Robotica - Induteq
43
AWL-Techniek Robotica
Transcript of Robotica - Induteq
AWL-Techniek
Robotica
2 Keeps you ahead in automated welding www.awl.nl
Basis ABB IRC5 Robot
Veiligheid
Besturing
Vragen
Programma maken
Tool Center Point (TCP)
Workobject
inhoud
Waarom automatisering met robots
3 Keeps you ahead in automated welding www.awl.nl
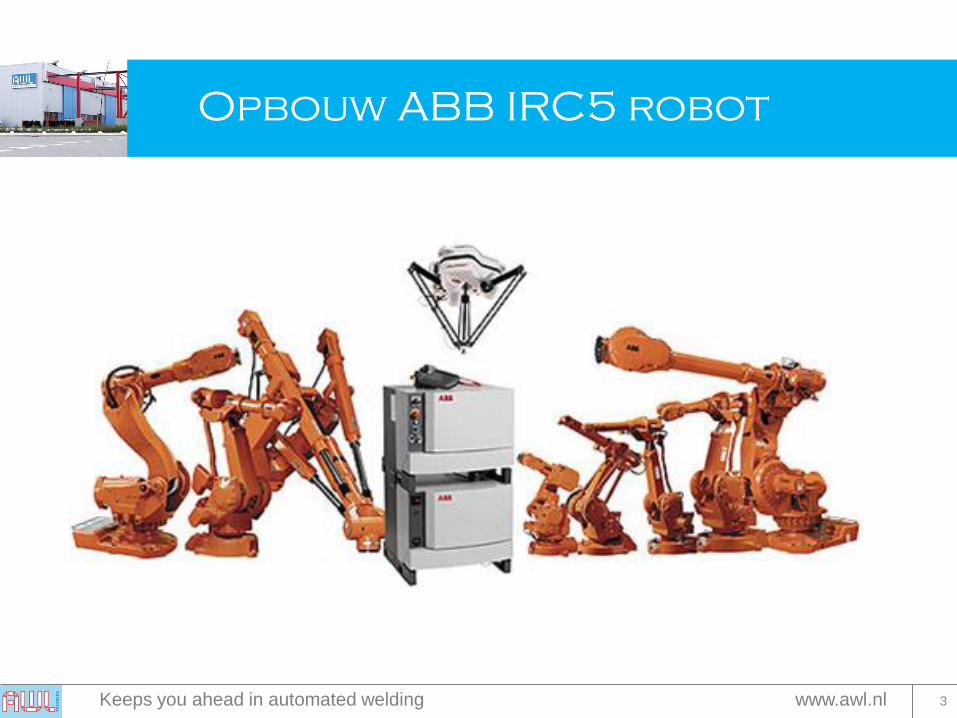
Opbouw ABB IRC5 robot
4 Keeps you ahead in automated welding www.awl.nl
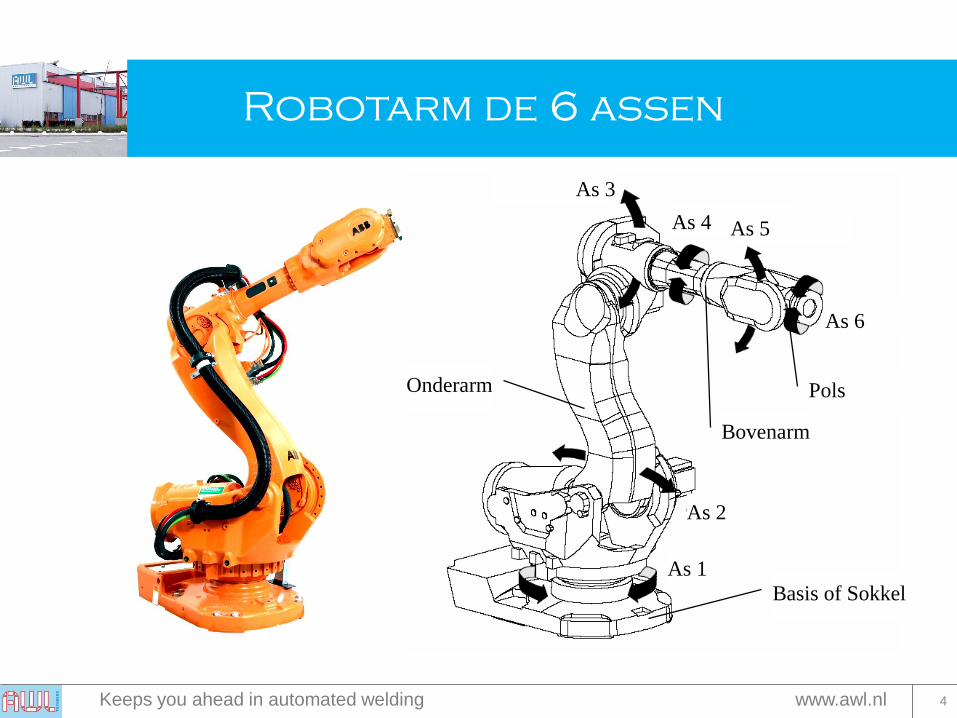
Robotarm de 6 assen
As 1
As 2
As 3
As 4 As 5
As 6
Basis of Sokkel
Onderarm
Bovenarm
Pols

5 Keeps you ahead in automated welding www.awl.nl
De besturingskasten

6 Keeps you ahead in automated welding www.awl.nl
De besturingskast
(Single Cabinet)
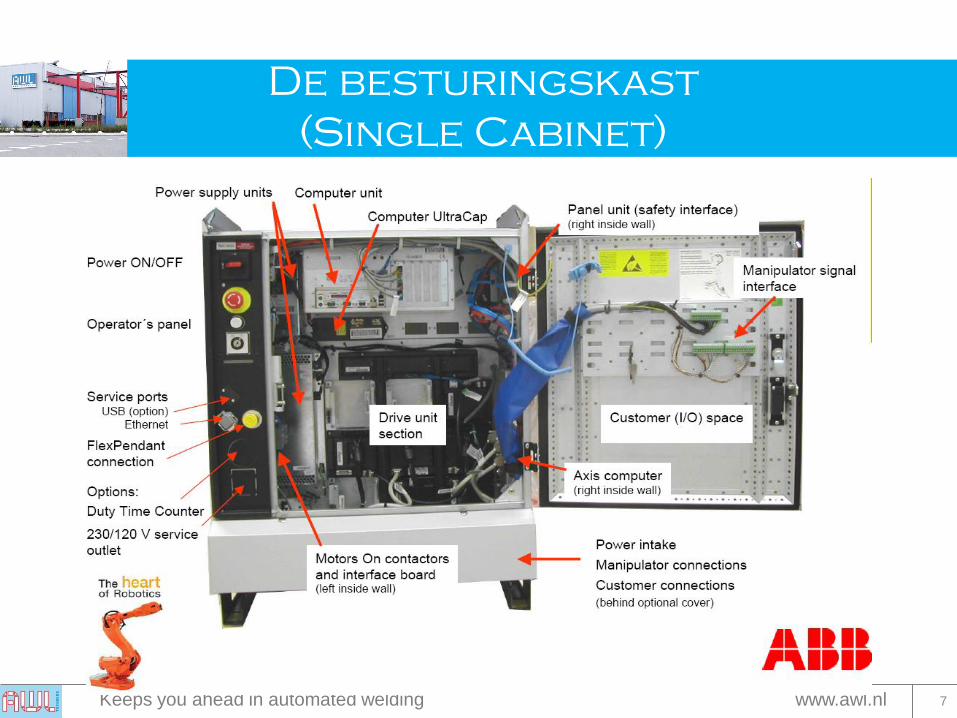
