Dubbel || Kinetik
13
B 26 Mechanik – B3 Kinetik B3 Kinetik J. Lackmann, Berlin; J. Villwock, Berlin Die Kinetik untersucht die Bewegung von Massenpunkten, Massenpunktsystemen, Körpern und Körpersystemen als Fol- ge der auf sie wirkenden Kräfte und Momente unter Berück- sichtigung der Gesetze der Kinematik. B3.1 Energetische Grundbegriffe – Arbeit, Leistung, Wirkungsgrad Arbeit. Das Arbeitsdifferential ist definiert als Skalarpro- dukt aus Kraftvektor und Vektor des Wegelements (Bild 1 a). dW D F dr D F ds cosˇ D F t ds. Demnach verrichtet nur die Tangentialkomponente einer Kraft Arbeit. Die Gesamtarbeit ergibt sich mit dW DF x dx CF y dy CF z dz zu W D s 2 Z s 1 F .s/dr D s 2 Z s 1 F t .s/ds D .P2 / Z .P1 / .F x dx CF y dy CF z dz/: (1) Sie ist gleich dem Inhalt des Tangentialkraft-Weg-Diagramms (Bild 1 b). Für F DF 0 Dconst folgt W DF 0 .s 2 s 1 /. Haben Kräfte ein Potential, d. h., ist F DgradU D @U @x e x @U @y e y @U @z e z ; so folgt W D .P2 / Z .P1 / @U @x dx C @U @y dy C @U @z dz D .P2 / Z .P1 / dU DU 1 U 2 : (2) Die Arbeit ist dann vom Integrationsweg unabhängig und gleich der Differenz der Potentiale zwischen Anfangspunkt P 1 und Endpunkt P 2 . Kräfte mit Potential sind Schwerkräfte und Federkräfte (elastische Formänderungskräfte). B3.1.1 Spezielle Arbeiten (Bild 2 a–d) a) Schwerkraft. Potential (potentielle Energie) U DF G z, Arbeit W G DU 1 U 2 DF G .z 1 z 2 /: (3) Bild 1. a Arbeit einer Kraft; b Tangentialkraft-Weg-Diagramm Bild 2. Arbeiten. a Schwerkraft; b Federkraft; c Reibungskraft; d Dreh- moment b) Federkraft. Potential (potentielle Federenergie) U Dcs 2 =2, Federkraft F c DgradU D @U @s e Dcse bzw. jF c jD F Dcs (c Federrate), Arbeit W c D s 2 Z s 1 csds Dc s 2 2 s 2 1 =2: (4) c) Reibungskraft. Kein Potential, da Reibungsarbeit in Form von Wärme verlorengeht. Arbeit W r D s 2 Z s 1 F r .s/dr D s 2 Z s 1 F r .s/ cos 180 ı ds D s 2 Z s 1 F r .s/ds: (5) Für F r Dconst DF r0 wird W r DF r0 .s 2 s 1 /. d) Drehmoment. Arbeit W M D ' 2 Z ' 1 M.'/d' D ' 2 Z ' 1 M.'/ cos d' D ' 2 Z ' 1 M t .'/d'; (6) d. h., nur die zur Drehachse parallele Momentkomponente M t verrichtet Arbeit. Für M Dconst DM 0 gilt W M DM 0 cos.' 2 ' 1 / DM t0 .' 2 ' 1 /: Gesamtarbeit. Wirken an einem Körper Kräfte und Mo- mente, so gilt W D s 2 Z s 1 X F i dr i C ' 2 Z ' 1 X M i d' i D s 2 Z s 1 X F i cosˇ i ds i C ' 2 Z ' 1 X M i cos i d' i D s 2 Z s 1 X F ti ds i C ' 2 Z ' 1 X M ti d' i (7) K.-H. Grote, J. Feldhusen (Hrsg.), Dubbel, 24. Aufl., DOI 10.1007/978-3-642-38891-0_6, © Springer-Verlag Berlin Heidelberg 2014
Transcript of Dubbel || Kinetik

B 26 Mechanik – B3 Kinetik
B3 Kinetik
J. Lackmann, Berlin; J. Villwock, Berlin
Die Kinetik untersucht die Bewegung von Massenpunkten,Massenpunktsystemen, Körpern und Körpersystemen als Fol-ge der auf sie wirkenden Kräfte und Momente unter Berück-sichtigung der Gesetze der Kinematik.
B3.1 Energetische Grundbegriffe – Arbeit,Leistung, Wirkungsgrad
Arbeit. Das Arbeitsdifferential ist definiert als Skalarpro-dukt aus Kraftvektor und Vektor des Wegelements (Bild 1 a).dW D F dr DF dscosˇDFt ds. Demnach verrichtet nur dieTangentialkomponente einer Kraft Arbeit. Die Gesamtarbeitergibt sich mit dW DFxdxCFydyCFz dz zu
W Ds2Z
s1
F .s/dr Ds2Z
s1
Ft .s/ds
D.P2/Z
.P1/
.FxdxCFydyCFzdz/:
(1)
Sie ist gleich dem Inhalt des Tangentialkraft-Weg-Diagramms(Bild 1 b).Für F DF0 Dconst folgt W DF0.s2 � s1/.Haben Kräfte ein Potential, d. h., ist
F D�gradU D� @U@x
ex � @U
@yey � @U
@zez ;
so folgt
W D�.P2/Z
.P1 /
�@U
@xdxC @U
@ydyC @U
@zdz
�
D�.P2/Z
.P1 /
dU DU1 �U2 :
(2)
Die Arbeit ist dann vom Integrationsweg unabhängig undgleich der Differenz der Potentiale zwischen Anfangspunkt P1
und Endpunkt P2. Kräfte mit Potential sind Schwerkräfte undFederkräfte (elastische Formänderungskräfte).
B3.1.1 Spezielle Arbeiten (Bild 2 a–d)
a) Schwerkraft. Potential (potentielle Energie) U DFGz,
Arbeit WG DU1 �U2 DFG.z1 �z2/: (3)
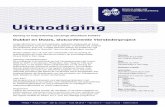
Bild 1. a Arbeit einer Kraft; b Tangentialkraft-Weg-Diagramm
Bild 2. Arbeiten. a Schwerkraft; b Federkraft; c Reibungskraft; d Dreh-moment
b) Federkraft. Potential (potentielle Federenergie) U Dcs2=2,Federkraft F c D �gradU D � @U
@se D �cse bzw. jF c j D
F Dcs (c Federrate),
Arbeit Wc Ds2Z
s1
csdsDc�s2
2 �s21
�=2: (4)
c) Reibungskraft. Kein Potential, da Reibungsarbeit in Formvon Wärme verlorengeht.
Arbeit Wr Ds2Z
s1
F r.s/dr Ds2Z
s1
Fr.s/cos 180ıds
D�s2Z
s1
Fr.s/ds :
(5)
Für Fr DconstDFr0 wird Wr D�Fr0.s2 �s1/.d) Drehmoment.
Arbeit WM D'2Z
'1
M.'/d'D'2Z
'1
M.'/cos�d'
D'2Z
'1
Mt .'/d' ;
(6)
d. h., nur die zur Drehachse parallele Momentkomponente Mt
verrichtet Arbeit. FürM Dconst DM0 gilt
WM DM0 cos�.'2 �'1/DMt0.'2 �'1/:
Gesamtarbeit. Wirken an einem Körper Kräfte und Mo-mente, so gilt
W Ds2Z
s1
�XF i dr i
�C
'2Z
'1
�XM i d'i
�
Ds2Z
s1
�XFi cosˇi dsi
�C
'2Z
'1
�XMi cos�i d'i
�
Ds2Z
s1
�XFt i dsi
�C
'2Z
'1
�XMt i d'i
�
(7)
K.-H. Grote, J. Feldhusen (Hrsg.), Dubbel, 24. Aufl., DOI 10.1007/978-3-642-38891-0_6, © Springer-Verlag Berlin Heidelberg 2014

B3.2 Kinetik des Massenpunkts und des translatorisch bewegten Körpers B 27
B
bzw. für Fi D const D Fi0 und Mi D constD Mi0
Arbeit W DPŒFi0.si2 �si1/�C
PŒMi0.'i2 �'i1/�.
Leistung ist Arbeit pro Zeiteinheit.
