ANALISIS PENAMBAHAN NILAI MOMENTUM PADA PREDIKSI ...
6
84 ANALISIS PENAMBAHAN NILAI MOMENTUM PADA PREDIKSI PRODUKTIVITAS KELAPA SAWIT MENGGUNAKAN BACKPROPAGATION Eka Irawan 1 , M. Zarlis 2 , Erna Budhiarti Nababan 3 Magister Teknik Informatika, Universitas Sumatera Utara Jl. Universitas No.9A Kampus USU, Medan, Sumatera Utara-Indonesia [email protected] Abstrak— Algoritma backpropagation merupakan multi layer perceptron yang banyak digunakan untuk menyelesaikan persoalan yang luas, namun algoritma backpropagation juga mempunyai keterbatasan yaitu laju konvergensi yang cukup lambat. Pada penelitian ini penulis menambahkan parameter learning rate secara adaptif pada setiap iterasi dan koefisien momentum untuk menghitung proses perubahan bobot. Dari hasil simulasi komputer maka diperoleh perbandingan antara algoritma backpropagation standar dengan backpropagation dengan penambahan momentum. Untuk algoritma backpropagation standar kecepatan konvergensi 727 epoch dengan nilai MSE 0,01, sedangkan algoritma backpropagation standar mencapai 4000 epoch dengan nilai MSE 0,001. . Hal ini menunjukkan bahwa algoritma backpropagation adaptive learning lebih cepat mencapai konvergensi daripada algoritma backpropagation standar. Keywords— Backpropagation, Adaptive learning rate, momentum, konvergensi. I. PENDAHULUAN Perkembangan teknologi ilmu komputer saat ini telah menciptakan beberapa teknik pendekatan dalam menyelesaikan suatu masalah yang disebut soft computing. Soft Computing merupakan bagian dari sistem cerdas yang merupakan suatu model pendekatan untuk melakukan komputasi dengan meniru akal manusia dan memiliki kemampuan untuk menalar dan belajar pada lingkungan yang penuh dengan ketidakpastian dan ketidaktepatan. Komponen utama pembentuk soft computing adalah sistem fuzzy (fuzzy system), jaringan syaraf (neural network), algoritma evolusioner(evolutionary algorithm), dan penalaran dengan probabilitas (probabilistic reasoning). Multi layer perceptron terdiri dari input layer, hidden layer dan output layer. masing-masing layer terdiri dari node. Banyak model pembelajaran pada menggunakan algoritma backpropagation. Algoritma ini juga berhasil diterapkan pada multi layer perceptron untuk menyelesaikan persoalan yang luas. Metode backpropagation standar (Gradient Descent) punya keterbatasan yaitu laju konvergensi yang cukup lambat[1]. Laju konvergensi dari algoritma backpropagation juga tergantung pada pemilihan arsitektur jaringan, bobot awal dan bias, learning rate, cooefisien momentum dan fungsi aktivasi[2]. Oleh karena itu dalam penelitian ini modifikasi dilakukan terhadap backpropagation standar dengan cara mengganti fungsi pelatihannya. Modifikasi yang akan digunakan adalah pemilihan arsitektur yang tepat serta metode yang menggunakan adaptive laju pembelajaran dan momentum. Algoritma ini memiliki performa pelatihan yang tinggi sehingga mempercepat laju konvergensi. Dalam hal perkebunan juga prediksi dilakukan dengan pembelajaran backpropagasi adapun peneitian yakni memorisasi mampu mengenali 90.74% dan generalisasi mampu mengenali sebesar 84.44%, bidang perkebunan [3] memprediksi produktivitas lahan perkebunan kelapas awit berdasarkan beberapa anasir tanah dan iklim secara simultan, curah hujan menggunakan metode backpropagation untuk memprediksi cuaca, dan menemukan bahwa proses pelatihan dapat dilakukan dengan cepat. Algoritma Backpropagation merupakan algoritma yang memiliki jaringan, learning rate dan momentum sebagai komponen utama yang akan melakukan proses pembelajaran dalam melakukan sebuah prediksi. Semakin besar nilai learning rate mengakibatkan semakin besarnya langkah pembelajaran. Jika learning rate diset terlalu besar, maka algoritma akan menjadi tidak stabil, dan sebaliknya algoritma akan konvergen dalam jangka waktu yang sangat lama. Untuk meningkatkan kecepatan proses training dilakukan dengan menambahkan parameter momentum. Range nilai yang umum digunakan antara 0 sampai dengan 1. Nilai yang biasanya paling optimal adalah 0,9. Momemtum ini berguna untuk mempercepat konvergensi. Penggunaan algoritma pelatihan dalam jaringan syaraf tiruan telah dilakukan dalam menyelesaikan banyak permasalahan prediksi produktivitas kelapa sawit. Peramalan produksi kelapa sawit terbaik diperoleh dengan kombinasi umur tanaman, pemupukan, jumlah hari hujan dan penyinaran matahari pada 18 BSP, dan defisit air pada 24 BSP. Regresi terbaik adalah Y = 3.15 + 0.010 umur tanaman –0.016 pupuk –0.016 penyinaran –0.005 defisit air –
Transcript of ANALISIS PENAMBAHAN NILAI MOMENTUM PADA PREDIKSI ...