7 Keeps you ahead in automated welding www.awl.nl
De besturingskast
(Single Cabinet)
8 Keeps you ahead in automated welding www.awl.nl
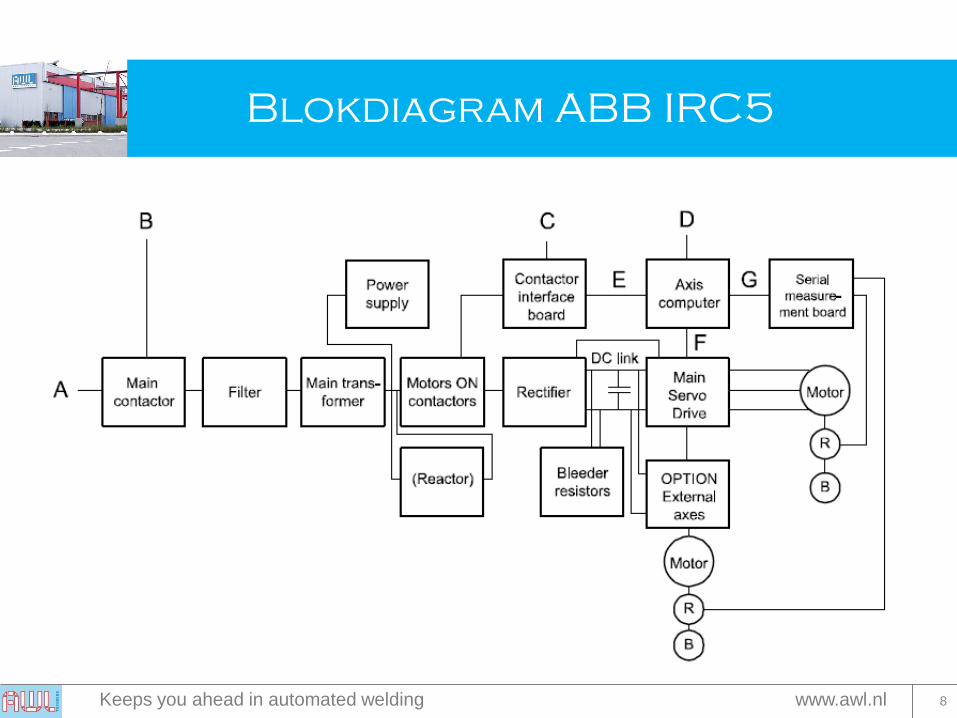
Blokdiagram ABB IRC5
9 Keeps you ahead in automated welding www.awl.nl
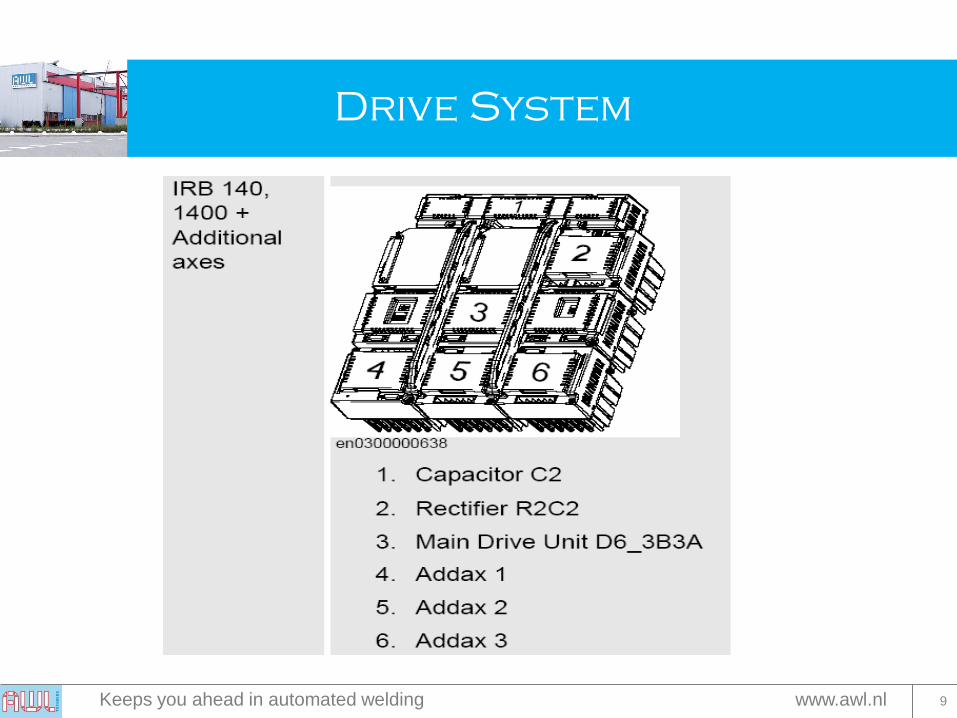
Drive System
10 Keeps you ahead in automated welding www.awl.nl
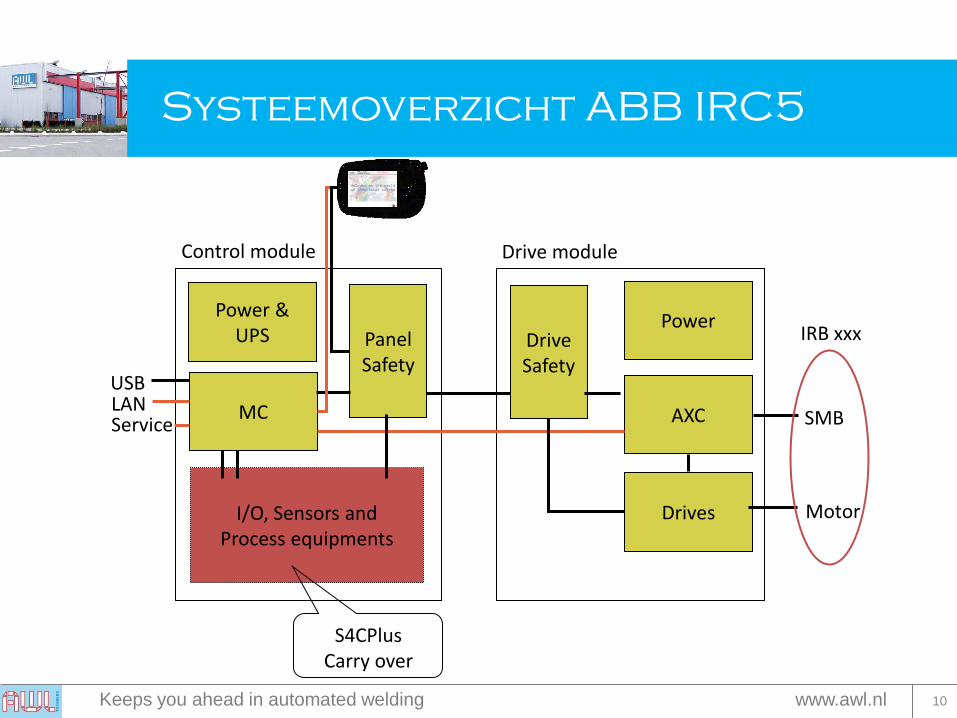
Systeemoverzicht ABB IRC5
MC
Panel Safety
Power & UPS
Power Drive Safety
AXC
Drives I/O, Sensors and Process equipments
USB LAN Service
Control module Drive module
SMB
Motor
S4CPlus Carry over
IRB xxx
11 Keeps you ahead in automated welding www.awl.nl
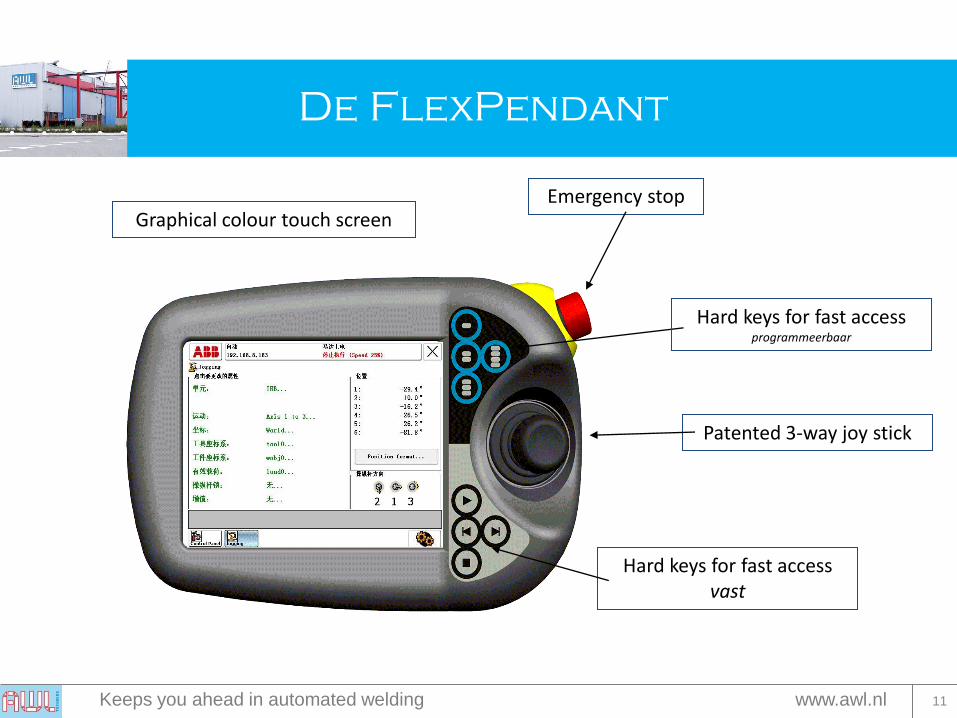
De FlexPendant
Graphical colour touch screen
Patented 3-way joy stick
Emergency stop
