Elementare elektronica schakelingen in de ... · RC-schakelingen bestaan uit een condensator en een...
19
Elementare elektronica schakelingen in de motorvoertuigentechniek (5) Timloto o.s. / E. Gernaat / ISBN 978-90-808907-4-9 Op dit werk is de Creative Commens Licentie van toepassing. Uitgave: september 2012 1 Discrete basisschakelingen Hieronder verstaan we de schakelingen die opgebouwd zijn uit meerdere half- geleiders en die samen een functie-eenheid vormen. In dit hoofdstuk behande- len we een aantal belangrijke schakelingen die ook hun autotechnische toepas- singen kennen. De schakelingen zoals hier bedoeld zijn opgebouwd uit losse componenten, de zgn. discrete schakelingen. Er zijn er uiteraard veel meer dan dat we hier behandelen. 2 RC-schakelingen RC-schakelingen bestaan uit een condensator en een weerstand. Hoewel het geen elektronische schakelingen zijn in de zin van het woord komen we ze zoveel tegen dat een behandeling niet achterwege mag blijven. Afhankelijk van de plaatsing van de componenten en het aangeboden signaal onderscheiden we: • een integratorschakeling; • een differentiator schakeling; • een laagdoorlaatfilter; • een hoogdoorlaatfilter. We behandelen al deze schakelingen afzonderlijk. 2.1 Integratorschakeling Bij de integratorschakeling zetten we een blokspanning op de ingang en meten de invloed van de schakeling op de uitgang (fig. 1). Door de blokspanning wordt de condensator geladen (blok hoog) en ontladen (blok laag). De laad- en ontlaadspanning wordt dan gemeten. Omdat de schakeling de blokspanning 1
Transcript of Elementare elektronica schakelingen in de ... · RC-schakelingen bestaan uit een condensator en een...

Elementare elektronica schakelingen in demotorvoertuigentechniek (5)
Timloto o.s. / E. Gernaat / ISBN 978-90-808907-4-9Op dit werk is de Creative Commens Licentie van toepassing.
Uitgave: september 2012
1 Discrete basisschakelingen
Hieronder verstaan we de schakelingen die opgebouwd zijn uit meerdere half-geleiders en die samen een functie-eenheid vormen. In dit hoofdstuk behande-len we een aantal belangrijke schakelingen die ook hun autotechnische toepas-singen kennen. De schakelingen zoals hier bedoeld zijn opgebouwd uit lossecomponenten, de zgn. discrete schakelingen. Er zijn er uiteraard veel meer dandat we hier behandelen.
2 RC-schakelingen
RC-schakelingen bestaan uit een condensator en een weerstand. Hoewel hetgeen elektronische schakelingen zijn in de zin van het woord komen we zezoveel tegen dat een behandeling niet achterwege mag blijven. Afhankelijk vande plaatsing van de componenten en het aangeboden signaal onderscheidenwe:
• een integratorschakeling;• een differentiator schakeling;• een laagdoorlaatfilter;• een hoogdoorlaatfilter.
We behandelen al deze schakelingen afzonderlijk.
2.1 Integratorschakeling
Bij de integratorschakeling zetten we een blokspanning op de ingang en metende invloed van de schakeling op de uitgang (fig. 1). Door de blokspanningwordt de condensator geladen (blok hoog) en ontladen (blok laag). De laad-en ontlaadspanning wordt dan gemeten. Omdat de schakeling de blokspanning
1