P .t/DdW=dtDX
F i�i CX
M i !i
DX
Ft i�i CX
Mt i!i
DX�
Fxi�xi CFyi�yi CFzi�zi
�
CX�
Mxi!xi CMyi!yi CMzi!zi
�:
(8)
Also ist für eine Kraft P DFt� und für ein Moment P DM!.Integration über die Zeit ergibt die Arbeit
W Dt2Z
t1
dW Dt2Z
t1
P.t/dtDPm.t2 � t1/:
Mittlere Leistung:
Pm Dt2Z
t1
P.t/dt=.t2 � t1/DW=.t2 � t1/: (9)
Wirkungsgrad ist das Verhältnis von Nutzarbeit zu zugeführ-ter Arbeit, wobei letztere aus Nutz- und Verlustarbeit besteht:
�m DWn=Wz DWn=.Wn CWv/ (10)
�m mittlerer Wirkungsgrad (Arbeit ist mit der Zeit veränder-lich). Augenblicklicher Wirkungsgrad
�D dWn
dWzD dWn
dt
�dWz
dtDPn=Pz DPn=.Pn CPv/: (11)
Sind mehrere Teile am Prozess beteiligt, so gilt
�D�1�2�3 :::
B3.2 Kinetik des Massenpunkts unddes translatorisch bewegten Körpers
B3.2.1 Dynamisches Grundgesetz von Newton(2. Newton’sches Axiom)
Wirken auf einen freigemachten Massenpunkt (Massenele-ment, translatorisch bewegten Körper) eine Anzahl äußererKräfte, so ist die resultierende Kraft F R gleich der zeitlichenÄnderung des Impulsvektors pDm� bzw., wenn die Masse mkonstant ist, gleich dem Produkt aus Masse m und Beschleuni-gungsvektor a (Bild 3 a):
F.a/Res DF
.a/R D
XF i D d
dt.m�/; (12)
F.a/R D
XF i Dma Dmd�=dt : (13)
Die Komponenten in natürlichen bzw. kartesischen Koordina-ten (Bild 3 b, c) sind
F.a/Rt D
XFi t Dmat ; F
.a/Rn D
XFin Dman bzw.
F.a/Rx D
XFix Dmax ; F
.a/Ry D
XFiy Dmay ;
F.a/Rz D
XFiz Dmaz :
9>>>=>>>;(14)
Bei der Lösung von Aufgaben mit dem Newton’schen Grund-gesetz muss der Massenpunkt bzw. translatorisch bewegteKörper freigemacht werden, d. h., alle eingeprägten Kräfte undalle Reaktionskräfte sind als äußere Kräfte anzubringen.
Bild 3. Dynamisches Grundgesetz. a Vektoriell; b in natürlichen Ko-ordinaten; c in kartesischen Koordinaten; d Massenpunkt auf schieferEbene
Beispiel: Massenpunkt auf schiefer Ebene (Bild 3 d). Die Masse mD2;5 kg wird aus der Ruhelage 1 von der Kraft F1 D 50N .� D 15ı/
die schiefe Ebene (ˇD25ı) hinaufbewegt (Gleitreibungszahl�D0;3).Zu bestimmen sind Beschleunigung, Zeit und Geschwindigkeit beimErreichen der Lage 2 (s2 D 4m). – Da die Bewegung geradlinig ist,muss an D0 sein. Nach Gl. (14) gilt F .a/
Rn DPFin D0, also
Fn DmgcosˇCF1 sin.ˇC�/D54;37N
sowie
mat DF .a/Rt D
XFit DF1 cos.ˇC�/�FG sinˇ�Fr ;
woraus mit Fr D �Fn D 16;31N dann mat D 11;63N und at D4;65m=s2 folgen.Mit den Gesetzen der gleichmäßig beschleunigten Bewegung aus derRuhelage (s. B 2.1.1) ergeben sich
t2 Dp2s2=at D1;31 s und �2 D
p2at s2 D6;10m=s:
B3.2.2 Arbeits- und Energiesatz
Aus Gl. (13) folgt nach Multiplikation mit dr und Integrationder Arbeitssatz
W1; 2 D.r2/Z
.r1 /
F Rdr D.r2/Z
.r1/
md�
dtdr D
�2Z
�1
m�d�
D m
2�2
2 � m
2�2
1 DE2 �E1 ;
(15)
d. h., die Arbeit ist gleich der Differenz der kinetischen Ener-gien. Haben alle am Vorgang beteiligten Kräfte ein Potential,verläuft der Vorgang also ohne Energieverluste, so giltW1; 2 DU1 �U2 (s. B 3.1), und aus Gl. (15) folgt der Energiesatz
U1 CE1 DU2 CE2 Dconst. (16)
Beispiel: Massenpunkt auf schiefer Ebene (Bild 3 d). Für das Beispielin B 3.2.1 ist die Geschwindigkeit �2 nach dem Arbeitssatz zu ermit-teln. – Mit �1 D0, d. h. E1 D0, wird
m�22=2DW1; 2 DF1 cos.ˇC�/s2 �Frs2 �FGhD46;51Nm:
Somit ist�2 D
p2 �46;51Nm=2;5 kgD6;10m=s:

B 28 Mechanik – B3 Kinetik
B3.2.3 Impulssatz
Aus Gl. (13) folgt nach Multiplikation mit dt und Integrationfür konstante Masse m
p1;2 Dt2Z
t1
F RdtD�2Z
�1
md�Dm�2 �m�1 Dp2 �p1 : (17)
Das Zeitintegral der Kraft, der sog. Antrieb, ist also gleich derDifferenz der Impulse.
B3.2.4 Prinzip von d’Alembert und geführteBewegungen
Aus dem Newton’schen Grundgesetz folgt für den Massen-punkt F R �ma D 0, d. h., äußere Kräfte und Trägheitskraft(negative Massenbeschleunigung, d’Alembert’sche Hilfskraft)bilden einen „Gleichgewichtszustand“. Im Fall der geführtenBewegung setzt sich die Resultierende F R aus den eingepräg-ten Kräften F e, den Zwangskräften F z und den Reibungskräf-ten F r zusammen:
F e CF z CF r �maD0: (18)
Wird auf dieses „Gleichgewichtssystem“ das Prinzip der virtu-ellen Arbeiten (s. B 1.4.3) angewendet, so folgt (Bild 4) •W D.F e CF z CF r �ma/•r D 0. Hierbei ist •r eine mit der Füh-rung geometrisch verträgliche Verrückung tangential zur Bahn.Da die Führungskräfte F z normal zur Bahn stehen und somitkeine Arbeit verrichten, gilt
•W D.F e CF r �ma/•r D0 (19)
bzw. in kartesischen Koordinaten
•W D.Fex CFrx �max/•xC.Fey CFry �may /•y
C.Fez CFrz �maz /•zD0 (20)
bzw. in natürlichen Koordinaten
•W D.Fet �Fr �mat /•sD0 (21)
(entsprechend in Zylinderkoordinaten usw.; s. folgendes Bei-spiel). Die Gln. (19) bis (21) stellen das d’Alembert’schePrinzip in der Lagrange’schen Fassung dar. Das Prinzip eignetsich besonders für Aufgaben ohne Reibung, da es die Berech-nung der Zwangskräfte erspart.
Bild 4. Zum Prinzip von d’Alembert
Bild 5. Impulsmomentensatz (Flächensatz)
Beispiel: Massenpunkt auf Schraubenlinie (s. B 2 Bild 7). Die Massem bewege sich reibungsfrei infolge ihrer Gewichtskraft eine zylindri-sche Schraubenlinie hinunter, die durch Zylinderkoordinaten
r0.t/D r0 Dconst: '.t/ und z.t/D .h=2 /'.t/
beschrieben ist (s. B 2.1.3). – Aus
r.t/D r0er C0 �e' Cz.t/ez folgt •r D r0•'e' C•zez :
Mit F e DF G D�mgez sowie a.t/D� P'2r0er C R'r0e' C R'.h=2 /ez
gemäß B 2.1.3 wird nach Gl. (19)
•W D .F e �ma/•r D�mg•z�mr20 R'•'�m R'.h=2 /•zD0
und mit •zD .h=2 /•'
m•'hgh=2 Cr2
0 R'Ch2=.2 /2 � R'i
D0;
woraus R'D � gh=.2 r20
/
1Ch2=.2 r0/2D const D �A folgt. Die Integration er-
gibt P'.t/ D �At CC1 und '.t/ D �At2=2CC1t CC2, wobei dieIntegrationskonstanten aus Anfangsbedingungenzu ermitteln sind. DieGln. in B 2.1.3 liefern dann mit ˇDarctanŒh=.2 r0/� die Bewegungs-gesetze des Massenpunkts:
s.t/D r0
��At2=2CC1tCC2
�=cosˇ;
�.t/D r0.�AtCC1/=cosˇ;
an.t/D r0.�AtCC1/2; at .t/D�r0A=cosˇDconst;
also eine gleichmäßig beschleunigte (rückläufige) Bewegung.
B3.2.5 Impulsmomenten- (Flächen-) undDrehimpulssatz
Nach vektorieller Multiplikation mit einem Radiusvektor r
folgt aus Gl. (13) r �F R DMR Dr �ma. Wegen ��m� D0
gilt
MR D d
dt.r �m�/D dD
dt(22)
Impulsmomentensatz: Die zeitliche Änderung des Impulsmo-ments D D r �m� (auch Drehimpuls oder Drall genannt) istgleich dem resultierenden Moment.Nun ist r �m�Dm.r �dr=dt / und r �dr D2dA ein Vektor,dessen Betrag gleich ist dem doppelten Flächeninhalt der vomVektor r überstrichenen Fläche (Bild 5). Damit nimmt Gl. (22)die Form an
M R D d
dt
�2m
dA
dt
�D2m d2A
dt2(23)
Flächensatz: Das resultierende Moment ist gleich dem Pro-dukt aus doppelter Masse und der Ableitung der Flächenge-schwindigkeit dA=dt . Ist F R eine Zentralkraft, d. h. stets inRichtung von r gerichtet, so wird MR Dr �F R D0 und damitnach Gl. (23) dA=dt D const, d. h., die Flächengeschwindig-keit ist konstant, der Radiusvektor überstreicht in gleichenZeiten gleiche Flächen (2. Kepler’sches Gesetz).Aus Gl. (22) folgt
t2Z
t1
M RdtDt2Z
t1
d.r �m�/Dt2Z
t1
dD DD2 �D1 (24)
Drehimpulssatz: Das Zeitintegral über das Moment ist gleichder Differenz der Drehimpulse. Ist M R D0, so gilt D1 DD2 Dconst.