Hard keys for fast access vast
Hard keys for fast access programmeerbaar
12 Keeps you ahead in automated welding www.awl.nl
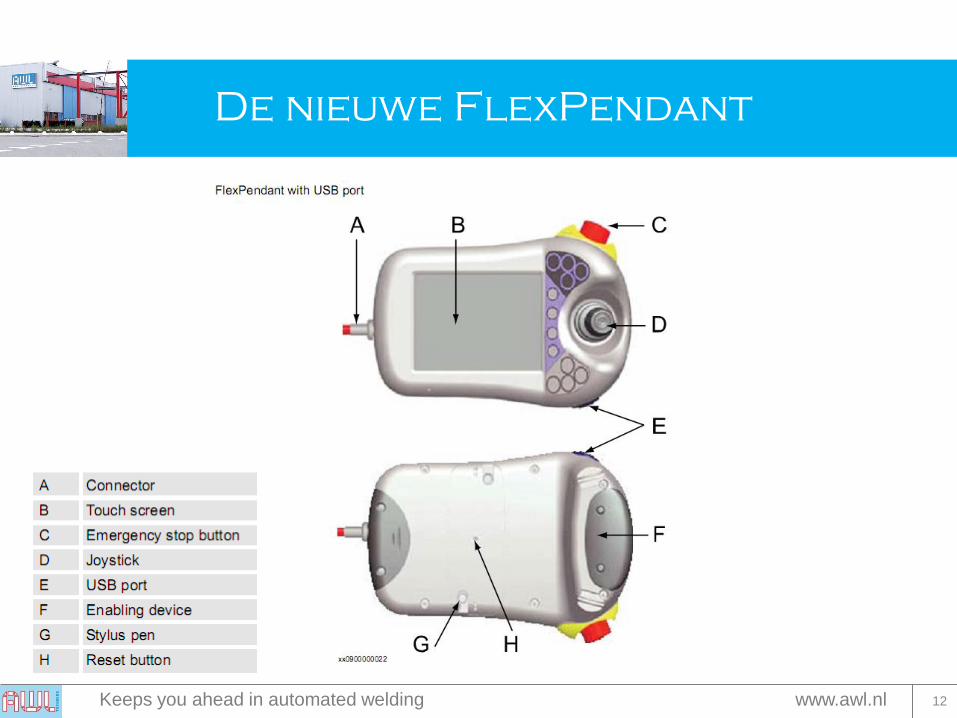
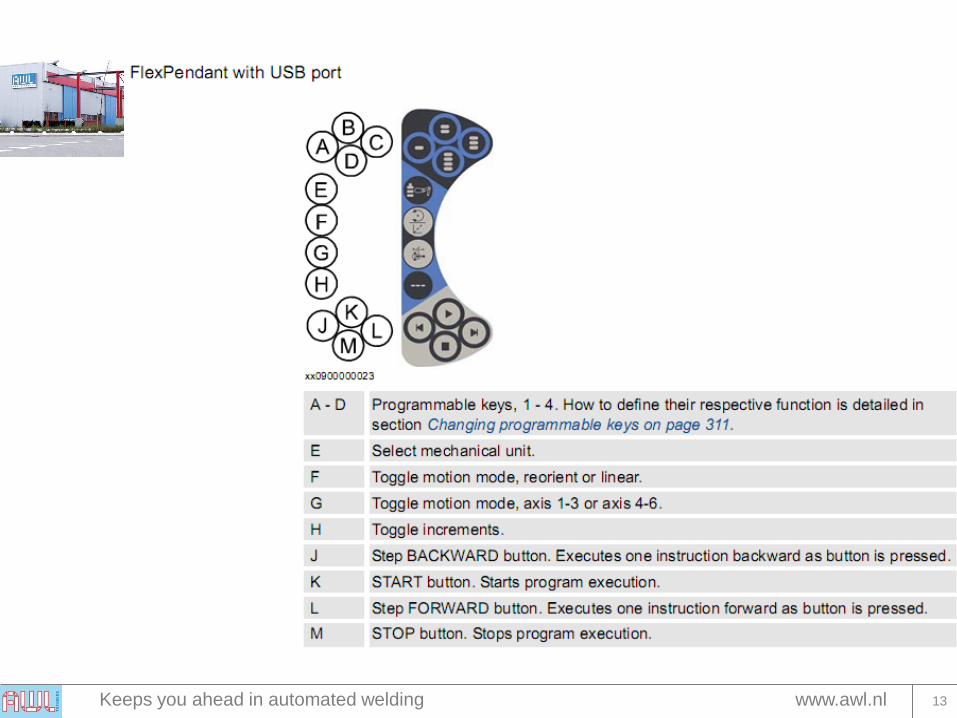
De nieuwe FlexPendant
13 Keeps you ahead in automated welding www.awl.nl
14 Keeps you ahead in automated welding www.awl.nl
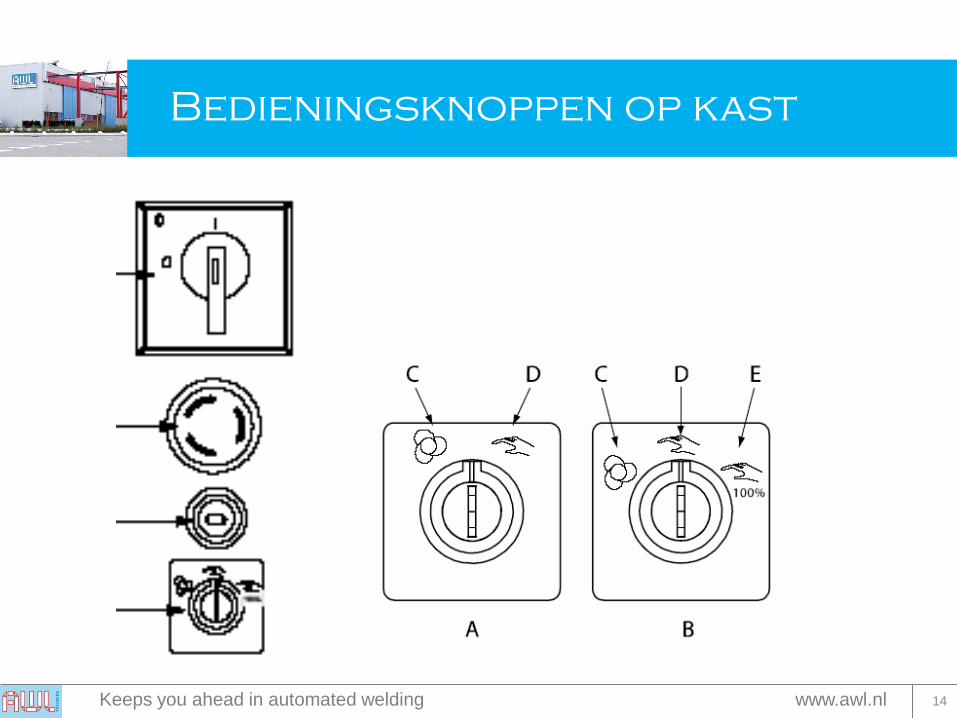
Bedieningsknoppen op kast
15 Keeps you ahead in automated welding www.awl.nl
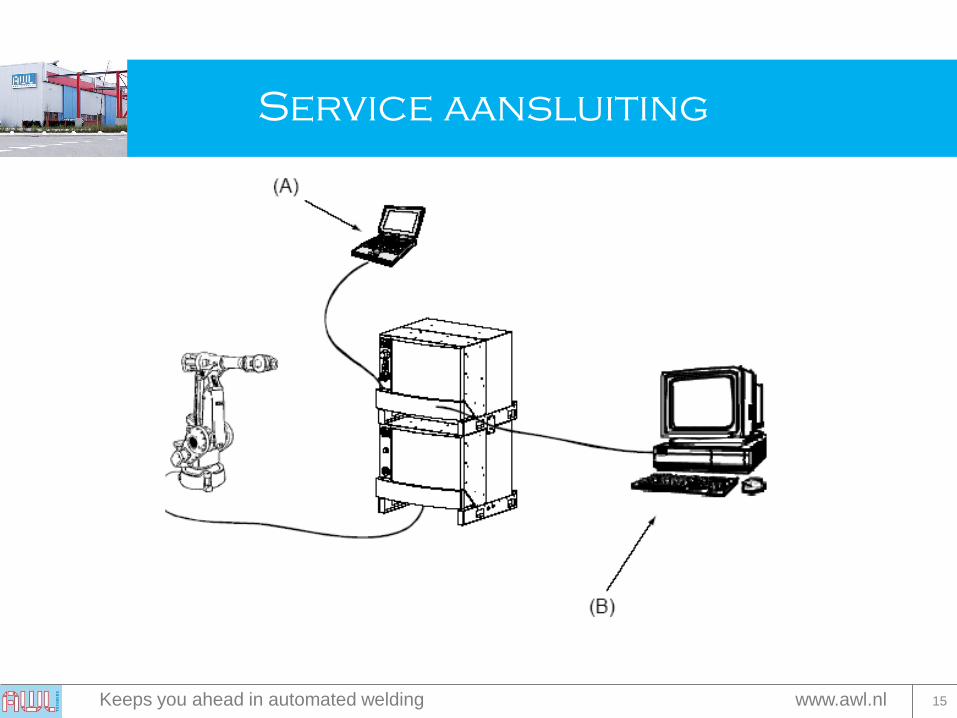
Service aansluiting
16 Keeps you ahead in automated welding www.awl.nl
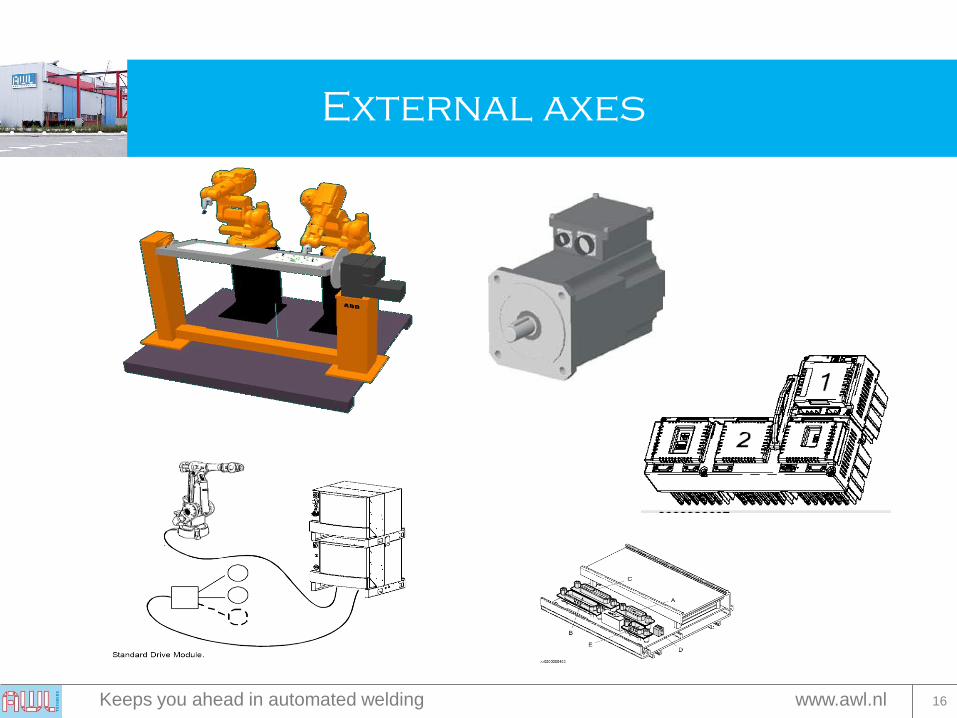
External axes

17 Keeps you ahead in automated welding www.awl.nl
Veiligheid
18 Keeps you ahead in automated welding www.awl.nl
Veilig werken met Robots
Aandachtspunten zijn:
Knel- en knalpunten.
