Naar een opgaven gestuurde organisatie: Samen meer realiseren

Faculteit Ingenieurswetenschappen
Vakgroep Elektronica en Informatiesystemen
Voorzitter: Prof. Dr. Ir. J. Van Campenhout
Ontwerp van een volledig geıntegreerde
PWM-gestuurde H-brug met IGBT’s
voor de snelheidsregeling van DC-motoren
door
Rik Verplancke
en
Jeroen Missinne
Promotor: Prof. Dr. Ir. J. Doutreloigne
Scriptiebegeleiders: Dr. B. Bakeroot, Ir. V. De Gezelle
Scriptie ingediend tot het behalen van de academische graad van
Burgerlijk Elektrotechnisch Ingenieur:
optie Elektronische Circuits en Systemen
Academiejaar 2006–2007

Voorwoord
In hedendaagse toestellen is elektronica bijna niet meer weg te denken, hoewel ze soms niet
zichtbaar aanwezig is. Een moderne auto heeft bijvoorbeeld tal van systemen aan boord om
de gewenste functionaliteit en veiligheid te garanderen. Het is in dit kader dat het werk zich
situeert.
Deze scriptie heeft als doel een volledig elektronisch systeem te ontwerpen en is dus vooral
van praktische aard. Daarbij was het echter vaak nodig om onderzoek te doen om bepaalde
problemen op een zo goed mogelijke manier op te lossen. Enerzijds werd gebruik gemaakt
van bestaande resultaten, maar anderzijds hebben we zelf ook veel nieuwe circuits ontworpen.
Dit zou uiteraard niet mogelijk geweest zijn zonder de hulp van een aantal personen.
Eerst en vooral zouden we onze promotor Jan Doutreloigne en thesisbegeleiders Benoit Ba-
keroot en Vincent De Gezelle willen bedanken omdat ze altijd onmiddellijk beschikbaar waren
om ons te ontvangen in Zwijnaarde en onze vragen te beantwoorden. Bovendien willen we
nog eens speciaal een woordje van dank uitspreken voor dit mooi thesisonderwerp. Na het
Hardware-ontwerp project van vorig jaar zijn we echt warm geworden voor de materie en dit
enthousiasme is tijdens het uitvoeren van de thesis zeker niet afgenomen. Het was niet altijd
even gemakkelijk, we zijn op veel problemen gestoten en er kroop veel meer tijd in de thesis
dan we aanvankelijk gedacht hadden. We zijn er echter altijd blijven in geloven en hebben
iedere nieuwe dag vol ‘goesting’ en met een glimlach ingezet.
i

ii
Verder willen we ook een dankwoord richten tot Herbert De Pauw en Wim Meews om ons
raad te geven i.v.m. de I3T80 technologie of ons te helpen wanneer Cadence weer zijn grillen
had. Ook zouden we iedereen van de onderzoeksgroep TFCG Microsystems willen bedanken
voor de goede sfeer aldaar.
Ten slotte willen we iedereen bedanken die op welke manier ook een bijdrage geleverd heeft
om dit werk mogelijk te maken en niet met naam vernoemd is. Speciale dank gaat hierbij uit
naar onze ouders, familie, vrienden en medestudenten.
Rik Verplancke en Jeroen Missinne, juni 2007

Toelating tot bruikleen
“De auteurs geven de toelating deze scriptie voor consultatie beschikbaar te stellen en delenvan de scriptie te kopieren voor persoonlijk gebruik.Elk ander gebruik valt onder de beperkingen van het auteursrecht, in het bijzonder met be-trekking tot de verplichting de bron uitdrukkelijk te vermelden bij het aanhalen van resultatenuit deze scriptie.”
Rik Verplancke en Jeroen Missinne, juni 2007
iii

Ontwerp van een volledig geıntegreerde
PWM-gestuurde H-brug met IGBT’s
voor de snelheidsregeling van DC-motoren
door
Rik Verplancke
en
Jeroen Missinne
Scriptie ingediend tot het behalen van de academische graad van
Burgerlijk Elektrotechnisch Ingenieur:
optie Elektronische Circuits en Systemen
Academiejaar 2006–2007
Promotor: Prof. Dr. Ir. J. Doutreloigne
Scriptiebegeleiders: Dr. B. Bakeroot, Ir. V. De Gezelle
Faculteit Ingenieurswetenschappen
Universiteit Gent
Vakgroep Elektronica en Informatiesystemen
Voorzitter: Prof. Dr. Ir. J. Van Campenhout
Samenvatting
In deze thesis wordt voor de eerste maal een volledig monolithisch geıntegreerde elektronischeschakeling rond nieuw ontworpen IGBT’s gebouwd. Hierbij wordt een circuit uitgedachtom deze IGBT’s in een H-brug configuratie aan te sturen, met behulp van een op maatontworpen levelshifter. Uiteindelijk zal deze H-brug dienen om een kleine DC-motor aan tedrijven. Door gebruik te maken van PWM technieken en feedback voor de aansturing vande H-brug, wordt ervoor gezorgd dat de snelheid van de motor in beide richtingen geregeldkan worden onafhankelijk van de belasting. Om de IGBT’s te beschermen werden ook eenaantal protectiecircuits aangebracht. Enerzijds is er een systeem voorzien om de dissipatiein de vermogenscomponenten te begrenzen. Anderzijds zorgt een thermische sensor voor hetveilig uitschakelen indien de temperatuur toch nog te hoog zou oplopen.
Trefwoorden
H-brug, IGBT, snelheidsregeling, AMI Semiconductor I3T80 Technologie, levelshifter
Design of a fully integrated PWM-controlledH-bridge with IGBT’s for the speed control of
DC-motorsJeroen Missinne & Rik Verplancke
Supervisor(s): Jan Doutreloigne, Benoit Bakeroot, Vincent De Gezelle
Abstract—In this article, a system is introduced to control the speed of aDC-motor using insulated gate bipolar transistors (IGBT’s) as switching el-ements in an H-bridge configuration. A fully integrated system has been de-signed using a Smart Power technology, the 80 V 0, 35 µm I3T (ImprovedIntelligent Interface Technology) [1].
Keywords—H-bridge, IGBT, speed control, DC-motor, Smart Power, I3T
I. INTRODUCTION
MODERN electronics have a need for components that dis-sipate less power, without giving in on other performance
parameters. It also has become a trend to integrate an au-tonomous microsystem on a single chip [2]. These so calledSmart Power technologies are used in automotive applicationsor for industrial control.
Recently, IGBT’s have been developed at the TFCG Mi-crosystems Lab and these have been proven promising for theuse in these technologies. However, these components havenever been used in a fully integrated circuit. Therefore, a com-plete system for the speed control of a DC-motor has been de-signed using these IGBT’s in an H-bridge configuration.
A digital circuit generates PWM pulses for the speed controlof a DC-motor, driven by the H-bridge. Several additional cir-cuits are integrated to protect the system against overheating.
II. IGBT
Classical IGBT’s have a few drawbacks. These componentssuffer from latch-up and cannot be used in circuits requiring awide safe operating area. Moreover, the substrate current injec-tion and possible crosstalk with nearby CMOS logic or analogcomponents, makes the integration in Smart Power technologiesdifficult. The proposed IGBT’s try to overcome these problemsusing the standard I3T80 process mask set [3],[4],[5].
III. DESCRIPTION OF THE SYSTEM
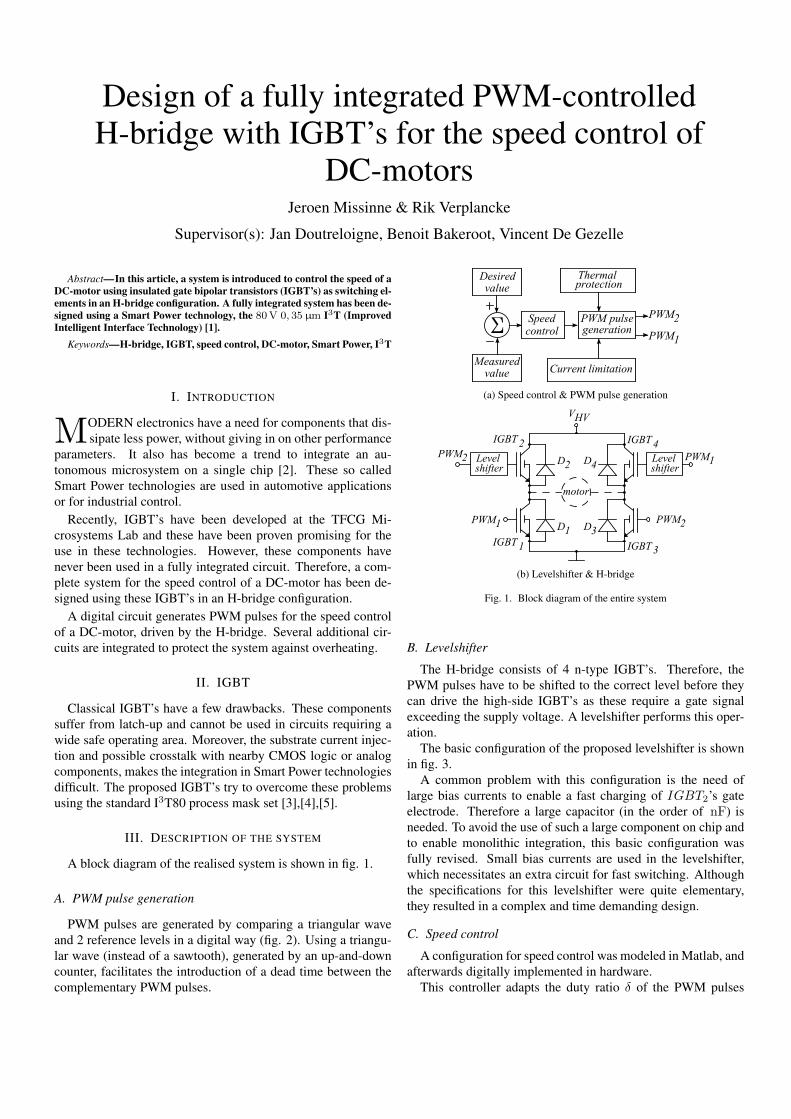
A block diagram of the realised system is shown in fig. 1.
A. PWM pulse generation
PWM pulses are generated by comparing a triangular waveand 2 reference levels in a digital way (fig. 2). Using a triangu-lar wave (instead of a sawtooth), generated by an up-and-downcounter, facilitates the introduction of a dead time between thecomplementary PWM pulses.
(a) Speed control & PWM pulse generation
(b) Levelshifter & H-bridge
Fig. 1. Block diagram of the entire system
B. Levelshifter
The H-bridge consists of 4 n-type IGBT’s. Therefore, thePWM pulses have to be shifted to the correct level before theycan drive the high-side IGBT’s as these require a gate signalexceeding the supply voltage. A levelshifter performs this oper-ation.
The basic configuration of the proposed levelshifter is shownin fig. 3.
A common problem with this configuration is the need oflarge bias currents to enable a fast charging of IGBT2’s gateelectrode. Therefore a large capacitor (in the order of nF) isneeded. To avoid the use of such a large component on chip andto enable monolithic integration, this basic configuration wasfully revised. Small bias currents are used in the levelshifter,which necessitates an extra circuit for fast switching. Althoughthe specifications for this levelshifter were quite elementary,they resulted in a complex and time demanding design.
C. Speed control
A configuration for speed control was modeled in Matlab, andafterwards digitally implemented in hardware.
This controller adapts the duty ratio δ of the PWM pulses
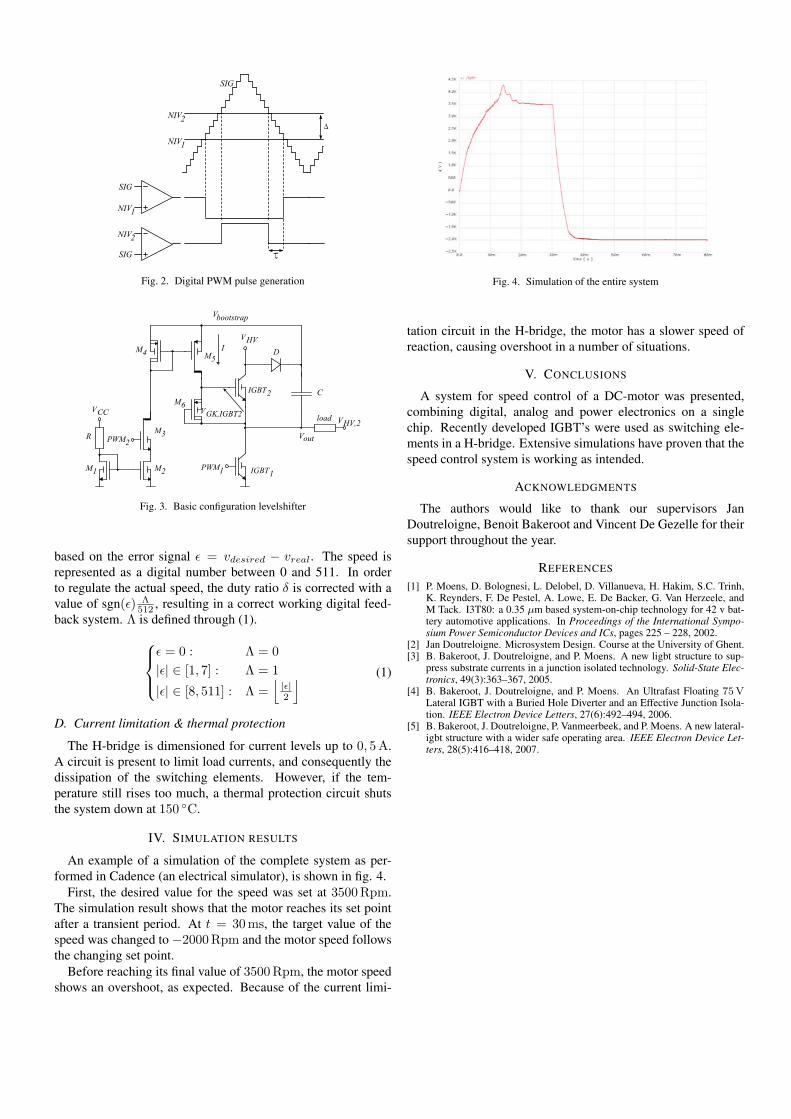
Fig. 2. Digital PWM pulse generation
Fig. 3. Basic configuration levelshifter
based on the error signal ε = vdesired − vreal. The speed isrepresented as a digital number between 0 and 511. In orderto regulate the actual speed, the duty ratio δ is corrected with avalue of sgn(ε) Λ
512 , resulting in a correct working digital feed-back system. Λ is defined through (1).
ε = 0 : Λ = 0|ε| ∈ [1, 7] : Λ = 1
|ε| ∈ [8, 511] : Λ =⌊
|ε|2
⌋ (1)
D. Current limitation & thermal protection
The H-bridge is dimensioned for current levels up to 0, 5 A.A circuit is present to limit load currents, and consequently thedissipation of the switching elements. However, if the tem-perature still rises too much, a thermal protection circuit shutsthe system down at 150 C.
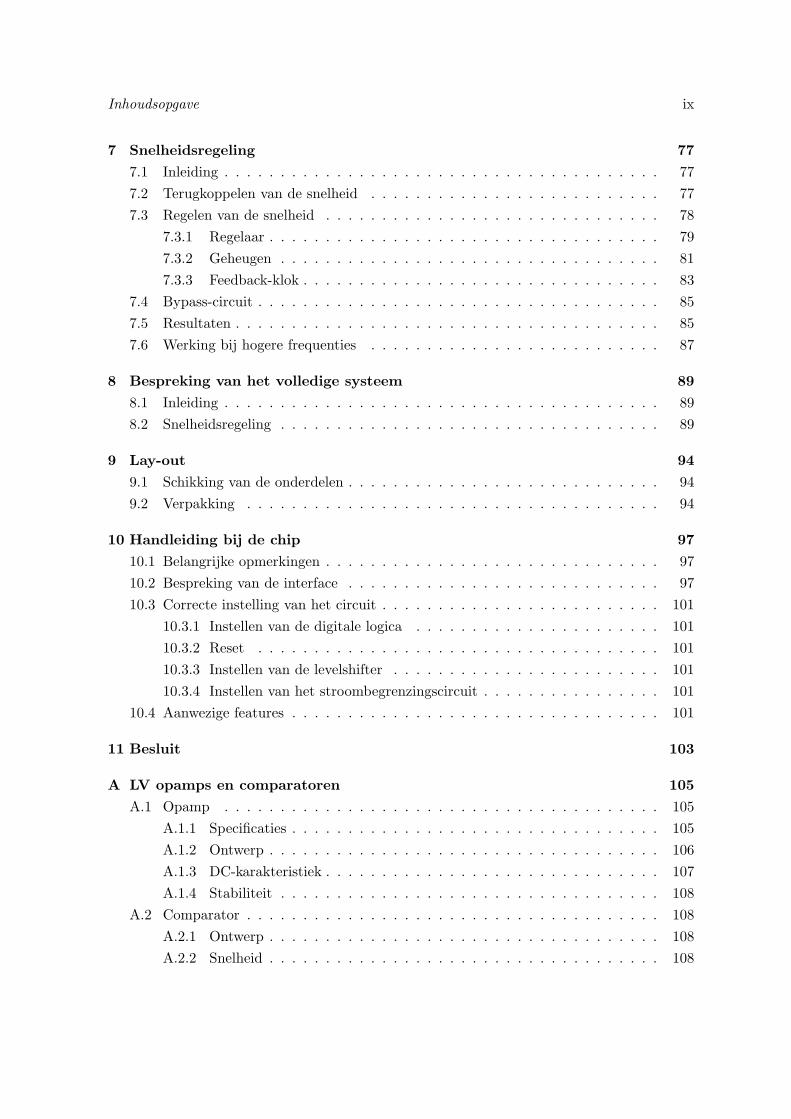
IV. SIMULATION RESULTS
An example of a simulation of the complete system as per-formed in Cadence (an electrical simulator), is shown in fig. 4.
First, the desired value for the speed was set at 3500 Rpm.The simulation result shows that the motor reaches its set pointafter a transient period. At t = 30 ms, the target value of thespeed was changed to −2000 Rpm and the motor speed followsthe changing set point.
Before reaching its final value of 3500 Rpm, the motor speedshows an overshoot, as expected. Because of the current limi-
Fig. 4. Simulation of the entire system
tation circuit in the H-bridge, the motor has a slower speed ofreaction, causing overshoot in a number of situations.
V. CONCLUSIONS
A system for speed control of a DC-motor was presented,combining digital, analog and power electronics on a singlechip. Recently developed IGBT’s were used as switching ele-ments in a H-bridge. Extensive simulations have proven that thespeed control system is working as intended.
ACKNOWLEDGMENTS
The authors would like to thank our supervisors JanDoutreloigne, Benoit Bakeroot and Vincent De Gezelle for theirsupport throughout the year.
REFERENCES
[1] P. Moens, D. Bolognesi, L. Delobel, D. Villanueva, H. Hakim, S.C. Trinh,K. Reynders, F. De Pestel, A. Lowe, E. De Backer, G. Van Herzeele, andM Tack. I3T80: a 0.35 µm based system-on-chip technology for 42 v bat-tery automotive applications. In Proceedings of the International Sympo-sium Power Semiconductor Devices and ICs, pages 225 – 228, 2002.
[2] Jan Doutreloigne. Microsystem Design. Course at the University of Ghent.[3] B. Bakeroot, J. Doutreloigne, and P. Moens. A new ligbt structure to sup-
press substrate currents in a junction isolated technology. Solid-State Elec-tronics, 49(3):363–367, 2005.
[4] B. Bakeroot, J. Doutreloigne, and P. Moens. An Ultrafast Floating 75 VLateral IGBT with a Buried Hole Diverter and an Effective Junction Isola-tion. IEEE Electron Device Letters, 27(6):492–494, 2006.
[5] B. Bakeroot, J. Doutreloigne, P. Vanmeerbeek, and P. Moens. A new lateral-igbt structure with a wider safe operating area. IEEE Electron Device Let-ters, 28(5):416–418, 2007.

Inhoudsopgave
Overzicht iv
Extended abstract v
Inhoudsopgave vii
Gebruikte afkortingen xi
1 Inleiding 11.1 Kader . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Probleemstelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3 Doelstelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Principe van een PWM-gestuurde H-brug 42.1 H-brug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Aansturing van een H-brug . . . . . . . . . . . . . . . . . . . . . . . . 52.1.2 Inductieve last . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.1.3 Aansturen van een motor . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 PWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3 IGBT’s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 IGBT’s 93.1 IGBT’s in de I3T80 technologie van AMIS . . . . . . . . . . . . . . . . . . . . 9
3.1.1 Klassieke n-LIGBT structuur . . . . . . . . . . . . . . . . . . . . . . . 93.1.2 Verbeterde n-LIGBT structuur . . . . . . . . . . . . . . . . . . . . . . 11
3.2 Elektrische karakteristieken van de IGBT . . . . . . . . . . . . . . . . . . . . 143.2.1 De IGBT in DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2.2 Safe Operating Area . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2.3 Schakelgedrag van een igbt . . . . . . . . . . . . . . . . . . . . . . . . 16
vii

Inhoudsopgave viii
4 Generatie van PWM-pulsen 204.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.2 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.3 Realisatie van de verschillende bouwblokken . . . . . . . . . . . . . . . . . . . 21
4.3.1 Gemodificeerde teller . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.3.2 Klok ter aansturing van de gemodificeerde teller . . . . . . . . . . . . 224.3.3 Sommatie-circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.3.4 Comparator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4 Globaal schema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.5 Resultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.6 Werking bij hogere frequenties . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5 Aansturing van de uitgangstrap met behulp van een levelshifter 325.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2 Principeschema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2.1 Werking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.2.2 Specificaties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.2.3 Problemen bij het principeschema . . . . . . . . . . . . . . . . . . . . 37
5.3 Ontworpen schema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.3.1 De regime-tak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.3.2 De ontlaad-tak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.3.3 De laad-tak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.4 Resultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.4.1 Simulatieresultaten van de levelshifter met inductieve last (motor) . . 555.4.2 Robuustheid van het ontwerp . . . . . . . . . . . . . . . . . . . . . . . 595.4.3 Specificaties van het ontwerp . . . . . . . . . . . . . . . . . . . . . . . 61
6 De H-brug met protectiecircuits 646.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646.2 Stroombegrenzing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2.1 Werking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646.2.2 Dimensionering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666.2.3 Resultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.3 Thermisch protectiecircuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.3.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.3.2 Temperatuursensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.3.3 Geconditioneerde temperatuursensor . . . . . . . . . . . . . . . . . . . 726.3.4 Toegepaste thermische beveiliging . . . . . . . . . . . . . . . . . . . . 74
Inhoudsopgave ix
7 Snelheidsregeling 777.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 777.2 Terugkoppelen van de snelheid . . . . . . . . . . . . . . . . . . . . . . . . . . 777.3 Regelen van de snelheid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.3.1 Regelaar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 797.3.2 Geheugen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 817.3.3 Feedback-klok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7.4 Bypass-circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 857.5 Resultaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 857.6 Werking bij hogere frequenties . . . . . . . . . . . . . . . . . . . . . . . . . . 87
8 Bespreking van het volledige systeem 898.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 898.2 Snelheidsregeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
9 Lay-out 949.1 Schikking van de onderdelen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 949.2 Verpakking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
10 Handleiding bij de chip 9710.1 Belangrijke opmerkingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9710.2 Bespreking van de interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9710.3 Correcte instelling van het circuit . . . . . . . . . . . . . . . . . . . . . . . . . 101
10.3.1 Instellen van de digitale logica . . . . . . . . . . . . . . . . . . . . . . 10110.3.2 Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10110.3.3 Instellen van de levelshifter . . . . . . . . . . . . . . . . . . . . . . . . 10110.3.4 Instellen van het stroombegrenzingscircuit . . . . . . . . . . . . . . . . 101
10.4 Aanwezige features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
11 Besluit 103
A LV opamps en comparatoren 105A.1 Opamp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
A.1.1 Specificaties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105A.1.2 Ontwerp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106A.1.3 DC-karakteristiek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107A.1.4 Stabiliteit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
A.2 Comparator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108A.2.1 Ontwerp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108A.2.2 Snelheid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Inhoudsopgave x
B Gebruikte componenten 111B.1 Componenten uit de bibliotheek van de I3T80 technologie . . . . . . . . . . . 111B.2 Ontworpen logica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
B.2.1 D-flipflop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113B.2.2 JK-flipflop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
B.3 Modellen voor externe componenten . . . . . . . . . . . . . . . . . . . . . . . 114B.3.1 DC-motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114B.3.2 Snelheidssensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Bibliografie 118
Lijst van figuren 120
Lijst van tabellen 124
Gebruikte afkortingen
ADC Analoog naar digitaal omzetter
BLN Begraven laag van n-type silicium
BLP Begraven laag van p-type silicium
CMOS Complementary Metal-Oxide-Semiconductor
DC Gelijkstroom
DIP Dual in-line package
DMOS Double-diffused Metal-Oxide-Semiconductor
GND Massapotentiaal
HV Hoogspanning (in dit werk: spanningen hoger dan VCC)
I3T Improved Intelligent Interface Technology
IGBT Insulated Gate Bipolar Transistor
L Transistorlengte
LSB Minst significante bit
LV Laagspanning (in dit werk: spanningen tot VCC)
MOS Metal-Oxide-Semiconductor
NMOS N-kanaals MOSFET
MOSFET Metal-Oxide-Semiconductor Field-Effect Transistor
MSB Meest significante bit
Opamp Operationele versterker
PMOS P-kanaals MOSFET
PWM Pulsbreedtemodulatie
Rpm Toeren per minuut
SOA Veilig werkingsgebied
VCC Laagspanningsvoeding
xi

Hoofdstuk 0. Gebruikte afkortingen xii
VHDL VHSIC Hardware Description Language
VHSIC Very-High-Speed Integrated Circuit
W Transistorbreedte
Hoofdstuk 1
Inleiding
1.1 Kader
In de automobiel-elektronica, robotica en industriele controle worden vaak zogenaamde SmartPower technologieen aangewend. Dit zijn geavanceerde silicium-technologieen waarmee opeenzelfde chip alle vereiste analoge en digitale elektronica kan worden geıntegreerd voor hetrealiseren van een autonoom microsysteem:
Analoge circuits zijn met hun hoge precisie uitermate geschikt voor de signaalcondi-tionering van allerhande sensoren die bv. temperatuur, druk, snelheid of versnellingmeten.
Compacte (maar complexe), snelle digitale logica voor signaalverwerking en lokale in-telligentie.
Speciale schakelingen die werken op hogere spanningen (typisch tot enkele tientallenVolt) en hogere stroomniveaus (typisch tot een paar Ampere) voor het aansturen vanallerlei actuatoren zoals kleine DC-motoren, stappenmotoren, kleppen, . . .
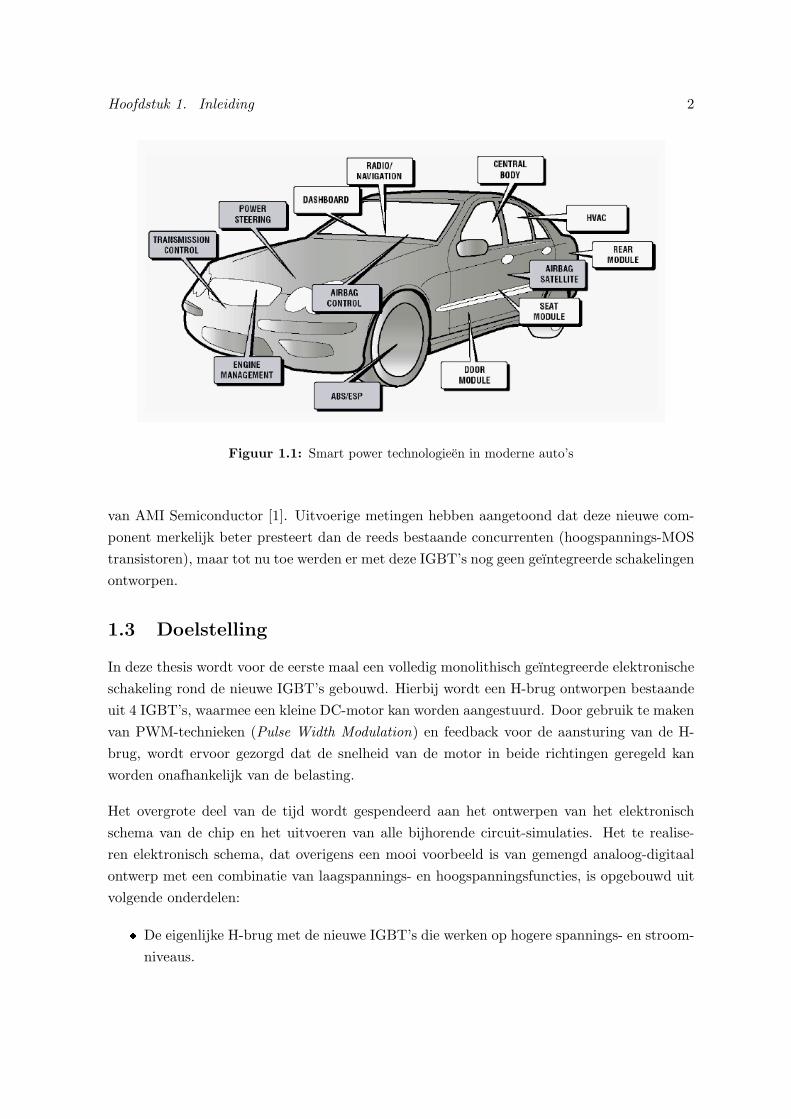
In moderne auto’s zijn tientallen dergelijke microsystemen terug te vinden (figuur 1.1). Denkmaar aan de elektronica voor het activeren van airbags, elektronische ontsteking en brand-stofinjectie, elektronische positionering van de buitenspiegels, . . .
1.2 Probleemstelling
Binnen de TFCG Microsystems onderzoeksgroep gebeurt al vele jaren onderzoek naar hetontwikkelen van nieuwe hoogspanningstransistoren in dergelijke smart power technologieenom met name de performantie van de hoogspannings-uitgangstrappen te verbeteren, en devereiste silicium-oppervlakte te verkleinen. Zo werd onlangs met succes een heel efficiente IG-BT (voluit Insulated Gate Bipolar Transistor) ontwikkeld in de 80 V 0, 35 µm I3T technologie
1
Hoofdstuk 1. Inleiding 2
Figuur 1.1: Smart power technologieen in moderne auto’s
van AMI Semiconductor [1]. Uitvoerige metingen hebben aangetoond dat deze nieuwe com-ponent merkelijk beter presteert dan de reeds bestaande concurrenten (hoogspannings-MOStransistoren), maar tot nu toe werden er met deze IGBT’s nog geen geıntegreerde schakelingenontworpen.
1.3 Doelstelling
In deze thesis wordt voor de eerste maal een volledig monolithisch geıntegreerde elektronischeschakeling rond de nieuwe IGBT’s gebouwd. Hierbij wordt een H-brug ontworpen bestaandeuit 4 IGBT’s, waarmee een kleine DC-motor kan worden aangestuurd. Door gebruik te makenvan PWM-technieken (Pulse Width Modulation) en feedback voor de aansturing van de H-brug, wordt ervoor gezorgd dat de snelheid van de motor in beide richtingen geregeld kanworden onafhankelijk van de belasting.
Het overgrote deel van de tijd wordt gespendeerd aan het ontwerpen van het elektronischschema van de chip en het uitvoeren van alle bijhorende circuit-simulaties. Het te realise-ren elektronisch schema, dat overigens een mooi voorbeeld is van gemengd analoog-digitaalontwerp met een combinatie van laagspannings- en hoogspanningsfuncties, is opgebouwd uitvolgende onderdelen:
De eigenlijke H-brug met de nieuwe IGBT’s die werken op hogere spannings- en stroom-niveaus.

Hoofdstuk 1. Inleiding 3
Niveau-verschuivers (levelshifters) voor het aansturen van de gate-elektrodes van de 2IGBT’s bovenaan in de H-brug.
Een gemengd analoog-digitaal blok dat instaat voor het genereren van de PWM-signalenwaarmee uiteindelijk de gate-elektrodes van de IGBT’s moeten worden geactiveerd. Ditcircuit zal ook zorgen voor snelheidsfeedback.
Een analoog regelcircuit dat op basis van het gemeten stroomniveau in de H-brug, destroom door de IGBT’s beperkt tot een gepaste waarde.
Een thermisch protectiecircuit dat eventuele oververhitting van de IGBT’s voorkomt.
Bij het ontwerp dient in acht genomen te worden dat het volledige systeem op 1 silicium chipmoet komen (monolithisch geıntegreerd), die liefst zo compact mogelijk blijft. Dit zijn dusnog 2 bijkomende, maar niet onbelangrijke specificaties.
Eenmaal het elektronisch schema van de chip volledig is ontworpen, en de simulaties aange-toond hebben dat het circuit naar behoren zou moeten functioneren, wordt overgegaan tothet tekenen van de layout van de chip.
Uiteindelijk zal de chip ook worden gefabriceerd in de 80 V 0, 35 µm I3T technologie van AMISemiconductor. Gelet op de tijd die vereist is voor het vervaardigen van de chip (typisch zo’n3 maanden), gebeurt de evaluatie van de chip buiten het kader van dit afstudeerwerk.
Hoofdstuk 2
Principe van een PWM-gestuurde
H-brug
In dit hoofdstuk wordt een korte inleiding gegeven op de verschillende onderwerpen waarvanhet begrip noodzakelijk is voor het vervolg van dit werk.
2.1 H-brug
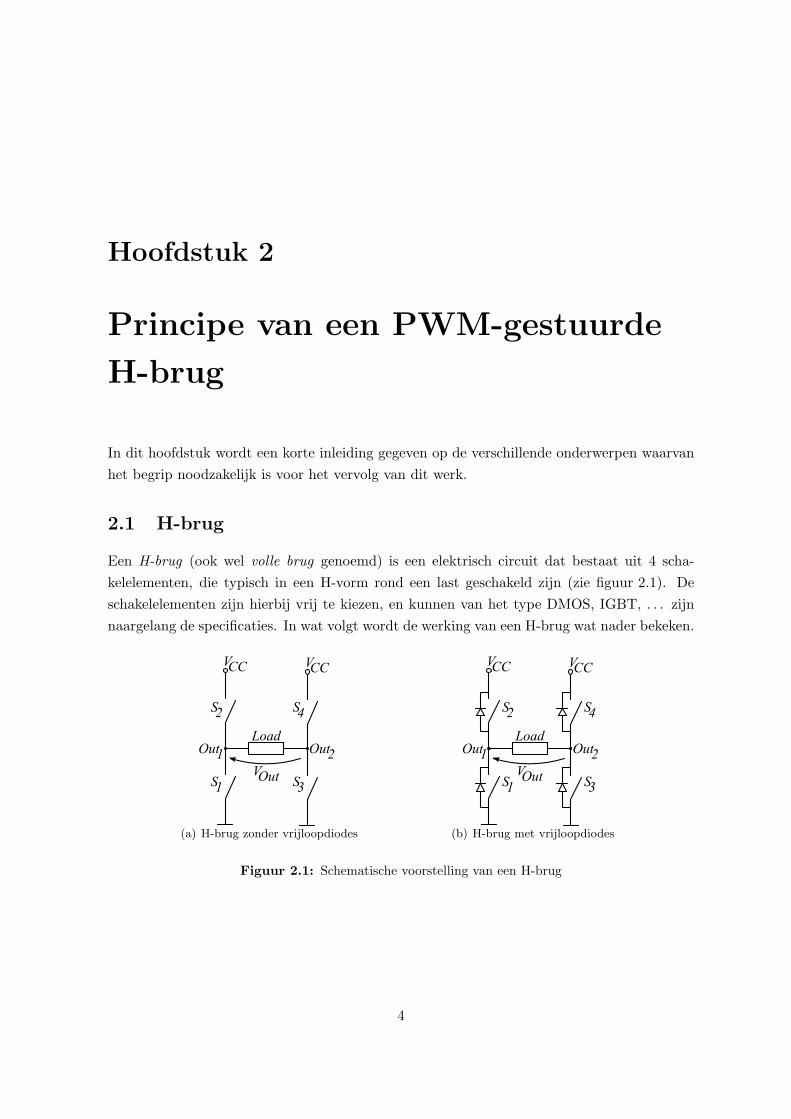
Een H-brug (ook wel volle brug genoemd) is een elektrisch circuit dat bestaat uit 4 scha-kelelementen, die typisch in een H-vorm rond een last geschakeld zijn (zie figuur 2.1). Deschakelelementen zijn hierbij vrij te kiezen, en kunnen van het type DMOS, IGBT, . . . zijnnaargelang de specificaties. In wat volgt wordt de werking van een H-brug wat nader bekeken.
(a) H-brug zonder vrijloopdiodes (b) H-brug met vrijloopdiodes
Figuur 2.1: Schematische voorstelling van een H-brug
4
Hoofdstuk 2. Principe van een PWM-gestuurde H-brug 5
2.1.1 Aansturing van een H-brug
Een H-brug kan op verschillende manieren aangestuurd worden. Op basis van de gemiddel-de spanning VOUT die men over de last verkrijgt (of equivalent hiermee: op basis van degemiddelde stroomzin doorheen de last), wordt er een onderscheid gemaakt tussen 2 gevallen.
Unipolaire uitgangsspanning Indien een van de schakelelementen constant actief is, dankomt een van de terminals van de last op een constante spanning (massa of voeding)te staan. Door de andere tak aan te sturen m.b.v. PWM-pulsen, kan de gemiddeldespanning over (en dus ook de gemiddelde stroom doorheen) de last geregeld worden.De gemiddelde spanning over de last kan bij dit type sturing slechts een teken (positiefof negatief) aannemen. Er wordt dus een unipolaire uitgangsspanning verkregen.
Bipolaire uitgangsspanning In dit geval schakelen afwisselend de elementen S1,S4 aanen tegelijk S2,S3 af, of omgekeerd. Beide paren schakelelementen dienen gestuurd teworden door 2 complementaire PWM-pulsen. De gemiddelde spanning over de last kannu zowel negatieve als positieve waarden aannemen. Deze wijze van aansturing geeftdus aanleiding tot een bipolaire uitgangsspanning .
Bij de aansturing van een H-brug dient erop gelet te worden dat 2 schakelelementen uit een-zelfde tak (S1,S2 en S3,S4) nooit simultaan actief zijn. Indien dit wel het geval zou zijn, danzou gedurende die tijd massa met voeding laagohmig verbonden zijn, en dus aanleiding geventot kortsluitstromen. Aangezien dit absoluut vermeden moet worden, bezitten de comple-mentaire stuurpulsen van de H-brug vaak een dode tijd τ . Deze dode tijd hangt uiteraard afvan de gebruikte schakelelementen, de frequentie waarmee geschakeld wordt, . . .
2.1.2 Inductieve last
Indien de eenvoudige H-brug uit figuur 2.1(a) gebruikt wordt om een resistieve last aan testuren, dan zouden er zich geen problemen voordoen. Dit is echter niet het geval bij eeninductieve last zoals een motor. Van een inductieve last is immers geweten dat de stroomdoorheen deze last continu moet zijn. Wanneer een H-brug gebruikt wordt om zo’n last aante sturen, dan moet ervoor gezorgd worden dat de stroom continu kan blijven vloeien. Bijhet eenvoudig schema in figuur 2.1(a) is dit zeker niet het geval gedurende de dode tijd vande stuurpulsen. Zelfs zonder dode tijd kunnen gevaarlijke overgangsverschijnselen optreden.
Om de continuıteit van de laststroom te verzekeren, dienen een aantal vrijloopdiodes in pa-rallel met de schakelelementen geplaatst te worden, en dit zoals voorgesteld in figuur 2.1(b).Door de vrijloopdiodes op deze wijze te schakelen is er altijd een pad aanwezig waarlangsstroom kan vloeien, ook gedurende de dode tijd van de stuurpulsen.

Hoofdstuk 2. Principe van een PWM-gestuurde H-brug 6
Merk tot slot op dat sommige schakelelementen reeds intern een diode kunnen bevatten.Meestal is het echter noodzakelijk om extern over de schakelelementen nog vrijloopdiodes aante brengen.
2.1.3 Aansturen van een motor
Een H-brug wordt vaak gebruikt om snelheid, positie of het koppel van een motor (DC-motor,stappenmotor, . . . ) te regelen. Ook in dit werk staat de snelheidsregeling van een motorcentraal. In wat volgt worden kort wat specificaties opgesomd die voor dit werk gelden.
Het regelen van snelheid en draaizin van een motor komt eigenlijk neer op het regelenvan respectievelijk grootte en stroomzin van de gemiddelde stroom doorheen de motor.Om het regelen van de draaizin van de motor mogelijk te maken, zal de H-brug dusaanleiding moeten kunnen geven tot een bipolaire uitgangsspanning (of dus een gemid-delde laststroom die beide polariteiten kan aannemen). Er is dan ook gekozen voor eendifferentiele aansturing van de diametrale transistorparen van de H-brug.
De elektrische tijdsconstante van de aan te sturen motor bepaalt de benodigde frequentievan de PWM-pulsen. De tijdsconstante van de motor die als referentie gebruikt wordt,bedraagt 1, 2 ms. Meestal wordt de periode van het PWM signaal veel groter gekozendan deze tijdsconstante opdat de stroom door de motor dan min of meer constant blijft.Voor deze motor is een PWM frequentie van 10 kHz dus een goede keuze.
2.2 PWM
PWM (of Pulse Width Modulation) is een techniek waarbij pulsen opgewekt worden waarvanmen de duty-ratio δ kan laten varieren. De duty-ratio δ van een puls wordt hierbij gedefinieerdals de verhouding van de tijd dat de puls hoog is tot de periode van de puls:
δ =ton
T(2.1)
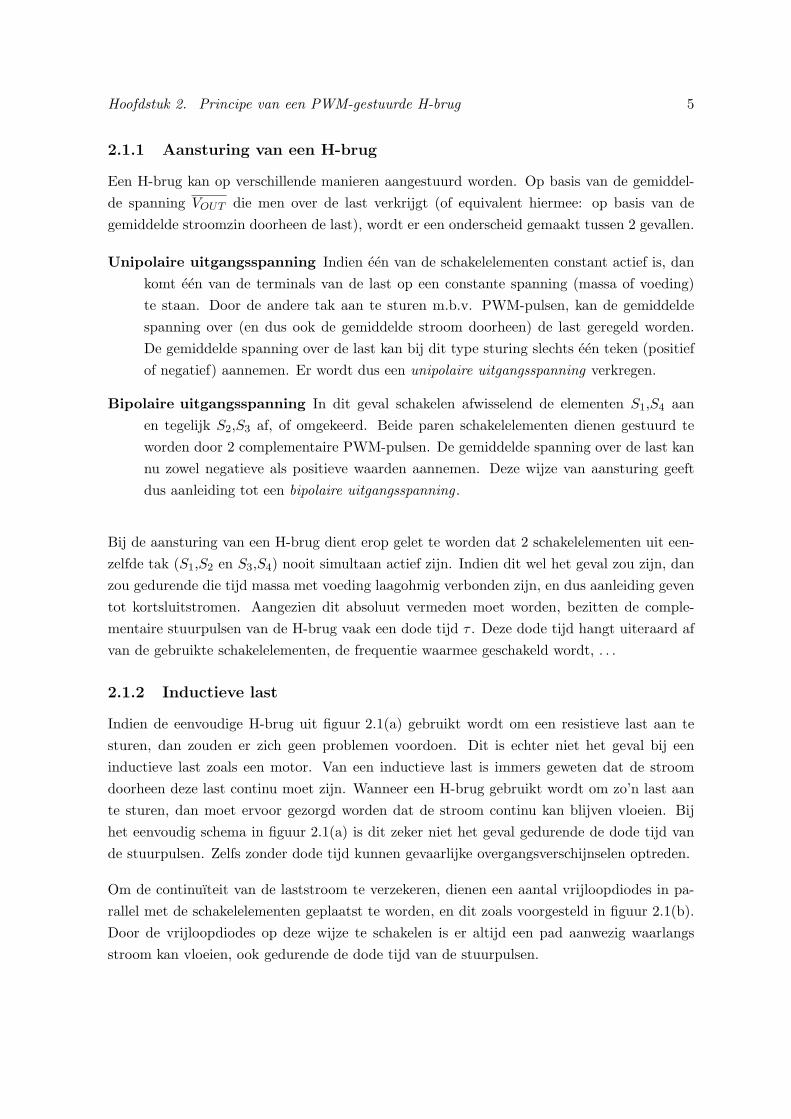
Het opwekken van PWM-pulsen kan op verscheidene manieren gebeuren, en dit zowel analoogals digitaal. In het eenvoudigste geval gaat men uit van een zaagtand- of driehoekssignaal eneen variabel referentieniveau. Door het referentieniveau met het signaal te vergelijken a.d.h.v.een comparator, kan een puls opgewekt worden (zie figuur 2.2(a)). De pulsbreedte van dezepuls kan gevarieerd worden door het referentieniveau te laten varieren. Op deze wijze wordtuiteraard pulsbreedtemodulatie verkregen.
Ook een complementaire puls kan op deze manier makkelijk opgewekt worden. Dit kan bv.gebeuren door de reeds opgewekte puls te inverteren of m.b.v. een tweede comparator waarbij
Hoofdstuk 2. Principe van een PWM-gestuurde H-brug 7
(a) (b)
Figuur 2.2: Genereren van PWM-pulsen
beide ingangen omgewisseld zijn. Er kan ook gebruik gemaakt worden van een tweede referen-tieniveau, zoals bv. voorgesteld in figuur 2.2(b). Deze laatste methode heeft als voordeel datop een eenvoudige manier een dode tijd τ tussen 2 complementaire PWM-pulsen ingevoerdkan worden. Dit is noodzakelijk indien overlap van beide pulsen absoluut vermeden moetworden, zoals het geval is bij de aansturing van een H-brug (zie 2.1 H-brug).
2.3 IGBT’s
(a) Symbool met contacten (A)node,
(K)athode, (G)ate en (B)ulk
(b) Macromodel
Figuur 2.3: De IGBT
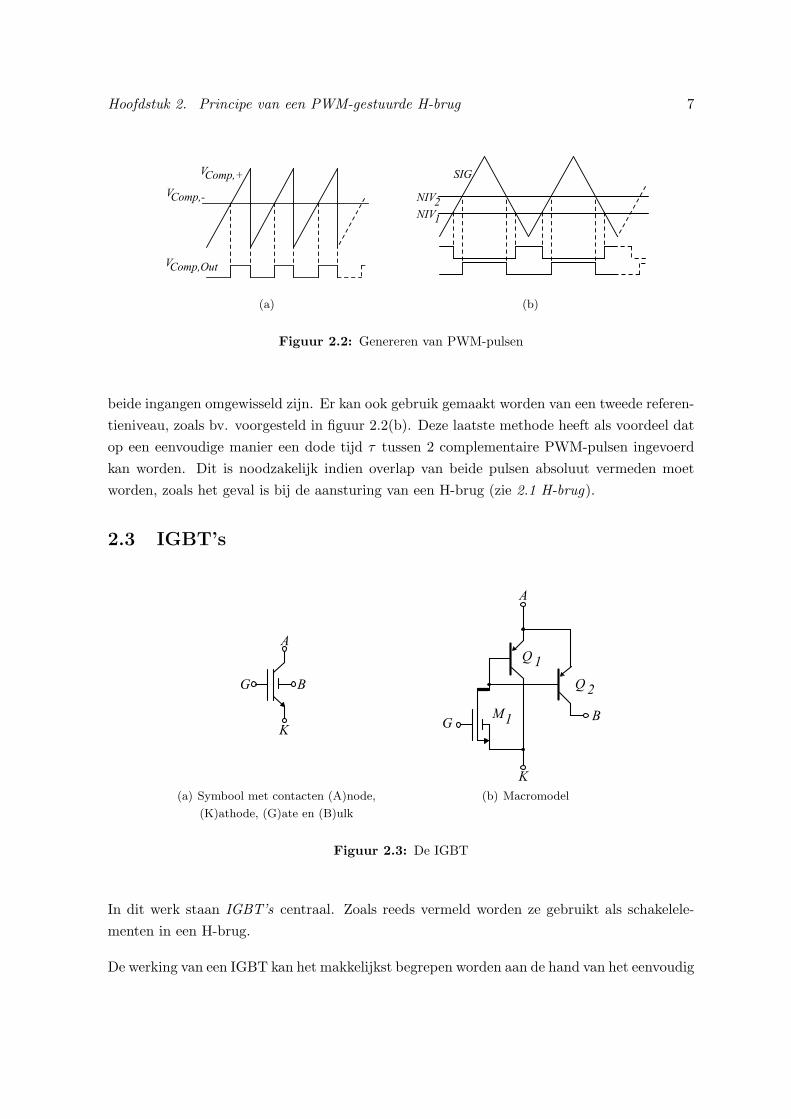
In dit werk staan IGBT’s centraal. Zoals reeds vermeld worden ze gebruikt als schakelele-menten in een H-brug.
De werking van een IGBT kan het makkelijkst begrepen worden aan de hand van het eenvoudig
Hoofdstuk 2. Principe van een PWM-gestuurde H-brug 8
macromodel uit figuur 2.3(b). Een positieve spanning op de gate van MOS transistor M1 zalervoor zorgen dat deze gaat geleiden. Dit creeert een basisstroom voor de bipolaire PNPtransistor Q1. Deze basisstroom wordt versterkt door transistor Q1, wat aanleiding geefttot een grote collectorstroom. Transistor Q2 stelt de parasitaire PNP transistor naar hetsubstraat voor.
Een IGBT combineert dus de goede eigenschappen van MOS en bipolaire elektronica. Ener-zijds is er een geısoleerde gate-elektrode, hetgeen eenvoudige spanningssturing toelaat. Ander-zijds wordt een hoge stroomdichtheid bereikt door conductiviteitsmodulatie zoals in bipolairetransistoren. Deze laatste eigenschap laat toe om met compacte componenten toch grotestromen te kunnen voeren.
Hoofdstuk 3
IGBT’s
Een korte inleiding tot IGBT’s werd reeds in 2.3 IGBT’s gegeven. In wat volgt worden destructuur en eigenschappen van deze componenten wat nader bekeken.
3.1 IGBT’s in de I3T80 technologie van AMIS
Tot dusver konden IGBT’s nog niet concurreren met de reeds bestaande HV MOS-transistorenvoor het gebruik in bijvoorbeeld de automobielelektronica. IGBT’s moeten namelijk competi-tie aangaan met de goed ingeburgerde DMOS transistoren. Bovendien is een integratie samenmet CMOS logica moeilijk door de grote substraatstroom en overspraak die deze hoogspan-ningscomponenten veroorzaken. Binnen de TFCG Microsystems onderzoeksgroep heeft meneen heel efficiente IGBT ontwikkeld die deze concurrentie mogelijks wel aankan [2, 3, 4]. DezeIGBT werd ontworpen in de 80V 0, 35 µm I3T80 technologie van AMI Semiconductor. Hier-onder wordt deze component vergeleken met een reeds bestaand ontwerp. De getekende lagenuit de I3T80 technologie zijn beschreven in [5]. In [1] wordt de technologie voorgesteld.
3.1.1 Klassieke n-LIGBT structuur
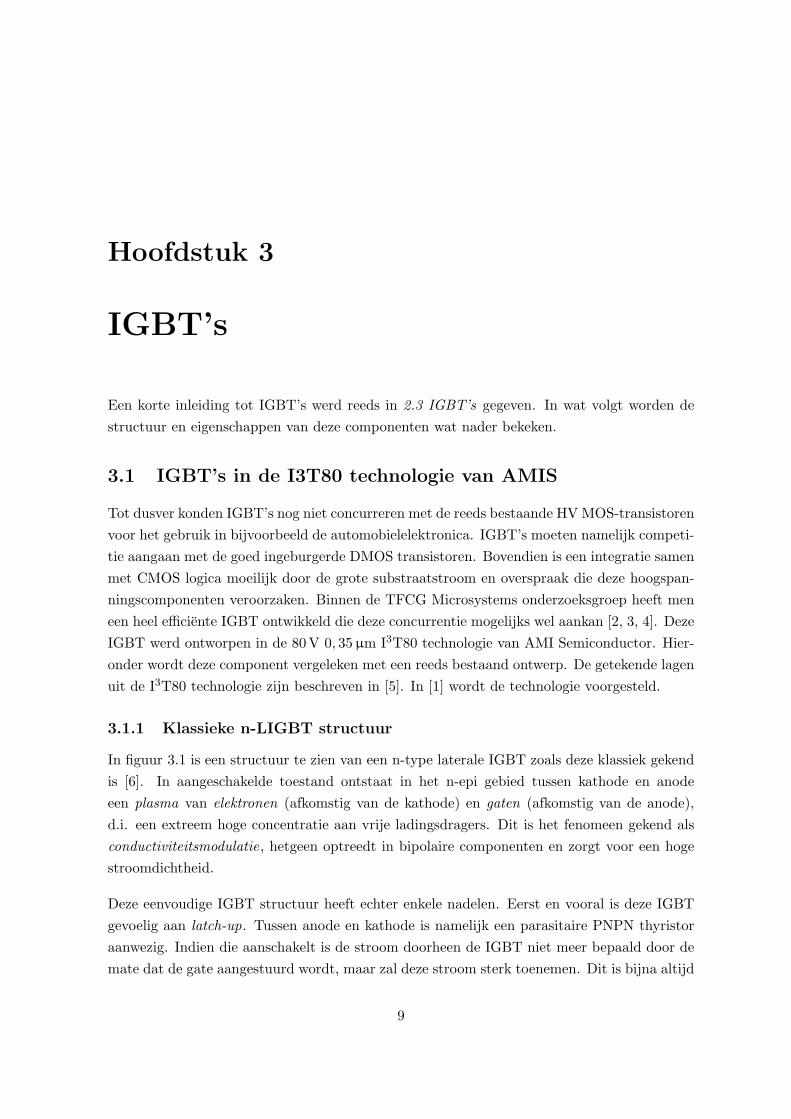
In figuur 3.1 is een structuur te zien van een n-type laterale IGBT zoals deze klassiek gekendis [6]. In aangeschakelde toestand ontstaat in het n-epi gebied tussen kathode en anodeeen plasma van elektronen (afkomstig van de kathode) en gaten (afkomstig van de anode),d.i. een extreem hoge concentratie aan vrije ladingsdragers. Dit is het fenomeen gekend alsconductiviteitsmodulatie, hetgeen optreedt in bipolaire componenten en zorgt voor een hogestroomdichtheid.
Deze eenvoudige IGBT structuur heeft echter enkele nadelen. Eerst en vooral is deze IGBTgevoelig aan latch-up. Tussen anode en kathode is namelijk een parasitaire PNPN thyristoraanwezig. Indien die aanschakelt is de stroom doorheen de IGBT niet meer bepaald door demate dat de gate aangestuurd wordt, maar zal deze stroom sterk toenemen. Dit is bijna altijd
9

