3 van Newton - die Keure...De eerste wet 3 van Newton Ook zonder whiplash krijg je in het dagelijkse...
17
De eerste wet van Newton 3 Ook zonder whiplash krijg je in het dagelijkse leven voortdurend te maken met de eerste wet van Newton. • Als je rechtstaat in een bus die bruusk vertrekt, vlieg je naar achteren. • Misschien zag je ooit de demonstratie waarbij een tafelkleed snel onder een servies wordt weggetrok- ken. • Je kunt met één hand een blaadje van de wc-rol trekken, als je dat doet met een snelle beweging. In elk van die voorbeelden is het systeem (jij, servies, wc-rol) in rust en tracht het in rust te blijven. • Als je in een bus zit die plots remt, vlieg je naar voren. • Bij een crashtest houdt de gordel de dummy op de zetel, maar armen, benen en hoofd bewegen naar voren. • Een hamerkop kun je vastzetten door de steel op de grond te kloppen. • Een vrachtwagen die een bocht neemt, kan in die bocht zijn lading verliezen. In elk van die voorbeelden heeft het systeem (jij, de dummy, de hamerkop, de lading) een bepaalde snel- heid (grootte en richting) en tracht het die te behouden. Een voorwerp komt niet vanzelf in beweging of tot rust, of buigt niet uit zichzelf af. Daarvoor is er een ‘uit- wendige invloed’ nodig. In het 3e jaar leerde je reeds dat we zo’n uitwendige invloed kracht noemen. De eerste wet van Newton zegt hoe een systeem beweegt als de resulterende kracht erop nul is. Als er op een voorwerp geen (resulterende) kracht wordt uitgeoefend, behoudt het zijn bewegingstoe- stand: • is het voorwerp in rust, dan blijft het in rust; • beweegt het voorwerp, dan blijft het bewegen met constante snelheid en in dezelfde richting en zin. Dat is de eerste wet van Newton. Een systeem waarop geen resulterende kracht werkt, voert dus een eenparige rechtlijnige beweging (ERB) uit. Die beweging, die je reeds leerde kennen in het derde jaar, bekijken we in de volgende paragraaf. Omdat op een voorwerp op aarde altijd de zwaartekracht werkt (en meestal ook wrijving), kun je die wet op aarde niet aantonen. In de ruimte lukt dat wel: als er geen zwaartekracht is, kan een ruimtetuig blijven voortbewegen zonder dat de motoren werken. In de beschreven experimenten, bv. het blad onder het glas wegtrekken, werkt de kracht gedurende zo een korte tijd dat ze nauwelijks effect heeft. Een whiplash is een typisch letsel aan de nek en/ of rug voor inzittenden van een auto die langs achter wordt aangereden. Het hoofd krijgt daar- bij een slag naar achteren. Er kan daarbij een beschadiging aan zachte weefsels en structuren in de nek optreden, die aanleiding tot klachten geeft. De meeste slachtoffers herstellen op korte termijn, maar een whiplash kan ook blijvende last veroorzaken. Een whiplash is een pijnlijke illustratie van de eerste wet van Newton. De eerste wet van Newton 3.1 © Scania Die wet noemt men ook de wet van de traagheid, omdat een voorwerp zich lijkt te verzetten tegen een verandering van bewegingstoestand. + WET
Transcript of 3 van Newton - die Keure...De eerste wet 3 van Newton Ook zonder whiplash krijg je in het dagelijkse...
De eerste wet van Newton3
Ook zonder whiplash krijg je in het dagelijkse leven voortdurend te maken met de eerste wet van Newton.• Als je rechtstaat in een bus die bruusk vertrekt, vlieg je naar achteren.• Misschien zag je ooit de demonstratie waarbij een tafelkleed snel onder een servies wordt weggetrok-
ken.• Je kunt met één hand een blaadje van de wc-rol trekken, als je dat doet met een snelle beweging.In elk van die voorbeelden is het systeem (jij, servies, wc-rol) in rust en tracht het in rust te blijven.
• Als je in een bus zit die plots remt, vlieg je naar voren.• Bij een crashtest houdt de gordel de dummy op de zetel, maar armen, benen en hoofd bewegen naar
voren.• Een hamerkop kun je vastzetten door de steel op de grond te kloppen.• Een vrachtwagen die een bocht neemt, kan in die bocht zijn lading verliezen.In elk van die voorbeelden heeft het systeem (jij, de dummy, de hamerkop, de lading) een bepaalde snel-heid (grootte en richting) en tracht het die te behouden.
Een voorwerp komt niet vanzelf in beweging of tot rust, of buigt niet uit zichzelf af. Daarvoor is er een ‘uit-wendige invloed’ nodig. In het 3e jaar leerde je reeds dat we zo’n uitwendige invloed kracht noemen. De eerste wet van Newton zegt hoe een systeem beweegt als de resulterende kracht erop nul is.
Als er op een voorwerp geen (resulterende) kracht wordt uitgeoefend, behoudt het zijn bewegingstoe-stand: • is het voorwerp in rust, dan blijft het in rust;• beweegt het voorwerp, dan blijft het bewegen met constante snelheid en in dezelfde richting en zin.Dat is de eerste wet van Newton.
Een systeem waarop geen resulterende kracht werkt, voert dus een eenparige rechtlijnige beweging (ERB) uit. Die beweging, die je reeds leerde kennen in het derde jaar, bekijken we in de volgende paragraaf.
Omdat op een voorwerp op aarde altijd de zwaartekracht werkt (en meestal ook wrijving), kun je die wet op aarde niet aantonen. In de ruimte lukt dat wel: als er geen zwaartekracht is, kan een ruimtetuig blijven voortbewegen zonder dat de motoren werken. In de beschreven experimenten, bv. het blad onder het glas wegtrekken, werkt de kracht gedurende zo een korte tijd dat ze nauwelijks effect heeft.
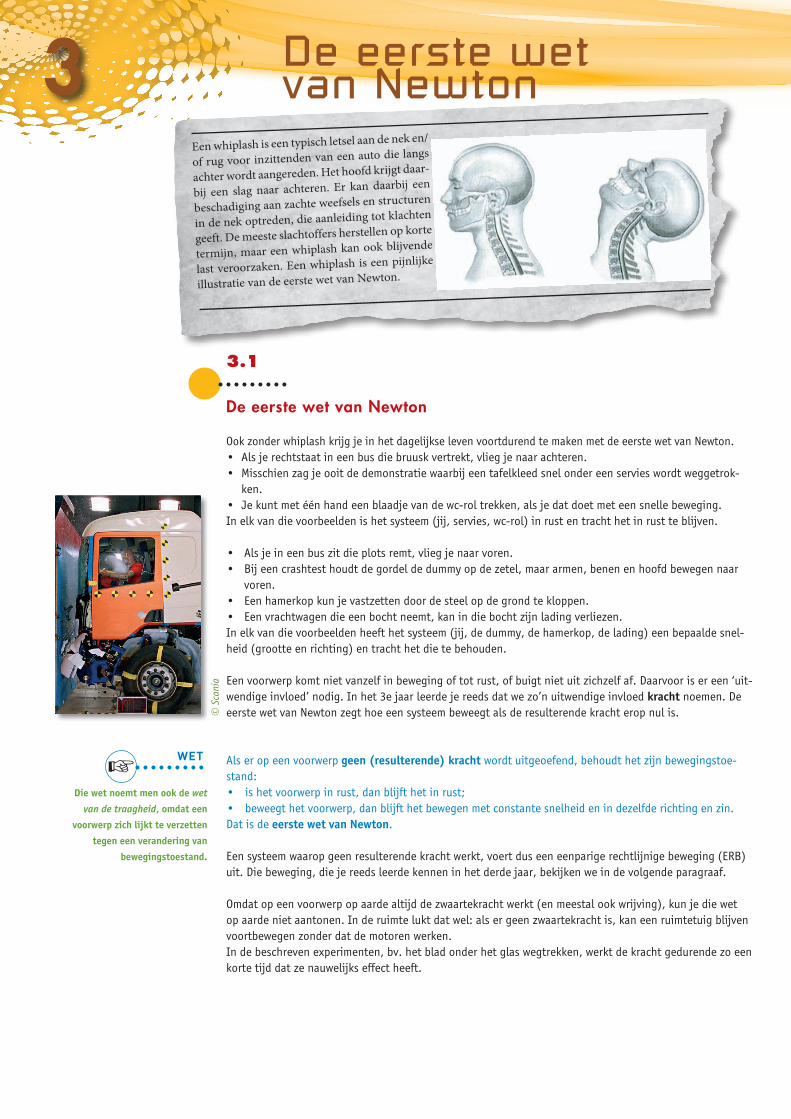
Een whiplash is een typisch letsel aan de nek en/
of rug voor inzittenden van een auto die langs
achter wordt aangereden. Het hoofd krijgt daar-
bij een slag naar achteren. Er kan daarbij een
beschadiging aan zachte weefsels en structuren
in de nek optreden, die aanleiding tot klachten
geeft. De meeste slachtoffers herstellen op korte
termijn, maar een whiplash kan ook blijvende
last veroorzaken. Een whiplash is een pijnlijke
illustratie van de eerste wet van Newton.
De eerste wet van Newton
3.1
© S
cani
a
Die wet noemt men ook de wet
van de traagheid, omdat een
voorwerp zich lijkt te verzetten
tegen een verandering van
bewegingstoestand.
