
WU Ë ¨© © ? ¸ 8 v Ç ó ¬ s ö ¦ ¦ ¸ î² C o \ } ¤ ¥ ô ó ò V z Þ ê s u } ó ñ í...
1
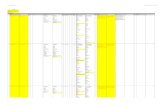
6 6 宇宙船AI ~強化学習に挑む~ 福井県立高志中学2年 森本 新太郎 ポイント② 1.これまでの研究 【オセロAI①】 アルゴリズムAI 手動でデータ分析 【オセロAI②】 パーセプトロンによる機械学習 データ分析を自動化 【オセロAI③】 ニューラルネットワーク による機械学習 +独自の アルゴリズム ●●● ●● ● ● ●●● 〇〇● 〇 機械学習ができる独自のアルゴリズムを設計できた データ分析の精度を高めることができた。 教師データなしで学習する強化学習AIを設計する。 ランダムフォレストを用いた強化学習を作る。 回帰木は難易度が高いので、分類木を使った決定木を作る。 ステージの状態を毎フレーム8項目で評価し、 データを蓄積する。 (1)データをためる 初めからAIが宇宙船を動かすことも可能だが、実験の効率を上げるため、 最初に人が操作したデータをためる。 8項目の要素を設定する 1 2 3 4 5 6 説明変数 (2)決定木を作る 全データ ランダムに油出し て、毎回データ数 を一定にする サンプルデータ 1 説明変数 >または< ランダムな数 >01 ×100 >52 >24 <99 サンプルデータ 不純度を 求める 0.32 0.15 0.005 0.9 不純度が最も0に近い ノードの候補を選ぶ ノードの 候補 0.005 決定木のルートノード (最初のノード)にする サンプルデータ ルートノードの条件に合うデータのみを サンプルデータから油出する 絞り込んだサンプルデータ このデータを使って再度 ノード候補、不純度を求め直し、 次のノードを決める >51 4>24ではない サンプルデータ 条件は 4>24かつ3>5な サンプルデータ と を使用し、同じように ノードを作り、並べていく ※ 先にノードを作らない場合、使ったサンプルデータの中で、最も多い方向を選別する。 (3)決定木に沿って動く 作った決定木をフローチャートの要領で進んでいき、先にノードの続かないところに到達したら、 そこで選別された方向がその決定木の予想する方向となる。 ※ 不純度が0で、使用したサンプルデータをその条件で、目的変数0か1で完全に分けられる場合か、ノードの数が規程の20個に達した場合、その先にノードは作らない。 4>54 3>84 2<34 5<85 4>4 決定木① ↑ 決定木② → 決定木③ ↑ 決定木の出した方向の多数決をとり、最終的に動く方向を決める。 6 ・データをためてもステージの端によってしまい、 出てくる隕石を避けれず当たってしまうことが多く、 思うような結果が出せなかった。 ・データ数が600の時と、6000の時の、避け続けた フレーム数を比較すると、それぞれ100、103となり、 データが増えてもほとんど変化はなかった。 ・実験中、始めは隕石が迫っても、隕石の方に動い たり、動かずにとどまっていたりして、すぐにぶつ かっていたが、学習が少し進むと、自機に近づいて くる隕石を、方向転換して避ける動作が、ほぼ毎回 みられた。 