REISTIJDVARIABILITEIT OP SNELWEGEN: ANALYSE MET … · 2011-12-09 · Het beeld van deze camera...
38
REISTIJDVARIABILITEIT OP SNELWEGEN: ANALYSE MET BEHULP VAN VASTE DETECTOREN Mario Vanlommel Verhandeling aangeboden tot het behalen van de graad van Master in de Ingenieurswetenschappen Promotor : Prof. B. Immers 2009-2010 KATHOLIEKE UNIVERSITEIT LEUVEN FACULTEIT INGENIEURSWETENSCHAPPEN DEPARTEMENT BOUWKUNDE AFDELING VERKEERSKUNDE
Transcript of REISTIJDVARIABILITEIT OP SNELWEGEN: ANALYSE MET … · 2011-12-09 · Het beeld van deze camera...

REISTIJDVARIABILITEIT OP SNELWEGEN: ANALYSE MET BEHULP VAN
VASTE DETECTOREN
Mario Vanlommel Verhandeling aangeboden tot het behalen van de graad van
Master in de Ingenieurswetenschappen
Promotor : Prof. B. Immers
2009-2010
KATHOLIEKE UNIVERSITEIT
LEUVEN
FACULTEIT INGENIEURSWETENSCHAPPEN DEPARTEMENT BOUWKUNDE AFDELING VERKEERSKUNDE

2

3
Dankwoord
Via deze weg wil ik graag enkele personen in het bijzonder bedanken. Zonder de hulp
van velen zou het maken van deze masterproef onmogelijk zijn geweest.
Graag zou ik mijn begeleider Dr. Ir. Chris Tampère bedanken voor zijn begeleiding
en tussentijdse evaluaties. Hij gaf me kritische feedback en waardevolle suggesties,
maar liet hierbij (soms meer dan) voldoende ruimte voor eigen inbreng en
zelfstandige verwerking.
Daarnaast wil ik een woord van dank richten tot de andere mensen van de afdeling
Verkeerskunde. In het bijzonder aan Ir. Ruben Corthout voor zijn begeleiding
tussentijds, maar ook aan Dr. Ir. Francesco Viti, voor het ontwerp van de VT-viewer
en voor zijn nooit-aflatende enthousiasme om het programma werkbaar te maken.
Tevens wil ik mijn ouders bedanken die mij met hun steun de mogelijkheid hebben
geboden om via deze opleiding mijn capaciteiten verder te ontwikkelen.
Ten slotte wil ik van de gelegenheid gebruik maken om mijn kotgenoten te bedanken
voor de steun tijdens de voorbije jaren en de interesse die ze toonden in mijn werk.
Hen wil ik samen met mijn vrienden en medestudenten bedanken omdat ze van mijn
lange studentenleven onvergetelijke jaren gemaakt hebben.
Mario Vanlommel

4
Inhoudsopgave Dankwoord................................................................................................................ 3
Inhoudsopgave .......................................................................................................... 4
Figurenlijst ................................................................................................................ 5
Inleiding.................................................................................................................... 6
Deel 1: Evaluatie van reistijdalgoritmes..................................................................... 7
1. Beschrijving van de gebruikte data.................................................................. 7
1.1 Gerealiseerde reistijden ............................................................................. 8
1.2 Cijfermateriaal ........................................................................................ 10
2. Beschrijving van de algoritmes ..................................................................... 11
2.1 Helbing-filter .......................................................................................... 11
2.1.1 Eenzijdig / Tweezijdig met trajectoriereistijden ................................ 12
2.1.2 Enkelzijdig met instantane reistijden ................................................ 13
2.2 CTA-algoritme........................................................................................ 13
2.3 Praktische uitwerking algoritmes............................................................. 15
3. Vergelijking van de algoritmes ..................................................................... 17
3.1 Noodzakelijke bewerkingen op de gegevens............................................ 18
3.2 Lowpass-filter ......................................................................................... 19
3.3 Bepalen van de maximale crosscorrelatie ................................................ 20
3.4 Root Mean Square Error (RMSE)............................................................ 21
3.5 Robuustheid ............................................................................................ 22
3.6 Analyse van de resultaten........................................................................ 25
4. Conclusie...................................................................................................... 28
Deel II: Variabiliteit van reistijden op de Antwerpse ring......................................... 29
5. Berekening van routereistijden...................................................................... 29
6. Clustering van reistijden ............................................................................... 32
Conclusie ................................................................................................................ 37
Bibliografie ............................................................................................................. 38

5
Figurenlijst
Figuur 1: Situering onderzoekslocatie........................................................................ 7 Figuur 2: AID-camera ............................................................................................... 8 Figuur 3: VT-viewer.................................................................................................. 8 Figuur 4: Gerealiseerde reistijden gevonden met de VT-viewer ................................. 9 Figuur 5 : Reconstructie van een traject tussen detector A en B - Bepaling van de
tijdsgrenzen voor de berekening van de gemiddelde snelheid........................... 14 Figuur 6: Aanduiding van de locaties voor de camera's (gele markers) en de
meetlussen (rode markers) ............................................................................... 15 Figuur 7: Verschil tussen rasterdichtheid van 250m en 100m................................... 16 Figuur 8: XT-plot van het bestudeerde gebied met w = -17 km/u ............................. 17 Figuur 9: Reistijden berekend met de verschillende algoritmes ................................ 19 Figuur 10: Werkelijke en gefilterde reistijden .......................................................... 20 Figuur 11: Crosscorrelaties van de verschillende algoritmes met de werkelijke
waarden ........................................................................................................... 20 Figuur 12: Crosscorrelaties van de algoritmes met 1 ontbrekend detectorpunt.......... 22 Figuur 13: Crosscorrelaties van de algoritmes met 2 ontbrekende detectorpunten .... 23 Figuur 14: XT-plot van snelheden uit de helbingfilter met meetlussen 4 en 5
weggelaten....................................................................................................... 25 Figuur 15: XT-plot met detectorpunt 5 weggelaten .................................................. 26 Figuur 16: Reistijden voor de verschillende algoritmes bij het weglaten van meetlus 5
........................................................................................................................ 27 Figuur 17: Reistijden voor de verschillende algoritmes bij het weglaten van
meetlussen 4 en 5............................................................................................. 27 Figuur 18: Algoritme-reistijden uitgezet tov reële reistijden..................................... 28 Figuur 19: 30, 50, 70 en 90-percentielen voor een donderdag .................................. 29 Figuur 20: Reistijdpercentielen voor maandag ......................................................... 30 Figuur 21: Reistijdpercentielen voor dinsdag ........................................................... 31 Figure 22: Reistijdpercentielen voor woensdag........................................................ 31 Figure 23: Reistijdpercentielen voor donderdag....................................................... 31 Figuur 24: Reistijdpercentielen voor vrijdag ............................................................ 32 Figuur 25: Projectie van reistijden op de eerste twee basisvectoren van de
correlatiematrix................................................................................................ 33 Figuur 26: Zoom op de geconcentreerde waarden .................................................... 34 Figuur 27: Dendrogram voor reistijden voor het traject Antwerpen Noord-West...... 35 Figuur 28: Projectie op basisvectoren van de reistijden gedurende de avondspits ..... 35 Figuur 29: Dendrogram voor de reistijden uit de avondspits .................................... 36 Figuur 30: Projectie op basisvectoren en dendrogram .............................................. 36

