Phillip J. Cornwell Parçacık Kinematiği · 2016. 2. 22. · MÜHENDİSLER İÇİN VEKTÖR...
65
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK 10.Basım Ferdinand P. Beer E. Russell Johnston, Jr. Phillip J. Cornwell Lecture Notes: Brian P. Self California Polytechnic State University BÖLÜM © 2013 The McGraw-Hill Companies, Inc. All rights reserved. 11 Parçacık Kinematiği Çeviri: Mühendisler için Vektör Mekaniği: Dinamik kitabından faydalanılmıştır. Yrd. Doç. Dr. Cihan MIZRAK Karabük Üniversitesi Mekatronik Mühendisliği Bölümü
Transcript of Phillip J. Cornwell Parçacık Kinematiği · 2016. 2. 22. · MÜHENDİSLER İÇİN VEKTÖR...

MÜHENDİSLER İÇİN
VEKTÖR MEKANİĞİ:DİNAMİK
10.Basım
Ferdinand P. Beer
E. Russell Johnston, Jr.
Phillip J. Cornwell
Lecture Notes:
Brian P. SelfCalifornia Polytechnic State University
BÖLÜM
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
11Parçacık Kinematiği
Çeviri: Mühendisler için Vektör
Mekaniği: Dinamik kitabından
faydalanılmıştır.
Yrd. Doç. Dr. Cihan MIZRAK
Karabük Üniversitesi
Mekatronik Mühendisliği Bölümü

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Contents
11 - 2
Giriş
Parçacıkların Doğrusal Hareketi:
Konum, Hız ve İvme
Parçacığın Hareketinin
Belirlenmesi
Örnek Problem 11.2
Örnek Problem 11.3
Düzgün Doğrusal Hareket
Sabit İvmeli Doğrusal Hareket
Birden Fazla Parçacığın Hareketi:
Bağıl Hareket
Örnek Problem 11.4
Birden Fazla Parçacığın Hareketi :
Bağımlı Hareket
Örnek Problem 11.5
Doğrusal Hareket Problemlerinin
Grafik Çözümleri
Diğer Grafik Yöntemleri
Parçacığın Eğrisel Hareketi: Konum,
Hız ve İvme
Vektör Fonksiyonlarının Türevleri
Hız ve İvmenin Dik Bileşenleri
Ötelenen Bir Çerçeveye Göre Hareket
Teğetsel ve Normal Bileşenler
Radyal ve Enine Bileşenler
Örnek Problem 11.10
Örnek Problem 11.12

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
ÖNEMLİ HATIRLATMALAR
• Ders, sınıfın kapısı kapandığı andan itibaren
başlayacaktır. Kapıyı kapalı görenler bir sonraki
derse gelebilir.
• Ders süresince kendi aranızda
konuşmak yasaktır. Bir sorunuz
olursa bana yöneltin.
• Ders süresince telefonlar sessiz
konumda olmalıdır.
• Ders dahil tüm soru ve görüşleriniz için;
Eposta: [email protected]
http://web.karabuk.edu.tr/cihanmizrak/

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
ÖNEMLİ HATIRLATMALAR
Ders Kitabı (Türkçe) :
Beer, Johnston, Cornwell-Mühendisler
için Vektör Mekaniği: Dinamik Çevirisi
(Ömer Gündoğdu, Osman Kopmaz)
Yaşar Pala-Mühendislik Mekaniği
Dinamik

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
ÖNEMLİ HATIRLATMALAR
• Temel matematik bilgilerinizi
tazeleyin (trigonometrik dönüşümler,
türev, integral)
• Bunun yanında Mühendislik
Mekaniği-STATİK (Birim
vektör, Serbest Çizim
Diyagramı)

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
DİNAMİK NEDİR
Türk Dil Kurumu’na göre;
Mekaniğin KUVVET, HAREKET,
ENERJİ arasındaki ilişkilerini inceleyen
dalı.
Diğer bir deyiş ile;
HAREKET’e sebep olan ve
hareketi değiştiren unsurlar
ile HAREKETin sonuçlarını
inceler.
Öyle ise
HAREKETolmasaydı

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
MEKANİK NEDİR
KUVVETlerin etkisi
altındaki cisimlerin HAREKET
li ve DURAĞAN hâllerini
inceleyen bilim dalıdır.
MÜHENDSİLİK MEKANİĞİ
STATİK
MÜHENDSİLİK MEKANİĞİ
DİNAMİK
KİNEMATİKKİNETİK
HAREKETin sebebiHAREKETin sonucu
Katı
Elastik
Akışkan

