模件型調節器 DMC10 智能編程器軟件包 SLP-D10...
198
No. CP-UM-5143C 模件型調節器 DMC10 智能編程器軟件包 SLP-D10 使用說明書 功能說明篇 非常感謝您購買模件型調節器 DMC10。 本使用說明書對 DMC10 本體及智能編程 器軟件包 SLP-D10 進行說明。本書中記 述了正確安全使用 DMC10 的必要事項。 對於承擔使用 DMC10 的操作盤、裝置的 設計、維護的工作人員請務必在閱讀理 解本書的基礎上使用。 此外,本使用說明書不只在安裝時,在 維護和故障維修時也是必不可少的。請 常備此手冊以供參考。
Transcript of 模件型調節器 DMC10 智能編程器軟件包 SLP-D10...

No. CP-UM-5143C
模件型調節器 DMC10
智能編程器軟件包 SLP-D10
使用說明書
功能說明篇
非常感謝您購買模件型調節器 DMC10。
本使用說明書對 DMC10 本體及智能編程
器軟件包 SLP-D10 進行說明。本書中記
述了正確安全使用 DMC10 的必要事項。
對於承擔使用 DMC10 的操作盤、裝置的
設計、維護的工作人員請務必在閱讀理
解本書的基礎上使用。
此外,本使用說明書不只在安裝時,在
維護和故障維修時也是必不可少的。請
常備此手冊以供參考。

使用上的限制
本産品是在一般設備上使用為前提開發、設計和製造的。 在下列有安全性要求的場合應用時,請在周全考慮了故障保全設計,冗餘設計及定期維護檢查等系統和設備整體的安全性的情况下使用。
• 以人體保護爲目的的安全裝置 • 輸送設備的直接控制(運行停止等) • 航空設備 • 航天宇宙設備 • 原子能設備等
請勿把本産品用在與人身安全直接相關的用途上。
要求
請確保把本使用說明書送到本産品使用者手中。 禁止擅自複印和轉載本使用說明書全部或部分內容。
今後內容變更時恕不事先通知。 本使用說明書的內容經過仔細審查校對,萬一有錯誤或遺漏,
請向本公司提出。 對客戶應用結果,本公司有不能承擔責任的場合,敬請諒解。
©1999 Yamatake Corporation ALL RIGHTS RESERVED
DMC 是株式會社 山武的注冊商標
TM

安全注意事項
■ 圖示說明
此安全注意事項的目的:爲了正確安全使用本産品,防患於未然以免給
您及他人造成危害及財産損失,請務必遵守本安全注意事項。
本書中使用了各種圖形符號。
其表示的含義如下所示,請認真理解所述內容。
警告
注意
■ 圖示例
該符號表示在使用時需要“注意”的內容。
該符號表示“禁止”的內容。
該符號表示必須按照“指示”操作的內容。
i
當錯誤使用本産品時,可能會造成使用者死亡或重傷的危險情况。
當錯誤使用本産品時,可能會造成使用者輕傷或財物損失的危
險情况。

注意
對本産品進行接線、安裝、拆卸時,請務必在切斷供給電源後進行。 否則有觸電的危險。
請勿在本機處於通電中的狀態下從底座上拆下本機。
否則會產生故障。
請勿分解本機。
否則會產生故障。
請在規格書中記載的使用條件(溫度、濕度、振動、撞擊、安裝方向、環境
等)範圍內使用本産品。
否則有發生火災、故障的危險。
請勿蓋住本機的通風孔。
否則有發生火災、故障的危險。 請按規定的標準、指定的電源及施工方法正確配線。
否則有觸電、發生火災、故障的危險。
請勿讓斷線頭、鐵粉、水進入機箱內。
否則有發生火災、故障的危險。
請按規格書中記載的扭矩擰緊端子螺絲。螺絲沒有完全擰緊的話,有發生火
災及故障的危險。
請勿把本機未使用的端子作為中継端子使用。
否則有觸電、發生火災、故障的危險。
有發生雷浪湧危險的場合,請使用本公司的浪湧吸收器。
否則有發生火災、故障的危險。
廢棄本機時,請按各地方的法規及條例,作為産業廃棄物進行恰當處理。
請在規格書中記載的使用壽命範圍內使用本産品的繼電器。超過使用壽命後
如果仍繼續使用,會發生火災及故障的危險。
本機通電後,大約10秒鐘內將不動作。把本機的繼電器輸出作為聯鎖信號使用時請注意。
連接的模件全體的消耗功率不要超過100W。
對所連接的模件,請勿配置2個以上的供電系統。
否則有發生火災、故障的危險。 請勿對控制輸出部(電壓脈衝輸出時)進行短路。如果進行短路,內部電源的
過電流保護將動作,把本機置於復位狀態。
ii

請確認
您購買的SLP-D10由以下內容構成。
請在開箱時確認以下的項目。
1. 檢查商品型號與訂貨內容是否一致。
2. 檢查商品的外觀有無破損。
3. 檢查附屬品是否齊全。
附屬品如下所示。
開箱後,千萬注意不要遺失或損壞附屬品。
萬一出現異常或錯誤的情況,請與銷售店聯繫。
品名 型號 數量 備註
智能編程器軟件包 SLP-D10
系統光盤
SLP-D10J50
1 CD-ROM
専用纜線一根 — 1
使用說明書 CP-UM-5143C 1 本書
用戶登記卡 1
在用戶登記卡上記入必要事項後,請立即返送本公司。如果不進行登記,將不通知有關版本升級的信息,對用戶的咨詢也將不於對應。
iii

本使用說明書的定位
DMC10相關的使用說明書共有3冊。請根據用途閱讀相應的使用說明書。如果您手裏無相關資料時,請向
弊公司或銷售代理店索取。
模件型調節器 DMC10S, DMC10D 資料編號 CP-UM-5126
DMC10S或DMC10D 與本體同包裝。僅對DMC10S、DMC10D在使用上的注意事項﹑ 規格及接線進行說明。
模件型調節器 DMC10E 資料編號 CP-UM-5131
DMC10E 與本體同包裝。僅對DMC10E在使用上的注意事項﹑規格及接線進行說明。
模件型調節器 DMC10 智能編程器軟件包 SLP-D10功能說明篇
資料編號 CP-UM-5143C
本書。
與智能編程器軟件包SLP-D10的系統光盤同包裝。對DMC10本體和SLP-D10進 行說明。對DMC10的概要、裝入裝置時的設置方法、配線方法、維護檢查、故障時的處理、功能的規格、SLP-D10的安裝方法、計算機的操作﹑各功能、設定方法進行說明。
iv

本使用說明書的構成 本使用說明書由以下內容構成。
第1章 概 要
對本機的概要及產品的型號進行說明。
第2 章 各部分的名稱及功能
對本機各部分的名稱及功能進行說明。
第3 章 安裝
對本機的安裝場所、安裝方法進行說明。
第4章 接 線
對本機的接線、電源、RS-485 通訊的連接進行說明。
第5 章 機器連接與構成
對本機的系統的構成、產品的型號進行說明。
第6 章 設定及操作
使本機動作所需的整體操作方法進行說明。
第7章 編程器
對本機専用的智能編程器軟件包 SLP-D10的操作方法進行說明。
第8 章 設定參數 (DMC10S、DMC10D 共通)
對設定參數一覧及各功能進行詳細說明。 第9 章 設定參數 (DMC10D)
僅對與DMC10D相關的設定參數的追加部分進行詳細說明。 第10章 CPL通訊功能
本機與計算機或PLC等上位機器採用本公司標準的CPL通訊時,對其通訊
方法進行說明。
第11章 MODBUS通訊功能
本機與計算機或PLC等上位機器採用MODBUS通訊時,對其通訊方法進行說
明。
第12章 校 正
對本機的校正方法及步驟進行說明。
第13章 故障處理
對本機發生故障時的原因分析、處理方法進行說明。
第14章 規 格
對本機的一般規格、性能規格、外形尺寸等進行說明。
附 錄
記載了有關使用方法上的建議。
v

目 錄
安全注意事項 請確認 本使用說明書的定位 本使用說明書的構成 本使用說明書的標記
第1章 概 要
■ 特 長 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 1-1
■ 型號構成 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 1-2
第2 章 各部分的名稱與功能
■ 本 體 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 2-1
■ 底 座 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 2-2
第3 章 安裝
■ 安裝場所 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 3-1
■ 模件的連接 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 3-1
■ 安裝方法 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 3-1
■ 把本體安裝在底板上 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 3-2
第4章 接 線
■ 接 線 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-1
■ 接線上的注意事項 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-4
■ 電源的連接 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-6
■ 通訊的連接 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-6
■ 與SSR的連接 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-7
第5 章 機器連接及構成
■ 連接台數 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 5-1
■ 機器地址的設定 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 5-2
■ 與CMC10組合時的構成 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 5-3
■ 事件輸出模件DMC10E的配置 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 5-4
第6 章 有關設定與操作
■ 整體的操作步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 6-1
■ 設定方法 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 6-1
vi

第7 章 編程器
7-1 概 要 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-1
■ 編程器的功能 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-1
■ 顯示語言的切換 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-1
■ 動作所需的系統環境 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-2
7-2 安裝與啟動、結束 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-3
■ SLP-D10的安裝 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-3
■ USB編程器纜線設備驅動器的安裝• • • • • • • • • • • • • • • • • • • • • • • • • 7-6
■ 啟動SLP-D10• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-12
■ 結束SLP-D10• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-12
7-3 設定功能 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-13
■ 設定功能的概要 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-13
■ 畫面的說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-13
■ 操作步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-15
7-4 監視功能 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-19
■ 概 要 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-19
■ 畫面說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-20
■ 數值監視畫面的操作方法 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-21
■ 趨勢監視操作方法 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 7-23
第8 章 設定參數 (DMC10S、DMC10D 共通)
8-1 設定參數一覽 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-1
■ 基本功能 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-1
■ 可選功能 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-3
8-2 基本功能說明的詳細說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-5
■ PV 輸入• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-5
■ 控制輸出關聯 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-8
■ SP、控制參數 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-12
■ 通 訊 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-13
■ 其他 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-14
8-3 可選功能的詳細說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-16
■ 事件輸出 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-16
■ 變流器輸入• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-25
■ 外部開關輸入• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-26
■ 輔助輸出(電流輸出) • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-29
8-4 事件輸出特殊動作 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-30
■ 設定參數(僅事件輸出特殊動作相關部分) • • • • • • • • • • • • • • • • • • 8-30
■ 詳細說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-31
8-5 外部開關輸入特殊動作 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-32
■ 設定參數(僅外部開關輸入特殊動作相關部分) • • • • • • • • • • • • • • • • 8-32
■ 詳細說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-32
vii

第9 章 設定參數(DMC10D)
9-1 高級功能的概要 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-1
■ PV 輸入關聯 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-1
■ 控制輸出關聯 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-1
9-2 基本功能的詳細說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-3
■ 加熱冷卻控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-3
■ CH間偏差控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-4
■ 遠程SP控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-5
■ 位置比例控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-6
■ 時間比例省電模式• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-11
■ 操作量分支控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 9-14
第 10 章 CPL通訊功能
10-1 通訊的概要 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-1
■ 特 長 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-1
■ 初始設定 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-1
■ 通訊步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-2
10-2 電文的構成 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-3
■ 電文的構成 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-3
■ 數據鏈層• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-3
■ 應用層 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-5
10-3命令的說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-6
■ 連續數據讀出命令(RS命令) • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-6
■ 連續數據寫入命令(WS命令) • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-7
■ 固定長連續數據讀出命令(RD命令) • • • • • • • • • • • • • • • • • • • • • • • • • 10-8
■ 固定長連續數據寫入命令(WD命令) • • • • • • • • • • • • • • • • • • • • • • • • • 10-9
■ 固定長隨機讀出命令(RU命令) • • • • • • • • • • • • • • • • • • • • • • • • • • 10-10
■ 固定長隨機寫入命令(WU命令) • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-11
10-4 字地址的定義 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-12
10-5 應用層的數值表現形式• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-13
10-6 結束代碼一覽• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-14
10-7 發送接收時間 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-15
■ 命令電文、應答電文時間規格 • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-15
■ RS-485 驅動器控制時間規格• • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-15
10-8 所有通訊參數一覽表(RAM地址順序)• • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-16
■ 字信息數據 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-16
■ 位信息數據 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-34
10-9 通訊條件的詳細說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-43
■ 寫入條件 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-43
■ 寫入範圍 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-44
■ 通常寫入禁止 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 10-45
10-10 制作主站用通訊程序時的注意事項• • • • • • • • • • • • • • • • • • • • • • • • • • 10-46
viii

第 11 章 MODBUS通訊功能
11-1 通訊的概要 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-1
■ 特 長 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-1
■ 初始設定 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-1
■ 通訊步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-1
11-2 電文的構成 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-2
■ 電文的構成 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-2
■ 發送電文 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-4
■ 應答時間 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-4
■ 其他規格 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-4
11-3 命令的說明 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-5
■ 讀出命令(03H) • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-5
■ 寫入命令(10H) • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 11-7
第 12 章 校正及齊納柵調整
■ 校正前的注意事項• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 12-1
■ 校正時必要的測定器 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 12-1
■ 校正步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 12-1
■ 有關齊納柵調整 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 12-5 第 13 章 故障處理
■ 報警檢查時前面LED的使用方法 • • • • • • • • • • • • • • • • • • • • • • • • 13-1
■ PV 輸入關聯 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 13-2
■ 本體報警關聯• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 13-2
■ 編程器通訊關聯 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 13-3
■ 上位通訊關聯 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 13-3
■ 控制關聯 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 13-4 第 14 章 規 格
14-1 一般規格 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 14-1
■ 環境條件 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 14-1
■ 其他規格 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 14-1
14-2 性能規格 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 14-2
■ PV 輸入 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 14-2
■ 輸入輸出間隔離 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 14-6
■ 外形尺寸 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 14-6
ix

附 錄
附-1 與控制參數相關的建議 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-1
■ ON/OFF控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-1
■ 自適應控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-1
■ PID固定值控制 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-2
附-2 與事件相關的建議 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-3
附-3 事件輸出特殊動作 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-5
■ 事件輸出特殊動作的內部構造 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-5
■ 輸出特殊動作的方塊圖 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-6
■ 事件輸出特殊動作的使用步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-7
附-4 外部開關輸入特殊動作 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-10
■ 外部開關輸入特殊動作的概略 • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-10
■ 外部開關輸入特殊動作的使用步驟 • • • • • • • • • • • • • • • • • • • • • • • • 附-12
■ 事件輸出特殊動作與外部開關輸入特殊動作組合使用例 • • • • • • • • • • • • 附-14
附-5 加熱冷卻控制使用時的設定 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-15
■ 設定步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-15
附-6 遠程SP使用時的設定 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-16
■ 設定步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-16
附-7 通道間偏差控制使用時的設定 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-17
■ 設定步驟 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 附-17
索 引
x

本使用說明書的標記 本使用說明書的標記如下。
使用上的注意事項 :表示在使用時敬請注意的事項。
參 考 :知道後易於理解的事項。
:表示敬請參照的項目及頁碼。
①②③ :表示操作步驟或者對圖等進行相應說明的部分。
[打開] 按鈕 :表示計算機畫面的選擇按鈕。
:表示計算機畫面的圖標。
[SLP-D10.exe] :表示計算機畫面的信息及菜單。
[印刷]
[打開文件]
》 :表示操作的結果、計算機或機器上顯示的內容或操作後機器的狀態。
[Tab]鍵、[F4] 鍵 :表示鍵盤的鍵。
Ctrl + T 鍵 :表示按住鍵盤的[Ctrl]鍵後按[T]鍵。
-(負)~ 有關數值範圍的表示,從-(負)到+(正)的範圍時,本書採用
+(正) -10~+100 表示。
單方向的場合,例如0~1000時,不加+(正)
標號。對通訊的送信、收信所使用的數據,不需要+(正)標號。
如果使用+(正)標號,會產生錯誤,敬請注意。
xi

第 1 章 概 要
■ 特長
● 本機是1台具有2電路或4電路的帶有調節功能的模件型調節器。
● 輸入種類可指定熱電偶(K、J、E、T、R、S、B、DIN U、DIN L、PLII)、
熱電阻(Pt100、JPt100)、電流信號(4~20mA DC)、電壓信號(0~1V DC、
0~5V DC、1~5V DC),各通道可獨立指定各自的輸入種類。所以,不同
種類的輸入可組合使用。另外,各通道間相互隔離,所以無需擔心因回流
電路引起的故障。
● 控制輸出種類有繼電器、電壓脈衝型,可執行ON/OFF控制、自適應控制、
固定PID控制。
● 2CH型的可選功能中,加熱器斷線警報所使用的變流器輸入、上下限
警報或加熱器斷線警報、可作為延遲定時器功能使用的事件輸出、
RUN/READY或AUTO/MANUAL切換、作為四個設定值的切換功能使用的外部
開關輸入、能輸入PV值的趨勢到記錄儀的電流輸出(AUX),根據
用途可選擇(4CH型中,不能附加可選功能)。另外,電流輸出(AUX)根
據設定,還可用於控制輸出等。
● 通過使用另售的事件輸出模件,4CH模件也可作為事件輸出使用。
● 通過本機側面的連接頭或底座上配備的中継端子,可 大連接15塊模件。 ● 本機沒有顯示/設定部,所以結構小巧,寬30mm×高100mm×深110mm。
● 本機可安裝在DIN導軌上或用螺絲固定在牆壁上,所以能簡單地安裝到盤或
裝置上。
● 另售的DMC10智能編程器軟件包對應DOS/V計算機(OS採用Windows)。
● 用另售的DMC10智能編程器軟件包可簡單的進行參數的読寫操作。除表形
式的設定外,還可在運行時進行操作或對趨勢畫面控制狀態進行監視,所
以上位機器沒有程序也可進行本機的操作。
● 高級功能版DMC10D除上述特長外,還可使用加熱/冷卻控制、CH間偏差控
制、遠程SP輸入、位置比例控制、節電功能。 ● 符合IEC指令,帶CE標示。
(適合規格:EN61010-1、EN50081-2、EN50082-2)
另外,裝置取得CE規格的場合,請使用帶CE標示的、市面上銷售的24VDC
電源。
1-1

第1 章 概 要
■ 型號構成
● DMC10S、DMC10D的型號構成
基本型號 CH數 配線方法 控制輸出 可選項 追加處理 規 格
DMC10S 標準型 *1
DMC10D 高級功能型
2 2CH輸入 *2
4 4CH輸入 *3
T 端子配線
C 連接頭配線
R 繼電器輸出
V 電壓脈衝輸出(SSR駆動用)
00 無
01 CT輸入2點、事件繼電器輸出4點
02 CT輸入2點、外部開關輸入4點
03 AUX輸出2點、事件繼電器輸出4點
04 AUX輸出2點、外部開關輸入4點
05 CT輸入2點、事件繼電器輸出2點、事件電壓輸出2點
06 CT輸入2點、外部開關輸入2點、事件電壓輸出2點
00 無
D0 帶檢查成績書
Y0 跟蹤証明對應
*1: 選擇標準型時,不能選擇可選項“05”、“06”。
*2 : 選擇2CH輸入時,不能選擇可選項“00”。
*3 : 選擇4CH輸入時,可選項“00”固定。
有關加熱冷卻控制、位置比例控制的可選型號,請參閱
9-1、9-3頁。
● DMC10相關產品一覽表
型 號 規 格
DMC10E4CR0000 事件輸出模件(4CH 繼電器輸出)
SLP-D10J50 DMC10用智能編程器軟件包(含専用纜線)
81440792-001 連接頭套(4個裝、PHOENIX CONTACT公司生產的 MSTB2、 5/5-STF-5、 08AU)
SDU10T0100 DMC10用簡易顯示器
● CMC10 相關產品一覽表
型 號 規 格
CMC10ACL1A000 通訊控制器 CC-Link/CPL轉換器
CMC10BCP1A000 通訊控制器 CPL/CPL轉換器
CMC10L001A000 RS-232C/RS-485 轉換器
CMC10G001A000 通訊控制器 PLC/調節器轉換器
SLP-CM1J20 CMC10B 用智能編程器軟件包(含専用纜線)
81446717-001 * CMC10A 用終端電阻單元(110Ω、2 個)
81446717-002 * CMC10A 用終端電阻單元(130Ω、2 個)
81446748-001 CMC10L 用AC適配器
81440792-001 連接頭套(4個裝、PHOENIX CONTACT公司生產的MSTB2、5/5-STF-5、08AU)
* 請在 CC-Link兩端的單元上,連接該終端電阻。根據纜線種類等,對CC-Link的終端電阻的規定不同。有關
終端電阻的詳細說明,請參閱
三菱電機(株) CC-Link 系統主• 從單元用戶手冊(詳細篇)及三菱PLC定序器技術訊息(No.PLC-D-330)。 1-2

第 2 章 各部分的名稱及功能
■ 本 體
● DMC10S、DMC10D
機器地址用 撥碼開關 :上位通訊時設定 0 :不能通訊 (出廠時設定) 1~F :通訊有效
編程器插孔 :DMC10智能編程器軟件包 用與SLP-D10J20同包裝的専用纜線連接,
用編程器進行設定/監視時使用
POWER燈 :電源供給時燈亮 (出廠時設定) 電源投入後約10秒鐘執行初始化, 燈閃爍 初始化期間不能通訊 根據設定,可進行各種狀態的監視
● DMC10E
EV1~4動作燈 :模件內的對象CH的繼電器接點 ON時燈亮
參 考
DMC10S、DMC10D的連接頭配線型及DMC10E 用適合連接頭,其部件編號為
81440792-001(4個/套)。
與PHOENIX CONTACT公司生產的MSTB2, 5/5-STF-5,08AU相當。
2-1

第2 章 各部分的名稱及功能
■ 底座
安裝螺絲孔 :2處 用M3螺絲 固定底座
卡銷 :固定本體
通訊切斷開關 :左側連接的機器 不進行CPL通訊 時使用 出廠時為 CONNECT側 (連接)
側連接頭 電源端子
安裝螺絲孔
DIN導軌固定器 :固定到DIN導軌上 時使用
CPL通訊端子 :3線式RS-485的 連接端子
2-2

第 3 章 安裝
注意
請在規格中記載的使用條件 (溫度、濕度、振動、撞擊、安裝角度、 環境等) 範圍內使用本機。 否則有發生火災、故障的危險。
請勿蓋住本機的通風孔。
否則有發生火災、故障的危險。 ■ 安裝場所
請勿安裝在以下場所。
• 超過規格範圍的高溫、低溫、高濕度、低濕度的場所
• 有硫化氣等腐蝕性氣體的場所
• 有粉塵、油煙等的場所
• 陽光直射、風吹雨淋的場所
• 有超過規格範圍允許的機械振動、撞擊的場所
• 高壓線下、焊接機及電氣干擾發生源的附近
• 在離鍋爐等高壓點火裝置15m以內的場所
• 受磁場影響的場所
• 有可燃性液體或蒸氣的場所
■ 模件的連接
本機可通過底板左右的側連接頭與別的模件連接。請在DIN導軌安裝或螺絲
安裝前進行模件的連接作業。模件連接後,各模件的電源及CPL通訊被連接,
可實現省配線。可用底板的通訊切斷開關切斷通訊。
■ 安裝方法
本機安裝時可采取用螺絲固定到底板上或使用DIN導軌的任一方法。
● 請按下圖的方向安裝本機。
上面
前面
使用上的注意事項
從水平位置的前後左右的安裝角度,不要超過規格範圍的傾斜角度。
3-1

第3 章 安裝
● 請勿按下圖的方向安裝。
前面
前面
上面
上面
● 螺絲安裝的場合
用M3螺絲固定底板的2處安裝螺絲孔。
(30)
5 10±0.2
+0.9 30+0.3
單位:mm
M3
● DIN導軌安裝的場合
固定DIN導軌後,把DIN導軌固定器充分拉出後把底座掛在導軌上。然後向上
按壓模件直到聽到喀噠一聲為止。
■ 把本體安裝在底板上
掛鈎掛住底座,按壓模件直到聽到卡銷發出喀噠一聲為止。拆卸時,按住上
部的卡銷朝自己的方向拉。
卡銷
掛鈎
3-2

第 4 章 接 線
注意 請務必先切斷電源後再進行本機接線或安裝、拆卸。
否則有發生故障的危險。 本機接線時,請按規定的標準、指定的電源線及施工方法進行正確配線。
否則有觸電、發生火災及故障的危險。 請按規格中記載的扭矩可靠的擰緊端子螺絲。如果端子螺絲緊固不完全,有可
能發生火災。 請勿把本機未使用的端子作為中継端子使用。
否則有觸電、發生火災及故障的危險。
■ 接 線 ● 2CH 型
CT輸入(CH1) AUX輸出(CH1)
ADR 0
21
4
C
8LDR
PWR
DMC10
11 繼電器輸出(CH1) 電壓輸出(CH1)
CT 21 22
CT1 21 + 22 -
AUX122 12
OUT1 11
12
11 + 12 -
外部开关輸入 (CH1/2)
事件繼電器輸出(CH1/2) 23 13
熱電偶輸入(CH1) 熱電阻輸入(CH1) 直流電壓/ 直流電流輸入(CH1)
RSW1 23
RSW2 RSW
事件1
事件2 EV1,2 24 14
13 13 C 13 +mA
24 25
1,224 25 25 15
PV1 14 - 15 +
14 B 15 A V
14 - 15 +
CT輸入(CH2) AUX輸出(CH2)26 16
繼電器輸出(CH2) 電壓輸出(CH2)
CT 26 27
CT2 26 +
27 -
AUX227 17
OUT2 16
17
16 + 17 -
外部开关輸入 (CH3/4)
事件電壓輸出 (CH3/4)
事件繼電器輸出(CH3/4) 28 18
RSW3
RSW4 RSW
3,4
事件3 事件4
事件3
事件4 EV3,4 29 19 PV2
18 19 -
18 C 19 B
mA V
18 + 19 -
30 30 2020 + 20 A 20 +
● 4CH 型
*帶連接頭的型號的端子編號相同。
ADR 0
21
4
C
8LDR
PWR
DMC10
11
繼電器輸出(CH1) 電壓輸出(CH1)
21 + 21 A 21 +V
OUT1 11 11 +
22 - 22 B 22 -PV3 22 12 12 12 -
23 23 C mA 23 23 13 熱電偶輸入(CH1) 熱電阻輸入(CH1) 直流電压/直流電流
輸入(CH1)
13 13 C 13 +
24 25
24 - 25 +
OUT3
24
25
14
15
PV1 14 - 15 +
14 B 15 A V
14 - 15 +
26 16
26 + 27 -
26 A 27 B
V 26 + 27 -
PV4 27 17
OUT2 16
17
16 + 17 -
28 28 C mA 28 28 18
29 19 PV2
18 19
18 C 19 B
mA18 + 19 -29
30
29 - 30 +
OUT430 20
20 20 A V20
*帶連接頭的型號的端子編號相同。
4-1
28 +
29 -
23
28 +
29 +
30 -
28
29
30
熱電偶輸入(CH2) 熱電阻輸入(CH2) 直流電壓/ 直流電流輸入(CH2)
繼電器輸出(CH2) 電壓輸出(CH2)
熱電偶輸入(CH2) 熱電阻輸入(CH2) 直流電压/直流電流輸入(CH2)
熱電偶輸入(CH3) 熱電阻輸入(CH3) 直流電压/直流電流輸入(CH3)
熱電偶輸入(CH4) 熱電阻輸入(CH4) 直流電压/直流電流輸入(CH4)
繼電器輸出(CH4) 電壓輸出(CH4)
繼電器輸出(CH3) 電壓輸出(CH3)

第4 章 接 線
● 加熱冷卻型 (2CH 型)
AUX1
AUX2
EV3,4
4
ADR 0
C
21
22
23
24
25
26
27
28
29
30
LDR
8
PWR
DMC10
11
12
13
14
15
16
17
18
19
20
OUT1
PV1
OUT2
PV2
加熱冷卻控制的場合,根據型號,需要設定各回路的輸出。4CH型沒有加熱
冷卻型。
設定內容與輸出規格的關係如下。
下記的設定是僅在使用編程器進行全體寫入時才被設定。 設定 操作端類型 ch1 輸出 ch2 輸出 可利用的型號 備 注
端口 端口
0 加熱: 繼電器 OUT1 OUT2 • DMC10D2XR01X0
冷卻: 繼電器 EV3 EV4 • DMC10D2XR03X0
1 加熱: 電壓 OUT1 OUT2 • DMC10D2XV01X0
冷卻: 繼電器 EV3 EV4 • DMC10D2XV03X0
2 加熱: 繼電器 EV3 EV4 • DMC10D2XV01X0
冷卻: 電壓 OUT1 OUT2 • DMC10D2XV03X0
3 加熱: 電壓 EV3 EV4 • DMC10D2XR05X0
冷卻: 繼電器 OUT1 OUT2 • DMC10D2XR06X0
4 加熱: 繼電器 OUT1 OUT2 • DMC10D2XR05X0
冷卻: 電壓 EV3 EV4 • DMC10D2XR06X0
5 加熱: 電壓 OUT1 OUT2 • DMC10D2XV05X0
冷卻: 電壓 EV3 EV4 • DMC10D2XV06X0
6 加熱: 繼電器 OUT1 OUT2 • DMC10D2XR03X0
冷卻: 電流 AUX1 AUX2 • DMC10D2XR04X0
7 加熱: 電流 AUX1 AUX2 • DMC10D2XR03X0
冷卻: 繼電器 OUT1 OUT2 • DMC10D2XR04X0
8 加熱: 電壓 OUT1 OUT2 • DMC10D2XV03X0
冷卻: 電流 AUX1 AUX2 • DMC10D2XV04X0
9 加熱: 電流 AUX1 AUX2 • DMC10D2XV03X0
冷卻: 電壓 OUT1 OUT2 • DMC10D2XV04X0
10 加熱: 電流 AUX1 - • DMC10D2XX03X0 僅1回
冷卻: 電流 AUX2 - • DMC10D2XX04X0 路控制
注:可利用的型號中的X可以是對應的任一功能代碼。
4-2

第4 章 接 線
● 位置比例型 (2CH 型)
EV3,4
ADR 0
21
22
23
24
25
26
27
28
29
30
4 LDR
8
C PWR
DMC10
11
12
13
14
15
16
17
18
19
20
OUT1
PV1
OUT2
PV2
在位置比例控制時,作為1CH或2CH的位置比例控制用控制器使用。 下記的輸出端子分配僅在使用編程器進行全體寫入時才被設定。
可利用的型號 位置比例 PV 反饋 OPEN CLOSE 備 注
CH號 輸入 DMC10D2XRXXX CH1 PV1 PV2 OUT1 OUT2 有反饋
CH2 - - - -
DMC10D2XR01X CH1 PV1 - OUT1 OUT2 無反饋
DMC10D2XR03X CH2 PV2 - EV3 EV4
注:可利用的型號中的X可以是對應的任一功能代碼。
使用上的注意事項
• 馬達駆動中,請務必使用輔助繼電器。
• 把位置比例設定為有反饋的場合,PV輸入CH即為反饋輸入。(參照上
述內容)
• 馬達的連接如下。
馬達 Y
T
A DMC
B PV輸入
G C
• 不使用位置比例CH2的場合,通過變更事件特殊輸出動作(輸出端子
的分配),可把EV3、EV4作為通常的EVENT端子使用。
• 不使用位置比例CH2的場合,DMC10D2XRXXX的型號也可選擇。
• 不能變更反饋輸入的通道。
● 位置比例型 (4CH 型)
PV3
OUT3
PV4
OUT4
ADR 0
21
22
23
24
25
26
27
28
29
30
4 LDR
8
C PWR
DMC10
11
12
13
14
15
16
17
18
19
20
OUT1
PV1
OUT2
PV2
可利用的型號 位置比例 PV 反饋 OPEN CLOSE 備 注
控制CH號 輸入 DMC10D4XRXXX CH1 PV1 PV3 OUT1 OUT3 有反饋
CH2 PV2 PV4 OUT2 OUT4
DMC10D4XRXXX CH1 PV1 - OUT1 OUT3 無反饋
CH2 PV2 - OUT2 OUT4
注:可利用的型號中的X可以是對應的任一功能代碼。
4-3

第4 章 接 線
● DMC10E的接線
EV1
EV2
EV3
EV4
擴展事件(CH1)
EV1
11
11 11 NO 12
12 12
NC 13 13 13
EV2
14 14
15 15
擴展事件(CH2)
14
15
擴展事件(CH3)
EV3
16 16 16
17 17 NO 17
18 18 NC 18
19 19
EV4
20 20
DMC10
擴展事件(CH4) 19
20
NO:Nomaly Open (開) NC:Nomaly Close (閉)
■ 接線上的注意事項
注意
本機在通電後,約10秒鐘將不動作。把本機的繼電器輸出作為聯鎖信號使用 的場合,敬請注意。
• 請確認貼在本體側面的標簽上標明的儀錶型號及端子號後,再接線。
• 請採用與M3.5螺絲匹配的壓接端子進行端子的連接。
• 請注意壓接端子等不能與相隣的端子接觸。
• 請把輸入輸出信號線距離動力線或電源線50cm以上。並且請勿放在同一
配線管或線槽內。
• 與其他儀錶並聯的場合,請充分調查其他儀錶的條件後再進行作業。
• 請把加熱器電流流經的導線穿過變流器。同時,加熱器電流不能超過規
格記載的容許電流。否則會損壞本機。
• 本機通電後,為了確保穩定, 長10秒鐘將不動作。之後進入運行狀態,
但為了達到規定的精度,請進行預熱。預熱時間在30分鐘以上。
• 接線完成後,在通電前請確認有無連接錯誤。
4-4

第4 章 接 線
● 連接頭的接線(81440792-001:另售品)
• 使用纜線的規格
線種 :單線、絞線均可
線規格 :0.2 ~ 2.5mm2 (AWG28 ~ 12)
恰當剝離 :7mm
7mm
• 螺絲擰緊扭矩
連接頭端子部 :0.5~0.6N·m
連接頭安裝部 :0.5~0.6N·m
• 推薦螺絲刀規格
為了可靠的固定電纜,請使用與連接頭螺絲吻合的螺絲刀。
製造商名 :PHOENIX CONTACT公司
型號 :SZS0.6 × 3.5
參 考
• 壓接端子
如果要在各電纜上作記號,一般是利用壓接端子的護套。下記
列舉的是與本連接頭吻合的壓接端子,供參考使用。
製造商名:日本壓接端子(株)
型號: VTUB-1.25
(帶絶縁護套、1000個裝、線徑:0.25~1.65mm2)
VTUB-2
(帶絶縁護套、1000個裝、線徑:1.04~2.63mm2)
TUB-1.25
(不帶絶縁護套、1000個裝、線徑:0.25~1.65mm2)
TUB-2
(不帶絶縁護套、1000個裝、線徑:1.04~2.63mm2)
4-5

第4 章 接 線
■ 電源的連接
注意
請把連接的模件消耗功率的総和控制在100W以內。
電源端子的連接如下所示。連接的模件之間,電源相互連接。請對連
接的任一模件供電。
編號 信號名
1 24V DC(+)
2 24V DC(-)
3 禁止使用
1 2 3
禁止使用 + -
24V DC
為了使其符合UL規格,請連接UL CLASS 2 的電源。
使用上的注意事項
選擇電源時,要考慮所連接模件消耗功率的總和。
■ 通訊的連接
通訊(RS-485)採用3線式連接。請連接任意一個相互連接的模
件,進行通訊。
編號 信號名
4 DA
5 DB
6 SG
4 5 6
DA DB SG
RS-485
使用上的注意事項
• 本機內藏有與終端電阻相當的電阻。 請勿與外部終端電阻連接。
• 即使採用與本公司產品SDC系列、DCP系列、SRF系列等同一通訊線時,
也不要連接終端電阻。
• 請務必連接SG。否則通訊會出現不穩定的情況。
4-6

第4 章 接 線
■ 與SSR的連接
主要的SSR可多台連接。
但有連接條件,敬請注意。
● 與PGM102/152/202/302/402(山武產品)連接的場合
SSR台數 連接條件 備 注
1 串聯時需要510Ω(消耗功率1/2W以上) 的外部電阻
DMC10
電壓輸出
510Ω
PGM
SSR
2 串聯連接
與1台PGM(山武產品)的連接方法
DMC10
3 串聯連接
電壓輸出 PGM
SSR
••••
PGM
SSR
與2台以上PGM(山武產品)的連接方法
與PGM102/152/202/302/402(山武產品)連接台數為2台時的計算例如下。
DMC10 R1
PGM
R2
PGM
R2 V
VF VF
V :13V±5%
R1:150Ω±5%
R2:260Ω
VF:1.2V
PGM的端子間電壓=
(V-2×VF)
R1+2×R2
×R2+VF
≒ 5.3V
PGM的容許端子間電壓:3~6V時上記的動作可能
4-7
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-

第4 章 接 線
● 與PGM10N/F(山武產品)連接的場合
SSR 台數 連接條件 備 注
1
2 並聯連接
DMC10
電壓輸出
SSR
•••• SSR
3 並聯連接
(僅PGM10N)
與2台以上PGM的連接方法
與PGM10N015連接時的計算例如下。
• SSR的輸入電流的 大值≦電壓脈衝輸出的容許 大電流值:
輸入電流在10mA以下,10mA×3台=30mA,所以電壓脈衝輸出的容許 大
電流為30mA。所以可驅動3台。
• SSR的輸入電壓範圍在電壓脈衝輸出的端子間電壓的範圍內:
13V±5%(輸出的端子間電壓)-150 Ω±5%(內部電阻)×30mA(駆動電
流3台)≒ 7.5~9.5V
SSR的輸入電壓範圍為3.5~30V內。所以可駆動3 台。
● 與G3PA(歐姆龍產品)連接的場合
SSR 台數 連接條件 備 注
1 DMC10 200VAC
G3PA
G3PA
200VAC
2 並聯連接 電壓輸出
SSR ••••
負載 SSR 負載
3 並聯連接
與2台以上G3PA(歐姆龍產品)的連接方法
4-8
+
-
+
-
+
-
+
-
+
-
+
-

第 5 章 機器連接及構成
■ 連接台數
● 15 台以下的連接
相對於1台上位機器(計算機、可編程顯示器、 PLC),可直接連接的本機
的台數 大為15台。
參 考
通訊必要的時間大致如下。
通訊時間={(每1台的數據數)×3.3ms+27ms}×連接台數。
但該值是在19200bps速度下,使用本公司的主機用測試程序的場合
(Windows98、Pentium Ⅲ 800MHz),含主機側的處理時間在內的參考值。
上記條件下,4ch型15台多分支連接,讀出各機器的PV=4ch×15台(全部60ch
的PV)的場合
• RS-232C/RS-485轉換時請使用本公司的CMC10L
• 通訊命令:RD03EA0004(各機器讀出4ch的PV)的場合,約600ms完成。
上位機器的動作內容,根據與本機的通訊內容、設定、使用命令等不同,會
有很大差異。請作為參考值。
CMC10L
CMC10L是RS-232C RS-485的轉換器。
上位機器具有3線式RS-485的通訊端口的場合,不需要。
● 16 台以上的連接
連接16 台以上的場合,需要使用另售的通訊轉換器CMC10B。
CMC10L
CMC10B
CMC10B CMC10B
DMC10S
DMC10D
DMC10S
DMC10D
DMC10S
DMC10D
RS-485 RS-485
參 考
相對於上位機器, 大可連接31台的CMC10B。
使用上的注意事項
• 連接台數是指電氣上可連接的數量。連接時,需要確認通訊速度
是否滿足應用的要求級別。請向本公司銷售店或本公司銷售員垂詢。
• 連接台數中不包括事件輸出模件DMC10E。
5-1
最大 15 台
最大 15 台 最大 15 台 最大 15 台
DMC10S/DMC10D

第5 章 機器連接及構成
■ 機器地址的設定
使用本機時,需要設定機器地址。
機器地址的設定如下:
● 1台上位機器連接15臺本機的場合,請把前面的機器地址用旋轉開關各
自設定為1~F後,重新通電。
使用上的注意事項
不可使用相同的號。
● 1台上位機器通過數台CMC10B連接15台本機的場合
① 請把CMC10B的機器地址用旋轉開關設定為1~99之間的數。
② 請把本機前面的機器地址用旋轉開關設定為1~F之間的數。
CMC10L
CMC10B(設定1~99的值)
DMC10S/DMC10D
(設定1~F的值)
CMC10B(設定1~99的值)
DMC10S/DMC10D
(設定1~F的值)
CMC10B(設定1~99的值)
DMC10S/DMC10D
(設定1~F的值)
RS-485 RS-485
參 考
上位機器可 大連接31台CMC10B。
使用上的注意事項
• 使用MODBUS的場合,不可連接CMC10B。
• 同一CMC10B上連接的DMC10,請務必使用不同的機器地址。
• 不同CMC10B連接的場合,可使用相同的機器地址。
• 有關CMC10B設定的詳細內容,請參閱另冊的通訊控制器CMC10B
(CPL/CPL轉換器)
使用說明書“設計篇”CP-SP-1064。
5-2

第5 章 機器連接及構成
■ 與CMC10組合時的構成
● CMC10之間的連接
用側面連接頭進行CMC10B相互連接的場合,請把底板的通訊切斷開關切換到
右側。各CMC10的下位通訊獨立。
把通訊切斷, 開關切換到右側
[例] 以下構成時,有必要只把CMC10B位於底板上的通訊切斷開關置於右
側,使左側的CMC10B與下位通訊相互獨立。這樣電源的配線可省略。
CMC10L
CMC10B
CMC10B
● CMC10B的位置
連接組內,也可把CMC10B配置在任意位置。 CMC10B CMC10B
5-3

第5 章 機器連接及構成
■ 事件輸出模件DMC10E的配置
在用連接頭連接的組內,只可用1台事件輸出模件DMC10E。
如下圖所示,不使用側面連接頭,而用底座接線的場合,就成為別的組,
則可使用新的事件輸出模件。
● 事件輸出模件的位置
DMC10E DMC10E DMC10E
RS485通訊 RS485通訊
DMC10E DMC10E
相同的組不能
使用2台以上的DMC10E
事件輸出模件DMC10E可配置在組內的任意位置上。
DMC10E DMC10E 5-4

第 6 章 有關設定與操作
■ 整體的操作步驟
使用本機前,請進行下記的操作或準備。
步驟 1
根據客戶的用途決定本機的運行參數值
步驟 2
把運行用的設定參數輸入到通訊機器中
(計算機或定序器、可編程顯示器等)
步驟 3
從通訊機器寫入本機的設定參數
(事前需要把本機安裝在盤上並接線)
步驟 4
開始運行,進行控制參數的調整
(使用自適應時,有時不需要)
參 考
本機配備有另售的専用智能編程器軟件包SLP-D10。
使用SLP-D10,可簡單進行運行前的數據設定、運行用的設定參數的輸入、
運行中的監視或設定變更。
不使用専用智能編程器軟件包的場合,需要由客戶製作程序。
通過使用専用智能編程器軟件包,可大幅度減少程序的製作、調試時的負
載、設定或監視所花費的時間及上位通訊機器的程序容量等。
■ 設定方法
本機的設定有以下三種方法。
1. 使用専用智能編程器軟件包進行設定或運行中監視的場合,請參閱
第7 章 編程器。
2. 使用用戶程序進行設定或運行中監視的場合,請參閱
第 10 章 CPL通訊功能。
3. 運行前必要的設定參數通過専用的智能編程器軟件包進行設定,在運行
中需要使用用戶程序對SP(設定值)或 PV(測量值)等參數進行監視或變更
的場合,請同時參閱
第7 章 編程器、第 10 章 CPL通訊功能 。
6-1

第 7 章 編程器
7 - 1 概 要 ■ 編程器的功能
SLP-D10具有以下三種功能。
• 設定功能
• 監視功能
• 校正功能
● 設定功能
運行中由計算機進行必要參數的設定,再寫入本機(設定)的功能。
大可進行約70種的參數設定。
● 監視功能
寫入設定參數後,可進行試運行中的控制參數的變更或調整、模式的切換
(RUN/READY 或AUTO/MANUAL等)、運行狀態或報警發生狀況的確認。
趨勢畫面也可監視運行狀態,可輸出CSV格式的文件,以便用市售的Microsoft
Excel等表計算軟件也能進行處理。
使用上的注意事項
使用前面的編程器插孔進行監視的場合,監視的對象僅限於1台。
● 校正功能
由用戶進行本機的輸入校正時使用。
有關校正功能,請參閱
第 12 章 校正與齊納柵調整 。
使用上的注意事項
一旦執行本操作,之前的調整值將被消除( 初時,本公司調整值會被消
除)。請注意。
■ 顯示語言的切換
SLP-D10對應日語及英語兩種。要變更為英語顯示的場合,請把Windows控制
面扳的區域設定變更為英語(US),再次啟動計算機。
7-1
R

第7 章 編程器
■ 動作時必要的系統環境
使用SLP-D10時,需要以下的系統環境。
● 硬件機器
項 目 內 容
計算機 對象機種 Pentium以上的CPU PC/AT 互換機
(推薦500MHz以上)
內存 本應用要求32MB 以上
操作系統 日語版Windows98 /Me /2000 專業版/ XP家庭版
/XP專業版
日語輸入系統 Windows對應的日語輸入系統
USB端口 1個端口以上
外部設備 顯示屏 800×600點以上、推薦16位色以上
硬盤 空容量在40MB以上
CD-ROM驅動器 1個驅動器以上
指向設備 與Windows對應的鼠標或與鼠標相當的設備
使用上的注意事項
• 啟動SLP-D10時,請關閉其他的應用軟件。其他應用軟件在動作中時,
SLP-D10有不動作的情況。另外,請把省電設定、紅外線通訊、屏幕保護軟
件置為OFF。
• 請確認[控制面板]→[區域]→[數值]的[小數點的標號]的設定務必是“.”。
設定成其他文字的場合,編程器不會正常動作。
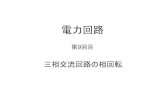
● 硬件構成
SLP-D10
DMC10
發送/接收 専用
纜線(付屬品)
讀出/保存
數據用盤
參 考 動作時使用的計算機
廠家 型 號
Dell Optiplex Gxi5200
Dell Optiplex GX5166
富士通 FMV-5166T3 7-2

