NASA SP 8077

of 58
Transcript of NASA SP 8077
-
7/27/2019 NASA SP 8077
1/58
NASASPACEVEHICLEDESIGNCRITERIA(STRUCTURES)
NASASP-8077
TRANSPORTATIONANDHANDLINGLOADS
Co__
-
7/27/2019 NASA SP 8077
2/58
-
7/27/2019 NASA SP 8077
3/58
FOREWORD
NASA experience has indicated a need for uniform criteria for the design of spacevehicles. Accordingly, criteria are being developed in the following areas of technology:
EnvironmentStructuresGuidance and ControlChemical Propulsion
Individual components of this work will be issued as separate monographs as soon asthey are completed. A list of all published monographs in this series can be found atthe end of this document.These monographs are to be regarded as guides to the formulation of designrequirements and specifications by NASA Centers and project offices.
This monograph was prepared under the cognizance of the Langley Research Center.The Task Manager was G.W. Jones, Jr. The author was F.E. Ostrem of GeneralAmerican Transportation Corporation/Research Division. A number of otherindividuals assisted in developing the material and reviewing the drafts. In particular,the significant contributions made by the following are hereby acknowledged: C.P.
-
7/27/2019 NASA SP 8077
4/58
-
7/27/2019 NASA SP 8077
5/58
GUIDE TO THE USE OF THIS MONOGRAPH
The purpose of this monograph is to'provide a uniform basis for design of flightworthystructure. It summarizes for use in space vehicle development the significant experienceand knowledge accumulated in research, development, and operational programs todate. It can be used to improve consistency in design, efficiency of the design effort,and confidence in the structure. All monographs in this series employ the same basicformat three major sections preceded by a brief INTRODUCTION, Section 1. andcomplemented by a list of REFERENCES.
The STATE OF THE ART, Section 2, reviews and assesses current design practices andidentifies important aspects of the present state of technology. Selected references arecited to supply supporting information. This section serves as a survey of the subjectthat provides background material and prepares a proper technological base for theCRITERIA and RECOMMENDED PRACTICES.
The CRITERIA, Section 3, state what rules, guides, or limitations must be imposedto ensure flightworthiness. The criteria can serve as a checklist for guiding a designor assessing its adequacy.
The RECOMMENDED PRACTICES, Section 4. state how to satisfy the criteria.Whenever possible, the best procedure is described; when this cannot be done,appropriate references are suggested. These practices, in conjunction with the criteria,
-
7/27/2019 NASA SP 8077
6/58
-
7/27/2019 NASA SP 8077
7/58
CONTENTS
,/
, i _ _i
1. INTRODUCTION .............................. 1
2. STATE OF THE ART .................... ........ 3
2.1 Prediction Methods for Transportation and Handling Loads ...... 52.1.1 Analysis Using Limit Load Factors ............... 62.1.2 Analysis of Partial System with Composite Loadbed Inputs . . 72.1.3 Scaling and Extrapolation from Similar System Experience . . 102.1.4 Analysis of Full System with Transportation Medium
Inputs .............................. 102.2 Inputs from Excitation Sources ..................... 112.2.1 Inputs from Transportation Mediums or Handling Devices . . . 11
2.2.1.1 Inputs to Road Transport Vehicles .......... 122.2.1.2 Inputs to Rail Transport Vehicles .......... 152.2.1.3 Inputs to Air Transport Vehicles ........... 162.2.1.4 Inputs to Water Transport Vehicles ......... 172.2.1.5 Inputs to Handling Devices .............. 17
2.2.2 Inputs from Loadbed Measurements .............. 182.2.2.1 Road Transport Loadbed Inputs ........... 182.2.2.2 Rail Transport Loadbed Inputs ........... 20
-
7/27/2019 NASA SP 8077
8/58
4.2 VerificationofTransportationandHandlingLoads........... 334.3 MonitoringofTransportationandHandlingLoads........... 34REFERENCES 37 , * . .... .... NASA SPACE VEHICLE DESIGN CRITERIAMONOGRAPHS ISSUED TO DATE ....................... 41
-
7/27/2019 NASA SP 8077
9/58
TRANSPORTATIONAND HANDLING LOADS1. INTRODUCTIONMost space vehicles and their major segments, such as stages, motors, or spacecraft, aremoved several times during their service life by a variety of handling and transportationsystems. During these movements, the space vehicle or its segments are subjected toloads which may be different from those of flight or other mission requirements. It is adesired design goal that allowable loads for a space vehicle be governed by flight loadsand mission requirements rather than by transportation and handling. Therefore,transportation and handling loads must be predicted during design and, if necessary,attenuated to ensure that the design goal is met where feasible and that space vehiclestructural damage does not occur.Inadequate assessment of transportation and handling loads can lead to local damage tothe space vehicle caused by insufficient load-bearing on the handling fixture or it canlead to fatigue failure in flight caused by accumulated damage from cyclic loads.
This monograph is concerned with the generation and presentation of criteria andrecommended practices for the prediction and verification of transportation andhandling loads for space vehicle structure and for monitoring these loads duringtransportation and handling of the vehicle or major vehicle segments. Elements of the
-
7/27/2019 NASA SP 8077
10/58
ili!il
Whenestimatesof allowableloadsare available,an initial selectionis madeof atransportationandhandlingsystemwhich it is roughlyestimateddoesnot generateloadsthat exceedtheallowableoadsnor appreciablyaffectthevehicle'sfatiguelife.After this initial selection,the loadsimposedon the spacevehicleby the selectedtransportationand handlingsystemarepredictedby oneor moreof the followinganalyticalmethods:
Limit load factors (constant "g") basedon accumulatedexperiencentransportationandhandlingof manytypesof fragilecargoareusedasinputto supportpointsof thespacevehicle.CompositeoadS,synthesizedrom loadsmeasuredat the cargooadbedofthe appropriatetype of transportvehicleduringpreviousshipmentswithmanytypesof cargo,areusedasforcing-functionnputsto amathematicalmodelof the spacevehicleandthatportionof thetransportationorhandlingsystembetweenhespacevehicleandthetransportvehiclecargooadbed.Loadsmeasuredon a similarspacevehicleduringshipmentor handling withthe same or similar transportation or handling system are scaled orextrapolated to the space vehicle of interest by an analysis usingmathematical models of both systems.
Loads from the environment external to the transportation or handlingsystem are used as forcing-function inputs to a mathematical model of thespace vehicle and its entire transportation or handling systems.
-
7/27/2019 NASA SP 8077
11/58
2. STATE OF THE ARTTransportation and handling loads encountered by space vehicles during shipment areextremely difficult to predict accurately because of the complex nature of the loadingsand the lack of documented studies or recommended practices for their prediction. Inspite of these shortcomings, safe shipments of space vehicles have been made with fewreported structural failures or damage. Much of this success can be attributed toelaborate load-attenuation systems and the many restrictions that have been imposedto limit the induced loads. For some vehicles, special transporters have been developedto act as the load attenuation system. Also, detailed restrictions have been specified onspeed and the condition of the medium through or on which the system travels. Inmany cases an observer or an escort has been required to accompany the space vehicleto ensure that these restrictions were observed. These measures are justified because ofthe highly specialized nature of the cargo and the cost of its replacement. In additionto the major goal of determining that transportation and handling loads do not causestructural damage, and, where feasible, do not affect design of the structure, thedetermination of transportation and handling loads is essential to the design of spacevehicles for the following reasons:
To aid in the selection of appropriate handling and transporting devices andtheir operational procedures
To establish load-attenuation requirements for the design of transportationand handling devices or fixtures
To provide necessary load inputs to compute space vehicle response andinternal stresses at critical locations within the vehicle during transportation
-
7/27/2019 NASA SP 8077
12/58
L
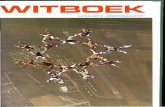
Etements of System
1. Space vehicle orvehicle segment
2. Handling fixture
3. Transportation mode(train, truck, boat,ai rp la ne , he li co pt er )
Note: Items 2 a nd 3 a reoften combined to forma transporter
4. Transporta.tionmedium (rail, road,water, air)
A A A A
A. -- Loads inputt o sp acevehicle
B B B Bl t I tIoadbed oftransportvehicle
i . . i i . i | iX / k / k / \ !
