







Talen
Pages
Wettelijk

UNIVERSITEIT GENTFACULTEIT ECONOMIE EN BEDRIJFSKUNDE
ACADEMIEJAAR 2002-2003
Fasetransities in projectplanning: morfologische enhulpmiddelen gerelateerde maatstaven
Scriptie voorgedragen tot het bekomen van de graad van:Licentiaat in de toegepaste economische wetenschappen
Ines Crabbe
onder leiding van
Prof. Dr. Mario Vanhoucke

II
I. ALGEMENE INLEIDING.............................................................................................. 1
II. projectplanning ................................................................................................................. 3
1. Het ontstaan........................................................................................................................ 5
2. Netwerkplanning................................................................................................................. 7
2.1. PERT............................................................................................................................ 8
2.2 Methode van het kritieke pad (CPM) ......................................................................... 10
2.3 Vergelijking tussen beide methodes ........................................................................... 11
3. Projectplanning onder hulpmiddelenbeperkingen (RCPS)............................................... 13
3.1. Optimalisatie .............................................................................................................. 17
3.1.1. Lineair programmeren...............................................................................................18
3.1.2. Integer programmeren...............................................................................................18
3.2. Heuristieken............................................................................................................... 19
3.2.1. Meta-heuristieken .....................................................................................................19
3.2.1.1. Genetische algoritmes.................................................................................... 20
3.2.1.2. Tabu Search................................................................................................... 20
3.2.1.3. Simulated annealing....................................................................................... 20
3.2.2. Op prioriteitsregel(s) gebaseerde heuristieken.............................................................21
3.2.2.1. Serie en parallel plannen................................................................................ 21
3.2.2.2. Prioriteitsregels .............................................................................................. 24
4. Hulpmiddelennivellering .................................................................................................. 29
5. Primavera vs. andere projectmanagement software ......................................................... 32
5.1. Indeling projectmanagement software....................................................................... 32
5.2. Vergelijkende studie .................................................................................................. 34
III. Fasetrantsities in projectplanning ................................................................................. 40
1. Morfologie van netwerken................................................................................................ 41
1.1. Coëfficiënt van netwerk complexiteit (CNC)............................................................ 41
1.2. Ordekracht (OS)......................................................................................................... 42
1.3. Complexiteitsindex (CI) ............................................................................................ 42
1.4. Morfologische indicatoren I1 tot I6. ........................................................................... 42
Inhoudsopgave
III
2. Topologische maatstaven en RCPSP................................................................................ 46
3. Hulpmiddelen gerelateerde maatstaven............................................................................ 48
3.1. Hulpmiddelenfactor (RF)........................................................................................... 48
3.2. Hulpmiddelenkracht (RS).......................................................................................... 48
3.3. Hulpmiddelenrestrictiviteit (RC)............................................................................... 49
4. Op hulpmiddelen gebaseerde parameters en RCPSP ....................................................... 50
5. impact van hulpmiddelengerelateerde en morfologische maatstaven op
projectmanagement software. ............................................................................................... 52
6. Netwerkgeneratoren.......................................................................................................... 58
IV. Onderzoek....................................................................................................................... 62
1. Hulpmiddelennivellering in Primavera 3.1 (P3)............................................................... 63
2. Netwerkgeneratie met behulp van RanGen 2 ................................................................... 68
3. De onderzochte prioriteitsregels ....................................................................................... 72
4. Impact van de morfologische indicatoren......................................................................... 74
V. besluit ............................................................................................................................... 76

III
Lijst met figuren
Figuur 1. 1: Gantt-kaart ......................................................................................................... 5
Figuur 1. 2: start-start relatie, start-einde relatie, einde-start relatie en einde-einde relatie .. 7
Figuur 1. 3: pijlenvoorstelling................................................................................................ 8
Figuur 1. 4: Bètaverdeling ..................................................................................................... 9
Figuur 1. 5: PERT, Primavera Project Planner 3.1.............................................................. 10
Figuur 1. 6: netwerk diagram............................................................................................... 11
Figuur 1. 7: knooppuntenvoorstelling.................................................................................. 13
Figuur 1. 8: serie planningsschema ..................................................................................... 22
Figuur 1. 9: parallel planningsschema ................................................................................. 22
Figuur 1. 10: combinaties planningsschema’s en prioriteitsregels...................................... 23
Figuur 1. 11: vergelijking tussen optimale en heuristische oplossingen voor RCPSP........ 26
Figuur 1. 12: relatieve prestatie van acht prioriteitsregels................................................... 27
Figuur 1. 13: hulpmiddelenhistogram.................................................................................. 33
Figuur 1. 14: types projectmanagement softwarepakketten................................................ 34
Figuur 1. 15: technische gegevens van vijf verschillende softwarepakketten..................... 37
Figuur 1. 16: gebruikt projectmanagement softwarepakket in de bouwnijverheid ............. 38
Figuur 1. 17: relatie tussen gebruikt softwarepakket en aantal gebruikte analytische
technieken voor de bouwnijverheid ............................................................................. 39
Figuur 2. 1: gemakkelijke-hard-gemakkelijk complexiteitspatroon, CPU-tijd in funtie van
RS en RC ..................................................................................................................... 50
Figuur 2. 2: niveaus van systematisch gegenereerde probleemparameters ......................... 53
Figuur 2. 3: gemiddelde en standaardafwijking van het percentage afwijking bekomen door
zeven projectmanagement softwarepakketten............................................................. 54
Figuur 2. 4: significantieniveaus voor parametrische en niet-parametrische testen, het effect
van onafhankelijke parameters op projectmanagement software................................ 55
Figuur 2. 5: performatieklasses van projectmanagement softwarepakketten...................... 56
Figuur 2. 6: gemiddelde afwijking van duurtijd (%) voor verschillende waarden van RS . 57
Figuur 2. 7: gemiddelde afwijking van duurtijd (%) voor verschillende waarden van RF en
CNC............................................................................................................................. 57
Figuur 2. 8: netwerkgeneratoren in de literatuur ................................................................. 59
IV
Figuur 3. 1: opties voor hulpmiddelennivellering in Primavera 3.1.................................... 63
Figuur 3. 2: prioriteitsregels in Primavera 3.1..................................................................... 65
Figuur 3. 3: gebruikte parametersettings netwerkgenerator RanGen 2 ............................... 68
Figuur 3. 4: relatie tussen I2 en overige morfologische indicatoren.................................... 69
Figuur 3. 5: relaties tussen morfologische indicatoren........................................................ 70
Figuur 3. 6: algemene prestaties van de 11 onderzochte prioriteitsregelsFout! Bladwijzer
niet gedefinieerd.
Figuur 3. 7: impact van I2 .............................................Fout! Bladwijzer niet gedefinieerd.
Figuur 3. 8: impact van I3, I5 en RC .............................Fout! Bladwijzer niet gedefinieerd.
V
Ondergetekende Ines Crabbe bevestigt hierbij dat onderhavige scriptie mag wordengeraadpleegd en vrij mag worden gefotokopieerd. Bij het citeren moet steeds de titel ende auteur van de scriptie worden vermeld.
Mijn bijzondere dank gaat uit naar:
Prof. Dr. Mario Vanhoucke om te willen optreden als promotor.
Prof. Dr. Roland Paemeleire en Prof. Dr. Ir. Ann Vereecke om dit werkstuk te willenbeoordelen als commissarissen.
De heer Onno Kors van Primavera, voor de bereidwilligheid deze scriptie te ondersteunenen het verschaffen van Primavera Project Planner 3.1.
Alle professors en assistenten uit de opleiding TEW, voor de vier jaar kennisverschaffing.
Mijn ouders, vrienden en medestudenten voor de morele steun.
Zonder deze mensen was dit werk nooit tot stand gekomen.
Crabbe Ines, 2 mei 2003
1
Toepassingen van projectplanning komen in veel verscheide contexten voor, zoals bouwkunde,
softwareontwikkeling, R&D projecten en dergelijke meer. Overschrijding van de toegekende
budgetten en de geplande duur en toegevingen op de voorgeschreven werkinhoud blijken echter
een gemeenschappelijk kenmerk van de meeste projecten, niet zelden ondanks het gebruik van
gespecialiseerde software.
Dergelijke softwarepakketten, die steeds meer toepassing vinden in zowat alle industrieën, steunen
op één of meerdere prioriteitsregels om de activiteiten van het project te plannen ingeval
volgordebeperkingen en om hulpmiddelen aan de activiteiten toe te kennen ingeval
hulpmiddelenbeperkingen. Toch valt de bekomen totale projectduur vaak nog hoger uit dan de
optimale, zoals berekend met de methode van het kritieke pad. Bedoeling van deze scriptie is de
prestaties van een aantal van deze prioriteitsregels, zowel enkele opgenomen in het softwarepakket
Primavera Project Planner 3.1 als enkele sterk aanbevolen uit de literatuur, te analyseren. Daartoe
werd de netwerkgenerator RanGen 2 gebruikt zodat de impact van zowel morfologische als
hulpmiddelen gerelateerde indicatoren van netwerken kan nagegaan worden.
Verschillende auteurs wezen reeds op de inconsistentie van gebruikte termen in
projectmanagement. Vertalingen leiden maar al te vaak tot verwarring en foutieve opvattingen. Dit
is de reden waarom het Project Management Instituut een gids uitgegeven heeft, de PMBOK1,
waarin alle algemeen aanvaarde termen voorkomen. Vandaar dat in deze scriptie ook her en der
deze termen of afkortingen zullen gebruikt worden. Desalniettemin zal ook steeds de
Nederlandstalige term en beschrijving gegeven worden.
In een eerste deel van dit werk wordt nader ingegaan op de initiële stap in projectplanning,
namelijk netwerkplanning. Twee belangrijke methodes worden besproken en vergeleken, met name
PERT en CPM (methode van het kritieke pad). Vervolgens wordt het planningprobleem onder
hulpmiddelenbeperkingen (RCPSP) besproken. Om dit probleem op te lossen werden veelvuldig
1 Project Management Body Of Knowledge
I. ALGEMENE INLEIDING
2
zowel exacte als heuristische procedures voorgesteld. De exacte methodes hebben tot nu toe de
weg naar de softwarepakketten niet gevonden wegens de te grote complexiteit en oplossingstijd.
Naast dit probleem wordt ook dat van hulpmiddelennivellering besproken, waarbij gestreefd wordt
naar reductie van variabiliteit in hoeveelheid hulpmiddelengebruik. Het eerste deel wordt
afgesloten met een indeling en vergelijking van de verschillende projectmanagement
softwarepakketten.
Problemen in projectplanning kunnen fasetransities ondergaan, wat er op neer komt dat de
berekeningscomplexiteit van het probleem varieert naargelang de fase waarin het zich bevindt.
Deze fasetransities worden bepaald door de morfologische en hulpmiddelengerelateerde parameters
van netwerken. Deze verschillende parameters en hun relatie met het planningsprobleem onder
hulpmiddelenbeperkingen wordt uitvoerig besproken.
Het onderzoek en de resultaten ervan worden weergegeven in deel III. Vooreerst werden netwerken
gegenereerd met behulp van de netwerkgenerator RanGen 2. Dit werd gedaan voor dertig
activiteiten en 4 hulpmiddelen. De parametersettings van de zes gebruikte morfologische
indicatoren en hulpmiddelenrestricitiviteit zijn terug te vinden onder punt twee. De relaties tussen
deze verschillende indicatoren worden uitvoerig beschreven. Voor elke setting werden telkens
50000 netwerken gegenereerd. Vervolgens werden elf prioriteitsregels geprogrammeerd om de
gecreëerde probleeminstanties op te lossen. Het normale en maximale hulpmiddelengebruik dient
vooraf ingesteld te worden. Dit zal gedaan worden voor verschillende intervallen om de invloed
daarvan na te gaan. Daarnaast zijn twee opties beschikbaar wanneer hulpmiddelenbeperkingen zich
voordoen. Enerzijds kan de hulpmiddelenbeschikbaarheid stijgen van het normale niveau tot het
maximale. Anderzijds kan de normale beschikbaarheid stijgen met 10% van het verschil tussen de
normale en maximale hoeveelheid. Ook de impact van deze twee opties zal geanalyseerd worden.
Tenslotte wordt ook nog nagegaan welk effect de hulpmiddelenrestricitiviteit heeft op de
oplossingskracht.
“Plans are nothing, planning is everything”
Dwight Eisenhower
Deel I Projectplanning3
Een project kan gedefinieerd worden als een uniek proces, bestaande uit een verzameling
gecoördineerde en gecontroleerde activiteiten met start- en eindtijdstippen, die worden uitgevoerd
met het oog op het realiseren van een doelstelling binnen voorgeschreven tijds-, hulpmiddelen- en
kostenbeperkingen (Demeulemeester E. en Herroelen W., 2000). Projectmanagement is dan het
plannen, coördineren, beheren en opvolgen van de uitvoering van de projectactiviteiten (De Reyck
B. en Herroelen W., 1999). Commerciële projectmanagement softwarepakketten ondersteunen het
plannen van een project, het implementeren van het plan en het opvolgen van de vooruitgang van
het project.
Een project uitvoeren gebeurt in drie fasen, namelijk projectplanning, project ‘scheduling’ 2 en
project opvolging. In de eerste fase zal men de activiteiten kiezen die nodig zijn om de vooraf
bepaalde doelstellingen te bereiken. Zo bekomt men als het ware een deels geordende
opeenvolging van activiteiten die verder kunnen opgesplitst worden tot meer gedetailleerde taken.
De eerste fase betekent dus een globaal plan opstellen voor het project.
In de tweede fase, project ‘scheduling’, zal men het projectplan meer in detail gaan bekijken. Dit is
de fase waarin tijdelijke technische beperkingen zullen geanalyseerd worden en waarin
hulpmiddelen zullen toegewezen worden in die mate dat het project kan uitgevoerd worden.
Bovendien worden de start- en eindtijdsstippen van de activiteiten nauwkeurig vastgelegd (Tormos
et al., 2002). Het onderwerp van deze scriptie zal zich vooral op dit niveau situeren.
In de laatste fase tenslotte, de projectopvolging, probeert men het project te controleren en te
beheersen. Daarbij worden de gebeurlijke verschillen tussen plan en realiteit geanalyseerd.
Eventueel moeten correctieve aanpassingen gebeuren.
Projectmanagementsoftware, wat tot de sterkste klimmers in de softwaremarkt behoort, werd
ontwikkeld om de projectmanager te ondersteunen bij het opstellen, controleren en herzien van het
projectplan. Deze pakketten automatiseren hulpmiddelenplanning en enkele wiskundige
2 In het Nederlands zouden deze twee termen gelijk vertaald worden naar ‘projectplanning’. Vandaar dat hierde meer genuanceerde Engelstalige term gebruikt wordt.
II. PROJECTPLANNING

Deel I Projectplanning4
berekeningen, die voorheen met methodes zoals PERT en CPM manueel dienden te gebeuren. Ze
bieden bovendien een grote flexibiliteit bij het rapporteren van projectplannen.