第7 章 編程器
7 - 2 安裝與啟動、結束 ■ SLP-D10的安裝
對SLP-D10的計算機安裝方法進行說明。
使用上的注意事項
• 其他的應用軟件正在動作中的場合,安裝程序會出現不正常動作的情況。
請關閉其他的應用軟件後,再啟動安裝程序。
另外,與其他的應用、驅動等組合,可能會造成編程器不動作。
有關Windows、計算機的設定,請分別參閱Windows、計算機付屬的使用
說明書。
• Windows 2000 Professional / XP Professional 的場合,安裝/卸載
時,用戶的帳戶組請使用Administrators。
Windows XP Home Edition 的場合, 安裝/卸載時,用戶帳戶組請使用計
算機的管理者。
● 安裝SLP-D10
① 把SLP-D10的CD-ROM放入CD驅動器。
》安裝程序將自動啟動,顯示以下畫面。
② 選擇Japanese(日語),點擊[OK]。
③ 只有安裝了舊版SLP-D10的場合,才點擊[OK],刪除舊版SLP-D10。
7-3

第7 章 編程器
④ 點擊[下一步(N)]。
》顯示如下的畫面。
⑤點擊[下一步(N)]。
》顯示如下的畫面。
參 考
變更安裝目標目錄時, 點擊[參照(B)]。
7-4

第7 章 編程器
⑥ 點擊[下一步(N)]。
》顯示如下的畫面。
參 考
變更組的場合,請輸入組名。
⑦ 點擊[下一步(N)]。
》顯示如下的畫面。
7-5

第7 章 編程器
⑧ 點擊[完成(F)]。
》正常結束後,顯示以下畫面。
■ USB編程器電纜設備驅動器的安裝 為了使用USB編程器電纜,需要安裝設備驅動器。
請按以下的步驟把設備驅動器裝入計算機中。
● 設備驅動器的安裝方法
使用上的注意事項
• 請務必按以下說明的步驟進行設備驅動器的安裝。
如果步驟錯誤,會有不能識別USB編程器電纜的情況。
出現不能識別時,請卸載後再次安裝。
• 安裝驅動時,需要所使用的計算機的管理者権限。請使用Administrator
或Administrators組所屬的用戶。
USB編程器電纜對應與Windows 98/Me/2000/XP(32位版)。
不能用於Windows XP(64位版)、Windows 95、Windows NT、MS-DOS、
PC-DOS 。
• 有多個USB端口的場合,請每次把USB編程器纜線連接到同一端口上。
如果要與別的端口連接,可能需要再次安裝驅動器。
1. 請把SLP的CD-ROM放入計算機的CD-ROM驅動器中
安裝開始的場合,請終止。
2. 請把USB編程器纜線連接到USB端口上
7-6

第7 章 編程器
》Windows識別到USB編程器纜線後,以下的顯示會出現在任務欄上,顯示驅
動器的安裝用嚮導。
3. 安裝設備驅動
①Windows識別到USB編程器纜線後,顯示如下畫面。(根據Windows的環境,
會出現不顯示的場合)
選擇[不、這次不連接(T)],點擊[下一步(N)]按鈕。
② 安裝的設備驅動器的検索目標選擇[自動安裝軟件(推薦)(I)], 點擊
[下一步(N)]按鈕。
7-7

第7 章 編程器
》開始検索設備驅動器。
》發現設備驅動器後,顯示如下的窗口。
③ 點擊[繼續(C)]按鈕。
》開始設備驅動器的安裝。
7-8

第7 章 編程器
》設備驅動的安裝完成後,顯示如下的窗口。
④ 點擊[完成]按鈕。
》設備驅動器的安裝作業完成後,如下的顯示會出現在任務欄上,顯示
Windows 正常地識別到了USB編程器纜線。
⑤ 打開[控制面板]→[系統]→[硬件]→[設備管理器](Windows XP/2000)、
[控制面板]→[系統]→[設備管理器](Windows 98/Me),確認[端口(COM 與
LPT)]中的Yamatake USB Loader Comm.port的號。
7-9

第7 章 編程器
⑥ 啟動SLP,打開[菜單]→[環境設定]畫面,設定剛才確認過的通信端口
後,按[OK]按鈕,這樣就完成了變更。
參 考
手上沒有SLP的CD-ROM時,可在步驟②把安裝的設備驅動器的検索目標選擇
為 [從一覧或特定的場所安裝(詳細)(S)],按[下一步(N)]按鈕。
然後, 點擊[參照(R)]按鈕,指定安裝了SLP的文件夾,點擊[下一步(N)]按
鈕。
通常指定為[C:¥Program Files¥slp¥SLPD10]。
其後請進行步驟③~⑥的操作。 7-10

第7 章 編程器
● 設備驅動器的卸載方法
使用上的注意事項
• 執行卸載後,要求再啟動計算機。所以,請結束其他應用程序後再執行
卸載。
• 要卸載驅動器,需要使用計算機的管理者権限。請使用Administrator
或 Administrators組所屬的用戶。
1. 執行卸載程序
① 雙擊CD-ROM中 圖標的[DrvRemover_Ycslp.exe]。
手上沒有SLP的CD的場合,安裝了SLP的文件夾下有[DrvRemover_Ycslp.exe] 。
通常是[C:¥Program Files¥slp¥SLPD10]。
》出現執行卸載作業的確認畫面。
② 點擊[OK]按鈕。
》顯示如下的窗口。
③ 卸載完成後,計算機需要再啟動。
點擊[是(Y)]按鈕,進行計算機的再啟動。
7-11

第7 章 編程器
■ 啟動SLP-D10
① 單擊畫面下部的[啟動]按鈕
選擇[程序]→[SLP]→[SLP-D10(DMC10)]。
》SLP-D10啟動,顯示菜單窗口。
參 考
有關使用的操作系統或鼠標的使用方法,請參閱Windows付屬的使用
說明書。
■ 結束SLP-D10
①點擊畫面右上的 圖標。
另外選擇[菜單]→[結束]也能進行相同的處理。
②點擊[OK]按鈕。
● 顯示結束對話框
7-12

第7 章 編程器
7 - 3 設定功能 ■ 設定功能的概要
設定功能是為了使本機按客戶的用途發揮功能,對各種參數(指動作所必要
的常數。約有10~70個)進行設定,再寫入調節器中的操作。初次使用時,
如果不進行此項操作,調節器將不會按要求進行動作。請務必進行各種參數
的設定操作。 SP(設定值)或控制常數(PID值)等,在運行中變更比較頻繁的常數,也可從監視功能畫面進行設定。 對於一旦設定後就幾乎無需變更的常數,可以在運行前用一覽表形式製作文
件,作成後進行總體寫入的操作。
■ 畫面的說明
● 菜單畫面
菜單 圖標 子菜單 內 容 快捷鍵
菜單(M) 設定(S) 顯示設定窗口 Ctrl+S
監視(M) 顯示監視/趨勢窗口 Ctrl+M
校正(J) 顯示校正窗口 Ctrl+J
環境設定(E) 變更動作環境 Ctrl+E
結束(Q) 結束 Ctrl+Q
幫助(H) 版本(A) 顯示版本信息 Ctrl+A
7-13

第7 章 編程器
● 設定畫面
菜單條
按鈕條 參數顯示區域 選擇窗口
信息窗口
菜單 圖標 子菜單 內 容 快捷鍵
文件(F) 初始化(N) 新作成數據 Ctrl+N
打開(O) 讀出已保存的文件 Ctrl+O
覆蓋保存(S) 保存數據 Ctrl+S
另存為(A) 把數據用別的名字保存 Ctrl+A
CSV輸出(X) 用CSV格式保存數據 Ctrl+X
HTML輸出(H) 用HTML格式保存數據 Ctrl+H
結束(Q) 結束 Ctrl+Q
編輯(E) 數據檢查(D) 設定值的總體檢查 Ctrl+D
位輸入(B) 一攬子輸入位 Ctrl+B
複製(C) 記憶複製源 * Ctrl+C
粘貼(P) 執行複製 * Ctrl+V
通訊(C) 讀出 (DMC10→ SLP) 讀出儀錶的數據 Ctrl+R
(R)
寫入(SLP→DMC10) 把數據寫入儀錶 Ctrl+W (W)
項目(S) 基本功能
可選功能設定
用戶 簡單設定(1)
級別(U) 標準設定(2)
多功能設定(3)
設定(O) 型號設定(T) 變更型號設定 Ctrl+T
環境設定(E) 變更動作環境 Ctrl+E
特殊功能(U)
齊納柵調整(Z)
監視開度自動調整/手動操作(M)
* 複製及粘貼按列單位進行。光標所在列的數據總體複製或粘貼。
7-14

第7 章 編程器
■ 操作步驟
● 離線作業
離線作業是指電纜不與本體連接的情況下進行的作業。
作業項目如下。
步驟 1 :本機的型號設定
步驟 2 :初始化(清除前次的設定值)
步驟 3 :環境設定
步驟 4 :特殊功能的設定
步驟 5 :DMC10的參數的設定
步驟 6 :設定數據的保存
步驟 7 :下裝
使用上的注意事項
步驟 1~6 的作業是輸入本機的設定參數前必要的作業,請務必実施。
如果不進行該作業, 會產生不顯示必要的設定項目、顯示不必要的項
目等現象,造成誤設定。
● 步驟1(本機的型號設定)
請對應於本體的型號,進行SLP-D10的型號設定。
① 點擊 圖標。
選擇[設定]→[型號設定]命令也能進行相同的處理。
用 Ctrl + T 鍵也可執行相同的處理。
》顯示型號設定對話框。
② 設定功能、控制電路數、配線方法、控制輸出、附加功能。
③ 請從選擇項目中選擇各項設定。
④ 點擊[OK]按鈕。
參 考
也可從所使用的產品中把數據上傳的方式進行型號設定。這樣可防止
由於型號設定錯誤產生的錯誤參數的下傳。
7-15

第7 章 編程器
使用上的注意事項
• 此處設定的型號是供SLP-D10內部使用的設定。即使用SLP-D10改變
型號,本體的型號也不會變更。
• [控制電路數]的指定選擇了[4通道]時,強制性地把[配線方法]固
定為“連接頭配線”,把[附加功能]指定為“無”。
• 有關各規格的說明,請參閱型號構成表。
● 步驟2(初始化)
① 點擊 圖標。
選擇[文件]→[初始化]命令,也可執行相同的處理。
用 Ctrl + N 鍵也執行相同的處理。
》顯示初始化對話框。
② 點擊[OK]按鈕。
》新文件被打開。
● 步驟3(環境設定)
設定計算機的通訊端口或字體。
① 點擊 圖標。
選擇[設定]→[環境設定]命令也執行相同的處理。
用 Ctrl +
E 鍵也執行相同的處理。
》顯示環境設定對話框。
② 設定通訊端口。請從選擇項目中選擇。
③ 設定字體大小。請從選擇項目中選擇。
④ 點擊[√ OK] 按鈕。
使用上的注意事項
• 通常選擇“COM1”。即使在可選擇的場合,根據通訊端口的形狀,也
會出現不能使用的情況。
• 通常選擇“用編程器纜線連接”使用。
7-16

第7 章 編程器
● 步驟4(特殊功能的設定)
在使用特殊功能時設定。通過點擊所使用功能名稱的開頭部分的檢查框,
顯示出與特殊功能相關的設定項目。
“多SP組”在使用多組SP組時設定。1台本機 大有16個SP值。
“事件輸出特殊動作”
使用事件輸出分配。請參閱 8-3頁
“外部開關輸入特殊動作”
使用外部開關的分配。請參閱 8-4頁
“加熱冷卻控制” 僅DMC10D
使用加熱冷卻控制。請參閱 9-3頁
“遠程SP輸入” 僅DMC10D
使用遠程SP輸入。請參閱 9-5頁
“MV分支輸出” 僅DMC10D 使用MV分支輸出。
“位置比例控制種類”僅DMC10D 使用位置比例控制種類。
“省電” 僅DMC10D 使用省電功能。
● 步驟5(DMC10的參數的設定)
把光標移到各設定項目的對象通道上,進行以下操作。
• 設定是數值的場合:輸入數值,進行回車操作。
• 設定由編號進行選擇的場合
:點擊參數顯示區域上的設定內容,顯示出設定內容
一覧。選擇對應的項目名,點擊後設定結束。
設定運行所需的各參數。參數有以下二種。
• 基本功能 :控制及通訊等,機器動作的基本部分的功能
• 可選功能 :事件輸出或外部開關輸入、變流器輸入等與可選規
格相關的功能
使用上的注意事項
• 本機中,還有除上述功能以外,還有幾個被稱為特殊功能的功能。
但這些功能作為基本功能或可選功能中的設定電路或設定項目被顯
示。
有關功能的詳細內容,請參閱
第8 章 設定參數(DMC10S、DMC10D 共通)、
第9 章 設定參數(僅DMC10D) 。
• 根據其他的設定項目,設定不要/禁止的參數在單元內顯示成 “----”,不可設定。該場合下,請再次確認型號設定或相關的 其他項目的設定內容。
• 橫軸的項目在基本功能設定時為通道號、在可選功能設定時為事件輸
出號或外部開關輸入號。
• 有關與計算機的連接
通常使用専用電纜與DMC10連接,但變更可選項-環境設定-通訊設
定後,可使用CMC10B/L進行連接。這種場合下,需要事先將通訊設定
與其對應。此時通訊的設定不可變更。
7-17

第7 章 編程器
● 步驟6(設定數據的保存)
所有設定結束後,請對設定內容進行保存。如此,下次出現相同內容
時,可大幅度減輕設定作業的負荷。保存內容有以下三種。
• 型號
• 特殊功能使用/未使用
• 設定參數
① 選擇[文件]→[另存為]。
用 Ctrl + A 鍵也能執行相同的處理。
》顯示另取文件名的保存對話框。
② 輸入文件名,點擊[保存(S)] 按鈕。
● 步驟7(下傳)
把從設定過的參數或已保存的文件中調出的參數寫入到本機中。
①
用専用的編程器纜線連接寫入設定參數的DMC10本體與計算機。
② 接通本體的電源。
③ 點擊 圖標。
選擇下拉菜單的[寫入(SLP→DMC10)]命令,也可執行相同的處理。
》顯示[執行寫入]。
④ 點擊[OK]按鈕。
》開始設定參數的寫入。
寫入中,顯示[請稍候],寫入結束時,顯示[正常結束]。
使用上的注意事項
寫入失敗的場合,顯示[發生了通訊錯誤]。
不能寫入的場合,請參閱
第 13 章 故障處理 。
7-18

第7 章 編程器
7 - 4 監視功能 ■ 概 要
通過使用本機専用的智能編程器軟件包SLP-D10進行運行操作/監視。
點擊菜單畫面的[監視]進入運行操作/監視畫面。
運行操作/監視畫面分為以下二種。 ● 數值監視:執行設定變更或模式變更等操作的畫面。
• 各種運行用參數的數值顯示(可變更)
• 各種運行模式燈的顯示(可操作)
• 報警顯示(代表及詳細內容)
● 趨勢監視:用趨勢狀態監視運行狀態的畫面。
• 大能顯示8個數據的趨勢畫面
• 収集數據的CSV文件化
• 趨勢畫面複製
• 數據種類 :PV、SP、MV、用戶定義數據
(可通訊的全部模擬數據)
• 収集週期 :1~3600s可變
• 大収集次數:7200 週期 (與収集的數據數量無關,
固定)
參 考
CSV文件是Microsoft EXCEL等表計算軟件可使用的數據格式。収集的
趨勢數據可用表計算軟件進行分析。 使用這些畫面可進行以下操作。
• 在數值監視畫面下監視運行狀態及變更各種參數
• 在數值監視畫面下切換運行模式
• 在數值監視畫面下調整控制參數
• 運行中的趨勢監視及數據収集
• 在數值監視畫面下監視報警狀態
使用上的注意事項
• 有關與計算機的連接
使用智能編程器軟件包SLP-D10進行設定/監視操作的場合,必須連接編
程器纜線。希望對其他DMC10進行訪問的場合,需要進行編程器纜線的
替換。
• 要開始趨勢監視,則必須進行趨勢畫面的設定。請在開始監視前進行設
定。
• 根據通訊周期的變動,収集周期有偏移的情況。想測定準確時間的場
合,請使用専用的記録儀或數據記錄器。
7-19

第7 章 編程器
■ 畫面說明 ● 數值監視
● 趨勢監視
菜單 圖標 子菜單 內 容 快捷鍵
文件(F) 初始化(N) 初始化監視/趨勢設定 Ctrl +N
結束(Q) 結束 Ctrl +Q
數值監視 數值監視開始/結束 監視開始或結束 Ctrl +M
(M) (M)
趨勢監視 趨勢監視 趨勢的開始或結束 Ctrl +T (T) 開始/結束(T)
CSV 數據輸出(X) 用CSV格式輸出趨勢數據 Ctrl +X
剪貼板 把曲線的畫像輸出到剪貼板上 Ctrl +C 圖形輸出(C)
窗口 數值監視(M) 顯示個別監視
(W) 數值組監視(G) 顯示數值組監視
趨勢監視(T) 顯示趨勢監視
可選 設定(S) 顯示設定窗口
(O)
報警詳細(A) 顯示報警詳細窗口
命令行(C) 顯示命令行窗口
7-20

第7 章 編程器
■ 數值監視畫面的操作方法
● 監視的開始(通訊開始)
要開始監視,必須進行以下操作。 否則,將不能進行監視或重寫操作。
• 點擊 圖標。
選擇下拉菜單的[數值監視]→[數值監視開始],也能執行相同的處理。
》正常時:顯示本機內的數據。
異常時:顯示“請確認連接中的儀錶”。
請參照 第13章 故障處理 對應。
如果機器與編程器的連接正常,則可進行如下的操作。
● 運行狀態的監視及各種參數的變更
數值監視(用表形式顯示) 標號 數值組監視 PV
SP值 SP組 控制操作量(MV) PID值 加熱器電流值 RUN/READY狀態 AUTO/MANUAL狀態 自整定的啟動/停止狀態
狀態監視 RUN/READY狀態、 (用燈亮狀態顯示) AUTO/MANUAL狀態
自整定的啟動/停止狀態 自適應的啟動/停止狀態 控制輸出的ON/OFF狀態 事件輸出的ON/OFF狀態 事件總線輸出的ON/OFF狀態* 外部開關輸入的ON/OFF狀態 PV報警的發生狀況 報警的發生狀況
操作 SP值的變更 (用數值變更可操作的內容 SP組的變更 僅限於右記項目) MANUAL狀態下的控制操作量(MV)的變更
PID值的變更 RUN READY切換 AUTO MANUAL切換 自整定的開始 停止 通道位號名稱的輸入
燈 RUN READY切換 (用點擊可操作的內容僅限 AUTO MANUAL切換 於右記的項目) 自整定的開始 停止 有關動作模式 RUN/READY狀態 0: RUN 1: READY
AUTO/MANUAL狀態 0: AUTO 1: MANUAL
*只有在事件總線輸出中設定過的機器, 才會在監視畫面中顯示出事件總線輸出的
ON/OFF狀態。未設定的場合,不在畫面上顯示。
參 考
在通道上,可附加僅用於畫面上的標簽名稱。該名稱僅在畫面上用,不
能下裝到本機。
7-21

第7 章 編程器
● 數據變更• 模式切換
• 數值輸入的操作→輸入數值,執行回車操作。
• 點擊燈的操作→點擊對象的顯示燈。
● 用戶定義地址的設定
可把表中沒有的任意的數據登録在表中的用戶組態地址UF 1~4中。根據數
據的種類可進行読寫。
設定方法
① 選擇下拉菜單的[可選]→[設定]的[監視設定]框。
按照 10-8 所有通訊參數一覽表(RAM地址順序) (10-16 頁) ,輸
入要顯示的數據的地址。
使用上的注意事項
用戶組態數據 大可設定4個,是全通道共通的數據。
● 命令行的使用
通過直接輸入通訊命令,可進行數據的読寫或模式的切換。
使用上的注意事項
• 發出錯誤的命令時,可能會產生故障。所以請充分注意命令種類、地
址、數據等的記述。
• 有關通訊命令與數據的地址,請參閱 第10 章 CPL通訊功能。
• 內存保護有效。
● 報警詳細內容的確認
發生了報警的場合,可通過“報警詳細”窗口確認詳細內容。
• 點擊 圖標。
操作[可選]→[報警詳細]也可執行相同的處理。
• 顯示發生中的報警的詳細內容。
使用上的注意事項
該顯示是對發生中的報警的內容進行顯示,而不是恢復報警的功能。要
恢復報警,請按照故障處理進行恰當的處理。
● 有關數值組監視
把環境設定-通訊設定設定成[經由CMC10連接]時,可進行數值組監視。編程器纜線與CMC10B連接。 大可監視8組。
7-22

第7 章 編程器
■ 趨勢監視操作方法
● 設 定
通過[可選]→[設定]選擇[趨勢設定],按収集數據(1 ~8)進行下記設定。 周期及顯示下限與顯示上限是全通道共通的,數據的1的設定為有效,數據 的2~8為不可設定。
設定項目 設定內容 設定範圍 初始值
周期 収集周期的設定 1~3600s 1
顯示下限 畫面顯示的縦軸的下限值 -2000~顯示上限 0
顯示上限 畫面顯示的縦軸的上限值 顯示下限~10000 0
顯示 對畫面的顯示/非顯示的指定 0:不顯示 1
1:顯示
數據種類 収集數據的種類 0:不使用
1:CH1的PV 2:CH2的PV 3:CH3的PV 4:CH4的PV 5:CH1的MV 6:CH2的MV 7:CH3的MV 8:CH4的MV 9:CH1的SP 10:CH2的SP 11:CH3的SP 12 :CH4的SP 13 :用戶定義數據
用戶 數據的種類為用戶種類的 可通訊的參數的地址
定義地址 場合,對應的參數的地址
通訊地址 使用CMC10B等場合,設定 0~127 通訊地址
通訊子 使用CMC10B等場合,設定 0~127 地址 通訊子地址
使用上的注意事項
指定用戶定義地址的場合,數值不帶小數點,請手動設定數值監視設定
畫面的小數點。
● 収集的開始
設定結束後,可開始趨勢監視。
點擊 圖標。
也可選擇[趨勢監視]→[趨勢監視開始]進行相同的處理。開始趨勢的収集,
畫面上顯示出指定的參數趨勢。
• 趨勢監視開始後,在執行停止操作或7200次的數據採集完畢前,動作將
會持續。
• 即使沒有停止操作的場合,7200次數據収集完成後,趨勢監視也會自動
停止。
• 在趨勢監視動作中,可切換到數值監視畫面,但不能停止編程器﹑設定
畫面的切換。這種場合下,請停止趨勢監視。
7-23

第7 章 編程器
● 収集的停止
選擇[趨勢監視]→[趨勢監視停止]。
趨勢監視被停止。
● 収集數據的保存
通過趨勢監視,可把収集到的數據按CSV格式保存為文件。CSV格式收集的
數據,可由Microsoft R Excel等表計算軟件進行處理。
使用上的注意事項
• 在趨勢監視動作中也能進行文件保存。
• 只要不進行初始化,文件保存的數據將保留在畫面上或PC內,但保存
的文件不能在畫面上進行再顯示。
● 剪貼板圖表輸出
趨勢監視畫面的顯示內容可直接進行畫面複製,保存在剪貼板上。 7-24

第 8 章 設定參數 (DMC10S、DMC10D 共通)
8 - 1 設定參數一覧 ■ 基本功能 詳細內容請參閱
8-2 基本功能的詳細說明 (8-5 頁) 。 簡:簡単 標:標準 多:多功能
分 類 項目名 設定範圍 初期值 用戶
級別 備 注
輸入種類 根據PV輸入種類/量程表 43:0~5V 簡/標/多 參照14-3、14-4 頁
溫度単位 0:℃ 1:特殊単位 0:℃ 多 熱電偶輸入或熱電阻
輸入時
小數點位置 0:無小數點
1:小數點以下1位
2:小數點以下2位
3:小數點以下3位
0:無小數點 標/多 直流電壓或直流電流
輸入時,或熱電偶或
熱電阻的一部分量程
可設定
PV量程下限值 -2000 ~+10000 0 簡/標/多 直流電壓或直流電流
輸入時可設定
PV量程上限值 -2000 ~+10000 1000 簡/標/多 直流電壓或直流電流
輸入時可設定
PV偏置 -2000 ~+10000 0 標/多
PV濾波 0.0~120.0s 0.0s 多
冷端補償動作 0:內部
1:外部 0:內部 多 僅熱電偶輸入時
SP限幅下限 PV量程下限值~SP限幅上限值 PV量程下限值 標/多 SP限幅上限 SP限幅上限值~PV量程上限值 PV量程上限值 標/多
SP下降斜率 0 ~10000 0 多
SP上升斜率 0 ~10000 0 多
PV輸入
SP下降斜率時間
単位
0:unit/分
1:unit/時間 0 多
控制方式 0:ON/OFF 控制
1:自適應控制
2:PID固定值控制
0:ON/OFF控制 簡/標/多
控制動作 0:加熱控制(逆動作)
1:冷卻控制(正動作)
0:加熱控制 簡/標/多
時間比例周期 5~120s(繼電器輸出時)
1~120s(電壓輸出時)
10s 簡/標/多 ON/OFF控制時設定不可
時間比例動作
模式
0:重視控制性
1:重視操作端壽命*
0:重視控制性 多 * 時間比例周期內,
ON/OFF動作1次
ON/OFF控制時設定
不可
PID 初期操作量 -10.0 ~+110.0% 0.0% 多 ON/OFF控制時設定不可
AUTO/MANUAL
切換動作
0:無擾
1:預置
0:無擾 標/多 ON/OFF控制時不能
切換成MANUAL
預置手動值 -10.0 ~+110.0% 0.0% 標/多 ON/OFF控制時設定不可
READY時操作量 -10.0 ~+110.0% 0.0% 多 發生PV報警時
操作量
-10.0 ~+110.0% 0.0% 多
操作量變化率
限幅
0.1 ~100.0% 100.0% 多 ON/OFF控制時設定不可
自適應升降 啟動條件
0:PV值的上升下降時均啟動
1:PV值的上升時啟動
0:PV上升下降
時均啟動
多 僅自適應控制時
控制
輸出
自適應升降 整定幅
0.0~5.0℃(溫度傳感器輸入時) 0.0~3.0%FS(線性輸入時)
2.0℃
0.5%FS
多 僅自適應控制時
8-1

第8 章 設定參數
分類 項目名 設定範圍 初期值 用戶
級別 備 注
SP 值 SP限幅下限值~SP限幅上限值
0 簡/標/多
比例帶(P) 0.1~999.9% 5.0% 簡/標/多 PID固定值控制時
可設定
積分時間(I) 0~3600s 120s 簡/標/多 PID固定值控制時
可設定
微分時間(D) 0~1200s 30s 簡/標/多 PID固定值控制時
可設定
操作量下限(OL) -10%~操作量上限值 0% 多 ON/OFF控制時不可設定
操作量上限(OH) 操作量下限值~110% 100% 多 ON/OFF控制時不可設定
手動復位值(rE) -10 ~+110% 50% 標/多 PID固定值控制&積
分時間=0s時可設定
差動(動作間隙) 1~9999unit 5unit 標/多 ON/OFF控制時可設定
SP、控
制參數
干擾應答係數 (Quick-FiTTER)
0~30 0
多 ON/OFF控制時不可
認定
傳送速度 0:2400bps
1:4800bps
2:9600bps
3:19200bps
3:19200bps 簡/標/多
數據形式 0:位長8、偶數校驗、1停止位
1:位長8、無奇偶校驗、2停止位
0:位長 8、
偶數校驗、
1停止位
簡/標/多
通訊 短應答時間 0:1ms 1:10ms 2:100ms 3:200ms
1:10ms 多 命令收信完成後到開
始返信為止的 小時
間
通訊 短應答時間增加值 0 ~100ms 0 多 加在通訊 短應答時
間上
通 信
CPL/MODBUS切換 0:CPL 1:MODBUS (ASCII形式) 2:MODBUS (RTU形式)
0 多
內存保護 0: 可全部寫入 1:僅SP、EV、MODE、通訊DI時可寫入 2:僅SP、MODE、通訊DI時可寫入 3:內存保護以外不可寫入
0:可全部
寫入
簡/標/多 編程器進行的變更不
可
LED動作種類
0:常亮 1:READY時閃爍 2:MANUAL時閃爍 3:RSP時閃爍 4:自適應整定等待時閃爍 5:自整定執行時閃爍 6:發生PV報警時閃爍 7:發生內存報警時閃爍 8:SP組選擇編號閃爍 9:上位通訊時閃爍 10:上位/編程器通訊時閃爍 11:控制輸出狀態(ON時燈亮) 12:事件輸出狀態(ON時燈亮) 13:事件總線輸出開關狀態(ON時燈亮) 14:外部開關輸入狀態(ON時燈亮) 15:外部總線狀態(ON時燈亮) 16:通訊DI輸入狀態(ON時燈亮) 17:CH間偏差控制時閃爍 18:SP斜率時閃爍
19:馬達控制位置推定中閃爍
0:常亮
多
其他
LED動作對象通道 0:全通道的OR動作
1:CH1
2:CH2
3:CH3
4:CH4
0:全通道
的OR動作
多
LED動作種類設定:
7、9、10時不可設定
8-2

第8 章 設定參數
■ 可選功能
可選功能有如下內容。 詳細請參閱
8-3 可選功能的詳細說明 (8-16 頁) 。
根據本機型號或特殊功能的使用設定,可顯示的項目不同。
• 事件輸出
• 變流器輸入
• 外部開關輸入
分 類 項目名 設定範圍 初始值 用戶
級別 備 注
動作種類 0:無事件 1:PV上限 2:PV下限 3:PV上下限 4:偏差上限(當前SP基準) 5:偏差下限(當前SP基準) 6:偏差上下限(當前SP基準) 7:通道間偏差上限 8:通道間偏差下限 9:通道間偏差上下限 10:READY 狀態 11:MANUAL 狀態 12:控制動作 正 13:自整定啟動狀態 14:自適應整定等待狀態 15:回路診斷 16:定時器 17:加熱器斷線/過電流 18:加熱器短路1 19:個別通道• PV• 報警 20:內存報警 21:LOCAL 22:SP上限 23:SP下限 24:SP上下限 25:偏差上限( 終SP基準) 26:偏差下限( 終SP基準) 27:偏差上下限( 終SP基準) 28:SP 傾斜中 29:馬達控制位置推定中
30:回路診斷2
0:無事件 簡/標/多
対象通道 1或2 (2 通道型號時)
1~4 (4 通道型號時)
EV/BUS 1 → 1
EV/BUS 2 → 2
EV/BUS 3 → 3
EV/BUS 4 → 4
簡/標/多 動作種類設定0時,
不可設定
報警OR動作 0:無
1:使用OR動作
0:無 多
事件設定值主 根據動作種類 0 簡/標/多 參閱附錄 事件相
關建議
事件設定值副 根據動作種類 1000 簡/標/多 參閱附錄 事件相
關建議
回差 根據動作種類 5 標/多 參閱附錄 事件相
關建議
正 逆 0:正動作
1:逆動作
0:正 簡/標/多
待 機 0:無
1:待機
2:待機+SP變更時待機
0:無 標/多 SP 變更時,待機
動作再啟動
鎖定 0:無
1:鎖定動作
0:無 多
事件輸出
(事件輸出
特殊動作
未使用時)
READY時的動作 0: READY時動作繼續
1:READY時動作強制OFF
0:READY時
動作繼續
多
8-3

第8 章 設定參數
分 類 項目名 設定範圍 初始值 用戶
級別 備 注
ON延遲時間 (時)
0~99h 0 多
ON延遲時間 (分)
0~59min 0 多
ON延遲時間 (秒)
0~59s 0 多
OFF延遲時間 (時)
0~99h 0 多
OFF延遲時間 (分)
0~59min 0 多
事件輸出(事
件輸出特殊
動作未使用
時)
OFF延遲時間 (秒)
0~59s 0 多
變流器輸入CH
指定
1:OUT1
2:OUT2
3:EV1
4:EV2
5:EV3
6:EV4
CT1 → 1
CT2 → 2
多 變流器輸入
測定等待時間 3~30(×10ms) 3 簡/標/多 等待時間=設定值×10ms 動作種類
0:無功能
1:SP組編號上加1
2:SP組編號上加2
3:SP組編號上加4
4:RUN/READY
5:AUTO/MANUAL
6:LOCAL/REMOTE
7:自整定停止/啟動
8:自適應停止/執行
9:定時器停止/啟動
10:鎖定狀態解除
11:CH間偏差控制切換
12:CH間偏差控制種類
13:外部開關輸入狀態
14:SP斜率停止
0:無功能
簡/標/多
無外部開關輸入選項
的型號,也可使用內部總
線。
対象通道
0:全通道
1:通道1
2:通道2
3:通道3
4:通道4
簡/標/多 動作種類:1~5、7、8
4通道型號時,通道3、4
可用
外部開關
輸入
正 逆
0:正
1:逆
0:正
標/多
動作種類
0:PV/RSP值
1:PV1-PV2值
2:SP值
3:操作量
4:加熱側操作量
5:冷卻側操作量
6:操作量(比率前PID運算結果)
7:反饋值
0 簡/標/多
対象通道
1:CH1
2:CH2 AUX→1
AUX→2
標/多
輸出種類
0:4~20mA
1:0~20mA
A
0
多
0%設定 -2000~+10000 0 簡/標/多
輔助輸出
100%設定 -2000~+10000 1000 簡/標/多
8-4

第8 章 設定參數
8 - 2 基本功能的詳細說明 ■ 關於PV 輸入
● 輸入種類
設定PV輸入的種類。溫度傳感器的場合,設定傳感器的種類及溫度量程,直
流電壓• 直流電流輸入的場合,設定信號的種類。直流電壓• 直流電流輸入
的量程及小數點位置由PV 量程的下限值、PV量程的上限值的項目進行設定。
項 目 設定內容 初始值 用戶級別
輸入種類 請參照量程代碼表 43 :0~5V 簡單•標準•多功能
14-3頁
參 考
• 本機可把溫度傳感器或直流電流/電壓信號作為PV 輸入使用。另外各通道也可分配不同種類的輸入信號。
• 有未使用通道的場合,通過設定量程號“0”,控制輸出將變為OFF、PV報警也為OFF 。所以,未使用通道的PV輸入不需配線。
● 溫度單位
PV 輸入使用溫度傳感器時的溫度單位設定。 熱電偶輸入或熱電阻輸入時可
設定。
項 目 設定內容 初始值 用戶級別
溫度單位 0 :℃ 0 :℃ 多功能
1 :特殊單位
相關的設定項目:輸入種類
● 小數點位置 (輸入種類為直流電壓• 直流電流• 熱電阻的一部分時,及高功能型號的熱電偶的一
部分時)
設定一部分直流電壓• 直流電流• 熱電阻及熱電偶輸入時量程的小數點位
置。通過該設定,相關的參數全部按設定的小數點位置變更。(與PV、SP、
PV 相關的事件設定值、PV偏置、SP限幅上限、SP限幅下限、CH間偏差、控
制偏差值、輔助輸出0%、100%設定、SP上昇斜率、SP下降斜率)
使用上的注意事項
項 目 設定內容 初始值 用戶級別
小數點位置 0 :無小數點 0 :無小數點 標準• 多功能
1:小數點以下1位 2:小數點以下2位 3:小數點以下3位
相關的設定項目:輸入種類、PV量程下限值、PV量程上限值、與PV相關的事件
設定值、CH間偏差控制偏差值、輔助輸出0%、100% 設定、 SP上昇斜率、SP下降斜率
• 要變更小數點位置的場合,需要對已設定的各參數值進行再設定。
例:按SP=400設定後,把小數點位置變更為第一位時,SP=40.0。
• 對小數點位置不可變更的量程進行設定的場合,不能經由通訊寫入小數點位置。 例:量程 No.1 的場合,小數點位置按“0”固定,但不能寫入“0”。
8-5

第8 章 設定參數
● PV量程上下限值(僅輸入種類為直流電壓• 直流電流時)
設定直流電壓• 直流電流輸入時的PV量程上下限值。
輸入信號為 小值、 大值時的顯示值設定。(4~20 mA DC輸入的場合,
4mA輸入時為 小值、20mA輸入時為 大值)
項 目 設定內容 初始值 用戶級別
PV量程下限值 -2000 ~ 0 簡單•標準•多功能 +10000
PV量程上限值 2000 ~ 1000 10000
相關的設定項目:輸入種類·小數點位置
● PV偏置
PV值補正的場合使用。
在傳感器劣化時進行補正等場合下使用。
項 目 設定內容 初始值 用戶級別
PV 偏置 -2000~+10000 0 標準• 多功能
● PV濾波
PV值反復急劇變動不能控制的場合,或者因干擾等影響PV值細微振盪的場
合使用。在大多數場合,採用初始值就可使用,通常不需要設定。
項 目 設定內容 初始值 用戶級別
PV 濾波 0.0~120.0s 0.0s 多功能
參 考
PV值的細微振盪會造成控制操作量的急劇變動。 操作端頻繁地重復
ON/OFF、控制中的加熱器電流值等反復急激變動的場合,可使用PV濾波進行
穩定。
但使用PV濾波時,表面的PV值與実際的PV值由於延遲的原因,會有不同。
關係式如下所示。
OUT=OUT-1 +(IN -OUT-1)/(T/TS +1)
PV濾波 0.0~120.0s(0.0的場合無濾波) PV上可施加一階延遲數字濾波。
IN PV濾波
OUT
IN :PV 濾波的輸入
OUT :本次的濾波運算輸出
OUT-1 :前次的濾波運算輸出
T :濾波設定值(s)
Ts :採樣周期(500ms) 8-6

第8 章 設定參數 ● 冷端補償動作 (僅熱電偶輸入時)
熱電偶輸入時,冷端補償不是利用調節器內部的功能,而是使用冰櫃等冷
端補償機器,在要求高精度的場合下使用。
項 目 設定內容 初始值 用戶級別
冷端補償動作 0:內部 0 :內部 多功能
1:外部
相關的設定項目:輸入種類
● SP限幅下限、SP限幅上限
SP值的設定範圍的上下限值設定。不能寫入在該設定範圍外的SP值。
項 目 設定內容 初始值 用戶級別
SP限幅下限 PV量程下限值~ PV 量程下限值
SP限幅上限值 標準• 多功能
SP限幅上限 SP限幅下限值~ PV 量程上限值
PV量程上限值
● SP下降斜率、SP上昇斜率、SP下降斜率時間單位
設定SP的上昇斜率、下降斜率、斜率的單位。
以下場合時,把當前PV值作為開始SP值,SP值按斜率緩慢向 終SP值上昇
(或者下降)。在希望PV值緩慢上昇(或者下降)等場合下使用。
• 通電時
• 從MANUAL向AUTO切換時
• 從READY向RUN切換時
• AT結束時
另外,以下場合時,把REMOTE時的 後的SP值作為開始SP值,向 終SP值
動作。
• 從REMOTE向LOCAL切換時
在SP斜率中,如果讀出“當前使用中的SP”,則斜率中的SP值被讀出。
在MANUAL中、READY中、AT執行中,如果讀出“當前使用中的SP”,則目標
SP( 終SP)被讀出。
項 目 設定內容 初始值 用戶級別
SP下降斜率 0~10000 0 多
SP上昇斜率 0~10000 0
SP斜率時間單位 0:unit/分 0 1:unit/時間
使用上的注意事項
時間精度為設定時間±1%。長時間使用時,請注意。
8-7

第8 章 設定參數
■ 關於控制輸出
● 控制方式
控制方式從以下方式中選擇。
詳細內容請參閱
附-1 與控制常數相關的建議 (附-1 頁)。
● ON/OFF控制:PV值達到SP值,反復進行ON/OFF的控制。因為會發生某種
程度的上超調、下超調,所以在不太重視控制性的場合下使用。
使用上的注意事項
實際中為回避操作端的頻繁ON/OFF動作,被稱為動作間隙(差動)的一定間隙,反復進行ON和OFF控制。動作間隙值可以在1~9999unit的範圍內設定。
● 自適應控制:SP值變更或控制特性變化時產生振盪的場合,調節器自動進
行控制常數調整,實現穩定狀態的控制。
● PID固定值控制:以自整定或編程器等設定的PID控制常數為基準進行的
控制。由於PID常數僅限於操作不能變更,因此當SP值變更或控制對象特
性變化引起控制紊亂的場合,必須進行變更操作。
項 目 設定內容 初始值 用戶級別
控制方式 0 :ON/OFF控制 0 :ON/OFF控制 簡單•標準•多功能
1 :自適應控制 2 :PID固定值控制
● 控制動作
設定是使用加熱控制還是冷卻控制。
• 加熱控制:伴隨PV值的上昇,控制操作量減小(或者設定為OFF)的控制。
由於PV值和控制操作量的變化成反比例關係,所以稱為逆動
作。
• 冷卻控制:伴隨PV值的上升,控制操作量增大(或者設定為ON)的控制。
由於PV值和控制操作量的變化成正比例關係,所以稱為正動
作。
項 目 設定內容 初始值 用戶級別
控制動作 0:加熱控制(逆動作) 0:加熱控制(逆動作) 簡單•標準•多功能
1:冷卻控制(正動作) 8-8

第8 章 設定參數
● 時間比例周期
時間比例控制時的時間周期設定。此項時間乘以操作量的值為ON時間。通常
時間比例周期越短控制性越好,但是如果縮短周期,容易造成ON/OFF切換頻
繁,所以必須考慮操作端的壽命。
另外,時間比例周期在10秒以上或者包含繼電器輸出的場合,通常不進行比
200ms短的ON/OFF動作。
項 目 設定內容 初始值 用戶級別
時間比例周期 5~120s 10s 簡單•標準•多功能
(繼電器輸出的場合) 1~120s
(電壓脈衝輸出的場合)
相關設定項目:控制方式
● 時間比例動作模式
設定時間比例控制時的動作方式。
• 控制性重視型 :重視控制性,有必要變動操作量值的場合,在時間
比例周期內,頻繁地讓控制輸出動作的同時進行
佳的控制。
• 操作端壽命重視型 :為了避免操作端的頻繁動作,即使操作量較大地變
動,但在時間比例周期內只進行1次ON/OFF動作。
使用上的注意事項
降低操作端的動作頻率時,建議與延長時間比例周期配合使用。
項 目 設定內容 初始值 用戶級別
時間比例動作 0:重視控制性型 0:重視控制性型 簡單•標準•多功能 模式 1:重視操作端壽命型
相關設定項目:控制方式
● PID初始操作量
從通電或者READY(控制停止狀態)向RUN(控制中)切換時,或者SP值有變動時
的 初的操作量。
項 目 設定內容 初始值 用戶級別
PID初始操作量 -10.0~+110.0% 0.0% 多功能
8-9

第8 章 設定參數
● AUTO/MANUAL切換時動作
此項中設定從自動控制狀態(AUTO狀態)向一定操作量的強制輸出狀態(MANUAL狀態)切換時的動作。
本機中配備了強制輸出除自動控制以外的設定好的任意操作量的功能。試運行時的操作端動作確認或裝置運行停止時,希望通過一定輸出來保持溫度等場合下使用。
• 預設置:切換到MANUAL狀態時,輸出任意的操作量。此時的操作量通過預
設置手動值項目進行設定。
• 無擾:把切換前自動控制時的操作量作為 初的初始值使用。
項 目 設定內容 初始值 用戶級別
AUTO/MANUAL 0:無擾 0:無擾 標準• 多功能 切換時動作 1:預設置
相關設定項目:預設置手動值、控制方式
使用上的注意事項
• 控制方式為ON/OFF控制的場合不能切換到MANUAL。
• 關於位置比例控制中無反饋時的MANUAL操作,請參閱
9-8 頁 。
● 預設置手動值
預設置從AUTO向MANUAL切換時的動作的場合,設定切換時的手動值(操作
量)。
項 目 設定內容 初始值 用戶級別
預設置 -10.0~+110.0% 0.0% 標準• 多功能 手動值
相關設定項目: AUTO/MANUAL 切換時的動作
● READY時操作量
希望READY狀態(控制停止狀態)時的操作量不是0%,而是一定值的場合進行
設定。使用於在控制停止時也需要某種程度的餘熱的裝置等場合。
項 目 設定內容 初始值 用戶級別
READY時操作量 -10.0~+110.0% 0.0% 多功能
● 發生PV報警時的操作量
因傳感器故障或斷線,發生PV輸入報警時,設定輸出的操作量。
項 目 設定內容 初始值 用戶級別
發生PV報警 -10.0~+110.0% 0.0% 多功能
時的操作量
8-10

