




Talen
Pages
Wettelijk


FIT ISI 2015FIT ISI 2015Forum Ilmiah Tahunan Ikatan Surveyor Indonesia Malang 2015
PROSIDINGForum Ilmiah TahunanIKATAN SURVEYOR INDONESIA
Pro
sid
ing
Fo
ru
m Ilm
iah
Ta
hu
na
n Ik
ata
n S
urv
ey
or In
do
ne
sia
| 20
15
“Mewujudkan Pembangunan Berkelanjutan Melalui Pengelolaan Administrasi Pertanahan yang Baik”
Batu, Jawa Timur.19 November 2015
ISSN : 2406 - 9051
Volume 2, Edisi 1, Tahun 2015
KAKAP(KADASTER LENGKAP)
KANTOR PERTANAHAN KABUPATEN GRESIK
Sponsor :

ii
SUSUNAN DEWAN REDAKSI
Pelindung :
Ketua Umum ISI
Virgo Eresta Jaya
Dekan FTSP ITN Malang
Sudirman Indra
Penanggung jawab : Leo Pantimena
Penyunting :
Alifah Norani
Silvester Sari Sai
Mohammad Nurhadi
Hery Purwanto
Dedy Kurnia Sunaryo
Agus Darpono
Reviewer :
M.Edwin Tjahjadi
Pradono Joanes De Deo
Dr. Irawan Sumarto
Syartoni Kamarudin
Lucky Fakhriadi
Jasmani

v
KATA SAMBUTAN
Assalammualaikum, Waramahtullah Wabarokatuh,
Pertama – tama kami panjatkan puji syukur kehadirat Allah SWT, yang telah
memberikan kesehatan dan karunianya kepada kita semua sehingga kita bisa
menghadiri acara Forum Ilmiah Tahunan (FIT ISI 2015) yang kali ini di gelar di Malang.
Kedua kami juga mau menyampaikan terima kasih kepada Ikatan Surveyor Indonesia
(ISI) dan KAPTI Agraria yang telah bekerjasama bahu membahu untuk terlaksananya
kegiatan FIT ISI 2015.
Pada tahun ini Forum Ilmiah Tahunan ISI 2015 mengambil tema: “Mewujudkan
Pembangunan Berkelanjutan Melalui Pengelolaan Administrasi Pertanahan Yang Baik”.
Dengan tema tersebut FIT ISI kali ini diharapkan dapat menghasilkan ide, gagasan atau
pemikiran tentang Administrasi pertanahan untuk mewujudkan pembangunan
berkelanjutan. Dalam hal ini bisa mensinergikan berbagi disiplin ilmu yang mencakup
pendaftaran tanah, perencanaan tata ruang , penilaian tanah dan penggunaan tanah
untuk pembangunan.
Dalam waktu yang singkat pada pelaksanaan FIT ISI 2015 mudah – mudahan
tidak mengurangi semangat teman-teman surveyor untuk memberikan sumbangsih ide,
gagasan dan pemikiran pembangunan berkelanjutan dengan memanfaatkan
Administrasi pertanahan yang baik.
Akhir kata, kami selaku panitia pelaksana FIT ISI 2015 mohon maaf , apabila
penerimaan kami kurang berkenan kepada Bapak dan Ibu. Sekian dan Terima kasih.
Salam Satu Jiwa AREMA.
Malang, 19 November 2015
Ketua Pelaksana
FIT ISI 2015
Ir. Leo Pantimena, M.Sc

iii
KATA SAMBUTAN
Selamat datang dan terimakasih atas kehadiran Bapak, Ibu, dan Saudara
sekalian. Pada hari yang berbahagia ini marilah kita panjatkan puji syukur ke hadirat
Tuhan Yang Maha Esa, bahwasanya kita semua dapat hadir dalam Forum Ilmiah
Tahunan (FIT ISI 2015).
Forum Ilmiah Tahunan ISI 2015 ini merupakan salah satu kegiatan yang
bertujuan mempertemukan para ahli, akademisi, praktisi, dan berbagai kalangan
lainnya dalam rangka berdiskusi mengenai pentingnya Administrasi Pertanahan yang
lebih baik dengan tema : “Mewujudkan Pembangunan Berkelanjutan Melalui
Pengelolaan Administrasi Pertanahan Yang Baik”. Gagasan tema sinergi antar disiplin
ilmu adalah mengingat, secara umum pembangunan berkelanjutan (sustainable
development) ahli dari berbagi disiplin ilmu yang mencakup pendaftaran tanah,
pengaturan tata ruang (land use), penilaian tanah dan penggunaan tanah untuk
pembangunan. Kegiatan FIT ISI 2015 memberikan ruang untuk berbagai macam
lembaga pemerintah, organisasi profesi, serta akademisi yang dapat berkontribusi di
dalam Forum Ilmiah ini.
Sebagai bentuk tindak lanjut dari Forum Ilmiah yang dilaksanakan kali ini, Ikatan
Surveyor Indonesia berharap dapat meningkatkan kualitas sumber daya manusia
bidang informasi geospasial melalui koordinasi dengan lembaga pemerintah serta
organisasi profesi terkait administrasi pertanahan dan pembangunan berkelanjutan
dalam kegiatan Cointinuing Professional Development (CPD). CPD adalah sarana bagi
seseorang atau individu guna memelihara pengetahuan dan keterampilan yang
berkaitan dengan lingkup profesional. Setiap mengikuti kegiatan CPD yang
diselenggarakan oleh Ikatan Surveyor Indonesia, peserta akan mendapatkan poin CPD
seperti pada FIT ISI 2015 mendapatkan poin CPD sebanyak 10 poin.
Forum Ilmiah sehari ini kiranya benar – benar mendatangkan manfaat bagi kita
semua dan merupakan kontribusi bagi kemajuan administrasi pertanahan nasional dan
menjadi salah satu milestone bagi roadmap pembangunan berkelanjutan di Indonesia.