ポイント① データの蓄積 ① ブーストラップサンプリング 1 自機のステージ中心との距離 隕石Aの自機との距離 3 隕石Aの進行方向と隕石から 見た自機の角度の差 4 隕石Bの自機との距離 5 隕石Bの進行方向と隕石から 見た自機の角度の差 7 隕石にぶつかった かどうか ぶつかったときの 評価値 2 ② ランダムにノード (決定木の分岐条件)の候補を作る ③ 各ノード候補の 不純度を求める ④ ノードを決める ⑤ サンプルデータの絞り込み ⑥ 次のノードを決める(②~⑤を繰り返す) ⑦ 決定木を作る 5>8 1<99 2>24 2>25 5<24 1<4 2<98 1>15 3<3 5<87 不純度は、ノードの有用性を、 評価する値で、条件で、データ を目的変数0か1に分割できるも のの値が0に近くなる 8 この決定木の 予測する方向 始めに人がデータを 取った時と同じように 8種類のデータを取り、 隕石にぶつかるまで これを繰り返す。 ↑ オセロ対戦AIの設計を通して、 機械学習の研究を積み重ねてきた。 5. 研究考察 4.研究結果 成果 課題 ステージの端からランダムに出てくる隕石を、 宇宙船を動かして避ける、弾幕ゲームを作る。 AIは、宇宙船を8方向に 動かすことができる。 2.研究の概要 1フレーム → 0.1秒 ポイント② 決定木の作成 データをとる→決定木にそって動く→増えたデータを使って決定木を更に強化する。 以上を繰り返し、学習後の宇宙船の動きを評価する。 3.研究のポイントについて 目的変数 6 自機の動いた方向 演題番号 42 <過学習について> ブーストラップサンプリングにより、各決定木がそれぞれ違う方向を示していたため、過学習は防げていると思われる。 研究結果から、データの数は学習に大きく影響はせず、データのとり方などが大切だと分かった。 ランダムフォレストなどの、基本的な仕組みはできたが、データの中で方向が偏ってしまっていたため、取る説明変数の種類に改善の余地があると思う。 <説明変数の取り方> 今回は、決定木で、最終的に8方向を出すAIだったが、隕石に当たらない空間を探し出し、そこに向かって動くようにするなどの方法が考えられる。 説明変数は、今回距離と角度だったが、それを隕石同士の位置関係や、自機の座標にするなど、改善することができると思う。 <これまでの研究を通して> これまでの研究で、パーセプトロンやニューラルネットワーク、ランダムフォレストについて学んで、AIを使う用途に合わせて、これらの手法を適切に選択すること が大切だと分かった。また、今回の研究をとおして、そういった手法だけでなく、AIに取り込む説明変数などのデータの種類なども同じように大切だと分かった。これ からAIを開発することがあれば、それらも大切にしたい。 ①~⑤を繰り返し、 決定木を複数作る ⑧ 繰り返す <78 0 54 15 31 14 54 1 0 0 1 64 11 64 58 28 5 0 0 2 31 6 7 14 65 8 0 0 52 55 91 41 15 25 3 0 0 53 48 34 82 25 48 1 0 1 54 73 87 37 26 17 4 1 2 73 54 72 73 58 21 7 1 18 74 46 24 47 73 97 3 1 19 75 38 98 54 95 84 1 1 20 76 5 71 26 18 51 3 0 0 ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ 6 1 3 4 5 7 8 2 ぶつかる直前の2秒前までの を1とするため、75フレームで、 ぶつかり、54フレームまでを1にする。さらにその2秒間の間でも、 1~20の評価をつける。( )76からは2ゲーム目となる。 8 7 5 1 4 1 >01 >52 >24 <99 5 1 4 1 >24 4 >24 4 >24 4 >24 4 3 >24 4 >51 3
Transcript of WU Ë ¨© © ? ¸ 8 v Ç ó ¬ s ö ¦ ¦ ¸ î² C o \ } ¤ ¥ ô ó ò V z Þ ê s u } ó ñ í...
