Eigenvalue Based Ss

of 12
-
Upload
zeynep-atlas -
Category
Documents
-
view
227 -
download
0
Transcript of Eigenvalue Based Ss
-
7/31/2019 Eigenvalue Based Ss
1/12
arXiv:0804.2960v1
[cs.IT]1
8Apr2008
Eigenvalue based Spectrum Sensing Algorithms for Cognitive Radio
Yonghong Zeng, Senior Member, IEEE, and Ying-Chang Liang, Senior Member, IEEEInstitute for Infocomm Research, A*STAR, Singapore.
November 23, 2009
Abstract
Spectrum sensing is a fundamental component is a cogni-tive radio. In this paper, we propose new sensing methodsbased on the eigenvalues of the covariance matrix of sig-nals received at the secondary users. In particular, twosensing algorithms are suggested, one is based on the ra-
tio of the maximum eigenvalue to minimum eigenvalue; theother is based on the ratio of the average eigenvalue to mini-mum eigenvalue. Using some latest random matrix theories(RMT), we quantify the distributions of these ratios andderive the probabilities of false alarm and probabilities ofdetection for the proposed algorithms. We also find thethresholds of the methods for a given probability of falsealarm. The proposed methods overcome the noise uncer-tainty problem, and can even perform better than the idealenergy detection when the signals to be detected are highlycorrelated. The methods can be used for various signaldetection applications without requiring the knowledge ofsignal, channel and noise power. Simulations based on ran-
domly generated signals, wireless microphone signals andcaptured ATSC DTV signals are presented to verify the ef-fectiveness of the proposed methods.
Key words: Signal detection, Spectrum sensing, Sensingalgorithm, Cognitive radio, Random matrix, Eigenvalues,IEEE 802.22 Wireless regional area networks (WRAN)
1 Introduction
A Cognitive Radio senses the spectral environment over awide range of frequency bands and exploits the temporallyunoccupied bands for opportunistic wireless transmissions[1, 2, 3]. Since a cognitive radio operates as a secondaryuser which does not have primary rights to any pre-assignedfrequency bands, it is necessary for it to dynamically de-tect the presence of primary users. In December 2003, theFCC issued a Notice of Proposed Rule Making that iden-tifies cognitive radio as the candidate for implementing ne-gotiated/opportunistic spectrum sharing [4]. In response tothis, in 2004, the IEEE formed the 802.22 Working Group
Part of this work has been presented at IEEE PIMRC, Athens,Greece, Sept. 2007
to develop a standard for wireless regional area networks(WRAN) based on cognitive radio technology [5]. WRANsystems will operate on unused VHF/UHF bands that areoriginally allocated for TV broadcasting services and otherservices such as wireless microphone, which are called pri-mary users. In order to avoid interfering with the primaryservices, a WRAN system is required to periodically detect
if there are active primary users around that region.As discussed above, spectrum sensing is a fundamental
component in a cognitive radio. There are however severalfactors which make the sensing problem difficult to solve.First, the signal-to-noise ratio (SNR) of the primary usersreceived at the secondary receivers may be very low. For ex-ample, in WRAN, the target detection SNR level at worstcase is 20dB. Secondly, fading and time dispersion of thewireless channel may complicate the sensing problem. Inparticular, fading will cause the received signal power fluc-tuating dramatically, while unknown time dispersed channelwill cause coherent detection unreliable [6, 7, 8]. Thirdly,the noise/interference level changes with time which resultsin noise uncertainty [9, 6, 10]. There are two types of noiseuncertainty: receiver device noise uncertainty and environ-ment noise uncertainty. The sources of receiver device noiseuncertainty include [6, 10]: (a) non-linearity of components;and (b) thermal noise in components, which is non-uniformand time-varying. The environment noise uncertainty maybe caused by transmissions of other users, including near-byunintentional transmissions and far-away intentional trans-missions. Because of the noise uncertainty, in practice, it isvery difficult to obtain the accurate noise power.
There have been several sensing algorithms including theenergy detection [11, 9, 12, 6, 10], the matched filtering
[12, 6, 8, 7] and cyclostationary detection [13, 14, 15, 16],each having different operational requirements, advantagesand disadvantages. For example, cyclostationary detectionrequires the knowledge of cyclic frequencies of the primaryusers, and matched filtering needs to know the waveformsand channels of the primary users. On the other hand, en-ergy detection does not need any information of the signalto be detected and is robust to unknown dispersive chan-nel. However, energy detection relies on the knowledgeof accurate noise power, and inaccurate estimation of thenoise power leads to SNR wall and high probability of false
1
http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1http://arxiv.org/abs/0804.2960v1 -
7/31/2019 Eigenvalue Based Ss
2/12
alarm [9, 10, 17]. Thus energy detection is vulnerable tothe noise uncertainty [9, 6, 10, 7]. Finally, while energy de-tection is optimal for detecting independent and identicallydistributed (iid) signal [12], it is not optimal for detectingcorrelated signal, which is the case for most practical appli-cations.
