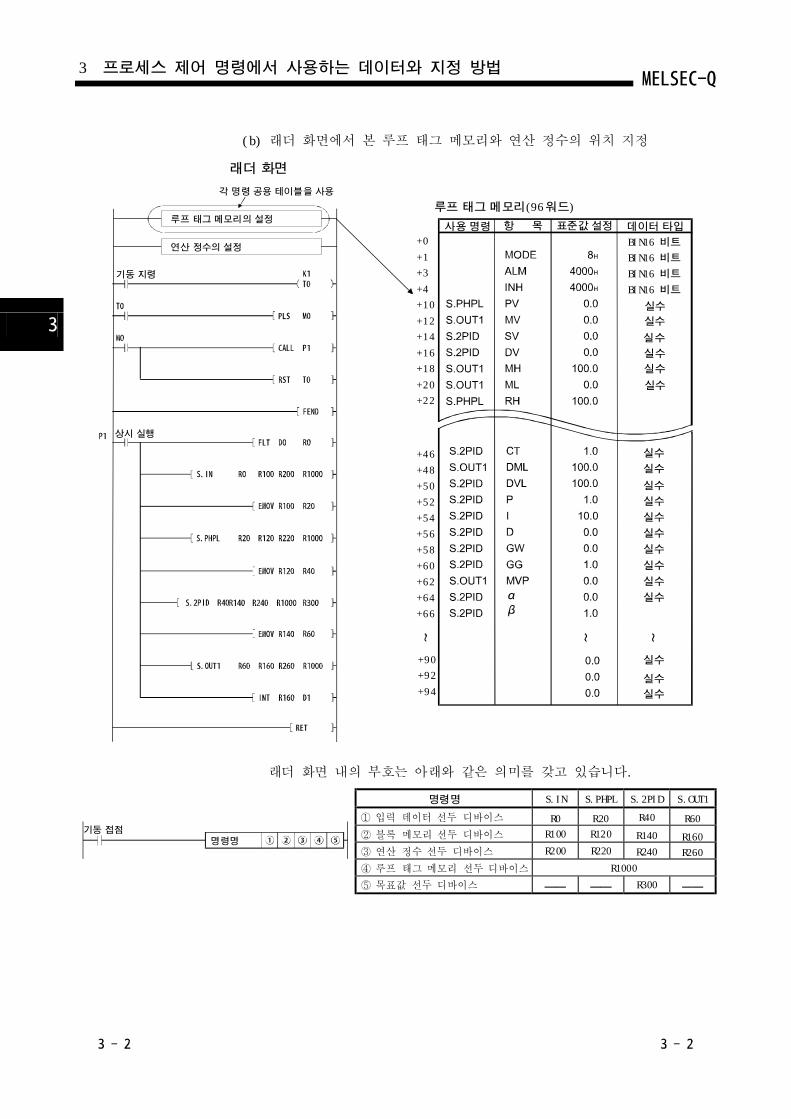
(b) 래더 화면에서 본 루프 태그 메모리와 연산 정수의 위치 지정
래더 화면
각 명령공용 테이블을 사용
루프 태그 메모리의 설정
연산 정수의 설정
기동 지령
상시 실행
루프 태그메모리(96워드)
사용 명령 항 목 표준값 설정 데이터 타입
BIN16 비트
BIN16 비트
BIN16 비트
BIN16 비트
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
래더 화면 내의 부호는 아래와 같은 의미를 갖고 있습니다.
기동 접점명령명
명령명 S.IN S.PHPL S.2PID S.OUT1
① 입력 데이터 선두 디바이스 R0 R20 R40 R60
② 블록 메모리 선두 디바이스 R100 R120 R140 R160
③ 연산 정수 선두 디바이스 R200 R220 R240 R260
④ 루프 태그 메모리 선두 디바이스 R1000
⑤ 목표값 선두 디바이스 R300
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
+0
+1
+3
+4
+10
+12
+14
+16
+18
+20
+22
+46
+48
+50
+52
+54
+56
+58
+60
+62
+64
+66
+90
+92
+94
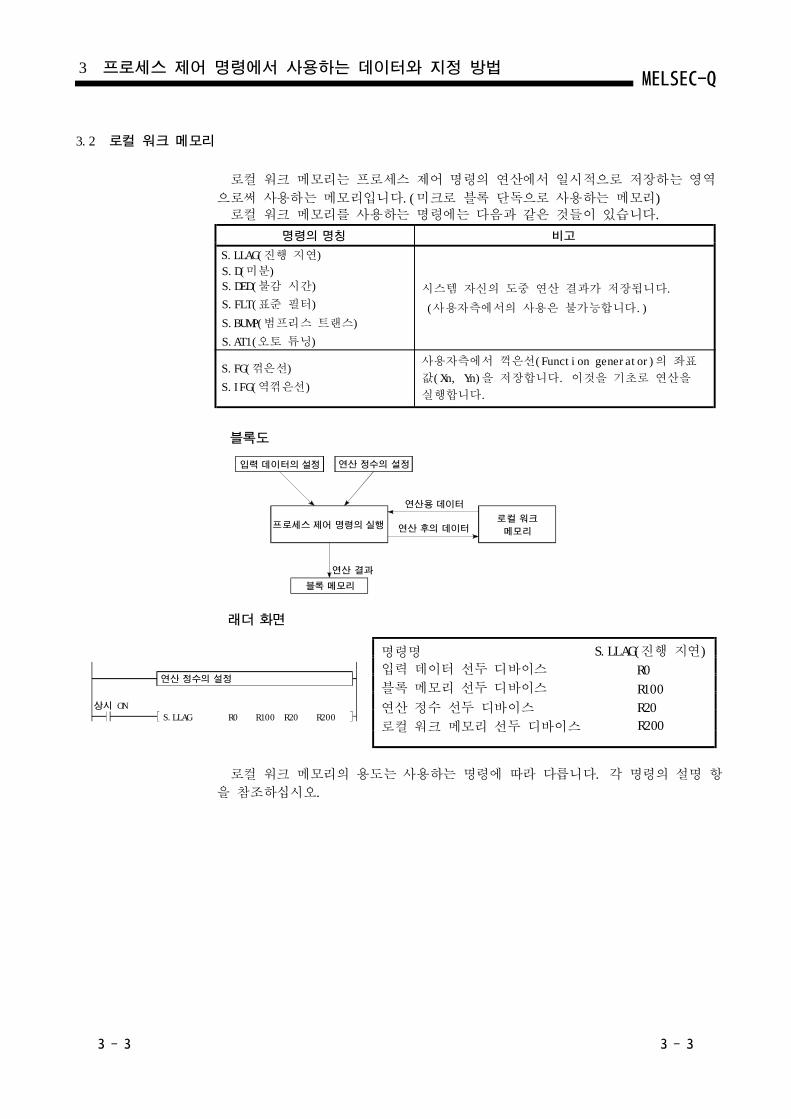
3.2 로컬 워크 메모리
로컬 워크 메모리는 프로세스 제어 명령의 연산에서 일시적으로 저장하는 영역
으로써 사용하는 메모리입니다.(미크로 블록 단독으로 사용하는 메모리)로컬 워크 메모리를 사용하는 명령에는 다음과 같은 것들이 있습니다.
명령의 명칭 비고
S.LLAG(진행 지연)
S.D(미분)
S.DED(불감 시간)
S.FLT(표준 필터)
S.BUMP(범프리스 트랜스)
S.AT1(오토 튜닝)
시스템 자신의 도중 연산 결과가 저장됩니다.
(사용자측에서의 사용은 불가능합니다.)
S.FG(꺾은선)
S.IFG(역꺾은선)
사용자측에서 꺽은선(Function generator)의 좌표
값(Xn, Yn)을 저장합니다. 이것을 기초로 연산을
실행합니다.
블록도
입력 데이터의 설정 연산 정수의 설정
프로세스 제어 명령의 실행
연산용 데이터
연산 후의 데이터로컬 워크
메모리
연산 결과
블록 메모리
래더 화면
연산 정수의 설정
상시 ON
명령명 S.LLAG(진행 지연)
입력 데이터 선두 디바이스 R0
블록 메모리 선두 디바이스 R100
연산 정수 선두 디바이스 R20
로컬 워크 메모리 선두 디바이스 R200
로컬 워크 메모리의 용도는 사용하는 명령에 따라 다릅니다. 각 명령의 설명 항
을 참조하십시오.
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
S.LLAG R0 R100 R20 R200
3.3 프로세스 제어 명령에서 사용하는 데이터
프로세스 제어 명령에서 사용하는 데이터에는 다음과 같은 종류가 있습니다.
ㆍ루프 메모리 :3.3.1항
ㆍ입력 데이터 :3.3.2항
ㆍ블록 메모리 :3.3.3항
ㆍ연산 정수 :3.3.4항
ㆍ로컬 워크 메모리 :3.2항
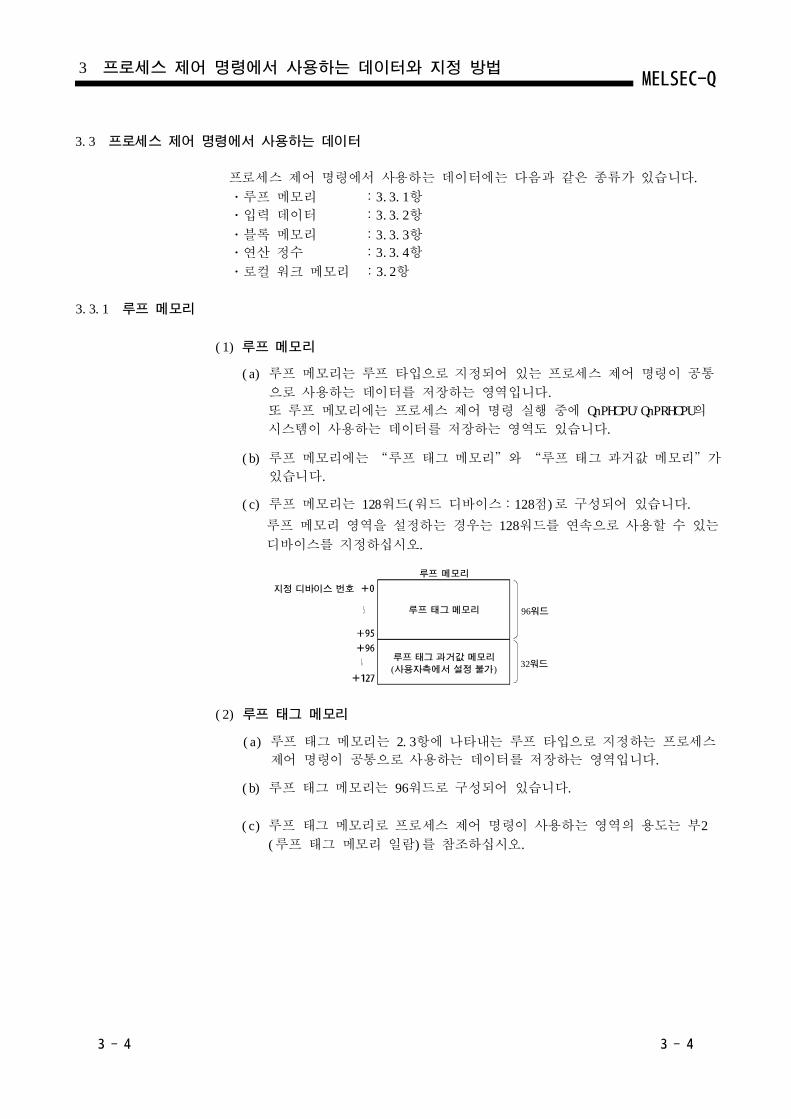
3.3.1 루프 메모리
(1) 루프 메모리
(a) 루프 메모리는 루프 타입으로 지정되어 있는 프로세스 제어 명령이 공통
으로 사용하는 데이터를 저장하는 영역입니다.
또 루프 메모리에는 프로세스 제어 명령 실행 중에 QnPHCPU/QnPRHCPU의
시스템이 사용하는 데이터를 저장하는 영역도 있습니다.
(b) 루프 메모리에는 “루프 태그 메모리”와 “루프 태그 과거값 메모리”가
있습니다.
(c) 루프 메모리는 128워드(워드 디바이스:128점)로 구성되어 있습니다.
루프 메모리 영역을 설정하는 경우는 128워드를 연속으로 사용할 수 있는
디바이스를 지정하십시오.
지정 디바이스 번호
루프 메모리
루프 태그 메모리 96워드
루프 태그 과거값 메모리
(사용자측에서 설정 불가)32워드
(2) 루프 태그 메모리
(a) 루프 태그 메모리는 2.3항에 나타내는 루프 타입으로 지정하는 프로세스
제어 명령이 공통으로 사용하는 데이터를 저장하는 영역입니다.
(b) 루프 태그 메모리는 96워드로 구성되어 있습니다.
(c) 루프 태그 메모리로 프로세스 제어 명령이 사용하는 영역의 용도는 부2
(루프 태그 메모리 일람)를 참조하십시오.
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
(3) 루프 태그 과거값 메모리
(a) 루프 태그 과거값 메모리는 프로세스 제어 명령 실행 시에 QnPHCPU/
QnPRHCPU의 시스템이 사용하는 영역입니다.
사용자는 운전 중에 데이터는 쓸 수 없습니다.만약 사용자가 운전 중에 루프 태그 과거값 메모리에 데이터의 쓰기를 실
행한 경우에는 정상적인 연산을 할 수 없게 됩니다.
(b) 루프 태그 과거값 메모리는 루프 태그 메모리의 뒤에 32워드가 있습니다.
(c) 프로세스 제어 명령의 시작 시에는 루프 태그 과거값 메모리에 “0”을
써 주십시오.
3.3.2 입력 데이터
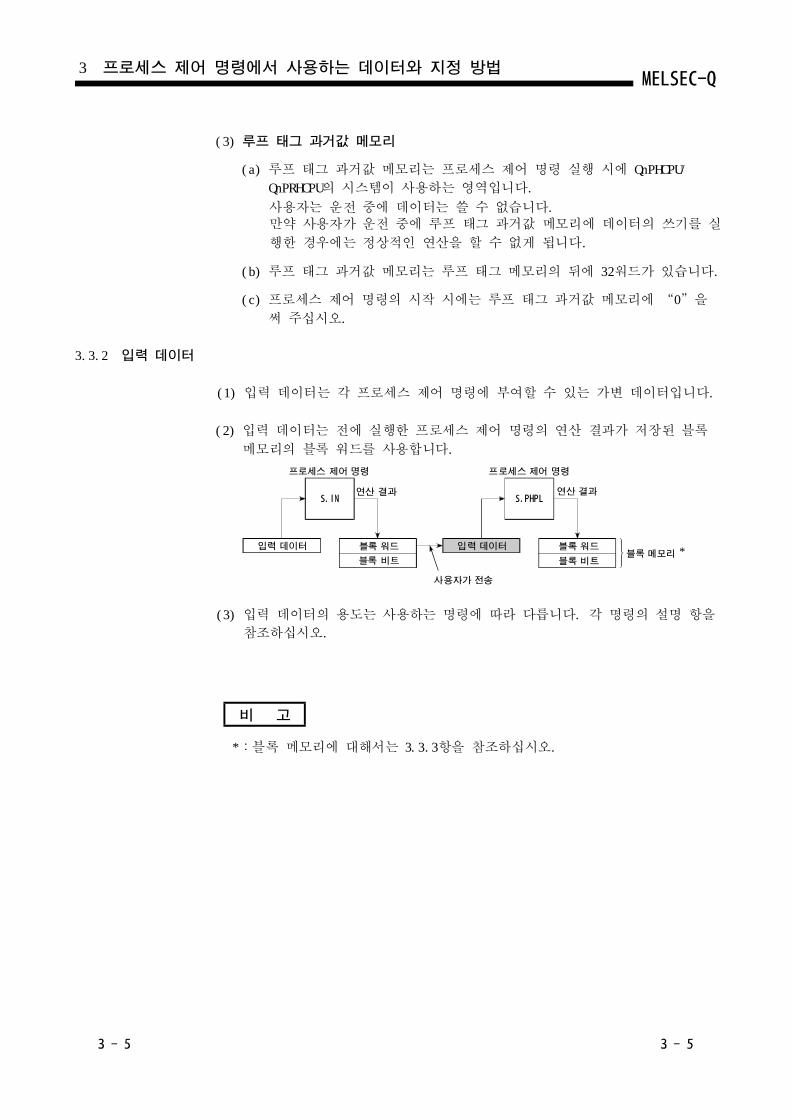
(1) 입력 데이터는 각 프로세스 제어 명령에 부여할 수 있는 가변 데이터입니다.
(2) 입력 데이터는 전에 실행한 프로세스 제어 명령의 연산 결과가 저장된 블록
메모리의 블록 워드를 사용합니다.
프로세스 제어 명령 프로세스 제어 명령
연산 결과 연산 결과
입력 데이터 블록 워드
블록 비트
입력 데이터 블록 워드
블록 비트블록 메모리 *
사용자가 전송
(3) 입력 데이터의 용도는 사용하는 명령에 따라 다릅니다. 각 명령의 설명 항을
참조하십시오.
비 고
*:블록 메모리에 대해서는 3.3.3항을 참조하십시오.
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
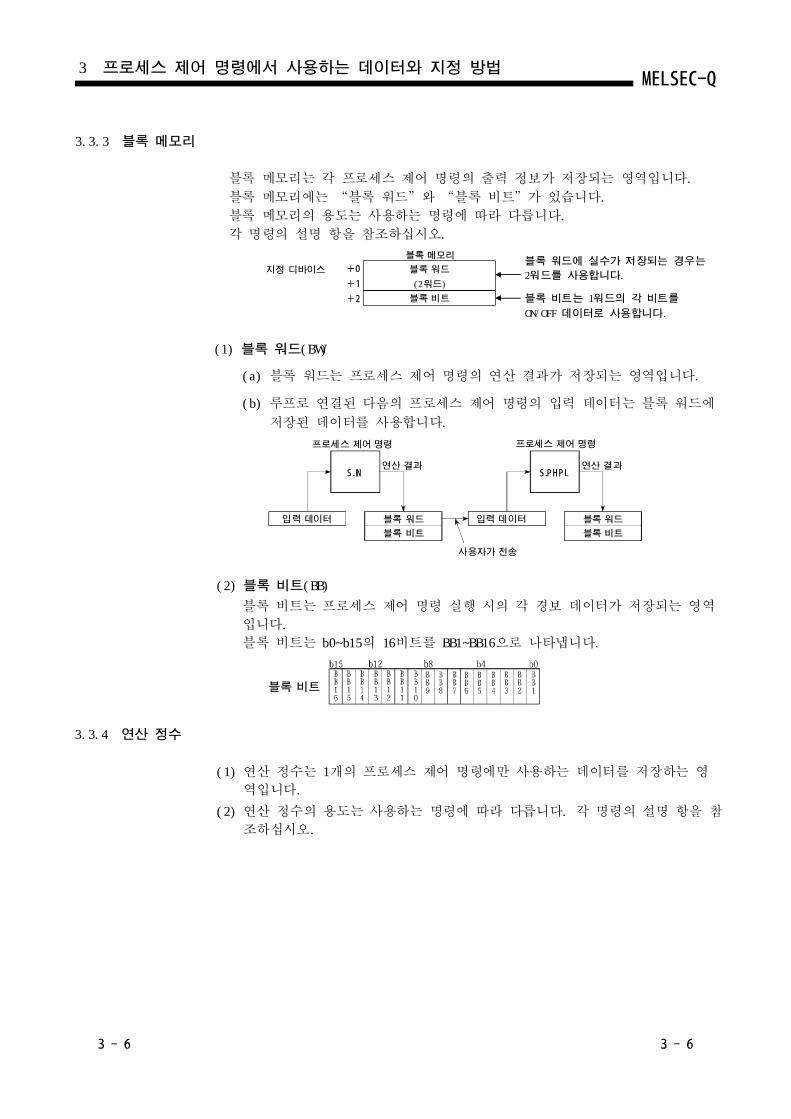
3.3.3 블록 메모리
블록 메모리는 각 프로세스 제어 명령의 출력 정보가 저장되는 영역입니다.
블록 메모리에는 “블록 워드”와 “블록 비트”가 있습니다.
블록 메모리의 용도는 사용하는 명령에 따라 다릅니다.
각 명령의 설명 항을 참조하십시오.
지정 디바이스
블록 메모리
블록 워드
(2워드)
블록 비트
블록 워드에 실수가 저장되는 경우는
워드를 사용합니다2 .
블록 비트는 워드의 각 비트를
데이터로 사용합니다
1
ON/OFF .
(1) (BW)블록 워드
(a) 블록 워드는 프로세스 제어 명령의 연산 결과가 저장되는 영역입니다.
(b) 루프로 연결된 다음의 프로세스 제어 명령의 입력 데이터는 블록 워드에
저장된 데이터를 사용합니다.
프로세스 제어명령 프로세스 제어 명령
연산 결과 연산 결과
입력 데이터 블록 워드
블록 비트
입력 데이터 블록 워드
블록 비트
사용자가 전송
(2) (BB)블록 비트
블록 비트는 프로세스 제어 명령 실행 시의 각 경보 데이터가 저장되는 영역
입니다.
블록 비트는 b0~b15의 16비트를 BB1~BB16으로 나타냅니다.
블록 비트
3.3.4 연산 정수
(1) 연산 정수는 1개의 프로세스 제어 명령에만 사용하는 데이터를 저장하는 영
역입니다.
(2) 연산 정수의 용도는 사용하는 명령에 따라 다릅니다. 각 명령의 설명 항을 참
조하십시오.
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
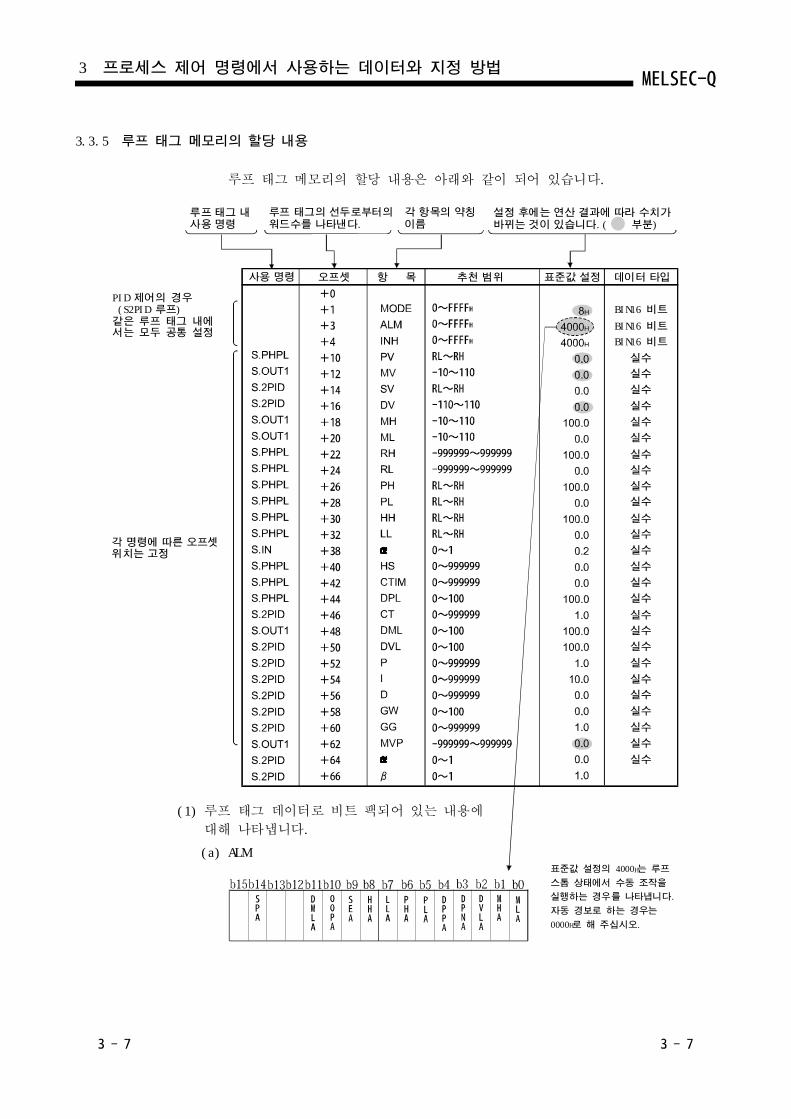
3.3.5 루프 태그 메모리의 할당 내용
루프 태그 메모리의 할당 내용은 아래와 같이 되어 있습니다.
루프 태그 내사용 명령
루프 태그의 선두로부터의워드수를 나타낸다.
각 항목의 약칭이름
설정 후에는 연산 결과에 따라 수치가바뀌는 것이 있습니다. ( 부분)
사용 명령 오프셋 항 목 추천 범위 표준값 설정 데이터 타입
PID(S2PID )제어의 경우
루프같은 루프 태그 내에서는 모두 공통 설정
각 명령에 따른 오프셋위치는 고정
BIN16 비트
BIN16 비트
BIN16 비트
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
(1) 루프 태그 데이터로 비트 팩되어 있는 내용에
대해 나타냅니다.
(a) ALM표준값 설정의 는 루프
스톱 상태에서 수동 조작을
실행하는 경우를 나타냅니다
자동 경보로 하는 경우는
로 해 주십시오
4000
.
0000 .
H
H
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
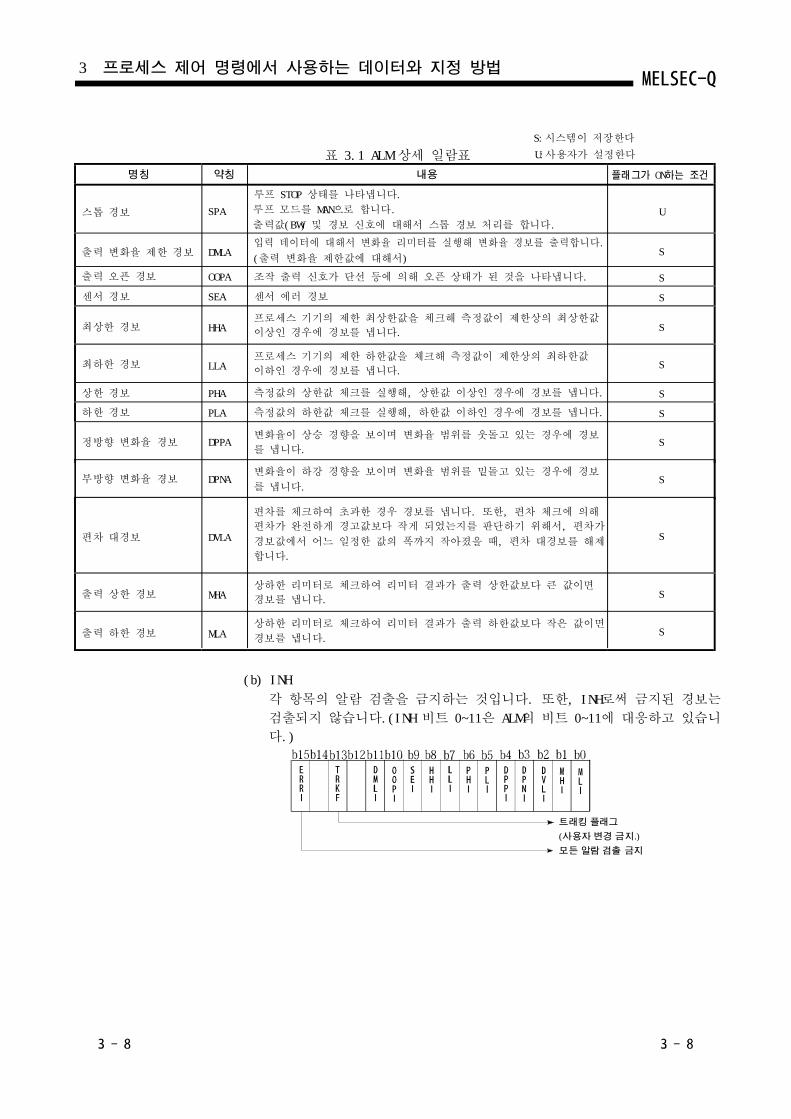
표 3.1 ALM 상세 일람표
S:시스템이 저장한다
U:사용자가 설정한다
명칭 약칭 내용 플래그가 하는 조건ON
스톱 경보 SPA
루프 STOP 상태를 나타냅니다.
루프 모드를 MAN으로 합니다.
출력값(BW) 및 경보 신호에 대해서 스톱 경보 처리를 합니다.U
출력 변화율 제한 경보 DMLA입력 데이터에 대해서 변화율 리미터를 실행해 변화율 경보를 출력합니다.
(출력 변화율 제한값에 대해서)S
출력 오픈 경보 OOPA 조작 출력 신호가 단선 등에 의해 오픈 상태가 된 것을 나타냅니다. S
센서 경보 센서 에러 경보SEA S
최상한 경보 HHA프로세스 기기의 제한 최상한값을 체크해 측정값이 제한상의 최상한값
이상인 경우에 경보를 냅니다. S
최하한 경보 LLA프로세스 기기의 제한 하한값을 체크해 측정값이 제한상의 최하한값
이하인 경우에 경보를 냅니다.S
상한 경보 PHA 측정값의 상한값 체크를 실행해, 상한값 이상인 경우에 경보를 냅니다. S
하한 경보 PLA 측정값의 하한값 체크를 실행해, 하한값 이하인 경우에 경보를 냅니다. S
정방향 변화율 경보 DPPA변화율이 상승 경향을 보이며 변화율 범위를 웃돌고 있는 경우에 경보
를 냅니다.S
부방향 변화율 경보 DPNA변화율이 하강 경향을 보이며 변화율 범위를 밑돌고 있는 경우에 경보
를 냅니다.S
편차 대경보 DVLA
편차를 체크하여 초과한 경우 경보를 냅니다. 또한, 편차 체크에 의해
편차가 완전하게 경고값보다 작게 되었는지를 판단하기 위해서, 편차가
경보값에서 어느 일정한 값의 폭까지 작아졌을 때, 편차 대경보를 해제
합니다.
S
출력 상한 경보 MHA상하한 리미터로 체크하여 리미터 결과가 출력 상한값보다 큰 값이면
경보를 냅니다.S
출력 하한 경보 MLA상하한 리미터로 체크하여 리미터 결과가 출력 하한값보다 작은 값이면
경보를 냅니다.S
각 항목의 알람 검출을 금지하는 것입니다. 또한, INH로써 금지된 경보는
검출되지 않습니다.(INH 비트 0~11은 ALM의 비트 0~11에 대응하고 있습니
다.)
트래킹 플래그
(사용자 변경 금지.)
모든 알람 검출 금지
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
(b) INH
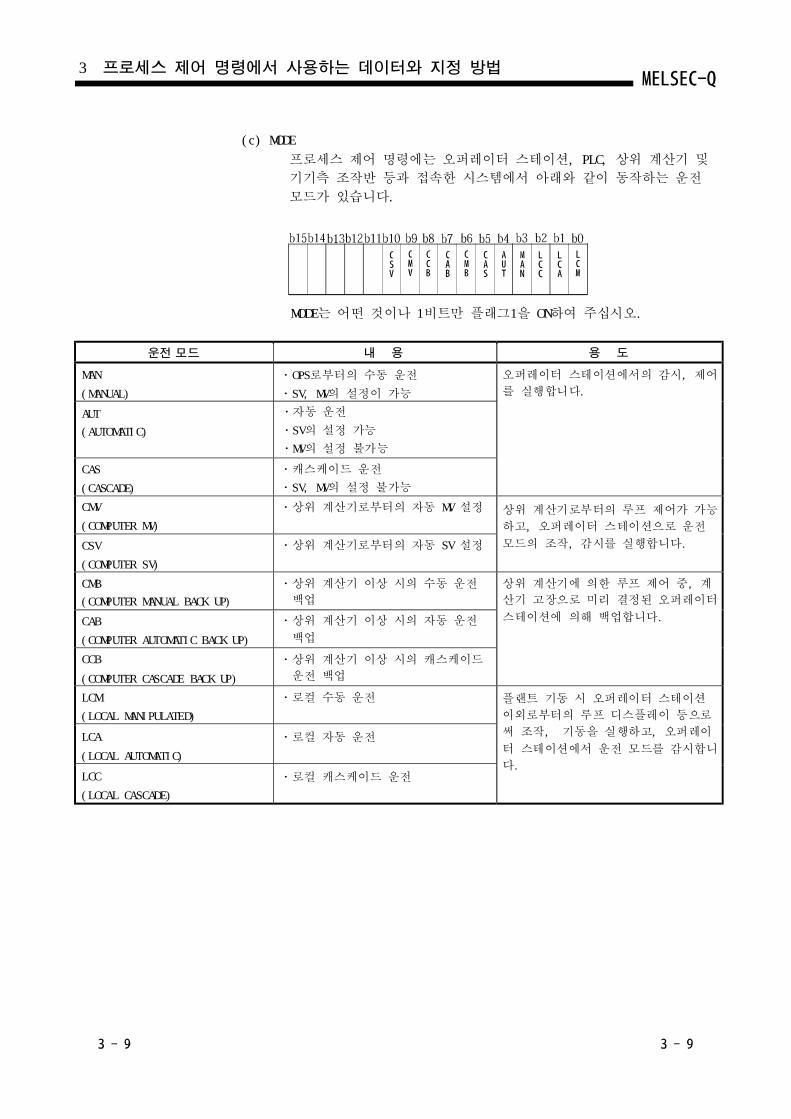
(c) MODE
프로세스 제어 명령에는 오퍼레이터 스테이션, PLC, 상위 계산기 및
기기측 조작반 등과 접속한 시스템에서 아래와 같이 동작하는 운전
모드가 있습니다.
MODE는 어떤 것이나 1비트만 플래그1을 ON하여 주십시오.
운전 모드 내 용 용 도
MAN
(MANUAL)
ㆍOPS로부터의 수동 운전
ㆍSV, MV의 설정이 가능
오퍼레이터 스테이션에서의 감시, 제어
를 실행합니다.
AUT
(AUTOMATIC) ㆍSV의 설정 가능
ㆍ자동 운전
ㆍMV의 설정 불가능
CAS
(CASCADE)
ㆍ캐스케이드 운전
ㆍSV, MV의 설정 불가능
CMV
(COMPUTER MV)
ㆍ상위 계산기로부터의 자동 MV 설정 상위 계산기로부터의 루프 제어가 가능
하고, 오퍼레이터 스테이션으로 운전
모드의 조작, 감시를 실행합니다.CSV
(COMPUTER SV)
ㆍ상위 계산기로부터의 자동 SV 설정
CMB
(COMPUTER MANUAL BACK UP)
ㆍ상위 계산기 이상 시의 수동 운전
백업
상위 계산기에 의한 루프 제어 중, 계
산기 고장으로 미리 결정된 오퍼레이터
스테이션에 의해 백업합니다.CAB
(COMPUTER AUTOMATIC BACK UP)
ㆍ상위 계산기 이상 시의 자동 운전
백업
CCB
(COMPUTER CASCADE BACK UP)
ㆍ상위 계산기 이상 시의 캐스케이드
운전 백업
LCM
(LOCAL MANIPULATED)
ㆍ로컬 수동 운전 플랜트 기동 시 오퍼레이터 스테이션
이외로부터의 루프 디스플레이 등으로
써 조작, 기동을 실행하고, 오퍼레이
터 스테이션에서 운전 모드를 감시합니
다.
LCA
(LOCAL AUTOMATIC)
ㆍ로컬 자동 운전
LCC
(LOCAL CASCADE)
ㆍ로컬 캐스케이드 운전
3 프로세스 제어 명령에서 사용하는 데이터와 지정 방법
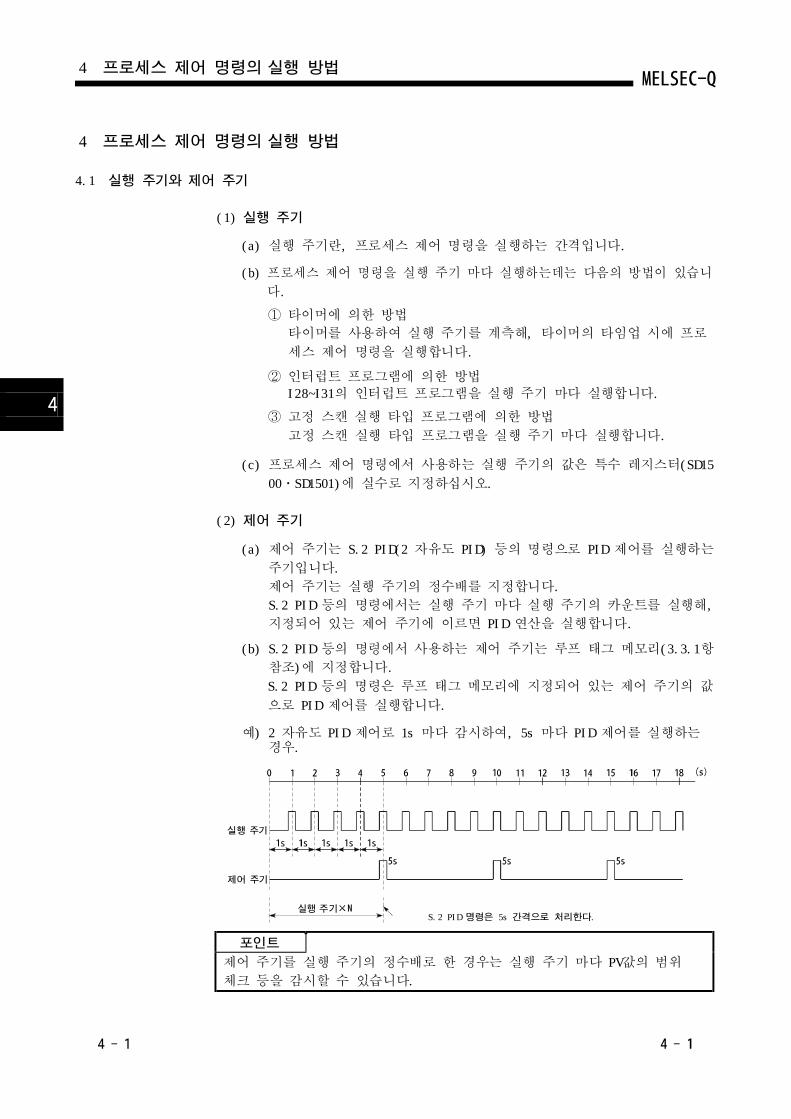
4.1 실행 주기와 제어 주기
(1) 실행 주기
(a) 실행 주기란, 프로세스 제어 명령을 실행하는 간격입니다.
(b) 프로세스 제어 명령을 실행 주기 마다 실행하는데는 다음의 방법이 있습니
다.
① 타이머에 의한 방법
타이머를 사용하여 실행 주기를 계측해, 타이머의 타임업 시에 프로
세스 제어 명령을 실행합니다.
② 인터럽트 프로그램에 의한 방법I28~I31의 인터럽트 프로그램을 실행 주기 마다 실행합니다.
③ 고정 스캔 실행 타입 프로그램에 의한 방법
고정 스캔 실행 타입 프로그램을 실행 주기 마다 실행합니다.
(c) 프로세스 제어 명령에서 사용하는 실행 주기의 값은 특수 레지스터(SD15
00ㆍSD1501)에 실수로 지정하십시오.
(2) 제어 주기
(a) 제어 주기는 S.2 PID(2 자유도 PID) 등의 명령으로 PID 제어를 실행하는
주기입니다.
제어 주기는 실행 주기의 정수배를 지정합니다.
S.2 PID 등의 명령에서는 실행 주기 마다 실행 주기의 카운트를 실행해,
지정되어 있는 제어 주기에 이르면 PID 연산을 실행합니다.
(b) S.2 PID 등의 명령에서 사용하는 제어 주기는 루프 태그 메모리(3.3.1항
참조)에 지정합니다.
S.2 PID 등의 명령은 루프 태그 메모리에 지정되어 있는 제어 주기의 값
으로 PID 제어를 실행합니다.
예) 2 자유도 PID 제어로 1s 마다 감시하여, 5s 마다 PID 제어를 실행하는경우.
실행 주기
제어 주기
실행 주기S.2 PID 5s .명령은 간격으로 처리한다
포인트
제어 주기를 실행 주기의 정수배로 한 경우는 실행 주기 마다 PV값의 범위
체크 등을 감시할 수 있습니다.
4 프로세스 제어 명령의 실행 방법
4 프로세스 제어 명령의 실행 방법
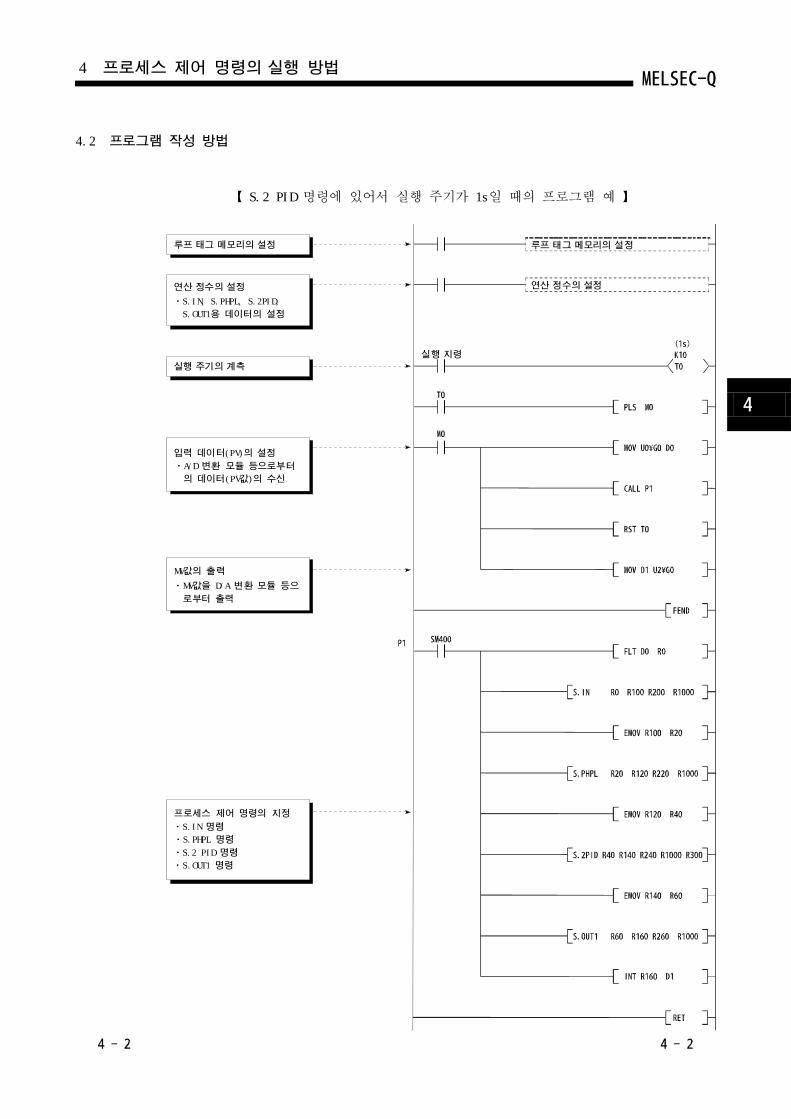
4.2 프로그램 작성 방법
【 S.2 PID 명령에 있어서 실행 주기가 1s일 때의 프로그램 예 】
루프 태그 메모리의 설정
연산 정수의 설정
실행 지령
ㆍ
용 데이터의 설정
S.IN, S.PHPL, S.2PID,
S.OUT1
ㆍ 변환 모듈 등으로부터
의 데이터 값 의 수신
A/D
(PV )
ㆍ 값을 변환 모듈 등으
로부터 출력
MV D/A
루프 태그 메모리의 설정
연산 정수의 설정
실행 주기의 계측
입력 데이터 의 설정(PV)
MV값의 출력
프로세스 제어 명령의 지정
ㆍ 명령S.IN
ㆍ 명령S.PHPL
ㆍ 명령S.2 PID
ㆍ 명령S.OUT1
4 프로세스 제어 명령의 실행 방법
5.1 실행 조건의 전환
5.1.1 RUN/STOP루프
PLC 이외의 검출기, 조작단 등의 루프 구성 기기가 고장났을 경우에, 해당 루프
의 유지보수를 하기 위해서 루프별로 RUN/STOP할 수 있습니다.
해당 루프의 RUN/STOP은 알람 검출(ALM)의 “SPA” 비트로써 실행합니다.
(1) STOP루프 시의 기본 동작
(a) 출력 상황을 기억합니다.(예:S.2 PID 명령의 출력=0)
(b) 알람은 검출되지 않도록 합니다.
(c) 제어 모드는 MAN으로 합니다.
5 실행 조건의 전환과 기능
5 실행 조건의 전환과 기능
5.2 기 능
5.2.1 트래킹 기능
트래킹 기능은 “범프리스 기능”과 “출력 리미터 처리”를 포함한 기능입니다.
(1) (Bumpless)범프리스 기능
범프리스 기능이란, 모드 전환(자동 모드 수동 모드) 시, 조작량(MV)의 출력
의 스테핑(stepping) 변화를 방지하여 연속적이고 부드럽게 MV 출력을 제어하
게 하는 기능입니다.
(2) 출력 리미터 처리 기능
출력 리미터 처리 기능은 자동 모드 시 PID 연산으로 출력된 조작량(MV)의 상
한 또는 하한을 제한하는 기능입니다.
이 출력 리미터 처리 기능은 자동 모드 시만 유효하고, 수동 모드일 때는 실
행하지 않습니다.
또한, 자동 모드에서도 트래킹 비트(TRK)를 “0:트래킹하지 않는다”로 설
정한 경우에도, 출력 리미터 처리 기능은 실행하지 않습니다.
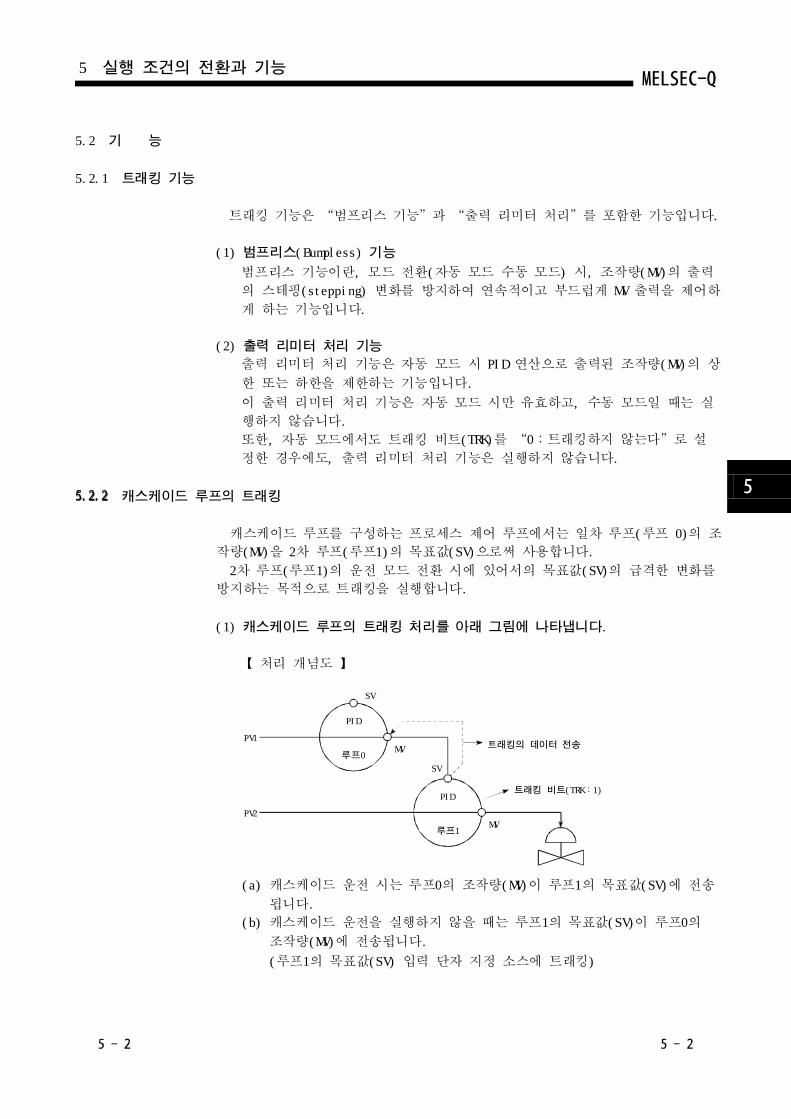
5.2.2 캐스케이드 루프의 트래킹
캐스케이드 루프를 구성하는 프로세스 제어 루프에서는 일차 루프(루프 0)의 조
작량(MV)을 2차 루프(루프1)의 목표값(SV)으로써 사용합니다.
2차 루프(루프1)의 운전 모드 전환 시에 있어서의 목표값(SV)의 급격한 변화를
방지하는 목적으로 트래킹을 실행합니다.
(1) .캐스케이드 루프의 트래킹 처리를 아래 그림에 나타냅니다
【 처리 개념도 】
루프0
SV
PV1
PV2
SV
PID
PID
MV
MV
트래킹의 데이터 전송
트래킹 비트 :(TRK 1)
루프1
(a) 캐스케이드 운전 시는 루프0의 조작량(MV)이 루프1의 목표값(SV)에 전송
됩니다.
(b) 캐스케이드 운전을 실행하지 않을 때는 루프1의 목표값(SV)이 루프0의
조작량(MV)에 전송됩니다.
(루프1의 목표값(SV) 입력 단자 지정 소스에 트래킹)
5 실행 조건의 전환과 기능
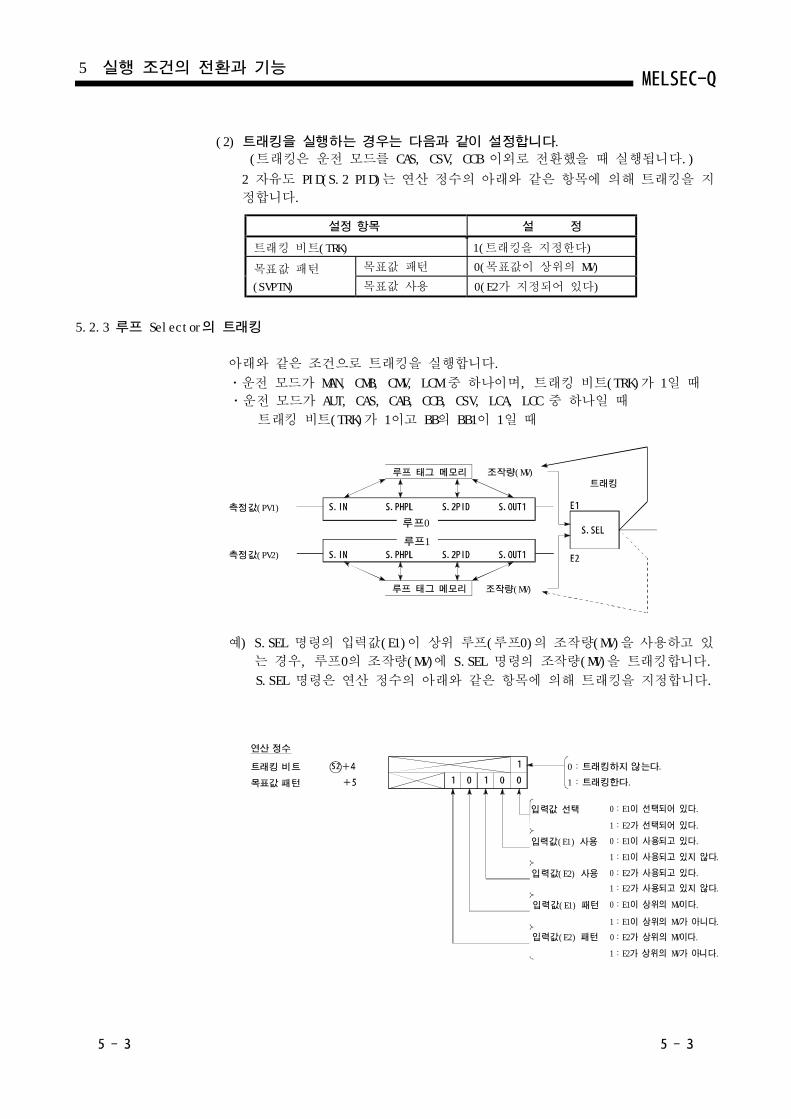
(2) .트래킹을 실행하는 경우는 다음과 같이 설정합니다
(트래킹은 운전 모드를 CAS, CSV, CCB 이외로 전환했을 때 실행됩니다.)
2 자유도 PID(S.2 PID)는 연산 정수의 아래와 같은 항목에 의해 트래킹을 지
정합니다.
설정 항목 설 정
트래킹 비트(TRK) 1(트래킹을 지정한다)
목표값 패턴
(SVPTN)
목표값 패턴 0(목표값이 상위의 MV)
목표값 사용 0(E2가 지정되어 있다)
5.2.3 Selector루프 의 트래킹
아래와 같은 조건으로 트래킹을 실행합니다.
ㆍ운전 모드가 MAN, CMB, CMV, LCM 중 하나이며, 트래킹 비트(TRK)가 1일 때
ㆍ운전 모드가 AUT, CAS, CAB, CCB, CSV, LCA, LCC 중 하나일 때
트래킹 비트(TRK)가 1이고 BB의 BB1이 1일 때
루프 태그 메모리 조작량(MV)
측정값(PV1)
트래킹
루프0
측정값(PV2)
루프1
루프 태그 메모리 조작량(MV)
예) S.SEL 명령의 입력값(E1)이 상위 루프(루프0)의 조작량(MV)을 사용하고 있
는 경우, 루프0의 조작량(MV)에 S.SEL 명령의 조작량(MV)을 트래킹합니다.
S.SEL 명령은 연산 정수의 아래와 같은 항목에 의해 트래킹을 지정합니다.
연산 정수
트래킹 비트
목표값 패턴
0:트래킹하지 않는다.
1:트래킹한다.
입력값 선택 0 E1 .: 이 선택되어 있다
1 E2 .: 가 선택되어 있다
입력값 사용 (E1) 0 E1 .: 이 사용되고 있다
1 E1 .: 이 사용되고 있지 않다
입력값 사용(E2) 0 E2 .: 가 사용되고 있다
1 E2 .: 가 사용되고 있지 않다
입력값 패턴(E1) 0 E1 MV .: 이 상위의 이다
1 E1 MV .: 이 상위의 가 아니다
입력값 패턴(E2) 0 E2 MV .: 가 상위의 이다
1 E2 MV .: 가 상위의 가 아니다
5 실행 조건의 전환과 기능
6 명령 일람
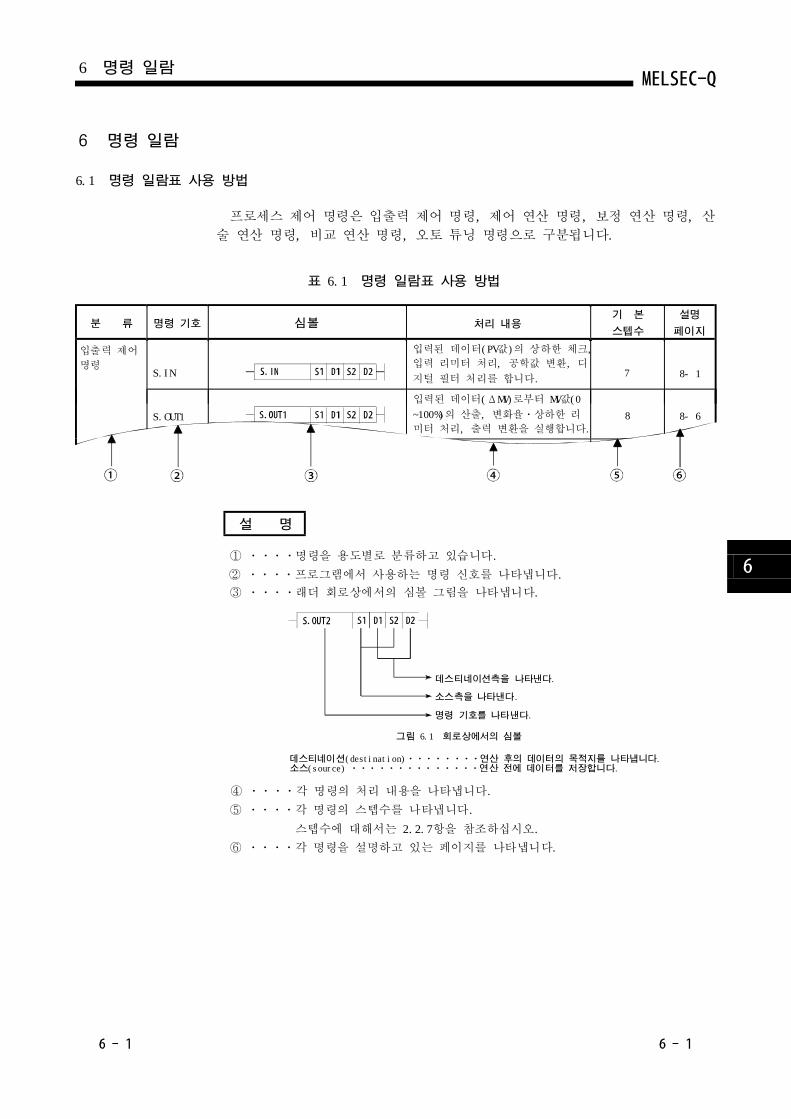
6.1 명령 일람표 사용 방법
프로세스 제어 명령은 입출력 제어 명령, 제어 연산 명령, 보정 연산 명령, 산
술 연산 명령, 비교 연산 명령, 오토 튜닝 명령으로 구분됩니다.
표 명령 일람표 사용 방법6.1
설 명
① ㆍㆍㆍㆍ명령을 용도별로 분류하고 있습니다.
② ㆍㆍㆍㆍ프로그램에서 사용하는 명령 신호를 나타냅니다.
③ ㆍㆍㆍㆍ래더 회로상에서의 심볼 그림을 나타냅니다.
데스티네이션측을 나타낸다.
소스측을 나타낸다.
명령 기호를 나타낸다.
그림 회로상에서의 심볼6.1
데스티네이션 ㆍㆍㆍㆍㆍㆍㆍㆍ연산 후의 데이터의 목적지를 나타냅니다(destination) .소스 ㆍㆍㆍㆍㆍㆍㆍㆍㆍㆍㆍㆍㆍㆍ연산 전에 데이터를 저장합니다(source) .
④ ㆍㆍㆍㆍ각 명령의 처리 내용을 나타냅니다.
⑤ ㆍㆍㆍㆍ각 명령의 스텝수를 나타냅니다.
스텝수에 대해서는 2.2.7항을 참조하십시오.
⑥ ㆍㆍㆍㆍ각 명령을 설명하고 있는 페이지를 나타냅니다.
6 명령 일람
분 류 명령 기호 심볼 처리 내용기 본
스텝수
설명
페이지
입출력 제어
명령
입력된 데이터(PV값)의 상하한 체크,
입력 리미터 처리, 공학값 변환, 디
지털 필터 처리를 합니다.7 8- 1
S.OUT1
S.IN
입력된 데이터(ΔMV)로부터 MV값(0
~100%)의 산출, 변화율ㆍ상하한 리
미터 처리, 출력 변환을 실행합니다.8 8- 6
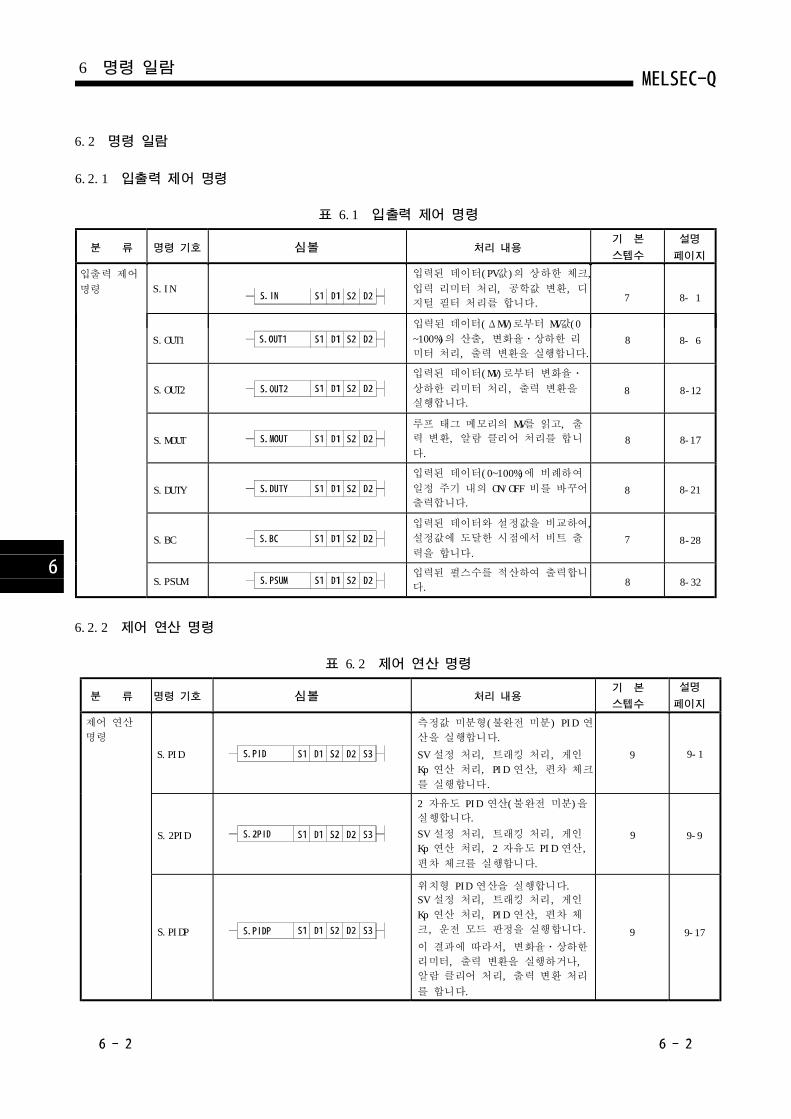
6.2 명령 일람
6.2.1 입출력 제어 명령
표 입출력 제어 명령6.1
분 류 명령 기호 심볼 처리 내용기 본
스텝수
설명
페이지
분 류 명령 기호 심볼 처리 내용기 본
스텝수
설명
페이지
입출력 제어
명령
입력된 데이터(PV값)의 상하한 체크,
입력 리미터 처리, 공학값 변환, 디
지털 필터 처리를 합니다.7 8- 1
S.OUT1
S.IN
입력된 데이터(ΔMV)로부터 MV값(0
~100%)의 산출, 변화율ㆍ상하한 리
미터 처리, 출력 변환을 실행합니다.
8 8- 6
S.OUT2
입력된 데이터(MV)로부터 변화율ㆍ
상하한 리미터 처리, 출력 변환을
실행합니다.8 8-12
S.MOUT
루프 태그 메모리의 MV를 읽고, 출
력 변환, 알람 클리어 처리를 합니
다.
8 8-17
S.DUTY
입력된 데이터(0~100%)에 비례하여
일정 주기 내의 ON/OFF 비를 바꾸어
출력합니다.8 8-21
S.BC
입력된 데이터와 설정값을 비교하여,
설정값에 도달한 시점에서 비트 출
력을 합니다.
7 8-28
S.PSUM입력된 펄스수를 적산하여 출력합니
다. 8 8-32
6.2.2 제어 연산 명령
표 제어 연산 명령6.2
제어 연산
명령
S.PID
측정값 미분형(불완전 미분) PID 연
산을 실행합니다.
SV 설정 처리, 트래킹 처리, 게인
Kp 연산 처리, PID 연산, 편차 체크
를 실행합니다.
9 9-1
S.2PID
2 자유도 PID 연산(불완전 미분)을
실행합니다.
SV 설정 처리, 트래킹 처리, 게인
Kp 연산 처리, 2 자유도 PID 연산,
편차 체크를 실행합니다.
9 9-9
S.PIDP
위치형 PID 연산을 실행합니다.
SV 설정 처리, 트래킹 처리, 게인
Kp 연산 처리, PID 연산, 편차 체
크, 운전 모드 판정을 실행합니다.
이 결과에 따라서, 변화율ㆍ상하한
리미터, 출력 변환을 실행하거나,
알람 클리어 처리, 출력 변환 처리
를 합니다.
9 9-17
6 명령 일람
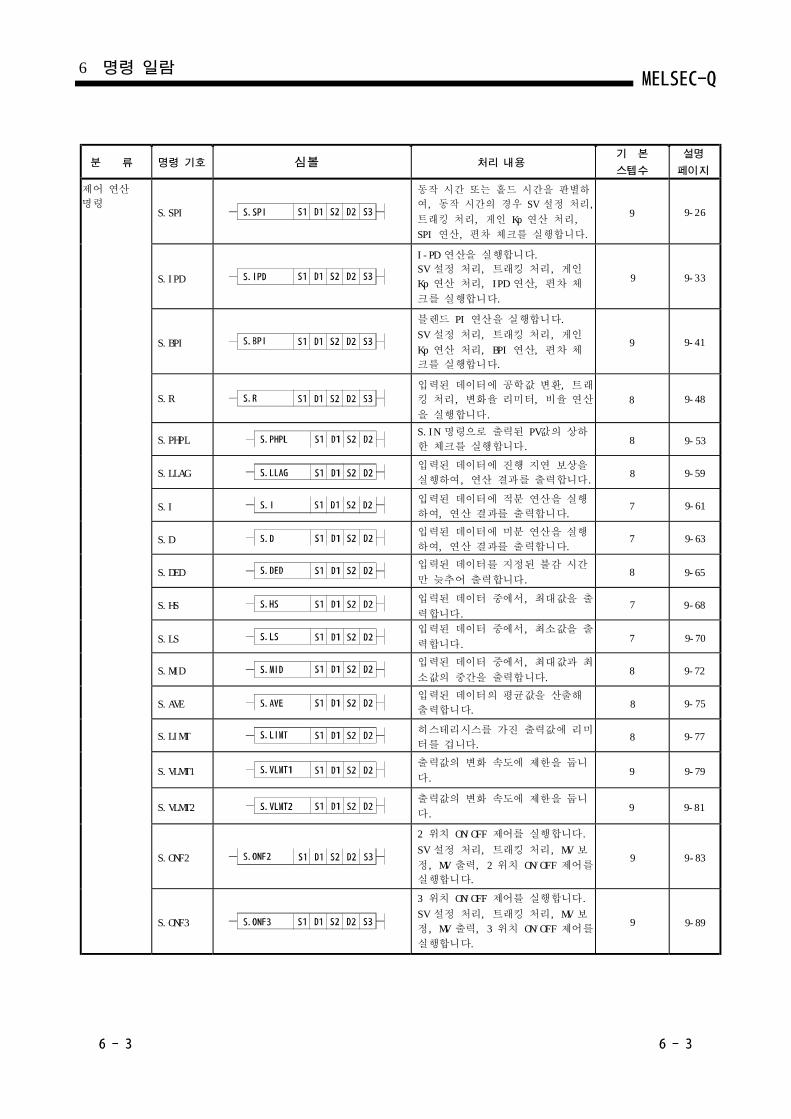
제어 연산
명령S.SPI
동작 시간 또는 홀드 시간을 판별하
여, 동작 시간의 경우 SV 설정 처리,
트래킹 처리, 게인 Kp 연산 처리,
SPI 연산, 편차 체크를 실행합니다.
9
S.IPD
I-PD 연산을 실행합니다.
SV 설정 처리, 트래킹 처리, 게인
Kp 연산 처리, IPD 연산, 편차 체
크를 실행합니다.
9 9-33
9-26
S.BPI
블렌드 PI 연산을 실행합니다.
SV 설정 처리, 트래킹 처리, 게인
Kp 연산 처리, BPI 연산, 편차 체
크를 실행합니다.
9 9-41
S.R
입력된 데이터에 공학값 변환, 트래
킹 처리, 변화율 리미터, 비율 연산
을 실행합니다.
8 9-48
S.PHPLS.IN 명령으로 출력된 PV값의 상하
한 체크를 실행합니다.8 9-53
S.LLAG입력된 데이터에 진행 지연 보상을
실행하여, 연산 결과를 출력합니다.8 9-59
S.I입력된 데이터에 적분 연산을 실행
하여, 연산 결과를 출력합니다.7 9-61
S.D입력된 데이터에 미분 연산을 실행
하여, 연산 결과를 출력합니다.7 9-63
S.DED입력된 데이터를 지정된 불감 시간
만 늦추어 출력합니다.8 9-65
S.HS입력된 데이터 중에서, 최대값을 출
력합니다.7 9-68
S.LS입력된 데이터 중에서, 최소값을 출
력합니다.7 9-70
S.MID입력된 데이터 중에서, 최대값과 최
소값의 중간을 출력합니다.8 9-72
S.AVE입력된 데이터의 평균값을 산출해
출력합니다.8 9-75
S.LIMT히스테리시스를 가진 출력값에 리미
터를 겁니다.8 9-77
S.VLMT1출력값의 변화 속도에 제한을 둡니
다.9 9-79
S.VLMT2출력값의 변화 속도에 제한을 둡니
다.9 9-81
S.ONF2
2 위치 ON/OFF 제어를 실행합니다.
SV 설정 처리, 트래킹 처리, MV 보
정, MV 출력, 2 위치 ON/OFF 제어를
실행합니다.
9 9-83
S.ONF3
3 위치 ON/OFF 제어를 실행합니다.
SV 설정 처리, 트래킹 처리, MV 보
정, MV 출력, 3 위치 ON/OFF 제어를
실행합니다.
9 9-89
6 명령 일람
분 류 명령 기호 심볼 처리 내용기 본
스텝수
설명
페이지

표 제어 연산 명령6.2
제어 연산
명령S.DBND
불감대를 마련해 출력 처리를 합니
다.
S.PGSSV와 MV의 패턴에 따라서 조작 출력
을 출력합니다.8
8
9-97
9-95
S.SEL
자동 시는 입력된 데이터 중에 선택
신호로써 선택된 값을 출력하며, 수
동 시는 루프 태그 메모리의 MV를
출력합니다.
9 9-102
S.BUMP
모드 변경 신호가 수동에서 자동으
로 전환되었을 경우, 출력값을 출력
제어값에서 출력 설정값으로 서서히
접근합니다.
8 9-108
S.AMR출력값을 일정한 비율로 증감합니
다.8 9-110
6.2.3 보정 연산 명령
표 보정 연산 명령6.3
보정 연산
명령 S.FG입력된 데이터가 지정되어 있는 꺾
은선 패턴에 따른 값을 출력합니다.7 10- 1
S.IFG
입력된 데이터를 지정되어 있는 역
꺾은선 패턴에 따른 값을 출력합니
다.
8 10- 3
S.FLT
지정된 데이터 수집 간격으로 샘플
링 한 n개의 데이터의 평균값을 출
력합니다.
8 10- 5
S.SUM입력된 데이터를 적산해 출력합니
다.8 10- 8
S.TPC입력된 데이터를 온도 압력을 보정
하여 출력합니다.8 10-10
S.ENG입력된 데이터를 공학값으로 변환합
니다. 8 10-12
S.IENG입력된 데이터를 공학값으로 역변환
하여 출력합니다.8 10-14
6 명령 일람
분 류
분 류
명령 기호
명령 기호
심볼
심볼
처리 내용
처리 내용
기 본
기 본
스텝수
스텝수
설명
설명
페이지
페이지
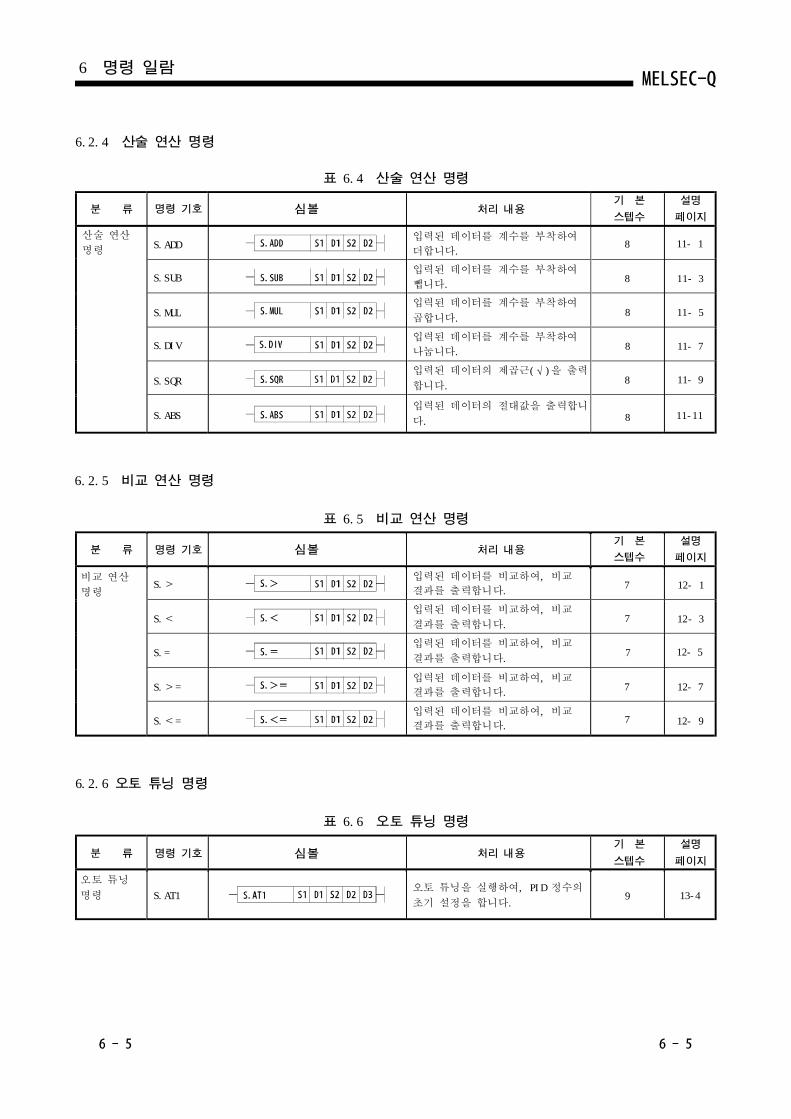
6.2.4 산술 연산 명령
표 산술 연산 명령6.4
산술 연산
명령S.ADD
입력된 데이터를 계수를 부착하여
더합니다.8 11- 1
S.SUB입력된 데이터를 계수를 부착하여
뺍니다.8 11- 3
S.MUL입력된 데이터를 계수를 부착하여
곱합니다.8 11- 5
S.DIV입력된 데이터를 계수를 부착하여
나눕니다.8 11- 7
S.SQR입력된 데이터의 제곱근(√)을 출력
합니다.8 11- 9
S.ABS입력된 데이터의 절대값을 출력합니
다. 8 11-11
6.2.5 비교 연산 명령
표 비교 연산 명령6.5
비교 연산
명령S.>
입력된 데이터를 비교하여, 비교
결과를 출력합니다.7 12- 1
S.<입력된 데이터를 비교하여, 비교
결과를 출력합니다.7 12- 3
S.=입력된 데이터를 비교하여, 비교
결과를 출력합니다.7 12- 5
S.>=입력된 데이터를 비교하여, 비교
결과를 출력합니다.7 12- 7
S.<=입력된 데이터를 비교하여, 비교
결과를 출력합니다.7 12- 9
6.2.6 오토 튜닝 명령
표 오토 튜닝 명령6.6
오토 튜닝
명령 S.AT1오토 튜닝을 실행하여, PID 정수의
초기 설정을 합니다.9 13-4
6 명령 일람
분 류 명령 기호 심볼 처리 내용기 본
스텝수
설명
페이지
분 류 명령 기호 심볼 처리 내용기 본
스텝수
설명
페이지
분 류 명령 기호 심볼 처리 내용기 본
스텝수
설명
페이지
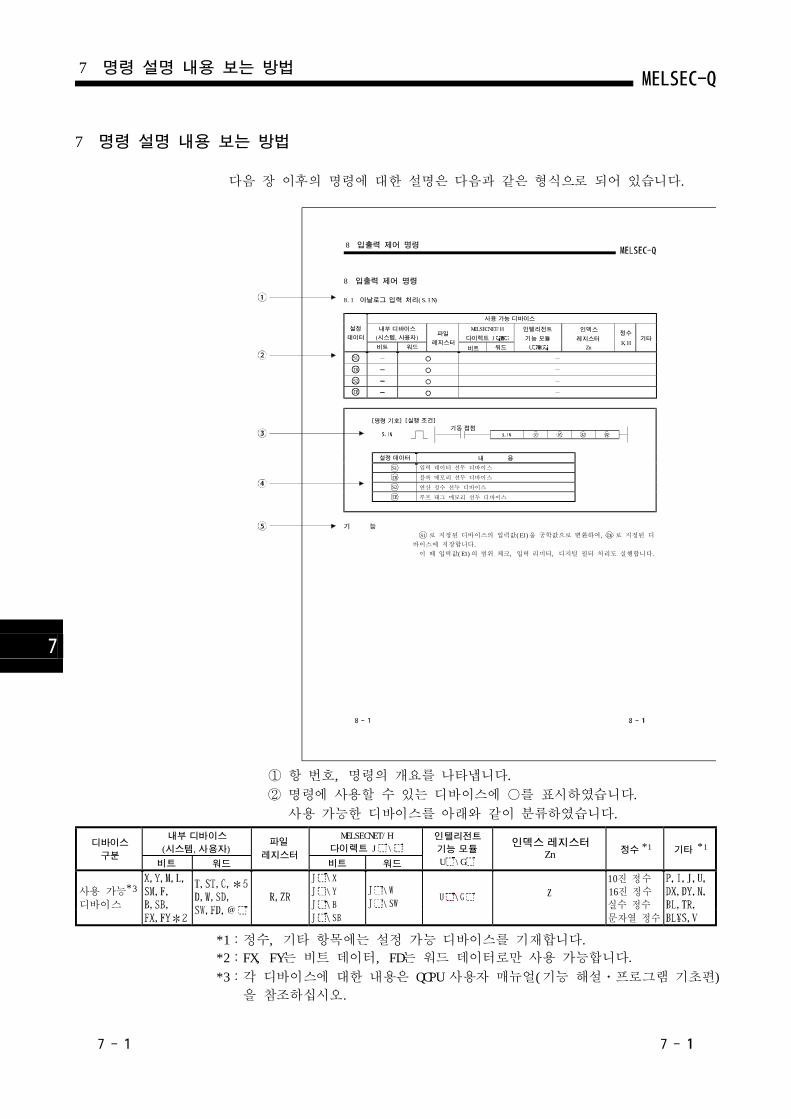
7 명령 설명 내용 보는 방법
다음 장 이후의 명령에 대한 설명은 다음과 같은 형식으로 되어 있습니다.
① 항 번호, 명령의 개요를 나타냅니다.
② 명령에 사용할 수 있는 디바이스에 ○를 표시하였습니다.
사용 가능한 디바이스를 아래와 같이 분류하였습니다.
디바이스
구분
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J \
인텔리전트
기능 모듈
U \G
인덱스 레지스터Zn 정수 *1 기타 *1
비트비트 워드워드
사용 가능*3
디바이스
10진 정수16진 정수실수 정수
문자열 정수
*1:정수, 기타 항목에는 설정 가능 디바이스를 기재합니다.
*2:FX, FY는 비트 데이터, FD는 워드 데이터로만 사용 가능합니다.
*3:각 디바이스에 대한 내용은 QCPU 사용자 매뉴얼(기능 해설ㆍ프로그램 기초편)
을 참조하십시오.
7 명령 설명 내용 보는 방법
\
\ \
\ \\
\
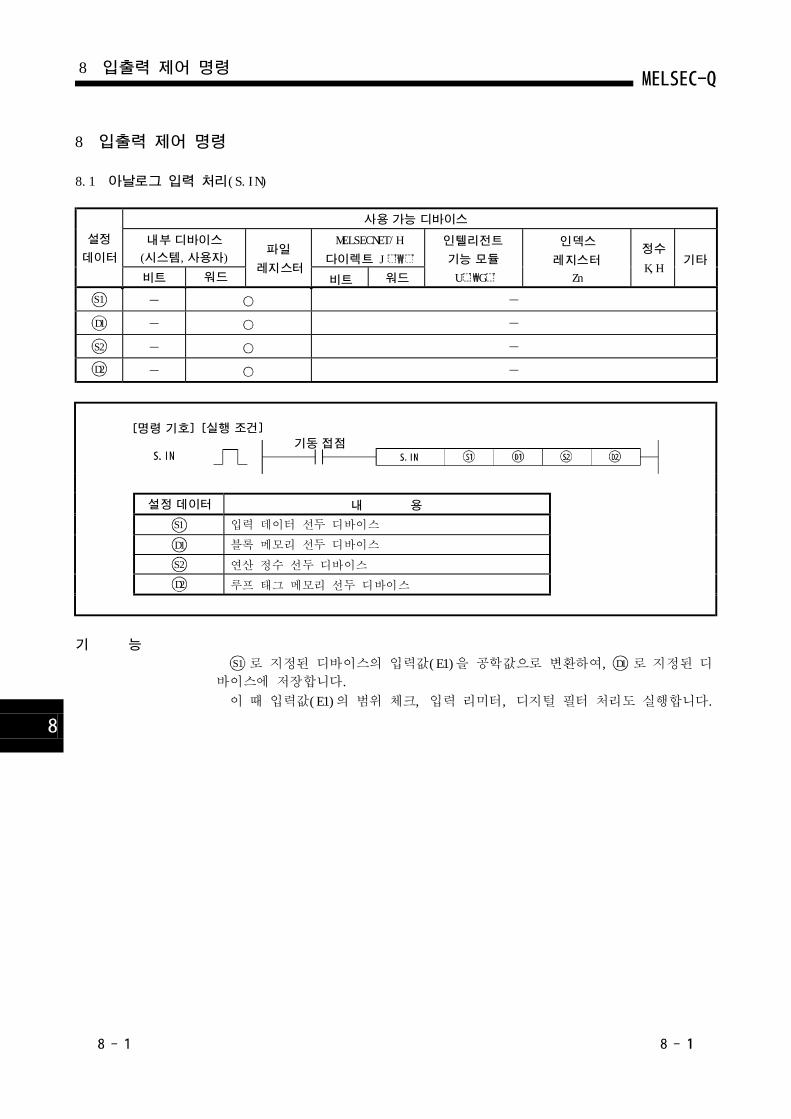
8.1 (S.IN)아날로그 입력 처리
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1 입력 데이터 선두 디바이스
D1 블록 메모리 선두 디바이스
S2 연산 정수 선두 디바이스
D2 루프 태그 메모리 선두 디바이스
기 능
S1 D1로 지정된 디바이스의 입력값(E1)을 공학값으로 변환하여, 로 지정된 디
바이스에 저장합니다.
이 때 입력값(E1)의 범위 체크, 입력 리미터, 디지털 필터 처리도 실행합니다.
8 입출력 제어 명령
8 입출력 제어 명령
S1
D1
S2
D2
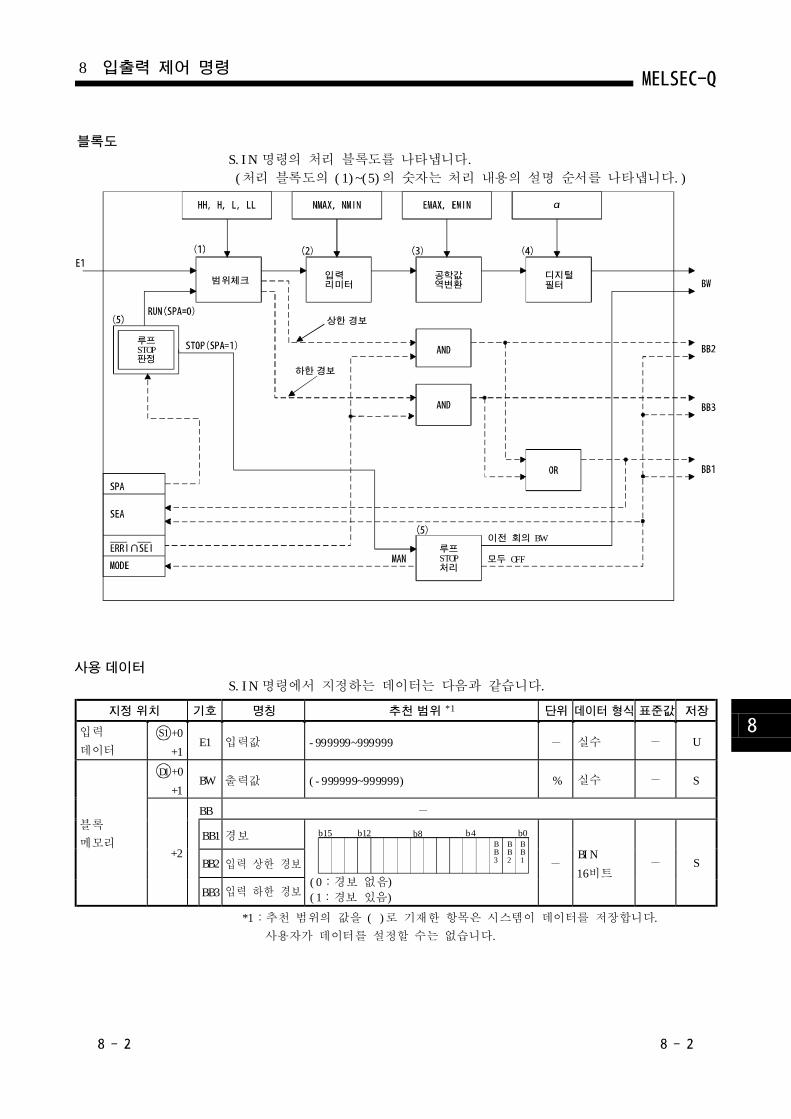
블록도
S.IN 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(5)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
범위체크입력리미터
공학값역변환
디지털필터
루프
판정STOP
상한 경보
하한 경보
루프
처리STOP
이전 회의 BW
모두 OFF
사용 데이터
S.IN 명령에서 지정하는 데이터는 다음과 같습니다.
지정 위치 기호 명칭 추천 범위 *1 단위 데이터형식 표준값 저장
입력
데이터
S1 +0
+1E1 입력값 -999999~999999 ― 실수 ― U
D1 +0
+1
블록
메모리
BW 출력값 (-999999~999999) % 실수 ― S
BB ―
BB1 경보
BB2 입력 상한 경보+2
BB3 입력 하한 경보
b15 b12 b8 b4 b0
(0:경보 없음)
(1:경보 있음)
―BIN
16비트― S
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
BB1
BB2
BB3
8 입출력 제어 명령
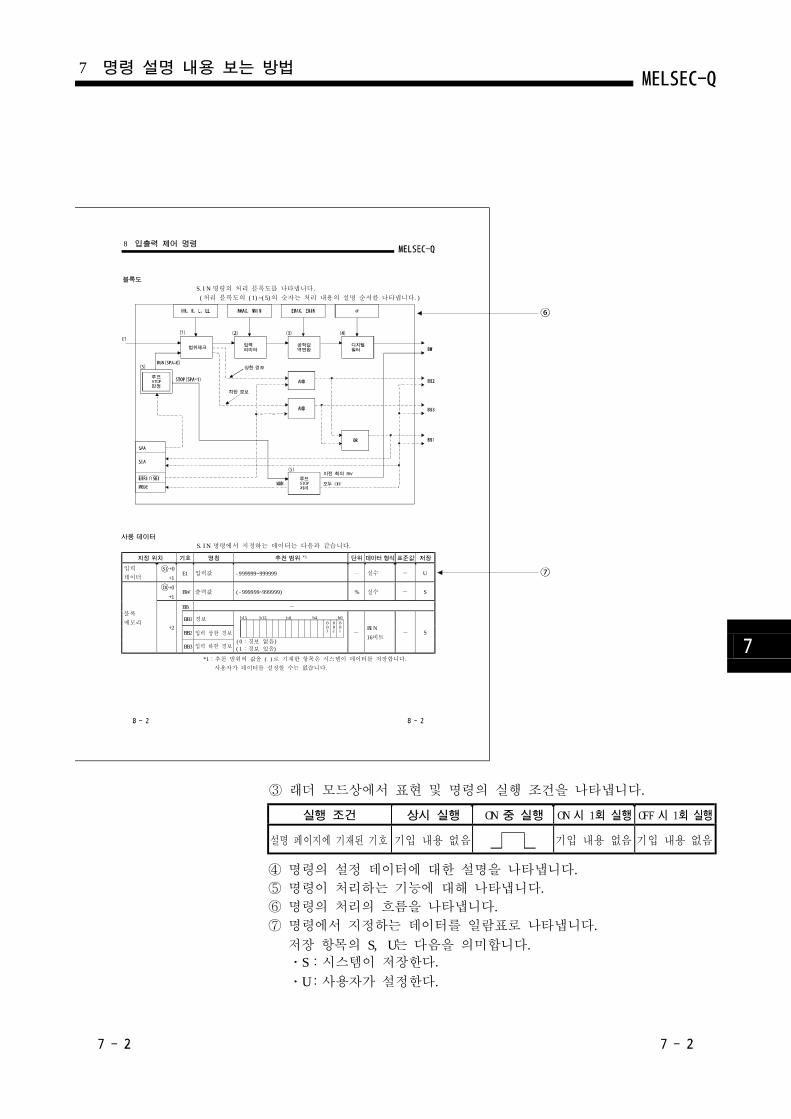
③ 래더 모드상에서 표현 및 명령의 실행 조건을 나타냅니다.
④ 명령의 설정 데이터에 대한 설명을 나타냅니다.
⑤ 명령이 처리하는 기능에 대해 나타냅니다.
⑥ 명령의 처리의 흐름을 나타냅니다.
⑦ 명령에서 지정하는 데이터를 일람표로 나타냅니다.
저장 항목의 S, U는 다음을 의미합니다.
ㆍS:시스템이 저장한다.
ㆍU:사용자가 설정한다.
실행 조건 상시 실행 ON 중 실행 ON 1시 회 실행 OFF 1시 회 실행
설명 페이지에 기재된 기호 기입 내용 없음 기입 내용 없음 기입 내용 없음
7 명령 설명 내용 보는 방법