+WET
29
KIN
EM
AT
ICA
EN
DY
NA
MIC
A
De eerste wet van Newton
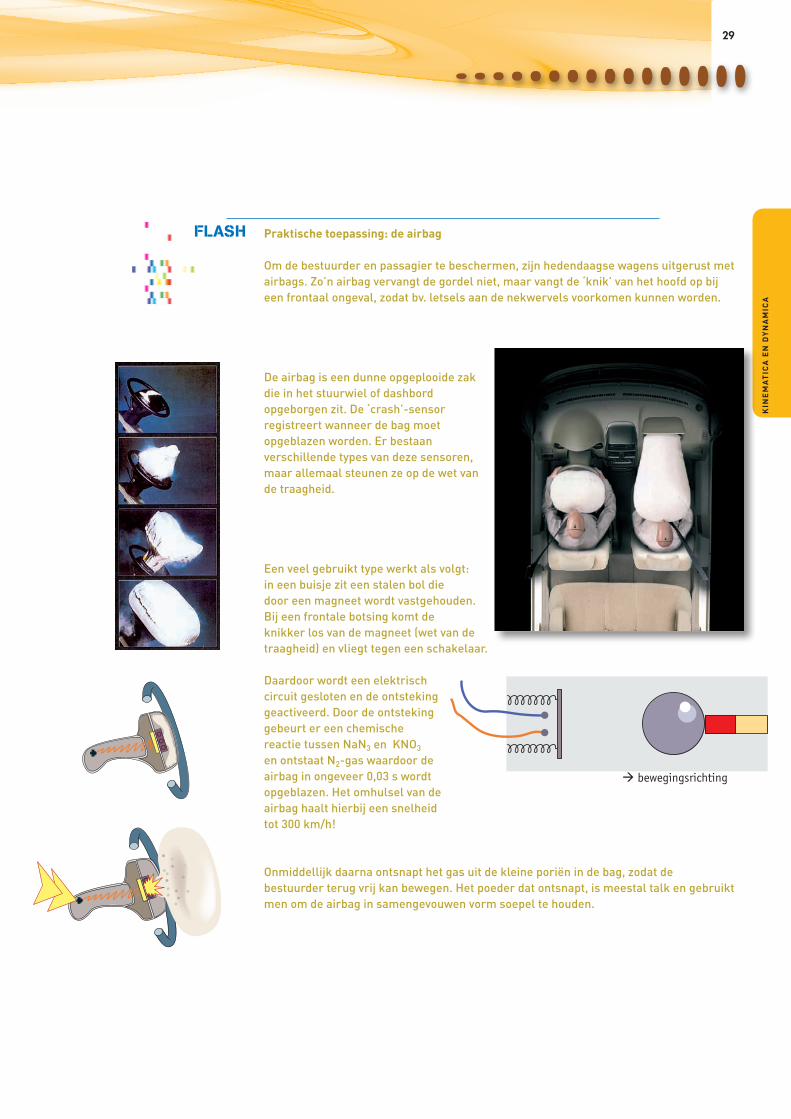
Praktische toepassing: de airbag Om de bestuurder en passagier te beschermen, zijn hedendaagse wagens uitgerust met airbags. Zo’n airbag vervangt de gordel niet, maar vangt de ‘knik’ van het hoofd op bij een frontaal ongeval, zodat bv. letsels aan de nekwervels voorkomen kunnen worden. De airbag is een dunne opgeplooide zak die in het stuurwiel of dashbord opgeborgen zit. De ‘crash’-sensor registreert wanneer de bag moet opgeblazen worden. Er bestaan verschillende types van deze sensoren, maar allemaal steunen ze op de wet van de traagheid.
Een veel gebruikt type werkt als volgt:in een buisje zit een stalen bol die door een magneet wordt vastgehouden. Bij een frontale botsing komt de knikker los van de magneet (wet van de traagheid) en vliegt tegen een schakelaar.
Daardoor wordt een elektrisch circuit gesloten en de ontsteking geactiveerd. Door de ontsteking gebeurt er een chemische reactie tussen NaN3 en KNO3 en ontstaat N2-gas waardoor de airbag in ongeveer 0,03 s wordt opgeblazen. Het omhulsel van de airbag haalt hierbij een snelheid tot 300 km/h!
Onmiddellijk daarna ontsnapt het gas uit de kleine poriën in de bag, zodat de bestuurder terug vrij kan bewegen. Het poeder dat ontsnapt, is meestal talk en gebruikt men om de airbag in samengevouwen vorm soepel te houden.
bewegingsrichting
30 ] Kinematica en dynamica
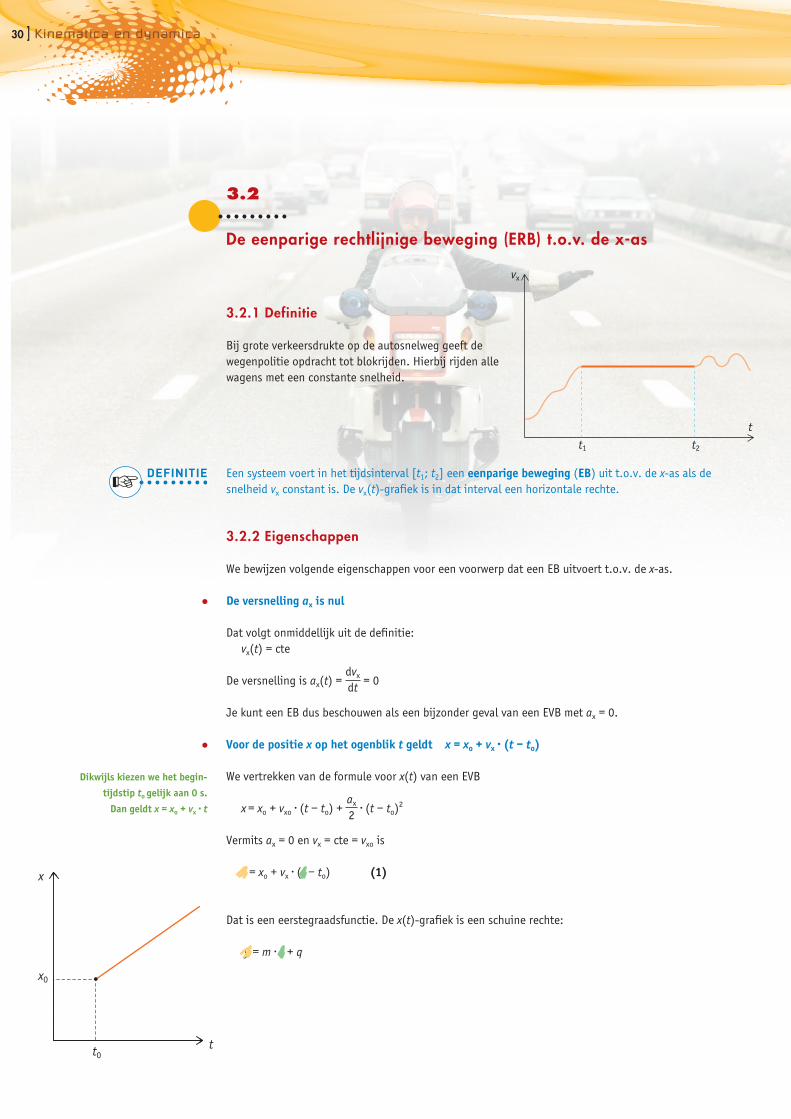
3.2.1 Definitie
Bij grote verkeersdrukte op de autosnelweg geeft de wegenpolitie opdracht tot blokrijden. Hierbij rijden alle wagens met een constante snelheid.
Een systeem voert in het tijdsinterval [t1; t2] een eenparige beweging (EB) uit t.o.v. de x-as als de snelheid vx constant is. De vx(t)-grafiek is in dat interval een horizontale rechte.
3.2.2 Eigenschappen
We bewijzen volgende eigenschappen voor een voorwerp dat een EB uitvoert t.o.v. de x-as.
De versnelling ax is nul
Dat volgt onmiddellijk uit de definitie: vx(t) = cte
De versnelling is ax(t) = dvx
dt = 0
Je kunt een EB dus beschouwen als een bijzonder geval van een EVB met ax = 0.
Voor de positie x op het ogenblik t geldt x = xo + vx · (t – to)
We vertrekken van de formule voor x(t) van een EVB
x = xo + vxo ∙ (t – to) + ax
2 ∙ (t – to)2
Vermits ax = 0 en vx = cte = vxo is
x = xo + vx ∙ (t – to) (1)
Dat is een eerstegraadsfunctie. De x(t)-grafiek is een schuine rechte:
y = m · x + q
De eenparige rechtlijnige beweging (ERB) t.o.v. de x-as
3.2
+DEFINITIE
7
7
tt1
vx
t2
Dikwijls kiezen we het begin-
tijdstip to gelijk aan 0 s.
Dan geldt x = xo + vx · t
t0
x0
x
t

31
De gemiddelde snelheid vx,g is dezelfde voor elk tijdsinterval ∆t en is gelijk aan vx
De gemiddelde snelheid in een tijdsinterval ∆t is
vx,g = ∆x∆t
= x2 – x1
t2 – t1
Invullen van (1) geeft
vx,g = xo + vx ∙ (t2 – to) – [xo + vx ∙ (t1 – to)]
t2 – t1
Dat uitwerken geeft vx,g = vx (2) Voor de verplaatsing ∆x in een tijdsinterval ∆t geldt ∆x = vx · ∆t
Uit vx,g = ∆x∆t (definitie) volgt
∆x = vx,g ∙ ∆t
Dan geldt volgens (2)
∆x = vx ∙ ∆t
De verplaatsing ∆x in een interval ∆t is dus recht evenredig met ∆t.In gelijke tijdsintervallen verandert de positie met dezelfde waarde.
Tijdens de Ronde van Frankrijk heeft een kopgroep op een bepaald ogenblik een voorsprong van 2,00 km op een groepje achtervolgers met daarin gele trui Chris Froome. De kopgroep rijdt aan 48,0 km/h, de achtervolgers aan 54,0 km/h. Het parcours is een lange rechte weg.
a) Na hoeveel tijd halen de achtervolgers de kopgroep in?b) De kopgroep bevindt zich op dat ogenblik op 12,0 km van de aankomst. Halen de achtervolgers de
kopgroep in voor de streep? Zo nee, hoeveel m komen ze te kort?