6
Inleiding De ring van Antwerpen werd in 2004 en 2005 van fundering tot wegdek volledig heraangelegd. Van deze gelegenheid werd gebruik gemaakt om een aantal meetsystemen aan te brengen. De gegevens die hiermee verzameld worden bevatten een schat aan informatie, maar zijn moeilijk te doorgronden. Een manier om een beter overzicht over deze dataset te krijgen, is ze te bundelen tot reistijden. Een reistijd is een gegeven dat veel frequenter gebruikt wordt en dat ook tastbaar is, in tegenstelling tot een lijstje snelheden. In de loop der jaren zijn verschillende algoritmes uitgewerkt om snelheden te aggregeren tot reistijden. Vaak bleef het echter bij een theoretische uitwerking, aangezien validatiemogelijkheden beperkt waren. Er werd wel eens één of meerdere proefrit(ten) gereden, maar de steekproef is dan zo klein dat de waarde ervan eerder klein is. Met het totale pakket gegevens dat beschikbaar is op de ring van Antwerpen zijn we in staat om reistijdalgoritmes te valideren, en ze op die manier kwalitatief te beoordelen ten opzichte van elkaar. Het uitwerken van deze algoritmes, het aanpassen ervan zodat ze geschikt zijn om de beschikbare gegevens te verwerken en de mogelijke problemen trachten te omzeilen was een belangrijke eerste stap in dit werk. Validatie met reële reistijdwaarden zal leiden tot een ‘beste’ algoritme voor dit soort gegevens. Dit onderzoek zal een eerste belangrijk deel van deze tekst in beslag nemen. Wanneer een geschikt algoritme gevonden is om reistijden te berekenen, gaan we hiermee aan de slag om de reistijden op de Antwerpse ring aanschouwelijk voor te stellen. Dit wordt in eerste instantie puur beschrijvend aangepakt. Als we in de voorstelling van de reistijden per dag bepaalde patronen menen te herkennen, willen we dit ook kunnen kwantificeren. Men stelt zich al langer de vraag of men, afhankelijk van de dag van de week of andere factoren, een inschatting kan maken van de verwachte drukte. Om dagen te kunnen inschatten, moeten we eerst zeker weten dat een bepaalde dag een terugkomend patroon bezit. Dit werd reeds talloze keren (zonder positief resultaat) onderzocht voor verschillende mogelijke invloedsfactoren. Nu we echter zullen beschikken over reistijden die al deze verschillende factoren bundelen, willen we opnieuw kijken of het mogelijk is bepaalde dagen te clusteren, en op die manier een eerste aanzet kunnen geven tot voorspellingen.

7
Deel 1: Evaluatie van reistijdalgoritmes
1. Beschrijving van de gebruikte data De meetsystemen die aangebracht werden op de ring van Antwerpen en op sommige aanloopstukken leveren gegevens van de snelheid en de intensiteit van het voorbijkomende verkeer. Aan de hand van deze data kunnen reistijden berekend worden met behulp van een aantal verschillende reistijdalgoritmes. Deze reistijden zijn veel eenvoudiger te interpreteren dan de gegevens van de snelheid en de intensiteit. De juistheid van deze berekende reistijden is niet zomaar te controleren. Door de uitgebreidheid van de dataset is het echter mogelijk om de reistijdalgoritmes te valideren voor een geselecteerd traject. De proefsite wordt gekozen op een aanloopstuk van de E313 naar de Antwerpse ring vanuit de richting Hasselt.
Figuur 1: Situering onderzoekslocatie
Dit wegdeel levert een aantal voordelen op bij het verzamelen van de gegevens. Zo is het aantal op- en afritten op dit traject beperkt en kan een relatief lang tracé gekozen worden met gelijkblijvend aantal rijstroken. Het vergelijken van berekende reistijden met werkelijk gerealiseerde reistijden vereist een exacte reistijdweergave. Het unieke aan de gebruikte dataset zit in het feit dat er zowel beeldmateriaal als cijfermateriaal beschikbaar is voor deze proefsite. Het beeldmateriaal is afkomstig van AID-camera’s, en wordt gebruikt om exact gerealiseerde reistijden te bekomen. Het cijfermateriaal met snelheden en intensiteiten per voertuigklasse voor alle verschillende rijstroken op verschillende kilometerpunten is afkomstig van meetlussen. Deze zijn tijdens de recente heraanleg van de ring in het wegdek aangebracht.

8
1.1 Gerealiseerde reistijden Exacte reistijden worden, zoals hierboven vermeld, gehaald uit beeldmateriaal dat door AID-camera’s (zie figuur 2) continu geregistreerd wordt. Aan de hand van dit beeldmateriaal gaat men via een matlabtool (VT-Viewer) (zie figuur 3) op zoek naar een welbepaalde auto die voorbijkomt aan de eerste camera en aan de laatste. De selectie van camerastandpunten gebeurt niet willekeurig. Om een voldoende grote afstand te kunnen overbruggen moet men rekening houden met de werkbaarheid van deze selectie. Het is immers vergeefse moeite om de reistijd over het gekozen traject te zoeken van een auto die de snelweg onderweg verlaten heeft of er pas aan een oprit is opgekomen. Deze auto legt niet het volledige traject af en levert geen nuttige meting. Er moet dus een manier gevonden worden om zeker te zijn dat een auto het volledige traject aflegt.
Figuur 2: AID-camera
Figuur 3: VT-viewer

9
Een goede manier om dit probleem te verhelpen, is te vertrekken van een camerastandpunt tussen af- en oprit. Het beeld van deze camera wordt als referentiebeeld gekozen. Nadien kan een geselecteerde auto gezocht worden op plaatsen stroomopwaarts en stroomafwaarts. Om dit proces makkelijker te laten verlopen worden een aantal variabelen mee opgenomen in de tool. Zo worden de verschillen met een eerder gevonden voertuig weergegeven voor de twee resterende camerastandpunten. Ook wordt er een ruw geschatte instantane reistijd meegenomen in het programma, welke gebruikt kan worden om een eerste geschat beeld te verkrijgen. Deze schatting gebeurt voor de begin- en eindlocatie op basis van een rudimentaire deling van de afstand door de snelheid. In het geval van de E313 is er een camera beschikbaar net boven de verkeerswisselaar van Wommelgem. Het beginmeetpunt ligt 3,87 km stroomopwaarts, terwijl het eindmeetpunt op het einde van de E313 ligt, 2,67 km stroomafwaarts. Op deze manier wordt een traject verkregen van 6,54 km. De exact gerealiseerde reistijden in functie van hun begintijdstip zijn te vinden in onderstaande figuur. Deze reistijden zijn gevonden voor vrachtwagens (zowel vaste wagens als trekker-oplegger-combinaties) en bussen.
Figuur 4: Gerealiseerde reistijden gevonden met de VT-viewer
Het ontbreekt in deze werkelijke reistijddata aan gegevens over personenwagens, vooral omwille van praktische beperkingen. Door enerzijds de lage resolutie van de beelden en anderzijds het zwart-wit karakter, is het bijna onmogelijk om verschillende auto’s te onderscheiden. Zeker in de bestudeerde ochtendspits, waarbij voor de verschillende cameralocaties een verschillende lichtinval geldt, is het onmogelijk gebleken om personenauto’s te vinden. Dit geeft uiteraard een vertekend beeld van de werkelijke reistijd. Met deze vertekening wordt in de berekening rekening gehouden

10
bij het aggregeren van de beschikbare snelheden tot PAE’s (personenauto-equivalent). Bovendien is deze vertekening relatief klein, aangezien er een aantal filegolven ontstaan tijdens de ochtendspits. Uiteraard zal het effect van het gebrek aan personenauto’s in freeflow groter zijn, gezien het verschil in maximumsnelheid.
1.2 Cijfermateriaal Het cijfermateriaal dat nodig is om aan de reistijdalgoritmes mee te geven, wordt verzameld op twee verschillende manieren. Enerzijds meten de eerder aangehaalde AID-camera’s de snelheid van het voorbijkomende verkeer, wat minuutgemiddelde waarden oplevert per rijstrook. Anderzijds leveren meetlussen – aangebracht in het wegdek – zowel intensiteit- als snelheidsgegevens. Uit eerder onderzoek blijkt dat de snelheidsgegevens verkregen door de AID-camera’s gemiddeld 7,87% te hoog zijn in vergelijking met de waarden die de meetlussen opleveren. [1] Omdat de meetlussen op geijkte afstanden werken en onafhankelijk zijn van klimatologische verschillen, wordt ervan uit gegaan dat deze waarden correct zijn. Een andere reden die aanzet tot het gebruik van de cijfergegevens afkomstig van de meetlussen, is de beschikbaarheid van gesplitste intensiteitgegevens voor verschillende voertuigtypes. Zowel intensiteiten van personenwagens (3 verschillende types) als van vrachtwagens (2 verschillende types) worden onderscheiden. Dit geeft de mogelijkheid om een gemiddelde snelheid te berekenen over de voertuigtypes en hierbij rekening te houden met de beperktheid van de beschikbare werkelijke reistijden. Deze zijn immers alleen gevonden voor vrachtvervoer, zodat enkel de snelheden van de twee types vrachtwagen dienen meegenomen te worden in de verdere berekening. Uiteraard vallen ook bussen in deze categorie, maar dan gaat het wel over bussen die zich in het normale verkeer begeven, aangezien bussen voor openbaar vervoer gebruik kunnen maken van de ingerichte busstrook. Deze is echter niet overal voorzien in het behandelde tracé. Het kan desondanks interessant zijn om te kijken welke winst er gemaakt wordt door gebruik van de busstrook. Dit maakt echter geen deel uit van dit werk. Een eerste bewerking die op de ruwe data moet worden uitgevoerd, is een interpolatie om ervoor te zorgen dat er waarden beschikbaar komen voor elke minuut. Het gebeurt dat een detector een waarde mist voor een bepaalde minuut, zodat interpolatie noodzakelijk is. Nadien worden de gegevens meegegeven aan de verschillende algoritmes. Wanneer een bepaalde detector gedurende een volledige minuut geen