第8 章 設定參數
● 操作量變化率限幅
為了將操作量的變動抑制在一定操作量以下時使用。另外,當調節器的急劇
輸出變動會對操作端或處理對象物體造成不好影響時使用。
在每個輸出更新周期的操作量的 大變化量中設定。本機在約0.5秒時為 大
變化量。
項 目 設定內容 初始值 用戶級別
操作量變化率 0.1~100.0% 100.0% 多功能
限幅 ● 自適應昇降啟動條件
使用自適應時,在PV值下降時不讓自適應啟動的功能。用於昇溫和降溫的特
性有很大差異,溫度下降時對控制性沒有要求的控制對象。
項 目 設定內容 初始值 用戶級別
自適應 0:PV值上昇和下降時 0:PV值上昇和下降 時 多功能
昇降啟動條件 均啟動 均啟動
1:PV值上昇時
啟動
相關設定項目:控制方式
● 自適應整定幅
自適應啟動偏差幅。“0”設定時基於偏差的自適應不啟動。(SP變更自適應
啟動)
使用干擾系(容易受到上下左右鄰接的控制對象的影響)裝置或斷斷續續發生
干擾的裝置(包裝機)等場合,請設定為“0”。
項 目 設定內容 初始值 用戶級別
自適應 熱電偶/熱電阻 :0.0~5.0℃ 2.0℃ 多功能
整定幅 直流電壓/電流 :0.0~3.0%FS 0.5%FS
SP值
PV值
整定幅
自適應啟動
8-11

第8 章 設定參數
■ SP、控制參數
● SP值
控制目標值的設定。
本機有 多16個(所有通道合計)SP值,通過通訊或外部開關輸入可以進行
切換。每個通道使用多個SP值的場合,必須進行“特殊功能”“使用多個
SP“的設定。
項 目 設定內容 初始值 用戶級別
SP值 SP限幅下限值~ 0 簡單•標準•多功能 SP限幅上限值
● 比例帶(P)、積分時間(I)、微分時間(D)
控制常數的比例帶(P)、積分時間(I)、微分時間(D)的設定。使用自適應或
自整定的場合,根據控制對象的特性,自動進行設定。
在已經得知 佳值或自適應、自整定很難發揮效果的場合,進行手動輸入。
項 目 設定內容 初始值 用戶級別
比例帶(P) 0.1~999.9% 5.0%
積分時間(I) 0~3600s 120s 簡單•標準•多功能
微分時間(D) 0~1200s 30s
相關設定項目:控制方式
● 操作量下限值(OL)、操作量上限值(OH)
用於設定操作量的上下限值。
項 目 設定內容 初始值 用戶級別
操作量下限值(OL) -10~操作量上限值 0% 多功能
操作量上限值(OH) 操作量下限值 100% ~110%
相關設定項目:控制方式
● 手動復位值(rE)
積分時間(I)= 0 秒時,PV和SP之間產生偏差。為了消除這個偏差(目標值
和測量值的差),通過增減一定的操作量進行對應的場合時使用。控制方式
= 1 或者 2 (PID固定值控制)、I = 0s時可以設定。
項 目 設定內容 初始值 用戶級別
手動 -10 ~+110% 50% 標準• 多功能 復位值
相關設定項目:控制方式、積分時間
8-12

第8 章 設定參數
● 差動(動作間隙)
ON/OFF控制時ON點和OFF點的差的設定。為避免操作端反復、頻繁ON/OFF操
作的設定,但是,如果設定的值太大,會造成PV值上下波動大,控制性
差。
項 目 設定內容 初始值 用戶級別
差動 1~9999unit 5unit 標準• 多功能 (動作間隙)
相關設定項目:控制方式
● 干擾應答係數(Quick-FiTTER)
一定周期下發生相同特性的干擾時,為了盡快恢復到穩定狀態,抑制上超調
時使用。值越大效果越明顯,PV值緩慢、平穩地恢復到正常值。
通常時PV
Quick-FiTTER動作時PV
時間
效果明顯
發生干擾時溫度恢復, 反向動作抑制上超調, 儘快恢復到穩定狀態
Quick-FiTTER 僅在控制方式為PID固定值控制時使用。
項 目 設定內容 初始值 用戶級別
■ 通 訊
干擾應答係數 0~30 0 多功能
● CPL/MODBUS切換
CPL、MODBUS(ASCII)、MODBUS(RTU)切換。 詳細內容請參閱
第 10 章 CPL通訊功能 。
● 傳送速度
決定傳送速度。通常建議使用 快值(19200bps)。
通訊上位機器的規格或通訊不佳的場合,變更傳送速度後使用。
項 目 設定內容 初始值 用戶級別
傳送速度 0 : 2400bps 3 :19200bps 簡單•標準•多功能
1 : 4800bps 2 : 9600bps 3 : 19200bps
使用上的注意事項
由於內置與終端電阻相當的電阻,所以請勿在外部連接終端電阻。
否則不能通訊。
8-13

第8 章 設定參數
● 數據形式
設定通訊數據形式。按照通訊上位機器的規格進行選擇。
項 目 設定內容 初始值 用戶級別
數據形式 0:位長8、 0:位長8、 簡單•標準•多功能
偶校驗、 偶校驗、
1停止位 1停止位 1:位長8、
無校驗、
2停止位
● 通訊 短應答時間
設定從接受命令到返回應答的 短等待時間。時間短的話通訊速度就快。根
據通訊上位機器或轉換器的規格,需要設定一定的等待時間的場合,必須將
時間設定得長一些。
項 目 設定內容 初始值 用戶級別
低應答時間 0: 1ms 1: 10ms 多功能
1: 10ms 2: 100ms 3: 200ms
● 通訊 短應答時間增加值 (ms)
通訊 短應答時間加上本參數中設定的應答時間,其合計時間為真正的通
訊 短應答時間。
(例) 通訊 短應答時間的設定= 1 (10ms)
通訊 短應答時間增加值的設定= 50 (ms)
合計 低應答時間= 60ms
■ 其他
● 內存保護
禁止通過通訊對特定參數進行變更的功能。
與下列內容無關,可以通過編程器變更。
SP : SP值、SP組號
MODE :RUN/READY、AUTO/MANUAL、自整定啟動/ 停止、LOCAL/REMOTE
項 目 設定內容 初始值 用戶級別
內存保護 0:可寫入所有內容 0:可寫入所有內容 簡單•標準•多功能
1:僅可寫入SP、EV設定值MODE、通訊DI
2:僅可寫入SP、MODE、通訊DI
3:內存保護以外的內容不能寫入
8-14

第8 章 設定參數
● LED動作種類
設定本機面板上的POWER燈動作內容的功能。試運行等場合,希望通過LED
的燈亮/閃爍狀態確認運行狀態時進行設定。通常通電中LED常亮。
項 目 設定內容 初始值 用戶級別
LED動作種類 0 :常亮 0 :常亮 多功能 1 :READY時閃爍 2 :MANUAL時閃爍 3 :RSP時閃爍 4 :自適應 整定等待時閃爍 5 :自整定 執行時閃爍
6 :發生PV報警時閃爍 7 :發生存儲報警時閃爍
8 :SP組選擇號閃爍 *1 9 :主站通訊時閃爍 *2 10 :主站/編程器
通訊時閃爍
11 :控制輸出狀態 (ON 時燈亮)
12 :事件輸出狀態 (ON 時燈亮)
13 :事件總線輸出 (ON 時燈亮)
14 :外部開關輸入狀態(ON 時燈亮)
15 :外部總線狀態 16 :通訊DI 輸入狀態
(ON 時燈亮) 17 :CH間偏差控制時閃爍 18 :SP斜率時閃爍 19 :馬達控制位置推定
中閃爍
關聯設定項目: LED動作對象通道
*1:SP組選擇號時的閃爍是SP號值的部分閃爍
*2 :僅接收到自身的機器地址時閃爍
● LED動作對象通道
LED動作種類中設定的內容與通道指定相關的場合,設定動作對象的通道號。
項 目 設定內容 初始值 用戶級別
LED動作對象 0 :所有通道的 1 :CH1 多功能
通道 OR 動作
1 :CH1 2 :CH2 3 :CH3
4 :CH4 (注)
相關設定項目: LED動作種類
(注) LED動作種類為16時,設定範圍為0~12
• 根據LED動作種類設定內容不同
• LED動作種類與通道無關的場合設定無效
設定內容為7(發生存儲報警時閃爍)、9(主站通訊時閃爍)、10(主站/編程器
通訊時閃爍)時設定無效
8-15

第8 章 設定參數
8 - 3 可選功能的詳細說明
■ 事件輸出
本機有下列事件輸出。
• 4點事件繼電器輸出(可選)
• 4點事件總線輸出(所有機型)
另外,這些事件輸出可以通過通訊讀出動作狀態(ON/OFF狀態)。
請參閱 附-2 與事件相關的建議 (附-3 頁)。
使用上的注意事項
事件總線輸出,是指採用本機底板內的總線,可以通過事件輸出模件的
繼電器輸出的事件輸出。
在使用不具有事件繼電器輸出的4CH模件,必需物理的繼電器輸出的場
合,或者2CH型,必需多個事件輸出的場合下使用。
另外,事件總線輸出即使不是事件輸出模件,也可以作為內部位信號使
用。
● 動作種類
項 目
範 圍
待 鎖 正 報
主 副 HYS ON延遲 OFF延遲 CH 時:分:秒 時:分:秒
機 定 逆 警 動 作
0:無事件 - - - 00:00:00~00:00:00~ 1~6 - ○ ○ ○ 通常事件輸出為OFF
99:59:59 99:59:59 使用鎖定的場合,也為強制OFF狀態
1:PV上限 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○ 對應於PV值動作
+10000 10000 99:59:59 99:59:59
2:PV下限 -2000 ~ - 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○ 對應於PV值動作
+10000 10000 99:59:59 99:59:59
3:PV上下限 -2000~ 主~ 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○ 對應於PV值動作
副 10000 10000 99:59:59 99:59:59
4:偏差上限 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 △ ○ ○ ○ 對應於SP和PV的偏差動作
(當前SP基準) +10000 10000 99:59:59 99:59:59
5:偏差下限 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 △ ○ ○ ○ 對應於SP和PV的偏差動作
(當前SP基準) +10000 10000 99:59:59 99:59:59
6:偏差上下限 0~ 0~ 0~ 00:00:00~00:00:00~ 1~4 △ ○ ○ ○ 對應於SP和PV的偏差動作
(當前SP基準) 10000 10000 10000 99:59:59 99:59:59
7:CH間偏差 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○ 對應於不同2CH的PV值的偏差動作
上限 +10000 10000 99:59:59 99:59:59
8:CH間偏差 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○ 對應於不同2CH的PV值的偏差動作
下限 +10000 10000 99:59:59 99:59:59
9:CH偏差 -2000~ 主~ 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○ 對應於不同2CH的PV值的偏差動作
上下限 副 10000 10000 99:59:59 99:59:59
10:READY - - - 00:00:00~00:00:00~ 1~6 - ○ ○ ○ 變成READY狀態時為ON
狀態 99:59:59 99:59:59
11:MANUAL - - - 00:00:00~00:00:00~ 1~6 - ○ ○ ○ 變成MANUAL狀態時為ON
狀態 99:59:59 99:59:59
12:控制動作 - - - 00:00:00~00:00:00~ 1~6 - ○ ○ ○ 控制動作為正動作(冷卻控制)時為ON
正 99:59:59 99:59:59
13:自整定時 - - - 00:00:00~00:00:00~ 1~6 - ○ ○ ○ 自整定啟動到結束期間為ON
99:59:59 99:59:59
14:自適應 - - - 00:00:00~00:00:00~ 1~6 - ○ ○ ○ 適應控制狀態下啟動自適應
整定等待 99:59:59 99:59:59 直到計算出控制參數為止,一直為ON
8-16

第8 章 設定參數
項 目
範 圍
主 副 HYS ON延遲 OFF延遲 CH 時:分:秒 時:分:秒
待 鎖 正 報
機 定 逆 警
動 作
15:回路診斷 0~ -2000~ 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○
10000 +10000 10000 99:59:59 99:59:59
16:定時器 - - - 00:00:00~00:00:00~ 1~6*1 - ○ - ○ ON延遲的動作:定時器啟動用信號(外
99:59:59 99:59:59 *2 部開關輸入或內部位)變成ON後,經過設
定的時間,事件輸出為ON。
OFF延遲的動作:定時器啟動用信號(外
部開關輸入或內部位)變成OFF後,經過
設定的時間,事件輸出為OFF。
*1:Ready時事件為OFF,請指定監視
Ready狀態的PV CH。
*2:請一定要設定為0。
17:加熱器斷線/ 0 主~ 0~ 00:00:00~00:00:00~ 1~2 - ○ ○ ○ 對應於變流器值動作
過電流 ~副 1000.0 1000.0 99:59:59 99:59:59 MV=ON時動作
18:加熱器短路 0~ - 0~ 00:00:00~00:00:00~ 1~2 - ○ ○ ○ 對應於變流器值動作
1000.0 1000.0 99:59:59 99:59:59 MV=OFF時動作
19:個別通道 - - - 00:00:00~00:00:00~ 1~6 ○ ○ ○ ○ 對應於報警狀態動作
PV報警 99:59:59 99:59:59 設定的PVch 報警為ON時,事件為ON
20:個別存儲 - - - 00:00:00~00:00:00~ 1~6*3 ○ ○ ○ ○ *3:只有使用報警時才顯示1~6
報警 99:59:59 99:59:59
21:LOCAL - - - 00:00:00~00:00:00~ 1~6 ○ ○ ○ ○
99:59:59 99:59:59
22:SP上限 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 △ ○ ○ ○
+10000 10000 99:59:59 99:59:59
23:SP下限 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 △ ○ ○ ○
+10000 10000 99:59:59 99:59:59
24:SP上下限 -2000 主~ 0~ 00:00:00~00:00:00~ 1~4 △ ○ ○ ○
~副 10000 10000 99:59:59 99:59:59
25:偏差上限 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○
( 終SP基準) +10000 10000 99:59:59 99:59:59
26:偏差下限 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○
( 終SP基準) +10000 10000 99:59:59 99:59:59
27:偏差上下限 0~ 0~ 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○
( 終SP基準) 10000 10000 10000 99:59:59 99:59:59
28:SP斜率中 - - - 00:00:00~00:00:00~ 1~6 ○ ○ ○ ○
99:59:59 99:59:59
29:馬達控制 - - - 00:00:00~00:00:00~ 1~6 ○ ○ ○ ○
位置推定中 99:59:59 99:59:59
30:回路診斷 -2000~ - 0~ 00:00:00~00:00:00~ 1~4 ○ ○ ○ ○
2 +10000 10000 99:59:59 99:59:59
△:通常可以使用待機動作,但是SP變更時不能使用待機。 偏差事件中使用待機動作的場合,請使用事件類別號 25、26、27。
• 無功能的場合,通常事件運算結果(事件輸出)=0 。
• 以下是通道的設定範圍。
1~4 :PV通道的指定 5 : 所有存在的PV通道的OR動作 6 : 所有存在的PV通道的AND動作
• 加熱器關聯事件(項目 =17、18)的CH表示變流器的通道。
• 表中的“-”是不必設定的參數。 (可以寫入,但沒有意義) 事件設定值=-2000~+10000、CH=1~6、正逆=0~1 ,即使設定了,功能也無效。
• 事件動作種類=17、18的主、副、HYS值,請輸入實際電源值的10倍值。
例: 11.5A 的場合為115。
8-17

第8 章 設定參數
● 每個事件類別的動作
項 目 正動作 逆動作
●包含此項值 ○◯不包含此項值
0: 無功能的場合,即使進行了其他設定,事件輸出也為OFF 無事件 但是,即使事件類別=0,鎖定也不能被解除
1: 和PV下限• 逆動作同樣動作 和PV下限·正動作同樣動作
PV上限 HYS ON
主 PV
ON HYS
主 PV
2: 和PV上限• 逆動作同樣動作 和PV上限• 正動作同樣動作 PV下限
ON HYS
主 PV
HYS ON
主 PV
3: PV上下限
ON HYS
主
HYS ON
副
PV
HYS ON
主
HYS
副
PV
4: 和偏差下限• 逆動作同樣動作 和偏差下限• 正動作同樣動作 偏差上限 HYS ON ON HYS
SP+主 SP+主 PV PV
5: 和事件類別=4(偏差上限)• 逆動作同樣動作 和偏差上限• 正動作同樣動作 偏差下限
ON HYS
HYS ON
SP+主 PV
SP+主 PV
6: 和PV上下限• 逆動作同樣動作
偏差
上下限
ON HYS
主
HYS ON SP
副 PV
HYS
主
ON HYS
SP 副
PV
7: CH間偏差按照下列方式進行運算 CH間偏差 上限 CH 設定 2CH 型 4CH 型
1 PV1 -PV2 PV1 -PV2
2 PV2 -PV1 PV2 -PV3
3 設定不可 PV3 -PV4
4 設定不可 PV4 -PV1
和偏差下限• 逆動作同樣動作 和偏差下限• 正動作同樣動作
HYS ON ON HYS
主 主 CH間偏差
CH間偏差
8: CH間偏差按照CH間運算對象進行運算 和偏差上限• 正動作同樣動作 CH間偏差 和偏差上限• 逆動作同樣動作
下限 ON HYS
HYS ON
主 主 CH間偏差
9:
CH間偏差
CH間偏差 ON HYS HYS ON HYS ON HYS
上下限
主 副
CH間偏差
主 副
CH間偏差
8-18

第8 章 設定參數
項 目 正動作 逆動作 CH 指定 注意事項
10: 變成READY狀態時 正動作反轉輸出 1~4:個別CH READY時的動作 READY 事件狀態=ON 指定 請設定為0 狀態 5:所有CH OR動作
6:所有CH AND動作
11: 變成MANUAL狀態時 正動作反轉輸出 1~4:個別CH MANUAL 事件狀態=ON 指定狀態
5:所有CH OR動作
6:全CH AND動作
12: 控制為正動作時 正動作反轉輸出 1~4 :個別CH 待機設定
控制動作 事件狀態=ON 指定 為0 正 5:所有CH OR動作
6:所有CH AND動作
13: 自整定時 正動作反轉輸出 1~4 :個別CH
自整定 事件狀態=ON 指定 5:所有CH OR動作
6:所有CH AND動作
14: 自適應整定等待時 正動作反轉輸出 1~4 :個別CH
自適應 事件狀態=ON 指定 整定等待 5:所有CH OR動作
6:所有CH AND動作
15: 儘管控制輸出為ON,檢測不到PV值變化的場合還是為ON。
回路 在希望檢測操作端故障等場合中使用。 診斷 ●設定項目
• 主設定:控制輸出值 • 副設定:PV值 • ON延遲時間:診斷時間(回路診斷事件的場合)
●動作規格 儘管在診斷時間內保持主設定值以上的控制輸出值,在診斷時間內沒有達到副設定中設定的PV值的場合還是為ON。
加熱控制的場合 冷卻控制的場合
條件1
1~4:個別CH
指定
待機設定禁止
PV 條件1
副 (PV)
PV 主
(PV)
條件2
MV 主
(MV)
條件2
條件2
MV 主
(MV)
條件2
條件3 ON延遲 設定時間
EV EV
滿足事件ON條件的區域
一旦具備條件1、條件2,ON延遲開始
條件3 ON延遲 設定時間
滿足事件ON條件的區域
一旦具備條件1、條件2,ON延遲開始
8-19

第8 章 設定參數
項 目 正動作 逆動作 CH 指定 注意事項
16: 啟動信號變成ON後,經過ON延遲時間,變為ON。 定時器 啟動信號變成OFF後,經過OFF延遲時間,變為OFF。
啟動信號是指外部開關輸入或內部BUS等的DI。
● ON延遲定時器的動作
定時器事件輸出
外部開關輸入
或者
總線外部開關輸入
其他
ON
ON延遲 時間 設定時間(S)
ON
● OFF延遲定時器的動作
定時器事件輸出
外部開關輸入 或者 總線外部開關輸入
ON
OFF延遲 時間 設定時間(S)
ON
為了再次通電或者定時器的設定值變更後,定時器的向下數值計數能復位,再次從ON延遲的初始值開始。
17: 控制輸出=ON期間在變流器輸入 控制輸出=ON期間在變流器輸
加熱器/ 側檢測到副設定值以上的電流的場 入側檢測到主設定值以上、且副設
斷線 合,或者僅流過主設定值以下的電流 定值以下的電流的場合動作 過電流 的場合動作。
ON HYS
主
HYS ON
副
HYS
ON HYS
副主
1: CH1 待機設定為0
2: CH2
電流 電流
18: 控制輸出=OFF期間流過事件設定值以上的電流的場合動作
加熱器 1: CH1 待機設定為0短路 HYS ON
ON HYS
2: CH2
主 電流 主 電流
19: 檢測到個別通道的PV ALARM 正動作反轉輸出 1~4 :個別 CH
個別 (PV 上下限報警、B 線斷線報警) 指定
通道 5:所有CH OR動作 PV報警 6:所有CH AND動作
20: 以儀錶的存儲報警(參數區域RAM校 正動作反轉輸出 不指定
存儲 驗和、調整區域EEPROM,RAM校驗和) 報警 和PV報警(PV上限報警、下限報警、
CJ異常、B線斷線)為對象,發生其中任意一個報警時事件=ON
21: 使用Local SP時 正動作反轉輸出 1~2 :個別CH LOCAL 事件狀態=1 指定
5:所有CH OR動作 6:所有CH AND動作
22: 和SP下限、逆動作同樣動作 和SP下限、正動作同樣動作
SP上限 HYS ON ON HYS
主 SP
主 SP
23: 和SP上限、逆動作的動作相同 和SP上限、正動作的動作相同
SP下限 ON HYS
主 SP
HYS ON
主 SP
24: 和SP上限、逆動作同樣動作 和SP上限、正動作同樣動作
SP上下限 ON HYS
HYS ON
PV
HYS ON
HYS
PV 主 SP
副 主 SP 副
8-20

第8 章 設定參數
項 目 正動作 逆動作 CH 指定 注意事項
25: 和偏差下限、逆動作同樣動作 和偏差下限、正動作同樣動作 偏差上限
( 終 SP HYS ON ON HYS
基準) SP+主 PV SP+主 PV
26: 和偏差上限、逆動作同樣動作 和偏差上限、正動作同樣動作
偏差下限 ( 終 SP
ON HYS
HYS ON
基準)
27:
SP+主 PV
SP+主 PV
偏差上下限 ( 終 SP
ON HYS
HYS ON
SP PV
HYS ON
SP
HYS
PV
基準) 主 副 主 副
28: SP斜率動作中時 正動作反轉輸出 1~4 :個別CH SP斜率中 事件狀態=1 指定
5:所有CH OR動作 6:所有CH AND動作
29: 馬達控制位置推定中時事件狀 正動作反轉輸出 1~2 馬達控制 態=1
位置推定中
30: 儘管控制輸出為ON,檢測不到PV變化的場合還是為ON
回路診斷 在希望檢測到操作端故障等場合時使用
2 15:電路診斷與PV關聯事件ON條件不同 ●設定項目
• 主設定:操作量 • 副設定:無 • 回差:操作量超過主設定時點的PV值的偏差
● 動作規格 • 保持主設定值以上的操作量,並且超過主設定值時點的PV值加上(減去)回差設定值後的值,在診斷
時間(ON延遲時間)內沒有達到PV的場合為ON
加熱控制的場合 冷卻控制的場合
PV (PV)
條件1
Hys(PV)
PV (PV)
條件1
Hys(PV)
條件2
MV
條件2
條件2
MV
條件2
EV Low (MV)
EV Low (MV)
條件3 ON延遲 設定時間
EV
條件3 ON延遲 設定時間
EV
滿足事件ON條件的區域
一旦具備條件1、條件2,ON延遲開始
滿足事件ON條件的區域
一旦具備條件1、條件2,ON延遲開始
8-21

第8 章 設定參數
參 考
事件ON延遲,是指在滿足事件動作條件(溫度上限溢出等)下,經過設定時間
後,事件輸出動作的功能。
PV
PV
事件設定值
● 對象通道
事件輸入
ON延遲時間
時間 ON OFF
指定事件動作對象的CH。
• 根據事件種類,對象通道的含義為PV通道的場合與變流器的通道區分。
• 可以設定為5的場合,所有通道OR動作。
• 可以設定為5的場合,所有通道AND動作。
• 同時設定為PV ALARM OR的場合,此對象通道的設定同時變為PV ALARM
OR對應的PV通道選擇。(不能個別設定事件設定類別和PV ALARM OR)
• 不必設定對象通道的事件類別的場合,可設定為1~8,即使設定了也不
影響動作。
項 目 設定內容 初始值 用戶級別
對象通道 1 或者 2 EV1/EV_BUS1→1 簡單•標準•多功能 (2 通道型) EV2/EV_BUS2→2 1~4 EV3/EV_BUS3→3 (4 通道型) EV4/EV_BUS4→4
● 報警OR動作
存在的所有PV通道的PV關聯報警、或者儀錶的存儲報警發生的場合,其事件
類別的狀態OR動作,事件=ON。
事件類別=0時,事件設定用的各參數為ALARM OR專用設定。即使設定待機=有,
此設定也被無視,此項ALARM OR動作輸出。因此,執行待機=有的設定 ,從剛
通電到發生PV報警的場合,事件為ON(正動作的場合)。設定為逆動作的場合,
ALARM OR事件通常為正動作。
但是待機的場合,如果設定為READY狀態,則事件為OFF。
項 目 設定內容 初始值 用戶級別
儀錶報警 0 :無 0 :無 多功能
OR 動作 1 :使用OR動作 8-22

第8 章 設定參數
● 事件設定值(主)
事件的設定值。根據事件類別設定上限、下限二個值的場合,為下限值。
項 目 設定內容 初始值 用戶級別
事件設定值 根據動作種類設定 0 簡單•標準•多功能 (主)
● 事件設定值(副)
事件的設定值。根據事件類別設定上限、下限二個值的場合,為上限值。
項 目 設定內容 初始值 用戶級別
事件設定值 根據動作種類設定 1000 簡單•標準•多功能 (副)
● 回 差
ON點和OFF點的差。為避免事件輸出頻繁、反復ON/OFF操作,設定為某個值
時使用。
項 目 設定內容 初始值 用戶級別
回差 0~10000 5 標準• 多功能 ● 正 逆
正逆動作的設定,希望反轉設定事件動作的動作極性(切換ON/OFF關係)時
設定的項目。
項 目 設定內容 初始值 用戶級別
正 逆 0 :正動作 0 :正 簡單•標準•多功能
1 :逆動作
使用上的注意事項
◎PV上限、偏差上限的正動作和PV下限、偏差下限的逆動作相同。
[例]事件動作種類的設定 : 3 (PV 上下限警報)
正/逆動作的設定 : 1 (逆)
ON OFF
HYS ON
主
HYS
副 PV
◎使用PV、偏差上下限及加熱器斷線/過電流、操作端短路警報的場合,
請注意HYS的設定,避免OFF點消失。
ON HYS
主
HYS ON
副 PV
ON HYS
主
HYS ON
副 PV
錯誤設定 正確設定
8-23

第8 章 設定參數
● 待 機
待機,是指儀錶通電或者從READY切換到RUN狀態時,使用中的事件即使滿足
ON條件,也不讓此事件為ON的功能。
滿足一次OFF條件後,再次滿足ON條件時動作。
“2 :待機+SP變更時待機”是指“1 :待機”的功能加上SP變更時(SP值變
更、SP組號變更)再設定待機的功能。
項 目 設定內容 初始值 用戶級別
待 機 0 :無 0 :無 標準• 多功能 1 :待機 2 :待機+SP變更
時待機
● 鎖 定
一旦事件變成ON狀態後,即使滿足OFF條件,還保持ON狀態的功能。復位鎖
定功能時,事件OFF的條件下進行下列任意一個操作。
• 外部開關輸入中請設定為“鎖定解除”,外部開關設定為ON。
• 請再次通電。
• 請發送鎖定解除電文。(參照10-18 頁的1109W )
項 目 設定內容 初始值 用戶級別
鎖定 0 :無 0 :無 多功能
1 :鎖定動作
● READY時的動作
儀錶為READY狀態時希望事件輸出不動作的場合進行設定。
項 目 設定內容 初始值 用戶級別
READY時的動作 0:READY時動作繼續 0:READY時動作繼續 多功能
1:READY時動作強制 OFF
8-24

第8 章 設定參數
■ 變流器輸入
本機2通道型具有測定加熱器電流值的變流器輸入功能。通過監視流過加
熱器的電流值,可以檢測到加熱器斷線或過電流、繼電器等操作端短路狀
態。
● 對象通道
指定變流器輸入的對象通道。
各CH中指定變流器為初始值,單相中使用的場合不必變更設定。三相中使用
的場合,請在此項設定中指定對象通道。
項 目 設定內容 初始值 用戶級別
對象通道 1: OUT1 CT1→1 多功能
2: OUT2 CT2→2 3: EV1 4: EV2 5: EV3 6: EV4
● 測定等待時間
從控制輸出變成ON到開始測定電流值的時間的設定。
加熱器斷線/過電流檢測的場合,通過測定加熱器ON狀態時的電流值,監視
異常狀態。根據應用負載,控制輸出剛變成ON之後,因衝擊電流檢測到很大
數值的場合,請延長此項設定值。
為了縮短控制輸出的ON時間,希望縮短到測定的時間的場合,進行設定變
更。
控制輸出
加熱器電流
等待時間的算式
時間
測定等待時間 測定週期
等待時間(ms)=設定值×10
項 目 設定內容 初始值 用戶級別
測定等待時間 3~30(× 10ms) 3 簡單•標準•多功能
8-25

第8 章 設定參數
■ 外部開關輸入
本機中外部開關輸入功能可選的場合, 多可以使用4點外部開關輸入。另
外,DMC10所有型號中4點事件總線輸出(EV_BUS1~EV_BUS4)可以和外部開關
總線輸入(RSW_BUS1~RSW_BUS4)同樣使用。
參 考
事件總線輸出可以作為外部開關總線輸入使用。
事件總線輸出也可以作為事件輸出模件的輸入,輸出到本機的外部,但可以
就這樣在本機內部代替外部開關總線輸入使用。
此項功能有以下內容。
• 因某個通道發生報警,其他通道或者所有通道的控制輸出設定為 OFF
(READY狀態)。
• 某個通道達到一定溫度後,開始其他通道或者所有通道的控制(READY狀態
→ RUN狀態)。
• 經過一定時間後,開始(RUN狀態)或者停止(READY狀態)某個通道或者所有通道的控制。
● 動作種類
設定外部開關輸入或者事件輸出功能的動作。
動作對象通道的指定,可以對個別通道和所有通道的同時動作進行指定。
所有外部開關輸入的動作條件為級別輸入,動作繼續時必須保持輸入。
在通常正動作中使用,逆動作時可以切換ON和OFF時的動作。逆動作時說明內
的 ON和OFF時的動作相反。
項目 設定內容 對象通道 正逆
用戶
級別
動作 0 :無功能 0:所有CH 0:正動作 簡單•標準
種類 1 :SP組號加1 1~4 :個別CH或者 1:逆動作 •多功能
2 :SP組號加2 事件輸出
3 :SP組號加4 1~4
4 :RUN/READY 5~8 :總線輸出
5 :AUTO/MANUAL
6 :LOCAL/REMOTE
7 :自整定停止/啟動
8 :自適應停止/執行
9 :定時器停止/啟動
10:事件實際輸出鎖定狀態解除
11:CH間偏差控制切換
12 :CH間偏差控制種類
13 :外部開關輸入狀態
14 :SP斜率停止
8-26

第8 章 設定參數
0:無功能
即使指定的外部開關輸入為ON,調節器也沒有任何動作。但是,由於可
以通過通訊讀入指定外部開關輸入的ON/OFF狀態,所以可以用作報警或
監視開關的ON/OFF狀態的讀取。
1:SP組號加1、2:SP組號加2、
3:SP組號加4
本機可以有 多16個SP值。(2通道型的場合為8個/通道,4通道型的場
合為4個/通道)
切換這些SP值的場合使用。根據使用的輸入點數,SP值按照以下方式進
行切換。
1點: SP1/SP2
2點: SP1~SP4
3點: SP1~SP8
SP1 SP2 SP3 SP4 SP5 SP6 SP7 SP8
1點的場合 外部開關輸入1 × ○
2點的場合 外部開關輸入1 × ○ × ○ 外部開關輸入2 × × ○ ○
3點的場合 外部開關輸入1 × ○ × ○ × ○ × ○
外部開關輸入2 × × ○ ○ × × ○ ○
外部開關輸入3 × × × × ○ ○ ○ ○
上述外部開關輸入的號不限於這些號。 ○: ON、×: OFF
4:RUN/READY切換
RUN(控制狀態)/READY(控制停止狀態)切換。
外部開關輸入 OFF ON
機器狀態 RUN READY
5:AUTO/MANUAL切換
調節器從自動控制狀態(AUTO狀態)切換到可以手動操作的狀態(MANUAL
狀態)。相關設定請參閱 8-10 頁。
外部開關輸入 OFF ON
機器狀態 AUTO MANUAL
使用上的注意事項
控制方式為ON/OFF控制時,不能切換到MANUAL狀態。
6:LOCAL/REMOTE切換
高功能型DMC10D中可以使用此項功能。
本地SP的控制切換到遠程SP輸入的SP時使用。
外部開關輸入 OFF ON
機器狀態 LOCAL REMOTE
8-27

第8 章 設定參數
7:自整定停止/啟動
PID常數的自整定啟動/停止。
• 如果自整定啟動中設定為OFF,則終止整定。
• 自整定啟動後正常結束,希望再次執行的場合,請設定一次外部開關
輸入為OFF,再次設定為ON。
外部開關輸入 OFF ON
機器狀態 自整定停止 自整定啟動
參 考
關於加熱冷卻控制的自整定,請參閱 ■加熱冷卻控制 (9-3 頁)。
8:自適應停止/執行
自適應停止/執行切換。
外部開關輸入 OFF ON
機器狀態 自適應啟動許可 自適應啟動禁止
使用上的注意事項
使用此項功能時,首先必須把[基本功能]→[控制輸出關聯]→ [控制方式]設定為“1:自適應控制”。
9:定時器停止/啟動
事件輸出類別為定時器時為啟動信號。ON時定時器開始計數,如果計數到
達前變成OFF,則計數停止/計數值被復位。計數到達後事件動作,啟動信
號為OFF時事件動作和計數值被復位。 外部開關輸入 OFF ON
機器狀態 定時器計數 定時器計數啟動 停止&復位
10:鎖定狀態解除
外部開關輸入用作事件輸出鎖定狀態解除的場合,進行設定。
外部開關輸入 OFF ON
機器狀態 鎖定狀態保持許可 鎖定狀態解除
11:通道間偏差控制切換
高級功能型DMC10D中可以使用。
從通常的控制切換到CH間偏差控制的場合使用。
外部開關輸入 OFF ON
機器狀態 通常控制 CH間偏差控制
8-28

第8 章 設定參數
12:CH間偏差控制種類切換
高級功能型DMC10D中可以使用。
CH間偏差控制中,與對象PV值的偏差控制、或者與對象SP值的偏差控制
切換的場合使用。
外部開關輸入 OFF ON
機器狀態 與對象PV值的偏差控制 與對象SP值的偏差控制
13:外部開關輸入狀態
僅把外部開關輸入信號直接讀取到DMC10內部的功能。作為通用 DI使
用,和事件輸出特殊操作等使用。
外部開關輸入 OFF ON
機器狀態 0 1
14:SP斜率停止
使用SP斜率時可以停止SP斜率動作。
如果在SP斜率中停止,那麼SP值= 終到達SP值。
外部開關輸入 OFF ON
機器狀態 SP斜率執行 SP斜率停止 ■ 輔助輸出(電流輸出)
本機可選 多2點輔助輸出功能(電流輸出)。
項 目 設定內容 初始值 用戶級別
動作種類 0:PV值 0 簡/標準/多
1:PV1-PV2值 2:SP值 3:操作量值 4:加熱側操作量 5:冷卻側操作量 6:馬達反饋值
對象通道 1~2 AUX1→1 標準/多
AUX2→2
輸出種類 0:4~20mA 0 多 1:0~20mA
0 %設定 -2000~+10000 0 簡/標準/多
100 %設定 -2000~+10000 1000 簡/標準/多
動作種類的SP值中使用了SP斜率的場合,為斜率中的SP值。
0%、100%設定是對輸出種類的設定。
例:輸出種類0~20mA的場合,0%表示0mA時的值
100%表示20mA時的值
8-29

第8 章 設定參數
8 - 4 事件輸出特殊動作
希望在事件輸出中就這樣輸出邏輯運算(AND、OR)或端口信號等場合,可以選擇“特殊功能”的事件輸出
特殊動作。以下是事件輸出特殊動作的設定參數一覽表及其說明。
另外,關於事件輸出特殊動作的構造、具體的設定方法,請參閱
附-3 事件輸出特殊動作的詳細說明 (附-5 頁) 。
■ 設定參數 (僅事件輸出特殊動作關聯內容)
分類 項目名 設定範圍 初始值 用戶級別 備註
事件 動作種類 與標準事件輸出“動作種類”相同 參照8-3 頁
表 對象通道 與標準事件輸出“對象通道”相同 參照8-3 頁
報警OR動作 與標準事件輸出“報警OR動作”相同 參照8-3 頁
事件設定值(主) 與標準事件輸出“事件設定值(主)”相同 參照8-3 頁
事件設定值(副) 與標準事件輸出“事件設定值(副)”相同 參照8-3 頁
回差 與標準事件輸出“回差”相同 參照8-3 頁
正逆 與標準事件輸出“正逆”相同 參照8-3 頁
待機 與標準事件輸出“待機”相同 參照8-3 頁
ON延遲(時) 與標準事件輸出“ON延遲(時)”相同 參照8-4 頁
ON延遲(分) 與標準事件輸出“ON延遲(分)”相同 參照8-4 頁
ON延遲(秒) 與標準事件輸出“ON延遲(秒)”相同 參照8-4 頁
OFF延遲(時) 與標準事件輸出“OFF延遲(時)”相同 參照8-4 頁
OFF延遲(分) 與標準事件輸出“OFF延遲(分)”相同 參照8-4 頁
OFF延遲(秒) 與標準事件輸出“OFF延遲(秒)”相同 參照8-4 頁
事件 輸出分配 1 參照以後的詳細說明或者表10-8 簡/標/多 參照10-39 頁
輸出分配 輸出分配 2 參照以後的詳細說明或者表 10-9 簡/標/多 參照10-39 頁
邏輯 0:OR 0 多 1:AND
鎖定 0:無 0 多 1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 0:正 0 多 1:逆
外部總線 0:把外部總線看作繼電器, 0 多 型定義 進行時間比例動作
1:把外部總線看作電壓脈衝,進行時間比例動作
注 :標準事件輸出的設定參數中有鎖定參數,但是在事件輸出特殊動作中,鎖定移動到事件輸出指定中。
參 考
8-30
外部總線型定義:
輸出到外部總線(側連接頭)時,內部進行以下判定,進行時間比例動作。
(下面是編程器設定畫面的說明)
0 :把外部總線看作繼電器,進行時間比例動作
1 :把外部總線看作電壓脈衝,進行時間比例動作
例) 電壓脈衝輸出中設定周期=2s的場合,使用事件輸出指定同時輸出到外
部總線(側連接頭)時,根據外部總線定義進行以下動作。
• 把外部總線型定義作為繼電器進行設定,把時間比例運算的周期和死
區作為繼電器輸出進行動作(周期 短5s、有ON/OFF的死區)。
• 把外部總線型定義作為電壓脈衝進行設定,把時間比例運算的周期和
死區作為電壓脈衝進行動作。

第8 章 設定參數
■ 詳細說明
因事件表內的各項目與標準事件輸出項目內容相同,請參照標準事件輸出。
● 輸出分配1
事件輸出特殊動作中使用邏輯等場合,定義使用哪種信號的設定。
可以選擇多個信號,加上輸出分配2、3可以從40個信號中選擇。編程器上檢
測過的信號有效。
項目名 設定內容 初始值 用戶級別
輸出分配1 EV_TBL1 內部運算結果 EV_TBL1→EV1 簡/標/多
EV_TBL2 內部運算結果 EV_TBL2→EV2 EV_TBL3 內部運算結果 EV_TBL3→EV3 EV_TBL4 內部運算結果 EV_TBL4→EV4 EV_TBL5 內部運算結果 EV_TBL5→EV BUS1 EV_TBL6 內部運算結果 EV_TBL6→EV BUS2 EV_TBL7 內部運算結果 EV_TBL7→EV BUS3 EV_TBL8 內部運算結果 EV_TBL8→EV BUS4 外部開關輸入1 OUT1 結果→ OUT1 外部開關輸入2 OUT2 結果→ OUT2 外部開關輸入3 OUT3 結果→ OUT3 外部開關輸入4 OUT4 結果→ OUT4 OUT1 控制運算結果 OUT2 控制運算結果 OUT3 控制運算結果 OUT4 控制運算結果
● 輸出分配2
事件輸出特殊動作中使用邏輯等場合,定義使用哪種信號的設定。
可以選擇多個信號,加上輸出分配1、3可以從40個信號中選擇。編程器上檢
測過的信號有效。
項目名 設定內容 初始值 用戶級別
輸出分配2 RSW_TBL1 內部運算結果 無 簡/標/多 RSW_TBL2 內部運算結果 RSW_TBL3 內部運算結果 RSW_TBL4 內部運算結果 RSW_TBL5 內部運算結果 RSW_TBL6 內部運算結果 RSW_TBL7 內部運算結果 RSW_TBL8 內部運算結果 外部開關總線輸入1 外部開關總線輸入2 外部開關總線輸入3 外部開關總線輸入4 通訊DI1 通訊DI2 通訊DI3 通訊DI4
8-31

第8 章 設定參數
● 輸出分配3
事件輸出特殊動作中使用邏輯等場合,定義使用哪種信號的設定。
可以選擇多個信號,加上輸出分配1、2從40個信號中選擇。編程器上檢測
過的信號有效。
項目名 設定內容 初始值 用戶級別
輸出分配3 通訊DI5 無 簡/標/多
通訊DI6 通訊DI7 通訊DI8 通訊DI9 通訊DI10 通訊DI11 通訊DI12 未定義 未定義 未定義 未定義 未定義 未定義 未定義 未定義
注:可以寫入-32768~+32767(0000H~FFFFH),未定義的地方是備用位,
不動作,通常請設定為0。
● 邏 輯
事件輸出特殊動作中使用邏輯等場合,設定輸出指定1和輸出指定2中選擇
的信號的邏輯。
項目名 設定內容 初始值 用戶級別
邏輯 0: OR 0 多
1: AND
● 鎖 定
事件輸出特殊動作中輸出指定1和輸出指定2中選擇的信號的邏輯值輸出鎖
定的設定。
和標準事件輸出的鎖定規格相同。
項目名 設定內容 初始值 用戶級別
鎖定 0:無 0 多
1:有(ON時鎖定) 2:有(OFF時鎖定)
● 正 逆
事件輸出特殊動作中輸出指定1和輸出指定2中選擇的信號的邏輯值輸出極
性的設定。
和標準事件輸出的正逆規格相同。
項目名 設定內容 初始值 用戶級別
正逆 0:正 0 多 1:逆
8-32

第8 章 設定參數
8 - 5 外部開關輸入特殊動作
在外部開關輸入中,希望對來自輸入端口的信號和其他信號進行邏輯運算(AND、OR)的場合,可以選擇
“特殊功能”的外部開關輸入特殊動作。
以下是外部開關輸入特殊動作的設定參數一覽表及其說明。
另外,關於外部開關輸入特殊動作的構造、具體設定方法,請參閱
附-4 外部開關輸入特殊動作的詳細說明 (附-10 頁)。 ■ 設定參數 (僅外部開關輸入特殊動作關聯內容)
分類 項目名 設定範圍 初始值 用戶級別 備註
外部開關 動作種類 與標準外部開關輸入“動作種類”相同 參照8-4 頁
輸入 對象通道 與標準外部開關輸入“對象通道”相同 參照8-4 頁
輸入分配1 參照以後的詳細說明或者表 10-11 簡/標/多 參照10-40 頁
輸入分配2 參照以後的詳細說明或者表 10-12 簡/標/多 參照10-41 頁
邏輯 0:OR 0 多
1:AND
正逆 0:正 0 多 1:逆
■ 詳細說明
外部開關輸入內的動作種類、對象通道與標準外部開關輸入的項目內容相
同,請參照標準外部開關輸入。
● 輸入分配1
外部開關輸入特殊動作中使用邏輯等場合,定義使用哪種信號的設定。
可以選擇多個信號,和輸入分配2、3一起從32個信號中選擇。編程器上檢測
過的信號有效。
項目名 設定內容 初始值 用戶級別
輸入分配1 外部開關輸入1 RSW1→RSW_TBL1 簡/標/多
外部開關輸入2 RSW2→RSW_TBL2 外部開關輸入3 RSW3→RSW_TBL3 外部開關輸入4 RSW4→RSW_TBL4 外部開關總線輸入1 RSW_BUS1→RSW_TBL5 外部開關總線輸入2 RSW_BUS2→RSW_TBL6 外部開關總線輸入3 RSW_BUS3→RSW_TBL7 外部開關總線輸入4 RSW_BUS4→RSW_TBL8 EV_TBL1 內部運算結果 EV_TBL2 內部運算結果 EV_TBL3 內部運算結果 EV_TBL4 內部運算結果 EV_TBL5 內部運算結果 EV_TBL6 內部運算結果 EV_TBL7 內部運算結果 EV_TBL8 內部運算結果
8-33

第8 章 設定參數
● 輸入分配2
外部開關輸入特殊動作中使用邏輯等場合,定義使用哪種信號的設定。
可以選擇多個信號,加上輸入分配1、3,從32個信號中選擇。編程器上檢測
過的信號有效。
項目名 設定內容 初始值 用戶級別
輸入分配2 未定義 無 簡/標/多 未定義 未定義 未定義 未定義 未定義 未定義 未定義 事件輸出1 事件輸出2 事件輸出3 事件輸出4 通訊DI1 通訊DI2 通訊DI3 通訊DI4
● 輸入分配3
項目名 設定內容 初始值 用戶級別
輸入分配3 通訊DI5 無 簡/標/多 通訊DI6 通訊DI7 通訊DI8 通訊DI9 通訊DI10 通訊DI11 通訊DI12 未定義 未定義 未定義 未定義 未定義 未定義 未定義 未定義
注:可以寫入-32768~+32767(0000H~FFFFH),未定義的地方是備用位,
不動作,通常請設定為0。
● 邏 輯
外部開關輸入特殊動作中使用邏輯等場合,設定輸入分配1和輸入分配2中選擇的信號的邏輯。
項目名 設定內容 初始值 用戶級別
邏輯 0:OR 0 多
1:AND
8-34

