СОРОКИН Дмитрий Владимирович400 («Basler Electric», США), UNITROL...
25
На правах рукописи СОРОКИН Дмитрий Владимирович ВЫБОР НАСТРОЕК АРВ ГЕНЕРАТОРОВ СЛОЖНОЙ ЭНЕРГОСИСТЕМЫ НА ОСНОВЕ ПРИМЕНЕНИЯ ГЕНЕТИЧЕСКОГО АЛГОРИТМА И МЕТОДОВ МОДАЛЬНОГО АНАЛИЗА Специальность 05.14.02 - Электростанции и электроэнергетические системы Автореферат 2 6 НОЯ 2009 диссертации на соискание учёной степени кандидата технических наук Санкт-Петербург - 2009
Transcript of СОРОКИН Дмитрий Владимирович400 («Basler Electric», США), UNITROL...

На правах рукописи
СОРОКИН Дмитрий Владимирович
ВЫБОР НАСТРОЕК АРВ ГЕНЕРАТОРОВ СЛОЖНОЙ
ЭНЕРГОСИСТЕМЫ НА ОСНОВЕ ПРИМЕНЕНИЯ ГЕНЕТИЧЕСКОГО
АЛГОРИТМА И МЕТОДОВ МОДАЛЬНОГО АНАЛИЗА
Специальность 05.14.02 Электростанции
и электроэнергетические системы
Автореферат 2 6 НОЯ 2009
диссертации на соискание учёной степени
кандидата технических наук
СанктПетербург 2009
Работа выполнена на кафедре «Электрические системы и сети»
Государственного образовательного учреждения высшего
профессионального образования «СанктПетербургский государственный
политехнический университет»
Научный руководитель: доктор технических наук, профессор
Смоловик Сергей Владимирович
Официальные оппоненты: доктор технических наук, профессор
Юрганов Алексей Анатольевич
кандидат технических наук,
ст. научный сотрудник
Богачков Михаил Лазаревич
Ведущая организация: ОАО «Силовые машины» филиал
«Электросила»
Защита состоится « [ j» С^ЬШХССШ. 2009 г. в часов на заседании диссертационного совета^Д 212.229.11 при ГОУ ВПО «СанктПетербургский государственный политехнический университет» по адресу: 195251, г. СанктПетербург, ул. Политехническая, д. 29. Главное здание, ауд. 325.
С диссертацией можно ознакомиться в фундаментальной библиотеке ГОУ ВПО «СанктПетербургский государственный политехнический университет»
Автореферат разослан « ШН:
Учёный секретарь диссертационного совета Д 212.229.11
кандидат технических наук, доцент Попов М.Г.

ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы. В настоящее время в энергосистеме РФ происходит активная модернизация систем возбуждения генераторов. Модернизация может быть обусловлена как физическим износом, так и моральным старением оборудования систем возбуждения. Современные тенденции в модернизации систем возбуждения заключаются в замене медленнодействующих электромашинных и высокочастотных (ВЧ) систем возбуждения на быстродействующие статические тиристорные системы параллельного самовозбуждения. В качестве альтернативного варианта модернизации системы возбуждения без полной ее замены предлагается также модернизация ВЧ системы возбуждения. Модернизация систем возбуждения позволяет повысить быстродействие системы возбуждения и привести технические характеристики системы в соответствие с ГОСТ 215582000 «Системы возбуждения турбогенераторов, гидрогенераторов и синхронных компенсаторов». Модернизация систем возбуждения генераторов обычно сопровождается заменой входящих в их состав автоматических регуляторов возбуждения предыдущих поколений на современные цифровые регуляторы возбуждения на базе микропроцессорной техники. К регуляторам возбуждения предыдущих поколений в настоящее время можно отнести регуляторы возбуждения на базе магнитных усилителей (панели ЭПА120, ЭПА325В, ЭПА305 и ЭПА500), аналоговые (АРВСДП, АРВСДШ, АРВСДШМ, РАЦИС, АРВСДБ) и цифроаналоговые регуляторы возбуждения (АРВСДС). Данные типы регуляторов возбуждения генераторов до сих пор широко распространены на территории РФ. К современным регуляторам возбуждения относятся, например, цифровые регуляторы возбуждения АРВМ и его модификации АРВ2М и АРВЗМ (ОАО «Силовые машины» филиал «Электросила»), АРВРЭМ (ЗАО «НПП «РусэлпромЭлектромаш»»), КОСУРЦ (ОАО «НИИэлектромаш»), АРВНЛ (НПО «Элсиб» ОАО), AVR2 (ЗАО «Энергокомплект»), DECS400 («Basler Electric», США), UNITROL6000 («ABB», Швейцария), ЕХ2100 («General Electric», США) и др.
В настоящее время в ЕЭС РФ не применяется общепринятой методики выбора мест установки АРВСД. При этом модернизация систем возбуждения по условиям физического износа и (или) морального старения оборудования систем возбуждения может не обеспечить требуемых уровней колебательной устойчивости. В связи с этим, в настоящей диссертации разработана методика выбора мест установки АРВСД (системных стабилизаторов) по условию обеспечения требуемых уровней колебательной устойчивости при минимизации количества АРВСД. Предложенная методика может быть
3
использована также для определения порядка последовательного ввода в эксплуатацию АРВСД (системных стабилизаторов) генераторов.
В связи с тем, что в результате модернизации увеличивается быстродействие систем возбуждения, и регуляторы возбуждения предыдущих поколений заменяются современными цифровыми регуляторами возбуждения на базе микропроцессорной техники, ставится задача выбора новых настроек регуляторов возбуждения, обеспечивающих эффективное демпфирование электромеханических колебаний. Применяемые в настоящее время методики выбора настроек АРВ имеют ряд известных недостатков. Например, выбор настроек АРВ на основе применения методов, при которых последовательно определяются настройки каналов АРВ по условию обеспечения эффективного демпфирования колебаний, может не обеспечить того качества демпфирования электромеханических колебаний и уровня колебательной устойчивости, которые могут быть достигнуты при координации настроек АРВ. Традиционные методы настройки АРВ на основе применения Dразбиения и построения областей колебательной устойчивости позволяют производить одновременную координацию только двух параметров АРВ. Градиентные методы оптимизации позволяют производить многопараметрическую координацию настроек АРВ, однако при их применении накладывается ряд ограничений на вид и свойства целевой функции (обеспечение дифференцируемое™ целевой функции, ее неразрывности, а также отсутствия у целевой функции овражных свойств). Также в результате применения градиентных методов возможно получение в качестве решения локального оптимума, который может быть далек от глобального оптимума, что для задачи выбора настроек АРВ соответствует получению неэффективной настройки. Для преодоления указанных недостатков в настоящей диссертации разработана методика выбора настроек АРВ генераторов на основе применения генетического алгоритма.
В настоящее время существует тенденция появления на российском рынке систем возбуждения зарубежных производителей (компаний «ABB», «ALSTOM», «SIEMENS», «Basler Electric» и др.). В связи с этим, наблюдается рост числа генераторов на территории РФ, оснащенных системами возбуждения, в состав которых входят АРВ зарубежного производства. Таким образом, необходимость учета влияния АРВ зарубежного производства при анализе статической и динамической устойчивости энергосистем ЕЭС РФ, особенности структуры АРВ зарубежного производства по сравнению с АРВ отечественного производства, а также недостаточное описание АРВ зарубежного производства в отечественной литературе обуславливают
4