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
HAREKET NEDİR
HAREKETKUVVET
ENERJİ
MOMENTUM
Sebep
İVME
YER
DEĞİŞTİRME
HIZ
Sonuç
KİNETİK KİNEMATİK
∫
Dönme
T=Iα
Öteleme
F=ma
Yada;
Dönme+Öteleme
Şeklindedir.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
HAREKET NEREDE GERÇEKLEŞİR
HAREKETTek Boyutta
(Doğrusal)
İki Boyutta
(Düzlemsel)
Üç Boyutta
(Uzay)
Dört Boyutta

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
ÜÇ BOYUTTA KOORDİNAT SİSTEMLERİ
x
y
z
ij
k.
.
.
KOORDİNAT
SİSTEMLERİKartezyen Silindirik
Küresel
x
y
z
r
z
θ
θ
ϕr
x
z
y

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Ne hareket Eder
KÜTLESİ OLAN HERŞEY
Peki
IŞIKO zaman;
Parçacık:Cismin kütlesinin bir noktada toplandığı
varsayılarak işlem yapılan cisimlerdir.
Bu cisimlerin ataleti
Katı Cisim:İç ve dış etkilerle şeklini değiştirmeyen (Kabul. N.Ş.A’da böyle
değildir), yani esnemeyen ve ataleti olan cisimdir.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Göreceğİmİz konular
TOPARLAYACAK OLURSAK;
Parçacıkların
Katı Cisimlerin
KİNEMATİK KİNETİKAnalizi

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacıkların Doğrusal Hareketi: Konum, Hız ve İvme
11 - 13
• Doğrusal hareket: Bir doğru
boyunca parçacığın hareketi.
• Konum koordinatı: Bir doğru
üzerinde parçacığın orijinden pozitif
yada negatif olan uzaklığı belirtir.
• Bir parçacığın yer koordinatı her t
zamanı için biliniyorsa, parçacığın
hareketi biliniyordur deriz.
• Hareketin zaman tablosu x ve t
cinsinden mesela;326 ttx
gibi bir denklem yada yandaki şekilde x
ve t ye bağlı grafik olarak verilebilir.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacıkların Doğrusal Hareketi: Konum, Hız ve İvme
11 - 14
• Anlık hız pozitif yada negatif değer alabilir.
Ani hızın şiddeti ise parçacığın süratini
verir.
• Parçacığın t zamanında işgal ettiği P yerini
ve buna karşılık gelen x koordinatını göz
önüne alalım. Aynı zamanda parçacığın
t+Dt, zamanında bulunduğu P’ yerini
düşünelim. Buna göre;
t
xv
t
x
t D
D
D
D
D 0lim
Ortalama hız
Anlık hız
• Türevin tanımından;
dt
dx
t
xv
t
D
D
D 0lim
e.g.,
2
32
312
6
ttdt
dxv
ttx

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacıkların Doğrusal Hareketi: Konum, Hız ve İvme
11 - 15
• Parçacığın t anındaki hızı v ve daha sonraki
bir t+Dt anındaki hızı v+Dv ise parçacığın;
Anlık ivmesit
va
t D
D
D 0lim
tdt
dva
ttv
dt
xd
dt
dv
t
va
t
612
312e.g.
lim
2
2
2
0
D
D
D
• Türevin tanımından;
• Anlık ivme;
- Pozitif: Pozitif hız artabilir yada
Negatif hız azalabilir.
- Negatif: Pozitif hız azalabilir yada
Negatif hız artabilir.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
İçerik Quiz
2 - 16
Parçacığın kinematiği için aşağıdakilerden hangisi
doğrudur?
a) Parçacığın hızı daima pozitiftir.
b) Konum-zaman grafiğinin eğimi hızı verir.
c) Parçacığın konumu sıfır ise hız sıfır olmak
zorundadır.
d) Parçacığın hızı sıfır ise ivmesi sıfır olmak
zorundadır.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacıkların Doğrusal Hareketi: Konum, Hız ve İvme
11 - 17
• Örneğimizden,
326 ttx
2312 ttdt
dxv
tdt
xd
dt
dva 612
2
2
- at t = 2 s, x = 16 m, v = vmax = 12 m/s, a = 0
- at t = 4 s, x = xmax = 32 m, v = 0, a = -12 m/s2
• t = 2 s için x, v, ve a nedir?
• Dikkat edilirse a=0 olduğunda vmax olur. Bu
nedenle hız-zaman eğrisinin türevi bu noktada
sıfırdır. • t = 4 s için x, v, ve a ne olur ?

