





Talen
Pages
Wettelijk

Faculteit Ingenieurswetenschappen
Vakgroep Wiskundige natuurkunde en Sterrenkunde
Voorzitter: Prof. Dr. W. Sarlet
Modelleren van niet-holonome
mechanische systemen
door
Koen Salvo
Promotor: Prof. Dr. W. Sarlet
Scriptie ingediend tot het behalen van de academische graad van
Burgerlijk Natuurkundig Ingenieur
Academiejaar 2006–2007

Faculteit Ingenieurswetenschappen
Vakgroep Wiskundige natuurkunde en Sterrenkunde
Voorzitter: Prof. Dr. W. Sarlet
Modelleren van niet-holonome
mechanische systemen
door
Koen Salvo
Promotor: Prof. Dr. W. Sarlet
Scriptie ingediend tot het behalen van de academische graad van
Burgerlijk Natuurkundig Ingenieur
Academiejaar 2006–2007
Voorwoord
Graag had ik langs deze weg enkele mensen bedankt. Jan Das die met een grote gedre-
venheid de professionele figuren leverde, Ingrid Telen die mijn verre van foutloos Engels
schrijven verbeterde en mijn ouders die ik om de haverklap print- en kopieerwerkjes liet
uitvoeren. Een speciaal dankwoordje gaat uit naar mijn promoter Willy Sarlet die mijn
vreemde hersenkronkels wist recht te trekken, steeds met raad en daad klaarstond en
verscheidene malen deze scriptie van voor naar achter en terug naar voren las op zoek
naar fouten.
Toelating tot bruikleen
“De auteur geeft de toelating deze scriptie voor consultatie beschikbaar te stellen
en delen van de scriptie te kopieren voor persoonlijk gebruik.
Elk ander gebruik valt onder de beperkingen van het auteursrecht, in het bijzonder
met betrekking tot de verplichting de bron uitdrukkelijk te vermelden bij het
aanhalen van resultaten uit deze scriptie.”
Koen Salvo, augustus 2007
i
Modelleren van niet-holonomemechanische systemen
Koen Salvo
Promotor: Prof. Dr. W. Sarlet
Scriptie ingediend tot het behalen van de academische graad van
Burgerlijk Natuurkundig Ingenieur
Academiejaar 2006–2007
Universiteit Gent
Faculteit Ingenieurswetenschappen
Vakgroep Wiskundige natuurkunde en Sterrenkunde
Voorzitter: Prof. Dr. W. Sarlet
Onderzoeksgroep Theoretische Mechanica
Samenvatting
Eerst worden de vergelijkingen van Lagrange en Hamilton binnen het kader van de varia-
tierekening afgeleid. Vervolgens worden de nodige differentiaalmeetkundige ‘tools’ aange-
reikt om deze vergelijkingen op een intrinsieke, coordinaatonafhankelijke wijze te formule-
ren. Gewapend met deze kennis worden oplossingsstrategieen voor systemen onderworpen
aan niet-holonome bindingen —die restricties aan de mogelijke snelheden opleggen— be-
sproken. Ook wordt er aandacht geschonken aan niet-lineaire niet-holonome sytemen en
hun praktische uitvoering.
Trefwoorden
Lagrange-en Hamiltondynamica, Intrinsieke formulering van de dynamica, Principe van
d’Alembert, Niet-Holonome bindingen, Regel van Chetaev

Modeling of nonholonomic mechanical systemsKoen Salvo
Supervisor(s): Willy Sarlet
Abstract— Firstly the equations of Lagrange will be derived in an ana-lytical setting. Thereupon these equations will be formulated in an intrin-sic manner using basic notions of differential geometry. Armed with thisknowledge systems subjected tot nonholonomic constraints —restrictingthe admissible kinematical states rather than the geometrical ones— willbe discussed for linear as well as nonlinear constraints in the velocities. Fi-nally, attention will be given to their practical realization.
Keywords— Intrinsic formulation of dynamics, nonholonomic con-straints, Chetaev’s rule
I. INTRODUCTION
THE formalism created by Lagrange in 1788 or in a similarmanner by Hamilton is inappropriate to derive the equa-
tions of motion for systems subjected to nonholonomic con-straints. Classical variational principles cannot be used and al-ternatives have to be proposed. A keystone in this discussionis the question of how the definition of d’Alembert’s principleof zero virtual work for ideal constraint forces can be extendedto nonholonomic systems. Because of the indefiniteness of theconstraint forces, this is needed in order to obtain a fully de-termined set of equations. For nonholonomic constraints affinein the velocities this generalization is somewhat clear, contraryto nonclassical kinematic —nonlinear, nonholonomic— con-straints. For such systems, the rule of Chetaev can be used(which amounts to a local linearization), but this use is subjectto discussion.Under impulse of W. Tulczyjew geometry made its way to me-chanics, it turned out that this allow one to formulate the equa-tions of motion in an intrinsic —coordinate independent— man-ner.
II. ANALYTICAL DESCRIPTION OF DYNAMICS
Newton’s equations of motion
mkrk = F k + Rk, k = 1, . . . , N (1)
with F k the active, and Rk the constraint forces for a systemconsisting of N point masses subjected to holonomical con-straints Gα=1,...,m (q, t) = 0 can be modified by writing thepositions in function of the n = 3N − m generalized coor-dinates q = (q1, . . . , qn). Summing (1) and multiplying by∂rk
∂qi, k = 1, . . . , N respectively, gives
N∑k=1
(mkrk − F k) ·∂rk
∂qi=
N∑k=1
Rk ·∂rk
∂qi, i = 1, . . . , n.
(2)By means of the Lagrangian L (q, q), the generalized com-ponents of the nonconservative force Qi =
∑Nk=1 F k · ∂rk
∂qi
K. Salvo is with the Faculty of Engineering, Ghent University (UGent), Gent,Belgium. E-mail: [email protected] .
and the generalized components of the constraint force fi =∑Nk=1 Rk · ∂rk
∂qianalogously, this leads to
ddt
(∂L
∂qi
)− ∂L
∂qi= Qi + fi, i = 1, . . . , n. (3)
Because f = (f1, . . . , fn) is unknown, these equations are un-derdetermined. Using d’Alembert’s principle the equations (3)become well-defined.
Theorem 1 (d’Alembert’s principle) The virtual work doneby the constraint forces of an ideal constraint vanishes for anyinfinitesimal virtual displacement compatible with the constraintfrozen at time t.When there are no extra nonholonomic constraints, these virtualdisplacements simply coincide with ∂rk
∂qi, i = 1, . . . , n and the
fi’s become zero.
A. Classical kinematic constraints
When the system is also subjected to classical kinematic —affine, nonholonomic— constraints
n∑i=1
aβ,i(q, t)qi + bβ(q, t) = 0, β = 1, . . . , ` < n (4)
not all the virtual displacements δi=1,...,nq are permitted. It isstated that the virtual displacements have to meet the additionalrequirements
n∑i=1
aβ,i(q, t)δqi = 0, β = 1, . . . , ` < n (5)
which defines a (n− `)-dimensional surface in IRn. Accordingto theorem (1) , the generalized constraint force has to lie inthe `-dimensional space perpendicular to this surface. Becausethis space is generated by the rows aβ of a, there have to existcoefficients λβ=1,...,` (t), called Lagrangemultipliers, so
f =∑β=1
λβaβ . (6)
Together with (3) and (4) this forms a well-defined set ofequations.
B. Nonclassical kinematic constraints
For dealing with general nonholonomic constraints
Gβ(q, q, t) = 0, β = 1, . . . , ` (7)
Chetaev proposed to linearize these equations in the velocitiesso one obtains
n∑i=1
∂Gβ
∂qiδqi = 0 β = 1, . . . , `. (8)

instead of (5) . By replacing aβ,i by ∂Gβ
∂qiin (6) , the same set
of equations (3) , (4) and (6) can be used.
III. GEOMETRICAL SETTING
We assume that the reader is familiar with basic differentialgeometry and their applications to mechanics. We shall de-note the smooth n-dimensional, time independent manifold Qby the configuration space with coordinates q =
(q1, . . . , qn
),
the tangent bundle TQ by the space of kinematic states and thethe cotangent bundle T ∗Q by the phase space. FurthermoreL : TQ → T ∗Q will be the Legendre transformation
L :(qi, vi
)→
(qi, pi =
∂L (q, v)∂vi
). (9)
In this section we will extend the intrinsic formulation of thedynamics of conservative, holonomic systems
iXLωL = −d (H L) (10a)
iXHω = −dH (10b)
in Lagrange’s, respectively Hamilton’s formalism to nonconser-vative and nonholonomic ones. Herein XL plays the role of theLagrangian vector field, XH is the Hamiltonian vector field, ωL
is the Poincare 2-form and ω is the canonical symplectic 2-form.
A. Lagrange’s formalism
Imposing nonholonomic constraints means that for every ξ ∈Q not all the velocities vξ ∈ TξQ are possible but only a sub-space Cξ of it. We will assume that Cξ is defined throughout Qand is of constant dimension. Considering whole Q, the veloc-ities compatible with the nonholonomic constraints have to beelements of the constraint manifold
C =⋃ξ∈Q
(ξ × Cξ
). (11)
In accordance with the rule of Chetaev, the space of admissi-ble infinitesimal virtual displacements for every vξ ∈ Cξ is thecotangent space Tvξ
C. Mathematically generalized forces aredescribed by elements of T ∗Q so theorem (1) gives rise to thecondition fξ ∈
(Tvξ
C)0
, ∀ ξ ∈ Q wherein(Tvξ
C)0
is theannihilator of Tvξ
C, defined by(Tvξ
C)0 =
fξ ∈ T ∗
ξ Q | 〈fξ, wξ〉 = 0, ∀ wξ ∈ TvξC
.(12)
Let c(t) a smooth curve on Q represent the motion of the systemand YL the associated vector field
dc (t)dt
= YL
(c (t)
). (13)
The extension of (10a) to nonholonomic systems with non-conservative forces Q =
∑ni=1 Qidqi and reaction forces f =∑n
i=1 fidqi is
iYLωL = −d (H L) +Q+ f. (14)
Moreover fc(t) ∈(T dc
dtC
)0
and the constraint equation dcdt ∈ C
have to be fulfilled.
B. Hamilton’s formalism
In Hamilton’s formalism, c(t) = L dc(t)dt on T ∗Q represents
the motion of the system and let YH be the associated vectorfield
dc (t)dt
= YH
(c (t)
). (15)
Hence the constraint equation becomes dcdt ∈ D = L (C). Let
the pull-back of the inverse of L act on (14) , with L∗YH = YL
and L∗ω = ωL, then one obtains
iYHω = −dH + (L∗)−1 (Q+ f) (16)
and it can be proved that (L∗)−1 (Q+ f) = i(QH+fH)ωwherein QH and fH are vertical vector fields on T ∗Q
fH =n∑
i=1
fi L−1 (q, p)∂
∂pi(17a)
QH =n∑
i=1
Qi L−1 (q, p)∂
∂pi. (17b)
Substituting (17) in (16) finally leads to
i(YH−QH−fH)ω = −dH. (18)
The rule of Chetaev states that for every pξ ∈ D, fH,ξ has to bean element of Wξ defined by
Wξ =
fH,ξ | ifH,ξω = (L∗)−1
fξ , fξ ∈(Tvξ
C)0
. (19)
IV. PRACTICAL REALIZATION OF NONCLASSICAL SYSTEMS
Practical realization of systems subjected to nonclassical con-straints is rather difficult. Appell’s machine [1, p. 223–233]and Benenti’s construction [2] are such attempts but they areobtained by a limit process. Such systems consist of 2 subsys-tems S1 and S2 and as a whole they are classical but after ne-glecting the masses of S2 and eliminating the coordinates of S2,S1 becomes a nonclassical system S′1. Delassus proved that theequations of motion for S1 do not converge towards the equa-tions which would be obtained by applying Chetaev’s rule to S′1only, therefore these type of nonclassical systems are not totallysatisfactory. Another possibility was given by Marle [3], he sug-gested the use of servomechanisms. But also this is disputable.
ACKNOWLEDGMENTS
The author would like to acknowledge the suggestions of hissupervisor, Prof. Dr. W. Sarlet.
REFERENCES
[1] N. A. Fufaev and Ju. I. Neimark, Dynamics of Nonholonomic Systems,vol. 33 of Translations of Mathematical Monographs, American Mathe-matical Society Providence, 1972.
[2] S. Benenti, “Geometrical aspects of the dynamics of non-holonomic sys-tems,” in Journees relativistes, Chambery, May 1987.
[3] C.-M. Marle, “Various approaches to conservative and nonconservativenonholonomic systems,” Reports on Matheamtical Physics, vol. 42, pp.211–229, 1998.
[4] C.-M. Marle and P. Libermann, Symplectic Geometry and Analytical Me-chanics, D. Reidel Publishing Company, Dordrecht, 1987.
Inhoudsopgave
1 Herformulering Newtons wetten 1
1.1 Van Newton naar Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Veralgemeende coordinaten . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Principe van d’Alembert . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.3 De vergelijkingen van Lagrange . . . . . . . . . . . . . . . . . . . . 3
1.2 Principe van Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Conservatief systeem met holonome bindingen . . . . . . . . . . . . 5
1.2.2 Niet-conservatief systeem . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Van Lagrange naar Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Geometrische beschrijving van de mechanica 10
2.1 De configuratie- en faseruimte . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1 De configuratieruimte . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2 De raakruimte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.3 De co-raakruimte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Afbeeldingen tussen varieteiten . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.1 Natuurlijke projecties . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.2 De raakafbeelding . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Vector- en tensorvelden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.1 Types van tensorvelden . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.2 Enkele bewerkingen op tensorvelden . . . . . . . . . . . . . . . . . . 27
2.4 De Hamiltoniaan in de geometrische beschrijving . . . . . . . . . . . . . . 31
2.4.1 Vectorvelden en differentiaalvergelijkingen . . . . . . . . . . . . . . 32
2.4.2 De co-raakbundel als symplectische varieteit . . . . . . . . . . . . . 34
2.4.3 Hamiltoniaanse vectorvelden . . . . . . . . . . . . . . . . . . . . . 37
2.5 De Lagrangiaan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
v
Inhoudsopgave vi
3 Mechanische bindingen 41
3.1 Voorbespreking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.1.1 Holonome versus niet-holonome bindingen . . . . . . . . . . . . . . 41
3.1.2 Het principe van d’Alembert verder uitgediept . . . . . . . . . . . 43
3.2 Analytische beschrijving . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.1 Methode van de Lagrangemultiplicatoren . . . . . . . . . . . . . . 47
3.2.2 Methode van Caplygin . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2.3 Regel van Chetaev . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3 Geometrische beschrijving . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.3.1 Lagrangeformalisme . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.3.2 Hamiltonformalisme . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.4 Praktische realisatie van niet-lineaire, niet-holonome bindingen . . . . . . 65
3.4.1 Appells machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.4.2 Benenti’s probleem . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.4.3 Servomechanismen . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4 Conclusie 76
Bibliografie 78
Lijst van figuren 80
Gebruikte symbolen
Qi veralgemeende krachtcomponenten
T kinetische energie
V potentiele energie
L Lagrangiaan
H Hamiltoniaan
Q configuratieruimte
TQ raakbundel
T ∗Q co-raakbundel
τM natuurlijke projectie TM → M
πM natuurlijke projectie T ∗M → M
θ canonische 1-vorm
ω canonische 2-vorm
XH Hamiltoniaans vectorveld
L Legendretransformatie
XL Lagrangeiaans vectorveld
θL Poincare-Cartan 1-vorm
ωL Poincare-Cartan 2-vorm
fi veralgemeende krachtcomponenten van de reacties
C kinematische bundel
D Hamiltoniaanse kinematische bundel
vii
Hoofdstuk 1
Herformulering Newtons wetten
Wanneer de bewegingsvergelijkingen van Newton voor een stelsel van N massapunten
moeten opgelost worden, brengt dit enkele moeilijkheden met zich mee. Het probleem zit
hem in de reactiekrachten die t.g.v. bindingen tussen de massapunten optreden. Enerzijds
zijn deze a priori niet gekend en dienen ze samen met het oplossen van het vraagstuk
bepaald te worden. Anderzijds is de oplossing niet steeds uniek bepaald, m.a.w. er zijn nog
extra verbanden nodig waaraan de reactiekrachten moeten voldoen. Een herformulering
van de bewegingsvergelijkingen van Newton dringt zich op.
1.1 Van Newton naar Lagrange
1.1.1 Veralgemeende coordinaten
In het Newtonformalisme wordt de beweging van een stelsel van N massapunten beschre-
ven d.m.v. 3N cartesische coordinaten rk, k = 1, . . . , N . In het algemeen is dit stelsel
nog onderworpen aan bindingen die beschreven worden door bindingsvergelijkingen van
de vorm
fα(rk, t) = 0, α = 1, . . . ,m (1.1)
waarbij er enkel holonome bindingen beschouwd worden. Dit zijn zijn bindingen waarbij
de corresponderende bindingsvergelijking geen rk-afhankelijkheden vertonen. De plaat-
sen rk zijn nu niet meer als onafhankelijke coordinaten op te vatten daar er nu slechts
3N − m = n vrijheidgraden overblijven. Er kan dan overgegaan worden op n-aantal
1

Hoofdstuk 1. Herformulering Newtons wetten 2
nieuwe veralgemeende coordinaten qi die impliciet met de bindingen rekening houden. De
bindingsvergelijkingen leveren dan een stel identiteiten op
fα(rk (q, t) , t
)≡ 0, α = 1, . . . ,m (1.2)
met q = (q1, . . . , qn).
1.1.2 Principe van d’Alembert
Het principe van d’Alembert vergt de kennis van virtuele snelheden ‘wk’. Dit zijn bewe-
gingen die op het begintijdstip t0 voldoen aan
fα(rk(t0), t0
)= 0, α = 1, . . . ,m
en
N∑k=1
wk ·∇kfα(rk(t0), t0
)= 0, α = 1, . . . ,m.
Anders gezegd, het zijn bewegingen vanuit een mogelijke beginstand met de bindingen
zoals ze op t0 waren. Dit omdat een mogelijke beginsnelheid ‘vk’ moet voldoen aan
dfαdt
∣∣∣∣t0
=N∑k=1
vk ·∇kfα(rk(t0), t0
)+
∂fα∂t
(rk(t0), t0
)= 0, α = 1, . . . ,m (1.3)
waarbij rekening gehouden wordt met het feit dat de bindingen in de tijd kunnen evolue-
ren. Wanneer de bindingsvergelijkingen niet expliciet van de tijd afhangen, is de laatste
term in (1.3) nul en is er geen onderscheid tussen virtuele en mogelijke snelheden. Door
de bindingsvergelijkingen (1.2) af te leiden naar de veralgemeende coordinaten
∂fα∂qi
=N∑k=1
∂rk∂qi
·∇kfα = 0, α = 1, . . . ,m
blijkt dat ∂rk/∂qi, i = 1, . . . , n een stel virtuele snelheden vormt. Nu zijn alle ingredienten
aanwezig om het principe van d’Alembert te formuleren.

Hoofdstuk 1. Herformulering Newtons wetten 3
Definitie 1.1 (Principe van d’Alembert) Het principe van d’Alembert zegt dat het
totaal virtueel vermogen van de reactiekrachten nul is.
N∑k=1
Rk ·
∂rk∂qi
= 0, i = 1, . . . , n. (1.4)
Met Rk de reactiekracht die op het massapunt ‘k’ inwerkt.
1.1.3 De vergelijkingen van Lagrange
Uit de bewegingsvergelijkingen
mkrk = F k + Rk, k = 1, . . . , N (1.5)
met F k de uitwendige kracht inwerkend op massapunt ‘k’, bekomt men m.b.v. het principe
van d’Alembert (1.4)
N∑k=1
(F k −mkrk) ·∂rk∂qi
= 0, i = 1, . . . , n. (1.6)
d’Alembert bewees bovendien dat ook in omgekeerde richting de bewegingsvergelijkingen
van Newton uit vergelijkingen (1.6) volgen, waarmee de equivalentie tussen beide aange-
toond werd. In een laatste stap worden deze vergelijkingen in een bruikbare vorm gegoten
wat met ‘T ’ de kinetische energie van het stelsel
T =N∑k=1
mkv2k
2
en ‘Qi’ de veralgemeende krachtcomponenten
Qi =N∑k=1
F k ·∂rk∂qi
, i = 1, . . . , n (1.7)
de vergelijkingen van Lagrange van de 1e soort opleveren
d
dt
(∂T
∂qi
)− ∂T
∂qi= Qi, i = 1, . . . , n. (1.8)

Hoofdstuk 1. Herformulering Newtons wetten 4
De kinetische energie dient nog wel in functie van de veralgemeende coordinaten geschre-
ven te worden. Indien de uitwendige krachten conservatief zijn, bestaat er een globale
potentiele functie ‘V ’ zodat
F k = −∇kV, k = 1, . . . , N
waaruit volgt
Qi = −∂V
∂qi, i = 1, . . . , n.
Met L = T − V de Lagrangiaan worden dan de vergelijkingen van Lagrange van de 2e
soort gevonden.d
dt
(∂L
∂qi
)− ∂L
∂qi= 0, i = 1, . . . , n (1.9)
1.2 Principe van Hamilton
In het Newtonformalisme wordt de versnelling van een deeltje op een bepaalde plaats en
tijdstip aangewend om zijn beweging juist na dit moment en in de onmiddellijke omgeving
van zijn positie te bepalen, het is m.a.w. een locale beschrijving van beweging. Er blijkt
echter ook een globale aanpak mogelijk waarbij de beweging in zijn geheel beschouwd
wordt. Hierbij wordt geponeerd dat beweging een type van verandering is en dat die
verandering minimaal dient te zijn. Bertrand Russel verwoordde het als ‘the law of cosmic
laziness’. Maar welk grootheid beschrijft verandering? Het kostte wetenschappers bijna 2
eeuwen om deze vraag te beantwoorden. Het bleek dat verandering door een enkel getal
—de actie ‘S’— gekarakteriseerd kan worden. De volgende argumenten
Veel beweging betekent veel actie.
Hoe meer arbeid de uitwendige krachten leveren, hoe meer actie.
Indien beweging in potentiele energie getransformeerd wordt, betekent dit een klei-
nere actie.
De actie van een systeem is gelijk aan de som van de acties van zijn subsystemen.
Hoofdstuk 1. Herformulering Newtons wetten 5
Actie kan zowel toe- als afnemen in de tijd.
rechtvaardigen de keuze van actie als het gemiddelde verschil tussen de kinetische en
potentiele energie vermenigvuldigt met de verstreken tijd.
S = (T − V ) (t2 − t1) =
∫ t2
t1
(T − V ) dt (1.10)
Bij het zoeken van het extremum van S dienen verschillende gevallen beschouwd te worden.
Bij de definitie van S werd impliciet aangenomen dat er een globale potentiaalfunctie
bestaat. Voor een niet conservatief systeem —wanneer dit niet het geval is— zal de
definitie moeten uitgebreid worden.
Het zoeken naar het extremum van S is een variationeel vraagstuk dat naargelang
het systeem aan holonome of niet-holonome bindingen onderworpen is, een andere
oplossingsstrategie zal vergen.
1.2.1 Conservatief systeem met holonome bindingen
Voor een conservatief systeem kan de Langrangiaan L = T − V uit vergelijking (1.9)
gebruikt worden zodat het principe van kleinste actie —wat in wat volgt het ‘principe
van Hamilton’ zal genoemd worden— als volgt geformuleerd kan worden [15§6.1.2].
Definitie 1.2 (Principe van Hamilton) De baan qi(t), i = 1, . . . , n die het systeem
met Lagrangiaan L (q (t) , q (t) , t) tussen twee tijdstippen t1 en t2 beschrijft, is een extre-
maal van de fuctionaal
S(q) =
∫ t2
t1
L(q (t) , q (t) , t
)dt (1.11)
t.o.v. alle mogelijke variaties met vaste eindpunten.
Om het extremum te vinden, wordt de volgende strategie toegepast. Stel dat de qi (t) , i =
1, . . . , n de oplossingen zijn van het vraagstuk en op elke qi een ‘variatie’ aangebracht wordt
van de vorm
q(v)i (t) = qi (t) + εfi (t) , i = 1, . . . , n
Hoofdstuk 1. Herformulering Newtons wetten 6
waarbij bovendien geldt dat fi(t1) = fi(t2) = 0, i = 1, . . . , n zodat inderdaad van variaties
met vaste eindpunten kan gesproken worden. Met deze ‘verstoorde’ banen wordt
Sv(q) =
∫ t2
t1
L(q(v)(t), q(v)(t), t
)dt
geconstrueerd zodat het extremaal zijn van S(q) betekent dat
dSvdε
∣∣∣∣ε=0
=
∫ t2
t1
[n∑i=1
(∂L
∂q(v)i
∂q(v)i
∂ε+
∂L
∂q(v)i
∂q(v)i
∂ε
)]ε=0
dt
=
∫ t2
t1
[n∑i=1
(∂L
∂qifi +
∂L
∂qifi
)]dt (1.12)
nul moet zijn. Met de gebruikelijke notaties van de variatierekening
δS =dSvdε
∣∣∣∣ε=0
δqi =∂q
(v)i
∂ε
∣∣∣∣∣ε=0
= fi
δqi =∂q
(v)i
∂ε
∣∣∣∣∣ε=0
= fi
en gebruikmakend van
∂L
∂qifi =
d
dt
(∂L
∂qifi
)− d
dt
(∂L
∂qi
)fi
en fi(t1) = fi(t2) = 0, i = 1, . . . , n bekomt men finaal
δS =
∫ t2
t1
[n∑i=1
(∂L
∂qi− d
dt
(∂L
∂qi
))δqi
]dt = 0. (1.13)
Omdat alle variaties δqi onafhankelijk van elkaar zijn, volgen hier de vergelijkingen van
Lagrange van de 2e soort (1.9) uit.
1.2.2 Niet-conservatief systeem
Wanneer er niet-conservatieve krachten op het systeem inwerken, kan er geen Lagrangiaan
en daarmee geen actie gedefinieerd worden. Desalniettemin kan er een soortgelijk principe