7
Dit kun je ook vaststellen met een
fietscomputer: als je gedurende een
bepaalde tijd met een constante
snelheid van 20 km/h fietst, is
je gemiddelde snelheid in dat
tijdsinterval ook 20 km/h.
7
Maak ook dit jaar een formularium
met alle geziene definities en
eigenschappen.
50 km/h 50 km/h 50 km/h 50 km/h 50 km/h 50 km/h
x
OEFENING
KIN
EM
AT
ICA
EN
DY
NA
MIC
A
32 ] Kinematica en dynamica
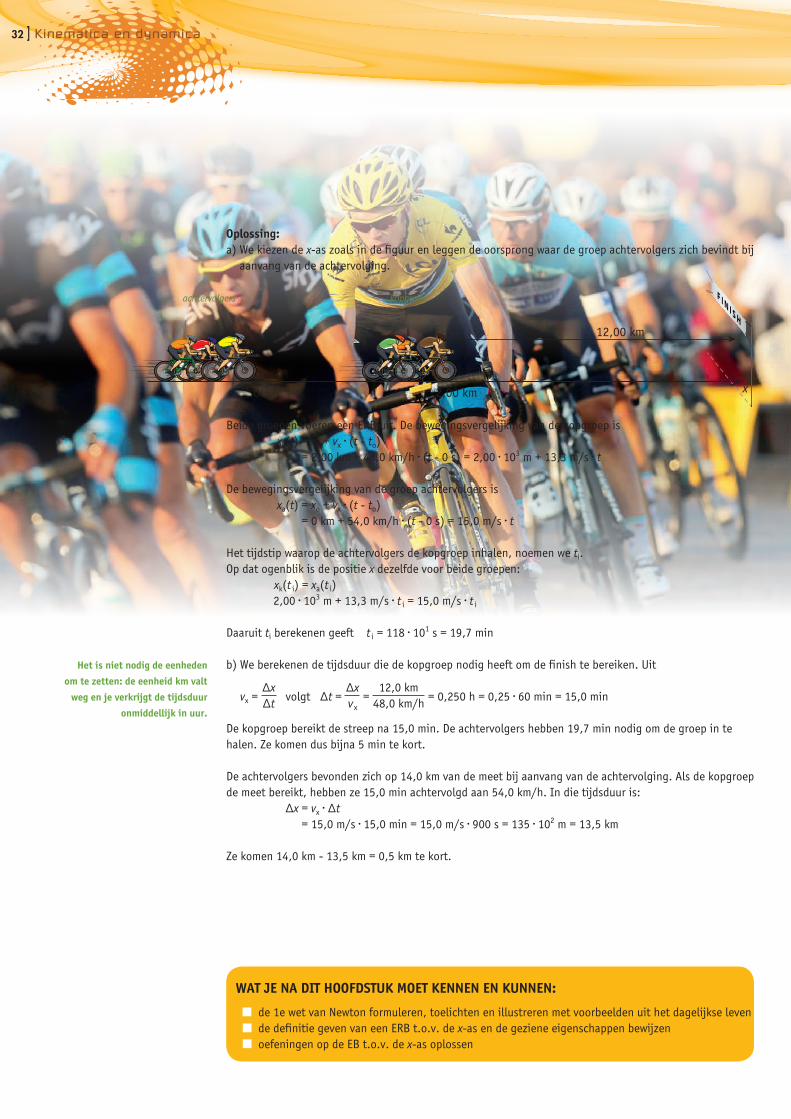
Oplossing:a) We kiezen de x-as zoals in de figuur en leggen de oorsprong waar de groep achtervolgers zich bevindt bij
aanvang van de achtervolging.
x0 2,00 km
12,00 km
achtervolgers kopgroep
Beide groepen voeren een ERB uit. De bewegingsvergelijking van de kopgroep is xk(t) = xo + vx ∙ (t - to) = 2,00 km + 48,0 km/h ∙ (t - 0 s) = 2,00 ∙ 103 m + 13,3 m/s ∙ t
De bewegingsvergelijking van de groep achtervolgers is xa(t) = xo + vx ∙ (t - to) = 0 km + 54,0 km/h ∙ (t - 0 s) = 15,0 m/s ∙ t
Het tijdstip waarop de achtervolgers de kopgroep inhalen, noemen we ti.Op dat ogenblik is de positie x dezelfde voor beide groepen: xk(t i) = xa(t i)
2,00 ∙ 103 m + 13,3 m/s ∙ t i = 15,0 m/s ∙ t i
Daaruit ti berekenen geeft t i = 118 ∙ 101 s = 19,7 min
b) We berekenen de tijdsduur die de kopgroep nodig heeft om de finish te bereiken. Uit vx =
∆x∆t
volgt ∆t = ∆xvx
= 12,0 km
48,0 km/h = 0,250 h = 0,25 ∙ 60 min = 15,0 min
De kopgroep bereikt de streep na 15,0 min. De achtervolgers hebben 19,7 min nodig om de groep in te halen. Ze komen dus bijna 5 min te kort.
De achtervolgers bevonden zich op 14,0 km van de meet bij aanvang van de achtervolging. Als de kopgroep de meet bereikt, hebben ze 15,0 min achtervolgd aan 54,0 km/h. In die tijdsduur is: ∆x = vx ∙ ∆t = 15,0 m/s ∙ 15,0 min = 15,0 m/s ∙ 900 s = 135 ∙ 102 m = 13,5 km
Ze komen 14,0 km - 13,5 km = 0,5 km te kort.
Het is niet nodig de eenheden
om te zetten: de eenheid km valt
weg en je verkrijgt de tijdsduur
onmiddellijk in uur.
WAT JE NA DIT HOOFDSTUK MOET KENNEN EN KUNNEN:
■ de 1e wet van Newton formuleren, toelichten en illustreren met voorbeelden uit het dagelijkse leven❏ ■ de definitie geven van een ERB t.o.v. de x-as en de geziene eigenschappen bewijzen❏ ■ oefeningen op de EB t.o.v. de x-as oplossen
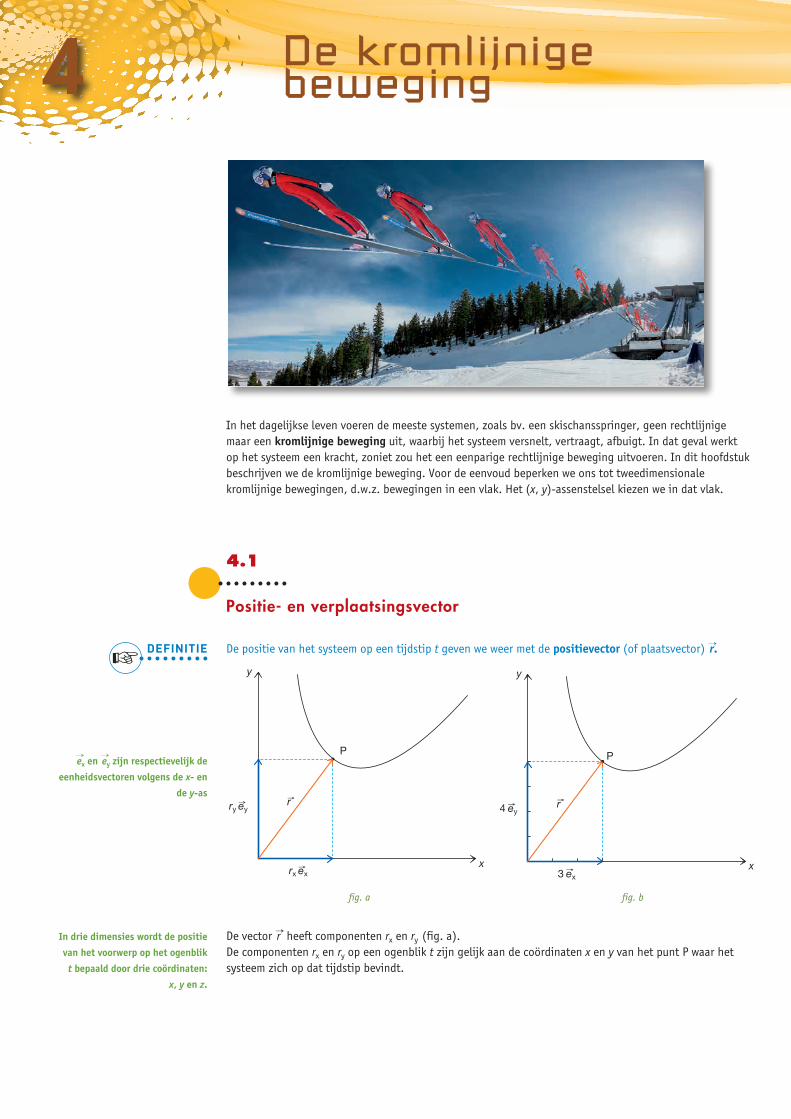
In het dagelijkse leven voeren de meeste systemen, zoals bv. een skischansspringer, geen rechtlijnige maar een kromlijnige beweging uit, waarbij het systeem versnelt, vertraagt, afbuigt. In dat geval werkt op het systeem een kracht, zoniet zou het een eenparige rechtlijnige beweging uitvoeren. In dit hoofdstuk beschrijven we de kromlijnige beweging. Voor de eenvoud beperken we ons tot tweedimensionale kromlijnige bewegingen, d.w.z. bewegingen in een vlak. Het (x, y)-assenstelsel kiezen we in dat vlak.
De positie van het systeem op een tijdstip t geven we weer met de positievector (of plaatsvector) →r.