doet afvlakken spreken we van een integratorschakeling. In de praktijk zal elkeblokspanning op deze wijze in meerdere of mindere mate worden vervormd. Ditwordt veroorzaakt omdat twee draden in de kabelboom capacitief met elkaarin verbinding staan. Bij het gebruik van oscilloscopen is het belangrijk om diteffect te herkennen.
��
����
����
����
R
Cin uit
ingangssignaal uitgangssignaal
Figuur 1: De integratorschakeling met in- en uitgangssignaal
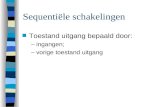
2.2 Differentiator schakeling
Wanneer de condensator en de weerstand van plaats wisselen dan ontstaateen differentiatorschakeling (fig. 2). We meten nu over de weerstand. De blok-spanning laadt en ontlaadt de condensator. Deze laad- en ontlaadstroom vloeitover de weerstand en zorgt voor een wisselspanning. Over de weerstand (deuitgang) wordt een wisselspanning gemeten. De vorm van de wisselspanninghangt af van de grootte van de weerstand c.q. condensator alsmede de frequen-tie. Een lage frequentie bijv. staat toe dat de condensator zich geheel laadt enontlaadt waardoor uitsluitend spanningspieken worden gemeten (fig. 2).
2.3 Filterschakelingen
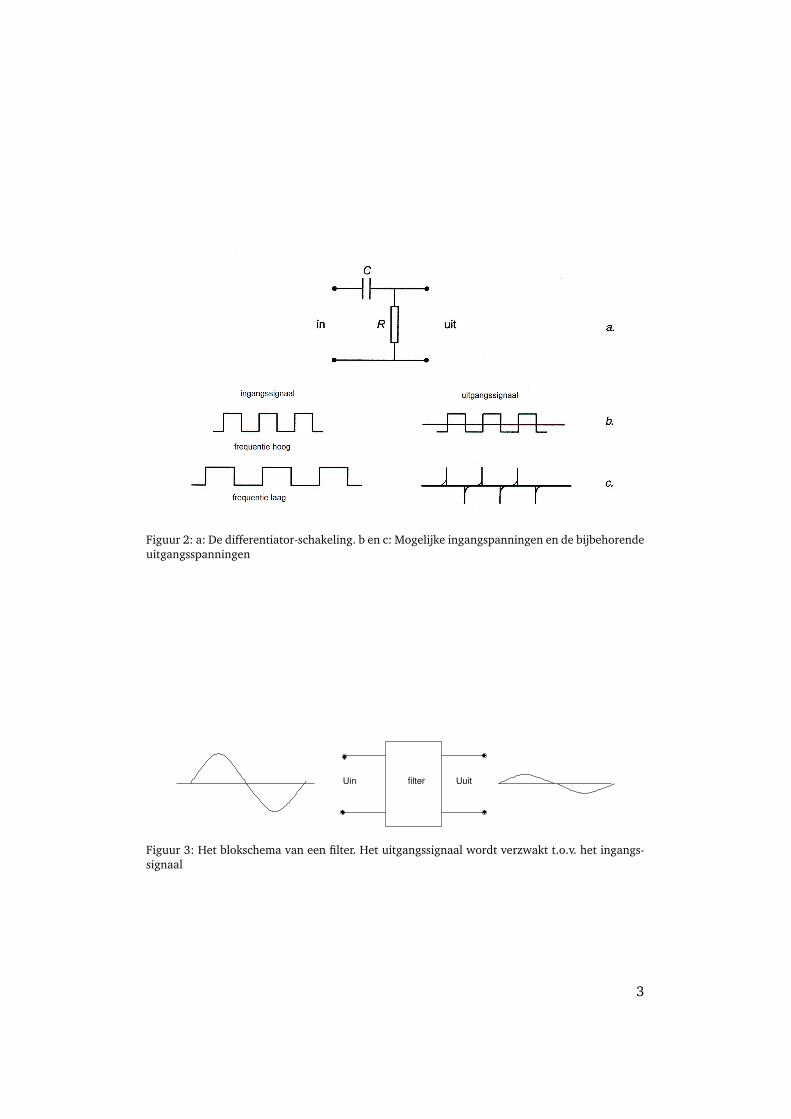
In de automobieltechniek wordt gebruik gemaakt van filters om bepaalde sig-nalen van elkaar te scheiden of om stoorsignalen te verwijderen. Het eenvou-digste filter is een RC-filter. Men spreekt van een passief filter. Het filter heefteen ingang waarop een bepaald signaal van een bepaalde spanningsgrootte enfrequentie kan worden gezet (Uin) bijv. een sinus van 10 kHz met een Vtt van10 V. Aan de uitgangszijde zal dan een spanning komen te staan (Uuit) dieafgeleid is van de ingangsspanning en die gefilterd is door de elektrische com-ponenten. De relatie tussen Uin en Uuit zegt iets over de werking van het filter.Fig. 3 geeft het blokschema van een filter weer. We verstaan onder een (ideaal)
2
Figuur 2: a: De differentiator-schakeling. b en c: Mogelijke ingangspanningen en de bijbehorendeuitgangsspanningen
��������
����
��������
��������
Uin Uuitfilter
Figuur 3: Het blokschema van een filter. Het uitgangssignaal wordt verzwakt t.o.v. het ingangs-signaal
3

filter een passieve of actieve schakeling die een bepaald frequentiegebied onver-zwakt doorlaat en daarbuiten een oneindig hoge verzwakking van het signaalgeeft. Bij een filter hebben we o.a. te maken met de mate van verzwakking ende faseverschuiving van het signaal. De eigenschappen van een filter worden ineen grafiek weergegeven. De belangrijkste grafiek is de zgn. overdrachtskarak-teristiek die de signaalverzwakking uitzet tegen de signaalfrequentie (fig. 4).De signaalverzwakking wordt gewoonlijk uitgedrukt in dB waarbij de situatieUuit = Uin gelijk is aan 0 dB. Een negatieve waarde geeft dan de mate vanverzwakking weer. Filters worden wat betreft hun werking onderscheiden in:
• een laag doorlaatfilter (laat alleen lage frequentie door);• een hoog doorlaatfilter (laat alleen hoge frequentie door);• een bandfilter (laat alleen een bepaald frequentiegebied door).
Figuur 4: Overdrachtskarakteristieken van de drie belangrijkste filtertypen. a) laagdoorlaatfilterb) bandfilter c) hoogdoorlaatfilter (tek. Elektuur)
2.3.1 Laagdoorlaatfilter
Fig. 5 laat een RC-schakeling zien als laagdoorlaatfilter. We kunnen de scha-keling zien als een spanningsdeler waarvan de condensator een frequentie-afhankelijke weerstand is. De condensator vormt bij lage frequenties een groteweerstand waardoor een groot spanningsverschil over de condensator wordtgemeten. Bij hoge frequenties neemt de condensator-weerstand af zodat uit-eindelijk de weerstand bijna rechtstreeks aan de min wordt gelegd. De uitgang
4