Hoofdstuk 1. Herformulering Newtons wetten 7
geformuleerd worden [15§6.2.1].
Definitie 1.3 (Principe Hamilton niet-conservatieve systemen) De baan qi(t),
i = 1, . . . , n die het systeem tussen twee tijdstippen t1 en t2 beschrijft, is zodanig dat
∫ t2
t1
[δT(q(t), q(t), t
)+ W (v)
(q(t), q(t), t
)]dt = 0 (1.14)
voor alle mogelijke variaties met vaste eindpunten. Waarin W (v) de variatie op de arbeid
voorstelt en gegeven is door
W (v) =N∑k=1
F k
(rj (t) , rj (t) , t
)· δrk (t)
=n∑i=1
Qi
(q (t) , q (t) , t
)δqi (t) (1.15)
met Qi de veralgemeende krachtcomponenten.
Omdat er geen functie kan gevonden worden waarvan W (v) de variatie is, bestaat er
geen functionaal meer. Het principe van Hamilton kan dan ook niet meer in die hoeda-
nigheid gedefinieerd worden. Voor conservatieve krachten is W (v) = −δV waarmee de
oude vertrouwde vergelijkingen van Lagrange van de 2e soort teruggevonden worden. Na
substitutie van (1.15) in (1.14) bekomt men
∫ t2
t1
[n∑i=1
(∂T
∂qi− d
dt
(∂T
∂qi
)+ Qi
)δqi
]dt +
n∑i=1
∂T
∂qiδqi
∣∣∣∣t2t1
= 0. (1.16)
Daar er gewerkt wordt met variaties met vaste eindpunten, is de laatste som nul. Samen
met de wetenschap dat alle variaties δqi onafhankelijk zijn, bekomt men de vergelijkingen
van Lagrange van de 1e soort (1.8) . Er dient opgemerkt te worden dat indien er ook con-
servatieve krachten aanwezig zijn, deze ondergebracht kunnen worden in een (onvolledige)
Lagrangiaan wat de vergelijkingen van Lagrange van de 3e soort oplevert.
d
dt
(∂L
∂qi
)− ∂L
∂qi= Qi, i = 1, . . . , n. (1.17)

Hoofdstuk 1. Herformulering Newtons wetten 8
1.3 Van Lagrange naar Hamilton
Vooraleer over te gaan naar de geometrische beschrijving van de mechanica, worden eerst
nog de vergelijkingen van Hamilton uit die van Lagrange afgeleid. Stel dat het me-
chanische systeem gekarakteriseerd wordt door een Lagrangiaan L(q, q, t). Met elke qi
correspondeert dan een toegevoegd moment pi gegeven door
pi =∂L
∂qi. (1.18)
Er geldt dus pi = pi(q, q, t), i = 1, . . . , n. Vervolgens kan bewezen worden dat deze relaties
geınverteerd kunnen worden naar qi = qi(q, p, t), i = 1, . . . , n waarmee de Hamiltoniaan
kan opgesteld worden.
Definitie 1.4 (Hamiltoniaan) De Hamiltoniaan H(q, p, t) wordt gedefinieerd door in
n∑i=1
qi∂L
∂qi(q, q, t)− L(q, q, t)
de qi = qi(q, p, t)-afhankelijkheden te substitueren.
H(q, p, t) =n∑i=1
qi(q, p, t)pi − L(q, q(q, p, t), t
)(1.19)
Deze overgang van coordinaten (q, q, t) naar coordinaten (q, p, t) wordt de Legendretrans-
formatie genoemd. Uit het linkerlid van (1.19) volgt dat
dH(q, p, t) =n∑i=1
(∂H
∂qidqi +
∂H
∂pidpi
)+
∂H
∂tdt
terwijl het rechterlid
d
(n∑i=1
qipi − L(q, q, t)
)=
n∑i=1
(pidqi + qidpi)−n∑i=1
(∂L
∂qidqi +
∂L
∂qidqi
)+
∂L
∂tdt
=n∑i=1
(qidpi − (pi −Qi) dqi
)+
∂L
∂tdt

Hoofdstuk 1. Herformulering Newtons wetten 9
oplevert. Hierbij is in de laatste stap gebruik gemaakt van (1.17)
∂L
∂qi=
d
dt
(∂L
∂qi
)−Qi = pi −Qi.
Gelijkstellen van de overeenkomstige coefficienten geeft —afgezien van ∂H/∂t =
−∂L/∂t— de canonische vergelijkingen van Hamilton.
qi = +∂H
∂pi(1.20a)
pi = −∂H
∂qi+ Qi (1.20b)
Wat een stelsel van 2n differentiaalvergelijkingen van eerste orde is.
Hoofdstuk 2
Geometrische beschrijving van de
mechanica
In dit hoofdstuk worden de configuratie- en faseruimte in een differentiaalmeetkundige
context gedefinieerd. Vervolgens wordt een beknopte kennis van tensorvelden en de be-
werkingen die hierop ageren meegegeven om dan tot het begrip symplectische varieteiten
te komen. Gebruik makend van de speciale structuur van een symplectische varieteit wordt
er met elke Hamiltoniaan een Hamiltoniaans vectorveld geassocieerd dat de canonische
vergelijkingen van Hamilton (1.20) genereert. Belangrijk is dat in deze beschrijving de
vergelijkingen van Hamilton op een intrinsieke wijze geformuleerd worden, zonder in een
bepaald coordinatenstelsel te werken. Tenslotte worden ook de vergelijkingen van Lagran-
ge afgeleid. Er is gepoogd de abstracte begrippen die de geometrische beschrijving met
zich meebrengt op een intuıtieve manier aan te brengen, zonder een rigoureuze wiskundige
aanpak te hanteren. Inspiratie werd uit [3, 13, 14, 16] geput.
2.1 De configuratie- en faseruimte
2.1.1 De configuratieruimte
De configuratie van een systeem kan gekarakteriseerd worden d.m.v. een punt in zijn
configuratieruimte. Voor een systeem met N massapunten zonder bindingen is dit de
lineaire vectorruimte IR3N . Wanneer er bindingen optreden, zullen de toegelaten punten
10
Hoofdstuk 2. Geometrische beschrijving van de mechanica 11
slechts een deelruimte van IR3N vormen dat intuıtief als een oppervlak ingebed in IR3N kan
opgevat worden. Met m bindingen zal de configuratieruimte 3N − m = n dimensionaal
zijn. Nemen we als voorbeeld een massapunt verbonden via een massaloze staaf met lengte
1 aan een sferisch scharnier. De configuratieruimte is dan de eenheidsbol ‘S2’ ingebed in
de driedimensionale ruimte. We zoeken een gepast stel coordinaten voor de punten op S2
en denken hierbij aan de klassieke sferische coordinaten (θ, φ). D.m.v.
ϕ−11 :
x = cos φ sin θ
y = sin φ sin θ
z = cos θ
(2.1)
wordt elk punt van de rechthoek U ′1 = (θ, φ) : 0 < θ < π, 0 < φ < 2π ⊂ IR2 op U1 =
S2 \ NV Z afgebeeld. Het koppel (U1, ϕ1) wordt een lokale kaart van S2 genoemd.
Essentieel daarbij is dat —naast het feit dat U1 een open deelverzameling van S2 is—
ϕ1 een homeomorfisme moet zijn, wat betekent dat zowel ϕ1 als ϕ−11 continu zijn. Dit
verklaart waarom de polen N en Z niet in U1 opgenomen zijn, met θ = 0, π en elke 0 < φ <
π correspondeert namelijk N, respectievelijk Z. Om heel S2 van coordinaten te voorzien,
zal een tweede stel coordinaten moeten ingevoerd worden. Kiezen we bijvoorbeeld de
coordinaten (θ′, φ′) zoals gedefinieerd in figuur (2.1) .
Figuur 2.1: Coordinaten (θ′, φ′) op S2.

Hoofdstuk 2. Geometrische beschrijving van de mechanica 12
Hier komt de lokale kaart (U2, ϕ2) mee overeen met U2 = S2 \ OAW en
ϕ−12 :
x = − cos φ′ sin θ′
y = cos θ′
z = sin φ′ sin θ′.
(2.2)
Samen bedekken ze heel het boloppervlak S2 en waar ze overlappen —U1 ∩ U2 =
S2 \ (NV Z ∪ OAW)— bestaat er een C∞-diffeomorfisme ϕ12 = ϕ2 ϕ−11
∣∣U1∩U2
(zowel ϕ21 als ϕ−121 zijn van orde C∞) tussen beide coordinaatsystemen. Men zegt dat
(U1, ϕ1), (U2, ϕ2) een C∞-atlas voor S2 vormt. Een expliciete uitdrukking van ϕ12 kan
uit (2.1) en (2.2) gevonden worden wat voor θ′
θ′ = arccos (sin φ sin θ)
en φ′ de iets ingewikkeldere relatie
φ′ =
π − arctan (cos φ tan θ) ; x > 0
− arctan (cos φ tan θ) ; x < 0, z > 0
2π − arctan (cos φ tan θ) ; x < 0, z < 0
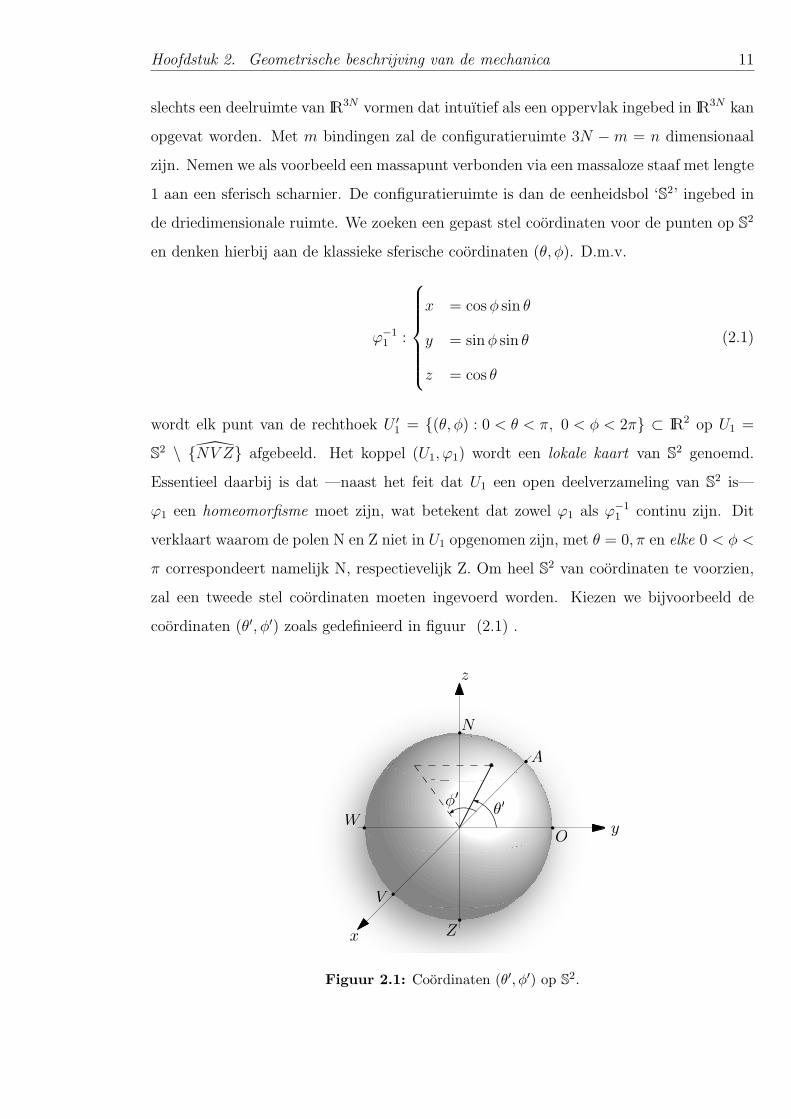
oplevert. In figuur (2.2) is het overlappen van lokale kaarten voor een willekeurig
oppervlak M afgebeeld. In het algemeen is een C∞-atlas van M een familie (Ui, ϕi) | i ∈
I van lokale kaarten die voldoen aan
(i) M =⋃i∈I Ui
(ii) bij overlappen van Ui en Uj bestaat er een C∞-diffeomorfisme ϕij = ϕj ϕ−1i
∣∣Ui∩Uj
.
Dit volstaat om een heuristische definitie van een differentieerbare varieteit te geven.
Definitie 2.1 Een C∞-differentieerbare varieteit M is een n-dimensionaal oppervlak te-
zamen met een C∞-atlas.
Hoofdstuk 2. Geometrische beschrijving van de mechanica 13
Figuur 2.2: Overlappen van lokale kaarten.
2.1.2 De raakruimte
In de vorige paragraaf werd de varieteit als een wiskundig instrument geıntroduceerd om
de configuratie van een mechanisch systeem te beschrijven, in deze paragraaf wordt uit de
doeken gedaan hoe de veralgemeende snelheid zijn weg vindt in de differentiaalmeetkunde
door het begrip raakruimte in te voeren.
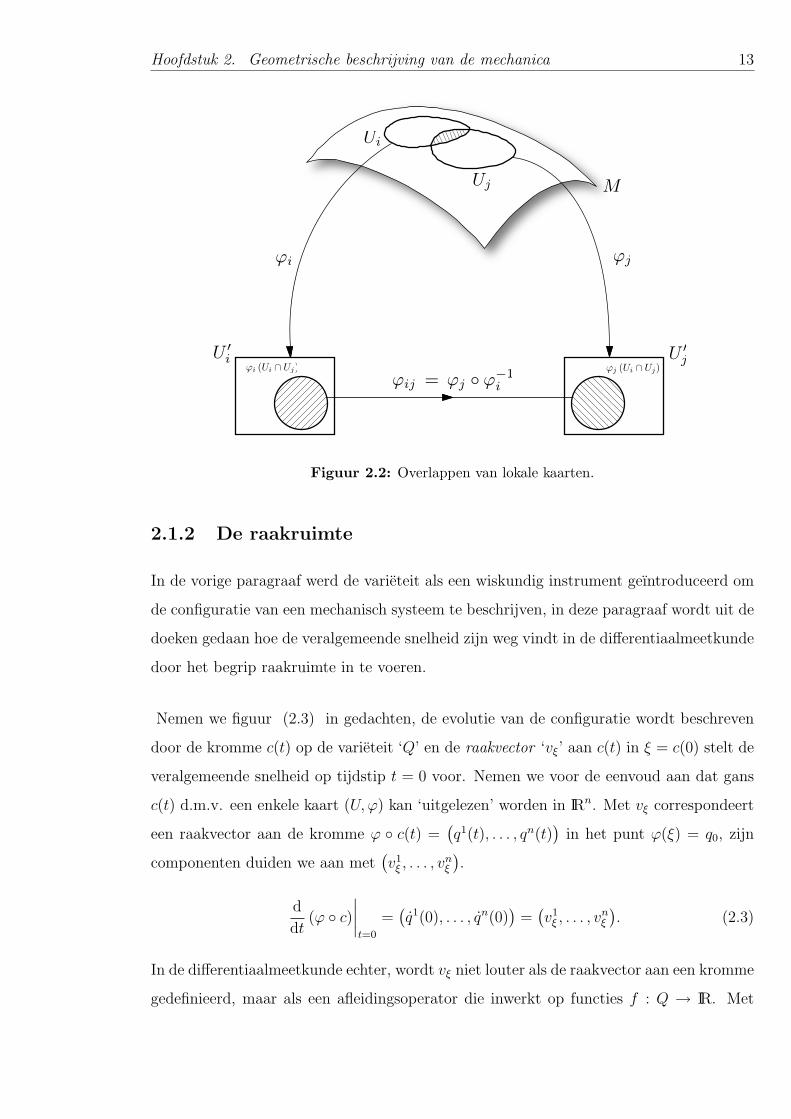
Nemen we figuur (2.3) in gedachten, de evolutie van de configuratie wordt beschreven
door de kromme c(t) op de varieteit ‘Q’ en de raakvector ‘vξ’ aan c(t) in ξ = c(0) stelt de
veralgemeende snelheid op tijdstip t = 0 voor. Nemen we voor de eenvoud aan dat gans
c(t) d.m.v. een enkele kaart (U,ϕ) kan ‘uitgelezen’ worden in IRn. Met vξ correspondeert
een raakvector aan de kromme ϕ c(t) =(q1(t), . . . , qn(t)
)in het punt ϕ(ξ) = q0, zijn
componenten duiden we aan met(v1ξ , . . . , v
nξ
).
d
dt(ϕ c)
∣∣∣∣t=0
=(q1(0), . . . , qn(0)
)=(v1ξ , . . . , v
nξ
). (2.3)
In de differentiaalmeetkunde echter, wordt vξ niet louter als de raakvector aan een kromme
gedefinieerd, maar als een afleidingsoperator die inwerkt op functies f : Q → IR. Met
Hoofdstuk 2. Geometrische beschrijving van de mechanica 14
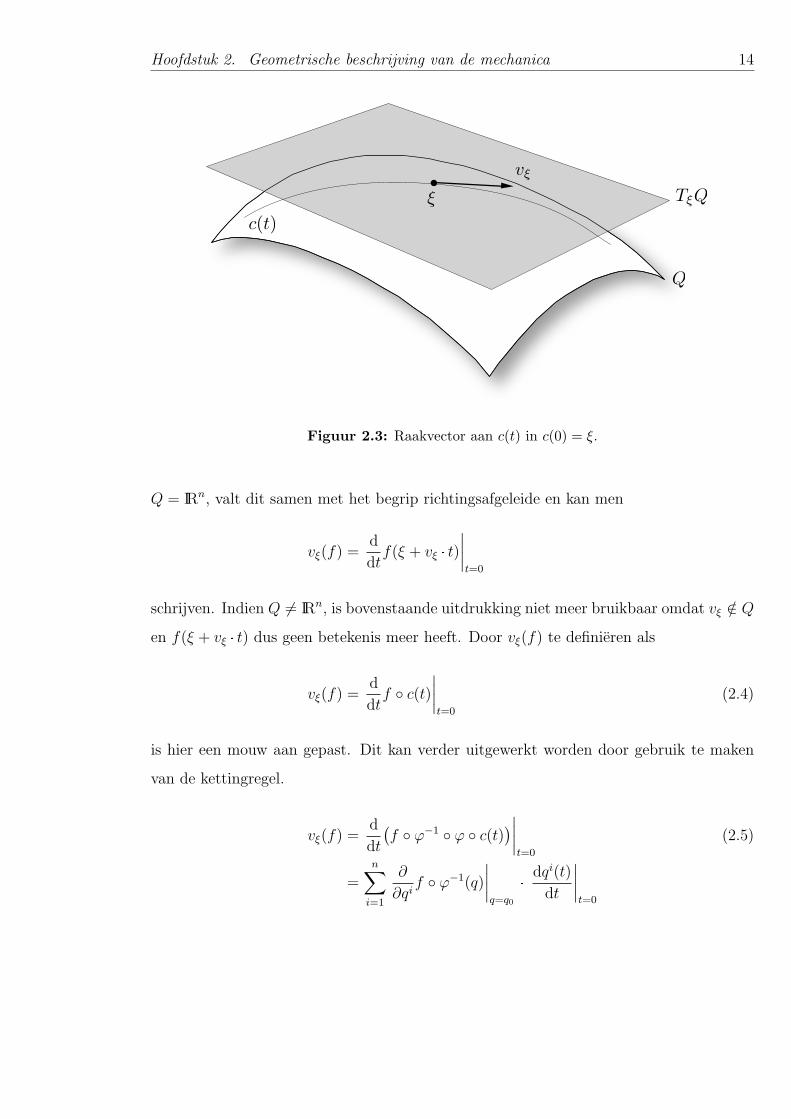
Figuur 2.3: Raakvector aan c(t) in c(0) = ξ.
Q = IRn, valt dit samen met het begrip richtingsafgeleide en kan men
vξ(f) =d
dtf(ξ + vξ · t)
∣∣∣∣t=0
schrijven. Indien Q 6= IRn, is bovenstaande uitdrukking niet meer bruikbaar omdat vξ /∈ Q
en f(ξ + vξ · t) dus geen betekenis meer heeft. Door vξ(f) te definieren als
vξ(f) =d
dtf c(t)
∣∣∣∣t=0
(2.4)
is hier een mouw aan gepast. Dit kan verder uitgewerkt worden door gebruik te maken
van de kettingregel.
vξ(f) =d
dt
(f ϕ−1 ϕ c(t)
)∣∣∣∣t=0
(2.5)
=n∑i=1
∂
∂qif ϕ−1(q)
∣∣∣∣q=q0
·dqi(t)
dt
∣∣∣∣t=0
Hoofdstuk 2. Geometrische beschrijving van de mechanica 15
Met fϕ = f ϕ−1, viξ = qi(0) en gesteld dat
∂
∂qi
∣∣∣∣ξ
(f) =∂
∂qifϕ
∣∣∣∣q0
(2.6)
geeft dit
vξ(f) =n∑i=1
viξ∂
∂qi
∣∣∣∣ξ
(f)
waarmee de coordinaatuitdrukking van de raakvector gevonden is.
vξ =n∑i=1
viξ∂
∂qi
∣∣∣∣ξ
(2.7)
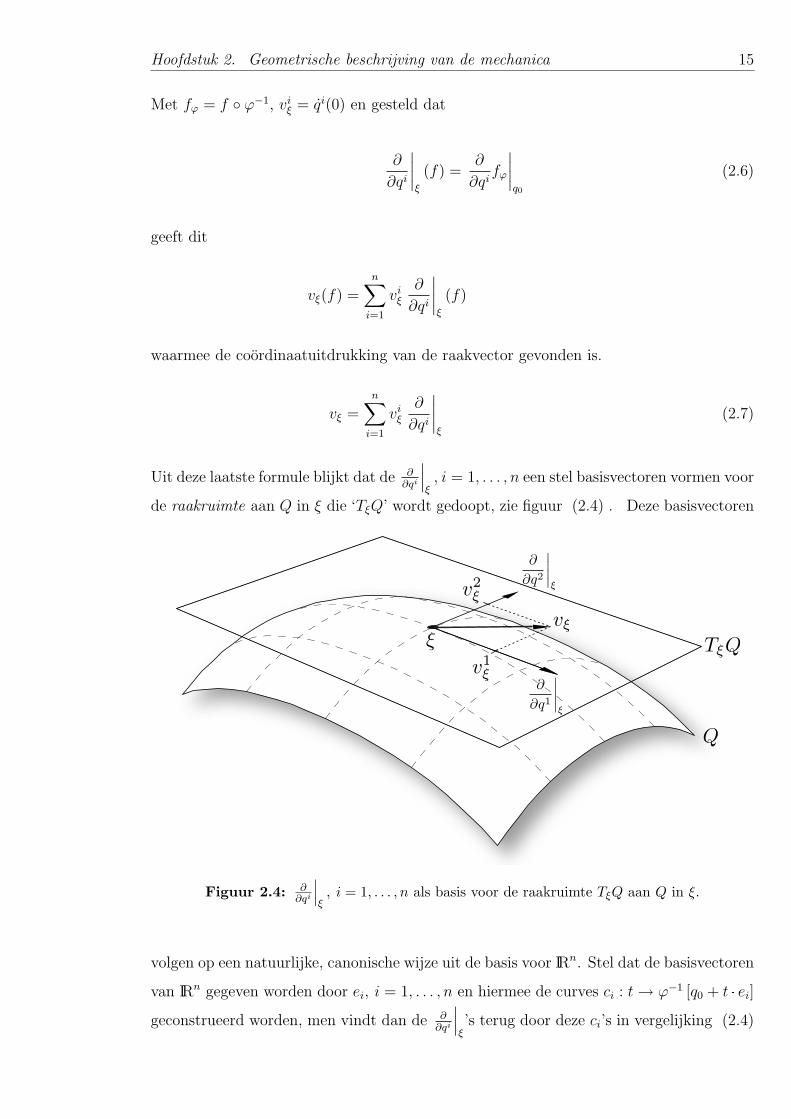
Uit deze laatste formule blijkt dat de ∂∂qi
∣∣∣ξ, i = 1, . . . , n een stel basisvectoren vormen voor
de raakruimte aan Q in ξ die ‘TξQ’ wordt gedoopt, zie figuur (2.4) . Deze basisvectoren
Figuur 2.4: ∂∂qi
∣∣∣ξ, i = 1, . . . , n als basis voor de raakruimte TξQ aan Q in ξ.
volgen op een natuurlijke, canonische wijze uit de basis voor IRn. Stel dat de basisvectoren
van IRn gegeven worden door ei, i = 1, . . . , n en hiermee de curves ci : t → ϕ−1 [q0 + t · ei]
geconstrueerd worden, men vindt dan de ∂∂qi
∣∣∣ξ’s terug door deze ci’s in vergelijking (2.4)

