
Inhoudsopgave - doclib.uhasselt.be · Ex extreme inversiestand PO push-off fase 3D...
56
éêçãçíçê W bÉå ãÉíÜçÇçäçÖáëÅÜ çåÇÉêòçÉâ mêçÑK ÇêK mÉíÉê ifmmbkp ÅçJéêçãçíçê W báåÇîÉêÜ~åÇÉäáåÖ îççêÖÉÇê~ÖÉå íçí ÜÉí ÄÉâçãÉå î~å ÇÉ Öê~~Ç j~ëíÉê áå ÇÉ ÄáçãÉÇáëÅÜÉ ïÉíÉåëÅÜ~ééÉå âäáåáëÅÜÉ Éå ãçäÉÅìä~áêÉ ïÉíÉåëÅÜ~ééÉå ^å~íçãáëÅÜÉ ëíìÇáÉ î~å ÇÉ áåîÉêëáÉÄÉïÉÖáåÖ î~å ÇÉ îçÉí áå ÇÉ áåáíáØêÉåÇÉ íçÉëí~åÇ î~å ÇÉ òïÉÉÑÑ~ëÉ mêçÑK ÇêK hççë s^k wtfbqbk ^åå oÉóëâÉåë
Transcript of Inhoudsopgave - doclib.uhasselt.be · Ex extreme inversiestand PO push-off fase 3D...
éêçãçíçê=W
bÉå=ãÉíÜçÇçäçÖáëÅÜ=çåÇÉêòçÉâ
mêçÑK=ÇêK=mÉíÉê=ifmmbkp
ÅçJéêçãçíçê=W
báåÇîÉêÜ~åÇÉäáåÖ=îççêÖÉÇê~ÖÉå=íçí=ÜÉí=ÄÉâçãÉå=î~å=ÇÉ=Öê~~Ç=j~ëíÉê=áå=ÇÉ=ÄáçãÉÇáëÅÜÉ=ïÉíÉåëÅÜ~ééÉå=âäáåáëÅÜÉ=Éå=ãçäÉÅìä~áêÉ=ïÉíÉåëÅÜ~ééÉå
^å~íçãáëÅÜÉ=ëíìÇáÉ=î~å=ÇÉ=áåîÉêëáÉÄÉïÉÖáåÖ=î~å=ÇÉ=îçÉí=áå=ÇÉ=áåáíáØêÉåÇÉ=íçÉëí~åÇ=î~å=ÇÉ=òïÉÉÑÑ~ëÉ
mêçÑK=ÇêK=hççë=s^k=wtfbqbk
^åå=oÉóëâÉåë
Inhoudsopgave 1 Inleiding ........................................................................................................................................1
1.2 Anatomie van voet en enkel ...................................................................................................2
1.2.1 Gewrichten en ligamenten van de enkel .........................................................................3
1.2.2 Gewrichten en ligamenten van de voet ...........................................................................5
1.3 De normale wandelcyclus ......................................................................................................7
1.4 Literatuuroverzicht .................................................................................................................9
1.5 Doelstelling ..........................................................................................................................14
2 Materialen en methoden ..............................................................................................................16
2.1 Dissectiewerk .......................................................................................................................16
2.2 Metingen...............................................................................................................................19
2.2.1 Plaatsen van de schroeven.............................................................................................19
2.2.2 Röntgenfoto’s................................................................................................................19
2.2.3 Tracings maken .............................................................................................................20
2.2.4 Goniometrische berekeningen.......................................................................................21
2.2.5 Stand van de preparaten ................................................................................................22
3 Resultaten ....................................................................................................................................23
3.1 Röntgenfoto’s .......................................................................................................................25
3.1.1 Instrumentatie onnauwkeurigheden ..............................................................................27
3.1.2 Morfologische kenmerken van de RX’en .....................................................................28
3.1.3 Andere beeldvormingstechnieken.................................................................................31
3.2 Maken van de tracings en lengtebepaling van de schroeven ...............................................33
3.3 Goniometrische berekeningen..............................................................................................35
4 Discussie......................................................................................................................................37
Referenties......................................................................................................................................45
Bijlagen.............................................................................................................................................
Afkortingen Lig. ligamentum
MRI magnetic resonance imaging
GRF ground reaction force
MTP metatarsophalangeaal
GPS global positioning system
TMT tarsometatarsaal
RX röntgen X-rays
m. musculus
MAS milliampère/seconde
Cos cosinus
PF plantaire flexie
DF dorsiflexie
N normale standfase
Ex extreme inversiestand
PO push-off fase
3D drie-dimensionaal
RA rheumatöide arthritis
COP center of pressure
Voorwoord Op het einde van mijn derde bachelorjaar vernam ik dat aan mij dit onderwerp van prof. dr. Koos
Jaap van Zwieten als thesisonderwerp was toegewezen. Na enkele besprekingen bij hem, werd ik
al warm gemaakt voor het onderwerp wat in het begin echt een moeilijk te doorgronden thema
leek. Een thesis is ook niet zo maar 50 pagina’s volschrijven, het is iets neerschrijven wat je met
vallen en opstaan hebt doorstaan. Met deze thesis maak ik dan ook een einde aan mijn
studeerperiode aan de Universiteit Hasselt, deze studietijd heb ik met ups en downs doorstaan en
zonder mijn vriendinnen zou het er heel anders hebben uitgezien.
Op de eerste plaats bedank ik vooral mijn promotor prof. dr. Koos Jaap van Zwieten, hij was er
altijd voor mij, heeft me veel dingen bijgeleerd en me aangemoedigd in tijden dat ik het minder
zag zitten. Hiernaast wil ik ook prof. dr. M Vandersteen en prof. dr. P. Lippens bedanken voor
hun medewerking aan mijn thesis.
Ik heb dit voorbije half jaar stage gelopen bij zeer toffe mensen waardoor de werksfeer zeer
aangenaam was, wat een positieve invloed had op mijn inzet. Hiermee wil ik dan ook de stagaires
van prof. dr. I. Lambrichts bedanken (Sofie, Gitte en Esther), hiernaast wil ik zeker Anouk Agten
bedanken voor het aangenaam gezelschap en de toffe uren die we op ons kantoortje hebben
doorgebracht. Ook wil ik de technici bedanken die steeds voor me klaar stonden als ik hen iets
vroeg, ik denk hier vooral aan O. De Moor, R. Jacobs, L. Houbrechts en M. Withofs. Heel
speciaal wil ik H. Beelen bedanken, zonder hem zou ik nergens hebben gestaan want hij heeft
namelijk de constructie ontworpen om metingen te kunnen uitvoeren. Dr. P. Colla en Prof. Dr.
Palmers wil ik bedanken voor de goede samenwerking met het ZOL.
Mijn broers, zussen verdienen ook een grote ‘dank u wel’ omdat ze me in mijn studeerperiode
altijd gesteund hebben en me de nodige ontspanning gaven. Mijn vriend Jeroen mag ik zeker niet
vergeten, hij heeft me zoveel aangemoedigd en me gesteund tijdens mijn studies.
Als laatste, maar zeker niet het minst belangrijk zou ik graag mijn mama bedanken dat ze me de
mogelijkheid heeft geboden om deze studie tot een einde te brengen en me te steunen in tijden dat
ik het moeilijk had.
Samenvatting
Situering: In deze anatomische studie werd de mobiliteit van de voet bestudeerd, met name de
eerste straal, tijdens de inversiebeweging van de stapcyclus (push-off fase). Wanneer men loopt
maakt de voet aan het einde van de standfase, vooraleer deze in de lucht gaat zweven
(zweeffase), een kleine inversie beweging terwijl het onderbeen exoroteert. Als men inzicht kan
verwerven in deze beweging, kan men meer inzicht krijgen in pathologieën omtrent deze
inversiebeweging (inversietrauma bij het verkeerd neerkomen van de voet) en omtrent deze
eerste straal (bv. hallux valgus en -varus), deze pathologieën beter behandelen en misschien zelfs
voorkomen. Tijdens dit onderzoek werd aan de hand van meetresultaten geconcludeerd dat er
meer nauwkeurige methodes zijn voor een dergelijk onderzoek. Deze worden uitvoerig
besproken. Hiernaast worden morfologische kenmerken van de tien preparaten besproken.
Methode: Aan de hand van een anatomisch onderzoek van tien humane preparaten, van het
onderbeen, werden metingen uitgevoerd op tracings. Deze tracings werden gemaakt van
röntgenfoto’s, genomen van de onderbenen in drie posities: normale standfase, push-off fase
(inversie) en extreme inversiefase. In elke voet werden referentiepunten (schroeven, ’intracortical
pins’) op gekende positie aangebracht. Deze schroeven zijn duidelijk zichtbaar op de tracings.
Aan de hand van de lengteveranderingen in de projectiefiguren van de schroeven, werden hoeken
berekend waarover de eerste straal draaide tijdens de inversiebeweging.
Resultaten: Verwacht werd dat naarmate het eerste metatarsaalbeen van de voet meer zou
roteren (tijdens inversie), de schroef naar achter zou bewegen ten opzichte van de RX-plaat.
Hierdoor zouden de projecties van de schroeven op de RX-afbeeldingen dus korter worden in de
push-off fase en de extreme inversiefase ten opzichte van de normale fase. De resultaten
beantwoorden voor een gedeelte niet aan deze verwachtingen. Aan de hand van vertekeningen,
die het gevolg zijn van het nemen van de RX’en, kunnen deze resultaten worden verklaard. De
hoek waarover het metatarsaal I draait bedraagt, distaal gemeten, gemiddeld slechts ongeveer 9°.
Conclusie: Aan de hand van dit onderzoek kan worden besloten dat de eerste straal, vooral het
distale deel, slechts een kleine rotatiebeweging uitvoert tijdens de push-off fase van de
stapcyclus. Verder onderzoek is echter vereist.
Inleiding
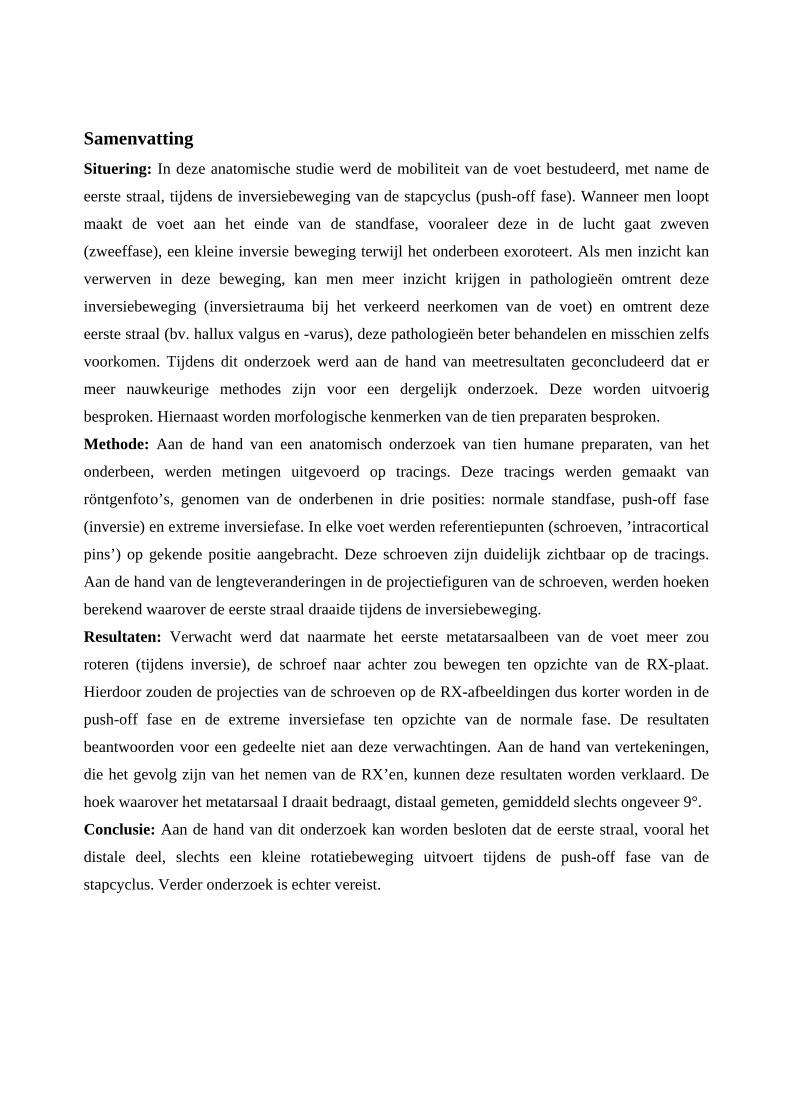
1 Inleiding Wanneer men wandelt, maakt de voet vanaf het moment dat hij plat op de grond vertrekt (einde
van de standfase) een kleine naar binnen roterende beweging, de zogenaamde inversiebeweging
(figuur 1,2,3), vooraleer hij los komt van de grond (zweeffase). Tijdens deze inversiebeweging
draait de voet mediaal in het frontale vlak, de voetzool beweegt inwaarts en het onderbeen
exoroteert. In dit onderzoek gaat de interesse uit naar wat er gebeurt met de voet tijdens deze
inversiebeweging. Er wordt specifiek gekeken naar het niveau van de eerste straal, hier komt de
naar binnen draaiende beweging namelijk het meeste tot uiting (1).
Figuur 1: Inversie en eversie van de voet (Tortora en Grabowski, 2000) (2)
Figuur 3: Inversie van een voet tijdens de push-off fase. Achteraanzicht (Bojsen Møller, 1979) (4)
Figuur 2: Inversie op een onregelmatig oppervlak (Williams, 1995) (3)
1
Inleiding
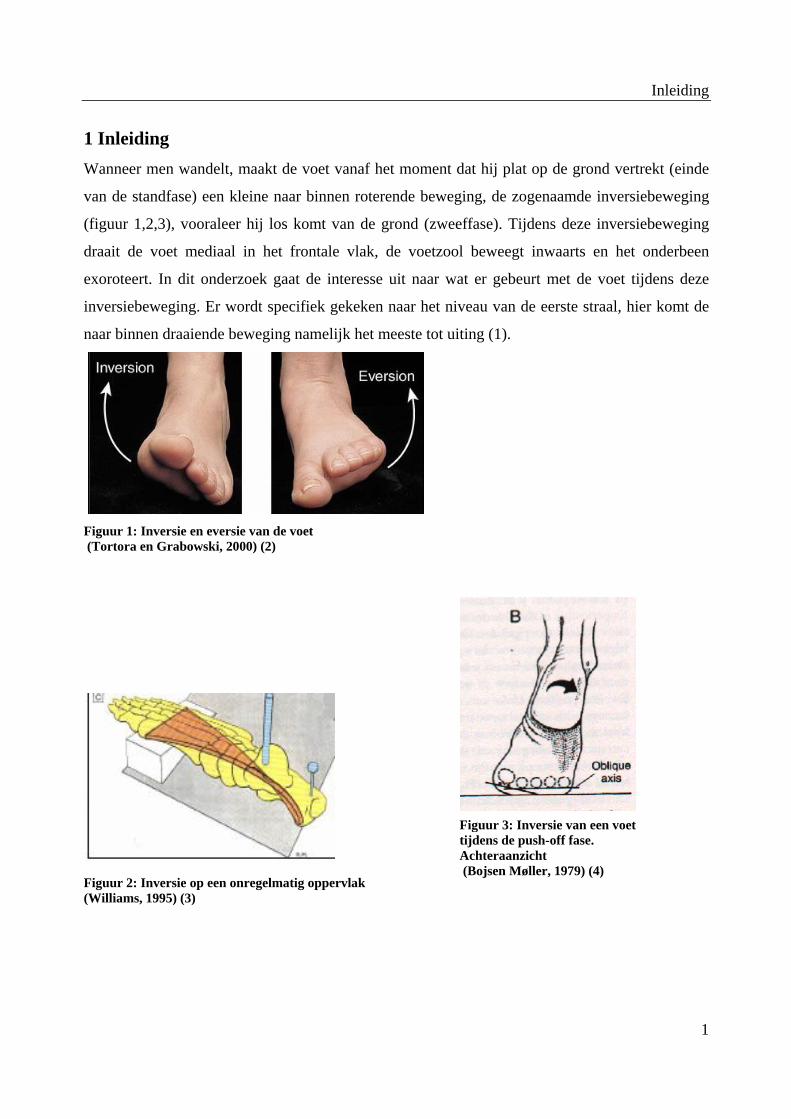
1.2 Anatomie van voet en enkel
De voet kan worden onderverdeeld in 3 functionele componenten : de voorvoet, de middenvoet
en de achtervoet. Deze drie componenten vormen samen een complexe eenheid die het
lichaamsgewicht kan dragen en het lichaam kan verplaatsen. De voorvoet bevat 5
metatarsaalbeenderen en 14 phalangen. Het eerste metatarsaalbeen draagt het meeste gewicht en
speelt de belangrijkste rol in de propulsie. Dit is ook het kortste en het dikste metatarsaalbeen,
hiernaast voorziet het ook aanhechting voor verschillende pezen.
De middenvoet bevat 5 van de 7 tarsaalbeenderen met name de drie cuneiformen, het os
naviculare en het os cuboideum. De middenvoet is gescheiden van de voorvoet door vijf
tarsometatarsale gewrichten, deze vormen samen het gewricht van Lisfranc. De talus en de
calcaneus vormen samen de achtervoet. De calcaneus is het grootste tarsale bot en vormt de hiel.
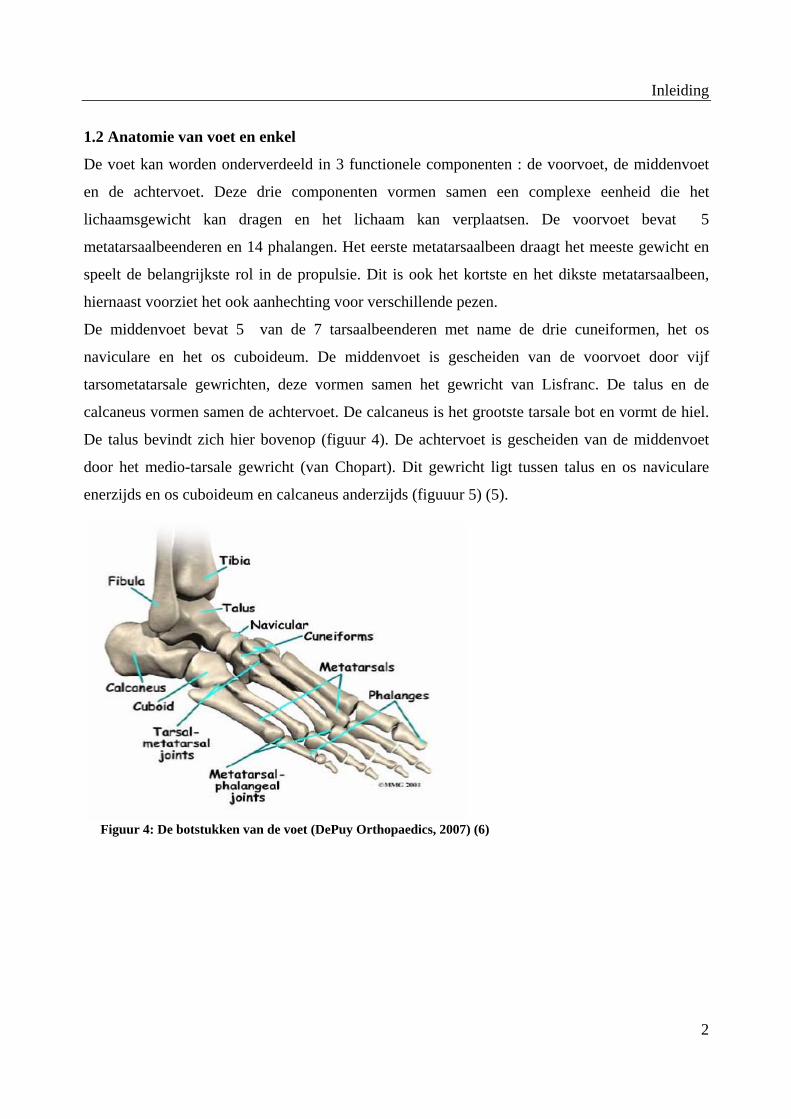
De talus bevindt zich hier bovenop (figuur 4). De achtervoet is gescheiden van de middenvoet
door het medio-tarsale gewricht (van Chopart). Dit gewricht ligt tussen talus en os naviculare
enerzijds en os cuboideum en calcaneus anderzijds (figuuur 5) (5).
