Dr Božo Ilićvtsns.edu.rs/wp-content/uploads/2018/11/EMP-i_Skripta-za...- asinhroni motori i -...
55
1 Dr Božo Ilić Elektromotorni pogoni Skripta za kolokvijum Visoka tehnička škola strukovnih studija u Novom Sadu, 2019.
Transcript of Dr Božo Ilićvtsns.edu.rs/wp-content/uploads/2018/11/EMP-i_Skripta-za...- asinhroni motori i -...

1
Dr Božo Ilić
Elektromotorni pogoni Skripta za kolokvijum
Visoka tehnička škola strukovnih studija u Novom Sadu, 2019.

2
Sadržaj 1. Osnovni pojmovi o elektromotornim pogonima .................................................... 3
1.1. Pojam i znaĉaj elektromotornih pogona ............................................................. 3
1.2. Regulisani elektromotorni pogoni....................................................................... 4
1.3. Neregulisani elektromotorni pogoni ................................................................. 12
1.4. Energetska efikasnost elektromotornih pogona ................................................ 13
1.5. Elektromotorni pogon elektriĉnog automobila ................................................. 13
1.6. Vrste elektromotornih pogona .......................................................................... 21
1.7. Naĉini opterećivanja elektromotora .................................................................. 23
2. Osnove dinamike elektromotornog pogona .......................................................... 26
2.1. Osnovna (Njutnova) jednaĉina kretanja............................................................ 26
2.2. Moment inercije i zamajni moment .................................................................. 28
2.3. Vreme puštanja i zaustavljanja motora ............................................................. 30
2.4. Stabilnost elektromotornog pogona .................................................................. 31
2.5. Zagrevanje i hlaĊenje elektromotora ................................................................ 33
3. Izbor elektromotora za određeni EMP ................................................................. 41
3.1. Izbor elektromotora odgovarajuće konstrukcije za date uslove radne sredine . 41
3.2. Izbor vrste (tipa) elektromotora ........................................................................ 43
3.3. Izbor snage elektromotora ................................................................................. 44
3.3.1. Izbor snage elektromotora za trajni pogon ................................................... 45
3.3.1.1. Izbor snage elektromotora za trajni pogon sa nepromenljivim
opterećenjem (za radnu mašinu koja radi stalnom snagom) ............................................. 45
3.3.1.2. Izbor snage elektromotora za trajni pogon sa promenljivim
opterećenjem (za radnu mašinu koja neprekidno radi pri razliĉitim snagama opterećenja)
45
3.3.2. Izbor snage elektromotora za kratkotrajni rad (pogon) ................................ 46
3.3.3. Izbor snage elektromotora za intermitirani pogon ....................................... 47
3.3.4. Provera da li elektromotor izabrane snage može da izdrži kratkotrajno
preopterećenje 48
3.4. Provera da li je polazni moment elektromotora dovoljno veći od momenta
radne mašine da je može pokrenuti ........................................................................................... 49
3.5. Izbor brzine elektromotora prema brzini koju zahteva radna mašina ............... 52
4. Literatura................................................................................................................. 55

3
1. Osnovni pojmovi o elektromotornim pogonima
1.1. Pojam i značaj elektromotornih pogona
Elektromotorni pogon (eng. electric drive) je elektromehaniĉki sistem u kome
elektromotor pokreće radnu mašinu, pri ĉemu se vrši pretvaranje elektriĉne energije u mehaniĉki
rad.
Elektromotorni pogoni imaju važnu ulogu u svakodnevnom životu i razvoju društva
uopšte. U svetu preko 50% od ukupno proizvodene elektriĉne energije elektromotorni pogoni
pretvarе u mehaniĉki rad.
Elektromotorni pogoni sе koriste u industriji, rudarstvu, vozilima, aparatima u
domaćinstvima, ruĉnim alatima, klima ureĊajima, pumpama, kompresorima, robotima i drugim
sistemima.
Prednosti elektromotornih pogona u odnosu na druge vrste pogona su:
- imaju širok opseg snaga (poĉev od snaga ispod jednog vata (npr. elektronski
ĉasovnici), pa do više stotina megavata (npr. pumpe u reverzibilnim
hidroelektranama)),
- imaju širok opseg obrtnih momenata (iznad jednog miliona Nm npr. u valjaonicama)
- imaju širok opseg brzina (preko 100.000 ob/min npr. u centrifugalnim mašinama),
- imaju sposobnost da rade u skoro svim radnim uslovima (prinudno hlaĊeni, potpuno
zatvoreni, potopljeni, u eksplozivnoj atmosferi itd.),
- imaju sposobnost da poĉnu sa radom odmah i to pod punim opterećenjem,
- imaju razliĉite konstrukcije, prilagoĊene razliĉitim potrebama ugradnje u radne
mašine (npr. više manjih motora montiranih na mestima direktne upotrebe umesto
jednog većeg sa mehaniĉkim prenosnicima, zatim motor sa rotorom sa spoljašnje
strane, linearni motor umesto rotacionog itd.).
- imaju pozitivne ekološke efekte (ne koriste zapaljiva goriva, ne emitiju gasove,
proizvode relativno male vibracije i buku),
- imaju veoma male potrebe za održavanjem,
- imaju veoma male gubitke praznog hoda,
- imaju veoma visok stepen iskorišćenja,
- mogu da izdrže visoka kratkotrajna preopterećenja,
- imaju mogućnost lakog upravljanja brzinom ili momentom ito u širokom opsegu
brzina bez potrebe za mehaniĉkim menjanjem prenosnog odnosa,
- imaju veoma brz dinamiĉki odziv prilikom upravljanja,
- imaju mogućnost lakog menjanja smera obrtanja (mogućnost reversiranja bez
mehaniĉkih prenosnika), mogu da rade u sva 4 kvadranta (imaju jednostavan revers),

4
- imaju mogućnost generatorskog koĉenja sa rekuperacijom (regeneracijom) elektriĉne
energije natrag u izvor elektriĉne energije,
- imaju ravnomeran obrtni momenat i miran hod bez vibracija,
- imaju dug period eksploatacije (životni vek), jer ne rade pod naroĉito visokim
temperaturama itd.
Nedostaci elektromotornih pogona u odnosu na druge vrste pogona su:
- zavisni su od izvora elektriĉne energije, što ograniĉava njihovu primenu u elektriĉnoj
vuĉi. Ekonomski prihvatljiva akumulatorska baterija je oko 50 puta teža nego
odgovarajuća koliĉina goriva za motor sa unutrašnjim sagorevanjem.
- imaju mali odnos snage prema težina.
Samo ova dva znaĉajna nedostatka elektromotornih pogona u odreĊenim sluĉajevima
mogu da spreĉe ili ograniĉe njihovu primenu.
S obzirom na to da li imaju mogućnost regulacije karakteristiĉnih veliĉina elektromotorni
pogoni mogu biti:
- regulisani i
- neregulisani.
1.2. Regulisani elektromotorni pogoni
Ranije se regulacija brzine obrtanja motora ostvarivala dodavanjem otpora u kolo rotora
asinhronog motora ili delovanjem na pobudu motora jednosmerne struje.
Savremeni regulisani elektromotorni pogon se u opštem sluĉaju sastoji od, slika 2.1.:
- elektromotora,
- mehaniĉkog prenosnika,
- radne mašine (mehaniĉkog opterećenja, tehnološkog procesa) i
- pretvaraĉa elektriĉne energije (npr. pretvaraĉa energetske elektronike),
- upravljaĉkog sistema (regulatora u širem smislu) i
- senzora.

5
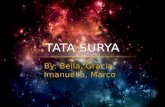
Slika 1.1. Strukturna blok šema regulisanog elektromotornog pogona
U zatvorenom krugu regulacije se signal stvarne vrednosti regulisane veliĉine povratnom
spregom dovodi na ulaz detektora signala greške gde se poredi sa signalom zadate vrednosti
regulisane veliĉine. Kao rezultat tog poreĊenja na izlazu detektora signala greške se dobija signal
greške. Upravljaĉki sistem (regulator) na osnovu veliĉine i znaka signala greške na svom izlazu
generiše upravljaĉki signal pomoću koga preko pretvaraĉa elektriĉne energije deluje na
elektromotor (i radnu mašinu) tako da odstupanje stvarne od zadate vrednosti regulisane veliĉine
svede na nulu ili na zanemarivo malu vrednost.
Izvor elektriĉne energije
(el. mreža)
Pretvaraĉ
elektriĉne
energije
Elektromotor Radna
mašina Regulator
Senzor
Zadata
(referentna)
vrednost
(npr.
brzine,
položaja)
Elektriĉna
energija
(fiksnih
parametara)
Signal
Elektriĉna energija
(promenljivih parametara)
Smer toka elektriĉne energije
Smer toka mehaniĉke energije
Smer toka signala u upravljaĉkom sistemu
Mehaniĉka
energija Detektor
signala
greške
Mehaniĉki
prenosnik
Mehaniĉka
energija
Upravljaĉki sistem

6
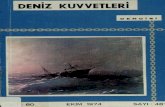
Slika 1.1. Šema regulisanog elektromotornog pogona
Slika Primer iz prakse regulisanog elektromotornog pogona sa asinhronim motorom
Pretvaraĉ elektriĉne energije Radna mašina
Elektromotor
Izvor
elektriĉne
energije
(el. mreža)
Upravljaĉki
sistem
Senzor
Digitalni sistem
upravljanja
Digitalna
komunikacija
Mehaniĉki prenosnik
Upravljaĉki sistem
Mehaniĉki prenosnik

7
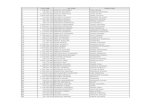
Slika Primer regulisanog elektromotornog pogona sa asinhronim motorom
1. Elektromotor
Elektromotor je glavni deo elektromotornog pogona, koji pokreće (pogoni) radnu mašinu
pri ĉemu ona vrši mehaniĉki rad. Elektromotor pretvara elektriĉnu energiju koju uzima iz mreže
u mehaniĉki rad koji predaje radnoj mašini.
U EMP-ima se koriste tri osnovne vrste elektromotora:
- motori jednosmerne struje,
- asinhroni motori i
- sinhroni motori.
Ranije su se u EMP-ima sa promenljivom brzinom obrtanja koristili motori jednosmerne
struje, dok su se asinhroni i sinhroni motori koristili iskljuĉivo u neregulisanim EMP-ima. To je
zbog toga što je regulaciona oprema koja je bila potrebna u EMP-ima sa promenljivom brzinom
bila složena i skupa.
Pojavom pretvaraĉa energetske elektronike i mikroraĉunara primena složenih tehnika
upravljanja (kao što su upravljanje orijentacijom polja, upravljanje promenom strukture sa
klizajućim karakteristikama itd.) nije više tako složena i skupa. Tako da su u savremenim EMP-
ima sa promenljivom brzinom asinhroni i sinhroni motori, (pa i neke nove vrste motora, kao što
su motori jednosmerne struje bez ĉetkica i motori promenljive reluktanse) zamenili motore
jednosmerne struje.
U EMP-ima se ĉesto koristi osobina elektromotora da može da pretvara energiju i u
obrnutom smeru, tj. da može pod odreĊenim uslovima da radi kao generator i vrši koĉenje radne
mašine. U tim sluĉajevima pojedini smerovi tokova energije prikazani na sl. 2.1. okreću se u
suprotnu stranu (od radne mašine preko mehaniĉkog prenosnika ka motoru). Ako to obezbeĊuje
tip pretvaraĉa elektriĉne energije, taj povratni tok energije se može produžiti i preko pretvaraĉa
elektriĉne energije sve do izvora elektriĉne energije, u tom sluĉaju se govori o generatorskom
koĉenju, odnosno o koĉenju sa rekuperacijom energije. Ĉesto je pretvaraĉ elektriĉne energije
takvog tipa da ne dozvoljava povratni tok energije (npr. obiĉan ispravljaĉ). U tom sluĉaju se
povratna mehaniĉka energija pri koĉenju mora pretvoriti u toplotu u samom elektromotoru ili u

8
otpornicima koji se postavljaju izmeĊu radne mašine i nerekuperabilnog pretvaraĉa energetske
elektronike.
2. Mehanički prenosnik
Mehaniĉki prenosnik (zupĉanik, kajišnik, spojnica itd.) služi za prenos mehaniĉke snage
sa elektromotora na radnu mašinu. Pored toga mehaniĉki prenosnik služi za prenos i
prilagoĊavanje brzine, odnosno momenta, kao i vrste kretanja koje motor predaje radnoj mašini.
Mehaniĉki prenosnik mehaniĉki povezuje elektromotor sa radnom mašinom. U
najjednostavnijem sluĉaju mehaniĉki prenosnik je zajedniĉko vratilo motora i radne mašine.
Mehaniĉki prenos snage sa elektromotora na radnu mašinu može biti direktan (preko spojnice) ili
redukovan preko mahaniĉkog prenosnika.
U mehaniĉke prenosnike spadaju:
- zupĉasti prenosnici (paralelni, višestepeni, pod uglom itd.) sa fiksnim prenosnim
odnosom (najĉešće reduktori za smanjenje brzine i povećanje momenta), slika , i
- kajišni prenosnici (klinasti i pljosnati) sa fiksnim prenosnim odnosom (najĉešće
reduktori za smanjenje brzine i povećanje momenta), slika ,
- prenosnici sa promenljivim penosnim odnosom (stepenasto, kao kod automobilskog
menjaĉa ili kontinualno),
- pužasti prenosnici, prenosnici rotacionog kretanja u translatorno,
- prenosnici sa lancem i lanĉanikom (slika ).
- zamajci itd.
Slika Zupĉasti prenosnici
Slika Kajišni prenosnici

9
Slika Prenosnici sa lancem i lanĉanikom
3. Radna mašina
Radna mašina je mehaniĉki ureĊaj koji služi za obavljanje mehaniĉkog rada potrebnog
tehnološkom procesu. Radne mašine su: pumpe (slika ), ventilatori (slika ), kompresori, dizalice,
alatne mašine itd.
Centrifugalna pumpa Ventilator
4. Pretvarač električne energije
Najznaĉajniji element elektromotornog pogona je naravno elektromotor. MeĊutim, u
savremenim elektromotornim pogonima veliku ulogu igra i elektronika i to dve njene grane:
- energetska elektronika i
- upravljaĉka elektronika.
Elektromotorni pogon se najĉešće napaja elektriĉnom energijom iz elektriĉne mreže (koja
može biti monofazna ili trofazna, niskonaponska ili visokonaponska) preko mrežnog
transformatora ili bez njega, pekidaĉa, osiguraĉa i ureĊaja za zaštitu, merenje, nadzor itd.
Elektromotorni pogon se može napajati elektriĉnom energijom i izvora jednosmernog napona
(npr. iz akumulatorske baterije, generatora jednosmerne struje ili kontaktne mreže elektriĉne
vuĉe itd.).
S jedne strane, elektromotori zahtevaju elektriĉnu energiju odgovarajućih parametara da
bi mogli da rade optimalno. Sa druge strane, mreža daje elektriĉnu energiju frekvencije 50 Hz i
napona 220 V.
Pretvarač električne energije služi da elektriĉnu energiju jednih parametara (visine
napona, jaĉine struje, frekvencije i/ili broja faza) pretvori u elektriĉnu energiju drugih parametara
(npr. pretvori trofaznu naizmeniĉnu struju u jednosmernu i obratno) radi regulacije
karakteristiĉnih veliĉina motora (brzine, ubrzanja, momenta, položaja i/ili trzaja) na naĉin na koji
mu to zada upravljaĉki sistem.
Kao pretvaraĉi elektriĉne energije koriste se:

10
- pretvaraĉi energetske elektronike, koriste se u savremenim pogonima;
- elektro-mehaniĉko-elektro pretvaraĉi (npr. Vard-Leonardova grupa), koriste se u
starijim pogonima;
- transformatori sa promenljivim prenosnim odnosom, koriste se u starijim pogonima i
- ureĊaji sa magnetnim pojaĉavaĉima, koriste se u starijim pogonima i dr.
Pretvarači energetske elektronike mogu da rade dovoljno brzo, a da sa druge strane
prenesu veliku energiju, odnosno mogu da izdrže veliko strujno i naponsko opterećenje.
Pretvaraĉi energetske elektronike su upravljivi, jer sadrže ureĊaje energetske elektronike, kao što
su: tiristori, snažni tranzistori i drugi poluprovodniĉki prekidaĉi.
Postoje ĉetiri vrste pretvaraĉa energetske elektronike:
- Ispravljači, pretvaraju naizmeniĉni napon u jednosmerni pulsirajući periodiĉni, koji
se filtrira ispred potrošaĉa.
- Invertori, pretvaraju jednosmerni napon u naizmeniĉni (koji može biti monofazni ili
trofazni), koji nije prostoperiodiĉan već sadrži niz trapeznih pulseva i koji se mogu
popraviti filtriranjem.
- Jednosmerni pretvarači (čoperi), pretvaraju jednosmerni napon jednog naponskog
nivoa u jednosmerni napon drugog naponskog nivoa. Obiĉno snižavaju napon na
kontrolisan naĉin, ali mogu i da ga podižu. Na izlazu se dobija jednosmerni
pulsirajući napon, koji se mora filtrirati.
- Naizmenični pretvarači, pretvaraju naizmeniĉni napon jednog naponskog nivoa i/ili
frekvencije u naizmeniĉni napon drugog naponskog nivoa i/ili frekvencije.
- Pretvarači frekvencije, pretvaraju naizmeniĉnu struju jedne frekvencije u
naizmeniĉnu struju druge frekvencije. Mogu biti direktni i indirektni. Indirektni
pretvaraĉi frekvencije prvo naizmeniĉnu struju jedne frkvencije u ispravljaĉu
pretvaraju u jednosmernu pulsirajuću, koja se prvo pegla a zatim se u invertoru
pretvara u naizmeniĉnu struju druge frekvencije koja može biti i viša i niža od ulazne.
Direktni pretvaraĉi na svom izlazu daju naizmeniĉnu struju frekvencije niže od
ulazne. Zbog svoje jednostavne konstrukcije i visokog stepena iskorišćenja su
najĉešće korišćeni pretvaraĉi frekvencije.
Na slici 2.2. je prikazana šema pretvaraĉa energetske elektronike koji služi za pretvaranje
monofazne naizmeniĉne struje (konstantne amplitude 230 V i frekvencije 50 Hz) u trofaznu
(promenljivog napona, struje, frekvencije i/ili broja faza). To se postiže tako što se naizmeniĉne
veliĉine pretvaraju u jednosmerne, a zatim ponovo u naizmeniĉne.

11
Slika 2.2. Šema pretvaraĉa broja faza i frekvencije
Slika 2.2. Šema pretvaraĉa frekvencije
Ovaj pretvaraĉ energetske elektronike se sastoji od:
- ispravljaĉa,
- jednosmernog meĊukola i
- invertora.
Ispravljač. - Ispravljaĉ služi da naizmeniĉni napon pretvori u jednosmerni. S obzirom na
mogućnost regulacije napona na izlazu, ispravljaĉi mogu biti neregulisani i regulisani.
Neregulisani ispravljaĉi sadrže samo diode kao prekidaĉke elemente, dok se regulacija izlaznog
napona kog regulisanih ispravljaĉa postiže upotrebom tiristora. Većina elektromotornih pogona
napaja se iz trofazne naizmeniĉne mreže, pa se zato uglavnom koriste trofazni ispravljaĉi.
Trofazni ispravljaĉi u poreĊenju sa monofaznim ispravljaĉima imaju veću vrednost
jednosmernog izlaznog napona, manju talasnost i daju veću snagu na izlazu.
Jednosmerno međukolo. – Jednosmerno meĊukolo je neka vrsta skladišta energije,
kome ispravljaĉ daje a invertor uzima energiju. MeĊukolo može biti formirano na više naĉina, u
zavisnosti od izvedbe pretvaraĉa energetske elektronike. Ispravljeni napon mreže se filtrira
kondenzatorom u jednosmernom meĊukolu i dovodi na invertor u trofaznom mosnom spoju. U
jednosmernom meĊukolu se takoĊe nalaze i prigušnice koje prigušuju struje viših harmonika.
Prigušnice povećavaju otpornost pretvaraĉa na promene napona napajanja i produžuju mu
životni vek.
Invertor. – Invertor pretvara jednosmerni napon u naizmeniĉni (koji može biti
monofazni ili trofazni), koji nije prostoperiodiĉan već sadrži niz trapeznih pulseva i koji se mogu
popraviti filtriranjem.
Ispravljaĉ Invertor
Jednosmerno
meĊukolo
Ispravljaĉ
or Jednosmerno meĊukolo
Invertor

12
5. Upravljački sistem
Upravljaĉki sistem uzima informacije o stanju pogona od odgovarajućih senzora koji se
nalaze u povratnoj sprezi, kao i od pretvaraĉa zadate vrednosti regulisanih veliĉina i obraĊuje ih
prema utvrĊenim algoritmima.
Upravljaĉki sistem (ili regulator u širem smislu) služi za automatsko upravljanje radom
elektromotora, tj. za puštanje u rad, koĉenje, regulaciju karakteristiĉnih veliĉina motora (brzine,
ubrzanja, momenta, položaja i/ili trzaja), najĉešće delujući svojim upravljaĉkim signalima na
pretvaraĉ energetske elektronike, ali ponekad i na sam motor (npr. pobudu motora) ili na
mehaniĉki prenosnik.
Upravljaĉki sistem je u savremenim pogonima elektronski (analogni ili digitalni) i sadrži
tranzistore, integrisana kola, operacione pojaĉavaĉe, logiĉka kola, mikroprocesore i
mikroraĉunare. Upravljaĉki sistem ĉesto ima i zaštitnu funkciju i napaja se iz nekog izvora
elektriĉne energije. Na bazi raznih mikroprocesora i DSP, razvijeni su razliĉiti digitalni algoritmi
upravljanja pretvaraĉima energetske elektronike.
1.3. Neregulisani elektromotorni pogoni
Neregulisani elektromotorni pogon se u opštem sluĉaju sastoji od, slika 2.1:
- elektromotora,
- mehaniĉkog prenosnika i
- radne mašine (mehaniĉkog opterećenja, tehnološkog procesa).
Slika 1.1. Strukturna blok šema neregulisanog elektromotornog pogona
U neregulisanim EMP-ima nema upravljaĉkog sistema (regulatora) niti pretvaraĉa
elektriĉne energije, kao ni senzora. Elektromotor se direktno prikljuĉuje na izvor elektriĉne
energije, a njegova brzina zavisi od parametara elektriĉne energije koja dolazi iz izvora i od
radne mašine.
Elektromotor Mehaniĉki
prenosnik
Radna mašina
Elektriĉna energija
(fiksnih parametara)
Smer toka elektriĉne energije
Smer toka mehaniĉke energije
Mehaniĉka energija
Izvor
elektriĉne
energije
(el. mreža)
Radna mašina
Mehaniĉka energija

13
1.4. Energetska efikasnost elektromotornih pogona
U svetu preko 50% od ukupno proizvedene elektriĉne energije elektromotorni pogoni
pretvaraju u mehaniĉki rad. U uslovima sve manjih energetskih resursa vrlo je važno da stepen
iskorišćenja (energetska efikasnost) elektromotornih pogona bude što veća. Pretvaraĉi elektriĉne
energije (pretvaraĉi energetske elektronike, transformatori itd.) u odnosu na radne mehanizme
(ventilatore, pumpe, kompresore i td.) imaju relativno visok stepen iskorišćenja. Stepen
iskorišćenja pretvaraĉa energetske elektronike iznosi do 98,5%, velikih transformatora do 99%,
velikih elektromotra do 97%. Pumpe i ventilatori imaju korisnost do 80%. Reduktori i
multiplikatori imaju korisnost do 90%.
Elektromotori se projektuju i grade prema kriterijumima najmanjih gubitaka (motori
visoke korisnosti). U odnosu na druge pogonske mašine (npr. motore s unutrašnjim
sagorevanjem, gasne i parne turbine) elektromotor ima mnogo veću korisnost pretvaranja
energije (asinhroni motor snage 4 MW ima stepen iskorišćenja oko 90%, gasna turbina iste snage
oko 30%).
Zbog unapreĊenja energetske efikasnosti u poslednje vreme se sve više koriste regulisani
elektromotorni pogoni. Postojeći neregulisani elektromotorni pogoni se postepeno zamenjuju
regulisanim gde god je to ekonomski opravdano. Pored toga što se koriste zbog unapreĊenja
energetske efikasnosti, regulisani pogoni se koriste i zbog:
- zahteva tehnološkog procesa (automatizacije, ... ) i
- zaštite mreža, motora i radnih mehanizama.
Regulisati se može brzina ili pložaj.
1.5. Elektromotorni pogon električnog automobila
Ekološka vozila kao što su: bicikla, elektriĉna bicikla, segveji i elektriĉni automobili,
imaju mali uticaj na životnu sredinu, štede prostor i promovišu zdrave stilove života. ZagaĊenja
vazduha, emisija gasova sa efektom staklene bašte, smog, buka, gužve u saobraćaju su samo neki
od problema koji se rešavaju upotrebom ovih vozila. Ova vozila spadaju u proizvodni sistem
obnovljivih izvora energije.
Elektriĉni automobili su automobili koje pogoni elektromotor, umesto motora s
unutrašnjim sagorevanjem, koristeći elektriĉnu energiju uskladištenu u bateriji, slika 1. Delovi
pogonskog sistema elektriĉnog automobila su (slika 1):
- punjaĉ baterije,
- baterija u kojoj je uskladištena energija,
- vuĉni pretvaraĉ i
- elektromotor.

14
Slika 1. Delovi pogonskog sistema elektriĉnog automobila
Na slici 2. je prikazana uprošćena šema pogonskog sistema elektriĉnog automobila. Kao
izvor energije koristi se baterija, koja daje jednosmerni napon, koji se u trofaznom
tranzistorskom invertoru kao vuĉnom pretvaraĉu pretvara u simetriĉni trofazni promenljivi napon
promenljive frekvencije potreban za pokretanje trofaznog asinhronog motora.
Slika 2. Uprošćena šema pogonskog sistema elektriĉnog automobila

15
Slika 3. Šema pogonskog sistema elektriĉnog automobila; MI - mrežni ispravljaĉ, VFP
(DC/AC) – visokofrekventi pretvaraĉ, VFI - ispravljaĉki stepen visokofrekventnog pretvaraĉa
VFP-a, akumulatorska baterija 72 [V], TTI- trofazni tranzistorski invertor kao vuĉni pretvaraĉ,
MNS - motor naizmeniĉne struje (trofazni asinhroni motor)
1. Punjač baterija
Punjaĉ baterija u vozilu služi za pretvaranje naizmeniĉnog napona mreže u jednosmerni
napon za punjenje baterije. Od njega zavisi vreme punjenja baterija. Punjaĉi slabije snage
baterije u elektriĉnom automobilu mogu napuniti za 6 do10 h, dok punjaĉi jaĉe snage to ĉine
puno brže i baterije u elektriĉnom automobilu napune ĉak i za 20-ak minuta. Punjaĉ se može
ugraditi u auto, ali i ne mora.
2. Baterije
Glavni razlog sporog razvoja elektriĉnih automobila je problem skladištenja elektriĉne
energije. Skladištenje elektriĉne energije u baterije se zasniva na pretvaranju elektriĉne energije
u hemijsku.
Trenutno se koristi više vrsta baterija, kao što su:
- olovno-sulfatne (Pb-kiselina).
- litijum-jonske (Li-ion),
- nikl-kadmijumske (NiCd),
- nikl-metal hibridne (Ni-MH) i
- natrijum-sumporne (NaS).
Olovno-sulfatne baterije. - Do pre dvadesetak godina za skladištenje većih koliĉina
elektriĉne energije koristile su se u pravilu olovne akumulatorske baterije. Postojale su i druge

16
vrste, najĉešće Nikl-Kadmij (NiCd), meĊutim bile su znatno skuplje, a nisu nudile baš puno više.
Zna se da su olovne baterije velike i teške, a u elektriĉnom automobilu ih treba podosta. Za 100
[km] preĊenog puta trebalo bi oko 700 kg baterija, što bi zauzimalo prostor koji zauzima 300
litara goriva. Previše za mali auto. Uz to olovne baterije imaju dosta znaĉajan nedostatak - na
niskim temperaturama (već od +10oC)) kapacitet im znatno pada što rezultira drastiĉnim padom
dometa u zimskim uslovima. Punjenje u pravilu traje od 6-12 sati zavisno od snage punjaĉa.
Olovne baterije ne podnose brza punjenja (manje od dva sata). Olovne baterije namenjene za
pogon elektriĉnih vozila u pravilu izdrže 500-1000 ciklusa punjenje-pražnjenje, odnosno pet
kalendarskih godina.
Litijum-jonske (Li-ion) baterije. - U novije vreme na tržištu su se pojavile
akumulatorske baterije zasnovane na litijumu. Litijum je jedan od najlakših metala. U pravilu
litijumske baterije tri puta su lakše i manje od olovnih baterija za isti kapacitet. Neki tipovi
podnose brza punjenja i uz upotrebu dovoljno snažnog punjaĉa mogu se napuniti za dvadesetak
minuta. Iako im je cena znatno veća od cene olovnih baterija (3-15 puta) svojom trajnošću i
karakteristikama znatno su isplativiji izbor.
Litijum-jonske (Li-ion) baterije su savremeni tip baterija koje danas preovladavaju kao
izvor napajanja mobilnih telefona, digitalnih fotoaparata, laptop raĉunara, kamera itd. Litijum-
jonske baterije pune se složenim i vrlo preciznim postupkom i ne preporuĉuje se nikakvo drugo
punjenje nego na punjaĉima koji su za njih namenjeni. Elektronika ugraĊena u svaku Litijum-
jonsku bateriju brine se o tome da se baterija ne napuni i ni ne isprazni van dozvoljenih granica
(koje su jako precizne, naroĉito gornja).
Litijum-jonske baterije po pravilu mogu da izdrže od 1000 do 5000 ciklusa (punjenja-
pražnjenja), odnosno do 10 kalendarskih godina, pre nego što izgube toliko kapaciteta da se
moraju zameniti.
Nikl-kadmijumske (NiCd) baterije. - Nikl-kadmijumske (NiCd) baterija predstavlja
prvu široko prihvaćenu punjivu bateriju opšte namene. Uprkos tome što nudi nisku gustinu
energije, a i hemijski sastav joj je daleko od ekološki prihvatljivog (toksiĉni kadmijum), veliki
životni vek (ĉak i do 1.500 ciklusa) i dobro podnošenje većih struja pražnjenja ĉini je i danas vrlo
pogodnom za odreĊene primene (kućni ureĊaji i alati, prenosne radio-stanice, medicinska
oprema, profesionalne video-kamere).
3. Trofazni tranzistorski invertor kao vučni pretvarač (TTI) - kontroler
Elektromotorom se upravljaja pomoću trofaznog tranzistorskog invertora kao vuĉnog
pretvaraĉa – kontolera. Kontroler motora nadzire snagu, broj obrtaja motora, položaj rotora
motora, te temperaturu motora. U kotroleru se jednosmerni napon baterije pretvara u naizmeniĉni
koji je potreban za pokretanje motora. Kontroler je ureĊaj koji upravlja radom motora. U
zavisnosti od pritiska na papuĉicu gasa ili koĉnice kontroler će osigurati motoru potrebnu struju.
Kontroler je vrlo složen i nezaobilazan ureĊaj te se može posmatrati kao funkcionalna celina sa
elektromotorom. Cena kontrolera u pravilu iznosi 100-200% cene motora.
Trofazni tranzistorski invertor kao vuĉni pretvaraĉ je napravljen tako da je njegov
maksimalni izlazni napon jednak nominalnom naponu asinhronog motora (naponu trajnog rada
bez oštećenja izolacije).
4. Električni motor