Deel I Projectplanning5
1. Het ontstaan
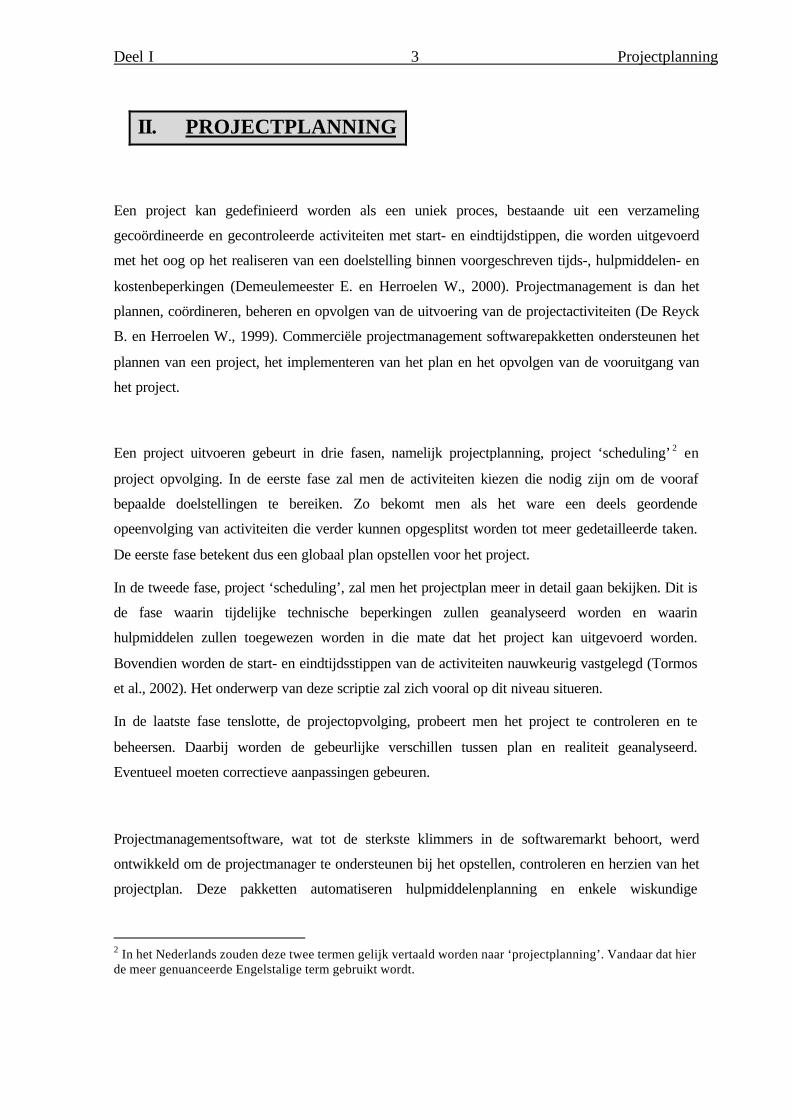
Het prille begin van projectmanagement situeert zich al in het begin van de 20ste eeuw. Henry
Gantt was de persoon die tussen de jaren 1920 en 1940 de nu reeds zeer gekende Gantt-kaarten
ontwikkelde. Daarbij worden de uit te voeren activiteiten voorgesteld op de verticale as en hun
overeenkomstige duur op de horizontale as. De horizontale blokken met variërende lengte stellen
de opeenvolging, het begintijdstip en de tijdsspanne van elke activiteit voor. De Gantt-kaart in de
projectmanagement softwarepakketten laat de gebruiker toe interactieve wijzigingen aan te
brengen.
Figuur 1. 1: Gantt-kaart
In de jaren die volgden werden ten gevolge van het Manhattan project voor het eerst
planningstechnieken in gebruik genomen. De jaren 1950 werden gekenmerkt door de
ontwikkeling van netwerkmodellen die tijdsbeheersing van projecten tot doel hadden.
Meer bepaald gaat het hier over het ontstaan van de methodes PERT en CPM (zie later). In
het daaropvolgende decennium werden deze methodes ter tijdsplanninganalyse verder
uitgebreid. Tussen 1970 en 1990 geschiedde de grote doorbraak wanneer de eigenlijke
projectmanagement softwarepakketten op de markt kwamen en wanneer meer en meer
aandacht uitging naar hulpmiddelenallocatie. In de meest recente jaren staan ontwikkeling
van diverse nieuwe instrumenten, zoals koppeling van het softwarepakket met MRP-
systemen, en uitgebreider onderzoek naar hulpmiddelenallocatie voorop.
Tot de jaren 70 was projectmanagement software enkel toepasselijk voor grote bedrijven, enorm
kostelijk en enkel beschikbaar op grote computers. Door de grote technologische vooruitgang, de

Deel I Projectplanning6
lagere kost van de pc en het grootschalig gebruik van internet zijn vele projectmanagement
softwarepakketten nu beschikbaar variërend van enkele honderden tot duizenden euro’s.
Deel I Projectplanning7
2. Netwerkplanning
Het basisprobleem in projectplanning is de kritieke activiteiten weten te vinden en de optimale
starttijden van activiteiten in een activiteitennetwerk te determineren. Dit netwerk is een deels
geordende set van activiteiten met voorgeschreven duurtijden die samen een niet cyclische grafiek
vormen. Vanzelfsprekend is ook het bepalen van de vroegste eindtijd van het project van uiterst
belang.
De traditionele netwerkplanningsmethoden, zoals PERT (‘Program Evaluation and Review
Technique’) en de methode van het kritieke pad (‘Critical Path Method’ of CPM), maken het
mogelijk om plannen voor projecten te vinden met minimale duurtijd. Deze technieken gaan er
echter van uit dat de verscheidene hulpmiddelen, die nodig zijn voor de voltooiing van het project,
onbeperkt zijn, wat nogal vaak strookt met de werkelijkheid. Vandaar dat deze veronderstelling in
de loop der jaren afgezwakt werd en steeds meer rekening gehouden wordt met
hulpmiddelenbeperkingen. In de literatuur worden deze hulpmiddelenbeperkingen bij het plannen
van een project bestudeerd in het domein van ‘resource-constrained project scheduling’ of kortweg
RCPS.
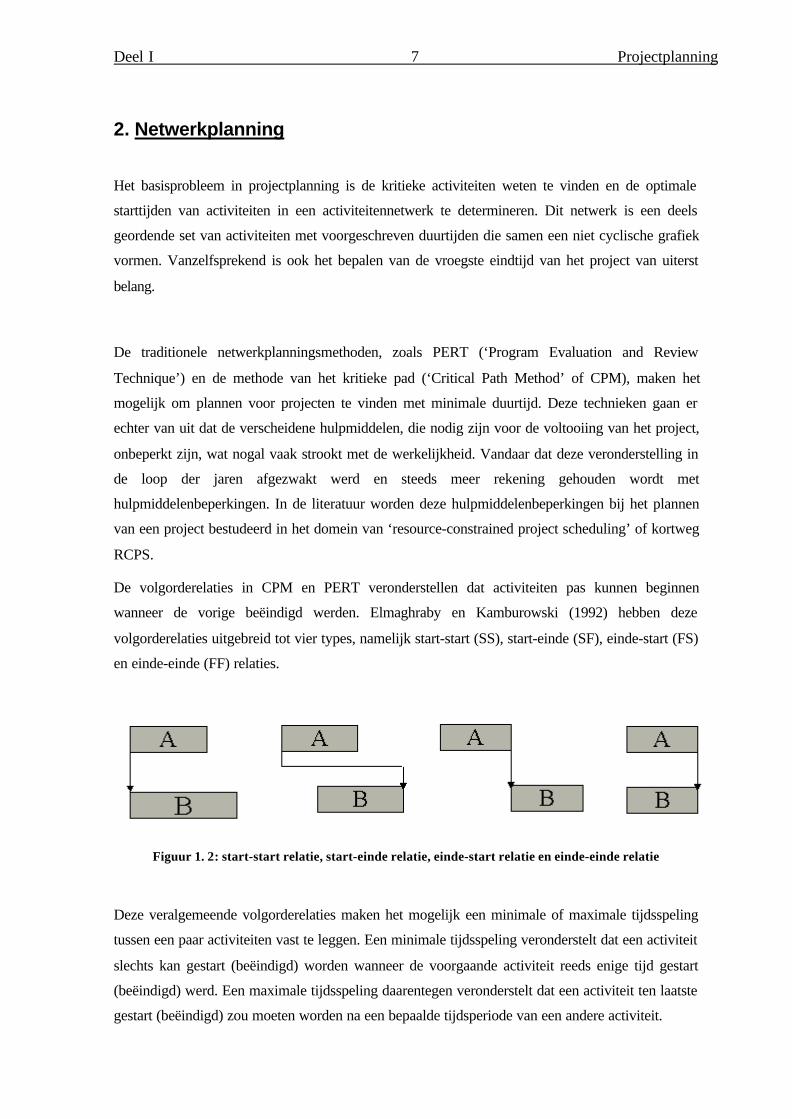
De volgorderelaties in CPM en PERT veronderstellen dat activiteiten pas kunnen beginnen
wanneer de vorige beëindigd werden. Elmaghraby en Kamburowski (1992) hebben deze
volgorderelaties uitgebreid tot vier types, namelijk start-start (SS), start-einde (SF), einde-start (FS)
en einde-einde (FF) relaties.
Figuur 1. 2: start-start relatie, start-einde relatie, einde-start relatie en einde-einde relatie
Deze veralgemeende volgorderelaties maken het mogelijk een minimale of maximale tijdsspeling
tussen een paar activiteiten vast te leggen. Een minimale tijdsspeling veronderstelt dat een activiteit
slechts kan gestart (beëindigd) worden wanneer de voorgaande activiteit reeds enige tijd gestart
(beëindigd) werd. Een maximale tijdsspeling daarentegen veronderstelt dat een activiteit ten laatste
gestart (beëindigd) zou moeten worden na een bepaalde tijdsperiode van een andere activiteit.
Deel I Projectplanning8
2.1. PERT3
PERT werd aan het eind van de jaren 1950 door de zeemacht ontwikkeld voor het Polaris raket
programma. Men realiseerde zich al gauw dat de beheersing en coördinatie van de beschikbare
hulpmiddelen voor dit enorme project, met maar liefst 250 hoofdaannemers en 9000
onderaannemers, het grote struikelblok zou zijn. Daarom werd, in samenwerking met het
consultancybedrijf van Booz, Allen en Hamilton, het ‘Program Evaluation and Review Technique’
of kortweg PERT ontwikkeld. Dit is een instrument dat planning, beheersing, rapportering en
communicatie van projecten toelaat (Focken, 2002).
De PERT-methode maakt gebruik van een pijlenvoorstelling, waarbij de pijlen staan voor
activiteiten. De zeshoeken aan het begin en uiteinde van de pijl worden knooppunten genoemd en
geven het start –en eindpunt aan van iedere taak of activiteit. Deze pijlenvoorstelling werd later in
vraag gesteld. Algemeen wordt nu de knooppuntvoorstelling aanvaard, zoals die ook van
toepassing is in alle projectmanagement softwarepakketten (zie later).
Figuur 1. 3: pijlenvoorstelling
Gewoonlijk veronderstelt men bij het plannen dat de duur van de activiteiten precies gekend is. In
realiteit is dit echter zelden het geval. Wanneer het plan opgemaakt wordt, is meestal nog geen
gedetailleerde informatie beschikbaar over de methodes en hulpmiddelen die nodig zijn voor de
realisatie van de activiteiten. Chanas et al. (2002) stelden bovendien dat zelfs wanneer de
duurtijden van activiteiten onafhankelijk willekeurige variabelen waren, de totale projectduur nog
niet na te gaan valt, tengevolge van de afhankelijkheden geïntroduceerd door de morfologie van
een netwerk4.
Dit probleem werd al gauw opgemerkt door de ontwikkelaars van PERT. Zij stelden dan ook voor
de duur van de activiteiten te bepalen aan de hand van waarschijnlijkheidsverdelingen. Zo poogden
ze het gemiddelde en de standaardafwijking van de vroegste starttijden van activiteiten te
evalueren.
3 Program Evaluation and Review Technique
Deel I Projectplanning9
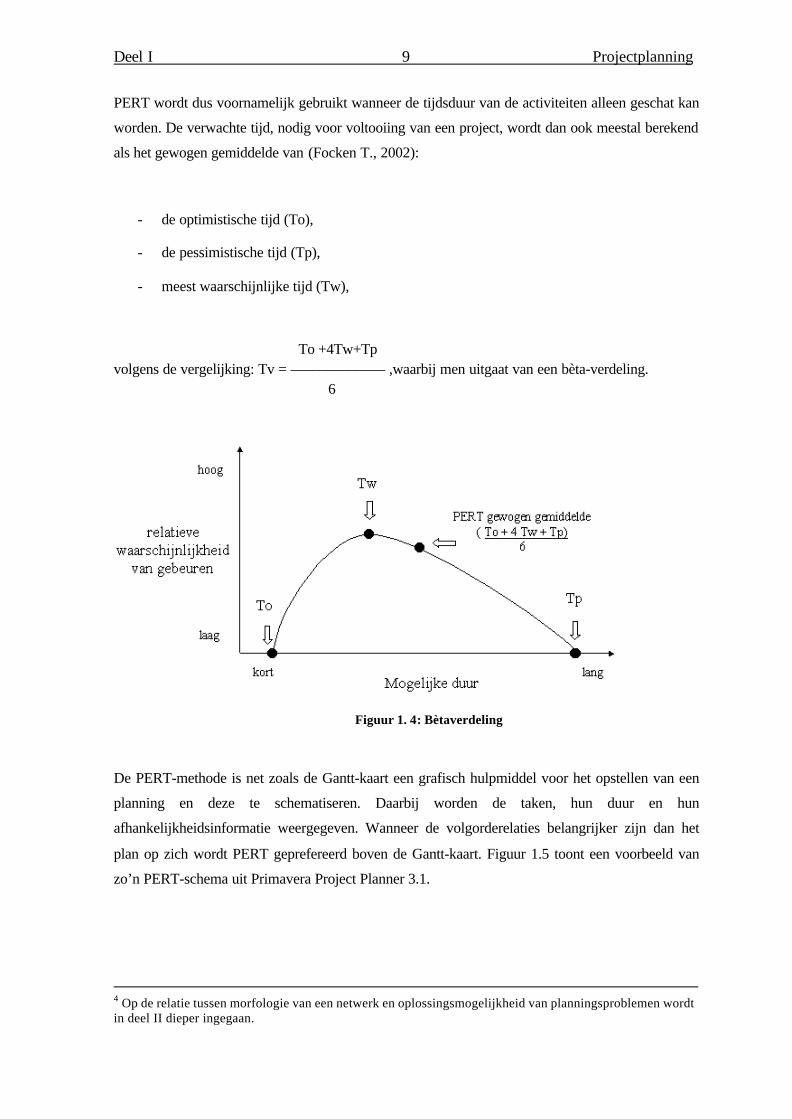
PERT wordt dus voornamelijk gebruikt wanneer de tijdsduur van de activiteiten alleen geschat kan
worden. De verwachte tijd, nodig voor voltooiing van een project, wordt dan ook meestal berekend
als het gewogen gemiddelde van (Focken T., 2002):
- de optimistische tijd (To),
- de pessimistische tijd (Tp),
- meest waarschijnlijke tijd (Tw),
To +4Tw+Tpvolgens de vergelijking: Tv = ––––––––––––– ,waarbij men uitgaat van een bèta-verdeling.