B3.3 Kinetik des Massenpunktsystems
Ein Massenpunktsystem ist ein aufgrund innerer Kräfte (z. B.Massenanziehung, Federkräfte, Stabkräfte) zusammengehalte-ner Verband von n Massenpunkten (Bild 6 a). Für die innerenKräfte gilt das 3. Newton’sche Axiom von actioDreactio, d. h.
F.i/ik
DF .i/ki
.

B3.3 Kinetik des Massenpunktsystems B 29
B
Bild 6. Massenpunktsystem. a Allgemein; b zwei Massen
B3.3.1 Schwerpunktsatz
Das Newton’sche Grundgesetz für freigemachte Massenpunkteund die Summation über den gesamten Verband liefert
nXiD1
F.a/Ri C
nXi; kD1
F.i/ik
DnX
iD1
mi ai : (25)
Da für die inneren KräfteP
F.i/ik
D0 und nach B 1.10 Gl. (25)RrSmDP
mi Rr i ist, folgt
nXiD1
F.a/Ri DmaS (26)
Schwerpunktsatz: Der Massenmittelpunkt (Schwerpunkt) ei-nes Massenpunktsystems bewegt sich so, als ob die Gesamt-masse in ihm vereinigt wäre und alle äußeren Kräfte an ihmangreifen würden.
B3.3.2 Arbeits- und Energiesatz
Aus Gl. (25) folgt nach Multiplikation mit dr i (differentiellkleiner Verschiebungsvektor des i-ten Massenpunkts) und nachIntegration zwischen zwei Zeitpunkten 1 und 2
X .2/Z
.1/
F.a/Ri dr i C
X .2/Z
.1/
F.i/ik
dr i DX .2/Z
.1/
mi �i d�i
bzw. W.a/
1;2 CW .i/1;2 D
X.mi=2/
��2
i2 ��2i1
�(27)
Arbeitssatz: Die Arbeit der äußeren und inneren Kräfte amMassenpunktsystem (wobei die der Zwangskräfte wieder nullist) ist gleich der Differenz der kinetischen Energien. Dieinneren Kräfte verrichten bei starren Verbindungen der Mas-senpunkte keine Arbeit.
Haben alle beteiligten Kräfte ein Potential, so gilt der Energie-satz Gl. (16).
Beispiel: Punktmassen auf schiefen Ebenen (Bild 6 b). Die beidenüber ein nichtdehnbares Seil verbundenen Massen werden aus derRuhelage von der Kraft F die schiefen Ebenen entlang gezogen. Ge-sucht sind ihre Geschwindigkeiten nach Zurücklegen einer Strecke s1.– Nach dem Freimachen ergeben sich die Normaldruckkräfte (Zwangs-kräfte) zu Fn2 D FG2 cosˇ2 und Fn1 D FG1 cosˇ1 �F sinˇ1, wobeials Voraussetzung des NichtabhebensF 5FG1 cotˇ1 sein muss. Damitsind die Reibungskräfte Fr2 D�2Fn2 und Fr1 D�1Fn1. Der Arbeits-satz Gl. (27) liefert
F cosˇ1s1 CFG1h1 �Fr1 s1 �FSs1 CFSs2 �FG2h2 �Fr2 s2
Dm1�21 =2Cm2�
22 =2;
und mit s2 D s1 , �2 D �1 (nichtdehnbares Seil!) sowie mit h1 Ds1 sinˇ1 und h2 D s2 sinˇ2 ist dann
�21 D2s1ŒF cosˇ1 CFG1 sinˇ1 ��1.FG1 cosˇ1 �F sinˇ1/
�FG2 sinˇ2 ��2FG2 cosˇ2�=.m1 Cm2/:
B3.3.3 Impulssatz
Aus Gl. (25) folgt nach Multiplikation mit dt und Integration
X t2Z
t1
F.a/Ri dtC
X t2Z
t1
F.i/ik
dtDX t2Z
t1
mi
d�i
dtdt
DX
mi .�i2 ��i1/Dp2 �p1 :
DaP t2R
t1
F.i/ik
dt D 0 und nach B 1 Gl. (25) m�S D Pmi �i ist,
ergibt sich
p2 �p1 DX t2Z
t1
F.a/Ri dtD
Xmi .�i2 ��i1/
Dm.�S2 ��S1 / (28)
Impulssatz: Das Zeitintegral über die äußeren Kräfte des Sys-tems ist gleich der Differenz aller Impulse bzw. gleich derDifferenz der Schwerpunktimpulse. – Sind keine äußeren Kräf-te vorhanden, so folgt aus Gl. (28)
Xmi �i1 D
Xmi �i2 Dconst bzw.
m�S1 Dm�S2 Dconst ; (29)
d. h., der Gesamtimpuls bleibt erhalten.
Beispiel: Massenpunktsystem und Impulssatz (Bild 7). Eine Feder(Federrate c), die um den Betrag s1 vorgespannt war, schleudert dieMassen m1 und m2 auseinander. Zu ermitteln sind deren Geschwin-digkeiten. – Unter Vernachlässigung von Reibungskräften während desEntspannungsvorgangs der Feder wirken am System keine äußerenKräfte in Bewegungsrichtung, so dass mit �11 D 0 und �21 D 0 ausGl. (29)m1�12 �m2�22 D0, alsom1�12 Dm2�22 , folgt. Hiermit lie-fert der Energiesatz, Gl. (16), cs2
1=2DCm1�212=2Cm2�
222=2 dann
�12 Dqcs2
1=
�m1 Cm2
1=m2
�und �22 D
qcs2
1=
�m2 Cm2
2=m1
�:
Bild 7. Zum Impuls- und Energiesatz

B 30 Mechanik – B3 Kinetik
B3.3.4 Prinzip von d’Alembert und geführteBewegungen
Aus Gl. (25) folgtP
F.a/Ri C .�P
mi ai /D �PF
.i/ik
. WegenPF
.i/ik
D 0 sind die verlorenen Kräfte, das ist die Gesamt-heit der äußeren Kräfte zuzüglich der Trägheitskräfte (ne-gative Massenbeschleunigungen), am Massenpunktsystem imGleichgewicht:
XF
.a/Ri C
��
Xmi ai
�D0: (30)
Das Prinzip eignet sich in dieser Fassung besonders zur Be-rechnung der Schnittlasten dynamisch beanspruchter Systeme,wobei man die Schnittlasten als äußere Kräfte einführt. ImFall geführter Bewegungen setzt sich die Resultierende deräußeren Kräfte an den einzelnen Massenpunkten aus den ein-
geprägten Kräften F.e/i , den Führungs- oder Zwangskräften
F.z/i und den Reibungskräften F
.r/i zusammen. Für starre Sys-
teme erhält man mit dem Gleichgewichtsprinzip der virtuellenArbeiten (s. B 1.4.3), indem man jedem Massenpunkt eine mitden geometrischen Bindungen verträgliche Verrückung •r i er-teilt, dann aus Gl. (30)
XhF
.e/Ri CF
.z/Ri CF
.r/Ri C.�mi ai /
i•r i D0:
Da die Zwangskräfte bei Verrückungen keine Arbeit ver-richten, folgt das d’Alembert’sche Prinzip in Lagrange’scherFassung:
XhF
.e/Ri CF
.r/Ri C.�mi ai /
i•r i D0: (31)
In kartesischen bzw. natürlichen Koordinaten lautet Gl. (31)entsprechend den Gln. (20) und (21) für den Massenpunkt.Dieses Prinzip ist besonders zur Berechnung des Beschleu-nigungszustands von geführten Bewegungen ohne Reibunggeeignet, da es die Berechnung der Zwangskräfte erspart.
Beispiel: Physikalisches Pendel (Bild 8). – Für das aus zwei punktför-migen Massen m1 und m2 an „masselosen“ Stangen (gegeben r1 ;r2;hund somit ˇ D arcsin.h=r2/) bestehende Pendel wird die Schwin-gungsdifferentialgleichung aufgestellt. Bei fehlenden Reibungskräftennimmt das d’Alembert’sche Prinzip in Lagrange’scher Fassung in na-türlichen Koordinaten analog Gl. (21) die Form
•W DX�
F .e/
ti�miat i
�•si D0
an; damit wird
•W D .�FG1 sin'�m1at1/•s1
C.�FG2 sin.ˇC'/�m2at2/•s2 D0:
Mit •s1 D r1•', •s2 D r2•' sowie at1 D r1 R', at2 D r2 R' erhältman Œm1.gr1 sin'C r2
1 R'/Cm2.gr2 sin.ˇC'/C r22 R'/�•' D 0, wor-
aus die nichtlineare Differentialgleichung dieser Pendelschwingung
Bild 8. Physikalisches Pendel
folgt: R'.m1r21
Cm2r22/Cm1gr1 sin'Cm2gr2sin.'Cˇ/D 0. Für
kleine Auslenkungen ' nimmt sie wegen sin'�' und sin.'Cˇ/�'cosˇCsinˇ die Form R'.m1r
21
Cm2r22/C'.m1gr1Cm2gr2 cosˇ/D
�m2gr2 sinˇ an, deren Lösung in B 4 beschrieben wird.