第8 章 設定參數
● 正 逆
外部開關輸入特殊動作中,對輸入分配1和輸入分配2中選擇的信號的邏輯
值輸出極性的設定。
和標準外部開關輸入的正逆規格相同。
項目名 設定內容 初始值 用戶級別
正逆 0:正 0 多
1:逆
8-35

第 9 章 設定參數 (DMC10D)
9 - 1 高功能的概要 ■ PV輸入關聯
高級功能型DMC10D中熱電偶量程部分(詳細內容參照量程表)可以使用到小
數第一位。對細微的溫度控制更有效。
■ 控制輸出關聯
高級功能型DMC10D中追加了下列控制內容。
● 加熱冷卻控制
2CH高級功能型(不對應4CH型)中,可以進行2CH的加熱冷卻控制。
請從編程器上的“特殊功能”中選擇加熱冷卻,進行各項設定。
如果不進行此項設定,則本體不進行加熱冷卻控制。
不能與遠程SP輸入或CH間偏差控制、自適應並用。
● CH間偏差控制
在讓對象物體的溫度均等或相互干擾的應用中,能發揮比原來的各回路獨立
控制更有效的功能。
編程器上的基本功能的控制輸出關聯內容中,請設定CH間偏差控制的參數希
望執行的通道為1。
然後,請設定CH偏差控制種類、CH偏差控制偏差值。
● 遠程SP控制
通過來自外部模擬信號發生器的信號,可以進行遠程SP控制。
如果在編程器上的“特殊功能”中設定遠程SP,則可以切換遠程SP和本地
SP(固定SP)。
● 位置比例控制
可以進行使用伺服馬達的位置比例控制。
請在編程器上的“特殊功能”中選擇位置比例控制。選擇了此項功能時,不
能同時使用RSP控制、加熱冷卻控制、省電、自適應。
馬達的控制狀態請通過
表 10-3:控制關聯狀態 (10-36 頁) 確認。
以下型號可以通過編程器選擇位置比例控制。
型 號 控制狀態 位置比例控制
電路數
DMC10D2XRXXXX 有FB 1
DMC10D4XRXXXX 2
DMC10D2XR01XX 無FB 2
DMC10D2XR03XX 2
DMC10D4XR00XX 2
DMC10D2XRXXXX 無FB 2 (使用1個電路的場合)
注) FB :“反饋線”的省略語
9-1

第9 章 設定參數(DMC10D)
● 時間比例省電模式
請在編程器上的“特殊功能”中選擇時間比例省電模式。
選擇了此項功能時,不能同時使用加熱冷卻控制、CH間偏差控制。
● 操作量分支控制
對於PID運算的通常的操作量,使用任意通道的結果或者對操作量進行比率
或偏移量(OFFSET)運算。
9-2

第9 章 設定參數(DMC10D)
9 - 2 基本功能的詳細說明 ■ 加熱冷卻控制
● 加熱冷卻輸出指定
• 加熱冷卻控制的場合,必須設定各電路的輸出。
根據型號I/O不同,因此選擇內容也不同。
項目名 設定內容 初始值 用戶級別
加熱冷卻輸出 0~10 0 簡/標/多
指定
關於設定內容和輸出規格的關係,請參閱
●加熱冷卻型(2CH 型) (4-2 頁) 。
• 採用加熱冷卻控制時,請務必將控制方式設定為“2”。
● 加熱冷卻死區
加熱冷卻控制的場合,設定加熱側輸出和冷卻側輸出的死區。
項目名 設定內容 初始值 用戶級別
加熱冷卻 -100.0~+100.0% 0.10% 簡/標/多
死區
死區 的1/2
死區 的1/2
死區 的1/2
死區 的1/2
100.0% 100.0%
100.0%
100.0%
↑
冷卻側 操作量
Cool Heat
↑
加熱側 操作量
↑
冷卻側 操作量
Cool Heat
↑
加熱側 操作量
↑
冷卻側 操作量
Cool Heat
↑
加熱側 操作量
0.0%
PID操作量→
0.0%
0.0% PID操作量→ PID操作量→
0.0%
0.0% 50.0% 100.0%
0.0% 50.0% 100.0%
0.0% 50.0% 100.0%
加熱冷卻死區=0 加熱冷卻死區< 0 加熱冷卻死區> 0
● 加熱冷卻控制AT
如果啟動加熱冷卻控制AT,進行以下動作。
①AT啟動
②進行Heat側AT
③Heat側AT結束時,與Heat側相同的PID值在Cool側也被保存
④接著自動啟動Cool側AT
此時,按照Heat側AT時得到的結果,自動輸出Heat側的輸出
⑤Cool側AT結束時,Cool側的PID值被保存
使用上的注意事項
• 中斷加熱冷卻控制AT時,請設定一次READY或者MANUAL狀態。
• AT啟動時請確認既不是AUTO狀態,也不是RUN狀態,並且沒有發生PV報
警。出現這些狀態時AT不能啟動。另外,AT中變成這些狀態時,AT被
終止。
• 在上述③動作以前中斷AT時,保留AT執行前的PID值。
③狀態以後中斷AT時,保存新的PID結果。
9-3

第9 章 設定參數(DMC10D)
■ CH間偏差控制
● CH間偏差控制
CH間偏差控制的場合,必須設定此項參數。
可以對每個通道進行設定/不設定。不設定的場合,此通道為通常的控制。
項目名 設定內容 初始值 用戶級別
CH間偏差控制 0:無 0 多
1:有
● CH間偏差控制CH指定
CH間偏差控制的場合,設定以此通道為基準。
此處設定的通道為基準,其他通道把此處設定的通道的偏差量作為SP進行控
制。
項目名 設定內容 初始值 用戶級別
CH間偏差控制 1~2(2ch 型) CH1→2 多
CH指定 1~4(4ch 型) CH2、3、4→1
● CH間偏差控制種類
CH間偏差控制的場合,設定按照基準通道的PV或者SP的偏差量進行控制。
項目名 設定內容 初始值 用戶級別
CH間偏差控制 0 :指定chPV+偏差值為SP 0 多 種類 1 :指定chSP+偏差值為SP
0:控制回路的SP=指定CH的PV值+CH間偏差控制偏差值
1:控制回路的SP=指定CH的SP值+CH間偏差控制偏差值
● CH間偏差控制偏差值
CH間偏差控制的場合,設定偏差值。
項目名 設定內容 初始值 用戶級別
CH間偏差控制 -2000~+10000 0 多 偏差值
9-4

第9 章 設定參數(DMC10D)
■ 遠程SP控制
• 編程器上的“特殊功能”中設定遠程SP時,可以在每個PV通道切換遠程
SP和本地SP(固定SP)。
• 可以通過通訊寫入或外部開關輸入切換遠程SP和本地SP。
項目名 設定內容 初始值 用戶級別
遠程SP輸入 0:不使用 0:不使用 “特殊功能”
1:使用 上顯示
遠程 0:本地SP(固定SP) 遠程SP輸入=1 -- (遠程/本地 1:遠程SP 設定時設定為1 切換)
● RSP輸入指定
設定遠程SP輸入時,指定以下輸入。
類型
CH1 CH2 CH3 CH4
PV OUT PV OUT PV OUT PV OUT
2 PV1 OUT1 CH1用 無效 -- -- -- -- 遠程SP
4 PV1 OUT1 PV2 OUT2 CH1用 無效 CH2 用 無效
遠程SP 遠程SP
端子請參閱
4-1 頁 。
● 附加功能
遠程SP輸入通道可以使用小數點位置、量程上下限、偏置、 濾波。
使用上的注意事項
• 遠程SP輸入通道,請與利用此輸入通道的小數點單位一起使用。
• 即使超過遠程SP輸入量程上下限±10%,也不會發生和PV輸入異常同
樣的輸入報警。
• 不能和加熱冷卻控制、CH間偏差控制、位置比例控制並用。
9-5

第9 章 設定參數(DMC10D)
■ 位置比例控制
● 位置比例控制設定項目
編程器特殊功能選擇
項目名 設定內容 初始值 用戶級別
位置比例控制 0:不使用 0 簡/標/多
使用/種類 1:有FB控制+推定位置控制 2:有FB控制 3:無FB 4:無FB+通電時位置一致
運行前的設定項目
項目名 設定內容 初始值 用戶級別
位置比例控制 0:停止/終止 0 簡/標/多
自動調整 1:開始
位置比例死區 0.1~25.0% 10.0
位置比例調整值 0~9999 1000 • 全閉值
位置比例調整值 0~9999 2000 • 全開值
全開時間 1~250s 30s
位置比例馬達 電位計的全程電阻值 0
電阻值 0:未瞞400Ω 1:400Ω~1000Ω 2:1000Ω~4000Ω
電位計壽命 0:重視控制性 1
1:重視電位計壽命
運行中項目
項目名 設定內容 初始值 用戶級別
無FB位置比例 0:停止 0 簡/標/多
時的手動操作 1~9999s:開方向的動作時間(s) 0 -1~2000s:閉方向的動作時間(s)
馬達反饋值 -5.0%~110.0% -- -- (僅讀出)
參 考
不使用編程器的一攬子寫入,寫入位置比例控制種類到直接字地址
7275W的場合,請參考表設定事件輸出指定。
選擇使用位置比例控制時默認輸出緩存
類型 位置比例通道 OPEN CLOSE FB
2CH CH1 MV1 MV2 PV2
CH2 (無FB) MV3 MV4 --
4CH CH1 MV1 MV3 PV3
CH2 MV2 MV4 PV4
9-6

第9 章 設定參數(DMC10D)
○使用“有FB”控制的場合
• 請一定要進行自動調整。
• 採用“有FB控制+推定位置控制”時,檢測到反饋輸入異常的場合,自動變成推定位置控制。例如:反饋線斷線的場合或因電位計老化反饋異常時,不中斷位置控制,繼續控制。所以可以作為備用動作使用。
• 推定狀態的場合,或者馬達動作時,當正確的狀態在一定條件下持續的場合,回復到通常的反饋值使用狀態。
• 可以確認馬達的位置(開度%)。
○使用“無FB”控制的場合
• 使用“無FB”控制時,可以進行無FB線的位置比例控制。
• 使用前請務必設定“全開時間”。
• “全開時間”請務必設定為實測值。
• 使用“無FB+通電時位置一致”時,通電時“全開時間”中設定的時間內對馬達強制輸出閉命令,使馬達的位置和儀錶沒有推定位置的誤差。但是,在MANUAL時、READY時、發生PV報警時中斷閉命令。
• 如果設定為MANUAL狀態,則通常手動設定下馬達不動作。請設定為“無FB時手動時操作”。按照以下時間單位設定。
• 輸出開命時間:以秒為單位寫入正值 • 輸出閉命令時間:以秒為單位寫入負值
• 設定為READY狀態時
• READY時操作量=0時,保持閉命令 • READY時操作量>0時,保持開命令
• 操作量=0%、100%的場合,保持閉命令、開命令
• 位置比例控制自動調整
• 有FB線的位置比例控制的場合,請在正確連接了所有接線後務必進行自動
調整。可以通過編程器的設定畫面進行調整。有關編程器的操作在下一個項目中說明。
• 啟動調整時,自動全閉→全開動作,自動設定位置比例調整全閉值/ 全開值/時間三個參數。
• 無FB的控制中、MANUAL中、READY中、FB輸入異常中不能進行自動調整。另外,調整中變成這些狀態時,調整被終止。
• 調整被終止的場合,保持此前保存的值。
• 以下條件時,判斷為調整異常,不保存調整結果。這種場合,請在“位置比例控制馬達電阻值選擇”中選擇 佳輸入種類。
①全開調整值-全閉調整值<100
②全閉調整值>=10000
③全開調整值>=10000
④全開時間<5(s)
9-7

第9 章 設定參數(DMC10D)
• 調整沒有動作到全閉或全開位置,中途結束等非正常結束的場合,是由於
“位置比例馬達電阻值”的選擇不適當,請變更為其他設定,再次進行調整。
使用上的注意事項
• 使用位置比例控制功能時,不能同時使用自適應功能、加熱冷卻控制、省電功能、遠程SP功能等功能。
• 因裝置狀態等原因不能執行自動調整的場合,請按照以下方式進行調整。
①設定儀錶為全閉,讀出並保存“當前FB計數值(馬達調整用)”(字地址請參閱下表)
②設定儀錶為全開,保存全開時間和全開時的馬達調整值 (字地址請參閱下表)
③從編程器的“馬達開度自動調整”畫面手動輸入全閉調整值、全開調整值、全開時間,寫入到儀錶,或者寫入值到各字地址。
位置比例控制1 位置比例控制2 備 注
當前FB計數值 1038W 1039W 讀出專用
(馬達調整用)
全閉側調整值 7280W 7281W
全開側調整值 7282W 7283W
全開時間 7284W 7285W
• 從編程器畫面進行位置比例操作
從編程器的畫面可以進行位置比例控制用馬達調整和手動操作。
項目名 內 容 備 注
顯示更新 檢查、開始通訊
設定 讀出 從儀錶讀出調整值
寫入 寫入調整值到儀錶
自動調整 開始 開始自動調整 位置比例控制種類=1,2 時顯示
終止 終止自動調整 位置比例控制種類=1,2
時顯示
手動 Open 輸出手動輸出Open 位置比例控制種類=3,4
操作 時顯示
Close 輸出手動輸出Close 位置比例控制種類=3,4 時顯示
OFF 輸出手動輸出OFF 位置比例控制種類=3,4
時顯示
Out 通常輸出 位置比例控制種類=3,4
時顯示
CH 選擇 選擇CH1/CH2 2CH型、且位置比例控制種 類=1,2時不能選擇CH2
關閉 關閉畫面
9-8

第9 章 設定參數(DMC10D)
• 馬達自動調整
• 馬達手動操作
僅位置比例控制種類=1、2時(有反饋)可以使用。
調整方法:
① 從設定畫面顯示讀出
② 選擇[設定(S)]→[馬達開度自動調整/手動操作]
③ 選擇CH號(2CH型只能選擇CH1)
④ 選擇[自動調整(A)]→[開始],開始自動調整。
僅位置比例控制種類= 3、4時(無反饋)可以使用。
操作方法:
① 從設定畫面顯示讀出
② 選擇[設定(S)]→[馬達開度自動調整/手動操作]
③ 按[Open]、[Close]、[OFF]按鈕
使用[手動操作(M)]→[Open]、[手動操作(M)]→[Close]、
[手動操作(M)]→[OFF]菜單也進行同樣的處理。
④ 按[Out]按鈕,返回通常狀態。
使用[手動操作(M)]→[Out]菜單也進行同樣的處理。
9-9

第9 章 設定參數(DMC10D)
• 位置比例調整值• 全閉值• 全開值
有FB的場合 :通過自動調整進行設定,通常不必設定。
無FB的場合 :請確認為默認的設定值(全閉=1000、全開=3000)。
• 全開時間
有FB的場合 :通過自動調整進行設定,通常不必設定。
無FB的場合 :請正確測定從全閉到全開的時間,以秒為單位輸入。
• 位置比例馬達電阻值
按照馬達的電阻值進行設定。
• 電位計長壽命
• 設定為重視電位計壽命時,減少操作端的動作次數,考慮電位計壽命進行
控制。
• 在內部計算並使用各通道的“操作量變化率限幅”和“位置比例死區”的
佳值,用戶不用設定值。因此,這些設定的參數無效。
• 反饋輸出運算
進行以下輸出運算。
PID的MV
OPEN命令 CLOSE命令
死區 (DZ)
STOP
1/4DZ 1/4DZ 馬達位置
9-10

第9 章 設定參數(DMC10D)
■ 時間比例省電模式
使時間比例輸出的各通道不同時為ON的輸出。
● 節省1/2電能
消耗電流為1/2。
2CH型各通道不同時為ON。
4CH型2通道一組,各組中不同時為ON。
周期
組1
組2
CH1:時間比例輸出 ON
CH2:時間比例輸出 ON CH3:時間比例輸出 ON
CH4:時間比例輸出 ON
2CH型
4CH型
● 節省1/4電能 (僅4CH型)
消耗功率為1/4。
4CH的時間比例輸出不同時為ON。
周期
CH1:時間比例輸出 ON
CH2:時間比例輸出 ON
組
ON CH3:時間比例輸出
CH4:時間比例輸出 ON
9-11

第9 章 設定參數(DMC10D)
● 延遲
因執行器動作延遲,時間比例輸出的ON狀態重合的場合,設定從前一個通道
為OFF後到下一個通道為ON的延遲時間。
周期開始
CH1 ON
CH2 ON
ON時間重合
周期開始
CH1
CH2
ON時間沒有重合
ON
ON
設定延遲時間避免延遲時間中的ON時間重合
項目名 設定內容 初始值 用戶級別
省電時間比例輸出 2CH型 0 多功能
0:不使用 1:使用 2:未定義 *1
4CH型 0:不使用 1:節省1/4電能 2:節省1/2電能 *2
省電延遲時間 0~1000(ms) 10 無
*1: 僅4CH型 (2CH型時請不要設定)
*2: 1ms以上時,請根據實際的儀錶進行設定
● 各輸出CH的ON條件
型號
• 節省1/2電能
省電組 1 省電組 2
CH1 CH2 CH3 CH4
2CH 優先 CH1OUT為OFF時 -- --
(主站) (CH1的從站)
4CH 優先 * CH1OUT為OFF時 優先 * CH3為OFF時 (主站) (CH1的從站) (主站) (CH1的從站)
* 僅對4CH型有意義(可以設定,但是2CH型時與選擇1的場合同樣動作)
型號
• 節省1/4電能
省電組 1
CH1 CH2 CH3 CH4
4CH 優先 CH1OUT為OFF時 CH1~2為OFF時 CH3為OFF時 (主站) (CH1的從站) (CH1,2的從站) (CH1,2,3的從站)
9-12

第9 章 設定參數(DMC10D)
使用上的注意事項
◎在使用之際,請務必確認以下設定。
• 省電組各通道的周期請設定為相同值。
• 請務必設定為“重視操作端壽命型”。
• 時間比例輸出的輸出指定中的邏輯運算設定請使用默認值。
(請勿進行And/Or或反轉等設定)
• 請使用固定PID。
(請勿使用自適應)
• 加熱冷卻控制、位置比例控制不能和本功能同時使用。這種場合,請務
必把本功能設定為“不使用”。
• 為了對應從站通道執行器的延遲,請務必設定必要的延遲時間,延遲時
間因使用的執行器而不同。
◎在使用時,有以下限制。
• 主站通道輸出大,從站通道輸出時間不能完全進入周期時間內的場合,
在從站側時間比例輸出周期的 後,輸出被切斷。因此,會出現控制運
算結果沒有完全輸出的情況。這種情況下,請限定主站通道的“操作量
上限”(OH)中操作量的上限,設定總操作量不要超過100%。通常按照以
下方式設定。
節省1/4電能的場合,各通道操作量上限=25%
節省1/2電能的場合,各通道操作量上限=50%
• 即使是Manual時、Ready時、發生PV報警時,省電中輸出的時間比例輸
出結果優先。因此,會出現根據主站通道的操作量,設定的操作量不輸
出的場合。
• 繼電器輸出型的場合,會出現 低ON時間、 低OFF時間不保持
200ms,進行OFF或者ON的情況。
• PV=SP穩定時各通道控制輸出和延遲時間的合計必須在100%以下。超過100%的場合,從站側通道不能通過設定值進行控制。
• 因設定值變更時或發生干擾時實際輸出時間比例操作量受限制,和不使
用省電功能時的時間比例輸出控制結果比較,應答特性會出現變化。
9-13

第9 章 設定參數(DMC10D)
■ 操作量分支控制
對PID運算的通常操作量,使用任意通道的結果,對操作量進行比率或者
OFFSET運算。
• 切換使用/不使用本功能
• 選擇輸出通道
• 對選擇的操作量進行比率運算
• 對選擇操作量進行OFFSET運算
對操作量={(選擇通道的操作量)×(比率)+偏移量)} ,進行操作量上下
限限幅
選擇通道的操作量,使用事先進行的原通道操作量上下限限幅後的值。
比率運算前的MV
1091~1094W
PID運算結果
通常的MV
1020~1023W
PID運算結果1
OL/OH1
Run/Rdy1
Auto/Man1
Ratio 1
Offset 1
ChEn 1+
OL/OH1
Run/Rdy1
Auto/Man1
MV1
PID運算結果2
OL/OH2
Run/Rdy2
Auto/Man2
Ratio 2
Offset 2
ChEn 2+
OL/OH2
Run/Rdy2
Auto/Man2
MV2
PID運算結果3
OL/OH3
Run/Rdy3
Auto/Man3
Ratio 3
Offset 3
ChEn 3+
OL/OH3
Run/Rdy3
Auto/Man3
MV3
PID運算結果4
OL/OH4
Run/Rdy4
Auto/Man4
Ratio 4
Offset 4
ChEn 4+
OL/OH4
Run/Rdy4
Auto/Man4
MV4
MV分支控制
所有CH均可進行任意CH選擇/比率/
OFFSET加法運算
“MV分支控制使用時”、且“使用CH間偏差
控制”時,對本CH的PID運算結果進行加法
運算(OFFSET取消)
分 類 項目名 設定範圍 初始值 備 注
控制輸出 使用 0:不使用 0
1:使用
使用通道選擇 1~4 CH1: 1
CH2: 2
CH3: 3 CH4: 4
比率 0~10000 1000 使用設定值×0.001
偏移量 -2000 ~+10000 0 使用設定值×0.1
● 使 用
設定為不使用的場合,設定的參數被無視,強制使用出廠時設定值。這種場
合,作為參數記憶的其他值不變化。
● 通道選擇
進行分支控制的場合,對顯示使用的PID運算結果的通道進行設定。
● 比率的設定
設定選擇通道的操作量的比率。
設定值×0.001作為比率使用。 9-14

第9 章 設定參數(DMC10D)
● 偏移量的設定
對選擇通道的操作量,設定偏移量的操作量。
設定值×0.1作為偏移量,進行加法運算。 ● Ready時的動作
● Manual時的動作
參照對象的通道為Ready的場合,主站的操作量=Ready時操作量。因此,參
照目標也以這個操作量為基礎進行運算。
參照目標的各通道為Ready或者Manual狀態的場合,輸出各通道的Ready時操
作量、或者Manual時操作量。
參照對象的通道為Manual的場合,參照目標為AUTO且RUN時,參照目標的操
作量=相對於Manual操作量進行的比率、偏移量、操作量上下限運算後的
值。
參照目標的各通道為Ready或者Manual狀態的場合,輸出各通道的Ready時操
作量或者Manual時操作量。
● 通道間偏差控制並用時的動作
設定為“使用分支控制”的場合,如果設定為“使用通道間偏差控制”,可
以取消單靠輸出比率設定調整無法完全取消的偏移量。
這是操作量分支控制的運算操作量加上自通道運算的通道間偏差控制功能下
得到的PID操作量的動作。自通道的PID運算結果的增益高,整定前的應答特
性就變好,但是干擾系區域間(通道間)的干擾程度會變大。
(例) CH2跟蹤CH1的場合
CH2的設定:
• 操作量變化率限幅的設定
CH 指定: 1, 比率= 0.800, 偏移量= 0.0
• CH間偏差控制的設定
CH 指定= 1, SP= 指定CH的SP+CH間偏差控制偏差值
CH間偏差控制偏差值= 0
• 其他PID參數設定為適當的值
以下是動作方塊圖。圖的斜線部分表示可以變更設定的參數。
PV1
PID1
OL/OH1 Ratio 1
Offset 2
MV1
SP1
CH2的MV分支輸出
Ratio 2 Offset 2
+
MV2
PV2
PID2
OL/OH2
SP2
CH2的 CH間偏差控制功能
9-15

第10章 CPL通訊功能
10 - 1 通訊的概要
本機標準配備RS-485通訊功能,使用客戶製作的程序,可以與計算機或者PLC等上位機器通訊。通訊協議
可以選擇CPL通訊(Controller Peripheral Link:本公司上位通訊協議)和MODBUS通訊。
本章對通訊的共通功能和CPL通訊進行說明。MODBUS通訊固有的說明請參閱
第11章 MODBUS通訊。
■ 特 長
本機的通訊功能有以下特長。
• 1台作為上位機器的主站,可以連接 多15台本機。
使用16台以上的場合,需要另售的通訊轉換器CMC10B。
• 上位機器的通訊規格是RS-232C的場合,需要另售的通訊轉換器CMC10L。
可以進行RS-232C RS-485轉換。
• 可以進行儀錶的大多數參數的通訊。
通訊參數的內容請參閱
10-8 所有通訊參數一覽表(RAM地址順序) (10-16 頁)。
• 使用頻率高的參數備有2種地址排列。根據用途可以選擇1個命令中使用
的參數組。
• 備有隨機訪問命令。對地址分離的參數,可以使用1個命令進行讀寫。
• 可以對應 高19200bps的傳送速度。
■ 初始設定
要開始通訊,必須進行以下設定。
設定項目 設定場所 設定範圍 初始值
CPL/ 通過計算機編程器設定 0:CPL 0:CPL
MODBUS 1:MODBUS(ASCII 形式)
切換 2:MODBUS(RTU 形式)
機器地址 機器地址用 0~F
通過旋轉開關設定
傳送速度 通過計算機編程器設定 0:2400bps 3:19200bps
1:4800bps 2:9600bps 3:19200bps
數據形式 通過計算機編程器設定 0:位長8、偶校驗、 0:位長8、偶校驗、
1停止位 1停止位
1:位長8、無校驗、
2停止位
應答 低時間 通過計算機編程器設定 0:1ms 1:10ms
1:10ms 2:100ms 3:200ms
10-1

第10 章 CPL通訊功能
■ 通訊步驟
以下是通訊步驟。
① 相對於1台希望通訊的本機(從站),從上位機器(主站)發送命令電文。
② 從站接收命令電文,根據電文內容進行讀出或者寫入處理。
③ 從站再把對應於處理內容的電文作為應答電文發送。 ④ 主站接收應答電文。
使用上的注意事項
• CPL/MODBUS切換只有通過計算機編程器進行。
• 選擇MODBUS動作模式的場合,編程器端口側通訊通常為CPL。
• 在主站側通訊端口,CPL和MODBUS ASCII形式、MODBUS RTU形式不能
同時混合使用。
10-2

第10 章 CPL通訊功能
10 - 2 電文的構成 ■ 電文的構成
電文構成如下所示。
電文按大類分成數據連接層、應用層。
• 數據連接層
具有通訊時必要的基本信息的層。包含通訊電文的目的地、電文校驗信
息。
• 應用層
讀寫數據的層。內容根據目的而不同。
電文由下圖的①~⑨構成。
應用層中存儲了來自主站的發送內容的命令、來自從站的應答內容的應答。
02H 58H
03H
0DH 0AH
STX X ETX
CR LF
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨
數據連接層 應用層 數據連接層
1幀
① STX(電文的開頭)
② 機器地址 ③ 子地址 ④ 設備區分代碼 ⑤ 發送電文=命令 應答電文=應答
⑥ ETX(命令/應答的結束) ⑦ 校驗和 ⑧ CR(定界符) ⑨ LF(定界符)
■ 數據連接層
● 數據連接層的概要
數據連接層是固定長,規定了各數據的位置、文字數。但是ETX以後的數據
連接層的數據位置根據應用層的文字數移位,文字長不變化。
● 應答開始條件
• 只有在數據連接層的①電文構成、機器地址、子地址、校驗和、1幀電文
長全部正確的場合,儀錶才發送應答電文。只要這些數據中的任意一個不
正確,就不發送應答電文,處於STX接收等待狀態。
使用上的注意事項
主站必須預先設定子地址=00(30H 30H)。 • 1 幀電文可以訪問的字地址數
種類 命令的說明 RAM區域 EEPROM 區域
RS 10進制數的讀出命令 16 16
WS 10進制數的寫入命令 16 16
RD 16進制數的讀出命令 28 28
WD 16進制數的寫入命令 27 16
RU 16進制數的隨機讀出命令 28 28
WU 16進制數的隨機寫入命令 14 14
10-3

第10 章 CPL通訊功能
● 數據連接層的數據定義一覽
數據連接層的數據定義一覽如下所示。
數據名 字符代碼 文字數 數據的含義
STX 02H 1 電文的起始
機器地址 用16進制數字符 2 通訊對象機器的區別
代碼表示0~0FH
子地址 用16進制數字符 2 無功能
代碼表示0~7FH
設備區分代碼 "X"(58H) 或者"x"(78H) 1 儀錶的類別
ETX ETX(03H) 1 應用層結束位置
校驗和 用2位16進制數 2 電文的校驗和
字符代碼表示00H~FFH
CR 0DH 1 電文的結束(1)
LF 0AH 1 電文的結束(2)
● 數據的說明
● STX(02H)
儀錶接收到STX的場合,判斷為發送電文的起始。因此,到此為止無論處於
何種接收狀態都返回到初始狀態,接收到第1個文字STX的儀錶開始進行電
文處理。這是考慮到因干擾等發生發送電文異常的場合,通過主站側的下
一個正確電文(例如:RETRY電文)恢復儀錶的應答。
● 機器地址
儀錶在主站發送電文中機器地址相同的場合才生成應答電文。另外,電文
中的機器地址為2位16進制數字符。
機器地址的設定通過機器地址用旋轉開關進行,設定範圍為0~F。使用16
台以上的場合,需要另售的通訊轉換器CMC10B。
機器地址=0(30H 30H)的場合,即使機器地址一致也無應答。
儀錶返回與受信設備相同的機器地址作為應答電文。
● 子地址
由於本機不使用子地址,設定子地址為"00"(30H 30H)。
儀錶返回與受信設備相同的子地址作為應答電文。
● 設備區分代碼
本機的設備區分代碼設定為X(58H)或者x(78H)。這是對每種機器系列作出
的規定,所以不能選擇其他文字。儀錶返回與受信設備相同的設備區分代
碼作為應答電文。初始值使用X(58H),x(78H)用於區分再次發送的電文。
● ETX
ETX表示應用層的結束。
10-4

第10章 CPL通訊功能
● 校驗和
檢查電文在通訊途中是否因某種異常(例如:干擾)發生變化的值。
2位16進制數文字。
• 校驗和的生成方法
1. 從STX到ETX的電文以1個字節為單位進行加法運算
2. 對加法運算結果取2的補數
3. 轉換成字符代碼
● CR/LF
表示電文的 後。LF接收結束後,立刻變為允許接收電文處理狀態。
■ 應用層
應用層的構成如下。
項 目 內 容
命令 "RS"(10進制數的連續地址數據讀出命令)
"WS"(10進制數的連續地址數據寫入命令)
"RD"(16進制數的連續地址數據讀出命令)
"WD"(16進制數的連續地址數據寫入命令)
"RU"(16進制數的隨機地址數據讀出命令)
"WU"(16進制數的隨機地址數據寫入命令)
數據分隔符 RS,WS:","(逗號)
其他命令:無
字地址 RS,WS:"501W"等
其他命令:"01F5"等
讀出數 "1"等字符表示的數值
寫入數值 RS,WS:"100"等字符表示的數值
其他命令:"0064"等HEX表示的數值
10-5

第10 章 CPL通訊功能
10 - 3 命令的說明
■ 連續數據讀出命令(RS命令) 通過1個命令讀出連續地址的數據的命令。地址的指定可以對實際地址和虛
擬地址進行。
● 發送電文
可以通過1個電文從指定的讀出啟始地址,讀出連續的數據地址內容的命
令。以下表示數據讀出時的發送電文的應用層構成。
R S , 1 5 0 1 W , 1
① ② ③ ② ④
應用層
① 連續讀出命令
② 數據分隔符 ③ 字地址 ④ 讀出數據數
● 應答電文
電文被正確接收的場合,返回與命令內容對應的應答電文。
以下表示數據讀出時的應答電文的應用層構成。
● 正常時(1數據讀出)
0 0 ,
① ② ③
● 正常時(複數數據讀出)
0 0 , , ,
① ② ③ ② ④ ② ⑤
● 異常時
X X XX中輸入異常結束代碼。
①
① 結束代碼
有關代碼的內容請參閱 10-6 結束代碼一覽 (10-14頁)
② 數據分隔符 ③ 數據 ④ 數據2~(n-1) ⑤ 數據(n)
● 1個電文的 多讀出數據數
RAM、EEPROM區域均為 多16字。
10-6

第10 章 CPL通訊功能
■ 連續數據寫入命令(WS命令)
對連續地址寫入數據的命令。
● 發送電文
以下表示數據寫入命令用發送電文的應用層構成。
W S , 1 5 0 1 W , 1 , 6 5
① ② ③ ② ④ ② ⑤
① 連續寫入命令 ② 數據分隔符 ③ 寫入起始字地址 ④ 寫入數據(第1個字) ⑤ 寫入數據(第2個字)
● 應答電文
以下表示數據寫入時的應答電文的應用層構成。
● 正常時
0 0
①
● 異常/警告時
X X XX中輸入異常結束代碼。
①
① 結束代碼
有關代碼的內容請參閱 10-6 結束代碼一覽 (10-14頁)。
● 1個電文的 多寫入數據數
RAM、EEPROM區域均為 多16字。
10-7

第10 章 CPL通訊功能
■ 固定長連續數據讀出命令(RD命令)
RD是讀出2字節單位連續數據的命令。因為是固定長,所以適用於PLC通訊中
通過梯形圖程序讀取數據。
起始數據地址的位數在RD中用4位16進制數形式表示。數據數是4位,數據用
4×n(n為正整數)位16進制數形式表示。
● 發送電文
發送讀出起始字地址(4位16進制數)和讀出數據數(4位16進制數)。
R D
① ② ③
① 固定長連續讀出命令
② 數據起始字地址 ③ 數據數
● 應答電文
正常的場合,結束代碼=正常(2位10進制數),應答電文中附帶命令中指定
個數的讀出數據(4位16進制數×個數),返回信息。異常的場合,結束代碼
=異常(2位10進制數),應答電文中不帶讀出數據,返回信息。
● 正常時(讀出1個數據)
0 0
① ②
● 正常時(讀出多個數據)
0 0
① ② ③ ④
● 異常時
X
X XX中輸入異常結束代碼。
①
① 結束代碼
② 數據
有關代碼的內容請參閱 10-6 結束代碼一覽 (10-14頁)。
③ 數據2~(n-1) ④ 數據(n)
● 1個電文的 多讀出數據數
RAM、EEPROM區域均為 多28字。 10-8

第10 章 CPL通訊功能
■ 固定長連續數據寫入命令(WD命令)
WD是寫入2字節單位連續數據的命令。因為是固定長,所以適用於PLC通訊中
通過梯形圖程序讀取數據。
起始數據地址的位數在WD中用4位16進制數形式表示。數據用4×n(n為正整
數)位16進制數形式表示。
● 發送電文
發送寫入起始字地址(4位16進制數)和寫入n個寫入數據(4位×n 16進制數)。
● 寫入1個數據
W D
① ② ③
● 寫入多個數據
W D
① ② ③ ④ ⑤
① 固定長連續數據寫入命令
② 數據起始字地址 ③ 數據1 ④ 數據2~數據(n-1) ⑤ 數據n
● 應答電文
寫入的場合,返回結束代碼=正常(2位10進制數)。 僅寫入一部分數據,剩
餘數據沒有寫入的場合,返回結束代碼=警告(2位10進制數)。完全沒有寫入
的場合,返回結束代碼=異常(2位10進制數)。
● 正常時
0 0
①
● 異常/警告時
X X XX中輸入異常結束代碼。
①
① 結束代碼
有關代碼的內容請參閱 10-6 結束代碼一覽 (10-14頁)。
● 1個電文的 多寫入數據數
RAM區域 : 多27字
EEPROM 區域 : 多16字
10-9

第10 章 CPL通訊功能
■ 固定長隨機讀出命令(RU命令) RU是讀出2字節單位隨機(非連續)數據的命令。
● 發送電文
RU中按順序指定並發送讀出數據的字地址(4位16進制數)。
R U 0 0
① ② ③ ④ ⑤
① 固定長隨機數據讀出命令 ② 子命令 00固定 ③ 數據地址1 ④ 數據地址2~(n-1) ⑤ 數據地址(n)
● 應答電文
正常的場合,結束代碼=正常(2位10進制數),應答電文中附帶命令中指定
個數的讀出數據(4位16進制數×個數),返回信息。異常的場合,結束代碼
=異常(2位10進制數),應答電文中不帶讀出數據,返回信息。
● 正常時
0 0
① ② ③ ④
● 異常時
X
X XX中輸入異常結束代碼。
①
① 結束代碼
② 數據1
有關代碼的內容請參閱 10-6 結束代碼一覽 (10-14頁)。
③ 數據2~(n-1) ④ 數據(n)
● 1個電文的 多讀出數據數
RAM、EEPROM區域均為 多28字 10-10

第10 章 CPL通訊功能
■ 固定長隨機寫入命令(WU命令)
WU是對隨機(非連續)地址寫入2字節單位數據的命令。WU中用4位16進制數
形式表示。
● 發送電文
通過WU把寫入數據的字地址(4位16進制數)和數據(4位16進制數)組合,僅
發送寫入個數的電文。
W U 0 0
① ② ③
④ ⑤ ⑥
① 固定長隨機數據寫入命令
② 子命令 00固定 ③ 數據地址1 ④ 寫入數據1 ⑤ 數據地址(n) ⑥ 寫入數據(n)
● 應答電文
寫入的場合,返回結束代碼=正常(2位10進制數)。僅寫入一部分數據,剩餘
數據沒有寫入的場合,返回結束代碼=警告(2位10進制數)。完全沒有寫入的
場合,返回結束代碼=異常(2位10進制數)。
● 正常時
0 0
①
● 異常/警告時
X X XX中輸入異常結束代碼。
①
① 結束代碼
有關代碼的內容請參閱 10-6 結束代碼一覽 (10-14頁)。
● 1個電文的 多寫入數據數
RAM、EEPROM區域均為 多14字。
10-11

第10 章 CPL通訊功能
10 - 4 字地址的定義
● 字地址的 RAM• EEPROM區域
字地址分類如下。
字地址 名 稱 備 注
1000W~4999W RAM訪問字地址 對RAM進行讀出/寫入訪問。 寫入數據存儲到RAM,再次通電時,變為EEPROM的值。 但是,一部分特殊數據被記憶並保存在EEPROM中。
5000W~8999W EEPROM訪問字地址 對EEPROM進行讀出/寫入訪問。
讀出的場合,和讀出1001W~4999W時的結果相同。
寫入數據保存到EEPROM,即使再次通電也可以恢復值。
使用上的注意事項
EEPROM的重寫次數有限制(約10萬次)。因此,對重寫頻率非常高的參數,
建議寫入到無重寫次數限制的RAM。但是,如果寫入到RAM,再次通電時
EEPROM的數據將被傳送。
● 寫入數據範圍
如果寫入值超出各參數規定的範圍,則不寫入,返回特定的代碼。
● 寫入條件
根據條件不能寫入的場合,返回特定的結束代碼。
10-12

第10章 CPL通訊功能
10 - 5 應用層的數值表現形式
各數值必須用消零方式表示。
以下表示的規格中包含了不消零的場合。HOST側的發送電文必須發送被全部消零的數據。
● 數值• 符號的使用
項 目 規 格 異常時處理
數值部分• 符號部分 • RS、WS命令的場合 中斷電文處理,應答電文中返回 不可附加+符號 結束代碼"99"。
• 表示負數時附加-符號 • 不可附加不要的0、空格
● RS、WS命令的場合
項 目 規 格 異常時處理
不要的空格 不可附加 中斷電文處理,應答電文中返回
異常結束代碼。
不要的零 不可附加
數值=零 不可省略
必須使用"0"
其他不要的文字 可以在數值的前面附加表示負數
的"-"
不可附加其他文字
正數值的場合不可附加"+"
可使用的數值的 -32768~+32767
範圍 不可超出此範圍
● RD、WD、RU、WU命令的場合
項 目 規 格 異常時處理
不要的空格 不可附加 中斷電文處理,應答電文中返回
不要的零 不可附加 異常結束代碼。
數值=零 不可省略
必須使用"0000"
其他不要的文字 不可附加
可使用的數值的 0000H~FFFFH
範圍
10-13

第10 章 CPL通訊功能
10 - 6 結束代碼一覧
應用層發生異常的場合,應答電文中返回結束代碼。
結束代碼 異常內容 處 理 例
00 正常結束 所有處理正常結束
99 命令未定義 返回結束代碼 AA,1001W,1
不進行電文處理 RX03E80001
22 寫入數據的值在範圍外 除了這類字地址外, WS,2001W,3000
繼續電文處理
23 由於儀錶設定值條件或儀錶 除了這類字地址外 外部條件,寫入不可 繼續電文處理
40 讀出字數異常 返回結束代碼 RS,1001W,A
不進行電文處理 RD03E9000Z
41 字地址在範圍外 返回結束代碼 RS,100000W,1
轉換異常 不進行電文處理 WD0XXX0001
超出-32768~+32767範圍
42 數據的值在範圍外• 數據異 僅處理到這類字地址為止, WS,2001W,100,XXX
常• 超出1個字的範圍 不進行以後的處理 WS,2001W,100000 WD03E900010XXX
10-14

第10 章 CPL通訊功能
10 - 7 發送接收時間 ■ 命令電文、應答電文時間規格
主站和從站通過RS-485直接連接,或者通過CMC10L連接的場合,關於主站的
命令電文發送和從站的應答電文發送時間必須注意以下內容。
● 應答監視時間
主站發送命令電文結束後,到開始接收來自從站的應答電文的 長應答時間
為2秒。(①的部分)
因此,請設定應答監視時間為2秒。
一般在應答監視時間超時的情況下,再次發送命令電文。
● 發送開始時間
主站接收完應答電文後,到開始發送下一個命令電文需要等待(發送到同一從站的場合和發送到不同從站的場合) 10ms以上。(②的部分)
● RS-485 3線式 ① ②
通訊路
命令電文
應答電文
命令電文
應答電文
① 主站發送結束 -從站發送開始時間 = 2000ms以下
② 從站發送結束 -主站發送開始時間 = 10ms以上 ■ RS-485 驅動控制時間規格
由主站直接控制RS-485 3線式發送/接收的場合,請注意以下時間。
主站 驅動控制
通訊路
從站 驅動控制
(許可)
有效 數據
(命令電文)
(禁止)
① ④
(禁止)
有效 數據
(應答電文)
(許可)
② ③
主站發送結束 從站發送結束
① 主站發送結束 -驅動禁止時間 = 500μs以下
② 從站接收結束 -驅動許可時間 = 1ms以上
③ 從站發送結束 -驅動禁止時間 = 10ms以下
④ 主站接收結束 -驅動許可時間 = 10ms以上
10-15

第10 章 CPL通訊功能
10 - 8 所有通訊參數一覽表 (RAM地址順序)
■ 字信息數據
RAM、ROM的讀/寫 ○ :可能 ◯ :不可寫入PV小數點位置不能變更的量程 (例: PV量程 No.1時,不能寫入0到PV小數點位置) × :不可能
小數點信息
○ :根據數據信息的內容使用數據 (例: PV量程 No.22時,PV小數點位置為1,原來的PV值為100.0℃時,通訊時的PV值使用1000)
△ :數據按原來的值的10倍使用 (例:原來的值為50.0%時,通訊中使用500) △1:數據按原來的值的1000倍使用 (例:原來的值為1.000%時,通訊中使用1000) - :不受小數點信息影響
別名
與對象源的字地址鏈接的字地址。內容完全相同,但是數據排列發生了變化,可以根據目的分別使用。 例 :希望連續讀出所有CH的PV值時,使用1004W ~字地址會很方便。希望以CH為單位連續讀出數據
時,使用1504W ~字地址會比較方便。
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
- 所有報警代表 1001 03E9H - - ○ × × × - 詳細內容參照表10-1
- PV報警詳細內容 1002 03EAH - - ○ × × × - 詳細內容參照表10-2
- 控制關聯狀態 1003 03EBH - - ○ × × × - 詳細內容參照表10-3
CH1 PV值 1004 03ECH - - ○ × × × ○ 根據量程種類、小數
CH2 1005 03EDH - - ○ × × × ○ 點信息不同
CH3 1006 03EEH - - ○ × × × ○
CH4 1007 03EFH - - ○ × × × ○
CH1 使用中的SP值 1008 03F0H 5008 1390H ○ ○ ○ ○ ○
CH2 1009 03F1H 5009 1391H ○ ○ ○ ○ ○
CH3 1010 03F2H 5010 1392H ○ ○ ○ ○ ○
CH4 1011 03F3H 5011 1393H ○ ○ ○ ○ ○
CH1 使用中的SP組號 1012 03F4H 5012 1394H ○ ○ ○ ○ - 1~4(4CH型)
CH2 1013 03F5H 5013 1395H ○ ○ ○ ○ - 1~8(2CH型)
CH3 1014 03F6H 5014 1396H ○ ○ ○ ○ -
CH4 1015 03F7H 5015 1397H ○ ○ ○ ○ -
CH1 控制輸出值(通常控制時) 1020 03FCH - - ○ ○ × × △ -100~+1100
CH2 1021 03FDH - - ○ ○ × × △ (10倍值)
CH3 1022 03FEH - - ○ ○ × × △
CH4 1023 03FFH - - ○ ○ × × △
CH1 加熱側的控制輸出值 1024 0400H - - ○ × × × △ -100~+1100
CH2 (僅加熱冷卻控制時有效) 1025 0401H - - ○ × × × △ (10倍值)
CH1 冷卻側的控制輸出值 1026 0402H - - ○ × × × △ -100~+1100
CH2 (僅加熱冷卻控制時有效) 1027 0403H - - ○ × × × △ (10倍值)
CH1 AUTO/MANUAL狀態 1028 0404H 5028 13A4H ○ ○ ○ ○ - 0:AUTO
CH2 1029 0405H 5029 13A5H ○ ○ ○ ○ - 1:MANUAL
CH3 1030 0406H 5030 13A6H ○ ○ ○ ○ -
CH4 1031 0407H 5031 13A7H ○ ○ ○ ○ -
CH1 RUN/READY狀態 1032 0408H 5032 13A8H ○ ○ ○ ○ - 0:RUN
CH2 1033 0409H 5033 13A9H ○ ○ ○ ○ - 1:READY
CH3 1034 040AH 5034 13AAH ○ ○ ○ ○ -
CH4 1035 040BH 5035 13ABH ○ ○ ○ ○ -
CH1 LOCAL/REMOTE狀態 1036 040CH 5036 13ACH ○ ○ ○ ○ - 0:LOCAL
CH2 1037 040DH 5037 13ADH ○ ○ ○ ○ - 1:REMOTE 10-16