C C Ct l lC.- Forcing
functioninputs fromtransportationmedium
5. Handling devices( cr ane , f or kl if t,elevator, etc.)
D. - Loads fromhandlingdevices
-
7/27/2019 NASA SP 8077
13/58
predictingtransportationandhandlingloadsaresummarizedandappraisedand theelementsof thesepredictionmethodsarediscussed;2) the forcingfunction inputsfrom the varioustransportationandhandlingmediumsaredescribedandthe sourcesanddescriptionsof forcingfunction inputsfrom the transportvehiclecargoloadbedsare given; and (3)the proceduresutilized and measurementsneededto verifytransportationand handlingloadsand to monitor these loads on shipmentsofproductionspacevehiclesarediscussed.2.1 Prediction Methods for Transportation and Handling
LoadsAn early approach was to design the space vehicle without regard to the transportationand handling loads and then design a protective system to limit the induced loads todesired levels. A prototype of the space vehicle was fabricated and submitted to testswhich simulated operations with the transportation vehicles and handling systemsunder consideration and the loads were monitored. Suitable load-attenuation systemswere then designed and/or operating restrictions imposed to limit the loads to specifiedlevels. Although this approach has proven adequate, it is costly and time consuming.Another disadvantage of this approach is that the space vehicle structure cannot bereadily modified if the transportation and handling loads cannot be adequatelyattenuated.
Several methods for predicting and estimating the loads to be encountered by spacevehicles or their major segments during transportation and handling are in general useand have proven adequate when supported by test measurements on a prototypesystem. Generally, the simplest available approach is employed. The selection of aparticular analytical method depends on such factors as the nature of the space vehicle
-
7/27/2019 NASA SP 8077
14/58
: _ i i
vibration response prediction. These methods are discussed in detail in references 1, 2,and 3 and are particularly applicable for modelingthe space Vehicle. Experience withmodeling transportation systems, however, has usually shown that certain componentsin the system are difficult to model (e.g., tires, shock absorbers, mechanisms withfriction, leaf springs, coupling devices on rail cars, and oleo struts). Because thesecomponents must be modeled successfully to obtain valid answers, tests must often berun as part of the model development. Further, these components are often nonlinear;for example, tires leave the ground, and the resistance of dampers is different inextension and in compression.Models of complete systems using road transport are given in references 4 and 5. Moresimple models of the road transport vehicles are given in references 6 and 7.Mathematical models of rail vehicles are given in references 8 and 9. Similarly,mathematical models for ships are given in references 10 and 11. An example of amathematical model of an airplane that could be used to calculate the accelerationloads at the cargo floor is given in referencell2. Mathematical models of missilehandling systems are given in references 13 and 14.
In each of the analytical prediction techniques for transportation and handling loads,the model of the system and the input forcing functions are both incorporated in theequations of motion which describe the dynamics of the system during transportationor handling. These equations of motion can be solved to obtain the transportation orhandling loads in terms of input acceleration at the space vehicle attachment points.From such accelerations the response of the vehicle to its transportation or handlingenvironment may be obtained. Examples of equations of motion formulated for anumber of transportation and handling systems can be found in the references of thepreceding paragraph.
-
7/27/2019 NASA SP 8077
15/58
WaterAirGround
TABLE 1. TRANSPORTATION LIMIT LOAD FACTORS[From ref. 15]
Medium/mode
Truck
Rail (humping shocks) iRail (rolling)Slow-moving dolly
Longitudinalload factors,g
Lateralload factors,
g+2.5+1.5
+3.5+6.0 to +30.0
+2.0
+_2.0 to +5.0+0.25 to +3.0+1.0
+_0.25 to +0.75I
+0.75
Verticalload factors,, g
+2.5
+3.0
+6.0+4.0 to +15.0J
+0.2 to +3.0+2.0
2.1.2 Analysis of Partial System with Composite Loadbed InputsAnother method for predicting transportation and handling loads on a space vehicleimposes the forcing functions caused by the motions of the cargo floor or loadbed ofthe transport vehicle or handling device on a partial system consisting of the spacevehicle and its handling fixture. Such forcing functions are composites of the loadbedinputs measured during the travel of a transportation or handling device such as acommon carrier, crane, forklift, or elevator. The measured load values are compiledand used as forcing-function inputs to a mathematical model of the space vehicle and
-
7/27/2019 NASA SP 8077
16/58
: .
Some of the reasons for this scarcity of data are that (1) the primary interest has beenin monitoring loads and responses at the space vehicle rather than loads at the loadbed;(2) the purpose of monitoring and surveillance of transportation and handlingoperations has been to limit load levels imposed on a specific system rather than togenerate typical data; (3) data that are generated are usually considered proprietary;and (4) the systems that have been monitored are unique so that generalization of datahas been difficult.
In spite of these obstacles, measurements on several systems have been reported.Moreover, loadbed data are available from extensive measurement programs which havebeen conducted to determine the shock and vibration loads for general cargo duringtransportation by commercial type vehicles and for typical handling operations.Although not directly applicable to the shipment of space vehicles, such informationcan be useful.
References 16 and 17 summarize the data available in 1967. Data reduction techniquesand instrumentation are also described in these references. A review of transportationand handling data employed by missile manufacturers prior to 1962 is presented inreference 18.
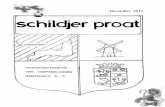
Acceleration frequency spectrum curves for the four major modes of transportation areshown in figure 2. These curves envelop the maximum reported vertical accelerationsmeasured on the cargo floor for all types of commercial vehicles traveling normalroutes. The curves represent a composite of a great number of loads, systems, andoperating conditions. For a particular system, the levels shown will only exist fordiscrete frequencies and for a specific condition, as discussed in detail in references 16and 17.
-
7/27/2019 NASA SP 8077
17/58
10
1.0
0.1/
AirY J L
c5g
>
10
1.0
0.1 \ /Water
Transient (slamming and emergency maneuvers)
Continuous (rough seas)
10
1.0
Rail(exclud ing coupl ings)
_ Transient (slack run-out andrun-in, starts and stops)_ Continuous
(Steady runs overrough t rack)
-
7/27/2019 NASA SP 8077
18/58
predictions of loads in excess of allowable loads by this method are usuallysubstantiated by a more comprehensive prediction approach, such as the dynamicfull-system analysis discussed in Section 2.1.4.
2.1.3 Scaling and Extrapolation from Similar System ExperienceA third method of predicting the transportation and/or handling loads is based on theuse of previously measured data from an analogous system, usually a similar spacevehicle and the same transportation or handling system. In addition to the measuredloads, a knowledge of the structural characteristics of the system for which themeasurements were recorded is required, The source of excitation is assumed to be thesame for both the previous and the new system, and the measured data are adjusted toaccount for any change in the structural characteristics of the new system. Thistechnique is particularly useful in estimating loads for a system developed with onlysize, or capacity, and/or minor structural changes from a previous design.