17
Elektriĉni motor služi za pretvaranje elektriĉne energije u mehaniĉki rad. Prednosti
elektriĉnog motora su minimalni gubici energije do 10%, te jednostavna konstrukcija koja ĉini
motor pouzdanijim i smanjuje troškove njegovog održavanja. Sigurno najprepoznatljivija razlika
izmeĊu elektriĉnih i drugih automobila je motor, dok kod benzinskog/dizel automobila motor
uĉestvuje u ukupnoj ceni sa znaĉajnim postotkom. Kod elektriĉnog autamobila na motor otpada
priliĉno mali deo cene. Elektromotori su znatno jeftiniji i jednostavnije konstrukcije od motora sa
unutrašnjim sagorevanjem. Savremeni motori sa unutrašnjim sagorevanjem sastoje se od oko
hiljadu pokretnih delova. Elektromotori se u pravilu sastoje od tri do pet pokretnih delova što ih
ĉini višestruko pouzdanijim i trajnijim te praktiĉno ne zahtevaju nikakvo održavanje. Nemaju
ulja niti uljnih i vazduših filtera, praktiĉno nemaju delova koji se troše. Uz to su znatno lakši i
manji.
Postoji više vrsta elektromotora koji se znatno razlikuju po konstrukciji i principu rada.
Motori jednosmerne struje. - Prednosti motora jednosmerne struje su: ukupna cena
motora i pretvaraĉa niža je za motor jednosmerne struje, ali se odnos tih cena menja. Nedostaci
su: manji stepen korisnog dejstva, i veća cena motora, i postojanje kolektora i potreba za
njihovim održavanjem.
Motori naizmenične struje. - Prednosti motora naizmeniĉne struje su: cena 2 do 3 puta
niža nego motora jednosmerne struje, brzina za 50% do 150% veća od maksimalne brzine
motora jednosmerne struje, efikasnost iznosi 95% do 97% za razliku od 85% do 89% kod motora
jednosmerne struje. Nedostaci su: složena regulacija brzine i postojanje vuĉnog pretvaraĉa za
promenu napona i uĉestanosti. U motore naizmeniĉne struje spadaju: asinhroni motori sa kratko
spojenim (kaveznim) rotorom, sinhroni motor sa permanentnim magnetima na rotoru i
reluktantni motori. Sa aspekta polaznog momenta i rada u oblasti slabljenja polja asinhroni vuĉni
motor se nameće kao jedno od najboljih rešenja problema pogona u elektriĉnoj vuĉi.
Sa pojavom energetske elektronike i frekventnih pretvaraĉa krajem 60-ih godina prošlog
veka pa sve do danas, razvijen je veliki broj metoda upravljanja asinhronim motorima. Metode
upravljanja asinhronim motorima se mogu podeliti u dve osnovne grupe:
- skalarno upravljanje (U/f regulacija), je upravljanje na osnovu statiĉkih karakteristika,
i
- vektorsko upravljanje, je upravljanje na osnovu dinamiĉkog modela mašine.
Obe ove grupe upravljanja se zasnivaju na promenljivoj frekvenciji napajanja. Osnovna
razlika izmeĊu ova dva pristupa upravljanja leži u dinamici promene upravljaĉkih veliĉina,
odnosno u pristupu upravljanja skalarnim ili vektorskim vrednostima karakteristiĉnih veliĉina
mašine [4].
Skalarno upravljanje (U/f regulacija), je zasnovano na promeni frekvencije statorskih
struja koristeći napon i frekvenciju kao upravljaĉke promenljive. Karakteristiĉno za ovaj naĉin
upravljanja je da ukoliko se održava odnos U/f=const. prevalni momenat će takoĊe biti
konstantan. Pri nominalnom naponu i povećanju frekvencije smanjuje se magnetni fluks i opada
moment motora, slika 2 (f1 - osnovna frekvencija motora). Pogodnim U/f upravljanjem moguće
je dobiti konstantnu promenu momenta i vrlo finu promenu brzine obrtanja motora. Jako je
ekonomiĉno upravljanje, štedi mnogo energije i moguće je da motor radi veoma dugo bez
prekida, sa smanjenom brzinom, jer je odnos U/f uvek konstantan, tako da magnetni fluks nije

18
prekinut i nema opasnosti da motor uĊe u zasićenje [5].
Slika 2. Promena momentnih karakteristika kod skalarne regulacije
U poĉetku svoje primene orijentacija polja je odreĊivana na osnovu merenja fluksa u
mašini (tzv. direktno vektorsko upravljanje). Ovo merenje izvodilo se ugraĊivanjem posebnih
senzora magnetne indukcije (na bazi Holovog efekta) u meĊugvožĊe mašine ili integracijom
napona indukovanog u posebnom mernom namotaju u statorskim žlebovima.
Radi postizanja kontrolabilnosti vuĉne sile pribegava se vektorskom upravljanju
asinhhronim motorom. Skalarna ili U/f regulacija - promena brzine promenom uĉestanosti
proporcionalno sa promenom napona napajanja. Pri rotorskim brzinama ωr < ωn manjim od
nominalne (U/I=const.) vuĉni motor radi u režimu konstantnog fluksa.
Univerzalni motori. - Univerzalni motori mogu da rade i na jednosmernu i na
naizmeniĉnu struju.
Svaka od navedenih vrsta elektromotora se deli na svoje podvrste s obzirom na
konstrukciju. Tako postoje motori jednosmerne struje sa stalnim magnetima, motori sa
serijskom, paralelnom ili kombinovanom pobudom. TakoĊe motori naizmeniĉne struje, mogu
biti sinhroni i asinhroni. Svi ti motori razlikuju se i po naponu potrebnom za rad, a kod
naizmeniĉnih je još važna i frekvencija struje. Svaki od njih razlikuje se po karakteristikama,
npr. krivoj momenta, stepenu iskorišćenja itd. Kod pogona vozila susreću se svi navedeni tipovi
elektromotora. Do nedavno su motori jednosmerne struje suvereno vladali kao pokretaĉi
elektriĉnih vozila (u elektriĉnoj vuĉi: tramvaji, trolejbusi, vozovi i sl.), meĊutim sve više ih
potiskuju motori naizmeniĉne struje koji su po svojoj konstrukciji jednostavniji, ali je upravljanje
komplikovanije.
Prednosti električnih u odnosu na automobile sa motorima s unutrašnjim
sagorevanjem, su:
1. Električni automobili doprinose smanjuju zagađenja vazduha u gradovima i
smanjenju emisije gasova sa efektom staklene bašte. – Elektriĉni automobili ne ispuštaju
štetne supstance u okolinu tokom rada, kao što su: ugljen-dioksid, ugljen-monoksid, ĉestice ĉaĊi,
nezasićena organska jedinjenja, ugljovodonici, ozon, olovo i razni azotni oksidi, kao što to rade
automobili sa motorom s unutrašnjim sagorevanjem. Koliko ovi automobili doprinose smanjenju

19
zagaĊenja vazduha to zavisi od tehnologije koja se koristi za proizvodnju elektriĉne energije za
punjenje akumulatora. MeĊutim, koristi od ĉistog vazduha su najĉešće lokalnog znaĉaja, zbog
toga što su, zavisno od izvora iz koga je proizvedena elektriĉna energija za punjenje baterija,
emisije štetnih gasova u vazduh pomerene na mesto proizvodnje elektriĉne energije. TakoĊe,
elektriĉni automobil ne ostavlja fleke od motornog ulja na putu. Buka se drastiĉno smanjuje što
doprinosi poboljšanju zdravlja ljudi, jer nestankom buke, nestaje i stres koji je prisutan u buĉnom
okruženju. Emitovanje toplote u okolinu drastiĉno se smanjuje. Time se poboljšava stanje
globalne klime i mikroklime u gradovima, gde je i najveća koncentracija saobraćaja.
Elektriĉna energija koja se koristi za pokretanje elektriĉnog automobila može se dobiti iz
razliĉitih izvora energije, izmeĊu ostalog i iz obnovljivih izvora energije. Neka turistiĉka mesta
poseduju fotonaponske panele, koji obezbeĊuju punjenje baterija elektriĉnih automobila,
elektriĉnih bicikala i segveja. Tokom noći, kada se vozila ne koriste, prikljuĉuju se na te sisteme
za punjenje, kako bi bila spremna za upotrebu narednog dana. Fotonaponski sistemi se sastoje od
fotonaponskih ćelija koje pretvaraju solarno zraĉenje direktno u jednosmernu elektriĉnu struju.
Princip punjenja baterija elektriĉnih automobila elektriĉnom energijom proizvedenom pomoću
fotonaponskih panela, prikazan je na slici 4.
Slika 4. Princip punjenja baterija automobila elektriĉnom energijom proizvedenom
pomoću fotonaponskih panela; 1 - fotonaponski panel, 2 - invertor, 3 - elektriĉni razvod, 4 -
elektriĉno brojilo, 5 - utiĉnica za punjenje, 6 - elektriĉno vozilo, 7 - distributivna mreža
2. Troškovi za energiju za isti pređeni put električnih automobila su znatno niži. -
Elektriĉni automobili za isti preĊeni put (efekat) potroše tri puta manje energije izražene u [MJ]
nego klasiĉni automobili. Pri tome oni koriste elektriĉnu energiju, koja se može proizvesti iz
obnovljivih izvora energije izmeĊu ostalog i ugradnjom fotonaponskih panela na haubi i krovu
automobila, ĉime se štede energetski resursi i produžava put koji se može preći izmeĊu dva
punjenja.
3. Električni automobili imaju niže troškove održavanja. - Troškovi održavanja
elektriĉnih automobila su znatno niži nego troškovi održavanja automobila sa motorom s
unutrašnjim sagorevanjem, jer su elektromotori znatno jednostavnije konstrukcije od motora sa
unutrašnjim sagorevanjem što ih ĉini znatno pouzdanijim i trajnijim. Motori sa unutrašnjim
sagorevanjem imaju oko hiljadu pokretnih delova, dok elektromotori imaju od tri do pet
pokretnih delova. Elektromotori nemaju ulja, niti uljnih i vazduših filtera, praktiĉno nemaju
delova koji se troše pa generalni remonti elektromotora nisu potrebni. Praktiĉno elektromotori
ne zahtevaju nikakvo održavanje, ĉime su smanjeni troškovi njihovog održavanja.
Većina troškova održavanja elektriĉnog automobila se odnosi na održavanje i zamenu
baterija. Pošto je baterija sastavljena od mnogo ćelija, koje se ne troše ravnomerno, povremenom

20
zamenom najlošijih može se zadržati ista dužina puta koju može preći po jednom punjenju. Ĉak i
"na kraju životnog veka", baterija nije potpuno bezvredna, jer se može ponovno upotrebiti,
reciklirati ili koristiti kao rezervna.
4. Električni automobili imaju znatno veću energetsku efikasnost. – Iskorišćenost
energije kod elektromotora je preko 90% (dok kod motora sa unutrašnjim sagorevanjem iznosi
oko 30%), što doprinosi uštedi i oĉuvanju energetskih resursa. Elektromotori su puno energetski
efikasniji u korišćenju energije od motora sa unutrašnjim sagorevanjem, pa za isti preĊeni put
(efekat) elektriĉni automobili potroše tri puta manje energije izražene u MJ nego klasiĉni
automobili. Motori s unutrašnjim sagorevanjem su relativno neefikasni u pretvaranju energije
goriva za pogon, jer se kod njih većina energije troši na toplotne gubitke, dok su kod
elektromotora gubici energije znatno manji.
Pored toga elektriĉna energija koja se koristi za pogon elektriĉnog automobila može se
dobiti i iz obnovljivih izvora, kao što su izmeĊu ostalog i fotonaponski paneli, koji se mogu
ugraditi i na krov i haubu elektriĉnog automobila, ĉime se dobija besplatna energija.
TakoĊe, elektriĉni automobili imaju mogućnost reverzibilnog (regenerativnog) koĉenja,
jer se pritiskom na nožnu koĉnicu, koristi se tehnologija regenerativnog koĉenja. Motor prelazi u
generatorski režim i kinetiĉka energija proizvedena tokom koĉenja se pretvara u elektriĉnu i
smešta u bateriju automobila, što znaĉi da se energija ne troši prilikom koĉenja nego se proizvodi
i puni bateriju ĉime se produžava put koji automobil može preći izmeĊu dva punjenja. To znaĉi
da se ĉuva energija koja bi se inaĉe izgubila u vidu toplote, odnosno zagrevanja elektromotora.
Na taj naĉin maksimalno se iskorišćava potencijal elektromotora, postiže bolja ušteda energije i
produžava put koji automobil može preći izmeĊu dva punjenja. Ova karakteristika elektriĉnog
vozila je vrlo važna u gradskom naĉinu vožnje “stani-kreni“.
5. Električni automobili povećavaju bezbednost saobraćaja. - Upotrebom elektriĉnih
automobila povećava se bezbednost u saobraćaju, zbog mogućnosti njihove elektronske kontrole
i ograniĉenja kretanja. Povezivanjem GPS ureĊaja u elektriĉnom automobilu sa sistemom za
lokalno praćenje saobraćaja, mogu se izbeći saobraćajne gužve, spreĉiti saobraćajne nesreće, kao
i kraĊe automobila. Ugradnjom elektromotora za upravljanje volanom vozila i senzorima,
povezivanjem sa GPS ureĊajem i kompjuterom u elektriĉnom automobilu, bila bi moguća i
upotreba autovozaĉa. Upotrebom autovozaĉa ne bi bilo saobraćajnih nesreća, jer bi se eliminisao
ljudski faktor kao uzrok saobraćajnih nezgoda.
Nedostaci električnih automobila u odnosu na automobile sa motorima s
unutrašnjim sagorevanjem, su:
1. Električni automobili su znatno skuplji. - Elektriĉni automobili su znatno skuplji od
automobila sa motorom s unutrašnjim sagorevanjem zbog visoke cene njihovih litijum-jonskih
baterija. Cena baterija pada sa masovnijom proizvodnjom i oĉekuje se da će i dalje padati.
MeĊutim, kupci automobila ne žele kupiti elektriĉni automobil iako po preĊenom km puta troše
manje novca za energiju i jeftiniji su za održavanje, jer su znatno skuplji od automobila sa
motorom s unutrašnjim sagorevanjem, što spreĉava masovniji prelazak sa benzinskih na
elektriĉne automobile.
2. Rastojanje koje mogu preći električni automobili između dva punjenja je kraće i
ta punjenja znatno duže traju. - Automobili sa motorima s unutrašnjim sagorevanjem mogu se
napuniti gorivom vrlo brzo i skoro bilo gde, dok kod elektriĉnih automobila to punjenje traje

