Dubbel || Elastizitätstheorie
3
C3.2 Rotationssymmetrischer Spannungszustand C 33 C C3 Elastizitätstheorie J. Lackmann, Berlin; J. Villwock, Berlin C3.1 Allgemeines Aufgabe der Elastizitätstheorie ist es, den Spannungs- und Verformungszustand eines Körpers unter Beachtung der gege- benen Randbedingungen zu berechnen, d. h. die Größen x , y , z , xy , xz , yz , " x , " y , " z , xy , xz , yz , u, , w zu ermitteln. Für diese 15 Unbekannten stehen zunächst die Glei- chungen C1 Gl. (12) und C1 Gl. (13) zur Verfügung. Hinzu kommen drei Gleichgewichtsbedingungen (Bild 1) mit den Vo- lumenkraftdichten X, Y, Z. @ x @x C @ yx @y C zx @z CX D0; @ xy @x C @ y @y C @ zy @z CY D0; @ xz @x C @ yz @ C @ z @z CZ D0; 9 > > > > > > > = > > > > > > > ; (1) sowie für isotrope Körper die sechs verallgemeinerten Hooke’- schen Gesetze " x D x . y C z / E ; " y D y . x C z / E ; " z D z . x C y / E ; xy D xy G ; xz D xz G ; yz D yz G : 9 > > > > > > > > > > = > > > > > > > > > > ; (2) in ihrer dehnungsexpliziten Form x D E 1 C " x C 1 2 " x C" y C" z ; y D E 1 C " y C 1 2 " x C" y C" z ; z D E 1 C " z C 1 2 " x C" y C" z ; xy DG xy ; xz DG xz ; yz DG yz : 9 > > > > > > > > > = > > > > > > > > > ; (2a) Damit stehen 15 Gleichungen für 15 Unbekannte zur Verfü- gung. Eliminiert man aus ihnen alle Spannungen, so erhält man drei partielle Differentialgleichungen für die unbekannten Ver- schiebungen: G ĩu C 1 1 2 @" @x CX D0; G ĩ C 1 1 2 @" @y CY D0; G ĩw C 1 1 2 @" @z CZ D0 9 > > > > > > > = > > > > > > > ; (3) Bild 1. Gleichgewicht am Element mit ĩu D @ 2 u=@x 2 C@ 2 u=@y 2 C@ 2 u=@z 2 usw. und " D " x C " y C" z D@u=@x C@=@y C@w=@z. Die Navier’schen Gln. (3) eignen sich zur Lösung von Proble- men, bei denen als Randbedingungen Verschiebungen vorge- geben sind. Eliminiert man aus den zitierten 15 Gleichungen alle Verschiebungen und deren Ableitungen, so bleiben sechs Gleichungen für die unbekannten Spannungen: ĩ x C 1 1 C @ 2 @x 2 C2 @X @x C 1 @X @x C @Y @y C @Z @z D0 (4a) (entsprechend für die y- und z-Richtung) und ĩ xy C 1 1 C @ 2 @x @y C @X @y C @Y @x D0 (4b) (entsprechend für die y- und z-Richtung). Hierbei ist D x C y C z . Die Beltrami’schen Gln. (4) eignen sich zur Lösung von Problemen, bei denen als Rand- bedingungen Spannungen vorgegeben sind. Bei gemischten Randbedingungen sind beide Gleichungssysteme zu benutzen. Lösungen der Differentialgleichungen (3) und (4) liegen im Wesentlichen für rotationssymmetrische und ebene Probleme vor. C3.2 Rotationssymmetrischer Spannungszustand Setzt man Symmetrie zur z-Achse voraus, so treten lediglich die Spannungen r ; t ; z ; rz D zr D auf (Bild 2). Die Gleichgewichtsbedingungen in r- und z-Richtung lauten @ @r .r r / C @ @z .r/ t CrR D0; @ @r .r/ C @ @z .r z / CrZ D0: 9 > > > = > > > ; (5) Die Hooke’schen Gesetze haben die Form " r D @u @r D r . t C z / E ; " t D u r D t . r C z / E ; " z D @w @z D z . r C t / E ; rz D @u @z C @w @r D G D 2.1 C/ E : 9 > > > > > > > > > > > > > = > > > > > > > > > > > > > ; (6) Bild 2. Rotationssymmetrischer Spannungszustand K.-H. Grote, J. Feldhusen (Hrsg.), Dubbel, 24. Aufl., DOI 10.1007/978-3-642-38891-0_13, © Springer-Verlag Berlin Heidelberg 2014
Transcript of Dubbel || Elastizitätstheorie

C3.2 Rotationssymmetrischer Spannungszustand C 33
C
C3 Elastizitätstheorie
J. Lackmann, Berlin; J. Villwock, Berlin
C3.1 Allgemeines
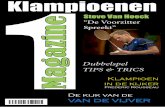
Aufgabe der Elastizitätstheorie ist es, den Spannungs- undVerformungszustand eines Körpers unter Beachtung der gege-benen Randbedingungen zu berechnen, d. h. die Größen �x ,�y , �z , �xy , �xz , �yz , "x , "y , "z , �xy , �xz , �yz , u, � , w zuermitteln. Für diese 15 Unbekannten stehen zunächst die Glei-chungen C 1 Gl. (12) und C 1 Gl. (13) zur Verfügung. Hinzukommen drei Gleichgewichtsbedingungen (Bild 1) mit den Vo-lumenkraftdichten X, Y, Z.
