Modeling Steering System

of 19
Transcript of Modeling Steering System
-
8/12/2019 Modeling Steering System
1/19
Paper No.: 993076An ASAE Meeting Presentation
UILU-ENG-99-7019
MODELING AND SIMULATION OF AN ELECTROHYDRAULICSTEERING SYSTEM
Hongchu Qiu Qin Zhang John F. Reid Duqiang Wu
Graduate Assistant Assistant Professor Professor Visiting Scholar
Department of Agricultural EngineeringUniversity of Illinois at Urbana-Champaign
1304 West Pennsylvania Avenue
Urbana, IL 61801, USA
Written for Presentation at the 1999 ASAE/CSAE-SCGR Annual International Meeting
Sheraton Center Hall
Toronto, Ontario, CanadaJuly 18 21, 1999.
Summary:
This paper presents a model and its simulation results of an agricultural vehicle electrohydraulic (E/H) steering
system. The dynamic characteristics of an E/H steering system plays an important role in realizing accurate
steering control for an automatically guided agricultural vehicle. E/H steering systems are typically nonlinear with
large deadband, asymmetric flow gain, time delay, hysteresis, and saturation, which result in difficulties in the
system analysis, design, and control. In this paper, a mathematical model has been developed for an E/H steering
system. This model has taken the main components of the E/H steering system, including a PWM driver, an E/H
proportional directional control valve, steering actuating cylinders, steering linkage, and wheel-ground interactions,into consideration. It was then linearized with assumptions of incompressible fluid, the zero lapped valve, and
frictionless. This model has been validated via vehicle steering tests. A third order liner model with considering
the deadband, saturation, and time delay could well approximate the dynamic response within the steering angle
range of 15 to 15 degrees. The validated model was used to estimate the dynamic behaviors of E/H steering
systems in steering controller design. Those parameters are critical for designing high performance steering
controller.
Keywords:
Dynamic model, simulation, nonlinear system, electrohydraulic system, steering system, agricultural vehicles.
The author(s) is solely responsible for the content of this technical presentation. The technical presentation does not necessarily reflect theofficial position of ASAE, and its printing and distribution does not constitute an endorsement of views which may be expressed.
Technical presentations are not subject to the formal peer review process by ASAE editorial committees; therefore, they are not to be presentedas refereed publications.
Quotations from this work should state that it is from a presentation made by (name of author) at the (listed) ASAE meeting.
EXAMPLE From Author s Last Name, Initials. Title of Presentation. Presented at the Date and Title of meeting, Paper No. X. ASAE,2950 Niles Rd., St. Joseph, MI 49085-9659 USA.
For information about securing permission to reprint or reproduce a technical presentation, please address inquiries to ASAE.
ASAE, 2950 Niles Rd., St. Joseph, MI 49085-9659 USA.Voice: 616.429.0300 FAX: 616.429.3852
-
8/12/2019 Modeling Steering System
2/19
-
8/12/2019 Modeling Steering System
3/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
2
DESCRIPTION OF ELECTROHYDRAULIC STEERING SYSTEM
This E/H steering system model was developed based on a research platform of agricultural vehicle. This
research platform was based on a Case-IH Magnum18920 MFD agricultural tractor
2, on which the
steering system had been modified by adding a solenoid driven E/H proportional steering control valve for
implementing automatic steering control. The rest of hydraulic components remained unmodified. The
main components of the E/H steering system included a pulse-width-modulus (PWM) E/H valve driver, anE/H steering control valve, two steering actuating cylinders, and the steering linkage (Figure 1).
The E/H steering control valve was a three-position four-port proportional direction control valve. This
control valve controlled both the flow direction and flow rate so that the steering actuators could steer
front wheels to make desired turns. Since the E/H steering system was added in parallel to the existinghandpump steering system, this modified platform could be steered either manually or automatically.