Figuur 4: De botstukken van de voet (DePuy Orthopaedics, 2007) (6)
2
Inleiding
Figuur 5: Het medio-tarsale gewricht of transversaal tarsaal gewricht (zie pijl) vormt een scheidingslijn tussen midden- en achtervoet (Feneis, 1999) (7)
1.2.1 Gewrichten en ligamenten van de enkel
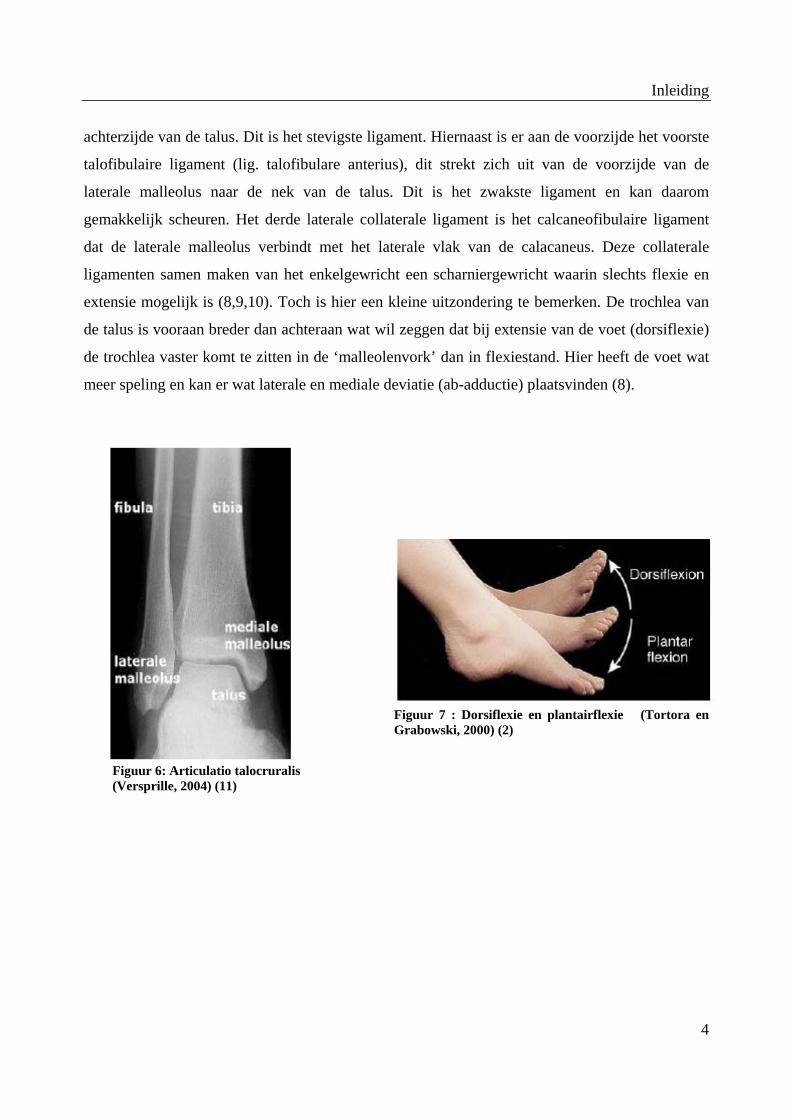
Het enkelgewricht (articulatio talocruralis) wordt gevormd door drie botstukken : de talus distaal,
de tibia en de fibula proximaal (figuur 6). De ondereinden van de tibia en de fibula vormen één
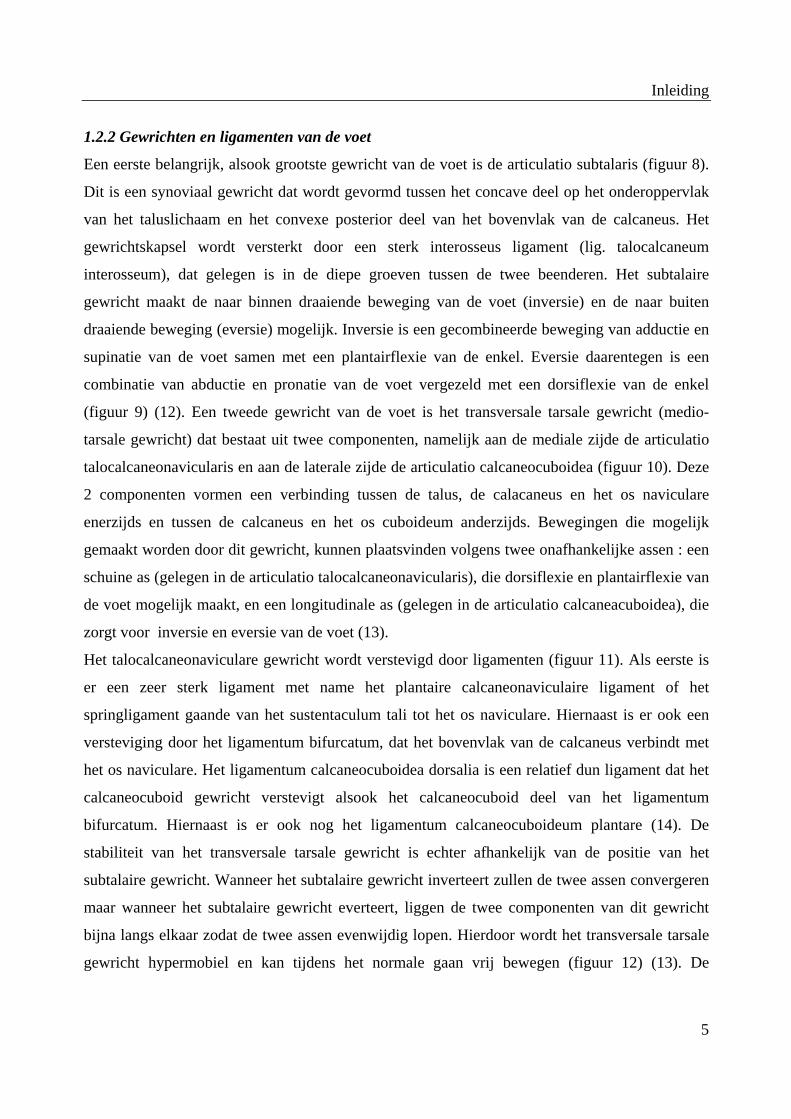
functionele eenheid waarin de talus past. Deze botverbinding maakt de strek- en buigbeweging
van de voet mogelijk. Deze bewegingen worden dorsiflexie en plantaire flexie genoemd (figuur
7)(5). Het fibreuze gewrichtskapsel is voor-en achteraan dun en aan de zijkanten versterkt door
stevige collaterale ligamenten (8). Ligamenten bestaan grotendeels uit collageenvezels en laten
mobiliteit toe en zorgen voor stabiliteit. Aan de mediale zijde van het gewricht is er een breed en
zeer stevig ligament, namelijk het mediale ligament (lig. deltoideum). Dit ligament zit proximaal
vast aan de mediale malleolus en heeft een oppervlakkig en een diep deel. Het oppervlakkige deel
is vastgehecht aan het sustentaculum tali van de calcaneus (pars tibiocalcanea) en het diepe deel
waaiert uit over de hele lengte van de zijkant van de talus (pars tibiotalaris anterior en posterior)
en bereikt het os naviculare (pars tibionavicularis). Het laterale collaterale ligament dat het
enkelgewricht overspant, bestaat uit drie delen. Aan de achterzijde ligt het achterste talofibulaire
ligament (lig. talofibulare posterius), zich uitstrekkend van de laterale malleolus naar de
3
Inleiding
achterzijde van de talus. Dit is het stevigste ligament. Hiernaast is er aan de voorzijde het voorste
talofibulaire ligament (lig. talofibulare anterius), dit strekt zich uit van de voorzijde van de
laterale malleolus naar de nek van de talus. Dit is het zwakste ligament en kan daarom
gemakkelijk scheuren. Het derde laterale collaterale ligament is het calcaneofibulaire ligament
dat de laterale malleolus verbindt met het laterale vlak van de calacaneus. Deze collaterale
ligamenten samen maken van het enkelgewricht een scharniergewricht waarin slechts flexie en
extensie mogelijk is (8,9,10). Toch is hier een kleine uitzondering te bemerken. De trochlea van
de talus is vooraan breder dan achteraan wat wil zeggen dat bij extensie van de voet (dorsiflexie)
de trochlea vaster komt te zitten in de ‘malleolenvork’ dan in flexiestand. Hier heeft de voet wat
meer speling en kan er wat laterale en mediale deviatie (ab-adductie) plaatsvinden (8).
Figuur 7 : Dorsiflexie en plantairflexie (Tortora en Grabowski, 2000) (2)
Figure 1
Figuur 6: Articulatio talocruralis (Versprille, 2004) (11)
4
Inleiding
1.2.2 Gewrichten en ligamenten van de voet
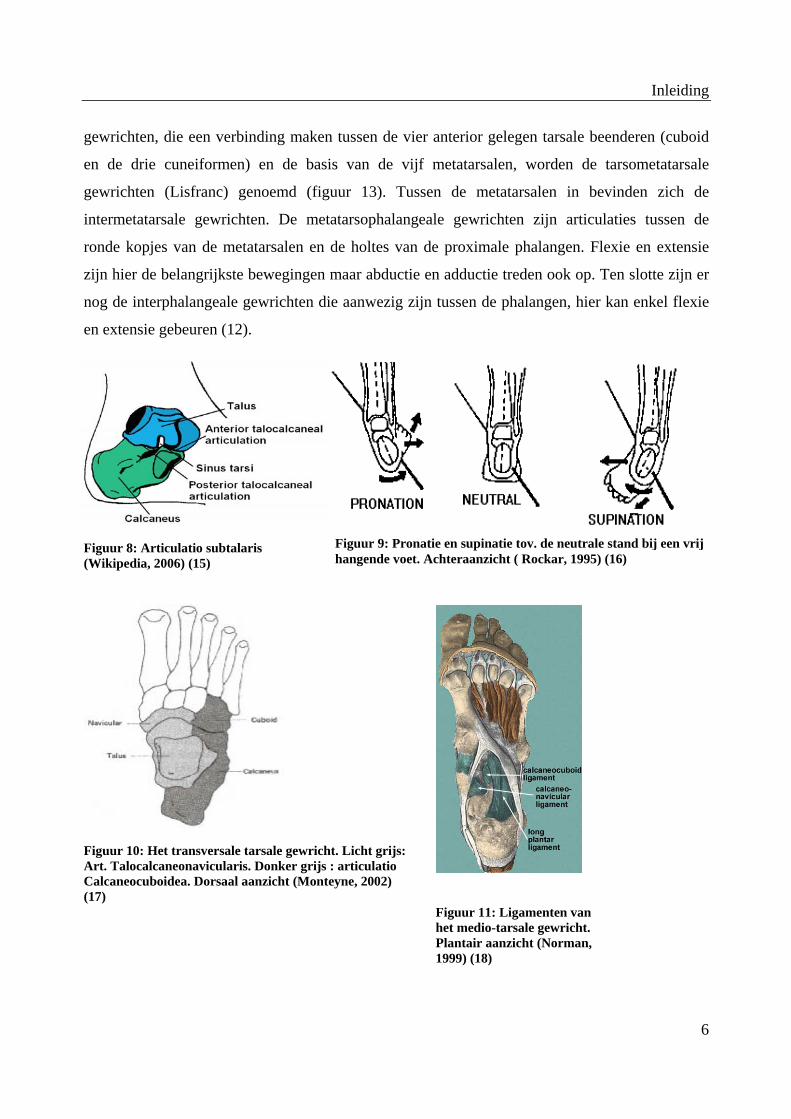
Een eerste belangrijk, alsook grootste gewricht van de voet is de articulatio subtalaris (figuur 8).
Dit is een synoviaal gewricht dat wordt gevormd tussen het concave deel op het onderoppervlak
van het taluslichaam en het convexe posterior deel van het bovenvlak van de calcaneus. Het
gewrichtskapsel wordt versterkt door een sterk interosseus ligament (lig. talocalcaneum
interosseum), dat gelegen is in de diepe groeven tussen de twee beenderen. Het subtalaire
gewricht maakt de naar binnen draaiende beweging van de voet (inversie) en de naar buiten
draaiende beweging (eversie) mogelijk. Inversie is een gecombineerde beweging van adductie en
supinatie van de voet samen met een plantairflexie van de enkel. Eversie daarentegen is een
combinatie van abductie en pronatie van de voet vergezeld met een dorsiflexie van de enkel
(figuur 9) (12). Een tweede gewricht van de voet is het transversale tarsale gewricht (medio-
tarsale gewricht) dat bestaat uit twee componenten, namelijk aan de mediale zijde de articulatio
talocalcaneonavicularis en aan de laterale zijde de articulatio calcaneocuboidea (figuur 10). Deze
2 componenten vormen een verbinding tussen de talus, de calacaneus en het os naviculare
enerzijds en tussen de calcaneus en het os cuboideum anderzijds. Bewegingen die mogelijk
gemaakt worden door dit gewricht, kunnen plaatsvinden volgens twee onafhankelijke assen : een
schuine as (gelegen in de articulatio talocalcaneonavicularis), die dorsiflexie en plantairflexie van
de voet mogelijk maakt, en een longitudinale as (gelegen in de articulatio calcaneacuboidea), die
zorgt voor inversie en eversie van de voet (13).
Het talocalcaneonaviculare gewricht wordt verstevigd door ligamenten (figuur 11). Als eerste is
er een zeer sterk ligament met name het plantaire calcaneonaviculaire ligament of het
springligament gaande van het sustentaculum tali tot het os naviculare. Hiernaast is er ook een
versteviging door het ligamentum bifurcatum, dat het bovenvlak van de calcaneus verbindt met
het os naviculare. Het ligamentum calcaneocuboidea dorsalia is een relatief dun ligament dat het
calcaneocuboid gewricht verstevigt alsook het calcaneocuboid deel van het ligamentum
bifurcatum. Hiernaast is er ook nog het ligamentum calcaneocuboideum plantare (14). De
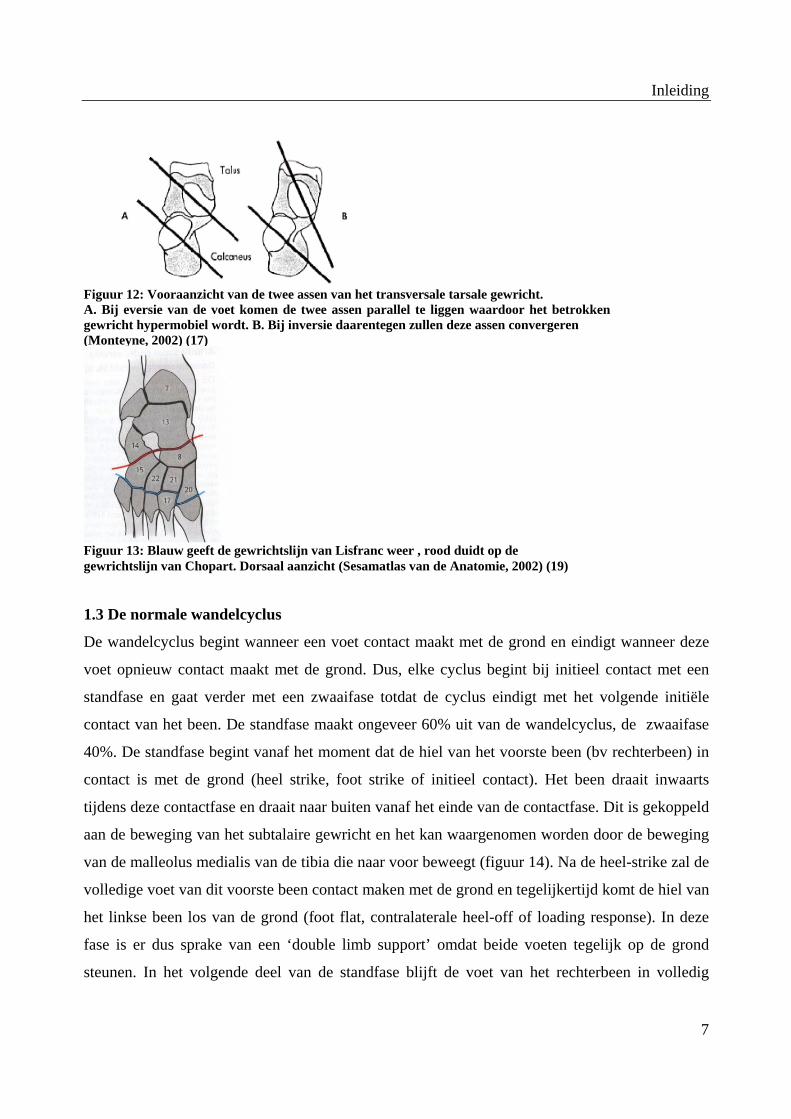
stabiliteit van het transversale tarsale gewricht is echter afhankelijk van de positie van het
subtalaire gewricht. Wanneer het subtalaire gewricht inverteert zullen de twee assen convergeren
maar wanneer het subtalaire gewricht everteert, liggen de twee componenten van dit gewricht
bijna langs elkaar zodat de twee assen evenwijdig lopen. Hierdoor wordt het transversale tarsale
gewricht hypermobiel en kan tijdens het normale gaan vrij bewegen (figuur 12) (13). De
5
Inleiding
gewrichten, die een verbinding maken tussen de vier anterior gelegen tarsale beenderen (cuboid
en de drie cuneiformen) en de basis van de vijf metatarsalen, worden de tarsometatarsale
gewrichten (Lisfranc) genoemd (figuur 13). Tussen de metatarsalen in bevinden zich de
intermetatarsale gewrichten. De metatarsophalangeale gewrichten zijn articulaties tussen de
ronde kopjes van de metatarsalen en de holtes van de proximale phalangen. Flexie en extensie
zijn hier de belangrijkste bewegingen maar abductie en adductie treden ook op. Ten slotte zijn er
nog de interphalangeale gewrichten die aanwezig zijn tussen de phalangen, hier kan enkel flexie
en extensie gebeuren (12).
Figuur 9: Pronatie en supinatie tov. de neutrale stand bij een vrij hangende voet. Achteraanzicht ( Rockar, 1995) (16)
Figuur 8: Articulatio subtalaris (Wikipedia, 2006) (15)
Figuur 10: Het transversale tarsale gewricht. Licht grijs: Art. Talocalcaneonavicularis. Donker grijs : articulatio Calcaneocuboidea. Dorsaal aanzicht (Monteyne, 2002) (17) Figuur 11: Ligamenten van
het medio-tarsale gewricht. Plantair aanzicht (Norman, 1999) (18)
6
Inleiding
Figuur 12: Vooraanzicht van de twee assen van het transversale tarsale gewricht. A. Bij eversie van de voet komen de twee assen parallel te liggen waardoor het betrokken gewricht hypermobiel wordt. B. Bij inversie daarentegen zullen deze assen convergeren (Monteyne, 2002) (17)
Figuur 13: Blauw geeft de gewrichtslijn van Lisfranc weer , rood duidt op de gewrichtslijn van Chopart. Dorsaal aanzicht (Sesamatlas van de Anatomie, 2002) (19)
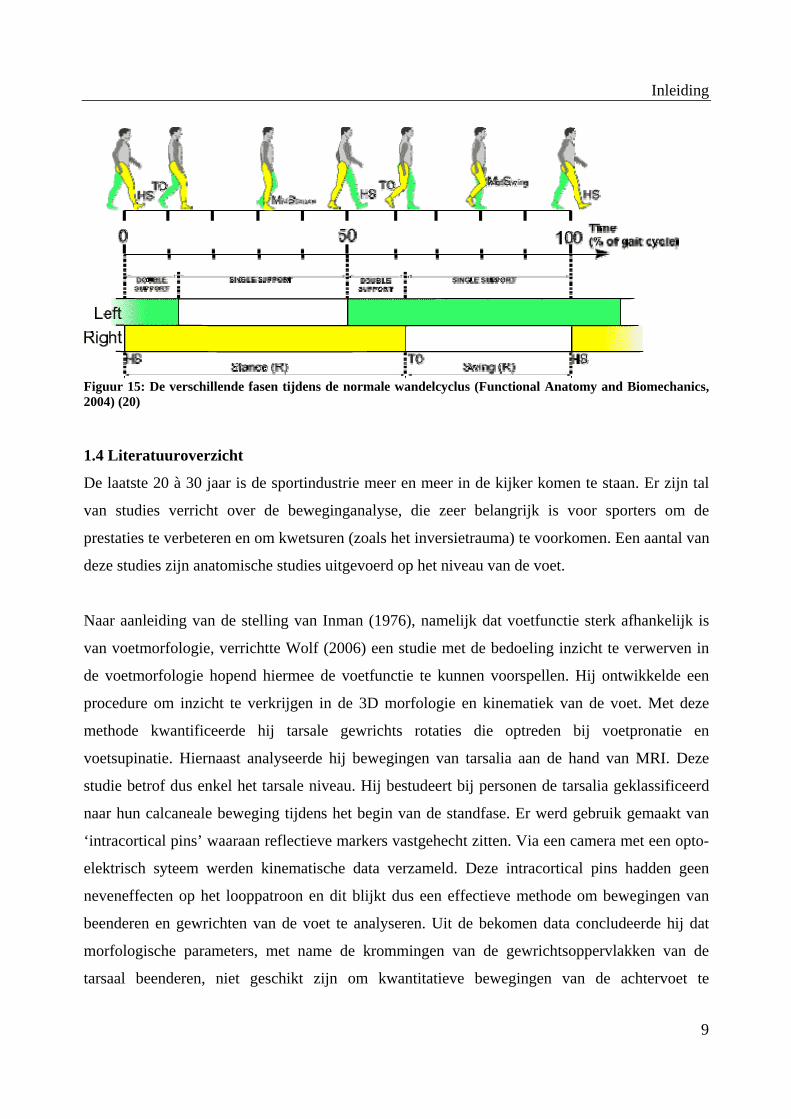
1.3 De normale wandelcyclus
De wandelcyclus begint wanneer een voet contact maakt met de grond en eindigt wanneer deze
voet opnieuw contact maakt met de grond. Dus, elke cyclus begint bij initieel contact met een
standfase en gaat verder met een zwaaifase totdat de cyclus eindigt met het volgende initiële
contact van het been. De standfase maakt ongeveer 60% uit van de wandelcyclus, de zwaaifase
40%. De standfase begint vanaf het moment dat de hiel van het voorste been (bv rechterbeen) in
contact is met de grond (heel strike, foot strike of initieel contact). Het been draait inwaarts
tijdens deze contactfase en draait naar buiten vanaf het einde van de contactfase. Dit is gekoppeld
aan de beweging van het subtalaire gewricht en het kan waargenomen worden door de beweging
van de malleolus medialis van de tibia die naar voor beweegt (figuur 14). Na de heel-strike zal de
volledige voet van dit voorste been contact maken met de grond en tegelijkertijd komt de hiel van
het linkse been los van de grond (foot flat, contralaterale heel-off of loading response). In deze
fase is er dus sprake van een ‘double limb support’ omdat beide voeten tegelijk op de grond
steunen. In het volgende deel van de standfase blijft de voet van het rechterbeen in volledig
7

Inleiding
contact met de grond, maar is de voet van het linkerbeen niet meer in contact met de grond (mid-
stance of opposite toe-off). Tijdens deze mid-stance fase supineert het subtalaire gewricht verder
en maakt het van de voet een stevige hefboom. Het gewricht beweegt naar een gesupineerde
positie voor ‘heel-off’. Dit is een gecombineerd effect van de kuitspieren en beenrotatie. Het
onderbeen roteert nu naar buiten. Vervolgens is de hiel van het rechterbeen niet meer in
aanraking met de grond (heel-off of terminal stance). Het linkerbeen komt tegelijkertijd in
volledig contact met de grond. Hier opnieuw is er sprake van een ‘double limb support’. Deze
twee periodes van double limb support maken 20% tot 24% uit van de totale duur van de
wandelcyclus. Deze standfase eindigt wanneer naast de hiel, nu ook de tenen van het rechterbeen
niet meer in contact zijn met de grond (toe-off of pre-swing). Bij deze supinatiebeweging, komt
de dikke teen als laatste van de grond. Deze voorbereidende inverterende fase voorafgaande aan
de zwaaifase is zeer belangrijk in het huidige onderzoek. Het deel van de standfase dat start met
heel-off en eindigt met toe-off wordt de propulsieve fase genoemd. Tijdens deze fase zal
supinatie van het subtalaire gewricht de skeletstabiliteit doen toenemen en de hefboom effecten
van de voetbewegingen versterken. Na deze supinatie zal de voet lichtjes proneren juist
voorafgaand aan toe-off. De zwaaifase gaat van start wanneer de rechtervoet geen enkel contact
meer maakt met de grond, dit been kan dus vrij in de lucht zweven (initiële zwaaifase). Dit been
zal tijdens deze vrije beweging in de lucht eerst tot onder de romp worden gebracht (mid-swing
of vroege zwaaifase) en hierna zal de hiel van de voet van dit rechtse been terug in aanraking
komen met de grond (heel-strike of late zwaaiffase) (figuur 15) (20).