необходимость подробного описания структуры и методов настройки АРВ зарубежного производства в настоящей диссертации.
Корректный выбор настроек АРВ и выдача рекомендации по местам установки АРВСД (системных стабилизаторов) при применении цифровых моделей энергосистем возможны только при использовании достоверных цифровых моделей энергосистем, адекватно отображающих динамические свойства энергосистемы. В связи с этим, наряду с рассмотрением вопросов выбора мест установки и настройки регуляторов возбуждения рассматривается вопрос верификации используемых цифровых моделей АРВ и цифровых моделей энергосистем в целом.
Значительный вклад в решение поставленных задач в разные годы внесли И.А. Груздев, А.С. Зсккель, В.А. Строев, СМ. Устинов, А.А. Юрганов, А.Х. Есипович, А.С. Герасимов, В.А. Кожевников, В.Г. Любарский, В.А. Масленников, И.Ф. Перельман, А.В. Фадеев и др., а также зарубежные ученые F. P. de Mello, P. Kundur, N. Martins, I. J. PerezArriage, E. V. Larsen, B. Marinescu, R. Kutzner, A. Murdoch, M. J. Basler, K. Kiyong и др.
Цели работы состоят в разработке комплексной методики выбора мест установки и настройки АРВСД (системных стабилизаторов) генераторов в цифровых моделях сложных энергосистем на основе применения генетического алгоритма и методов модального анализа по условию обеспечения эффективного демпфирования электромеханических колебаний, а также реализация разработанных методик и алгоритмов в программном обеспечении.
На защиту выносятся следующие основные методические и прикладные результаты исследования:
1. Методика выбора мест установки АРВСД (системных стабилизаторов) генераторов на основе применения методов модального анализа.
2. Методика идентификации групп когерентных генераторов с учетом топологии схемы энергосистемы.
3. Методика выбора настроек АРВ отечественного и зарубежного производства на основе применения генетического алгоритма.
4. Положение о том, что применение корневой целевой функции в оптимизационной процедуре при выборе настроек АРВ генераторов менее эффективно по сравнению с применением в качестве оптимизируемого функционала интегральных квадратичных критериев качества.
5

5. Реализация предлагаемых методик и алгоритмов в разработанном автором программновычислительном комплексе.
Методология исследований, представленных в диссертационной работе, базируется на аппарате линейной алгебры, методах модального анализа динамической системы, теории эволюционных алгоритмов и нечетких множеств, методах частотного синтеза регуляторов, теории линейных операторов, использовании прикладной теории графов, теории моделирования и оптимизации, а также математических моделях энергосистем. Приведенные в настоящей диссертационной работе модальные характеристики рассчитаны в разработанном в процессе исследований программном обеспечении «Модальный анализ», написанном на языке программирования MATLAB («The Mathworks», США). Цифровая модель энергосистемы разработана в программновычислительном комплексе (ПВК) EUROSTAG («Tractebel», Бельгия).
Научная новизна диссертационной работы состоит:
• в разработке методики выбора места установки АРВСД (системных стабилизаторов) по условию улучшения качества демпфирования электромеханических колебаний при минимизации количества АРВСД,
• в разработке методики выбора настроек АРВ генераторов на основе применения генетического алгоритма,
• в разработке программного обеспечения «Модальный анализ», реализующего представленные в диссертационной работе методики и алгоритмы.
Практическая ценность и реализация результатов работы
1. В процессе диссертационных исследований разработано программное обеспечение «Модальный анализ», реализующее представленную в настоящей работе комплексную методику выбора мест установки и настроек АРВСД (системных стабилизаторов). ПО «Модальный анализ» применяется в настоящее время в ОАО «НИИПТ» для анализа возникновения низкочастотных колебаний в энергосистемах и выработки рекомендаций по их предотвращению.
2. Разработаны цифровые модели энергосистем Республики Коми и Архангельской области в ПВК EUROSTAG. Использованные в процессе исследования модели автоматических регуляторов возбуждения генераторов верифицированы по частотным характеристикам натурных регуляторов. Параметры генераторного оборудования уточнены по формулярам, полученным от заводовизготовителей. Достоверность разработанной цифровой модели энергосистемы подтверждена путем воспроизведения в ней технологического нарушения, имевшего место в
6