A High Country Tek s (Nevada City, CA) dual-coil PWM driver card2was used to drive solenoids in
implementing valve control. This PWM driver was driven by 12-Volt DC power. A computer-based
controller would provide voltage steering control signals to the PWM driver, which converted steering
signals into duty cycles of DC currents, and then drove corresponding solenoid on the E/H valve to controlflow direction and flow rate.
A linear potentiometer was used as the wheel angle feedback sensor to monitor the steering control
performance. The potentiometer was mounted on the right-side hydraulic steering actuator to measure its
displacement. According to kinematic analysis of the steering linkage, the relationship between wheelangle and actuator displacement could be determined. In this paper, Ackerman steering angle was chosen
as the nominal wheel angle to avoid possible confusion caused by different angles on two front wheels
during turning. Wheel angle conversion model will be discussed in detail below.
The wheel-ground interaction was handled as an external disturbance on steering load. It was affected by
vehicle speed, soil property, tire pressure, and other factors. Therefore, the wheel-ground interaction acted
on wheels as a time-varying load in this model. It is one of the common characteristics for offroadvehicles and results in uncertainty and inconsistency to agricultural vehicle dynamic models.
KINEMATIC ANALYSIS OF STEERING LINKAGE
It is necessary to have kinematic analysis of the steering linkage in order to derive a conversion equation
for converting cylinder displacement reading into steering angle. This relationship provides the feedback
information for the closed-loop control to achieve an accurate tracking and high performance. Moreover,kinematic analysis will also determine the relationship between steering loads and steering actuating
forces.
The steering linkage on the Case-IH Magnum 8920 MFD tractor is a spatial linkage consisting of twoactuating cylinders, a linking rod, two symmetric kingpin axles and front wheels, as shown in Figure 2.
The bars AOa and BOb are turning with the left-side kingpin axle while the bars COc and DOd are
turning with the right-side kingpin axle. aO and bO are fixed points on the left-side kingpin axle while cO
1 CaseIH and Magnum are trade marks of Case Corporation, used with permission.2Mention of a trade name, proprietary product, or specific equipment does not constitute a guarantee or warranty by the
University of Illinois, and does not imply the approval of the named product to the exclusion of other products that may be
suitable.
-
8/12/2019 Modeling Steering System
4/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
3
and dO are fixed points on the right-side kingpin axle. The linking rod BCconnects the two kingpin
axles. 3AO is the left-side actuator and 4DO is the right-side actuator. The points 3O and 4O are fixed
joints. The kingpin angle is 7to the axiszin the yzplane, which results in the steering system a spatiallinkage. According to mobility analysis of this linkage, this steering linkage is a one-degree-of-freedom
space linkage referred to the frame.
An algebraic analysis method was used to describe the nonlinear geometric relationship for the steeringlinkage. The displacement of the right-side actuator was chosen as the input variable, and wheel angles
and steer arms were theoretically expressed as functions of the actuator displacement. The steering angle,
angular velocity and acceleration of the front wheels could be determined using the developed equations.Assumptions that all components were rigid bodies, and gaps in all joints were negligible were made to
simplify the model.
All other steering system geometric parameters could be determined if the angles of both front wheels
were known. UseR and L , respectively, to represent wheel angles of right-side and left-side wheels
referring to vehicle center line (Fig. 2). The trajectories of points A and B were circles around the left-side kingpin axle. Similarly, points C and D would turn around the right-side kingpin axle. Therefore, theposition of points A, B, C, and D could theoretically be determined by wheel angles using two rotational
transformations and one translation transformation as expressed in Eqs. (1) (4). Since the steering
linkage is a one-degree-of-freedom system, the wheel angles R and L was constrained by the linking
rod (Eq. 5).
