Project report › ORIG › FJ1 › EBNN › KAMI74IL › ... · 2020-05-25 · Université Libre...
22
Université Libre de Bruxelles PROJ-H421 - Projet polydaire Project report Supervisor : Simon-Pierre GORZA Client-professor : Marie ANTOUN Jean KIMUS Simon SCHIFFMANN Anthony VAN BOURGOGNE texte en couleur 25 mai 2020
Transcript of Project report › ORIG › FJ1 › EBNN › KAMI74IL › ... · 2020-05-25 · Université Libre...

Université Libre de Bruxelles
PROJ-H421 - Projet polydaire
Project report
Supervisor : Simon-Pierre GORZAClient-professor : Marie ANTOUN
Jean KIMUSSimon SCHIFFMANNAnthony VAN BOURGOGNE
texte en couleur25 mai 2020

Table des matières
1 Proposal 21.1 Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Basic needs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2.2 Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.3 Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.4 Ergonomic design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.5 Portability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.6 Durability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2.7 Pedagogical aspects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Morphological chart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Safety analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Elaboration plan 52.1 Modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Mathematical model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.1.2 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.3 Realisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Rotating platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.1 Mathematical model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.2 Motor torque consideration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.3 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2.4 Moment of inertia of the platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2.5 Realisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2.6 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Electronic components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4 Code implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Lesson proceeding and pedagogical supports 183.1 Basic needs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2 Road safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3 Originality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.4 Portfolio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Improvements 18
A Measurement data 20A.1 The modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
i

Introduction
The science learning during the years of secondary school may seem troublesome for students, and the lack ofexperimental equipment makes the teaching even more difficult. Actually, an input of new supports to the physicstheory instruction could help the students to better apprehend the concepts, and also lead to a great deal of interestto this discipline. With this in mind, the Polydaire project intends to offer opportunities for the students to look atscience through a new prism, and to propose to the teachers a different way to approach some theoretical concepts.
In this report we will present the different aspects of the Polydaire project of the year 2019-2020, consisting inthe conception and the construction on an experimental device able to be used and understood in a secondary schoolclass and dedicated to the illustration of the friction forces, the Uniform Circular Motion (UCM) and their concreteapplication to an aspect of road safety (in our case : the road holding of a car in a road bend). This documentbegins with a summary of the proposal, where are introduced the different requirements for the prototype and thecorresponding solutions. Thereafter is presented our elaboration plan, i.e. the steps of fabrication of the prototype.Afterwards the pedagogical aspects of the project are reviewed. Finally a section is related to the possible futureimprovements to the project.
1

1 Proposal
In this first section are presented :
1. The specifications needed for the experiment. They ensue from an interview with the client-professor, MarieAntoun.
2. The solutions chosen to fulfil all of the conditions.3. A Morphological chart that synthesises the two first points.4. An analysis of the safety issues.
1.1 Requirements
This year, the aim of the project is the construction of an experimental device that illustrates the friction forcesand the uniform circular motion. The requirements are hereunder divided in two categories :
— Technical and experimental requirements— Pedagogical requirements
1. Technical requirements :
* Basic need : The device must illustrate the concepts of friction forces and uniform circular motion.* Parameters : The user should be able to change the parameters of the device, in order to run the
experiments.* Vehicle : For now the students’ background is limited to the mechanics of the point. The experimental
design should therefore be modelisable with a rather simple point-dynamic model.* Ergonomic design : An untrained user (such as secondary school students) should be able to completesuccessfully the experiments.
* Portability : The apparatus should be portable and easy to carry from one classroom to another one.* Safety : The experiment should be safe for the students and for the teacher.* Durability : The risks of fatigue break and erosion by friction should be minimised.* Execution plan : An execution plan, containing the technical plans, crafting and assembly instructionsand a user guide, is required.
2. For the pedagogical aspect :
* Basic need : The aim of the session is to handle with the concepts of friction forces and UCM with anexperimental perspective.
* Road safety : The experiments must illustrate at least one aspect of road safety.* Originality : This course needs to be an opportunity for the students to approach some concepts of their
physics lessons with a point of view different from the usual one.* Portfolio : A pedagogical support is required for the students and for the professor. Those supportsshould improve the structure and the organisation of the session.
* Evaluation : The teacher can chose to evaluate his students at the end of the session. Therefore aprototype of test must be written.
1.2 Solutions
1.2.1 Basic needs
For those requirements two different devices have been conceptualized :
2