Hoofdstuk 3. IGBT’s 10
Figuur 3.1: Structuur van een klassieke IGBT
destructief. Het gebied dat gevoelig is voor deze latch-up bevindt zich onder het gate-oxidein de buurt van de n+-p-well junctie. In principe is deze junctie kortgesloten want kathodeen bulk zijn met elkaar verbonden. Aangezien de p-well echter niet zwaar gedopeerd is,bevat deze een bepaalde weerstand waarover een spanningsval kan bestaan. Bij een bepaaldeanodestroom zal deze spanningsval groot genoeg worden, waardoor de PNPN thyristor zalontsteken en er latch-up optreedt. Bij deze klassieke structuur treedt latch-up op bij relatieflage waarden van de anodestroom.
Een tweede probleem is de substraatstroom injectie. Tussen anode en substraat is er een para-sistaire PNP transistor aanwezig. Zelfs bij normale werking zal deze transistor aangeschakeldzijn (zie figuur 2.3(b)). Daardoor is er injectie van gaten in het substraat wat leidt tot sub-straatstromen. Op het eerste zicht is dit geen probleem aangezien de goede werking van decomponent niet in gevaar lijkt te komen. De stroom kan inderdaad niet onbeperkt toenemen,maar wordt gestuurd door de basisstroom van de (slechte) parasitaire bipolaire transistor.Nu is het echter zo dat een IGBT in een microsysteem meestal niet als aparte componentop een chip staat en het blijkt dat substraatstromen kunnen leiden tot allerlei ongewensteparasitaire effecten. Het is dus zeker belangrijk om deze substraatstromen te vermijden.
Hoofdstuk 3. IGBT’s 11
3.1.2 Verbeterde n-LIGBT structuur
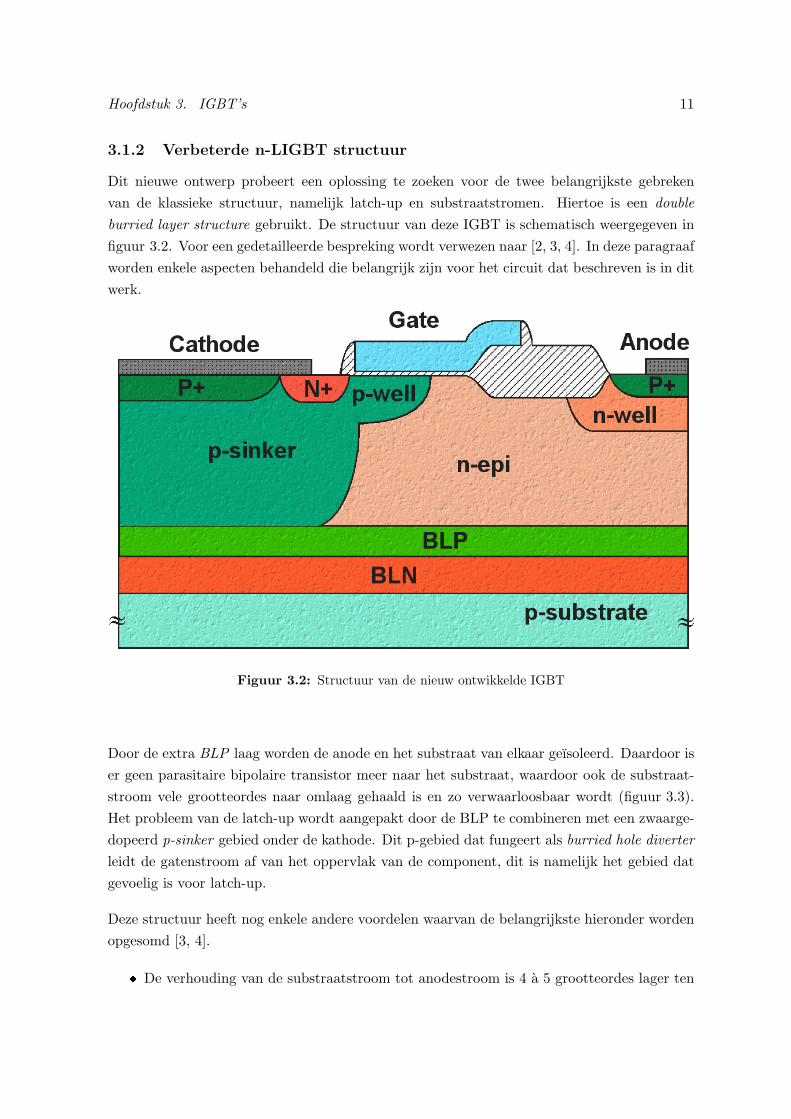
Dit nieuwe ontwerp probeert een oplossing te zoeken voor de twee belangrijkste gebrekenvan de klassieke structuur, namelijk latch-up en substraatstromen. Hiertoe is een doubleburried layer structure gebruikt. De structuur van deze IGBT is schematisch weergegeven infiguur 3.2. Voor een gedetailleerde bespreking wordt verwezen naar [2, 3, 4]. In deze paragraafworden enkele aspecten behandeld die belangrijk zijn voor het circuit dat beschreven is in ditwerk.
Figuur 3.2: Structuur van de nieuw ontwikkelde IGBT
Door de extra BLP laag worden de anode en het substraat van elkaar geısoleerd. Daardoor iser geen parasitaire bipolaire transistor meer naar het substraat, waardoor ook de substraat-stroom vele grootteordes naar omlaag gehaald is en zo verwaarloosbaar wordt (figuur 3.3).Het probleem van de latch-up wordt aangepakt door de BLP te combineren met een zwaarge-dopeerd p-sinker gebied onder de kathode. Dit p-gebied dat fungeert als burried hole diverterleidt de gatenstroom af van het oppervlak van de component, dit is namelijk het gebied datgevoelig is voor latch-up.
Deze structuur heeft nog enkele andere voordelen waarvan de belangrijkste hieronder wordenopgesomd [3, 4].
De verhouding van de substraatstroom tot anodestroom is 4 a 5 grootteordes lager ten
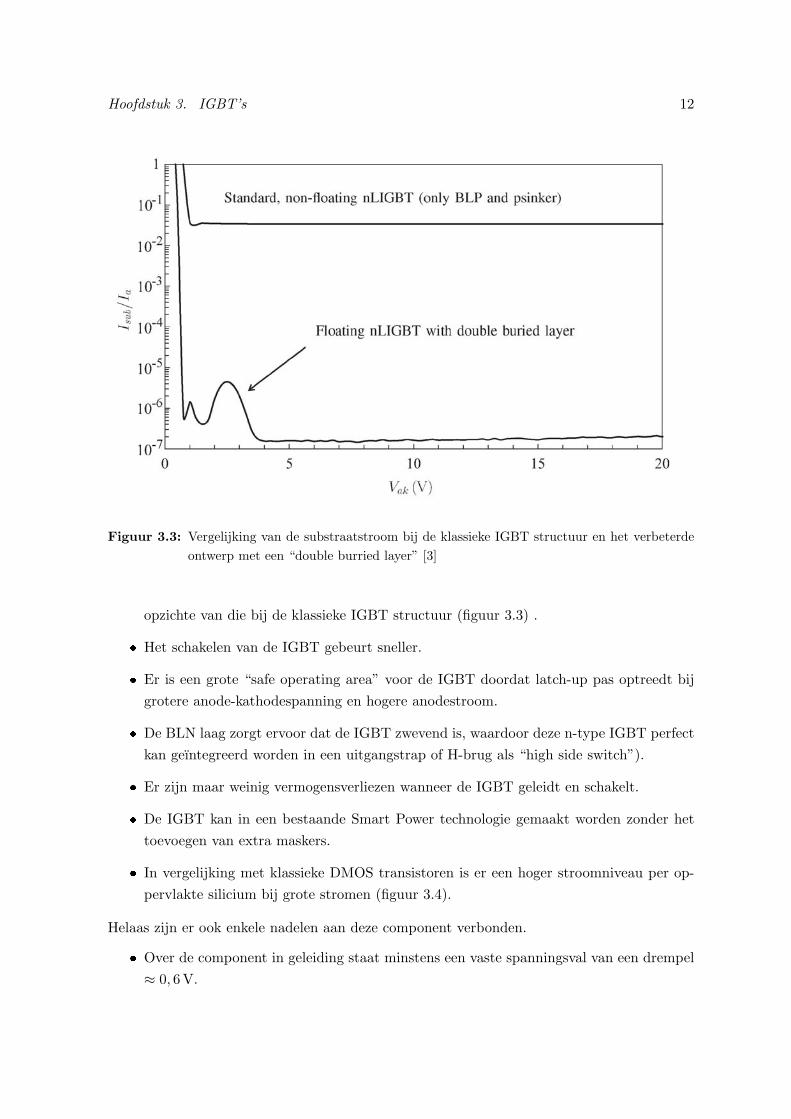
Hoofdstuk 3. IGBT’s 12
Figuur 3.3: Vergelijking van de substraatstroom bij de klassieke IGBT structuur en het verbeterdeontwerp met een “double burried layer” [3]
opzichte van die bij de klassieke IGBT structuur (figuur 3.3) .
Het schakelen van de IGBT gebeurt sneller.
Er is een grote “safe operating area” voor de IGBT doordat latch-up pas optreedt bijgrotere anode-kathodespanning en hogere anodestroom.
De BLN laag zorgt ervoor dat de IGBT zwevend is, waardoor deze n-type IGBT perfectkan geıntegreerd worden in een uitgangstrap of H-brug als “high side switch”).
Er zijn maar weinig vermogensverliezen wanneer de IGBT geleidt en schakelt.
De IGBT kan in een bestaande Smart Power technologie gemaakt worden zonder hettoevoegen van extra maskers.
In vergelijking met klassieke DMOS transistoren is er een hoger stroomniveau per op-pervlakte silicium bij grote stromen (figuur 3.4).
Helaas zijn er ook enkele nadelen aan deze component verbonden.
Over de component in geleiding staat minstens een vaste spanningsval van een drempel≈ 0, 6 V.

Hoofdstuk 3. IGBT’s 13
Latch-up kan nog steeds optreden, hoewel slechts bij hoge waarden van VAK en IA.
Figuur 3.4: Vergelijking van de stroomdichtheid bij de verbeterde IGBT en bij een DMOS transistor
Aan de hand van simulaties kan de hogere stroomdichtheid van een IGBT inderdaad bevestigdworden. De uitgangskarakteristiek van een laterale n-type DMOS (lfndm14 ) met dezelfdestroomvoerende oppervlakte werd vergeleken met deze van de gebruikte IGBT. Op basis vandeze oppervlakte werden volgende afmetingen gekozen:
DMOS (lfndm14 ):W = 2200µm (18 vingers) (3.1)
IGBT:W = 960µm (8 vingers) (3.2)
Op figuur 3.6 is het resultaat weergegeven. Eerst en vooral is de saturatiestroom (bij hogeVDS of VAK) bij de IGBT veel groter. Bij gebruik in de H-brug is het lineaire werkings-gebied echter het interessantst. Voor zeer lage stromen lijkt een DMOS het best aangeziende spanningsval over de component het kleinst is. Hierdoor zal de dissipatie dus ook lagerzijn. De reden hiervoor is de aanwezigheid van de bipolaire structuur in de IGBT. Daar-door zal over de IGBT steeds een drempelspanning staan. Naarmate de stroom toeneemt,presteert de IGBT steeds beter. De lagere aan-weerstand van de IGBT is hiervan de oor-zaak waardoor vanaf een bepaald stroomniveau een IGBT interessanter wordt. Ook moet
Hoofdstuk 3. IGBT’s 14
vermeld worden dat geen volledig equivalente component werd gevonden in de bibliotheekvan de I3T80 technologie om de IGBT mee te vergelijken. De lfndm14 kan eigenlijk maar tot14 V gebruikt worden, waardoor die compacter kan gemaakt worden. Daardoor werden deprestaties (stroom per oppervlakte-eenheid) van de DMOS in deze simulatie overschat en isde IGBT dus beter dan zou blijken uit deze resultaten. Dit is ook op te maken uit de groteverschillen in transistorbreedtes in (3.1) en (3.2), voor een zelfde oppervlakte silicium.
3.2 Elektrische karakteristieken van de IGBT
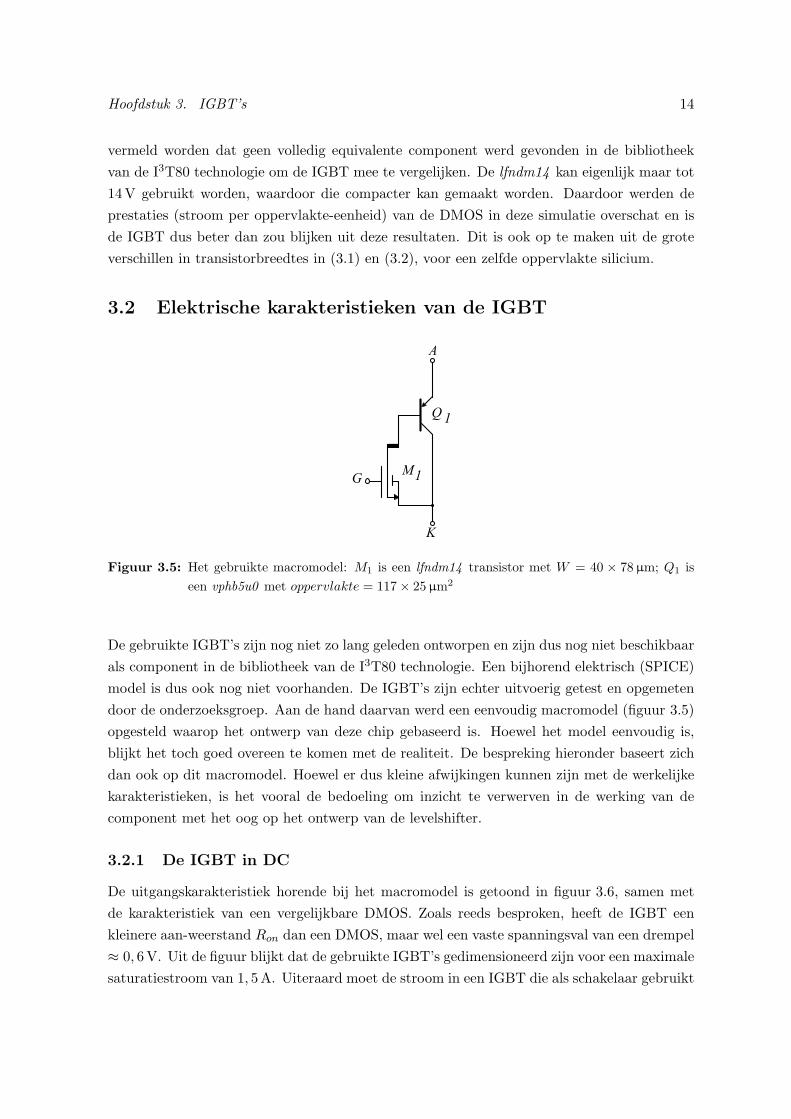
Figuur 3.5: Het gebruikte macromodel: M1 is een lfndm14 transistor met W = 40 × 78 µm; Q1 iseen vphb5u0 met oppervlakte = 117× 25 µm2
De gebruikte IGBT’s zijn nog niet zo lang geleden ontworpen en zijn dus nog niet beschikbaarals component in de bibliotheek van de I3T80 technologie. Een bijhorend elektrisch (SPICE)model is dus ook nog niet voorhanden. De IGBT’s zijn echter uitvoerig getest en opgemetendoor de onderzoeksgroep. Aan de hand daarvan werd een eenvoudig macromodel (figuur 3.5)opgesteld waarop het ontwerp van deze chip gebaseerd is. Hoewel het model eenvoudig is,blijkt het toch goed overeen te komen met de realiteit. De bespreking hieronder baseert zichdan ook op dit macromodel. Hoewel er dus kleine afwijkingen kunnen zijn met de werkelijkekarakteristieken, is het vooral de bedoeling om inzicht te verwerven in de werking van decomponent met het oog op het ontwerp van de levelshifter.
3.2.1 De IGBT in DC
De uitgangskarakteristiek horende bij het macromodel is getoond in figuur 3.6, samen metde karakteristiek van een vergelijkbare DMOS. Zoals reeds besproken, heeft de IGBT eenkleinere aan-weerstand Ron dan een DMOS, maar wel een vaste spanningsval van een drempel≈ 0, 6 V. Uit de figuur blijkt dat de gebruikte IGBT’s gedimensioneerd zijn voor een maximalesaturatiestroom van 1, 5 A. Uiteraard moet de stroom in een IGBT die als schakelaar gebruikt

Hoofdstuk 3. IGBT’s 15
wordt, een stuk lager blijven dan deze saturatiestroom. Er is gekozen om de stroom door deIGBT’s te beperken tot 0, 5 A (zie Hoofdstuk 6 De H-brug met protectiecircuits). Uit figuur 3.6blijkt dat de IGBT in dat geval nog steeds in zijn lineair gebied werkt en de spanningsvalerover nog aanvaardbaar is, hetgeen gewenst is.
Figuur 3.6: Vergelijking van de stroomdichtheid bij de IGBT (IA) en bij een DMOS (ID) doorhet uitvoeren van een simulatie met componenten die evenveel siliciumruimte in beslagnemen. Voor de IGBT werd het macromodel uit figuur 3.5 gebruikt.
Hoofdstuk 3. IGBT’s 16
3.2.2 Safe Operating Area
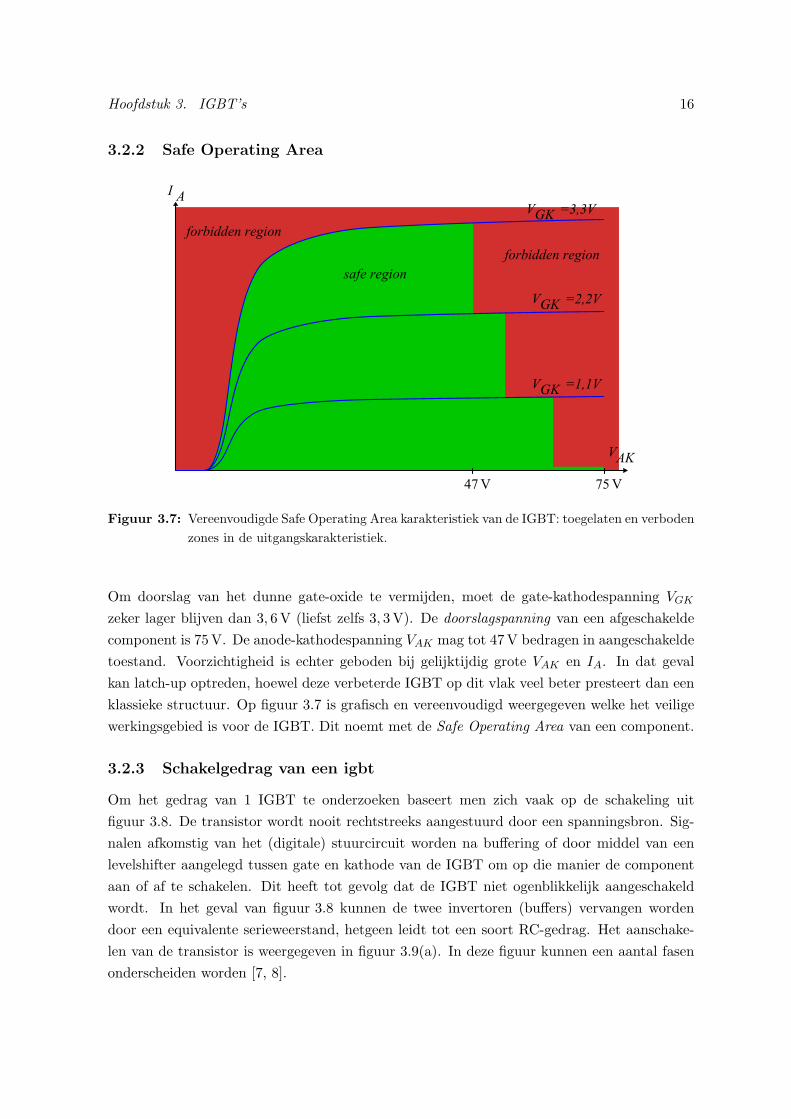
Figuur 3.7: Vereenvoudigde Safe Operating Area karakteristiek van de IGBT: toegelaten en verbodenzones in de uitgangskarakteristiek.
Om doorslag van het dunne gate-oxide te vermijden, moet de gate-kathodespanning VGK
zeker lager blijven dan 3, 6 V (liefst zelfs 3, 3 V). De doorslagspanning van een afgeschakeldecomponent is 75 V. De anode-kathodespanning VAK mag tot 47 V bedragen in aangeschakeldetoestand. Voorzichtigheid is echter geboden bij gelijktijdig grote VAK en IA. In dat gevalkan latch-up optreden, hoewel deze verbeterde IGBT op dit vlak veel beter presteert dan eenklassieke structuur. Op figuur 3.7 is grafisch en vereenvoudigd weergegeven welke het veiligewerkingsgebied is voor de IGBT. Dit noemt met de Safe Operating Area van een component.
3.2.3 Schakelgedrag van een igbt
Om het gedrag van 1 IGBT te onderzoeken baseert men zich vaak op de schakeling uitfiguur 3.8. De transistor wordt nooit rechtstreeks aangestuurd door een spanningsbron. Sig-nalen afkomstig van het (digitale) stuurcircuit worden na buffering of door middel van eenlevelshifter aangelegd tussen gate en kathode van de IGBT om op die manier de componentaan of af te schakelen. Dit heeft tot gevolg dat de IGBT niet ogenblikkelijk aangeschakeldwordt. In het geval van figuur 3.8 kunnen de twee invertoren (buffers) vervangen wordendoor een equivalente serieweerstand, hetgeen leidt tot een soort RC-gedrag. Het aanschake-len van de transistor is weergegeven in figuur 3.9(a). In deze figuur kunnen een aantal fasenonderscheiden worden [7, 8].
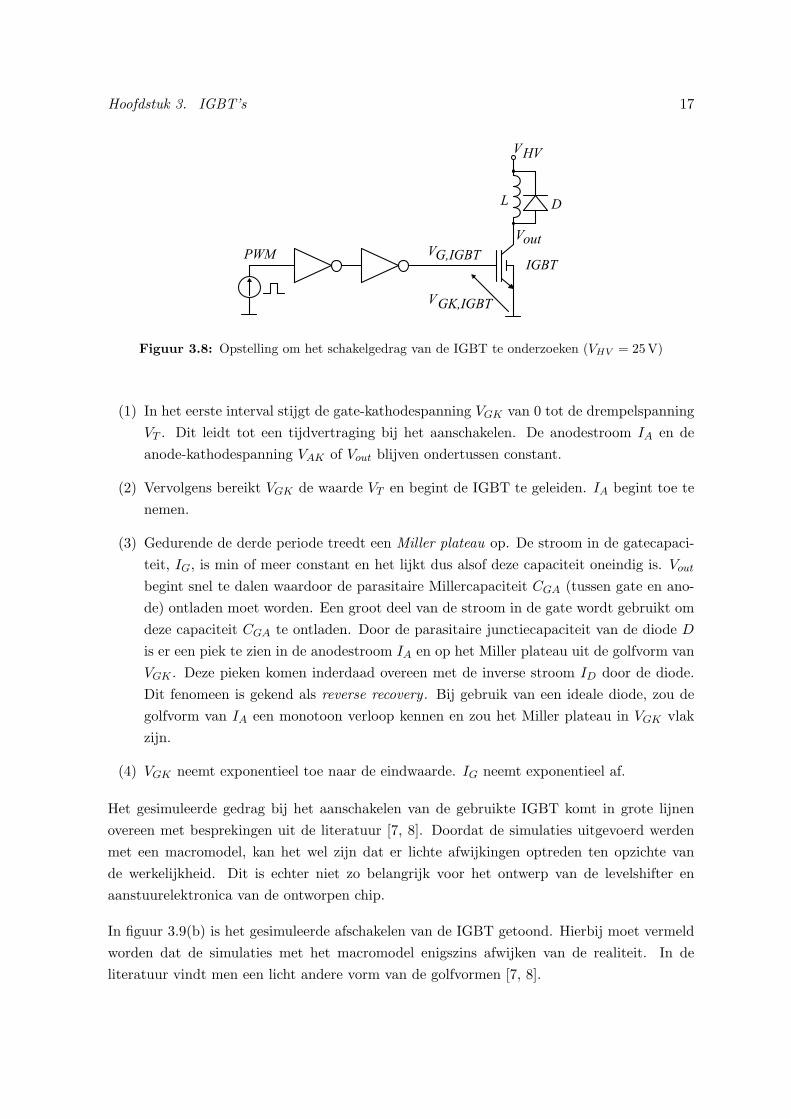
Hoofdstuk 3. IGBT’s 17
Figuur 3.8: Opstelling om het schakelgedrag van de IGBT te onderzoeken (VHV = 25V)
(1) In het eerste interval stijgt de gate-kathodespanning VGK van 0 tot de drempelspanningVT . Dit leidt tot een tijdvertraging bij het aanschakelen. De anodestroom IA en deanode-kathodespanning VAK of Vout blijven ondertussen constant.
(2) Vervolgens bereikt VGK de waarde VT en begint de IGBT te geleiden. IA begint toe tenemen.
(3) Gedurende de derde periode treedt een Miller plateau op. De stroom in de gatecapaci-teit, IG, is min of meer constant en het lijkt dus alsof deze capaciteit oneindig is. Vout
begint snel te dalen waardoor de parasitaire Millercapaciteit CGA (tussen gate en ano-de) ontladen moet worden. Een groot deel van de stroom in de gate wordt gebruikt omdeze capaciteit CGA te ontladen. Door de parasitaire junctiecapaciteit van de diode D
is er een piek te zien in de anodestroom IA en op het Miller plateau uit de golfvorm vanVGK . Deze pieken komen inderdaad overeen met de inverse stroom ID door de diode.Dit fenomeen is gekend als reverse recovery . Bij gebruik van een ideale diode, zou degolfvorm van IA een monotoon verloop kennen en zou het Miller plateau in VGK vlakzijn.
(4) VGK neemt exponentieel toe naar de eindwaarde. IG neemt exponentieel af.
Het gesimuleerde gedrag bij het aanschakelen van de gebruikte IGBT komt in grote lijnenovereen met besprekingen uit de literatuur [7, 8]. Doordat de simulaties uitgevoerd werdenmet een macromodel, kan het wel zijn dat er lichte afwijkingen optreden ten opzichte vande werkelijkheid. Dit is echter niet zo belangrijk voor het ontwerp van de levelshifter enaanstuurelektronica van de ontworpen chip.
In figuur 3.9(b) is het gesimuleerde afschakelen van de IGBT getoond. Hierbij moet vermeldworden dat de simulaties met het macromodel enigszins afwijken van de realiteit. In deliteratuur vindt men een licht andere vorm van de golfvormen [7, 8].

Hoofdstuk 3. IGBT’s 18
(a) Aanschakelen (b) Afschakelen
Figuur 3.9: Simulatieresultaten van de opstelling uit figuur 3.8 met het macromodel voor de IGBTuit figuur 3.5.
(1) De gatespanning VGK begint af te nemen en IA en Vout blijven min of meer constant.
(2) VGK bereikt de waarde waarbij het Miller plateau optreedt en blijft gedurende dezeperiode constant. Vout begint toe te nemen. In tegenstelling tot de simulatie met hetmacromodel, zal Vout in realiteit gedurende deze fase quasi de eindwaarde bereiken.Daarom noemt met dit ook de voltage rise phase van het afschakelen.
(3) IA daalt snel en ook VGK neemt verder af. Aangezien de stroom door de spoel L continumoet zijn, begint de vrijloopdiode D te geleiden.
(4) Wanneer VGK lager wordt dan VT schakelt de MOS transistor, die deel uitmaakt van hetingangsgedeelte van de IGBT, af. IA neemt verder af met een staartstroom. Dit is hetgevolg van recombinatie van minoritaire ladingsdragers in het substraat. Het is duidelijkdat deze staartstroom verantwoordelijk is voor een groot deel van de schakelverliezen.
Zoals reeds vermeld wijkt deze simulatie af van het betere schakelgedrag in de realiteit. Hetafschakelen van de gebruikte IGBT werd reeds opgemeten [4] en is weergegeven in figuur 3.10.Tijdens de “voltage rise phase” stijgt Vout en blijft de stroom constant. In de fase (3) daarnadaalt de stroom bijna ogenblikkelijk en is er geen staartstroom zoals men zou verwachten bij

Hoofdstuk 3. IGBT’s 19
Figuur 3.10: Opgemeten golfvorm van de anodestroom in de IGBT bij het afschakelen (opstelling uitfiguur 3.8 met L = 2, 35 mH en VHV = 50 V). De gate wordt gedurende 500 ns vollediggeopend en vervolgens afgeschakeld. Na de voltage rise phase daalt de anodestroombijna ogenblikkelijk naar 0. De invloed van de uitgangscapaciteit bij het afschakelen isook getoond [4].
IGBT’s. Dit is te danken aan de aanwezigheid van de p-sinker en BLP. Voor meer informatiehieromtrent wordt verwezen naar [4].

Hoofdstuk 4
Generatie van PWM-pulsen
4.1 Inleiding
In dit werk is ervoor gekozen om de PWM-pulsen op een digitale [9] wijze te genereren.Op deze manier wordt het ontwerp van een schakeling met analoge componenten vermeden,wat uiteraard tijdrovender en kritischer is. Een digitale realisatie neemt ook zeer weinigsiliciumruimte in beslag. In dit hoofdstuk wordt de digitale opwekking van PWM-pulsen watnader bekeken.
4.2 Principe
Voor de sturing van een H-brug zijn 2 complementaire PWM-pulsen nodig (zie 2.1.1 Aanstu-ring van een H-brug). Zoals reeds in vorige paragraaf vermeld, worden de PWM-pulsen indeze thesis op een digitale wijze gegenereerd. Hiertoe wordt vertrokken van een eenvoudigemaar synchrone teller.
Beschouw een synchrone teller die voortdurend van begin- tot eindwaarde telt. Dit kan als hetware gezien worden als een digitaal zaagtandsignaal. Het synchrone karakter van de teller ishierbij noodzakelijk om van een mooi zaagtandsignaal te kunnen spreken. Bij een asynchroneteller zou het signaal immers niet-gewenste overgangsverschijnselen vertonen.
Omdat een dode tijd tussen de 2 pulsen nodig is om kortsluitstromen in de H-brug te ver-mijden, zal een zaagtandsignaal hier niet volstaan. Een dode tijd τ is, zoals reeds eerdervermeld, veel makkelijker te realiseren indien gebruik gemaakt wordt van een driehoekssig-naal en 2 referentieniveaus die een zekere waarde ∆ van elkaar verschillen. De teller die alsstartpunt beschouwd werd dient dus zo gemodificeerd te worden dat deze achtereenvolgensop- en aftelt. Op deze wijze wordt een digitaal driehoekssignaal verkregen (zie ook figuur 4.1).
Eenmaal het driehoekssignaal beschikbaar is, wordt m.b.v. een logisch circuit (op te vatten
20
Hoofdstuk 4. Generatie van PWM-pulsen 21
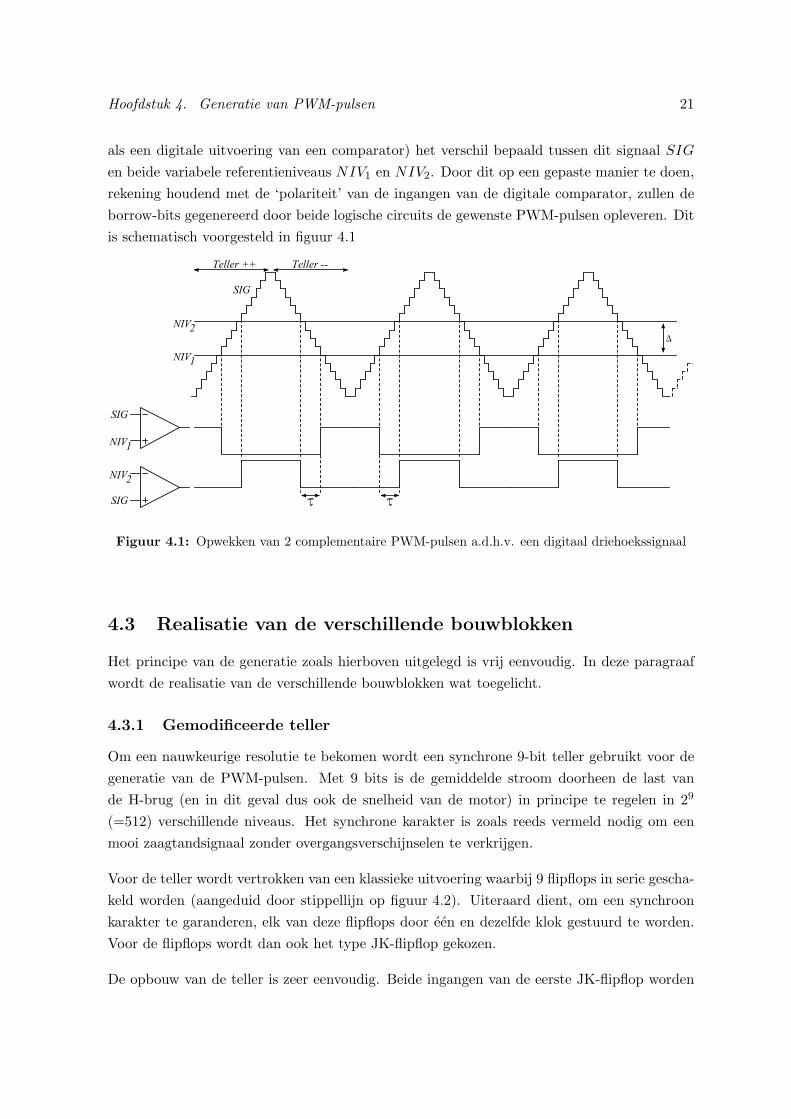
als een digitale uitvoering van een comparator) het verschil bepaald tussen dit signaal SIG
en beide variabele referentieniveaus NIV1 en NIV2. Door dit op een gepaste manier te doen,rekening houdend met de ‘polariteit’ van de ingangen van de digitale comparator, zullen deborrow-bits gegenereerd door beide logische circuits de gewenste PWM-pulsen opleveren. Ditis schematisch voorgesteld in figuur 4.1
Figuur 4.1: Opwekken van 2 complementaire PWM-pulsen a.d.h.v. een digitaal driehoekssignaal
4.3 Realisatie van de verschillende bouwblokken
Het principe van de generatie zoals hierboven uitgelegd is vrij eenvoudig. In deze paragraafwordt de realisatie van de verschillende bouwblokken wat toegelicht.
4.3.1 Gemodificeerde teller
Om een nauwkeurige resolutie te bekomen wordt een synchrone 9-bit teller gebruikt voor degeneratie van de PWM-pulsen. Met 9 bits is de gemiddelde stroom doorheen de last vande H-brug (en in dit geval dus ook de snelheid van de motor) in principe te regelen in 29
(=512) verschillende niveaus. Het synchrone karakter is zoals reeds vermeld nodig om eenmooi zaagtandsignaal zonder overgangsverschijnselen te verkrijgen.
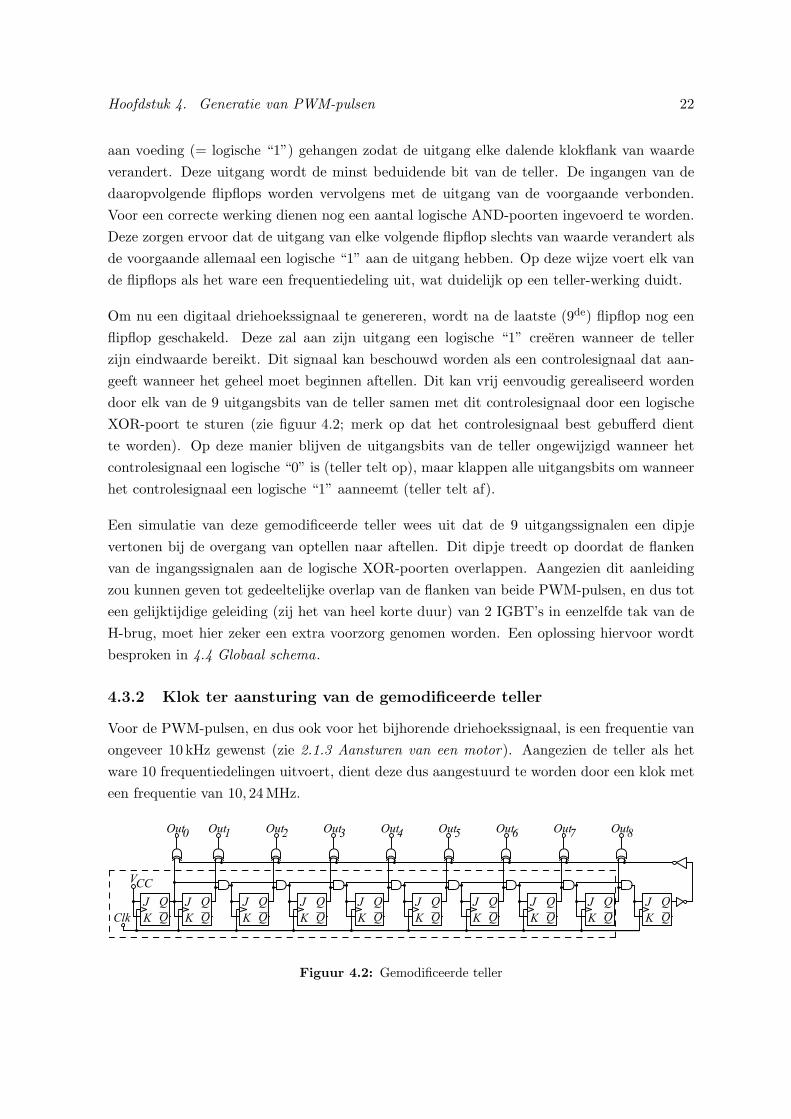
Voor de teller wordt vertrokken van een klassieke uitvoering waarbij 9 flipflops in serie gescha-keld worden (aangeduid door stippellijn op figuur 4.2). Uiteraard dient, om een synchroonkarakter te garanderen, elk van deze flipflops door een en dezelfde klok gestuurd te worden.Voor de flipflops wordt dan ook het type JK-flipflop gekozen.
De opbouw van de teller is zeer eenvoudig. Beide ingangen van de eerste JK-flipflop worden
Hoofdstuk 4. Generatie van PWM-pulsen 22
aan voeding (= logische “1”) gehangen zodat de uitgang elke dalende klokflank van waardeverandert. Deze uitgang wordt de minst beduidende bit van de teller. De ingangen van dedaaropvolgende flipflops worden vervolgens met de uitgang van de voorgaande verbonden.Voor een correcte werking dienen nog een aantal logische AND-poorten ingevoerd te worden.Deze zorgen ervoor dat de uitgang van elke volgende flipflop slechts van waarde verandert alsde voorgaande allemaal een logische “1” aan de uitgang hebben. Op deze wijze voert elk vande flipflops als het ware een frequentiedeling uit, wat duidelijk op een teller-werking duidt.
Om nu een digitaal driehoekssignaal te genereren, wordt na de laatste (9de) flipflop nog eenflipflop geschakeld. Deze zal aan zijn uitgang een logische “1” creeren wanneer de tellerzijn eindwaarde bereikt. Dit signaal kan beschouwd worden als een controlesignaal dat aan-geeft wanneer het geheel moet beginnen aftellen. Dit kan vrij eenvoudig gerealiseerd wordendoor elk van de 9 uitgangsbits van de teller samen met dit controlesignaal door een logischeXOR-poort te sturen (zie figuur 4.2; merk op dat het controlesignaal best gebufferd dientte worden). Op deze manier blijven de uitgangsbits van de teller ongewijzigd wanneer hetcontrolesignaal een logische “0” is (teller telt op), maar klappen alle uitgangsbits om wanneerhet controlesignaal een logische “1” aanneemt (teller telt af).
Een simulatie van deze gemodificeerde teller wees uit dat de 9 uitgangssignalen een dipjevertonen bij de overgang van optellen naar aftellen. Dit dipje treedt op doordat de flankenvan de ingangssignalen aan de logische XOR-poorten overlappen. Aangezien dit aanleidingzou kunnen geven tot gedeeltelijke overlap van de flanken van beide PWM-pulsen, en dus toteen gelijktijdige geleiding (zij het van heel korte duur) van 2 IGBT’s in eenzelfde tak van deH-brug, moet hier zeker een extra voorzorg genomen worden. Een oplossing hiervoor wordtbesproken in 4.4 Globaal schema.
4.3.2 Klok ter aansturing van de gemodificeerde teller
Voor de PWM-pulsen, en dus ook voor het bijhorende driehoekssignaal, is een frequentie vanongeveer 10 kHz gewenst (zie 2.1.3 Aansturen van een motor). Aangezien de teller als hetware 10 frequentiedelingen uitvoert, dient deze dus aangestuurd te worden door een klok meteen frequentie van 10, 24 MHz.
Figuur 4.2: Gemodificeerde teller
Hoofdstuk 4. Generatie van PWM-pulsen 23
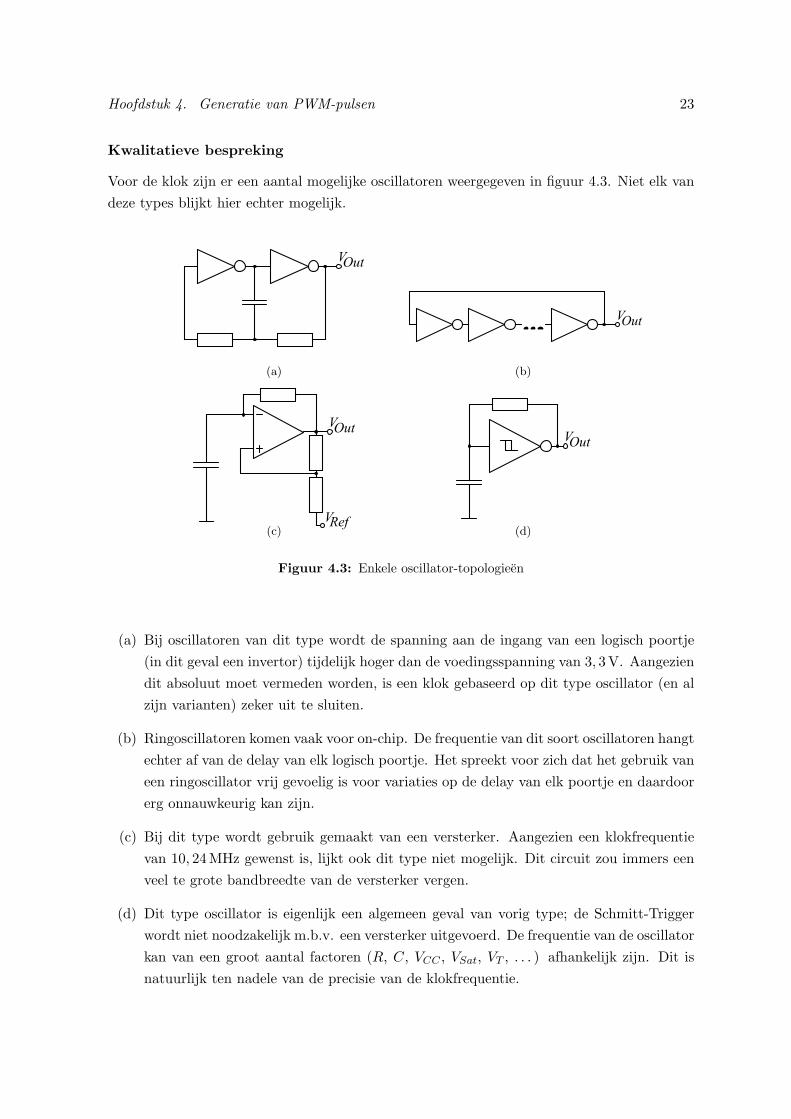
Kwalitatieve bespreking
Voor de klok zijn er een aantal mogelijke oscillatoren weergegeven in figuur 4.3. Niet elk vandeze types blijkt hier echter mogelijk.
(a) (b)
(c) (d)
Figuur 4.3: Enkele oscillator-topologieen
(a) Bij oscillatoren van dit type wordt de spanning aan de ingang van een logisch poortje(in dit geval een invertor) tijdelijk hoger dan de voedingsspanning van 3, 3 V. Aangeziendit absoluut moet vermeden worden, is een klok gebaseerd op dit type oscillator (en alzijn varianten) zeker uit te sluiten.
(b) Ringoscillatoren komen vaak voor on-chip. De frequentie van dit soort oscillatoren hangtechter af van de delay van elk logisch poortje. Het spreekt voor zich dat het gebruik vaneen ringoscillator vrij gevoelig is voor variaties op de delay van elk poortje en daardoorerg onnauwkeurig kan zijn.
(c) Bij dit type wordt gebruik gemaakt van een versterker. Aangezien een klokfrequentievan 10, 24 MHz gewenst is, lijkt ook dit type niet mogelijk. Dit circuit zou immers eenveel te grote bandbreedte van de versterker vergen.
(d) Dit type oscillator is eigenlijk een algemeen geval van vorig type; de Schmitt-Triggerwordt niet noodzakelijk m.b.v. een versterker uitgevoerd. De frequentie van de oscillatorkan van een groot aantal factoren (R, C, VCC , VSat, VT , . . . ) afhankelijk zijn. Dit isnatuurlijk ten nadele van de precisie van de klokfrequentie.
Hoofdstuk 4. Generatie van PWM-pulsen 24
Uit voorgaande bespreking volgt dat een uitvoering van het type (d) de beste keuze lijkt.Voor de Schmitt-Trigger dient echter wel een realisatie zonder versterkers gebruikt te worden.
Schmitt-Trigger
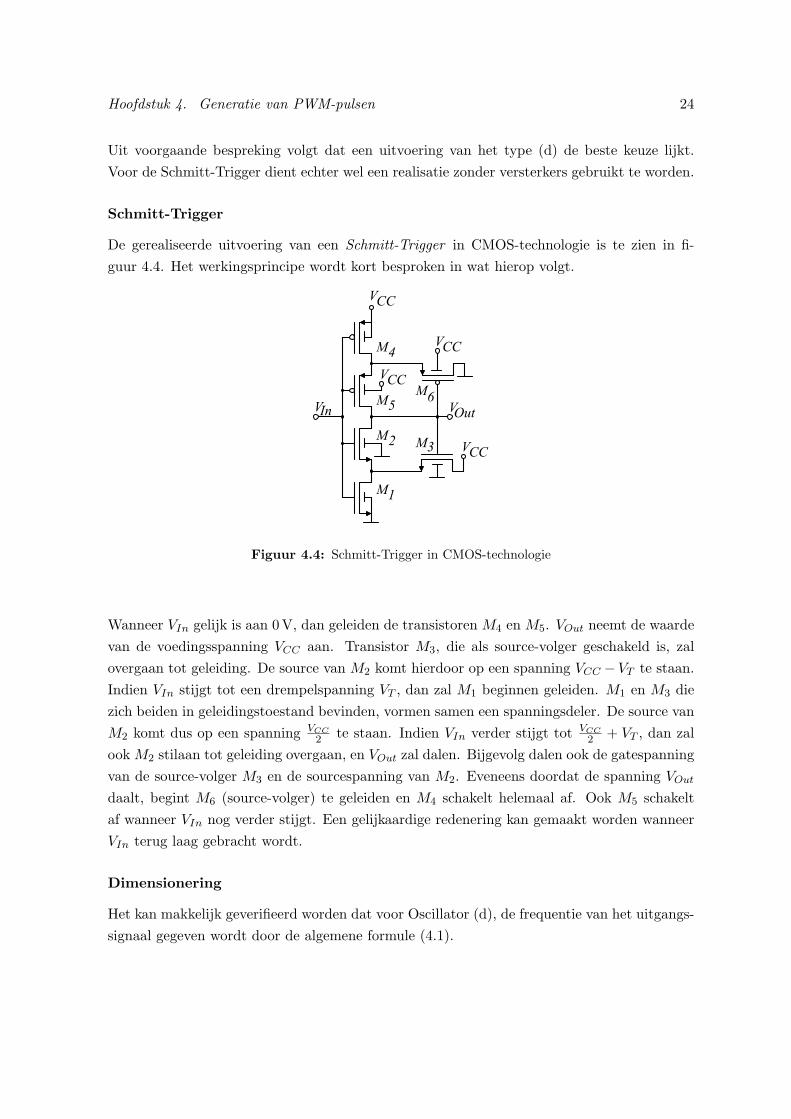
De gerealiseerde uitvoering van een Schmitt-Trigger in CMOS-technologie is te zien in fi-guur 4.4. Het werkingsprincipe wordt kort besproken in wat hierop volgt.
Figuur 4.4: Schmitt-Trigger in CMOS-technologie
Wanneer VIn gelijk is aan 0V, dan geleiden de transistoren M4 en M5. VOut neemt de waardevan de voedingsspanning VCC aan. Transistor M3, die als source-volger geschakeld is, zalovergaan tot geleiding. De source van M2 komt hierdoor op een spanning VCC −VT te staan.Indien VIn stijgt tot een drempelspanning VT , dan zal M1 beginnen geleiden. M1 en M3 diezich beiden in geleidingstoestand bevinden, vormen samen een spanningsdeler. De source vanM2 komt dus op een spanning VCC
2 te staan. Indien VIn verder stijgt tot VCC2 + VT , dan zal
ook M2 stilaan tot geleiding overgaan, en VOut zal dalen. Bijgevolg dalen ook de gatespanningvan de source-volger M3 en de sourcespanning van M2. Eveneens doordat de spanning VOut
daalt, begint M6 (source-volger) te geleiden en M4 schakelt helemaal af. Ook M5 schakeltaf wanneer VIn nog verder stijgt. Een gelijkaardige redenering kan gemaakt worden wanneerVIn terug laag gebracht wordt.
Dimensionering
Het kan makkelijk geverifieerd worden dat voor Oscillator (d), de frequentie van het uitgangs-signaal gegeven wordt door de algemene formule (4.1).