84
ANALISIS PENAMBAHAN NILAI MOMENTUM PADA PREDIKSIPRODUKTIVITAS KELAPA SAWIT MENGGUNAKAN
BACKPROPAGATION
Eka Irawan1, M. Zarlis2, Erna Budhiarti Nababan3
Magister Teknik Informatika, Universitas Sumatera UtaraJl. Universitas No.9A Kampus USU, Medan, Sumatera Utara-Indonesia
Abstrak— Algoritma backpropagation merupakan multi layer perceptron yang banyakdigunakan untuk menyelesaikan persoalan yang luas, namun algoritma backpropagation jugamempunyai keterbatasan yaitu laju konvergensi yang cukup lambat. Pada penelitian ini penulismenambahkan parameter learning rate secara adaptif pada setiap iterasi dan koefisienmomentum untuk menghitung proses perubahan bobot. Dari hasil simulasi komputer makadiperoleh perbandingan antara algoritma backpropagation standar dengan backpropagationdengan penambahan momentum. Untuk algoritma backpropagation standar kecepatankonvergensi 727 epoch dengan nilai MSE 0,01, sedangkan algoritma backpropagation standarmencapai 4000 epoch dengan nilai MSE 0,001. . Hal ini menunjukkan bahwa algoritmabackpropagation adaptive learning lebih cepat mencapai konvergensi daripada algoritmabackpropagation standar.
Keywords— Backpropagation, Adaptive learning rate, momentum, konvergensi.
I. PENDAHULUANPerkembangan teknologi ilmu komputer saat ini
telah menciptakan beberapa teknik pendekatan dalammenyelesaikan suatu masalah yang disebut softcomputing. Soft Computing merupakan bagian darisistem cerdas yang merupakan suatu modelpendekatan untuk melakukan komputasi denganmeniru akal manusia dan memiliki kemampuan untukmenalar dan belajar pada lingkungan yang penuhdengan ketidakpastian dan ketidaktepatan. Komponenutama pembentuk soft computing adalah sistem fuzzy(fuzzy system), jaringan syaraf (neural network),algoritma evolusioner(evolutionary algorithm), danpenalaran dengan probabilitas (probabilistic reasoning).
Multi layer perceptron terdiri dari input layer,hidden layer dan output layer. masing-masing layerterdiri dari node. Banyak model pembelajaran padamenggunakan algoritma backpropagation. Algoritmaini juga berhasil diterapkan pada multi layerperceptron untuk menyelesaikan persoalan yang luas.Metode backpropagation standar (Gradient Descent)punya keterbatasan yaitu laju konvergensi yang cukuplambat[1]. Laju konvergensi dari algoritmabackpropagation juga tergantung pada pemilihanarsitektur jaringan, bobot awal dan bias, learning rate,cooefisien momentum dan fungsi aktivasi[2]. Olehkarena itu dalam penelitian ini modifikasi dilakukanterhadap backpropagation standar dengan caramengganti fungsi pelatihannya. Modifikasi yang akandigunakan adalah pemilihan arsitektur yang tepat sertametode yang menggunakan adaptive laju pembelajarandan momentum. Algoritma ini memiliki performapelatihan yang tinggi sehingga mempercepat laju
konvergensi. Dalam hal perkebunan juga prediksidilakukan dengan pembelajaran backpropagasi adapunpeneitian yakni memorisasi mampu mengenali 90.74%dan generalisasi mampu mengenali sebesar 84.44%,bidang perkebunan [3] memprediksi produktivitaslahan perkebunan kelapas awit berdasarkan beberapaanasir tanah dan iklim secara simultan, curah hujanmenggunakan metode backpropagation untukmemprediksi cuaca, dan menemukan bahwa prosespelatihan dapat dilakukan dengan cepat. AlgoritmaBackpropagation merupakan algoritma yang memilikijaringan, learning rate dan momentum sebagaikomponen utama yang akan melakukan prosespembelajaran dalam melakukan sebuah prediksi.Semakin besar nilai learning rate mengakibatkansemakin besarnya langkah pembelajaran. Jika learningrate diset terlalu besar, maka algoritma akan menjaditidak stabil, dan sebaliknya algoritma akan konvergendalam jangka waktu yang sangat lama. Untukmeningkatkan kecepatan proses training dilakukandengan menambahkan parameter momentum. Rangenilai yang umum digunakan antara 0 sampai dengan 1.Nilai yang biasanya paling optimal adalah 0,9.Momemtum ini berguna untuk mempercepatkonvergensi.
Penggunaan algoritma pelatihan dalam jaringansyaraf tiruan telah dilakukan dalam menyelesaikanbanyak permasalahan prediksi produktivitas kelapasawit. Peramalan produksi kelapa sawit terbaikdiperoleh dengan kombinasi umur tanaman,pemupukan, jumlah hari hujan dan penyinaranmatahari pada 18 BSP, dan defisit air pada 24 BSP.Regresi terbaik adalah Y = 3.15 + 0.010 umur tanaman–0.016 pupuk –0.016 penyinaran –0.005 defisit air –
InfoTekJar (Jurnal Nasional Informatika dan Teknologi Jaringan) e-ISSN : 2540-7600Vol 1, No 2, Maret 2017 p-ISSN : 2540-7597
85
0.015 hari hujan.Faktor agroekologi menentukanakurasi ramalan produksi kelapa sawit.
