






![IMPACT ROBOTICA 2016[1] - responsa.be · ROBOTICA Vrijdag 30 SEPTEMBER tot zondag 2 OKTOBER 2016 Doelgroep: van 6j tot 13j Robotica, een fascinerende wetenschap! Robots worden reeds](https://static.fdocuments.nl/doc/165x107/5f93f5284722552fca4792a8/impact-robotica-20161-robotica-vrijdag-30-september-tot-zondag-2-oktober-2016.jpg)
Talen
Pages
Wettelijk


ROBOTICA INTEGRANTES:
ELIZABET MIRANDA GOMEZ. ANGIE LORENA MONSALVE. ANYI PAOLA LONDOÑO. DIVAYS CONTRERAS POSADA. VANESSA PASTRANA HERNANDES.
1. Enumera la características de básicas de un robot.
A partir de ellas razona porque los robots son sistemas automáticos en lazo cerrado.
CARACTERISTICAS:• Esta capacitado para ejecutar una o varias
tareas, según un programa preestablecido.
• Es capaz de captar cambios en las variables del proceso y modificar la secuencia de acciones.
• Puede ser programado.
• 2. Las lavadoras automáticas disponen de un microprocesador interno capaz de establecer la secuencia de acciones ( prelavado-lavado-aclarado-centrifugado ) y el tiempo de cada una de ellas, sin mas que seleccionar un programada de lavado.
• Indica si puede considerarse un robot o no. Razona la respuesta .
• Una lavadora no es un robot por que es de lazo abierto, requiere de un usuario presente cuando esta funcionando un robot es de lazo cerrado.
3. Indica objetos de uso cotidiano que puedan considerarse robots. Justifica tu respuesta.
• Televisor: Ya que se puede programar para que se apague sin tener un usuario presente.
• Computador: El computador tiene un microprocesador que es el que hace que los programas cumplan su función.
4. Clasifica los siguientes operadores componentes de un robot según sean mecánicos, eléctricos, electrónicos, neumáticos o hidráulicos. Ten presente que algunos pueden corresponder a mas de una categoría.
MECANICOS
• Ejes.• Ruedas.• Engranajes.• Juntas cardan.• Embragues. • Biela-manivela.• Levas y excéntricas• Muelles y resortes.• Frenos.
ELECTRICOS
• Red eléctrica.• Fuentes de
alimentación.• Resistencias
eléctricas.• Motores eléctricos.• Interruptores.• Conmutadores.• Pulsadores.• Relés
NEUMATICOS E HIDRAULICOS
• Compresores.• Tuberías de
distribución.• Elementos de control
y mando.• Elementos de trabajo.• Unidad de presión.• Conducciones• cilindros y motores.
5. Define que se entiende por sistema automático.• Explica como funciona un sistema automático
en lazo abierto y como lo hace un sistema en lazo cerrado.
• Pon ejemplos de dispositivos de uso cotidiano que sean sistemas automáticos. Distingue, en cada caso, si funciona en lazo abierto o en lazo cerrado.