Veiligheidsvoorzieningen. Niet overbruggen!
Gezond verstand.
Noodstopknoppen.
Dodemansknop.
Harde stop/Softwarestop/elektrische stop.
Gereduceerde snelheid in handmatig bedrijf.
Hoe het niet moet
19 Keeps you ahead in automated welding www.awl.nl
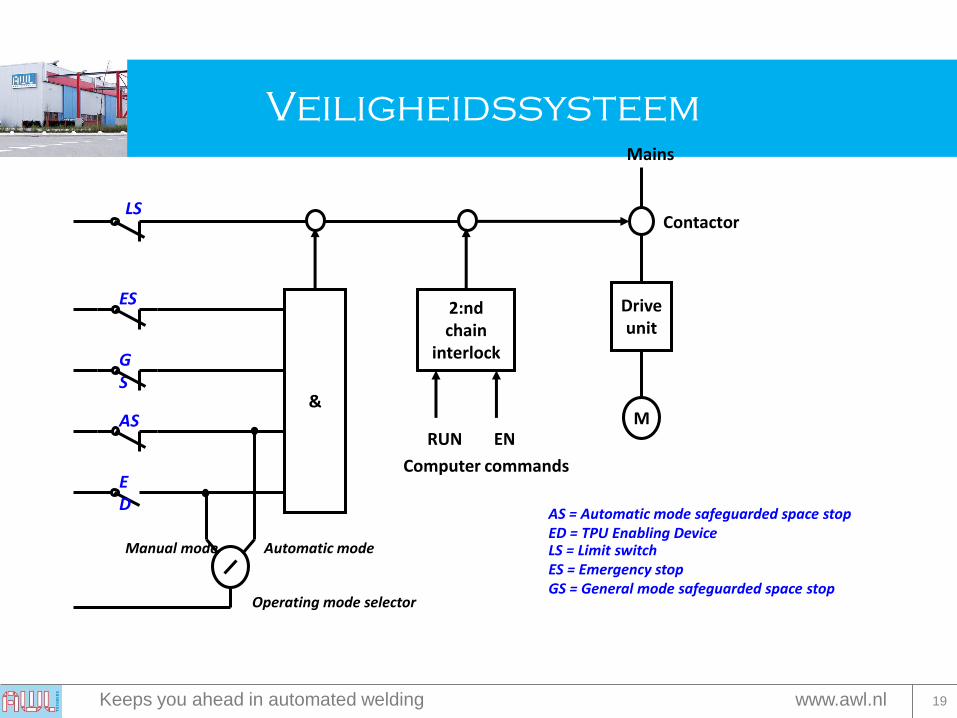
Veiligheidssysteem
Contactor
EN RUN
Computer commands
LS
Automatic mode
ES
GS
ED
AS
Drive unit
M
Mains
&
Manual mode
2:nd chain
interlock
Operating mode selector
AS = Automatic mode safeguarded space stop ED = TPU Enabling Device LS = Limit switch ES = Emergency stop GS = General mode safeguarded space stop
20 Keeps you ahead in automated welding www.awl.nl
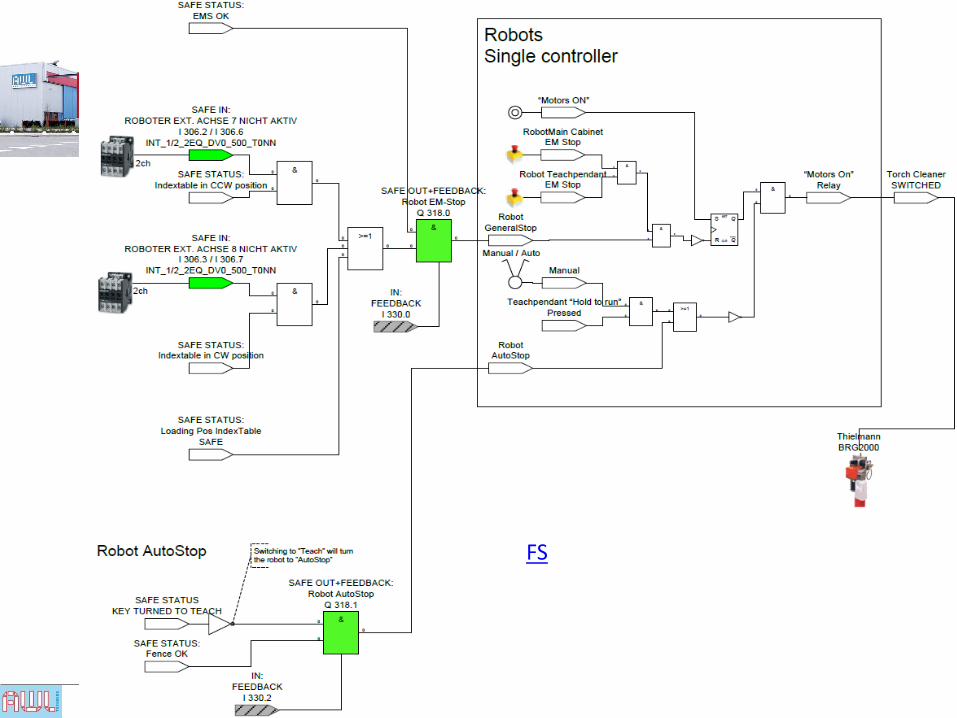
FS
21 Keeps you ahead in automated welding www.awl.nl
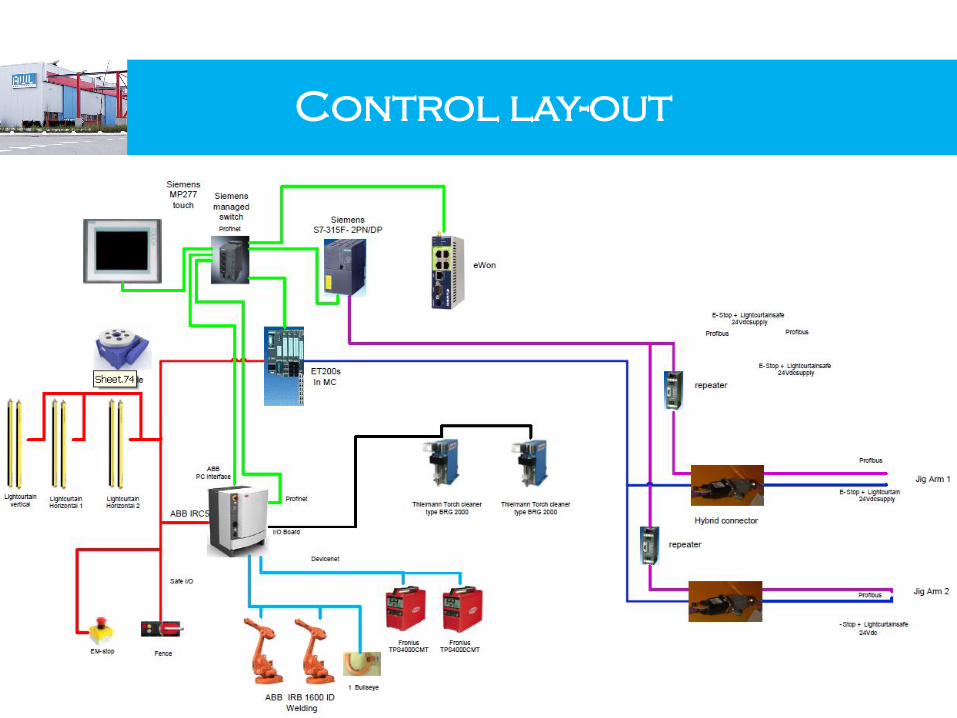
Control lay-out
22 Keeps you ahead in automated welding www.awl.nl