@�x
@xC @�yx
@yC �zx
@zCX D0;
@�xy
@xC @�y
@yC @�zy
@zCY D0;
@�xz
@xC @�yz
@�C @�z
@zCZ D0;
9>>>>>>>=
>>>>>>>;
(1)
sowie für isotrope Körper die sechs verallgemeinerten Hooke’-schen Gesetze
"x D �x ��.�y C�z/
E;
"y D �y ��.�x C�z/
E;
"z D �z ��.�x C�y /
E;
�xy D �xy
G; �xz D �xz
G; �yz D �yz
G:
9>>>>>>>>>>=
>>>>>>>>>>;
(2)
in ihrer dehnungsexpliziten Form
�x D E
1C�
�"x C �
1�2�
�"x C"y C"z
��;
�y D E
1C�
�"y C �
1�2�
�"x C"y C"z
��;
�z D E
1C�
�"z C �
1�2�
�"x C"y C"z
��;
�xy DG�xy ; �xz DG�xz ; �yz DG�yz :
9>>>>>>>>>=
>>>>>>>>>;
(2a)
Damit stehen 15 Gleichungen für 15 Unbekannte zur Verfü-gung. Eliminiert man aus ihnen alle Spannungen, so erhält mandrei partielle Differentialgleichungen für die unbekannten Ver-schiebungen:
G
�
�uC 1
1�2�
@"
@x
�
CX D0;
G
�
�� C 1
1�2�
@"
@y
�
CY D0;
G
�
�wC 1
1�2�
@"
@z
�
CZ D0
9>>>>>>>=
>>>>>>>;
(3)
Bild 1. Gleichgewicht am Element
mit �u D @2u=@x2 C@2u=@y2 C@2u=@z2 usw. und " D "x C"y C"z D@u=@x C@�=@yC@[email protected] Navier’schen Gln. (3) eignen sich zur Lösung von Proble-men, bei denen als Randbedingungen Verschiebungen vorge-geben sind. Eliminiert man aus den zitierten 15 Gleichungenalle Verschiebungen und deren Ableitungen, so bleiben sechsGleichungen für die unbekannten Spannungen:
��x C 1
1C�
@2�
@x2C2
@X
@xC �
1��
�@X
@xC @Y
@yC @Z
@z
�
D0
(4a)(entsprechend für die y- und z-Richtung) und
��xy C 1
1C�
@2�
@x @yC @X
@yC @Y
@xD0 (4b)
(entsprechend für die y- und z-Richtung).Hierbei ist � D �x C �y C �z . Die Beltrami’schen Gln. (4)eignen sich zur Lösung von Problemen, bei denen als Rand-bedingungen Spannungen vorgegeben sind. Bei gemischtenRandbedingungen sind beide Gleichungssysteme zu benutzen.Lösungen der Differentialgleichungen (3) und (4) liegen imWesentlichen für rotationssymmetrische und ebene Problemevor.