энергосистеме Республики Коми, и сравнения осциллограмм переходных процессов при технологическом нарушении и при его моделировании.
3. Проведен анализ колебательной устойчивости энергосистем Республики Коми и Архангельской области и даны рекомендации по предотвращению возникновения низкочастотных колебаний. На основе применения разработанных в настоящей диссертации методик, а также программного обеспечения, реализующего представленные методики, выбраны место установки и настройки АРВСД (системного стабилизатора) генератора Республики Коми (генератор №6 ТЭЦ СЛПК). Полученные настройки регуляторов обеспечивают эффективное демпфирование электромеханических колебаний.
Апробация работы и публикации
Основные положения диссертационной работы докладывались на научных семинарах кафедры «Электрические системы и сети» СанктПетербургского государственного политехнического университета, на Международной научнотехнической конференции «ЭНЕРГОСИСТЕМА: Исследование свойств, Управление, Автоматизация» (г. Новосибирск), а также на Шм Всероссийском конкурсе молодых специалистов инжинирингового профиля в области электроэнергетики (г. Геленджик). Положения диссертационной работы докладывались на научных семинарах ОАО «НИИПТ». По теме диссертации опубликовано четыре печатных работы, среди которых имеется единоличная публикация. Два издания, в которых автор имеет публикации, принадлежат перечню рецензируемых ВАК научных журналов и изданий.
Структура и объем диссертации
Диссертация состоит из введения, пяти глав, заключения, приложений и списка литературы из 97 наименований. Основная часть работы изложена на 168 страницах машинописного текста и включает 65 рисунков и 15 таблиц.
СОДЕРЖАНИЕ РАБОТЫ
Во введении рассмотрены основные этапы развития автоматических регуляторов возбуждения от регуляторов на магнитных усилителях до современных цифровых регуляторов возбуждения на основе микропроцессорной техники. Сделан обзор существующих методов настройки автоматических регуляторов возбуждения (системных стабилизаторов) и указаны их недостатки. В заключительном разделе главы обосновывается актуальность работы, формулируется ее цель и основные задачи.
7
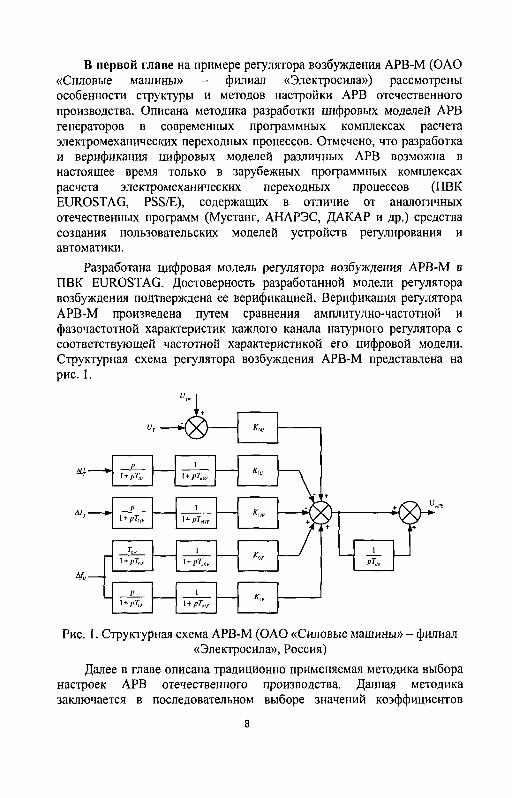
В первой главе на примере регулятора возбуждения АРВМ (ОАО «Силовые машины» филиал «Электросила») рассмотрены особенности структуры и методов настройки АРВ отечественного производства. Описана методика разработки цифровых моделей АРВ генераторов в современных программных комплексах расчета электромеханических переходных процессов. Отмечено, что разработка и верификация цифровых моделей различных АРВ возможна в настоящее время только в зарубежных программных комплексах расчета электромеханических переходных процессов (ПВК EUROSTAG, PSS/E), содержащих в отличие от аналогичных отечественных программ (Мустанг, АНАРЭС, ДАКАР и др.) средства создания пользовательских моделей устройств регулирования и автоматики.
Разработана цифровая модель регулятора возбуждения АРВМ в ПВК EUROSTAG. Достоверность разработанной модели регулятора возбуждения подтверждена ее верификацией. Верификация регулятора АРВМ произведена путем сравнения амплитудночастотной и фазочастотной характеристик каждого канала натурного регулятора с соответствующей частотной характеристикой его цифровой модели. Структурная схема регулятора возбуждения АРВМ представлена на рис. 1.
Рис. 1. Структурная схема АРВМ (ОАО «Силовые машины» филиал «Электросила», Россия)
Далее в главе описана традиционно применяемая методика выбора настроек АРВ отечественного производства. Данная методика заключается в последовательном выборе значений коэффициентов
8
усиления в каналах регулятора. Значения коэффициентов усиления в каналах регулирования по отклонению напряжения и производной напряжения выбираются по условию обеспечения эффективной стабилизации напряжения на шинах генератора (или необходимого статизма по напряжению для ПДзакона регулирования напряжения). Значения коэффициента усиления в канале стабилизации по отклонению производной тока ротора выбирается по условию возможности работы генератора в режимах недовозбуждения. Настройка системного стабилизатора АРВ традиционно проводится путем построения областей колебательной устойчивости (на основе применения Dразбиения) в координатах коэффициентов усиления каналов стабилизации по отклонению частоты напряжения АГ,„, и ее производной К]г. Значения коэффициентов Kw и К]г определяются по условию обеспечения наилучшего качества демпфирования электромеханических колебаний. Следует отметить, что при практической настройке АРВ постоянные времени каналов регулирования и стабилизации регулятора в большинстве случаев не корректируются и принимаются «типовыми».
Совокупность параметров АРВ, полученная на основе применения традиционной методики настройки регулятора, не гарантирует достижения того качества демпфирования электромеханических колебаний, которое могло бы обеспечить применение оптимизационной процедуры настройки АРВ, при которой достигается координация всей совокупности выбранных настроек (как коэффициентов усиления, так и постоянных времени каналов АРВ).
В заключительной части главы рассмотрены особенности и функциональные возможности программных комплексов для настройки автоматических регуляторов возбуждения: программы «ПОИСК», разработанной в СанктПетербургском государственном политехническом университете, и программы «Область», разработанной в ОАО «НИИПТ». Описаны методы настройки регуляторов возбуждения, реализованные в данных программах.
Во второй главе рассмотрены особенности структуры и методов настройки АРВ зарубежного производства. В настоящее время на российском рынке наиболее распространены регуляторы возбуждения, имеющие в своем составе системный стабилизатор типа PSS2B и регулятор напряжения типа ST4B. Данную структуру имеет, например, регулятор возбуждения DECS400 («Basler Electric», США). Цифровая модель регулятора возбуждения DECS400 («Basler Electric», США) разработана в ПВК EUROSTAG. Проведена верификация модели регулятора по частотным характеристикам натурного регулятора. Выявлены особенности верификации регуляторов возбуждения
9