6
Figuur 1. 4: Bètaverdeling
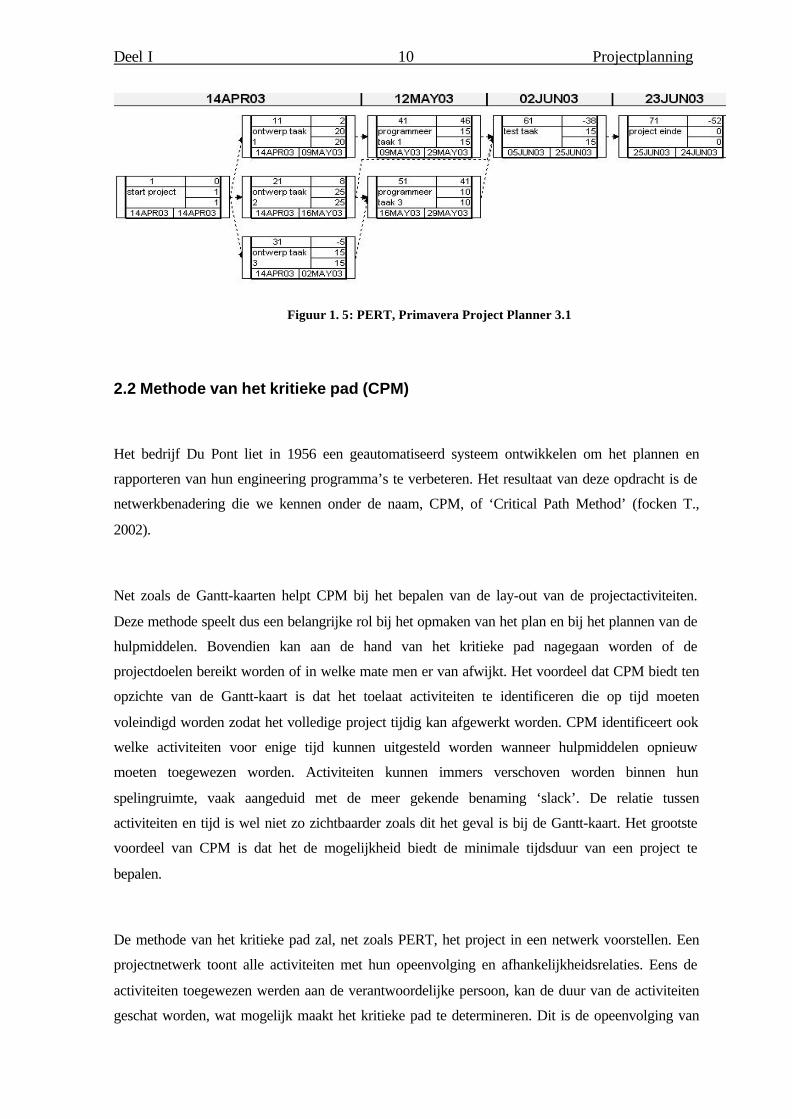
De PERT-methode is net zoals de Gantt-kaart een grafisch hulpmiddel voor het opstellen van een
planning en deze te schematiseren. Daarbij worden de taken, hun duur en hun
afhankelijkheidsinformatie weergegeven. Wanneer de volgorderelaties belangrijker zijn dan het
plan op zich wordt PERT geprefereerd boven de Gantt-kaart. Figuur 1.5 toont een voorbeeld van
zo’n PERT-schema uit Primavera Project Planner 3.1.
4 Op de relatie tussen morfologie van een netwerk en oplossingsmogelijkheid van planningsproblemen wordtin deel II dieper ingegaan.
Deel I Projectplanning10
Figuur 1. 5: PERT, Primavera Project Planner 3.1
2.2 Methode van het kritieke pad (CPM)
Het bedrijf Du Pont liet in 1956 een geautomatiseerd systeem ontwikkelen om het plannen en
rapporteren van hun engineering programma’s te verbeteren. Het resultaat van deze opdracht is de
netwerkbenadering die we kennen onder de naam, CPM, of ‘Critical Path Method’ (focken T.,
2002).
Net zoals de Gantt-kaarten helpt CPM bij het bepalen van de lay-out van de projectactiviteiten.
Deze methode speelt dus een belangrijke rol bij het opmaken van het plan en bij het plannen van de
hulpmiddelen. Bovendien kan aan de hand van het kritieke pad nagegaan worden of de
projectdoelen bereikt worden of in welke mate men er van afwijkt. Het voordeel dat CPM biedt ten
opzichte van de Gantt-kaart is dat het toelaat activiteiten te identificeren die op tijd moeten
voleindigd worden zodat het volledige project tijdig kan afgewerkt worden. CPM identificeert ook
welke activiteiten voor enige tijd kunnen uitgesteld worden wanneer hulpmiddelen opnieuw
moeten toegewezen worden. Activiteiten kunnen immers verschoven worden binnen hun
spelingruimte, vaak aangeduid met de meer gekende benaming ‘slack’. De relatie tussen
activiteiten en tijd is wel niet zo zichtbaarder zoals dit het geval is bij de Gantt-kaart. Het grootste
voordeel van CPM is dat het de mogelijkheid biedt de minimale tijdsduur van een project te
bepalen.
De methode van het kritieke pad zal, net zoals PERT, het project in een netwerk voorstellen. Een
projectnetwerk toont alle activiteiten met hun opeenvolging en afhankelijkheidsrelaties. Eens de
activiteiten toegewezen werden aan de verantwoordelijke persoon, kan de duur van de activiteiten
geschat worden, wat mogelijk maakt het kritieke pad te determineren. Dit is de opeenvolging van
Deel I Projectplanning11
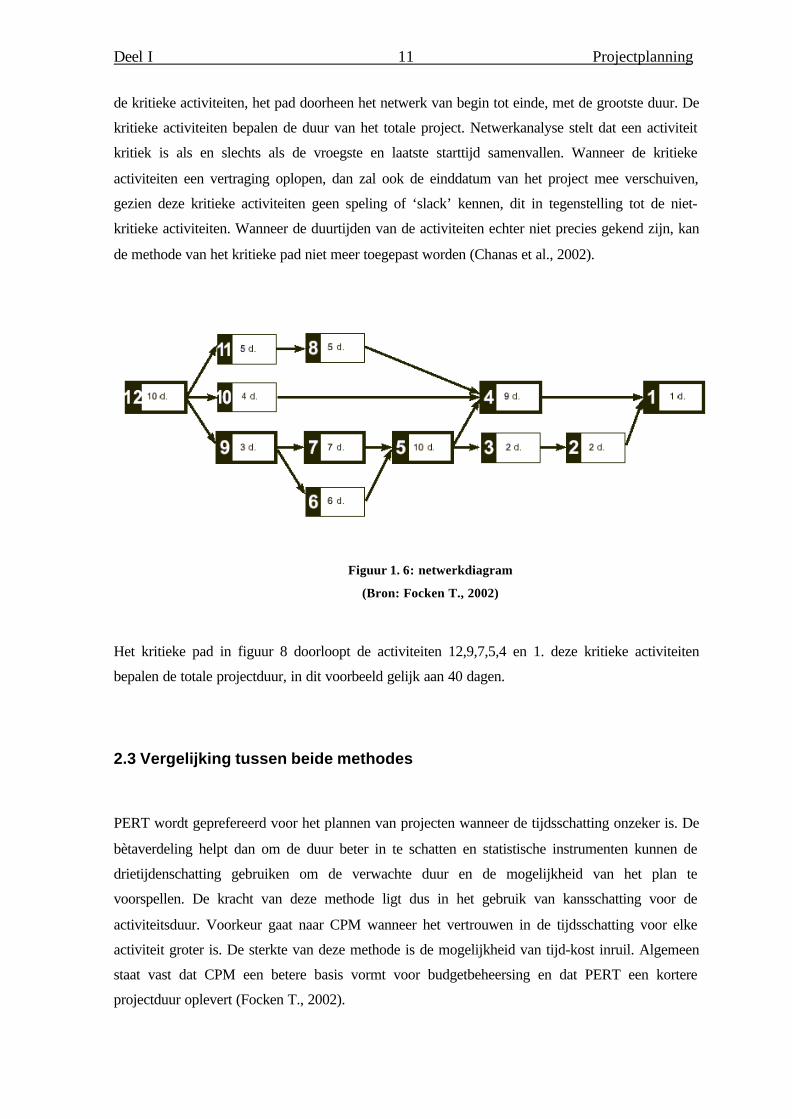
de kritieke activiteiten, het pad doorheen het netwerk van begin tot einde, met de grootste duur. De
kritieke activiteiten bepalen de duur van het totale project. Netwerkanalyse stelt dat een activiteit
kritiek is als en slechts als de vroegste en laatste starttijd samenvallen. Wanneer de kritieke
activiteiten een vertraging oplopen, dan zal ook de einddatum van het project mee verschuiven,
gezien deze kritieke activiteiten geen speling of ‘slack’ kennen, dit in tegenstelling tot de niet-
kritieke activiteiten. Wanneer de duurtijden van de activiteiten echter niet precies gekend zijn, kan
de methode van het kritieke pad niet meer toegepast worden (Chanas et al., 2002).
Figuur 1. 6: netwerkdiagram
(Bron: Focken T., 2002)
Het kritieke pad in figuur 8 doorloopt de activiteiten 12,9,7,5,4 en 1. deze kritieke activiteiten
bepalen de totale projectduur, in dit voorbeeld gelijk aan 40 dagen.
2.3 Vergelijking tussen beide methodes
PERT wordt geprefereerd voor het plannen van projecten wanneer de tijdsschatting onzeker is. De
bètaverdeling helpt dan om de duur beter in te schatten en statistische instrumenten kunnen de
drietijdenschatting gebruiken om de verwachte duur en de mogelijkheid van het plan te
voorspellen. De kracht van deze methode ligt dus in het gebruik van kansschatting voor de
activiteitsduur. Voorkeur gaat naar CPM wanneer het vertrouwen in de tijdsschatting voor elke
activiteit groter is. De sterkte van deze methode is de mogelijkheid van tijd-kost inruil. Algemeen
staat vast dat CPM een betere basis vormt voor budgetbeheersing en dat PERT een kortere
projectduur oplevert (Focken T., 2002).
Deel I Projectplanning12
PERT en CPM blijken echter enkel nuttig te zijn wanneer de projectdeadline niet vast staat en de
hulpmiddelen niet beperkt zijn, noch door beschikbaarheid, noch door tijd. Dit is echter slechts
zelden het geval in realiteit.
Het planningprobleem onder hulpmiddelenbeperkingen (zie later) meer bekend als ‘resource-
constrained project scheduling problem’ (RCPSP) vormt dan ook een enorm belangrijk
studiegebied in projectmanagement 5.
Het wordt al gauw duidelijk dat netwerken plannen en veranderen volgens de traditionele methodes
enorm moeilijk wordt en vooral veel tijd in beslag neemt wanneer het aantal activiteiten stijgt. Als
de volgorde of de duur van activiteiten zou moeten veranderd worden, moet het volledige proces
opnieuw doorlopen worden. Projectmanagement software biedt dan ook het voordeel deze
methodes geautomatiseerd te hebben. Veranderingen kunnen daardoor herhaaldelijk plaatsgrijpen
en zonder veel moeilijkheden berekend worden door de computer. Gevolg van dit alles is dus de
mogelijkheid van een ‘wat als’ analyse. Verschillende scenario’s kunnen vergeleken worden, wat
de gebruiker van de software een beter inzicht in het probleem kan verschaffen.
Waar de Gantt-kaart, de CPM-methode en de PERT-methode falen om rekening te houden met
hulpmiddelenconflicten, melden de softwarepakketten wanneer deze overdadig ingezet worden. Zij
zullen dan ook automatisch het projectplan aanpassen (Corder S. en Ruby Jr. R., 1993). De
softwarepakketten incalculeren dus het RCPS probleem.
5 In overeenstemming met de vakliteratuur en om eventuele misverstanden te vermijden zal verder deEngelstalige afkorting RCPS gebruikt worden.
Deel I Projectplanning13
3. Projectplanning onder hulpmiddelenbeperkingen (RCPS)
Wanneer hulpmiddelen beperkt zijn, wat nogal vaak het geval is in realiteit, komt het er op aan de
activiteiten zodanig te verschuiven totdat de hulpmiddelenvereisten de beschikbare hulpmiddelen
niet overtreffen. Zodoende wordt een minimale duurtijd van het project bekomen.
RCPS houdt dus het rangschikken van projectactiviteiten in, rekening houdend met volgorde- en
hulpmiddelenbeperkingen, teneinde het vooraf bepaalde doel te bereiken, wat nogal vaak een zo
kort mogelijke projectduur is.
Het klassieke RCPS-probleem is gebaseerd op enkele veronderstellingen (Demeulemeester en
Herroelen, 1996):
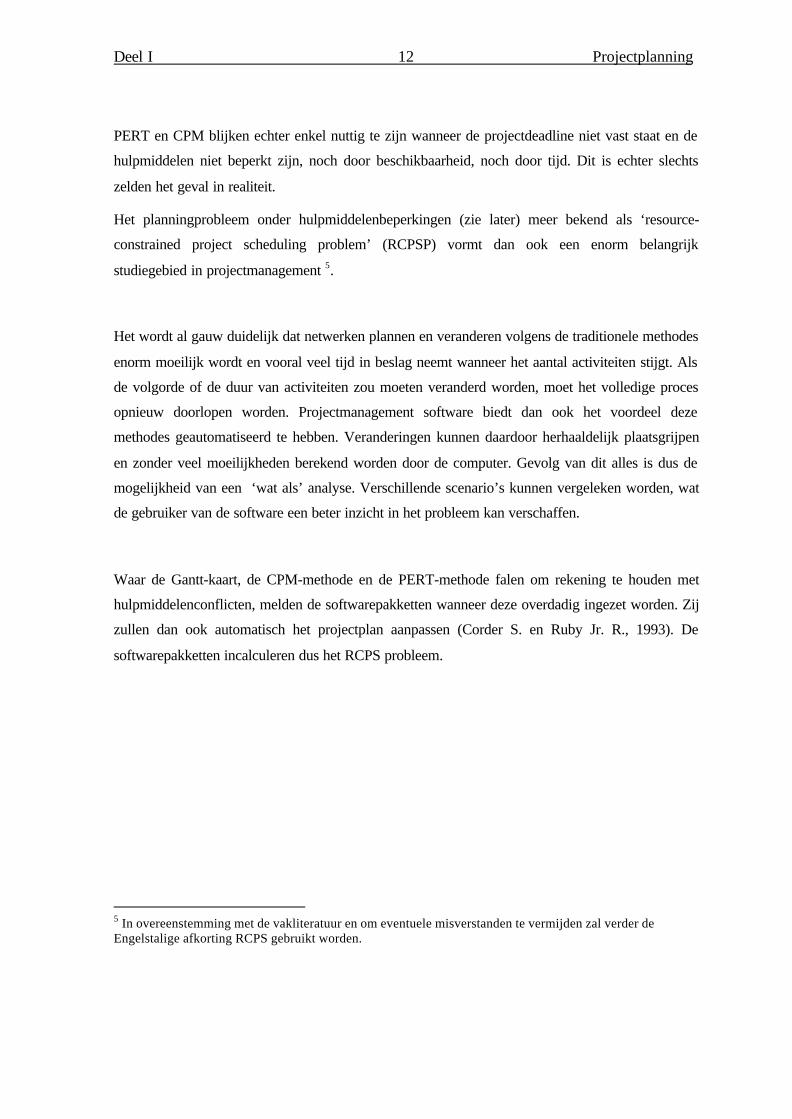
§ Het project bestaat uit meerdere activiteiten die uitgedrukt worden in een
knooppuntvoorstelling6. Dit is een gerichte, niet cyclische grafiek waarin de activiteiten
voorgesteld worden door knooppunten (de zeshoeken) en waarbij de pijlen de symbolische
weergave vormen van een volgorderelatie. Er worden twee dummyvariabelen
geïntroduceerd, namelijk de begin- en eindactiviteit.
