Onderzoek naar een stalen frame voor een excitator opstelling · kracht van 11.000 FT kan leveren....
65
Onderzoek naar een stalen frame voor een excitator opstelling Citation for published version (APA): Velden, v.d., P. (1987). Onderzoek naar een stalen frame voor een excitator opstelling. (DCT rapporten; Vol. 1987.048). Eindhoven: Technische Universiteit Eindhoven. Document status and date: Gepubliceerd: 01/01/1987 Document Version: Uitgevers PDF, ook bekend als Version of Record Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal. If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, please follow below link for the End User Agreement: www.tue.nl/taverne Take down policy If you believe that this document breaches copyright please contact us at: [email protected] providing details and we will investigate your claim. Download date: 25. Feb. 2019
Transcript of Onderzoek naar een stalen frame voor een excitator opstelling · kracht van 11.000 FT kan leveren....
Onderzoek naar een stalen frame voor een excitatoropstellingCitation for published version (APA):Velden, v.d., P. (1987). Onderzoek naar een stalen frame voor een excitator opstelling. (DCT rapporten; Vol.1987.048). Eindhoven: Technische Universiteit Eindhoven.
Document status and date:Gepubliceerd: 01/01/1987
Document Version:Uitgevers PDF, ook bekend als Version of Record
Please check the document version of this publication:
• A submitted manuscript is the version of the article upon submission and before peer-review. There can beimportant differences between the submitted version and the official published version of record. Peopleinterested in the research are advised to contact the author for the final version of the publication, or visit theDOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and pagenumbers.Link to publication
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal.
If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, pleasefollow below link for the End User Agreement:
www.tue.nl/taverne
Take down policyIf you believe that this document breaches copyright please contact us at:
providing details and we will investigate your claim.
Download date: 25. Feb. 2019
Stagaix :
School :
!if;agepfaaZ;s :
StagehegeZeiBer :
Contact docent :
Eindhoven, juni 1987
Onderzoek naar een stalen frame
voor een excitator opstelling.
P. v . d. Velden
W.F.W. 87.048
I
P. v. d. Velden
H.T.S. werktuigbouwkunde
Techidsche Universiteit Eintthoven
Vakgroep der fundamentele werktuigbouwkunde
nlg. J2nsi
Dr. ir. Bootsma
SAMENVATTING
in het l a b o m t o r i m van de vükgroep fundamentele werktuigbouwkunde, op de T.U. in Eindhoven, worden vaak expirimenten verricht waarbij op een te on- derzoeken object een mechanische belûs . t ing noet áaordcn uitgevoerd. Het is de
bedoeling om voor het uitvoeren van dynamische experimenten een opstelling te maken. Onderzocht is of het n o g e l i j k is deze i r p s t e l l i n g vabi staal te naken a
De generatie van de trilllagen geschiedt m.b.v. een "excitator". De exci- t.ator i s reeds aanwezig op de T.U. en is een hydraulische, die maximaal eel?, kracht van 11.000 FT kan leveren. Voor deze excitator moet nog een frame ge- maakt worden, da.t aan de volgende eisen voldoet t
1 De excitator moet een werkstuk met een maximale hoogte van 1 .50 meter crrp elke willekeurige plaats in het bovenVlak,, en ook van de zijkant aan kunnen stoten.
2 Omdat de excitator een dynamische kracht met e r n frequentie tussen 0 en 120 Xz kan leveren, aag het frame zelf geen eigenfrequenties bezitten in dit gebied.
Ket bleek niet mogelijk t e zijn om een frame .te ontwerpen welke aan al deze eisen voldoet. De eis om de excitator op elke willekeurige plaats te plaatsen in hell horizontale vlak ( everiwijdig aan, i:e vloer 1 i Sleek le t ter - Lijk en figuurlijk t e zwaar. Een lichte construktie voor de verplaatsing va^
de exci tator in het horizontale vleik. was niet realiseerbaar. Zondei- de
laatst genoemde eis is de constructie van een stalen frame wel mogelijk, ik laagste eigenfrequenties van d i t frame berekend met het eindige delltenten ~ r o g r a ~ ~ a ~ ~ S ~ ~ ~ 2 ~ ~ ( een sofware pakket voor microcomputers 1' l i g * hij 103
Hz . Ee;i Ii.reecii: nadeel van liei; ciatworpen stalt-llr fzme, i s d a t de wezks&ukke~
in het horizontale vlak zeer beperkte afmetingen zouden mcigen frebben I Oe maximale diameter zou slechts 40 crn bedragen. Een alternatief voor dit stalen frame wordt geboden door eer, op:;telling be- staande uit twee betosrieri blokken. %en mei daarop de excitator bevestigd, en een met daarop het te beproeven werkstuk. Of deze opstelling praktisch uit- voerbaar is zal nog onderzocht moeter! worden.
2
VOORWOORD
In mijn derde stageperiode ben in werkzaam geweest op de t.echnisc’iie uni- versiteit in Eindhoven. ik heb hier gewerkt in het laboratorium van de vak-
groep fundamentele werktuigbouwkunde. Het eerste deel van de opdracht die ik had, was het ontwerpen van een
frame voor een excitatos, waarmee allerlei werkstukken zowel statisch als dynamisch belast kimnen worden, Het, tweede deel van de opdracht bestond uit het bedrijfsklaar maken van de reeds bestaande excitator en randapparatuur, die al sinds enkele jaren buiten gebruik was.
Voorts biril ik mijn stagebegeleider, Iienri Jans bedanken voor mijn bege- leiding.
3
SAMENVATTING
VOORWOORD
INHOUDSOPGAVE
1 INLEIDING
I N H O U D S O P G A V E
2 DE WERKING VAN DE EXITATOR EN TOEBEHOREN
3 HET EXITATOR FRAME 3.1. Inleiding 3.2. Voorbeschouwing 3.3. Het ontwerp van de framepaal 3.4. Controle op maximale buislengte 3.5. Controle op eigenfrequenties
4 BEPALING EIGENFREQUENTIES M.B.V. ASAPM2M 4.1. ASAPMSM 4.2. Berekening eigenfrequenties
5 SLOT 5.1. Conclusies en aan de hand van het eisenpakket 5.2. Het alternatief
2
3
4
5
7
10 10
10
12 19 23
29 29 30
36
36
37
39
4
1 INLEIDING
In het laboratorium van de vakgroep "fundamentele werktuigbouwkunde" op de technische universiteit in Eindhoven, worden vaak expirimenten verricht, waarbij op een te onderzoeken object een mechanische belasting moet worden uitgevoerd.
Onder een mechanische belasting wordt verstaan : een statische kracht of een in de tijd varierende ( dynamische 1 kracht ofwel een combinatie van beide belastingstypen.
Be vakgroep heeft de beschikking over een hydraulische excitator, waarmee statische krachten tot 1 'f . O00 newton kunnen worden gegenereerd ~ Behalve deze statische kracht hestast de mogelijkheid van het superpone.ren van een dyna- mische komponent met een maximale vibratief requentie van 120 Hz.
Echter deze excitator inclusie: randapperatur i s reeds enkele jaren buiten bedrijf en gedeeltelijk gedemonteerd.
De opdracht bestaat uit twee delen :
1. Montage van de excitator. Dit wil zeggen hei: opnieuw inregelen van de en het besturinyscircuit in samenwerking met een monteur van kleppen
de leverancier. 2. Het ontwerpen, tekenen en konstrueren van een universele beproevings-
opstelling, Deze opstelling moet aan de volgende eisen voldoen : - De excitator raoet binnen zijn frame in alle richtingen ver- plaatsbaar zijn. De verplaatsbaarheid in vertikale richting moet ongeveer 7.S meter bedragen.
- De excitator moet op zo'n manier draaibaar zijn, dat de te be- proeven werkstukken ook aan de zijkant nangestoten kunnen war-
den, en we1 aan elke willekeurige zijde. - In verband met dynamische experimenten die op de werkstukken uitgevoerd worden, mag het frame zelf geen eigenfrequenties beaeden de 130 - 120 Hz bezitten.
- Het frame moet een opspan mogenlijkkid hebben voor het werk- stuk ( b.v. een tafelblad met t-gleuven f .
- De beproevingsopstelling moet gebruikersvriendelijk en vol- doende beveiligd zijn.
In hoofdstuk 2 zal besproken worden hoe de excitator en de randaperatuur werken. Hoofdstuk 3 behan4el.d het ontwerp van het excitatorframe. In het
vierde hoofdstuk wordt het fsame gecontroleerd op eiyenfreyuenties. Tot slut volgen er in hoofdstuk 5 een aûntal conclusies, en een alternatief voor de excitatur opstelling.
2 DE WERKING VAN DE EXCITATOR EN TOEBEHOREN
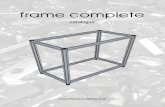
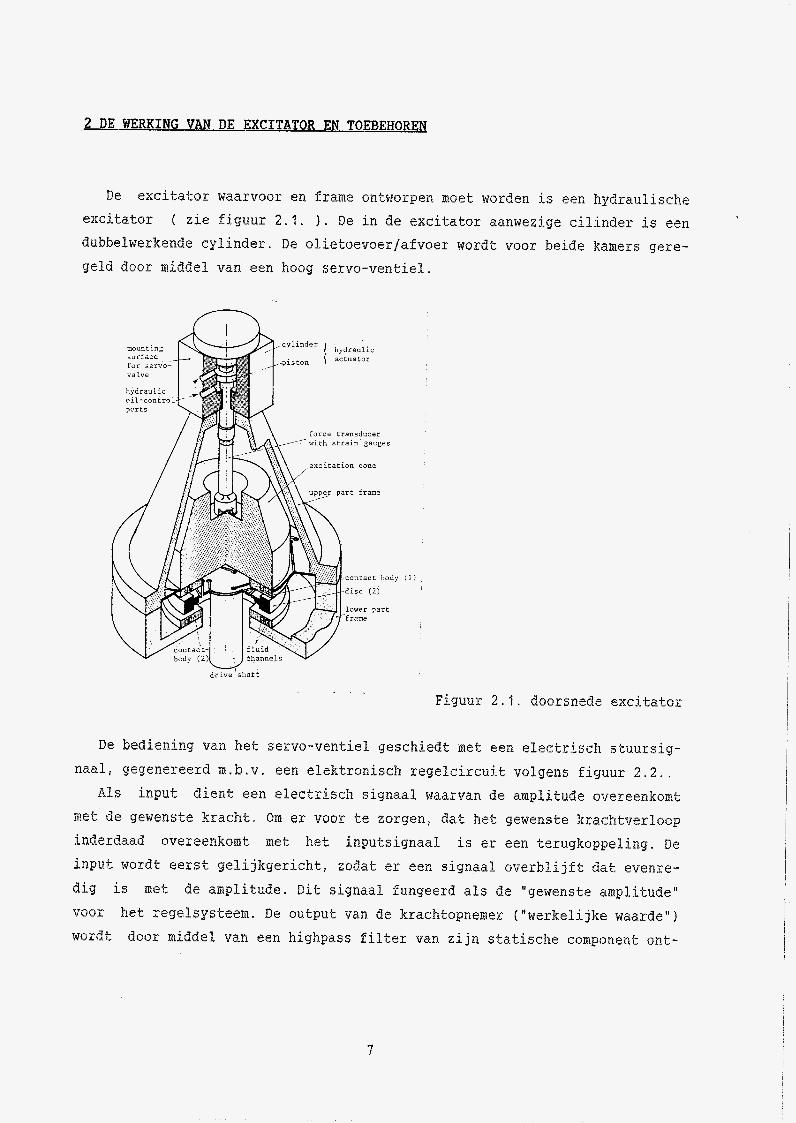
Ue excitator waarvoor en frame ontworpen moet worden is een hydraulische excitator zie figuur 2 . 1 . 1 . De in de excitator aanwezige cilinder is een dubhelwerkende cylinder. De olietoevoer/afvoer wordt voor beide kamers gere- geld door middel van een hoog servo-ventiel.
oil-can trol
LorCe transducer - A w ~ t h strain nauges
excitation cone
Figuur 2.1. doorsnede excitator
De bediening van tiei- servo-ventiel geschiedt met een electrisch stuursig- naal, gegenereerd m.b.v. een elektronisch regelcircuit volgens figuur 2.2. ~
Als input dient een electrlsch signaal waarvan de amplitude overeenkomt zet de gewenste kracht. Om er voor te zorgen, dat het gewenste kraChtVerlCJop inderdaad overeenkomt met het inputsignaal is er een terugkoppeling. De input wordt eerst gelijkgericht, zodat er een signaal overblijft d a t evenre- dig is met de amplitude. D i t signaal fungeerd als de "gewenste amplitude" voox wordt door middel van een highpass filter van zijn statische component ont-
het regelsysteem. Be output van de krachtopnemer ( "werkelijke waarde"
7
retour desired value I I:stst
repul at or
h i g h p a s s filter
desired pro sr am F c'yn
f
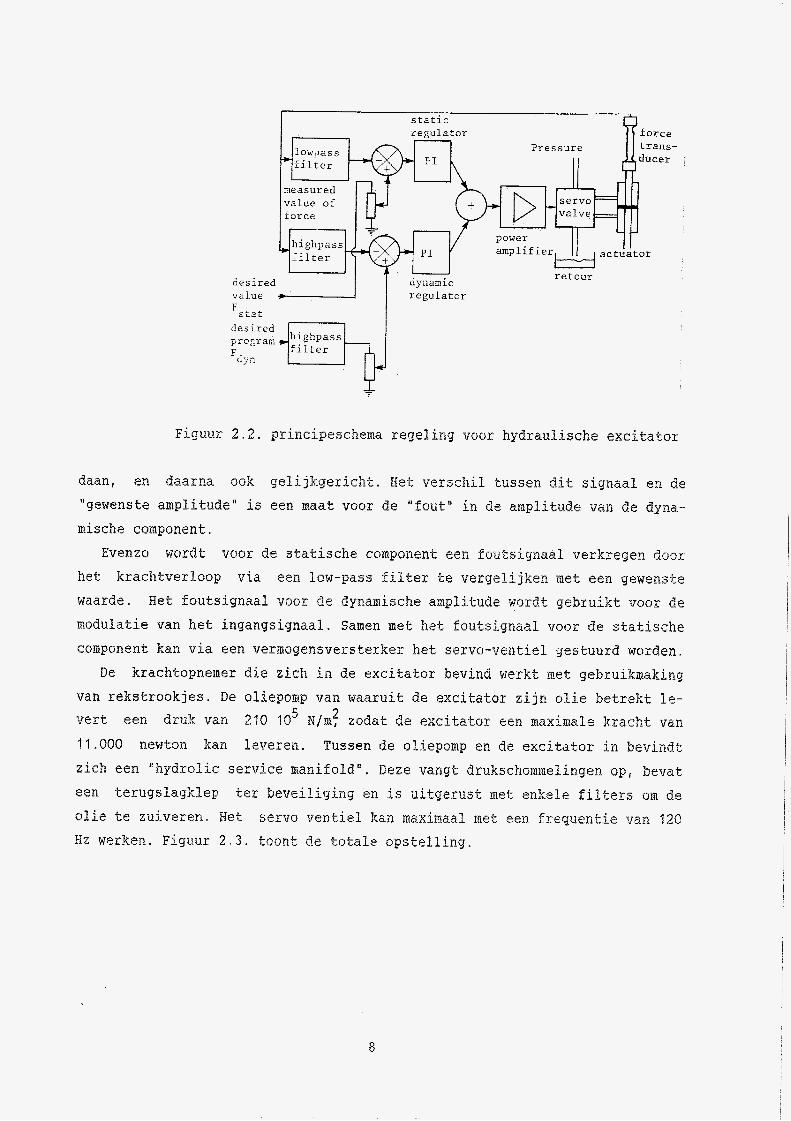
Figuur 2 . 2 . principeschema regeling voor hydraulische e x c i t a t o r
daan, en daarna ook ge l i jkger i ch t . Eet verschi l tussen t : f i t signaal en de
"gewenste amplitude" i s een maat voor de "fout" in de amplitude van de d17na-
mische component. Evenzo wordt voor de s t a t i s che component een foutsignaal verkregen dooi-
h e t kracht.verloop v i a een low-pass f i l t e r t e vergel i jken met een gewemte
waarde. Het foutsignaal voor de dynamische amplitude trordt gebruikt vo«r de modulatie van het ingangsignaal. Samen met het foutsignaal voor de s ta t i s che component kan v i a een vermcqensversterker h e t servo-ventiel gestuurd worden.
krachttipneîraer d ie zich in de exc i t a tor bevind werkt met g ~ b ~ u i k ~ a ~ i n g
van rekstrookjes. De oliepomp van waaruit de exc i t a tor z i j , o l i e betrekt le- v e r t e e n drulc van 2-10 îû ~ / i n r zodat de e x i t s t o r een mximale kracht rian
11 .OOG newton kan leveren. Tussen de oliepomp en de e x c i t a t o r i a bevindt zich een "hydrolic service manifold". Deze vangt ~ r ~ ~ s c h o m m e l i n g ~ n op, bevat
een terugslagklep ter bevei l iging en i s rritgeriist met enkele f i l t e r s om de
c l l ie t e zuiveren. Het servo vent ie l kr,n rnaxirnaal rret een fsl-eqrii-ntie .$ran 120 Hz werken. Figuur 2 . 3 . toont de totale opste l l ing .
De
5
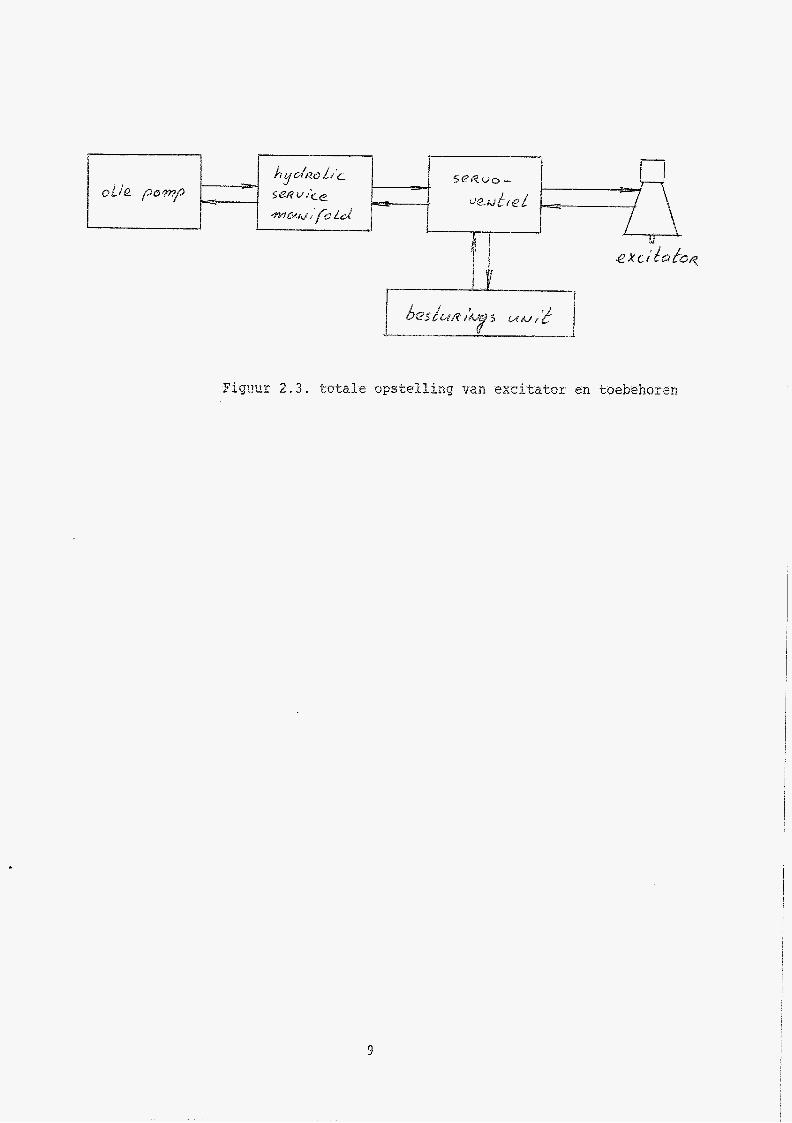
Figuur 2.3. t o ta l e opstelling van eacitator eri toebehoren
3 HET EXCITATOR FRAME
3 . 1 . Inleidinq
Een van de punten uit het eisenpakket ( zie HI INLEIDING ) # i s dat het frame geen eigenfrequenties mag bezitten onder de 120 Hz. Uit de formule
waarin "f I' de eigenfrequentie voorsteld, " c " de stijfheidsfac- tor en "m" de massa, volyt dat de eigenfrequentie hoger ligt, naarmate de stijfheid hoger en de massa kleiner is. Of het mogelijk is om het frame van staal te maken zal verder onderzocht worden.
o
3.2. Voorbeschouwinq
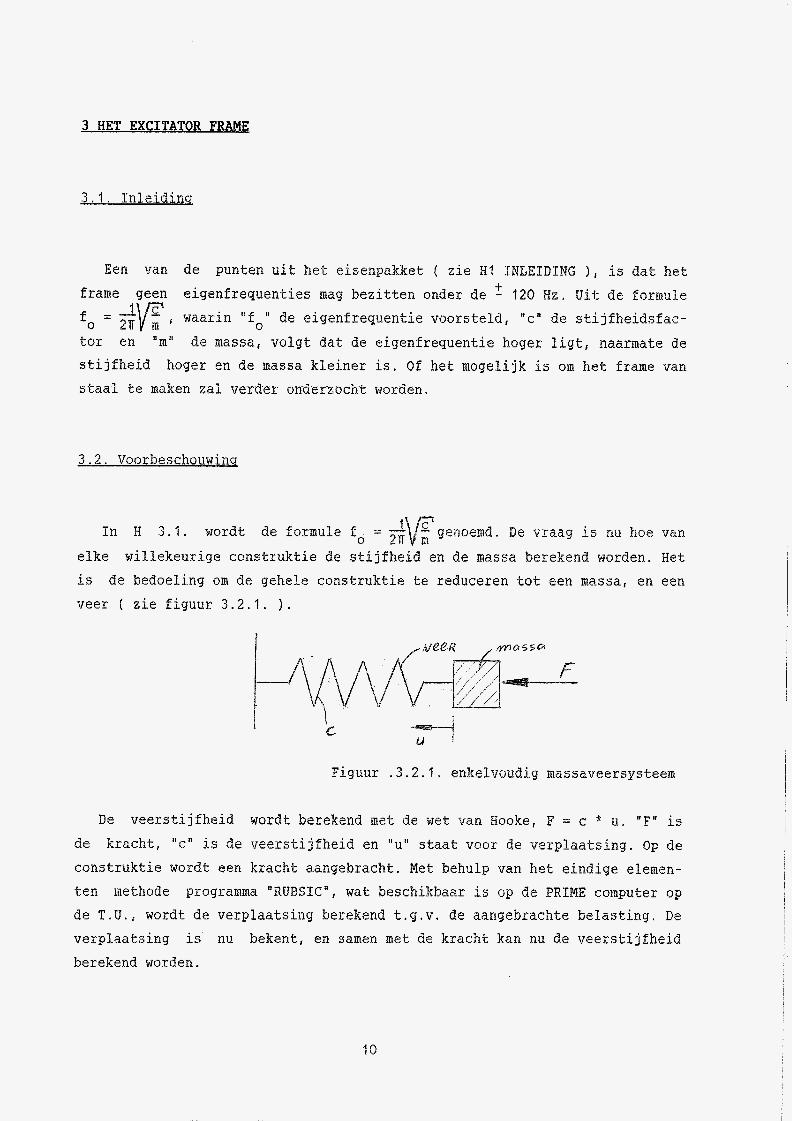
In H 3 . 1 . wordt de forinule fc, = genoemd. De vraag i s nu hoe van elke is veer ( zie f i g u u r 3 . 2 . 1 . ) ,
willekeurige construktie de stijfheid en de massa berekend worden. Het de hedoeling om de gehele construktie te reduceren t o t een massa, en een
l
i
C
Figuur . 3 . 2 . 1 . enkelvoudig massaveersysteem
De veerstijfheid wordt berekend met de wet van Hooke, F = c * u. "E" is de kracht, " c " is de veerstijfheid en "u" staat voor de verplaatsing. Op de construktie wordt een kracht aangebracht. Net behulp van het eindige elemen- ten methode programma "RUBSIC", wat beschikbaar is rip de PRIME computer op de T . U . , wordt de verplaatsing berekend t,g.v. de aangebrachte belasting. De verplaatsing is nu bekent, en samen met de kracht kan nu de veerstijfheid berekend worden.