De vector →r heeft componenten rx en ry (fig. a).De componenten rx en ry op een ogenblik t zijn gelijk aan de coördinaten x en y van het punt P waar het systeem zich op dat tijdstip bevindt.
Positie- en verplaatsingsvector
4.1
+DEFINITIE
P
r
y
xexrx
eyry
P
r
y
x
ey4
ex3
fig. a fig. b
In drie dimensies wordt de positie
van het voorwerp op het ogenblik
t bepaald door drie coördinaten:
x, y en z.
De kromlijnige beweging4
→ex en →ey zijn respectievelijk de
eenheidsvectoren volgens de x- en
de y-as
34 ] Kinematica en dynamica
Voorbeeld:
In fig. b heeft P als coördinaten x = 3 y = 4
De plaatsvector →r heeft als componenten rx = +3 ry = +4
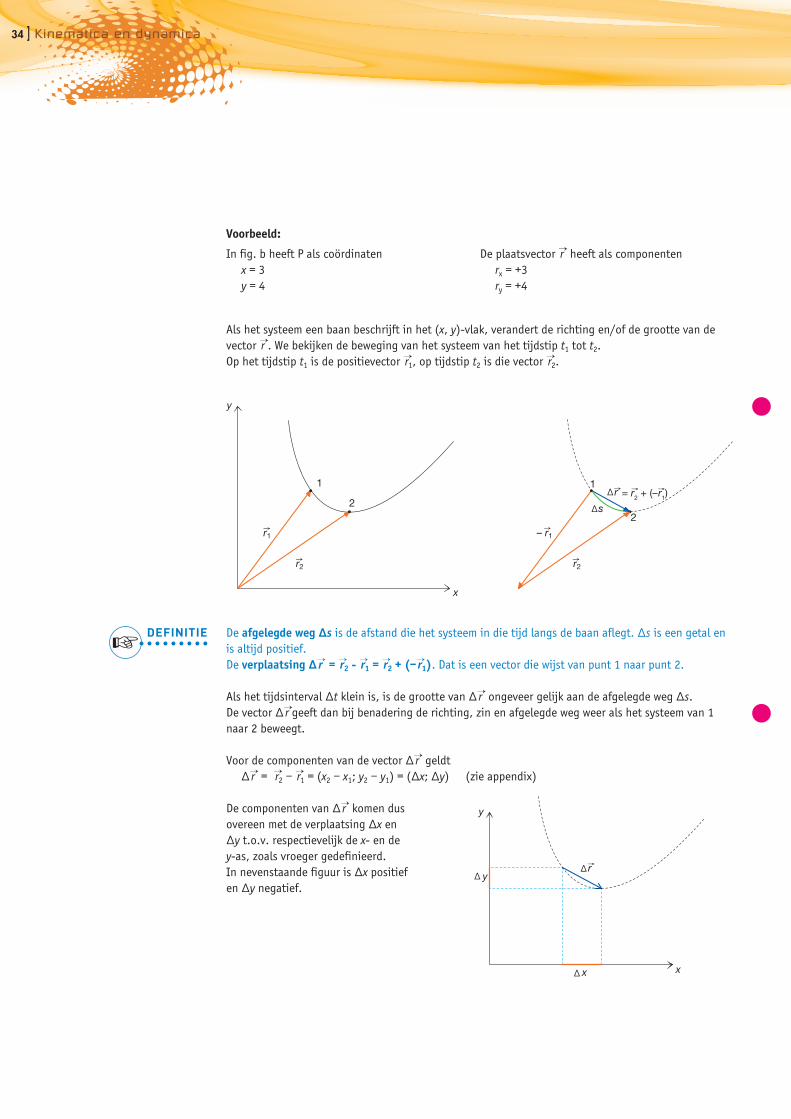
Als het systeem een baan beschrijft in het (x, y)-vlak, verandert de richting en/of de grootte van de vector →r . We bekijken de beweging van het systeem van het tijdstip t1 tot t2. Op het tijdstip t1 is de positievector →r1, op tijdstip t2 is die vector →r2.
De afgelegde weg ∆s is de afstand die het systeem in die tijd langs de baan aflegt. ∆s is een getal en is altijd positief.De verplaatsing ∆→r = →r2 -
→r1 = →r2 + (–→r1). Dat is een vector die wijst van punt 1 naar punt 2.
Als het tijdsinterval ∆t klein is, is de grootte van ∆→r ongeveer gelijk aan de afgelegde weg ∆s.De vector ∆→r geeft dan bij benadering de richting, zin en afgelegde weg weer als het systeem van 1 naar 2 beweegt.
Voor de componenten van de vector ∆→r geldt ∆→r = →r2 – →r1 = (x2 – x1; y2 – y1) = (∆x; ∆y) (zie appendix)
De componenten van ∆→r komen dus overeen met de verplaatsing ∆x en ∆y t.o.v. respectievelijk de x- en de y-as, zoals vroeger gedefinieerd.In nevenstaande figuur is ∆x positief en ∆y negatief.
1
2
y
x
r1
r2
– r1
r2
= r2 + (–r1)∆
∆
1
2
+DEFINITIE
y
x
∆∆
∆
35
KIN
EM
AT
ICA
EN
DY
NA
MIC
A
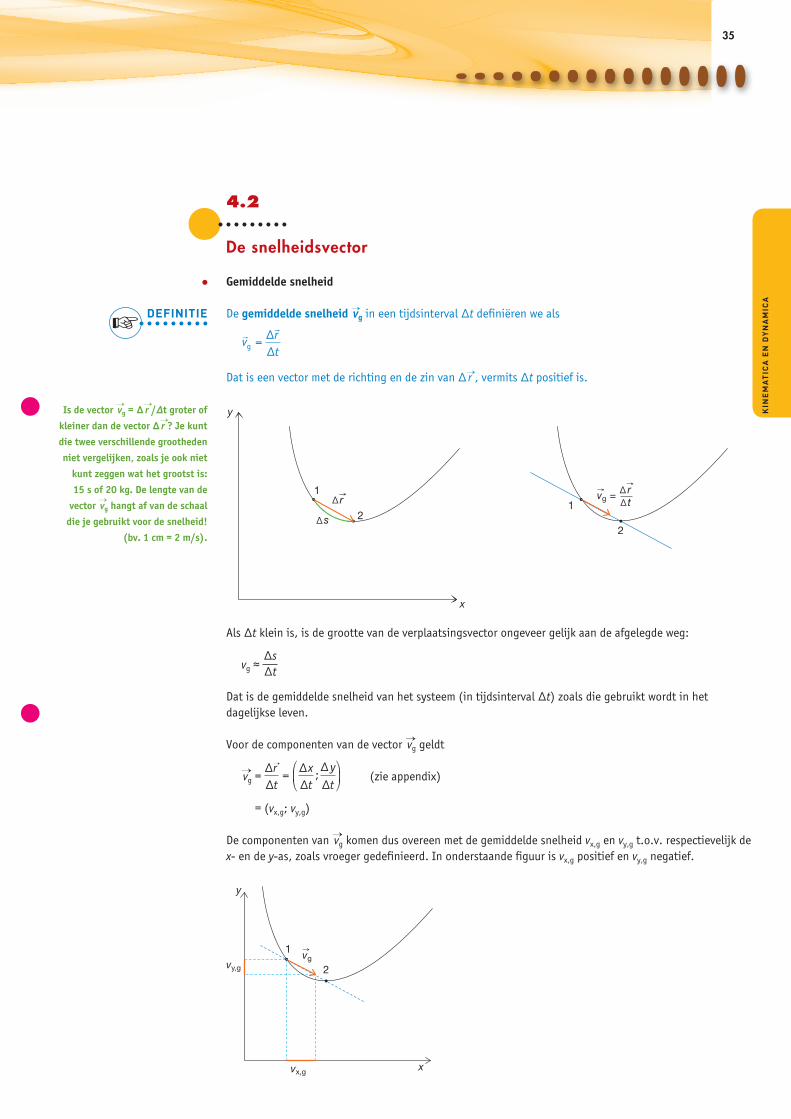
Gemiddelde snelheid
De gemiddelde snelheid →vg in een tijdsinterval ∆t definiëren we als
v rtg =
∆∆
Dat is een vector met de richting en de zin van ∆→r , vermits ∆t positief is.
Als ∆t klein is, is de grootte van de verplaatsingsvector ongeveer gelijk aan de afgelegde weg:
vg ≈ ∆s∆t
Dat is de gemiddelde snelheid van het systeem (in tijdsinterval ∆t) zoals die gebruikt wordt in het dagelijkse leven.
Voor de componenten van de vector →vg geldt
→vg = ∆∆
∆∆
∆∆
rt
xt
y
t=⎛
⎝⎜
⎞
⎠⎟;
�
(zie appendix) = (vx,g; vy,g)
De componenten van →vg komen dus overeen met de gemiddelde snelheid vx,g en vy,g t.o.v. respectievelijk de x- en de y-as, zoals vroeger gedefinieerd. In onderstaande figuur is vx,g positief en vy,g negatief.
De snelheidsvector
4.2
7
+DEFINITIE
Is de vector →vg = ∆→r /∆t groter of
kleiner dan de vector ∆→r ? Je kunt
die twee verschillende grootheden
niet vergelijken, zoals je ook niet
kunt zeggen wat het grootst is:
15 s of 20 kg. De lengte van de
vector →vg hangt af van de schaal
die je gebruikt voor de snelheid!