처리 내용
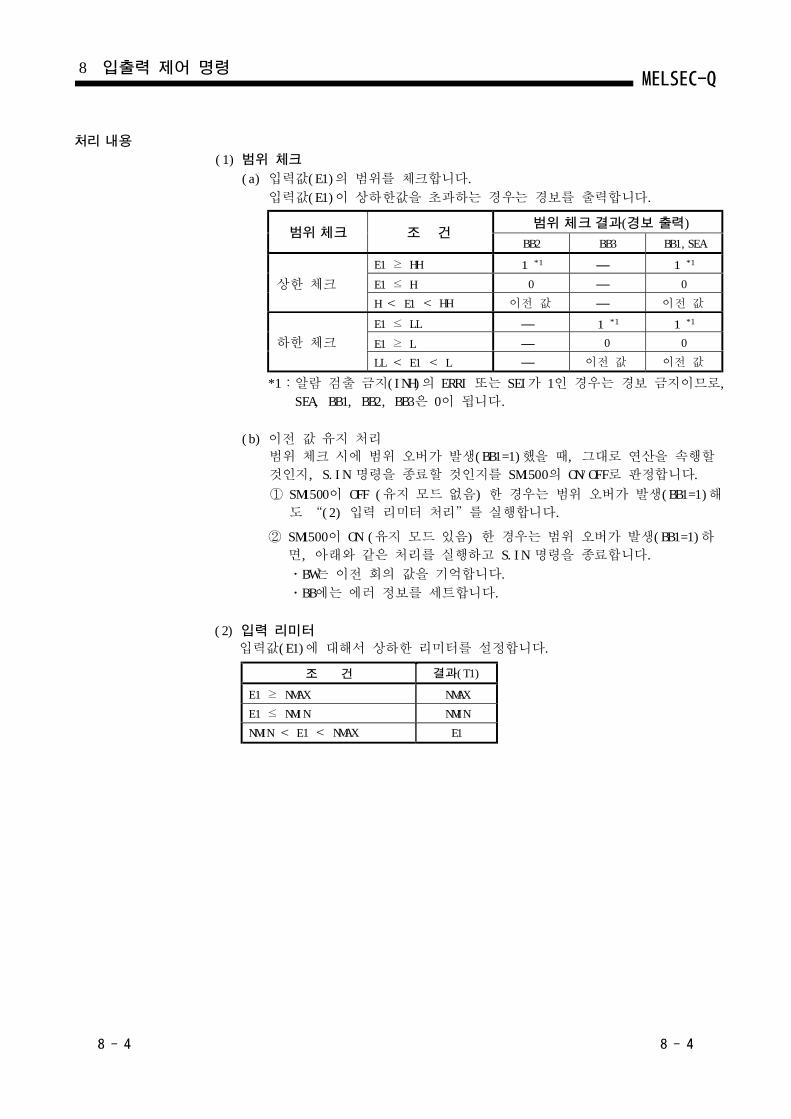
(1) 범위 체크
(a) 입력값(E1)의 범위를 체크합니다.
입력값(E1)이 상하한값을 초과하는 경우는 경보를 출력합니다.
범위 체크 조 건범위 체크 결과(경보 출력)
상한 체크
E1 ≥ HH
E1 ≤ H
H < E1 < HH
NMAX
NMIN
E1
E1 ≥ NMAX
E1 ≤ NMIN
NMIN < E1 < NMAX
E1 ≤ LL
E1 ≥ L
LL < E1 < L
이전 값
0
BB2 BB3 BB1,SEA
1 *1 1 *1
1 *11 *1
0
00
이전 값
하한 체크
이전 값 이전 값
*1:알람 검출 금지(INH)의 ERRI 또는 SEI가 1인 경우는 경보 금지이므로,
SEA, BB1, BB2, BB3은 0이 됩니다.
(b) 이전 값 유지 처리
범위 체크로 범위 오버가 발생(BB1=1)했을 때, 그대로 연산을 속행할 것
인지, S.IN 명령을 종료할 것인지를 SM1500의 ON/OFF로 판정합니다.
① SM1500이 OFF (유지 모드 없음) 한 경우는 범위 오버가 발생(BB1=1)해
도 “(2) 입력 리미터 처리”를 실행합니다.
② SM1500이 ON (유지 모드 있음) 한 경우는 범위 오버가 발생(BB1=1)하
면, 아래와 같은 처리를 실행하고 S.IN 명령을 종료합니다.
ㆍBW는 이전 회의 값을 기억합니다.
ㆍBB에는 에러 정보를 세트합니다.
(2) 입력 리미터
입력값(E1)에 대해서 상하한 리미터를 설정합니다.
조 건 결과(T1)
8 입출력 제어 명령
-
-
-
-
-
-
⑧ 명령의 각 처리에 대해 설명합니다.
7 명령 설명 내용 보는 방법
T1-NMIN
NMAX-NMIN
T1
T2
EMIN
EMAX
NMAXNMIN
T2=(NMAX-NMIN)× +EMIN
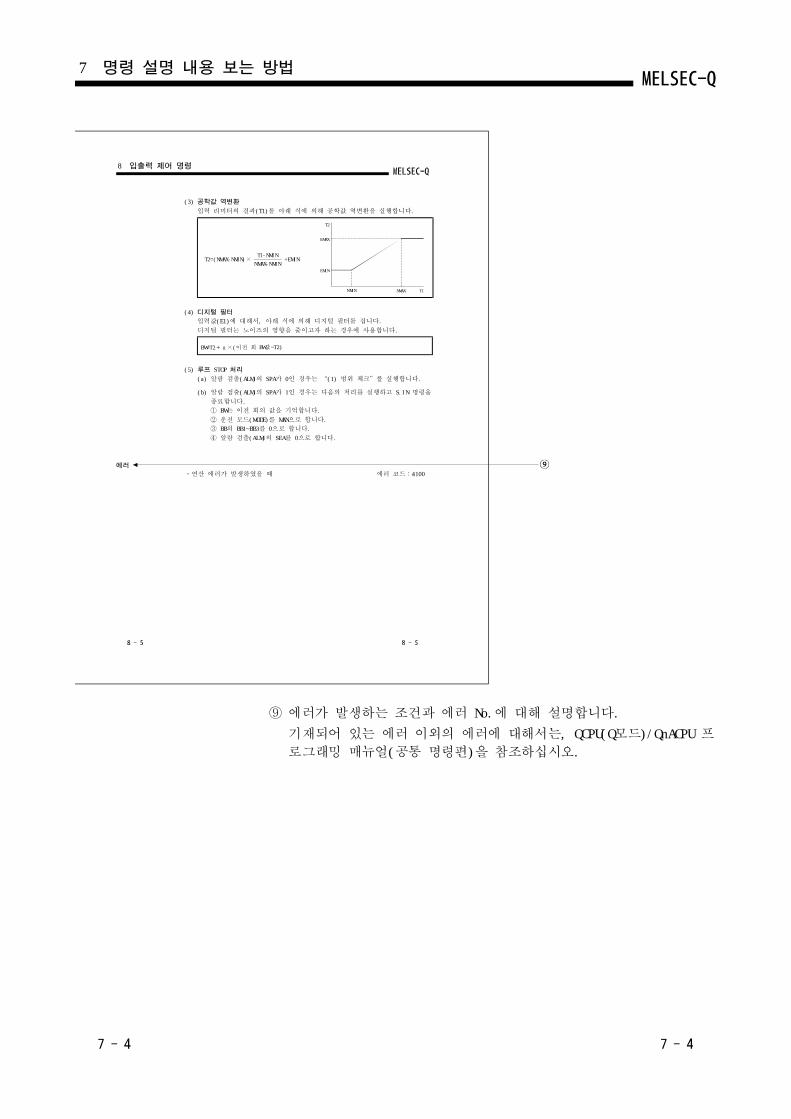
⑨ 에러가 발생하는 조건과 에러 No.에 대해 설명합니다.
기재되어 있는 에러 이외의 에러에 대해서는, QCPU(Q모드)/QnACPU 프
로그래밍 매뉴얼(공통 명령편)을 참조하십시오.
7 명령 설명 내용 보는 방법
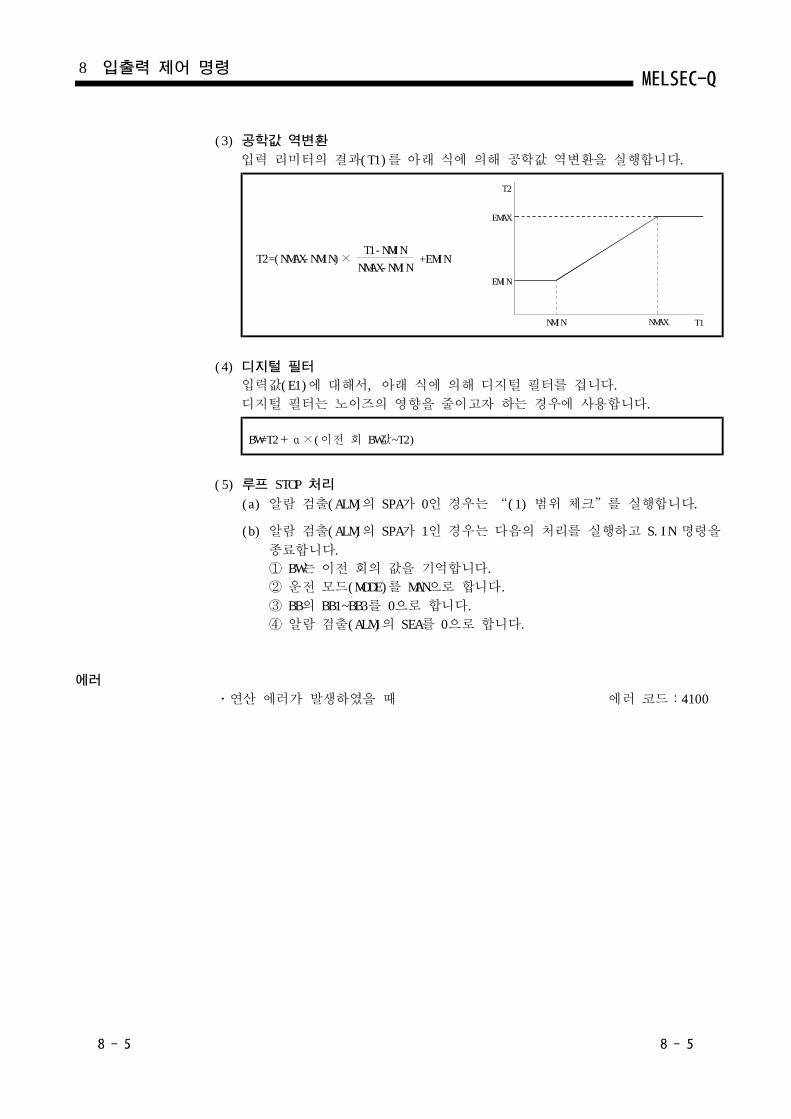
(3) 공학값 역변환
입력 리미터의 결과(T1)를 아래 식에 의해 공학값 역변환을 실행합니다.
(4) 디지털 필터
입력값(E1)에 대해서, 아래 식에 의해 디지털 필터를 겁니다.
디지털 필터는 노이즈의 영향을 줄이고자 하는 경우에 사용합니다.
BW=T2+α×(이전 회 BW값~T2)
(5) STOP루프 처리
(a) 알람 검출(ALM)의 SPA가 0인 경우는 “(1) 범위 체크”를 실행합니다.
(b) 알람 검출(ALM)의 SPA가 1인 경우는 다음의 처리를 실행하고 S.IN 명령을
종료합니다.
① BW는 이전 회의 값을 기억합니다.
② 운전 모드(MODE)를 MAN으로 합니다.
③ BB의 BB1~BB3를 0으로 합니다.
④ 알람 검출(ALM)의 SEA를 0으로 합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
8 입출력 제어 명령
8.1 (S.IN)아날로그 입력 처리
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1 입력 데이터 선두 디바이스
D1 블록 메모리 선두 디바이스
S2 연산 정수 선두 디바이스
D2 루프 태그 메모리 선두 디바이스
기 능
S1 D1로 지정된 디바이스의 입력값(E1)을 공학값으로 변환하여, 로 지정된 디
바이스에 저장합니다.
이 때 입력값(E1)의 범위 체크, 입력 리미터, 디지털 필터 처리도 실행합니다.
8 입출력 제어 명령
8 입출력 제어 명령
S1
D1
S2
D2
블록도
S.IN 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(5)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
범위체크입력리미터
공학값역변환
디지털필터
루프
판정STOP
상한 경보
하한 경보
루프
처리STOP
이전 회의 BW
모두 OFF
사용 데이터
S.IN 명령에서 지정하는 데이터는 다음과 같습니다.
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
S1 +0
+1E1 입력값 -999999~999999 ― 실수 ― U
D1 +0
+1
블록
메모리
BW 출력값 (-999999~999999) % 실수 ― S
BB ―
BB1 경보
BB2 입력 상한 경보+2
BB3 입력 하한 경보
b15 b12 b8 b4 b0
(0:경보 없음)
(1:경보 있음)
―BIN
16비트― S
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
BB1
BB2
BB3
8 입출력 제어 명령
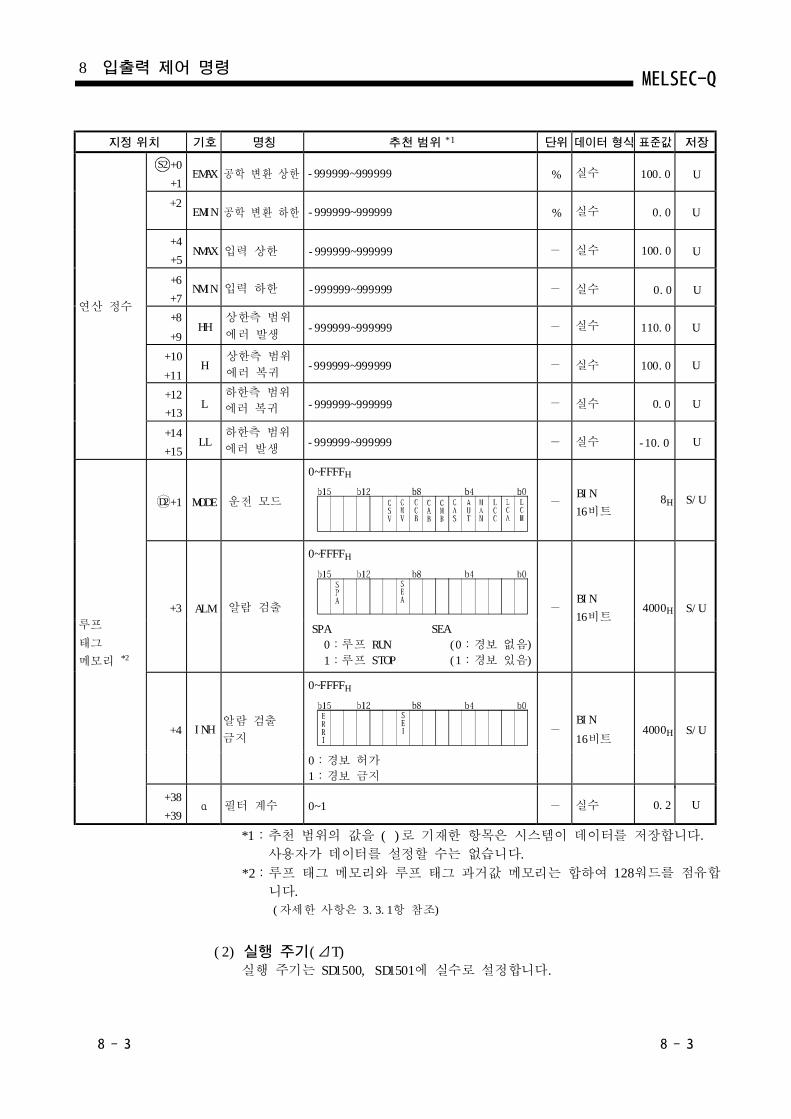
S2 +0
+1EMAX 공학 변환 상한 -999999~999999 % 실수 100.0 U
+2
+3
+4
+38
+39
EMIN 공학 변환 하한 -999999~999999 % 실수 0.0 U
+4
+5NMAX 입력 상한 -999999~999999 실수 100.0 U
+6
+7NMIN 입력 하한
연산 정수
-999999~999999 ―
―
―
―
―
―
―
―
―
―
실수 0.0 U
+8
+9HH
상한측 범위
에러 발생-999999~999999 실수 110.0 U
+10
+11H
상한측 범위
에러 복귀-999999~999999 실수 100.0 U
+12
+13L
하한측 범위
에러 복귀 -999999~999999 실수 0.0 U
+14
+15LL
하한측 범위
에러 발생-999999~999999
0~FFFFH
0~FFFFH
0~FFFFH
실수 -10.0
8H
4000H
4000H
0.2
U
S/U
S/U
S/U
U
루프
태그
메모리 *2
D2+1 MODE
ALM
INH
α
운전 모드BIN
BIN
16비트
16비트알람 검출
0:루프 RUN
SPA SEA
1:루프 STOP
(0:경보 없음)
(1:경보 있음)
알람 검출
금지
0:경보 허가
0~1
1:경보 금지
BIN
16비트
필터 계수 실수
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
(2) ( T)실행 주기 Δ실행 주기는 SD1500, SD1501에 실수로 설정합니다.
8 입출력 제어 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
처리 내용
(1) 범위 체크
(a) 입력값(E1)의 범위를 체크합니다.
입력값(E1)이 상하한값을 초과하는 경우는 경보를 출력합니다.
범위 체크 조 건범위 체크결과(경보 출력)
상한 체크
E1 ≥ HH
E1 ≤ H
H < E1 < HH
NMAX
NMIN
E1
E1 ≥ NMAX
E1 ≤ NMIN
NMIN < E1 < NMAX
E1 ≤ LL
E1 ≥ L
LL < E1 < L
이전 값
0
BB2 BB3 BB1,SEA
1 *1 1 *1
1 *11 *1
0
00
이전 값
하한 체크
이전 값 이전 값
*1:알람 검출 금지(INH)의 ERRI 또는 SEI가 1인 경우는 경보 금지이므로,
SEA, BB1, BB2, BB3은 0이 됩니다.
(b) 이전 값 유지 처리
범위 체크 시에 범위 오버가 발생(BB1=1)했을 때, 그대로 연산을 속행할
것인지, S.IN 명령을 종료할 것인지를 SM1500의 ON/OFF로 판정합니다.
① SM1500이 OFF (유지 모드 없음) 한 경우는 범위 오버가 발생(BB1=1)해
도 “(2) 입력 리미터 처리”를 실행합니다.
② SM1500이 ON (유지 모드 있음) 한 경우는 범위 오버가 발생(BB1=1)하
면, 아래와 같은 처리를 실행하고 S.IN 명령을 종료합니다.
ㆍBW는 이전 회의 값을 기억합니다.
ㆍBB에는 에러 정보를 세트합니다.
(2) 입력 리미터
입력값(E1)에 대해서 상하한 리미터를 설정합니다.
조 건 결과(T1)
8 입출력 제어 명령
-
-
-
-
-
-
(3) 공학값 역변환
입력 리미터의 결과(T1)를 아래 식에 의해 공학값 역변환을 실행합니다.
(4) 디지털 필터
입력값(E1)에 대해서, 아래 식에 의해 디지털 필터를 겁니다.
디지털 필터는 노이즈의 영향을 줄이고자 하는 경우에 사용합니다.
BW=T2+α×(이전 회 BW값~T2)
(5) STOP루프 처리
(a) 알람 검출(ALM)의 SPA가 0인 경우는 “(1) 범위 체크”를 실행합니다.
(b) 알람 검출(ALM)의 SPA가 1인 경우는 다음의 처리를 실행하고 S.IN 명령을
종료합니다.
① BW는 이전 회의 값을 기억합니다.
② 운전 모드(MODE)를 MAN으로 합니다.
③ BB의 BB1~BB3를 0으로 합니다.
④ 알람 검출(ALM)의 SEA를 0으로 합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
8 입출력 제어 명령
T1-NMIN
NMAX-NMIN
T1
T2
EMIN
EMAX
NMAXNMIN
T2=(NMAX-NMIN)× +EMIN
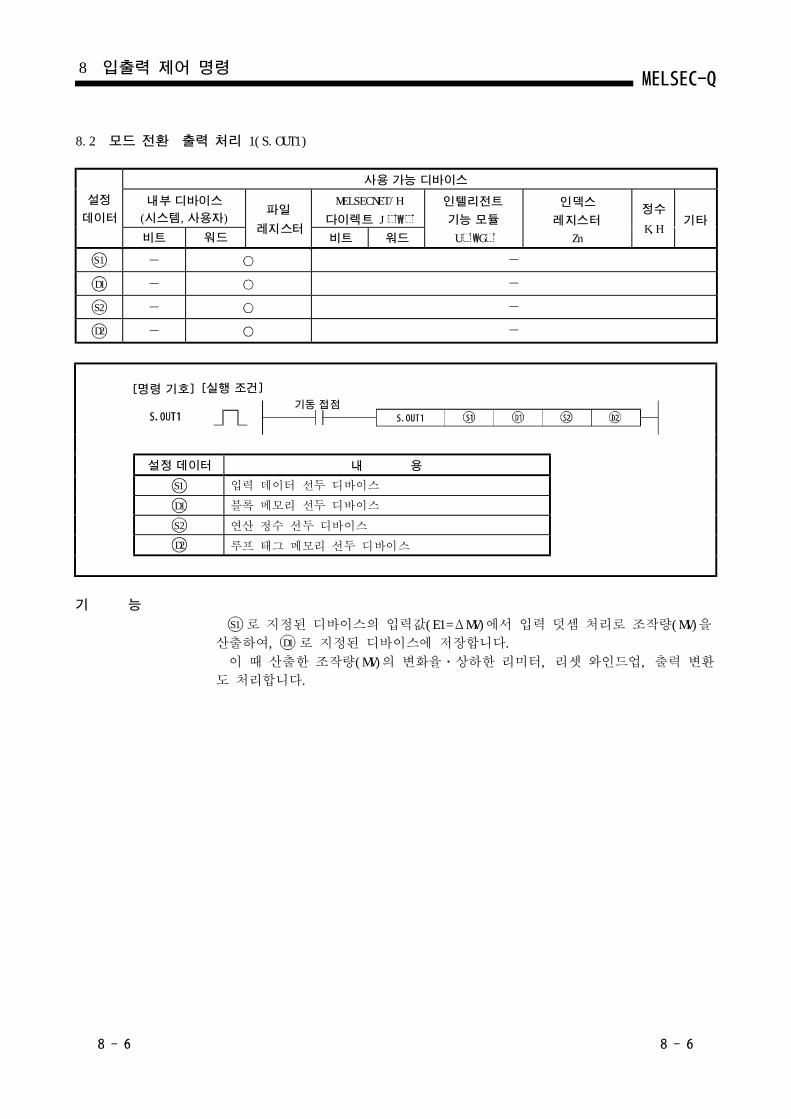
8.2 1(S.OUT1)모드 전환 출력 처리
로 지정된 디바이스의 입력값(E1=ΔMV)에서 입력 덧셈 처리로 조작량(MV)을
산출하여, 로 지정된 디바이스에 저장합니다.
이 때 산출한 조작량(MV)의 변화율ㆍ상하한 리미터, 리셋 와인드업, 출력 변환
도 처리합니다.
S1
D1
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1 입력 데이터 선두 디바이스
D1 블록 메모리 선두 디바이스
S2 연산 정수 선두 디바이스
D2 루프 태그 메모리 선두 디바이스
S1
D1
S2
D2
8 입출력 제어 명령
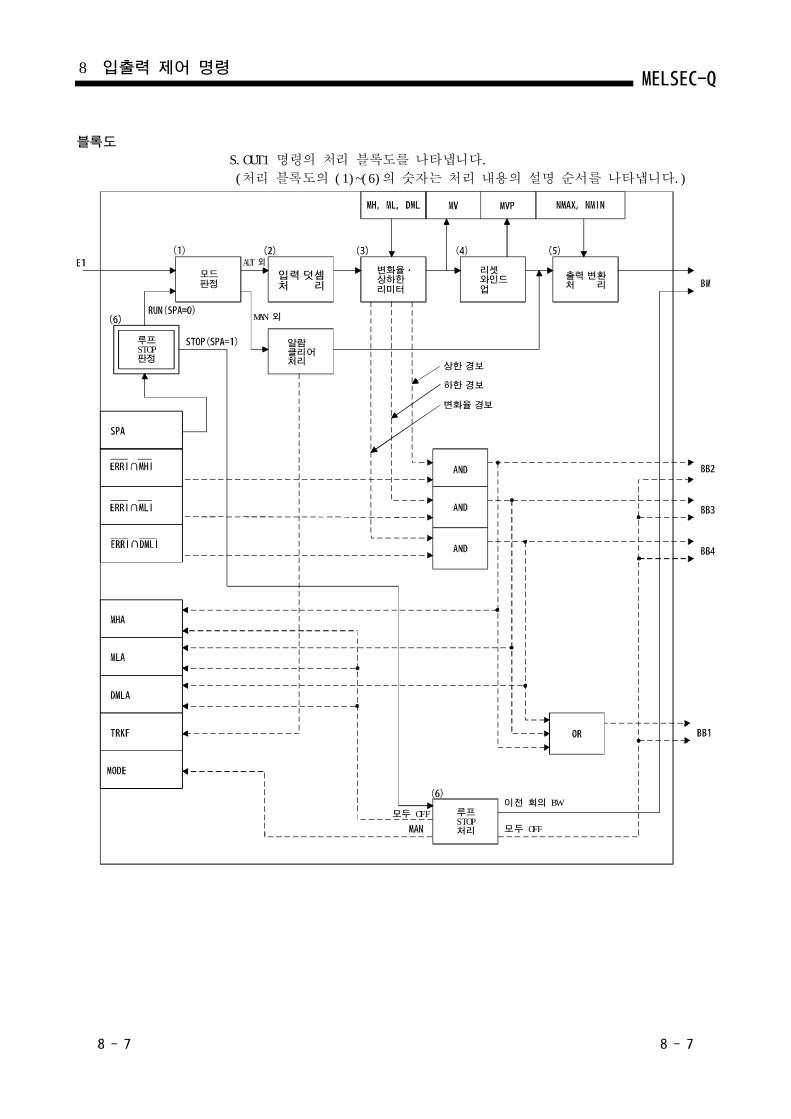
블록도
S.OUT1 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(6)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
모드판정
AUT 외
입력 덧셈처 리
변화율ㆍ상하한리미터
리셋와인드업
출력 변환처 리
MAN 외
알람클리어처리
상한 경보
하한 경보
변화율 경보
루프
판정STOP
루프
처리STOP
이전 회의 BW
모두 OFF
모두 OFF
8 입출력 제어 명령
사용 데이터
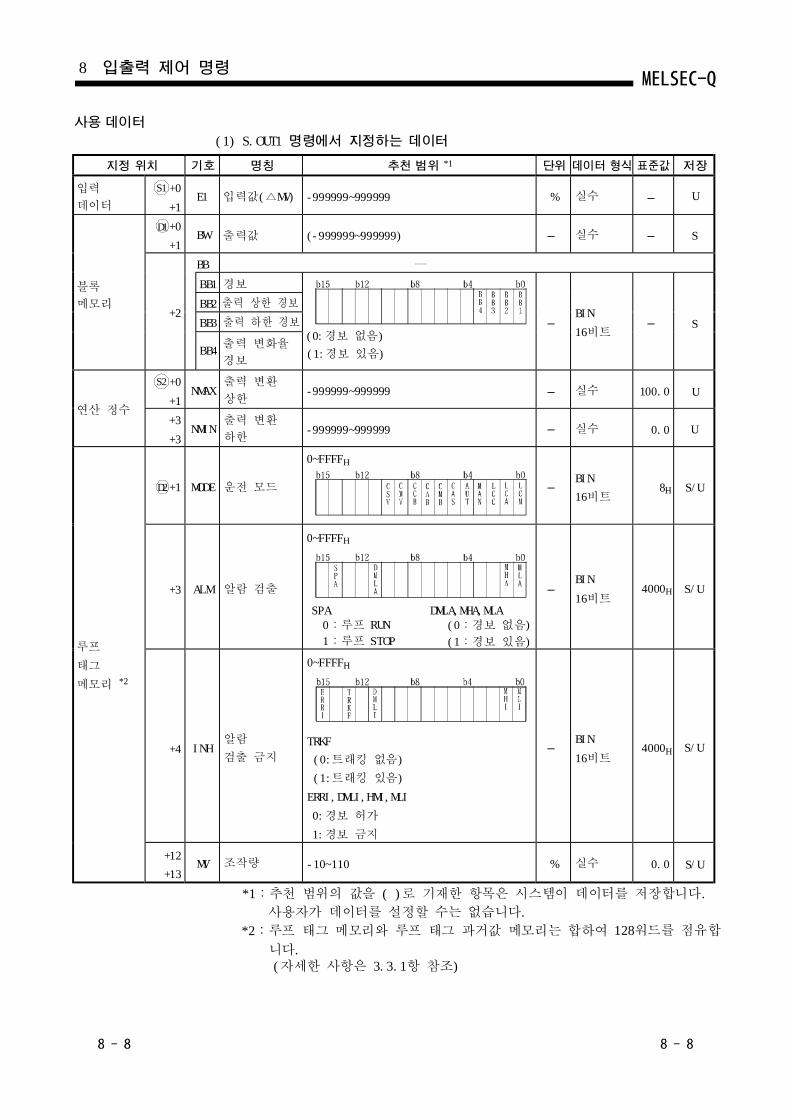
(1) S.OUT1 명령에서 지정하는 데이터
입력
데이터입력값( MV)△E1
S1
S2
D1
D2
BW
BB
BB1
BB2
BB3
BB4
NMAX
NMIN
MODE
ALM
INH
MV %
%+0
+1
+0
+1
+2
+1
+3
+4
+12
+13
+3
+3
+0
+1
실수
블록
메모리
출력값 실수
경보
출력 상한 경보
출력 하한 경보
출력 변화율
경보
(0:경보 없음)
(1:경보 있음)
BIN
16비트
연산 정수
출력 변환
상한실수
출력 변환
하한실수
루프
태그
메모리 *2
운전 모드BIN
16비트
알람 검출
0:루프 RUN
1:루프 STOP
(0:경보 없음)
(1:경보 있음)
BIN
16비트
알람
검출 금지 (0:트래킹 없음)
(1:트래킹 있음)
0:경보 허가
1:경보 금지
BIN
16비트
조작량 실수
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
8 입출력 제어 명령
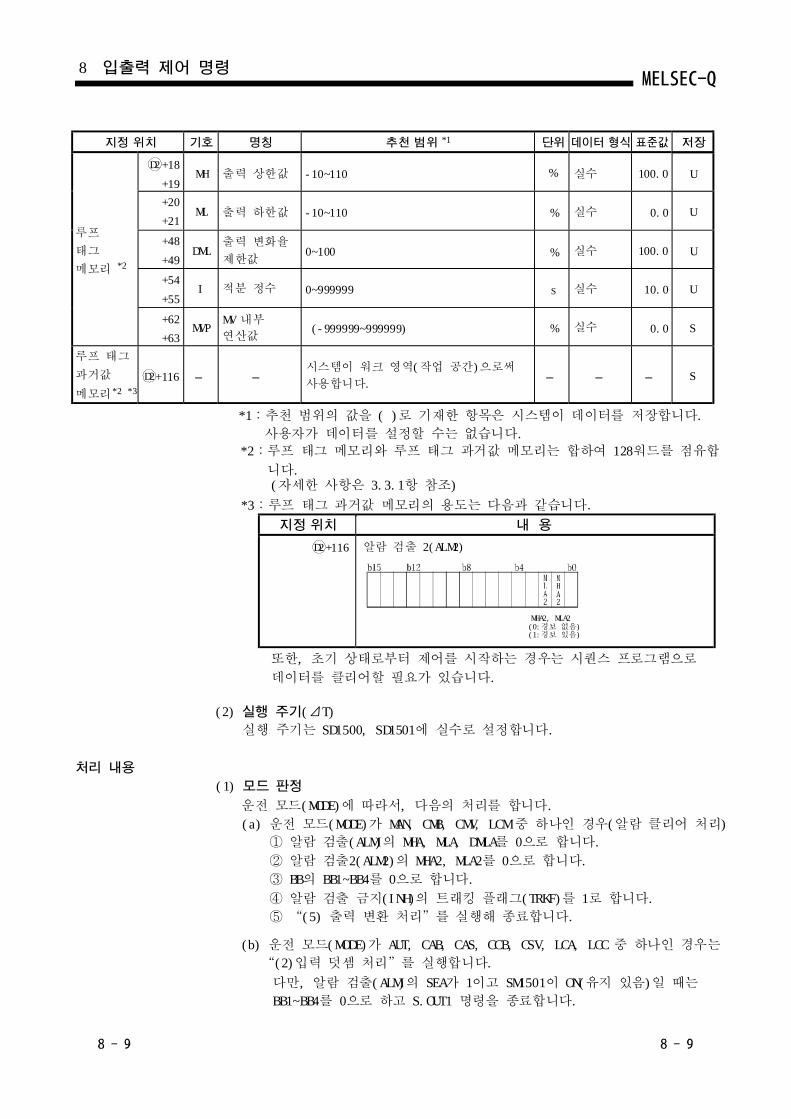
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
-999999~999999
-999999~999999
(-999999~999999)
-999999~999999
100.0
U
S
S
U
0~FFFFH
0~FFFFH
0~FFFFH
8H
4000H
4000H
0.0
0.0
S/U
S/U
S/U
S/U
U
SPA
TRKF
ERRI,DMLI,HMI,MLI
DMLA,MHA,MLA
-10~110
-
-
-
-
-
-
-
-
-
-
루프
태그
메모리 *2
출력 상한값MH
ML
DML
I
MVP
출력 하한값
출력 변화율
제한값
적분 정수
MV 내부
연산값
루프 태그
과거값
메모리*2 *3
시스템이 워크 영역(작업 공간)으로써
사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
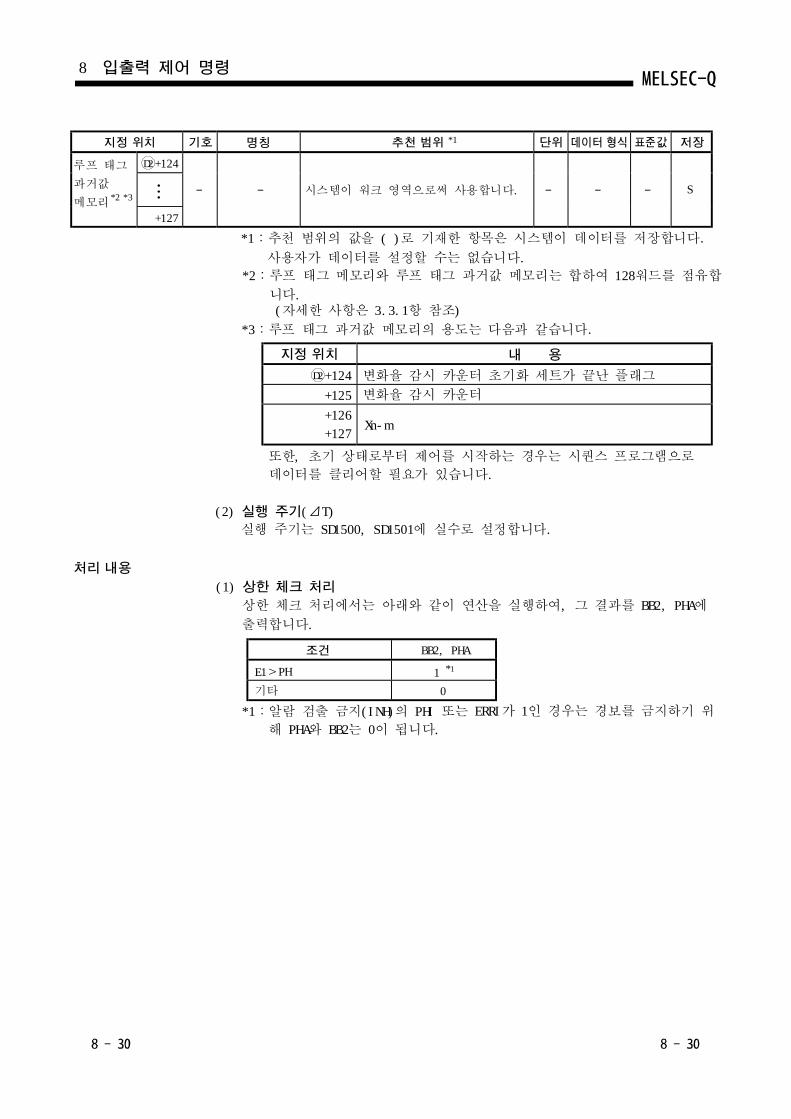
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
지정 위치 내 용
알람 검출 2(ALM2)
MHA2, MLA2(0:경보 없음)(1:경보 있음)
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로
데이터를 클리어할 필요가 있습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 모드 판정
운전 모드(MODE)에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나인 경우(알람 클리어 처리)
① 알람 검출(ALM)의 MHA, MLA, DMLA를 0으로 합니다.
② 알람 검출2(ALM2)의 MHA2, MLA2를 0으로 합니다.
③ BB의 BB1~BB4를 0으로 합니다.
④ 알람 검출 금지(INH)의 트래킹 플래그(TRKF)를 1로 합니다.
⑤ “(5) 출력 변환 처리”를 실행해 종료합니다.
(b) 운전 모드(MODE)가 AUT, CAB, CAS, CCB, CSV, LCA, LCC 중 하나인 경우는
“(2)입력 덧셈 처리”를 실행합니다.
다만, 알람 검출(ALM)의 SEA가 1이고 SM1501이 ON(유지 있음)일 때는
BB1~BB4를 0으로 하고 S.OUT1 명령을 종료합니다.
8 입출력 제어 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
%
%
%
S
%
0~999999
0~100
-10~110
-10~110
(-999999~999999)
100.0
100.0
U
U
0.0
10.0
0.0
U
U
S
S
+18
+19
+20
+21
+48
+49
+54
+55
+62
+63
+116D2
D2
+116D2
--- - -
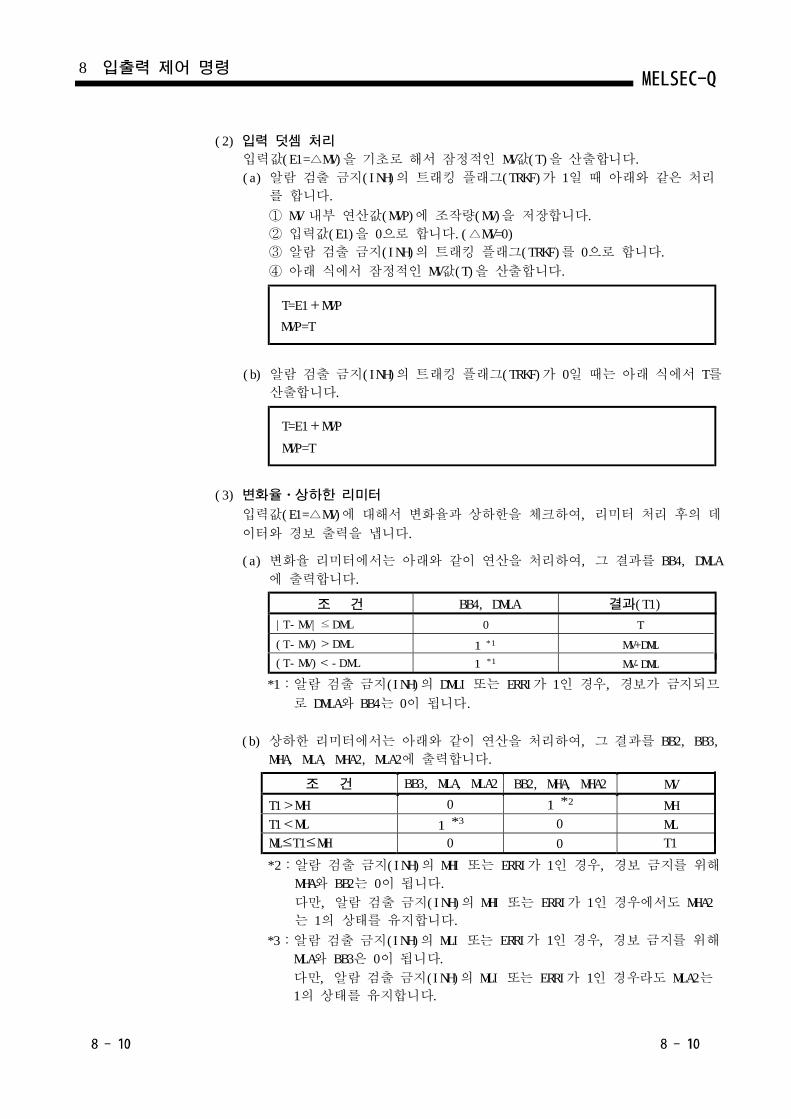
(2) 입력 덧셈 처리
입력값(E1=△MV)을 기초로 해서 잠정적인 MV값(T)을 산출합니다.
(a) 알람 검출 금지(INH)의 트래킹 플래그(TRKF)가 1일 때 아래와 같은 처리
를 합니다.
① MV 내부 연산값(MVP)에 조작량(MV)을 저장합니다.
② 입력값(E1)을 0으로 합니다.(△MV=0)
③ 알람 검출 금지(INH)의 트래킹 플래그(TRKF)를 0으로 합니다.
④ 아래 식에서 잠정적인 MV값(T)을 산출합니다.
T=E1 MVP+
MVP=T
(b) 알람 검출 금지(INH)의 트래킹 플래그(TRKF)가 0일 때는 아래 식에서 T를
산출합니다.
T=E1 MVP+
MVP=T
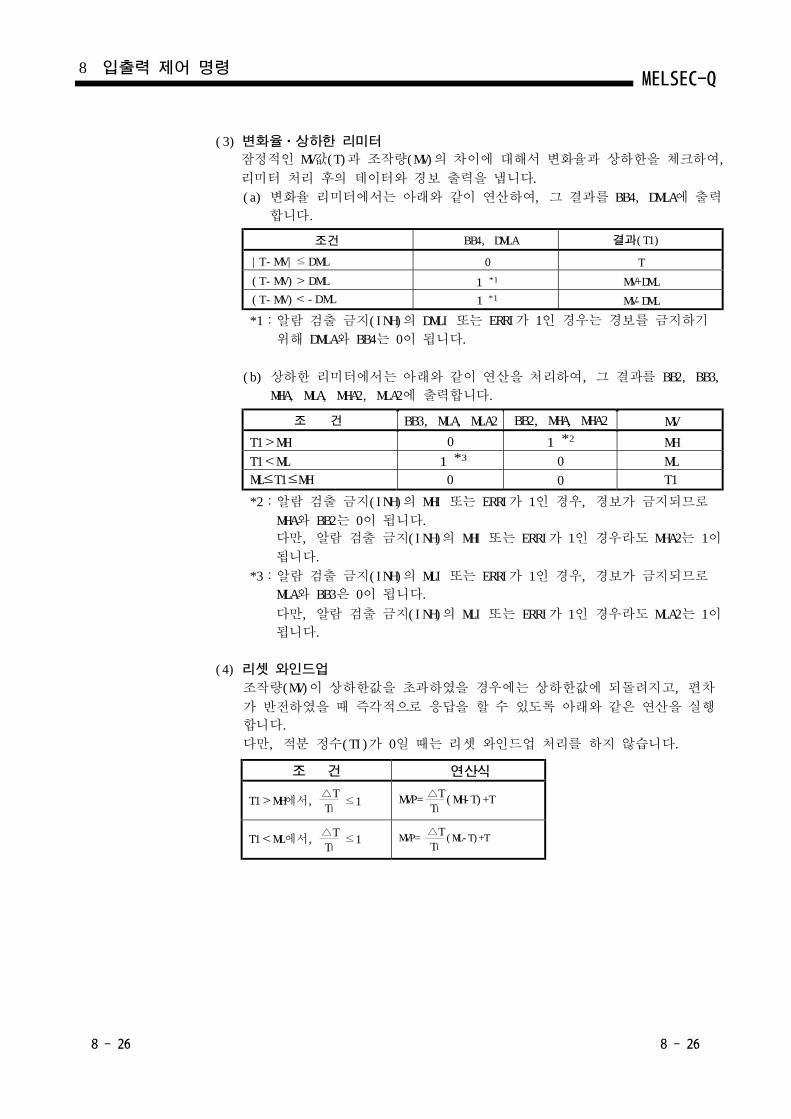
(3) 변화율ㆍ상하한 리미터
입력값(E1=△MV)에 대해서 변화율과 상하한을 체크하여, 리미터 처리 후의 데
이터와 경보 출력을 냅니다.
(a) 변화율 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 BB4, DMLA
에 출력합니다.
조 건 BB4, DMLA
BB3, MLA, MLA2 BB2, MHA, MHA2 MV
결과(T1)
*1:알람 검출 금지(INH)의 DMLI 또는 ERRI가 1인 경우, 경보가 금지되므
로 DMLA와 BB4는 0이 됩니다.
(b) 상하한 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 BB2, BB3,
MHA, MLA, MHA2, MLA2에 출력합니다.
조 건
*2:알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우, 경보 금지를 위해
MHA와 BB2는 0이 됩니다.
다만, 알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우에서도 MHA2
는 1의 상태를 유지합니다.
*3:알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우, 경보 금지를 위해
MLA와 BB3은 0이 됩니다.
다만, 알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우라도 MLA2는
1의 상태를 유지합니다.
8 입출력 제어 명령
1 *1
1 *31 *2
1 *1
0
0
0
00
T
MV+DML
MV-DML
T1>MH
T1<ML
ML T1 MH≤ ≤
MH
ML
T1
|T- MV|≤DML
(T- MV)>DML
(T- MV)<-DML
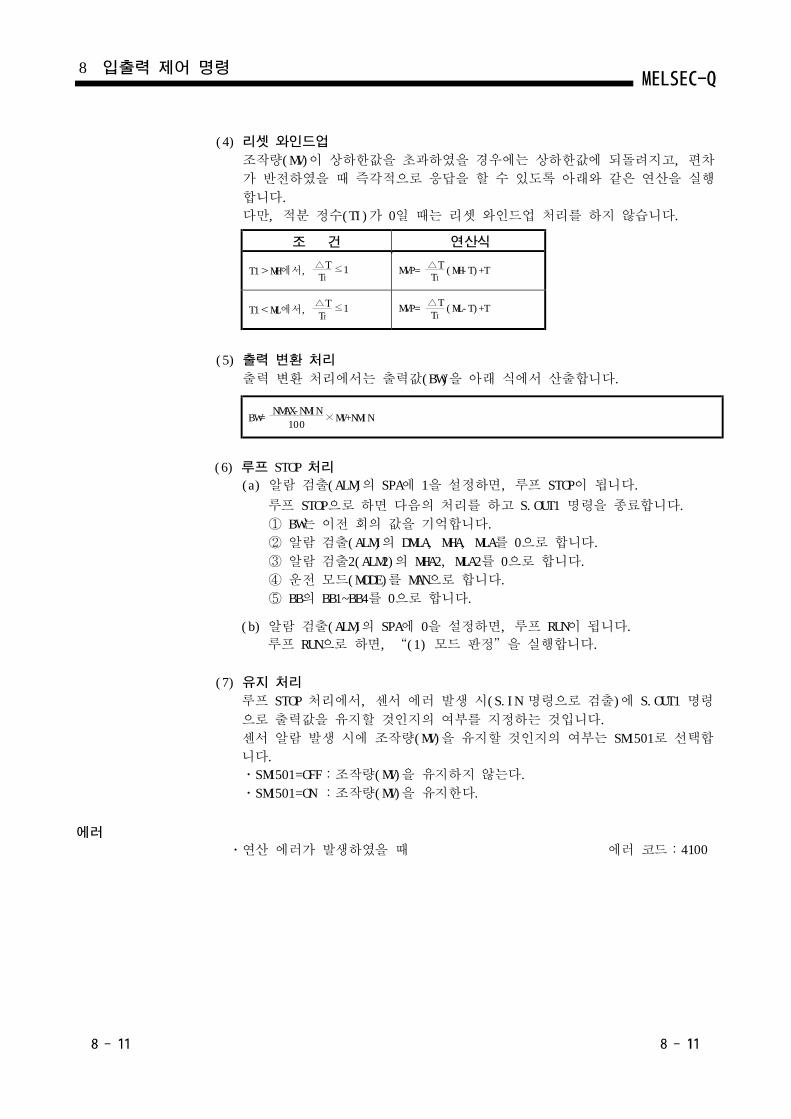
(4) 리셋 와인드업
조작량(MV)이 상하한값을 초과하였을 경우에는 상하한값에 되돌려지고, 편차
가 반전하였을 때 즉각적으로 응답을 할 수 있도록 아래와 같은 연산을 실행
합니다.
다만, 적분 정수(TI)가 0일 때는 리셋 와인드업 처리를 하지 않습니다.
조 건 연산식
(5) 출력 변환 처리
출력 변환 처리에서는 출력값(BW)을 아래 식에서 산출합니다.
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.OUT1 명령을 종료합니다.
① BW는 이전 회의 값을 기억합니다.
② 알람 검출(ALM)의 DMLA, MHA, MLA를 0으로 합니다.
③ 알람 검출2(ALM2)의 MHA2, MLA2를 0으로 합니다.
④ 운전 모드(MODE)를 MAN으로 합니다.
⑤ BB의 BB1~BB4를 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면, “(1) 모드 판정”을 실행합니다.
(7) 유지 처리
루프 STOP 처리에서, 센서 에러 발생 시(S.IN 명령으로 검출)에 S.OUT1 명령
으로 출력값을 유지할 것인지의 여부를 지정하는 것입니다.
센서 알람 발생 시에 조작량(MV)을 유지할 것인지의 여부는 SM1501로 선택합
니다.
ㆍSM1501=OFF:조작량(MV)을 유지하지 않는다.
ㆍSM1501=ON :조작량(MV)을 유지한다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
8 입출력 제어 명령
BW=NMAX-NMIN
×MV+NMIN100
≤1
≤1
T1>MH에서, MVP= (MH-T)+T
MVP= (ML-T)+TT1<ML에서,
△TTI
△TTI
△TTI
△TTI
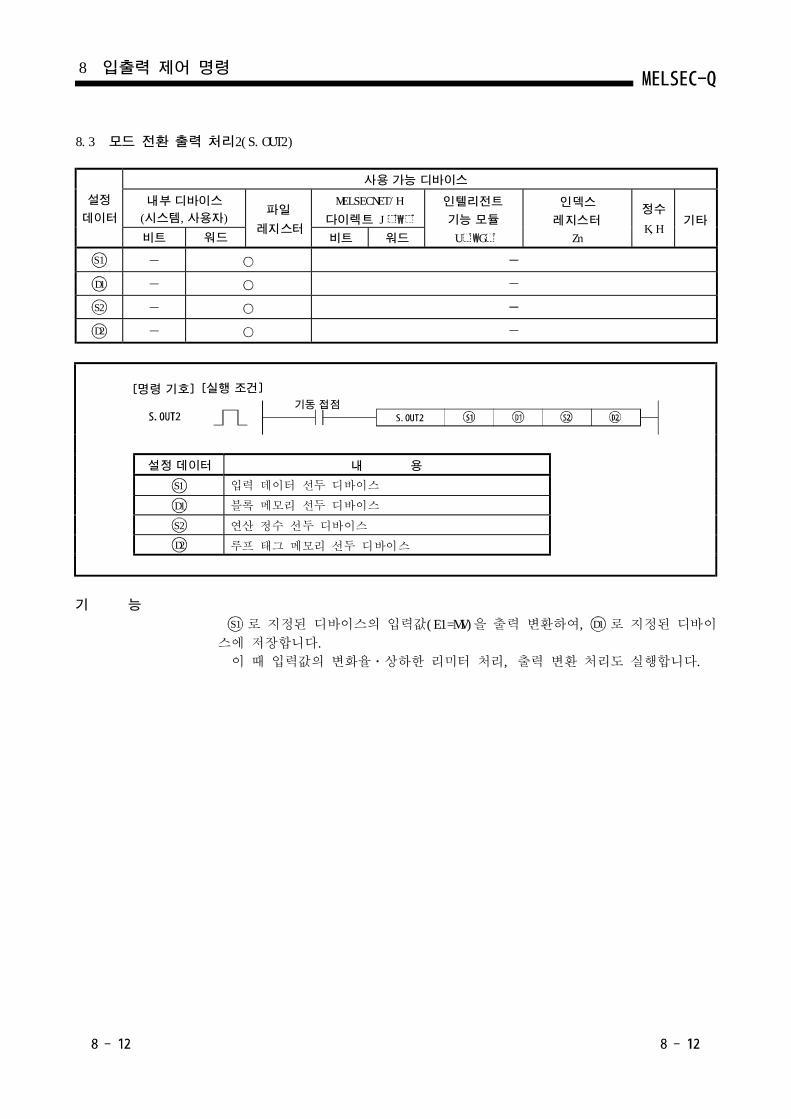
8.3 2(S.OUT2)모드 전환 출력 처리
지정된 디바이스의 입력값(E1=MV)을 출력 변환하여, 지정된 디바이
스에 저장합니다.
이 때 입력값의 변화율ㆍ상하한 리미터 처리, 출력 변환 처리도 실행합니다.
S1 D1로 로
8 입출력 제어 명령
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1 입력 데이터 선두 디바이스
D1 블록 메모리 선두 디바이스
S2 연산 정수 선두 디바이스
D2 루프 태그 메모리 선두 디바이스

블록도
S.OUT2 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(4)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
AUT 외
MAN 외
8 입출력 제어 명령
모드판정
변화율ㆍ상하한리미터
출력 변환처 리
알람클리어처리
상한 경보
하한 경보
변화율 경보
루프
판정STOP
루프
처리STOP
이전 회의 BW
모두 OFF
모두 OFF
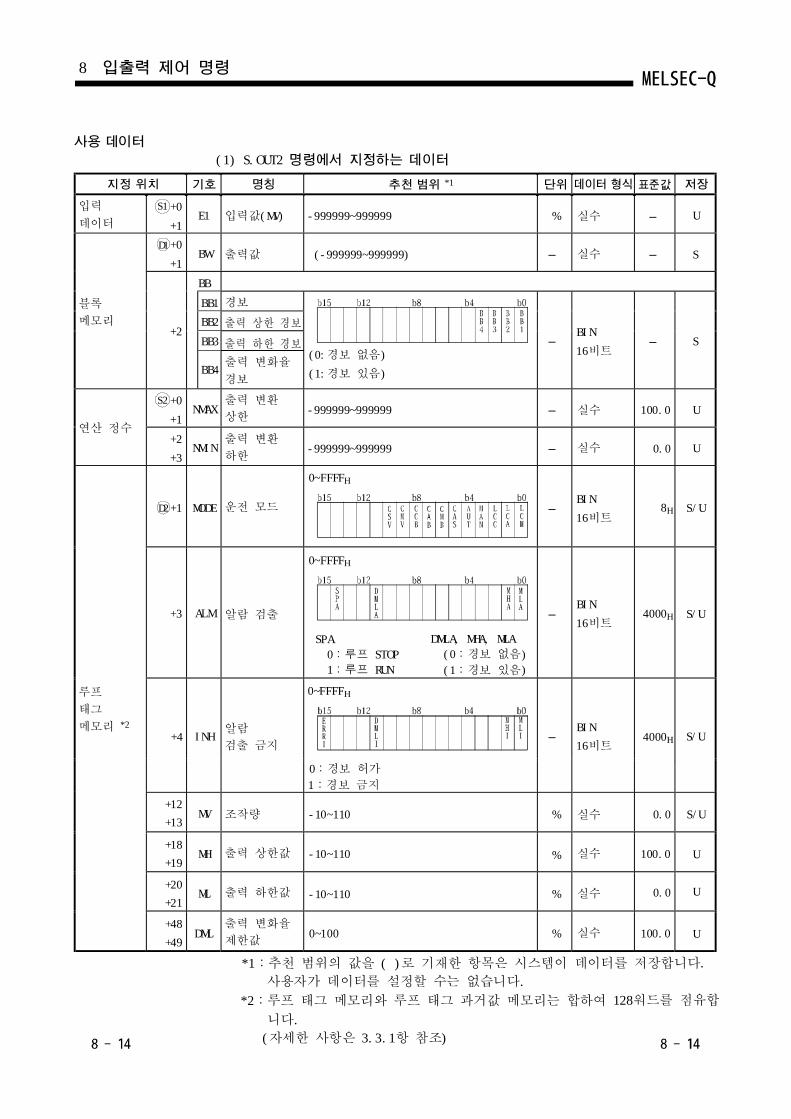
사용 데이터
(1) S.OUT2 명령에서 지정하는 데이터
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
입력
데이터입력값(MV)
블록
메모리
출력값
경보
출력 상한 경보
출력 하한 경보
출력 변화율
경보
(0:경보 없음)
(1:경보 있음)
연산 정수
출력 변환
상한
출력 변환
하한
루프
태그
메모리 *2
운전 모드
알람 검출
SPA
0 STOP:루프
1 RUN:루프
DMLA, MHA, MLA
(0:경보 없음)
(1:경보 있음)
알람
검출 금지
0:경보 허가
1:경보 금지
조작량
출력 상한값
출력 하한값
출력 변화율
제한값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
8 입출력 제어 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
E1
BW
BB
BB1
BB2
BB3
BB4
NMAX
NMIN
MODE
ALM
INH
MV
MH
ML
DML
-999999~999999
-999999~999999
-999999~999999
(-999999~999999)
0~FFFFH
0~FFFFH
0~FFFFH
-10~110
-10~110
-10~110
0~100
100.0
100.0
U
S
S
U
U
U
100.0 U
8H
4000H
4000H
0.0
0.0
0.0
S/U
S/U
S/U
S/U
U
-
- -
--
-
-
-
-
-
%
%
%
%
%
+0
+1
+0
+1
+2
+1
+2
+3
+4
+3
+0
+1
S1
S2
D1
D2
+12
+18
+20
+48
+13
+19
+21
+49
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
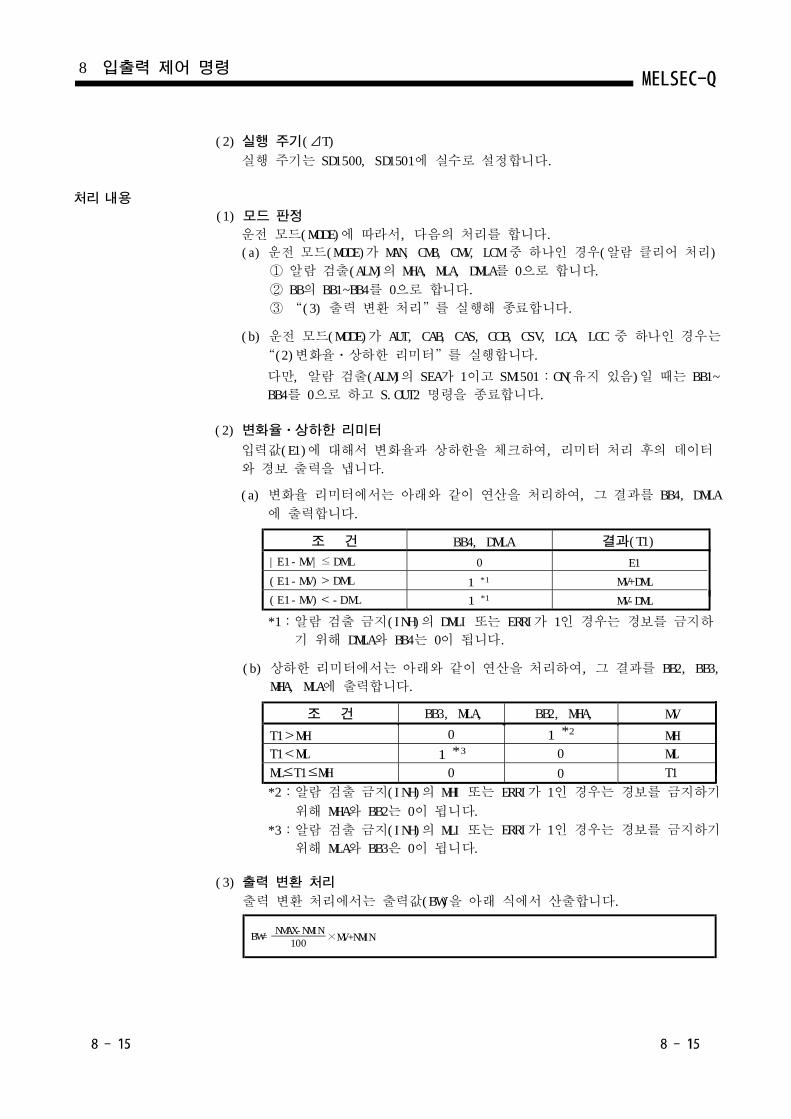
처리 내용
(1) 모드 판정
운전 모드(MODE)에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나인 경우(알람 클리어 처리)
① 알람 검출(ALM)의 MHA, MLA, DMLA를 0으로 합니다.
② BB의 BB1~BB4를 0으로 합니다.
③ “(3) 출력 변환 처리”를 실행해 종료합니다.
(b) 운전 모드(MODE)가 AUT, CAB, CAS, CCB, CSV, LCA, LCC 중 하나인 경우는
“(2)변화율ㆍ상하한 리미터”를 실행합니다.
다만, 알람 검출(ALM)의 SEA가 1이고 SM1501:ON(유지 있음)일 때는 BB1~
BB4를 0으로 하고 S.OUT2 명령을 종료합니다.
(2) 변화율ㆍ상하한 리미터
입력값(E1)에 대해서 변화율과 상하한을 체크하여, 리미터 처리 후의 데이터
와 경보 출력을 냅니다.
(a) 변화율 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 BB4, DMLA
에 출력합니다.
*1:알람 검출 금지(INH)의 DMLI 또는 ERRI가 1인 경우는 경보를 금지하
기 위해 DMLA와 BB4는 0이 됩니다.
(b) 상하한 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 BB2, BB3,
MHA, MLA에 출력합니다.
*2:알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우는 경보를 금지하기
위해 MHA와 BB2는 0이 됩니다.
*3:알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우는 경보를 금지하기
위해 MLA와 BB3은 0이 됩니다.
(3) 출력 변환 처리
출력 변환 처리에서는 출력값(BW)을 아래 식에서 산출합니다.
8 입출력 제어 명령
BB3, MLA, BB2, MHA, MV조 건
1 *31 *20
0
00
T1>MH
T1<ML
ML T1 MH≤ ≤
MH
ML
T1
조 건 BB4, DMLA 결과(T1)
1 *1
1 *1
0 E1
MV+DML
MV-DML
|E1-MV|≤DM L
(E1-MV)>DM L
(E1-MV)<-D ML
BW=NMAX-NMIN
×MV+NMIN100
(4) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.OUT2 명령을 종료합니다.
① BW는 이전 회의 값을 기억합니다.
② 알람 검출(ALM)의 DMLA, MHA, MLA를 0으로 합니다.
③ 운전 모드(MODE)를 MAN으로 합니다.
④ BB의 BB1~BB4를 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면, “(1) 모드 판정”을 실행합니다.
(5) 유지 처리
루프 STOP 처리에서, 센서 에러 발생 시(S.IN 명령으로 검출)에 S.OUT2 명령
으로 출력값을 유지할 것인지의 여부를 지정하는 것입니다.센서 알람 발생 시에 조작량(MV)을 유지할 것인지의 여부는 SM1501의 설정에
따라 선택할 수 있습니다.
ㆍSM1501=OFF:조작량(MV)을 유지하지 않는다
ㆍSM1501=ON :조작량(MV)을 유지한다
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
8 입출력 제어 명령
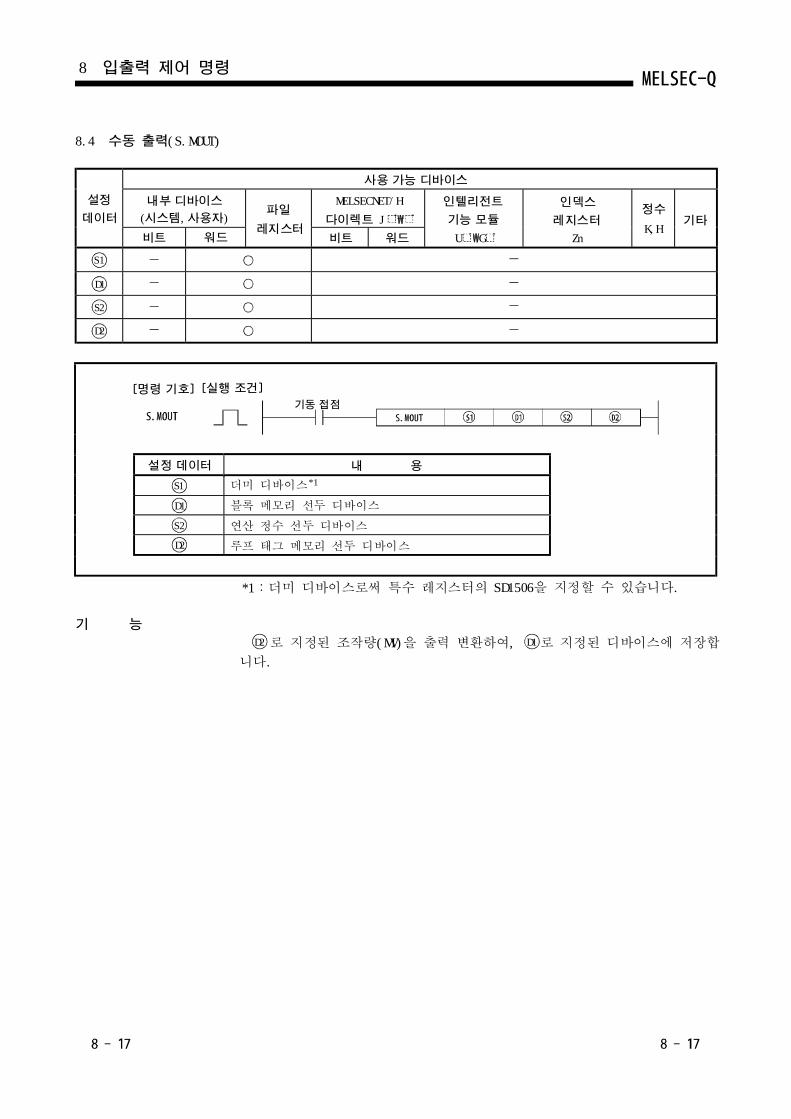
8.4 (S.MOUT)수동 출력
더미 디바이스*1
*1:더미 디바이스로써 특수 레지스터의 SD1506을 지정할 수 있습니다.
로 지정된 조작량(MV)을 출력 변환하여, 로 지정된 디바이스에 저장합
니다.
D2 D1
8 입출력 제어 명령
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
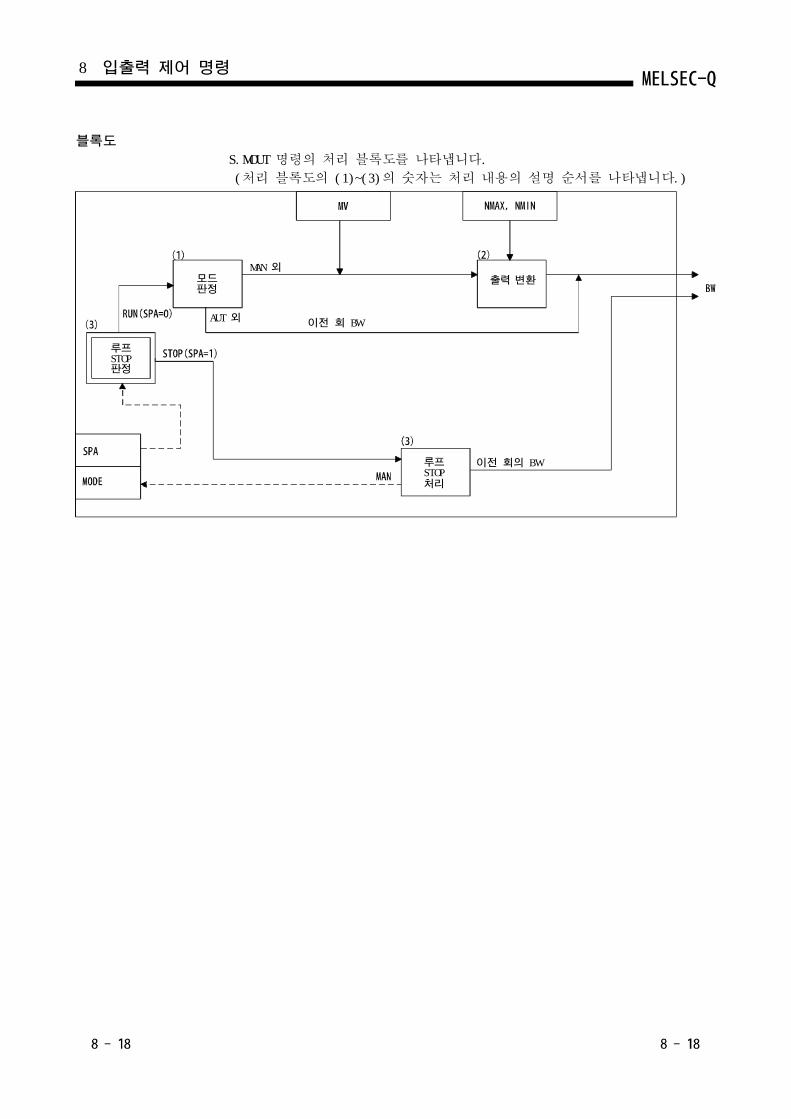
블록도
S.MOUT 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(3)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
MAN 외출력 변환
AUT 외 BW이전 회
BW이전 회의
8 입출력 제어 명령
모드판정
루프
판정STOP
루프
처리STOP
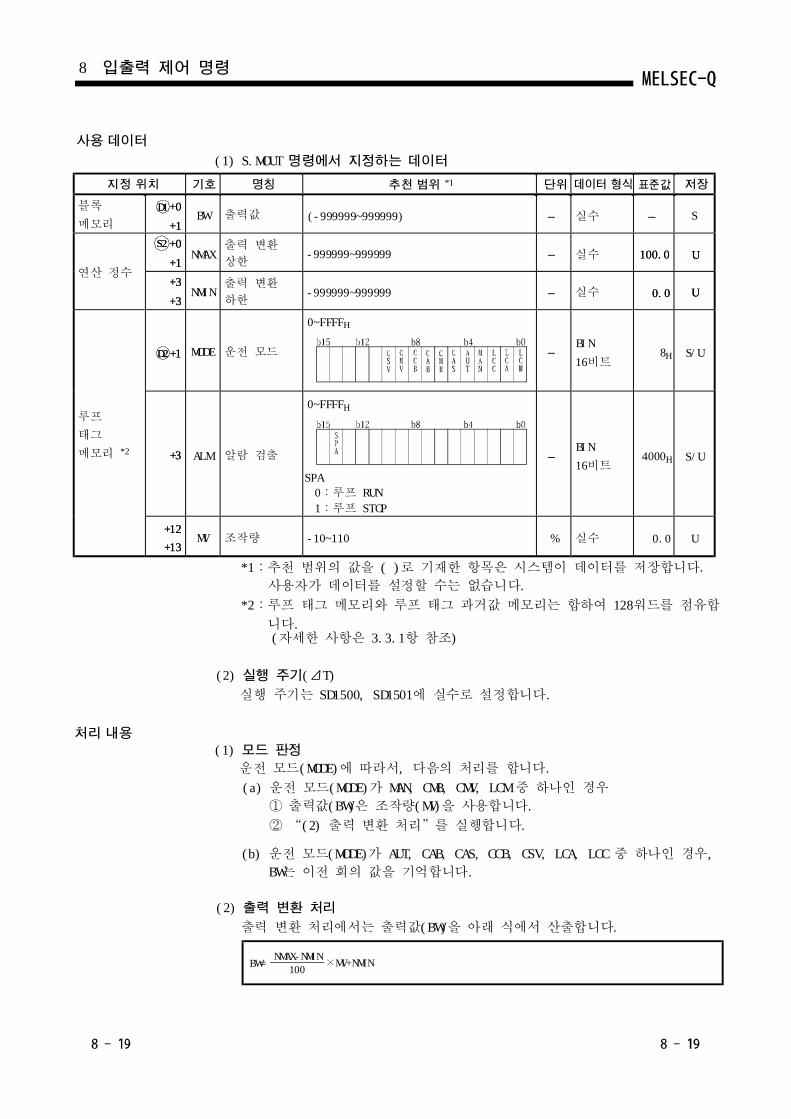
사용 데이터
(1) S.MOUT 명령에서 지정하는 데이터
BIN
16비트
BIN
16비트
연산 정수
블록
메모리출력값
출력 변환
상한
출력 변환
하한
루프
태그
메모리 *2
운전 모드
알람 검출
0:루프 RUN
1:루프 STOP
-10~110조작량
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 모드 판정
운전 모드(MODE)에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나인 경우
① 출력값(BW)은 조작량(MV)을 사용합니다.
② “(2) 출력 변환 처리”를 실행합니다.
(b) 운전 모드(MODE)가 AUT, CAB, CAS, CCB, CSV, LCA, LCC 중 하나인 경우,
BW는 이전 회의 값을 기억합니다.
(2) 출력 변환 처리
출력 변환 처리에서는 출력값(BW)을 아래 식에서 산출합니다.
8 입출력 제어 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수 --
-
-
-
-
실수
실수
실수
-999999~999999
-999999~999999
(-999999~999999)
0~FFFFH
0~FFFFH
SPA
4000H S/U
8H S/U
100.0100.0 UU
0.00.0 UU
0.0 U
BW
NMAX
NMIN
MODE
ALM
MV
BW=NMAX-NMIN
×MV+NMIN100
S
%+12
+13
+0
+1
+3
+3
S2
+0
+1
D1
+1
+3
D2
+12
+13
+0
+1
+3
+3
S2
+0
+1
D1
+1
+3
D2

