國立清華大學簡訊 - nthu.edu.t78%,將可應用於量子計算及長距離量子通訊。未來將結合光儲 技術與 靜止光脈衝,期望實現單光子的相位調變,開創量子

PointCloud and PointCloud Pro
レーザースキャニング –正確なデータ取得を素早く効率的に
•ほとんどの3Dスキャンデータ フォーマットをAutoCADにイ ンポート
•点群を効率的に管理: マスク、分割、結合
•スキャンデータ、CAD、写真 を有効利用
•3Dワイヤーフレームモデルと ソリッドを素早く構成
•点群セクションにポリライン シリンダー、面を自動適合
•他のデザインプログラムに転送 するためにシリンダーラインを トレーシング
•スキャンデータと作成された CADオブジェクト間の衝突データ を分析
•スキャンデータと写真をコンバ インすることによって得る高解像度
•写真測量機能の統合
一般的な利用シーン
PointCloudはさまざまなAutoCADワークフローを助けます
•歴史的建造物、遺跡の保存に おける管理ドキュメント
•建築物の管理
•考古学遺跡のドキュメンテーション
•事件現場のドキュメンテーションと 証拠保全
AutoCAD上で3Dレーザースキャンデータを分析PointCloud はAutoCAD上にレーザースキャンデータをインポートし、分析、管理モデリングをするためのさまざまな機能があります。現在利用可能なほとんどのスキャンデータフォーマットはPointCloudを使用することによりAutoCADにインポートすることが可能です。
AutoCAD上で点群の管理
手動または自動(UCSまたは指定したパスに沿って平行に)で生成されたセクションは、セクションマネージャーによって点群セクションの表示をコントロール、管理することができます。
3Dスキャンデータの分析PointCLoud ProにはAutoCAD
AutoCADで写真を使用また、PointCloud Proには写真測量機能もあります。標定画像は視覚画質を高めるために点群データ上にオーバーレイさせることができます。デジタルカメラからの単写真は図面にコントロールポイントをアタッチすることによって標定をすることができます。写真上で描かれたジオメトリックオブジェクトは点群の中にそれらの正確な位置に自動的に置かれます。
AutoCADの中で標準的な写真測量PointCloud Proにある標準的な写真測量手順によって画像を使用することができます。2つのセパレート画像で同じ点をクリックすることによってPointCloud Proは望まれた点の3D座標を計算することができます。従って、3Dスキャンデータがない場合でも3Dモデルを作成することができます
kubit GmbH
Software for surveying and documentationFiedlerstr. 36
01307 Dresden Germany
tel +49 351 41767-0
fax +49 351 41767-29
hotline +49 351 41767-25
e-mail [email protected]
Fact Sheet
kubit GmbH has been developing software since 1999. kubit programs enable users to transfer data accurately and efficiently from various measuring devices/sensors into
AutoCAD. The software then offers numerous functions for an efficient analysis, evaluation and documentation of the data within CAD. This way, kubit combines the field-proven
solutions of sophisticated measurement technology with the well-tried CAD functionality for a wide range of users.
From Real World to CAD
で3Dレーザースキャンデータを分析するための強力な機能があります。ポリライン面、シリンダーのようなジオメトリックオブジェクトは自動的に点群に適合されます。これらのオブジェクトの空間的な結合はコーナー、エッジ、頂点を生成します。さらにパイプラインの自動トレーシング/モデリングと衝突検出機能があります。
日本代理店 株式会社みるくる〒150-0043 東京都渋谷区道玄坂1-12-1 電話 03-4360-5557 FAX 03-4360-5790 e-mail [email protected] http://www.mirukuru.co.jp/ http://jp.kubit-software.com/