(bv. 1 cm = 2 m/s).
y
x
2
1
2
1vg =∆
∆
∆∆
y
x
2
1vg
vy,g
vx,g
36 ] Kinematica en dynamica
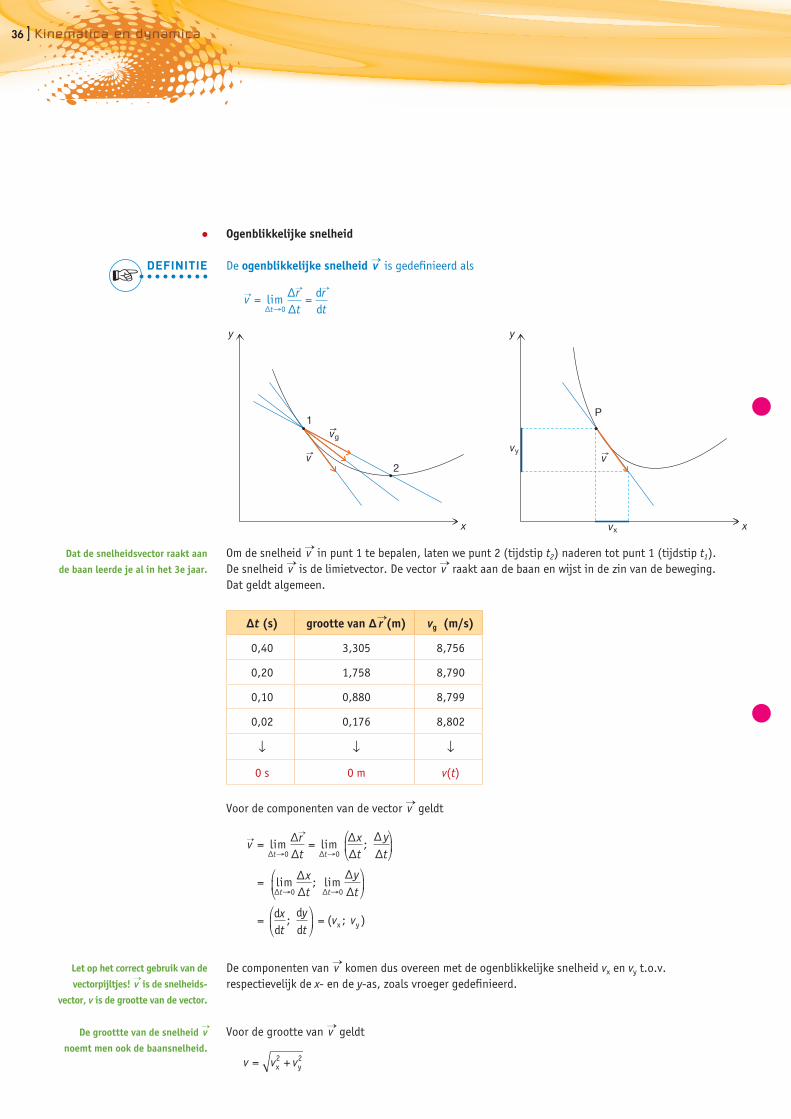
Ogenblikkelijke snelheid
De ogenblikkelijke snelheid →v is gedefinieerd als
→v r
trtt
= =→
lim∆
∆∆0
dd
→ →
Om de snelheid →v in punt 1 te bepalen, laten we punt 2 (tijdstip t2) naderen tot punt 1 (tijdstip t1). De snelheid →v is de limietvector. De vector →v raakt aan de baan en wijst in de zin van de beweging.Dat geldt algemeen.
∆t (s) grootte van ∆→r (m) vg (m/s)
0,40 3,305 8,756
0,20 1,758 8,790
0,10 0,880 8,799
0,02 0,176 8,802
0 s 0 m v(t)
Voor de componenten van de vector →v geldt
v rt
xt
ytt t
= =
=
→ →lim lim ;
lim
∆ ∆
∆∆
∆∆
∆∆0 0
∆ ∆
∆∆
∆y∆t t
xt t
xt
yt
→ →
=
0 0; lim
;dd
dd
= ( ; )v vx y
→→ ⎛
⎝⎜
⎞
⎠⎟
⎛
⎝⎜
⎛
⎝⎜
⎞
⎠⎟
⎞
⎠⎟
De componenten van →v komen dus overeen met de ogenblikkelijke snelheid vx en vy t.o.v. respectievelijk de x- en de y-as, zoals vroeger gedefinieerd.
Voor de grootte van →v geldt
v v v= +x2
y2
7
+DEFINITIE
Dat de snelheidsvector raakt aan
de baan leerde je al in het 3e jaar.
De groottte van de snelheid →v
noemt men ook de baansnelheid.
y
x
vy
vx
vg
v2
1
y
x
v
P
Let op het correct gebruik van de
vectorpijltjes! →v is de snelheids-
vector, v is de grootte van de vector.
37
KIN
EM
AT
ICA
EN
DY
NA
MIC
A
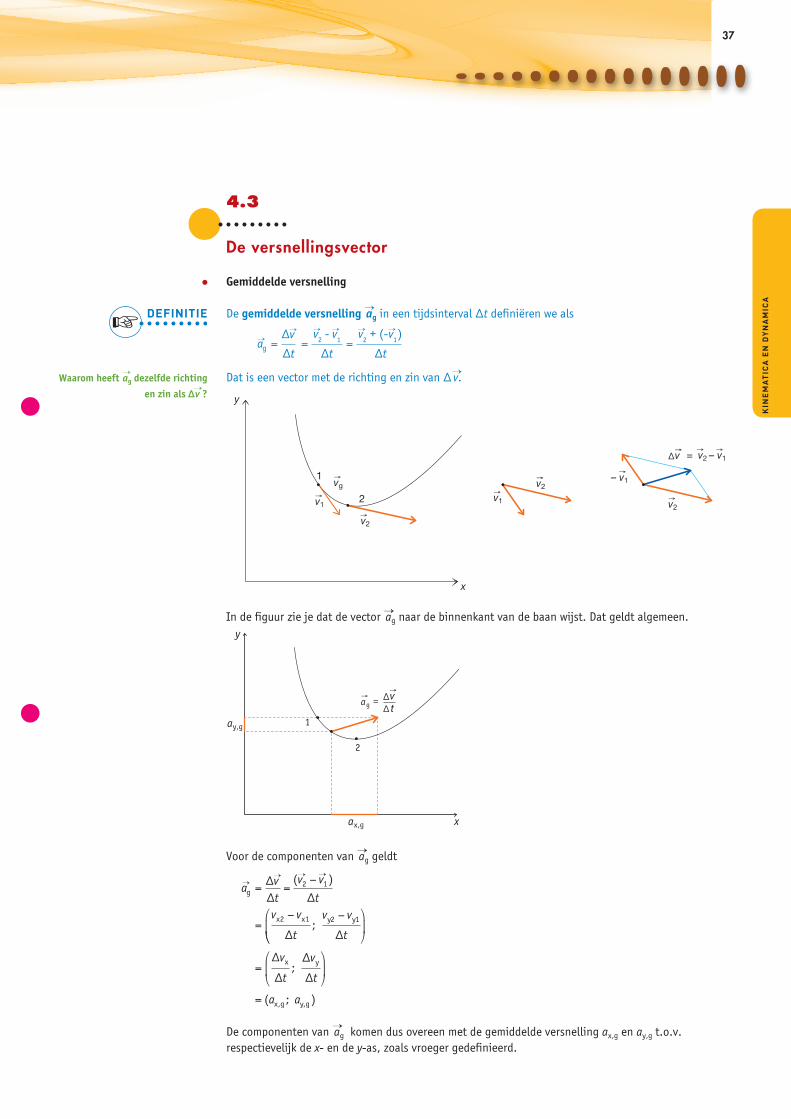
Gemiddelde versnelling
De gemiddelde versnelling →ag in een tijdsinterval ∆t definiëren we als
av
tg =∆
∆→
→ v2 -
t=
∆
→ v1
→ v2 + (- )
t=
∆
→ v1
→
Dat is een vector met de richting en zin van ∆→v.
In de figuur zie je dat de vector →ag naar de binnenkant van de baan wijst. Dat geldt algemeen.
Voor de componenten van →ag geldt
a vt
v v
tv v
t
v v
t
g
x2 x1 y2 y1
= =−
=− −⎛
∆∆ ∆
∆ ∆
( )
;
2 1
⎝⎝⎜
⎞
⎠⎟
=⎛
⎝⎜
⎞
⎠⎟
=
∆
∆
∆
∆
v
t
v
t
a a
x y
x,g y,g
;
( ; )
�� � �
De componenten van →ag komen dus overeen met de gemiddelde versnelling ax,g en ay,g t.o.v. respectievelijk de x- en de y-as, zoals vroeger gedefinieerd.