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH1 馬達調整用計數值 1038 040EH 5038 13AEH ○ × × × -
CH2 1039 040FH 5039 13AFH ○ × × × -
CH1 自整定 1040 0410H 5040 13B0H ○ ○ ○ ○ - 0:停止、1:啟動
CH2 1041 0411H 5041 13B1H ○ ○ ○ ○ - 關於加熱冷卻控制的
CH3 1042 0412H 5042 13B2H ○ ○ ○ ○ - 自整定請參照
CH4 1043 0413H 5043 13B3H ○ ○ ○ ○ - 8-28 頁
- 事件/外部開關 1044 0414H - - ○ × × × - 詳細內容參照表10-4 輸入的內部運算結果
- 外部開關輸入端子狀態 1045 0415H - - ○ × × × - 詳細內容參照表10-5
- 事件輸出端子/控制輸出端子狀態 1046 0416H - - ○ × × × - 詳細內容參照表10-6
CH1 CT值 1047 0417H - - ○ × × × △ 0~500(10倍值)
CH2 1048 0418H - - ○ × × × △
EV1 ON延遲定時器剩餘時間 1051 041BH 5051 13BBH ○ × × × -
ON延遲定時器剩餘分 1052 041CH 5052 13BCH ○ × × × -
ON延遲定時器剩餘秒 1053 041DH 5053 13BDH ○ × × × -
EV2 ON延遲定時器剩餘時間 1054 041EH 5054 13BEH ○ × × × -
ON延遲定時器剩餘分 1055 041FH 5055 13BFH ○ × × × -
ON延遲定時器剩餘秒 1056 0420H 5056 13C0H ○ × × × -
EV3 ON延遲定時器剩餘時間 1057 0421H 5057 13C1H ○ × × × -
ON延遲定時器剩餘分 1058 0422H 5058 13C2H ○ × × × -
ON延遲定時器剩餘秒 1059 0423H 5059 13C3H ○ × × × -
EV4 ON延遲定時器剩餘時間 1060 0424H 5060 13C4H ○ × × × -
ON延遲定時器剩餘分 1061 0425H 5061 13C5H ○ × × × -
ON延遲定時器剩餘秒 1062 0426H 5062 13C6H ○ × × × -
EV5 ON延遲定時器剩餘時間 1063 0427H 5063 13C7H ○ × × × -
ON延遲定時器剩餘分 1064 0428H 5064 13C8H ○ × × × -
ON延遲定時器剩餘秒 1065 0429H 5065 13C9H ○ × × × -
EV6 ON延遲定時器剩餘時間 1066 042AH 5066 13CAH ○ × × × -
ON延遲定時器剩餘分 1067 042BH 5067 13CBH ○ × × × -
ON延遲定時器剩餘秒 1068 042CH 5068 13CCH ○ × × × -
EV7 ON延遲定時器剩餘時間 1069 042DH 5069 13CDH ○ × × × -
ON延遲定時器剩餘分 1070 042EH 5070 13CEH ○ × × × -
ON延遲定時器剩餘秒 1071 042FH 5071 13CFH ○ × × × -
EV8 ON延遲定時器剩餘時間 1072 0430H 5072 13D0H ○ × × × -
ON延遲定時器剩餘分 1073 0431H 5073 13D1H ○ × × × -
ON延遲定時器剩餘秒 1074 0432H 5074 13D2H ○ × × × -
CH1 比例帶(P) 1075 0433H 5075 13D3H ○ ○ ○ ○ △ 1~9999(10倍值)
積分時間(I) 1076 0434H 5076 13D4H ○ ○ ○ ○ - 0~3600
微分時間(D) 1077 0435H 5077 13D5H ○ ○ ○ ○ - 0~1200
手動復位(RE) 1078 0436H 5078 13D6H ○ ○ ○ ○ - -10~+110
CH2 比例帶(P) 1079 0437H 5079 13D7H ○ ○ ○ ○ △ 1~9999(10倍值)
積分時間(I) 1080 0438H 5080 13D8H ○ ○ ○ ○ - 0~3600
微分時間(D) 1081 0439H 5081 13D9H ○ ○ ○ ○ - 0~1200
手動復位(RE) 1082 043AH 5082 13DAH ○ ○ ○ ○ - -10~+110
CH3 比例帶(P) 1083 043BH 5083 13DBH ○ ○ ○ ○ △ 1~9999(10倍值)
積分時間(I) 1084 043CH 5084 13DCH ○ ○ ○ ○ - 0~3600
微分時間(D) 1085 043DH 5085 13DDH ○ ○ ○ ○ - 0~1200
手動復位(RE) 1086 043EH 5086 13DEH ○ ○ ○ ○ - -10~+110
CH4 比例帶(P) 1087 043FH 5087 13DFH ○ ○ ○ ○ △ 1~9999(10倍值)
積分時間(I) 1088 0440H 5088 13E0H ○ ○ ○ ○ - 0~3600
10-17

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH4 微分時間(D) 1089 0441H 5089 13E1H ○ ○ ○ ○ - 0~1200
手動復位(RE) 1090 0442H 5090 13E2H ○ ○ ○ ○ - -10~+110
CH1 PID運算結果 1091 0443H 5091 13E3H ○ × ○ × △
CH2 (比率運算前) 1092 0444H 5092 13E4H ○ × ○ × △
CH3 1093 0445H 5093 13E5H ○ × ○ × △
CH4 1094 0446H 5094 13E6H ○ × ○ × △
CH1 位置比例無FB時 1095 0447H 5095 13E7H ○ ○ ○ ○ -
CH2 手動操作 1096 0448H 5096 13E8H ○ ○ ○ ○ -
CH1 馬達反饋值 1097 0449H 5097 13E9H ○ × ○ × △
CH2 1098 044AH 5098 13EAH ○ × ○ × △
- 通訊DI輸入(字單位) 1100 044CH 5100 13ECH ○ ○ ○ ○ - 0~4095
COMM1 通訊DI輸入 1101 044DH 5101 13EDH ○ ○ ○ ○ - 0、1
COMM2 1102 044EH 5102 13EEH ○ ○ ○ ○ -
COMM3 1103 044FH 5103 13EFH ○ ○ ○ ○ -
COMM4 1104 0450H 5104 13F0H ○ ○ ○ ○ -
- 鎖定解除 1109 0455H - - ○ ○ × × - 詳細內容參照表10-7
COMM1 通訊DI 輸入 1111 0457H 5111 13F7H ○ ○ ○ ○ - 0、1
COMM2 1112 0458H 5112 13F8H ○ ○ ○ ○ - 地址1101~1104與
COMM3 1113 0459H 5113 13F9H ○ ○ ○ ○ - 1111~1114相同,是
COMM4 1114 045AH 5114 13FAH ○ ○ ○ ○ - 對COMM1~COMM4讀寫
COMM5 1115 045BH 5115 13EBH ○ ○ ○ ○ -
COMM6 1116 045CH 5116 13ECH ○ ○ ○ ○ -
COMM7 1117 045DH 5117 13FDH ○ ○ ○ ○ -
COMM8 1118 045EH 5118 13FEH ○ ○ ○ ○ -
COMM9 1119 045FH 5119 13FFH ○ ○ ○ ○ -
COMM10 1120 0460H 5120 1400H ○ ○ ○ ○ -
COMM11 1121 0461H 5121 1401H ○ ○ ○ ○ -
COMM12 1122 0462H 5122 1402H ○ ○ ○ ○ -
- 所有報警代表 1501 05DDH - - ○ × × × - RAM地址: 1001W的別名
- PV報警詳細內容 1502 05DEH - - ○ × × × - RAM地址: 1002W的別名
- 控制關聯狀態 1503 05DFH - - ○ × × × - RAM地址: 1003W的別名
CH1 PV 1504 05E0H - - ○ × × × ○ RAM地址:
1004W的別名
使用中的SP值 1505 05E1H 5505 1581H ○ ○ ○ ○ ○ RAM地址:
1008W的別名
使用中的SP組號 1506 05E2H 5506 1582H ○ ○ ○ ○ - RAM地址:
1012W的別名
操作量(通常控制時) 1507 05E3H - - ○ ○ × × △ RAM地址:
1020W的別名
加熱側的操作量 1508 05E4H - - ○ × × × △ RAM地址:
(僅加熱冷卻控制時有效) 1024W的別名
冷卻側的操作量 1509 05E5H - - ○ × × × △ RAM地址:
(僅加熱冷卻控制時有效) 1026W的別名
AUTO/MANUAL狀態 1510 05E6H 5510 1586H ○ ○ ○ ○ - RAM地址:
1028W的別名
RUN/READY狀態 1511 05E7H 5511 1587H ○ ○ ○ ○ - RAM地址:
1032W的別名
LOCAL/REMOTE狀態 1512 05E8H 5512 1588H ○ ○ ○ ○ - RAM地址:
1036W的別名
自整定 1513 05E9H 5513 1589H ○ ○ ○ ○ - RAM地址:
停止/啟動狀態 1040W的別名
CT值 1514 05EAH - - ○ × × × △ RAM地址:
1047W的別名
10-18

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH1 比例帶(P) 1515 05EBH 5515 158BH ○ ○ ○ ○ △ RAM地址:
1075W的別名
積分時間(I) 1516 05ECH 5516 158CH ○ ○ ○ ○ - RAM地址:
1076W的別名
微分時間(D) 1517 05EDH 5517 158DH ○ ○ ○ ○ - RAM地址:
1077W的別名
手動復位(RE) 1518 05EEH 5518 158EH ○ ○ ○ ○ - RAM地址:
1078W的別名
CH2 PV 1519 05EFH - - ○ × × × ○ RAM地址:
1005W的別名
使用中的SP值 1520 05F0H 5520 1590H ○ ○ ○ ○ ○ RAM地址:
1009W的別名
使用中的SP組號 1521 05F1H 5521 1591H ○ ○ ○ ○ - RAM地址:
1013W的別名
操作量(通常控制時) 1522 05F2H - - ○ ○ × × △ RAM地址:
1021W的別名
加熱側的操作量 1523 05F3H - - ○ × × × △ RAM地址:
(僅加熱冷卻控制時有效) 1025W的別名
冷卻側的操作量 1524 05F4H - - ○ × × × △ RAM地址:
(僅加熱冷卻控制時有效) 1027W的別名
AUTO/MANUAL狀態 1525 05F5H 5525 1595H ○ ○ ○ ○ - RAM地址:
1029W的別名
RUN/READY狀態 1526 05F6H 5526 1596H ○ ○ ○ ○ - RAM地址:
1033W的別名
LOCAL/REMOTE狀態 1527 05F7H 5527 1597H ○ ○ ○ ○ - RAM地址:
1037W的別名
自整定 1528 05F8H 5528 1598H ○ ○ ○ ○ - RAM地址:
停止/啟動狀態 1041W的別名
CT 值 1529 05F9H - - ○ × × × △ RAM地址: 1048W的別名
比例帶(P) 1530 05FAH 5530 159AH ○ ○ ○ ○ △ RAM地址:
1079W的別名
積分時間(I) 1531 05FBH 5531 159BH ○ ○ ○ ○ - RAM地址:
1080W的別名
微分時間(D) 1532 05FCH 5532 159CH ○ ○ ○ ○ - RAM地址:
1081W的別名
手動復位(RE) 1533 05FDH 5533 159DH ○ ○ ○ ○ - RAM地址:
1082W的別名
CH3 PV 1534 05FEH - - ○ × × × ○ RAM地址:
1006W的別名
使用中的SP值 1535 05FFH 5535 159FH ○ ○ ○ ○ ○ RAM地址:
1010W的別名
使用中的SP組號 1536 0600H 5536 15A0H ○ ○ ○ ○ - RAM地址:
1014W的別名
操作量(通常控制時) 1537 0601H - - ○ ○ × × △ RAM地址:
1022W的別名
AUTO/MANUAL狀態 1540 0604H 5540 15A4H ○ ○ ○ ○ - RAM地址:
1030W的別名
RUN/READY狀態 1541 0605H 5541 15A5H ○ ○ ○ ○ - RAM地址:
1034W的別名
自整定 1543 0607H 5543 15A7H ○ ○ ○ ○ - RAM地址:
停止/啟動狀態 1042W的別名
比例帶(P) 1545 0609H 5545 15A9H ○ ○ ○ ○ △ RAM地址:
1083W的別名
積分時間(I) 1546 060AH 5546 15AAH ○ ○ ○ ○ - RAM地址:
1084W的別名
微分時間(D) 1547 060BH 5547 15ABH ○ ○ ○ ○ - RAM地址:
1085W的別名 手動復位(RE) 1548 060CH 5548 15ACH ○ ○ ○ ○ - RAM地址:
1086W的別名
10-19

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH4 PV 1549 060DH - - ○ × × × ○ RAM地址: 1007W的別名
使用中的SP值 1550 060EH 5550 15AEH ○ ○ ○ ○ ○ RAM地址:
1011W的別名
使用中的SP組號 1551 060FH 5551 15AFH ○ ○ ○ ○ - RAM地址:
1015W的別名
操作量(通常控制時) 1552 0610H 5552 15B0H ○ ○ × × △ RAM地址:
1023W的別名
AUTO/MANUAL狀態 1555 0613H 5555 15B3H ○ ○ ○ ○ - RAM地址:
1031W的別名
RUN/READY狀態 1556 0614H 5556 15B4H ○ ○ ○ ○ - RAM地址:
1035W的別名
自整定 1558 0616H 5558 15B6H ○ ○ ○ ○ - RAM地址:
停止/啟動狀態 1043W的別名
比例帶(P) 1560 0618H 5560 15B8H ○ ○ ○ ○ △ RAM地址:
1087W的別名
積分時間(I)) 1561 0619H 5561 15B9H ○ ○ ○ ○ - RAM地址:
1088W的別名
微分時間(D) 1562 061AH 5562 15BAH ○ ○ ○ ○ - RAM地址:
1089W的別名
手動復位(RE) 1563 061BH 5563 15BBH ○ ○ ○ ○ - RAM地址:
1090W的別名
CH1 SP值(第 1SP) 2001 07D1H 6001 1771H ○ ○ ○ ○ ○ 根據量程種類、小數
SP值(第 2SP) 2002 07D2H 6002 1772H ○ ○ ○ ○ ○ 點信息不同
SP值(第 3SP) 2003 07D3H 6003 1773H ○ ○ ○ ○ ○
SP值(第 4SP) 2004 07D4H 6004 1774H ○ ○ ○ ○ ○
SP值(第 5SP) *1 2005 07D5H 6005 1775H ○ ○ ○ ○ ○
SP值(第 6SP) *1 2006 07D6H 6006 1776H ○ ○ ○ ○ ○
SP值(第 7SP) *1 2007 07D7H 6007 1777H ○ ○ ○ ○ ○
SP值(第 8SP) *1 2008 07D8H 6008 1778H ○ ○ ○ ○ ○
CH2 SP值(第 1SP) 2009 07D9H 6009 1779H ○ ○ ○ ○ ○ 根據量程種類、小數
SP值(第 2SP) 2010 07DAH 6010 177AH ○ ○ ○ ○ ○ 點信息不同
SP值(第 3SP) 2011 07DBH 6011 177BH ○ ○ ○ ○ ○
SP值(第 4SP) 2012 07DCH 6012 177CH ○ ○ ○ ○ ○
SP值(第 5SP) *1 2013 07DDH 6013 177DH ○ ○ ○ ○ ○
SP值(第 6SP) *1 2014 07DEH 6014 177EH ○ ○ ○ ○ ○
SP值(第 7SP) *1 2015 07DFH 6015 177FH ○ ○ ○ ○ ○
SP值(第 8SP) *1 2016 07E0H 6016 1780H ○ ○ ○ ○ ○
CH3 SP值(第 1SP) 2017 07E1H 6017 1781H ○ ○ ○ ○ ○ 根據量程種類、小數
SP值(第 2SP) 2018 07E2H 6018 1782H ○ ○ ○ ○ ○ 點信息不同
SP值(第 3SP) 2019 07E3H 6019 1783H ○ ○ ○ ○ ○
SP值(第 4SP) 2020 07E4H 6020 1784H ○ ○ ○ ○ ○
CH4 SP值(第 1SP) 2025 07E9H 6025 1789H ○ ○ ○ ○ ○ 根據量程種類、小數
SP值(第 2SP) 2026 07EAH 6026 178AH ○ ○ ○ ○ ○ 點信息不同
SP值(第 3SP) 2027 07EBH 6027 178BH ○ ○ ○ ○ ○
SP值(第 4SP) 2028 07ECH 6028 178CH ○ ○ ○ ○ ○
CH1 比例帶(P) 2101 0835H 6101 17D5H ○ ○ ○ ○ △ 1~9999(10倍值)
或者 積分時間(I) 2102 0836H 6102 17D6H ○ ○ ○ ○ - 0~3600
H/C時*2 微分時間(D) 2103 0837H 6103 17D7H ○ ○ ○ ○ - 0~1200
CH1 操作量下限(OL) 2104 0838H 6104 17D8H ○ ○ ○ ○ - -10~+110
加熱 操作量上限(OH) 2105 0839H 6105 17D9H ○ ○ ○ ○ -
手動復位(RE) 2106 083AH 6106 17DAH ○ ○ ○ ○ -
10-20

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH1 干擾應答係數 2112 0840H 6112 17E0H ○ ○ ○ ○ - 0~30
差動(DIFF) 2114 0842H 6114 17E2H ○ ○ ○ ○ ○ 根據小數點信息不同
CH2 比例帶(P) 2115 0843H 6115 17E3H ○ ○ ○ ○ △ 1~9999(10倍值)
或者 積分時間(I) 2116 0844H 6116 17E4H ○ ○ ○ ○ - 0~3600
H/C時*2 微分時間(D) 2117 0845H 6117 17E5H ○ ○ ○ ○ - 0~1200
CH2 操作量下限(OL) 2118 0846H 6118 17E6H ○ ○ ○ ○ - -10~+110
加熱 操作量上限(OH) 2119 0847H 6119 17E7H ○ ○ ○ ○ -
手動復位(RE) 2120 0848H 6120 17E8H ○ ○ ○ ○ -
干擾應答係數 2126 084EH 6126 17EEH ○ ○ ○ ○ - 0~30
差動(DIFF) 2128 0850H 6128 17F0H ○ ○ ○ ○ ○ 根據小數點信息不同
CH3 比例帶(P) 2129 0851H 6129 17F1H ○ ○ ○ ○ △ 1~9999(10倍值)
或者 積分時間(I) 2130 0852H 6130 17F2H ○ ○ ○ ○ - 0~3600
H/C時*2 微分時間(D) 2131 0853H 6131 17F3H ○ ○ ○ ○ - 0~1200
CH1 操作量下限(OL) 2132 0854H 6132 17F4H ○ ○ ○ ○ - -10~+110
冷卻 操作量上限(OH) 2133 0855H 6133 17F5H ○ ○ ○ ○ -
手動復位(RE) 2134 0856H 6134 17F6H ○ ○ ○ ○ -
干擾應答係數 2140 085CH 6140 17FCH ○ ○ ○ ○ - 0~30
差動(DIFF) 2142 085EH 6142 17FEH ○ ○ ○ ○ ○ 根據小數點信息不同
CH4 比例帶(P) 2143 085FH 6143 17FFH ○ ○ ○ ○ △ 1~9999(10倍值)
或者 積分時間(I) 2144 0860H 6144 1800H ○ ○ ○ ○ - 0~3600
H/C時*2 微分時間(D) 2145 0861H 6145 1801H ○ ○ ○ ○ - 0~1200
CH2 操作量下限(OL) 2146 0862H 6146 1802H ○ ○ ○ ○ - -10~+110
冷卻 操作量上限(OH) 2147 0863H 6147 1803H ○ ○ ○ ○ -
手動復位(RE) 2148 0864H 6148 1804H ○ ○ ○ ○ -
干擾應答係數 2154 086AH 6154 180AH ○ ○ ○ ○ - 0~30
差動(DIFF) 2156 086CH 6156 180CH ○ ○ ○ ○ ○ 根據小數點信息不同
EV1 事件1設定值(主) 2901 0B55H 6901 1AF5H ○ ○ ○ ○ - RAM地址:
3004W的別名
事件1設定值(副) 2902 0B56H 6902 1AF6H ○ ○ ○ ○ - RAM地址:
3005W的別名
EV2 事件2設定值(主) 2903 0B57H 6903 1AF7H ○ ○ ○ ○ - RAM地址:
3021W的別名
事件2設定值(副) 2904 0B58H 6904 1AF8H ○ ○ ○ ○ - RAM地址:
3022W的別名
EV3 事件3設定值(主) 2905 0B59H 6905 1AF9H ○ ○ ○ ○ - RAM地址:
3038W的別名
事件3設定值(副) 2906 0B5AH 6906 1AFAH ○ ○ ○ ○ - RAM地址:
3039W的別名
EV4 事件4設定值(主) 2907 0B5BH 6907 1AFBH ○ ○ ○ ○ - RAM地址:
3055W的別名
事件4設定值(副) 2908 0B5CH 6908 1AFCH ○ ○ ○ ○ - RAM地址:
3056W的別名
EV 事件5設定值(主) 2909 0B5DH 6909 1AFDH ○ ○ ○ ○ - RAM地址:
總線1 3072W的別名
事件5設定值(副) 2910 0B5EH 6910 1AFEH ○ ○ ○ ○ - RAM地址:
3073W的別名
EV 事件6設定值(主) 2911 0B5FH 6911 1AFFH ○ ○ ○ ○ - RAM地址:
總線2 3089W的別名
事件6設定值(副) 2912 0B60H 6912 1B00H ○ ○ ○ ○ - RAM地址:
3090W的別名
*1 :僅2CH型有效。 *2 :H/C是指加熱冷卻。
10-21

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
EV 事件7設定值(主) 2913 0B61H 6913 1B01H ○ ○ ○ ○ - RAM地址: 總線3 3106W的別名
事件7設定值(副) 2914 0B62H 6914 1B02H ○ ○ ○ ○ - RAM地址:
3107W的別名
EV 事件8設定值(主) 2915 0B63H 6915 1B03H ○ ○ ○ ○ - RAM地址:
總線4 3123W的別名
事件8設定值(副) 2916 0B64H 6916 1B04H ○ ○ ○ ○ - RAM地址:
3124W的別名
EV1 動作種類 3001 0BB9H 7001 1B59H ○ ○ ○ ○ - 0~28
對象通道 3002 0BBAH 7002 1B5AH ○ ○ ○ ○ - 1~4
報警OR動作 3003 0BBBH 7003 1B5BH ○ ○ ○ ○ - 0:無、1:有
事件設定值(主) 3004 0BBCH 7004 1B5CH ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3005 0BBDH 7005 1B5DH ○ ○ ○ ○ - (根據選擇的種類不同)
回差 3006 0BBEH 7006 1B5EH ○ ○ ○ ○ - 0~10000
(根據選擇的種類不同)
正逆 3007 0BBFH 7007 1B5FH ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3008 0BC0H 7008 1B60H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
READY時事件動作 3010 0BC2H 7010 1B62H ○ ○ ○ ○ - 0:繼續、1:強制OFF
ON延遲(時) 3011 0BC3H 7011 1B63H ○ ○ ○ ○ - 0~99
ON延遲(分) 3012 0BC4H 7012 1B64H ○ ○ ○ ○ - 0~59
ON延遲(秒) 3013 0BC5H 7013 1B65H ○ ○ ○ ○ - 0~59
OFF延遲(時) 3014 0BC6H 7014 1B66H ○ ○ ○ ○ - 0~99
OFF延遲(分) 3015 0BC7H 7015 1B67H ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3016 0BC8H 7016 1B68H ○ ○ ○ ○ - 0~59
EV2 動作種類 3018 0BCAH 7018 1B6AH ○ ○ ○ ○ - 0~28
對象通道 3019 0BCBH 7019 1B6BH ○ ○ ○ ○ - 1~4
報警OR動作 3020 0BCCH 7020 1B6CH ○ ○ ○ ○ - 0:無、1:有
事件設定值(主) 3021 0BCDH 7021 1B6DH ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3022 0BCEH 7022 1B6EH ○ ○ ○ ○ - (根據選擇的種類不同)
回差 3023 0BCFH 7023 1B6FH ○ ○ ○ ○ - 0~10000
(根據選擇的種類不同)
正逆 3024 0BD0H 7024 1B70H ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3025 0BD1H 7025 1B71H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
READY時事件動作 3027 0BD4H 7027 1B74H ○ ○ ○ ○ - 0:繼續、1:強制OFF
ON延遲(時) 3028 0BD5H 7028 1B75H ○ ○ ○ ○ - 0~99
ON延遲(分) 3029 0BD6H 7029 1B76H ○ ○ ○ ○ - 0~59
ON延遲(秒) 3030 0BD7H 7030 1B77H ○ ○ ○ ○ - 0~59
OFF延遲(時) 3031 0BD8H 7031 1B78H ○ ○ ○ ○ - 0~99
OFF延遲(分) 3032 0BD9H 7032 1B79H ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3033 0BDAH 7033 1B7AH ○ ○ ○ ○ - 0~59
EV3 動作種類 3035 0BDBH 7035 1B7BH ○ ○ ○ ○ - 0~28
對象通道 3036 0BDCH 7036 1B7CH ○ ○ ○ ○ - 1~4
報警OR動作 3037 0BDDH 7037 1B7DH ○ ○ ○ ○ - 0:有、1:無
事件設定值(主) 3038 0BDEH 7038 1B7EH ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3039 0BDFH 7039 1B7FH ○ ○ ○ ○ - (根據選擇的種類不同)
回差 3040 0BE0H 7040 1B80H ○ ○ ○ ○ - 0~10000
(根據選擇的種類不同)
正逆 3041 0BE1H 7041 1B81H ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3042 0BE2H 7042 1B82H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
10-22

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
EV3 READY時事件動作 3044 0BE4H 7044 1B84H ○ ○ ○ ○ - 0:繼續、1:強制OFF
ON延遲(時) 3045 0BE5H 7045 1B85H ○ ○ ○ ○ - 0~99
ON延遲(分) 3046 0BE6H 7046 1B86H ○ ○ ○ ○ - 0~59
ON延遲(秒) 3047 0BE7H 7047 1B87H ○ ○ ○ ○ - 0~59
OFF延遲(時) 3048 0BE8H 7048 1B88H ○ ○ ○ ○ - 0~99
OFF延遲(分) 3049 0BE9H 7049 1B89H ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3050 0BEAH 7050 1B8AH ○ ○ ○ ○ - 0~59
EV4 動作種類 3052 0BECH 7052 1B8CH ○ ○ ○ ○ - 0~28
對象通道 3053 0BEDH 7053 1B8DH ○ ○ ○ ○ - 1~4
報警OR動作 3054 0BEEH 7054 1B8EH ○ ○ ○ ○ - 0:無、1:有
事件設定值(主) 3055 0BEFH 7055 1B8FH ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3056 0BF0H 7056 1B90H ○ ○ ○ ○ - (根據選擇的種類不同)
回差 3057 0BF1H 7057 1B91H ○ ○ ○ ○ - 0~10000
(根據選擇的種類不同)
正逆 3058 0BF2H 7058 1B92H ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3059 0BF3H 7059 1B93H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
READY時事件動作 3061 0BF5H 7061 1B95H ○ ○ ○ ○ - 0:繼續、1:強制OFF
ON延遲(時) 3062 0BF6H 7062 1B96H ○ ○ ○ ○ - 0~99
ON延遲(分) 3063 0BF7H 7063 1B97H ○ ○ ○ ○ - 0~59
ON延遲(秒) 3064 0BF8H 7064 1B98H ○ ○ ○ ○ - 0~59
OFF延遲(時) 3065 0BF9H 7065 1B99H ○ ○ ○ ○ - 0~99
OFF延遲(分) 3066 0BFAH 7066 1B9AH ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3067 0BFBH 7067 1B9BH ○ ○ ○ ○ - 0~59
EV 動作種類 3069 0BFDH 7069 1B9DH ○ ○ ○ ○ - 0~28
總線1 對象通道 3070 0BFEH 7070 1B9EH ○ ○ ○ ○ - 1~4
報警OR動作 3071 0BFFH 7071 1B9FH ○ ○ ○ ○ - 0:無、1:有
事件設定值(主) 3072 0C00H 7072 1BA0H ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3073 0C01H 7073 1BA1H ○ ○ ○ ○ - (根據選擇的種類不同)
回差 3074 0C02H 7074 1BA2H ○ ○ ○ ○ - 0~10000
(根據選擇的種類不同)
正逆 3075 0C03H 7075 1BA3H ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3076 0C04H 7076 1BA4H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
READY時事件動作 3078 0C06H 7078 1BA6H ○ ○ ○ ○ - 0:繼續、1:強制OFF
ON延遲(時) 3079 0C07H 7079 1BA7H ○ ○ ○ ○ - 0~99
ON延遲(分) 3080 0C08H 7080 1BA8H ○ ○ ○ ○ - 0~59
ON延遲(秒) 3081 0C09H 7081 1BA9H ○ ○ ○ ○ - 0~59
OFF延遲(時) 3082 0C0AH 7082 1BAAH ○ ○ ○ ○ - 0~99
OFF延遲(分) 3083 0C0BH 7083 1BABH ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3084 0C0CH 7084 1BACH ○ ○ ○ ○ - 0~59
EV 動作種類 3086 0C0EH 7086 1BAEH ○ ○ ○ ○ - 0~28
總線2 對象通道 3087 0C0FH 7087 1BAFH ○ ○ ○ ○ - 1~4
報警OR動作 3088 0C00H 7088 1BA0H ○ ○ ○ ○ - 0:無、1:有
事件設定值(主) 3089 0C11H 7089 1BB1H ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3090 0C12H 7090 1BB2H ○ ○ ○ ○ - (根據動作種類不同)
回差 3091 0C13H 7091 1BB3H ○ ○ ○ ○ - 0~10000
(根據選擇的種類不同)
正逆 3092 0C14H 7092 1BB4H ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3093 0C15H 7093 1BB5H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
10-23

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
EV READY時事件動作 3095 0C17H 7095 1BB7H ○ ○ ○ ○ - 0:繼續、1:強制OFF
總線2 ON延遲(時) 3096 0C18H 7096 1BB8H ○ ○ ○ ○ - 0~99
ON延遲(分) 3097 0C19H 7097 1BB9H ○ ○ ○ ○ - 0~59
ON延遲(秒) 3098 0C1AH 7098 1BBAH ○ ○ ○ ○ - 0~59
OFF延遲(時) 3099 0C1BH 7099 1BBBH ○ ○ ○ ○ - 0~99
OFF延遲(分) 3100 0C1CH 7100 1BBCH ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3101 0C1DH 7101 1BBDH ○ ○ ○ ○ - 0~59
EV 動作種類 3103 0C1FH 7103 1BBFH ○ ○ ○ ○ - 0~28
總線3 對象通道 3104 0C20H 7104 1BC0H ○ ○ ○ ○ - 1~4
報警OR動作 3105 0C21H 7105 1BC1H ○ ○ ○ ○ - 0:無、1:有
事件設定值(主) 3106 0C22H 7106 1BC2H ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3107 0C23H 7107 1BC3H ○ ○ ○ ○ - (根據選擇的種類不同)
回差 3108 0C24H 7108 1BC4H ○ ○ ○ ○ - 0~10000
(根據動作種類不同)
正逆 3109 0C25H 7109 1BC5H ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3110 0C26H 7110 1BC6H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
READY時事件動作 3112 0C28H 7112 1BC8H ○ ○ ○ ○ - 0:繼續、1:強制OFF
ON延遲(時) 3113 0C29H 7113 1BC9H ○ ○ ○ ○ - 0~99
ON延遲(分) 3114 0C2AH 7114 1BCAH ○ ○ ○ ○ - 0~59
ON延遲(秒) 3115 0C2BH 7115 1BCBH ○ ○ ○ ○ - 0~59
OFF延遲(時) 3116 0C2CH 7116 1BCCH ○ ○ ○ ○ - 0~99
OFF延遲(分) 3117 0C2DH 7117 1BCDH ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3118 0C2EH 7118 1BCEH ○ ○ ○ ○ - 0~59
EV 動作種類 3120 0C30H 7120 1BD0H ○ ○ ○ ○ - 0~28
總線4 對象通道 3121 0C31H 7121 1BD1H ○ ○ ○ ○ - 1~4
報警OR動作 3122 0C32H 7122 1BD2H ○ ○ ○ ○ - 0:無、1:有
事件設定值(主) 3123 0C33H 7123 1BD3H ○ ○ ○ ○ - -2000~+10000
事件設定值(副) 3124 0C34H 7124 1BD4H ○ ○ ○ ○ - (根據選擇的種類不同)
回差 3125 0C35H 7125 1BD5H ○ ○ ○ ○ - 0~10000
(根據動作種類不同)
正逆 3126 0C36H 7126 1BD6H ○ ○ ○ ○ - 0:正動作、1:逆動作
待機 3127 0C37H 7127 1BD7H ○ ○ ○ ○ - 0:無、1:待機
2:SP變更時待機再設定
READY時事件動作 3129 0C39H 7129 1BD9H ○ ○ ○ ○ - 0:繼續、1:強制OFF
ON延遲(時) 3130 0C3AH 7130 1BDAH ○ ○ ○ ○ - 0~99
ON延遲(分) 3131 0C3BH 7131 1BDBH ○ ○ ○ ○ - 0~59
ON延遲(秒) 3132 0C3CH 7132 1BDCH ○ ○ ○ ○ - 0~59
OFF延遲(時) 3133 0C3DH 7133 1BDDH ○ ○ ○ ○ - 0~99
OFF延遲(分) 3134 0C3EH 7134 1BDEH ○ ○ ○ ○ - 0~59
OFF延遲(秒) 3135 0C3FH 7135 1BDFH ○ ○ ○ ○ - 0~59
CH1 控制方式 3201 0C81H 7201 1C21H ○ ○ ○ ○ - 0:ON/OFF
CH2 3202 0C82H 7202 1C22H ○ ○ ○ ○ - 1:自適應
CH3 3203 0C83H 7203 1C23H ○ ○ ○ ○ - 2:固定 PID
CH4 3204 0C84H 7204 1C24H ○ ○ ○ ○ -
CH1 時間比例周期 3207 0C87H 7207 1C27H ○ ○ ○ ○ - 5~120(繼電器)
CH2 3208 0C88H 7208 1C28H ○ ○ ○ ○ - 1~120(電壓)
CH3 3209 0C89H 7209 1C29H ○ ○ ○ ○ -
CH4 3210 0C8AH 7210 1C2AH ○ ○ ○ ○ -
10-24

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息 CH1 PV偏置 3211 0C8BH 7211 1C2BH ○ ○ ○ ○ ○ 根據小數點信息不同
CH2 3212 0C8CH 7212 1C2CH ○ ○ ○ ○ ○
CH3 3213 0C8DH 7213 1C2DH ○ ○ ○ ○ ○
CH4 3214 0C8EH 7214 1C2EH ○ ○ ○ ○ ○
CH1 PV濾波 3215 0C8FH 7215 1C2FH ○ ○ ○ ○ △ 0~1200(10倍值)
CH2 3216 0C90H 7216 1C30H ○ ○ ○ ○ △
CH3 3217 0C91H 7217 1C31H ○ ○ ○ ○ △
CH4 3218 0C92H 7218 1C32H ○ ○ ○ ○ △
- 輸出分支控制的使用 3903 0F3FH 7903 1EDFH ○ ○ ○ ○ - 0:無 1:有
CH1 MV分支輸出CH 3219 0C93H 7219 1C33H ○ ○ ○ ○ - 1~4
CH2 3220 0C94H 7220 1C34H ○ ○ ○ ○ - 1~4
CH3 3221 0C95H 7221 1C35H ○ ○ ○ ○ - 1~4
CH4 3222 0C96H 7222 1C36H ○ ○ ○ ○ - 1~4
CH1 MV分支輸出用Ratio 3223 0C97H 7223 1C37H ○ ○ ○ ○ △1 0~10000 (1000倍值)
CH2 3224 0C98H 7224 1C38H ○ ○ ○ ○ △1 0~10000
(1000倍值)
CH3 3225 0C99H 7225 1C39H ○ ○ ○ ○ △1 0~10000
(1000倍值)
CH4 3226 0C9AH 7226 1C3AH ○ ○ ○ ○ △1 0~10000
(1000倍值)
CH1 操作量變化率限幅 3227 0C9BH 7227 1C3BH ○ ○ ○ ○ △ 0~1000(10倍值)
CH2 3228 0C9CH 7228 1C3CH ○ ○ ○ ○ △
CH3 3229 0C9DH 7229 1C3DH ○ ○ ○ ○ △
CH4 3230 0C9EH 7230 1C3EH ○ ○ ○ ○ △
CT1 變流器輸入 3231 0C9FH 7231 1C3FH ○ ○ ○ ○ - 1~6
CT2 CH 指定 3232 0CA0H 7232 1C40H ○ ○ ○ ○ -
CH1 變流器輸入 3235 0CA3H 7235 1C43H ○ ○ ○ ○ - 3~30
CH2 測定等待時間 3236 0CA4H 7236 1C44H ○ ○ ○ ○ -
CH1 時間比例動作模式 3239 0CA7H 7239 1C47H ○ ○ ○ ○ - 0:重視控制型
CH2 3240 0CA8H 7240 1C48H ○ ○ ○ ○ - 1:重視操作端壽命型
CH3 3241 0CA9H 7241 1C49H ○ ○ ○ ○ -
CH4 3242 0CAAH 7242 1C4AH ○ ○ ○ ○ -
CH1 自適應昇降啟動條件 3243 0CABH 7243 1C4BH ○ ○ ○ ○ - 0:PV下降時
CH2 3244 0CACH 7244 1C4CH ○ ○ ○ ○ - 1:PV上昇時
CH3 3245 0CADH 7245 1C4DH ○ ○ ○ ○ -
CH4 3246 0CAEH 7246 1C4EH ○ ○ ○ ○ -
CH1 自適應整定幅 3247 0CAFH 7247 1C4FH ○ ○ ○ ○ △ 熱電偶/熱電阻
CH2 3248 0CB0H 7248 1C50H ○ ○ ○ ○ △ 0~20
CH3 3249 0CB1H 7249 1C51H ○ ○ ○ ○ △ 直流電壓/電流
CH4 3250 0CB2H 7250 1C52H ○ ○ ○ ○ △ 0~50(10倍值)
CH1 CH間偏差控制 3255 0CB7H 7255 1C57H ○ ○ ○ ○ - 0:無、1:有
CH2 3256 0CB8H 7256 1C58H ○ ○ ○ ○ -
CH3 3257 0CB9H 7257 1C59H ○ ○ ○ ○ -
CH4 3258 0CBAH 7258 1C5AH ○ ○ ○ ○ -
CH1 CH間偏差控制CH指定 3259 0CBBH 7259 1C5BH ○ ○ ○ ○ - 1~4
CH2 3260 0CBCH 7260 1C5CH ○ ○ ○ ○ -
CH3 3261 0CBDH 7261 1C5DH ○ ○ ○ ○ -
CH4 3262 0CBEH 7262 1C5EH ○ ○ ○ ○ -
CH1 CH間偏差控制種類 3263 0CBFH 7263 1C5FH ○ ○ ○ ○ - 0:PV+偏差值
CH2 3264 0CC0H 7264 1C60H ○ ○ ○ ○ - 1:SP+偏差值
10-25

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH3 CH間偏差控制種類 3265 0CC1H 7265 1C61H ○ ○ ○ ○ -
CH4 3266 0CC2H 7266 1C62H ○ ○ ○ ○ -
CH1 CH間偏差控制偏差值 3267 0CC3H 7267 1C63H ○ ○ ○ ○ ○ -2000~+10000
CH2 3268 0CC4H 7268 1C64H ○ ○ ○ ○ ○ (根據小數點信息
CH3 3269 0CC5H 7269 1C65H ○ ○ ○ ○ ○ 不同)
CH4 3270 0CC6H 7270 1C66H ○ ○ ○ ○ ○
CH1 MV分支輸出偏移量 3271 0CC7H 7271 1C67H ○ ○ ○ ○ △ -2000~+10000 (10倍值)
CH2 3272 0CC8H 7272 1C68H ○ ○ ○ ○ △ -2000~+10000 (10倍值)
CH3 3273 0CC9H 7273 1C69H ○ ○ ○ ○ △ -2000~+10000 (10倍值)
CH4 3274 0CCAH 7274 1C6AH ○ ○ ○ ○ △ -2000~+10000 (10倍值)
- 位置比例控制種類 3275 0CCBH 7275 1C6BH ○ ○ ○ ○ - 詳細內容參照9-6 頁
CH1 死區 3276 0CCCH 7276 1C6CH ○ ○ ○ ○ - 1~250
CH2 3277 0CCDH 7277 1C6DH ○ ○ ○ ○ - (10倍值)
CH1 馬達調整 3278 0CCEH 7278 1C6EH ○ ○ ○ ○ - 0:停止 1:啟動
CH2 3279 0CCFH 7279 1C6FH ○ ○ ○ ○ -
CH1 全閉側調整值 3280 0CD0H 7280 1C70H ○ ○ ○ ○ - 0~9999
CH2 3281 0CD1H 7281 1C71H ○ ○ ○ ○ -
CH1 全開側調整值 3282 0CD2H 7282 1C72H ○ ○ ○ ○ - 0~9999
CH2 3283 0CD3H 7283 1C73H ○ ○ ○ ○ -
CH1 馬達開時間 3284 0CD4H 7284 1C74H ○ ○ ○ ○ - 0~250
CH2 3285 0CD5H 7285 1C75H ○ ○ ○ ○ -
CH1 馬達電阻值選擇 3286 0CD6H 7286 1C76H ○ ○ ○ ○ - 詳細內容參照9-6 頁
CH2 3287 0CD7H 7287 1C77H ○ ○ ○ ○ -
CH1 電位計長壽命 3288 0CD8H 7288 1C78H ○ ○ ○ ○ - 詳細內容參照9-6 頁
CH2 3289 0CD9H 7289 1C79H ○ ○ ○ ○ -
CH1 外部總線型定義 3292 0CDCH 7292 1C7CH ○ ○ ○ ○ - 0:繼電器 1:電壓脈衝 詳細內容參照8-30 頁
- 省電 3293 0CDDH 7293 1C7DH ○ ○ ○ ○ - 詳細內容參照9-12 頁
- 省電延遲時間 3294 0CDEH 7294 1C7EH ○ ○ ○ ○ -
CH1 控制方式 3301 0CE5H 7301 1C85H ○ ○ ○ ○ - RAM地址: 3201W的別名
時間比例週期 3302 0CE6H 7302 1C86H ○ ○ ○ ○ - RAM地址:
3207W的別名
PV偏置 3303 0CE7H 7303 1C87H ○ ○ ○ ○ ○ RAM地址:
3211W的別名
PV濾波 3304 0CE8H 7304 1C88H ○ ○ ○ ○ △ RAM地址:
3215W的別名
自適應 3305 0CE9H 7305 1C89H ○ ○ ○ ○ - RAM地址:
昇降啟動條件 3243W的別名
自適應 3306 0CEAH 7306 1C8AH ○ ○ ○ ○ △ RAM地址:
整定幅 3247W的別名
MV分支輸出CH 3307 0CEBH 7307 1C8BH ○ ○ ○ ○ - RAM地址
3903W的別名
MV分支輸出用 Ratio 3308 0CECH 7308 1C8CH ○ ○ ○ ○ △1 RAM地址
3223W的別名
操作量變化率限幅 3309 0CEDH 7309 1C8DH ○ ○ ○ ○ △ RAM地址:
3227W的別名
CT測定等待時間 3311 0CEFH 7311 1C8FH ○ ○ ○ ○ - RAM地址:
3235W的別名
時間比例動作模式 3312 0CF0H 7312 1C90H ○ ○ ○ ○ - RAM地址:
3239W的別名
10-26