B3.3.5 Impulsmomenten- und Drehimpulssatz
Aus dem Newton’schen Grundgesetz F.a/Ri CF
.i/ik
Dmi ai folgtnach vektorieller Multiplikation mit einem Radiusvektor r i
und Summation über das gesamte Massenpunktsystem
X�r i �F
.a/Ri
�C
X�r i �F
.i/ik
�D
X.r i �mi ai / :
Hieraus folgt analog der Ableitung von Gl. (22)
M.a/R D
X�r i �F
.a/Ri
�D d
dt
X.r i �mi �i /D dD
dt(32)
Impulsmomenten- oder Drallsatz: Die zeitliche Änderung desDralls (Drehimpulses) D DP
.r i �mi �i / ist gleich dem resul-tierenden Moment der äußeren Kräfte am Massenpunktsystem.Gleichung (32) gilt bezüglich eines raumfesten Punkts oderbezüglich des beliebig bewegten Schwerpunkts. Aus ihr folgtnach Integration über die Zeit der Drehimpulssatz analogGl. (24).
B3.3.6 Lagrange’sche Gleichungen
Sie liefern durch Differentiationsprozesse über die kinetischeEnergie die Bewegungsgleichungen des Systems. Ein Systemmit n Massenpunkten kann zwar 3n Freiheitsgrade haben, je-doch bestehen häufig zwischen einigen Koordinaten aufgrundmechanischer Bindungen Abhängigkeiten, wodurch die Zahlder Freiheitsgrade auf m (im Grenzfall bis auf mD 1) redu-ziert wird. Handelt es sich um holonome Systeme, bei denendie Beziehungen zwischen den Koordinaten in endlicher Formund nicht in Differentialform darstellbar sind, dann gelten dieLagrange’schen Gleichungen (2. Art):
d
dt
�@E
@ Pqk
�� @E
@qk
DQk .kD1;2;:::;m/: (33)
Hierbei ist E die gesamte kinetische Energie des Systems, qk
sind die generalisierten Koordinaten der m Freiheitsgrade, Qk
die generalisierten Kräfte. Ist qk eine Länge, so ist das zugehö-rige Qk eine Kraft; ist qk ein Winkel, so ist das dazu gehörigeQk ein Moment.Die Lagrange’sche Kraft Qk erhält man aus
Qk•qk DX
F.a/i •si bzw. Qk D
�XF
.a/i •si
�=•qk ;
(34)wobei •si Verschiebungen des Systems infolge alleiniger Än-derung (Variation) der Koordinate qk sind (•qi D0; i¤k).Haben die beteiligten Kräfte ein Potential, so gilt Qk D� @U
@qk
und @U@ Pqk
D0. Damit folgt aus Gl. (33)
d
dt
�@E
@ Pqk
�� @E
@qk
D� @U
@qk
bzw.
d
dt
�@L
@ Pqk
�� @L
@qk
D0;(35)
wobei LDE�U DL.q1 :::qmI Pq1 ::: Pqm/ die Lagrange’scheFunktion ist.
Beispiel: Schwinger mit einem Freiheitsgrad (Bild 9). Die Schwin-gung wird für kleine Auslenkungen ', d. h. für xD l1' und yD l2',und unter Vernachlässigung der Stangen- und Federmassen untersucht.– Es gilt E D m1 Px2=2Cm2 Py2=2 D m1l
21
P'2=2Cm2l22
P'2=2, al-
so @E@'
D 0 und @E@ P'
D .m1l21
Cm2l22/ P', d. h. d
dt
�@E@ P'
�D .m1l
21
Cm2l
22/ R'. Ferner ist U Dm1g.l1Cl2/Cm2gl2.1�cos'/Cc.l2'/2=2,

B3.4 Kinetik starrer Körper B 31
B
Bild 9. Schwinger
d. h. @U@'
Dm2gl2sin'Ccl22'. Mit sin'� ' wird @U
@'D .m2gl2 C
cl22/'. Aus Gl. (35) folgt dann mit qk D'
R'�m1l
21 Cm2l
22
�C'
�m2gl2 Ccl22
�D0
(Lösung s. B 4).
B3.3.7 Prinzip von Hamilton
Während die Lagrange’schen Gleichungen ein Differential-prinzip darstellen, handelt es sich hier um ein Integralprinzip(aus dem sich auch die Lagrange’schen Gleichungen herleitenlassen). Es lautet
t2Z
t1
.•W .e/ C•E/ dtD0:
Haben die eingeprägten Kräfte ein Potential, ist also •W .e/ D�•U ein totales Differential, so wird daraus
t2Z
t1
.•E�•U / dtD•t2Z
t1
.E�U/ dtD•t2Z
t1
LdtD0;
d. h., die Variation des Zeitintegrals über die Lagrange’scheFunktion wird null, das Zeitintegral nimmt einen Extremwertan.
B3.3.8 Systeme mit veränderlicher Masse
Grundgleichung des Raketenantriebs: Infolge des ausgesto-ßenen Massenstroms P�.t/ mit der Relativgeschwindigkeit�r.t / (Relativbewegung) ist die Raketenmasse m(t) veränder-lich. Aus dem dynamischen Grundgesetz, Gl. (12), folgt dann
F.a/R D d
dtŒm.t/�.t /�D Pm.t/�.t /Cm.t/ P�.t /.
Nun ist Pm.t/�.t /D � P�.t/�r.t / (die Masse nimmt ab) und
somit F.a/R Dm.t/a.t /� P�.t/�r.t / bzw. m.t/a.t /D F
.a/R C
P�.t/�r.t /. Wirken keine äußeren Kräfte .F .a/R D0/, so gilt
m.t/a.t /D P�.t/�r.t /DF S.t /; (36)
d. h., a ist parallel zu �r , und F S.t / ist der Schub der Rakete.Ist ferner P�D P�0 Dconst;�r D�r0 Dconst und �r parallel zu �,so wird die Bahn eine Gerade. Dann gilt m.t/at .t /D P�0�r0 DFS0
. Die verlorene Masse bis zur Zeit t ist �.t/D P�0t undsomit m.t/Dm0 � P�0t . Mit at Dd�=dt wird dann
d�
dtD P�0�r0
m0 � P�0tD P�0�r0
m0 Œ1�. P�0=m0/t �:
Die Integration mit den Anfangsbedingungen �.tD0/D0 unds.tD0/D0 liefert
�.t/D��r0 ln
�1� P�0
m0
t
�und
s.t /D m0�r0
P�0
�1� P�0
m0
t
�ln
�1� P�0
m0
t
�C P�0
m0
t
:
B3.4 Kinetik starrer Körper
Ein starrer Körper ist ein kontinuierliches Massenpunktsys-tem mit unendlich vielen starr miteinander verbundenen Mas-senelementen. Die kinematischen Grundlagen sind in B 2.2beschrieben. Ein starrer Körper kann eine Translation, eine Ro-tation oder eine allgemeine ebene bzw. räumliche Bewegungausführen.