21
duže (od 20-tak [min] za brzo punjenje do 6 ili 10 h za sporo punjenje) i izmeĊu dva punjenja
mogu preći kraći put nego automobili koje pokreću fosilna goriva.
3. Nedostatak infrastrukture za punjenje baterija. - Jedan od razloga koji spreĉava
masovnije korišćenje elektriĉnih automobila jeste i nedostatak javne infrastrukture za punjenje
baterija i strah vozaĉa od nestanka energije pre dolaska na odredište zbog kraćeg puta koji
postojeći elektriĉni automobili mogu preći izmeĊu dva punjenja.
Električni automobil Tesla Roadster
Elektriĉni automobil Tesla Roadster kao elektriĉni motor koristi ĉetvoropolni indukcioni
Teslin motor snage 180 kW sa specijalno izraĊenim rotorom. Pronalazaĉ Martin Eberhard je
prilagodio litijum-jonske baterije, sliĉne onim u laptop-ovima. Naime on je pronašao naĉin kako
da spoji ove baterije u veća pakovanja, sa naponskim nivoom koji omogućava veći broj ciklus
punjenje-pražnjenje i bolje održavanje temperature. Vrlo velika baterija u Teslinom Roadsteru
ima predviĊeni životni vek od sedam godina pri tipiĉnoj vožnji i košta 12.000 $. Kapacitet
baterija je 50 kWh. DC/AC invertor se sastoji od 72 tranzistora koji emituju malo toplote što
olakšava hlaĊenje.
Elektriĉni automobil Tesla Roadster ubrzava od 0 do 100 km/h za manje od 4 s, dostiže
maksimalnu brzinu od 230 km/h, može preći put od 415 km po jednom punjenju, a puni se za
svega nekoliko sati po ceni od 2,5 $ (USA).
Ovaj automobil može preći put dužine od 4,1 km po 1 kWh potrošene energije, odnosno
može preći put dužine od 1,14 km po 1 MJ potrošene elektriĉne energije, tj. troši 0,877 MJ
elektriĉene energije po 1 km preĊenog puta. Firma Better Place napravila je proraĉun troškova
potrošnje elektriĉne energije za punjenje akumulatora, koji su 2010. godine iznosili 0,05 $/km
preĊenog puta, a oĉekuje se da će 2015. godine iznositi 0,025 $/km preĊenog puta.
Elektromotor omogućava ubrzanje vozila sa znatno boljom karakteristikom u odnosu na
motore s unutrašnjim sagorevanjem. Elektriĉni automobili imaju dobro ubrzanje i generalno
prihvatljivu maksimalnu brzinu.
Za putovanja kratkog dometa, gradskog tipa, elektriĉni automobili su praktiĉan oblik
prevoza i mogu se jeftino puniti preko noći.
1.6. Vrste elektromotornih pogona
S obzirom na naĉin povezivanja elektromotora sa radnom mašinom, elektromotorni
pogon može biti:
- pojedinaĉni,
- grupni i
- višemotorni.
Pojedinačni elektromotorni pogon (slika 8.41), kod njega jedan elektromotor pokreće
samo jednu radnu mašinu (koja može imati više radnih mehanizama). Ovakav elektromotroni
pogon omogućava promenu smera radne mašine promenom smera obrtanja elektromotora, kao i
uvoĊenje raznih sistema regulacije. Ovakav pogon omogućava raspored mašina saglasno
postupku proizvodnje, kao i napajanju pokretnih radnih mašina, a upotrebom upravljaĉkih

22
sistema moguće je i bolje prilagoĊavanje karakteristika motora tehnologiji rada radne mašine.
Slika 8.41. Pojedinaĉni pogon
Grupni elektromotorni pogon (slika 8.42), kod njega jedan veliki elektromotor preko
mehaniĉkog (npr. kajišniĉkog) prenosnika pokreće vratilo, a ono preko drugih mehaniĉkih (npr.
kajišniĉkih) prenosnika pokreće više radnih mašina (koje mogu imati više radnih mehanizama).
Ovakav pogon ima više nedostataka (kao što su npr.: nizak stepen iskorišćenja i vrlo ograniĉene
mogućnosti upravljanja), zbog ĉega se danas retko koristi.
Slika 8.42. Šema grupnog pogona: RM1, RM2, ... , RMN - radne mašine, L – ležaj, V -
vratilo
Višemotorni elektromotorni pogon (slika 8.43), kod njega više elektromotora pokreće
jednu radnu mašinu (koja ima više radnih mehanizama), pri ĉemu svaki od tih elektromotora
pokreće po jedan radni mehanizam te mašine. Pokretanja tih mehanizama su meĊusobno uslovno
povezana. Ovakav elektromotorni pogon se koristi kada se zahteva više vrsta kretanja (npr. kod
strugova, glodalica, veš mašina, kranova (za pokretanje kranskog mosta koristi se jedan motor, a
za pokretanje kranske kuke drugi motor itd.)), kretanja su nezavisna, sekvencirana ili malo
usklaĊena. Više motora može da obavlja svoje funkcije na kompleksnoj proizvodnoj traci, pri
ĉemu rad tih motora mora biti usklaĊen (sinhronizovan) kako bi cela proizvodna traka efikasno
funkcionisala. Upravljanje ovakvim pogonom može biti poluautomatizovano, kada u nekim
operacijama upravljanja uĉestvuje ĉovek, i automatizovano, kada je celokupno upravljanje
preneto na upravljaĉki sistem.

23
Slika 8.43. Dvomotorni pogon
1.7. Načini opterećivanja elektromotora
U toku rada elektromotor se ponaša onako kako to od njega zahteva radna mašina kako bi
mogla da izvrši predviĊene radne operacije.
Postoje tri osnovna naĉina opterećivanja elektromotora:
1. trajno, koje može biti:
a) ravnomerno i
b) promenljivo.
2. kratkotrajno i
3. isprekidano (intermitirano) opterećenje.
Pored navedene tri osnovne vrste opterećenja elektromotora postoje i njihove
kombinacije.
1. Trajno opterećenje. - Tokom celog radnog ciklusa radne mašine elektromotor je
opterećen konstantnom ili promenljivom snagom,
a) Ravnomerno opterećenje. - Tokom celog radnog ciklusa radne mašine elektromotor
je opterećen konstantnom snagom, slika 8.45 a. Trajanje opterećenja je toliko dugo da
temperature svih delova elektromotora dostižu stacionarna stanja. Ovako su opterećeni
elektromotori koji pokreću ventilatore, pumpe itd.
Slika 8.45 а. Ravnomerno opterećenje
b) Promenljivo opterećenje. – Tokom celog radnog ciklusa radne mašine elektromotor je
opterećen promenljivom snagom, ali bez prekida rada (opterećenja) motora, slika 8.45 б. Ovako
su opterećeni elektromotori koji pokreću brusilice itd.

24
Slika 8.45 б. Promenljivo opterećenje
2. Kratkotrajno opterećenje. - Motor je samo kratkotrajno oterećen (period rada je
relativno kratak), slika 8.45 b. Temperatura tokom rada motora ne uspeva da dostigne
stacionarno stanje, a period prekida rada (opterećenja) je dovoljno dug da se motor praktiĉno
ohladi do temperature okolne sredine. Primer za ovaj režim može biti pogon krana.
Slika 8.45. Kratkotrajno opterećenje
3. Intermitirano (isprekidano) opterećenje. - Tokom trajanja radnog ciklusa
elektromotor je jedno vreme neopterećen (P = 0). Periodi rada (opterećenja) i prekida rada
(pauza) se smenjuju, slika 8.45 c, pri ĉemu ni u jednom periodu rada temperatura motora ne
dostiže stacionarno stanje. Primer ovakvog opterećenja je pogon lifta, rendisaljke ili automatskog
struga, koji pri serijskoj proizvodnji obavlja jednu operaciju.
Slika 8.45. Intermitirano opterećenje
Karakteristiĉna veliĉina za ovakvo opterećenje naziva se koeficijent intermitencije:
i = t/T
koji se najĉešće izražava u procentima:
P [kW]
t [min]

25
i = (t/T)·100%
gde je:
T - vremenski period radnog ciklusa, u min
t - vremenski period rada (opterećenja) motora u toku radnog ciklusa, u min
Elektromotori se rade za navedene vrste opterećenja i na natpisnoj ploĉici se nalaze
odgovarajuće oznake. U zavisnosti od vrste opterećenja elektromotora, razlikuju se i nominalni
podaci elektromotora.
Ako se oĉekuje da će elektromotor biti trajno opterećen konstantnom ili promenljivom
snagom tokom celog radnog ciklusa, bez prekida rada (pauza u radu), onda se koriste motori
opšte namene, koji su predviĊeni za trajni rad.
Za intermitirano opterećenje koriste se motori specijalne namene koji su po dimenzijama
manji od motora opšte namene (koji su predviĊeni za trajan rad) istog tipa, konstrukcije, snage i
brzine obrtanja. Ovi motori se mogu lako prepoznati po oznakama za intermitenciju koje se
nalaze na natpisnoj ploĉici motora (npr. i = 15%, i = 25%, i = 40% ili i = 60%). Ako se na
natpisnoj ploĉici motora nalazi oznaka za intermitenciju i=40% onda to znaĉi ako radni ciklus
traje 10 minuta motor je predviĊen da radi 4 minuta, a ako bi taj motor radio duže od 4 minuta
onda bi se on zagrejao iznad dozvoljene temperature. Ako na natpisnoj ploĉici nema oznake za
intermitenciju onda se podrazumeva da je intermitencija i = 100%, što znaĉi ako radni ciklus
traje 10 minuta motor je predviĊen da radi svih 10 minuta bez prekida u radu.

26
2. Osnove dinamike elektromotornog pogona U toku rada elektromotora razlikuju se dva radna stanja:
- ustaljeno radno (pogonsko) stanje, je stanje u kome ne dolazi do promene brzine
(ubrzavanja ili usporavanja), i
- prelazno radno (pogonsko) stanje, je stanje u kome dolazi do promene brzine
(ubrzavanja odnosno usporavanja, uglavnom nastaje prilikom puštanju u rad odnosno
zaustavljanja elektromotora).
Dinamiku elektromotornog pogona ĉine sva radna (pogonska) stanja tog pogona, kao i
njihove promene. Pod promenom radnog (pogonskog) stanja podrazumeva se promena brzine
obrtanja i brzina promene pogonskog stanja. Jedan od osnovnih uslova koje elektromotor treba
da ispuni jeste da sa odgovarajućom brzinom odziva prati sve promene pogonskog stanja (brzine
obrtanja ili promene momenta).
2.1. Osnovna (Njutnova) jednačina kretanja
Iz mehanike je poznato da je kod translatornog (pravolinijskog) kretanja tela mase m
brzinom v prvi izvod koliĉine kretanja (proizvoda m·v) jednak algebarskom zbiru svih sila koje
deluju na to telo u pravcu kretanja (Drugi Njutnov zakon):
(1)
(2)
gde je:
fe - pokretaĉka (motorna) sila
fm - statiĉka (otporna) sila koja se suprotstavlja kretanju
m - masa
v - brzina translatornog kretanja
Analogno izrazu (1) u sluĉaju rotacionog (obrtnog) kretanja tela važi izraz:
(3)
gde je:
J - moment inercije tela koje se obrće
- ugaona brzina tela
Mi - i-ti obrtni moment koji deluju na telo koje se obrće
Kod elektromotornih pogona obiĉno se radi o rotacionom kretanju (obrtanju), koje
i
ifvmdt
d
vmdt
dff me
i
iMJdt
d
dt
dmv
dt
dvmff me

27
nastaje kao posledica dejstva dva meĊusobno suprostavljena momenta, tako da se iz izraza (3)
dobija:
(4)
Moment inercije J je najĉešće konstantan pa je:
(5)
tako se dobija:
(6)
Jednaĉina (6) se naziva osnovna (Njutnova) jednačina kretanja i ona opisuje prelazno
radno stanje.
Izraz se naziva dinamiĉki moment i oznaĉava sa Mu , tako da jednaĉina (6) dobija
oblik:
Vrednost dinamiĉkog momenta može biti pozitivna, negativna ili jednaka nuli, u
zavisnosti od toga da li se sistem ubrzava, usporava ili je u stacionarnom stanju.
Ovaj moment je razliĉit od nule kada postoji promena brzine. Dinamiĉki moment je
posledica ubrzavanja ili usporavanja pojedinih obrtnih delova elektromotornog pogona. Da bi se
neka masa poĉela obrtati potrebno je da postoji dinamiĉki momenat Mu (da postoji razlika
momenata Mu=Mem-Mm) koja će izazvati ubrzavanje motora (promenu pogonskog stanja).
U stacionarnom (ustaljenom) radnom stanju je dinamiĉki moment jednak nuli:
pa osnovna jednaĉina kretanja (6) dobija oblik:
gde je:
Mem - moment motora (elektromagnetni ili vuĉni moment motora) u Nm, polazni
moment motora Mem ne može biti veći od najvećeg kod asinhronog motora, a i kod
svih ostalih motora u izvesnim granicama je odreĊen izborom snage i tipa motora.
Mm - moment radne mašine (moment opterećenja ili statiĉki, otporni, mehaniĉki
moment) u Nm, je posledica otpora koji se javljaju prilikom rada radne mašine (otpori
trenja svih vrsta, otpor rezanja, otpor koji pruža teret pri podizanju itd.). Moment
radne mašine Mm zavisi od karakteristika te radne mašine, kao i ugaona brzina ω,
0dt
dJ
dt
dJMM mem
dt
dJ
dt
dJMM mem
0dt
dJМ u
mem MM
Jdt
dMM mem
umem MMM
dt
dJ