• Friction forces : The way of illustrating this concept has been very quickly decided : the students willmeasure different static friction coefficients with the help of an experimental device. The simplest way tomake this kind of measurements is to put a mobile (that will be called vehicle in the rest of this report) ona surface with a variable angle of inclination, gradually increase this angle and note the value at which thevehicle starts to slip. The µ coefficient can thereafter be deduced with a simple point-dynamic formula :
µ = tan θ (1)
(see the section 2.1.1). We will call the experiment that measures the static friction coefficients the staticexperiment.• Uniform circular motion : In order to illustrate the concept of circular motion, it is a necessity to put
a vehicle in rotation. As we will see later, the vehicle needs to move radially freely. To do that, differentsolutions have been considered :— vehicle in rotation : the first, and most natural, idea is to simply put a small vehicle in rotation on a fixed
circular path. We would then need to attach this vehicle to a central axis with a deformable rod (such asa spring), to allow radial motion, and to observe centripetal acceleration.
— Platform in rotation : another approach, nearly equivalent on the point-mechanical point of view (theonly difference resting on the motion of the vehicle in the direction of its motion relatively to the surfaceon which it rests), is to place the vehicle on a rotating platform. In the reference frame of the vehicle, theplatform is then fixed, and the vehicle undergoes a centrifugal acceleration.
Among those two solutions, the second one has been chosen for the reasons summarized in the followongtable :
vehicle in rotation platform in rotationneeded driving forces Low torque : the motor puts
the vehicle (∼ 100g) in rotationHigh torque : the motor puts theplatform (∼ 1kg) in rotation
manufacturing issues Many : mechanical coupling bet-ween the motor and the spring,traction of the vehicle
Few : mechanical coupling bet-ween a motor and a platform
experimental accessibility Bad : Initial conditions hard tosettle, bad reproducibility
Good : easy initial conditions se-tup, good reproducibility
theoretical model Simple : very analogous to rea-lity
Hard : the model is the same, butit is less intuitive, less close to thereal situation
Table 1 – Comparative table between the two rotation system possibilities
In the end, the experimental and manufacture advantages are far more important than the few pedagogicaland driving force issues. It has therefore been decided to build a 60cm rotating platform. This dimension isa satisfactory compromise between the feasibility (a too large device makes it difficult to build and control)and the visibility (in front of the class, the experiment must be seen by everyone).This second part of the experiments will be called the rotating experiment in the rest of this report.
1.2.2 Parameters
An experiment consists in the modifying of one or several parameters and in the observing of the impact ofthese parameters on the values that are measured. In our case, as we have already seen in the first paragraph, thevalue that is looked at is the moment when the vehicle begins to slip (because of either the gravity force or thecentrifugal acceleration). We have therefore listed the different parameters that could be modified :
• Static experiment : The measure of the inclination angle of some surface is enough to characterize thissurface’s static friction coefficient with the vehicle.• Rotating experiment : The equations of UCM shows that the radial distance, the rotation speed and the
inclination angle of the surface play a role in the determination of the moment when the vehicle begins toslip.
For the first part of the experiment, a direct solution is the building of several devices (called modules in therest of this report) made of different materials (PVC, wood, rubber, aluminium, ...) to offer surfaces with different
3