Hoofdstuk 2. Geometrische beschrijving van de mechanica 16
in te vullen.
In een laatste stap, wordt het punt ξ ‘losgelaten’, waarmee de componenten viξ alsook de
basisvectoren plaatsafhankelijk worden. Vergelijking (2.7) wordt daarmee
v =n∑i=1
vi(q)∂
∂qi(2.8)
waarmee aan elk punt (binnen een zelfde kaart) van Q een afleidingsoperator gehecht is.
Het begrip raakruimte kan evenzeer uitgebreid worden door de unie van de raakruimtes
over alle punten van Q te nemen, wat ons bij de raakbundel ‘TQ’ van Q brengt.
TQ =⋃ξ∈Q
(ξ × TξQ
).
Een punt van TQ heeft (q, v) als coordinaten. De raakbundel zal dan ook het instrument
bij uitstek zijn om de configuratie en de snelheid van het systeem te karakteriseren.
2.1.3 De co-raakruimte
Het Hamiltonformalisme vergt nog de invoering van een ruimte waarin de toegevoegde
momenten kunnen beschreven worden. Het zal blijken dat dit de co-raakbundel ‘T ∗Q’ is.
Om dit te verantwoorden moeten eerst de begrippen duale ruimte en co- en contravariante
vectoren aangebracht worden.
Duale ruimte
Definitie 2.2 De duale ruimte E∗ van een eindig dimensionale vectorruimte E is de
ruimte van lineaire afbeeldingen van E naar IR. Met (e1, . . . , en) de basis van E wordt de
duale basis (α1, . . . , αn) van E∗ geconstrueerd volgens het voorschrift
αj (ei) = δji . (2.9)

Hoofdstuk 2. Geometrische beschrijving van de mechanica 17
Uit de lineariteit van de afbeelding volgt met x =n∑i=1
xiei dat
αj (x) = αj
(n∑i=1
xiei
)=
n∑i=1
xiαj (ei) =n∑i=1
xiδji = xj.
Hieruit volgt dat we de α’s kunnen opvatten als een stel ‘basisfuncties’ die een x ∈ E op
zijn coordinaten projecteert. Een y ∈ E∗
y =n∑i=1
yiαi
beeldt x dan af op IR volgens
y (x) =n∑i=1
yiαi (x) =
n∑i=1
yixi
wat ook als 〈y, x〉 = 〈x, y〉 genoteerd wordt. Deze laatste notatie suggereert dat ook
omgekeerd x y op IR afbeeldt, wat inderdaad zo is.
De duale ruimte van TQ
We zijn nu klaar om de co-raakruimte aan Q in ξ ‘T ∗ξ Q’ als de duale vectorruimte van
TξQ te introduceren. De co-raakbundel bekomt men dan door de unie te nemen van alle
co-raakruimtes aan Q.
T ∗Q =⋃ξ∈Q
(ξ × T ∗
ξ Q)
Dan rest nog de vraag hoe er een gepaste basis kan geconstrueerd worden. Om dit te be-
antwoorden, introduceren we de differentiaal ‘df ’ van een functie f : Q → IR gedefinieerd
door
df(v) = v(f) (2.10)
met v gegeven door (2.8) . Door nu de functies qi, i = 1, . . . , n —die een ξ ∈ Q op zijn
coordinaten afbeeldt— voor f en ∂∂qj voor v te kiezen, krijgen we
dqi(∂
∂qj) =
∂qi
∂qj= δij i = 1, . . . , n
Hoofdstuk 2. Geometrische beschrijving van de mechanica 18
wat voldoet aan (2.9) . Hiermee is de duale basis (dq1, . . . , dqn) van ( ∂∂q1
, . . . , ∂∂qn ) gevon-
den.
We drukken df in deze basis uit
df =n∑i=1
αidqi
met voorlopig nog onbekende αi’s. Deze bepalen we door gebruik te maken (2.10)
n∑i=1
αivi = df (v) = v (f) =
n∑i=1
vi∂f
∂qi
waaruit door gelijkstellen van de componenten volgt
df =n∑i=1
∂f
∂qidqi. (2.11)
df komt dus overeen met ons intuıtief begrip van een differentiaal van een functie.
Algemeen ziet een αξ ∈ T ∗ξ Q er als volgt uit
αξ =n∑i=1
αi,ξdqi∣∣ξ
(2.12)
die ook over heel Q (binnen een zelfde kaart) kan gedefinieerd worden
α =n∑i=1
αi(q)dqi. (2.13)
Met vξ ∈ TξQ en αξ ∈ T ∗ξ Q zal 〈vξ, αξ〉 een element van IR en daarmee 〈v, α〉 een reele
functie voorstellen.
〈v, α〉 : Q → IR (2.14)
v krijgt dus niet alleen de interpretatie van afleidingsoperator, maar ook als afbeelding
van T ∗Q naar IR. In paragraaf §2.3.1 zullen we nog een 3e interpretatie ontmoeten.
Co- en contravariante vectoren
Co- en contravariante vectoren verschillen in de wijze hoe ze transformeren bij een verande-
ring van basis. Stel dat in E van basis (e1, . . . , en) wordt overgegaan op basis (e′1, . . . , e′n).

Hoofdstuk 2. Geometrische beschrijving van de mechanica 19
Deze zijn met elkaar verbonden via het voorschrift e′j =n∑i=1
Aijei. Omgekeerd is dan
ej =n∑i=1
Bije′i met B = A−1. Door x ∈ E uit te drukken in de verschillende basissen,
bekomen wen∑
j=1
x′je′j = x =n∑
i=1
xiei =n∑j=1
(n∑i=1
xiBji
)e′j
waaruit volgt dat
x′j =n∑i=1
Bjixi, j = 1, . . . , n. (2.15)
De componenten van x veranderen bij een overgang op een nieuwe basis m.a.w. volgens
A−1, wat de naam contravariant verklaart. Volgens de conventie worden de componenten
van een contravariante vector met een superscript geschreven.
Anders is het met y ∈ E∗
n∑j=1
y′jx′j = y′ (x′) = y (x) =
n∑i=1
yixi =
n∑j=1
(n∑i=1
yiAij
)x′j
waarbij de componenten volgens A transformeren
y′j =n∑i=1
Aijyi, j = 1, . . . , n (2.16)
wat een covariante vector wordt genoemd. Deze worden met een subscript aangeduid.
Het toegevoegde moment als co-variante vector
Passen we het bovenstaande toe op de raakruimte TξQ waarin wordt overgegaan op een
nieuwe basis∂
∂q′j
∣∣∣∣ξ
=n∑i=1
Aij∂
∂qi
∣∣∣∣ξ
(2.17)
dan kan vjξ analoog aan (2.15) in functie van v′ξ geschreven worden.
vjξ =n∑i=1
Ajiv′iξ , j = 1, . . . , n (2.18)

Hoofdstuk 2. Geometrische beschrijving van de mechanica 20
Waaruit de voor ons bruikbare formule volgt
∂vjξ∂v′iξ
= Aji , i, j = 1, . . . , n. (2.19)
Keren we nu terug naar het Lagrangeformalisme. Bij overgang op een nieuw stel veralge-
meende coordinaten, krijgen we een nieuwe Lagrangiaan
L′(q′, v′, t
)≡ L
(q (q′, t) , v (q′, v′, t) , t
)waaruit de bijhorende toegevoegde momenten kunnen berekend worden.
p′i =∂L′
∂v′i(q′, v′, t) =
n∑j=1
∂L
∂vj∂vj
∂v′i
Dit geeft samen met pj = ∂L∂qj en (2.19)
p′i =n∑j=1
Ajipj.
Het toegevoegde moment gedraagt zich dus inderdaad als een co-variante vector wat
verantwoordt dat deze de elementen van de co-raakruimtes vormen. Een punt van de
co-raakbundel heeft dan de 2n coordinaten (q, p) en T ∗Q stelt dus de faseruimte van het
systeem voor.
Tot slot van deze paragraaf stellen we ons tot doel de gedaante van de coefficienten Aij te
achterhalen. Hernemen we figuur (2.2) en associeren we het coordinatenstelsel q met ϕ1,
q′ met ϕ2 en q (q′) dus met ϕ21 = ϕ1 ϕ−12 . Dan kan door formule (2.5) te herschrijven
als
vξ(f) =d
dt
(f ϕ−1
1 ϕ21 ϕ2 c(t))∣∣∣∣t=0
het verband tussen de vjξ en v′iξ ’s achterhaald worden. Toepassen van de kettingregel geeft
vξ(f) =n∑j=1
∂fϕ1
∂qj
∣∣∣∣q=q0
·
(n∑i=1
∂qj
∂q′i
∣∣∣∣q′=q′0
·dq′i
dt
∣∣∣∣t=0
)

Hoofdstuk 2. Geometrische beschrijving van de mechanica 21
waarin f ϕ−11 = fϕ1 , ϕ21 = q (q′), ϕ1 (ξ) = q0 en ϕ2 (ξ) = q′0 gebruikt is. Samen met
(2.6) en q′i (0) = v′iξ bekomt men dan
vξ(f) =n∑j=1
(n∑i=1
∂qj
∂q′i
∣∣∣∣q′=q′0
· v′iξ
)∂
∂qj
∣∣∣∣ξ
(f)
waaruit
vjξ =n∑i=1
∂qj
∂q′i
∣∣∣∣q′=q′0
· v′iξ (2.20)
gevonden wordt. Vergelijken van (2.20) met (2.18) levert ons tenslotte het gezochte
verband.
Aji =∂qj
∂q′i
∣∣∣∣q′=q′0
(2.21)
2.2 Afbeeldingen tussen varieteiten
Hierna zullen we afbeeldingen f : M → N beschouwen, afhankelijk van de gekozen kaart
zal f onder een andere gedaante voorkomen. Neem bijvoorbeeld voor M het boloppervlak
uit paragraaf §2.1.1 en de functie f : M → IR (IR is ook een varieteit) die met elk punt
m ∈ M zijn hoogte associeert. Hiermee wordt f gelijk aan ‘cos θ’ in de ene en ‘sin θ′ cos φ′’
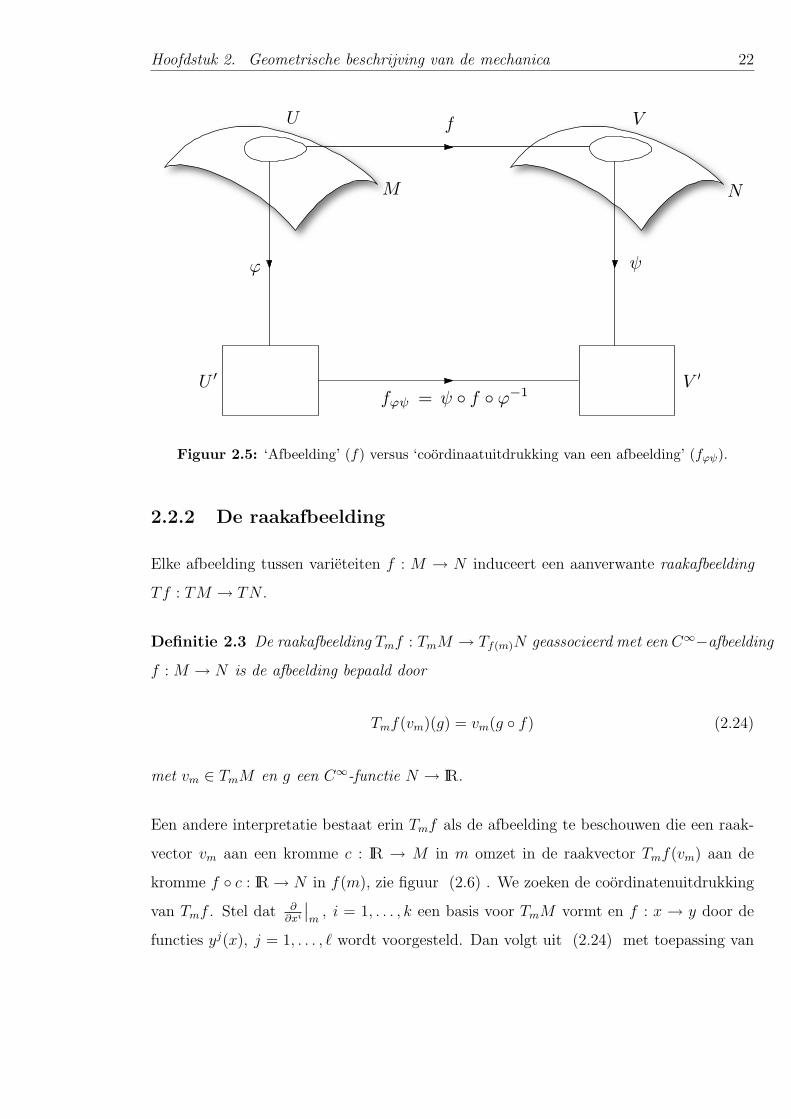
in de andere basis. In wat volgt zal geen onderscheid gemaakt worden tussen de begrippen
‘afbeelding’ (f) en ‘coordinaatuitdrukking van een afbeelding’ (fϕψ) —zie figuur (2.5) —,
wat in een rigoureuze behandeling wel dient te gebeuren.
2.2.1 Natuurlijke projecties
Tussen een raakbundel TM en zijn onderliggende varieteit M bestaat de natuurlijke pro-
jectie
τM : TM → M (2.22)
zodanig dat ∀ vm ∈ TmM : τM(vm) = m. Volledig analoog hebben we de natuurlijke
projectie
πM : T ∗M → M (2.23)
die alle αm ∈ T ∗mM afbeeldt op m. Het is duidelijk dat deze projecties een intrinsieke
betekenis hebben.
Hoofdstuk 2. Geometrische beschrijving van de mechanica 22
Figuur 2.5: ‘Afbeelding’ (f) versus ‘coordinaatuitdrukking van een afbeelding’ (fϕψ).
2.2.2 De raakafbeelding
Elke afbeelding tussen varieteiten f : M → N induceert een aanverwante raakafbeelding
Tf : TM → TN .
Definitie 2.3 De raakafbeelding Tmf : TmM → Tf(m)N geassocieerd met een C∞−afbeelding
f : M → N is de afbeelding bepaald door
Tmf(vm)(g) = vm(g f) (2.24)
met vm ∈ TmM en g een C∞-functie N → IR.
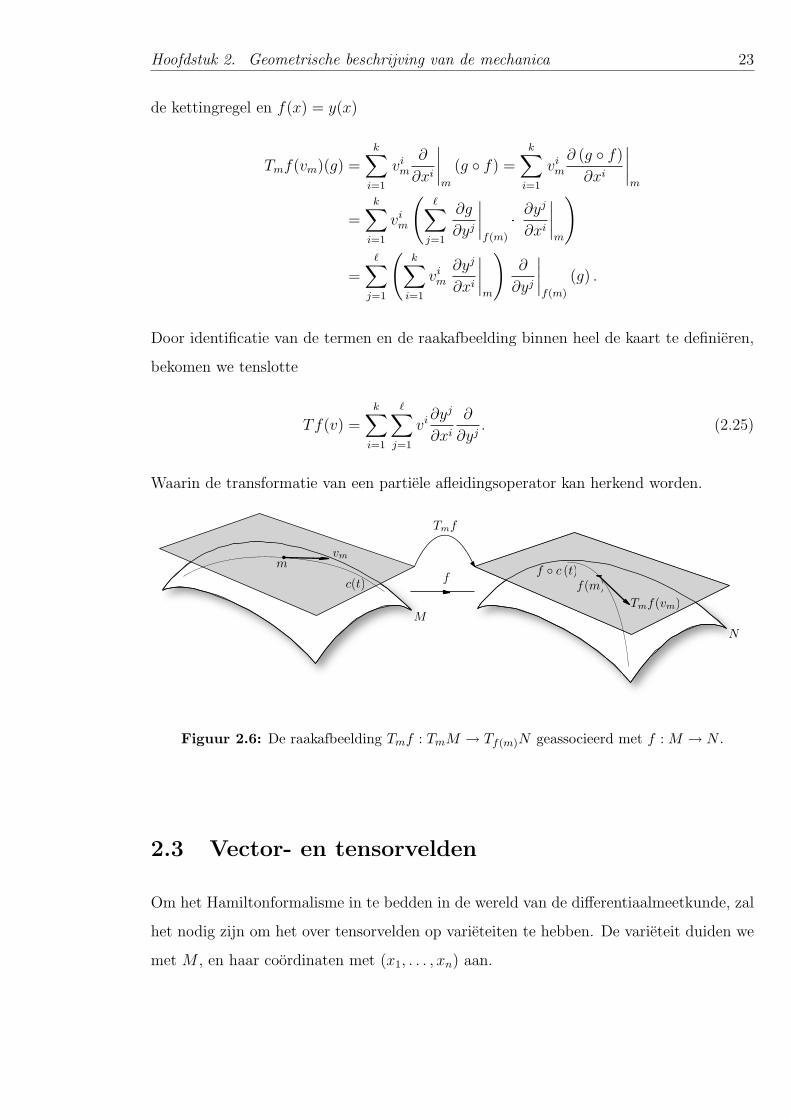
Een andere interpretatie bestaat erin Tmf als de afbeelding te beschouwen die een raak-
vector vm aan een kromme c : IR → M in m omzet in de raakvector Tmf(vm) aan de
kromme f c : IR → N in f(m), zie figuur (2.6) . We zoeken de coordinatenuitdrukking
van Tmf . Stel dat ∂∂xi
∣∣m
, i = 1, . . . , k een basis voor TmM vormt en f : x → y door de
functies yj(x), j = 1, . . . , ` wordt voorgesteld. Dan volgt uit (2.24) met toepassing van
Hoofdstuk 2. Geometrische beschrijving van de mechanica 23
de kettingregel en f(x) = y(x)
Tmf(vm)(g) =k∑i=1
vim∂
∂xi
∣∣∣∣m
(g f) =k∑i=1
vim∂ (g f)
∂xi
∣∣∣∣m
=k∑i=1
vim
(∑j=1
∂g
∂yj
∣∣∣∣f(m)
·∂yj
∂xi
∣∣∣∣m
)
=∑j=1
(k∑i=1
vim∂yj
∂xi
∣∣∣∣m
)∂
∂yj
∣∣∣∣f(m)
(g) .
Door identificatie van de termen en de raakafbeelding binnen heel de kaart te definieren,
bekomen we tenslotte
Tf(v) =k∑i=1
∑j=1
vi∂yj
∂xi∂
∂yj. (2.25)
Waarin de transformatie van een partiele afleidingsoperator kan herkend worden.
Figuur 2.6: De raakafbeelding Tmf : TmM → Tf(m)N geassocieerd met f : M → N .
2.3 Vector- en tensorvelden
Om het Hamiltonformalisme in te bedden in de wereld van de differentiaalmeetkunde, zal
het nodig zijn om het over tensorvelden op varieteiten te hebben. De varieteit duiden we
met M , en haar coordinaten met (x1, . . . , xn) aan.

Hoofdstuk 2. Geometrische beschrijving van de mechanica 24
2.3.1 Types van tensorvelden
Eerst wordt een algemene definitie van een tensorveld gegeven waarna kort de belangrijk-
ste types besproken worden.
Definitie 2.4 (Tensorveld) Een (r, s)-tensorveld op M is een voorschrift dat op dif-
ferentieerbare wijze met elk punt m van een varietiet M een tensor associeert over de
raakruimte TmM in m.
t : M → T rs (M) = (T ∗M)s × (TM)r
m → t(m) = tm
De tensor tm is dan een multilineaire afbeelding:
tm : (T ∗M)r × (TM)s → IR.
C∞-functies op M
De C∞-functies of tensorvelden van type (0, 0) worden genoteerd als f : M → IR en
vormen de verzameling F(M).
Vectorvelden
Dit zijn tensorvelden van type (1, 0)
X : M → TM
m → X(m) = Xm
zodat Xm overeenkomt met de reeds ingevoerde begrippen (2.7) en (2.14) . Alle
mogelijke vectorvelden op M vormen de verzameling X (M). Uitgedrukt in coordinaten
geeft
X =n∑i=1
X i (x)∂
∂xi(2.26)
met X i(x), i = 1, . . . , n ∈ F(M).

Hoofdstuk 2. Geometrische beschrijving van de mechanica 25
Co-vectorvelden of 1-vormen
Dit zijn tensorvelden van type (0, 1)
α : M → T ∗M
m → α(m) = αm
zodat αm een co-raakvector voorstelt zoals in (2.12) . Ze vormen de verzameling X ∗(M)
en in coordinaten uitgedrukt geeft dit
α =n∑i=1
αi (x) dxi (2.27)
met αi(x), i = 1, . . . , n ∈ F(M).
Differentiaal k-vormen
Een differentiaal k-vorm of kortweg k-vorm ‘ω’ is een tensorveld van type (0, k)
ω : M → Ωk(M) ⊂ T 0k (M) = (T ∗M)k
m → ω(m) = ωm
met als bijkomende voorwaarde dat ωm voldoet aan
ωm(Xσ(1)m , . . . , Xσ(k)m
)= sign(σ) ·ωm (X1m , . . . , Xkm) , ∀ σ ∈ Sk (2.28)
voor elke m ∈ M en waar Sk de groep van alle permutaties van (1, . . . , k) voorstelt met
sign(σ) = +1 of −1 naargelang de permutatie even of oneven is. Dit betekent dat ωm
antisymmetrisch in zijn argumenten is. De verzameling van alle k-vormen over M stellen
we voor door Λk(M). Merk ook op dat F(M) = Λ0(M) en X ∗(M) = Λ1(M).
Voorbeeld 2.1 Stel k = 3, dan is σ = (1, 3, 2) een oneven permutatie van (1, 2, 3) zodat
sign(σ) = −1 is. Voor een 3-vorm moet dan gelden dat
ωm (X1m , X3m , X2m) = −ωm (X1m , X2m , X3m) . (2)

Hoofdstuk 2. Geometrische beschrijving van de mechanica 26
We zoeken nu een coordinaatuitdrukking van k-vormen. Algemeen is
ω (X1, . . . , Xk) = ω
(n∑
i1=1
X i11
∂
∂xi1, . . . ,
n∑ik=1
X ikk
∂
∂xik
)
waaruit t.g.v. de multilinearitiet van tensorvelden volgt dat
ω (X1, . . . , Xk) =n∑
i1,...,ik=1
X i11 . . . X ik
k ω
(∂
∂xi1, . . . ,
∂
∂xik
).
Door de functies ω(
∂∂xi1
, . . . , ∂∂xik
)voor te stellen als ωi1...ik en gebruik te maken van
X i` = dxi(X`) verkrijgen we
ω (X1, . . . , Xk) =n∑
i1,...,ik=1
ωi1...ikdxi1 (X1) . . . dxik (Xk). (2.29)
Hierin is nog geen rekening gehouden met de antisymmetrie van ω. Uit (2.28) met
sign(σ)2 = 1 en k! het aantal mogelijke permutaties volgt dat aan de identiteit
ω (X1, . . . , Xk) ≡1
k!
∑σ∈Sk
sign (σ) ω(Xσ(1), . . . , Xσ(k)
). (2.30)
is voldaan. Door in deze laatste formule ω(Xσ(1), . . . , Xσ(k)
)te herschrijven d.m.v. (2.29)
bekomen we
ω (X1, . . . , Xk) =1
k!
n∑i1,...,ik=1
ωi1...ik∑σ∈Sk
sign (σ) dxi1(Xσ(1)
). . . dxik
(Xσ(k)
). (2.31)
Met behulp van het uitwendig product zal dit in een elegante vorm kunnen gegoten
worden.
Definitie 2.5 (Uitwendig product) Het uitwendig product van een k-vorm ω en een
`-vorm ρ is
ω ∧ ρ (X1, . . . , Xk+`) =1
k!`!
∑σ∈Sk+`
sign (σ) ω(Xσ(1), . . . , Xσ(k)
)ρ(Xσ(`), . . . , Xσ(k+`)
)(2.32)
zodat ω ∧ ρ een (k + `)-vorm oplevert.