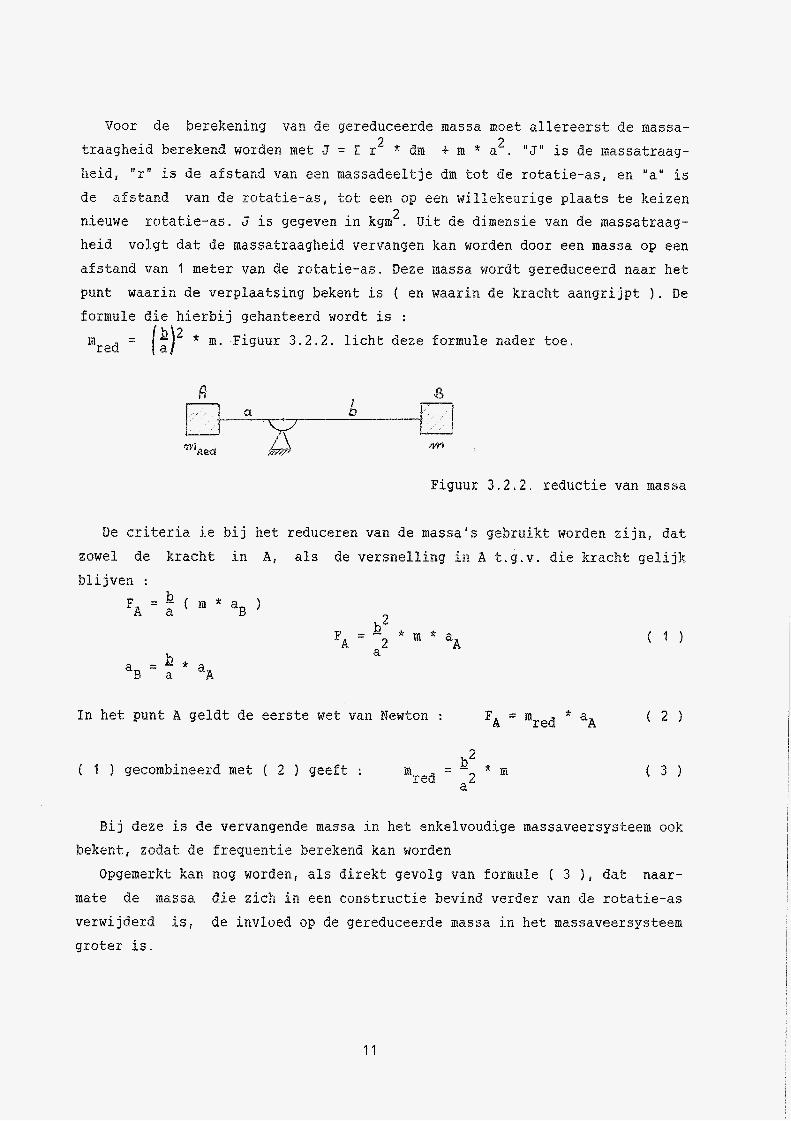
Voor de berekening van de gereduceerde massa moet allereerst de massa- traagheid berekend worden met J = i r2 * dm 4 m * a . "J" is de imssatraag- heid, "r" is de afstand van een massadeeltje dm tot de rotatie-as, en "a" is de afstand van de rotatieas, tot een op een willekeurige plaats te keizen nieuwe rotatie-as. J is gegeven in kgm . Uit de dimensie van de massatraag- heid volgt dat de massatraagheid vervangen kan worden door een massa op een afstand van 1 meter van de rotatie-as. Deze massa wordt gereduceerd naar het punt waarin de verplaatsing bekent is ( en waarin de kracht aangrijpt ) . De
formule die hierbij gehanteerd wordt is :
2
2
* m. Figuur 3 . 2 . 2 . licht deze formule nader toe. - - red in
Figuur 3.2.2. reductie van aassa
De criteria ie bij tiet reduceren van de massa's gebruikt worden zijn, dat zowel de kracht in A, als de versnelling in A k.g.v. die kracht gelijk blijven :
- - * b a % - a A
"A * m * _ - b2 % - 2 a
In het punt A geldt de eerste wet van Newton :
( 1 1 gecombineerd met ( 2 ) geeft :
FA = mred * aA
1
m ( 3 )
Bij deze is de vervangende massa in het enkelvoudige massaveersysteem ook bekent, zodat. de frequentie berekend kan worden
Opgemerkt kan nog worden, als direkt gevolg van formule i 3 1 , dat naar- mate de massa die zich in een constructie bevind verder van de rotatie-as verwijderd is, de invloed op de gereduceerde massa in het massaveersysteem groter is.
- . . .. . . . . .... i!
i
i d i i + - I F.-i P '
I i L
F
"-
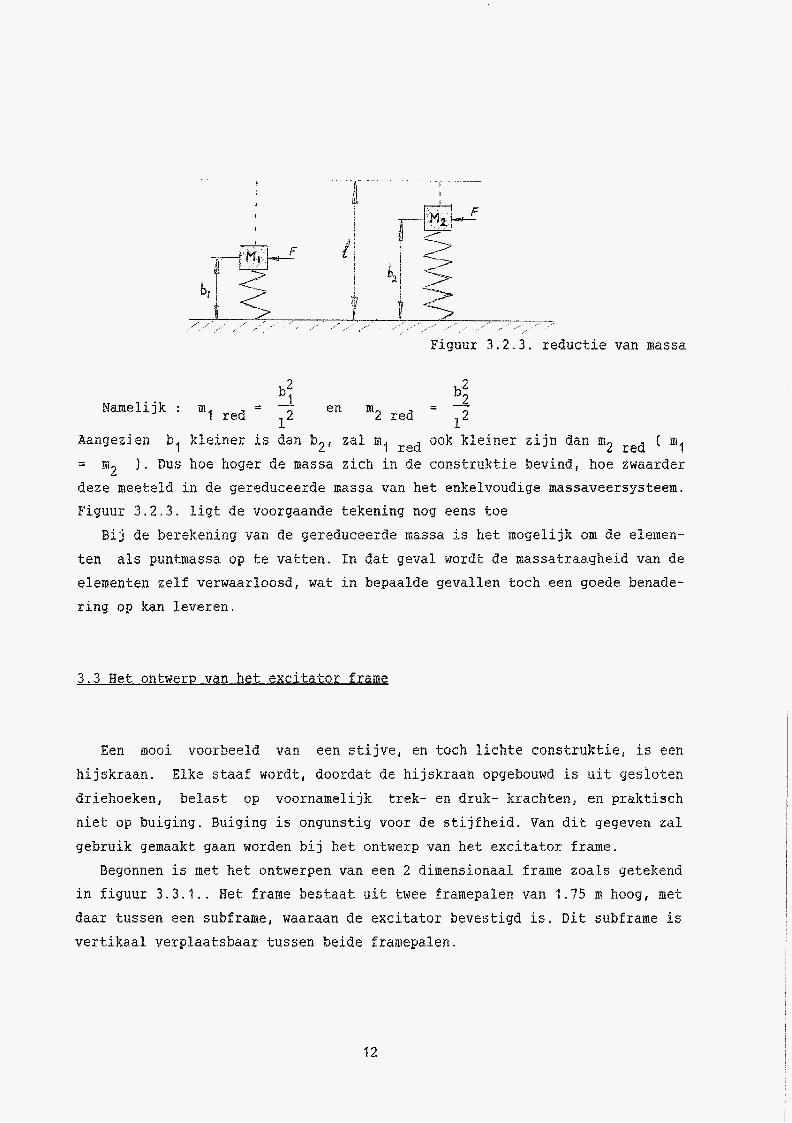
Figuur 3 . 2 . 3 . reductie van massa
1 2
en m LI red 1 2 Namelijk :
I i
Aangezien b,, kleiner i s dan b2, zal mi red ook kleiner zijn dan m2 red ( in., = in2 l . Dus hoe hoger de massa zich in de construktie bevind, hoe zwaarder deze meeteld in de gereduceerde massa van het enkelvoudige massaveersysteem. Figuur 3 . 2 . 3 . ligt de voorgaande tekening nog eens toe
Bij de berekening van de gereduceerde massa is het mogelijk om de elemen- ten als puntmassa op te vatten. i n dat geval wordt de aassatraagheid van de elementen zelf verwaarloosd, wat in bepaalde gevallen toch een goede benade- ring op kan leveren.
3 . 3 Het ontwerp van het excatator frame
Een mooi voorbeeld van een stijve, en toch lichte construktie, is een hijskraan. Elke staaf wordt, doordat de hijskraan QpyebouWd i s uit; gesloten driehoeken, belast op voornamelijk trek- en druk- krachten, en praktisch niet op buiging. Buiging is ongunstig voor de stijfheid. Van dit gegeven zal gebmik gemaakt gaan worden bij het ontwerp van het excitator frame.
Begonnen is met het ontwerpen van een 2 dimensionaal frame zoals getekend in figuur 3 . 3 . 1 . . Het frame bestaat u i t twee framepalen van 1.75 m hoog, met daar tussen een subframe, waaraan de excitator bevestigd is. Dit subframe is vertikaal verplaatsbaar tussen beide framepalen.
12
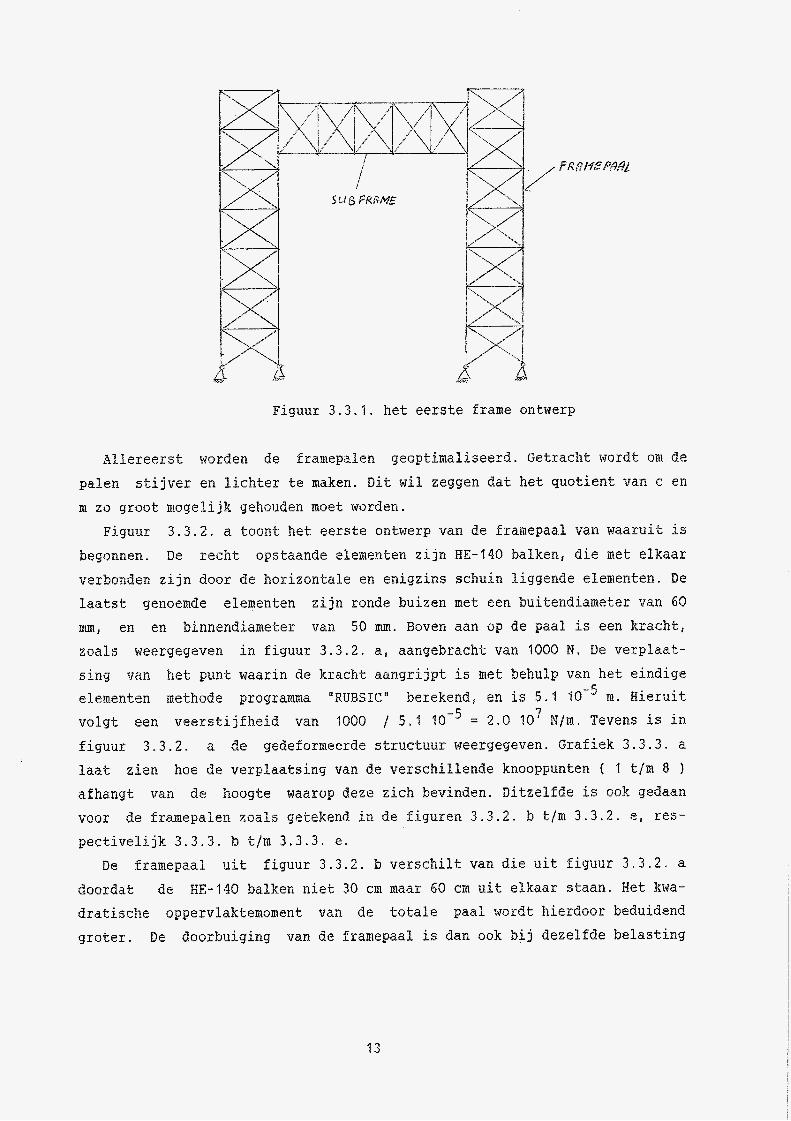
Figuur 3.3.j. het eerste frame ontwerp
Allereerst worden de Eramepalen geoptimaliseerd. Getracht wordt, om de palen stijver en lichter te maken. Dit wil zeggen dat het quotient van c en m zo groot mogelijk gehouden moet worden.
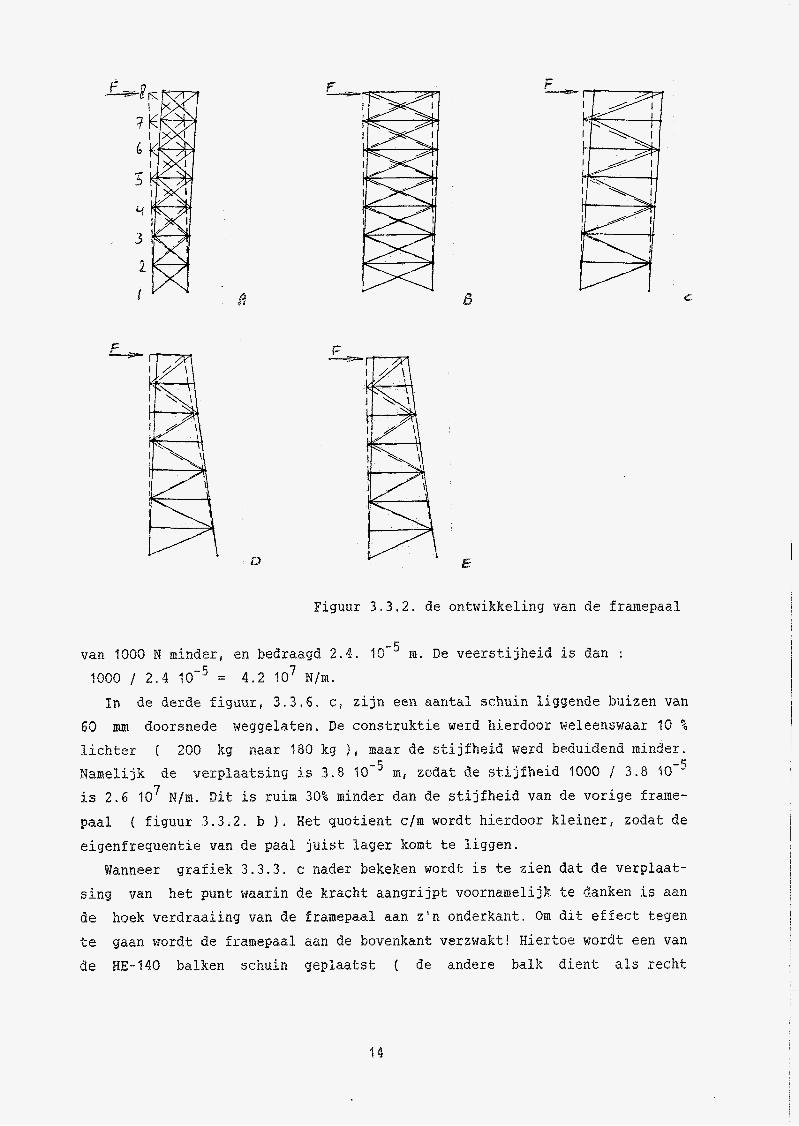
3.3.2. a toont het eerste ontwerp van de framepaal van waaruit is begonnen. De recht opstaande elementen zijn HE-:40 balken, die met elkaar verbonden zijn door de horizontale en enigzins schuin liggende elementen. De laatst genoemde elementen zijn ronde buizen met een buitendiameter van 69
mm, en en binnendiameter van 50 mm. Boven aan op de paal is een kracht, zoals weergegeven in figuur 3.3.2. a, aangebracht van 10000 N. ik verplaiik- sing het punt waarin de kracht aangrijpt is met behulp van het eindige elementen methode programma "XUBSIC" berekend, en is 5.1 m. Hieruit, volgt een veerstijfheid van 1000 / 5.1 70 ' - 2.0 10' N/m. Tevens is in figuur 3.3.2. a de gedeformeerde structuur weergegeven. Grafiek 3.3.3. a laat zien hoe de verplaatsing van de verschillende knooppunten ( 1 t/m 8 1 afhangt van de hoogte waarop deze zich bevinden. Ditzelfde is ook gedaan voor de framepalen zoals getekend in de figuren 3.3.2. b t/m 3.3.2. ei res- pectivelijk 3.3.3. b t/m 3.3.3. e.
Figuur
van
-5 -
De framepaal uit figuur 3.3.2. b verschilt van die uit figuur 3.3.2. a doordat de RE-140 balken niet 30 cm maar 40 cm uit elkaar staan. Het k m - dratiscfie oppervlaktemoment van de totale paal wordt hierdoor beduidend groter. De doorbuiging van de framepaal is dan ook bij dezelfde belasting
o
c
Figuur 3 . 3 . 2 . de ontwikkeling van de framepaal
van 1000 N minderl en bedraagd 2.4. 'iow5 m. De veersti jheid is dan : 1900 / 2 . 4 = 4 .2 IO7 E/m. In de derde figuur, 3 . 3 . 6 ; . c l zijn een aantal schuin liggende buizen van
60 mm doorsnede weggelaten. De construktie werd hierdoor weleenswaar 10 %
lichter ( 200 kg naar j80 kg maar de stijfheid werd beduidend minder. Plamelijk de verplaat.sing is 3 . 8 m, zodat de stijfheid 1000 / 3 . 8
is 2 . 4 I O E/m. Dit i s ruim 30% minder dan de stijfheid van de vorige frame- paal ( figuur 3 . 3 . 2 . b ) , Het quotient c/m wordt hierdoor kleiner, zodat de eigenfrequentie van de paal juist lager komt te liggen.
grafiek 3 . 3 . 3 . c nader bekeken wordt is te zien dat de verplaat- sing van het punt waarin de kracht aangrijpt voornamelijk te danken is aan de hoek verdraaiing van de framepaal aan z'n onderkant. Om dit effect. tegen te gaan wordt de framepaal aan de bovenkant verzwakt! Hiertoe wordt een van de HE-240 balken schuin geplaatst ( de andere balk dient als recht
7
Wanneer
14
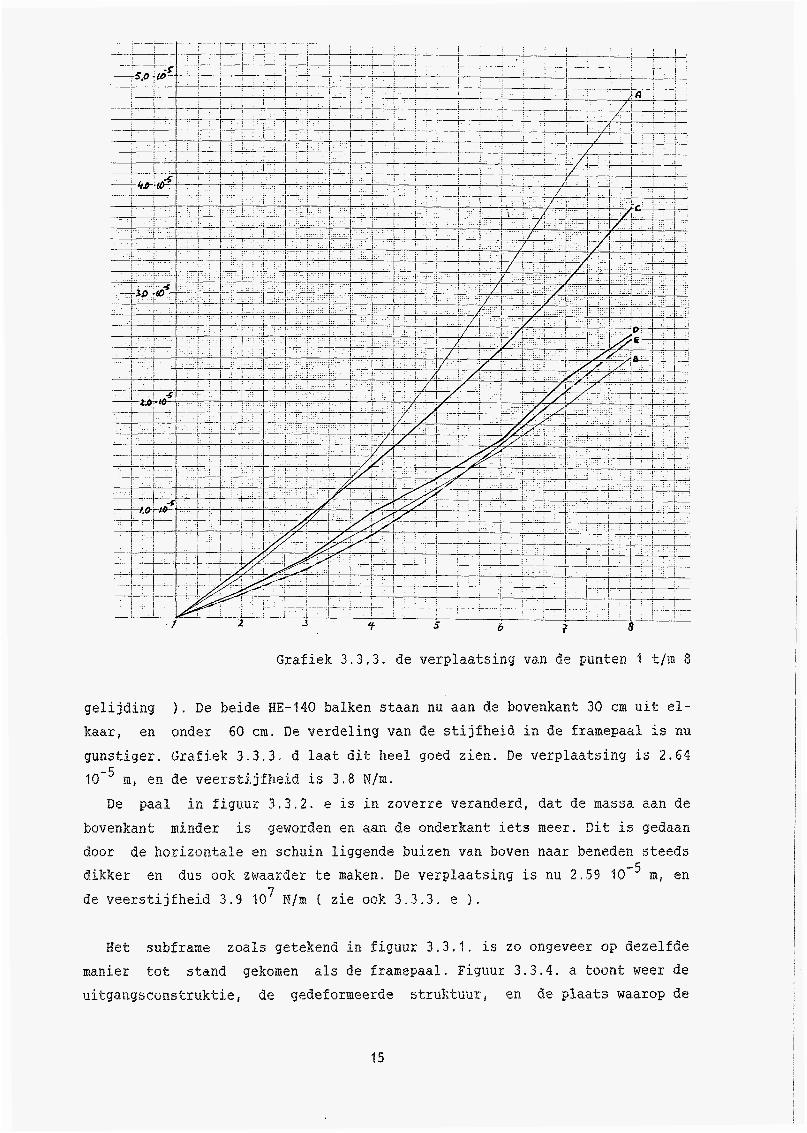
Grafiek 3.3.3. de verplaatsing van de punten 'i t/ai 8
gelijding ) . De beide HE-140 balken staan nu aan de bovenkant 30 cm uit el- kaar, en onder 60 cm. De verdeling van de stijfheid in de framepaal i s nu gunstiger. Grafiek 3 . 3 . 3 . d laat dit heel goed zien. De verplaatsing is 2.64
m, en de veerstijfheid is 3 . 8 H/m.
De paal in figuur 3 . 3 . 2 . e i s in zoverre veranderd, dat de mas:ja aan de bovenkant minder is geworden en aan de onderkant iets meer. Dit i s gedaan door de horizontale en schuin liggende buizen van boven naar beneden steeds dikker en dus ook zwaarder te maken. De verplaatsing is nu 2 .59 EI, en de veerstijfheid 3.9 'i0 H/m { zie ook 3 , 3 . 3 . e 1 . 7
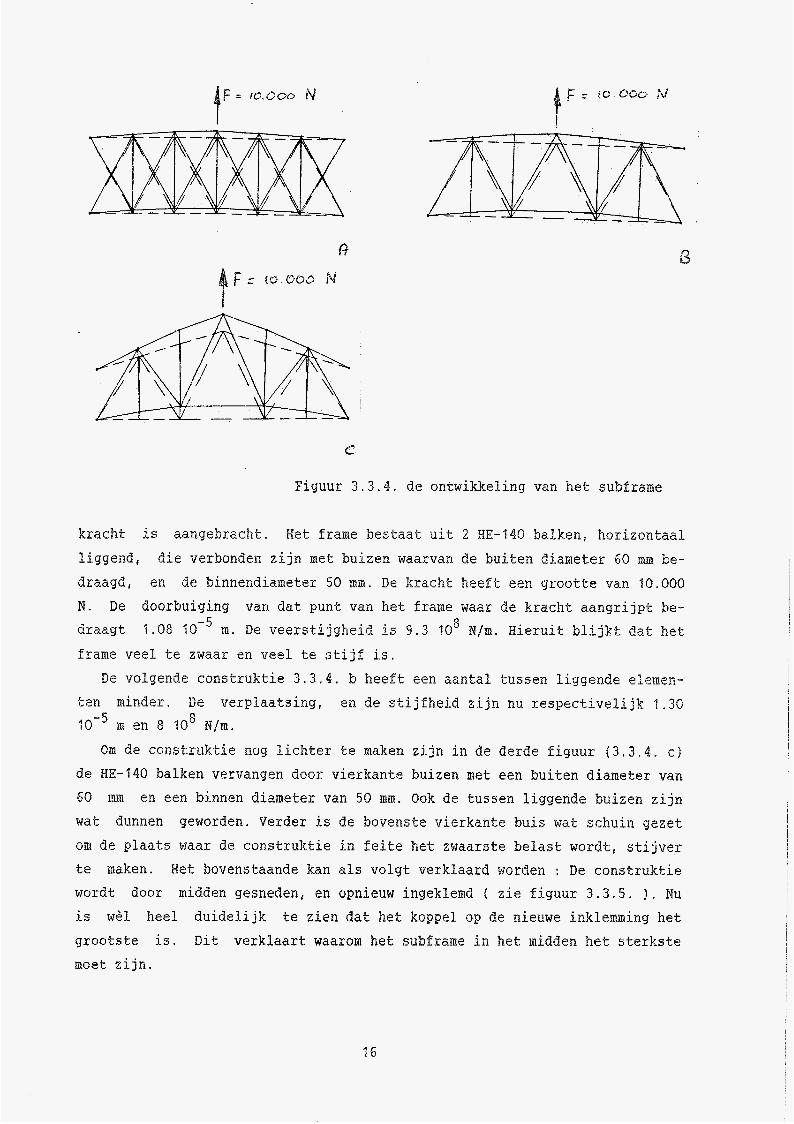
Het subframe zoals getekend in figuur 3.3.1. is zo ongeveer op dezelfde manier tot stand gekomen als de framepaal. Figuur 3 . 3 . 4 . a tooazt weer de uitgangsconstrulrtie, de gedeformeerde st.rrnk-tuur, en de plaats waarop de
15
F = m.Co0 N I
c
Figuur 3.3.4. de ontwikkeling van het subframe
kracht is aangebracht. Het frame bestaat zit 2 HE-I40 balken, horizontaal liggend, die verbonden zijn met buizen waarvan de buiten diameter GO mm be- draagd, en de ~inn~ndia~~eter SO mm. De kracht heeft een grootte van 30.000 I?. De doorbuiging van dat punt van het frame waar de kracht aangrijpt De- draagt I .OB IO-’ m. ~e veersti jgheid is 9.3 l~~ N/m. ~ i e r u ï t b i i jk i t dat het
frame veel te zwaar en veel t e stijf is. De volgende construktie 3.3.4. b heeft een aantal tussen liggende elemen-
ten minder. l)e verplaatsing, en de stijfheid zijn nu respeetivelijk i ,3û 8 m en 8 10 %/m.