Figuur 14: Overzicht supinatie- en pronatiebewegingen tijdens het gaan (Gray’s Anatomy) (5)
8
Inleiding
Figuur 15: De verschillende fasen tijdens de normale wandelcyclus (Functional Anatomy and Biomechanics, 2004) (20) 1.4 Literatuuroverzicht
De laatste 20 à 30 jaar is de sportindustrie meer en meer in de kijker komen te staan. Er zijn tal
van studies verricht over de beweginganalyse, die zeer belangrijk is voor sporters om de
prestaties te verbeteren en om kwetsuren (zoals het inversietrauma) te voorkomen. Een aantal van
deze studies zijn anatomische studies uitgevoerd op het niveau van de voet.
Naar aanleiding van de stelling van Inman (1976), namelijk dat voetfunctie sterk afhankelijk is
van voetmorfologie, verrichtte Wolf (2006) een studie met de bedoeling inzicht te verwerven in
de voetmorfologie hopend hiermee de voetfunctie te kunnen voorspellen. Hij ontwikkelde een
procedure om inzicht te verkrijgen in de 3D morfologie en kinematiek van de voet. Met deze
methode kwantificeerde hij tarsale gewrichts rotaties die optreden bij voetpronatie en
voetsupinatie. Hiernaast analyseerde hij bewegingen van tarsalia aan de hand van MRI. Deze
studie betrof dus enkel het tarsale niveau. Hij bestudeert bij personen de tarsalia geklassificeerd
naar hun calcaneale beweging tijdens het begin van de standfase. Er werd gebruik gemaakt van
‘intracortical pins’ waaraan reflectieve markers vastgehecht zitten. Via een camera met een opto-
elektrisch syteem werden kinematische data verzameld. Deze intracortical pins hadden geen
neveneffecten op het looppatroon en dit blijkt dus een effectieve methode om bewegingen van
beenderen en gewrichten van de voet te analyseren. Uit de bekomen data concludeerde hij dat
morfologische parameters, met name de krommingen van de gewrichtsoppervlakken van de
tarsaal beenderen, niet geschikt zijn om kwantitatieve bewegingen van de achtervoet te
9

Inleiding
voorspellen. Dus, de resultaten van zijn onderzoek zijn ontoereikend om de bovengenoemde
stelling te ondersteunen. Hij suggesteert dat verder onderzoek beter focust op andere factoren dan
bot- en gewrichtmorfologie, zoals ligament eigenschappen. De bewegingen worden namelijk
grotendeels door ligamenten geleid (21).
In 1978 schreef Bojsen-Møller een zeer inspirerend en invloedrijk artikel waarop mijn studie
voor een groot deel is gebaseerd. Hij stelde dat doordat metatarsaal II naar voor uitsteekt de
zogenaamde push-off (afzet) fase rond twee assen kan worden uitgevoerd, namelijk een
transversale as die door de kopjes van metatarsaal I en II loopt en een schuine as die de kopjes
van metatarsaal II tot V verbindt. Hij stelde dat met de tenen op de grond en de voet omhoog
komend, dorsiflexie van de tenen rond één van de twee assen op het metatarsophalangeaal niveau
samen gaat met een compenserende plantairflexie in het enkelgewricht. Deze twee assen worden
gebruikt voor respectievelijk een hoge en lage versnellings push-off beweging. In zijn studie
werden de bewegingen van ligamenten en gewrichten van de middenvoet bestudeerd om zo hun
betrokkenheid aan te tonen voor boogsteun en voetstabiliteit. De werking van de voet bij hoge en
lage versnellings push-off werd bestudeerd aan de hand van een loopplaat waarin een glasplaat
aangebracht werd. Door een onderliggende spiegel kon de progressie van het contactgebied van
de voet worden gevolgd. Er werden anatomische skelet-banden preparaten van menselijke voeten
bestudeerd, waar enkel de gewrichtskapsels en ligamenten intact werden gehouden nadat huid,
spieren en pezen waren verwijderd. Hij was vooral geïnteresseerd in het calcaneocuboid
gewricht. Hij besloot dat de hoge versnellings push-off wordt uitgevoerd rond de transversale as.
Hier maakt de voorvoet een meer everterende beweging ten opzichte van de achtervoet. De
plantaire aponeurose is gespannen en klaar om de boog te ondersteunen, het calcaneocuboid
gewricht is nu ‘close packed’*. Bij lage versnellings push-off daarentegen voert de voet een
inverterende beweging uit rond de schuine as, het calcaneocuboid gewricht bevindt zich nu in ‘no
close packed position’. In deze fase wordt de aponeurose slapper en kan deze de boog niet
ondersteunen (4).
* close packed positie is de naam die men geeft aan de positie waar de gewrichtsoppervlakken van calcaneus en
cuboid nauw aansluiten, bij de no close packed positie is deze verbinding zwakker
10
Inleiding
Arndt et al. (2004) beschreven als eerste waarom de zogenaamde ‘intracortical pins’ nuttig zijn
voor het bestuderen van de kinematiek van het enkelgewricht. Abnormale beweging in dit
gewricht is namelijk een significante factor in de ontwikkeling van kwetsuren aan het onderbeen
en daarom is het zo belangrijk om beweging binnen dit gewricht te analyseren. Vele
biomechanische studies hebben dit probleem al bestudeerd maar de onderzoekers hebben
moeilijkheden ondervonden met het identificeren van de talus tijdens de dynamische
bewegingen.
Dit probleem werd opgelost door het gebruik van intracortical pins, die in zijn onderzoek onder
lokale anesthesie aangebracht werden in tibia, talus en calcaneus van gezonde proefpersonen. Het
looppatroon werd bestudeerd door het vergelijken van grond reactie kracht (GRF) kurves tijdens
het verloop van de standfase met en zonder geïnserteerde pins. De mogelijke nadelen van deze
invasieve methode zijn mogelijke pijn, ethische problemen en invloeden op het normale
gangpatroon. Het grote voordeel ervan is de rechtstreekse verbinding tussen de reflectieve
merkers (op de pins) en de beenderen om rotaties exact te beschrijven. Door de GRF tijdens het
lopen te meten, voor en na insertie van de pins, werd er vastgesteld dat deze intracortical pins een
verwaarloosbare invloed hadden op het looppatroon waardoor er een juiste kinematische analyse
van het looppatroon gemaakt kan worden door gebruik te maken van deze pins (22).
In een studie van Cornwall et al. (2002) moesten personen zonder voetproblemen lopen over een
loopplaat terwijl de angulaire en lineaire verplaatsingen van tibia, calacaneus, os naviculare en
metatarsaal I gemeten werden via elektromagnetische bewegingsanalyse. 3D bewegingen van
achtereenvolgens calcaneus ten opzichte van tibia, os naviculare ten opzichte van calacaneus en
van metatarsaal I ten opzichte van os naviculare werden berekend tijdens de standfase. Er werden
telkens sensoren aangebracht op de desbetreffende plaatsen waarna de patiënten liepen over een
loopplaat terwijl de hoeken werden gemeten. Cornwall had als doel met deze studie de
basiskennis van de voetfunctie te verbeteren en licht te werpen op verschillende pathologische
condities zoals platvoeten, tendinitis,... De resultaten van zijn studie steunen de theorie van
beweging in de drie anatomische vlakken traditioneel beschreven voor de achtervoet, middenvoet
en de eerste straal. Behandeling van de voetklachten, met name van de eerste straal, moet deze
bewegingen proberen te verbeteren. Hij raadde verder onderzoek aan van de eerste straal, die
betrekking heeft op de mediale longitudinale boog (23).
11
Inleiding
Hicks (1953) stelde eerder al vast dat deze mediale longitudinale boog een belangrijke
ladingdragende structuur is in de voet en dat deze boog afhankelijk is van de kinematiek van de
eerste straal voor optimale steun tijdens het gaan (24). Dat verklaart ten dele waarom er reeds
studies zijn verricht naar de beweging van deze eerste straal. Deze beweging krijgt ook veel
aandacht van auteurs omwille van de betrokkenheid bij vele voet pathologieën. Zo zijn er vele
chirurgische procedures die zich concentreren op de eerste straal om verschillende structurele en
functionele deformiteiten zoals hallux valgus, platvoeten,... te corrigeren. Studies uitgevoerd op
dit niveau vertonen soms ook nog tegenovergestelde resultaten (26,27). Een aantal van deze
studies worden hieronder besproken
In een kwantitatieve analyse, van Roukis et al. (1996), naar het effect van eerste straal positie op
de beweging van het eerste metatarsophalangeale (MTP) gewricht werden de graden dorsiflexie
van in het eerste MTP gewricht gemeten bij tien mannelijke vrijwilligers. Dit met de eerste straal
in 3 posities, namelijk de gewichtsdragende rustpositie (de ‘0 mm’ positie), en 4mm en 8mm
dorsiflexie ten opzichte van de grond. Het doel van de studie was het bepalen of dorsiflexie van
de eerste straal dorsiflexie van het eerste MTP gewricht doet afnemen. Longitudinale midtarsale
gewrichts inversie werd gemeten door het subtalaire gewricht manueel te stabiliseren in de
neutrale positie en vervolgens het mediale aspect van de voorvoet, ten opzichte van de
gestabiliseerde achtervoet, te inverteren. Met behulp van een goniometer werd de hoek, gevormd
tussen het plantaire aspect van de geïnverteerde voorvoet en het plantaire aspect van de
achtervoet gehouden in de subtalaire neutrale positie, gemeten. Als resultaat vond hij dat
dorsiflexie van het MTP gewricht 19% afnam wanneer de eerste straal bewoog van de rustpositie
naar 4mm dorsiflexie, 19.3% afnam als de eerste straal bewoog van 4mm naar 8mm dorsiflexie
en 34.7% afnam wanneer de eerste straal bewoog van rustpositie naar 8mm dorsiflexie. De
auteurs stelden als voornaamste conclusie dat dit resultaat een predominerende achterliggende
factor is bij de ontwikkeling van hallux valgus en hallux rigidus deformititeiten (25).
Kelso et al.(1982) bestudeerden de beweging van de eerste straal en van het os cuneiforme
mediale bij 24 anatomische preparaten. Hun bevindingen wezen uit dat beweging van de
metatarsalen in het frontale vlak simultaan optreedt bij beweging van de eerste straal in het
sagittale vlak. Ze maakten gebruik van een opstelling die ervoor zorgde dat er geen beweging kon
12
Inleiding
optreden behalve aan het eerste tarsometatarsale gewricht, het cuneonaviculare gewricht en het
talonaviculare deel van het talocalcaneonaviculare gewricht. Hierna werden referentie pinnen
aangebracht in het kopje van metatarsaal I, in de rug van de kopjes van metatarsaal I en II, in de
mediale aspecten van metatarsaal I, en in het mediale cuneiforme been en het naviculare been.
Hun resultaten geven de beweging weer van het eerste metatarsaalkopje ten opzichte van de rest
van de voet en ten opzichte van de grond in het sagittaal en frontaal vlak, wanneer de eerste straal
passief een dorsiflexie en plantairflexie onderging terwijl de rest van de voet stabiel werd
gehouden. In alle specimens inverteerde metatarsaal I in relatie tot de andere metatarsalen en de
grond wanneer de eerste straal een passieve dorsiflexie onderging. Metatarsaal I everteerde ten
opzichte van de andere metatarsalen en de grond wanneer de eerste straal een passieve
plantairflexie onderging. Ze besloten dat de eerste straal functioneert rond een onafhankelijke as
die beweging toelaat vooral in het frontale en sagittale vlak waardoor inversie ontstaat met
dorsiflexie en eversie met plantairflexie. Het is deze onafhankelijke beweging van de eerste straal
die in bepaalde situaties kan leiden tot instabiliteit van het eerste metatarsophalangeaal gewricht
(26).
In 1979 voerden Oldenbrook et al. een studie uit om de exacte bewegingen te bepalen die de
individuele metatarsalen ondergaan tengevolge van de pronatie-supinatie beweging van de
subtalaire en midtarsale gewrichten. Hierbij werd gebruik gemaakt van vijf recent geamputeerde
benen en van een mechanisch apparaat dat nodig was om de benen vast te houden en om de juiste
bewegingen uit te voeren. Hiernaast werd er ook gebruik gemaakt van een elektronisch apparaat
om de beweging van elk metatarsaalkopje te meten. Dit apparaat maakt gebruik van een
accelerometer om beweging te vertalen in elektrische signalen. Als resultaat vond men dat bij een
interne rotatie van het been (pronatie van subtalair gewricht) alle vijf metatarsalen een eversie- en
dorsiflexie beweging uitvoerden. Daarentegen bij een externe rotatie van het been (supinatie van
subtalair gewricht), voerden de 5 metatarsalen een inversie en plantairflexie uit. Dit in
tegenstelling met de latere studie van Kelso et al. (1982). De data van Oldenbrook tonen aan dat
er minder beweging optreedt van metatarsaal I in het frontale vlak ten opzichte van de tweede
metatarsaal maar dat er meer beweging van metatarsaal I optreedt in het sagittale vlak (27).
13
Inleiding
Meer recent zijn er ook studies verricht omtrent de vergelijkende anatomie. Zo kan men met
huidige registratiemethoden ook voetbewegingen van primaten en hun voorlopers zichtbaar
maken. Vereecke et al. voerden in 2003 een studie uit waarmee ze met de zogenaamde footscan
de plantaire drukverdeling bij 7 bonobos (dwergchimpansees) konden bestuderen tijdens
tweevoetige en viervoetige voortbeweging. Met deze methode kon men de functionele
voetlengte, graad van hallux abductie en de totale contacttijd van de voet bepalen (28).
Warburton (2003) analyseerde in haar studie de functionele morfologie en evolutie van de
buidelmol. Buideldieren in het algemeen hebben een grotere grijpfunctie en een kleinere
stabiliteit dan de mens. In haar studie vond ze dat buidelmollen het onderbeen kunnen supineren
en proneren, terwijl bij de mens enkel het enkelgewricht hiertoe in staat is wat een verklaring kan
zijn waarom er zoveel letsels (zoals het inversietrauma) ontstaan aan de enkel (29).
Naast de genoemde methodes zijn er recenter meer nauwkeurige technieken ontwikkeld om de
voetmobiliteit driedimensionaal te registreren. De gebruikte röntgentechniek geeft bovendien
slechts de relatieve voetbeweging weer, terwijl andere methodes de absolute beweging
weergeven.
Het computergestuurd video systeem Vicon is zo’n methode waarmee men 3D bewegingsanalyse
kan bestuderen. Dan is er ook het ‘Global positioning system’ (GPS) waarmee men vooral de
basisparameters van het gaan kan analyseren zoals wandelsnelheid, staplengte en stapfrequentie.
Hiernaast kan ook de footscan een indruk geven over de voetbeweging door middel van
drukverdelingen weer te geven.
1.5 Doelstelling
Inman citeerde in 1976 : ‘voetfunctie is afhankelijk van de voetmorfologie’ dus als men inzicht
kan verwerven in de morfologie van de voet, zou men meer inzicht kunnen verwerven in de
functie van de voet. Aan de hand van deze stelling en de bovengenoemde literatuur is het doel
van mijn onderzoek vastgelegd. Het doel is inzicht te verwerven in de beweging van de voet, met
name de eerste straal, tijdens de inversiebeweging van de stapcyclus (push-off fase). Hiermee kan
men dan pathologieën omtrent de inversiebeweging (inversietrauma bij het verkeerd neerkomen
van de voet) en de eerste straal (bv.hallux valgus en varus) beter begrijpen, beter behandelen en
misschien zelfs voorkomen.
14
Inleiding
Dit wordt uitgevoerd door 10 humane preparaten, van het onderbeen, te dissecteren tot op het
niveau van de ligamenten van enkel en voet om zo de nodige mobiliteit te voorzien. Vervolgens
worden er markeringen (schroeven) aangebracht op een gekende positie ten opzichte van de
tarsometatarsale (TMT) gewrichtsspleet. Hierna worden van deze preparaten RX-(röntgen)foto’s
genomen met het been gefixeerd in een klem. Deze foto’s worden genomen van het been in drie
verschillende posities : de normale inversiefase, de push-off fase (inversie) en de extreme
inversiefase. Op deze foto’s kan men duidelijk de posities van de schroeven waarnemen.
Tenslotte worden er tracings gemaakt van de RX’en waardoor men de lengte van de projectie van
de schroeven op de RX kan bepalen. De hypothese hier is dat naarmate de voet meer gaat
inverteren, en zich dus verder verwijdert van de RX-plaat, de afbeelding van de schroef korter
wordt. Aan de hand van deze lengtes worden, via een goniometrische formule, de hoeken
berekend waarover wordt gedraaid.
15
Materialen en methoden
2 Materialen en methoden In de aanvang van dit onderzoek werden tien humane preparaten, van het onderbeen,
gedissecteerd tot op het niveau van de ligamenten van enkel en voet. In elk prepraat werd een
drietal ligamenten blootgelegd waardoor de voet mobieler werd, deze mobiliteit was namelijk
nodig om de preparaten in de juiste posities te plaatsen wanneer er foto’s werden genomen. De
preparaten waren gefixeerd in een vloeistof bestaande uit 4,6% formaldehyde, 3,07% glycerine,
3,07% fenol, 6,2% ethanol, 30,78% gedenatureerde alcohol en 52,3% water. Aan deze vloeistof
was ook nog een kleine hoeveelheid van het schimmelwerende middel thymol toegevoegd. De
preparaten werden vervolgens bewaard in een formalineoplossing < 4% in water. Tijdens het
dissecteren werd gebruik gemaakt van verschillende instrumenten, waaronder dissectiemesjes nr.
24, 15, 11, een groot anatomisch pincet, een klein anatomisch pincet, een klein chirurgisch
pincet, een schaar en een kleine chirurgische schaar.
2.1 Dissectiewerk
Het dissecteren werd uitgevoerd volgens de richtlijnen weergegeven door Dankmeijer et al.
(1973) (30). Verdere info werd verkregen uit Vandersteen (8).