Hoofdstuk 2. Geometrische beschrijving van de mechanica 27
Men kan bewijzen dat voldaan is aan de volgende eigenschappen.
Stelling 2.1 Zij ω ∈ Λk(M), ρ ∈ Λ`(M) en µ ∈ Λm(M).
(i) ω ∧ ρ = (−1)k`ρ ∧ ω
(ii) ω ∧ (ρ ∧ µ) = (ω ∧ ρ) ∧ µ = ω ∧ ρ ∧ µ
Steunend op de associatieve eigenschap volgt voor het uitwendig product van de 1-vormen
dxi` , ` = 1, . . . , k dat
dxi1 ∧ . . . ∧ dxik (X1, . . . , Xk) =∑σ∈Sk
sign (σ) dxi1(Xσ(1)
). . . dxik
(Xσ(k)
). (2.33)
En ingevuld in (2.31) geeft dit finaal
ω =1
k!
n∑i1,...,ik=1
ωi1...ikdxi1 ∧ . . . ∧ dxik . (2.34)
Voor het speciaal geval k = 2 hebben we
ω =1
2
n∑i,j=1
ωijdxi ∧ dxj (2.35)
waarbij t.g.v. de asymmetrie ωij = −ωji.
2.3.2 Enkele bewerkingen op tensorvelden
De uitwendige afgeleide van k-vormen
In paragraaf §2.1.3 hebben we de differentiaal df van een functie f ∈ F(M) ingevoerd
a.d.h.v.
df(X) = X(f)
met X ∈ X (M). Met de net ingevoerde notaties echter, kan d geınterpreteerd worden als
een afleidingsoperator die met een 0-vorm(∈ F(M) = Λ0(M)
)een 1-vorm
(X ∗(M) =

Hoofdstuk 2. Geometrische beschrijving van de mechanica 28
Λ1(M))
associeert.
d : Λ0(M) → Λ1(M)
f → df
We zullen dit veralgemenen voor willekeurige k-vormen. Definieren we eerst een aflei-
dingsoperator van graad r.
Definitie 2.6 Een afbeelding D noemen we een afleidingsoperator van graad r, indien
(i) D(Λk(M)) ⊂ Λk+r(M)
(ii) D(ω + aρ) = D(ω) + aD(ρ), ω, ρ ∈ Λk(M) en a ∈ IR
(iii) D(ω ∧ ρ) = D(ω) ∧ ρ + (−1)krω ∧D(ρ), met ω ∈ Λk(M).
Er kan bewezen worden dat er een unieke afleidingsoperator van graad 1 bestaat waarvoor
d2 = d d = 0 en voor 0-vormen f ∈ Λ0(M) samenvalt met de differentiaal df van f .
Deze operator d wordt de uitwendige afgeleide van k-vormen genoemd. Het is belangrijk
op te merken dat dit een intrinsieke operator is, dat hij niet afhangt van de keuze van
coordinaten. Met (2.34) de coordinaatuitdrukking van een k-vorm, geeft dω per definitie:
dω =1
k!
n∑i1,...,ik=1
(n∑j=1
∂ωi1...ik∂xj
dxj
)∧ dxi1 ∧ . . . ∧ dxik (2.36a)
of
dω =1
k!
n∑i1,...,ik=1
dωi1...ik ∧ dxi1 ∧ . . . ∧ dxik . (2.36b)
Voor het speciale geval van een 1-vorm α =∑n
i=1 αidxi hebben we
dα =n∑
i,j=1
∂αj∂xj
dxj ∧ dxi (2.37)
=n∑i=1
dαi ∧ dxi. (2.38)

Hoofdstuk 2. Geometrische beschrijving van de mechanica 29
De contractie van k-vormen met vectorvelden
Definitie 2.7 De contractie van een (k+1)-vorm ω ∈ Λk+1(M) met een vectorveld X ∈
X (M) —ook het inwendig product van X en ω genoemd— is de k-vorm iXω bepaald door
iXω (X1, . . . , Xk) = ω (X, X1, . . . , Xk) , ∀ X1, . . . , Xk ∈ X (M). (2.39)
Voor f ∈ Λ0(M) stellen we iXf = 0.
Er kan bewezen worden dat iX een afleidingsoperator van graad −1 is. Vermelden we hier
enkel nog dat voor een 1-vorm α geldt dat
iXα = 〈X,α〉
en in het bijzonder
iXdf = df(X) = X(f). (2.40)
De pull-back van een 1-vorm
Stel dat men beschikt over een 1-vorm α ∈ X ∗(N) en een C∞-afbeelding f : M → N .
We zouden graag α d.m.v. f ∗ ‘terugvoeren’ naar M zodat we een 1-vorm f ∗α ∈ X ∗(M)
bekomen, zie figuur (2.7) .
Definitie 2.8 (Pull-back van een 1-vorm) Zij α ∈ X ∗(N) en f een C∞-afbeelding
f : M → N , dan wordt hiermee de pull-back f ∗α ∈ X ∗(M) geassocieerd, bepaald door:
(f ∗α) (m) (vm) = α(f (m)
)(Tmf (vm)
)∀ m ∈ M, ∀ vm ∈ TmM. (2.41)
Deze voorwaarde kan ook kort als 〈(f ∗α)m , vm〉 =⟨αf(m), Tmf (vm)
⟩geschreven worden.
Gaan we op zoek naar de coordinatenuitdrukking van (f ∗α)m. Stel dat dim(M) = k,
dim(N) = ` en f : x → y door de functies yj=1,...,`(x) wordt voorgesteld, dan hebben we
(i) vm ∈ TmM ⇒ vm =∑k
i=1 vim∂∂xi
∣∣m
(ii) αm ∈ T ∗f(m)N ⇒ αf(m) =
∑`j=1 αj,f(m) dyj|f(m)
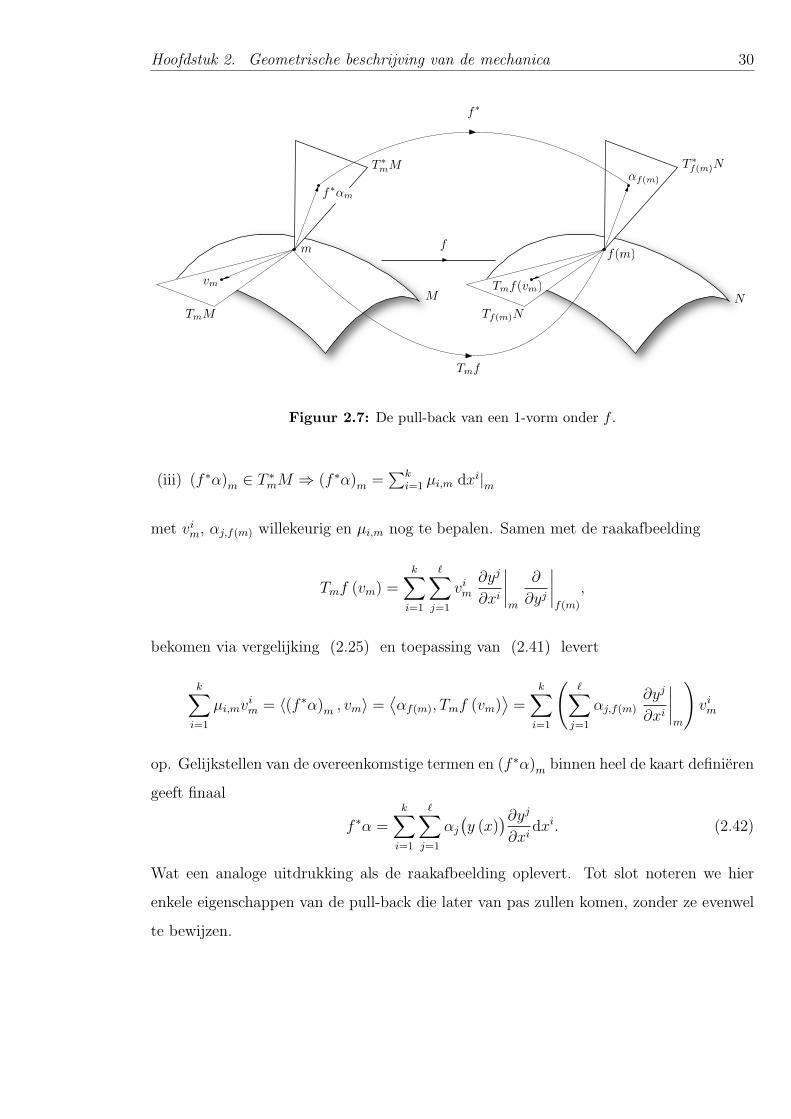
Hoofdstuk 2. Geometrische beschrijving van de mechanica 30
Figuur 2.7: De pull-back van een 1-vorm onder f .
(iii) (f ∗α)m ∈ T ∗mM ⇒ (f ∗α)m =
∑ki=1 µi,m dxi|m
met vim, αj,f(m) willekeurig en µi,m nog te bepalen. Samen met de raakafbeelding
Tmf (vm) =k∑i=1
∑j=1
vim∂yj
∂xi
∣∣∣∣m
∂
∂yj
∣∣∣∣f(m)
,
bekomen via vergelijking (2.25) en toepassing van (2.41) levert
k∑i=1
µi,mvim = 〈(f ∗α)m , vm〉 =⟨αf(m), Tmf (vm)
⟩=
k∑i=1
(∑j=1
αj,f(m)∂yj
∂xi
∣∣∣∣m
)vim
op. Gelijkstellen van de overeenkomstige termen en (f ∗α)m binnen heel de kaart definieren
geeft finaal
f ∗α =k∑i=1
∑j=1
αj(y (x)
)∂yj
∂xidxi. (2.42)
Wat een analoge uitdrukking als de raakafbeelding oplevert. Tot slot noteren we hier
enkele eigenschappen van de pull-back die later van pas zullen komen, zonder ze evenwel
te bewijzen.
Hoofdstuk 2. Geometrische beschrijving van de mechanica 31
Stelling 2.2 (Eigenschappen pull-back) Zij f : M → N , g ∈ F(N), α ∈ X ∗(N) en
Y ∈ X (N), dan geldt:
(i) pull-back van een C∞-afbeelding g: f ∗ (g) = g f ,
(ii) pull-back van een 2-vorm dα: f ∗ (dα) = d (f ∗α),
(iii) pull-back van een contractie van dα met Y : f ∗ (iY dα) = if∗Y (f ∗dα).
In de laatste eigenschap duikt ook de pull-back van een vectorveld ‘f ∗Y ’ op, deze is enkel
gedefinieerd wanneer ook f−1 bestaat of f m.a.w. een diffeomorfisme is. We laten f ∗Y
verder ongespecificeerd maar het is wel duidelijk dat f ∗Y ∈ X (M).
2.4 De Hamiltoniaan in de geometrische beschrijving
De Hamiltoniaan is een functie van de veralgemeende coordinaten en hun toegevoegde
momenten wat in de analytische beschrijving H ∈ F(IR2n) en voor de geometrische be-
schrijving H ∈ F(T ∗Q) geeft (in §2.1.3 werd aangetoond dat met Q de configuratieruimte
van het systeem, T ∗Q de faseruimte voorstelt). In de analytische beschrijving is het
niet mogelijk om H los van zijn coordinaten te zien. Anders is het met de geometrische
beschrijving. Hierin is een coordinatensystemen slechts een uitdrukking van dezelfde, on-
derliggende varieteit en die varieteit heeft betekenis ook zonder die coordinaten. Net zoals
het voorbeeld aangehaald in §2.2 waar de hoogte van een punt op een boloppervlak een
intrinsieke betekenis heeft, heeft de Hamiltoniaan dit ook. Het heeft m.a.w. zin over een
Hamiltoniaan te spreken, ook zonder het coordinatensysteem te specificeren.
Deze paragraaf is gewijd aan de vertaling van de canonische vergelijkingen van Hamilton in
de analytische naar de geometrische beschrijving. Eerst wordt getoond hoe een vectorveld
een stelsel differentiaalvergelijkingen van 1e orde genereert, dan hoe een vectorveld op
intrinsieke, eenduidige wijze met een Hamiltoniaan verbonden is. De hierbij gevolgde
strategie is geınspireerd door de speciale structuur die de canonische vergelijkingen van
Hamilton herbergen. Hernemen we nog eens vergelijkingen (1.20) voor een conservatief
Hoofdstuk 2. Geometrische beschrijving van de mechanica 32
systeem
qi = +∂H
∂pi
pi = −∂H
∂qi.
en schrijven we dit in matrixvorm door (q, p) als een stel coordinaten te behandelen.
d
dt
q1
...
qn
p1
...
pn
=
0 In
−In 0
·
∂H∂q1
...
∂H∂qn
∂H∂p1...
∂H∂pn
(2.43)
Dan blijkt hier een anti-symmetrische matrix in op te duiken.
2.4.1 Vectorvelden en differentiaalvergelijkingen
We zullen het verband tussen differentiaalvergelijkingen en vectorvelden bespreken, te
beginnen met volgende definitie.
Definitie 2.9 (Integraalkromme) Een C∞-kromme γ : ]a, b[ → M noemen we een
integraalkromme van X ∈ X (M) als de raakvector in elk punt m van de kromme γ sa-
menvalt met Xm.
In §2.2.2 werd geopperd dat de raakafbeelding Tf de afbeelding is die een raakvector aan
een kromme c afbeeldt op de raakvector aan de kromme f c. De raakvector aan γ in M
kan dus gevonden worden door de raakvector in IR af te beelden d.m.v. Tγ. Met γ een
integraalkromme geldt dan per definitie
Tγ
(d
dt
∣∣∣∣t0
)= X
(γ(t0)
), ∀ t0 ∈ ]a, b[ .

Hoofdstuk 2. Geometrische beschrijving van de mechanica 33
Neem x(t) als de voorstelling van γ in coordinaten, met toepassing van (2.25) krijgen
wen∑i=1
dxi
dt
∣∣∣∣t0
∂
∂xi
∣∣∣∣x(t0)
= Tγ
(d
dt
∣∣∣∣t0
)= X
(x(t0)
)=
n∑i=1
X i(x(t0)
) ∂
∂xi
∣∣∣∣x(t0)
Wat na identificatie van de overeenkomstige termen een stelsel differentiaalvergelijkingen
van 1e orde oplevert.
dxi
dt(t0) = X i
(x(t0)
), i = 1, . . . , n, ∀ t0 ∈ ]a, b[ . (2.44)
Een vectorveld induceert m.a.w. een stelsel differentiaalvergelijkingen van 1e orde waar-
van de integraalkrommes oplossingen zijn. Nu is een vectorveld over heel de varieteit
gedefinieerd en een integraalkromme slechts over een deelverzameling ervan. Daar kan
echter een mouw aan gepast worden. Stel dat we beschikken over een integraalkromme
γm van X die door een punt m ∈ M gaat. Zonder verlies van algemeenheid kunnen we
stellen dat 0 ∈ ]a(m), b(m)[ en γm(0) = m. Volgens de existentie- en eenduidigheidsstel-
ling is er steeds zo een kromme te vinden. Bovendien zal γm op een continue manier van
de beginvoorwaarde afhangen, wat toelaat de flow ‘φ’ van een vectorveld in te voeren.
Deze heeft de beginwaarde m als een extra variabele —naast de tijd— en associeert met
elk punt m ∈ M een integraalkromme aan X met γm(0) = m, m.a.w.:
φ(t,m) = γm(t). (2.45)
Er kan de volgende belangrijke stelling bewezen worden.
Stelling 2.3 (Existentie- en eenduidigheidsstelling) Zij X ∈ X (M) een zacht ver-
lopend vectorveld. Voor elke m ∈ M bestaat er een maximaal open interval Im =
]a(m), b(m)[ van 0 en een zacht verlopende kromme φm : Im → M die voldoet aan
dφmdt
(t) = X(φm(t)
), ∀ t ∈ Im (2.46a)
φm(0) = m, (2.46b)
op continue wijze afhankelijk is van de beginwaarde m en uniek bepaald is op het overeen-
komstige interval Im
Hoofdstuk 2. Geometrische beschrijving van de mechanica 34
2.4.2 De co-raakbundel als symplectische varieteit
In deze paragraaf zetten we eerst uiteen wat een symplectische varieteit is en tonen dan aan
dat de co-raakbundel T ∗Q op een intrinsieke wijze uitgerust is met zo een symplectische
structuur.
Symplectische varieteit
Definitie 2.10 Een symplectische varieteit is een koppel (M, ω) met ω een niet-ontaarde
gesloten 2-vorm op de varieteit M.
Waarbij nog gespecificeerd dient te worden wat een niet-ontaarde gesloten 2-vorm bete-
kent. Het geloten zijn van ω wil zeggen dat dω = 0. Merken we nu reeds op dat indien ω
als de uitwendig afgeleide van een 1-vorm ω = dα te schrijven is, uit d2 = d d = 0 volgt
dat ω dan zeker gesloten is. Het niet-ontaard is als volgt gedefinieerd.
Definitie 2.11 ω ∈ Λ2(M) heet niet-ontaard indien ω(X, Y ) = 0,∀X ∈ X (M) ⇒ Y = 0.
Wat equivalent is met de voorwaarde dat de determinant van de coefficientenmatrix
det(ωij) verschillend is van nul.
De canonische 1-vorm
Een 1-vorm θ op M = T ∗Q is een co-vectorveld dat met elk punt m ∈ M een afbeelding
θm : Tm (T ∗M) → IR associeert. Nu zouden we graag een canonische 1-vorm vinden, een
die een intrinsieke betekenis heeft. Omdat we op een co-raakbundel werken, beschikken
we alvast over de natuurlijke afbeelding πQ : T ∗Q → Q. Deze heeft een intrinsieke
betekenis dus als we er in slagen uit πQ een 1-vorm af te leiden, is de klus geklaard.
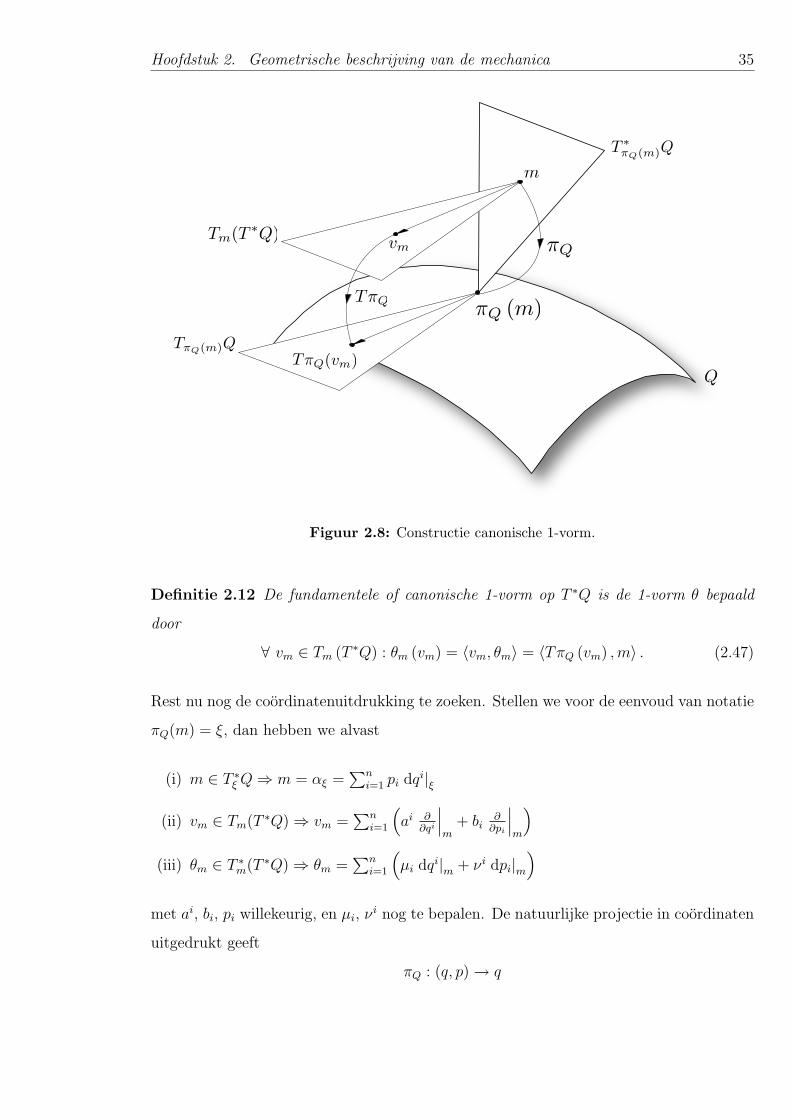
Neem figuur (2.8) in gedachten. Hier is op onorthodoxe wijze getracht een voorstelling
te geven van TπQ(m)M en T ∗πQ(m)M in πQ(m) gehecht aan Q. Bovendien is geıllustreerd
hoe een vm ∈ Tm(T ∗Q) door de raakafbeelding TπQ op TπQ(m)Q wordt afgebeeld.Omdat
m en TπQ(vm) in elkaars duale ruimte liggen, is 〈m,TπQ(vm)〉 ∈ IR. Idem dito voor
θm ∈ T ∗m(T ∗Q) en vm. Nu zijn alle ingredienten aanwezig om θ te definieren.
Hoofdstuk 2. Geometrische beschrijving van de mechanica 35
Figuur 2.8: Constructie canonische 1-vorm.
Definitie 2.12 De fundamentele of canonische 1-vorm op T ∗Q is de 1-vorm θ bepaald
door
∀ vm ∈ Tm (T ∗Q) : θm (vm) = 〈vm, θm〉 = 〈TπQ (vm) , m〉 . (2.47)
Rest nu nog de coordinatenuitdrukking te zoeken. Stellen we voor de eenvoud van notatie
πQ(m) = ξ, dan hebben we alvast
(i) m ∈ T ∗ξ Q ⇒ m = αξ =
∑ni=1 pi dqi|ξ
(ii) vm ∈ Tm(T ∗Q) ⇒ vm =∑n
i=1
(ai ∂
∂qi
∣∣∣m
+ bi∂∂pi
∣∣∣m
)(iii) θm ∈ T ∗
m(T ∗Q) ⇒ θm =∑n
i=1
(µi dqi|m + νi dpi|m
)met ai, bi, pi willekeurig, en µi, νi nog te bepalen. De natuurlijke projectie in coordinaten
uitgedrukt geeft
πQ : (q, p) → q

Hoofdstuk 2. Geometrische beschrijving van de mechanica 36
waaruit d.m.v. vergelijking (2.25) de raakafbeelding gevonden wordt
TπQ(vm) =n∑i=1
ai∂
∂qi
∣∣∣∣ξ
waarin yj = qj ⇒ ∂qj
∂qi = δji ,∂qj
∂pi= 0 gesubstitueerd werd. Door toepassing van (2.47)
n∑i=1
µiai + νibi = 〈vm, θm〉 = 〈TπQ (vm) , m〉 =
n∑i=1
aipi
volgt µi = pi en νi = 0, i = 1, . . . , n. Waarmee de coordinatenuitdrukking van θm bepaald
is.
θm =n∑i=1
pi dqi∣∣ξ
Weerom kan θ binnen heel de kaart gedefinieerd worden
θ =n∑i=1
pidqi. (2.48)
De canonische 2-vorm
Door de uitwendige afgeleide (2.38) van θ te nemen, bekomen we de canonische 2-vorm
ω = dθ =n∑i=1
dpi ∧ dqi (2.49)
die al zeker gesloten is. We herschrijven bovenstaande formule door de coordinaten
(x1, . . . , x2n) = (q1, . . . , qn, p1, . . . , pn) van M = T ∗Q te gebruiken
ω =n∑i=1
dxi+n ∧ dxi.
Hieruit blijkt dat de coefficientenmatrix ωij = ω( ∂∂xi ,
∂∂xj ) gegeven is door
ωij =
0 In
−In 0
wat dezelfde coefficientenmatrix geeft als de vergelijkingen van Hamilton in matrixvorm
(2.43) . Bovendien is det(ωij) 6= 0 zodat ω niet-ontaard is.