28
odnosno brzina obrtanja motora n, ĉije podatke dobijamo iz dijagrama koga daje
konstruktor.
- dinamički moment (moment ubrzavanja ili usporavanja) u Nm,
J – moment inercije rotora motora (moment inercije obrtnih masa rotora motora i
radne mašine sveden na osovinu motora)
- ugaona brzina motora
- ugaono ubrzanje vratila (osovine) motora
θ - ugaoni položaj vratila (osovine) motora
Pri postavljanju osnovne jednaĉine kretanja (6) treba voditi raĉuna o predznacima
momenta motora Mem i momenta mašine Mm.
Moment mašine Mm je pozitivnog predznaka ako je njegov smer suprotan od smera
obrtanja motora, a negativnog ako je njegov smer isti kao i smer obrtanja motora.
Moment motora Mem je pozitivnog predznaka ako motor radi u svom uobiĉajenom
motorskom režimu, a negativnog ako radi u režimu koĉenja. Tako da u motorskom režimu rada
motora važi jednaĉina (6):
(8)
MeĊutim, ako se odreĊenom akcijom rukovaoca izazove promena smera elektromagnetne
sile (koĉenje motora), onda predznak elektromagnetnog momenta motora Mem postaje negativan i
dolazi do smanjenja brzine u intervalu Δt (–Δω), pa jednaĉina (6) dobija oblik:
(9)
tj.:
(10)
UporeĊujući jednaĉinu (10) sa jednaĉinom (8), može se uoĉiti da se promenio samo
predznak ispred momenta radne mašine Mm, jer je smer delovanja momenta radne mašine Mm isti
kao i smer delovanja momenta motora Mem.
2.2. Moment inercije i zamajni moment
Moment inercije J kod obrtnog (rotacionog) kretanja ima istu ulogu kao i masa m kod
translatornog kretanja.
U praksi se moment inercije izraĉunava na razliĉite naĉine i izražava u razliĉitim mernim
jedinicama.
Moment inercije J bilo kog tela, može se izraĉunati kao suma proizvoda masa
dt
dJMM mem
dt
dJMM mem
dt
dЈMM mem
)1(/ dt
dJMM mem
2
2
dt
dJ
dt
d
dt
dJM u

29
elementarnih ĉestica tela mk i kvadrata rastojanja rk tih elementarnih ĉestica od ose obrtanja:
Moment inercije J se može izraĉunati i kao proizvod mase tela m i kvadrata polupreĉnika
inercije Rin:
gde je:
Rin – polupreĉnik inercije, predstavlja rastojanje od ose obrtanja taĉke u kojoj se
može zamisliti skoncentrisana sva masa tela koje se obrće oko te ose
Moment inercije rotora motora (tela koje se obrće) se može izraĉunati po obrascima:
, kgm2
, Nm2/(m/s
2)
gde je:
m - zamajna masa rotora motora (tela koje rotira), u kg
D - preĉnik inercije rotora motora (tela koje rotira), u m
m·D2 - zamajni moment rotora motora u kgm
2, koga treba savladati rotacijom
(okretanjem) mase m
GD2 - zamajni moment rotora motora u Nm
2, daje se u tabelama i ako je izražen u
kgm2 onda se mora pomnožiti sa 9,81 da bi se dobio u Nm
2
G=mg - težina rotora, u N
g=9,81 m/s2 - gravitaciono ubrzanje
S obzirom da je kod elektromotora zamajna masa rotora u obliku cilindra, spoljnjeg
preĉnika Ds i unutrašnjeg preĉnika Du, moment inercije takvog rotora može se izraĉunati po
obrascu:
gde je:
m – zamajna masa rotora motora koji je u obliku cilindra, može se izraĉunati po
obrascu:
gde je:
γ - specifiĉna masa po jedinici zapremine, u m3/kg
l - dužina rotirajućeg tela mase m (lim-paketa rotora elektromotora), u m
Uvrštavanjem izraza za zamajnu masu () u izraz za moment inercije () dobija se da je:
lDDm us 22
4
84
22
22 us
us
DDlDDJ
8
22
us DDmJ
4
2DmJ
n
k
kk rmJ1
2
2
inRmJ
g
DGJ
4
2g
g/

30
Iz izraza za ugaonu brzinu motora:
dobija se da se brzina obrtanja motora može izraĉunati prema izrazu:
, ob/min
2.3. Vreme puštanja i zaustavljanja motora
Uvrštavanjem izraza za moment inercije () i izraza za ugaonu brzinu ω () u izraz za
dinamiĉki moment (moment ubrzavanja i usporavanja) rotora:
dobija se da je:
Ako je dinamiĉki moment Mu konstantan, onda je i ubrzanje konstantno:
pa izraz za dinamiĉki moment dobija oblik:
Iz ovog izraza može se doći do izraza za izraĉunavanje vremena puštanja (polaska,
zaletanja, ubrzavanja) i zaustavljanja (kočenja, usporavanja) motora:
, s
, s
gde je:
Mu - dinamiĉki moment
n - brzina obrtanja (broj obrtaja) motora, u ob/min
Ovi izrazi važe u sluĉaju da je dinamiĉki moment (moment ubrzanja) Mu konstantan
dt
dJM u
44
32us DD
lJ
602
4
2 n
dt
dDmM u
dt
dnDmM u
460
2 2
dt
dnDmM u
2,38
2
t
nDmM u
2,38
2
.constt
n
dt
dn
uM
nDmt
2,38
2
uM
nDGt
375
2
602
n
f 2
602
n
g
g/

31
tokom vremena. MeĊutim, u praksi i moment motora Mem i moment radne mašine Mm nisu
vremenski konstantne veliĉine, pa ni njihova razlika Mu=Mem-Mm (dinamiĉki momenat) nije
konstantna i u najboljem sluĉaju može se govoriti samo o proseĉnim vremenima zaletanja.
Iz izraza () se vidi da je vreme puštanja (zaletanja, ubrzavanja) i zaustavljanja
motora direktno proporcionalno zamajnom momentu rotora motora mD2, a time i
momentu inercije rotora motora J, jer je:.
Znaĉi, što je moment inercije J veći to je duže vreme puštanja i zaustavljanja motora i
obrnuto.
Za istu težinu rotora motora:
a samim tim i za istu snagu P i istu brzinu n mogu se napraviti rotori motora sa razliĉitim
momentima inercije J, a samim tim i sa razliĉitim vremenima puštanja i zaustavljanja. Tako npr.
ako se napravi motor većeg preĉnika rotora D, a manje dužine rotora l tako da težina rotora
motora G ostane ista moment inercije će biti veći, a time i duže vreme puštanja i zaustavljanja.
Motori za dizalice su manjeg preĉnika rotora D, a veće dužine l pa imaju kraće vreme puštanja i
zaustavljanja, tj. pogodni su za brzo puštanje i zaustavljanje motora.
Zavisno od dužine vremena puštanja motora standardom je odreĊena težina polaska. Ako
vreme puštanja (polaska) motora traje:
- do 5 s, polazak je lak,
- od 5-15 s, polazak je normalan i
- duže od 15 s, polazak je težak.
2.4. Stabilnost elektromotornog pogona
Pod stabilnošću elektromotornog pogona podrazumeva se njegova sposobnost da se
(zahvaljujući svojim radnim karakteristikama) pri poremećaju brzine ubrzano vrati na prethodno
ustaljenu brzinu.
EMP je stabilan ako u sluĉaju smanjenja brzine motora u odnosu na prethodno ustaljenu
(iz nekih razloga koje nije uzrokovao rukovalac), motor razvija veći moment Mem od momenta
radne mašine Mm. Taj višak momenta motora Mem u odnosu na moment radne mašine Mm dovodi
do povećanja brzine motora i povratka na prethodno ustaljenu brzinu.
TakoĊe, EMP je stabilan ako u sluĉaju povećanja brzine motora u odnosu na prethodno
ustaljenu (iz nekih razloga koje nije uzrokovao rukovalac) motor razvija manji moment Mem od
momenta radne mašine Mm. Taj manjak momenta motora Mem u odnosu na moment radne mašine
Mm dovedi do smanjenja brzine motora i povratka na prethodno ustaljenu brzinu.
n
PkG
4
2DmJ

32
Slika Karakteristika momenta motora Mem i karakteristika momenta radne mašine Mm za
sluĉaj stabilne radne taĉke
Na slici su prikazane karakteristike momenta asinhronog motora i dve karakteristike
momenata radne mašine sa dve stabilne radne taĉke.
Slika Karakteristika momenta motora Mem i karakteristike momenata radne mašine Mm za
sluĉaj stabilne dve radne taĉke i jedne nestabilne radne taĉke
Može se zakljuĉiti da od izbora karakteristike momenta motora Mem prema karakteristici
momenta radne mašine zavisi da li će EMP biti stabilan. Zbog toga je potrebno na zajedniĉkom
dijagramu nacrtati karakteristiku momenta motora i karakteristiku momenta radne mašine tek
onda analizirati stabilnost rada ĉitavog pogona i izabrati odgovarajući elektromotor za
predviĊenu radnu mašinu.
M Mm
Mem
+∆M
n
- ∆M
n0 n1 n2
Stabilna radna taĉka

33
2.5. Zagrevanje i hlađenje elektromotora
1. Zagrevanje elektromotora
Elektromotor koji je mehaniĉki opterećen, najveći deo elektriĉne energije koju uzima iz
elektriĉne mreže pretvara u mehaniĉki rad, dok manji deo te elektriĉne energije pretvara u
toplotu zbog pojave gubitaka. Gubici u motoru se javljaju zbog zagrevanja namotaja statora i
rotora, vrtložnih struja i histerezisa u lim-paketima, trenja, ventilacije itd. Usled ovih gubitaka
elektromotor se zagreva, pa tokom vremena slabe karakteristike izolacije namotaja, lim-paketa,
ležajeva itd., zbog ĉega je potrebno vršiti hlaĊenje motora. Kritiĉni delovi motora u pogledu
zagrevanja su: izolacija namotaja i kolektor kod mašina jednosmerne struje. Pored toga što se
namotaji motora naprežu termički (usled zagrevanja), oni se naprežu i mehanički (usled dejstva
elektromagnetnih sila).
Znaĉi, vek trajanja izolacije namotaja zavisi od temperature. Približno se, vek trajanja
izolacije skraćuje za polovinu, za svakih 8°C iznad dozvoljene temperature.
Temperatura namotaja se raĉuna po obrascu:
gde je:
Ta – temperatura ambijenta (okoline)
θ – nadtemperatura (priraštaj temperature) namotaja, predstavlja razliku temperature
namotaja T i temperature ambijenta (okoline) Ta.
Dozvoljena apsolutna temperatura namotaja se raĉuna po obrascu:
gde je:
Tanom - nominalna apsolutna temperatura ambijenta, koja prema IEC standardu iznosi:
Tanom=40oC
θdoz - dozvoljena nadtemperatura namotaja, koja zavisi od klase izolacije namotaja
kao što se vidi iz tabele 1.
Tabela 1. Dozvoljena nadtemperatura namotaja θdoz u zavisnosti od klase izolacije
namotaja
Klasa izolacije namotaja A E B F H
Dozvoljena nadtemperatura namotaja θdoz , °C 60 70 80 100 125
S obzirom na vrednost dozvoljene nadtemperature, izolacija namotaja motora se deli u
više "klasa izolacije". Za niže temperature kao izolacija namotaja koristi se pamuk, svila, papir,
za srednje temperature koriste se proizvodi od liskuna i azbesta, a za najviše temperature
staklena vuna, kvarc sa lakovima za visoku temperaturu.
dozanomdoz TT
aTT

34
Nominalnu snagu motora treba izabrati tako da maksimalna nadtemperatura motora u
stacionarnom stanju ne prelazi vrednost dozvoljene nadtemperature za klasu izolacije namotaja
upotrebljenog u njemu.
Ako motor radi u nominalnim uslovima rada (nnom, Inom, Unom, Tanom itd.) opterećen
nominalnom snagom, onda njegova maksimalna nadtemperatura u stacionarnom stanju θmax ne
sme preći vrednost dozvoljene nadtemperature θdoz:
θmax ≤ θdoz
Nominalne snage motora, koje su navedene na natpisnim ploĉicama motora, se odnose na
nominalnu apsolutnu temperaturu ambijenta (okolne sredine) Tanom, ako je ta temperatura veća,
onda je snaga kojom se motor može opteretiti manja i obrnuto.
Preopterećenja su moguća samo kratko vreme, tako da se ne prekoraĉi dozvoljena
nadtemperatura θdoz. Minimalno preopterećenje iznosi min=1,6.
2. Kriva zagrevanja motora (zakonitost promene nadtemperature motora tokom
vremena prilikom puštanja motora u rad)
Zagrevanje motora predstavlja važan kriterijum prilikom izbora njegove snage, jer
direktno utiĉe na snagu motora.
Da bi se izvršio izbor snage elektromotora za trajni, kratkotrajni i intermitirani režim rada
neophodno je poznavati zakonitost promene nadtemperature motora tokom vremena.
Zakonitost promene nadtemperature motora tokom vremena, naroĉito prilikom puštanja
motora u rad, može se dobiti matematiĉkim putem ako se poznaju zakonitosti pojave toplotnih
gubitaka, uslovi rada motora, kao i uslovi prenošenja toplote sa motora na okolni prostor. Pri
tome se problem se uprošćava, tj. pretpostavlja se da je motor u pogledu zagrevanja homogeno
telo sa unutrašnjim izvorom toplote (sa konstantnim gubicima koji se pretvaraju u toplotu) i
pored toga što on predstavlja vrlo složeno nehomogeno telo u pogledu zagrevanja, koje se sastoji
od bakarnih namotaja, izolacije, magnetnog kola, kućišta od gvozdenih delova, vazduha itd.).
Koliĉina toplotne energije Q koja se razvije (generiše) u motoru u intervalu dt (Q·dt)
jednaka je zbiru koliĉine toplotne energije koju motor predaje okolnoj sredini (pretežno
provoĊenjem i konvekcijom) (A·θ·dt) i koliĉine toplotne energije koja se akumulira u motoru
(C·dθ) i tako uzrokuje priraštaj temperature motora (dθ) u odnosu na temperaturu okoline. Tako
da diferencijalna jednaĉina zagrevanja motora glasi:
(8.77)
U stacionarnom stanju motor dostiže maksimalnu nadtemperaturu θmax i nema priraštaja
temperature motora u odnosu na temperature okoline (dθ=0, tj. C·dθ=0) pa se sva razvijena
(generisana) toplotna energija predaje okolini, tako da je:
(8.78)
(8.79)
Uvrsti li se (8.79) u (8.77) dobija se:
dCdtAdtQ
dCdtAdtA max
dtAdtQ max
max AQ