(3) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 0을 설정한 경우는 “(1) 모드 판정”을 실행합
니다.
(b) 알람 검출(ALM)의 SPA에 1을 설정한 경우, 다음의 처리를 하고 S.MOUT
명령을 종료합니다.
① BW는 이전 회의 값을 기억합니다.
② 운전 모드(MODE)를 MAN으로 합니다.
에러ㆍ연산 에러가 발생하였을 때 에러 코드:4100
8 입출력 제어 명령
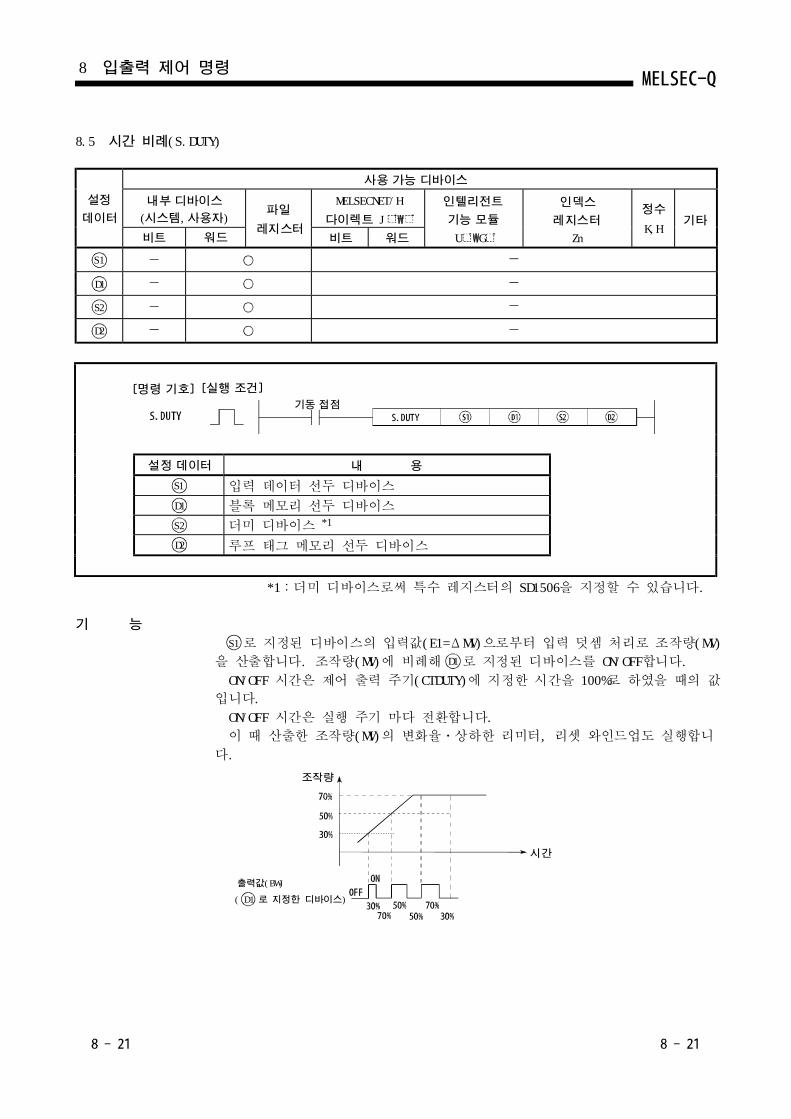
8.5 (S.DUTY)시간 비례
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
루프 태그 메모리 선두 디바이스
*1:더미 디바이스로써 특수 레지스터의 SD1506을 지정할 수 있습니다.
로 지정된 디바이스의 입력값(E1=ΔMV)으로부터 입력 덧셈 처리로 조작량(MV)
을 산출합니다. 조작량(MV)에 비례해 로 지정된 디바이스를 ON/OFF합니다.
ON/OFF 시간은 제어 출력 주기(CTDUTY)에 지정한 시간을 100%로 하였을 때의 값
입니다.
ON/OFF 시간은 실행 주기 마다 전환합니다.
이 때 산출한 조작량(MV)의 변화율ㆍ상하한 리미터, 리셋 와인드업도 실행합니
다.
S1
D1
조작량
시간
출력값(BW)
( D1 )로 지정한 디바이스
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
8 입출력 제어 명령
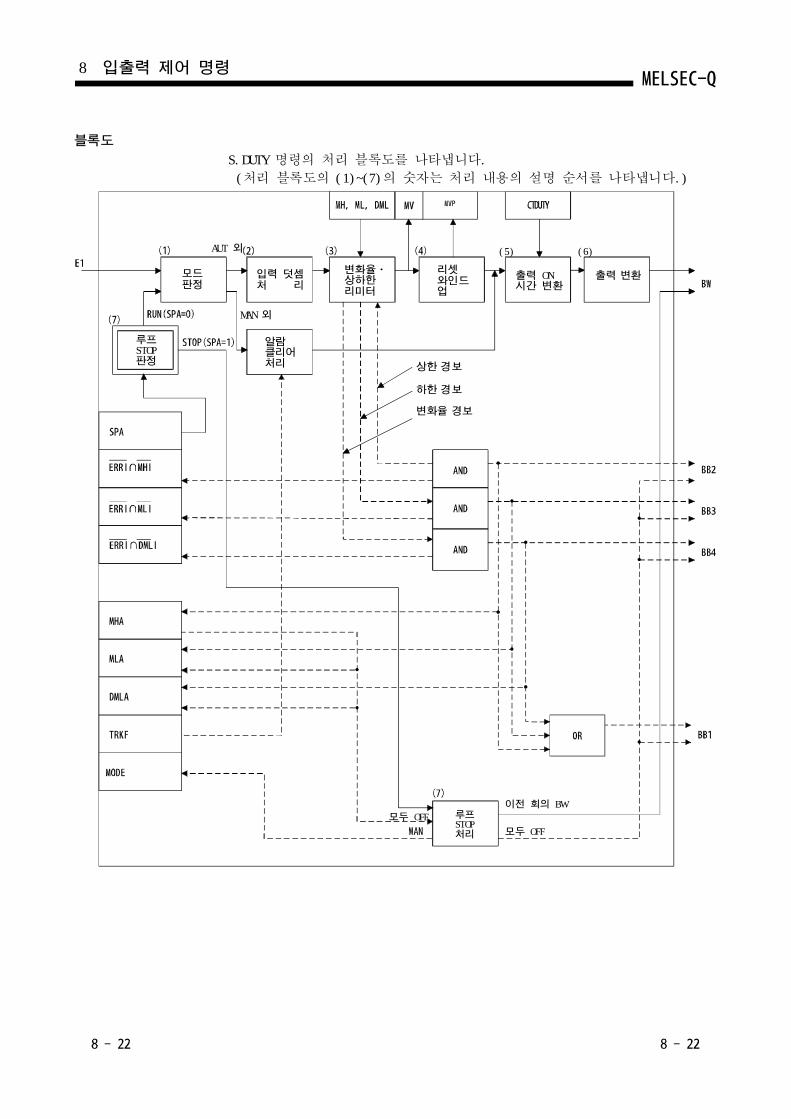
블록도
S.DUTY 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
AUT 외
입력 덧셈처 리
ON출력시간 변환
MAN 외
상한 경보
하한 경보
변화율 경보
모드판정
변화율ㆍ상하한리미터
알람클리어처리
루프
판정STOP
리셋와인드업
출력 변환
(6)(5)
루프
처리STOP
이전 회의 BW
모두 OFF
모두 OFF
8 입출력 제어 명령
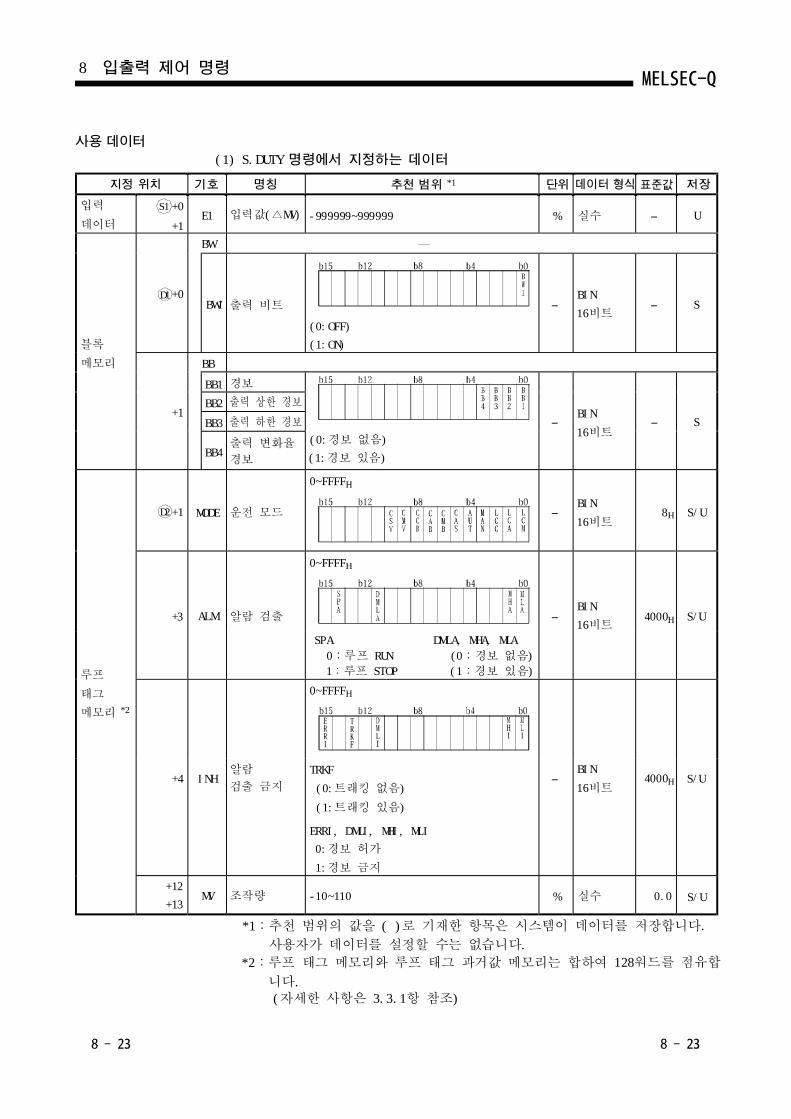
사용 데이터
(1) S.DUTY 명령에서 지정하는 데이터
블록
메모리
입력
데이터입력값(△MV)
출력 비트
경보
출력 상한 경보
출력 하한 경보
출력 변화율
경보
(0:경보 없음)
(0:OFF)
(1:경보 있음)
(1:ON)
루프
태그
메모리 *2
운전 모드
알람 검출
SPA
0:루프 RUN
1:루프 STOP
DMLA, MHA, MLA
(0:경보 없음)
(1:경보 있음)
알람
검출 금지
TRKF
(0:트래킹 없음)
(1:트래킹 있음)
ERRI, DMLI, MHI, MLI
0:경보 허가
1:경보 금지
조작량
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수%
%
-
--
- -
-
-
-
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
8 입출력 제어 명령
E1
BW
BW1
BB
BB1
BB2
BB3
BB4
MODE
ALM
INH
MV
+3
+4
+12
+13
+0
+1
+1
+0
+1
S1
D1
D2
-999999~999999
0~FFFFH
0~FFFFH
0~FFFFH
U
S
S
8H
4000H
4000H
0.0
S/U
S/U
S/U
S/U-10~110
루프 태그
메모리 *2
출력 상한값
출력 하한값
출력 변화율
제한값
적분 정수
MV 내부
연산값
제어 출력
주기
루프 태그
과거값
메모리 *2 *3시스템이 워크 영역으로써
사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
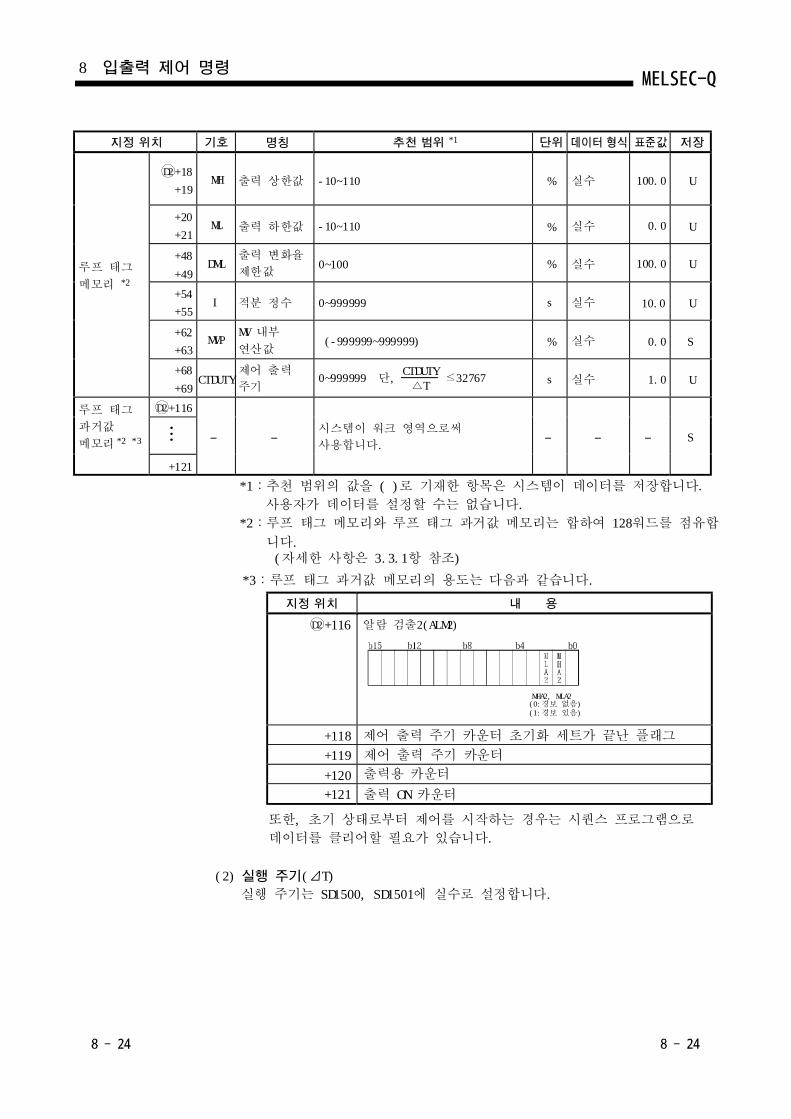
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
지정 위치 내 용
알람 검출2(ALM2)
MHA2, MLA2(0:경보 없음)(1:경보 있음)
+118 제어 출력 주기 카운터 초기화 세트가 끝난 플래그
+119 제어 출력 주기 카운터
+120 출력용 카운터
+121 출력 ON 카운터
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로
데이터를 클리어할 필요가 있습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
실수%
%
%
s
%
s
실수
실수
실수
실수
실수
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
8 입출력 제어 명령
S
S
100.0 U
U
U
100.0 U
10.0
0.0
0.0
1.0
U
-- -- -
-10~110
-10~110
0~100
0~999999
0~999999 단, ≤32767
(-999999~999999)
CTDUTY△T
MH
ML
DML
I
MVP
CTDUTY
D2
D2
+18
+20
+48
+54
+62
+68
+116
D2+116
+121
+19
+21
+49
+55
+63
+69
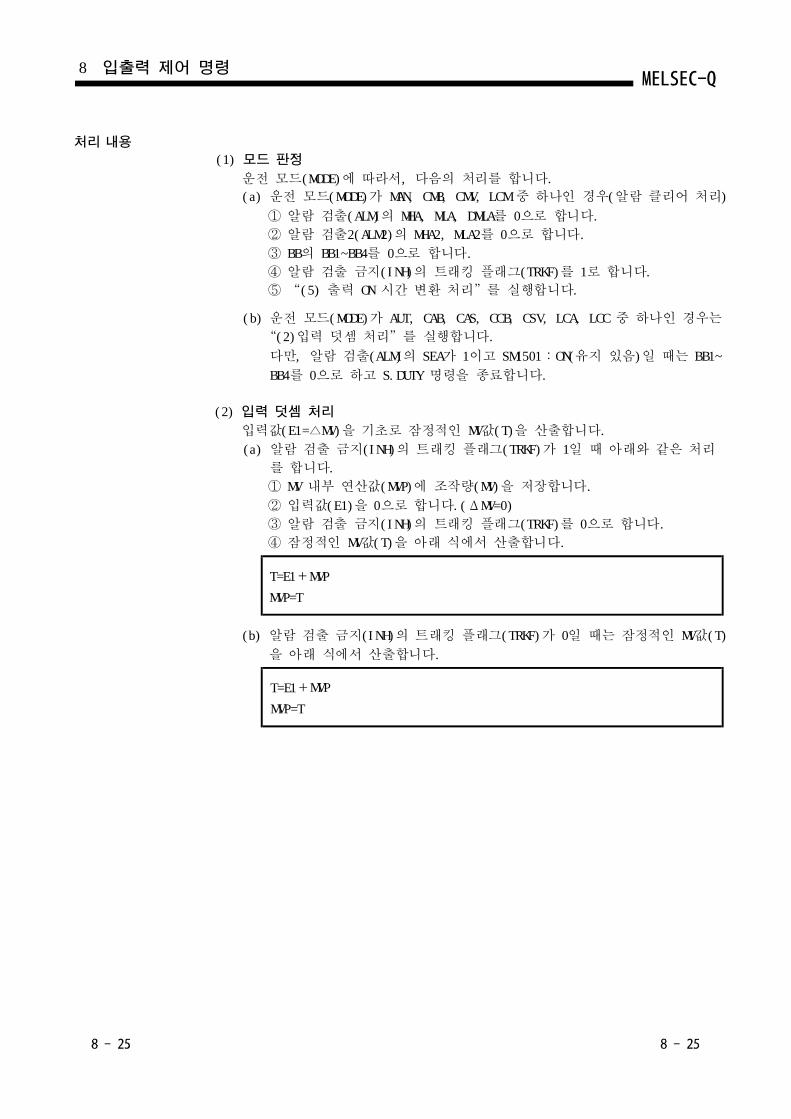
처리 내용
(1) 모드 판정
운전 모드(MODE)에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나인 경우(알람 클리어 처리)
① 알람 검출(ALM)의 MHA, MLA, DMLA를 0으로 합니다.
② 알람 검출2(ALM2)의 MHA2, MLA2를 0으로 합니다.
③ BB의 BB1~BB4를 0으로 합니다.
④ 알람 검출 금지(INH)의 트래킹 플래그(TRKF)를 1로 합니다.
⑤ “(5) 출력 ON 시간 변환 처리”를 실행합니다.
(b) 운전 모드(MODE)가 AUT, CAB, CAS, CCB, CSV, LCA, LCC 중 하나인 경우는
“(2)입력 덧셈 처리”를 실행합니다.
다만, 알람 검출(ALM)의 SEA가 1이고 SM1501:ON(유지 있음)일 때는 BB1~
BB4를 0으로 하고 S.DUTY 명령을 종료합니다.
(2) 입력 덧셈 처리
입력값(E1=△MV)을 기초로 잠정적인 MV값(T)을 산출합니다.
(a) 알람 검출 금지(INH)의 트래킹 플래그(TRKF)가 1일 때 아래와 같은 처리
를 합니다.
① MV 내부 연산값(MVP)에 조작량(MV)을 저장합니다.
② 입력값(E1)을 0으로 합니다.(ΔMV=0)
③ 알람 검출 금지(INH)의 트래킹 플래그(TRKF)를 0으로 합니다.
④ 잠정적인 MV값(T)을 아래 식에서 산출합니다.
T=E1+MVP
MVP=T
(b) 알람 검출 금지(INH)의 트래킹 플래그(TRKF)가 0일 때는 잠정적인 MV값(T)
을 아래 식에서 산출합니다.
T=E1+MVP
MVP=T
8 입출력 제어 명령
(3) 변화율ㆍ상하한 리미터
잠정적인 MV값(T)과 조작량(MV)의 차이에 대해서 변화율과 상하한을 체크하여,
리미터 처리 후의 데이터와 경보 출력을 냅니다.
(a) 변화율 리미터에서는 아래와 같이 연산하여, 그 결과를 BB4, DMLA에 출력
합니다.
조건 BB4, DMLA 결과(T1)
*1:알람 검출 금지(INH)의 DMLI 또는 ERRI가 1인 경우는 경보를 금지하기
위해 DMLA와 BB4는 0이 됩니다.
(b) 상하한 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 BB2, BB3,
MHA, MLA, MHA2, MLA2에 출력합니다.
조 건
*2:알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우, 경보가 금지되므로
MHA와 BB2는 0이 됩니다.
다만, 알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우라도 MHA2는 1이
됩니다.
*3:알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우, 경보가 금지되므로
MLA와 BB3은 0이 됩니다.
다만, 알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우라도 MLA2는 1이
됩니다.
(4) 리셋 와인드업
조작량(MV)이 상하한값을 초과하였을 경우에는 상하한값에 되돌려지고, 편차
가 반전하였을 때 즉각적으로 응답을 할 수 있도록 아래와 같은 연산을 실행
합니다.
다만, 적분 정수(TI)가 0일 때는 리셋 와인드업 처리를 하지 않습니다.
8 입출력 제어 명령
BB3, MLA, MLA2 BB2, MHA, MHA2 MV
1 *1
1 *31 *2
1 *1
0
0
0
00
T
MV+DML
MV-DML
T1>MH
T1<ML
ML T1 MH≤ ≤
MH
ML
T1
|T-MV|≤DML
(T-MV)>DML
(T-MV)<-DML
조 건 연산식
≤1
≤1
T1>MH에서, MVP= (MH-T)+T
MVP= (ML-T)+TT1<ML에서,
△T
TI△T
TI
△T
TI△T
TI
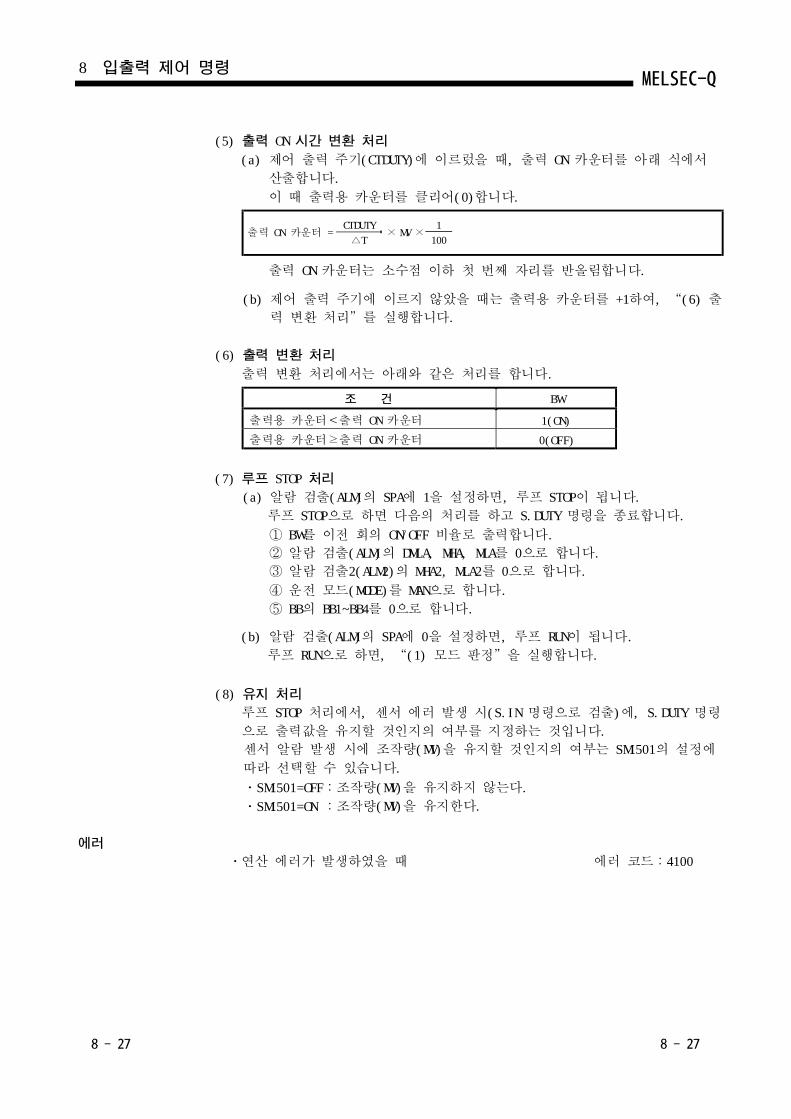
(5) ON출력 시간 변환 처리
(a) 제어 출력 주기(CTDUTY)에 이르렀을 때, 출력 ON 카운터를 아래 식에서
산출합니다.
이 때 출력용 카운터를 클리어(0)합니다.
출력 ON 카운터 = × MV ×
출력 ON 카운터는 소수점 이하 첫 번째 자리를 반올림합니다.
(b) 제어 출력 주기에 이르지 않았을 때는 출력용 카운터를 +1하여, “(6) 출
력 변환 처리”를 실행합니다.
(6) 출력 변환 처리
출력 변환 처리에서는 아래와 같은 처리를 합니다.
조 건 BW
출력용 카운터<출력 ON 카운터 1(ON)
출력용 카운터≥출력 ON 카운터 0(OFF)
(7) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.DUTY 명령을 종료합니다.
① BW를 이전 회의 ON/OFF 비율로 출력합니다.
② 알람 검출(ALM)의 DMLA, MHA, MLA를 0으로 합니다.
③ 알람 검출2(ALM2)의 MHA2, MLA2를 0으로 합니다.
④ 운전 모드(MODE)를 MAN으로 합니다.
⑤ BB의 BB1~BB4를 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면, “(1) 모드 판정”을 실행합니다.
(8) 유지 처리
루프 STOP 처리에서, 센서 에러 발생 시(S.IN 명령으로 검출)에, S.DUTY 명령
으로 출력값을 유지할 것인지의 여부를 지정하는 것입니다.
센서 알람 발생 시에 조작량(MV)을 유지할 것인지의 여부는 SM1501의 설정에
따라 선택할 수 있습니다.
ㆍSM1501=OFF:조작량(MV)을 유지하지 않는다.
ㆍSM1501=ON :조작량(MV)을 유지한다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
8 입출력 제어 명령
CTDUTY
△T
1
100
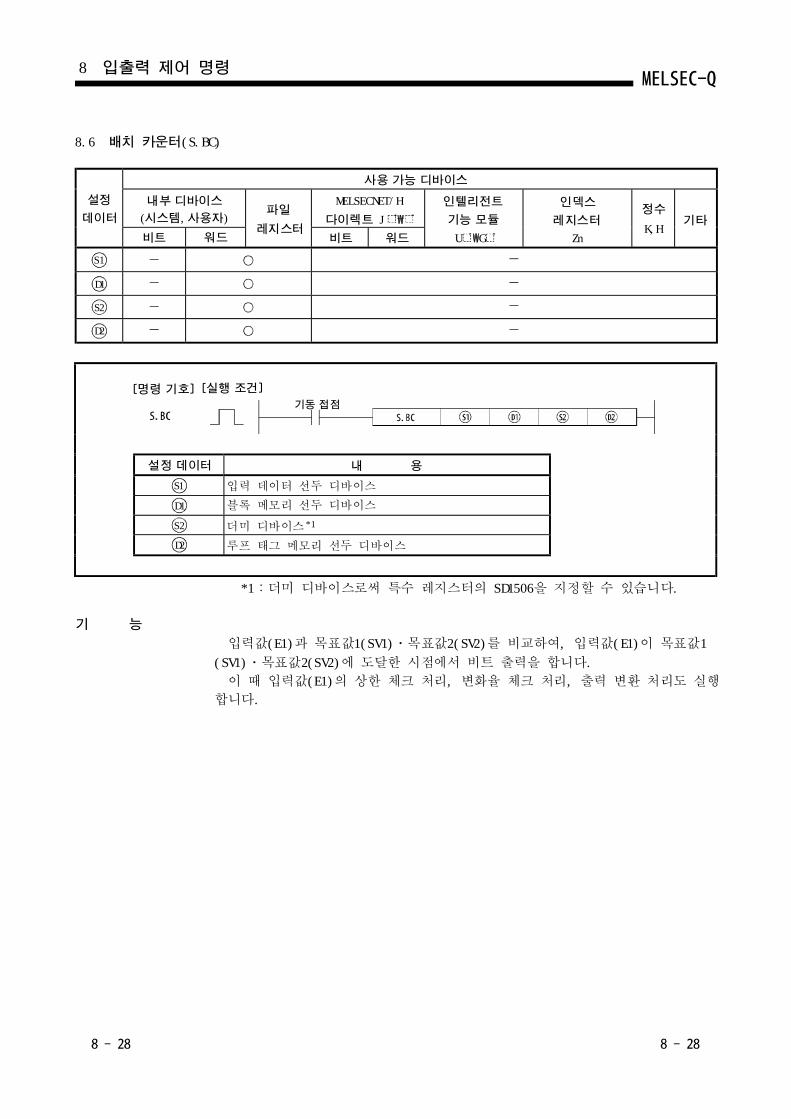
8.6 (S.BC)배치 카운터
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
루프 태그 메모리 선두 디바이스
*1:더미 디바이스로써 특수 레지스터의 SD1506을 지정할 수 있습니다.
입력값(E1)과 목표값1(SV1)ㆍ목표값2(SV2)를 비교하여, 입력값(E1)이 목표값1
(SV1)ㆍ목표값2(SV2)에 도달한 시점에서 비트 출력을 합니다.
이 때 입력값(E1)의 상한 체크 처리, 변화율 체크 처리, 출력 변환 처리도 실행
합니다.
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
8 입출력 제어 명령
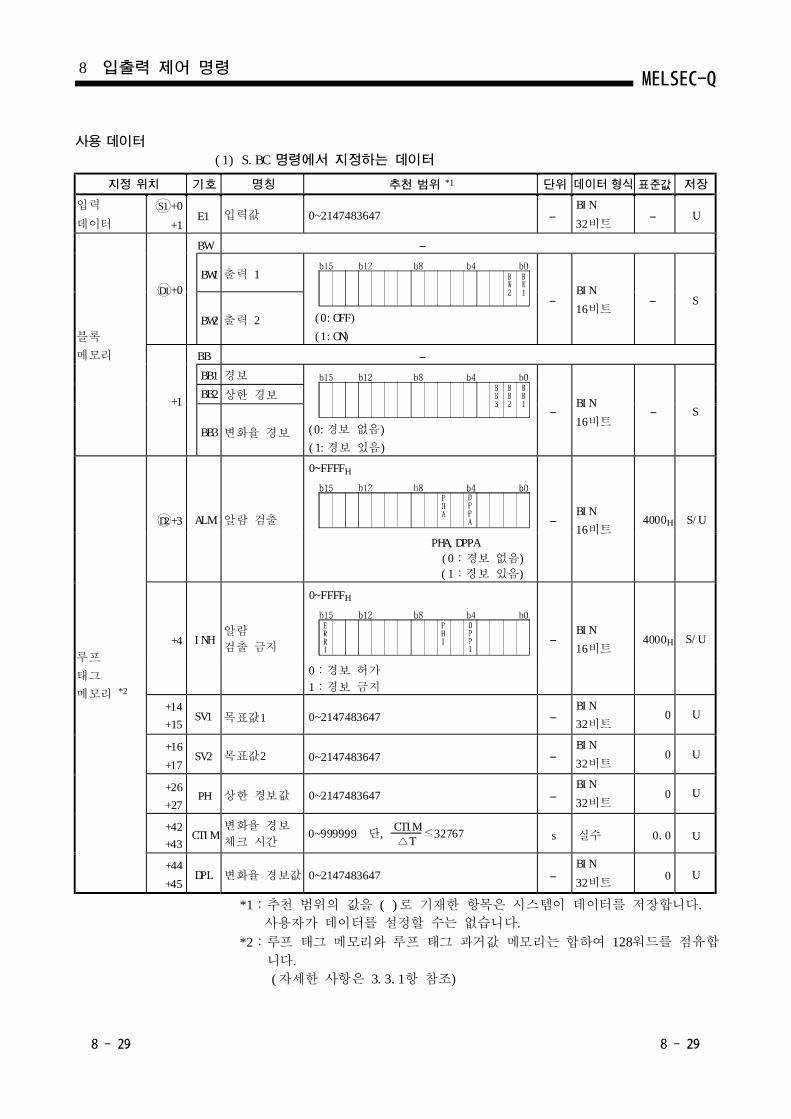
사용 데이터
(1) S.BC 명령에서 지정하는 데이터
블록
메모리
입력
데이터입력값
출력 1
출력 2
경보
상한 경보
변화율 경보 (0:경보 없음)
(1:경보 있음)
루프
태그
메모리 *2
알람 검출
PHA,DPPA
(0:경보 없음)
(1:경보 있음)
알람
검출 금지
0:경보 허가
1:경보 금지
목표값1
목표값2
상한 경보값
변화율 경보
체크 시간
변화율 경보값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수s
BIN
16비트
BIN
16비트
BIN
32비트
BIN
32비트
BIN
32비트
BIN
32비트
BIN
16비트
BIN
16비트
BIN
32비트
8 입출력 제어 명령
--
-
-
--
--
-
-
-
-
-
-
U
S
S
4000H
4000H
0.0
0
0
0
0
S/U
S/U
U
U
U
U
U
0~2147483647
0~2147483647
0~2147483647
0~2147483647
0~2147483647
0~FFFFH
0~FFFFH
(0:OFF)
(1:ON)
0~999999 단, ≤32767CTIM△T
E1
BW
BB
BB1
BW1
BB2
BW2
BB3
ALM
INH
SV1
SV2
PH
CTIM
DPL
+14
+16
+26
+42
+44
+15
+17
+27
+43
+45
+4
+1
+0
+1
S1
+0D1
+3D2
루프 태그
과거값
메모리*2 *3
시스템이 워크 영역으로써 사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
지정 위치 내 용
변화율 감시 카운터 초기화 세트가 끝난 플래그
변화율 감시 카운터
Xn-m
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로
데이터를 클리어할 필요가 있습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 상한 체크 처리
상한 체크 처리에서는 아래와 같이 연산을 실행하여, 그 결과를 BB2, PHA에
출력합니다.
조건
기타
E1>PH
BB2, PHA
0
1 *1
*1:알람 검출 금지(INH)의 PHI 또는 ERRI가 1인 경우는 경보를 금지하기 위
해 PHA와 BB2는 0이 됩니다.
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
8 입출력 제어 명령
D2
D2
+124
+124
+125
+126
+127
+127
--- -- S
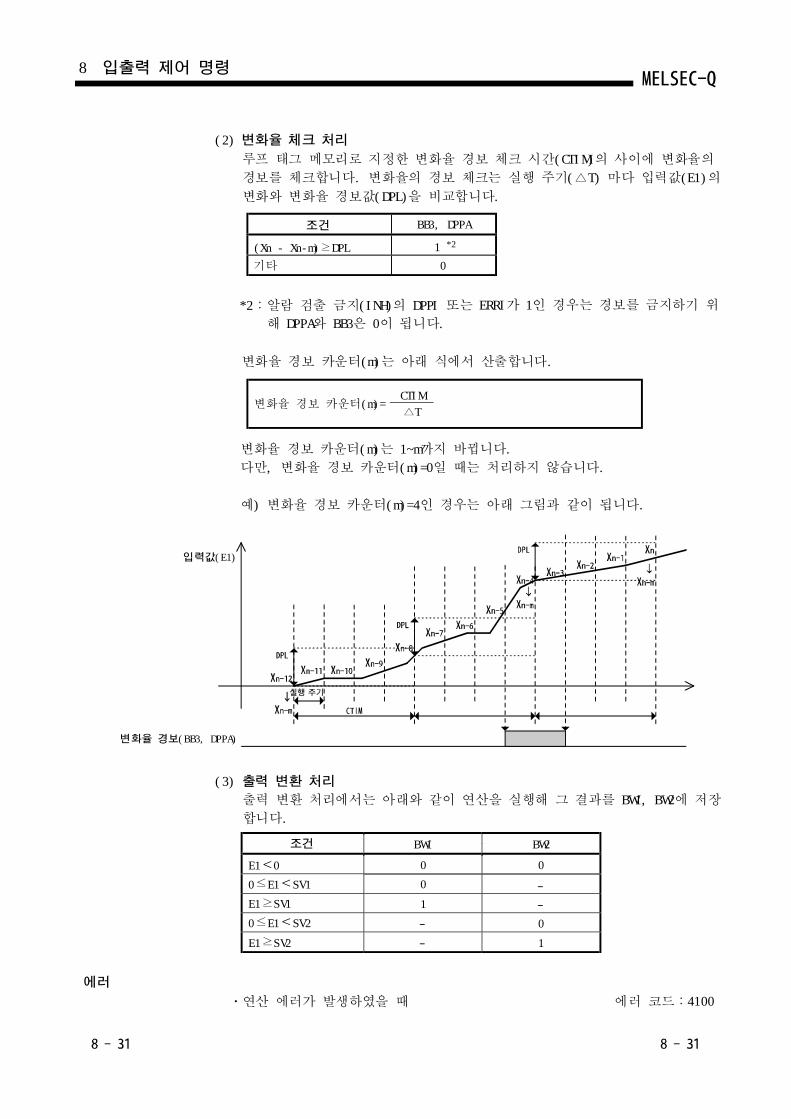
(2) 변화율 체크 처리
루프 태그 메모리로 지정한 변화율 경보 체크 시간(CTIM)의 사이에 변화율의
경보를 체크합니다. 변화율의 경보 체크는 실행 주기(△T) 마다 입력값(E1)의
변화와 변화율 경보값(DPL)을 비교합니다.
조건 BB3, DPPA
(Xn - Xn-m)≥DPL 1 *2
기타 0
*2:알람 검출 금지(INH)의 DPPI 또는 ERRI가 1인 경우는 경보를 금지하기 위
해 DPPA와 BB3은 0이 됩니다.
변화율 경보 카운터(m)는 아래 식에서 산출합니다.
변화율 경보 카운터(m)=
변화율 경보 카운터(m)는 1~m까지 바뀝니다.
다만, 변화율 경보 카운터(m)=0일 때는 처리하지 않습니다.
예) 변화율 경보 카운터(m)=4인 경우는 아래 그림과 같이 됩니다.
입력값(E1)
실행 주기
변화율 경보(BB3, DPPA)
출력 변환 처리에서는 아래와 같이 연산을 실행해 그 결과를 BW1, BW2에 저장
합니다.
조건
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
(3) 출력 변환 처리
8 입출력 제어 명령
CTIM
△T
E1 0
0 E1 SV1
E1 SV1
0 E1 SV2
E1 SV2
<
≤ <
≥
≤ <
≥
0
0
BW1 BW2
0
0
1
1
-
-
-
-
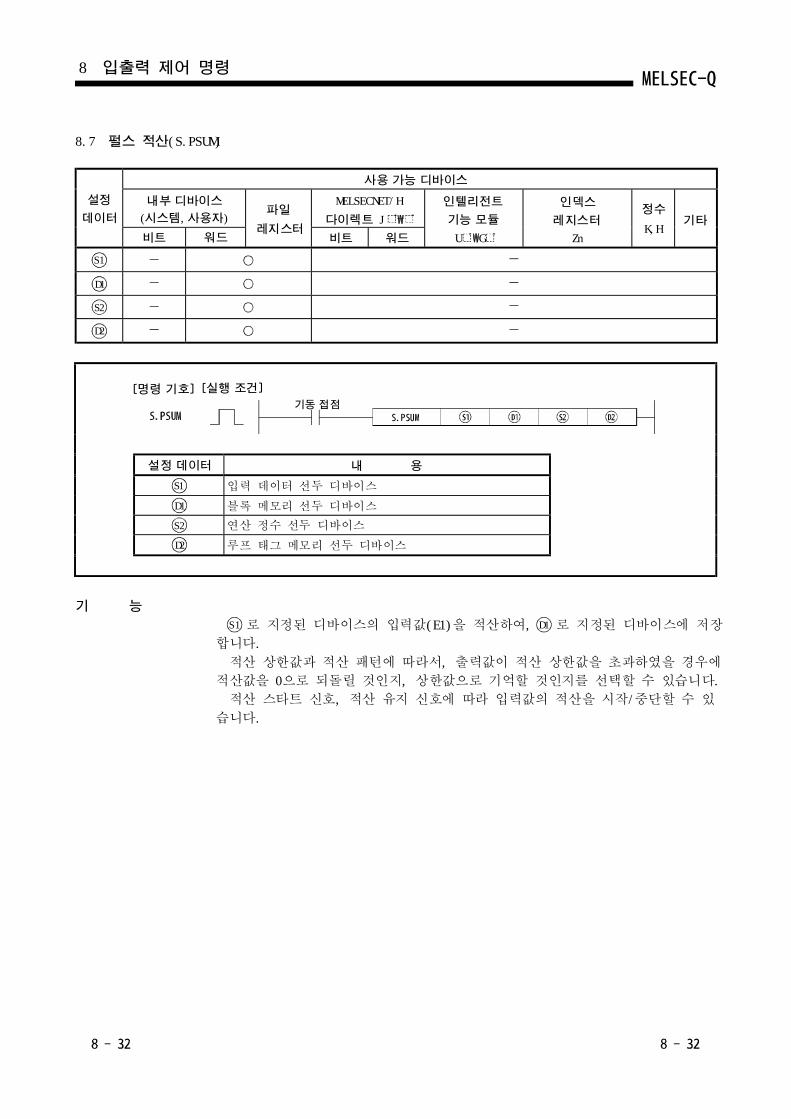
8.7 (S.PSUM)펄스 적산
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
로 지정된 디바이스의 입력값(E1)을 적산하여, 로 지정된 디바이스에 저장
합니다.
적산 상한값과 적산 패턴에 따라서, 출력값이 적산 상한값을 초과하였을 경우에
적산값을 0으로 되돌릴 것인지, 상한값으로 기억할 것인지를 선택할 수 있습니다.
적산 스타트 신호, 적산 유지 신호에 따라 입력값의 적산을 시작/중단할 수 있
습니다.
S1 D1
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
8 입출력 제어 명령
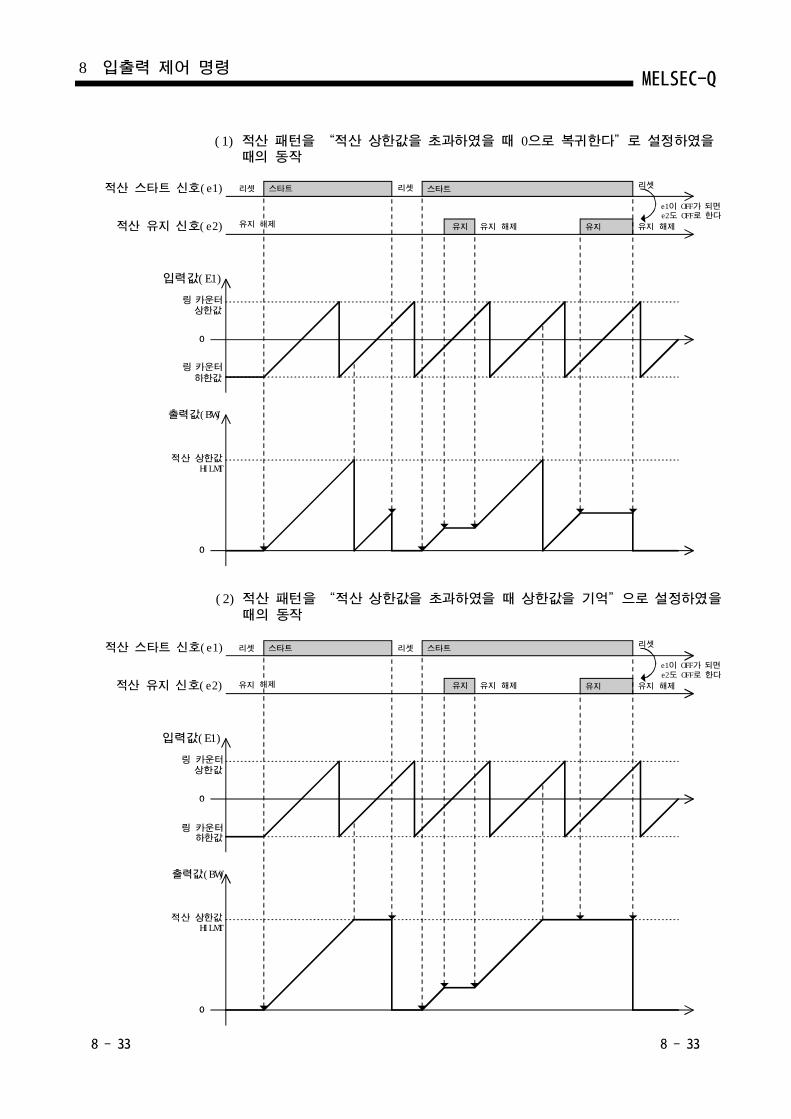
(1) 0적산 패턴을 “적산 상한값을 초과하였을 때 으로 복귀한다”로 설정하였을때의 동작
적산 스타트 신호(e1) 리셋 스타트 리셋
리셋리셋
스타트
스타트스타트
리셋
리셋
적산 유지 신호(e2) 유지 유지
유지
유지 해제
유지 해제
유지
유지
e1 OFF이 가 되면
e1 OFF이 가 되면
e2 OFF도 로 한다
e2 OFF도 로 한다
유지 해제
유지 해제
입력값(E1)
링 카운터상한값
링 카운터하한값
출력값(BW)
적산 상한값HILMT
(2) 적산 패턴을 “적산 상한값을 초과하였을 때 상한값을 기억”으로 설정하였을때의 동작
적산 스타트 신호(e1)
적산 유지 신호(e2) 유지
입력값(E1)
링 카운터상한값
링 카운터하한값
출력값(BW)
적산 상한값HILMT
해제
해제
8 입출력 제어 명령
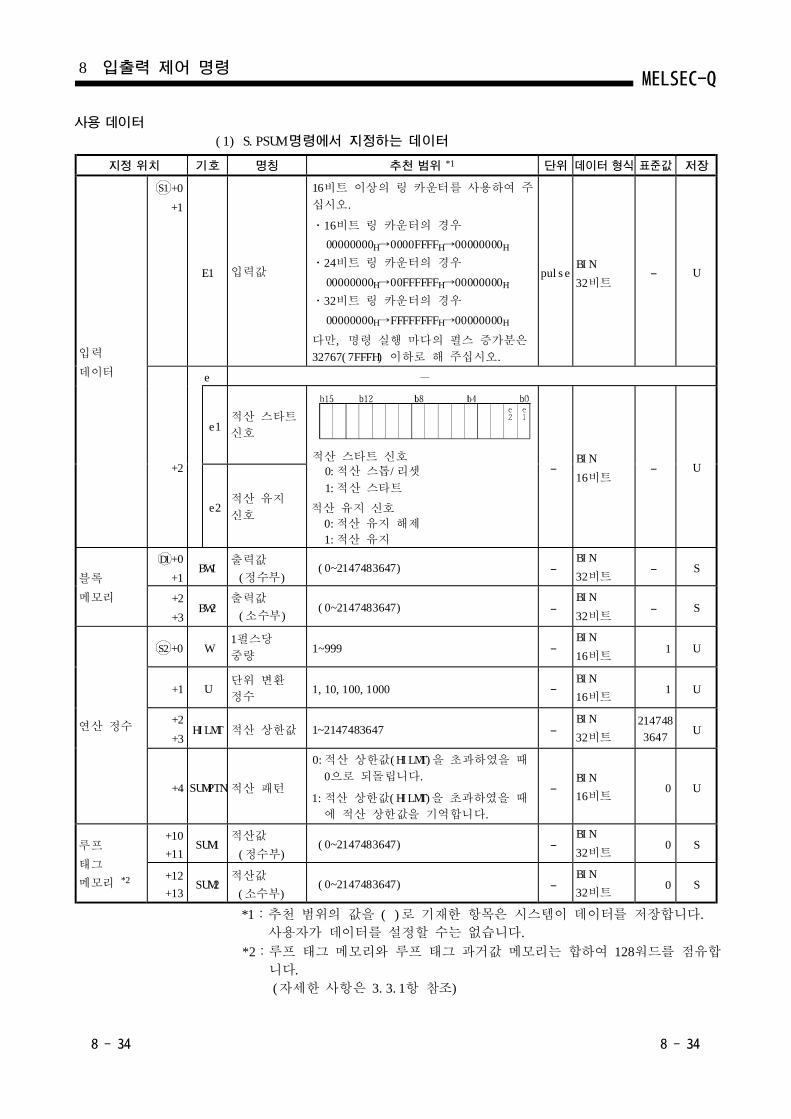
사용 데이터
(1) S.PSUM 명령에서 지정하는 데이터
입력
데이터
입력값
16비트 이상의 링 카운터를 사용하여 주
십시오.
ㆍ16비트 링 카운터의 경우
00000000 →0000FFFF →00000000H H H
ㆍ24비트 링 카운터의 경우
00000000 →00FFFFFF →00000000H H H
ㆍ32비트 링 카운터의 경우
00000000 →FFFFFFFF →00000000H H H
다만, 명령 실행 마다의 펄스 증가분은
32767(7FFFH) 이하로 해 주십시오.
적산 스타트
신호
적산 유지
신호
적산 스타트 신호0:적산 스톱/리셋
1:적산 스타트
적산 유지 신호
0:적산 유지 해제
1:적산 유지
블록
메모리
출력값
(정수부)
출력값
(소수부)
연산 정수
1펄스당
중량
단위 변환
정수
적산 상한값
적산 패턴
0:적산 상한값(HILMT)을 초과하였을 때
0으로 되돌립니다.
1:적산 상한값(HILMT)을 초과하였을 때
에 적산 상한값을 기억합니다.
루프
태그
메모리 *2
적산값
(정수부)
적산값
(소수부)
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
8 입출력 제어 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
32비트
BIN
32비트
BIN
32비트
BIN
32비트
BIN
32비트
BIN
32비트pulse
S
S
S
S
0
1
1
0
0
U
U
U
-
-
-
-
-
-
-
-
-
-
-
-
-
U
U
U
(0~2147483647)
(0~2147483647)
(0~2147483647)
(0~2147483647)
1~999
1,10,100,1000
1~2147483647214748
3647
E1
BW1
BW2
W
U
HILMT
SUMPTN
SUM1
SUM2
e
e1
e2
+0
+1
+0
+1
+2
+4
+12
+10
+13
+11
+2
+3
+2
+3
+0
+1
S1
S2
D1
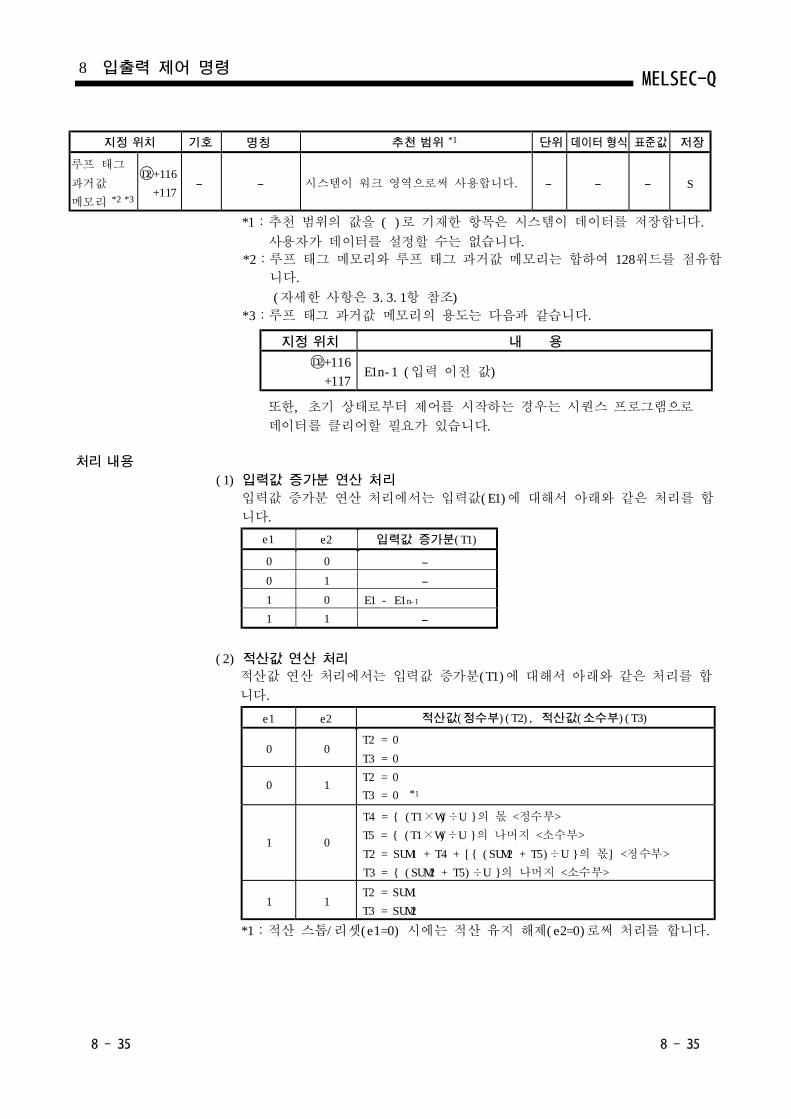
루프 태그
과거값
메모리 *2 *3
D2+116
+117시스템이 워크 영역으로써 사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
지정 위치 내 용
D2+116
+117E1n-1 (입력 이전 값)
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로
데이터를 클리어할 필요가 있습니다.
처리 내용
(1) 입력값 증가분 연산 처리
입력값 증가분 연산 처리에서는 입력값(E1)에 대해서 아래와 같은 처리를 합
니다.
e1 e2 입력값 증가분(T1)
(2) 적산값 연산 처리
적산값 연산 처리에서는 입력값 증가분(T1)에 대해서 아래와 같은 처리를 합
니다.
e1 e2 적산값 정수부 적산값 소수부( )(T2), ( )(T3)
T4 = { (T1×W)÷U }의 몫 <정수부>
0
0
1
1
0
0
1
1
0
1
0
1
0
1*1
0
1
T5 = { (T1×W)÷U }의 나머지 <소수부>
T2 = SUM1 + T4 + [{ (SUM2 + T5)÷U }의 몫] <정수부>
T3 = { (SUM2 + T5)÷U }의 나머지 <소수부>
*1:적산 스톱/리셋(e1=0) 시에는 적산 유지 해제(e2=0)로써 처리를 합니다.
8 입출력 제어 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
---
-
-
-
--
E1 - E1n-1
T2 = SUM1
T2 = 0
T2 = 0
T3 = SUM2
T3 = 0
T3 = 0
S
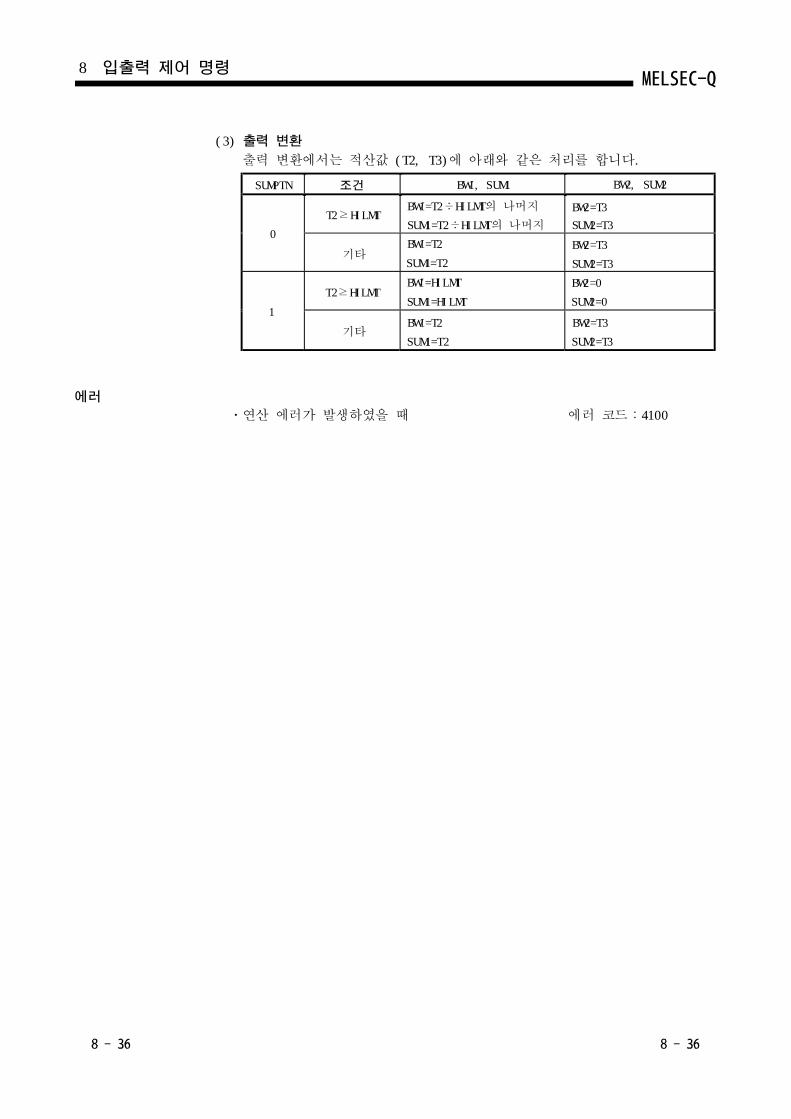
(3) 출력 변환
출력 변환에서는 적산값 (T2, T3)에 아래와 같은 처리를 합니다.
SUMPTN 조건 BW1, SUM1 BW2, SUM2
0
T2≥HILMTBW1=T2÷HILMT의 나머지
SUM1=T2÷HILMT의 나머지
BW2=T3
SUM2=T3
기타BW1=T2
SUM1=T2
BW2=T3
SUM2=T3
1
T2≥HILMTBW1=HILMT
SUM1=HILMT
BW2=0
SUM2=0
기타BW1=T2
SUM1=T2
BW2=T3
SUM2=T3
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
8 입출력 제어 명령
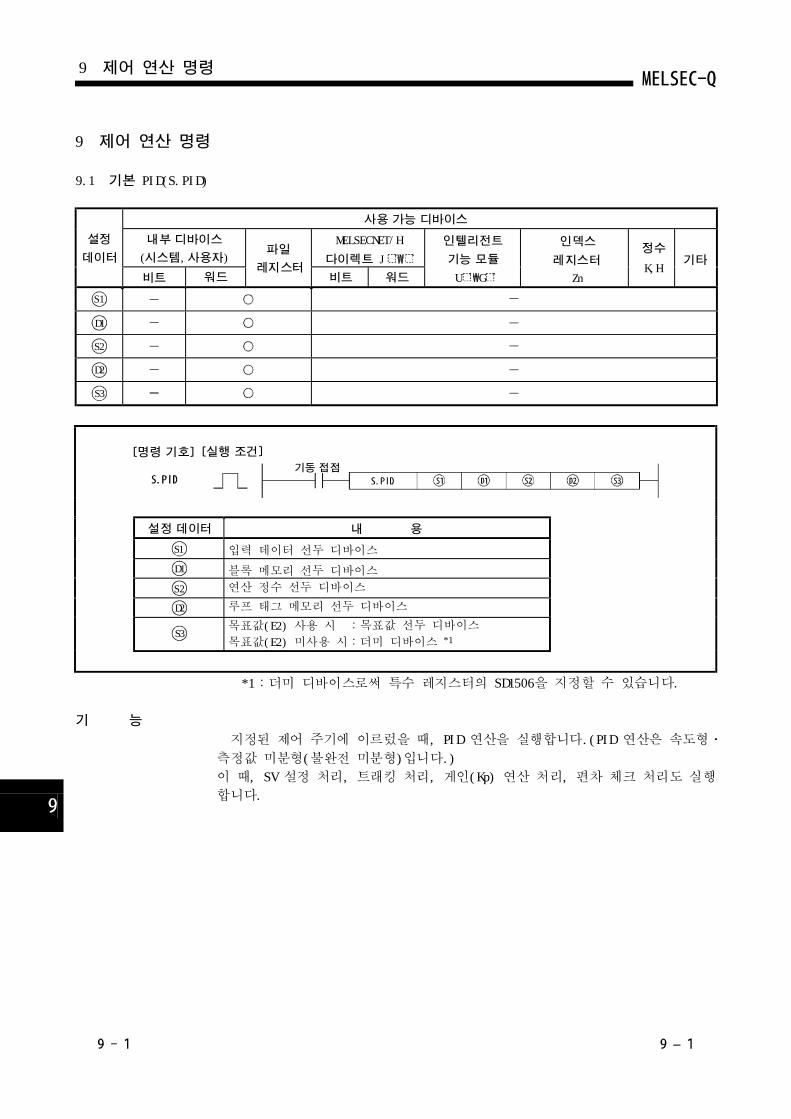
9.1 PID(S.PID)기본
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시 :목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터의 SD1506을 지정할 수 있습니다.
지정된 제어 주기에 이르렀을 때, PID 연산을 실행합니다.(PID 연산은 속도형ㆍ
측정값 미분형(불완전 미분형)입니다.)
이 때, SV 설정 처리, 트래킹 처리, 게인(Kp) 연산 처리, 편차 체크 처리도 실행
합니다.
9 제어 연산 명령
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
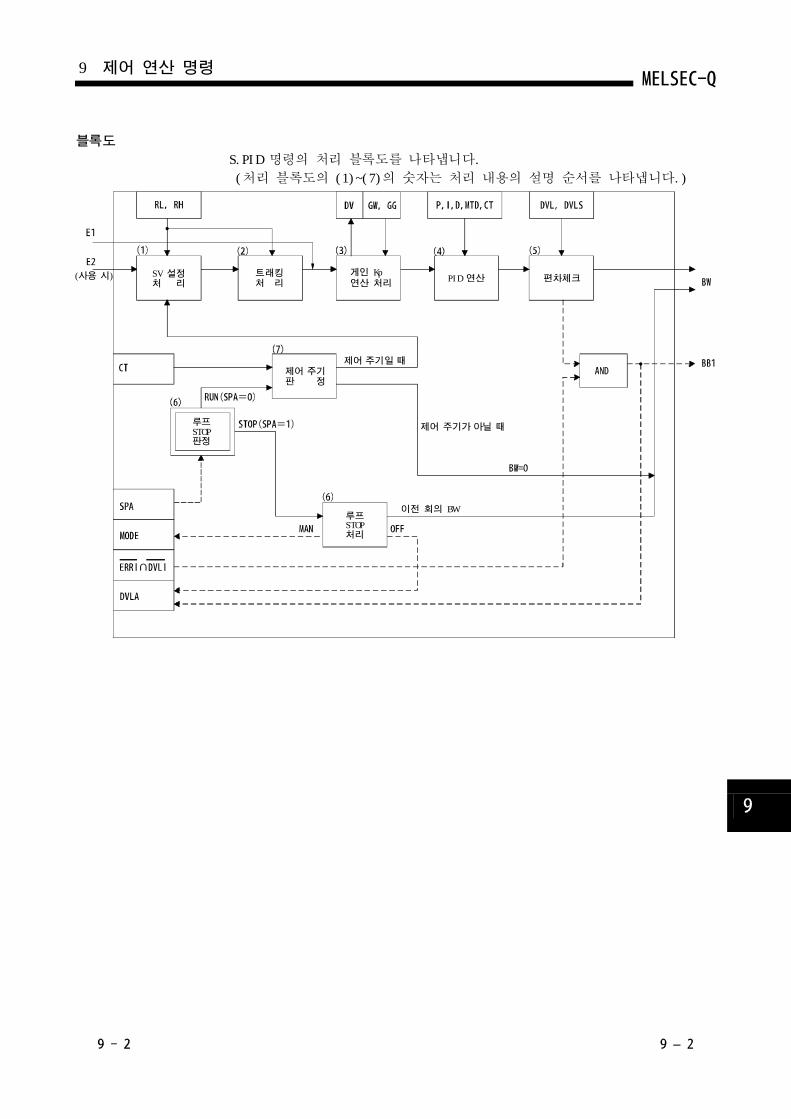
블록도
S.PID 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
(사용 시) SV 설정처 리
트래킹처 리
게인연산 처리
KpPID 연산 편차체크
제어 주기판 정
제어 주기일 때
제어 주기가 아닐 때
이전 회의 BW
루프
판정STOP
루프
처리STOP
9 제어 연산 명령
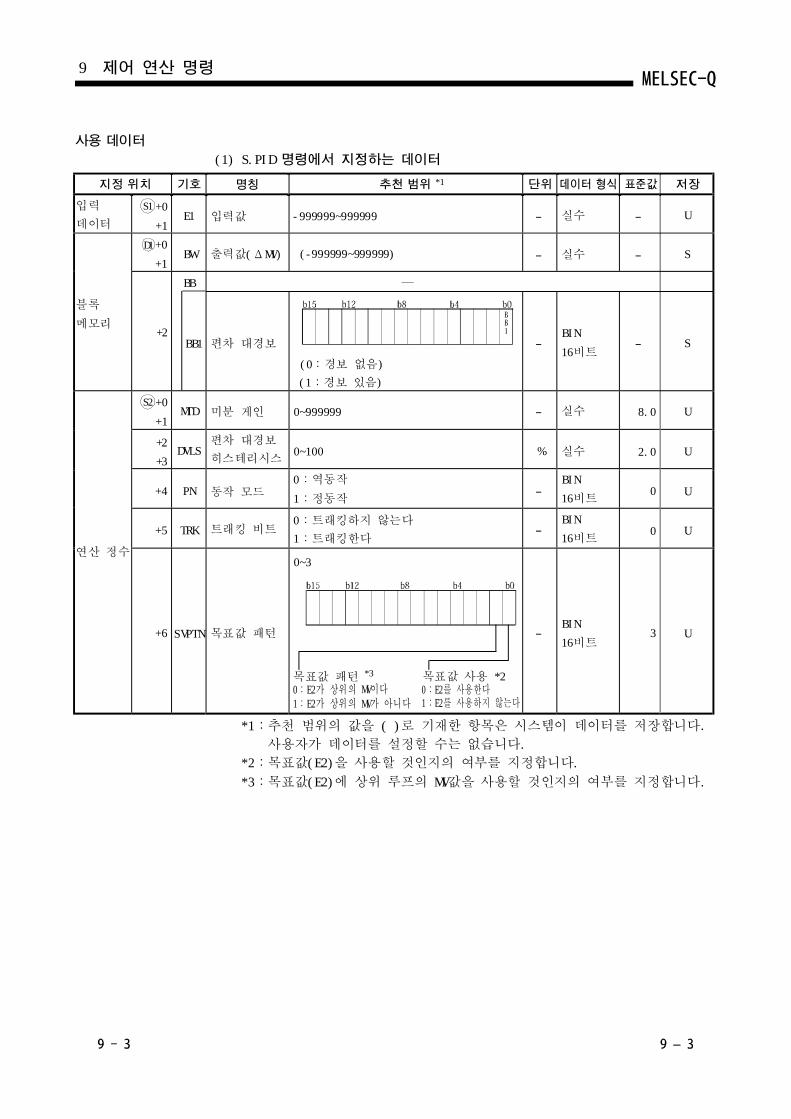
사용 데이터
(1) S.PID 명령에서 지정하는 데이터
입력
데이터
블록
메모리
입력값
출력값(ΔMV)
편차 대경보
(0:경보 없음)
(1:경보 있음)
연산 정수
미분 게인
편차 대경보
히스테리시스
동작 모드0:역동작
1:정동작
트래킹 비트0:트래킹하지 않는다
1:트래킹한다
목표값 패턴
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *20:E2를 사용한다1:E2를 사용하지 않는다
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
9 제어 연산 명령
E1
BW
BB
BB1
MTD
DVLS
PN
TRK
SVPTN
+0
+1
+2
+5
+6
+4
+2
+3
+0
+1
-999999~999999
(-999999~999999)
0~999999
0~100
0~3
S1
D1
+0
+1
S2
S
S
2.0
8.0
0
0
3
U
U
U
U
U
U
%
-
-
- -
- -
- -
-
-
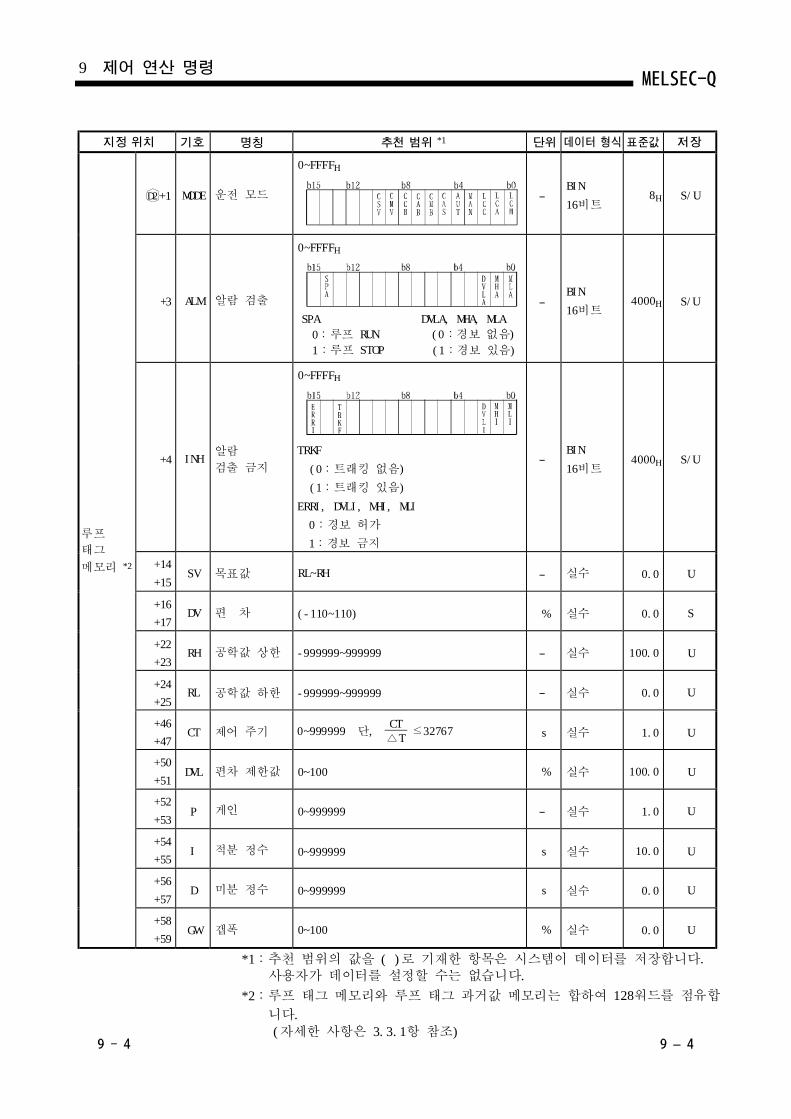
루프
태그
메모리 *2
운전 모드
알람 검출
0:루프 RUN
1:루프 STOP
(0:경보 없음)
(1:경보 있음)
알람
검출 금지 (0:트래킹 없음)
(1:트래킹 있음)
0:경보 허가
1:경보 금지
목표값
편 차
공학값 상한
공학값 하한
제어 주기
편차 제한값
게인
적분 정수
미분 정수
갭폭
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
-999999~999999
-999999~999999
0~999999
0~999999
0~999999
0~FFFFH
0~FFFFH
0~FFFFH
SPA DVLA, MHA, MLA
TRKF
ERRI, DVLI, MHI, MLI
0~100
0~100
(-110~110)
RL~RH
0~999999 단, ≤32767CT△T
100.0
100.0
8H
4000H
4000H
0.0
0.0
0.0
0.0
10.0
1.0
1.0
S
U
U
S/U
S/U
S/U
U
U
U
U
U
U
0.0 U
%
%
s
s
s
%
-
-
-
-
-
-
-
MODE
ALM
INH
SV
DV
RH
RL
CT
DVL
P
I
D
GW
+1D2
+3
+4
+14
+16
+22
+24
+46
+50
+52
+54
+56
+58
+15
+17
+23
+25
+47
+51
+53
+55
+57
+59
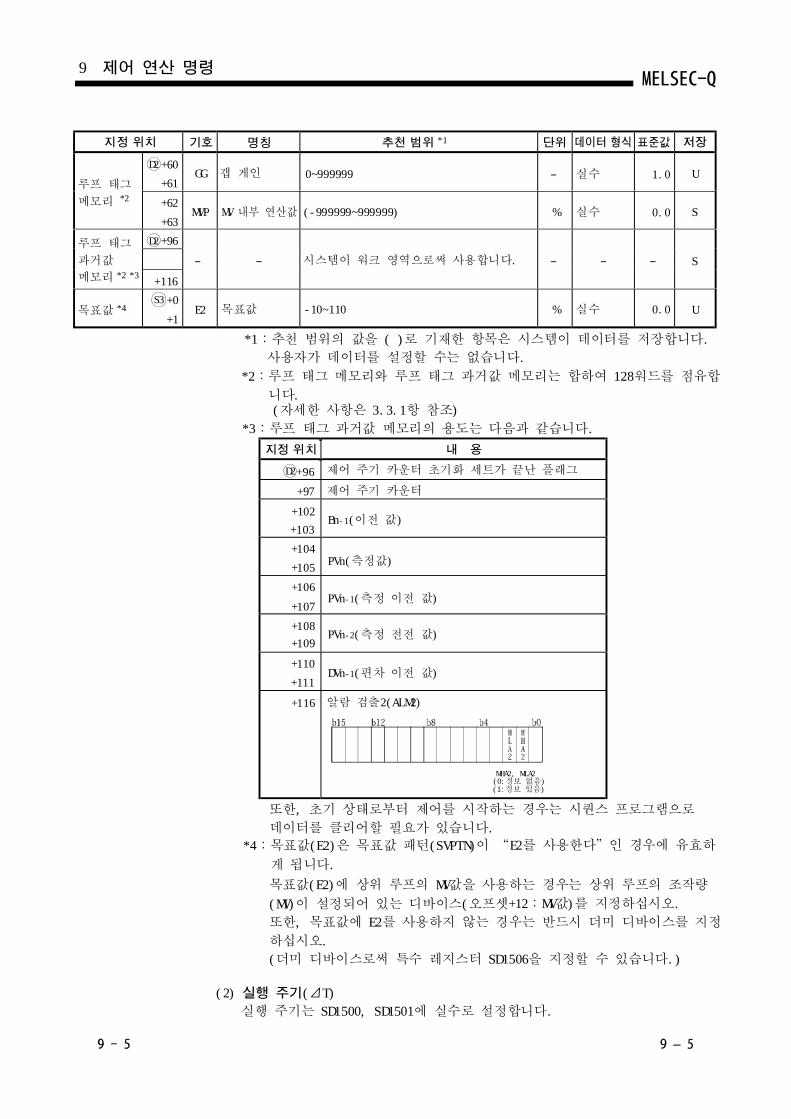
루프 태그
메모리 *2
갭 게인GG
MVP
E2
MV 내부 연산값
루프 태그
과거값
메모리 *2 *3
시스템이 워크 영역으로써 사용합니다.
목표값 *4 목표값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
지정 위치 내 용
D2+96 제어 주기 카운터 초기화 세트가 끝난 플래그
+97 제어 주기 카운터
+102
+103Bn (이전 값)-1
+104
+105PVn(측정값)
+106
+107PVn (측정 이전 값)-1
+108
+109PVn (측정 전전 값)-2
+110
+111DVn (편차 이전 값)-1
+116 알람 검출2(ALM2)
MHA2, MLA2(0:경보 없음)(1:경보 있음)
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로
데이터를 클리어할 필요가 있습니다.
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하
게 됩니다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량
(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정
하십시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
(-999999~999999)
0~999999
-10~110+0
+1
S3
+60
+96
+62
+61
+63
+116
D2
D2
%
%
--- - -
-
0.0
1.0
0.0
U
U
S
S
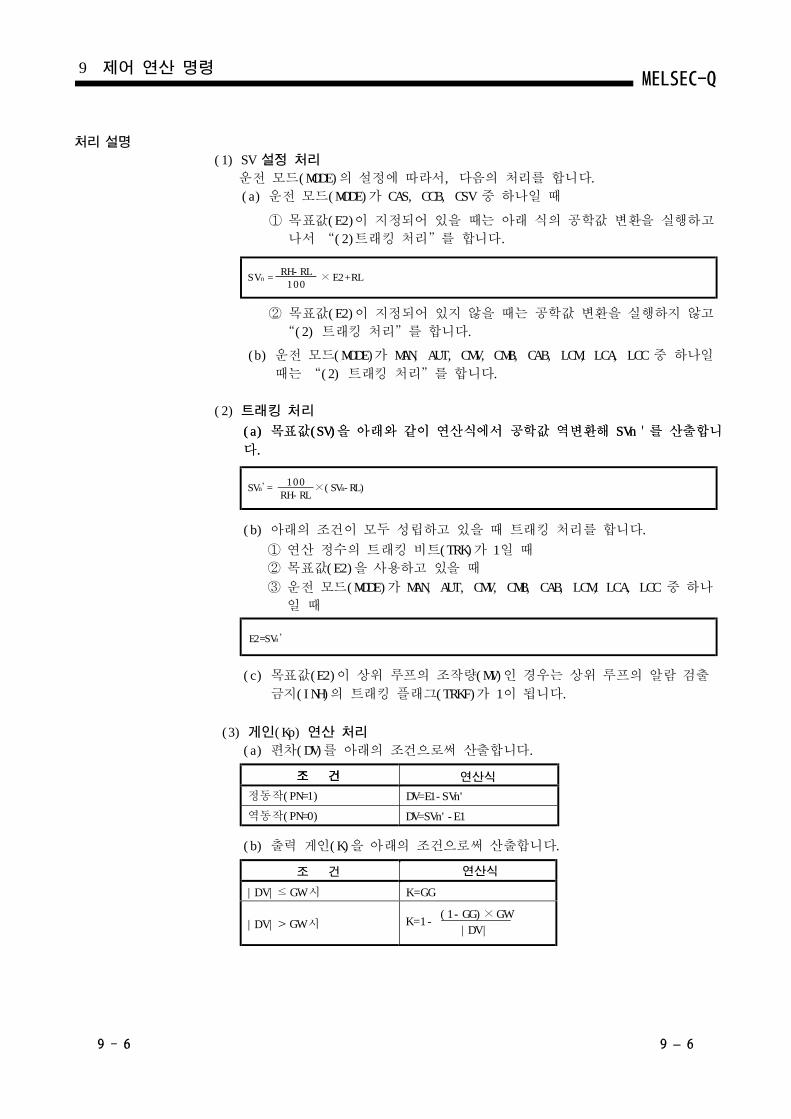
처리 설명
(1) SV 설정 처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식의 공학값 변환을 실행하고
나서 “(2)트래킹 처리”를 합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값 변환을 실행하지 않고
“(2) 트래킹 처리”를 합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 합니다.
(2) 트래킹 처리
(a) 목표값(SV)을 아래와 같이 연산식에서 공학값 역변환해 SVn'를 산출합니
다.
(a) 목표값(SV)을 아래와 같이 연산식에서 공학값 역변환해 SVn'를 산출합니
다.
(b) 아래의 조건이 모두 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) (Kp)게인 연산 처리
(a) 편차(DV)를 아래의 조건으로써 산출합니다.
조 건조 건
조 건
연산식
정동작(PN=1) DV=E1-SVn'
역동작(PN=0) DV=SVn'-E1
(b) 출력 게인(K)을 아래의 조건으로써 산출합니다.
연산식
9 제어 연산 명령
SV = × E2+RLn
SV ’= ×(SV -RL)n n
E2=SV ’n
RH-RL100
100RH-RL
|DV|≤ GW 시 K=GG
(1- GG)×GWK=1-|DV|>GW 시
|DV |
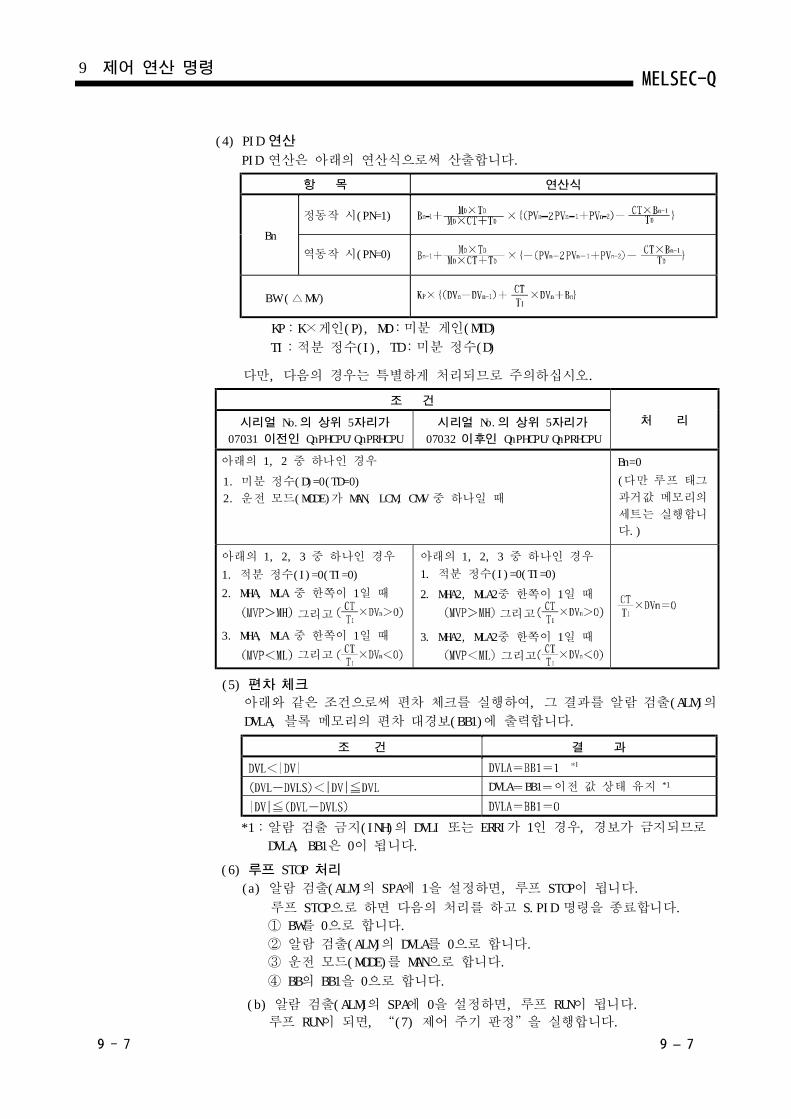
(4) PID 연산
PID 연산은 아래의 연산식으로써 산출합니다.
항 목 연산식
Bn
정동작 시(PN=1)
역동작 시(PN=0)
KP:K×게인(P), MD:미분 게인(MTD)
TI:적분 정수(I), TD:미분 정수(D)
다만, 다음의 경우는 특별하게 처리되므로 주의하십시오.
조 건
처 리시리얼 의 상위 자리가
이전인
No. 5
07031 QnPHCPU/QnPRHCPU
시리얼 의 상위 자리가
이후인
No. 5
07032 QnPHCPU/QnPRHCPU
아래의 1, 2 중 하나인 경우
1. 미분 정수(D)=0(TD=0)
2. 운전 모드(MODE)가 MAN, LCM, CMV 중 하나일 때
Bn=0
(다만 루프 태그
과거값 메모리의
세트는 실행합니
다.)
아래의 1, 2, 3 중 하나인 경우
1. 적분 정수(I)=0(TI=0)
2. MHA, MLA 중 한쪽이 1일 때
그리고
3. MHA, MLA 중 한쪽이 1일 때
그리고
아래의 1, 2, 3 중 하나인 경우
1. 적분 정수(I)=0(TI=0)
2. MHA2, MLA2중 한쪽이 1일 때
그리고
3. MHA2, MLA2중 한쪽이 1일 때
그리고
(5) 편차 체크
아래와 같은 조건으로써 편차 체크를 실행하여, 그 결과를 알람 검출(ALM)의
DVLA, 블록 메모리의 편차 대경보(BB1)에 출력합니다.
조 건 결 과
DVLA BB1 이전 값 상태 유지 *1
*1:알람 검출 금지(INH)의 DVLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DVLA, BB1은 0이 됩니다.
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.PID 명령을 종료합니다.
① BW를 0으로 합니다.
② 알람 검출(ALM)의 DVLA를 0으로 합니다.
③ 운전 모드(MODE)를 MAN으로 합니다.
④ BB의 BB1을 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN이 되면, “(7) 제어 주기 판정”을 실행합니다.
9 제어 연산 명령
BW (△MV)
9 제어 연산 명령
(7) 제어 주기 판정
(a) 지정된 제어 주기에 도달하지 않으면 BW(ΔMV)를 0으로 하고 S.PID 명령
을 종료합니다.
(b) 제어 주기에 도달하면 “(1) SV 설정 처리”를 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
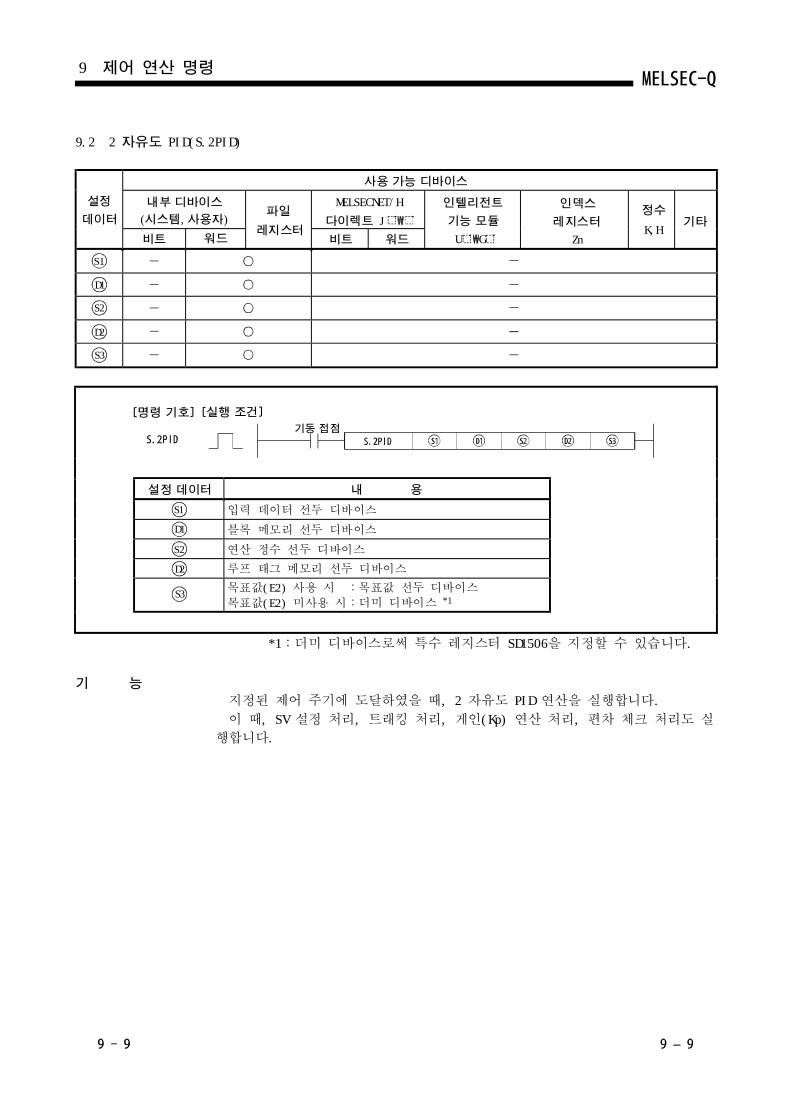
9 제어 연산 명령
9.2 2 PID(S.2PID)자유도
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시 :목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
지정된 제어 주기에 도달하였을 때, 2 자유도 PID 연산을 실행합니다.
이 때, SV 설정 처리, 트래킹 처리, 게인(Kp) 연산 처리, 편차 체크 처리도 실
행합니다.
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
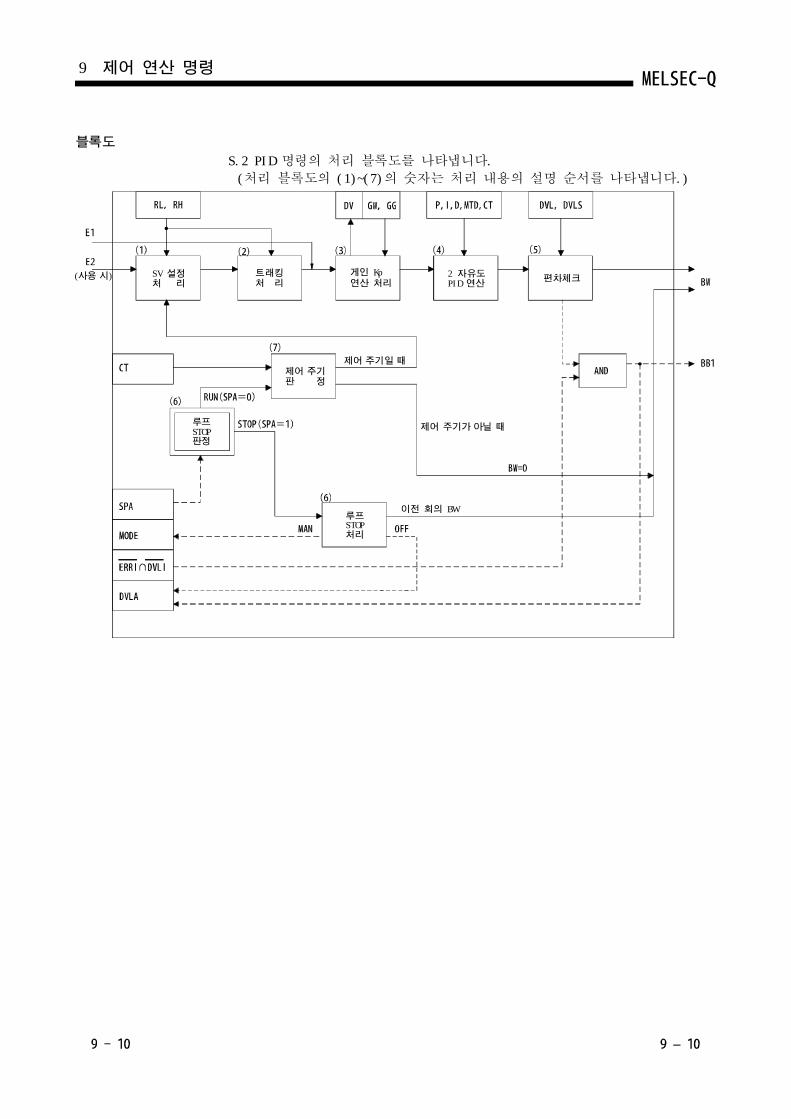
9 제어 연산 명령
블록도
S.2 PID 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
2 자유도(사용 시) SV 설정처 리
트래킹처 리
게인연산 처리
KpPID 연산
편차체크
제어 주기판 정
제어 주기일 때
제어 주기가 아닐 때
이전 회의 BW
루프
판정STOP
루프
처리STOP
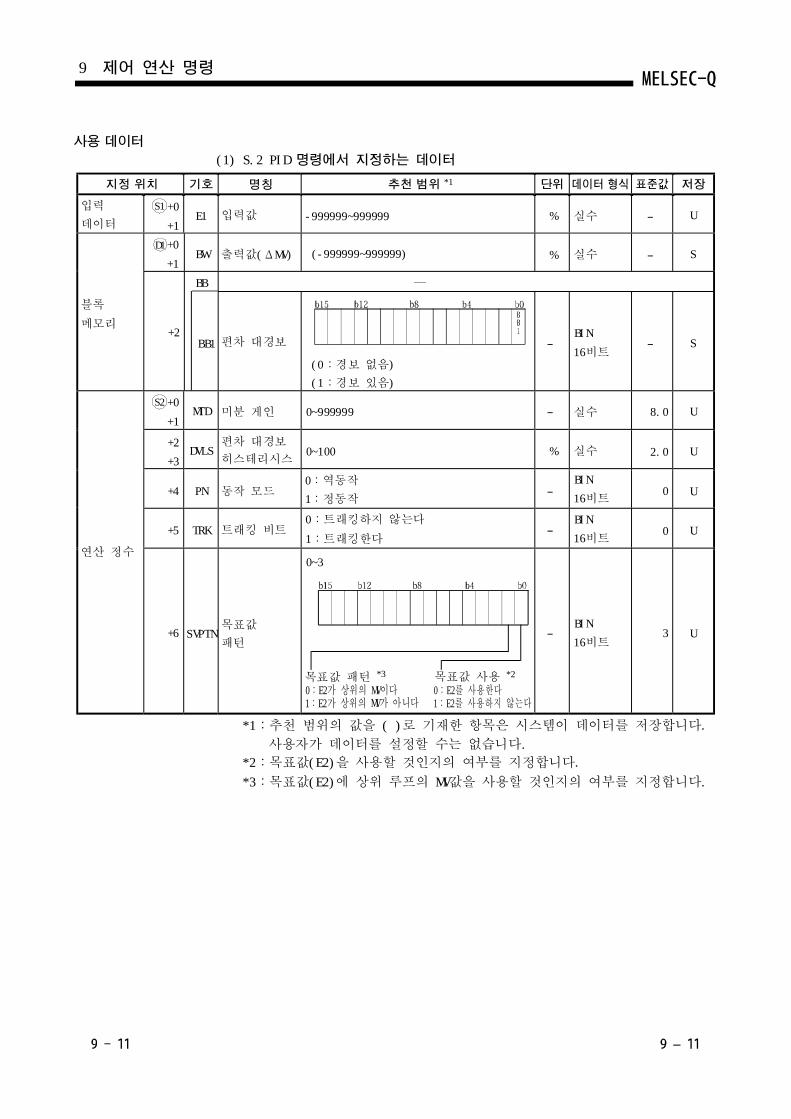
9 제어 연산 명령
사용 데이터
(1) S.2 PID 명령에서 지정하는 데이터
입력값
출력값(ΔMV)
편차 대경보
(0:경보 없음)
(1:경보 있음)
미분 게인
편차 대경보
히스테리시스
동작 모드0:역동작
1:정동작
트래킹 비트0:트래킹하지 않는다
1:트래킹한다
목표값
패턴
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
입력
데이터
블록
메모리
연산 정수
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
+0
+1
+2
+5
+6
+4
+2
+3
+0
+1
S1
D1
+0
+1
S2
E1
BW
BB
BB1
MTD
DVLS
PN
TRK
SVPTN
-999999~999999
(-999999~999999)
0~999999
0~100
0~3
S
S
2.0
8.0
0
0
3
U
U
U
U
U
U
%
%
%
-
-
- -
-
-
-
-
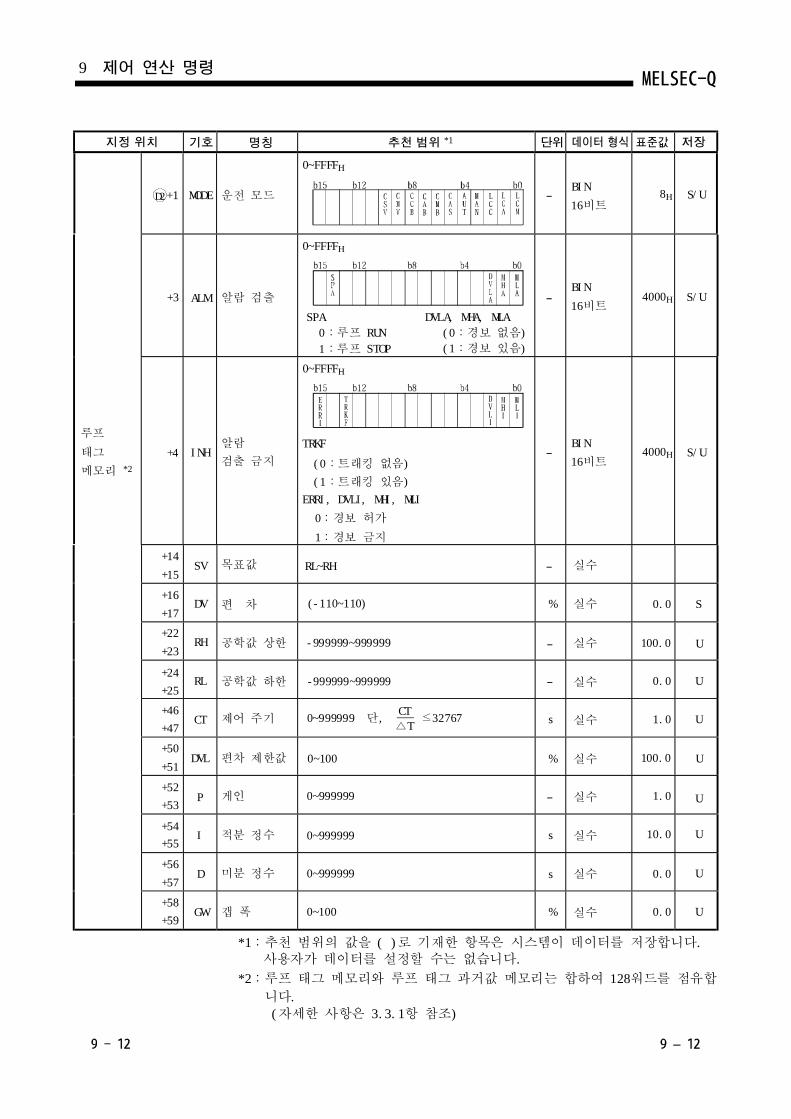
9 제어 연산 명령
루프
태그
메모리 *2
운전 모드
알람 검출
0:루프 RUN
1:루프 STOP
(0:경보 없음)
(1:경보 있음)
알람
검출 금지 (0:트래킹 없음)
(1:트래킹 있음)
0:경보 허가
1:경보 금지
목표값
편 차
공학값 상한
공학값 하한
제어 주기
편차 제한값
게인
적분 정수
미분 정수
갭 폭
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
MODE
ALM
INH
SV
DV
RH
RL
CT
DVL
P
I
D
GW
+1D2
+3
+4
+14
+16
+22
+24
+46
+50
+52
+54
+56
+58
+15
+17
+23
+25
+47
+51
+53
+55
+57
+59
-999999~999999
-999999~999999
0~999999
0~999999
0~999999
0~FFFFH
0~FFFFH
0~FFFFH
SPA DVLA, MHA, MLA
TRKF
ERRI, DVLI, MHI, MLI
0~100
0~100
(-110~110)
RL~RH
0~999999 단, ≤32767CT
△T
100.0
100.0
8H
4000H
4000H
0.0
0.0
0.0
0.0
10.0
1.0
1.0
S
U
U
S/U
S/U
S/U
U
U
U
U
U
U
%
%
s
s
s
%
-
-
-
-
-
-
-
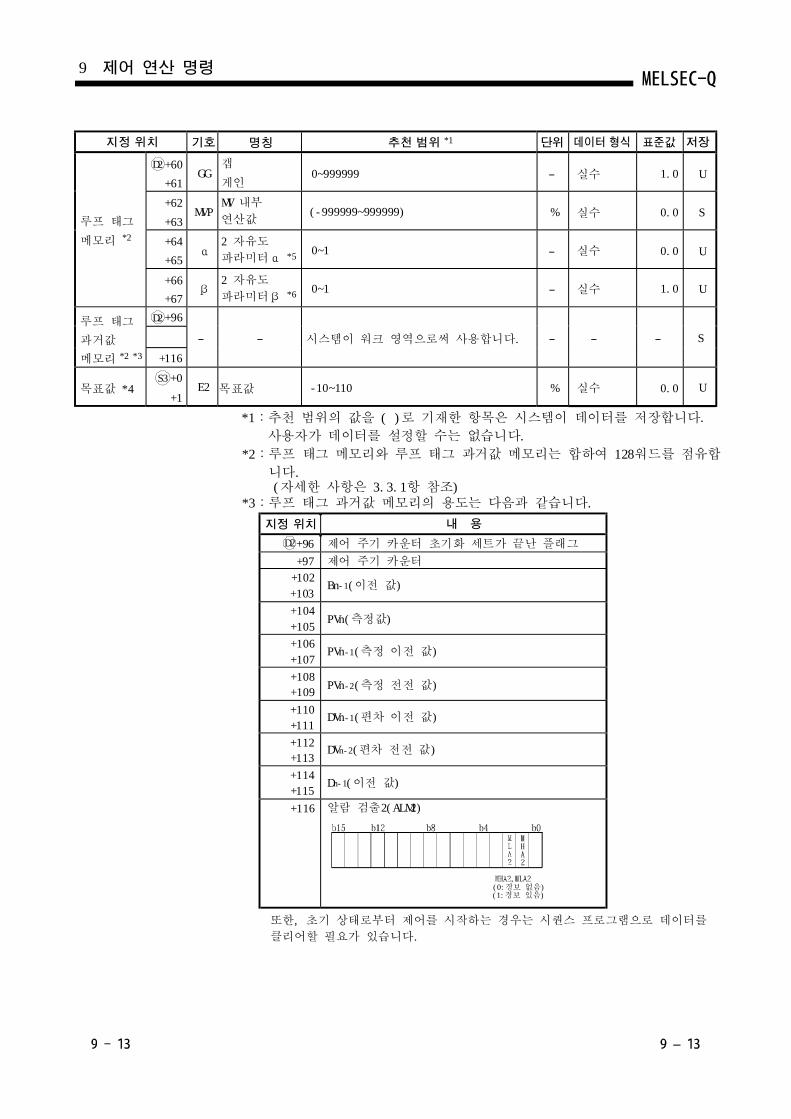
9 제어 연산 명령
루프 태그
메모리 *2
갭
게인
MV 내부
연산값
2 자유도
파라미터α *5
2 자유도
파라미터β *6
루프 태그
과거값
메모리 *2 *3
시스템이 워크 영역으로써 사용합니다.
목표값 *4 목표값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
지정 위치 내 용
제어 주기 카운터 초기화 세트가 끝난 플래그
제어 주기 카운터
Bn (이전 값)-1
PVn(측정값)
PVn (측정 이전 값)-1
PVn (측정 전전 값)-2
DVn (편차 이전 값)-1
DV (편차 전전 값)n-2
D (이전 값)n-1
알람 검출2(ALM2)
(0:경보 없음)(1:경보 있음)
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를
클리어할 필요가 있습니다.
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
(-999999~999999)
0~999999
0~1
0~1
-10~110
-
-
-- -
0.0
0.0
0.0
1.0
1.0
U
U
S
U
U
S
%
%
-
-
+0
+1
S3
+60
+96
+62
+64
+66
+61
+63
+65
+67
+116
D2
D2
GG
MVP
α
E2
-
β
D2+96
+97
+102
+103
+104
+105
+106
+107
+108
+109
+110
+112
+114
+111
+113
+115
+116