In this approach, the previous system is analyzed using the actual data measured on thespace vehicle as the system response and working backward into the transportationsystem to compute the basic forcing function. Depending upon the degree of similaritybetween the previous and the new systems, the forcing function may be defined at thepoints where the space vehicle is attached to its handling fixture, at the points wherethe handling fixture is attached to the transport vehicle, or even at the interfacebetween the system and the transportation medium (see fig. 1). The computed basicforcing function is then used as the forcing function input to a mathematical dynamicmodel of the new system which is usually the model of the previously developedsystem. The extent of the modeling and analyses depends upon the degree of similaritybetween the systems and the detail of load definition required. Methods of applying
-
7/27/2019 NASA SP 8077
19/58
model usedin this approachare primarily the forcing functionsgeneratedby thetransportationor handlingmedium(e.g.,the roador rail profile) coupledwith thevelocity of themovingsystem.Thedevelopmentof themathematicalmodelrequiresdetailedinformationon the massandstiffnessdistributionsof eachelementof thesystemso that the model and the attendant equations of motion acceptablyapproximatethe dynamicsof the actualsystem.Thesystemis subjectedto knowninput forcing functions and the input loadsat the vehicleattachmentpoints arecQmputed.
Theapproachof full-systemanalysiswith transportation-mediumnputsisparticularlyapplicableto newor extensivelymodifiedsystemsor which no applicabledataareavailable.t is alsoemployedwhentransportationandhandlingloadshavebeenudgedcritical by preliminaryanalysisanddetailedload definition is required.If the loadinputsaredistributedoverseveralpoints,thismethodof analysiswill providethetimeand phaserelationshipof the loads.A disadvantagef this analysiss that it mayrequirethe developmentf a complexmathematicalmodel.
A major part of this methodof estimatingtransportationandhandlingloadsis anaccuratedeterminationof theinput forcingfunction or excitationto themodelfromthe transportationmedium(C in fig. 1). Unfortunately, there is little publishedinformation on these inputs. The sourcesof excitationsto the varioustypesoftransportvehiclesandhandlingdevicesandthemeansor determininghesenputsarediscussedn the followingsection.
2.2 Inputs from Excitation Sources
-
7/27/2019 NASA SP 8077
20/58
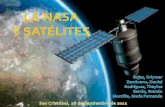
2.2.1.1 Inputs to Road Transport VehiclesThe sources of excitation for road transporters can be categorized as both internal andexternal. However, internal excitations, the vibrations caused by the engine,transmission and drive assembly, wheel unbalance, and shimmy, can be limited to lowlevels by careful design and maintenance of the transport vehicle and therefore do notcontribute significantly to the system load environment; in fact many transporters aretowed and therefore do not have engine and drive assemblies as sources of excitation.The principal external excitation results from road irregularities. Other externalexcitations result from starting, stopping, turning, docking, and wind loadings. Startingand stopping excitation inputs to the system can be determined from the braking andstarting characteristics of the vehicle. The maximum speed and minimum turningradius establish maximum inputs during turning. Docking inputs are determined by theforce of impact with the dock, which can be controlled to a large degree by the vehicleoperator. Local weather conditions and the drag coefficient of the exposed systemestablish wind inputs.By means of operating restrictions and special handling instructions that can be givento the equipment operators, excitations from starting, stopping, turning, and dockingcan be controlled to acceptable levels. Criteria for wind and thermal environmentsduring transportation and handling are discussed in reference 21.The determination of excitations caused by road irregularities is more complex thanthose due to the other sources and therefore of more concern. Numerous systems havebeen developed to measure road roughness (refs. 22 to 24) but very few detailed datahave been published. A description of some road profile measuring systems, theiroperating principles and procedures, and methods for reducing measured data for usein vehicle response analyses is given in reference 24.
-
7/27/2019 NASA SP 8077
21/58
0.10
>:
o_(3-
0.01
0.001
0.0001
0.00001
mWest German roadsArizona roads\ \
"x "\__ _ i_'_ Upper bOund
,,\ -)Lower bound _'_t _ ''_
,, \ ,,\
-
7/27/2019 NASA SP 8077
22/58
To compensate for the lack of measured data of road surface profiles, one investigatordeveloped (ref. 5) the generalized classification of road roughness shown in table II.The road profile is assumed to consist of a washboard course and individual bumps.The washboard course is set at the critical wavelength the wave length that gives thegreatest input into the vehicle. The washboards are usually spaced so that all or most ofthe axles reach the top of the boards at the same time. The critical frequencies are thenobtained by moving a vehicle over the course at various speeds. The course issufficiently long to develop maximum response in the lowest system mode. The heightsof the washboard and bumps are given in the table in terms of probability ofoccurrence. Use of this road-roughness classification has given conservative estimates ofcargo response.
TABLE II. ROAD ROUGHNESS CLASSIFICATION[From ref. 5 ]
Type of road encountered
Primary and secondary roads withrigid or flexible pavement that arewell constructed and maintainedPaved primary and secondary roadswith average maintenance; or wellconstructed unpaved roads with
Low probabilityof occurrence
(a)Sinusoidalwashboardamplitude,
cm(c) (d)
1.91
2.54
Single bumpamplitude,cm(c) (d)
3.81
5.08
High probabilityof occurrence(b)
Sinusoidalwashboardamplitude,
cm(c) (d)0.95
1.29
Single bumpamplitude,cm
(d)
2.54
3.81
-
7/27/2019 NASA SP 8077
23/58
2.2.1.2 Inputs to Rail Transport VehiclesThe major sources of vertical excitation to railroad transport vehicles are rail roughness(or rail profile), discontinuities at the rail joints, and elasticity of the rail roadbed.Lateral excitation is induced by the tapered wheel treads which cause the trucks tohunt or oscillate between the rails and by the wheel flanges striking the rail head.Lateral and vertical sources of excitation are discussed in detail in references 25 and26. Longitudinal excitation is caused by railroad-car switching or coupling operationsand by slack run-outs and run-ins which occur when there is a take-up of slack in thecouplers on starting, stopping, or varying speed. Very few data on rail profiles havebeen published. Reference 25 discusses some unpublished statistical studies whichshow that the frequency spectra of irregularities in typical tracks exhibit somepredictable relationships between frequency and amplitude; for example, thedisplacement amplitude decreases as spatial frequency increases.
Instrumentation has been developed to measure the vertical, lateral, and cross-elevationcharacteristics of rail profiles. Two of these rail-profile measuring systems are describedin references 27 and 28. Measurements of the rail profiles, however, are generallycomplicated by the elasticity of the rail and road bed. Because the inputs required forthe mathematical model of a transportation system using a rail transport vehicle are theundisturbed track profile, plus the characteristics of the road bed, the deflection of therail caused by the weight of the vehicle containing the measuring system must beaccounted for. If the measuring system vehicle is similar to the transportation systemvehicle under consideration, the dynamic track profile can be used as the input to themodel. The dynamic characteristics of the rail and roadbed combination are alsorequired inputs for the model. Measurement of these parameters is discussed inreference 27.
-
7/27/2019 NASA SP 8077
24/58
Application of axle-acceleration-measurementata to a dynamic model of amissile/transportersystemis describedn reference8. Dynamicmodelingof rail-carsystemsto determinelateral stability causedby track discontinuities(joints) isdescribedn reference9.The longitudinalexcitationcausedby slackrun-outor run-in depends on the length ofthe train and the position of the car in the train. Cars in short trains, or cars close tothe locomotive in long trains, encounter the lowest shocks. Run-out and run-in effectsare discussed in reference 29.