komt dan op nul volt te staan. Omdat de ingangsspanning bij deze hoge fre-quenties niet meer aan de uitgang meetbaar is spreekt men van een laagdoor-laatfilter.
Figuur 5: Schakeling en karakteristiek van een laagdoorlaatfilter
2.3.2 Hoogdoorlaatfilter
Fig. 6 laat een RC-schakeling zien als hoogdoorlaatfilter. De uitgangsspanningwordt gemeten over de weerstand. Bij hoge frequenties zal de condensator-weerstand zo klein zijn dat de ingangsspanning vrijwel geheel over de weer-stand komt te vallen. Hoge frequenties worden dan doorgelaten. Wanneer webeide schakelingen combineren ontstaan zogenaamde banddoorlaatfilters. De-ze laten alleen een bepaald frequentiegebied door (fig. 4).
Figuur 6: Het schema en karakteristiek van een hoogdoorlaatfilter
3 Vertragingsschakeling
Als voorbeeld van een samengestelde schakeling een schakeling die een bepaal-de tijdvertraging geeft. De basis voor de tijdvertraging wordt gevormd doorde condensator. Vertragingsschakelingen komt men in de motorvoertuigentech-niek onder andere tegen bij ruitewisser-intervalschakelaars. We zouden een
5

inschakel- en uitschakelvertraging kunnen onderscheiden. Bij intervalschake-laars voor ruitewissermotoren is er vaak sprake van uitschakelvertraging, waar-door een relais de motor nog enige tijd uitgeschakeld houdt. De vertragingstijdwordt dan bepaald door de RC-tijd. Fig. 7 geeft een eenvoudig voorbeeld vaneen vertragingsschakeling.
Figuur 7: Eenvoudige vertragingsschakeling. De vertraging wordt bepaald door de RC-tijd.
3.0.3 Werking
Bij het sluiten van de schakelaar zal de condensator door de uiterst kleine weer-stand in het circuit vrijwel op hetzelfde moment tot aan de voedingsspanningworden geladen. De transistor gaat geleiden en de led licht op. Bij het openenvan de schakelaar zal de led niet onmiddellijk doven omdat de geladen con-densator zich eerst via de weerstand Rb (basiscircuit van de transistor) moetontladen. Pas wanneer de condensatorspanning onder de 0,7 V is gekomen,zal de transistor sperren en de led doven. De uitschakelvertragingstijd wordtbepaald door de RC-tijd.
4 Spanningsstabilisatieschakelingen
De spanning van de elektrische installatie in een auto varieert tussen de 12 en14,5 V. Deze spanning is afhankelijk van de toestand van de batterij en het feitof de dynamo wel of niet laadt. Tijdens het starten kan de spanning voor enigeogenblikken onder de 8 Volt komen. Deze praktische spanningsvariatie geeftvoor een aantal autocomponenten problemen. Met name de computers moeteneen constante voedingsspanning hebben van 5 V. Hiervoor maakt men gebruikvan een spanningsstabiliserende schakeling. De eenvoudigste bestaat uit eenweerstand en een zenerdiode van bijv. 4,7 V zoals we eerder hebben gezien.Deze schakeling heeft een zeer klein vermogen en de uitgangspanning varieert
6

met enige procenten. Een betere schakeling verkrijgen we door gebruik te ma-ken van een transistor en zenerdiode (fig. 8). In het schema van fig. 8 zien we
Figuur 8: Schakeling van een spanningsstabilisator met zener en transistor.
de zenerdiode in het basiscircuit geschakeld, zodanig dat de spanning op debasis gelijk moet zijn aan de zenerspanning, bijv. 5,6 V. De belastingsweerstandR2 staat in de emittorleiding geschakeld en vormt daardoor zowel de weer-stand voor het collector-emittorcircuit als voor het basiscircuit. De spanningover de uitgangsweerstand R2 is gelijk aan de spanning over de zenerdiodeverminderd met de basis-emittorspanning van de transistor. De uitgangsspan-ning zal dan zijn 5,6 V - 0,7 V = 4,9 V. Wanneer de ingangsspanning wat hogerwordt omdat de dynamo gaat draaien, zal het nauwelijks invloed hebben opde uitgangsspanning, omdat de stroom door R1 en de zener wel wat groterwordt, maar de zenerspanning niet. De uitgangsspanning blijft derhalve con-stant. De transistor T draagt zorg voor het benodigde spanningsverschil tus-sen de ingangs- en de uitgangsspanning en zal, omdat de uitgangsstroom decollector-emittorstroom is, ook (behoorlijk) warm worden.
5 Gelijkrichtschakelingen
Aangezien dioden slechts in een richting stroom doorlaten zijn ze dus ideaal omwisselspanning gelijk te richten. We onderscheiden een- en tweezijdige gelijk-richting. Bij de eenzijdige gelijkrichting komt er maar een periodehelft door, bijde tweezijdige gelijkrichting wordt de onderste periodehelft als het ware omge-keerd. We beperken ons tot de meest voorkomende tweezijdige gelijkrichting.
5.1 Tweezijdige gelijkrichting (een fase)
Willen we gebruik maken van beide periodehelften dan maken we gebruik vaneen Graetz-schakeling. Zie fig. 9. De schakeling toont ons vier dioden waarvaner per periodehelft twee in gebruik zijn. Vaak staan in schema’s de dioden ruit-vormig opgesteld. Door het volgen van de pijlen kan de stroomrichting voor
7