зарубежного производства по сравнению с регуляторами отечественного производства. Структурные схемы системного стабилизатора и регулятора напряжения регулятора возбуждения DECS400 представлены на рис. 2 и 3.
Р Т„ р ГШ1 1 _
*Р T
W\ * 1+Р
ТЯ2 ~~* І + Р ^ " ,
1 + 1' Т, 4gh "
PTm
у + рт№і
РТ*А
1+рТ*.,
Рис. 2. Структурная схема системного стабилизатора типа PSS2B («Basler Electric», США)
< 8 ^ ка
^к
' 'f
l + pVV,
г
*,6 S
*t\r»
J
Рис. 3. Структурная схема регулятора напряжения типа ST4B
(«Basler Electric», США)
Как видно из сравнения рисунков 1, 2 и 3, АРВ зарубежного производства имеет принципиально другую структуру по сравнению с АРВ отечественного производства. Например, для АРВ зарубежного производства характерно последовательное соединение системного стабилизатора и регулятора напряжения, для АРВ отечественного производства параллельное. Отличия касаются также и традиционно применяемых входных сигналов системных стабилизаторов. Согласно стандарту IEEE1 Std 421.5 в системном стабилизаторе типа PSS2B АРВ зарубежного производства в качестве входных сигналов могут применяться отклонение активной мощности генератора, отклонение
' IEEE (англ. Institute of Electrical and Electronics Engineers) Ассоциация инженеров по электротехнике и
электронике
10
частоты напряжения на шинах генератора или отклонение частоты вращения вала генератора. В качестве входных сигналов системного стабилизатора АРВ отечественного производства традиционно применяются отклонение частоты напряжения на шинах генератора и ее производная. Характерным отличием АРВ отечественного производства является также наличие канала «внзтреннеи стабилизации» (канала стабилизации по отклонению производной тока ротора), отсутствующего в АРВ зарубежного производства.
Далее в главе рассмотрены основные типы системных стабилизаторов, применяемых в настоящее время в составе АРВ зарубежного производства. Подробно рассмотрена структура системного стабилизатор типа PSS2B. Следует отметить, что принцип действия системного стабилизатора типа PSS2B основан на концепции «ускоряющей мощности», что делает невозможным для системных стабилизаторов данного типа применение традиционных методов настройки АРВ отечественного производства. В диссертационной работе рассмотрена традиционная методика настройки системных стабилизаторов, основанная на компенсации фазового сдвига управляющего сигнала и дальнейшем выборе значения коэффициента усиления KSI по условию обеспечения необходимого качества демпфирования электромеханических колебаний. Наряду с рассмотрением традиционной методики настройки системного стабилизатора, приведена традиционная методика настройки регулятора напряжения АРВ зарубежного производства.
Следует подчеркнуть, что традиционная методика настройки АРВ зарубежного производства в настоящее время недостаточно описана в отечественной литературе. В связи с этим, в большинстве случаев настройку АРВ зарубежного производства, устанавливаемых в ЕЭС РФ, выполняет разработчик регулятора на цифровой модели энергосистемы в простейшей схеме «синхронный генератор линия электропередач шины бесконечной мощности». Настройка АРВ, полученная разработчиком, проверяется в процессе пусконаладочных работ при вводе АРВ в эксплуатацию и при необходимости корректируется.
В третьей главе приведено описание и теоретическое обоснование методов модального анализа в применении к электроэнергетическим системам. К методам модального анализа относят математические методы исследования динамических систем, основанные на вычислении собственных чисел и собственных векторов системы.
11