Hoofdstuk 4. Generatie van PWM-pulsen 25
f =1
RC ln[(
V2−V −sat
V1−V −sat
)(V1−V +
sat
V2−V +sat
)] (4.1)
Hierbij stellen V1 en V2 in (4.1) respectievelijk het laagste en hoogste kippunt van de Schmitt-Trigger voor, terwijl V −
sat en V +sat respectievelijk de lage en hoge saturatiespanning van de
Schmitt-Trigger voorstellen.
De uitgang van de Schmitt-Trigger schakelt in het ideale geval tussen 0V en VCC . Invullenvan deze waarden voor V −
sat en V +sat in de algemene formule (4.1) leidt tot (4.2).
f =1
RC ln[(
V2V1
)(V1−VCCV2−VCC
)] (4.2)
De frequentie van de klok blijkt dus afhankelijk te zijn van de kippunten, de voedingsspanningen de tijdsconstante RC.
De theoretische waarden voor de kippunten werden reeds bepaald bij de bespreking van deSchmitt-Trigger als zijnde V1 = VCC
2 − VT en V2 = VCC2 + VT . Uitvoeren van een simulatie,
dat met zijn nauwkeurigere modellen een betere schatting geeft, levert uiteindelijk volgendewaarden voor de kippunten: V1 = 1, 17 V en V2 = 2, 02 V. Eenmaal deze waarden gekend,rest er enkel nog een RC-circuit dat gedimensioneerd moet worden. Hierbij wordt in achtgenomen dat de oppervlaktes van de weerstand en capaciteit ongeveer even groot moeten zijnom tot een minimaal oppervlaktegebruik in de layout te komen. Dit kan makkelijk nagegaanworden door een extremumonderzoek uit te voeren op de oppervlakte-functie (4.3), waarinW de breedte van een ’square’ voorstelt van de weerstand R.
A(R,C)[µm2] =R
1 kΩW 2[µm2] +
C
1, 5 fF/µm2(4.3)
Bovenstaande opmerking en vergelijking (4.2) leveren dus een eerste schatting voor R en C.Het uitvoeren van enkele simulaties levert uiteindelijk de definitieve waarden (4.4). Bij hetbepalen van deze definitieve waarden wordt er op simulaties gesteund omdat de modellen diein Cadence zijn opgenomen, nauwkeuriger zijn.R = 100 kΩ
C = 0, 74 pF(4.4)
De gedimensioneerde versie van de klok is afgebeeld in figuur 4.5. Bemerk de aanwezigheidvan een buffer aan de uitgang om de klokflanken steiler te maken.
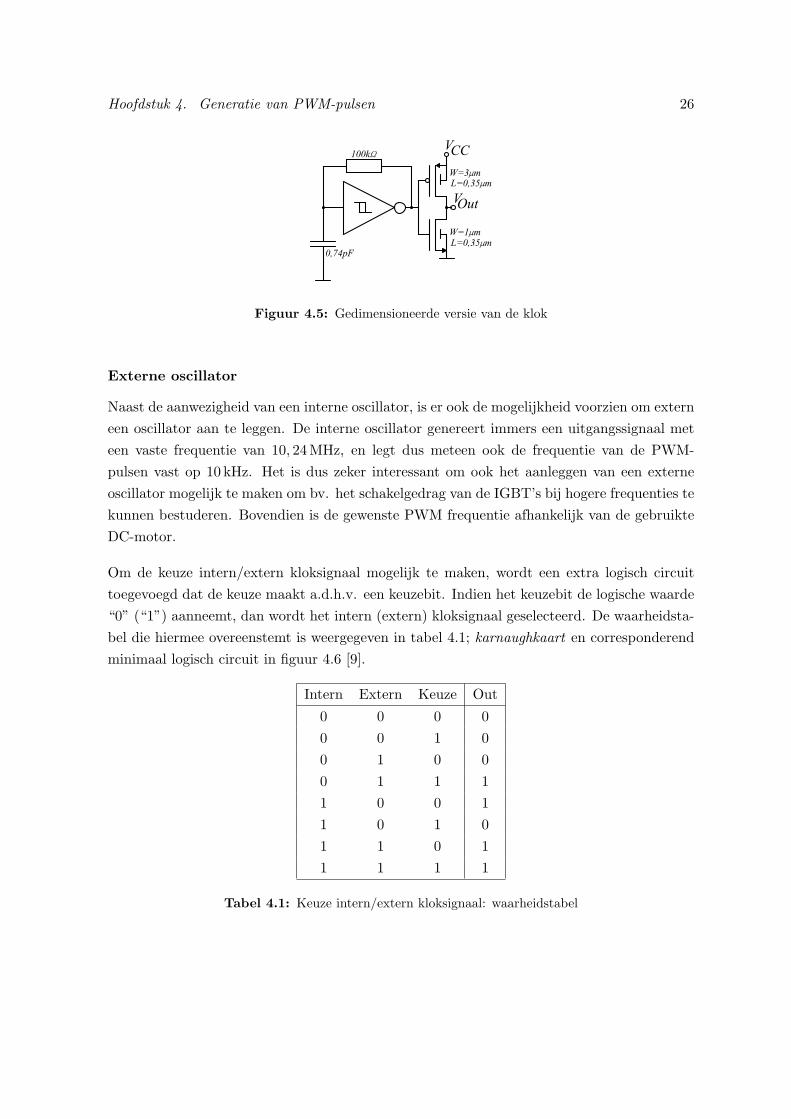
Hoofdstuk 4. Generatie van PWM-pulsen 26
Figuur 4.5: Gedimensioneerde versie van de klok
Externe oscillator
Naast de aanwezigheid van een interne oscillator, is er ook de mogelijkheid voorzien om externeen oscillator aan te leggen. De interne oscillator genereert immers een uitgangssignaal meteen vaste frequentie van 10, 24 MHz, en legt dus meteen ook de frequentie van de PWM-pulsen vast op 10 kHz. Het is dus zeker interessant om ook het aanleggen van een externeoscillator mogelijk te maken om bv. het schakelgedrag van de IGBT’s bij hogere frequenties tekunnen bestuderen. Bovendien is de gewenste PWM frequentie afhankelijk van de gebruikteDC-motor.
Om de keuze intern/extern kloksignaal mogelijk te maken, wordt een extra logisch circuittoegevoegd dat de keuze maakt a.d.h.v. een keuzebit. Indien het keuzebit de logische waarde“0” (“1”) aanneemt, dan wordt het intern (extern) kloksignaal geselecteerd. De waarheidsta-bel die hiermee overeenstemt is weergegeven in tabel 4.1; karnaughkaart en corresponderendminimaal logisch circuit in figuur 4.6 [9].
Intern Extern Keuze Out
0 0 0 00 0 1 00 1 0 00 1 1 11 0 0 11 0 1 01 1 0 11 1 1 1
Tabel 4.1: Keuze intern/extern kloksignaal: waarheidstabel
Hoofdstuk 4. Generatie van PWM-pulsen 27
(a) Karnaughkaart (b) Logisch circuit
Figuur 4.6: Keuze intern/extern kloksignaal: karnaughkaart (a) en logisch circuit (b)
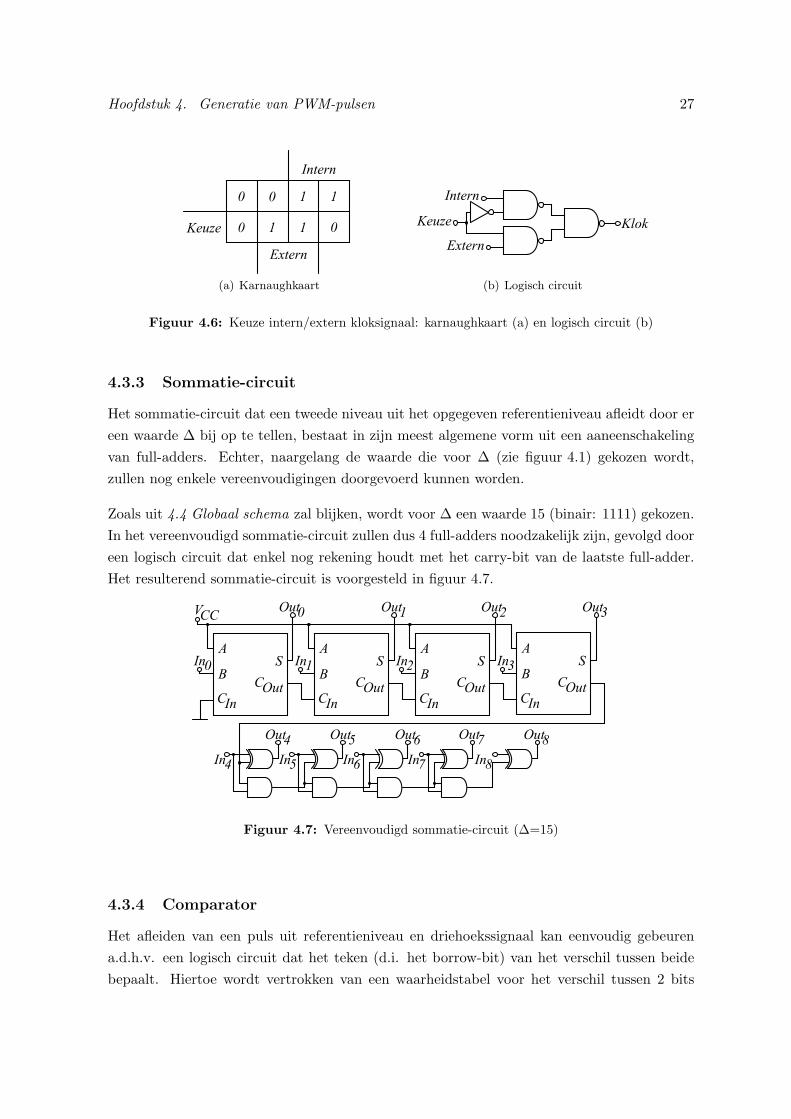
4.3.3 Sommatie-circuit
Het sommatie-circuit dat een tweede niveau uit het opgegeven referentieniveau afleidt door ereen waarde ∆ bij op te tellen, bestaat in zijn meest algemene vorm uit een aaneenschakelingvan full-adders. Echter, naargelang de waarde die voor ∆ (zie figuur 4.1) gekozen wordt,zullen nog enkele vereenvoudigingen doorgevoerd kunnen worden.
Zoals uit 4.4 Globaal schema zal blijken, wordt voor ∆ een waarde 15 (binair: 1111) gekozen.In het vereenvoudigd sommatie-circuit zullen dus 4 full-adders noodzakelijk zijn, gevolgd dooreen logisch circuit dat enkel nog rekening houdt met het carry-bit van de laatste full-adder.Het resulterend sommatie-circuit is voorgesteld in figuur 4.7.
Figuur 4.7: Vereenvoudigd sommatie-circuit (∆=15)
4.3.4 Comparator
Het afleiden van een puls uit referentieniveau en driehoekssignaal kan eenvoudig gebeurena.d.h.v. een logisch circuit dat het teken (d.i. het borrow-bit) van het verschil tussen beidebepaalt. Hiertoe wordt vertrokken van een waarheidstabel voor het verschil tussen 2 bits
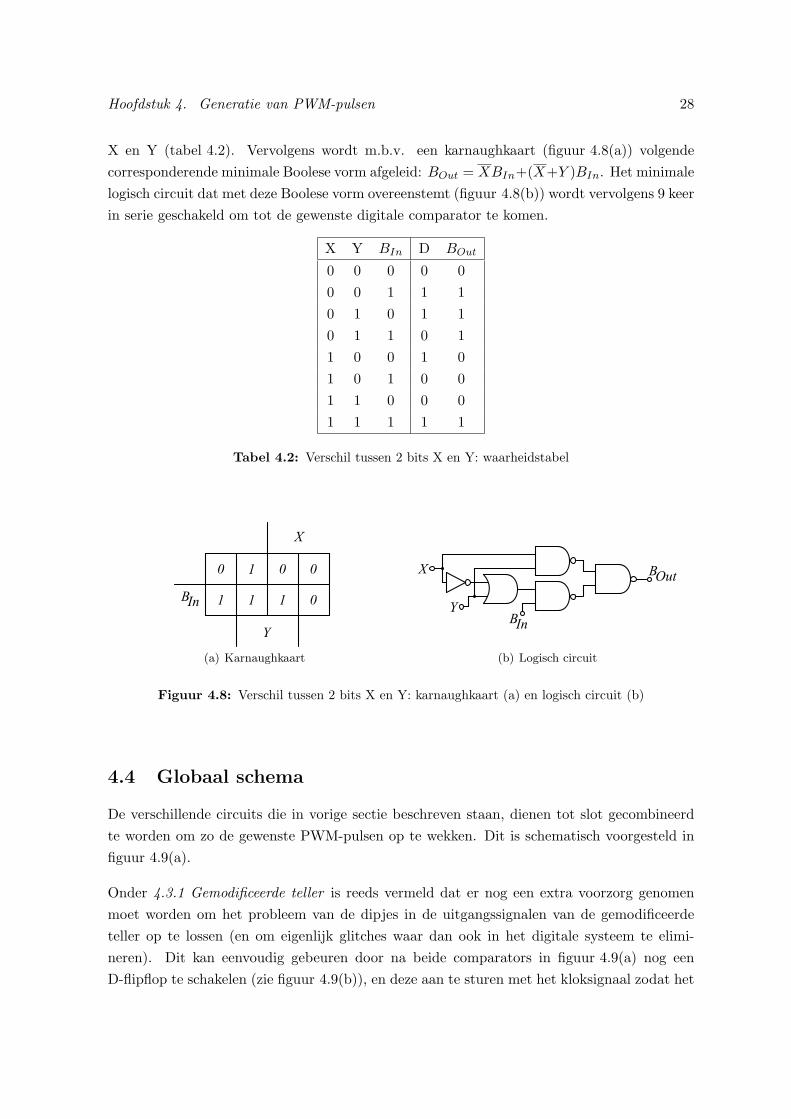
Hoofdstuk 4. Generatie van PWM-pulsen 28
X en Y (tabel 4.2). Vervolgens wordt m.b.v. een karnaughkaart (figuur 4.8(a)) volgendecorresponderende minimale Boolese vorm afgeleid: BOut = XBIn+(X+Y )BIn. Het minimalelogisch circuit dat met deze Boolese vorm overeenstemt (figuur 4.8(b)) wordt vervolgens 9 keerin serie geschakeld om tot de gewenste digitale comparator te komen.
X Y BIn D BOut
0 0 0 0 00 0 1 1 10 1 0 1 10 1 1 0 11 0 0 1 01 0 1 0 01 1 0 0 01 1 1 1 1
Tabel 4.2: Verschil tussen 2 bits X en Y: waarheidstabel
(a) Karnaughkaart (b) Logisch circuit
Figuur 4.8: Verschil tussen 2 bits X en Y: karnaughkaart (a) en logisch circuit (b)
4.4 Globaal schema
De verschillende circuits die in vorige sectie beschreven staan, dienen tot slot gecombineerdte worden om zo de gewenste PWM-pulsen op te wekken. Dit is schematisch voorgesteld infiguur 4.9(a).
Onder 4.3.1 Gemodificeerde teller is reeds vermeld dat er nog een extra voorzorg genomenmoet worden om het probleem van de dipjes in de uitgangssignalen van de gemodificeerdeteller op te lossen (en om eigenlijk glitches waar dan ook in het digitale systeem te elimi-neren). Dit kan eenvoudig gebeuren door na beide comparators in figuur 4.9(a) nog eenD-flipflop te schakelen (zie figuur 4.9(b)), en deze aan te sturen met het kloksignaal zodat het
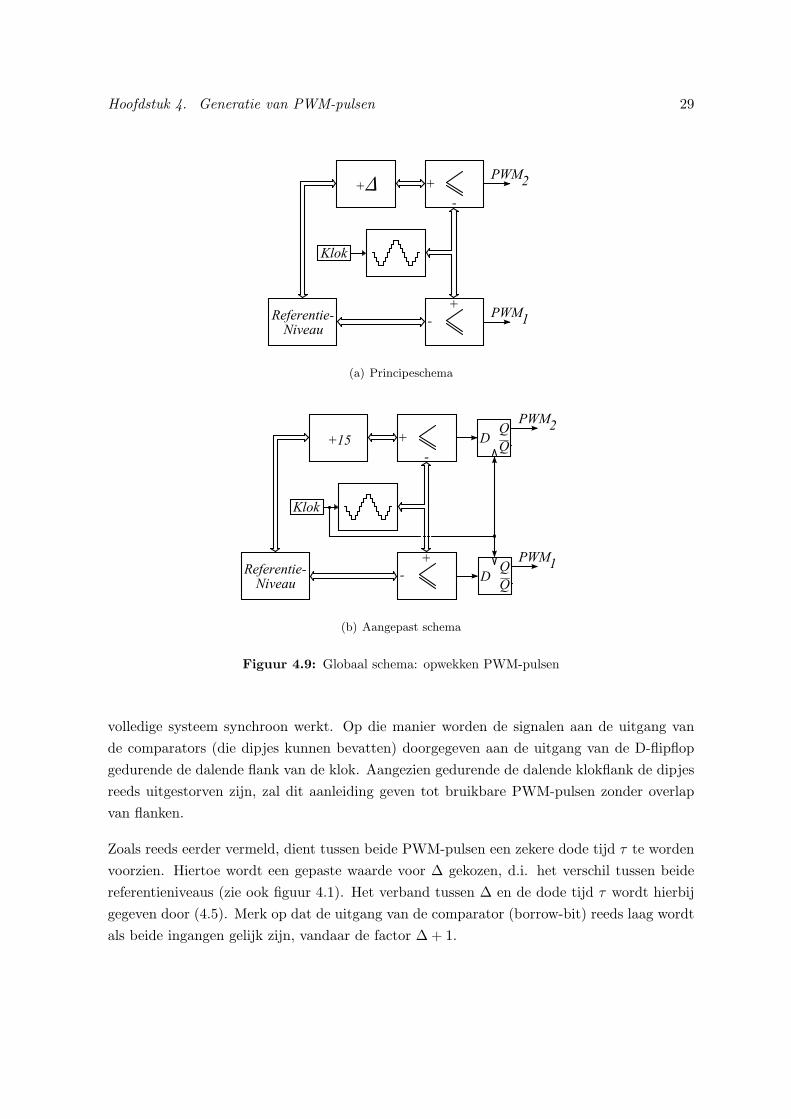
Hoofdstuk 4. Generatie van PWM-pulsen 29
(a) Principeschema
(b) Aangepast schema
Figuur 4.9: Globaal schema: opwekken PWM-pulsen
volledige systeem synchroon werkt. Op die manier worden de signalen aan de uitgang vande comparators (die dipjes kunnen bevatten) doorgegeven aan de uitgang van de D-flipflopgedurende de dalende flank van de klok. Aangezien gedurende de dalende klokflank de dipjesreeds uitgestorven zijn, zal dit aanleiding geven tot bruikbare PWM-pulsen zonder overlapvan flanken.
Zoals reeds eerder vermeld, dient tussen beide PWM-pulsen een zekere dode tijd τ te wordenvoorzien. Hiertoe wordt een gepaste waarde voor ∆ gekozen, d.i. het verschil tussen beidereferentieniveaus (zie ook figuur 4.1). Het verband tussen ∆ en de dode tijd τ wordt hierbijgegeven door (4.5). Merk op dat de uitgang van de comparator (borrow-bit) reeds laag wordtals beide ingangen gelijk zijn, vandaar de factor ∆ + 1.

Hoofdstuk 4. Generatie van PWM-pulsen 30
τ =( 1
10, 24 MHz
)(∆ + 1) (4.5)
Uit simulaties van de H-brug met de levelshifters en IGBT’s als schakel-elementen, blijkt datdeze in een tijd van ongeveer 100 ns ontladen zijn. Aldus zal voor de gerealiseerde H-brug opzijn minst een dode tijd τ = 100 ns noodzakelijk zijn. Om hier toch enige marge in te bouwen,wordt ∆ = 15 gekozen. Dit stemt overeen met een dode tijd τ = 1, 56 µs indien de interneklok gebruikt wordt. Bovendien is deze dode tijd afhankelijk van de klokfrequentie. De dodetijd wordt groter gekozen dan strikt noodzakelijk opdat het circuit ook nog zou werken bijtesten met eventuele hogere klokfrequenties.
Een laatste punt waar rekening mee gehouden moet worden, is dat voor beide pulsen een zekereminimale pulsbreedte noodzakelijk is. De noodzaak hiervan zal blijken uit de beschrijving vande gebruikte levelshifter (zie 5.2 Principeschema). Omdat de realisatie van deze minimalepulsbreedte het makkelijkst te implementeren is in combinatie met de snelheidsregeling, wordtdit besproken in 7.3.1 Minimale pulsduur PWM1 en PWM2.
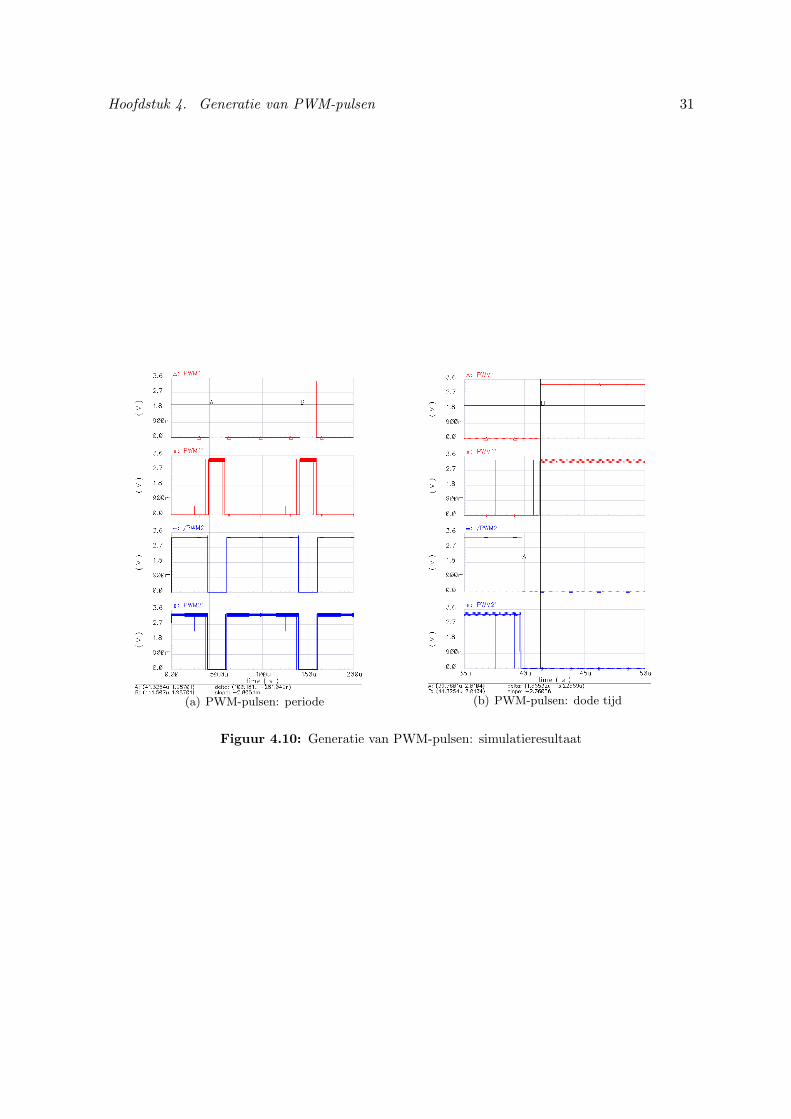
4.5 Resultaten
Ter volledigheid wordt nog een simulatie van de PWM-pulsen opgenomen. In figuur 4.10zijn de PWM-pulsen voor en na de D-flipflop van figuur 4.9(b) opgenomen, respectievelijkvoorgesteld door PWM ′ en PWM . De glitches in PWM ′ waarvan sprake in 4.4 Globaalschema zijn duidelijk op te merken. Verder kunnen periode en dode tijd afgelezen worden oprespectievelijk figuur 4.10(a) en figuur 4.10(b). Deze blijken zeer goed te beantwoorden aande verwachte waarden.
4.6 Werking bij hogere frequenties
Handig om weten is een bovengrens voor de frequentie die haalbaar is voor de PWM-pulsen.Omdat deze beperkt zal worden door de minimale pulsbreedte voor PWM1 en PWM2 dienodig is voor de gebruikte levelshifter, wordt dit besproken in Hoofdstuk 7 Snelheidsregeling .
Hoofdstuk 4. Generatie van PWM-pulsen 31
(a) PWM-pulsen: periode (b) PWM-pulsen: dode tijd
Figuur 4.10: Generatie van PWM-pulsen: simulatieresultaat
Hoofdstuk 5
Aansturing van de uitgangstrap
met behulp van een levelshifter
5.1 Inleiding
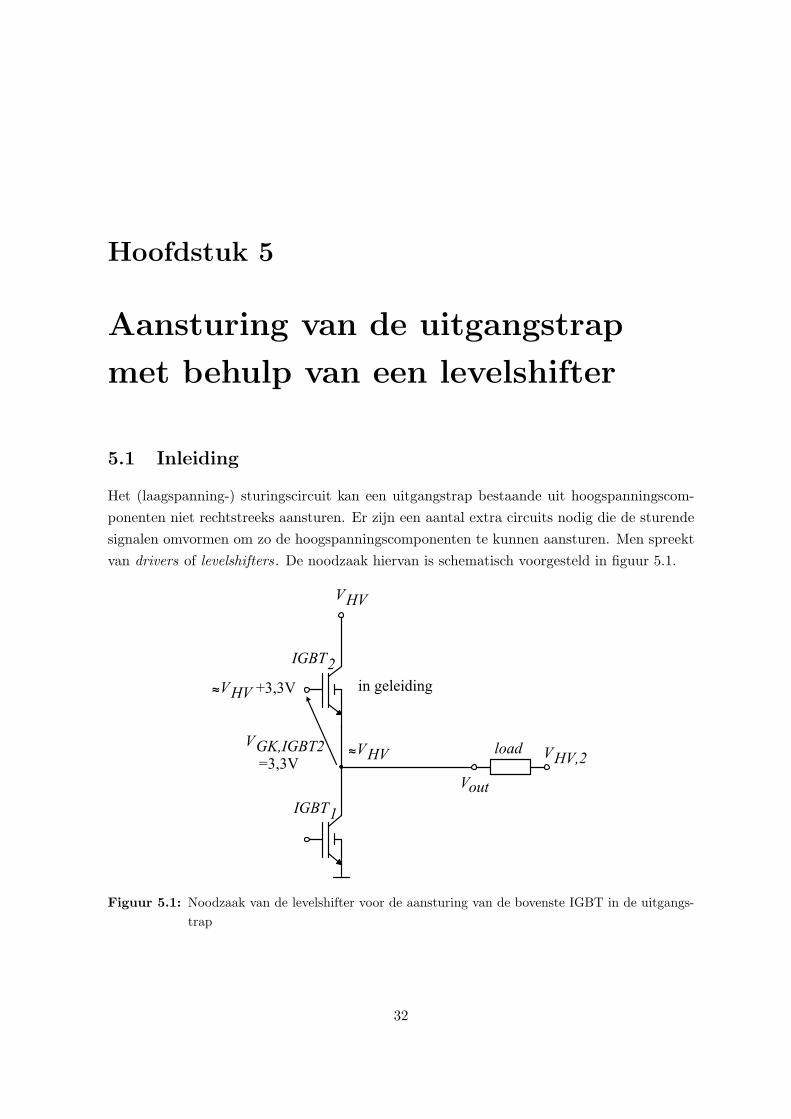
Het (laagspanning-) sturingscircuit kan een uitgangstrap bestaande uit hoogspanningscom-ponenten niet rechtstreeks aansturen. Er zijn een aantal extra circuits nodig die de sturendesignalen omvormen om zo de hoogspanningscomponenten te kunnen aansturen. Men spreektvan drivers of levelshifters. De noodzaak hiervan is schematisch voorgesteld in figuur 5.1.
Figuur 5.1: Noodzaak van de levelshifter voor de aansturing van de bovenste IGBT in de uitgangs-trap
32
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 33
Voor het aansturen van de onderste IGBT is er op het eerste zicht geen probleem. Het digitaalopgewekte PWM-signaal kan inderdaad rechtstreeks de gate van deze IGBT sturen, uiteraardmits toevoegen van een buffer.
Het aansturen van de bovenste IGBT brengt wat meer problemen met zich mee. Eerst envooral is het duidelijk dat het zonder meer aanleggen van een stuursignaal dat gedefinieerdis tussen 3, 3 V en de massa voor problemen zal zorgen. Het signaal moet verschoven wordennaar de juiste spanningen. Bovendien zijn beide IGBT’s in de tak van het n-type. Om decomponent aan te schakelen is dus een spanning op de gate nodig die 3, 3 V hoger is dan zijnkathodespanning. Het is evident dat in aan-toestand gewenst is dat de spanningsval overde IGBT zo laag mogelijk is. Bijgevolg zal de kathodespanning niet veel lager zijn dan devoedingsspanning en is dus aan de gate een spanning nodig hoger dan deze voedingsspanning.Dit vergt het extra circuit waarover dit hoofdstuk handelt.
In dit hoofdstuk wordt de levelshifter besproken die zal dienen voor het aansturen van eentak van de H-brug. Door twee van deze takken te gebruiken vormt men uiteraard een H-brug(zie 2.1 H-brug).
5.2 Principeschema
In de literatuur zijn heel wat verschillende types van levelshifters te vinden. Voor het ontwerpvan het circuit is vertrokken van een Cascode-driven Bootstrapped levelshifter [6] waarvan hetschema getoond is in figuur 5.3.
5.2.1 Werking
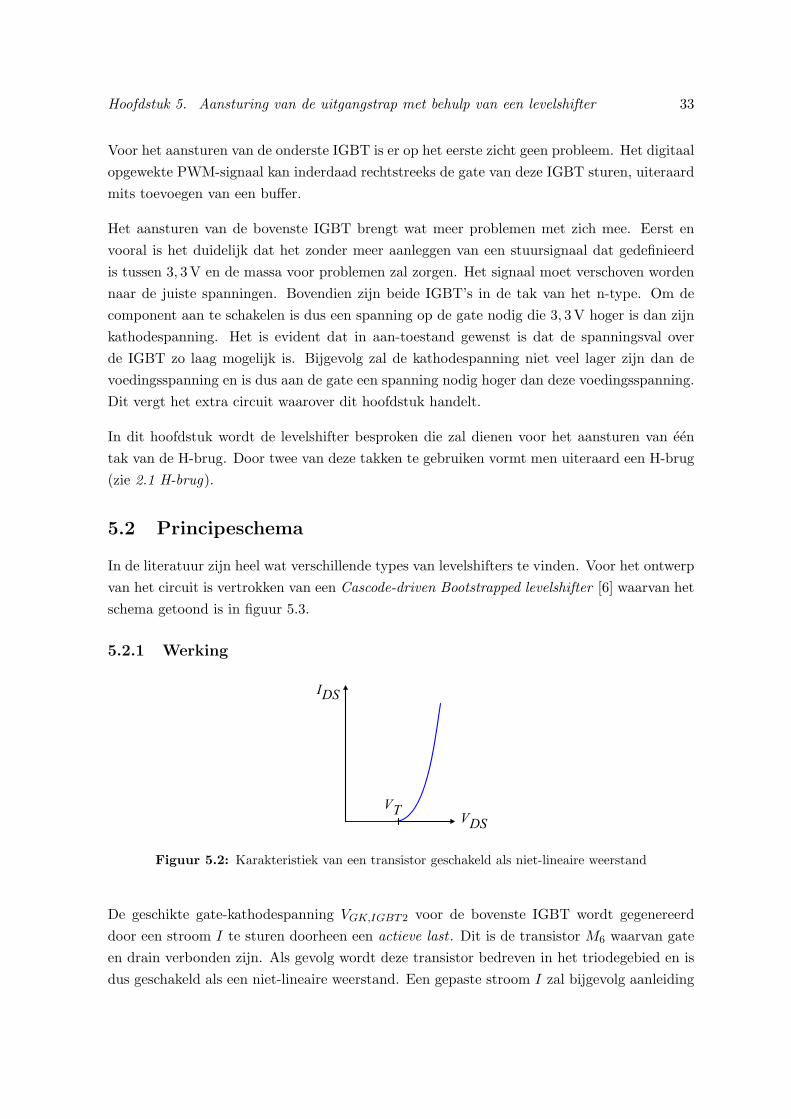
Figuur 5.2: Karakteristiek van een transistor geschakeld als niet-lineaire weerstand
De geschikte gate-kathodespanning VGK,IGBT2 voor de bovenste IGBT wordt gegenereerddoor een stroom I te sturen doorheen een actieve last . Dit is de transistor M6 waarvan gateen drain verbonden zijn. Als gevolg wordt deze transistor bedreven in het triodegebied en isdus geschakeld als een niet-lineaire weerstand. Een gepaste stroom I zal bijgevolg aanleiding
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 34
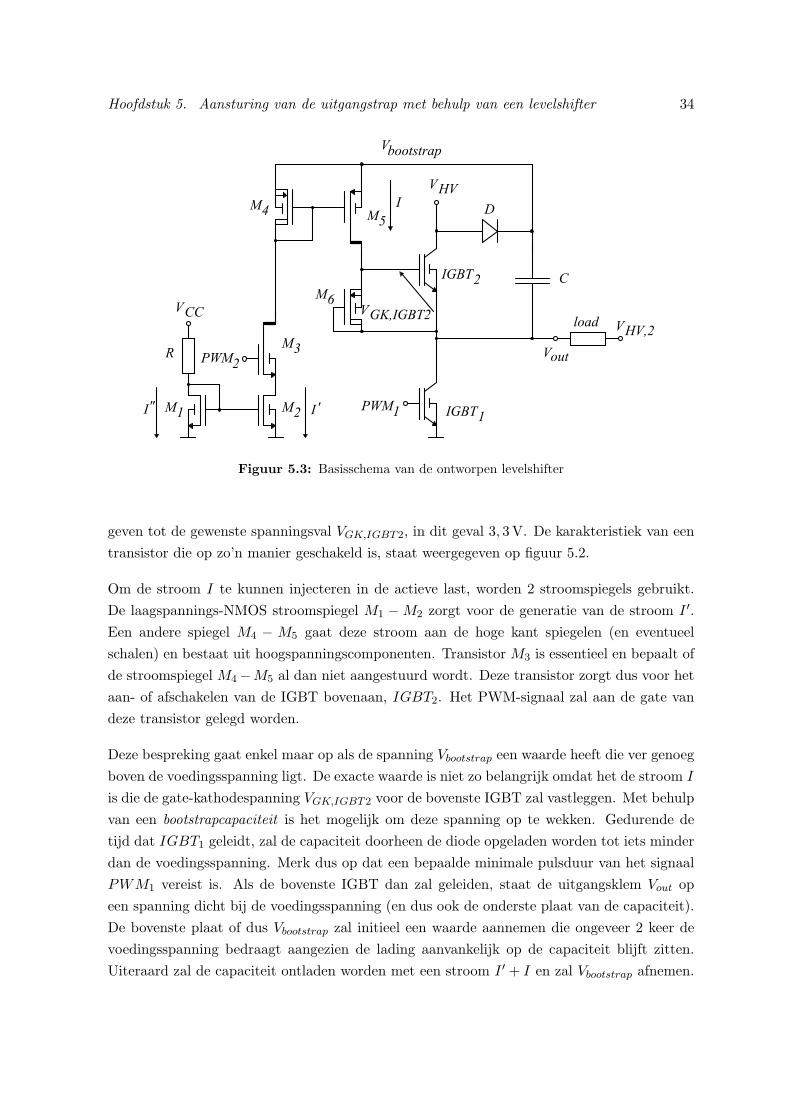
Figuur 5.3: Basisschema van de ontworpen levelshifter
geven tot de gewenste spanningsval VGK,IGBT2, in dit geval 3, 3 V. De karakteristiek van eentransistor die op zo’n manier geschakeld is, staat weergegeven op figuur 5.2.
Om de stroom I te kunnen injecteren in de actieve last, worden 2 stroomspiegels gebruikt.De laagspannings-NMOS stroomspiegel M1 − M2 zorgt voor de generatie van de stroom I ′.Een andere spiegel M4 − M5 gaat deze stroom aan de hoge kant spiegelen (en eventueelschalen) en bestaat uit hoogspanningscomponenten. Transistor M3 is essentieel en bepaalt ofde stroomspiegel M4−M5 al dan niet aangestuurd wordt. Deze transistor zorgt dus voor hetaan- of afschakelen van de IGBT bovenaan, IGBT2. Het PWM-signaal zal aan de gate vandeze transistor gelegd worden.
Deze bespreking gaat enkel maar op als de spanning Vbootstrap een waarde heeft die ver genoegboven de voedingsspanning ligt. De exacte waarde is niet zo belangrijk omdat het de stroom I
is die de gate-kathodespanning VGK,IGBT2 voor de bovenste IGBT zal vastleggen. Met behulpvan een bootstrapcapaciteit is het mogelijk om deze spanning op te wekken. Gedurende detijd dat IGBT1 geleidt, zal de capaciteit doorheen de diode opgeladen worden tot iets minderdan de voedingsspanning. Merk dus op dat een bepaalde minimale pulsduur van het signaalPWM1 vereist is. Als de bovenste IGBT dan zal geleiden, staat de uitgangsklem Vout opeen spanning dicht bij de voedingsspanning (en dus ook de onderste plaat van de capaciteit).De bovenste plaat of dus Vbootstrap zal initieel een waarde aannemen die ongeveer 2 keer devoedingsspanning bedraagt aangezien de lading aanvankelijk op de capaciteit blijft zitten.Uiteraard zal de capaciteit ontladen worden met een stroom I ′ + I en zal Vbootstrap afnemen.

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 35
Door een goede dimensionering is het mogelijk om ervoor te zorgen dat Vbootstrap hoog genoegblijft gedurende de tijd dat de bovenste IGBT geleidt.
Figuur 5.4: Golfvormen horend bij het principeschema van figuur 5.3, met als last een DC-motorgeschakeld tussen Vout en VHV,2 = 12, 5 V
De golfvormen die horen bij dit principeschema zijn getoond in figuur 5.4. Volgende dimen-sionering werd hierbij gebruikt: I ′ = 21µA
I = 270µA(5.1)
C = 1, 5 nF (5.2)
De PWM periode is 100µs. Met deze stroom I werd IGBT2 in minder dan 1µs opgeladen.Om C minimaal te ontladen werd er ook voor gezorgd dat de stroomspiegel een schalinguitvoert: door M4 vloeit een stroom I ′ die te verwaarlozen is ten opzichte van de I = 270µAdoor M5 (die nodig is om de gatecapaciteit van IGBT2 snel op te laden). De dimensioneringvan de overige componenten is hier nog van geen belang.
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 36
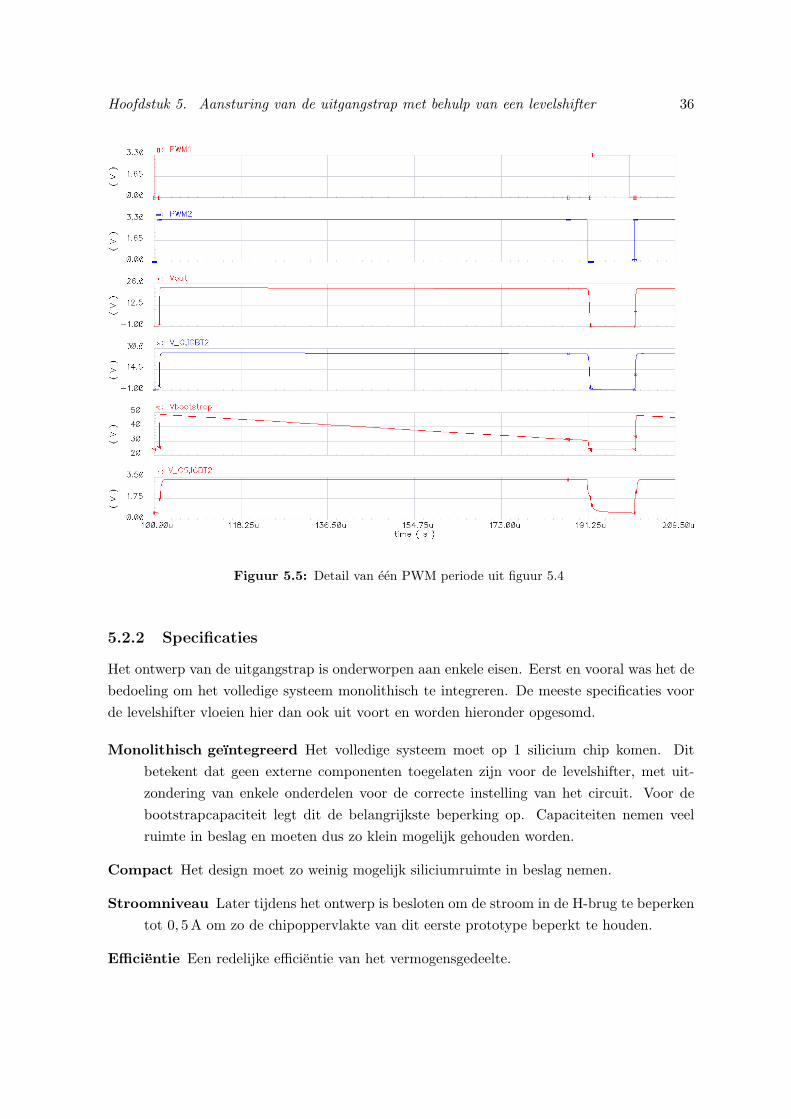
Figuur 5.5: Detail van een PWM periode uit figuur 5.4
5.2.2 Specificaties
Het ontwerp van de uitgangstrap is onderworpen aan enkele eisen. Eerst en vooral was het debedoeling om het volledige systeem monolithisch te integreren. De meeste specificaties voorde levelshifter vloeien hier dan ook uit voort en worden hieronder opgesomd.
Monolithisch geıntegreerd Het volledige systeem moet op 1 silicium chip komen. Ditbetekent dat geen externe componenten toegelaten zijn voor de levelshifter, met uit-zondering van enkele onderdelen voor de correcte instelling van het circuit. Voor debootstrapcapaciteit legt dit de belangrijkste beperking op. Capaciteiten nemen veelruimte in beslag en moeten dus zo klein mogelijk gehouden worden.
Compact Het design moet zo weinig mogelijk siliciumruimte in beslag nemen.
Stroomniveau Later tijdens het ontwerp is besloten om de stroom in de H-brug te beperkentot 0, 5 A om zo de chipoppervlakte van dit eerste prototype beperkt te houden.
Efficientie Een redelijke efficientie van het vermogensgedeelte.

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 37
5.2.3 Problemen bij het principeschema
Het belangrijkste probleem dat optreedt is de beperkte grootte van de bootstrapcapaciteit.Een kleinere condensator betekent een kleiner ‘stroomreservoir’ en lage stromen leiden op hunbeurt tot het traag op- en ontladen van andere capaciteiten (onder meer de gatecapaciteitvan de IGBT’s). Dit heeft traag schakelen in de H-brug tot gevolg. Uiteraard is dit nietgewenst als de schakelverliezen beperkt moeten worden. Het principeschema hierboven biedtweinig vrijheidsgraden en zal enkel werken als de bootstrapcapaciteit voldoende groot is (de1, 5 nF capaciteit (5.2) uit het principeschema is ongeoorloofd groot om op chip te integreren).Daarom wordt dit basisschema aangepast om het hoofd te bieden aan enkele problemen.
Verder is er steeds een fundamenteel probleem bij het ontwerp van levelshifters. Stromenzijn niet heel nauwkeurig in te stellen op chip waardoor de spanning VGK,IGBT2 op figuur 5.3ook niet heel nauwkeurig gekend is bij ontwerp. Zelfs al zouden de stromen op chip perfectbepaald zijn, dan nog is het mogelijk dat VGK,IGBT2 een foutieve waarde aanneemt doorparametervariaties. De VT van de transistor in de actieve last M6 is bijvoorbeeld niet exactgekend. VGK,IGBT2 is een vrij kritieke spanning. Deze mag zeker niet meer dan 3, 6 V bedragen(om doorslag van het gate-oxide te vermijden) maar ook niet minder dan 3, 3 V want dan zijnde geleidingsverliezen in de IGBT groter. Om deze redenen wordt de regelweerstand R externaangebracht zodat VGK,IGBT2 op de gepaste waarde kan ingesteld worden.
5.3 Ontworpen schema
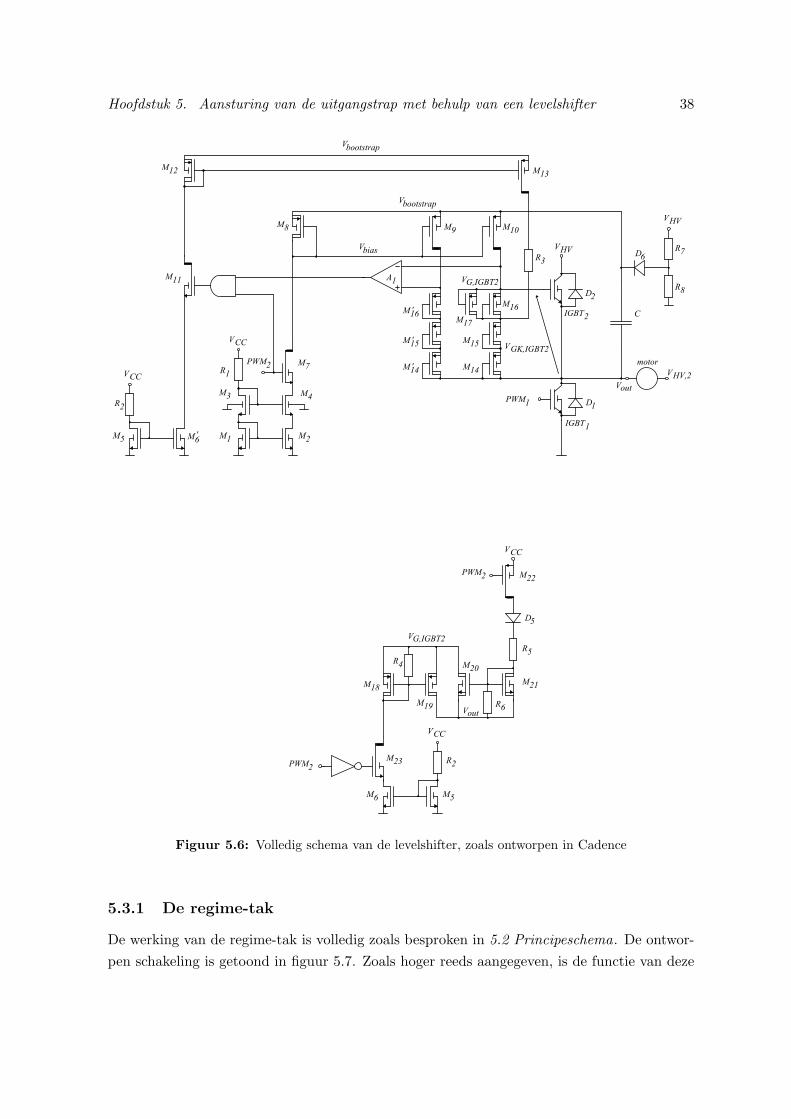
Het schema dat ontworpen werd voor de levelshifter is afgebeeld in figuur 5.6. Het basisprin-cipe is nog steeds aanwezig, maar er werden enkele extra circuits toegevoegd (hierna takkengenoemd) om snel schakelen mogelijk te maken. Aan de hand van figuur 5.6 kunnen volgendetakken onderscheiden worden.
Regime-tak (zie figuur 5.7) Deze tak komt in wezen overeen met het principeschema vanfiguur 5.3. In regime (“lange tijd” na aanschakelen van IGBT2) genereert deze tak eenVGK,IGBT2 van 3, 3 V. Echter de stroom die deze tak levert is te laag om de gatecapa-citeit van IGBT2 snel op te laden of te ontladen.
Ontlaad-tak(ken) (zie figuur 5.8) Dit circuit zal ervoor zorgen dat IGBT2 snel kan af-schakelen.
Laad-tak (zie figuur 5.9) Dit circuit zal ervoor zorgen dat IGBT2 snel kan aanschakelen.
Elk van deze onderdelen wordt hieronder in meer detail besproken.
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 38
Figuur 5.6: Volledig schema van de levelshifter, zoals ontworpen in Cadence
5.3.1 De regime-tak
De werking van de regime-tak is volledig zoals besproken in 5.2 Principeschema. De ontwor-pen schakeling is getoond in figuur 5.7. Zoals hoger reeds aangegeven, is de functie van deze

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 39
Figuur 5.7: De onderdelen van de regime-tak
tak een stroom te sturen door een actieve last met als doel de gewenste spanning VGK,IGBT2
erover op te wekken. De actieve last bestaat nu uit 3 transistoren M14 − M16 in serie omsiliciumoppervlakte uit te sparen. Een transistor geschakeld als actieve last gedraagt zichnamelijk als een niet-lineaire weerstand. Hierdoor zal een kleine stroom gestuurd worden metals doel een spanning van 3, 3 V op te wekken. Om dit mogelijk te maken zal een transistormet een uiterst kleine W
L verhouding nodig zijn, of dus een zeer lange transistor. Voor eentransistor geldt namelijk benaderend:
IDS = µCoxW
L
((VGS − VT ) VDS −
V 2DS
2
)(5.3)
De karakteristiek van de niet-lineaire weerstand (VG = VD) is dus:
IDS = µCoxW
L
(V 2
DS
2− VT VDS
)(5.4)
Uit (5.4) volgt dus dat WL zeer klein moet zijn om met een kleine stroom IDS een grote
spanning VDS over de transistor op te wekken. Met courante waarden van de technologischeconstanten geeft dit bijvoorbeeld:

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 40
IDS = 5µA = 50µAV2
W
L
(3, 3 V2
2− 0, 6 V 3, 3 V
)(5.5)
W
L= 2, 9× 10−2 (5.6)
Door 3 niet-lineaire weerstanden in serie te plaatsen, zijn de afzonderlijke transistoren eenstuk kleiner. W wordt ook liefst niet minimaal (0, 5 µm) gekozen omdat de transistoren danminder nauwkeurig zijn.
Op figuur 5.7 is ook te zien dat de stroomspiegel M1 − M4 nu uitgevoerd is als een casco-deschakeling. De gunstige eigenschappen van de cascodeschakeling zijn hier niet zo zeer vanbelang. Wel is deze schakeling gekozen om R1 niet te groot en de W
L van de transistoren inde stroomspiegel niet te klein te hoeven maken. Er moeten namelijk kleine stromen opgewektworden. Hierop wordt teruggekomen bij de dimensionering.
Een ander verschil met het principeschema is dat diode D6 niet rechtstreeks met de voe-dingsspanning is verbonden, maar door middel van een spanningsdeler. Door R7 toe tevoegen zal de maximale stroom door de diode beperkt worden. Indien deze weerstand erniet zou staan, dan zou D6 veel groter moeten zijn om de grote laadstroom aan te kunnen.Het opladen van C zal nu wel trager gebeuren, namelijk met een tijdsconstante R7C. Eentweede weerstand R8 vormt een spanningsdeler samen met R7. Het is namelijk zo dat eenMetal 2-2.5 capaciteit een doorslagspanning heeft van minimaal 25V. Om hier toch wat mar-ge op te behouden zorgt de spanningsdeler dat de maximale spanning over C beperkt blijfttot 20 V.
Dimensionering van de regime-tak schakeling
De bootstrapcondensator C Metal 2-2.5 :
Capaciteiten nemen relatief veel siliciumruimte in beslag en worden dus bij voorkeurzo klein mogelijk gekozen. Stel dat voor C een capaciteit van ongeveer 100 pF gekozenwordt (die al een redelijk grote oppervlakte in beslag neemt). De capaciteit wordtopgeladen tot 20V. De maximale tijd dat de bootstrapcapaciteit stroom zal moetenleveren is de periode van het PWM-signaal (100 µs). Gedurende 100µs kan C danmaximaal 20 µA leveren voordat de spanning erover tot nul teruggevallen is. Er moetechter ook wat marge ingebouwd worden, dus het is direct duidelijk dat de stromen inde levelshifter niet al te groot mogen zijn (orde enkele µA). Dit zal in hetgeen volgt ookduidelijk zijn. De precieze dimensionering van C wordt verder gegeven.
NMOS laagspanningstransistoren enm:

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 41
De transistoren M1−M4 (figuur 5.7) worden gedimensioneerd zodat de stroombron M2
en M4 de gewenste stroom voert. Om de bootstrapcapaciteit niet te snel te ontladenwordt met kleine stromen gewerkt. De stromen in de levelshifter mogen echter ook niette klein gekozen worden om de goede werking niet in het gedrang te brengen. Immers,hoe kleiner de stromen, hoe meer de parasitaire effecten tot uiting komen. In aan-toestand wordt de stroom door M1 en M3 ingesteld op ongeveer 5 µA. Transistoren M2
en M4 worden half zo breed gekozen en voeren dus een stroom van 2, 5 µA. Uiteindelijkzal de spiegel M8,M10 deze stroom schalen tot 7µA, hetgeen ook de stroom zal zijn diedoorheen M14 − M16 vloeit. Het is gebruikelijk om de instelspanning over M1 en M3
(geschakeld als niet-lineaire weerstanden) een 200− talmV hoger te kiezen dan de VT
van de transistoren. Dit komt overeen met een gm
IDvan ongeveer 10, hetgeen meestal
resulteert in een goede dimensionering [10]. Deze instelspanning moet voldoende bovende VT liggen (bv. 200 mV) om er voor te zorgen dat de spiegel nog blijft werken indiende VT ’s van de transistoren lichtjes afwijken van elkaar. Dit resulteert in de volgendedimensionering voor M1 −M4.
W1
L1=
W3
L3=
1 µm0, 4 µm
(5.7)
W2
L2=
W4
L4=
0, 5 µm0, 4 µm
(5.8)
De benodigde weerstand R1 is gegeven door:
R1 =(3, 3 V − 2 (VT + 0, 2 V))
5 µA≈ 300 kΩ (5.9)
DMOS hoogspanningstransistoren:
Het gaat hier in de levelshifter telkens om lage stromen, de transistoren hoeven dus nietgroot te zijn. De gebruikte DMOS-transistoren hebben echter een vaste kanaallengtevan 0, 9 µm en een minimale breedte van 20µm (indien nauwkeurigheid gewenst is),hetgeen meer dan voldoende is voor deze toepassing. De stroom die deze transistorenkunnen voeren ligt reeds ver boven de vereisten voor de levelshifter. Er worden dustelkens DMOS-transistoren met minimale afmetingen gekozen. In figuur 5.6 zijn ditalle n-type DMOS transistoren en alle p-type DMOS transistoren met uitzondering vanM9, M10 en M22 waarvan de dimenisonering verder zal besproken worden.
M7 is van het n-type en wordt gebruikt als schakelaar. Deze transistor vangt hetgrootste deel van de spanning Vbootstrap op en moet dus een 45 V aankunnen. De enigebeschikbare transistor met deze specificaties is de vfndm80 . Het is ook duidelijk dat

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 42
M10 een hoogspanningstransistor moet zijn die iets minder dan 20 V aankan, maar nuvan het p-type. De DMOS lfpdm80 uit de bibliotheek voldoet hieraan.
HV-floating PMOS laagspanningstransistoren:
De afmetingen van de (floating) PMOS transistoren moeten uiteraard wel gepast ge-kozen worden. De dimensionering zal bij het onderdeel laad-tak besproken worden.Voorlopig is het voldoende te weten dat transistoren M14−M16 zo gekozen worden datze samen een spanningsval geven van 3, 3 V wanneer er een stroom van ongeveer 7 µAdoor gestuurd wordt (zie verder). Aangezien deze actieve last uit 3 transistoren bestaatzijn er dus een aantal vrijheidsgraden om dit resultaat te bekomen.
M8 wordt gedimensioneerd zodat de DMOS transistor M10 ongeveer 7 µA voert.
W8
L8=
6, 5 µm0, 4 µm
(5.10)
Vrijloopdiodes:
De keuze van geschikte vrijloopdiodes D1 en D2 uit de bibliotheek van de I3T80 tech-nologie zorgde voor enkele problemen. De enige component die de hogere spanningenkan opvangen is de fid80 diode. Deze heeft echter een vaste anodelengte van 2, 6 µm omhet Spectre simulatiemodel nauwkeurig te houden. Om daarmee een voldoende grootanodeoppervlakte te verkrijgen (om genoeg stroom te kunnen voeren) moet de diodezeer breed gemaakt worden. Volgens de gegevens uit de datasheet [11] zou een diodedie gedimensioneerd is op 0, 5 A meer dan 1mm2 siliciumoppervlakte innemen. Dit isvele malen groter dan de oppervlakte van een IGBT en daarom is in samenspraak metde promotor en begeleider beslist om de diode ook uit te rekken in de lengte (hoeweldit initieel volgens de ontwerpsregels niet is toegelaten). Op die manier wordt de anode250 µm × 250 µm groot, hetgeen meer aanvaardbare afmetingen zijn. Het is namelijkniet gewenst dat de afmetingen van de chip zouden verviervoudigen door het gebruikvan de standaard diodes uit de bibliotheek. Deze zelfgetekende diodes zijn echter nognooit getest, maar zouden in principe moeten werken. De stroomdichtheid per µmomtrek neemt wel sterk toe maar die zou nog steeds binnen de aanvaardbare grenzenmoeten blijven, zeker als in rekening wordt gebracht dat deze stroomdichtheid bij deDMOS transistor of IGBT nog veel grotere waarden aanneemt. Indien deze toch nietzouden werken, kunnen nog steeds extern diodes aangebracht worden.
5.3.2 De ontlaad-tak
Om de bovenste IGBT snel af te schakelen zijn er ontlaad-takken (getoond in figuur 5.8). Ditextra circuit is noodzakelijk omdat anders de gatecapaciteit van IGBT2 maar kan ontladen
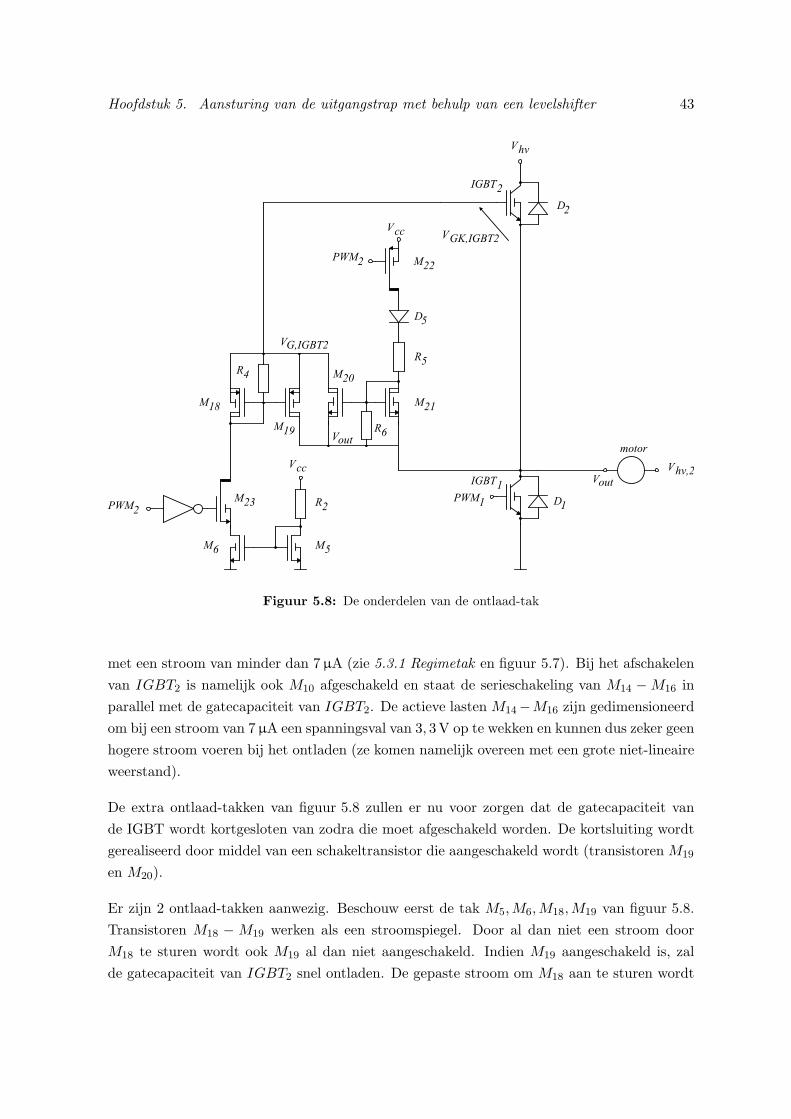
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 43
Figuur 5.8: De onderdelen van de ontlaad-tak
met een stroom van minder dan 7 µA (zie 5.3.1 Regimetak en figuur 5.7). Bij het afschakelenvan IGBT2 is namelijk ook M10 afgeschakeld en staat de serieschakeling van M14 − M16 inparallel met de gatecapaciteit van IGBT2. De actieve lasten M14−M16 zijn gedimensioneerdom bij een stroom van 7 µA een spanningsval van 3, 3 V op te wekken en kunnen dus zeker geenhogere stroom voeren bij het ontladen (ze komen namelijk overeen met een grote niet-lineaireweerstand).
De extra ontlaad-takken van figuur 5.8 zullen er nu voor zorgen dat de gatecapaciteit vande IGBT wordt kortgesloten van zodra die moet afgeschakeld worden. De kortsluiting wordtgerealiseerd door middel van een schakeltransistor die aangeschakeld wordt (transistoren M19
en M20).
Er zijn 2 ontlaad-takken aanwezig. Beschouw eerst de tak M5,M6,M18,M19 van figuur 5.8.Transistoren M18 − M19 werken als een stroomspiegel. Door al dan niet een stroom doorM18 te sturen wordt ook M19 al dan niet aangeschakeld. Indien M19 aangeschakeld is, zalde gatecapaciteit van IGBT2 snel ontladen. De gepaste stroom om M18 aan te sturen wordt

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 44
opgewekt in de stroomspiegel M5−M6. Deze stroom wordt al dan niet doorheen M18 gestuurddoor transistor M23 aan of af te schakelen. Logischerwijs wordt M23 aangestuurd met PWM2.Inderdaad, wanneer PWM2 laag is, moet IGBT2 afgeschakeld zijn.
Wanneer de stroomspiegel M18−M19 afgeschakeld wordt, dan blijft over M18 nog een residu-spanning van ongeveer VT staan. Dit is het gevolg van het feit dat M18 als een niet-lineaireweerstand geschakeld is waarvan de karakteristiek getoond is in figuur 5.2. Ruwweg komenalle spanningen VDS van 0V tot VT overeen met een stroom IDS = 0 A. Als een punt dezecurve doorloopt van een hoge stroom naar een stroom die 0 A bedraagt, zal de spanning zichdus instellen op ongeveer VT aangezien dit het eerste punt is dat voldoet aan de voorwaardeIDS = 0 A. Wanneer de VT ’s van de transistoren enigszins afwijken kan het voorkomen datM19 dus toch lichtjes gaat geleiden als de stroom door M18 afgeschakeld is. R4 zorgt ervoordat de spanning over M18 tot nul herleid wordt door deze transistor te “ontladen”. Op diemanier zal de gatecapaciteit van IGBT2 zeker niet (lichtjes) ontladen worden wanneer IGBT2
aangeschakeld is. Deze weerstand is groot genoeg gekozen om de schakeling M18−M19 niet testoren in aangeschakelde toestand. R6 heeft dezelfde functie, maar dan voor de stroomspiegelM20 −M21 die hieronder besproken wordt.
Dit circuit zou perfect werken indien de last aan Vout resistief is, en de uitgangsspanningdus nooit lager dan 0V kan worden. Met een inductieve last (bijvoorbeeld een DC-motor)kan het gebeuren dat de vrijloopdiode D1 gaat geleiden waardoor Vout negatief wordt, na-melijk −VD (met VD de drempelspanning van de diode). Het is ook evident dat het circuitM5,M6,M18,M19 maar zal werken zolang VG,IGBT2 groter dan 0 V is omdat anders de stroom-spiegels M5 −M6 en M18 −M19 niet meer in hun juiste werkingsgebied zitten. Bijgevolg zalVGK,IGBT2 nooit lager dan VD kunnen worden. VD bedraagt 0, 7− 0, 8 V hetgeen net ietsmeer is dan de drempelspanning van de IGBT’s, waardoor deze op het randje van de gelei-ding zullen staan en dus enige stroom voeren. Dit is zeker niet gewenst. Uit simulaties bleekbijvoorbeeld dat IGBT2 in “afgeschakelde toestand” nog tot 50mA voert. Tegelijk staat er25 V over deze component wat een DC-dissipatie oplevert van 1, 25 W hetgeen absoluut moetvermeden worden! Ter vergelijking: in aangeschakelde toestand dissipeert een IGBT in ditontwerp maximaal 0, 8 W.
Om dit probleem te verhelpen wordt een tweede ontlaad-tak ingevoerd (M20,M21,M22 opfiguur 5.8). Dit circuit werkt net wel goed als VG,IGBT2 en Vout laag zijn. Een stroom sturendoorheen M21 zal M20 aanschakelen. M22 zal deze stroom aan- of afschakelen. Het is eenDMOS van het p-type en wordt dus aangestuurd met het PWM2 signaal. R5 stelt de juistestroom door M21 in. D5 zal er voor zorgen dan de drain-bulk diode van M22 niet gaatgeleiden wanneer Vout hoger dan VCC wordt. Het geleiden van deze drain-bulk diode kannamelijk ongewenste parasitaire effecten tot gevolg hebben (bijvoorbeeld substraatstromen oflatch-up van parasitaire bipolaire elementen).

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 45
Deze beide takken zijn nodig omdat de ene niet werkt als VG,IGBT2 te hoog is (hoger danVCC), en de andere niet werkt indien VG,IGBT2 te laag is (lager dan 0 V).
Dimensionering van de ontlaad-tak schakeling
De dimensionering van deze subschakeling is niet zo kritisch aangezien de belangrijkste tran-sistoren als schakelaars werken en dus de instelstromen niet zo nauwkeurig gekend hoeven tezijn.
M19 en M20 worden zo gedimensioneerd dat ze groot genoeg zijn om de gatecapaciteit vanIGBT2 snel te ontladen. M18 en M21 worden zo gekozen dat ze een spanningsval opwekken dievoldoende is om M19 en M20 aan te schakelen. Ter informatie worden hieronder de afmetingenvan de gebruikte elementen vermeld:
NMOS laagspanningstransistoren enm:
W5
L5=
8 µm0, 35 µm
(5.11)
W6
L6=
4 µm0, 35 µm
(5.12)
HV-floating PMOS laagspanningstransistoren epm:
W18
L18=
1, 5 µm0, 35 µm
(5.13)
W19
L19=
20 µm0, 35 µm
(5.14)
W20
L20=
10 µm0, 35 µm
(5.15)
W21
L21=
4 µm1 µm
(5.16)
Merk op dat de twee transistoren in de “stroomspiegel” M18 −M19 sterk verschillendeafmetingen hebben. M19 fungeert namelijk als schakelaar en moet dus iets groter zijn.M18 genereert een relatief grote VGS voor deze schakelaar en moet dus een kleine W
L
hebben. Een analoge bespreking gaat op voor M20 −M21
DMOS hoogspanningstransistor lfpdm80 :

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 46
M22 wordt als schakelaar gebruikt en moet dus niet de “minimale breedte voor nauw-keurigheid” van 20 µm hebben aangezien de transistorkarakteristiek van een schakelaarniet exact gekend hoeft te zijn.
W22
L22=
5 µm0, 9 µm
(5.17)
DMOS hoogspanningstransistor vfndm80 :
W23
L23=
20 µm0, 9 µm
(5.18)
hipor weerstanden:
R2 : nsq = 10,W = 1, 2 µm(≈ 10 kΩ) (5.19)
R4, R5, R6 : nsq = 100,W = 1, 2 µm(≈ 100 kΩ) (5.20)
Floating hoogspanningsdiode fid80
D4 : W = 2, 6 µm, L = 2, 6 µm(omtrek = 66, 4 µm, oppervlakte = 275, 56 µm2) (5.21)
5.3.3 De laad-tak
De laad-tak werkt volgens hetzelfde principe als de regime-tak. Het verschil zit hem in hetfeit dat de tak slechts gedurende korte tijd geactiveerd is, na het aanschakelen van de IGBT.Daardoor kan deze tak op een hoog stroomniveau werken om de gatecapaciteit van IGBT2
snel op te laden en tegelijk de bootstrapcapaciteit niet te veel te ontladen. Dit circuit isgetoond in (figuur 5.9). Merk op dat ook de regime-tak afgebeeld is op deze figuur. Dezecircuits werken immers nauw samen zoals zal blijken uit onderstaande.
Evenals de regime-tak, zal ook de laad-tak een stroom injecteren in de actieve last om zosnel de gewenste spanning VGK,IGBT2 te veroorzaken. Echter, de actieve last M14,M15,M16
verandert niet. Indien dus een hogere stroom Ilaad gestuurd wordt door dezelfde actieve last,zal de spanningsval ook hoger zijn. Dit is niet toegelaten aangezien de gate-kathodespanningvan de IGBT’s zeker tot 3, 6 V beperkt moet blijven. Initieel wordt de gatecapaciteit vanIGBT2 echter opgeladen en stijgt de spanning over de actieve last M14,M15,M16 geleidelijk.Daarom werd een speciale manier uitgedacht om deze tak aan en af te schakelen.
Eerst en vooral wordt de stroom geınjecteerd aan de source van transistor M15. Door gepastedimensionering van de 3 transistoren M14,M15,M16 die deel uitmaken van de actieve last, ishet mogelijk om zowel bij de laad-stroom als bij de regime-stroom een spanningsval van 3, 3 V
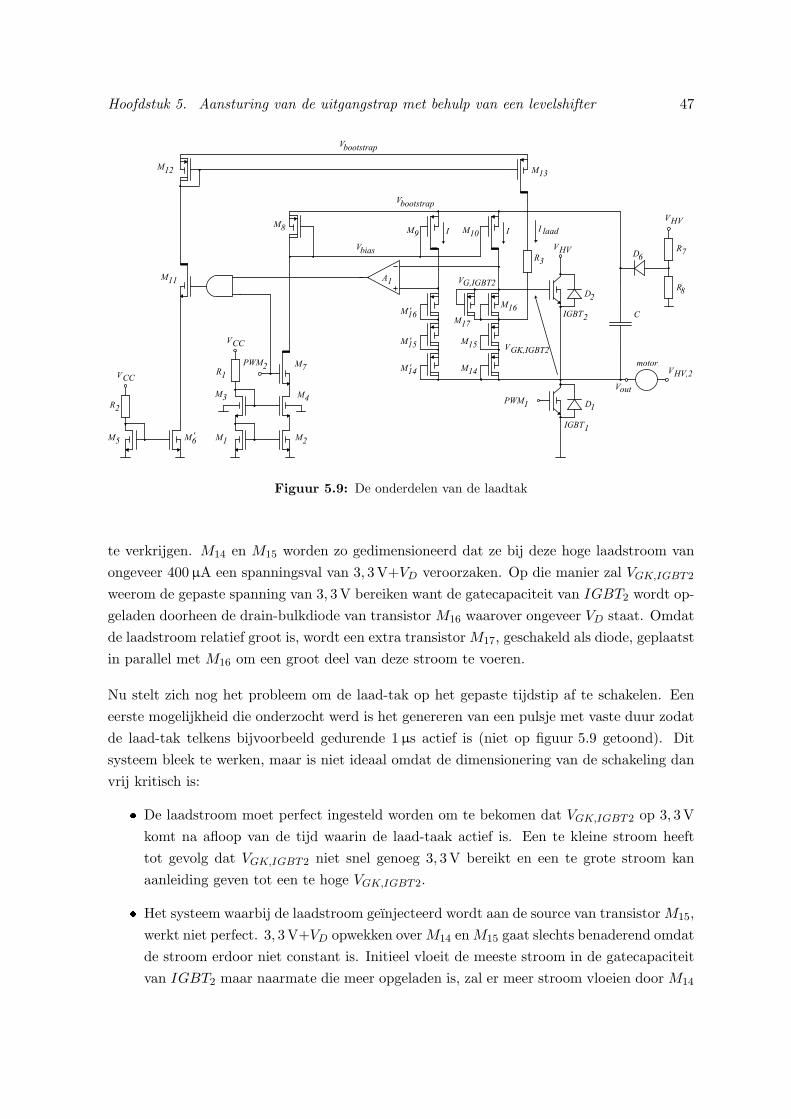
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 47
Figuur 5.9: De onderdelen van de laadtak
te verkrijgen. M14 en M15 worden zo gedimensioneerd dat ze bij deze hoge laadstroom vanongeveer 400 µA een spanningsval van 3, 3 V+VD veroorzaken. Op die manier zal VGK,IGBT2
weerom de gepaste spanning van 3, 3 V bereiken want de gatecapaciteit van IGBT2 wordt op-geladen doorheen de drain-bulkdiode van transistor M16 waarover ongeveer VD staat. Omdatde laadstroom relatief groot is, wordt een extra transistor M17, geschakeld als diode, geplaatstin parallel met M16 om een groot deel van deze stroom te voeren.
Nu stelt zich nog het probleem om de laad-tak op het gepaste tijdstip af te schakelen. Eeneerste mogelijkheid die onderzocht werd is het genereren van een pulsje met vaste duur zodatde laad-tak telkens bijvoorbeeld gedurende 1µs actief is (niet op figuur 5.9 getoond). Ditsysteem bleek te werken, maar is niet ideaal omdat de dimensionering van de schakeling danvrij kritisch is:
De laadstroom moet perfect ingesteld worden om te bekomen dat VGK,IGBT2 op 3, 3 Vkomt na afloop van de tijd waarin de laad-taak actief is. Een te kleine stroom heefttot gevolg dat VGK,IGBT2 niet snel genoeg 3, 3 V bereikt en een te grote stroom kanaanleiding geven tot een te hoge VGK,IGBT2.
Het systeem waarbij de laadstroom geınjecteerd wordt aan de source van transistor M15,werkt niet perfect. 3, 3 V+VD opwekken over M14 en M15 gaat slechts benaderend omdatde stroom erdoor niet constant is. Initieel vloeit de meeste stroom in de gatecapaciteitvan IGBT2 maar naarmate die meer opgeladen is, zal er meer stroom vloeien door M14
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 48
en M15. Bij de keuze van de laadstroom moet dus een compromis gemaakt wordentussen de snelheid waarmee de gatecapaciteit van IGBT2 wordt opgeladen en de matevan overshoot die zal optreden bij de golfvorm van VGK,IGBT2. Een goed compromisleidde helaas tot een kritisch dimensionering.
De duur van het intern opgewekte pulsje is nooit perfect gekend.
Deze schakeling is gevoelig aan parametervariaties (bijvoorbeeld de VT ’s van de transis-toren of de temperatuursafhankelijkheid)
Deze problemen kunnen verholpen worden door de weerstand R2 extern aan te brengen. Zokan de laadstroom juist ingesteld worden, maar het is niet de bedoeling om veel externecomponenten toe te laten.
Daarom is de tweede mogelijkheid, voorgesteld in figuur 5.9, een betere oplossing. De nood-zaak van de laad-tak komt voort uit het feit dat de spanning over de actieve last M14,M15,M16
niet ogenblikkelijk op zijn eindwaarde 3, 3 V komt en dit doordat de gatecapaciteit van IGBT2,die ermee in parallel staat, moet opgeladen worden. Als deze (grote) gatecapaciteit er nietzou zijn, dan was er geen probleem. Uit dit gegeven vloeide het idee voort om een tweede,identieke actieve last M ′
14,M′15,M
′16 te construeren en daardoor dezelfde stroom I te sturen
als de regime-tak door de eerste actieve last stuurt. Deze stroom wordt correct ingesteld dooreen externe weerstand R1 en levert dus de gewenste spanningsval van 3, 3 V over de actievelast. Aan deze tweede actieve last hangt echter geen grote gatecapaciteit, dus de spanning er-over neemt snel zijn eindwaarde aan. Deze spanning wordt nu gebruikt als referentie waarmeeVG,IGBT2 wordt vergeleken. Zodra VGK,IGBT2 dus 3, 3 V bereikt, wordt de laad-tak afgescha-keld. De comparator A1 moet snel zijn, hoge spanningen aankunnen en zuinig zijn en zalhieronder besproken worden.
Op die manier is de dimensionering van de laad-tak niet meer kritisch. Er mag van uitgegaanworden dat identieke transistoren dicht bij elkaar op chip ongeveer identieke karakteristiekenzullen hebben en dat de twee actieve lasten dus dezelfde spanningsval zullen opleveren. Delaadstroom is ook niet kritisch en mag gerust groot zijn. Echter, daar het onmogelijk is omeen oneindig snelle comparator te maken mag deze stroom ook niet te hoog zijn aangezienVGK,IGBT2 toch een lichte overshoot zal vertonen, die toeneemt naarmate de laadstroomgroter wordt. Deze stroom wordt beperkt tot een maximum waarde van ongeveer 500 µAdoor het plaatsen van de weerstand R3. Deze weerstand is tot op 10% nauwkeurig gekenden levert dus voldoende bescherming tegen te hoge stromen. Zo is de dimensionering van hetcircuit dat de laadstroom genereert (M5 −M6,M12 −M13) ook niet meer kritisch.
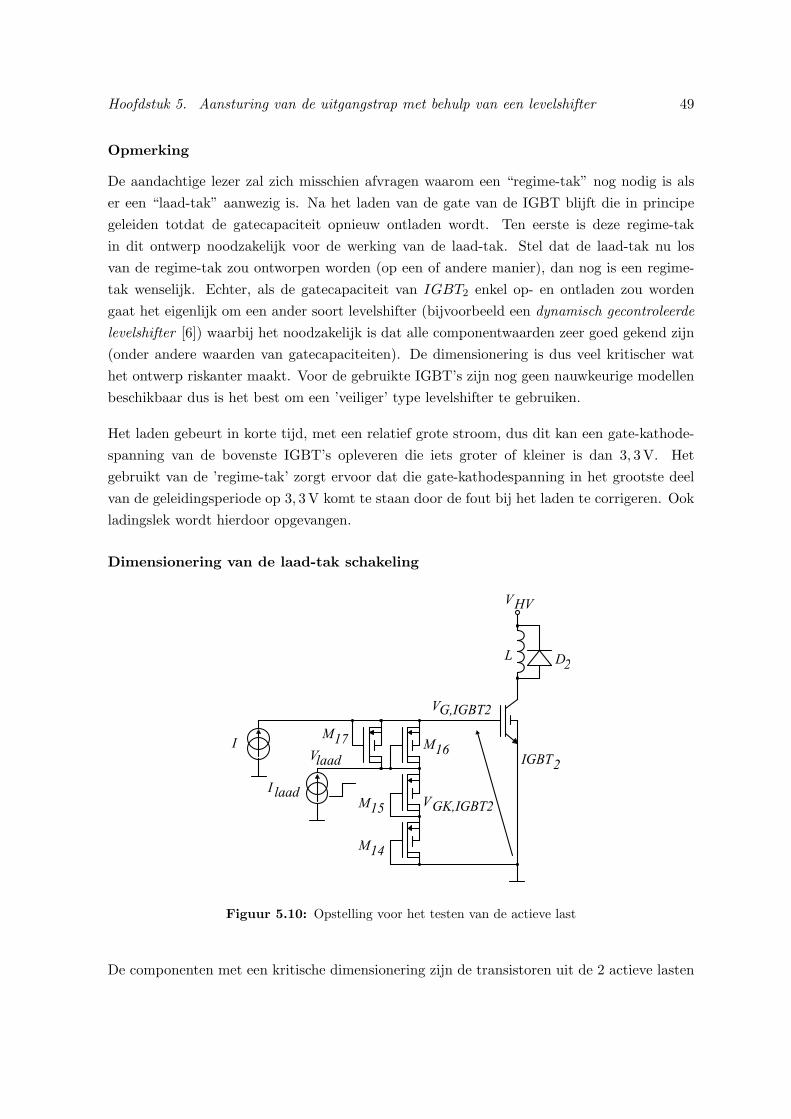
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 49
Opmerking
De aandachtige lezer zal zich misschien afvragen waarom een “regime-tak” nog nodig is alser een “laad-tak” aanwezig is. Na het laden van de gate van de IGBT blijft die in principegeleiden totdat de gatecapaciteit opnieuw ontladen wordt. Ten eerste is deze regime-takin dit ontwerp noodzakelijk voor de werking van de laad-tak. Stel dat de laad-tak nu losvan de regime-tak zou ontworpen worden (op een of andere manier), dan nog is een regime-tak wenselijk. Echter, als de gatecapaciteit van IGBT2 enkel op- en ontladen zou wordengaat het eigenlijk om een ander soort levelshifter (bijvoorbeeld een dynamisch gecontroleerdelevelshifter [6]) waarbij het noodzakelijk is dat alle componentwaarden zeer goed gekend zijn(onder andere waarden van gatecapaciteiten). De dimensionering is dus veel kritischer wathet ontwerp riskanter maakt. Voor de gebruikte IGBT’s zijn nog geen nauwkeurige modellenbeschikbaar dus is het best om een ’veiliger’ type levelshifter te gebruiken.
Het laden gebeurt in korte tijd, met een relatief grote stroom, dus dit kan een gate-kathode-spanning van de bovenste IGBT’s opleveren die iets groter of kleiner is dan 3, 3 V. Hetgebruikt van de ’regime-tak’ zorgt ervoor dat die gate-kathodespanning in het grootste deelvan de geleidingsperiode op 3, 3 V komt te staan door de fout bij het laden te corrigeren. Ookladingslek wordt hierdoor opgevangen.
Dimensionering van de laad-tak schakeling
Figuur 5.10: Opstelling voor het testen van de actieve last
De componenten met een kritische dimensionering zijn de transistoren uit de 2 actieve lasten
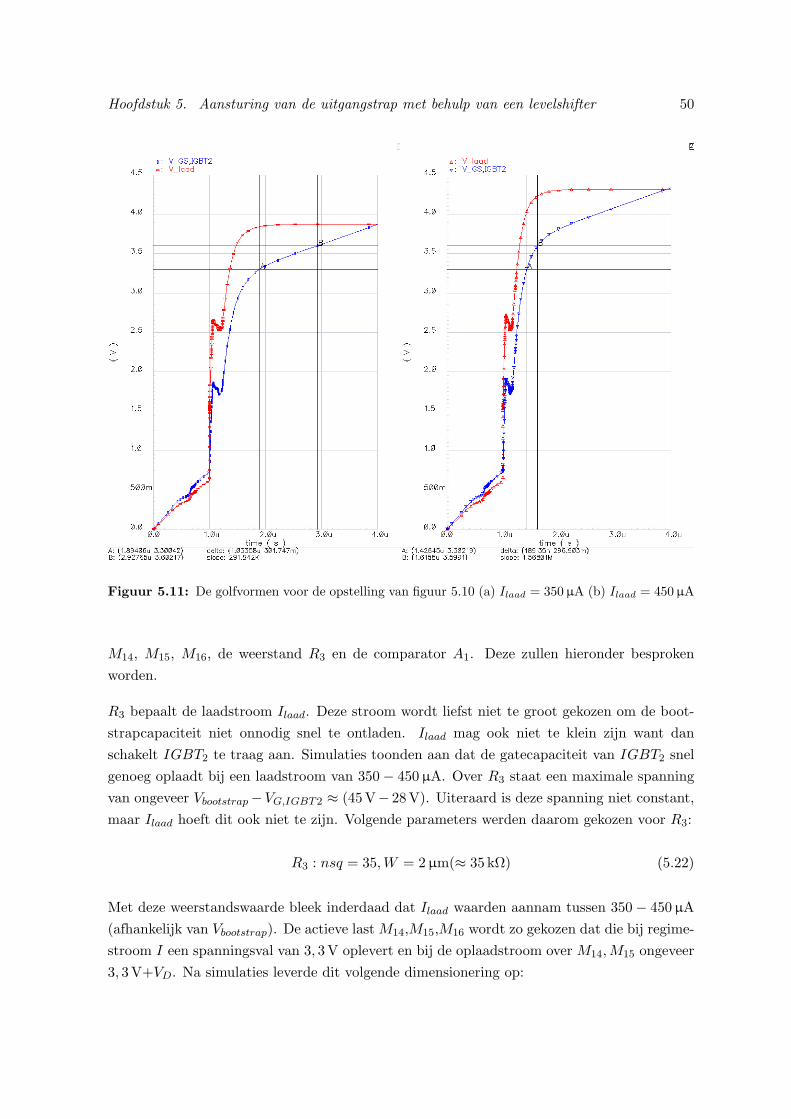
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 50
Figuur 5.11: De golfvormen voor de opstelling van figuur 5.10 (a) Ilaad = 350µA (b) Ilaad = 450 µA
M14, M15, M16, de weerstand R3 en de comparator A1. Deze zullen hieronder besprokenworden.
R3 bepaalt de laadstroom Ilaad. Deze stroom wordt liefst niet te groot gekozen om de boot-strapcapaciteit niet onnodig snel te ontladen. Ilaad mag ook niet te klein zijn want danschakelt IGBT2 te traag aan. Simulaties toonden aan dat de gatecapaciteit van IGBT2 snelgenoeg oplaadt bij een laadstroom van 350− 450 µA. Over R3 staat een maximale spanningvan ongeveer Vbootstrap−VG,IGBT2 ≈ (45 V− 28 V). Uiteraard is deze spanning niet constant,maar Ilaad hoeft dit ook niet te zijn. Volgende parameters werden daarom gekozen voor R3:
R3 : nsq = 35,W = 2µm(≈ 35 kΩ) (5.22)
Met deze weerstandswaarde bleek inderdaad dat Ilaad waarden aannam tussen 350− 450 µA(afhankelijk van Vbootstrap). De actieve last M14,M15,M16 wordt zo gekozen dat die bij regime-stroom I een spanningsval van 3, 3 V oplevert en bij de oplaadstroom over M14,M15 ongeveer3, 3 V+VD. Na simulaties leverde dit volgende dimensionering op:

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 51
W14
L14=
W15
L15=
4, 5 µm0, 35 µm
(5.23)
W16
L16=
1, 2 µm3 µm
(5.24)
M ′14, M ′
15 en M ′16 hebben uiteraard dezelfde dimensies. M17 is geschakeld als diode en wordt
gewoon groot genoeg gekozen om zonder problemen Ilaad te voeren.
W17
L17=
10 µm0, 35 µm
(5.25)
Dit geeft inderdaad het gewenste resultaat. In figuur 5.11 is de spanning over de actievelast M14,M15,M16 getoond als op t = 1µs een stap wordt aangelegd met grootte gelijk aanIlaad en een constante stroombron I = 7µA. De opstelling voor deze simulatie is getoond infiguur 5.10. Op de simulatieresultaten is te zien dat in het worst case geval met de hoogsteIlaad het 189 ns duurt vooraleer VGK,IGBT2 stijgt van 3, 3 V naar de maximaal toegelatenwaarde van 3, 6 V. De comparator reageert in 10− 20 ns (zie 5.3.3 Dimensionering van dehoogspanningscomparator A1) wat duidelijk snel genoeg is om de laadstroom af te schakelen.Een tweede gegeven dat kan afgeleid worden uit figuur 5.11 is dat de gatecapaciteit van IGBT2
wordt opgeladen in 400− 900 ns. Aangezien de PWM-periode 100µs bedraagt is dit relatiefgezien meer dan snel genoeg en voldoet de dimensionering dus.Ter informatie worden hier de dimensies vermeld van de overige, minder kritische componen-ten:
NMOS laagspanningstransistoren enm:
M5 is een gemeenschappelijke transistor waarvan de dimensionering vermeld is in (5.11)
W ′6
L′6
=2 µm
0, 35 µm(5.26)
HV-floating PMOS laagspanningstransistor epm:
W12
L12=
1, 5 µm0, 5 µm
(5.27)
DMOS hoogspanningstransistor lfpdm80 :
W13
L13=
20 µm0, 9 µm
(5.28)
W9
L9=
30 µm0, 9 µm
(5.29)
W10
L10=
30 µm0, 9 µm
(5.30)

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 52
Merk op dat de DMOS transistoren M9 en M10 niet minimaal gekozen worden opW = 20 µm, omdat deze transistoren een iets grotere stroom moeten voeren dan M24,de transistor die de instelstroom verzorgt voor de hoogspanningscomparator A1. Opdatdezelfde stroomspiegel zou kunnen gebruikt worden voor deze 3 transistoren worden M9
en M10 groter gekozen. Door de actieve last M14, M15, M16 mag de instelstroom niet teklein zijn omdat parasitaire effecten dan relatief belangrijker gaan worden. De stroommag echter ook niet te groot gekozen worden, want dan zal de bootstrapcapaciteit tesnel ontladen. Een compromis leverde een stroom van 7µA op.
IDS9 = IDS10 = 7µA (5.31)
DMOS hoogspanningstransistor vfndm80 :
W11
L11=
20 µm0, 9 µm
(5.32)
hipor weerstanden:
R2 is een gemeenschappelijke weerstand waarvan de dimensionering vermeld is in (5.19)
Bootstrapcondensator C (Metal 2-2.5 ):
Uiteindelijk bleek dat deze capaciteit een waarde van 150 pF moet hebben opdat deregime-tak en laad-taak er voldoende stroom zou kunnen uit trekken.
Dimensionering van de hoogspanningscomparator A1
Deze comparator (figuur 5.12) bestaat uit een enkel differentiaalpaar M24 −M28 om de snel-heid te maximaliseren. De uitgangsweerstand van de gebruikte transistoren zijn toch grootgenoeg om een steile karakteristiek te bekomen. Het enige verschil met een traditioneel laag-spanningsdifferentiaalpaar [10] zit hem in de transistoren M24 −M26. Die zijn nu uitgevoerdmet hoogspanningstransistoren opdat V+ en V− de hoge spanning VGK,IGBT2 zou aankunnen.
Nu is er echter een probleem. Vcomp kan ook grote spanningen aannemen indien enkel hetdifferentiaalpaar beschouwd wordt. Als V+ > V−, zal Vcomp = Vbootstrap en als V+ < V− isVcomp = 0. Deze spanning Vcomp moet een digitaal poortje aansturen in de levelshifter en magdus niet groter worden dan 3, 3 V. Om die reden wordt een begrenzingscircuit aangebracht.De opamp A2 buffert een spanning die iets kleiner is dan VCC . Transistor M29 is geschakeldals diode en zal er dus voor zorgen dat Vcomp nooit hoger wordt dan de spanning aan deuitgang van de buffer vermeerderd met de drempelspanning VD van de diode.M24−M26 zijn DMOS transistoren van het p-type (lfpdm80 ). De minimale afmetingen waarbijnauwkeurigheid gegarandeerd is worden gekozen.
W24
L24=
W25
L25=
W26
L26=
20 µm0, 9 µm
(5.33)
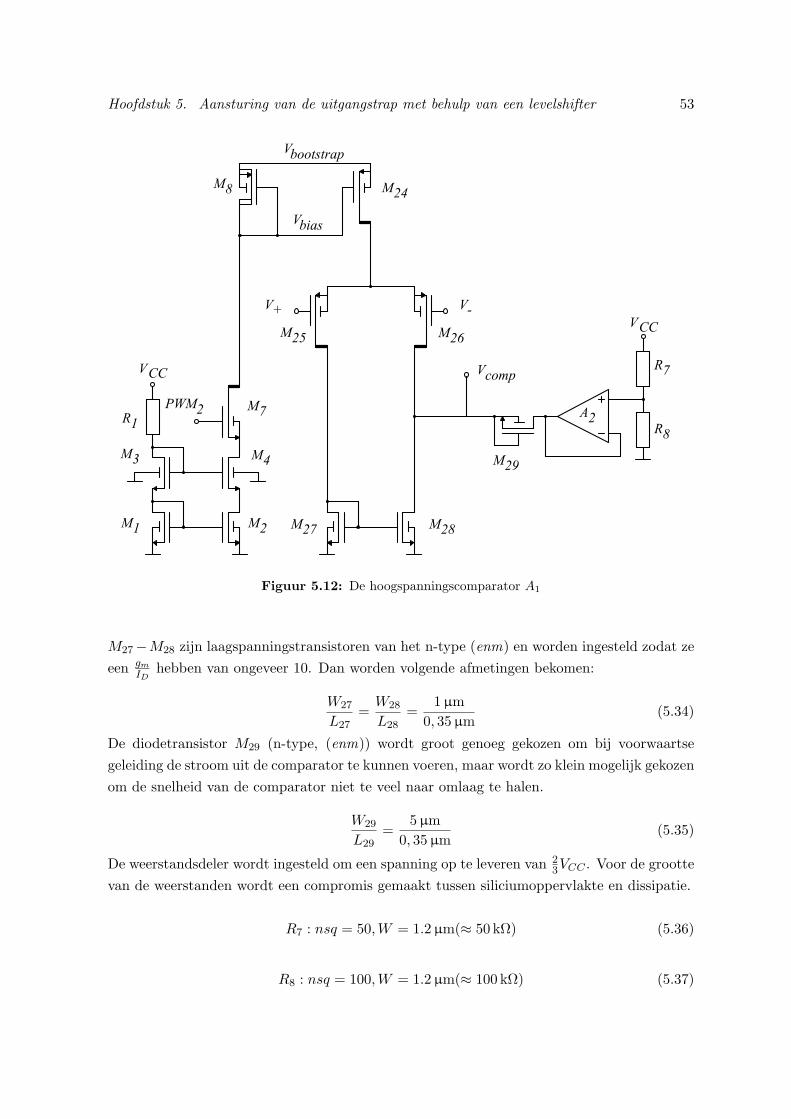
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 53
Figuur 5.12: De hoogspanningscomparator A1
M27−M28 zijn laagspanningstransistoren van het n-type (enm) en worden ingesteld zodat zeeen gm
IDhebben van ongeveer 10. Dan worden volgende afmetingen bekomen:
W27
L27=
W28
L28=
1 µm0, 35 µm
(5.34)
De diodetransistor M29 (n-type, (enm)) wordt groot genoeg gekozen om bij voorwaartsegeleiding de stroom uit de comparator te kunnen voeren, maar wordt zo klein mogelijk gekozenom de snelheid van de comparator niet te veel naar omlaag te halen.
W29
L29=
5 µm0, 35 µm
(5.35)
De weerstandsdeler wordt ingesteld om een spanning op te leveren van 23VCC . Voor de grootte
van de weerstanden wordt een compromis gemaakt tussen siliciumoppervlakte en dissipatie.
R7 : nsq = 50,W = 1.2µm(≈ 50 kΩ) (5.36)
R8 : nsq = 100,W = 1.2µm(≈ 100 kΩ) (5.37)

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 54
Bovenstaande dimensionering levert volgende waarden op voor de rustinstelling van het dif-ferentiaalpaar M25 −M26:
IDS,25 = IDS,26 = −2, 1 µA (5.38)
gm,25 = gm,26 = 40µAV
(5.39)
Figuur 5.13: Simulatie van de hoogspanningscomparator. V+ = 30V
De snelheid van deze comparator is te zien in figuur 5.13. Aan V+ werd een constante spanningvan 30V gehangen en aan V− een langzaam stijgende spanning waarvan de helling ongeveerovereenkomt met die van VG,IGBT2. Na 15 ns is de comparator volledig omgeklapt. De snelheidwordt beperkt door parasitaire capaciteiten aan de uitgang en de lage instelstroom en gm vanhet differentiaalpaar, maar voor deze toepassing is dit resultaat ruim voldoende. Een lageinstelstroom is gewenst omdat deze stroom uit de bootstrapcapaciteit getrokken wordt.
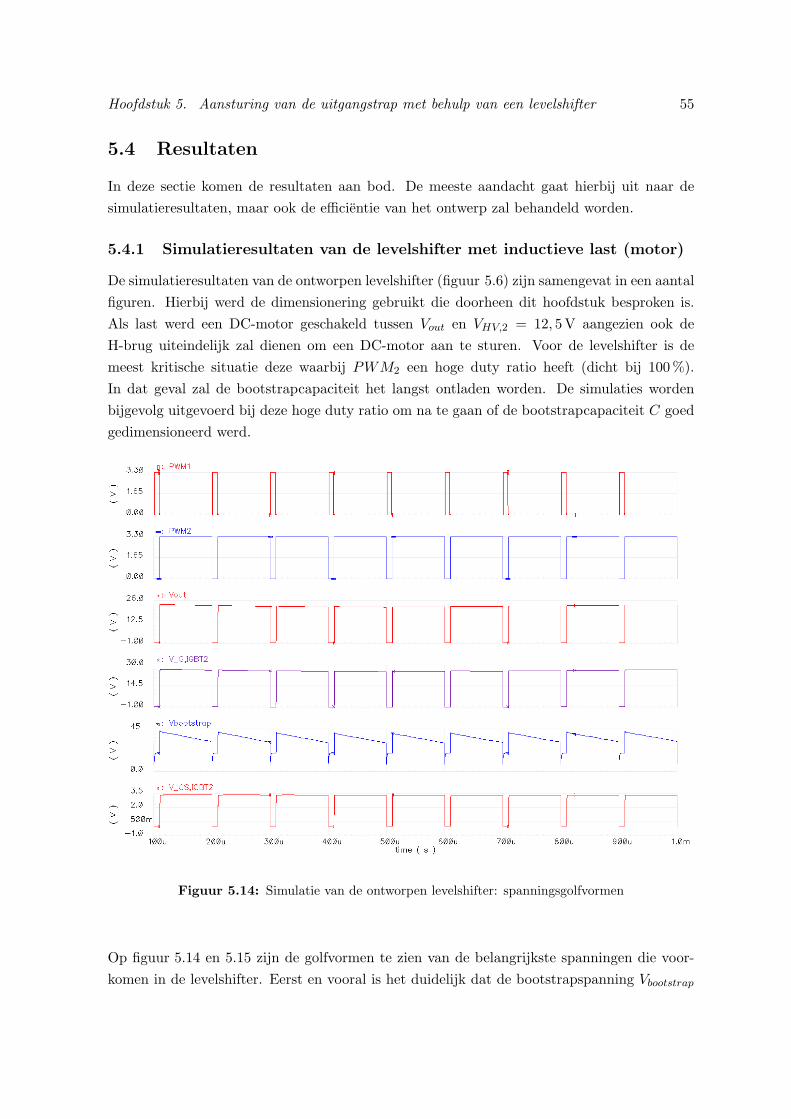
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 55
5.4 Resultaten
In deze sectie komen de resultaten aan bod. De meeste aandacht gaat hierbij uit naar desimulatieresultaten, maar ook de efficientie van het ontwerp zal behandeld worden.
5.4.1 Simulatieresultaten van de levelshifter met inductieve last (motor)
De simulatieresultaten van de ontworpen levelshifter (figuur 5.6) zijn samengevat in een aantalfiguren. Hierbij werd de dimensionering gebruikt die doorheen dit hoofdstuk besproken is.Als last werd een DC-motor geschakeld tussen Vout en VHV,2 = 12, 5 V aangezien ook deH-brug uiteindelijk zal dienen om een DC-motor aan te sturen. Voor de levelshifter is demeest kritische situatie deze waarbij PWM2 een hoge duty ratio heeft (dicht bij 100 %).In dat geval zal de bootstrapcapaciteit het langst ontladen worden. De simulaties wordenbijgevolg uitgevoerd bij deze hoge duty ratio om na te gaan of de bootstrapcapaciteit C goedgedimensioneerd werd.
Figuur 5.14: Simulatie van de ontworpen levelshifter: spanningsgolfvormen
Op figuur 5.14 en 5.15 zijn de golfvormen te zien van de belangrijkste spanningen die voor-komen in de levelshifter. Eerst en vooral is het duidelijk dat de bootstrapspanning Vbootstrap
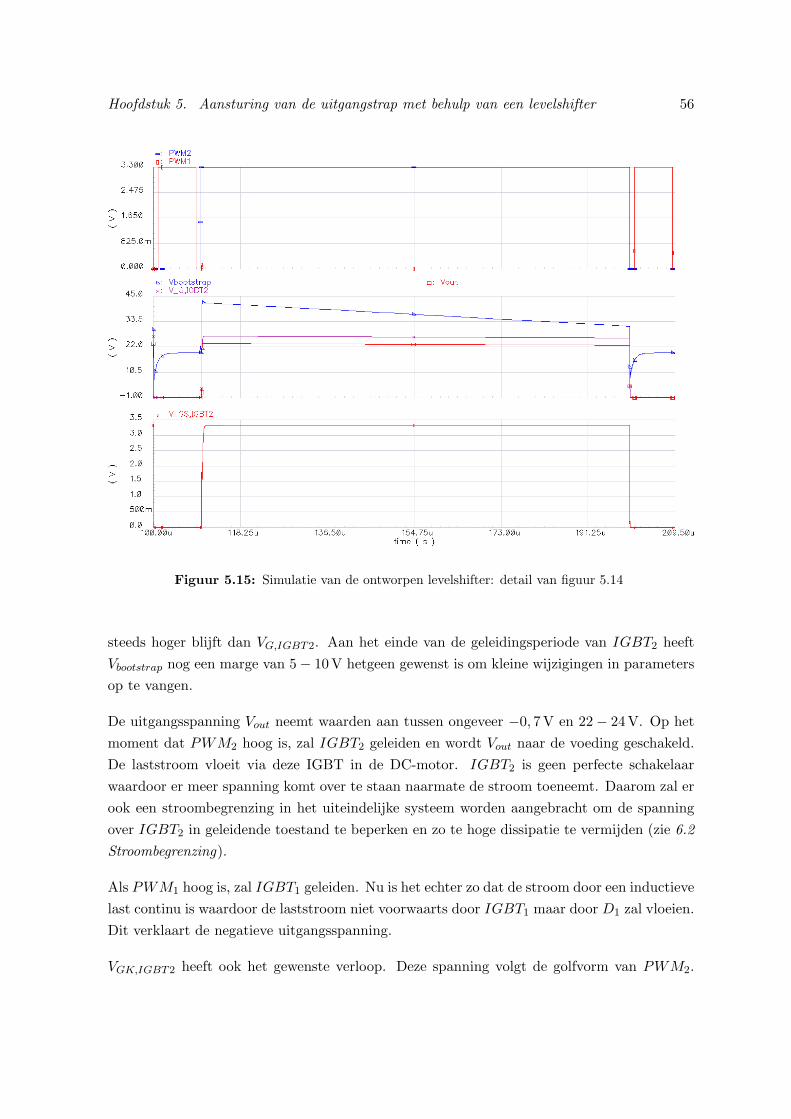
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 56
Figuur 5.15: Simulatie van de ontworpen levelshifter: detail van figuur 5.14
steeds hoger blijft dan VG,IGBT2. Aan het einde van de geleidingsperiode van IGBT2 heeftVbootstrap nog een marge van 5− 10 V hetgeen gewenst is om kleine wijzigingen in parametersop te vangen.
De uitgangsspanning Vout neemt waarden aan tussen ongeveer −0, 7 V en 22− 24 V. Op hetmoment dat PWM2 hoog is, zal IGBT2 geleiden en wordt Vout naar de voeding geschakeld.De laststroom vloeit via deze IGBT in de DC-motor. IGBT2 is geen perfecte schakelaarwaardoor er meer spanning komt over te staan naarmate de stroom toeneemt. Daarom zal erook een stroombegrenzing in het uiteindelijke systeem worden aangebracht om de spanningover IGBT2 in geleidende toestand te beperken en zo te hoge dissipatie te vermijden (zie 6.2Stroombegrenzing).
Als PWM1 hoog is, zal IGBT1 geleiden. Nu is het echter zo dat de stroom door een inductievelast continu is waardoor de laststroom niet voorwaarts door IGBT1 maar door D1 zal vloeien.Dit verklaart de negatieve uitgangsspanning.
VGK,IGBT2 heeft ook het gewenste verloop. Deze spanning volgt de golfvorm van PWM2.
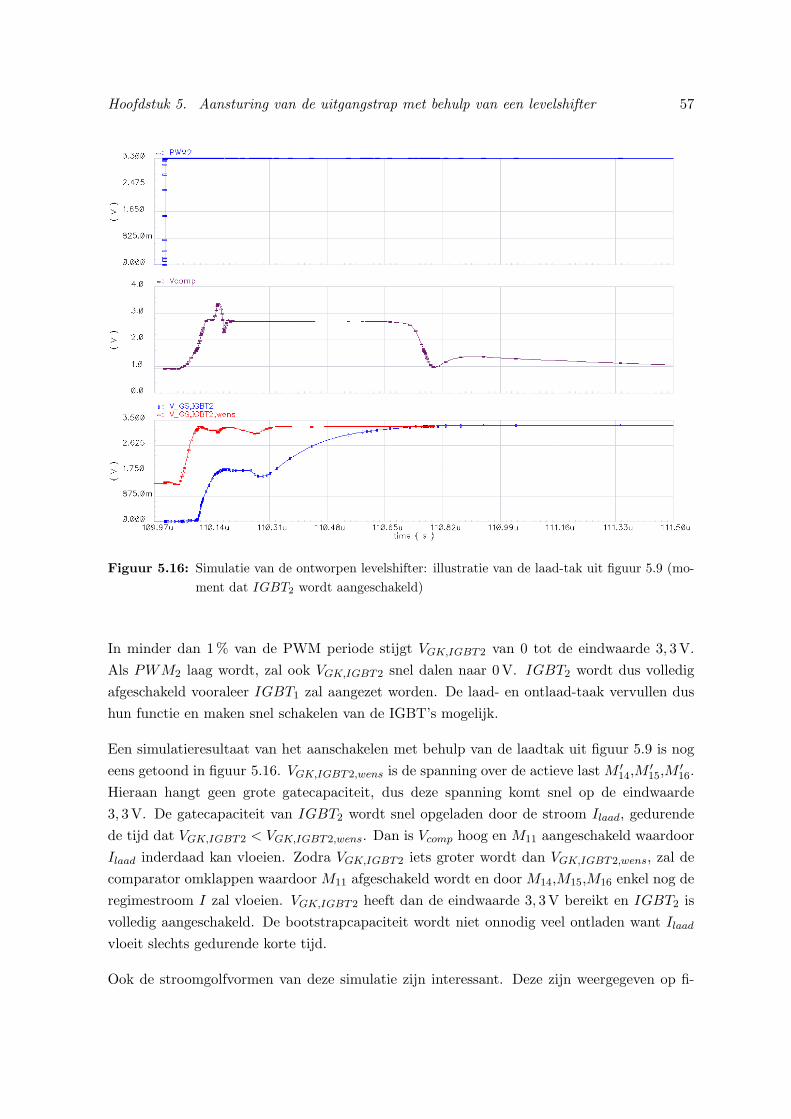
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 57
Figuur 5.16: Simulatie van de ontworpen levelshifter: illustratie van de laad-tak uit figuur 5.9 (mo-ment dat IGBT2 wordt aangeschakeld)
In minder dan 1% van de PWM periode stijgt VGK,IGBT2 van 0 tot de eindwaarde 3, 3 V.Als PWM2 laag wordt, zal ook VGK,IGBT2 snel dalen naar 0 V. IGBT2 wordt dus volledigafgeschakeld vooraleer IGBT1 zal aangezet worden. De laad- en ontlaad-taak vervullen dushun functie en maken snel schakelen van de IGBT’s mogelijk.
Een simulatieresultaat van het aanschakelen met behulp van de laadtak uit figuur 5.9 is nogeens getoond in figuur 5.16. VGK,IGBT2,wens is de spanning over de actieve last M ′
14,M′15,M
′16.
Hieraan hangt geen grote gatecapaciteit, dus deze spanning komt snel op de eindwaarde3, 3 V. De gatecapaciteit van IGBT2 wordt snel opgeladen door de stroom Ilaad, gedurendede tijd dat VGK,IGBT2 < VGK,IGBT2,wens. Dan is Vcomp hoog en M11 aangeschakeld waardoorIlaad inderdaad kan vloeien. Zodra VGK,IGBT2 iets groter wordt dan VGK,IGBT2,wens, zal decomparator omklappen waardoor M11 afgeschakeld wordt en door M14,M15,M16 enkel nog deregimestroom I zal vloeien. VGK,IGBT2 heeft dan de eindwaarde 3, 3 V bereikt en IGBT2 isvolledig aangeschakeld. De bootstrapcapaciteit wordt niet onnodig veel ontladen want Ilaad
vloeit slechts gedurende korte tijd.
Ook de stroomgolfvormen van deze simulatie zijn interessant. Deze zijn weergegeven op fi-
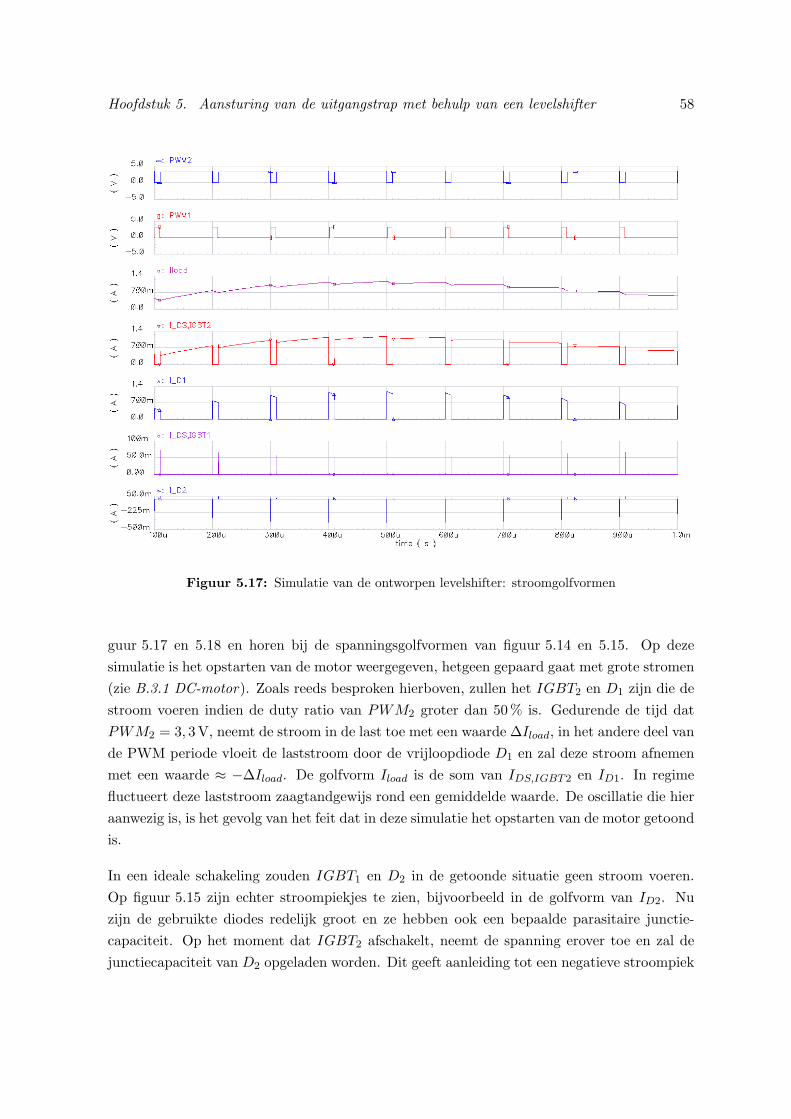
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 58
Figuur 5.17: Simulatie van de ontworpen levelshifter: stroomgolfvormen
guur 5.17 en 5.18 en horen bij de spanningsgolfvormen van figuur 5.14 en 5.15. Op dezesimulatie is het opstarten van de motor weergegeven, hetgeen gepaard gaat met grote stromen(zie B.3.1 DC-motor). Zoals reeds besproken hierboven, zullen het IGBT2 en D1 zijn die destroom voeren indien de duty ratio van PWM2 groter dan 50 % is. Gedurende de tijd datPWM2 = 3, 3 V, neemt de stroom in de last toe met een waarde ∆Iload, in het andere deel vande PWM periode vloeit de laststroom door de vrijloopdiode D1 en zal deze stroom afnemenmet een waarde ≈ −∆Iload. De golfvorm Iload is de som van IDS,IGBT2 en ID1. In regimefluctueert deze laststroom zaagtandgewijs rond een gemiddelde waarde. De oscillatie die hieraanwezig is, is het gevolg van het feit dat in deze simulatie het opstarten van de motor getoondis.
In een ideale schakeling zouden IGBT1 en D2 in de getoonde situatie geen stroom voeren.Op figuur 5.15 zijn echter stroompiekjes te zien, bijvoorbeeld in de golfvorm van ID2. Nuzijn de gebruikte diodes redelijk groot en ze hebben ook een bepaalde parasitaire junctie-capaciteit. Op het moment dat IGBT2 afschakelt, neemt de spanning erover toe en zal dejunctiecapaciteit van D2 opgeladen worden. Dit geeft aanleiding tot een negatieve stroompiek