Hoofdstuk 2. Geometrische beschrijving van de mechanica 37
2.4.3 Hamiltoniaanse vectorvelden
We zullen aantonen dat er met elke Hamiltoniaan H ∈ F(T ∗Q) op eenduidige wijze een
vectorveld XH ∈ X (T ∗Q) kan geassocieerd worden.
Definitie 2.13 Het Hamiltoniaans vectorveld XH , corresponderend met de Hamiltoniaan
H ∈ F(T ∗Q), is het vectorveld bepaald door de relatie
iXHω = −dH (2.50)
met ω de canonische 2-vorm op T ∗Q.
XH kunnen we als volgt bepalen, met XH ∈ X (T ∗Q) krijgen we
XH =n∑i=1
(µi
∂
∂qi+ νi
∂
∂pi
), µi, νi ∈ F(T ∗Q)
waarbij µi(q, p) en νi(q, p) nog te bepalen functies zijn. Hiermee is, steunend op vergelij-
kingen (2.39) en (2.33) ,
iXHω = ω(XH , · ) =
n∑i=1
dpi(XH)dqi − dqi(XH)dpi
=n∑i=1
νidqi − µidpi. (2.51)
Anderzijds is H(q, p) ∈ F(T ∗Q), wat
dH =n∑i=1
(∂H
∂qidqi +
∂H
∂pidpi
)(2.52)
oplevert. Gelijkstellen van de overeenkomstige termen in (2.51) en (2.52) geeft dan
uiteindelijk
XH =n∑i=1
(∂H
∂qi∂
∂qi− ∂H
∂pi
∂
∂pi
). (2.53)
Uit (2.46a) volgt dat hiermee het stelsel differentiaalvergelijkingen
qi = +∂H
∂pi
pi = −∂H
∂qi.

Hoofdstuk 2. Geometrische beschrijving van de mechanica 38
geassocieerd is.
Opmerking 2.1 Bij de afleiding van (2.51) is nog iets over het hoofd gezien. Indien
det(ωij) = 0, bestaat er een Y ∈ X (T ∗Q) waarvoor ω(Y, · ) = 0. Zodus zou XH + aY ,
a ∈ F(T ∗Q) ook een oplossing zijn van (2.50) . Het niet-ontaard zijn van ω garandeert
m.a.w. het enig zijn van XH .
2.5 De Lagrangiaan
Steunend op de resultaten bekomen uit de vorige paragraaf, worden de vergelijkingen van
Lagrange afgeleid. In hoofdstuk 1 was de Lagrangiaan een functie van de posities en hun
snelheden, logischerwijs kan hier de Lagrangiaan als een C∞-functie L ∈ F(TQ) ingevoerd
worden. Bovendien kwam in paragraaf §1.3 reeds de Legendretransformatie ter sprake als
de overgang van coordinaten (q, q, t) naar coordinaten (q, p, t) via pi = ∂L∂qi . Beschouwen
we hier enkel bindingen die niet expliciet van de tijd afhangen, de Legendretransformatie
in de geometrische beschrijving is daarmee een afbeelding L : TQ → T ∗Q geassocieerd
met de Lagrangiaan L : TQ → IR. Uitgedrukt in coordinaten geeft dit
L : (q, v) → L (q, v) =
(q1, . . . , qn; p1 =
∂L
∂v1, . . . , pn =
∂L
∂vn
). (2.54)
We stellen nu als doel de vergelijkingen van Lagrange (1.9) uit vergelijking (2.50) af te
leiden [13, p. 77–81]. Hiertoe maken we gebruik van de pull-back onder L waarmee dH
terug gevoerd kan worden naar X ∗(TQ). Nemen we de pull-back van vergelijking (2.50)
onder L
L∗ (iXHω) = L∗ (−dH)
en maken we gebruik van de eigenschappen (2.2) , dan volgt met ω = dθ
iL∗XHd (L∗θ) = −d (H L) . (2.55)

Hoofdstuk 2. Geometrische beschrijving van de mechanica 39
Stellen we hierin L∗XH = XL het Lagrangeiaans vectorveld en lossen we bovenstaande
vergelijking hiernaar op. Omdat XL ∈ X (TQ), kan XL als
XL =n∑i=n
µi∂
∂qi+ νi
∂
∂vi(2.56)
geschreven worden met µi en νi onbekend. Nemen we eerst het linkerlid onderhanden.
Met θ =∑n
i=1 pidqi volgt uit (2.42) de pull-back van θ onder L
L∗θ =n∑i=1
∂L
∂vidqi
en daarmee
d (L∗θ) =n∑i=1
[n∑j=1
(∂2L
∂qj∂vidqj +
∂2L
∂vj∂vidvj)]
∧ dqi (2.57)
waarin de uitwendige afgeleide van een 1-vorm (2.37) gebruikt is. L∗θ wordt ook wel de
Poincare-Cartan 1-vorm ‘θL’ en d (L∗θ) Poincare-Cartan 2-vorm ‘ωL’ genoemd. Vergelij-
kingen (2.57) en (2.56) ingevuld in (2.55) geven samen, rekeninghoudend met (2.33)
,
iXLd (L∗θ) =
n∑i,j=1
∂2L
∂qj∂vi(µjdqi − µidqj
)+
n∑i,j=1
∂2L
∂vj∂vi(νjdqi − µidvj
). (2.58)
Uit de definitie van de Hamiltoniaan (1.4) volgt dat
H L =n∑i=1
vi∂L(q, v)
∂vi− L(q, v) (2.59)
zodat het rechterlid van (2.55) kan gevonden worden als
−d (H L) =n∑j=1
[∂
∂qj
(L−
n∑i=1
vi∂L
∂vi
)dqj +
∂
∂vj
(L−
n∑i=1
vi∂L
∂vi
)dvj
]
=n∑j=1
[(∂L
∂qj−
n∑i=1
vi∂2L
∂qj∂vi
)dqj +
(0−
n∑i=1
vi∂2L
∂vj∂vi
)dvj
]. (2.60)
Gelijkstellen van de overeenkomstige termen in (2.58) en (2.60) —wetende dat de
indices (i, j) mogen verwisseld worden omdat de sommatie over i, j = 1, . . . , n loopt—

Hoofdstuk 2. Geometrische beschrijving van de mechanica 40
levert de voorwaarden
n∑i=1
[∂2L
∂vi∂vjνi +
∂2L
∂qi∂vjµi − ∂2L
∂qj∂viµi]
=∂L
∂qj−
n∑i=1
vi∂2L
∂qj∂vi(2.61a)
n∑i=1
∂2L
∂vi∂vjµi =
n∑i=1
vi∂2L
∂vj∂vi(2.61b)
op voor j = 1, . . . , n. Indien L regulier verondersteld wordt, is
det
(∂2L
∂vi∂vj
)6= 0 (2.62)
en XL daarmee uniek bepaald. In paragraaf §2.4.1 werd uit de doeken gedaan hoe een een
vectorveld een stelsel differentiaalvergelijkingen van 1e orde induceert, volgens vergelijking
(2.46a) voldoen de componenten van XL dus aan
qi = µi, i = 1, . . . , n (2.63a)
vi = νi, i = 1, . . . , n. (2.63b)
Uit vergelijking (2.61b) volgt samen met (2.62) dat µi = vi, i = 1, . . . , n. Dit samen
met de verbanden (2.63) ingevuld in (2.61a) geeft
n∑i=1
[∂
∂qi
(∂L
∂vj
)qi +
∂
∂vi
(∂L
∂vj
)vi]− ∂L
∂qj= 0 j = 1, . . . , n
waaruit de vergelijkingen van Lagrange volgen.
d
dt
(∂L
∂vj
)− ∂L
∂qj= 0 j = 1, . . . , n
Opmerking 2.2 De Lagrangiaan werd d.m.v. vergelijking (2.59) op een coordinaataf-
hankelijke wijze in het verhaal betrokken. In [14, p. 144] echter, wordt het Liouvillevec-
torveld ‘Z’ op intrinsieke wijze gedefinieerd en de coordinaatuitdrukking ‘Z =∑n
i=1 vi ∂∂vi ’
afgeleid. Zodoende vindt men
H L = iZdL− L (2.64)
waarin we er aan herinneren dat iZdL = dL (Z) = Z (L), zie vergelijking (2.40) .
Hoofdstuk 3
Mechanische bindingen
Waar in de vorige hoofdstukken enkel holonome bindingen beschouwd werden en het prin-
cipe van d’Alembert (1.4) gehanteerd werd om de bewegingsvergelijkingen af te leiden, zal
hier het principe van d’Alembert onder de loep genomen worden en de nodige analytische
en differentiaalmeetkundige ‘tools’ aangereikt worden om ook niet-holonome bindingen
te modelleren. Eerst zullen niet-holonome bindingsvergelijkingen die affien in de snel-
heden zijn aan bod komen, nadien worden ook algemene besproken. Voor de eenvoud
behandelen we enkel mechanische systemen met een gladde, n-dimensionale configuratie-
ruimte ‘Q’ die niet van de tijd afhangt. De conventie volgend, zullen de coordinaten in de
analytische beschrijving door qi, qi en pi gegeven worden, in een differentiaalmeetkundige
context gebruiken we qi, vi en pi.
3.1 Voorbespreking
3.1.1 Holonome versus niet-holonome bindingen
Toen Joseph Louis Lagrange in 1788 zijn ‘Mecanique Analytique’ publiceerde en daarmee
de grondslag legde voor alle verdere ontwikkelingen in de theoretische mechanica, was hij
nog niet op de hoogte van het bestaan van niet-holonome bindingen. Het zou nog meer
dan 100 jaar duren aleer Heinrich Rudolf Hertz in 1894 het onderscheid tussen holono-
me en niet-holonome mechanische bindingen aankaartte. Holonome —of geometrische—
bindingsvergelijkingen leggen restricties op aan de mogelijke geometrische posities van de
41
Hoofdstuk 3. Mechanische bindingen 42
individuele delen van het systeem. Niet-holonome —of kinematische— bindingsvergelij-
kingen daarentegen beperken de mogelijke snelheden. Belangrijk hierbij is in te zien dat
geometrische bindingen ter zelfdertijd aanleiding geven tot kinematische bindingen. Zo zal
het opleggen van |r| = ` aan een massapunt impliceren dat —in sferische coordinaten—
de radiale snelheid nul zal moeten zijn. Omgekeerd echter, beperken kinematische bindin-
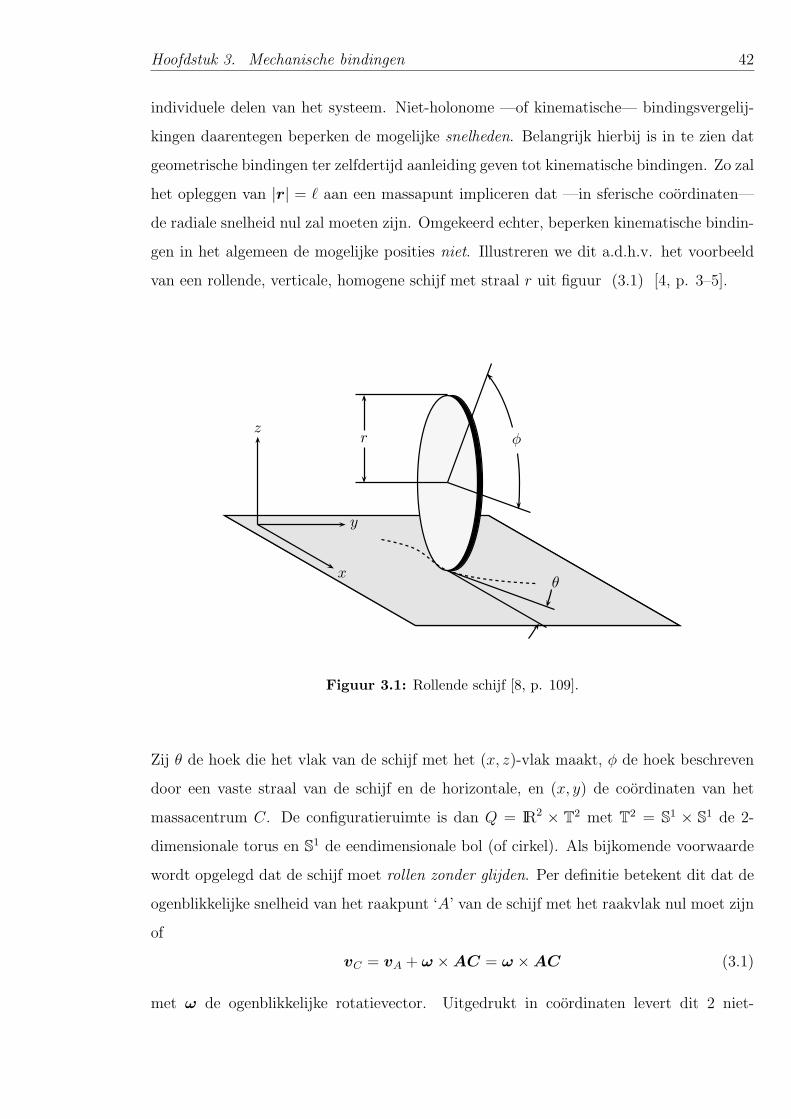
gen in het algemeen de mogelijke posities niet. Illustreren we dit a.d.h.v. het voorbeeld
van een rollende, verticale, homogene schijf met straal r uit figuur (3.1) [4, p. 3–5].
06/01/2004 2.6 Constraints in mechanics 109
z
y
x
φr
θ
Figure 2.9 A rolling disk
The example is a disk rolling upright on a flat surface as shown in Figure 2.9. Theconfiguration space for the disk is Q = R
2 × T2, where R
2 gives the point where the disktouches the plane and where the angles in T
2 describe the two angles of rotation, “roll” and“spin.” For coordinates on Q, we shall take (x, y, θ, φ) as shown in Figure 2.9.
We suppose the disk to have a uniform mass distribution with support in a vertical plane.Thus its inertia tensor has two equal eigenvalues as seen in Proposition 1.5.9. We denotethe inertia for the “spin” motion by J and the inertia for the “roll” motion by I. The massof the body we denote by m. The kinetic energy for the disk is then
K =1
2m(x2 + y2) +
1
2Iθ2 +
1
2Jφ2,
giving the associated Riemannian metric as
g = m(dx ⊗ dx + dy ⊗ dy) + Idθ ⊗ dθ + Jdφ ⊗ dφ.
We suppose the system to be without potential, which will be the case if gravity acts in thez-direction in Figure 2.9.
Now let us describe the constraints. We ask that the disk roll without slipping on theplane. This will place constraints on the velocities allowed to us, as we shall now see. InFigure 2.10, we view the disk from directly above. A little thought with this picture, and
θ(x, y)
Figure 2.10 The rolling disk from above
one realises that the condition that the disk roll without slipping may be expressed as the
110 2 Lagrangian mechanics 06/01/2004
conditionx = r cos θφ, y = r sin θφ,
where r is the radius of the disk. This means that the points (x, y, θ, φ, vx, vy, vθ, vφ) in TQwhich are allowed by the constraints must satisfy
vx − r cos θvφ = 0, vy − r sin θvφ = 0.
We now must put this into the form we have given for a constraint. That is, we must writedown the set of allowable velocities at each configuration (x, y, θ, φ). We shall do this bywriting down vector fields on Q which span the linear part of the constraint distribution ateach point. To do this, we note that a vector field X given by
X = Xx∂
∂x+ Xy
∂
∂y+ Xθ
∂
∂θ+ Xφ
∂
∂φ
will satisfy the constraints if and only if the vector (Xx, Xy, Xθ, Xφ) lies in the kernel of thematrix [
1 0 0 −r cos θ0 1 0 −r sin θ
].
One readily ascertains that two such vector fields are
X1 = r cos θ∂
∂x+ r sin θ
∂
∂y+
∂
∂φ, X2 =
∂
∂θ.
We therefore have
C(x,y,θ,φ) = spanRX1(x, y, θ, φ), X2(x, y, θ, φ) .
We note that this is therefore a linear constraint.
2.6.2 Holonomic and nonholonomic constraints We have already seen that a con-straint is linear when Cq = (Cq) for each q ∈ Q. Linear constraints are by far the predom-inant type, although others certainly occur. Within the set of linear constraints, however,there is an important distinction which can be made. Let q0 ∈ Q. Denote by Mq0 the set ofpoints q ∈ Q for which there exists a piecewise differentiable curve c : [0, 1] → Q, satisfyingthe constraints, with the property that c(0) = q0 and c(1) = q. Thus Mq0 is the set ofpoints reachable from q0 with curves which satisfy the constraint. The set of points Mq0
will typically be some smooth surface in Q running through the point q0, and so Mq0 willhave a well-defined dimension. We shall suppose that this dimension is independent of thepoint q0, something which is frequently true. A linear constraint C is holonomic if thedim(Mq0) = rank(C). A constraint which is not holonomic is called nonholonomic. Thus,the idea with an holonomic constraint is that one can only access as many dimensions inconfiguration space as directions are allowed by the constraints. Perhaps a newcomer wouldexpect that this would always be the case. But the fact of the matter is that many linearconstraints are in fact nonholonomic. If this were not so, you would not be able to parkyour car. Indeed, your car can be thought of as having a configuration space of dimension5 (at least for present purposes): (1) 3 dimensions for the position and orientation of thecar (say (x, y, θ)); (2) 1 dimension for the steering wheel angle; (3) 1 dimension for the drivewheel angle i.e., what makes the car move forward. However, you have direct access to only2 of the 5 directions, one via the steering angle, and the other via the drive wheel angle.
Figuur 3.1: Rollende schijf [8, p. 109].
Zij θ de hoek die het vlak van de schijf met het (x, z)-vlak maakt, φ de hoek beschreven
door een vaste straal van de schijf en de horizontale, en (x, y) de coordinaten van het
massacentrum C. De configuratieruimte is dan Q = IR2 × T2 met T2 = S1 × S1 de 2-
dimensionale torus en S1 de eendimensionale bol (of cirkel). Als bijkomende voorwaarde
wordt opgelegd dat de schijf moet rollen zonder glijden. Per definitie betekent dit dat de
ogenblikkelijke snelheid van het raakpunt ‘A’ van de schijf met het raakvlak nul moet zijn
of
vC = vA + ω ×AC = ω ×AC (3.1)
met ω de ogenblikkelijke rotatievector. Uitgedrukt in coordinaten levert dit 2 niet-

Hoofdstuk 3. Mechanische bindingen 43
holonome bindingen op
x− (r cos θ) φ = 0
y − (r sin θ) φ = 0.(3.2)
Hierdoor blijven er slechts 4 − 2 = 2 vrijheidsgraden voor de snelheden over. Daar
tegenover staat dat vanuit een gegeven beginpositie (x0, y0, θ0, φ0) elke configuratie
(x1, y1, θ1, φ1) kan bereikt worden door de schijf vanuit (x0, y0) langsheen een curve met
lengte r (φ1 − φ0 + 2πk) —k ∈ N0— naar (x1, y1) te rollen en dan te roteren tot in θ = θ1.
De rolvoorwaarden beperken de te bereiken posities dus niet.
3.1.2 Het principe van d’Alembert verder uitgediept
Doen we de berekeningen die leiden tot de vergelijkingen van Lagrange (1.9) nog eens over
voor een stelsel van N massapunten onderworpen aan m holonome bindingen, maar zonder
gebruik te maken van het principe van d’Alembert (1.4) . Uit de bewegingsvergelijkingen
(1.5)
mkrk = F k + Rk, k = 1, . . . , N
bekomt men
N∑k=1
(mkrk − F k) ·∂rk∂qi
=N∑k=1
Rk ·∂rk∂qi
, i = 1, . . . , n.
waarin het rechterlid nu niet gelijk aan nul genomen is. Het linkerlid kan —zie paragraaf
§1.1.3— m.b.v. de Lagrangiaan herwerkt worden en de som in het rechterlid schrijven we
kortweg als fi(q, q).
d
dt
(∂L
∂qi
)− ∂L
∂qi= Qi +
N∑k=1
Rk ·∂rk∂qi
= Qi + fi (q, q) , i = 1, . . . , n (3.3)
Zodoende bekomt men n 2e orde differentiaalvergelijkingen in de n onbekenden qi=1,...,n (t).
Om dit op te lossen, dienen de fi’s echter wel in functie van (q, q) gekend te zijn en hiervoor
zal men veronderstellingen moeten maken in overeenstemming met fysische eigenschappen
van de binding. Voor een massapunt, bewegend op Q = IR2, zou men bijvoorbeeld een
van de volgende modellen kunnen hanteren.

Hoofdstuk 3. Mechanische bindingen 44
1. Visceuze (natte) wrijving wordt gekarakteriseerd door een kracht in de zelfde richting
als de verplaatsing maar met tegengestelde zin. Ze is een lineaire functie van de
snelheden. In cartesische coordinaten, met r = x1x + y1y, geeft dit
RV isceus = −µV (x1x + y1y)
waarin µV een positieve viscositeitscoefficient voorstelt. In dit eenvoudige voorbeeld
is fx = −µV x en fy = −µV y.
2. Stick-slip treedt op wanneer de kracht nodig om de wrijving te overwinnen bij stil-
stand groter is dan bij beweging.
RStick−slip =
K (1x + 1y) ; x = y = 0
−µS (x1x + y1y) ; elders
Ze is discontinu en de statische component moet begrepen worden als zijnde een
minimum die een uitwendige kracht dient uit te oefenen alvorens het object in
beweging treedt.
3. Rolweerstand is de weerstand ondervonden wanneer een oppervlak vervormd wordt
bij het rollen zonder glijden over een ander oppervlak.
RRol =
0 ; x = y = 0
− µr√x2+y2
(x1x + y1y) ; elders
Deze is onafhankelijk van de grootte van de snelheid, in cartesische coordinaten
geldt immers
|f |2 = f 2x + f 2
y =µ2r
x2 + y2
(x2 + y2
)= µ2
r.
De wrijvingscoefficienten in deze modellen kunnen uit het experiment bepaald worden
en houden verband met de grootte en aard van het contactoppervlak, elasticiteit van de
objecten, grootte van de normale component van de reactiekracht, . . . Men kan zich dan
afvragen hoe een ideale binding zich dient te gedragen. Omdat wrijvingskrachten dissi-
patief zijn, is het geen gek idee te stellen dat ideale bindingen geen (negatief) vermogen
mogen leveren. Deze voorwaarde gaat niet meer op wanneer de bindingen expliciet van
Hoofdstuk 3. Mechanische bindingen 45
de tijd afhangen. Neem het eenvoudige voorbeeld van een massapunt in het xy-vlak. Om
geen vermogen te leveren zal de reactiekracht volgens de z-as moeten gericht zijn. Wan-
neer het bewegingsvlak zelf een functie van de tijd is echter —en een snelheidscomponent
volgens de z-as heeft— is het vermogen geleverd door de reactiekracht niet meer nul, al-
hoewel het nog steeds over dezelfde gladde, wrijvingsloze binding gaat. Door niet te eisen
dat het geleverde vermogen, maar het geleverde virtueel vermogen van de reactiekrachten
nul moet zijn, is hier een mouw aan gepast. Virtuele snelheden —i.p.v. mogelijke snelhe-
den aangewend om het vermogen van de reactiekrachten te berekenen— bevatten immers
niet de snelheidscomponenten geassocieerd met de tijdsafhankelijkheid van de bindingen,
zie vergelijking (1.3) .
Het principe van d’Alembert vertaalt het ‘ideaal’ zijn van de bindingen in formulevorm en
heeft bovendien de leuke mathematische eigenschap dat het stelsel vergelijkingen (3.3) nu
zonder verdere a priori informatie over de reactiekrachten volledig bepaald is. Wanneer er
niet-holonome bindingen op het toneel verschijnen, is het niet zonder meer duidelijk hoe
virtuele snelheden en daarmee virtueel vermogen moet gedefinieerd worden. Een alles-
omvattende aanpak bestaat er niet en men moet zijn toevlucht nemen tot op hypotheses
gestoelde resultaten die slechts beperkt toepasbaar zijn. In dit hoofdstuk wordt getracht
enkele van deze initiatieven te duiden en hun sterktes en zwaktes toe te lichten.
3.2 Analytische beschrijving
Eerst behandelen we de methodes van de Lagrangemultiplicatoren en van Caplygin die
enkel op systemen onderworpen aan niet-holonome bindingen, affien in de snelheden
toepasbaar zijn. Vervolgens bespreken we ook een algemene oplossingsstrategie.
Starten we met niet-holonome bindingsvergelijkingen affien in de veralgemeende snelhe-
den van de vorm
n∑i=1
aβ,i(q, t)qi + bβ(q, t) = 0, β = 1, . . . , ` < n (3.4)
waarbij nog wordt geeist dat de (`× n)- matrix a van maximale rang ` is. Anders zou
er immers een lineaire combinatie van het linkerlid bestaan die nulrijen voor de gemodifi-
Hoofdstuk 3. Mechanische bindingen 46
ceerde a oplevert. De bindingsvergelijking horende bij deze rij zou dan onafhankelijk van
de veralgemeende snelheden zijn en dus geen niet-holonome binding voorstellen.
Hernemen we (1.16) waarin ‘T ’ reeds met de conservatieve krachten is aangevuld tot ‘L’
∫ t2
t1
[n∑i=1
(∂L
∂qi− d
dt
(∂L
∂qi
)+ Qi
)δqi
]dt = 0. (3.5)
Om tot de Lagrangevergelijkingen van de 3e soort (1.17) te komen, werd gesteld dat de
variaties δqi=1,...,n allen onafhankelijk waren, dit geldt nu omwille van (3.4) duidelijk niet
meer. Men werpt de hypothese op dat de variaties nu via
n∑i=1
aβ,i(q, t)δqi = 0, β = 1, . . . , ` < n (3.6)
met elkaar verbonden zijn, dus zonder de coefficienten bβ. Een waterdichte verantwoording
hiervoor kan er niet gegeven worden al komt dit niet helemaal uit de lucht gevallen.
Wanneer de bijkomende bindingen van het holonome type zijn
Gβ(q, t) = 0, β = 1, . . . , ` < n (3.7)
induceren deze de lineaire condities
dGβ
dt=
n∑i=1
∂Gβ
∂qiqi +
∂Gβ
∂t= 0, β = 1, . . . , ` < n
van dezelfde vorm als (3.4) . Voorts leggen de holonome bindingen (3.7) de voorwaarden
δGβ =dGβ
dε
(q(v), t
)∣∣∣∣ε=0
=n∑i=1
∂Gβ
∂qiδqi = 0, β = 1, . . . , ` < n
voor de variaties op. Identificatie van∂Gβ
∂qimet aβ,i verantwoordt dan (3.6) .
Opmerking 3.1 Er is echter nog een manier om dit in te zien. Stel dat de schijf uit
figuur (3.1) rolt zonder glijden op een vlak dat een constante snelheid vB heeft, dan is
dit te interpreteren al is de bindingsvergelijking expliciet van de tijd afhankelijk want de
positie van het grondvlak is een functie van de tijd. Zoals reeds op het einde van paragraaf
§3.1.2 beredeneerd, zal vB geen bijdrage tot de virtuele snelheden mogen leveren. En nu