De versnellingsvector
4.3
7
+DEFINITIE
Waarom heeft →ag dezelfde richting
en zin als ∆→v ? y
x
vg
v1v1
v2
v2
v2 – v1
2
=
1 – v1
v2
∆
y
x
2
1
ag =
ay,g
ax,g
∆∆
38 ] Kinematica en dynamica
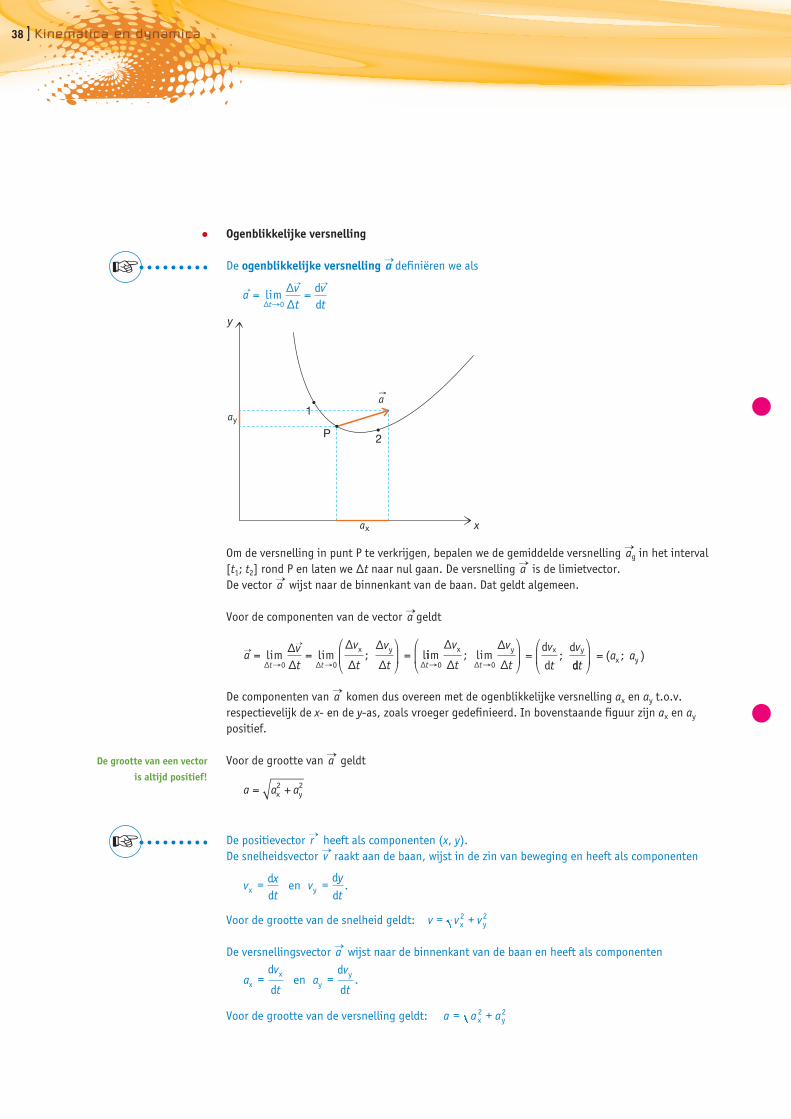
Ogenblikkelijke versnelling
De ogenblikkelijke versnelling →a definiëren we als
a vt
vtt
= =→
lim∆
∆∆0
dd
→→→
Om de versnelling in punt P te verkrijgen, bepalen we de gemiddelde versnelling →ag in het interval [t1; t2] rond P en laten we ∆t naar nul gaan. De versnelling →a is de limietvector. De vector →a wijst naar de binnenkant van de baan. Dat geldt algemeen.
Voor de componenten van de vector →a geldt
a v
t
v
t
v
tt t= =
⎛
⎝⎜
⎞
⎠⎟ =
→ →lim lim ; l
∆ ∆
∆∆
∆
∆
∆
∆0 0
x y iim ; lim ;∆ ∆
∆
∆
∆
∆t t
v
t
v
t
v
t
v→ →
⎛
⎝⎜
⎞
⎠⎟ =
0 0
x y x yd
d
d
dd x yta a
⎛
⎝⎜
⎞
⎠⎟ = ( ; )
→→
De componenten van →a komen dus overeen met de ogenblikkelijke versnelling ax en ay t.o.v. respectievelijk de x- en de y-as, zoals vroeger gedefinieerd. In bovenstaande figuur zijn ax en ay positief.
Voor de grootte van →a geldt
a a a= +x2
y2
De positievector →r heeft als componenten (x, y).De snelheidsvector →v raakt aan de baan, wijst in de zin van beweging en heeft als componenten
v xt
vy
tx y= dd
en =dd
.
Voor de grootte van de snelheid geldt: 2 2v+v v x y=
De versnellingsvector →a wijst naar de binnenkant van de baan en heeft als componenten
av
ta
v
txx
yy=
d
den =
d
d.
Voor de grootte van de versnelling geldt: 2 2+ aa ax y=
7
+
De grootte van een vector
is altijd positief!
+
y
x
P
1
2
a
ay
ax
39
KIN
EM
AT
ICA
EN
DY
NA
MIC
A
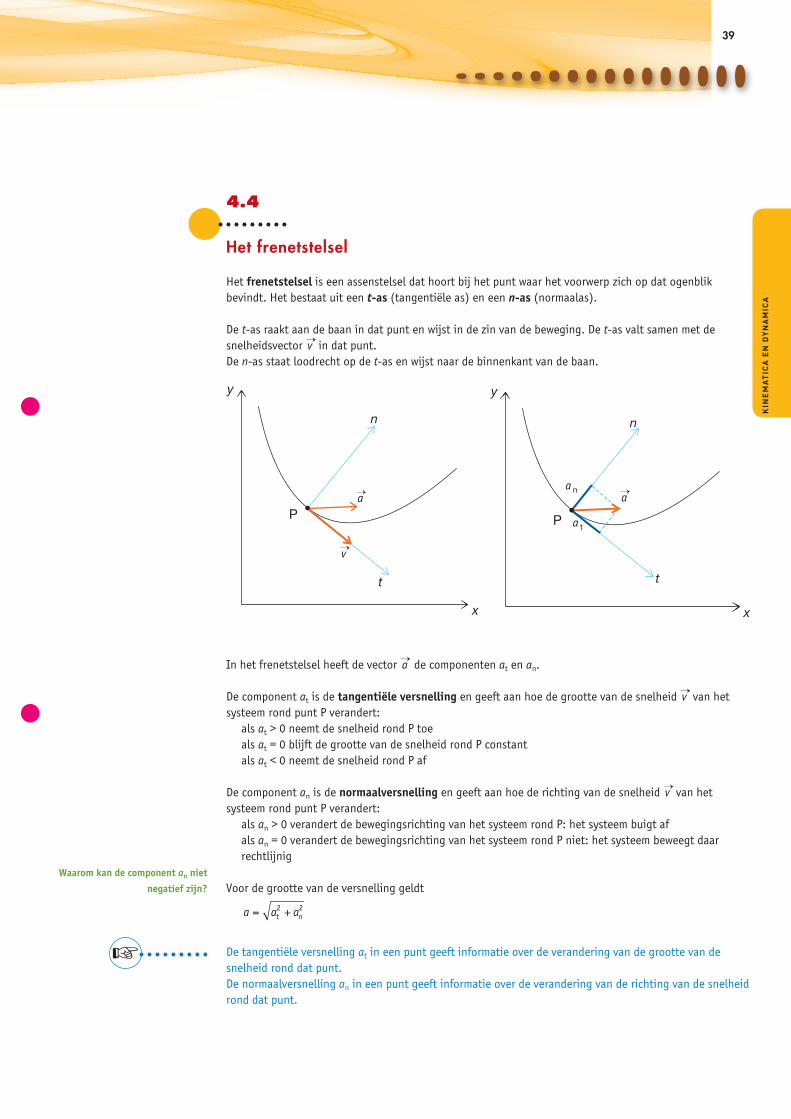
Het frenetstelsel is een assenstelsel dat hoort bij het punt waar het voorwerp zich op dat ogenblik bevindt. Het bestaat uit een t-as (tangentiële as) en een n-as (normaalas).
De t-as raakt aan de baan in dat punt en wijst in de zin van de beweging. De t-as valt samen met de snelheidsvector →v in dat punt.De n-as staat loodrecht op de t-as en wijst naar de binnenkant van de baan.
In het frenetstelsel heeft de vector →a de componenten at en an.
De component at is de tangentiële versnelling en geeft aan hoe de grootte van de snelheid →v van het systeem rond punt P verandert: als at > 0 neemt de snelheid rond P toe als at = 0 blijft de grootte van de snelheid rond P constant als at < 0 neemt de snelheid rond P af
De component an is de normaalversnelling en geeft aan hoe de richting van de snelheid →v van het systeem rond punt P verandert: als an > 0 verandert de bewegingsrichting van het systeem rond P: het systeem buigt af als an = 0 verandert de bewegingsrichting van het systeem rond P niet: het systeem beweegt daar
rechtlijnig
Voor de grootte van de versnelling geldt
a a a= +t2
n2
De tangentiële versnelling at in een punt geeft informatie over de verandering van de grootte van de snelheid rond dat punt.De normaalversnelling an in een punt geeft informatie over de verandering van de richting van de snelheid rond dat punt.
Het frenetstelsel
4.4
y
x
t
n
P�a
�v
y
x
t
n
a t
a n
P
�a
Waarom kan de component an niet
negatief zijn?
+
40 ] Kinematica en dynamica
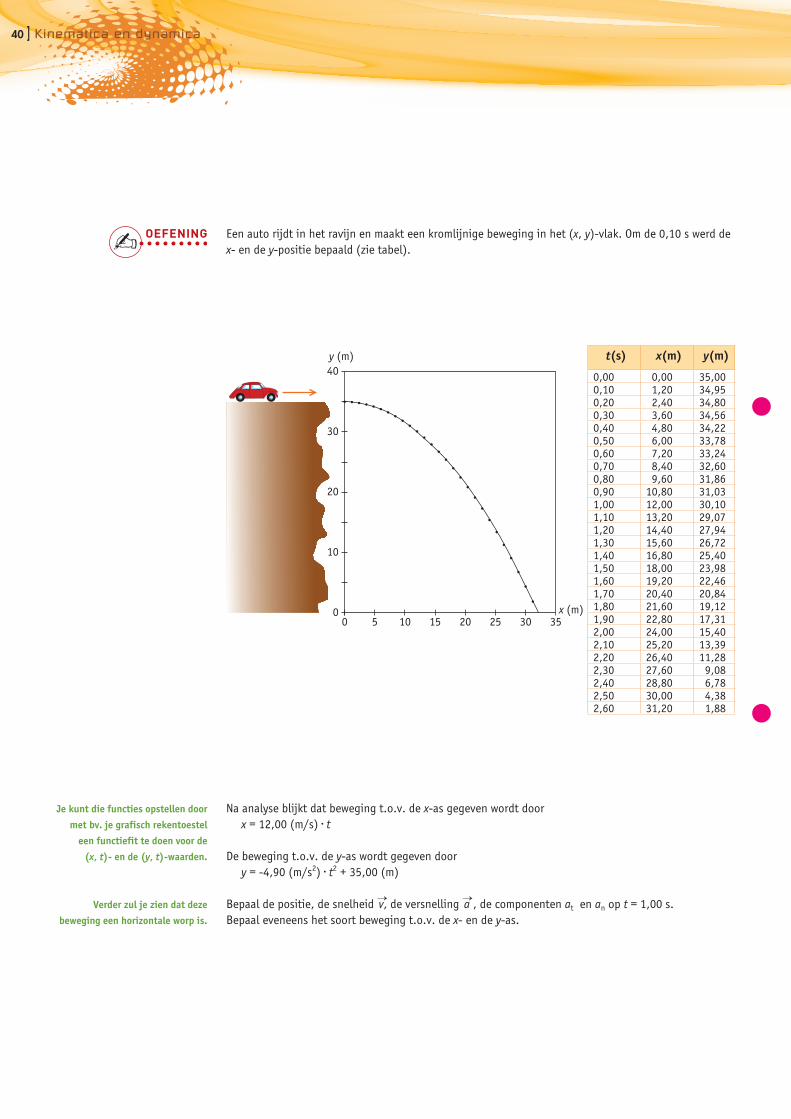
Een auto rijdt in het ravijn en maakt een kromlijnige beweging in het (x, y)-vlak. Om de 0,10 s werd de x- en de y-positie bepaald (zie tabel).