11
enkel voertuig telt, geeft hij zowel voor de intensiteit als de snelheid nul terug. Om te vermijden dat deze snelheid het gemiddelde zou beïnvloeden, wordt de snelheid in dat geval op 90 km/u gezet. Dit is immers de maximale snelheid voor vrachtwagens in vrij verkeer. Men mag er hierbij vanuit gaan dat dit de gehaalde snelheid is, gezien de begrenzing van deze voertuigen vrij accuraat is afgesteld. Voor de berekeningen met de verschillende algoritmes zijn niet enkel gegevens beschikbaar van de drie camerastandpunten die gebruikt worden met de VT-Viewer. Er zijn immers meer detectoren aanwezig in het beschouwde tracé. De bijbehorende detectornummers en hun respectievelijke kilometerpunten worden weergegeven in onderstaande tabel. Per rijstrook is een detector voorzien, zodat het aantal detectoren eveneens het aantal rijstroken ter plaatse aanduidt. De exacte plaatsen zijn ook weergegeven in figuur 6 verderop in deze tekst.
Detectornummers Kilometerpunt 139,140,141,142 93,21 144,145,146,147 94,16 148,149,150,151 95,82 152,153,154,155 97,06 159,226,227,228 97,76 160,161,162,163 98,82
Tabel 1: Locaties van de meetlussen
2. Beschrijving van de algoritmes Er zijn verschillende manieren om reistijden te berekenen op basis van bovenvermelde cijfergegevens. In dit hoofdstuk worden vier algoritmes beschreven. In een eerste paragraaf komt de Helbing-filter algemeen aan bod. Vervolgens worden drie algoritmes besproken die op basis van deze filter de reistijden berekenen. In een laatste paragraaf wordt het vierde algoritme, het CTA-algoritme, beschreven.
2.1 Helbing-filter De Helbingfilter is een adaptieve filter die wordt gebruikt voor twee doeleinden. Enerzijds filtert het de snelheidsgegevens die beschikbaar zijn van de meetlussen en voorziet het een oplossing voor ontbrekende metingen. Anderzijds gebruikt de filter de beschikbare metingen om een zelf gecreëerd afstand-tijd-rooster (x-t-rooster) te

12
vullen met gewogen interpolaties van de oorspronkelijke snelheidsmetingen. [3] Hierbij houdt de filter rekening met de verkeerstoestand ter plaatse. Om deze te kunnen inschatten, maakt de filter gebruik van gegevens die beschikbaar zijn zowel stroomop- als stroomafwaarts. [4] De afstand tot die beschikbare gegevens wordt meegenomen in de berekening door middel van wegingsfactoren. Om de snelheid in een nieuw punt te berekenen, wordt rekening gehouden met omliggende oude punten, zowel in tijds- als in afstandsperspectief. Deze oude punten worden in rekening vermenigvuldigd met wegingsfactoren. Deze wegingsfactoren zijn maximaal voor de originele snelheidswaarden die de kleinste afstand vertonen tot het nieuwe punt, en nemen exponentieel af met toenemende afstand. Het adaptieve karakter van de filter wordt weerspiegeld in het feit dat de filter een andere berekening maakt voor een datapunt in congestief of freeflow regime. Verstoringen planten zich immers anders voort bij vrij verkeer dan wanneer er file optreedt. In freeflow gaan we ervan uit dat deze verstoringen zich bewegen met het verkeer mee met een snelheid van 100 km/u, terwijl dit bij congestie tegen het verkeer in gebeurt met een snelheid van 17 km/u. Deze twee karakteristieken worden meegenomen in de filter, samen met twee parameters die bepalen hoe uitgebreid het tijds- en ruimtekader wordt waarbinnen de filter werkzaam zal zijn. De berekeningswijze is als volgt:
z(x, t) = w(zcong , zvrij) · zcong (x, t) + (1 − w(zcong , zvrij)) · zvrij(x, t) Hierin is w een wegingsfactor voor het verkeersregime. De factoren zvrij en zcong zijn de snelheden in het x-t-rooster berekend op basis van een filter voor respectievelijk freeflow en congestie. In geval van freeflow is w bijna 0 en weegt vooral zvrij door, in het geval van congestie wordt w bijna 1, en is het vooral zcong die de waarde van het nieuwe datapunt bepaalt. Oorspronkelijk is niet bekend in welk regime een bepaald punt zich bevindt, zodat beide berekeningen dienen te gebeuren. Vervolgens wordt er een schatting voor het regime gemaakt op basis van de berekende snelheid in het punt, waarbij de minste aanduiding tot file-regime voldoende is om het punt in de richting van congestie te duwen.
2.1.1 Eenzijdig / Tweezijdig met trajectoriereistijden Zoals reeds eerder aangehaald, gebruikt de Helbingfilter gegevens uit de omgeving van een nieuw datapunt om de snelheid in dat nieuwe punt vast te leggen. Omdat er een onderscheid moet gemaakt worden tussen berekeningen voor historische data en real-time data, moet hier ook rekening mee gehouden worden bij de toepassing van de

13
Helbingfilter. Dit is mee opgenomen in de verwerking van de gegevens door een eenzijdige en een tweezijdige Helbingfilter te definiëren. Beide algoritmes maken een nieuw ruimte-tijd-rooster aan, waarbij ze per minuut een snelheidswaarde berekenen en daarbij de x-afstand opdelen in stukjes van 0,25km. De tweezijdige Helbingfilter maakt gebruik van historische invoergegevens rondom het nieuwe datapunt, zowel stroomop- als stroomafwaarts, in een tijdsgebied dat symmetrisch rond het nieuwe datapunt gelegen is. Om de filter ook te testen voor real-time dataverwerking, is een eenzijdige Helbingfilter gecreëerd, die nog steeds gegevens stroomop- en stroomafwaarts meeneemt, maar die enkel gegevens gebruikt die in tijdsperspectief voor het nieuwe datapunt liggen. Beide algoritmes op basis van de Helbingfilter berekenen trajectoriereistijden doorheen het fijne rooster. Dit houdt praktisch in dat er een minuut wordt afgelegd vanaf het vertrektijdstip aan de snelheid op dat ogenblik op het beginpunt. Na een minuut wordt gekeken welke afstand er afgelegd is en of het volgende x-punt in het rooster al bereikt is. Wanneer dit het geval is, wordt er voor de volgende minuut de snelheid van het nieuwe x-punt genomen. In het andere geval wordt de snelheid behouden gedurende de volgende minuut. Zo wordt verder gerekend tot uiteindelijk de bestemming bereikt wordt.
2.1.2 Enkelzijdig met instantane reistijden Om de rekentijd te beperken, wordt vaak gebruik gemaakt van een instantane reistijd. Deze kan berekend worden op basis van ruwe data. In dit werk maken we echter gebruik van de resultaten van de Helbingfilter. Zo worden problemen met ontbrekende gegevens vermeden. Aangezien een instantane reistijdberekening in principe enkel gebeurt op basis van gegevens uit de tijdsperiode voor het berekeningspunt, wordt gebruik gemaakt van de enkelzijdige Helbingfilter. Bij de berekening van de reistijd wordt voor elk x-punt de afstand bepaald tussen het midden van dit en het vorige x-punt en het midden van dit en het volgende x-punt. Deze afstand wordt vervolgens gedeeld door de snelheid in dit x-punt. De verschillende reistijden worden over de totale afstand opgeteld op één bepaald tijdstip. Het is dus eigenlijk een imaginaire reistijd, die nooit kan worden bewerkstelligd. Het is echter een vaak gebruikte manier om snel tot een resultaat gekomen worden.
2.2 CTA-algoritme Het CTA-algoritme is een algoritme dat reistijden berekent op basis van de snelheden gemeten op verschillende detectorpunten en hierbij rekening houdt met verkeerskundige aspecten. Het is sterk vergelijkbaar met het Coifman-algoritme. [5]