A major reason for the infrequent use of rail cars for transporting space vehicles is thesevere loadings which can occur during coupling operations. The excitation occurringduring rail-car coupling is a transient phenomena and depends upon the speed ofimpact, the configuration of cars impacted, and the undercarriage design of the car inthe system being evaluated. Evaluation of this excitation is based on establishing areasonable speed for actual impacts (a summary of measured impact speeds ispresented in reference 16). A dynamic model of the Minuteman missile/transporterused for longitudinal-impact analyses is described in reference 30. Analytical results forvarious impact velocities showed good correlation with measured loads.2.2.1.3 Inputs to Air Transport VehiclesSources of excitation to aircraft can be local or distributed; they are discussed in detailin reference 31. Local excitations include the forces applied by the ground during taxi,take-off, and landing as well as those caused by the power plants at their attachmentpoints. Significant local excitation of the fuselage occurs at the blade passagefrequency on propeller-driven aircraft, whereas excitation on jet-powered aircraft israndom in nature. Distributed excitations are those which are spatially distributed over
-
7/27/2019 NASA SP 8077
25/58
A method to account for atmospheric turbulence on a continuous rather than adiscrete-gust basis is given in reference 34. This reference also presents data onatmospheric-turbulence measurements in clear air, cumulus clouds, and thunderstorms;calculated and experimentally determined airplane transfer functions; and analyticalprocedures for determining aircraft response based on power-spectral techniques.
Local excitations during taxi and take-off can be determined from runway andtaxi-surface profile measurements made with the same instrumentation systems used inmeasuring road profiles. A bibliography of runway roughness studies is given inreference 34. Reference 35 presents data for several airport runways. The response ofseveral turbojet airplanes to runway roughness is presented in reference 36.Landing forces can be determined by measurement of the vertical rate of descent orsinking speed at the time of impact. Sinking speeds measured on cargo aircraft arepresented in reference 31.
2.2.1.4 Inputs to Water Transport VehiclesMajor ship excitations result from rough seas and "slamming" which occurs when thebow rises out of the water and subsequently impacts it again. Other dynamicexcitations of a ship include (1)the simple harmonic excitations resulting fromunbalanced propellers and shafting or by reciprocating engines, (2)the varyinghydrodynamic excitations caused by rotation of the propellers in a nonuniform wake,and (3) the varying wave forces in heavy seas. These sources of excitation are discussedin detail in reference 10.
The excitations caused by machinery and propellers are generally much lower than
-
7/27/2019 NASA SP 8077
26/58
droppedasa result of humanerror, accident,or expediency.Thus,the significanthandlingloadsthat canoccurduringoperationssuchashoisting,acking,andassemblyareapt to beaccidental.Themagnitudeof suchloadsdependsargelyon thetrainingandskill of the personnelnvolvedand the equipmentbeingused.Specialhandlinginstructionsandproceduresndanobservercanhelp to limit theseoads.Thenormalhandlingexcitationscanusuallybedeterminedrom theperformancee.g.,torque,acceleration,ifting and loweringspeeds,andbraking,characteristics)f thehandlingequipmentunderconsideration.Predictionsof significantexcitationsfromthe humanelementmust be basedon someassumedheightof possibleverticaldropand/oron someassumedateraland longitudinalimpactvelocity.Typicalaccidentaldrop heightsfor variouscontainersare presentedin references17 and 18. Spacevehicles,however,arenot usuallydesignedor accidentsandthereforetheexperienceaccumulatedn handlingthemisusedn estimatinghandlingoadinputs.References13 and 14, describemodelsof missilehandlingsystemsor the Polarismissilesand alsogivesomerealisticvaluesof inputs from handlingdeviceso thesystem.The handlingequipmentconsistedof a missilecontainer,a shock-isolationsystem,a cable,anda crane.Themodelswereanalyzedo determinemissileresponseand to establishmpactforcesfor variousloweringvelocitiesand inertia forcesforvariouscableaccelerations.In manyof thecurrentspacevehiclehandlingsystems,hespacevehicles loadedonoroff the transporterby meansof aroll-on/roll-offmechanismwith thetransportertselfproviding the loweringor elevatingcapability (refs.39 and 40). This procedureeffectivelyelim_,nateshe possibilityof the systembeingdroppedor handledroughlyduringthis typeof transfer.
-
7/27/2019 NASA SP 8077
27/58
accompanyinghe systemestimatedvisuallywhetherthe spacevehicleresponsewasexcessive,ndif so,requestedareductionin speeduntil themotionhadattenuated.Data recordedduring transportationof the Ranger8 and Surveyorspacecraftbyair-suspensionrailer vansare presentedn references1 and42. Shockspectraandpower-spectraldensitiesof the measureddataarepresentedfor roughandsmoothhighwaysfor threedifferent locationsin thevan.Only measurementsn theverticaldlrection are given.The report statesthat valuesin the longitudinalandtransversedirectionswereasmuchas40-percentessthantheverticalmeasurements;owever,theselevelsmaystill be important.The vertical accelerationat the vanfloor rarelyexceeded1-gpeak.A significantvariationin accelerationevelsrecordedbetweenwosupposedlyidentical vans indicated that each transporter must be qualifiedindividually.Reference43 presentsdatameasuredduringroadtransportationof a3.05-m(120-in.)diametersolid-propellantvehiclesegment.The transportationvehiclewasa low-bedtrailer 3.35-m(11-ft) wide, with a 6 x 104kg (60-ton)capacity.Thereferencegivesrepresentativeaccelerationdata and forcing frequenciesor eachpart of the trip,includinga suddenstopon an incline.Theverticalaccelerationevelsrangedrom0.2to 0.4gat frequenciesrom2 to 6Hz.Reference40 presentsoadbedmeasurementsadeduringshipmentof Polarismotors,includingmeasurementsf maximumverticalaccelerationsor Variousoadconditionsandspeeds.Vibrationsoccurredat frequenciesof 1 and10Hz. Thetransporterwasasemitrailervanwith aninnerstructural-supportoxsuspendednairsprings.Additional datadescribingmeasuredoadsoncommercialoadcarriersarepresentednreferences16 to 18.References6and17summarizehedataavailableup to thetime
-
7/27/2019 NASA SP 8077
28/58
TABLE III. - LOADBED DATA FOR A SEMI-TRAILER TRUCK COMBINATION[From ref. 19]
O-Peakacceleration,
g
3.2 @2.3 ---1.65 - - -
1.20.860,62 @0.45 3.110.32 7.160.23 18.140.17 15.240.12 7.240.1 23.33
Frequency 0-band, Hz 21A
Notes:
Probability of occurrence in percent
.... ..... .... 012 . ......
....... 0.11 .................... 0.91 0.10 - - -
....... 0.70 0.15 ............... 3.58 0.83 1.360.21 0.26 1.99 0.71 0.32 ........... 6.71 3.12 5.511.35 2.05 5.66 3.33 2.12 0.66 0.53 - - - 10.59 8.92 16.483.24 4.87 7.71 6.85 4.54 2.47 1.24 0.19 8.89 11.28 15.977.02 10.27 10.01 12.82 7.52 6.88 2.86 0.95 9.17 12.87 17.6588.11 82.50 73.78 76.09 85.42 89.90 95.25 98.65 59.96 62.63 42.71
2Y_- 5- 10- 15- 23- 30- 44- 63- 88- 125- 175-5 10 15 23 3D 44 63 88 125 175 238
This summary accounts for probability of occurrence of road speeds and road typesencountered in a typical transcontinental trip.The circled values are those which may be considered to be shocks. The uncircledvalues are those considered to be vibration.Total peak accelerations used in this summary: 2 253 493(- - - ) (Probability less than 0.1% is not reported)Overall trip composite amplitude distribution for a loaded truck, vertical axis (front,center and aft locations)
Q
0.171.604.9211.8613.5116.1250.66
238-313
2.2.2.2 Rail Transport Loadbed Inputs
-
7/27/2019 NASA SP 8077
29/58
by a slack run-in. Although the loads were applied in the longitudinal direction, thehighest accelerations were recorded in the vertical direction.