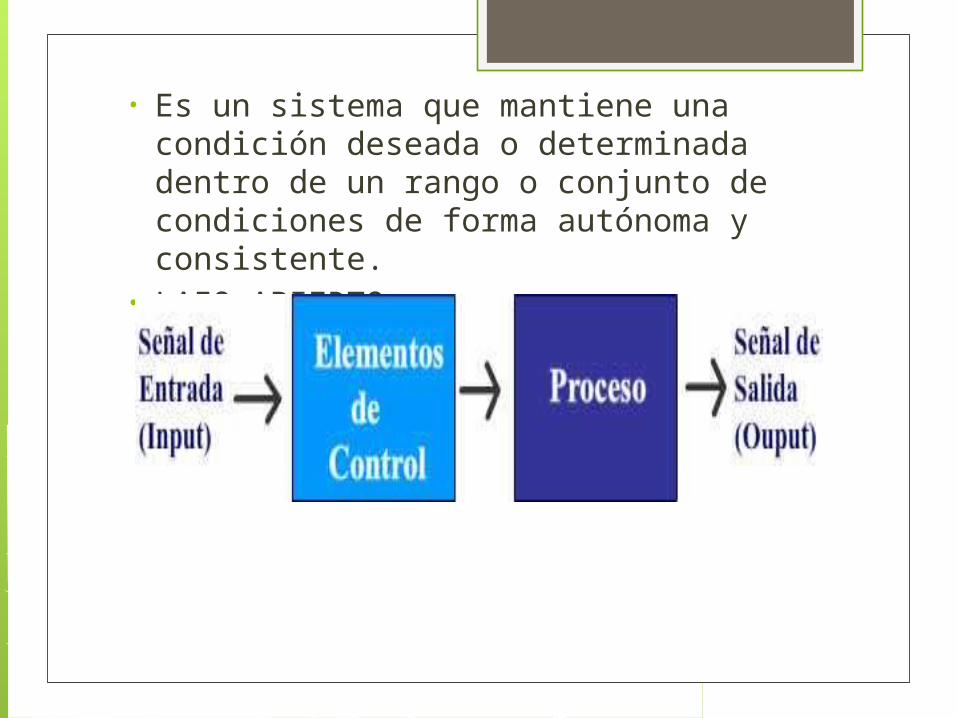
• Es un sistema que mantiene una condición deseada o determinada dentro de un rango o conjunto de condiciones de forma autónoma y consistente.
• LAZO ABIERTO:
El sistema de lazo abierto no tiene retroalimentación y por ende no tiene control.
LAZO CERRADO: el lazo cerrado son aquella que tienen retroalimentación.
• OBJETOS DE USO COTIDIANOS.• Lazo abierto:
-un ventilador: hasta que no lo apagues va a dejar de funcionar -un foco -un taladro -lavadora de las viejitas de las que apagas hasta que le presionas el botón de off
• Lazo cerrado:
• una plancha, si se caliente de mas se apaga y si se empieza a enfriar mucho se vuelve a prender.
• un boiler se apaga cuando llega a cierta temperatura.
6. Completa este texto con las palabras adecuadas.
A. Los sistemas automáticos disponen de tres tipos básicos de elementos: controladores, actuadores y sensores
B. Los controladores son los encargados de regular el funcionamiento del sistema y enviar las ordenes a los actuadores.
C. Los sistemas automáticos disponen de una gran variedad de mecanismos de este tipo. Algunos de los mas conocidos son los temporizadores y los programadores.
D. Los programadores son dispositivos que conectan o desconectan el sistema despues de que haya transcurrido n tiempo determinado.
E. Los temporizadores son dispositivos electrónicos que regulan una o varias funciones del sistema. Suelen ir provistos de un microprocesador que lleva gravado el programa de trabajo.
F. Los actuadores son los mecanismos encargados de recibir las ordenes que les llegan desde los controladores y de ejecutar el trabajo.
G. Según la tecnología empleada, pueden ser mecánicos eléctricos, hidráulicos o mecánicos.
H. Los sensores se encargan de tomar datos y facilitar a los controladores para que modifiquen las ordenes que mandan a los actuadores. Este tipo de elementos solo existe en los sistema de lazo cerrado.
I. Las variables que se encargan de controlar pueden ser muy diferentes, como la posesión, la proximidad, presión o la temperatura.
7. Además de los sensores de posición, de proximidad, de presión o e temperatura, los sistemas automáticos utilizan otros.
• Busca información y averigua que tipo de sensores se emplean para detectar acidez, deformaciones, luz, sonido o contacto.
• Sensores que detectan la acidez: es un sensor electromagnético que reacciona a cambios en la actividad del ion dado. Si el cambio es en la actividad del ion hidrogeno se había entonces de un ISFET sensible al pH.