Berdasarkan kajian permasalahan yang telahdisampaikan, maka tujuan penelitian ini adalahmenerapkan algoritma pelatihan backpropagationdalam contoh kasus prediksi produktivitas kelapasawit untuk mendapatkan tingkat error, menentukanpelatihan jaringan yang paling optimal (yangmemberikan error terkecil) dan kecepatan konvergensijika momentum tersebut dinaikkan atau di turunkannilainya. Dari uraian diatas, penulis tertarik untukmengambil judul “Analisis Penambahan NilaiMomentum Pada Prediksi Produktivitas Kelapa SawitDengan Backpropagasi Neural Network”
II. LANDASAN TEORIA. Neural Network
Artificial Neural Network / Jaringan Saraf Tiruan(JST) adalah paradigma pengolahan informasi yangterinspirasi oleh sistem saraf secara biologis, sepertiproses informasi pada otak manusia. Elemen kuncidari paradigma ini adalah struktur dari sistempengolahan informasi yang terdiri dari sejumlah besarelemen pemrosesan yang saling berhubungan (neuron),bekerja serentak untuk menyelesaikan masalah tertentu.
Neuron biologi merupakan sistem yang “faulttolerant” dalam 2 hal. Pertama, manusia dapatmengenali sinyal input yang agak berbeda dari yangpernah kita terima sebelumnya. Sebagai contoh,manusia sering dapat mengenali seseorang yangwajahnya pernah dilihat dari foto, atau dapatmengenali seseorang yang wajahnya agak berbedakarena sudah lama tidak dijumpainya.
Kedua, otak manusia tetap mampu bekerjameskipun beberapa neuronnya tidak mampu bekerjadengan baik. Jika sebuah neuron rusak, neuron lainkadang-kadang dapat dilatih untuk menggantikanfungsi sel yang rusak tersebut.
Cara kerja JST seperti cara kerja manusia, yaitubelajar melalui contoh. Lapisan-lapisan penyusun JSTdibagi menjadi 3, yaitu lapisan input (input layer),lapisan tersembunyi (hidden layer), dan lapisan output(ouput layer). Jaringan syaraf tiruan adalahmerupakan salah satu representasi buatan dari otakmanusia yang selalu mencoba untuk mensimulasikanproses pembelajaran pada otak manusia tersebut.Istilah buatan disini digunakan karena jaringan syarafini diimplementasikan dengan menggunakan programkomputer yang mampu menyelesaikan sejumlahproses perhitungan selama proses pembelajaran .
B. Metode Backprpagationd Backpropagation merupakan salah satu dari
beberapa metode yang digunakan dalam JST danyang paling sering digunakan dalam berbagaibidang aplikasi, seperti pengenalan pola, peramalandan optimisasi. Jaringan syaraf tiruan backpropagation(BP) pertama kali diperkenalkan oleh Rumelhart,Hinton dan William pada tahun 1986, kemudian
Rumelhart dan Mc Cleland mengembangkannya padatahun 1988. Jaringan ini merupakan model jaringanmultilayer. backpropagation paling banyak digunakanoleh pemakai jaringan saraf tiruan, bahkandiperkirakan lebih dari 80 % proyek jaringan saraftiruan yang tengah dikembangkan menggunakanbackpropagation [4].
Arsitektur backpropagation merupakan salah satuarsitektur jaringan saraf tiruan yang dapat digunakanuntuk mempelajari dan menganalisis pola data masalalu lebih tepat sehingga diperoleh keluaran yang lebihakurat (dengan kesalahan atau error minimum).
Langkah-langkah dalam membangun algoritmabackpropagation adalah sebagai berikut:a. Inisialisasi bobot (ambil nilai random yang cukup
kecil).b. Tahap perambatan maju (forward propagation)
1) Setiap unit input (X1, i=1,2,3,…,n) menerimasinyal xi dan meneruskan sinyal tersebut kesemua unit pada lapisan tersembunyi.
2) Setiap unit tersembunyi (Z1, j=1,2,3,…,p)menjumlahkan bobot sinyal input, ditunjukkandengan persamaan (1).
Dan menerapkan fungsi aktivasi untukmenghitung sinyal output-nya, ditunjukkandengan persamaan (2).
Fungsi aktivasi yang digunakan adalah fungsisigmoid, kemudian mengirimkan sinyaltersebut ke semua unit output.
3) Setiap unit output (Yk, k=1,2,3,…,m)menjumlahkan bobot sinyal input, ditunjukkandengan persamaan (3).
Dan menerapkan fungsi aktivasi untukmenghitung sinyal output-nya, ditunjukkandengan persamaan (4).
c. Tahap perambatan balik (backpropagation)1) Setiap unit output (Yk, k=1,2,3,…,m) menerima
pola target yang sesuai dengan pola inputpelatihan, kemudian hitung error, ditunjukkandengan persamaan (5).
f’ adalah turunan dari fungsi aktivasi.Kemudian hitung korelasi bobot, ditunjukkandengan persamaan (6).
Dan menghitung koreksi bias, ditunjukkandengan persamaan (7).
Sekaligus mengirimkan δk ke unit-unit yang adadi lapisan paling kanan.
2) Setiap unit tersembunyi (Zj, j=1,2,3,…,p)menjumlahkan delta input-nya (dari unit-unityang berada pada lapisan di kanannya),ditunjukkan dengan persamaan (8).
(1)
(2)
(3)
(4)
(5)
(6)
(7)
InfoTekJar (Jurnal Nasional Informatika dan Teknologi Jaringan) e-ISSN : 2540-7600Vol 1, No 2, Maret 2017 p-ISSN : 2540-7597
86
Untuk menghitung informasi error, kalikannilai ini dengan turunan dari fungsi aktivasinya,ditunjukkan dengan persamaan (9).