-
6
6
宇宙船AI~強化学習に挑む~ 福井県立高志中学2年森本新太郎
ポイント②
1.これまでの研究
【オセロAI①】
アルゴリズムAI
手動でデータ分析
【オセロAI②】
パーセプトロンによる機械学習
データ分析を自動化
【オセロAI③】
ニューラルネットワーク
による機械学習
+独自の
アルゴリズム● ● ●● ● ●●
● ● ●〇 〇 ●〇
機械学習ができる独自のアルゴリズムを設計できたデータ分析の精度を高めることができた。
教師データなしで学習する強化学習AIを設計する。
ランダムフォレストを用いた強化学習を作る。
回帰木は難易度が高いので、分類木を使った決定木を作る。
ステージの状態を毎フレーム8項目で評価し、
データを蓄積する。
(1)データをためる 初めからAIが宇宙船を動かすことも可能だが、実験の効率を上げるため、最初に人が操作したデータをためる。
8項目の要素を設定する
1
23
45
6
説明変数
(2)決定木を作る
全データ
ランダムに油出し
て、毎回データ数
を一定にする
サンプルデータ
1
説明変数
>または<ランダムな数
>01
×100
>52
>24
51
4>24ではないサンプルデータ
条件は
4>24かつ3>5なサンプルデータ
と を使用し、同じように
ノードを作り、並べていく
※ 先にノードを作らない場合、使ったサンプルデータの中で、最も多い方向を選別する。
(3)決定木に沿って動く作った決定木をフローチャートの要領で進んでいき、先にノードの続かないところに到達したら、
そこで選別された方向がその決定木の予想する方向となる。
※ 不純度が0で、使用したサンプルデータをその条件で、目的変数0か1で完全に分けられる場合か、ノードの数が規程の20個に達した場合、その先にノードは作らない。
4>54
3>84 28
124
2>25 5244
>244
3
>244
>513




![SPECS BDTOPO v22 S22016 - Esri France€¦ · õ ó î D ] v ] µ hdD î ìE t'^ ô ð õ ó ï ' µ Ç v hdD î îE Z'&' õ ñ õ ó ð Z µ v ] } v hdD ð ì^ Z'Z õ î õ ó ñ](https://static.fdocuments.nl/doc/165x107/5f81ab3bf00be569e203ab42/specs-bdtopo-v22-s22016-esri-france-d-v-hdd-e-t-.jpg)

![Wilbers Katalogus 2020 Heidi bezig · 2020-05-13 · ^ Z } l u D } } v î ì î ì,< r^ µ v ] } v s r s ] i À o v ò r ð ì ì ñ , r d/ > d o X ì ï ð ð r ò ï í õ](https://static.fdocuments.nl/doc/165x107/5f333fbfe3591a62d73e82dc/wilbers-katalogus-2020-heidi-bezig-2020-05-13-z-l-u-d-v-.jpg)



![W ] K µ } o Maarten... · •K µ Z v v l Á l ] i • í õ ô î À Z µ ] v , µ u u o } ~' o o v ì î l í ì l î ì í ô](https://static.fdocuments.nl/doc/165x107/610cabeffafc8a118e63b0f5/w-k-o-maarten-ak-z-v-v-l-l-i-a-z-v-.jpg)
![2016 BUN jaarcijfers definitief · } Z ] ] Z h v ] E o v W } µ í ó î ô ò í ì ì í :' u u: l v ] v P î ì í ò](https://static.fdocuments.nl/doc/165x107/5f5aca6b2cc39615946d48ab/2016-bun-jaarcijfers-definitief-z-z-h-v-e-o-v-w-.jpg)


![W } v o X } Ç ] P Z î ì í ñ ] Æ / v X o o ] P Z À X W,, ì ð ì í íuba-ebc.portals.s3.amazonaws.com/86752_Flu and Pneumonia... · 2015-12-04 · prevention for nearly everyone.](https://static.fdocuments.nl/doc/165x107/5f4717e1388fac715074e24d/w-v-o-x-p-z-v-x-o-o-p-z-x-w-uba-ebcportalss3.jpg)
![: X UW Z U W · e Á z } l u î ì î ì u î ì í ô u î ì í ñ u î ì í ï u î ì í í u î ì ì õ u î ì ì ó u î ì ì ð u î ì ì í u í õ õ ô x ^ ] o v U](https://static.fdocuments.nl/doc/165x107/5e8122efcfc03f7ea4415448/-x-uw-z-u-w-e-z-l-u-u-u-u-.jpg)
![v v u v ] v P µ } ] s ZhD Z< - TOOLS · 2020. 4. 3. · í ì ì î í ô ð^d >>/E & î ð rdZ í U ñDD í ì ìD í ñ U ô í l 'hEE K í ì ì î í ô ñ^d >>/E](https://static.fdocuments.nl/doc/165x107/612744a79388103d0d2f687d/v-v-u-v-v-p-s-zhd-z-tools-2020-4-3-d-e.jpg)