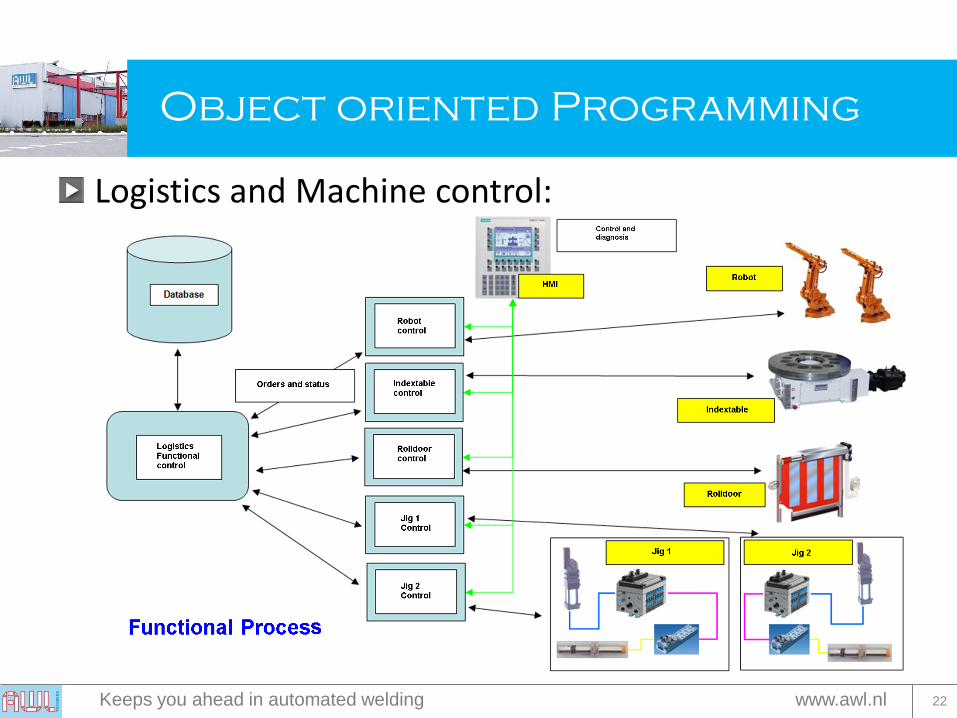
Logistics and Machine control:
Object oriented Programming
23 Keeps you ahead in automated welding www.awl.nl
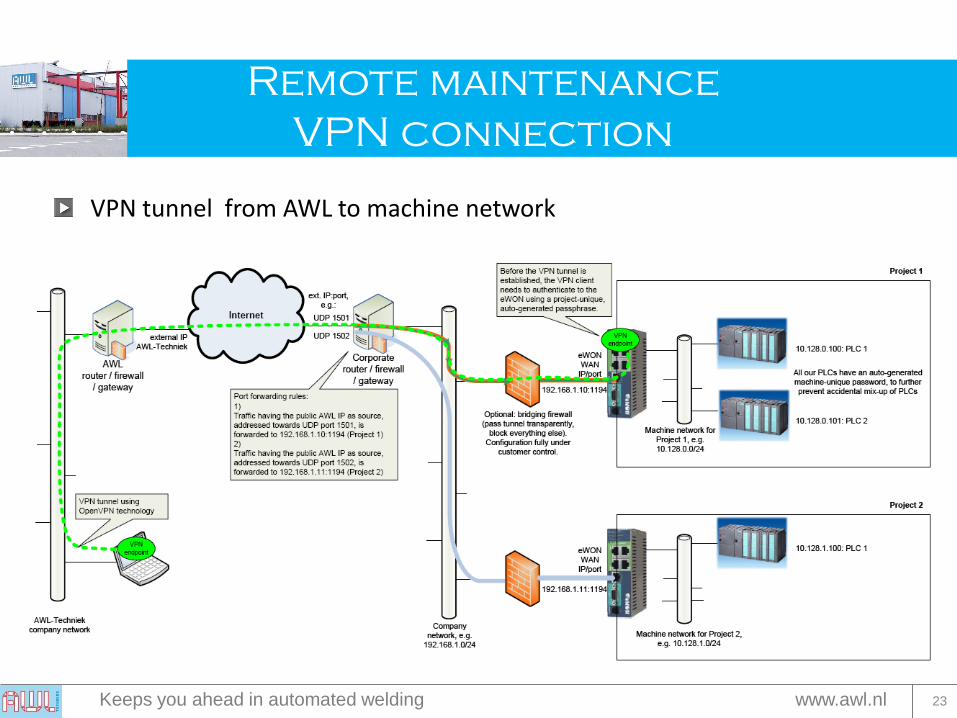
VPN tunnel from AWL to machine network
Remote maintenance
VPN connection

24 Keeps you ahead in automated welding www.awl.nl
Vragen
25 Keeps you ahead in automated welding www.awl.nl
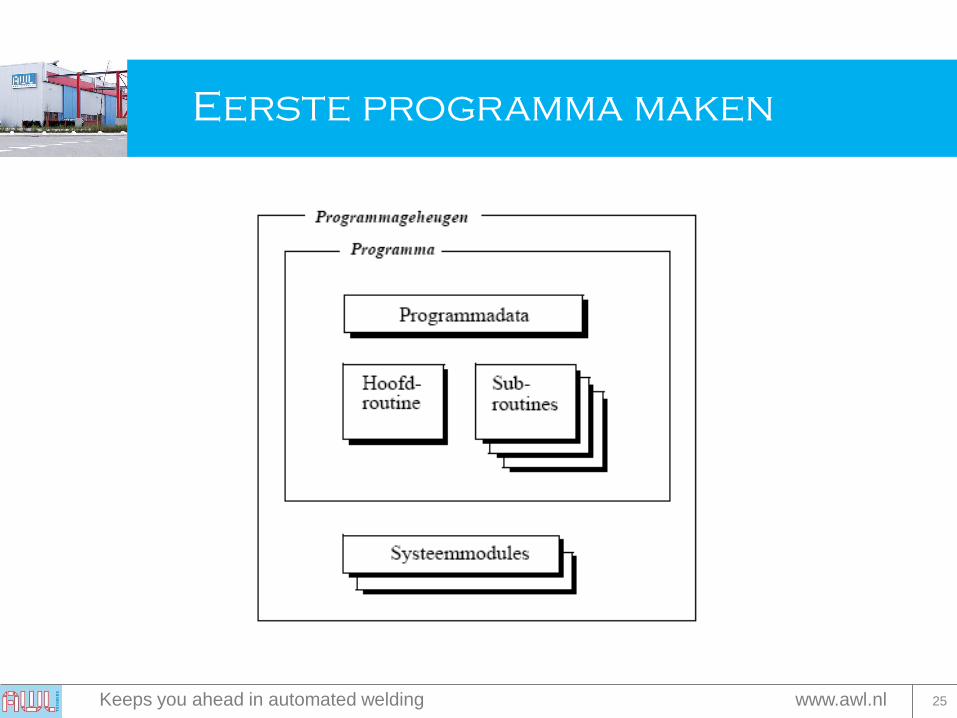
Eerste programma maken
26 Keeps you ahead in automated welding www.awl.nl
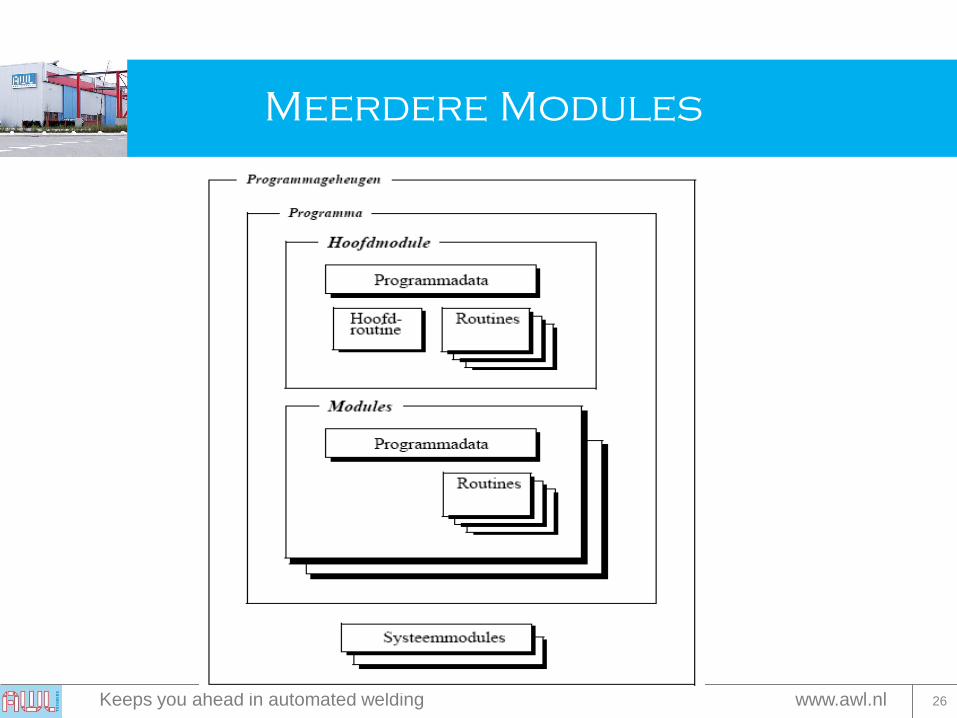
Meerdere Modules
27 Keeps you ahead in automated welding www.awl.nl
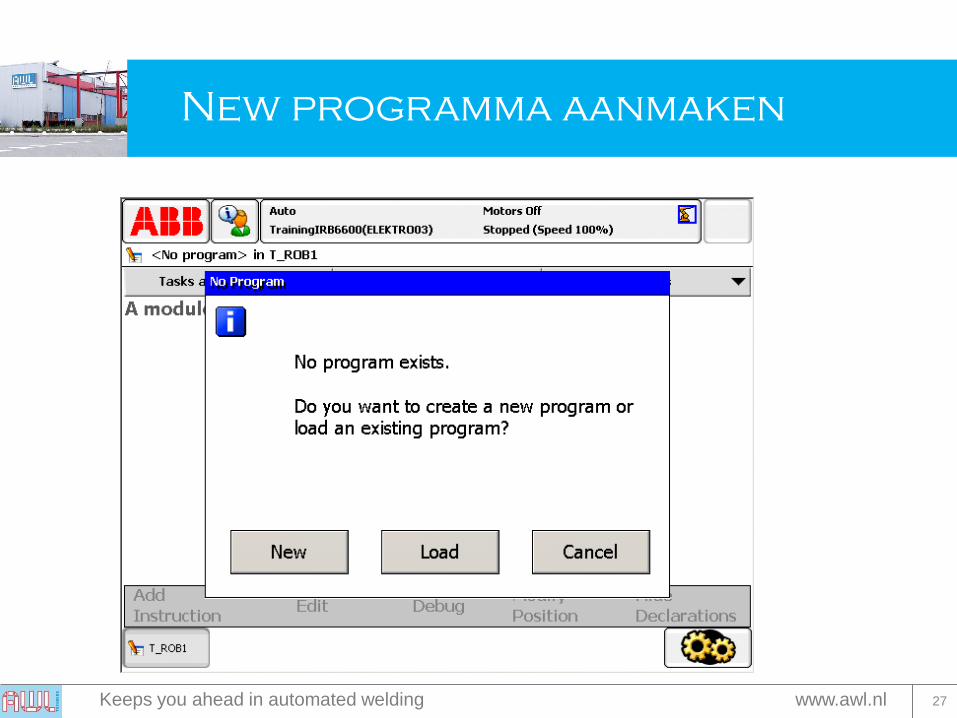
New programma aanmaken
28 Keeps you ahead in automated welding www.awl.nl
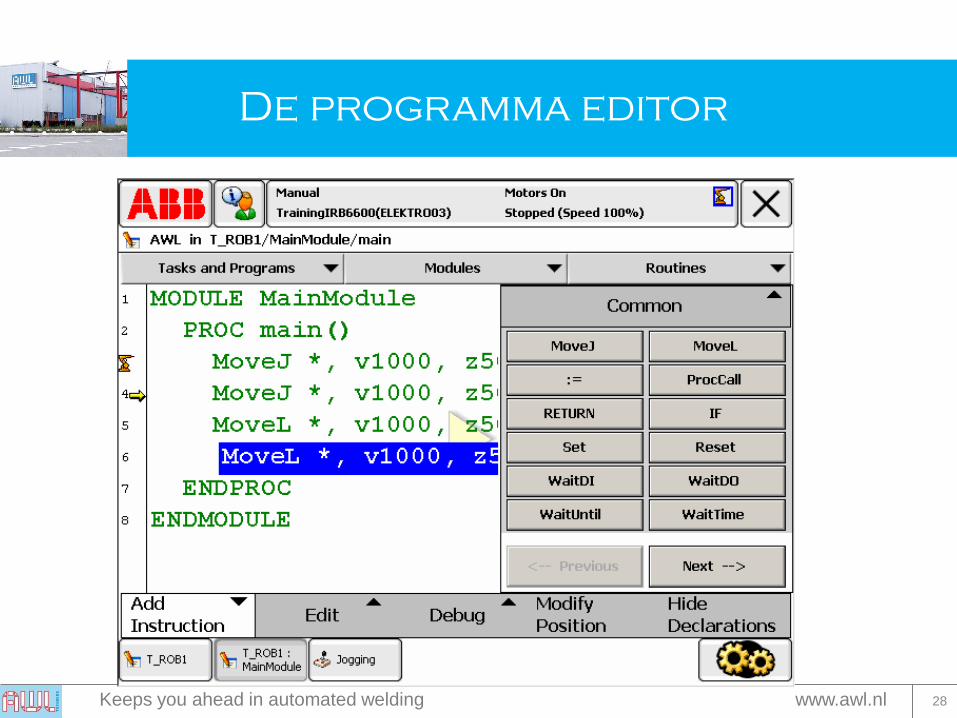
De programma editor
29 Keeps you ahead in automated welding www.awl.nl
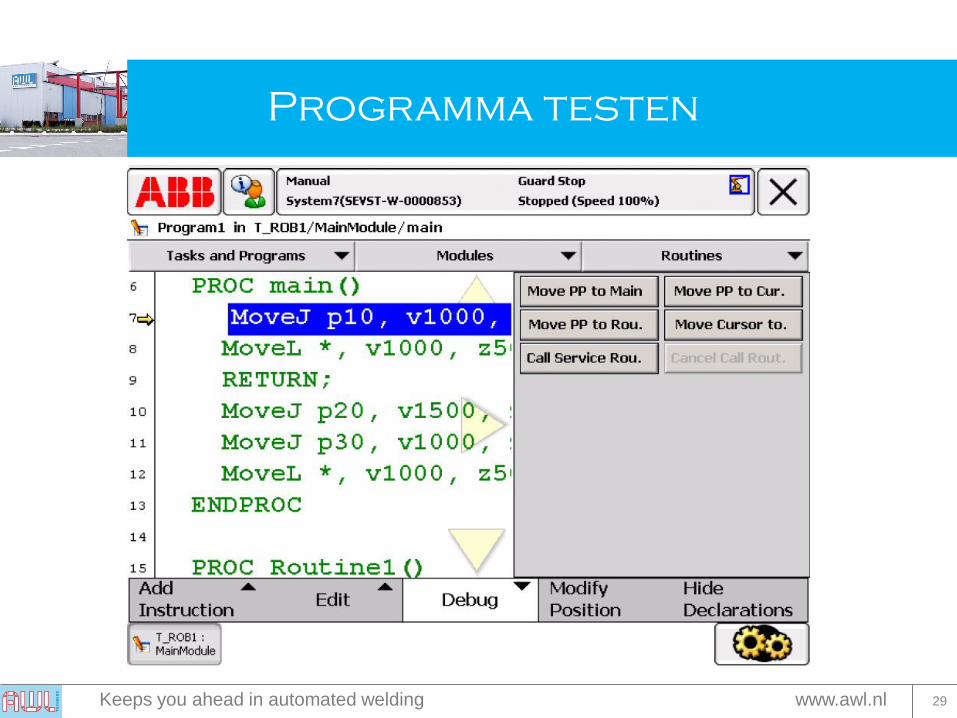