14
Het CTA-algoritme berekent trajectoriereistijden per link op basis van de snelheid waarmee snelheidsgolven zich stroomopwaarts verplaatsen tijdens congestie. Een link wordt hier gedefinieerd als een stuk weg tussen twee detectorpunten A en B (zie figuur 5).
Figuur 5 : Reconstructie van een traject tussen detector A en B - Bepaling van de
tijdsgrenzen voor de berekening van de gemiddelde snelheid Voor de berekening van de reistijd over een link op een bepaald tijdstip t* wordt er gebruik gemaakt van een harmonisch gemiddelde snelheid (de uiteindelijke gemiddelde snelheid voor die link op dat ogenblik) op basis van snelheden van de stroomafwaartse en de stroomopwaartse detector. Deze twee snelheden zijn op hun beurt een harmonisch gemiddelde van een aantal verschillende snelheden van deze detectorpunten die gemiddeld worden met behulp van volgende formule:
Men gaat er hierbij vanuit dat filegolven zich in een normaal filepatroon tegen de rijrichting in verplaatsen met een golfsnelheid w. De tijdstippen van de snelheden die meegenomen worden in deze berekening verschillen voor de beide detectorpunten. Als we, rekening houdend met de golfsnelheid w, een reconstructie maken van het snelheidsprofiel van een voertuig dat tussen detectorpunt A en B beweegt, kunnen we

15
afleiden dat op detectorpunt A de snelheidsgegevens van t* tot t* + T(AB)(t*) + ∆x/w belangrijk zijn. Voor detectorpunt B worden de snelheidsgegevens van t* - ∆x/w tot t* + T(AB)(t*) gebruikt (zoals aangeduid in figuur 5).
2.3 Praktische uitwerking algoritmes In de voorgaande alinea’s werden de twee gebruikte algoritmes theoretisch uitgelegd. De praktische toepassing in het onderzoeksopzet vereist echter meerdere aanpassingen. Deze aanpassingen zijn noodzakelijk doordat de beschikbare basisgegevens niet helemaal voldoen aan de gevraagde inputparameters. Zo bestrijkt het reële traject dat onderzocht wordt (met behulp van de camerabeelden) een groter gebied dan het gebied waarvoor cijfergegevens beschikbaar zijn (zie figuur).
Figuur 6: Aanduiding van de locaties voor de camera's (gele markers) en de meetlussen (rode markers)
Het traject waarvoor reële gegevens beschikbaar zijn vanuit de cameragegevens loopt van kilometer 93,20 tot kilometer 99,74. De eerste detector ligt echter op kilometer 93,21 en de laatste op kilometer 98,82. Dit houdt in dat voor beide algoritmes extrapolaties moeten gemaakt worden voor de stukken van het traject die buiten het meetbare traject vallen. Voor de reistijd over de tien meter die tussen de eerste camera en de eerste meetlus ligt is het effect van deze extrapolatie bijna verwaarloosbaar. Op het einde van het traject volgt er echter nog bijna een volledige kilometer voorbij het laatste detectorpunt, zodat daar de extrapolatie een groter effect heeft . Voor deze kilometer kan het CTA-algoritme geen gebruik maken van zijn volle sterkte, aangezien er geen harmonisch gemiddelde kan gemaakt worden van de twee omvattende detectorpunten. In dat geval wordt er enkel gebruik gemaakt van het stroomopwaartse detectorpunt, en wordt de snelheid die daaruit voorvloeit (met dezelfde berekeningsmethode als eerder aangehaald) gebruikt voor de volledige afstand. Bij de berekening op basis van de helbingfilter duiken eveneens dezelfde problemen op. Het nieuwe rooster dat wordt gevormd door het algoritme ligt immers maximaal

16
uitgespreid binnen de uiterste grenzen van de detectorpunten. Dit zorgt ervoor dat het gedeelte van het traject waarvoor de gegevens moeten worden geëxtrapoleerd groter wordt. Deze extrapolatie gebeurt in dit geval niet met een harmonisch gemiddelde van snelheden, maar er wordt gebruik gemaakt van de snelheid voor een bepaalde minuut op het uiterste rasterpunt. Deze snelheid is door het algoritme berekend op basis van een aantal verschillende snelheden. In eerste instantie is voor de helbingfilter gekozen voor een rastergrootte van 250 m. Aangezien het in de onderzochte case gaat om een volledig traject van 6,54 km levert dit 26 rasterpunten op, wat oorspronkelijk een voldoende fijne opdeling leek. Een eerste analyse toonde echter grote fluctuaties in de reistijden. Uit de werking van het algoritme en de vergelijking met het CTA-algoritme blijkt dat een verfijning van dit rooster zou moeten zorgen voor een meer accuraat resultaat. Doordat detectorwaarden worden meegerekend met een wegingsfactor afhankelijk van hun afstand tot het nieuwe rasterpunt, kan bij een grovere rasterindeling de plaats van een detectorpunt toevallig zorgen voor een vertekening van de resultaten. We beperken de invloed van deze toevalsfactor door het raster te verfijnen tot 100 m (zie figuur 7). Wanneer we deze verfijning toepassen, zullen plotse uitschieters en uitzonderlijk kleine waarden veel minder invloed hebben op het uiteindelijke resultaat. Dit is ook te zien op onderstaande figuur. De grootste pieken doen zich vooral voor bij het raster van 250 m, terwijl ze bij een rooster van 100 m meestal niet voorkomen.
Figuur 7: Verschil tussen rasterdichtheid van 250m en 100m Reistijden op basis van de helbingfilter en het CTA-algoritme naderen naar elkaar wanneer we het raster van de helbingfilter steeds verfijnen, aangezien het helbingrooster met oneindig kleine vakjes in principe een traject oplevert van kleine

17
stukjes, net zoals dat in het CTA-algoritme nagebootst wordt door de gemiddelde snelheid te bepalen in functie van kleine deeltrajecten. Uiteraard zullen er toch nog verschillen optreden door de exponentiële factor bij de helbingfilter en de constante wegingsfactor die bij het CTA-algoritme gebruikt wordt. De uiteindelijke golfsnelheid waarmee files zich stroomopwaarts doorheen het verkeer bewegen, is bepaald door een aantal XT-plots te maken met verschillende keuzes voor deze parameter. Een XT-plot geeft in kleur een maat voor de snelheid over een bepaald traject (verticale as) doorheen een tijdsinterval (horizontale as). Onderstaande XT-plot is gemaakt op basis van de helbingfilter, en zou in principe een gelijkmatig terugslaande file moeten weergeven. Wanneer men kiest voor een foute waarde van de golfsnelheid zal men ter hoogte van de detectorpunten zien dat de filegolf zich niet meer met een constante snelheid tegen de stroom in beweegt. Onderstaande figuur geeft de XT-plot waarbij is gekozen voor een golfsnelheid van -17 km/u.
Figuur 8: XT-plot van het bestudeerde gebied met w = -17 km/u
3. Vergelijking van de algoritmes In dit hoofdstuk worden bovenvermelde algoritmes met elkaar vergeleken. Eerst worden enkele noodzakelijke bewerkingen op de gegevens besproken en wordt de werking van de lowpass-filter toegelicht. In de volgende paragrafen worden de algoritmes vergeleken met behulp van de maximale crosscorrelatie, de RMSE en wordt hun robuustheid nagegaan door het effect van een of meerdere ontbrekende detectorlocatie(s) te meten.