Figuur 1. 7: knooppuntenvoorstelling
§ De activiteiten zijn gerelateerd door een reeks einde-start volgorderelaties met tijdsinterval
nul. Een activiteit kan dus pas gestart worden wanneer de voorgaande activiteit volledig
beëindigd werd.
§ Er wordt voor geen enkele activiteit een einddatum of vervaldatum vooropgesteld.
§ Elke activiteit heeft een constante duur.
§ Elke activiteit vereist een constante hoeveelheid eenheden hernieuwbare hulpmiddelen.
§ De beschikbaarheid van de hernieuwbare hulpmiddelen is een constante doorheen het
project.
6 Dit in tegenstelling tot CPM en PERT die een pijlenvoorstelling hanteren.
Deel I Projectplanning14
§ Eens gestart, kan een activiteit niet onderbroken worden.
§ De bedoeling is om het project zo snel mogelijk te beëindigen, zonder de hulpmiddelen- of
volgorderelaties te schenden.
Een andere mogelijkheid om netwerken voor te stellen is de pijlenvoorstelling, zoals gebruikt bij
PERT en CPM, maar deze methode is echter geen aanrader. Daarbij wordt elke activiteit
voorgesteld door een pijl en elke gebeurtenis door een knoop. De volgorderelaties tussen twee
activiteiten wordt dan weergegeven door het eindknooppunt van de ene pijl, die de eerste activiteit
voorstelt, te laten samenvallen met het beginknooppunt van de pijl die de activiteit voorstelt die pas
na afloop van de eerste activiteit kan worden gestart.
Het grote nadeel van deze methode is dat men genoodzaakt is om schijnactiviteiten te gaan
gebruiken om een juiste voorstelling van het project te bekomen, wat voor een serieuze ballast
zorgt bij de netwerkvoorstelling. Als men bovendien van deze schijnactiviteiten een verschillend
aantal gebruikt of als men deze een andere plaatsing toekent, kan hetzelfde project op verschillende
wijzen worden voorgesteld. De meeste planningspakketten voor projectmanagement zijn daarom
ook op de knooppuntenvoorstelling gebaseerd.
Klein (2000) benadrukt dat het klassieke planningsprobleem onder hulpmiddelenbeperkingen
(RCPSP) in de praktijk eerder zelden toegepast kan worden om planningsproblemen op te lossen,
wat hij aantoont aan de hand van drie voorbeelden:
1. Wanneer geproduceerd wordt op order, is het mogelijk dat een werkstuk op de ene
machine moet afgewerkt worden alvorens overgebracht te worden naar de volgende. Dit
kan gemodelleerd worden als twee activiteiten met een algemene volgorderelatie. Er
ontstaat echter een moeilijkheid wanneer de tweede machine een voorbereidingstijd nodig
heeft die onafhankelijk is van de vooruitgang en die de uitvoering van het werkstuk op de
eerste machine kan overlappen. Wanneer deze voorbereidingstijd opgenomen wordt in de
uitvoeringstijd van de tweede machine terwijl de volgorderelaties behouden blijven, zal dit
tot onnodige onbenutte tijd leiden omdat het voorbereidingsproces niet zal starten voor het
werkstuk de eerste machine verlaat.
2. Het kan in bepaalde periodes gebeuren dat slechts een deel van alle werknemers of
machines beschikbaar zijn. Dit bijvoorbeeld door verlof of onderhoud van machines. De
beschikbaarheid van hulpmiddelen is in de praktijk dus zelden of nooit constant doorheen
Deel I Projectplanning15
het project. Er dient rekening gehouden te worden met voorspelbare schommelingen. De
hulpmiddelenbeperkingen zouden bijgevolg moeten aangepast worden om het RCPS-
probleem op te lossen.
3. Het kan nodig zijn een latere datum vast te leggen wanneer de benodigde hulpmiddelen
niet onmiddellijk beschikbaar zijn. Bovendien worden ten gevolge van contractuele
overeenkomsten ook vaak een vaste datum in de toekomst vooropgesteld voor het
uitvoeren van enkele activiteiten. Het is dus mogelijk dat tijdsintervallen bestaan
gedurende dewelke activiteiten moeten uitgevoerd worden.
Als gevolg van deze beperkte toepassing van RCPSP, werden de planningsproblemen in de
literatuur vaak uitgebreid. Yang en Geunes (2001) geven een overzicht van de verschillende
modellen in RCPS. Een onderscheid kan bijvoorbeeld gemaakt worden tussen het enkelvoudige en
meervoudige planningsprobleem onder hulpmiddelenbeperkingen. Enkelvoudige problemen
veronderstellen dat elk project en elke activiteit slechte één enkele uitvoeringswijze kent. Zowel de
duurtijd van de activiteiten en hun hulpmiddelenvereisten worden vast verondersteld. Daarbij
bestaan twee soorten volgorderelaties. Gevallen waarbij een activiteit op eender welk moment kan
starten na de beëindiging van de voorgaande activiteit en gevallen waarbij een activiteit moet
starten binnen een tijdsinterval na de beëindiging van de vorige activiteit. Deze laatste worden de
algemene volgorderelaties genoemd. Bovendien kan de hulpmiddelenbeschikbaarheid voor een
bepaald hulpmiddel kan dezelfde zijn voor alle periodes of kan variëren. Dit geldt ook voor het
hulpmiddelengebruik. Deze laatste kan constant zijn of variëren over de verschillende periodes.
Tenslotte kunnen ook gevallen beschouwd worden waarbij de activiteiten moeten volbracht worden
eens ze gestart zijn of gevallen waarvoor de activiteiten mogen onderbroken worden.
Voor het meervoudige RCPS-probleem zijn meerdere uitvoeringswijzen beschikbaar. Elke
realisatiewijze is gekenmerkt door haar uitvoeringstijd en een hoeveelheid van een specifiek
hulpmiddelentype om de activiteit uit te voeren. Hulpmiddelen kunnen wel of niet hernieuwbaar
zijn. De niet hernieuwbare hulpmiddelen zijn uitgeput na een bepaald aantal periodes, terwijl de
hernieuwbare hulpmiddelen steeds een zelfde beschikbaarheid hebben in elke periode.
Yang en Geunes (2001) onderscheiden bovendien RCPS-problemen met reguliere en niet reguliere
doelfuncties. In het geval van een reguliere doelfunctie wordt de doelfunctie nooit slechter door de
uitvoeringstijd van een taak in te korten zonder deze van een andere taak te verhogen. In het geval
van niet reguliere doelfuncties gebeurt dit wel. Tot de specifieke probleemtypes behoren:
Deel I Projectplanning16
§ het probleem van hulpmiddelennivellering
§ het probleem van maximale netto geactualiseerde waarde
§ het probleem van verdisconteerde kasstroom
Naast de enkelvoudige, meervoudige en RCPS-problemen met niet reguliere doelfuncties erkennen
de eerder vermelde auteurs het stochastische RCPSP. Daarbij is de uitvoeringstijd van elke
activiteit een willekeurige variabele die een waarschijnlijkheidsverdeling volgt. Het meest
voorkomende doel bij dit probleem is dit keer de ‘verwachte’ projectduur te minimaliseren. Hoewel
deze veronderstelling realistischer is, gaat het gepaard met een veel grotere analysecomplexiteit.
Wat betreft de tot nu reeds besproken vormen van RCPS, kunnen projecten of taken kiezen tussen
verschillende hulpmiddelen maar slechts één operatie is vereist voor elke job. Een taak in een multi
RCPSP daarentegen kan een set van operaties vereisen of een set van opeenvolgende hulpmiddelen
(Yang en Geunes, 2001). Zo is het mogelijk dat de hulpmiddelen in serie moeten aangewend
worden. Wanneer bepaalde hulpmiddelen echter parallel zijn, dan kan eender welk van deze
hulpmiddelen gekozen worden. Deze problemen worden vaak machineplanningsproblemen
genoemd gezien in de verwerkende nijverheid machines en werkstations vaak zowel in serie als in
parallel opgesteld worden.
Ook Brucker et al. (1999) maakten een overzicht van de verschillende RCPS-problemen en
poogden de kloof tussen productieplanning en projectplanning te dichten wat betreft het notatie –
en classificatieschema. Zij onderscheiden vier basis RCPS-problemen:
1. PS ¦ prec¦ Cmax:
Dit model is het meest klassieke probleem, zoals beschreven door Demeulemeester en
Herroelen (1996). Het houdt in dat volgorderelaties en hulpmiddelenbeperkingen moeten
in rekening gebracht worden terwijl gepoogd wordt de projectduur minimaal te houden.
2. MPS ¦ temp¦ Cmax:
Deze modellen behandelen de inruil tussen tijd en hulpmiddelen en tussen hulpmiddelen
onderling in een multiprojectomgeving. Dit weerspiegelt dus meer wat in realiteit gebeurt
in project management.
Deel I Projectplanning17
3. PS ¦ temp¦ Cmax:
Voor veel toepassingen doet zich niet alleen een minimaal tijdsverloop tussen de
activiteiten voor maar ook een maximaal start-start tijdsverloop. Dit probleem is sterk NP-
hard.
4. PS ¦ temp¦ ? ck f (rk (S,t)):
Dit model wordt toegepast wanneer de beschikbaarheid van hernieuwbare hulpmiddelen
beperkt is en wanneer het hulpmiddelengebruik moet genivelleerd worden doorheen het
project. ck staat voor de kost per hulpmiddel k en rk (S,t)) voor de consumptie van
hulpmiddel k van plan S op tijdstip t. f (rk (S,t)) bepaalt bijgevolg de doelfunctie.
Om het planningsprobleem onder hulpmiddelenbeperkingen (RCPSP) op te lossen werden in de
literatuur zowel exacte procedures als heuristische procedures voorgesteld (Gemmill D.D. en
Edwards M.L., 1999). Lineaire en integer programmeren zijn voorbeelden van benaderingen die
leiden tot optimale oplossingen. Deze zijn echter niet eenvoudig berekenbaar en vereisen een nogal
hoge CPU-tijd, vooral voor grotere projectnetwerken. Farrington et al (1999) stellen dat, zelfs
wanneer optimalisatie initieel haalbaar zou zijn, deze methodes toch nog het nadeel hebben zich als
een zwarte doos te gedragen. Wanneer immers verandering zou optreden in het project, zou het
probleem moeten geherformuleerd worden en een nieuwe optimale oplossing gezocht worden.
Gezien verandering eigen is aan projectplanning en gezien de lange berekeningstijden wordt in de
praktijk gebruik gemaakt van heuristische beslissingsregels. Deze hebben het voordeel eenvoudig
begrijpbaar en aanwendbaar te zijn en goedkoop om te gebruiken in computer programma’s.
Heuristieken leveren echter wel een variërende doelmatigheid wanneer ze gebruikt worden in
verschillende netwerken. Bovendien is het aantal heuristieken, waaruit een keuze moet gemaakt
worden, enorm groot.
3.1. Optimalisatie
Een optimaal projectplan bekomen zou vanzelfsprekend de beste oplossing zijn voor de
projectmanager. Wiskundig programmeren is een techniek waarbij gezocht wordt naar de enige
optimale uitkomst. East et al. (1993) beschrijven twee methodes, namelijk lineair programmeren en
integer programmeren.
Deel I Projectplanning18
3.1.1. Lineair programmeren
Lineair programmeren is een wiskundige beslissingstechniek waarbij het probleem voorgesteld
wordt als een stelsel van drie vergelijkingen of ongelijkheden, die lineaire combinaties zijn van de
beslissingsvariabelen. Een eerste vergelijking beschrijft het gedrag van het systeem. Daarbij dient
een set beslissingsvariabelen gedefinieerd te worden die ingezet zullen worden om de mogelijke
oplossingen te beschouwen. De beperkingen vormen de tweede vergelijking. Deze zijn nodig om
de beslissingsvariabelen te beperken tot waarden die realistisch zijn voor een specifiek probleem.
Een laatste vergelijkingstype is de doelfunctie. Deze bepalen de kost die gepaard gaat met de
beslissingsvariabelen en de richting van het doel, minimalisatie of maximalisatie. Lineaire
programmeringsmodellen weerspiegelen echter zelden de ware problemen waarmee een
projectmanager geconfronteerd wordt.
Toepassingen van lineair programmeren zijn vooral terug te vinden in het domein van weg- en
waterbouwkunde. Voor bouwkunde wordt lineair programmeren het vaakst toegepast om tegemoet
te komen aan het tijd-kost inruil probleem.
3.1.2. Integer ‘programming’
Wanneer beslissingsvariabelen geen onderling verband vertonen, wordt vaak integer programmeren
geprefereerd. Deze methode kan gebruikt worden voor meerdere planningsproblemen, zoals
hulpmiddelenallocatie, hulpmiddelennivellering en het tijd-kost inruil probleem.
Er bestaan echter enkele problemen bij het modelleren van problemen met behulp van integer
programmeren. De gebruikte modellen zijn statisch. Ze werden ontwikkeld om een complete
oplossing te vinden voor een volledige set van beperkingen. Wanneer deze modellen dus veranderd
worden, kan dit leiden tot een continue herziening van het model zonder ooit echt in gebruik
genomen te worden. Een tweede probleem is de moeilijkheid om conflicterende doelen,
bijvoorbeeld het tegelijk nastreven van minimalisatie van hulpmiddelengebruik en kost, voor te
stellen. Het model zal schending van enkele beperkingen, zodat de globale oplossing beter wordt,
niet toestaan. Een andere tekortkoming van deze techniek is dat het stelsel van vergelijkingen
convex moet zijn. Daardoor kunnen vergelijkingen die als stapfuncties of waardefuncties moeten
gemodelleerd worden moeilijk omgezet worden in integer programmeringsformuleringen.
Een methode om integer programmeren op te lossen en die optimaliteit garandeert is de
zoektechniek, meer bekend als Branch&Bound. Deze methode vertrekt van deelplannen die

Deel I Projectplanning19
geassocieerd zijn met de top van de enumeratie boomdiagram (Brucker et al., 1999). Het
vertakkingproces bestaat uit het uitbreiden van het deelplan op verschillende manieren.