friction coefficients, as well as the possibility to gradually increase the angle of inclination of these surfaces. Thisidea has been followed.
For the second part, two different ideas were proposed :
— Building of different rotating plates, each one offering a different type of surface and a different angle ofinclination for the vehicle
— Building of one single horizontal platform, on which the modules presented above could be fixed
The second option has been chosen to respond to the portability requirement and to reduce the amount ofconstructions.
1.2.3 Vehicle
The vehicle used here has to fulfill the following requirements :
— Be modelisable with a simple point-dynamic model— Be ideally representative of real road safety situations
Two solutions have been considered : auto toy or parallelepiped volume. Those two solutions are compared inthe next table.
Auto toy Parallelepiped volumeexperimental reproductibility Bad : hazardous contact points
between the vehicle and the sur-face
Good : uniform contact with thesurface
visualisation of analogous real si-tuations
Good : the auto toy has theshape of a real car
Bad : the analogy is less evident
feasability Good Goodexperimental issues Many : the fixed shape of the car
models does not allow many re-productibility optimisations (lo-wering of the gravity center, ...)
Few : This shape allows manymore reproductibility optimisa-tions (nearly arbitrary shape)
Table 2 – Comparative table between the two vehicle options
Despite the obvious advantages of the second solution, the first one has been chosen. The most important pointseemed to be the visual aspect.
As we can easily show with the equations of point dynamics, the angle of slipping, as the limit speed of rotation,are both independent from the mass of the vehicle. But this brings a potentially interesting feature of the experiment :the measure of the non-impact of the vehicle mass on those values. Therefore two vehicles with two different massescould be used for the experiments.
1.2.4 Ergonomic design
The ease of use expected requires a limitation of external actions needed to run the experiment (use of acomputer interface, electronic modifications, ...). Therefore the angles of inclination and rotation speed should beeasily controllable by any new user. The control of rotation speed should be achievable with the help of an analogiccontroller, such as a potentiometer. This speed should be visible on a display screen. To ease the starting of thedevice, all of the electric energy required should be provided by a simple plug.
1.2.5 Portability
To meet this need, one proposition is to build the whole experimental setup contained into one larger box, sothat every components can lie into this containing at the end of the experiment. An other idea is to create a suitcaseto place the setup once it is dismounted. The first idea, far more ergonomic, as it does not need any assembly bythe user, has been opted for.
4

1.2.6 Durability
Since the forces necessary to bring the device to the needed conditions are weak, no durability issues have turnedup during this project.
1.2.7 Pedagogical aspects
The pedagogical needs have already been partially discussed in the previous subsections. The rest of those pointswill be presented in section 3.
1.3 Morphological chart
The following chart contains the proposition, and in bold the solution chosen.
Needs PropositionsRotation Vehicle in rotation, fixed track Track in rotationParameters Different rotating plates Different modulesVehicle Auto toy Other volumePortability Setup build into a box Removable components and suitcase
1.4 Safety analysis
A few safety issues have been treated :— Risk of electrocution— Risks linked to the rotating platformFor the first one, every naked wire has been encapsulated into the box. The only wire to which the external user
has access is the power supply wire. This will prevent any possible electrocution.
For the second one, a plexiglas wall all around the device has been considered. But since the forces involved inthis project are weak, this wall has not been built. Safety instruction for students with long hair will be stated.
2 Elaboration plan
In this section we describe the different steps of the realisation of the devices described in the proposal.
2.1 Modules
The modules are relatively simple devices. They consist in a surface, made of a specific material, fixed on asupport with a hinge.
2.1.1 Mathematical model
The mathematical model of the modules is very simple and can be detailed with the students during the session.It is based on the following forces diagram :
5

Figure 1 – Forces diagram of the situation in the static experiment
The forces are decomposed in parallel and perpendicular components. The balance of the parallel forces at thelimit of the Coulomb law (i.e. when Ff = µN) gives :
mg sin θ = µmg cos θ (2)
Isolating the friction coefficient, we obtain :µ = tan θ (3)
2.1.2 Design
The full 3D plan of this device is visible on the following figure.
Figure 2 – 3D plan of the modules
6

A detailed exploded view is shown below :
Figure 3 – Exploded view of the modules
Here are the detailed functions of every piece :1. The lower plate, supporting the rest of the device2. The hinge, allowing the rotation of the upper plate3. The upper plate, offering a specific surface on which the vehicle can be disposed4. The support piece, keeping the upper plate at a minimum inclination angle of 0
5. The angle measurement piece, offering an easy way to measure the inclination angle at every moment6. The Angle measurement piece support, allowing the easy fixing and removing of the previously mentioned
piece to the lower plate7. The L’s, stuck to the angle measurement piece, supporting it when they are inserted in the angle measurement
piece support8. The block support piece, ensuring the fixing of an angle-blocking piece that fixes the angle of inclination at a
certain value (see figure 4).9. The car blocking piece, ensuring that the car does not slip away from the platform during the experiment
2.1.3 Realisation
The lower plate is a plexiglas plate of 5mm thick, cut with a jigsaw. The upper plate is made of a differentmaterial for every module. Therefore its thickness may vary by a few millimeters.
The pieces 4 and 9 have simply been cut in plexiglas rods.
The pieces 5, 6, 7 and 8 have been 3D designed and printed with a Anycubic Photon S printer, using SLA resin.
As described in the first section of this report, those modules are also compatible with the rotating device. Theyare therefore attachable to the platform. The rotating experiment also requires the possibility for the modules tobe blocked in a specific angle. In order to do that, specifically designed blocks can be placed between the two slabs(cf. figure 4).
7