8. Resume en cuatro tablas las características de los operadores que se emplean en la construcción de un robot.
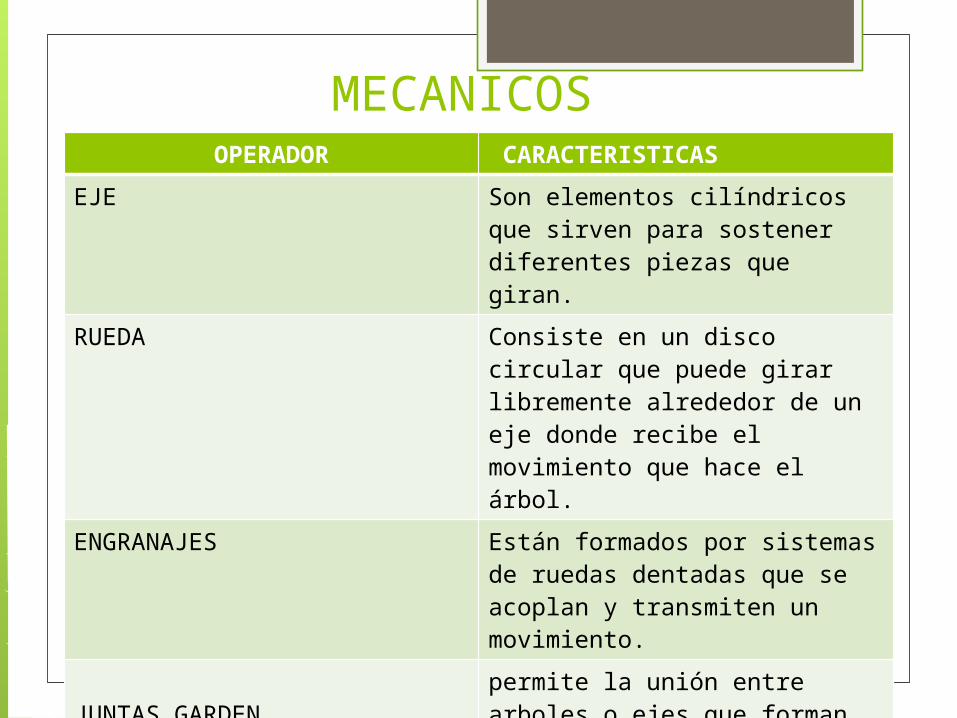
MECANICOSOPERADOR CARACTERISTICAS
EJE Son elementos cilíndricos que sirven para sostener diferentes piezas que giran.
RUEDA Consiste en un disco circular que puede girar libremente alrededor de un eje donde recibe el movimiento que hace el árbol.
ENGRANAJES Están formados por sistemas de ruedas dentadas que se acoplan y transmiten un movimiento.
JUNTAS GARDENpermite la unión entre arboles o ejes que forman un Angulo inferior de 45°.
EMBRAGUES Permiten la unión de dos arboles o dos ejes alineados.