Электроэнергетическая система описывается в общем случае системой нелинейных дифференциальных уравнений вида:
х = Дх,и),
y = g(x,u), (1)
вектор выходных где х вектор переменных состояния, у
переменных, и вектор входных переменных. С помощью процедуры линеаризации в рассматриваемой точке
(дго, ио) система нелинейных дифференциальных уравнений (1) приводится к системе линейных дифференциальных уравнений:
(2) Ах
Ау
где
L̂ <3х,
Sf„
дх,
"fcl дх,
Фк дх,
= ААхі
С&Х +
tt~ Sx„
§L Sx„
dg
дх,
Sg,
дх,
В Аи,
DAu,
B =
i
D =
du,
EL du,
du,
& L
du,
EL dur
dur
dur
<& du,
(3)
n количество переменных состояния,
m количество выходных переменных,
г количество входных переменных,
Ах = хх„ вектор приращений переменных состояния,
А)' = УУ» ~ вектор приращений выходных переменных,
Аи = ии0 вектор приращений входных переменных,
А матрица состояния, В матрица управляющих воздействий,
С матрица выходных сигналов,
D матрица прямых связей между входными и выходными переменными.
12
Из теории линейных систем известно, что малое отклонение переменной состояния, т.е. решение системы (2), может быть записано в виде:
Дг,(0 =фІІс]еі'' + фі2с2е*
1' + ... + ф,„с„е
л"', (4)
где
А, =а, +.іщ /'ое собственное число системы,
ФІ[ФЧ Фи ••• Ф„І1 правый собственный вектор, соответствующий собственному числу А,,
Ѵ /=[ѵ ,і ҐІ2 ••• ѵ Л левый собственный вектор, соответствующий собственному числу А;,
Дт(0) вектор начальных условий,
с, =1//, Дѵ (0) скалярное произведение левого собственного вектора і//, и вектора начальных условий Лѵ (0).
Как видно из рассмотрения (4), поведение динамической системы при малых отклонениях переменных состояний в основном определяется такими модальными характеристиками системы, как ее собственные числа и собственные вектора.
Согласно теории линейных систем правый и левый собственные вектора определяются следующим образом:
Афі = А. •</>,.,
л 3 ( 5 )
у, Л = А,. •!//•,.
Соответствующие элементы правого собственного вектора фі
характеризуют отклонения скоростей вращения роторов генераторов энергосистемы при малом возмущении в энергосистеме и определяют, таким образом, группы когерентных генераторов.
Степень колебательности компоненты движения, соответствующая /'му собственному числу, характеризует показатель демпфирования f,.:
С,= , "' , (6)
Одной из основных модальных характеристик динамической системы является коэффициент участия рѵ /ой переменной состояния в относительном движении на jovi частоте, определяемый следующим образом:
Ра=Ґ,гФ» (7)
13

Коэффициент участия является удобным количественным критерием при определении приоритетных генераторов для установки автоматических регуляторов сильного действия (системных стабилизаторов).
Далее в главе разработан алгоритм идентификации групп когерентных генераторов для определения мест установки АРВСД (системных стабилизаторов) с учетом топологии электрической схемы энергосистемы. Подтверждена необходимость учета топологии электрической схемы энергосистемы для корректной идентификации групп когерентных генераторов. Под когерентными генераторами на рассматриваемой частоте понимаются группы генераторов, в отклонении скорости вращения роторов которых присутствуют компоненты движения данной частоты и с одинаковой (или близкой) фазой движения. На основе применения разработанного алгоритма возможно определение типа колебаний, соответствующих компонентам движения определенной частоты (межсистемные, внутри или межстанционные и локальные колебания). Определение типа колебаний необходимо для определения возможности улучшения качества демпфирования электромеханических колебаний путем установки АРВСД (системных стабилизаторов) на генераторы одной группы когерентности.
Алгоритм идентификации групп когерентных генераторов состоит из двух этапов. На первом этапе производится предварительная оценка состава и количества групп когерентных генераторов на основе вычисления правых собственных векторов системы для доминирующих частот. В связи с тем, что количество групп когерентных генераторов в общем случае заранее неизвестно, то для его оценки применяется блок нечеткой кластеризации, что позволяет избежать необходимости задания количества групп когерентных генераторов непосредственно и увеличивает степень автоматизации расчетов. На втором этапе работы алгоритма производится уточнение состава и количества групп когерентных генераторов с учетом топологии электрической схемы энергосистемы. Необходимость учета топологии схемы обусловлена тем, что сходство фаз компонент движения роторов генераторов является необходимым, но не достаточным условием включения данных генераторов в группу когерентности. Для уточнения состава и количества групп когерентных генераторов применяются методы теории графов (в частности, алгоритм определения кратчайших расстояний между узлами графа Флойда Уоршелла).
Достоверность результатов работы алгоритма идентификации групп когерентных генераторов подтверждена путем моделирования в цифровой модели энергосистемы тестового импульса и сравнения
14

результатов работы алгоритма с результатами разложения в ряд Фурье сигналов изменения частоты вращения роторов генераторов энергосистемы. Алгоритм разработанной в настоящей диссертации методики представлен в виде блоксхемы, изображенной на рис. 4.
Глшн, п,
I »wit'w:«vi «С
1
1 '
Т>(Щ
|=|»| '
J
L 1
п
( иачачо )
n»»,,,,»,,,,^»™,,,,™*,,.^, „,.,«„„
1 Bt*4Mf.{HiH\W npoiisuX №6i'.Hlf:liH!yX КсктОр^й
і Or:pfddпений .(Яічрсв кластеров Ф«з грлві».*
w.)6i:'f»t»M«NKH«!iito[x>acHr.«ofitj.4*i»3Hn*tM им?ш>г:з
сѵ с?трог!ТиЕ»югс алгоритма ИгераФилввз
і Классификация фаз грзиш* соОстиянны* в е п о р з в
I / ызничеста и состава ip^tsri /
n • иііличество генераторов
i Ф«рМИ(ІГ.;в8Ш№ yfiftCiiuflHuCXO ІрЛфЯ ГлИс'ХГрИчеСКОЙ
г Нахождение матрицы М ф а г ч з й ш и х путей меаду (УЧІЫИ геттрліорніхми узлами (алгоритм Ф І Ю Й Д Л
Уорцкішіа)
I M I гамерптлртми у лея
1 :й генераторной r j e n
_L »• ^ ф ~ ^
!
:
!
^ G rpytma. к к іп. іроі : Оімооикм <»!Й ;»нсрацір. G труппй. * кагооой ІУЛІООМІЧ.Й JШИ генйрсиор
^U Grpe j ien^ f Ит> іфатчииимзго ііѵ тк мй»ду іым it ^ым
генераторами MJ матрицу А*
l •: _иі редкое и яо количества t3 гекераіорнвік узпяя на лученном пути, не поинаялелсащи* текущей группе G ;
ір»нной G,}
*• ^ с Ъ г ^ ' * '
1 ^ ' , ; | ій и ІІЛ («t t t jptnupu рдздпде групп ) ( ' * " и ' ~ * 'йи&ііьтары оачой фуіч ѵ » \\
•*' _~—V̂ , „, J 3 ^ '
^•^^Г" Сформировано груікіы К"» юра герои
1 у ' Вывести на печать группы У
/ К»Г«Г)йИТНі»іХ ГТЗН?р<Ѵ Т0рйВ / ^
1 Konwt )
і
Рис. 4. Алгоритм идентификации групп когерентных генераторов с учетом топологии схемы энергосистемы
15