Figure 4 – A plexiglas module, with the blocking piece maintaining it at an inclination angle of 20
2.1.4 Results
The different selected coatings are plexiglas, rubber, aluminum and PVC. Those materials have been chosen fortheir accessibility and the fact that they offer significatively different friction coefficients. The measures obtainedwith the final devices are summarized in the table below.
Material µexp Standard deviationPlexiglas 0.64 0.048Rubber 0.79 0.032
Aluminium 0.50 0.031PVC 0.61 0.016
Table 3 – Friction coefficients µ obtained with the different modules (the whole data are visible in the appendixA.1)
2.2 Rotating platform
2.2.1 Mathematical model
As presented in the section 1 of this report, the rotating experiment consists in the fixing of the modules on arotating platform, the gradual increasing of its angular speed and the observation of the slipping conditions. Thescheme below illustrates the general situation of an inclined module rotating on the platform :
8

Figure 5 – Forces diagram of the rotating vehicle on a inclined surface, in the reference frame of the vehicle (thisnon inertial reference frame induces the presence of a "centrifugal force" Fc)
where m is the mass of the vehicle, θ the angle of inclination of the module, R the distance between the centerof mass of the vehicle and the axis of rotation, N the total normal force and ω the angular speed of rotation (inrad/s). Here the forces are, as previously, projected on the parallel and on the perpendicular axes, and we willassume that our vehicle is modelisable with a point-dynamic model.
The Coulomb law Ff ≤ µN restricts the maximal value of the friction force. At the limit Ff = µN , the forcesbalance on the direction parallel to the surface gives :
µN +mg sin θ = mω2limR cos θ
⇐⇒µ(mg cos θ +mω2
limR sin θ) +mg sin θ = mω2limR cos θ
Therefore the angular speed at the sliding limit is given by :
ω2lim =
µg cos θ + g sin θ
R cos θ − µR sin θ⇐⇒
ω2lim =
µg
R
cos θ + sin θµ
cos θ − µ sin θ⇐⇒
ωlim =
õg
R
cos θ + sin θµ
cos θ − µ sin θ
Note that if the inclination angle is zero, this formula gives the simple value :
ωlim =
õg
R
2.2.2 Motor torque consideration
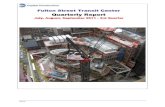
In order to estimate a maximum and a minimum for the angular speed, extreme values for the parameters areused. The friction coefficients are included between 0.5 (for aluminium coating) and 0.8 (for rubber coating), theradius should be fixed at 20cm and the surface inclination is comprised between 0 and 30. The graphs below showthe value of the limit angular speed for those conditions.
9

Figure 6 – Angular speed evolution with the incli-nation angle and R = 0.2m, µ = 0.5.
Figure 7 – Angular speed evolution with the incli-nation angle and R = 0.2m, µ = 0.8.
Based on this estimation, the highest angular speed reached would be 12rad/s and the lowest would be 5rad/s.Therefore the required torque can also be bounded, using mechanics theory of the inertia moment. The equationthat links the torque and the moment of inertia can take the following form :
C = J · dωdt
Where C is the torque applied (in Nm), J the moment of inertia of the rotating platform (expressed in kg ·m2)and dω
dt is the angular acceleration (in rad/s2). This acceleration will be assumed as a constant, so that at the startof the motor the torque can be expressed as :
C = J · ω∆t′
(4)
With ∆t′ the time to reach the angular speed ω. In our case, the value of the moment of inertia J can be approachedby : J = 0.171Nms2 (the computation of this value is detailed in the section 2.2.4) .
The maximal torque delivered by the motor is given by its technical data sheet, and it is about 0.5Nm. Hencethe time to reach the maximal angular speed would be :
∆t′ =J · ωC
=0.171 · 12
0.5= 4.10s
Consequently, the torque delivered by the motor should be sufficient. Nevertheless in order to to keep thepossibility to multiply the torque, and also to absorb transverse efforts, a belt and pulley system has been chosen(see the next section).
2.2.3 Design
Preliminary comments
In order to make the platform rotate, a stepper motor has been chosen, for it allows us to directly control themotor speed, in open loop, by specific signals, easily configurable by an Arduino board. As speed is one of the mainparameters of the experiments, this feature is very useful.
The large platform rotation entails several issues. Two of them have been highlighted : the stability and thefriction forces.
A disequilibrium of the mass distribution on the platform could introduce transverse effort on the axis. In orderto firstly reduce this effort and secondly to accommodate any transverse load, complementary solutions have beenproposed. Under the platform, universal roulettes have been placed to reduce a possible loss of balance of theplatform (see figure 8).
10