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 59
Figuur 5.18: Simulatie van de ontworpen levelshifter: stroomgolfvormen (detail figuur 5.17)
in de golfvorm van ID2. Bij het aanschakelen van IGBT2 wordt de junctiecapaciteit van D2
ontladen hetgeen aanleiding geeft tot een positief piekje in diens stroomgolfvorm. De hoogtevan het piekje is een stuk lager maar aangezien het aanschakelen van IGBT2 trager gebeurtdan het afschakelen, duurt het piekje wel langer. Ruwweg is het piekje 4 keer langer dan bijhet afschakelen, maar ook 4 keer minder hoog. Een analoge bespreking is mogelijk voor deandere golfvormen.
5.4.2 Robuustheid van het ontwerp
Simulatieresultaten verschillen steeds enigszins met de realiteit. Daarom is het nuttig om na tegaan of het ontwerp gevoelig is aan allerlei invloeden zoals de temperatuur, parametervariaties,parasitaire effecten, . . .
Invloed van de temperatuur
Op de chip is een temperatuursensor aanwezig (zie 6.3 Thermisch protectiecircuit) die ervoorzal zorgen dat de schakeling geactiveerd blijft zolang de temperatuur lager is dan 150 C.Het is dus ook wenselijk dat de schakeling blijft werken voor temperaturen tot 150 C. Uit
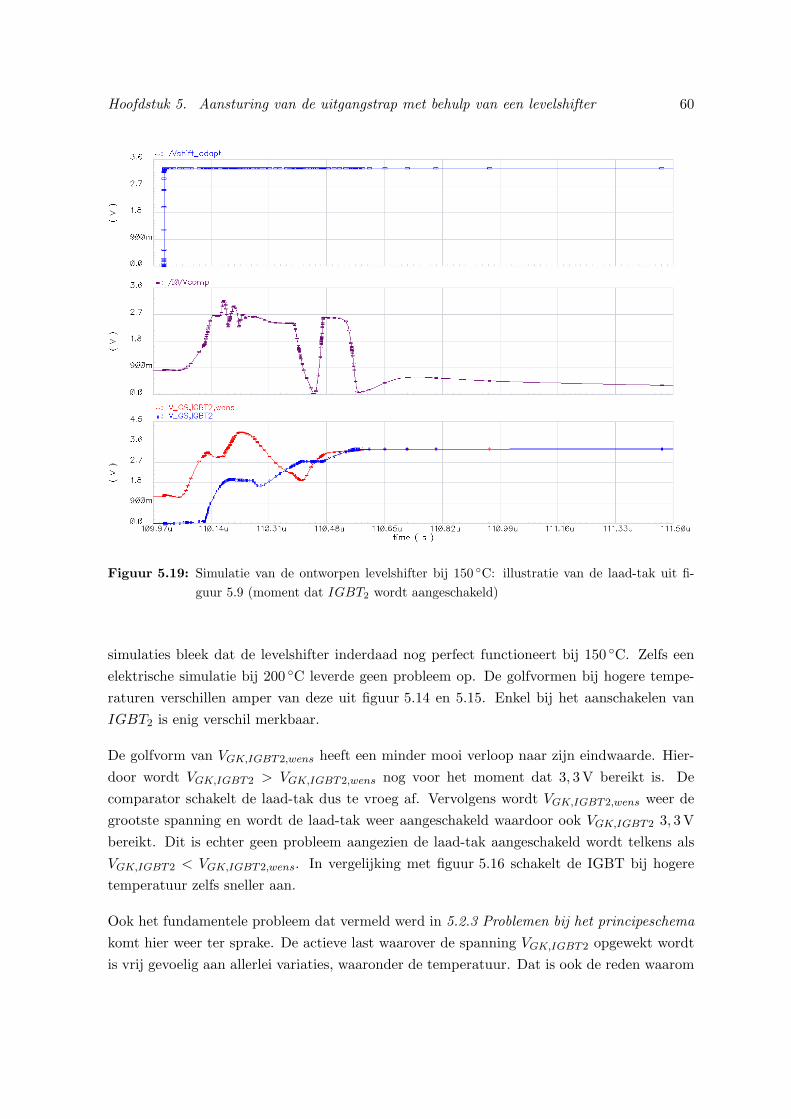
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 60
Figuur 5.19: Simulatie van de ontworpen levelshifter bij 150 C: illustratie van de laad-tak uit fi-guur 5.9 (moment dat IGBT2 wordt aangeschakeld)
simulaties bleek dat de levelshifter inderdaad nog perfect functioneert bij 150 C. Zelfs eenelektrische simulatie bij 200 C leverde geen probleem op. De golfvormen bij hogere tempe-raturen verschillen amper van deze uit figuur 5.14 en 5.15. Enkel bij het aanschakelen vanIGBT2 is enig verschil merkbaar.
De golfvorm van VGK,IGBT2,wens heeft een minder mooi verloop naar zijn eindwaarde. Hier-door wordt VGK,IGBT2 > VGK,IGBT2,wens nog voor het moment dat 3, 3 V bereikt is. Decomparator schakelt de laad-tak dus te vroeg af. Vervolgens wordt VGK,IGBT2,wens weer degrootste spanning en wordt de laad-tak weer aangeschakeld waardoor ook VGK,IGBT2 3, 3 Vbereikt. Dit is echter geen probleem aangezien de laad-tak aangeschakeld wordt telkens alsVGK,IGBT2 < VGK,IGBT2,wens. In vergelijking met figuur 5.16 schakelt de IGBT bij hogeretemperatuur zelfs sneller aan.
Ook het fundamentele probleem dat vermeld werd in 5.2.3 Problemen bij het principeschemakomt hier weer ter sprake. De actieve last waarover de spanning VGK,IGBT2 opgewekt wordtis vrij gevoelig aan allerlei variaties, waaronder de temperatuur. Dat is ook de reden waarom

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 61
de regelweerstand R1 uit figuur 5.6 extern wordt aangebracht. Op die manier is het mogelijkom de spanning VGK,IGBT2 perfect in te stellen. Dit geldt echter enkel als de temperatuurconstant blijft. Bij stijgende temperatuur is een iets grotere stroom nodig door de actievelast M14,M15,M16 om dezelfde VGK,IGBT2 te bekomen. Een ander probleem is groeiendemismatch tussen M12 en M13 als de temperatuur toeneemt. Dit probleem is niet eenvoudigop te lossen, maar gelukkig is het effect niet zo uitgesproken. Indien de levelshifter wordtingesteld voor een correcte werking bij 150 C (VGK,IGBT2=3, 3 V), dan zal die instelling bij100 C een VGK,IGBT2 opleveren van 3, 1 V en bij 27 C 2, 8 V. Dit komt overeen met eennominale waarde voor R1 van 600 kΩ. IGBT2 zal dus niet volledig aangeschakeld wordenwaardoor de dissipatie in de component iets hoger zal zijn. Gelukkig is dit een fenomeenwaarbij negatieve feedback komt kijken. Bij een hogere dissipatie verwacht men ook een hogerewarmteproductie, wat op zijn beurt leidt tot een temperatuurstijging. Dit leidt dan tot eenhogere VGK,IGBT2 en dus minder dissipatie in de IGBT. Spijtig genoeg is een elektrothermischeanalyse om dit fenomeen te onderzoeken tot op heden nog niet echt mogelijk.
Invloed van parametervariaties
Zoals hierboven besproken is de ontlaad-tak vrij ongevoelig aan parametervariaties aangeziende ontlaad-transistoren niet aangestuurd hoeven te worden met exact gekende stromen. Ookde laad-tak is nagenoeg ongevoelig aan parametervariaties aangezien de laadstroom minstenstot op 10 % nauwkeurig gekend is, daar deze ingesteld is door een weerstand. Door de opbouwvan dit circuit met een comparator is deze nauwkeurigheid meer dan voldoende.
De regime-tak is wel gevoelig aan parametervariaties doordat de stroom in de actieve lastM14,M15,M16 perfect moet ingesteld worden. Dit is een fundamenteel probleem dat nieteenvoudig op te lossen is, tenzij met een externe regelweerstand R1.Voor de volledige levelshifter kan dus besloten worden dat parametervariaties geen grote rolzullen spelen indien R1 correct extern is ingesteld.
5.4.3 Specificaties van het ontwerp
Afmetingen
Ten opzichte van het principeschema uit figuur 5.3 is de gerealiseerde levelshifter uit figuur 5.6duidelijk een stuk compacter wat betreft siliciumoppervlakte. De grootste component van hetschema is de bootstrapcapaciteit. In het principeschema is die ≈ 1, 5 nF in tegenstelling tot150 pF in het gerealiseerde ontwerp (factor 10 beter). Als deze gerealiseerd wordt met eenmetal2-2.5 capaciteit die een capaciteit per oppervlakte eenheid van 1, 5 fF/µm2 heeft, resul-teert dit in een oppervlaktegebruik van de grootteorde 0, 1 mm vs. 1 mm voor het realiserenvan een capaciteit.
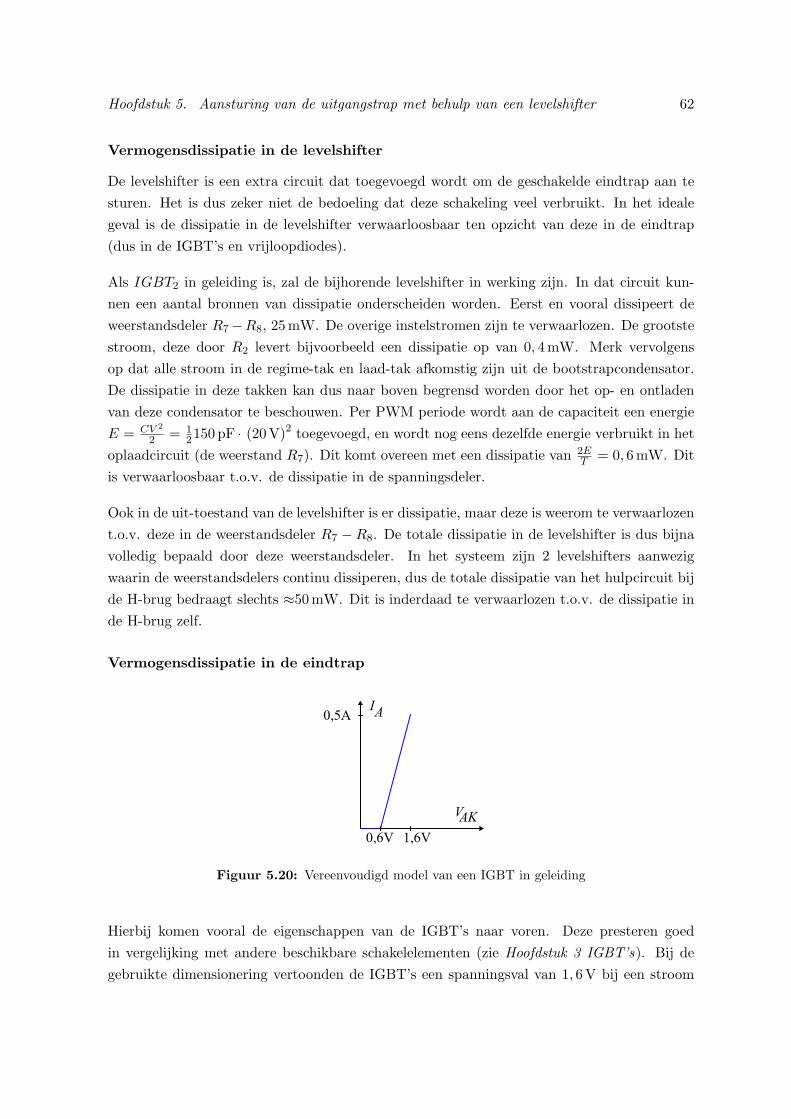
Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 62
Vermogensdissipatie in de levelshifter
De levelshifter is een extra circuit dat toegevoegd wordt om de geschakelde eindtrap aan testuren. Het is dus zeker niet de bedoeling dat deze schakeling veel verbruikt. In het idealegeval is de dissipatie in de levelshifter verwaarloosbaar ten opzicht van deze in de eindtrap(dus in de IGBT’s en vrijloopdiodes).
Als IGBT2 in geleiding is, zal de bijhorende levelshifter in werking zijn. In dat circuit kun-nen een aantal bronnen van dissipatie onderscheiden worden. Eerst en vooral dissipeert deweerstandsdeler R7−R8, 25mW. De overige instelstromen zijn te verwaarlozen. De grootstestroom, deze door R2 levert bijvoorbeeld een dissipatie op van 0, 4 mW. Merk vervolgensop dat alle stroom in de regime-tak en laad-tak afkomstig zijn uit de bootstrapcondensator.De dissipatie in deze takken kan dus naar boven begrensd worden door het op- en ontladenvan deze condensator te beschouwen. Per PWM periode wordt aan de capaciteit een energieE = CV 2
2 = 12150 pF · (20 V)2 toegevoegd, en wordt nog eens dezelfde energie verbruikt in het
oplaadcircuit (de weerstand R7). Dit komt overeen met een dissipatie van 2ET = 0, 6 mW. Dit
is verwaarloosbaar t.o.v. de dissipatie in de spanningsdeler.
Ook in de uit-toestand van de levelshifter is er dissipatie, maar deze is weerom te verwaarlozent.o.v. deze in de weerstandsdeler R7 −R8. De totale dissipatie in de levelshifter is dus bijnavolledig bepaald door deze weerstandsdeler. In het systeem zijn 2 levelshifters aanwezigwaarin de weerstandsdelers continu dissiperen, dus de totale dissipatie van het hulpcircuit bijde H-brug bedraagt slechts ≈50 mW. Dit is inderdaad te verwaarlozen t.o.v. de dissipatie inde H-brug zelf.
Vermogensdissipatie in de eindtrap
Figuur 5.20: Vereenvoudigd model van een IGBT in geleiding
Hierbij komen vooral de eigenschappen van de IGBT’s naar voren. Deze presteren goedin vergelijking met andere beschikbare schakelelementen (zie Hoofdstuk 3 IGBT’s). Bij degebruikte dimensionering vertoonden de IGBT’s een spanningsval van 1, 6 V bij een stroom

Hoofdstuk 5. Aansturing van de uitgangstrap met behulp van een levelshifter 63
van 0, 5 A. Hiervan is ≈0, 6 V afkomstig van de drempelspanning in de bipolaire structuur. Deoverige ≈1 V is het gevolg van de aan-weerstand Ron van de IGBT, die ongeveer 1V
0,5A = 2 Ωbedraagt. Samen komt dit overeen met een DC-dissipatie van 0, 8 W. Dit gedrag is grafischvoorgesteld in figuur 5.20. Aan de hand van dit vereenvoudigde model kan de dissipatie inelke situatie bepaald worden.
De vrijloopdiodes hebben in voorwaartse geleiding een spanningsval van ongeveer 0, 8 V vanaf≈0, 1 A.
Aangezien bij een min of meer constante laststroom van 0, 5 A telkens 2 IGBT’s of 2 vrijloop-diodes gaan geleiden, zal bij een duty-cycle van bijvoorbeeld 90% en een inductieve last dedissipatie in de eindtrap de volgende zijn:
Pdiss,dc ≈ 2 · 0, 9 · 0, 5 A · 1, 6 V + 2 · 0, 1 · 0, 8 V · 0, 5 A = 1, 52 W (5.40)
In principe moeten ook nog de schakelverliezen in rekening gebracht worden. Dit vergt echteriets meer berekeningen, maar kan ook makkelijk bepaald worden uit een simulatie. Bij eenlaststroom van 0, 5 A treedt tijdens het aanschakelen van bijvoorbeeld IGBT2 een benaderendparabolische vermogenspiek op met maximale waarde ≈12 W en een duur van ≈200 ns. Ditlevert een gemiddeld vermogen op van:
Pdiss,schakel ≈1, 2 s
100 µs= 12mW (5.41)
De dissipatie bij het afschakelen bleek een factor 10 lager te liggen. Het afschakelen gebeurtinderdaad sneller. Hetzelfde geldt voor de IGBT’s onderaan in de H-brug. Deze wordenrechtstreeks door grote buffers aangestuurd. De schakelverliezen liggen een factor 15 lagerdan in (5.41).
Hoofdstuk 6
De H-brug met protectiecircuits
6.1 Inleiding
Bij het aansturen van motoren kunnen nog al eens grote laststromen vloeien zoals bij hetopstarten van een DC-motor of bij een grote mechanische belasting ervan. Om de H-brug,en meer bepaald de IGBT’s die er onderdeel van zijn, te beschermen tegen te hoge stromenen te hoge temperaturen, worden protectiecircuits ingebouwd. Enerzijds wordt de stroom inde last (en dus ook de stroom door de IGBT’s) beperkt tot 0, 5 A. De IGBT’s zijn namelijkzo gedimensioneerd dat de dissipatie nog aanvaardbaar is bij een laststroom van 0, 5 A. An-derzijds is er een thermisch protectiecircuit aanwezig dat het HV-gedeelte uitschakelt als detemperatuur oploopt tot meer dan 150 C.
6.2 Stroombegrenzing
6.2.1 Werking
Bij 0, 5 A door de IGBT bedraagt de spanningsval erover 1, 6 V (zie figuur 3.6). Dit leidt toteen (DC-) dissipatie van 0, 8 W. De stroombegrenzing wordt ingesteld op deze waarde. Hetcircuit om dit te realiseren is getoond in figuur 6.1. De stroom doorheen de H-brug wordtgemeten door de (zeer kleine) weerstand Rsense waarover een spanningsval Vsense bestaat.Aan de hand van een comparator wordt deze vergeleken met Vlimit. Zodra Vsense groterwordt dan Vlimit, komt Vout,comp op 0 V (logische “0”). Op dat moment krijgt de SR-latcheen ingangswaarde R =“1” en S =“0” waardoor de uitgang Q op “0” komt te staan. PWM1
en PWM2 worden dus niet meer doorgelaten (PWM1,adapt = PWM2,adapt =“0”) waardooralle IGBT’s in de H-brug afgeschakeld worden. Bijgevolg zal de laststroom terug afnemenwaardoor Vsense weer lager wordt dan Vlimit. De extra digitale logica is nodig om ervoor tezorgen dat PWM1,adapt en PWM2,adapt terug pas hoog kunnen worden op het moment datPWM1 respectievelijk PWM2 opnieuw hoog worden. Dit wordt gerealiseerd door in de dodetijd (het moment dat PWM1 en PWM2 beide laag zijn) pas een set-puls (S =“1”, R =“0”)
64
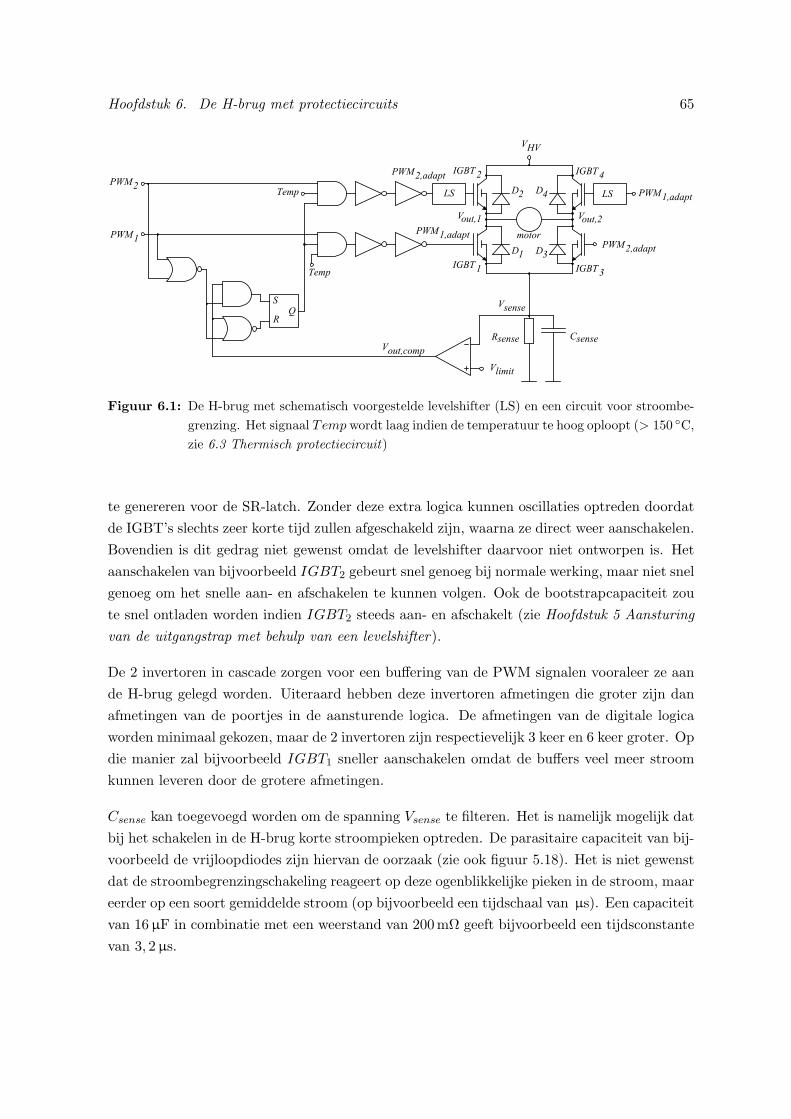
Hoofdstuk 6. De H-brug met protectiecircuits 65
Figuur 6.1: De H-brug met schematisch voorgestelde levelshifter (LS) en een circuit voor stroombe-grenzing. Het signaal Temp wordt laag indien de temperatuur te hoog oploopt (> 150 C,zie 6.3 Thermisch protectiecircuit)
te genereren voor de SR-latch. Zonder deze extra logica kunnen oscillaties optreden doordatde IGBT’s slechts zeer korte tijd zullen afgeschakeld zijn, waarna ze direct weer aanschakelen.Bovendien is dit gedrag niet gewenst omdat de levelshifter daarvoor niet ontworpen is. Hetaanschakelen van bijvoorbeeld IGBT2 gebeurt snel genoeg bij normale werking, maar niet snelgenoeg om het snelle aan- en afschakelen te kunnen volgen. Ook de bootstrapcapaciteit zoute snel ontladen worden indien IGBT2 steeds aan- en afschakelt (zie Hoofdstuk 5 Aansturingvan de uitgangstrap met behulp van een levelshifter).
De 2 invertoren in cascade zorgen voor een buffering van de PWM signalen vooraleer ze aande H-brug gelegd worden. Uiteraard hebben deze invertoren afmetingen die groter zijn danafmetingen van de poortjes in de aansturende logica. De afmetingen van de digitale logicaworden minimaal gekozen, maar de 2 invertoren zijn respectievelijk 3 keer en 6 keer groter. Opdie manier zal bijvoorbeeld IGBT1 sneller aanschakelen omdat de buffers veel meer stroomkunnen leveren door de grotere afmetingen.
Csense kan toegevoegd worden om de spanning Vsense te filteren. Het is namelijk mogelijk datbij het schakelen in de H-brug korte stroompieken optreden. De parasitaire capaciteit van bij-voorbeeld de vrijloopdiodes zijn hiervan de oorzaak (zie ook figuur 5.18). Het is niet gewenstdat de stroombegrenzingschakeling reageert op deze ogenblikkelijke pieken in de stroom, maareerder op een soort gemiddelde stroom (op bijvoorbeeld een tijdschaal van µs). Een capaciteitvan 16 µF in combinatie met een weerstand van 200mΩ geeft bijvoorbeeld een tijdsconstantevan 3, 2 µs.
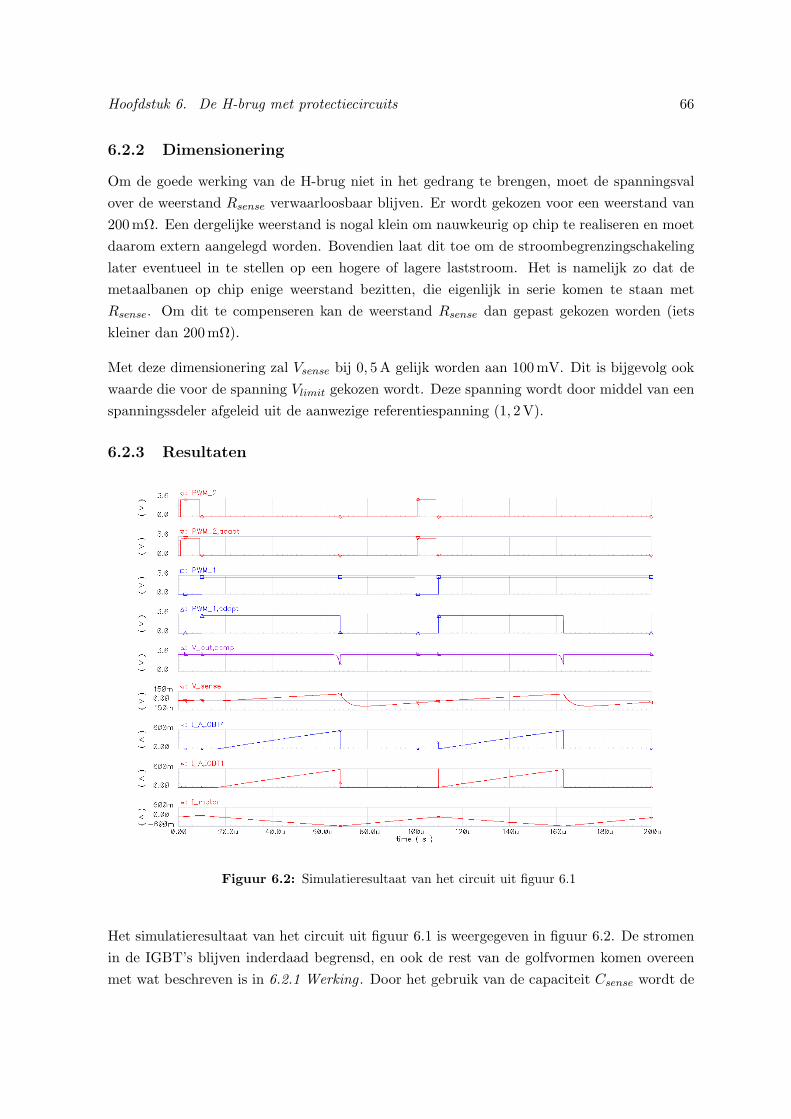
Hoofdstuk 6. De H-brug met protectiecircuits 66
6.2.2 Dimensionering
Om de goede werking van de H-brug niet in het gedrang te brengen, moet de spanningsvalover de weerstand Rsense verwaarloosbaar blijven. Er wordt gekozen voor een weerstand van200 mΩ. Een dergelijke weerstand is nogal klein om nauwkeurig op chip te realiseren en moetdaarom extern aangelegd worden. Bovendien laat dit toe om de stroombegrenzingschakelinglater eventueel in te stellen op een hogere of lagere laststroom. Het is namelijk zo dat demetaalbanen op chip enige weerstand bezitten, die eigenlijk in serie komen te staan metRsense. Om dit te compenseren kan de weerstand Rsense dan gepast gekozen worden (ietskleiner dan 200 mΩ).
Met deze dimensionering zal Vsense bij 0, 5 A gelijk worden aan 100mV. Dit is bijgevolg ookwaarde die voor de spanning Vlimit gekozen wordt. Deze spanning wordt door middel van eenspanningssdeler afgeleid uit de aanwezige referentiespanning (1, 2 V).
6.2.3 Resultaten
Figuur 6.2: Simulatieresultaat van het circuit uit figuur 6.1
Het simulatieresultaat van het circuit uit figuur 6.1 is weergegeven in figuur 6.2. De stromenin de IGBT’s blijven inderdaad begrensd, en ook de rest van de golfvormen komen overeenmet wat beschreven is in 6.2.1 Werking . Door het gebruik van de capaciteit Csense wordt de

Hoofdstuk 6. De H-brug met protectiecircuits 67
stroom in de IGBT’s iets groter dan 0, 5 A. Csense moet de spanning Vsense voldoende filteren(kies Csense niet te klein) maar mag ook niet teveel vertraging introduceren (kies Csense niette groot). Bij deze simulatie werd een capaciteit met grootte 16 µF gekozen.
De stroom in de diodes zal (op stroompieken na) nooit groter worden dan de stroom door deIGBT’s aangezien de laststroom afneemt gedurende de tijd dat de vrijloopdiodes geleiden. Inde vrijloopdiodes zullen dus ook geen te grote stromen vloeien.
Bij het opstarten van de DC-motor vloeien grote stromen aangezien de tegenelektromotorischespanning zich moet opbouwen. Dit is een systeem met negatieve feedback. De stroom in eenovergangsperiode kan hierbij overshoot vertonen. Het is net door deze overshoot dat de motorsnel opstart (zie B.3.1 DC-motor).
Als de stroom nu begrensd wordt, zal dit uiteraard invloed hebben op de snelheid van hetopstarten. Zoals in figuur 6.3(a) te zien is, zal de motor met stroombegrenzing trager op-starten. Hierdoor zal een overshoot die eventueel aanwezig is, beperkt worden; dit is ook temerken op figuur 6.3. De golfvorm die het toerental van de motor voorstelt, vertoont wel eengrilliger verloop. In praktijk zal men hier echter niets van merken.
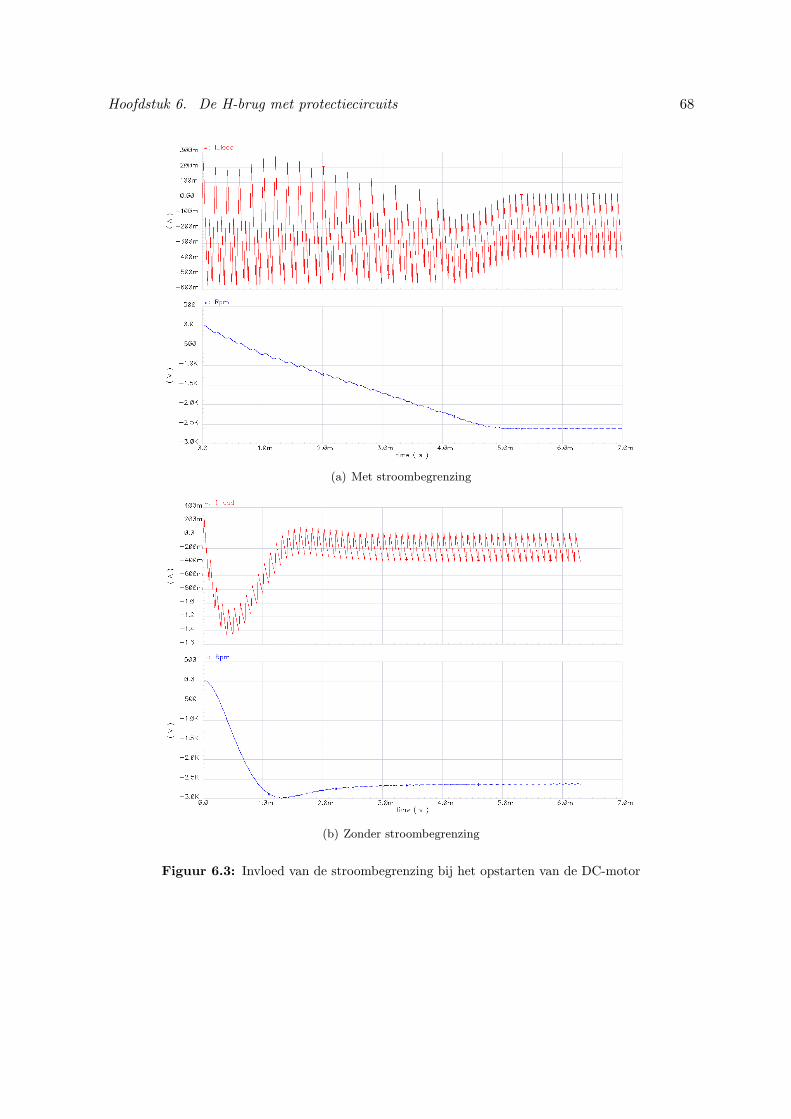
Hoofdstuk 6. De H-brug met protectiecircuits 68
(a) Met stroombegrenzing
(b) Zonder stroombegrenzing
Figuur 6.3: Invloed van de stroombegrenzing bij het opstarten van de DC-motor

Hoofdstuk 6. De H-brug met protectiecircuits 69
6.3 Thermisch protectiecircuit
6.3.1 Principe
Het thermisch protectiecircuit moet ervoor zorgen dat de temperatuur niet hoger wordt dan150 C. Om dit mogelijk te maken dient in een eerste stap een temperatuursensor ontworpente worden. Vervolgens wordt de uitgang van die sensor omgevormd naar een bruikbaar sig-naal (d.i. conditioneren van de temperatuursensor). Hier is het de bedoeling dat dit signaalbij 150 C een bepaald voltage overschrijdt. Er wordt hierbij vergeleken met een tempera-tuuronafhankelijke referentiespanning, met name de “bandgap reference voltage” van silicium(≈ 1, 2 V). Wanneer het geconditioneerd signaal groter wordt dan deze referentiespanning,zal de temperatuur te hoog zijn, en moet het vermogensgedeelte afgeschakeld worden.
Een voorwaarde voor de goede werking van dit principe is dat het uitgangssignaal van de tem-peratuursensor monotoon moet varieren (bijvoorbeeld stijgen) in functie van de temperatuur.Een niet-monotoon varierend uitgangssignaal legt de temperatuur immers niet eenduidig vast,en is hier dus niet bruikbaar.
6.3.2 Temperatuursensor
Principeschema
Het principeschema van de temperatuursensor is afgebeeld in figuur 6.4(a). Uitgaande vandit eenvoudige circuit kan een verschilspanning gecreeerd worden die enkel afhankelijk isvan de temperatuur. Dit kan eenvoudig geverifieerd worden door een uitdrukking voor deemitterstromen van beide bipolaire PNP-transistoren op te stellen. Uiteindelijk bekomt menals uitdrukking voor de verschilspanning (6.1).
VE1 − VE2 =kT
qln
(A2
A1
)(6.1)
De verhouding van de emitteroppervlakten A2 : A1 kan hierbij vrij gekozen worden, metuitzondering van de verhouding 1 : 1. De verhouding wordt echter best niet te klein gekozenaangezien de thermische spanning Vt = kT
q slechts van de orde mV is. De gevoeligheid vandeze verschilspanning aan de temperatuur moet immers niet te klein worden.
Gerealiseerd schema
Het gerealiseerde schema is voorgesteld in figuur 6.4(b). De stroombronnen I0 uit figuur 6.4(a)worden elk uitgevoerd a.d.h.v. een stroomspiegel. De stroom I0 wordt liefst zo klein mogelijkgehouden. Om hiervoor een weerstand van de orde MΩ te vermijden, wordt de stroomspiegeluitgevoerd m.b.v. een cascode. Dat dit inderdaad tot een kleinere weerstandswaarde leidt, iseenvoudig in te zien. Immers, door de extra actieve last komt de spanning in het punt A op
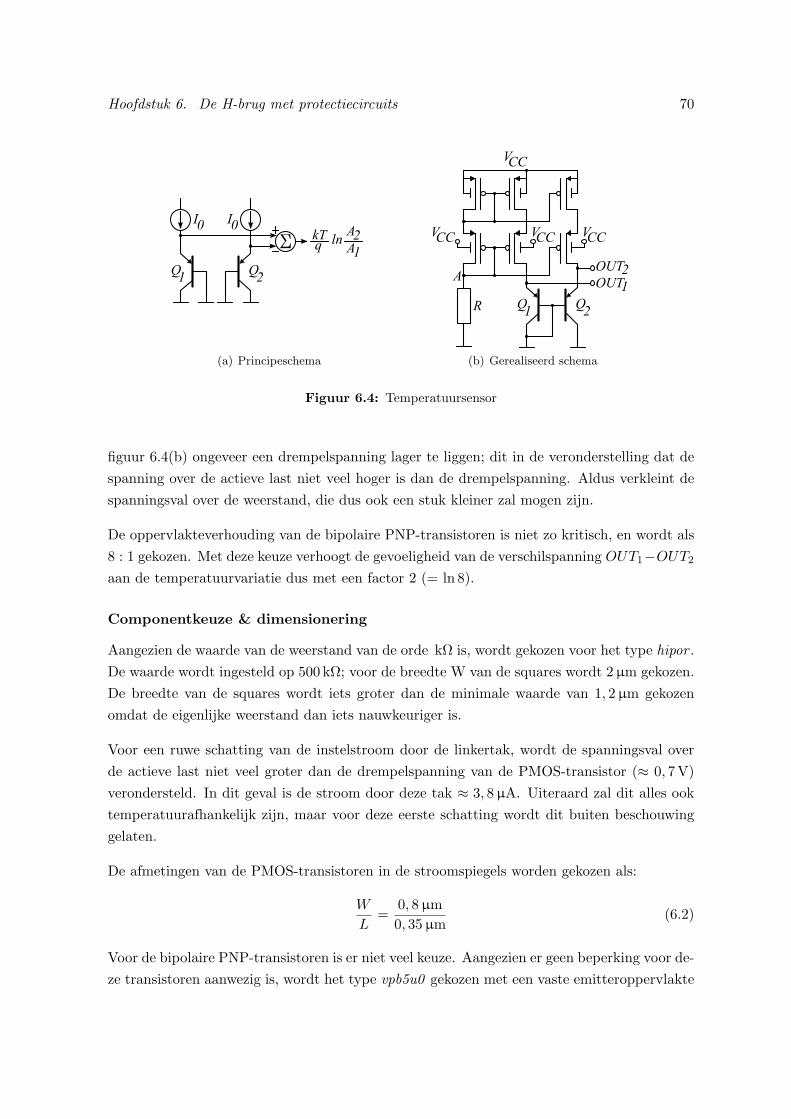
Hoofdstuk 6. De H-brug met protectiecircuits 70
(a) Principeschema (b) Gerealiseerd schema
Figuur 6.4: Temperatuursensor
figuur 6.4(b) ongeveer een drempelspanning lager te liggen; dit in de veronderstelling dat despanning over de actieve last niet veel hoger is dan de drempelspanning. Aldus verkleint despanningsval over de weerstand, die dus ook een stuk kleiner zal mogen zijn.
De oppervlakteverhouding van de bipolaire PNP-transistoren is niet zo kritisch, en wordt als8 : 1 gekozen. Met deze keuze verhoogt de gevoeligheid van de verschilspanning OUT1−OUT2
aan de temperatuurvariatie dus met een factor 2 (= ln 8).
Componentkeuze & dimensionering
Aangezien de waarde van de weerstand van de orde kΩ is, wordt gekozen voor het type hipor .De waarde wordt ingesteld op 500 kΩ; voor de breedte W van de squares wordt 2 µm gekozen.De breedte van de squares wordt iets groter dan de minimale waarde van 1, 2 µm gekozenomdat de eigenlijke weerstand dan iets nauwkeuriger is.
Voor een ruwe schatting van de instelstroom door de linkertak, wordt de spanningsval overde actieve last niet veel groter dan de drempelspanning van de PMOS-transistor (≈ 0, 7 V)verondersteld. In dit geval is de stroom door deze tak ≈ 3, 8 µA. Uiteraard zal dit alles ooktemperatuurafhankelijk zijn, maar voor deze eerste schatting wordt dit buiten beschouwinggelaten.
De afmetingen van de PMOS-transistoren in de stroomspiegels worden gekozen als:
W
L=
0, 8 µm0, 35 µm
(6.2)
Voor de bipolaire PNP-transistoren is er niet veel keuze. Aangezien er geen beperking voor de-ze transistoren aanwezig is, wordt het type vpb5u0 gekozen met een vaste emitteroppervlakte
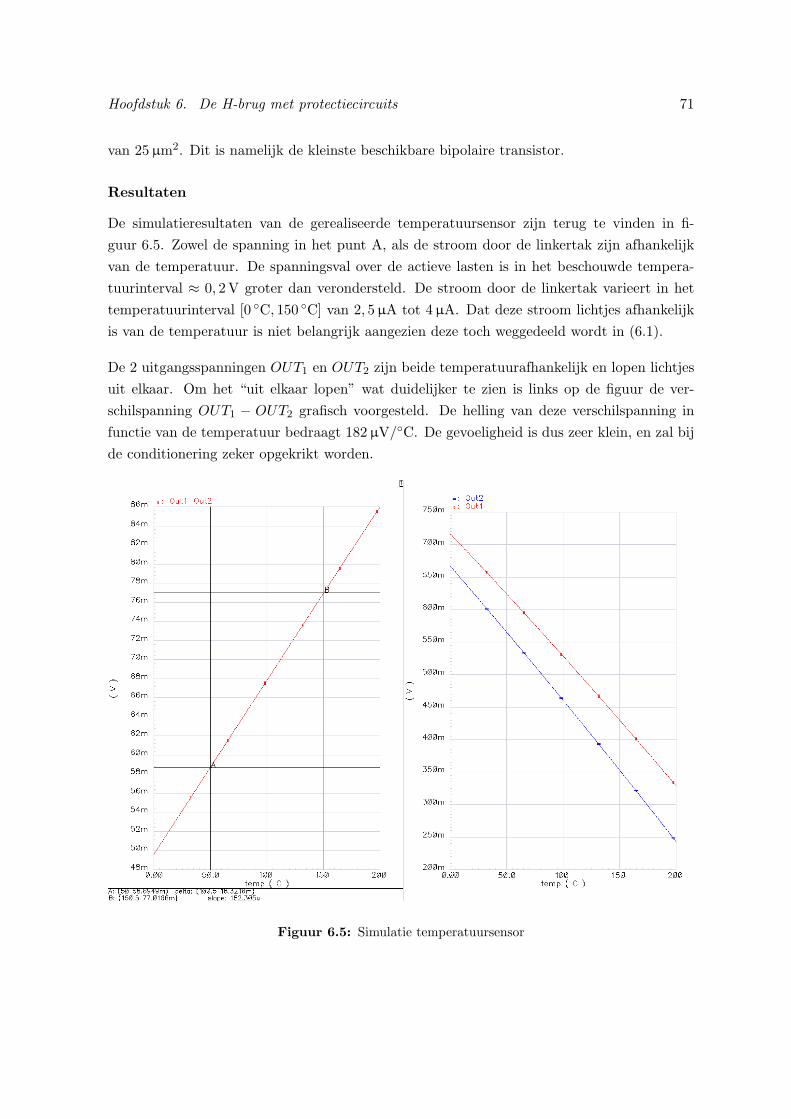
Hoofdstuk 6. De H-brug met protectiecircuits 71
van 25 µm2. Dit is namelijk de kleinste beschikbare bipolaire transistor.
Resultaten
De simulatieresultaten van de gerealiseerde temperatuursensor zijn terug te vinden in fi-guur 6.5. Zowel de spanning in het punt A, als de stroom door de linkertak zijn afhankelijkvan de temperatuur. De spanningsval over de actieve lasten is in het beschouwde tempera-tuurinterval ≈ 0, 2 V groter dan verondersteld. De stroom door de linkertak varieert in hettemperatuurinterval [0 C, 150 C] van 2, 5 µA tot 4 µA. Dat deze stroom lichtjes afhankelijkis van de temperatuur is niet belangrijk aangezien deze toch weggedeeld wordt in (6.1).
De 2 uitgangsspanningen OUT1 en OUT2 zijn beide temperatuurafhankelijk en lopen lichtjesuit elkaar. Om het “uit elkaar lopen” wat duidelijker te zien is links op de figuur de ver-schilspanning OUT1 − OUT2 grafisch voorgesteld. De helling van deze verschilspanning infunctie van de temperatuur bedraagt 182 µV/C. De gevoeligheid is dus zeer klein, en zal bijde conditionering zeker opgekrikt worden.
Figuur 6.5: Simulatie temperatuursensor
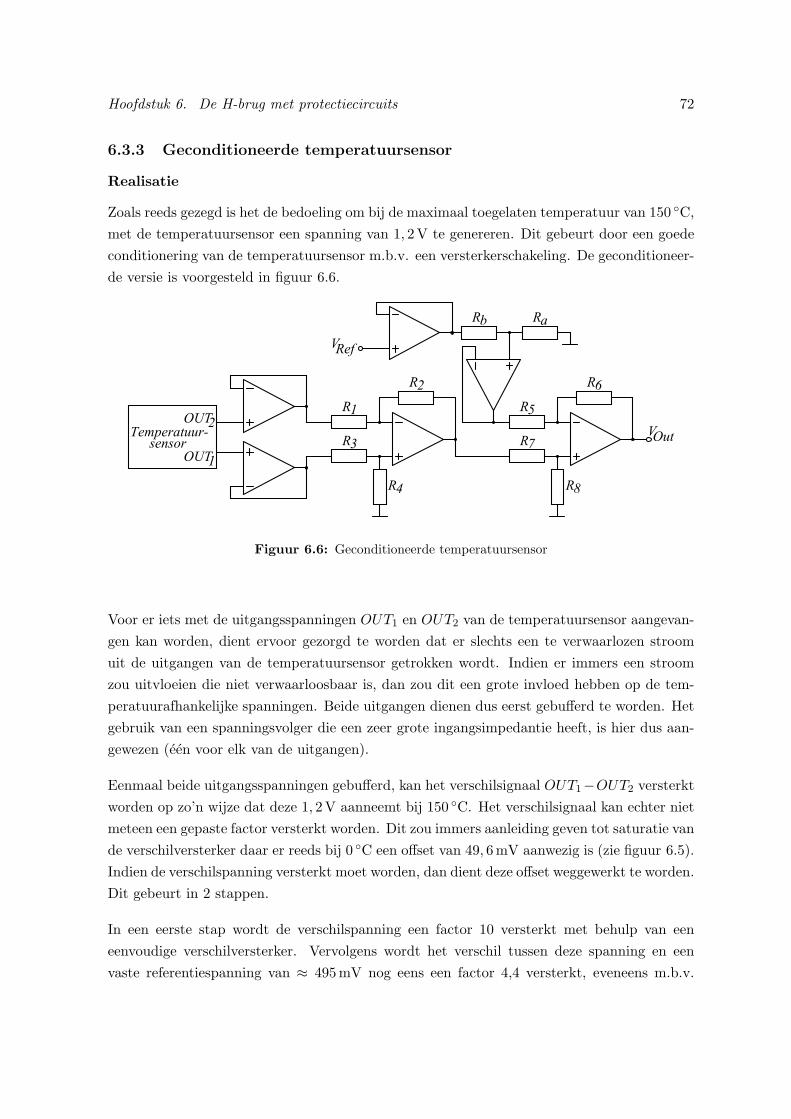
Hoofdstuk 6. De H-brug met protectiecircuits 72
6.3.3 Geconditioneerde temperatuursensor
Realisatie
Zoals reeds gezegd is het de bedoeling om bij de maximaal toegelaten temperatuur van 150 C,met de temperatuursensor een spanning van 1, 2 V te genereren. Dit gebeurt door een goedeconditionering van de temperatuursensor m.b.v. een versterkerschakeling. De geconditioneer-de versie is voorgesteld in figuur 6.6.
Figuur 6.6: Geconditioneerde temperatuursensor
Voor er iets met de uitgangsspanningen OUT1 en OUT2 van de temperatuursensor aangevan-gen kan worden, dient ervoor gezorgd te worden dat er slechts een te verwaarlozen stroomuit de uitgangen van de temperatuursensor getrokken wordt. Indien er immers een stroomzou uitvloeien die niet verwaarloosbaar is, dan zou dit een grote invloed hebben op de tem-peratuurafhankelijke spanningen. Beide uitgangen dienen dus eerst gebufferd te worden. Hetgebruik van een spanningsvolger die een zeer grote ingangsimpedantie heeft, is hier dus aan-gewezen (een voor elk van de uitgangen).
Eenmaal beide uitgangsspanningen gebufferd, kan het verschilsignaal OUT1−OUT2 versterktworden op zo’n wijze dat deze 1, 2 V aanneemt bij 150 C. Het verschilsignaal kan echter nietmeteen een gepaste factor versterkt worden. Dit zou immers aanleiding geven tot saturatie vande verschilversterker daar er reeds bij 0 C een offset van 49, 6 mV aanwezig is (zie figuur 6.5).Indien de verschilspanning versterkt moet worden, dan dient deze offset weggewerkt te worden.Dit gebeurt in 2 stappen.
In een eerste stap wordt de verschilspanning een factor 10 versterkt met behulp van eeneenvoudige verschilversterker. Vervolgens wordt het verschil tussen deze spanning en eenvaste referentiespanning van ≈ 495 mV nog eens een factor 4,4 versterkt, eveneens m.b.v.
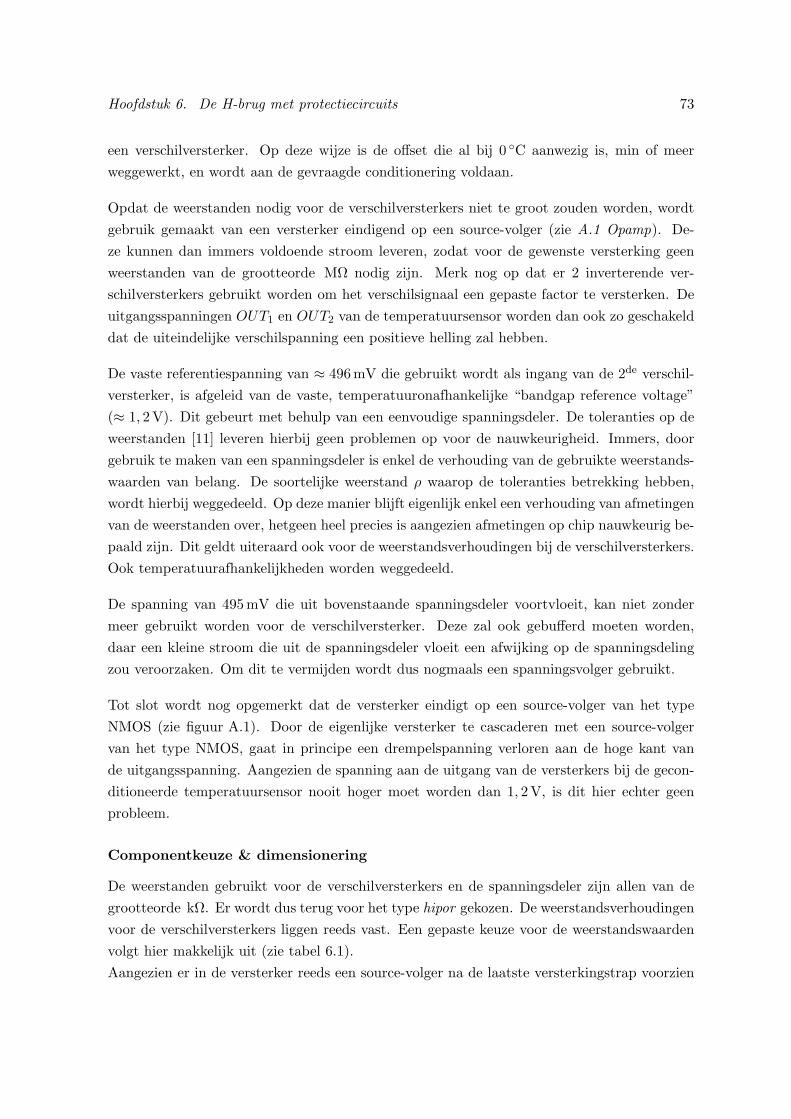
Hoofdstuk 6. De H-brug met protectiecircuits 73
een verschilversterker. Op deze wijze is de offset die al bij 0 C aanwezig is, min of meerweggewerkt, en wordt aan de gevraagde conditionering voldaan.
Opdat de weerstanden nodig voor de verschilversterkers niet te groot zouden worden, wordtgebruik gemaakt van een versterker eindigend op een source-volger (zie A.1 Opamp). De-ze kunnen dan immers voldoende stroom leveren, zodat voor de gewenste versterking geenweerstanden van de grootteorde MΩ nodig zijn. Merk nog op dat er 2 inverterende ver-schilversterkers gebruikt worden om het verschilsignaal een gepaste factor te versterken. Deuitgangsspanningen OUT1 en OUT2 van de temperatuursensor worden dan ook zo geschakelddat de uiteindelijke verschilspanning een positieve helling zal hebben.
De vaste referentiespanning van ≈ 496 mV die gebruikt wordt als ingang van de 2de verschil-versterker, is afgeleid van de vaste, temperatuuronafhankelijke “bandgap reference voltage”(≈ 1, 2 V). Dit gebeurt met behulp van een eenvoudige spanningsdeler. De toleranties op deweerstanden [11] leveren hierbij geen problemen op voor de nauwkeurigheid. Immers, doorgebruik te maken van een spanningsdeler is enkel de verhouding van de gebruikte weerstands-waarden van belang. De soortelijke weerstand ρ waarop de toleranties betrekking hebben,wordt hierbij weggedeeld. Op deze manier blijft eigenlijk enkel een verhouding van afmetingenvan de weerstanden over, hetgeen heel precies is aangezien afmetingen op chip nauwkeurig be-paald zijn. Dit geldt uiteraard ook voor de weerstandsverhoudingen bij de verschilversterkers.Ook temperatuurafhankelijkheden worden weggedeeld.
De spanning van 495 mV die uit bovenstaande spanningsdeler voortvloeit, kan niet zondermeer gebruikt worden voor de verschilversterker. Deze zal ook gebufferd moeten worden,daar een kleine stroom die uit de spanningsdeler vloeit een afwijking op de spanningsdelingzou veroorzaken. Om dit te vermijden wordt dus nogmaals een spanningsvolger gebruikt.
Tot slot wordt nog opgemerkt dat de versterker eindigt op een source-volger van het typeNMOS (zie figuur A.1). Door de eigenlijke versterker te cascaderen met een source-volgervan het type NMOS, gaat in principe een drempelspanning verloren aan de hoge kant vande uitgangsspanning. Aangezien de spanning aan de uitgang van de versterkers bij de gecon-ditioneerde temperatuursensor nooit hoger moet worden dan 1, 2 V, is dit hier echter geenprobleem.
Componentkeuze & dimensionering
De weerstanden gebruikt voor de verschilversterkers en de spanningsdeler zijn allen van degrootteorde kΩ. Er wordt dus terug voor het type hipor gekozen. De weerstandsverhoudingenvoor de verschilversterkers liggen reeds vast. Een gepaste keuze voor de weerstandswaardenvolgt hier makkelijk uit (zie tabel 6.1).Aangezien er in de versterker reeds een source-volger na de laatste versterkingstrap voorzien