Om de construktie nog lichter te maken zijn in de derde figuur (3.3.4. c j de HE-140 balken vervangen door vierkante buizen met een buiten diameter van 60 mm en een binnen diameter van 50 mm. Ook de tussen liggende buizen zijn wat dunnen geworden. Verder is de bovenste vierkante buis wat schuin gezet
om de plaats waar de construktie in feite het zwaarste belast wordt, stijver te maken. Het bovenstaande kan als volgt verklaard worden : De construktie wordt door midden gesneden, en opnieuw ingeklemd f zie figuur 3 . 3 . 5 . ) = Nu
is wel heel duidelijk te zien dat het koppel op de nieuwe inklemming het grootste i s , Dit verklaart waarom het subframe in het midden het sterkste moet zijn.
16
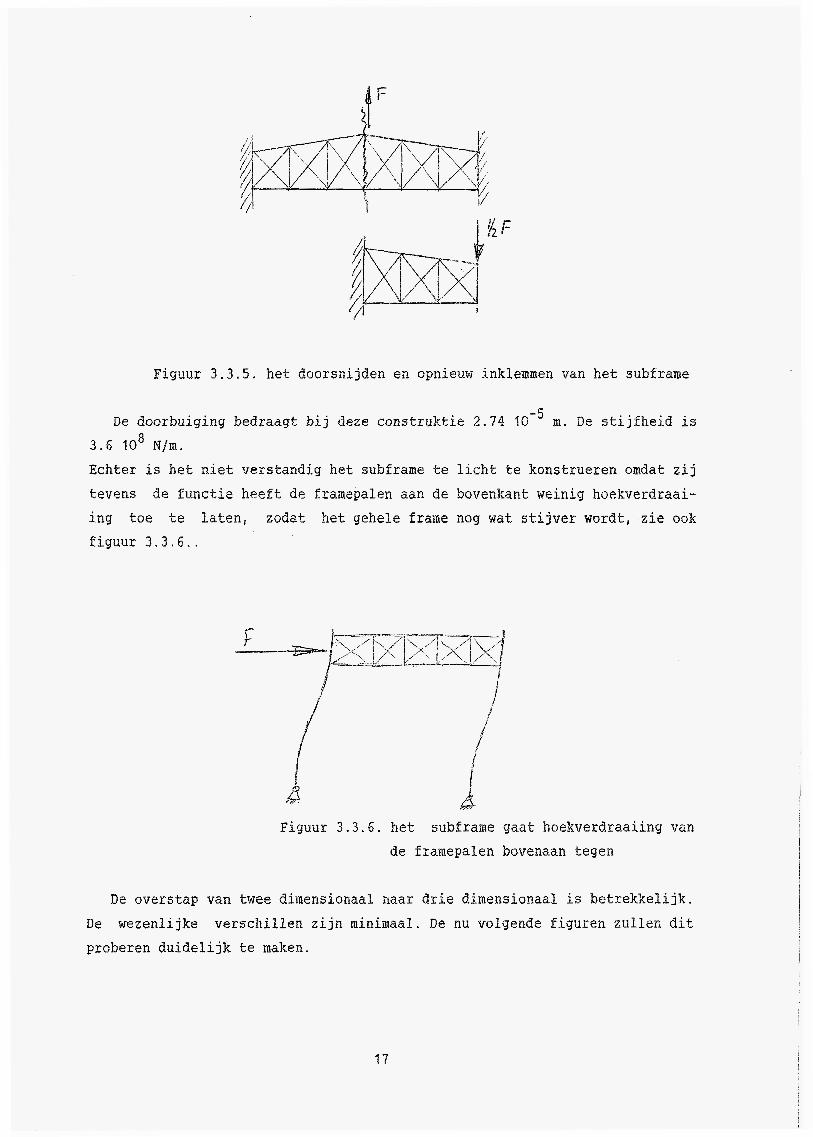
Figuur 3.3.5. het doorsnijden en opnieuw inklemmen van het subframe
De doorbuiging bedraagt bij deze construktie 2.74 m. De stijfheid is 3 . 6 10 N/m. Echter is het niet verstandig het subframe te licht te konstrueren omdat zij tevens de functie heelt de framepalen aan de bovenkant weinig hoekverdraai- izg toe t e laten, zodat het gehele frame nog wat stijver wordt, zie ook
figuur 3 . 3 . 6 . .
8
I
Figuur 3 . 3 . 6 . het subframe gaat hoekverdraaiing van de framepalen bovenaan tegen
Be overstap van twee dimensionaal naar drie dimensionaal is betrekkelijk. verschillen zijn minimaal. De nu volgende figuren zullen dit. De wezenlijke
proberen duidelijk te maken.
17
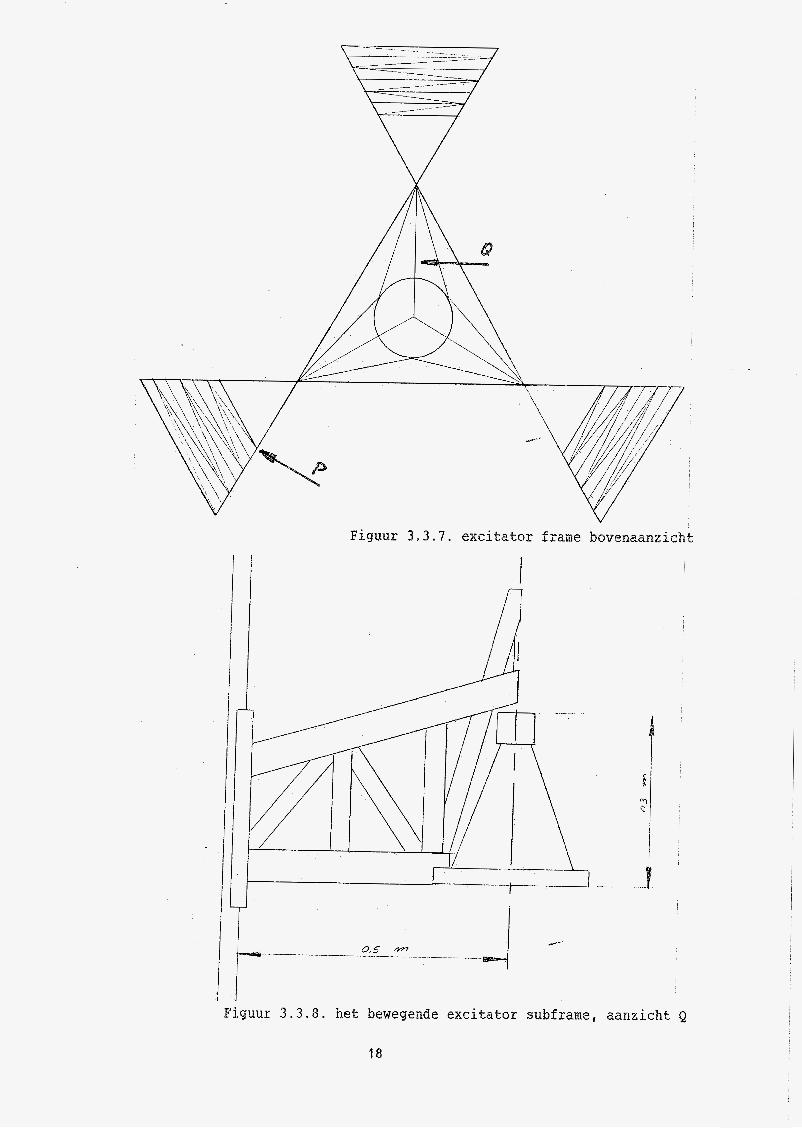
Figuur 3.3.7. excitator Erame bovenaanzicht
m
c
I r I -- .
s-
I 'iguur 3.3.8. het bewegende exci tator subf rame, aanzicht Q
18
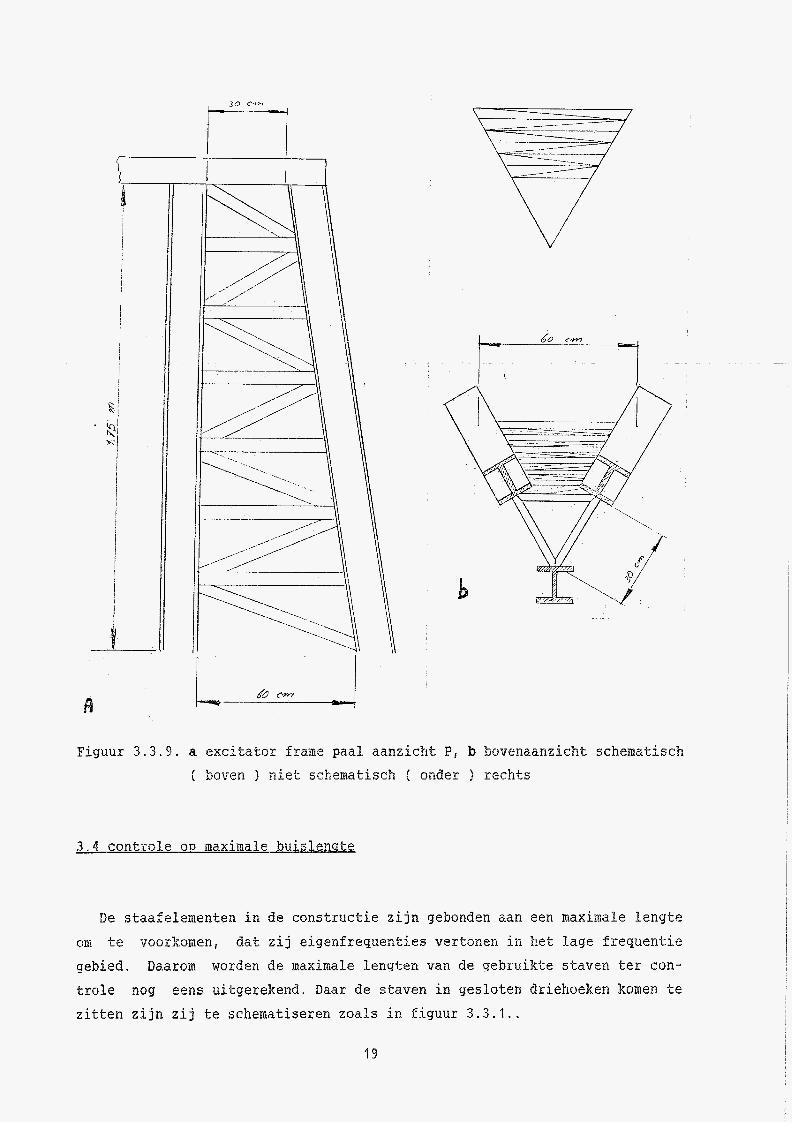
Figuur 3.3.9. a excitator frame paal aanzicht P, b bovenaanzicht schematisch i boven 1 niet schematisch ( onder I rechts
3.4 controle OD maximale buislengte
De staafelementen in de constructie zijn gebonden aan een maximale lengte om te voorkomen, dat zij eigenfrequenties vertonen i n het lage frequentie gebied. Daarom worden de maxbniale lengten van de gebruikte staven ter con- trole nog eens uitgerekend. Daar de staven in gesloten driehoeken koinen te zitten zijn zij te schematiseren zoals in figuur 3.3.1..
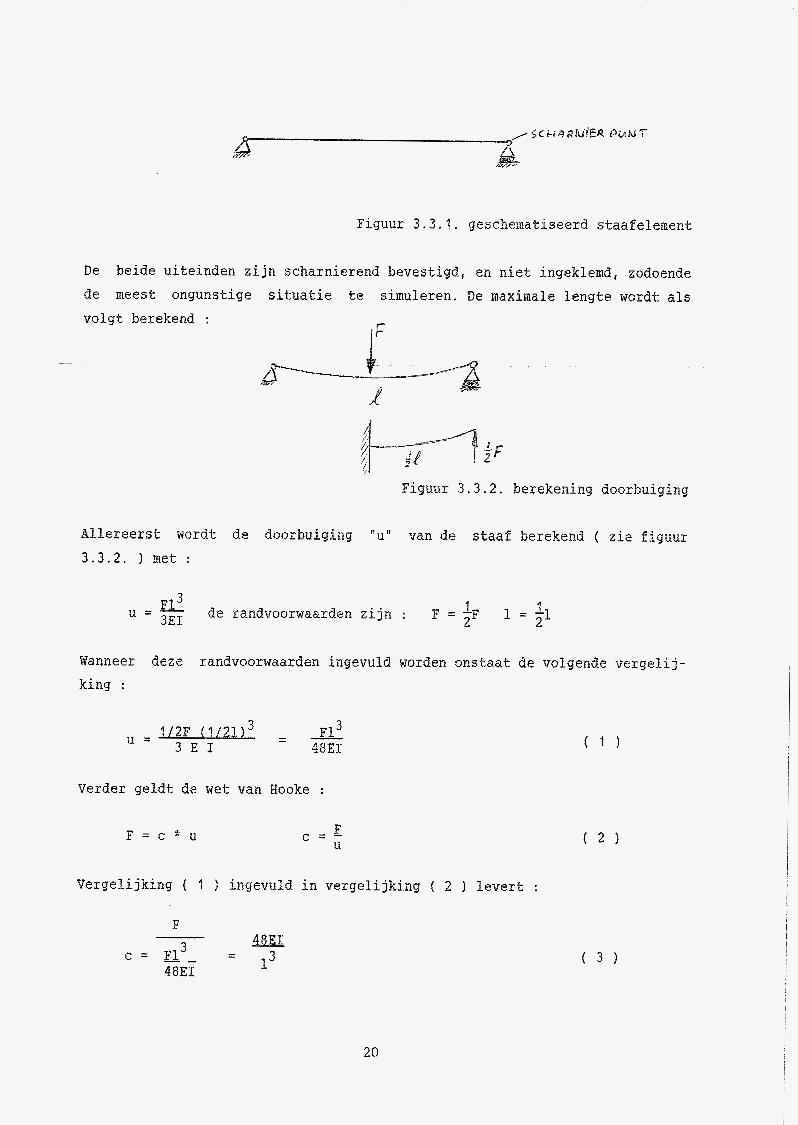
Figuur 3.3.1. geschematiseerd staafelement
De heide uiteinden zijn scharnierend bevestigd, en niet ingeklemd, zodoende de meest ongunstige situatie te simuleren. De maximale lengte wordt als volgt berekend :
Figuur 3.3.2. berekening doorbuiging
Allereerst wordt de doorbuiging "u" van de staaf berekend i zie figuur 3.3.2. 1 met :
FI u = - 3ET de randvoorwaarden zijn :
Wanneer deze randvoorwaarden ingevuld. worden onstaat de volgende vergelij- king :
FI 48EI
Verder geldt de wet van Hooke :
F = c X ' u F c = - U
Vergelijking ( 1 1 ingevuld in vergelijking f 2 ) levert :
F 4XEI
- - 13 ( 3 )
20

De massa van een element wordt met de volgende formulde berekend :
Echter slechts 1/3 van deze massa teld [nee in het enkelvoudige massaveer- systeem ( zie hiervoor ook figuur 3 . 3 . 2 . 1 . Wanneer het element doorgesneden is blijven twee halve elementen emer. Volgens de theorie kan de massa van het halve element vervangen worden door 1 / 3 van de massa op een afstand 112 1. Het gevolg is :
= 1/3 m = 1/3 e * 1 * k sed m
De formules f 3 1 en ( 5 1 worden ingevuld in de onderstaande formule en vergelijking ( 6 1 ontstaat :
Eormule ( 6 ) kan vervolgens weer omgeschreven worden naar lengte "l" :
c) 36 E I
Tabel 'I toont de maximale lengten van enkele waarschijnlijk te gebruiken 2 3 elementen. Hierin is "2" 2.1 10'' N/m en "E" 7800 kg/m =
21
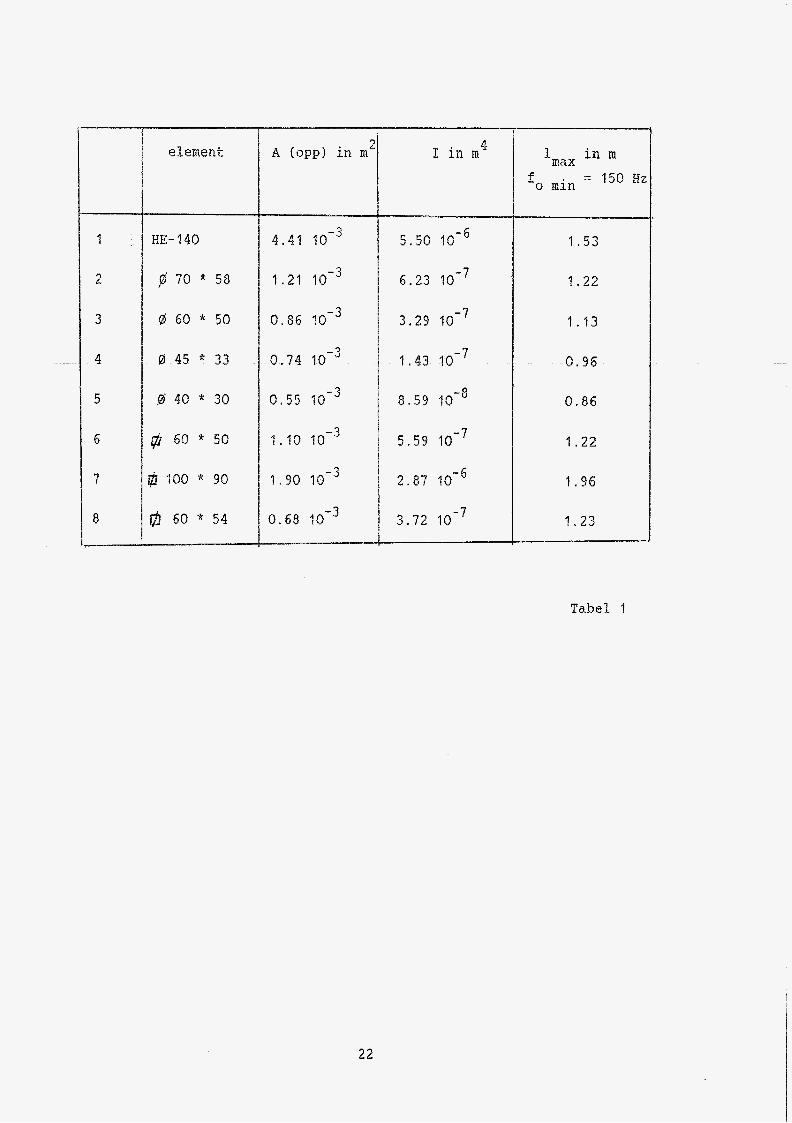
Tabel 1
22
3.5. Controle OP eisenfrequenties
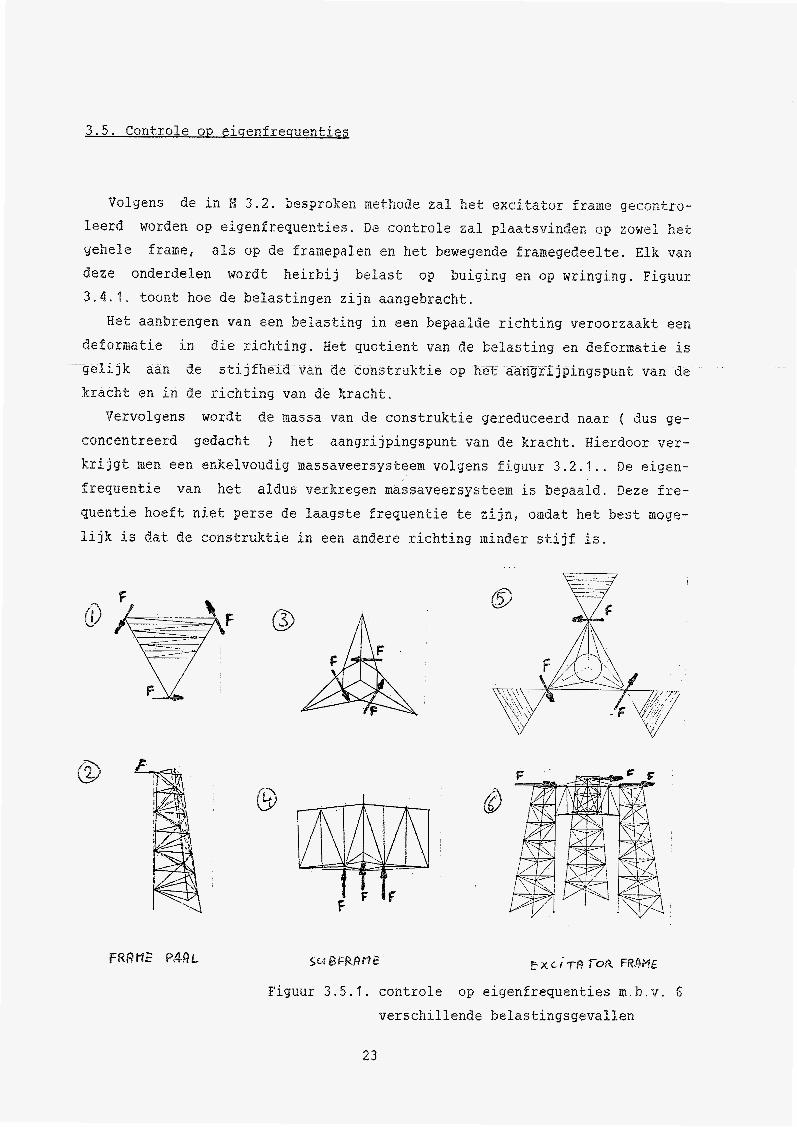
Volgens de in H 1.2. besproken methode zal het cxcitator frame gecontro- leerd worden op eigenfrequenties. De controle zal plaatsvinden op zowel het gehele fraine, als 02 de framepalen en het bewegende framegedeelte. Elk van deze onderdelen wordt heirbij belas t op buiging en op wringing. Figuur 3 . 4 . 1 . toont hoe de belastingen zijn aungebracht.
Het aanbrengen van een helasting i n een bepaalde richting veroorzaakt een deformatie i n 6ie richting. Het quotient van de belasting en deformatie i s
gelijk aan de stijthgid va3 de construktie op het aangrijpingspunt van de kïacht en in de richtirig van de kracht.
Vervolgens wordt de massa van de construktie gereduceerd naar ( dus ge- concentreerd gedacht ) h e t aangrijpingspunt van de kracht. Hierdc. 'or ver- krijgt men een enkelvoudig massaveersysteem volgens figuur 3 . 2 . I . . ge eigen- frequentie van het aldus verkregen massaveersysteem is bepaald. ikze fre- quentie hoeft niet perse de laagste frequentie te zijn, omdat het b e s t moge-
lijk is dat de constrtiktie in een aadere richting minder stijf is.