Na analyse blijkt dat beweging t.o.v. de x-as gegeven wordt door x = 12,00 (m/s) ∙ t
De beweging t.o.v. de y-as wordt gegeven door y = -4,90 (m/s2) ∙ t2 + 35,00 (m)
Bepaal de positie, de snelheid →v, de versnelling →a , de componenten at en an op t = 1,00 s. Bepaal eveneens het soort beweging t.o.v. de x- en de y-as.
- OEFENING
40
30
20
10
00 105 15 20 25 30 35
x (m)
y (m) t(s) x(m) y(m)
0,00 0,00 35,000,10 1,20 34,950,20 2,40 34,800,30 3,60 34,560,40 4,80 34,220,50 6,00 33,780,60 7,20 33,240,70 8,40 32,600,80 9,60 31,860,90 10,80 31,031,00 12,00 30,101,10 13,20 29,071,20 14,40 27,941,30 15,60 26,721,40 16,80 25,401,50 18,00 23,981,60 19,20 22,461,70 20,40 20,841,80 21,60 19,121,90 22,80 17,312,00 24,00 15,402,10 25,20 13,392,20 26,40 11,282,30 27,60 9,082,40 28,80 6,782,50 30,00 4,382,60 31,20 1,88
Je kunt die functies opstellen door
met bv. je grafisch rekentoestel
een functiefit te doen voor de
(x, t)- en de (y, t)-waarden.
Verder zul je zien dat deze
beweging een horizontale worp is.
41
KIN
EM
AT
ICA
EN
DY
NA
MIC
A
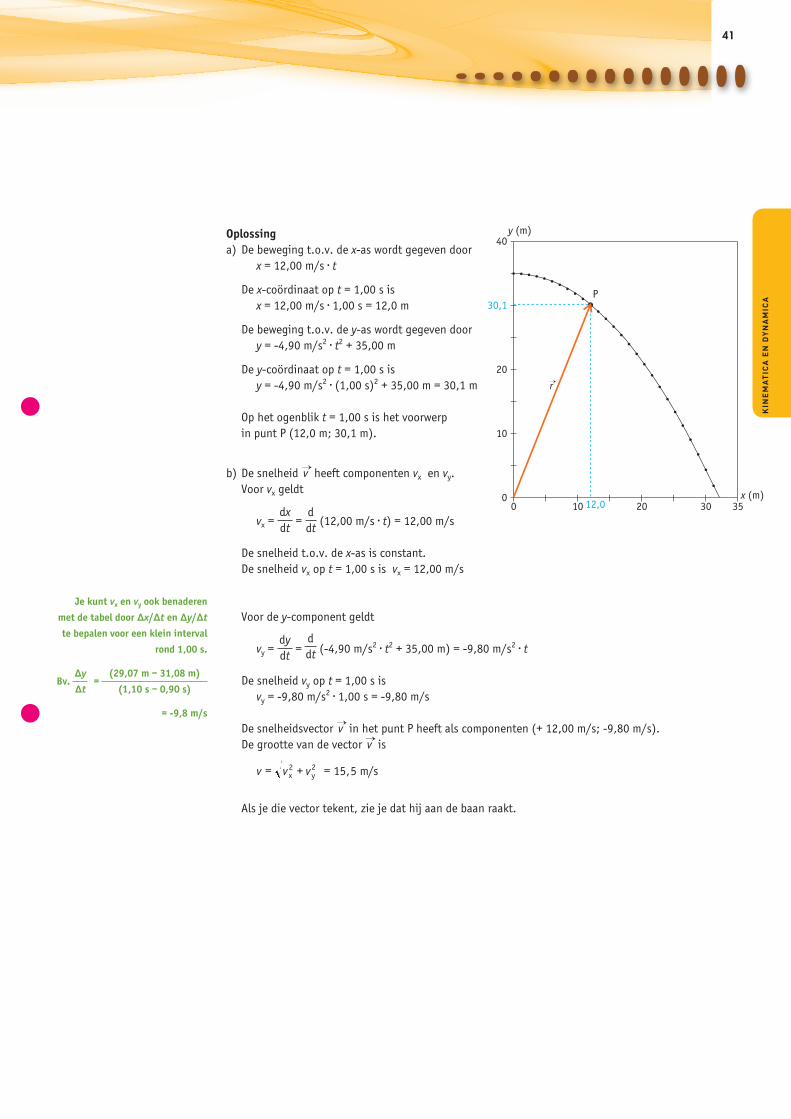
Oplossinga) De beweging t.o.v. de x-as wordt gegeven door x = 12,00 m/s ∙ t
De x-coördinaat op t = 1,00 s is x = 12,00 m/s ∙ 1,00 s = 12,0 m
De beweging t.o.v. de y-as wordt gegeven door y = -4,90 m/s2 ∙ t2 + 35,00 m
De y-coördinaat op t = 1,00 s is y = -4,90 m/s2 ∙ (1,00 s)2 + 35,00 m = 30,1 m
Op het ogenblik t = 1,00 s is het voorwerp in punt P (12,0 m; 30,1 m).
b) De snelheid →v heeft componenten vx en vy. Voor vx geldt
vx = dxdt =
ddt
(12,00 m/s ∙ t) = 12,00 m/s De snelheid t.o.v. de x-as is constant. De snelheid vx op t = 1,00 s is vx = 12,00 m/s
Voor de y-component geldt
vy = dydt =
ddt (-4,90 m/s2 ∙ t2 + 35,00 m) = -9,80 m/s2 ∙ t
De snelheid vy op t = 1,00 s is vy = -9,80 m/s2 ∙ 1,00 s = -9,80 m/s
De snelheidsvector →v in het punt P heeft als componenten (+ 12,00 m/s; -9,80 m/s). De grootte van de vector →v is
2 2v+ ,v v 15 5 m/sx y= =
Als je die vector tekent, zie je dat hij aan de baan raakt.
Je kunt vx en vy ook benaderen
met de tabel door ∆x/∆t en ∆y/∆t
te bepalen voor een klein interval
rond 1,00 s.
Bv. ∆y
∆t =
(29,07 m – 31,08 m)
(1,10 s – 0,90 s)
= -9,8 m/s
40
30,1
20
10
00 10 20 3012,0 35
x (m)
P
y (m)
�r
42 ] Kinematica en dynamica
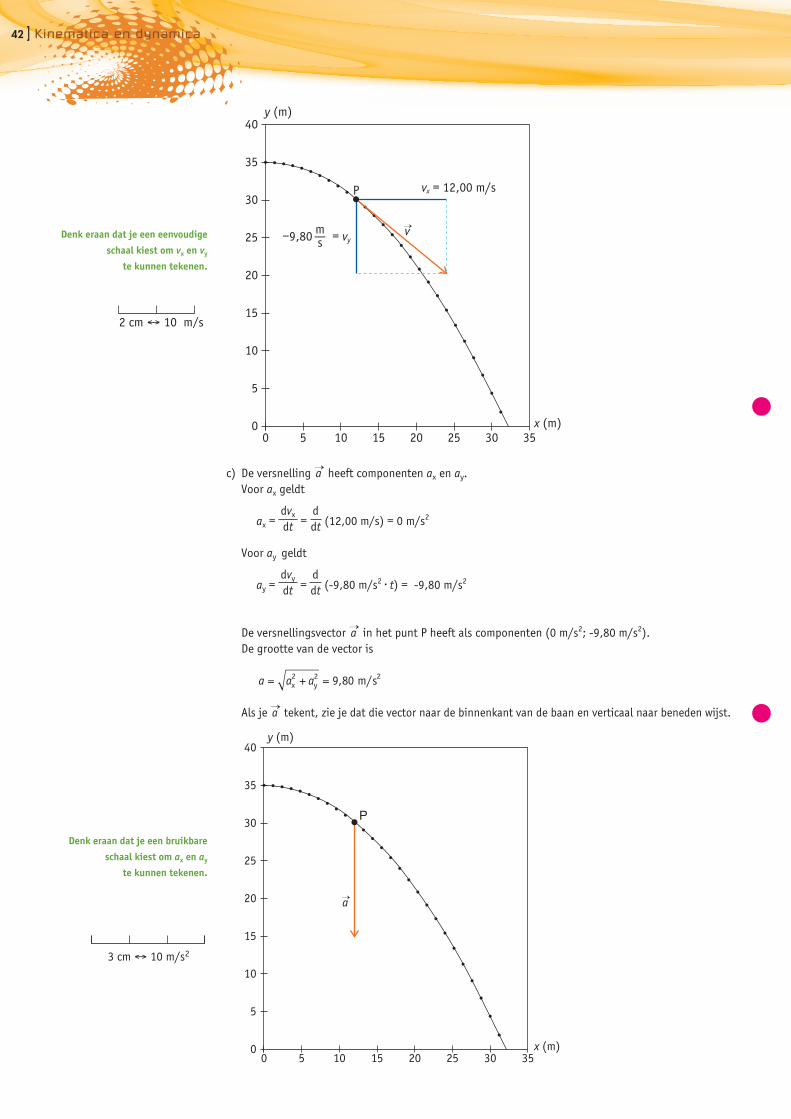
c) De versnelling →a heeft componenten ax en ay. Voor ax geldt
ax = dvx
dt = ddt (12,00 m/s) = 0 m/s2
Voor ay geldt
ay = dvy
dt = ddt (-9,80 m/s2 ∙ t) = -9,80 m/s2
De versnellingsvector →a in het punt P heeft als componenten (0 m/s2; -9,80 m/s2). De grootte van de vector is
a a a= + =x
2y2 29,80 m/s
Als je →a tekent, zie je dat die vector naar de binnenkant van de baan en verticaal naar beneden wijst.