Dominantieregels, ondergrenzen en directe selectie laten toe het aantal alternatieven tot deze
uitbreiding te verlagen. De Branch&Bound procedure van Demeulemeester en Herroelen (1992)
wordt tot op heden als de meest performante beschouwd.
In het slechtste geval kan voor het bekomen van een optimale oplossing aan de hand van de
Branch&Bound-procedure een evaluatie nodig zijn van alle combinaties van beslissingsvariabelen.
Het oplossen van zo’n probleem vereist exponentieel meer tijd dan het aantal beperkingtoenames.
Zo’n type probleem wordt ook wel een NP-probleem genoemd.
3.2. Heuristieken
Tijdens het plannen komt het er op aan behoorlijk snel activiteiten te plannen en hulpmiddelen toe
te wijzen aan de specifieke activiteiten. Aangezien integer programmeringmodellen niet in staat
zijn om optimale resultaten te leveren voor de ware praktijkproblemen, zijn vele onderzoekers
overgegaan tot het formuleren van vuistregels of heuristieken om prioriteit toe te kennen aan
activiteiten wanneer deze gekenmerkt worden door hulpmiddelenbeperkingen.
Het zou dus uiterst nuttig zijn de heuristieken te kennen die leiden tot een minimale duurtijd van
het project en een maximale benutting van de hulpmiddelen.
Een onderscheid dient gemaakt te worden tussen prioriteitsgebaseerde heuristieken en meta-
heuristieken. De meta-heuristieken kunnen gezien worden als een algemene strategie om
heuristieken te leiden zodat betere oplossingen kunnen gevonden worden dan de lokale optimale
oplossingen.
3.2.1. Meta-heuristieken
De drie belangrijkste meta-heuristieken worden hieronder besproken. Het betreft de genetische
algoritmes, ‘tabu search’ en ‘simulated annealing’.
Deel I Projectplanning20
3.2.1.1. Genetische algoritmes
De genetische algoritmes splitsen een probleem op in strengen waaruit nieuwe potentiële
oplossingen worden ontwikkeld. Deze benadering levert een groot aantal mogelijke alternatieve
oplossingen die allen getest worden op hun bekwaamheid. Aan de hand van een iteratieprocedure
worden aan die oplossingen die beter presteren een hogere frequentie toegekend. Er wordt gebruik
gemaakt van gespecialiseerde operatoren om de bestaande alternatieven te permuteren zodat de
oplossingen niet beperkt blijven tot de initiële set alternatieven (East et al., 1993).
Sommige auteurs zijn van mening dat deze genetische algoritmes minder belastend zijn qua
berekening voor het zoeken van NP-complete oplossingsmogelijkheden. Een ander erkend
voordeel is dat systemen die deze evolutionaire benadering toepassen verandering van de
systeemparameters of toevoeging van nieuwe parameters schijnen te aanvaarden zonder dat de
globale prestaties van de genetische algoritmes verlagen.
3.2.1.2. Tabu Search
Deze methode is eigenlijk een uitbreiding van de gebruikelijke lokale zoekmethodes. Deze laatste
worden toegepast om een initiële oplossing te verbeteren7. Dit gebeurt aan de hand van
opeenvolgende bewerkingen die een oplossing omzetten in een andere. Terwijl de traditionele
lokale zoekmethodes enkel toelaten naar een betere oplossing te evolueren, vermijden de meer
gesofisticeerde methodes vast te lopen in een lokaal optimum door intermediaire achteruitgang toe
te laten. De methode tabu search vermijdt in een cyclische spiraal terecht te komen door enkele
ontwikkelingen te verbieden, steunend op informatie over de zoekgeschiedenis. Voor een
uitgebreid overzicht rond Tabu search verwijs ik graag naar Klein (2000).
3.2.1.3. Simulated annealing
Simulated annealing, of letterlijk “stochastisch koelen”, is eveneens een methode om tot een
suboptimale oplossing van een probleem te komen. Kirkpatrick et al. (1983) onderzochten dit
probleem aan de hand van het handelsreizigersprobleem (‘TSP: travelling salesman problem’). Dit
probleem stelt dat de reiziger de kortste weg moet zien te vinden om een aantal steden te bezoeken
en uiteindelijk terug op de initiële plaats terecht te komen.
Deel I Projectplanning21
Simulated annealing is een Monte Carlo berekening die een globaal minimaliserend algoritme
implementeert dat werkt voor willekeurige functies (Kirkpatrick et al., 1983). Simpele
minimaliserende algoritmes vinden enkel lokale minima. Simulated annealing daarentegen kan
zo’n lokaal minimum verlaten. Dit gebeurt echter met een dalende probabiliteit.
Deze procedure is analoog aan de processen in de natuur. Het komt er op aan het minimum op
langzame wijze te bereiken. De stochastische koeling moet dus in kleine stapjes plaatsvinden.
3.2.2. Op prioriteitsregel(s) gebaseerde heuristieken
De meest voorkomende heuristische benadering voor RCPS is het gebruik van prioriteitsregels. De
op prioriteitsregel gebaseerde methodes bestaan uit twee componenten, namelijk één of meerdere
planningsschema’s en één of meerdere prioriteitsregels (Schirmer, 1998).
3.2.2.1. Serie en parallel plannen
Er bestaan twee varianten van het planningsschema, namelijk seriële en parallelle schema’s.
Een planningsschema bepaalt hoe een plan wordt opgebouwd. Door deelplannen, die enkel een
deel van de activiteiten beslaan, stapsgewijze te verhogen, wordt een mogelijk volledig plan
bekomen, die alle activiteiten bevatten (Hartmann en Kolisch, 2000). Tijdens elke fase bepaalt het
plan de set van activiteiten die in aanmerking komen om gepland te worden. De prioriteitsregels
dienen dan om voorrang te verlenen aan een bepaalde activiteit wanneer meerdere tegelijkertijd
klaar zijn om gepland te worden.
De seriemethode rangschikt activiteiten om gepland te worden alvorens de
hulpmiddelenbeperkingen in rekening te nemen. De activiteiten worden zodanig genummerd dat
geen enkele activiteit een lager nummer krijgt dan één van de voorgaande. Vervolgens wordt het
plan opgemaakt door de activiteiten in volgorde te beschouwen en hen één voor één te plannen
voor de vroegste mogelijke uitvoering, rekening houdend met de beperkingen. Het serieel
planningsschema verdeelt de activiteiten in drie disjuncte klasses: gepland, geschikt en niet
geschikt. Een activiteit die zich reeds in het deelplan bevindt, is gepland. Een activiteit waarvan al
zijn voorgangers gepland zijn, komt in aanmerking om gepland te worden (geschikt). Tijdens elke
fase wordt een activiteit geselecteerd, gebruik makend van een prioriteitsregel als meer dan één
activiteit geschikt is, en gepland voor de vroegst mogelijke starttijd. In de volgende fase worden
7 Bijvoorbeeld een oplossing die reeds bekomen werd met behulp van een prioriteitsregel.
Deel I Projectplanning22
sommige eerder niet geschikte activiteiten nu geschikt gezien al hun voorgangers gepland zijn. Het
schema eindigt met de laatste fase wanneer alle activiteiten gepland zijn.
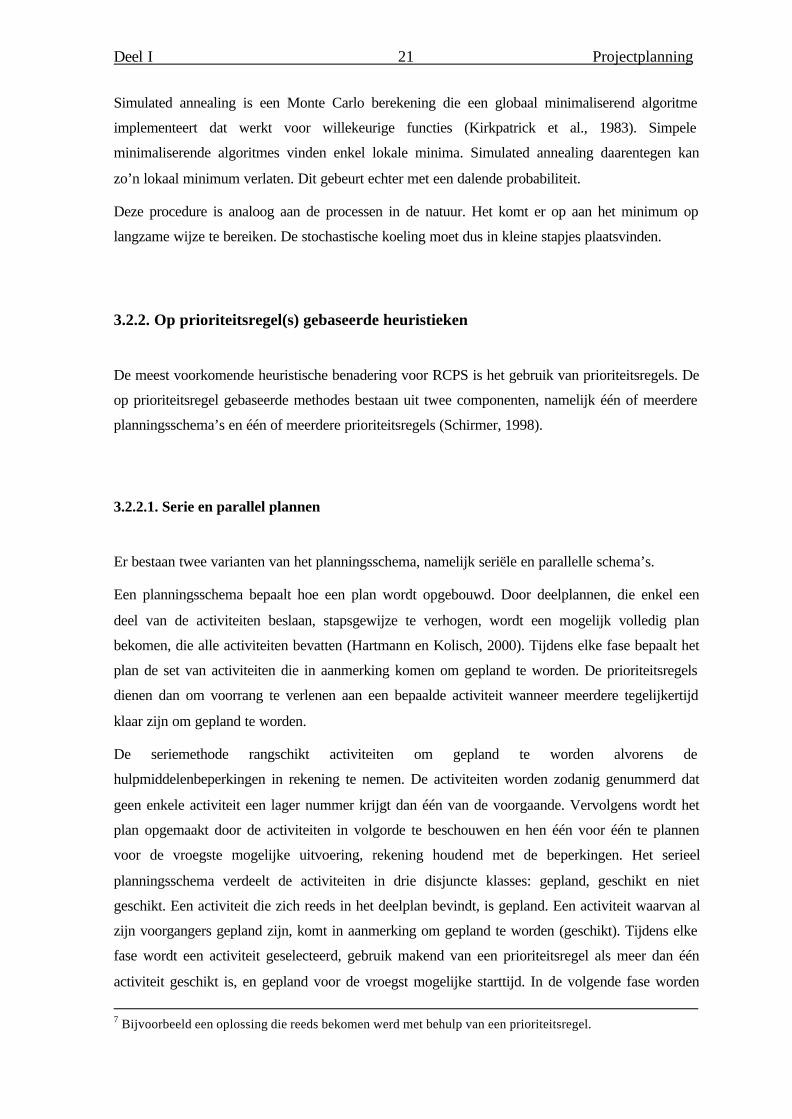
Figuur 1. 8: serie planningsschema Figuur 1. 9: parallel planningsschema
(Bron: East et al., 1993)
In tegenstelling tot de seriële methode, zal de parallelle methode de set activiteiten herordenen
wanneer de hulpmiddelenbeperkingen geëvalueerd werden.
Het parallel planningsschema deelt de activiteiten in vier disjuncte classes in: actief, beëindigd,
geschikt en niet geschikt. Een geplande activiteit is actief tijdens zijn uitvoering, daarna wordt die
‘beëindigd’. In tegenstelling tot het seriële schema, wordt een activiteit wanneer het noch actief is,
noch beëindigd werd, geschikt genoemd als het kan gepland worden rekening houdend met de
volgorderelaties EN hulpmiddelenbeperkingen. Is dit niet het geval dan worden ze niet geschikt
genoemd. Het deelplan bestaat dus uit alle actieve en beëindigde activiteiten. Geschikte activiteiten
worden geselecteerd, gebruik makend van een prioriteitsregel wanneer meerdere geschikt zijn, en
worden gepland. Wanneer geen activiteiten meer geschikt zijn, wordt de planningstijd verhoogd.
De verhoogde planningstijd wordt ingesteld op het minimum van de eindtijd van alle activiteiten.
Door deze aanpassing worden activiteiten geschikt die dit voordien niet waren. Het schema stopt
wanneer elke activiteit gepland werd, i.e. ofwel actief is, ofwel beëindigd werd.
Deel I Projectplanning23
Zowel Kolisch (1996) als Klein (2000) kwamen tot de conclusie dat gemiddeld genomen het
parallelle planningsschema tot betere resultaten leidt dan het seriële planningsschema.
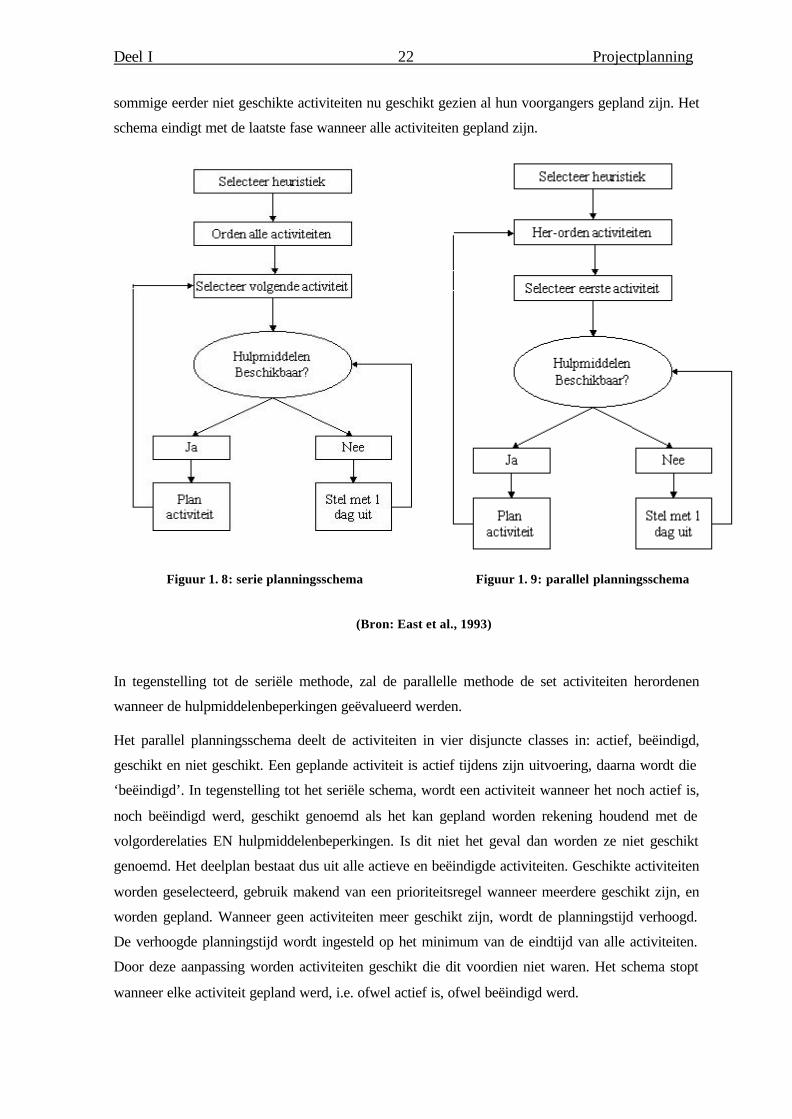
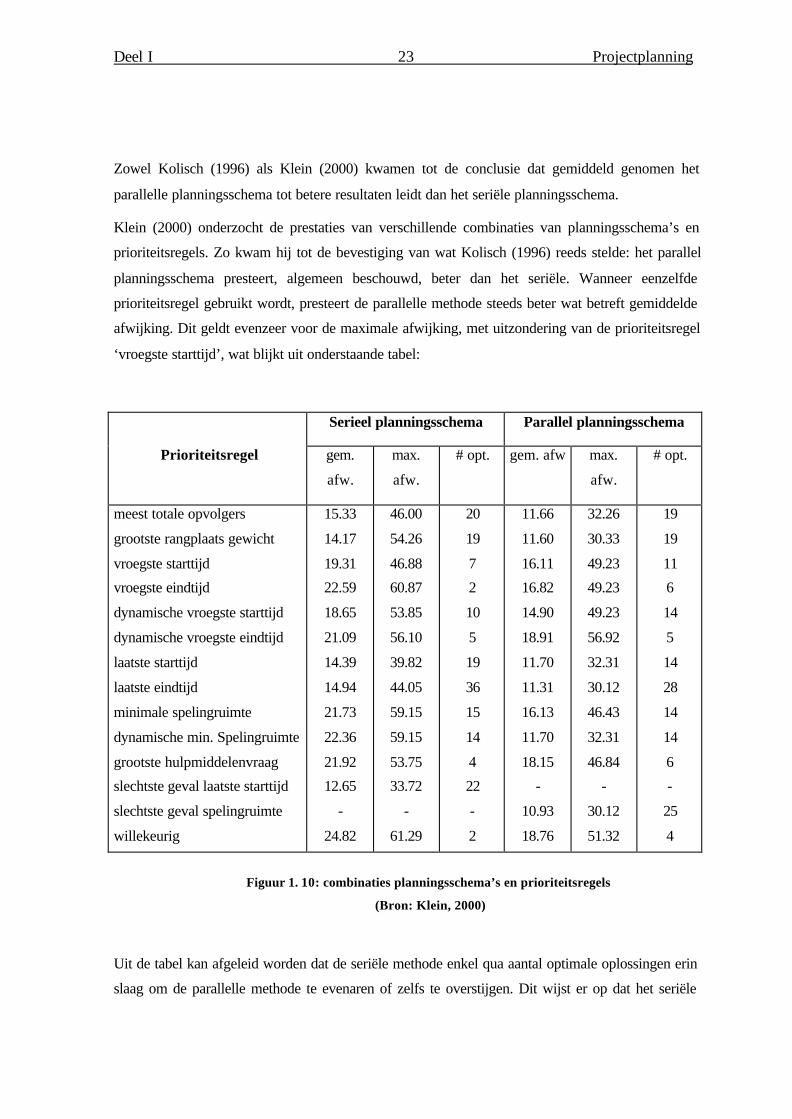
Klein (2000) onderzocht de prestaties van verschillende combinaties van planningsschema’s en
prioriteitsregels. Zo kwam hij tot de bevestiging van wat Kolisch (1996) reeds stelde: het parallel
planningsschema presteert, algemeen beschouwd, beter dan het seriële. Wanneer eenzelfde
prioriteitsregel gebruikt wordt, presteert de parallelle methode steeds beter wat betreft gemiddelde
afwijking. Dit geldt evenzeer voor de maximale afwijking, met uitzondering van de prioriteitsregel
‘vroegste starttijd’, wat blijkt uit onderstaande tabel:
Serieel planningsschema Parallel planningsschema
Prioriteitsregel gem.