Kemudian hitung koreksi bobot, ditunjukkandengan persamaan (10).
Setelah itu, hitung juga koreksi bias,ditunjukkan dengan persamaan (11).
d. Tahap perubahan bobot dan bias1) Setiap unit output (Yk, k=1,2,3,…,m) dilakukan
perubahan bobot dan bias (j=0,1,2,…,p),ditunjukkan dengan persamaan (12).
Setiap unit tersembunyi (Zj, j=1,2,3,…,p)dilakukan perubahan bobot dan bias(i=0,1,2,…,n), ditunjukkan dengan persamaan(13).
2) Tes kondisi berhenti.
III. METODE PENELITIANpenelitian ini akan dilakukan beberapa langkah
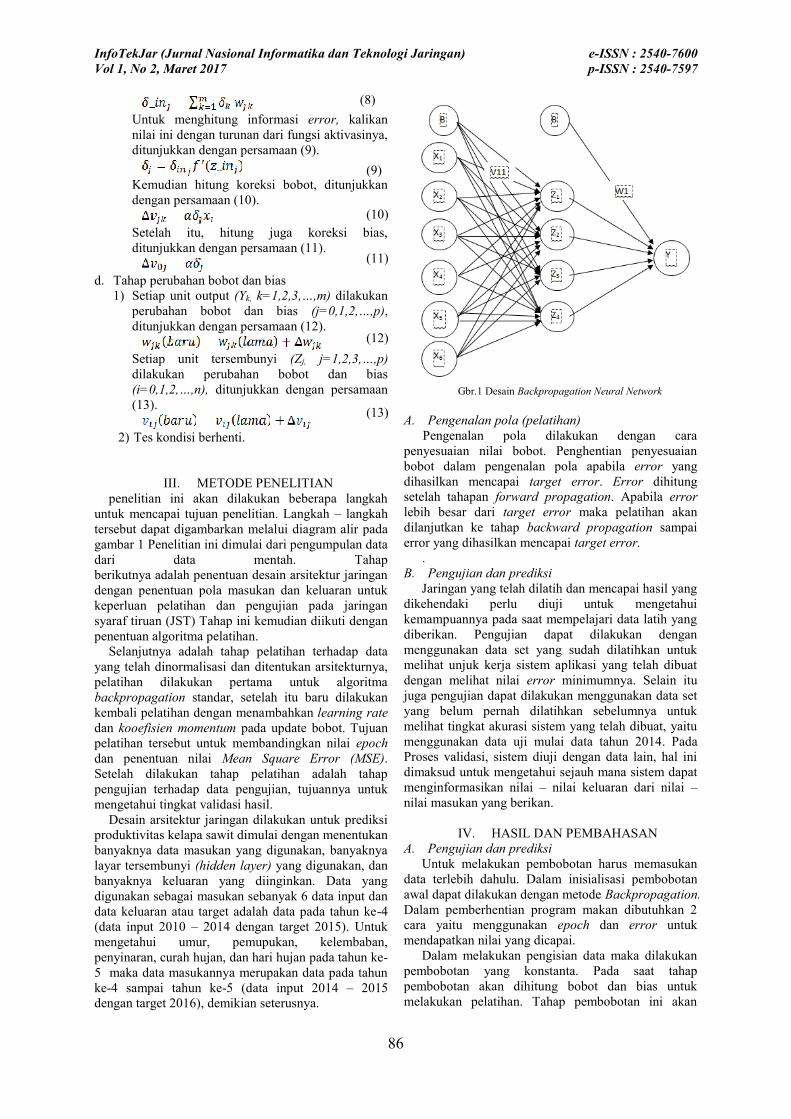
untuk mencapai tujuan penelitian. Langkah – langkahtersebut dapat digambarkan melalui diagram alir padagambar 1 Penelitian ini dimulai dari pengumpulan datadari data mentah. Tahapberikutnya adalah penentuan desain arsitektur jaringandengan penentuan pola masukan dan keluaran untukkeperluan pelatihan dan pengujian pada jaringansyaraf tiruan (JST) Tahap ini kemudian diikuti denganpenentuan algoritma pelatihan.
Selanjutnya adalah tahap pelatihan terhadap datayang telah dinormalisasi dan ditentukan arsitekturnya,pelatihan dilakukan pertama untuk algoritmabackpropagation standar, setelah itu baru dilakukankembali pelatihan dengan menambahkan learning ratedan kooefisien momentum pada update bobot. Tujuanpelatihan tersebut untuk membandingkan nilai epochdan penentuan nilai Mean Square Error (MSE).Setelah dilakukan tahap pelatihan adalah tahappengujian terhadap data pengujian, tujuannya untukmengetahui tingkat validasi hasil.
Desain arsitektur jaringan dilakukan untuk prediksiproduktivitas kelapa sawit dimulai dengan menentukanbanyaknya data masukan yang digunakan, banyaknyalayar tersembunyi (hidden layer) yang digunakan, danbanyaknya keluaran yang diinginkan. Data yangdigunakan sebagai masukan sebanyak 6 data input dandata keluaran atau target adalah data pada tahun ke-4(data input 2010 – 2014 dengan target 2015). Untukmengetahui umur, pemupukan, kelembaban,penyinaran, curah hujan, dan hari hujan pada tahun ke-5 maka data masukannya merupakan data pada tahunke-4 sampai tahun ke-5 (data input 2014 – 2015dengan target 2016), demikian seterusnya.