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息 CH2 控制方式 3313 0CF1H 7313 1C91H ○ ○ ○ ○ - RAM地址:
3202W的別名
時間比例周期 3314 0CF2H 7314 1C92H ○ ○ ○ ○ - RAM地址:
3208W的別名
PV偏置 3315 0CF3H 7315 1C93H ○ ○ ○ ○ ○ RAM地址:
3212W的別名
PV濾波 3316 0CF4H 7316 1C94H ○ ○ ○ ○ △ RAM地址:
3216W的別名
自適應 3317 0CF5H 7317 1C95H ○ ○ ○ ○ - RAM地址:
昇降啟動條件 3244W的別名
自適應 3318 0CF6H 7318 1C96H ○ ○ ○ ○ △ RAM地址:
整定幅 3248W的別名
MV分支輸出CH 3319 0CF7H 7319 1C97H ○ ○ ○ ○ - RAM地址
3904W的別名
MV分支輸出用Ratio 3320 0CF8H 7320 1C98H ○ ○ ○ ○ △1 RAM地址
3224W的別名
操作量變化率限幅 3321 0CF9H 7321 1C99H ○ ○ ○ ○ △ RAM地址:
3228W的別名
CT測定等待時間 3323 0CFBH 7323 1C9BH ○ ○ ○ ○ - RAM地址:
3236W的別名
時間比例動作模式 3324 0CFCH 7324 1C9CH ○ ○ ○ ○ - RAM地址:
3240W的別名
CH3 控制方式 3325 0CFDH 7325 1C9DH ○ ○ ○ ○ - RAM地址:
3203W的別名
時間比例周期 3326 0CFEH 7326 1C9EH ○ ○ ○ ○ - RAM地址:
3209W的別名
PV偏置 3327 0CFFH 7327 1C9FH ○ ○ ○ ○ ○ RAM地址:
3213W的別名
PV濾波 3328 0D00H 7328 1CA0H ○ ○ ○ ○ △ RAM地址:
3217W的別名
自適應 3329 0D01H 7329 1CA1H ○ ○ ○ ○ - RAM地址:
昇降啟動條件 3245W的別名
自適應 3330 0D02H 7330 1CA2H ○ ○ ○ ○ △ RAM地址:
整定幅 3249W的別名
MV分支輸出CH 3331 0D03H 7331 1CA3H ○ ○ ○ ○ - RAM地址
3905W的別名
MV分支輸出用Ratio 3332 0D04H 7332 1CA4H ○ ○ ○ ○ △1 RAM地址
3225W的別名
操作量變化率限幅 3333 0D05H 7333 1CA5H ○ ○ ○ ○ △ RAM地址:
3229W的別名
時間比例動作模式 3336 0D08H 7336 1CA8H ○ ○ ○ ○ - RAM地址:
3241W的別名
CH4 控制方式 3337 0D09H 7337 1CA9H ○ ○ ○ ○ - RAM地址:
3204W的別名
時間比例周期 3338 0D0AH 7338 1CAAH ○ ○ ○ ○ - RAM地址:
3210W的別名
PV偏置 3339 0D0BH 7339 1CABH ○ ○ ○ ○ ○ RAM地址:
3214W的別名
PV濾波 3340 0D0CH 7340 1CACH ○ ○ ○ ○ △ RAM地址:
3218W的別名
自適應 3341 0D0DH 7341 1CADH ○ ○ ○ ○ - RAM地址:
昇降啟動條件 3246W的別名
自適應 3342 0D0EH 7342 1CAEH ○ ○ ○ ○ △ RAM地址:
整定幅 3250W的別名
MV分支輸出CH 3343 0D0FH 7343 1CAFH ○ ○ ○ ○ - RAM地址
3906W的別名
10-27

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH4 MV分支輸出用Ratio 3344 0D10H 7344 1CB0H ○ ○ ○ ○ △1 RAM地址 3226W的別名
操作量變化率限幅 3345 0D11H 7345 1CB1H ○ ○ ○ ○ △ RAM地址:
3230W的別名
時間比例動作模式 3348 0D14H 7348 1CB4H ○ ○ ○ ○ - RAM地址:
3242W的別名
- 內存保護 3401 0D49H 7401 1CE9H ○ ○ ○ ○ - 0~3
- 單個/多SP組 3402 0D4AH 7402 1CEAH ○ ○ ○ ○ - 0:單個SP、1:多個SP
CH1 溫度單位 3403 0D4BH 7403 1CEBH ○ ○ ○ ○ - 0:攝氏、1:特殊單位
控制動作 3404 0D4CH 7404 1CECH ○ ○ ○ ○ - 0:加熱控制
1:冷卻控制
輸入種類 3405 0D4DH 7405 1CEDH ○ ○ ○ ○ - 0~13、21~28
41~44
小數點位置 3406 0D4EH 7406 1CEEH ○ ◯ ○ ◯ - 0、1
(根據量程種類不同)
PV量程下限值 3407 0D4FH 7407 1CEFH ○ ○ ○ ○ ○ 根據量程種類、小數
PV量程上限值 3408 0D50H 7408 1CF0H ○ ○ ○ ○ ○ 點信息不同
SP限幅下限 3409 0D51H 7409 1CF1H ○ ○ ○ ○ ○
SP限幅上限 3410 0D52H 7410 1CF2H ○ ○ ○ ○ ○
發生PV報警時操作量 3411 0D53H 7411 1CF3H ○ ○ ○ ○ △ -100~+1100
READY時操作量 3412 0D54H 7412 1CF4H ○ ○ ○ ○ △ (10倍值)
PID初始操作量 3413 0D55H 7413 1CF5H ○ ○ ○ ○ △
冷端補償動作 3414 0D56H 7414 1CF6H ○ ○ ○ ○ - 0:有、1:無
AUTO/MANUAL切換時 3415 0D57H 7415 1CF7H ○ ○ ○ ○ - 0:無擾
動作 1:預置
預置手動值 3416 0D58H 7416 1CF8H ○ ○ ○ ○ △ -100~+1100
(10倍值)
SP下降斜率 3417 0D59H 7417 1CF9H ○ ○ ○ ○ ○ 根據小數點信息不同
SP上昇斜率 3418 0D5AH 7418 1CFAH ○ ○ ○ ○ ○
SP斜率時間單位 3419 0D5BH 7419 1CFBH ○ ○ ○ ○ ○ 0:unit/分、1:unit/小時
CH2 溫度單位 3421 0D5DH 7421 1CFDH ○ ○ ○ ○ - 0:攝氏、1:特殊單位
控制動作 3422 0D5EH 7422 1CFEH ○ ○ ○ ○ - 0:加熱控制
1:冷卻控制
輸入種類 3423 0D5FH 7423 1CFFH ○ ○ ○ ○ - 0~13、21~28、 41~44
小數點位置 3424 0D60H 7424 1D00H ○ ○ ○ ○ - 0、1
(根據量程種類不同)
PV量程下限值 3425 0D61H 7425 1D01H ○ ○ ○ ○ ○ 根據量程種類、小數
PV量程上限值 3426 0D62H 7426 1D02H ○ ○ ○ ○ ○ 點信息不同
SP限幅下限 3427 0D63H 7427 1D03H ○ ○ ○ ○ ○
SP限幅上限 3428 0D64H 7428 1D04H ○ ○ ○ ○ ○
發生PV報警時操作量 3429 0D65H 7429 1D05H ○ ○ ○ ○ △ -100~+1100
READY時操作量 3430 0D66H 7430 1D06H ○ ○ ○ ○ △ (10倍值)
初始操作量 3431 0D67H 7431 1D07H ○ ○ ○ ○ △
冷端補償動作 3432 0D68H 7432 1D08H ○ ○ ○ ○ - 0:有、1:無
AUTO/MANUAL切換時 3433 0D69H 7433 1D09H ○ ○ ○ ○ - 0:無擾
動作 1:預置
預置手動值 3434 0D6AH 7434 1D0AH ○ ○ ○ ○ △ -100~+1100
(10倍值)
SP下降斜率 3435 0D6BH 7435 1D0BH ○ ○ ○ ○ ○ 根據小數點信息不同
SP上昇斜率 3436 0D6CH 7436 1D0CH ○ ○ ○ ○ ○
SP斜率時間單位 3437 0D6DH 7437 1D0DH ○ ○ ○ ○ ○ 0:unit/分、1:unit/小時
10-28

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
CH3 溫度單位 3439 0D6FH 7439 1D0FH ○ ○ ○ ○ - 0:攝氏度、1:特殊單位
控制動作 3440 0D70H 7440 1D10H ○ ○ ○ ○ - 0:加熱控制
1:冷卻控制
輸入種類 3441 0D71H 7441 1D11H ○ ○ ○ ○ - 0~13、21~28、 41~44
小數點位置 3442 0D72H 7442 1D12H ○ ○ ○ ○ - 0、1
(根據量程種類不同)
PV量程下限值 3443 0D73H 7443 1D13H ○ ○ ○ ○ ○ 根據量程種類、小數
PV量程上限值 3444 0D74H 7444 1D14H ○ ○ ○ ○ ○ 點信息不同
SP限幅下限 3445 0D75H 7445 1D15H ○ ○ ○ ○ ○
SP限幅上限 3446 0D76H 7446 1D16H ○ ○ ○ ○ ○
發生PV報警時操作量 3447 0D77H 7447 1D17H ○ ○ ○ ○ △ -100~+1100
READY時操作量 3448 0D78H 7448 1D18H ○ ○ ○ ○ △ (10倍值)
初始操作量 3449 0D79H 7449 1D19H ○ ○ ○ ○ △
冷端補償動作 3450 0D7AH 7450 1D1AH ○ ○ ○ ○ - 0:有、1:無
AUTO/MANUAL切換時 3451 0D7BH 7451 1D1BH ○ ○ ○ ○ - 0:無擾 動作 1:預置
預置手動值 3452 0D7CH 7452 1D1CH ○ ○ ○ ○ △ -100~+1100
(10倍值)
SP下降斜率 3453 0D7DH 7453 1D1DH ○ ○ ○ ○ ○ 根據小數點信息不同
SP上昇斜率 3454 0D7EH 7454 1D1EH ○ ○ ○ ○ ○
SP斜率時間單位 3455 0D7FH 7455 1D1FH ○ ○ ○ ○ ○ 0:unit/分、1:unit/小時
CH4 溫度單位 3457 0D81H 7457 1D21H ○ ○ ○ ○ - 0:攝氏度、1:特殊單位
控制動作 3458 0D82H 7458 1D22H ○ ○ ○ ○ - 0:加熱控制
1:冷卻控制
輸入種類 3459 0D83H 7459 1D23H ○ ○ ○ ○ - 0~13、21~28、 41~44
小數點位置 3460 0D84H 7460 1D24H ○ ○ ○ ○ - 0、1
(根據量程種類不同)
PV量程下限值 3461 0D85H 7461 1D25H ○ ○ ○ ○ ○ 根據量程種類、小數
PV量程上限值 3462 0D86H 7462 1D26H ○ ○ ○ ○ ○ 點信息不同
SP限幅下限 3463 0D87H 7463 1D27H ○ ○ ○ ○ ○
SP限幅上限 3464 0D88H 7464 1D28H ○ ○ ○ ○ ○
發生PV報警時操作量 3465 0D89H 7465 1D29H ○ ○ ○ ○ △ -100~+1100
READY時操作量 3466 0D8AH 7466 1D2AH ○ ○ ○ ○ △ (10倍值)
初始操作量 3467 0D8BH 7467 1D2BH ○ ○ ○ ○ △
冷端補償動作 3468 0D8CH 7468 1D2CH ○ ○ ○ ○ - 0:有、1:無
AUTO/MANUAL切換時 3469 0D8DH 7469 1D2DH ○ ○ ○ ○ - 0:無擾
動作 1:預置
預置手動值 3470 0D8EH 7470 1D2EH ○ ○ ○ ○ △ -100~+1100
(10倍值)
SP下降斜率 3471 0D8FH 7471 1D2FH ○ ○ ○ ○ ○ 根據小數點信息不同
SP上昇斜率 3472 0D90H 7472 1D30H ○ ○ ○ ○ ○
SP斜率時間單位 3473 0D91H 7473 1D31H ○ ○ ○ ○ ○ 0:unit/分、1:unit/小時
- LED動作種類 3501 0DADH 7501 1D4DH ○ ○ ○ ○ - 0~18
- LED對象通道 3502 0DAEH 7502 1D4EH ○ ○ ○ ○ - 0~4
AUX1 動作種類 3503 0DAFH 7503 1D4FH ○ ○ ○ ○ - 0~5
對象通道 3504 0DB0H 7504 1D50H ○ ○ ○ ○ - 1~4
0%設定 3505 0DB1H 7505 1D51H ○ ○ ○ ○ - -2000~+10000
100%設定 3506 0DB2H 7506 1D52H ○ ○ ○ ○ - (根據種類選擇不同)
輸出種類 3507 0DB3H 7507 1D53H ○ ○ ○ ○ - 0: 4~20mA
1: 0~20mA
10-29

第10章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
AUX2 動作種類 3508 0DB4H 7508 1D54H ○ ○ ○ ○ - 0~5
對象通道 3509 0DB5H 7509 1D55H ○ ○ ○ ○ - 1~4
0%設定 3510 0DB6H 7510 1D56H ○ ○ ○ ○ - -2000~+10000
100%設定 3511 0DB7H 7511 1D57H ○ ○ ○ ○ - (根據種類選擇不同)
輸出種類 3512 0DB8H 7512 1D58H ○ ○ ○ ○ - 0: 4~20mA
1: 0~20mA
- 加熱冷卻控制的動作 3513 0DB9H 7513 1D59H ○ ○ ○ ○ - 0:無、1:有
CH1 加熱冷卻控制的死區 3514 0DBAH 7514 1D5AH ○ ○ ○ ○ △ -1000~+1000
CH2 3517 0DBDH 7517 1D5DH ○ ○ ○ ○ △ (10倍值)
- 遠程SP輸入 3519 0DBFH 7519 1D5FH ○ ○ ○ ○ - 0:無、1:有
RSW1 動作種類 3601 0E11H 7601 1DB1H ○ ○ ○ ○ - 0~14
對象通道 3602 0E12H 7602 1DB2H ○ ○ ○ ○ - 0~8(根據種類選擇不同)
輸入分配2 3603 0E13H 7603 1DB3H ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3604 0E14H 7604 1DB4H ○ ○ ○ ○ - 詳細內容參照表 10-11
邏輯 3605 0E15H 7605 1DB5H ○ ○ ○ ○ - 0:OR、1:AND
正逆 3606 0E16H 7606 1DB6H ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW2 動作種類 3607 0E17H 7607 1DB7H ○ ○ ○ ○ - 0~14
對象通道 3608 0E18H 7608 1DB8H ○ ○ ○ ○ - 0~2
輸入分配2 3609 0E19H 7609 1DB9H ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3610 0E1AH 7610 1DBAH ○ ○ ○ ○ - 詳細內容參照表 10-11
邏輯 3611 0E1BH 7611 1DBBH ○ ○ ○ ○ - 0:OR、1:AND
正逆 3612 0E1CH 7612 1DBCH ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW3 動作種類 3613 0E1DH 7613 1DBDH ○ ○ ○ ○ - 0~14
對象通道 3614 0E1EH 7614 1DBEH ○ ○ ○ ○ - 0~2
輸入分配2 3615 0E1FH 7615 1DBFH ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3616 0E20H 7616 1DC0H ○ ○ ○ ○ - 詳細內容參照表 10-11
邏輯 3617 0E21H 7617 1DC1H ○ ○ ○ ○ - 0:OR、1:AND
正逆 3618 0E22H 7618 1DC2H ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW4 動作種類 3619 0E23H 7619 1DC3H ○ ○ ○ ○ - 0~14
對象通道 3620 0E24H 7620 1DC4H ○ ○ ○ ○ - 0~2
輸入分配2 3621 0E25H 7621 1DC5H ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3622 0E26H 7622 1DC6H ○ ○ ○ ○ - 詳細內容參照表 10-11
邏輯 3623 0E27H 7623 1DC7H ○ ○ ○ ○ - 0:OR、1:AND
正逆 3624 0E28H 7624 1DC8H ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW 動作種類 3625 0E29H 7625 1DC9H ○ ○ ○ ○ - 0~14
總線1 對象通道 3626 0E2AH 7626 1DCAH ○ ○ ○ ○ - 0~2
輸入分配2 3627 0E2BH 7627 1DCBH ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3628 0E2CH 7628 1DCCH ○ ○ ○ ○ - 詳細內容參照表 10-11
邏輯 3629 0E2DH 7629 1DCDH ○ ○ ○ ○ - 0: OR、1:AND
正逆 3630 0E2EH 7630 1DCEH ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW 動作種類 3631 0E2FH 7631 1DCFH ○ ○ ○ ○ - 0~14
總線2 對象通道 3632 0E30H 7632 1DD0H ○ ○ ○ ○ - 0~2
輸入分配2 3633 0E31H 7633 1DD1H ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3634 0E32H 7634 1DD2H ○ ○ ○ ○ - 詳細內容參照表 10-11
邏輯 3635 0E33H 7635 1DD3H ○ ○ ○ ○ - 0:OR、1:AND
正逆 3636 0E34H 7636 1DD4H ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW 動作種類 3637 0E35H 7637 1DD5H ○ ○ ○ ○ - 0~14
總線3 對象通道 3638 0E36H 7638 1DD6H ○ ○ ○ ○ - 0~2
輸入分配2 3639 0E37H 7639 1DD7H ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3640 0E38H 7640 1DD8H ○ ○ ○ ○ - 詳細內容參照表 10-11
10-30

第10章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息 RSW 邏輯 3641 0E39H 7641 1DD9H ○ ○ ○ ○ - 0:OR、1:AND
總線3 正逆 3642 0E3AH 7642 1DDAH ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW 動作種類 3643 0E3BH 7643 1DDBH ○ ○ ○ ○ - 0~14
總線4 對象通道 3644 0E3CH 7644 1DDCH ○ ○ ○ ○ - 0~2
輸入分配2 3645 0E3DH 7645 1DDDH ○ ○ ○ ○ - 詳細內容參照表 10-12
輸入分配1 3646 0E3EH 7646 1DDEH ○ ○ ○ ○ - 詳細內容參照表 10-11
邏輯 3647 0E3FH 7647 1DDFH ○ ○ ○ ○ - 0:OR、1:AND
正逆 3648 0E40H 7648 1DE0H ○ ○ ○ ○ - 0:正動作、1:逆動作
RSW1 輸入分配3 3649 0E41H 7649 1DE1H ○ ○ ○ ○ - 詳細內容參照表 10-13
RSW2 輸入分配3 3650 0E42H 7650 1DE2H ○ ○ ○ ○ - 詳細內容參照表 10-13
RSW3 輸入分配3 3651 0E43H 7651 1DE3H ○ ○ ○ ○ - 詳細內容參照表 10-13
RSW4 輸入分配3 3652 0E44H 7652 1DE4H ○ ○ ○ ○ - 詳細內容參照表 10-13
RSW 輸入分配3 3653 0E45H 7653 1DE5H ○ ○ ○ ○ - 詳細內容參照表 10-13
總線1
RSW 輸入分配3 3654 0E46H 7654 1DE6H ○ ○ ○ ○ - 詳細內容參照表 10-13 總線2
RSW 輸入分配3 3655 0E47H 7655 1DE7H ○ ○ ○ ○ - 詳細內容參照表 10-13 總線3
RSW 輸入分配3 3656 0E48H 7656 1DE8H ○ ○ ○ ○ - 詳細內容參照表 10-13 總線4
EV1 輸出分配2 3701 0E75H 7701 1E15H ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配1 3702 0E76H 7702 1E16H ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3703 0E77H 7703 1E17H ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3704 0E78H 7704 1E18H ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3705 0E79H 7705 1E19H ○ ○ ○ ○ - 0:正動作、1:逆動作
EV2 輸出分配2 3706 0E7AH 7706 1E1AH ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配1 3707 0E7BH 7707 1E1BH ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3708 0E7CH 7708 1E1CH ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3709 0E7DH 7709 1E1DH ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3710 0E7EH 7710 1E1EH ○ ○ ○ ○ - 0:正動作、1:逆動作
EV3 輸出分配2 3711 0E7FH 7711 1E1FH ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配1 3712 0E80H 7712 1E20H ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3713 0E81H 7713 1E21H ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3714 0E82H 7714 1E22H ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3715 0E83H 7715 1E23H ○ ○ ○ ○ - 0:正動作、1:逆動作
EV4 輸出分配2 3716 0E84H 7716 1E24H ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配1 3717 0E85H 7717 1E25H ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3718 0E86H 7718 1E26H ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3719 0E87H 7719 1E27H ○ ○ ○ ○ - 0:無
1:有(ON時鎖定)
2:有(OFF時鎖定)
正逆 3720 0E88H 7720 1E28H ○ ○ ○ ○ - 0:正動作、1:逆動作
10-31

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息
EV 輸出分配2 3721 0E89H 7721 1E29H ○ ○ ○ ○ - 詳細內容參照表 10-9
總線1 輸出分配1 3722 0E8AH 7722 1E2AH ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3723 0E8BH 7723 1E2BH ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3724 0E8CH 7724 1E2CH ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3725 0E8DH 7725 1E2DH ○ ○ ○ ○ - 0:正動作、1:逆動作
EV 輸出分配2 3726 0E8EH 7726 1E2EH ○ ○ ○ ○ - 詳細內容參照表 10-9
總線2 輸出分配1 3727 0E8FH 7727 1E2FH ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3728 0E90H 7728 1E30H ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3729 0E91H 7729 1E31H ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3730 0E92H 7730 1E32H ○ ○ ○ ○ - 0:正動作、1:逆動作
EV 輸出分配2 3731 0E93H 7731 1E33H ○ ○ ○ ○ - 詳細內容參照表 10-9
總線3 輸出分配1 3732 0E94H 7732 1E34H ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3733 0E95H 7733 1E35H ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3734 0E96H 7734 1E36H ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3735 0E97H 7735 1E37H ○ ○ ○ ○ - 0:正動作、1:逆動作
EV 輸出分配2 3736 0E98H 7736 1E38H ○ ○ ○ ○ - 詳細內容參照表 10-9
總線4 輸出分配1 3737 0E99H 7737 1E39H ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3738 0E9AH 7738 1E3AH ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3739 0E9BH 7739 1E3BH ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3740 0E9CH 7740 1E3CH ○ ○ ○ ○ - 0:正動作、1:逆動作
OUT1 輸出分配2 3741 0E9DH 7741 1E3DH ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配1 3742 0E9EH 7742 1E3EH ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3743 0E9FH 7743 1E3FH ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3744 0EA0H 7744 1E40H ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3745 0EA1H 7745 1E41H ○ ○ ○ ○ - 0:正動作、1:逆動作
OUT2 輸出分配2 3746 0EA2H 7746 1E42H ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配1 3747 0EA3H 7747 1E43H ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3748 0EA4H 7748 1E44H ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3749 0EA5H 7749 1E45H ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3750 0EA6H 7750 1E46H ○ ○ ○ ○ - 0:正動作、1:逆動作
OUT3 輸出分配2 3751 0EA7H 7751 1E47H ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配1 3752 0EA8H 7752 1E48H ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3753 0EA9H 7753 1E49H ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3754 0EAAH 7754 1E4AH ○ ○ ○ ○ - 0:無
1:有(ON時鎖定)
2:有(OFF時鎖定)
正逆 3755 0EABH 7755 1E4BH ○ ○ ○ ○ - 0:正動作、1:逆動作
10-32

第10 章 CPL通訊功能
對象 項 目 RAM地址 ROM地址 RAM ROM 小數點 數據信息
CH 10進制數 16進制數 10進制數 16進制數 讀 寫 讀 寫 信息 OUT4 輸出分配 2 3756 0EACH 7756 1E4CH ○ ○ ○ ○ - 詳細內容參照表 10-9
輸出分配 1 3757 0EADH 7757 1E4DH ○ ○ ○ ○ - 詳細內容參照表 10-8
邏輯 3758 0EAEH 7758 1E4EH ○ ○ ○ ○ - 0:OR、1:AND
鎖定 3759 0EAFH 7759 1E4FH ○ ○ ○ ○ - 0:無
1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆 3760 0EB0H 7760 1E50H ○ ○ ○ ○ - 0:正動作、1:逆動作
EV1 輸出分配3 3761 0EB1H 7761 1E51H ○ ○ ○ ○ - 詳細內容參照表 10-10
EV2 輸出分配3 3762 0EB2H 7762 1E52H ○ ○ ○ ○ - 詳細內容參照表 10-10
EV3 輸出分配3 3763 0EB3H 7763 1E53H ○ ○ ○ ○ - 詳細內容參照表 10-10
EV4 輸出分配3 3764 0EB4H 7764 1E54H ○ ○ ○ ○ - 詳細內容參照表 10-10
EV 輸出分配3 3765 0EB5H 7765 1E55H ○ ○ ○ ○ - 詳細內容參照表 10-10
總線1
EV 輸出分配3 3766 0EB6H 7766 1E56H ○ ○ ○ ○ - 詳細內容參照表 10-10 總線2
EV 輸出分配3 3767 0EB7H 7767 1E57H ○ ○ ○ ○ - 詳細內容參照表 10-10 總線3
EV 輸出分配3 3768 0EB8H 7768 1E58H ○ ○ ○ ○ - 詳細內容參照表 10-10 總線4
OUT1 輸出分配3 3769 0EB9H 7769 1E59H ○ ○ ○ ○ - 詳細內容參照表 10-10
OUT2 輸出分配3 3770 0EBAH 7770 1E5AH ○ ○ ○ ○ - 詳細內容參照表 10-10
OUT3 輸出分配3 3771 0EBBH 7771 1E5BH ○ ○ ○ ○ - 詳細內容參照表 10-10
OUT4 輸出分配3 3772 0EBCH 7772 1E5CH ○ ○ ○ ○ - 詳細內容參照表 10-10
- 數據形式 3802 0EDAH 7802 1E7AH ○ × ○ × - 0:8bit EVEN 1st 1:8bit NO 2st
- 傳送速度 3803 0EDBH 7803 1E7BH ○ × ○ × - 0:2400、1:4800 2:9600、3:19200
- 通訊 短應答時間 3804 0EDCH 7804 1E7CH ○ ○ ○ ○ - 0:1ms、 2:10ms 3:100ms、4:200ms
- 通訊 短應答時間(加法運算) 3805 0EDDH 7805 1E7DH ○ ○ ○ ○ - 0~100ms
- 通訊種類 3806 0EDEH 7806 1E7EH ○ ○ ○ ○ - 詳細內容參照表 10-1
10-33

第10章 CPL通訊功能
■ 位信息數據
● 表 10-1:所有報警代表
215 214
213 212
211 210
29 28
27 26
25 24
23 22
21 20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① PV異常代表 PV1~4中任意一個發生異常時 PV上下限異常、CJ異常、B線異常
值=1
② 內部數據異常 ⑭~⑯中任意一個發生異常時 RAM、EEPROM發生存儲報警 值=1
③ 預約 通常為0
④ 預約 通常為0
⑤ 預約 通常為0
⑥ CH1馬達調整異常 位置比例馬達調整沒有正常結束的場合 到再次通電或者調整正常結束
⑦ CH2馬達調整異常 值=1 保持值=1
⑧ 預約 通常為0
⑨ PV CH1的PV異常 與PV輸入異常的PV CH1相關的位中, 發生PV CH1上下限報警、A/D異常
任意一個發生異常時,值=1 中的一個報警
⑩ PV CH2的PV異常 與PV輸入異常的PV CH2相關的位中, 發生PV CH2的上下限報警、A/D異常
任意一個發生異常時,值=1 中的一個報警
⑪ PV CH3的PV異常 與PV輸入異常的PV CH3相關的位中, 發生PV CH3的上下限報警、A/D異常
任意一個發生異常時,值=1 中的一個報警
⑫ PV CH4的PV異常 與PV輸入異常的PV CH4相關的位中, 發生PV CH4的上下限報警、A/D異常
任意一個發生異常時,值=1 中的一個報警
⑬ 預約 通常為0
⑭ RAM的參數 異常發生時=1 RAM(參數區域)的校驗和異常
校驗和異常
⑮ RAM的調整 異常發生時=1 RAM(調整區域)的校驗和異常
校驗和異常
⑯ EEPROM 全區域 異常發生時=1 發生EEPROM的校驗和異常
校驗和異常
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
[讀出示例]
PV CH1的PV發生異常的場合,由於①和⑨同時為ON, 所以
發送: RS,1001W,1
應答: 00,257
10-34

第10章 CPL通訊功能
● 表 10-2 : PV報警詳細內容 215 214
213 212
211 210
29 28
27 26
25 24
23 22
21 20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① PV CH1上限報警 異常發生時=1
② PV CH2上限報警 異常發生時=1
③ PV CH3上限報警 異常發生時=1
超出量程的上限+10%時為異常
發生PV報警時輸出操作量
*1
反饋輸入1 Y線斷線 異常發生時=1 無特別動作
④ PV CH4 上限報警 異常發生時=1 和*1相同
反饋輸入2 Y線斷線 異常發生時=1 無特別動作
⑤ PV CH1下限報警 異常發生時=1
⑥ PV CH2下限報警 異常發生時=1
⑦ PV CH3下限報警 異常發生時=1
低於量程的下限-10%時為異常
發生PV報警時輸出操作量
*2
反饋輸入1 G線斷線 異常發生時=1 無特別動作
⑧ PV CH4下限報警 異常發生時=1 和*2相同
反饋輸入2 G線斷線 異常發生時=1 無特別動作
⑨ PV CH1 異常發生時=1 CJ故障(熱電偶) CJ/BC線報警 B或者C線斷線(熱電阻)
發生PV報警時輸出操作量
⑩ PV CH2 異常發生時=1 CJ故障(熱電偶) CJ/BC線報警 B或者C線斷線(熱電阻)
發生PV報警時輸出操作量
⑪ PV CH3 異常發生時=1 CJ故障(熱電偶) CJ/BC線報警 B或者C線斷線(熱電阻)
發生PV報警時輸出操作量
反饋輸入1 T線斷線 異常發生時=1 無特別動作
⑫ PV CH4 異常發生時=1 CJ故障(熱電偶) CJ/BC線報警 B或者C 線斷線(熱電阻)
發生PV報警時輸出操作量
反饋輸入2 T線斷線 異常發生時=1 無特別動作
⑬ PV CH1 A/D報警 異常發生時=1 A/D轉換器不動作的場合為異常
⑭ PV CH2 A/D報警 異常發生時=1 發生PV報警時輸出操作量
⑮ PV Ch3 A/D報警 異常發生時=1
⑯ PV Ch4 A/D報警 異常發生時=1
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
使用上的注意事項
進行使用遠程SP的設定,選擇本地SP的場合,輸入遠程用SP的通道不產生
PV上下限報警。
使用RSP(3519W,7519W=1)時的PV上下限報警
LSP中 RSP中
PV CH 1 2 3 4 1 2 3 4
2CH 型 有 無 - - 有 有 - -
4CH 型 有 有 無 無 有 有 有 有
有: 有PV上下限報警
無: 無PV上下限報警
10-35

第10章 CPL通訊功能
● 表 10-3 :控制關聯狀態
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① CH1自適應 整定等待時 =1
整定/整定等待
② CH1變流器 測定可能時 =1
測定不可/可能
③ CH1位置比例推定狀態 0:電位計的反饋值 僅在位置比例控制使用中有意義
使用中
1:推定反饋值使用中
④ CH1位置比例調整狀態 0:馬達運行中 僅在位置比例控制使用中有意義 1:馬達調整中
⑤ CH2自適應 整定等待時=1 整定/整定等待
⑥ CH2變流器 測定可能時=1 測定不可/可能
⑦ CH2位置比例推定狀態 0:電位計的反饋值 僅在位置比例控制使用中有意義
使用中
1:推定反饋值使用中
⑧ CH1位置比例調整狀態 0 :馬達運行中 僅在表示位置比例控制使用中有意義 1 :馬達調整中
⑨ CH3自適應 整定等待時=1
整定/整定等待
⑩ CH3變流器 測定可能時=1
測定不可/可能
⑪ CH1馬達動作 close open側輸出 0:OFF 1:ON
⑫ CH1馬達動作 open close側輸出 0:OFF 1:ON
⑬ CH4自適應 整定等待時 =1 整定/整定等待
⑭ CH4變流器 測定可能時 =1 測定不可/可能
⑮ CH2馬達動作 close open側輸出 0:OFF
1:ON
⑯ CH2馬達動作 open close側輸出 0:OFF
1:ON
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
10-36

第10章 CPL通訊功能
● 表 10-4 :事件/外部開關輸入的內部運算結果(1044W)
215 214
213 212
211 210
29 28
27 26
25 24
23 22
21 20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 事件輸出內部運算結果1 0:OFF 1:ON 內部的事件運算結果。
② 事件輸出內部運算結果2 0:OFF 1:ON 編程器中“事件輸出關聯內容”
③ 事件輸出內部運算結果3 0:OFF 1:ON “事件表”所表示的功能的運算結果
④ 事件輸出內部運算結果4 0:OFF 1:ON (不是輸出端子或外部總線的輸出
⑤ 事件輸出內部運算結果5 0:OFF 1:ON 狀態)。
⑥ 事件輸出內部運算結果6 0:OFF 1:ON
⑦ 事件輸出內部運算結果7 0:OFF 1:ON
⑧ 事件輸出內部運算結果8 0:OFF 1:ON
⑨ 外部開關輸入內部運算結果 1 0:OFF 1:ON 外部開關輸入的運算結果。
⑩ 外部開關輸入內部運算結果 2 0:OFF 1:ON 編程器中“外部開關輸入”所表示的功
⑪ 外部開關輸入內部運算結果 3 0:OFF 1:ON 能的運算結果
⑫ 外部開關輸入內部運算結果 4 0:OFF 1:ON (不是外部開關輸入或外部總線的輸入
⑬ 外部開關輸入內部運算結果 5 0:OFF 1:ON 端子狀態。輸入端子狀態請參閱
⑭ 外部開關輸入內部運算結果 6 0:OFF 1:ON 表10-5)。
⑮ 外部開關輸入內部運算結果 7 0:OFF 1:ON
⑯ 外部開關輸入內部運算結果 8 0:OFF 1:ON
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
● 表 10-5 :外部開關輸入端子狀態(1045W)
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 外部開關輸入1 0:OFF 1:ON 僅外部開關型
② 外部開關輸入2 0:OFF 1:ON 外部開關輸入端子的ON/OFF狀態
③ 外部開關輸入3 0:OFF 1:ON
④ 外部開關輸入4 0:OFF 1:ON
⑤ 外部開關總線輸入1 0:OFF 1:ON 外部總線輸入的ON/OFF狀態
⑥ 外部開關總線輸入2 0:OFF 1:ON
⑦ 外部開關總線輸入3 0:OFF 1:ON
⑧ 外部開關總線輸入4 0:OFF 1:ON
⑨ 預約 通常為0
⑩ 預約 通常為0
⑪ 預約 通常為0
⑫ 預約 通常為0
⑬ 預約 通常為0
⑭ 預約 通常為0
⑮ 預約 通常為0
⑯ 預約 通常為0
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。 10-37

第10章 CPL通訊功能
● 表 10-6 :事件輸出端子/控制輸出端子狀態(1046W)
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 事件輸出1 0:OFF 1:ON 事件輸出端子的ON/OFF狀態
② 事件輸出2 0:OFF 1:ON 僅帶事件輸出端子的型號有效
③ 事件輸出3 0:OFF 1:ON 其他型號時為不定值
④ 事件輸出4 0:OFF 1:ON
⑤ 事件總線輸出1 0:OFF 1:ON 外部總線輸出的ON/OFF狀態
⑥ 事件總線輸出2 0:OFF 1:ON
⑦ 事件總線輸出3 0:OFF 1:ON
⑧ 事件總線輸出4 0:OFF 1:ON
⑨ OUT1 0:OFF 1:ON 控制輸出端子的ON/OFF狀態
⑩ OUT2 0:OFF 1:ON (2ch型的場合,由於沒有端子,
⑪ OUT3 0:OFF 1:ON OUT3、OUT4為不定值)
⑫ OUT4 0:OFF 1:ON
⑬ 預約 不定
⑭ 預約 不定
⑮ 預約 不定
⑯ 預約 不定
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
● 表 10-7 :鎖定解除
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 事件輸出1 0:無 1:解除
② 事件輸出2 0:無 1:解除
③ 事件輸出3 0:無 1:解除
④ 事件輸出4 0:無 1:解除
⑤ 事件總線輸出1 0:無 1:解除
⑥ 事件總線輸出2 0:無 1:解除
⑦ 事件總線輸出3 0:無 1:解除
⑧ 事件總線輸出4 0:無 1:解除
⑨ OUT1 0:無 1:解除
⑩ OUT2 0:無 1:解除
⑪ OUT3 0:無 1:解除
⑫ OUT4 0:無 1:解除
⑬ 預約 通常為0
⑭ 預約 通常為0
⑮ 預約 通常為0
⑯ 預約 通常為0
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
10-38

第10章 CPL通訊功能
● 表 10-8 :輸出指定 1 (7702W、7707W 等)
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① EV_TBL1 內部運算結果 0:OFF 1:ON 把設定為1:ON的位的狀態作為輸出使用
② EV_TBL2 內部運算結果 0:OFF 1:ON
③ EV_TBL3 內部運算結果 0:OFF 1:ON
④ EV_TBL4 內部運算結果 0:OFF 1:ON
⑤ EV_TBL5 內部運算結果 0:OFF 1:ON
⑥ EV_TBL6 內部運算結果 0:OFF 1:ON
⑦ EV_TBL7 內部運算結果 0:OFF 1:ON
⑧ EV_TBL8 內部運算結果 0:OFF 1:ON
⑨ 外部開關輸入1 0:OFF 1:ON
⑩ 外部開關輸入2 0:OFF 1:ON
⑪ 外部開關輸入3 0:OFF 1:ON
⑫ 外部開關輸入4 0:OFF 1:ON
⑬ OUT1 控制運算結果 0:OFF 1:ON
⑭ OUT2 控制運算結果 0:OFF 1:ON
⑮ OUT3 控制運算結果 0:OFF 1:ON
⑯ OUT4 控制運算結果 0:OFF 1:ON 注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
● 表 10-9 :輸出指定 2 (7701W、7706W 等)
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① RSW_TBL1 內部運算結果 0:OFF 1:ON 把設定為1:ON的位的狀態作為輸出使用
② RSW_TBL2 內部運算結果 0:OFF 1:ON
③ RSW_TBL3 內部運算結果 0:OFF 1:ON
④ RSW_TBL4 內部運算結果 0:OFF 1:ON
⑤ RSW_TBL5 內部運算結果 0:OFF 1:ON
⑥ RSW_TBL6 內部運算結果 0:OFF 1:ON
⑦ RSW_TBL7 內部運算結果 0:OFF 1:ON
⑧ RSW_TBL8 內部運算結果 0:OFF 1:ON
⑨ 外部開關總線輸入1 0:OFF 1:ON
⑩ 外部開關總線輸入2 0:OFF 1:ON
⑪ 外部開關總線輸入3 0:OFF 1:ON
⑫ 外部開關總線輸入4 0:OFF 1:ON
⑬ 通訊DI1 0:OFF 1:ON
⑭ 通訊DI2 0:OFF 1:ON
⑮ 通訊DI3 0:OFF 1:ON
⑯ 通訊DI4 0:OFF 1:ON
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
10-39

第10章 CPL通訊功能
● 表 10-10:輸出指定 3 (7761W~7772W 等)
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 通訊DI5 0:OFF 1:ON 把設定為1:ON的位的狀態作為輸出使用
② 通訊DI6 0:OFF 1:ON
③ 通訊DI7 0:OFF 1:ON
④ 通訊DI8 0:OFF 1:ON
⑤ 通訊DI9 0:OFF 1:ON
⑥ 通訊DI10 0:OFF 1:ON
⑦ 通訊DI11 0:OFF 1:ON
⑧ 通訊DI12 0:OFF 1:ON
⑨ 未定義 通常為0
⑩ 未定義 通常為0
⑪ 未定義 通常為0
⑫ 未定義 通常為0
⑬ 未定義 通常為0
⑭ 未定義 通常為0
⑮ 未定義 通常為0
⑯ 未定義 通常為0
注:可寫入-32768~+32767(8000H~7FFFH),未定義的場所是預約位,不動作。請通常設定為0。
● 表 10-11:輸入指定1 (7604W、7610W 等)
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 外部開關輸入1 0:OFF 1:ON 把設定為1:ON的位的狀態作為外部
② 外部開關輸入2 0:OFF 1:ON 開關輸入的ON/OFF使用
③ 外部開關輸入3 0:OFF 1:ON
④ 外部開關輸入4 0:OFF 1:ON
⑤ 外部開關總線輸入1 0:OFF 1:ON
⑥ 外部開關總線輸入2 0:OFF 1:ON
⑦ 外部開關總線輸入3 0:OFF 1:ON
⑧ 外部開關總線輸入4 0:OFF 1:ON
⑨ EV_TBL1 內部運算結果 0:OFF 1:ON
⑩ EV_TBL2 內部運算結果 0:OFF 1:ON
⑪ EV_TBL3 內部運算結果 0:OFF 1:ON
⑫ EV_TBL4 內部運算結果 0:OFF 1:ON
⑬ EV_TBL5 內部運算結果 0:OFF 1:ON
⑭ EV_TBL6 內部運算結果 0:OFF 1:ON
⑮ EV_TBL7 內部運算結果 0:OFF 1:ON
⑯ EV_TBL8 內部運算結果 0:OFF 1:ON
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
10-40

第10章 CPL通訊功能
● 表 10-12 :輸入指定2 (7603W、7609W 等)
215 214
213 212
211 210
29 28
27 26
25 24
23 22
21 20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 預約 通常為0 把設定為1:ON的位的狀態作為外部
② 預約 通常為0 開關輸入的ON/OFF使用
③ 預約 通常為0
④ 預約 通常為0
⑤ 預約 通常為0
⑥ 預約 通常為0
⑦ 預約 通常為0
⑧ 預約 通常為0
⑨ 事件輸出1 0:OFF 1:ON
⑩ 事件輸出2 0:OFF 1:ON
⑪ 事件輸出3 0:OFF 1:ON
⑫ 事件輸出4 0:OFF 1:ON
⑬ 通訊DI1 0:OFF 1:ON
⑭ 通訊DI2 0:OFF 1:ON
⑮ 通訊DI3 0:OFF 1:ON
⑯ 通訊DI4 0:OFF 1:ON
注 :所有16位數據作為帶符號的1個字數據(-32768~+32767、8000H~7FFFH)讀取。
● 表 10-13 :輸入指定 3 (7649W~7656W 等)
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 通訊DI5 0:OFF 1:ON 把設定為1:ON的位的狀態作為外部
② 通訊DI6 0:OFF 1:ON 開關輸入的ON/OFF使用
③ 通訊DI7 0:OFF 1:ON
④ 通訊DI8 0:OFF 1:ON
⑤ 通訊DI9 0:OFF 1:ON
⑥ 通訊DI10 0:OFF 1:ON
⑦ 通訊DI11 0:OFF 1:ON
⑧ 通訊DI12 0:OFF 1:ON
⑨ 未定義 通常為0
⑩ 未定義 通常為0
⑪ 未定義 通常為0
⑫ 未定義 通常為0
⑬ 未定義 通常為0
⑭ 未定義 通常為0
⑮ 未定義 通常為0
⑯ 未定義 通常為0
注 :可以寫入-32768~+32767(8000H~7FFFH),,未定義的場所是預約位,不動作。請通常設定為0。
10-41

第10章 CPL通訊功能
● 表 10-14 :通訊DI
215 214 213
212 211
210 29
28 27
26 25
24 23
22 21
20
⑯ ⑮ ⑭ ⑬ ⑫ ⑪ ⑩ ⑨ ⑧ ⑦ ⑥ ⑤ ④ ③ ② ①
項 目 值 備 注
① 通訊DI1 0:OFF 1:ON
② 通訊DI2 0:OFF 1:ON
③ 通訊DI3 0:OFF 1:ON
④ 通訊DI4 0:OFF 1:ON
⑤ 通訊DI5 0:OFF 1:ON
⑥ 通訊DI6 0:OFF 1:ON
⑦ 通訊DI7 0:OFF 1:ON
⑧ 通訊DI8 0:OFF 1:ON
⑨ 通訊DI9 0:OFF 1:ON
⑩ 通訊DI10 0:OFF 1:ON
⑪ 通訊DI11 0:OFF 1:ON
⑫ 通訊DI12 0:OFF 1:ON
⑬ 未定義 通常為0
⑭ 未定義 通常為0
⑮ 未定義 通常為0
⑯ 未定義 通常為0
注 :可以寫入-32768~+32767(8000H~7FFFH),⑬~⑯是預約位,不動作。請通常設定為0。
10-42

第10 章 CPL通訊功能
10 - 9 通訊條件的詳細說明 寫入條件隨各種條件變化的參數,按照類別用以下方式表示。
◆ 對象參數
• 不能寫入的條件
■ 寫入條件
● 寫入條件隨動作模式變化的參數
◆ AUTO/MANUAL切換
• ON/OFF控制時
◆ 手動控制輸出值
• AUTO時
• ON/OFF控制時
◆ 馬達調整啟動
• MANUAL時
• READY時
• 發生反饋輸入報警時
• 位置比例類別為“3:無FB、4:無FB(通電時位置一致)”
• AT啟動中
◆ AT啟動
• RSW中分配了AT啟動
• FB調整中
• ON/OFF動作中
• 參考:MANUAL中、READY中、發生PV報警中可以寫入。但是,AT不能啟
動。
● 寫入條件隨其他設定變化的參數
◆ SP組切換
• 單個SP設定時
◆ LOCAL/REMOTE SP切換
• REMOTE/LOCAL切換被設定為RSW
• 不使用RSP的設定
• HEAT/COOL使用時
◆ PV量程上下限
• 熱電偶、熱電阻量程選擇時
◆ 小數點
• 熱電偶、熱電阻的小數點選擇了不可以使用的量程號時
◆ RSW功能中設定了各功能切換的場合
• SP組切換時-SP組切換
• AUTO/MANUAL切換時-AUTO/MANUAL切換
• RUN/READY切換時-RUN/READY切換
• LOCAL/REMOTE SP切換時-LOCAL/REMOTE SP切換
• AT啟動切換時-AT啟動
• CH間偏差控制使用切換時-CH間偏差控制使用切換
10-43