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacıkların Doğrusal Hareketi: Konum, Hız ve İvme
11 - 18
• İvme genellikle uygulanan kuvvetten yola çıkarak elde
edilmektedir. (Bu konu kinetik kısmında detaylı
anlatılacaktır) Generally have three classes of motion
- ivme, zamanın bir fonksiyonu olarak, a = f(t)
- ivme, konumun bir fonksiyonu olarak, a = f(x)
- ivme, hızın bir fonksiyonu olarak, a = f(v)
ifade edilebilir.
• Kuvvetin pozisyonun bir fonksiyonu olduğu fiziksel
bir örnek düşünebilirmisiniz?
yay sürtünme

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
İvme, zamanın, konumun ve hızın birer fonksiyonu ise;
2 - 19
a a t 0 0
v t
v
dv a t dt ( )dv
a tdt
vdv a x dx
0 0
v x
v x
v dv a x dx a a x
and dx dv
dt av dt
dv
v a vdx
0 0
v t
v
dvdt
a v
0 0
x v
x v
v dvdx
a v
a a v
( )dv
a vdt
Eğer… Kinematik ilişki İntegral

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.2
11 - 20
• Herhangi bir t anında ve herhangi bir
yükseklikteyken v hızını ve y yüksekliğini,
• Topun ulaştığı maksimum yüksekliği ve
buna karşılık gelen t zamanını,
• Topun yere çarptığı zamanı ve bu sıradaki
hızı belirleyip v-t ve y-t eğrilerini çiziniz.
Bir top yerden 20 m yukarıdaki bir
pencereden düşey olarak yukarı doğru
10 m/s’lik bir hızla atılıyor. Topun
ivmesinin sabit ve aşağı doğru 9.81 m/s2
olduğu bilindiğine göre;
SOLUTION:
• v(t) ve y(t) değerleri için sabit
ivmeden yola çıkılarak integre
edilecek
• Hızın sıfır olduğu noktada maksimum
yükseklik olur ve buradan bu noktaya
çıkmak için gerekli olan t süresi ve y
mesafesi bulunur.
• Top yere çarptığında ise y=0 olur ve
buradan gerekli süre ile topun hızı
bulunur.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.2
11 - 21
tvtvdtdv
adt
dv
ttv
v
81.981.9
sm81.9
00
2
0
ttv
2s
m81.9
s
m10
2
21
00
81.91081.910
81.910
0
ttytydttdy
tvdt
dy
tty
y
2
2s
m905.4
s
m10m20 ttty
ÇÖZÜM:
• v(t) ve y(t) için integrasyon işlemleri

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.2
11 - 22
• Hızın sıfır olduğu noktada t;
0s
m81.9
s
m10
2
ttv
s019.1t
• Bu zaman süresince topun aldığı mesafe ve pozisyonu;
22
2
2
s019.1s
m905.4s019.1
s
m10m20
s
m905.4
s
m10m20
y
ttty
m1.25y

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.2
11 - 23
• Topun son pozisyonu sıfır olduğundaki t;
0s
m905.4
s
m10m20 2
2
ttty
s28.3
manasiz s243.1
t
t
s28.3s
m81.9
s
m10s28.3
s
m81.9
s
m10
2
2
v
ttv
s
m2.22v
• Bu noktadaki hızı;

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.3
11 - 24
Belli tipteki silahlarda geri tepmeyi
azaltmak için kullanılan bu fren
mekanizması, esas itibari ile namluya
bağlı ve yağla doldurulmuş sabit bir
silindir içinde hareket eden bir pistondan
ibarettir. Namlu v0 hızı ile geri teptiğinde
piston hareket eder ve yağ, piston ve
namlunun hızlarıyla orantılı
yavaşlamasına neden olacak tarzda,
pistondaki deliklerden geçmeye zorlanır.
Yani a=-kv’dir. Buna göre v’yi t
cinsinden, x’i t cinsinden, v’yi t cinsinden
ifade ediniz ve hareket eğrilerini çiziniz.
kva
ÇÖZÜM:
v(t)’yi bulmak için;
• Integrate a = dv/dt = -kv
v(x)’yi bulmak için;
• Integrate a = v dv/dx = -kv
x(t)’yi bulmak için;
• Integrate v(t) = dx/dt