Gbr.1 Desain Backpropagation Neural Network
A. Pengenalan pola (pelatihan)Pengenalan pola dilakukan dengan cara
penyesuaian nilai bobot. Penghentian penyesuaianbobot dalam pengenalan pola apabila error yangdihasilkan mencapai target error. Error dihitungsetelah tahapan forward propagation. Apabila errorlebih besar dari target error maka pelatihan akandilanjutkan ke tahap backward propagation sampaierror yang dihasilkan mencapai target error.
.B. Pengujian dan prediksi
Jaringan yang telah dilatih dan mencapai hasil yangdikehendaki perlu diuji untuk mengetahuikemampuannya pada saat mempelajari data latih yangdiberikan. Pengujian dapat dilakukan denganmenggunakan data set yang sudah dilatihkan untukmelihat unjuk kerja sistem aplikasi yang telah dibuatdengan melihat nilai error minimumnya. Selain itujuga pengujian dapat dilakukan menggunakan data setyang belum pernah dilatihkan sebelumnya untukmelihat tingkat akurasi sistem yang telah dibuat, yaitumenggunakan data uji mulai data tahun 2014. PadaProses validasi, sistem diuji dengan data lain, hal inidimaksud untuk mengetahui sejauh mana sistem dapatmenginformasikan nilai – nilai keluaran dari nilai –nilai masukan yang berikan.
IV. HASIL DAN PEMBAHASANA. Pengujian dan prediksi
Untuk melakukan pembobotan harus memasukandata terlebih dahulu. Dalam inisialisasi pembobotanawal dapat dilakukan dengan metode Backpropagation.Dalam pemberhentian program makan dibutuhkan 2cara yaitu menggunakan epoch dan error untukmendapatkan nilai yang dicapai.
Dalam melakukan pengisian data maka dilakukanpembobotan yang konstanta. Pada saat tahappembobotan akan dihitung bobot dan bias untukmelakukan pelatihan. Tahap pembobotan ini akan
(8)
(9)
(10)
(11)
(12)
(13)
InfoTekJar (Jurnal Nasional Informatika dan Teknologi Jaringan) e-ISSN : 2540-7600Vol 1, No 2, Maret 2017 p-ISSN : 2540-7597
87
dipilih secara random, yang mana bobot yangdiperoleh akan digunakan untuk feedforward (arusmaju). Dimana pada tahap ini akan menerima sinyal X(data yang mempengaruhi penambahan nilaimomentum pada prediksi produktivitas kelapa) Sinyalyang dimasukan akan diterima dan dikalikan denganbobot pada satu node dari input layer menuju hiddenlayer serta ditambah dengan bias. Setelah tahap inidilakukan pada masing-masing node pada hidden akandihasilkan sinyal bobot pada satu node hidden layer.Untuk menghitung sinyal output pada hidden layerdigunakan fungsi aktivasi sigmoid dan threshold untukhidden layer.
Setelah itu akan menjumlahkan bobot dari sinyalinput sehingga didapat sinyal output dari output layeryang sudah diaktifkan. Sinyal yang diperoleh darioutput layer akan dihitung error-nya denganmengurangkan dengan data target. Selisihpengurangannya disebut dengan nilai error. Nilaierror harus dicari nilainya lebih kecil dari batas erroryang digunakan. Jika nilainya masih diatas batas errormaka dilakukan koreksi bobot dan bias, koreksi bobotdan bias dilakukan untuk mengurangi nilai errorsehingga sistem menemukan pola untuk mendapatkantarget. Selanjutnya bobot yang dapat menemukan polauntuk prediksi akan disimpan.
Pada tahap pengujian bobot yang diperoleh padasaat pembobotan akan digunakan untuk mengujisistem, apakah sistem sudah dapat menemukan targetatau belum. Dalam pengujian ini dilakukan sampaidiperoleh error paling rendah atau yang mendekatitarget yang dicapai.