9 제어 연산 명령
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하
게 됩니다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량
(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정
하십시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
*5:α를 크게 하면, 목표값 변경에 대한 조작량의 변동이 작아집니다.
(안정될 때까지의 시간이 걸립니다.)
α 작게 하면, 목표값 변경에 대한 조작량의 변동이 커집니다.를
다만, 수정 동작이 강해지므로, 헌팅이 커지는 경우가 있습니다.
*6:β 크게 하면, 목표값 변경에 대한 미분의 효과는 작아집니다.를
β 작게 하면, 목표값 변경에 대한 미분의 효과는 커집니다.를
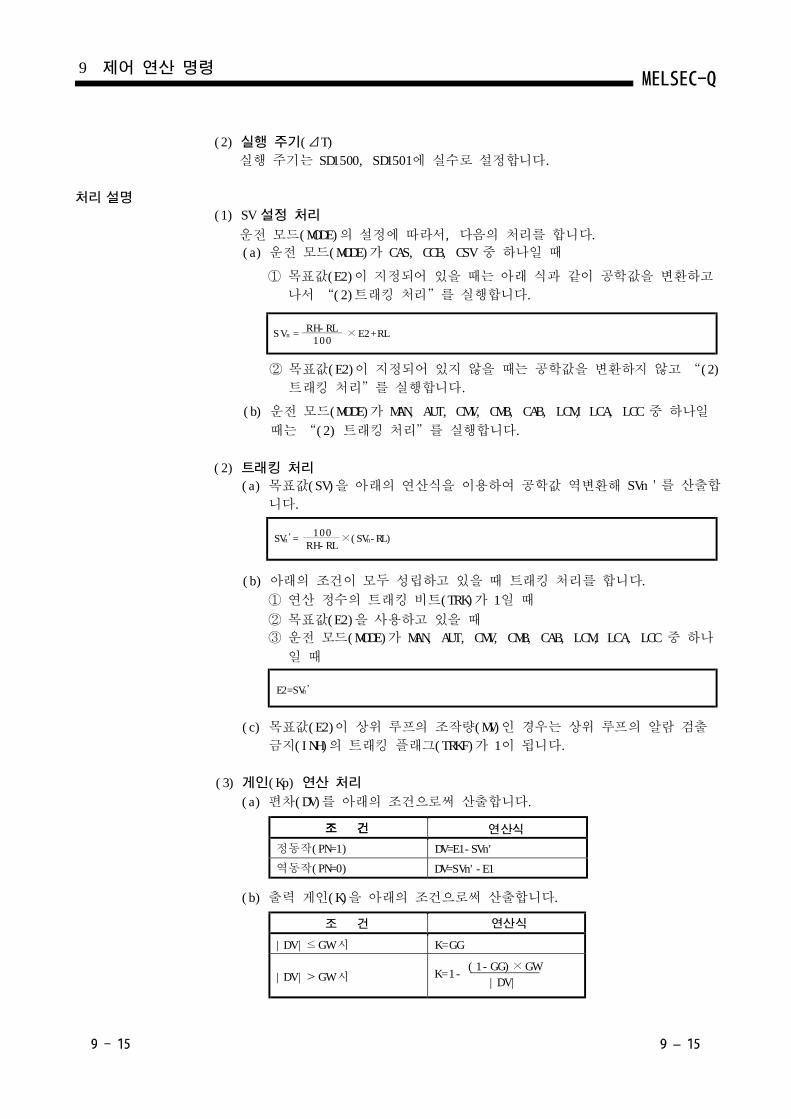
조 건조 건
조 건
연산식
정동작(PN=1) DV=E1-SVn'
역동작(PN=0) DV=SVn'-E1
연산식
|DV |≤GW 시 K=GG
(1-GG)×GWK=1-|DV |>GW 시 |DV|
9 제어 연산 명령
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 설명
(1) SV 설정 처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)트래킹 처리”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
트래킹 처리”를 실행합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 실행합니다.
(2) 트래킹 처리
(a) 목표값(SV)을 아래의 연산식을 이용하여 공학값 역변환해 SVn'를 산출합
니다.
(b) 아래의 조건이 모두 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) (Kp)게인 연산 처리
(a) 편차(DV)를 아래의 조건으로써 산출합니다.
(b) 출력 게인(K)을 아래의 조건으로써 산출합니다.
S V = ×E2+RLn
SV ’= ×(SV -RL)n n
E2=SV’n
R H-RL100
100R H-RL
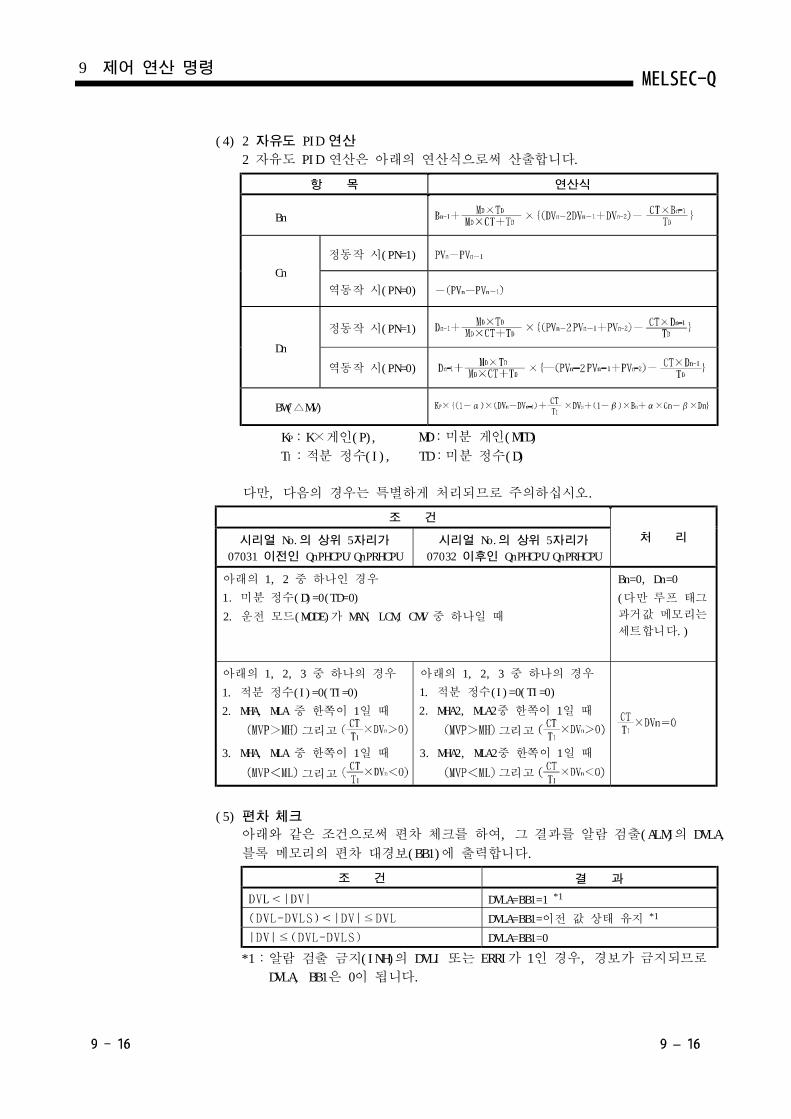
(4) 2 PID자유도 연산
2 자유도 PID 연산은 아래의 연산식으로써 산출합니다.
항 목 연산식
정동작 시(PN=1)
Bn
Cn
Dn
BW(△MV)
역동작 시(PN=0)
정동작 시(PN=1)
역동작 시(PN=0)
K :K×게인(P), MD:미분 게인(MTD)P
T :적분 정수(I), TD:미분 정수(D)I
다만, 다음의 경우는 특별하게 처리되므로 주의하십시오.
조 건
처 리시리얼 의 상위 자리가
이전인
No. 5
07031 QnPHCPU/QnPRHCPU
시리얼 의 상위 자리가
이후인
No. 5
07032 QnPHCPU/QnPRHCPU
아래의 1, 2 중 하나인 경우
1. 미분 정수(D)=0(TD=0)
2. 운전 모드(MODE)가 MAN, LCM, CMV 중 하나일 때
Bn=0, Dn=0
(다만 루프 태그
과거값 메모리는
세트합니다.)
아래의 1, 2, 3 중 하나의 경우
1. 적분 정수(I)=0(TI=0)
2. MHA, MLA 중 한쪽이 1일 때
그리고
그리고
3. MHA, MLA 중 한쪽이 1일 때
아래의 1, 2, 3 중 하나의 경우
1. 적분 정수(I)=0(TI=0)
2. MHA2, MLA2중 한쪽이 1일 때
그리고
그리고
3. MHA2, MLA2중 한쪽이 1일 때
(5) 편차 체크
아래와 같은 조건으로써 편차 체크를 하여, 그 결과를 알람 검출(ALM)의 DVLA,
블록 메모리의 편차 대경보(BB1)에 출력합니다.
조 건 결 과
DVLA=BB1=이전 값 상태 유지 *1
DVLA=BB1=1 *1
DVLA=BB1=0
*1:알람 검출 금지(INH)의 DVLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DVLA, BB1은 0이 됩니다.
9 제어 연산 명령
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.2 PID 명령을 종료합니다.
① BW를 0으로 합니다.
② 알람 검출(ALM)의 DVLA를 0으로 합니다.
③ 운전 모드(MODE)를 MAN으로 합니다.
④ BB의 BB1을 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN이 되면, “(7) 제어 주기 판정”을 실행합니다.
(7) 제어 주기 판정
(a) 지정된 제어 주기에 도달하지 않으면 BW(ΔMV)를 0으로 하고 S.2 PID 명
령을 종료합니다.
(b) 제어 주기에 도달하면 “(1) SV 설정 처리”를 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
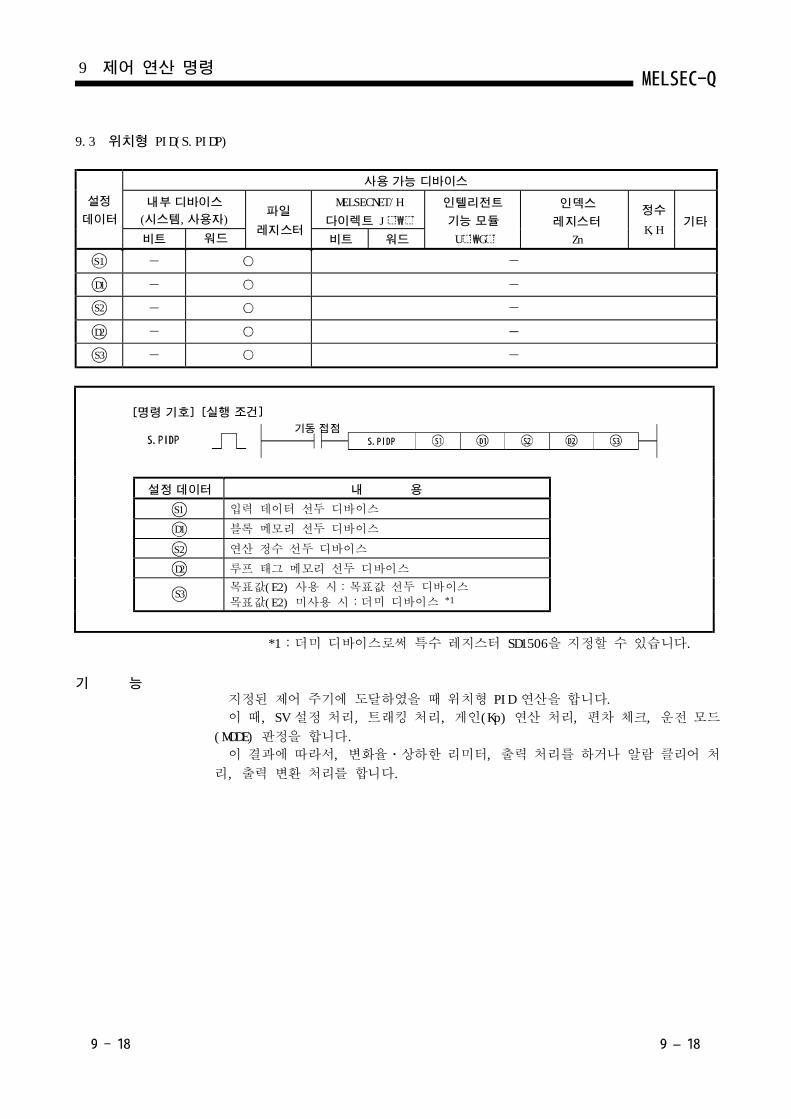
9.3 PID(S.PIDP)위치형
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시:목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
지정된 제어 주기에 도달하였을 때 위치형 PID 연산을 합니다.
이 때, SV 설정 처리, 트래킹 처리, 게인(Kp) 연산 처리, 편차 체크, 운전 모드
(MODE) 판정을 합니다.
이 결과에 따라서, 변화율ㆍ상하한 리미터, 출력 처리를 하거나 알람 클리어 처
리, 출력 변환 처리를 합니다.
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
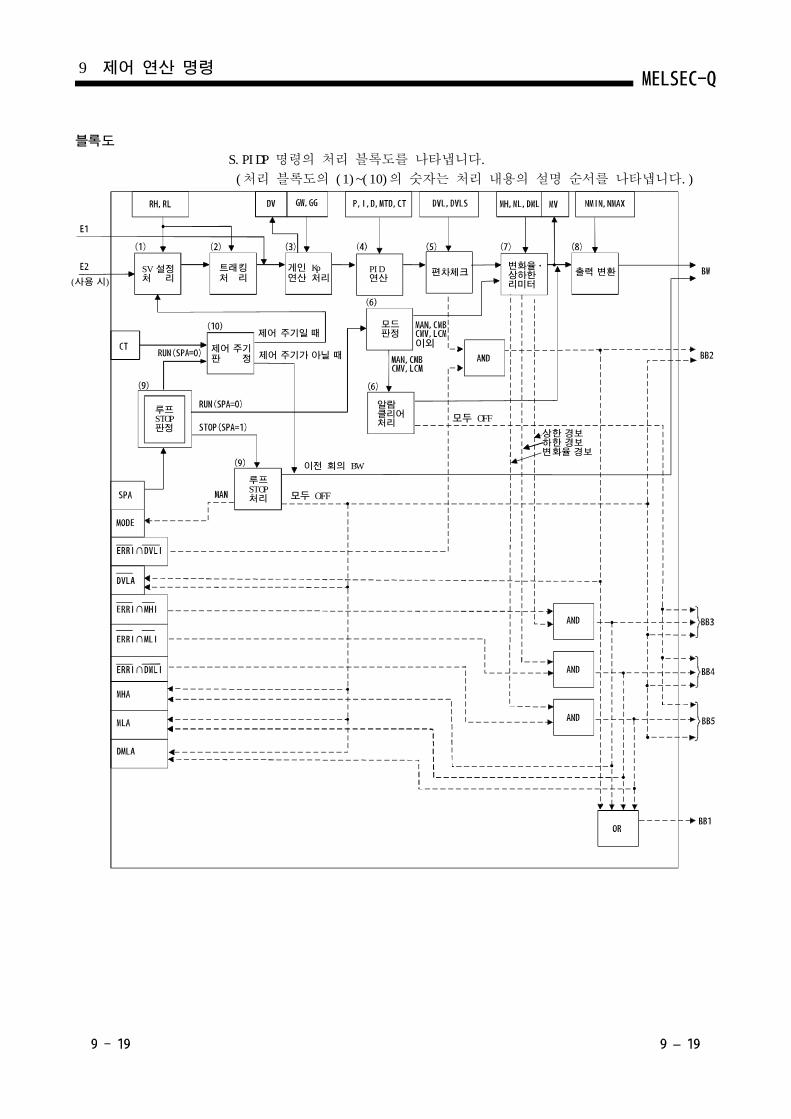
블록도
S.PIDP 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(10)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
9 제어 연산 명령
상한 경보하한 경보변화율 경보
모드판정
변화율ㆍ상하한리미터
알람클리어처리
루프
판정STOP
출력 변환SV 설정처 리
트래킹처 리
게인연산 처리
Kp PID연산
편차체크
제어 주기판 정
제어 주기일때
제어 주기가 아닐 때
이전 회의 BW
루프
처리STOP
모두 OFF
모두 OFF
이외
(사용 시)
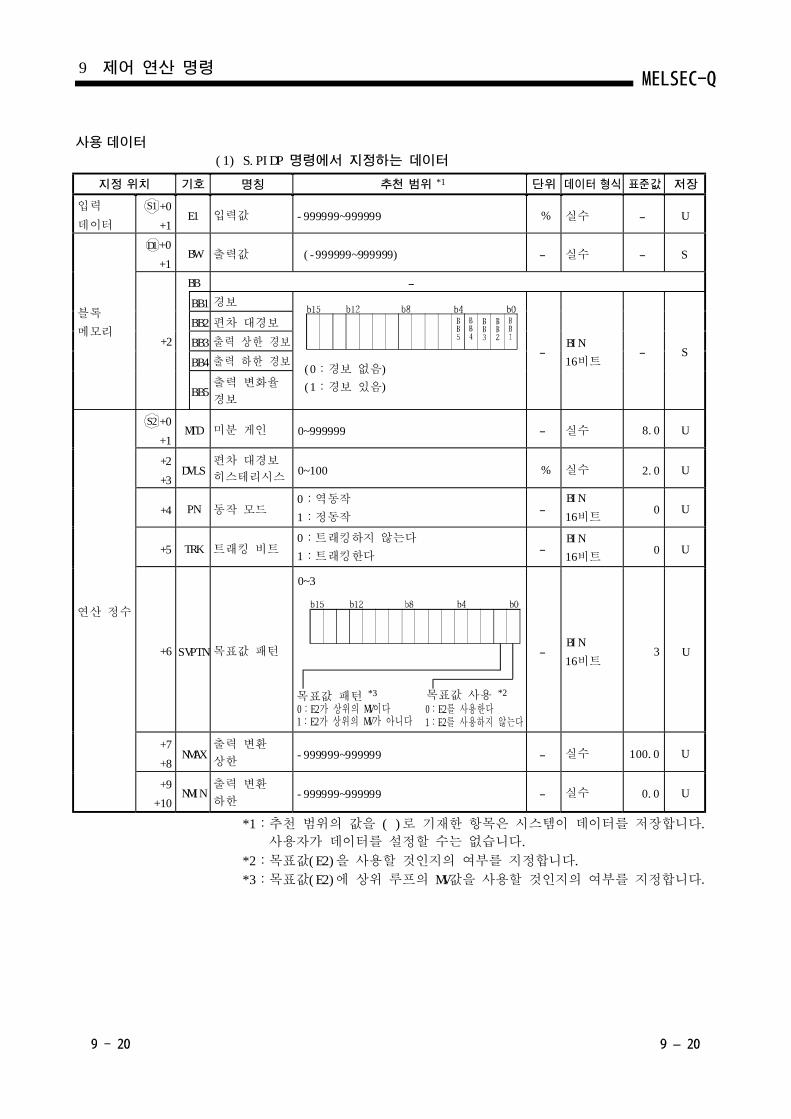
사용 데이터
(1) S.PIDP 명령에서 지정하는 데이터
입력값
출력값
경보
편차 대경보
출력 상한 경보
출력 하한 경보
출력 변화율
경보
(0:경보 없음)
(1:경보 있음)
연산 정수
미분 게인
편차 대경보
히스테리시스
동작 모드0:역동작
1:정동작
트래킹 비트0:트래킹하지 않는다
1:트래킹한다
목표값 패턴
출력 변환
상한
출력 변환
하한
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
9 제어 연산 명령
블록
메모리
입력
데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
E1
BW
BB
BB1
BB2
BB3
BB4
BB5
MTD
DVLS
PN
TRK
SVPTN
NMAX
NMIN
+0
+1
+2
+5
+6
+7
+8
+9
+10
+4
+2
+3
+0
+1
-999999~999999
-999999~999999
-999999~999999
(-999999~999999)
0~999999
0~100
0~3
S1
D1
+0
+1
S2
S
S
2.0
8.0
0
0
3
U
U
U
U
U
U
%
%
-
-
-
- -
- -
-
-
-
-
-
0.0
100.0
U
U
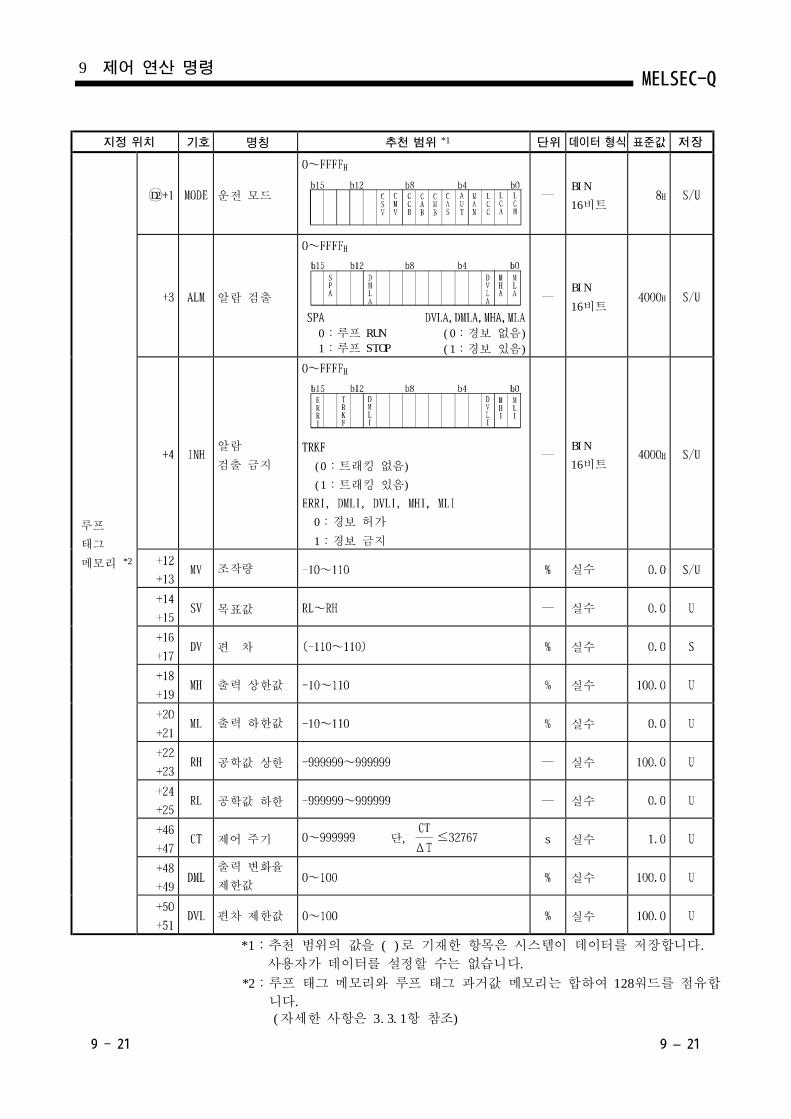
0:루프 RUN
1:루프 STOP(0:경보 없음)
(1:경보 있음)
(0:트래킹 없음)
(1:트래킹 있음)
0:경보 허가
1:경보 금지
조작량
출력 상한값
출력 하한값
출력 변화율
제한값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프
태그
메모리 *2
운전 모드
알람 검출
알람
검출 금지
목표값
편 차
공학값 상한
공학값 하한
제어 주기
편차 제한값
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
단,
D2
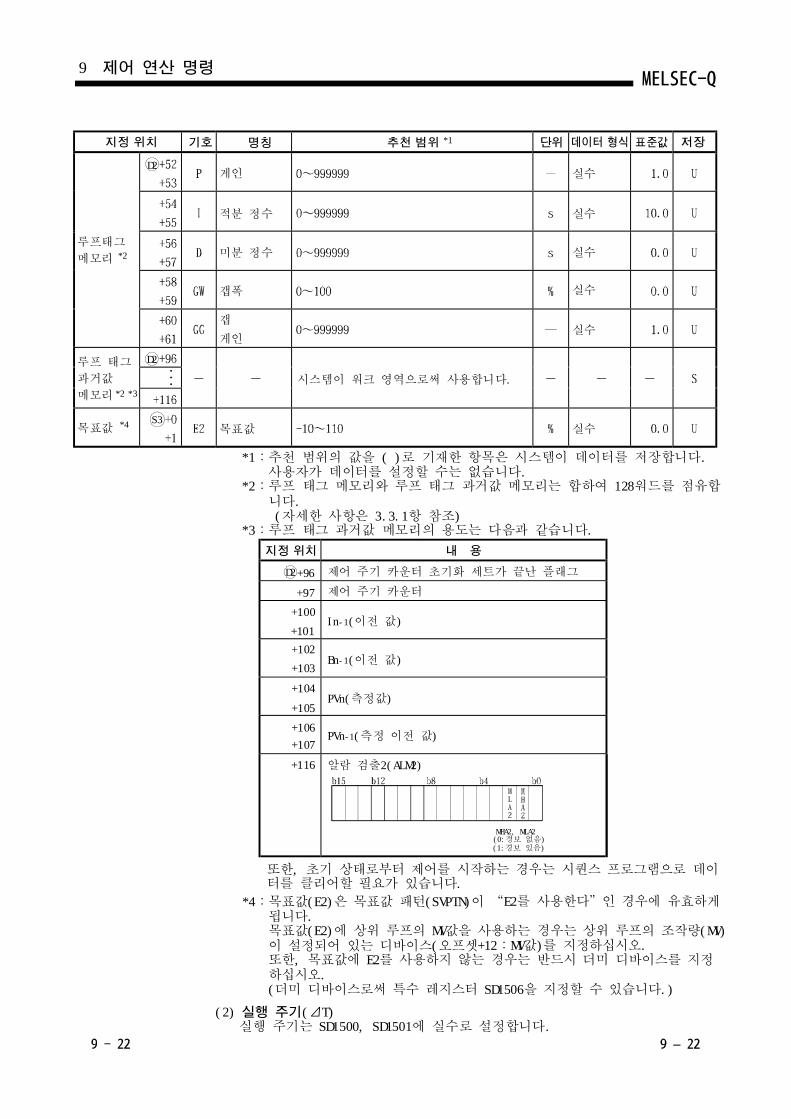
루프 태그
과거값
메모리 *2 *3
게인
적분 정수
미분 정수
갭폭
갭
게인
시스템이 워크 영역으로써 사용합니다.
목표값 *4 목표값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합니다.(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
제어 주기 카운터 초기화 세트가 끝난 플래그
제어 주기 카운터
In (이전 값)-1
Bn (이전 값)-1
PVn(측정값)
PVn (측정 이전 값)-1
알람 검출2(ALM2)
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를 클리어할 필요가 있습니다.
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하게됩니다.목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정하십시오.(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
(2) ( T)실행 주기 Δ실행 주기는 SD1500, SD1501에 실수로 설정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프태그
메모리 *2
실수
실수
실수
실수
실수
실수
지정 위치 내 용
(0:경보 없음)(1:경보 있음)
D2+96
+97
+100
+101
+102
+103
+104
+105
+106
+107
+116
MHA2, MLA2
S3
D2
D2
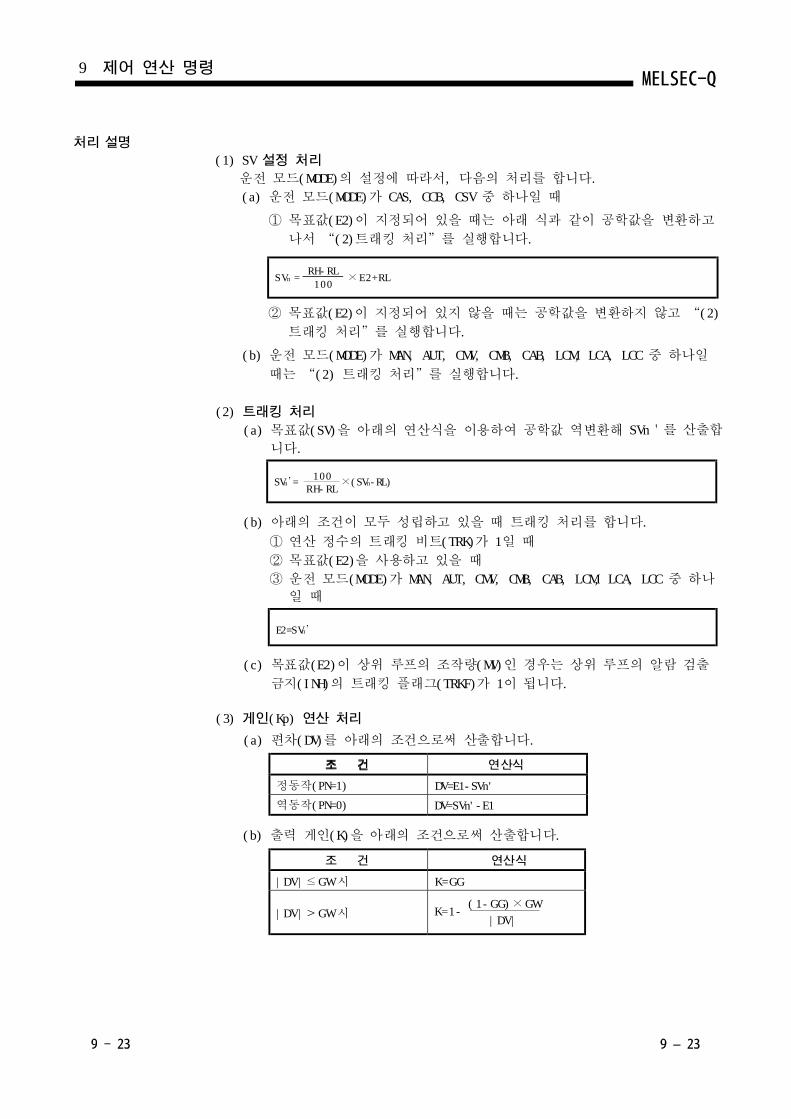
조 건조 건
조 건
연산식
정동작(PN=1) DV=E1-SVn'
역동작(PN=0) DV=SVn'-E1
연산식
|DV |≤GW 시 K=GG
(1-GG)×GWK=1-|DV |>GW 시
|DV|
처리 설명
(1) SV 설정 처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)트래킹 처리”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
트래킹 처리”를 실행합니다.
(2) 트래킹 처리
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 실행합니다.
(a) 목표값(SV)을 아래의 연산식을 이용하여 공학값 역변환해 SVn'를 산출합
니다.
(b) 아래의 조건이 모두 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) (Kp)게인 연산 처리
(a) 편차(DV)를 아래의 조건으로써 산출합니다.
(b) 출력 게인(K)을 아래의 조건으로써 산출합니다.
9 제어 연산 명령
SV = ×E2+RLn
SV ’= ×(SV -RL)n n
E2=SV’n
RH-RL
100
100R H-RL
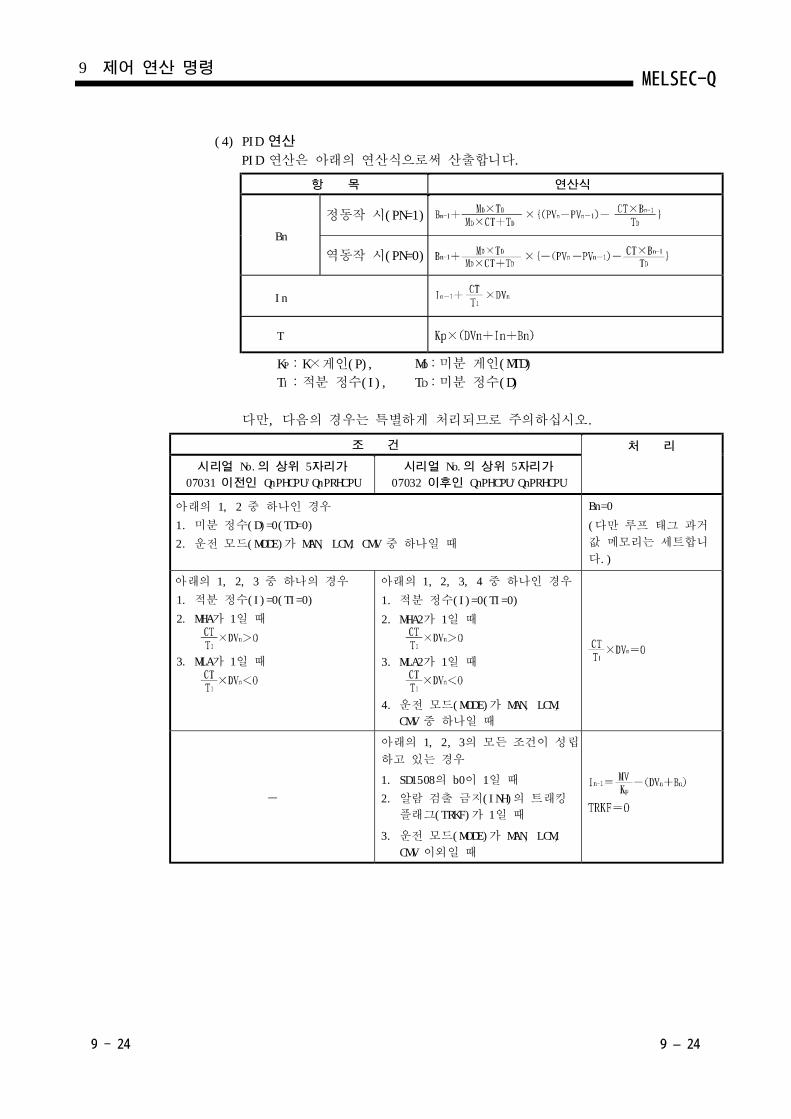
(4) PID 연산
PID 연산은 아래의 연산식으로써 산출합니다.
정동작 시(PN=1)
Bn
In
T
역동작 시(PN=0)
K :K×게인(P), M :미분 게인(MTD)P D
T :적분 정수(I), T :미분 정수(D)I D
다만, 다음의 경우는 특별하게 처리되므로 주의하십시오.
조 건 처 리
아래의 1, 2 중 하나인 경우
1. 미분 정수(D)=0(TD=0)
2. 운전 모드(MODE)가 MAN, LCM, CMV 중 하나일 때
Bn=0
(다만 루프 태그 과거
값 메모리는 세트합니
다.)
아래의 1, 2, 3 중 하나의 경우
1. 적분 정수(I)=0(TI=0)
2. MHA가 1일 때
3. MLA가 1일 때
아래의 1, 2, 3, 4 중 하나인 경우
1. 적분 정수(I)=0(TI=0)
2. MHA2가 1일 때
3. MLA2가 1일 때
4. 운전 모드(MODE)가 MAN, LCM,
CMV 중 하나일 때
아래의 1, 2, 3의 모든 조건이 성립
하고 있는 경우
1. SD1508의 b0이 1일 때
2. 알람 검출 금지(INH)의 트래킹
플래그(TRKF)가 1일 때
3. 운전 모드(MODE)가 MAN, LCM,
CMV 이외일 때
시리얼 의 상위 자리가
이전인
No. 5
07031 QnPHCPU/QnPRHCPU
시리얼 의 상위 자리가
이후인
No. 5
07032 QnPHCPU/QnPRHCPU
항 목 연산식
9 제어 연산 명령
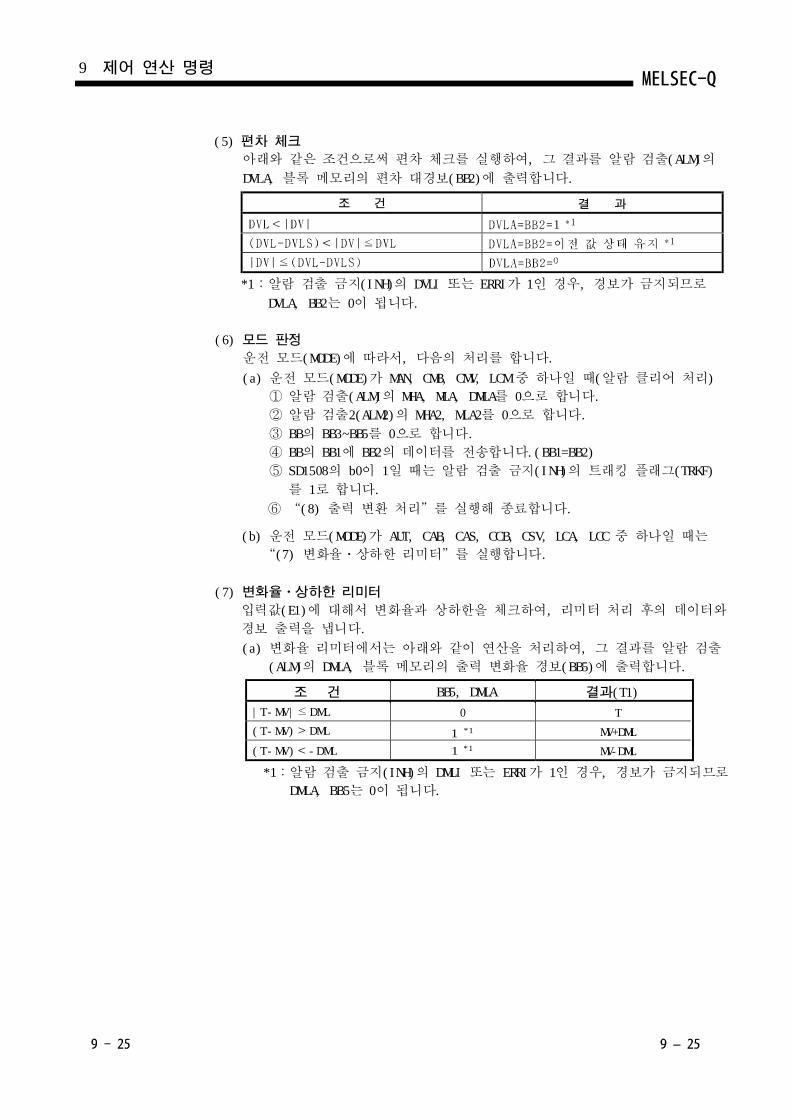
(5) 편차 체크
아래와 같은 조건으로써 편차 체크를 실행하여, 그 결과를 알람 검출(ALM)의
DVLA, 블록 메모리의 편차 대경보(BB2)에 출력합니다.
*1:알람 검출 금지(INH)의 DVLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DVLA, BB2는 0이 됩니다.
(6) 모드 판정
운전 모드(MODE)에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나일 때(알람 클리어 처리)
① 알람 검출(ALM)의 MHA, MLA, DMLA를 0으로 합니다.
② 알람 검출2(ALM2)의 MHA2, MLA2를 0으로 합니다.
③ BB의 BB3~BB5를 0으로 합니다.
④ BB의 BB1에 BB2의 데이터를 전송합니다.(BB1=BB2)
⑤ SD1508의 b0이 1일 때는 알람 검출 금지(INH)의 트래킹 플래그(TRKF)
를 1로 합니다.
⑥ “(8) 출력 변환 처리”를 실행해 종료합니다.
(b) 운전 모드(MODE)가 AUT, CAB, CAS, CCB, CSV, LCA, LCC 중 하나일 때는
“(7) 변화율ㆍ상하한 리미터”를 실행합니다.
(7) 변화율ㆍ상하한 리미터
입력값(E1)에 대해서 변화율과 상하한을 체크하여, 리미터 처리 후의 데이터와
경보 출력을 냅니다.
(a) 변화율 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 알람 검출
(ALM)의 DMLA, 블록 메모리의 출력 변화율 경보(BB5)에 출력합니다.
*1:알람 검출 금지(INH)의 DMLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DMLA, BB5는 0이 됩니다.
조 건 결 과
9 제어 연산 명령
조 건 BB5, DMLA 결과(T1)
1 *1
1 *1
0 T
MV+DML
MV-DML
|T-MV|≤DML
(T-MV)>DML
(T-MV)<-DML
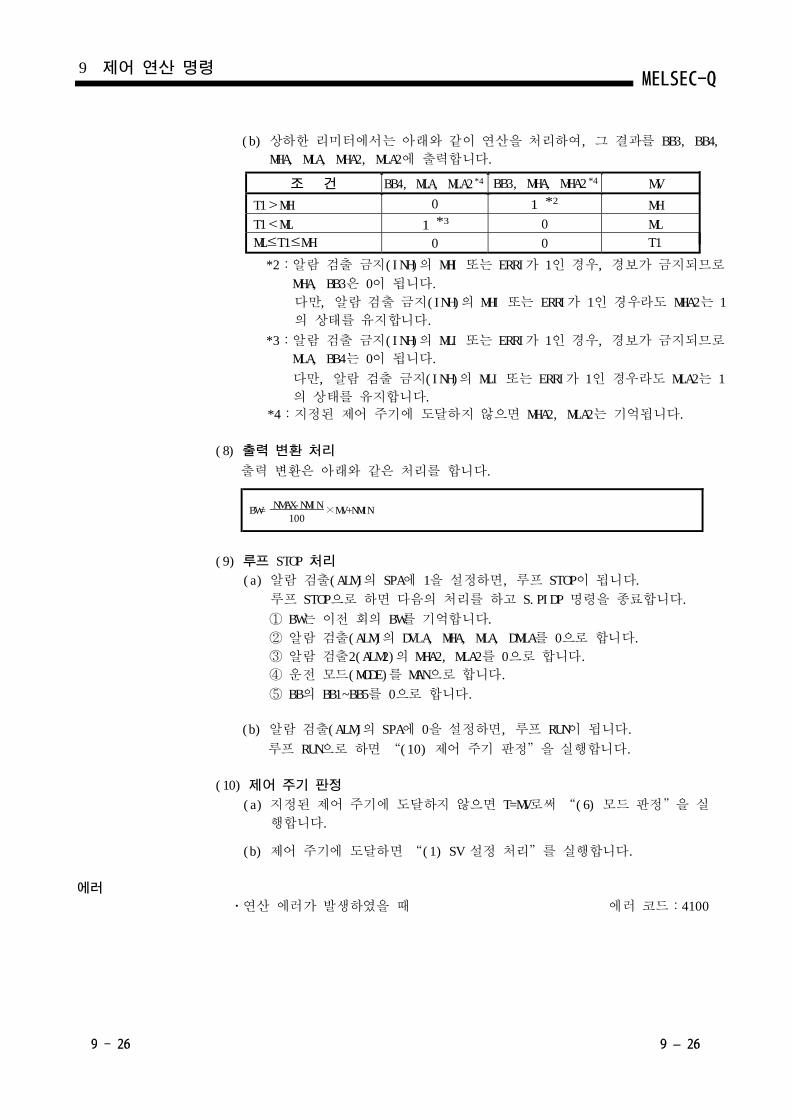
(b) 상하한 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 BB3, BB4,
MHA, MLA, MHA2, MLA2에 출력합니다.
*2:알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우, 경보가 금지되므로
MHA, BB3은 0이 됩니다.
다만, 알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우라도 MHA2는 1
의 상태를 유지합니다.
*3:알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우, 경보가 금지되므로
MLA, BB4는 0이 됩니다.
다만, 알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우라도 MLA2는 1
의 상태를 유지합니다.
*4:지정된 제어 주기에 도달하지 않으면 MHA2, MLA2는 기억됩니다.
(8) 출력 변환 처리
출력 변환은 아래와 같은 처리를 합니다.
(9) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.PIDP 명령을 종료합니다.
① BW는 이전 회의 BW를 기억합니다.
② 알람 검출(ALM)의 DVLA, MHA, MLA, DMLA를 0으로 합니다.
③ 알람 검출2(ALM2)의 MHA2, MLA2를 0으로 합니다.
④ 운전 모드(MODE)를 MAN으로 합니다.
⑤ BB의 BB1~BB5를 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면 “(10) 제어 주기 판정”을 실행합니다.
(10) 제어 주기 판정
(a) 지정된 제어 주기에 도달하지 않으면 T=MV로써 “(6) 모드 판정”을 실
행합니다.
(b) 제어 주기에 도달하면 “(1) SV 설정 처리”를 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
BW=NMAX-NMIN
×MV+NMIN100
BB3, MHA, MHA2 *4 MV
1 *2
0
0
MH
ML
T1
BB4, MLA, MLA2 *4조 건
1 *30
0
T1>MH
T1<ML
ML T1 MH≤ ≤
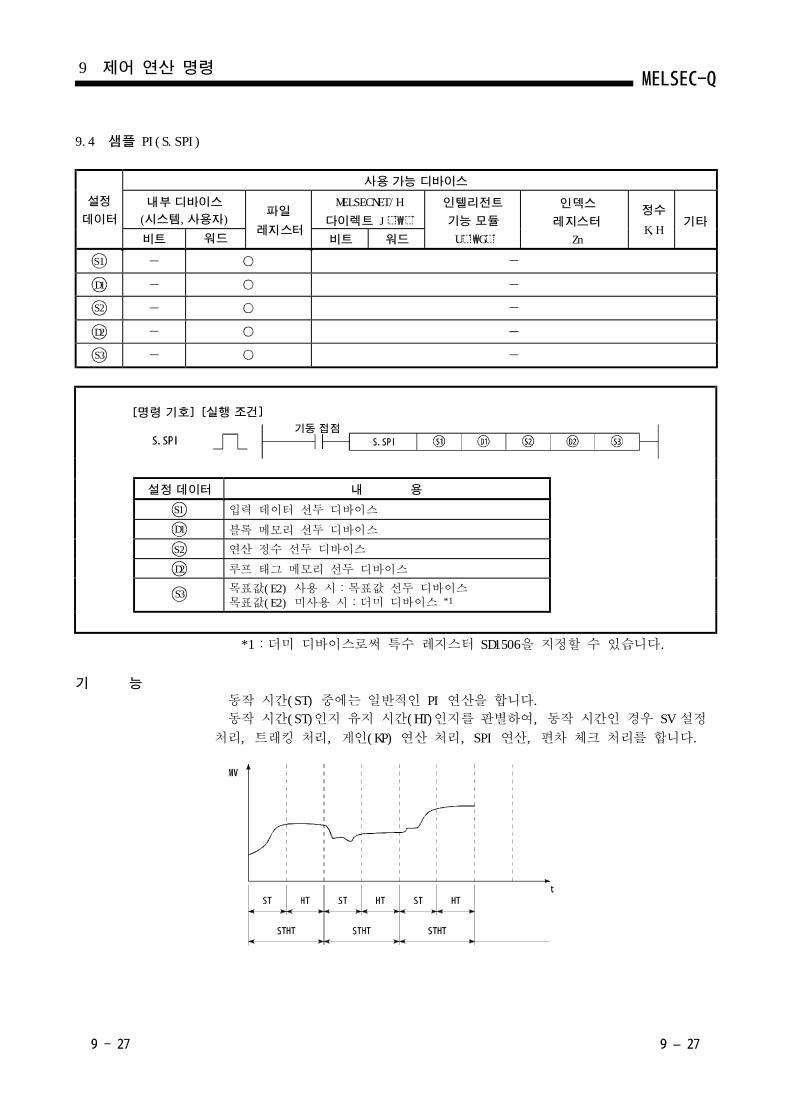
9.4 PI(S.SPI)샘플
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시:목표값 선두 디바이스목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
동작 시간(ST) 중에는 일반적인 PI 연산을 합니다.
동작 시간(ST)인지 유지 시간(HT)인지를 판별하여, 동작 시간인 경우 SV 설정
처리, 트래킹 처리, 게인(KP) 연산 처리, SPI 연산, 편차 체크 처리를 합니다.
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
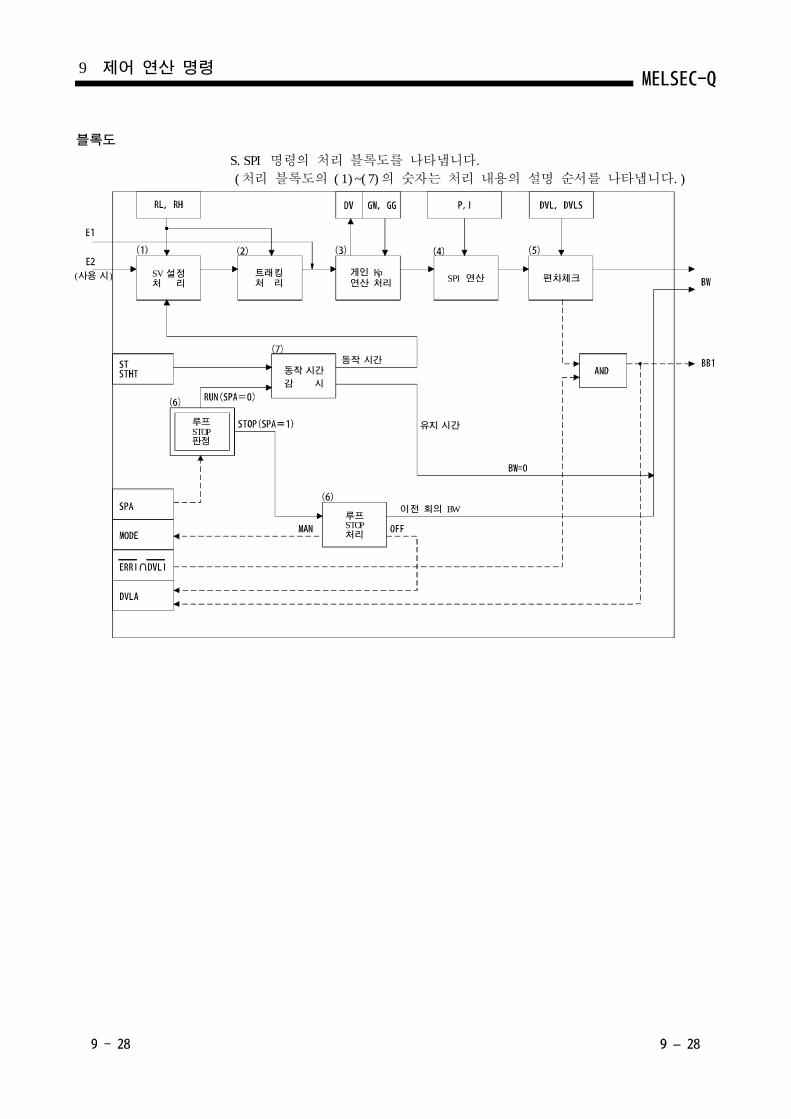
블록도
S.SPI 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
동작 시간
감 시
동작 시간
유지 시간
9 제어 연산 명령
(사용 시) SV 설정처 리
트래킹처 리
게인연산 처리
KpSPI 연산 편차체크
이전 회의 BW
루프
판정STOP
루프
처리STOP
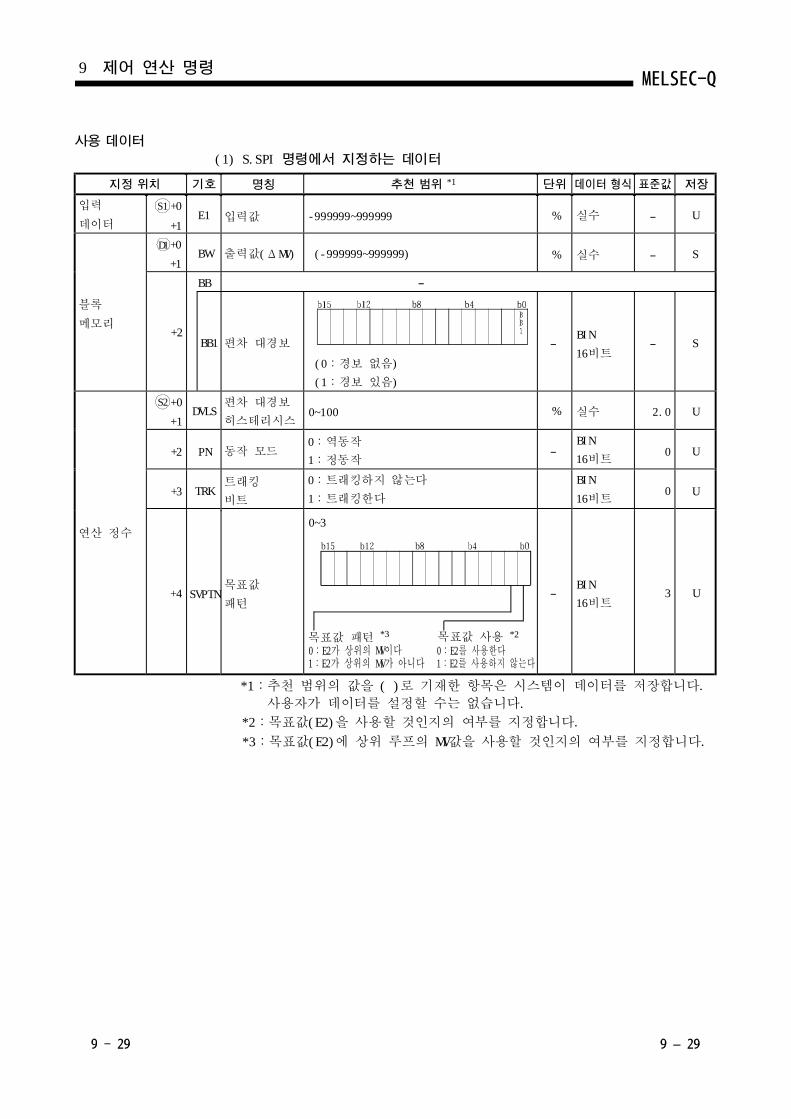
사용 데이터
(1) S.SPI 명령에서 지정하는 데이터
입력
데이터
블록
메모리
입력값
출력값(ΔMV)
편차 대경보
(0:경보 없음)
(1:경보 있음)
연산 정수
편차 대경보
히스테리시스
동작 모드0:역동작
1:정동작
트래킹
비트
0:트래킹하지 않는다
1:트래킹한다
목표값
패턴
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
E1
BW
BB
BB1
DVLS
PN
TRK
SVPTN
+0
+1
+2
+4
+2
+3
+0
+1
-999999~999999
(-999999~999999)
0~100
0~3
S1
D1
+0
+1
S2
S
S
0
2.0
0
3
U
U
U
U
U
%
%
%
-
- -
-
-
-
-
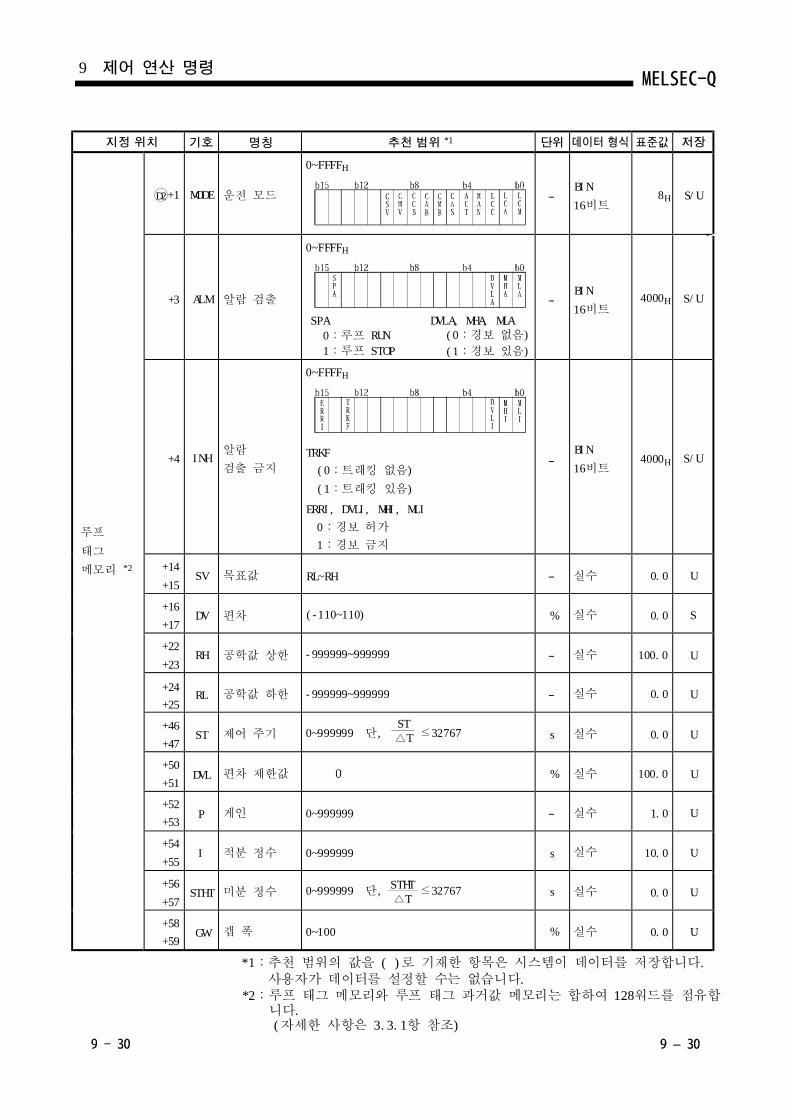
0:루프 RUN
1:루프 STOP
(0:경보 없음)
(1:경보 있음)
(0:트래킹 없음)
(1:트래킹 있음)
0:경보 허가
1:경보 금지
공학값 상한
공학값 하한
편차 제한값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합니다.(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프
태그
메모리 *2
운전 모드
알람 검출
알람
검출 금지
목표값
편차
제어 주기
게인
적분 정수
미분 정수
갭 폭
실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
MODE
ALM
INH
SV
DV
RH
RL
ST
DVL
P
I
STHT
GW
+1D2
+3
+4
+14
+16
+22
+24
+46
+50
+52
+54
+56
+58
+15
+17
+23
+25
+47
+51
+53
+55
+57
+59
100.0
100.0
S
U
U
8H
4000H
4000H
0.0
0.0
0.0
0.0
10.0
1.0
0.0
S/U
S/U
S/U
U
U
U
U
U
U
0.0 U
%
%
s
s
s
%
-
-
-
-
-
-
-
-999999~999999
-999999~999999
0~999999
0~999999
0~FFFFH
0~FFFFH
0~FFFFH
TRKF
ERRI, DVLI, MHI, MLI
0~100
(-110~110)
RL~RH
0~999999 단, ≤32767
0~999999 단, ≤32767
ST△T
STHT△T
SPA DVLA, MHA, MLA
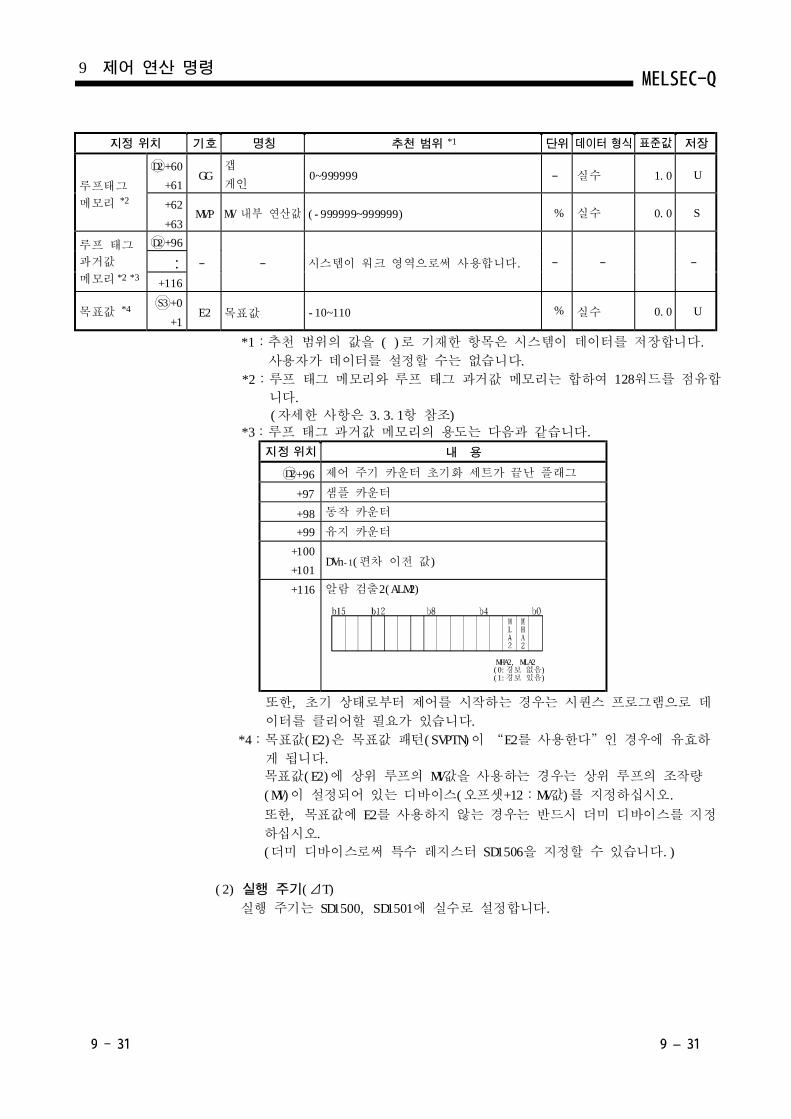
갭
게인
MV 내부 연산값
시스템이 워크 영역으로써 사용합니다.
목표값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
제어 주기 카운터 초기화 세트가 끝난 플래그
샘플 카운터
동작 카운터
유지 카운터
DVn (편차 이전 값)-1
알람 검출2(ALM2)
(0:경보 없음)(1:경보 있음)
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데
이터를 클리어할 필요가 있습니다.
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하
게 됩니다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량
(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정
하십시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
과거값
메모리 *2 *3
목표값 *4
루프태그
메모리 *2
실수
실수
실수
지정 위치 내 용
GG
MVP
E2
(-999999~999999)
0~999999
-10~110+0
+1
S3
+60
+96
+62
+61
+63
+116
D2
D2
--
D2+96
+97
+98
+99
+100
+101
+116
MHA2, MLA2
%
%
- - -
-
0.0
1.0
0.0
U
U
S
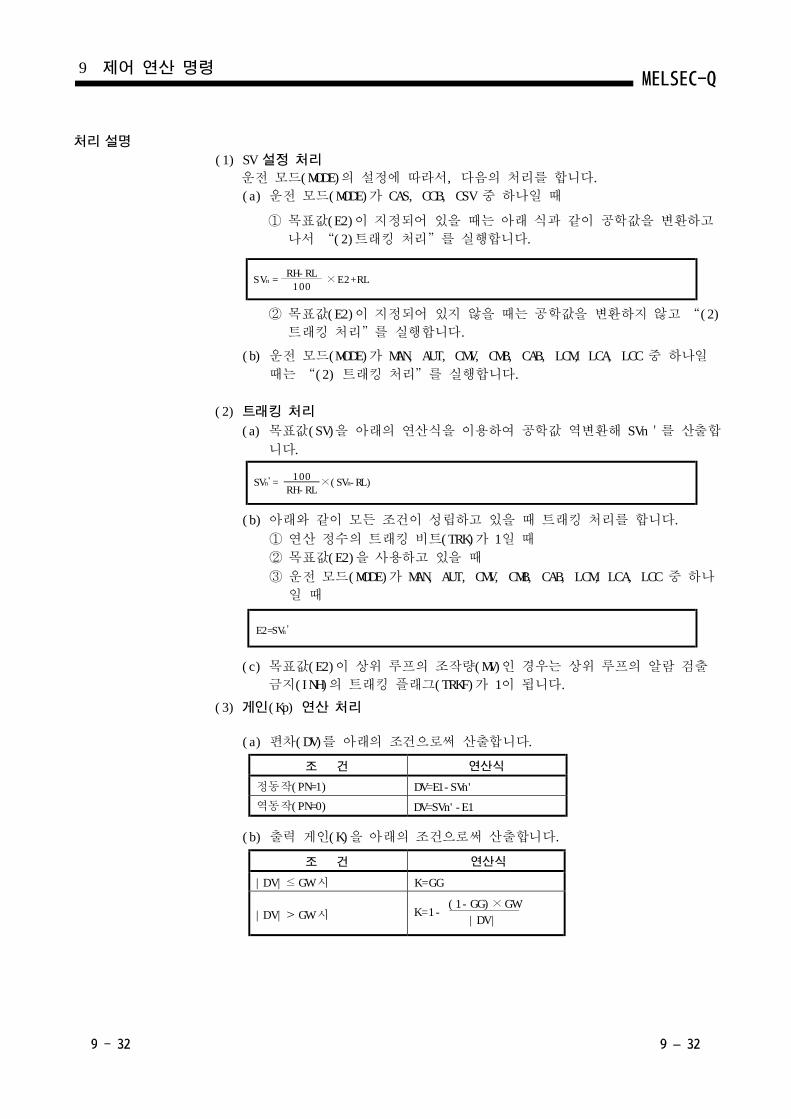
처리 설명
(1) SV 설정 처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)트래킹 처리”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
트래킹 처리”를 실행합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 실행합니다.
(2) 트래킹 처리
(a) 목표값(SV)을 아래의 연산식을 이용하여 공학값 역변환해 SVn'를 산출합
니다.
(b) 아래와 같이 모든 조건이 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) (Kp)게인 연산 처리
(a) 편차(DV)를 아래의 조건으로써 산출합니다.
(b) 출력 게인(K)을 아래의 조건으로써 산출합니다.
9 제어 연산 명령
조 건
조 건
연산식
정동작(PN=1) DV=E1-SVn'
역동작(PN=0) DV=SVn'-E1
연산식
|DV|≤ GW 시 K=GG
(1-GG)×GWK=1-|DV|> GW 시 |DV |
SV = ×E2+RLn
SV ’= ×(SV -RL)n n
E2=SV ’n
RH-RL
100
100
RH-RL
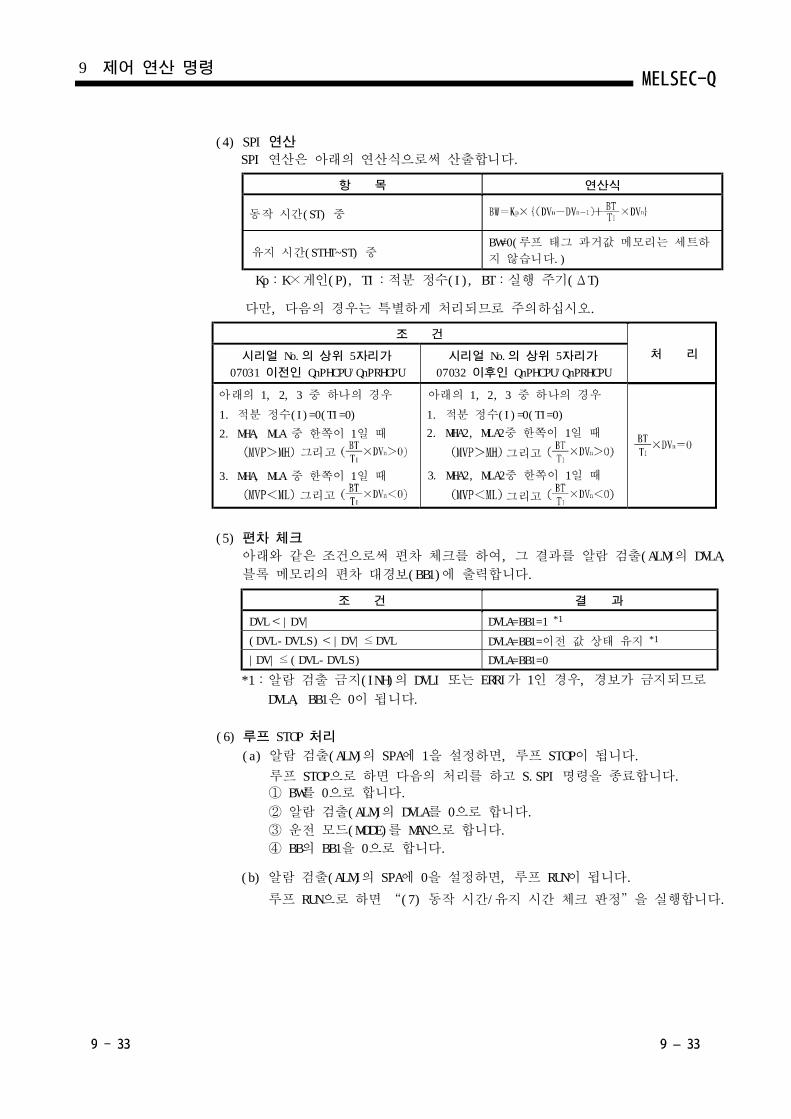
(4) SPI 연산
SPI 연산은 아래의 연산식으로써 산출합니다.
동작 시간(ST) 중
유지 시간(STHT~ST) 중BW=0(루프 태그 과거값 메모리는 세트하
지 않습니다.)
Kp:K×게인(P), TI:적분 정수(I), BT:실행 주기(ΔT)
다만, 다음의 경우는 특별하게 처리되므로 주의하십시오.
아래의 1, 2, 3 중 하나의 경우
1. 적분 정수(I)=0(TI=0)
2. MHA, MLA 중 한쪽이 1일 때
그리고
3. MHA, MLA 중 한쪽이 1일 때
그리고
아래의 1, 2, 3 중 하나의 경우
1. 적분 정수(I)=0(TI=0)
2. MHA2, MLA2중 한쪽이 1일 때
그리고
3. MHA2, MLA2중 한쪽이 1일 때
그리고
(5) 편차 체크
아래와 같은 조건으로써 편차 체크를 하여, 그 결과를 알람 검출(ALM)의 DVLA,
블록 메모리의 편차 대경보(BB1)에 출력합니다.
*1:알람 검출 금지(INH)의 DVLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DVLA, BB1은 0이 됩니다.
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.SPI 명령을 종료합니다.① BW를 0으로 합니다.
② 알람 검출(ALM)의 DVLA를 0으로 합니다.
③ 운전 모드(MODE)를 MAN으로 합니다.
④ BB의 BB1을 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면 “(7) 동작 시간/유지 시간 체크 판정”을 실행합니다.
9 제어 연산 명령
조 건
처 리시리얼 의 상위 자리가
이전인
No. 5
07031 QnPHCPU/QnPRHCPU
시리얼 의 상위 자리가
이후인
No. 5
07032 QnPHCPU/QnPRHCPU
항 목 연산식
조 건 결 과
DVLA=BB1=이전 값 상태 유지 *1
DVLA=BB1=1 *1
DVLA=BB1=0
DVL<|DV|
(DVL-DVLS)<|DV|≤DVL
|DV|≤(DVL-DVLS)
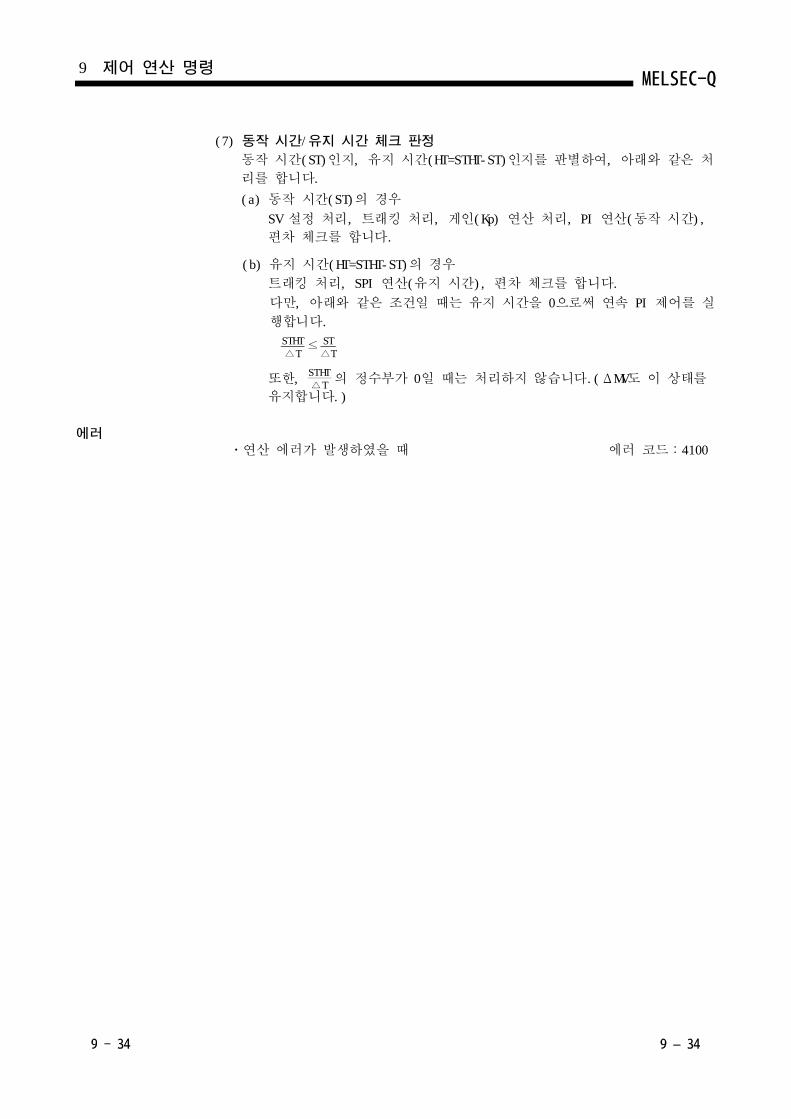
(7) /동작 시간 유지 시간 체크 판정
동작 시간(ST)인지, 유지 시간(HT=STHT-ST)인지를 판별하여, 아래와 같은 처
리를 합니다.
(a) 동작 시간(ST)의 경우
SV 설정 처리, 트래킹 처리, 게인(Kp) 연산 처리, PI 연산(동작 시간),
편차 체크를 합니다.
(b) 유지 시간(HT=STHT-ST)의 경우
트래킹 처리, SPI 연산(유지 시간), 편차 체크를 합니다.
다만, 아래와 같은 조건일 때는 유지 시간을 0으로써 연속 PI 제어를 실
행합니다.
또한, 의 정수부가 0일 때는 처리하지 않습니다.(ΔMV도 이 상태를
유지합니다.)
에러ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
STHT△T
STHT△T
ST△T
≤
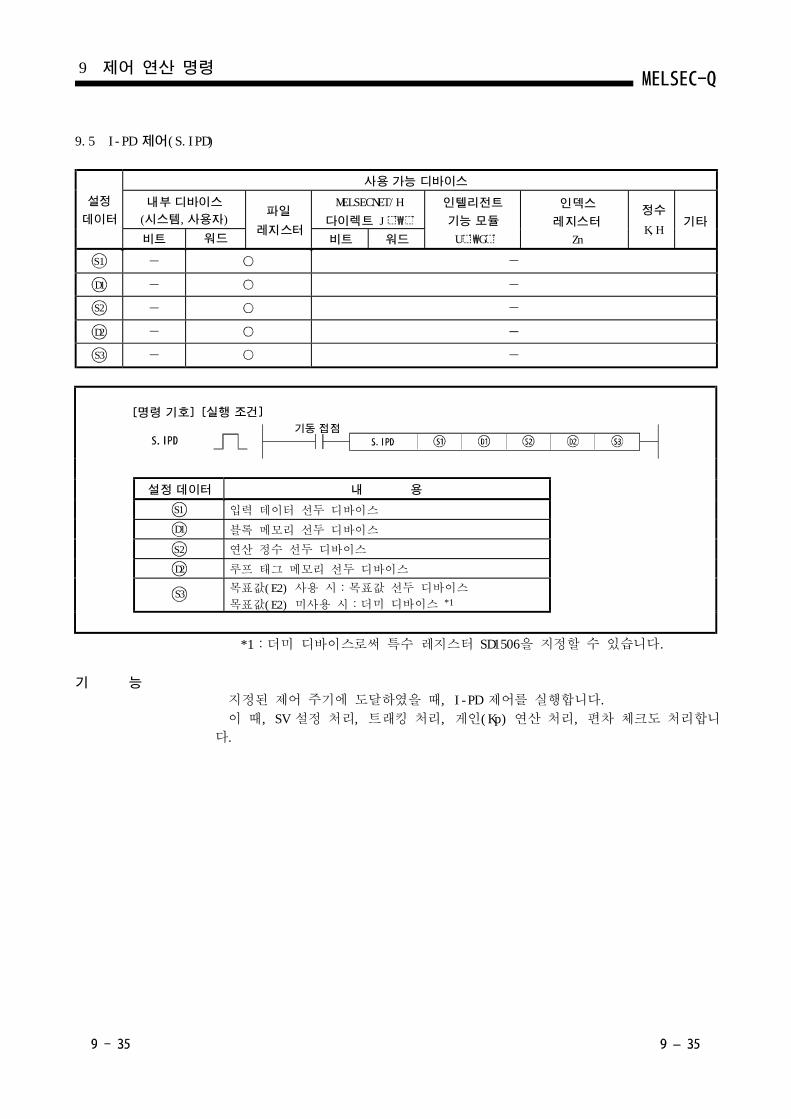
9.5 I-PD (S.IPD)제어
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시:목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
지정된 제어 주기에 도달하였을 때, I-PD 제어를 실행합니다.
이 때, SV 설정 처리, 트래킹 처리, 게인(Kp) 연산 처리, 편차 체크도 처리합니
다.
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
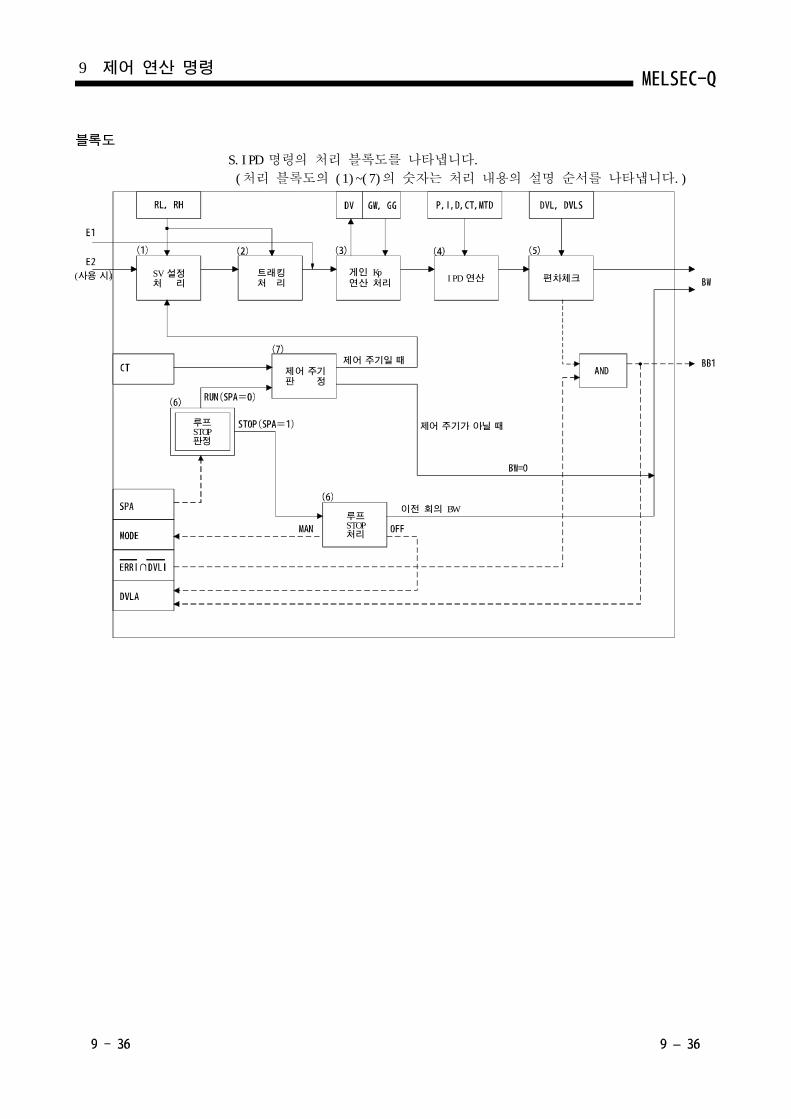
블록도
S.IPD 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
9 제어 연산 명령
루프
판정STOP
제어 주기판 정
제어 주기일 때
제어 주기가 아닐 때
이전 회의 BW루프
처리STOP
(사용 시) SV 설정처 리
트래킹처 리
게인연산 처리
KpIPD 연산 편차체크
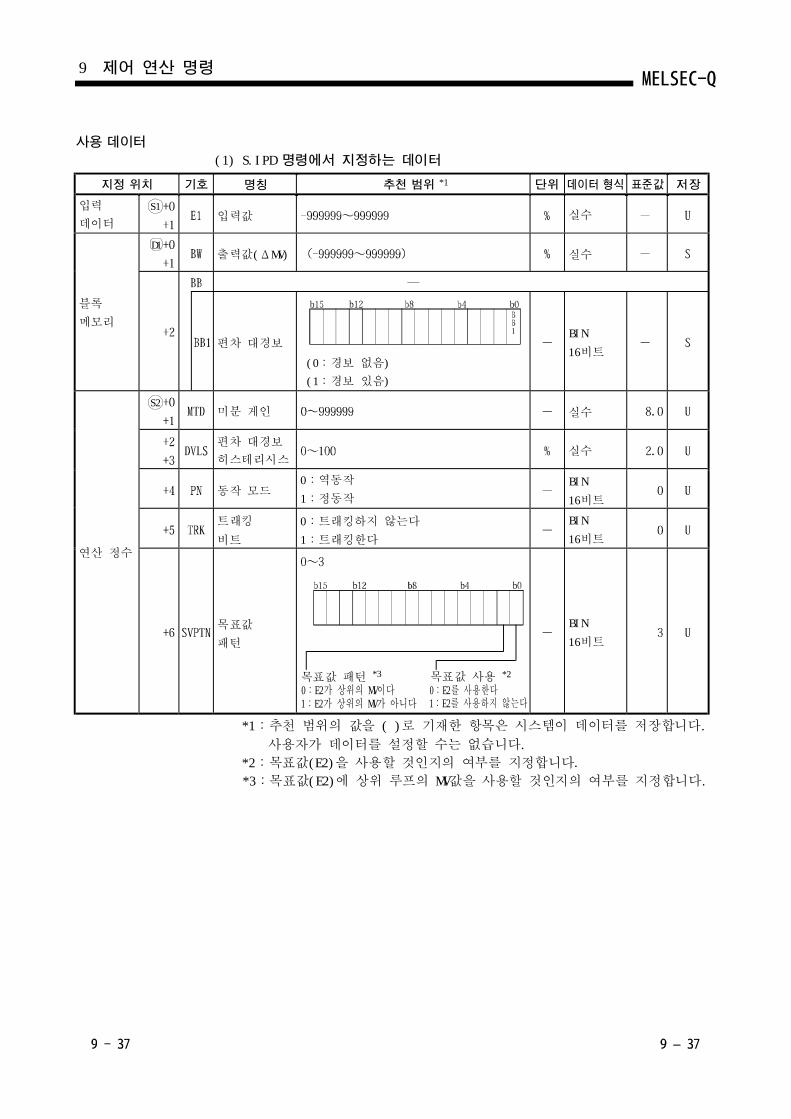
사용 데이터
(1) S.IPD 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리
출력값(ΔMV)
편차 대경보
(0:경보 없음)
(1:경보 있음)
연산 정수
미분 게인
편차 대경보
히스테리시스
동작 모드0:역동작
1:정동작
트래킹
비트
0:트래킹하지 않는다
1:트래킹한다
목표값
패턴
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
S1
S2
D1
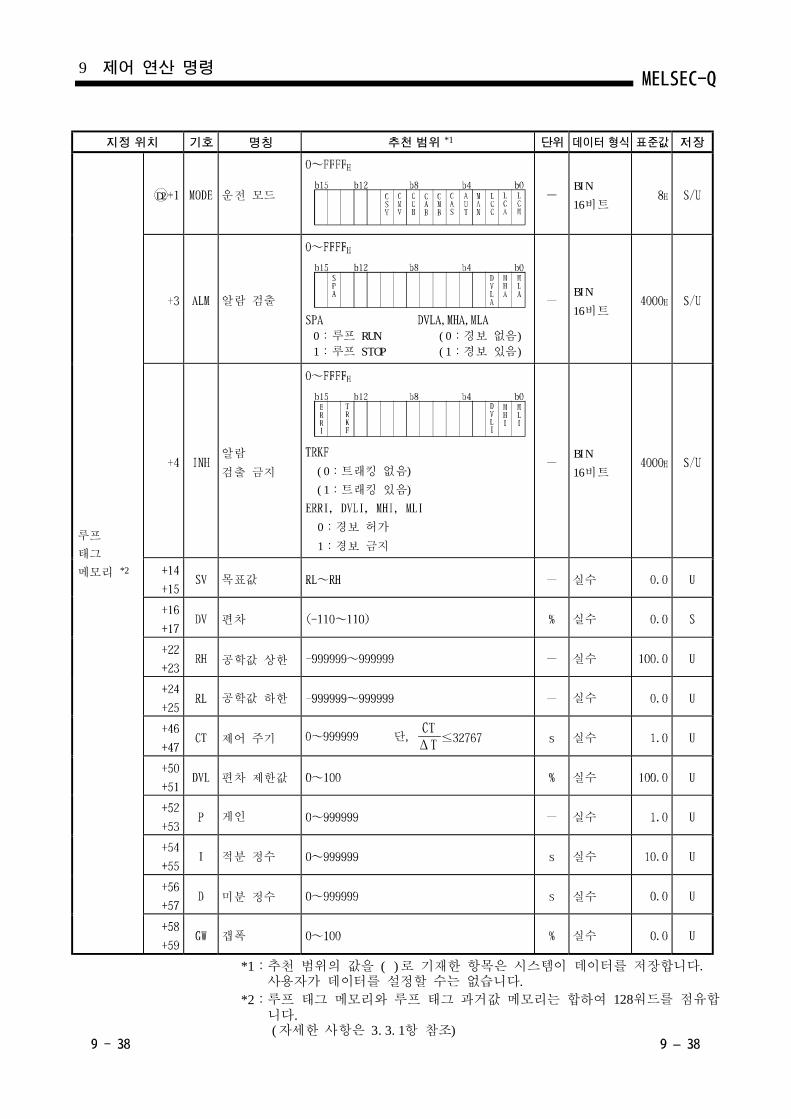
운전 모드
알람 검출
0:루프 RUN (0:경보 없음)
1:루프 STOP (1:경보 있음)
알람
검출 금지 (0:트래킹 없음)
(1:트래킹 있음)
0:경보 허가
1:경보 금지
목표값
편차
공학값 상한
공학값 하한
제어 주기 단,
편차 제한값
게인
적분 정수
미분 정수
갭폭
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합니다.(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프
태그
메모리 *2실수
실수
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트D2
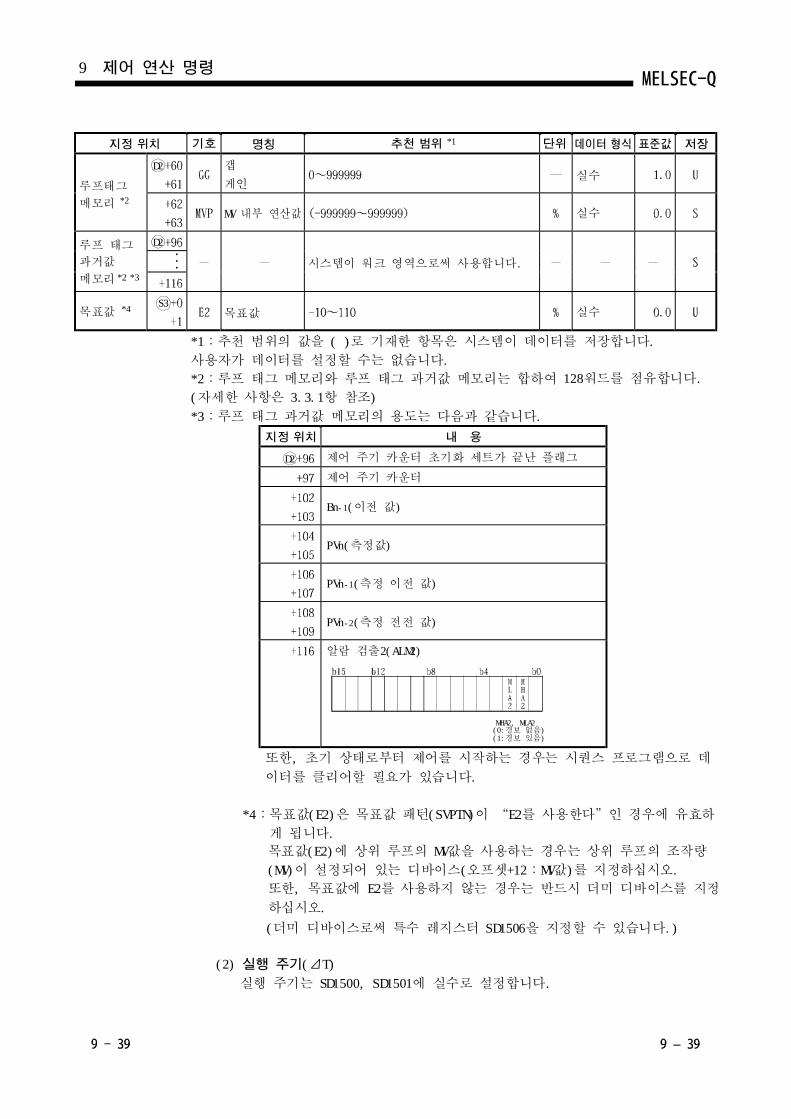
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합니다.
(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
제어 주기 카운터 초기화 세트가 끝난 플래그
제어 주기 카운터
Bn (이전 값)-1
PVn(측정값)
PVn (측정 이전 값)-1
PVn (측정 전전 값)-2
알람 검출2(ALM2)
(0:경보 없음)(1:경보 있음)
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데
이터를 클리어할 필요가 있습니다.
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하
게 됩니다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량
(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정
하십시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
갭
게인
MV 내부 연산값
시스템이 워크 영역으로써 사용합니다.
목표값
루프 태그
과거값
메모리 *2 *3
목표값 *4
루프태그
메모리 *2
실수
실수
실수
지정 위치 내 용
S3
D2
D2
D2
MHA2, MLA2
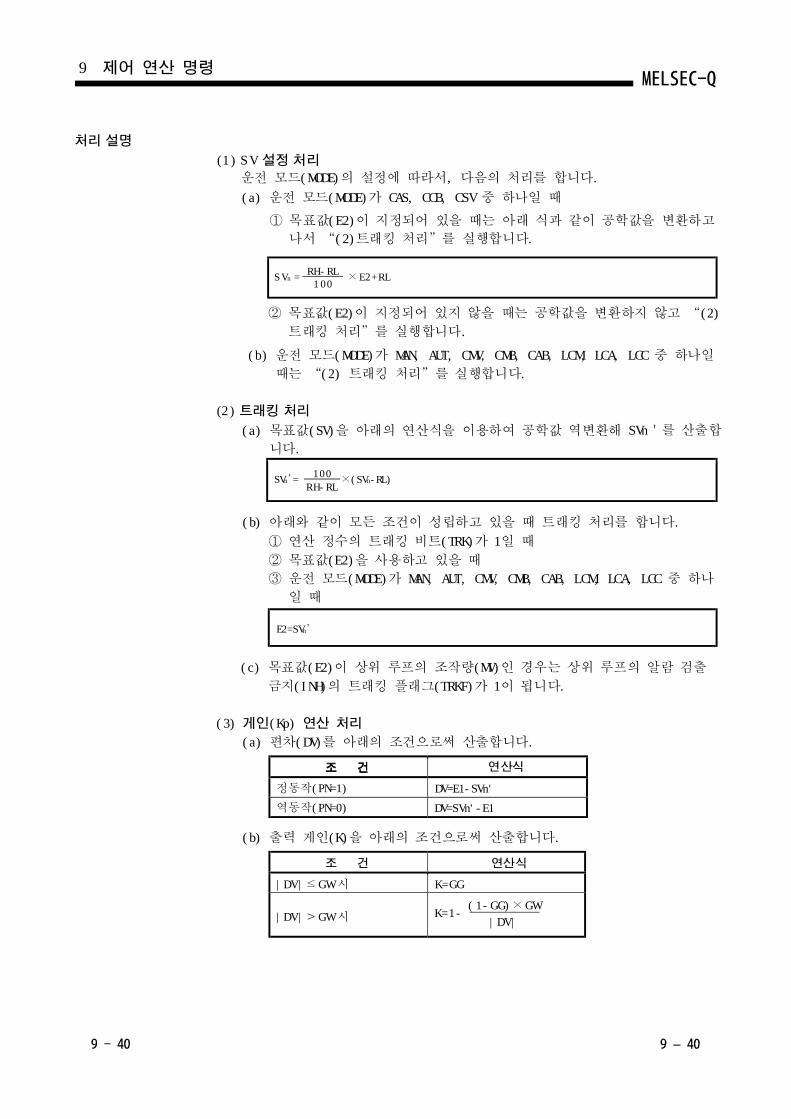
처리 설명
(1) SV 설정처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)트래킹 처리”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
트래킹 처리”를 실행합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 실행합니다.
(2) 트래킹 처리
(a) 목표값(SV)을 아래의 연산식을 이용하여 공학값 역변환해 SVn'를 산출합
니다.
(b) 아래와 같이 모든 조건이 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) (Kp)게인 연산 처리
(a) 편차(DV)를 아래의 조건으로써 산출합니다.
(b) 출력 게인(K)을 아래의 조건으로써 산출합니다.
9 제어 연산 명령
조 건조 건
조 건
연산식
정동작(PN=1) DV=E1-SVn'
역동작(PN=0) DV=SVn'-E1
연산식
|DV |≤GW 시 K=GG
(1-GG)×GWK=1-|DV |>GW 시 |DV|
SV ’= ×(SV -RL)n n
E2=SV’n
100
R H-RL
S V = ×E2+ RLnRH -RL1 00
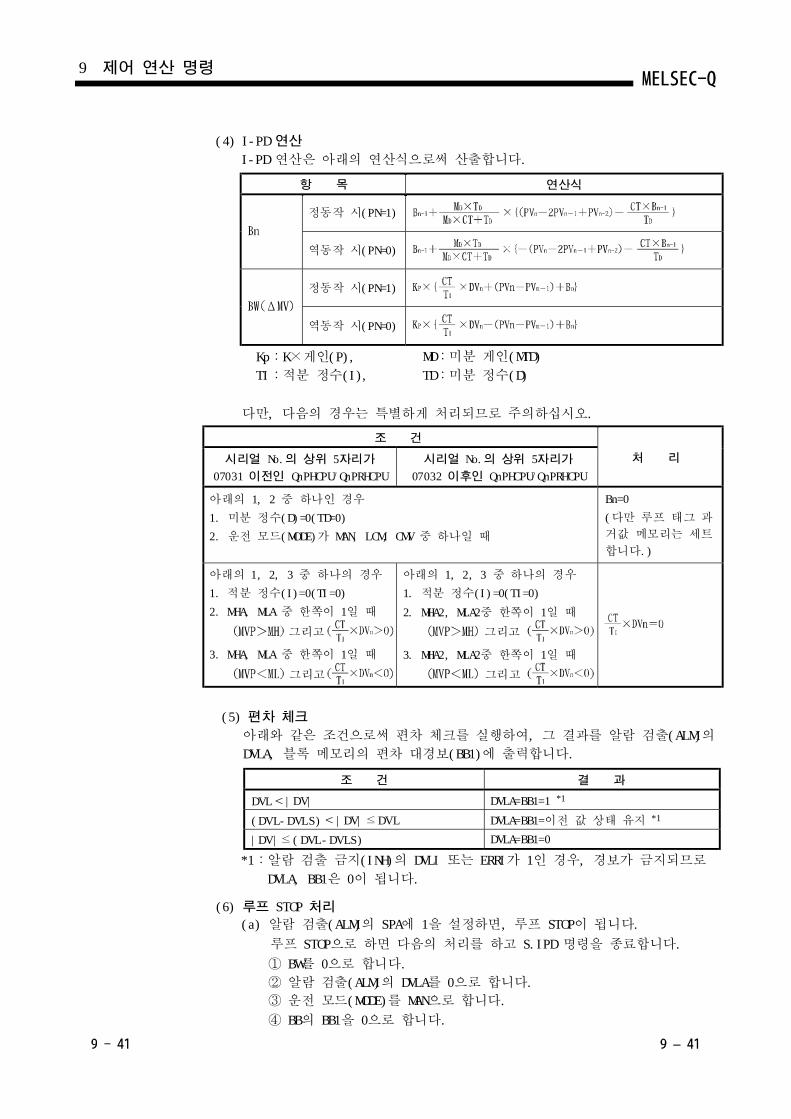
조 건 결 과
DVLA=BB1=이전 값 상태 유지 *1
DVLA=BB1=1 *1
DVLA=BB1=0
DVL<|DV|
(DV L-DVLS)<|DV|≤DV L
|DV |≤(DVL-DVLS)
(4) I-PD 연산
I-PD 연산은 아래의 연산식으로써 산출합니다.
정동작 시(PN=1)
역동작 시(PN=0)
정동작 시(PN=1)
역동작 시(PN=0)
Kp:K×게인(P), MD:미분 게인(MTD)
TI:적분 정수(I), TD:미분 정수(D)
다만, 다음의 경우는 특별하게 처리되므로 주의하십시오.
아래의 1, 2 중 하나인 경우
1. 미분 정수(D)=0(TD=0)
2. 운전 모드(MODE)가 MAN, LCM, CMV 중 하나일 때
Bn=0
(다만 루프 태그 과
거값 메모리는 세트
합니다.)
아래의 1, 2, 3 중 하나의 경우
1. 적분 정수(I)=0(TI=0)
2. MHA, MLA 중 한쪽이 1일 때
그리고 그리고
3. MHA, MLA 중 한쪽이 1일 때
그리고 그리고
아래의 1, 2, 3 중 하나의 경우
1. 적분 정수(I)=0(TI=0)
2. MHA2, MLA2중 한쪽이 1일 때
3. MHA2, MLA2중 한쪽이 1일 때
(5) 편차 체크
아래와 같은 조건으로써 편차 체크를 실행하여, 그 결과를 알람 검출(ALM)의
DVLA, 블록 메모리의 편차 대경보(BB1)에 출력합니다.
*1:알람 검출 금지(INH)의 DVLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DVLA, BB1은 0이 됩니다.
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.IPD 명령을 종료합니다.
① BW를 0으로 합니다.
② 알람 검출(ALM)의 DVLA를 0으로 합니다.
③ 운전 모드(MODE)를 MAN으로 합니다.
④ BB의 BB1을 0으로 합니다.
9 제어 연산 명령
항 목 연산식
조 건
처 리시리얼 의 상위 자리가
이전인
No. 5
07031 QnPHCPU/QnPRHCPU
시리얼 의 상위 자리가
이후인
No. 5
07032 QnPHCPU/QnPRHCPU
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN이 되면, “(7) 제어 주기 판정”을 실행합니다.
(7) 제어 주기 판정
(a) 지정된 제어 주기에 도달하지 않으면 BW(ΔMV)를 0으로 하고, S.IPD 명령
을 종료합니다.
(b) 제어 주기에 도달하면 “(1) SV 설정 처리”를 실행합니다.
에러ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
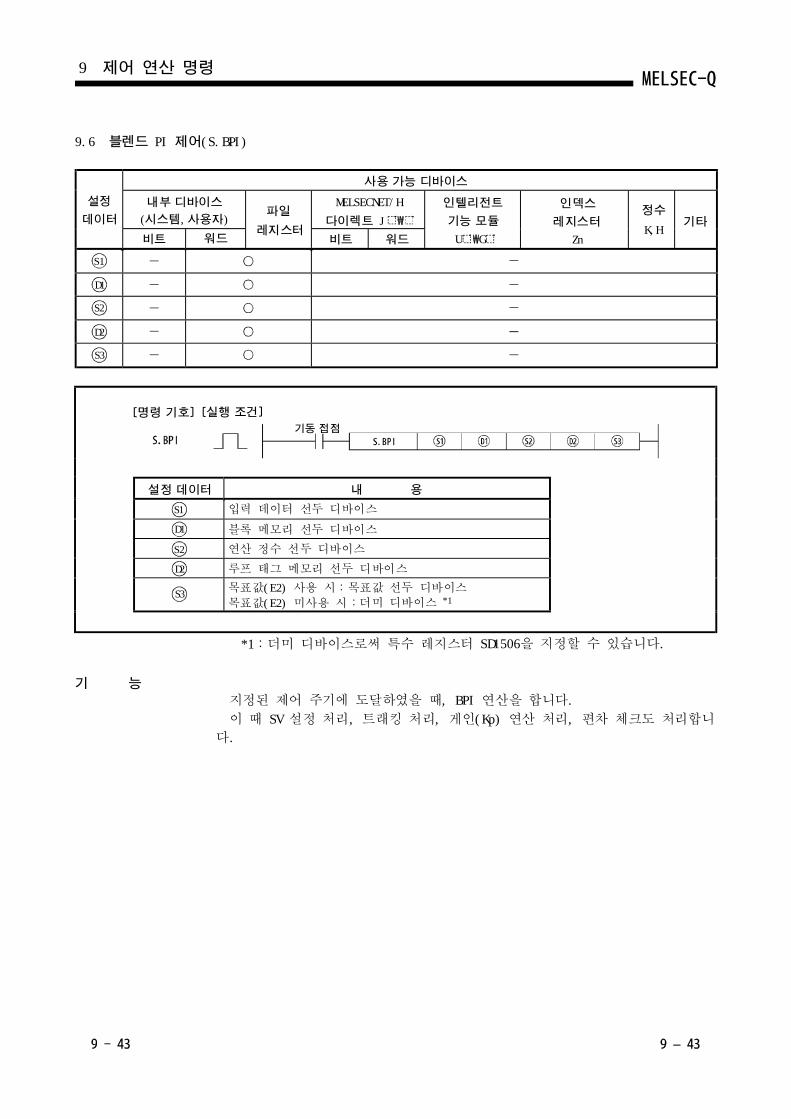
9.6 PI (S.BPI)블렌드 제어
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시:목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
지정된 제어 주기에 도달하였을 때, BPI 연산을 합니다.
이 때 SV 설정 처리, 트래킹 처리, 게인(Kp) 연산 처리, 편차 체크도 처리합니
다.
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
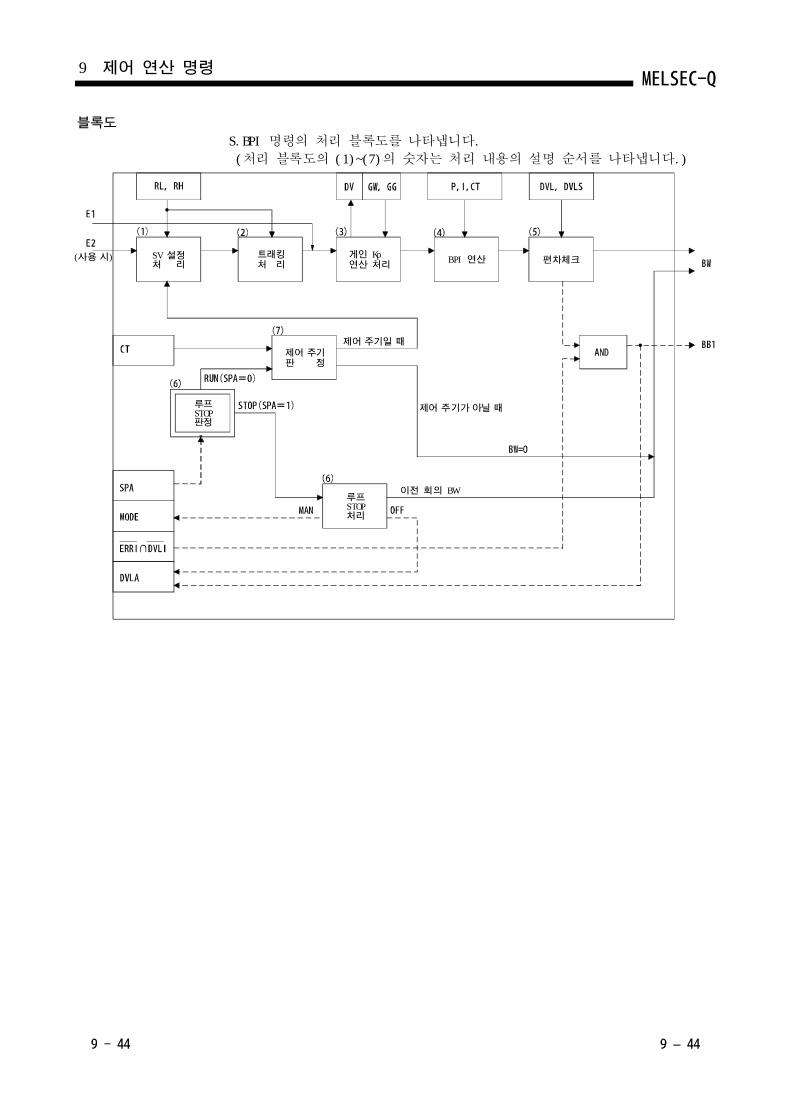
블록도
S.BPI 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
9 제어 연산 명령
루프
판정STOP
제어 주기판 정
제어 주기일 때
제어 주기가 아닐 때
이전 회의 BW루프
처리STOP
(사용 시) SV 설정처 리
트래킹처 리
게인연산 처리
KpBPI 연산 편차체크
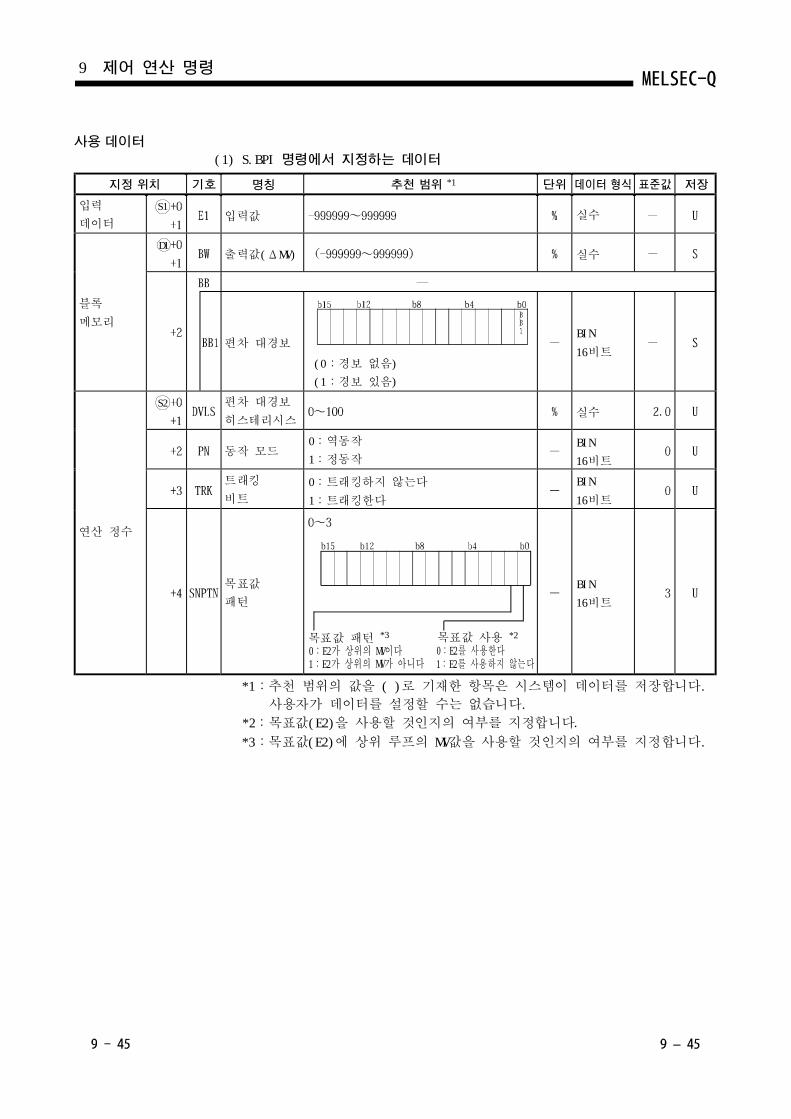
사용 데이터
(1) S.BPI 명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
블록
메모리
연산 정수
입력값
출력값(ΔMV)
편차 대경보
편차 대경보
히스테리시스
동작 모드
트래킹
비트
목표값
패턴
(0:경보 없음)
(1:경보 있음)
0:역동작
1:정동작
0:트래킹하지 않는다
1:트래킹한다
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
S1
S2
D1
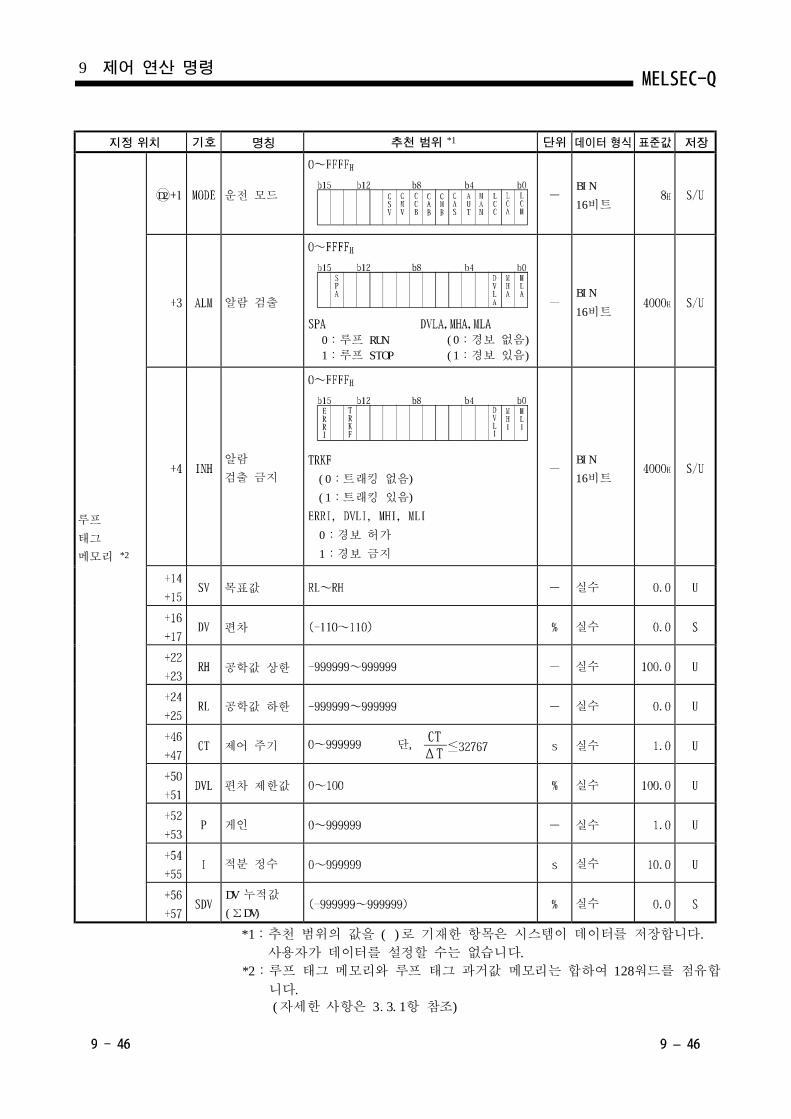
DV 누적값
(ΣDV)
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프
태그
메모리 *2
운전 모드
알람 검출
알람
검출 금지
목표값
편차
공학값 상한
공학값 하한
제어 주기
편차 제한값
게인
적분 정수
0:루프 RUN (0:경보 없음)
1:루프 STOP (1:경보 있음)
(0:트래킹 없음)
(1:트래킹 있음)
0:경보 허가
1:경보 금지
단,
실수
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트D2
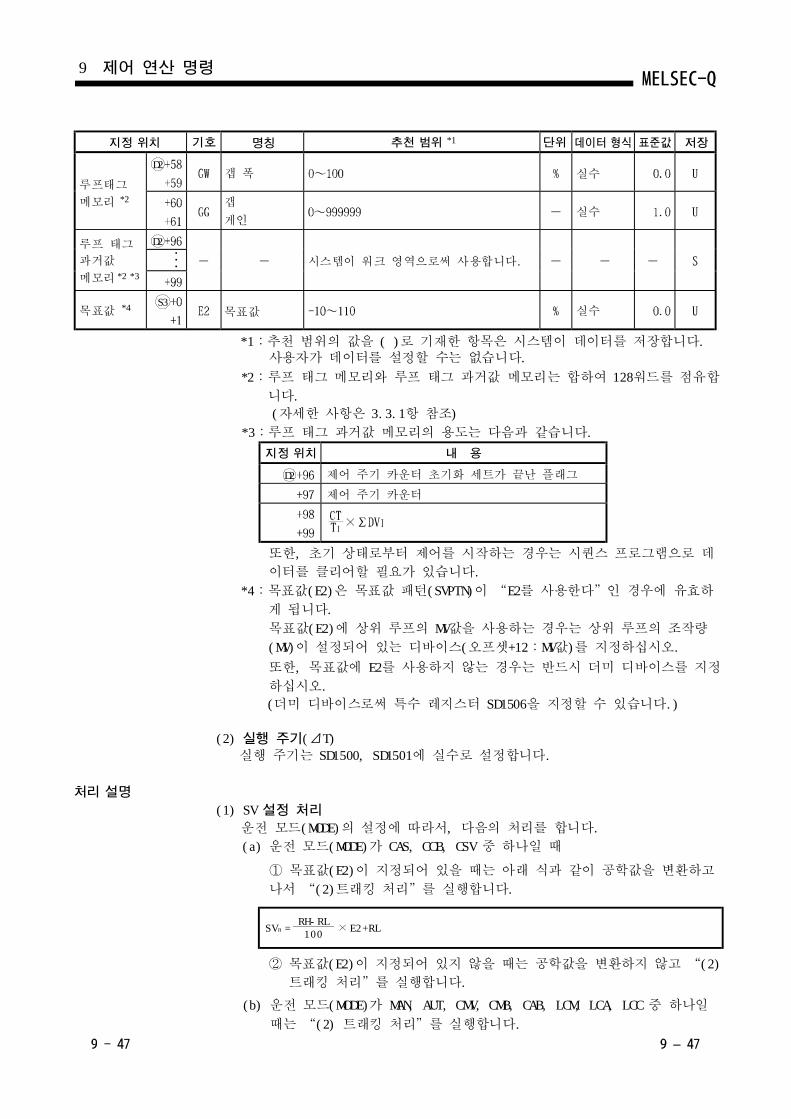
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수는 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
제어 주기 카운터 초기화 세트가 끝난 플래그
제어 주기 카운터
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데
이터를 클리어할 필요가 있습니다.
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하
게 됩니다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량
(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정
하십시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 설명
(1) SV 설정 처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)트래킹 처리”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
트래킹 처리”를 실행합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 실행합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
갭 폭
갭
게인
시스템이 워크 영역으로써 사용합니다.
목표값
루프 태그
과거값
메모리 *2 *3
목표값 *4
루프태그
메모리 *2
실수
실수
실수
지정 위치 내 용
SV = × E2+RLnRH-RL100
D2
D2
S3
D2
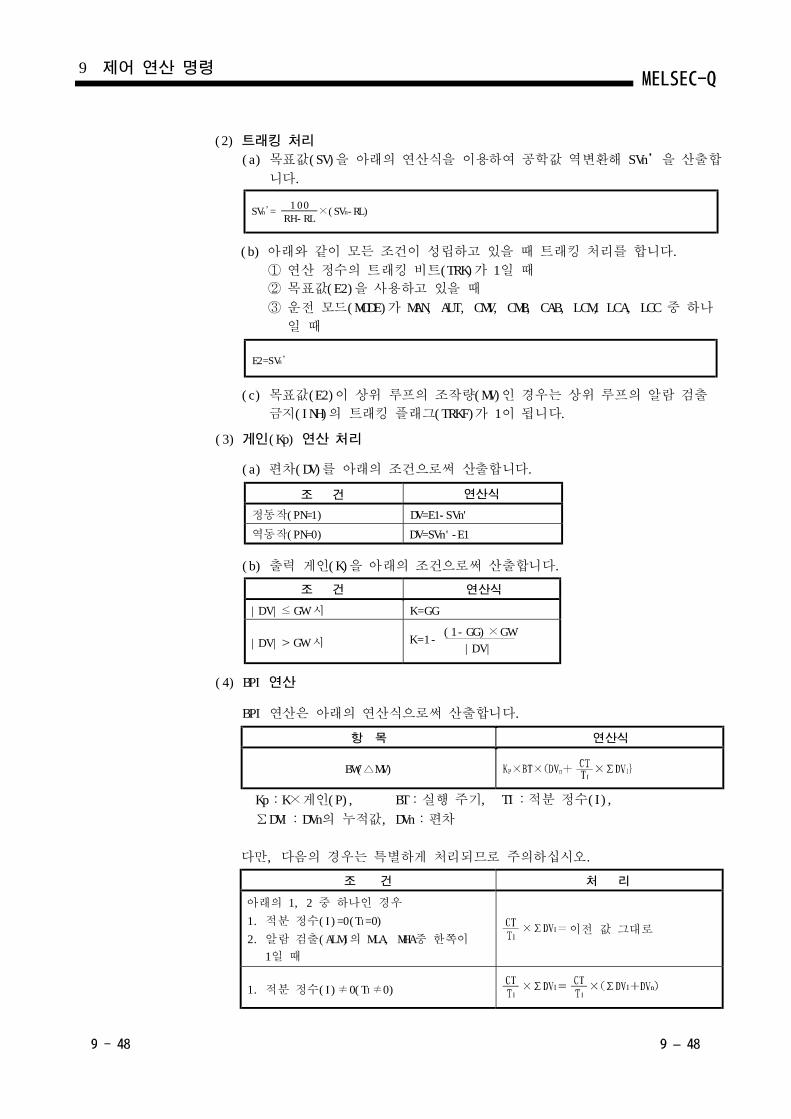
(2) 트래킹 처리
(a) 목표값(SV)을 아래의 연산식을 이용하여 공학값 역변환해 SVn 을 산출합
니다.
’
(b) 아래와 같이 모든 조건이 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) (Kp)게인 연산 처리
(a) 편차(DV)를 아래의 조건으로써 산출합니다.
(b) 출력 게인(K)을 아래의 조건으로써 산출합니다.
(4) BPI 연산
BPI 연산은 아래의 연산식으로써 산출합니다.
Kp:K×게인(P), BT:실행 주기, TI:적분 정수(I),
ΣDVI:DVn의 누적값, DVn:편차
다만, 다음의 경우는 특별하게 처리되므로 주의하십시오.
아래의 1, 2 중 하나인 경우
1. 적분 정수(I)=0(T =0)I
2. 알람 검출(ALM)의 MLA, MHA중 한쪽이
1일 때
이전 값 그대로
BW( MV)△
1. 적분 정수(I)≠0(T ≠0)I
항 목 연산식
조 건 처 리
9 제어 연산 명령
조 건
조 건
연산식
정동작(PN=1) DV=E1-SVn'
역동작(PN=0) DV=SVn'-E1
연산식
|DV|≤ GW 시 K=GG
(1- GG)×GWK=1-|DV|>GW 시 |DV|
SV ’= ×(SV -RL)n n
E2=SV ’n
1 00
RH -RL
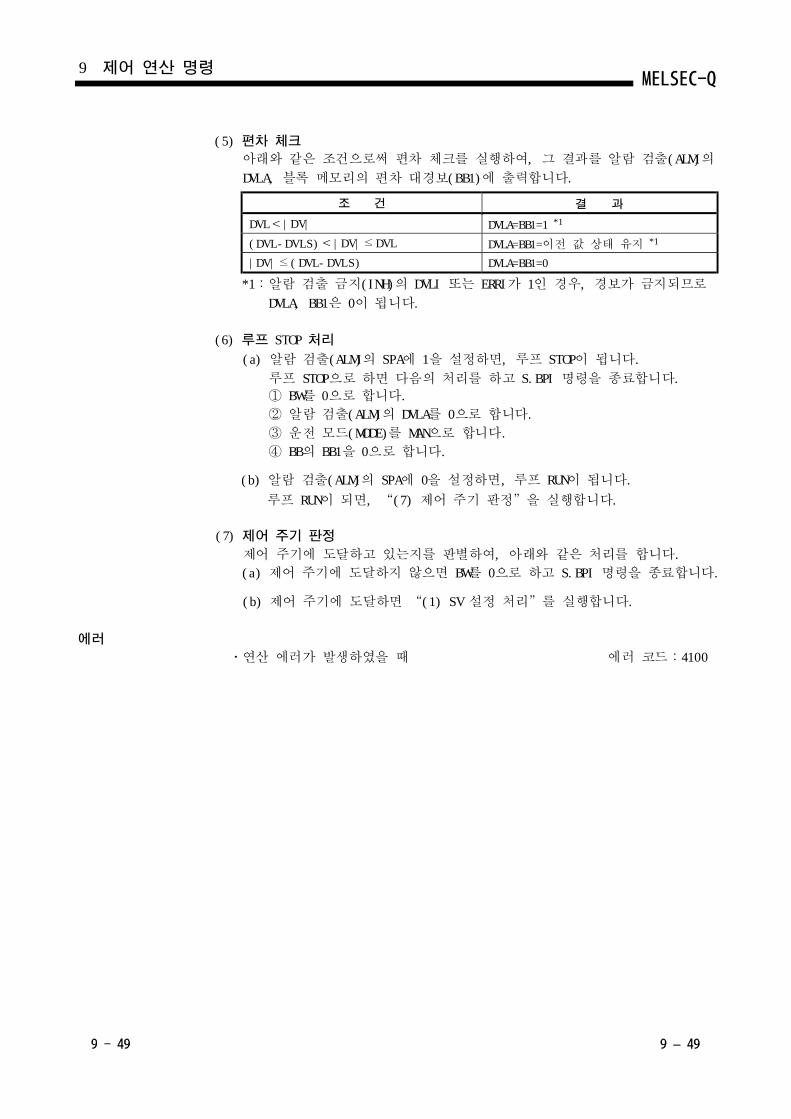
(5) 편차 체크
아래와 같은 조건으로써 편차 체크를 실행하여, 그 결과를 알람 검출(ALM)의
DVLA, 블록 메모리의 편차 대경보(BB1)에 출력합니다.
*1:알람 검출 금지(INH)의 DVLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DVLA, BB1은 0이 됩니다.
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.BPI 명령을 종료합니다.
① BW를 0으로 합니다.
② 알람 검출(ALM)의 DVLA를 0으로 합니다.
③ 운전 모드(MODE)를 MAN으로 합니다.
④ BB의 BB1을 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN이 되면, “(7) 제어 주기 판정”을 실행합니다.
(7) 제어 주기 판정
제어 주기에 도달하고 있는지를 판별하여, 아래와 같은 처리를 합니다.
(a) 제어 주기에 도달하지 않으면 BW를 0으로 하고 S.BPI 명령을 종료합니다.
(b) 제어 주기에 도달하면 “(1) SV 설정 처리”를 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
조 건 결 과
DVLA=BB1=이전 값 상태 유지 *1
DVLA=BB1=1 *1
DVLA=BB1=0
DVL<|DV|
(DVL-DVLS)<|DV|≤DVL
|DV|≤(DVL-DVLS)
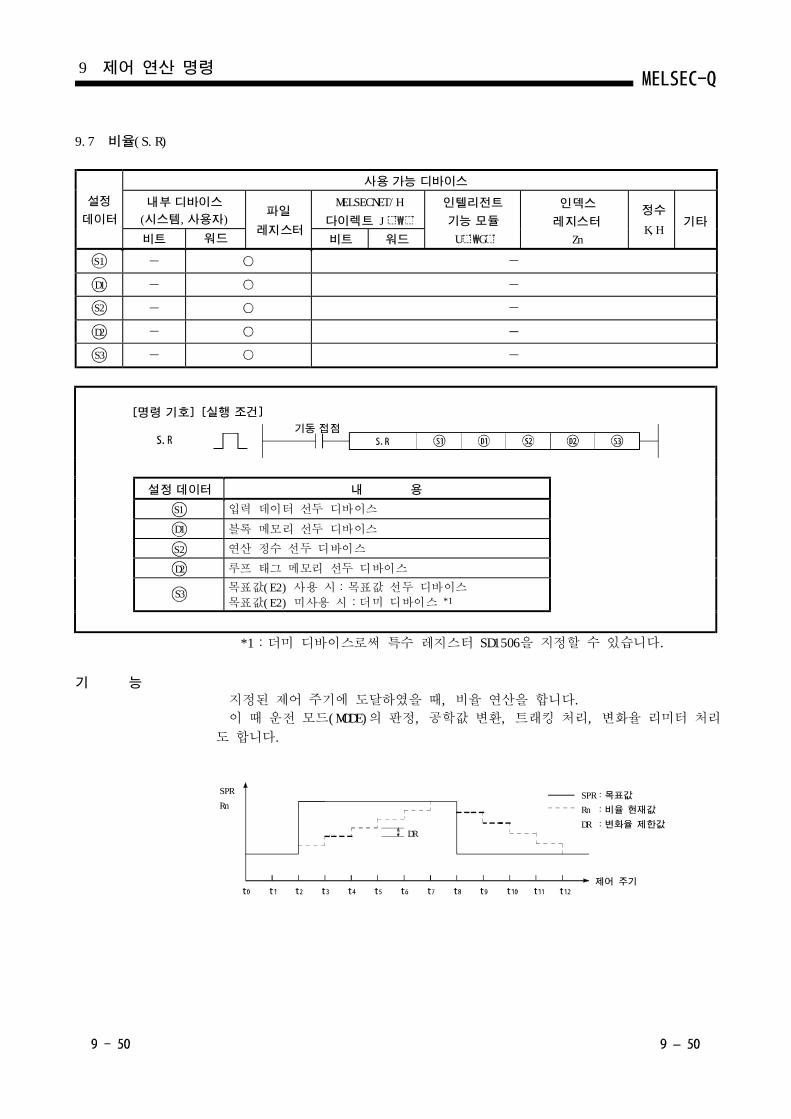
9.7 (S.R)비율
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시:목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
지정된 제어 주기에 도달하였을 때, 비율 연산을 합니다.
이 때 운전 모드(MODE)의 판정, 공학값 변환, 트래킹 처리, 변화율 리미터 처리
도 합니다.
SPR:목표값SPR
Rn :비율 현재값Rn
DR :변화율 제한값DR
제어 주기
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
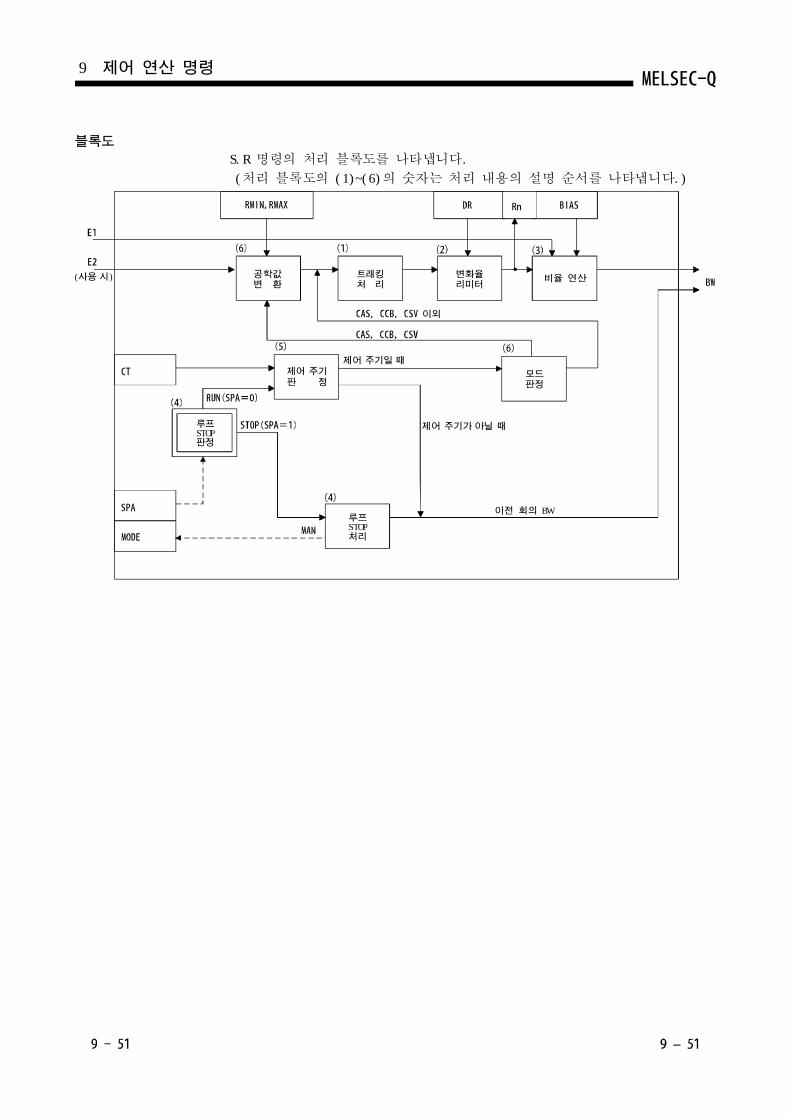
블록도
S.R 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(6)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
9 제어 연산 명령
루프
판정STOP
제어 주기판 정
모드판정
제어 주기일 때
제어 주기가 아닐 때
이전 회의 BW루프
처리STOP
(사용 시) 트래킹처 리
변화율리미터
공학값변 환
비율 연산
이외

사용 데이터
(1) S.R 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리출력값
연산 정수
트래킹
비트
0:트래킹하지 않는다
1:트래킹한다
목표값
패턴
루프
태그
메모리 *4
운전 모드
알람 검출
0:루프 RUN
1:루프 STOP
목표값
바이어스
제어 주기
변화율 제한값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수는 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
*4:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
단,
+0
+1
+0
+1
+1
+0
+1
S1
S2
D1
D2
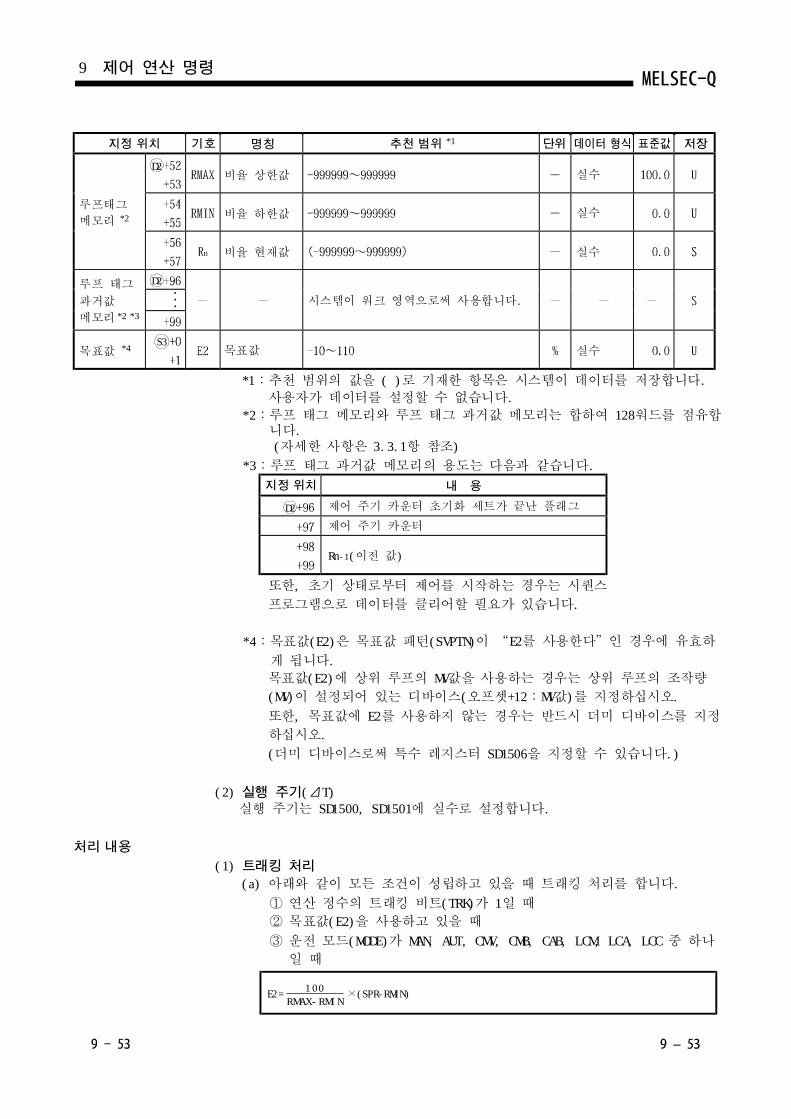
S3
비율 상한값
비율 하한값
비율 현재값
목표값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합니다.(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
제어 주기 카운터 초기화 세트가 끝난 플래그
제어 주기 카운터
Rn (이전 값)-1
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스
프로그램으로 데이터를 클리어할 필요가 있습니다.
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하
게 됩니다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량
(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정
하십시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
(2) ( T)실행 주기 Δ실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 트래킹 처리
(a) 아래와 같이 모든 조건이 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
과거값
메모리 *2 *3
목표값 *4
루프태그
메모리 *2
시스템이 워크 영역으로써 사용합니다.
실수
실수
실수
실수
지정 위치 내 용
E2= ×( PR-RMIN)S1 00
RMAX -RMIN
D2
D2
D2
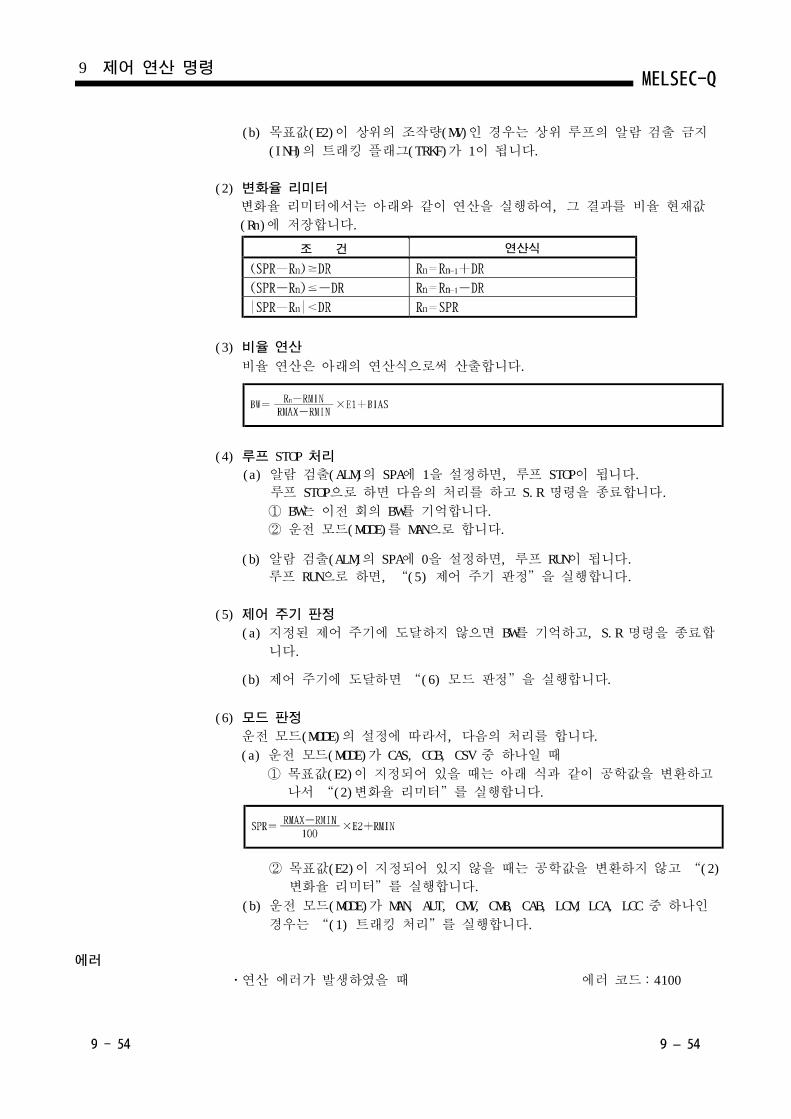
(b) 목표값(E2)이 상위의 조작량(MV)인 경우는 상위 루프의 알람 검출 금지
(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(2) 변화율 리미터
변화율 리미터에서는 아래와 같이 연산을 실행하여, 그 결과를 비율 현재값
(Rn)에 저장합니다.
(3) 비율 연산
비율 연산은 아래의 연산식으로써 산출합니다.
(4) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.R 명령을 종료합니다.
① BW는 이전 회의 BW를 기억합니다.
② 운전 모드(MODE)를 MAN으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면, “(5) 제어 주기 판정”을 실행합니다.
(5) 제어 주기 판정
(a) 지정된 제어 주기에 도달하지 않으면 BW를 기억하고, S.R 명령을 종료합
니다.
(b) 제어 주기에 도달하면 “(6) 모드 판정”을 실행합니다.
(6) 모드 판정
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)변화율 리미터”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
변화율 리미터”를 실행합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나인
경우는 “(1) 트래킹 처리”를 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
연산식조 건
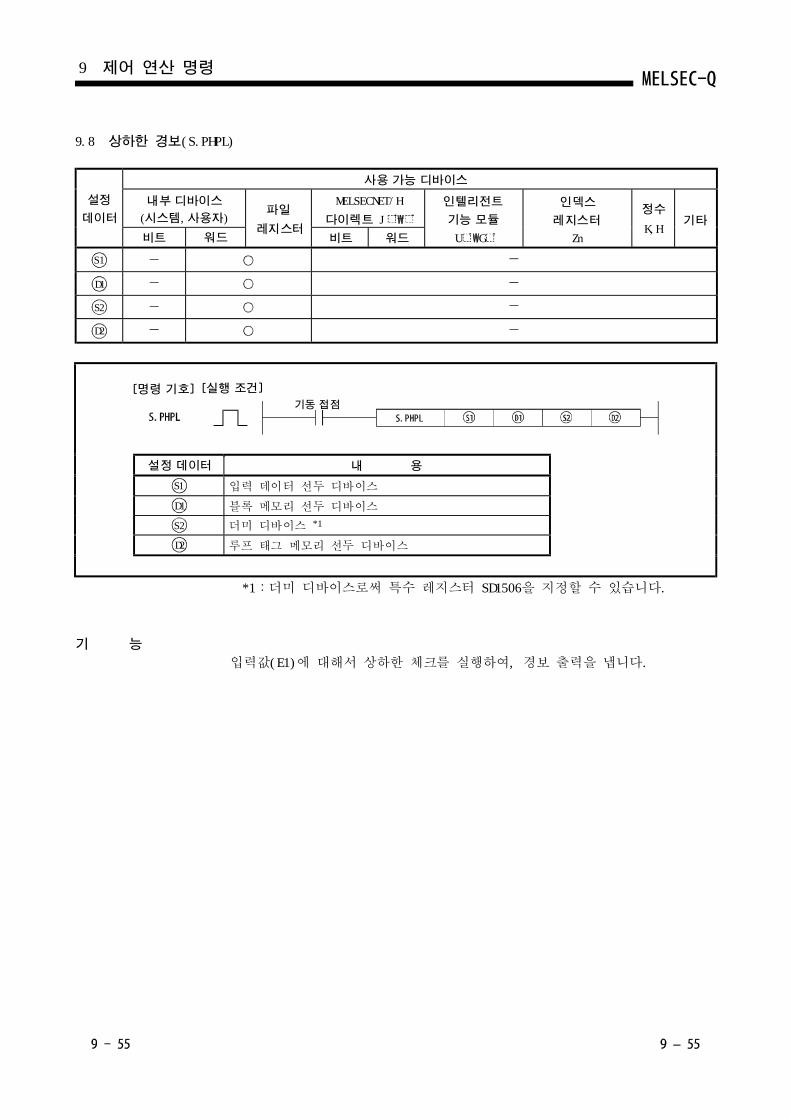
9.8 (S.PHPL)상하한 경보
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1)에 대해서 상하한 체크를 실행하여, 경보 출력을 냅니다.
9 제어 연산 명령
기 능
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
루프 태그 메모리 선두 디바이스
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
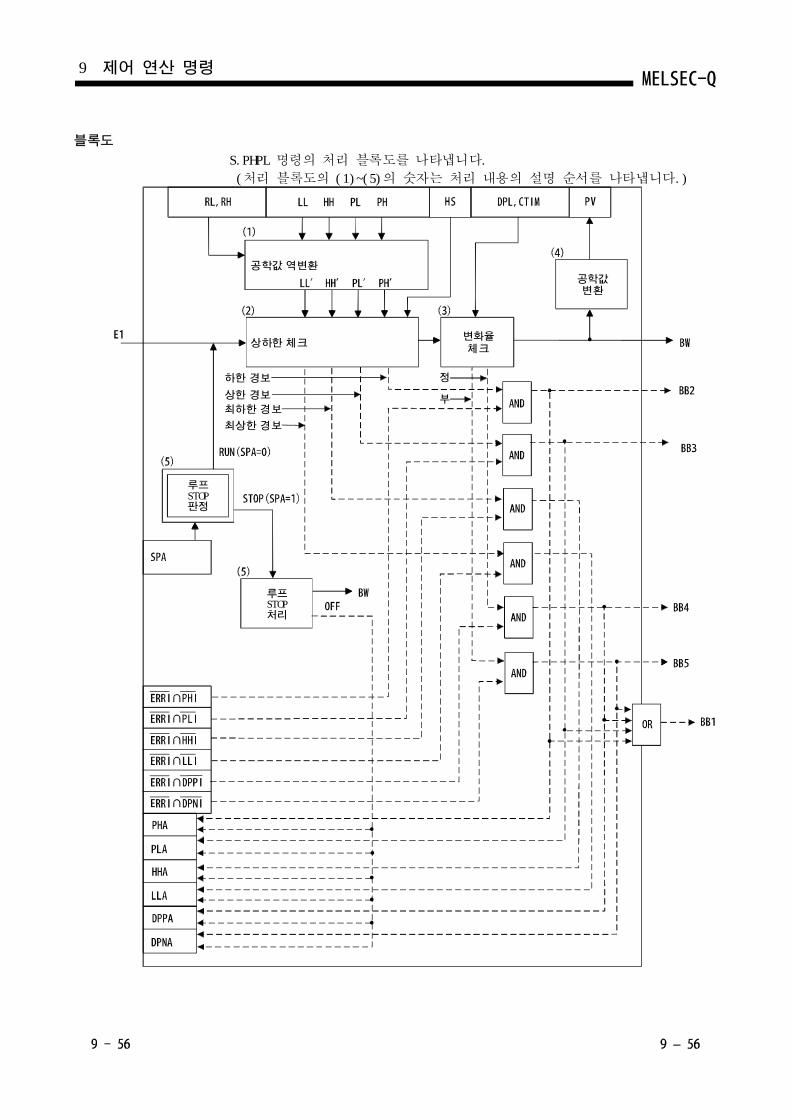
블록도
S.PHPL 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(5)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
공학값 역변환
공학값변환
상하한 체크변화율체크
하한 경보
상한 경보
최하한 경보
최상한 경보
정
부
9 제어 연산 명령
루프
판정STOP
루프
처리STOP
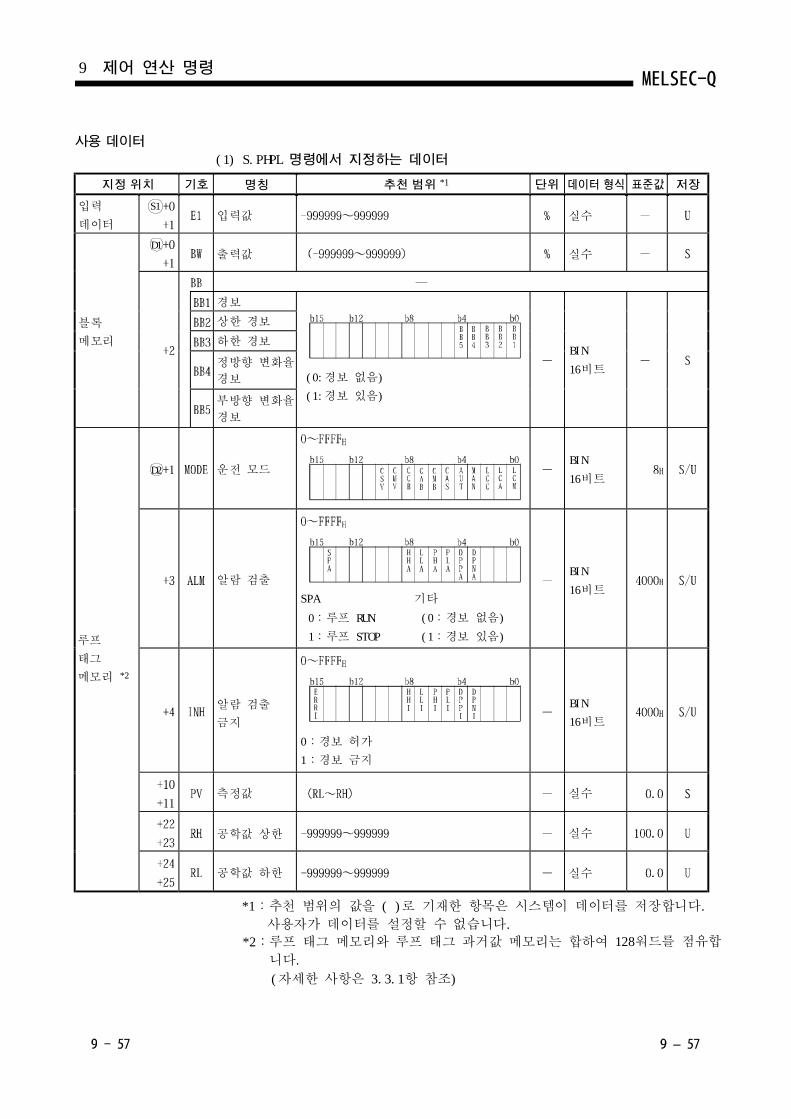
사용 데이터
(1) S.PHPL 명령에서 지정하는 데이터
입력
데이터입력값
경보
블록
메모리
출력값
(0:경보 없음)
(1:경보 있음)
상한 경보
하한 경보
정방향 변화율
경보
부방향 변화율
경보
운전 모드
알람 검출
SPA 기타
0:루프 RUN (0:경보 없음)
1:루프 STOP (1:경보 있음)
알람 검출
금지
0:경보 허가
1:경보 금지
측정값
공학값 상한
공학값 하한
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프
태그
메모리 *2
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
S1
D1
D2
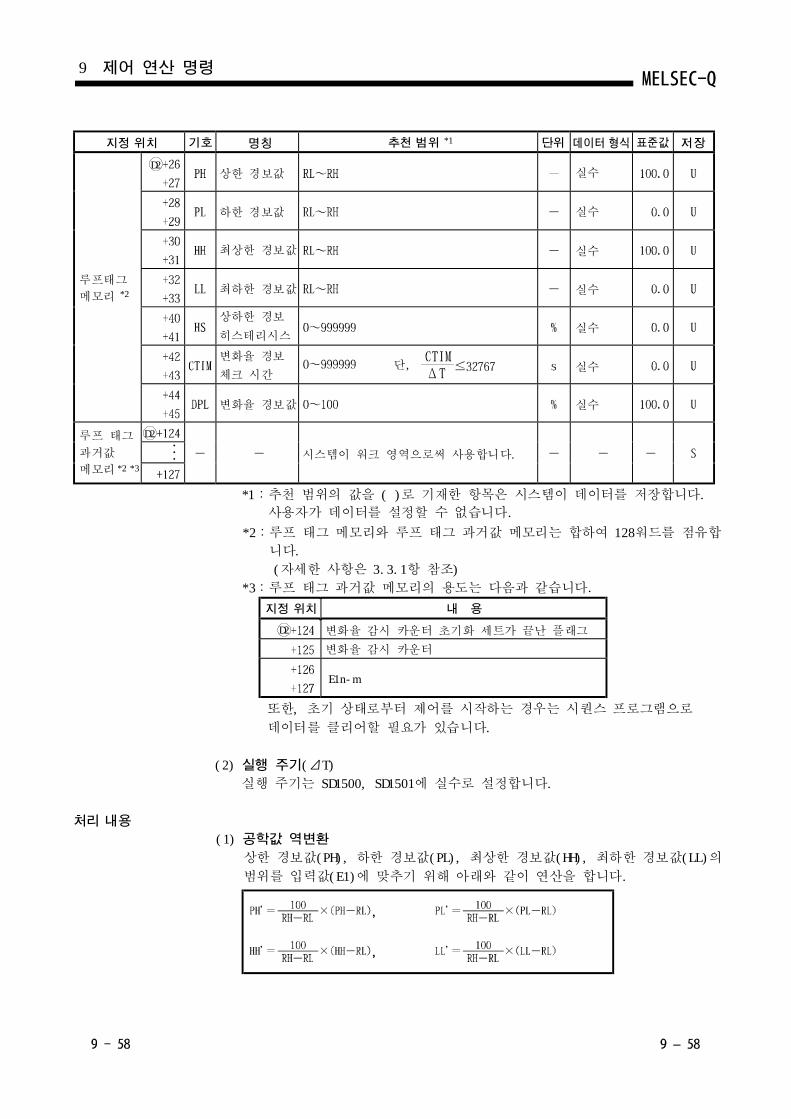
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
상하한 경보
히스테리시스
변화율 경보
체크 시간단,
변화율 경보값
시스템이 워크 영역으로써 사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
변화율 감시 카운터 초기화 세트가 끝난 플래그
변화율 감시 카운터
E1n-m
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로
데이터를 클리어할 필요가 있습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 공학값 역변환
상한 경보값(PH), 하한 경보값(PL), 최상한 경보값(HH), 최하한 경보값(LL)의
범위를 입력값(E1)에 맞추기 위해 아래와 같이 연산을 합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
과거값
메모리 *2 *3
루프태그
메모리 *2
실수
실수
실수
실수
실수
실수
실수
지정 위치 내 용
D2
D2
D2