%UBFPg?aME
Figuur 3.5.1. controle
EXLi.R FOR FRAU&
op eigenfrequenties m.b.v. 6
verschillende belastingsgevallen
23
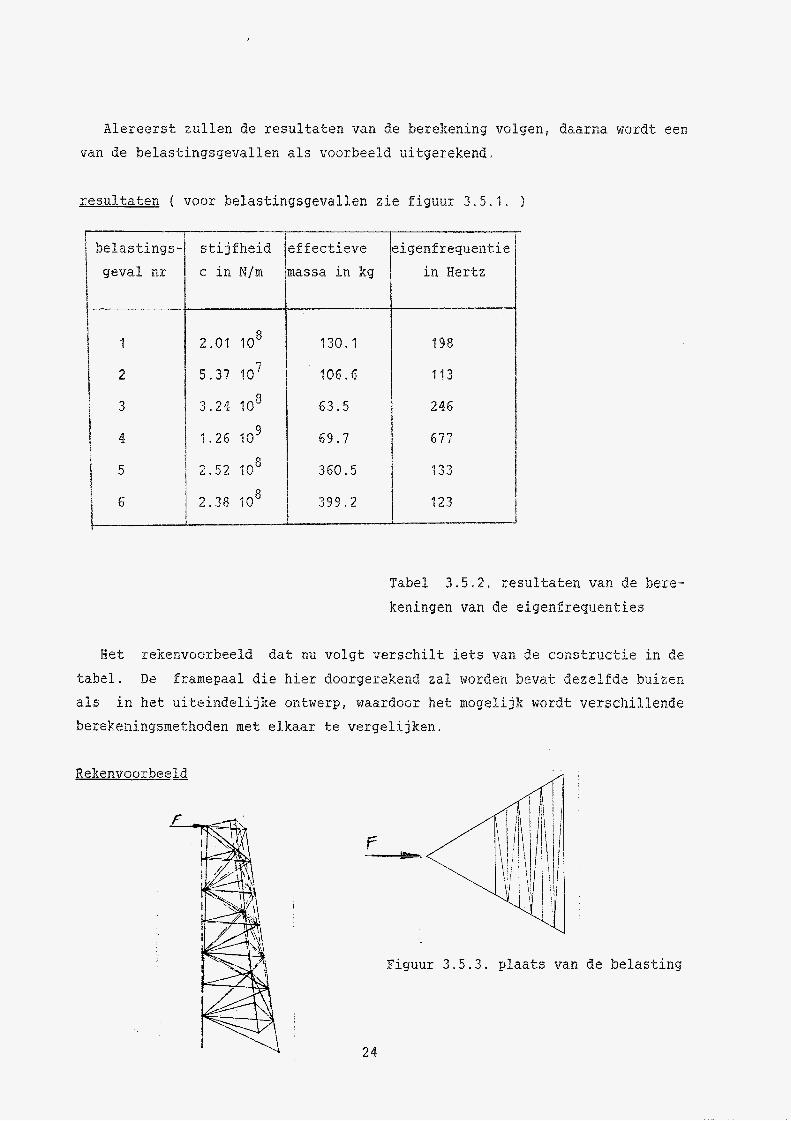
Alereerst zullen de resultaten van de berekening volgen, daarna word t een van de belastingsgevallen als voorbeeld uitgerekend,
resultaten ( voor belastingsgevallen zie figuur 3.5 .2
sti j fheid c in w/m
! f f ectieve Lassa in kg
139.1
206.6
6 3 . S
6 9 . 7
369 I 5
3 9 9 . 2
~
igenfrequentie in Hertz
'i 98
143
246
6 7 7
7 33
123
Tabel 3 .5 .2 . resultaten van de bere- keningen van de eigenfrequenties
Het dat nu volgt verschilt iets van de constructie in de
tabel. fralr,epaal die hier doorgerekend zal worden bevat dezelfde buizen a l s in het uiteindelijke ontwerp, waardour het nogelijk wordt verschillende b e ~ e ~ ~ ~ i ~ ~ s ~ e t ~ i ~ d e n met elkaar te vergelijken.
iclenvourbeeld De
Rekenvoorbeeld
Figuur 3 , 5 . 3 . plaats van de belasting
2 4

Op de fratnepaal wordt een kracht van 1000 N aangebracht. Het behulp van eindige elementen programma wordt de verplaatsing berekend van het print :let
waarop de )rrackt a a n g r i j p t .
Berekenins s t i j f h e i d
-5 verplaatsing ( u 1 = 1 . 8 6 :o m F = 1000 N
E) e reken i nq cí e r e du c e er d e ma- s 3 ii
1 = BE-140 2 = @ 40 * 30
3 = $ 4 5 * 33
4 = $ 6 0 * 5 0
Figuur 3 . 5 . 4 , inideling verschil lende buizen en profie len in de Eramepaal
Oin de berekeningen n i e t cmnodig gekor~p~iceerd t e maketi worden a l l e e les ment.en I dus n i e t de 1 profie len, a ls puntmassa opgevat, Al le massa's zullen aazr de hoogte van 1.75 E worden gereduceerd.
,-I ,I J = 5 m ì"
2 m * - - m 1 gereduceerde massa op I meter afstand red - 3
- b2 red red 2
a b = 1 meter; a = 1 meter; m = Ir1
,-I
= 1/3 m ì2 e = 1/3 ~ t r gered. massa op i ineter "red 3
R U-mT-tE - 136 - - - J -
E'iguus 3 . 5 . 5 . massatraagheid P prof ie l 25
n
mLed HE-IS0 =
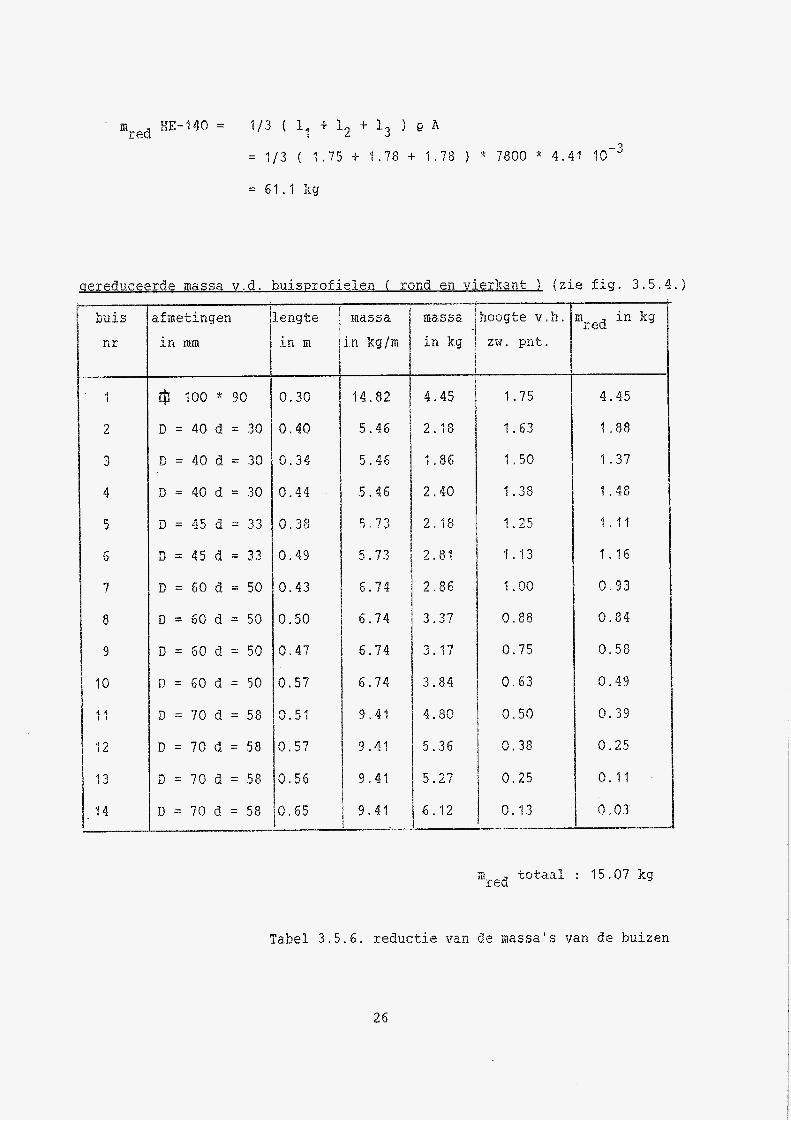
sereduceerde massa v .d . huisprofielen ( zond en vierkant ( z i e fig. 3 . 5 - 4 . )
Buis nr
4
5
6
7
8
9
I0
f l
T2
14
rfrnet ingen lri Rlrn
?O0 * 30
D = 40 d = 30
n = 4 0 d = 30
a = 40 d = 30
u = 45 d = 33
D = 45 d = 3 3
D = A O d = 5 0
D = 6 0 d = 5 0
D = 60 d = 50
n = 60 d = 50
n = 7 0 d = 53
D = 7 0 d = 5 8
n - LI - 70 6 = 53
u = 70 d = 58
engte
in a
0 .30
0.40
0 . 3 4
0 . 4 4
o. 38
0 . 4 9
0.43
0 .47
0 .57
3 .51
1.57
3 .55
3 , 6 5
14.82
5 . 4 6
5 . 4 6
5.46
Y * 5 73
5 . 7 3
6.74
6 .74
5 . 7 4
6 . 7 4
9 - 4 1
3 . 4 7
9 . 4 1
9 . 4 1
massa
in kg
4 . 4 5
2 * 1 8
1 . 8 6
2 . 4 0
2 , :ü
2 . 8 1
2 .86
3 . 3 7
3 . I 7
3 . 8 4
4.110
5 . 3 6
5.27
6 * 7 2
~
loogte v.h. zw. pnt.
1 .75
1 . 6 3
î . 5 0
1.38
1 . 2 5
1 . 13
I .o0
0 .88
0 . 7 5
0 .63
0 . 5 0
o . 38
0 . 2 5
0 . 13
4 . 4 5
1 . 8 8
? ; 3 ?
1 .48
1,11
1 . 1 6
o . 3.3
0 . 8 4
5 . 5 8
3 ; 4 9
0.39
0 . 2 5
0 . I 1
0 . 0 3
abel 3 . 5 . 6 . reductie van de aassa's van de buizen
26
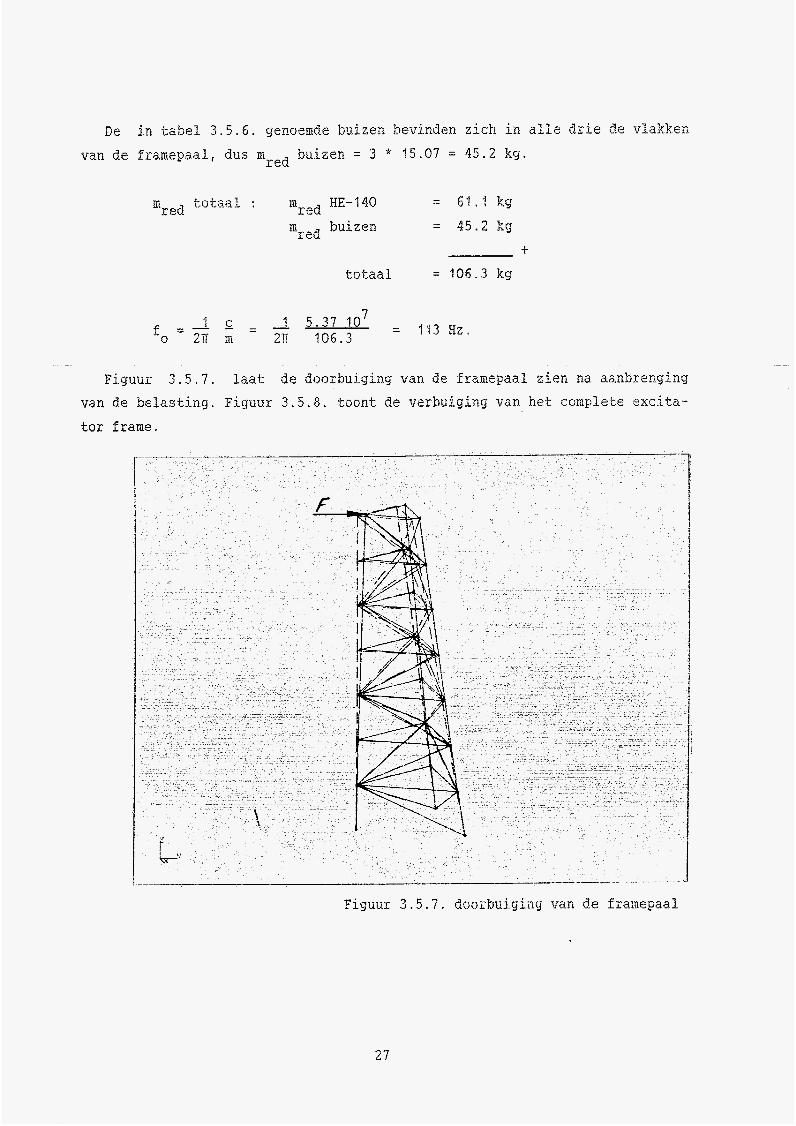
De in tabel 3 . 5 . 6 . genoemcte huizen hevinden zich in alle d r i e de vliikkeii
van d e framepaal, dus mred buizen = 3 * 13.07 = 45.2 kg.
m t.istaai r mred HE-I40 = 6 1 . 1 kg
mred buizen = 45.2 17.4 red
totaal = l 0 6 . 3 kg
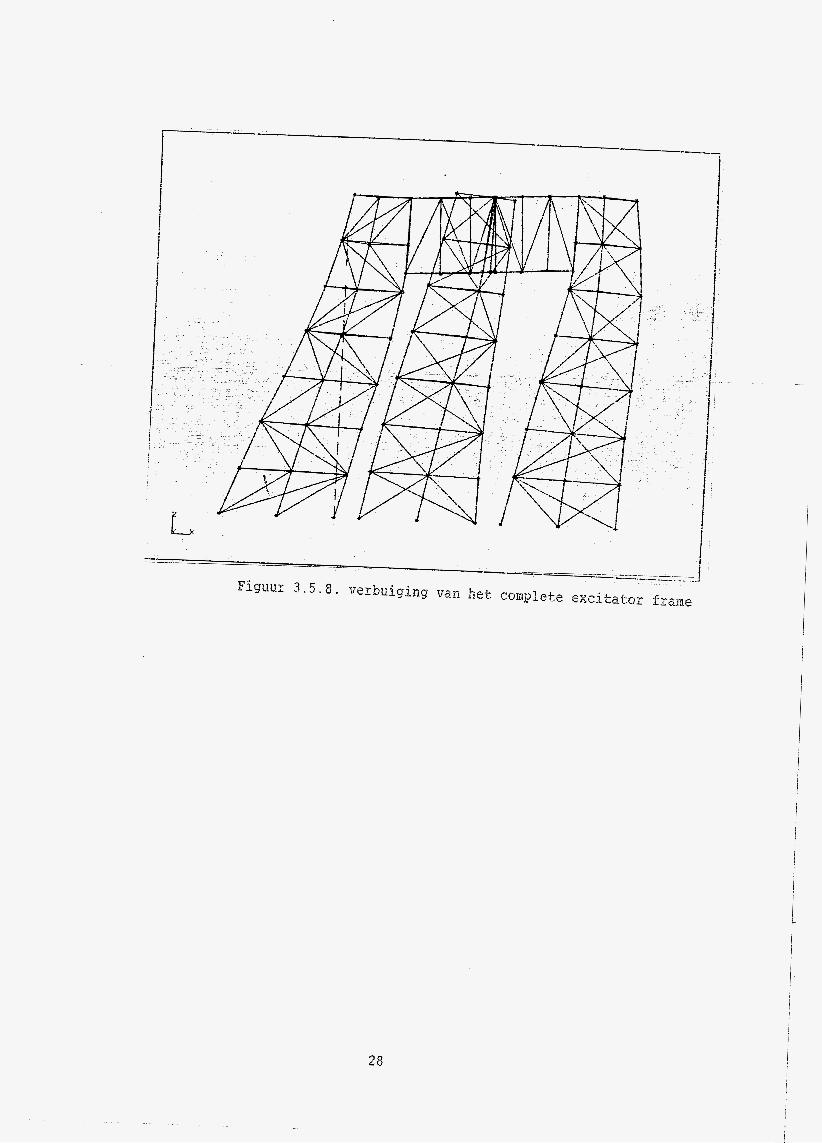
F i g u w 3 .5. 7. laat de doorbuiging van de Tramepaal z i e n na aanbrenging van de belasting. Firjuur 3.5.8. t o o n t de v-rbuiging vun het complete ~ x c i t i l - tor frame.
Liguur 3 i 5 . 7 . doorbuiging van de f ramepaal
27
k
28
4 Bepalincr eicrenfreauenties m.v.b. ASAPMZM
4 . 1 . ASAPN2M
Het berekenen van eigenfrequenties op de manier, zoals beschreven in hoofdstuk 3 gaat erg moeizaam. Bovendien brengt het de onzekerheid met zich mee dat : - De berekende frequentie te hoog is t.g.v. verwaarlozing van de
massatraagheid van elementen. De hierdoor lagere massa resul- teert in een hogere eigenfrequentie.
frequentie te hoog is omdat bij het kiezen van de belastingsrichting niet de trillingsvorm met de laagste Erequen- tie aangestoten is. De stijfheid lijkt dan hoger te zijn, zodat de eigenfrequentie ook hoger is.
- De berekende
Omdat het toch belangrijk is om meer zekerheid te krijgen ten aanzien van de grootte van de laagste eigenfrequentie(s) en de bijbehorende trillings- vorm(en1, zal het excitatorframe gecontroleerd worden op eigenfrequenties m.b.v. het softwarepakket "ASAPM2M".
ASAPMSM is en eindige elementen methode programma voor een microcomputer. Het programma kan zowel statische als dynamische analyse uitvoeren. De dyna- mische analyse bestaat uit :
I . Berekening eigenfrequenties ( eigenwaarden en eigenvectoren 1. 2. Berekening eigenfrequenties, gevolgd door een analyse i n het tijd
domein. 3 . Berekening eigenfrequenties, gevolgd door een analyse in het fre-
het programma kunnen verschillende elementtypen gebruikt worden ( ook in quentie domein.
In een probleem ) . De mogelijk t e gebruiken elementtypen zijn :
- 3d buigbalk - 3d trekstaaf - vlakspannings trekldruk element - vlakspannings buigelement - 2d axisymetric solid - Id trekstaaf ( boundary element 1
29
De maximale capaciteit van het programma is 600 knooppunten. Vanwege de matige handleiding die bij het programma bijgeleverd is, is er een aanvul- lende handleiding in de bijlagen opgenomen.
4.2. Eerekenincr eisenfresuenties
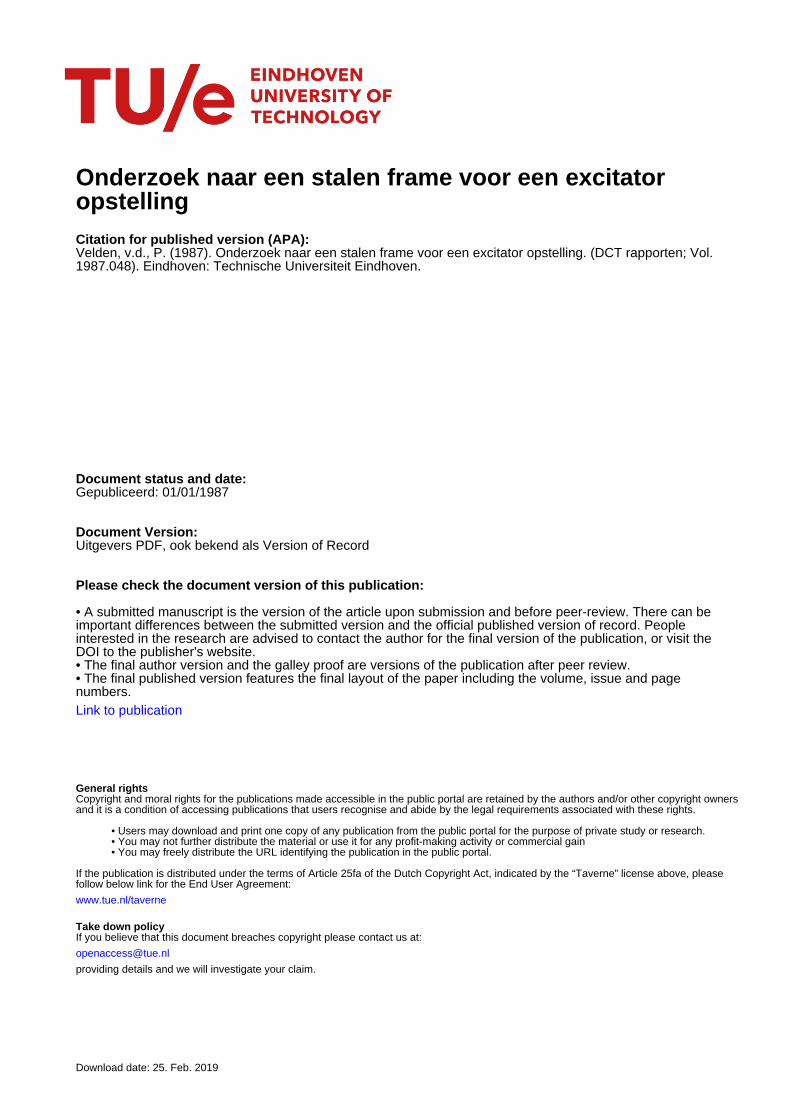
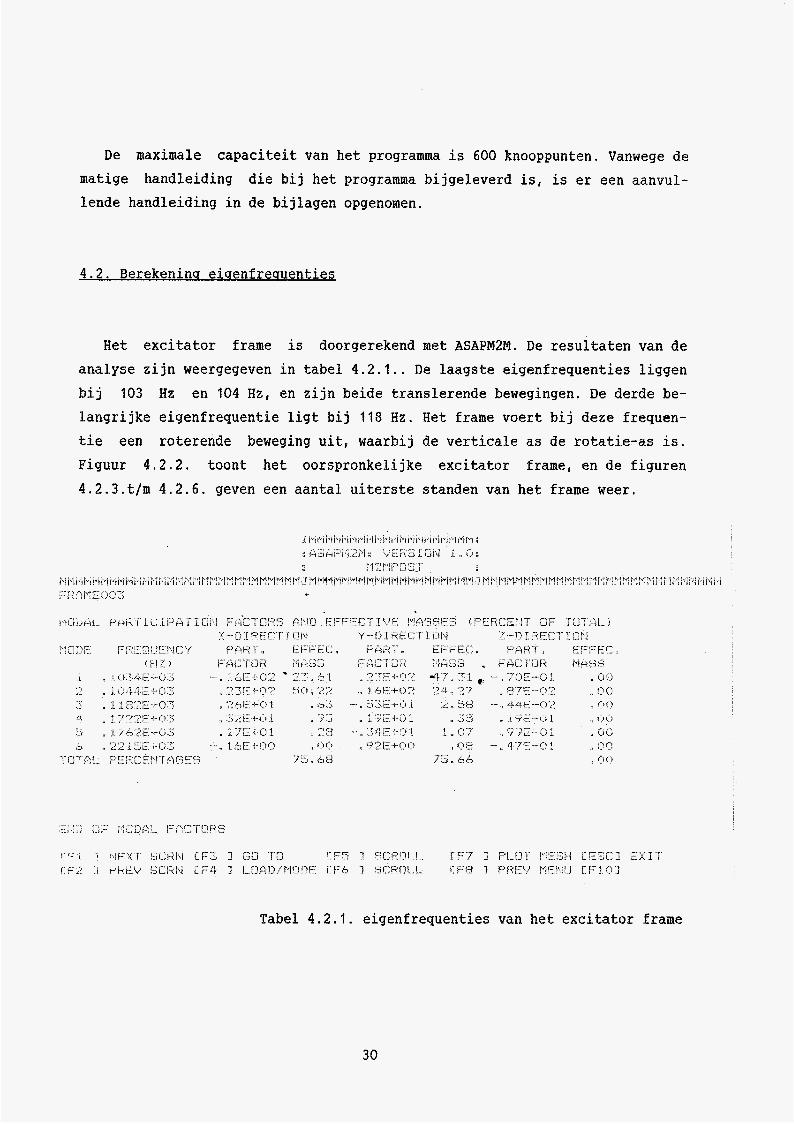
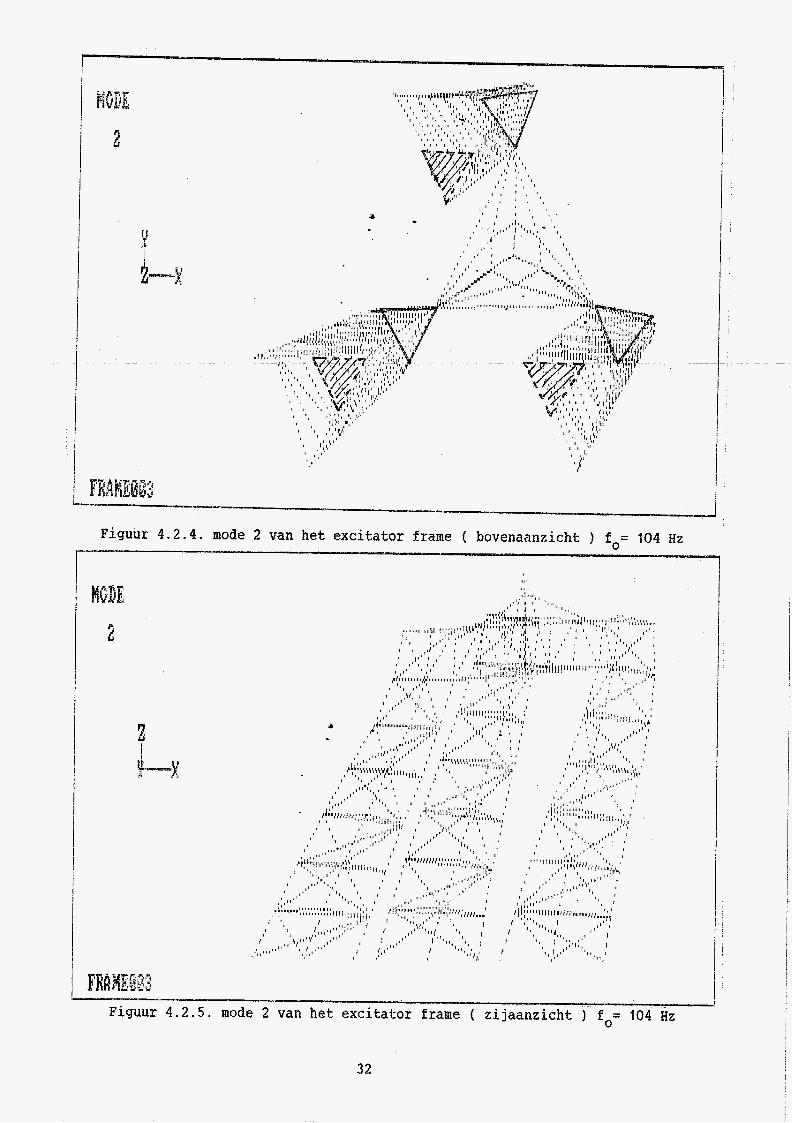
Het excitator frame is doorgerekend met ASAPM2W. De resultaten van de analyse zijn weergegeven in tabel 4.2.1.. De laagste eigenfrequenties liggen bij 103 Hz en 104 Hz, en zijn beide translerende bewegingen. De derde be- langrijke eigenfrequentie ligt bij 118 Hz. Het frame voert bij deze frequen- tie een roterende beweging uit, waarbij de verticale as de rotatieas is. Figuur 4.2.2. toont het oorspronkelijke excitator frame, en de figuren 4.2.3.t/m 4 . 2 . 6 . geven een aantal uiterste standen van het frame weer.