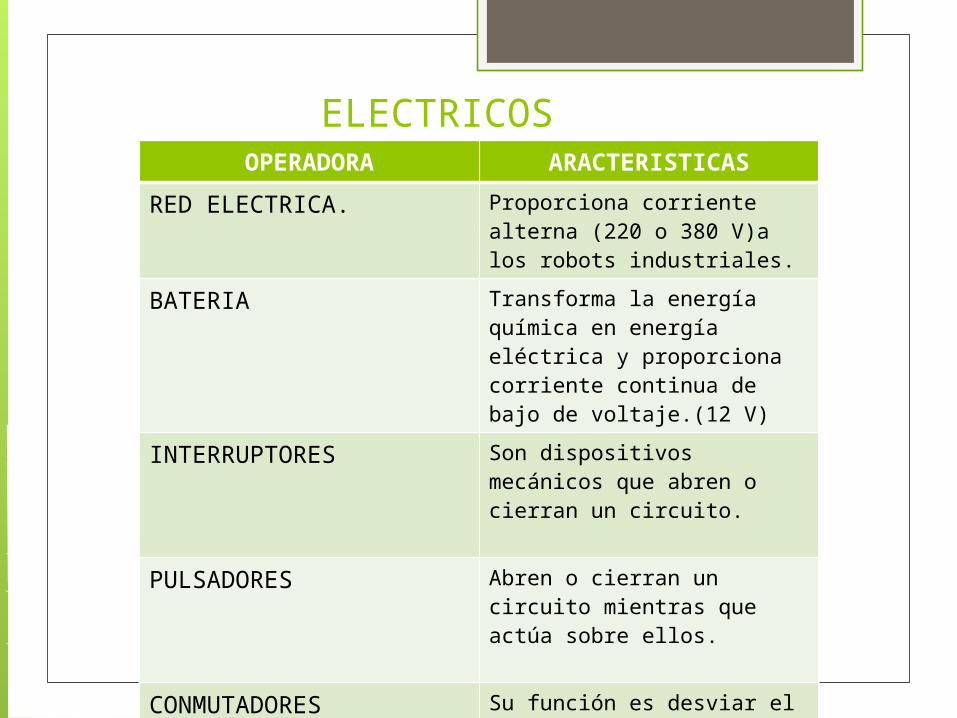
ELECTRICOSOPERADORA ARACTERISTICAS
RED ELECTRICA. Proporciona corriente alterna (220 o 380 V)a los robots industriales.
BATERIA Transforma la energía química en energía eléctrica y proporciona corriente continua de bajo de voltaje.(12 V)
INTERRUPTORES Son dispositivos mecánicos que abren o cierran un circuito.
PULSADORES Abren o cierran un circuito mientras que actúa sobre ellos.
CONMUTADORES Su función es desviar el paso de la corriente de un circuito a otro.
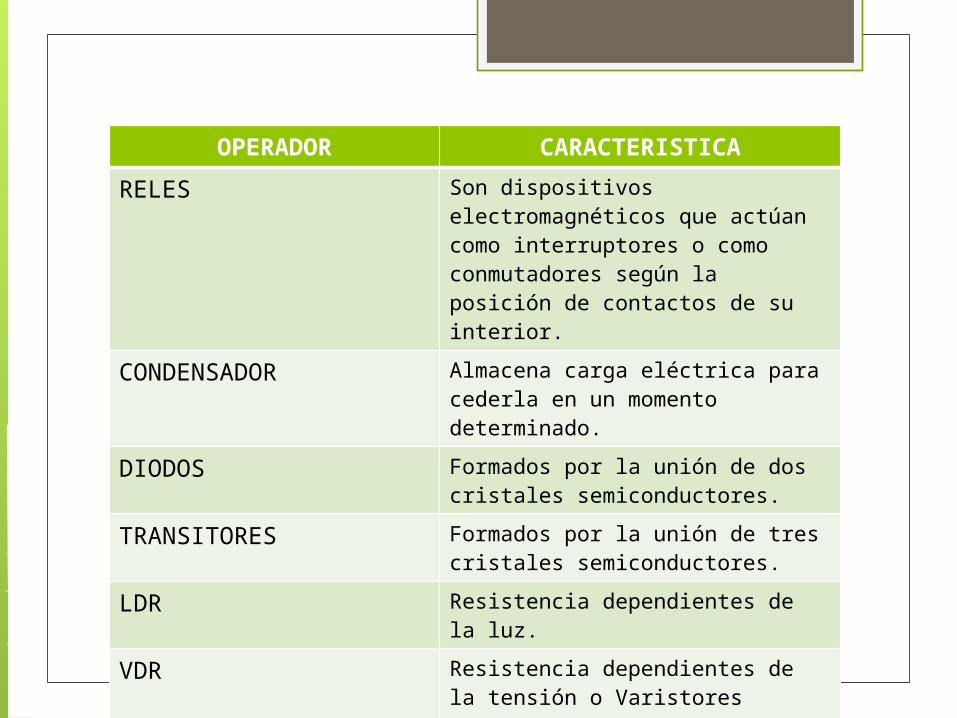
E L E C T R O N IC O S
OPERADOR CARACTERISTICA
RELES Son dispositivos electromagnéticos que actúan como interruptores o como conmutadores según la posición de contactos de su interior.