iv
Akhir kata, tak ada gading yang tak retak, mewakili panitia FIT ISI 2015 mohon
maaf sekiranya ada hal – hal yang kurang berkenan di hati para hadirin sekalian.
Sekian dan Terima kasih.
Jakarta, 19 November 2015
Ketua Umum
Ikatan Surveyor Indonesia
Ir. Virgo Eresta Jaya, M.Eng.Sc

vi
DAFTAR ISI
Halaman Judul -------------------------------------------------------------------------------------------------- i Susunan Dewan Redaksi -------------------------------------------------------------------------------------- ii Kata Sambutan Ketua Umum ISI ---------------------------------------------------------------------------- iii Kata Sambutan Ketua Pelaksana --------------------------------------------------------------------------- v Daftar Isi --------------------------------------------------------------------------------------------------------- vi
1. Peningkatan Kualitas Data Pertanahan di Kantor Pertanahan Kota Kendari
Kariyono, Yuli Efendi, I Made Sumadra
2. Urgensi Regulasi Terkait Penyimpanan Dan Pengamanan Informasi Geospasial Untuk Mendukung Pengelolahan Administrasi Pertanahan Yang Baik Akbar Hiznu Mawanda, S.H., M.H.
3. Airborne Radar Untuk Mempercepat Proses Perencanaan Tata Ruang Edi Sutopo
4. Menggagas (kembali) E-Sertipikat Hary L. Prabowo
5. Kajian Akurasi DEM Hasil Stereoplotting Interaktif Foto Udara Format Kecil Hesti Nur Septa Anggraini, Harintaka
6. Analisis Tutupan Lahan Kota Jayapura Tahun 2014 Dengan Memanfaatkan Citra Wordview 2 Dan Lansat 8 LDCM Eko Indrianto, Purnama Budi Santoso, Heri Sutanta
7. Pengukuran Monitoring Waduk Jatibarang Dengan GPS Menggunakan Software Gamit 10.5 Ir. Bambang Sudarsono, MS., Fauzi Janu Amarrohman, S. T. M. Eng.
8. Konsolidasi Tanah Gadingsari sebagai Alternatif Model Penataan Pertanahan Partisipatif Hary L. Prabowo
9. Penentuan Koordinat Titik Kontrol Pemantauan Deformasi Bendungan Sermo Dengan Teknologi GNSS Asri Ria Affriani, Nurrohmat Widjajanti, Yulaikhah
10. Pengadaan Tanah Perumahan Kajian Pengkaplingan Tanah Prijono Nugroho D., Sumarto, Charlinda P, Irsyad Adhi WH
11. Penggunaan GNSS CORS RTK NTRIP Untuk Penentuan Luas Bidang tanah Asri Ria Affriani, Silvester Sari Sai
12. Kajian Sebaran Kekeringan Lahan Pertanian Kabupaten Demak dengan Algoritma Tasseled Cap Bandi Sasmito, Andri Suprayogi

vii
13. Quo Vadis, Perusahaan Pemetaan dengan Standar Kompetensinya Edi Sutopo
14. Pemetaan Kerusakan Hutan Mangrove Kawasan Pesisir Desa Kramat Kecamatan Bungah Kabupaten Gresik A.A. Sagung Alit W, Rhenny Ratnawati, Prasetyo Aji Siswanto
15. Studi Perubahan Tutupan Lahan Pada Area Daratan Dari Pesisir Kota Semarang Dengan Citra Satelit Berbasis Sistem Informasi Geografis Hani’ah, Andri Suprayogi, Suharyanto, Sudarno
16. Analisis Deformasi Bendungan Waduk Sermo Dessy Apriyanti, Nurrohmat Widjajanti, Yulaikhah
17. Perhitungan Regangan Wilayah Jawa Tengah Menggunakan Data GNSS-CORS M. Awaluddin, Bambang Sudarsono, Fauzi Janu A., Rizky Saputra, Budi Prayitno, Agung Syetiawan
18. Metadata dalam Pengelolaan Informasi Geospasial di Pemerintah Daerah Diyono
19. Analisis Kecepatan Pergeseran Horisontal Segmen Mentawai Akibat Gempa Tektonik 10 Juli 2013 Hilmiyati Ulinnuha, T. Aris Sunantyo, Nurrohmat Widjajanti
20. Pengaruh pembobotan dalam perataan jaring gayaberat terhadap akurasi geoid Kota Semarang L. M. Sabri, Leni Sophia Heliani, T. Aris Sunantyo, Nurrohmat Widjajanti
21. Aplikasi Lidar untuk Kehutanan dalam Estimasi Biomassa Intan Ika Apriani, Budhy Soeksmantono , Ketut Wikantika
22. Pemanfaatan Alarm Berbasis GPS dalam Rangka Pengelolaan Wilayah Pesisir Daerah Perbatasan I Made Sapta Hadia, Rofiqohb, M. BagasLailRamadhanc, Imaddudin A. Majidd
23. Pemodelan Nilai Tanah Menggunakan Jaringan Syaraf Tiruan Di Desa Trihanggo Kecamatan Gamping Kabupaten Sleman Daerah Istimewa Yogyakarta Catur Yulianto1), Bambang Suyudi2), Wahyuni2)
24. Penilaian Ekonomi Kawasan Dengan Pendekatan Effect on Production di Pantai Depok Desa Parangtritis Kecamatan Kretek Kabupaten Bantul Hayyina Asrof1, Bambang Suyudi2, Sudibyanung2
25. Membangun Definisi Kadaster Kelautan Untuk Indonesia Sebagai Negara Kepulauan
Yackob Astor,ST.,MT , Prof.Dr.Ir. Widyo Nugroho SULASDI , Dr.Ir.S.Hendriatiningsih, MS , Dr.Ir. Dwi Wisayantono, MT