40
35
30
25
20
15
10
5
00 3530252015105
x (m)
y (m)
vx = 12,00 m/s
–9,80 = vy 2 cm ↔ 10 m/sm–s
�v
P
40
35
30
25
20
15
10
5
00 35
3 cm ↔ 10 m/s2
30252015105x (m)
y (m)
P
�a
Denk eraan dat je een bruikbare
schaal kiest om ax en ay
te kunnen tekenen.40
35
30
25
20
15
10
5
00 35
3 cm ↔ 10 m/s2
30252015105x (m)
y (m)
P
�a
Denk eraan dat je een eenvoudige
schaal kiest om vx en vy
te kunnen tekenen.
40
35
30
25
20
15
10
5
00 3530252015105
x (m)
y (m)
vx = 12,00 m/s
–9,80 = vy 2 cm ↔ 10 m/sm–s
�v
P
43
KIN
EM
AT
ICA
EN
DY
NA
MIC
A
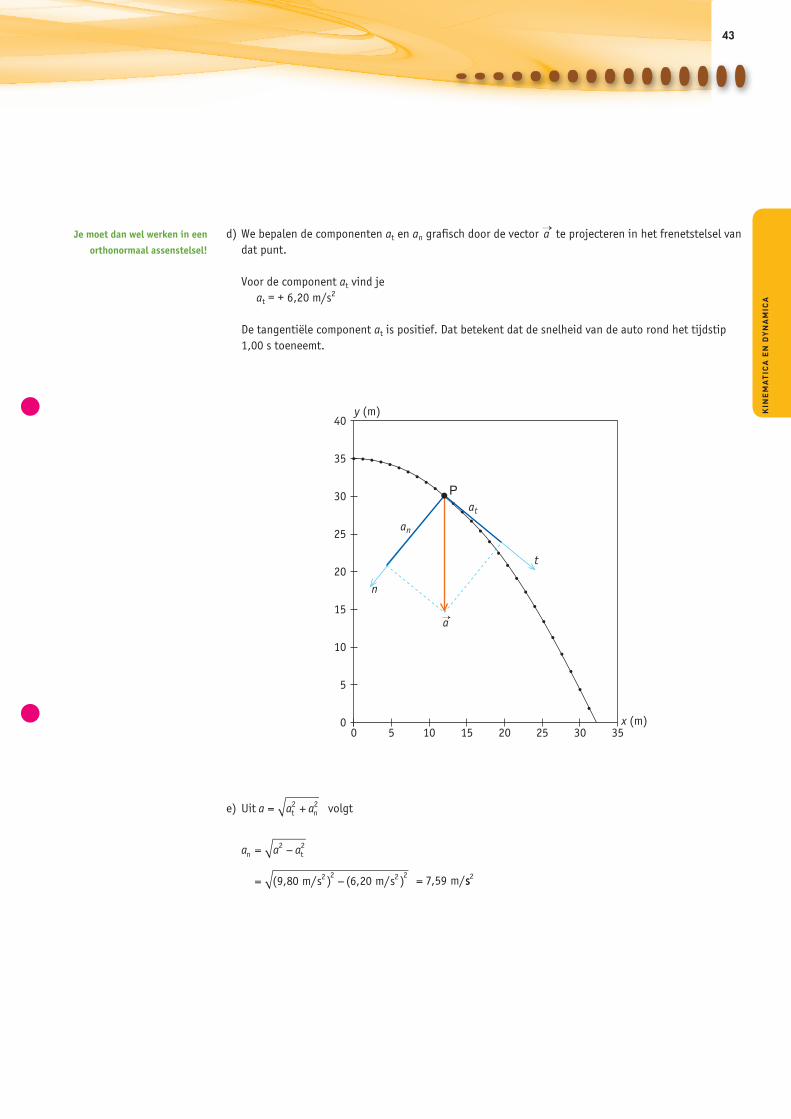
d) We bepalen de componenten at en an grafisch door de vector →a te projecteren in het frenetstelsel van dat punt.
Voor de component at vind je at = + 6,20 m/s2
De tangentiële component at is positief. Dat betekent dat de snelheid van de auto rond het tijdstip 1,00 s toeneemt.
P
40
35
30
25
20
15
10
5
00 3530252015105
x (m)
y (m)
an
at
→a
t
n
3 cm ↔ 10 m/s2
e) Uit a a a= +t2
n2 volgt
a a an t2
2 29,80 m/s 6,20 m/s ,59 m/
= −
= − =
2
2 2 7( ) ( ) ss2
Je moet dan wel werken in een
orthonormaal assenstelsel!
44 ] Kinematica en dynamica
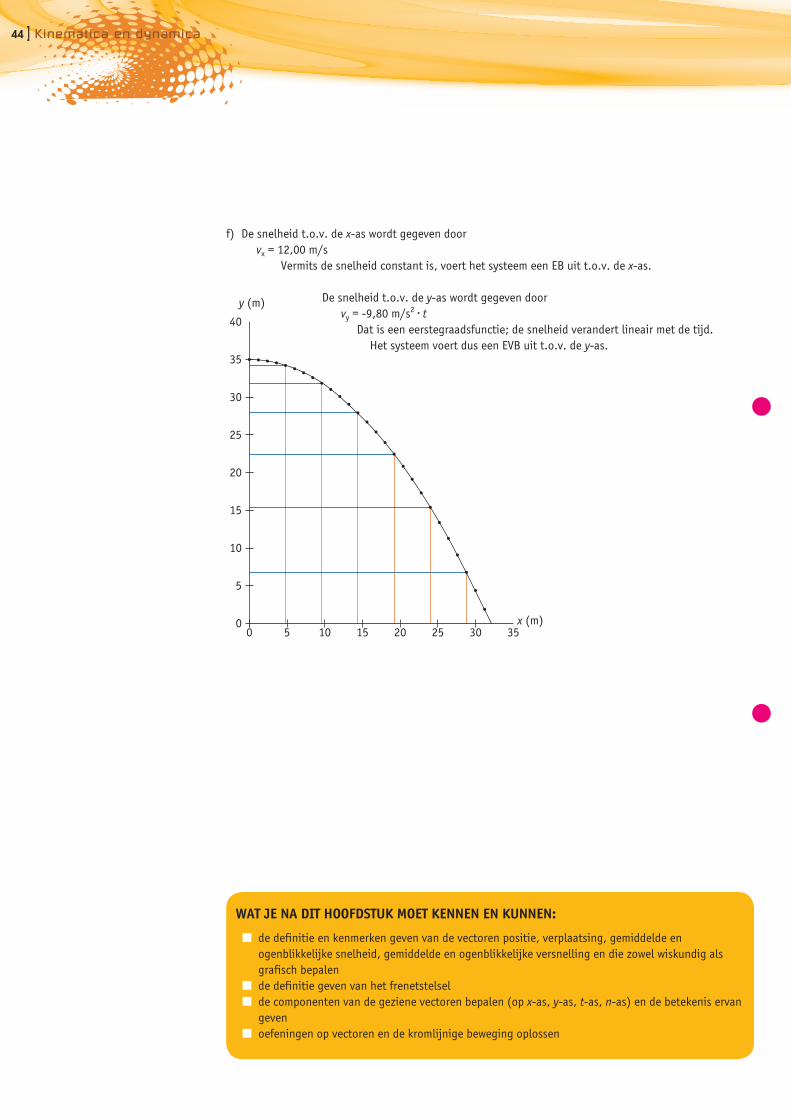
f) De snelheid t.o.v. de x-as wordt gegeven door vx = 12,00 m/s Vermits de snelheid constant is, voert het systeem een EB uit t.o.v. de x-as.
De snelheid t.o.v. de y-as wordt gegeven door vy = -9,80 m/s2 ∙ t Dat is een eerstegraadsfunctie; de snelheid verandert lineair met de tijd. Het systeem voert dus een EVB uit t.o.v. de y-as.
40
35
30
25
20
15
10
5
00 3530252015105
x (m)
y (m)
WAT JE NA DIT HOOFDSTUK MOET KENNEN EN KUNNEN:
■ de definitie en kenmerken geven van de vectoren positie, verplaatsing, gemiddelde en ogenblikkelijke snelheid, gemiddelde en ogenblikkelijke versnelling en die zowel wiskundig als grafisch bepalen
■ de definitie geven van het frenetstelsel ■ de componenten van de geziene vectoren bepalen (op x-as, y-as, t-as, n-as) en de betekenis ervan
geven ■ oefeningen op vectoren en de kromlijnige beweging oplossen