beide periodehelften worden vastgesteld. We zien dat zowel de positieve als denegatieve periodehelft in dezelfde richting door de belastingsweerstand gaat.
Figuur 9: De Graetz schakeling als gelijkrichtschakeling
5.2 Tweezijdige gelijkrichtschakeling van driefasendynamo’s
Voor de driefasendynamo geldt dat de opgewekte spanning van drie spoelenmoet worden gelijkgericht. We maken dan gebruik van een 6-tal dioden. Deschakeling vertoont grote overeenkomsten met de Graetz-schakeling. Aange-zien we drie om de 1200 opgewekte spanningen tweezijdig gelijkrichten, ont-staat er een gelijkspanning die minder pulserend is dan in de hiervoor genoem-de schakelingen. In het schema van fig. 10 is door middel van pijlen de stroom-loop weergegeven voor een bepaalde situatie, namelijk spoel ’a’ positief en ’b’negatief. We zien dat de stroom weer twee dioden doorloopt. Tijdens het draai-en van de dynamo wisselt de polariteit van de spoelen voortdurend en ook detwee dioden die in geleiding zijn. De uitgang geeft een licht pulserende gelijk-spanning, die in de praktijk door de capaciteit van de batterij nog verder wordtafgevlakt.
5.3 Spanningsregeling bij driefasendynamo’s
De dynamospanning hangt af van het motortoerental en de sterkte van het mag-netische veld. De sterkte van het magnetische veld wordt op zijn beurt weerbepaald door de grootte van de rotorstroom. Omdat de dynamospanning tengevolge van de batterijeigenschappen constant moet blijven en we het toerentalniet onder controle hebben zullen we dus de grootte van de rotorstroom moe-ten regelen. We meten de dynamospanning en afhankelijk hiervan zullen wede rotorstroom gaan verkleinen of vergroten. Dit is de taak van de ingebouwdeelektronische spanningsregelaar. Fig. 11 geeft het principe van de spannings-regelaar weer. De werking is eenvoudig. Als de dynamospanning laag is, is de
8