Figure 8 – Universal roulette
Furthermore, a belt and pulley system is used to prevent any damage in case of misalignment between the axesof the platform and the motor (see the end of this section and figure 12).
Different sites of the device are particularly subject to friction. Firstly the embedding of the platform axis intothe connection piece will be done with the use of a ball bearing to reduce possible friction between the metals.Secondly the wheels may induce erosion on the platform through friction. To prevent damages, a rubber band willbe placed under the platform, along the roulettes trajectory.
The full 3D design of this device is shown on the following figure.
Figure 9 – 3D view of the assembled box and rotating platform
The two U shapes on the platform are the places where the modules can be fixed.
A detailed 3D design exploded view can be seen below :
11

Figure 10 – Exploded view of the rotating device (the content of the red rectangle is zoomed at on the figure 11)
Figure 11 – Zoom on an exploded view of the rotating device (without the platform)
Here are the detailed functions of every piece :1. The box supporting the rotating platform and protecting the electronic components and the motor. It is
made of wood to ensure robustness, portability and lightness. One of the faces is removable, in order to givean easy access to the motor and electronic devices.
12

2. The threaded rods framing the stepper motor in its support and squeezing the superior slab of aluminiumabove the motor.
3. The motor support keeping the motor in place, fixed to inferior face of the box.4. An aluminium slab compressing the motor, absorbing heat and limiting the vibrations of the motor.5. The axis transmitting the torque to the platform. It has been knurled at the base (for a better grip with the
belt), squeezed in a ball bearing at its center, and threaded at the top (to compress the platform).6. The superior side of the box supporting the rotating platform and receiving the upper pieces.7. The rotating platform lying on the support piece and maintained by the locking piece. This platform is a
plexiglas disk on which two frames have been glued to receive modules.8. The connection piece clamping the bearing of the axis through three screws in order to limit the transverse
efforts on the axis. It is fixed to the superior side of the box.9. The ball bearing 1 tightening the axis. It is placed into the connection piece, and provides maintain to the
axis while reducing the friction.10. The support piece fixed to the axis through two tightening screws. The rotating platform is placed on it.11. The locking piece squeezing the rotating platform on the support piece, by the use of a screw clamped through
the axis.
Complementary comment on the belt and pulley system
As explained above in this section, the installation a of belt and pulley system has two main interests : firstly thepossible increasing of the torque delivered to the axis, and secondly the absence of misalignment problems betweenthe axis and the motor shaft.
Figure 12 – Image of the transmission system
The system is shown on the figure 12, and consists in :1. A pulley GT2 of 9mm width, fixed on the motor shaft.2. A tensioner that stretches the belt during the experiment. It is composed of small bearings stacked on a
screw and supported by a metallic bar fixed to one of the motor support rods. This whole system can beclamped by a nut at the adequate position.
3. A belt that should be adapted to pulley, in this case a GT2 belt of 6mm width.4. A knurling on the platform axis to provide better grip.
1. Bearing reference : 62-22-2RS-SKF
13

2.2.4 Moment of inertia of the platform
In order to compute this moment of inertia, we can model the platform as a perfect plexiglas cylinder (ρ =1.18g/cm3) with two rectangular parallelepipeds (also considered as pure plexiglas) on its surface :
Figure 13 – Scheme of the platform with two modules attached to it
We will assume that the modules and the platform have a thickness of 1cm.
We can make use the three following formulas :— Moment of inertia of a cylinder :
Jcyl =1
2MR2 (5)
with M the mass and R the radius— Moment of inertia of a rectangular parallelepiped :
Jparall =M(L2 + l2)
12(6)
with M the mass and L and l respectively the length and the width of the parallelepiped— Steiner formula :
∆J = MD2 (7)
It gives the additional moment of inertia when we displace the center of mass of the solid from the symmetryaxes. Here we will assume that the center of inertia of the modules is 15cm away from the axis of rotation.
With the data detailed above, the total moment of inertia is :
Jtot =1
23.34× 0.32︸ ︷︷ ︸
Jcyl
+2× 0.354× (0.252 + 0.122)
12︸ ︷︷ ︸Jparall
+ 2× 0.354× 0.152︸ ︷︷ ︸∆J
= 0.171Nms2 (8)
2.2.5 Realisation
The pieces presented hereinabove have required different manufacturing processes.
The piece n3 was printed with a Anycubic Photon S printer, using SLA resin.
14