На основе применения разработанного алгоритма идентификации когерентных генераторов и ряда модальных характеристик разработана методика выбора мест установки АРВСД (системных стабилизаторов) по условию обеспечения эффективного демпфирования электромеханических колебаний при минимизации количества АРВСД. Основные этапы разработанной методики представлены на рис. 5. Установку АРВСД (системного стабилизатора) целесообразно производить на генератор, имеющий наибольший коэффициент участия для частоты наиболее плохо демпфируемой компоненты движения и участвующий при возможности в наибольшем количестве групп когерентности для доминирующих частот. Следует отметить, что высокий коэффициент участия может также свидетельствовать о возможности перенастройки имеющегося регулятора без необходимости модернизации. Таким образом, модернизация системы возбуждения генератора с установкой АРВСД (системного стабилизатора) выполняется в случае нецелесообразности перенастройки имеющегося регулятора возбуждения (например, в случае физического старения оборудования системы возбуждения) или недостижения в результате перенастройки необходимого качества демпфирования колебаний. В случае выявленных плохо демпфируемых межсистемных колебаний целесообразно рассмотреть установку АРВСД на ряде генераторов соответствующей группы когерентности в соответствии с предложенной методикой.
/ Начало )
Определение доминирующих частот в энергосистеме
I Определение групп когерентных генераторов на
доминирующих частотах
+ "~ Вычисление коэффициентов участия на доминирующих
частотах
[ Конец
Рис. 5. Алгоритм, реализующий методику выбора мест установки АРВСД (системных стабилизаторов)
)
16

В процессе диссертационных исследований разработано программное обеспечение (ПО) «Модальный анализ», реализующее на персональном компьютере представленные в настоящей работе алгоритмы и методы. Программное обеспечение написано в среде программновычислительного комплекса MATLAB, имеет модульную структуру и удобный графический пользовательский интерфейс. Функциональные возможности разработанного программного обеспечения представлены на рис. 6. ПО «Модальный анализ» обеспечивает импорт линеаризованной модели энергосистемы в среду MATLAB и в зависимости от запускаемого модуля реализует ту или иную его функциональную возможность. Импортируемая с помощью ПО «Модальный анализ» линеаризованная модель энергосистемы может быть представлена как в классической форме (2), так и в виде системы алгебродифференциальных уравнений. Возможность импорта линеаризованных моделей в различных форматах обеспечивает универсальность разработанного ПО и позволяет импортировать линеаризованные модели, созданные не только в ПВК EUROSTAG, но и другими программными продуктами (например, SIMULINK, Dymola и др.).
ПО «Модальный анализ»
Линеаризация системы Выбор мест установки АРВ генераторов
Вычисление собственных значений Идентификация когерентных
генераторов с учетом топологии
Расчет собственных векторов Настройка АРВ (генетический
алгоритм)
Расчет коэффициентов участия Частотный анализ энергосистемы
Выявление доминирующих частот ! Модуль автоматизации расчетов в
ПВКEUROSTAG
Построение диаграммы движения корней
Взаимодействие с программой RastrWin
Рис. 6. Функциональные возможности разработанного программного обеспечения «Модальный анализ»
В четвертой главе разработана методика настройки регуляторов возбуждения на основе применения генетических алгоритмов (ГА). Генетические алгоритмы это алгоритмы оптимизации, основанные на естественных законах эволюции. Впервые генетический алгоритм описал и исследовал J. Holland в 1975 году. Применение ГА для
17
решения оптимизационных задач имеет ряд существенных преимуществ перед традиционными методами оптимизации (переборными и градиентными), позволяющих эффективно применять ГА при выборе настроек АРВ генераторов:
1. Важным достоинством генетических алгоритмов является то, что при их применении не накладывается какихлибо ограничений на вид и свойства оптимизируемого функционала (отсутствие овражных свойств, диффсренцирусмость, неразрывность и т.д.). Таким образом, выбор вида оптимизируемого функционала при применении ГА обусловлен только практической целесообразностью данного функционала при решении поставленной задачи, а не требованиями обеспечения необходимых свойств целевой функции.
2. Генетические алгоритмы объединяют как вероятностные, так и детерминированные правила для перехода от одних точек анализа к другим, что позволяет оптимизационной процедуре, использующей генетический алгоритм, организовывать поиск решения в направлении глобального, а не локального оптимума.
3. Характерной особенностью генетических алгоритмов является быстрая генерация достаточно «хороших» (в смысле оптимальности) решений.
В то же время недостатком применения генетического алгоритма является длительное время поиска точного значения глобального оптимума (в случае неудачного задания начального приближения решения).
В настоящей диссертации рассмотрено применение оптимизируемых функционалов (целевых функций) различных типов: корневых и интегральных. Под корневыми целевыми функциями понимаются функции, значения которых вычисляются на основе выполнения операций с собственными числами системы. Так, в качестве корневой целевой функции при выборе настроек АРВ на основе применения генетического алгоритма в настоящей диссертационной работе рассмотрен функционал следующего вида:
J = 0^l6&l+frLl°7aol > m i n> (8)
где /' такое, что Ј < Ј„; j такое, что аі > а„;
Л,=0!, + /Й> /ый корень соответствующего характеристического уравнения;
18