Figuur 10: Tweezijdige gelijkrichting bij de driefasendynamo. De uitgangsspanning vertoont eengeringe pulsatie.
R2
rotorspoel
spanningsregelaar
T1
T2Z
dynamospanning
R1
−−
Figuur 11: Het principe schema van een elektronische spanningsregelaar van een dynamo.
9
zener niet in geleiding en gaat er een basisstroom door T1. De rotorspoel wordtdan aan massa gelegd en het magnetische veld is sterk. De dynamospanningloopt dan op. Wordt de afgeregelde spanning van ongeveer 14,5 V bereikt dangaat de zenerdiode in geleiding waardoor T2 ook in geleiding gaat en de basisvan T1 aan de massa gelegd wordt. T1 spert en de rotorstroom valt weg. Doorhet wegvallen van het magnetische veld daalt de dynamospanning waardoorde zener weer spert en het proces zich kan herhalen.
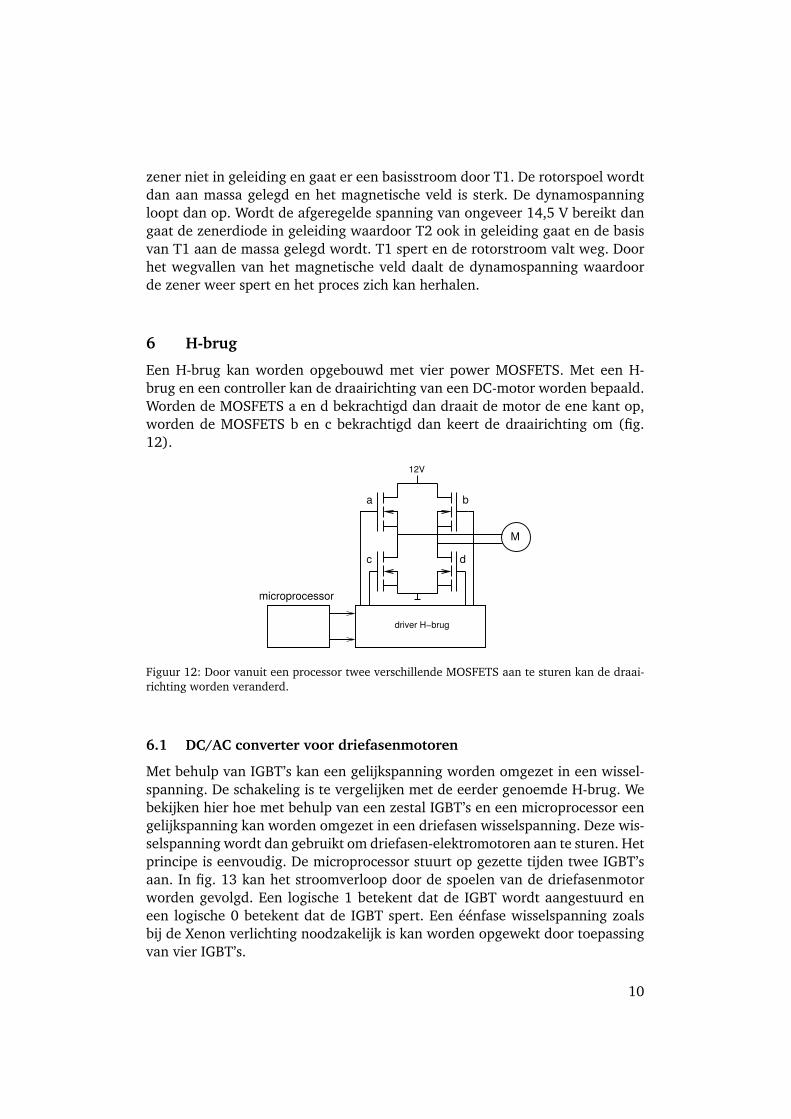
6 H-brug
Een H-brug kan worden opgebouwd met vier power MOSFETS. Met een H-brug en een controller kan de draairichting van een DC-motor worden bepaald.Worden de MOSFETS a en d bekrachtigd dan draait de motor de ene kant op,worden de MOSFETS b en c bekrachtigd dan keert de draairichting om (fig.12).
driver H−brug
12V
microprocessor
M
c d
a b
Figuur 12: Door vanuit een processor twee verschillende MOSFETS aan te sturen kan de draai-richting worden veranderd.
6.1 DC/AC converter voor driefasenmotoren
Met behulp van IGBT’s kan een gelijkspanning worden omgezet in een wissel-spanning. De schakeling is te vergelijken met de eerder genoemde H-brug. Webekijken hier hoe met behulp van een zestal IGBT’s en een microprocessor eengelijkspanning kan worden omgezet in een driefasen wisselspanning. Deze wis-selspanning wordt dan gebruikt om driefasen-elektromotoren aan te sturen. Hetprincipe is eenvoudig. De microprocessor stuurt op gezette tijden twee IGBT’saan. In fig. 13 kan het stroomverloop door de spoelen van de driefasenmotorworden gevolgd. Een logische 1 betekent dat de IGBT wordt aangestuurd eneen logische 0 betekent dat de IGBT spert. Een eenfase wisselspanning zoalsbij de Xenon verlichting noodzakelijk is kan worden opgewekt door toepassingvan vier IGBT’s.
10

1 0 1 00 0
0 0 0 1 0
0 1 0 0 1 0
1
Figuur 13: Door vanuit een processor twee IGBT’s op gezette tijden aan te sturen kan vanuit eengelijkspanning een driefasen-wisselspanning worden verkregen.
11

7 Multivibratoren
Multivibratorschakelingen zijn belangrijke basisschakelingen in de elektronica.We onderscheiden een drietal uitvoeringen namelijk:
• de a-stabiele multivibrator, a.m.v. of oscillator genoemd;• de mono-stabiele multivibrator, ook wel monoflop genoemd;• de bi-stabiele multivibrator, ook wel flipflop genoemd.
We bekijken eerst de verschillen tussen de drie schakelingen. We beschouwenhet ingangssignaal en het uitgangssignaal, de werking zelf laten we in eersteinstantie buiten beschouwing.
7.1 A-stabiele multivibrator
De a-stabiele multivibrator is eigenlijk een oscillator. We kunnen hem beschou-wen als een elektronisch schakeling, die geen ingangssignaal nodig heeft (uiter-aard wel een voeding), maar eenmaal ingeschakeld een constant aan-uit signaalgeeft. Dus het ene moment heeft de uitgang bijv. 5 V spanning en het ande-re moment 0 V. Hij geeft dus een blokspanning af. A-stabiele multivibratorenkunnen bijv. bij richtingaanwijzers en ruitewisser-intervalschakelaars wordentoegepast. Fig. 14 geeft door middel van een blokje (het symbool) de schake-ling weer, voorzien van de voeding (+ en - aansluiting) en de uitgang met hetuitgangssignaal.
Figuur 14: Het symbool en de uitgangsspanning van een a.m.v. schakeling
7.2 Mono-stabiele multivibrator
Deze geeft bij een (willekeurige) ingangs-spanningsimpuls aan de uitgang eenspanningsblokje af (fig. 15). De grootte van het blokje (spanning en tijd) wordt
12