Als eerste werd de huid van de voorkant van het onderbeen en van de voetrug losgeprepareerd,
waarna al het onderhuids vetweefsel werd verwijderd. De huidzenuwen en subcutane venen
werden echter zoveel mogelijk in het prepraat behouden. Daaropvolgend werd de fascia cruris en
de fascia van de voetrug ingesneden en werden de spieren van de voorzijde van het onderbeen en
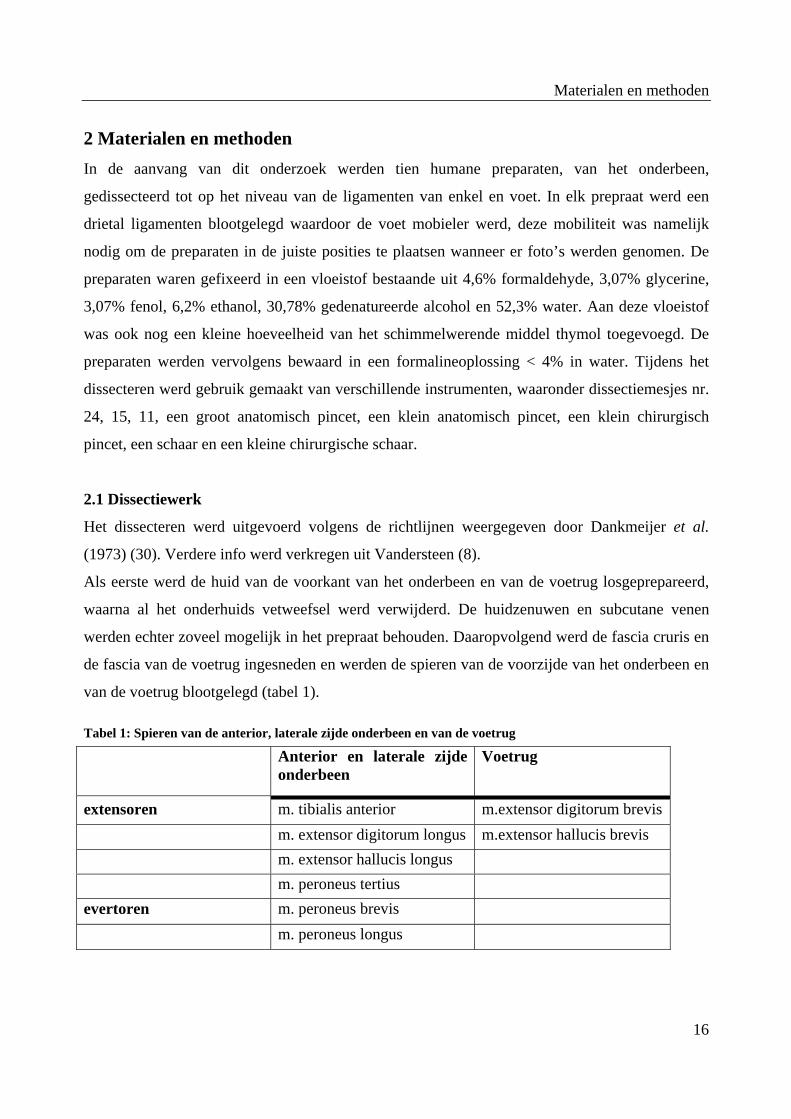
van de voetrug blootgelegd (tabel 1). Tabel 1: Spieren van de anterior, laterale zijde onderbeen en van de voetrug
Anterior en laterale zijde onderbeen
Voetrug
extensoren m. tibialis anterior m.extensor digitorum brevis m. extensor digitorum longus m.extensor hallucis brevis m. extensor hallucis longus m. peroneus tertius evertoren m. peroneus brevis m. peroneus longus
16
Materialen en methoden
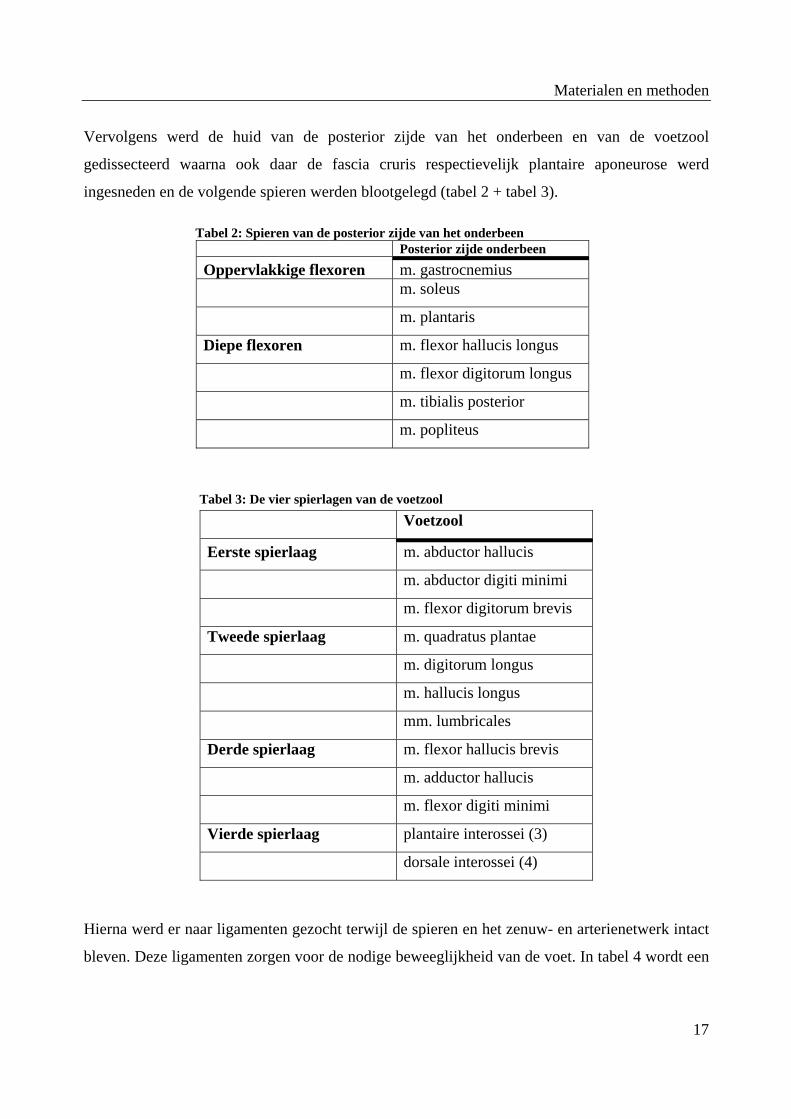
Vervolgens werd de huid van de posterior zijde van het onderbeen en van de voetzool
gedissecteerd waarna ook daar de fascia cruris respectievelijk plantaire aponeurose werd
ingesneden en de volgende spieren werden blootgelegd (tabel 2 + tabel 3). Tabel 2: Spieren van de posterior zijde van het onderbeen
Posterior zijde onderbeen Oppervlakkige flexoren m. gastrocnemius m. soleus
m. plantaris
Diepe flexoren m. flexor hallucis longus
m. flexor digitorum longus
m. tibialis posterior
m. popliteus
Tabel 3: De vier spierlagen van de voetzool
Voetzool
Eerste spierlaag m. abductor hallucis
m. abductor digiti minimi
m. flexor digitorum brevis
Tweede spierlaag m. quadratus plantae
m. digitorum longus
m. hallucis longus
mm. lumbricales
Derde spierlaag m. flexor hallucis brevis
m. adductor hallucis
m. flexor digiti minimi
Vierde spierlaag plantaire interossei (3)
dorsale interossei (4)
Hierna werd er naar ligamenten gezocht terwijl de spieren en het zenuw- en arterienetwerk intact
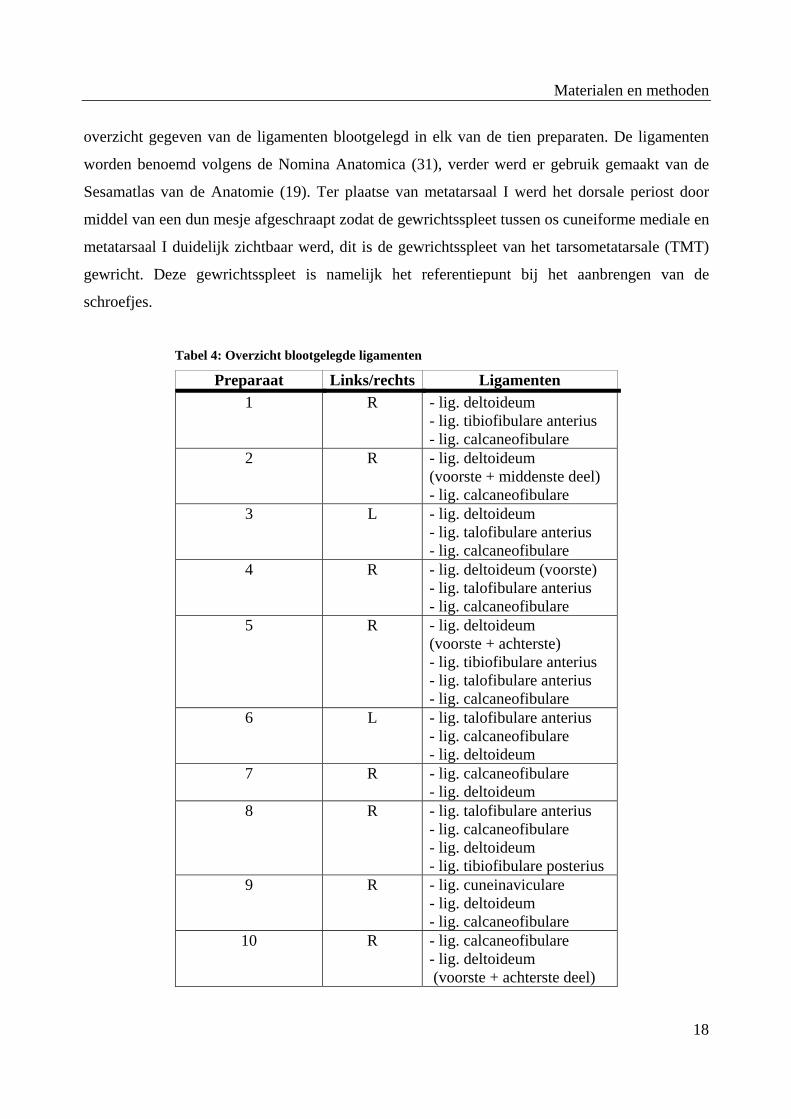
bleven. Deze ligamenten zorgen voor de nodige beweeglijkheid van de voet. In tabel 4 wordt een
17
Materialen en methoden
overzicht gegeven van de ligamenten blootgelegd in elk van de tien preparaten. De ligamenten
worden benoemd volgens de Nomina Anatomica (31), verder werd er gebruik gemaakt van de
Sesamatlas van de Anatomie (19). Ter plaatse van metatarsaal I werd het dorsale periost door
middel van een dun mesje afgeschraapt zodat de gewrichtsspleet tussen os cuneiforme mediale en
metatarsaal I duidelijk zichtbaar werd, dit is de gewrichtsspleet van het tarsometatarsale (TMT)
gewricht. Deze gewrichtsspleet is namelijk het referentiepunt bij het aanbrengen van de
schroefjes.
Tabel 4: Overzicht blootgelegde ligamenten
Preparaat Links/rechts Ligamenten 1 R
- lig. deltoideum - lig. tibiofibulare anterius - lig. calcaneofibulare
2 R
- lig. deltoideum (voorste + middenste deel) - lig. calcaneofibulare
3 L
- lig. deltoideum - lig. talofibulare anterius - lig. calcaneofibulare
4 R
- lig. deltoideum (voorste) - lig. talofibulare anterius - lig. calcaneofibulare
5 R
- lig. deltoideum (voorste + achterste) - lig. tibiofibulare anterius - lig. talofibulare anterius - lig. calcaneofibulare
6 L
- lig. talofibulare anterius - lig. calcaneofibulare - lig. deltoideum
7 R
- lig. calcaneofibulare - lig. deltoideum
8 R
- lig. talofibulare anterius - lig. calcaneofibulare - lig. deltoideum - lig. tibiofibulare posterius
9 R
- lig. cuneinaviculare - lig. deltoideum - lig. calcaneofibulare
10 R
- lig. calcaneofibulare - lig. deltoideum (voorste + achterste deel)
18
Materialen en methoden
2.2 Metingen
Om nauwkeurige metingen te kunnen uitvoeren, die niet afhangen van de anatomische structuren
van de voetbeenderen zelf, werden eerst referentiepunten in de eerste metatarsalen van de voeten
aangebracht. Hierna werden röntgenfoto’s werden waarop de referentiepunten duidelijk
waarneembaar zijn. Aan de hand van tracings, gemaakt van de bekomen röntgenfoto’s, konden
berekeningen worden uitgevoerd om zo resultaten te bekomen.
2.2.1 Plaatsen van de schroeven
Om de referentiepunten voor de metingen zichtbaar te maken, werd er gebruik gemaakt van
schroefjes, met name universele schroeven van roestvrij staal (pgb-fasteners®) (zie bijlage 1) van
3 mm dik en 16 mm lang. Deze werden in elk preparaat op 1.5 cm afstand van de TMT
gewrichtsspleet en loodrecht op metatarsaal I aangebracht (proximaal). Dit werd uitgevoerd met
behulp van een hangmotor voor tandtechniek, (Kavo EWL K9) met regelbare snelheid en een
kopje met een dikte van 1.55 mm terwijl het preparaat vastzat in de klem (zie 2.2.2). Hiernaast
werd op ongeveer 1 cm afstand van het eerste schroefje nog een tweede schroefje geplaatst
(distaal). Manueel werd de proximale schroef loodrecht op het metatarsaalbot aangebracht en
evenwijdig aan deze werd evenzo de distale schroef in het metatarsaalbot aangebracht. Dit
gebeurde met visuele controle door twee personen. Met de boor werd er eerst een gaatje gemaakt
in het bot, diep genoeg zodat het schroefje niet meer kon bewegen, en hierna werd het schroefje
vastgedraaid in de cortex met behulp van een schroevendraaier.
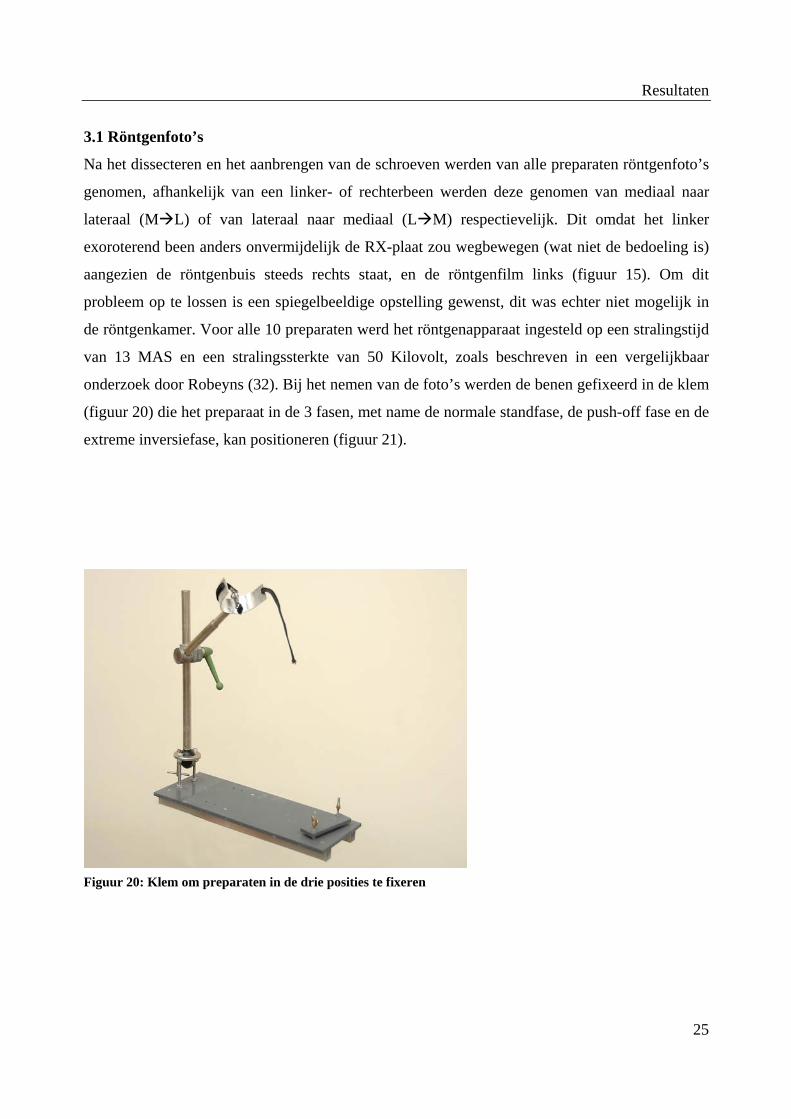
2.2.2 Röntgenfoto’s
Voor het maken van de röntgenfoto’s werd een klem ontworpen waarin de onderbenen gefixeerd
konden worden tijdens het nemen van de RX’en (figuur 20). Aan deze klem werden een aantal
constructie-eisen opgelegd, ze moest namelijk bestaan uit een aan een kogelgewricht bevestigde
staaf, om de preparaten in allerhande posities te kunnen brengen zodat de normale standfase, de
push-off fase en de extreme inversiefase gesimuleerd konden worden. Hiernaast moest op de
grondplaat (van 49 cm op 18.5 cm) een plaatje worden bevestigd waaronder de tenen gefixeerd
konden worden op de grondplaat, zodat deze niet zouden bewegen tijdens het nemen van de
röntgenfoto’s. De grondplaat mocht niet te glad zijn zodat de natte preparaten niet zouden
verschuiven en wegglijden. Om dit probleem te voorkomen, werd de plaat met schuurpapier
19
Materialen en methoden
afgeschuurd. Er werd ook een riem voorzien aan de klem waar de preparaten ter plaatse van het
onderbeen in vastgeklemd konden worden. Het grote voordeel van dit ontwerp is dat men de
benen niet moet positioneren en vasthouden tijdens het nemen van de foto’s wat het risico op
schadelijke stralen minimaliseert. Om een zo hoog mogelijk contrast te verkrijgen werd het
röntgentoestel (Two-pulse X-ray Apparatus for basic radiographic system (BRS), rotalix tube
housing ROT 350 10, 1988) ingesteld op een stralingssterkte van 50 Kilovolt en een stralingsstijd
van 13 MAS (Milliampère/seconde). Van elk preparaat werden er drie foto’s genomen, met name
één van de voet in de normale standfase, één van de voet in de push-off fase (licht geïnverteerd)
en één van de voet in een extreme inversiefase (exorotatie onderbeen). Afhankelijk van een
linker- of rechterbeen werd de foto genomen respectievelijk van mediaal naar lateraal of van
lateraal naar mediaal. Er werd tevens gebruik gemaakt van fixatieblokken waarin de constructie
met het been werd geschoven zodat elke foto in dezelfde positie werd genomen. Op elke
röntgenfoto werd het nummer van het preparaat, datum van afname, positie van de voet, de
stralingsstijd en stralingssterkte vermeld door middel van een etiket.
2.2.3 Tracings maken
Aangezien er vervolgens werd gewerkt met een schuifpasser met scherpe kanten werden er van
de bekomen röntgenfoto’s tracings gemaakt door gebruik te maken van kalkpapier (tracingpapier
van het merk Croquis échelle canson met een dikte van 90g/m2) en een lichtbak. Deze tracings
werden zo nauwkeurig mogelijk getekend met een potlood Staedtler minerva HB 2. Hierdoor
bleven de röntgenfoto’s zelf intact.
2.2.3.1 Lengtebepaling
Het is zeer belangrijk dat de lengtes van de schroefjes juist worden overgetekend. Omdat het
meten van de lengte van de volledige schroef op de tracings nogal onnauwkeurig is door het feit
dat de projectie van het kopje van de schroef, wanneer deze naar achter draait, van een
cirkelvorm naar een cilindervorm overgaat en omdat het overtekenen van de windingen van de
schroef nogal onnauwkeurig is, wordt er een andere meetmethode toegepast. Met behulp van de
röntgenfoto wordt met een puntje de locatie van de eerste winding (vanaf de kop) van de schroef
weergegeven en met een tweede puntje wordt de punt van de schroef weergeven. De afstand
tussen deze twee punten geeft dan de lengte van de schroef weer. Hierbij moet er rekening
20

Materialen en methoden
worden gehouden met een foutmarge van 0.75 mm (afstand tussen twee windingen). Deze lengtes
worden exact bepaald met behulp van een schuifpasser die meet tot op 0.05 mm nauwkeurig. Bij
deze lengtebepaling moet er rekening gehouden worden met de dispersie van de
röntgenstralenbundel (zie ook Discussie).
2.2.4 Goniometrische berekeningen
Nadat de lengtes van de schroeven werden bepaald, kon aan de hand van deze lengtes via
goniometrie hoeken worden berekend. Deze hoeken geven dan weer hoe de eerste straal roteert in
de inversiefase en extreme inversiefase ten opzichte van de standfase. Door middel van
onderstaande figuren wordt uitgelegd hoe dit principe werkt.
Figuur 16: Principe lengteverschillen in de drie fasen, achteraanzicht van eerste straal, röntgenbron rechts, röntgenplaat links Wanneer een foto wordt genomen van het preparaat in de standfase, staat deze evenwijdig met de
röntgenplaat. Wanneer de voet vervolgens gaat inverteren, gaat de voet met de schroef naar
achter bewegen ten opzichte van de plaat en de lengte van de projectie van de schroef wordt
hiermee korter. Als de voet nog verder gaat inverteren, gaat deze schroef nog meer naar achter
bewegen en wordt de projectie nog korter.
Cos A = aanliggende zijde / schuine zijde (1)
Figuur 17: Goniometrie voor hoekbepaling
21
Materialen en methoden
Vervolgens kunnen met behulp van eenvoudige goniometrie hoeken worden bepaald. De hoek
die wordt gevormd tussen de schroeven van de voet in standfase en de push-off fase kan worden
bepaald door middel van formule (1) en de hoek gevormd tussen de schroeven van de voet in de
standfase en de extreme inversiefase kan via dezelfde formuleworden bepaald. De aanliggende
zijde is de lengte van de projectie van de schroef in de push-off fase en evenzo in de extreme
inversiefase. De schuine zijde is gelijk aan de straal van de cirkel, dus gelijk aan de lengte van de
projectie van de schroef in de normale standfase. De schroef staat hierbij immers loodrecht op het
os metatarsale in de normale standfase, dus ook evenwijdig aan de röntgenplaat.
2.2.5 Stand van de preparaten
Omdat de meeste preparaten zich niet in de normale stand bevonden met het onderbeen in het
enkelgewricht loodrecht (90°) op het grondvlak, werd met behulp van een goniometer de graad
van plantaire flexie van de voet gemeten en ook de graad van dorsiflexie van de hallux. Deze
waarden worden dus kwantitatief (in °) weergegeven.