To overcome the shortcomings of energy detection, in thispaper, we propose new methods based on the eigenvalues ofthe covariance matrix of the received signal. It is shownthat the ratio of the maximum or average eigenvalue to theminimum eigenvalue can be used to detect the the presenceof the signal. Based on some latest random matrix theories(RMT) [18, 19, 20, 21], we quantify the distributions of theseratios and find the detection thresholds for the proposed de-tection algorithms. The probability of false alarm and prob-ability of detection are also derived by using the RMT. Theproposed methods overcome the noise uncertainty problemand can even perform better than energy detection when the
signals to be detected are highly correlated. The methodscan be used for various signal detection applications with-out knowledge of the signal, the channel and noise power.Furthermore, different from matched filtering, the proposedmethods do not require accurate synchronization. Simula-tions based on randomly generated signals, wireless micro-phone signals and captured digital television (DTV) signalsare carried out to verify the effectiveness of the proposedmethods.
The rest of the paper is organized as follows. In SectionII, the system model and some background information areprovided. The sensing algorithms are presented in SectionIII. Section IV gives theoretical analysis and finds thresholds
for the algorithms based on the RMT. Simulation resultsbased on randomly generated signals, wireless microphonesignals and captured DTV signals are given in Section V.Also some open questions are presented in this section. Con-clusions are drawn in Section VI. A pre-whitening techniqueis given in Appendix A for processing narrowband noise. Fi-nally, a proof is given in Appendix B for the equivalence ofaverage eigenvalue and signal power.
Some notations used in the paper are listed as follows:superscripts T and stand for transpose and Hermitian(transpose-conjugate), respectively. Iq is the identity ma-trix of order q.
2 System Model and Background
Let xc(t) = sc(t) + c(t) be the continuous-time receivedsignal, where sc(t) is the possible primary users signaland c(t) is the noise. c(t) is assumed to be a station-ary process satisfying E(c(t)) = 0, E(
2c(t)) =
2 and
E(c(t)c(t + )) = 0 for any = 0. Assume that we areinterested in the frequency band with central frequency fcand bandwidth W. We sample the received signal at a sam-pling rate fs, where fs W. Let Ts = 1/fs be the sampling
period. For notation simplicity, we define x(n) xc(nTs),s(n) sc(nTs) and (n) c(nTs). There are two hy-pothesizes: H0, signal does not exist; and H1, signal exists.The received signal samples under the two hypothesizes aregiven respectively as follows [6, 8, 7]:
H0 : x(n) = (n), (1)
H1 : x(n) = s(n) + (n), (2)
where s(n) is the received signal samples including the ef-fects of path loss, multipath fading and time dispersion,and (n) is the received white noise assumed to be iid, andwith mean zero and variance 2. Note that s(n) can be thesuperposition of signals from multiple primary users. It isassumed that noise and signal are uncorrelated. The spec-trum sensing or signal detection problem is to determine ifthe signal exists or not, based on the received samples x(n).
Note: In above, we have assumed that the noise samplesare white. In practice, if the received samples are the filteredoutputs, the corresponding noise samples may be correlated.However, the correlation among the noise samples is onlyrelated to the receiving filter. Thus the noise correlationmatrix can be found based on the receiving filter, and pre-whitening techniques can then be used to whiten the noisesamples. The details of a pre-whitening method are givenin Appendix A.
Now we consider two special cases of the signal model.(i) Digital modulated and over-sampled signal. Let s(n)
be the modulated digital source signal and denote the sym-bol duration as T0. The discrete signal is filtered and trans-mitted through the communication channel [22, 23, 24].
The resultant signal (excluding receive noise) is given as[22, 23, 24]
sc(t) =
k=
s(k)h(t kT0), (3)
where h(t) encompasses the effects of the transmission fil-ter, channel response, and receiver filter. Assume that h(t)has finite support within [0, Tu]. Assume that the receivedsignal is over-sampled by a factor M, that is, the samplingperiod is Ts = T0/M. Define
xi(n) = x((nM + i 1)Ts),
hi(n) = h((nM + i 1)Ts),i(n) = c((nM + i 1)Ts), (4)
n = 0, 1, ; i = 1, 2, , M.We have
xi(n) =
Nk=0
hi(k)s(n k) + i(n), (5)
where N = Tu/T0. This is a typical single input multi-ple output (SIMO) system in communications. If there are
2
-
7/31/2019 Eigenvalue Based Ss
3/12
multiple source signals, the received signal turns out to be
xi(n) =
Pj=1
Nijk=0
hij(k)sj(n k) + i(n), (6)
where P is the number of source signals, hij(k) is the chan-nel response from source signal j, and Nij is the order ofchannel hij(k). This is a typical multiple input multipleoutput (MIMO) system in communications.
(ii) Multiple-receiver model. The model (6) is also ap-plicable to multiple-receiver case where xi(n) becomes thereceived signal at receiver i. The difference between theover-sampled model and multiple-receiver model lies in thechannel property. For over-sampled model, the channelshij(k)s (for different i) are induced by the same channelhj(t). Hence, they are usually correlated. However, formultiple receiver model, the channel hij(k) (for different i)
can be independent or correlated, depending on the antennaseparation. Conceptually, the over-sampled and multiple-receiver models can be treated as the same.