B3.4.1 Rotation eines starren Körpers um eine festeAchse
Entsprechend Gl. (26) für das Massenpunktsystem gilt hier beiIntegration über den ganzen Körper der Schwerpunktsatz
F.a/R DF
.e/R CF
.z/R D
XF
.a/i DmaS (37)
bzw. in Komponenten (bei Drehung um die z-Achse, Bild 10 a)
F.e/Rx CF .z/
Rx DX
F.e/ix CFAx CFBx DmaSx ;
F.e/Ry CF .z/
Ry DX
F.e/iy CFAy CFBy DmaSy ;
F.e/Rz CF .z/
Rz DX
F.e/iz CFAz D0
9>>>=>>>;
(38a–c)
mit aSx D�!2z xS �˛zyS und aSy D˛zxS �!2
zyS [s. B 2, Gl.(25 b)].Diese Gleichungen gelten sowohl für ein raumfestes als auchfür ein mitdrehendes (körperfestes) System mit Nullpunkt aufder Drehachse. Ferner gilt analog dem Massenpunktsystem derDrallsatz
M.a/R DM
.e/R CM
.z/R D d
dt
Z.r ��/dmD dD
dt: (39)
Gemäß B 2.2 Gl. (23) gilt in kartesischen Koordinaten (beiDrehung um die z-Achse, d. h. mit !x D!y D0)
�x D.!yz�!zy/D�!zy ;
�y D.!zx�!xz/D!zx ;
�z D.!xy�!yx/D0:(40)
Bild 10. Kinetische Lagerdrücke. a Allgemein; b Welle mit schiefsit-zender Scheibe

B 32 Mechanik – B3 Kinetik
Aus Gl. (39) wird hiermit
M.e/R CM
.z/R D d
dt
Z ˇ̌ˇ̌ˇ̌ˇex ey ez
x y z
�x �y 0
ˇ̌ˇ̌ˇ̌ˇdm
D d
dt
Z�!zxzdmex C
Z�!zyzdmey
CZ!z.x
2 Cy2/dmez
D d
dtŒ�!zJxzex �!zJyz ey C!zJzez �I
(41)Jxz D R
xz dm, Jyz D Ryz dm Deviations- oder Zentrifugal-
momente, Jz DR.x2 Cy2/ dmDR
r2z dm axiales Massenträg-
heitsmoment. In Komponenten
M.e/Rx CM .z/
Rx DX
M.e/ix CFAy l1 �FBy l2
D�d.!zJxz /=dtD�Jxz˛z C!2zJyz ;
M.e/Ry CM .z/
Ry DX
M.e/iy CFBx l2 �FAx l1
D�d.!zJyz /=dtD�Jyz˛z �!2zJxz ;
M.e/Rz D
XM
.e/iz Dd.!zJz /=dtDJz˛z :
9>>>>>>>>>=>>>>>>>>>;
(42a–c)Diese Gleichungen gelten sowohl für ein raumfestes als auchfür ein mitdrehendes Koordinatensystem x, y, z mit Nullpunktauf der Drehachse. Im ersten Fall sind Jxz und Jyz zeit-lich veränderlich, im zweiten Fall konstant. Die Gln. (38 a–c)und (42 a, b) liefern die unbekannten fünf Auflagerreaktionen,wobei ˛z und !z aus Gl. (42 c) folgen. Dabei ergeben die ein-
geprägten Kräfte F.e/i und Momente M .e/
ix und M .e/iy die rein
statischen Auflagerreaktionen, während die kinetischen Aufla-
gerreaktionen sich mit F.e/i D0, M .e/
ix DM .e/iy D0 aus
F.k/Ax CF .k/
Bx DmaSx ; F.k/Ay CF .k/
By DmaSy ; F.k/Az D0;
(43)F
.k/Ay l1 �F .k/
By l2 D�Jxz˛z C!2zJyz ;
F.k/Bx l2 �F .k/
Ax l1 D�Jyz˛z �!2zJxz
(44)
berechnen lassen. Nach diesen Gleichungen verschwinden sie,wenn aS D 0 wird, also die Drehachse durch den Schwer-punkt geht und wenn sie eine Hauptträgheitsachse ist, d. h., dieZentrifugalmomente Jxz und Jyz null werden. Die Drehachseheißt dann freie Achse. Für sie gehen die Gln. (38 a–c) sowie(42 a, b) in die bekannten Gleichgewichtsbedingungen über,während das dynamische Grundgesetz für die Drehbewegungnach Gl. (42 c) lautet
M.e/R D
XM
.e/i DJ˛ (45)
J DRr2dm, wobei r der Abstand senkrecht zur Drehachse ist.
Arbeits- und Drehimpulssatz. Aus Gl. (45) folgen
W1;2 D'2Z
'1
M.e/R d'D
'2Z
'1
Jd!
dtd'
DJ!2Z
!1
! d!D J
2
�!2
2 �!21
�;
(46)
D2 �D1 Dt2Z
t1
M.e/R dtD
t2Z
t1
Jd!
dtdt
DJ!2Z
!1
d!DJ.!2 �!1/:
(47)
Bild 11. Massenträgheitsmomente
Beispiel: Welle mit schiefsitzender Scheibe (Bild 10 b). Auf einer mit!z D const D !0 rotierenden Welle ist eine vollzylindrische Scheibe(Radius r, Dicke h, Masse m) unter dem Winkel geneigt aufge-keilt. Zu ermitteln sind die Auflagerkräfte. – Als einzige eingeprägteKraft erzeugt die zentrische Gewichtskraft FG Dmg keine Momente,so dass die Gln. (38 a–c) und (42 a, b) mit aSx DaSy D0 und (wegen!z D const) ˛z D0 FAx CFBx D0; FAy CFBy D0, �FG CFAz D0,FAy l1 �FBy l2 D !2
0Jyz , FBx l2 �FAx l1 D �!2
0Jxz ergeben. Mit
den Richtungswinkeln der x-Achse gegenüber den Hauptachsen � , �, (s. B 3.4.2) ˛1 D 0, ˇ1 D 90ı, �1 D 90ı, mit denen der y-Achse˛2 D 90ı, ˇ2 D ; �2 D 90ı C und denen der z-Achse ˛3 D 90ı,ˇ3 D90ı � , �3 D erhält man gemäß Gl. (52)
Jyz D�J1 cos˛2 cos˛3 �J2 cosˇ2 cosˇ3 �J3 cos�2 cos�3
D�J2 cos sin CJ3 sin cos
und entsprechendJxz D0. Nach Tab. 1 ist J2 DJ� Dm.3r2Ch2/=12,J3 DJ� Dmr2=2 und somit Jyz D Œm.3r2 �h2/=24�sin2 , so dasssich die Auflagerkräfte
FAx DFBx D0; FAz DFG ;
FAy D�FBy Dn!2
0m.3r2 �h2/
ıŒ24.l1 Cl2/�
osin2
ergeben.
B3.4.2 Allgemeines über Massenträgheitsmomente(Bild 11)
Axiale Trägheitsmomente:
Jx DZ.y2 Cz2/ dmD
Zr2
x dm;
Jy DZ.x2 Cz2/ dmD
Zr2
y dm;
Jz DZ.x2 Cy2/ dmD
Zr2
z dm:
9>>>>>>=>>>>>>;
(48)
Polares Trägheitsmoment sowie Deviations- oder Zentrifugal-momente:
Jp DZr2 dmD
Z.x2 Cy2 Cz2/ dm
D.Jx CJy CJz/=2 I
Jxy DZxy dm; Jxz D
Zxz dm; Jyz D
Zyz dm:
(49)
Die Trägheitsmomente lassen sich mit Jx DJxx , Jy DJyy undJz DJzz zum Trägheitstensor, einem symmetrischen Tensor 2.Stufe, zusammenfassen. In Matrixschreibweise gilt
J D
0B@
Jxx �Jxy �Jxz
�Jyx Jyy �Jyz
�Jzx �Jzy Jzz
1CA :

B3.4 Kinetik starrer Körper B 33
B
Tabelle 1. Massenträgheitsmomente homogener Körper
Kreiszylinder
mD�r2h
Jx Dmr2
2Jy DJz D m.3r2
Ch2/12
ZylinderschaleWanddicke ı�r :mD2�rhı
Jx Dmr2 Jy DJz D m.6r2
Ch2/12
Hohlzylinder
mD��r2
a �r2i
�h
Jx Dm
�r2
a Cr2i
�2
Jy DJz D m
�r2
a Cr2i
Ch2=3
�4
Kugel
mD 43�r3
Jx DJy DJz D 25mr2
KugelschaleWanddicke ı�r :mD4�r2ı
Jx DJy DJz D 23mr2
Kreiskegel
mD�r2h=3
Jx D3
10mr2 Jy DJz D 3m.4r2
Ch2/80
KegelschaleWanddicke ı�r :mD�rsı
Jx D mr2
2
Quader
mDabc
Jx Dm.b2
Cc2 /12
Jy D m.a2Cc2 /
12
Jz D m.a2Cb2/
12
Dünner Stab
mDAl
Jy DJz D ml2
12
Hohlkugel
mD 43�
�r3
a �r3i
�
Jx DJy DJz D 25m
r5a �r5
i
r3a �r3
i
Kreiskegelstumpf
mD 13�h
�r2
2 Cr2r1 Cr21
�Jx D 3
10m
r52 �r5
1r3
2 �r31
Rechteck-Pyramide
mDabh=3
Jx Dm
�a2
Cb2�
20Jy D m
�b2
C34
h2�
20
Jz D m
�a2
C34
h2�
20
Kreistorus
mD2�2r2R
Jx DJy D m.4R2C5r2/
8
Jz D m.4R2C3r2/
4
Halbkugel
mD 23�r3
Jx D Jy D83
320mr2 Jz D 2
5mr2
Beliebiger Rotationskörper
mD�x2Rx1
f 2.x/dx
Jx D 12�
x2Rx1
f 4.x/dx
Hauptachsen. Wird J�� DJ�� DJ�� D 0, so liegen Haupt-trägheitsachsen � , �, vor. Die zugehörigen axialen Haupt-trägheitsmomente J1, J2, J3 verhalten sich so, dass eins dasabsolute Maximum und ein anderes das absolute Minimumaller Trägheitsmomente des Körpers ist. Hat ein Körper ei-ne Symmetrieebene, so ist jede dazu senkrechte Achse eineHauptachse. Allgemein erhält man die Hauptträgheitsmomen-te als Extremalwerte der Gl. (50) mit der Nebenbedingungh D cos2˛C cos2ˇC cos2� � 1D 0. Mit den Abkürzungencos˛D�, cosˇD�, cos�D� folgen mit J DJx�
2 CJy�2 C
Jz�2 � 2Jxy��� 2Jyz�� � 2Jxz�� und f D J � ch aus
ıf=ı� D 0 usw. drei homogene lineare Gleichungen für �,�, � , die nur dann eine nichttriviale Lösung haben, wenn ih-re Koeffizientendeterminante null wird. Daraus erhält man diekubische Gleichung für c mit den Lösungen c1 DJ1, c2 DJ2
und c3 DJ3 .
Trägheitsellipsoid. Trägt man in Richtung der Achsen x,y, z die Größen 1=
pJx , 1=
pJy , 1=
pJz ab, so liegen die
Endpunkte auf dem Trägheitsellipsoid mit den Hauptachsen1=
pJ1 usw. und der Gleichung J1�
2 CJ2�2 CJ3
2 D1. Liegthierbei der Koordinatenanfangspunkt im Schwerpunkt, sprichtman vom Zentralellipsoid; die zugehörigen Hauptachsen sinddann freie Achsen.