Hoofdstuk 3. Mechanische bindingen 47
blijkt dat —tenminste in dit voorbeeld— de componenten van vB door de coefficienten
bβ=1,...,` worden gegeven. De voorwaarde voor rollen zonder glijden is nu immers vA = vB
en er geldt dus
vC = vA + ω ×AC = vB + ω ×AC
of in coordinaten uitgedrukt, afgezien van z − vBz = 0,
x− (r cos θ) φ− vBx = 0
y − (r sin θ) φ− vBy = 0.(3.8)
Het ontbreken van de bβ’s in (3.6) heeft m.a.w. zijn oorsprong in het weren van vB —of
algemeen de expliciete tijdsafhankelijkheid van de bindingsvergelijkingen— uit de virtuele
snelheden.
3.2.1 Methode van de Lagrangemultiplicatoren
Om (3.5) verder op te lossen, wordt de hulp van Lagrange-mutiplicatoren ‘λβ=1,...,`(t)’
ingeroepen. Vermenigvuldigen van deze —voorlopig onbekende— continue functies met
de respectievelijke vergelijkingen∑n
i=1 aβ,i(q, t)δqi = 0, β = 1, . . . , ` geeft na lid aan lid
optellen van al deze termen en integratie
∫ t2
t1
[∑β=1
λβ(t)
(n∑i=1
aβ,i(q(t), t
)δqi(t)
)]dt = 0.
Door dit bij (3.5) te voegen, bekomt men
∫ t2
t1
[n∑i=1
(∂L
∂qi− d
dt
(∂L
∂qi
)+ Qi +
∑β=1
λβaβ,i
)δqi
]dt = 0.
Hierin zijn slechts n− ` variaties δqi onafhankelijk van elkaar zodat enkel voor die termen
mag gesteld worden dat de corresponderende term nul moet zijn. Maar door de invoering
van de Lagrange-multiplicatoren kunnen de λβ zo gekozen worden dat de overige ` termen
ook nul worden. Dat zo’n λβ’s bestaan , volgt uit het van maximale rang zijn van de matrix
Hoofdstuk 3. Mechanische bindingen 48
a. Uiteindelijk bekomt men dan een goed gedefinieerd stelsel vergelijkingen [15§6.2.2]
n∑i=1
aβ,i(q, t)qi + bβ(q, t) = 0, β = 1, . . . , ` (3.9a)
d
dt
(∂L
∂qi
)− ∂L
∂qi= Qi +
∑β=1
λβaβ,i, i = 1, . . . , n (3.9b)
in de n + ` onbekenden (qi=1,...,n, λβ=1,...,`).
Wanneer we (3.9b) met (3.3) vergelijken, blijkt dat∑`
β=1 λβaβ,i de taak van de veralge-
meende krachtcomponenten van de reacties fi=1,...,n op zich neemt. Dit kan ook als volgt
begrepen worden. De niet-holonome bindingen (3.6) definieren een (n−`)-dimensionaal
vlak waarin de variaties moeten liggen. De `-dimensionale ruimte hier loodrecht op wordt
door de rijen aβ = [aβ,1 . . . aβ,n] , β = 1, . . . , ` opgespannen. En we weten dat voor een
reactiekracht die geen vermogen levert moet gelden dat
N∑k=1
Rk · δrk = 0.
Met
δrk =n∑i=1
∂rk∂qi
δqi
wordt ditn∑i=1
(N∑k=1
Rk ·∂rk∂qi
)δqi = 0. (3.10)
De veralgemeende reactie f = [f1 . . . fn] met fi =∑N
k=1 Rk ·∂rk
∂qiligt dus in de ruimte
loodrecht op het (n− `)-dimensionaal vlak van de variaties. Omdat die door de rijen van
a wordt opgespannen, moeten er coefficienten λβ=1,...,` bestaan zodat
f =∑β=1
λβaβ
of geprojecteerd
fi =N∑k=1
Rk ·∂rk∂qi
=∑β=1
λβaβ,i i = 1, . . . , n
en dit zijn nu net de termen die in (3.9b) opduiken.

Hoofdstuk 3. Mechanische bindingen 49
Voorbeeld 3.1 (Rollende schijf) Nemen we figuur (3.1) in gedachten en zij ‘m’ de
massa van de schijf en ‘IC ’ en ‘ID’ zijn traagheidsmomenten, de Lagrangiaan is daarmee
L = T =m
2
(x2 + y2
)+
1
2IC φ2 +
1
2IDθ2. (3.11)
De bindingsvergelijkingen (3.2) kunnen in matrixvorm geschreven worden
1 0 −r cos θ 0
0 1 −r sin θ 0
x
y
φ
θ
+
0
0
=
0
0
(3.12)
waardoor de coefficienten van aβ,i meteen herkenbaar zijn. De bewegingsvergelijkingen
(3.9b) worden daarmee [15, p. 153–155]
d
dt
(∂T
∂x
)− ∂T
∂x=
2∑β=1
λβaβ,1 ⇒ mx = λ1 (t) (3.13a)
d
dt
(∂T
∂y
)− ∂T
∂y=
2∑β=1
λβaβ,2 ⇒ my = λ2 (t) (3.13b)
d
dt
(∂T
∂φ
)− ∂T
∂φ=
2∑β=1
λβaβ,3 ⇒ IC φ = −rλ1 (t) cos θ − rλ2 (t) sin θ (3.13c)
d
dt
(∂T
∂θ
)− ∂T
∂θ=
2∑β=1
λβaβ,4 ⇒ IDθ = 0. (3.13d)
Substitutie van (3.13a) en (3.13b) in (3.13c) geeft
IC φ = −mr (x cos θ + y sin θ) (3.14)
en afleiden van de bindingsvergelijkingen (3.2) leert dat
x = (r cos θ) φ− (r sin θ) θφ
y = (r sin θ) φ + (r cos θ) θφ.(3.15)
Na vermenigvuldiging met cos θ, respectievelijk sin θ, en lid aan lid opgeteld, geeft (3.15)
als rechterlid ‘rφ’ en als linkerlid —op de term ‘−mr’ na— (3.14) . Zodus bekomt men
Hoofdstuk 3. Mechanische bindingen 50
het eenvoudig stelsel differentiaalvergelijkingen
(IC + mr2) φ = 0
IDθ = 0.(3.16)
Tot slot berekenen we de veralgemeende krachtcomponenten van de reacties t.g.v. de
niet-holonome bindingen. Uit (3.13) volgt: fx = mx, fy = my en fφ = fθ = 0. Deze
kunnen i.f.v. de veralgemeende snelheden geschreven worden door op te merken dat met
φ = 0 ingevuld in (3.15) en rekeninghoudend met (3.2) volgt dat
x = − (r sin θ) θφ = −yφ
y = + (r cos θ) θφ = +xφ.(3.17)
De veralgemeende reactiekracht staat daarmee loodrecht op de beweging van het massa-
middelpunt want ‘fxx + fyy’ is gelijk aan nul. 2
3.2.2 Methode van Caplygin
In vele praktische toepassingen kunnen de laatste ` veralgemeende coordinaten van de
eerste n − ` gescheiden worden. Dit is het geval wanneer de Lagrangiaan niet afhan-
kelijk is van de laatste ` veralgemeende coordinaten en de bindingsvergelijkingen (3.4)
herschreven kunnen worden als
qn−`+β =n−∑j=1
aβ,j (q) qj + bβ (q), β = 1, . . . , ` (3.18)
waarin q = (q1, . . . , qn−`) gesteld is. Caplygin leidde hieruit in 1897 een stelsel vergelij-
kingen in slechts n− ` onbekenden mee af (tegenover n + ` in het geval van de methode
van de Lagrangemultiplicatoren). Om deze vergelijkingen te bekomen, vertrekken we van
δqn−`+β =n−∑i=1
aβ,i (q) δqi, β = 1, . . . , `. (3.19)
analoog aan (3.6) . Door verder de som in vergelijking (3.5) —toegepast op een
conservatief systeem— te splitsen in i = 1, . . . , n− ` en β = 1, . . . , ` en gebruik te maken

Hoofdstuk 3. Mechanische bindingen 51
van (3.19) en ∂L/∂qn−`+β = 0, β = 1, . . . , `, verkrijgen we
δS =
∫ t2
t1
[n−∑i=1
(∂L
∂qi− d
dt
(∂L
∂qi
)−∑β=1
d
dt
(∂L
∂qn−`+β
)aβ,i
)δqi
]dt = 0. (3.20)
waar nu elke term horende bij een δqi=1,...,n−` nul dient te zijn. Voorts kunnen de veral-
gemeende snelheden qn−`+β, β = 1, . . . , n in de Lagrangiaan m.b.v (3.18) geelimineerd
worden
L(q, ˙q)≡ L
(q; ˙q; qn−`+1 (q, ˙q) , . . . , qn (q, ˙q)
)zodat
∂L
∂qi=
∂L
∂qi+∑β=1
∂L
∂qn−`+β
∂qn−`+β∂qi
=∂L
∂qi+∑β=1
∂L
∂qn−`+β
(n−∑j=1
∂aβ,j∂qi
qj +∂bβ∂qi
)(3.21)
en
∂L
∂qi=
∂L
∂qi+∑β=1
∂L
∂qn−`+β
∂qn−`+β∂qi
=∂L
∂qi+∑β=1
∂L
∂qn−`+βaβ,i
waarmee
d
dt
(∂L
∂qi
)=
d
dt
(∂L
∂qi
)+∑β=1
[d
dt
(∂L
∂qn−`+β
)aβ,i +
∂L
∂qn−`+β
(n−∑j
∂aβ,i∂qj
qj
)]. (3.22)
Vergelijkingen (3.21) en (3.22) lid aan lid aftrekken geeft
d
dt
(∂L
∂qi
)− ∂L
∂qi=
d
dt
(∂L
∂qi
)− ∂L
∂qi
+∑β=1
d
dt
(∂L
∂qn−`+β
)aβ,i −
∑β=1
[∂L
∂qn−`+β
(∂bβ∂qi
+n−∑j=1
(∂aβ,j∂qi
− ∂aβ,i∂qj
)qj
)].
Hoofdstuk 3. Mechanische bindingen 52
Invullen in (3.20) tenslotte, levert de vergelijkingen van Caplygin [4, p. 100–110]
d
dt
(∂L
∂qi
)− ∂L
∂qi+∑β=1
[∂L
∂qn−`+β
∣∣∣∣∗
(∂bβ∂qi
+n−∑
j=1, 6=i
(∂aβ,j∂qi
− ∂aβ,i∂qj
)qj
)]= 0 (3.23)
op voor i = 1, . . . , n− ` en waarin met ‘ |∗’ bedoeld wordt dat na het partieel afleiden, de
relaties (3.18) in de Lagrangiaan moeten gesubstitueerd worden. Omdat de term in de
som over j voor j = i steeds nul is, sluiten we, om het rekenwerk te verlichten, deze term
uit. Bekijken we enkele voorbeelden.
Voorbeeld 3.2 (Rollende schijf) Hernemen we voorbeeld (3.1) , maar lossen we het
nu d.m.v. de vergelijkingen van Caplygin op [4, p. 101]. De bindingsvergelijkingen (3.2)
ingevuld in (3.11) geven
L =1
2
(mr2 + IC
)φ2 +
1
2IDθ2 (3.24)
en (3.2) in de vorm (3.18) geschreven leert dat
∂a1,1
∂θ= −r sin θ en
∂a2,1
∂θ= r cos θ (3.25)
en de rest van de afgeleiden —alsook bβ=1,2— nul zijn. Substitueren van (3.24) en (3.25)
in (3.23) leveren de vergelijkingen van Caplygin voor φ
d
dt
(∂L
∂φ
)− 0 +
∂L
∂x
∣∣∣∣∗
[0 +
(0− ∂a1,1
∂θ
)θ
]+
∂L
∂y
∣∣∣∣∗
[0 +
(0− ∂a2,1
∂θ
)θ
]= 0
d
dt
((mr2 + IC
)φ)
= 0 (3.26)
en θ
d
dt
(∂L
∂θ
)− 0 +
∂L
∂x
∣∣∣∣∗
[0 +
(∂a1,1
∂θ− 0
)θ
]+
∂L
∂y
∣∣∣∣∗
[0 +
(∂a2,1
∂θ− 0
)θ
]= 0
d
dt
(IDφ
)= 0 (3.27)
op. Met deze methode bekomt men de vergelijkingen (3.16) dus meteen, in tegenstelling
tot de methode van de Lagrangemultiplicatoren waarbij nog enkele tussenstappen nodig
waren. Langs de andere kant laat de methode van Caplygin niet toe om de veralgemeende
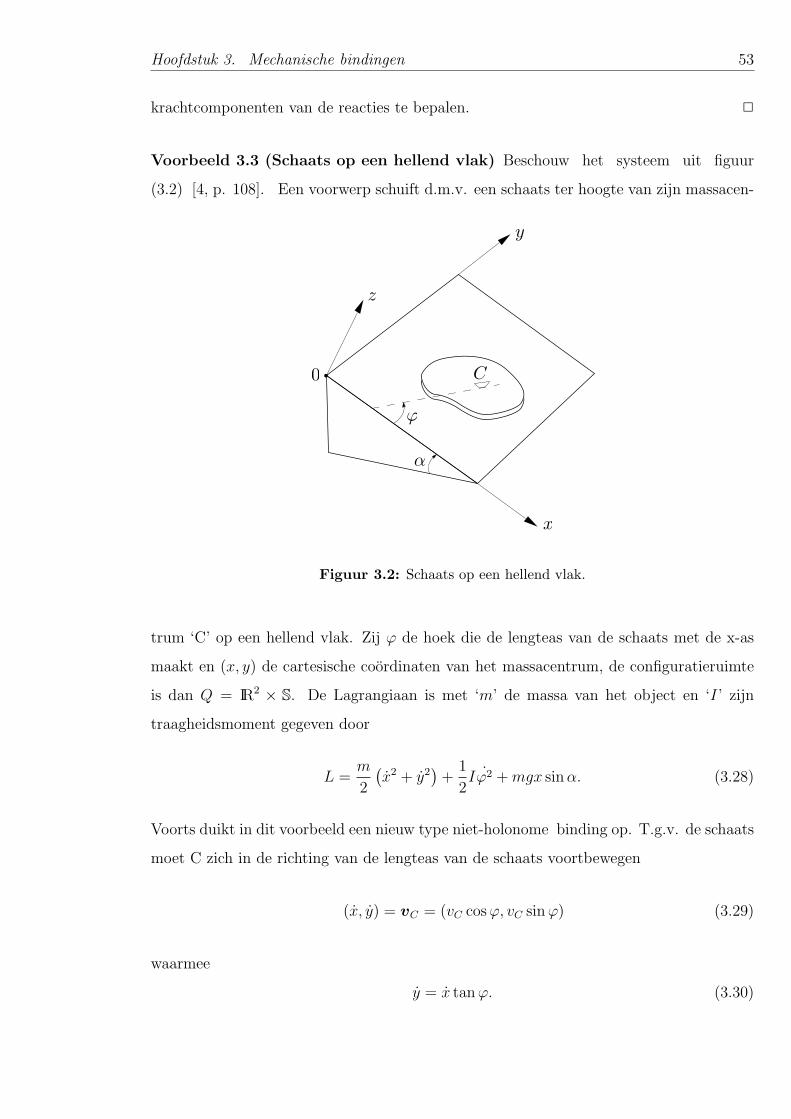
Hoofdstuk 3. Mechanische bindingen 53
krachtcomponenten van de reacties te bepalen. 2
Voorbeeld 3.3 (Schaats op een hellend vlak) Beschouw het systeem uit figuur
(3.2) [4, p. 108]. Een voorwerp schuift d.m.v. een schaats ter hoogte van zijn massacen-
Figuur 3.2: Schaats op een hellend vlak.
trum ‘C’ op een hellend vlak. Zij ϕ de hoek die de lengteas van de schaats met de x-as
maakt en (x, y) de cartesische coordinaten van het massacentrum, de configuratieruimte
is dan Q = IR2 × S. De Lagrangiaan is met ‘m’ de massa van het object en ‘I’ zijn
traagheidsmoment gegeven door
L =m
2
(x2 + y2
)+
1
2Iϕ2 + mgx sin α. (3.28)
Voorts duikt in dit voorbeeld een nieuw type niet-holonome binding op. T.g.v. de schaats
moet C zich in de richting van de lengteas van de schaats voortbewegen
(x, y) = vC = (vC cos ϕ, vC sin ϕ) (3.29)
waarmee
y = x tan ϕ. (3.30)

Hoofdstuk 3. Mechanische bindingen 54
Hieruit volgt dat afgezien van∂a1,1
∂ϕ= 2
tan ϕ
cos2 ϕ(3.31)
al de afgeleiden nul worden. De bindingsvoorwaarde (3.30) ingevuld in (3.28) geeft
L =m
2 cos2 ϕx2 +
1
2Iϕ2 + mgx sin α. (3.32)
waaruit de vergelijkingen van Caplygin volgen voor x
d
dt
(∂L
∂x
)− ∂L
∂x+
∂L
∂y
∣∣∣∣∗
[0 + 0x +
(0− ∂a1,1
∂ϕ
)ϕ
]= 0
x + ϕx tan ϕ− g sin α cos2 ϕ = 0 (3.33)
en ϕ
d
dt
(∂L
∂ϕ
)− ∂L
∂ϕ+
∂L
∂y
∣∣∣∣∗
[0 +
(∂a1,1
∂ϕ− 0
)x + 0ϕ
]= 0
d
dt(Iϕ) = 0. (3.34)
Vergelijkingen (3.33) en (3.34) vormen dan een stelsel differentiaalvergelijkingen in
slechts 2 onbekenden x(t) en ϕ(t). 2
3.2.3 Regel van Chetaev
Wanneer de niet-holonome bindingsvergelijkingen
Gβ(q, q) = 0, β = 1, . . . , ` (3.35)
niet-lineair in de snelheden zijn, is niet meteen duidelijk hoe de virtuele snelheden ge-
definieerd dienen te worden. De reactiekrachten zullen immers, net als in het geval van
tijdsafhankelijke holonome bindingen en affiene niet-holonome bindingen, in het algemeen
vermogen leveren. Dit kan ingezien worden —voor een conservatief systeem— door de

Hoofdstuk 3. Mechanische bindingen 55
verbanden
∂H
∂qi= −pi + fi
∂H
∂pi= +qi
in de tijdsafgeleide van de Hamiltoniaan te substitueren
dH
dt=
n∑i=1
∂H
∂qiqi +
∂H
∂pipi =
n∑i=1
fiqi (3.36)
waaruit blijkt dat de Hamiltoniaan —en dus de totale energie— t.g.v. de reactiekrachten
geen constante van beweging meer is. Zoals reeds in paragraaf §3.1.2 en opmerking 3.1
beargumenteerd, kan het ideaal zijn van de bindingen in formulevorm gegoten worden
door niet te eisen dat het vermogen, maar het virtueel vermogen geleverd door de reac-
tiekrachten nul moet zijn. De virtuele snelheden moesten dan zo gedefinieerd worden dat
de ‘tijdsafhankelijkheid’ van de bindingsvergelijkingen uit de mogelijke snelheden geweerd
wordt. Met fα(q, t) = 0 een holonome binding, was dit simpelweg de term ∂fα/∂t. In het
geval van niet-holonome bindingen affien in de snelheden∑n
i=1 aβ,i(q, t)qi + bβ(q, t) = 0
bekwamen we de term bβ. Maar hoe is dit uit te breiden naar algemene, niet-holonome
bindingsvergelijkingen Gβ(q, q) = 0? Een intuıtief aanvaardbare, maar desalniettemin
niet hard te maken regel om ook voor deze gevallen virtuele snelheden te definieren is die
van Chetaev. Hierbij worden de bindingsvergelijkingen gelineariseerd in de veralgemeende
snelheden. Een stel niet-holonome bindingsvergelijkingen Gβ(q, q) = 0 β = 1, . . . , ` levert
daarmee de voorwaarden
n∑i=1
∂Gβ
∂qiδqi = 0 β = 1, . . . , `. (3.37)
voor de virtuele snelheden op. Nu kan weer de methode van de Lagrangemultiplicatoren
toegepast worden. Vervangen van aβ,i door ∂Gβ/∂qi in (3.9b) levert meteen de juiste
vergelijkingen op die samen met (3.35) een goed gedefinieerd stelsel vormen.
Gβ (q, q) = 0, β = 1, . . . , ` (3.38a)
d
dt
(∂L
∂qi
)− ∂L
∂qi= Qi +
∑β=1
λβ∂Gβ
∂qi, i = 1, . . . , n (3.38b)
Hoofdstuk 3. Mechanische bindingen 56
Wanneer de Gβ=1,...,` affien in de snelheden zijn, is de regel van van Chetaev dus alvast
in overeenstemming met (3.6) . Waar de aβ,i enkel afhankelijk van de veralgemeende
coordinaten waren, zijn de ∂Gβ/∂qi’s ook afhankelijk van de veralgemeende snelheden.
De virtuele snelheden worden nu m.a.w. niet louter door de geometrische, maar door de
kinematische toestand bepaald.
3.3 Geometrische beschrijving
Waar in de vorige paragraaf niet-holonome bindingen binnen het bestek van de varia-
tierekening behandeld werden, trachten we dit nu in een geometrisch kader te plaatsen.
Eerst krijgen toegelaten virtuele snelheden hun broertje in de differentiaalmeetkunde en
dan worden veralgemeende krachtcomponenten onder handen genomen. In tegenstelling
tot hoofdstuk (2) waar de Lagrangeiaanse beschrijving uit de Hamiltoniaanse werd
afgeleid, zal het hier eenvoudiger zijn te vertrekken van het Lagrangeformalisme. De be-
doeling is weer om deze begrippen op een intrinsieke, coordinaatonafhankelijke wijze aan
te brengen. Wanneer er dan toch op coordinaten wordt overgegaan, zullen we —om de
zaken aanschouwelijk te maken— steeds binnen dezelfde kaart ‘(U,ϕ)’ met coordinaten
q = (q1, . . . , qn) van Q werken.
3.3.1 Lagrangeformalisme
De kinematische bundel en virtuele snelheden
Stel dat het systeem zich in de configuratie horende bij ξ ∈ Q bevindt, zonder kinematische
bindingen zijn alle snelheden vξ ∈ TξQ mogelijk. Opleggen van extra niet-holonome
bindingen heeft tot gevolg dat de snelheden nu in een deelruimte Cξ ⊂ TξQ moeten
liggen. We nemen aan dat Cξ voor elke ξ ∈ Q gedefinieerd en van constante dimensie is, de
meeste praktische voorbeelden voldoen hieraan. Over heel Q bekeken, zullen de snelheden
compatibel met de kinematische bindingen elementen van de kinematische bundel ‘C’
C =⋃ξ∈Q
(ξ × Cξ
)