Programma testen
30 Keeps you ahead in automated welding www.awl.nl
Tool Center Point (TCP)
Definitie van een TCP:
Het TCP zegt de computer waar het Tool (lastang/toorts) zich bevindt tov het TOOL COÖRDINATEN STELSEL (tool0).
Het is gemakkelijker om te joggen.
Voor de snelheids controle.
Waarom een TCP gebruiken ?
Om een goede rechtlijnige beweging te krijgen.
31 Keeps you ahead in automated welding www.awl.nl
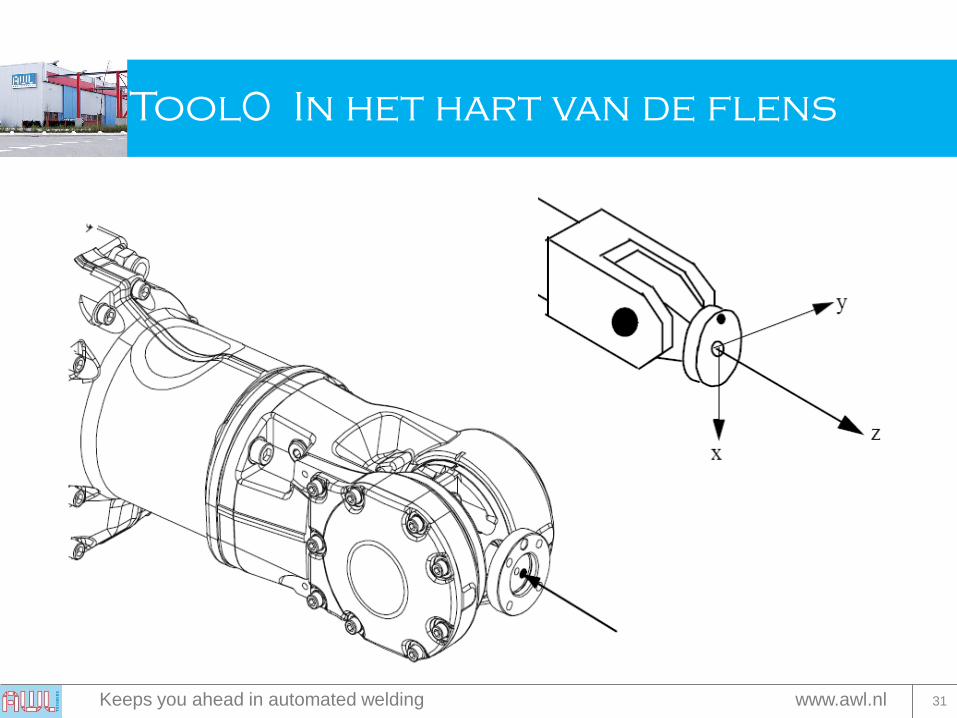
Tool0 In het hart van de flens

32 Keeps you ahead in automated welding www.awl.nl
Locatie van het TCP
33 Keeps you ahead in automated welding www.awl.nl
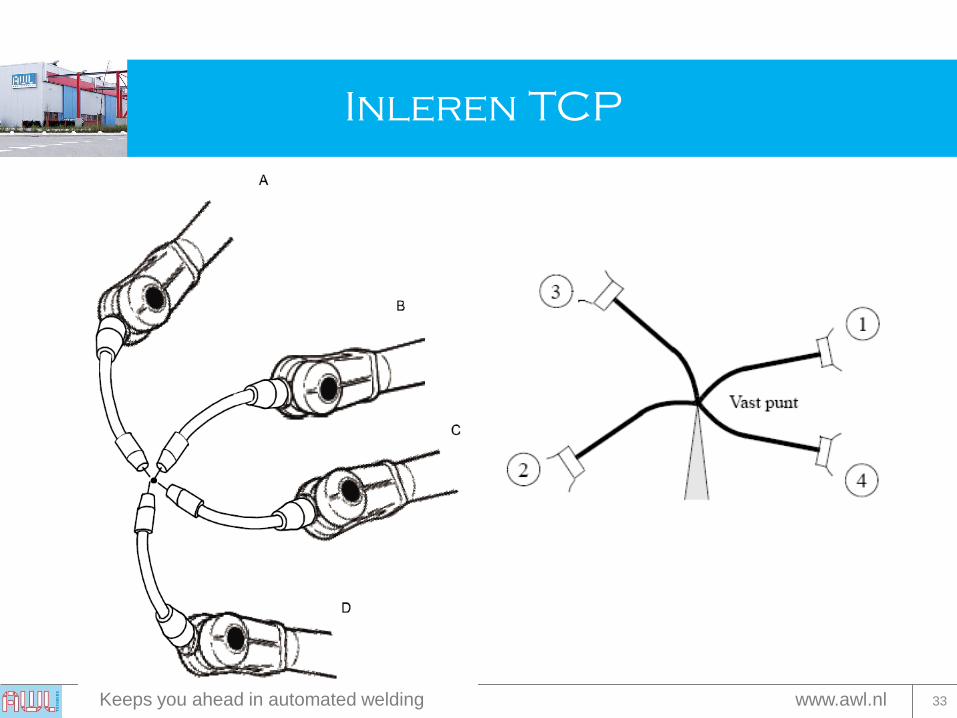
Inleren TCP
34 Keeps you ahead in automated welding www.awl.nl
Workobjecten

35 Keeps you ahead in automated welding www.awl.nl
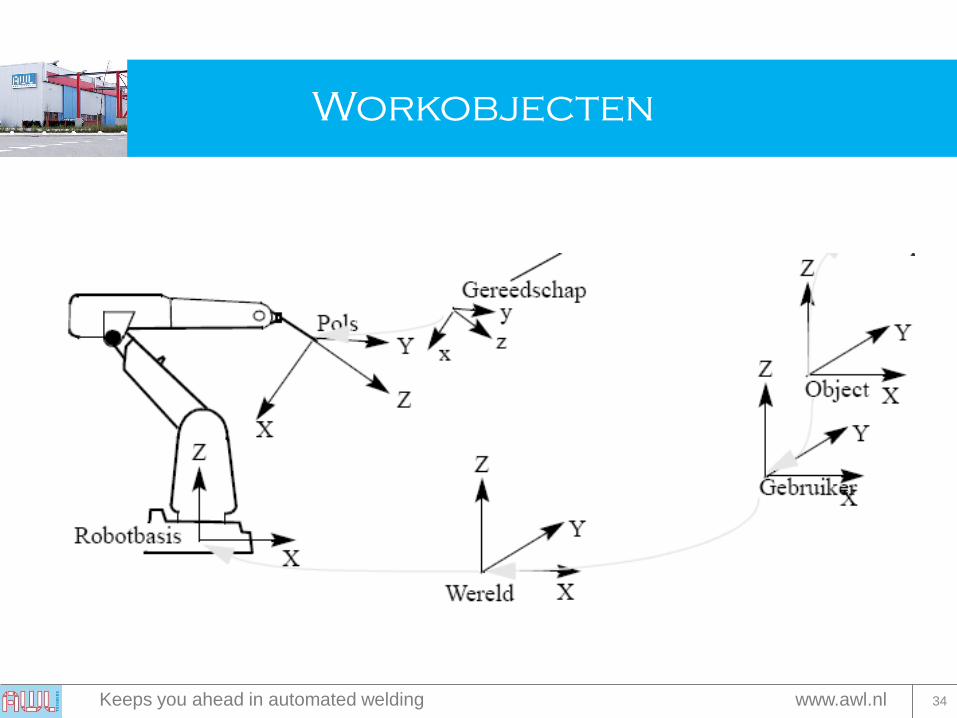
Workobject