viii
26. Integrasi Urusan Tataruang Dan Pertanahan : Peluang & Tantangan Kelembagaan Sutaryono
27. Restandarisasi Survey Kadaster Kusmiarto
28. RT-PPP: Concept and Performace in Indonesia Region Brian Bramanto, Irwan Gumilar, WedyantoKuntjro
29. Aplikasi Fotogrametri Teristris untuk Pemodelan 3D Tempat Kejadian Perkara
Al Antra Adefan1, Elpakhri Akmal1, Mahendra Ary Perdana1, Muhammad Ghaly
Kurniawan1, Ruli Andaru2
30. Efek Pasang Surut Pada Metode Kinematic Precise Point Positioning (Kppp) Gps
Arisauna M. Pahlevi, Aning Haryati, Kosasih Prijatna, Irwan Meilano, Ibnu Sofian
31. Penentuan Kecepatan Sedimentasi Waduk Berdasarkan Data Pengukuran Batimetri dan Analisa Kandungan Sedimen Dalam Air BK Cahyono, AD Adhi, PN Djojosumarto, Sumarno
32. Beda Tampilan Peta Lereng Tersedia, Kabupen Banggai Kepulauan Kris Sunarto, Drs. MSi.
33. Pemetaan Dari Udara Dampak Kebakaran Kebun Sawit dengan Teknologi Wahana Udara Tanpa Awak Catur Aries Rokhmana
34. Konsolidasi Tanah Di Pemukiman Kumuh Guna Meningkatkan Kualitas Lingkungan
Bambang Edhi Leksono*1, Agoes Soewandito Soedomo*2, Didik Wihardi W.
Soerowidjojo*3, Nanin Trianawati Sugito*4, Andri Rapik Ahmadi*5, Levana Apriani*6,
Muhammad Ihsan*7
35. Karakterisasi Ocean Tide Loading Dan Pole Tide Pada Penentuan Posisi Menggunakan Kontinu
GPS Aning Haryati1 Arisauna M. Pahlevi2 Kosasih Prijatna1 Irwan Meilano1
36. Studi Awal Penggunaan Modul GPS Murah untuk Pengukuran RTK NTRIP
Dedi Atunggal, Abdul Basith, Catur Aries Rokhmana, Dasita Meygan Pratiwi
37. Peran Informasi Geospasial Dalam Proses Boundry Making dan Sengketa Batas Daerah Pada Era Otonimi Daerah di Indonesia Dr. Ir. Sumaryo Joyosumarto M.Si.

ix
38. Pemetaan Pelabuhan Perikanan Pantai Sadeng Kabupaten Gunungkidul Menggunakan UAV Abdul Basith1 , Catur Aries Rokhmana1, Christine Noegroho Kartini1, Horas Togatorop2Fitrawan Pradanakusuma2, Dwi Putra Ananta2, Trias Sugeng Prayoga2, Yudhono Prakoso3
39. Integrasi Pendekatan Penilaian Tanah dalam Perspektif Kompensasi Pembebasan Lahan
Nanin Trianawati Sugito #1, Irawan Sumarto #2, S. Hendriatiningsih #3, Bambang Edhi Leksono #4
40. Model Pembelajaran Kepplerian Orbit dan Sistem Bola Langit secara 3D (KEPO BOLA) untuk
Menunjang Kompetensi Surveyor
Aditya Sanjaya1, Rahmat Hanif Ashari1, Retno Agus Pratiwi1 , Ruli Andaru2
41. Evaluasi Ketelitian Koordinat pada Stasiun Gnss Pemantauan Sesar Opak
Nurrohmat Widjajanti1), Fajar Sidiq Palupi2), Parseno1), Djawahir1)
42. Investigasi Akurasi Pengamatan DGPS Dan RTK Untuk Pengukuran Bidang dan Batas Wilayah
Bambang Darmo Yuwono, Fauzi Janu Amarrohman, Bambang Sudarsono Mualif Marbawi, S.T., Muhammad Ilman Fanani, S.T.
43. Kadaster Lengkap Sebagai Mesin Utama Sistem Administrasi Pertanahan Drs. Dalu Agung Darmawan M.Si 1 , Dwi Budi Martono S.T, M.T 2 , I Made Supriadi S.SiT 3 , Muhammad Rifqi Andikasani S.T 4 , Andika Rizal Bahlefi S.T 5 .
44. Pemanfaatan Jaringan Referensi Satelit Pertanahan (JRSP) untuk Pengukuran Batas Administrasi Kecamatan Andrian Putra, Eko Budi Wahyono, Arief Syaifullah
45. Pemetaan Topografi dan Batimetri untuk Perencanaan Rute Kabel Laut 150 KV Kariangau-Penajam Bilal Ma’rufa, Winda Kurniawatib
46. Manajemen Konflik Pertanahan Alfita Puspa Handayani, ST, MT*, Asep Yusup Saptari, ST, M.Sc*, Rizqi Abdulharis, ST, M.Sc*, Dr. Andri Hernandi, ST, MSP*, Dr. Ir. S. Hendriatiningsih, MS*
47. Model Penilaian Tanah Dan Uji Kualitasnya Waljiyanto
48. Optimalisasi Bank Data Pertanahan Rencana Jalan Tol Cisumdawu Bambang Edhi Leksono S #1, Budhy Soeksmantono #2, S Agoes Soewandito Soedomo #3, Nanin Trianawati Sugito #4, Andri Rapik Ahmadi #5, Levana Apriani #6, Muhammad Ihsan #7
49. PEMETAAN PARTISIPATORIS (STUDI KASUS DI KECAMATAN PENAWANGAN KABUPATEN
GROBOGAN) Nuraini Aisiyah1, Arief Syaifullah2, Bambang Suyudi3