Tabel 4.2.1. eigenfrequenties van het excitator frame
30
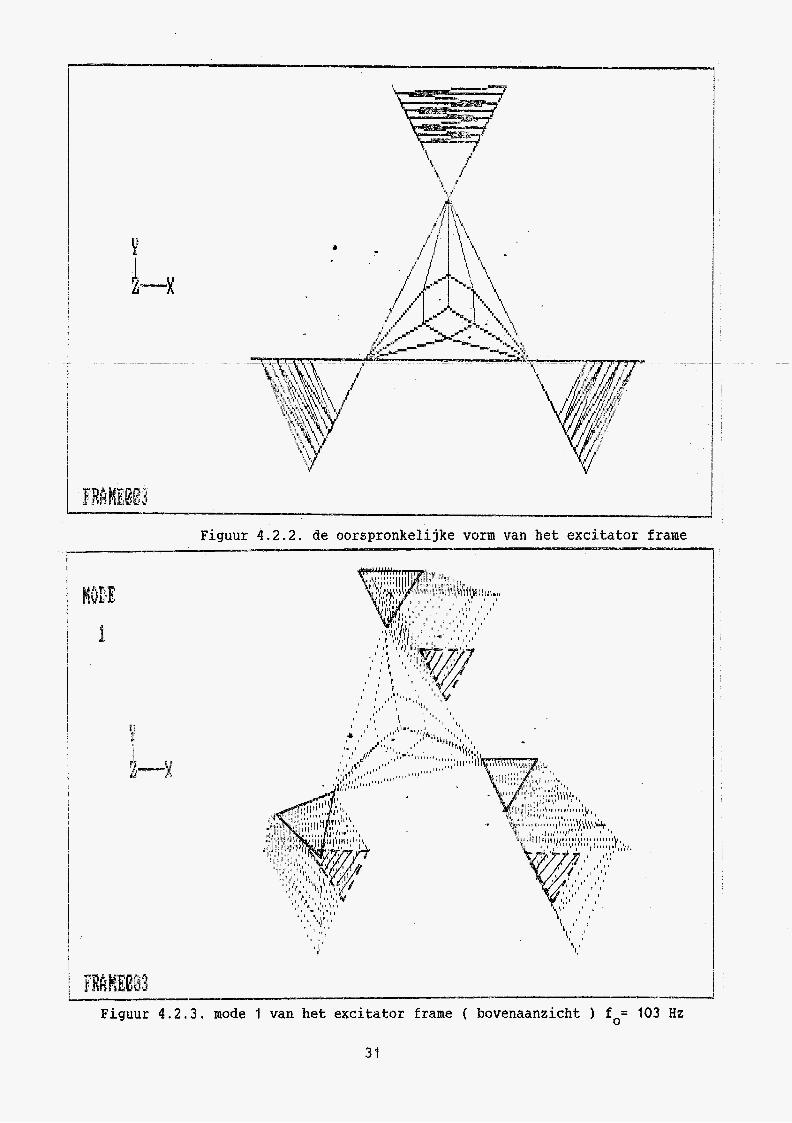
Figuur 4.2.2. de oorspronkelijke vorm van het excitator frame
~~~ _II-___
Figuur 4.2.3. mode I van het excitator frame ( bovenaanzicht 1 fo= 103 Hz
31
J 7
Figuur 4.2.5. mode 2 van het excitator frame ( zijaanzicht 1 f,= 104 Hz
32
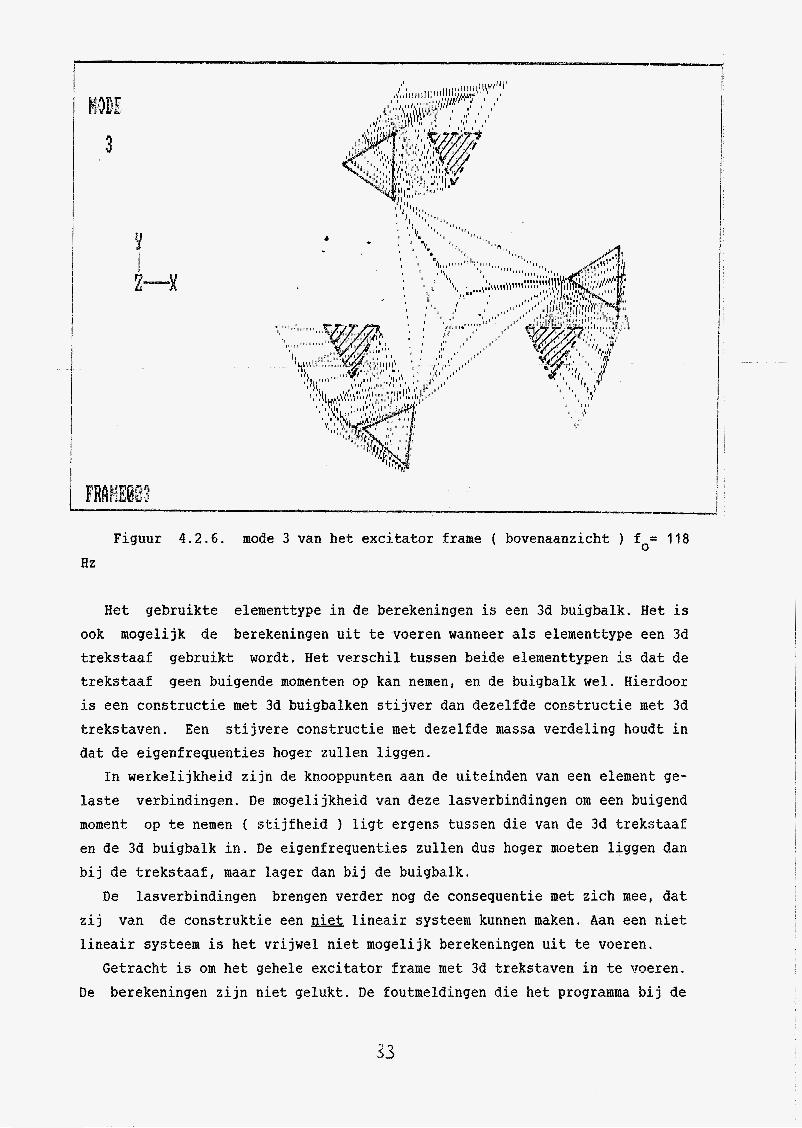
Figuur 4.2.6. mode 3 van het excitator frame ( bovenaanzicht ) fo= 118
Hz
Het gebruikte elementtype in de berekeningen is een 3d buigbalk. Het is ook mogelijk de berekeningen uit te voeren wanneer als elementtype een 3d trekstaaf gebruikt wordt. Het verschil tussen beide elementtypen is dat de trekstaaf geen buigende momenten op kan nemen, en de buigbalk wel. Hierdoor is een constructie met 3d buigbalken stijver dan dezelfde constructie met 3d trekstaven. Een stijvere constructie met dezelfde massa verdeling houdt in dat de eigenfrequenties hoger zullen liggen.
In werkelijkheid zijn de knooppunten aan de uiteinden van een element ge- laste verbindingen. De mogelijkheid van deze lasverbindingen om een buigend moment op te nemen ( stijfheid ) ligt ergens tussen die van de 3d trekstaaf en de 3d buigbalk in. De eigenfrequenties zullen dus hoger moeten liggen dan bij de trekstaaf, maar lager dan bij de buigbalk.
lasverbindingen brengen verder nog de consequentie met zich mee, dat zij van de construktie een niet lineair systeem kunnen maken. Aan een niet lineair systeem i s het vrijwel niet mogelijk berekeningen uit te voeren.
Getracht is om het gehele excitator frame met 3d trekstaven in te vnesen. De berekeningen zijn niet gelukt. De foutmeldingen die het programma bij de
De
berekening gaf bleken niet op korte termijn oplosbaar. Het bleek wel moge- lijk te zijn om een framepaal door te rekenen.
Om nu toch een idee te krijgen over het verschil tussen de beide element- is een van de framepalen twee keer op eigenfrequenties doorgerekend. typen,
Een keer uitgevoerd met trekstaven en een keer uitgevoerd met buigbalken. Een tweede reden om de framepaal door te rekenen met ASAPMSM, is om te
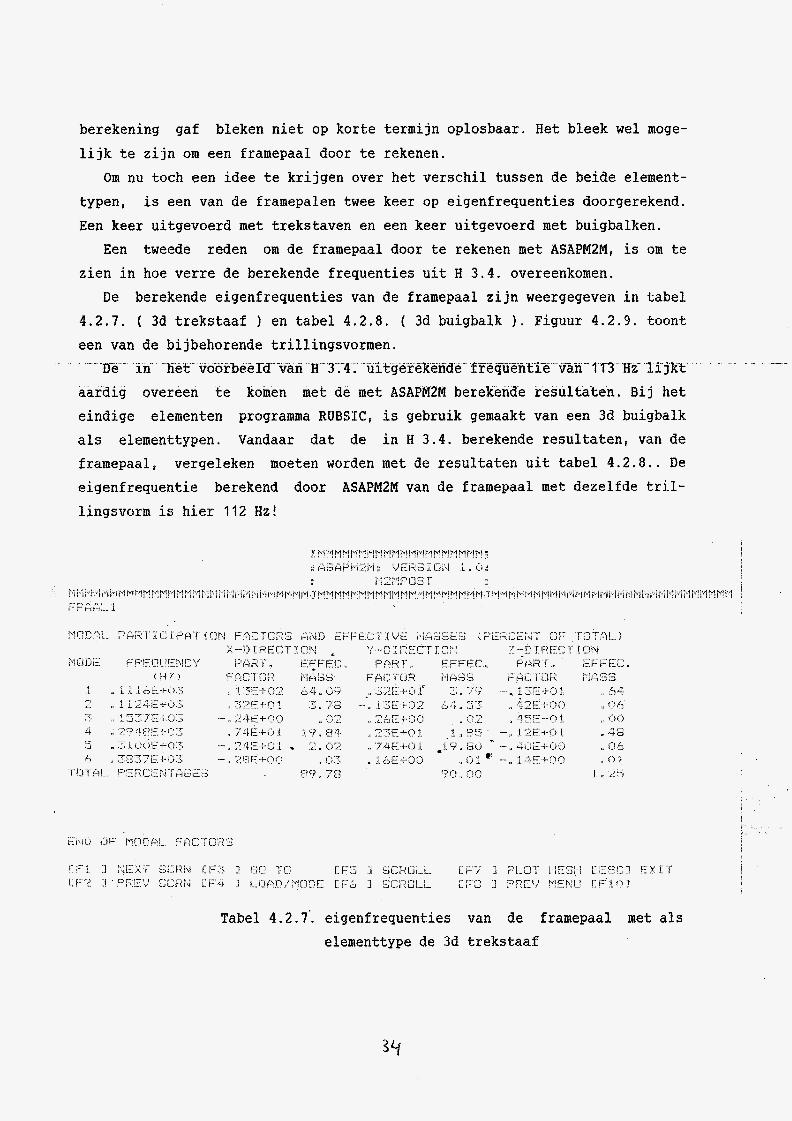
zien in hoe verre de berekende frequenties uit H 3 . 4 . overeenkomen. De berekende eigenfrequenties van de framepaal zijn weergegeven in tabel
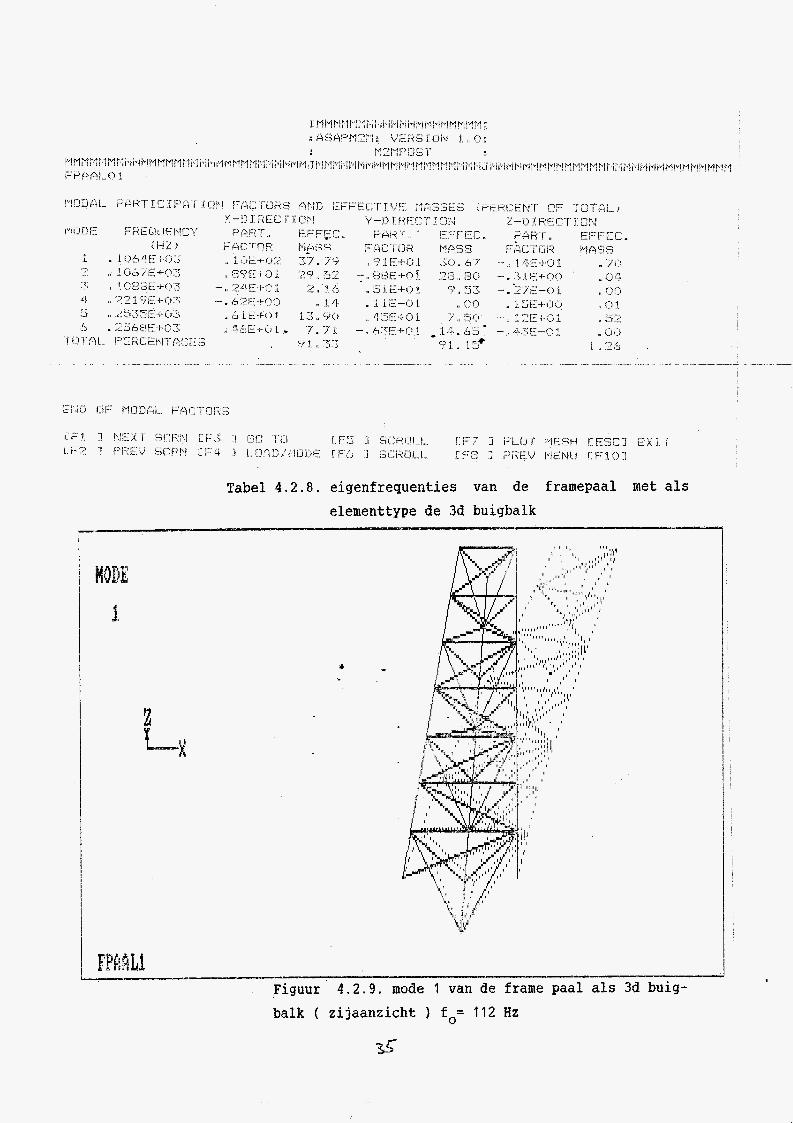
4 . 2 . 7 . ( 3d trekstaaf ) en tabel 4 . 2 . 8 . ( 3d buigbalk 1. Figuur 4 . 2 . 9 . toont een van de bijbehorende trillingsvormen.
De in het voorbeeld van €i 3.4. uitgerekende frequentie van 113 Hz lijkt aardig overeen te komen met de met ASAPM2PiI berekende resultaten. Bi] het eindige elementen programma RUBSIC, is gebruik gemaakt van een 3d buigbalk als elementtypen. Vandaar dat de in H 3 . 4 . berekende resultaten, van de framepaal, vergeleken moeten worden met de resultaten uit tabel 4 . 2 . 8 . . De eigenfrequentie berekend door ASAPM2M van de framepaaf met dezelfde tril- lingsvorm is hier 112 Hz!
i
Tabel 4.2.7'. eigenfrequenties van de framepaal met als elementtype de 3d trekstaaf
x
'*ca, /(y \i!
Figuur balk ( zijaanzicht ) €,= 112 Hz
4.2.9. mode 1 van de frame paal als 3d buig-
5 SLOT
5 . 1 . Conclusies aan de hand van het eisenpakket
Het werkgebied van de excitator is van O Hz tot 120 Hz. Het logische ge- volg hiervan is, dat het frame zo mogelijk geen eigenfrequenties onder de 120 Hz heeft. De laagste eigenfrequentie berekent met ASAPM2N is 103 Hz. Vanwege de beperkte stijfheid van de lasverbindingen, en waarschijnlijk nog tal van andere invloedsfactoren, zal de laagste eigenf reqüentie van het frame nog wel wat lager liggen. De laagste eigenfrequentie ligt nu dus zeer kritisch.
Vanuit dit oogpunt gezien wil dat zeggen dat allerlei onderdelen die nog bij het excitator frame geconstrueerd moeten worden niet veel massa mögën hebben. Ook is het zo, dat het frame beslist niet hoger en/of breeder ge- maakt kan worden. Wel is het mogelijk hoogte toe' te geven, en daarvoor breedte terug t e krijgen.
In het eisenpakket staat dat de excitator een werkstuk moet kunnen aan- stoten vanuit de verticale richting, tot de horizontale richting. Om de excitator onder een hoek te zetten, zonder al te veel gewichts toename, is constructief gezien goed mogelijk. Echter het verplaatsen van de excitator in het horizontale vlak levert zo'n enorme gewichtstoename op, dat dit vrij- wel niet mogelijk is gezien de eigenfrequenties van het excitator frame.
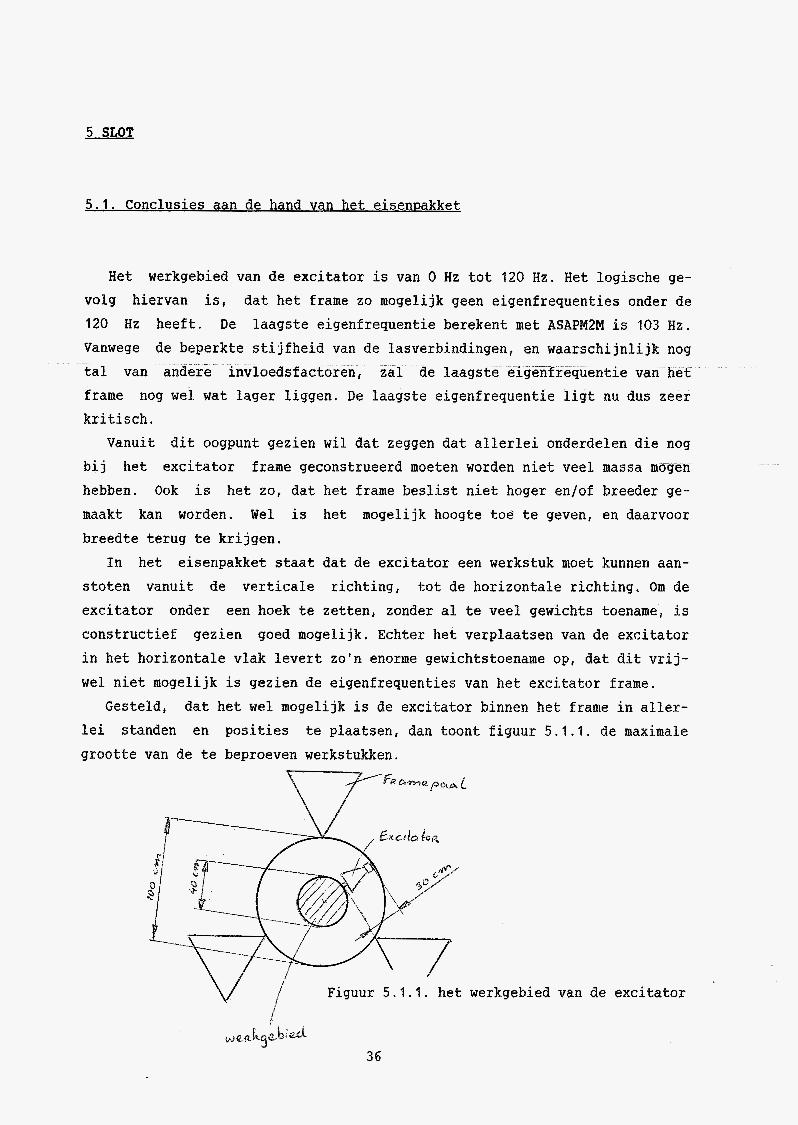
dat het wel mogelijk is de excitator binnen het frame in aller- lei standen en posities te plaatsen, dan toont figuur 5.1.1. de maximale grootte van de te beproeven werkstukken.
Gesteld,
Figuur 5 . 1 . 1 . het werkgebied van de excitator
36
Een werkstuk dat van alle richtingen aangestoten moet kunnen worden mag in het horizontale vlak niet buiten het gearceerde gebied in figuur 5.1.1. komen. Dit betekend voor het te beproeven werkstuk een maximale horizontale doorsnede van O 40 cm.
Gezien deze nadelen, en het zware eisenpakket, is het niet zinvol om te proberen liet excitator frame van staal te maken.
5.2. Het alternatief
In de vorige paragraaf is geconcludeerd, dat het niet mogelijk was de constructie van staal te maken, althans niet op de in dit verslag uitgewerk- te manier.
Een alternatief is om de opstelling te laten bestaan uit twee betonnen blokken, een met daarop de excitator bevestigd, en een met daamp het te be- proeven werkstuk.