(2) 상하한 체크
입력값(E1)의 상하한 체크를 아래와 같은 조건으로써 실행합니다.
상한 체크
기타
기타
기타
기타
PHA:이전 값을 유지 *1
이전 값을 유지 *2이전 값을 유지 *2
이전 값을 유지 *4
이전 값을 유지 *3
유지 *1
유지 *2
하한 체크
PLA:
최상한 체크
HHA:
최하한 체크
LLA:
*1:알람 검출 금지(INH)의 ERRI 또는 PHI가 1인 경우, 경보가 금지되므로
PHA와 BB2는 0이 됩니다.
*2:알람 검출 금지(INH)의 ERRI 또는 PLI가 1인 경우, 경보가 금지되므로
PLA와 BB3은 0이 됩니다.
*3:알람 검출 금지(INH)의 ERRI 또는 HHI가 1인 경우, 경보가 금지되므로
HHA는 0이 됩니다.
*4:알람 검출 금지(INH)의 ERRI 또는 LLI가 1인 경우, 경보가 금지되므로
LLA는 0이 됩니다.
(3) 변화율 체크
(a) 변화율 체크는 CTIM으로 지정된 시간동안 실행합니다.
변화율 체크의 실행 횟수는 아래 식에 따릅니다.
m은 1~m까지 변경됩니다.
다만 m=0(정수부) 시는 무처리됩니다.
예를 들어, m=4인 경우는 아래와 같이 됩니다.
(a) 0번째
(b) 1회째
(c) 2번째
(d) 3번째
(e) 4번째
실행 주기
9 제어 연산 명령
체크 항목 조 건
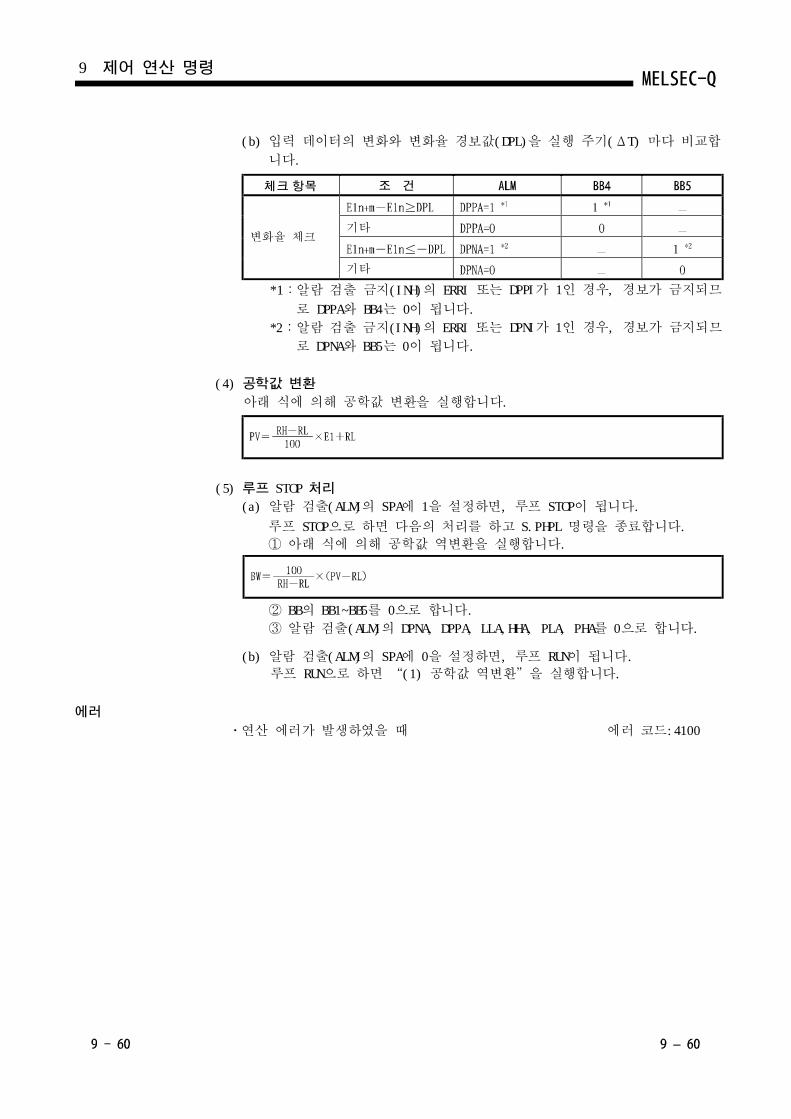
(b) 입력 데이터의 변화와 변화율 경보값(DPL)을 실행 주기(ΔT) 마다 비교합
니다.
체크 항목 조 건
변화율 체크기타
기타
*1:알람 검출 금지(INH)의 ERRI 또는 DPPI가 1인 경우, 경보가 금지되므
로 DPPA와 BB4는 0이 됩니다.
*2:알람 검출 금지(INH)의 ERRI 또는 DPNI가 1인 경우, 경보가 금지되므
로 DPNA와 BB5는 0이 됩니다.
(4) 공학값 변환
아래 식에 의해 공학값 변환을 실행합니다.
(5) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.PHPL 명령을 종료합니다.
① 아래 식에 의해 공학값 역변환을 실행합니다.
② BB의 BB1~BB5를 0으로 합니다.
③ 알람 검출(ALM)의 DPNA, DPPA, LLA,HHA, PLA, PHA를 0으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면 “(1) 공학값 역변환”을 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
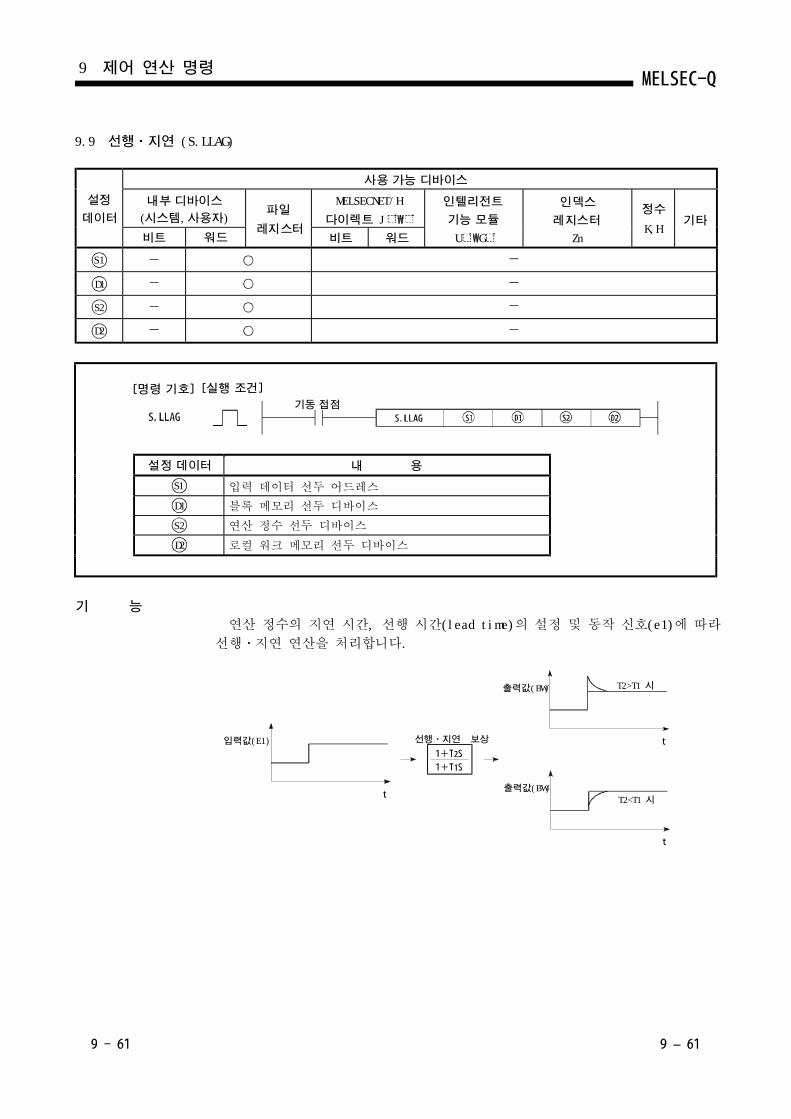
9.9 (S.LLAG)선행ㆍ지연
입력 데이터 선두 어드레스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
로컬 워크 메모리 선두 디바이스
연산 정수의 지연 시간, 선행 시간(lead time)의 설정 및 동작 신호(e1)에 따라
선행ㆍ지연 연산을 처리합니다.
입력값(E1) 선행ㆍ지연 보상
출력값(BW) T2>T1 시
출력값(BW)
T2<T1 시
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
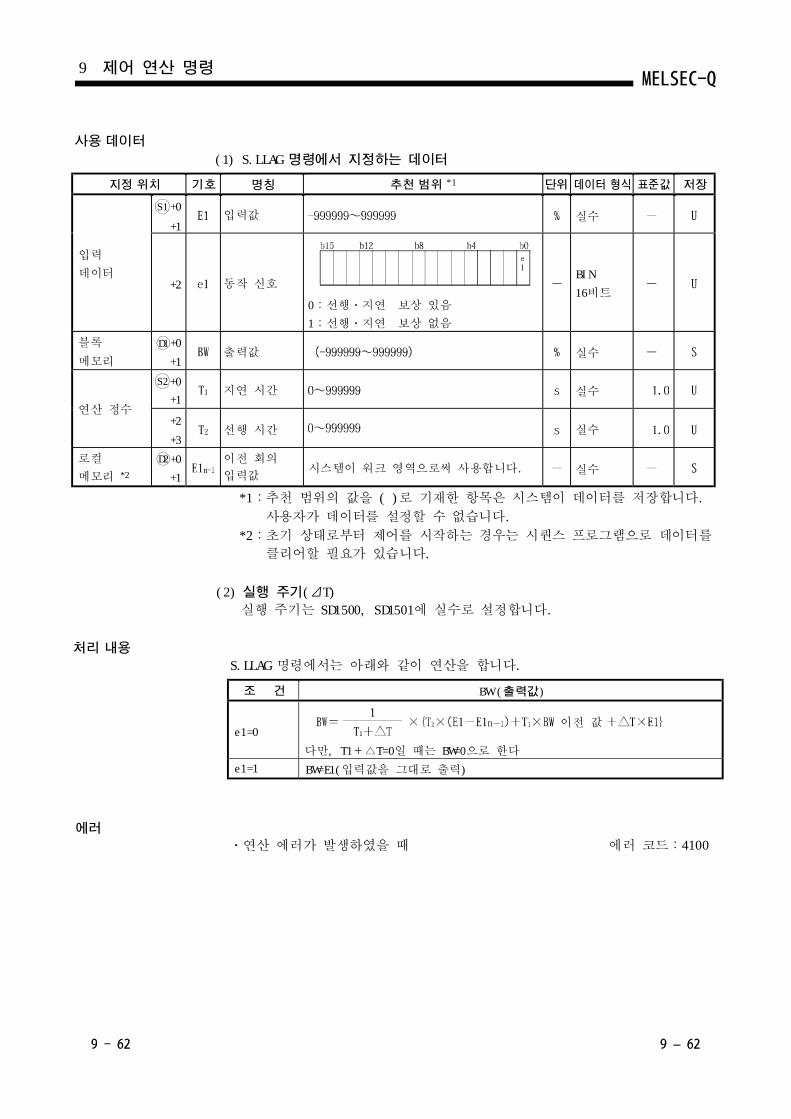
사용 데이터
(1) S.LLAG 명령에서 지정하는 데이터
입력
데이터
입력값
동작 신호
0:선행ㆍ지연 보상 있음
1:선행ㆍ지연 보상 없음
블록
메모리출력값
연산 정수
지연 시간
선행 시간
로컬
메모리 *2
이전 회의
입력값시스템이 워크 영역으로써 사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를
클리어할 필요가 있습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
S.LLAG 명령에서는 아래와 같이 연산을 합니다.
BW ( )출력값
다만, T1+△T=0일 때는 BW=0으로 한다
e1=1
e1=0
BW=E1(입력값을 그대로 출력)
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
이전 값
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
조 건
실수
실수
실수
실수
실수
BIN
16비트
+0
+1
+0
+1
+2
+0
+0
+1
+1
+2
+3
S1
S2
D1
D2
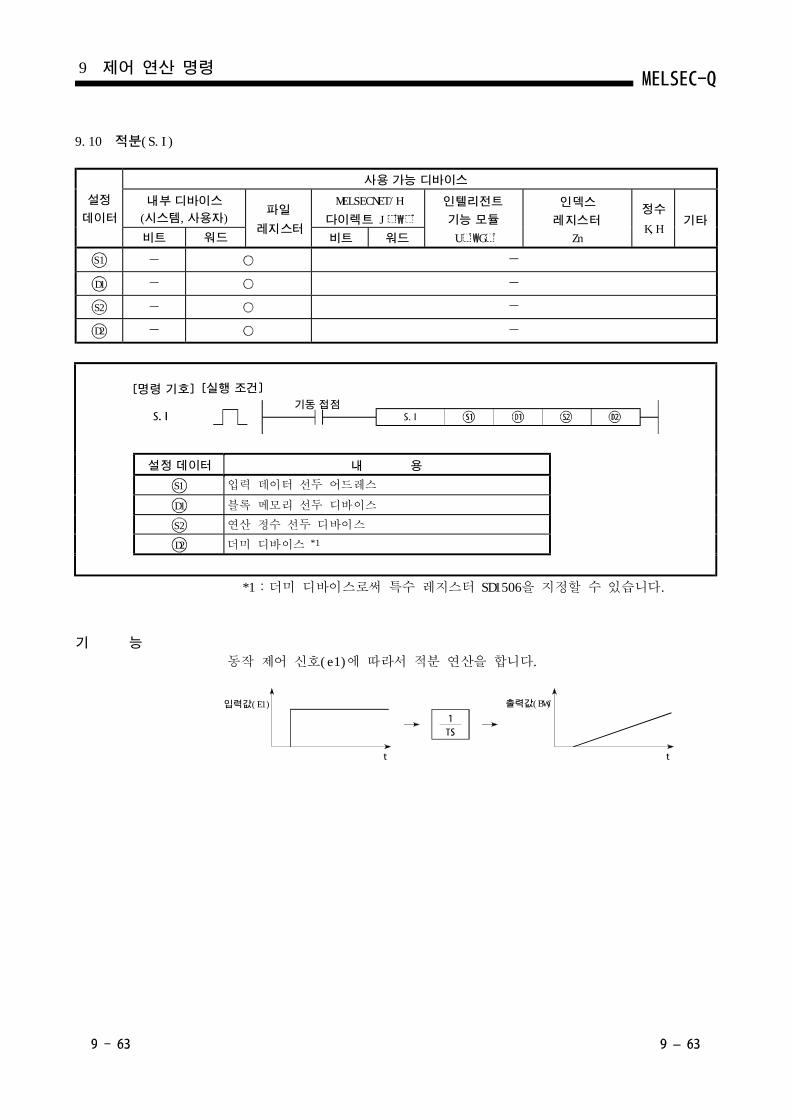
9.10 (S.I)적분
입력 데이터 선두 어드레스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
동작 제어 신호(e1)에 따라서 적분 연산을 합니다.
입력값(E1) 출력값(BW)
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
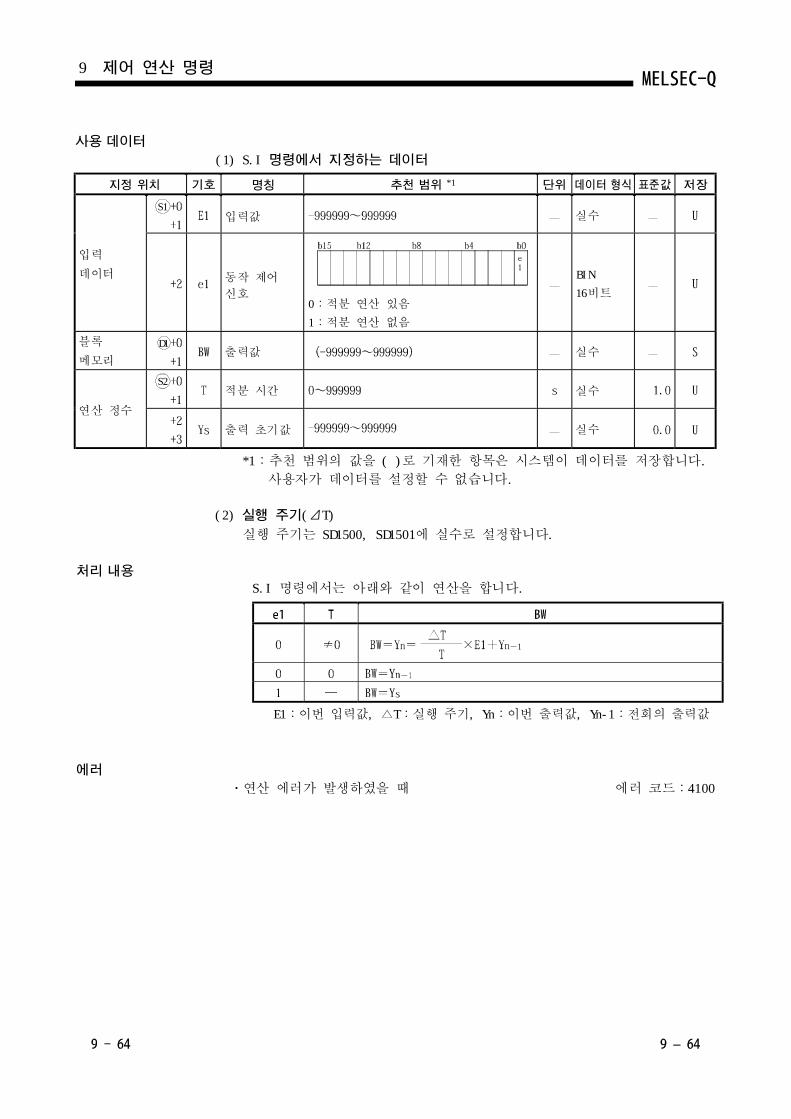
사용 데이터
(1) S.I 명령에서 지정하는 데이터
입력
데이터
입력값
동작 제어
신호0:적분 연산 있음
1:적분 연산 없음
블록
메모리출력값
연산 정수
적분 시간
출력 초기값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
S.I 명령에서는 아래와 같이 연산을 합니다.
E1:이번 입력값, △T:실행 주기, Yn:이번 출력값, Yn-1:전회의 출력값
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
9 제어 연산 명령
S1
S2
D1
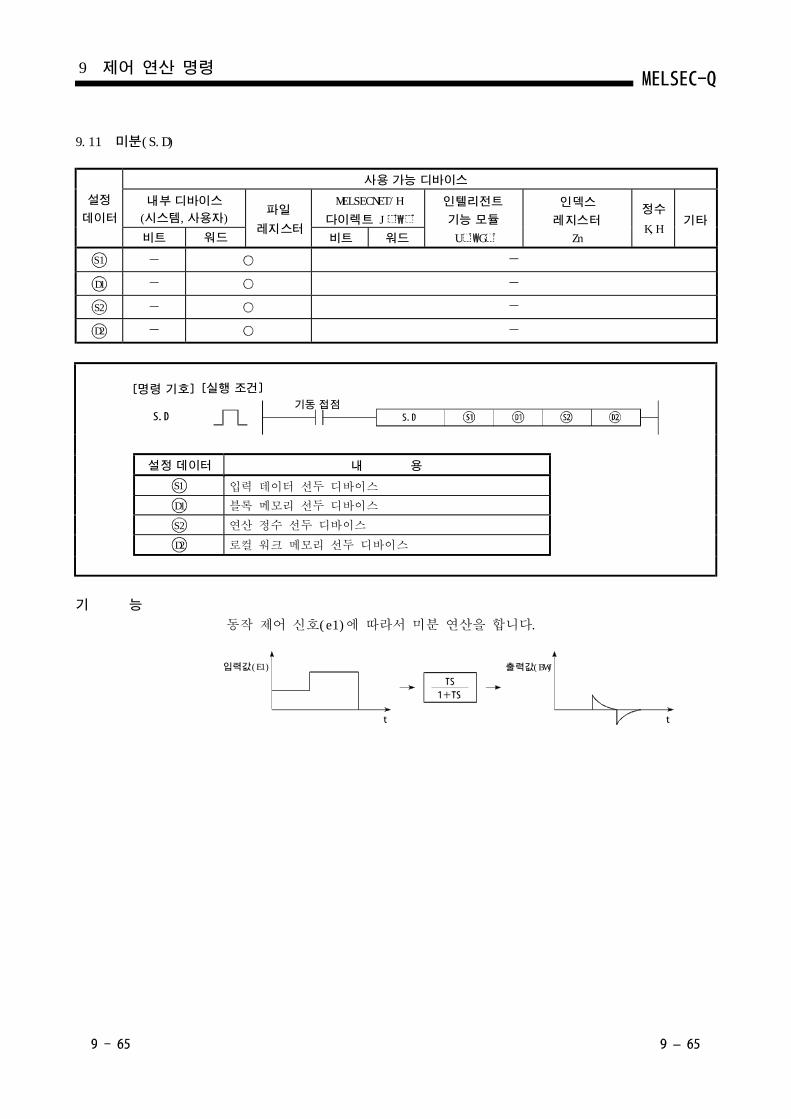
9.11 (S.D)미분
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
로컬 워크 메모리 선두 디바이스
동작 제어 신호(e1)에 따라서 미분 연산을 합니다.
입력값(E1) 출력값(BW)
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
9 제어 연산 명령
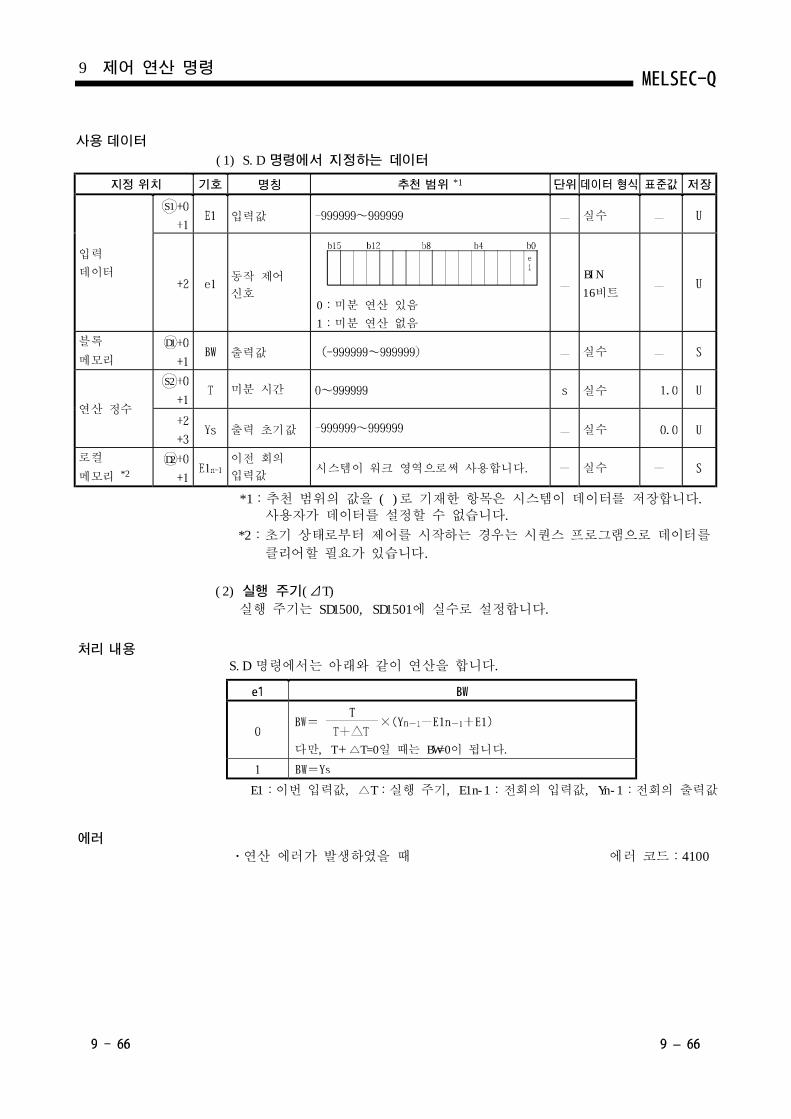
사용 데이터
(1) S.D 명령에서 지정하는 데이터
입력
데이터
입력값
동작 제어
신호0:미분 연산 있음
1:미분 연산 없음
블록
메모리출력값
연산 정수
미분 시간
출력 초기값
로컬
메모리 *2
이전 회의
입력값시스템이 워크 영역으로써 사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수 없습니다.
*2:초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를
클리어할 필요가 있습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용S.D 명령에서는 아래와 같이 연산을 합니다.
다만, T+△T=0일 때는 BW=0이 됩니다.
E1:이번 입력값, △T:실행 주기, E1n-1:전회의 입력값, Yn-1:전회의 출력값
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
지정 위치 기호 명칭 추천 범위 *1 단위데이터 형식 표준값 저장
9 제어 연산 명령
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
D2
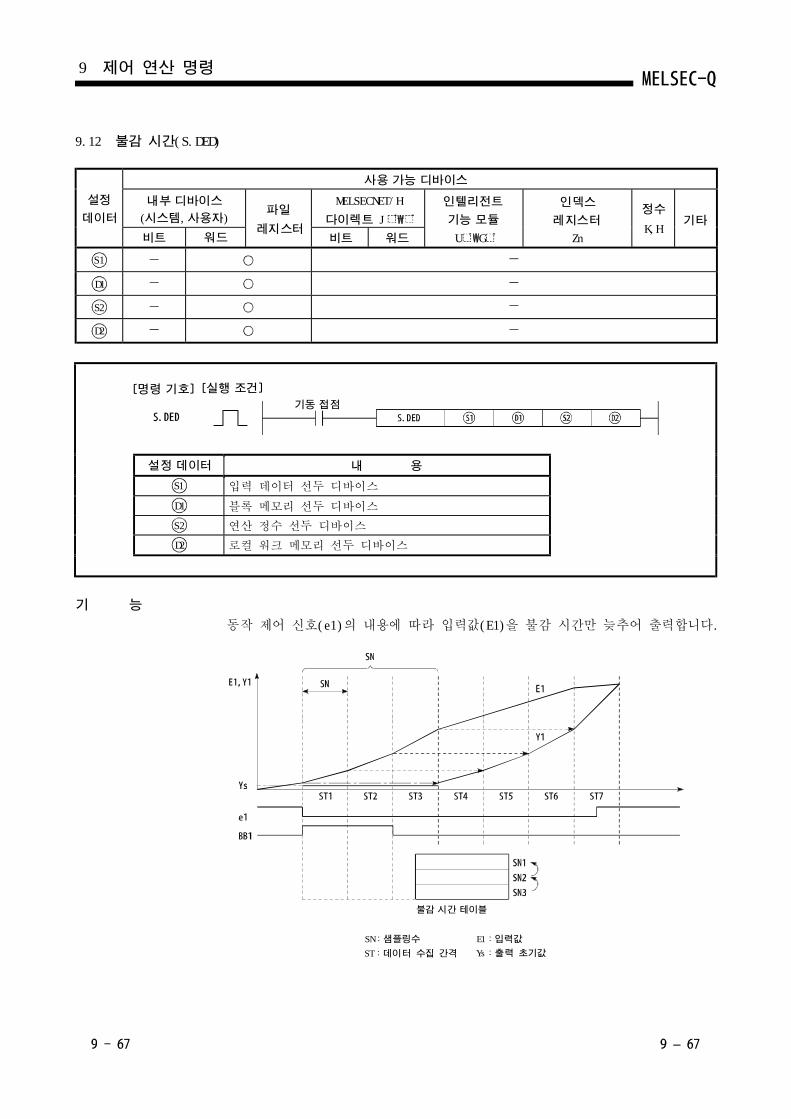
9.12 (S.DED)불감 시간
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
로컬 워크 메모리 선두 디바이스
동작 제어 신호(e1)의 내용에 따라 입력값(E1)을 불감 시간만 늦추어 출력합니다.
불감 시간 테이블
SN:샘플링수 E1:입력값
ST:데이터 수집 간격 Ys:출력 초기값
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
9 제어 연산 명령
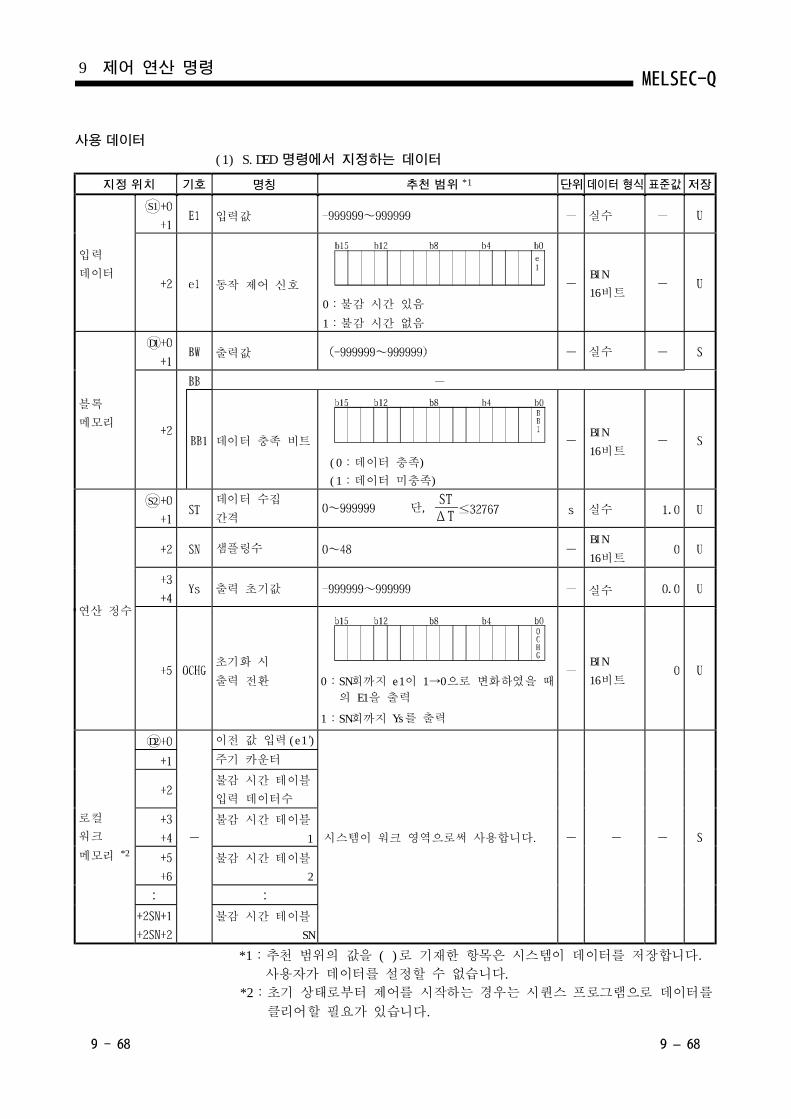
사용 데이터
(1) S.DED 명령에서 지정하는 데이터
입력
데이터
입력값
동작 제어 신호
0:불감 시간 있음
1:불감 시간 없음
블록
메모리
출력값
데이터 충족 비트
(0:데이터 충족)
(1:데이터 미충족)
연산 정수
데이터 수집
간격단,
샘플링수
출력 초기값
초기화 시
출력 전환 0:SN회까지 e1이 1→0으로 변화하였을 때
의 E1을 출력
1:SN회까지 Ys를 출력
로컬
워크
메모리 *2
이전 값 입력 (e1')
시스템이 워크 영역으로써 사용합니다.
주기 카운터
불감 시간 테이블
입력 데이터수
불감 시간 테이블
1
불감 시간 테이블
2
불감 시간 테이블
SN
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를
클리어할 필요가 있습니다.
지정 위치 기호 명칭 추천 범위 *1 단위데이터 형식 표준값 저장
9 제어 연산 명령
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
S1
S2
D1
D2
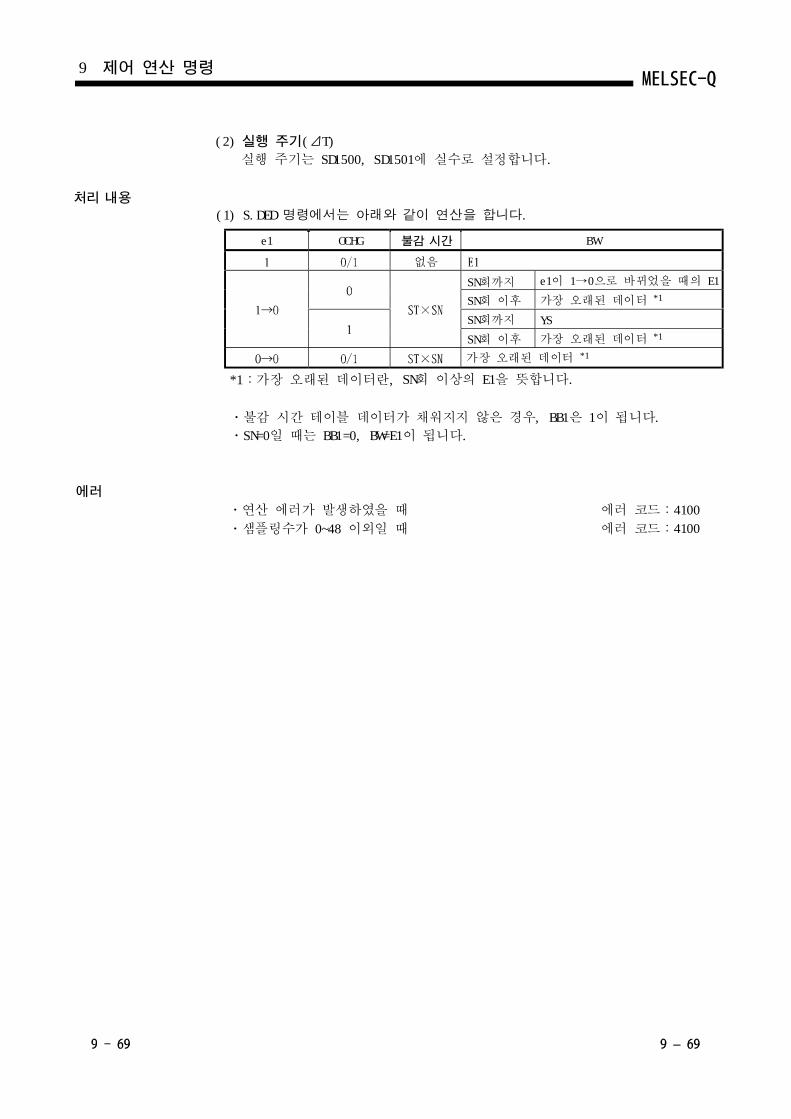
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) S.DED .명령에서는 아래와 같이 연산을 합니다
e1 OCHG 불감 시간 BW
없음
SN회까지 e1이 1→0으로 바뀌었을 때의 E1
SN회 이후 가장 오래된 데이터 *1
SN회까지 YS
SN회 이후 가장 오래된 데이터 *1
가장 오래된 데이터 *1
*1:가장 오래된 데이터란, SN회 이상의 E1을 뜻합니다.
ㆍ불감 시간 테이블 데이터가 채워지지 않은 경우, BB1은 1이 됩니다.
ㆍSN=0일 때는 BB1=0, BW=E1이 됩니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍ샘플링수가 0~48 이외일 때 에러 코드:4100
9 제어 연산 명령
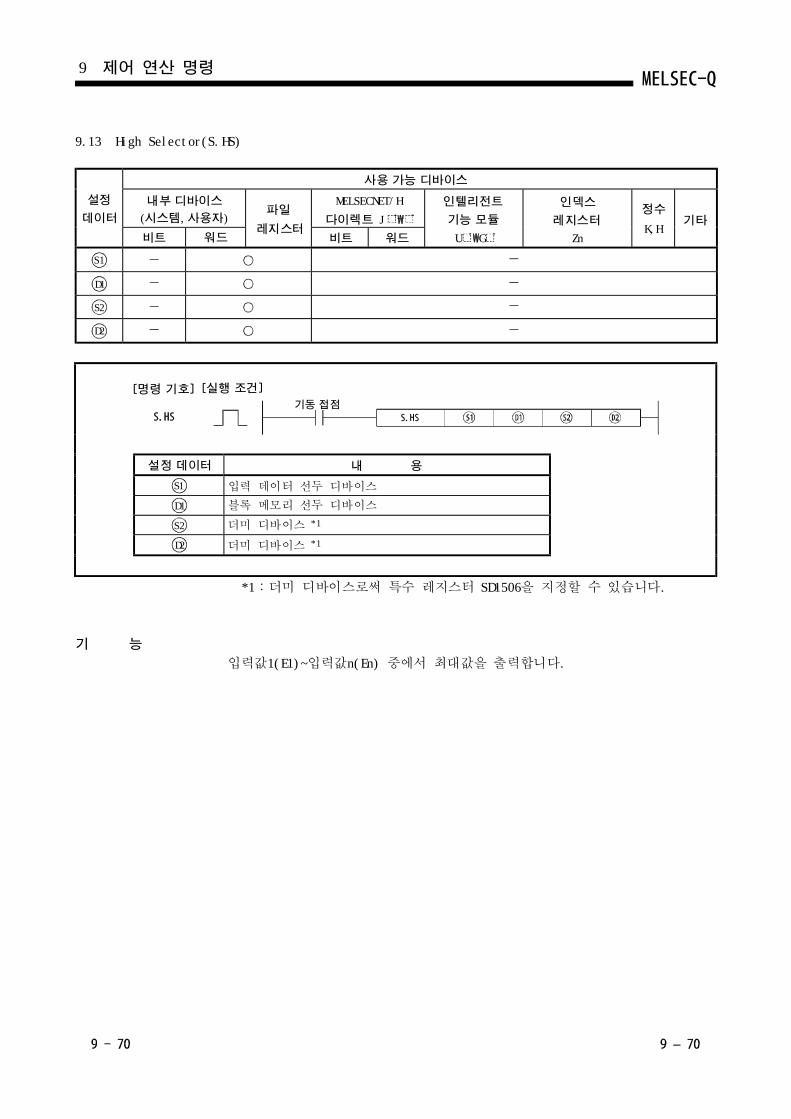
9.13 High Selector(S.HS)
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)~입력값n(En) 중에서 최대값을 출력합니다.
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
9 제어 연산 명령
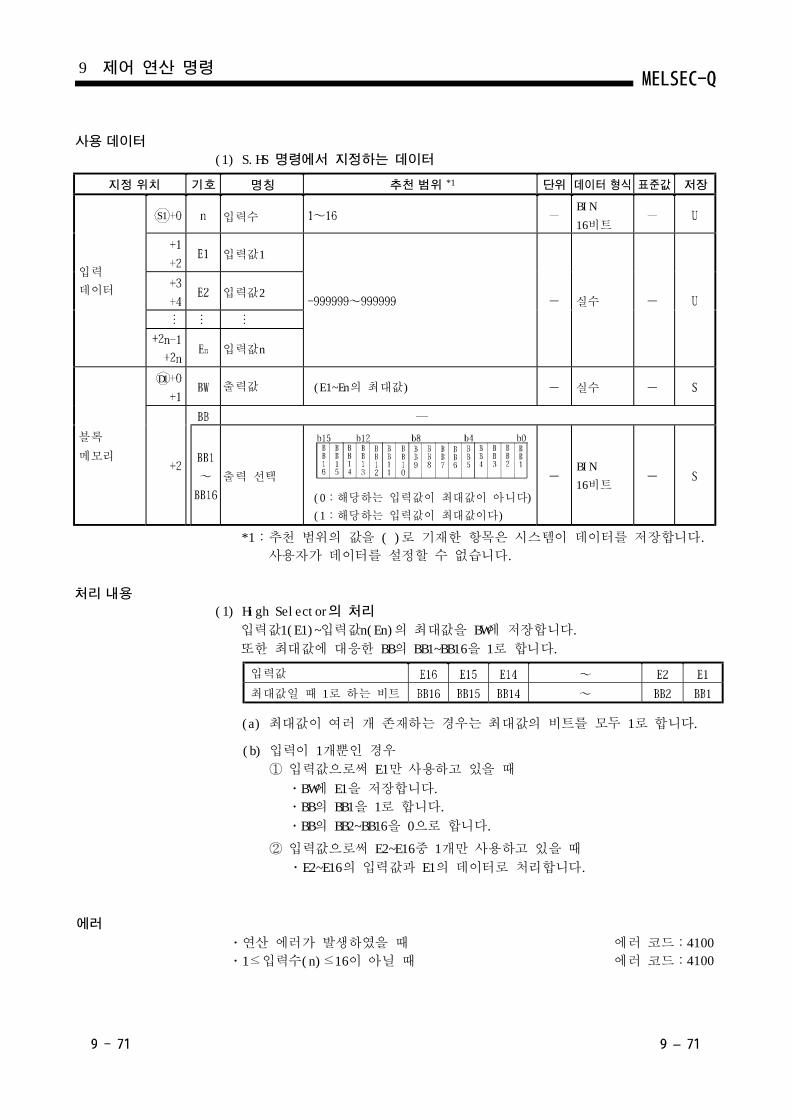
(1) S.HS 명령에서 지정하는 데이터
입력
데이터
입력수
입력값1
입력값2
입력값n
출력값 (E1~En의 최대값)
블록
메모리
출력 선택
(0:해당하는 입력값이 최대값이 아니다)
(1:해당하는 입력값이 최대값이다)
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) High Selector의 처리
입력값1(E1)~입력값n(En)의 최대값을 BW에 저장합니다.
또한 최대값에 대응한 BB의 BB1~BB16을 1로 합니다.
입력값
최대값일 때 1로 하는 비트
(a) 최대값이 여러 개 존재하는 경우는 최대값의 비트를 모두 1로 합니다.
(b) 입력이 1개뿐인 경우
① 입력값으로써 E1만 사용하고 있을 때
ㆍBW에 E1을 저장합니다.
ㆍBB의 BB1을 1로 합니다.
ㆍBB의 BB2~BB16을 0으로 합니다.
② 입력값으로써 E2~E16중 1개만 사용하고 있을 때
ㆍE2~E16의 입력값과 E1의 데이터로 처리합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍ1≤입력수(n)≤16이 아닐 때 에러 코드:4100
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
사용 데이터
9 제어 연산 명령
실수
실수
BIN
16비트
BIN
16비트
S1
D1
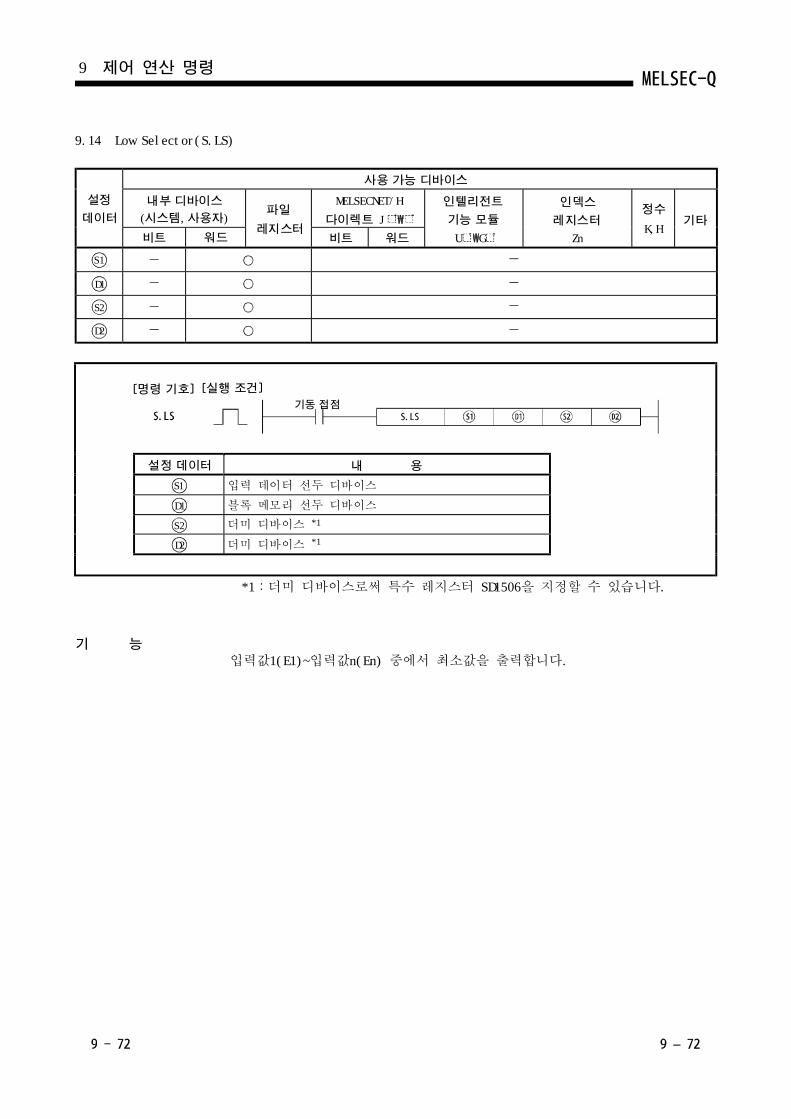
9.14 Low Selector(S.LS)
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)~입력값n(En) 최소값을 출력합니다.중에서기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
9 제어 연산 명령
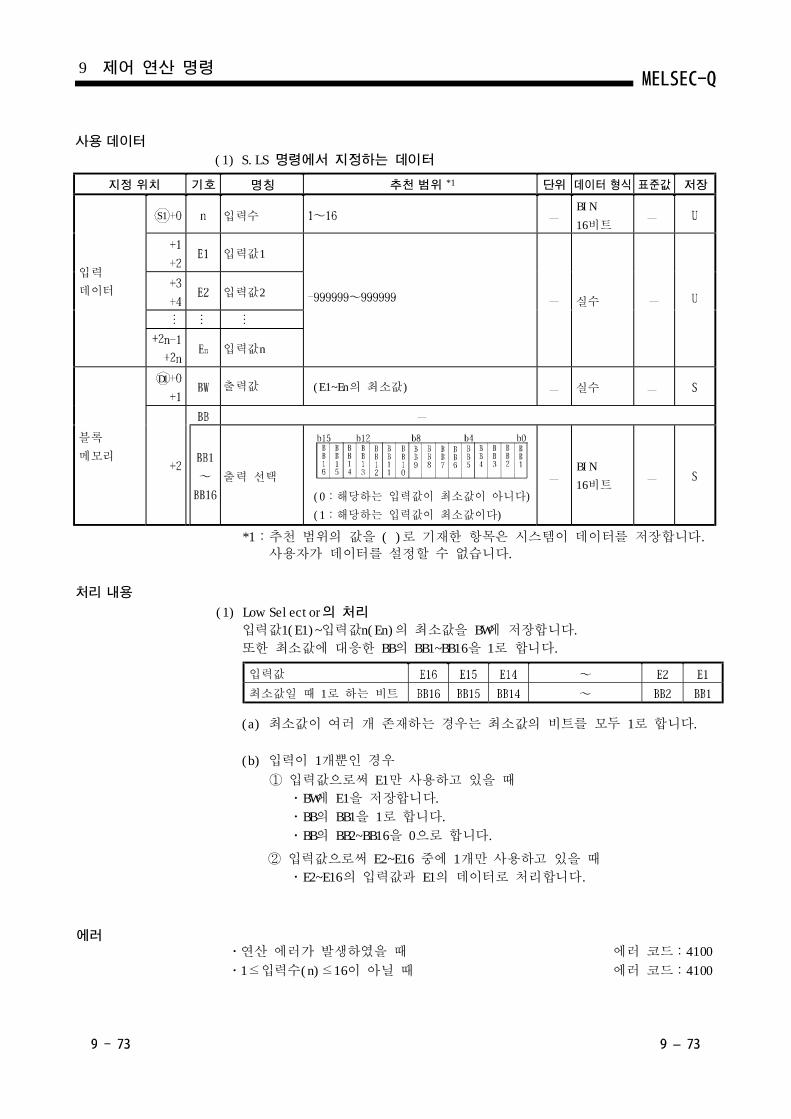
(1) S.LS 명령에서 지정하는 데이터
입력
데이터
입력수
입력값1
입력값2
입력값n
출력값 (E1~En의 최소값)
블록
메모리
출력 선택
(0:해당하는 입력값이 최소값이 아니다)
(1:해당하는 입력값이 최소값이다)
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) Low Selector의 처리
입력값1(E1)~입력값n(En)의 최소값을 BW에 저장합니다.
또한 최소값에 대응한 BB의 BB1~BB16을 1로 합니다.
입력값
최소값일 때 1로 하는 비트
(a) 최소값이 여러 개 존재하는 경우는 최소값의 비트를 모두 1로 합니다.
(b) 입력이 1개뿐인 경우
① 입력값으로써 E1만 사용하고 있을 때
ㆍBW에 E1을 저장합니다.
ㆍBB의 BB1을 1로 합니다.
ㆍBB의 BB2~BB16을 0으로 합니다.
② 입력값으로써 E2~E16 중에 1개만 사용하고 있을 때
ㆍE2~E16의 입력값과 E1의 데이터로 처리합니다.
에러ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍ1≤입력수(n)≤16이 아닐 때 에러 코드:4100
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
사용 데이터
9 제어 연산 명령
실수
실수
BIN
16비트
BIN
16비트
S1
D1
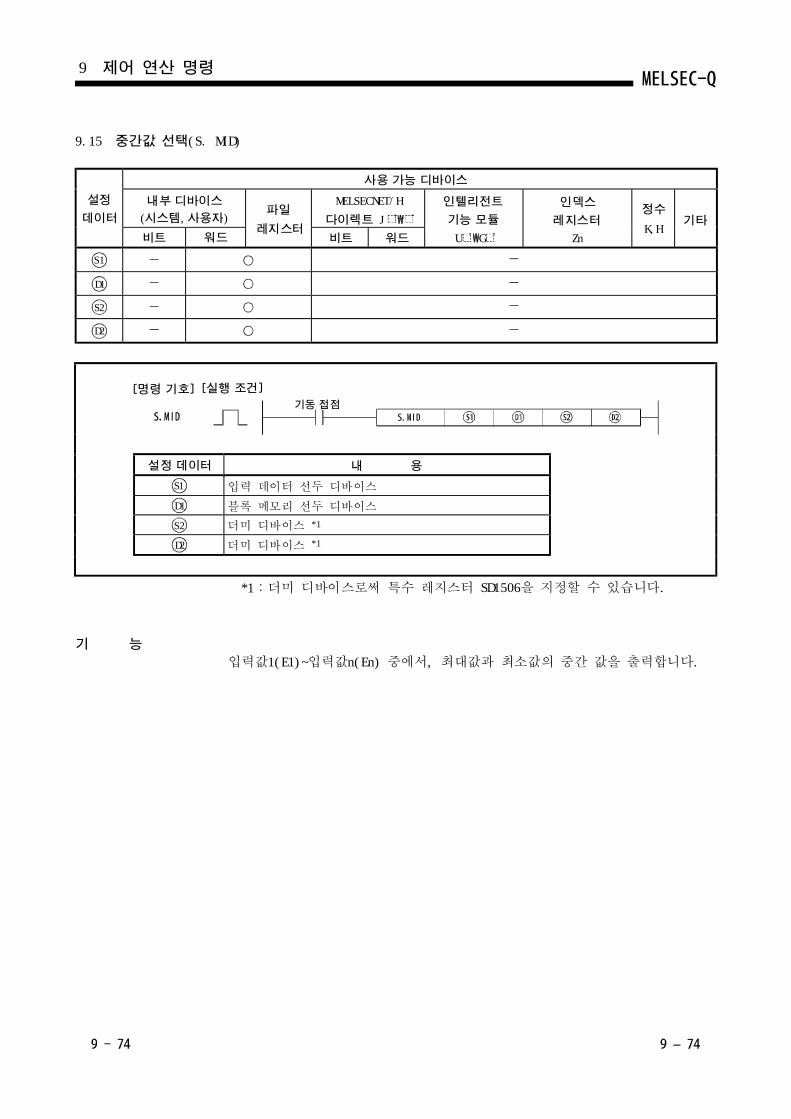
9.15 (S. MID)중간값 선택
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)~입력값n(En) , 최대값과 최소값의 중간 값을 출력합니다.중에서
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
더미 디바이스 *1
9 제어 연산 명령
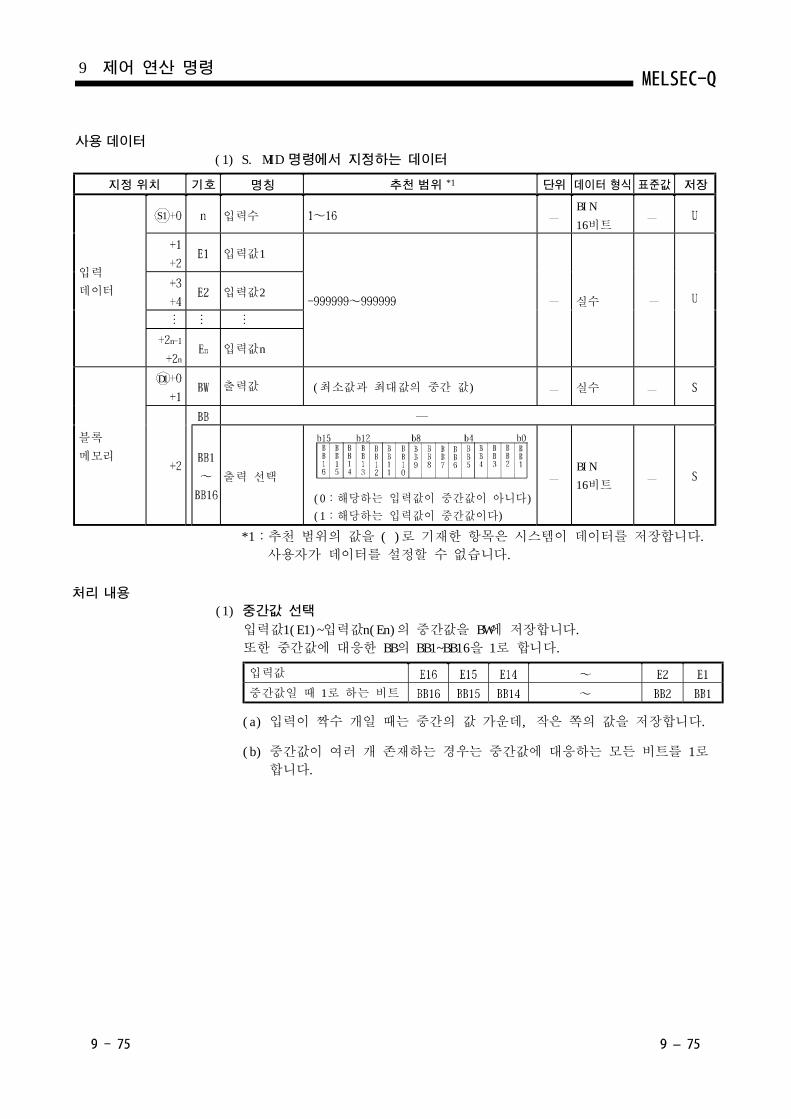
(1) S. MID 명령에서 지정하는 데이터
(최소값과 최대값의 중간 값)
(0:해당하는 입력값이 중간값이 아니다)
(1:해당하는 입력값이 중간값이다)
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) 중간값 선택
입력값1(E1)~입력값n(En)의 중간값을 BW에 저장합니다.
또한 중간값에 대응한 BB의 BB1~BB16을 1로 합니다.
입력값
중간값일 때 1로 하는 비트
(a) 입력이 짝수 개일 때는 중간의 값 가운데, 작은 쪽의 값을 저장합니다.
(b) 중간값이 여러 개 존재하는 경우는 중간값에 대응하는 모든 비트를 1로
합니다.
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
사용 데이터
9 제어 연산 명령
입력
데이터
블록
메모리
입력수
입력값1
입력값2
입력값n
출력값
출력 선택
실수
실수
BIN
16비트
BIN
16비트
S1
D1
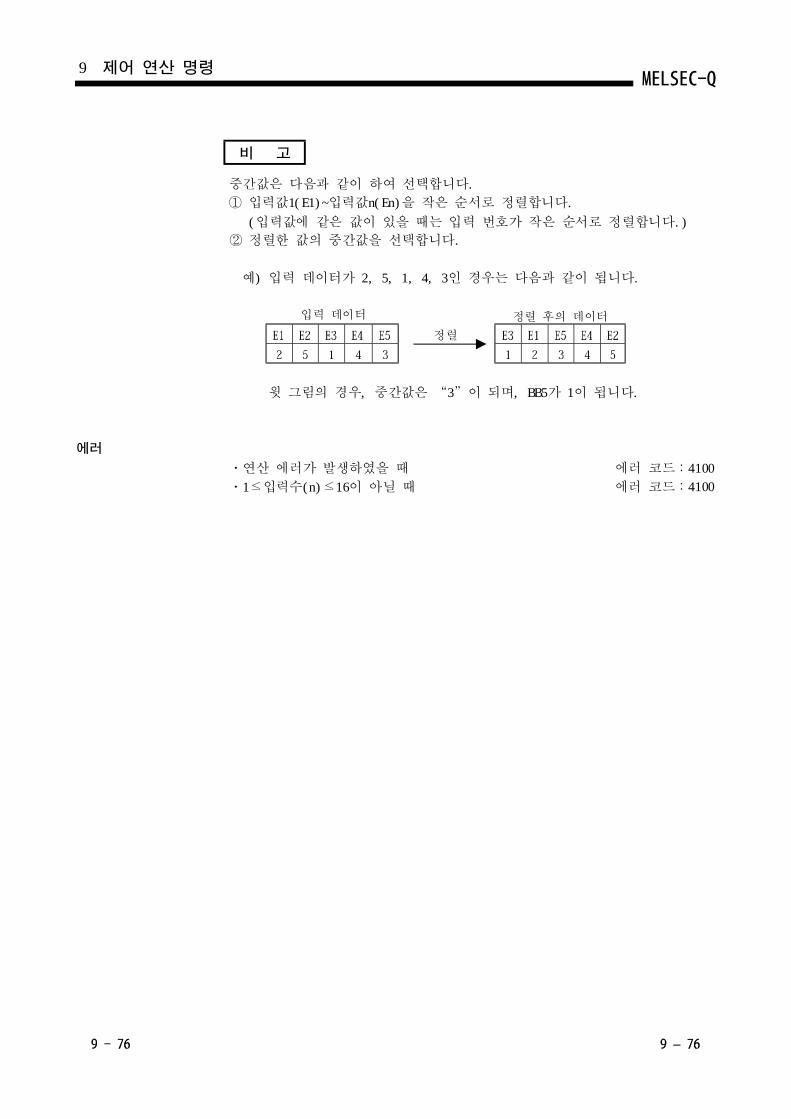
비 고
중간값은 다음과 같이 하여 선택합니다.
① 입력값1(E1)~입력값n(En)을 작은 순서로 정렬합니다.
(입력값에 같은 값이 있을 때는 입력 번호가 작은 순서로 정렬합니다.)
② 정렬한 값의 중간값을 선택합니다.
예) 입력 데이터가 2, 5, 1, 4, 3인 경우는 다음과 같이 됩니다.
입력 데이터
정렬
정렬 후의 데이터
윗 그림의 경우, 중간값은 “3”이 되며, BB5가 1이 됩니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍ1≤입력수(n)≤16이 아닐 때 에러 코드:4100
9 제어 연산 명령
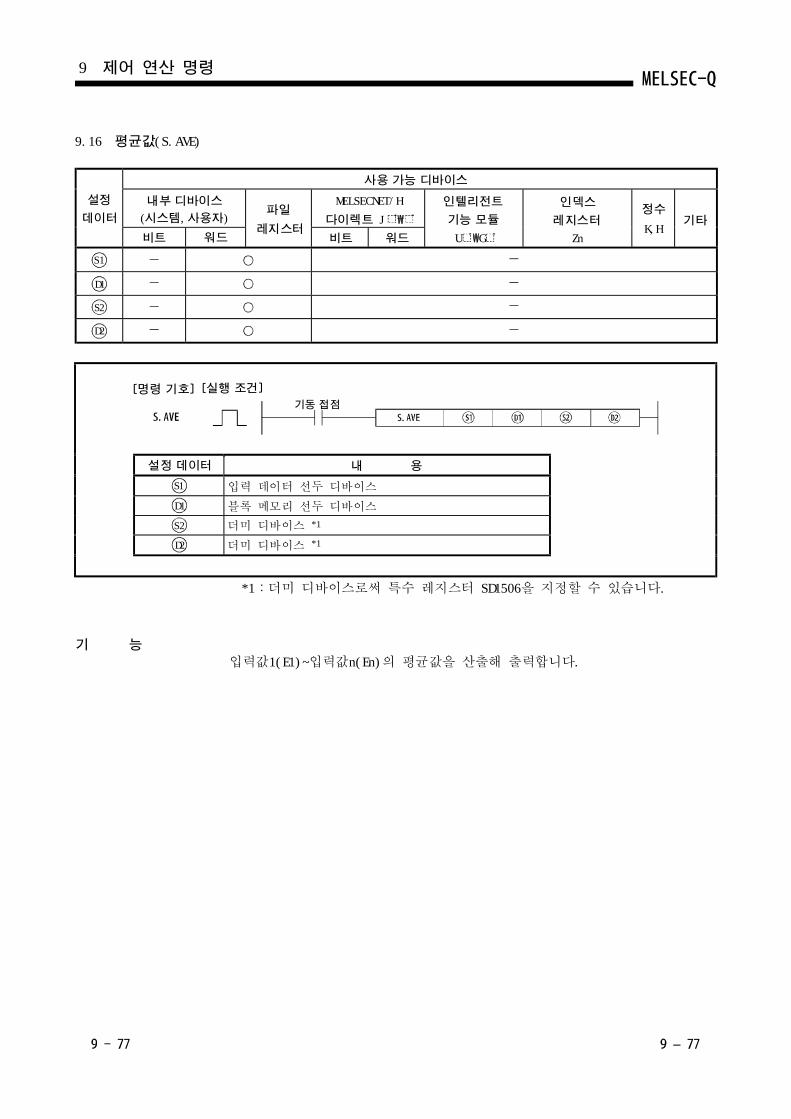
9.16 (S.AVE)평균값
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)~입력값n(En)의 평균값을 산출해 출력합니다.
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
9 제어 연산 명령
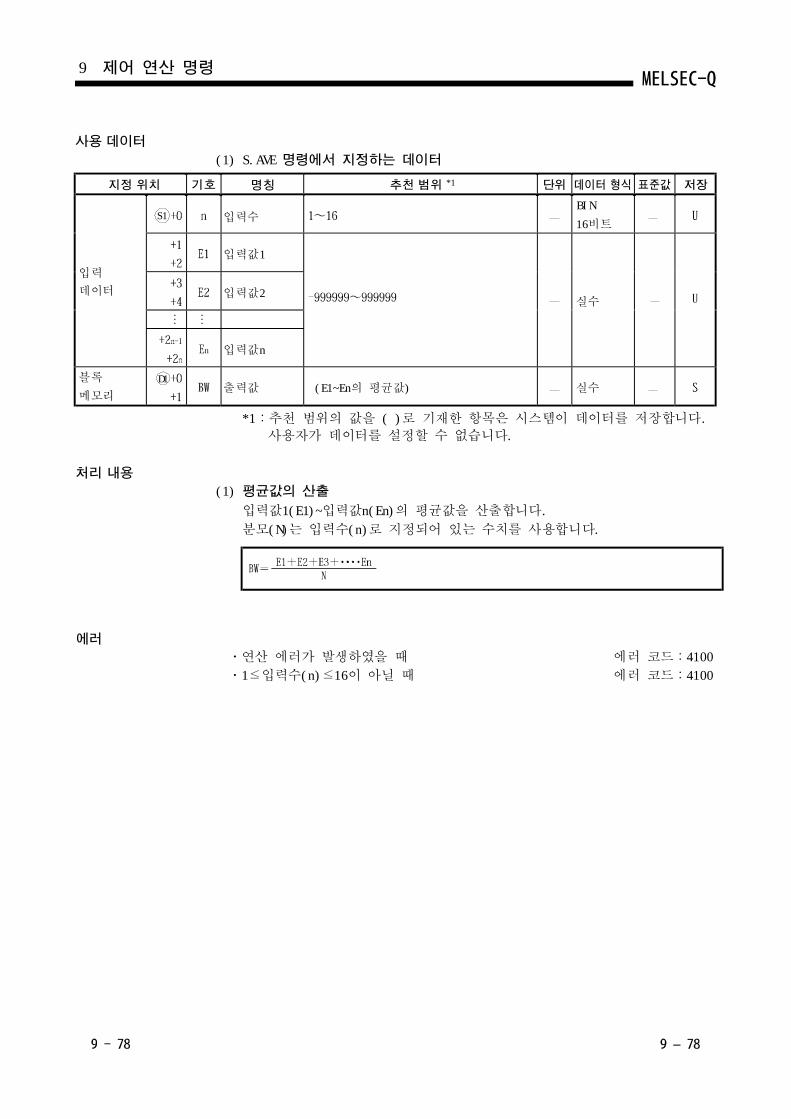
(1) S.AVE 명령에서 지정하는 데이터
입력
데이터
입력수
입력값1
입력값2
입력값n
블록
메모리출력값 (E1~En의 평균값)
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) 평균값의 산출
입력값1(E1)~입력값n(En)의 평균값을 산출합니다.
분모(N)는 입력수(n)로 지정되어 있는 수치를 사용합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍ1≤입력수(n)≤16이 아닐 때 에러 코드:4100
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
사용 데이터
9 제어 연산 명령
실수
실수
BIN
16비트S1
D1
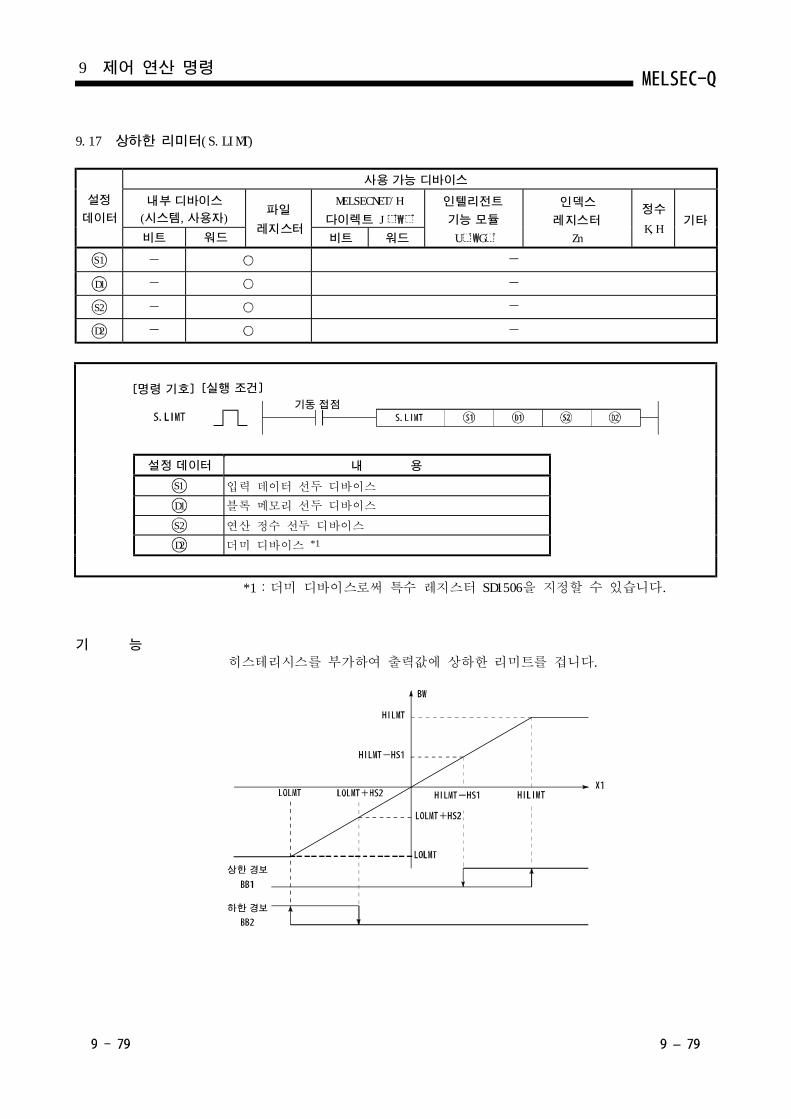
9.17 (S.LIMT)상하한 리미터
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
히스테리시스를 부가하여 출력값에 상하한 리미트를 겁니다.
상한 경보
하한 경보
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
9 제어 연산 명령

사용 데이터
(1) S.LIMT 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리
출력값
상한 경보
하한 경보 (0:경보 없음)
(1:경보 있음)
연산 정수
상한값 *2
하한값 *2
상한
히스테리시스
하한
히스테리시스
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:HILMT LOLMT가 되도록 설정합니다.
처리 내용
(1) S.LIMT 명령에서는 아래와 같이 연산을 합니다.
조 건
상기 이외(히스테리시스 부분) 이전 값 이전 값
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍHS1<0 또는 HS2 0일 때 에러 코드:4100<
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
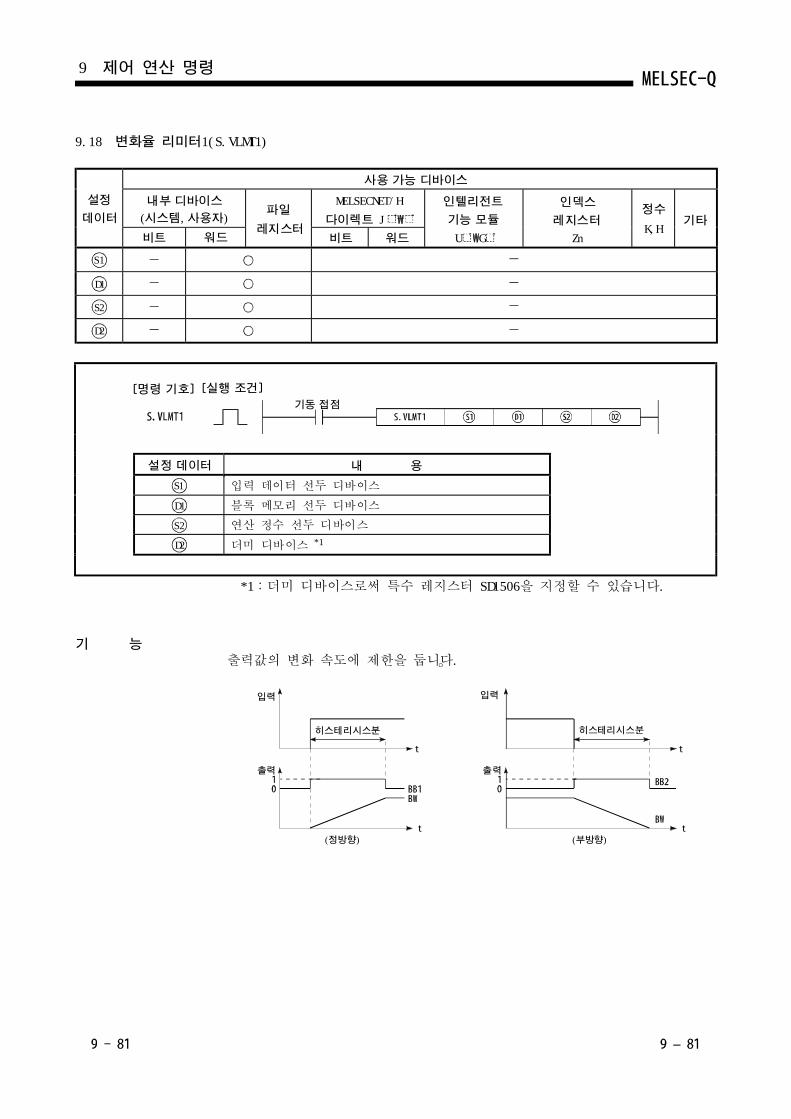
9.18 1(S.VLMT1)변화율 리미터
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
출력값의 변화 속도에 제한을 둡니다.
입력
히스테리시스분
입력
히스테리시스분
출력
(정방향)
출력
(부방향)
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
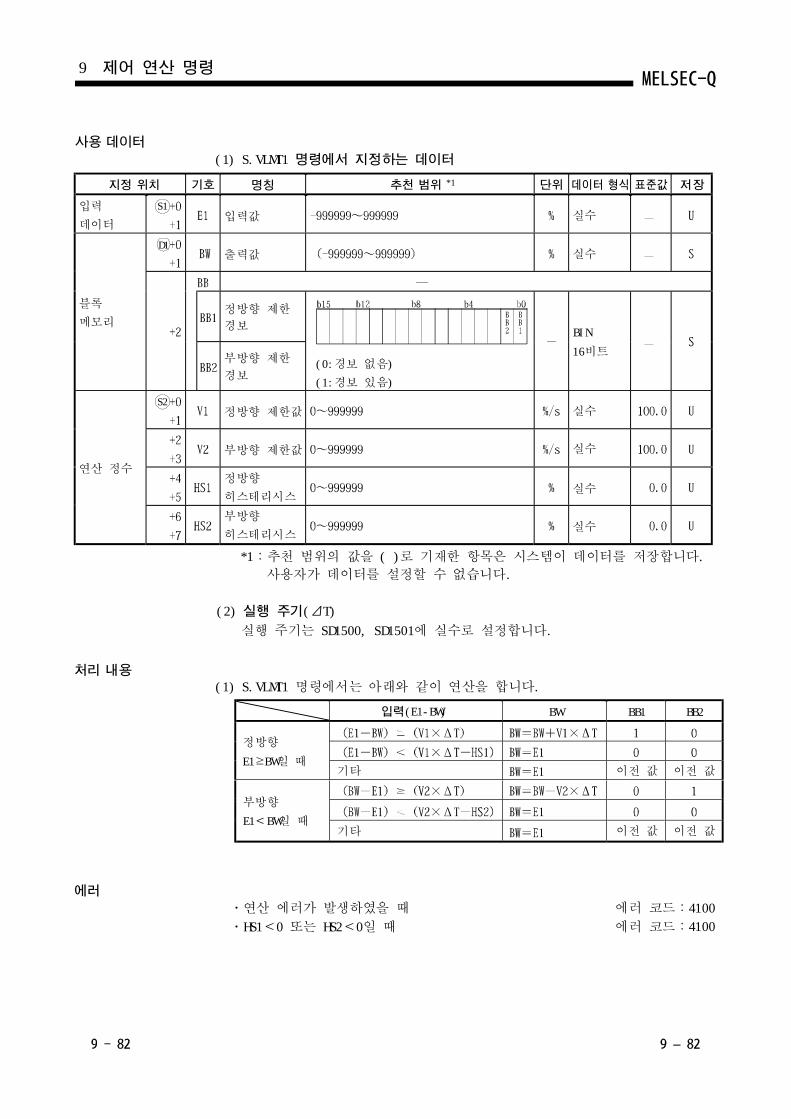
(1) S.VLMT1 명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용(1) S.VLMT1 명령에서는 아래와 같이 연산을 합니다.
입력(E1-BW) BW BB1 BB2
정방향
E1 BW일 때≥기타
기타
이전 값
이전 값
이전 값
이전 값
부방향
E1 BW일 때<
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍHS1 0 또는 HS2 0일 때 에러 코드:4100< <
입력
데이터입력값
블록
메모리
출력값
정방향 제한
경보
부방향 제한
경보(0:경보 없음)
(1:경보 있음)
연산 정수
정방향 제한값
부방향 제한값
정방향
히스테리시스
부방향
히스테리시스
9 제어 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
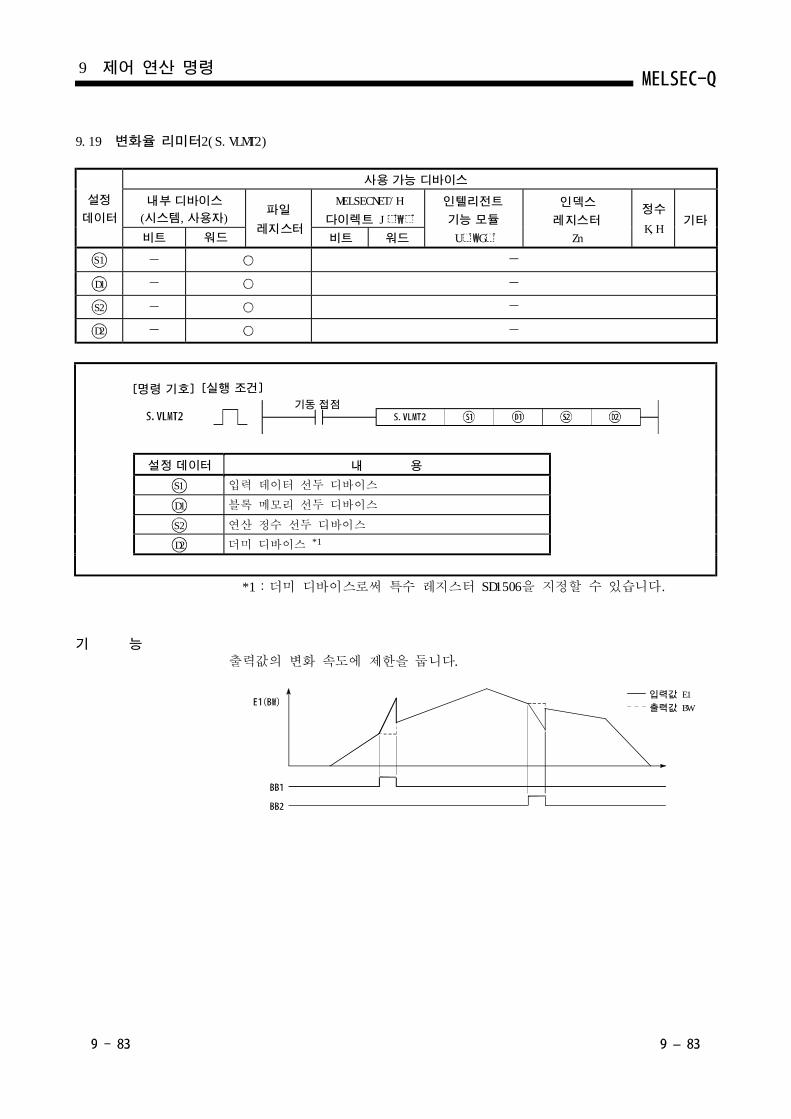
9.19 2(S.VLMT2)변화율 리미터
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
출력값의 변화 속도에 제한을 둡니다.
입력값 E1
출력값 BW
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
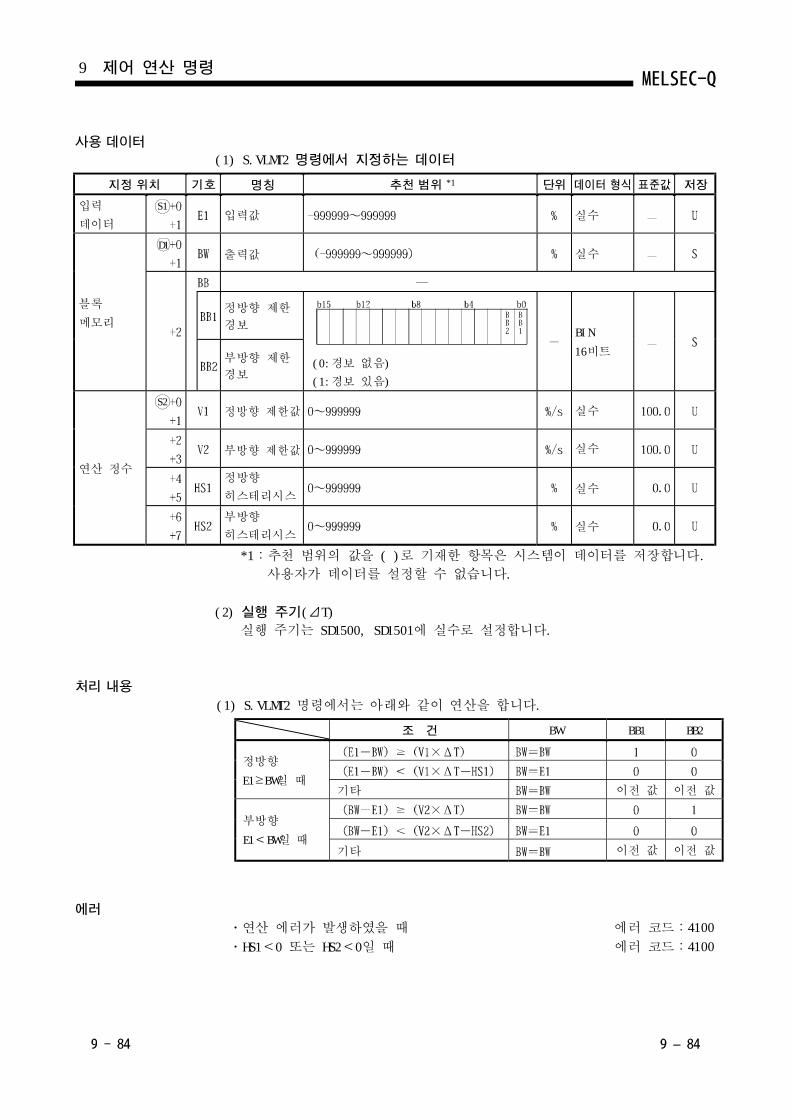
입력
데이터입력값
출력값
블록
메모리
정방향 제한
경보
부방향 제한
경보(0:경보 없음)
(1:경보 있음)
연산 정수
정방향 제한값
부방향 제한값
정방향
히스테리시스
부방향
히스테리시스
(1) S.VLMT2 명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) S.VLMT2 명령에서는 아래와 같이 연산을 합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍHS1 0 또는 HS2 0일 때 에러 코드:4100< <
9 제어 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
정방향
E1 BW일 때≥
부방향
E1 BW일 때<
기타
기타
이전 값
이전 값
이전 값
이전 값
BW BB1 BB2조 건
실수
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
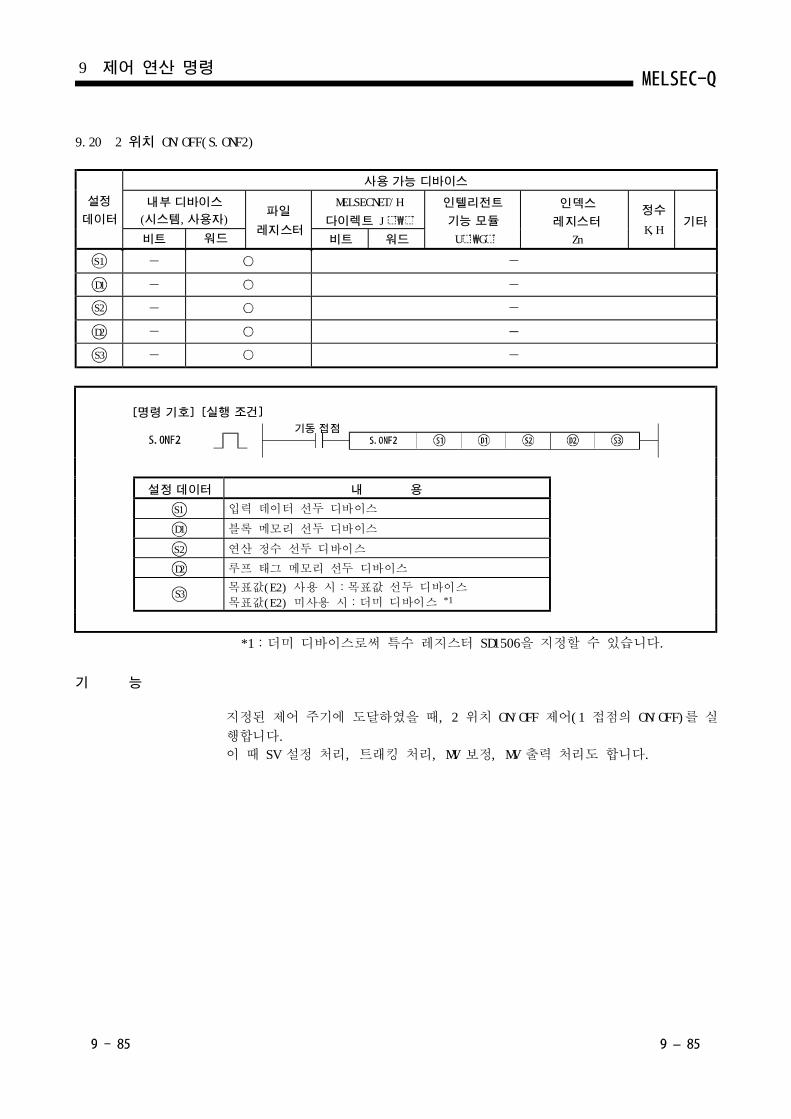
9.20 2 ON/OFF(S.ONF2)위치
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시:목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
지정된 제어 주기에 도달하였을 때, 2 위치 ON/OFF 제어(1 접점의 ON/OFF)를 실
행합니다.
이 때 SV 설정 처리, 트래킹 처리, MV 보정, MV 출력 처리도 합니다.
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
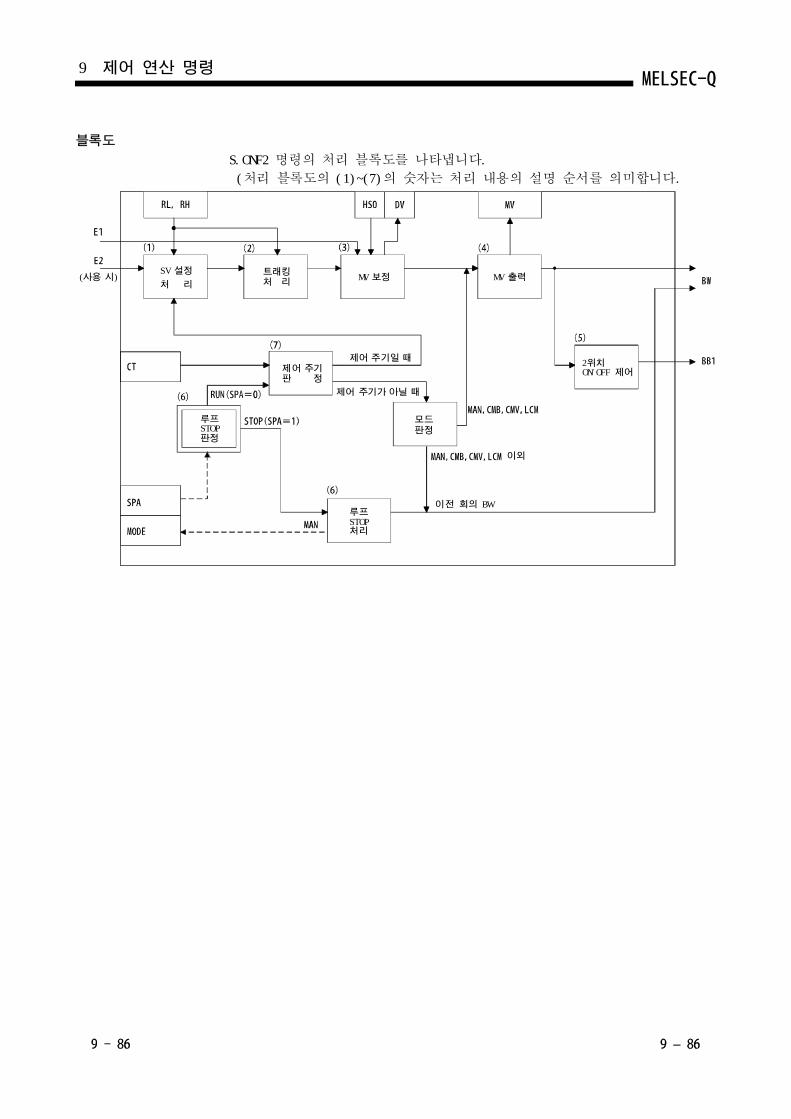
S.ONF2 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 의미합니다.
SV 설정
처 리MV 보정 MV 출력
2ON/OFF위치
제어
9 제어 연산 명령
블록도
루프
판정STOP
제어 주기판 정
제어 주기일 때
제어 주기가 아닐 때
루프
처리STOP
트래킹처 리
모드판정
(사용 시)
이전 회의 BW
이외
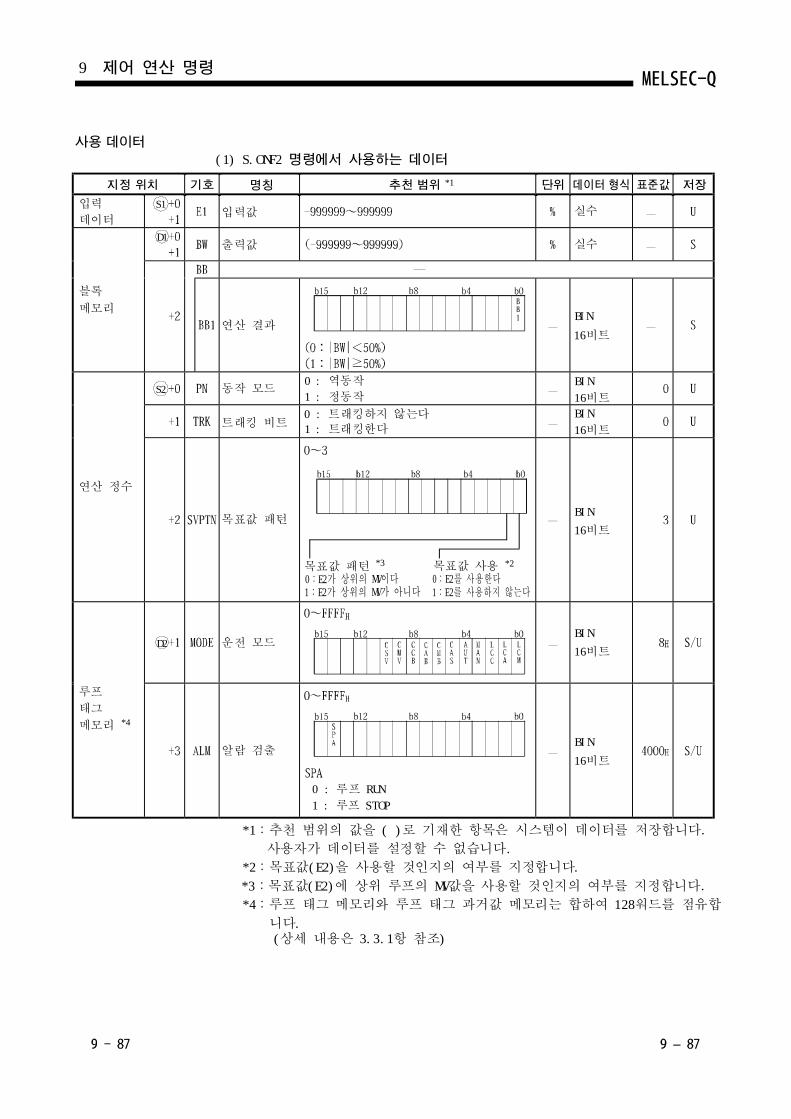
입력
데이터입력값
블록
메모리
출력값
연산 결과
연산 정수
동작 모드0 : 역동작
1 : 정동작
트래킹 비트0 : 트래킹하지 않는다
1 : 트래킹한다
목표값 패턴
루프
태그
메모리 *4
운전 모드
알람 검출
0 : 루프 RUN
1 : 루프 STOP
(1) S.ONF2 명령에서 사용하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
*4:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(상세 내용은 3.3.1항 참조)
9 제어 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
S1
S2
D1
D2
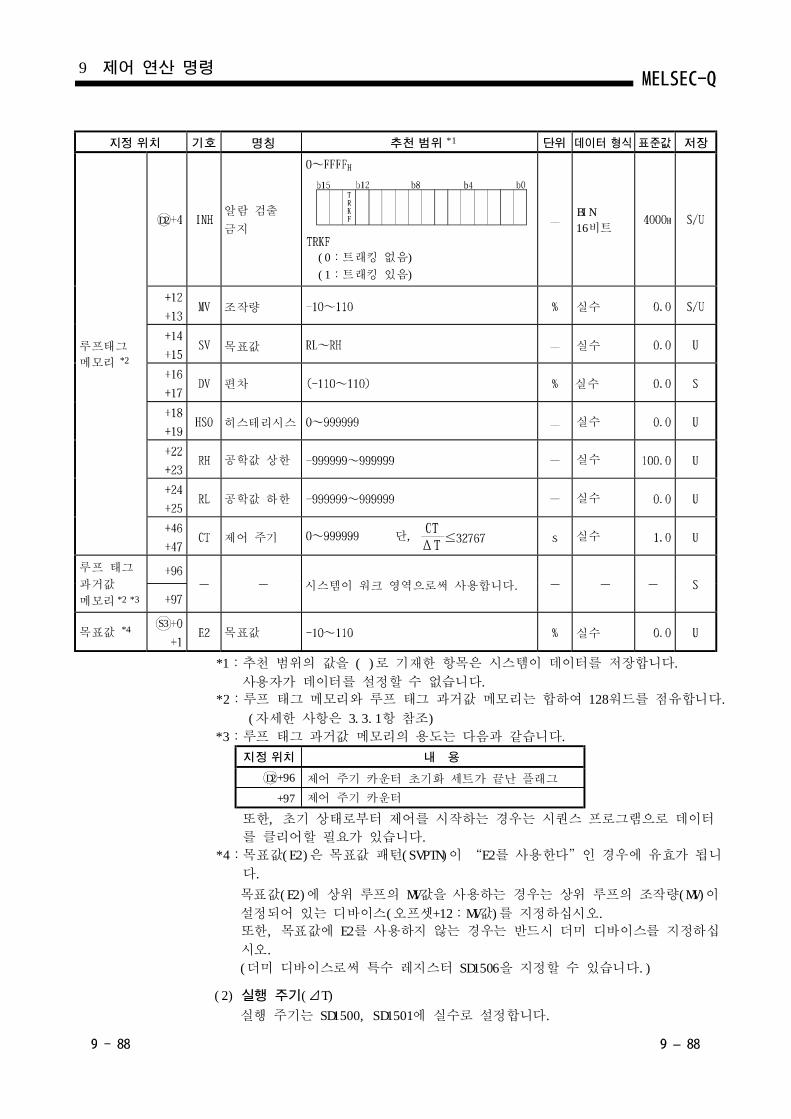
알람 검출
금지
(0:트래킹 없음)
(1:트래킹 있음)
조작량
목표값
편차
히스테리시스
공학값 상한
공학값 하한
제어 주기 단,
시스템이 워크 영역으로써 사용합니다.
목표값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합니다.
(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
D2+96 제어 주기 카운터 초기화 세트가 끝난 플래그
+97 제어 주기 카운터
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터
를 클리어할 필요가 있습니다.
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효가 됩니
다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량(MV)이
설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정하십
시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
과거값
메모리 *2 *3
목표값 *4
루프태그
메모리 *2
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
지정 위치 내 용
S3
D2
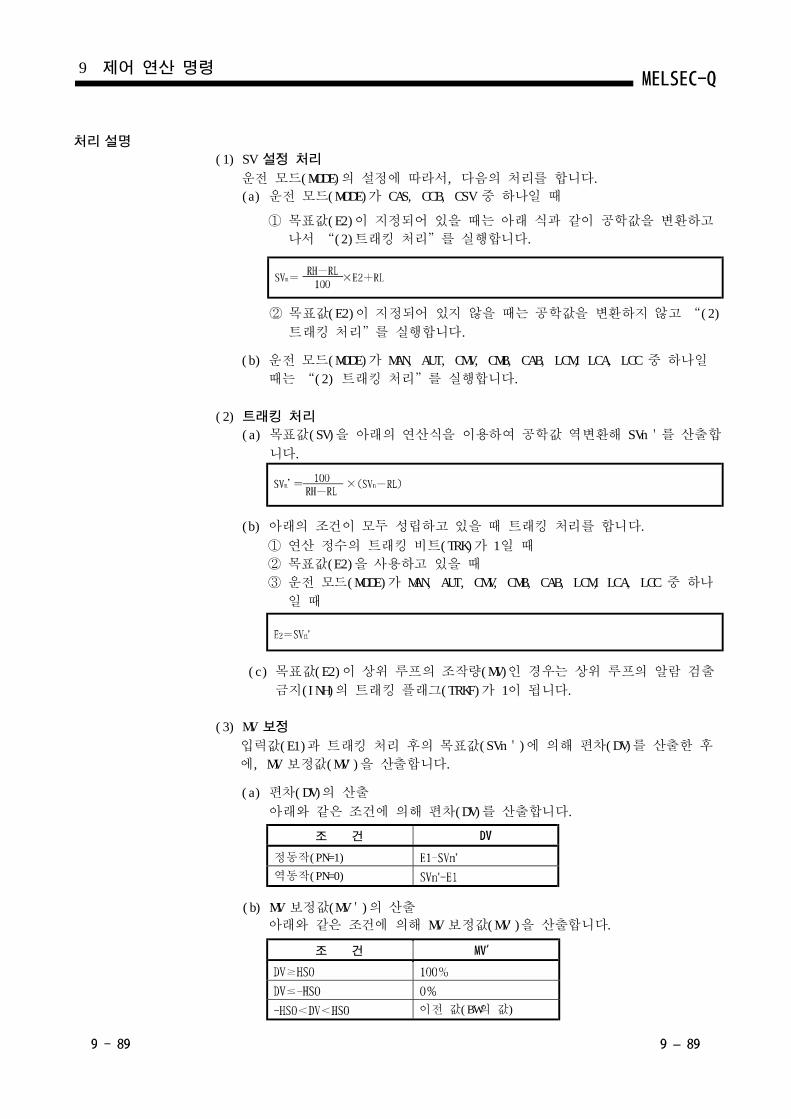
처리 설명
(1) SV 설정 처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)트래킹 처리”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
트래킹 처리”를 실행합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 실행합니다.
(2) 트래킹 처리
(a) 목표값(SV)을 아래의 연산식을 이용하여 공학값 역변환해 SVn'를 산출합
니다.
(b) 아래의 조건이 모두 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) MV 보정
입력값(E1)과 트래킹 처리 후의 목표값(SVn')에 의해 편차(DV)를 산출한 후
에, MV 보정값(MV')을 산출합니다.
(a) 편차(DV)의 산출
아래와 같은 조건에 의해 편차(DV)를 산출합니다.
정동작(PN=1)
역동작(PN=0)
(b) MV 보정값(MV')의 산출
아래와 같은 조건에 의해 MV 보정값(MV')을 산출합니다.
이전 값(BW의 값)
9 제어 연산 명령
조 건
조 건
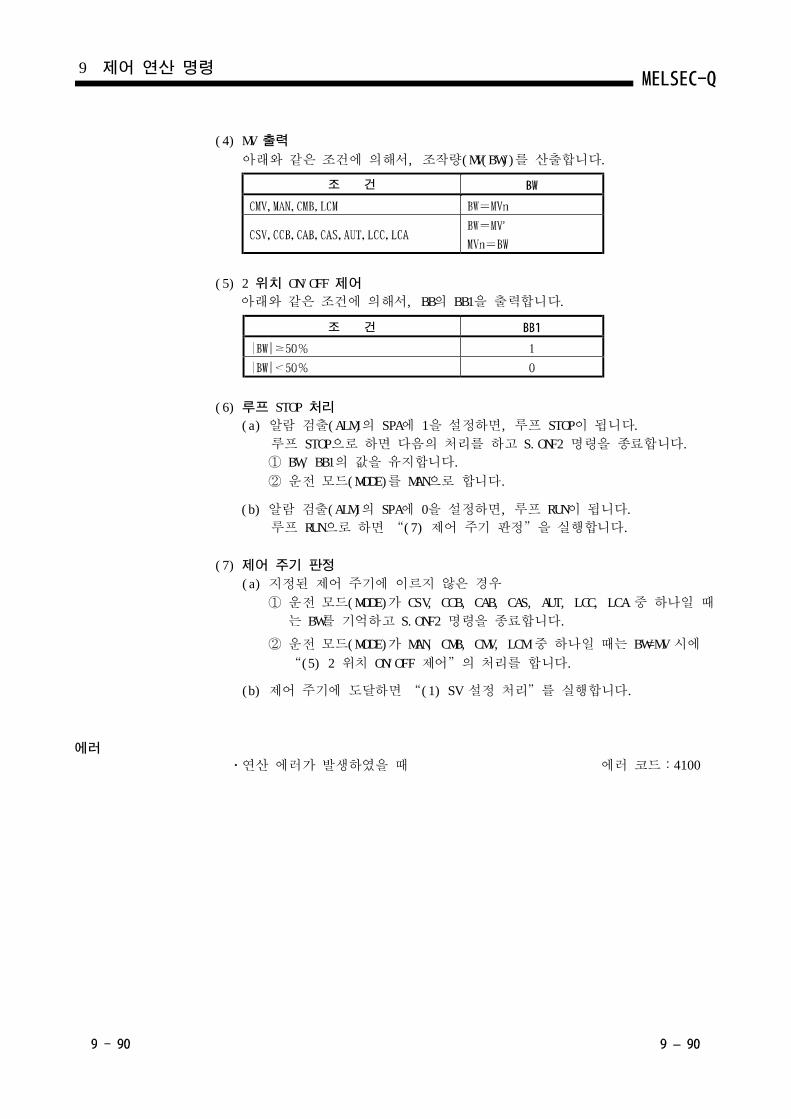
(4) MV 출력
아래와 같은 조건에 의해서, 조작량(MV(BW))를 산출합니다.
(5) 2 ON/OFF위치 제어
아래와 같은 조건에 의해서, BB의 BB1을 출력합니다.
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.ONF2 명령을 종료합니다.
① BW, BB1의 값을 유지합니다.
② 운전 모드(MODE)를 MAN으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면 “(7) 제어 주기 판정”을 실행합니다.
(7) 제어 주기 판정
(a) 지정된 제어 주기에 이르지 않은 경우
① 운전 모드(MODE)가 CSV, CCB, CAB, CAS, AUT, LCC, LCA 중 하나일 때
는 BW를 기억하고 S.ONF2 명령을 종료합니다.
② 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나일 때는 BW=MV 시에
“(5) 2 위치 ON/OFF 제어”의 처리를 합니다.
(b) 제어 주기에 도달하면 “(1) SV 설정 처리”를 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
조 건
조 건

9.21 3 ON/OFF(S.ONF3)위치
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
목표값(E2) 사용 시:목표값 선두 디바이스
목표값(E2) 미사용 시:더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
제어 주기 마다, 3 위치 ON/OFF 제어(2 접점의 ON/OFF)를 처리합니다.
이 때 SV 설정 처리, 트래킹 처리, MV 보정, MV 출력 처리도 실행합니다.
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
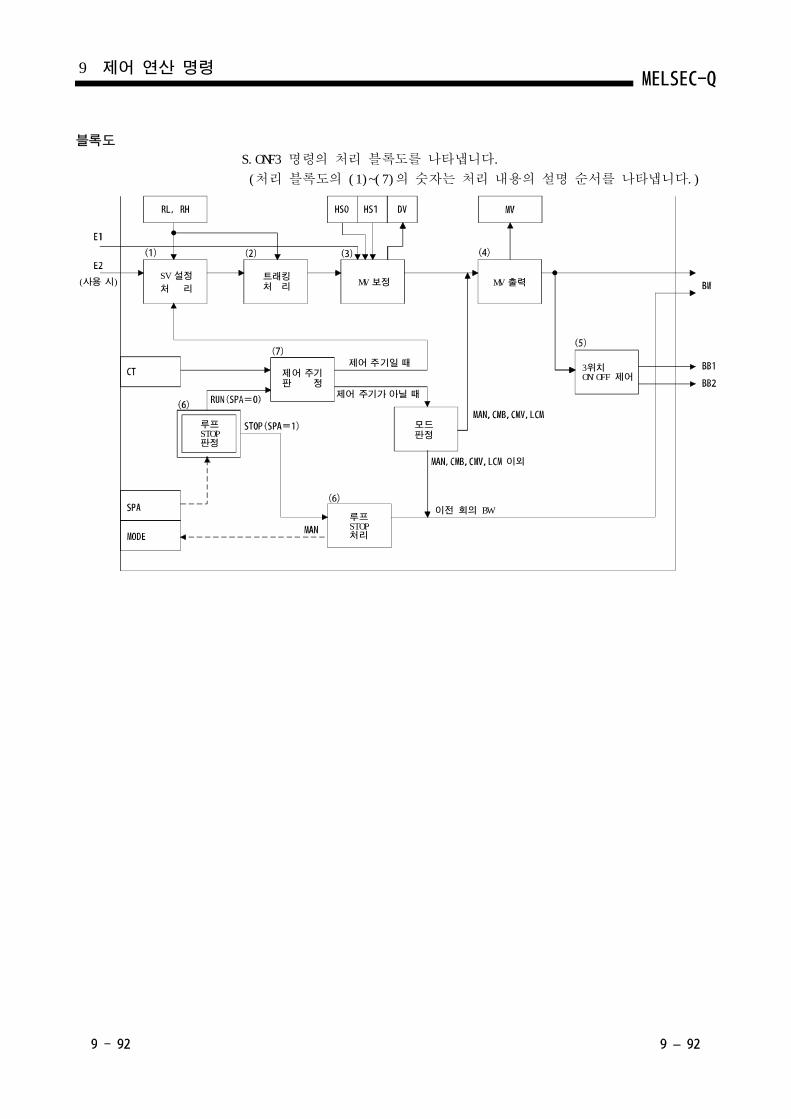
블록도
S.ONF3 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
9 제어 연산 명령
SV 설정
처 리MV 보정 MV 출력
3ON/OFF위치
제어
루프
판정STOP
제어 주기판 정
제어 주기일 때
제어 주기가 아닐 때
루프
처리STOP
트래킹처 리
모드판정
(사용 시)
이전 회의 BW
이외
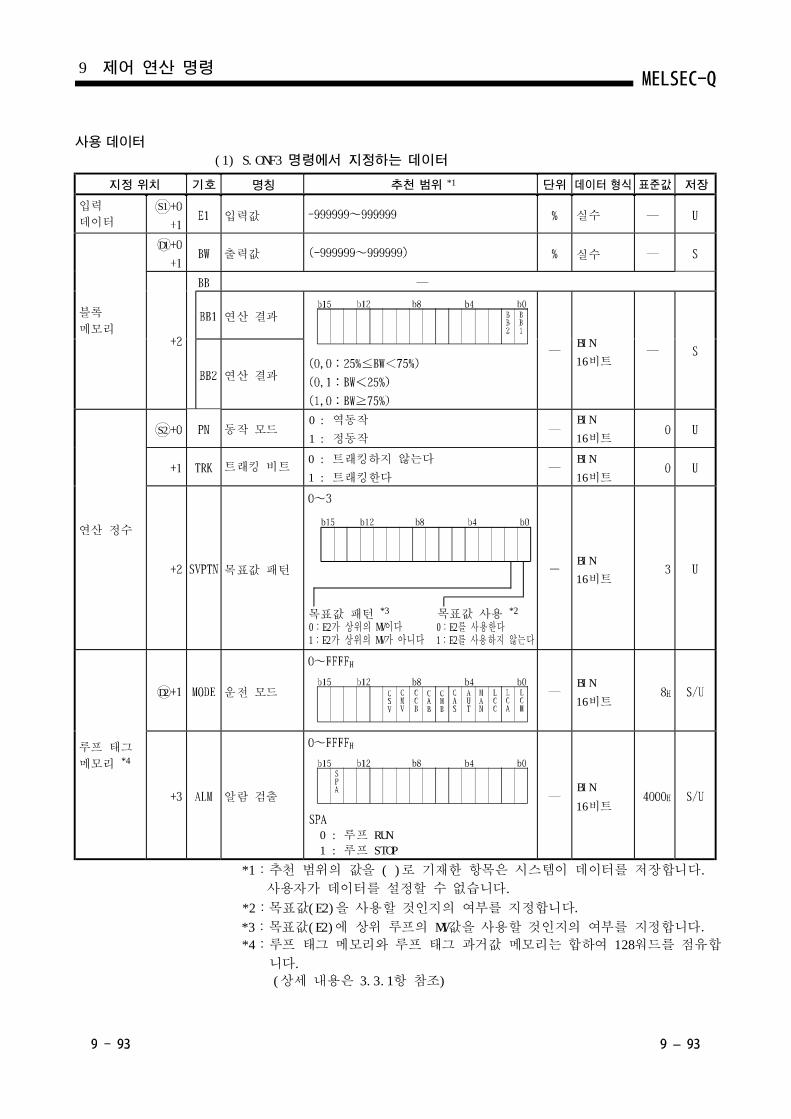
(1) S.ONF3 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리
출력값
연산 결과
연산 결과
연산 정수
동작 모드0 : 역동작
1 : 정동작
트래킹 비트0 : 트래킹하지 않는다
1 : 트래킹한다
목표값 패턴
루프 태그
메모리 *4
운전 모드
알람 검출
0 : 루프 RUN
1 : 루프 STOP
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:목표값(E2)을 사용할 것인지의 여부를 지정합니다.
*3:목표값(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
*4:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.
(상세 내용은 3.3.1항 참조)
9 제어 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
목표값 패턴 *3
0:E2가 상위의 MV이다1:E2가 상위의 MV가 아니다
목표값 사용 *2
0:E2를 사용한다1:E2를 사용하지 않는다
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
S1
S2
D1
D2
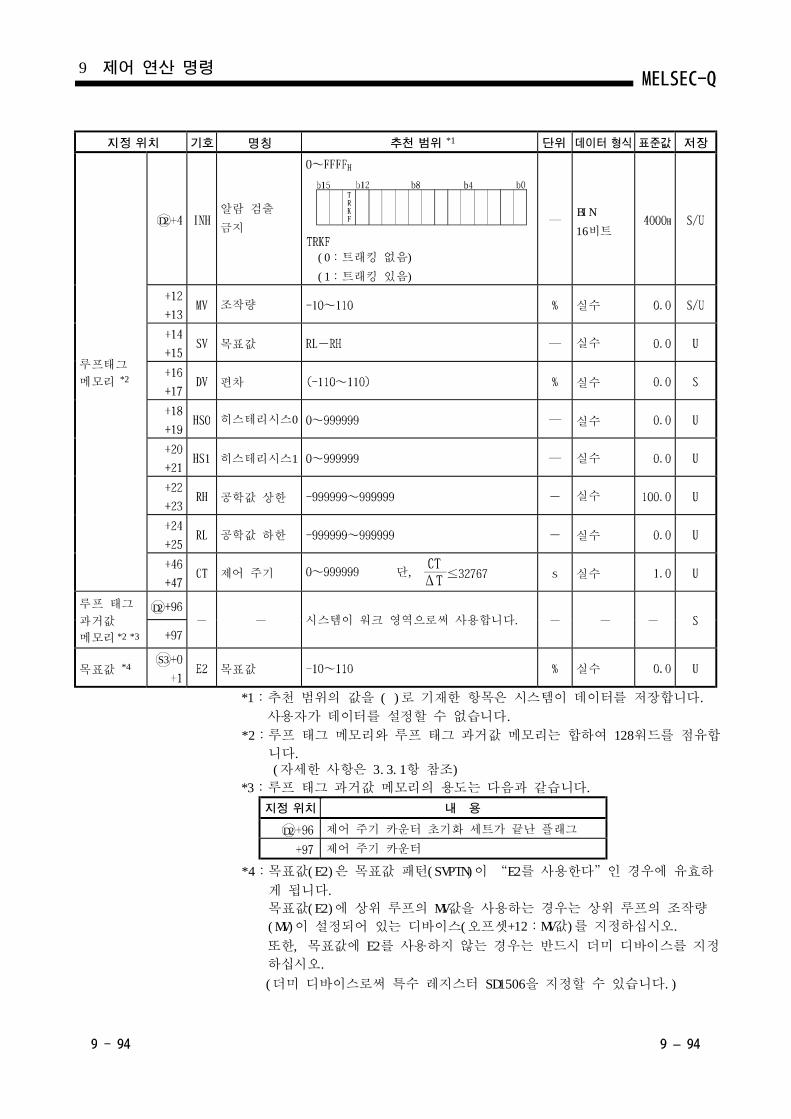
알람 검출
금지
(0:트래킹 없음)
(1:트래킹 있음)
조작량
목표값
편차
히스테리시스0
히스테리시스1
공학값 상한
공학값 하한
제어 주기 단,
시스템이 워크 영역으로써 사용합니다.
목표값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
*3:루프 태그 과거값 메모리의 용도는 다음과 같습니다.
제어 주기 카운터 초기화 세트가 끝난 플래그
제어 주기 카운터
*4:목표값(E2)은 목표값 패턴(SVPTN)이 “E2를 사용한다”인 경우에 유효하
게 됩니다.
목표값(E2)에 상위 루프의 MV값을 사용하는 경우는 상위 루프의 조작량
(MV)이 설정되어 있는 디바이스(오프셋+12:MV값)를 지정하십시오.
또한, 목표값에 E2를 사용하지 않는 경우는 반드시 더미 디바이스를 지정
하십시오.
(더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
과거값
메모리 *2 *3
루프태그
메모리 *2
목표값 *4
지정 위치 내 용
실수
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
S3
D2
D2
D2
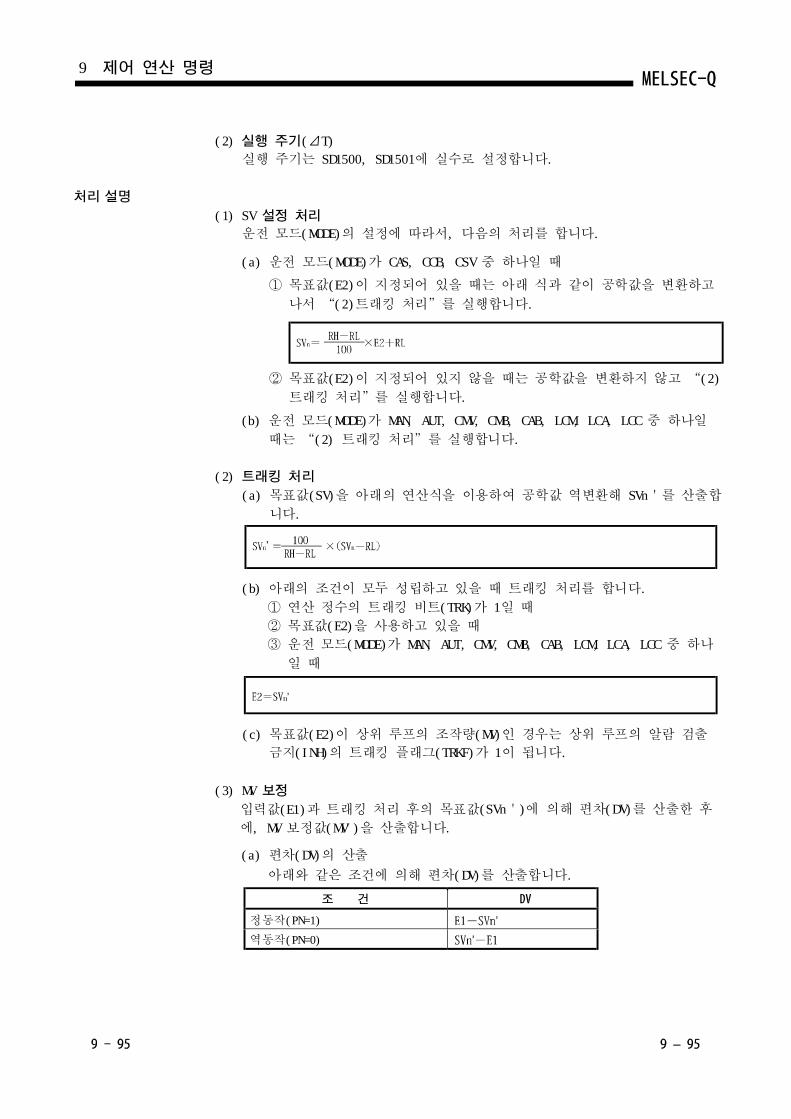
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 설명
(1) SV 설정 처리
운전 모드(MODE)의 설정에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 CAS, CCB, CSV 중 하나일 때
① 목표값(E2)이 지정되어 있을 때는 아래 식과 같이 공학값을 변환하고
나서 “(2)트래킹 처리”를 실행합니다.
② 목표값(E2)이 지정되어 있지 않을 때는 공학값을 변환하지 않고 “(2)
트래킹 처리”를 실행합니다.
(b) 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나일
때는 “(2) 트래킹 처리”를 실행합니다.
(2) 트래킹 처리
(a) 목표값(SV)을 아래의 연산식을 이용하여 공학값 역변환해 SVn'를 산출합
니다.
(b) 아래의 조건이 모두 성립하고 있을 때 트래킹 처리를 합니다.
① 연산 정수의 트래킹 비트(TRK)가 1일 때
② 목표값(E2)을 사용하고 있을 때
③ 운전 모드(MODE)가 MAN, AUT, CMV, CMB, CAB, LCM, LCA, LCC 중 하나
일 때
(c) 목표값(E2)이 상위 루프의 조작량(MV)인 경우는 상위 루프의 알람 검출
금지(INH)의 트래킹 플래그(TRKF)가 1이 됩니다.
(3) MV 보정
입력값(E1)과 트래킹 처리 후의 목표값(SVn')에 의해 편차(DV)를 산출한 후
에, MV 보정값(MV')을 산출합니다.
(a) 편차(DV)의 산출
아래와 같은 조건에 의해 편차(DV)를 산출합니다.
정동작(PN=1)
역동작(PN=0)
9 제어 연산 명령
조 건
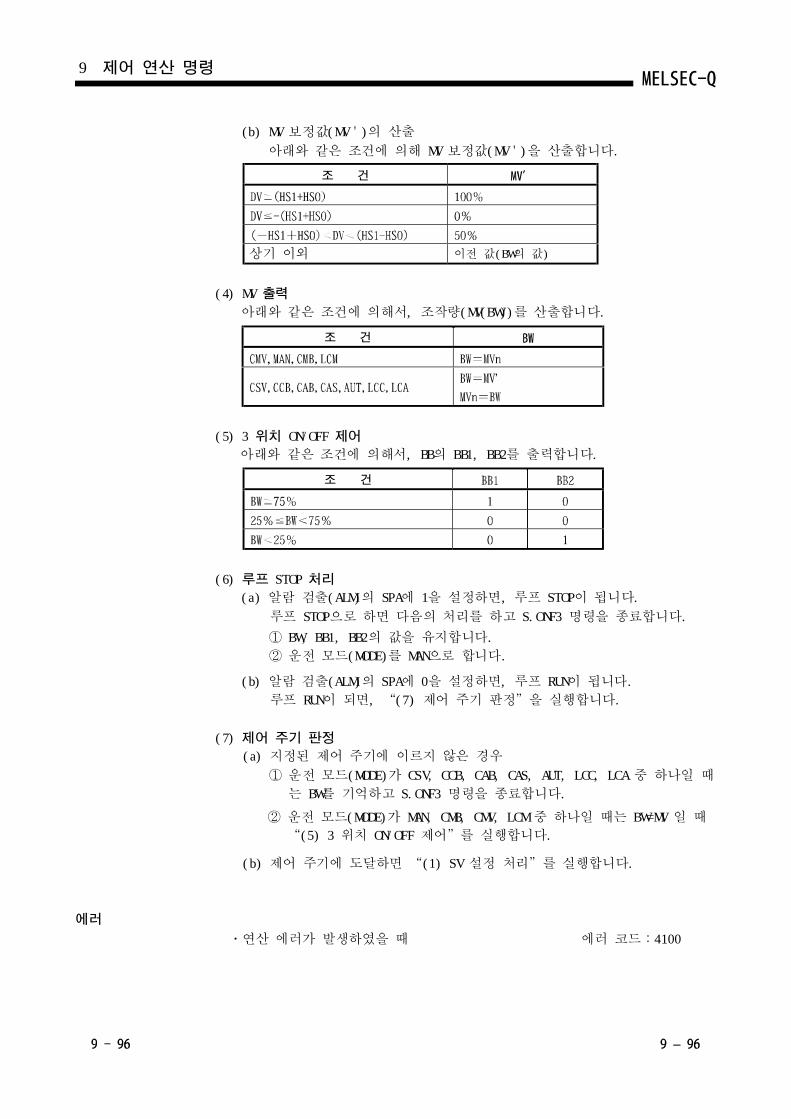
(b) MV 보정값(MV')의 산출
아래와 같은 조건에 의해 MV 보정값(MV')을 산출합니다.
(4) MV 출력
아래와 같은 조건에 의해서, 조작량(MV(BW))를 산출합니다.
(5) 3 ON/OFF위치 제어
아래와 같은 조건에 의해서, BB의 BB1, BB2를 출력합니다.
(6) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.ONF3 명령을 종료합니다.
① BW, BB1, BB2의 값을 유지합니다.
② 운전 모드(MODE)를 MAN으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN이 되면, “(7) 제어 주기 판정”을 실행합니다.
(7) 제어 주기 판정
(a) 지정된 제어 주기에 이르지 않은 경우
① 운전 모드(MODE)가 CSV, CCB, CAB, CAS, AUT, LCC, LCA 중 하나일 때
는 BW를 기억하고 S.ONF3 명령을 종료합니다.
② 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나일 때는 BW=MV 일 때
“(5) 3 위치 ON/OFF 제어”를 실행합니다.
(b) 제어 주기에 도달하면 “(1) SV 설정 처리”를 실행합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
조 건
조 건
조 건
상기 이외 이전 값(BW의 값)
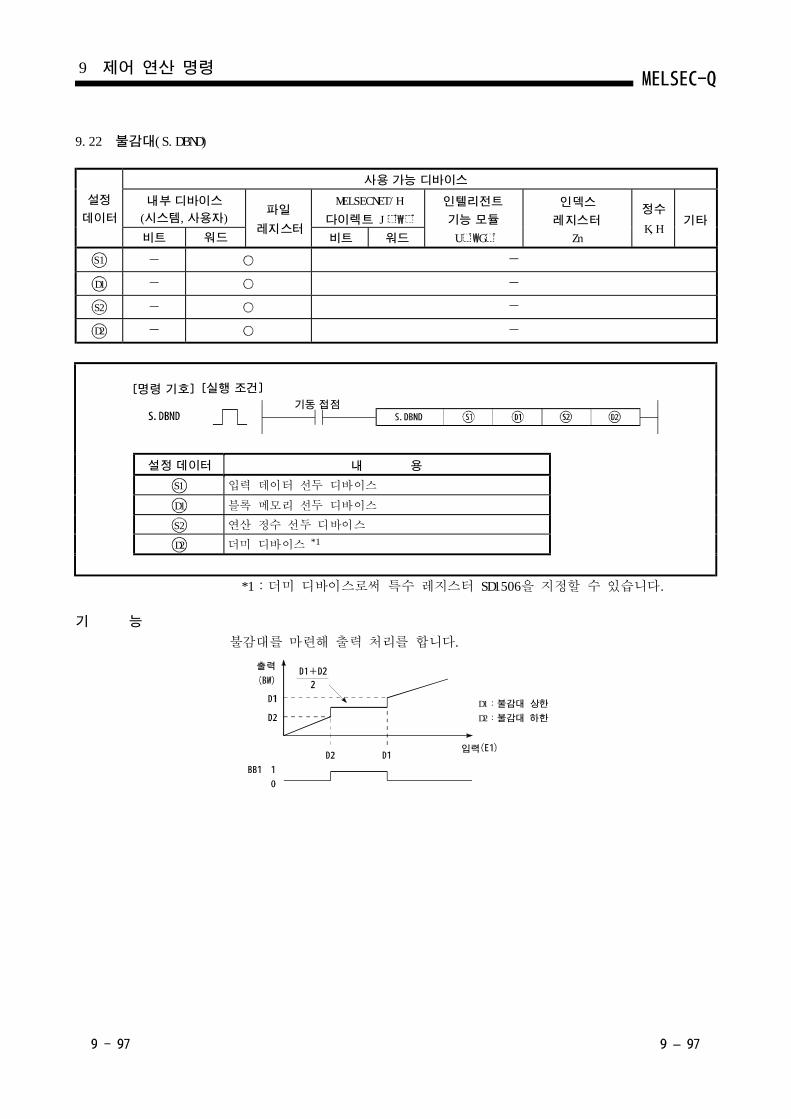
9.22 (S.DBND)불감대
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
불감대를 마련해 출력 처리를 합니다.
출력
입력
D1:불감대 상한
D2:불감대 하한
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
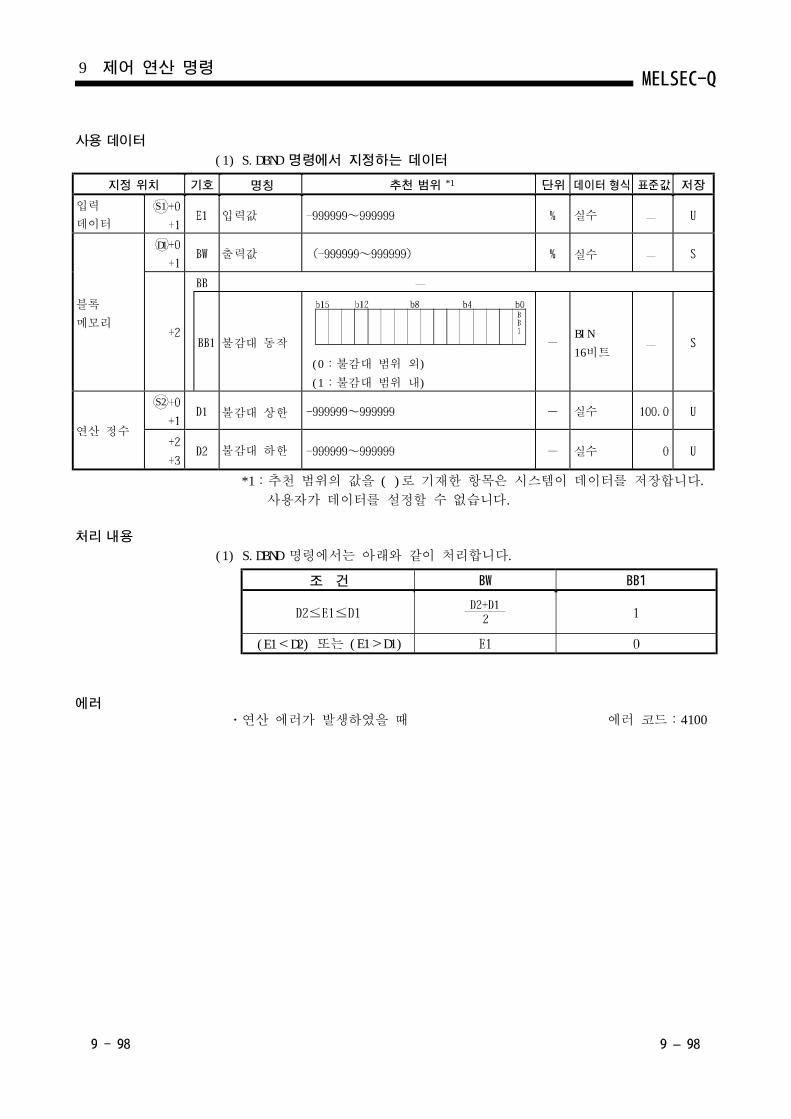
사용 데이터
(1) S.DBND 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리
출력값
불감대 동작
(0:불감대 범위 외)
(1:불감대 범위 내)
연산 정수
불감대 상한
불감대 하한
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.DBND 명령에서는 아래와 같이 처리합니다.
조 건
(E1<D2) 또는 (E1>D1)
에러ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
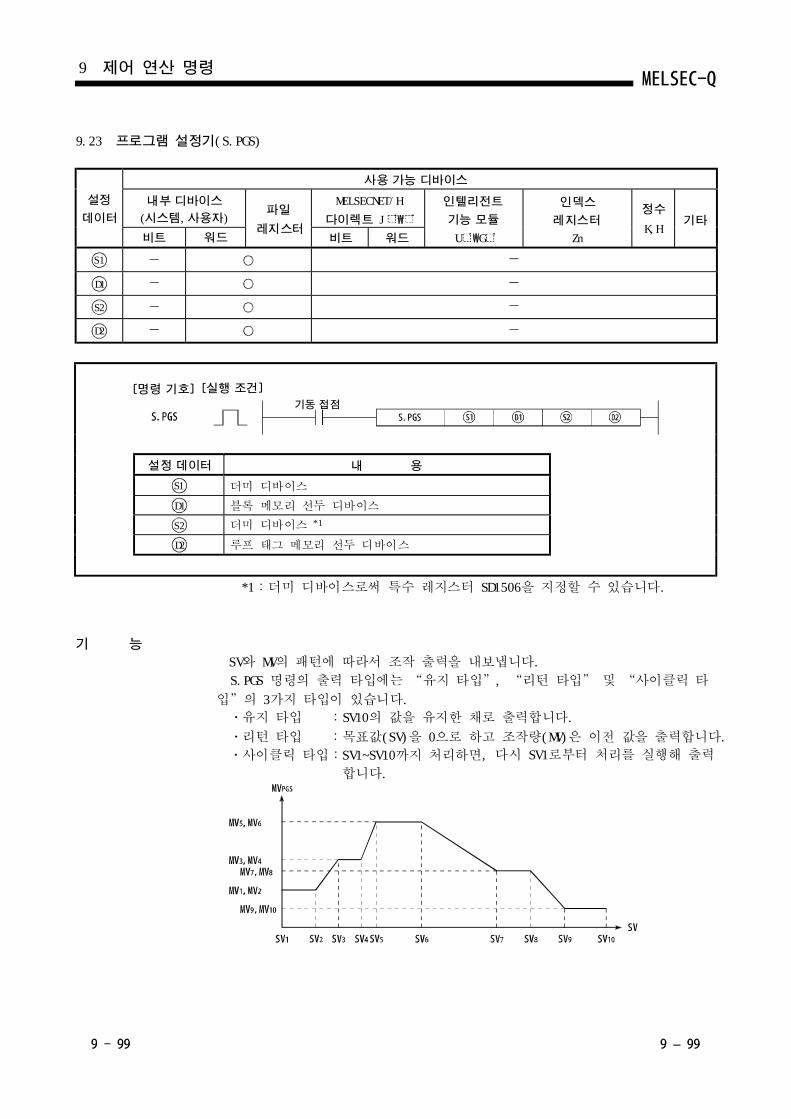
9.23 (S.PGS)프로그램 설정기
더미 디바이스
블록 메모리 선두 디바이스
더미 디바이스 *1
루프 태그 메모리 선두 디바이스
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
SV와 MV의 패턴에 따라서 조작 출력을 내보냅니다.
S.PGS 명령의 출력 타입에는 “유지 타입”, “리턴 타입” 및 “사이클릭 타
입”의 3가지 타입이 있습니다.
ㆍ유지 타입 :SV10의 값을 유지한 채로 출력합니다.
ㆍ리턴 타입 :목표값(SV)을 0으로 하고 조작량(MV)은 이전 값을 출력합니다.
ㆍ사이클릭 타입:SV1~SV10까지 처리하면, 다시 SV1로부터 처리를 실행해 출력
합니다.
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
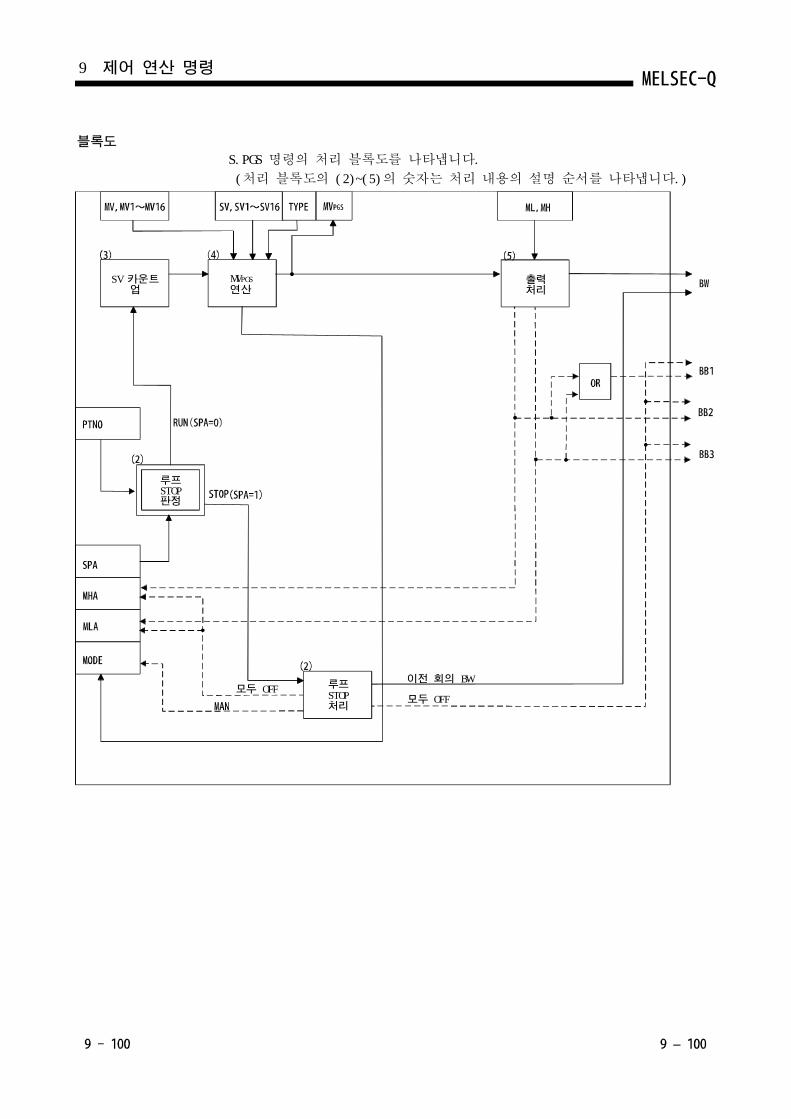
블록도
S.PGS 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (2)~(5)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
SV 카운트업
MVPGS연산
출력처리
모두 OFF모두 OFF
9 제어 연산 명령
루프
판정STOP
루프
처리STOP
이전 회의 BW
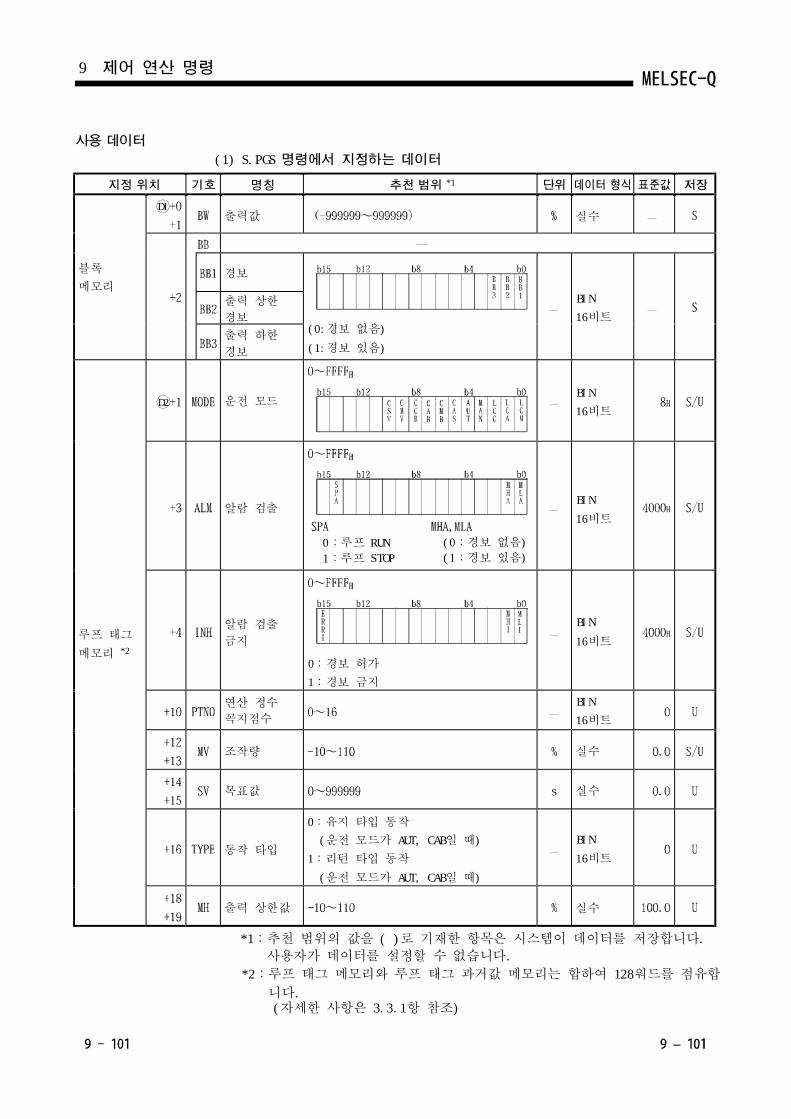
(1) S.PGS 명령에서 지정하는 데이터
블록
메모리
출력값
경보
출력 상한
경보
출력 하한
경보
(0:경보 없음)
(1:경보 있음)
루프 태그
메모리 *2
운전 모드
알람 검출
0:루프 RUN
1:루프 STOP
(0:경보 없음)
(1:경보 있음)
알람 검출
금지
0:경보 허가
1:경보 금지
연산 정수
꼭지점수
조작량
목표값
동작 타입
0:유지 타입 동작
(운전 모드가 AUT, CAB일 때)
1:리턴 타입 동작
(운전 모드가 AUT, CAB일 때)
출력 상한값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
D1
D2