Hoofdstuk 3. Mechanische bindingen 57
moeten zijn. Wanneer de ` kinematische bindingsvergelijkingen affien in de snelheden zijn,
is Cξ een (n−`)-dimensionaal vlak in de n-dimensionale vectorruimte TξQ. Translatie van
dit vlak naar de oorsprong —zie figuur (3.3) — geeft de vectordeelruimte ‘~Cξ’ waarvan de
virtuele snelheden volgens (3.6) elementen van zijn. Cξ en ~Cξ zijn met elkaar verbonden
via het voorschrift
Cξ =
ηξ + µξ | µξ ∈ ~Cξ
waarin ηξ een (snelheids-) vector van Cξ voorstelt. Nemen we bovendien aan dat aβ,i
Figuur 3.3: Een affiene deelruimte Cξ van TξQ en zijn geassocieerde vectordeelruimte ~Cξ.
en bβ in de niet-holonome bindingsvergelijkingen (3.4) C∞-functies zijn, zodoende zal
Cξ op differentieerbare wijze over Q varieren en ~Cξ opgespannen worden door (n − `)
vectorvelden Xi=1,...,n−`(q)
~Cq = span X1 (q) , . . . , Xn−` (q) , ϕ(ξ) = q. (3.39)
De vectorvelden Xi=1,...,n−`(q) maken dan de nulruimte van de matrix a in (3.4) uit.
Verduidelijken we dit a.d.h.v. een voorbeeld.
Voorbeeld 3.4 (Rollen zonder glijden op een grondvlak met snelheid vB) De
niet-holonome bindingen (3.8) in matrixvorm geschreven, zijn

Hoofdstuk 3. Mechanische bindingen 58
1 0 −r cos θ 0
0 1 −r sin θ 0
x
y
φ
θ
− vBx
vBy
=
0
0
.
~Cξ wordt dus opgespannen door de nulruimte van de matrix
a =
1 0 −r cos θ 0
0 1 −r sin θ 0
(3.40)
waaruit
~C(x,y,φ,θ) = span X1 (x, y, φ, θ, ) , X2 (x, y, φ, θ, ) (3.41)
met
X1 = r cos θ∂
∂x+ r sin θ
∂
∂y+
∂
∂φ(3.42a)
X2 =∂
∂θ. (3.42b)
2
Voor algemene kinematische bindingsvergelijkingen die niet zo nodig affien in de snelheden
zijn, kan de regel van Chetaev toegepast worden. Het lineariseren van de bindingsver-
gelijkingen —zie (3.37) — kan geometrisch geınterpreteerd worden al zijn de virtuele
snelheden elementen van de raakruimte TvξC aan Cξ in vξ. In figuur (3.4) is dit afge-
beeld voor de kinematische bindingsvergelijking v21 + v2
2 = a2, a ∈ IR. Merken we nog op
dat voor Cξ een affiene deelruimte van TξQ inderdaad geldt dat TvξC = ~Cξ.
De veralgemeende krachtcomponenten
In de Lagrangiaanse dynamica zijn de veralgemeende krachtcomponenten van de reacties
‘f ’ elementen van de co-raakbundel T ∗Q. Langs de ene kant lijkt dit aannemelijk omdat
met w een virtuele snelheid, 〈f, w〉 ∈ IR dan het virtueel vermogen oplevert. Langs de
andere kant gedraagt f zich bij een coordinatentransformatie als een co-variante vector
(2.16) . Om dit aan te tonen, vertrekken we van (3.3) uitgedrukt in het coordinatenstelsel
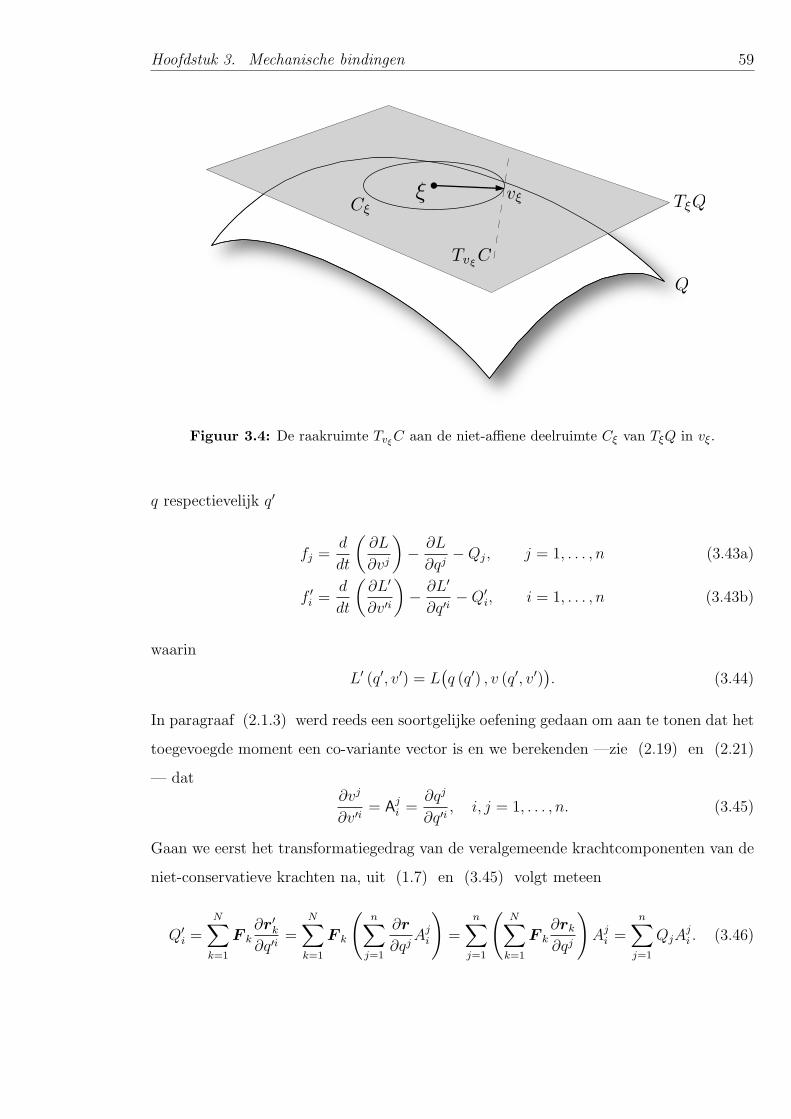
Hoofdstuk 3. Mechanische bindingen 59
Figuur 3.4: De raakruimte TvξC aan de niet-affiene deelruimte Cξ van TξQ in vξ.
q respectievelijk q′
fj =d
dt
(∂L
∂vj
)− ∂L
∂qj−Qj, j = 1, . . . , n (3.43a)
f ′i =d
dt
(∂L′
∂v′i
)− ∂L′
∂q′i−Q′
i, i = 1, . . . , n (3.43b)
waarin
L′ (q′, v′) = L(q (q′) , v (q′, v′)
). (3.44)
In paragraaf (2.1.3) werd reeds een soortgelijke oefening gedaan om aan te tonen dat het
toegevoegde moment een co-variante vector is en we berekenden —zie (2.19) en (2.21)
— dat∂vj
∂v′i= Aji =
∂qj
∂q′i, i, j = 1, . . . , n. (3.45)
Gaan we eerst het transformatiegedrag van de veralgemeende krachtcomponenten van de
niet-conservatieve krachten na, uit (1.7) en (3.45) volgt meteen
Q′i =
N∑k=1
F k∂r′k∂q′i
=N∑k=1
F k
(n∑j=1
∂r
∂qjAji
)=
n∑j=1
(N∑k=1
F k∂rk∂qj
)Aji =
n∑j=1
QjAji . (3.46)

Hoofdstuk 3. Mechanische bindingen 60
De Lagrangiaan kunnen we als volgt aanpakken. Vergelijking (3.45) samen met (3.44)
laat toe de afgeleiden
d
dt
(∂L′
∂v′i
)=
d
dt
(n∑j=1
∂L
∂vjAji
)=
n∑j=1
[d
dt
(∂L
∂vj
)Aji +
∂L
∂vidAj
i
dt
](3.47a)
∂L′
∂q′j=
n∑j=1
[∂L
∂qjAji +
∂L
∂vj∂vj
∂q′i
](3.47b)
te bepalen. Lid aan lid aftrekken van (3.46) en (3.47) en wetende dat
dAji
dt=
d
dt
(∂qj
∂q′i
)=
n∑k=1
∂
∂q′k
(∂qj
∂q′i
)v′k =
∂
∂q′i
(n∑k=1
Ajkv′k
)=
∂vj
∂q′i
geeft samen met (3.43)
f ′i =n∑j=1
[d
dt
(∂L
∂vj
)− ∂L
∂qj−Qj
]Aji + 0 =
n∑j=1
fjAji
wat het co-variante karakter van f bewijst. Een algemene uitdrukking voor f is dus
f =n∑i=1
fidqi (3.48)
maar de regel van Chetaev legt hier nog restricties aan op. Wil het virtueel vermogen
van de reactiekrachten nul zijn, moet —voor elke vξ ∈ Cξ— fξ een element zijn van de
annihilator ‘(Tvξ
C)0
’ van TvξC
(Tvξ
C)0
=fξ ∈ T ∗
ξ Q | 〈fξ, wξ〉 = 0, ∀ wξ ∈ TvξC
. (3.49)
Onderzoeken we naar waar dit leidt voor affiene bindingsvergelijkingen. Voor TvξC 6= ~Cξ is
onderstaande afleiding volledig analoog, maar moet aβ,i door ∂Gβ/∂qi vervangen worden.
Waar ~Cξ ⊂ TξQ door n − ` vectorvelden Xi=1,...,n−`(q) wordt opgespannen, zullen er `
1-vormen αβ=1,...,`(q) bestaan die een basis voor ~C0ξ vormen
~C0q = span α1(q), . . . , α`(q) , ϕ(ξ) = q. (3.50)
Hoofdstuk 3. Mechanische bindingen 61
Omdat Xi=1,...,n−` de nulruimte van a uitmaken, worden de αβ=1,...,` simpelweg door de
rijen van a gegeven
αβ =n∑i=1
aβ,idqi, β = 1, . . . , `. (3.51)
Met fξ ∈ ~C0ξ , bestaan er coefficienten λβ=1,...,` zodat
f =∑β=1
λβαβ =n∑i=1
(∑β=1
λβaβ,i
)dqi
en dus
fi =∑β=1
λβaβ,i
Zoals reeds in paragraaf §3.2.1 bekomen. Illustreren we dit a.d.h.v. voorbeeld (3.4) .
Voorbeeld 3.5 (Rollen zonder glijden op een grondvlak met snelheid vB) Uit
(3.40) volgt dat
~C0(x,y,φ,θ) = span α1 (x, y, φ, θ, ) , α2 (x, y, φ, θ, ) (3.52)
met
α1 = dx− r cos θdφ (3.53a)
α2 = dy − r sin θdφ. (3.53b)
2
Opmerking 3.2 Zeggen dat de veralgemeende krachten elementen van T ∗Q zijn, is niet
helemaal juist. Hun componenten zijn immers functies van zowel q als v. Correcter is
de veralgemeende krachten als elementen van T ∗ (TQ) te beschouwen. Omdat ze geen
componenten volgens dvi hebben, zijn ze semi-basisch. Belangrijk is wel dat dit een
intrinsieke betekenis dient te hebben. Als bij overgang op nieuwe coordinaten zou blijken
dat er dan ook termen volgens dvi opduiken, heeft het uberhaupt geen zin om zoiets
als semi-basisch te definieren. Gaan we dit expliciet na. Wanneer in het algemeen van
een stel coordinaten x = (x1, . . . , xn) wordt overgegaan op een stel coordinaten y =
(y1, . . . , yn), kunnen de xj’s als functies van y geınterpreteerd worden waarmee uit (2.11)
Hoofdstuk 3. Mechanische bindingen 62
de transformatieformules
dxj =n∑i=1
∂xj
∂yidyi, j = 1, . . . , n (3.54)
volgen. Op een raakbundel is de situatie iets complexer, daar werken we steeds (alhoewel
niet noodzakelijk) met natuurlijke bundelkaarten waarbij de coordinatentransformatie
q → q′ meteen ook de overgang v → v′ induceert. Uit (2.20) weten we dat de vj’s
volgens
vj =n∑i=1
∂qj
∂q′i· v′i, j = 1, . . . , n
transformeren. Samen met (3.45) en ∂qi/∂v′j = 0 in het achterhoofd volgt hieruit
dqj =n∑i=1
[∂qj
∂q′idq′i +
∂qj
∂v′idv′i]
=n∑i=1
∂qj
∂q′idq′i (3.55a)
dvj =n∑i=1
[∂vj
∂q′idq′i +
∂vj
∂v′idv′i]
=n∑i=1
[(n∑k=1
∂2qj
∂q′k∂q′iv′k
)dq′i +
∂qj
∂q′idv′i
](3.55b)
wat bewijst dat het semi-basisch zijn goed gedefinieerd is.
De bewegingsvergelijkingen
Zij YL ∈ X (Q) met c(t) zijn integraalkromme
dc (t)
dt= YL
(c (t)
)(3.56)
die de beweging van het systeem karakteriseert. Men kan dan gemakkelijk nagaan dat
de intrinsieke formulering van de bewegingsvergelijkingen iXLωL = −d (H L) uitgebreid
met niet-conservatieve krachten Q =∑n
i=1 Qidqi en reactiekrachten f =∑n
i=1 fidqi gege-
ven wordt door
iYLωL = −d (H L) +Q+ f. (3.57a)
Uitdrukken in coordinaten geeft inderdaad (3.3) . Samen met de bindingsvergelijking
dc (t)
dt∈ C (3.57b)

Hoofdstuk 3. Mechanische bindingen 63
en de regel van Chetaev
fc(t) ∈(Tdc
dtC)0
(3.57c)
vormt dit een goed gedefinieerd stel vergelijkingen.
3.3.2 Hamiltonformalisme
Het komt er nu op aan het voorgaande te vertalen naar het Hamiltonformalisme. Vooreerst
introduceren we de kromme
c (t) = L dc (t)
dt, (3.58)
als de integraalkromme van YH = L YL
dc (t)
dt= YH
(c (t)
). (3.59)
De bindingsvergelijking (3.57b) wordt simpelweg
c ∈ D = L (C)
met D ⊂ T ∗Q de Hamiltoniaanse kinematische bundel. Om de bewegingsvergelijkingen te
vinden, moet men de inverse van de pull-back van de Legendretransformatie op (3.57a)
laten inwerken. Dit geeft, zie paragraaf §2.5,
iYHω = −dH + (L∗)−1 (Q+ f) . (3.60)
Omrekenen van de term (L∗)−1 (Q+ f) is iets moeilijker. Doen we de berekening voor f ,
die voor Q is volledig analoog. Drukken we f uit in coordinaten, maken we gebruik van
(L∗)−1 = (L−1)∗
en stellen we fL = (L−1)∗f , dan volgt uit (2.42) en (3.48)
fL =n∑i=1
n∑j=1
(fj L−1 (q, p)
) ∂qj
∂qidqi +
n∑j=1
(fj L−1 (q, p)
) ∂qj
∂pidpi

Hoofdstuk 3. Mechanische bindingen 64
waarin reeds fn+j = 0 en yj = qj, j = 1, . . . , n gesubstitueerd werd. Door ook ∂qj
∂qi = δji
en ∂qj
∂pi = 0 in te vullen, bekomt men het semi-basische co-vectorveld
fL =n∑i=1
fi L−1 (q, p) dqi. (3.61)
op T ∗Q. fL is dus volledig analoog aan f , enkel de componenten zijn nu in functie van q
en p uitgedrukt i.p.v. q en v. Maar daarmee is de kous nog niet af, met elke fL wordt via
het voorschrift
ifHω = fL. (3.62)
op canonische wijze een vectorveld fH op T ∗Q geassocieerd. Zoeken we zijn coordinaten-
uitdrukking, algemeen is
fH =n∑i=1
(µi
∂
∂qi+ νi
∂
∂pi
), µi, νi ∈ F(T ∗Q)
met µi(q, p) en νi(q, p) nog te bepalen functies. Steunend op (2.39) en (2.33) krijgen
we, analoog aan de afleiding van XH in paragraaf §2.4.3,
ifHω = ω(fH , · ) =
n∑i=1
dpi(fH)dqi − dqi(fH)dpi
=n∑i=1
νidqi − µidpi
waaruit na gelijkstellen aan (3.61) volgt dat
fH =n∑i=1
fi L−1 (q, p)∂
∂pi. (3.63)
De uitdrukkingen voor Q
iQHω = QL (3.64)
QH =n∑i=1
Qi L−1 (q, p)∂
∂pi. (3.65)
bekomt men volledig analoog. fH en QH nemen de taak van veralgemeende (reactie-)
krachten in het Hamiltonformalisme op zich. Invullen van (3.62) en (3.64) in (3.60)

Hoofdstuk 3. Mechanische bindingen 65
geeft immers
i(YH−QH−fH)ω = −dH (3.66)
en hieruit volgen, met rekeningschap van vergelijkingen (3.59) , (2.50) en (2.53) , de
bewegingsvergelijkingen
qi = +∂H
∂pi
pi = −∂H
∂qi+ (Qi + fi) L−1.
Dan rest enkel nog de regel van Chetaev in dit verhaal te passen, deze legt op dat —voor
elke pξ ∈ D— fH,ξ een element van Wξ moet zijn die gedefinieerd is door
Wξ =
fH,ξ | ifH,ξω = (L∗)−1 fξ , fξ ∈
(Tvξ
C)0
. (3.67)
Samengevat vertalen vergelijkingen (3.57) zich naar
iYHω = −d (H L) + i(QH+fH)ω (3.68a)
c (t) ∈ D (3.68b)
fH,c(t) ∈ Wc(t) (3.68c)
in het Hamiltonformalisme.
Opmerking 3.3 In [9, 10, 11, 12] transformeert Marle de reactiekrachten van het
Lagrange- naar het Hamiltonformalisme op een andere wijze.
3.4 Praktische realisatie van niet-lineaire, niet-
holonome bindingen
Men kan zich terecht afvragen of het zoeken naar de correcte bewegingsvergelijkingen
van mechanische systemen onderworpen aan niet-lineaire, niet-holonome bindingen geen
papieren probleem is. Concrete realisaties van dergelijke systemen blijken inderdaad niet
voor het oprapen te liggen. We bespreken en becommentarieren twee voorbeelden waarna
we servomechanismen behandelen. Naar de mening van Marle zijn deze op te vatten als
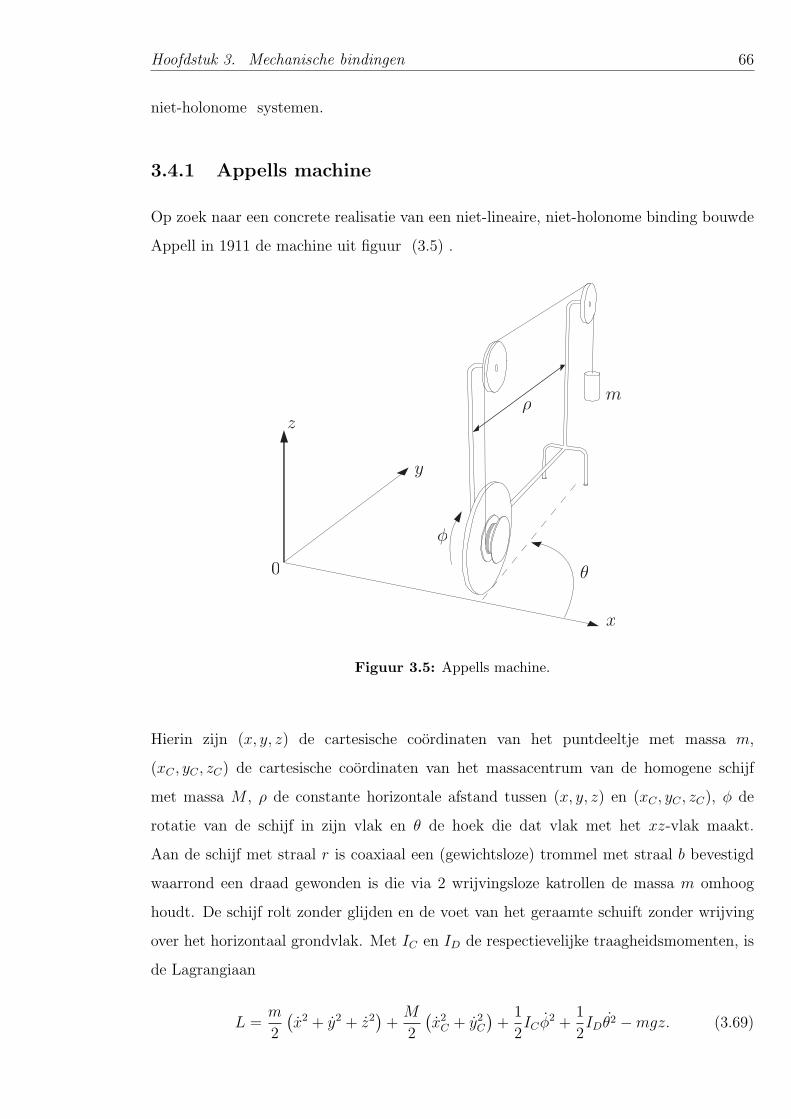
Hoofdstuk 3. Mechanische bindingen 66
niet-holonome systemen.
3.4.1 Appells machine
Op zoek naar een concrete realisatie van een niet-lineaire, niet-holonome binding bouwde
Appell in 1911 de machine uit figuur (3.5) .
Figuur 3.5: Appells machine.
Hierin zijn (x, y, z) de cartesische coordinaten van het puntdeeltje met massa m,
(xC , yC , zC) de cartesische coordinaten van het massacentrum van de homogene schijf
met massa M , ρ de constante horizontale afstand tussen (x, y, z) en (xC , yC , zC), φ de
rotatie van de schijf in zijn vlak en θ de hoek die dat vlak met het xz-vlak maakt.
Aan de schijf met straal r is coaxiaal een (gewichtsloze) trommel met straal b bevestigd
waarrond een draad gewonden is die via 2 wrijvingsloze katrollen de massa m omhoog
houdt. De schijf rolt zonder glijden en de voet van het geraamte schuift zonder wrijving
over het horizontaal grondvlak. Met IC en ID de respectievelijke traagheidsmomenten, is
de Lagrangiaan
L =m
2
(x2 + y2 + z2
)+
M
2
(x2C + y2
C
)+
1
2IC φ2 +
1
2IDθ2 −mgz. (3.69)

Hoofdstuk 3. Mechanische bindingen 67
Hierbij is echter nog geen rekening gehouden met de holonome bindingen
x = xC + ρ cos θ (3.70a)
y = yC + ρ sin θ. (3.70b)
Afleiden van (3.70)
x = xC − (ρ sin θ) θ (3.71a)
y = yC + (ρ cos θ) θ (3.71b)
en substitutie ervan in (3.69) geeft
L =1
2(m + M)
(x2C + y2
C
)+ mρ
[(cos θ) yC − (sin θ) xC
]θ
+m
2
(ρ2θ2 + z2
)+
1
2IC φ2 +
1
2IDθ2 −mgz (3.72)
zodat de configuratieruimte nu Q = IR3 × T2 is. Voorts is het systeem nog aan de niet-
holonome bindingen
xC = (r cos θ) φ (3.73a)
yC = (r sin θ) φ. (3.73b)
en
z = bφ (3.74)
onderworpen die in matrixvorm geschreven
1 0 0 −r cos θ 0
0 1 0 −r sin θ 0
0 0 1 −b 0
xC
yC
z
φ
θ
=
0
0
0
(3.75)
opleveren. Dit zijn lineaire niet-holonome bindingen die door toepassing van de me-
thode van de Lagrangemultiplicatoren in rekening kunnen gebracht worden [5§6.2]. De
Hoofdstuk 3. Mechanische bindingen 68
bewegingsvergelijkingen (3.9b) worden
(m + M) xC − (mρ sin θ) θ − (mρ cos θ) θ2 = λ1(t) (3.76a)
(m + M) yC + (mρ cos θ) θ − (mρ sin θ) θ2 = λ2(t) (3.76b)
mz + mg = λ3(t) (3.76c)
IC φ = −[rλ1 (t) cos θ + rλ2 (t) sin θ + bλ3(t)
](3.76d)
mρd
dt
[(cos θ) yC − (sin θ) xC
]+(mρ2 + ID
)θ + mρ
[(cos θ) xC + (sin θ) yC
]θ = 0.
(3.76e)
Vermenigvuldigen van (3.76a) en (3.76b) met cos θ, respectievelijk sin θ en lid aan lid
optellen bij (3.76c) vermenigvuldigd met b, geeft
r (m + M)[(cos θ) xC + (sin θ) yC
]−mρrθ2 + mbz + mbg
=[rλ1 (t) cos θ + rλ2 (t) sin θ + bλ3(t)
].
In het rechterlid herkennen we (3.76d) en in het linkerlid vullen we (3.74) en —zie
(3.15) —
(cos θ) xC + (sin θ) yC = rφ
in wat een eerste bewegingsvergelijking oplevert.
[(m + M) r2 + mb2 + IC
]φ−mρrθ2 + mgb = 0 (3.77)
Een 2e bekomen we door op te merken dat uit (3.73) volgt dat
(sin θ) xC − (cos θ) yC = 0
(cos θ) xC + (sin θ) yC = rφ.
en dit in vergelijking (3.76e) te substitueren.
(mρ2 + ID
)θ + mρrφθ = 0. (3.78)
Na oplossen van (3.77) en (3.78) is de beweging van het systeem volledig gekend want
invullen van φ(t) en θ(t) in (3.73) en (3.74) levert na integratie de overige onbekenden
Hoofdstuk 3. Mechanische bindingen 69
xC(t), yC(t) en z(t) op.
Tot zover was er geen sprake van niet-lineaire, niet-holonome bindingen. Daar kan echter
voor gezorgd worden door de massa van de schijf te verwaarlozen —M = IC = ID = 0—
waardoor (3.77) en (3.78) nu
(r2 + b2
)φ− ρrθ2 + gb = 0
mρθ + mrφθ = 0 (3.79)
geven en hierin de limiet ρ → 0 te nemen.
(r2 + b2
)φ + gb = 0 (3.80a)
θ = 0 (3.80b)
Uit (3.80) , (3.73) en (3.74) en na eliminatie van φ en θ bekomt men een stelsel
vergelijkingen in x(t), y(t) en z(t) bestaande uit 2 bewegingsvergelijkingen en 1 niet-
lineaire, niet-holonome binding. Daartoe leiden we (3.73) af wetende dat θ = 0 en uit
(3.70) met ρ = 0 volgt dat x = xC en y = yC
x = (r cos θ) φ (3.81a)
y = (r sin θ) φ. (3.81b)
Vermenigvuldigen van (3.73a) en (3.73b) met (3.81b) , respectievelijk (3.81a) en lid
aan lid aftrekken levert een eerste bewegingsvergelijking op.
xy − yx = 0 (3.82a)
Een tweede vinden we eenvoudigweg door substitutie van (3.74) in (3.80a)
(r2 + b2
)z + gb2 = 0. (3.82b)
De niet-lineaire, niet-holonome bindingsvergelijking tenslotte, vindt men door (3.73a)