Model (2) can be treated as a special case of model (6)with M = P = 1 and Nij = 0, and s(n) replaced by s(n).For simplicity, in the following, we only consider model (6).Note that the methods are directly applicable tomodel (2) with M = P = 1 (later the simulation forwireless microphone is based on this model).
Energy detection is a basic sensing method [11, 9, 12, 6].Let T(Ns) be the average power of the received signals, thatis,
T(Ns) =1
MNs
Mi=1
Ns1n=0
|xi(n)|2, (7)
where Ns is the number of samples. The energy detectionsimply compares T(Ns) with the noise power to decide thesignal existence. Accurate knowledge on the noise power istherefore the key to the success of the method. Unfortu-nately, in practice, the noise uncertainty always presents.Due to the noise uncertainty [9, 6, 10], the estimated noisepower may be different from the actual noise power. Letthe estimated noise power be 2 =
2 . We define the
noise uncertainty factor (in dB) as
B = max{10log10 }. (8)
It is assumed that (in dB) is evenly distributed in aninterval [B, B] [6, 17]. In practice, the noise uncertaintyfactor of receiving device is normally 1 to 2 dB [6]. Theenvironment noise uncertainty can be much higher due tothe existence of interference [6]. When there is noise un-certainty, the energy detection is not an effective method[9, 6, 10, 17] due to the existence of SNR wall and/or highprobability of false alarm.
3 Eigenvalue based Detections
Let Njdef= max
i(Nij). Zero-padding hij(k) if necessary, and
defining
x(n)
def
= [x1(n), x2(n), , xM(n)]T
, (9)hj(n)
def= [h1j(n), h2j(n), , hMj (n)]T, (10)
(n)def= [1(n), 2(n), , M(n)]T, (11)
we can express (6) into a vector form as
x(n) =
Pj=1
Njk=0
hj(k)sj(n k) + (n), n = 0, 1, . (12)
Considering L (called smoothing factor) consecutive out-puts and defining
x(n)
def
= [x
T
(n), x
T
(n 1), , xT
(n L + 1)]T
,(n)
def= [T(n),T(n 1), ,T(n L + 1)]T,
s(n)def= [s1(n), s1(n 1), , s1(n N1 L + 1), ,
sP(n), sP(n 1), , sP(n NP L + 1)]T, (13)we get
x(n) = Hs(n) + (n), (14)
where H is a ML (N+ P L) (N def=Pj=1
Nj) matrix defined
as
Hdef= [H1,H2,
,HP], (15)
Hjdef=
264hj(0) hj(Nj) 0
. . .. . .
0 hj(0) hj(Nj)
375 . (16)
Note that the dimension ofHj is M L (Nj + L).Define the statistical covariance matrices of the signals
and noise as
Rx = E(x(n)x(n)), (17)
Rs = E(s(n)s(n)), (18)
R = E((n)(n)). (19)
We can verify that
Rx = HRsH + 2IML , (20)
where 2 is the variance of the noise, and IML is the identitymatrix of order M L.
3.1 The algorithms
In practice, we only have finite number of samples. Hence,we can only obtain the sample covariance matrix other thanthe statistic covariance matrix. Based on the sample covari-ance matrix, we propose two detection methods as follows.
3
-
7/31/2019 Eigenvalue Based Ss
4/12
Algorithm 1 Maximum-minimum eigenvalue (MME) de-tection
Step 1. Compute the sample covariance matrix of thereceived signal
Rx(Ns) def= 1Ns
L2+Nsn=L1
x(n)x(n), (21)
where Ns is the number of collected samples.Step 2. Obtain the maximum and minimum eigenvalue of
the matrix Rx(Ns), that is, max and min.Step 3. Decision: if max/min > 1, signal exists
(yes decision); otherwise, signal does not exist (nodecision), where 1 > 1 is a threshold, and will be given inthe next section.
Algorithm 2 Energy with minimum eigenvalue (EME) de-
tectionStep 1. The same as that in Algorithm1.Step 2. Compute the average power of the received signal
T(Ns) (defined in (7)), and the minimum eigenvalue minof the matrix Rx(Ns).
Step 3. Decision: if T(Ns)/min > 2, signal exists(yes decision); otherwise, signal does not exist (no de-cision), where 2 > 1 is a threshold, and will be given in thenext section.
The difference between conventional energy detection andEME is as follows: energy detection compares the signalenergy to the noise power, which needs to be estimated in
advance, while EME compares the signal energy to the min-imum eigenvalue of the sample covariance matrix, which iscomputed from the received signal only.
Remark: Similar to energy detection, both MME andEME only use the received signal samples for detections,and no information on the transmitted signal and channel isneeded. Such methods can be called blind detection meth-ods. The major advantage of the proposed methods overenergy detection is as follows: energy detection needs thenoise power for decision while the proposed methods do notneed.