22
Resultaten
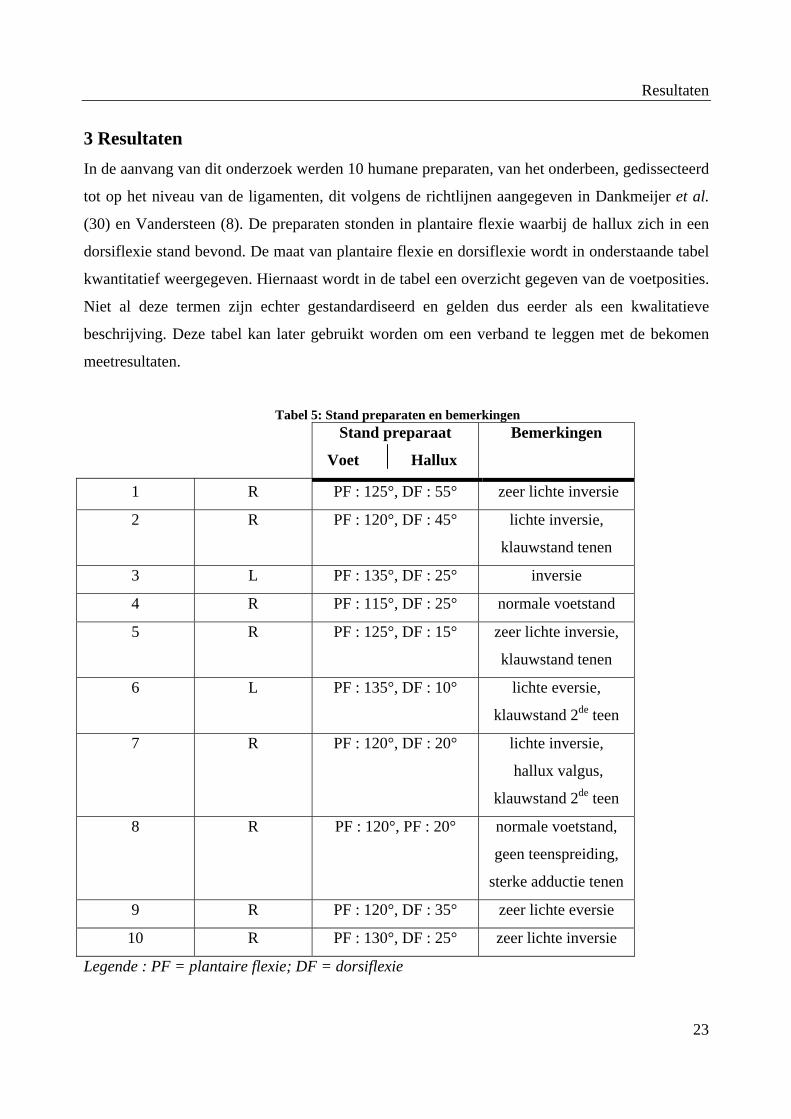
3 Resultaten In de aanvang van dit onderzoek werden 10 humane preparaten, van het onderbeen, gedissecteerd
tot op het niveau van de ligamenten, dit volgens de richtlijnen aangegeven in Dankmeijer et al.
(30) en Vandersteen (8). De preparaten stonden in plantaire flexie waarbij de hallux zich in een
dorsiflexie stand bevond. De maat van plantaire flexie en dorsiflexie wordt in onderstaande tabel
kwantitatief weergegeven. Hiernaast wordt in de tabel een overzicht gegeven van de voetposities.
Niet al deze termen zijn echter gestandardiseerd en gelden dus eerder als een kwalitatieve
beschrijving. Deze tabel kan later gebruikt worden om een verband te leggen met de bekomen
meetresultaten.
Tabel 5: Stand preparaten en bemerkingen
Stand preparaat
Voet Hallux
Bemerkingen
1 R PF : 125°, DF : 55° zeer lichte inversie
2 R PF : 120°, DF : 45° lichte inversie,
klauwstand tenen
3 L PF : 135°, DF : 25° inversie
4 R PF : 115°, DF : 25° normale voetstand
5 R PF : 125°, DF : 15° zeer lichte inversie,
klauwstand tenen
6 L PF : 135°, DF : 10° lichte eversie,
klauwstand 2de teen
7 R PF : 120°, DF : 20° lichte inversie,
hallux valgus,
klauwstand 2de teen
8 R PF : 120°, PF : 20° normale voetstand,
geen teenspreiding,
sterke adductie tenen
9 R PF : 120°, DF : 35° zeer lichte eversie
10 R PF : 130°, DF : 25° zeer lichte inversie
Legende : PF = plantaire flexie; DF = dorsiflexie
23
Resultaten
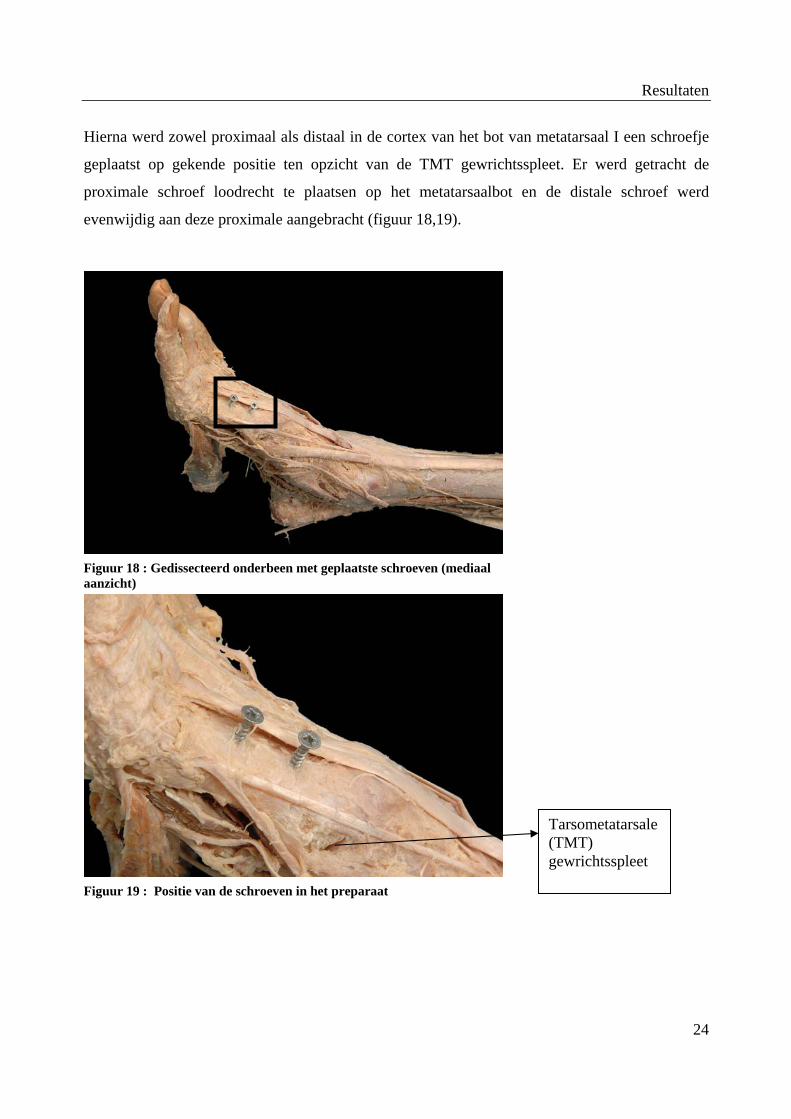
Hierna werd zowel proximaal als distaal in de cortex van het bot van metatarsaal I een schroefje
geplaatst op gekende positie ten opzicht van de TMT gewrichtsspleet. Er werd getracht de
proximale schroef loodrecht te plaatsen op het metatarsaalbot en de distale schroef werd
evenwijdig aan deze proximale aangebracht (figuur 18,19).
Figuur 18 : Gedissecteerd onderbeen met geplaatste schroeven (mediaal aanzicht)
Figuur 19 : Positie van de schroeven in het preparaat
Tarsometatarsale (TMT) gewrichtsspleet
24
Resultaten
3.1 Röntgenfoto’s
Na het dissecteren en het aanbrengen van de schroeven werden van alle preparaten röntgenfoto’s
genomen, afhankelijk van een linker- of rechterbeen werden deze genomen van mediaal naar
lateraal (M L) of van lateraal naar mediaal (L M) respectievelijk. Dit omdat het linker
exoroterend been anders onvermijdelijk de RX-plaat zou wegbewegen (wat niet de bedoeling is)
aangezien de röntgenbuis steeds rechts staat, en de röntgenfilm links (figuur 15). Om dit
probleem op te lossen is een spiegelbeeldige opstelling gewenst, dit was echter niet mogelijk in
de röntgenkamer. Voor alle 10 preparaten werd het röntgenapparaat ingesteld op een stralingstijd
van 13 MAS en een stralingssterkte van 50 Kilovolt, zoals beschreven in een vergelijkbaar
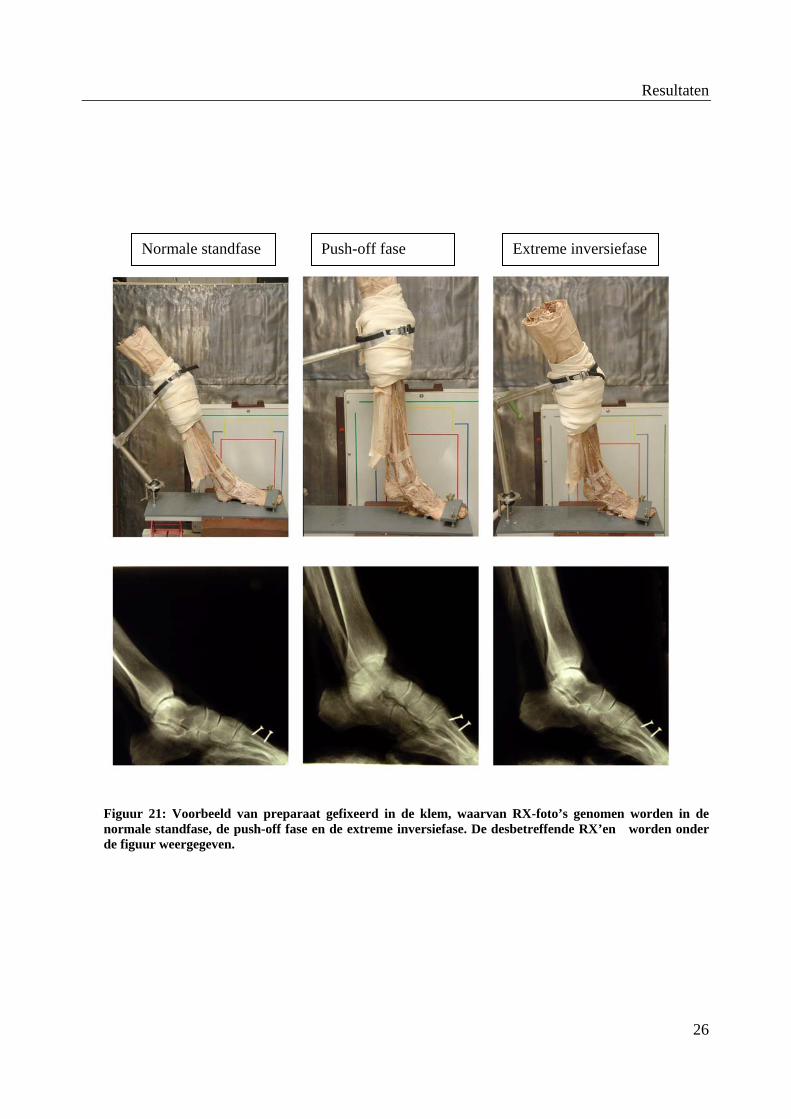
onderzoek door Robeyns (32). Bij het nemen van de foto’s werden de benen gefixeerd in de klem
(figuur 20) die het preparaat in de 3 fasen, met name de normale standfase, de push-off fase en de
extreme inversiefase, kan positioneren (figuur 21).
Figuur 20: Klem om preparaten in de drie posities te fixeren
25
Resultaten
Normale standfase Push-off fase Extreme inversiefase
Figuur 21: Voorbeeld van preparaat gefixeerd in de klem, waarvan RX-foto’s genomen worden in de normale standfase, de push-off fase en de extreme inversiefase. De desbetreffende RX’en worden onder de figuur weergegeven.
26
Resultaten
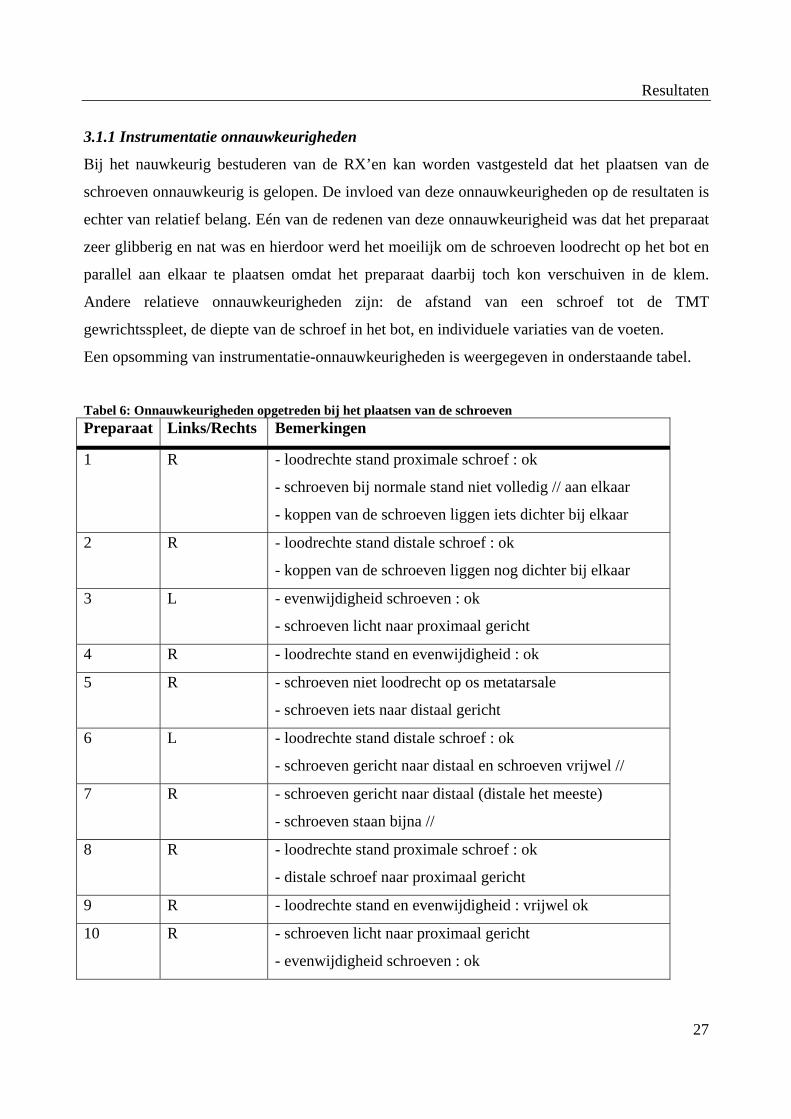
3.1.1 Instrumentatie onnauwkeurigheden
Bij het nauwkeurig bestuderen van de RX’en kan worden vastgesteld dat het plaatsen van de
schroeven onnauwkeurig is gelopen. De invloed van deze onnauwkeurigheden op de resultaten is
echter van relatief belang. Eén van de redenen van deze onnauwkeurigheid was dat het preparaat
zeer glibberig en nat was en hierdoor werd het moeilijk om de schroeven loodrecht op het bot en
parallel aan elkaar te plaatsen omdat het preparaat daarbij toch kon verschuiven in de klem.
Andere relatieve onnauwkeurigheden zijn: de afstand van een schroef tot de TMT
gewrichtsspleet, de diepte van de schroef in het bot, en individuele variaties van de voeten.
Een opsomming van instrumentatie-onnauwkeurigheden is weergegeven in onderstaande tabel.
Tabel 6: Onnauwkeurigheden opgetreden bij het plaatsen van de schroeven Preparaat Links/Rechts Bemerkingen
1 R - loodrechte stand proximale schroef : ok
- schroeven bij normale stand niet volledig // aan elkaar
- koppen van de schroeven liggen iets dichter bij elkaar
2 R - loodrechte stand distale schroef : ok
- koppen van de schroeven liggen nog dichter bij elkaar
3 L - evenwijdigheid schroeven : ok
- schroeven licht naar proximaal gericht
4 R - loodrechte stand en evenwijdigheid : ok
5 R - schroeven niet loodrecht op os metatarsale
- schroeven iets naar distaal gericht
6 L - loodrechte stand distale schroef : ok
- schroeven gericht naar distaal en schroeven vrijwel //
7 R - schroeven gericht naar distaal (distale het meeste)
- schroeven staan bijna //
8 R - loodrechte stand proximale schroef : ok
- distale schroef naar proximaal gericht
9 R - loodrechte stand en evenwijdigheid : vrijwel ok
10 R - schroeven licht naar proximaal gericht
- evenwijdigheid schroeven : ok
27
Resultaten
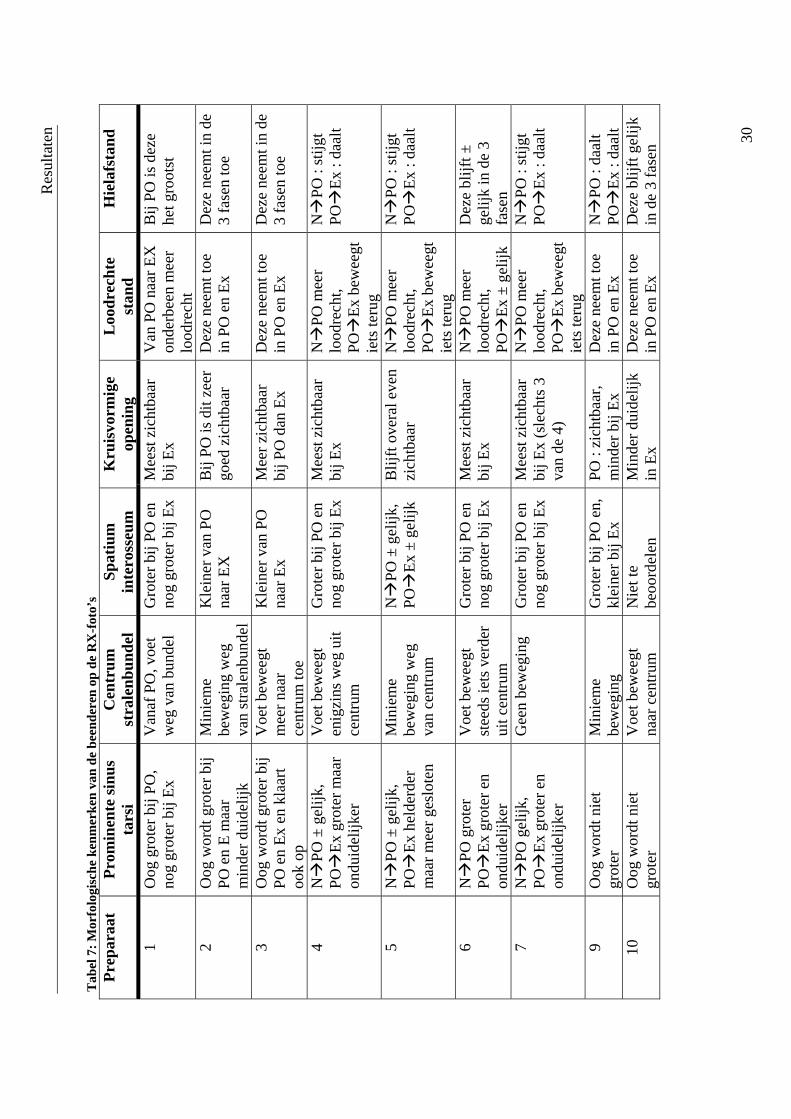
3.1.2 Morfologische kenmerken van de RX’en
De RX’en geven ook een beeld van de bijzonderheden van elke voet en zijn beenderen weer.
Deze bijzonderheden kunnen in verband worden gebracht met de bekomen resultaten. Deze
variaties worden weergegeven in tabel 7. In deze tabel is voorlopig afgezien van kwantificatie
omdat het hier een pilootstudie betreft.
Op elke foto werden dezelfde kwalitatieve punten nagegaan, dit onder toezicht van een radioloog,
met name :
- De prominente sinus tarsi. Hiernaar wordt in de Angelsaksische literatuur verwezen als
een ‘bullet hole’ die gezien kan worden als een oog dat normalerwijze meer opent
naarmate de voet meer inverteert (33).
- Beweegt de voet uit het centrum van de stralenbundel? (van centrum weg of naar centrum
toe). Immers, hoe verder de voet uit het centrum van de stralenbundel beweegt, hoe groter
de vertekening.
- De ruimte gevormd tussen fibula en tibia wordt in de zoölogie ‘spatium interosseum
cruris’ genoemd. Vreemd genoeg wordt deze nomenclatuur bij de mens niet gebruikt (31).
De membrana interossea cruris overspant deze ruimte tussen tibia en fibula. Deze ruimte
wordt normalerwijze groter in een lateraal aanzicht naarmate het onderbeen tijdens de
stapcyclus meer exoroteert (34).
- De kruisvormige opening gevormd tussen vier beenstukken, met name calcaneus,
taluskop, os naviculare en os cuboid, deze ‘gapingen’ worden meer zichtbaar bij extreme
inversie (30).
- De stand van de onderbenen ten opzichte van het grondvlak. Neemt deze toe, af of blijft
deze gelijk?
- De afstand tussen calcaneus en grond, neemt deze toe of af? Immers bij een realistische
simulatie van de loopbeweging neemt deze normalerwijze toe.
In onderstaande tabel is preparaat 8 weggelaten omdat de röntgenfoto’s hiervan heel onduidelijk
waren. Na inspectie door een radioloog, kon worden vastgesteld dat er lucht aanwezig was in het
preparaat en dat de botstructuur zeer dens was waardoor de foto’s moeilijk te beoordelen zijn.
Ook werd er waargenomen dat er een vorm van chronische ontsteking aanwezig was aan de
aanhechting van de achillespees (entesopathie).