Trägheitsmomente bezüglich gedrehter Achsen. Für eineunter den Winkeln ˛, ˇ, � gegen x, y, z geneigte Achse Nx folgtmit e Nx D.cos˛;cosˇ;cos�/ aus J Nx De NxJ eTNx (s. www.dubbel.de) sowie mit Jxy DJyx usw.
J Nx DJx cos2˛CJy cos2ˇCJz cos2�
�2Jxy cos˛cosˇ�2Jyz cosˇcos�
�2Jxz cos˛cos� :
(50)
Sind dagegen ˛1, ˇ1, �1 die Richtungswinkel der x-Achsegegenüber den Hauptachsen � , �, , so gilt für das axiale Träg-heitsmoment
Jx DJ1 cos2˛1 CJ2 cos2ˇ1 CJ3 cos2�1 I (51)
Jy ;Jz entsprechend mit den Richtungswinkeln ˛2, ˇ2, �2 bzw.˛3, ˇ3, �3 der y- bzw. z-Achse gegenüber den Hauptachsen.Die zugehörigen Deviationsmomente sind (für Jxz und Jyz
entsprechend)
Jxy D�J1 cos˛1 cos˛2 �J2 cosˇ1 cosˇ2
�J3 cos�1 cos�2 :(52)
Satz von Steiner. Für parallele Achsen gilt
Jx DJ Nx C�y2
S Cz2S
�m; Jy DJ Ny C�
z2S Cx2
S
�m;
Jz DJ Nz C�x2
S Cy2S
�m; Jxy DJ Nx Ny CxSySm;
Jxz DJ Nx Nz CxSzSm; Jyz DJ Ny Nz CySzSmI(53)

B 34 Mechanik – B3 Kinetik
Nx, Ny, Nz sind zu x, y, z parallele Achsen durch den Schwerpunkt.
Trägheitsradius. Wird die Gesamtmasse in Entfernung ivon der Drehachse (bei gegebenem J und m) vereinigt, so giltJ D i2m bzw. iDp
J=m.
Reduzierte Masse. Denkt man sich die Masse mred inbeliebiger Entfernung d von der Drehachse angebracht (bei ge-gebenem J), so gilt J Dd 2mred bzw.mred DJ=d 2.
Berechnung der Massenträgheitsmomente. Für Einzel-körper mittels dreifacher Integrale
Jx DZr2
x dmDZ Z Z
%.y2 Cz2/ dx dy dz :
Je nach Körperform verwendet man auch Zylinder- oder Ku-gelkoordinaten. Zum Beispiel wird für den vollen Kreiszylin-der (s. Tab. 1)
Jx DraZ
rD0
2 Z
'D0
Ch=2Z
zD�h=2
%r2.r d' dr dz/
D%�r4
a =4�2 hDmr2
a =2:
Für zusammengesetzte Körper gilt mit dem Satz von SteinerJx DP
ŒJxi C.y2Si Cz2
Si /mi � usw. (s. C 2.4.5 Flächenmomente2. Ordnung).
B3.4.3 Allgemeine ebene Bewegung starrer Körper
Ebene Bewegung bedeutet zD const bzw. �z D!x D!y D 0
und az D˛x D˛y D 0. Wie beim Massenpunktsystem geltenSchwerpunktsatz und Drallsatz (Momentensatz)
F.a/R D
XF
.a/i DmaS ; (54)
M.a/R D
XM
.a/i D d
dt
Z.r ��/dm
D d
dt
Z ˇ̌ˇ̌ˇ̌ˇex ey ez
x y z
Px Py 0
ˇ̌ˇ̌ˇ̌ˇdmD dD
dt:
(55)
(Der Momentensatz gilt bezüglich eines raumfesten Punktsoder des beliebig bewegten Schwerpunkts.)In kartesischen Koordinaten
F.a/Rx D
XF
.a/ix DmaSx ; F
.a/Ry D
XF
.a/iy DmaSy ;
F.a/Rz D
XF
.a/iz D0;
M.a/Rx D� d
dt
Zz Py dmD� d2
dt2
Zzy dmD� d2Jyz
dt2;
M.a/Ry D d
dt
Zz Px dmD d2
dt2
Zzx dmD d2Jxz
dt2;
M.a/Rz D d
dt
Z.x Py� Pxy/ dm
9>>>>>>>>>>>>>>=>>>>>>>>>>>>>>;(56)
bzw. mit Gl. (40) und !z D!
M.a/Rz D d
dt
Z!.x2 Cy2/ dmD d
dt
Z!r2
z dmD d
dt.!Jz/:
M.a/Rx und M .a/
Ry sind die zur Erzwingung der ebenen Bewe-gung nötigen äußeren Momente, wenn z keine Hauptträgheits-achse ist. Ist z eine Hauptträgheitsachse (Jyz D Jxz D 0), so
folgen M .a/Rx D 0, M .a/
Ry D 0, M .a/Rz D d
dt.!Jz / bzw. bezüglich
des körperfesten Schwerpunkts mit JS Dconst
M.a/RS D
XM
.a/iS DJS˛: (57)
Bild 12. Rollbewegung auf schiefer Ebene
Arbeitssatz:
W1;2 DZ
F.a/R dr C
ZM
.a/RS d'D
�m
2�2
S2C JS
2!2
2
�
��m
2�2
S1C JS
2!2
1
�DE2 �E1
(58)
Haben die äußeren Kräfte und Momente ein Potential, so giltder Energiesatz U1 CE1 DU2 CE2 Dconst.Impuls- und Drehimpulssatz:
p2 �p1 Dt2Z
t1
F.a/R dtDm.�S2 ��S1 / (59)
D2 �D1 Dt2Z
t1
M.a/RS dtDJS.!2 �!1/ (60)
D’Alembert’sches Prinzip. Die verlorenen Kräfte, d. h. dieSumme aus eingeprägten Kräften und Trägheitskräften, haltensich am Gesamtkörper das Gleichgewicht. Mit dem Gleichge-wichtsprinzip der virtuellen Verrückungen gilt dann in Lagran-ge’scher Fassung
�F
.e/R �maS
�•rS C�
M.e/RS �JS˛
�•'D0: (61)
Beispiel: Rollbewegung auf schiefer Ebene (Bild 12). Aus der Ru-helage soll ein zylindrischer Körper (r;m;JS) von der Kraft F dieschiefe Ebene (Neigungswinkel ˇ) hinaufgerollt werden ohne zu glei-ten. Zu ermitteln sind seine Schwerpunktbeschleunigung sowie Zeitund Geschwindigkeit bei Erreichen der Lage 2 nach Zurücklegen desWegs s2. – Da der Schwerpunkt eine geradlinige Bewegung ausführt,fällt sein Beschleunigungsvektor in die Bewegungsrichtung. Schwer-punktsatz, Gl. (54), und Momentensatz, Gl. (57), liefern (Bild 12 a)maS D F cosˇ�FG sinˇ�Fr und JS˛D Frr , woraus mit ˛ D aS=r
wegen des reinen Rollens
aS D .F cosˇ�FG sinˇ/=.mCJS=r2/
folgt. Mit den Gesetzen der gleichmäßig beschleunigten Bewegung ausder Ruhelage (s. B 2.1.1) ergeben sich �S2 Dp
2aSs2 und t2 D�S2=aS.Der Arbeitssatz, Gl. (58),
.F cosˇ�FG sinˇ/s2 Dm�2S2=2CJS!
22=2
liefert mit !2 D�S2 =r wiederum
�S2 Dq2.F cosˇ�FG sinˇ/s2
ı�mCJS=r2
�:
Impulssatz und Drehimpulssatz, Gln. (59) und (60),
.F cosˇ�FG sinˇ�Fr/t2 Dm�S2 und Frrt2 DJS!2
ergeben ebenfalls
t2 D�S2
�mCJS=r
2�ı.F cosˇ�FG sinˇ/D�S2=aS :
Das d’Alembert’sche Prinzip in der Lagrange’schen Fassung nachGl. (61) führt zu (Bild 12 b)
.F cosˇ�FG sinˇ�maS/ısC.0�JS˛/ı'D0 I

B3.4 Kinetik starrer Körper B 35
B
Bild 13. Starrkörpersystem
mit ˛DaS=r , •'D•s=r folgt
•s�F cosˇ�FG sinˇ�maS �JSaS=r
2�D0; also wieder
aS D .F cosˇ�FG sinˇ/ı�mCJS=r
2�:
Ebene Starrkörpersysteme. Die Bewegung lässt sich aufverschiedene Weise berechnen:– Freimachen jedes Einzelkörpers und Ansatz von Schwer-
punktsatz, Gl. (54), und Momentensatz, Gl. (57), wenn zHauptträgheitsachse ist,
– Anwenden des d’Alembert’schen Prinzips, Gl. (61), auf dasaus n Körpern bestehende System
X�F
.e/Ri �mi aiS
�•r iS C
X�M
.e/Ri �JiS˛i
�•'i D0;
(62)– Anwenden der Lagrange’schen Bewegungsgleichungen
Gln. (33)–(35).