3.2 Theoretical analysis
Let the eigenvalues of Rx and HRsH be 1 2
ML and 1 2 ML , respectively. Obviously,n = n +
2. When there is no signal, that is, s(n) = 0
(then Rs = 0), we have 1 = 2 = = ML = 2. Hence,1/ML = 1. When there is a signal, if 1 > ML , wehave 1/ML > 1. Hence, we can detect if signal existsby checking the ratio 1/ML . This is the mathematicalground for the MME. Obviously, 1 = ML if and only ifHRsH
= IML , where is a positive number. From thedefinition of the matrix H and Rs, it is highly probable that
HRsH = IML . In fact, the worst case is Rs = 2sI, that
is, the source signal samples are iid. At this case, HRsH =
2sHH. Obviously, 2sHH
= IML if and only if all therows ofH have the same power and they are co-orthogonal.This is only possible when Nj = 0, j = 1, , P and M = 1,that is, the source signal samples are iid, all the channelsare flat-fading and there is only one receiver.
If the smoothing factor L is sufficiently large, L >N/(M P), the matrix H is tall. Hence
n = 0, n = 2, n = N + P L + 1, , ML. (22)
At this case, 1 = 1 + 2 > ML =
2, and furthermore
the minimum eigenvalue actually gives an estimation of thenoise power. This property has been successfully used insystem identification [23, 25] and direction of arrival (DOA)estimation (for example, see [21], page 656).
In practice, the number of source signals (P) and the
channel orders usually are unknown, and therefore it is dif-ficult to choose L such that L > N/(M P). Moreover, toreduce complexity, we may only choose a small smoothingfactor L (may not satisfy L > N/(M P)). At this case,if there is signal, it is possible that ML = 0. However, asexplained above, it is almost sure that 1 > ML and there-fore, 1/ML > 1. Hence, we can almost always detect thesignal existence by checking the ratio 1/ML .
Let be the average of all the eigenvalues of Rx. Forthe same reason shown above, when there is no signal,/ML = 1, and when there is signal, /ML > 1. Hence,we can also detect if signal exists by checking the ratio/ML .
The average eigenvalue is almost the same as the signalenergy (see the proof in the appendix B). Hence, we can usethe ratio of the signal energy to the minimum eigenvalue fordetection, which is the mathematical ground for the EME.
4 Performance Analysis and Detec-
tion Threshold
At finite number of samples, the sample covariance matrixRx(Ns) may be well away from the statistical covariancematrices Rx. The eigenvalue distribution of Rx(Ns) be-
comes very complicated [18, 19, 20, 21]. This makes thechoice of the threshold very difficult. In this section, we willuse some latest random matrix theories to set the thresholdand obtain the probability of detection.
Let Pd be the probability of detection, that is, at hypoth-esis H1, the probability of the algorithm having detectedthe signal. Let Pfa be the probability of false alarm, thatis, at H0, the probability of the algorithm having detectedthe signal. Since we have no information on the signal (ac-tually we even do not know if there is signal or not), it isdifficult to set the threshold based on the Pd. Hence, usually
4
-
7/31/2019 Eigenvalue Based Ss
5/12
we choose the threshold based on the Pfa . The threshold istherefore not related to signal property and SNR.
4.1 Probability of false alarm and thresh-
old
When there is no signal, Rx(Ns) turns to R(Ns), the sam-ple covariance matrix of the noise defined as,
R(Ns) =1
Ns
L2+Nsn=L1
(n)(n). (23)
R(Ns) is nearly a Wishart random matrix [18]. The studyof the spectral (eigenvalue distributions) of a random matrixis a very hot topic in recent years in mathematics as well ascommunication and physics. The joint probability densityfunction (PDF) of ordered eigenvalues of a Wishart randommatrix has been known for many years [18]. However, since
the expression of the PDF is very complicated, no closedform expression has been found for the marginal PDF ofordered eigenvalues. Recently, I. M. Johnstone and K. Jo-hansson have found the distribution of the largest eigenvalue[19, 20] as described in the following theorem.
Theorem 1. Assume that the noise is real. Let A(Ns) =Ns2
R(Ns), = (
Ns 1 +
M L)2 and = (
Ns 1 +ML)( 1
Ns1+1ML
)1/3. Assume that limNs
MLNs
= y (0 1min)
= P
2Ns
max(A(Ns)) > 1min
P
max(A(Ns)) > 1(
Ns
ML)2
= P
max(A(Ns))
>
1(
Ns
M L)2
= 1 F1
1(Ns M L)2
. (26)
This leads to
F1
1(
Ns
ML)2
= 1 Pfa , (27)
or, equivalently,
1(
Ns
M L)2
= F11 (1 Pfa). (28)
From the definitions of and , we finally obtain the thresh-old
1 =(
Ns +
M L)2
(
Ns
M L)2
1 +(
Ns +
M L)2/3
(NsML)1/6F11 (1 Pfa )
. (29)
Please note that, unlike energy detection, here thethreshold is not related to noise power. The thresh-old can be pre-computed based only on Ns, L andPfa, irrespective of signal and noise.