x
50. Pemodelan Geoid Lokal Pulau Sumatera: Studi Awal dalam Rangka Airborne Gravity 2016 Bagas Triarahmadhana, Arisauna M. Pahlevi, Dyah Pangastuti, Erfan D. Variandy
51. Pengaruh Variasi Resolusi Model Geopotensial Global (MGG) Terhadap Ketelitian Geoid Lokal Leni S. Heliani a, Ramdhan Hidayatb,Bagas T. Ramadhanib
52. Practical Solution Of GPS Integer Ambiguity For Attitude Determination H. F. Suhandri
53. OPTIMASI KUALITAS DATA DAN ALUR-KERJA PADA SPHERICAL PHOTOGRAMMETRY Handoko Pramulyo1, Agung Budi Harto2, Saptomo Handoro Mertotaroeno3
54. EVALUASI MODEL GEOID INDONESIA DI PULAU KALIMANTAN Prayudha Hartanto, Andhika Prastyadi Nugroho
55. KONTRIBUSI KONSTANTA PASANG SURUT PERAIRAN DANGKAL TERHADAP PASANG SURUT DI SEKITAR PULAU JAWA Abdul Basith ,Yudhono Prakoso
56. PEMETAAN POTENSI PANAS BUMI (GEOTHERMAL) MENGGUNAKAN CITRA LANDSAT 8 (Studi Kasus : GUNUNG ARJUNO-WELIRANG) Leody Hazwendra, Bangun Muljo sukojo
57. PERAN DAN FUNGSI PENDIDIKAN TINGGI INFORMASI GEOSPASIAL DI WILAYAH
PERBATASAN DALAM RANGKA MENJAGA KEDAULATAN NEGARA KESATUAN REPUBLIK
INDONESIA (NKRI
Bangun Muljo Sukojo
58. ANALISA POTENSI PRODUKTIVITAS LAHAN PERTANIAN PADI MENGGUNAKAN CITRA
LANDSAT 8
Argho Mahendra Brata, Bangun Muljo Sukojo
59. Studi Kinerja Perangkat Lunak Starpoint untuk Pengolahan Baseline GPS
Irwan Gumilar, Brian Bramanto, Teguh P. Sidiq
60. Pemberdayaan Masyarakat Bidang Pertanahan melalui UKM Budidaya Ikan
Budhy Soeksmantono, Bambang Edhi Leksono S, Didik Wihardi W. Soerowidjojo, Nanin
Trianawati Sugito, Andri Rapik Ahmadi, Levana Apriani, Muhammad Ihsan
61. INVESTIGASI AKURASI PENGAMATAN RTK UNTUK PENGUKURAN BIDANG DAN BATAS
WILAYAH (STUDI KASUS KOTA Semarang)
Bambang Darmo Yuwono, Fauzi Janu Amarrohman, Bambang Sudarsono, Mualif
Marbawi, S.T., Muhammad Ilman Fanani, S.T.
62. Studi Pemanfaatan Teknologi 3D Laser Scanning untuk Pemetaan Aset Pertamina Hulu
Ruli Andaru, Istarno, Sumaryo, Djoko Waluyo, Usman, Insan Kamil

xi
63. Integrasi Data Pengamatan GPS dan Terestris Jaring Pemantau Deformasi Candi Borobudur
Dwi Lestari
64. Studi Kawasan Rawan Longsor Menggunakan Data Inventori dan Sistem Informasi Geografis
(Studi Kasus: Sub DAS Tawangmangu, Karanganyar, Jawa Tengah)
Ghefra R.G.
65. Kadaster Kelautan Multiguna Di Kabupaten Lombok Tengah Propinsi Nusa Tenggara Barat
Eko Budi Wahyono,Tanjung Nugroho, Kusmiarto
66. Uji Perbandingan Distorsi pada Proyeksi UTM dan TM-3º (Sebuah Pertimbangan dalam Mewujudkan One Map Policy) Wiwit Cipto Nugroho, Tanjung Nugroho, Eko Budi Wahyono
67. Evaluasi Infrastruktur JRSP/CORS BPN RI di Kantah Kota Medan, Kab. Tebing Tinggi dan Kab Asaha T. Aris Sunantyo, Yudi Riyarso, Elom Surpiatna, Wisnu widyana , Heri Andreas
68. GNSS MOBILE BASE STATION VIA OPEN VPN Wisang Wisudanar, M. Amin Mukti, R. Rudi Prayitno
69. PAPARAN SISTEM REFERENSI TINGGI DI INDONESIA Dina A Sarsito, Heri Andreas, Arisauna Pahlevi
70. PENYAJIAN PETA MULTI RISIKO BENCANA KABUPATEN BANYUMAS SEBAGAI IDS KEBENCANAAN BERBASIS OPEN SOURCE GIS Arief Laila Nugraha, Andri Suprayogi, Briandana Januar AG
71. Kajian Penggunaan dan Pemanfaatan Tanah Berbasis Informasi Geospasial M. Ibnu Munadi, Abdi Sukmono, Arwan Putra Wijaya
72. PENGECEKAN IZIN MENDIRIKAN BANGUNAN (IMB) MENGGUNAKAN TEKNIK FOTOGRAMETRI RENTANG DEKAT MENGGUNAKAN DRONE/UAV Arif Rohman, Zulqadri Ansar, D. Muhally Hakim
73. Radio Ultra Wideband untuk Pekerjaan Survei Kadaster Sujoko
74. STATUS JARING KONTROL HORIZONTAL NASIONAL (JKHN) PASCA PEMBANGUNAN CORS & PENERAPAN SRGI2013 Heri Andreas, Dina A Sarsito, Irwan Meilano
75. Uji Akurasi Ketelitian Vertikal DSM TerraSAR-X (studi kasus : Kota Banjarmasin dan Kota Palangkaraya) Maundri Prihanggo, Arga Geofana, dan Ade Komara Mulyana