35
(8.79)
Integraciona konstanta C se odreĊuje iz poĉetnih uslova. Neka u trenutku t=0,
nadtemperatura iznosi θ0:
Rešavanjem diferencijalne jednaĉine zagrevanja motora dobija se funkcija zagrevanja
motora je eksponencijalna i glasi:
(8.80)
ako je θ0=0 onda je:
(8.81)
gde je:
θ – nadtemperatura motora, predstavlja razliku apsolutne temperature motora i
apsolutne temperature ambijenta (okolne sredine)
θ0 - nadtemperatura motora u trenutkau t=0
dCdtA max
max
d
A
Cdt
max
ddt
Ct maxln
0maxln C
max
0maxlnt
t
e max0max
t
e
max
0max
tt
ee max0max
ttt
eee :/0maxmax
tt
ee
0maxmax
t-
max e-1
t
e
0
t-
max e-1
max

36
- maksimalna nadtemperatura motora u stacionarnom stanju, kod dobro
izabranog motora ne prelazi vrednost dozvoljene nadtemperature: θmax ≤ θdoz
- vremenska konstanta zagrevanja motora, predstavlja vreme za koje se motor
zagreje do 63% maksimalne nadtemperature.
Maksimalna nadtemperatura motora u stacionarnom stanju se raĉuna po obrascu:
gde je:
A - specifiĉna snaga hlaĊenja
Q - gubici snage u motoru koji se pretvaraju u toplotu (koliĉina toplote koja se razvije
u motoru u jedinici vremena), raĉunaju se po obrascu:
, W
Vremenska konstanta zagrevanja motora, predstavlja vreme za koje se motor zagreje
do 63% maksimalne nadtemperature. Ima konstantnu vrednost ako su uslovi hlaĊenja A
konstantni. Za gotov motor C i A su konstantne veliĉine. Prema ovom naĉinu razmatranja, τ je
konstantna veliĉina i ne zavisi od opterećenja mašine. Ona se naziva vremenska konstanta
zagrevanja i predstavlja vreme za koje bi motor dostigao maksimalnu nadtemperaturu θmax kada
ne bi bilo odavanja toplote okolnoj sredini. Istovremeno τ brojno predstavlja vreme za koje
mašina, pri odavanju toplote okolini, dostigne nadtemperaturu od 0,632 θmax, tj. za t=τ:
Vremenska konstanta zagrevanja τ je reda veliĉine od nekoliko desetina minuta do
nekoliko ĉasova. Najĉešće izmeĊu 30 min i 1 ĉasa.
Vremenska konstanta zagrevanja motora se raĉuna po obrascu:
gde je:
C=m·c - toplotni kapacitet motora, u Ws/°C
m - masa motora
c - specifiĉni toplotni kapacitet motora (gvožĊa)
A=S·αS – specifiĉna snaga hlaĊenja, tj. specifiĉna toplotna snaga koju motor predaje
okolnoj sredini, predstavlja koliĉinu toplote koju motor predaje okolnoj sredini u 1
sekundi za svaki oC temperaturne razlike, u W/°C
S - površina hlaĊenja (površina sa koje se odvodi toplota)
αS - koeficijent prelaza toplote sa motora na okolnu sredinu
Kada zagrevanje motora poĉinje od nadtemperature θ0=0oC proces zagrevanja motora se
A
Qmax
1Q P P
max
t-
max 632,0e-1
t
sS
cm
A
C

37
može prikazati krivom 1, a kada zagrevanje poĉinje od nadtemperature θ0≠0 proces zagrevanja
motora se može prikazati krivom 2, kao što se vidi sa slike 8.46.
Slika 8.46. Tipiĉni oblici krivih zagrevanja elektromotora
Iz jednaĉine (8.80) se vidi, da će se maksimalna nadtemperatura teorijski postići tek
nakon beskonaĉno dugog vremena t=∞. MeĊutim, praktiĉno nadtemperatura dostiže maksimalnu
vrednost kod manjih motora sa veštaĉkom ventilacijom nakon (2-3) h, a kod većih motora nakon
(4-8) h.
Na slici 8.47. prikazana je familija krivih zagrevanja jednog elektromotora za razliĉita
opterećenja.
Slika 8.47. Familija krivih zagrevanja elektromotora za razliĉita opterećenja
Ako vrednost dozvoljene nadtemperature namotaja motora iznosi θdoz onda se motor
može trajno opteretiti snagom P3. Isti motor se sme kratkotrajno opteretiiti snagom Pk, samo za
vreme tk. Što je trajanje kratkotrajnog opterećenja kraće, to je mogućnost preopterećenja motora
veća, i obratno. Granica povećanja opterećenja motora, na raĉun skraćenja trajanja opterećenja,
predstavlja trenutnu snagu preopterećenja. Ovo treba imati u vidu prilikom izbora snage motora
za kratkotrajni režim rada.
2. Kriva hlađenja motora (zakonitost promene nadtemperature motora tokom
vremena prilikom isključenja motora)
Diferencijalna jednaĉina hlaĊenja motora kada se on iskljuĉi sa mreže dobija se ako se u
poĉetnu diferencijalnu jednaĉinu zagrevanja motora (8.77) stavi da je razvijena (generisana)
toplota u motoru jednaka nuli Q=0, tj.: 0max dCdtA

38
(8.81)
U režimu hlaĊenja je dθ < 0.
Rešavanjem diferencijalne jednaĉine zagrevanja (8.81) dobija se funkcija hlaĊenja
motora:
(8.82)
gde je:
τ ′=C/A′ - vremenska konstanta hlaĊenja
A′ - specifiĉna snaga hlaĊenja, pri ĉemu je: A′ ≤ A
Kod motora sa sopstvenim hlaĊenjem vremenska konstanta zagrevanja τ je manja od
vremenske konstante hlaĊenja τ′ (τ ≤ τ′), jer je odvoĊenje toplote manje zbog smanjenog strujanja
vazduha. Treba napomenuti da bi vremenska konstanta zagrevanja τ bila jednaka vremenskoj
konstanti hlaĊenju τ′ samo u sluĉaju ako bi se mašina i pri hlaĊenju obrtala istom brzinom kao i
pri zagrevanju.
Na slici je prikazana kriva hlaĊenja motora nakon njegovog iskljuĉenja sa mreže. Ako
hlaĊenje poĉinje od maksimalne nadtemperature θmax, kriva hlaĊenja potpuno je simetriĉna sa
krivom zagrevanja u odnosu na osu paralelnu sa apscisom, koja se nalazi na θmax/2.
Slika Kriva hlaĊenja elektromotora nakon njegovog iskljuĉenja sa mreže
dtC
Ad
max
et
/lnmax
dtAdC max
dtd
1
max
t
e
max
'
max
t
et

39
4. Načini hlađenja elektromotora tokom rada
Energija gubitaka motora prelazi u neželjenu toplotu, koja se mora odvoditi sa motora, da
se ne bi prekoraĉile dozvoljene temperature delova motora, pogotovo izolacije.
Nominalnu snagu motora definišu nominalna brzina i nominalni moment. Na moment
utiĉu razni faktori:
- jaĉina magnetnog polja u zazoru, koja zavisi od kvaliteta upotrebljenog
feromagnetnog materijala,
- kvalitet izolacije namotaja, tj. najviša dozvoljena temperatura izolacije,
- vrsta sistema hlaĊenja,
- veliĉina zazora (preĉnik i dužina rotora), a time i veliĉina celog motora.
Moment i snaga motora a time i snaga gubitaka rastu sa trećim stepenom linearnih
dimenzija, a površina hlaĊenja sa drugim stepenom linearnih dimenzija. Zato se motori manjih
snaga lako hlade i sopstvenim ventilatorom, a za motore velikih snaga primenjuju se efikasniji
ali skuplji sistemi hlaĊenja.
TakoĊe, za istu nominalnu snagu (a time i za istu snagu gubitaka), brzohodni motori su
manjih dimenzija pa je i površina hlaĊenja manja. Dakle, brži motori se teže hlade.
Problem zagrevanja motora tokom rada se se rešava hlaĊenjem (odvoĊenjem razvijene
toplote sa) motora, koje se konstruktivno može rešiti na tri naĉina:
- prirodnim hlaĊenjem (koristi se kod mašina malih snaga), kada motor nema nikakav
specijalni ureĊaj za hlaĊenje;
- hlaĊenjem sopstvenom ventilacijom, kada postoji ventilator (koji može biti spoljašnji
i/ili unutrašnji, slika 2), koji sa obrtnim delom motora ĉini jednu celinu;
- nezavisnim (prinudnim) hlaĊenjem nekim sredstvom (vazduhom, gasom, teĉnošću)
koje se posebnim pumpama i cevima dovodi spolja do motora.

40
Slika 2. Sopstveno hlaĊenje motora unutrašnjim i spoljašnjim ventilatorom
Slika 1. Prinudno hlaĊenje motora vazduhom
Slika Prinudno hlaĊenje motora vazduhom
Spoljni ventilator Radijatorska rebra Unutrašnji ventilator
Cevi za prinudno hlaĊenje vazduhom

41
3. Izbor elektromotora za određeni EMP U zavisnosti od namene motora i radne mašine, koriste se motori razliĉitih konstrukcija,
kao što su:
- normalne serije obiĉnih elektromotora, koji su pogodni za veći broj razliĉitih grana
industrije pri normalnim uslovima radne sredine;
- specijalne vrste motora (namenski motori), koji su pogodni za pojedine grane
industrije i pojedine radne mehanizme pri normalnim uslovima radne sredine;
- motori ugraĊeni u pojedine mašine s kojima ĉine jednu celinu, kao što su: npr. motori
za pumpe, ventilatore itd.;
- reduktorski motori, u koje su već ugraĊeni reduktori (zupĉaniĉki prenosi) smešteni u
isto kućište.
Da bi se mogao izvršiti pravilan izbor elektromotora za odreĊeni EMP, potrebno je
poznavati koje osnovne karakteristike elektromotorni pogon treba da ima, odnosno treba
znati:
- da li treba da postoji mogućnost regulacije brzine obrtnja motora,
- da li treba da postoji mogućnost promene smera obrtanja,
- karakteristiku momenta (mehaniĉka karakteristika) motora, koja predstavlja zavisnost
momenta motora od brzine obrtanja,
- naĉin pokretanja elektromotora.
Prilikom izbora elektromotora za odreĊeni EMP treba:
- izabrati elektromotor odgovarajuće konstrukcije za date uslove radne sredine,
- izabrati vrstu (tip) elektromotora,
- izabrati snagu elektromotora (i proveriti da li elektromotor izabrane snage može da
izdrži kratkotrajna preopterećenja),
- proveriti da li je polazni moment elektromotora dovoljno veći od momenta radne
mašine da je može pokrenuti,
- izabrati brzinu elektromotora prema brzini koju zahteva radna mašina.
3.1. Izbor elektromotora odgovarajuće konstrukcije za date
uslove radne sredine
Elektromotori se razlikuju u pogledu konstrukcije, jer za odgovarajuće uslove radne
sredine u kojoj se koriste (otvoreni prostor, prisustvo vlage, prisustvo prašine, prisustvo
zapaljivih smeša ili prisustvo eksplozivnih smeša u sredini i sl.) treba izabrati odgovarajuću
konstrukciju motora.
U postavljenim okvirima izrade elektromotora raznih konstrukcija ubraja se i pitanje
izrade motora konstruisanih da rade u sredinama koje mogu da štete njihovom normalnom radu i

42
veku trajanja. Tako, osim otvorenih motora, postoje zaštićeni i zatvoreni, kao i motori sa
zaštitom protiv eksplozije.
Elektromotori se proizvode za rad u odreĊenoj radnoj sredini, što se prema preporukama
meĊunarodne elektrotehniĉke komisije (IEC) i oznaĉava slovima IP (International Protection),
iza kojih sledi dvocifreni broj. Prva cifra oznaĉava nivo zaštite od dodira delova pod naponom i
od prodora stranih tela, postoji 7 nivoa, od 0 (bez zaštite) do 6 (potpuna zaštita). Druga cifra
oznaĉava nivo (stepen) zaštite od prodora teĉnosti, postoji 9 nivoa od 0 (bez zaštite) do 8 (zaštita
od vode pod pritiskom).
Povećanjem stepena zaštite motora pogoršavaju se uslovi hlaĊenja. Zato, za motore iste
veliĉine i brzine, a razliĉitih IP klasa, nominalna snaga motora opada sa porastom IP klase. Na
primer, kod proizvoĊaĉa ATB Sever motor OK 225 M-2 klase IP 23 ima nominalnu snagu 75
kW, a motor ZK 225 M-2 klase IP 54 ima nominalnu snagu 45 kW.
1. Zaštićeni motori imaju takvu konstrukciju koja štiti namotaje i druge delove pod
naponom od sluĉajnog dodira ili prodiranja stranih tela u unutrašnjost motora, ali ne spreĉava
slobodan protok vazduha za hlaĊenje. Ovo se postiže, tako što otvoreni poklopci motora imaju
jedan paok više, koji treba da bude širi.
2. Zatvoreni motori zovu se tako iako, uopšte uzev, nisu hermetički zatvoreni, jer
poklopci dopuštaju prolaženje vazduha kroz motor, mada je skoro potpuno onemogućeno
ulaženje većih i manjih stranih tela u motor (IP 44).
Ako je ĉitava sredina u kojoj je motor takva da postoji opasnost da sa vazduhom prodru u
motor tela opasna po njegov rad, onda se upotrebljavaju zatvoreni ventilisani motori. Oni se
hlade vazduhom ili nekim inertnim gasom, koji se dovodi cevima do unutrašnjosti motora.
Postoje i potpuno (hermetički) zatvoreni motori, kod kojih se može zatvoriti ceo
motor u oklop. Motor IP68 može da izdrži pod vodom nekoliko ĉasova a da za to vreme vlaga
ne prodre u unutrašnjost. Ovakvi motori se upotrebljavaju, na primer, u metalurgiji. Uslovi
hlaĊenja ovih motora su veoma otežani; iako su bez ventilacije, snaga im za isti gabarit opada na
50% snage motora otvorene izrade. Stoga im cena dostiže dvostruku vrednost cene otvorenih
motora. Oni se ne izraĊuju za velike snage. Ako su za pogone potrebni zatvoreni motori velike
snage, ekonomiĉnije je rešiti problem pogona motorom otvorene izrade koji je jevtiniji, ali ih
treba smestiti u posebnu ĉistu prostoriju pored mašinskog odeljenja.
3. Motori zaštićeni od eksplozije su zatvoreni motori sa specijalnim oklopom otpornim
protiv sila eksplozije, koje se mogu razviti u unutrašnjosti motora, tako da se požar ne prenese na
okolni prostor. Ovo su hermetiĉki zatvoreni motori sa pojaĉanim zaptivanjem prirubnicom. Pošto
varnice mogu da izazovu uglavnom ĉetkice na prstenovima ili kolektorima, ponekad se prave
motori kod kojih su hermetiĉki oklopljeni samo ovi delovi motora. Kod ovih motora ispitni
napon izolacije mora da ima 50% veću vrednost, a dozvoljeno zagrevanje mora da mu se smanji
za 25%.
U prostorima ugroženim eksplozivnom atmosferom, kao što su naftna i gasna postrojenja
ili hemijska industrija, postavljaju se posebni zahtevi pri projektovanju i izvedbi elektromotornih
pogona. Osiguranje protiveksplozivne zaštite u ovakvim pogonima zasniva se na primeni ureĊaja
i instalacija posebno projektovanih i ispitanih za upotrebu u prostorima ugroženim
eksplozivnom atmosferom, kao što su npr. elektromotori u Ex (eksplozivno zaštićenoj)