Now we analyze the EME method. When there is nosignal, it can be verified that the average energy defined in(7) satisfies
E(T(Ns)) = 2 , Var(T(Ns)) =
24MNs
. (30)
T(Ns) is the average of M Ns statistically independent andidentically distributed random variables. Since Ns is large,the central limit theorem tells us that T(Ns) can be ap-proximated by the Gaussian distribution with mean 2 and
5
-
7/31/2019 Eigenvalue Based Ss
6/12
-
7/31/2019 Eigenvalue Based Ss
7/12
4.3 Computational complexity
The major complexity of MME and EME comes from twoparts: computation of the covariance matrix (equation (21))and the eigenvalue decomposition of the covariance matrix.For the first part, noticing that the covariance matrix is a
block Toeplitz matrix and Hermitian, we only needs to eval-uate its first block row. Hence M2LNs multiplications andM2L(Ns 1) additions are needed. For the second part,generally O((M L)3) multiplications and additions are suffi-cient. The total complexity (multiplications and additions,respectively) are therefore as follows:
M2LNs + O(M3L3). (42)
Since Ns is usually much larger than L, the first part isdominate.
The energy detection needs MNs multiplications andM(Ns
1) additions. Hence, the complexity of the proposed
methods is about M L times that of the energy detection.
5 Simulations and Discussions
In the following, we will give some simulation results usingthe randomly generated signals, wireless microphone signals[29] and the captured DTV signals [30].
5.1 Simulations
We define the SNR as the ratio of the average received signalpower to the average noise power
SNRdef=
E(||x(n) (n)||2)E(||(n)||2) . (43)
We require the probability of false alarm Pfa 0.1. Thenthe threshold is found based on the formulae in SectionIV. For comparison, we also simulate the energy detectionwith or without noise uncertainty for the same system. Thethreshold for the energy detection is given in [6]. At noiseuncertainty case, the threshold is always set based on theassumed/estimated noise power, while the real noise poweris varying in each Monte Carlo realization to a certain de-gree as specified by the noise uncertainty factor defined in
Section II.(1) Multiple-receiver signal detection. We consider a
2-input 4-receiver system (M = 4, P = 2) as defined by (6).The channel orders are N1 = N2 = 9 (10 taps). The channeltaps are random numbers with Gaussian distribution. Allthe results are averaged over 1000 Monte Carlo realizations(for each realization, random channel, random noise andrandom BPSK inputs are generated).
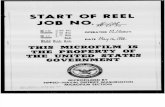
For fixed L = 8 and Ns = 100000, the Pd for the MMEand energy detection (with or without noise uncertainty) areshown in Figure 1, where and in the following EG-x dB
20 18 16 14 12 10 8 6 4 2 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR (dB)
Probabilityofdete
ction
EG2dBEG1.5dBEG1dBEG0.5dBEG0dBEMEEMEtheoMMEMMEtheo
Figure 1: Probability of detection: M = 4, P = 2, L = 8.
means the energy detection with x-dB noise uncertainty.If the noise variance is exactly known (B = 0), the energydetection is very good (note that it is optimal for iid signal).The proposed methods are slightly worse than the energydetection with ideal noise power. However, as discussed in[9, 6, 31], noise uncertainty is always present. As shownin the figure, if there is 0.5 to 2 dB noise uncertainty, thedetection probability of the energy detection is much worsethan that of the proposed methods. From the figure, wesee that the theoretical formulae in Section IV.B for the Pd(the curves with markMME-theo and EME-theo) aresomewhat conservative.
The Pfa is shown in Table 2 (second row) (note that Pfa isnot related to the SNR because there is no signal). The Pfafor the proposed methods and the energy detection withoutnoise uncertainty almost meet the requirement (Pfa 0.1),but the Pfa for the energy detection with noise uncertaintyfar exceeds the limit. This means that the energy detectionis very unreliable in practical situations with noise uncer-tainty.
To test the impact of the number of samples, we fix theSNR at -20dB and vary the number of samples from 40000to 180000. Figure 2 and Figure 3 show the Pd and Pfa , re-spectively. It is seen that the Pd of the proposed algorithms
and the energy detection without noise uncertainty increaseswith the number of samples, while that of the energy detec-tion with noise uncertainty almost does not change (thisphenomenon is also verified in [10, 17]). This means thatthe noise uncertainty problem cannot be solved by increas-ing the number of samples. For the Pfa , all the algorithmsdo not change much with varying number of samples.
To test the impact of the smoothing factor, we fix theSNR at -20dB, Ns = 130000 and vary the smoothing fac-tor L from 4 to 14. Figure 4 shows the results for bothPd and Pfa . It is seen that both Pd and Pfa of the pro-
7
-
7/31/2019 Eigenvalue Based Ss
8/12
method EG-2 dB EG-1.5 dB EG-1 dB EG-0.5 dB EG-0dB EME MMEPfa (M = 4, P = 2, L = 8, Ns = 10
5) 0.499 0.499 0.498 0.495 0.104 0.065 0.103Pfa (M = P = 1, L = 10, Ns = 5 104) 0.497 0.496 0.488 0.470 0.107 0.019 0.074
Pfa (M = 2, P = 1, L = 8, Ns = 5 104) 0.499 0.499 0.497 0.486 0.097 0.028 0.072
Table 2: Probability of false alarm at different parameters
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
x 105
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of samples
Probabilityofdetection
EG2dBEG1.5dBEG1dBEG0.5dB
EG0dBEMEMME
Figure 2: Probability of detection: M = 4, P = 2, L = 8,SNR=20 dB.