xii
76. SRTM UNTUK EVALUASI TATA RUANG KABUPATEN BANGGAI KEPULAUAN Yatin Suwarno dan Kris Sunarto
77. Drone : Untuk Pemetaan Skala Besar Andreas Suradji
78. PENGUATAN STATUS SURVEYOR BERLISENSI MENJADI PEJABAT PENGUKUR BIDANG TANAH (PPBT) Ir. Tjahyo Widianto, MSc., MH.

Studi Awal Penggunaan Modul GPS Murah untuk Pengukuran RTK NTRIP
Dedi Atunggal, Abdul Basith, Catur Aries Rokhmana, Dasita Meygan Pratiwi
Jurusan Teknik Geodesi dan Geomatika, Fakultas Teknik, Universitas Gadjah Mada
Tel: +62 274 520226 Fax: +62 274 520226 http://www.geodesi.ugm.ac.id
Intisari
Industri perangkat board GPS dan modul GPS murah dewasa ini semakin berkembang. Pada awalnya perangkat-perangkat ini digunakan untuk penentuan posisi pada kendaraan dan wahana tanpa awak (unmanned vehicle) seperti pada Unmanned Survey Vessel (USV) atau Unmanned Aerial Vehicle (UAV). Perangkat-perangkat tersebut memiliki spesifikasi dan fitur yang memungkinan penentuan posisi teliti menggunakan berbagai macam metode seperti; static post-processing, kinematic post-processing maupun real-time kinematic GPS. Pada makalah ini dibahas tentang penggunaan modul GPS murah untuk penentuan posisi metode RTK menggunakan data koreksi dari Continuously Operating Reference Station (CORS) atau yang lebih dikenal dengan istilah Networked Transported RTCM via Internet Protocol (NTRIP).
Kata Kunci: modul GPS, program RTK, RTK NTRIP, akurasi, presisi
Abstract
Nowadays, the industry of low-cost GPS board and module is growing. At first these devices are used for positioning of mobile vehicles and unmanned vehicle (unmanned vehicle) e.g. the Unmanned Survey Vessel (USV) or Unmanned Aerial Vehicle (UAV). These devices have the specifications and features that allow the application of accurate positioning using various methods such as; static post-processing, kinematic post-processing and real-time kinematic GPS. This paper discussed the use of low-cost GPS module for real-time kinematic GPS using RTK correction data from Continuously Operating Reference Station (CORS), better known by the term Networked Transported RTCM via Internet Protocol (NTRIP).
Keywords: GPS modul, RTK program, RTK NTRIP, accuracy, precision
Pendahuluan Inovasi pada teknologi penentuan posisi GPS berjalan dengan sangat cepat, baik pada peralatan GPS tipe geodetik, tipe pemetaan maupun tipe navigasi. Selain tiga tipe GPS tersebut, dalam lima tahun terakhir perangkat-perangkat GPS low-cost/murah juga mengalami perkembangan yang siginifikan. Perangkat-perangkat GPS murah ini biasanya berbentuk board GPS dan modul GPS atau yang sering disebut sebagai Original Equipment Manufacturer (OEM) GPS. Pada awalnya, peralatan tersebut dikembangkan untuk memberikan solusi pengukuran dengan akurasi memadai dan dengan harga yang terjangkau. Dalam perkembangannya, alat ini sering digunakan untuk penentuan posisi pada kendaraan dan wahana tanpa awak (unmanned vehicle) seperti pada Unmanned Surface Vessel (USV) atau Unmanned Aerial Vehicle (UAV). Perkembangan teknologi modul GPS murah sepertinya banyak dipengaruhi oleh meningkatnya penggunaan UAV dan USV untuk berbagai keperluan, mulai dari surveillance hingga survei pemetaan.
Modul GPS murah memiliki spesifikasi dan fitur yang memungkinan penentuan posisi teliti menggunakan berbagai macam metode seperti; static post-processing, kinematic post-processing maupun real-time kinematic GPS. Pada makalah ini dibahas tentang studi awal penggunaan modul GPS murah untuk penentuan posisi metode RTK menggunakan data koreksi dari Continuously Operating Reference Station (CORS) atau yang lebih dikenal dengan istilah Networked Transported RTCM via Internet Protocol (NTRIP). Potensi masalah teknis yang dihadapi dalam penggunaan GPS murah pada umumnya adalah pada penyusunan sistem serta akurasi yang dihasilkan dari pemanfaatan sistem pada pengukuran riil di lapangan. Dalam Makalah ini dibahas tentang teknis penyusunan sistem RTK menggunakan GPS modul murah yang dikoreksi menggunakan layanan NTRIP dari CORS. Hasil-hasil awal terkait pengujian sistem RTK yang dibuat juga disampaikan dengan tujuan memberikan gambaran performa dari sistem RTK ini.