18
3.1 Noodzakelijke bewerkingen op de gegevens Om de reistijden die gevonden werden met de verschillende algoritmes te kunnen vergelijken met de werkelijk optredende reistijden, zijn reistijdwaarden vereist op eenduidig bepaalde punten. Deze waarden zijn het makkelijkst vast te leggen op de minuutwaarden, vermits deze waarden reeds beschikbaar zijn uit de algoritmes. Dit levert echter moeilijkheden op voor de werkelijke data, aangezien de gevonden reistijden willekeurige vertrektijdstippen hebben. De vertrektijdstippen hebben een tussentijd van ongeveer een minuut, maar liggen willekeurig verspreid over de tijdsas. Om dit probleem te verhelpen wordt er een interpolatie uitgevoerd van de reistijden naar waarden precies op de minuut, met de originele vertrektijdstippen als oude basis. De algoritmes leveren per definitie reistijden op voor elke minuut, voor de volledige dag. Om een degelijke vergelijking mogelijk te maken, wordt eerst gekeken naar de beschikbaarheid van de werkelijke waarden. Er wordt gezocht naar een geschikt tijdsinterval dat gerealiseerde reistijdgegevens bevat voor voldoende vertrektijdstippen. Zoals eerder aangehaald is ongeveer 1 reistijdwaarde per minuut op de tijdsas nodig. Dit levert voor de hoger vermelde interpolatie voldoende waarden op. Op basis van de reistijdwaarden gevonden met de VT-viewer wordt er een geschikt interval bepaald. Er wordt een begin- en eindminuut vastgesteld die binnen het geselecteerde tijdsinterval valt en alle vertrektijdstippen worden gezocht die hierbinnen liggen. Deze worden in een matrix gezet met de bijbehorende reistijden en gesorteerd op basis van vertrektijdstip. Om de interpolatie ook voldoende werkzaam te houden op de randpunten, wordt er een meting meegenomen voor en na het geselecteerde tijdsinterval. De interpolatie vereist vertrektijdstippen die verschillend zijn van elkaar. Doordat er af en toe haperingen optreden in de werking van de VT-Viewer, kunnen bepaalde voertuigen meerdere keren opgeslagen zijn. Anderzijds is het ook mogelijk dat er op een bepaald vertrektijdstip meerdere voertuigen vertrekken, die op het einde van het traject een verschillende reistijd realiseren. Hierdoor kunnen er verschillende reistijdwaarden op hetzelfde vertrektijdstip opgeslagen zijn. Om de interpolatie mogelijk te maken, wordt de tijdsas doorlopen om identieke waarden op te zoeken. Een oplossing in één keer is enkel mogelijk door op te slaan hoeveel keer een bepaalde vertrektijdstip voorkomt. Het aantal keer dat hetzelfde tijdstip voorkomt in het vervolg van de lijst wordt vermenigvuldigd met een kleine waarde (0,00001). Deze tijd wordt afgetrokken van het oorspronkelijke vertrektijdstip. Op deze manier

19
verandert het beeld van de reistijden amper en kan de interpolatie probleemloos uitgevoerd worden. De reistijden berekend met de verschillende algoritmes en geselecteerd binnen het interval waarvoor er gerealiseerde reistijden beschikbaar zijn, zijn te zien in volgende figuur.
Figuur 9: Reistijden berekend met de verschillende algoritmes
3.2 Lowpass-filter Om eigenschappen van een verkeersstroom aanschouwelijk weer te geven is reistijd de meest geschikte variabele. Men moet er zich echter bewust van zijn dat de reistijd op een bepaald traject zeer volatiel is. Zo kunnen reistijden op hetzelfde moment sterk verschillen op naast elkaar liggen rijstroken. Maar ook achter elkaar rijdende auto’s kunnen elkaar voorbijsteken en zo op een andere rijstrook terechtkomen. Op die manier kan een groot verschil in reistijd ontstaan. Om deze sterke fluctuaties enigszins te beperken en de grafiek van de reistijd zo geleidelijk mogelijk te laten variëren, wordt een lowpass-filter gebruikt. De filter krijgt enkel de reistijden als ingangssignaal mee. De filter maakt gebruik van de FFT (fast-fourier-transformatie) en behoudt slechts een bepaald deel van de frequenties, waardoor hoogfrequente ruis uitgeschakeld wordt. Het effect op de grafiek is duidelijk te merken en er wordt een meer vloeiende grafiek verkregen. Op deze manier kan een meer geleidelijke overgang gezien worden in de gegevens en worden kleine pieken, gebaseerd op één auto, weggefilterd. Zoals reeds vermeld, zijn deze pieken vaak het gevolg van verschillen in snelheid tussen rijstroken en geven dus minder informatie over het algemene verkeersbeeld.

20
De filter is toegepast op de originele data die gevonden zijn met behulp van de VT-viewer. Dit geeft de filter de kans om de grootste pieken weg te filteren alvorens de interpolatie wordt doorgevoerd naar de equidistante punten. Een andere inputparameter voor de filter is de afkapfrequentie. We stellen deze gelijk aan ¼, zodat enkel de 25% laagste frequenties van het signaal behouden blijven. In onderstaande figuur zijn de geïnterpoleerde exacte reistijden weergegeven, samen met de geïnterpoleerde waarden van de filter.
Figuur 10: Werkelijke en gefilterde reistijden
3.3 Bepalen van de maximale crosscorrelatie
Om na te gaan of er een tijdsvertraging optreedt in de resultaten van een algoritme ten opzichte van de werkelijke reistijden, wordt de crosscorrelatie berekend van de resultaten bekomen uit de verschillende algoritmes met de werkelijke waarden. Dit levert volgende grafiek op.
Figuur 11: Crosscorrelaties van de verschillende algoritmes met de werkelijke waarden
Uit deze grafiek blijkt dat enkel bij de instantane berekening op basis van de helbingfilter een tijdsvertraging optreedt. Dit betekent dat zelfs de trajectoriereistijden op basis van de éénzijdige helbingfilter (die enkel gegevens uit het verleden gebruikt)

21
geen significante vertraging vertonen ten opzichte van de reële reistijden. De vertraging bij de instantane berekening blijft wel beperkt tot 1 minuut. Concreet betekent dit dat de berekende instantane reistijden op basis van de helbingfilter maximaal overeenkomen met de reële reistijden wanneer we voor een bepaald vertrektijdstip de reistijd nemen die volgens het algoritme 1 minuut later pas optreedt.
3.4 Root Mean Square Error (RMSE) Om een vergelijking te kunnen maken tussen de verschillende algoritmes, is nood aan een eenduidig cijfer dat de kwaliteit van de algoritmes voorstelt. Hiervoor werd de Root Mean Square Error gekozen. Dit is de vierkantswortel van de gemiddelde kwadratische fout tussen de gemeten waarde en de berekende waarde. [8] In eerste instantie worden de werkelijke reistijden vergeleken met de originele berekeningen van de algoritmes. Dit geeft volgende resultaten:
Algoritme RMSE CTA 43,8
Helbingfilter dubbelzijdig (trajectorie) 54,9 Helbingfilter enkelzijdig (trajectorie) 53,1 Helbingfilter enkelzijdig (instantaan) 186,2
Tabel 2: RMSE van reële reistijden met algoritmes Uit deze tabel blijkt dat het CTA-algoritme met trajectoriereistijden het beste resultaat geeft. Om na te gaan of de waarden sterk beïnvloed worden door het discrete karakter van de steekproef, wordt de RMSE berekend van de algoritmes met de waarden gefilterd door een lpf-filter. De filter zorgt voor een geleidelijker reistijdverloop waarin de kleine pieken weggefilterd zijn. Hierdoor wordt de RMSE kleiner. Enkel bij de instantane berekening van de reistijd op basis van de helbingfilter verhoogt de waarde van RMSE. Dit is wellicht te verklaren doordat de filter een smoothing maakt van het reistijdverloop, waardoor de pieken die de instantane berekening vertoont een nog grotere afwijking gaan opleveren.
Algoritme RMSE CTA 41,3
Helbingfilter dubbelzijdig (trajectorie) 52,5 Helbingfilter enkelzijdig (trajectorie) 52,9 Helbingfilter enkelzijdig (instantaan) 189,4
Tabel 3: RMSE van gefilterde reële reistijden met algoritmes