Hoofdstuk 6. De H-brug met protectiecircuits 74
R1 = R3 10 kΩR2 = R4 100 kΩ
R5 = R7 10 kΩR6 = R8 44 kΩ
Tabel 6.1: Weerstandswaarden horende bij de verschilversterkers
wordt, zijn deze grootteordes verantwoord. Ze zijn namelijk veel groter dan de uitgangsweer-stand van de source-volger (Rout < 1 kΩ).
De vereiste weerstandsverhouding voor de spanningsdeler die de spanning van ≈ 496 mVafleidt uit de “bandgap reference voltage” wordt 0,496
1,2 ≈ 0, 41. De eigenlijke weerstandswaar-den dienen niet te hoog gekozen te worden (Si-oppervlakte beperken), maar ook niet te laag(stroom door de spanningsdeler beperken). Vandaar volgende keuze: Ra = 41 kΩ & Rb =59 kΩ.
Resultaten
Het simulatieresultaat van de geconditioneerde temperatuursensor is te zien in figuur 6.7.
Golfvorm V∗ geeft de verschilspanning OUT1 − OUT2 weer wanneer deze reeds een factor10 versterkt is (d.i. na de eerste verschilversterker). De offset van deze spanning bij 0 Cbedraagt ≈ 495 mV zoals verwacht.
Golfvorm Vout geeft de uitgangsspanning van de geconditioneerde temperatuursensor weer.Uit deze simulatie blijkt de uitgangsspanning inderdaad 1, 2 V te zijn bij een temperatuur van≈150 C.
6.3.4 Toegepaste thermische beveiliging
Nu de geconditioneerde temperatuursensor beschikbaar is, dient in een laatste stap de eigenlij-ke vergelijking van zijn uitgangsspanning VOut met de referentiespanning van 1, 2 V uitgevoerdte worden. Hiervoor wordt de analoge comparator, beschreven in A.2 Comparator , gebruikt.De referentiespanning wordt hierbij aan de negatieve ingangsklem, en de uitgangsspanningvan de temperatuursensor VOut aan de positieve ingangsklem gehangen (zie figuur 6.8(a)).
Indien de temperatuur op de chip te hoog wordt, dan levert de comparator een hoge uit-gangsspanning (VComp,Out = 3, 3 V) af. Dit signaal wordt vervolgens gebruikt in een logischcircuit waarvan de uitgang Temp zal gebruikt worden om de PWM-pulsen los te koppelen vande H-brug, en dit op eenzelfde manier als bij de stroombegrenzing (zie figuur 6.1; Temp laag
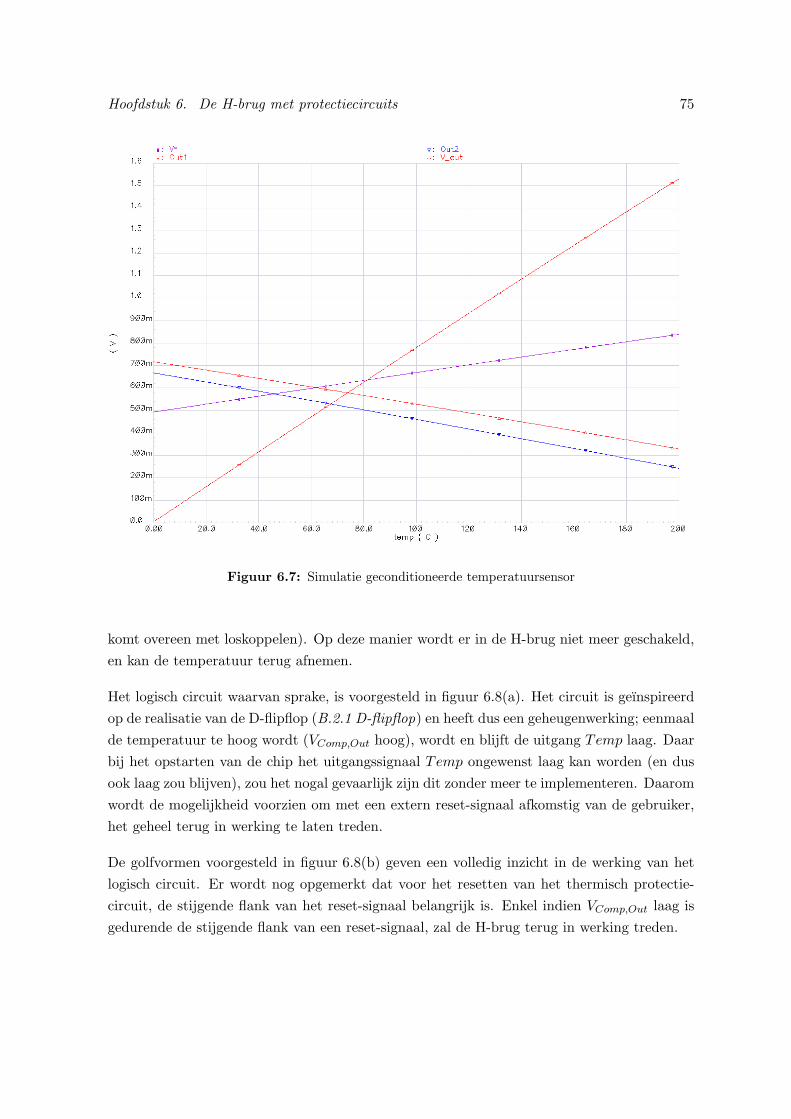
Hoofdstuk 6. De H-brug met protectiecircuits 75
Figuur 6.7: Simulatie geconditioneerde temperatuursensor
komt overeen met loskoppelen). Op deze manier wordt er in de H-brug niet meer geschakeld,en kan de temperatuur terug afnemen.
Het logisch circuit waarvan sprake, is voorgesteld in figuur 6.8(a). Het circuit is geınspireerdop de realisatie van de D-flipflop (B.2.1 D-flipflop) en heeft dus een geheugenwerking; eenmaalde temperatuur te hoog wordt (VComp,Out hoog), wordt en blijft de uitgang Temp laag. Daarbij het opstarten van de chip het uitgangssignaal Temp ongewenst laag kan worden (en dusook laag zou blijven), zou het nogal gevaarlijk zijn dit zonder meer te implementeren. Daaromwordt de mogelijkheid voorzien om met een extern reset-signaal afkomstig van de gebruiker,het geheel terug in werking te laten treden.
De golfvormen voorgesteld in figuur 6.8(b) geven een volledig inzicht in de werking van hetlogisch circuit. Er wordt nog opgemerkt dat voor het resetten van het thermisch protectie-circuit, de stijgende flank van het reset-signaal belangrijk is. Enkel indien VComp,Out laag isgedurende de stijgende flank van een reset-signaal, zal de H-brug terug in werking treden.
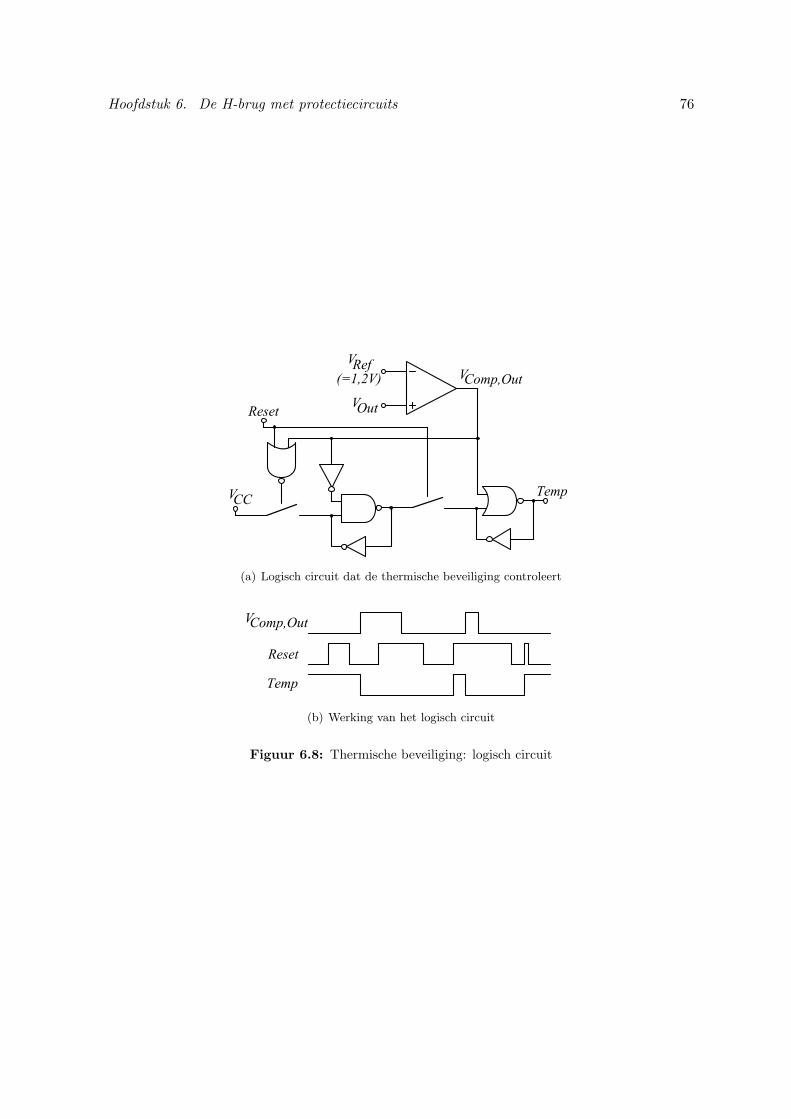
Hoofdstuk 6. De H-brug met protectiecircuits 76
(a) Logisch circuit dat de thermische beveiliging controleert
(b) Werking van het logisch circuit
Figuur 6.8: Thermische beveiliging: logisch circuit
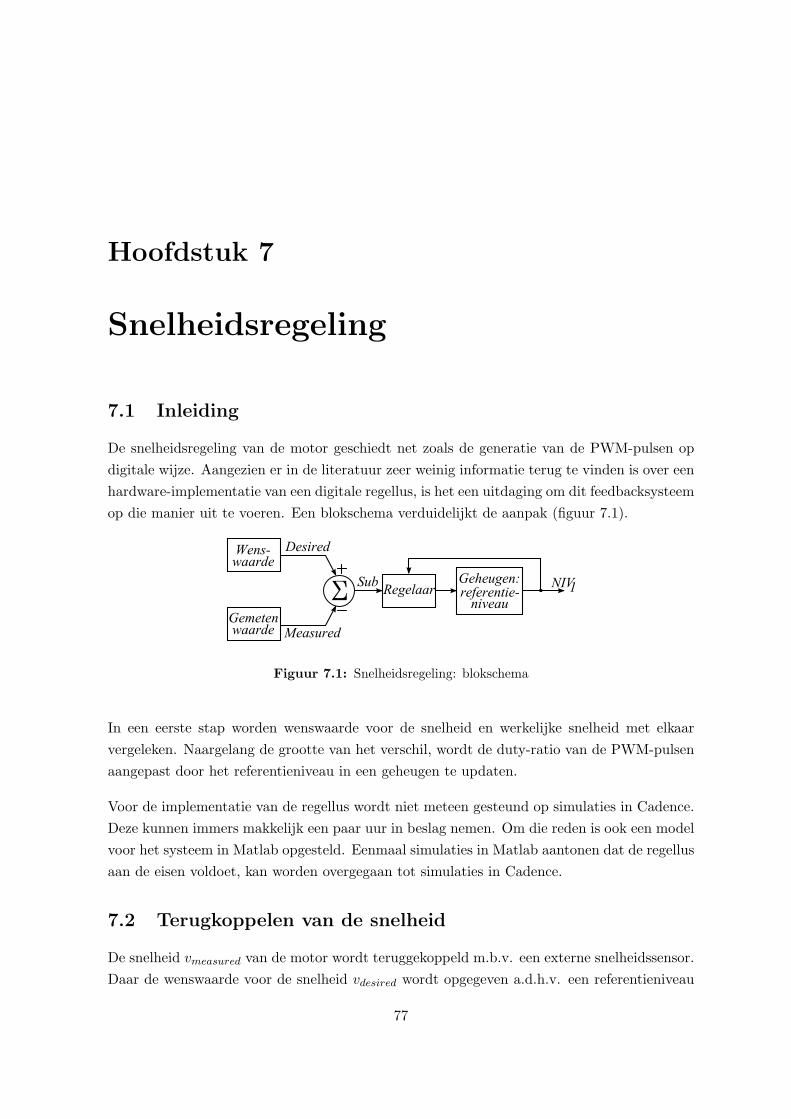
Hoofdstuk 7
Snelheidsregeling
7.1 Inleiding
De snelheidsregeling van de motor geschiedt net zoals de generatie van de PWM-pulsen opdigitale wijze. Aangezien er in de literatuur zeer weinig informatie terug te vinden is over eenhardware-implementatie van een digitale regellus, is het een uitdaging om dit feedbacksysteemop die manier uit te voeren. Een blokschema verduidelijkt de aanpak (figuur 7.1).
Figuur 7.1: Snelheidsregeling: blokschema
In een eerste stap worden wenswaarde voor de snelheid en werkelijke snelheid met elkaarvergeleken. Naargelang de grootte van het verschil, wordt de duty-ratio van de PWM-pulsenaangepast door het referentieniveau in een geheugen te updaten.
Voor de implementatie van de regellus wordt niet meteen gesteund op simulaties in Cadence.Deze kunnen immers makkelijk een paar uur in beslag nemen. Om die reden is ook een modelvoor het systeem in Matlab opgesteld. Eenmaal simulaties in Matlab aantonen dat de regellusaan de eisen voldoet, kan worden overgegaan tot simulaties in Cadence.
7.2 Terugkoppelen van de snelheid
De snelheid vmeasured van de motor wordt teruggekoppeld m.b.v. een externe snelheidssensor.Daar de wenswaarde voor de snelheid vdesired wordt opgegeven a.d.h.v. een referentieniveau
77

Hoofdstuk 7. Snelheidsregeling 78
voor de generatie van de PWM-pulsen (9-bit signaal “Desired”), zal er ook voor gezorgdmoeten worden dat de sensor een gelijkaardig signaal (9-bit signaal “Measured”) aflevert.Hierbij kan er gebruik gemaakt worden van een digitale snelheidssensor, of van een analogesensor in combinatie met een analoog-digitaalomzetter (AD-converter) dat het snelheidsbereikopdeelt in 29 discrete niveaus.
Het vergelijken van vdesired en vmeasured, of eigenlijk van de respectievelijke 9-bit voorstellingenDesired en Measured, gebeurt a.d.h.v. het schema voorgesteld in figuur 7.2. Dit is eigenlijkeen eenvoudige aftrekker die een 2-complement voorstelling van het verschil (9-bit signaal“Sub”) aflevert. Om dit in te zien wordt opgemerkt dat er wordt overgegaan op een 2-complement voorstelling van de signalen Desired en Measured. Hiertoe wordt een teken-bit(10de bit) toegevoegd aan beide signalen. Desired blijft hierbij ongewijzigd (teken-bit “0”),terwijl Measured wordt omgezet tot zijn negatief equivalent in 2-complement voorstelling(teken-bit “1”). Vervolgens kunnen beide 2-complement voorstellingen zonder meer bij elkaaropgeteld worden met als resultaat het verschil tussen Desired en Measured.
Figuur 7.2: Vergelijken van Desired en Measured
7.3 Regelen van de snelheid
Het regelen van de snelheid gebeurt door een samenwerken van “Regelaar” en “Geheugen”(zie figuur 7.1). Het geheugen heeft als doel het vorige referentieniveau (zie 4 Generatievan PWM-pulsen) te onthouden, en deze terug te koppelen naar de regelaar. Deze berekentop basis van het verschil Desired − Measured een nieuw referentieniveau dat op gepastetijdstippen, gecontroleerd door een klok “feedback-klok”, in het geheugen wordt geladen.
Bij het updaten van het referentieniveau in het geheugen dient erop gelet te worden dat demotor voldoende tijd krijgt om zich te settelen. Dit gebeurt uiteraard door een gepaste fre-quentie voor de feedback-klok te kiezen, rekening houdend met de mechanische tijdsconstantevan de motor.

Hoofdstuk 7. Snelheidsregeling 79
7.3.1 Regelaar
De regelaar heeft 2 ingangen, nl. Sub dat een 2-complement voorstelling is voor het verschilDesired − Measured, en het huidige referentieniveau NIV1,huidig. De stap Λ waarmee hethuidig referentieniveau NIV1,huidig aangepast wordt, wordt bepaald door de waarde van Sub.Bepaling van de stap Λ gebeurt volgens (7.1).
Sub = 0 : Λ = 0
|Sub| ∈ [1, 7] : Λ = 1
|Sub| ∈ [8, 511] : Λ =⌊|Sub|
2
⌋ (7.1)
Het nieuwe referentieniveau NIV ∗1,nieuw dat berekent wordt uit het huidige NIV1,huidig, wordt
bepaald door (7.2). Dit zal echter nog niet het niveau zijn dat wordt opgeslagen in hetgeheugen. Er moet immers nog rekening gehouden worden met 2 problemen die elk op eengepaste manier opgelost dienen te worden.
NIV ∗1,nieuw = NIV1,huidig + sgn(Sub) Λ (7.2)
Minimale pulsduur PWM1 en PWM2
Een eerste probleem werd reeds vermeld in 4.4 Globaal Schema. Beide PWM-pulsen dienenvan een minimale pulsbreedte voorzien te worden om de bootstrapcapaciteit die gebruiktwordt in de levelshifter te kunnen op- en ontladen. Hiertoe worden 2 gepaste saturatieniveausvoor het referentieniveau NIV1 ingevoerd.
Negatieve saturatie Het saturatieniveau dat een minimale pulsbreedte van PWM1 verze-kert, wordt ingesteld op een waarde ‘7’ (binair: 000000111). Het referentieniveau NIV1
kan dus geen waarden in het gebied [‘0’, ‘6’] aannemen. Dit leidt tot een minimalepulsduur van 7 klokperiodes.
Positieve saturatie Bij het bepalen van een saturatieniveau dat voor een minimale puls-breedte van PWM2 zorgt, moet gelet worden op het feit dat NIV2 uit NIV1 wordtafgeleid door er een waarde ∆ = 15 bij op te tellen. Het referentieniveau NIV1 wordtop een waarde ‘488’ (binair: 111101000) ingesteld, omdat dit makkelijk te implemente-ren is in het gebruikte circuit. Aldus wordt het saturatieniveau voor NIV2 vastgelegdop ‘503’ (binair: 111110111). De minimale pulsduur van PWM2 is dus 8 klokperiodes.
Indien gebruik gemaakt wordt van de interne klok voor de teller (zie 4.3.2 Klok ter aansturingvan de gemodificeerde teller), dan leiden deze saturatieniveaus tot een minimale pulsduur voorPWM1 en PWM2 van respectievelijk 0, 68 µs en 0, 78 µs. Deze minimale pulsduren blijken

Hoofdstuk 7. Snelheidsregeling 80
voldoende te zijn voor een goede werking van de levelshifter (zie Hoofdstuk 5 Aansturing vande uitgangstrap met behulp van een levelshifter).
Overflow/underflow
Een tweede probleem treedt op bij de manier van snelheidsregeling zelf. Indien de stap Λzonder meer wordt opgeteld bij het huidige referentieniveau NIV1, dan kan het voorkomendat er overflow (of underflow) optreedt. Stel bv. dat de snelheid van de motor wordt ingesteldop de maximale waarde. Indien de motor zo traag opstart dat het verschil Desired − Real
nog altijd danig groot is als het referentieniveau reeds dicht bij zijn maximale waarde ligt, danzou het referentieniveau dus nogmaals met een (grote) stap Λ aangepast worden. Doordathier slechts met 9 bits gewerkt wordt, gaat het 10de bit dus verloren. Het referentieniveauin het geheugen zou terugvallen tot een veel lagere waarde, wat overeenkomt met een grotesnelheid van de motor in tegengestelde richting. Ook hier dient dus een zekere begrenzingingevoerd te worden.
Een gelijkaardige redenering kan uitgevoerd worden voor de snelheid in de andere richting(een lage waarde van NIV1). In dit geval kan underflow optreden.
Realisatie
Het circuit voor de regelaar is voorgesteld in figuur 7.3. Het is hier niet de bedoeling om hetcircuit in detail te analyseren, daar dit zou leiden tot een ellenlange uiteenzetting die de lezerniets bijbrengt over de functionaliteit van het circuit. Om deze reden wordt de bespreking vanhet circuit beperkt tot het aangeven van de functionaliteit van de verschillende aangeduideonderdelen.
(A) Bepaalt de stap Λ waarmee het referentieniveau NIV1 aangepast moet worden op basisvan het ingangssignaal Sub.
(B) Dit is de eigenlijke opteller die de stap Λ bij het huidige referentieniveau optelt. Deuitgang van dit blok is NIV ∗
1,nieuw, gegeven door (7.2).
(C) Deze logische poorten genereren de controlebits OFL en UFL die respectievelijk aan-geven of er overflow of underflow optreedt.
(D) Zorgt voor een controlebit dat moet aangeven of negatieve saturatie noodzakelijk is.
(E) Zorgt voor een controlebit dat moet aangeven of positieve saturatie noodzakelijk is.
(F) Deze logische poorten zorgen ervoor dat de begrenzing in het geval van overflow (un-derflow) voorrang heeft op negatieve (positieve) saturatie. Dit is noodzakelijk. Het kanimmers voorkomen dat, indien een overflow (underflow) optreedt, een van de referentie-niveaus terecht komt in het saturatiegebied [‘0’, ‘6’] ([‘504’, ‘511’]). Dit zou leiden tot een

Hoofdstuk 7. Snelheidsregeling 81
onbepaalde toestand waar een controlebit voor de respectievelijke saturatie gegenereerdwordt terwijl ook begrenzing door overflow/underflow optreedt. Dit moet uiteraardvermeden worden.
(G) Zorgt ervoor dat, op basis van de controlebits voor saturatie en overflow/underflow, hetjuiste niveau NIV1,nieuw afgeleverd wordt aan het geheugen.
7.3.2 Geheugen
Het geheugen moet het signaal NIV1 onthouden, en moet dus uit 9 geheugenelementen be-staan.
Bij het opstarten van de chip of bij het genereren van een reset-signaal, kan het bijzonderhandig zijn om de motor op stilstand in te stellen. Dit komt overeen met een waarde ‘248’(binair: 011111000) voor het referentieniveau (NIV1). Dit in tegenstelling tot de waarde‘256’ die men intuıtief zou verwachten. De reden hiervoor is de aanwezigheid van een dodetijd τ . Indien symmetrische PWM-pulsen gewenst zijn, moet bijgevolg met de waarde van ∆(figuur 4.1) rekening gehouden worden. NIV1 dient dus een waarde ∆−1
2 lager te liggen.
Om een initiele waarde mee te kunnen geven aan het geheugen, worden 2 varianten op de D-flipflop (zie B.2.1 D-flipflop) opgesteld, en dit naargelang de initiele waarde “0” of “1” dientte zijn. De respectievelijke geheugenelementen zijn afgebeeld in figuur 7.4(a) en figuur 7.4(b).De correcte werking kan makkelijk door de lezer nagegaan worden.
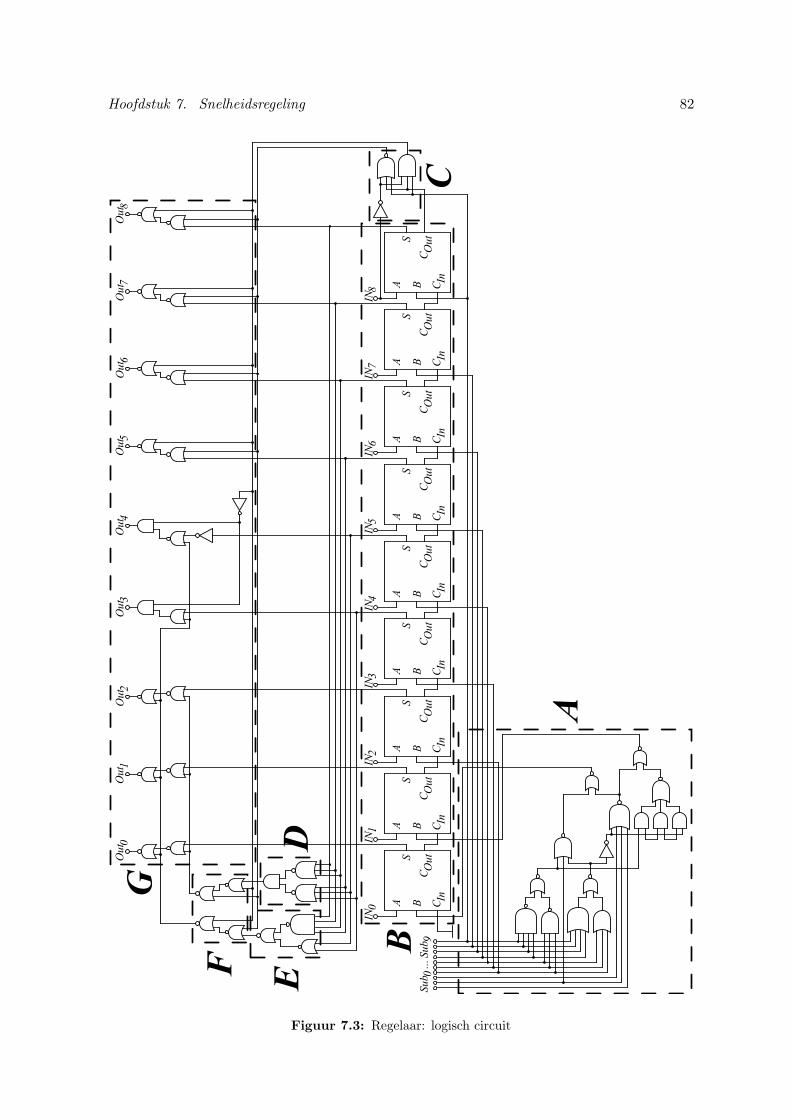
Hoofdstuk 7. Snelheidsregeling 82
Figuur 7.3: Regelaar: logisch circuit
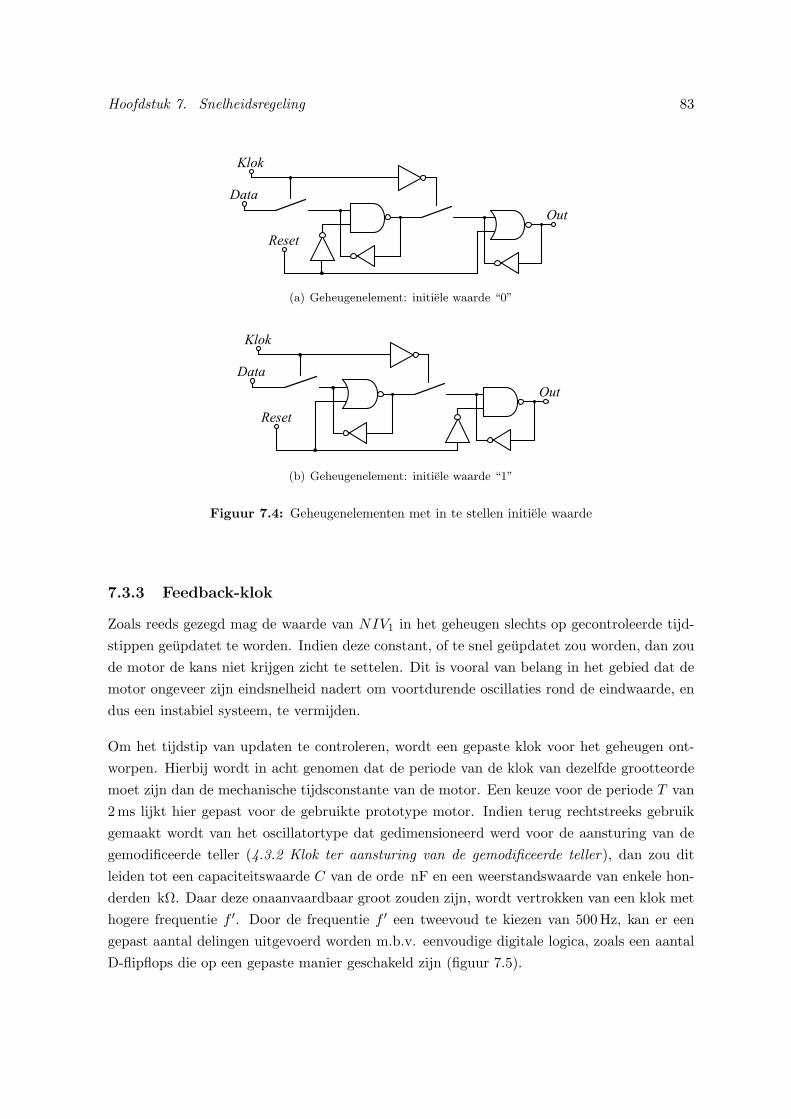
Hoofdstuk 7. Snelheidsregeling 83
(a) Geheugenelement: initiele waarde “0”
(b) Geheugenelement: initiele waarde “1”
Figuur 7.4: Geheugenelementen met in te stellen initiele waarde
7.3.3 Feedback-klok
Zoals reeds gezegd mag de waarde van NIV1 in het geheugen slechts op gecontroleerde tijd-stippen geupdatet te worden. Indien deze constant, of te snel geupdatet zou worden, dan zoude motor de kans niet krijgen zicht te settelen. Dit is vooral van belang in het gebied dat demotor ongeveer zijn eindsnelheid nadert om voortdurende oscillaties rond de eindwaarde, endus een instabiel systeem, te vermijden.
Om het tijdstip van updaten te controleren, wordt een gepaste klok voor het geheugen ont-worpen. Hierbij wordt in acht genomen dat de periode van de klok van dezelfde grootteordemoet zijn dan de mechanische tijdsconstante van de motor. Een keuze voor de periode T van2 ms lijkt hier gepast voor de gebruikte prototype motor. Indien terug rechtstreeks gebruikgemaakt wordt van het oscillatortype dat gedimensioneerd werd voor de aansturing van degemodificeerde teller (4.3.2 Klok ter aansturing van de gemodificeerde teller), dan zou ditleiden tot een capaciteitswaarde C van de orde nF en een weerstandswaarde van enkele hon-derden kΩ. Daar deze onaanvaardbaar groot zouden zijn, wordt vertrokken van een klok methogere frequentie f ′. Door de frequentie f ′ een tweevoud te kiezen van 500 Hz, kan er eengepast aantal delingen uitgevoerd worden m.b.v. eenvoudige digitale logica, zoals een aantalD-flipflops die op een gepaste manier geschakeld zijn (figuur 7.5).
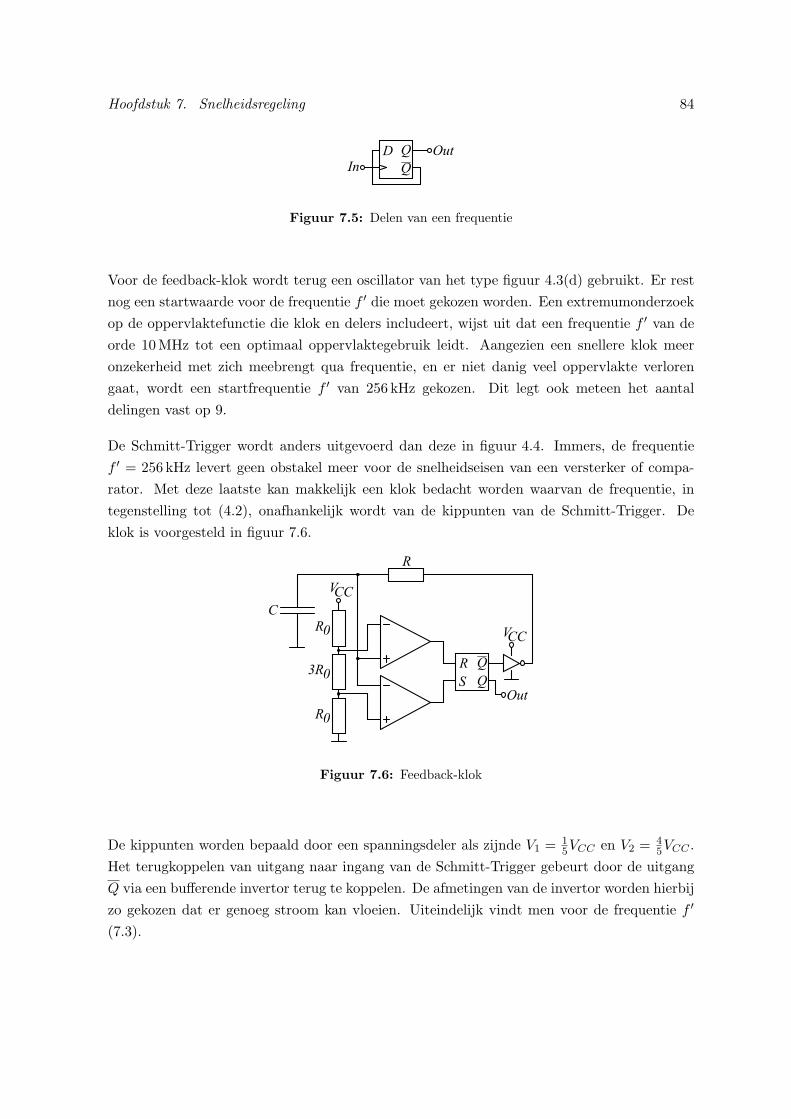
Hoofdstuk 7. Snelheidsregeling 84
Figuur 7.5: Delen van een frequentie
Voor de feedback-klok wordt terug een oscillator van het type figuur 4.3(d) gebruikt. Er restnog een startwaarde voor de frequentie f ′ die moet gekozen worden. Een extremumonderzoekop de oppervlaktefunctie die klok en delers includeert, wijst uit dat een frequentie f ′ van deorde 10 MHz tot een optimaal oppervlaktegebruik leidt. Aangezien een snellere klok meeronzekerheid met zich meebrengt qua frequentie, en er niet danig veel oppervlakte verlorengaat, wordt een startfrequentie f ′ van 256 kHz gekozen. Dit legt ook meteen het aantaldelingen vast op 9.
De Schmitt-Trigger wordt anders uitgevoerd dan deze in figuur 4.4. Immers, de frequentief ′ = 256 kHz levert geen obstakel meer voor de snelheidseisen van een versterker of compa-rator. Met deze laatste kan makkelijk een klok bedacht worden waarvan de frequentie, integenstelling tot (4.2), onafhankelijk wordt van de kippunten van de Schmitt-Trigger. Deklok is voorgesteld in figuur 7.6.
Figuur 7.6: Feedback-klok
De kippunten worden bepaald door een spanningsdeler als zijnde V1 = 15VCC en V2 = 4
5VCC .Het terugkoppelen van uitgang naar ingang van de Schmitt-Trigger gebeurt door de uitgangQ via een bufferende invertor terug te koppelen. De afmetingen van de invertor worden hierbijzo gekozen dat er genoeg stroom kan vloeien. Uiteindelijk vindt men voor de frequentie f ′
(7.3).