第10 章 CPL通訊功能
● 其他寫入條件變化的參數
◆ 使用中的SP組
• 4CH型的SP3、SP4選擇
◆ 通訊條件(傳送速度、通訊形式、通訊種類)
• RS-485的設定(僅通過編程器設定)
◆ 輔助輸出關聯參數
◆ 位置比例關聯參數(S型)
◆ 加熱冷卻控制關聯參數(S型)
◆ 省電關聯參數(S型)
◆ LOCAL/REMOTE SP切換(S型)
◆ 3/4CH 對象參數(2CH 型)
• 根據型號的寫入條件(不存在的功能的寫入)
■ 寫入範圍
● 寫入範圍隨其他參數變化的參數
◆ 使用中的SP值
• 選擇的量程號
◆ 使用中的SP組
• 2/4CH型
◆ SP值
• 選擇的量程號
◆ 操作量上下限
• AUX有、無
◆ 事件設定範圍(主、副)
• 事件類別
◆ 小數點位置
◆ PV量程上下限
◆ 自適應整定幅
• 量程種類
◆ SP限幅上下限
• PV量程上下限
● 寫入範圍隨型號變化的參數
◆ 各參數的對象通道
• 不存在的CH的設定
◆ 時間比例周期
• 繼電器輸出、電壓輸出 10-44

第10 章 CPL通訊功能
■ 常時寫入禁止
下列參數如果進行常時寫入將無法正確動作。
請在必要時僅寫入1次。 ◆ 量程號
◆ 溫度單位
◆ 小數點位置
◆ 使用中的SP值(僅SP設定時待機再設定使用時)
◆ 加熱冷卻使用
◆ 省電使用
◆ 位置比例控制種類
◆ 位置比例馬達電阻值選擇
◆ 控制方式
◆ 比例帶
◆ 積分時間
◆ 微分時間
◆ 操作量下限
◆ 操作量上限
◆ 手動復位
◆ 自適應整定幅
◆ 鎖定解除(為了處於常時解除狀態)
◆ AT啟動/停止
10-45

第10 章 CPL通訊功能
10 - 10 製作主站用通訊程序時的注意事項
製作通訊程序時請留意以下幾點。
• 機器的 長應答時間為2秒。因此,請設定應答監視時間為2秒。
• 2秒以內無應答的場合,請再次發送同樣的電文。
再次發送2次仍然無應答的場合,請作為通訊錯誤處理。
• 通訊中因干擾等影響電文沒有正確傳送時,請務必進行上述的再次發送。
參 考
如果在主站再次發送電文時,交替使用設備區分代碼的“X”和“x”,便於
區分接收的應答電文是上次的電文還是這次的電文。
● 通訊程序示例
這裏的程序示例是用富士通株式會社製造的F-BASIC 6.0 (Windows 版)編
寫。 這個程序僅用作客戶製作程序時的參考內容,不能保證所有動作的正確
性。 執行程序前請確認機器的通訊條件、機器地址。此程序進行數據的讀出
和數據的寫入。
如果執行,則顯示通訊的命令電文、應答電文的應用層。
命令電文應用層
RS,123W,4
應答電文應用層
00,10,-20,0,40
命令電文應用層
WS,234W,1,1
應答電文應用層
00
• 通訊設定
執行結果顯示示例
10-46
把希望通訊的機器的機器地址設定到“ADDRESS”
打開RS-232C,調出子程序* INIT_DATA。
• 讀出數據
把讀出起始數據地址設定到“READ_ADRS”,讀出數據數到“READ_LEN”
後,調出子程序* DATA_READ。
此程序中設定為從數據地址123讀出4個數據,但請根據機器變更設定。
• 寫入數據
把寫入起始數據地址設定到“WRITE_ADRS”,寫入數據數到
“WRITE_LEN”,寫入數據到“WRITE_DATA”後,調出子程序*
DATA_WRITE。
此程序中設定為從數據地址234開始寫入2個數據,但請根據機器變更設
定。

第10 章 CPL通訊功能 ● 數據讀出/寫入例子程序
例子程序在安裝了編程器的文件夾中。
標準安裝時為“c:¥program files¥slp¥slpd10¥sample 95.bas”。
使用上的注意事項
因使用此程序示例造成的故障,本公司不承擔任何責任。
10-47

第 11 章 MODBUS通訊功能
11 - 1 通訊的概要 ■ 特 長
本機的通訊功能有以下特長。
• 可以選擇CPL通訊、MODBUS(ASCII,RTU)通訊。
• 對作為上位機器的1台主站,可以 多連接15台本機。
使用MODBUS的場合,不能連接CMC10B。
• 上位機器的通訊規格是RS-232C的場合,必需另售的通訊轉換器CMC10L。 可以進行RS-232C RS-485轉換。
• 儀錶的大多數參數都可以通訊。
通訊參數的內容請參閱
10-8 所有通訊參數一覽表(10-16頁)。
• 對使用頻率高的參數,備有2種地址排列。根據用途可以選擇1個命令中
使用的參數組。
• 傳送速度 高可對應19200bps。
■ 初始設定
要開始通訊必須進行以下設定。
設定項目 設定場所 設定範圍 初始值
通訊種類 通過計算機編程器設定 0:CPL 0:CPL
1:MODBUS(ASCII形式) 2:MODBUS(RTU形式)
機器地址 通過機器地址用 0~F
旋轉開關設定
傳送速度 通過計算機編程器設定 0:2400bps 3:19200bps
1:4800bps 2:9600bps 3:19200bps
數據形式 通過計算機編程器設定 0:位長8、偶校驗、 0:位長8、偶校驗、
1停止位 1停止位 1:位長8、無校驗、
2停止位
應答 短時間 通過計算機編程器設定 0:1ms 1:10ms
1:10ms 2:100ms 3:200ms
■ 通訊步驟
以下是通訊步驟。
① 從上位機器(主站) 對希望通訊的1台本機(從站)發送命令電文。
② 從站接收命令電文,根據電文的內容,進行讀出或寫入處理。 ③ 然後從站把與處理內容對應的電文作為應答電文發送。 ④ 主站接收應答電文。
11-1

第11 章 MODBUS通訊功能
11 - 2 電文的構成
■ 電文的構成
電文構成如下所示。
電文全部用16進制數表示。
● MODBUS ASCII
定界符以外的電文全部使用16進制數的ASCII代碼。
MODBUS(ASCII)的電文有以下的①~⑥構成。
來自主站的發送內容命令、來自從站的應答內容的應答電文保存在③中。
電文全部使用ASCII代碼。(下面1個塊為1個字符)
3AH 0DH 0AH
: CR LF
① ② ③
1幀
④ ⑤ ⑥
①電文的起始(用ASCII代碼3AH表示 冒號)
②機器地址(2 字節)
③發送電文、應答電文
④校驗和(2字節的LRC)
⑤ CR(定界符)
⑥ LF(定界符)
• 冒號(3AH)
接收到冒號的場合,具有和CPL的STX相同的功能。請參閱
●數據的說明• STX(02H) (10-4頁)。
• 機器地址
具有和CPL的機器地址相同的功能。詳細內容請參閱
●數據的說明 (10-4頁)。
• 校驗和(LRC)
具有和CPL的機器地址相同的功能。詳細內容請參閱
●數據的說明 (10-4頁)。
但是,校驗和的生成方法和CPL不同。
校驗和的生成方法
①從電文起始的冒號(3AH)的下一個文字,以1個字節為單位對發
送數據進行加法運算。(請注意加法運算的值不是發送電文的
ASCII字符值,而是ASCII字符轉換前的發送數據。加法運算的
內容是上圖中的②~③)
②對加法運算結果取2的補數
③把加法運算結果的下位1個字節轉換成字符代碼
• CR/LF
具有和CPL的CR/LF相同的功能。詳細內容請參閱
●數據的說明 (10-4 頁)。 11-2

第11 章 MODBUS通訊功能
● MODBUS RTU
電文全部採用二進制數據。
MODBUS(RTU)的電文由下列①~③構成。
來自主站的發送內容命令、來自從站的應答內容的應答電文保存在②中。
電文全部採用二進制數據。(下面的1個塊為1個字節)。
① ② ③
1幀
①機器地址(1個字節)
②發送電文、應答電文
③校驗和(2個字節)
• 機器地址
具有和CPL的機器地址相同的功能。詳細內容請參閱
●數據的說明 (10-4 頁)。
• 校驗和
具有和CPL的機器地址相同的功能。詳細內容請參閱
●數據的說明 (10-4 頁)。
但是,校驗和的生成方法和CPL不同,進行CRC檢查。
校驗和(CRC)的生成方法如下所示。
/* CRC 計算 */
/* 輸入 unsigned char length :發送字節數 */
/* unsigned char *top :發送數據開頭指針 */
/* 輸出 unsigned short CRC :CRC 計算結果 */
unsigned short crc16( unsigned char length,unsigned char *top )
{ unsigned short CRC= 0xffff;
unsigned short next; unsigned
short carry; unsigned short n;
unsigned char crcl;
while ( length-- ) {
next = (unsigned short)*top;
CRC ^= next;
for (n = 0; n < 8; n++) {
carry = CRC & 1;
CRC >>= 1;
if (carry) {
CRC ^= 0xA001;
}
}
top++;
}
crcl = (CRC & 0xff00)>>8;
CRC <<= 8;
CRC ¦= crcl;
return CRC;
}
11-3

第11 章 MODBUS通訊功能
• 1 幀結束判定
電文結束(1幀結束)是指不接收字符的時間超過每種傳送速度規定的時間的
場合,判定為1幀結束。經過下述的超時時間後,沒有接收到下一個字符的
場合,判定為1幀結束。
但是,超時時間與下表記述的超時時間有±1ms的變動。
設定的傳送速度 超時時間 (bps)
2400 20ms 以上
4800 10ms 以上
9600 5ms 以上
19200 5ms 以上
■ 發送電文
以下是發送電文。
項 目 內 容
ASCII(ASCII字符顯示) RTU(二進制顯示)
命令 讀出 "03" 03H
寫入 "10" 10H
字地址 "03E9" 03E9H
讀出數 字符表示的數值 -
以1個字為單位
寫入數值 - 二進制表示的數值
以字為單位
■ 應答時間
從接收到1幀發送電文的全部數據,到儀錶開始返回應答電文的時間用“通
訊 短應答時間+通訊 短應答時間(增加值)+超時時間”表示,時間單
位是ms。
詳細內容請參閱
●通訊 短應答時間、●通訊 短應答時間增加值(ms) (8-14頁)。
■ 其他規格
請參閱
10-7 發送接收時間 (10-15頁) 。
• 對應MODBUS Class 0 。
• 異常結束代碼 01 :命令異常
02 :地址異常
03 :數據異常
• 多通訊數據字數
數據數 ASCII RTU
03 (READ) 16 32
10 (WRITE) 16 32 11-4
• 有關其他MODBUS規格的詳細內容請參閱
MODBUS公司 OPEN MODBUS/TCP SPECIFICATION (Release 1.0)。

第11 章 MODBUS通訊功能
11 - 3 命令的說明 連續數據讀出命令是使用1個命令讀出連續地址數據。
■ 讀出命令(03H)
● 發送電文
使用1個電文從指定的讀出起始地址可以讀出連續數據地址的內容的命令。
以下是數據讀出時發送電文的示例。 MODBUS(ASCII)
3AH 30H 41H 30H 33H 30H 33H 45H 39H 30H 30H 30H 32H 30H 35H 0DH 0AH
: 0 A 0 3 0 3 E 9 0 0 0 2 0 5 CR LF
① ② ③ ④ ⑤ ⑥ ⑦
①電文起始
②機器地址
③讀出命令
④起始字地址
⑤讀出數
⑥校驗和(LRC)
⑦定界符
MODBUS(RTU)
0AH 03H 03H E9H 00H 02H 14H C0H
① ② ③ ④ ⑤
①機器地址
②讀出命令
③起始字地址
④讀出數
⑤校驗和(CRC)
● 應答電文
正確接收到電文的場合,返回與命令內容對應的應答電文。
以下表示數據讀出時的應答電文。 MODBUS(ASCII)
3AH 30H 41H 30H 33H 30H 34H 30H 33H 30H 31H 30H 30H 30H 33H 45H 38H 0DH 0AH
: 0 A 0 3 0 4 0 3 0 1 0 0 0 3 E 8 CR LF
① ② ③ ④ ⑤ ⑥ ⑦ ⑧
• 正常時的例子
①電文起始
②機器地址
③讀出命令
④數據數× 2
⑤讀出數據 1
⑥讀出數據 2
⑦校驗和(LRC)
⑧定界符
11-5

第11 章 MODBUS通訊功能
• 異常時的例子
3AH 30H 41H 38H 34H 30H 31H 37H 31H 0DH 0AH
: 0 A 8 4 0 1 7 1 CR LF
① ② ③ ④ ⑤ ⑥
①電文起始
②機器地址
③異常標誌(發送電文中把未定義的04作為命令發送,所以 上位的位為ON,返
回84)
④異常結束代碼( 11-4 頁)
⑤校驗和 (LRC)
⑥定界符
MODBUS(RTU)
• 正常時的例子
0AH 03H 04H 03H 01H 00H 03H 51H 76H
① ② ③ ④ ⑤ ⑥
①機器地址
②讀出命令
③讀出數×2 (字節數)
④讀出數據1
⑤讀出數據2
⑥校驗和(CRC)
• 異常時的例子
0AH 84H 01H F3H 02H
① ② ③ ④
①機器地址
②異常標誌(發送電文中把未定義的04作為命令發送,所以 上位的位為ON,返
回84)
③異常結束代碼( 11-4 頁)
④校驗和(CRC) 11-6

第11 章 MODBUS通訊功能
■ 寫入命令(10H)
● 發送電文
使用1個電文從指定的讀出起始地址可以寫入連續數據地址的內容的命令。
以下是數據寫入時發送電文的示例。
(例) 從1501W(05DDH)寫入01A0H和0E53H的值到2字的連續字地址。 MODBUS(ASCII)
3AH 30H 31H 31H 30H 30H 35H 44H 44H 30H 30H 30H 32H 30H 34H
: 0 1 1 0 0 5 D D 0 0 0 2 0 4
① ② ③ ④ ⑤ ⑥
30H 31H 41H 30H 30H 45H 35H 33H 30H 35H 0DH 0AH
0 1 A 0 0 E 5 3 0 5 CR LF
⑦ ⑧ ⑨ ⑩ ⑪
①電文起始
②機器地址
③寫入命令10H
④寫入起始字地址1
⑤寫入數據數
⑥寫入數據數×2
⑦寫入數據1
⑧寫入數據2
⑨校驗和
⑩CR
⑪LF
MODBUS(RTU)
01H 10H 05H DDH 00H 02H 04H 01H A0H 0EH 53H 45H B9H
① ② ③ ④ ⑤ ⑥ ⑦ ⑧
①機器地址
②寫入命令10H
③寫入起始字地址
④寫入數據數
⑤寫入數據數×2
⑥寫入數據1
⑦寫入數據2
⑧校驗和
11-7

第11 章 MODBUS通訊功能
● 應答電文
正確接收到電文的場合,返回與命令內容對應的應答電文。
以下表示數據寫入時的應答電文。 MODBUS(ASCII) 3AH 30H 31H 31H 30H 30H 35H 44H 44H 30H 30H 30H 32H 30H 42H 0DH 0AH
: 0 1 1 0 0 5 D D 0 0 0 2 0 B CR LF
① ② ③ ④ ⑤ ⑥ ⑦ ⑧
①電文起始
②機器地址
③寫入命令10H
④寫入起始字地址1
⑤寫入數據數
⑥校驗和
⑦CR
⑧LF
MODBUS(RTU)
01H 10H 05H DDH 00H 02H D1H 3EH
① ② ③ ④ ⑤
①機器地址
②寫入命令10H
③寫入起始字地址
④寫入數據數
⑤校驗和
參 考
異常結束的應答電文和讀出命令的相同。 11-8

第12章 校正和齊納柵調整
本章對本機的校正進行說明。
使用上的注意事項
因客戶錯誤的校正作業造成的不良情況,不屬於本公司的保證範圍,敬請諒
解。
另外,萬一在校正中希望返回到出廠時設定的校正狀態的場合,只要從下拉
式菜單中選擇[命令]→[數據恢復],此前的校正數據就能被捨棄,恢復到出
廠時設定的數據。請注意如果在校正中不意地進行了此項作業,此前客戶校
正的內容將會全部丟失。 ■ 校正前的注意事項
校正時請遵守以下事項。
• 請在校正開始前向本機供給電源至少1小時以上。
否則,會造成精度不準。
• 請在本機規格書中規定的基準條件、校正的環境溫度下進行校正。
否則,會造成精度不準。
• 請勿在被風吹到或者環境溫度變動的場合對本機進行校正。
否則,會造成精度不準。
• 請勿使用低於下一項■ 校正時必要的測定器 中表示的規格性能的測
定器進行校正。
否則,會造成精度不準。
■ 校正時必需的測定器
測定器 規 格
標準電流電壓發生器 精度±0.1%以下、 低分辨率100μV以下(電壓)
低分辨率100μA以下(電流)
電阻器 精度±0.1%以下、 低分辨率0.1 Ω以下
電流計 精度±0.1%以下、 低分辨率1μA以下
溫度計 精度±0.1℃以下、 低分辨率0.1℃以下 ■ 校正步驟
● 各I/O的檢查
① 選擇[I/O檢查] 標簽。
② 從檢查內容中選擇希望檢查的項目。
③ 按[執行]。
由於輸入系統(外部開關輸入等)連續不斷讀入,所以輸入到本機的輸入端
子,顯示ON/OFF狀態。
輸出系統(事件輸出等)輸出複選框中選擇的內容(ON/OFF)到本機的輸出端
子。
12-1

第12 章 校正和齊納柵調整
● PV 輸入校正
使用上的注意事項
PV輸入校正的場合,必須進行所有增益的調整。 ① 選擇[PV輸入校正] 標簽。
② 選擇希望校正的對象通道。
③ 按從小到大的順序選擇增益號,執行校正。 初從“01”開始。
④ ZERO SPAN選擇項目中選擇[ZERO]。
這是為了對1個增益進行ZERO/SPAN動作,如果選擇增益,請務必執行
[ZERO],然後執行[SPAN]。
⑤ 按[讀出] 。
⑥把選擇的增益的ZERO的外加電壓/電流/電阻值外加到對象用戶端子。外加
時的連接方法請參照下圖。
CH1
CH2
CH3
CH4
增益1、2、5、6
13
14 發生器
15
增益1、2、5、6
18
19 發生器
20
增益1、2、5、6
21 發生器
22
23
增益1、2、5、6
26 發生器
27
28
增益3、4
13 C
14 B
15 A
增益3、4
18 C
19 B
20 A
增益3、4
A 21 B
22 C
23
增益3、4
A 26 B
27 C
28
電阻器
電阻器
電阻器 電阻器
增益7
13
14
15
增益7
18
19
20
增益7
21
22
23
增益7
26
27
28
發生器
發生器
發生器
發生器
12-2
⑦ 外加狀態維持約30秒鐘。但是,外加信號前端子長時間開放的場合沒有
此項限制。因此,外加信號前請設定端子為0V(或者端子間短路)的狀態。
⑧ 按[寫入]。
⑨ 返回到④的ZERO SPAN選擇項目,選擇[SPAN],SPAN側執行⑤~⑧。對
一個增益進行ZERO/SPAN結束後,請按照下列步驟進行操作。
⑩ 返回③的增益選擇,按照一個增益號推進,重複③~⑨的步驟
⑪ 選擇通道內的所有增益號校正結束後,返回到②選擇希望校正的通道,
按和上述相同的步驟重複進行剩餘通道的校正。
+ -
+ -
+ -
+ -
+ -
+ -
+ -
+ -

第12 章 校正和齊納柵調整
● 冷端補償校正
本校正前請把各I/O全部設定為OFF狀態,放置1小時以上。
否則,會造成本項目的調整不良。
① 選擇[端子溫度校正] 標簽。
② 選擇希望校正的對象通道。
③ 按[讀出]。
④ 連接溫度計到端子。
⑤ 連接方法請參照下圖。
CH1
13
CH2
18
CH3
21
CH4
26
14 溫度計
15
19 溫度計
20
22 溫度計
23
27 溫度計
28
⑥ 連接後請待機約5分鐘。
⑦ 輸入溫度計的值到溫度計顯示中。
⑧ 按[寫入]。
⑨ 返回到上面的選擇希望校正的通道,按和上述相同的步驟重複進行剩餘
通道的校正。 ● 配線電阻校正
① 選擇[配線電阻校正] 標簽。
② 選擇希望校正的對象通道。
③ 在ZERO SPAN選擇項目中選擇 [ZERO]。
這是因為相對於1個通道,ZERO/SPAN為一組,所以如果選擇了通道,請務必
執行[ZERO],然後執行[SPAN]。
④ 按[讀出]。
⑤把選擇通道的ZERO的電阻值外加到對象用戶端子。
外加信號時的連接方法請參照下圖。
CH1
13
14
CH2
18 19
CH3
21 22
CH4
26 27
電阻器 電阻器 電阻器 電阻器 15 20 23 28
⑥ 外加狀態維持約30秒鐘。但是,外加信號前端子長時間開放的場合沒有
此項限制。因此,外加信號前請設定端子為0V(或者端子間短路)的狀態。
⑦ 按[寫入]。
12-3

第12 章 校正和齊納柵調整
⑧ 返回到③的ZERO SPAN選擇項目,選擇[SPAN],SPAN側執行⑤~⑧。對
一個通道進行ZERO/SPAN結束後,請按照下列步驟進行操作。
⑨ 返回到②選擇希望校正的通道,按和上述相同的步驟重複進行剩餘通道
的校正。
● CT 輸入校正
① 選擇[CT輸入校正]標簽。 ② 選擇希望校正的對象通道。
③ 在ZERO SPAN選擇項目中選擇 [ZERO]。
這是因為相對於1個通道,ZERO/SPAN為一組,所以如果選擇了通道,請
務必執行 [ZERO],然後執行[SPAN]。 ④ 按[讀出]。
⑤把選擇通道的ZERO或者SPAN的電流值外加到對象的用戶端子。外加信號時
的連接方法請參照下圖。 ⑥ 維持外加狀態約30秒。
CH1
21 發生器
22
CH2
26 發生器
27
⑦ 按[寫入]。
⑧ 返回到③的ZERO SPAN選擇項目,選擇[SPAN],SPAN側執行⑤~⑧。對
一個通道進行ZERO/SPAN結束後,請按照下列步驟進行操作。
⑨ 返回到②選擇希望校正的通道,按和上述相同的步驟重複進行剩餘通道
的校正。
● AUX輸出校正
① 選擇[電壓輸出校正]標簽。 ② 選擇希望校正的對象通道。
③ 在ZERO SPAN選擇項目中選擇 [ZERO]。
這是因為相對於1個通道,ZERO/SPAN為一組,如果選擇了通道,請務必
執行 [ZERO],然後執行[SPAN]。 ④ 按[讀出]。
⑤ 輸出選擇通道的ZERO或者SPAN的電流值到對象的用戶端子。
測定方法請參照下圖。
CH1
21
CH2
26 電流計 電流計
22 27
12-4
+ -
+ -
+ -
+ -

第12 章 校正和齊納柵調整
⑥ 維持約30秒。
⑦ 讀出電流計的以mA為單位的數到小數第3位,輸入到畫面,按[寫入]。
⑧ 返回到③的ZERO SPAN選擇,選擇[SPAN],SPAN側執行⑤~⑧。對一個通
道進行ZERO/SPAN結束後,請按照下列步驟進行操作。
⑨ 返回到②選擇希望校正的通道,按和上述相同的步驟重複進行剩餘通道
的校正。
■ 關於齊納柵調整
熱電阻輸入與齊納柵組合使用的場合,為了補正齊納柵的電阻值,必須對本
機進行調整。
一般來說齊納柵的內部阻抗大,所以請使用符合熱電阻的容許配線電阻的規
格的齊納柵。
本公司生產的齊納柵的內部阻抗約70Ω,可使用的量程為量程21、24、27、
28。
① 請按照下圖接線。
齊納柵 C
齊納柵
B DMC10
熱電阻
齊納柵 A
② 選擇SLP-D10的 [設定功能]→[設定]的齊納柵調整。
使用上的注意事項
通過編程器的[菜單]→[設定]進行齊納柵的調整。
[校正]中不包含此項內容。
③ 指定進行調整的PV通道。
④ 按[讀出] 。
⑤ 維持外加狀態約30秒。
⑥ 按[寫入]。
⑦ 希望繼續進行其他通道的調整的場合,請重複進行③~⑥操作。
12-5

第13章 故障處理
故障內容分成以下大類。
• PV輸入關聯內容
• 本體報警關聯內容
• 編程器通訊關聯內容
• 上位通訊關聯內容
• 控制關聯內容
■ 報警檢查時面板上的LED的使用方法
根據設定可以指定本機面板上的LED為以下種類的動作。異常發生時等動作
檢查可以通過LED的燈亮狀態進行確認。
特別是通訊狀態,可以一目了然地確認通訊是否成立。
項 目 設定內容 初始值
LED動作種類 0 :無功能 0 :無功能
1 :READY時閃爍 2 :MANUAL時閃爍 3 :RSP時閃爍 4 :自適應整定等待時
閃爍
5 :AT執行時閃爍 6 :發生PV報警時閃爍 7 :發生存儲報警時閃爍
8 :SP組選擇號閃爍 9 :主站通訊時閃爍 * 10 :主站/編程器通訊時
閃爍
11 :MV繼電器狀態 (ON時燈亮)
12 :事件繼電器狀態 (ON時燈亮)
13 :外部總線運算結果 (ON時燈亮)
14 :物理DI輸入狀態 (ON時燈亮)
15 :外部總線狀態 (ON時燈亮)
16 :通訊接點輸入狀態 (ON時燈亮)
17 :CH間偏差控制時閃爍 18 :SP斜率時閃爍 19 :馬達控制位置推定中
*1:可以正確接收電文到自身的機器地址時閃爍。
13-1

第13 章 故障處理
■ PV輸入關聯內容
PV輸入關聯的故障有以下內容。
故障內容 原 因 處理方法
• 指示值在量程外 • 沒有連接傳感器 • 連接到傳感器的配線 • 編程器上發生PV上限、 • 必須供電的傳感器的場合, • 檢查是否供電,已供電的場合,檢 PV下限報警 沒有正確供電 查電壓值
• 因傳感器故障,輸入值超出上限 • 檢查傳感器,如果有故障,則 值或者下限值 進行更換
• 與傳感器連接的配線斷線 • 檢查連接線,如果有異常,則 進行更換
• 端子螺絲鬆動 • 擰緊螺絲 • 未使用通道的PV輸入端子 • 短接未使用通道的PV輸入端子
為開放狀態
• 儀錶發生故障 • 請與本公司或者本公司銷售店 聯繫
• PV值波動 • 受外部干擾的影響 • 採取干擾處理對策
• 控制方式不合適 • 變更控制方式 • 控制常數不是適當的值 • 進行自整定 • 手動輸入PID常數
• 端子螺絲鬆動引起接觸不良 • 擰緊螺絲
• 儀錶發生故障 • 請與本公司或者本公司銷售店 聯繫
• PV值固定不變化 • 傳感器故障 • 檢查傳感器,如果有故障,則 • 必須供電的傳感器的場合, 進行更換
沒有正確供電 • 檢查是否供電,已供電的場合檢 查電壓值
• 儀錶發生故障 • 請與本公司或者本公司銷售店 聯繫
■ 本體報警關聯內容
本體報警有以下內容。異常發生的場合多數是儀錶本體故障,所以必須修理
或者更換。
通過編程器在監視模式下的“報警詳細內容”可以確認是否屬於以下報警。
故障內容 原 因 處理方法
• CJ(冷端補償功能)異常 • 冷端補償功能故障 • 請與本公司或者本公司銷售店 • B線斷線狀態 • 熱電阻輸入的場合,到傳感器 聯繫
的配線B斷線 • 檢查連接線,如果有異常,則
進行更換
• A/D轉換異常 • PV輸入部的A/D轉換部故障 • 請與本公司或者本公司銷售店 聯繫
• RAM的參數 • RAM的數據因干擾或儀錶 • 請切斷電源,再次通電
校驗和異常 故障產生校驗和異常 這樣仍然不正常的場合,請與
本公司或者本公司銷售店聯繫
• RAM的調整校驗和異常 • RAM的數據因干擾或儀錶 • 請切斷電源,再次通電
故障產生校驗和異常 這樣仍然不正常的場合,請與
本公司或者本公司銷售店聯繫
• EEPROM所有區域的校驗 • EEPROM內的數據因干擾等被 • 請與本公司或者本公司銷售店
和異常 破壞 聯繫
13-2

第13 章 故障處理
■ 編程器通訊關聯內容
使用儀錶面板上的編程器插孔與計算機編程器通訊不成立的場合,請
進行以下檢查。
故障內容 原 因 處理方法
• 設定畫面中不能從計算機向本機 • 編程器用纜線沒有正確插入到本 寫入 機面板上的端口
• 設定畫面中不能通過計算機上裝 • 編程器用纜沒有正確插入計算 本機的數據 機的通訊端口
• 數值監視畫面中不能開始數值監 • 沒有使用正規的纜線 視 • 趨勢監視畫面中不能開始趨勢監 • 斷線等纜線發生異常
視 • 編程器的通訊端口的設定錯誤 • 校正畫面中不能讀入數據 • 沒有向本機正確供電
■ 上位通訊關聯內容
使用儀錶本體的RS-485通訊功能,與計算機或PLC等的通訊不成立的場
合,請進行以下檢查。
故障內容 原 因 處理方法
• 通訊無應答 • 配線沒有連接到正確的端子 • 連線到正確的端子
• 配線斷線 • 更換連接線 • 螺絲鬆動 • 擰緊螺絲 • 本機的地址設定錯誤 • 正確設定本機面板上的地址 • 傳送速度與儀錶的設定不一致 • 使用計算機編程器確認並正
確設定傳送速度 • 通訊條件與儀錶的設定不一致 • 使用計算機編程器確認並正 確設定通訊條件 • 發送電文的機器地址錯誤 • 修正發送電文的機器地址 • 發送電文的格式錯誤 • 修正為正確的發送電文 • 發送電文中使用了校驗和 • 檢查並修正校驗和的內容
校驗和的內容有誤
• 使用了終端電阻 • 拆除終端電阻 • 沒有遵守通訊時間 • 請參閱10-7 發送接收時間 (10-15頁)
• 通訊應答返回異常內容 發送電文錯誤 請參閱10-6 結束代碼一覽
(10-14頁)
13-3
• 確認編程器用纜線的配線狀
態
• 確認編程器用纜線連接著的
計算機的通訊端口
• 更換纜線
• 更換纜線
• 確認編程器的通訊端口的設
定
• 確認供給本機的電源是否適
當。

第13 章 故障處理
■ 控制關聯內容
控制關聯的故障例舉為以下內容。但是,根據控制對象的特性或裝置的構
造,僅依靠控制機器的對應,可能難以解決。
故障內容 原 因 處理方法
• 啟動時間非常慢 • 沒有輸入適當的控制常數 • 啟動自整定
• 控制對象自身的啟動時間慢 • 提高操作端的能力 • 自適應使用中因干擾或斷續的 • 設定PID值為初始值
干擾,PID常數變得極大 設定控制方式為“PID固定值控 制”或者設定自適應整定幅=0
• PV值不穩定 • 沒有輸入適當的控制常數 • 啟動自整定
• 啟動時超調大 • 沒有輸入適當的控制常數 • 啟動自整定
• 調整不結束 • PV值細微變動,持續不穩定 • 設定PV濾波值為1~2s左右 *
不結束調整
• 控制信號不必要地, • 時間比例周期過短 • 延長時間比例周期 *
反復ON/OFF動作 • 控制輸出值急劇變動 • 變更“時間比例時的動作”為 • ON/OFF控制下動作間隙大 “重視操作端壽命型” * • 增大動作間隙值 *
• 設定PV濾波值為1~2s左右 *
* 由於存在控制性能低的情況,請注意。 13-4

第14章 規 格
14 - 1 一般規格 ■ 環境條件
條 件 項 目 規 格
基準條件 環境溫度 23±2℃
環境濕度 60±5%RH(無結露)
電源電壓 24V DC±5%
振動 0m/s2
撞擊 0m/s2
安裝角度 (基準面)±3°
動作條件 環境溫度 0~50℃
環境濕度 10~90%RH(無結露)
額定電源電壓 24V DC
動作容許電源電壓 24V DC±10%
振動 0~1.96m/s2 (10~60Hz XYZ 各方向2h)
撞擊 0~9.81m/s2 (3次)
安裝角度 (基準面)±10°
運送保管條件 環境溫度 -20~+70℃
環境濕度 10~95%RH(無結露)
振動 0~4.90m/s2 (10~60Hz XYZ方向各2h)
撞擊 0~196m/s2 (DIN導軌安裝狀態、上下方向3次) 0~392m/s2 (壁安裝狀態、上下方向3次)
包裝落下試驗 落下高度60cm(根據1角3棱6面的自由落下法)
■ 其他規格
條 件 項 目 規 格
其他規格 記憶方式 不揮發性存儲
絕緣電阻 小20MΩ 電源端子和2次端子間(使用DC500V 絕緣電阻計)
耐電壓 500V AC、1min 電源端子和2次端子間/機箱間
消耗功率 DMC10S/DMC10D型: 大5W(動作條件下)
DMC10E型: 大3W(動作條件下)
通電時突入電流 大10A(動作條件下)
機箱材質、顏色 聚碳酸酯樹脂、淡灰色
安裝方法 DIN導軌或者螺絲
螺絲扭矩 底座部 M3.5螺絲 0.8~1.0N• m 端子配線 M3.5端子螺絲 0.8~1.0N• m 連接頭配線 連接頭端子部分 0.5~0.6N• m
連接頭安裝部分 0.5~0.6N• m
質量 200g以下
外形尺寸 30×100×110mm(詳細內容參照外形尺寸)
14-1

第14 章 規 格
14 - 2 性能規格
■ PV 輸入
項 目 規 格
輸入種類 熱電偶 K、J、E、T、R、S、B : JIS C1602-1995 DIN U、DIN L : DIN43710-1985 PLII : Engelhard Industries 資料(IPTS68)
熱電阻 Pt100 : JIS C1604-1997 JPt100 : JIS C1604-1989
線性(直流電流) 4~20mA 線性(直流電壓) 1~5V、0~5V、0~1V
輸入採樣周期 500ms
指示精度 DMC10S DMC10D
±0.5%FS±1digit ±0.3%FS±1digit 熱電偶的負區域為 熱電偶的負區域為
±1.0%FS±1digit ±0.6%FS±1digit
B熱電偶 B熱電偶 260℃以下±5.0%FS±1U 260℃以下±5.0%FS±1U
260~800℃±2.0%FS±1U 260~800℃±1.0%FS±1U 800~1800℃±1.0%FS±1U 800~1800℃±0.5%FS±1U
密集安裝時端子溫度補償部的誤差 端子配線型 :±1.0℃ 連接頭配線型 :±2.0℃
輸入偏置電流 • 熱電偶 :0.2μA以下(基準條件下) • 熱電阻 :約1mA 從A端子流出 • 線性 :5μA以下(基準條件下)
容許配線電阻 • 熱電偶 :250Ω以下(全線合計) • 熱電阻 (量程21,24,27,28) : 80Ω以下(每1根線) • 熱電阻 (量程22,23,25,26,29,30,31,32,33,34)
: 10Ω以下(每1根線) • 線性 : 250Ω以下(全線合計)
配線電阻影響 • 熱電偶 :±0.2μV/Ω以下 • 熱電阻 :±0.05%FS/Ω以下 • 線性 :±5μV/Ω以下
輸入阻抗 120Ω以下 (4-20mA輸入量程)
輸入容許電壓 4V以下(4-20mA輸入量程,施加超過該值的電壓後,會損壞輸入回路)
● 熱電偶輸入斷線時的動作
斷線狀況 PV值的動作 報警顯示 控制輸出 事件輸出
熱電偶斷線 上超量程 上限報警 根據設定輸出 動作繼續 *
* :根據設定也可以變更
● 熱電阻輸入斷線時的動作(超出容許配線電阻的場合發生BC線報警)
斷線/短路狀況 PV值的動作 報警顯示內容 控制輸出 事件輸出
電阻體斷線 上超量程 上限報警 根據設定輸出 動作繼續 *1
A線斷線 上超量程 上限報警 根據設定輸出 動作繼續 *1
B線斷線 上超量程 上限報警、 根據設定輸出 動作繼續 *1 BC線報警
C線斷線 下超量程 下限報警、 根據設定輸出 動作繼續 *1 BC線報警
2線以上斷線 上超量程 上限報警、 根據設定輸出 動作繼續 *1 BC線報警
A,B線短路 下超量程 *2 下限報警 *2 根據設定輸出 動作繼續 *1
A,C線短路 下超量程 *2 下限報警 *2 根據設定輸出 動作繼續 *1
*1:根據設定也可以變更 *2:不能檢測出量程21、24
14-2
●線性輸入斷線時的動作
斷線狀況 PV值的動作 報警顯示 控制輸出 事件輸出
電壓量程斷線 上超量程 上限報警 根據設定輸出 動作繼續 *
電流量程斷線 下超量程 下限報警 根據設定輸出 動作繼續 *
*:根據設定也可以變更

第14 章 規 格
● 反饋輸入斷線時的動作
斷線狀況 位置比例控制的動作 報警顯示內容 控制輸出
T線斷線
Y線斷線
G線斷線
使用位置比例控制種類=1的場合,
為推定位置控制
T線斷線 報警 無變化
Y線斷線 報警 無變化
G線斷線 報警 無變化 ● 未使用CH的量程表
存在不使用的CH的場合,通過設定為以下量程號讓控制輸出OFF、PV報警輸出
OFF。不需要未使用CH的PV輸入處理。
量程No. 規 格
00 PV 值 :0℃固定、控制輸出:OFF、PV報警 :OFF
● 熱電偶的PV輸入種類/量程表
量程No. 傳感器標號 溫度範圍(℃) 低分辨率(℃)
01 K:CA 0~1200 1
02 K:CA 0~600 1 *1
03 K:CA 0~400 1 *1
04 K:CA -200~+400 1 *1
05 J:IC 0~800 1
06 J:IC -200~+400 1 *1
07 E:CRC 0~600 1
08 T:CC -200~+400 1 *1
09 DINU -200~+400 1 *1
10 DINL 0~800 1
11 R 0~1600 1
12 S 0~1600 1
13 PLII 0~1200 1
14 B 0~1800 1
*1:僅限於高功能型DMC10D,本量程的 低分辨率為1,0.1℃。 ● 熱電阻的PV輸入種類/量程表
量程No. 傳感器標號 溫度範圍(℃) 低分辨率(℃)
21 Pt100 -200~+500 1
22 Pt100 0~200 1,0.1
23 Pt100 -50~+100 1,0.1
24 JPt100 -200~+500 1
25 JPt100 0~200 1,0.1
26 JPt100 -50~+100 1,0.1
27 Pt100 -100~+300 1
28 JPt100 -100~+300 1
29 Pt100 -50~+150 1,0.1
30 JPt100 -50~+150 1,0.1
31 Pt100 -75~+175 1,0.1
32 JPt100 -75~+175 1,0.1
33 Pt100 -100~+200 1,0.1
34 JPt100 -100~+200 1,0.1
14-3

第14 章 規 格
● 線性輸入的PV輸入種類/量程表
量程No. 傳感器標號 輸入範圍 可編程量程 低分辨率(℃)
41 4-20mA 4~20mA -2000~+10000 1,0.1,0.01,0.001
42 1-5V 1~5V -2000~+10000 1,0.1,0.01,0.001
43 0-5V 0~5V -2000~+10000 1,0.1,0.01,0.001
44 0-1V 0~1V -2000~+10000 1,0.1,0.01,0.001
● 控制輸出
條 件 項 目 規 格
繼電器輸出 控制方式 ON/OFF、時間比例 PID
輸出形式 繼電器輸出
接點構成 1a (SPST、Normally Open)
接點額定值 3A (30V DC /250V AC、電阻負載)
壽命 10 萬次以上
小開閉電壓/電流 5V、100mA
時間比例輸出分辨率 1/1000
時間比例周期 5s~120s (以1s為單位進行設定)
時間比例輸出更新 通過設定選擇以下內容
• 時間比例輸出周期內OUT值變化的場合,進行跟蹤,輸出ON/OFF
• 時間比例輸出周期內1次輸出ON
電壓輸出(V) 控制方式 ON/OFF、時間比例PID
輸出形式 電壓驅動方式
內部電阻 150Ω±5%
開放端子電壓 13V DC±5%
負載電流 30mA以下
注:輸出短路時內部電源電路因過電流保護儀錶變為復位狀態, 必須注意避免短路
OFF時漏電流 100μA以下
時間比例輸出分辨率 1/1000
時間比例周期 1s~120s (以1s為單位進行設定)
時間比例輸出更新 通過設定選擇以下內容
• 時間比例輸出周期內OUT值變化的場合,進行跟蹤,輸出ON/OFF
• 時間比例輸出周期內1次輸出ON
輸出電流 30mA以下
事件輸出 點 數 2點或者4點
(DMC10S,DMC10D 輸出形式 繼電器接點輸出 電壓輸出
型) 輸出定格 接點形式 : SPST 開放電壓: 13V DC±10%
接點額定值: 250V AC、1A 內部電阻:150Ω±5 30V DC、1A OFF時漏電流:100μA以下
壽 命: 10萬次以上(電阻負載) 輸出電流:30mA以下 小開閉規格:5V、10mA
14-4

第14 章 規 格
條 件 項 目 規 格 輔助輸出 輸出形式 0~20mA DC或者4~20mA DC 根據設定可以選擇
(AUX) 容許負載電阻 510Ω以下
輸出分辨率 1/10000以上
輸出內容 PV,SP,MV,CH間
輸出更新周期 500ms
輸出精度 DMC10S :±0.5%FS(基準條件下) DMC10D :±0.3%FS(基準條件下)
但是,1mA DC以下在精度保證之外
事件輸出 輸出點數 4點
(DMC10E 型) 輸出形式 繼電器輸出
接點構成(EV2,4) 1a (SPST、Normally Open)
(EV1,3) 1c (SPDT、Normally Open & Normally Close)
接點額定值 1A 30V DC /250V AC (電阻負載)
壽命 10 萬回以上 (30 回/min)
小開閉電壓/電流 5V、10mA
外部開關輸入 輸入點數 2點或者4點
輸入採樣時間 100ms
檢測 短保持時間 100ms
和其他儀錶並聯連接 和SDC10/SDC40系列可直接並聯連接
其他儀錶類型請與本公司銷售員聯繫
連接可能輸出形式 無電壓接點或者開路集電極
開放時端子電壓 13V±10% DC
短路時端子電流 從端子流出的電流為5mA TYP.(動作條件下)
容許ON接點電阻 250Ω以下(動作條件下)
容許OFF接點電阻 100kΩ以上(動作條件下)
容許ON殘留電壓 2V以下(動作條件下)
容許OFF漏電流 100μA以下(動作條件下)
變流器 使用變流器 另售QN206A (孔徑:5.8mm)、QN212A (孔徑:12mm)
輸入 測量電流範圍 0.4~50.0A
指示精度 ±5%FS
受信電阻 約50Ω
指示分辨率 0.1A
輸入採樣周期 100ms
上位通訊 信號級別 標準RS-485
傳送線路連接 多點(1台主站連接31台以下的从站)
通訊方式 半双工
同步方式 調歩同步式
傳送控制 輪詢選擇方式
大線路長 500m
通訊線數 3線式
通訊速度誤差 0.16%以下
終端電阻 內部安置了與終端電阻相當的電阻,因此禁止使用外接電阻
傳送速度 2400、4800、9600、19200bps
數據長 8 位
停止位長 1或者2位
校驗位 偶校驗或者無校驗
14-5

第14 章 規 格
■輸入輸出間隔離 以下表示輸入輸出間的相互隔離。
PV CH1 OUT CH1 *
PV CH2 OUT CH2 *
PV CH3 OUT CH3 *
PV CH4
電 源
OUT CH4 *
RSW CH1 EVENT CH1
RSW CH2 EVENT CH2
RSW CH3 EVENT CH3 *
RSW CH4 EVENT CH4 *
CT CH1 AUX CH1
CT CH2 邏 輯 AUX CH2
編程器通訊 CPL通訊
*:電壓輸出型時與電源不隔離。
:隔離
:不隔離
■ 外形尺寸
● DMC10S 單位: mm
端子台型 連接頭型
8 30 8 30 110
ADR 0
4 LDR
8
C PWR
DMC10
ADR 0
4 LDR
8
C PWR
21 11
22 12
23 13
24 14
25 15
26 16
27 17
28 18
29 19
30 20
21 11
22 12
23 13
24 14
25 15
26 16
27 17
28 18
29 19
30 20
DMC10
DIN導軌安裝、拆卸時必要的尺寸
本體安裝、拆卸時 必要的尺寸
● DMC10E 單位: mm
8 30
10.5 105
EV1
EV3
EV2
EV4
11
EV1 12
13
14
EV2
15
16
EV3 17
18
19
EV4
20
DMC10
DIN導軌安裝、拆卸時 必要的尺寸
14-6
本體安裝、拆卸時 必要的尺寸
100
100
32.3
(40)
(9)
(9)
5
5
100
(9)
5
32.3
(40)