CONDENSADOR Almacena carga eléctrica para cederla en un momento determinado.
DIODOS Formados por la unión de dos cristales semiconductores.
TRANSITORES Formados por la unión de tres cristales semiconductores.
LDR Resistencia dependientes de la luz.
VDR Resistencia dependientes de la tensión o Varistores
NTC Resistencias dependientes de la temperaturas o termistores.
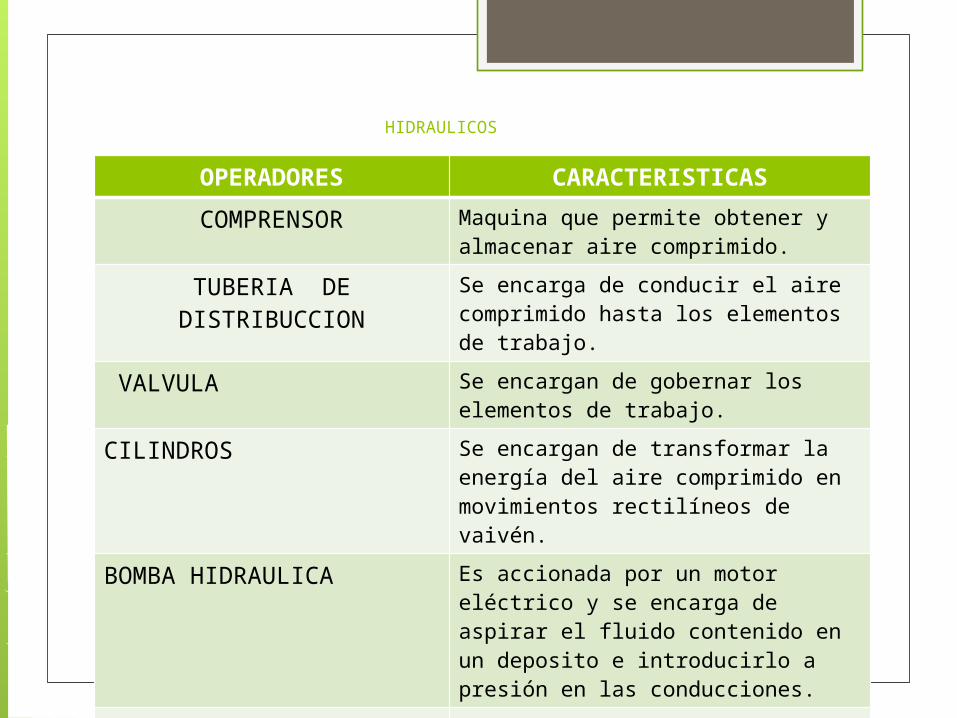
HIDRAULICOS
OPERADORES CARACTERISTICAS
COMPRENSOR Maquina que permite obtener y almacenar aire comprimido.
TUBERIA DE DISTRIBUCCION
Se encarga de conducir el aire comprimido hasta los elementos de trabajo.
VALVULA Se encargan de gobernar los elementos de trabajo.
CILINDROS Se encargan de transformar la energía del aire comprimido en movimientos rectilíneos de vaivén.
BOMBA HIDRAULICA Es accionada por un motor eléctrico y se encarga de aspirar el fluido contenido en un deposito e introducirlo a presión en las conducciones.
MOTORES Transforman la energía del fluido a presión en un movimiento de rotación
9. Completa esta frase con las palabras adecuadas.
¨los componentes fundamentales de un robot son: la unidad mecánica o el manipulador propiamente dicho; la unidad de control desde la que se gobierna; la unidad de programación, en la que se introducen las instrucciones de funcionamiento y la secuencias de tareas; y el cableado, que une la unidad mecánica con el resto de componentes¨¨.