Beispiel: Beschleunigungen eines Starrkörpersystems (Bild 13). DasSystem bewege sich in den angedeuteten Richtungen, wobei in derFührung von m1 die Reibkraft Fr1 wirkt und die Walze eine reineRollbewegung ausführt. – Das d’Alembert’sche Prinzip in der Lagran-ge’schen Fassung, Gl. (62), liefert
.FG1 �Fr1 �m1a1/ •z�J2˛2•'�.FG3 sinˇCm3a3S/ •s
�J3S˛3• D0:
Mit
•zD ra•'; •sD ri•' und • D•s=r3 D•'ri=r3
bzw.a1 D RzD ra R'D ra˛2 ; a3S D RsD ri R'D ri˛2 und
˛3 D R D Rs=r3 D˛2ri=r3
wird•'
�.FG1 �Fr1 /ra �m1r
2a ˛2 �J2˛2 �FG3 ri sinˇ
�m3r2i ˛2 �J3S.ri=r3/
2˛2
�D0:
Die Winkelbeschleunigung der Seilscheibe ist also
˛2 D Œ.FG1 �Fr1 /ra �FG3 ri sinˇ�ı�m1r
2a CJ2 Cm3r
2i
CJ3S.ri=r3/2�;
womit auch a1 D ra˛2 , a3S D ri˛2 und ˛3 D˛2ri=r3 bestimmt sind.
B3.4.4 Allgemeine räumliche Bewegung
Bewegungsgleichungen sind mit dem Schwerpunktsatz unddem Drall- oder Momentensatz gegeben:
F.a/R D
XF
.a/i DmaS (63)
M.a/R D
XM
.a/i D dD
dtD d
dt
Z.r ��/ dm (64)
(Erläuterungen s. Gln. (26) und (32)).
Bild 14. Allgemeine räumliche Bewegung
Der Momentensatz gilt bezüglich eines raumfesten Punkts oderdes beliebig bewegten Schwerpunkts. In kartesischen Koordi-naten mit � gemäß B 2 Gl.(23) wird
M.a/R D d
dt
Z ˇ̌ˇ̌ˇ̌ˇex ey ez
x y z
�x �y �z
ˇ̌ˇ̌ˇ̌ˇ
dm
D d
dtŒ.!xJx �!yJxy �!zJxz /ex
C.!yJy �!xJxy �!zJyz /ey
C.!zJz �!xJxz �!yJyz /ez �:
(65)
Diese Gleichung bezieht sich auf ein raumfestes Koordinaten-system x, y, z (Bild 14), dessen Koordinatenanfangspunkt auchim Schwerpunkt liegen kann, d. h., die Größen Jx , Jxy usw.sind zeitabhängig, da sich die Lage des Körpers ändert.Wird nach Euler ein körperfestes, mitbewegtes Koordinaten-system � , �, eingeführt (der Einfachheit halber in Richtungder Hauptträgheitsachsen des Körpers) und der Winkelge-schwindigkeitsvektor in diesem Koordinatensystem in seineKomponenten ! D !1e1 C!2e2 C!3e3 zerlegt, so nimmtGl. (65) die Form
M.a/R D d
dtŒ!1J1e1 C!2J2e2 C!3J3e3� (66)
an, wobei jetzt J1, J2, J3 konstant und !1J1 usw. die Kom-ponenten des Drallvektors D im bewegten Koordinatensystemsind. Mit der Regel für die Ableitung eines Vektors im be-wegten Koordinatensystem (s. B 2 Gl. (35)) wird dD=dt DdrD=dtC!�D, wobei drD=dt die Ableitung des Vektors D
relativ zum mitbewegten Koordinatensystem ist. Aus Gl. (66)folgt in Komponenten
M.a/
R�D Œ P!1J1 C!2!3.J3 �J2/�;
M.a/R� D Œ P!2J2 C!1!3.J1 �J3/�;
M.a/
R�D Œ P!3J3 C!1!2.J2 �J1/�:
9>=>; (67)
Das sind die Euler’schen Bewegungsgleichungen eines Kör-pers im Raum bezüglich der Hauptachsen mit einem raum-festen Punkt oder dem beliebig bewegten Schwerpunkt alsUrsprung. Aus den drei gekoppelten Differentialgleichungenergeben sich jedoch nur die Winkelgeschwindigkeiten !1.t /,!2.t /, !3.t / bezüglich des mitbewegten Koordinatensystems,nicht aber die Lage des Körpers gegenüber den raumfestenRichtungen x, y, z. Hierzu ist die Einführung der Euler’schenWinkel ', , # erforderlich [1]. Die Lage des Schwerpunktseines im Raum frei bewegten Körpers ist aus dem Schwer-punktsatz, Gl. (63), wie für einen Massenpunkt (s. B 3.2)berechenbar.
Drehimpulssatz:
t2Z
t1
M.a/R dtD
t2Z
t1
dD DD2 �D1
Für M.a/R D0 wird D2 DD1, d. h., ohne Einwirkung äußerer
Momente behält der Drallvektor seine Richtung im Raum bei.

B 36 Mechanik – B3 Kinetik
Bild 15. Kreisel. a Kräftefreier; b schwerer; c geführter
Energiesatz: Haben die einwirkenden Kräfte ein Potential, sogilt
U1 CE1 DU2 CE2 Dconst.
Kinetische Energie EDm�2S =2C�
J1!21 CJ2!
22 CJ3!
23
�=2
Kreiselbewegung (Bild 15). Hierunter versteht man dieDrehung eines starren Körpers um einen festen Punkt. Es gel-ten die Euler’schen Bewegungsgleichungen, Gl. (67).
Kräftefreier Kreisel. Sind alle Momente der äußeren Kräf-te null, d. h. Lagerung im Schwerpunkt (Bild 15 a), und wirkensonst keine Kräfte und Momente, so ist die Bewegung kräfte-frei; der Drallvektor behält seine Richtung und Größe im Raumbei. Dabei ergeben sich die möglichen Bewegungsformen desKreisels aus
J1 P!1 D.J2 �J3/!2!3; J2 P!2 D.J3 �J1/!1!3 ;
J3 P!3 D.J1 �J2/!1!2 Ialso entweder
!1 Dconst ; !2 D!3 D0 oder
!2 Dconst ; !1 D!3 D0 oder
!3 Dconst ; !1 D!2 D0;d. h. jeweils Drehung um eine Hauptträgheitsachse (Bewegungstabil, falls Drehung um die Achse des größten oder kleinstenTrägheitsmoments).Für den symmetrischen Kreisel folgen mit J1 D J2 die Glei-chungen, s. [2, 3],
!3 Dconst ; R!1 C�2!1 D0 und R!2 C�2!2 D0mit den Lösungen
!1 Dcsin.�t�˛/ und !2 Dccos.�t�˛/;wobei �D.J3=J1 �1/!3.Mit !2
1 C!22 D c2 D const folgt, dass der Winkelgeschwin-
digkeitsvektor ! D !1e� C !2e� C !3e� (die momentaneDrehachse) einen Kreiskegel im körperfesten System, denGangpolkegel, beschreibt, der auf dem Rastpolkegel, dessenAchse der feste Drallvektor ist, abrollt (Bild 15 a). Die Fi-gurenachse beschreibt dabei den Präzessionskegel (regulärePräzession).
Schwerer Kreisel. Hier sei speziell der schnell umlau-fende symmetrische Kreisel unter Eigengewicht betrachtet(Bild 15 b). Beim schnellen Kreisel ist D � !3J3e� , d. h.,Drallvektor und Figurenachse fallen näherungsweise zusam-men. Aus dem Drallsatz folgt dD D M
.a/R dt D .r � F G/ dt ,
d. h., der Kreisel trachtet, seine Figurenachse parallel und
gleichsinnig zu dem auf ihn wirkenden Moment einzustellen(Satz von Poinsot). Nach Bild 15 b gilt M DFGr sin# , dDDDsin# � d'. Aus dD DMdt folgt !P D d'=dt D FGr=D �FGr=.J3!3/. !P ist die Winkelgeschwindigkeit der Präzessi-on des Kreisels. Wegen !P fällt der Drallvektor nicht genauin die Figurenachse, daher überlagert sich der Präzession nochdie Nutation [2, 3].
Geführter Kreisel. Er ist ein umlaufender, in der Regelrotationssymmetrischer Körper, dem Führungskräfte eine Än-derung des Drallvektors aufzwingen, wodurch das Moment derKreiselwirkung und damit verbunden zum Teil erhebliche Auf-lagerkräfte entstehen (Kollergang, Schwenken von Radsätzenund Schiffswellen usw.). Für ein Fahrzeug in der Kurve liefertdie Kreiselwirkung der Räder ein zusätzliches Kippmoment.Umgekehrt finden geführte Kreisel als Stabilisierungselementefür Schiffe, Einschienenbahnen usw. Verwendung. Beim ho-rizontal schwimmend angeordneten Kreiselkompass wird dieDrallachse durch die Erddrehung in Nord-Süd-Richtung ge-zwungen.Für den in (Bild 15 c) dargestellten und mit !F geführten Ro-tationskörper gilt
M .a/ D dD
dtD!F �D D
ˇ̌ˇ̌ˇ̌ˇ
e� e� e�
0 0 !F
!1J1 0 !FJ3
ˇ̌ˇ̌ˇ̌ˇ
D!F!1J1e�
bzw. M .a/ D F.k/A l D !F!1J1, d. h. F .k/
A D !F!1J1=l . Das
Moment der Kreiselwirkung erzeugt in den Lagern die zu F .k/A
entgegengesetzten Auflagerdrücke.