B. Training Data Algoritma BackpropagationStandar
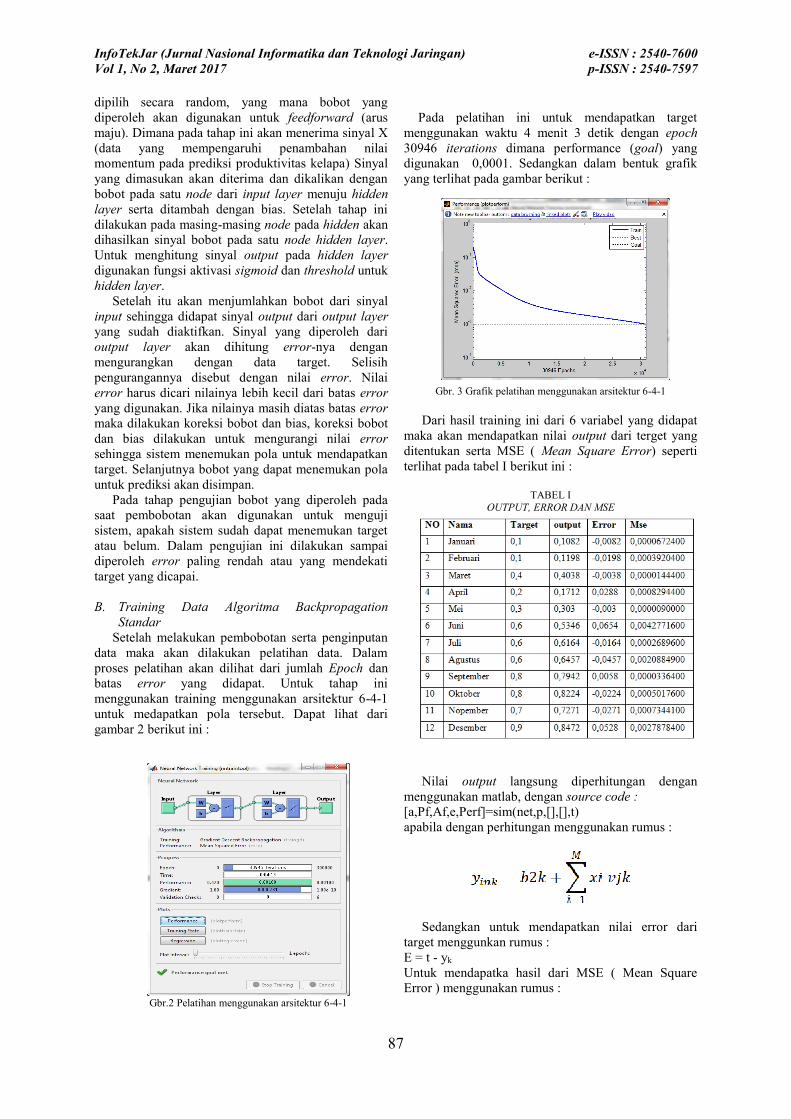
Setelah melakukan pembobotan serta penginputandata maka akan dilakukan pelatihan data. Dalamproses pelatihan akan dilihat dari jumlah Epoch danbatas error yang didapat. Untuk tahap inimenggunakan training menggunakan arsitektur 6-4-1untuk medapatkan pola tersebut. Dapat lihat darigambar 2 berikut ini :
Gbr.2 Pelatihan menggunakan arsitektur 6-4-1
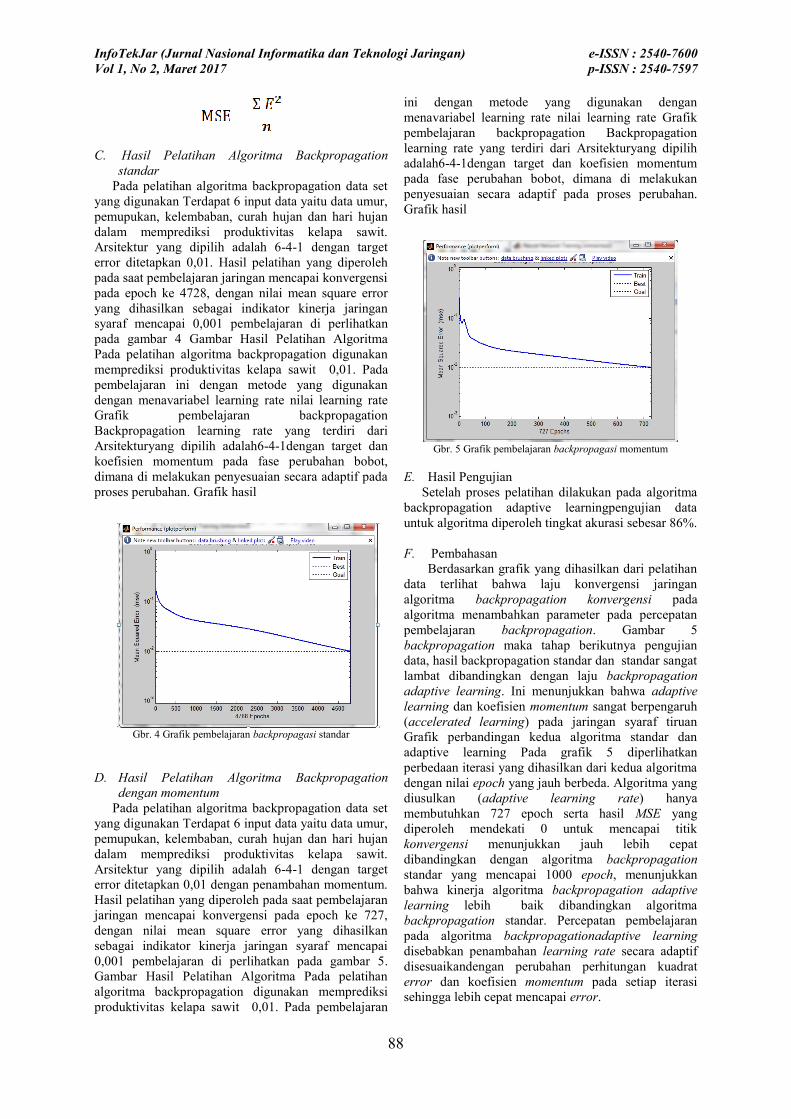
Pada pelatihan ini untuk mendapatkan targetmenggunakan waktu 4 menit 3 detik dengan epoch30946 iterations dimana performance (goal) yangdigunakan 0,0001. Sedangkan dalam bentuk grafikyang terlihat pada gambar berikut :
Gbr. 3 Grafik pelatihan menggunakan arsitektur 6-4-1
Dari hasil training ini dari 6 variabel yang didapatmaka akan mendapatkan nilai output dari terget yangditentukan serta MSE ( Mean Square Error) sepertiterlihat pada tabel I berikut ini :
TABEL IOUTPUT, ERROR DAN MSE
Nilai output langsung diperhitungan denganmenggunakan matlab, dengan source code :[a,Pf,Af,e,Perf]=sim(net,p,[],[],t)apabila dengan perhitungan menggunakan rumus :
Sedangkan untuk mendapatkan nilai error daritarget menggunkan rumus :E = t - ykUntuk mendapatka hasil dari MSE ( Mean SquareError ) menggunakan rumus :
InfoTekJar (Jurnal Nasional Informatika dan Teknologi Jaringan) e-ISSN : 2540-7600Vol 1, No 2, Maret 2017 p-ISSN : 2540-7597
88
C. Hasil Pelatihan Algoritma Backpropagationstandar
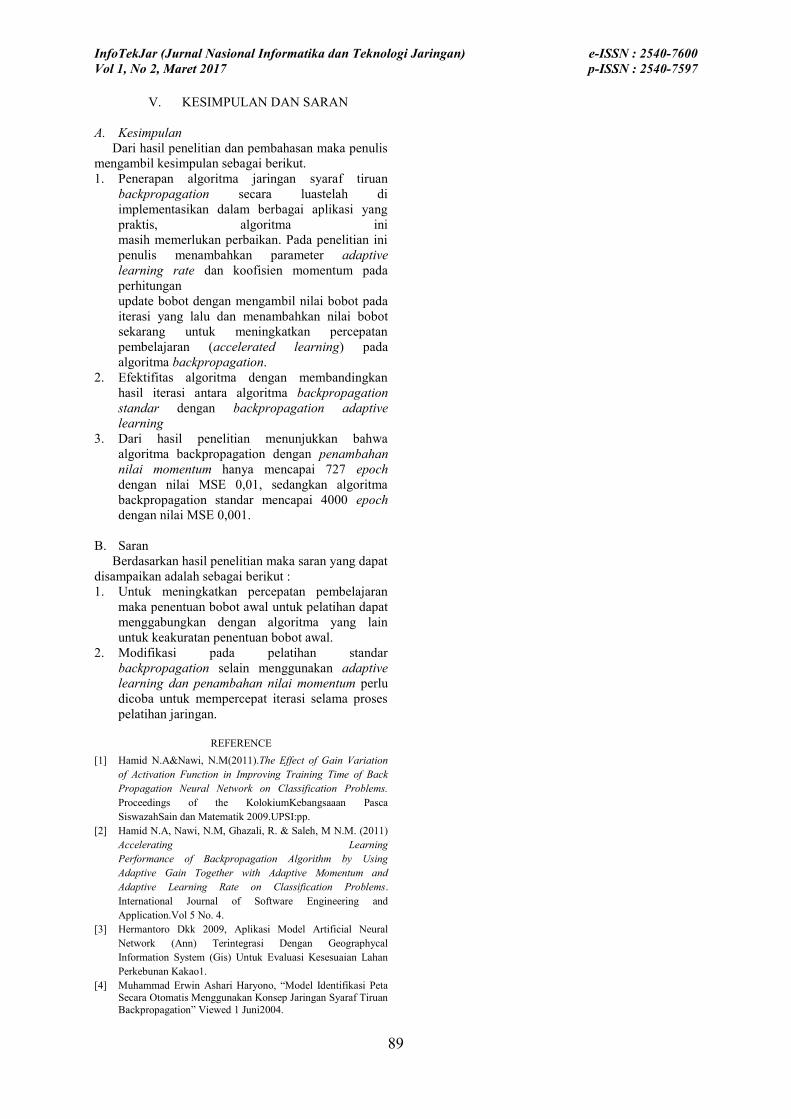
Pada pelatihan algoritma backpropagation data setyang digunakan Terdapat 6 input data yaitu data umur,pemupukan, kelembaban, curah hujan dan hari hujandalam memprediksi produktivitas kelapa sawit.Arsitektur yang dipilih adalah 6-4-1 dengan targeterror ditetapkan 0,01. Hasil pelatihan yang diperolehpada saat pembelajaran jaringan mencapai konvergensipada epoch ke 4728, dengan nilai mean square erroryang dihasilkan sebagai