s, ѵ «г показатель демпфирования, соответствующий
собственному числу А,.
Применение функционала вида (8) при выборе настроек АРВ генераторов в оптимизационной процедуре позволяет обеспечить смещение собственных чисел системы в область на комплексной плоскости, ограниченную параметрами а„ и Ј„.
В процессе диссертационных исследований выявлена неэффективность применения корневой целевой функции в оптимизационной процедуре при выборе настроек АРВ как отечественного, так и зарубежного производства. В связи с этим, предложено применение в качестве оптимизируемого функционала интегральных квадратичных критериев качества переходных процессов. Под интегральными целевыми функциями понимаются функции, являющимися интегральными критериями качества переходных процессов:
Jz = JAy2{t)c/t,
о
J, = \\Ay2(t)dt + T
2 с/ЛуО)
(9)
(10) dt
где г параметр функционала,
Д)'(/) ошибка динамической системы.
Показано, что одним из оптимальных режимных параметров, пригодных для применения в качестве переменной функции ошибки динамической системы, является отклонение скорости вращения ротора:
Ay(t) = co(,t)(oycl,
где ш скорость вращения ротора, рад/с;
(П)
а>пш установившееся значение скорости вращения ротора в
исходном режиме, рад/с.
Применение интегральных квадратичных критериев качества переходного процесса Л и J, позволило улучшить качество демпфирования электромеханических колебаний по сравнению с настройками, полученными традиционным методом.
Пятая глава включает результаты практического применения рассмотренных в диссертационной работе методов на примере тестовой схемы. В качестве тестовой схемы использована схема энергосистемы
19

Республики Коми и Архангельской области. Цифровая модель тестовой схемы энергосистемы разработана в ПВК EUROSTAG и верифицирована путем воспроизведения в ней технологического нарушения в Республике Коми 07.12.2006 г. На основе применения разработанного программного обеспечения «Модальный анализ» вычислены доминирующие собственные числа и, соответственно, доминирующие частоты в энергосистеме, соответствующие наиболее плохо демпфируемым компонентам движения в энергосистеме. Полученные на основе применения ПО «Модальный анализ» группы когерентных генераторов на основных доминирующих частотах приведены на рис. 7. Из рассмотрения данного рисунка видно, что роторы генераторов ТЭЦ СЛПК участвуют в движении на всех основных доминирующих частотах. Из этого следует, что генераторы ТЭЦ СЛПК являются наилучшими претендентами для установки АРВСД (системных стабилизаторов) по условию обеспечения эффективного демпфирования электромеханических колебаний на основных доминирующих частотах. Вычисление коэффициента участия генераторов для основной доминирующей частоты показало, что за наиболее плохо демпфируемую компоненту движения в наибольшей степени «ответственен» генератор №6 ТЭЦ СЛПК. Исследования показали, что высокий коэффициент участия генератора №6 ТЭЦ СЛПК получен также и для других доминирующих частот. На рис. 8. приведена диаграмма коэффициентов участия для основной доминирующей частоты энергосистемы. Таким образом, на основе применения разработанной методики выбора мест установки АРВСД (системных стабилизаторов) получено, что наиболее эффективное демпфирование электромеханических колебаний на всех основных доминирующих частотах обеспечивается при установке АРВСД на генератор" №6 ТЭЦ СЛПК (Республика Коми).
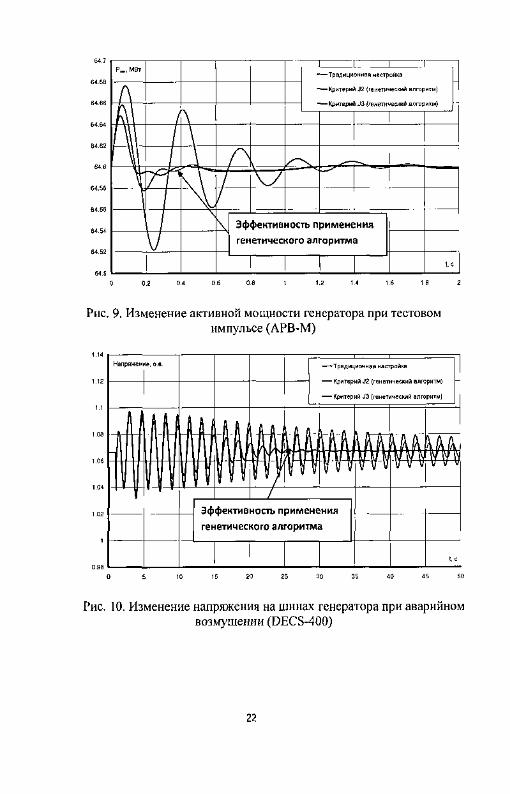
Далее в главе рассмотрены варианты установки АРВ отечественного производства (АРВМ) и АРВ зарубежного производства (DECS400) на генератор №6 ТЭЦ СЛПК. Рассмотрен выбор настроек АРВ на основе применения генетического алгоритма и различных целевых функций. Показано, что оптимизация настроек регуляторов возбуждения на основе применения генетического алгоритма и интегральных целевых функции позволяет улучшить качество демпфирования колебаний по сравнению с применением традиционных методик настройки АРВ как отечественного, так и зарубежного производства. На рис. 9 показано изменение активной
г При условии, что будут обеспечены эксплуатационные режимы, при которых генератор №6 ТЭЦ СЛПК
находится ѳ работе
20