출력 하한값
설정 시간 1
설정 시간 16
설정 출력 1
설정 출력 16
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 출력 타입
출력 타입은 운전 모드(MODE)와 동작 타입(TYPE)의 조합에 따라서 다음과 같
이 정해집니다.
운전 모드
(MODE)
동작 타입
(TYPE)동작 내용
현재의 SV, MV로 동작 정지
유지 타입 동작
리턴 타입 동작
사이클릭 타입 동작
(2) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP 또는 연산 정수 꼭지점수(PTNO)가 0일 때는 다음의 처리를 하
고 S.PGS 명령을 종료합니다.
① BW의 값을 유지합니다.
② BB의 BB1~BB3를 0으로 합니다.
③ 알람 검출(ALM)의 MHA, MLA를 0으로 합니다.
④ 운전 모드(MODE)를 MAN으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면, “(3) SV 카운트업 처리”를 실행합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
메모리 *2
실수
실수
실수
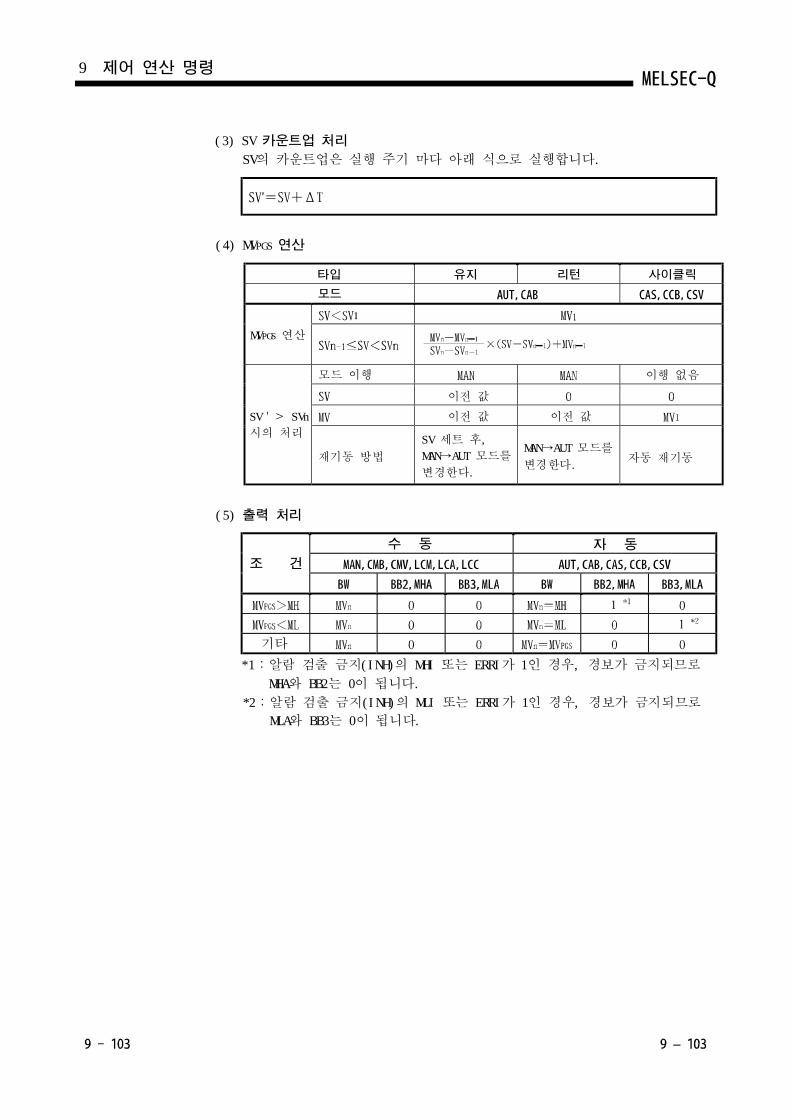
(3) SV 카운트업 처리
SV의 카운트업은 실행 주기 마다 아래 식으로 실행합니다.
(4) MVPGS 연산
타입 유지 리턴 사이클릭
모드
MV 연산PGS
SV'> SVn
시의 처리
모드 이행 이행 없음
이전 값
이전 값 이전 값
재기동 방법
SV 세트 후,
MAN→AUT 모드를
변경한다.
MAN→AUT 모드를
변경한다.자동 재기동
(5) 출력 처리
조 건
수 동 자 동
기타
*1:알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우, 경보가 금지되므로
MHA와 BB2는 0이 됩니다.
*2:알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우, 경보가 금지되므로
MLA와 BB3는 0이 됩니다.
9 제어 연산 명령
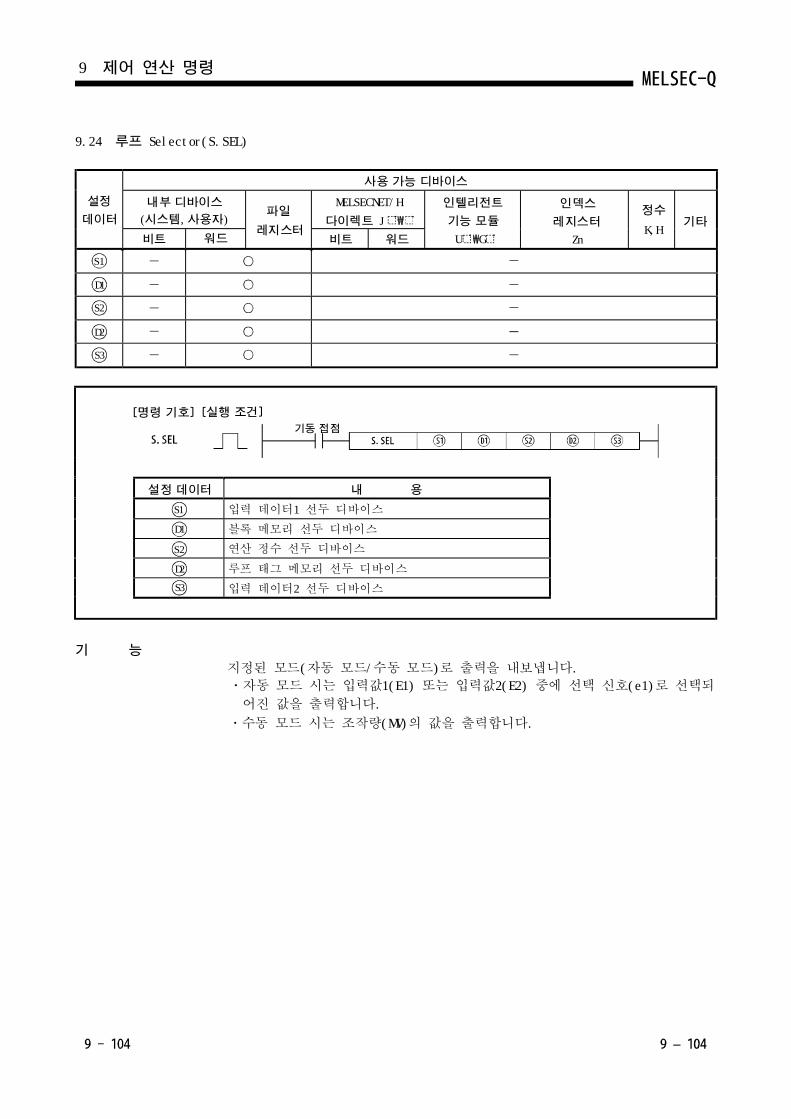
9.24 Selector(S.SEL)루프
입력 데이터1 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
입력 데이터2 선두 디바이스
지정된 모드(자동 모드/수동 모드)로 출력을 내보냅니다.
ㆍ자동 모드 시는 입력값1(E1) 또는 입력값2(E2) 중에 선택 신호(e1)로 선택되
어진 값을 출력합니다.
ㆍ수동 모드 시는 조작량(MV)의 값을 출력합니다.
9 제어 연산 명령
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
S3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
S3
기 능
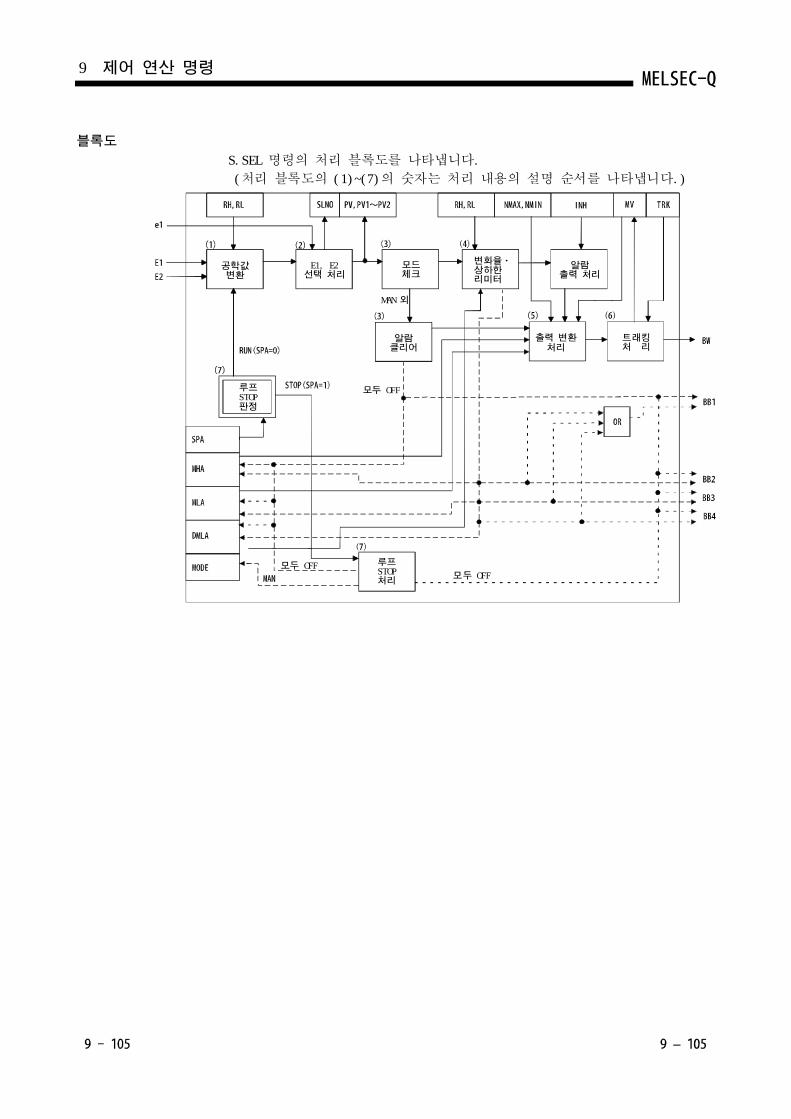
블록도
S.SEL 명령의 처리 블록도를 나타냅니다.
(처리 블록도의 (1)~(7)의 숫자는 처리 내용의 설명 순서를 나타냅니다.)
공학값변환
E1, E2선택 처리
모드체크
알람출력 처리
MAN 외
출력 변환처리
9 제어 연산 명령
변화율ㆍ상하한리미터
알람클리어
루프
판정STOP
트래킹처 리
루프
처리STOP 모두 OFF
모두 OFF
모두 OFF
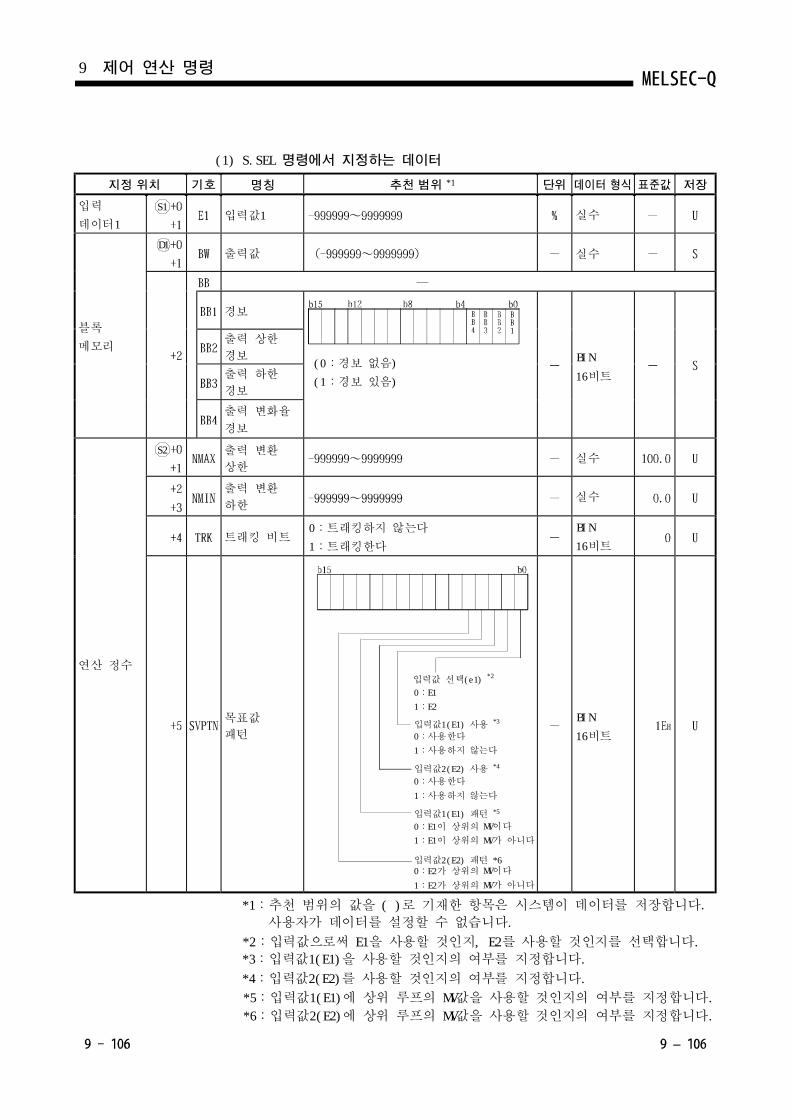
(1) S.SEL 명령에서 지정하는 데이터
입력
데이터1입력값1
블록
메모리
출력값
경보
(0:경보 없음)
(1:경보 있음)
출력 상한
경보
출력 하한
경보
출력 변화율
경보
연산 정수
출력 변환
상한
출력 변환
하한
트래킹 비트0:트래킹하지 않는다
1:트래킹한다
목표값
패턴
입력값 선택(e1) *2
0:E1
1:E2
입력값1(E1) 사용 *3
0:사용한다
1:사용하지 않는다
입력값2(E2) 사용 *4
0:사용한다
1:사용하지 않는다
입력값1(E1) 패턴 *5
0:E1이 상위의 MV이다
1:E1이 상위의 MV가 아니다
입력값2(E2) 패턴 *60:E2가 상위의 MV이다
1:E2가 상위의 MV가 아니다
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:입력값으로써 E1을 사용할 것인지, E2를 사용할 것인지를 선택합니다.
*3:입력값1(E1)을 사용할 것인지의 여부를 지정합니다.
*4:입력값2(E2)를 사용할 것인지의 여부를 지정합니다.
*5:입력값1(E1)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
*6:입력값2(E2)에 상위 루프의 MV값을 사용할 것인지의 여부를 지정합니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
S1
S2
D1
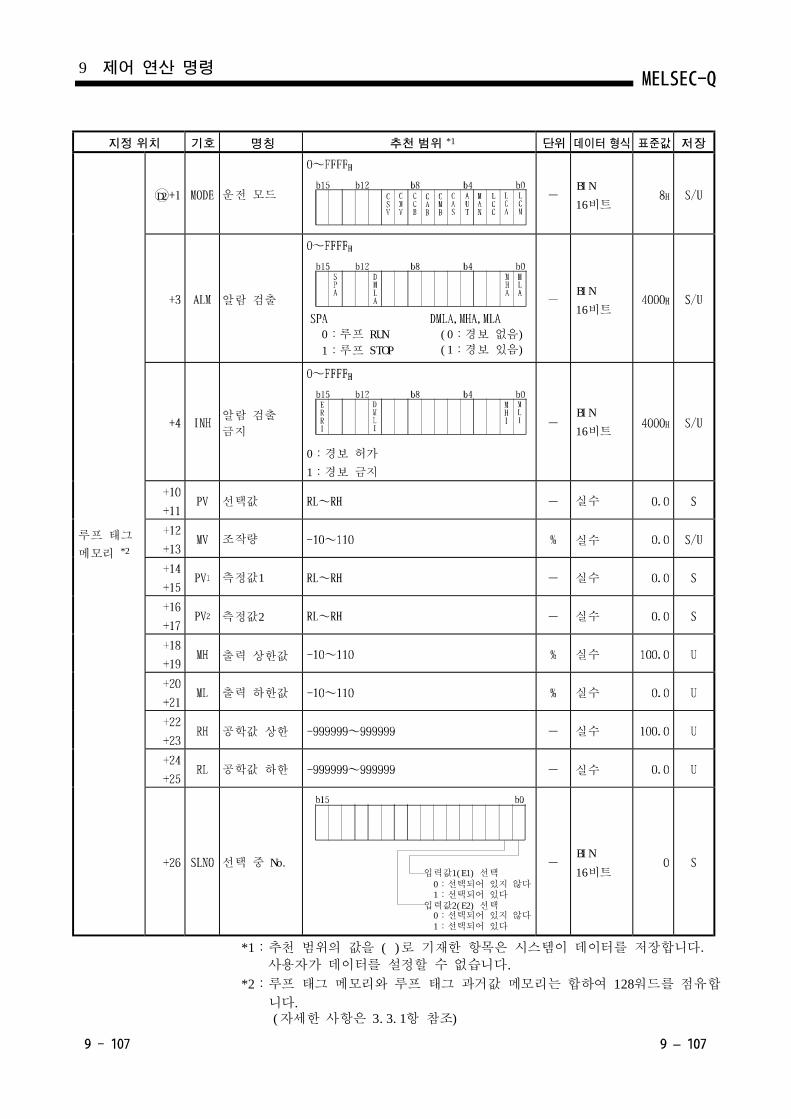
운전 모드
알람 검출
0:루프 RUN
1:루프 STOP
(0:경보 없음)
(1:경보 있음)
알람 검출
금지
0:경보 허가
1:경보 금지
선택값
조작량
측정값1
측정값2
출력 상한값
출력 하한값
공학값 상한
공학값 하한
선택 중 No.입력값1(E1) 선택
0:선택되어 있지 않다1:선택되어 있다
입력값2(E2) 선택0:선택되어 있지 않다1:선택되어 있다
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
메모리 *2
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트D2
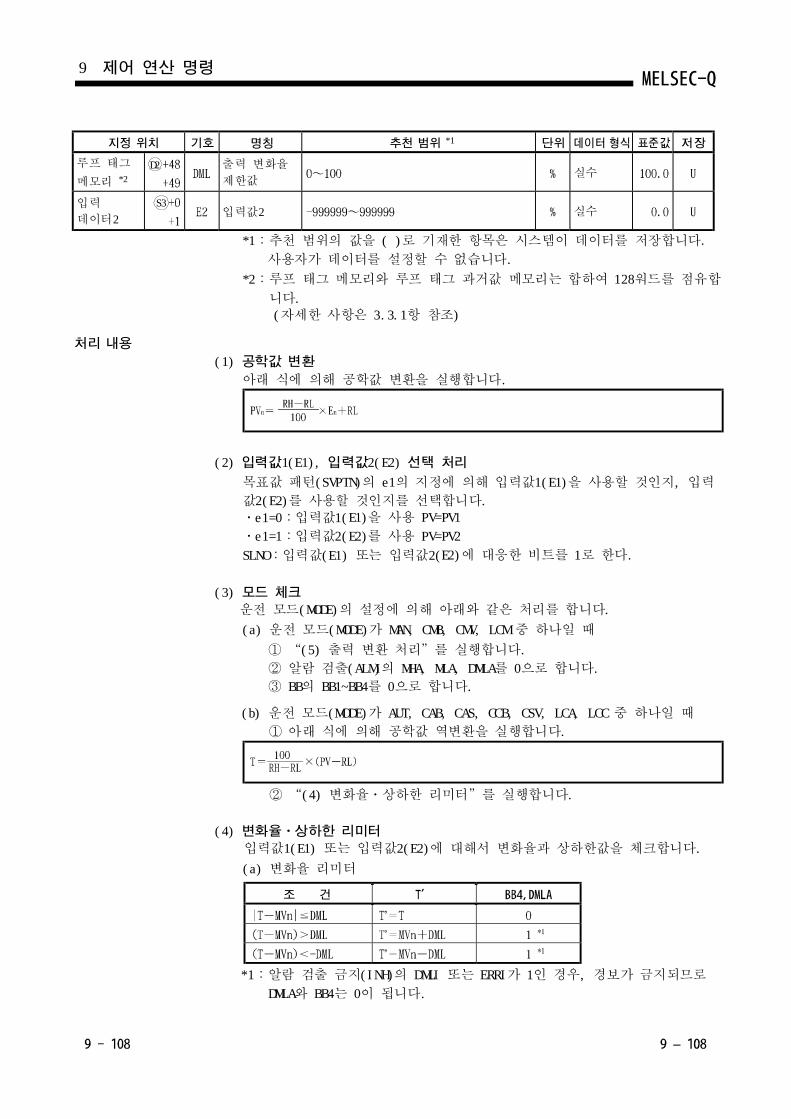
출력 변화율
제한값
입력
데이터2입력값2
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리는 합하여 128워드를 점유합
니다.(자세한 사항은 3.3.1항 참조)
처리 내용
(1) 공학값 변환
아래 식에 의해 공학값 변환을 실행합니다.
(2) 1(E1), 2(E2)입력값 입력값 선택 처리
목표값 패턴(SVPTN)의 e1의 지정에 의해 입력값1(E1)을 사용할 것인지, 입력
값2(E2)를 사용할 것인지를 선택합니다.ㆍe1=0:입력값1(E1)을 사용 PV=PV1
ㆍe1=1:입력값2(E2)를 사용 PV=PV2
SLNO:입력값(E1) 또는 입력값2(E2)에 대응한 비트를 1로 한다.
(3) 모드 체크
운전 모드(MODE)의 설정에 의해 아래와 같은 처리를 합니다.
(a) 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나일 때
① “(5) 출력 변환 처리”를 실행합니다.
② 알람 검출(ALM)의 MHA, MLA, DMLA를 0으로 합니다.
③ BB의 BB1~BB4를 0으로 합니다.
(b) 운전 모드(MODE)가 AUT, CAB, CAS, CCB, CSV, LCA, LCC 중 하나일 때
① 아래 식에 의해 공학값 역변환을 실행합니다.
② “(4) 변화율ㆍ상하한 리미터”를 실행합니다.
(4) 변화율ㆍ상하한 리미터
입력값1(E1) 또는 입력값2(E2)에 대해서 변화율과 상하한값을 체크합니다.
(a) 변화율 리미터
*1:알람 검출 금지(INH)의 DMLI 또는 ERRI가 1인 경우, 경보가 금지되므로
DMLA와 BB4는 0이 됩니다.
9 제어 연산 명령
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
루프 태그
메모리 *2
조 건
실수
실수
S3
D2
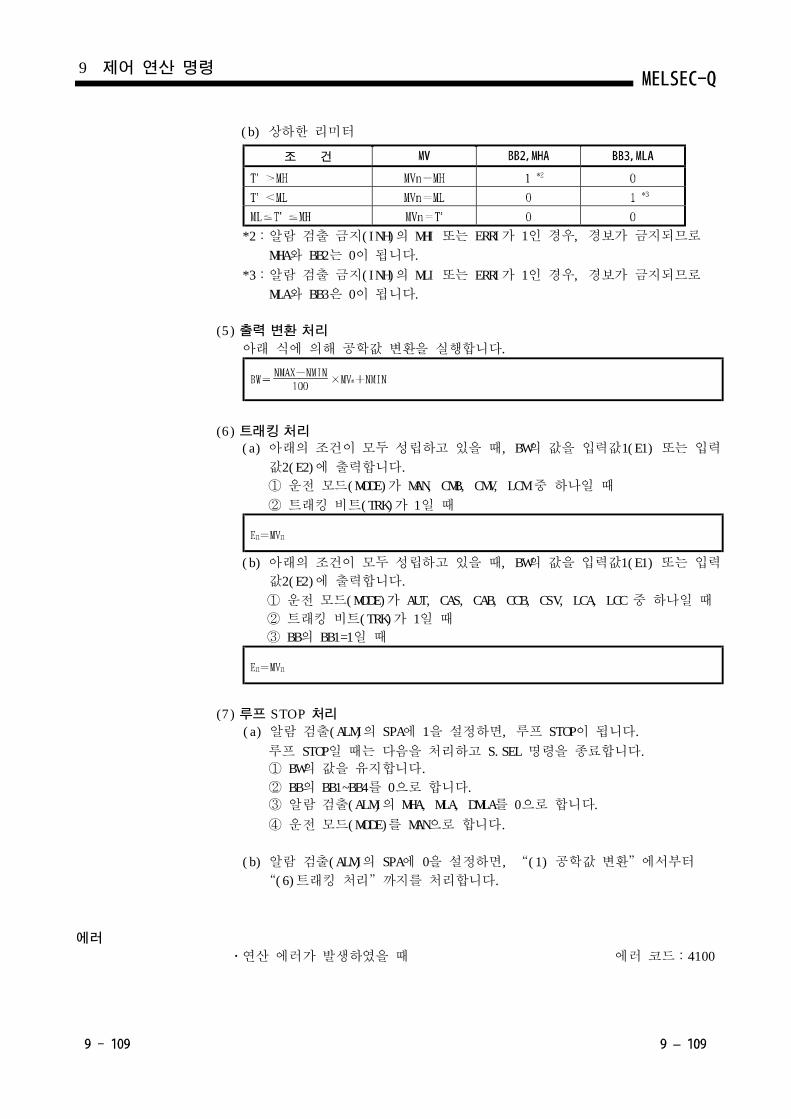
(b) 상하한 리미터
*2:알람 검출 금지(INH)의 MHI 또는 ERRI가 1인 경우, 경보가 금지되므로
MHA와 BB2는 0이 됩니다.
*3:알람 검출 금지(INH)의 MLI 또는 ERRI가 1인 경우, 경보가 금지되므로
MLA와 BB3은 0이 됩니다.
(5) 출력 변환 처리
아래 식에 의해 공학값 변환을 실행합니다.
(6) 트래킹처리
(a) 아래의 조건이 모두 성립하고 있을 때, BW의 값을 입력값1(E1) 또는 입력
값2(E2)에 출력합니다.
① 운전 모드(MODE)가 MAN, CMB, CMV, LCM 중 하나일 때
② 트래킹 비트(TRK)가 1일 때
(b) 아래의 조건이 모두 성립하고 있을 때, BW의 값을 입력값1(E1) 또는 입력
값2(E2)에 출력합니다.
① 운전 모드(MODE)가 AUT, CAS, CAB, CCB, CSV, LCA, LCC 중 하나일 때
② 트래킹 비트(TRK)가 1일 때
③ BB의 BB1=1일 때
(7) 루프 STOP 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP 때는 다음을 처리하고 S.SEL 명령을 종료합니다.일
① BW의 값을 유지합니다.
② BB의 BB1~BB4를 0으로 합니다.
③ 알람 검출(ALM)의 MHA, MLA, DMLA를 0으로 합니다.
④ 운전 모드(MODE)를 MAN으로 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, “(1) 공학값 변환”에서부터
“(6)트래킹 처리”까지를 처리합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
조 건
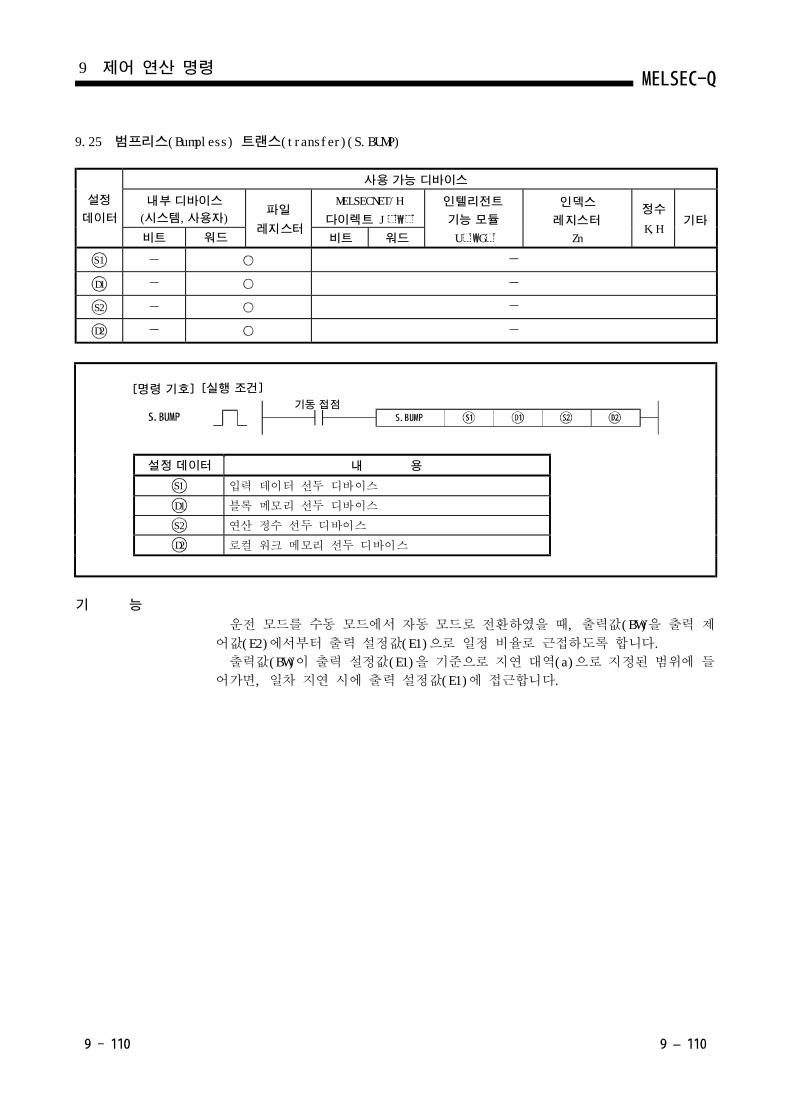
9.25 (Bumpless) (transfer)(S.BUMP)범프리스 트랜스
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
로컬 워크 메모리 선두 디바이스
운전 모드를 수동 모드에서 자동 모드로 전환하였을 때, 출력값(BW)을 출력 제
어값(E2)에서부터 출력 설정값(E1)으로 일정 비율로 근접하도록 합니다.
출력값(BW)이 출력 설정값(E1)을 기준으로 지연 대역(a)으로 지정된 범위에 들
어가면, 일차 지연 시에 출력 설정값(E1)에 접근합니다.
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
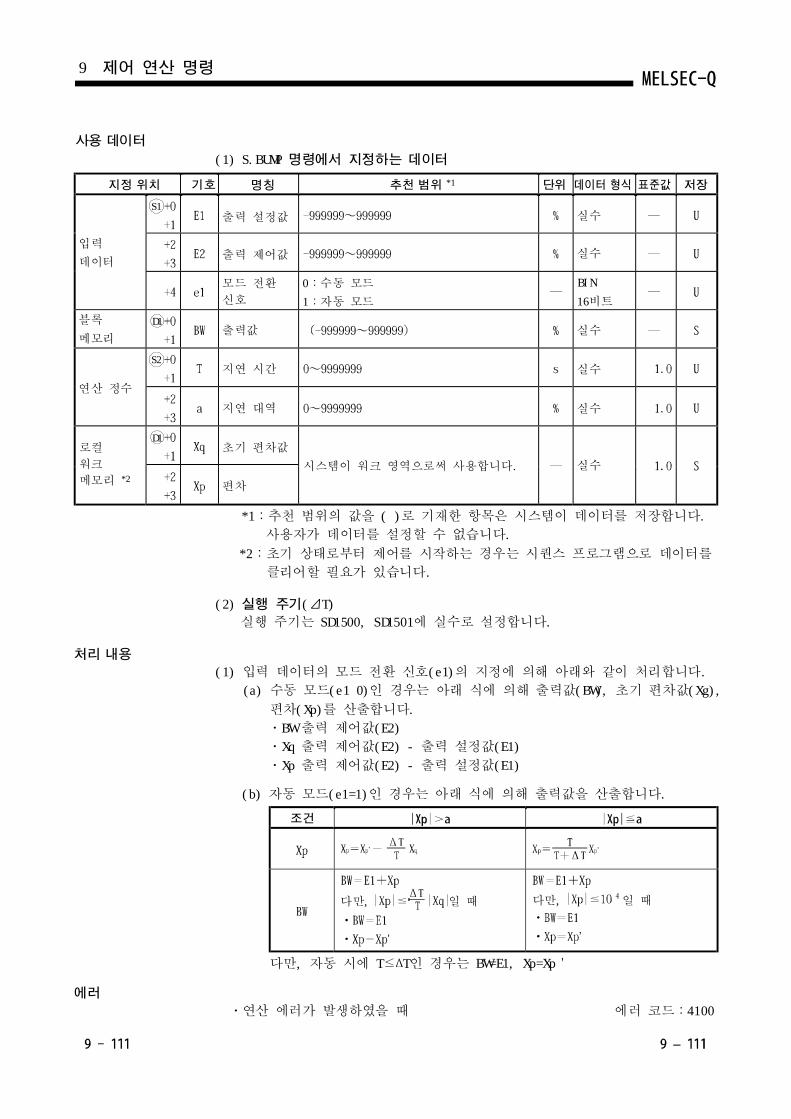
(1) S.BUMP 명령에서 지정하는 데이터
입력
데이터
출력 설정값
출력 제어값
모드 전환
신호
0:수동 모드
1:자동 모드
블록
메모리출력값
연산 정수
지연 시간
지연 대역
로컬
워크
메모리 *2
초기 편차값
시스템이 워크 영역으로써 사용합니다.
편차
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를
클리어할 필요가 있습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 입력 데이터의 모드 전환 신호(e1)의 지정에 의해 아래와 같이 처리합니다.
(a) 수동 모드(e1 0)인 경우는 아래 식에 의해 출력값(BW), 초기 편차값(Xg),
편차(Xp)를 산출합니다.
ㆍBW 출력 제어값(E2)
ㆍXq 출력 제어값(E2) - 출력 설정값(E1)
ㆍXp 출력 제어값(E2) - 출력 설정값(E1)
(b) 자동 모드(e1=1)인 경우는 아래 식에 의해 출력값을 산출합니다.
조건
다만, 일 때 다만, 일 때
다만, 자동 시에 T≤ T인 경우는 BW=E1, Xp=Xp'
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
D1
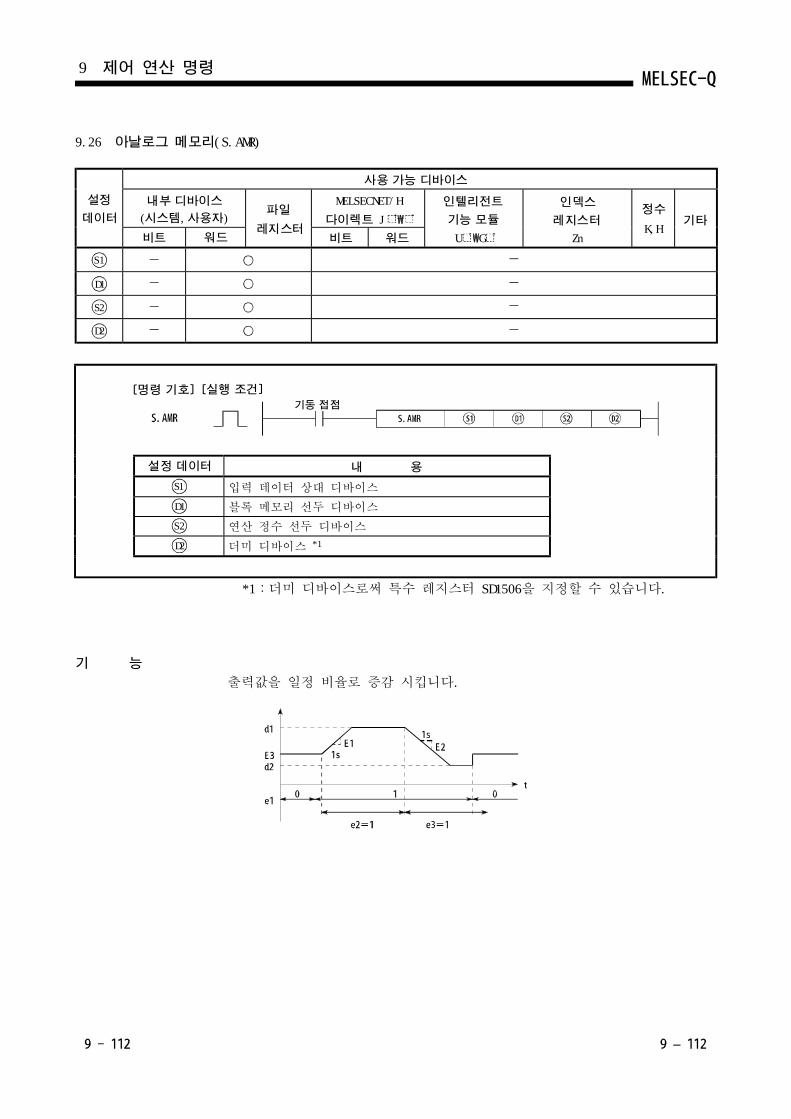
9.26 (S.AMR)아날로그 메모리
입력 데이터 상대 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
출력값을 일정 비율로 증감 시킵니다.
9 제어 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
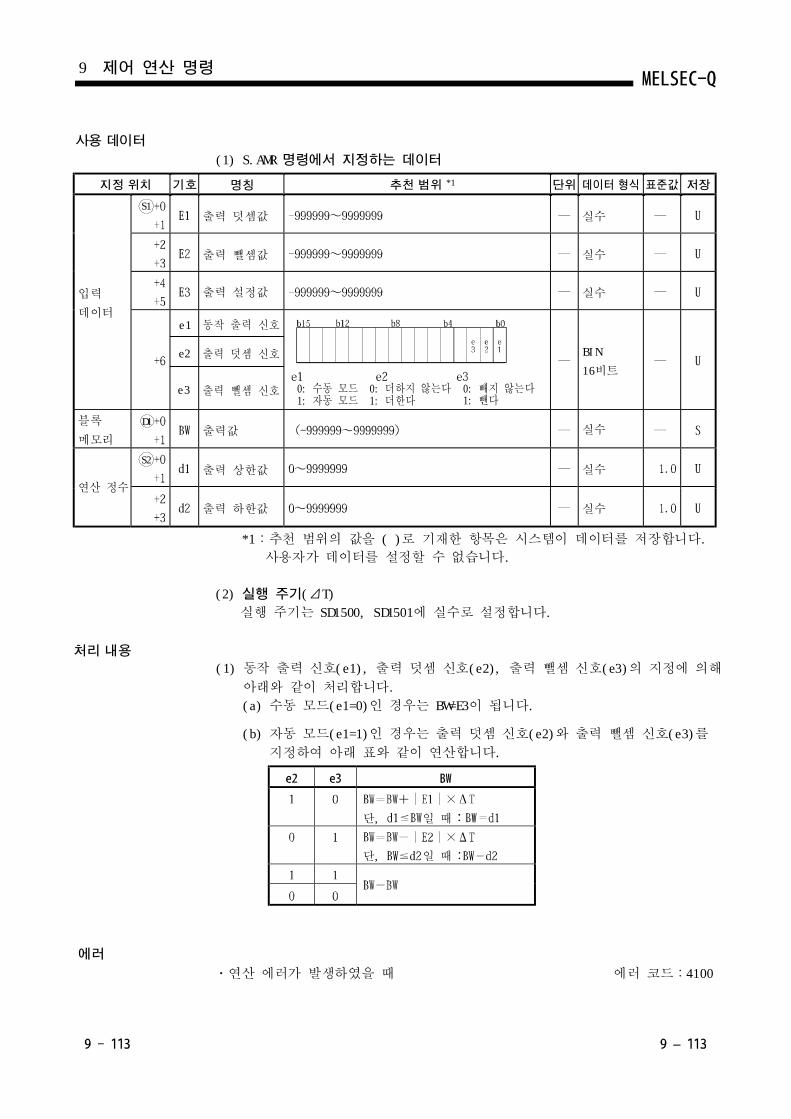
(1) S.AMR 명령에서 지정하는 데이터
입력
데이터
출력 덧셈값
출력 뺄셈값
출력 설정값
동작 출력 신호e1
0: 수동 모드1: 자동 모드
e2
0: 더하지 않는다1: 더한다
e3 0: 빼지 않는다1: 뺀다
출력 덧셈 신호
출력 뺄셈 신호
블록
메모리출력값
연산 정수
출력 상한값
출력 하한값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 동작 출력 신호(e1), 출력 덧셈 신호(e2), 출력 뺄셈 신호(e3)의 지정에 의해
아래와 같이 처리합니다.
(a) 수동 모드(e1=0)인 경우는 BW=E3이 됩니다.
(b) 자동 모드(e1=1)인 경우는 출력 덧셈 신호(e2)와 출력 뺄셈 신호(e3)를
지정하여 아래 표와 같이 연산합니다.
단, 일 때
단, 일 때
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
9 제어 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
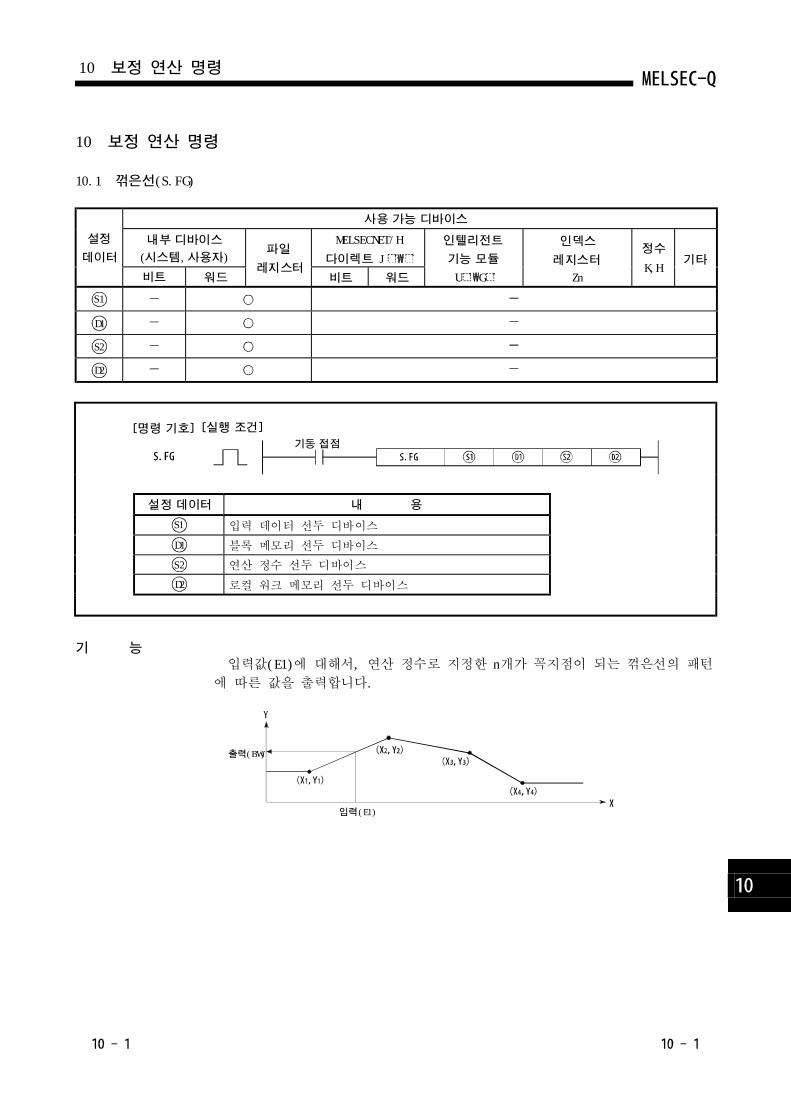
10.1 (S.FG)꺾은선
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
로컬 워크 메모리 선두 디바이스
입력값(E1)에 대해서, 연산 정수로 지정한 n개가 꼭지점이 되는 꺾은선의 패턴
에 따른 값을 출력합니다.
입력(E1)
출력(BW)
10 보정 연산 명령
10 보정 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
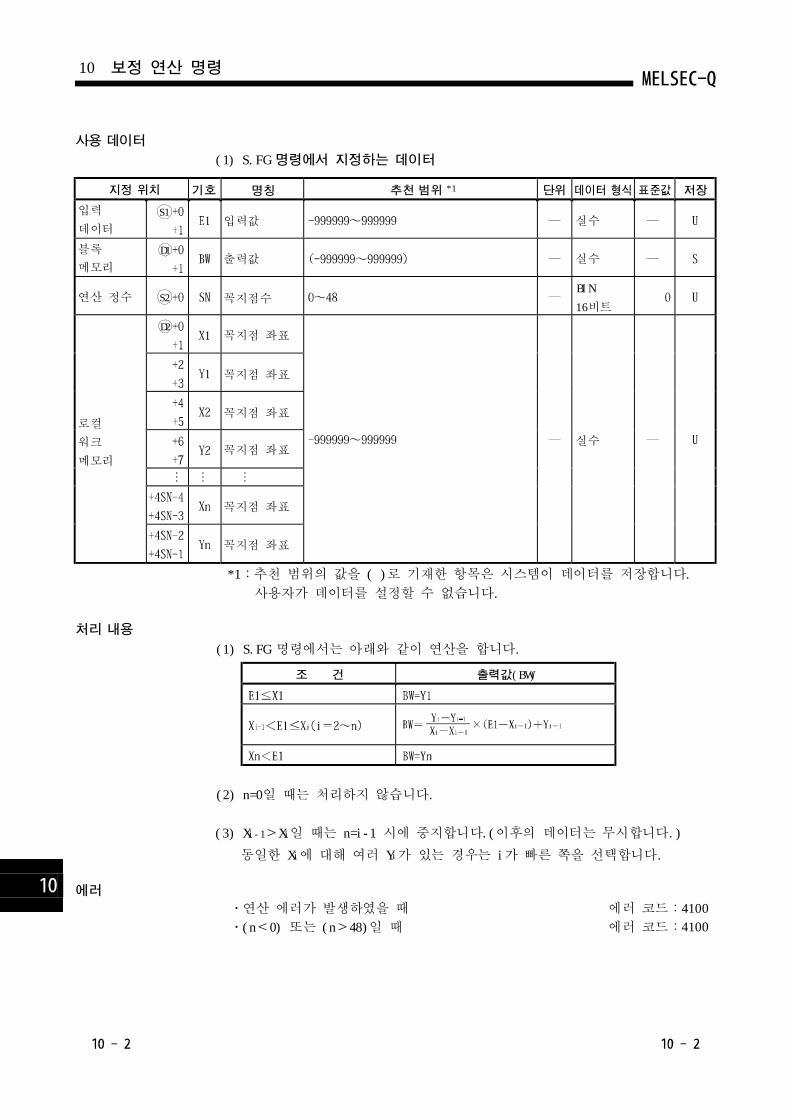
(1) S.FG 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리출력값
연산 정수 꼭지점수
로컬
워크
메모리
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.FG 명령에서는 아래와 같이 연산을 합니다.
조 건 출력값(BW)
(2) n=0일 때는 처리하지 않습니다.
(3) X >X 일 때는 n=i-1 시에 중지합니다.(이후의 데이터는 무시합니다.)i-1 i
동일한 X 에 대해 여러 Y 가 있는 경우는 i가 빠른 쪽을 선택합니다.i i
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍ(n<0) 또는 (n>48)일 때 에러 코드:4100
10 보정 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
BIN
16비트
S1
S2
D1
D2
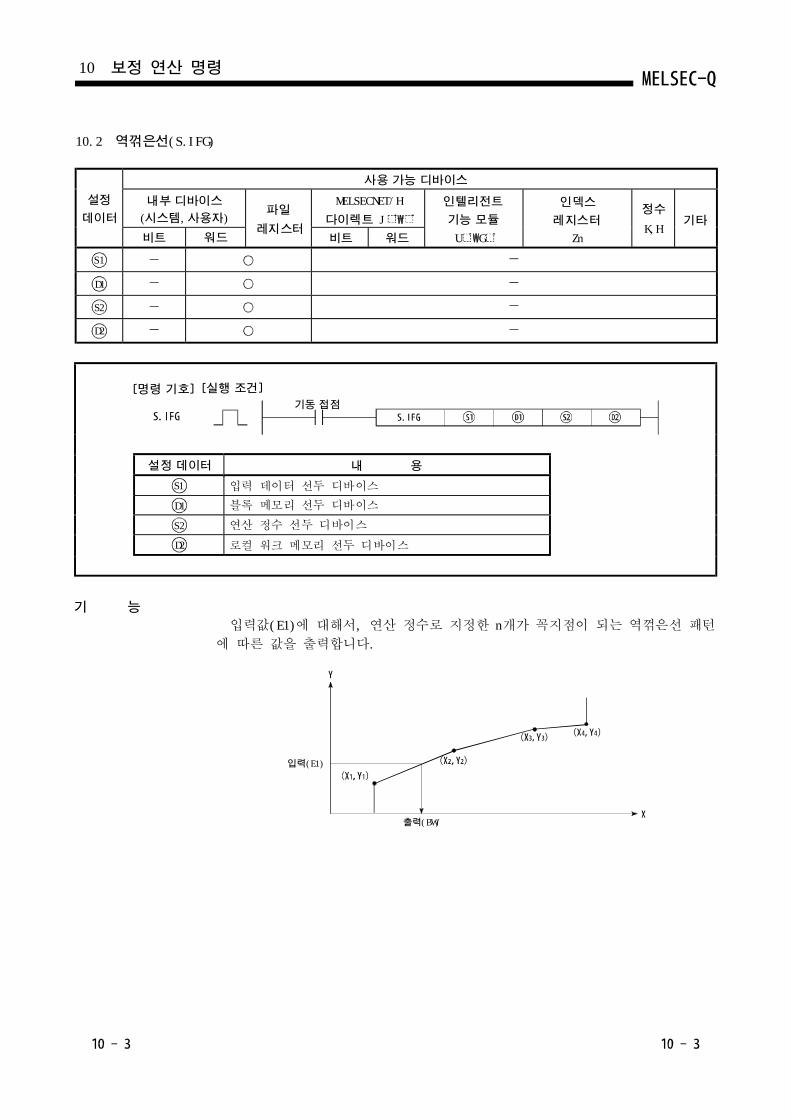
10.2 (S.IFG)역꺾은선
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
로컬 워크 메모리 선두 디바이스
입력값(E1)에 대해서, 연산 정수로 지정한 n개가 꼭지점이 되는 역꺾은선 패턴
에 따른 값을 출력합니다.
입력(E1)
출력(BW)
10 보정 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
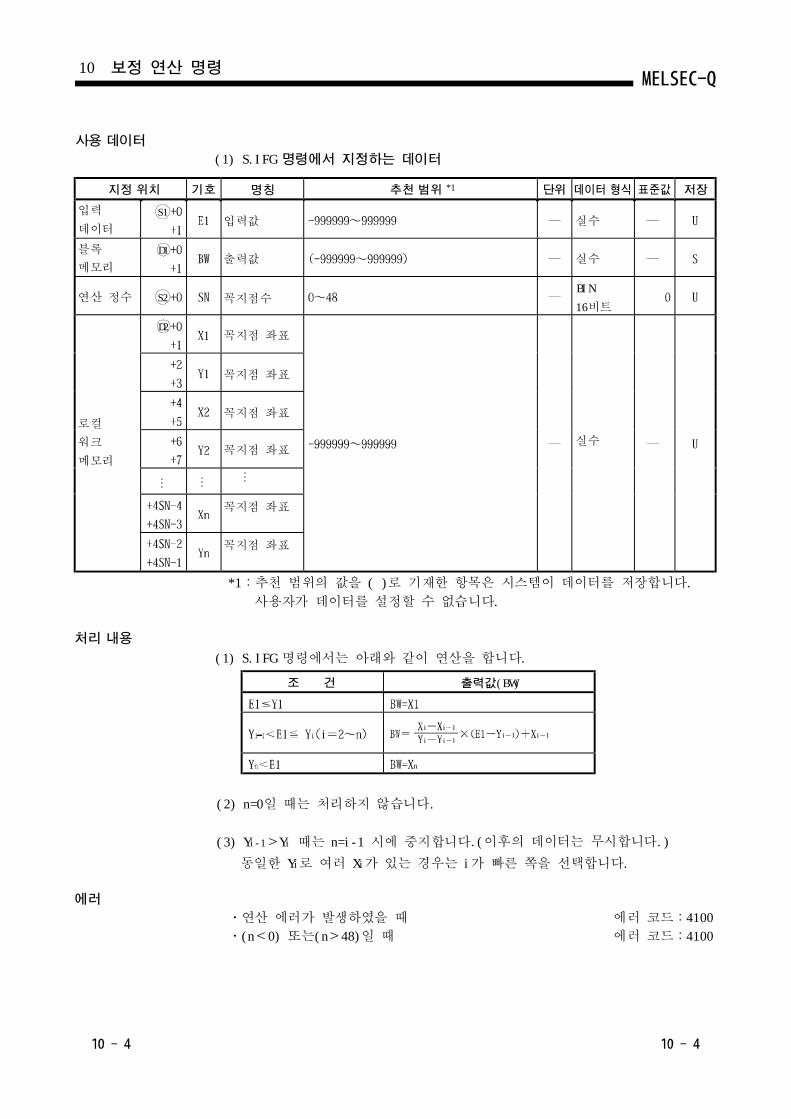
(1) S.IFG 명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.IFG 명령에서는 아래와 같이 연산을 합니다.
(2) n=0일 때는 처리하지 않습니다.
(3) Y >Y 때는 n=i-1 시에 중지합니다.(이후의 데이터는 무시합니다.)i-1 i
동일한 Y 로 여러 X 가 있는 경우는 i가 빠른 쪽을 선택합니다.i i
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍ(n<0) 또는(n>48)일 때 에러 코드:4100
10 보정 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
조 건 출력값(BW)
입력
데이터
블록
메모리
연산 정수
로컬
워크
메모리
입력값
출력값
꼭지점수
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
꼭지점 좌표
실수
실수
실수
BIN
16비트
S1
S2
D1
D2
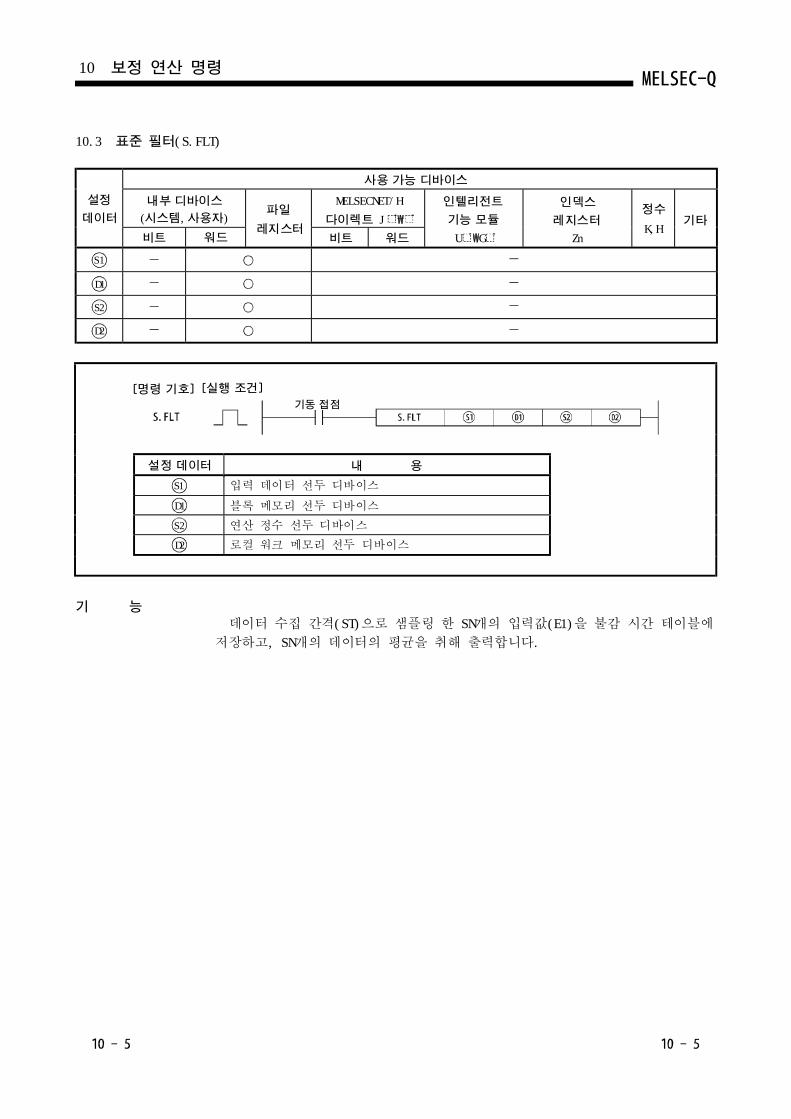
10.3 (S.FLT)표준 필터
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
로컬 워크 메모리 선두 디바이스
데이터 수집 간격(ST)으로 샘플링 한 SN개의 입력값(E1)을 불감 시간 테이블에
저장하고, SN개의 데이터의 평균을 취해 출력합니다.
10 보정 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
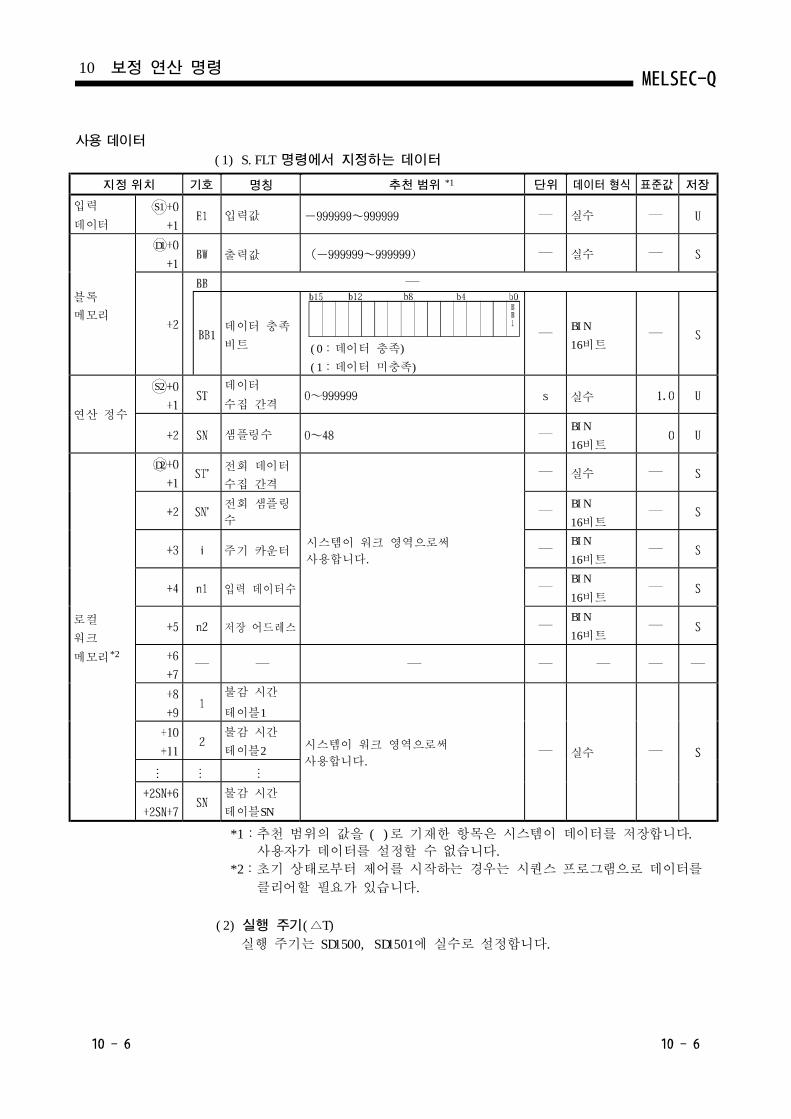
(1) S.FLT 명령에서 지정하는 데이터
입력
데이터입력값
출력값
블록
메모리데이터 충족
비트 (0:데이터 충족)
(1:데이터 미충족)
연산 정수
데이터
수집 간격
샘플링수
로컬
워크
메모리*2
전회 데이터
수집 간격
시스템이 워크 영역으로써
사용합니다.
전회 샘플링
수
주기 카운터
입력 데이터수
저장 어드레스
불감 시간
테이블1
시스템이 워크 영역으로써
사용합니다.
불감 시간
테이블2
불감 시간
테이블SN
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를
클리어할 필요가 있습니다.
(2) ( T)실행 주기 △
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
10 보정 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
S1
S2
D1
D2
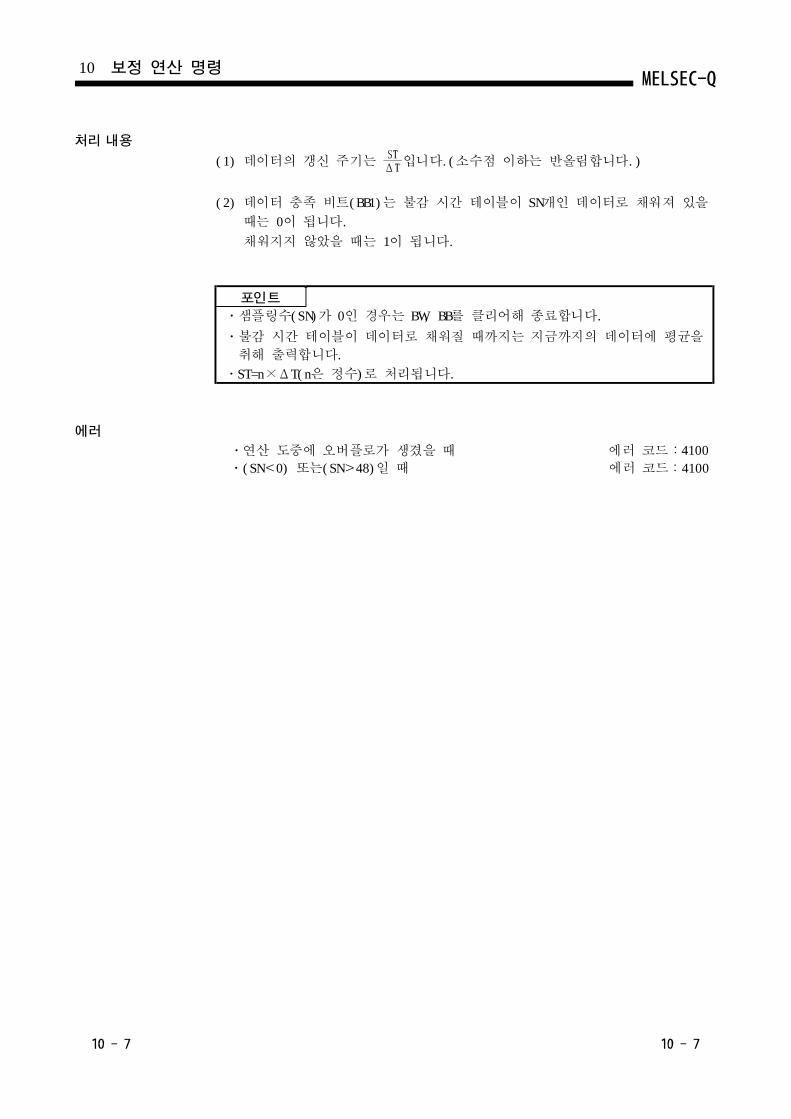
처리 내용
(1) 데이터의 갱신 주기는 입니다.(소수점 이하는 반올림합니다.)
(2) 데이터 충족 비트(BB1)는 불감 시간 테이블이 SN개인 데이터로 채워져 있을
때는 0이 됩니다.
채워지지 않았을 때는 1이 됩니다.
포인트
ㆍ샘플링수(SN)가 0인 경우는 BW, BB를 클리어해 종료합니다.
ㆍ불감 시간 테이블이 데이터로 채워질 때까지는 지금까지의 데이터에 평균을
취해 출력합니다.
ㆍST=n×ΔT(n은 정수)로 처리됩니다.
에러
ㆍ연산 도중에 오버플로가 생겼을 때 에러 코드:4100
ㆍ(SN<0) 또는(SN>48)일 때 에러 코드:4100
10 보정 연산 명령
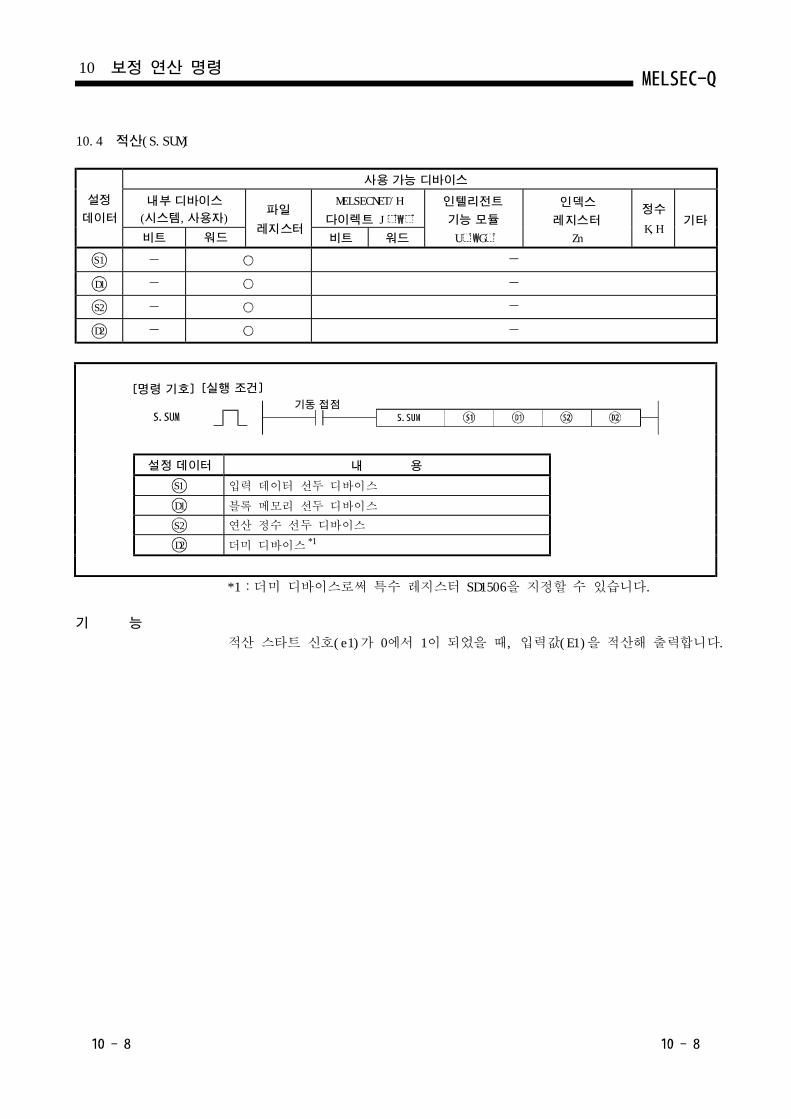
10.4 (S.SUM)적산
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
적산 스타트 신호(e1)가 0에서 1이 되었을 때, 입력값(E1)을 적산해 출력합니다.
10 보정 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
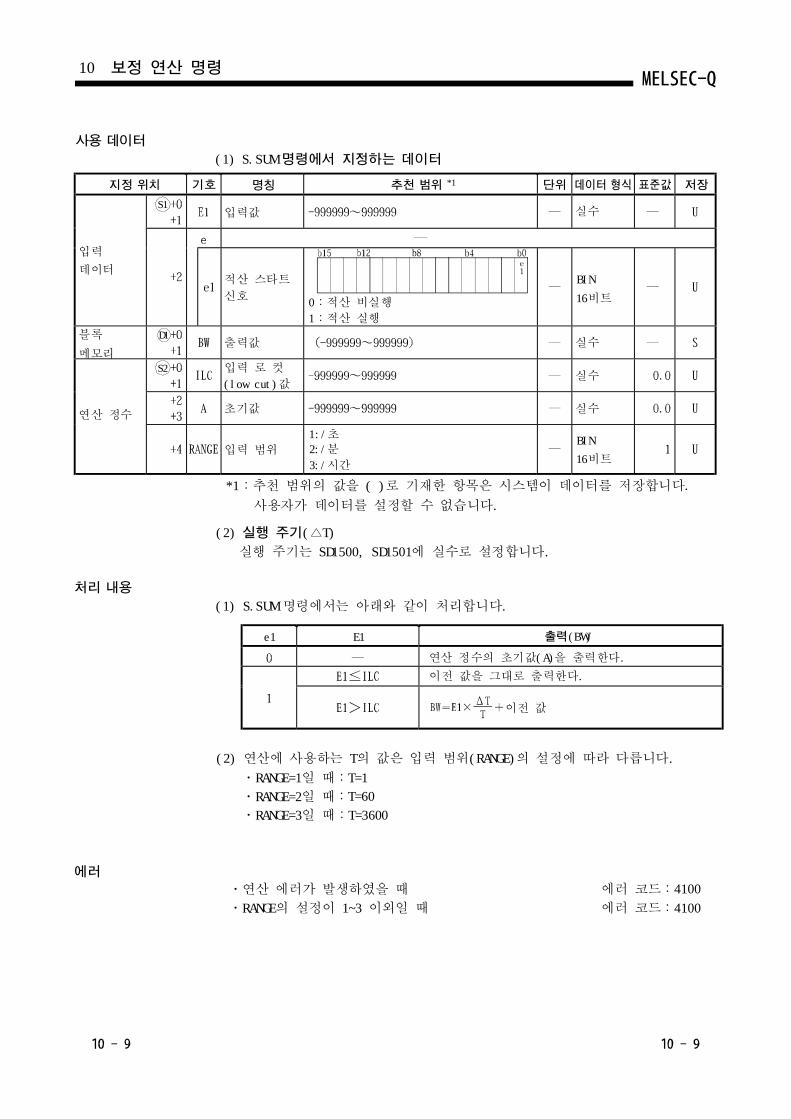
(1) S.SUM 명령에서 지정하는 데이터
입력
데이터
입력값
적산 스타트
신호0:적산 비실행
1:적산 실행
블록
메모리출력값
연산 정수
입력 로 컷
(low cut)값
초기값
1:/초
2:/분
3:/시간
입력 범위
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
(2) ( T)실행 주기 △
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) S.SUM 명령에서는 아래와 같이 처리합니다.
e1 E1 출력(BW)
연산 정수의 초기값(A)을 출력한다.
이전 값을 그대로 출력한다.
이전 값
(2) 연산에 사용하는 T의 값은 입력 범위(RANGE)의 설정에 따라 다릅니다.
ㆍRANGE=1일 때:T=1
ㆍRANGE=2일 때:T=60
ㆍRANGE=3일 때:T=3600
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍRANGE의 설정이 1~3 이외일 때 에러 코드:4100
10 보정 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
BIN
16비트
S1
S2
D1
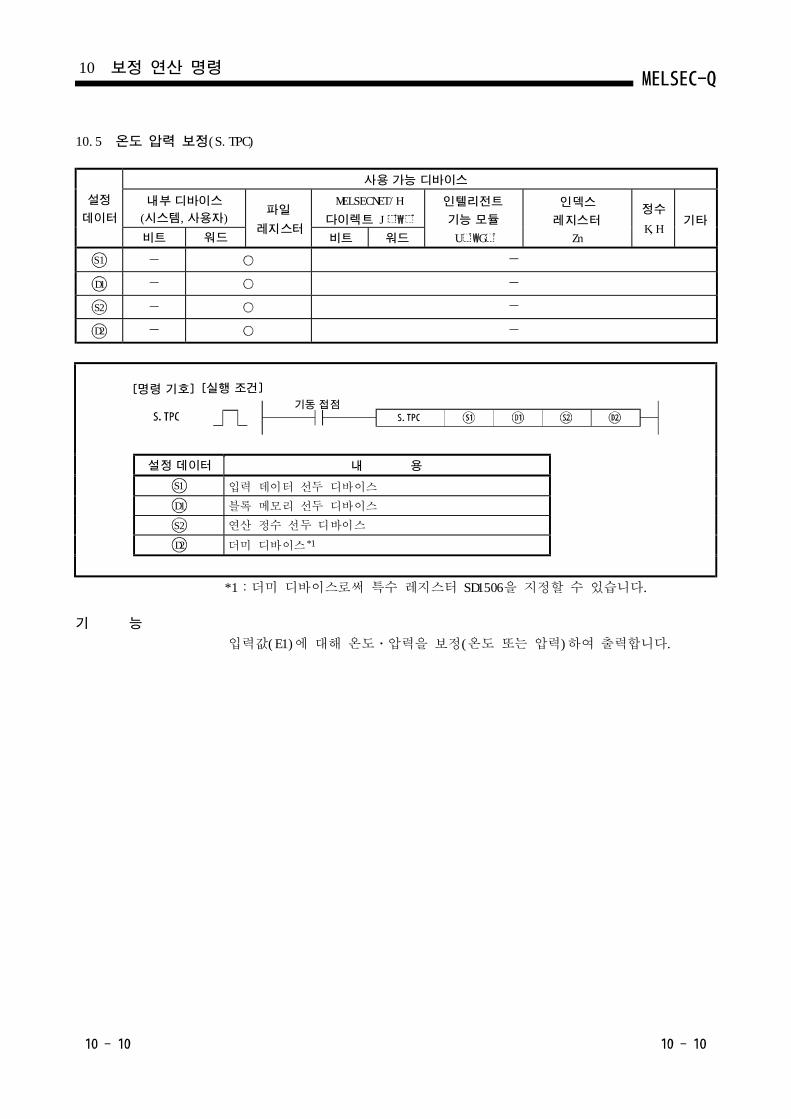
10.5 (S.TPC)온도 압력 보정
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스*1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1)에 대해 온도ㆍ압력을 보정(온도 또는 압력)하여 출력합니다.
10 보정 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2

(1) S.TPC 명령에서 지정하는 데이터
입력
데이터
압력차
측정 온도
측정 압력
E2 사용
플래그
E3 사용
플래그0:미사용
1:사용
블록
메모리출력값
연산 정수
설계 온도 T'
(공학값)
바이어스
(온도)
설계 압력 P'
(공학값)
바이어스
(압력)
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.TPC 명령에서는 아래 식에 의해 온도 압력 보정값을 산출합니다.
(2) A1, A2는 아래 식으로써 산출한 값을 사용합니다.
입 력
사용 사용
미사용 사용
사용 미사용
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
10 보정 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
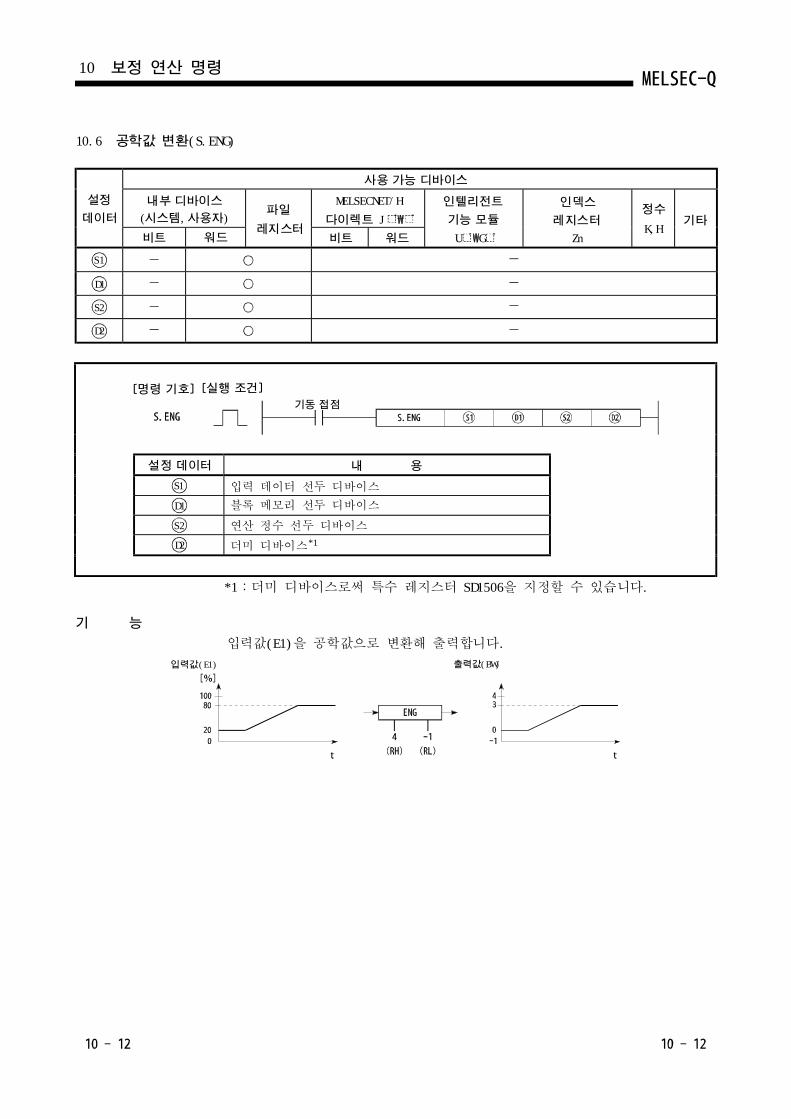
10.6 (S.ENG)공학값 변환
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스*1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1)을 공학값으로 변환해 출력합니다.
입력값(E1) 출력값(BW)
10 보정 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
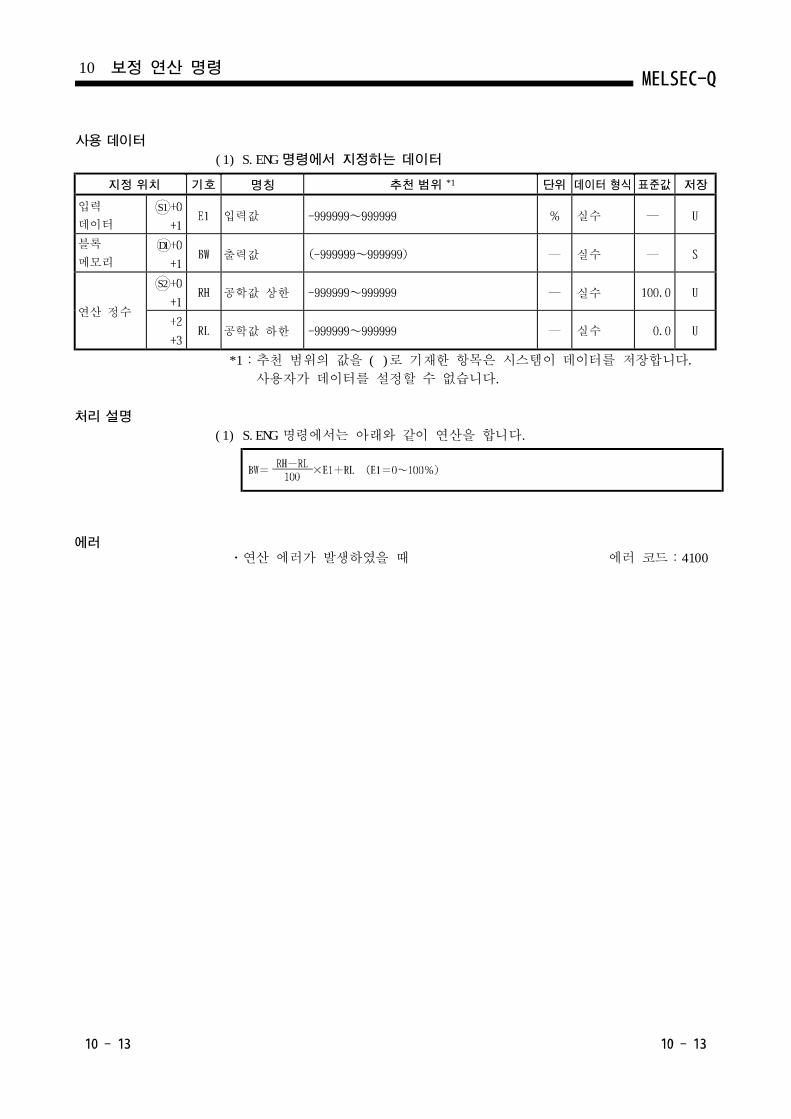
(1) S.ENG 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리출력값
연산 정수
공학값 상한
공학값 하한
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 설명
(1) S.ENG 명령에서는 아래와 같이 연산을 합니다.
에러ㆍ연산 에러가 발생하였을 때 에러 코드:4100
10 보정 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
S1
S2
D1
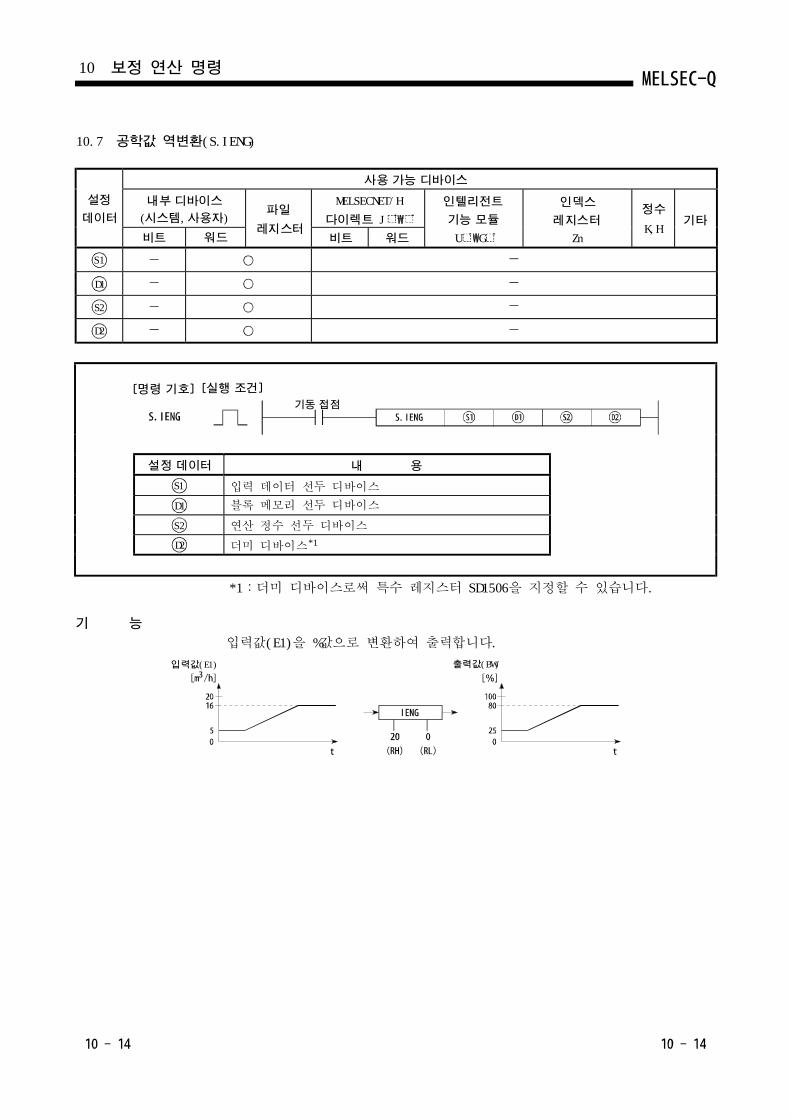
10.7 (S.IENG)공학값 역변환
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1)을 %값으로 변환하여 출력합니다.
입력값(E1) 출력값(BW)
10 보정 연산 명령
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스*1
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
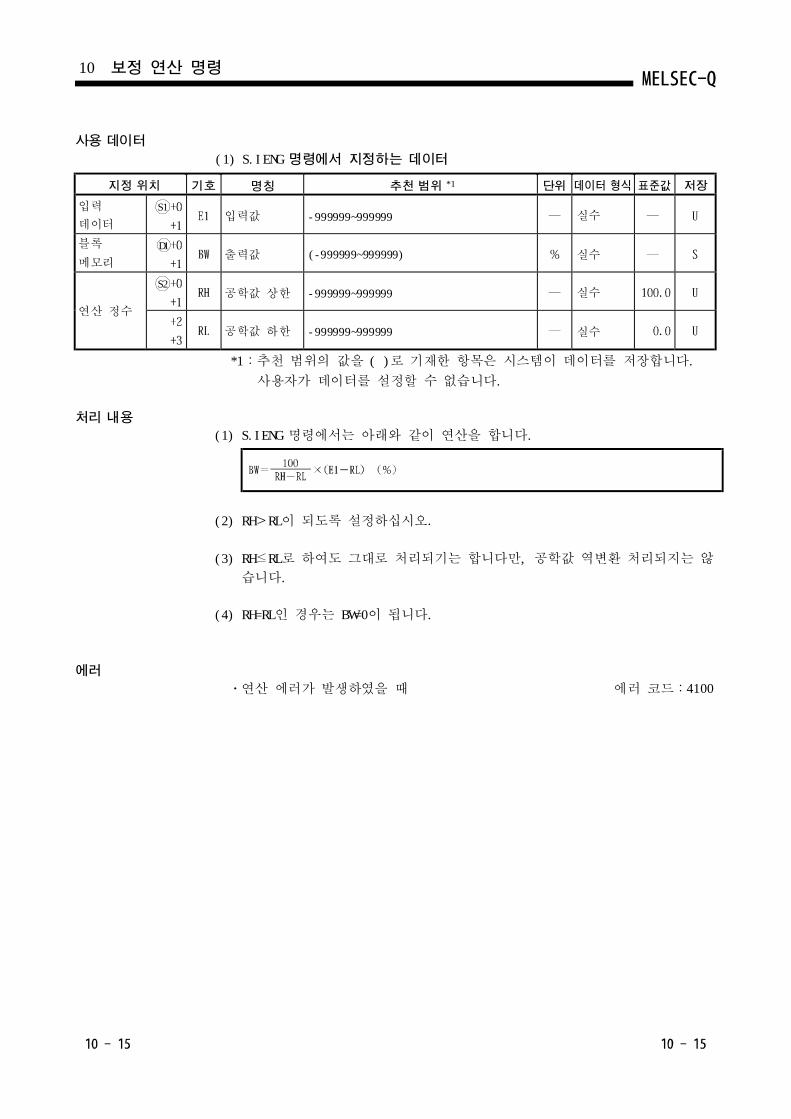
(1) S.IENG 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리출력값
연산 정수
공학값 상한
공학값 하한
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.IENG 명령에서는 아래와 같이 연산을 합니다.
(2) RH>RL이 되도록 설정하십시오.
(3) RH≤RL로 하여도 그대로 처리되기는 합니다만, 공학값 역변환 처리되지는 않
습니다.
(4) RH=RL인 경우는 BW=0이 됩니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
10 보정 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
(-999999~999999)
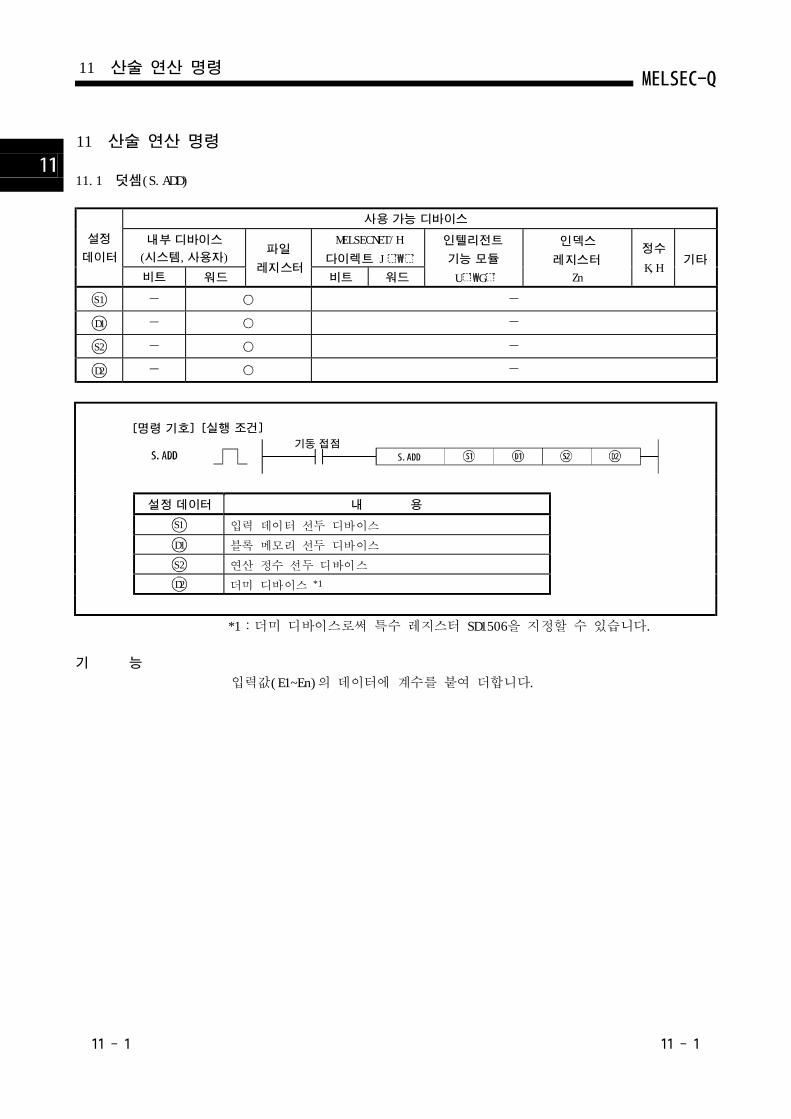
11.1 (S.ADD)덧셈
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1~En)의 데이터에 계수를 붙여 더합니다.
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
11 산술 연산 명령
11 산술 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
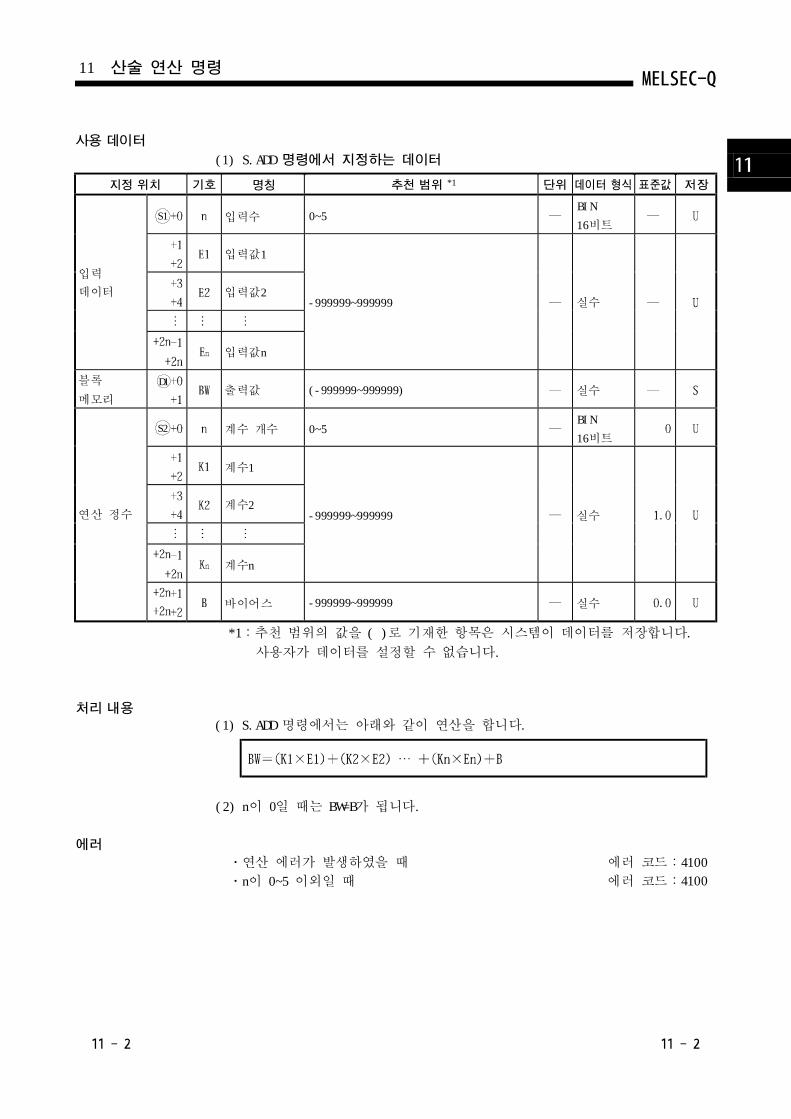
(1) S.ADD 명령에서 지정하는 데이터
입력수
입력값1
입력값2
입력값n
출력값
계수 개수
계수1
계수2
계수n
바이어스
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.ADD 명령에서는 아래와 같이 연산을 합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍn이 0~5 이외일 때 에러 코드:4100
(2) n이 0일 때는 BW=B가 됩니다.
11 산술 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
블록
메모리
연산 정수 실수
실수
실수
실수
BIN
16비트
BIN
16비트S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
(-999999~999999)
0~5
0~5
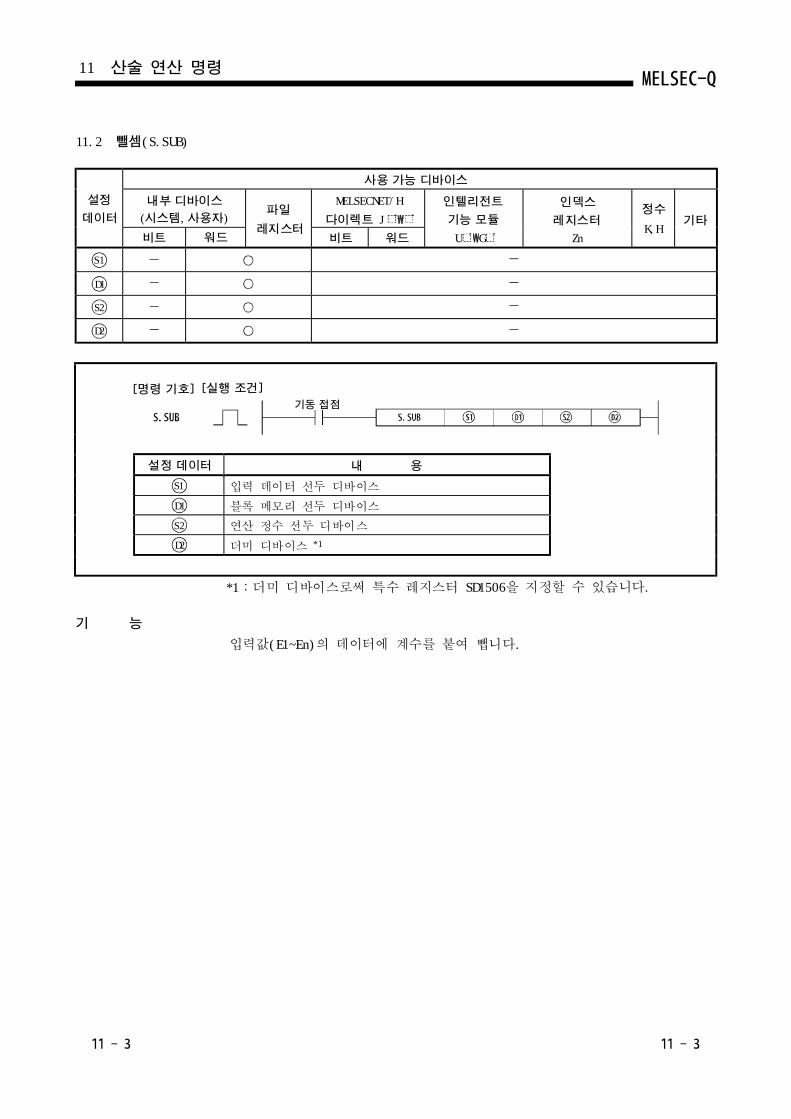
11.2 (S.SUB)뺄셈
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1~En)의 데이터에 계수를 붙여 뺍니다.
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
11 산술 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
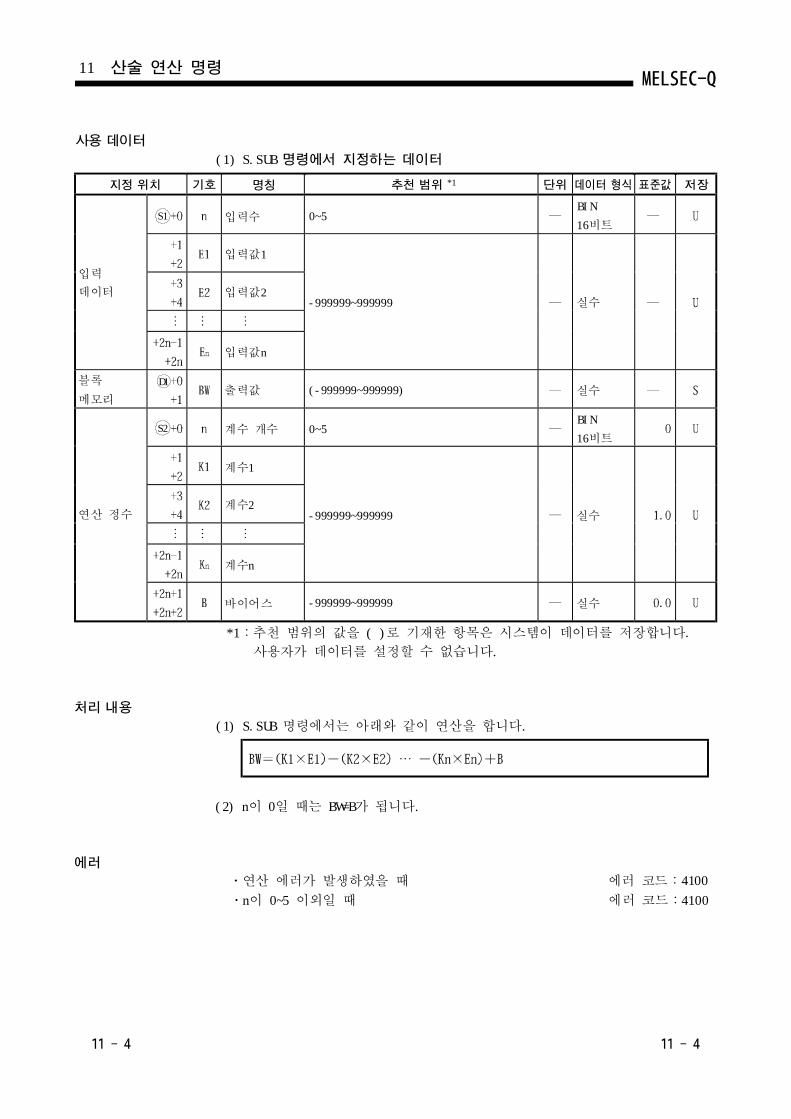
(1) S.SUB 명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.SUB 명령에서는 아래와 같이 연산을 합니다.
(2) n이 0일 때는 BW=B가 됩니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍn이 0~5 이외일 때 에러 코드:4100
11 산술 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
블록
메모리
연산 정수
입력수
입력값1
입력값2
입력값n
출력값
계수 개수
계수1
계수2
계수n
바이어스
실수
실수
실수
실수
BIN
16비트
BIN
16비트S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
(-999999~999999)
0~5
0~5
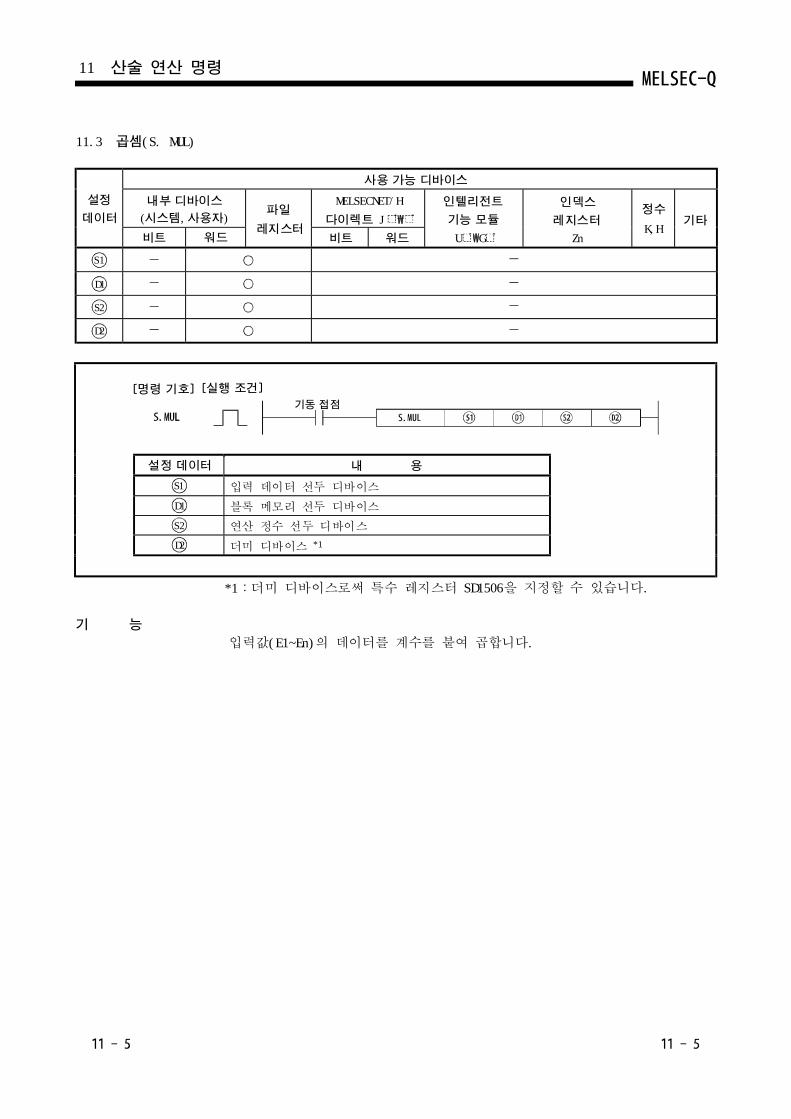
11.3 (S. MUL)곱셈
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1~En)의 데이터를 계수를 붙여 곱합니다.
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
11 산술 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
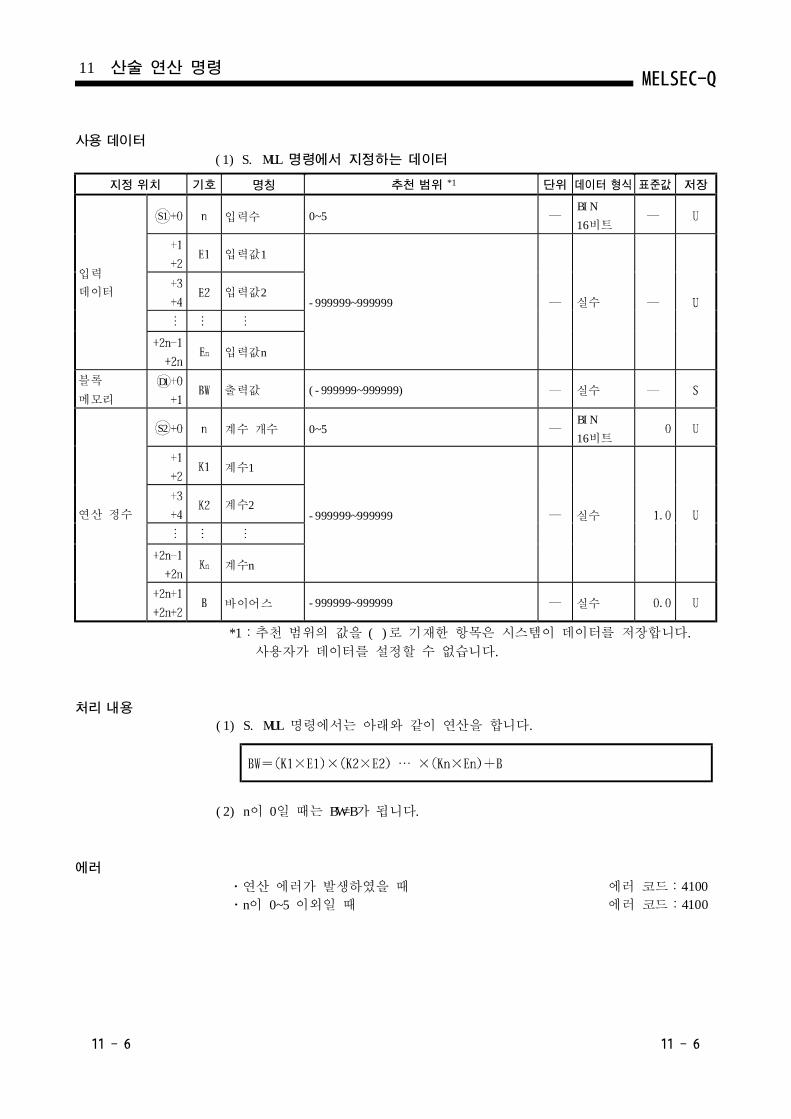
(1) S. MUL 명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S. MUL 명령에서는 아래와 같이 연산을 합니다.
(2) n이 0일 때는 BW=B가 됩니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
ㆍn 0~5 이외일 때 에러 코드:4100이
11 산술 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
BIN
16비트
입력
데이터
블록
메모리
연산 정수
입력수
입력값1
입력값2
입력값n
출력값
계수 개수
계수1
계수2
계수n
바이어스
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
(-999999~999999)
0~5
0~5
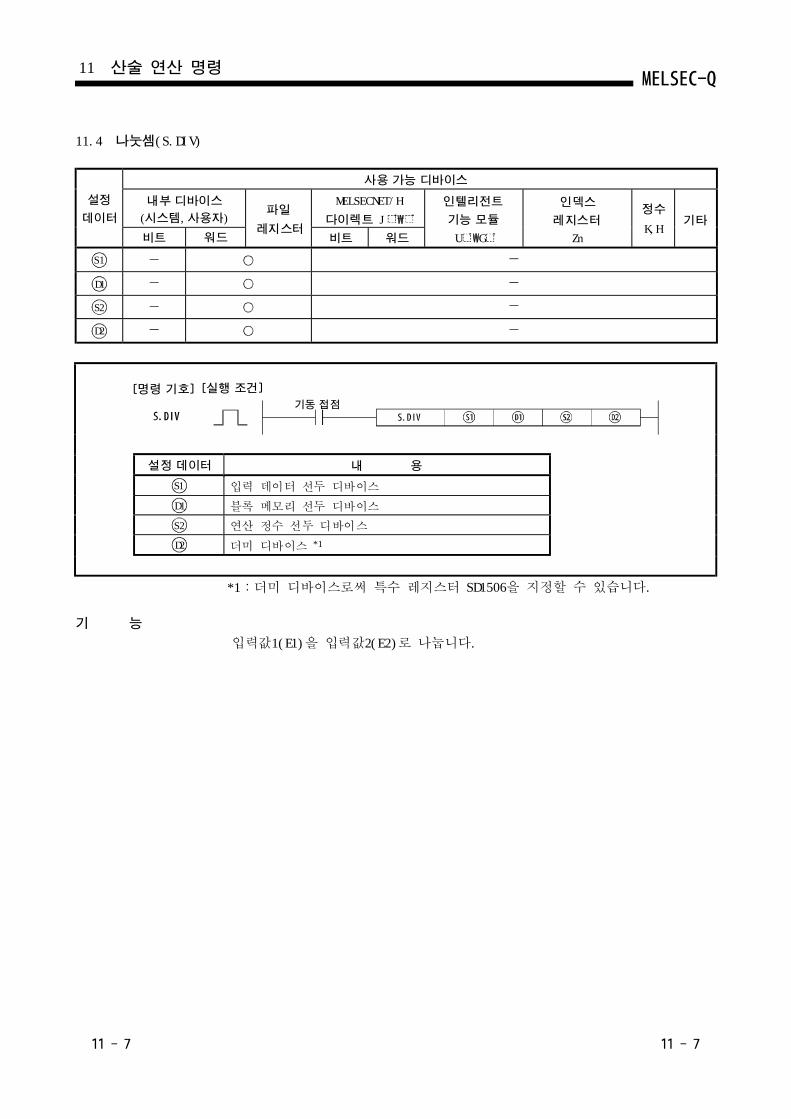
11.4 (S.DIV)나눗셈
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)을 입력값2(E2)로 나눕니다.
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
11 산술 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2