Een dergelijke opstelling met een soortgelijk eisenpakket is reeds aanwe- zig in het laboratorium. De elasticiteitsmodulus van beton ligt weleenswaar een factor 10 - 15 lager dan die van ijzer, maar toch schijnen de eigenfre- quenties in zo'n massief blok hoog genoeg te liggen voor de opstelling. l)e laagste eigenfrequentie van een massief blok beton dat op de grond staat is afkomstig van de beweging van de totale massa t.o.v. zijn verbindingsvlak (
de vloer ) .
Met de nu volgende berekening, z a l een schatting gedaan worden naar de minimale stijfheid, van de verbinding tussen vloer en beton. Aan de hand van dit getal kan een eerste uitspraak gedaan worden over de mogelijkheid om de excitator opstelling op deze manier uit te voeren.
Berekenins :
Stel het blok beton heeft de afmetingen : 1 * 1 * 1 meter. V = l * b * h = l * l * l = l m . m = p * V = 2.38 IO3 * 1 = 2380 kg.
3
De eigenfrequentie mag niet lager liggen dan 120 Hz.
3 7
2n 2380 120 =
= 2380 ( 240 ií l L ‘ver binding = 1 .35 I O 9 N/m ‘verbinding
Deze getalswaarde voor de stijfheid lijkt voor een starre verbinding van een blok beton aan de vloer makkelijk haalbaar, wanneer er nog eens terug geblikt wordt op de stijfheden die gegeven staan in tabel 3.4.2.
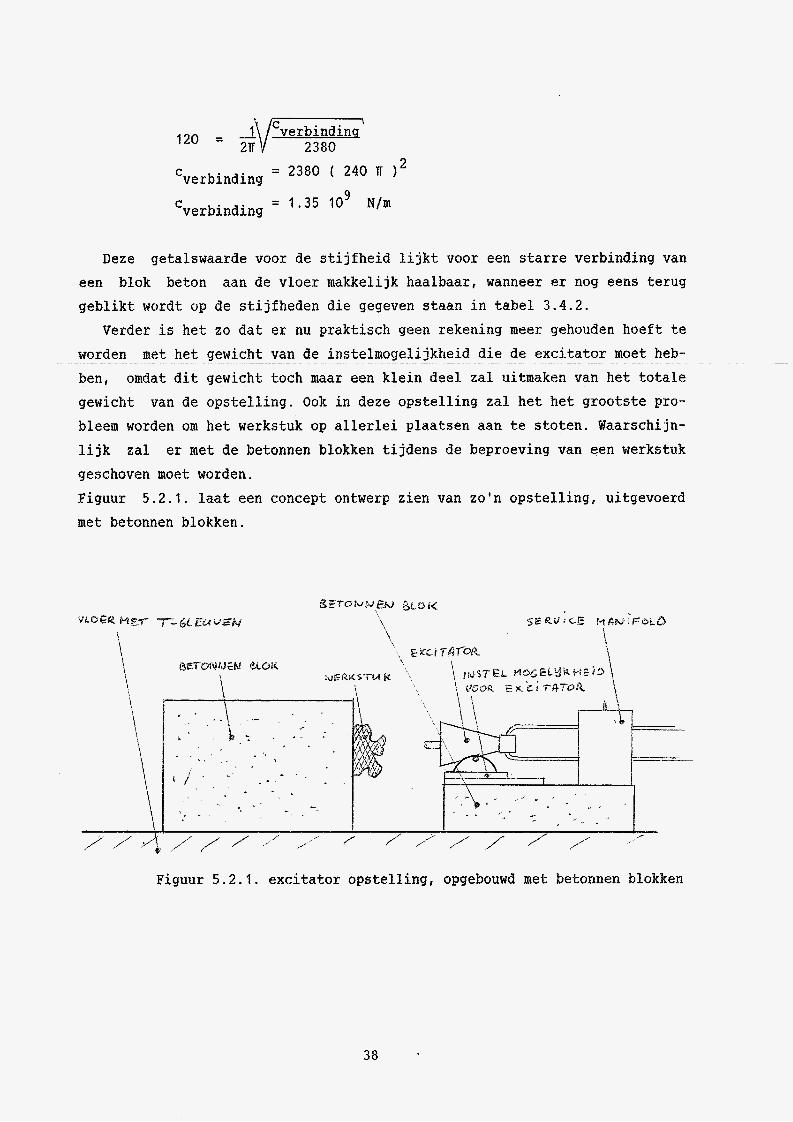
Verder is het zo dat er nu praktisch geen rekening meer gehouden hoeft te worden met het gewicht van de instelmogelijkheid die de excitator moet heb- ben, omdat dit gewicht toch maar een klein deel zal uitmaken van het totale gewicht van de opstelling. Ook in deze opstelling zal het het grootste pro- bleem worden om het werkstuk op allerlei plaatsen aan te stoten. Waarschijn- lijk zal er met de betonnen blokken tijdens de beproeving van een werkstuk geschoven moet worden. Figuur 5 . 2 . 1 . laat een concept ontwerp zien van zo’n opstelling, uitgevoerd met betonnen blokken.
Figuur 5 . 2 . 1 . excitator opstelling, opgebouwd met betonnen blokken
38
BIJLAGE
AANVULLENDE HANDLEIDING ASAPMSM
Deze handleiding is geschreven, omdat de in het programma aanwezige "help screens'', noch de bijbehorende handleiding, voeldoende informatie bevatten om met ASAPM2M te werken. Deze handleiding is niet bedoeld, als een opzich zelfstaand verhaal, maar dient alleen maar als aanvulling op de reeds aan- wezige documentatie, ~~~ waardoor het programma ( met name de invoer van ge- gevens ) beter toegandkelijk is. Besproken zullen worden :
- statisch belaste construkties, met bijbehorende vervormingen; - berekening van eigenfrequenties in een construktie.
Er zullen slechts twee elementtypen behandeld worden : - het truss element ( 3d trekstaaf 1 ; - het beam element ( 3d buigbalk f .
De indeling van deze handleiding is als volgt :
B 1 Beschrijving waaruit ASAPM2M opgebouwd is. B 2 Het opstarten van de programma's. B 3 Letterlijke beschrijving van de invoer menu's
39
B 1 Beschriivina waaruit ASAPW2M opcrebouwd is.
ASAPM2M is opgebouwd uit verschillende programma's, welke opgeslagen zijn op 6 diskettes. Het programma neemt ongeveer 2 Megabyte in beslag, en kan gerund worden zowel op een personal computer ( pc ) met een harddisk, als op een pc met twee diskdrives. De pc met twee diskdrives heeft de beperking, dat er alleen maar kleine problemen op berekend kunnen worden, omdat er tij- dens de berekening files aangemaakt worden, die niet altijd op 1 diskette passen. Voorwaarde is dat de pc een minimaal werkgeheugen ter beschikking moet hebben van 512 R. Tenslotte moet de DOS versie hoger dan, o f gelijk zijn aan 2.0. De verschillende programma's waaruit ASAPM2M opgebouwd is zijn :
~~
I. M2MPXE 2. ASAPBAND 3 . S2DSAP1 4. SSDSAPS 5 . M2MPOST 6. ASAPPRN
1 W2MPKE De invoergegevens worden aan de hand van allerlij menu's bij de prepro-
cessor ( M2MPRE ) ingevoerd. De preprocessor schrijft vervolgens de invoer- gegevens in matrixvorm in een file. Deze file dient als invoerfile voor het rekenprogramma deel 1 en 2.
2 ASAPBAND ASAPBAND is een programma waarmee de bandbreedte van de door de prepro-
cessor opgestelde matrices gereduceerd worden. Dit reduceren houdt in dat de knooppunten opnieuw genummerd worden, en wel zo, dat het verschil tussen twee knooppunten verbonden door een element zo klein mogelijk wordt. Vooral bij grotere problemen levert ASAPBAND een aanzienlijke tijdswinst op. Afhan- kelijk van de construktie kan deze tijdswinst soms meerdere uren bedragen.
3 SSDSAPI
S2DSAP1 is het 2e deel van het rekenprogramma. Berekend worden : - de verplaatsingen i statische geval i ; - de eigenwaarden en de eigenvectoren.
40
4 S2DSAP’l S2DSAP2 is het tweede deel van het rekenprogramma. Dit deel van het
rekenprogramma is verantwoordelijk voor de rest van de verdere modale analyse. SSDSAPI wordt altijd vooraf gegaan door S2DSAPI.
5 M2MPOCT De uitvoergegevens van SSDSAPI en S2DSAP2 kunnen weergegeven worden door postprocessor f M2MPOST 1 . Weergave van de resultaten, en invoergegevens de
kan geschieden op : - beeldscherm; - printer ( er wordt dan een file aangemaakt ) .
6 W2MPRN M2MPRN is een appart printprogramma, om direkt zonder een programma te
moeten doorlopen, of een file aan te maken, gegevens binnen het ASAPM2M pro- gramma uit te printen.
41
Het werken op en pc met harddisk, verschilt van het werken op een pc met alleen maar twee diskdrives. Zoals ook al eerder gezegt, heeft de laatst ge- noemde pc een beperking in de grootte van het rekenprobleem. Een ander na- deel is dat de rekentijd langer is. Dit komt omdat er voortdurend informatie ingelezen en weggeschreven ( interactief programma ) wordtf en dat gaat veel sneller op een harddisk.
Een praktisch nadeel bij het werken met de pc met twee diskdrives is, dat er nogal vaak een diskverwisselt moet worden.
Vanwege het verschil tussen beide soorten pc, zal het opstarten van de
programma's vor elke pc appart behandeld worden.
P.C. met harddisk
Preprocessor : M2MPRE
opstarten : C > M2MPRE < return > uitvoer : opgegeven filename ( in het vervolg TAPES genoemd )
Bandbreedte reductor : ASAPBAND
opstarten : C > ASAPBAND TAPES < return > uitvoer : TAPE5 - Deze nieuwe TAPE5 file is over de oude TAPES file
heengeschreven. Het verschil tussen beide is dat de knooppunten anders gerangschikt zijn.
TAPE5.NNX - Deze file wordt door de postprocessor gebruit om de uitvoerfile met de orginele knooppunts- rangschikking weer te geven.
TAPE5.KNX - De relatie tussen de oude, en de nieuwe knoop- puntsnurnmering is vastgelegt in de TAPE5.RNX file .
Rekensrouramma deel 1 : S2DSAP1
opstarten : C > S2DSAP1 TAPE5 < return >
42
uitvoer : naam uitvoerfile ( verder TAPE6,SSD genoemd 1 Rekenpromamma deel2 : S2DCAP2
opstarten : C > SSLISAP2 TAPE5 < return > uitvoer : TAPE6.S2D ( let op, de oude TAPE6.C2D file wordt overge-
schreven door de nieuwe 1
Postprocessor : M2MPOST
opstarten : C : M2MPOST TAPEG.S2D < return ) uitvoer : - begïdscherm
- printfile, met naam naar eigen keuze
Printprosramma : ACAPPRM
opstarten : C > M2MPRN TAPEG.S2D < insert ) uitvoer : een willekeurige uitgeprinte ASAPM2W file
P.C. met twee diskdrives
Voor de uitvoer van elk programma, zie p.c. met harddisk, die als eerste in dit hoofdstuk beschreven wordt. Het gebruik van de diskette stations en de invoer van diskettes is afhankelijk van het feit o f er in M2MPRE een nieuw probleem wordt gedefinieerd, of dat er een bestaande invoerfile wordt gemodificeerd. Beide gebruiksvoorschriften van de diskette stations, tijdens het werken met #2MPRE, worden hieronder beschreven.
Preprocessor : M2PiPRE
opstarten : disk 3 in drive A disk 1 in drive B commando : A > B:M2NPRE < return >
Wanneer dit gebeurd is kom je terecht in het hoofdmenu ( zie figuur 1 1. Hier worden een aantal keuzemogelijkheden geboden waarvan de voor ons rele- vante gegeven zullen worden :
1 : nieuwe invoerfile defineeren f F 1 ]
2 : bestaande invoerfile inlezen [ F 2 ] ( of [ F 3 I 1
43
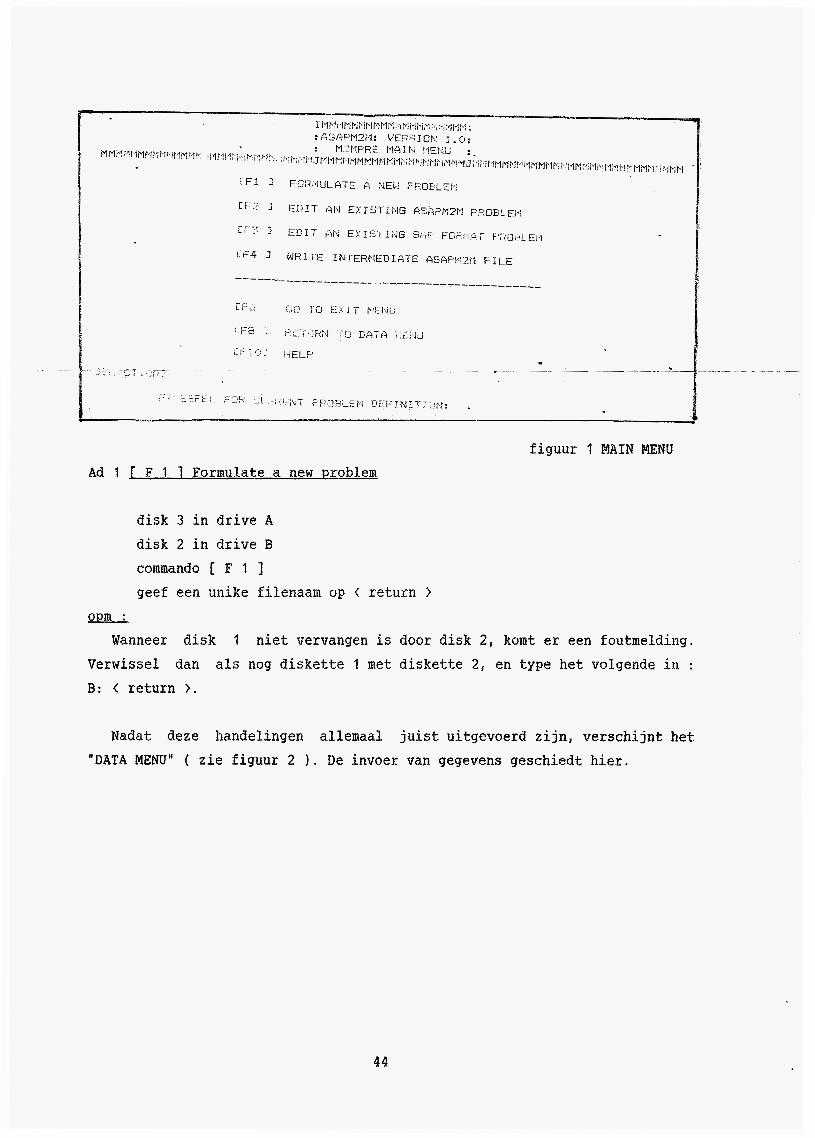
figuur 1 MAIN MENU Ad 1 1 F 1 1 Formulate a new problem
disk 3 in drive A
disk 2 in drive B
commando [ F 1 ]
geef een unike filenaam op < return > oPm :
Wanneer disk 1 niet vervangen is door disk 2, komt er een foutmelding. als nog diskette 1 met diskette 2 , en type het volgende in : Verwissel dan
B: < return >.
Nadat deze handelingen allemaal juist uitgevoerd zijn, verschijnt het "DATA MENU" ( zie figuur 2 1. De invoer van gegevens geschiedt hier.
44
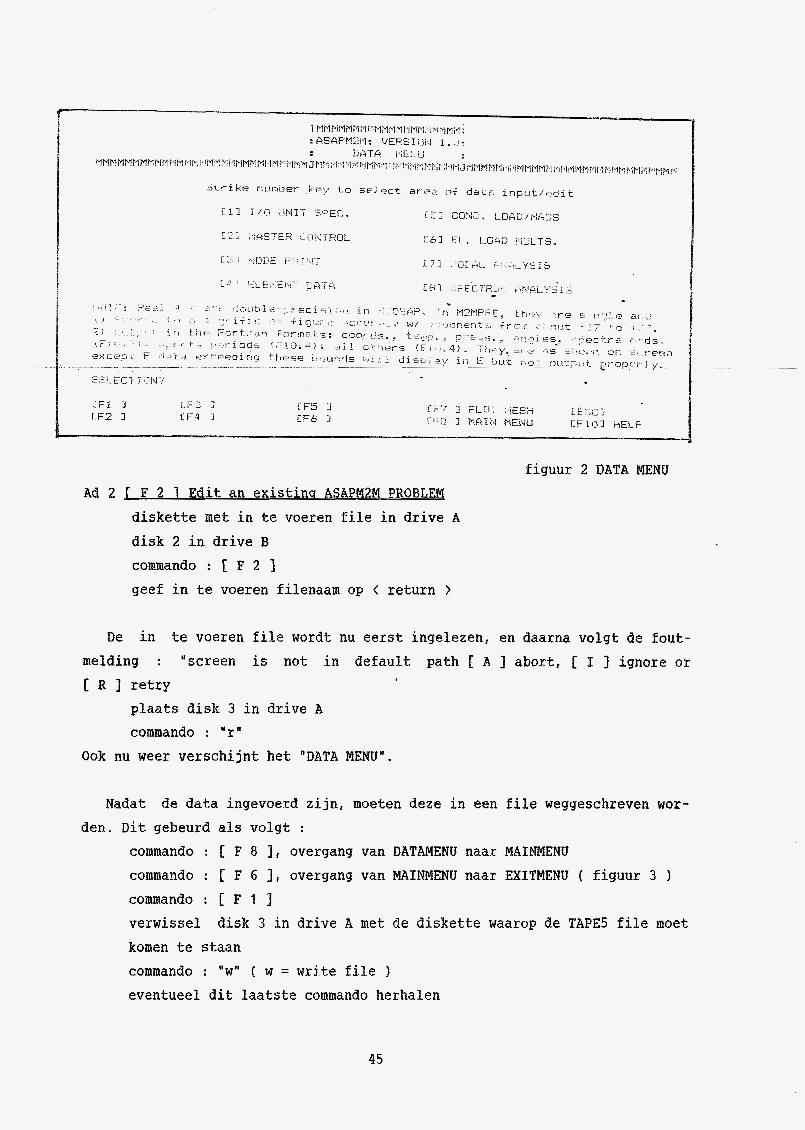
figuur 2 DATA MENU Ad 2 F 2 1 Edit an existins ASAPM2M PROBLEM
diskette met in te voeren fife in drive A
disk 2 in drive B commando : [ F 2 ] geef in te voeren filenaam op < return >
De in te voeren fife wordt nu eerst ingelezen, en daarna volgt de fout-
melding : "screen is not in default path [ A ] abort, [ I ] ignore or [ R ] retry
plaats disk 3 in drive A
commando : "r" Ook nu weer verschijnt het "DATA MENU".
Nadat de data ingevoerd zijn, moeten deze in een file weggeschreven wor- den. Dit gebeurd als volgt :
commando : [ F 8 3 , overgang van DATAMENU naar MAINMENU commando : [ F 6 3 , overgang van ~ I N ~ E N U naar EXITMENU ( figuur 3 1 commando : [ F 1 ]
verwissel disk 3 in drive A met de diskette waarop de TAPE5 file moet komen te staan commando : "w" ( w = wa-ite file 1 eventueel dit laatste commando herhalen
45
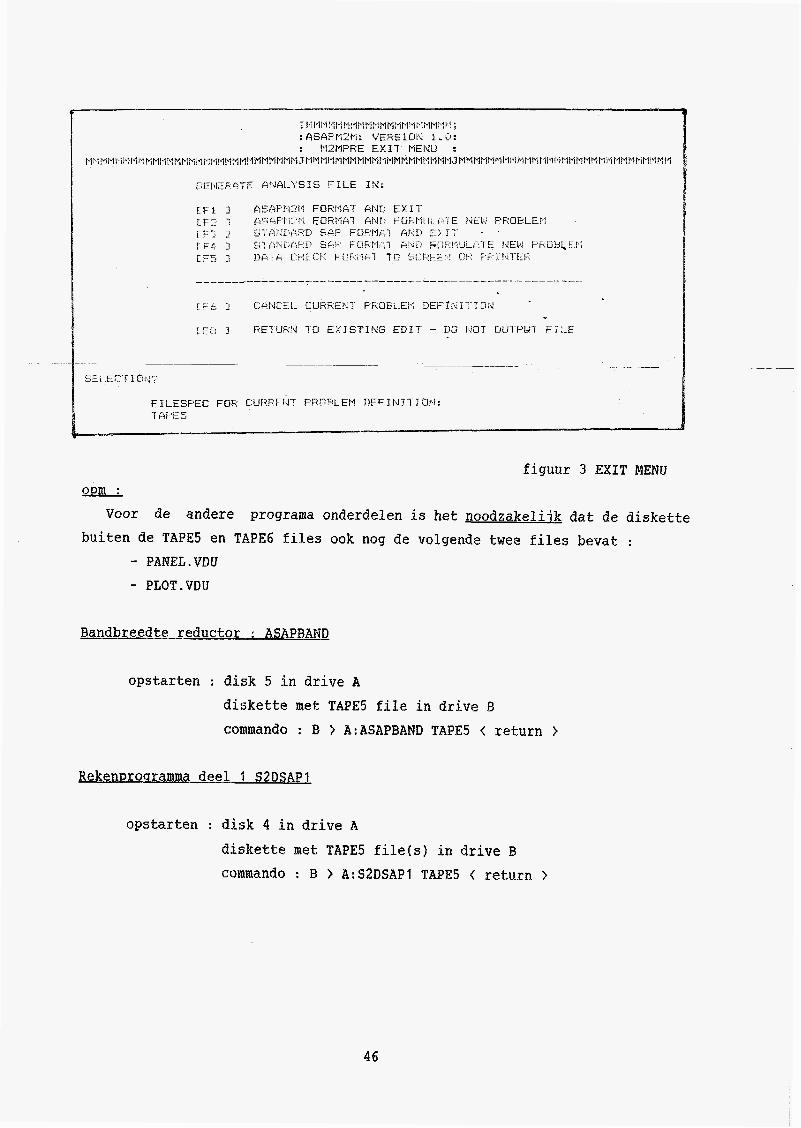
figuur 3 EXIT NENU oPm :
Voor de andere programa onderdelen is Pret noodzakelijk dat de diskette
buiten de TAPE5 en TAPE6 files ook nog de volgende twee files bevat :
- PANEL.VDü - PLOT.VDU
Bandbreedte reductor : ASAPBAND
opstarten : disk 5 in drive A diskette met TAPES file in drive B commando : B > A:ACAPBAND TAPE5 < return >
RekenProsramma deel 1 S2DSAP1
opstarten : disk 4 in drive A
diskette met TAPE5 file(s) in drive B commando : 8 > A:S2DSAP1 TAPE5 < return )
46
Rekenpromamma deel 2 : S2DSAP2
opstarten : disk 5 in drive A diskette met TAPE5 file(s1 en TBPE6.SSD file in drive B
commando : B > S2DSAP2 TAPES < return > Postprocessor : M2MPOST
opstarten : d i s k 6 i n drive A
diskette met TAPE5 file(s) en TAPE6.S2D file in drive B
commando : B > A:M2MPOST TAPE6.S2D ~ ~ ~ _ _ _ _ ~ ~ ~ ~ ~~~~~~ -~ - ~~~ ~ ~ ~-
PrintProqramma : ASAPPRN
opstarten : disk 5 in drive A
diskette met uit te printen file in drive 8
commando : B > B:€ilename
47
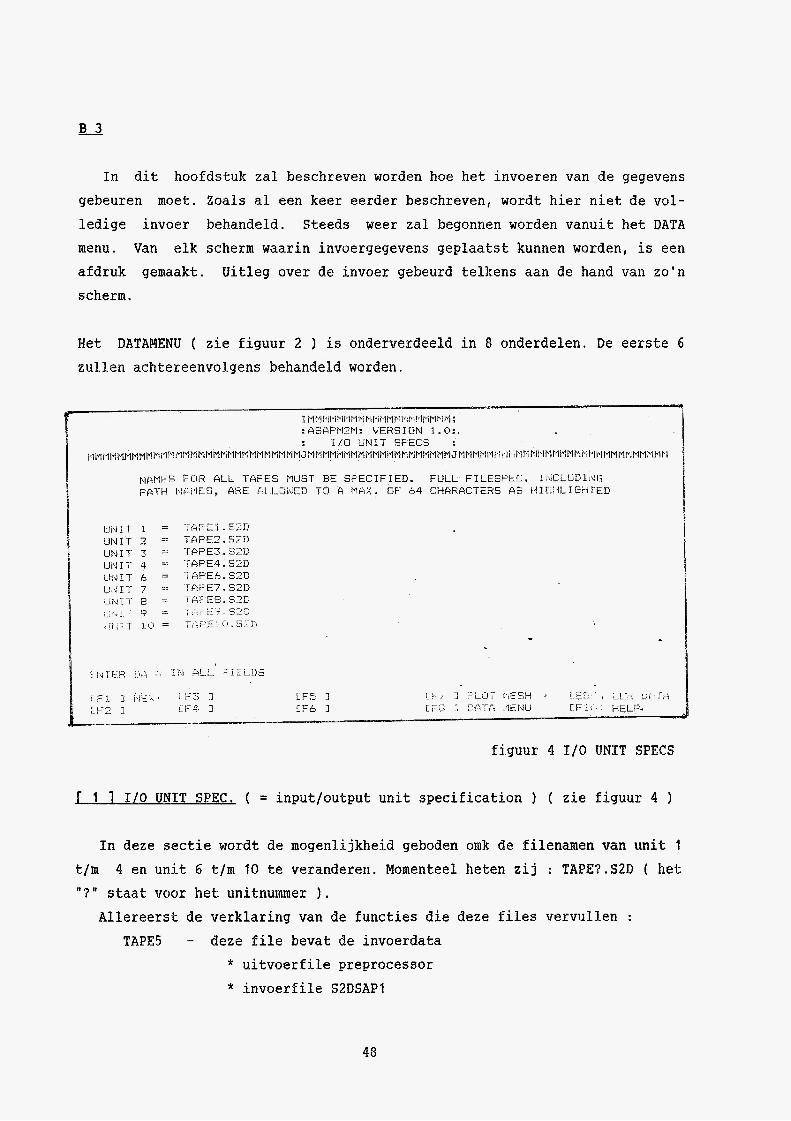
In dit hoofdstuk zal beschreven worden hoe het invoeren van de gegevens gebeuren moet. Zoals al een keer eerder beschreven, wordt hier niet de vol- ledige invoer behandeld. Steeds weer zal begonnen worden vanuit het DATA menu. Van elk scherm waarin invoergegevens geplaatst kunnen worden, is een afdruk gemaakt. Uitleg over de invoer gebeurd telkens aan de hand van zo'n scherm.