C3.2 RotationssymmetrischerSpannungszustand
Setzt man Symmetrie zur z-Achse voraus, so treten lediglichdie Spannungen �r ; �t; �z ; �rz D �zr D � auf (Bild 2). DieGleichgewichtsbedingungen in r- und z-Richtung lauten
@
@r.r�r/C @
@z.r �/��t CrRD0;
@
@r.r �/C @
@z.r�z/CrZ D0:
9>>>=
>>>;
(5)
Die Hooke’schen Gesetze haben die Form
"r D @u
@rD �r ��.�t C�z/
E;
"t D u
rD �t ��.�r C�z /
E;
"z D @w
@zD �z ��.�r C�t/
E;
�rz D @u
@zC @w
@rD �
GD 2.1C�/�
E:
9>>>>>>>>>>>>>=
>>>>>>>>>>>>>;
(6)
Bild 2. Rotationssymmetrischer Spannungszustand
K.-H. Grote, J. Feldhusen (Hrsg.), Dubbel, 24. Aufl., DOI 10.1007/978-3-642-38891-0_13, © Springer-Verlag Berlin Heidelberg 2014

C 34 Festigkeitslehre – C3 Elastizitätstheorie
Ihre Auflösung nach den Spannungen liefert
�r D2G
�@u
@rC �
1�2�"
�
;
�t D2G
�u
rC �
1�2�"
�
;
�z D2G
�@w
@zC �
1�2�"
�
; � DG
�@u
@zC @w
@r
�
;
9>>>>>>>>=
>>>>>>>>;
(7)
wobei
"D"r C"t C"z D @u
@rC u
rC @w
@z: (8)
Wird die Love’sche Verschiebungsfunktion ˚ eingeführt, somuss sie der Bipotentialgleichung
�@2
@z2C @2
@r2C 1
r
@
@r
��@2˚
@z2C @2˚
@r2C 1
r
@˚
@r
�
D��˚ D0 (9)
genügen. Lösungen der Bipotentialgleichung sind z. B. ˚ Dr2 , lnr , r2 lnr , z, z2 und
pr2 Cz2 sowie Linearkombinatio-
nen hiervon [1,3]. Die Verschiebungen und Spannungen folgendann aus
uD� 1
1�2�
@2˚
@r @z;
w D 2.1��/
1�2��˚ � 1
1�2�
@2˚
@z2;
�r D 2G�
1�2�
@
@z
�
�˚ � 1
�
@2˚
@r2
�
;
�z D 2.2��/G
1�2�
@
@z
�
�˚ � 1
2��
@2˚
@z2
�
;
�t D 2G�
1�2�
@
@z
�
�˚ � 1
�
1
r
@˚
@r
�
;
� D 2.1��/G
1�2�
@
@r
�
�˚ � 1
1��
@2˚
@z2
�
:
9>>>>>>>>>>>>>>>>>>>>>>>>>=
>>>>>>>>>>>>>>>>>>>>>>>>>;
(10)
Beispiel: Einzelkraft auf Halbraum (Formeln von Boussinesq) Bild 3.– Die Randbedingungen lauten
�z .z D0; r ¤0/D0; �.z D0; r ¤0/D0:
Mit dem Ansatz ˚ D C1RCC2z ln.z CR/, wobei R D pr2 Cz2 ist,
folgt aus den Gln. (10)
�z D�2G
��
C1 � 2�
1�2�C2
�z
R3C 3
1�2�.C1 CC2/
z3
R5
und
� D�2G
��
C1� 2�
1�2�C2
�r
R3C 3
1�2�.C1 CC2/
r z2
R5
:
Bild 3. Einzelkraft auf Halbraum
Während die erste Randbedingung automatisch befriedigt ist, folgt ausder zweiten C2 D .1�2�/=.2�/ C1 und damit �z D �C1.3G/=.�Œ1�2��/ � .z3=R5/. Aus F D �R
1
rD0�z2 r dr ergibt sich dann C1 D
F �.1�2�/=.2 G/ und damit aus den Gln. (10)
uD F
4 G
�r z
R3�.1�2�/
r
R.z CR/
;
w D F
4 G
�
2.1��/1
RC z2
R3
;
�z D� 3F
2
z3
R5;
�r D F
2
�
.1�2�/1
R.z CR/�3
zr2
R5
;
�t D F
2 .1�2�/
�z
R3� 1
R.z CR/
;
� D� 3F
2
r z2
R5:
9>>>>>>>>>>>>>>>>>>>>>>>=
>>>>>>>>>>>>>>>>>>>>>>>;
(11)
Wegen �z=� D z=r lassen sich �z und � zum Spannungsvektor sR Dp�2
z C�2 D 3F z2=.2 R4/ zusammenfassen, der stets in Richtung Rzeigt. Für �r ergeben sich gemäß �r D0 Nullstellen aus sin2 ˇcosˇ.1Ccosˇ/D .1�2�/=3 im Fall � D0;3 zu ˇ1 D15;4ı und ˇ2 D83ı. Zwi-schen den durch 2ˇ1 D30;8ı und 2ˇ2 D166ı bestimmten Kreiskegelnwird �r negativ (Druckspannung), außerhalb ist sie positiv (Zugspan-nung). Aus �t D 0 folgt cos2 ˇ Ccosˇ D 1, d. h. ˇ D 52ı, für ˇ < 52ı
wird �t positiv (Zugspannung), für ˇ >52ı negativ (Druckspannung).