+
+
+
=
aAO
AO
aAO
AOLA
AOLA
LL
LL
A
A
A
z
y
x
R
R
z
y
x
a
0
)sin(
)cos(
cossin0
sincos0
001
1
1
(1)
+
+
+
=
b
b
b
BO
BO
BO
BOLB
BOLB
LL
LL
B
B
B
z
y
x
R
R
z
y
x
0
)sin(
)cos(
cossin0
sincos0
001
1
1
(2)
+
+
+
=
c
c
c
CO
CO
CO
CORC
CORC
RR
RR
C
C
C
z
y
x
R
R
z
y
x
0
)sin(
)cos(
cossin0
sincos0
001
2
2
(3)
+
+
+
=
d
d
d
DO
DO
DO
DORD
DORD
RR
RR
D
D
D
z
y
x
R
R
z
y
x
0
)sin(
)cos(
cossin0
sincos0
001
2
2
(4)
BCCBCBCBLzzyyxx =++ 222 )()()( (5)
-
8/12/2019 Modeling Steering System
5/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
4
Where: L = left-side wheel angle
R = right-side wheel angle
L = left-side kingpin angle
R = right-side kingpin angle = - L
iR = distance to the nearest kingpin axle from point i (i=A, B, C, and D)
0i = initial angle to reference for point i (i=A, B, C, and D)
BCL = link length of tie rod BC
],,[ 000 iii zyx = coordinates on the nearest kingpin axle from point i
With Eqs. (1)-(5), the wheel angels could be numerically determined as a function of the actuator
displacement (Figure 3). This conversion equation was derived from test data using the least square
fitting. The fitted equation of Ackerman angle a (in degree) to the actuator displacement L (in mm) isgiven as Eq. (6).
LLa = 3335.00005.02
(6)
This Ackerman angle curve could be linearized by a straight line near the zero angle and expressed as Eq.
(7), if the displacement L is small (less than 40 mm). The zero angle was defined as the status at whichthe tractor is keeping straight-line tracking.
La = 3129.0 (7)
Relationships of steer arms to the right-side actuator displacement could be derived similarly and areshown in Eqs. (8) and (9). The plot of this relationship is shown in Figure 4.
94.1651329.00027.0
10104108
2
3648511
+
+=
LL
LLLLr
(8)
63.1651356.00017.0
10103102
2
354759
++
=
LL
LLLLl (9)
Equation (10) gives the calibration between the linear potentiometer output in volts and the displacement
of the right-side actuator in mm.
605.100365.43 += VL (10)
where: a = Ackermann angle and
L = displacement of right-side actuator
lL = steer arm of left-side actuator
rL = steer arm of right-side actuator.
MODELING OF STEERING SYSTEM
The E/H steering system was modeled by several subsystems, including an E/H valve subsystem, an
orifice flow control subsystem, and a steering linkage subsystem. The E/H valve subsystem includes a
-
8/12/2019 Modeling Steering System
6/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
5
PWM driver, two solenoids, and the steering control valve. Since the orifice flow plays a very important
role in the proportional flow control, therefore, it is discussed separately.
E/H Valve Subsystem
In controlling an E/H proportional valve, a PWM driver is commonly used to convert the voltage controlsignal into a modulated current to energize solenoid drivers, which will then generate a magnetic force topush the valve spool. The spool controls the size of valve orifices to govern the flow rate passing the
valve so that the speed of hydraulic steering actuators can proportionally be adjusted. The E/H valve
subsystem is shown in Figure 5.
The current to the solenoid drivers is modulated by a PWM driver (Eq. 11). The solenoids will thengenerate magnetic forces proportionally to the current to push the spool (Eq. 12). With the consideration
of Coulomb friction, the displacement of the valve spool can be determined by the Eq. (13).
R
V
dt
dii =+ (11)
iBF p= (12)
dt
xdm
dt
dxckx
dt
dxsignFF f
2
)( +++= (13)
Where: pB = solenoid coefficient
fF = Coulomb friction force that changes direction as the velocity changes its sign
V= applied voltage to the PWM
= coil time constant (L/R)i = coil currentc = proportional damping coefficient
k = spool spring stiffness
L = coil inductancem = spool and solenoid total mass
R = coil resistance including the inductance resistance.
x = spool displacement
Solenoid forces can be simplified as a linear function of the input voltage to PWM driver (Eq. 14).Therefore, dynamics behaviors of the spool can be expressed by Eq. (15).
uBF t= (14)
dt
xdm
dt
dxckx
dt
dxsignFuBF ft
2
)( ++== (15)
Where: tB = total factor coefficient including PWM, coil and solenoid,
u = input voltage.