The wooden pieces were assembled through by gluing and by the use of nails and screws. The wood used for thefaces is MDF and the seven support parallelepipeds are in raw wood.
The pieces 5, 8, 10, and 11 have required the use of a lathe. They are put together by tightening or with clampingscrews (that are all M4 type).
The rotating platform in plexiglas was cut of using a milling machine, and the components on it are glued.
Figure 14 – Image of the complete experimental setup
2.2.6 Results
In order to estimate the accuracy of the mathematical models, tests have been run with the final device. Theresults are summarized in the table below :
Radius R [m] Surface Material angle θ [] ωlim,th [rot/s] ωlim,exp [rot/s] Difference (in %)0.22 PVC (µ = 0.61) 0 0.83 0.68 180.22 20 1.19 1.26 5.80.22 Plexiglas (µ = 0.64) 0 0.85 0.66 220.22 20 1.21 1.22 0.80.22 Rubber (µ = 0.79) 0 0.94 0.75 200.22 20 1.35 1.45 7.40.22 Aluminium (µ = 0.50) 0 0.75 0.65 130.22 20 1.09 1.12 2.8
Table 4 – Results obtained with the final prototype, with ωlim,th the theoretical value and ωlim,exp the experimentalone.
As we can see on this table, the results are quite accurate for the experiment with the inclined modules (errors of∼ 5%), but less accurate with the modules at 0 (errors of ∼ 20%). These differences can be due to several causes :
— The inaccuracy of the measurements of the static friction coefficients— The approximations made in the model (no air resistance, point mechanics, ...)— The hazardous contact between the wheels of the auto toy and the surface of the modules (more important
for small forces, which explains the difference between the errors in the flat situation, where the forces are
15

weaker, and the errors in the inclined one).However, despite those large errors of measurement, the qualitative interpretation of the results stays the same :
the smaller the friction coefficient is, the slower the auto can be driven before the lost of control.
2.3 Electronic components
As explained in a previous section, a stepper motor 2 has been selected . The common way to control it is the useof a specific driver 3. To allow an easy control of the rotation speed, a potentiometer of 10 kΩ of internal resistanceis added to the circuit.
The display used to indicate the rotation speed is an LCD screen with the reference LCM1602 4.
The external power supply delivers a 12 volts tension to the Arduino UNO board and the motor (through thedriver).
Both electronic circuits are quite simple, and are presented on the figures 15 and 16
Figure 15 – Schema of the Alimentation, the potentiometer and the stepper motor with its driver (source :https://www.makerguides.com/a4988-stepper-motor-driver-arduino-tutorial/)
2. datasheet on https://en.nanotec.com/products/366-st4118l0804-a/3. datasheet on https://www.datasheet4u.com/datasheet-pdf/Allegro/A4988/pdf.php?id=7884744. datasheet on https://www.datasheet4u.com/datasheet-pdf/ETC/LCM1602/pdf.php?id=866414
16

Figure 16 – Schema of the LCD display (source : https://www.mathworks.com/matlabcentral/fileexchange/72150-simulink-library-for-arduino-dht-sensor-and-lcd)
Figure 17 – Electronic in the box
2.4 Code implementation
The code implemented towards the Arduino is divided in three main sections :— The "intro", where the libraries are imported, the pins of the Arduino are defined and other constants are
added.— The second part is the setup() function. In these lines, the pins are initialised. That is to say, the pins are
set to input or output.— The last part is the loop(). It is in this part that the Arduino fulfils the functions or the actions required.An other function used is Moyenne() 5.It does a "moyenne glissante" with 100 values given by the potentiometer.
5. Related information on : https://arduino.blaisepascal.fr/lisser-un-signal-analogique/
17