28
Resultaten
29
3.1.2.1 Achtergrond van het mechanisme
De achtergrond waarom deze morfologische kenmerken bestudeerd werden, wordt hier
toegelicht. Dankmeijer et al. (1973) stelden in hun beschrijving van de voetgewrichten: ‘‘De
pronatie en supinatie kan men uitvoeren met gefixeerd onderbeen en ‘vrij bewegende’ voet, het is
evenzeer mogelijk te proneren en te supineren door de voet op de laterale voetrand te kantelen,
terwijl het onderbeen rechtop blijft staan. In beide gevallen zal men kunnen waarnemen dat
verschuivingen plaatsvinden tussen talus en calacaneus, tussen talus en naviculare en tussen
cuboid en calcaneus. Men zal kunnen constateren dat in pronatie de gewrichtsvlakken van de in
het geding zijnde gewrichten volledig op elkaar aansluiten. Bij supinatie ziet men dat gapingen
tussen gewrichtsvlakken gaan optreden. Men dient nu een aantal van deze verschuivingen
gepaard gaande met gapingen te herkennen. Bij supinatie opent zich de ingang van de sinus tarsi,
een verschijnsel dat ook in röntgenfoto’s te zien is. Wanneer men de laterale voetrand kantelt en
daarbij het onderbeen ‘rechtop’ houdt, dan is het belangrijk te constateren dat exorotatie van het
onderbeen bij een voet die op de onderlaag gehouden wordt, leidt tot supinatie’’(30).
In mijn onderzoek wordt het verband gelegd tussen dit mechanisme en de normale stapcyclus.
Vooraleer de voet gaat zweven tijdens het stappen, gaat deze een kleine inverterende beweging
uitvoeren (push-off fase), die nu gesimuleerd wordt door de voet in de klem te fixeren en in de
gewenste positie (inversie) vast te zetten. Er is een fundamenteel verschil tussen de reële stap en
de simulatie. Bij de reële toestand wordt de fixatie van de voet bewerkstelligd door de
zwaartekracht (uitdrukbaar als lichaamsgewicht), die via het hefboomsysteem in enkel en voet
zelf op de voorvoet wordt overgedragen. Ook de grondreactiekrachten, waaronder wrijving (shear
stress) zijn daarbij anders. Bij de klem komen de fixatiekrachten uit een andere richting en is de
belasting van het hefboomsysteem in de voet anders.
Res
ulta
ten
30
Tab
el 7
: Mor
folo
gisc
he k
enm
erke
n va
n de
bee
nder
en o
p de
RX
-fot
o’s
Prep
araa
t Pr
omin
ente
sinu
s ta
rsi
Cen
trum
st
rale
nbun
del
Spat
ium
in
tero
sseu
m
Kru
isvo
rmig
e op
enin
g L
oodr
echt
e st
and
Hie
lafs
tand
1 O
og g
rote
r bij
PO,
nog
grot
er b
ij Ex
V
anaf
PO
, voe
t w
eg v
an b
unde
l G
rote
r bij
PO e
n no
g gr
oter
bij
Ex
Mee
st z
icht
baar
bi
j Ex
Van
PO
naa
r EX
on
derb
een
mee
r lo
odre
cht
Bij
PO is
dez
e he
t gro
otst
2 O
og w
ordt
gro
ter b
ij PO
en
E m
aar
min
der d
uide
lijk
Min
iem
e be
weg
ing
weg
va
n st
rale
nbun
del
Kle
iner
van
PO
na
ar E
X
Bij
PO is
dit
zeer
go
ed z
icht
baar
D
eze
neem
t toe
in
PO
en
Ex
Dez
e ne
emt i
n de
3
fase
n to
e
3 O
og w
ordt
gro
ter b
ij PO
en
Ex e
n kl
aart
ook
op
Voe
t bew
eegt
m
eer n
aar
cent
rum
toe
Kle
iner
van
PO
na
ar E
x M
eer z
icht
baar
bi
j PO
dan
Ex
Dez
e ne
emt t
oe
in P
O e
n Ex
D
eze
neem
t in
de
3 fa
sen
toe
4 N
PO ±
gel
ijk,
POEx
gro
ter m
aar
ondu
idel
ijker
Voe
t bew
eegt
en
igzi
ns w
eg u
it ce
ntru
m
Gro
ter b
ij PO
en
nog
grot
er b
ij Ex
M
eest
zic
htba
ar
bij E
x N
PO m
eer
lood
rech
t, PO
Ex b
ewee
gt
iets
teru
g
NPO
: st
ijgt
POEx
: da
alt
5 N
PO ±
gel
ijk,
POEx
hel
derd
er
maa
r mee
r ges
lote
n
Min
iem
e be
weg
ing
weg
va
n ce
ntru
m
NPO
± g
elijk
, PO
Ex ±
gel
ijk
Blij
ft ov
eral
eve
n zi
chtb
aar
NPO
mee
r lo
odre
cht,
POEx
bew
eegt
ie
ts te
rug
NPO
: st
ijgt
POEx
: da
alt
6 N
PO g
rote
r PO
Ex g
rote
r en
ondu
idel
ijker
Voe
t bew
eegt
st
eeds
iets
ver
der
uit c
entru
m
Gro
ter b
ij PO
en
nog
grot
er b
ij Ex
M
eest
zic
htba
ar
bij E
x N
PO m
eer
lood
rech
t, PO
Ex ±
gel
ijk
Dez
e bl
ijft ±
ge
lijk
in d
e 3
fase
n 7
NPO
gel
ijk,
POEx
gro
ter e
n on
duid
elijk
er
Gee
n be
weg
ing
Gro
ter b
ij PO
en
nog
grot
er b
ij Ex
M
eest
zic
htba
ar
bij E
x (s
lech
ts 3
va
n de
4)
NPO
mee
r lo
odre
cht,
POEx
bew
eegt
ie
ts te
rug
NPO
: st
ijgt
POEx
: da
alt
9 O
og w
ordt
nie
t gr
oter
M
inie
me
bew
egin
g G
rote
r bij
PO e
n,
klei
ner b
ij Ex
PO
: zi
chtb
aar,
min
der b
ij Ex
D
eze
neem
t toe
in
PO
en
Ex
NPO
: da
alt
POEx
: da
alt
10
Oog
wor
dt n
iet
grot
er
Voe
t bew
eegt
na
ar c
entru
m
Nie
t te
beoo
rdel
en
Min
der d
uide
lijk
in E
x D
eze
neem
t toe
in
PO
en
Ex
Dez
e bl
ijft g
elijk
in
de
3 fa
sen
Resultaten
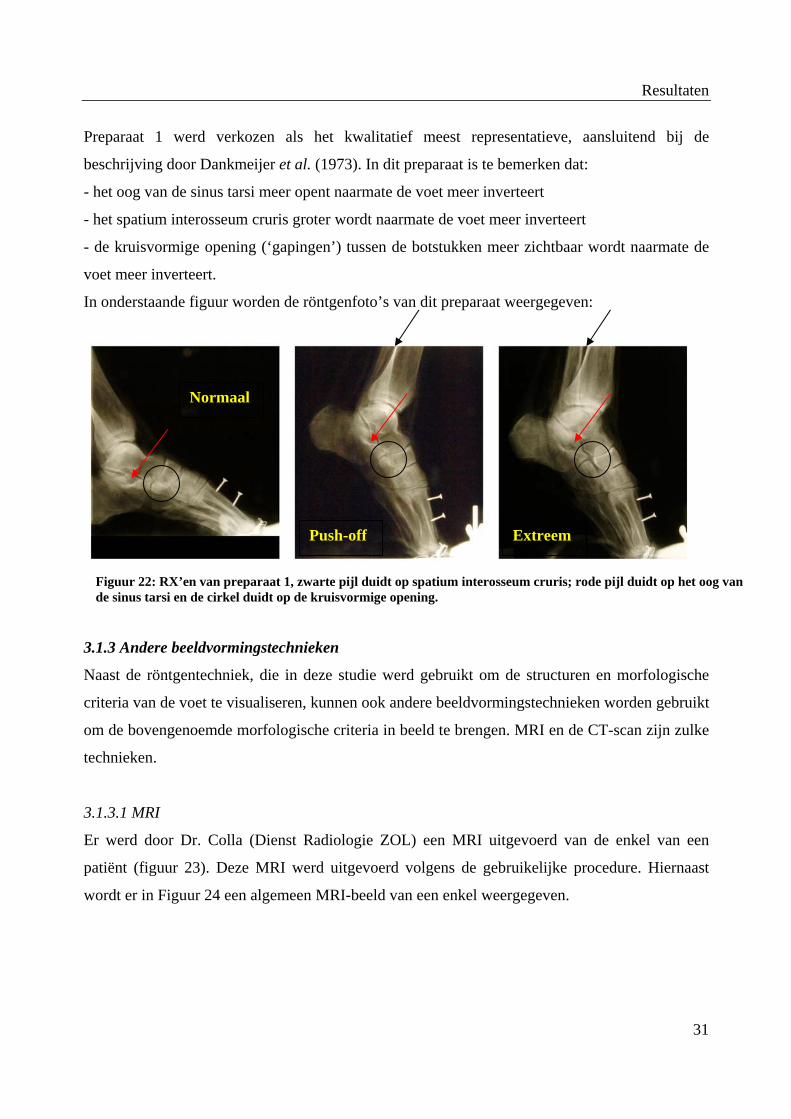
Preparaat 1 werd verkozen als het kwalitatief meest representatieve, aansluitend bij de
beschrijving door Dankmeijer et al. (1973). In dit preparaat is te bemerken dat:
- het oog van de sinus tarsi meer opent naarmate de voet meer inverteert
- het spatium interosseum cruris groter wordt naarmate de voet meer inverteert
- de kruisvormige opening (‘gapingen’) tussen de botstukken meer zichtbaar wordt naarmate de
voet meer inverteert.
In onderstaande figuur worden de röntgenfoto’s van dit preparaat weergegeven:
Normaal
Push-off Extreem
Figuur 22: RX’en van preparaat 1, zwarte pijl duidt op spatium interosseum cruris; rode pijl duidt op het oog van de sinus tarsi en de cirkel duidt op de kruisvormige opening.
3.1.3 Andere beeldvormingstechnieken
Naast de röntgentechniek, die in deze studie werd gebruikt om de structuren en morfologische
criteria van de voet te visualiseren, kunnen ook andere beeldvormingstechnieken worden gebruikt
om de bovengenoemde morfologische criteria in beeld te brengen. MRI en de CT-scan zijn zulke
technieken.
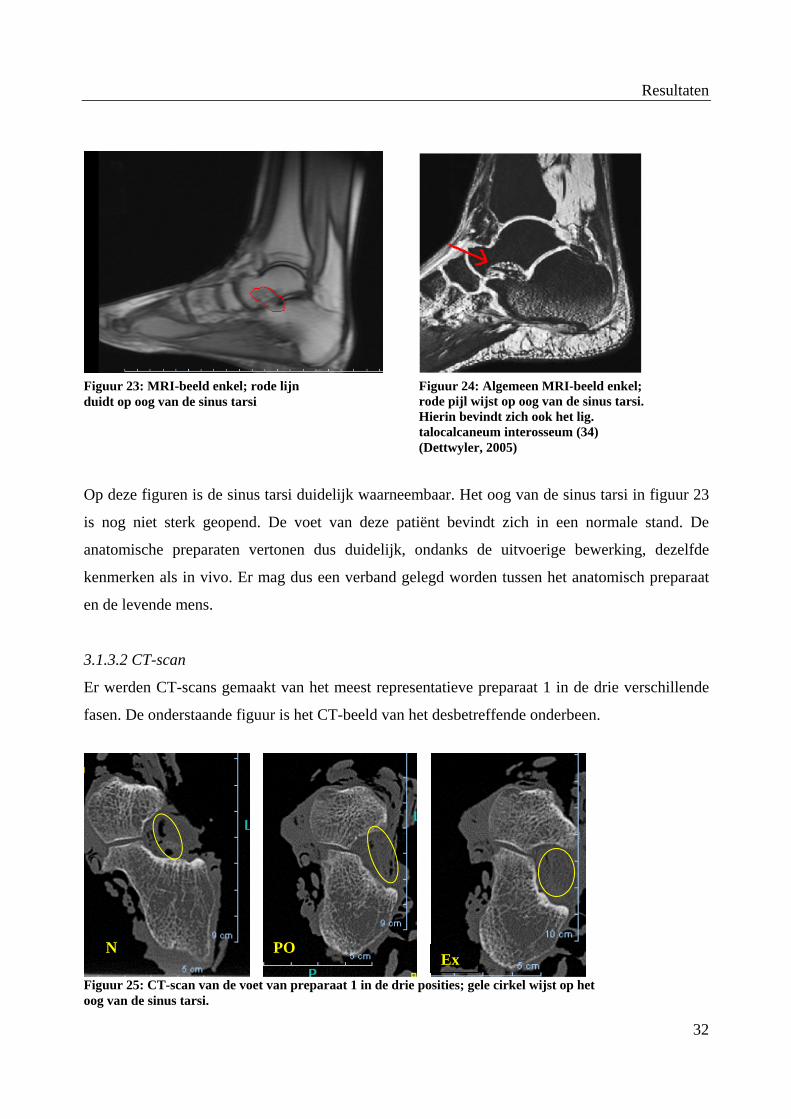
3.1.3.1 MRI
Er werd door Dr. Colla (Dienst Radiologie ZOL) een MRI uitgevoerd van de enkel van een
patiënt (figuur 23). Deze MRI werd uitgevoerd volgens de gebruikelijke procedure. Hiernaast
wordt er in Figuur 24 een algemeen MRI-beeld van een enkel weergegeven.
31
Resultaten
Figuur 23: MRI-beeld enkel; rode lijn duidt op oog van de sinus tarsi
Figuur 24: Algemeen MRI-beeld enkel; rode pijl wijst op oog van de sinus tarsi. Hierin bevindt zich ook het lig. talocalcaneum interosseum (34) (Dettwyler, 2005)
Op deze figuren is de sinus tarsi duidelijk waarneembaar. Het oog van de sinus tarsi in figuur 23
is nog niet sterk geopend. De voet van deze patiënt bevindt zich in een normale stand. De
anatomische preparaten vertonen dus duidelijk, ondanks de uitvoerige bewerking, dezelfde
kenmerken als in vivo. Er mag dus een verband gelegd worden tussen het anatomisch preparaat
en de levende mens.
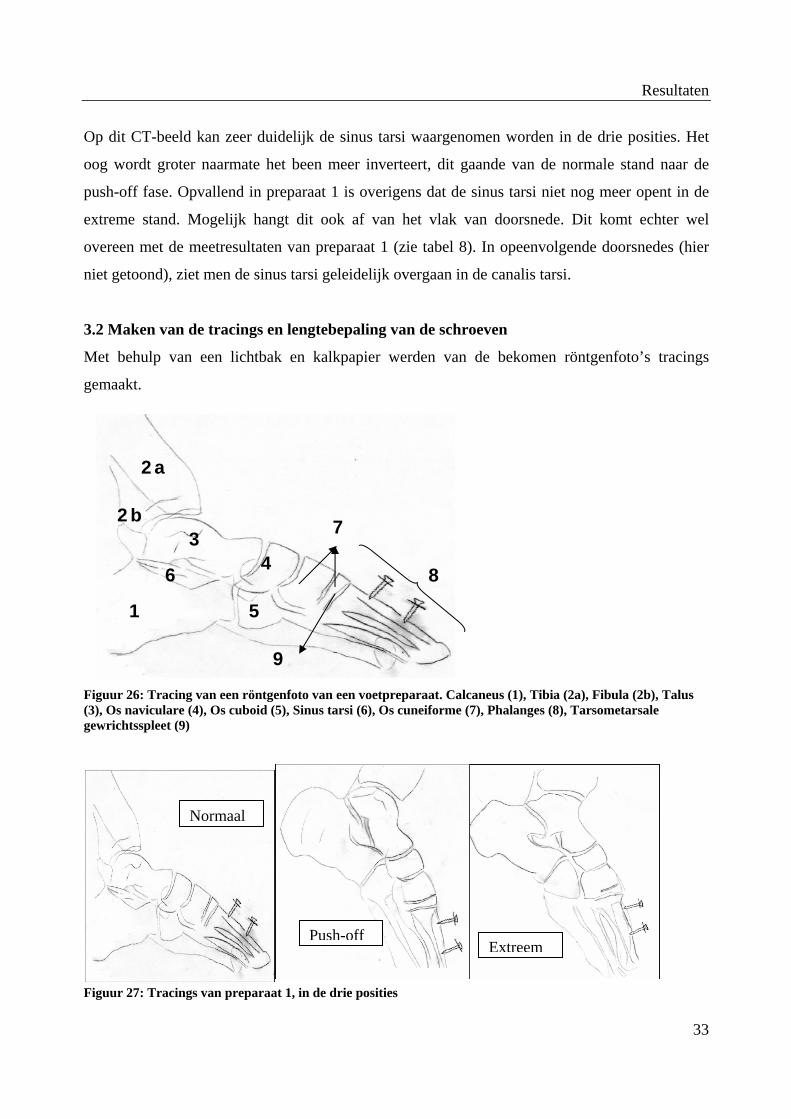
3.1.3.2 CT-scan
Er werden CT-scans gemaakt van het meest representatieve preparaat 1 in de drie verschillende
fasen. De onderstaande figuur is het CT-beeld van het desbetreffende onderbeen.
N PO Ex
Figuur 25: CT-scan van de voet van preparaat 1 in de drie posities; gele cirkel wijst op het oog van de sinus tarsi.
32
Resultaten
Op dit CT-beeld kan zeer duidelijk de sinus tarsi waargenomen worden in de drie posities. Het
oog wordt groter naarmate het been meer inverteert, dit gaande van de normale stand naar de
push-off fase. Opvallend in preparaat 1 is overigens dat de sinus tarsi niet nog meer opent in de
extreme stand. Mogelijk hangt dit ook af van het vlak van doorsnede. Dit komt echter wel
overeen met de meetresultaten van preparaat 1 (zie tabel 8). In opeenvolgende doorsnedes (hier
niet getoond), ziet men de sinus tarsi geleidelijk overgaan in de canalis tarsi.
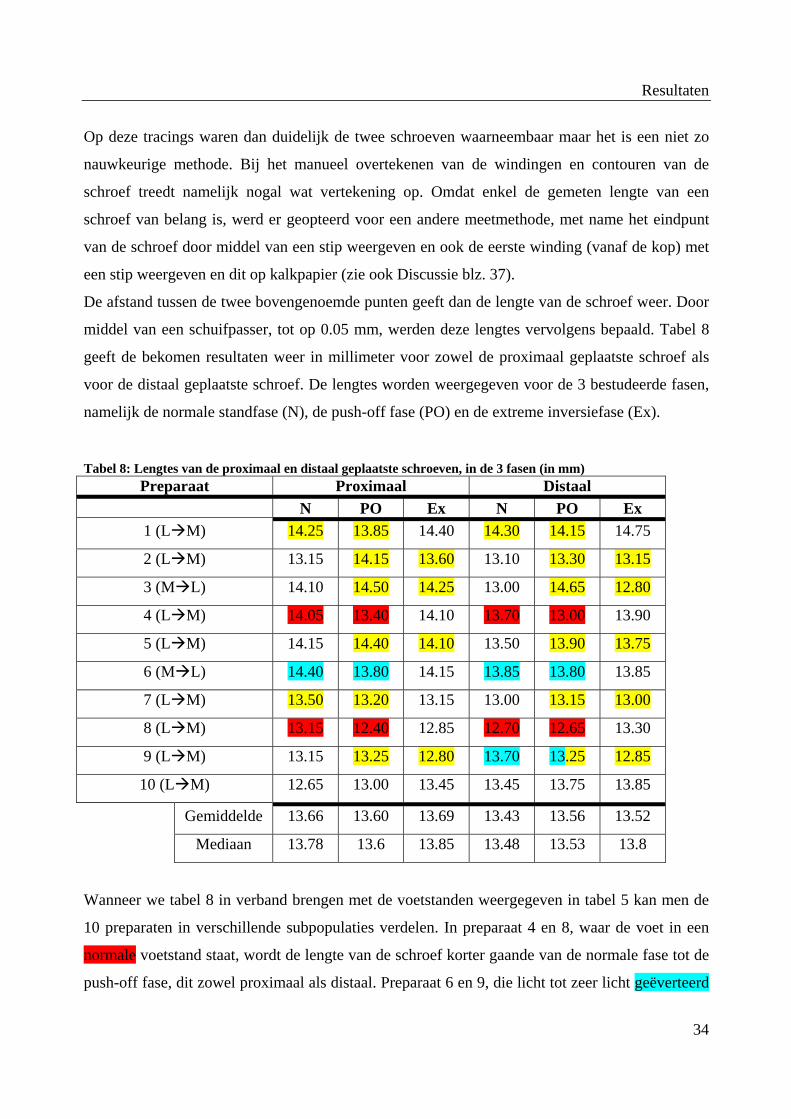
3.2 Maken van de tracings en lengtebepaling van de schroeven
Met behulp van een lichtbak en kalkpapier werden van de bekomen röntgenfoto’s tracings
gemaakt.
2a
2b 3
1
6 4
5
7
8
9
Figuur 26: Tracing van een röntgenfoto van een voetpreparaat. Calcaneus (1), Tibia (2a), Fibula (2b), Talus (3), Os naviculare (4), Os cuboid (5), Sinus tarsi (6), Os cuneiforme (7), Phalanges (8), Tarsometarsale gewrichtsspleet (9)
Normaal
Push-off
Extreem
Figuur 27: Tracings van preparaat 1, in de drie posities
33
Resultaten
Op deze tracings waren dan duidelijk de twee schroeven waarneembaar maar het is een niet zo
nauwkeurige methode. Bij het manueel overtekenen van de windingen en contouren van de
schroef treedt namelijk nogal wat vertekening op. Omdat enkel de gemeten lengte van een
schroef van belang is, werd er geopteerd voor een andere meetmethode, met name het eindpunt
van de schroef door middel van een stip weergeven en ook de eerste winding (vanaf de kop) met
een stip weergeven en dit op kalkpapier (zie ook Discussie blz. 37).