Een workobject is een assenkruis gedefinieerd door 2 frames (userframe en objectframe).
Het userframe is gerelateerd aan het worldframe.
Het objectframe is gerelateerd aan het userframe.
Workobjecten zijn noodzakelijk om offlineprogrammeren toe te kunnen passen.
Posities kunnen vastgelegd worden tov een workobject.
Workobjecten vereenvoudigen het joggen.
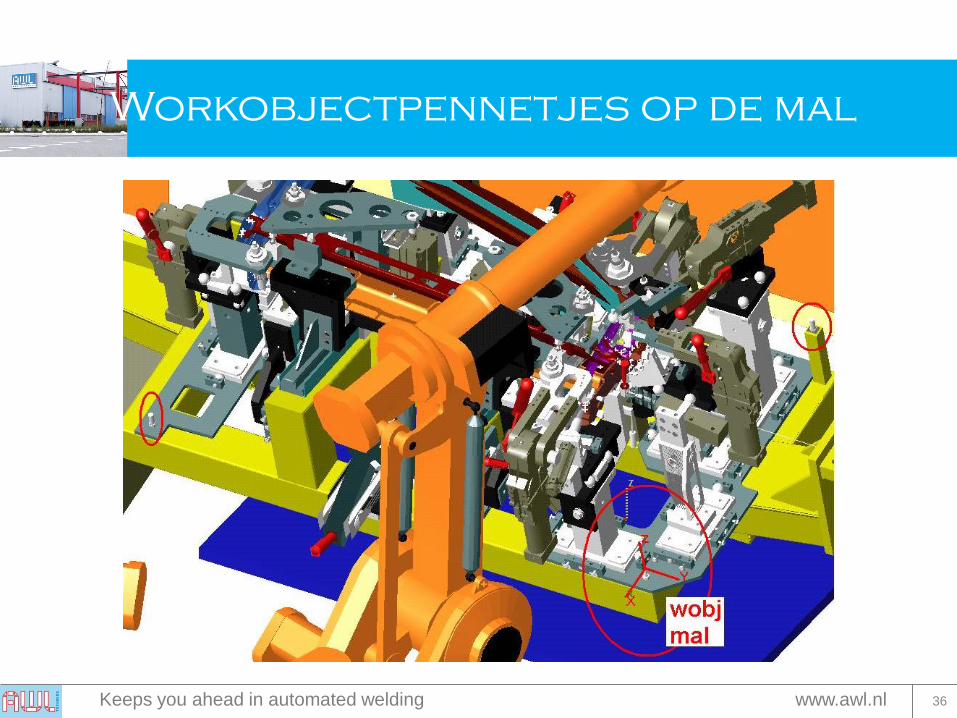
Workobject: Krachtig middel om verplaatsing van bijvoorbeeld een mal te compenseren.
36 Keeps you ahead in automated welding www.awl.nl
Workobjectpennetjes op de mal
37 Keeps you ahead in automated welding www.awl.nl
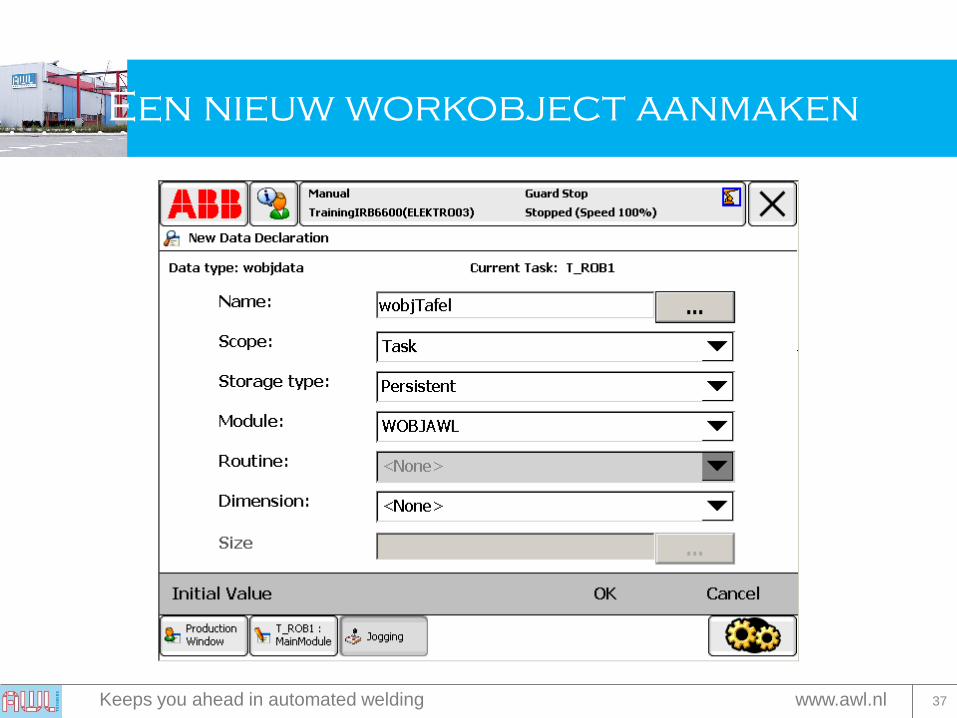
Een nieuw workobject aanmaken
38 Keeps you ahead in automated welding www.awl.nl
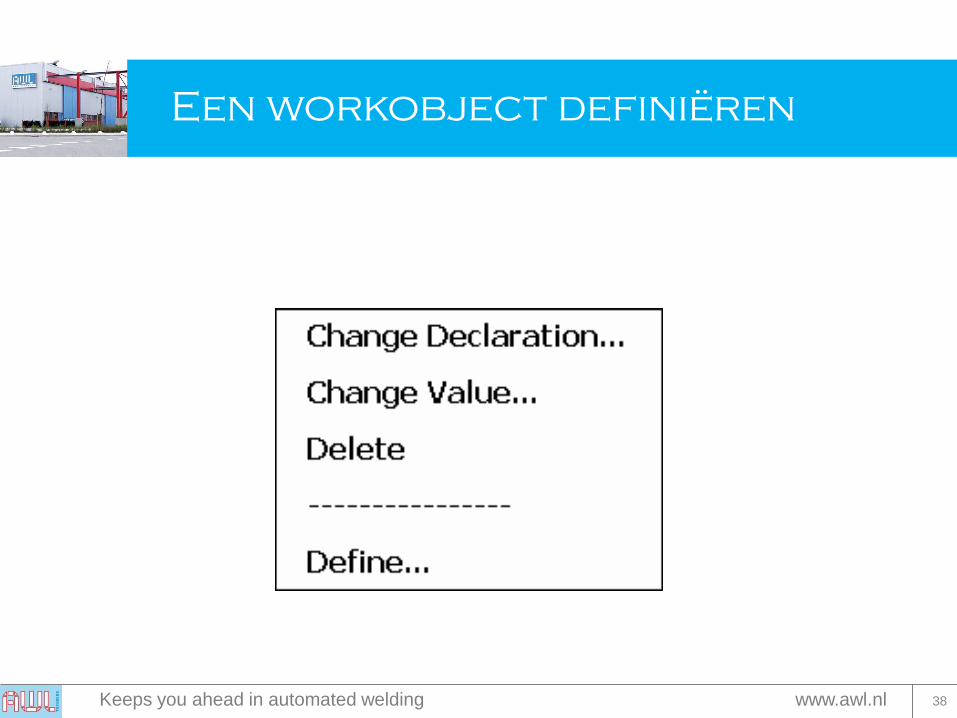
Een workobject definiëren
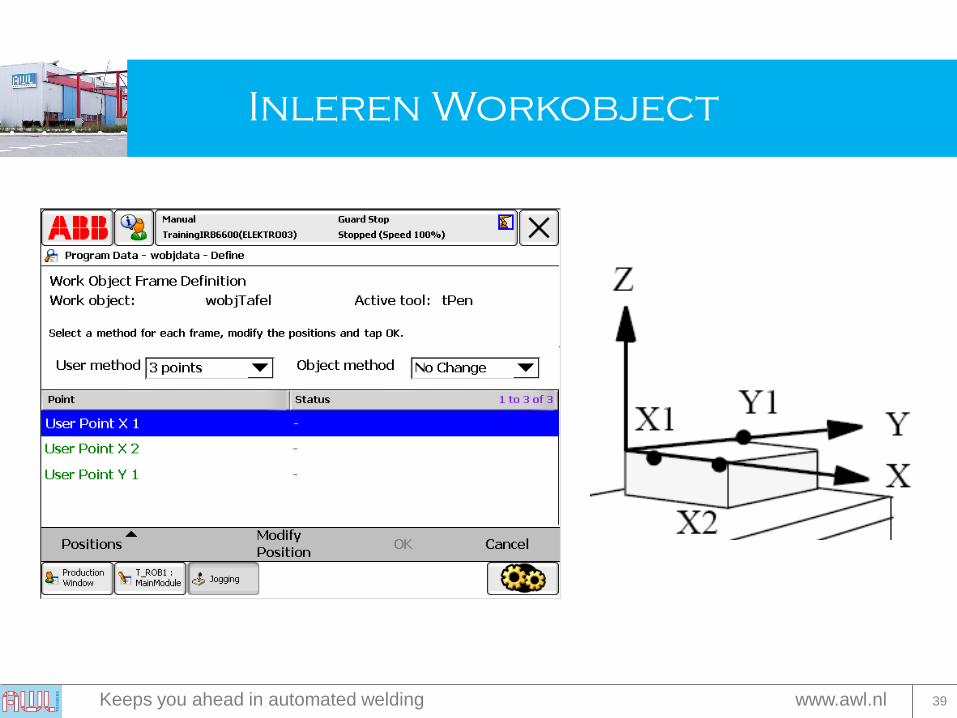