Tinjauan Pustaka Kebutuhan akan penentuan posisi yang akurat dengan pembiayaan yang terjangkau telah mendorong banyak peneliti mengembangkan berbagai alternatif solusi, salah satunya penentuan posisi teliti menggunakan modul GPS murah. Penggunaan modul GPS murah diawali oleh Takasu (2009) melalui penemuan RTKLIB yang merupakan kode paket pemrograman berbahasa C yang dapat digunakan sebagai platform standar aplikasi RTK GPS. Paket program ini mendukung komunikasi data melalui komunikasi data protokol serial I/O, TCP/IP dan NTRIP, menggunakan berbagai format koreksi data termasuk RTCM 2.3, RTCM 3.1 dan pesan baku eksklusif untuk beberapa receiver GPS. Metode resolusi ambiguitas fase yang digunakan oleh RTKLIB adalah metode LAMBDA (Takasu dan Yasuda, 2009). RTKLIB telah mengalami beberapa pengembangan dan penyesuaian. Versi pertama RTKLIB dirilis pada 31 Januari 2009 sedangkan versi terbarunya adalah versi 2.4.3 yang telah dirilis 31 Maret 2015. Hwang dkk (2012) kemudian mengembangkan aplikasi untuk pemodelan kesalahan pada penentuan posisi RTK GPS berbasis telepon pintar (smartphone). Sementara itu Grieneisen (2012) telah memanfaatkan teknologi RTK GPS untuk penentuan posisi pada pesawat udara kecil (micro aerial vehicle). Selain RTK GPS, penggunaan RTKLIB untuk penentuan posisi teliti menggunakan metode precise point positioning juga telah dikaji oleh Wiśniewski dkk (2013). Fitur penentuan posisi teliti yang dapat dilakukan dengan menggunakan modul GPS u-blox dapat secara detail di cermati pada u-blox LEI-6 Series Datasheet tahun 2014. Interoperabilitas data hasil penentuan posisi RTK GPS secara umum dan RTK GPS menggunakan modul GPS dapat dilakukan dengan mengacu pada tulisan Lee dkk (2002) tentang standar komunikasi data GPS format National Marine Electronic Association (NMEA) yang terbaru. Metodologi Konsep pengukuran yang dilakukan pada penelitian ini secara umum adalah survei RTK menggunakan koreksi dari CORS atau yang disebut dengan NTRIP. Alat-alat yang digunakan dalam penelitian ini meliputi perangkat keras (hardware) dan perangkat lunak (software). Perangkat keras yang digunakan adalah:
a. Satu unit GPS OEM Ublox seri LEI-6T b. Satu unit tablet android c. Kabel (Universal Serial Bus) USB to mini USB d. Kabel USB OTG (On The Go) e. Satu unit komputer/laptop
Perangkat lunak yang digunakan dalam penelitian ini adalah:
a. Aplikasi RTKLIB b. Aplikasi android RTK+ (berbasis koding
RTKLIB) c. Perangkat lunak U-center
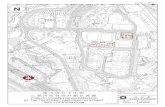
Diagram alir penelitian disajikan pada Gambar 1.
Gambar 1. Diagram alir penelitian
Penelitian dimulai dengan kegiatan persiapan yang meliputi persiapan alat (pengadaan alat utama berupa GPS OEM Ublox seri LEI-6T dan perangkat android). Dilanjut pengunduhan dan pemasangan perangkat lunak U-center pada komputer serta pengunduhan dan pemasangan aplikasi RTK+ pada perangkat android. Pengaturan sistem RTK yang dilakukan pada umumnya terdiri atas 2 tahap yakni pengaturan sistem pada modul GPS dan pengaturan pada aplikasi RTK+. Pengaturan yang dilakukan pada modul GPS meliputi pengaturan komunikasi data protokol serial (serial connection) dan tipe data dengan menggunakan perangkat lunak U-
Pengaturan Sistem RTK
Persiapan
Perakitan Sistem RTK
Pengukuran RTK
Mulai
Selesai
Sistem RTK
berfungsi?
Perbaikan dan
modifikasi
tidak
Evaluasi Hasil Pengukuran
Penulisan laporan
ya