Hoofdstuk 3. Mechanische bindingen 70
en (3.73b) te kwadrateren, lid aan lid op te tellen en gebruik te maken van (3.74) .
x2 + y2 =r2
b2z2 (3.83)
Er is echter een addertje onder het gras. Door de limiet ρ → 0 in (3.79) te nemen,
reduceert men immers de orde van de differentiaalvergelijking waardoor de oplossing ervan
fundamenteel kan wijzigen. In [4, p. 225–233] neemt men de proef op de som en berekent
men de oplossing voor ρ = 0 enerzijds en de limiet ρ → 0 van de oplossing voor ρ 6= 0
anderzijds. Deze blijken niet overeen te komen. Alhoewel Appells machine van historisch
belang is, is dit dus geen goed voorbeeld van een niet-lineair, niet-holonoom systeem.
De bewegingsvergelijkingen (3.82) kunnen ook nog op een andere manier afgeleid worden.
Door de schijf van in den beginne te negeren, bestaat het systeem enkel uit de massa m.
De Lagrangiaan is dan simpelweg
L =m
2
(x2 + y2 + z2
)−mgz. (3.84)
Toepassen van de regel van Chetaev (3.38b) met (3.83) als niet-holonome binding
geeft
mx = λ2x (3.85a)
my = λ2y (3.85b)
mz + mg = −λ2r2
b2z. (3.85c)
Vermenigvuldigen van het linkerlid van (3.85a) met het rechterlid van (3.85b) en idem
dito voor de andere leden
mx (λ2y) = my (λ2x)
levert na wegdelen van 2mλ de 1e bewegingsvergelijking (3.82a) op. Door (3.83) af te
leiden, (3.85a) en (3.85b) te substitueren en weer gebruik te maken van (3.83) , vindt
men
−λ2r2
b2z = mg
r2
r2 + b2
wat na invullen ervan in (3.85c) , (3.82b) oplevert.
Hoofdstuk 3. Mechanische bindingen 71
Langs de ene kant is dit een bevestiging van de regel van Chetaev, toepassen ervan levert
immers identiek dezelfde vergelijkingen op als diegene die men bekomt door de massa
van de schijf te verwaarlozen en ρ → 0 te nemen. Marle echter, benadrukt in [10, 11]
de inconsistentie tussen de oplossingen van deze vergelijkingen en de limiet ρ → 0 van
de oplossingen voor ρ 6= 0 en ziet dit als een argument voor het falen van de regel van
Chetaev. Diegenen die de correctheid van de regel van Chetaev bepleiten, zouden dan
weer kunnen aanhalen dat die inconsistentie niet te wijten is aan het falen van de regel
van Chetaev, maar aan het vraagstuk zelf dat slecht gesteld is. Marle vergeet er bij te
zeggen dat de niet-lineaire, niet-holonome bindingsvergelijking (3.83) zelf ook een gevolg
is van ρ gelijk aan nul te nemen.
Het voorgaande werd algemener behandeld door Delassus. Deze beschouwde mechanische
systemen S bestaande uit 2 subsystemen S1 en S2 waarbij S enkel onderworpen is aan niet-
holonome bindingen affien in de snelheden maar waarbij S1 aan niet-lineaire kinematische
vergelijkingen moet voldoen wanneer de massa mS2 van S2 verwaarloosd en de coordinaten
van S2 geelimineerd worden. Delassus bewees dat de bewegingsvergelijkingen voor mS2 6=
0 niet naar die van S2 convergeren voor mS2 → 0 bij toepassen van de regel van Chetaev.
3.4.2 Benenti’s probleem
Lange tijd gold Appells machine als het enige praktisch uitgevoerde type van een niet-
lineair, niet-holonoom systeem. Daar kwam verandering in toen Benenti in 1987 de dis-
cussie omtrent een nieuw type opende [1]. Verder uitgewerkt 1 geeft dit het systeem van
figuur (3.6) . Twee dezelfde gelijkzijdige driehoeken worden d.m.v. drie staven s1, s2
en s3 samengehouden die elkaar in het punt P snijden. De hoekpunten A1, B1, C1 en A2,
B2, C2 van de driehoeken kunnen wrijvingsloos over de staven glijden. Deze configuratie
heeft tot gevolg dat de orientatie van de driehoeken gelijk zijn. Met in de centra van de
driehoeken P1 en P2 schaatsen volgens de richtingen P1A1, respectievelijk P2A2, moe-
ten v1 en v2 evenwijdig zijn. Dit wordt uitgedrukt door de niet-lineaire, niet-holonome
bindingsvergelijking
v1 × v2 = 0. (3.86)
1http://www2.dm.unito.it/~benenti/Ricerca/NHS.htm
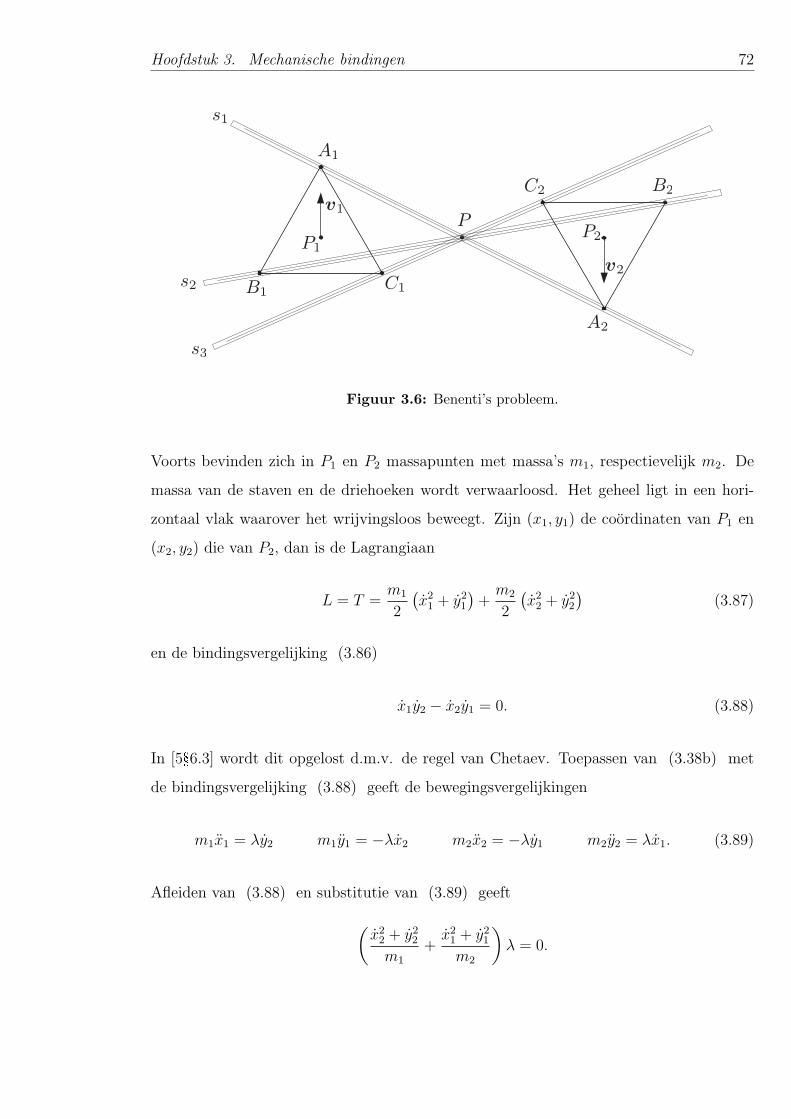
Hoofdstuk 3. Mechanische bindingen 72
Figuur 3.6: Benenti’s probleem.
Voorts bevinden zich in P1 en P2 massapunten met massa’s m1, respectievelijk m2. De
massa van de staven en de driehoeken wordt verwaarloosd. Het geheel ligt in een hori-
zontaal vlak waarover het wrijvingsloos beweegt. Zijn (x1, y1) de coordinaten van P1 en
(x2, y2) die van P2, dan is de Lagrangiaan
L = T =m1
2
(x2
1 + y21
)+
m2
2
(x2
2 + y22
)(3.87)
en de bindingsvergelijking (3.86)
x1y2 − x2y1 = 0. (3.88)
In [5§6.3] wordt dit opgelost d.m.v. de regel van Chetaev. Toepassen van (3.38b) met
de bindingsvergelijking (3.88) geeft de bewegingsvergelijkingen
m1x1 = λy2 m1y1 = −λx2 m2x2 = −λy1 m2y2 = λx1. (3.89)
Afleiden van (3.88) en substitutie van (3.89) geeft
(x2
2 + y22
m1
+x2
1 + y21
m2
)λ = 0.
Hoofdstuk 3. Mechanische bindingen 73
Dus ofwel zijn m1 en m2 in rust, oftewel is λ = 0. In beide gevallen zijn de rechterleden
in (3.89) gelijk aan nul en verkrijgen we de bewegingsvergelijkingen voor 2 vrije deeltjes.
Met de initiele snelheden parallel, blijven ze dus inderdaad parallel.
Net als voor Appells machine zijn de resultaten van Delassus —zoals bediscussieerd in de
vorige paragraaf— op dit voorbeeld toepasbaar. Wanneer de massa’s van de staven niet
verwaarloosd worden, kan (3.86) —afgezien van een niet-holonome binding a la (3.29)
— naar een serie holonome bindingen vertaald worden die verbanden tussen de hoeken
van de staven en de orientatie van de schaatsen opleggen.
3.4.3 Servomechanismen
Servomechanismen zijn apparaten die a.d.h.v. feedback geleverd door sensoren, het ge-
drag van een systeem d.m.v. actuatoren aansturen. Ze omvatten dus ook bijvoorbeeld
thermostaten die de temperatuur in huis regelen. Hier worden logischerwijs enkel servo-
mechanismen beschouwd die inwerken op de beweging van het systeem.
In [10, 11] introduceert Marle servomechanismen als een nieuwe klasse van mogelijke
niet-lineaire, niet-holonome systemen. Hij geeft het voorbeeld van een staaf AB in het
verticale (x, z)-vlak waarbij A vrij volgens de x-as kan bewegen en de staaf d.m.v. een
ideaal scharnier in A kan roteren, zie figuur (3.7) . Het servomechanisme heeft als doel
de staaf in verticaal evenwicht te brengen door een snelheid x(t) in functie van x, θ en θ
op te leggen. Hij wil daar bovendien mee aantonen dat de regel van Chetaev op dergelijke
systemen niet van toepassing is. We bespreken kort dit voorbeeld en uiten hier dan kritiek
op.
Zij m de massa van de homogene staaf met lengte 2`, I zijn traagheidsmoment, C zijn
massacentrum, x de coordinaat van A en θ de hoek die de staaf met de x-as maakt. De
configuratieruimte is daarmee Q = IR×S en de kinetische energie is gegeven door [6§2.3.3]
T =m
2v2C +
1
2Iθ2 =
m
2
(x2 − 2`xθ sin θ
)+
1
2
(I + m`2
)θ2
waarin gebruik is gemaakt van vC = vA + `θ1θ. Samen met de potentiele energie V =
mg` sin θ en J = I + m`2 het traagheidsmoment van de staaf t.o.v. A krijgen we de

Hoofdstuk 3. Mechanische bindingen 74
Figuur 3.7: Eenvoudig servomechanisme.
Lagrangiaan
L =m
2
(x2 − 2`xθ sin θ
)+
1
2Jθ2 −mg` sin θ. (3.90)
Omwille van het servomechanisme is de kinematische bundel
C =(
x, θ, x, θ)| x = h
(x, θ, θ
)(3.91)
met h ∈ F(TQ) een gekende functie. Marle redeneert verder dat, omdat het om een
ideaal scharnier gaat, de reactiekracht volgens de annihilator van ∂/∂θ moet liggen maar
dat deze voorwaarde niets met de regel van Chetaev te maken heeft.
Naar de mening van de auteur beschouwt Marle ten onrechte deze uitwendige krachten als
reactiekrachten. Waarschijnlijk berust deze verwarring op het feit dat de actieve krachten
in dit geval net als reactiekrachten zo moeten zijn dat steeds aan de bindingen voldaan is.
Dit neemt niet weg dat ze uitwendige krachten zijn die, omwille van hun niet-conservatieve
karakter, hun weg naar de Lagrangevergelijkingen via de veralgemeende krachtcomponen-
ten Qi=1,...,n vinden. Deze gedachte volgend, worden de bewegingsvergelijkingen (1.17)

Hoofdstuk 3. Mechanische bindingen 75
d
dt
(∂L
∂x
)− ∂L
∂x= Qx (3.92a)
d
dt
(∂L
∂θ
)− ∂L
∂θ= 0 (3.92b)
waarin verondersteld werd dat de actuator een kracht in de x-richting uitoefent. Samen
met (3.91) vormt (3.92) een stelsel van 3 vergelijkingen in 3 onbekenden x(t), θ(t) en
Qx(t). Substitutie van x = h(x, θ, θ
)en zijn afgeleide
x =∂h
∂xh +
∂h
∂θθ +
∂h
∂θθ
in (3.92b) levert een 2e orde differentiaalvergelijking in θ(t) op. Door deze op te lossen
en in (3.92a) in te vullen, bekomt men meteen Qx. De kracht die de actuator op
de staaf moet uitoefenen om aan x = h(x, θ, θ
)te voldoen, is daarmee gekent. In de
controletheorie wordt er op zoek gegaan naar een gepaste keuze voor h(x, θ, θ) waardoor
het verticaal rechtop staan van de staaf een stabiel evenwicht wordt, dit valt echter buiten
het bestek van deze scriptie.
Hoofdstuk 4
Conclusie
Deze scriptie begon met het afleiden van de vergelijkingen van Lagrange en de canoni-
sche vergelijkingen van Hamilton. Dit nieuw ontwikkeld formalisme stelde ons in staat de
3N bewegingsvergelijkingen van Newton voor een systeem bestaande uit N massapunten
en onderworpen aan m bindingen te reduceren tot n = 3N − m 2e orde differentiaal-
vergelijkingen in het Lagrangeformalisme of 2n 1e orde diffferentiaalvergelijkingen in het
Hamiltonformalisme.
Essentieel in dit verhaal was het onderscheid tussen uitwendige en reactiekrachten. Deze
laatsten dienden aan het systeem toegevoegd te worden om aan de bindingen te blijven
voldoen. Wel was verdere informatie over deze reactiekrachten nodig om een volledig be-
paald stelsel bewegingsvergelijkingen te bekomen. Het principe van d’Alembert verschafte
de nodige kennis over de reactiekrachten en had de leuke wiskundige eigenschap dat deze
nu zelfs helemaal uit het stelsel vergelijkingen verdwenen. Bovendien had het principe
van d’Alembert een duidelijke fysische betekenis. Het zegt dat het virtuele vermogen
—en niet het vermogen om ook tijdsafhankelijke bindingen te behelzen— geleverd door
de reactiekrachten nul moet zijn.
Toch was dit alles niet geheel bevredigend, zo was dit formalisme enkel van toepassing
op systemen onderworpen aan bindingen die geen afhankelijkheden in de snelheden ver-
toonden. Vooraleer op deze problematiek in te gaan werd parallel aan deze analyti-
sche beschrijving een geometrisch kader geschept waarin de mechanica op een intrinsieke,
coordinaatonafhankelijke wijze kon gedefinieerd worden. De speciale structuur van de
76
Hoofdstuk 4. Conclusie 77
canonische vergelijkingen van Hamilton leende zich hier het best toe en kregen dan ook
eerst hun broertje in de geometrische context. M.b.v. de pull-back van de Legendretrans-
formatie konden ook de Lagrangevergelijkingen aangepakt worden.
Het laatste hoofdstuk was gewijd aan het modelleren van niet-holonome bindingen. Wan-
neer deze affien in de snelheden waren, was een hypothese nodig die de virtuele snelheden
beperkte, maar desalniettemin kon —tenminste voor het voorbeeld van rollen zonder glij-
den op een bewegend grondvlak— hier een fysische betekenis aan gegeven worden. Voor
algemene bindingsvergelijkingen werd de regel van Chetaev als mogelijk model opgewor-
pen. Hierbij werden de bindingsvergelijkingen gelineariseerd in de snelheden waarna de
oplossingsstrategieen voor affiene bindingen konden gebruikt worden.
Niettegenstaande affiene, niet-holonome bindingen alomtegenwoordig zijn, kan dit niet
van niet-lineaire gezegd worden. Twee praktisch realiseerbare voorbeelden werden be-
sproken, maar deze werden bekomen door de massa van een deel van het systeem te
verwaarlozen en daarbij wordt de aard van de beweging fundamenteel gewijzigd. Boven-
dien is de niet-lineaire, niet-holonome bindingsvergelijking waar het syteem onderhevig
aan is, zelf ook een gevolg van die verwaarlozing. We besloten hieruit dat ze geen goede
voorbeelden waren.
Marle tenslotte, bracht servomechanismen als niet-lineaire, niet-holonome systemen aan.
Er werd aangevoerd dat het niet is omdat de kracht uitgeoefend door het servomechanis-
me tot doel heeft dat de snelheden aan een bepaald (niet-lineair) verband voldoen, dat
ze daarom reactiekrachten zijn. De methode om deze als onbekende niet-conservatieve
krachten in te voeren, werd toegelicht. De discussie hieromtrent staat echter nog open.
Publicaties uit theoretische hoek die deze problematiek behandelen zijn eerder schaars
en men moet het dan waarschijnlijk ook meer in de controletheorie gaan zoeken. Men
zou daarvoor ten rade kunnen gaan bij [2, 7] of bij [8, hoofdstuk 4] voor een algemeen
overzicht en bij de website van A. D. Lewis 1 voor een reeks artikels.
1http://penelope.mast.queensu.ca/~andrew/cgi-bin/pslist.cgi?papers.db
Bibliografie
[1] S. Benenti. Geometrical aspects of the dynamics of non-holonomic systems. In
Journees relativistes, Chambery, May 1987. http://www2.dm.unito.it/~benenti/
Ricerca/GNHS.pdf.
[2] A. M. Bloch. Nonholonomic mechanics and control internet supplement. internet
supplement, mei 2007. http://www.cds.caltech.edu/mechanics_and_control/
supplement/bbcm_internet_supl.pdf.
[3] K. Burns en M. Gidea. Differential geometry and topology with a view to dynamical
systems. Studies in advanced mathematics. CRC press, 2005.
[4] N. A. Fufaev en Ju. I. Neimark. Dynamics of Nonholonomic Systems, volume 33 of
Translations of Mathematical Monographs. American Mathematical Society Provi-
dence, 1972.
[5] A. Ibort, M. de Leon, G. Marmo, en D. Martın de Diego. Non-holonomic constrained
systems as implicit differential equations. In Proceedings of the workshop on geometry
and physics in honour of W. Tulczyjew, Vietri, Italy, 1996. http://arxiv.org/PS_
cache/math-ph/pdf/0104/0104021v1.pdf.
[6] M. H. Kobayashi en W. M. Oliva. A note on the conservation of energy and vo-
lume in the setting of nonholonomic mechanical systems. Qualitative Theory of
Dynamical Systems, 4(68):383–411, 2004. http://web.udl.es/usuaris/y4370980/
abstracts/abstracts/vol-42/kobayashi_oliva.pdf.
[7] A. D. Lewis. Aspects of Geometric Mechanics and Control of Mechanical Sys-
tems. Doctoraatsthesis, California Institute of Technology, Pasadena, California,
april 1995. https://qspace.library.queensu.ca/bitstream/1974/39/1/1995f_
letter.pdf.
78
Bibliografie 79
[8] A. D. Lewis. Lagrangian mechanics, dynamics, and control. http://penelope.
mast.queensu.ca/math439/notes.shtml, 2004.
[9] C.-M. Marle. Reduction of constrained mechanical systems and stability of relative
equilibria. Commun. Math. Phys., (174):295–318, 1995. http://perso.orange.fr/
Charles-Michel.Marle/pdffiles/comm95.pdf.
[10] C.-M. Marle. Kinematic and geometric constraints, servomechanics and control of
mechanical systems. volume 54, pages 353–364. Rend. Sem. Mat. Univ. Pol. Torino,
1996. http://perso.orange.fr/Charles-Michel.Marle/pdffiles/sptor96.pdf.
[11] C.-M. Marle. Various approaches to conservative and nonconservative nonholono-
mic systems. Reports on Matheamtical Physics, 42:211–229, 1998. http://perso.
orange.fr/Charles-Michel.Marle/pdffiles/rmp98.pdf.
[12] C.-M. Marle. On symmetries and constants of motion in Hamiltonian systems with
non-holonomic constraints. http://perso.orange.fr/Charles-Michel.Marle/
pdffiles/symnonho.pdf, 2003.
[13] C.-M. Marle en P. Libermann. Symplectic Geometry and Analytical Mechanics. D.
Reidel Publishing Company, Dordrecht, 1987.
[14] W. Sarlet. Differentiaalmeetkundige structuren en mechanica. Cursus UGent, 2006.
keuzevak licentie Wiskunde.
[15] W. Sarlet. Inleiding tot dynamische systemen. Cursus Ugent, 2006. 2e jaar Bachelor
in Wiskunde en Fysica & Sterrenkunde.
[16] Y. Talpaert. Differential geometry with applications to mechanics and physics. Marcel
Dekker, Inc., 2001.

Lijst van figuren
2.1 Coordinaten (θ′, φ′) op S2. . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Overlappen van lokale kaarten. . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Raakvector aan c(t) in c(0) = ξ. . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4 ∂∂qi
∣∣∣ξ, i = 1, . . . , n als basis voor de raakruimte TξQ aan Q in ξ. . . . . . . 15
2.5 ‘Afbeelding’ (f) versus ‘coordinaatuitdrukking van een afbeelding’ (fϕψ). . 22
2.6 De raakafbeelding Tmf : TmM → Tf(m)N geassocieerd met f : M → N . . . 23
2.7 De pull-back van een 1-vorm onder f . . . . . . . . . . . . . . . . . . . . . . 30
2.8 Constructie canonische 1-vorm. . . . . . . . . . . . . . . . . . . . . . . . . 35
3.1 Rollende schijf [8, p. 109]. . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2 Schaats op een hellend vlak. . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.3 Een affiene deelruimte Cξ van TξQ en zijn geassocieerde vectordeelruimte ~Cξ. 57
3.4 De raakruimte TvξC aan de niet-affiene deelruimte Cξ van TξQ in vξ. . . . . 59
3.5 Appells machine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.6 Benenti’s probleem. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.7 Eenvoudig servomechanisme. . . . . . . . . . . . . . . . . . . . . . . . . . . 74
80
Top Related