B3.5 Kinetik der Relativbewegung
Bei einer geführten Relativbewegung gilt für die Beschleu-nigung nach B 2.2 Gl. (36) und damit für das Newton’scheGrundgesetz
F.a/R DmaF Cmar CmaC : (68)
Für einen auf dem Fahrzeug befindlichen Beobachter ist nurdie Relativbeschleunigung wahrnehmbar
mar DF.a/R �maF �maC DF
.a/R CF F CF C ; (69)
d. h., den äußeren Kräften sind die Führungskraft und die Co-rioliskraft hinzuzufügen.
Beispiel: Bewegung in rotierendem Rohr (Bild 16). In einem Rohr,das um eine vertikale Achse mit ˛F.t/ und !F.t/ rotiert, wird mit-tels eines Fadens die Masse m mit der Relativbeschleunigung ar.t/
und der Relativgeschwindigkeit�r.t/ reibungsfrei nach innen gezogen.

B3.6 Stoß B 37
B
Bild 16. Relativbewegung
Für eine beliebige Lage r(t) sind die Fadenkraft sowie die Normal-kraft zwischen Masse und Rohr zu bestimmen. – Mit aF D aFn CaFt
(aFn D r!2F ; aFt D r˛F) und aC D2!F�r erhält man an der freigemach-
ten Masse nach Gl. (68)
FS Dm.ar CaFn/Dm�ar Cr!2
F
�und
Fn Dm.aC �aFt /Dm.2!F�r �r˛F/:
B3.6 Stoß
Beim Stoß zweier Körper gegeneinander werden in kurzer Zeitrelativ große Kräfte wirksam, denen gegenüber andere Kräf-te wie Gewichtskraft und Reibung vernachlässigbar sind. DieNormale der Berührungsflächen heißt Stoßnormale. Geht siedurch die Schwerpunkte beider Körper, so nennt man den Stoßzentrisch, sonst exzentrisch. Liegen die Geschwindigkeiten inRichtung der Stoßnormalen, so ist es ein gerader, sonst einschiefer Stoß. Über die während des Stoßes in der Berührungs-fläche übertragene Kraft und die Stoßdauer liegen nur wenigeErgebnisse vor [4, 5]. Der Stoßvorgang wird unterteilt in dieKompressionsperiode K, während der die Stoßkraft zunimmt,bis beide Körper die gemeinsame Geschwindigkeit u erreichthaben, und in die Restitutionsperiode R, in der die Stoßkraftabnimmt und die Körper ihre unterschiedlichen Endgeschwin-digkeiten c1 und c2 erreichen (Bild 17). Stoßimpulse oderKraftstöße in der Kompressionsperiode und in der Restituti-onsperiode ergeben sich zu:
pK Dt2Z
t1
FK.t /dt; pR Dt3Z
t2
FR.t /dt (70)
pK und pR werden mittels der Newton’schen Stoßhypothesezueinander in Beziehung gesetzt:
pR DkpK ; (71)
wobei k51 die Stoßziffer ist. Vollelastischer Stoß: kD1, teil-elastischer Stoß: k<1, unelastischer oder plastischer Stoß: kD0. Mittlere Stoßkraft Fm D.pK CpR/= t .
B3.6.1 Gerader zentraler Stoß
Mit �1 und �2 als Geschwindigkeiten beider Körper vor demStoß (Bild 17), u und c1 bzw. c2 wie erläutert, folgt aus den
Bild 17. Kraftverlauf beim Stoß
Gln. (70) und (71)
uD.m1�1 Cm2�2/=.m1 Cm2/;
c1 D Œm1�1 Cm2�2 �km2.�1 ��2/�=.m1 Cm2/;
c2 D Œm1�1 Cm2�2 Ckm1.�1 ��2/�=.m1 Cm2/;
kDpR=pK D.c2 �c1/=.�1 ��2/:
Energieverlust beim Stoß
ED m1m2
2.m1 Cm2/.�1 ��2/
2.1�k2/:
Sonderfälle:
m1 Dm2 ; kD1 WuD.�1 C�2/=2; c1 D�2 ; c2 D�1 Im1 Dm2 ; kD0 WuDc1 Dc2 D.�1 C�2/=2 Im2 !1; �2 D0; kD1 WuD0; c1 D��1; c2 D0 Im2 !1; �2 D0; kD0 WuD0; c1 D0; c2 D0:
Ermittlung der Stoßziffer: Bei freiem Fall gegen unendlichgroße Masse m2 gilt k D .c2 � c1/=.�1 � �2/ D p
h2=h1;h1 Fallhöhe vor dem Stoß, h2 Steighöhe nach dem Stoß. kabhängig von Auftreffgeschwindigkeit, bei � � 2;8m=s fürElfenbein k D 8=9, Stahl k D 5=9, Glas k D 15=16, HolzkD1=2.
Stoßkraft und Stoßdauer. Für den rein elastischen Stoßzweier Kugeln mit den Radien r1 und r2 hat Hertz [4] maxF Dk1v
6=5 abgeleitet, wobei � die relative Geschwindigkeit und
k1 D Œ1;25 �m1m2=.m1 Cm2/�3=5c
2=51 ist, mit
c1 D.16=3/=Œp1=r1 C1=r2.#1 C#2/�I #D.2=G/.1��/;
G Schubmodul, � Querdehnzahl. Ferner für die Stoßdauer T Dk2=
5p� mit k2 D2;943
�5
4c1
m1m2m1Cm2
�2=5.
B3.6.2 Schiefer zentraler Stoß
Mit den Bezeichnungen nach Bild 18 a gelten die Gleichungen
�1 sin˛Dc1 sin˛0; �2 sinˇDc2 sinˇ0 ;c1 cos˛0 D�1 cos˛
� Œ.�1cos˛��2 cosˇ/.1Ck/=.1Cm1=m2/�;
c2 cosˇ0 D�2 cosˇ
� Œ.�2cosˇ��1cos˛/.1Ck/=.1Cm2=m1/�;
aus denen man ˛0 , ˇ0, c1 und c2 erhält.
Beispiel: Stoß einer Kugel gegen eine Wand (Bild 18 b). – Mit �2 Dc2 D0 undm2 !1 folgt aus den vorstehenden Gleichungen
c1 cos˛0 D�k�1 cos˛; �tan˛0 D tan˛00 D .tan˛/=k
sowie
c1 D�k�1 cos˛=cos˛0 D��1 cos˛pk2 C tan2˛ :
Für kD 1 wird ˛0 D �˛ bzw. ˛00 D ˛ und c1 D �1 , d. h. Einfalls-winkel gleich Ausfallswinkel (Reflexionsgesetz) bei gleichbleibenderGeschwindigkeit.
B3.6.3 Exzentrischer Stoß
Stößt eine Masse m1 gegen einen pendelnd aufgehängtenKörper (Bild 18 c) mit dem Trägheitsmoment J0 um den Dreh-punkt 0, so gelten alle Formeln für den geraden zentralen Stoß,wenn dort m2 durch die reduzierte Massem2red DJ0=l
2 ersetztwird. Ferner gelten die kinematischen Beziehungen �2 D!2l

B 38 Mechanik – B3 Kinetik
Bild 18. Stoß. a Schiefer zentraler Stoß; b Reflexionsgesetz; c exzen-trischer Stoß; d Drehstoß
usw. Für den Kraftstoß auf den Aufhängepunkt gilt (wenn!2 D0)
p0 D.1Ck/m1�1.J0 �m2lrS/=.J0 Cm1l2/:
Dieser Impuls wird null für
lD lr DJ0=.m2rS/ bzw. rS DrSr DJS=.m2b/:
lr oder rSr geben die Lage des Stoßmittelpunkts an, der beimStoß kraftfrei bleibt bzw. um den sich (Momentanzentrum)ein freier angestoßener Körper dreht. lr ist gleichzeitig diereduzierte Pendellänge bei Ersatz durch ein mathematischesFadenpendel.
B3.6.4 Drehstoß
Für zwei rotierende zusammenstoßende Körper (Bild 18 d)setzt man m1 D J1=l
21 , m2 D J2=l
22 , �1 D !1l1, �2 D !2l2
usw. und führt damit das Problem auf den geraden zentralenStoß zurück. Dann gelten die Formeln in B 3.6.1.
Literatur
Spezielle Literatur
[1] Sommerfeld, A.: Mechanik, Bd. I, 8. Aufl. Akad. Verlags-ges. Geest u. Portig, Leipzig (1994), Nachdruck der 8. Aufl.(1978) – [2] Klein, I., Sommerfeld, A.: Theorie des Kreisels (4Bde.). Teubner, Leipzig (1897–1910) – [3] Grammel, R.: DerKreisel (2 Bde.), 2. Aufl. Springer, Berlin (1950) – [4] Hertz,H.: Über die Berührung fester elastischer Körper. J. f. reine u.angew. Math. 92 (1881) – [5] Berger, F.: Das Gesetz des Kraft-verlaufs beim Stoß. Vieweg, Braunschweig (1924)