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.3
11 - 25
ÇÖZÜM:
• v(t) için Integrate a = dv/dt = -kv
000
ln
v t
v
v tdv dva kv k dt kt
dt v v
ktevtv 0
• x(t) için Integrate v(t) = dx/dt.
0
0 0
00 0
1
kt
tx t
kt kt
dxv t v e
dt
dx v e dt x t v ek
ktek
vtx 10

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.3
11 - 26
• v(x) için Integrate a = v dv/dx = -kv.
kxvv
dxkdvdxkdvkvdx
dvva
xv
v
0
00
kxvv 0
• Alternatif,
0
0 1v
tv
k
vtx
kxvv 0
00 or
v
tveevtv ktkt
ktek
vtx 10with
and
then

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Group Problem Çözümü
2 - 27
Bir bovling topu, bir bottan gölün yüzeyine 8 m/s’lik
hızla çarpacak şekilde bırakılıyor. Su içindeyken
topun aşağıya doğru a=3-0.1v2 ivmesine sahip
olduğunu kabul ederek topun gölün tabanına
vurduğundaki hızını bulunuz.
Hangi integrasyonu kullanmak gerekir?
0 0
v t
v
dv a t dt 0 0
v x
v x
v dv a x dx
0 0
v t
v
dvdt
a v
0 0
x v
x v
v dvdx
a v
(a)
(b)
(c)
(d)
+y

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Group Problem Çözümü
11 - 28
ÇÖZÜM:
• Uygun kinematik ilişkileri kullanarak
zamana, konuma yada hıza bağlı
ivme ifadesini belirleyin.
• Aracın yolun yarısına kadar olan kat
ettiği mesafeyi bulun.
• Hızı bulmak için integrasyon yapın.
Durgun pozisyondan harekete geçen
otomobil hızla orantılı olarak
23 0.001a v
eşitliği ile ivmelenmektedir. 200 m
yarıçapa sahip dairesel bir yol üzerinde
ilerleyen aracın yolun yarısına geldiği
andaki hızı ne olur?

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Grup Problem Çözümü
2 - 29
dv
v a vdx
0 0
x v
x v
v dvdx
a v
Uygun kinematik ilişkiyi seç.
Verilen: 23 0.001a v
vo = 0, r = 200 m
Bulunacak: v, ½ yol
Maximum hız
İvme hızın bir fonksiyonu olduğundan
katedilen mesafe, aşağıdaki kinematik ilişki
yardımıyla elde edilir. Onun için zamana
bağlı kinematik ilişkileri kullanmaya gerek
yoktur.
Yolun yarısına kadar olan toplam
yerdeğiştirme
3.14(200) 628.32 mx r

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Group Problem Çözümü
2 - 30
0 0
x v
x v
v dvdx
a v
Verilenlere göre integral ve sınırları
628.32
2
0 03 0.001
vv
dx dvv
İntegralin hesaplanması ve hızın elde edilmesi
2
0
1628.32 ln 3 0.001
0.002
v
v
2628.32( 0.002) ln 3 0.001 ln 3 0.001(0)v
2ln 3 0.001 1.2566 1.0986= 0.15802v
2 0.158023 0.001v e Her iki taraf e tabanında yazılmasıyla