мощности генератора №6 ТЭЦ СЛПК при тестовом импульсе и установленном на генераторе регулятора возбуждения АРВМ. На рис. 10 показано изменение напряжения на шинах генератора при воспроизведении в цифровой модели энергосистемы технологического нарушения 07.12.2006 г. и установленном на генераторе регулятора возбуждения DECS400.
.; сев.тэігі :•••••.„„ Сев.ТЭЦ2 ІАЛі
>"ч /?
// Место установки АРВСД
Центра..
0,77Гц(;=3%)
1.U8 Гц (;7%)
і,обГц(;=і2%)
1.J2 Гц(;=15%)
Q) \ ОЭС CeWpoЗапада ,.ff""". ( , „ ' < Q ) Ікв. ОЭС...^:—:;;;;;.....:Д . Й С \ ,'N <*^^ :;^;С'\
ътэи.і ПГРЭС
ТЭЦКИБ(<
ОЭС Центра „ . . Сосн. T3U"
ТЭЦ СЛПК ОЭСУрала _ /
Рис. 7. Диаграмма когерентности
0.1
0.04
П > . . . 1 1
1 1 1 генератор №6 ТЭЦ СЛПК
1 • і і і
ТЭЦ К
І . . І . І
ЦБК
Вор
1L
*ут. ТС
1.
ц
к_ LLL
ТЭЦ СЛПК
j j f l l
ТЭЦ
Номер пвременнойсостояния
Рис. 8. Диаграмма коэффициентов участия для основной доминирующей частоты/=0,77 Гц
Цифрой около электростанций на диаграмме обозначено количество групп когерентности, в которых участвуют генераторы данной электростанции
21
Р,_, МВт
л № А і
\
]
j /
л гг
\
\
\
Л' \
^
л т 1 \
ѵ
Х7
і і і і — Традиционная настройка
Критерий J2 (генетический алгоритм)
Критерий J3 (генетический алгоритм)
Эффективность применения
генетического алгоритма
|
1,
0.2 0.4 1.2 1.4
Рис. 9. Изменение активной мощности генератора при тестовом импульсе (АРВМ)
1.12
1.06
1.04
1.02
Напряжен не. о.е.
Jf, HI I
' . І ( І
1 ill Йі w Iff
А А і
JUU
—Традиционная настройка
— Критерий J3 (генетический алгоритм)
МШгатіг IV Iff
/
и \Щ V u if i
V V V
Эффективность применения
генетического алгоритма
Ш \ \ \ U U V
ш Ѵ У\ V V V
\кк mm V V V
t, с
10 15 20 25 30 35 40 45 50
Рис. 10. Изменение напряжения на шинах генератора при аварийном возмущении (DECS400)
22

ЗАКЛЮЧЕНИЕ
1. Разработана методика выбора мест установки АРВСД генераторов по условию обеспечения эффективного демпфирования электромеханических колебаний при минимизации количества АРВСД. Ввод в эксплуатацию АРВСД в соответствии с разработанной методикой позволит на каждом этапе ввода обеспечить наибольший возможный уровень колебательной устойчивости и реализовать максимальный диапазон возможных схемнорежимных условий работы энергосистемы.
2. Разработана методика идентификации групп когерентных генераторов с учетом топологии схемы энергосистемы. Показано, что учет топологии является необходимым условием для корректной идентификации групп когерентных генераторов в сложных схемах энергосистемы.
3. Разработана методика выбора настроек АРВ отечественного и зарубежного производства на основе применения генетического алгоритма.
4. Выявлена неэффективность применения корневой целевой функции в оптимизационной процедуре при выборе настроек АРВ генераторов.
5. Показано, что применение вместо корневой целевой функции интегральных квадратичных критериев качества переходного процесса позволяет улучшить качество демпфирования электромеханических колебаний по сравнению с настройками, выбранными традиционным способом.
6. Рассмотрены особенности структуры и методов настройки АРВ зарубежного производства.
7. Разработаны цифровые модели автоматических регуляторов возбуждения АРВМ (ОАО «Силовые машины» филиал «Электросила») и DECS400 («Basler Electric», США) в программновычислительном комплексе EUROSTAG, достоверность которых подтверждена путем верификации данных моделей по частотным характеристикам соответствующих натурных регуляторов возбуждения.
8. Разработана цифровая модель энергосистемы Республики Коми и Архангельской области в программновычислительном комплексе EUROSTAG. Достоверность разработанной цифровой модели энергосистемы подтверждена воспроизведением в ней технологического нарушения, имевшего место в Республике Коми.
23

9. Разработано программное обеспечение "Модальный анализ" на языке MATLAB, реализующее представленные в диссертационной работе методики и алгоритмы.
Основные положения диссертации опубликованы в следующих работах:
1. Сорокин, Д.В. Координация настроек автоматических регуляторов возбуждения генераторов на основе применения генетического алгоритма / Д.В. Сорокин // Научнотехнические ведомости СПБГПУ. 2009. № 1 . С. 1825.
2. Смирнов, А.Н. Настройка автоматических регуляторов возбуждения с использованием достоверных цифровых моделей энергосистемы / А.Н. Смирнов, Д.В. Сорокин // III Всероссийский Конкурс молодых специалистов инжинирингового профиля в области электроэнергетики: Сборник докладов. М.: НП «ВТИ», 2009. С. 184196.
3. Герасимов, А.С. Разработка цифровых моделей отечественных и зарубежных АРВ и методика их верификации / А.Х. Есипович, А.Н. Смирнов, Д.В. Сорокин, Й. Штефка // Известия НИИ постоянного тока. 2008 . №68 . С . 3143.
4. Левандовский, А.В. Опыт использования достоверных цифровых моделей энергосистем для анализа устойчивости и обеспечения системной надежности / А.С. Герасимов, А.Х. Есипович, А.Н. Смирнов, Д.В. Сорокин // Научные проблемы транспорта Сибири и Дальнего Востока. 2009. №1. С. 4953.
24

Лицензия ЛР № 020593 от 07.08.97
Подписано в печать 22.10.2009. Формат 60x84/16. Печать цифровая. Усл. печ. л. 1,0. Уч.изд. л. 1,0. Тираж 100. Заказ 5068b.
Отпечатано с готового оригиналмакета, предоставленного автором, в Цифровом типографском центре Издательства Политехнического университета.
195251, СанктПетербург, Политехническая ул., 29. Тел.:(812)5504014
Тел./факс: (812) 2975776