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
x 105
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Number of samples
Probabilityoffalsealarm
EG2dBEG1.5dBEG1dBEG0.5dBEG0dBEMEMME
Figure 3: Probability of false alarm: M = 4, P = 2, L = 8.
4 5 6 7 8 9 10 11 12 13 1410
2
101
100
Smoothing factor
PdandPfa
EG0.5dB (Pfa
)
EG0dB (Pfa
)
EME (Pfa
)
MME (Pfa
)
EG0.5dB (Pd)
EG0dB (Pd)
EME (Pd)
MME (Pd)
Figure 4: Impact of smoothing factor: M = 4, P = 2,SNR=20 dB, Ns = 130000.
posed algorithms slightly increase with L, but will reach aceiling at some L. Even ifL N/(M P) = 9 , the meth-ods still works well (much better than the energy detectionwith noise uncertainty). Noting that smaller L means lowercomplexity, in practice, we can choose a relatively small L.However, it is very difficult to choose the best L because itis related to signal property (unknown). Note that the Pdand Pfa for the energy detection do not change with L.
(2) Wireless microphone signal detection. FM mod-ulated analog wireless microphone is widely used in USAand elsewhere. It operates on TV bands and typically occu-
pies about 200KHz (or less) bandwidth [29]. The detectionof the signal is one of the major challenge in 802.22 WRAN[5]. In this simulation, wireless microphone soft speaker sig-nal [29] at central frequency fc = 200 MHz is used. Thesampling rate at the receiver is 6 MHz (the same as theTV bandwidth in USA). The smoothing factor is chosen asL = 10. Simulation results are shown in Figure 5 and Table2 (third row for Pfa). From the figure and the table, we seethat all the claims above are also valid here. Furthermore,here the MME is even better than the ideal energy detec-tion. The reason is that here the signal samples are highly
8
-
7/31/2019 Eigenvalue Based Ss
9/12
22 20 18 16 14 12 10 8 6 4 2
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR (dB)
Probabilityofdete
ction
EG2dBEG1.5dBEG1dBEG0.5dBEG0dBEMEMME
Figure 5: Probability of detection for wireless microphonesignal.
103
102
101
102
101
100
Probability of false alarm
Probabilityofdetection
EG0.5dB (SNR=20dB)EG0dB (SNR=20dB)EME (SNR=20dB)MME (SNR=20dB)EG0.5dB (SNR=15dB)EG0dB (SNR=15dB)EME (SNR=15dB)MME (SNR=15dB)
Figure 6: ROC curve for wireless microphone signal: Ns =50000.
correlated and therefore energy detection is not optimal.The Receiver Operating Characteristics (ROC) curve is
shown in Figure 6, where the sample size is Ns = 50000.Note that we need slightly adjusting the thresholds to keepall the methods having the same Pfa values (especially for
the energy detection with noise uncertainty, the thresholdbased on the predicted noise power and theoretical formulais very inaccurate to obtain the target Pfa as shown in Table2). It shows that MME is the best among all the methods.The EME is worse than the ideal energy detection but betterthan the energy detection with noise uncertainty 0.5 dB.
(3) Captured DTV signal detection. Here we test thealgorithms based on the captured ATSC DTV signals [30].The real DTV signals (field measurements) are collected atWashington D.C. and New York, USA, respectively. Thesampling rate of the vestigial sideband (VSB) DTV signal
20 18 16 14 12 10 8 6 4 2 0
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR (dB)
Probabilityofdete
ction
EG2dBEG1.5dBEG1dBEG0.5dBEG0dBEMEMME
Figure 7: Probability of detection for DTV signal WAS-003/27/01.
is 10.762 MHz [32]. The sampling rate at the receiver is twotimes that rate (oversampling factor is 2). The multipathchannel and the SNR of the received signal are unknown.In order to use the signals for simulating the algorithms atvery low SNR, we need to add white noises to obtain variousSNR levels [31]. In the simulations, the smoothing factor ischosen as L = 8. The number of samples used for each testis 2Ns = 100000 (corresponding to 4.65 ms sampling time).The results are averaged over 1000 tests (for different tests,different data samples and noise samples are used). Figure7 gives the Pd based on the DTV signal file WAS-003/27/01
(at Washington D.C., the receiver is outside and 48.41 milesfrom the DTV station) [30]. Figure 8 gives the results basedon the DTV signal file NYC/205/44/01 (at New York, thereceiver is indoor and 2 miles from the DTV station) [30].Note that each DTV signal file contains data samples in 25seconds. The Pfa are shown in Table 2 (fourth row). Thesimulation results here are similar to those for the randomlygenerated signals.
In summary, all the simulations show that the proposedmethods work well without using the information of signal,channel and noise power. The MME is always better thanthe EME (yet theoretical proof has not been found). Theenergy detection are not reliable (low probability of detec-
tion and high probability of false alarm) when there is noiseuncertainty.
5.2 Discussions
Theoretic analysis of the proposed methods highly relies onthe random matrix theory, which is currently one of the hottopic in mathematics as well as in physics and communica-tion. We hope advancement on the random matrix theorycan solve the following open problems.