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Group Problem Çözümü
2 - 31
2 0.158023 0.001v e Buradan v
0.158022 3
2146.20.001
ev
46.3268 m/sv
Maksimum hız nasıl hesaplanacak?
23 0.001a v Hızın maksimum olduğu yerde
ivme sıfırdır.
Buradan 20.001 3v
30.001maxv
max 54.772 m/sv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Düzgün Doğrusal Hareket
11 - 32
Düzgün doğrusal hareket
yapan parçacık için hız
sabit ve bu nedenle de
ivme sıfıra eşittir.
vtxx
vtxx
dtvdx
vdt
dx
tx
x
0
0
00
constant
Serbest düşüş esnasında
paraşütlünün sahip olduğu
maksimum hız, paraşütlünün
ağırlığının havanın direnç
kuvvetine eşit olduğu zaman
gerçekleşir. Bu hareket düz bir
çizgi boyunca devam ederse
buna düzgün doğrusal hareket
denir.
BU DURUM SADECE
DÜZGÜN DOĞRUSAL
HAREKETTE GEÇERLİDİR.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Sabit İvmeli Doğrusal Hareket
11 - 33
Eğer cisim üzerine
uygulanan kuvvet sabit ise
bu cisim için sabit ivmeli
doğrusal hareket yapıyor
denir.
Sürtünmenin ihmal
edildiği durum için serbest
düşme hareketi.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Sabit İvmeli Doğrusal Hareket
11 - 34
Sabit ivmeli doğrusal hareket yapan bir parçacığın ivmesi sabittir.
Gördüğünüz Fizik I dersinden tanıdık gelecek ifadeler;
0
0
0
constant
v t
v
dva dv a dt v v at
dt
0
210 0 0 0 2
0
x t
x
dxv at dx v at dt x x v t at
dt
0 0
2 2
0 0constant 2
v x
v x
dvv a v dv a dx v v a x x
dx
BU DURUM SADECE SABİT İVMELİ
DOĞRUSAL HAREKETTE GEÇERLİDİR.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Birden Fazla Parçacığın Hareketi
2 - 35
Birden fazla parçacığın hareketini düşünecek olursak, bu parçacıklar
birbirinden bağımsız yada bağımlı olarak hareket edebilmektedirler.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Birden Fazla Parçacığın Hareketi: Bağıl Hareket
11 - 36
• İki parçacığın aynı doğru üzerindeki hareketi
için zaman aynı başlangıç anından itibaren
kaydedilmeli ve yer değiştirmelerde aynı
orijinden ve aynı doğrultuda ölçülmelidir.
ABAB xxx B’nin A’ya göre bağıl
yer değiştirmesiABAB xxx
ABAB vvv B’nin A’ya göre bağıl
hızıABAB vvv
ABAB aaa B’nin A’ya göre bağıl
ivmesiABAB aaa

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.4
11 - 37
Bir top asansör boşluğunda 12 m’den
düşey doğrultuda 18 m/s’lik bir
başlangıç hızıyla yukarıya fırlatılıyor.
Aynı anda açık platformlu bir asansör,
yukarı doğru 2 m/s’lik sabit hızla
hareket halinde 5 m yükseklikten
geçiyor. (a) Topun ne zaman ve nerede
asansöre çarpacağını (b) top asansöre
çarptığı anda topun asansöre göre bağıl
hızını bulunuz
ÇÖZÜM:
• Topun hareketin sabit ivmeli doğrusal
bir hareket olduğu görülüp, başlangıç
anındaki konum, hız ve ivme
değerlerinin belirlenmesi
• Asansörün hareketinin sabit hızla
doğrusal hareket olduğu ve buradan yer
değiştirmesinin belirlenmesi
• Top asansöre çarptığında birbirlerine
göre bağıl yer değiştirmelerinin aynı
olduğu ve buradan çarpma zamanının
belirlenmesi
• Topun asansöre göre bağıl hızını
bulmak için topun hızı ve asansörün
hızının bağıl hız ifadesinde yerlerine
konulması

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.4
11 - 38
ÇÖZÜM:
• O orijini yer seviyesinde yerleştirip pozitif yönü
yukarı doğru seçersek, topun başlangıç konumu,
y0=+12 m, başlangıç hızı v0=+18 m/s ve ivme a=-
9.81 m/s2 ‘den;
2
2
2
21
00
20
s
m905.4
s
m18m12
s
m81.9
s
m18
ttattvyy
tatvv
B
B
• Tekrardan O orijini yer seviyesinde yerleştirip
pozitif yönü yukarı doğru seçersek, asansörün
başlangıç konumu, y0=+5 m, başlangıç hızı v0=+2
m/s ‘den;
ttvyy
v
EE
E
s
m2m5
s
m2
0

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.4
11 - 39
• Topun asansöre göre bağıl konumu çarpma anında aynı
olduğundan;
025905.41812 2 ttty EB
s65.3
smeaningles s39.0
t
t
• Çarpma zamanı elde edildikten sonra asansörün som
konumu ve topun asansöre göre olan bağıl hızı;
65.325Ey
m3.12Ey
65.381.916
281.918
tv EB
s
m81.19EBv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Birden Fazla Parçacığın Hareketi: Bağımlı Hareket
11 - 40
• Parçacığın konumu bir yada birden fazla parçacığın
konumuna bağlı olabilir.
• B kütlesinin konumu A kütlesinin konumuna bağlıdır.
Halat esnemeyen sabit uzunlukta olduğu için her bir
kütlenin referans düzlemine göre olan mesafelerinin
toplamı sabittir.
BA xx 2 sabit (tek serbestlik dereceli)
• A, B ve C kütleleri birlikte bağımlı hareket gerçekleştirir.
CBA xxx 22 sabit (iki serbestlik dereceli)
• Konumun doğrusal hareketi için hız ve ivme ifadeleri
de benze şekildedir.
022or022
022or022
CBACBA
CBACBA
aaadt
dv
dt
dv
dt
dv
vvvdt
dx
dt
dx
dt
dx