附 錄
附 - 1 与控制常數相關的建議 本機有三種控制方法。
• ON/OFF控制
• 自適應控制
• PID固定值控制
這些控制方式、相關常數的設定在[基本功能設定]-[控制關聯][SP、控制常數]中進行。
■ ON/OFF控制
簡單的控制方式,設定• 操作簡單,但是與其他控制方式比較控制性能
差。
ON/OFF控制時必須進行以下設定。
• 差動(動作間隙)
ON點和OFF點的差的設定。為了避免操作端頻繁動作的設定。動作間隙大,可
以防止操作端頻繁動作,但是控制性能低。相反,動作間隙小,控制性能
高,但是操作端動作頻繁。
• SP值設定
■ 自適應控制
自適應是指進行下一個操作的場合,調節器自動開始PID調整的功能。根據
SP或工件的變更,即使控制對象的特性變動,也能省去PID常數的設定時
間。
• SP(目標值)變更到滿量程的5%以上的場合(控制方式設定為“自適應控
制”後, 初啟動時達到10%以上)
• 控制中發生超過參數的自適應整定幅以上的偏差的場合
使用上的注意事項
滿量程表示調節器量程的幅。
[例] K 熱電偶輸入-200~+400℃的場合
滿量程為600℃,10%FS表示60℃。
• 自適應控制是指在PID時間比例控制中添加通過自適應进行的自動
PID常數調整功能。
• 自適應中越是反復調整控制性能就越好。從運行開始就要求良好控
制性能的場合,建議和自整定並用。
自適應控制時必須進行以下設定和操作。
1. 控制方式的設定
2. 自適應整定幅
3. 自適應升降啟動條件
4. 時間比例周期
5. 時間比例控制的動作模式(必要時)
6. 自整定啟動(從初次運行就要求良好控制性能的場合)
附-1

附 錄
● 關聯設定項目的說明
• 自適應整定幅
自適應啟動條件中因發生偏差啟動自適應的啟動條件幅。發生的偏差超出
此整定幅的場合,啟動自適應。設定整定=0時,自適應不根據偏差啟動,
只根據SP變更啟動。
• 自適應啟動昇降啟動條件
SP變更的自適應的場合,僅PV上昇時(向SP值的上方向變更)啟動的場合進
行設定。通常為上昇和下降(向SP值的下方向變更)雙向啟動,但是,在PV
上昇和下降時特性顯著不同,下降時的控制性不必要的場合,變更設定。
(建議在保溫性高的注射模塑成形機等的控制時變更設定)
使用上的注意事項
• 自適應通常不動作,只有在SP變更或發生超出一定值(自適應整定幅以上)
的偏差時才動作。這以外的狀態下由給定的控制常數進行控制。
• 自適應啟動中電源OFF的場合,整定結果不能寫入到調節器中。可以通過
PC編程器的監視畫面確認自適應是否結束。
• 自適應啟動條件中,相對於偏差啟動的整定不適合以下控制對象。
• 諸如回流爐或模具、注射模塑成形機等上下、左右都有控制對象鄰接,
這些控制對象間受PV變動影響的設備。
• 包裝機等斷續發生干擾的裝置
這種場合請設定自適應整定幅為0,這樣自適應就不會因偏差而啟動,僅
SP變更時自適應才啟動。
■ PID固定值控制
手動或者自整定設定控制常數的PID值進行控制的功能。控制常數一經設定
後,只要不進行手動設定或執行自整定,控制常數就不變化。
SP值或工件變更,但控制對象特性不變化的場合,或者因這些變動產生的
控制紊亂不會成為問題的場合,建議使用這種控制方法。
PID固定值控制時必須進行以下設定。
• 控制方式的設定
• PID值設定、或者自整定啟動
參 考
關於干擾應答控制Quick-FiTTER
對於反復進行一定規律的溫度變動的控制對象,在PV從下降→上昇時,用於抑制上超調的參數。 詳細內容請參閱
●干擾應答係數 (Quick-FiTTER) (8-13頁)。
附-2

附 錄
附 - 2 與事件相關的建議
● 關於總線
側連接頭標準配置在本體背面,橫向連接用端子。
此側連接頭內置
(1)電源
(2)RS-485線
(3)ON/OFF信號用數據總線輸入×4本
(4)ON/OFF信號用數據總線輸出×4本。
僅用這個連接頭連接,就可以相互利用這些功能。
本章對其中的ON/OFF信號用總線進行說明。
● 用側連接頭傳送總線信號(ON/OFF信號傳送)的目的
用於其他DMC10或事件模件接收並利用某一台儀錶的ON/OFF狀態。因此,使
用2台以上儀錶時,這是一項很有效的功能。
● 用側連接頭傳送總線信號(ON/OFF信號傳送)的規格
使用側連接頭橫向連接的DMC10的ON/OFF信號總線以OR邏輯連接。
因此,用側連接頭連接的DMC10中任意一台儀錶的總線輸出為ON狀態時,所
有儀錶的輸入為ON狀態,事件模件對應的輸出繼電器為ON。
BUS 4
BUS 3
BUS 2
BUS 1
1 2 3 4 1 2 3 4
1 2 3 4 1 2 3 4
1 2 3 4
BUS OUT
BUS1~4
BUS IN
RSW BUS1~4
BUS OUT
BUS1~4
BUS IN
RSW BUS1~4
BUS IN
EV1~4輸出端子
側連接頭
側連接頭
側連接頭
DMC10E
DMC10
DMC10
事件輸出模件
● 用側連接頭可傳送的數據(ON/OFF信號傳送)
請參閱下一項的事件輸出動作、事件輸入動作。
● 用側連接頭傳送的總線信號(ON/OFF信號傳送)的使用準備
為了在DMC10間使用該總線,必須進行 低限度的設定。
1.決定各儀錶輸出到總線的信號
• 在編程器的“特殊功能”畫面中選擇“事件輸出特殊動作”
• 編程器的“事件輸出分配”被追加顯示在菜單中,所以通過該設定項
目,根據需要設定以下項目。
(a) 輸出數據的選擇(可以選擇多個數據) • • • • “輸出分配1~3”
(b) 選擇項目的AND/OR運算• • • • • • • • • • • “邏輯”
(c) 結果的鎖定• • • • • • • • • • • • • • “鎖定”
(d) 正逆動作的選擇• • • • • • • • • • • • • “正逆”
附-3

附 錄
2.決定各儀錶接收來自總線的信號後處理的內容
• 在編程器的“特殊功能”畫面中選擇“外部開關輸入特殊動作”。
• 編程器的“外部開關輸入”的菜單被擴展,根據需要進行相應的設定。
(a) 總線1~4的狀態下讓DMC10動作的功能的選擇• • • “動作種類”
(b) 選擇讓哪個PV通道動作 • • • • • • • • • “對象通道”
(c) 利用哪個儀錶的ON/OFF狀態• • • • • • • “輸入分配1~3”
(d) 輸入狀態的OR/AND運算• • • • • • • • • • • “邏輯”
(e) 輸入狀態的反轉• • • • • • • • • • • • • “正逆”
詳細內容請參閱下一項的“事件輸出特殊動作”和“外部開關輸入特殊動作”。
● 關於機器構成• 台數制限
連接組中可以使用1台事件輸出模件DMC10E。
採用以下方式不用側連接頭連接,從底板接線的場合,就變為另外的組,還
可以使用1台DMC10E。
DMC10E DMC10E DMC10E
RS485通訊 RS485通訊
DMC10E DMC10E
相同組中不能使用 2台以上DMC10E
● 事件總線輸出的D/I的分配
事件總線輸出可以就這樣在內部分配為D/I。
[使用示例]
通過“發生加熱器斷線時, 從RUN切換到READY”的使用方法,可以不
輸出信號到外部。
有關“事件輸出關聯”和“外部開關輸入關聯”的編程器設定方法
基本功能設定中編程器畫面的橫軸上顯示通道號,“事件輸出”和“外部
開關輸入”中橫軸上顯示事件輸出號(事件總線輸出號)或外部開關輸入
號。
附-4

附 錄
附 - 3 事件輸出特殊動作 ■ 事件輸出特殊動作的內部構造
● 標準狀態
標準狀態中一個事件要素(一個事件表×所有8個)的運算結果被固定為單純
輸出到一個輸出端口。
輸出目標端子名(所有12個端子) 輸出的內部要素 備註
事件端子 1(僅帶事件的型號) EV1 的結果 帶事件端子的
事件端子 2(僅帶事件的型號) EV2 的結果 型號
事件端子 3(僅帶事件的型號) EV3 的結果
事件端子 4(僅帶事件的型號) EV4 的結果
BUS1 (側連接頭) EV BUS1 的結果 側連接頭的
BUS2 (側連接頭) EV BUS2 的結果 總線輸出
BUS3 (側連接頭) EV BUS3 的結果
BUS4 (側連接頭) EV BUS4 的結果
OUT1 時間比例輸出運算(PVch1)的結果
OUT2 時間比例輸出運算(PVch2)的結果
OUT3 時間比例輸出運算(PVch3)的結果 僅4ch型
OUT4 時間比例輸出運算(PVch4)的結果
● 事件輸出特殊動作使用時
每個輸出目標端子通過進行“要素輸出用各種設定和運算”, 可以自由選
擇、運算對各輸出端子/側連接頭的總線(所有12個端子)輸出的數據。
輸出目標端子名(所有12個端子) 通過12個端子輸出要素的各種設定
事件端子 1(僅帶事件的型號) ○要素的選擇(可以從下述40個種類/要素中選擇多項)
事件端子 2(僅帶事件的型號) • EV TBL1~8
事件端子 3(僅帶事件的型號) • 事件輸出1~4
事件端子 4(僅帶事件的型號) • 外部開關1~4
BUS1 (側連接頭) • OUT1~4運算結果
BUS2 (側連接頭) • 外部開關TBL1~8內部運算結果
BUS3 (側連接頭) • 外部開關總線輸入1~4
BUS4 (側連接頭) • 通訊DI1~DI12
OUT1 ○邏輯(0:OR運算 1:AND運算)
OUT2 ○正逆(0:正動作 1:逆動作)
OUT3 ○鎖定 0:無
OUT4 1:有(ON時鎖定)
2:有(OFF時鎖定)
( 參照 附-7~9頁)
○外部總線型定義(0:繼電器 1:電壓脈衝)
( 參照 8-30頁)
附-5
( )

附 錄
• 以下是各要素的概略。
所有40種可輸出的狀態的種類(要素) 說明
EV TBL(事件表)1~8 EV TBL1~8的內部運算結果
輸出到端子前的內部運算結果狀態
EV TBL要素使用通過以下參數運算的結果
• 事件類別、對象通道、正逆、待機、報警OR動作、事件設定值(主、
副)、回差、READY時事件動作、ON延遲、OFF延遲
事件輸出1~4 事件端子的輸出狀態
僅帶事件端子的型號有效
外部開關1~4 外部開關1~4的狀態
僅可選外部開關的型號有效
OUT1~4運算結果 時間比例輸出的運算結果
輸出到端子前的內部狀態
外部開關TBL1~8內部運算結果 RSW TBL1~8中設定• 使用的狀態
外部開關表的要素使用通過以下參數進行的運算結果
• 動作種類、對象通道、邏輯、正逆
外部開關總線輸入1~4 側連接頭的總線輸入信號的狀態
通訊DI1~DI12 通過通訊寫入自由ON/OFF的位狀態
• 即使是無事件端子的型號,所有機型的事件表均標準配備8點。因此,事
件的狀態可個別設定 多8個種類,可以經過側連接頭的總線輸出或通過
通訊讀出事件的狀態。
■ 輸出特殊動作的方塊圖
可輸出分配的要素
• 產品內部信息
• 時間比例輸出1~4
的狀態
• 事件TBL1~8
的運算結果
• 產品外部信息
• 外部開關輸入
1~4狀態
• RSW TBL1~8的
運算結果
• 側連接頭的
總線1~4狀態
• 通訊DI1~DI12的
狀態
可多項分配
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
輸出分配1~3
輸出種類的選擇
邏輯
0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
0:無 1:有(ON時鎖定) 2:有(OFF時鎖定)
0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定)
0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定)
0:無 1:有(ON時鎖定) 2:有(OFF時鎖定) 0:無 1:有(ON時鎖定) 2:有(OFF時鎖定)
正逆
0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
正逆 0:正 1:反轉
BUS1
BUS2
BUS3
BUS4
EV1
EV2
EV3
EV4
OUT1
OUT2
OUT3
OUT4
側連接頭 輸出
(總線輸出)
僅帶事件可選的型號
端子輸出
僅4ch型
• 輸出端子根據型號不同。
附-6

附 錄
■ 事件輸出特殊動作的使用步驟
使用事件輸出特殊動作的場合,按照以下步驟設定。不進行這些設定,事件
輸出特殊動作功能無效。
按照以下步驟設定。
①事件輸出特殊動作的使用設定
②事件動作內容(事件表)的設定
③事件表的輸出目標/邏輯動作的設定
具體的設定方法如下所示。
● 設定步驟
① 事件輸出特殊動作的指定
計算機編程器的 [設定功能]中,請指定[設定]→[特殊功能]到[事件輸
出特殊動作]。
》[可選功能]中,更新顯示[事件表]和[事件輸出分配]項目,事件的設
定內容和實際輸出目標分離。
被分離事件的設定單位稱作[事件表]。
② 事件表的設定
[可選功能]→[事件表] (下述)中設定事件的動作內容。事件表可以設定
多8個(EV_TBL1~EV_TBL8)。
附-7

附 錄
③ 事件表的輸出目標和邏輯動作的設定
在[可選功能]→[事件輸出分配]中設定事件表的輸出目標和邏輯動作。
1) 輸出目標
畫面的橫軸顯示輸出目標的名稱 * 。
* : EV1、EV2、EV3、EV4、EV_BUS1、EV_BUS2、EV_BUS3、
EV_BUS4、OUT1、OUT2、OUT3、OUT4
(根據DMC10的型號存在不能使用的場合)
2) 設定內容的分配
光標移動到輸出分配1或者輸出分配2欄的狀態下,點擊菜單的[編輯]
→[位輸入],顯示下面的窗口。
• 光標放在輸出分配1欄時的設定窗口
這裏選擇希望分配的內容。
(*:選擇、◯:不選擇)
附-8

附 錄
• 光標放在輸出分配2欄時的設定窗口
• 光標放在輸出分配3欄時的設定窗口
“輸出分配1”、“輸出分配2”、“輸出分配3”按照設定內容的種類分
類。
3) 邏輯動作的設定
選擇多個設定內容的場合,在“邏輯”設定中進行AND動作或OR動作的
設定,未設定的場合為OR動作。
4) 邏輯動作的設定
鎖定或正逆的切換必要的場合,請進行設定。
附-9

附 錄
附 - 4 外部開關輸入特殊動作
■ 外部開關輸入特殊動作的概略 • 標準狀態
標準狀態中RSW功能的切換要素固定為以下內容。
輸入端子名稱 可設定的參數 啟動RSW的名稱 備註
外部開關輸入1 • 動作類別 RSW1 僅帶外部端子的型號有效
外部開關輸入2 • 邏輯(0:OR運算 1:AND運算) RSW2
外部開關輸入3 • 正逆(0:正動作 1:逆動作) RSW3
外部開關輸入4 RSW4
外部開關總線輸入1 RSW5 (RSW BUS1) 側連接頭的事件總線輸入
外部開關總線輸入2 RSW6 (RSW BUS2)
外部開關總線輸入3 RSW7 (RSW BUS3)
外部開關總線輸入4 RSW8 (RSW BUS4)
• 外部開關輸入特殊動作使用時
可以自由選擇切換RSW設定功能的要素,並進行OR/AND邏輯運算。
啟動RSW功能的各種要素選擇 可設定的參數 啟動RSW的名稱
RSW 啟動要素的選擇(參照附-13頁) • 動作類別 RSW1
(可以從下述40種要素(ON/OFF狀態)中選擇多項) • 邏輯(0:OR運算 1:AND運算) RSW2
• EV TBL1~8 • 正逆(0:正動作 1:逆動作) RSW3
• 事件輸出1~4(僅帶事件的型號) ( 參照附-12 頁) RSW4
• 外部開關輸入1~4(僅帶外部開關的型號) RSW5
• 外部開關TBL1~8內部運算結果 RSW6
• 外部開關總線輸入1~4 RSW7
• 通訊DI1~DI12 RSW8
• 即使是無外部接點輸入的型號,所有機型的外部開關輸入表均標準配備8
點。因此,可以 多個別控制8種儀錶的狀態。
附-10

附 錄
• 輸入分配方塊圖
外部開關輸入中可分配
的輸入要素
• 外部開關輸入
1~4狀態
• 側連接頭
總線輸入1~4狀態
• 事件TBL1~8
的運算結果
• 事件輸出端子
1~4的狀態
• 通訊DI1~DI12的
狀態
輸入分配1~3 切換RSW功能的狀態
種類選擇
輸入分配1~3 切換RSW功能的狀態
種類選擇
輸入分配1~3 切換RSW功能的狀態
種類選擇
輸入分配1~3 切換RSW功能的狀態
種類選擇
輸入分配1~3 切換RSW功能的狀態
種類選擇
輸入分配1~3 切換RSW功能的狀態
種類選擇
輸入分配1~3 切換RSW功能的狀態
種類選擇
輸入分配1~3 切換RSW功能的狀態
種類選擇
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
邏輯 0:OR 1:AND
正逆 0:正 1 1:反轉
正逆 0:正 2 1:反轉
正逆 0:正 3 1:反轉
正逆 0:正 4 1:反轉
正逆 0:正 5 1:反轉
正逆 0:正 6 1:反轉
正逆 0:正 7 1:反轉
正逆 0:正 8 1:反轉
RSW1功能 • 動作種類 • 對象通道 RSW2功能 • 動作種類 • 對象通道 RSW3功能 • 動作種類 • 對象通道 RSW4功能 • 動作種類 • 對象通道 RSW5功能 • 動作種類 • 對象通道 RSW6功能 • 動作種類 • 對象通道 RSW7功能 • 動作種類 • 對象通道 RSW8功能 • 動作種類 • 對象通道
外部開關 TBL1~8 內部運算結果
附-11

附 錄
■ 外部開關輸入特殊動作的使用步驟
使用外部開關輸入特殊動作的場合,按照以下步驟設定。不進行這些設
定,事件輸出特殊動作功能無效。
按照以下步驟設定。
①外部開關特殊動作的使用設定
②外部開關輸入動作內容(外部開關輸入表)的設定
③外部開關輸入的輸入源/邏輯動作的設定
具體的設定方法如下所示。
● 設定步驟
附-12
① 設定外部開關特殊動作的使用
在計算機編程器中[設定功能]指定[設定]→[特殊功能]到[外部開關輸入特
殊動作]。
》外部開關輸入的設定內容和實際輸入分離。
另外,[外部開關輸入]的設定項目中顯示[輸入分配1]、[輸入分配2]、
[邏輯]的設定項目。
被分離的外部開關設定單位稱作[外部開關輸入表]。
外部開關輸入表分配到哪個輸入源,在[輸入分配1]、或者[輸入分配
2]中進行。
② 外部開關輸入動作內容(外部開關輸入表)的設定
在[可選功能]→[外部開關輸入](下述)中設定外部開關輸入的動作內
容。
畫面的橫軸上顯示外部開關輸入表的設定內容(RSW_TBL1~RSW_TBL8)。請
設定“動作的種類”、“對象通道”。

附 錄
③ 外部開關輸入源/邏輯動作的設定
在[輸入分配1]或者[輸入分配2]中設定讓橫軸上顯示的外部開關輸入表
的設定內容(RSW_TBL1~RSW_TBL8)動作的外部開關輸入的種類。
光標移動到輸入分配1、或者輸入分配2欄的狀態下,點擊菜單的[編輯]
→[位輸入],顯示下面的窗口,在這裏設定對象的輸入種類。
1) 輸入種類的設定
• 光標放在輸入分配1欄時的設定窗口
這裏選擇希望分配的內容。
(*:選擇、◯:不選擇)
• 光標放在輸入分配2欄時的設定窗口
• 光標放在輸入分配3欄時的設定窗口
2) 邏輯動作的設定
選擇多個設定內容的場合,在“邏輯”設定中進行AND動作或OR動作的
設定,未設定的場合為OR動作。
附-13

附 錄
■ 事件輸出特殊動作和外部開關輸入特殊動作組合使用示例
下面是使用示例。這些僅是通過本機設定組合實現的各種功能的一小部分
例子。根據需要自由設定事件類別、外部開關功能、總線等輸入輸出條件
(種類、邏輯運算、正逆、鎖定),從而可以實現各種各樣的功能。
● 採用OR條件將多台DMC10的事件(警報)結果匯總為一個警報輸出
• 例:採用側連接頭連接的DMC10×15台 4CH型(合計PV60CH)的偏差事件(逆
動作)的狀態和報警事件狀態(逆動作)中,任意一台為事件發生條件的場
合,從事件模件輸出警報。
● 採用AND條件將DMC10內部多個( 多8點)事件(警報)結果匯總為一個警報輸出
• 例:某個通道的偏差在範圍外(使用偏差事件)、且PV超出一定值(使用PV上
限事件)時,輸出ON信號到總線。
因為該信號,被連接的其他所有DMC10均變成READY (使用外部開關表)
狀態。
● 採用AND條件將DMC10內部多個PV通道( 多4CH)的事件結果匯總為一個警報輸出
• 例:PV1~4CH的所有通道的偏差到達一定值(使用偏差事件)時,輸出警
報。
● 通過簡易時間管理執行程序
• 例:PV1~4CH的所有通道的偏差到達一定值(使用偏差事件)時,120秒後(使
用事件ON/OFF延遲)自動變更SP組(使用外部開關輸入),昇溫到下一個設
定值。
● 使用通訊DI,只需通過1次通訊就可以切換 多所有15台×4CH DMC10的狀態(例:RUN/READY狀態)
• 例:通過通訊從主站計算機只對一台DMC10的通訊DI1寫入ON/OFF狀態,這
個狀態被輸出到外部總線,與這個總線的狀態對應,所有通道可以同
時進行被連接的所有PV通道的RUN/READY狀態切換。
(以前必須對所有通道分別寫入,要進行60次通訊, 快也會產生數
秒以上的延遲時間)。
附-14

附 - 5 加熱冷卻控制使用時的設定
(僅DMC10D 2CH型可以使用)
附 錄
使用高級功能2CH型DMC10D,必須進行加熱冷卻控制的設定以及輸出設定分配的設定。
關於適用的型號請參閱
■ 型號構成 (1-2 頁)。
■ 設定步驟
① 加熱冷卻控制的指定
請在計算機編程器的[設定功能]中指定[設定]→[特殊功能]到[加熱冷
卻控制]。
使用上的注意事項
加熱冷卻控制和遠程SP控制不能組合使用。
② 加熱冷卻控制的輸出分配設定
進行加熱冷卻控制輸出、冷卻控制輸出的種類選擇。根據設定內容強制分
配。
OUT1、2(控制輸出端子)、EV3、4(事件輸出端子)、 AUX1、2(輔助輸出端
子)作為輸出端子使用。
附-15

附 錄
附 - 6 遠程SP使用時的設定
(僅DMC10D可以使用)
■ 設定步驟
① 遠程SP控制的指定
請在計算機編程器的[設定功能]中指定[設定]→[特殊功能]到[遠程SP輸
入]。
》[基本功能]的[PV 輸入關聯的設定項目]中遠程SP用輸入通道顯示變更
為RSP。
使用上的注意事項
遠程SP控制和加熱冷卻控制不能組合使用。
附-16

附 - 7 通道間偏差控制使用時的設定
(僅DMC10D可以使用)
附 錄
高級功能型可以使用把通道間的PV偏差設定為SP的控制方法。主站通道設定為通常控制,其他通道設定為
通道間偏差控制使用。
■ 設定步驟
① 在[基本功能]的[控制輸出關聯的設定項目]的14~17進行設定。
下面是主站通道:ch1的設定示例。
• 14:CH間偏差控制
使用/不使用通道間偏差控制的選擇
(0:不使用、1:使用)
• 15:CH間偏差控制ch指定
設定偏差的對象通道的指定
(指定ch1~4)
• 16:CH間偏差控制種類
偏差內容為哪種控制種類的設定。
• 和對象通道的PV偏差:通常(主站ch的PV值穩定時)
• 和對象通道的SP偏差:主站ch的PV值不穩定的場合
( 0:SP=指定chPV+CH間偏差控制偏差值、
1:SP=指定chSP+CH間偏差控制偏差值)
• 17:CH間偏差控制偏差值
偏差值的設定
附-17

索 引
【A~Z】
AUTO/MANUAL切換時動作 • • • • • • • • • • • • • • 8-10
AUX輸出校正 • • • • • • • • • • • • • • • • • • • • • • 12-4
CE符號 • • • • • • • • • • • • • • • • • • • • • • • • • 1-1
CH間偏差控制 • • • • • • • • • • • • • • • • • • 9-1, 9-4
CMC10B • • • • • • • • • • • • • • • • • • • • • • • • • • 5-1
CMC10L • • • • • • • • • • • • • • • • • • • • • • • • • • 5-1
CPL/MODBUS切換 • • • • • • • • • • • • • • • • • • • 8-13
CPL通訊端子 • • • • • • • • • • • • • • • • • • • • • • 2-2
CRC檢查 • • • • • • • • • • • • • • • • • • • • • • • • 11-3
CSV文件• • • • • • • • • • • • • • • • • • • • • • • • • 7-19
CT輸入校正• • • • • • • • • • • • • • • • • • • • • • • 12-4
DIN導軌固定器• • • • • • • • • • • • • • • • • • 2-2, 3-2
DMC10D• • • • • • • • • • • • • • • • • • • • • • • 1-1, 2-1
DMC10E • • • • • • • • • • • • • • • • • • • • • • • • • • 2-1
DMC10S • • • • • • • • • • • • • • • • • • • • • • • • • • 2-1
EV1~4動作燈 • • • • • • • • • • • • • • • • • • • • • • 1-2
IEC指令• • • • • • • • • • • • • • • • • • • • • • • • • • 1-1
LED動作對象通道 • • • • • • • • • • • • • • • • • • • 8-15
LED動作種類• • • • • • • • • • • • • • • • • • 8-15, 13-1
MODBUS • • • • • • • • • • • • • • • • • • • • • 11-1, 11-4
MODBUS ASCII • • • • • • • • • • • • • • • • • • • • • 11-2
MODBUS RTU• • • • • • • • • • • • • • • • • • • • • • • 11-3
MV分支輸出• • • • • • • • • • • • • • • • • • • • • • • 7-17
ON/OFF控制• • • • • • • • • • • • • • • • • • • • • • • 附-1
PGM • • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-7
PID固定值控制 • • • • • • • • • • • • • • • • • • • • 附-2
PID初始操作量 • • • • • • • • • • • • • • • • • • • • • 8-9
POWER燈 • • • • • • • • • • • • • • • • • • • • • • • • • 2-1
PV偏置 • • • • • • • • • • • • • • • • • • • • • • • • • • 8-6
PV量程上下限值• • • • • • • • • • • • • • • • • • • • • 8-6
PV濾波 • • • • • • • • • • • • • • • • • • • • • • • • • • 8-6
PV輸入 • • • • • • • • • • • • • • • • • • • • • • 8-5, 14-2
PV輸入校正• • • • • • • • • • • • • • • • • • • • • • • 12-2
RD命令• • • • • • • • • • • • • • • • • • • • • • • • • • 10-8
READY時操作量• • • • • • • • • • • • • • • • • • • • • 8-10
RS命令• • • • • • • • • • • • • • • • • • • • • • • • • • 10-6
RU命令• • • • • • • • • • • • • • • • • • • • • • • • • 10-10
SP下降斜率 • • • • • • • • • • • • • • • • • • • • • • • 8-7
SP下降斜率時間• • • • • • • • • • • • • • • • • • • • • 8-7
SP限幅下限 • • • • • • • • • • • • • • • • • • • • • • • 8-7
SP限幅上限 • • • • • • • • • • • • • • • • • • • • • • • 8-7
SP上昇斜率 • • • • • • • • • • • • • • • • • • • • • • • 8-7
SP值 • • • • • • • • • • • • • • • • • • • • • • • • • • • 8-12
SSR • • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-7
WD命令 • • • • • • • • • • • • • • • • • • • • • • • • • 10-9
WS命令 • • • • • • • • • • • • • • • • • • • • • • • • • 10-7
WU命令 • • • • • • • • • • • • • • • • • • • • • • • • 10-11
【a】
安裝 • • • • • • • • • • • • • • • • • • • • • • • • • 7-3
安裝場所 • • • • • • • • • • • • • • • • • • • • • • • 3-1
安裝程序 • • • • • • • • • • • • • • • • • • • • • • • 7-3
安裝方法• • • • • • • • • • • • • • • • • • • 3-2, 14-2
安裝螺絲孔• • • • • • • • • • • • • • • • • • • • • • 2-2
【b】
把本體安裝在底板上 • • • • • • • • • • • • • • • • 3-2
報警詳細 • • • • • • • • • • • • • • • • • • • • • • 7-16
本 體• • • • • • • • • • • • • • • • • • • • • • • • • 2-1
比例帶• • • • • • • • • • • • • • • • • • • • • • • • 8-12
編程器• • • • • • • • • • • • • • • • • • • • • • • • • 7-1
編程器插孔 • • • • • • • • • • • • • • • • • • • • • • 2-1
【c】
菜單畫面 • • • • • • • • • • • • • • • • • • • • • • 7-13
參數的設定• • • • • • • • • • • • • • • • • • • • • 7-17
操作步驟 • • • • • • • • • • • • • • • • • • • • • • • 6-1
操作量変化率限幅• • • • • • • • • • • • • • • • • 8-11
操作量分支控制• • • • • • • • • • • • • • • 9-2, 9-14
操作量上限值• • • • • • • • • • • • • • • • • • • • 8-12
操作量下限值• • • • • • • • • • • • • • • • • • • • 8-12
側連接頭 • • • • • • • • • • • • • • • • • • • • • • • 2-2
差動• • • • • • • • • • • • • • • • • • 8-8, 8-13, 附-1
初始化• • • • • • • • • • • • • • • • • • • • • • • • 7-16
初始設定 • • • • • • • • • • • • • • • • • • • • • • 10-1
傳送速度• • • • • • • • • • • • • • • • • • 8-13, 11-4
【d】
底座• • • • • • • • • • • • • • • • • • • • • • • • • • 2-2
纜線• • • • • • • • • • • • • • • • • • • • • • • • • • 4-5
變流器輸入 • • • • • • • • • • • • • • • • • • • • • 8-25
電流輸出 • • • • • • • • • • • • • • • • • • • • • • 8-29
電文的構成• • • • • • • • • • • • • • • • • • • • • 10-3
電源的連接 • • • • • • • • • • • • • • • • • • • • • 4-6
電源端子 • • • • • • • • • • • • • • • • • • • • • • • 2-2
動作燈• • • • • • • • • • • • • • • • • • • • • • • • • 2-1
動作間隙• • • • • • • • • • • • • • • 8-8, 8-13, 附-1
動作條件 • • • • • • • • • • • • • • • • • • • • • • 14-1
多SP組• • • • • • • • • • • • • • • • • • • • • • • • 7-17
【f】
發生PV報警時的操作量• • • • • • • • • • • • • • 8-10
輔助繼電器 • • • • • • • • • • • • • • • • • • • • • 4-3
輔助輸出 • • • • • • • • • • • • • • • • • • • • • • 8-29
索-1

【g】
干擾應答係數• • • • • • • • • • • • • • • • • • • • • 8-13
高功能版 • • • • • • • • • • • • • • • • • • • • • • • • 1-1
固定長連續數據讀出命令• • • • • • • • • • • • • • 10-8
固定長連續數據寫入命令• • • • • • • • • • • • • • 10-9
固定長隨機讀出命令 • • • • • • • • • • • • • • • • 10-10
固定長隨機寫入命令 • • • • • • • • • • • • • • • • 10-11
關聯產品• • • • • • • • • • • • • • • • • • • • • • • • • 1-2
【h】
環境設定 • • • • • • • • • • • • • • • • • • • • • • • • 7-16
環境條件 • • • • • • • • • • • • • • • • • • • • • • • • 14-1
【j】
機器地址 • • • • • • • • • • • • • • • • • • • • 5-2, 10-4
機器地址用旋轉開關• • • • • • • • • • • • • • • • • • 2-1
積分時間 • • • • • • • • • • • • • • • • • • • • • • • • 8-12
基本功能 • • • • • • • • • • • • • • • • • • • • 7-16, 8-1
基準條件 • • • • • • • • • • • • • • • • • • • • • • • • 14-1
記憶方式 • • • • • • • • • • • • • • • • • • • • • • • • 14-1
加熱控制• • • • • • • • • • • • • • • • • • • • • • • • • 8-8
加熱冷卻控制 • • • • • • • • • • • • • • 7-17, 9-1, 9-3
校驗和的生成方法 • • • • • • • • • • • • • • • • • • 11-2
校正 • • • • • • • • • • • • • • • • • • • • • • • • • • • 12-1
校正步驟 • • • • • • • • • • • • • • • • • • • • • • • • 12-1
校正功能 • • • • • • • • • • • • • • • • • • • • • • • • • 7-1
監視功能 • • • • • • • • • • • • • • • • • • • • 7-1, 7-19
接線• • • • • • • • • • • • • • • • • • • • • • • • • • • • 4-1
接線上的注意事項 • • • • • • • • • • • • • • • • • • • 4-4
節省1/2電能 • • • • • • • • • • • • • • • • • • • • • • 9-11
節省1/4電能 • • • • • • • • • • • • • • • • • • • • • • 9-11
結束SLP-D10 • • • • • • • • • • • • • • • • • • • • • • 7-12
結束代碼 • • • • • • • • • • • • • • • • • • • • • • • 10-14
絕緣電阻 • • • • • • • • • • • • • • • • • • • • • • • • 14-1
【k】
側連接頭• • • • • • • • • • • • • • • • • • • • • • • • • 2-2
可選功能• • • • • • • • • • • • • • • • • 1-1, 7-17, 8-3
控制常數 • • • • • • • • • • • • • • • • • • • • • • • • 附-1
控制動作• • • • • • • • • • • • • • • • • • • • • • • • • 8-8
控制方式• • • • • • • • • • • • • • • • • • • • • • • • • 8-8
控制輸出 • • • • • • • • • • • • • • • • • • • • • • • • 14-4
控制輸出種類 • • • • • • • • • • • • • • • • • • • • • • 1-1
【l】
冷端補償動作 • • • • • • • • • • • • • • • • • • • • • • 8-7
冷端補償校正 • • • • • • • • • • • • • • • • • • • • • 12-3
索-2
冷卻控制• • • • • • • • • • • • • • • • • • • • • • • 8-8
離線作業 • • • • • • • • • • • • • • • • • • • • • • 7-15
連接台數 • • • • • • • • • • • • • • • • • • • • • • • 5-1
連接頭 • • • • • • • • • • • • • • • • • • • • • • • • 1-1
連接頭的接線 • • • • • • • • • • • • • • • • • • • • 4-5
連續數據讀出命令 • • • • • • • • • • • • • • • • 10-6
連續數據寫入命令 • • • • • • • • • • • • • • • • 10-7
【m】
馬達手動操作 • • • • • • • • • • • • • • • • • • • • 9-9
馬達自動調整 • • • • • • • • • • • • • • • • • • • • 9-9
滿量程• • • • • • • • • • • • • • • • • • • • • • • • 附-1
命令行• • • • • • • • • • • • • • • • • • • • • • • • 7-22
模件的連接• • • • • • • • • • • • • • • • • • • • • • 3-1
【n】
內存保護 • • • • • • • • • • • • • • • • • • • • • • 8-14
耐電壓 • • • • • • • • • • • • • • • • • • • • • • • • 14-1
【p】
配線電阻校正 • • • • • • • • • • • • • • • • • • • 12-3
【q】
齊納柵調整• • • • • • • • • • • • • • • • • • • • • 12-5
啟動SLP-D10 • • • • • • • • • • • • • • • • • • • • 7-12
趨勢的收集• • • • • • • • • • • • • • • • • • • • • 7-22
趨勢監視 • • • • • • • • • • • • • • • • • • 7-19, 7-20
趨勢監視操作 • • • • • • • • • • • • • • • • • • • 7-23
【r】
熱電偶的PV輸入種類 • • • • • • • • • • • • • • 14-3
熱電偶輸入斷線時的動作 • • • • • • • • • • • • 14-2
熱電阻的PV輸入種類 • • • • • • • • • • • • • • • 14-3
熱電阻的輸入短線時的動作• • • • • • • • • • • 14-2
【s】
設備區分代碼• • • • • • • • • • • • • • • • • • • • 10-4
設常數據的保存 • • • • • • • • • • • • • • • • • • 7-18
設定參數 • • • • • • • • • • • • • • • • • • • • • • • 6-1
設定參數一覽 • • • • • • • • • • • • • • • • • • • • 8-1
設定方法 • • • • • • • • • • • • • • • • • • • • • • • 6-1
設定功能 • • • • • • • • • • • • • • • • • • • • • • 7-13
設定畫面 • • • • • • • • • • • • • • • • • • • • • • 7-14
省電 • • • • • • • • • • • • • • • • • • • • • • • • • 7-17
時間比例動作模式 • • • • • • • • • • • • • • • • • 8-9
時間比例省電模式 • • • • • • • • • • • • • 9-2, 9-11

時間比例週期• • • • • • • • • • • • • • • • • • • • • • 8-9
時間精度• • • • • • • • • • • • • • • • • • • • • • • • • 8-7
實際地址 • • • • • • • • • • • • • • • • • • • • • • • • 11-5
事件輸出 • • • • • • • • • • • • • • • • • • • • • • • • 8-16
事件輸出模件DMC10E的配置 • • • • • • • • • • • • • 5-4
事件輸出特殊動作• • • • • • • • • • 7-17, 8-30, 附-5
適合連接頭 • • • • • • • • • • • • • • • • • • • • • • • 2-1
収集數據的保存• • • • • • • • • • • • • • • • • • • • 7-24
收集週期 • • • • • • • • • • • • • • • • • • • • • • • • 7-19
手動復位值• • • • • • • • • • • • • • • • • • • • • • • 8-12
輸出指定 • • • • • • • • • • • • • • • • • • • • • • • • 8-31
輸入採樣週期 • • • • • • • • • • • • • • • • • • • • • 14-2
輸入輸出間隔離• • • • • • • • • • • • • • • • • • • • 14-6
輸入分配 • • • • • • • • • • • • • • • • • • • • • • • • 8-33
輸入種類 • • • • • • • • • • • • • • • • • • • • • 1-1, 8-5
數據鏈層• • • • • • • • • • • • • • • • • • • • • • • • 10-4
數據形式 • • • • • • • • • • • • • • • • • • • • • • • • 8-14
數值監視• • • • • • • • • • • • • • • • 7-19, 7-20, 7-21
數值組監視• • • • • • • • • • • • • • • • • • • • • • • 7-22
發送接收時間• • • • • • • • • • • • • • • • • • • • • 10-15
隨機訪問命令 • • • • • • • • • • • • • • • • • • • • • 11-1
【t】
特殊功能的設定• • • • • • • • • • • • • • • • • • • • 7-17
通電時衝擊電流• • • • • • • • • • • • • • • • • • • • 14-1
通訊步驟• • • • • • • • • • • • • • • • • • • • 10-2, 11-1
通訊程序示例 • • • • • • • • • • • • • • • • • • • • 10-46
通訊的連接 • • • • • • • • • • • • • • • • • • • • • • • 4-6
通訊切斷開關 • • • • • • • • • • • • • • • • • • • • • • 2-2
通訊時間• • • • • • • • • • • • • • • • • • • • • • • • • 5-1
通訊條件 • • • • • • • • • • • • • • • • • • • • • • • 10-43
通訊轉換器 • • • • • • • • • • • • • • • • • • • 5-1, 11-1
通訊 短應答時間 • • • • • • • • • • • • • • • • • • 8-14
【w】
外部開關輸入 • • • • • • • • • • • • • • • • • • • • • 8-26
外部開關輸入特殊動作 • • • • • • 7-16, 8-33, 附-10
外部總線型定義• • • • • • • • • • • • • • • • • • • • 8-30
外形寸法 • • • • • • • • • • • • • • • • • • • • • • • • 14-6
微分時間 • • • • • • • • • • • • • • • • • • • • • • • • 8-12
未使用CH的量程表 • • • • • • • • • • • • • • • • • • 14-3 位信息數據 • • • • • • • • • • • • • • • • • • • • • • 10-34
位置比例控制 • • • • • • • • • • • • • • • • • • 9-1, 9-6
位置比例控制種類 • • • • • • • • • • • • • • • • • • 7-17
溫度單位• • • • • • • • • • • • • • • • • • • • • • • 8-5
【x】
系統環境• • • • • • • • • • • • • • • • • • • • • • • 7-2
下裝 • • • • • • • • • • • • • • • • • • • • • • • • 7-18
顯示語言 • • • • • • • • • • • • • • • • • • • • • • • 7-1
線性輸入的PV輸入種類• • • • • • • • • • • • • • 14-4
線性輸入斷線時的動作• • • • • • • • • • • • • • 14-2
消耗功率 • • • • • • • • • • • • • • • • • • • • • • 14-1
小數點位置 • • • • • • • • • • • • • • • • • • • • • 8-5
型號構成 • • • • • • • • • • • • • • • • • • • • • • • 1-2
型號設定 • • • • • • • • • • • • • • • • • • • • • • 7-15
性能規格 • • • • • • • • • • • • • • • • • • • • • • 14-2
虛擬地址 • • • • • • • • • • • • • • • • • • • • • • 11-5
【y】
壓接端子 • • • • • • • • • • • • • • • • • • • • • • • 4-5
應答監視時間• • • • • • • • • • • • • • • • • • • 10-43
應用層 • • • • • • • • • • • • • • • • • • • • • • • 10-5
硬件構成 • • • • • • • • • • • • • • • • • • • • • • • 7-2
用戶定義地址• • • • • • • • • • • • • • • • • • • • 7-22
與CMC10組合• • • • • • • • • • • • • • • • • • • • • 5-3
與SSR的連接• • • • • • • • • • • • • • • • • • • • • 4-7
預熱時間• • • • • • • • • • • • • • • • • • • • • • • 4-4
預置手動值• • • • • • • • • • • • • • • • • • • • • 8-10
遠程SP控制 • • • • • • • • • • • • • • • • • • 9-1, 9-5
遠程SP輸入• • • • • • • • • • • • • • • • • • • • • 7-17
運送保管條件 • • • • • • • • • • • • • • • • • • • 14-1
運行參數 • • • • • • • • • • • • • • • • • • • • • • • 6-1
運行操作/監視• • • • • • • • • • • • • • • • • • • 7-19
【z】
正常結束 • • • • • • • • • • • • • • • • • • • • • 10-14
質量 • • • • • • • • • • • • • • • • • • • • • • • • • 14-1
智能編程器軟件包 • • • • • • • • • • • • • • • • • 1-1
終端電阻 • • • • • • • • • • • • • • • • • • • • • • • 4-6
子地址• • • • • • • • • • • • • • • • • • • • • • • • 10-4
字地址 • • • • • • • • • • • • • • • • • • • • • • • 10-12
字信息數據 • • • • • • • • • • • • • • • • • • • • 10-16
自適應• • • • • • • • • • • • • • • • • • • • • • • • 附-1
自適應昇降啟動條件 • • • • • • • • • • • • • • • 8-11
自適應整定幅 • • • • • • • • • • • • • • • • • • • 8-11
索-3

改訂履歴
印刷年月 資料編號 種 類 改訂頁 改訂內容
07-12 CP-UM-5143C 初 版

本資料所記內容如有變更恕不另行通知
山武自動化儀錶(上海)有限公司
上海本部 上海市虹橋路3號港匯中心2座2608室
郵編:200300
電話:021-61132335,2336
傳真:021-61132331
北京支店 北京市朝陽區朝外大街20號聯合大廈1107室
郵編:100020
電話:010-65887571,7572
傳真:010-65887569
華南支店 深圳市南山區桃園路1號西海明珠大廈1211、1212室
郵編:518052
電話:0755-86264600
傳真:0755-86264900
計裝中心 北京市朝陽區朝外大街20號聯合大廈1107室
郵編:100020
電話:010-65887861
傳真:010-65887569
上海營業部 上海市春申路3800號金燕大廈205室
郵編:201100
電話:021-64605704,5714
傳真:021-64605734
珠海辦事處 珠海拱北迎賓南路2188號名門大廈304室
郵編:519000
電話:0756-3831802,3831801
傳真:0756-3831806 寧波辦事處 寧波市蒼松路299弄22號428室
郵編:315012 電話:057487499401 傳真:057487499451
瀋陽辦事處 瀋陽市和平區南京南街52號鴻源大廈1005室
郵編:110001
電話:024-31509535
傳真:024-31509536
蘇州辦事處 蘇州市西環路6號蘇州國際經貿大廈22樓09B單元
郵編:215008
電話:0512-68663535
傳真:0512-68663528
天津辦事處 天津市和平區建設路105號濱江萬麗寫字間1207室
郵編:300042
電話:022-23130851,0861
傳真:022-23130961
廣州辦事處 廣州市天河區龍口東路5號龍輝大廈508室
郵編:510635
電話:020-87591008
傳真:020-87591108
成都辦事處 成都市一環路南一段22號紅瓦大廈622室
郵編:610041
電話:028-85356283,6285
傳真:028-85356071
廈門聯絡所 廈門市嘉禾路370號 1904第 3間
郵編:361000
電話:0592-5532424
傳真:0592-5502424
香港部 香港新界荃灣橫龍街77-87號富利工業大廈3號樓
電話:00852-21496633
傳真:00852-21496600
2007 年 12 月 中文初版(07) 日文第 22 版