(1) Accurate and analytic expression for the Pd at given
9
-
7/31/2019 Eigenvalue Based Ss
10/12
20 18 16 14 12 10 8 6 4 2 0
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR (dB)
Probabilityofdete
ction
EG2dBEG1.5dBEG1dBEG0.5dBEG0dBEMEMME
Figure 8: Probability of detection for DTV signalNYC/205/44/01.
threshold. This requires the eigenvalue distribution of ma-trix Rx(Ns) when both signal and noise are present. At thiscase, Rx(Ns) is no longer a Wishart random matrix.
(2) When there is no signal, the exact solution ofP(max/min > ). This is the Pfa . That is, we need tofind the distribution ofmax/min. As we know, this is stillan unsolved problem. In this paper, we have approximatedthis probability through replacing min by a deterministicnumber.
(3) Strictly speaking, the sample covariance matrix of thenoise R(Ns) is not a Wishart random matrix, because the
(n) for different n are correlated. Although the correla-tions are weak, the eigenvalue distribution may be affected.Is it possible to obtain a more accurate eigenvalue distribu-tion by using this fact?
6 Conclusions
Methods based on the eigenvalues of the sample covariancematrix of the received signal have been proposed. Latestrandom matrix theories have been used to set the thresholdsand obtain the probability of detection. The methods canbe used for various signal detection applications without
knowledge of signal, channel and noise power. Simulationsbased on randomly generated signals, wireless microphonesignals and captured DTV signals have been done to verifythe methods.
Appendix A
At the receiving end, usually the received signal is filtered bya narrowband filter. Therefore, the noise embedded in thereceived signal is also filtered. Let (n) be the noise samples
before the filter, which are assumed to be independent andidentically distributed (i.i.d). Let f(k), k = 0, 1, , K, bethe filter. After filtering, the noise samples turns to
(n) =K
k=0
f(k)(n
k), n = 0, 1,
. (44)
Consider L consecutive outputs and define
(n) = [(n), , (n L + 1)]T. (45)
The statistical covariance matrix of the filtered noise be-comes
R = E((n)(n)) = 2HH
, (46)
where H is a L (L + K) matrix defined as
H=
26664
f(0) f(1) f(K) 0 00 f(0) f(K 1) f(K) 0
.. . . . .
0 0 f(0) f(1) f(K)
37775 . (47)
Let G = HH. If analog filter or both analog and digitalfilters are used, the matrix G should be defined based onthose filter properties. Note that G is a positive definiteHermitian matrix. It can be decomposed to G = Q2, whereQ is also a positive definite Hermitian matrix. Hence, wecan transform the statistical covariance matrix into
Q1RQ1 = 2IL. (48)
Note that Q is only related to the filter. This means that
we can always transform the statistical covariance matrixRx in (17) (by using a matrix obtained from the filter) suchthat equation (20) holds when the noise has been passedthrough a narrowband filter. Furthermore, since Q is notrelated to signal and noise, we can pre-compute its inverseQ1 and store it for later usage.
Appendix B
It is known that the summation of the eigenvalues of a ma-trix is the trace of the matrix. Let (Ns) be the average ofthe eigenvalues of Rx(Ns). Then
(Ns) =1
M LTr(Rx(Ns))
=1
M LNs
L2+Nsn=L1
x(n)x(n). (49)
After some mathematical manipulations, we obtain
(Ns) =1
M LNs
Mi=1
L2+Nsm=0
(m)|xi(m)|2, (50)
10
-
7/31/2019 Eigenvalue Based Ss
11/12
where
(m) =
m + 1, 0 m L 2L, L 1 m Ns 1Ns + L m 1, Ns m Ns + L 2
(51)
Since Ns is usually much larger than L, we have
(Ns) 1MNs
Mi=1
Ns1m=0
|xi(m)|2 = T(Ns). (52)
References
[1] J. Mitola and G. Q. Maguire, Cognitive radios: mak-ing software radios more personal, IEEE PersonalCommunications, vol. 6, no. 4, pp. 1318, 1999.
[2] S. Haykin, Cognitive radio: brain-empowered wire-less communications, IEEE Trans. Communications,
vol. 23, no. 2, pp. 201220, 2005.
[3] D. Cabric, S. M. Mishra, D. Willkomm, R. Brodersen,and A. Wolisz, A cognitive radio approach for usage ofvirtual unlicensed spectrum, in 14th IST Mobile andWireless Communications Summit, June 2005.
[4] FCC, Facilitating opportunities for flexible, efficient,and reliable spectrum use employing cognitive radiotechnologies, notice of proposed rule making and or-der, in FCC 03-322, Dec. 2003.
[5] 802.22 Working Group, IEEE P802.22/D0.1 DraftStandard for Wireless Regional Area Networks.http://grouper.ieee.org/groups/802/22/, May 2006.
[6] A. Sahai and D. Cabric, Spectrum sensing: funda-mental limits and practical challenges, in Proc. IEEEInternational Symposium on New Frontiers in Dy-namic Spectrum Access Networks (DySPAN), (Balti-more, MD), Nov. 2005.
[7] D. Cabric, A. Tkachenko, and R. W. Brodersen, Spec-trum sensing measurements of pilot, energy, and col-laborative detection, in Military Comm. Conf. (MIL-COM), pp. 17, Oct. 2006.