(1) S.DIV 명령에서 지정하는 데이터
입력값1
(분자)
입력값2
(분모)
출력값
계수1
계수2
계수3
바이어스1
바이어스2
바이어스3
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.DIV 명령에서는 아래와 같이 연산을 합니다.
(2) 분모가 0일 때는 BW=B3이 됩니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
11 산술 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
블록
메모리
연산 정수
실수
실수
실수
실수
실수
실수
실수
실수
실수
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
-999999~999999
-999999~999999
-999999~999999
-999999~999999
-999999~999999
(-999999~999999)
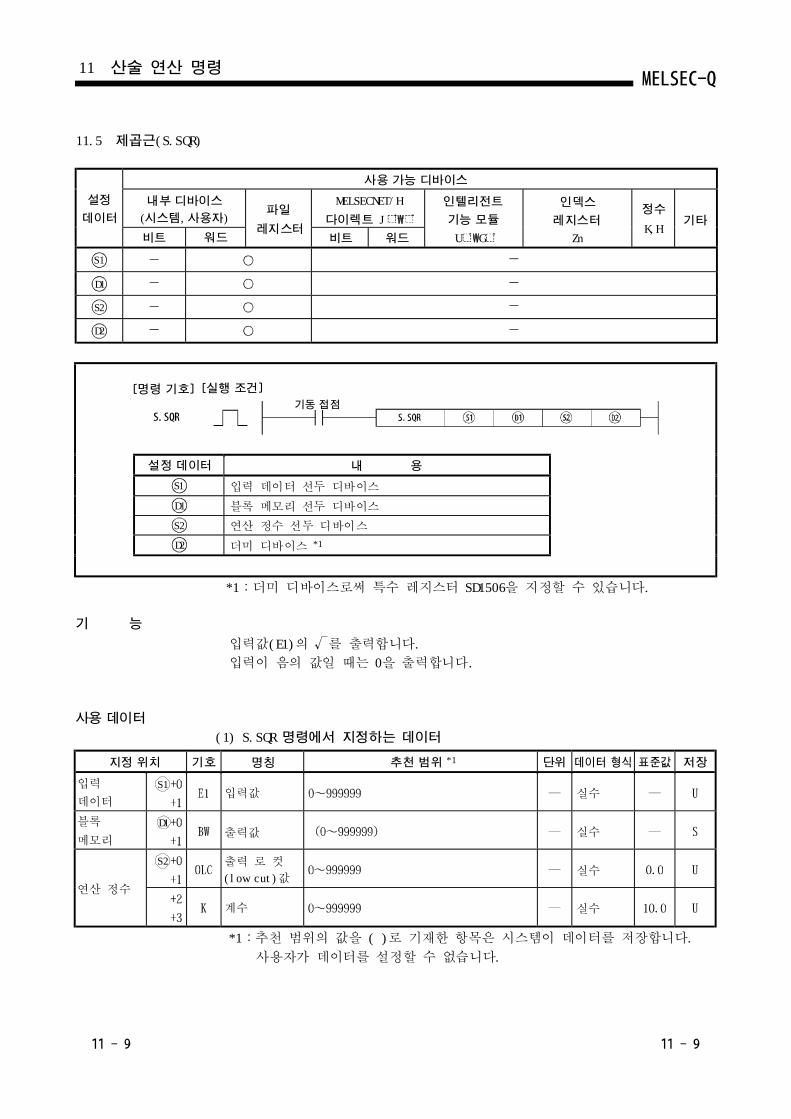
11.5 (S.SQR)제곱근
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1)의 출력합니다.를
입력이 음의 값일 때는 0을 출력합니다.
(1) S.SQR 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리출력값
연산 정수
출력 로 컷
(low cut)값
계수
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
11 산술 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
S1
S2
D1
처리 내용
(1) S.SQR 명령에서는 아래와 같이 연산을 합니다.
(2) 일 때는 BW=0이 됩니다.
또한, (E1<0)일 때도, BW=0이 됩니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
11 산술 연산 명령
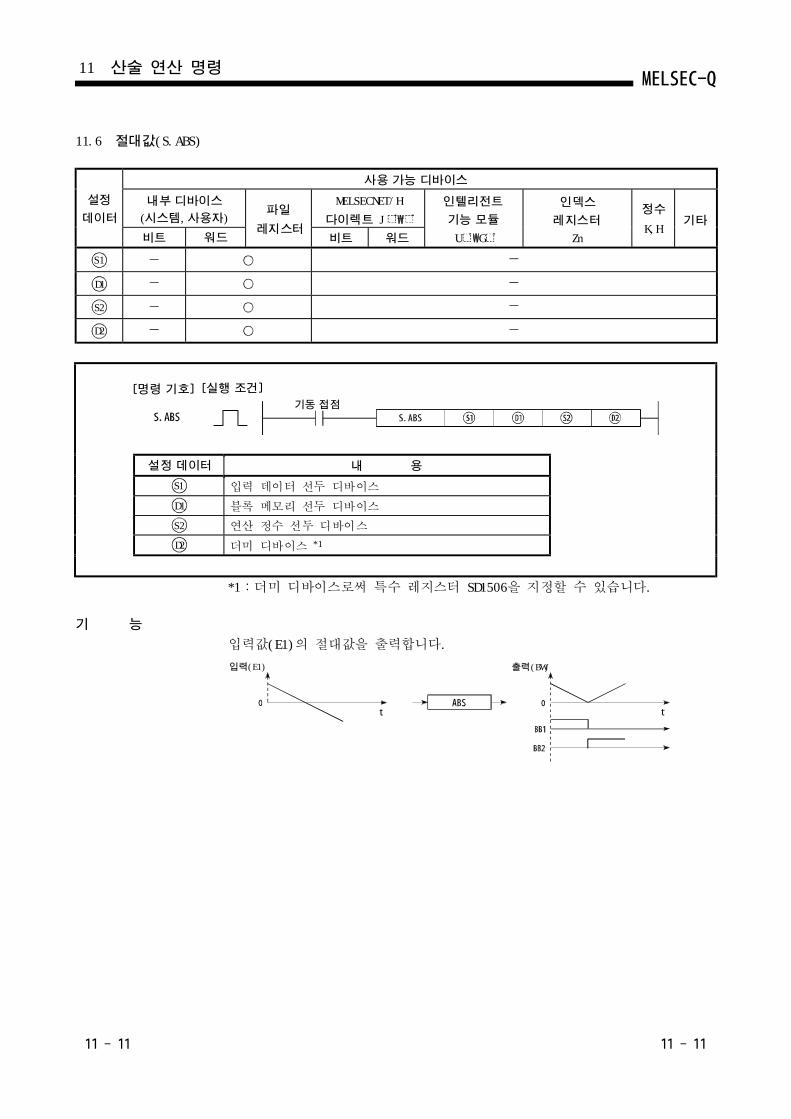
11.6 (S.ABS)절대값
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값(E1)의 절대값을 출력합니다.
입력(E1) 출력(BW)
입력 데이터 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
11 산술 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
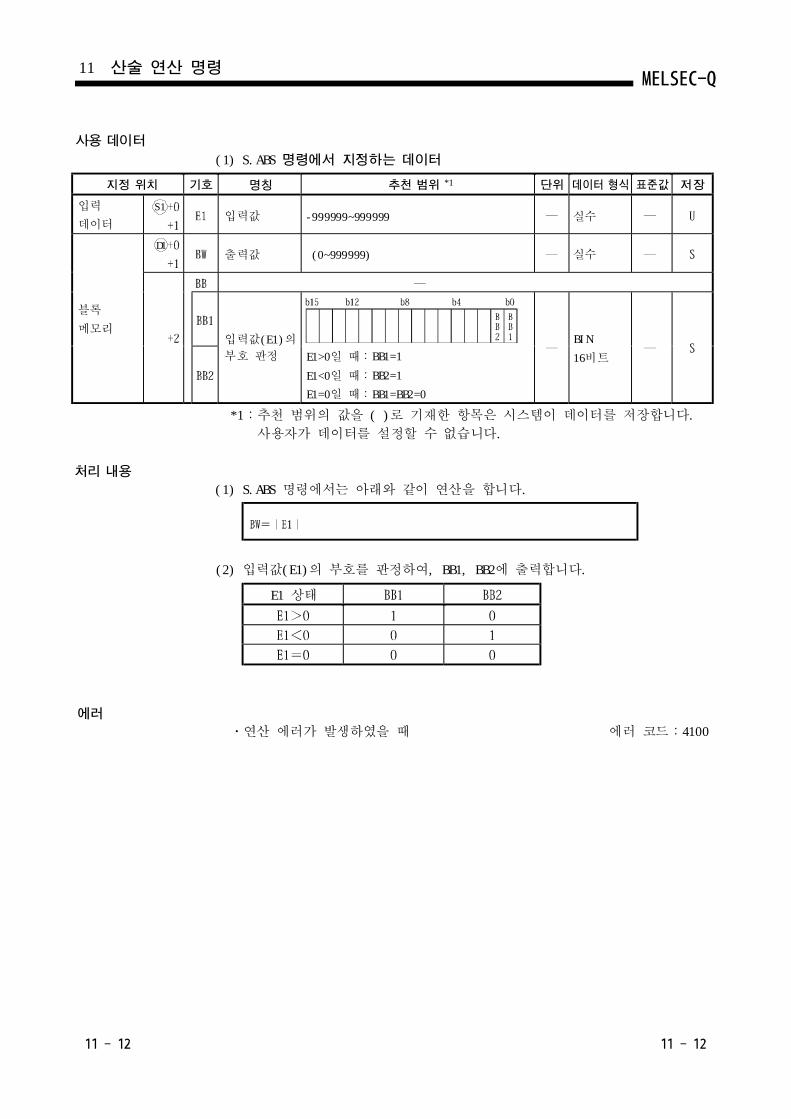
(1) S.ABS 명령에서 지정하는 데이터
입력
데이터입력값
블록
메모리
출력값
입력값(E1)의
부호 판정 E1>0일 때:BB1=1
E1<0일 때:BB2=1
E1=0일 때:BB1=BB2=0
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) S.ABS 명령에서는 아래와 같이 연산을 합니다.
(2) 입력값(E1)의 부호를 판정하여, BB1, BB2에 출력합니다.
E1 상태
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
11 산술 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
BIN
16비트
S1
D1
-999999~999999
(0~999999)
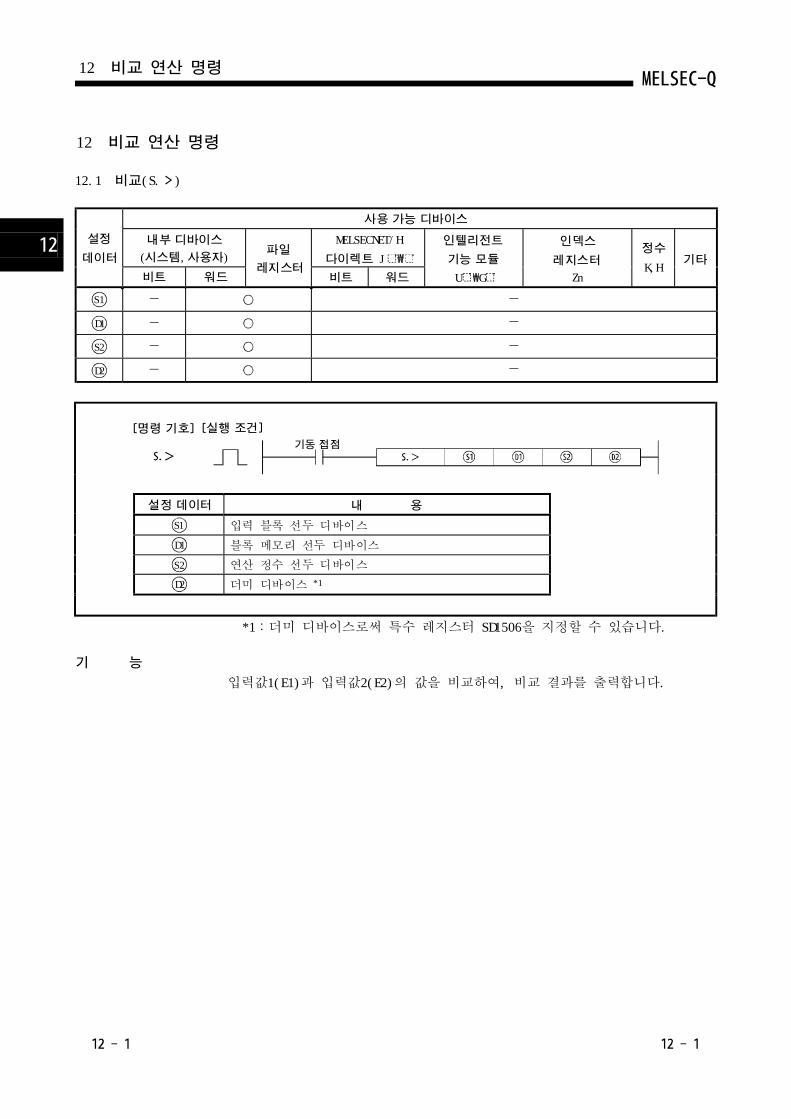
12.1 (S. )비교 >
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)과 입력값2(E2)의 값을 비교하여, 비교 결과를 출력합니다.
입력 블록 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
12 비교 연산 명령
12 비교 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
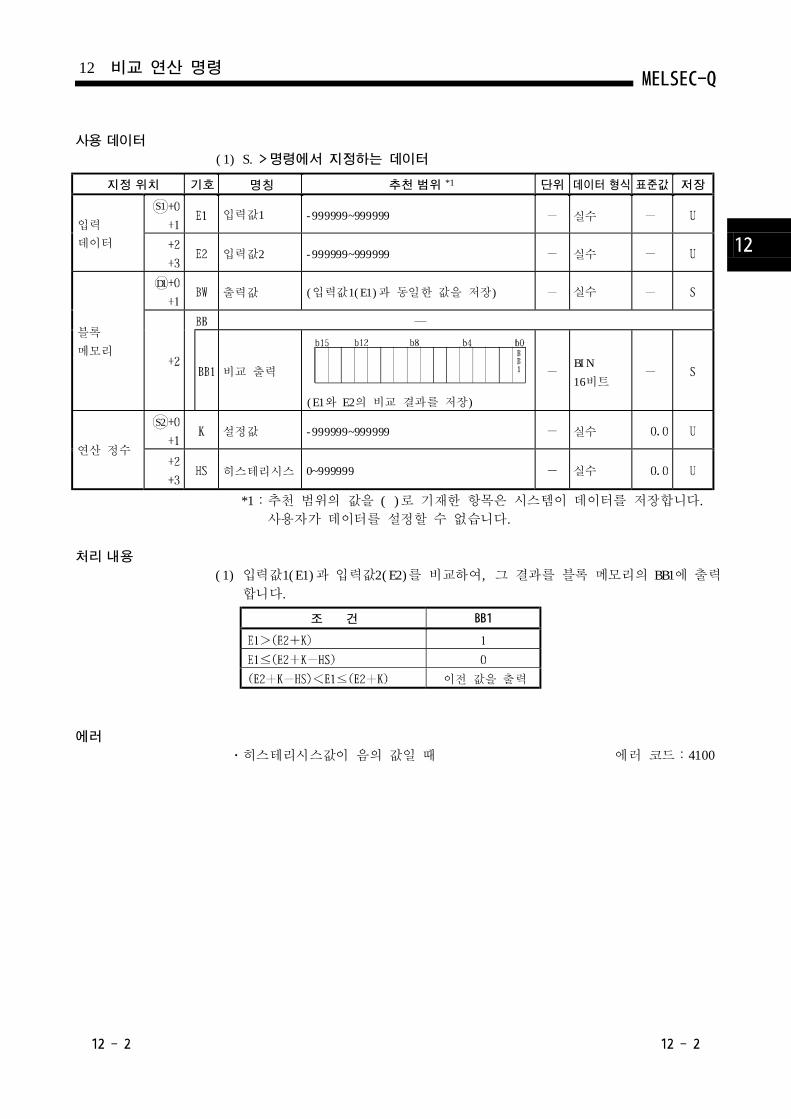
(1) S.>명령에서 지정하는 데이터
입력
데이터
입력값1
입력값2
블록
메모리
출력값 (입력값1(E1)과 동일한 값을 저장)
비교 출력
(E1와 E2의 비교 결과를 저장)
연산 정수
설정값
히스테리시스
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) 입력값1(E1)과 입력값2(E2)를 비교하여, 그 결과를 블록 메모리의 BB1에 출력
합니다.
조 건
이전 값을 출력
에러
ㆍ히스테리시스값이 음의 값일 때 에러 코드:4100
12 비교 연산 명령
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
BIN
16비트
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
0~999999
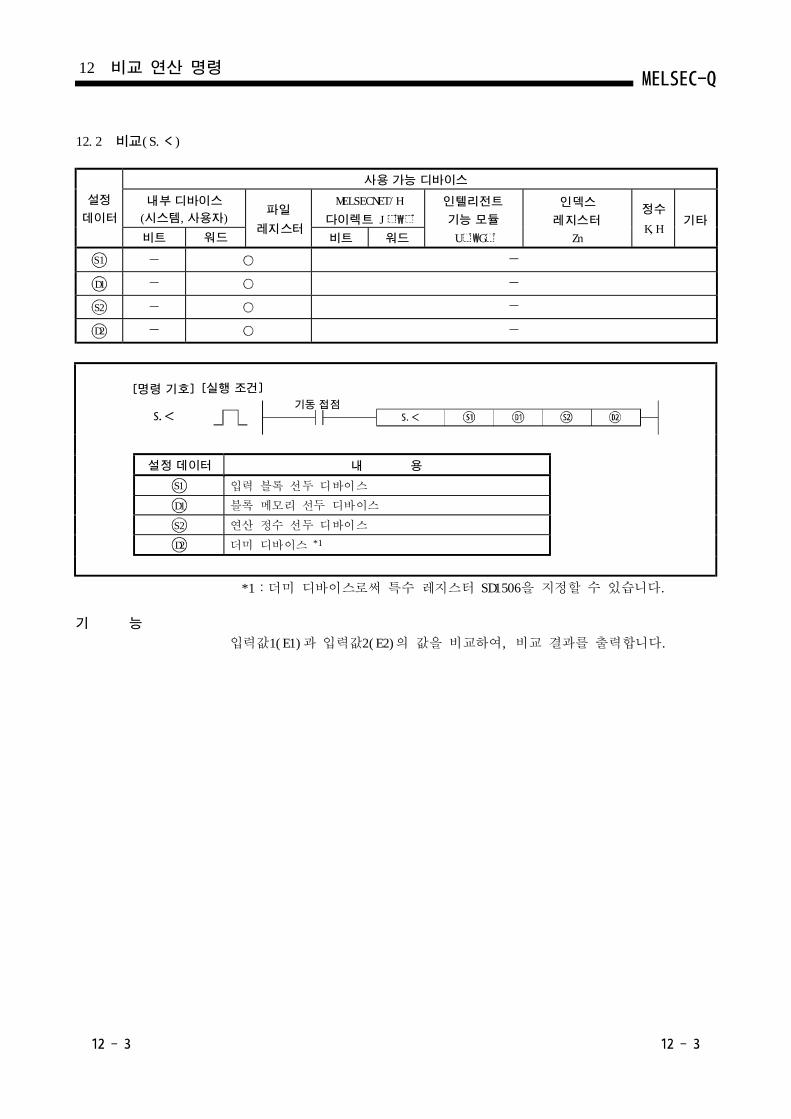
12.2 (S. )비교 <
입력 블록 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)과 입력값2(E2)의 값을 비교하여, 비교 결과를 출력합니다.
12 비교 연산 명령
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
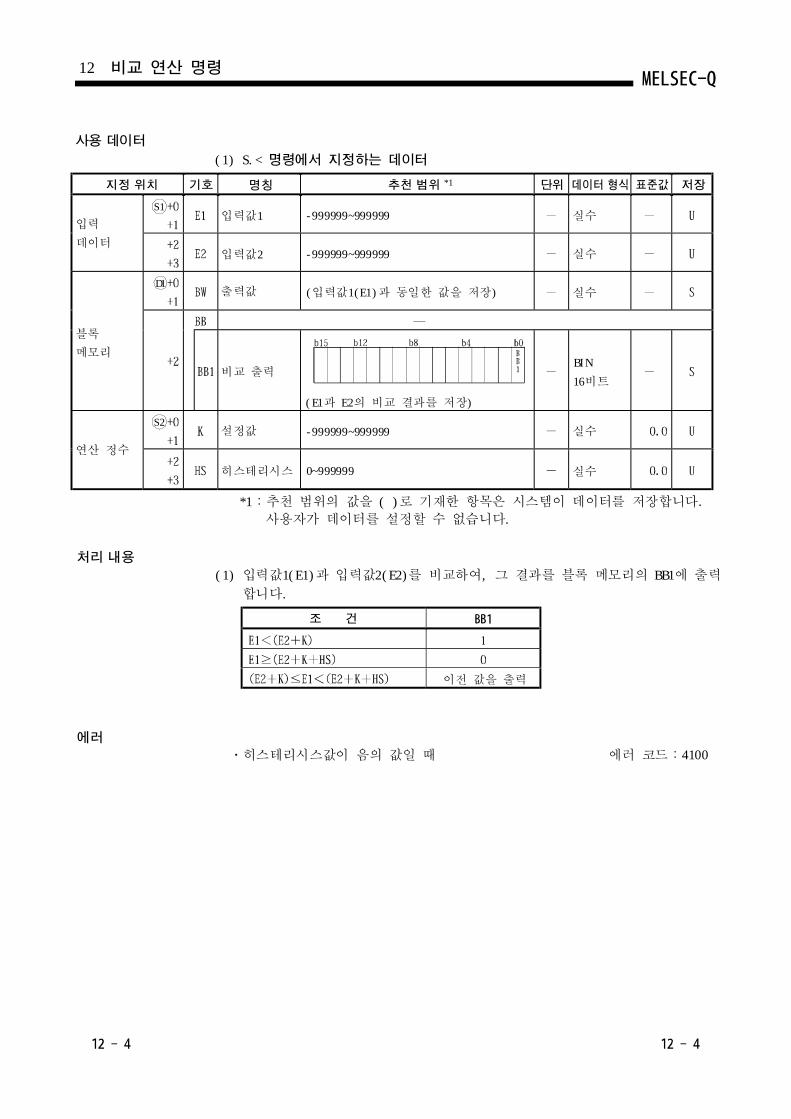
(1) S.< 명령에서 지정하는 데이터
입력
데이터
입력값1
입력값2
블록
메모리
출력값 (입력값1(E1)과 동일한 값을 저장)
비교 출력
(E1과 E2의 비교 결과를 저장)
연산 정수
설정값
히스테리시스
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) 입력값1(E1)과 입력값2(E2)를 비교하여, 그 결과를 블록 메모리의 BB1에 출력
합니다.
이전 값을 출력
에러
ㆍ히스테리시스값이 음의 값일 때 에러 코드:4100
조 건
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
BIN
16비트
12 비교 연산 명령
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
0~999999
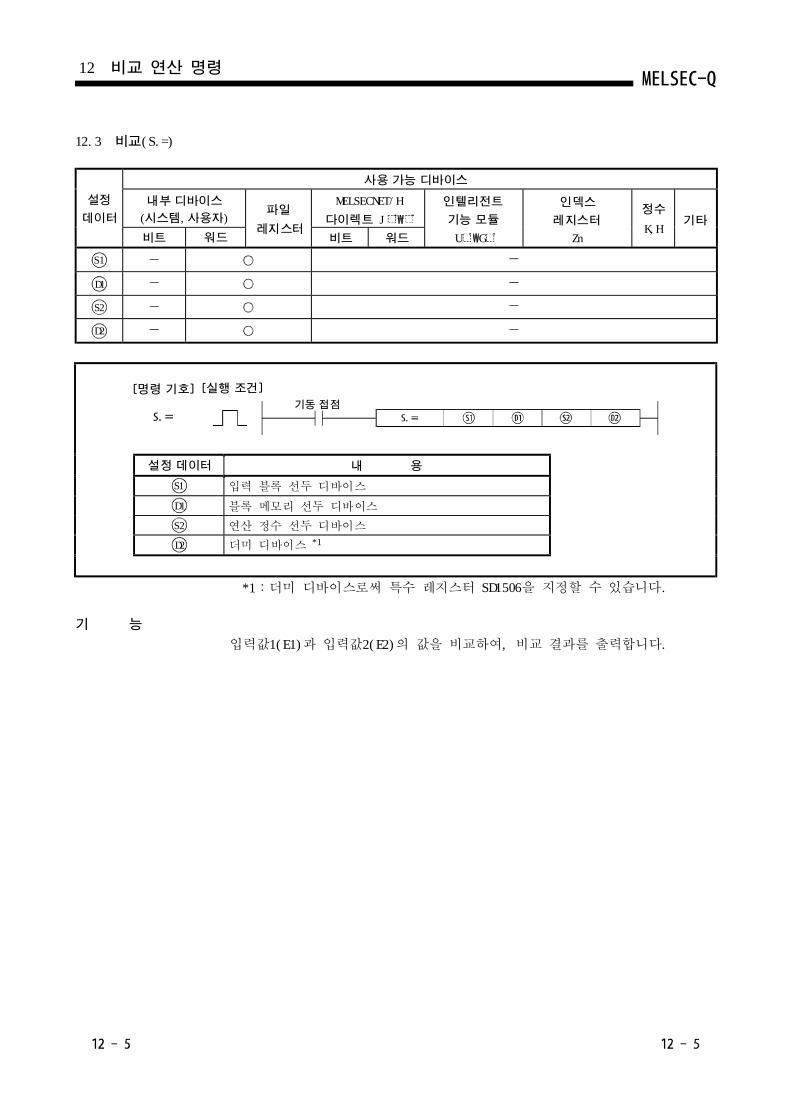
12.3 (S.=)비교
입력 블록 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)과 입력값2(E2)의 값을 비교하여, 비교 결과를 출력합니다.
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
12 비교 연산 명령
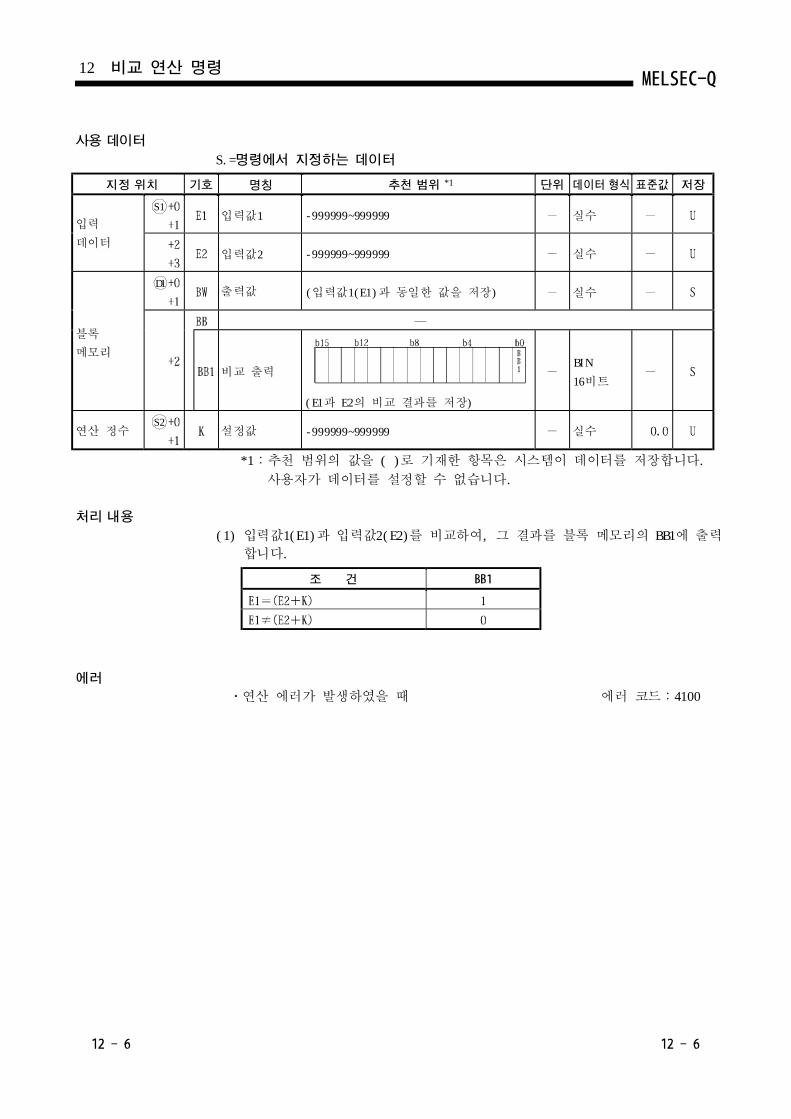
S.=명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) 입력값1(E1)과 입력값2(E2)를 비교하여, 그 결과를 블록 메모리의 BB1에 출력
합니다.
조 건
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
블록
메모리
연산 정수
입력값1
입력값2
출력값
비교 출력
설정값 실수
실수
실수
실수
BIN
16비트
(입력값1(E1)과 동일한 값을 저장)
(E1과 E2의 비교 결과를 저장)
12 비교 연산 명령
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
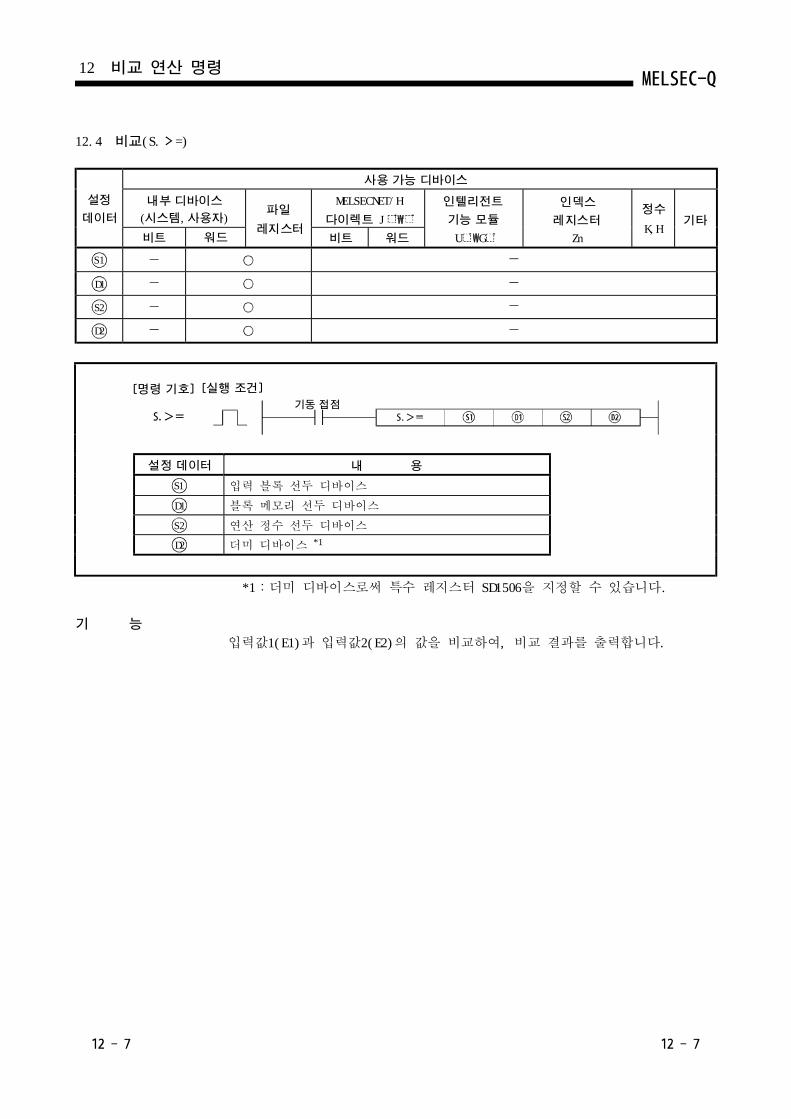
12.4 (S. =)비교 >
입력 블록 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)과 입력값2(E2)의 값을 비교하여, 비교 결과를 출력합니다.
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
12 비교 연산 명령
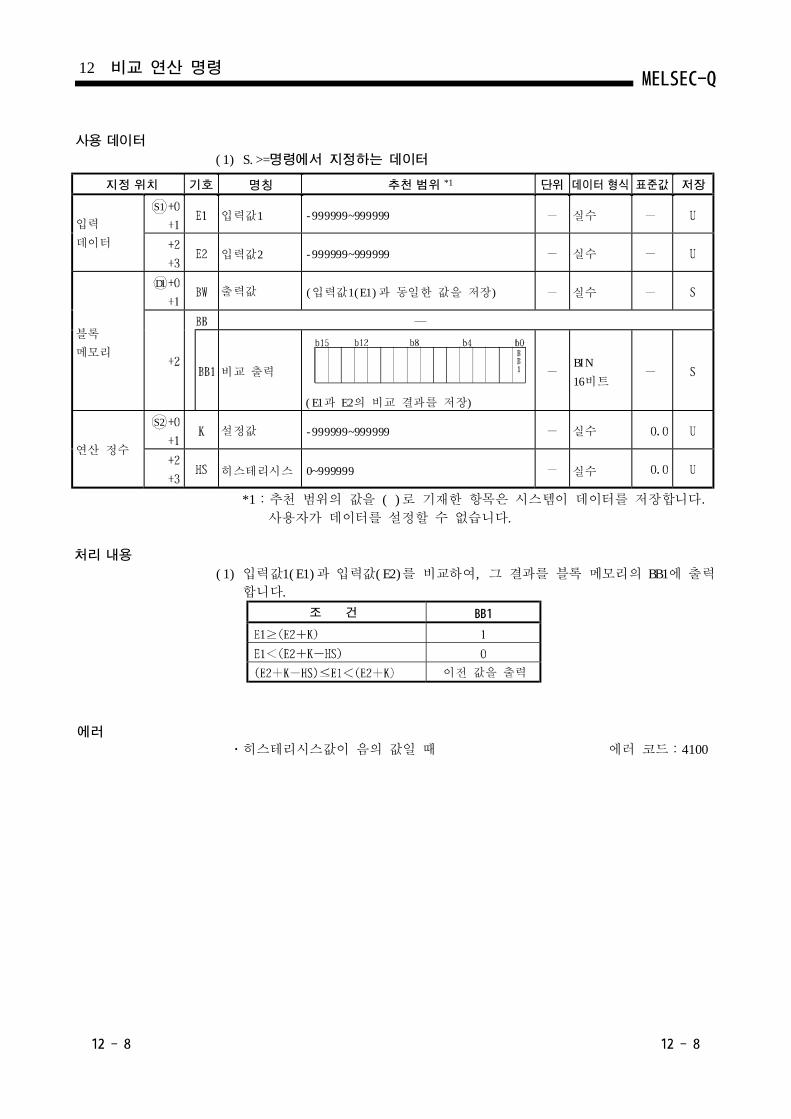
(1) S.>=명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) 입력값1(E1)과 입력값(E2)를 비교하여, 그 결과를 블록 메모리의 BB1에 출력
합니다.
에러
ㆍ히스테리시스값이 음의 값일 때 에러 코드:4100
이전 값을 출력
조 건
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
블록
메모리
연산 정수
입력값1
입력값2
출력값
비교 출력
설정값
히스테리시스 실수
실수
실수
실수
실수
BIN
16비트
(입력값1(E1)과 동일한 값을 저장)
(E1과 E2의 비교 결과를 저장)
12 비교 연산 명령
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
0~999999
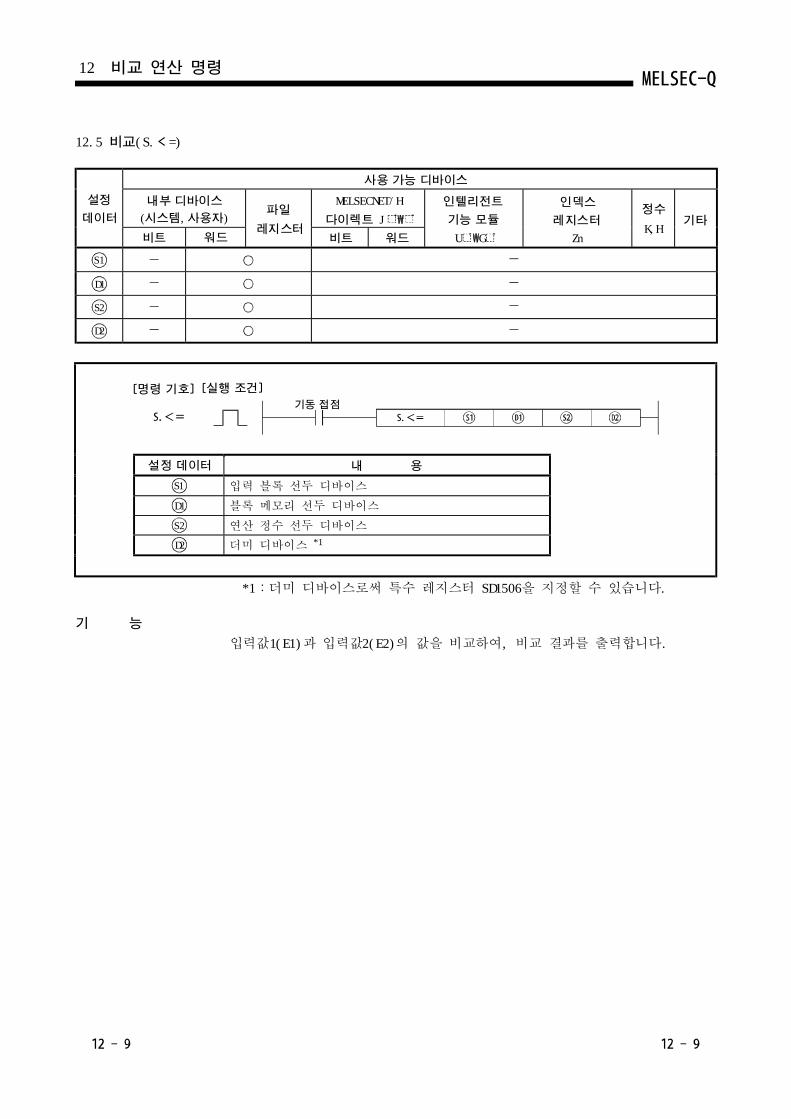
12.5 (S. =)비교 <
*1:더미 디바이스로써 특수 레지스터 SD1506을 지정할 수 있습니다.
입력값1(E1)과 입력값2(E2)의 값을 비교하여, 비교 결과를 출력합니다.
입력 블록 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
더미 디바이스 *1
기 능
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
12 비교 연산 명령

(1) S, <=명령에서 지정하는 데이터
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
처리 내용
(1) 입력값1(E1)과 입력값2(E2)를 비교하여, 그 결과를 블록 메모리의 BB1에 출력
합니다.
에러
ㆍ히스테리시스값이 음의 값일 때 에러 코드:4100
이전 값을 출력
조 건
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
입력
데이터
블록
메모리
연산 정수
입력값1
입력값2
출력값
비교 출력
설정값
히스테리시스 실수
실수
실수
실수
실수
BIN
16비트
(입력값1(E1)과 동일한 값을 저장)
(E1과 E2의 비교 결과를 저장)
12 비교 연산 명령
S1
S2
D1
-999999~999999
-999999~999999
-999999~999999
0~999999
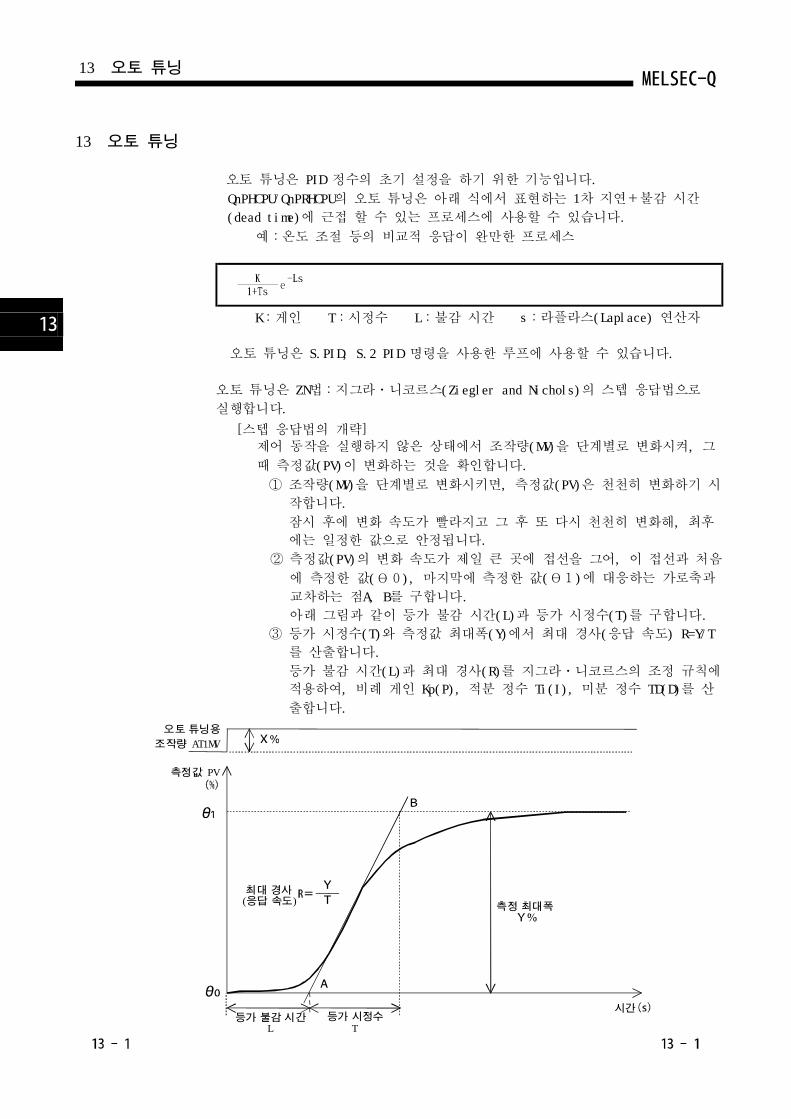
오토 튜닝은 PID 정수의 초기 설정을 하기 위한 기능입니다.
QnPHCPU/QnPRHCPU의 오토 튜닝은 아래 식에서 표현하는 1차 지연+불감 시간
(dead time)에 근접 할 수 있는 프로세스에 사용할 수 있습니다.
예:온도 조절 등의 비교적 응답이 완만한 프로세스
K:게인 T:시정수 L:불감 시간 s:라플라스(Laplace) 연산자
오토 튜닝은 S.PID, S.2 PID 명령을 사용한 루프에 사용할 수 있습니다.
오토 튜닝은 ZN법:지그라ㆍ니코르스(Ziegler and Nichols)의 스텝 응답법으로
실행합니다.
[스텝 응답법의 개략]
제어 동작을 실행하지 않은 상태에서 조작량(MV)을 단계별로 변화시켜, 그
때 측정값(PV)이 변화하는 것을 확인합니다.
① 조작량(MV)을 단계별로 변화시키면, 측정값(PV) 천천히 변화하기 시
작합니다.
잠시 후에 변화 속도가 빨라지고 그 후 또 다시 천천히 변화해, 최후
에는 일정한 값으로 안정됩니다.
은
② 측정값(PV)의 변화 속도가 제일 큰 곳에 접선을 그어, 이 접선과 처음
에 측정한 값(θ0), 마지막에 측정한 값(θ1)에 대응하는 가로축과
교차하는 점A, B를 구합니다.
아래 그림과 같이 등가 불감 시간(L)과 등가 시정수(T)를 구합니다.
③ 등가 시정수(T)와 측정값 최대폭(Y)에서 최대 경사(응답 속도) R=Y/T
를 산출합니다.
등가 불감 시간(L)과 최대 경사(R)를 지그라ㆍ니코르스의 조정 규칙에
적용하여, 비례 게인 Kp(P), 적분 정수 Ti(I), 미분 정수 TD(D)를 산
출합니다.
오토 튜닝용
조작량 AT1MV
측정값 PV
최대 경사(응답 속도)
측정 최대폭
등가 불감 시간L T
등가 시정수시간
13 오토 튜닝
13 오토 튜닝
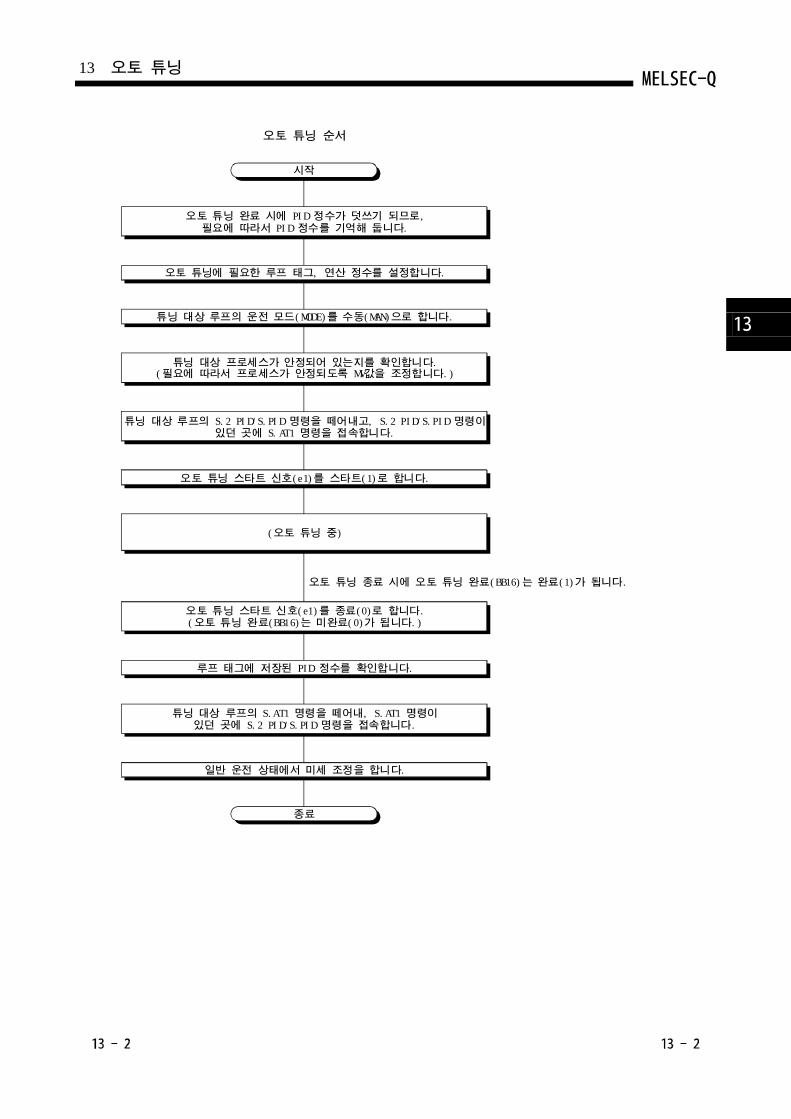
오토 튜닝 순서
시작
오토 튜닝 완료 시에 정수가 덧쓰기 되므로필요에 따라서 정수를 기억해 둡니다
PID ,PID .
오토 튜닝에 필요한 루프 태그 연산 정수를 설정합니다, .
튜닝 대상 루프의 운전 모드 를 수동 으로 합니다(MODE) (MAN) .
튜닝 대상 프로세스가 안정되어 있는지를 확인합니다필요에 따라서 프로세스가 안정되도록 값을 조정합니다
.( MV .)
튜닝 대상 루프의 명령을 떼어내고 명령이있던 곳에 명령을 접속합니다S.2 PID/S.PID , S.2 PID/S.PID
S.AT1 .
오토 튜닝 스타트 신호 를 스타트 로 합니다(e1) (1) .
( )오토 튜닝 중
오토 튜닝 종료 시에 오토 튜닝 완료 는 완료 가 됩니다(BB16) (1) .
오토 튜닝 스타트 신호 를 종료 로 합니다오토 튜닝 완료 는 미완료 가 됩니다
(e1) (0) .( (BB16) (0) .)
루프 태그에 저장된 정수를 확인합니다PID .
튜닝 대상 루프의 명령을 떼어내 명령이있던 곳에 명령을 접속합니다
S.AT1 , S.AT1S.2 PID/S.PID .
일반 운전 상태에서 미세 조정을 합니다.
종료
13 오토 튜닝

(1) 오토 튜닝 스타트~정상 완료까지의 타임 차트
오토 튜닝 스타트 신호 e1
오토 튜닝 스타트
오토 튜닝 완료
오토 튜닝 완료 BB16
각종 경보 ~BB1 BB8
조작량
PID 정수를 세트한다
(2) 오토 튜닝 스타트~경보 발생에 의한 중지까지의 타임 차트
오토 튜닝 스타트 신호 e1
오토 튜닝 스타트
오토 튜닝 중지
오토 튜닝 완료 BB16
각종 경보 ~BB1 BB8
경보 발생
조작량
PID 정수는 세트하지 않는다
13 오토 튜닝
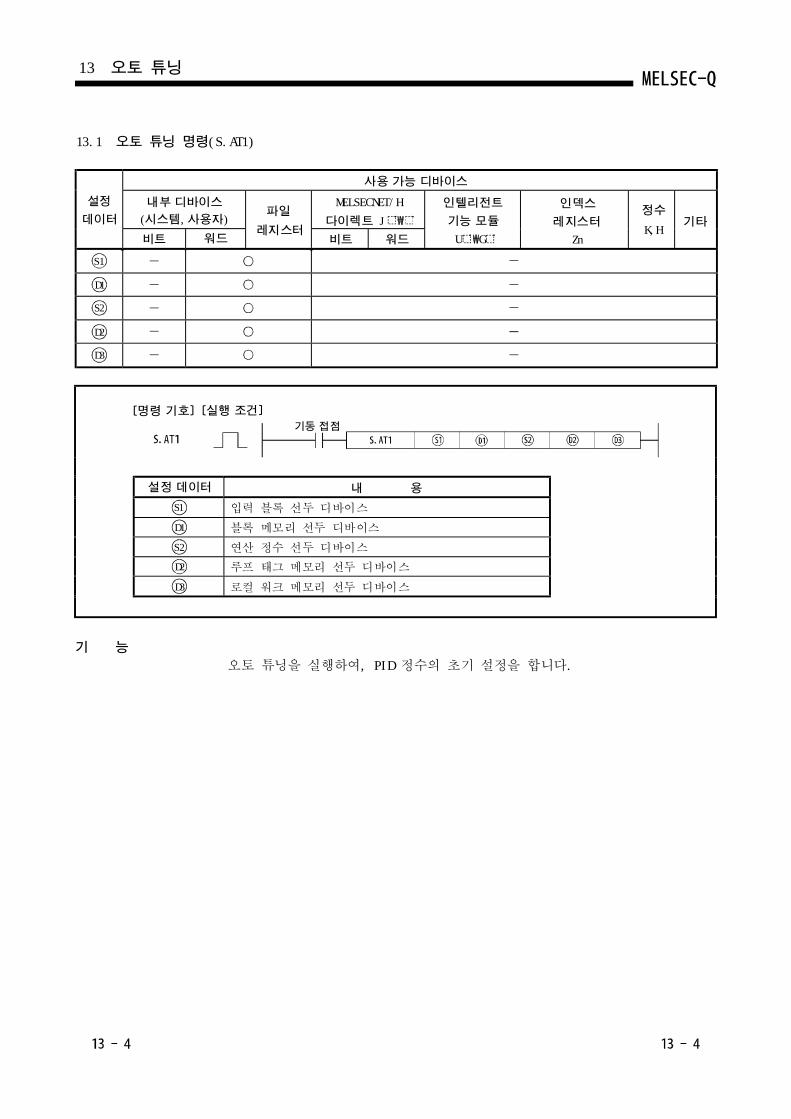
13.1 (S.AT1)오토 튜닝 명령
입력 블록 선두 디바이스
블록 메모리 선두 디바이스
연산 정수 선두 디바이스
루프 태그 메모리 선두 디바이스
로컬 워크 메모리 선두 디바이스
오토 튜닝을 실행하여, PID 정수의 초기 설정을 합니다.
〔명령 기호〕〔실행 조건〕
기동 접점
설정 데이터 내 용
S1
D1
S2
D2
D3
설정
데이터
사용 가능 디바이스
내부 디바이스
(시스템, 사용자)파일
레지스터
MELSECNET/H
다이렉트 J
인텔리전트
기능 모듈
U G
인덱스
레지스터
Zn
정수
K,H기타
비트 워드 비트 워드
S1
D1
S2
D2
D3
기 능
13 오토 튜닝
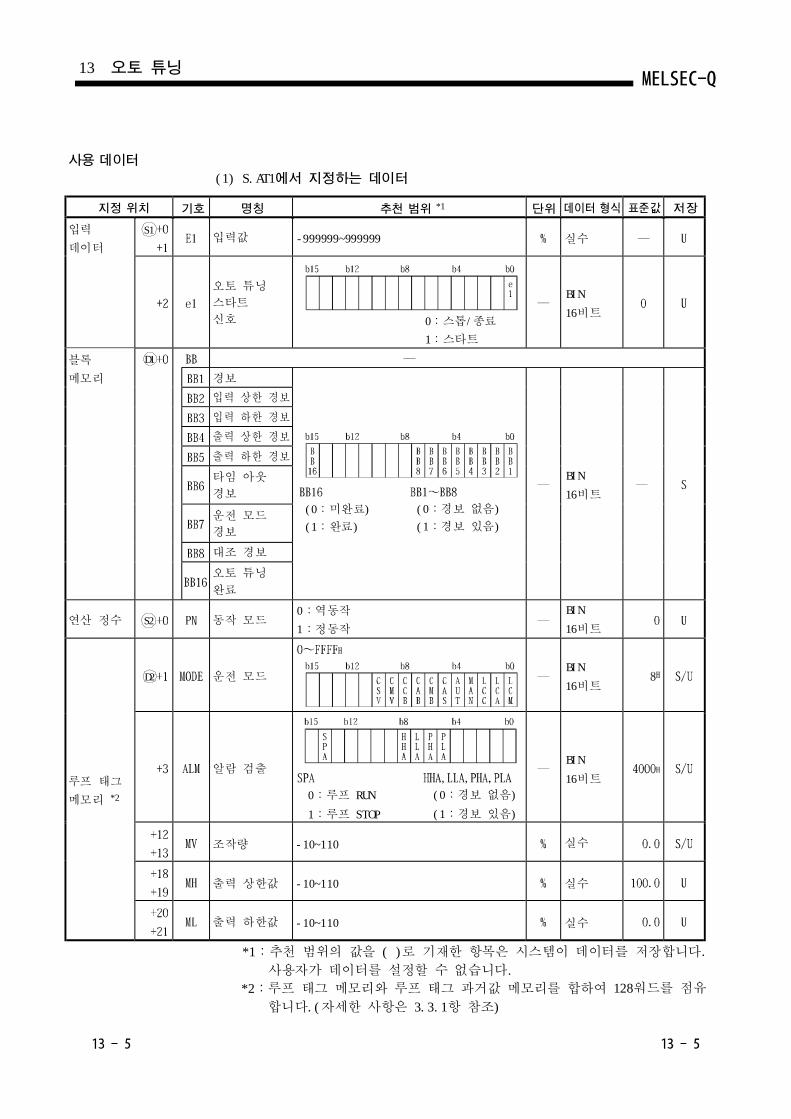
(1) S.AT1에서 지정하는 데이터
입력
데이터입력값
오토 튜닝
스타트
신호 0:스톱/종료
1:스타트
블록
메모리 경보
(0:미완료) (0:경보 없음)
(1:완료) (1:경보 있음)
입력 상한 경보
입력 하한 경보
출력 상한 경보
출력 하한 경보
타임 아웃
경보
운전 모드
경보
대조 경보
오토 튜닝
완료
연산 정수 동작 모드0:역동작
1:정동작
루프 태그
메모리 *2
운전 모드
알람 검출
0:루프 RUN (0:경보 없음)
1:루프 STOP (1:경보 있음)
-10~110
-10~110
-10~110
조작량
출력 상한값
출력 하한값
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리를 합하여 128워드를 점유
합니다.(자세한 사항은 3.3.1항 참조)
사용 데이터
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
BIN
16비트
13 오토 튜닝
S1
S2
D1
D2
-999999~999999
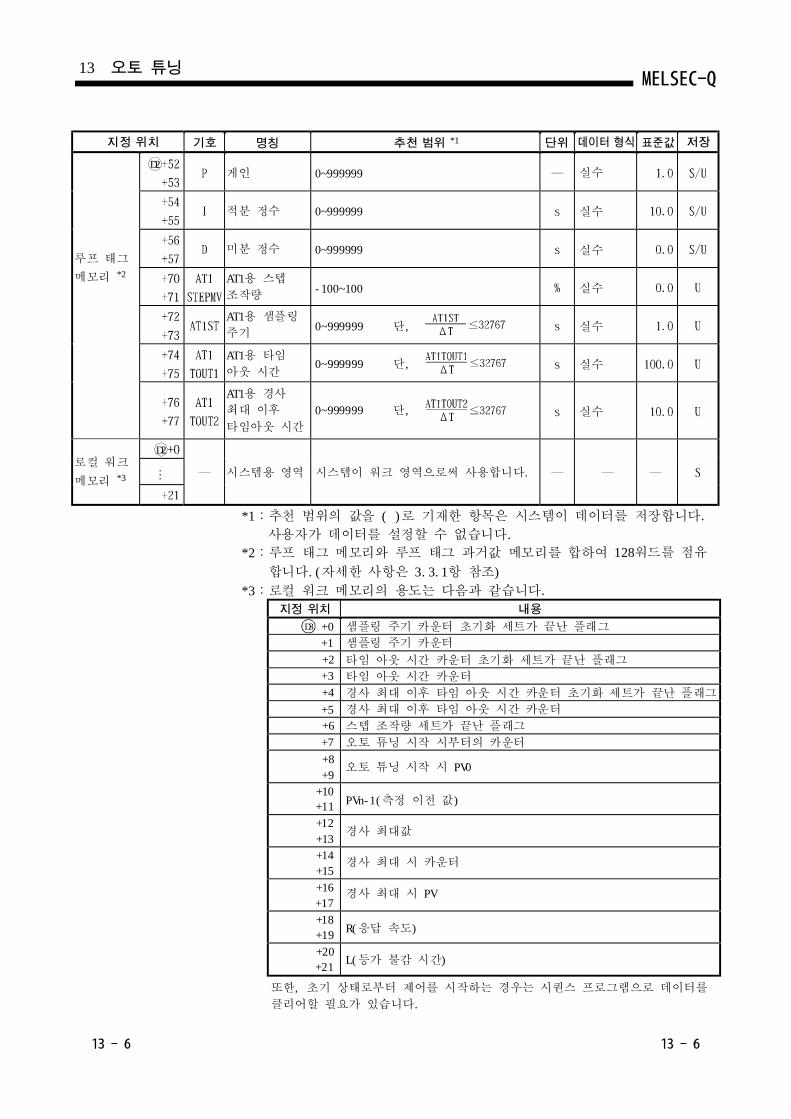
루프 태그
메모리 *2
게인
적분 정수
미분 정수
AT1용 스텝
조작량
AT1용 샘플링
주기0~999999 단,
AT1용 타임
아웃 시간0~999999 단,
AT1용 경사
최대 이후
타임아웃 시간
0~999999 단,
로컬 워크
메모리 *3 시스템용 영역 시스템이 워크 영역으로써 사용합니다.
*1:추천 범위의 값을 ( )로 기재한 항목은 시스템이 데이터를 저장합니다.
사용자가 데이터를 설정할 수 없습니다.
*2:루프 태그 메모리와 루프 태그 과거값 메모리를 합하여 128워드를 점유
합니다.(자세한 사항은 3.3.1항 참조)
*3:로컬 워크 메모리의 용도는 다음과 같습니다.
지정 위치 내용
D3 +0 샘플링 주기 카운터 초기화 세트가 끝난 플래그
+1 샘플링 주기 카운터
+2 타임 아웃 시간 카운터 초기화 세트가 끝난 플래그
+3 타임 아웃 시간 카운터
+4 경사 최대 이후 타임 아웃 시간 카운터 초기화 세트가 끝난 플래그
+5 경사 최대 이후 타임 아웃 시간 카운터
+6 스텝 조작량 세트가 끝난 플래그
+7 오토 튜닝 시작 시부터의 카운터
+8오토 튜닝 시작 시 PV0
+9
+10PVn-1(측정 이전 값)
+11
+12경사 최대값
+13
경사 최대 시 카운터+14
경사 최대 시 PV
+15
+16
R(응답 속도)
+17
+18
+19
+20L(등가 불감 시간)
+21
또한, 초기 상태로부터 제어를 시작하는 경우는 시퀀스 프로그램으로 데이터를
클리어할 필요가 있습니다.
지정 위치 기호 명칭 추천 범위 *1 단위 데이터 형식 표준값 저장
실수
실수
실수
실수
실수
실수
실수
13 오토 튜닝
D2
D20~999999
0~999999
0~999999
-100~100
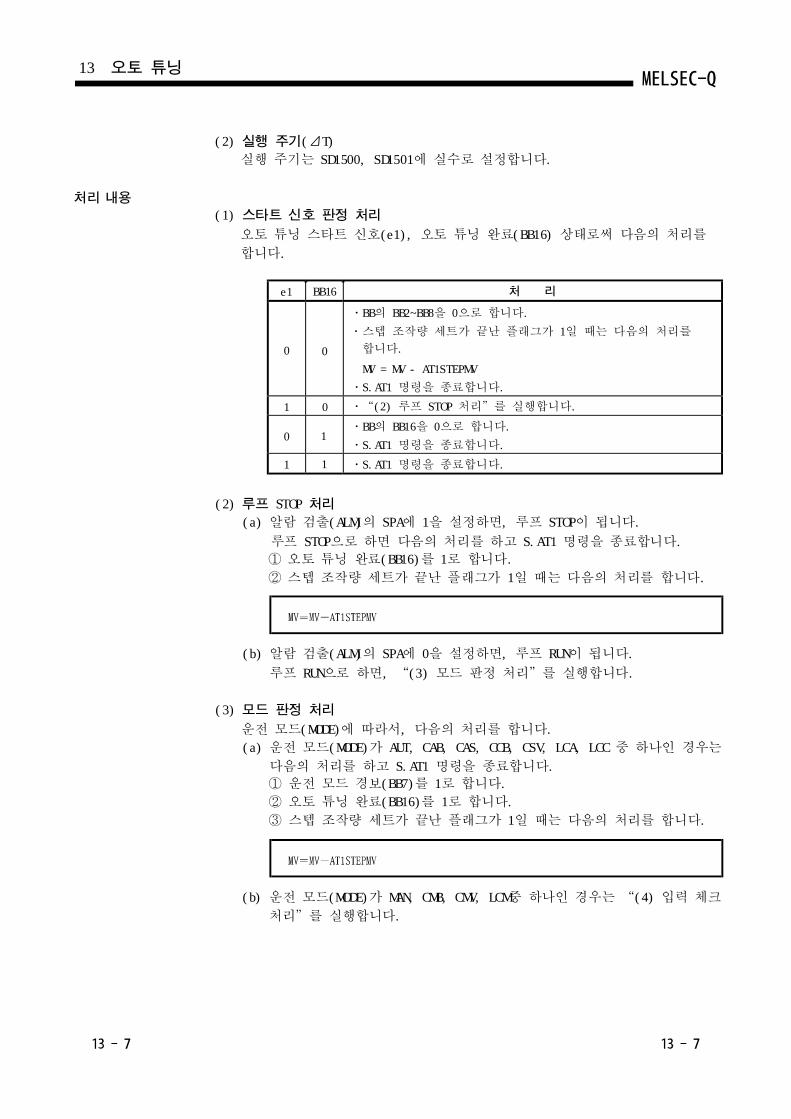
(2) ( T)실행 주기 Δ
실행 주기는 SD1500, SD1501에 실수로 설정합니다.
처리 내용
(1) 스타트 신호 판정 처리
오토 튜닝 스타트 신호(e1), 오토 튜닝 완료(BB16) 상태로써 다음의 처리를
합니다.
e1 BB16 처 리
0 0
ㆍBB의 BB2~BB8을 0으로 합니다.
ㆍ스텝 조작량 세트가 끝난 플래그가 1일 때는 다음의 처리를
합니다.
MV = MV - AT1STEPMV
ㆍS.AT1 명령을 종료합니다.
1 0 ㆍ“(2) 루프 STOP 처리”를 실행합니다.
0 1ㆍBB의 BB16을 0으로 합니다.
ㆍS.AT1 명령을 종료합니다.
1 1 ㆍS.AT1 명령을 종료합니다.
(2) STOP루프 처리
(a) 알람 검출(ALM)의 SPA에 1을 설정하면, 루프 STOP이 됩니다.
루프 STOP으로 하면 다음의 처리를 하고 S.AT1 명령을 종료합니다.
① 오토 튜닝 완료(BB16)를 1로 합니다.
② 스텝 조작량 세트가 끝난 플래그가 1일 때는 다음의 처리를 합니다.
(b) 알람 검출(ALM)의 SPA에 0을 설정하면, 루프 RUN이 됩니다.
루프 RUN으로 하면, “(3) 모드 판정 처리”를 실행합니다.
(3) 모드 판정 처리
운전 모드(MODE)에 따라서, 다음의 처리를 합니다.
(a) 운전 모드(MODE)가 AUT, CAB, CAS, CCB, CSV, LCA, LCC 중 하나인 경우는
다음의 처리를 하고 S.AT1 명령을 종료합니다.
① 운전 모드 경보(BB7)를 1로 합니다.
② 오토 튜닝 완료(BB16)를 1로 합니다.
③ 스텝 조작량 세트가 끝난 플래그가 1일 때는 다음의 처리를 합니다.
(b) 운전 모드(MODE)가 MAN, CMB, CMV, LCM중 하나인 경우는 “(4) 입력 체크
처리”를 실행합니다.
13 오토 튜닝
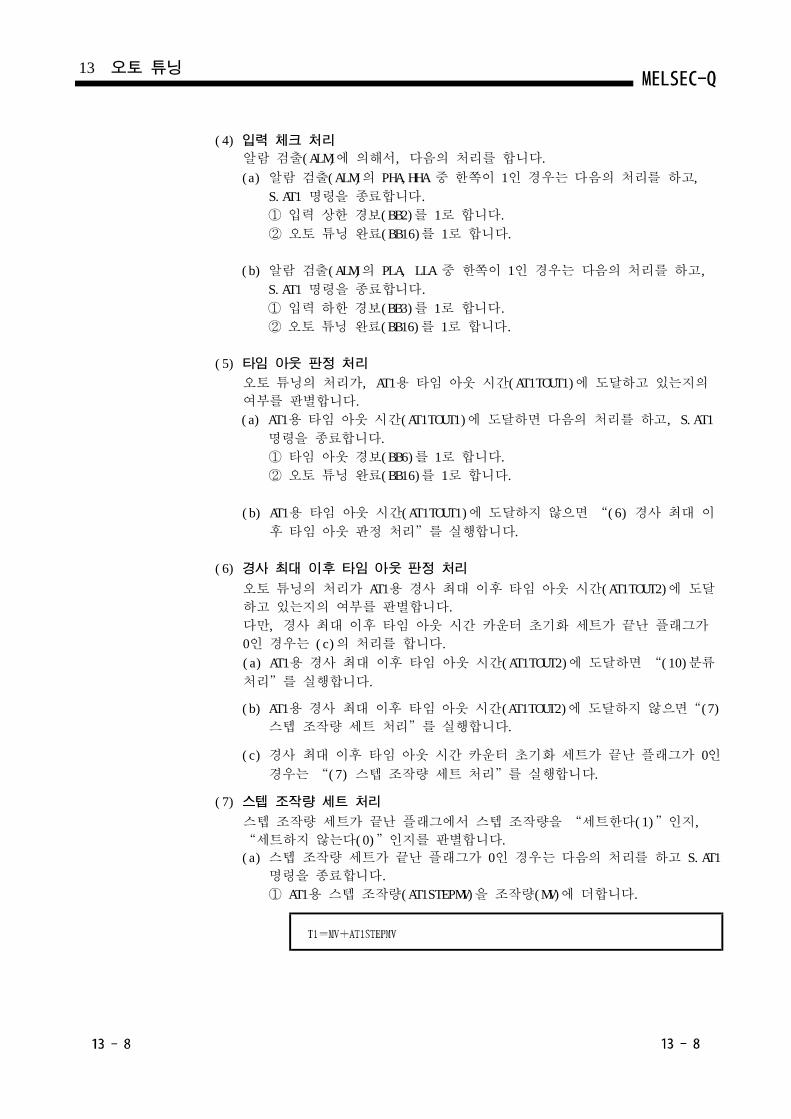
(4) 입력 체크 처리
알람 검출(ALM)에 의해서, 다음의 처리를 합니다.
(a) 알람 검출(ALM)의 PHA,HHA 중 한쪽이 1인 경우는 다음의 처리를 하고,
S.AT1 명령을 종료합니다.
① 입력 상한 경보(BB2)를 1로 합니다.
② 오토 튜닝 완료(BB16)를 1로 합니다.
(b) 알람 검출(ALM)의 PLA, LLA 중 한쪽이 1인 경우는 다음의 처리를 하고,
S.AT1 명령을 종료합니다.
① 입력 하한 경보(BB3)를 1로 합니다.
② 오토 튜닝 완료(BB16)를 1로 합니다.
(5) 타임 아웃 판정 처리
오토 튜닝의 처리가, AT1용 타임 아웃 시간(AT1TOUT1)에 도달하고 있는지의
여부를 판별합니다.
(a) AT1용 타임 아웃 시간(AT1TOUT1)에 도달하면 다음의 처리를 하고, S.AT1
명령을 종료합니다.
① 타임 아웃 경보(BB6)를 1로 합니다.
② 오토 튜닝 완료(BB16)를 1로 합니다.
(b) AT1용 타임 아웃 시간(AT1TOUT1)에 도달하지 않으면 “(6) 경사 최대 이
후 타임 아웃 판정 처리”를 실행합니다.
(6) 경사 최대 이후 타임 아웃 판정 처리
오토 튜닝의 처리가 AT1용 경사 최대 이후 타임 아웃 시간(AT1TOUT2)에 도달
하고 있는지의 여부를 판별합니다.
다만, 경사 최대 이후 타임 아웃 시간 카운터 초기화 세트가 끝난 플래그가
0인 경우는 (c)의 처리를 합니다.
(a) AT1용 경사 최대 이후 타임 아웃 시간(AT1TOUT2)에 도달하면 “(10)분류
처리”를 실행합니다.
(b) AT1용 경사 최대 이후 타임 아웃 시간(AT1TOUT2)에 도달하지 않으면“(7)
스텝 조작량 세트 처리”를 실행합니다.
(c) 경사 최대 이후 타임 아웃 시간 카운터 초기화 세트가 끝난 플래그가 0인
경우는 “(7) 스텝 조작량 세트 처리”를 실행합니다.
(7) 스텝 조작량 세트 처리
스텝 조작량 세트가 끝난 플래그에서 스텝 조작량을 “세트한다(1)”인지,
“세트하지 않는다(0)”인지를 판별합니다.
(a) 스텝 조작량 세트가 끝난 플래그가 0인 경우는 다음의 처리를 하고 S.AT1
명령을 종료합니다.
① AT1용 스텝 조작량(AT1STEPMV)을 조작량(MV)에 더합니다.
13 오토 튜닝
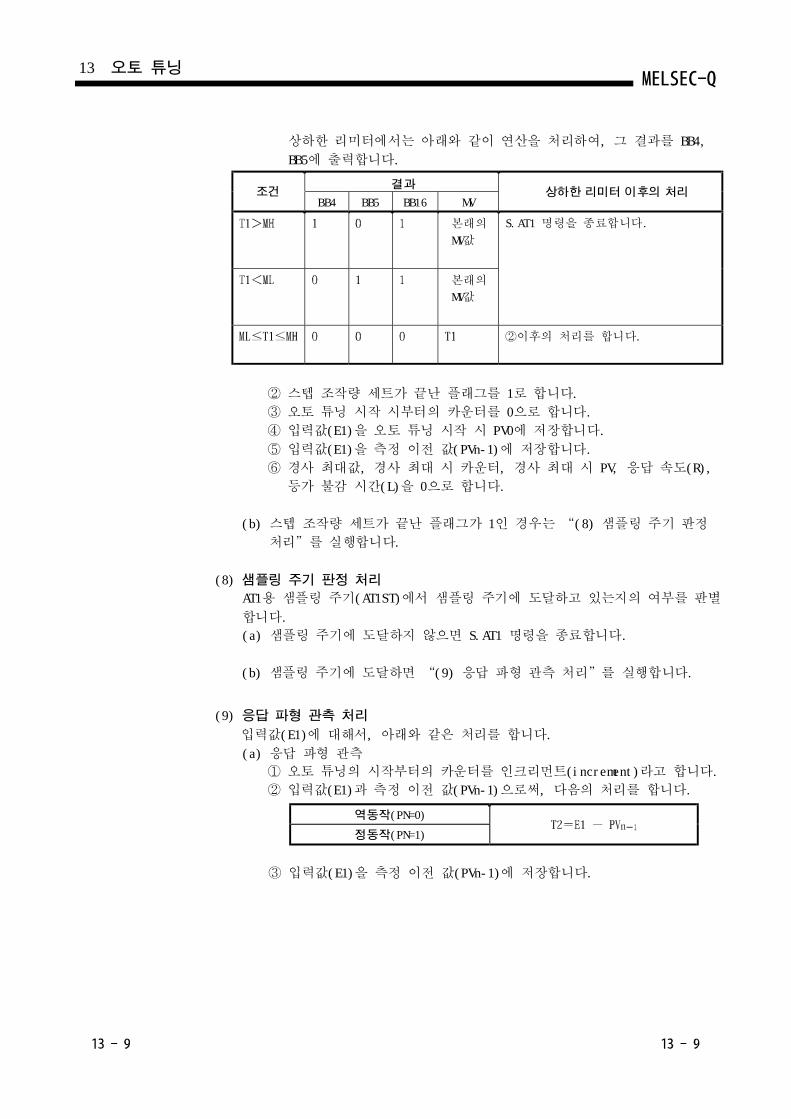
상하한 리미터에서는 아래와 같이 연산을 처리하여, 그 결과를 BB4,
BB5에 출력합니다.
조건결과
상하한 리미터 이후의 처리BB4 BB5 BB16 MV
본래의
MV값
S.AT1 명령을 종료합니다.
본래의
MV값
②이후의 처리를 합니다.
② 스텝 조작량 세트가 끝난 플래그를 1로 합니다.
③ 오토 튜닝 시작 시부터의 카운터를 0으로 합니다.
④ 입력값(E1)을 오토 튜닝 시작 시 PV0에 저장합니다.
⑤ 입력값(E1)을 측정 이전 값(PVn-1)에 저장합니다.
⑥ 경사 최대값, 경사 최대 시 카운터, 경사 최대 시 PV, 응답 속도(R),
등가 불감 시간(L)을 0으로 합니다.
(b) 스텝 조작량 세트가 끝난 플래그가 1인 경우는 “(8) 샘플링 주기 판정
처리”를 실행합니다.
(8) 샘플링 주기 판정 처리
AT1용 샘플링 주기(AT1ST) 샘플링 주기에 도달하고 있는지의 여부를 판별
합니다.
에서
(a) 샘플링 주기에 도달하지 않으면 S.AT1 명령을 종료합니다.
(b) 샘플링 주기에 도달하면 “(9) 응답 파형 관측 처리”를 실행합니다.
(9) 응답 파형 관측 처리
입력값(E1)에 대해서, 아래와 같은 처리를 합니다.
(a) 응답 파형 관측
① 오토 튜닝 시작부터의 카운터를 인크리먼트(increment)라고 합니다.의
② 입력값(E1)과 측정 이전 값(PVn-1)으로써, 다음의 처리를 합니다.
역동작(PN=0)
정동작(PN=1)
③ 입력값(E1)을 측정 이전 값(PVn-1)에 저장합니다.
13 오토 튜닝
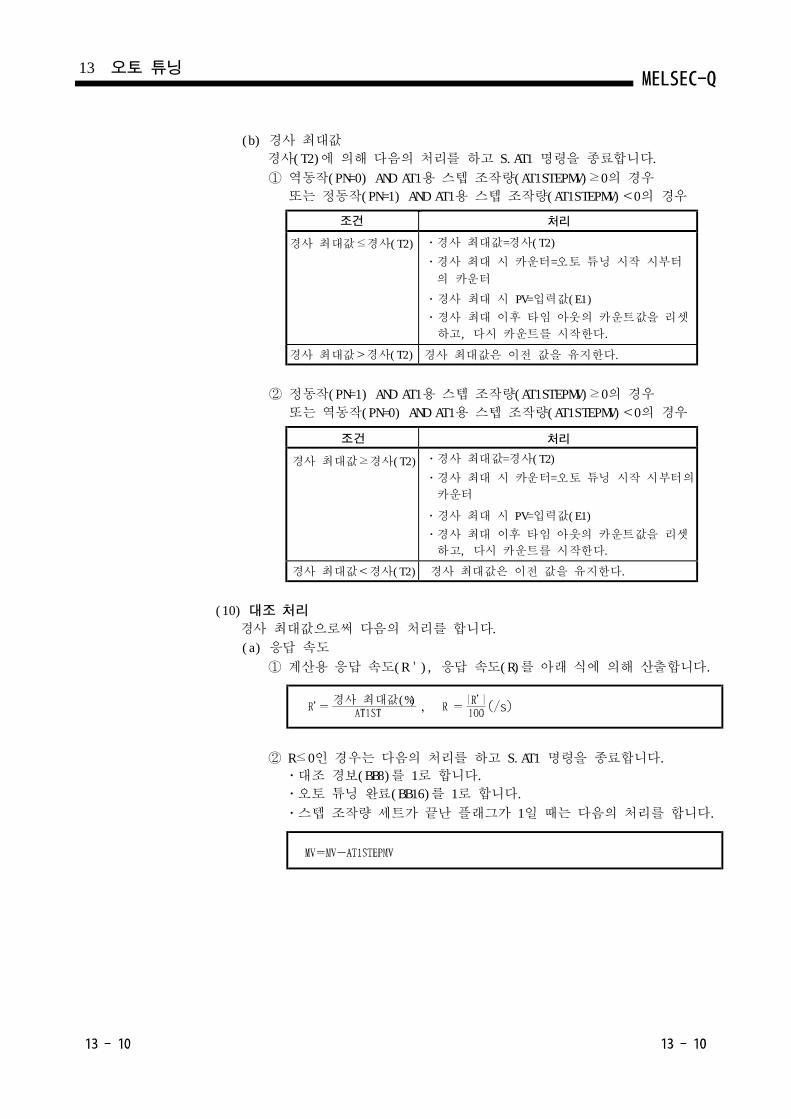
(b) 경사 최대값
경사(T2)에 의해 다음의 처리를 하고 S.AT1 명령을 종료합니다.
① 역동작(PN=0) AND AT1용 스텝 조작량(AT1STEPMV)≥0의 경우
또는 정동작(PN=1) AND AT1용 스텝 조작량(AT1STEPMV)<0의 경우
조건 처리
경사 최대값≤경사(T2) ㆍ경사 최대값=경사(T2)
ㆍ경사 최대 시 카운터=오토 튜닝 시작 시부터
의 카운터
ㆍ경사 최대 시 PV=입력값(E1)
ㆍ경사 최대 이후 타임 아웃의 카운트값을 리셋
하고, 다시 카운트를 시작한다.
경사 최대값>경사(T2) 경사 최대값은 이전 값을 유지한다.
② 정동작(PN=1) AND AT1용 스텝 조작량(AT1STEPMV)≥0의 경우
또는 역동작(PN=0) AND AT1용 스텝 조작량(AT1STEPMV)<0의 경우
조건 처리
경사 최대값≥경사(T2) ㆍ경사 최대값=경사(T2)
ㆍ경사 최대 시 카운터=오토 튜닝 시작 시부터의
카운터
ㆍ경사 최대 시 PV=입력값(E1)
ㆍ경사 최대 이후 타임 아웃의 카운트값을 리셋
하고, 다시 카운트를 시작한다.
경사 최대값<경사(T2) 경사 최대값은 이전 값을 유지한다.
(10) 대조 처리
경사 최대값으로써 다음의 처리를 합니다.
(a) 응답 속도
① 계산용 응답 속도(R'), 응답 속도(R)를 아래 식에 의해 산출합니다.
경사 최대값(%)
② R≤0인 경우는 다음의 처리를 하고 S.AT1 명령을 종료합니다.
ㆍ대조 경보(BB8)를 1로 합니다.
ㆍ오토 튜닝 완료(BB16)를 1로 합니다.
ㆍ스텝 조작량 세트가 끝난 플래그가 1일 때는 다음의 처리를 합니다.
13 오토 튜닝
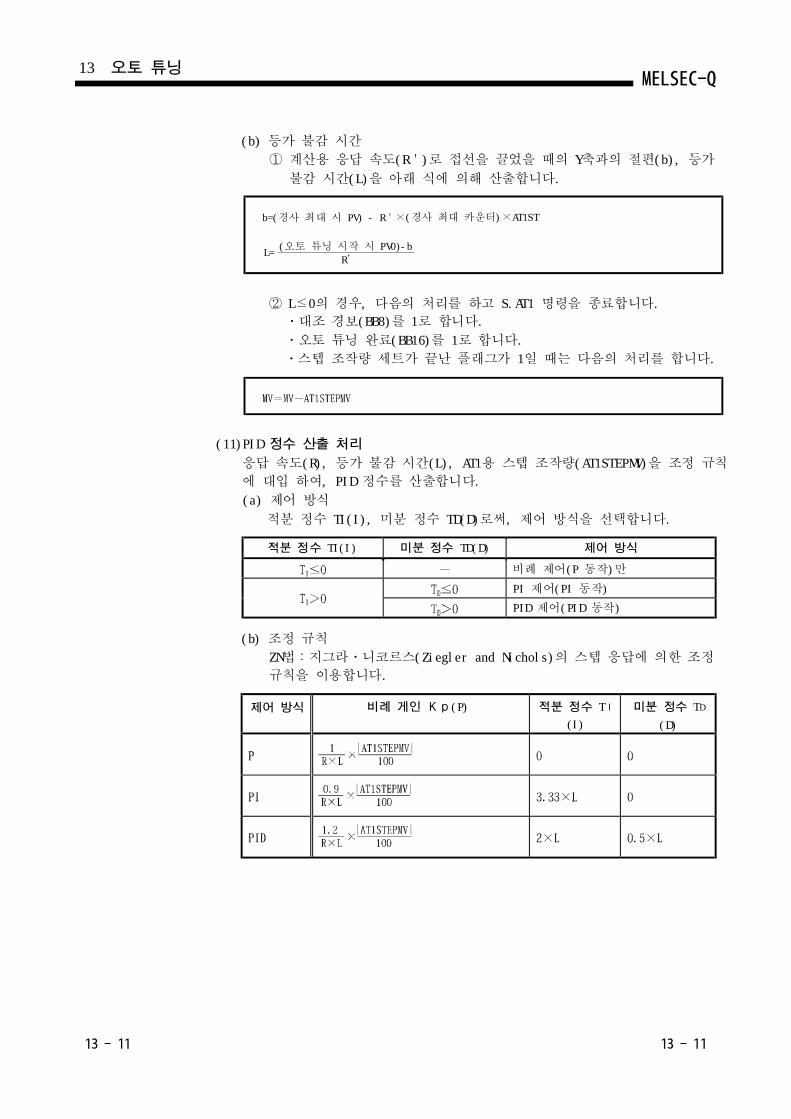
(b) 등가 불감 시간
① 계산용 응답 속도(R')로 접선을 끌었을 때의 Y축과의 절편(b), 등가
불감 시간(L)을 아래 식에 의해 산출합니다.
b=(경사 최대 시 PV) - R'×(경사 최대 카운터)×AT1ST
L=(오토 튜닝 시 PV0)-b시작
R’
② L≤0의 경우, 다음의 처리를 하고 S.AT1 명령을 종료합니다.
ㆍ대조 경보(BB8)를 1로 합니다.
ㆍ오토 튜닝 완료(BB16)를 1로 합니다.
ㆍ스텝 조작량 세트가 끝난 플래그가 1일 때는 다음의 처리를 합니다.
(11)PID 정수 산출 처리
응답 속도(R), 등가 불감 시간(L), AT1용 스텝 조작량(AT1STEPMV)을 조정 규칙
에 대입 하여, PID 정수를 산출합니다.
(a) 제어 방식
적분 정수 TI(I), 미분 정수 TD(D)로써, 제어 방식을 선택합니다.
적분 정수 TI(I) 미분 정수 TD(D) 제어 방식
비례 제어(P 동작)만
PI 제어(PI 동작)
PID 제어(PID 동작)
(b) 조정 규칙
ZN법:지그라ㆍ니코르스(Ziegler and Nichols)의 스텝 응답에 의한 조정
규칙을 이용합니다.
제어 방식 비례 게인 Kp(P) 적분 정수 TI
(I)
미분 정수 TD
(D)
13 오토 튜닝
(c) PID 정수 저장
다음의 처리를 하고 S.AT1 명령을 종료합니다.
① 게인(P), 적분 정수(I), 미분 정수(D)에 PID 정수를 저장합니다.
② 오토 튜닝 완료(BB16)를 1로 합니다.
③ 조작량(MV)에서 AT1용 스텝 조작량(AT1STEPMV)을 빼고, 조작량(MV)에
저장합니다.
에러
ㆍ연산 에러가 발생하였을 때 에러 코드:4100
13 오토 튜닝
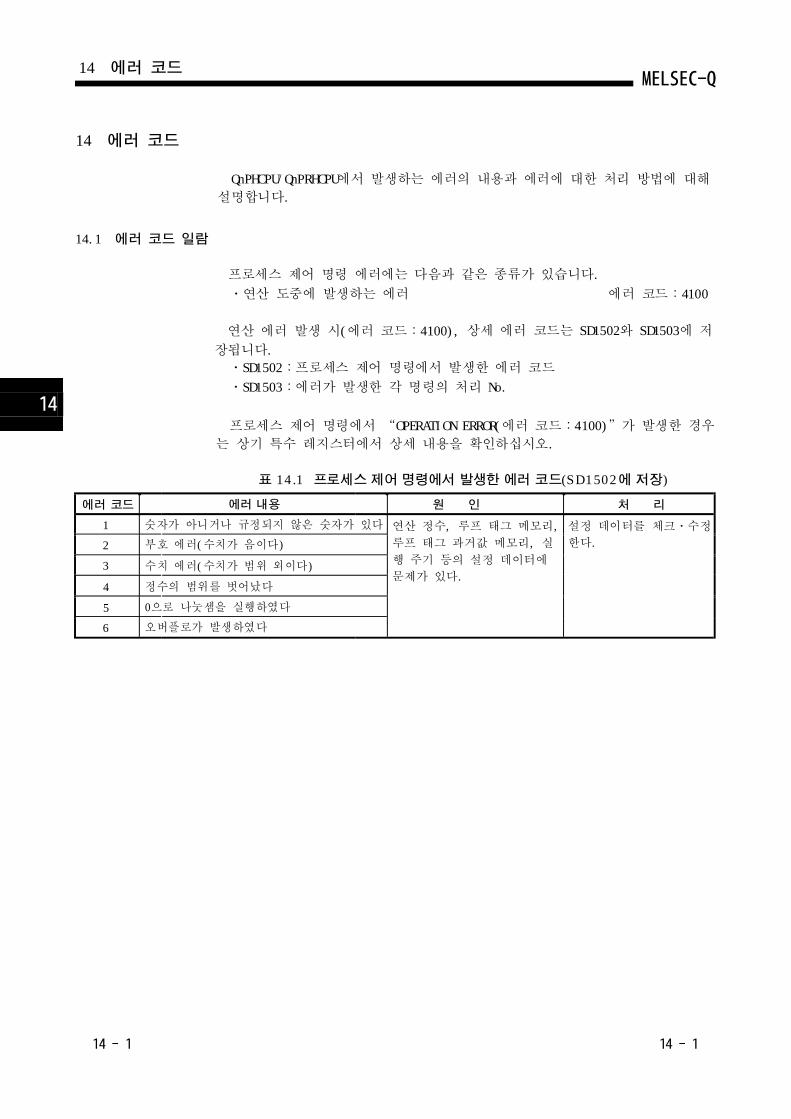
QnPHCPU/QnPRHCPU에서 발생하는 에러의 내용과 에러에 대한 처리 방법에 대해
설명합니다.
14.1 에러 코드 일람
프로세스 제어 명령 에러에는 다음과 같은 종류가 있습니다.
ㆍ연산 도중에 발생하는 에러 에러 코드:4100
연산 에러 발생 시(에러 코드:4100), 상세 에러 코드는 SD1502와 SD1503에 저
장됩니다.
ㆍSD1502:프로세스 제어 명령에서 발생한 에러 코드
ㆍSD1503:에러가 발생한 각 명령의 처리 No.
프로세스 제어 명령에서 “OPERATION ERROR(에러 코드:4100)”가 발생한 경우
는 상기 특수 레지스터에서 상세 내용을 확인하십시오.
표 14.1 프로세스제어명령에서 발생한 에러 코드(SD1502에저장)
에러 코드 에러 내용 원 인 처 리
1 숫자가 아니거나 규정되지 않은 숫자가 있다 연산 정수, 루프 태그 메모리,
루프 태그 과거값 메모리, 실
행 주기 등의 설정 데이터에
문제가 있다.
설정 데이터를 체크ㆍ수정
한다.2 부호 에러(수치가 음이다)
3 수치 에러(수치가 범위 외이다)
4 정수의 범위를 벗어났다
5 0으로 나눗셈을 실행하였다
6 오버플로가 발생하였다
14 에러 코드
14 에러 코드
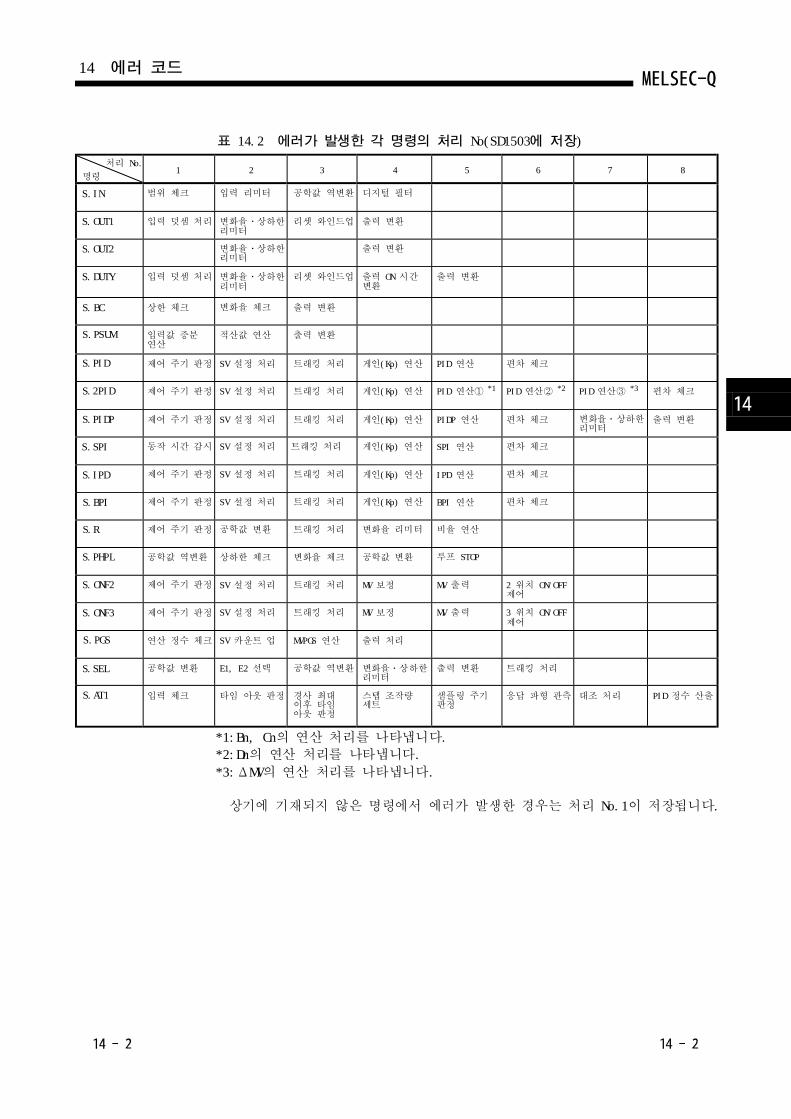
표 에러가 발생한 각 명령의 처리 에 저장14.2 No(SD1503 )
처리 No.
명령
S.IN 범위 체크
S.OUT1 입력 덧셈 처리
S.OUT2
S.DUTY 입력 덧셈 처리
S.BC 상한 체크
S.PSUM 입력값 증분연산
S.PID 제어 주기 판정
S.2PID 제어 주기 판정
S.PIDP 제어 주기 판정
S.SPI 동작 시간 감시 트래킹 처리
S.IPD 제어 주기 판정
S.BPI 제어 주기 판정
S.R 제어 주기 판정
S.PHPL 공학값 역변환
S.ONF2 제어 주기 판정
S.ONF3 제어 주기 판정
S.PGS 연산 정수 체크
S.SEL 공학값 변환
S.AT1 입력 체크
입력 리미터
변화율ㆍ상하한리미터
변화율ㆍ상하한리미터
변화율ㆍ상하한리미터
변화율 체크
적산값 연산
SV 설정 처리
SV 설정 처리
SV 설정 처리
SV 설정 처리
SV 설정 처리
SV 설정 처리
공학값 변환
상하한 체크
SV 설정 처리
SV 설정 처리
SV 카운트 업
E1, E2 선택
타임 아웃 판정
공학값 역변환
리셋 와인드업
리셋 와인드업
출력 변환
출력 변환
트래킹 처리
트래킹 처리
트래킹 처리
트래킹 처리
트래킹 처리
트래킹 처리
변화율 체크
트래킹 처리
트래킹 처리
MVPGS 연산
공학값 역변환
경사 최대이후 타임아웃 판정
디지털 필터
출력 변환
출력 변환
출력 ON 시간변환
게인(Kp) 연산
게인(Kp) 연산
게인(Kp) 연산
게인(Kp) 연산
게인(Kp) 연산
게인(Kp) 연산
변화율 리미터
공학값 변환
MV 보정
MV 보정
출력 처리
변화율ㆍ상하한리미터
스텝 조작량세트
출력 변환
PID 연산
PID 연산① *1
PIDP 연산
SPI 연산
IPD 연산
BPI 연산
비율 연산
루프 STOP
MV 출력
MV 출력
출력 변환
샘플링 주기판정
편차 체크
PID 연산② *2
편차 체크
편차 체크
편차 체크
편차 체크
2 위치 ON/OFF제어
3 위치 ON/OFF제어
트래킹 처리
응답 파형 관측
PID 연산③ *3
변화율ㆍ상하한리미터
대조 처리
편차 체크
출력 변환
PID 정수 산출
*1:Bn, Cn의 연산 처리를 나타냅니다.
*2:Dn의 연산 처리를 나타냅니다.
*3:ΔMV의 연산 처리를 나타냅니다.
상기에 기재되지 않은 명령에서 에러가 발생한 경우는 처리 No.1이 저장됩니다.
14 에러 코드
1 2 3 4 5 6 7 8