afw.
max.
afw.
# opt. gem. afw max.
afw.
# opt.
meest totale opvolgers
grootste rangplaats gewicht
vroegste starttijd
vroegste eindtijd
dynamische vroegste starttijd
dynamische vroegste eindtijd
laatste starttijd
laatste eindtijd
minimale spelingruimte
dynamische min. Spelingruimte
grootste hulpmiddelenvraag
slechtste geval laatste starttijd
slechtste geval spelingruimte
willekeurig
15.33
14.17
19.31
22.59
18.65
21.09
14.39
14.94
21.73
22.36
21.92
12.65
-
24.82
46.00
54.26
46.88
60.87
53.85
56.10
39.82
44.05
59.15
59.15
53.75
33.72
-
61.29
20
19
7
2
10
5
19
36
15
14
4
22
-
2
11.66
11.60
16.11
16.82
14.90
18.91
11.70
11.31
16.13
11.70
18.15
-
10.93
18.76
32.26
30.33
49.23
49.23
49.23
56.92
32.31
30.12
46.43
32.31
46.84
-
30.12
51.32
19
19
11
6
14
5
14
28
14
14
6
-
25
4
Figuur 1. 10: combinaties planningsschema’s en prioriteitsregels
(Bron: Klein, 2000)
Uit de tabel kan afgeleid worden dat de seriële methode enkel qua aantal optimale oplossingen erin
slaag om de parallelle methode te evenaren of zelfs te overstijgen. Dit wijst er op dat het seriële
Deel I Projectplanning24
planningsschema oplossingen levert die ofwel zeer goed zijn, ofwel behoorlijk slecht. Het parallelle
planningsschema daarentegen levert oplossingen met slechts kleine afwijkingen.
De twee prioriteitsregels die ontworpen zijn voor een specifiek planningsschema, namelijk
‘slechtste geval spelingruimte’ en ‘slechtste geval laatste starttijd’ scoren best wat betreft
gemiddelde en maximale relatieve afwijking. De prioriteitsregel ‘laatste eindtijd’ behaalde echter
het maximaal aantal optimale oplossingen, om het even welk planningsschema toegepast werd.
3.2.2.2. Prioriteitsregels
Bij het toewijzen van hulpmiddelen in netwerken zal men dus de activiteiten rangschikken volgens
één of meerdere prioriteitsregels. Traditioneel worden tijdsgebaseerde prioriteitsregels gebruikt.
Daarna wordt een simulatieproces toegepast om de hulpmiddelen toe te wijzen en de activiteiten te
plannen. De activiteit met de hoogste prioriteit komt als eerste in aanmerking voor
hulpmiddelenallocatie. Als de vraag naar hulpmiddelen van de activiteit met de hoogste prioriteit
de beschikbare hulpmiddelen overtreft, moet deze activiteit en al deze met een lagere prioriteit
wachten om gepland te worden.
Kolisch (1996) geeft drie redenen aan voor de nood aan goed presterende prioriteitsregels. Een
eerste is dat ze de kern vormen van nieuwe, efficiënte heuristieken die gebaseerd zijn op de lokale
zoekmethode. Kolisch bewees in 1995 al dat de prestaties van steekproefgebaseerde heuristieken
afhankelijk zijn van de deugdzaamheid van de gekozen prioriteitsregels. Een tweede reden waarom
goed presterende prioriteitsregels van belang zijn, is het gebruik ervan in de commerciële
projectmanagement softwarepakketten om snel projectplannen op te stellen, rekening houdend met
de eventuele beperkingen. Bovendien zijn de prestaties van de prioriteitsregels van groot belang
omdat ze dienen ingezet te worden wanneer grote problemen met meer dan duizend activiteiten
snel moeten opgelost worden.
Alle commerciële softwarepakketten wijzen hulpmiddelen toe met behulp van een
oplossingsmethodologie gebaseerd op prioriteitsregels (Kolish, 1999). Tot op heden is men er nog
niet in geslaagd om op een objectieve manier een passende heuristiek te selecteren om
hulpmiddelenbeperkte projecten in te delen en er bestaan geen echte richtlijnen bij het selecteren
van de beste prioriteitsregel voor een gegeven netwerk (Hegazy, 1999). Het komt er dus op neer dat
de gebruiker van de projectmanagement softwarepakketten zelf de gepaste prioriteitsregel moet
gaan selecteren. Een uitvoerige beschrijving van deze regels ontbreekt echter nogal vaak in de
Deel I Projectplanning25
handleiding van deze pakketten (De Wit en Herroelen, 1990). Veelal kan een meervoudig
prioriteitsbeleid geïmplementeerd worden, wat het selectieproces moeilijk en verscheiden maakt
(Khamooshi 1996).
Davis en Patterson (1975) waren de eersten die de doeltreffendheid van prioriteitsregels vergeleken
met een optimale oplossing. Hun experiment bestond erin 83 problemen op te lossen, eerst met de
exacte procedure ‘bindende enumeratie 8’, vervolgens met acht verschillende prioriteitsregels. Voor
de testproblemen werden 57 verschillende computergegenereerde netwerken gebruikt. De acht
geteste prioriteitsregels worden hieronder beschreven:
§ Minimale speling van de activiteit (MINSLK)
Deze wordt berekend als het verschil tussen de late start tijd (LST) en de vroege start tijd
(EST), beide bepaald door CPM.
§ Hulpmiddelenplanningsmethode (RSM)
Dit is de minimale waarde van de stijging van de projectduur tengevolge van twee
opeenvolgende activiteiten.
§ Minimale late eindtijd (LFT)
§ Grootste hulpmiddelenvraag (GRD)
Deze regel wijst prioriteit toe aan activiteiten op basis van de totale vereiste aan
hulpmiddelen voor alle types, met een hogere prioriteit voor grotere hulpmiddelenvraag.
§ Grootste hulpmiddelengebruik (GRU)
Prioriteit wordt gegeven aan die combinatie van activiteiten die resulteert in een maximaal
hulpmiddelengebruik voor elke planningsinterval.
§ Grootst aantal mogelijke activiteiten (MJP)
Prioriteit komt toe aan die combinatie activiteiten die resulteert in het grootste aantal
activiteiten gepland in om het even welk interval.
§ Activiteiten willekeurig selecteren (RAN)
Concurrerende activiteiten worden prioriteit toegewezen op volkomen willekeurige basis.
8 Voor een beschrijving van deze procedure verwijs ik graag naar Davis E.W. en Heidorn G.E (1971)
Deel I Projectplanning26
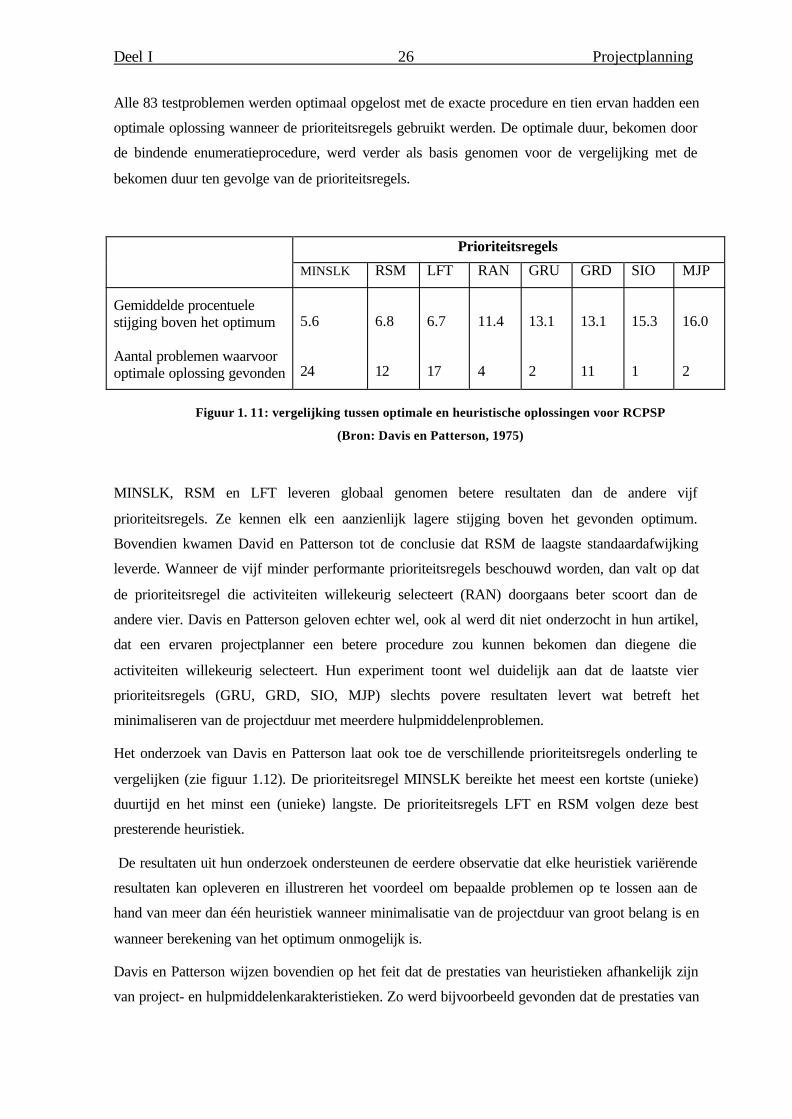
Alle 83 testproblemen werden optimaal opgelost met de exacte procedure en tien ervan hadden een
optimale oplossing wanneer de prioriteitsregels gebruikt werden. De optimale duur, bekomen door
de bindende enumeratieprocedure, werd verder als basis genomen voor de vergelijking met de
bekomen duur ten gevolge van de prioriteitsregels.
Prioriteitsregels
MINSLK RSM LFT RAN GRU GRD SIO MJP
Gemiddelde procentuelestijging boven het optimum
Aantal problemen waarvooroptimale oplossing gevonden
5.6
24
6.8
12
6.7
17
11.4
4
13.1
2
13.1
11
15.3
1
16.0
2
Figuur 1. 11: vergelijking tussen optimale en heuristische oplossingen voor RCPSP
(Bron: Davis en Patterson, 1975)
MINSLK, RSM en LFT leveren globaal genomen betere resultaten dan de andere vijf
prioriteitsregels. Ze kennen elk een aanzienlijk lagere stijging boven het gevonden optimum.
Bovendien kwamen David en Patterson tot de conclusie dat RSM de laagste standaardafwijking
leverde. Wanneer de vijf minder performante prioriteitsregels beschouwd worden, dan valt op dat
de prioriteitsregel die activiteiten willekeurig selecteert (RAN) doorgaans beter scoort dan de
andere vier. Davis en Patterson geloven echter wel, ook al werd dit niet onderzocht in hun artikel,
dat een ervaren projectplanner een betere procedure zou kunnen bekomen dan diegene die
activiteiten willekeurig selecteert. Hun experiment toont wel duidelijk aan dat de laatste vier
prioriteitsregels (GRU, GRD, SIO, MJP) slechts povere resultaten levert wat betreft het
minimaliseren van de projectduur met meerdere hulpmiddelenproblemen.
Het onderzoek van Davis en Patterson laat ook toe de verschillende prioriteitsregels onderling te
vergelijken (zie figuur 1.12). De prioriteitsregel MINSLK bereikte het meest een kortste (unieke)
duurtijd en het minst een (unieke) langste. De prioriteitsregels LFT en RSM volgen deze best
presterende heuristiek.
De resultaten uit hun onderzoek ondersteunen de eerdere observatie dat elke heuristiek variërende
resultaten kan opleveren en illustreren het voordeel om bepaalde problemen op te lossen aan de
hand van meer dan één heuristiek wanneer minimalisatie van de projectduur van groot belang is en
wanneer berekening van het optimum onmogelijk is.