Het DATAMENU ( zie figuur 2 ) is onderverdeeld in 8 onderdelen. De eerste 6 z u1 1ëK acht ër eënvol cjënS pbeñändelap wö Eden.
~~
fi.guur 4 1/0 UNIT SPECS
1 1 1/0 UNIT SPEC. ( = inputloutput unit specification ) ( zie figuur 4
In deze sectie wordt de mogeniijkheid geboden omk de filenamen van unit 1
t/m 4 en unit 6 t / m 10 te veranderen. Momenteel heten zij : TAPE?.S2D ( het ' I ? " staat voor het unitnuamer ) ,
Allereerst de verklaring van de functies die deze files vervullen : TAPES - deze file bevat de invoerdata
* uitvoerfile preprocessor * invoerfile SSDSAPI
48
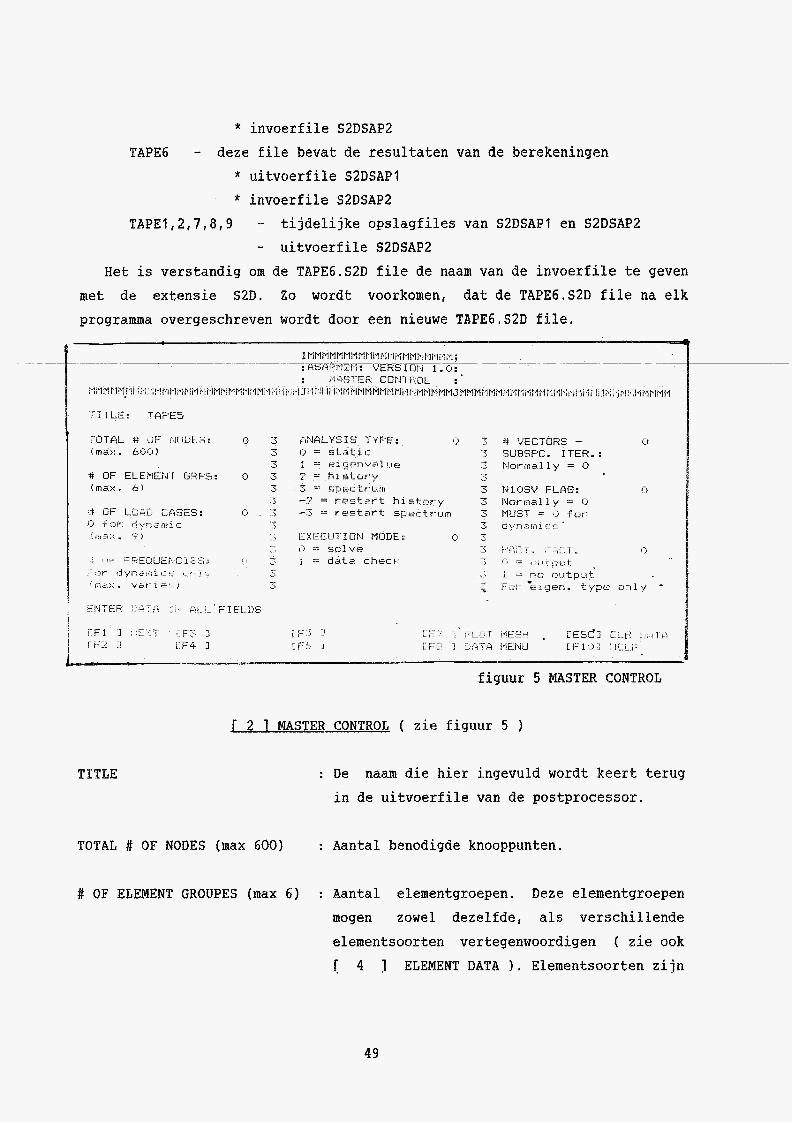
* invoerfile S2DSAP2 TAPE6 - deze file bevat de resultaten van de berekeningen
* uitvoerfile S2DSAPI * invoerfile S2DSAP2
TAPE1,2,7,8,9 - tijdelijke opslagfiles van S2DSAP1 en C2DCAP2 - uitvoerfile S2DSAP2
Het is verstandig om de TAPE6.S2D file de naam van de invoerfile te geven met de extensie S2D. Zo wordt voorkomen, dat de TAPEG.S2D file na elk programma overgeschreven wordt Boor een nieuwe TAPE6.S2D file.
~ ~~ I i.1M~ll.IMI.l~7t~MM~M~t~~~~l~~~~l~l~i~~ : r ? C k i ; M Z ~ : ~ : ~ E K ~ ~ I C ) i . I 1 . ~ ~ ~ - ~ ~ ~ _ _ _ _ ~ ~~~ ~ ~~
~~~~ ~~~~~~~
# VECTORS - (:I C l aLHCPC. I T E R . : Rlirmally = 1:)
figuur 5 MASTER CONTROL
J 2 1 MASTER CONTROL ( zie figuur 5
TITLE : De naam die hier ingevuld wordt keert terug in de uitvoerfile van de postprocessor.
TOTAL # OF NODES (max 600) : Aantal benodigde knooppunten.
# OF ELENENT GROUPEC (max 6) : Aantal elementgroepen. Deze elementgroepen mogen zowel dezelfde, als verschillende elementsoorten vertegenwoordigen ( zie ook [ 4 1 ELEMENT DATA 1 . Elementsoorten zijn
49
b.v. : - truss element ( 3d trekstaaf )
- beam element ( 3d buigbalk 1 # LOAD CASES O for dynamics Het aantal befastingsgevallen ( z i e hiervoor
( max 9 1 [ 6 ] EL. LOAD MULTS. 1 .
# FREQUENTIES for dynamics Aantal frequenties ( NF ) die berekend dienen only te worden, vanaf de laagste frequentie. Het
( max varies ) aantal berekende frequenties kan lager zijn dan het aantal frequenties die hier gevraagd worden. Dit vanwege geheugengebrek.
€
ANALYSES TYPE O = static : De vervormingen van een statischbelaste constructie worden berekend.
1 = eigenvalue : De eigenfrequenties van de construktie worden berekend.
2 = hisstory 3 = spectrum -2 = restart history -3 = restart spectrum
EXECUTTONMODE O = solve 1 = data check
Wanneer voor data check gekozen wordt, worden grote delen van het rekenproces overgeslagen.
# VECTORS -SUPERSPECIFICATION ITERATION normaly =O O = default waarde : 2 * NF of NF t 8
De grootste waarde wordt genomen. ( NF = number of frequenties 1
N1OV FLAG normaly = O Deze optie is bedoeld om bepaalde gegevens op TAPE10 op te slaan. must = O for dynamics
< DEZE OPTIE IS NOG NIET AANWEZIG IN DE HUIDIGE ASAPMSM VEKC'SE )
PARTICIPATïON FACTOR O = output Geen output betekend geen berekening 1 = no output van de massadeelname bij een trilling.
for eigen. type only
50
SYSTEM TYPE
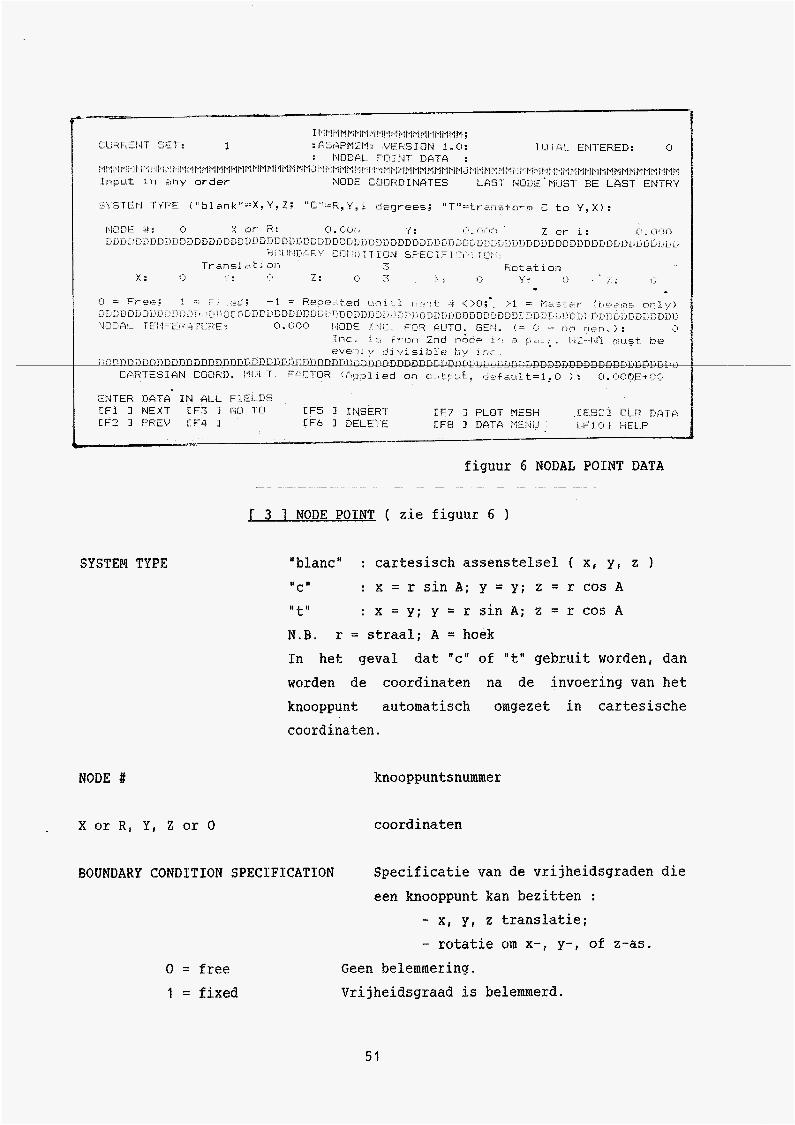
figuur 6 NODAL POINT DATA
3 1 NODE POINT ( zie figuur 6
"blanc" : cartesisch assenstelsel ( x , y , z 1 l tC" : x = r s i n A ; y = y ; z = r c o s A t IS : x = y; y = r sin A; z = r cos A
N.B. r = straal; A = hoek In het geval dat "c" of "t" gebruit worden, dan worden de coordinaten na de invoering van het knooppunt automatisch omgezet in cartesische coordinaten.
NODE # knooppuntsnummer
X or R, Y, 2 or O coordinaten
BOUNDARY CONDITION SPECIFICATION Specificatie van de vrijheidsgraden die een knooppunt kan bezitten :
- x, y, z translatie; - rotatie om x-, y-, of z-as.
Geen belemmering. Vrijheidsgraad is belemmerd.
o = free 1 = fixed
51
-1 = repeated until Maakt van elk volgend knooppunt de op "-1" next # < > O gezette vrijheidsgraad ook "-I", totdat er
een knooppunt is waarvan deze vrijheids- graad ongelijk aan "O" is.
>I = master Het ingvulde nummer stelt het nummer van ( beams only ) het "master" knooppunt voor. De vrijheids-
graad van het "slave" knooppunt wordt hier- door direct afhankelijk van dezelfde vrij- heidsgraad van de master.
NODAL TEMPERATURE Knooppuntstemperatuur.
NODE INCREMENT FOR AUTOMATIC GENERATION Het programma biedt de mogenlijkheid, om een willekeurig aan- tal knooppunten automatisch in te voeren. Hiervoor worden twee knooppunten beschouwd. De automatisch in te voeren knooppunten worden lineair, en op gelijke afstand tussen beide knooppunten geplaatst. Ook het temperatuursverloop is lineair.
werkincr : Het eerste knooppunt wordt normaal ingevoerd. Het tweede knooppunt is het laatste knooppunt van de serie waarover auto. gen. plaats moet vinden ( dit wordt tot uitdrukking gebracht m.b.v. het knoopuntsnummer 1. Tevens moet auto. gen. op "1" gezet worden.
opm : De vrijheidsgraden worden van het eerste knooppunt overge- nomen
CARTESIAN COORDINATE MULTIPLIER FACTOR Vermenigvuldigingsfactor van het carte- sische assenstelsel. De coordinaten van het desbetreffende knoopunt worden met het hier ingevuld getal vermeningvuldigd.
52
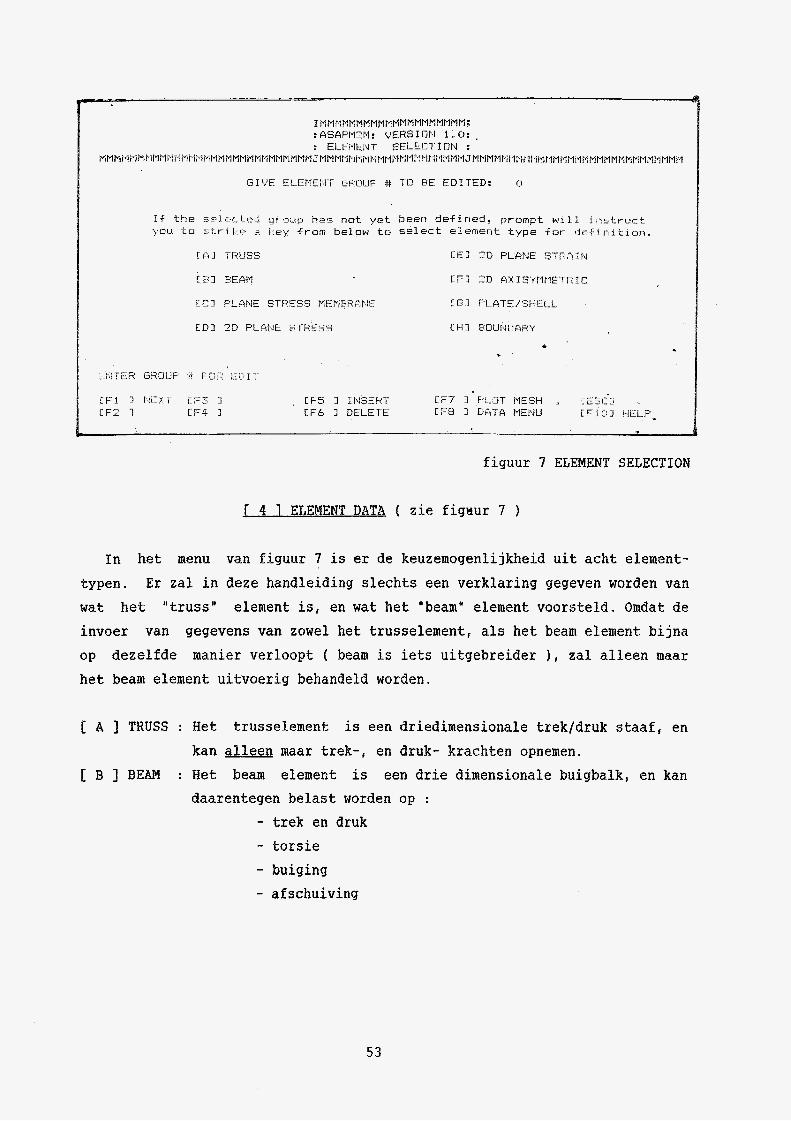
figuur 7 ELEMENT SELECTION
I 4 1 ELEMENT DATA ( zie figuur 7 1
In het menu van figuur 7 is er de keuzemogenlijkheid uit acht element- typen. Er zal in deze handleiding slechts een verklaring gegeven worden van wat het "truss" element is, en wat het "beam" element voorsteld. Omdat de invoer van gegevens van zowel het trusselement, als het beam element bijna op dezelfde manier verloopt ( beam is iets uitgebreider 1 , zal alleen maar het beam element uitvoerig behandeld worden.
[ A 3 TRUSS : Het trusselement is een driedimensionale trek/druk staaf, en kan alleen maar trek-, en druk- krachten opnemen.
B 3 BEAM : Het beam element is een drie dimensionale buigbalk, en kan daarentegen belast worden op :
- trek en druk - torsie - buiging - afschuiving
5 3
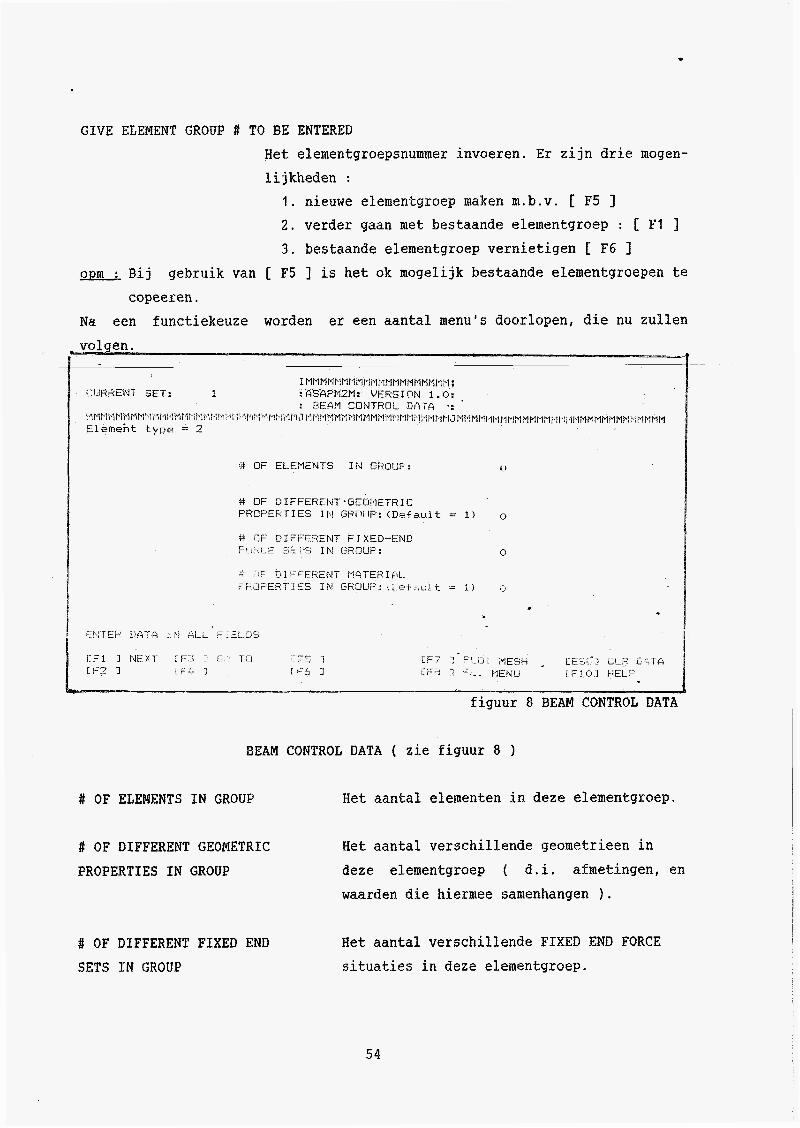
GIVE ELEMENT GROUP # TO BE ENTERED Het elementgroepsnummer invoeren. Er zijn drie mogen- lijkheden :
1 . nieuwe elementgroep maken m.b.v. [ F5 1 2. verder gaan met bestaande elementgroep : [ k'1 ]
3 . bestaande elementgroep vernietigen C F6 I opm : Bij gebruik van [ F5 1 is het ok mogelijk bestaande elementgroepen te
copeeren. Na een functiekeuze worden er een aantal menu's doorlopen, die nu zullen volgen. -*
WRRENT SET: I I MMMMMMMMMM~MMMt~MMM~~M : :ACAPM"M: V E R S I O N 1.0: . : BEAM CO:4TROL DATA ':
# OF U I FFERENT *GEÜIYETR IC FRGFERTIEC IN EROilP: ( D e f a u l t = 1 ) (1)
#- JF DIFFERENT F I XED-END r:,
figuur 8 BEAM CONTROL DATA
BEAM CONTROL DATA ( zie figuur 8 1
# OF ELEMENTS IN GROUP Het aantal elementen in deze elementgroep.
# OF DIFFERENT GEOMETRIC PROPERTIES IN GROUP deze elementgroep ( d.i. afmetingen, en
Het aantal verschillende geometrieen in
waarden die hiermee samenhangen 1.