부 부
부 록
부 록
부1 프로그램 예
아래의 프로그램에서는 전원 기동 시에 운전 모드가 수동 모드가 됩니다.
X10 ON하면 AUTO(자동 모드)가 되어, PID 제어를 실행합니다.을
운전 모드를 로 한다AUTO
알람 검출 을 으로 한다(ALM) 0
SM402 ON P0가 일 때 의 라벨로 점프한다
이전 값 유지 처리를 세트한다
이전 값 유지 처리를 리셋한다
출력값 유지 처리를 세트한다
출력값 유지 처리를 리셋한다
실행 주기로 설정한 시간과 맞춘다
M0 ON P1이 일 때 의 라벨로 점프한다
M0 ON T0 0이 하면 의 내용을 으로 한다
SM402 OFF가 의 시퀀스 프로그램의 끝을 나타낸다
D0 R0의 값을 실수로 해 에 저장한다
S.IN 명령의 각 선두 디바이스를 설정한다
S.IN R100 S.PHPL R20명령의 의 값을 의 에 전송한다
S.PHPL 명령의 각 선두 디바이스를 설정한다
S.PHPL R120 S.PID R40명령의 의 값을 의 에 전송한다
S.PID 명령의 선두 디바이스를 설정한다
S.PID R140 S.OUT1 R60명령의 의 값을 의 에 전송한다
S.OUT1 명령의 각 선두 디바이스를 설정한다
R160, R161의 실수를 바이너리로 변환한다
부
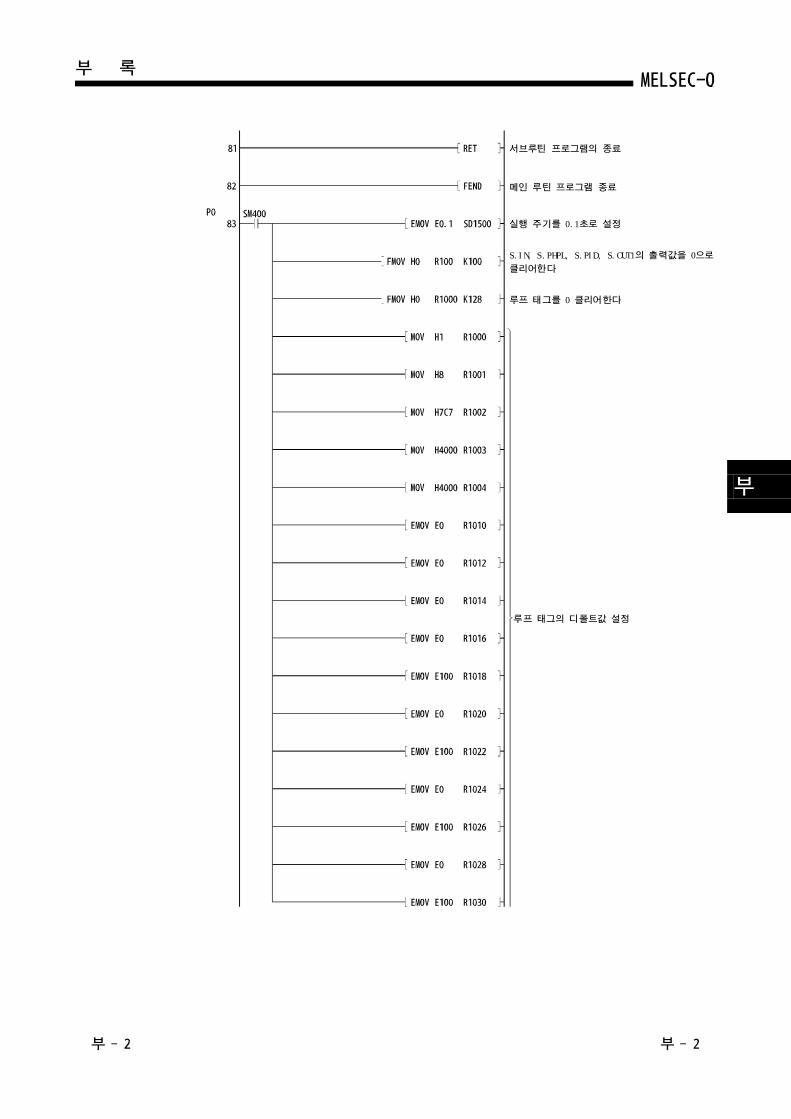
부 부
서브루틴 프로그램의 종료
메인 루틴 프로그램 종료
실행 주기를 초로 설정0.1
S.IN, S.PHPL, S.PID, S.OUT1 0의 출력값을 으로
클리어한다
루프 태그의 디폴트값 설정
루프 태그를 클리어한다0
부 록
부
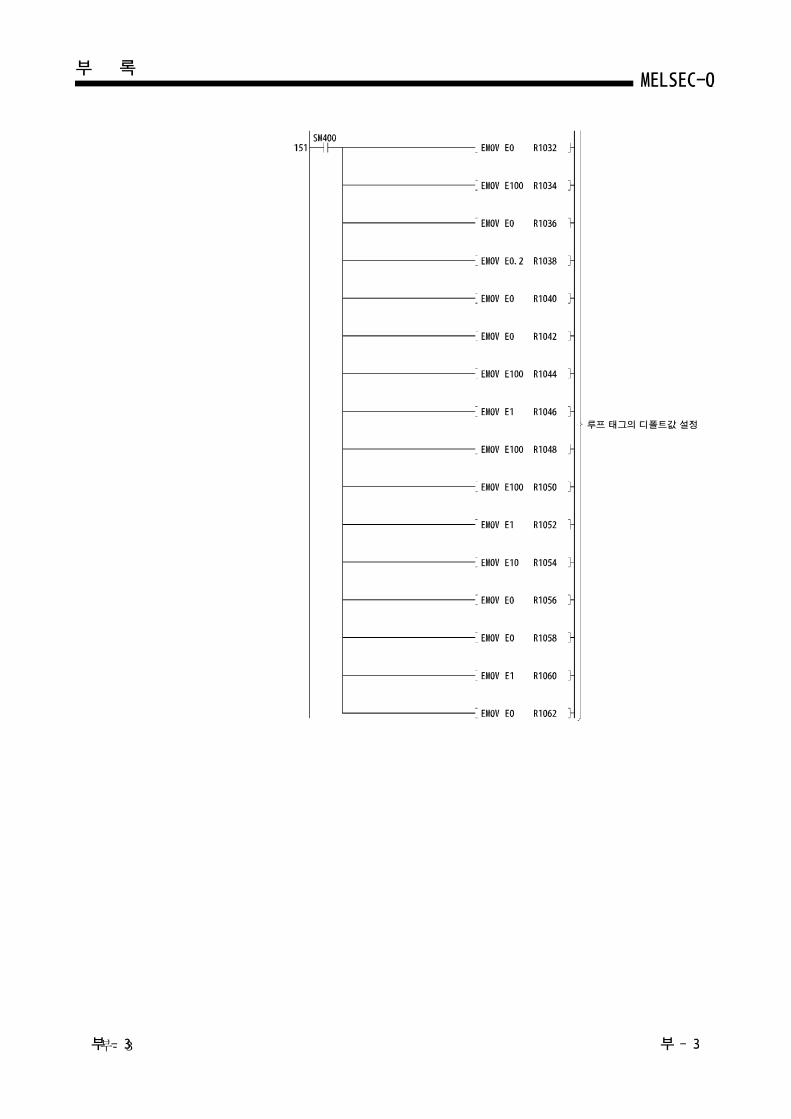
부 부부- 3
루프 태그의 디폴트값 설정
부 록
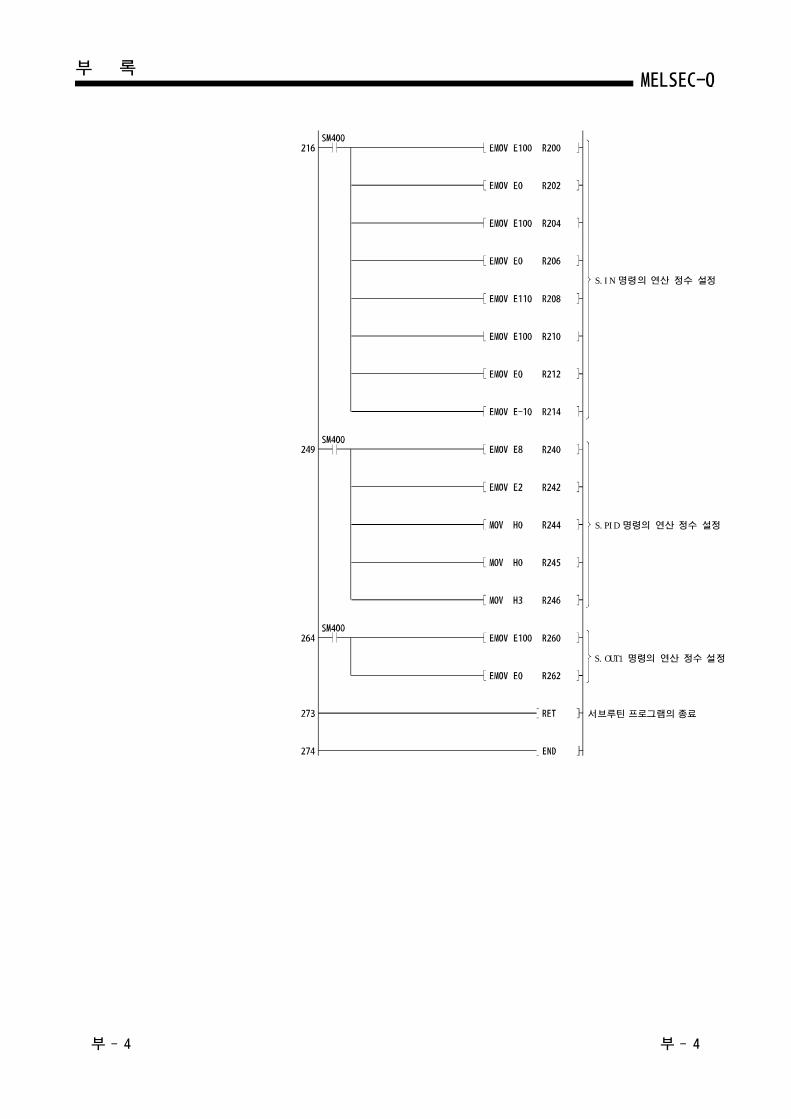
부 부
S.IN 명령의 연산 정수 설정
S.PID 명령의 연산 정수 설정
S.OUT1 명령의 연산 정수 설정
서브루틴 프로그램의 종료
부 록
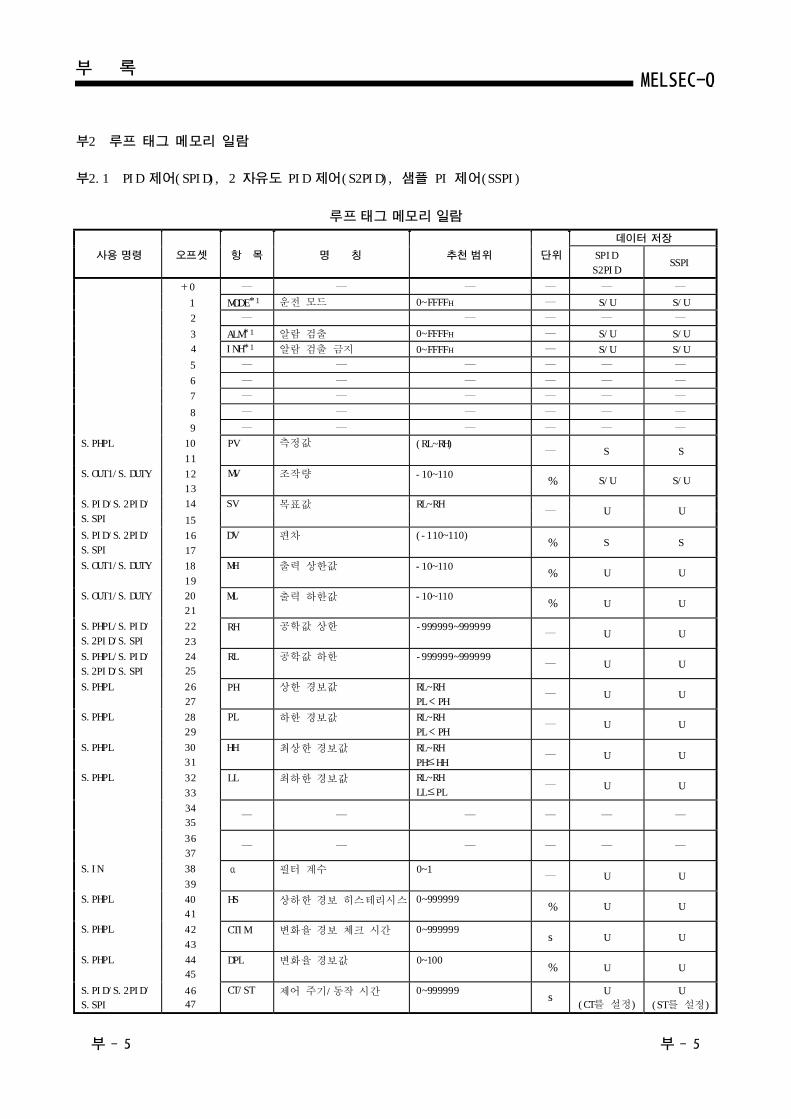
부 부
부 루프 태그 메모리 일람2
부 제어 자유도 제어 샘플 제어2.1 PID (SPID), 2 PID (S2PID), PI (SSPI)
루프태그 메모리 일람
사용 명령 오프셋 항 목 명 칭 추천 범위 단위
데이터 저장
SPID
S2PIDSSPI
운전 모드
알람 검출
알람 검출 금지
측정값
조작량
목표값
편차
출력 상한값
출력 하한값
공학값 상한
공학값 하한
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
필터 계수
상하한 경보 히스테리시스
변화율 경보 체크 시간
변화율 경보값
제어 주기/동작 시간(CT를 설정) (ST를 설정)
부 록
S.PHPL
S.OUT1/S.DUTY
S.PID/S.2PID/
S.SPI
S.PID/S.2PID/
S.SPI
S.OUT1/S.DUTY
S.OUT1/S.DUTY
S.PHPL/S.PID/
S.2PID/S.SPI
S.PHPL/S.PID/
S.2PID/S.SPI
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.IN
S.PHPL
S.PHPL
S.PHPL
S.PID/S.2PID/
S.SPI
+0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
MODE*1
ALM* 1
INH*1
PV
MV
SV
DV
MH
ML
RH
RL
PH
PL
HH
LL
HS
α
CTIM
DPL
CT/ST 0~999999
0~999999
0~999999
0~FFFFH S/U
S/U
S/U
S/U
S
S
U
U
U
U
U
U
U
U
U
U
U
U
U
U
S/U
S/U
S/U
S/U
S
S
U
U
U
U
U
U
U
U
U
U
U
U
U
U
0~FFFFH
0~FFFFH
0~100
0~1
%
s
s
%
%
%
%
%
-999999~999999
-999999~999999
(-110~110)
-10~110
-10~110
-10~110
RL~RH
RL~RH
RL~RH
RL~RH
RL~RH
PL PH<
PL PH<
PH HH≤
LL PL≤
(RL~RH)
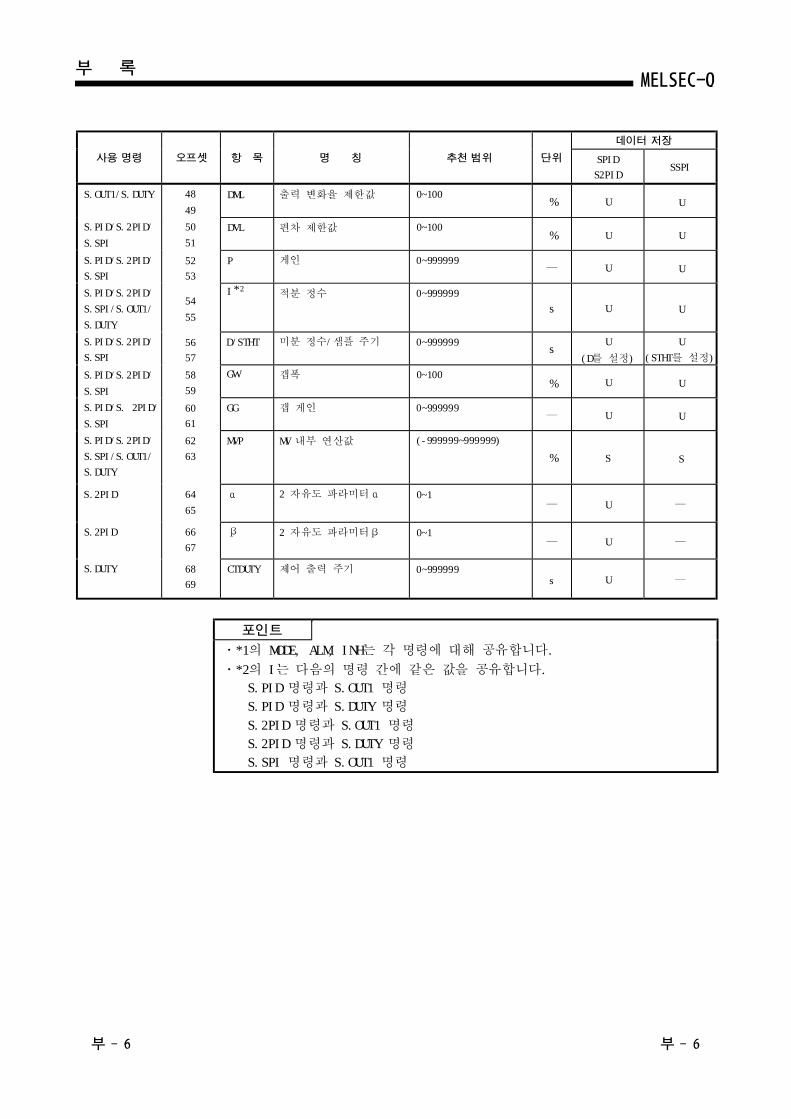
부 부
SPID
S2PIDSSPI
출력 변화율 제한값
편차 제한값
게인
적분 정수
미분 정수/샘플 주기
(D를 설정) (STHT를 설정)
갭폭
갭 게인
MV 내부 연산값
2 자유도 파라미터α
2 자유도 파라미터β
제어 출력 주기
포인트
ㆍ*1의 MODE, ALM, INH는 각 명령에 대해 공유합니다.
ㆍ*2의 I는 다음의 명령 간에 같은 값을 공유합니다.
S.PID 명령과 S.OUT1 명령
S.PID 명령과 S.DUTY 명령
S.2PID 명령과 S.OUT1 명령
S.2PID 명령과 S.DUTY 명령
S.SPI 명령과 S.OUT1 명령
사용 명령 오프셋 항 목 명 칭 추천 범위 단위
데이터 저장
부 록
U
U
U
U
U
U
U
U
U
Us
s
s
S
U
U
U
U
U
U
U
S
%
%
%
%
0~999999
0~999999
0~999999
0~999999
0~999999
0~100
0~100
0~100
0~1
0~1
(-999999~999999)
S.OUT1/S.DUTY
S.PID/S.2PID/
S.SPI
S.PID/S.2PID/
S.SPI
S.PID/S.2PID/
S.SPI/S.OUT1/
S.DUTY
S.PID/S.2PID/
S.SPI
S.PID/S.2PID/
S.SPI
S.PID/S. 2PID/
S.SPI
S.PID/S.2PID/
S.SPI/S.OUT1/
S.DUTY
S.2PID
S.2PID
S.DUTY
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
DML
DVL
P
I*2
D/STHT
MVP
CTDUTY
GG
GW
α
β
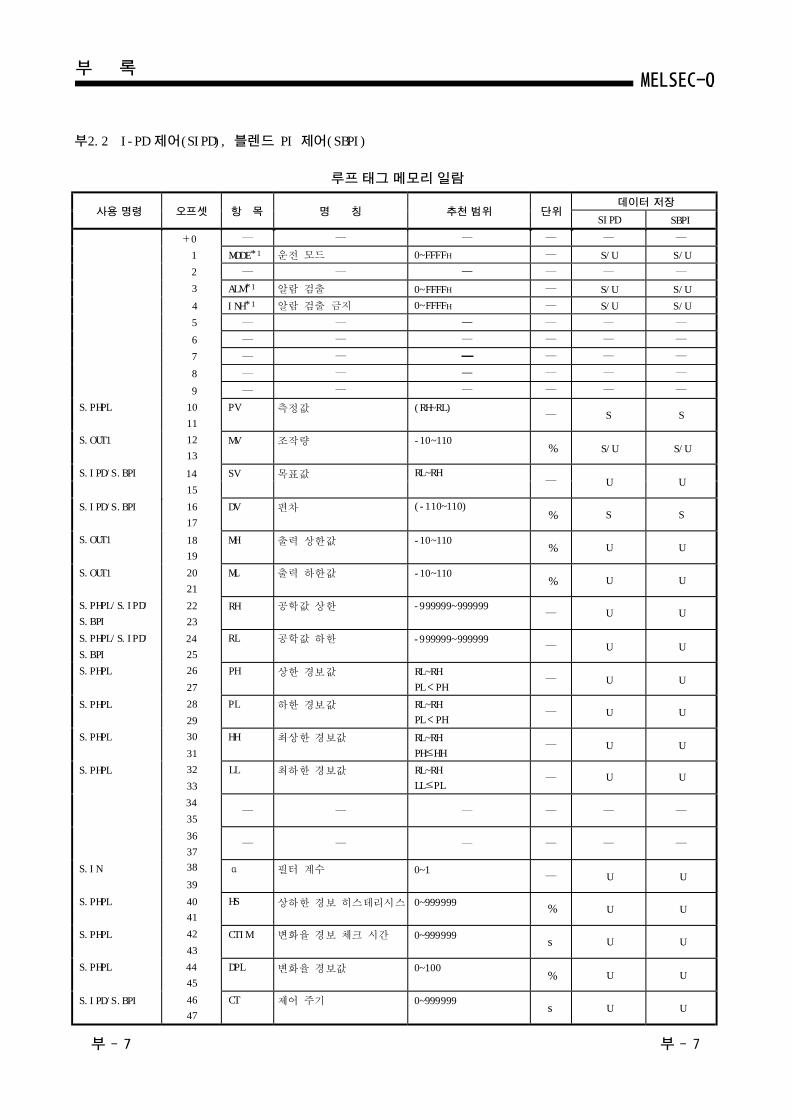
부 부
부 제어 블렌드 제어2.2 I-PD (SIPD), PI (SBPI)
루프태그 메모리일람
SIPD SBPI
운전 모드
알람 검출
알람 검출 금지
측정값
조작량
목표값
편차
출력 상한값
출력 하한값
공학값 상한
공학값 하한
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
필터 계수
상하한 경보 히스테리시스
변화율 경보 체크 시간
변화율 경보값
제어 주기
사용 명령 오프셋 항 목 명 칭 추천 범위 단위데이터 저장
부 록
S.PHPL
S.OUT1
S.IPD/S.BPI
S.IPD/S.BPI
S.OUT1
S.OUT1
S.PHPL/S.IPD/
S.BPI
S.PHPL/S.IPD/
S.BPI
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.IN
S.PHPL
S.PHPL
S.PHPL
S.IPD/S.BPI
+0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
MODE*1
ALM*1
INH*1
PV
MV
SV
DV
MH
ML
RH
RL
PH
PL
HH
LL
HS
α
CTIM
DPL
CT
0~FFFFH
0~FFFFH
0~FFFFH
0~999999
0~999999
0~999999
0~100
0~1
-999999~999999
-999999~999999
-10~110
(-110~110)
-10~110
-10~110
RL~RH
RL~RH
RL~RH
RL~RH
PL PH<
PL PH<
PH HH≤
LL PL≤
(RH~RL)
RL~RH
%
s
s
%
%
%
%
%
S/U S/U
S/U S/U
S/U S/U
U U
U U
U U
U U
U U
S/U S/U
S S
U U
U U
S S
U U
U U
U U
U U
U U
U U
U U

부 부
SIPD SBPI
출력 변화율 제한값
편차 제한값
게인
적분 정수
미분 정수/DV 누적값
갭폭
갭 게인
MV 내부 연산값
포인트
ㆍ*1의 MODE, ALM, INH는 각 명령에 대해 공유됩니다.
ㆍ*2의 I는 S.IPD 명령과 S.OUT1 명령, S.BPI 명령과 S.OUT1 명령은 같은 값이
공유됩니다.
사용 명령 오프셋 항 목 명 칭 추천 범위 단위데이터 저장
부 록
S.OUT1
S.IPD/S.BPI
S.IPD/S.BPI
S.IPD/S.BPI
S.OUT1
S.IPD/S.BPI
S.IPD/S.BPI
S.IPD/S.BPI
S.IPD/S.OUT1
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
DML
DVL
P
I*2
D/SDV
GW
GG
MVP
0~999999
0~999999
D:0~999999
0~999999
0~100
0~100
0~100
(-999999~999999)
SDV:-999999~999999
s
s
UU
UU
UU
UU
U
S
S
UU
UU
%
%
%
%
%
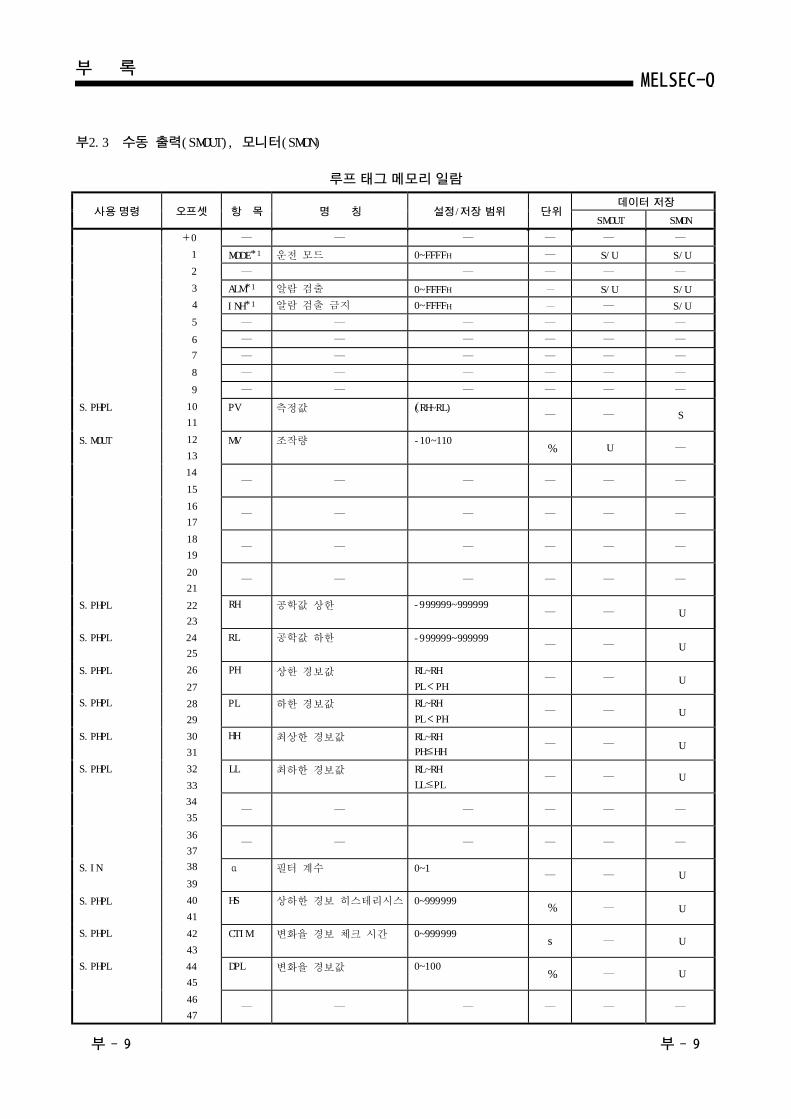
부 부
부 수동 출력 모니터2.3 (SMOUT), (SMON)
루프 태그 메모리일람
SMOUT SMON
운전 모드
알람 검출
알람 검출 금지
측정값
조작량
공학값 상한
공학값 하한
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
필터 계수
상하한 경보 히스테리시스
변화율 경보 체크 시간
변화율 경보값
사용 명령 오프셋 항 목 명 칭 설정/저장 범위 단위데이터 저장
부 록
S.PHPL
S.MOUT
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.IN
S.PHPL
S.PHPL
S.PHPL
+0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
MODE*1
ALM*1
INH*1
PV
MV
RH
RL
PH
PL
HH
LL
HS
α
CTIM
DPL
0~999999
0~999999
0~100
0~1
%
s
%
U
U
U
U
0~FFFFH
0~FFFFH
0~FFFFH
S/U S/U
S/U S/U
S/U
-10~110
(RH~RL)
%
S
U
-999999~999999
-999999~999999
RL~RH
RL~RH
RL~RH
RL~RH
PL PH<
PL PH<
PH HH≤
LL PL≤
U
U
U
U
U
U
부 부
포인트
ㆍ*1의 MODE, ALM, INH는 각 명령에 대해 공유됩니다.
부 록
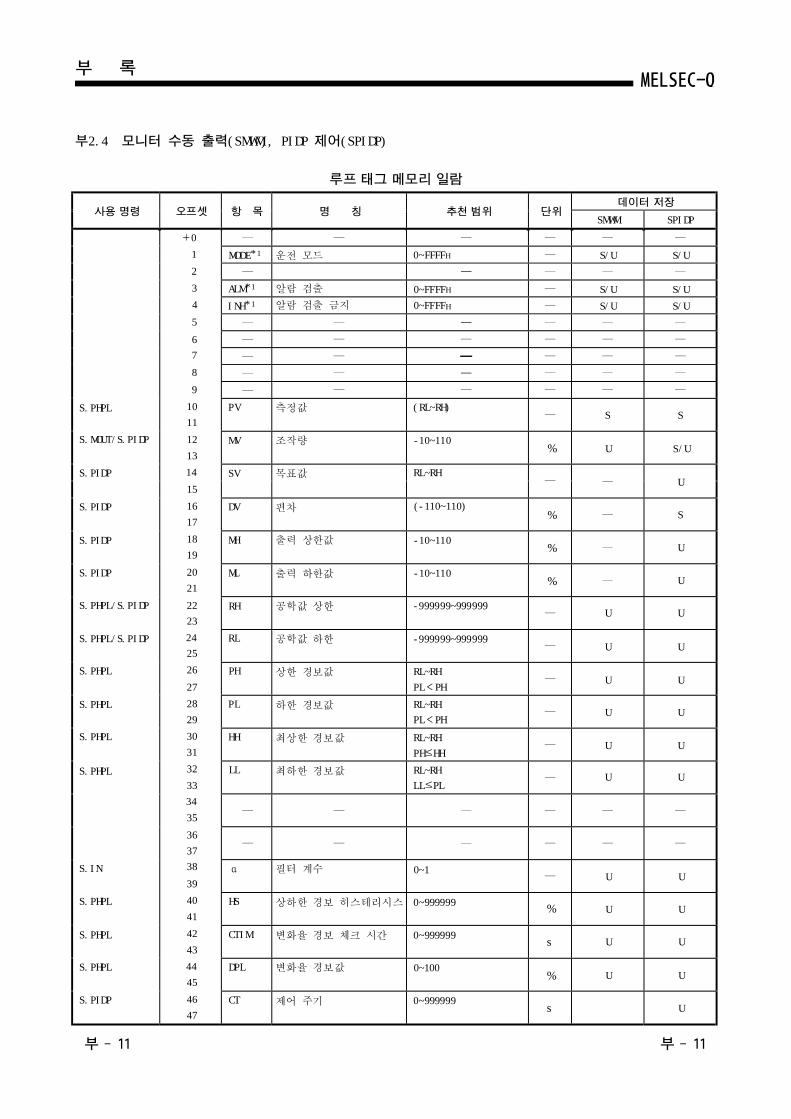
부 부
부 모니터 수동 출력 제어2.4 (SMWM), PIDP (SPIDP)
루프 태그 메모리 일람
SMWM SPIDP
운전 모드
알람 검출
알람 검출 금지
측정값
조작량
목표값
편차
출력 상한값
출력 하한값
공학값 상한
공학값 하한
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
필터 계수
상하한 경보 히스테리시스
변화율 경보 체크 시간
변화율 경보값
제어 주기
사용 명령 오프셋 항 목 명 칭 추천 범위 단위데이터 저장
부 록
S.PHPL
S.MOUT/S.PIDP
S.PIDP
S.PIDP
S.PIDP
S.PIDP
S.PHPL/S.PIDP
S.PHPL/S.PIDP
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.IN
S.PHPL
S.PHPL
S.PHPL
S.PIDP
+0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
MODE*1
ALM*1
INH*1
PV
MV
SV
DV
MH
ML
RH
RL
PH
PL
HH
LL
HS
α
CTIM
DPL
CT
0~FFFFH
0~FFFFH
0~FFFFH
0~999999
0~999999
0~999999
0~100
0~1
-999999~999999
-999999~999999
-10~110
(-110~110)
-10~110
-10~110
RL~RH
RL~RH
RL~RH
RL~RH
PL PH<
PL PH<
PH HH≤
LL PL≤
(RL~RH)
RL~RH
%
s
s
%
%
%
%
%
S/U
S/U
S/U
U
U
U
U
U
S
U
U
U
U
U
U
S/U
S/U
S/U
U
U
U
U
U
S/U
S
U
U
S
U
U
U
U
U
U
U
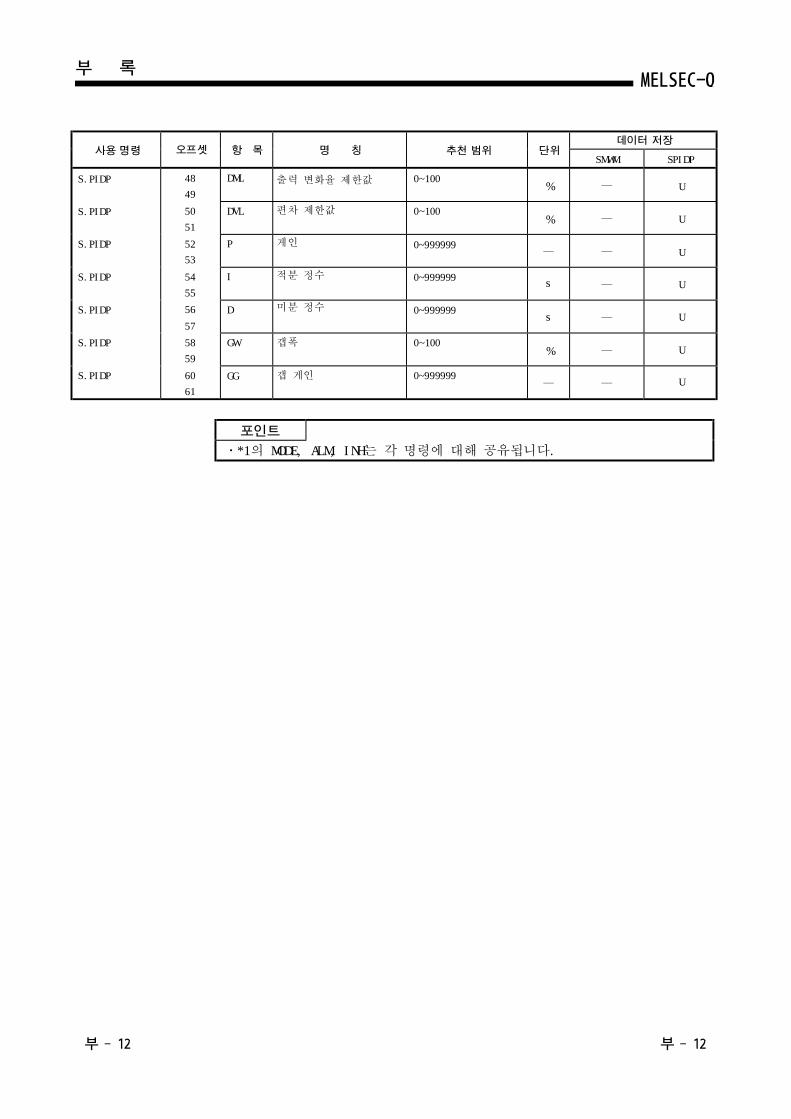
부 부
SMWM SPIDP
출력 변화율 제한값
편차 제한값
게인
적분 정수
미분 정수
갭폭
갭 게인
포인트
ㆍ*1의 MODE, ALM, INH는 각 명령에 대해 공유됩니다.
사용 명령 오프셋 항 목 명 칭 추천 범위 단위데이터 저장
부 록
S.PIDP
S.PIDP
S.PIDP
S.PIDP
S.PIDP
S.PIDP
S.PIDP
48
49
50
51
52
53
54
55
56
57
58
59
60
61
DML
DVL
P
I
D
GW
GG
0~999999
0~999999
0~999999
0~999999
0~100
0~100
0~100
s
s
U
U
U
U
U
U
U
%
%
%
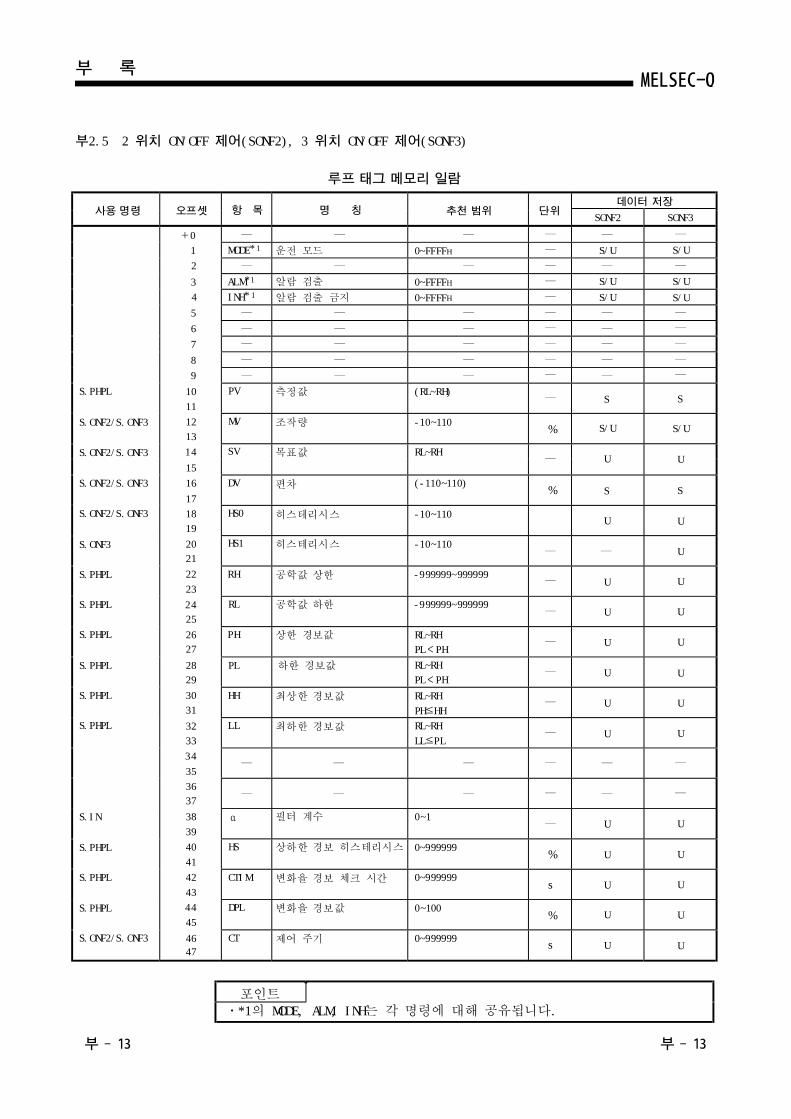
부 부
부 위치 제어 위치 제어2.5 2 ON/OFF (SONF2), 3 ON/OFF (SONF3)
루프 태그 메모리 일람
SONF2 SONF3
운전 모드
알람 검출
알람 검출 금지
측정값
조작량
목표값
편차
히스테리시스
히스테리시스
공학값 상한
공학값 하한
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
필터 계수
상하한 경보 히스테리시스
변화율 경보 체크 시간
변화율 경보값
제어 주기
포인트ㆍ*1의 MODE, ALM, INH는 각 명령에 대해 공유됩니다.
사용 명령 오프셋 항 목 명 칭 추천 범위 단위데이터 저장
부 록
S.PHPL
S.ONF2/S.ONF3
S.ONF2/S.ONF3
S.ONF2/S.ONF3
S.ONF2/S.ONF3
S.ONF3
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.IN
S.PHPL
S.PHPL
S.PHPL
S.ONF2/S.ONF3
+0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
MODE* 1
ALM*1
INH* 1
PV
MV
SV
DV
HS0
HS1
RH
RL
PH
PL
HH
LL
HS
α
CTIM
DPL
CT 0~999999
0~999999
0~999999
0~FFFFH
0~FFFFH
0~FFFFH
0~100
0~1
-999999~999999
-999999~999999
(-110~110)
-10~110
-10~110
-10~110
RL~RH
RL~RH
RL~RH
RL~RH
RL~RH
PL PH<
PL PH<
PH HH≤
LL PL≤
(RL~RH)
%
s
s
%
%
%
S/U
S/U
S/U
S/U
S
S
U
U
U
U
U
U
U
U
U
U
U
U
U
S/U
S/U
S/U
S/U
S
S
U
U
U
U
U
U
U
U
U
U
U
U
U
U
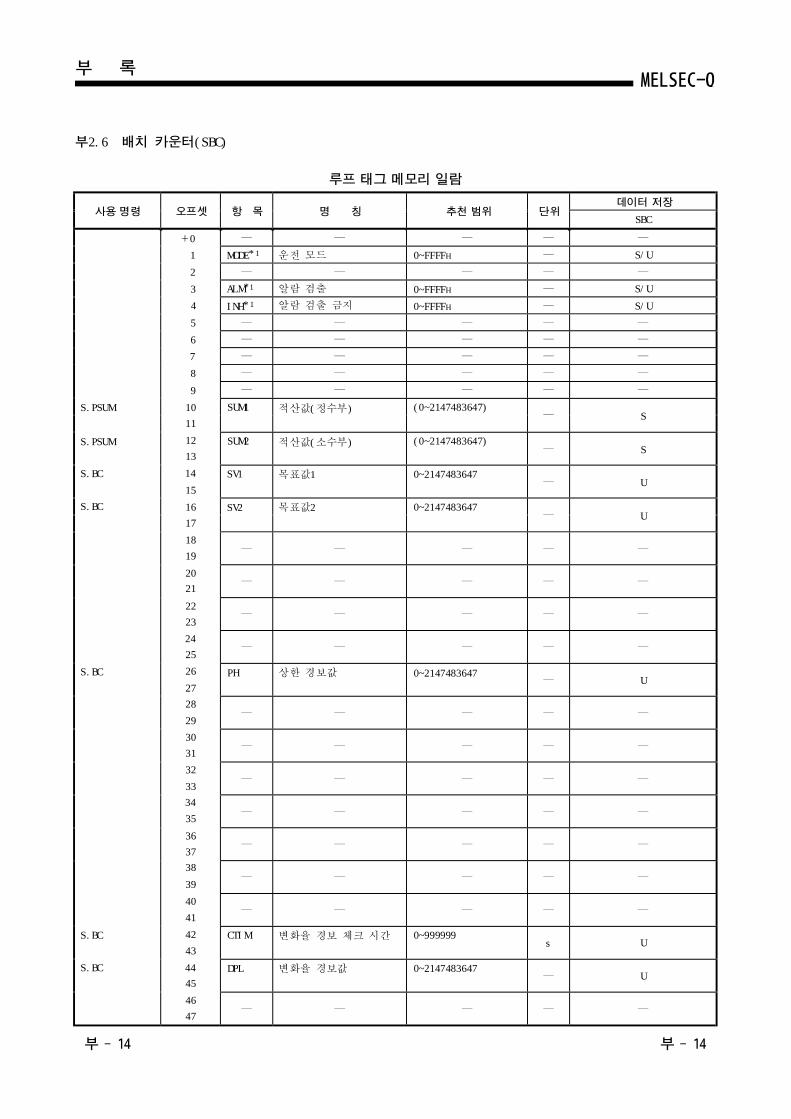
부 부
부 배치 카운터2.6 (SBC)
루프 태그 메모리 일람
SBC
운전 모드
알람 검출
알람 검출 금지
적산값(정수부)
적산값(소수부)
목표값1
목표값2
상한 경보값
변화율 경보 체크 시간
변화율 경보값
사용 명령 오프셋 항 목 명 칭 추천 범위 단위데이터 저장
부 록
S.PSUM
S.PSUM
S.BC
S.BC
S.BC
S.BC
S.BC
+0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
0~FFFFH
0~FFFFH
0~FFFFH
(0~2147483647)
(0~2147483647)
0~2147483647
0~2147483647
0~2147483647
0~2147483647
0~999999
MODE* 1
ALM*1
INH* 1
SUM1
SUM2
PH
CTIM
DPL
SV1
SV2
S/U
S/U
S/U
S
S
U
U
Us
U
U
부 부
포인트
ㆍ*1의 MODE, ALM, INH는 각 명령에 대해 공유됩니다.
부 록
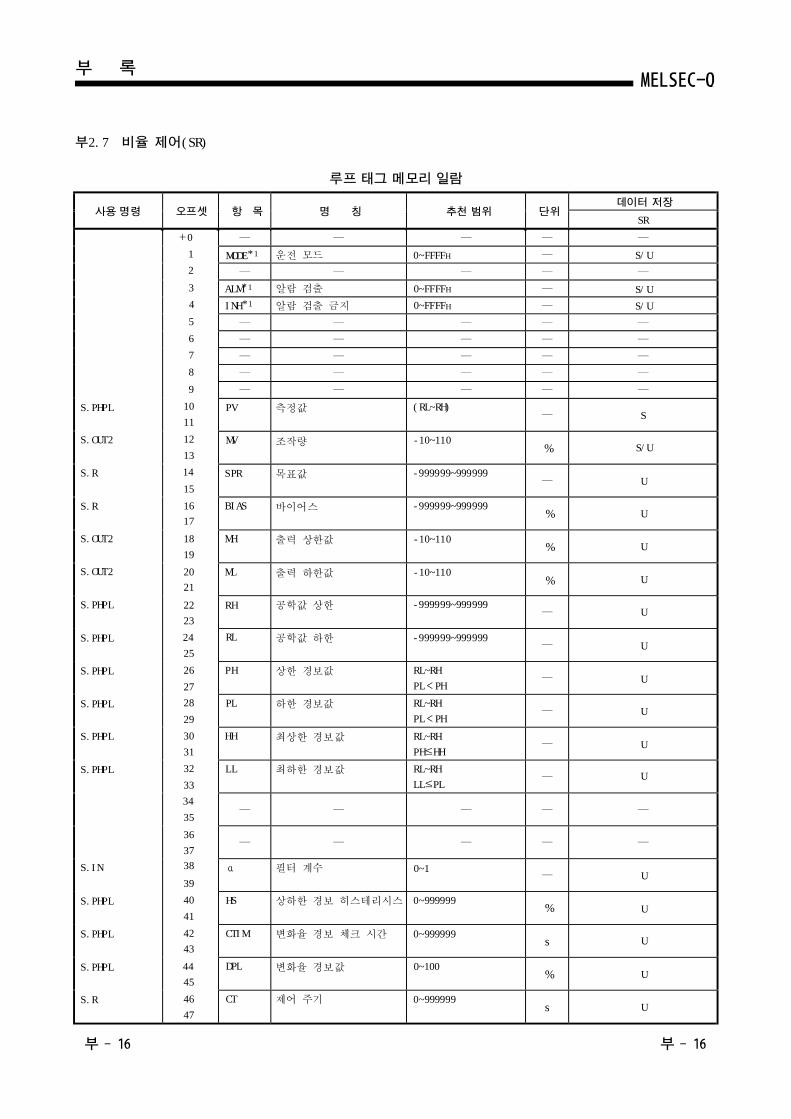
사용 명령 오프셋 항 목 명 칭 추천 범위 단위데이터 저장
부 부
부 비율 제어2.7 (SR)
루프 태그 메모리 일람
SR
운전 모드
알람 검출
알람 검출 금지
측정값
조작량
목표값
바이어스
출력 상한값
출력 하한값
공학값 상한
공학값 하한
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
필터 계수
상하한 경보 히스테리시스
변화율 경보 체크 시간
변화율 경보값
제어 주기
부 록
S.PHPL
S.OUT2
S.R
S.R
S.OUT2
S.OUT2
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.PHPL
S.IN
S.PHPL
S.PHPL
S.PHPL
S.R
+0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
MODE*1
ALM*1
INH*1
0~FFFFH
0~FFFFH
0~FFFFH
S/U
S/U
S/U
PV
MV
SPR
BIAS
MH
ML
RH
RL
PH
PL
HH
LL
HS
α
CTIM
DPL
CT 0~999999
0~999999
0~999999
0~100
0~1
%
s
s
%
U
U
U
U
U
-999999~999999
-999999~999999
-999999~999999
-999999~999999
-10~110
-10~110
-10~110
RL~RH
RL~RH
RL~RH
RL~RH
PL PH<
PL PH<
PH HH≤
LL PL≤
(RL~RH)
%
%
%
% S/U
S
U
U
U
U
U
U
U
U
U
U
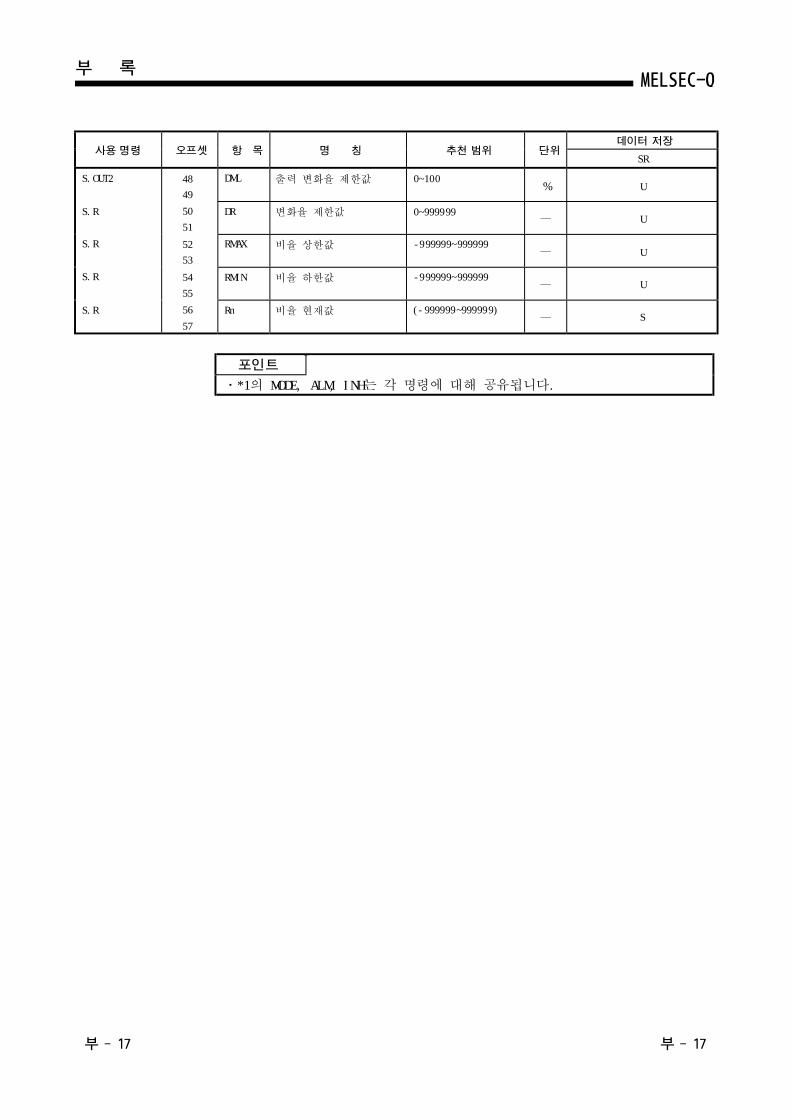
부 부
출력 변화율 제한값
변화율 제한값
비율 상한값
비율 하한값
비율 현재값
포인트
ㆍ*1의 MODE, ALM, INH는 각 명령에 대해 공유됩니다.
SR사용 명령 오프셋 항 목 명 칭 추천 범위 단위
데이터 저장
부 록
S.OUT2
S.R
S.R
S.R
S.R
48
49
50
51
52
53
54
55
56
57
DML
DR
RMAX
RMIN
Rn
0~999999
0~100
(-999999~999999)
-999999~999999
-999999~999999
U
U
U
U
S
%
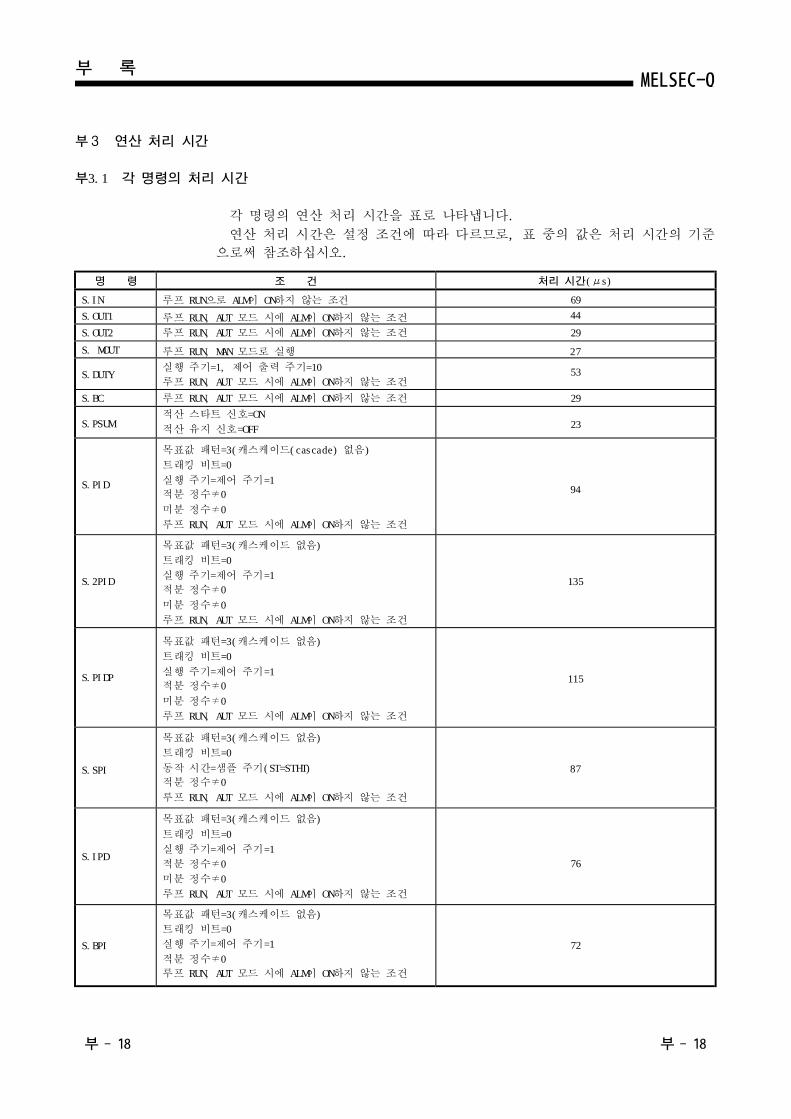
부 부
부3 연산 처리 시간
부 각 명령의 처리 시간3.1
각 명령의 연산 처리 시간을 표로 나타냅니다.
연산 처리 시간은 설정 조건에 따라 다르므로, 표 중의 값은 처리 시간의 기준
으로써 참조하십시오.
명 령 조 건 처리 시간 μ( s)
S.IN 루프 RUN으로 ALM이 ON하지 않는 조건 69
S.OUT1 루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건 44
S.OUT2 루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건 29
S. MOUT 루프 RUN, MAN 모드로 실행 27
S.DUTY실행 주기=1, 제어 출력 주기=10
루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건53
S.BC 루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건 29
S.PSUM적산 스타트 신호=ON
적산 유지 신호=OFF 23
S.PID
목표값 패턴=3(캐스케이드(cascade) 없음)
트래킹 비트=0
실행 주기=제어 주기=1
적분 정수≠0
미분 정수≠0
루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건
94
S.2PID
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=제어 주기=1
적분 정수≠0
미분 정수≠0
루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건
135
S.PIDP
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=제어 주기=1
적분 정수≠0
미분 정수≠0
루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건
115
S.SPI
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
동작 시간=샘플 주기(ST=STHT)
적분 정수≠0
루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건
87
S.IPD
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=제어 주기=1
적분 정수≠0
미분 정수≠0
루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건
76
S.BPI
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=제어 주기=1
적분 정수≠0
루프 RUN, AUT 모드 시에 ALM이 ON하지 않는 조건
72
부 록
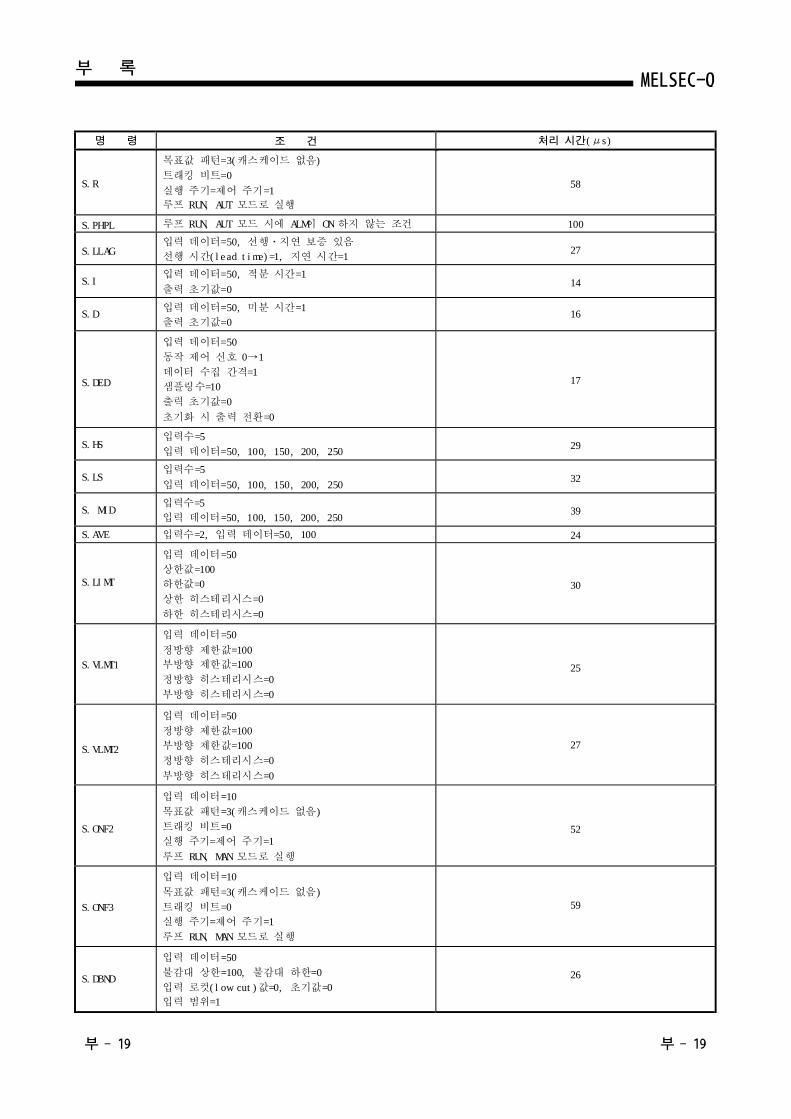
부 부
S.R
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=제어 주기=1
루프 RUN, AUT 모드로 실행
58
S.PHPL 루프 RUN, AUT 모드 시에 ALM이 ON 하지 않는 조건 100
S.LLAG입력 데이터=50, 선행ㆍ지연 보증 있음
선행 시간(lead time)=1, 지연 시간=127
S.I입력 데이터=50, 적분 시간=1
출력 초기값=014
S.D입력 데이터=50, 미분 시간=1
출력 초기값=016
S.DED
입력 데이터=50
동작 제어 신호 0→1
데이터 수집 간격=1
샘플링수=10
출력 초기값=0
초기화 시 출력 전환=0
17
S.HS입력수=5
입력 데이터=50, 100, 150, 200, 25029
S.LS입력수=5
입력 데이터=50, 100, 150, 200, 25032
S. MID입력수=5
입력 데이터=50, 100, 150, 200, 25039
S.AVE 입력수=2, 입력 데이터=50, 100 24
S.LIMT
입력 데이터=50
상한값=100
하한값=0
상한 히스테리시스=0
하한 히스테리시스=0
30
S.VLMT1
입력 데이터=50
정방향 제한값=100
부방향 제한값=100
정방향 히스테리시스=0
부방향 히스테리시스=0
25
S.VLMT2
입력 데이터=50
정방향 제한값=100
부방향 제한값=100
정방향 히스테리시스=0
부방향 히스테리시스=0
27
S.ONF2
입력 데이터=10
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=제어 주기=1
루프 RUN, MAN 모드로 실행
52
S.ONF3
입력 데이터=10
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=제어 주기=1
루프 RUN, MAN 모드로 실행
59
S.DBND
입력 데이터=50
불감대 상한=100, 불감대 하한=0
입력 로컷(low cut)값=0, 초기값=0
입력 범위=1
26
명 령 조 건 처리 시간 μ( s)
부 록
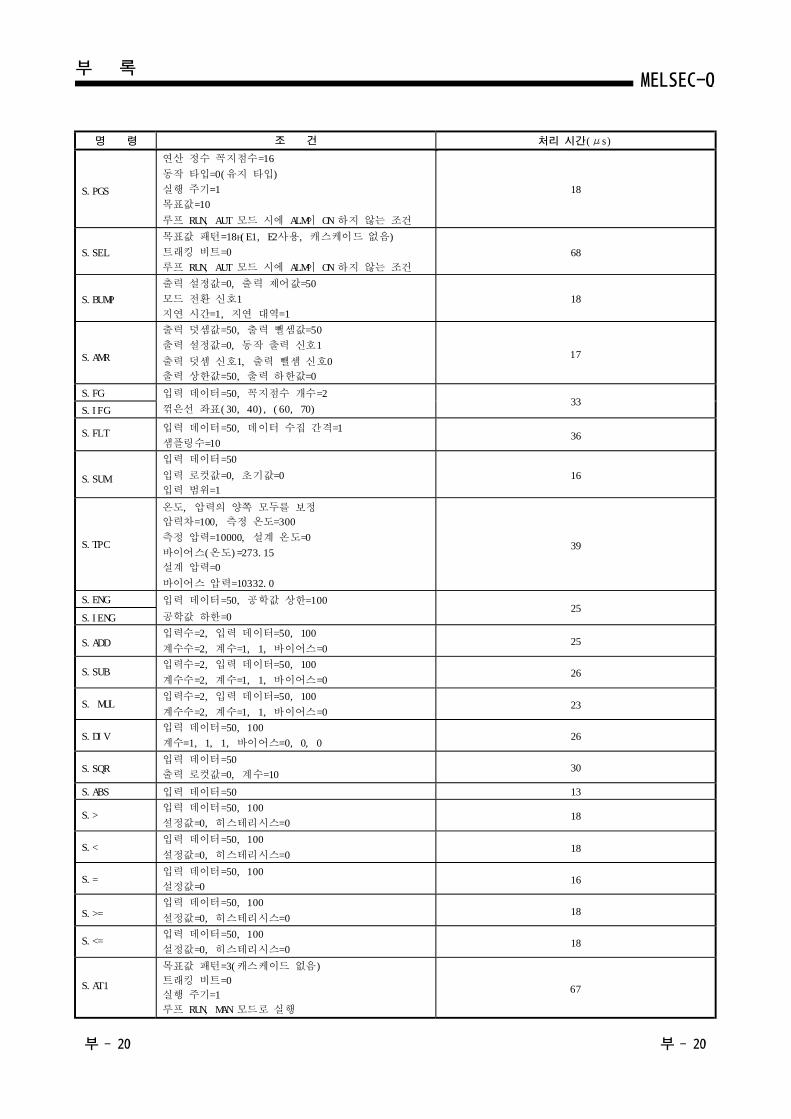
부 부
S.PGS
연산 정수 꼭지점수=16
동작 타입=0(유지 타입)
실행 주기=1
목표값=10
루프 RUN, AUT 모드 시에 ALM이 ON 하지 않는 조건
18
S.SEL
목표값 패턴=18 (E1, E2사용, 캐스케이드 없음)H
트래킹 비트=0
루프 RUN, AUT 모드 시에 ALM이 ON 하지 않는 조건
68
S.BUMP
출력 설정값=0, 출력 제어값=50
모드 전환 신호1
지연 시간=1, 지연 대역=1
18
S.AMR
출력 덧셈값=50, 출력 뺄셈값=50
출력 설정값=0, 동작 출력 신호1
출력 덧셈 신호1, 출력 뺄셈 신호0
출력 상한값=50, 출력 하한값=0
17
S.FG 입력 데이터=50, 꼭지점수 개수=2
꺾은선 좌표(30, 40), (60, 70)33
S.IFG
S.FLT 입력 데이터=50, 데이터 수집 간격=1
샘플링수=1036
S.SUM
입력 데이터=50
입력 로컷값=0, 초기값=0
입력 범위=1
16
S.TPC
온도, 압력의 양쪽 모두를 보정
압력차=100, 측정 온도=300
측정 압력=10000, 설계 온도=0
바이어스(온도)=273.15
설계 압력=0
바이어스 압력=10332.0
39
S.ENG 입력 데이터=50, 공학값 상한=100
공학값 하한=025
S.IENG
S.ADD입력수=2, 입력 데이터=50, 100
계수수=2, 계수=1, 1, 바이어스=025
S.SUB입력수=2, 입력 데이터=50, 100
계수수=2, 계수=1, 1, 바이어스=026
S. MUL입력수=2, 입력 데이터=50, 100
계수수=2, 계수=1, 1, 바이어스=023
S.DIV입력 데이터=50, 100
계수=1, 1, 1, 바이어스=0, 0, 026
S.SQR입력 데이터=50
출력 로컷값=0, 계수=1030
S.ABS 입력 데이터=50 13
S.>입력 데이터=50, 100
설정값=0, 히스테리시스=018
S.<입력 데이터=50, 100
설정값=0, 히스테리시스=018
S.=입력 데이터=50, 100
설정값=016
S.>=입력 데이터=50, 100
설정값=0, 히스테리시스=018
S.<=입력 데이터=50, 100
설정값=0, 히스테리시스=018
S.AT1
목표값 패턴=3(캐스케이드 없음)
트래킹 비트=0
실행 주기=1
루프 RUN, MAN 모드로 실행
67
명 령 조 건 처리 시간 μ( s)
부 록
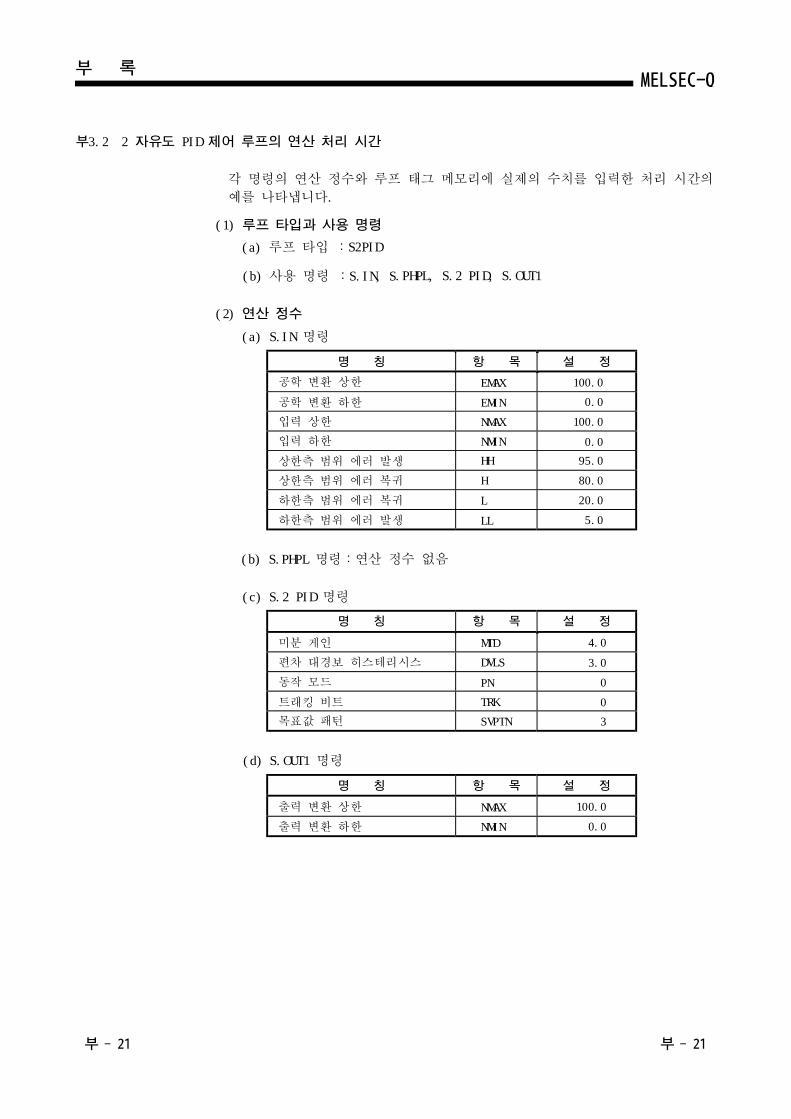
부 부
부 자유도 제어 루프의 연산 처리 시간3.2 2 PID
각 명령의 연산 정수와 루프 태그 메모리에 실제의 수치를 입력한 처리 시간의
예를 나타냅니다.
(1) 루프 타입과 사용 명령
(a) 루프 타입 :S2PID
(b) 사용 명령 :S.IN, S.PHPL, S.2 PID, S.OUT1
(2) 연산 정수
(a) S.IN 명령
명 칭 항 목 설 정
명 칭 항 목 설 정
명 칭 항 목 설 정
공학 변환 상한 EMAX 100.0
공학 변환 하한 EMIN 0.0
입력 상한 NMAX 100.0
입력 하한 NMIN 0.0
상한측 범위 에러 발생 HH 95.0
상한측 범위 에러 복귀 H 80.0
하한측 범위 에러 복귀 L 20.0
하한측 범위 에러 발생 LL 5.0
(b) S.PHPL 명령:연산 정수 없음
(c) S.2 PID 명령
미분 게인 MTD 4.0
편차 대경보 히스테리시스 DVLS 3.0
동작 모드 PN 0
트래킹 비트 TRK 0
목표값 패턴 SVPTN 3
(d) S.OUT1 명령
출력 변환 상한 NMAX 100.0
출력 변환 하한 NMIN 0.0
부 록
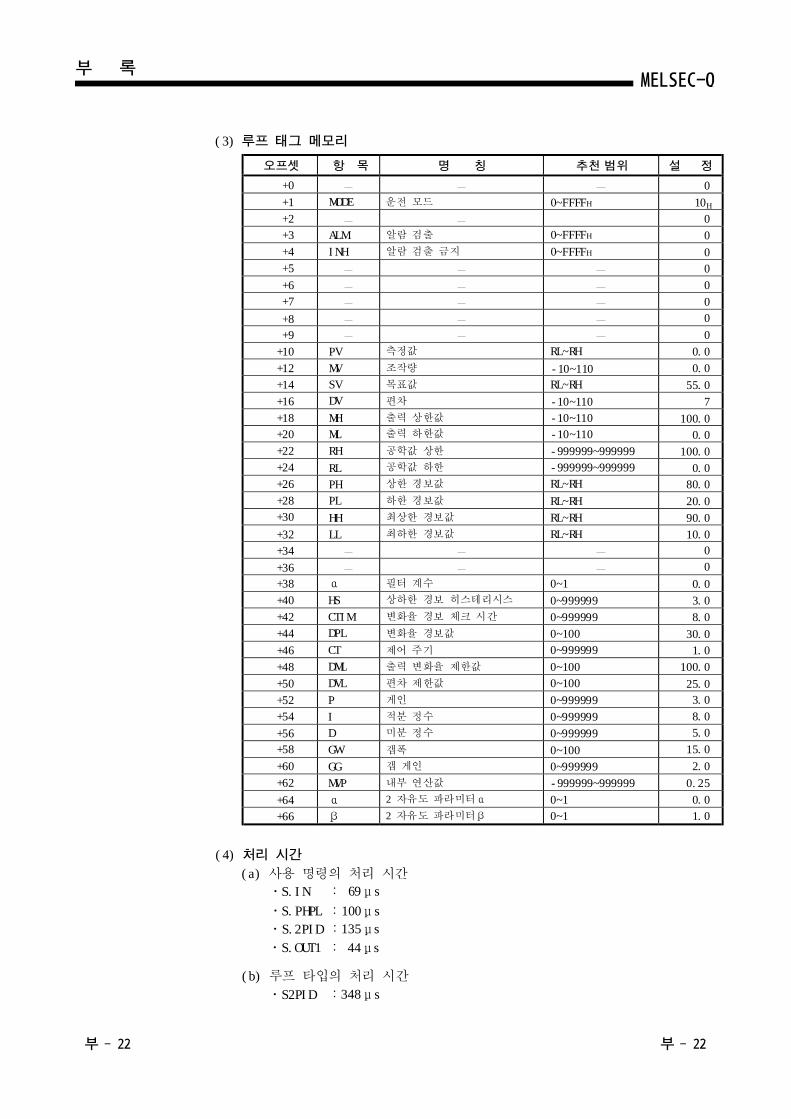
부 부
(3) 루프 태그 메모리
오프셋 추천 범위
운전 모드
알람 검출
알람 검출 금지
측정값
조작량
목표값
편차
출력 상한값
출력 하한값
공학값 상한
공학값 하한
상한 경보값
하한 경보값
최상한 경보값
최하한 경보값
필터 계수
상하한 경보 히스테리시스
변화율 경보 체크 시간
변화율 경보값
제어 주기
출력 변화율 제한값
편차 제한값
게인
적분 정수
미분 정수
갭폭
갭 게인
내부 연산값
2 자유도 파라미터α
2 자유도 파라미터β
(4) 처리 시간
(a) 사용 명령의 처리 시간
ㆍS.IN : 69μs
ㆍS.PHPL :100μs
ㆍS.2PID :135μs
ㆍS.OUT1 : 44μs
(b) 루프 타입의 처리 시간
ㆍS2PID :348μs
명 칭항 목 설 정
부 록
+0
+1
+2
+3
+4
+5
+6
+7
+8
+9
+10
+12
+14
+16
+18
+20
+22
+24
+26
+28
+30
+32
+34
+36
+38
+40
+42
+44
+46
+48
+50
+52
+54
+56
+58
+60
+62
+64
+66
MODE
ALM
INH
PV
MV
SV
DV
MH
ML
RH
RL
PH
PL
HH
LL
α
HS
CTIM
DPL
CT
DML
DVL
P
I
D
GW
GG
MVP
α
β
0~FFFFH 10H
0~FFFFH
0~FFFFH
-999999~999999
0~999999
0~999999
0~999999
0~999999
0~999999
0~999999
0~999999
-999999~999999
-999999~999999
-10~110
0
0
0
0
0
0
0
0
0
0.0
0.0
55.0
7
100.0
0.0
100.0
0.0
80.0
20.0
90.0
10.0
0
0
0.0
3.0
8.0
30.0
1.0
100.0
25.0
3.0
8.0
5.0
15.0
2.0
0.25
0.0
1.0
-10~110
-10~110
-10~110
0~1
0~1
0~1
0~100
0~100
0~100
0~100
RL~RH
RL~RH
RL~RH
RL~RH
RL~RH
RL~RH
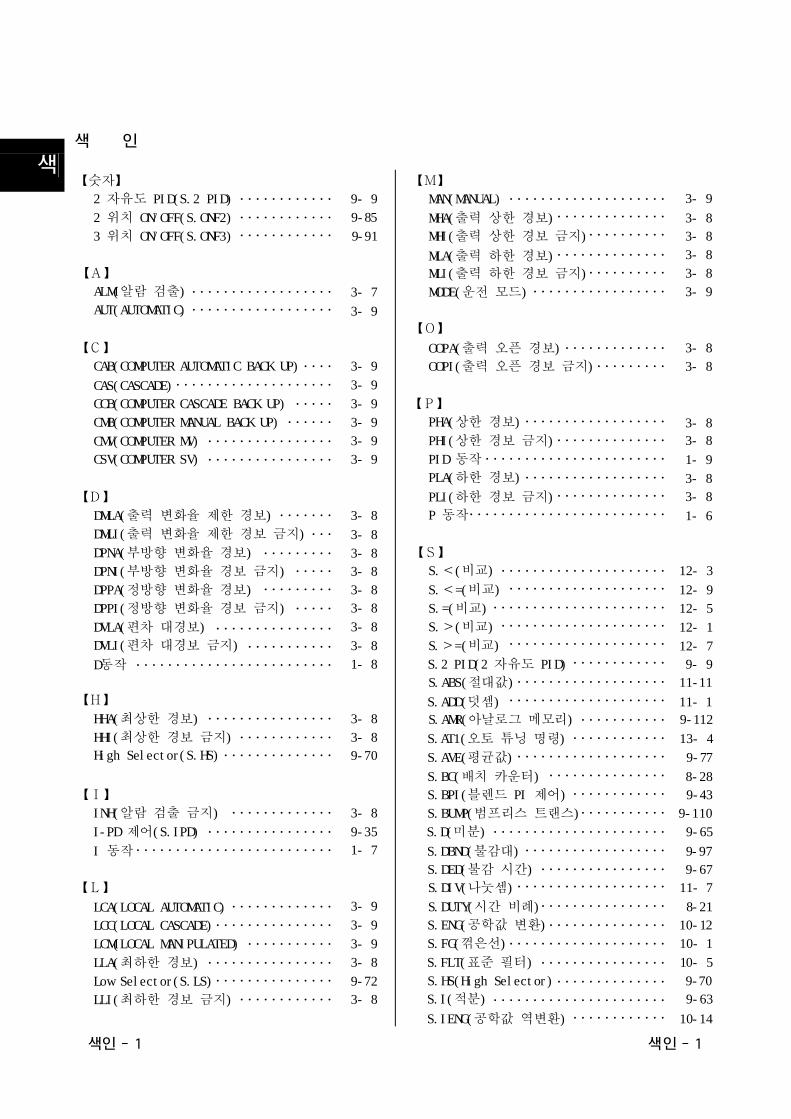
색인 색인
색 인
【숫자】
2 자유도 PID(S.2 PID)
2 위치 ON/OFF(S.ONF2)
3 위치 ON/OFF(S.ONF3)
【A】
ALM(알람 검출)
AUT(AUTOMATIC)
【C】
CAB(COMPUTER AUTOMATIC BACK UP)
CAS(CASCADE)
CCB(COMPUTER CASCADE BACK UP)
CMB(COMPUTER MANUAL BACK UP)
CMV(COMPUTER MV)
CSV(COMPUTER SV)
【D】
DMLA(출력 변화율 제한 경보)
DMLI(출력 변화율 제한 경보 금지)
DPNA(부방향 변화율 경보)
DPNI(부방향 변화율 경보 금지)
DPPA(정방향 변화율 경보)
DPPI(정방향 변화율 경보 금지)
DVLA(편차 대경보)
DVLI(편차 대경보 금지)
D동작
【H】
HHA(최상한 경보)
HHI(최상한 경보 금지)
High Selector(S.HS)
【I】
INH(알람 검출 금지)
I-PD 제어(S.IPD)
I 동작
【L】
LCA(LOCAL AUTOMATIC)
LCC(LOCAL CASCADE)
LCM(LOCAL MANIPULATED)
LLA(최하한 경보)
Low Selector(S.LS)
LLI(최하한 경보 금지)
【M】
MAN(MANUAL)
MHA(출력 상한 경보)
MHI(출력 상한 경보 금지)
MLA(출력 하한 경보)
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
1- 9
1- 6
3- 8
3- 9
3- 9
3- 9
3- 9
3- 9
3- 9
3- 9
3- 9
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
3- 8
1- 7
3- 8
3- 8
9-72
3- 8
3- 8
3- 9
3- 9
3- 9
9-35
9-70
1- 8
9- 9
9-85
9-91
3- 7
3- 9
MLI(출력 하한 경보 금지)
MODE(운전 모드)
【O】
OOPA(출력 오픈 경보)
OOPI(출력 오픈 경보 금지)
【P】
PHA(상한 경보)
PHI(상한 경보 금지)
PID 동작
PLA(하한 경보)
PLI(하한 경보 금지)
P 동작
【S】
S.<(비교)
S.<=(비교)
S.=(비교)
S.>(비교)
S.>=(비교) 12- 7
12- 1
12- 5
12- 9
12- 3
S.2 PID(2 자유도 PID) 9- 9
S.ABS(절대값) 11-11
S.ADD(덧셈) 11- 1
S.AMR(아날로그 메모리) 9-112
S.AT1(오토 튜닝 명령) 13- 4
S.AVE(평균값) 9-77
S.BC(배치 카운터) 8-28
S.BPI(블렌드 PI 제어) 9-43
S.BUMP(범프리스 트랜스) 9-110
S.D(미분) 9-65
S.DBND(불감대) 9-97
S.DED(불감 시간) 9-67
S.DIV(나눗셈) 11- 7
S.DUTY(시간 비례) 8-21
S.ENG(공학값 변환) 10-12
S.FG(꺾은선) 10- 1
S.FLT(표준 필터) 10- 5
S.HS(High Selector) 9-70
S.I(적분) 9-63
S.IENG(공학값 역변환) 10-14
............ ....................
.................
..............
..............
.............
..................
.....................
......................
........................................................
....................
.........................................
...................
...................
...................
......................
...............................
..................................................
............
....................
............
.......................
.......................
...............
..............
..............
.........................................
.........................
..........
..........
.........
............
............
..................
..................
........................
.....
.....
.....
...............
................
.........................
.........................
..........
.........
...........
............
.............
............................
..........................................
............
................
..............
.........
......
................
................
색
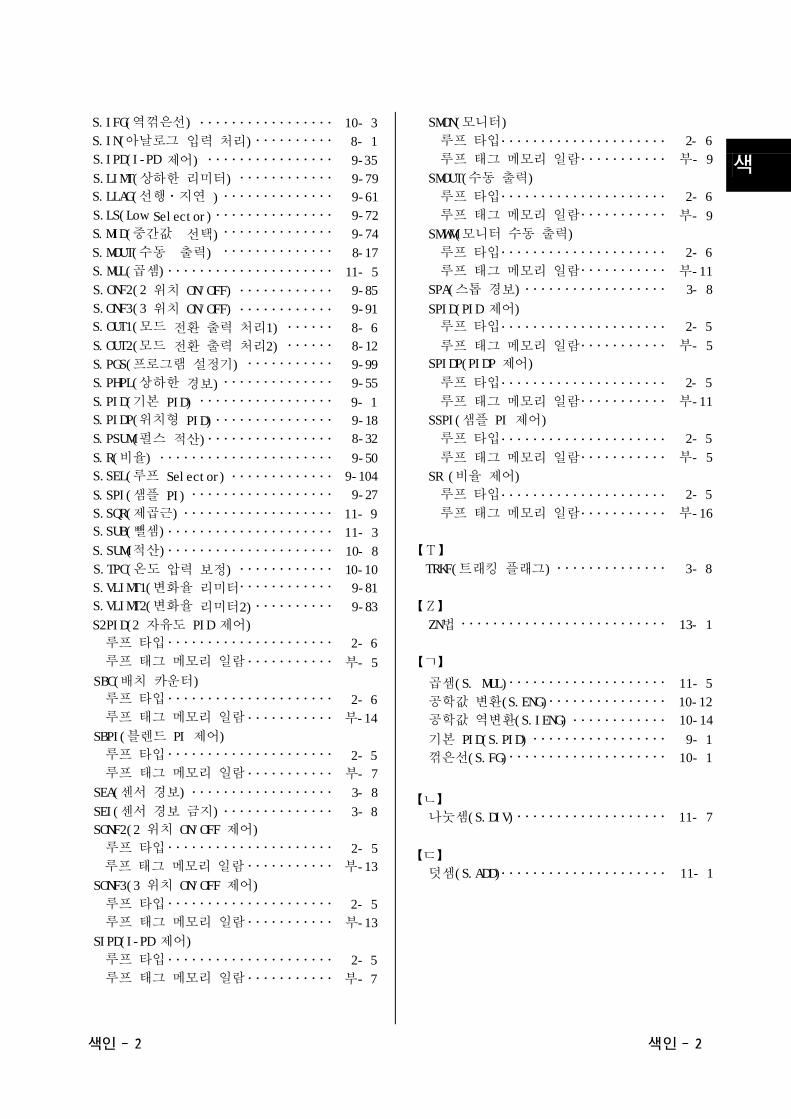
색인 색인
S.IFG(역꺾은선) 10- 3
S.IN(아날로그 입력 처리) 8- 1
S.IPD(I-PD 제어) 9-35
S.LIMT(상하한 리미터) 9-79
S.LLAG(선행ㆍ지연 ) 9-61
S.LS(Low Selector) 9-72
S.MID(중간값 선택) 9-74
S.MOUT(수동 출력) 8-17
S.MUL(곱셈) 11- 5
S.ONF2(2 위치 ON/OFF) 9-85
S.ONF3(3 위치 ON/OFF) 9-91
S.OUT1(모드 전환 출력 처리1) 8- 6
S.OUT2(모드 전환 출력 처리2) 8-12
S.PGS(프로그램 설정기) 9-99
S.PHPL(상하한 경보) 9-55
S.PID(기본 PID) 9- 1
S.PIDP(위치형 PID) 9-18
S.PSUM(펄스 적산) 8-32
S.R(비율) 9-50
S.SEL(루프 Selector) 9-104
S.SPI(샘플 PI) 9-27
S.SQR(제곱근) 11- 9
S.SUB(뺄셈) 11- 3
S.SUM(적산) 10- 8
S.TPC(온도 압력 보정) 10-10
S.VLIMT1(변화율 리미터 9-81
S.VLIMT2(변화율 리미터2) 9-83
S2PID(2 자유도 PID 제어)
루프 타입 2- 6
루프 태그 메모리 일람 부- 5
SBC(배치 카운터)
루프 타입 2- 6
루프 태그 메모리 일람 부-14
SBPI(블렌드 PI 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부- 7
SEA(센서 경보) 3- 8
SEI(센서 경보 금지) 3- 8
SONF2(2 위치 ON/OFF 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부-13
SONF3(3 위치 ON/OFF 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부-13
SIPD(I-PD 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부- 7
SMON(모니터)
루프 타입 2- 6
루프 태그 메모리 일람 부- 9
SMOUT(수동 출력)
루프 타입 2- 6
루프 태그 메모리 일람 부- 9
SMWM(모니터 수동 출력)
루프 타입 2- 6
루프 태그 메모리 일람 부-11
SPA(스톱 경보) 3- 8
SPID(PID 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부- 5
SPIDP(PIDP 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부-11
SSPI(샘플 PI 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부- 5
SR (비율 제어)
루프 타입 2- 5
루프 태그 메모리 일람 부-16
【T】
【Z】
TRKF(트래킹 플래그) 3- 8
ZN법 13- 1
【ㄱ】
곱셈(S. MUL) 11- 5
공학값 변환(S.ENG) 10-12
공학값 역변환(S.IENG) 10-14
기본 PID(S.PID) 9- 1
꺾은선(S.FG) 10- 1
【ㄴ】
나눗셈(S.DIV) 11- 7
【ㄷ】
덧셈(S.ADD) 11- 1
색
...........................
............................
.........................................................
.............................................
......
.................
..............................................................
...................................
.....................................
.....................
.......................................................
................................
.....................
.....................
..................
.....................
.....................
.....................
.....................
.....................
.....................
.....................
..................
.....................
.....................
.....................
...........
...........
..............
...........
...........
...........
...........
...........
...........
...........
...........
...........
...........
..............
...................................
.............................
....................
...................
.....................
..........................
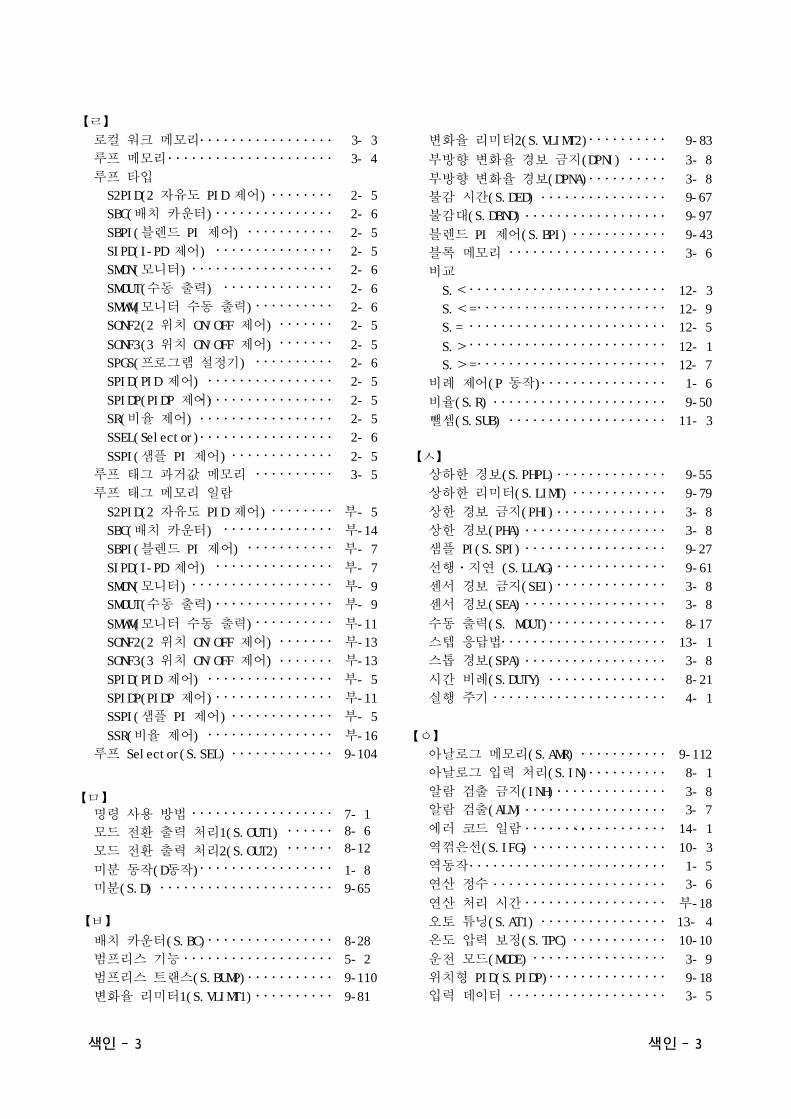
색인 색인
【ㄹ】
로컬 워크 메모리 3- 3
루프 메모리 3- 4
루프 타입
S2PID(2 자유도 PID 제어) 2- 5
SBC(배치 카운터) 2- 6
SBPI(블렌드 PI 제어) 2- 5
SIPD(I-PD 제어) 2- 5
SMON(모니터) 2- 6
SMOUT(수동 출력) 2- 6
SMWM(모니터 수동 출력) 2- 6
SONF2(2 위치 ON/OFF 제어) 2- 5
SONF3(3 위치 ON/OFF 제어) 2- 5
SPGS(프로그램 설정기) 2- 6
SPID(PID 제어) 2- 5
SPIDP(PIDP 제어) 2- 5
SR(비율 제어) 2- 5
SSEL(Selector) 2- 6
SSPI(샘플 PI 제어) 2- 5
루프 태그 과거값 메모리 3- 5
루프 태그 메모리 일람
S2PID(2 자유도 PID 제어) 부- 5
SBC(배치 카운터) 부-14
SBPI(블렌드 PI 제어) 부- 7
SIPD(I-PD 제어) 부- 7
SMON(모니터) 부- 9
SMOUT(수동 출력) 부- 9
SMWM(모니터 수동 출력) 부-11
SONF2(2 위치 ON/OFF 제어) 부-13
SONF3(3 위치 ON/OFF 제어) 부-13
SPID(PID 제어) 부- 5
SPIDP(PIDP 제어) 부-11
SSPI(샘플 PI 제어) 부- 5
SSR(비율 제어) 부-16
루프 Selector(S.SEL) 9-104
【ㅁ】명령 사용 방법 7- 1
모드 전환 출력 처리1(S.OUT1)
모드 전환 출력 처리2(S.OUT2)
미분 동작(D동작) 1- 8
미분(S.D) 9-65
8- 6
8-12
【ㅂ】
배치 카운터(S.BC) 8-28
범프리스 기능 5- 2
범프리스 트랜스(S.BUMP) 9-110
변화율 리미터1(S.VLIMT1) 9-81
【ㅅ】
【ㅇ】
......................................
.......................
..........................
................................
........................
.............................................................................
.......................
......................
..........................
.................................
.................
......
.......................
...................................
.....................
......................
...................................................
................
..................
.............
변화율 리미터2(S.VLIMT2) 9-83
부방향 변화율 경보 금지(DPNI) 3- 8
부방향 변화율 경보(DPNA) 3- 8
불감 시간(S.DED) 9-67
불감대(S.DBND) 9-97
블렌드 PI 제어(S.BPI) 9-43
블록 메모리 3- 6
비교
S.< 12- 3
S.<= 12- 9
S.= 12- 5
S.> 12- 1
S.>= 12- 7
비례 제어(P 동작) 1- 6
비율(S.R) 9-50
뺄셈(S.SUB) 11- 3
상하한 경보(S.PHPL) 9-55
상하한 리미터(S.LIMT) 9-79
상한 경보 금지(PHI) 3- 8
상한 경보(PHA) 3- 8
샘플 PI(S.SPI) 9-27
선행ㆍ지연 (S.LLAG) 9-61
센서 경보 금지(SEI) 3- 8
센서 경보(SEA) 3- 8
수동 출력(S. MOUT) 8-17
스텝 응답법 13- 1
스톱 경보(SPA) 3- 8
시간 비례(S.DUTY) 8-21
실행 주기 4- 1
아날로그 메모리(S.AMR) 9-112
아날로그 입력 처리(S.IN) 8- 1
알람 검출 금지(INH) 3- 8
알람 검출(ALM) 3- 7
에러 코드 일람 14- 1
역꺾은선(S.IFG) 10- 3
역동작 1- 5
연산 정수 3- 6
연산 처리 시간 부-18
오토 튜닝(S.AT1) 13- 4
온도 압력 보정(S.TPC) 10-10
운전 모드(MODE) 3- 9
위치형 PID(S.PIDP) 9-18
입력 데이터 3- 5
...............
..........................
..............................
..........................
..................................................
..............
................................
....................................
.................................
......................
.....................
...................................................................
...............................................
..................................
............................................
....................
.........................
....................
..................................................................................................
..........................................................
..
색인 색인
【ㅈ】
적분 동작(I 동작) 1- 7
적분(S.I) 9-61
적산(S.SUM) 10- 8
절대값(S.ABS) 11-11
정동작 1- 5
정방향 변화율 경보 금지(DPPI) 3- 8
정방향 변화율 경보(DPPA) 3- 8
제곱근(S.SQR) 11- 9
제어 주기 4- 1
중간값 선택(S. MID) 9-74
【ㅊ】
최상한 경보 금지(HHI) 3- 8
최상한 경보(HHA) 3- 8
최하한 경보 금지(LLI) 3- 8
최하한 경보(LLA) 3- 8
출력 리미터 처리 기능 5- 2
출력 변화율 제한 경보 금지(DMLI) 3- 8
출력 변화율 제한 경보(DMLA) 3- 8
출력 상한 경보 금지(MHI) 3- 8
출력 상한 경보(MHA) 3- 8
출력 오픈 경보 금지(OOPI) 3- 8
출력 오픈 경보(OOPA) 3- 8
출력 하한 경보 금지(MLI) 3- 8
출력 하한 경보(MLA) 3- 8
【ㅌ】
트래킹
트래킹 기능 5- 2
트래킹 플래그 (TRKF) 3- 8
루프 Selector 5- 3
캐스케이드 루프 5- 2
【ㅍ】
펄스 적산(S.PSUM) 8-32
편차 대경보 금지(DVLI) 3- 8
편차 대경보(DVLA) 3- 8
평균값(S.AVE) 9-77
표준 필터(S.FLT) 10- 5
프로그램 설정기(S.PGS) 9-99
프로그램 예 부- 1
프로세스 제어 명령에서 사용하는 데이터
3- 4
하한 경보 금지(PLI) 3- 8
하한 경보(PLA) 3- 8
【ㅎ】
..............................................................................
...............................
.............................
.....................................
............................
............................
...............
.................
.......................
.......................
..............
..................................
................................
...........................
...................................
............................
.....................
..........................
................................
색인 색인
메 모
보증에 대해서
사용 시에는 아래의 제품 보증 내용을 확인해 주실 것을 당부 드립니다.
1. 무상 보증 기간과 무상 보증 범위
무상 보증 기간 중에 제품에 당사측의 책임에 의한 고장이나 하자(이하 합쳐서 「고장」이라고부릅니다)가 발생했을 경우, 당사는 구입하신 판매점 또는 당사의 서비스 회사를 통하여 무상으로제품을 수리하여 드립니다.단, 국내로부터 해외로 출장 수리가 필요한 경우 또는 떨어져 있는 도서 및 이에 준하는 원격지에로의 출장 수리가 필요한 경우는 기술자 파견에 필요한 실비를 받습니다.
【무상 보증 기간】제품의 무상 보증 기간은 고객께서 구입 후 또는 지정 장소에 납입 후 1년간으로 합니다.단, 당사 제품 출하 후의 유통 기간을 최장 6개월로 하여 제조일로부터 18개월을 무상 보증 기간의 상한으로 합니다. 또한, 수리품의 무상 보증 기간은 수리 전의 무상 보증 기간을 초과하지 않습니다.
【무상 보증 범위】(1) 사용 상태, 사용 방법 및 사용 환경 등이 사용 설명서, 사용자 매뉴얼, 제품 본체의 주의 라벨 등에 기재된 조건, 주의 사항 등에 따른 정상적인 상태에서 사용되고 있는 경우로 한정합니다.
(2) 무상 보증 기간이라 하더라도 아래의 경우에는 유상 수리로 합니다.① 고객의 부적절한 보관이나 취급, 부주의, 과실 등에 의해 발생한 고장 및 고객의 하드웨어또는 소프트웨어 설계 내용에 기인한 고장.
② 고객께서 당사의 양해 없이 제품을 개조하는 등의 손을 댄 것에 기인하는 고장.③ 당사 제품이 고객의 기기에 구성되어 사용된 경우, 고객의 기기가 받고 있는 법적 규제에의한 안전장치 또는 업계의 통념상 갖추어야 한다고 판단되는 기능ㆍ구조 등을 갖추고 있으면 피할 수 있다고 인정되는 고장.
④ 사용 설명서 등에 지정된 소모 부품(배터리, 백라이트, 퓨즈 등)이 정상적으로 보수ㆍ교환되었으면 막을 수 있다고 인정되는 고장.
⑤ 화재, 이상 전압 등의 불가항력에 의한 외부 요인 및 지진, 낙뢰, 풍수해 등의 천재지변에의한 고장.
⑥ 당사 출하 시의 과학 기술 수준에서는 예견할 수 없었던 사유에 의한 고장.⑦ 기타, 당사의 책임 외의 경우 또는 고객이 당사 책임 밖으로 인정한 고장.
2. 생산 중지 후의 유상 수리 기간
(1) 당사가 유상으로 제품 수리를 접수할 수 있는 기간은 그 제품의 생산 중지 후 7년간입니다.생산 중지에 관하여는 당사 테크니컬 뉴스 등으로 알려드립니다.
(2) 생산 중지 후의 제품 공급(보조 용품 포함)은 불가능합니다.
3. 해외 서비스해외에 있어서는 당사의 각 지역 해외 FA센터에서 수리 접수를 받습니다. 단, 각 FA센터에서의 수
리 조건 등이 다른 경우가 있으므로 양해 바랍니다.
4. ,기회 손실 이차 손실 등의 보증 채무의 제외
무상 보증 기간의 내외를 불문하고 당사의 책임으로 귀속하지 않는 사유로부터 발생한 손해, 당사제품의 고장에 기인하는 고객의 기회 손실, 일실 이익, 당사의 예견의 유무를 불문하고 특별한 사정으로부터 발생한 손해, 이차 손해, 사고 보상, 당사 제품 이외의 원인에 의한 손상 및 다른 업무에대한 보상에 대해서 당사는 책임을 지지 않습니다.
5. 제품 사양의 변경
카탈로그, 매뉴얼 또는 기술 자료에 기재되어 있는 사양은 예고 없이 변경되는 경우가 있으므로사전에 양해해 주시기 바랍니다.
6. 제품의 적용에 대해(1) 당사 MELSEC 범용 PLC를 사용하실 때는, 본체에 고장ㆍ비정상적인 상태가 발생한 경우라도 중대한 사고에 이르지 않는 용도일 것 및 고장ㆍ비정상 상태 발생 시에 백업이나 페일 세이프 기능이 기기 외부에서 시스템적으로 마련되어 있을 것을 사용 조건으로 합니다.
(2) 당사 범용 PLC는 일반 공업용 등의 용도를 대상으로 하는 범용품으로 설계ㆍ제작되었습니다.따라서 각 전력 회사의 원자력 발전소 및 기타 발전소용 등과 같이 공공의 영향이 큰 용도나 각철도 회사 및 국방용 등 특별한 품질을 요구하는 용도에는 PLC의 적용을 제외하여 주십시오.또한, 항공, 의료, 철도, 연소ㆍ연료 장치, 유인 반송 장치, 오락 기계, 안전 기계 등 인명이나재산에 커다란 영향이 예측되며, 안전측면이나 제어 시스템에 특별한 고신뢰성이 요구되는 용도에 사용하시고자 하는 경우에는 당사 PLC의 적용을 제외하여 주십시오.단, 이들 용도라 하더라도 사전에 당사와 상담을 통해 용도를 한정하여 특별한 품질을 요구하지않을 것을 고객이 승인하는 경우에는, 필요한 문서를 교환하고 적용이 가능하도록 하겠습니다.
이 상
제조원 : MITSUBISHI ELECTRIC CORPORATION
수입판매원 : 한국미쓰비시전기오토메이션주식회사 TEL (02) 3660-9531~9547, FAX (02)3664-8335
HEAD OFFICE : MITSUBISHI DENKI BLDG MARUNOUCHI, TOKYO 100, FAX 81-3-3218-3579
본 매뉴얼의 내용은 품질개선을 위하여 예고없이 변경될 수 있으므로 제품구입시 문의 바랍니다.
2006년 3월 작성
한 홈페이지 : http://www
MELFANS web 홈페이지 : http://www.nagoya.melco.co.jp
국미쓰비시전기오토메이션주식회사 .mitsubishi-automation.co.kr
QnPHCPU/QnPRHCPU
프로그래밍 매뉴얼 (프로세스 제어 명령편)
형명 QNPHCPU-P-PROCESS-K
SH(NA)-080586KOR