indikator kinerja jaringansyaraf mencapai 0,001 pembelajaran di perlihatkanpada gambar 4 Gambar Hasil Pelatihan AlgoritmaPada pelatihan algoritma backpropagation digunakanmemprediksi produktivitas kelapa sawit 0,01. Padapembelajaran ini dengan metode yang digunakandengan menavariabel learning rate nilai learning rateGrafik pembelajaran backpropagationBackpropagation learning rate yang terdiri dariArsitekturyang dipilih adalah6-4-1dengan target dankoefisien momentum pada fase perubahan bobot,dimana di melakukan penyesuaian secara adaptif padaproses perubahan. Grafik hasil
Gbr. 4 Grafik pembelajaran backpropagasi standar
D. Hasil Pelatihan Algoritma Backpropagationdengan momentum
Pada pelatihan algoritma backpropagation data setyang digunakan Terdapat 6 input data yaitu data umur,pemupukan, kelembaban, curah hujan dan hari hujandalam memprediksi produktivitas kelapa sawit.Arsitektur yang dipilih adalah 6-4-1 dengan targeterror ditetapkan 0,01 dengan penambahan momentum.Hasil pelatihan yang diperoleh pada saat pembelajaranjaringan mencapai konvergensi pada epoch ke 727,dengan nilai mean square error yang dihasilkansebagai indikator kinerja jaringan syaraf mencapai0,001 pembelajaran di perlihatkan pada gambar 5.Gambar Hasil Pelatihan Algoritma Pada pelatihanalgoritma backpropagation digunakan memprediksiproduktivitas kelapa sawit 0,01. Pada pembelajaran
ini dengan metode yang digunakan denganmenavariabel learning rate nilai learning rate Grafikpembelajaran backpropagation Backpropagationlearning rate yang terdiri dari Arsitekturyang dipilihadalah6-4-1dengan target dan koefisien momentumpada fase perubahan bobot, dimana di melakukanpenyesuaian secara adaptif pada proses perubahan.Grafik hasil
Gbr. 5 Grafik pembelajaran backpropagasi momentum
E. Hasil PengujianSetelah proses pelatihan dilakukan pada algoritma
backpropagation adaptive learningpengujian datauntuk algoritma diperoleh tingkat akurasi sebesar 86%.