center. Sedangkan pengaturan pada aplikasi RTK+ meliputi pengaturan komunikasi data dan tipe data (parameternya harus sama dengan pengaturan pada pengaturan modul GPS dari U-center) serta pengaturan yang terkait dengan CORS yang akan digunakan (IP number, port number, username, dan password) Kegiatan perakitan sistem RTK dilakukan dengan menyambungkan modul GPS Ublox seri LEI-6T dengan perangkat android dengan menggunakan kabel USB OTG (micro USB to USB) yang disambung dengan kabel USB to mini USB. Antena bawaan modul GPS disambungkan dengan menggunakan konektor mini kabel coaxial. Setelah pengaturan sistem RTK selesai dilaksanakan dan alat sudah terakit kemudian dilanjutkan dengan melakukan tes untuk menguji apakah sistem RTK yang telah disusun dapat berfungsi dengan baik. Apabila terdapat kendala teknis dan sistem RTK tidak berfungsi maka dilakukan cek ulang pengaturan RTK yang terkait dengan komunikasi data dan tipe data modul GPS serta komunikasi data, tipe data pada aplikasi RTK+. Pengukuran RTK dilakukan untuk menguji apakah sistem RTK yang dibuat dapat digunakan untuk pengukuran secara riil di lapangan. Tahap ini terdiri atas dua pekerjaan yakni: 1. tes penentuan posisi RTK pada titik kontrol yang telah diketahui koordinat tetap-nya dan 2. tes pengukuran pada detil planimetrik. Tes yang pertama dilakukan di titik kontrol Orde-0 N0005 yang terletak di depan gedung DSSDI (Direktorat Sistem dan Sumberdaya Informasi) Universitas Gadjah Mada (Gambar 2). Koordinat yang dijadikan acuan adalah koordinat titik N0005 hasil pendefinisian Sistem Referensi Geospasial Indonesia tahun 2013 (SRGI2013) yang dimuat di laman http://srgi.big.go.id/peta/jkg.jsp milik Badan Informasi Geospasial (BIG).
Gambar 2. Lokasi 1 (tes penentuan posisi sistem RTK di atas titik kontrol N0005)
Tabel 1. Koordinat N0005 (srgi.big.go.id)
Koordinat Geodetik N0005 (epoch 2012) Lintang Bujur Tinggi -7.773803 110.376794 157.763487
Evaluasi tes pertama dilakukan dengan membandingkan koordinat rerata hasil pengukuran dengan koordinat fix titik N0005 dari SRGI2013 epoch 2012 yang tercantum pada tabel 1. Tes kedua dilakukan dengan mengukur sebuah taman di depan gedung Kantor Pusat Fakultas Teknik (KPFT) Universitas Gadjah Mada (Gambar 3). Tes ini dilakukan untuk mengecek hasil pengukuran RTK secara riil di lapangan pada obyek planimetrik. Lokasi tersebut dipilih dengan pertimbangan karena lokasinya cukup terbuka dan datar sehingga memudahkan pelaksanaan tes.
Gambar 3. Lokasi 2 (tes pengukuran detil planimetrik) Evaluasi untuk tes kedua dilakukan dengan beberapa langkah sebagai berikut; melihat secara visual hasil pengukuran (metode RTK dan absolute positioning) di atas Google Maps (satellite image view), membandingkan hasil jarak antara dua titik pengamatan RTK dengan pengukuran jarak langsung menggunakan pita ukur. Satu hal yang perlu disadari bahwa citra satelit pada Google Maps juga tidak lepas dari kesalahan, namun demikian menampilkan hasil pengukuran di atas citra tersebut dapat memberikan gambaran umum hasil penentuan posisi RTK yang dilakukan. Hasil dan Pembahasan Hasil dan pembahasan pada makalah ini meliputi; hasil rangkaian sistem RTK, hasil ujicoba fungsi sistem RTK hasil pengukuran RTK, dan evaluasi hasil pengukuran RTK.
obyek
planimetrik
yang diukur
N0005

1. Hasil rangkaian sistem RTK
Hasil rangkaian prototip sistem RTK disajikan pada Gambar 4. Dari gambar tersebut dapat dilihat bahwa secara umum tidak sulit untuk merangkai sistem RTK menggunakan modul GPS u-blox LEI-6T yang terkoneksi dengan aplikasi RTK+ pada perangkat android. Dari rangkaian tersebut juga dapat dilihat bahwa ke depan perlu didesain wadah (case) untuk melindungi modul receiver, mengingat modul tersebut terangkai dalam sebuah printed circuit board (PCB) kecil yang rawan rusak karena terbentur atau jatuh. Ada baiknya juga didesain holder untuk men-setup perangkat android dan antena agar bisa dengan nyaman digunakan saat pengukuran. Hal-hal ini perlu dilakukan mengingat pada prakteknya sistem ini akan digunakan pada pengukuran di lapangan yang memerlukan kemudahan dalam melakukan sentering, pengukuran maupun perpindahan antar titik pengamatan.
Gambar 4. Rangkaian prototip sistem RTK
2. Hasil uji coba fungsi sistem RTK
Sistem RTK yang telah dibuat telah diuji coba untuk digunakan dalam pengukuran. Setelah semua alat tersambung dan difungsikan lampu indikator pada modul GPS langsung menyala dan berkedip. Setelah itu sistem secara umum akan memerlukan sekitar 1-5 menit untuk melakukan inisialisasi penentuan posisi.
Setelah proses inisialisasi berhasil dilakukan maka akan muncul koordinat dan tipe solusi pengukuran yang dihasilkan. Pada umumnya koordinat yang muncul pada awalnya merupakan koordinat dengan tipe solusi absolute/standalone, kemudian dilanjut dengan koordinat dengan solusi RTK float dan atau fixed. Waktu yang dibutuhkan untuk mendapatkan solusi RTK bergantung pada keterbukaan pandangan langit (sky view) lokasi pengamatan dan kelancaran komunikasi data internet yang digunakan. Pada eksperimen ini inisialisasi memerlukan waktu sekitar 1 menit karena lokasi terbuka dan komunikasi data relatif lancar. Contoh tampilan aplikasi RTK+ pada saat pengukuran disajikan pada Gambar 5.
Gambar 5. Tampilan pengamatan RTK
Bagian atas tampilan aplikasi RTK+ memperlihatkan koordinat hasil penentuan posisi RTK dan kualitas solusi pengukurannya (float atau fixed). Bagian bawah tampilan RTK+ memperlihatkan grafik signal to noise ratio (SNR) dari base (CORS) dan rover. Tampilan grafik ini dapat dirubah menjadi tampilan lain sesuai kebutuhan pengguna (misal, skyplot, baseline, koordinat dan sebagainya)
3. Hasil Pengukuran RTK
Hasil pengukuran dapat disimpan dalam beberapa format data. Contoh cuplikan data hasil pengamatan RTK dalam format NMEA ditampilkan pada Gambar 4.