D
Reference 8 presents data recorded during rail movement of the Minuteman missile in aspecial soft-ride car, the Minuteman Rail Transporter. The truck suspension system ofthis transporter consists of a combination air and coil spring for shock isolation in thevertical direction and a pendulum system with snubbers for shock isolation in thelateral direction. Shock isolation is provided in the longitudinal direction by a slidingcenter sill and a hydraulic cushioning device. Because the Minuteman train was short,longitudinal levels were low (shocks during coupling were considered the onlysignificant longitudinal loads). The Minuteman Rail Transporter provided anorder-of-magnitude reduction in load levels on the missile.
Reference 40 presents data on measurements made during rail shipment of Polarismotors, including accelerations recorded on the floor of the transporter and at variouslocations on the motors. Maximum levels for various events are described. Themaximum vertical acceleration (1.7 g on the transporter and 1.4 g on the motors)occurred during a slack take-up. The maximum longitudinal acceleration (2.0 g on thetransporter and 1.6 g on one of the motors) occurred during the same event.
References 16 and 17 present additional data describing over-the-roadbed operationsincluding (1) envelope curves which show the maximum levels reported for all types ofsuspension systems, road conditions, and speeds in terms of zero-to-peak accelerationversus frequency and (2)envelope curves which show the effect of train speed anddirection of measurement (longitudinal, vertical, and lateral). Statistical data describingthe rail-transport vibration environment are presented in reference 45. Data similar tothat presented in table lII are given for load measurements in the vertical, transverse,and longitudinal axes. The loadbed environment (ref. 45) consists of random low-
-
7/27/2019 NASA SP 8077
30/58
i _
i
on the transporter ranged up to 2.27 g in the longitudinal direction, 2.90 g in thevertical direction, and 0.59 g in the lateral direction for impact speeds up to 4.5 m/sec( 10 mph).
Data recorded during rail-coupling impact tests of a system for transporting Polarismotors is reported in reference 40. The system tested consisted of a refrigerated vancontaining first- and second-stage motors mounted in an internal container that wassupported and restrained by an air flotation system. The maximum longitudinalacceleration (3.95 g on the van and 1.12 g on one of the motors) occurred during a4.32 m/sec (9.67 mph) impact. Data for other impact speeds, measurement locations,and directions are also given.
Reference 16 presents additional rail-coupling impact data in terms of shock spectra ofthe cargo floor for various impact speeds and directions (longitudinal, lateral, andvertical) and for both a standard and high-capacity (cushioned) coupling device. Shockspectra for the traditional worst case, the 4.92 m/sec (11 mph) impact, are presented inreference 45 and compared to shock spectra for other events such as a nominal 0.9 to2.25 m/sec (2 to 5 mph) coupling and the crossing of railroad tracks and switches. It isshown that at some frequencies, the 4.92 m/sec coupling is as much as two orders ofmagnitude higher than the usual or normal events.
2.2.2.3 Air Transport Loadbed InputsMeasurements recorded during air transport of the Saturn S-IV stage are presented inreferences 16 and 39. The loads were measured on the Pregnant Guppy, a conversionof the 4-engine Boeing 377 Stratocruiser that was modified specifically for transportinglarge space vehicles. Measured loads are reported for the forward and aft stations wherethe space vehicle is supported in the aircraft. Statistical distribution of the composite
-
7/27/2019 NASA SP 8077
31/58
Reference46presentsmeasurementsf theenvironmenton thecargod_ckandon theouter skin near the cargohook of the HH43 helicopter.It givesthe probabilitydistributionof the accelerationamplitudepeaksasa function of narrowbandsoffrequency.TheHH43helicopterispoweredby a turboshaftenginewhichdrivestwocontrarotatingrotors. Motor starts,rotor engagement,nd straightand levelcruisewereof little significancen inducingloadswhen comparedto hover,climb, andhigh-speedevents.Datashowedboth randomand dampedsinusoidalcharacteristics.Rotationof onerotor bladecausessinusoidalexcitationwhichbeginsto decaybut isreinforced by the next blade. The engineand air movementgeneraterandomexcitations.2.2.2.4 Water Transport Loadbed InputsMeasurements of the loads encountered during shipment of the Saturn S-IV stage byship and barge are presented in reference 39. For the ship, the only loads ofsignificance occurred during rough weather. The periods of measured accelerationsranged from 4 to 10 seconds per cycle. Composite accelerations were less than 0.35-gvertical, 0.22-g lateral, and 0.15-g longitudinal. For the ocean-going barge, the primaryenvironment consisted of gentle swells causing low-level accelerations, with periodsranging from 4 seconds to 12 seconds. During one shipment, strong winds produced an8 to 10 foot wave; the draft of the barge slammed the water and induced responses inthe barge and transporter at 9 Hz. The acceleration levels reached 0.8 g in the verticaldirection.
Reference 16 summarizes data on transient and continuous vibrations from numerousmeasurements on various types of ships. The transient vibrations include those whichoccur during emergency maneuvers and slamming. Measurements recorded in the cargo
-
7/27/2019 NASA SP 8077
32/58
iii_
ii_ ,
, i: _
pitching, water may wash over the ship's deck and produce severe loads on cargolocated on the deck.
2.2.2_5 Handling Devices Loadbed InputsLoads imposed on the space vehicle or vehicle segmentsduring handling operationssuch as transfers, loading, and unloading are generally very low because theseoperations are preplanned and closely monitored, and the equipment operatorsexercise extreme caution. Special handling systems, e.g., roll-on and roll-off systems,also contribute to low load levels. For these reasons little data on handling loads havebeen reported. Only when an accident occurs are handling-system loads significantHowever, space vehicles are not normally designed for this contingency
Reference 40 reports the loads encountered during the transfer of a flexi-vancontaining Polaris motors from a truck to a railroad car. The transfer consisted of theremoval of the rear wheels from a container van and the transfer of the van onto ahydraulic platform of the freight car. During the transfer operation, the maximumloads recorded on the van were a 1.3 g vertical shock with a duration of40 milliseconds and a 1.3 g vertical vibration at a frequency of 10 Hz.
Maximum vertical acceleration recorded during handling and transfer operation of theSaturn S-IV stage with a crane and cable system was 0.60 g. During one of thetransfers, however, the forward end of the vehicle was dropped 7.62 cm (3 in.) becausethe crane operator thought the vehicle was already firmly on the ground. The severestvertical acceleration level induced by this drop was 0.94g at the forwardattachment-point cradle. Reference 17 presents a shock-spectra envelope for this event
-
7/27/2019 NASA SP 8077
33/58
2.3 Verifying and Monitoring Transportation and Handling,Loads
The actual transportation and handling loads are usually measured to verify theaccuracy of the estimated loads, and they are monitored on selected vehicles to ensurethat the vehicle's flightworthiness is not affected. Measurements are made at the pointswhere the loads have been estimated and at other critical locations, as required, todefine the input loads to the vehicle and the vehicle response.
Initially, the loads are usually measured during trial runs of instrumentedtransportation and handling systems both with and without an instrumented simulatedspace vehicle. Later, as the program develops, qualification tests are performed tomeasure these loads on an instrumented transport vehicle and an updated engineeringmodel of the space vehicle. Frequently, during shipment of production flight vehiclesfrom the factory to the launch pad, the transportation and handling loads aremonitored to record unexpected occurrences that may produce load levels in excess ofspecifications.