43
izvedbi. Na primer, u prostorima ugroženim gasnom atmosferom (požarna zona 1), neophodno
je koristiti ureĊaje koji nisu uzroĉnici paljenja u normalnom radu niti kod oĉekivanog kvara.
3.2. Izbor vrste (tipa) elektromotora
Elektromotor pretvara elektriĉnu energiju u mehaniĉki rad, pri ĉemu pokreće radnu
mašinu.
S obzirom na to koju vrstu motora koriste EMP-i mogu biti sa:
- motorima jednosmerne struje,
- asinhronim motorima i
- sinhronim motorima.
Osnovni zahtev koji se postavlja pred elektromotorni pogon jeste mogućnost regulacije
brzine obrtanja motora.
U ne tako dalekoj prošlosti kontinualna promena brzine obrtanja pogona se vršila
pomoću motora jednosmerne struje. Razlog korišćenja motora jednosmerne struje u ovu svrhu
leži u jednostavnosti promene brzine obrtanja ovih motora. Brzine od nulte do nominalne
vrednosti, kod motora jednosmerne struje postizale su se promenom napona napajanja, dok su se
promenom (smanjenjem) pobudne struje postizale željene brzine iznad nominalne vrednosti.
MeĊutim nedostaci ovih motora su visoka cena u odnosu na druge motore, postojanje
komutatora i ĉetkica na kojima se javljaju varnice u toku rada, usled ĉega se smanjuje radni vek
motora, proizvode visoko frekventne smetnje što otežava regulaciju. Usled habanja javljaju se
uĉestali servisi što podiže cenu održavanja celog pogona.
Zbog navedenih nedostataka motora jednosmerne struje, krenulo se u razvoj mehanizama
za regulaciju trofaznih asinhronih motora, koji u sebi ne sadrže komutator i ĉetkice, već im je
rotor kaveznog tipa što povoljno utiĉe na vek eksploatacije motora.
Za regulaciju brzine obrtanja asinhronog motora u nedavnoj prošlosti su
primenjivane praktiĉno samo dve metode - regulisanje dodavanjem otpora u kolo rotora i
regulisanje promenom broja pari polova. Prvi metod je ekonomski opravdan samo kad se želi
regulisati brzina obrtanja u ne širem intervalu od 20%, a drugi metod obezbeĊuje samo diskretnu
(skokovitu) regulaciju i dosta se ĉesto primenjuje kod mašina za obradu rezanjem (strug,
glodalica i sl.). Sada je situacija, u pogledu regulacije asinhronog motora, nešto drugaĉija.
Naime, u poslednje vreme dosta je pala cena poluprovodniĉkih pretvaraĉa, pa se ĉesto sreću
pogoni sa asinhronim motorom sa kaveznim rotorom napajanim preko pretvaraĉa frekvencije,
koji omogućavaju praktiĉno kontinualnu promenu brzine obrtanja.
Komponente energetske elektronike omogućile su da se realizuju naponski izvori kojima
se može ostvariti naizmeniĉni napon promenljive amplitude i frekvencije. Sa ovim ureĊajima i
kontrola brzine asinhronih motora je pojednostavljena i svodi se na promenu frekvencije napona
napajanja motora. Sa promenom frekvencije menja se i amplituda napona, sa smanjenjem
frekvencije smanjuje se i amplituda dovedenog napona da magnetno kolo u mašini ne bi zašlo u
zasićenje, tj. odnos dovedenog napona i frekvencije mora uvek biti konstantan.
Upotrebom ovakvog ureĊaja, radne karakteristike asinhronog motora znaĉajno su

44
proširene. Pomoću frekventnog regulatora moguće je menjati brzinu motora u vrlo širokom
opsegu koji odgovara opsegu promene frekvencije izlaznog napona. Promenom frekvencije
moguće je postići da frekvencija klizanja pri polasku motora bude mala, tako da je višestruko
veću polaznu struju motora moguće smanjiti na nazivnu vrednost. Pored toga, moguće je
proizvesti veći polazni momenat ili ĉak momenat pri nultoj brzini. Promena smera obrtanja je
takoĊe znaĉajno olakšana. Obiĉno se postiže promenom dve faze na prikljuĉcima motora. Kod
invertora je dovoljno promeniti redosled upravljaĉkih impulsa u softveru mikrokontrolera.
Za ĉesta puštanja u rad i promenljiva opterećenja, kada se ne zahteva regulacija brzine
obrtanja, najpouzdaniji i najjednostavniji, a ujedno i najjeftiniji, je asinhroni motor sa kaveznim
rotorom. Motor sa namotanim rotorom je od njega skuplji i složeniji za održavanje, pa se
primenjuje kao alternativa ovom motoru, kada se zahteva regulisanje brzine obrtanja ili kada je
potreban veliki polazni momenat.
U neregulisanim pogonima najĉešće su korišćeni motori naizmeniĉne struje, sinhroni i
asinhroni motori (kod vrlo velikih snaga, ali i kod malih za regulisane pogone visokog kvaliteta).
Zbog toga što je regulaciona oprema koja je bila potrebna za njihovu primenu u pogonima
promenljive brzine bila složena i skupa.
Sinhroni motori se koriste kada je uz pogon potrebna i kompenzacija reaktivne energije
mreže uz pokretanje u praznom hodu ili uz poseban zahtev za konstantan broj obrtaja, pogotovo
kada se radi o većim snagama. Pri trajnom opterećenju, kad se zahteva stalna brzina
obrtanja, zadatak izbora elektromotora je dosta jednostavan. U ovakvom sluĉaju, najbolje se
opredeliti za sinhroni motor.
3.3. Izbor snage elektromotora
Izbor snage elektromotora za odreĊeni EMP se vrši tako da motor izabrane snage
obezbediti ekonomiĉan, produktivan i pouzdan rad radne mašine.
Izbor snage motora veće nego što je potrebna za odreĊeni EMP dovodi do suvišnih
gubitaka energije, kao i većih finansijskih ulaganja u motor, uz povećanje dimenzija motora i
pogona kao celine.
Izbor snage motora manje nego što je potrebna za odreĊeni EMP dovodi do smanjenja
produktivnosti proizvodnje i sniženja pouzdanosti elektromotora jer se motor izlaže termiĉkim
naprezanjima većim od dozvoljenih tako da su i veće mogućnosti otkaza motora.
Snagu motora treba izabrati tako da se za vreme rada motor zagreje približno do
dozvoljene temperature, ali ne iznad nje. Pored toga, motor treba da bude sposoban da izdrži
kratkotrajna preopterećenja i da razvija polazni momenat dovoljan za pokretanje radne mešine.
Zbog toga nakon izbora snage elektromotora (koja se vrši prema uslovima zagrevanja i hlaĊenja)
treba proveriti da li motor tako izabrane snage zadovoljava uslove kratkotrajnog preopterećenja i
uslove puštanja u rad.

45
3.3.1. Izbor snage elektromotora za trajni pogon
3.3.1.1. Izbor snage elektromotora za trajni pogon sa nepromenljivim
opterećenjem (za radnu mašinu koja radi stalnom snagom)
Najjednostavnije je izabrati snagu motora za trajni režim rada, pri konstantnom ili malo
promenljivom opterećenju. U takvim sluĉajevima, nominalna snaga motora mora biti jednaka, ili
veća od snage opterećenja, te provera da li motor zadovoljava uslove zagrevanja i kratkotrajnog
preopterećenja nije potrebna. Potrebno je samo proveriti da li je polazni moment tako izabranog
motora veći od momenta radne mašine.
Pošto postoje gubici snage u mehaniĉkom prenosu Pg onda na mestu povezivanja
elektromotora sa radom mašinom treba dovesti snagu Pem koja je veća od snage potrebne na
mestu korisnog rada Pk za iznos snage gubitaka u mehaniĉkom prenosu Pg:
Pem = Pk + Pg
Odnos snage potrebne mestu korisnog rada Pk i snage motora Pem predstavlja stepen
iskorišćenja mašine:
Ovaj stepen iskorišćenja ηm sliĉan je za sve mašine jedne vrste i obrnuto je
proporcionalan snazi gubitaka u mašini Pg.
Iz izraza za stepen iskorišćenja mašine ηm može se dobiti izraz po kome se može
izraĉunati snaga elektromotora:
gde je:
Pk - snaga potrebna na mestu korisnog rada mašine
ηm - stepen iskorišćenja mašine
Podaci o snazi potrebnoj na mestu korisnog rada Pk i stepenu iskorišćenja mašine ηm
mogu se naći u fabriĉkim prospektima za datu mašinu.
3.3.1.2. Izbor snage elektromotora za trajni pogon sa promenljivim
opterećenjem (za radnu mašinu koja neprekidno radi pri različitim
snagama opterećenja)
Radne mašine koje neprekidno rade i pri tome trpe razliĉita opterećenja tokom rada imaju
pravilne zahteve tokom kraćeg vremena rada, pa se ti zahtevi ponavljaju, takva kraća vremana u
kojima se pravilno ponavljaju zahtevi mašine nazivaju se periode T. U jednoj periodi vremena
mašina može da zahteva snagu P1 tokom vremena t1, snagu P2 tokom vremena t2, snagu P3
tokom vremena t3 (s1.-1.5.).
m
kem
PP
em
km
P
P

46
Slika Dijagram rada elektromotora za trajni pogon sa promenljivim opterećenjem
Prilikom izbora snage elektromotora treba voditi raĉuna o razliĉitim vremenima
zagrevanja (pa i hlaĊenja) motora, razliĉitim snagama opterećenja itd. Snaga elektromotora
potrebna za pokretanje mašine koja traži razliĉita opterećenja (P1, P2, P3) tokom vremena trajanja
(t1, t2, t3), pri kojoj se motor neće pregrejati se raĉuna po obrascu:
3.3.2. Izbor snage elektromotora za kratkotrajni rad (pogon)
Dijagram rada elektromotora za kratkotrajni pogon prikazan je na slici 1.6, gde se vidi da
motor radi pri nominalnoj snazi Pn samo kratkotrajno, tokom vremena tn, a zatim duže stoji.
Kada bi radio kratkotrajno za vreme tn mogao bi da radi većom snagom Pn i gubicima
snage Qn i dostigao bi dozvoljenu temperaturu θtr za vreme tn.
Kada bi radio svo vreme (t→∞), onda bi motor morao da radi sa manjom snagom Ptr i
gubicima snage Qtr i dostigao bi dozvoljenu temperaturu θtr za vreme t→∞.
Na kraju se iz obrasca za proraĉun stepena iskorišćenja motora, odnosno obrasca za
snagu gubitaka:
Snaga motora za kratkotrajan rad se dobija, tako što se prema poznatom dijagramu η=f(P)
n
n
trn P
PQ

47
tog motora biraju parovi vrednosti η i P za razliĉite vrednosti gubitaka snage Q dok se ne
zadovolji jednaĉina:
3.3.3. Izbor snage elektromotora za intermitirani pogon
U pogonima sa isprekidanim radom motor odreĊene snage i intermitencije (na primer
40%) ĉesto treba zameniti motorom sliĉne snage, ali druge intermitencije (na primer 25%). Tada
se može postaviti zahtev da se ispita da li motor neke nominalne snage (na primer P25) menja
svoju snagu (na primer na P40) ako mu se promeni intermitencija (na primer 25%), to jest trajanje
ukljuĉenosti u rad sa opterećenjem na novu intermitenciju (na primer 40%).
Ovaj proraĉun promene snage opterećenja motora takoĊe može da se zasniva na istom
naĉinu razmisljanja kao i pri izboru snage motora za promenljiva opterećenja u raznim
vremenima njihovog trajanja. To znaĉi da je zagrevanje i hlaĊenje motora i u ovom sluĉaju bitno
da bi se našla nova vrednost dopuštene snage opterećenja. Ako jedan motor radi kraće vreme, a
zatim stoji isto tako kraće vreme, on posle toga može više da se optereti. Ovo je moguće zbog
toga što pri dužem vremenu stajanja motor ima više vremena da se hladi. Kolika je vrednost
uvećane snage opterećenja pri kraćem trajanju vremena opterećenost može se utvrditi kada se
ima u vidu jednakost uslova zagrevanja i hlaĊenja u oba sluĉaja opterećenosti:
Pri intermitentnom režimu, motor se naizmeniĉno zagreva i hladi. Njegova temperatura,
za vreme svakog ciklusa, zavisi, pri tome, od njegovog prethodnog toplotnog stanja. Tipiĉni
oblik krive zagrevanja, za taj režim, prikazana je na slici 8.48. Ovakva kriva je tipiĉna, uz
pretpostavku da su uslovi hlaĊenja motora jednaki tokom ĉitavog vremena i da je dijagram
opterećenja idealan.
Slika 8.48 Zagrevanje elektromotora pri intermitentnom režimu rada
Sliĉno ovome dobijaju se obrasci za preraĉunavanje snage i u sluĉajevima drugih
intermitencija, to jest vremena trajanja ukljuĉenosti motora u pogonu, izraženo procentima:
Ovakvo preraĉunavanje snaga motora može da se vrsi samo za dve uzastopne vrednosti
intermitencije, pošto snaga motora ne zavisi samo od topotnih već i od elektromehaniĉkih i
konstrukcionih uslova rada. Mogućnost primene ovih obrazaca vidi se u sledećem primeru iz
1
2
21 t
tPP tt
n
n
trn P
PQ

48
pogona.
3.3.4. Provera da li elektromotor izabrane snage može da izdrži
kratkotrajno preopterećenje
Nakon što se izvrši izbor snage elektromotora za neki EMP prema uslovima zagrevanja i
hlaĊenja elektromotora (na osnovu gore navedenih obrazaca i datih opterećenja koja traju u
datim vremenskim razmacima) treba proveriti da li motor tako izabrane snage zadovoljava
uslove kratkotrajnog peotrećenja.
Osim nominalnom snagom, kojom elektromotor može da bude trajno opterećen, on može
da bude kratkotrajno preopterećen (opterećen znatno većom snagom od nominalne) u zavisnosti
od njegove konstrukcije. Kratkotrajno preopterećenje motora je ono opterećenje, koje motor
može savladati tokom vrlo kratkog vremenskog intervala (5, 10, 15, 30 min itd., ali ne trenutno),
a da ne doĊe do njegovog oštećenja. Posle tog vremenskog intervala motor se mora iskljuĉiti, da
bi se ohladio do temperature okoline.
Maksimalna snaga koju motor može dati Ppr se nalazi tako što se nominalna snaga
motora Pn pomnoži faktorom preopterećenja ν:
Ppr=v·Pn
gde je:
Ppr - maksimalna snaga koju motor može dati
Pn - nominalna snaga motora
ν - faktor preopterećenja, je broj koji pokazuje koliko puta najviše elektromotor može
kratkotrajno da razvije snagu veću od nominalne snage Pn. Faktor preopterećenja daje
proizvoĊaĉ elektromotora na tablicama motora ili katalozima.
Provera da li motor izabrane snage može da izdrži kratkotrajno preopterećenje se vrši
tako što se maksimalna snaga koju motor može dati Ppr uporedi sa maksimalnom snagom koju
traži pogon P1:
- Ako se dobije da je maksimalna snaga koju motor može dati Ppr veća od maksimalne
snage koju traži pogon P1 onda motor izabrane snage ispunjava uslove kratkotrajnog
preopterećenja i može se koristiti.
- Ako se dobije da je maksimalna snaga koju motor može dati Ppr manja od
maksimalne snage koju traži pogon P1 onda motor izabrane snage ne ispunjava uslove
kratkotrajnog preopterećenja (zbog prevelikog zagrevanja koje bi moglo dovesti do
njegovog oštećenja) i mora se usvojiti motor veće snage. Za ovakav motor se kaže da
je izabran prema uslovima kratkotrajnog preopterećenja, a ne prema uslovima
zagrevanja. U tom sluĉaju snaga motora se neće dovoljno koristiti (motor će raditi
nedovoljno toplotno iskorišćen).