Davis en Patterson wijzen bovendien op het feit dat de prestaties van heuristieken afhankelijk zijn
van project- en hulpmiddelenkarakteristieken. Zo werd bijvoorbeeld gevonden dat de prestaties van
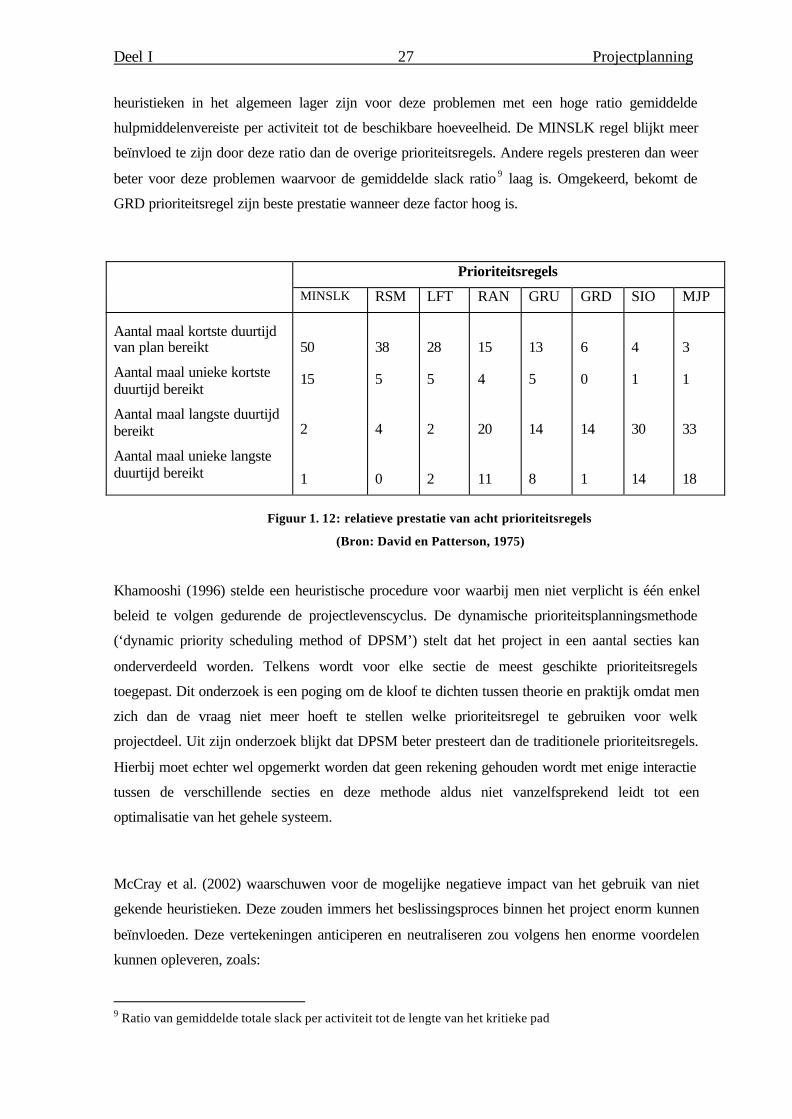
Deel I Projectplanning27
heuristieken in het algemeen lager zijn voor deze problemen met een hoge ratio gemiddelde
hulpmiddelenvereiste per activiteit tot de beschikbare hoeveelheid. De MINSLK regel blijkt meer
beïnvloed te zijn door deze ratio dan de overige prioriteitsregels. Andere regels presteren dan weer
beter voor deze problemen waarvoor de gemiddelde slack ratio 9 laag is. Omgekeerd, bekomt de
GRD prioriteitsregel zijn beste prestatie wanneer deze factor hoog is.
Prioriteitsregels
MINSLK RSM LFT RAN GRU GRD SIO MJP
Aantal maal kortste duurtijdvan plan bereikt
Aantal maal unieke kortsteduurtijd bereikt
Aantal maal langste duurtijdbereikt
Aantal maal unieke langsteduurtijd bereikt
50
15
2
1
38
5
4
0
28
5
2
2
15
4
20
11
13
5
14
8
6
0
14
1
4
1
30
14
3
1
33
18
Figuur 1. 12: relatieve prestatie van acht prioriteitsregels
(Bron: David en Patterson, 1975)
Khamooshi (1996) stelde een heuristische procedure voor waarbij men niet verplicht is één enkel
beleid te volgen gedurende de projectlevenscyclus. De dynamische prioriteitsplanningsmethode
(‘dynamic priority scheduling method of DPSM’) stelt dat het project in een aantal secties kan
onderverdeeld worden. Telkens wordt voor elke sectie de meest geschikte prioriteitsregels
toegepast. Dit onderzoek is een poging om de kloof te dichten tussen theorie en praktijk omdat men
zich dan de vraag niet meer hoeft te stellen welke prioriteitsregel te gebruiken voor welk
projectdeel. Uit zijn onderzoek blijkt dat DPSM beter presteert dan de traditionele prioriteitsregels.
Hierbij moet echter wel opgemerkt worden dat geen rekening gehouden wordt met enige interactie
tussen de verschillende secties en deze methode aldus niet vanzelfsprekend leidt tot een
optimalisatie van het gehele systeem.
McCray et al. (2002) waarschuwen voor de mogelijke negatieve impact van het gebruik van niet
gekende heuristieken. Deze zouden immers het beslissingsproces binnen het project enorm kunnen
beïnvloeden. Deze vertekeningen anticiperen en neutraliseren zou volgens hen enorme voordelen
kunnen opleveren, zoals:
9 Ratio van gemiddelde totale slack per activiteit tot de lengte van het kritieke pad
Deel I Projectplanning28
§ minder over- of onderschatting van de benodigde hulpmiddelen voor een gegeven project
§ een verbeterde allocatie van hulpmiddelen doorheen meerdere projecten
§ verbeterde identificatie van doeltreffende en niet doeltreffende projectmanagement
technieken
§ betere mentale veerkracht binnen de projectteams
§ een meer stabiele projectomgeving, wat tot een kwaliteitsvoller resultaat zal leiden
Zij wezen er bovendien op dat het gebruik van heuristieken wel bijzonder duidelijk mag zijn in de
initiatie- en planningsfase van het project, maar dat de positieve invloed van heuristieken tijdens de
uitvoerings-, controle en eindfase niet mag verwaarloosd worden.
Deel I Projectplanning29
4. Hulpmiddelennivellering
We spreken van hulpmiddelenallocatie en RCPS wanneer beperkingen optreden in de
beschikbaarheid van hulpmiddelen. In dit geval worden zowel de kritische als niet-kritische
activiteiten verschoven. Daarbij wordt gestreefd naar een zo laag mogelijke stijging van de
projectduur boven de oorspronkelijke duur berekend door middel van de kritieke pad methode, die
uitgaat van onbeperkte hulpmiddelen. Wanneer onvoldoende hulpmiddelen beschikbaar zijn, moet
de activiteit opnieuw gepland worden zodanig dat de benodigde hulpmiddelen kunnen vrijkomen.
Wanneer twee activiteiten tegelijkertijd dezelfde hulpmiddelen vereisen en die zijn onvoldoende
aanwezig, dan zal de activiteit met de hoogste prioriteit voorrang krijgen. Naast dit probleem ten
gevolge van een te beperkte beschikbaarheid van hulpmiddelen kent de projectmanager nog een
ander probleem, namelijk het reduceren van schommelingen in hulpmiddelengebruik doorheen het
project. Dit probleem wordt hulpmiddelennivellering genoemd.
Hulpmiddelennivellering10 wordt dus toegepast wanneer voldoende hulpmiddelen voorhanden zijn
maar wanneer de schommelingen in hulpmiddelengebruik afgevlakt moeten worden. Er wordt geen
limiet gelegd op het hulpmiddelengebruik, wel op de projectduur (De Reyck en Herroelen, 1999).
Tijdens dit proces worden de niet kritieke activiteiten verschoven binnen hun ‘float’. Dit laatste
betreft de speelruimte waarbinnen de activiteit kan verschoven worden zonder dat de totale
projectduur aangetast wordt. Deze procedure maakt het mogelijk dat werknemers beginnen aan een
taak, deze afwerken en vervolgens overgaan tot een nieuwe taak (East et al., 1993). Het hoofddoel
van hulpmiddelennivellering is dus de variatie hulpmiddelengebruik, wat vaak nogal kostelijk is, te
beperken. Het spreekt voor zich dat gedurende een project een werknemer niet zomaar kan
aangenomen, afgedankt en terug aangenomen worden wanneer dat het beste uitkomt voor de
uitvoering van het project. Het resultaat van dit proces is dat de geplande starttijd van vele
activiteiten samenvalt met hun late eindtijden, wat nogal vaak de totale projectduur verhoogt.
Yang en Geunes (2001) stelden dit probleem mathematisch voor. Veronderstel een set K
hulpmiddelen. Ck staat voor de kost per eenheid van hulpmiddel k en Rk(S,t) voor het totaal gebruik
van hulpmiddel k op tijdstip t onder een bepaald plan S. De doelfunctie kan dan volgens hen
geschreven worden als:
10 Meer bekend onder de Engelstalige naam ‘Resource levelling’.
Deel I Projectplanning30
Minimize ? Ck f (R (S,t) ) k∈K
Neumann en Zimmermann (1999) stellen dat men, behalve met hulpmiddelenbeperkingen, ook
rekening moet houden met maximale en minimale tijdsvertragingen en een vooropgestelde,
maximale projectduur wanneer hulpmiddelen genivelleerd worden. Zij stellen dat het maximaal
tijdsverloop in het bijzonder enorm belangrijk is in de praktijk. Ze worden immers ingesteld om
praktische eisen te modelleren, zoals deadlines voor deelprojecten of individuele activiteiten,
gelijktijdige of niet vertraagde uitvoering van meerdere activiteiten, gedeeltelijke of volledige
overlapping van activiteiten, tijdvariërende hulpmiddelenvereistes, tijdsintervallen voor
hulpmiddelen en plannen van productie op order.
De meeste projectmanagement softwarepakketten gaan om met hulpmiddelplanning en -nivellering
op een simplistische manier. Vaak steunen ze op nogal onduidelijke heuristieken, waarvan de
details meestal niet voldoende uitgelegd werden in de handleiding (De wit, Herroelen, 1990).
Bovendien worden beide problemen, RCPSP en hulpmiddelennivellering, vaak met één en dezelfde
term ‘levelling’ aangeduid (De Reyck en Herroelen, 1999).
Neumann en Zimmermann (1999) stelden polynome heuristische procedures voor om verschillende
types problemen van hulpmiddelennivellering op te lossen voor projecten met minimaal en
maximaal tijdsverloop tussen de activiteiten. Dit werd gedaan voor problemen zowel met als
zonder hulpmiddelenbeperkingen. Tot de publicatie van hun onderzoek werden nog geen exacte of
heuristische procedures voor hulpmiddelennivellering voorgesteld die uitgaan van
hulpmiddelenbeperkingen. Zij stelden zelfs dat alle bestaande heuristieken voor
hulpmiddelennivellering enkel pseudopolynome algoritmes betreffen. Ze gebruikten de
netwerkgenerator ProGen/Max (Schwindt, 1996) en genereerden zo enkele duizenden
probleeminstanties voor 500 activiteiten en vijf hulpmiddelen. Hun onderzoek toonde aan dat hun
heuristieken goed presteren om een grote variëteit moeilijke nivelleringproblemen op te lossen.
East et al. (1993) stellen dat de heuristiek van het minimale moment misschien wel de voornaamste
is voor hulpmiddelennivellering. Deze heuristiek is gebaseerd op de evaluatie van het
hulpmiddelenhistogram, waarvan de vertikale as het aantal vereiste hulpmiddelen per werkperiode
weergeeft en de horizontale as de werkperiodes. Deze heuristiek zal hulpmiddelen toewijzen aan
activiteiten zodanig dat een minimale schommeling in hulpmiddelengebruik voorkomt. De
gewenste vorm van een volledig genivelleerd plan is een rechthoek. Groepen activiteiten worden

Deel I Projectplanning31
geëvalueerd, lang verschillende paden, om te bepalen hoe de veranderingen in geplande starttijden
de vorm van het hulpmiddelenhistogram zullen beïnvloeden. Deze vormverandering wordt
gekwantificeerd in een verbeteringsfactor en de activiteit met het grootste verbeteringspotentieel
wordt verschoven binnen haar spelingruimte.
De heuristiek van het minimale moment zal, in tegenstelling tot de meeste heuristieken voor
hulpmiddelennivellering, activiteiten evalueren beginnend van het einde van het plan tot het begin.
Eens dit gebeurd is, worden de activiteiten opnieuw geëvalueerd, ditmaal beginnend van de start
van de activiteiten.
Deel I Projectplanning32
5. Primavera vs. andere projectmanagement software
Wegens de lage efficiëntie en de vele moeilijkheden om veelsoortige systemen te managen, hebben
vele bedrijven in het verleden beroep gedaan op ERP-systemen11 om de traditionele ‘back office’
functies volledig te automatiseren en integreren. Dit leidde ertoe dat deze bedrijven terug op gelijke
voet geraakten met de concurrenten, maar maakte het niet mogelijk hun proces te analyseren of te
verbeteren. Vandaar de nood aan een systeem om een project te plannen, analyseren, ontwerpen,
implementeren en onderhouden.
Bedoeling hier is een overzicht te geven van de belangrijkste softwarepakketten voor
projectmanagement en de onderlinge verschillen tussen deze pakketten te bespreken. Na deze
vergelijkende studie zou moeten duidelijk worden waarom Primavera gekozen werd om het
onderzoek van deze thesis te ondersteunen.
5.1. Indeling projectmanagement software
De Reyck en Herroelen (1999) maakten een onderscheid in de verschillende soorten
projectmanagement software. De eenvoudige planningspakketten (‘low-end’) zijn vooral gericht op
tijdsplanning. Ze bieden dan ook de mogelijkheid het project voor te stellen door middel van een
Gantt-kaart. Voorbeelden van dergelijke pakketten zijn FastTrackSchedule (AEC Software Inc.) en
Plan & Track en MacSchedule (Mainstay). De totale kostprijs van zo’n pakket bedraagt maximaal
500 euro.