Instrumentation and data analysis techniques vary, depending upon the type ofinformation being sought. Instrumentation may consist of strain gages, load cells,and/or accelerometers. References 16 and 17 discuss the various instrumentation andrecording systems used in transportation and handling studies. Methods used foranalyzing the data are also discussed. Descriptions of instrumentation systems usedspecifically for acquiring spacecraft transportation and handling data are presented inreferences 39, 40, 42, and 43. The development of a special instrumentation packagefor measuring and recording the transportation environment is described inreference 48. This system, called the Transportation Environmental Measurement and
-
7/27/2019 NASA SP 8077
34/58
-
7/27/2019 NASA SP 8077
35/58
/
i :
!_!:?_ii_, :
3. CRITERIAThe transportation and handling loads acting on a space vehicle shall be determined asneeded for space vehicle design. Transportation and handling loads shall be predictedby appropriate state-of-the-art analyses, verified by experimental measurements, and,to'the extent necessary, monitored during transportation and handling to ensure thatspace vehicle allowable loads have not been exceeded.
3.1 Determination of Transportation and Handling LoadsThe transportation and handling loads shall be determined, as necessary, for all phasesof space vehicle movements, including at least the following:
Loading on transporter or transportation vehicle
Transporting to assembly, test, and launch sites
Transferring from one transportation vehicle to another
Unloading at assembly, test, and launch sites
Moving (locally) by special ground handling equipment, dollies, or lift trucks
Assembling and integrating with other space vehicle elements
Erecting on the launch pad
-
7/27/2019 NASA SP 8077
36/58
All appropriatecombinationsof the aboveload sourcesn all directionsof loadapplication(vertical,longitudinal,ateral)shallbeaccountedor.
Thetransportationandhandlingloadsshallbedeterminedby suitablestate-of-the-artmethodsof analyses.Theanalysesusedshallpredict the transportationandhandlingloadsto theaccuracyneededo permitadequatedesign.3.2 Verification of Transportation and Handling LoadsExperimental measurements on engineering, prototype, or production models of spacevehicles and transportation and handling systems shall be performed, as required, toverify the predicted transportation and handling loads.
3.3 Monitoring of Transportation and Handling LoadsTransportation and handling loads shall be monitored on shipments of productionspace vehicles to the extent necessary to ensure that the loads actually incurred are lessthan the allowable loads.
-
7/27/2019 NASA SP 8077
37/58
4. RECOMMENDED PRACTICESTo ensure that transportation and handling loads are adequately determined andaccounted for in space vehicle design, close cooperation should be maintained betweenenvironmental specialists, dynamicists, structural designers, ground support equipmentdesigners, packaging specialists, and instrumentation engineers. As a general rule, it isrecommended that transportation and handling loads do not exceed the space vehicleallowable loads established by flight or other mission requirements. If the estimatedloads exceed the allowable loads, the transportation or handling systems should bemodified to provide sufficient attenuation to reduce these estimated loads to valuesless than the allowable loads. The space vehicle structure should be modified towithstand transportation or handling loads only if the transportation or handlingsystem cannot be feasibly modified to attenuate these loads.
An initial selection of the transportation and handling systems should be made duringthe conceptual design phase because the basic structural configuration of the spacevehicle, i.e., the size and weight of the stages, is constrained to some extent by thecargo volume, weight capacity, and other limitation of feasible transportation modes.When the space vehicle allowable load estimates first become available, an initialestimate of the transportation and handling loads should be made. This initial estimateand subsequent estimates of the transportation and handling loads should use anappropriate method of analysis based on the type of transportation and handling inputdata available and the nature of the space vehicle and transportation or handlingsystem selected. The initial transportation and handling load estimates should be usedto (1) provide guidance in evaluating and selecting appropriate transportation modesand handling devices, (2) establish load attenuation requirements for the design oftransportation and handling fixtures, and (3) act as source inputs for the strength and
-
7/27/2019 NASA SP 8077
38/58
and with the number of the modes responding, as discussed in reference2.References 1, 2, and 3 should be consulted for guidance on modeling techniques forspace vehicles.
i_
For predicted transportation and handling loads, the analytical models should simulate,individually, each significant loading direction for the transportation or handlingoperation under consideration. Actual loads and structures are complex andmultidirectional and difficult to analyze; however, adequate results may often beobtained by analyzing 2-dimensional (planar) lumped-mass parameter models.
4.1 Determination of Transportation and Handling LoadsTransportation and handling loads should be estimated by one or more of thefollowing prediction methods (see Section 2.1):
1. Analysis using limit load factors
2. Analysis of partial system with composite loadbed inputs
3. Scaling and extrapolation from similar system experience
4. Analysis of full system with transportation medium inputs
The particular method used to estimate the loads should be based on a number ofconsiderations including the availability and applicability of pertinent data for thetransportation and handling system under consideration, the detail of load definition
-
7/27/2019 NASA SP 8077
39/58
the cargofloor of all typesof commercialvehiclesandloads,they canthenserveasinput loadsto thehandlingor vehiclesupportmechanismattachedo thefloor of thetransportvehicle.Applicablecompositedataof this type for thefourmajormodesoftransportationare shown in figure2. Other valid sourcesof compositedata arediscussedn Section2.2.2.Mathematicalmodelingof thesystemabovehecargofloorin an analysisthat usesthe cargofloor loadsasinputs shouldbe usedto determineinput loadsto the spacevehicleandvehicleresponseo theseoads(Sec.2.1.2).Whenavailable,oadbeddatafor thespecifictransportationvehicleor handlingsystem,ratherthanthe dataof figure2, shouldbeusedto provideamoreaccurateestimateofthe loads.However,careshouldbe takenthat the datacoverthe rangeof conditionslikely to be encounteredwith the actual system.This approachis particularlyapplicableto transportationandhandlingsystemswhichare largecomparedo thespacevehicle, i.e., the spacevehiclehaslittle effect on the cargo-floormotions.Aircraft, ship,andsomerail carsfall into this category.Sourcesor loadbeddataarediscussedn Section2.2.2.If the spacevehicletransportationor handlingsystemunderconsiderations similartoa systemfor which loadmeasurementataandeither amathematicalmodelor thephysicalcharacteristicsequiredfor themodelareavailable,hen the datashouldbescaled or extrapolated (Sec.2.1.3) to the new systemusing method(3). Thedynamicistshouldhavea knowledgeof thestructureonwhich thedatawererecordedto determinethe effectof the load.Theapproachsbestsuitedto systemsn whichthere is only a small changein the structureor weightof the newspacevehicle,comparedwith the structure and weight of the vehicle on which the loadmeasurementsweremade.Thedataused,however,shouldcoverall the conditionslikely to be encounteredby the systemunder consideration.Datashouldbesoughtthroughinternalreportsor recordssinceverylittle dataof thistypeareavailablen the
-
7/27/2019 NASA SP 8077
40/58
H
For this method of analysis, in which the entire system is modeled and analyzed, theenvironmental specialist should seek data describing the basic source of excitation ofthe transportation medium, i.e., road profile, rail profile, air turbulence or gusts, andwave height and frequency. A summary of the limited data available in the literature isgiven by reference and discussion in Section 2.2.1.
Of the four basic sources of excitation, the road profile is the input medium which,where feasible, should be determined by measurements along the actual route. Forroad transport, the measuring equipment described in reference 4 should be used toprovide data describing the road profile. Road profiles should be monitored over theroughest section of the actual route. If time or circumstances do not allow this,previously measured data (ref. 4) or estimates (ref. 5) should be used. Use of estimatesof the road profile such as those presented in reference 5 results in conservativepredictions of the loads. Use of power-spectral-density data, such as those presented inreference 4, results in prediction of loads in terms of root-mean-square (rms) values.Maximum load values should be determined by multiplying the rms loads by a factorof 1.414 if the loads are sinusoidal and by a factor of 3 sigma if the loads are random.