Ori f ice Flow Control Subsystem
The volumetric flow rate can be expressed by the orifice equation (Anderson, 1988).
-
8/12/2019 Modeling Steering System
7/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
6
PxACQ q
=
2)( (16)
Where Q = volumetric flow rate
A(x) = restricted area based on spool position,x
qC = flow coefficient
P = pressure differential= fluid mass density
Equation (16) is a nonlinear equation and can be linearized using a Taylor series expansion. It is chosen a
steady state operating point, ( 0X , 0lP ), as the expansion reference point to linearize the nonlinear
equation.
)(),(
)(),(
),( 000
000
00 ll
l
lll PP
P
PXQXX
X
PXQPXQQ
+
+= (17)
Equation (17) can further be written approximately as a linear homogenous equation as shown in Eq. (18)
if the initials ( 0X , 0lP ) equals to zero. Eq. (18) is often used to determine the flow rate passing the
steering control valve.
lvv PRXKQ = (18)
where,
X
PXQK lv
=
),( 00 (19)
l
lv
P
PXQR
=),( 00 (20)
Steering L inkage Subsystem
According to mobility analysis, the steering linkage subsystem is a one degree-of-freedom (DOF) spatiallinkage referred to the frame. Two single-rod double-action steering cylinders drive the steering linkage
to implement the steering operation. The total active steering torque is determined by actuating forces and
steer arms. All the moving parts in the steering system contribute the inertial mass. Moreover, suchinertia is often neglected because the tractor chassis moves in steering operation.
Lagrange s equations are used to establish the equivalent dynamic equations for this one DOF steering
system. Using Ackerman steer angle, a , as the generalized coordinates, all the other moving parts could
be expressed as functions of the Ackerman steer angle, )( aif . The total equivalent inertial moment is
noted as eqJ . Equations. (21) and (22) describe the dynamic behaviors of steering linkage subsystem.
The free body diagram of the equivalent steering system is shown in Figure 6.
=+ iaeqaeq MCJ (21)
-
8/12/2019 Modeling Steering System
8/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
7
Lfcabba
Lrfcbbaai
LysignFAPAP
LysignFAPAPM
+
=))((
))((
(22)Where eqJ = total equivalent inertial moment for the steering system
eqC = steering system total equivalent damping
a = Ackermann steer angle second derivativea = derivative of the Ackermann steer anglesa = Ackermann steer angle
LM = total equivalent resistant moment (steering load)
aP = pressure in chamber a
bP = pressure in chamber b
aA = effective area in chamber a
bA = effective area in chamber b
fcF = Coulomb friction force in actuator piston
y = displacement of the right actuator.
Simpl if ication Assumptions and Model L ineari zation
As a flow control system, the output of the steering system is the angular velocity of front wheelscorresponding to the steering control input u. Model linearization is desirable to simplify the above
nonlinear equations of the steering system. Assumptions, including frictionless, no hydraulic leakage, and
incompressible fluid, were made in the linearization. From Eq. (7), the displacement of right-side
actuator, L , had a linear relationship to Ackerman angle, a . Assume that a zero lapped valve and zerosteering load were used, this steering system could be simplified as a third order model for velocity
control, or a fourth order model for position control.
)2)(1()(
)()(
22
nn
pssTs
K
sU
ssG
+++=
= (23)
)2)(1()(
)()(
22
nn
pssTss
K
sU
ssG
+++=
= (24)
Where = wheel angle velocity
= wheel angleU = input signal
T = time constant for the steering linkage subsystem
= damping ratio for the valve subsystem
n = natural frequency for the valve subsystem
K = overall gain
-
8/12/2019 Modeling Steering System
9/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
8
Generally, the natural frequency of the valve, n is much higher than that of the steering system (1/T).