PointCloud Pro
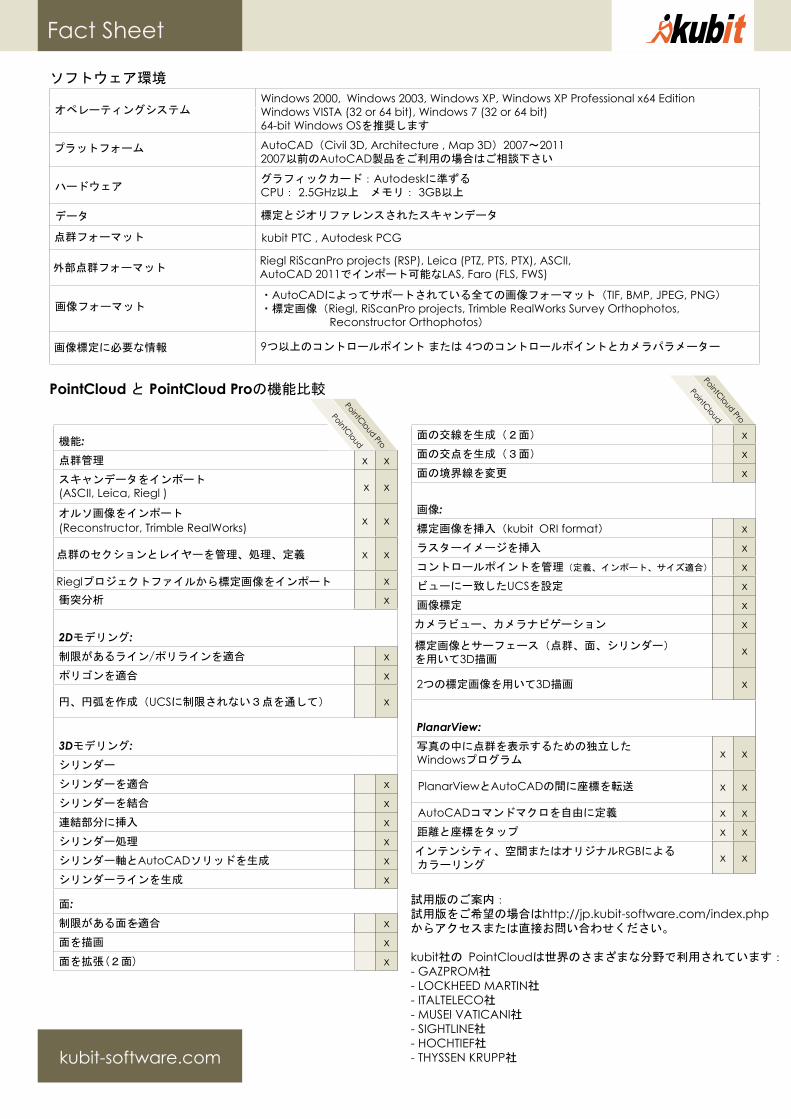
PointCloudソフトウェア環境
オペレーティングシステム Windows 2000, Windows 2003, Windows XP, Windows XP Professional x64 Edition
Windows VISTA (32 or 64 bit), Windows 7 (32 or 64 bit)64-bit Windows OSを推奨します
AutoCAD(Civil 3D, Architecture , Map 3D)2007~20112007以前のAutoCAD製品をご利用の場合はご相談下さい
ハードウェア
グラフィックカード:Autodeskに準ずるCPU: 2.5GHz以上 メモリ: 3GB以上
データ 標定とジオリファレンスされたスキャンデータ
点群フォーマット kubit PTC , Autodesk PCG
外部点群フォーマット Riegl RiScanPro projects (RSP), Leica (PTZ, PTS, PTX), ASCII,AutoCAD 2011でインポート可能なLAS, Faro (FLS, FWS)
画像フォーマット ・AutoCADによってサポートされている全ての画像フォーマット(TIF, BMP, JPEG, PNG)
・標定画像(Riegl, RiScanPro projects, Trimble RealWorks Survey Orthophotos, Reconstructor Orthophotos)
画像標定に必要な情報
9つ以上のコントロールポイント または 4つのコントロールポイントとカメラパラメーター
PointCloud と PointCloud Proの機能比較
kubit-software.com
機能:点群管理 x xスキャンデータをインポート(ASCII, Leica, Riegl )
x x
オルソ画像をインポート (Reconstructor, Trimble RealWorks) x x
点群のセクションとレイヤーを管理、処理、定義 x x
Rieglプロジェクトファイルから標定画像をインポート x衝突分析 x
2Dモデリング:制限があるライン/ポリラインを適合 xポリゴンを適合 x
円、円弧を作成(UCSに制限されない3点を通して) x
3Dモデリング:シリンダー
シリンダーを適合 xシリンダーを結合 x 連結部分に挿入 xシリンダー処理 xシリンダー軸とAutoCADソリッドを生成 xシリンダーラインを生成 x
面:制限がある面を適合 – x面を描画 x面を拡張(2面) x
面の交線を生成(2面) x面の交点を生成(3面) x面の境界線を変更 x
画像:標定画像を挿入(kubit ORI format) xラスターイメージを挿入 xコントロールポイントを管理(定義、インポート、サイズ適合) xビューに一致したUCSを設定 x画像標定 xカメラビュー、カメラナビゲーション x
標定画像とサーフェース(点群、面、シリンダー)を用いて3D描画
x
2つの標定画像を用いて3D描画 x
PlanarView:写真の中に点群を表示するための独立したWindowsプログラム
x x
x x
AutoCADコマンドマクロを自由に定義 x x距離と座標をタップ x x
インテンシティ、空間またはオリジナルRGBによる カラーリング
x x
試用版のご案内:試用版をご希望の場合はhttp://jp.kubit-software.com/index.phpからアクセスまたは直接お問い合わせください。
kubit社の PointCloudは世界のさまざまな分野で利用されています:- GAZPROM社- LOCKHEED MARTIN社- ITALTELECO社- MUSEI VATICANI社- SIGHTLINE社- HOCHTIEF社- THYSSEN KRUPP社
PointCloud Pro
PointCloud
Fact Sheet
プラットフォーム
PlanarViewとAutoCADの間に座標を転送













![iSALEをいた 速衝突物の計算impact/wiki/iSALE/?c=plugin;...衝突後1.2μs Radial6distance6[mm] 0 2 4 6 8 10] S2 0 2 4 • 計算解像が いほど 衝突点 かられた](https://static.fdocuments.nl/doc/165x107/5f0a14d97e708231d429edcc/isale-eeccec-impactwikiisalecplugin-ecoe12s.jpg)