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.5
11 - 41
A bileziği ve B bloğu şekilde gösterildiği
gibi C, D ve E gibi üç makaradan geçen
bir kabloyla bağlanmışlardır. C ve E
makaraları sabittir. Buna karşılık D
makarası 75 mm/s’lik sabit bir hızla
aşağıya doğru çekilen bir bileziğe
tutturulmuştur. t=0’da A bileziği K
yerinden itibaren sabit bir ivmeyle ve ilk
hızsız olarak aşağıya doğru hareket
etmeye başlamaktadır. L noktasından
geçerken A bileziğinin hızının 300 mm/s
olduğu bilindiğine göre tam bu sırada B
bloğunun yüksekliğindeki değişim, hız ve
ivmesini bulunuz.
ÇÖZÜM:
• Orijin üst yatay yüzeye yerleştirilir ve
pozitif yönü aşağı doğru seçilir.
• A bileziğinin sabit ivmeli doğrusal
hareketinden L mesafesini alması için
gerekli t bulunur.
• D makarasının sabit ivmeli doğrusal
hareketinden t zamanındaki son konumu,
• B bloğunun hareketi A bileziği ve D
makarasına bağlı olduğundan t zamanı
için bloğun bağımlı hareketi,
• Konumun türevlendirilmesi ile B bloğunun
hızı ve ivmesi elde edilmiş olur.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.5
11 - 42
ÇÖZÜM:
• Orijin üst yatay yüzeye yerleştirilir ve pozitif yönü
aşağı doğru seçilerek
• A bileziğinin sabit ivmeli doğrusal hareketinden
sırasıyla ivme ve t zamanı;
2
2
0
2
0
2
s
mm2252002
s
mm300
2
AA
AAAAA
amma
xxavv
s 333.1s
mm225
s
mm300
2
0
tt
tavv AAA

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Sample Problem 11.5
11 - 43
• D makarasının düzgün doğrusal hareketinden t
zamanı için konumu;
mm 100s333.1s
mm75
0
0
DD
DDD
xx
tvxx
• B bloğunun A ve D’ye göre olan bağımlı
hareketinden, halatın boyu sabit olacağından t
zamanı için orijine göre olan herbirinin konumları
toplamı;
0in.42in.8
02
22
0
000
000
BB
BBDDAA
BDABDA
xx
xxxxxx
xxxxxx
mm4000
BB xx

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.5
11 - 44
• B bloğunun konum ifadesi türevlendirilerek hız ve
ivme;
0s
mm752
s
mm300
02
sabit2
B
BDA
BDA
v
vvv
xxx
s
mm450Bv
0s
mm225
02
2
B
BDA
v
aaa
2s
mm225Ba

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Grup Problemi
2 - 45
A bloğu 6 m/s’lik sabit hızla sola doğru
hareket ediyor. Buna göre B bloğunun
hızını bulunuz.
Çözüm adımları
• Serbest çizim diagramı çizilir ve
koordinat ekseni tanımlanır.
• Kısıt eşitliği yazılır.
• Kısıt eşitliği türevlendirilerek hız
değeri elde edilir.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Grup Problem Çözümü
2 - 46
Verilenler: vA= 6 m/s sol tarafa hareket
Bulunacak: vBxA
yB
Bloğun ne kadar hareket ettiği önemsiz.
Çünkü halatın boyu sabit.
Serbest Çizim diagramı çizilir ve koordinat
eksenleri tanımlanır.
Kısıt eşitliğinin birinci mertebeden
türevi;
const nts3 aA Bx y L
Kısıt eşitliğinden;
6 m/s + 3 0Bv
2 m/sB v
Burada xA ‘nın büyük, yB’nin diğerine göre küçük değer aldığı görülmektedir. NEDEN