Therefore, this steering control system could be further simplified as a first order model (Eq. 25) for
velocity control, or a second order model (Eq. 26) for position control.
1)(
)()( +=
= Ts
K
sU
ssGp (25)
)1()(
)()(
+=
=
Tss
K
sU
ssGp (26)
SIMULATION AND VERIFICATION
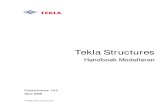
From the developed model, dynamic behaviors of this E/H steering system could be simulated. In thisresearch, a SIMULINK model (Figure 7) has been developed for the simulation of the E/H steering
system. The simulation model in SIMULINK was based on a third order linearized model of this E/Hsteering system, which had considered the deadband, asymmetric flow gain, and saturation, with or
without considering the time delay. The output variable of the simulation model was the turning rate ofAckerman steering angle for this vehicle.
The E/H steering system model was validated through comparing simulation results with field test results
in terms of angular velocity of the vehicle Ackerman steering angle. In the field test, the steering control
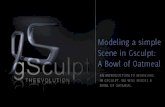
signals were generated by the computer-based controller, and delivered to the PWM driver to control thesteering control valve in the research tractor platform. Figures 8 and 9 show the comparison of system
dynamic responses to different step input steering control signals from both the simulation and field tests.
The simulation model was developed based on a third order linearized E/H steering system model without
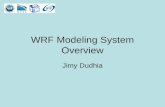
consideration of time delay. Figure 8 shows system dynamic responses obtained from both the simulationand field tests corresponding to exciting steering signals of 5 and 4 volts for a right-turn. Figure 9 shows
the similar results with exciting signals of -5 and -4 volts to make a left-turn. Results from both cases
indicated that the model was capable of providing system dynamic response evaluation with fare accuracy.However, there was some time delay from this steering system as the test results showed in Figures 8 and
9. The time delay was varying with the levels of input signal, and was estimated about 0.1 second for this
particular steering system.
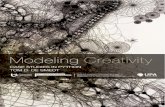
When taking consideration of the time delay in the third order linearized E/H steering model, it could
improve the accuracy in simulating dynamic responses significantly. Figures 10 and 11 show thecomparison of system responses of both the simulation results and the test results from the field test results
with the exciting steering signals as showed in Figures 8 and 9. In both cases, the calculated system
responses matched to the test data very well after adding the time delay into the model. It could beconcluded that it is necessary to include the time delay in a third-order linearized model for accurate
dynamic responses simulation for an E/H steering system.
DISCUSSION AND CONCLUSIONS
This paper analyzed an agricultural vehicle E/H steering system by modeling this system. A third-order
linearized model, with assumptions of zero lapped valve, frictionless, and no leakage, has been developed
for E/H steering system analysis. This model used Ackerman angle and steering actuator displacement to
-
8/12/2019 Modeling Steering System
10/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
9
describe the dynamic behaviors in steering rate control. Vehicle steering field tests, with different step
steering rate control signals to steer the vehicle Ackerman angle within -19 to +19 degrees, have beenconducted to validate the model. Results obtained from the field test indicated that the third-order
linearized model could satisfactorily approximate on system dynamic responses without considering time
delay effects for a nonlinear E/H steering system. Simulation accuracy could be greatly improved if the
time delay was considered in this third-order model. When the absolute value of the steering angle wasgreater than 15 degrees, the linearized model could result in some large errors compared with test results.
It could be concluded that a third-order linearized E/H steering model with time delay in consideration was
capable of describing the dynamics responses satisfactorily for a nonlinear E/H steering system when thesteering angle was in the range of 15 to +15 degrees.
Steering loads could be expressed as a disturbance to the system in this model. The steering load does
affect the system deadband and time delay significantly. In this linearized model, a zero steering load was
assumed. However, it should take steering load into consideration when developing a high performancemodel. System deadband was found varying with steering load. It is primarily resulted from the overlap
of valve spool, the spring preload, the friction, and the variation in steering load. The deadband could be
compensated by properly identifying its range, and design a proper compensation gain.