Figuur 15: Symbool en signalen van de mono-stabiele multivibrator
door de schakeling zelf bepaald en is onafhankelijk van de grootte van de in-gangsimpuls. Het aantal impulsen aan de ingang en de uitgang zijn gelijk. Mo-nostabiele multivibratoren werden onder andere in elektronische toerentellersgebruikt.
7.3 Bi-stabiele multivibrator
We kunnen de bi-stabiele multivibrator vergelijken met een elektronische scha-kelaar. Komt op de ingang A een impuls van een minimale spanningswaar-de, dan schakelt hij in, de uitgang komt dan bijv. op 5 V te staan. Deze uit-gangsspanning blijft zo lang gehandhaafd totdat er een impuls op de ingang Bkomt, waarna de uitgangsspanning terugvalt op 0 V. De bi-stabiele multivibra-tor vormt een belangrijke bouwsteen in de digitale elektronica. Fig. 16 geefthet symbool weer alsmede de ingangs- en uitgangsimpulsen. In het voorbeeldworden twee ingangen gebruikt. Bi-stabiele vibratoren kunnen ook een inganghebben. De eerste puls zet de uitgang hoog terwijl de tweede puls de uitganglaag brengt (de toggle-toesand).
7.3.1 Werking van de a-stabiele multivibrator
We bespreken, uitsluitend om een indruk te krijgen, de werking van de a.m.v.schakeling. Momenteel zien we deze schakelingen weinig meer opgebouwd uitlosse componenten maar zijn ze geıntegreerd tot een IC. Fig. 17 geeft het prin-cipeschema van een a-stabiele multivibrator die bestaat uit twee transistoren,twee condensatoren, alsmede een aantal weerstanden. Voor de duidelijkheidis in de uitgang A een ledje opgenomen dat zal gaan knipperen zodra we deschakeling aansluiten op de voedingsspanning. De werking komt hier op neerdat de transistoren elkaar zodanig beınvloeden, dat wanneer de ene geleidt, deandere spert en omgekeerd.
13
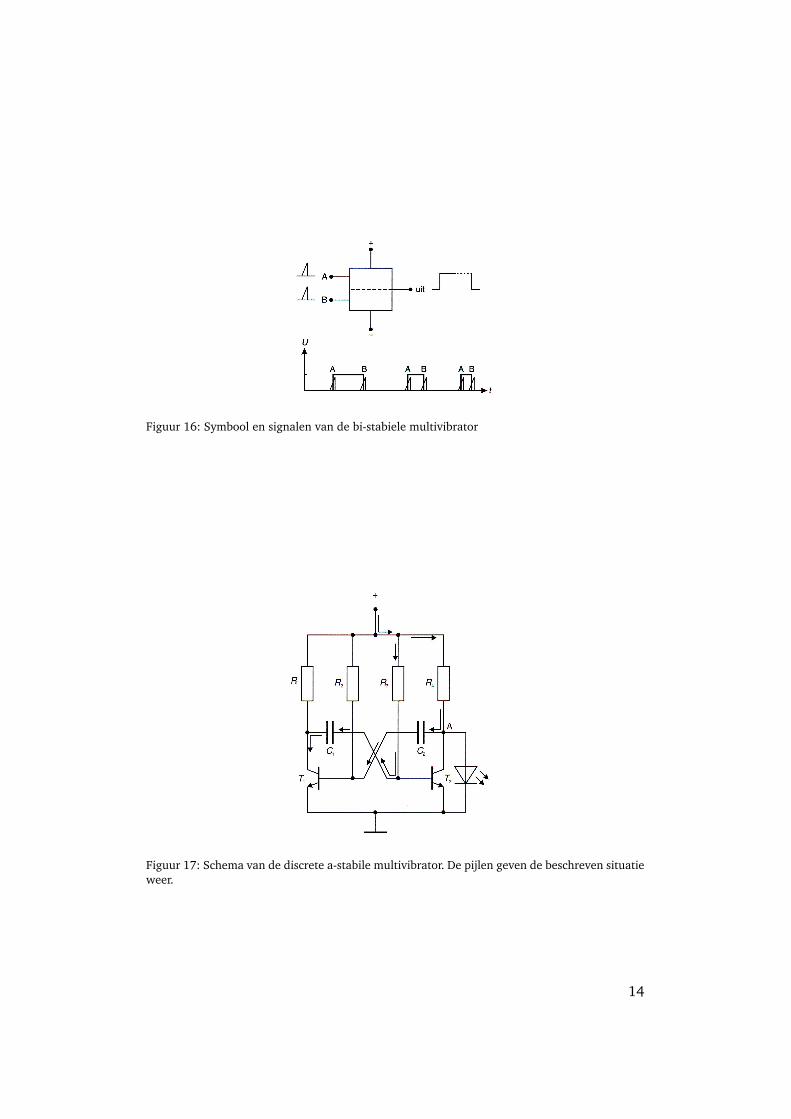
Figuur 16: Symbool en signalen van de bi-stabiele multivibrator
Figuur 17: Schema van de discrete a-stabile multivibrator. De pijlen geven de beschreven situatieweer.
14