Hoofdstuk 7. Snelheidsregeling 85
f ′ =1
RC ln[( 4
5VCC
15VCC
)( 15VCC−VCC
45VCC−VCC
)] (7.3)
Dimensioneren van de klok op f ′ = 256 kHz, rekening houdend met dezelfde argumentenals in 4.3.2 Klok ter aansturing van de gemodificeerde teller , leidt uiteindelijk tot de R- enC-waarden gegeven door (7.4). R = 685 kΩ
C = 1, 9 pF(7.4)
7.4 Bypass-circuit
Er is een circuit voorzien, bestaande uit een aantal schakelaars, dat de keuze aan de gebruikerlaat (via het bit “OL/CL” - zie 10.2 Bespreking van de interface) om de snelheidsregelingeventueel te bypassen. In dit geval kan er gekozen worden een aangepaste externe snelheidsre-geling te gebruiken, of om de wenswaarde Desired rechtstreeks als signaal NIV1 te gebruiken(“open loop”-werking).
7.5 Resultaten
Het systeem voor de snelheidsregeling wordt, zoals vermeld in de inleiding, gecontroleerda.d.h.v. een model voor het volledige systeem in Matlab. Hierbij worden natuurlijk heel watidealiseringen doorgevoerd (delays worden verwaarloosd, signalen worden als ideaal aanzien,. . . ), maar voor een controle van de regellus is dit van ondergeschikt belang.
In figuur 7.7 is het resultaat van een eerste simulatie te zien. De wenswaarde voor de snelheidwordt ingesteld op ‘128’. Dit komt overeen met een negatieve snelheid voor de motor diede helft van de maximale waarde bedraagt, d.i. ≈ −2 kRpm. De motor lijkt zijn gewensteeindwaarde inderdaad te bereiken, en dit na ongeveer 17ms.
Op figuur 7.7 kan eveneens de invloed van de verschillende stappen Λ herkend worden. Bijde start wordt de snelheid van de motor sterk aangepast (grote stap), terwijl de aanpassingsteeds kleiner wordt naarmate de motor tot zijn gewenste snelheid nadert.
In een tweede simulatie wordt een wenswaarde van ‘470’ veranderd naar ‘100’, of equivalenthiermee, een snelheid van ≈ 3, 4 kRpm wordt gewijzigd naar een snelheid van ≈ −2, 4 kRpm.Het resultaat is te zien in figuur 7.8. De simulatie blijkt aan de verwachtingen te voldoen.
In een derde simulatie (figuur 7.9) wordt de wenswaarde voor de snelheid ingesteld op ‘480’,dit is een positieve snelheid van de motor van ≈ 3, 5 kRpm. Dit maal worden echter wat
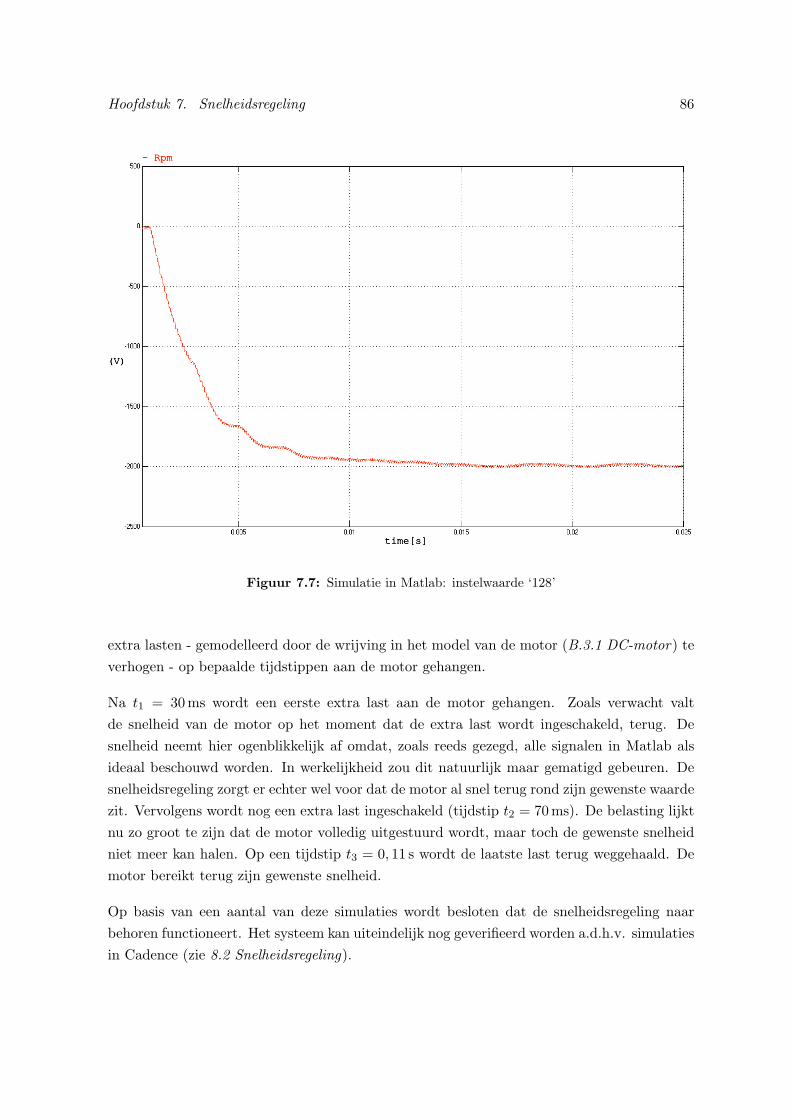
Hoofdstuk 7. Snelheidsregeling 86
time[s]
(V)
- Rpm
Figuur 7.7: Simulatie in Matlab: instelwaarde ‘128’
extra lasten - gemodelleerd door de wrijving in het model van de motor (B.3.1 DC-motor) teverhogen - op bepaalde tijdstippen aan de motor gehangen.
Na t1 = 30 ms wordt een eerste extra last aan de motor gehangen. Zoals verwacht valtde snelheid van de motor op het moment dat de extra last wordt ingeschakeld, terug. Desnelheid neemt hier ogenblikkelijk af omdat, zoals reeds gezegd, alle signalen in Matlab alsideaal beschouwd worden. In werkelijkheid zou dit natuurlijk maar gematigd gebeuren. Desnelheidsregeling zorgt er echter wel voor dat de motor al snel terug rond zijn gewenste waardezit. Vervolgens wordt nog een extra last ingeschakeld (tijdstip t2 = 70ms). De belasting lijktnu zo groot te zijn dat de motor volledig uitgestuurd wordt, maar toch de gewenste snelheidniet meer kan halen. Op een tijdstip t3 = 0, 11 s wordt de laatste last terug weggehaald. Demotor bereikt terug zijn gewenste snelheid.
Op basis van een aantal van deze simulaties wordt besloten dat de snelheidsregeling naarbehoren functioneert. Het systeem kan uiteindelijk nog geverifieerd worden a.d.h.v. simulatiesin Cadence (zie 8.2 Snelheidsregeling).
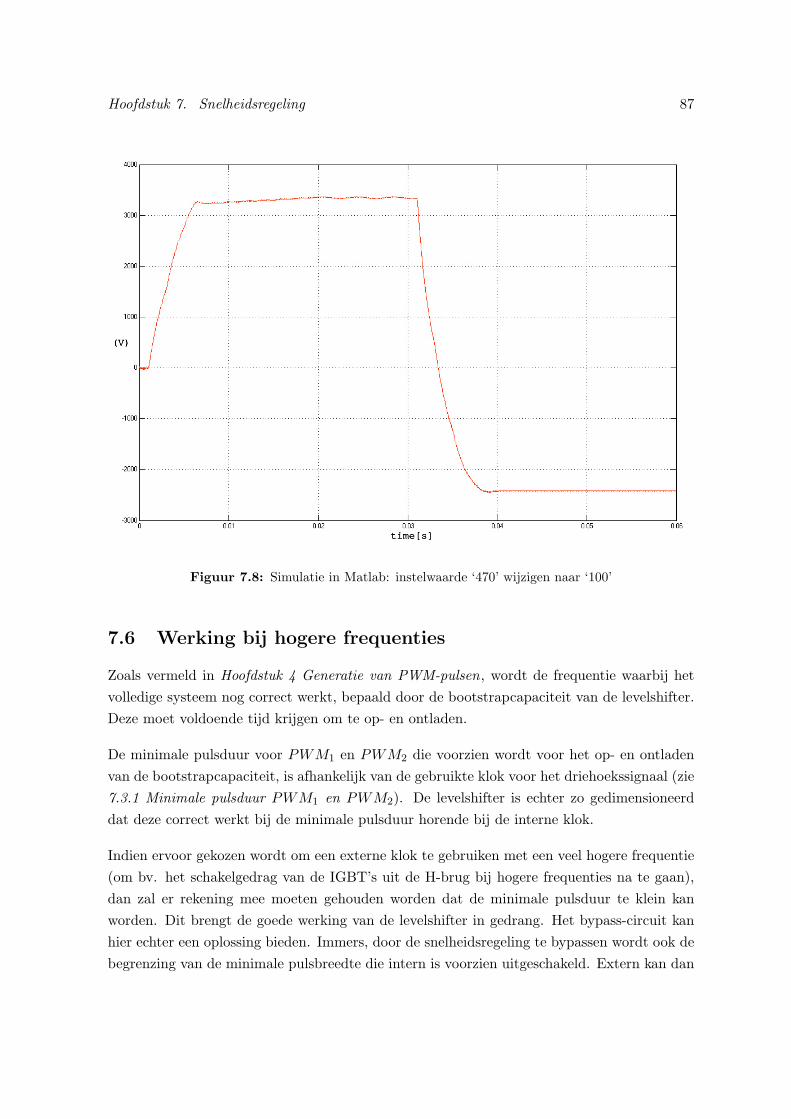
Hoofdstuk 7. Snelheidsregeling 87
time[s]
(V)
Figuur 7.8: Simulatie in Matlab: instelwaarde ‘470’ wijzigen naar ‘100’
7.6 Werking bij hogere frequenties
Zoals vermeld in Hoofdstuk 4 Generatie van PWM-pulsen, wordt de frequentie waarbij hetvolledige systeem nog correct werkt, bepaald door de bootstrapcapaciteit van de levelshifter.Deze moet voldoende tijd krijgen om te op- en ontladen.
De minimale pulsduur voor PWM1 en PWM2 die voorzien wordt voor het op- en ontladenvan de bootstrapcapaciteit, is afhankelijk van de gebruikte klok voor het driehoekssignaal (zie7.3.1 Minimale pulsduur PWM1 en PWM2). De levelshifter is echter zo gedimensioneerddat deze correct werkt bij de minimale pulsduur horende bij de interne klok.
Indien ervoor gekozen wordt om een externe klok te gebruiken met een veel hogere frequentie(om bv. het schakelgedrag van de IGBT’s uit de H-brug bij hogere frequenties na te gaan),dan zal er rekening mee moeten gehouden worden dat de minimale pulsduur te klein kanworden. Dit brengt de goede werking van de levelshifter in gedrang. Het bypass-circuit kanhier echter een oplossing bieden. Immers, door de snelheidsregeling te bypassen wordt ook debegrenzing van de minimale pulsbreedte die intern is voorzien uitgeschakeld. Extern kan dan

Hoofdstuk 7. Snelheidsregeling 88
time[s]
(V)
- Rpm
Figuur 7.9: Simulatie in Matlab: instelwaarde ‘400’
een gepaste puls PWM1 aangelegd worden met de gewenste hogere frequentie, en die tocheen voldoende minimale pulsduur verzekert.
Als alternatief kan ook een externe bootstrapcapaciteit, met bijhorende diode D6 en weer-standsdeler R7 − R8 worden aangelegd (zie figuur 5.7). Alle cruciale signalen hiervoor zijnnamelijk te vinden aan de pinnen van de chip. Dit circuit wordt dan zo gedimensioneerd dathet snel genoeg is bij de gewenste hogere PWM frequentie.
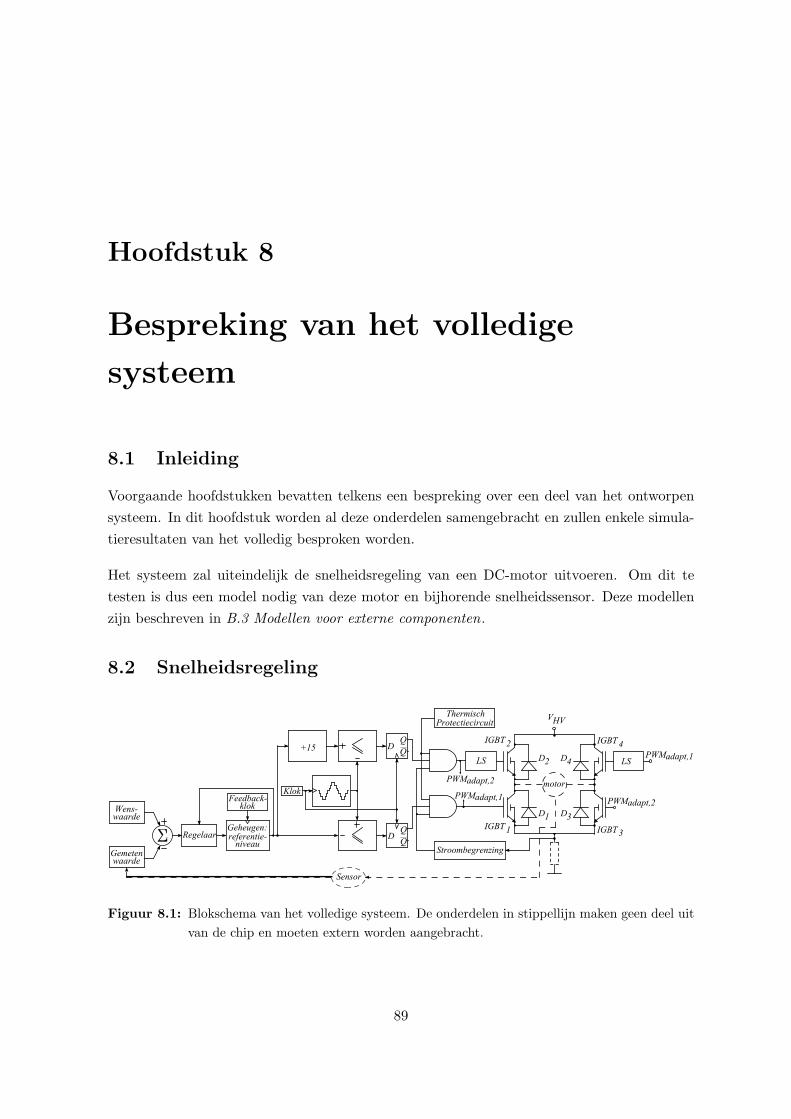
Hoofdstuk 8
Bespreking van het volledige
systeem
8.1 Inleiding
Voorgaande hoofdstukken bevatten telkens een bespreking over een deel van het ontworpensysteem. In dit hoofdstuk worden al deze onderdelen samengebracht en zullen enkele simula-tieresultaten van het volledig besproken worden.
Het systeem zal uiteindelijk de snelheidsregeling van een DC-motor uitvoeren. Om dit tetesten is dus een model nodig van deze motor en bijhorende snelheidssensor. Deze modellenzijn beschreven in B.3 Modellen voor externe componenten.
8.2 Snelheidsregeling
Figuur 8.1: Blokschema van het volledige systeem. De onderdelen in stippellijn maken geen deel uitvan de chip en moeten extern worden aangebracht.
89
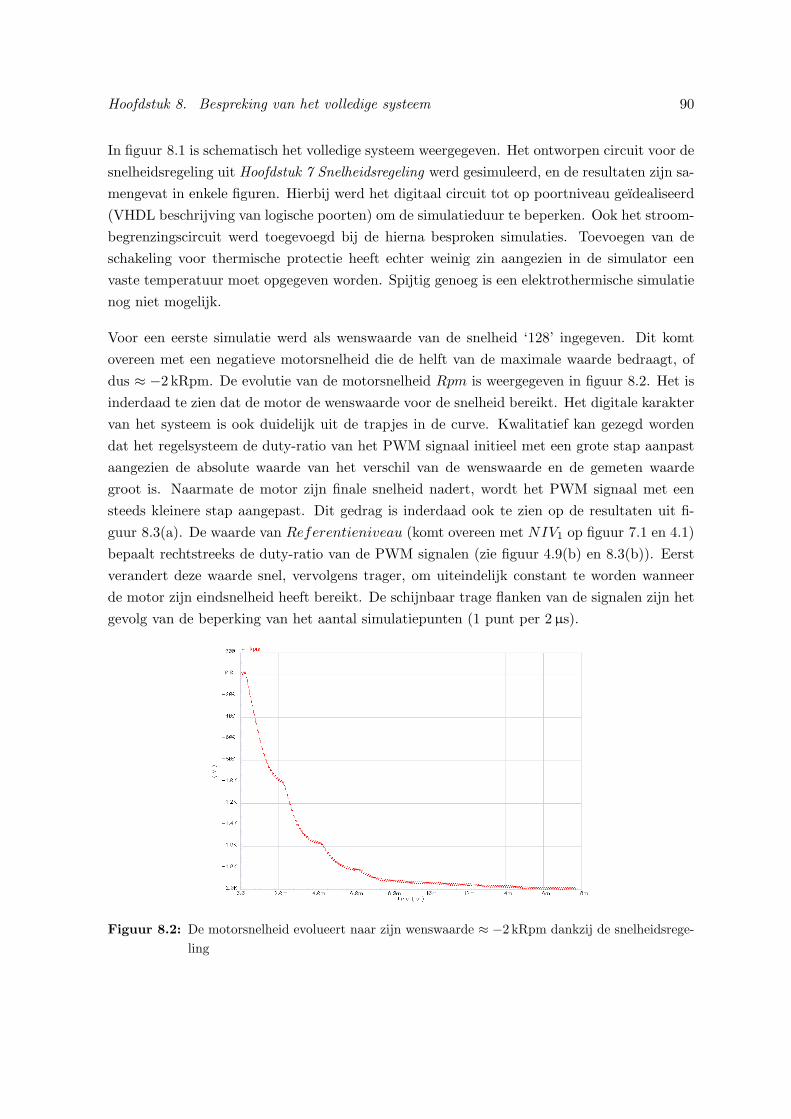
Hoofdstuk 8. Bespreking van het volledige systeem 90
In figuur 8.1 is schematisch het volledige systeem weergegeven. Het ontworpen circuit voor desnelheidsregeling uit Hoofdstuk 7 Snelheidsregeling werd gesimuleerd, en de resultaten zijn sa-mengevat in enkele figuren. Hierbij werd het digitaal circuit tot op poortniveau geıdealiseerd(VHDL beschrijving van logische poorten) om de simulatieduur te beperken. Ook het stroom-begrenzingscircuit werd toegevoegd bij de hierna besproken simulaties. Toevoegen van deschakeling voor thermische protectie heeft echter weinig zin aangezien in de simulator eenvaste temperatuur moet opgegeven worden. Spijtig genoeg is een elektrothermische simulatienog niet mogelijk.
Voor een eerste simulatie werd als wenswaarde van de snelheid ‘128’ ingegeven. Dit komtovereen met een negatieve motorsnelheid die de helft van de maximale waarde bedraagt, ofdus ≈ −2 kRpm. De evolutie van de motorsnelheid Rpm is weergegeven in figuur 8.2. Het isinderdaad te zien dat de motor de wenswaarde voor de snelheid bereikt. Het digitale karaktervan het systeem is ook duidelijk uit de trapjes in de curve. Kwalitatief kan gezegd wordendat het regelsysteem de duty-ratio van het PWM signaal initieel met een grote stap aanpastaangezien de absolute waarde van het verschil van de wenswaarde en de gemeten waardegroot is. Naarmate de motor zijn finale snelheid nadert, wordt het PWM signaal met eensteeds kleinere stap aangepast. Dit gedrag is inderdaad ook te zien op de resultaten uit fi-guur 8.3(a). De waarde van Referentieniveau (komt overeen met NIV1 op figuur 7.1 en 4.1)bepaalt rechtstreeks de duty-ratio van de PWM signalen (zie figuur 4.9(b) en 8.3(b)). Eerstverandert deze waarde snel, vervolgens trager, om uiteindelijk constant te worden wanneerde motor zijn eindsnelheid heeft bereikt. De schijnbaar trage flanken van de signalen zijn hetgevolg van de beperking van het aantal simulatiepunten (1 punt per 2 µs).
Figuur 8.2: De motorsnelheid evolueert naar zijn wenswaarde ≈ −2 kRpm dankzij de snelheidsrege-ling
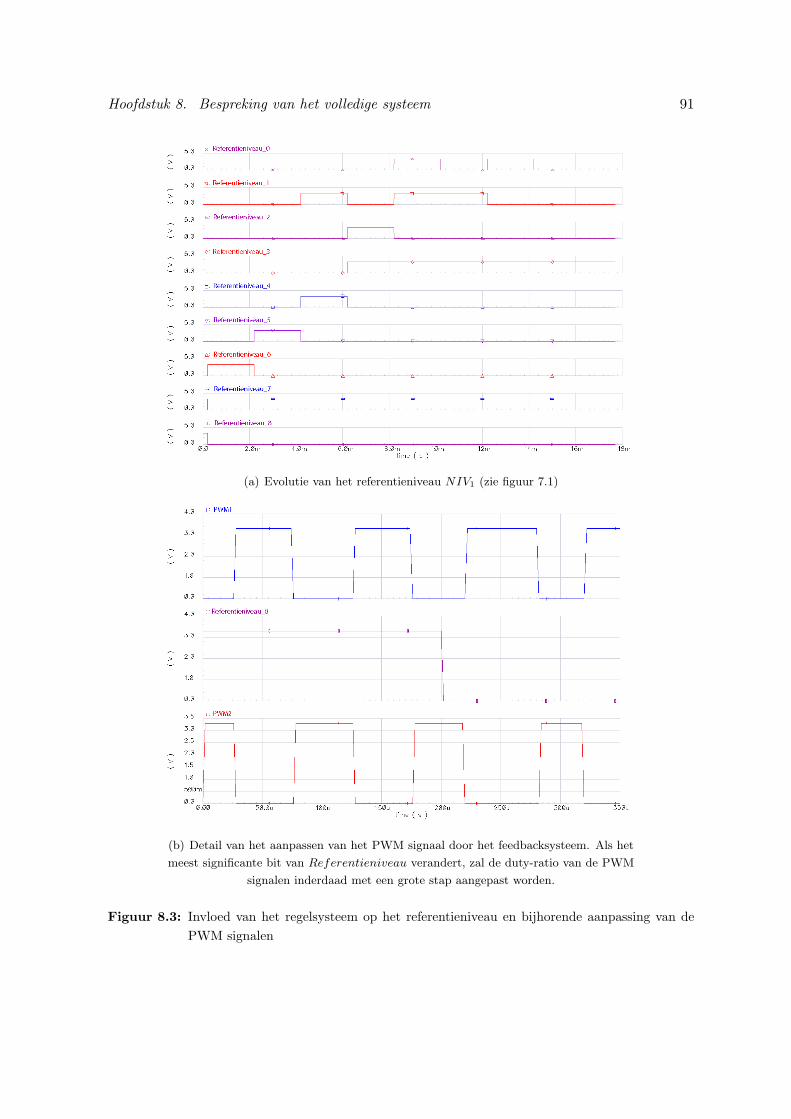
Hoofdstuk 8. Bespreking van het volledige systeem 91
(a) Evolutie van het referentieniveau NIV1 (zie figuur 7.1)
(b) Detail van het aanpassen van het PWM signaal door het feedbacksysteem. Als het
meest significante bit van Referentieniveau verandert, zal de duty-ratio van de PWM
signalen inderdaad met een grote stap aangepast worden.
Figuur 8.3: Invloed van het regelsysteem op het referentieniveau en bijhorende aanpassing van dePWM signalen
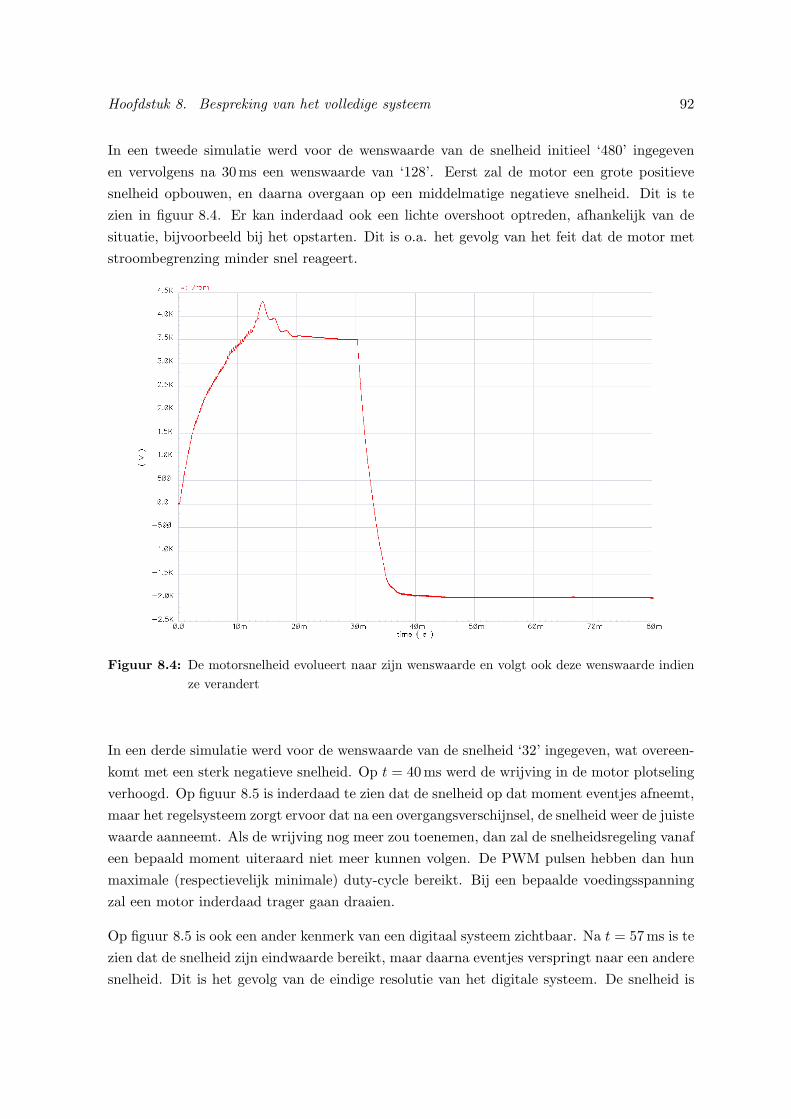
Hoofdstuk 8. Bespreking van het volledige systeem 92
In een tweede simulatie werd voor de wenswaarde van de snelheid initieel ‘480’ ingegevenen vervolgens na 30 ms een wenswaarde van ‘128’. Eerst zal de motor een grote positievesnelheid opbouwen, en daarna overgaan op een middelmatige negatieve snelheid. Dit is tezien in figuur 8.4. Er kan inderdaad ook een lichte overshoot optreden, afhankelijk van desituatie, bijvoorbeeld bij het opstarten. Dit is o.a. het gevolg van het feit dat de motor metstroombegrenzing minder snel reageert.
Figuur 8.4: De motorsnelheid evolueert naar zijn wenswaarde en volgt ook deze wenswaarde indienze verandert
In een derde simulatie werd voor de wenswaarde van de snelheid ‘32’ ingegeven, wat overeen-komt met een sterk negatieve snelheid. Op t = 40ms werd de wrijving in de motor plotselingverhoogd. Op figuur 8.5 is inderdaad te zien dat de snelheid op dat moment eventjes afneemt,maar het regelsysteem zorgt ervoor dat na een overgangsverschijnsel, de snelheid weer de juistewaarde aanneemt. Als de wrijving nog meer zou toenemen, dan zal de snelheidsregeling vanafeen bepaald moment uiteraard niet meer kunnen volgen. De PWM pulsen hebben dan hunmaximale (respectievelijk minimale) duty-cycle bereikt. Bij een bepaalde voedingsspanningzal een motor inderdaad trager gaan draaien.
Op figuur 8.5 is ook een ander kenmerk van een digitaal systeem zichtbaar. Na t = 57ms is tezien dat de snelheid zijn eindwaarde bereikt, maar daarna eventjes verspringt naar een anderesnelheid. Dit is het gevolg van de eindige resolutie van het digitale systeem. De snelheid is
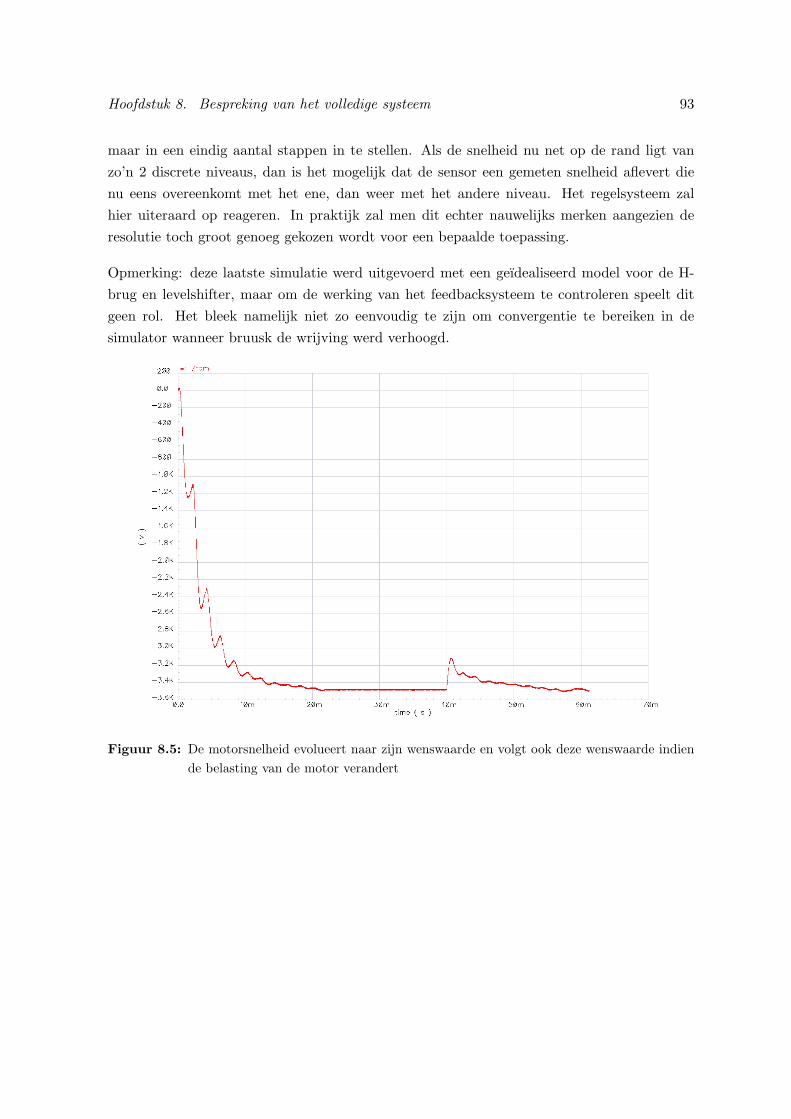
Hoofdstuk 8. Bespreking van het volledige systeem 93
maar in een eindig aantal stappen in te stellen. Als de snelheid nu net op de rand ligt vanzo’n 2 discrete niveaus, dan is het mogelijk dat de sensor een gemeten snelheid aflevert dienu eens overeenkomt met het ene, dan weer met het andere niveau. Het regelsysteem zalhier uiteraard op reageren. In praktijk zal men dit echter nauwelijks merken aangezien deresolutie toch groot genoeg gekozen wordt voor een bepaalde toepassing.
Opmerking: deze laatste simulatie werd uitgevoerd met een geıdealiseerd model voor de H-brug en levelshifter, maar om de werking van het feedbacksysteem te controleren speelt ditgeen rol. Het bleek namelijk niet zo eenvoudig te zijn om convergentie te bereiken in desimulator wanneer bruusk de wrijving werd verhoogd.
Figuur 8.5: De motorsnelheid evolueert naar zijn wenswaarde en volgt ook deze wenswaarde indiende belasting van de motor verandert
Hoofdstuk 9
Lay-out
9.1 Schikking van de onderdelen
In figuur 9.1 is een afbeelding te zien van de getekende lay-out [5]. Daarop zijn een aantalverschillende delen herkenbaar. Op figuur 9.2 zijn die verschillende onderdelen van het sys-teem aangeduid. De grootste chipoppervlakte wordt ingenomen door de H-brug bestaandeuit IGBT’s en vrijloopdiodes. Het digitale gedeelte is het compactste en bevat ruwweg 2000transistoren. De chip meet 2 mm x 2mm. In de levelshifter neemt de bootstrapcapaciteit hetmeeste plaats in beslag.
9.2 Verpakking
Er wordt een DIP verpakking gebruikt met 48 pinnen. De bondpaden moeten met de juistepinnen van de verpakking worden verbonden, zoals aangegeven op figuur 9.1. Bondpaden methet zelfde nummer, moeten ook naar dezelfde overeenkomstige pin “gewirebond worden”. Detoekenning van de pinnen is weergegeven in tabel 10.1.
94
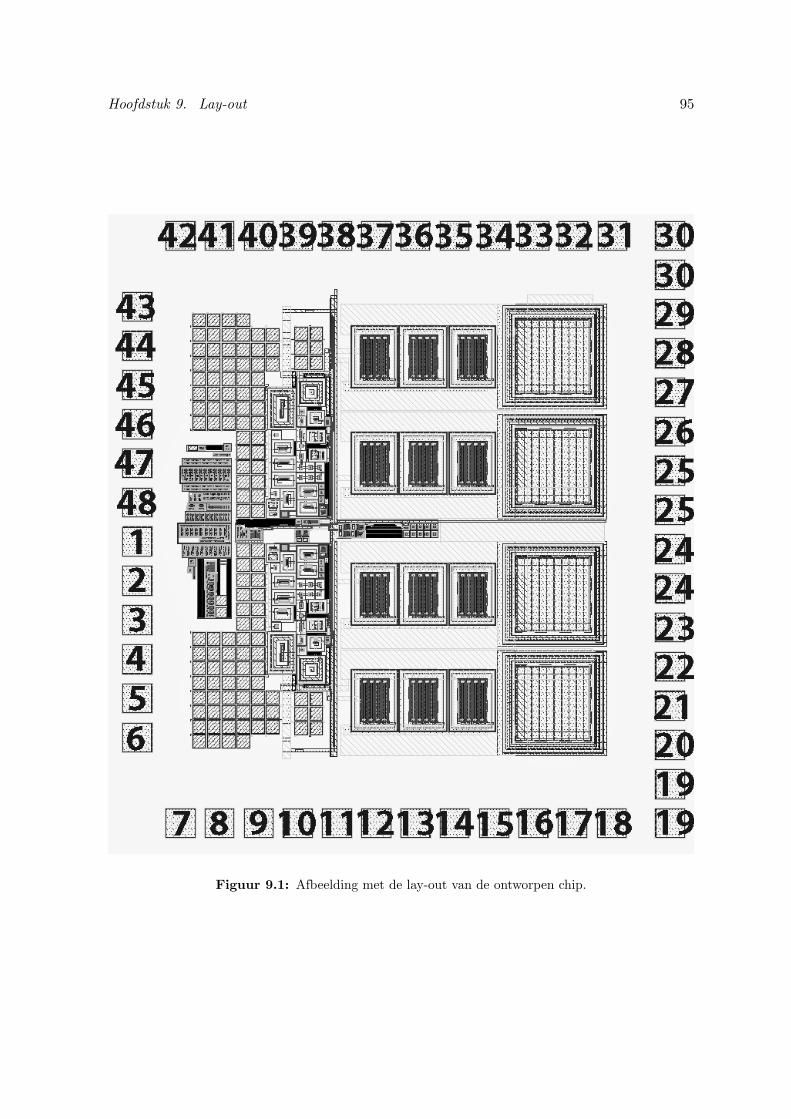
Hoofdstuk 9. Lay-out 95
Figuur 9.1: Afbeelding met de lay-out van de ontworpen chip.
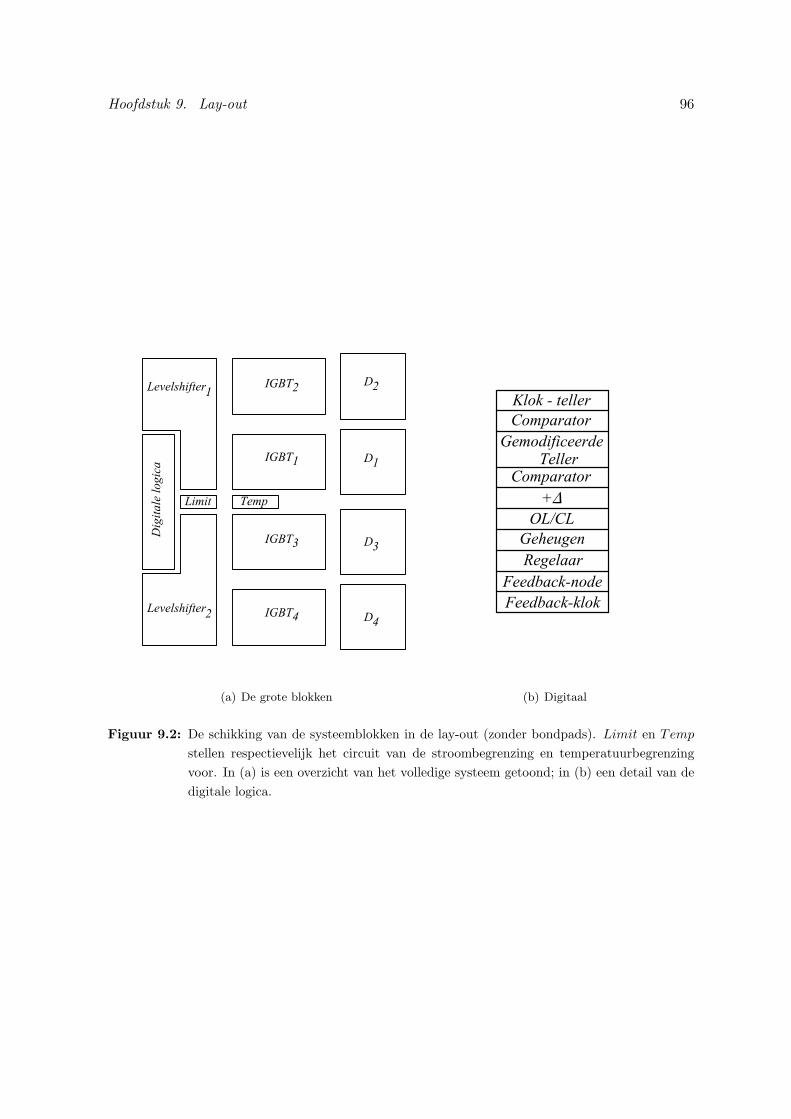
Hoofdstuk 9. Lay-out 96
(a) De grote blokken (b) Digitaal
Figuur 9.2: De schikking van de systeemblokken in de lay-out (zonder bondpads). Limit en Temp
stellen respectievelijk het circuit van de stroombegrenzing en temperatuurbegrenzingvoor. In (a) is een overzicht van het volledige systeem getoond; in (b) een detail van dedigitale logica.
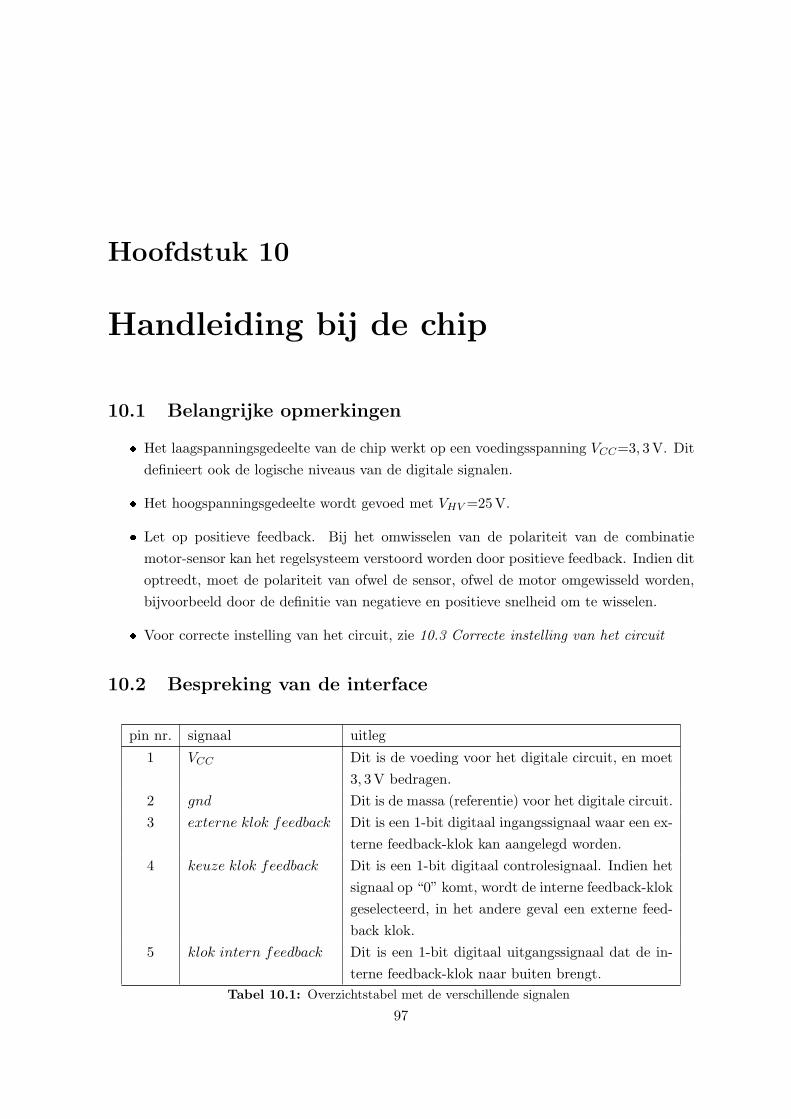
Hoofdstuk 10
Handleiding bij de chip
10.1 Belangrijke opmerkingen
Het laagspanningsgedeelte van de chip werkt op een voedingsspanning VCC=3, 3 V. Ditdefinieert ook de logische niveaus van de digitale signalen.
Het hoogspanningsgedeelte wordt gevoed met VHV =25V.
Let op positieve feedback. Bij het omwisselen van de polariteit van de combinatiemotor-sensor kan het regelsysteem verstoord worden door positieve feedback. Indien ditoptreedt, moet de polariteit van ofwel de sensor, ofwel de motor omgewisseld worden,bijvoorbeeld door de definitie van negatieve en positieve snelheid om te wisselen.
Voor correcte instelling van het circuit, zie 10.3 Correcte instelling van het circuit
10.2 Bespreking van de interface
pin nr. signaal uitleg
1 VCC Dit is de voeding voor het digitale circuit, en moet3, 3 V bedragen.
2 gnd Dit is de massa (referentie) voor het digitale circuit.3 externe klok feedback Dit is een 1-bit digitaal ingangssignaal waar een ex-
terne feedback-klok kan aangelegd worden.4 keuze klok feedback Dit is een 1-bit digitaal controlesignaal. Indien het
signaal op “0” komt, wordt de interne feedback-klokgeselecteerd, in het andere geval een externe feed-back klok.
5 klok intern feedback Dit is een 1-bit digitaal uitgangssignaal dat de in-terne feedback-klok naar buiten brengt.
Tabel 10.1: Overzichtstabel met de verschillende signalen
97
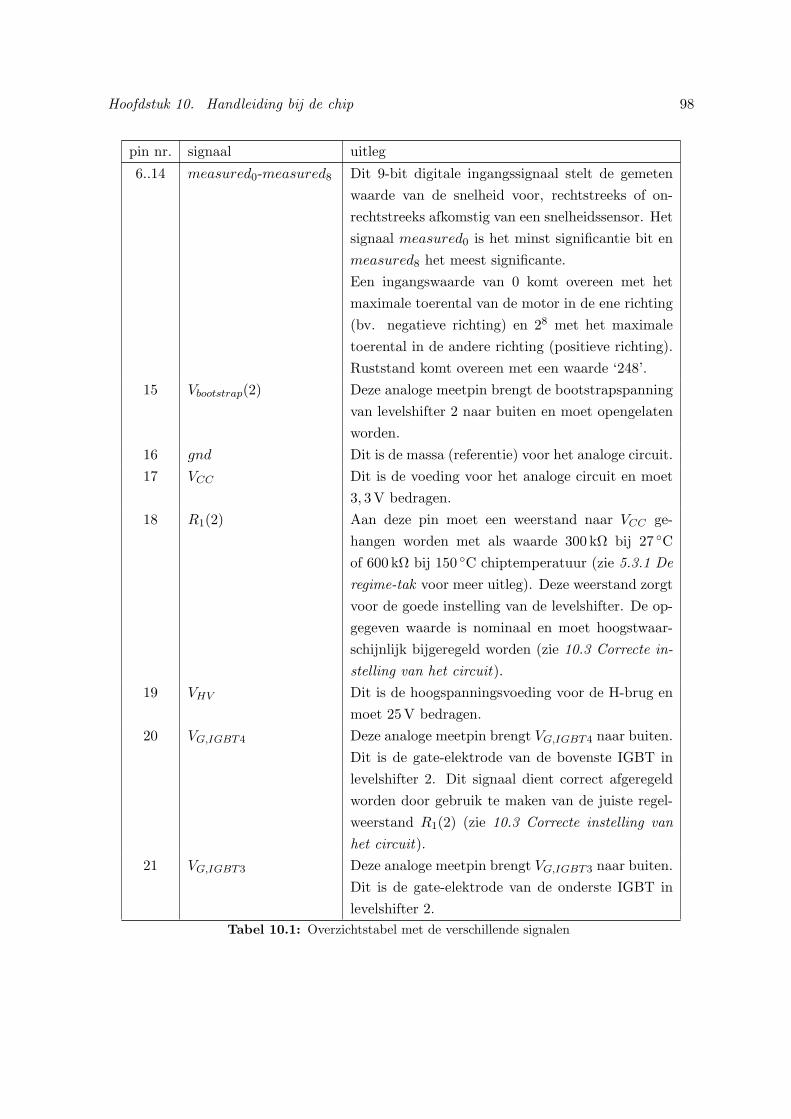
Hoofdstuk 10. Handleiding bij de chip 98
pin nr. signaal uitleg
6..14 measured0-measured8 Dit 9-bit digitale ingangssignaal stelt de gemetenwaarde van de snelheid voor, rechtstreeks of on-rechtstreeks afkomstig van een snelheidssensor. Hetsignaal measured0 is het minst significantie bit enmeasured8 het meest significante.Een ingangswaarde van 0 komt overeen met hetmaximale toerental van de motor in de ene richting(bv. negatieve richting) en 28 met het maximaletoerental in de andere richting (positieve richting).Ruststand komt overeen met een waarde ‘248’.
15 Vbootstrap(2) Deze analoge meetpin brengt de bootstrapspanningvan levelshifter 2 naar buiten en moet opengelatenworden.
16 gnd Dit is de massa (referentie) voor het analoge circuit.17 VCC Dit is de voeding voor het analoge circuit en moet
3, 3 V bedragen.18 R1(2) Aan deze pin moet een weerstand naar VCC ge-
hangen worden met als waarde 300 kΩ bij 27 Cof 600 kΩ bij 150 C chiptemperatuur (zie 5.3.1 Deregime-tak voor meer uitleg). Deze weerstand zorgtvoor de goede instelling van de levelshifter. De op-gegeven waarde is nominaal en moet hoogstwaar-schijnlijk bijgeregeld worden (zie 10.3 Correcte in-stelling van het circuit).
19 VHV Dit is de hoogspanningsvoeding voor de H-brug enmoet 25V bedragen.
20 VG,IGBT4 Deze analoge meetpin brengt VG,IGBT4 naar buiten.Dit is de gate-elektrode van de bovenste IGBT inlevelshifter 2. Dit signaal dient correct afgeregeldworden door gebruik te maken van de juiste regel-weerstand R1(2) (zie 10.3 Correcte instelling vanhet circuit).
21 VG,IGBT3 Deze analoge meetpin brengt VG,IGBT3 naar buiten.Dit is de gate-elektrode van de onderste IGBT inlevelshifter 2.
Tabel 10.1: Overzichtstabel met de verschillende signalen
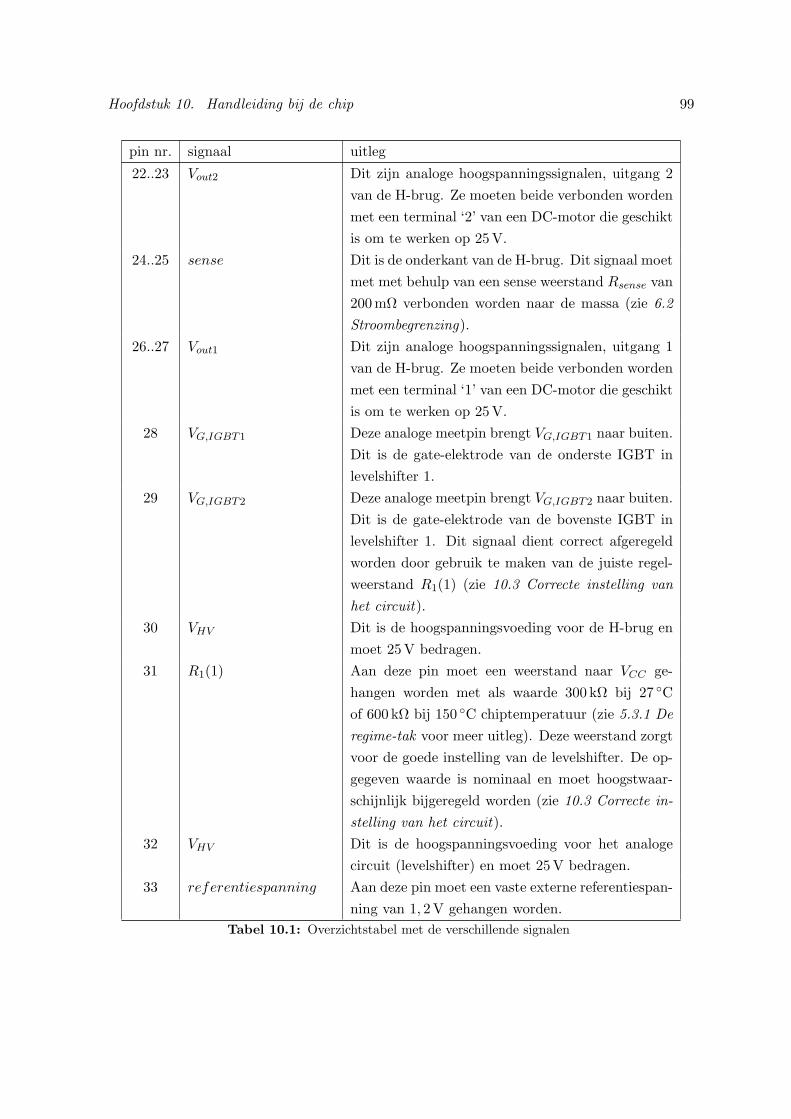
Hoofdstuk 10. Handleiding bij de chip 99
pin nr. signaal uitleg
22..23 Vout2 Dit zijn analoge hoogspanningssignalen, uitgang 2van de H-brug. Ze moeten beide verbonden wordenmet een terminal ‘2’ van een DC-motor die geschiktis om te werken op 25V.
24..25 sense Dit is de onderkant van de H-brug. Dit signaal moetmet met behulp van een sense weerstand Rsense van200 mΩ verbonden worden naar de massa (zie 6.2Stroombegrenzing).
26..27 Vout1 Dit zijn analoge hoogspanningssignalen, uitgang 1van de H-brug. Ze moeten beide verbonden wordenmet een terminal ‘1’ van een DC-motor die geschiktis om te werken op 25V.
28 VG,IGBT1 Deze analoge meetpin brengt VG,IGBT1 naar buiten.Dit is de gate-elektrode van de onderste IGBT inlevelshifter 1.
29 VG,IGBT2 Deze analoge meetpin brengt VG,IGBT2 naar buiten.Dit is de gate-elektrode van de bovenste IGBT inlevelshifter 1. Dit signaal dient correct afgeregeldworden door gebruik te maken van de juiste regel-weerstand R1(1) (zie 10.3 Correcte instelling vanhet circuit).
30 VHV Dit is de hoogspanningsvoeding voor de H-brug enmoet 25V bedragen.
31 R1(1) Aan deze pin moet een weerstand naar VCC ge-hangen worden met als waarde 300 kΩ bij 27 Cof 600 kΩ bij 150 C chiptemperatuur (zie 5.3.1 Deregime-tak voor meer uitleg). Deze weerstand zorgtvoor de goede instelling van de levelshifter. De op-gegeven waarde is nominaal en moet hoogstwaar-schijnlijk bijgeregeld worden (zie 10.3 Correcte in-stelling van het circuit).
32 VHV Dit is de hoogspanningsvoeding voor het analogecircuit (levelshifter) en moet 25 V bedragen.
33 referentiespanning Aan deze pin moet een vaste externe referentiespan-ning van 1, 2 V gehangen worden.
Tabel 10.1: Overzichtstabel met de verschillende signalen
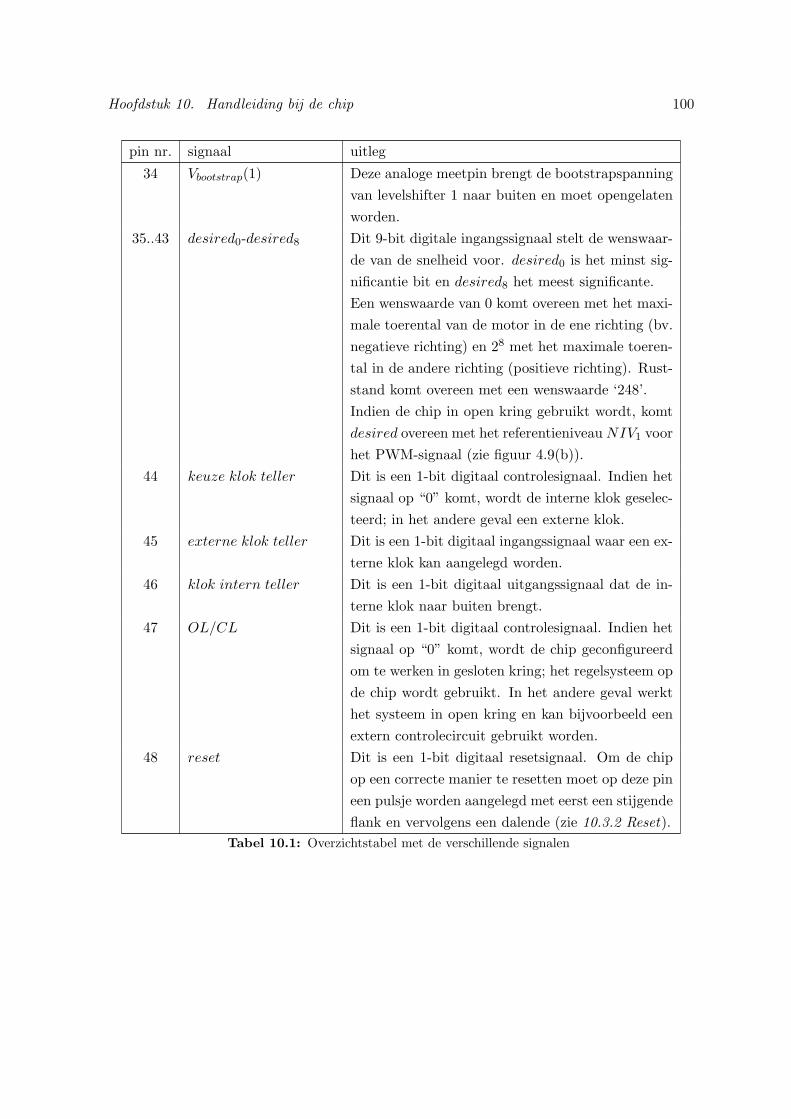
Hoofdstuk 10. Handleiding bij de chip 100
pin nr. signaal uitleg
34 Vbootstrap(1) Deze analoge meetpin brengt de bootstrapspanningvan levelshifter 1 naar buiten en moet opengelatenworden.
35..43 desired0-desired8 Dit 9-bit digitale ingangssignaal stelt de wenswaar-de van de snelheid voor. desired0 is het minst sig-nificantie bit en desired8 het meest significante.Een wenswaarde van 0 komt overeen met het maxi-male toerental van de motor in de ene richting (bv.negatieve richting) en 28 met het maximale toeren-tal in de andere richting (positieve richting). Rust-stand komt overeen met een wenswaarde ‘248’.Indien de chip in open kring gebruikt wordt, komtdesired overeen met het referentieniveau NIV1 voorhet PWM-signaal (zie figuur 4.9(b)).
44 keuze klok teller Dit is een 1-bit digitaal controlesignaal. Indien hetsignaal op “0” komt, wordt de interne klok geselec-teerd; in het andere geval een externe klok.
45 externe klok teller Dit is een 1-bit digitaal ingangssignaal waar een ex-terne klok kan aangelegd worden.
46 klok intern teller Dit is een 1-bit digitaal uitgangssignaal dat de in-terne klok naar buiten brengt.
47 OL/CL Dit is een 1-bit digitaal controlesignaal. Indien hetsignaal op “0” komt, wordt de chip geconfigureerdom te werken in gesloten kring; het regelsysteem opde chip wordt gebruikt. In het andere geval werkthet systeem in open kring en kan bijvoorbeeld eenextern controlecircuit gebruikt worden.
48 reset Dit is een 1-bit digitaal resetsignaal. Om de chipop een correcte manier te resetten moet op deze pineen pulsje worden aangelegd met eerst een stijgendeflank en vervolgens een dalende (zie 10.3.2 Reset).
Tabel 10.1: Overzichtstabel met de verschillende signalen