For handling systems, the input to the system should be based on judgment and pastexperience. The significant loads that occur during handling operations are a result ofhuman error, accident, or expediency in which the space vehicle receives a bump orsudden push or pull. These loads are chance phenomena and estimates of theirmagnitude and frequency of occurrence should be based on experience and describedon a statistical basis. As discussed in Section 2.2.1.5, very few data of this type areavailable and it is necessary to establish arbitrary but reasonable inputs. For example, astep change in velocity may be considered reasonable for loads imposed by humanerror or expediency during raising and lowering handling operations. The velocitiesused should be related to the characteristics of the equipment being used. If accidents
-
7/27/2019 NASA SP 8077
41/58
If the spacevehicledesign loads from flight and sources other than transportation andhandling are significantly greater than the loads induced by transportation andhandling, only a limited analysis is required. If the induced transportation loads areclose to the allowable loads, more extensive analyses should be performed. Althoughbeyond the scope of this monograph, the analysis of vehicle response (ref. 2) should beconsidered as a logical extension of the analyses for predicting transportation andhandling loads. This is particularly important in the design of a transporter or otherspecial equipment where the transporter itself is designed to act as the load attenuationsystem.
Appropriate combinations of transportation and handling load inputs should beconsidered in arriving at the final estimated loads. For example, it is known that inactual ground transportation and handling operations, the loads can occursimultaneously along the three perpendicular axes. In addition, moments or torquescan occur or tie-down loads, wind loads, and thermal expansion loads can occur at thesame time. These combinations should be considered in arriving at the final predictionswhen such loads are known to act at the same time.
4.2 Verification of Transportation and Handling LoadsIf the predicted values of transportation and handling loads are equal to, or more than,50 percent of the values of allowable loads, then the predicted load values should beverified by load-measurement tests. Even if the predicted load values are less than 50percent of the allowable values, load-measurement tests should be conducted if thereare serious doubts concerning the accuracy or conservatism of the analyses used topredict the loads.
-
7/27/2019 NASA SP 8077
42/58
integratedwith the qualificationtest programsor the transportationandhandlingsystems.f feasible,hesetestsshouldbeconductedor allphasesof movementof thespacevehicleor its major segmentsand for all conditionslikely to be encounteredduring actualshipment.If this is not practical,the testsshouldat leastduplicatetheseverestntransit andhandlingconditionslikely to be encounteredduringnormalshippingoperation.The loadsshouldbe measuredat the pointswheretheyhavebeenestimated,particularlyat thespacevehicleattachmentpointsandthetransportvehicleloadbed,andat all locationson thespacevehiclethat havebeenudgedcriticalasaresult of spacevehicleresponsenalyses.Resultsof thesetestsshouldprovidethebasisfor qualifyingthe transportationandhandlingsystems.The testsshouldalsoestablishthe need for restrictionson specific transportationor handlingoperations.Forexample,if the loadsareexcessiveor a particular transportvehiclespeedandroadtype,a speedrestrictionshouldbe imposedto ensureprotectionof thespacevehicle.Instrumentationusedfor measurementso verify thetransportationandhandlingloadsshouldbeappropriateo theinformationbeingsoughtandthelocationon thevehicle.Selectionof the type of instrumentationandthe locationof the instrumentationonthe transportation and handling systemshould be determinedjointly by theinstrumentationengineers,dynamicists,strengthengineers,andtest engineers.n allcases,he instrumentationshouldnot influencethemeasuredesponseandshouldbecapableof accuratelymeasuringandrecordingthe inducedoadsandthespacevehicleresponse.Whenevera programis undertakeno verify transportationandhandlingoadsthroughmeasurement,hesemeasurementshouldbe of valueto designersandanalystsonsimilarprograms.Therefore,t is recommendedhat duringthedatameasurementnddocumentationphases,considerationbe givento acquiringandpresentingsufficientstructuralanddynamicinformationto allowthedatato beusedn estimatingheloads
-
7/27/2019 NASA SP 8077
43/58
Themeasurementsbtainedduringproductionshipmentsshouldbeusedto verify thatthespacevehicleallowableoadshavenot beenexceeded.n the eventof anaccidentor an abnormalloadingconditionnot previouslyconsidered,his informationshouldbeusedto determinewhetherthespacevehicle'slightworthinesshasbeenimpaired.
,_, _ _,_i,_ _ _
-
7/27/2019 NASA SP 8077
44/58
i _ I
Ip _ _
_ iI _ _, j
-
7/27/2019 NASA SP 8077
45/58
REFERENCES
1. Anon.: Natural Vibration Modal Analysis. NASA Space Vehicle Design Criteria(Structures), NASA SP-8012, 1968.
2. Anon.: Structural Vibration Prediction. NASA Space Vehicle Design Criteria(Structures), NASA SP-8050, 1970.
3. McCormick, R. W., ed.: NASTRAN Users Manual. NASA SP-222, 1970.
Harvey, J. R.; and Wursche, R. A.: Roughness Measurement and System ResponseEvaluation for Highway Environment. The Shock and Vibration Bull. No. 35,Part 5, Feb. 1966.
5. Hager, R. W.; and Conner, E. R.: Road Transport Dynamics. The Shock andVibration Bull. No. 31, Part 3, Apr. 1963.
6. Lever, S. A.: Shock and Vibration of Apache Trailer. The Shock and VibrationBull. No. 30, Part 3, Feb. 1962.
7. Simun, R. R.; and Peterson, R. S.: Missile Transporter Vibration Analysis. TheShock and Vibration Bull. No. 30, Part 3, Feb. 1962.
-
7/27/2019 NASA SP 8077
46/58
12.
13.
14.
15.
16.
17.
18.
19.
Bennett,F. V.; andPratt, K. C.: CalculatedResponseof a LargeSweptWingAirplane to ContinuousTurbulencewith Flight Test Comparisons.NASATR R-69,1960.Fischer,E. G.; Brown,C. R.; andMolnar,A. J.: LateralImpactShockDuringShip Loadingof the A3 PolarisMissile.The ShockandVibrationBull. No.37,Part7,Jan.1968.Brown,C.R.;andAvis,A. J:: MissileHandlingAnalysis.TheShockandVibrationBull.No. 36,Part7, Feb.1967.Anon.: StructuralDesignCriteriaApplicableto a SpaceShuttle.NASA SpaceVehicleDesignCriteria(Structures),NASASP-8057,1971.Ostrem,F. E.; and Rummerman,M. L.: TransportationShockandVibrationDesign Criteria Manual. Vol. I, Rept. No. MR-1262, General AmericanTransportationCorporation,Sept.1965.Ostrem,F. E.; andRummerman,M. L.: TransportationandHandlingShockandVibration DesignCriteriaManual.ReportNo. MR-1262-2,GeneralAmericanTransportationCorp.,Apr. 1.967.Thompson,M. B.; Loser,J. B.; andBrown,R, S.: ResearchStudyon GroundEnvironmentLoadsCriteriafor GuidedMissiles.ReportNo.WADC-TR-59-627,Wright-PattersonAFB,Ohio,August1962.(AvailablefromDDCasAD 285852)Foley,J.T."TheEnvironmentExperiencedby CargoonaFlatbedTractor-Trailer
-
7/27/2019 NASA SP 8077
47/58
24. Simon,H. P.; and Roach,C. D.: Measurementof the Cross-CountryTerrainEnvironment.TheShockandVibrationBull.No.30,Part3,Feb.1962.25. Milenkovic,V.: FeasibilityStudy for aWheel-RailDynamicsResearchFacility.