The causes for time delay were much more complicated and harder to handle than the deadband. There
were several factors resulting in time delay. System deadband and steering loads were among the oneshave the most significant effects. Valve configuration and system design specifications were the other
major effects on system time delay. Introducing a time delay factor to the simulation model, and a
response prediction function to the control system could compensate the effect of time delay effectively.
ACKNOWLEDGEMENTS
This project was partially supported by USDA Hatch Funds, Illinois Council on Food and Agricultural
Research (98-069 AE), and Case Corporation. All the mentioned supports are gratefully acknowledged.
REFERENCES
Anderson, W. 1988. Controlling Electrohydraulic Systems, Marcel Dekker, Inc.
Backe, W.1993. The present and future of fluid power. Proceeding Instn. Mech. Engrs., Part I: Journal
of Systems and Control Engineering, 207:193-212.
DeSantis, R.M. 1997. Modeling and path-tracking for a load-haul-dump mining vehicle. Transactions ofthe ASME,119: 40-47
Fitzsimons, P.M., and J.J. Palazzolo. 1996. Part I: Modeling of one-degree-of-freedom active hydraulic
mount, Journal of Dynamic Systems, Measurement, and Control, 118: 439-442.Heck, B.S., and A.A. Ferri. 1996. Model reduction of coulomb friction damped systems using singular
perturbation theory, Transactions of the ASME, 118: 84-91.
Krus, P., K. Weddfelt, and J. Palmgerg. 1994. Fast pipeline models for simulation of hydraulic systems.Transactions of the ASME, 116: 132-136.
Manring, N.D. and R.E. Johnson. 1996. Modeling and designing a variable-displacement open-loop pump,
Journal of Dynamic Systems, Measurement, and Control, 118: 267-271.
-
8/12/2019 Modeling Steering System
11/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
10
Sepehri, N., F. Sassani, P. D. Lawrence, and A. Ghasempoor. 1996. Simulation and experimental studies
of gear backlash and stick-slip friction in hydraulic excavator swing motion, Journal of DynamicSystems, Measurement, and Control, 118: 463-467.
Vaughan, N.D. and J.B. Gamble. 1996. The modeling and simulation of a proportional solenoid valve,
Transactions of the ASME, 118: 120-125.
Wu, D. Q. Zhang, and J.F. Reid. 1998. Dynamic steering simulator of wheel type tractors,ASAE Paper983115. ASAE.
-
8/12/2019 Modeling Steering System
12/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
11
Ob
O a
AB
C
D
O 3 O 4
O c
O d
O 1
O 2
zx
yo
Figure 2. Schematic diagram of the steering linkage on Case-IH Magnum
8920 MFD agricultural tractor.
PWM E/H Valve Actuatorsu i Q aSteering
Linkage
Hydraulic
System
P
F
Figure 1. Block diagram of E/H steering system for an agricultural tractor.
-
8/12/2019 Modeling Steering System
13/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
12
Quadratic:
y = -0.0005x2- 0.3335x
R2= 1
Linear:
y = -0.3192x
R
2
= 0.9869
-40
-30
-20
-10
0
10
20
30
40
-120 -90 -60 -30 0 30 60 90 120
Displacement of right-sided cylinder, mm
Ackermannangle,
degree
Ackermann Angle [Degrees]
Poly. (Ackermann Angle [Degrees])
Linear (Ackermann Angle [Degrees])
Figure 3. Ackerman angle versus the displacement of right-side steeringactuator. The Ackerman angle curve was fitted by a quadratic
polynomial.
120
130
140
150
160
170
-150 -100 -50 0 50 100
Right-side Cylinder Displacement, mm
Ste
eringarmsoffrontwheels,mm
Effective Steer Arm of Left-side Cylinder
Effective Steer Arm of Right-side Cylinder
Figure 4. Steer arms of front wheel versus the displacement of
steering actuator.