De afstand tussen de twee bovengenoemde punten geeft dan de lengte van de schroef weer. Door
middel van een schuifpasser, tot op 0.05 mm, werden deze lengtes vervolgens bepaald. Tabel 8
geeft de bekomen resultaten weer in millimeter voor zowel de proximaal geplaatste schroef als
voor de distaal geplaatste schroef. De lengtes worden weergegeven voor de 3 bestudeerde fasen,
namelijk de normale standfase (N), de push-off fase (PO) en de extreme inversiefase (Ex). Tabel 8: Lengtes van de proximaal en distaal geplaatste schroeven, in de 3 fasen (in mm)
Preparaat Proximaal Distaal N PO Ex N PO Ex
1 (L M) 14.25 13.85 14.40 14.30 14.15 14.75
2 (L M) 13.15 14.15 13.60 13.10 13.30 13.15
3 (M L) 14.10 14.50 14.25 13.00 14.65 12.80
4 (L M) 14.05 13.40 14.10 13.70 13.00 13.90
5 (L M) 14.15 14.40 14.10 13.50 13.90 13.75
6 (M L) 14.40 13.80 14.15 13.85 13.80 13.85
7 (L M) 13.50 13.20 13.15 13.00 13.15 13.00
8 (L M) 13.15 12.40 12.85 12.70 12.65 13.30
9 (L M) 13.15 13.25 12.80 13.70 13.25 12.85
10 (L M) 12.65 13.00 13.45 13.45 13.75 13.85
Gemiddelde 13.66 13.60 13.69 13.43 13.56 13.52
Mediaan 13.78 13.6 13.85 13.48 13.53 13.8
Wanneer we tabel 8 in verband brengen met de voetstanden weergegeven in tabel 5 kan men de
10 preparaten in verschillende subpopulaties verdelen. In preparaat 4 en 8, waar de voet in een
normale voetstand staat, wordt de lengte van de schroef korter gaande van de normale fase tot de
push-off fase, dit zowel proximaal als distaal. Preparaat 6 en 9, die licht tot zeer licht geëverteerd
34
Resultaten
zijn, vertonen een afname in de lengte van de schroef gaande van de normale fase tot de push-off
fase. Voor preparaat 6 geldt dit zowel voor proximaal als voor distaal en voor preparaat 9 enkel
voor distaal. Preparaat 1,2,3,5,7 en 10 vertonen verschillende graden van inversie en deze kunnen
nog eens verder onderverdeeld worden. Bij been 1 en 7 (proximaal) wordt de lengte van de
schroef korter gaande van de normale fase tot de push-off fase. Bij preparaat 2,3 en 5 daarentegen
wordt de lengte van de schroef, zowel proximaal als distaal, korter gaande van de push-off fase
tot de extreme inversiefase. Preparaat 9 kan ook bij deze subgroep worden gerekend omdat dit
been een soortgelijk resultaat vertoont. Als opmerking kan worden gemaakt, dat bij preparaat 7
de lengte van de proximaal geplaatste schroef in de 3 fasen afneemt, dit geldt eveneens voor de
distaal geplaatste schroef bij preparaat 9. Preparaat 10 vertoont andere resultaten, met name
stijgingen in de schroeflengte. Daardoor beschouwen we dit onderbeen als een niet-representatief
resultaat (zie ook tabel 7).
3.3 Goniometrische berekeningen
Na het bepalen van de lengtes van de schroeven worden de hoeken berekend waarover er wordt
gedraaid tijdens de inversiebeweging, want de lengte van de schroeven stemt overeen met de
draaihoeken van inversie (zie figuur 17). Deze hoeken worden niet berekend voor elk preparaat
en voor elke stand. Enkel voor de preparaten waarvan er in de RX-foto’s een verkorting optreedt
van de lengte van de schroef gaande van de normale standfase tot de push-off fase, en voor de
preparaten waar er een verkorting optreedt tussen de normale standfase en de extreme
inversiefase. Deze hoeken worden weergegeven in tabel 9. Hiernaast wordt er ook een
gemiddelde berekend, dit van de preparaten waarvan er voor zowel proximaal als distaal een
hoek berekend is die wordt gevormd tussen de normale standfase en de extreme inversiefase.
35
Resultaten
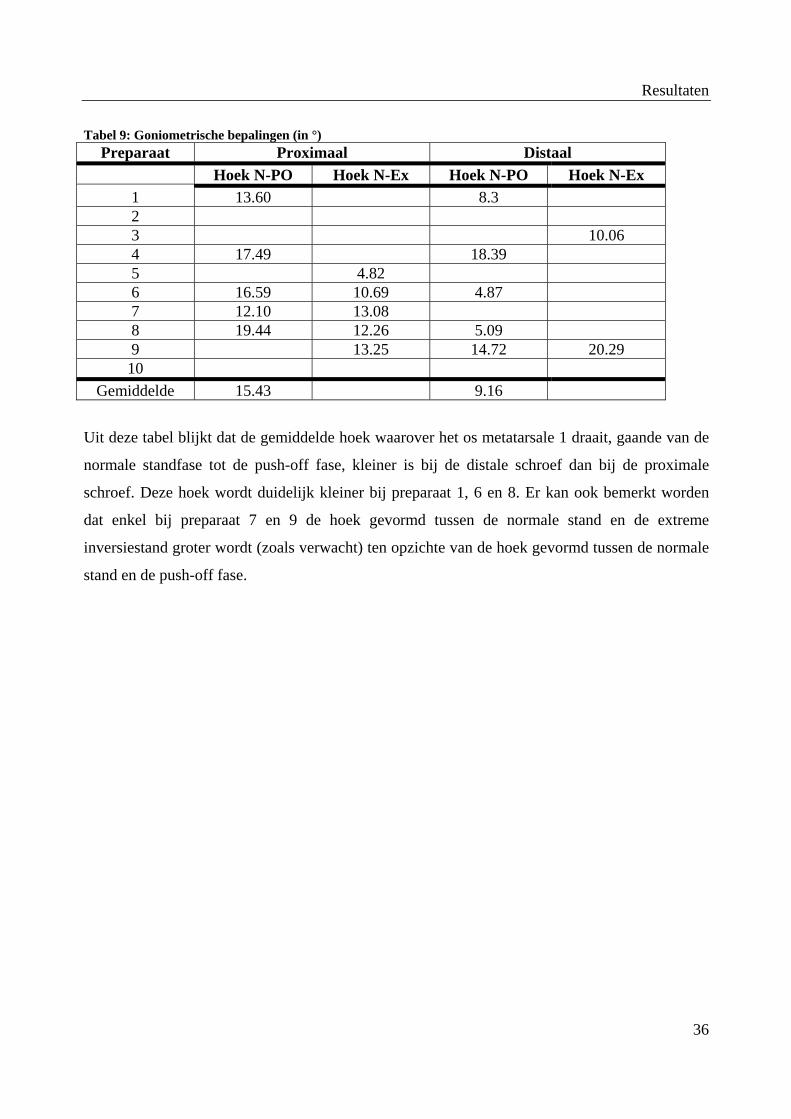
Tabel 9: Goniometrische bepalingen (in °) Preparaat Proximaal Distaal
Hoek N-PO Hoek N-Ex Hoek N-PO Hoek N-Ex 1 13.60 8.3 2 3 10.06 4 17.49 18.39 5 4.82 6 16.59 10.69 4.87 7 12.10 13.08 8 19.44 12.26 5.09 9 13.25 14.72 20.29 10
Gemiddelde 15.43 9.16
Uit deze tabel blijkt dat de gemiddelde hoek waarover het os metatarsale 1 draait, gaande van de
normale standfase tot de push-off fase, kleiner is bij de distale schroef dan bij de proximale
schroef. Deze hoek wordt duidelijk kleiner bij preparaat 1, 6 en 8. Er kan ook bemerkt worden
dat enkel bij preparaat 7 en 9 de hoek gevormd tussen de normale stand en de extreme
inversiestand groter wordt (zoals verwacht) ten opzichte van de hoek gevormd tussen de normale
stand en de push-off fase.
36
Discussie
4 Discussie In deze anatomische studie werd nagegaan hoe de eerste straal, met name in het
metatarsophalangeale (MTP) gewricht, beweegt. Dit vanaf het moment dat de voet plat op de
grond vertrekt (de normale standfase) tot wanneer deze lichtjes geïnverteerd is (de push-off fase)
en gaande van deze laatste fase tot wanneer de voet extreem geïnverteerd is. Uit de literatuur
blijkt dat er vooral dergelijke studies zijn verricht op tarsaal niveau, zoals Arndt (2004), Wolf
(2006). In de huidige studie is het accent verlegd naar het niveau van de eerste straal.
In het begin van deze studie werden 10 humane preparaten, van het onderbeen, gedissecteerd tot
het niveau van de ligamenten van de enkel en de voet. Er moet rekening worden gehouden met
het feit dat ¾ van de preparaten in plantaire flexie stonden en niet in de normale loodrechte stand
van het onderbeen op de voet. Deze abnormale stand kan vertekening doen optreden tijdens het
simuleren van de inversiebeweging. Hierna werden op elk been markeringen aangebracht, onder
de vorm van schroeven. Arndt et al. (2004) (22) waren de eersten die gebruik maakten van
‘intracortical pins’, zij stelden vast dat deze schroeven een verwaarloosbare invloed hebben op
het looppatroon waardoor ze dus gebruikt kunnen worden om een juiste kinematische analyse te
maken van het looppatroon. Naast hem maakte meer recent ook anderen, zoals Wolf (2006) (21),
gebruik van deze ‘pins’. In ons onderzoek werden deze schroeven op 1.5 cm van de
tarsometatarsale (TMT) gewrichtsspleet geplaatst (proximaal) en vanaf deze proximale werd nog
een schroef op 1 cm daarvan geplaatst (distale). Er werd getracht de proximale schroef loodrecht
te plaatsen op de dorsale zijde van het eerste metatarsaalbot, en de distale schroef werd
evenwijdig ten op zichte van deze proximale aangebracht. Hierna werden van alle preparaten
röntgenfoto’s gemaakt, waarna van deze foto’s tracings werden gemaakt. Deze methodologie van
tracings maken werd reeds toegepast in een studie uitgevoerd door Benink (1985) (36).
Doordat tijdens de push-off fase en de extreme inversiefase, de kop van de schroef mee naar
achter bewoog en de projectie daarvan op de RX-film van een cirkelvorm overging naar een meer
of minder ovale vorm, boden deze ovalen geen goed referentiepunt om de lengte van de schroef
te bepalen. Om dit probleem te ontwijken, werden van de röntgenfoto’s twee punten
overgetekend, namelijk de punt van de schroef, en het scherp afgebeelde profiel van de eerste
winding van de schroef. Zo werden de lengtes van de schroeven zo goed mogelijk tussen deze
twee punten gemeten.
37
Discussie
De werkhypothese van het onderzoek ging uit van de veronderstelling dat bij inversie van de op
de onderlaag gefixeerde voet, als gevolg van exorotatie van het onderbeen, ook ‘exorotatie’ van
de eerste straal optreedt (30), waardoor de posities van de schroeven naar achter zouden bewegen
ten opzichte van de RX-plaat. Dit principe van rotatie is ook duidelijk te zien in figuur 3 en
bijlage 3. Hierdoor zouden de projecties van de schroeven op de RX-afbeeldingen dus korter
worden in de push-off fase en in de extreme inversiefase, ten opzichte van de normale standfase.
Er werd daarom als hypothese gesteld dat als de voet gaat inverteren, de posities van de
schroeven naar achter zouden draaien ten opzichte van de RX-plaat en de afbeeldingen van de
schroeven op de RX’en dus korter zouden worden. Een deel van de bekomen resultaten zijn
echter tegen deze verwachtingen in (tabel 5). Bij de proximaal geplaatste schroef wordt het
gemiddelde van de gemeten waarden wel degelijk korter gaande van de normale fase naar de
push-off fase maar wordt dan weer langer gaande van de push-off fase tot de extreme
inversiefase. Bij de distaal geplaatste schroef wordt het gemiddelde van de gemeten waarden dan
weer langer van de normale fase tot de push-off fase maar korter van de push-off fase tot de
extreme standfase (tabel 5 en tabel 6).
Om een indruk te kunnen verkrijgen van deze vertekeningen werd er een bijkomend experiment
uitgevoerd. Er werd een nabootsing uitgevoerd van de meetsituatie (met de preparaten) en dit
door een gearticuleerd skelet (linkeronderbeen met voet) in de klem te plaatsen en op dezelfde
manier en op dezelfde lokaties schroefjes aan te brengen. Wanneer dit skeletstuk bewogen werd
van de normale standfase naar de push-off fase en van deze laatste naar de extreme inversiefase,
werd de afstand gemeten van de schroeven tot de RX-plaat. Bij overgang van de standfase naar
de push-off fase en van de push-off fase naar de extreme inversiefase nam deze afstand toe, voor
zowel de proximaal als distaal geplaatste schroef. Deze toename was echter het grootst voor de
proximale schroef. De invloed van de rotatie van het proximale deel van metatarsaal I tijdens
inversie op de vertekening op de RX is daardoor veel sterker dan bij het distale deel van
metatarsaal I. In figuur 3 en in bijlage 3 kan men ook duidelijk zien dat het proximale deel van
metatarsaal I verder weg naar lateraal beweegt dan het distale deel ervan. Daarom werd enkel
verder gewerkt met de bekomen resultaten steeds van de distale schroef. Deze vertekeningen
vallen deels te verklaren doordat een grotere afstand van een object ten opzichte van de RX-plaat
een grotere RX-afbeelding weergeeft (38). Er liggen ook enkele andere oorzaken aan de basis van
deze vertekening, deze worden hieronder kwalitatief opgesomd.
38
Discussie
Voorwaarden om afbeeldingen van de voet te verkijgen met een minimum aan vertekeningen op
de RX-plaat :
1) Het onderbeen vertrekt vanuit de normale standfase in een loodrechte stand ten opzichte
van het grondvlak.
2) De stralenbundel van het röntgenapparaat is en blijft tijdens de drie fasen gecentreerd op
één bepaald deel van de eerste straal en dan bij voorkeur het eerste os metatarsale.
3) De eerste straal staat in het sagittale vlak bij de normale standfase, en blijft dit in de push-
off fase en ook bij de extreme inversiefase.
4) De röntgenfilm staat evenwijdig aan het sagittale vlak.
5) De röntgenstralen zijn evenwijdig aan elkaar.
Aan geen van deze vijf voorwaarden kan in dit onderzoek echter voldaan worden, waardoor er
vertekeningen optreden.
Hoe kan het effect van deze vertekeningen geminimaliseerd worden?
1) Het talocrurale gewricht kan gezien worden als een cardan-koppeling (37, bijlage 2). Bij
dit mechanisme zal de talus, ongeacht de mate van talocrurale flexie, altijd de
rotatiebewegingen van het onderbeen rond zijn lengteas, overbrengen op de voet, als een
inversie- of eversiebeweging. Aan de hand van deze hypothese kan worden aangenomen
dat het niet uitmaakt dat ¾ van de preparaten in plantaire flexie stonden.
2) Als men bij het nemen van de foto’s van de preparaten in de normale standfase telkens
centreert op hetzelfde gebied bijvoorbeeld de talus verkrijgt men bij iedere RX-foto
dezelfde afwijking. Maar, de verplaatsingen tijdens de push-off fase en de extreme
inversiefase zijn echter niet voorspelbaar waardoor men aan deze voorwaarde om te
minimaliseren niet kan blijven voldoen.
3) Wanneer gebruik wordt gemaakt van het gearticuleerd voetskelet met de door Bojsen
Møller vernoemde schuine as die de kopjes van metatarsaal II tot V verbindt (4), kan men
bij simulatie van de beweging vertrekkende van de normale standfase tot de push-off fase
een toename zien in afstand van elke schroef tot de RX-plaat. Ook bij het simuleren van
de beweging van push-off fase naar de extreme inversiefase is deze toename zichtbaar.
Bij de distale schroef is deze toename het minst uitgesproken.
4) De mediale voetrand steeds evenwijdig plaatsen aan de röntgenfilm, zo vertrekt men
telkens in dezelfde startpositie waarbij het os metatarsale zich in het sagittale vlak
39
Discussie
bevindt. Hier moet wel rekening gehouden worden met mogelijke individuele variatie in
de voetmorfologie.
5) De RX-bron zover als in de RX-kamer mogelijk was, van het object (preparaat in klem)
verwijderen (1m20).
Hiernaast moet ook rekening worden gehouden met een vergroting van de röntgenbeelden van
±15%, deze kan geminimaliseerd worden door de preparaten zo dicht mogelijk bij de film te
plaatsen of door de röntgenbuis zo ver mogelijk te verwijderen. Beeldvervorming kan ook
optreden wanneer de stralenbundel niet loodrecht (niet orthogonaal) invalt en ook als het
preparaat te ver van de centrale stralenbundel is verwijderd. De orthogonaal invallende
stralenbundel geeft dus de minst vervormde beelden. Daarom moet het veld beperkt worden in
grootte en er moet precies ‘gemikt’ worden op het te onderzoeken oppervlak van het
desbetreffende lichaamsdeel (38).
Na het bepalen van de lengtes van de projectieafbeeldingen van de schroeven, konden de hoeken
waarover gedraaid werd, berekend worden via een goniometrische formule. Uit tabel 9 kan
worden afgeleid dat de gemiddelde hoek waarover gedraaid wordt van de normale standfase tot
de push-off fase groter is voor de proximaal geplaatste schroef dan voor de distaal geplaatste
schroef. Dit wijst erop dat het bewegingsbereik van het distale deel van het eerste
metatarsaalbeen tijdens inversie kleiner is dan van het proximale deel. Grotendeels hierdoor,
treedt bij de proximaal geplaatste schroef dan ook meer vertekening op. De hoek waarover
gedraaid wordt bij het distale deel van metatarsaal I bedraagt slechts ongeveer 9° dit wil zeggen
dat, distaal gemeten, slechts een kleine rotatie optreedt. Vlak vooraleer de voet van de grond
loskomt, beweegt deze tijdens het stappen zich nog van een geïnverteerde positie naar een lichtjes
geëverteerde positie (5). Dit kan dan ook een verklaring zijn van de kleine rotatie (9°) die
optreedt tijdens de inversiebeweging. De achtergronden hiervan zijn onderwerp van discussie,
maar een logische verklaring kan zijn dat de voet niet te sterk mag inverteren vooraleer hij in de
zweeffase terecht komt. Verder onderzoek naar de zweeffase zelf zou daarom wenselijk zijn.
Aangezien vertekeningen optreden door gebruik te maken van de röntgentechniek bij het
bestuderen van de 3D kinematiek van de voet, kan voor een vervolgonderzoek beter gewerkt
40
Discussie
worden met andere, meer nauwkeurige methodes. De röntgentechniek van het huidige onderzoek
geeft bovendien slechts de relatieve voetbewegingen weer, terwijl andere methodes de absolute
voetbewegingen weergeven. Mogelijke andere methodes worden hieronder besproken.
Een meer betrouwbare techniek voor 3D bewegingsanalyse is het computergestuurd video-
systeem Vicon. Vicon is een gemakkelijk bruikbare methode waarmee kleine retroreflectieve
markers worden vastgehecht aan specifieke oriëntatiepunten op het lichaam. De Vicon camera
zendt verstrooid licht uit dat reflecteert van de markers naar de camera’s. Hierdoor wordt er een
duidelijk, grijsschalig beeld gevormd van elke marker. De coördinaat-lokatie van elke marker
wordt vervolgens berekend binnen de Vicon camera’s en wordt dan doorgestuurd naar een
centrale computer. Deze computer ontvangt coördinaten van alle camera’s en spoort automatisch
de markers op om zeer correcte 3D trajecten te construeren. Met deze techniek kan de angulaire
positie, de beweging en de snelheid van een willekeurig gewricht in de 3 anatomische vlakken
berekend worden. Deze methode wordt gebruikt voor biomechanisch onderzoek, sport,
onderzoek bij dieren,... (38) Enkele voorbeelden hiervan worden hieronder vermeld.
Zo bepaalden Palmer et al. (2001) het dynamisch gangpatroon met behulp van het Vicon 215
systeem. Ze berekenden de gewrichtscentrum posities, gewrichts hoek posities en het gewrichts
draaimoment met behulp van de ‘Vicon clinical manager’ (40).
Ook Nantel et al. (2006) maakten gebruik van de Vicon apparatuur. Het doel van hun studie was
het vergelijken van biomechanische parameters tussen obese en niet-obese kinderen. Aan
kinderen werd gevraagd te lopen over een loopband, terwijl hun kinematiek werd geregistreerd
met 8 VICON optoelektronische camera’s. Uit hun resultaten bleek dat obese kinderen het heup
motorpatroon wijzigen door van extensor naar flexor moment te veranderen en dit vroeg in de
wandelcyclus. Hiernaast vonden de auteurs ook een significante daling in ‘single limb support’
tijdsduur bij de obese kinderen in vergelijking met de niet-obese kinderen (41).
Khazzam et al. (2007) bekeken in hun studie de specifieke veranderingen in voet-beweging bij
patiënten met rheumatoïde arthritis (RA) en vergeleken dit met personen zonder voet/enkel
pathologie. Voet- en enkelbewegingsdata werden verkregen door gebruik te maken van een 15-
camera Vicon bewegings analysesysteem. De RA groep vertoonde significante verschillen
vergeleken met de controlegroep, met name een verlengde standfase, een wandelsnelheid die
41

Discussie
80% bedroeg van die van de controlegroep en verschillen in tibiale, achtervoet en voorvoet
beweging. Met behulp van deze resultaten kan inzicht gebracht worden in de pathologie om de
behandeling en revalidatie van RA te verbeteren (42).