22
In het voorgaande deel is de crosscorrelatie behandeld, die aangeeft bij welke tijdsverschuiving de maximum correlatie behaald wordt. Deze waarde kan gebruikt worden om een verschuiving langs de as met de vertrektijdstippen te berekenen. Deze verschuiving kan nuttig zijn om bij analyse van data uit het verleden het tijdstip van bepaalde gebeurtenissen op een exacte manier te bepalen. De RMSE daalt uiteraard mee wanneer het signaal verschoven wordt in de richting van de maximale crosscorrelatie. Dit blijkt ook voor de instantane berekening (weliswaar in zeer beperkte mate) uit de gegevens in de volgende tabel.
Algoritme RMSE CTA 43,8
Helbingfilter dubbelzijdig (trajectorie) 54,9 Helbingfilter enkelzijdig (trajectorie) 53,1 Helbingfilter enkelzijdig (instantaan) 185,7
Tabel 4: RMSE voor reële reistijden met tijdsverschoven algoritme-reistijden
3.5 Robuustheid Om de robuustheid van de algoritmes na te gaan, worden de metingen van respectievelijk één en twee detectorpunten weggelaten. De nummers van de verschillende detectoren zijn hoger vermeld bij de bespreking van de cijfergegevens. In het eerste geval gaat het om de detectoren ter hoogte van kilometerpunt 97,76 (meetlus 5 in figuur 6), waarna zowel de crosscorrelaties als de RMSE-waarden herberekend worden. De berekening van de crosscorrelaties levert onderstaande figuren op. We tonen de grafiek van de crosscorrelaties voor de niet-verschoven gegevens.
Figuur 12: Crosscorrelaties van de algoritmes met 1 ontbrekend detectorpunt

23
Er kan opgemerkt worden dat de grafiek weinig verschilt van de oorspronkelijke figuur (zie figuur 11) waarbij data beschikbaar waren in alle meetpunten. Dit betekent praktisch dat de algoritmes geen extra tijdsverschuiving hebben ondergaan omwille van de ontbrekende detectoren. De gemiddelde kwadratische fout wordt verder in deze paragraaf behandeld. Dezelfde bewerking wordt herhaald voor twee ontbrekende detectorlocaties. Hiervoor wordt gekozen voor kilometerpunten 97,06 (meetlus 4) en 97,76 (meetlus 5). Zo ontstaat één groot gat in het detectorinterval. Opnieuw wordt de crosscorrelatie berekend van de reistijden op basis van de gereduceerde dataset met de werkelijke reistijden.
Figuur 13: Crosscorrelaties van de algoritmes met 2 ontbrekende detectorpunten We kunnen opmerken dat alle algoritmes een lagere crosscorrelatie vertonen met de reële waarden. Dit kan mogelijk verklaard worden doordat de berekende reistijden steeds grotere verschillen zullen vertonen ten opzichte van de werkelijke reistijden. Dit blijkt ook uit de berekening van de RMSE-waarden die volgt. Voor beide situaties (1 en 2 detectorpunten ontbrekend) worden in de volgende tabel de gevonden waarden voor de RMSE weergegeven samen met de oorspronkelijke resultaten.

24
Algoritme RMSE Origineel 1 ontbrekende
detector 2 ontbrekende
detectoren CTA 43,8 46,4 54,1
Helbingfilter dubbelzijdig (trajectorie)
54,9 56,7 53,9
Helbingfilter enkelzijdig (trajectorie)
53,1 53,8 62,7
Helbingfilter enkelzijdig (instantaan)
186,2 203,9 153,9
Gegevens met lpf-filter CTA 41,3 44,6 49,2
Helbingfilter dubbelzijdig (trajectorie)
52,5 55,7 51,3
Helbingfilter enkelzijdig (trajectorie)
52,9 53,2 59,3
Helbingfilter enkelzijdig (instantaan)
189,4 206,5 157,7
Verschoven volgens x-as CTA 43,8 46,4 54,1
Helbingfilter dubbelzijdig (trajectorie)
54,9 54,3 51,5
Helbingfilter enkelzijdig (trajectorie)
53,1 53,8 62,7
Helbingfilter enkelzijdig (instantaan)
185,7 203,9 153,9
Tabel 5: RMSE-waarden voor de verschillende algoritmes op basis van alle beschikbare meetgegevens, 1 weggelaten detector en 2 weggelaten detectoren
Er kan opgemerkt worden dat de kwaliteit van de verschillende algoritmes achteruit gaat wanneer er detectorpunten uitvallen. De dubbelzijdige helbingfilter ondervindt een minder grote invloed van twee ontbrekende detectoren dan de drie andere algoritmes. De reden waarom de instantane filter plots beter wordt, is mogelijk te verklaren doordat op dat moment meetlus 4 uitgeschakeld wordt. Deze meet de file die terugslaat van de oprit Wommelgem (vooral tussen 7 en 9u). De file wordt uitgesmeerd door de filter, en de instantane berekening zorgt voor een foute

25
opstapeling van reistijden. Deze fout wordt veel minder gemaakt wanneer de file aan de oprit niet meer geregistreerd wordt, en dit is ook te zien op de XT-plot gebaseerd op gegevens zonder meetlussen 4 en 5 (zie onderstaande figuur). Doordat de filegolven in de tijdsperiode tussen 8u en 9u (minuut 480 en 540) elkaar snel opvolgen verkrijgt men foute resultaten bij een instantane reistijdberekening, aangezien deze dan twee (of zelfs drie) filegolven meeneemt in de berekening, waar bij trajectoriereistijden dit genuanceerd berekend wordt. Deze plotse hogere waarden voor de instantane berekening zijn duidelijk te zien op de figuren van de reistijden (zie figuur 9)
Figuur 14: XT-plot van snelheden uit de helbingfilter met meetlussen 4 en 5 weggelaten
3.6 Analyse van de resultaten Op onderstaande figuren (zie figuur 16 en 17) is te merken dat de reistijd bij het weglaten van meetlus 5 bijna systematisch hoger, waar deze bij het weglaten van meetlussen 4 en 5 bijna systematisch lager is. Dit fenomeen treedt op vanaf het moment dat er filegolven gevormd worden.

26
Figuur 15: XT-plot met detectorpunt 5 weggelaten Dit kan verklaard worden door te kijken naar de XT-plot (figuur 15 in vergelijking met figuur 8). Wanneer de eerste detector weggenomen wordt (kilometer 97,76), wordt alle informatie van meetlus 4 en 6 gebruikt om de weggevallen gegevens op te vullen. We kunnen opmerken in de XT-plot dat meetlus 4 veel grotere filezones opmeet, wat te verklaren is door zijn fysische locatie. Meetlus 4 bevindt zich net stroomopwaarts van de oprit Wommelgem, en zal daardoor als eerste te maken hebben met terugslaande files van de oprit die een bottleneck vormt ter plaatse. De over de tijd uitgesmeerde filezones zullen uitgerokken worden tot in het midden van het gebied tussen meetlus 4 en 6, en bijgevolg hogere reistijden opleveren. Wanneer ook de gegevens van een tweede detector (meetlus 4) weggelaten worden, gaan de gegevens over de bottleneck verloren en kan men opmerken dat reistijden veelal te laag worden ingeschat. Onderstaand is voor elk van de twee situaties de figuur weergegeven van de reële reistijden met de reistijden berekend met de verschillende algoritmes met respectievelijk een en twee ontbrekende detectorpunten.

27
Figuur 16: Reistijden voor de verschillende algoritmes bij het weglaten van meetlus 5
Figuur 17: Reistijden voor de verschillende algoritmes bij het weglaten van meetlussen 4 en 5
Een ander punt dat kan geverifieerd worden aan de hand van de bekomen resultaten, is de aanname dat de gegevens van de meetlussen de juiste waarden zijn, en dat de camerabeelden gegevens leveren die daarvan afwijken. Om dit te testen kan men een plot maken waarin men de berekende reistijden uitzet tegenover de reële reistijden. In principe zouden alle uitgezette punten op een 45-graden lijn moeten liggen. Wanneer de punten hoger liggen betekent dit dat de berekende reistijden hoger zijn dan de werkelijke, en dat de snelheden onderschat worden. Het resultaat voor de reistijden berekend met het CTA-algoritme en de reistijden op basis van de dubbelzijdige helbingfilter zijn te zien in onderstaande figuur. Op de x-as zijn de reële reistijden uitgezet, op de y-as staan de berekende reistijden voor de twee algoritmes. In magenta is de 45-graden lijn uitgezet. We zien dat beide algoritmes vrij goed de werkelijkheid benaderen, en dat er enkel bij hogere reistijden overschattingen van de reistijden (dus onderschattingen van de snelheden) optreden.