Hoofdstuk 10. Handleiding bij de chip 101
10.3 Correcte instelling van het circuit
10.3.1 Instellen van de digitale logica
De chip moet geconfigureerd worden door de juiste signalen aan te leggen. Hiervoor wordtverwezen naar tabel 10.1. Wanneer overgeschakeld wordt van interne op externe klok, ofomgekeerd, dan wordt de chip best eerst uitgeschakeld.
10.3.2 Reset
Na het opstarten van de chip wordt deze best eerst gereset. Dit omdat tijdens het opstartenvan de chip logische niveaus kunnen ontstaan die niet gewenst zijn. Indien de chip gereset dientte worden, dan moet een volledige reset-puls (stijgende flank, logische “1” en dalende flank)gegenereerd worden. De stijgende flank van de reset-puls zorgt ervoor dat het thermischprotectiecircuit gereset wordt. De logische “1” initialiseert het geheugen gebruikt voor desnelheidsregeling (figuur 7.1) op een waarde “248”, de ruststand.
10.3.3 Instellen van de levelshifter
Zoals uiteengezet in Hoofdstuk 5 Aansturing van de uitgangstrap met behulp van een le-velshifter , moet de levelshifter correct worden ingesteld. Het komt erop neer om de gate-kathodespanning VGK van de bovenste IGBT in beide levelshifters in te stellen op 3, 3 V (ziefiguur 5.6). Dit wordt gedaan door een gepaste regelweerstand R1 te leggen aan pin 31 voorlevelshifter 1 en aan pin 18 voor levelshifter 2. R1 wordt zo gekozen dat VGK,1 gemeten tussentussen pin 29 en 26, 3, 3 V bedraagt. Dezelfde procedure moet gevolgd worden voor de ande-re levelshifter. Het is belangrijk te weten dat deze instelling lichtjes temperatuurafhankelijkis (zie 5.4.2 Invloed van de temperatuur). Deze instelling moet correct zijn bij de hoogstetemperatuur waarop de chip zal werken!
10.3.4 Instellen van het stroombegrenzingscircuit
De grootte van de weerstand Rsense uit figuur 6.2 bepaalt de maximale stroom door de IG-BT’s. Rsense wordt geplaatst tussen de massa en beide pinnen 24 en 25. Nominaal moet dezeweerstand 200 mΩ bedragen. Deze weerstand komt echter in serie te staan met de interneweerstand van de metaalbaantjes (hoewel geprobeerd is om die beperkt te houden). Waar-schijnlijk zal de weerstand Rsense dus iets kleiner moeten genomen worden dan de aangegevennominale waarde.
10.4 Aanwezige features
Hieronder wordt opgesomd welke mogelijkheden voorzien zijn op de chip. Ook de nummersvan de pinnen die relevant zijn voor elk van de features, worden weergegeven.
Hoofdstuk 10. Handleiding bij de chip 102
Er kan een externe klok aangelegd worden om de frequentie van de PWM-pulsen aante passen (externe klok teller, pinnen 44, 45, 46).
Er kan een externe klok aangelegd worden om de frequentie aan te passen waarop hetfeedbacksysteem werkt (externe klok feedback, pinnen 3, 4, 5). Het is namelijk zo datvoor elk type motor, het regelsysteem anders zal reageren (zie Hoofdstuk 7 Snelheidsre-geling).
Er is een mogelijkheid tot bypass van de regellus voor de snelheid voorzien. Dit kanhandig zijn indien het schakelgedrag van de IGBT’s bij hogere frequenties bestudeerdwenst te worden (zie figuur 7.6), of om een aangepaste externe snelheidsregeling tevoorzien (OL/CL, pin 47).
Hoofdstuk 11
Besluit
De laatste jaren wordt er steeds meer gezocht naar componenten die minder vermogen dissi-peren, maar toch niet inleveren op andere gebieden. Het is ook een trend geworden om eenautonoom microsysteem op een chip te integreren. Deze zogenaamde Smart Power technolo-gieen worden o.a. vaak toegepast in de automobiel industrie.
In dit werk wordt een systeem voorgesteld om de snelheid van een DC-motor te regelen, ge-bruik makend van IGBT’s als schakelelementen in een H-brug. Het is hierbij de bedoeling omeen volledig systeem te ontwerpen in de I3T80 Smart Power Technologie van AMI Semicon-ductor, gebruikmakend van IGBT’s ontwikkeld aan de onderzoeksgroep TFCG Microsystems.De performantie van deze componenten blijkt veelbelovend te zijn, maar ze werden nog nooiteerder op chip geıntegreerd samen met andere elektronica.
De vooropgestelde specificaties werden bereikt. Om een motor aan te drijven werd een H-brugmet IGBT’s als schakelelementen ontworpen die aangestuurd wordt door middel van PWM-pulsen. Om de aanstuurelektronica zo compact mogelijk te houden werden deze pulsen opeen digitale wijze gerealiseerd. Tussen dit digitale circuit en de hoogvermogens-uitgangstrapis nog een extra circuit nodig, namelijk een levelshifter. Deze zorgt ervoor dat de digitaalopgewekte PWM signalen naar de juiste niveaus worden verschoven om de IGBT’s in deH-brug aan te sturen.
Naast de aanstuurelektronica en de H-brug werd een circuit ontworpen dat kan dienen voor desnelheidsregeling van een DC-motor. Om het integreren van een ADC op de chip uit de wegte gaan, was het een uitdaging om dit regelsysteem ook digitaal te implementeren. Hierbijwerd handig gebruik gemaakt van Matlab om de correcte werking van de regellus na te gaan.
103
Hoofdstuk 11. Besluit 104
Om de IGBT’s te beschermen zijn ook een aantal protectiecircuits aangebracht. Enerzijds is ereen systeem voorzien om de dissipatie in de vermogenscomponenten te begrenzen. Anderzijdszorgt een thermische sensor voor het veilig uitschakelen indien de temperatuur toch nog tehoog zou oplopen.
In een laatste stap werd het ontworpen circuit gelay-out om dit prototype te kunnen latenproduceren.
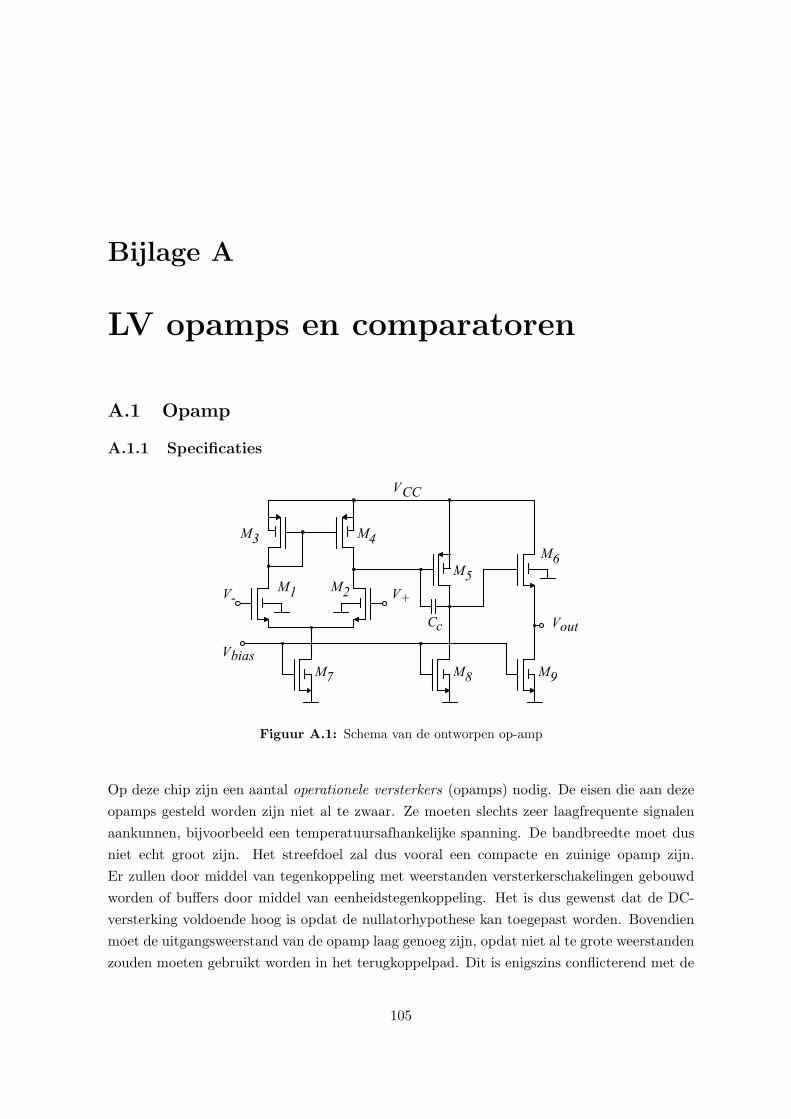
Bijlage A
LV opamps en comparatoren
A.1 Opamp
A.1.1 Specificaties
Figuur A.1: Schema van de ontworpen op-amp
Op deze chip zijn een aantal operationele versterkers (opamps) nodig. De eisen die aan dezeopamps gesteld worden zijn niet al te zwaar. Ze moeten slechts zeer laagfrequente signalenaankunnen, bijvoorbeeld een temperatuursafhankelijke spanning. De bandbreedte moet dusniet echt groot zijn. Het streefdoel zal dus vooral een compacte en zuinige opamp zijn.Er zullen door middel van tegenkoppeling met weerstanden versterkerschakelingen gebouwdworden of buffers door middel van eenheidstegenkoppeling. Het is dus gewenst dat de DC-versterking voldoende hoog is opdat de nullatorhypothese kan toegepast worden. Bovendienmoet de uitgangsweerstand van de opamp laag genoeg zijn, opdat niet al te grote weerstandenzouden moeten gebruikt worden in het terugkoppelpad. Dit is enigszins conflicterend met de
105

Bijlage A. LV opamps en comparatoren 106
Figuur A.2: Biascircuit voor de op-amp uit figuur A.1
eis voor een zeer compact design. Dit zal opgelost worden door een spanningsvolger toe tevoegen. Uiteraard moet de schakeling ook stabiel zijn bij (eenheids)tegenkoppeling.
A.1.2 Ontwerp
De opamp is ontworpen volgens de gangbare strategieen. Er wordt gelet op de afmetingenvan de transistoren, de gm, gm
ID, ID en VD,sat. De parasitairen worden hier verwaarloosd
aangezien de bandbreedte geen rol speelt (behalve voor de stabiliteitsanalyse!). Voor meerinformatie wordt verwezen naar [10]. De dimensionering van de schakeling uit figuur A.1 staatweergegeven in tabel A.1. Alle transistoren zijn gedimensioneerd voor eenzelfde gm
ID. Daarom
zijn de PMOS transistoren 3 keer groter dan de NMOS transistoren.
transistor W [ µm] L [ µm] gm [ µAV ] ID [µA] gm
ID[-]
M1 4 0,7 86,02 6,007 14,32M2 4 0,7 85,81 5,989 14,33M3 12 0,7 72,73 -6,007 12,11M4 12 0,7 72,51 -5,989 12,11M5 12 0,35 201,8 -18,15 11,12M6 24 0,35 1380 99,13 13,92M7 4 0,35 170,7 12 14,23M8 4 0,35 233,9 18,15 12,9M9 24 0,35 1327 99,13 13,38M10 2 0,35 69,53 4,698 14,8
Tabel A.1: Dimensionering van de opamp uit figuur A.1; instelwaarden bij V+ = 1, 65 V
Rbias : nsq = 500 ≈ 500 kΩ (A.1)
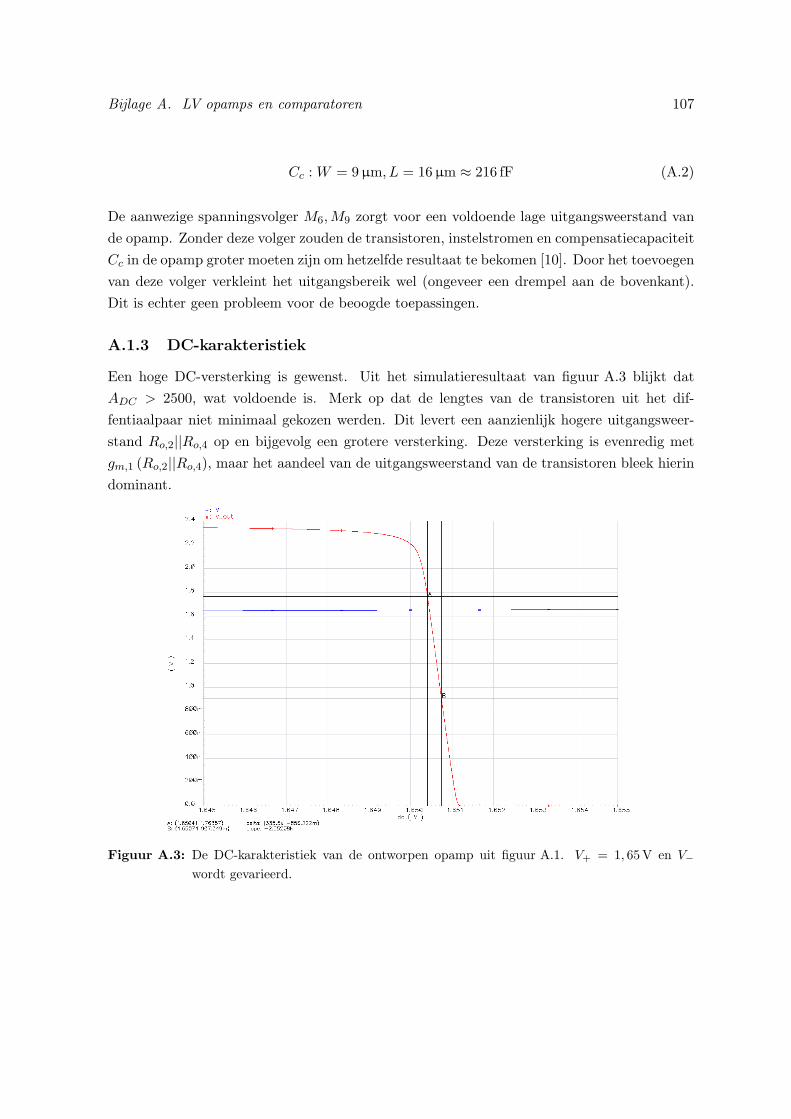
Bijlage A. LV opamps en comparatoren 107
Cc : W = 9µm, L = 16µm ≈ 216 fF (A.2)
De aanwezige spanningsvolger M6,M9 zorgt voor een voldoende lage uitgangsweerstand vande opamp. Zonder deze volger zouden de transistoren, instelstromen en compensatiecapaciteitCc in de opamp groter moeten zijn om hetzelfde resultaat te bekomen [10]. Door het toevoegenvan deze volger verkleint het uitgangsbereik wel (ongeveer een drempel aan de bovenkant).Dit is echter geen probleem voor de beoogde toepassingen.
A.1.3 DC-karakteristiek
Een hoge DC-versterking is gewenst. Uit het simulatieresultaat van figuur A.3 blijkt datADC > 2500, wat voldoende is. Merk op dat de lengtes van de transistoren uit het dif-fentiaalpaar niet minimaal gekozen werden. Dit levert een aanzienlijk hogere uitgangsweer-stand Ro,2||Ro,4 op en bijgevolg een grotere versterking. Deze versterking is evenredig metgm,1 (Ro,2||Ro,4), maar het aandeel van de uitgangsweerstand van de transistoren bleek hierindominant.
Figuur A.3: De DC-karakteristiek van de ontworpen opamp uit figuur A.1. V+ = 1, 65 V en V−
wordt gevarieerd.
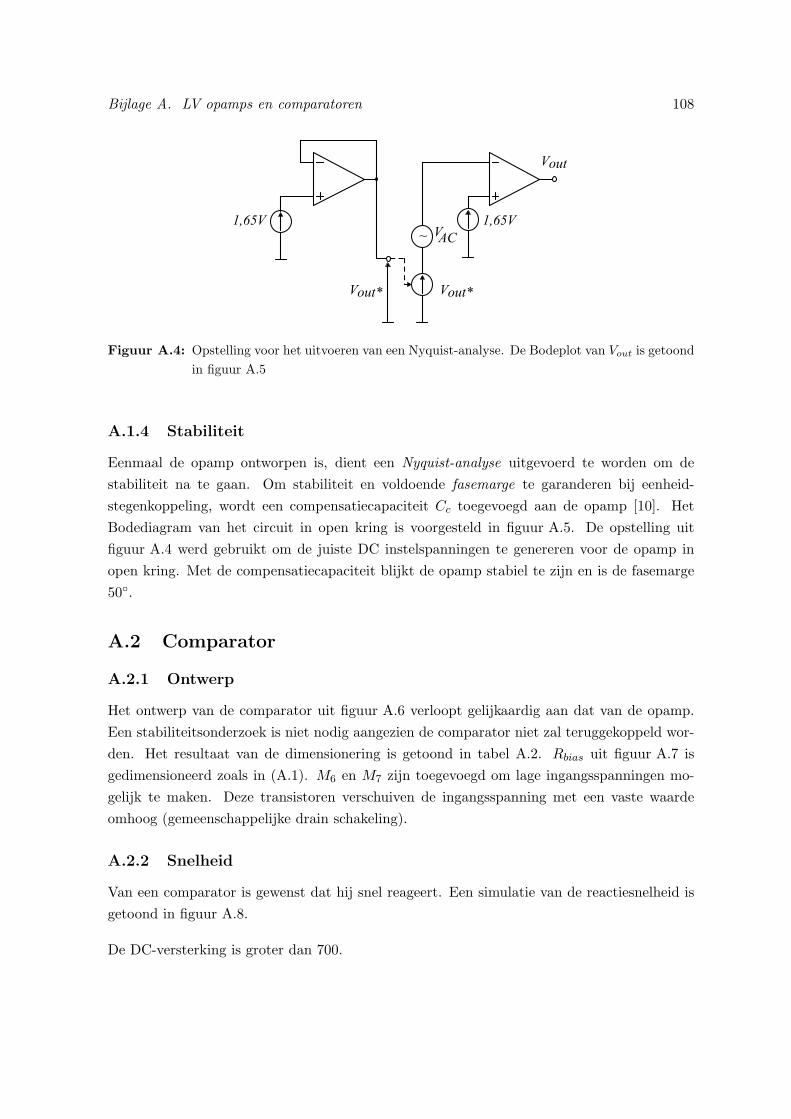
Bijlage A. LV opamps en comparatoren 108
Figuur A.4: Opstelling voor het uitvoeren van een Nyquist-analyse. De Bodeplot van Vout is getoondin figuur A.5
A.1.4 Stabiliteit
Eenmaal de opamp ontworpen is, dient een Nyquist-analyse uitgevoerd te worden om destabiliteit na te gaan. Om stabiliteit en voldoende fasemarge te garanderen bij eenheid-stegenkoppeling, wordt een compensatiecapaciteit Cc toegevoegd aan de opamp [10]. HetBodediagram van het circuit in open kring is voorgesteld in figuur A.5. De opstelling uitfiguur A.4 werd gebruikt om de juiste DC instelspanningen te genereren voor de opamp inopen kring. Met de compensatiecapaciteit blijkt de opamp stabiel te zijn en is de fasemarge50.
A.2 Comparator
A.2.1 Ontwerp
Het ontwerp van de comparator uit figuur A.6 verloopt gelijkaardig aan dat van de opamp.Een stabiliteitsonderzoek is niet nodig aangezien de comparator niet zal teruggekoppeld wor-den. Het resultaat van de dimensionering is getoond in tabel A.2. Rbias uit figuur A.7 isgedimensioneerd zoals in (A.1). M6 en M7 zijn toegevoegd om lage ingangsspanningen mo-gelijk te maken. Deze transistoren verschuiven de ingangsspanning met een vaste waardeomhoog (gemeenschappelijke drain schakeling).
A.2.2 Snelheid
Van een comparator is gewenst dat hij snel reageert. Een simulatie van de reactiesnelheid isgetoond in figuur A.8.
De DC-versterking is groter dan 700.

Bijlage A. LV opamps en comparatoren 109
Figuur A.5: Bodeplot van de opamp met eenheidstegenkoppeling in open kring (zie figuur A.4)
Figuur A.6: De ontworpen comparator
Figuur A.7: Biascircuit voor de comparator uit figuur A.6
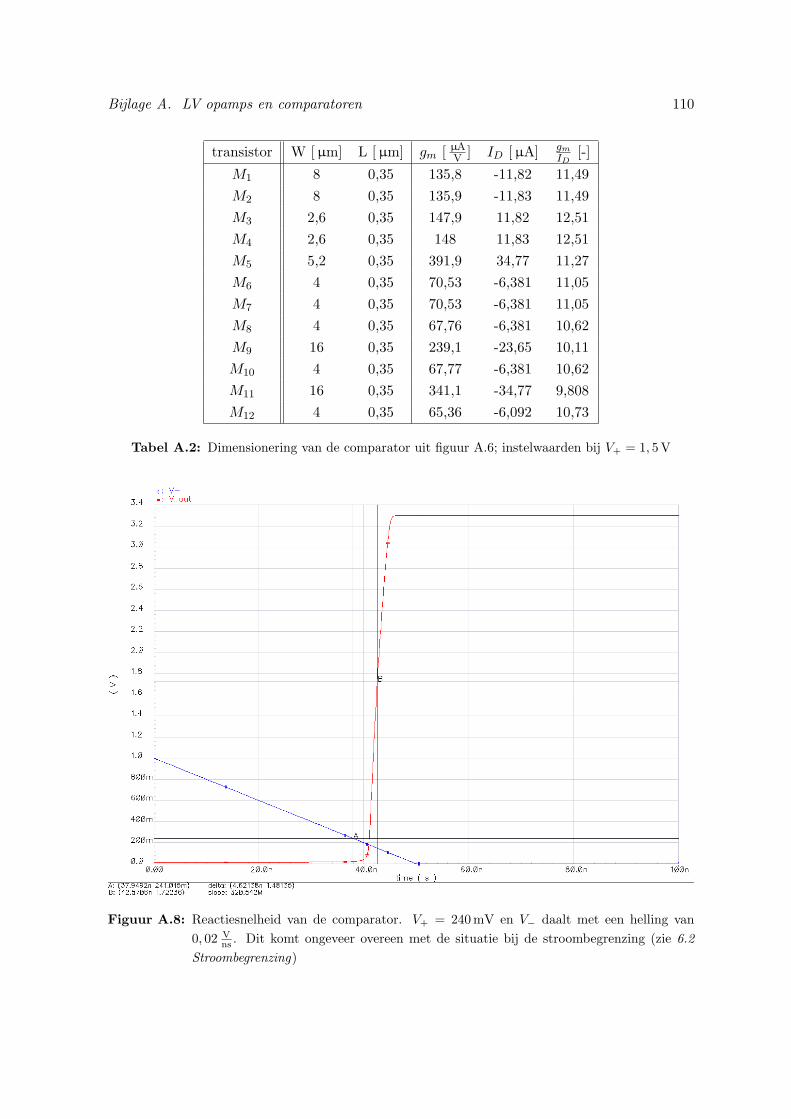
Bijlage A. LV opamps en comparatoren 110
transistor W [ µm] L [ µm] gm [ µAV ] ID [µA] gm
ID[-]
M1 8 0,35 135,8 -11,82 11,49M2 8 0,35 135,9 -11,83 11,49M3 2,6 0,35 147,9 11,82 12,51M4 2,6 0,35 148 11,83 12,51M5 5,2 0,35 391,9 34,77 11,27M6 4 0,35 70,53 -6,381 11,05M7 4 0,35 70,53 -6,381 11,05M8 4 0,35 67,76 -6,381 10,62M9 16 0,35 239,1 -23,65 10,11M10 4 0,35 67,77 -6,381 10,62M11 16 0,35 341,1 -34,77 9,808M12 4 0,35 65,36 -6,092 10,73
Tabel A.2: Dimensionering van de comparator uit figuur A.6; instelwaarden bij V+ = 1, 5 V
Figuur A.8: Reactiesnelheid van de comparator. V+ = 240mV en V− daalt met een helling van0, 02 V
ns . Dit komt ongeveer overeen met de situatie bij de stroombegrenzing (zie 6.2Stroombegrenzing)
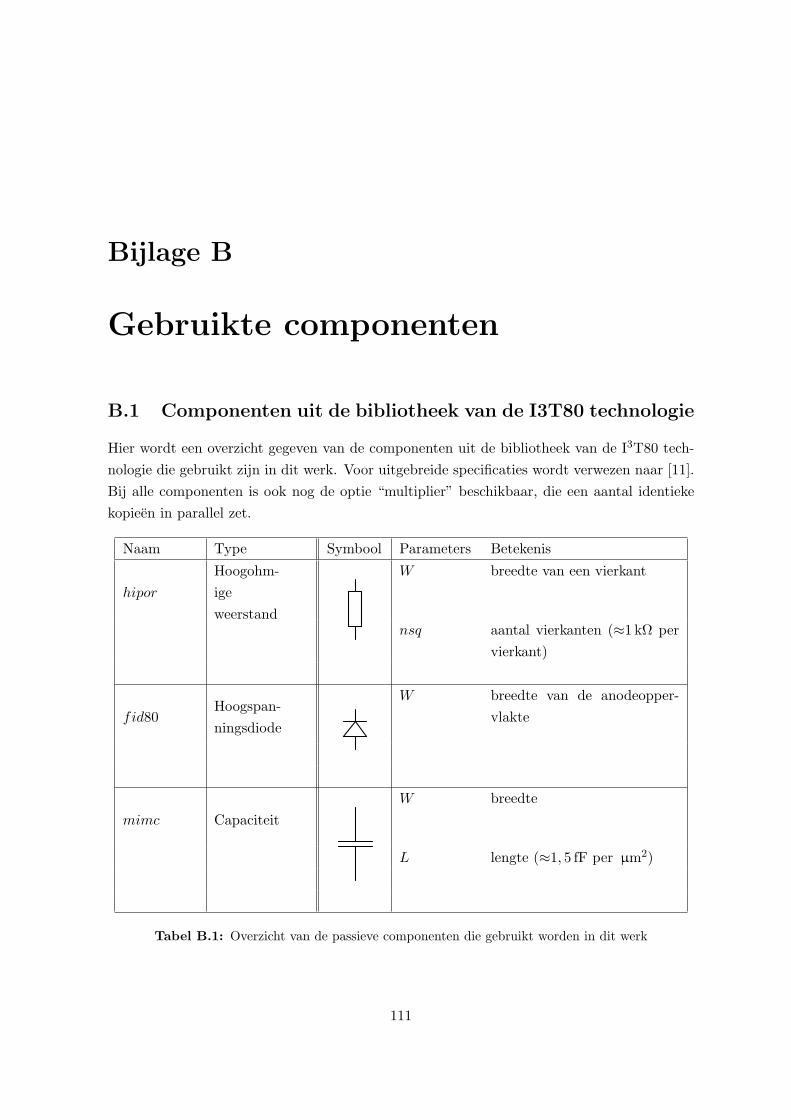
Bijlage B
Gebruikte componenten
B.1 Componenten uit de bibliotheek van de I3T80 technologie
Hier wordt een overzicht gegeven van de componenten uit de bibliotheek van de I3T80 tech-nologie die gebruikt zijn in dit werk. Voor uitgebreide specificaties wordt verwezen naar [11].Bij alle componenten is ook nog de optie “multiplier” beschikbaar, die een aantal identiekekopieen in parallel zet.
Naam Type Symbool Parameters Betekenis
hipor
Hoogohm-igeweerstand
W breedte van een vierkant
nsq aantal vierkanten (≈1 kΩ pervierkant)
fid80Hoogspan-ningsdiode
W breedte van de anodeopper-vlakte
mimc CapaciteitW breedte
L lengte (≈1, 5 fF per µm2)
Tabel B.1: Overzicht van de passieve componenten die gebruikt worden in dit werk
111
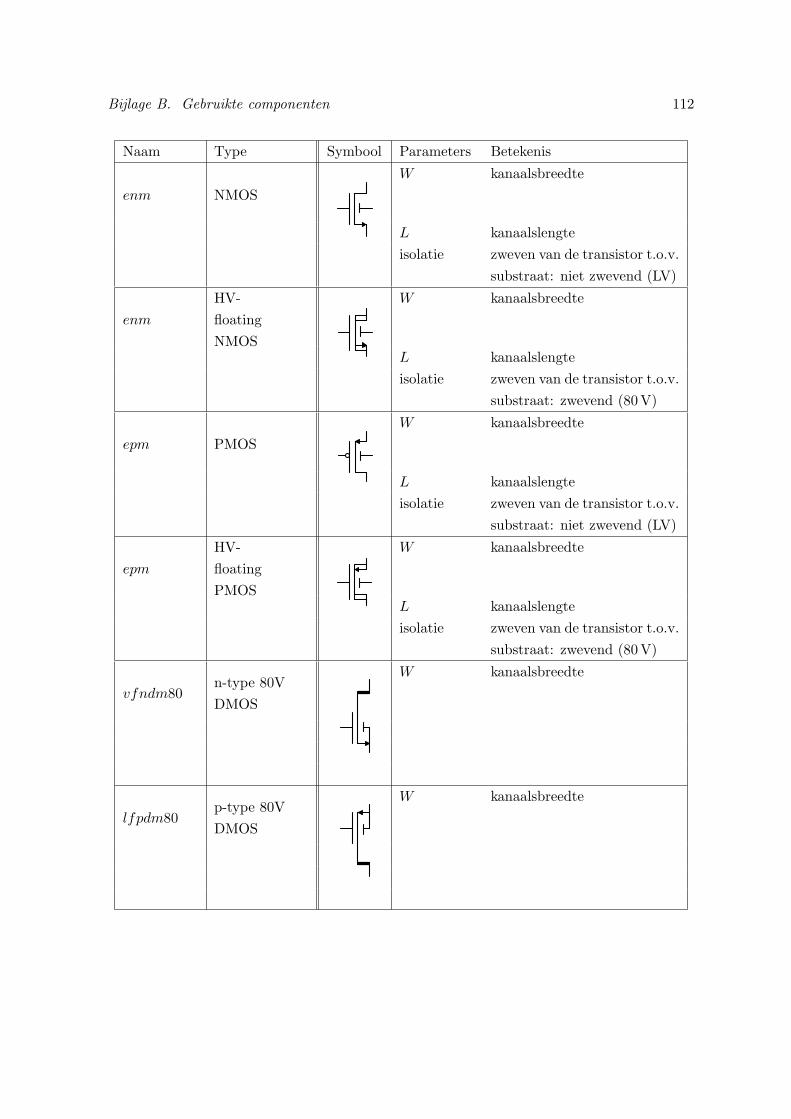
Bijlage B. Gebruikte componenten 112
Naam Type Symbool Parameters Betekenis
enm NMOSW kanaalsbreedte
L kanaalslengteisolatie zweven van de transistor t.o.v.
substraat: niet zwevend (LV)
enm
HV-floatingNMOS
W kanaalsbreedte
L kanaalslengteisolatie zweven van de transistor t.o.v.
substraat: zwevend (80 V)
epm PMOSW kanaalsbreedte
L kanaalslengteisolatie zweven van de transistor t.o.v.
substraat: niet zwevend (LV)
epm
HV-floatingPMOS
W kanaalsbreedte
L kanaalslengteisolatie zweven van de transistor t.o.v.
substraat: zwevend (80 V)
vfndm80n-type 80VDMOS
W kanaalsbreedte
lfpdm80p-type 80VDMOS
W kanaalsbreedte

Bijlage B. Gebruikte componenten 113
vpb5u0PNPbipolairetransistor
vaste afmetingen
n.v.t. IGBTvaste afmetingen
Tabel B.2: Overzicht van de transistoren die gebruikt worden in dit werk
In het digitaal deel van het ontworpen circuit worden de lengtes van de transistoren mi-nimaal gekozen. Voor alle NMOS transistoren wordt een breedte van 0, 8 µm gekozen envoor alle PMOS transistoren 2 µm. De breedte van de NMOS transistoren wordt dus nietminimaal gekozen omdat de pcell-generatie niet correct gebeurt voor breedtes kleiner dan0, 8 µm. Bovendien zijn het source en drain gebied minimaal 0, 8 µm breed, dus een kleineretransistorbreedte levert toch (nagenoeg) geen plaats winst op.
B.2 Ontworpen logica
B.2.1 D-flipflop
De D-flipflop wordt uitgevoerd zoals te zien in figuur B.1, en bestaat uit 2 schakelaars en 2bistabiele elementen. De eerste schakelaar geeft zijn input door wanneer de klok hoog is; detweede schakelaar geeft zijn input door wanneer de klok laag is. Op deze wijze wordt eenD-flipflop verkregen die reageert op de dalende klokflank.
Figuur B.1: D-flipflop

Bijlage B. Gebruikte componenten 114
De bistabiele elementen worden gevormd door 2 invertoren kop aan staart te schakelen. Deinvertor in het terugkoppelpad probeert de huidige ingang en uitgang vast te houden, en isnoodzakelijk wanneer de ingang van het bistabiel element zwevend zou worden (bv. als deschakelaar die aan het bistabiel element voorafgaat open staat). Daar de invertor in hetvoorwaarts pad te allen tijde zijn wil moet kunnen opdringen, moet deze een grotere stroomvoeren dan deze in het terugkoppelpad. Bovendien moet erop gelet worden dat de stroomdie de invertor in het terugkoppelpad voert, voldoende klein is in vergelijking met deze in hetvoorwaartse pad. Dit om ongewenste stroompieken te beperken in het geval de ingang vanwaarde verandert.
Rekening houdend met bovenstaande, wordt de lengte van de NMOS en PMOS van de invertorin het terugkoppelpad ongeveer een factor 9 groter gekozen dan deze uit het voorwaarts pad.De stroom die deze invertor voert wordt dan ook eenzelfde factor kleiner (transconductantiek van een MOSFET: k = µnCox
WL ), en de stroompieken worden verwaarloosbaar.
B.2.2 JK-flipflop
De JK-flipflop kan gemakkelijk gerealiseerd worden met behulp van voorgaande D-flipflop.Hiertoe dient de D-flipflop voorafgegaan te worden van een logisch circuit dat de logischewaarheid D = JQ + KQ impliceert. Het geheel is te zien in figuur B.2.
Figuur B.2: JK-flipflop
B.3 Modellen voor externe componenten
B.3.1 DC-motor
Om het ontworpen feedbacksysteem te simuleren is uiteraard een model nodig voor een DC-motor. Een dergelijke motor kan vereenvoudigd beschreven worden met behulp van volgendevergelijkingen.
VEMF = ωKEMF (B.1)

Bijlage B. Gebruikte componenten 115
T = KT I (B.2)
Hierbij is VEMF de opgewekte tegenelektromotorische spanning, KEMF en KT zijn motor-constanten, ω is de hoeksnelheid van de motor en VS is de spanning die aangelegd wordt overde DC-motor.
Figuur B.3: Een eenvoudig model voor een DC-motor, opgebouwd aan de hand van elektrische com-ponenten en ideale gestuurde bronnen
Het elektrisch gedrag van de motor wordt gekarakteriseerd door R,L, VEMF , VS . In stationairregime kan de differentiaalvergelijking die het mechanische gedrag karakteriseert benaderendvoorgesteld worden als:
T (ω) = Jdω
dt+ Bω (B.3)
T is het motorkoppel, J stelt de traagheid voor en B modelleert de wrijving. T (ω) kan alseen spanning geınterpreteerd worden en ω als een stroom. J en B stellen dan een spoel eneen weerstand voor. Op die manier kan (B.3) herschreven worden als:
VT (ω) = LJdIω
dt+ RBIω (B.4)
Deze vergelijking kan rechtstreeks voorgesteld worden als een elektrisch schema. Mits toe-voegen van stroomgestuurde spanningsbronnen kan een DC-motor dus gesimuleerd wordenals het elektrische circuit uit figuur B.3. Voor een typische DC-motor die op 25 V werkt enlaststromen van 1− 2 A aan kan, worden volgende constanten gevonden:
KEMF = 0, 0439 Vrad/s
KT = 0, 0438 Vrad/s
R = 1, 7 Ω
L = 2mH
(B.5)
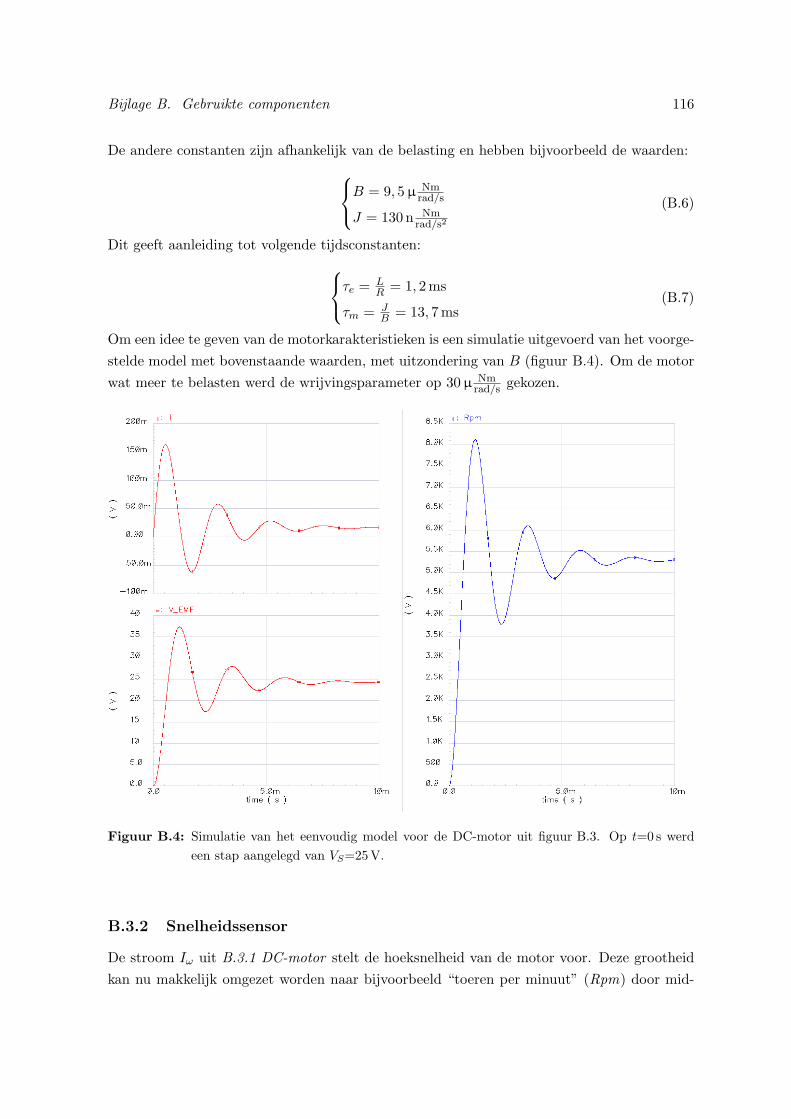
Bijlage B. Gebruikte componenten 116
De andere constanten zijn afhankelijk van de belasting en hebben bijvoorbeeld de waarden:B = 9, 5 µ Nmrad/s
J = 130 n Nmrad/s2
(B.6)
Dit geeft aanleiding tot volgende tijdsconstanten:τe = LR = 1, 2 ms
τm = JB = 13, 7 ms
(B.7)
Om een idee te geven van de motorkarakteristieken is een simulatie uitgevoerd van het voorge-stelde model met bovenstaande waarden, met uitzondering van B (figuur B.4). Om de motorwat meer te belasten werd de wrijvingsparameter op 30µ Nm
rad/s gekozen.
Figuur B.4: Simulatie van het eenvoudig model voor de DC-motor uit figuur B.3. Op t=0 s werdeen stap aangelegd van VS=25V.
B.3.2 Snelheidssensor
De stroom Iω uit B.3.1 DC-motor stelt de hoeksnelheid van de motor voor. Deze grootheidkan nu makkelijk omgezet worden naar bijvoorbeeld “toeren per minuut” (Rpm) door mid-

Bijlage B. Gebruikte componenten 117
del van een stroomgestuurde spanningsbron. Deze laatste grootheid wordt in dit werk alsstandaard gebruikt om de snelheid van de motor weer te geven. Het circuit voor de snel-heidsfeedback heeft als ingang voor het feedbacksignaal een digitaal getal van 9 bit. Om eenexterne digitale snelheidssensor na te bootsen wordt het toerental van de motor (uitgedruktin spanning) gedigitaliseerd door middel van een ideale ADC. Op die manier kan het feed-backsysteem getest worden in een elektrische simulator. Een gedigitaliseerde waarde van 0komt overeen met het maximale toerental van de motor in een richting en 28 met het maxi-male toerental in de andere richting. In het midden van de schaal ligt de ruststand. Hetmaximale toerental voor het gebruikte motormodel werd genomen op 4000Rpm. Uiteraardis dit afhankelijk van de motor en zal in werkelijkheid een geschikte sensor voor de gebruiktemotor moeten gekozen worden.
Bibliografie
[1] P. Moens, D. Bolognesi, L. Delobel, D. Villanueva, H. Hakim, S.C. Trinh, K. Reynders,F. De Pestel, A. Lowe, E. De Backer, G. Van Herzeele, and M Tack. I3T80: a 0.35 µmbased system-on-chip technology for 42 v battery automotive applications. In Proceedingsof the International Symposium Power Semiconductor Devices and ICs, pages 225 – 228,2002.
[2] B. Bakeroot, J. Doutreloigne, and P. Moens. A new ligbt structure to suppress substratecurrents in a junction isolated technology. Solid-State Electronics, 49(3):363–367, 2005.
[3] B. Bakeroot, J. Doutreloigne, and P. Moens. An Ultrafast Floating 75V Lateral IGBTwith a Buried Hole Diverter and an Effective Junction Isolation. IEEE Electron DeviceLetters, 27(6):492–494, 2006.
[4] B. Bakeroot, J. Doutreloigne, P. Vanmeerbeek, and P. Moens. A new lateral-igbt struc-ture with a wider safe operating area. IEEE Electron Device Letters, 28(5):416–418,2007.
[5] AMI Semiconductor Belgium BVBA. I3T80 Layout Rules Manual. DES-0002, Revision:2.0.
[6] Jan Doutreloigne. Ontwerp van microsystemen. Cursus gedoceerd aan de UniversiteitGent.
[7] Laurent Dulau, Serge Pontarollo, and Anthony Boimond. A New Gate Driver IntegratedCircuit for IGBT Devices With Advanced Protections. IEEE Transactions on PowerElectronics, 21(1):38–45, 2006.
[8] M. Jin and M. Weiming. Power converter emi analysis including igbt nonlinear switchingtransient model. IEEE Transactions on Industrial Electronics, 53(5):1577–1583, 2006.
[9] Jan Van Campenhout. Digitale elektronica. Cursus gedoceerd aan de Universiteit Gent.
[10] Pieter Rombouts. Geavanceerd analoog ontwerp. Cursus gedoceerd aan de UniversiteitGent.
118

Bibliografie 119
[11] AMI Semiconductor Belgium BVBA. I3T80 Process and Electrical Parameters. DES-0037, Revision: 4.0.
Lijst van figuren
1.1 Smart power technologieen in moderne auto’s . . . . . . . . . . . . . . . . . . 2
2.1 Schematische voorstelling van een H-brug . . . . . . . . . . . . . . . . . . . . 42.2 Genereren van PWM-pulsen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 De IGBT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Structuur van een klassieke IGBT . . . . . . . . . . . . . . . . . . . . . . . . 103.2 Structuur van de nieuw ontwikkelde IGBT . . . . . . . . . . . . . . . . . . . . 113.3 Vergelijking van de substraatstroom bij de klassieke IGBT structuur en het
verbeterde ontwerp met een “double burried layer” [3] . . . . . . . . . . . . . 123.4 Vergelijking van de stroomdichtheid bij de verbeterde IGBT en bij een DMOS
transistor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.5 Het gebruikte macromodel: M1 is een lfndm14 transistor met W = 40×78 µm;
Q1 is een vphb5u0 met oppervlakte = 117× 25 µm2 . . . . . . . . . . . . . . . 143.6 Vergelijking van de stroomdichtheid bij de IGBT (IA) en bij een DMOS (ID)
door het uitvoeren van een simulatie met componenten die evenveel silicium-ruimte in beslag nemen. Voor de IGBT werd het macromodel uit figuur 3.5gebruikt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.7 Vereenvoudigde Safe Operating Area karakteristiek van de IGBT: toegelatenen verboden zones in de uitgangskarakteristiek. . . . . . . . . . . . . . . . . . 16
3.8 Opstelling om het schakelgedrag van de IGBT te onderzoeken (VHV = 25V) . 173.9 Simulatieresultaten van de opstelling uit figuur 3.8 met het macromodel voor
de IGBT uit figuur 3.5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.10 Opgemeten golfvorm van de anodestroom in de IGBT bij het afschakelen (op-
stelling uit figuur 3.8 met L = 2, 35 mH en VHV = 50V). De gate wordtgedurende 500 ns volledig geopend en vervolgens afgeschakeld. Na de voltagerise phase daalt de anodestroom bijna ogenblikkelijk naar 0. De invloed vande uitgangscapaciteit bij het afschakelen is ook getoond [4]. . . . . . . . . . . 19
4.1 Opwekken van 2 complementaire PWM-pulsen a.d.h.v. een digitaal driehoeks-signaal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
120

Lijst van figuren 121
4.2 Gemodificeerde teller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.3 Enkele oscillator-topologieen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.4 Schmitt-Trigger in CMOS-technologie . . . . . . . . . . . . . . . . . . . . . . 244.5 Gedimensioneerde versie van de klok . . . . . . . . . . . . . . . . . . . . . . . 264.6 Keuze intern/extern kloksignaal: karnaughkaart (a) en logisch circuit (b) . . 274.7 Vereenvoudigd sommatie-circuit (∆=15) . . . . . . . . . . . . . . . . . . . . . 274.8 Verschil tussen 2 bits X en Y: karnaughkaart (a) en logisch circuit (b) . . . . 284.9 Globaal schema: opwekken PWM-pulsen . . . . . . . . . . . . . . . . . . . . . 294.10 Generatie van PWM-pulsen: simulatieresultaat . . . . . . . . . . . . . . . . . 31
5.1 Noodzaak van de levelshifter voor de aansturing van de bovenste IGBT in deuitgangstrap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.2 Karakteristiek van een transistor geschakeld als niet-lineaire weerstand . . . . 335.3 Basisschema van de ontworpen levelshifter . . . . . . . . . . . . . . . . . . . . 345.4 Golfvormen horend bij het principeschema van figuur 5.3, met als last een DC-
motor geschakeld tussen Vout en VHV,2 = 12, 5 V . . . . . . . . . . . . . . . . . 355.5 Detail van een PWM periode uit figuur 5.4 . . . . . . . . . . . . . . . . . . . 365.6 Volledig schema van de levelshifter, zoals ontworpen in Cadence . . . . . . . . 385.7 De onderdelen van de regime-tak . . . . . . . . . . . . . . . . . . . . . . . . . 395.8 De onderdelen van de ontlaad-tak . . . . . . . . . . . . . . . . . . . . . . . . . 435.9 De onderdelen van de laadtak . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.10 Opstelling voor het testen van de actieve last . . . . . . . . . . . . . . . . . . 495.11 De golfvormen voor de opstelling van figuur 5.10 (a) Ilaad = 350µA (b) Ilaad =
450 µA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.12 De hoogspanningscomparator A1 . . . . . . . . . . . . . . . . . . . . . . . . . 535.13 Simulatie van de hoogspanningscomparator. V+ = 30V . . . . . . . . . . . . 545.14 Simulatie van de ontworpen levelshifter: spanningsgolfvormen . . . . . . . . . 555.15 Simulatie van de ontworpen levelshifter: detail van figuur 5.14 . . . . . . . . . 565.16 Simulatie van de ontworpen levelshifter: illustratie van de laad-tak uit fi-
guur 5.9 (moment dat IGBT2 wordt aangeschakeld) . . . . . . . . . . . . . . 575.17 Simulatie van de ontworpen levelshifter: stroomgolfvormen . . . . . . . . . . 585.18 Simulatie van de ontworpen levelshifter: stroomgolfvormen (detail figuur 5.17) 595.19 Simulatie van de ontworpen levelshifter bij 150 C: illustratie van de laad-tak
uit figuur 5.9 (moment dat IGBT2 wordt aangeschakeld) . . . . . . . . . . . . 605.20 Vereenvoudigd model van een IGBT in geleiding . . . . . . . . . . . . . . . . 62
6.1 De H-brug met schematisch voorgestelde levelshifter (LS) en een circuit voorstroombegrenzing. Het signaal Temp wordt laag indien de temperatuur tehoog oploopt (> 150 C, zie 6.3 Thermisch protectiecircuit) . . . . . . . . . . 65
6.2 Simulatieresultaat van het circuit uit figuur 6.1 . . . . . . . . . . . . . . . . . 66

Lijst van figuren 122
6.3 Invloed van de stroombegrenzing bij het opstarten van de DC-motor . . . . . 686.4 Temperatuursensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 706.5 Simulatie temperatuursensor . . . . . . . . . . . . . . . . . . . . . . . . . . . 716.6 Geconditioneerde temperatuursensor . . . . . . . . . . . . . . . . . . . . . . . 726.7 Simulatie geconditioneerde temperatuursensor . . . . . . . . . . . . . . . . . . 756.8 Thermische beveiliging: logisch circuit . . . . . . . . . . . . . . . . . . . . . . 76
7.1 Snelheidsregeling: blokschema . . . . . . . . . . . . . . . . . . . . . . . . . . . 777.2 Vergelijken van Desired en Measured . . . . . . . . . . . . . . . . . . . . . . 787.3 Regelaar: logisch circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 827.4 Geheugenelementen met in te stellen initiele waarde . . . . . . . . . . . . . . 837.5 Delen van een frequentie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 847.6 Feedback-klok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 847.7 Simulatie in Matlab: instelwaarde ‘128’ . . . . . . . . . . . . . . . . . . . . . 867.8 Simulatie in Matlab: instelwaarde ‘470’ wijzigen naar ‘100’ . . . . . . . . . . 877.9 Simulatie in Matlab: instelwaarde ‘400’ . . . . . . . . . . . . . . . . . . . . . 88
8.1 Blokschema van het volledige systeem. De onderdelen in stippellijn maken geendeel uit van de chip en moeten extern worden aangebracht. . . . . . . . . . . 89
8.2 De motorsnelheid evolueert naar zijn wenswaarde ≈ −2 kRpm dankzij de snel-heidsregeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
8.3 Invloed van het regelsysteem op het referentieniveau en bijhorende aanpassingvan de PWM signalen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
8.4 De motorsnelheid evolueert naar zijn wenswaarde en volgt ook deze wenswaardeindien ze verandert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
8.5 De motorsnelheid evolueert naar zijn wenswaarde en volgt ook deze wenswaardeindien de belasting van de motor verandert . . . . . . . . . . . . . . . . . . . 93
9.1 Afbeelding met de lay-out van de ontworpen chip. . . . . . . . . . . . . . . . 959.2 De schikking van de systeemblokken in de lay-out (zonder bondpads). Limit en
Temp stellen respectievelijk het circuit van de stroombegrenzing en tempera-tuurbegrenzing voor. In (a) is een overzicht van het volledige systeem getoond;in (b) een detail van de digitale logica. . . . . . . . . . . . . . . . . . . . . . . 96
A.1 Schema van de ontworpen op-amp . . . . . . . . . . . . . . . . . . . . . . . . 105A.2 Biascircuit voor de op-amp uit figuur A.1 . . . . . . . . . . . . . . . . . . . . 106A.3 De DC-karakteristiek van de ontworpen opamp uit figuur A.1. V+ = 1, 65 V en
V− wordt gevarieerd. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107A.4 Opstelling voor het uitvoeren van een Nyquist-analyse. De Bodeplot van Vout
is getoond in figuur A.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108

Lijst van figuren 123
A.5 Bodeplot van de opamp met eenheidstegenkoppeling in open kring (zie figuur A.4)109A.6 De ontworpen comparator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109A.7 Biascircuit voor de comparator uit figuur A.6 . . . . . . . . . . . . . . . . . . 109A.8 Reactiesnelheid van de comparator. V+ = 240mV en V− daalt met een helling
van 0, 02 Vns . Dit komt ongeveer overeen met de situatie bij de stroombegrenzing
(zie 6.2 Stroombegrenzing) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
B.1 D-flipflop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113B.2 JK-flipflop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114B.3 Een eenvoudig model voor een DC-motor, opgebouwd aan de hand van elek-
trische componenten en ideale gestuurde bronnen . . . . . . . . . . . . . . . . 115B.4 Simulatie van het eenvoudig model voor de DC-motor uit figuur B.3. Op t=0 s
werd een stap aangelegd van VS=25V. . . . . . . . . . . . . . . . . . . . . . . 116

Lijst van tabellen
4.1 Keuze intern/extern kloksignaal: waarheidstabel . . . . . . . . . . . . . . . . 264.2 Verschil tussen 2 bits X en Y: waarheidstabel . . . . . . . . . . . . . . . . . . 28
6.1 Weerstandswaarden horende bij de verschilversterkers . . . . . . . . . . . . . 74
10.1 Overzichtstabel met de verschillende signalen . . . . . . . . . . . . . . . . . . 9710.1 Overzichtstabel met de verschillende signalen . . . . . . . . . . . . . . . . . . 9810.1 Overzichtstabel met de verschillende signalen . . . . . . . . . . . . . . . . . . 9910.1 Overzichtstabel met de verschillende signalen . . . . . . . . . . . . . . . . . . 100
A.1 Dimensionering van de opamp uit figuur A.1; instelwaarden bij V+ = 1, 65 V . 106A.2 Dimensionering van de comparator uit figuur A.6; instelwaarden bij V+ = 1, 5 V 110
B.1 Overzicht van de passieve componenten die gebruikt worden in dit werk . . . 111B.2 Overzicht van de transistoren die gebruikt worden in dit werk . . . . . . . . . 113
124