Onderzoek met behulp van de Vicon apparatuur voor 3D analyse van de eerste straal en van het
metatarsophalangeale gewricht is echter nog niet uitgevoerd. Wanneer men deze analyse uitvoert
kan men meer inzicht verwerven in de pathologieën die ontstaan aan de eerste straal van de voet
zoals bijvoorbeeld hallux valgus en varus.
Een andere methode voor het bepalen van de beweging van de voet is het ‘Global Positioning
System’ (GPS). Het grote voordeel hiervan is dat er geen infrastructuur voor nodig is maar op
sommige plaatsen, waar satellietsignalen niet ontvangen kunnen worden, werkt het niet. Het is
een satelliet gebaseerd navigatiesysteem bestaande uit een netwerk van 24 satellieten. GPS
ontvangers maken gebruik van driehoeksmeting om de exacte lokatie van de ontvanger te
berekenen. De GPS ontvanger vergelijkt de tijd, dat een signaal wordt overgebracht door een
satelliet, met de tijd dat het signaal wordt ontvangen. Het tijdsverschil vertelt de GPS ontvanger
hoe ver de satelliet verwijderd is.
Deze techniek wordt echter nog niet gebruikt om de werkelijke beweging van de voet, van mens
en dier, te bestuderen maar wordt vooral gebruikt voor inschatting van een aantal van de basis
stapparameters zoals wandelsnelheid, staplengte en stapfrequentie. Hierdoor lijkt GPS een zeer
belovende technologie op het gebied van wandel variabiliteitsanalyse. Toch blijven relatieve
hoge complexiteit en duurzaamheid, gecombineerd met een bruikbaarheid die verdere verbetering
vereist, obstakels aan de volledige ontwikkeling van de GPS technologie voor menselijke
toepassingen (43). Ook is de foutenmarge van het GPS systeem nog te groot om rendabel te zijn.
Terrier et al. (2000) toonden met hun studie aan dat GPS gebruikt kan worden als een nieuwe
technologie om de biomechanica van de menselijke beweging te bestuderen. Ze zagen dat GPS
ontvangers in staat waren om een lokatie op aarde te meten met een centimetrische precisie. Ze
concludeerden dat de GPS techniek nuttige biomechanische parameters kan verschaffen voor de
analyse van een ongelimiteerd aantal wandeltrajecten in een natuurlijke vrij-levende omgeving
(44).
42
Discussie
Zo voerden Witte et al. (2006) een studie uit waarbij via GPS gekeken werd naar de
loopparameters bij racepaarden. Hiervoor wordt gebruik gemaakt van accelerometers die
aangebracht worden aan de poten van het paard en van een GPS data logger. De paarden moesten
galloperen over een bepaald afstand. Via dit GPS systeem, kon men de verschillende
loopparameters nagaan (45).
Een heel andere methode waarmee voetbeweging geanalyseerd kan worden is het footscan
systeem. Hiermee kan men statische en dynamische druk meten door gebruik te maken van
footscan platen of -zooltjes. Naast de statische en dynamische drukken tijdens het afrollen van de
voet geeft de footscan nog belangrijke informatie : kwantificatie van de voetbeweging, temporele
en spatiële parameters van het wandelen,...dit zijn parameters nodig om het volledige
wandelpatroon van mens of dier te kunnen interpreteren (46).
Met behulp van deze footscan analyseerde Willems (2003) de oorzaak van het inversietrauma. Zij
keek hierbij naar de kinetische afwijkingen in het looppatroon. Hij liet 93 studenten zonder letsels
lopen over een loopbaan waarin een footscan drukplaat was ingebouwd. Hierna werden op de
voetzool 8 zones geplaatst (1 op de mediale en laterale zijde van de hiel, 5 op de
metatarsaalkoppen en 1 onder de hallux). Maximale drukdata, impulsen en temporele contacttijd
werden geanalyseerd. Hiernaast werd ook het ‘center of pressure’ (COP) geanalyseerd. Studenten
werden anderhalf jaar gevolgd, 16 studenten liepen een inversietrauma op. Zij concludeerde dat
een te laterale positie van het COP bij initieel contact sporters voorbeschikt maakt om een
inversietrauma op te lopen. Ook een te kleine verplaatsing van drukverdeling van lateraal naar
mediaal tijdens de midstance fase, wijzend op een supinatiepatroon, kan mede oorzaak zijn van
inversietrauma’s (47).
Zo keken Willems et al. (2004) naar het verband tussen wandel biomechanica en inversieletsels
en dit met behulp van de footscan. Dit onderzoek wees uit dat personen die een verhoogd risico
hebben op het oplopen van een inversietrauma een lateraal gesitueerd COP hebben bij initieel
contact. Deze personen vertoonden hiernaast een beweeglijk voettype bij eerste metatarsaal
contact en de push-off fase. De totale voet contacttijd was ook langer voor mensen met een
inversietrauma (48).
43
Discussie
Zelfs bij dierlijk onderzoek werd deze methode van de footscan reeds toegepast. Zo bestudeerden
van der Tol et al. (2003) de verticale GRF en de drukverdeling op de hoeven van koeien terwijl
deze liepen over een plat oppervlak, waarin de footscan was ingebouwd. Dit werd uitgevoerd om
de hypothesen te testen dat de verticale GRF ongelijk verdeeld is, wat sommige hoeven meer
vatbaar maakt aan letsels door overbelasting dan andere. Er werd geconcludeerd dat aan de
achterpoten een verhoogde druk een grote bedreiging vormt voor overbelasting (49).
44
Referenties
1. Lohman AHM. Vorm en beweging: leerboek van het bewegingsapparaat van de mens.
Utrecht: Oosthoek Uitgeversmaatschappij N.V; 1972.
2. Tortora G, Grabowski SR. Principles of anatomy and physiology. Ninth edition. New
York: John Wiley and Sons; 2000.
3. Williams PL. Gray’s Anatomy. The anatomical basis of medicine and surgery. Thirtyeight
edition. 1995. 733-736.
4. Bojsen Møller F. Calcaneocuboid joint and stability of the longitudinal arch of the foot at
high and low gear push off. J Anat 1979;129:165-176.
5. Drake LR, Wayne V, Mitchell WMA. Gray’s anatomy for students. Philadelphia:
Elsevier; 2005. 557-561.
6. http://www.allaboutarthritis.com
7. Feneis H. Geïllustreerd anatomisch zakwoordenboek van de internationale nomenclatuur.
Derde druk. Bohn Stafleu Van Loghum: Houten/Diegem;1999. 97-99
8. Vandersteen M. Regionale anatomie m.i.v. beeldvorming van de normale anatomie.
Cursustekst Universiteit Hasselt Diepenbeek. 1996-1997.
9. Mangwani J, Hakmi MA, Smith TWD. Chronic lateral ankle instability: review of
anatomy, biomechanics, pathology, diagnosis and treatment. The Foot 2001;11(2):76-84
10. John V. Basmajian. Primary Anatomy. Seventh edition. The Williams and Wilkins
company; 1976. 107-112.
11. Versprille K. Het inversietrauma, het is maar een verzwikte enkel. In : voeten in vorm; 2004.
12. Palastanga G, Field D, Soames R. Anatomy and human movement. Structure and
function. Oxford: Butterworth Heinemann; 1990. 552-574.
13. Appenzeller O, Atkinson R. Sports Medicine. Fitness, Training, Injuries. Second edition.
Baltimore: Urban and Schwarzenberg; 1983. 405-409.
14. Crafts R.C. A textbook of human anatomy. Second edition. New York: A Wiley Medical
Publication, John Wiley and sons; 1979. 430-437.
15. http://www.wikipedia.org
16. Rockar PA Jr. The subtalar joint: anatomy and joint motion. J Orthop Sports Phys Ther.
1998;28(6):415.
45
17. Monteyne P. Biomechanica van de menselijke voet. In : Studie van de functie van de voet
bij beweging van één- en tweepotige systemen. Thesis, Vrije Universiteit Brussel.
Faculteit Toegepaste Wetenschappen. 2002-2003. 2-10.
18. Norman W. Sole of the foot: In: The anatomy lesson. 1999.
19. Platzer W. Sesam Atlas van de anatomie. Deel 1 : Bewegingsapparaat. 20e druk. Baarn:
SESAM/HB uitgevers; 2002. 222-227.
20. http://moon.ouhsc.edu/dthompso/GAIT/TERMS.HTM
21. Wolf P. Tarsal Kinematics. Doctoral Dissertation. Swiss Federal Institute of Technology,
Zurich. DISS. ETH ,No.16680; 2006.
22. Arndt A, Westblad P, Winson I, Hashimoto T, Lundberg A. Ankle and subtalar
kinematics measured with intracortical pins during the stance phase of walking. Foot
Ankle Int 2004;25(5):357-64.
23. Cornwall MW, McPoil TG. Motion of the calcaneus, navicular, and first metatarsal
during the stance phase of walking. J Am Podiatr Med Assoc 2002;92(2):67-76.
24. Hicks JH. The mechanics of the foot. The joints. I. J Anat 1953;87(4):345-57.
25. Roukis TS, Scherer PR, Anderson CF. Motion of the first ray and motion of the first
metatarsophalangeal joint. J Am Podiatr Med Assoc 1996;86(11):538-46
26. Kelso SF, Richie DH Jr, Cohen IR, Weed JH, Root M. Direction and range of motion of
the first ray. J Am Podiatry Assoc 1982;72(12):600-5.
27. Oldenbrook LL, Smith CE. Metatarsal head motion secondary to rearfoot pronation and
supination: an anatomical investigation. J Am Podiatry Assoc 1979;69(1):24-8
28. Vereecke E, D’Aout K, De Clercq D, Van Elsacker L, Aerts P. Dynamic plantar pressure
distribution during terrestrial locomotion of bonobos (Pan paniscus). Am J Phys
Anthropol 2003;120(4):373-83.
29. Warburton MW. Functional morphology and evolution of marsupial moles. School of
Animal Biology. University of Western Australia. 2003.
30. Dankmeijer J, Lammens H.J, Landsmeer J.M.F. Practische ontleedkunde. 5de druk. Bohn:
Amsterdam; 1973.
31. Feneis H. Geïllustreerd anatomisch zakwoordenboek van de internationale nomenclatuur.
Derde druk. Bohn Staffleu Van Loghum : Houten Diegem; 1999.
46
32. Robeyns I, Van Zwieten KJ, Vandersteen M, Lippens PL, Mahabier RV, Lamur KS. The
role of foot muscles in the prevention of inversion traumatisms. 10th Euron PhD Student
Meeting, Euron Graduate School of Neuroscience, Maastricht University, 21-22
september 2006. Abstract book 48-49.
33. Butler MT. Tibialis posterior dysfunction and associated accessory navicular. Literature
Review. Australasian Journal of Podiatric Medicine 2003;37(2):35-42.
34. Jenskins FA Jr. Limb posture and locomotion in Virginia opossum (Didelphis
marsupialis) and in other non cursorial mammals. J. Zool., Lond. 1971;165:303-315.
35. Dettwyler MT. Biomechanische untersuchungen und modellierungen am menschlichen
oberen sprunggelenk im hindblick auf arthroplastiken. Doctoral
Dissertation.Eindgenössischen technischen hochschule Zürich. DISS. ETH ,No.15968;
2005
36. Benink RJ. The constraint-mechanism of the human tarsus. A roentgenological
experimental study. Thesis, Leiden, 1985.
37. De Backer H, Helsen F, Nuyes J, De Clippeleer RW. Mechanismen. 3e druk. Plantijn:
Deurne; 1992.
38. Achten E. Basisbegrippen radiologie.
39. www.vicon.com
40. Palmer M, Riley P, Herr H. Characterisation of the Human Foot/Ankle System During
Normal walking Gait. MIT Al Lab Abstracts 2001; 253-254.
41. Nantel J, Brochu M, Prince F. Locomotor strategies in obese and non-obese children.
Obesity (Silver Spring) 2006;14(10):1789-94.
42. Khazzam M, Long JT, Marks RM, Harris GF. Kinematic changes of the foot and ankle in
patients with systemic rheumatoid arthritis and forefoot deformity. J Orthop Res
2007;25(3):319-29.
43. Terrier P, Schutz Y. How useful is satellite positioning system (GPS) to track gait
parameters? A review. J Neuroengineering Rehabil 2005;2:28.
44. Terrier P, Ladetto Q, Merminod B, Schutz Y. High-precision satellite positioning system
as a new tool to study the biomechanics of human locomotion. J Biomech
2000;33(12):1717-22.
47
45. Witte TH, Hirst CV, Wilson AM. Effect of speed parameters in racehorses at gallop in
field conditions. J Exp Biol 2006;209:4389-97.
46. www.rsscan.com
47. Willems T. Kinetische afwijkingen in het looppatroon : oorzaak van inversietraumata.
Kine 2000,2003;14:36-37.
48. Willems T, Witvrouw E, Delbaere K, De Clercq D. Relationship between gait
biomechanics and inversion sprains: a prospective study of risk factors, Gait and
Posture,2004.
49. van der Tol PP, Metz JH, Noordhuizen-Stassen EN, Back W, Braam CR, Weijs WA. The
vertical ground rectaion force and the pressure distribution on the claws of dairy cows
while walking on a flat surface. J Dairy Sci 2003;86(9):2875-83.
48
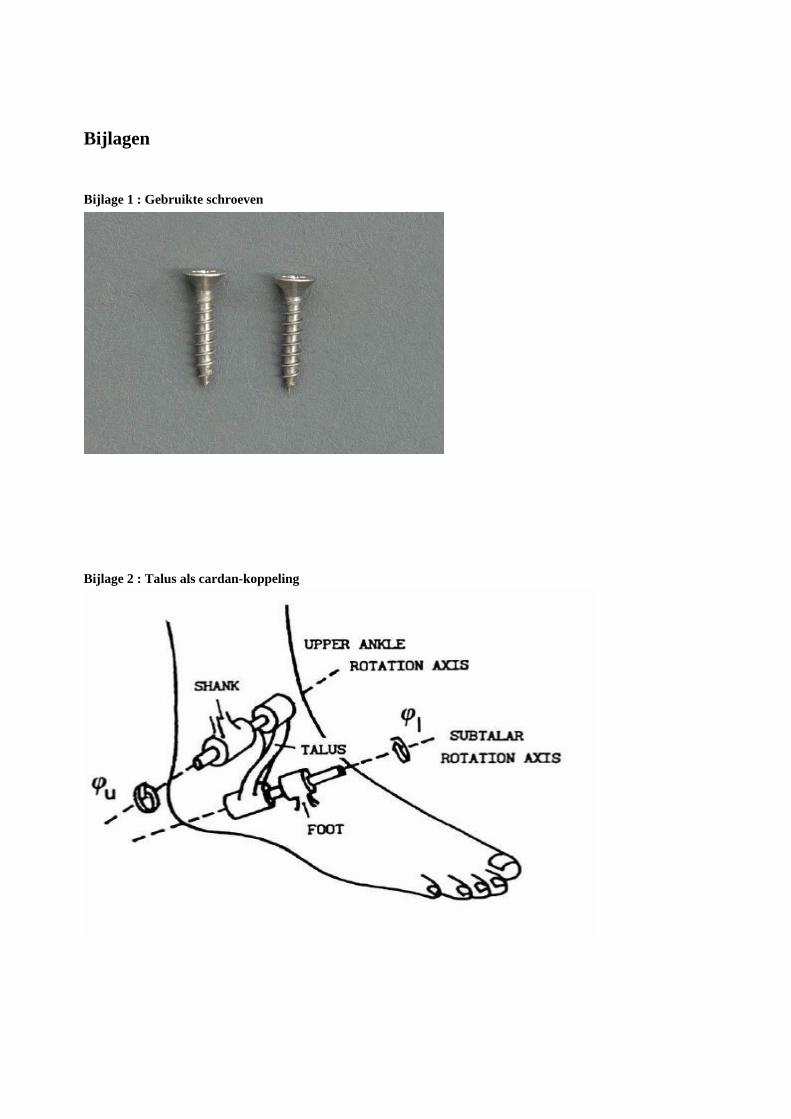
Bijlagen Bijlage 1 : Gebruikte schroeven
Bijlage 2 : Talus als cardan-koppeling
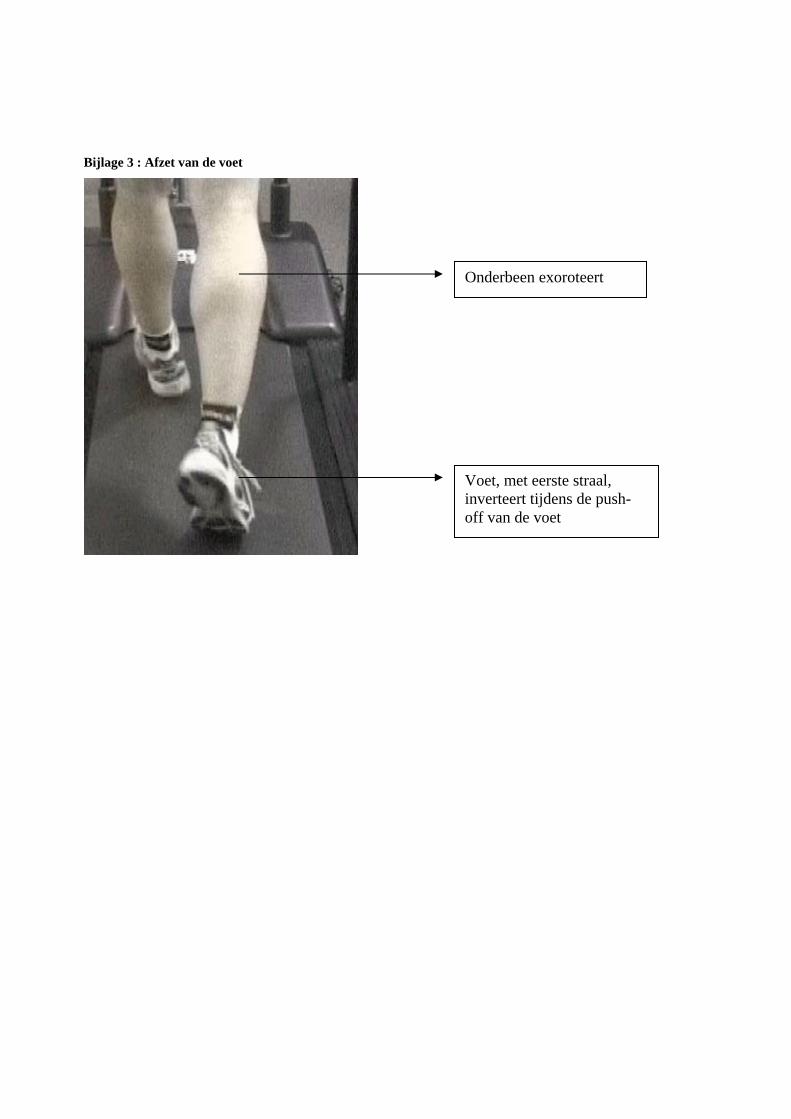
Bijlage 3 : Afzet van de voet
Voet, met eerste straal, inverteert tijdens de push-off van de voet
Onderbeen exoroteert
Auteursrechterlijke overeenkomstOpdat de Universiteit Hasselt uw eindverhandeling wereldwijd kan reproduceren, vertalen en distribueren is uw
akkoord voor deze overeenkomst noodzakelijk. Gelieve de tijd te nemen om deze overeenkomst door te
nemen, de gevraagde informatie in te vullen (en de overeenkomst te ondertekenen en af te geven).
Ik/wij verlenen het wereldwijde auteursrecht voor de ingediende eindverhandeling:
Anatomische studie van de inversiebeweging van de voet in de initiërende
toestand van de zweeffase: een methodologisch onderzoek
Richting: Master in de biomedische wetenschappen Jaar: 2007
in alle mogelijke mediaformaten, - bestaande en in de toekomst te ontwikkelen - , aan de
Universiteit Hasselt.
Niet tegenstaand deze toekenning van het auteursrecht aan de Universiteit Hasselt behoud ik
als auteur het recht om de eindverhandeling, - in zijn geheel of gedeeltelijk -, vrij te
reproduceren, (her)publiceren of distribueren zonder de toelating te moeten verkrijgen van
de Universiteit Hasselt.
Ik bevestig dat de eindverhandeling mijn origineel werk is, en dat ik het recht heb om de
rechten te verlenen die in deze overeenkomst worden beschreven. Ik verklaar tevens dat de
eindverhandeling, naar mijn weten, het auteursrecht van anderen niet overtreedt.
Ik verklaar tevens dat ik voor het materiaal in de eindverhandeling dat beschermd wordt door
het auteursrecht, de nodige toelatingen heb verkregen zodat ik deze ook aan de Universiteit
Hasselt kan overdragen en dat dit duidelijk in de tekst en inhoud van de eindverhandeling
werd genotificeerd.
Universiteit Hasselt zal mij als auteur(s) van de eindverhandeling identificeren en zal geen
wijzigingen aanbrengen aan de eindverhandeling, uitgezonderd deze toegelaten door deze
overeenkomst.
Ik ga akkoord,
Ann Reyskens
Datum: 18.06.2007
Lsarev_autr









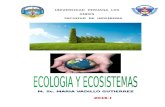




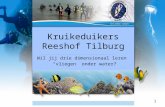
![Technologische beschrijving en screening van het ander ... · zonnecollector voor verschillende COP waarden [18]._____ 32 Figuur 13: Instralinglimiet Glim waaronder de indirecte configuratie](https://static.fdocuments.nl/doc/165x107/6035aca222caba551d1d476d/technologische-beschrijving-en-screening-van-het-ander-zonnecollector-voor-verschillende.jpg)