Gambar 4. Cuplikan data pengamatan RTK format NMEA
Sesuai dengan cuplikan yang ditampilkan Gambar 4, data pengamatan secara berurutan berisi Tanggal, GPS Time (GPST), koordinat (lat/long), tinggi (height), solution quality, jumlah satelit, standar deviasi posisi, usia koreksi RTK dan ratio pengukuran RTK. Informasi terkait solusi pengukuran RTK (float dan fixed) sangat bermanfaat untuk analisis data.
Tes penentuan posisi di atas titik N0005 dilakukan beberapa kali dengan durasi masing-masing pengukuran sekitar 1 jam. Dari seluruh pengamatan yang dilakukan, solusi pengukuran RTK yang dihasilkan dominan float (Gambar 5). Mengingat lokasi pengamatan yang terbuka (minim vegetasi dalam radius 20 meter), solusi yang dominan float ini kemungkinan diakibatkan oleh sinyal pantulan detil reflektif di sekitar lokasi pengamatan (gedung, pagar, jalan aspal dan lain-lain)
Gambar 5. Hasil penentuan posisi di titik N0005
Dari hasil yang disajikan pada Gambar 5 dapat diketahui bahwa posisi yang dihasilkan dari solusi float RTK dengan sistem ini masih sangat divergen untuk 10 menit pertama. Namun demikian pada periode berikutnya hingga menit ke 60 solusi sudah mulai konvergen dan mendekati nilai koordinat fix titik N0005 dari SRGI2013 epoch 2012. Nilai rata-rata koordinat hasil pengukuran float tersebut hanya berselisih 20cm dari titik N0005.
Solusi pengukuran yang masih dominan float dan memiliki akurasi desimeter sebenarnya belum ideal untuk digunakan untuk pengukuran detil planimetrik. Namun demikian pengukuran tetap dilaksanakan untuk mendapatkan gambaran riil hasil penentuan posisi RTK sistem ini untuk pemetaan detil. Pada Gambar 6 ditampilkan hasil tes pengukuran detil planimetrik. Seperti yang sudah diperkirakan sebelumnya bahwa belum kovergennya solusi dapat mengakibatkan hasil yang didapat bisa sangat berbeda dengan hasil pada tes pertama (penentuan posisi pada titik tetap). Terlihat secara visual pada Gambar 6 bahwa bentuk taman yang seharusnya teratur menjadi terdistorsi karena setiap titik pojok taman yang diukur dengan sistem RTK ini didapat solusi float dengan ketelitian pada level desimeter. Namun demikian jika dibandingkan dengan solusi absolute positioning tentu saja sistem RTK ini sudah memberikan solusi penentuan posisi yang jauh lebih baik.
Gambar 6. Hasil pengukuran detil planimetrik
10 menit pertama
menit 10-60

4. Evaluasi Hasil Pengukuran RTK Dari hasil-hasil yang telah disampaikan sebelumnya terlihat bahwa untuk meneliti performansi dari penentuan posisi menggunakan modul GPS murah dengan memanfaatkan koreksi RTK NTRIP dari CORS masih memerlukan kajian yang lebih mendalam. Dari eksperimen sederhana pada tes penentuan posisi pada titik kontrol N0005 dan pengukuran detil planimetrik didapat dua hasil yang agak berbeda dimana pada tes pertama penentuan posisi dengan sistem RTK ini menunjukkan ketelitian yang cukup baik (20cm untuk solusi float) namun pada tes pengukuran detil planimetrik didapatkan hasil dengan ketelitian lebih rendah Penutup Dari studi awal tentang penggunaan modul GPS U-Blox seri LEI-6T yang telah dilakukan dapat disimpulkan bahwa akurasi yang dihasilkan oleh sistem RTK menggunakan GPS modul murah pada solusi fixed dan float berkisar pada level sentimeter hingga desimeter. Solusi RTK yang dihasilkan dominan float. Ini kemungkinan disebabkan oleh antena bawaan modul GPS yang sangat rawan terhadap multipath. Diperlukan studi lebih lanjut untuk mengevaluasi penggunaan antena dengan kualitas yang lebih baik dibanding antena bawaan pada sistem RTK GPS modul murah. Ucapan terima kasih disampaikan kepada Kantor Pertanahan Kabupaten Bantul, Badan Pertanahan Nasional, untuk penggunaan koreksi CORS dari mountpoint Bantul Jaring Referensi Satelit Pertanahan. Daftar Pustaka
Grieneisen, D., 2012, Real Time Kinematic GPS for Micro Aerial Vehicle.
Hwang, J., Yun, H., Cho, J., Lee, D., 2012, Development of an RTK-GPS Positioning Application with an Improved Position Error Model for Smartphones, Multidisciplinary Digital Publishing Institute (MDPI), Published online Sep 25 2012.
Takasu, T., Yasuda, A., 2009, Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB, International Symposium on GPS/GNSS, International Convention Center Jeju, Korea, November 4-6, 2009
Takasu, T., 2009, RTKLIB: Open Source Program Package for RTK-GPS, FOSS4G 2009 Tokyo, Japan, November 2, 2009.
u-blox, 2014, LEA-6 GPS Module Data Sheet, November 27 2014.
Wiśniewski, B., Bruniecki, K., Moszyński, M., 2013, Evaluation of RTKLIB's Positioning Accuracy Using Low-cost GNSS Receiver and ASG-EUPOS, the International Journal on Marine Navigation and Safety of Sea Transportation Vol. 7 No. 1 March 2011.
Lee, A., Anderson, L., Cassidy, F., 2002, NMEA 2000 A Digital Interface for the 21st Century, Institute of
Navigation’s 2002 National Technical Meeting
January 30, 2002 in San Diego, California.
Top Related