28
Figuur 18: Algoritme-reistijden uitgezet tov reële reistijden
4. Conclusie Wanneer alle detectorwaarden meegenomen worden in de berekening levert het CTA-algoritme op basis van de RMSE de beste resultaten op. Ook wanneer er meerdere detectorpunten ontbreken blijft dit het geval. In deze setting interpoleert de helbingfilter de ontbrekende data, terwijl het CTA-algoritme een gemiddelde snelheid berekent op basis van verkeerskundige parameters. De RMSE wordt dan wel zoals verwacht groter. De RMSE daalt wanneer de tijdsverschuiving, berekend op basis van de crosscorrelatie, toegepast wordt. Deze tijdsverschuiving is echter enkel aanwezig bij de instantane berekening van de reistijden. Ook wanneer de algoritmes vergeleken worden met de gefilterde waarden is er een daling van de RMSE, op uitzondering van het instantane algoritme. Op basis van bovenstaande analyse wordt ervoor gekozen om bij de verdere uitwerking van dit werk het CTA-algoritme te gebruiken.

29
Deel II: Variabiliteit van reistijden op de Antwerpse ring
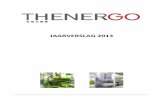
5. Berekening van routereistijden Vanuit het Vlaams Verkeerscentrum zijn cijfergegevens voor snelheid en intensiteit beschikbaar gesteld voor de periode tussen begin november 2007 en einde mei 2008. De dataset bevat snelheidsgegevens voor de volledige Antwerpse ring voor een tijdsduur van 207 dagen. Snelheden en intensiteiten zijn heel moeilijk te interpreteren, en het is een hele opdracht om dergelijke grote hoeveelheden data bevattelijk voor te stellen. Het eerder gevalideerde CTA-algoritme kan deze data omzetten in reistijden, welke makkelijker te interpreteren zijn. Deze reistijden zijn samengevat weergegeven voor alle donderdagen in onderstaande figuur.
Figuur 19: 30, 50, 70 en 90-percentielen voor een donderdag (traject: Antwerpen Noord – Antwerpen West)
De figuur is gebaseerd op de data van alle beschikbare donderdagen. Het geeft de reistijd weer voor het traject tussen Antwerpen Noord en Antwerpen West op de binnenring. In theorie zijn knooppunten op de Antwerpse ring gedefinieerd op één vaste fysische locatie, maar aangezien er soms grote verschillen bestaan tussen de op- en afrit, is de locatie van het samenvoegen in Antwerpen Noord en de opsplitsing in Antwerpen West exact bepaald. De afstand tussen beide knooppunten langs de binnenring is vastgelegd op 14,2 km. De keuze voor dit type traject is niet willekeurig gebeurd. Zo gebruikt het Vlaams Verkeerscentrum reeds geruime tijd deze knooppunten (verbindingen van de Antwerpse ring met andere snelwegen) om op hun website een indicatie te geven van de instantane reistijd voor verschillende trajecten. Ook is ondertussen een proefproject

30
opgestart om deze reistijden te tonen op de dynamische tekstborden die boven de invalswegen en de ring zelf hangen. Het traject dat hier weergegeven is, is het langst mogelijke traject op de binnenring, en omvat zowel het uivoegen richting Brussel via de E19 als de Kennedytunnel richting Gent. Figuur 19 geeft geen reistijdverloop voor bepaalde dagen. Men kan dus onmogelijk op basis van een real-time situatie in deze figuur aflezen wat het vervolg van de dag zal brengen. Eerst zijn de reistijden berekend voor alle 207 dagen waarvoor gegevens beschikbaar zijn met het CTA-algoritme. Vervolgens zijn deze 207 dagen opgesplitst volgens de dag van de week. Dit levert ongeveer 29 waarden op voor elke dag. Voor elk vertrektijdstip (elke minuut) tussen 6u en 22u worden nu deze 29 waarden gesorteerd naar toenemende reistijd. Vervolgens worden in deze gesorteerde lijst de verschillende percentielen berekend, wat er op neerkomt dat de reistijdwaarde die op plaats 0,3*29 komt geselecteerd wordt voor het dertigste percentiel. Dit wordt voor elk vertrektijdstip en voor de verschillende percentielen gedaan. Men moet de figuur dus als volgt interpreteren: voor elk vertrektijdstip kan men op de verticale as de reistijd voor het hele traject aflezen die met een kans kleiner of gelijk aan de bijhorende percentielwaarde bereikt zal worden. Door de weergave aan de hand van de verschillende percentielen kan er snel gekeken worden wat de betrouwbaarheid van de reistijd op een bepaald ogenblik is. Hoe groter de afstand tussen twee percentielen, hoe groter de variabiliteit van de reistijd op dat moment. Voor het negentigste percentiel is een grotere afwijking normaal, aangezien de kans dat een ongeval zich voordoet in dit percentiel veel groter is. Om de variabiliteit tussen verschillende dagen te bestuderen, worden de grafieken van verschillende dagen weergegeven:
Figuur 20: Reistijdpercentielen voor maandag

31
Figuur 21: Reistijdpercentielen voor dinsdag
Figure 22: Reistijdpercentielen voor woensdag
Figure 23: Reistijdpercentielen voor donderdag

32
Figuur 24: Reistijdpercentielen voor vrijdag
Op deze verschillende figuren zijn enkele tendensen te merken. Zo valt duidelijk de namiddagpiek op bij de woensdag in het 70ste percentiel. Dit is ongetwijfeld eigen aan de vrije woensdagnamiddag voor scholieren. Ook de avondspits op vrijdag die merkelijk vroeger begint in alle percentielen is duidelijk op te merken. Dit was te verwachten aangezien heel wat werknemers op vrijdag in de namiddag hun werkdag vroeger beëindigen. Dinsdagavond blijkt de zwaarste avondspits te zijn, terwijl de ochtendspits veelal gelijk blijft gedurende de week. Enkel op vrijdag komt de ochtendspits later op gang. Dit zijn slechts intuïtieve opmerkingen die gebaseerd zijn op het bekijken van de grafieken. Bovendien moet men ermee rekening houden dat dit geen reistijdverlopen zijn, maar variabiliteiten op elke minuut zoals hoger vermeld. Om wiskundig te kunnen nagaan of het reistijdverloop op bepaalde dagen een bepaald patroon vertoont dat anders is dan op andere dagen, gebruiken we een clusteralgoritme op basis van correlaties.
6. Clustering van reistijden In het verleden zijn reeds meerdere pogingen gedaan om clustering van weekdagen uit te voeren op basis van verschillende variabelen zoals snelheid en intensiteit. Men is er tot nu toe niet in geslaagd om dagen te clusteren op basis van deze variabelen. Nu we binnen dit werk beschikken over reistijden (die alle mogelijke variabelen integreren), willen we nagaan of deze wel aanleiding geven tot het clusteren van bepaalde weekdagen. Denken we maar aan de vroeg beginnende avondspits die kenmerkend lijkt te zijn voor vrijdagen, of de uitgebreidere middagpiek op woensdagen.