# OF DIFFERENT FIXED END SETS IN GROUP situaties in deze elementgroep.
Het aantal verschillende FIXED END FORCE
5 4
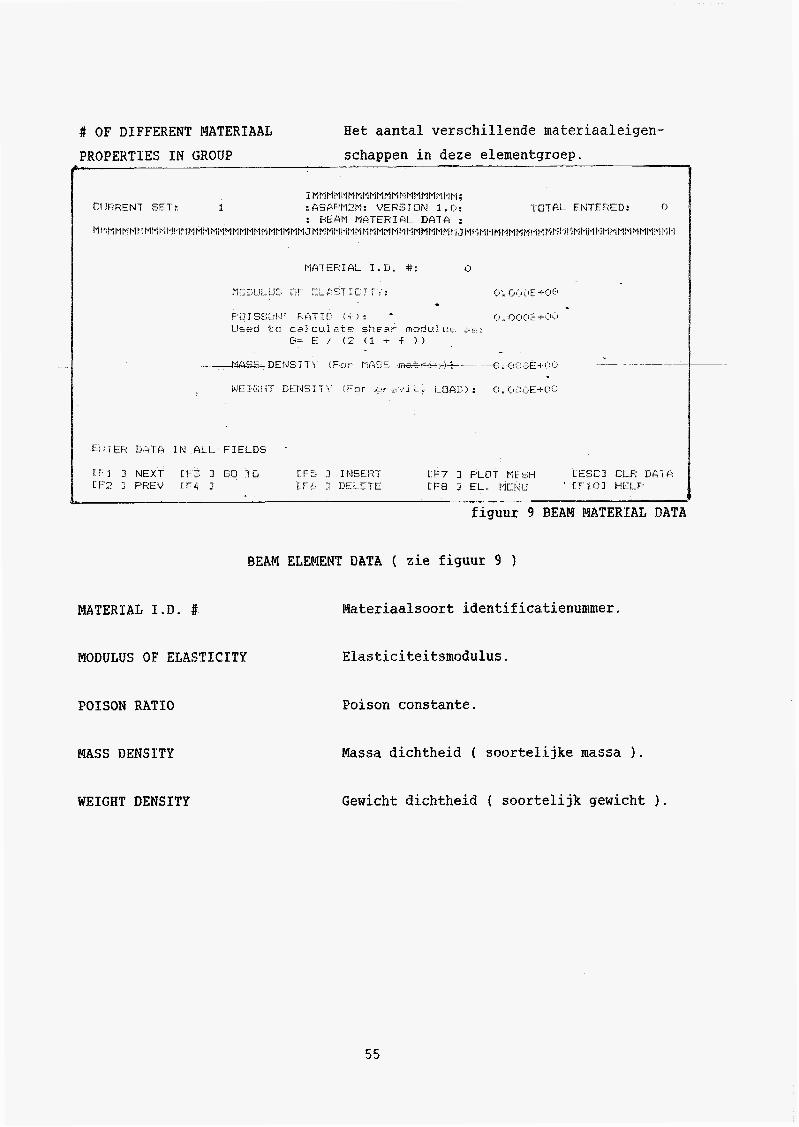
# OF DIFFERENT MATERIAAL PROPERTIES IN GROUP schappen in deze elementgroep.
Het aantal verschillende materiaaleigen-
BEAM ELEMENT UATA ( zie figuur 9 )
MATERIAL I.D. #
MODULUS OF ELASTICITY
POISON RATIO
MASS DENSITY
WEIGHT DENSITY
Materiaalsoort identificatienummer.
Elasticiteitsmodulus.
Poison constante.
Massa dichtheid ( soortelijke massa I .
Gewicht dichtheid f soortelijk gewicht 1 ,
55
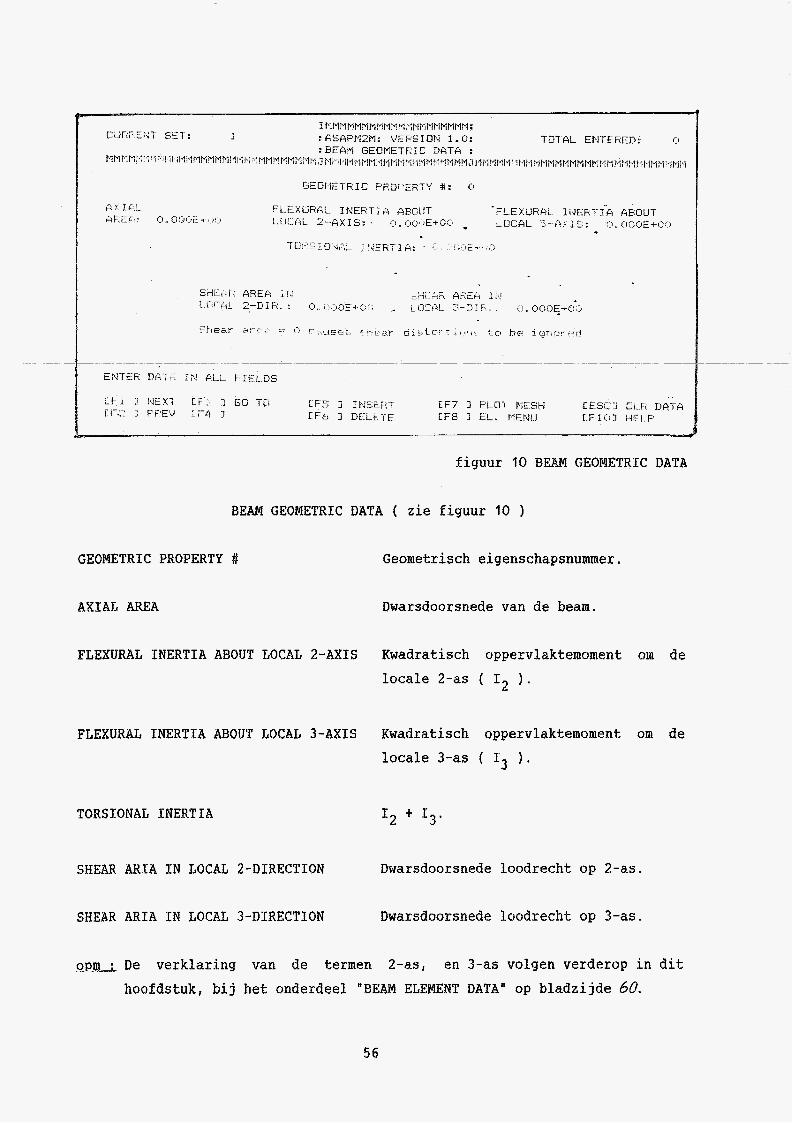
BEAN GEOMETRIC DATA ( zie figuur 10 1
GEOMETRIC PROPERTY #
AXIAL AREA
FLEXURAL INERTIA ABOUT LOCAL 2-AXIS
FLEXURAL INERTIA ABOUT LOCAL 3-AXIS
TORSIONAL INERTIA
SHEAR ARIA IN IJQCAL 2-DIRECTION
SHEAR ARIA IN LOCAL 3-DIRECTION
Geometrisch eigenschapsnummes.
Dwarsdoorsnede van de beam.
Kwadratisch oppervlaktemoment oir~ de locale 2-as ( I2 1 .
Kwadratisch oppervlaktemoment om de locale 3-as ( Ig 1.
r2 + r3.
Dwarsdoorsnede loodrecht op 2-as.
Dwarsdoorsnede loodrecht op 3-as.
opm : De verklaring van de termen 2-as, en 3-as volgen verderop in dit hoofdstuk, bij het onderdeel "BEAM ELEMENT DATA" op bladzijde 60.
56
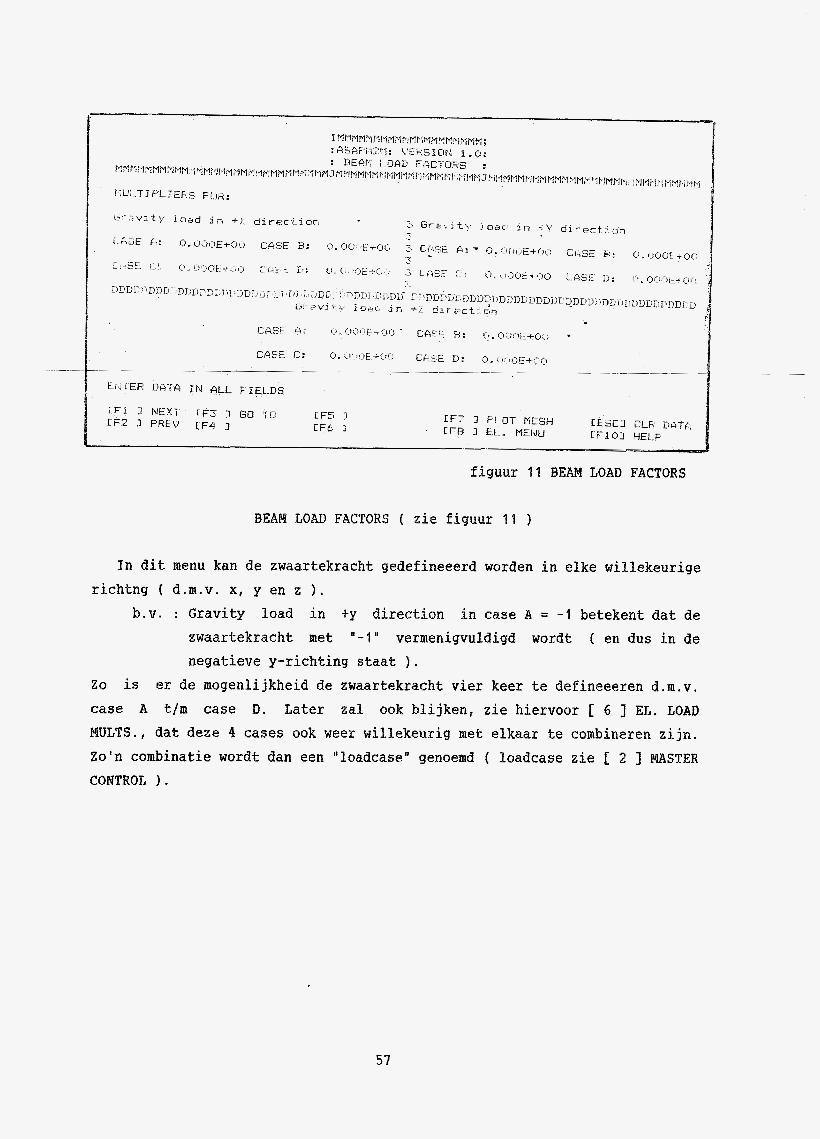
figuur 11 BEAM LOAD FACTORS
BEAM LOAD FACTORS ( zie figuur 11 1
In dit menu kan de zwaartekracht gedefineeerd worden in elke willekeurige
b.v. : Gravity load in +y direction in case A = -1 betekent dat de zwaartekracht met " - 1 " vermenigvuldigd wordt ( en dus in de negatieve y-richting staat ) .
richtng ( d.m.v. x, y en z ) .
Zo er de mogenlijkheid de zwaartekracht vier keer te defineeeren d.m.v. case A t/m case D. Later zal ook blijken, zie hiervoor 4 3 EL. LOAD
MULTS., dat deze 4 cases ook weer willekeurig met elkaar te conzbineren zijn. Zo'n combinatie wordt dan een "loadcase" genoemd ( loadcase zie [ 2 3 PiASTER
is
CONTROL 1 .
57
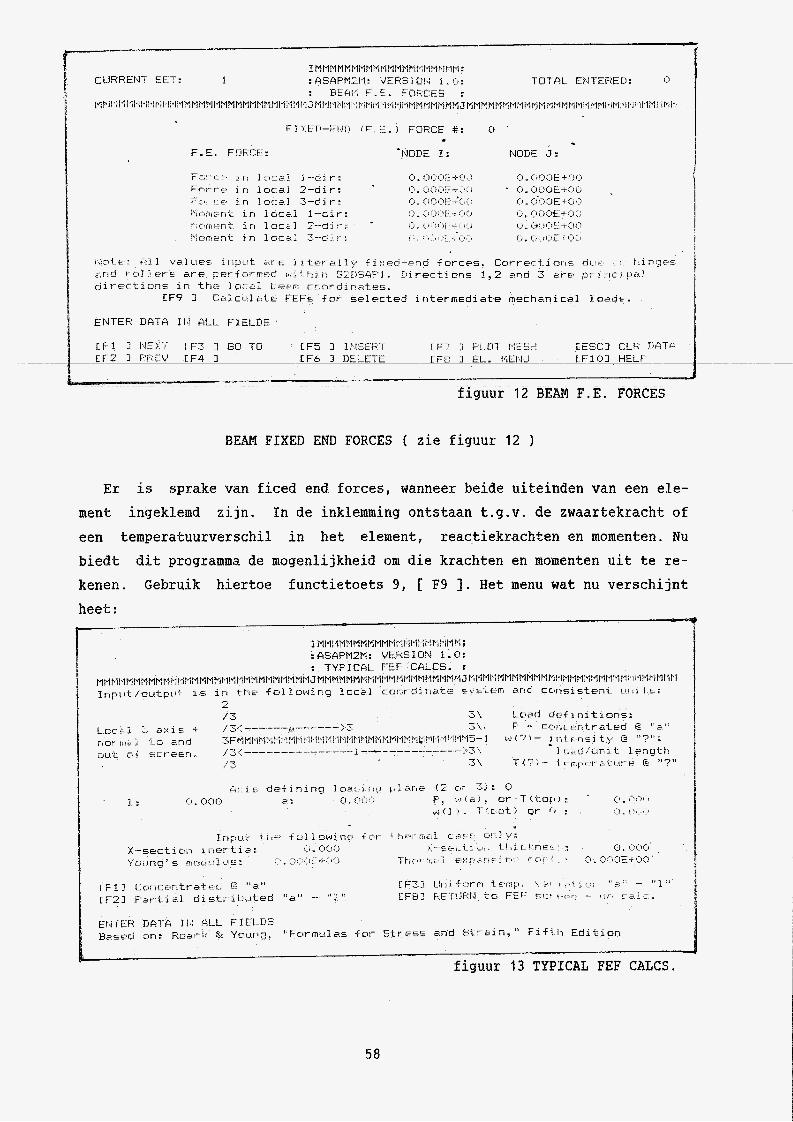
BEAM FIXED ENR FORCES ( zie figuur 12 )
I :
58
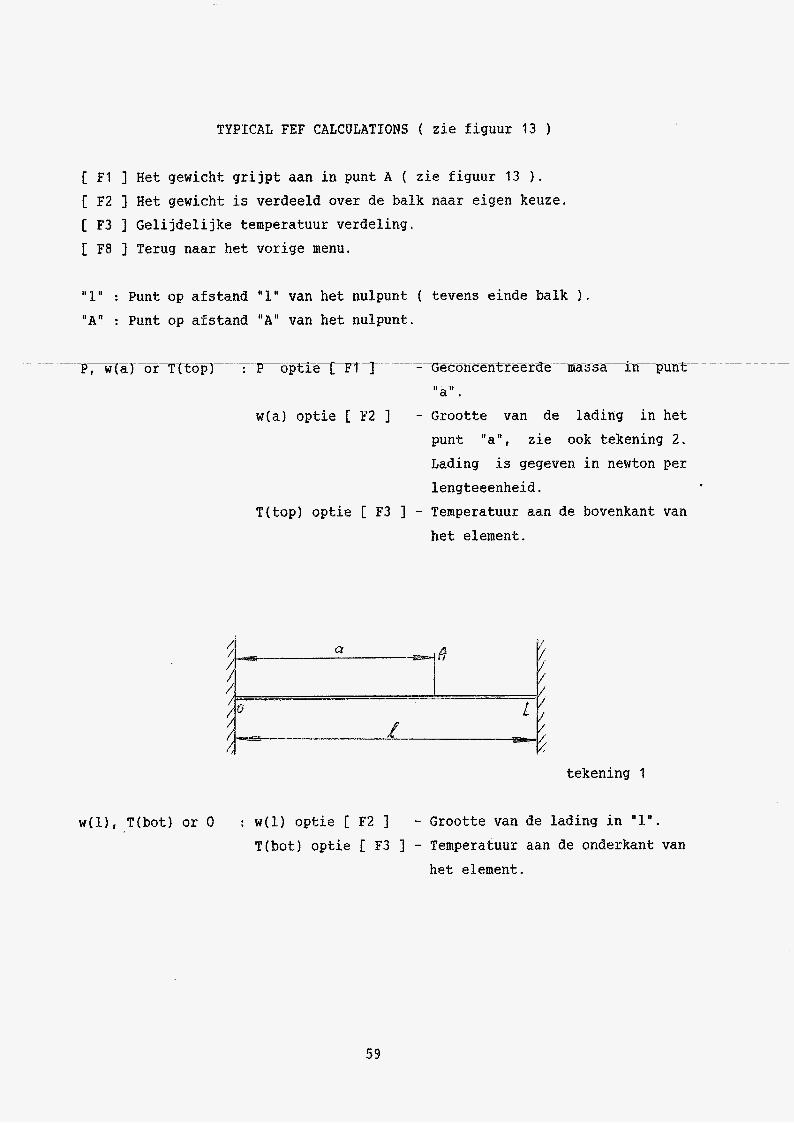
TYPICAL FEF CALCULATIONS ( zie figuur 13 )
[ F1 ] Het gewicht grijpt aan in punt A ( zie figuur 13 ) .
[ F2 ] Het gewicht is verdeeld over de balk naar eigen keuze. [ F3 ] Gelijdelijke temperatuur verdeling. [ F8 1 Terug naar het vorige menu.
"1" : Punt op afstand "1" van het nulpunt ( tevens einde balk 1. *'A" : Punt op afstand "A" van het nulpunt.
w(a) optie [ Y2 ]
~ PT(ä) -ör-T(topl i P o p t i e [-FIV] - GëconcenErëerde massa-in- punt I' a .
- Grootte van de lading in het punt "a", zie ook tekening 2. Lading is gegeven in newton per lengteeenheid.
T(top) optie [ F3 ] - Temperatuur aan de bovenkant van het element.
tekening 1
~ ( 1 1 , T(bot) or O : w(1) optie [ F2 ] - Grootte van de lading in "1". T(bot) optie [ F3 ] - Temperatuur aan de onderkant van
het element.
59
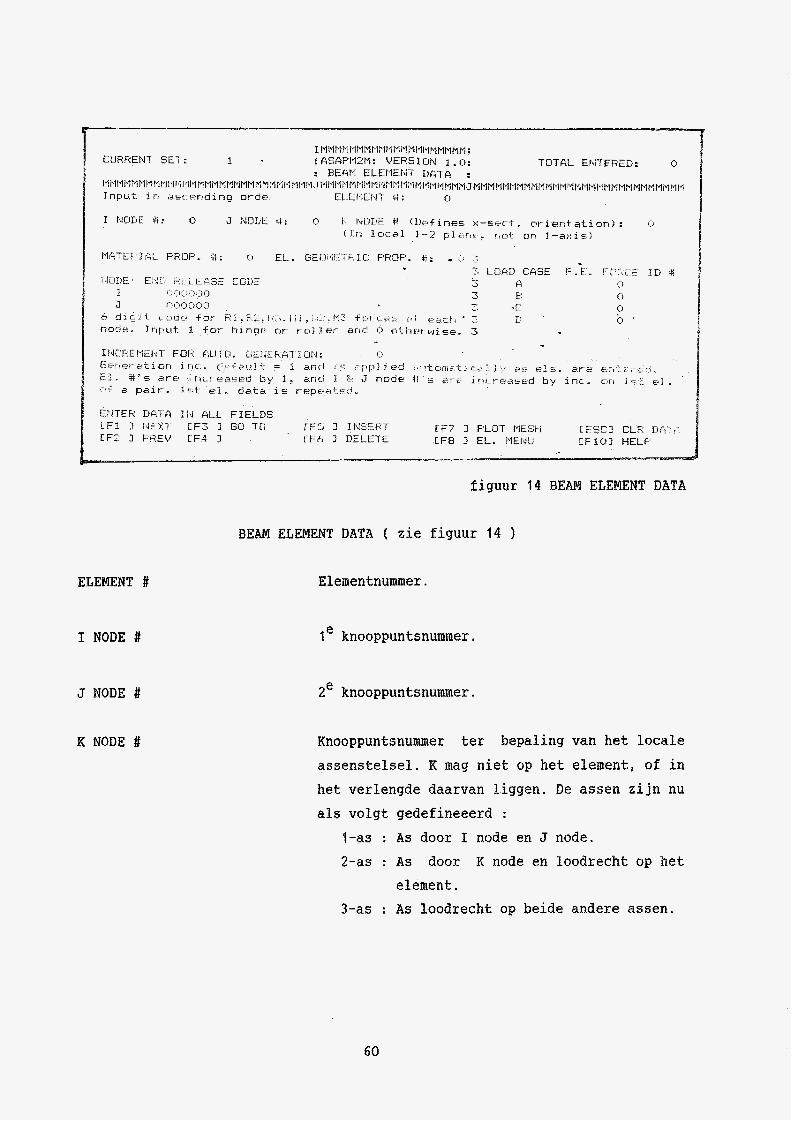
figuur 14 BEAM ELEMENT DATA
BEAM ELEMENT DATA ( zie figuur 14 1
ELEMENT #
I NODE #
J NODE #
K NODE #
Elementnummer.
le knooppuntsnummer .
ze knooppuntsnummer .
Knooppuntsnummer ter bepaling van het locale assenstelsel. K mag miet op het element, o f in het verlengde daarvan liggen. De assen zijn nu als volgt gedefineeerd :
I-as : As door 1' node en J node. 2-as As doos K node en loodrecht op het
element. 3-as : As loodrecht op beide andere assen.
60
MATERIAL PROPERTY # Hier moet het nummer ingevuld worden tot welke materiaal eigenschap groep dit element be- hoord.
ELEMENT GEOMETRIC PROPERTY # Het geometrische groep eigenschapsnummer waar- toe het element behoord.
LOAD CASE F.Z.FORCE I . D . # De fixed end forces kunnen hier per load case gedefineeerd worden.
NODE KELEKSEpCODE"anneer er een sch-arr~erë~~-e-lemen-tio~een roloplegging voorkokmt, kan dit middels een code tot uitdrukking gebracht worden. De defe- nities voor een scharnier en een roloplegging zijn :
1 Roloplessins Een roloplegging kan in de opgegeven richt- ing geen kracht "R" opnemen. 2 Scharnier Een scharnier kan om de opgeven as geen moment "MI" opnemen.
De code voor I en voor J is als volgt opge- bouwd: RI R2 R3 Ml Ms M3. Door invulling van
een "1" wordt het scharnier o f de roloplegging gecreeerd.
INCREMENT FOR AUTO. GEN. O = geen automatische generatie default = 1 1 = wel. automatische generatie
Wat gebeurd er t.g.v. deze automatische gene- ratie?
-Elementnummer wordt met 'I 1 '' verhoogd. -Knooppuntsnummers, I en J, worden met
1 It verhoogd. -Andere invoergegevens worden van het voorgaande element overgenomen.
61
Werkins : De automatische generatie werkt automatisch op de element die overgeslagen worden tij- dens de invoer ( tenzij de auto. gen. op "o" gezet wordt I .
WERKING FUNCTIETOETS [ F3 ] ( GOTO 1
Wanneer [ F3 3 bedient wordt verschijnt er onder aan het scherm de volgende regel :
[Albs, [Riel., [Clti, [M]tlf [Gleom, [L]d fac, [Flef, [E]l, [Ilgnore
tAlbs Na het intoetsen van [A] wordt er een getal verwacht. het ge- tal wat ingetoetst wordt is het absolute getal van het identi- ficatie nummer binnen het menu waarin op dat moment gewerkt wordt
CR3 Ook hier wordt een getal verwacht na intoetsing van [RI. Het gaat echter om een relatief gatal. Dit getal is maat voor het aantal identificatienummers dat overgeslagen moet worden bin- nen het menu waarin gewerkt wordt. Er kan een negatief getal ingevuld worden.
CCl Verplaatsing naar CONTROL DATA menu ( figuur 8 1 . EG1 Verplaatsing naar GEOMETRIC DATA menu ( figuur 9 1. [Ml Verplaatsing naar MATERIAL DATA menu ( figuur 10 1. CL1 Verplaatsing naar LOAD DATA menu ( figuur 11 1. tFI Verplaatsing naar FIXED END FORCES menu ( figuur 12 I . EEI Verplaatsing naar ELEMENT DATA menu ( figuur 14 1 . [I1 Betekent "ignore", waardoor het [ F3 ] commando vervalt.
62
I MIIM tlMMMMMMMMMMtlhY:~MM : : ASAFM2M: VERSIDN i. Ci: : CONC. LOGP/MACC DPTG:
o TOThL EtqTERED:
figuur 15 CONC. LOAD/MASS DATA
NODAL POINT #
f 5 i CONCENTRATED LOAD MASS ( zie figuur 15
STRUCTURE LOAD CASE
FORCE OR TRANSLATIONAL MASS
MOMENT OK KOTATIONAL INERTIA
Knooppuntsnummer.
Bij statische analyse moet hier een "o "
ingevuld worden' terwijl er in h e t geval van de dynamische analyse e r een"1" in- gevuld moet worden.
Externe kracht in x-t y- of z- richting.
Extern moment om x - ~ y- of z- as.
6 3
J 6 1 LOAD WULTIPLïERS ( zie figuur 16
Dit menu geeft de mogenlijkheid okm de cases A t/m D met elkaar te combi- neren. Een zo'n combinatie heeft in het programma een nogal verwarrende naam, namelijk "load case". Er zijn maximaal 9 loadcases mogenlijk ( elk be- staande uit een combinatie van case A, B, C en D ) .
De totale loadcase ( b.v. loadcase 1 1 i s als volgt opgebouwd :
1 . Concentrated load/masa gegevens ( belasting 1. 2 . Een combinatie van case A, El, C en D.
64