ResearchDivision,GeneralAmericanTransportationCorporation,Dec. 1968.(AvailablefromNTISasPB182472)26. Lindgren,P. W.: DynamicTrain Simulation.PreprintNo. 23-2-TID-67,22ndAnnualInstrumentSocietyof AmericaConference,Sept.1967.27. Law, C. W.: Instrumentation for High-Speed Railroad Research Project. Preprint
No. 23-2-TID-67, 22nd Annual Instrument Society of America Conference, Sept.1967.
28. O'Sullivan, W. B.: Boston and Maine Expand Role of Mechanical TrackInspection. Railway Track and Structures, Apr. 1965.
29. Lindner, F. J.: Engineering Approach to the Protection of a Fragile Item-PanelSession. The Shock and Vibration Bull. No. 30, Part 3, Feb. 1962.
30. Brown, W. H.; and Drydahl, R. L.: Simulation of Rail Car Coupling Environment.The Shock and Vibration Bull. No. 30, Part 3, Feb. 1962.
31. Harris, C. M.; and Crede, C. E.; eds.: The Shock and Vibration Handbook Vol. III.McGraw-Hill Book Co., Inc., 1961.
32. Pratt, K. G.; and Walker, W. G. : A Revised Gust-Load Formula on a Re-evaluationof V-G Data Taken on Civil Transport Airplanes from 1933 to 1950. NACA
-
7/27/2019 NASA SP 8077
48/58
37.
38.
39.
40.
41.
42.43.
44.
Jasper,N. H.: Statistical Distribution Patternsof OceanWavesand of WaveInducedShip StressesandMotions,with EngineeringApplication.DavidTaylorModelBasinRept.92,Oct. 1957.St. Denis,M.; andFersht,S.N.: TheEffect of ShipStiffnessupontheStructuralResponseof a CargoShipto anImpulsiveLoad.Rept.SSC-186,ShipStructureCommittee,Natl. Res.Council,Natl.Acad.Sci.U.S.,Sept.1968.(AvailableromDDCasAD 675639)TrudeU,R. W.;andElliott, K. E.: TheDynamicEnvironmentof the S-IVStageDuringTransportation.TheShockandVibrationBull.No. 33,Part4,Mar. 1964.Anon.: Rail and Road TransportationTest. New York Central System."Flexi-Van." LMSD501917,LockheedMissilesandSpaceDivision,Aug. 1959.Schlue,J. W.; andPhelps,W. D.: A New Look at TransportationVibrationStatistics.TheShockandVibrationBull.No.37,Part7,Jan.1968.Schlue,J. W.:TheDynamicEnvironmentof SpacecraftSurfaceTransportation.JetPropulsionLab.,TR 32-876,Mar. 1966.Molinari,L. A.; andReynolds,J. R.: Program624A Titan III-C TransportationTests.TheShockandVibrationBull.No.35,Part5, Feb.1966.Foley, J. T.: NormalandAbnormalEnvironmentsExperiencedBy Cargoon aFlatbedTruck, Rept.SC-DR-67-3003,andiaLabs.,Feb.1968.
45. Gens,M.B.: TheRailTransportEnvironment.TheJournalof EnvironmentalSci.,
-
7/27/2019 NASA SP 8077
49/58
NASA SPACE VEHICLE DESIGN CRITERIAMONOGRAPHS ISSUED TO DATE
SP-8001
SP-8002
SP-8003SP-8004SP-8005
SP-8006
SP-8007
SP-8008SP-8009SP-8010SP-8011
SP-8012SP-8013
(Structures)
(Structures)
(Structures)(Structures)(Environment)
(Structures)
(Structures)
(Structures)(Structures)(Environment)(Environment)
(Structures)(Environment)
Buffeting During Atmospheric Ascent, May 1964Revised November 1970
Flight-Loads Measurements During Launch andExit, December 1964
Flutter, Buzz, and Divergence, July 1964Panel Flutter, July 1964Solar Electromagnetic Radiation, June 1965Revised May 1971
Local Steady Aerodynamic Loads During Launchand Exit, May 1965
Buckling of Thin-Walled Circular Cylinders, Sep-tember 1965 Revised August 1968
Prelaunch Ground Wind Loads, November 1965Propellant Slosh Loads, August 1968Models of Mars Atmosphere (1967), May 1968Models of Venus Atmosphere (1968), December
1968Natural Vibration Modal Analysis, September 1968Meteoroid Environment Model - 1969 [NearEarth to Lunar Surface], March 1969
-
7/27/2019 NASA SP 8077
50/58
SP-8022SP-8023SP-8024SP-8025SP-8026SP-8027SP-8028SP-8029SP-8030SP-8031SP-8032SP-8033SP-8034SP-8035SP-8036SP-8037
(Structures)(Environment)(GuidanceandControl)(ChemicalPropulsion)(GuidanceandControl)(GuidanceandControl)(GuidanceandControl)(Structures)(Structures)(Structures)(Structures)(GuidanceandControl)(GuidanceandControl)(Structures)(GuidanceandControl)(Environment)
Staging Loads, February 1969Lunar Surface Models, May 1969Spacecraft Gravitational Torques, May 1969
Solid Rocket Motor Metal Cases, April 1970
Spacecraft Star Trackers, July 1970
Spacecraft Radiation Torques, October 1969
Entry Vehicle Control, November 1969
Aerodynamic and Rocket-Exhaust Heating DuringLaunch and Ascent, May 1969
Transient Loads from Thrust Excitation, February1969
Slosh Suppression, May 1969Buckling of Thin-Walled Doubly Curved Shells,August 1969
Spacecraft Earth Horizon Sensors, December 1969
Spacecraft Mass Expulsion Torques, December1969
Wind Loads During Ascent, June 1970Effects of Structural Flexibility on Launch VehicleControl Systems, February 1970Assessment and Control of Spacecraft Magnetic
-
7/27/2019 NASA SP 8077
51/58
SP-8048
SP-8049SP-8050SP-8051
SP-8052
SP-8053
SP-8054SP-8055
SP-8056SP-8057
SP-8058
SP-8059
SP-8060SP-8061
SP-8062SP-8063SP-8065
(ChemicalPropulsion)(Environment)(Structures)(ChemicalPropulsion)(ChemicalPropulsion)(Structures)
(Structures)(Structures)
(Structures)(Structures)
(Guidanceand Control)(Guidanceand Control)(Structures)(Structures)
(Structures)(Structures)(Guidanceand Control)
Liquid Rocket Engine Turbopump Bearings, March1971
The Earth's Ionosphere, March 1971Structural Vibration Prediction, June 1970Solid Rocket Motor Igniters, March 1971
Liquid Rocket Engine Turbopump Inducers, May1971
Nuclear and Space Radiation Effects on Materials,June 1970
Space Radiation Protection, June 1970Prevention of Coupled Structure-Propulsion Insta-bility (Pogo), October 1970
Flight Separation Mechanisms, October 1970Structural Design Criteria Applicable to a SpaceShuttle, January 1971
Spacecraft Aerodynamic Torques, January 1971
Spacecraft Attitude Control During ThrustingManeuvers, February 1971
Compartment Venting, November 1970Interaction with Umbilicals and Launch Stand,August 1970
Entry Gasdynamic Heating, January 1971Lubrication, Friction, and Wear, June 1971Tubular Spacecraft Booms (Extendible, ReelStored), February 1971
-
7/27/2019 NASA SP 8077
52/58
11_ ,
II I
-
7/27/2019 NASA SP 8077
53/58
r Ik I_ L
-
7/27/2019 NASA SP 8077
54/58
-
7/27/2019 NASA SP 8077
55/58
-
7/27/2019 NASA SP 8077
56/58
-
7/27/2019 NASA SP 8077
57/58
i ^
-
7/27/2019 NASA SP 8077
58/58
I