It has been implemented because the potentiometer had inherent imprecision. When the potentiometer has togive a constant value, it gives a value that fluctuates a little. The function aims so to smooth the output of thepotentiometer.
The codes for the motor control and the values display are based on open-access programs found online. The mo-tor control code is based on this site : https://www.makerguides.com/a4988-stepper-motor-driver-arduino-tutorial/and on https://www.airspayce.com/mikem/arduino/AccelStepper/classAccelStepper.html.
The display code it is based on : http://www.carobot.cc/how-to/lcd-16x2-or-20x4-usage-guide/
The final version of the code, meant for the experiment has been uploaded online :
https://www.instructables.com/id/Polydaire-MCU/
3 Lesson proceeding and pedagogical supports
In this section are presented the solutions brought to the pedagogical needs presented in the section 1.
3.1 Basic needs
Those aspects have already been treated in the presentation of the device.
3.2 Road safety
The road safety feature that has been chosen is the road holding of a car in a bend, as mentioned in theintroduction. As it can be easily seen in the mathematical models, the different results are independent from themass of the vehicle. The results obtained during the session can therefore be translated to a real situation, with a1t car driven in a road bend, with exactly the same equations. This topic can be discussed with the class at the endof the session.
3.3 Originality
The devices developed and crafted in this project bring an original approach to the classical course’s one :— It gives the opportunity to the students to run experiments by themselves with the static experiment— It shows a real motion and its consequences in the rotating experiment
3.4 Portfolio
Two portfolios are needed to correctly run the experiment :— The Professor’s portfolio, that gives the instructions and the different steps of the session. It also provides
the complete mathematical models and schemas needed for the explanations.— The Student’s portfolio, that gives partial theoretical intros to the different experiments, and blank spaces
to fill with mathematical developments, experimental results, schemas and personal notes
4 Improvements
In this section are listed the different propositions made to improve the prototype and the experiment after theend of the project.
— Among the possible upgrades, one regarding the electronic circuit seems judicious because of its complexityof assembly for an untrained user. This is why an open-access design of the circuit on a PCB, compatiblewith the format of https://easyeda.com/ could be a great improvement.
18

— Another possible upgrade concerns the speed control precision. A speed sensor could be placed so that theactual speed of the platform would be displayed, and not the speed command of the motor (as it is the casefor now). A possible deviation from the speed instruction would then be instantaneously detected.
— Different vehicles with different masses could be proposed for the experiment, in order to observe the factthat the limit angles and speeds are effectively independent from the mass of the mobile.
— Of course, the more surfaces are proposed, the more varied and interesting the results are. Therefore thebuilding of new modules with particularly low friction coefficients (ex : teflon) would be an interestingadditional feature.
— The building of dedicated cases for the LCD screen and the potentiometer would make the display moreergonomic for the user.
— Having another power supply for the motor. In fact the 12V power supply is used to feed the arduino butalso the stepper motor. However the motor can receive 36V as maximum voltage, and greater the voltage is,greater the torque of the motor can be.
Conclusion
This report began with the presentation of the requirements settled by the client professor, and the conceptualsolutions brought to fulfill them, in the proposal section. Thereafter the elaboration plan, with a mathematicalmodel of each experiment, 3D design and choices of materials, realisation methods and experimental results arepresented. The different concerns about the simplifications of the models are also discussed there. At the end, a listof possible improvements of the prototype is presented.
This project offered different really interesting challenges. Firstly the pedagogical ones : the conceiving of ex-periments that illustrate as well as possible some aspects of a secondary school physics course and at the sametime that are modelisable and understandable by the students. Secondly the technical ones : the implementation ofideas in real life give rise to many issues that the builders have to face and solve. And finally the organisation ones.Especially this year, we have faced many organisational problems : not enough time and structure during the firstsemester, and a certain virus in the second one, limiting the access to technical facilities.
19

A Measurement data
A.1 The modules
For each modules, ten angles of slipping have been measured. The results are summarized in the tables below.
Plexiglas Measure of µplexi Aluminium Measure of µAl0.75 0.530.685 0.5050.63 0.490.64 0.470.56 0.470.61 0.480.65 0.5050.63 0.580.61 0.490.62 0.505
Mean value µplexi 0.639 Mean value µAl 0.503Standard deviation √σplexi 0.048 Standard deviation
√σAl 0.031
Table 5 – Experimental values of the static friction coefficients of the plexiglas and the aluminium coatings
Rubber Measure of µrubber PVC Measure of µPV C0.82 0.640.82 0.590.84 0.590.81 0.620.76 0.620.82 0.6050.76 0.620.755 0.6050.765 0.590.76 0.625
Mean value µrubber 0.791 Mean value µPV C 0.611Standard deviation
√σrubber 0.032 Standard deviation
√σPV C 0.016
Table 6 – Experimental values of the static friction coefficients of the rubber and the PVC coatings
20