10. La unidad de control es el cerebro del robot.
• Enumera las funciones de las que se encargan .
FUNCIONES: Almacenar datos que permiten al robot saber
donde se encuentra y cual es la secuencia de movimientos que debe ejecutar.
Lleva a cabo el control de los movimientos, las velocidades y las aceleraciones.
Gestiona las entradas/salidas analógicas o digitales que permiten al robot comunicarse con el entorno.
Realiza los cálculos matemáticos y aritméticos- lógicos- que posteriormente se transforman en ordenes de movimientos.
• PRIMERA GENERACIÓN: Son llamados manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien manual, de secuencia fija o de secuencia variable.
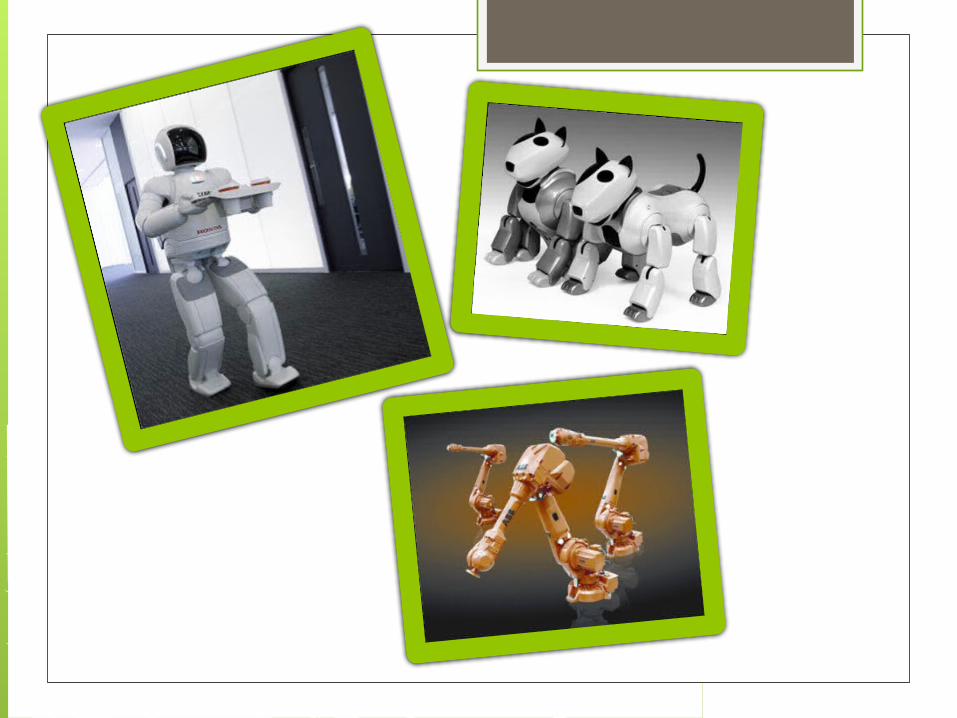
• SEGUNDA GENERACIÓN: También llamados robots de aprendizaje. Repiten una secuencia de movimientos que ha sido ejecutada previamente por un operador humano.
• TERCERA GENERACIÓN: Son también llamados robots con control sensorizado. El controlador es una computadora que ejecuta las órdenes de un programa y las envía al manipulador para que realice los movimientos necesarios.
• CUARTA GENERACIÓN: Son llamados también robots inteligentes. Son similares a las anteriores pero además poseen sensores que envían información a la computadora de control sobre el estado del proceso.
• QUINTA GENERACIÓN: Actualmente está en desarrollo esta nueva generación de robots, que pretende que el control emerja de la adecuada organización y distribución de módulos conductuales, esta nueva arquitectura es denominada arquitectura de subsunción, cuyo promotor es Rodney Brooks.
Top Related