39 Keeps you ahead in automated welding www.awl.nl
Inleren Workobject
40 Keeps you ahead in automated welding www.awl.nl
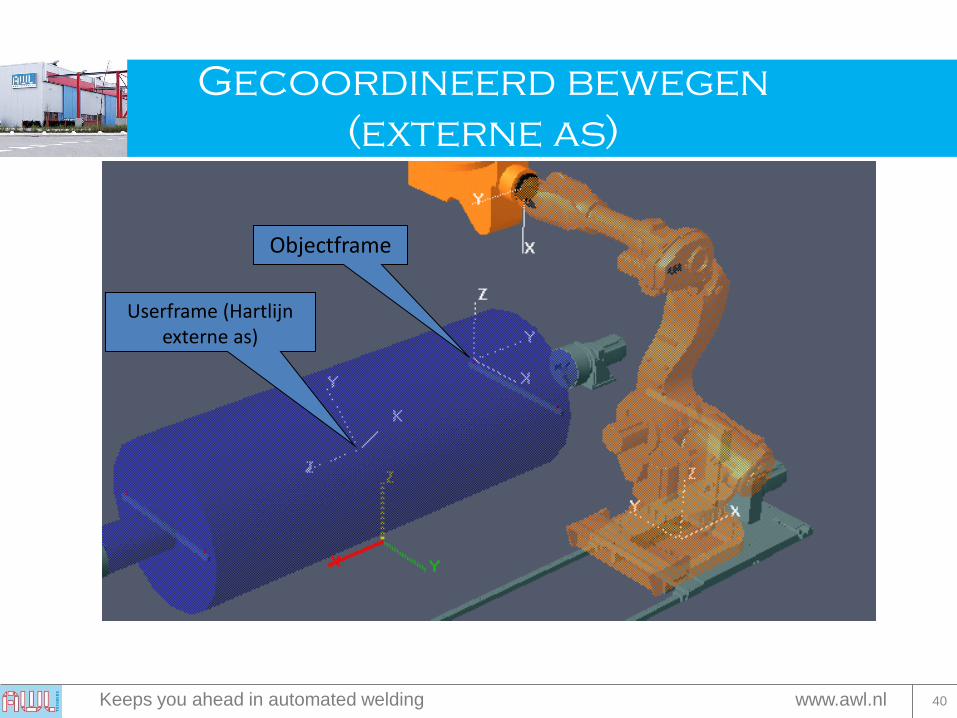
Gecoordineerd bewegen
(externe as)
Userframe (Hartlijn externe as)
Objectframe
41 Keeps you ahead in automated welding www.awl.nl
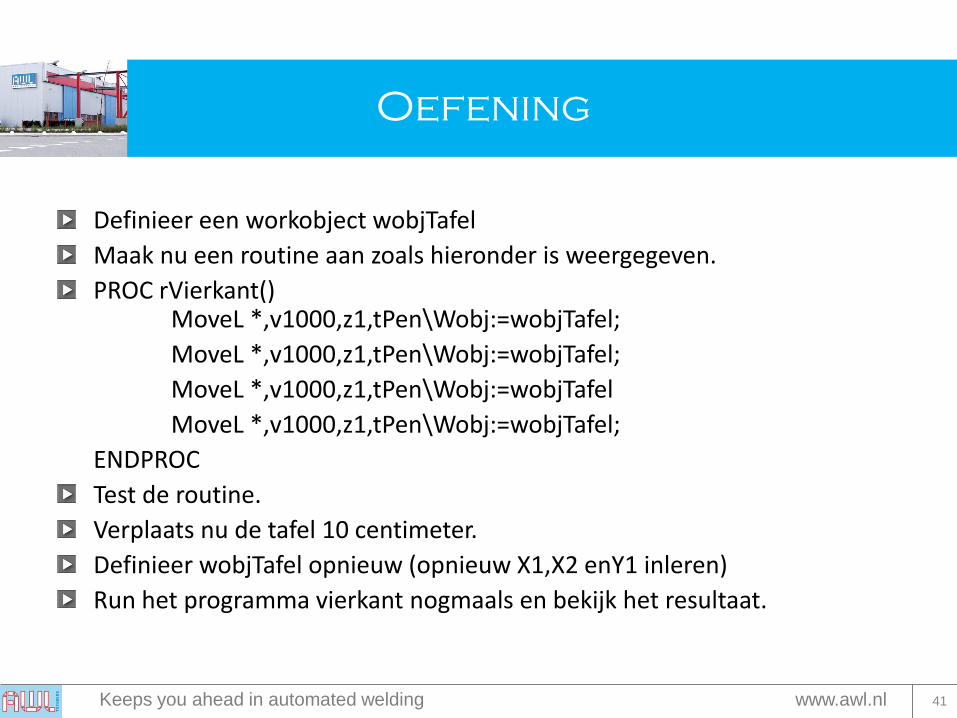
Oefening
Definieer een workobject wobjTafel
Maak nu een routine aan zoals hieronder is weergegeven.
PROC rVierkant() MoveL *,v1000,z1,tPen\Wobj:=wobjTafel;
MoveL *,v1000,z1,tPen\Wobj:=wobjTafel;
MoveL *,v1000,z1,tPen\Wobj:=wobjTafel
MoveL *,v1000,z1,tPen\Wobj:=wobjTafel;
ENDPROC
Test de routine.
Verplaats nu de tafel 10 centimeter.
Definieer wobjTafel opnieuw (opnieuw X1,X2 enY1 inleren)
Run het programma vierkant nogmaals en bekijk het resultaat.
Robcad
AWL-Techniek
Keeps you ahead in automated welding
AWL, your European partner