C3.3 Ebener Spannungszustand
Er liegt vor, wenn �z D 0; Z D 0, �xz D �yz D 0, d. h., wennSpannungen nur in der x, y-Ebene auftreten. Die Gleichge-wichtsbedingungen lauten für konstante Volumenkräfte
@�x
@xC @�yx
@yCX0 D0;
@�y
@yC @�xy
@xCY0 D0: (12)
Die Hooke’schen Gesetze haben die Form
"x D �x ���y
E; "y D �y ���x
E; �xy D �xy
G; (13)
und für die Formänderungen gilt
@u
@xD"x ;
@�
@yD"y ;
@u
@yC @�
@xD�xy : (14)
Dies sind acht Gleichungen für acht Unbekannte. Aus Gl. (14)folgt die Kompatibilitätsbedingung
@2"x
@y2C @2"y
@x2D @2�xy
@x @y; (15)
und durch Einsetzen von Gln. (13) in (15) ergibt sich
1
E
�@2�x
@y2��
@2�y
@y2C @2�y
@x2��
@2�x
@x2
�
D 1
G
@2�xy
@x @y: (16)
Werden nun die Gleichgewichtsbedingungen (12) durch Ein-führung der Airy’schen Spannungsfunktion F DF .x;y/ derartbefriedigt, dass
�x D @2F
@y2; �y D @2F
@x2; �xy D @2F
@x @y�X0y�Y0x (17)
ist, so folgt aus Gl. (16) für F(x, y)
@4F
@x4C2
@4F
@x2@y2C @4F
@y4D��F D0; (18)
d. h., die Airy’sche Spannungsfunktion muss der Bipotential-gleichung genügen. Die Bipotentialgleichung hat unendlichviele Lösungen, z. B. F Dx, x2, x3, y, y2 , y3, xy, x2y, x3y,

Literatur C 35
C
xy2, xy3, cosx �coshy, xcosx �coshy usw., ferner bihar-monische Polynome [2] sowie die Real- und Imaginärteile vonanalytischen Funktionen f .z/ D f .x ˙ iy/ usw. [1]. Mit demAnsatz geeigneter Linearkombinationen dieser Lösungen ver-sucht man die gegebenen Randbedingungen zu befriedigen unddamit das ebene Problem zu lösen.
Beispiel: Halbebene unter Einzelkraft. – Zur Lösung werden Polarko-ordinaten verwendet (Bild 4 a). Dann gilt für die Airy’sche Spannungs-funktion
��F D�
@2
@r2C 1
r
@
@rC 1
r2
@2
@'2
��@2F
@r2C 1
r
@F
@rC 1
r2
@2F
@'2
�
D0
und für die Spannungen (mit X DY D0)
�r D 1
r
@F
@rC 1
r2
@2F
@'2; �t D @2F
@r2; �rt D� @
@r
�1
r
@F
@'
�
:
Die Randbedingungen lauten
�t.r; ' D0/D0; �t.r; ' D /D0;
�rt.r; ' D0/D0; �rt.r; ' D /D0:
Mit dem Ansatz F.r;'/DC r' cos' folgt
��F D0; �r D�C2
rsin ' ; �t D0; �rt D0:
Die Lösung erfüllt die Randbedingungen. Mit der Scheibendicke hfolgt die Konstante C aus der Gleichgewichtsbedingung
PFiy D 0 DR
0�r sin' �hr d' CF0 D 0 zu C D F0=. h/. Wegen �rt D 0 sind die
�r und �t Hauptnormalspannungen, d. h., die zugehörigen Trajektoriensind Geraden durch den Nullpunkt bzw. die dazu senkrechten Krei-se um den Nullpunkt (Bild 4 b). Die Hauptschubspannungstrajektorienliegen dazu unter 45° (s. C 1.1.1). Der Verlauf der Spannungen�r ergibt
Bild 4. Halbebene unter Einzelkraft
sich für r DRDconst zu �r D�2F0=. hR/�sin' bzw. für ' D =2 zu�r D�Œ2F0=. h/�=r (Bild 4 c).
Literatur
Spezielle Literatur
[1] Szabó, I.: Höhere Technische Mechanik, 6. Aufl. Springer,Berlin (2001) – [2] Girkmann, K.: Flächentragwerke, 5. Aufl.Springer, Wien (1959) – [3] Timoshenko, S., Goodier, J. N.:Theory of Elasticity, 3rd ed. McGraw-Hill, Singapore (1987)