49
3.4. Provera da li je polazni moment elektromotora dovoljno
veći od momenta radne mašine da je može pokrenuti
Nakon izbora odgovarajućeg elektromotora treba proveriti da li izabrani motor isunjava
uslove puštanja u rad, odnosno da li je polazni momenat motora dovoljno veći od mometa radne
mašine da je može pokrenuti. Da bi se proverilo da li izabrani motor isunjava uslove puštanja u
rad treba proveriti da li njegova karakteristika odgovara karakteristici momenta radne mašine
M=f(n).
Provera da li karakteristika momenta elektromotora Mem odgovara karakteristici momenta
radne mašine Mm koju pokreće se vrši kako u periodu polaska, tako i u periodu ustaljenog rada i
u periodu zaustavljanja elektromotora:
- U periodu polaska elektromotora moment elektromotora Mem treba da bude veći od
momenta radne mašine Mm koju pokreće. Ovaj višak momenta motora potreban je da
bi se ubrzala radna mašina.
- U periodu ustaljenog rada elektromotora nije potrebno ubrzavati radnu mašinue, pa je
moment elektromotora Mem treba da bude jednak momentu radne mašine Mm da bi se
motor obrtao konstantnom brzinom.
- U periodu zaustavljanja elektromotora moment elektromotora Mem treba da bude
manji od momenta radne mašine Mm koju pokreće. Ovaj manjak momenta motora
potreban je da bi se usporila radna mašina.
Zbog toga se za svaki motor (bez obzira da li su ti motori iste snage) mora voditi raĉuna
da u trenutku polaska motora (kada je n=0) moment elektromotora (polazni moment motora) Mem
bude veći od momenta radne mašine Mm. Da bi se utvrdilo da li postoji dovoljna razlika ovih
momenta u trenutku polaska motora treba nacratati karakteristiku momenta motora i
karakteristiku momenta radne mašine u istoj srazmeri i uporedtiti ih, kao što je prikazano na
slici. Sa slike se vidi da je u trenutku polaska motora moment elektromotora veći od momenta
radne mašine.

50
Slika Karakteristika momenta elektromotora Mem i karakteristika momenta radne mašine
Mm
Prilikom puštanja trofaznog kratkospojenog asinhronog motora upuštaĉem zvezda-
trougao struja polaska je tri puta manja pa je i polazni moment motora tri puta manji. Zbog toga
treba voditi raĉuna da i ovako umanjen polazni moment motora bude veći od momenta radne
mašine, jer u protivnom motor neće moći da krene. Zbog toga se puštanje trofaznih asinhronih
motora sa kratkospojenim rotorom upuštaĉem zvezda-trougao vrši samo kod pogona, koji ne
zahtevaju veliki polazni moment (npr. kod ventilatora, pumpi itd.).
Trofazni asinhroni motori sa namotanim rotorom puštaju se u rad pomoću otpornika u
kolu rotora. Velika vrednost otpora u kolu rotora smanjuje polaznu struju, a samim tim i polazni
moment motora. Ako postoji mogućnost regulacije otpora u kolu rotora, onda se može regulisati
i polazna struja, a time i polazni moment motora. Ova mogućnost regulacije vrednosti polaznih
momenata trofaznih asinhronog motora sa namotanim rotorom otpornikom u kolu rotora
primenjuje se pri pokretanju radnih mašina koje pri polasku zahtevaju razliĉite vrednosti
polaznih momenata (npr. kran pri polasku zahteva veći polazni moment kada pokreće teži teret, a
manji kada pokreće lakši teret).
1. Karakteristike momenata (mehaničke ili statičke karakteristike) radnih mašina
Razliĉite radne mašine imaju vrlo razliĉite karakteristike momenata. Tipiĉni oblici
karakteristika momenata nekih radnih mašina prikazani su na slici 8.43.
Mm
Mem
n
M
n
Mem=Mm

51
Slika 8.43 Tipiĉni oblici karakteristika momenata nekih radnih mašina: 1- karakteristika
momenta radne mašine je konstantna, odnosno ne menja sa promenom brzine (npr. kod alatnih
mašina tipa struga), 2 - karakteristika momenta radne mašine se sastoji od komponente koja ne
zavisi od brzine n i komponente koja je proporcionalna sa kvadratom brzine n2 (npr. kod
centrifugalne pumpe), 3 - karakteristika momenta radne mašine je nelinearna (npr. kod
ventilatora) i 4 – karakteristika momenta radne mašine je linearna (u obliku pravca), tj. postoji
linearna zavisnost momenta radne mašine M od brzine n
2. Karakteristike momenata (mehaničke karakteristike) različitih tipova
elektromotora
Treba razlikovati:
- prirodne i
- veštaĉke karakteristike momenata motora.
Prirodne karakteristike momenata motora se dobijaju kada motor radi sa nominalnim
parametrima (nominalnim naponom napajanja, nominalnom frekvencijom, nominalnim
opterećenjem, nominalnom spregom motora) i bez primene bilo kakvih dodatnih elemenata u
kolima motora (kao što su otpori u kolu rotora asinhronog motora sa namotanim rotorom ili
dodatni otpori u kolu indukta motora jednosmerne struje). Postoji samo jedna prirodna
karakteristika. Prirodne karakteristike se još nazivaju i ekonomske, jer je po pravilu rad na njima
najekonomiĉniji. Na slici 8.49 su prikazani tipiĉni oblici prirodnih karakteristika momenata
osnovnih tipova motora.
Slika 8.49. Oblici prirodnih karakteristika momenata osnovnih tipova elektromotora
Veštačke karakteristike momenata elektromotora se dobijaju promenom napona
napajanja ili dodavanjem elemenata u kola motora ili promenom naĉina vezivanja u pojedinim
kolima motora (npr. promenom broja pari polova i sliĉno). Njih može biti neograniĉen broj.
Kao važna veliĉina kojom se karakterišu karakteristike momenata elektromotora koristi
se krutost (tvrdoća):
α=∆M/∆n
Tvrdoća (krutost) može imati razliĉite vrednosti na razliĉitim delovima iste karakteristike
momenta.
S obzirom na tvrdoću (krutost) karakteristike momenata motora mogu biti:

52
- apsolutno tvrde (krute)(α =∞, sinhroni motor),
- tvrde (krute) (α=10-40%), asinhroni motor na linearnom delu karakteristike i motor
jednosmerne struje sa paralelnom pobudom) i
- meke (α≤10%, veštaĉke karakteristike asinhronog motora i veštaĉke karakteristike
motora jednosmerne struje sa rednom pobudom).
Moguće su sve kombinacije:
Zahtevi u pogledu tvrdoće (krutosti) karakteristike momenta najĉešće su presudni
prilikom izbora tipa (vrste) motora. Npr. za kranske pogone i pogone transportnih ureĊaja,
poželjni su motori sa mekom karakteristikom momenta, a za valjaoniĉke stanove za hladno
valjanje, poželjni su motori sa apsolutno tvrdom (krutom) karakteristikom.
3.5. Izbor brzine elektromotora prema brzini koju zahteva
radna mašina
Da bi se dobila željena brzina na mestu korisnog rada radne mašine, potrebno je izabrati
odgovarajuću brzinu elektromotora. Izbor brzine elektromotora se vrši prema brzini koju zahteva
radna mašina.
Poželjno je da motor bude povezan sa radnim mehanizmom radne mašine direktno
(neposredno), tj. pomoću spojnice bez ikakvih mehaniĉkih prenosnika (zupĉastih ili kaišnih
prenosnika). Elektromotorni pogon sa direktnim prenosom je najekonomiĉnije rešenje kada
brzina motora i brzina radne mašine lako mogu biti usaglašene. Ovo je najĉešće sluĉaj kod
radnih mašina viših brzina, tipiĉno od 1.000 do 3.000 o/min (ali i do 12.000 o/min), kao što su
npr. ventilatori, pumpe (zupĉaste, klipne, centrifugalne) itd. Prednosti pogona sa direktnim
prenosom su relativno niska cena i dobar stepen iskorišćenja.
MeĊutim, ĉesto nije moguće motor direktno povezati sa radnom mašinom direktno
(neposredno), jer radne mašine obiĉno zahtevaju niže brzine obrtanja (izmeĊu 50-300 o/min), a
izrada elektromotora tako malih brzina nije ekonomiĉna.
Zavisnost težine elektromotora G od njegove snage P data je izrazom:
gde je:
k - konstanta
P - snaga elektromotora
n
PkG

53
Slika Zavisnost težine motora G od njegove snage P za razliĉite brzine obrtanja n
Sa slike se vidi da su za istu snagu P, motori nižih brzina teži, većih dimenzija i skuplji
od motora viših brzina.
Prilikom izbora brzine elektromotora kada su potrebne niže brzine radnih mašina moguće
su dve varijante:
- da se uzimu motori s nižim brzinama obrtanja i direktnim prenosom, time se
povećava težina, dimenzije i cena motora, a u eksploataciji oni rade sa manjim
stepenom iskorišćenja i faktorom snage, ĉime se poskupljuje njihov rad.
- ili da se uzimu motori s višim brzinama obrtanja i mehaniĉkim prenosnikom, time se
smanjuje cena motora, ali povećava cena EMP-a zbog potrebe za reduktorom, takoĊe
se javljaju gubici snage u reduktoru zbog ĉega stepen iskorišćenja pogona opada,
pored toga povećavaju se zahtevi u pogledu održavanja EMP-a.
Zbog toga je prilikom izbora brzine motora kada su potrebne niže brzine radnih mašina
potrebno je vršiti ekonomske analize. Ekonomske analize su pokazale da je za motore manjih
snaga (do 6 kW) i ekonomiĉnije koristiti motore uobiĉajenih brzina (od 750 do 3000 o/min) sa
mehaniĉkim prenosnikom pomoću koga se dobijaju niže brzine obrtanja radnih mašina (kao što
su npr. bubanj za sajle dizalica i liftova, mašine alatljike, razni mehanizmi itd). Pošto su kod
motora manjih snaga sa nižim brzinama obrtanja lošiji eksploatacioni uslovi: manji stepen
iskorišćenja i faktor snage. Dok je za motore većih snaga (iznad 6 kW) ekonomiĉnije koristiti
motore manjih brzina (ispod 750 o/min) sa direktnim prenosom.
Da bi se izvršio izbor elemenata mašinskog prenosa za neku radnu mašinu, potrebno je
najpre poznavati tehnologija rada na mestu korisnog rada. Zatim za odreĊeni mehaniĉki
prenosnik i za odreĊenu tehnologiju rada na mestu korisnog rada treba izabirati elektromotor
odgovarajuće snage i radnih karakteristika. Snaga elektromotora zavisi od momenta motora Mem
i brzine obrtanja n:
Pem=k·Mem·n
gde je:
k - konstrukciona konstanta
Mem - moment motora
G
n1
n2
n3
n4
n1< n2 <n3 <n4
P

54
n - brzina obrtanja motora
Prilikom izbora elektromotora nije dovoljno samo izabrati snagu elektromotora, već
nakon toga treba proveriti da li karateristika momenta motora Mem odgovara karakteristici
momenta radne mašine i da li brzina obrtanja elektromotora n odgovara brzini koju zahteva
radna mašina.

55
4. Literatura [1] V. Vuĉković, Elektromotorni pogoni, Akademska misao, Beograd, 2002.
[2] M. Bebić, Elektromotorni pogoni – zbirka rešenih zadataka, Akademska misao, 2003.
[3] M. Sokola, Ć., Oros, Elektriĉne mašine i elektromotorni pogoni 1, VTŠS, Novi Sad,
2008.
[4] B., Jurković, Elektromotorni pogoni, Školska knjiga, Zagreb, 1987.
[5] B., Ilić, Elektromotorni pogoni, skripta, 2017.
[6] Vladan Vuĉković: Elektriĉni pogoni, Elektrotehniĉki fakultet, Beograd 1997.
[7] B.Jeftenić, et. al....... ”ELEKTROMOTORNI POGONI zbirka rešenih zadataka”,
Akademska misao, 2003
[8] V.Vuĉković: Opšta teorija elektriĉnih mašina, Nauka, Beograd, 1992.
[9] B.Jurković: Elektromotorni pogoni, Školska knjiga, Zagreb, 1978.
[10] www.pogoni.etf.rs
[11] W. Leonhard: Control of Electrical Drives, Springer-Verlag Berlin, 2001.
[12] B. Bose: Modern Power Electronics and AC Drives, Prentice Hall, 2002.
[13] D.W.Novotni, T.A.Lipo, Vector Control and Dynamics of AC Drives, Oxford
University Press, 1996.
[14] J. Chiasson: Modeling and High-Performance Control of Electric Machines, IEEE
Press, Wiley, 2005
[15] P.C.Krause, et.al.: Analysis of Electric Machinery and Drive Systems, 3rd
Edition, Wiley, 2013
[16] P. Vas: Sensorless Vector and Direct Torque Control, Oxford University Press,
2003
[17] Р. Радетић: Системи аутоматске регулације са тиристорским претварачима;
Р. Радетић, Ниш 2008
[18] Д. Милић, Р. Стојић: Дигитални системи управљања; Научна књига, Београд
1989.
[19] Б. Јефтенић, В. Васић, Ђ. Орос: Регулисани електромоторни погони;
Академска мисао, Београд 2004
[20] М. А. Сокола, Ђ. Орос – Збирка задатака са елементима теорије –
Електричне машине и електромоторни погони 1; Висока Техничка Школа
струковних студија, Нови Сад 2008
[21] Л. Правица – Структуре управљања синкроним мотором с перманентним
магнетима; Свеучилиште у Загребу, Загреб 2012.