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Doğrusal Hareket Problemlerinin Grafik Çözümleri
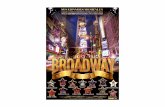
2 - 47
Mühendisler genellikle konum, hız ve ivme değerlerini
sensörler aracılığı ile veri şeklinde elde ederler. Grafik
çözüm yöntemi bu verilerin analiz edilmesinde sıklıkla
kullanılmaktadır. Data Fideltity / Highest Recorded Punch
0
20
40
60
80
100
120
140
160
180
47.76 47.77 47.78 47.79 47.8 47.81
Time (s)
Accele
rati
on
(g
)
Boksörün vuruş
anında yumruğundan
ivme sensörü aracılığı
ile alınmış zamana
göre ivmelenme
değerleri

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Doğrusal Hareket Problemlerinin Grafik Çözümleri
11 - 48
• Verilen x-t eğrisinin eğiminden elde
edilen, v-t eğrisi
• Verilen v-t eğrisinin eğiminden elde
edilen, a-t eğrisi

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Doğrusal Hareket Problemlerinin Grafik Çözümleri
11 - 49
• Verilen a-t eğrisin t1 ve t2 zaman aralığı için altında kalan
alanın hesaplanması ile elde edilen v-t eğrisi
• Verilen v-t eğrisin t1 ve t2 zaman aralığı için altında kalan
alanın hesaplanması ile elde edilen x-t eğrisi

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Diğer Grafik Metodları
11 - 50
• Moment-alan metodu bir parçacığın her hangibir andaki
yerini a-t grafiğinden elde etmek için kullanılır.
1
0
110
01 eğğisinin alan altıltınd
v
v
dvtttv
tvxx
dv = a dt eşitliğinden
1
0
11001
v
v
dtatttvxx
1
0
1
v
v
dtatt a-t eğrisinin t = t1 çizgisine göre
birinci eylemsizlik momenti under.
Ct
tta-ttvxx
centroid of abscissa
curve under area 11001

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Diğer Grafik Metodları
11 - 51
• Parçacığın ivmesinin v-x eğrisi yardımıyla bulunması:
BC
AB
dx
dvva
tan
subnormal to v-x curve

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacığın Eğrisel Hareketi: Konum, Hız ve İvme
11 - 52
Bezbol ve otomobilin eğrisel hareketi
• Parçacığın doğrusal hareketten farklı olarak
bir eğri boyunca iki boyutta gerçekleştirdiği
hareket eğrisel hareket.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacığın Eğrisel Hareketi: Konum, Hız ve İvme
11 - 53
• Parçacığın verilen bir t anında işgal ettiği P yerini tanımlamak için
öncelikle x, y, z gibi sabit referans sistemi seçilir ve O orijiniyle P noktasını
bağlayan r vektörü çizilir. Bu r vektörüne t zamanında parçacığın yer
vektörü de denilir.
• Parçacığın t + Dt anında işgal ettiği P’ yerini tanımlayan r’ vektörünü ele
alacak olursak

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacığın Eğrisel Hareketi: Konum, Hız ve İvme
11 - 54
0limt
s dsv
t dtD
D
D
Ani hız
(Vektör)
Ani Sürat
(skaler)
0limt
r drv
t dtD
D
D

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacığın Eğrisel Hareketi: Konum, Hız ve İvme
11 - 55
0limt
v dva
t dtD
D
Danlık ivme (vektör)
• Parçacığın herhangi bir t anında sahip olduğu hız, ve t+∆t anında sahip
olduğu hız ise;
v
v
• İvme vektörünün doğrultusu genellikle
parçacığın yörüngesine ve hızına teğet değildir.
• Parçacığın herhangi bir t anında ve t+∆t anındaki hızı düşünüldüğünde;

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Parçacığın Eğrisel Hareketi: Konum, Hız ve İvme
11 - 56
• Parçacığın hız vektörünün zamana göre değişiminden elde edilen
yörüngeye parçacığın ivmesi her zaman teğettir. Bu yörüngeye hodograf
denir.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Vektör Fonksiyonlarının Türevleri
11 - 57
uP
• u, skaler değişkenine bağlı vektör fonksiyonu olsun
u
uPuuP
u
P
du
Pd
uu D
D
D
D
DD
00limlim
• Türevlerin toplamı
du
Qd
du
Pd
du
QPd
du
PdfP
du
df
du
Pfd
• Skaler ve Vektörel fonksiyonların çarpımların türevi
• İki fonksiyonun skaler ve vektörel çarpımlarının türevleri
du
QdPQ
du
Pd
du
QPd
du
QdPQ
du
Pd
du
QPd