[8] H.-S. Chen, W. Gao, and D. G. Daut, Signature basedspectrum sensing algorithms for IEEE 802.22 WRAN,in IEEE Intern. Conf. Comm. (ICC), June 2007.
[9] A. Sonnenschein and P. M. Fishman, Radiometric de-tection of spread-spectrum signals in noise of uncer-tainty power, IEEE Trans. on Aerospace and Elec-tronic Systems, vol. 28, no. 3, pp. 654660, 1992.
[10] R. Tandra and A. Sahai, Fundamental limits on de-tection in low SNR under noise uncertainty, in Wire-lessCom 2005, (Maui, HI), June 2005.
[11] H. Urkowitz, Energy detection of unkown determin-istic signals, Proceedings of the IEEE, vol. 55, no. 4,pp. 523531, 1967.
[12] S. M. Kay, Fundamentals of Statistical Signal Process-ing: Detection Theory, vol. 2. Prentice Hall, 1998.
[13] W. A. Gardner, Exploitation of spectral redundancyin cyclostationary signals, IEEE Signal ProcessingMagazine, vol. 8, pp. 1436, 1991.
[14] W. A. Gardner, Spectral correlation of modulated sig-nals: part i-analog modulation, IEEE Trans. Commu-nications, vol. 35, no. 6, pp. 584595, 1987.
[15] W. A. Gardner, W. A. Brown, III, and C.-K. Chen,Spectral correlation of modulated signals: part ii-digital modulation, IEEE Trans. Communications,vol. 35, no. 6, pp. 595601, 1987.
[16] N. Han, S. H. Shon, J. O. Joo, and J. M. Kim, Spectralcorrelation based signal detection method for spectrumsensing in IEEE 802.22 WRAN systems, in Intern.Conf. Advanced Communication Technology, (Korea),Feb. 2006.
[17] S. Shellhammer and R. Tandra, Performance of thePower Detector with Noise Uncertainty. doc. IEEE802.22-06/0134r0, July 2006.
[18] A. M. Tulino and S. Verdu, Random Matrix Theoryand Wireless Communications. Hanover, USA: now
Publishers Inc., 2004.
[19] I. M. Johnstone, On the distribution of the largesteigenvalue in principle components analysis, The An-nals of Statistics, vol. 29, no. 2, pp. 295327, 2001.
[20] K. Johansson, Shape fluctuations and random matri-ces, Comm. Math. Phys., vol. 209, pp. 437476, 2000.
[21] Z. D. Bai, Methodologies in spectral analysis of largedimensional random matrices, a review, StatisticaSinica, vol. 9, pp. 611677, 1999.
[22] L. Tong, G. Xu, and T. Kailath, Blind identifica-
tion and equalization based on second-order statistics:a time domain approach, IEEE Trans. InformationTheory, vol. 40, pp. 340349, Mar. 1994.
[23] E. Moulines, P. Duhamel, J. F. Cardoso, andS. Mayrargue, Subspace methods for the blind identi-fication of multichannel FIR filters, IEEE Trans. Sig-nal Processing, vol. 43, no. 2, pp. 516525, 1995.
[24] J. G. Proakis, Digital Communications (4th edition).New York, USA: McGraw-Hill, 2001.
11
http://grouper.ieee.org/groups/802/22/http://grouper.ieee.org/groups/802/22/ -
7/31/2019 Eigenvalue Based Ss
12/12
[25] Y. H. Zeng and T. S. Ng, A semi-blind channel es-timation method for multi-user multi-antenna OFDMsystems, IEEE Trans. Signal Processing, vol. 52, no. 5,pp. 14191429, 2004.
[26] C. A. Tracy and H. Widom, On orthogonal and
symplectic matrix ensembles, Comm. Math. Phys.,vol. 177, pp. 727754, 1996.
[27] C. A. Tracy and H. Widom, The distribution ofthe largest eigenvalue in the gaussian ensembles, inCalogero-Moser-Sutherland Models (J. van Diejen andL. Vinet, eds.), (New York), pp. 461472, Springer,2000.
[28] M. Dieng, RMLab Version 0.02 .http://math.arizona.edu/ momar/, 2006.
[29] C. Clanton, M. Kenkel, and Y. Tang, Wireless mi-crophone signal simulation method, in IEEE 802.22-07/0124r0, March 2007.
[30] V. Tawil, 51 captured DTV signal .http://grouper.ieee.org/groups/802/22/, May 2006.
[31] S. Shellhammer, G. Chouinard, M. Muterspaugh,and M. Ghosh, Spectrum sensing simulation model.http://grouper.ieee.org/groups/802/22/, July 2006.
[32] W. Bretl, W. R. Meintel, G. Sgrignoli, X. Wang, S. M.Weiss, and K. Salehian, ATSC RF, modulation, andtransmission, Proceedings of the IEEE, vol. 94, no. 1,pp. 4459, 2006.
12
http://math.arizona.edu/~http://grouper.ieee.org/groups/802/22/http://grouper.ieee.org/groups/802/22/http://grouper.ieee.org/groups/802/22/http://grouper.ieee.org/groups/802/22/http://math.arizona.edu/~