F. PembahasanBerdasarkan grafik yang dihasilkan dari pelatihan
data terlihat bahwa laju konvergensi jaringanalgoritma backpropagation konvergensi padaalgoritma menambahkan parameter pada percepatanpembelajaran backpropagation. Gambar 5backpropagation maka tahap berikutnya pengujiandata, hasil backpropagation standar dan standar sangatlambat dibandingkan dengan laju backpropagationadaptive learning. Ini menunjukkan bahwa adaptivelearning dan koefisien momentum sangat berpengaruh(accelerated learning) pada jaringan syaraf tiruanGrafik perbandingan kedua algoritma standar danadaptive learning Pada grafik 5 diperlihatkanperbedaan iterasi yang dihasilkan dari kedua algoritmadengan nilai epoch yang jauh berbeda. Algoritma yangdiusulkan (adaptive learning rate) hanyamembutuhkan 727 epoch serta hasil MSE yangdiperoleh mendekati 0 untuk mencapai titikkonvergensi menunjukkan jauh lebih cepatdibandingkan dengan algoritma backpropagationstandar yang mencapai 1000 epoch, menunjukkanbahwa kinerja algoritma backpropagation adaptivelearning lebih baik dibandingkan algoritmabackpropagation standar. Percepatan pembelajaranpada algoritma backpropagationadaptive learningdisebabkan penambahan learning rate secara adaptifdisesuaikandengan perubahan perhitungan kuadraterror dan koefisien momentum pada setiap iterasisehingga lebih cepat mencapai error.
InfoTekJar (Jurnal Nasional Informatika dan Teknologi Jaringan) e-ISSN : 2540-7600Vol 1, No 2, Maret 2017 p-ISSN : 2540-7597
89
V. KESIMPULAN DAN SARAN
A. KesimpulanDari hasil penelitian dan pembahasan maka penulis
mengambil kesimpulan sebagai berikut.1. Penerapan algoritma jaringan syaraf tiruan
backpropagation secara luastelah diimplementasikan dalam berbagai aplikasi yangpraktis, algoritma inimasih memerlukan perbaikan. Pada penelitian inipenulis menambahkan parameter adaptivelearning rate dan koofisien momentum padaperhitunganupdate bobot dengan mengambil nilai bobot padaiterasi yang lalu dan menambahkan nilai bobotsekarang untuk meningkatkan percepatanpembelajaran (accelerated learning) padaalgoritma backpropagation.
2. Efektifitas algoritma dengan membandingkanhasil iterasi antara algoritma backpropagationstandar dengan backpropagation adaptivelearning
3. Dari hasil penelitian menunjukkan bahwaalgoritma backpropagation dengan penambahannilai momentum hanya mencapai 727 epochdengan nilai MSE 0,01, sedangkan algoritmabackpropagation standar mencapai 4000 epochdengan nilai MSE 0,001.
B. SaranBerdasarkan hasil penelitian maka saran yang dapat
disampaikan adalah sebagai berikut :1. Untuk meningkatkan percepatan pembelajaran
maka penentuan bobot awal untuk pelatihan dapatmenggabungkan dengan algoritma yang lainuntuk keakuratan penentuan bobot awal.
2. Modifikasi pada pelatihan standarbackpropagation selain menggunakan adaptivelearning dan penambahan nilai momentum perludicoba untuk mempercepat iterasi selama prosespelatihan jaringan.
REFERENCE[1] Hamid N.A&Nawi, N.M(2011).The Effect of Gain Variation
of Activation Function in Improving Training Time of BackPropagation Neural Network on Classification Problems.Proceedings of the KolokiumKebangsaaan PascaSiswazahSain dan Matematik 2009.UPSI:pp.
[2] Hamid N.A, Nawi, N.M, Ghazali, R. & Saleh, M N.M. (2011)Accelerating LearningPerformance of Backpropagation Algorithm by UsingAdaptive Gain Together with Adaptive Momentum andAdaptive Learning Rate on Classification Problems.International Journal of Software Engineering andApplication.Vol 5 No. 4.
[3] Hermantoro Dkk 2009, Aplikasi Model Artificial NeuralNetwork (Ann) Terintegrasi Dengan GeographycalInformation System (Gis) Untuk Evaluasi Kesesuaian LahanPerkebunan Kakao1.
[4] Muhammad Erwin Ashari Haryono, “Model Identifikasi PetaSecara Otomatis Menggunakan Konsep Jaringan Syaraf TiruanBackpropagation” Viewed 1 Juni2004.