7.3.2 Het schakelbegin
Wanneer we de schakeling op de voedingsspanning aansluiten, dan zullen T1en T2 in geleidende toestand willen overgaan, omdat beide transistoren eenbasisstroom kunnen ontvangen via R2 en R3. Tengevolge van de tolerantiever-schillen zal altijd een transistor het eerste gaan geleiden. We nemen aan dattransistor T1 het eerste in geleiding gaat, omdat de drempelspanning van T1net een beetje lager ligt dan die van T2. De basisstroom loopt dan via R2 en debijbehorende collectorstroom via R1. We zouden verwachten dat onmiddellijkhierna T2 gaat geleiden, maar dit gebeurt (nog) niet omdat condensator C1 viaR3 en T1 wordt geladen. Hierdoor is de spanning op de basis van T2 op heteerste moment 0 V en zal pas afhankelijk van de oplaadtijd van de condensatorC1 na een zekere tijd een waarde bereiken die gelijk is aan de drempelspanningvan T2. Tot zo lang zal T2 dus sperren en het ledje oplichten. Ook de conden-sator C2 zal via R4 en T1 worden opgeladen tot een spanning die gelijk zoukunnen worden aan de voedingsspanning (controleer dit aan de hand van fig.17).
7.3.3 Het continu schakelen
Wanneer C1 tot ongeveer 0,7 V (de drempelspanning van T2) is opgeladen danzal T2 in geleiding komen. De spanning op punt A valt weg en het ledje dooft.Ook wordt hierdoor de inmiddels geheel of gedeeltelijk opgeladen C2 plotse-ling aan massa gelegd, waardoor er een zgn. spanningssprong ontstaat. Steldat C2 via R4 tot 5 V was opgeladen. Doordat T2 schakelt zal de + kant van decondensator plotseling aan massa worden gelegd. Een condensatorcircuit heeftechter een vaste (ont)laadtijd. Er ontstaat voor de condensator een ’onmoge-lijke’ situatie. De condensator lost dit op door de linkerzijde op -5 V te zetten.Hierdoor blijft de condensator geladen terwijl de rechterzijde aan de min ligt.Dus: tengevolge van de spanningssprong zal de rechterzijde een potentiaal van0 V en de linkerzijde een potentiaal van -5 V aannemen. Hierdoor spert T1ogenblikkelijk (polariteit wordt op de basis-emittor overgang omgekeerd!). C2wordt eerst ontladen en vervolgens opgeladen via R2 en T2. C1 wordt opge-laden via R1 en T2 tot maximaal de voedingsspanning (controleer dit aan dehand van fig. 18). Wanneer de spanning aan de linkerzijde van C2 een waardeheeft bereikt van ongeveer 0,7 V, dan zal T1 weer in geleiding overgaan. Hier-door zal C1 een spanningssprong vertonen, waardoor T2 wordt dichtgedrukt enhet ledje weer aangaat. C1 kan ontladen, resp. opladen via R3 en T1. Op eengegeven moment zal T2 weer in geleiding gaan en zal T1 weer worden dicht-gedrukt, etc. etc. Het resultaat is dat het ledje aan de uitgang bij A op gezettetussenpozen spanning krijgt waardoor het zal gaan knipperen. Op de uitgang Akomt dus een blokspanning te staan.
15

Figuur 18: Schema a.m.v. schakeling. De pijlen geven de beschreven situatie weer.
8 Schmitt-trigger
De Schmitt-trigger is een drempelwaardeschakelaar en is in staat om van een’willekeurig’ signaal een blokspanning te maken. Vaak gaat het om een signaalwaarvan de flanken niet steil genoeg zijn. De Schmitt-trigger schakeling ver-betert dan het signaal. Kenmerk van een Schmitt-trigger schakeling is de zgn.hysteresis. De inschakelspanning ligt iets hoger dan dan de uitschakelspanning.Dit is nodig om te voorkomen dat de schakeling niet op de schakelspanningstaat te ’klapperen’. Fig. 19 geeft het symbool weer en de spanning op de in- enuitgang. Fig. 20 geeft de eigenlijke schakeling weer. Hoewel we hier de Schmitt-
u
Schmitt−trigger
symbool
in uit
ingangssignaal
uitgangssignaal
12
tijd
Figuur 19: Het Schmitt-trigger symbool en de uitgangsspanning als functie van een willekeurigespanning op de ingang. 1. Spanning waarbij de Schmitt-trigger inschakelt 2. Spanning waarbijde Schmitt-trigger uitschakelt.
trigger discreet zien uitgevoerd zal men in de meeste situaties kiezen voor een
16