33
Om de mogelijke clustering te kunnen uitvoeren, dienen we de correlatiematrix op te stellen van de reistijd gedurende de dag voor de verschillende dagen [10]. Om te vermijden dat uitzonderlijke incidenten een vertekening van de correlatiematrix met zich mee zouden brengen, worden dagen waarop de reistijd oploopt tot een waarde boven de 100 minuten weggelaten. We willen immers niet weten of dagen met ongevallen gecorreleerd zijn, maar we zijn op zoek naar correlaties tussen normale dagen. De correlatiematrix is verkregen door de matrix met de reistijden te vermenigvuldigen met zijn getransponeeerde, en in dit resultaat de kolommen te normaliseren. Op de correlatiematrix voeren we een singuliere waarden analyse uit. We kunnen dan de eigenwaarden aflezen en de eigenvectoren zijn eveneens bepaald. De eerste eigenvectoren behoren bij de grootste eigenwaarden, waardoor het volstaat om de verschillende reistijdverlopen te projecteren op deze eerste eigenvectoren, en deze projecties grafisch tegen elkaar uit te zetten om de overeenkomsten te bepalen tussen de reistijdverlopen voor de verschillende dagen (zie figuur 20). We kunnen dan nadien een dendrogram opstellen dat dagen clustert die in de grafische voorstelling kort bij elkaar liggen.
Figuur 25: Projectie van reistijden op de eerste twee basisvectoren van de correlatiematrix
In bovenstaande figuur is het traject Antwerpen Noord-Antwerpen West gebruikt. De singuliere waarden analyse is uitgevoerd op de correlatiematrix, waarna de reistijdverlopen voor de verschillende dagen geprojecteerd zijn op de eerste twee basisvectoren. In de figuur is op de x-as de projectie op de eerste basisvector uitgezet, en op de y-as de projectie op de tweede basisvector. We merken nog steeds een grote verspreiding van de punten op, maar zien tegelijk een geconcentreerde vlek linksonder. Inzoomen op deze vlek geeft volgende figuur:

34
Figuur 26: Zoom op de geconcentreerde waarden Door de dag van de week te plotten als label bij elk punt, slagen we erin om te achterhalen welke dagen bij elkaar gebundeld liggen. Het zijn vooral zaterdagen en zondagen die in deze vlek geconcentreerd zijn. Er zijn echter wel enkele uitzonderingen, waarbij we zeker drie maandagen en twee dinsdagen kunnen opmerken. Wanneer we dan het rijnummer van die dag plotten als label, kunnen we aan de hand van de kalender opzoeken of deze dagen eventueel uitzonderlijke momenten voorstelden. Na enig onderzoek blijkt dat deze dagen 24 december, kerstmis, oudjaar, nieuwjaar en paasmaandag zijn. We kunnen dus besluiten dat deze dagen overeenkomen met weekenddagen. Om na te gaan in hoeverre deze grafisch op te merken bundeling ook met berekeningen aan te tonen zijn, dienen we een clustering te maken van deze punten. We kunnen hiervoor een dendrogram opstellen, dat een minimalisatie maakt van de afstand tussen punten binnen een cluster, en de afstand tussen verschillende clusters maximaliseert. De verticale verbindingslijnen geven een maat weer voor de afstand tussen twee clusters. Wanneer we dit uitvoeren voor de bovenstaande setting krijgen we onderstaande grafiek (figuur 27). Wanneer meerdere dagen geclusterd zijn, staat op de horizontale as een getal, wanneer dagen apart gehouden worden staat onderaan de eerste letter van de dag. We zien op de figuur dat er enkele dagen niet geclusterd worden, en dat de afstand tussen de verschillende clusters die wel bestaan uit geclusterde dagen eerder beperkt is. We kunnen dus geen onderscheid maken tussen verschillende dagen, ook al lijkt dit in eerste instantie op figuur 25 wel zo te zijn.

35
Figuur 27: Dendrogram voor reistijden voor het traject Antwerpen Noord-West Een tweede analyse wordt gemaakt op basis van de avondspits tussen 14u10 en 20u10. Dezelfde analyse wordt gemaakt als boven beschreven. Er ontstaat opnieuw een geconcentreerde wolk voor de zaterdagen, zondagen en feestdagen, maar de spreiding van de andere dagen gebeurt gelijkmatiger (figuur 28), daar waar in figuur 25 een staart richting rechtsboven te zien is.
Figuur 28: Projectie op basisvectoren van de reistijden gedurende de avondspits Als we van deze data een dendrogram maken, wordt de hoogste top van het dendrogram een pak lager, maar de afstanden tussen de verschillende clusters blijft wel in dezelfde grootte-orde. Enig onderzoek levert hier wel op dat alle dagen uit de geconcentreerde wolk zich bevinden in cluster nummer 3, ongeveer midden in het dendrogram. De afstand die dit cluster vertoont met de andere clusters blijkt echter niet noemenswaardig groter, zodat ook hier de intuïtieve aanname verworpen wordt.

36
Figuur 29: Dendrogram voor de reistijden uit de avondspits In een derde case worden er drie verschillende trajecten voor dezelfde dag samen genomen, om na te gaan of er eventueel op die manier onderscheid kan gemaakt worden tussen de verschillende dagen. Dit levert eveneens geen bruikbare resultaten op. De punten liggen nog meer geconcentreerd bij elkaar. Dit is ook te zien in het bijbehorende dendrogram (zie figuur 30).
Figuur 30: Projectie op basisvectoren en dendrogram

37
Conclusie In deze tekst is de dataset verwerkt die beschikbaar is van de ring van Antwerpen
voor de periode van november 2007 tot en met mei 2008. Uit de beeldgegevens van
de dataset zijn reële reistijden gehaald, die gebruikt zijn om enkele reistijdalgoritmes
te evalueren, die nog eerst moesten geïmplementeerd worden. De cijfergegevens die
verzameld werden in de beschouwde periode zijn verwerkt tot geschikte invoer voor
de algoritmes. In dit werk zijn vier verschillende algoritmes met elkaar vergeleken
met behulp van de RMSE. Bovendien is de maximale crosscorrelatie berekend en is
de robuustheid van elk algoritme nagegaan door het effect te meten van ontbrekende
detectorlocaties. Uit de evaluatie van de algoritmes bleek dat de reistijden berekend
met het CTA-algoritme het beste aanleunen bij de werkelijkheid.
Vervolgens is met behulp van dit gekozen algoritme de reistijd berekend voor alle
dagen waarvoor voldoende meetgegevens beschikbaar zijn. Om deze overzichtelijk te
kunnen voorstellen, zijn voor elke dag van de week en voor elk vertrektijdstip de
percentielwaarden uitgezet. Uit de figuren van deze reistijden blijkt dat er sterke
verschillen bestaan tussen verschillende dagen.
Om deze verschillen tussen dagen en/of gelijkenissen binnen dezelfde dag te kunnen
kwantificeren is gebruik gemaakt van een clusteringsalgoritme. Ondanks onderzoek
bij verschillende cases, waarbij selecties zowel in tijdsinterval als in trajecten werden
gemaakt, lijkt er nergens een kwantificeerbaar verschil te zijn tussen verschillende
dagen. Het lijkt echter overdreven om te besluiten dat een eventuele clustering
onmogelijk is. Dit werk kan dan ook een eerste aanzet vormen tot verder onderzoek
naar mogelijke clustering op basis van reistijden.

38
Bibliografie [1] KU Leuven, faculteit Ingenieurswetenschappen, departement Bouwkunde, afdeling Verkeerskunde, Systematic Bias: AID vs Loops [2] Van Wijnendaele T. (2005), Analyse en interpretatie van verkeersdata: een tijdreeksanalyse. [3] Treiber M. & Helbing D. (2002), Reconstructing the Spatio-Temporal Traffic Dynamics from Stationary Detector Data, Coop. Tr@nspn. Dyn. 1, 3.1–3.24. [4] Tampère C. (2006), Werkpakket 1: Inventarisatie variabiliteit vraag, aanbod en afwikkeling, Onderzoek kwetsbaarheid wegvakken en robuustheid netwerk [5] Coifman B. (2002). Estimating travel times and vehicle tra jectories on freeways using dual loop detectors. Transportation Research A, 36A(4):351–364. [6] Maybeck P. (1979), Stochastic models, estimation, and control, Volume 1, Academic Press, Inc. [8] Bovy P. & Thijs R. (2000), Estimators of travel time for road networks, Delft University of Technology, 225-245 [9] Tool O.G.P., Bokma J.R. & Hoogendoorn S.P. (2006), 80, niet altijd prachtig?, Colloquium Vervoersplanologisch Speurwerk 2006. [10] Jolliffe I.T.(2002), Principal Component Analysis – Second Edition, Springer – Verlag New York, 1-59