-
8/12/2019 Modeling Steering System
14/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
13
L r
L L
a
M f
J e q
C e q
F a
Fb
Figure 6. Free body diagram of the steering system. Fa and Fb
are , respectively, the actuating forces of left-side and
right-side actuators.
P W M S o l e n o i d S p o o l
ui F em x
Figure 5. Block diagram of the E/H valve subsystem.
-
8/12/2019 Modeling Steering System
15/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
14
Zero-Order
Hold
Transport
Delay
94
s+12
Transfer Fcn1
2500
*0.7*50s+2
Transfer Fcn
angle
To Workspace2input
To Workspace1
output
To Workspace
Switch
Step
1
Slider
Gain
Signal
Generator
Scope2
Scope1Scope
Saturation1
SaturationProduct
s
1
Integrator
Dead Zone
1.18
Constant1
1
Constant
Figure 7. Simulation model using a third-order transfer function with
considering system deadband, saturation, and asymmetric flow
rate. Time delay can be either being considered or not in this
model.
-
8/12/2019 Modeling Steering System
16/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
15
-5
0
5
10
15
20
25
30
35
40
1 1.1 1.2 1.3 1.4 1.5 1.6
Time, sec.
Stee
ringanglechangerate,
deg/s
Vel_R5 Vel_R4 Vel_SIM_R5 Vel_SIM_R4
Figure 8. Comparison of dynamic responses of field test and simulation results with a third-
order model without considering the time delay. Vel_R5 and Vel_R4 are,
respectively, the field test with step steering rate inputs of 5 and 4 volts.Vel_SIM_R5 and Vel_SIM_R4 are, respectively, simulation results corresponding
to the same step inputs. The steering actuators make right-turn.
-
8/12/2019 Modeling Steering System
17/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
16
-50
-40
-30
-20
-10
0
10
1 1.1 1.2 1.3 1.4 1.5 1.6
Time, sec.
Steering
anglechangerate,
deg/s
Vel_L5 Vel_L4 Vel_SIM_L4 Vel_SIM_L5
Figure 9. Comparison of dynamic responses of field test and simulation results with a third-order model without considering the time delay. Vel_L5 and Vel_L4 are,respectively, the field test with step steering rate inputs of 5 and 4 volts.
Vel_SIM_L5 and Vel_SIM_L4 are, respectively, simulation results corresponding to
the same step inputs. The steering actuators make left-turn.
-
8/12/2019 Modeling Steering System
18/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
17
-5
0
5
10
15
20
25
30
35
40
1 1.1 1.2 1.3 1.4 1.5 1.6
Time, sec.
Steeringang
lechangerate,
deg/s
Vel_R5 Vel_R4 Vel_R5_SIM Vel_R4_SIM
Figure 10. Comparison of dynamic responses of field test and simulation results with a third-
order model with considering the time delay. Vel_R5 and Vel_R4 are,
respectively, the field test with step steering rate inputs of 5 and 4 volts.
Vel_SIM_R5 and Vel_SIM_R4 are, respectively, simulation results corresponding
to the same step inputs. The steering actuators make right-turn.
-
8/12/2019 Modeling Steering System
19/19
Qiu et al. : Modeling and Simulation of an Electrohydraulic Steering System
18
-50
-40
-30
-20
-10
0
10
1 1.1 1.2 1.3 1.4 1.5 1.6
Time, sec.
Steeringanglechangerate,
deg/s
Vel_L5 Vel_L4 Vel_L5_SIM Vel_L4_SIM
Figure 11. Comparison of dynamic responses of field test and simulation results with athird-order model with considering the time delay. Vel_L5 and Vel_L4 are,
respectively, the field test with step steering rate inputs of 5 and 4 volts.Vel_SIM_L5 and Vel_SIM_L4 are, respectively, simulation results
corresponding to the same step inputs. The steering actuators make left-turn.