geıntegreerd circuit. De Schmitt-trigger schakeling van fig. 20 bevat behalve de
+ 5V
ingang
D
T1 T2
R4
R1
R3
R2
uitgang ingang
uitgangT2
BB
R5
min −
Figuur 20: Links: Schmitt-trigger schakeling opgebouwd uit discrete componenten. Rechts: Hetspanningsverloop over de in- en de uitgang en op punt B.
voedings-aansluitingen weer een in- en een uitgang. De twee transistoren heb-ben een gemeenschappelijke emittor-weerstand (R4). Voor de uitleg gaan weuit van een voedingsspanning van 5 V en heeft de weerstand R4 een kleinereweerstandswaarde dan de overigen. R1 is verder groter dan R2. Het spannings-verloop is aangegeven. Stel dat bij een spanning van 2,4 Volt, T1 in geleidinggaat (op punt B staat dan iets meer dan 0 V omdat R1 ongeveer 200 x groter isdan R4). Het spanningsverlies over de collector-emittor is minimaal waardoordat T2 spert. De uitgang wordt dan hoog. Wanneer T1 spert (laag ingangssig-naal) dan gaat T2 in geleiding en wordt de uitgang laag. Nu wordt de spanningop punt B bepaald door de verhouding tussen R2 en R4. Aangezien R2 kleineris dan R1 zal de spanning op punt B omhoog gaan bijv. naar 1 V. Bij de vol-gende cyclus moet de spanning van 1 Volt op punt B overwonnen worden. Despanning op punt B varieert dus tussen de 0 en 1 Volt. De inschakelspanningligt dus (als voorbeeld) op 0,7 + 0,7 + 1 = 2,4 Volt en de uitschakelspanningop 0,7 + 0,7 = 1,4 Volt. Het verschil is hiermee verklaard.
9 Inverter
Het komt nogal eens voor dat men een signaal wil omkeren of wel dat men vaneen hoog signaal een laag signaal wil maken. In principe gebeurt dit al dooreen eenvoudige transistor. Immers een spanning op de basis (de ingang) doetde transistor geleiden waardoor de uitgang laag wordt (fig. 21). Een transis-tor doet -zoals men zegt- het signaal inverteren. Er worden een tweetal inver-ter symbolen gebruikt. De meest bekende komt vanuit de digitale techniek enwordt in fig. 21 rechts onder weergegeven.
17

T
R2
R1
min−
ingang
uitgang
R3
1
+ 5V
Figuur 21: De transistor als inverter (links) en de invertersymbolen (rechts)
10 Aansturing van stappenmotoren
Stappenmotoren zijn stelmotoren en kunnen worden gebruikt om kleppen ineen bepaalde stand te zetten. Een stappenmotor dankt zijn naam aan het feitdat de motor stapsgewijze wordt aangestuurd. Elke stap heeft een kleine ver-draaiing van het anker ten gevolge. Door de spoelen in de juiste volgorde aan testuren gaat de motor draaien of kan een bepaalde positie worden ingenomen.Men maakt wel onderscheid tussen een unipolaire en een bipolaire stappen-motor. Bij de unipolaire gaat de stroom in een richting door de spoelen. Bij debipolaire stappenmotor wordt de stroomrichting door de spoelen steeds omge-draaid. De volgorde van de pulsen die een stappenmotor doen draaien wordtwel het stappenpatroon van de motor genoemd. Fig. 22 laat het aanstuursche-ma zien van een unipolaire motor en fig. 23 van een bipolaire.
Figuur 22: Door de transistoren aan te sturen kan elke spoel afzonderlijk worden aangestuurd.
11 Oscillatoren
Oscillatoren zijn schakelingen die een trilling opwekken. Praktisch zal dat eenwisselspanning of blokspanning zijn. De a-stabiele multivibrator is een voor-beeld van een oscillator-schakeling. Men spreekt van een RC-oscillator. Een
18

Figuur 23: Voorbeeld van 4 stappen die op de transistorschakeling kunnen worden gezet om demotor 1 omwenteling te laten draaien (1 = spanning, 0 = geen spanning).
kwarts-oscillator wordt gebruikt in uurwerken en als klok in de microcomputer.Het tijdsbepalende element is dan niet de condensator maar een kwartskristal.De werking van het kwartskristal berust op het piezo-effect; de vormverande-ringen van het kristal hebben spannings-veranderingen tot gevolg. Het voordeelvan de kwartsmultivibrator is de grote frequentie-nauwkeurigheid.
12 Vragen en opgaven
Zie boek
19