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Hız ve İvmenin Dik Bileşenleri
11 - 58
• P parçacığının r yer vektörünü dik bileşenlere
ayırarak
kzjyixr
• Hız vektörü,
kvjviv
kzjyixkdt
dzj
dt
dyi
dt
dxv
zyx
• İvme vektörü,
kajaia
kzjyixkdt
zdj
dt
ydi
dt
xda
zyx
2
2
2
2
2
2

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Hız ve İvmenin Dik Bileşenleri
11 - 59
• Mesela bir top mermisinin hareketi düşünüldüğünde
hava direnci ihmal edildiğinde her bir eksen için ayrı
ayarı ivme ifadeleri düzenlenebilir.
00 zagyaxa zyx
Başlangıç koşullarından,
0,,0 000000 zyx vvvzyx
İki kere integrasyon işleminden sonra,
0
0
2
21
00
00
zgtyvytvx
vgtvvvv
yx
zyyxx
• Hareketin yatay bileşeni sabit hızlı doğrusal hareket
• Hareketin dikey bileşeni sabit ivmeli doğrusal hareket
• Eğik atış hareketinde dik bileşenler üzerindeki
hareket dik bileşenler üzerinde ayrı ayrı
değerlendirilir.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.7
11 - 60
Bir top mermisi 150 m
yükseklikteki bir uçurumun
kenarından yatayla 30 açıda 180
m/s’lik bir başlangıç hızıyla
ateşleniyor. Hava direncini ihmal
ederek (a) Topla merminin yere
düştüğü nokta arasındaki uzaklığı
(b) merminin yerden itibaren
ulaşabileceği en fazla yüksekliği
bulunuz.
ÇÖZÜM:
• Yatay ve dikey bileşenlerdeki hareketler
ayrı ayrı düşünülür.
• y-yönündeki hareket denklemleri yazılır
• x-yönündeki hareket denklemleri yazılır.
• Yatay doğrultudaki mesafeden yola
çıkarak merminin toplam uçuş süresi
hesaplanır.
• vy=0 anında merminin çıkabileceği azami
yükseklik hesaplanır.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.7
11 - 61
ÇÖZÜM:
Verilenler: (v)o =180 m/s (y)o =150 m
(a)y = - 9.81 m/s2 (a)x = 0 m/s2
Dikey hareket– sabit ivmeli
Yatay hareket – sabit hızlı:
Choose positive x to the right as shown

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Örnek Problem 11.7
11 - 62
ÇÖZÜM:
Yatay mesafe için,
Merminin zeminde ulaşacağı son
konumu
Merminin toplam havada kalma zamanı t bulunur.
Azami yükseklik vy=0 olduğu anda gerçekleşir.
(2) nolu denklemde yerine yazılırsa,
(4) nolu denklemde bulunan t zamanı yerine yazıldığında
Merminin zeminden ulaşabileceği azami yükseklik=

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Concept Quiz
2 - 63
Eğer mermi 150 m
yükseklikten tekrar ateşlenirse
yatay yönde alabileceği mesafe
aşağıdaki durumlardan
hangisinde daha fazla olur?
a) Fırlatma açısı 45 olma durumunda
b) Fırlatma açısı 45 ’den küçükse
c) Fırlatma açısı 45 ’den büyükse
d) Başlangıç hızını dikey bileşeni artırıldığında

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Grup Problem Çözümü
11 - 64
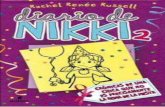
Bir beyzbol makinesi, beyzbol
toplarını yatay v0 hızıyla
fırlatıyor. h yüksekliğinin 788
mm olması istendiğine göre (a)
v0 bulunuz.
ÇÖZÜM:
• Yatay ve dikey bileşenlerdeki hareketler
ayrı ayrı düşünülür.
• y-yönündeki hareket denklemleri yazılır
• x-yönündeki hareket denklemleri yazılır
• Topun 788 mm deki pozisyonu için varış
zamanı bulunur
12.2 m
1.5 m

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ:DİNAMİK
10
.B
as
ım
Grup Problem Çözümü
2 - 65
y-yönündeki
hareketin analizi
Verilenler : x= 12.2 m,
yo = 1.5 m, yf= 788 mm.
Bulunacak: vo
20
1(0)
2fy y t gt
x-yönündeki
hareketin analizi
0 00 ( )xx v t v t
2
2
15.1788.0 gt
2905.4712.0 tm
st 047.2
svm 047.2)(2.12 0
smv /96.50