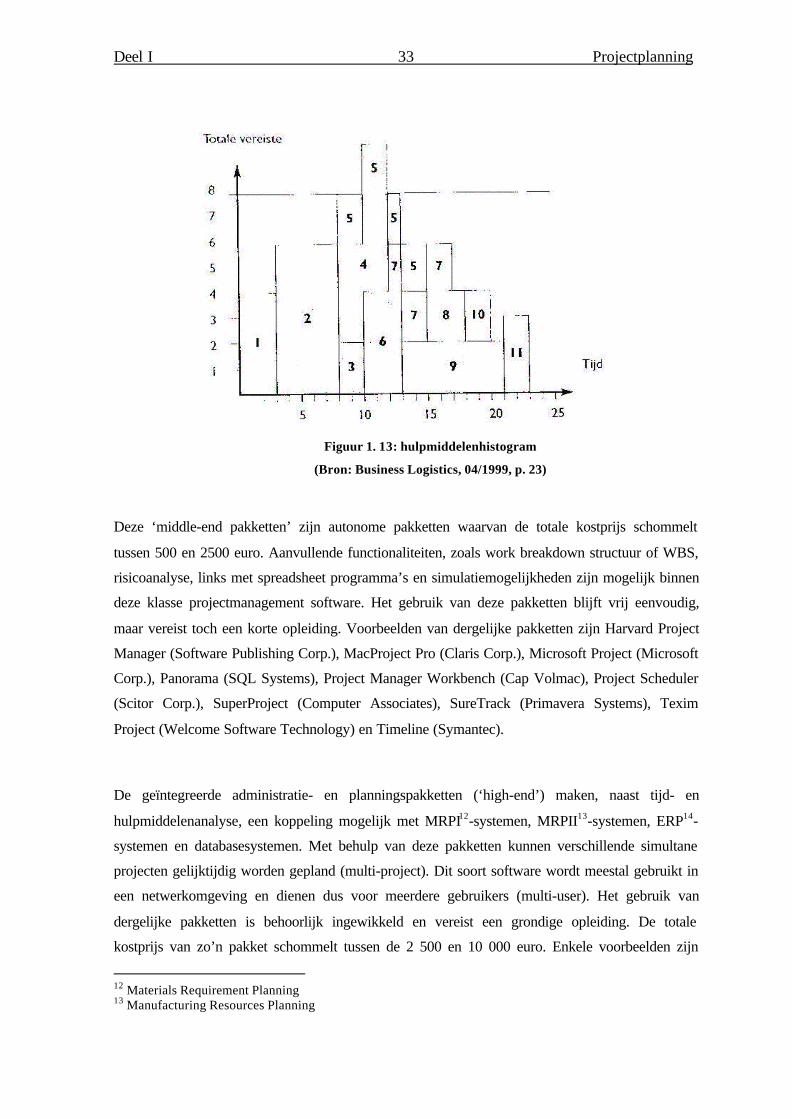
Planningspakketten met uitgebreide functionaliteit (‘middle-end’) laten zowel tijd- als
hulpmiddelenplanning toe. Daarom worden naast Gannt-kaarten en projectnetwerken eveneens
hulpmiddelenhistogrammen (figuur 1.13) aangeboden, waardoor hulpmiddelenconflicten zichtbaar
worden. Deze laatste kunnen interactief opgelost worden of men kan beroep doen op de
heuristieken die standaard in de pakketten vervat zitten.
In het voorbeeld in figuur 1.13 blijkt duidelijk dat voor de simultane uitvoering van activiteiten 4,5
en 6 meer hulpmiddelen nodig zijn dan er beschikbaar zijn. Om dit hulpmiddelenconflict op te
lossen kunnen bepaalde activiteiten uitgesteld worden. Dit kan echter wel de projectduur verhogen.
11 Enterprise Resource Planning
Deel I Projectplanning33
Figuur 1. 13: hulpmiddelenhistogram
(Bron: Business Logistics, 04/1999, p. 23)
Deze ‘middle-end pakketten’ zijn autonome pakketten waarvan de totale kostprijs schommelt
tussen 500 en 2500 euro. Aanvullende functionaliteiten, zoals work breakdown structuur of WBS,
risicoanalyse, links met spreadsheet programma’s en simulatiemogelijkheden zijn mogelijk binnen
deze klasse projectmanagement software. Het gebruik van deze pakketten blijft vrij eenvoudig,
maar vereist toch een korte opleiding. Voorbeelden van dergelijke pakketten zijn Harvard Project
Manager (Software Publishing Corp.), MacProject Pro (Claris Corp.), Microsoft Project (Microsoft
Corp.), Panorama (SQL Systems), Project Manager Workbench (Cap Volmac), Project Scheduler
(Scitor Corp.), SuperProject (Computer Associates), SureTrack (Primavera Systems), Texim
Project (Welcome Software Technology) en Timeline (Symantec).
De geïntegreerde administratie- en planningspakketten (‘high-end’) maken, naast tijd- en
hulpmiddelenanalyse, een koppeling mogelijk met MRPI12-systemen, MRPII13-systemen, ERP14-
systemen en databasesystemen. Met behulp van deze pakketten kunnen verschillende simultane
projecten gelijktijdig worden gepland (multi-project). Dit soort software wordt meestal gebruikt in
een netwerkomgeving en dienen dus voor meerdere gebruikers (multi-user). Het gebruik van
dergelijke pakketten is behoorlijk ingewikkeld en vereist een grondige opleiding. De totale
kostprijs van zo’n pakket schommelt tussen de 2 500 en 10 000 euro. Enkele voorbeelden zijn
12 Materials Requirement Planning13 Manufacturing Resources Planning

Deel I Projectplanning34
Artemis (Lucas Management Systems), Intelligent Planner (Planview Inc.) en Primavera Project
Planner (Primavera systems).
soort software beschrijving kostprijs
‘Low-end’ tijdplanning max. 500 €
‘Middle-end’ Tijd- en hulpmiddelenplanning tussen 500 en 2500 €
‘High-end’
tijd- en hulpmiddelenplanning
+ koppeling met MRP-en
databasesystemen.
tussen 2500 en 10 000 €
Figuur 1. 14: types projectmanagement softwarepakketten
Projectmanagement softwarepakketten stellen de structuur van het project op een geaggregeerd
niveau voor als een ‘work breakdown’ structuur (WBS) en op een meer gedetailleerd niveau als
een knooppuntenvoorstelling (Kolisch, 1999). Een work breakdown structuur wordt in de
PMBOK15 (2000) gedefinieerd als “een geörienteerde groepering van projectelementen die het
volledig bereik van een project definiëren en organiseren”. Daarbij worden de hoofdtaken of
deelprojecten verder opgedeeld in werkpakketten, waaraan specifieke doelstellingen worden
toegekend in termen van tijd, kosten en kwaliteit. Deze werkpakketten worden dan nogmaals
verder opgesplitst tot activiteiten. Op dit niveau zal men de volgorderelaties, de vereiste
hulpmiddelen, de werkmethode en de activiteitsduur bepalen.
5.2. Vergelijkende studie
Er bestaan slechts weinig publicaties omtrent de beoordeling van commerciële projectmanagement
softwarepakketten. Deze betreffen meestal algemene evaluaties en in meer recentere jaren
evaluaties van mogelijkheden tot hulpmiddelenallocatie. De Wit en Herroelen (1990) stelden dat
vele van deze software-evaluaties vooral lange opsommingen zijn van technische gegevens en
kostprijs. Ze bestempelden deze besprekingen bovendien als onkritisch, zelf overenthousiast.
14 Enterprise Resources Planning15 ‘Project Management Body Of Knowledge’: bevat algemeen aanvaarde definities en beschrijvingen vantermen gebruikt in projectmanagement.
Deel I Projectplanning35
De Wit en Herroelen (1990) maakten een grondige evaluatie de tien bekendste commerciële
softwarepakketten uit die tijd. Bedoeling was eigenlijk om de leden van het ‘Belgian Building
Research Institute’ of BBRI te voorzien van technische en praktische richtlijnen bij het selecteren
van een projectmanagement softwarepakket. De resultaten kunnen desalniettemin voor elke
potentiële toekomstige softwaregebruiker dienen. De tien onderzochte pakketten zijn:
§ Harvard Total Project Manager 2.0 § Primavera 3.1
§ Hornet 5000, versie 0587 § Promis 2.1
§ Microsoft Project 3.0 § Superproject Plus 2.0
§ Pertmaster Advance 1.12 § Superproject Expert 1.00
§ Plantrac 4B § Time Line 2.0
De Wit en Herroelen concludeerden dat geen enkele van deze pakketten tijd-kost inruil
mogelijkheden biedt en dat de meeste pakketten omgaan met hulpmiddelenplanning en –nivellering
op een nogal simplistische manier, waarbij gesteund wordt op onduidelijke heuristieken waarvan
de uitleg zelden weergegeven wordt in de handleiding.
Voor de meeste pakketten is het aan te raden een geheugen van 640K RAM beschikbaar te hebben.
Sommige pakketten, zoals Plantrac Primavera en Promis, dienen op de harde schijf geïnstalleerd te
worden. Alle onderzochte pakketten werken op IBM compatibele pc’s. Slechts Microsoft Project
3.0 bood de mogelijkheid niet om activiteiten te plotten.
Hornet, Pertmaster Advance en Plantrac zijn de enige pakketten die het gebruik van meer dan één
kalender per project toelaten en Primavera is het enigste pakket dat de link legt tussen werkdagen
en kalenderdagen.
De software varieert nogal wat betreft volgorderelaties. MS Project is het enige pakket dat
gelimiteerd is tot einde-start relaties, wat noodzaakt sommige activiteiten op te splitsen wil men
dezelfde projectduur bekomen als de vele pakketten die einde-einde, start-start en einde-start
relaties aanbieden. Enkel Pertmaster Advance biedt de vier mogelijkheden, dus ook start-einde
relaties. Opmerkelijk blijken enkele pakketten een serieus nadeel te kennen wat betreft de Gantt-
kaarten. Deze zouden foute laatste starttijden vertonen wanneer activiteiten gerelateerd worden
door start-start en einde-einde relaties. Dit tijdsverschil is te wijten aan de berekeningswijze door
de software wanneer overlappende netwerkactiviteiten plaatsvinden.
Kostopvolging werd als behoorlijk zwak geëvalueerd door De Wit en Herroelen. De software
verschilt in aantal, type en lay-out van rapporten voor kostopvolging. De invoer- en
uitvoermogelijkheden van data in bepaalde pakketten zijn behoorlijk effectief, maar betrekkelijk
complex. Voor Hornet, Plantrac en Primavera bijvoorbeeld is een praktische kennis van verwante
databasesystemen vereist.

Deel I Projectplanning36
Er bestaat nogal een groot verschil tussen de verscheidene pakketten in mogelijkheden tot
hulpmiddelenplanning. Het aantal hulpmiddelentypes dat kan gespecificeerd worden varieert
bijzonder. De Wit en Herroelen wijzen erop dat de methode om hulpmiddelen op te volgen vaak
niet alleen primitief maar ook misleidend is.
Waar De Wit en Herroelen veel aandacht aan vestigen is het feit dat de softwarepakketten meestal
falen om een gedetailleerde verklaring te geven van de heuristieken die gebruikt worden voor de
kostopvolging en hulpmiddelenplanning.
Mellentien en Trautmann (2001) hebben de hulpmiddelenallocatie mogelijkheden van vijf
softwarepakketten onder de loep genomen, namelijk:
§ Acos Plus.1 8.2
§ CA SuperProject 5.0a
§ CS Project Professional 3.0
§ MS Project 2000
§ Scitor Project Scheduler
Hun tests zijn gebaseerd op 1560 voorrangs- en hulpmiddelen beperkte problemen.
Eerst werden de hardware vereisten en interfaces van de verschillende pakketten vergeleken. Elk
pakket kan gebruikt worden op een pc met Microsoft Windows. Tabel 1.15 biedt een overzicht van
de technische gegevens.
Geen enkel pakket had meer dan zestig seconden CPU-tijd nodig voor de hulpmiddelenallocatie
van een enkel project. Maar geen enkel softwarepakket bood ook een beter resultaat dan degene tot
nu toe gekend voor de 1560 instanties. Enkel CA SuperProject en Project Scheduler ondersteunen
geen start-einde volgorderelaties. Alle pakketten voorzien echter wel verschillende soorten
kalenders en instrumenten om hulpmiddelengerelateerde kosten te managen.
Mellentien en Trautmann concluderen dat geen enkel onderzochte methode tot
hulpmiddelenallocatie competitief is met de beste state-of-the-art algoritmes uit de literatuur.
Vooral voor levensechte projecten met honderden activiteiten bestaat er nog een enorme
performatiekloof tussen de gebruikte algoritmes en de moderne state-of-the-art heuristieken uit de
literatuur. Geen enkel pakket biedt echter een exacte oplossing. Allen steunen op snelle
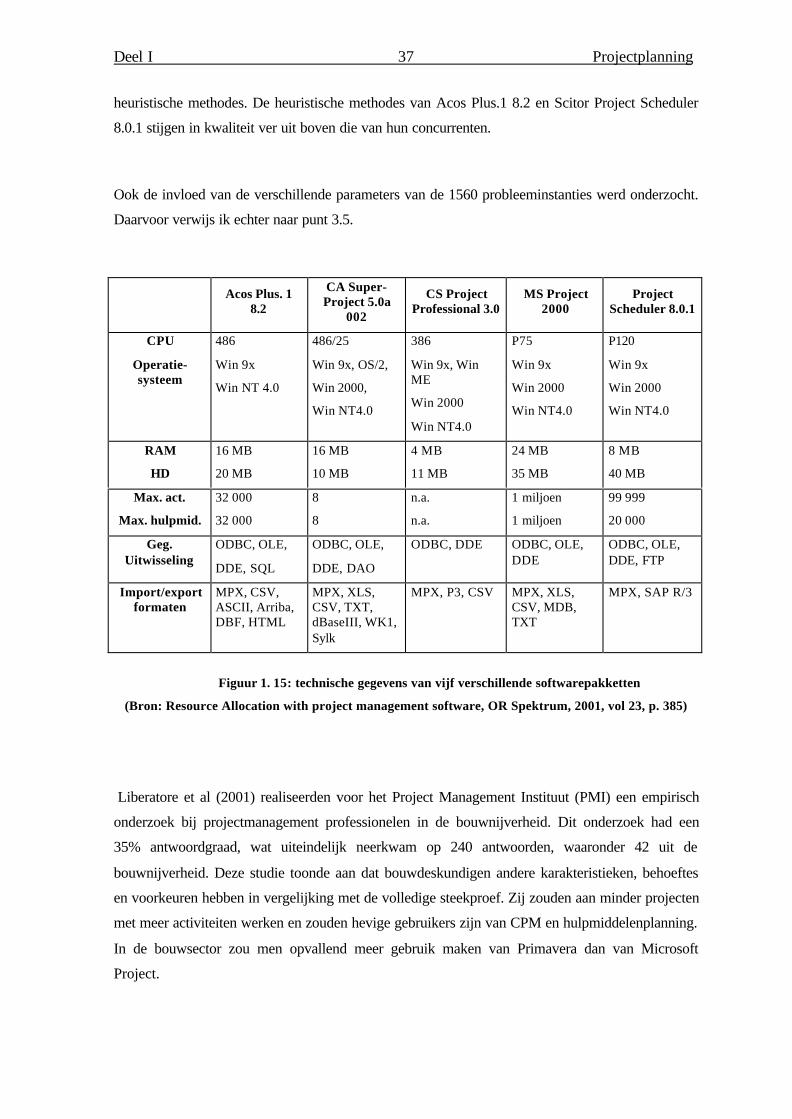
Deel I Projectplanning37
heuristische methodes. De heuristische methodes van Acos Plus.1 8.2 en Scitor Project Scheduler
8.0.1 stijgen in kwaliteit ver uit boven die van hun concurrenten.
Ook de invloed van de verschillende parameters van de 1560 probleeminstanties werd onderzocht.
Daarvoor verwijs ik echter naar punt 3.5.
Acos Plus. 18.2
CA Super-Project 5.0a
002
CS ProjectProfessional 3.0
MS Project2000
ProjectScheduler 8.0.1
CPU
Operatie-systeem
486
Win 9x
Win NT 4.0
486/25
Win 9x, OS/2,
Win 2000,
Win NT4.0
386
Win 9x, WinME
Win 2000
Win NT4.0
P75
Win 9x
Win 2000
Win NT4.0
P120
Win 9x
Win 2000
Win NT4.0
RAM
HD
16 MB
20 MB
16 MB
10 MB
4 MB
11 MB
24 MB
35 MB
8 MB
40 MB
Max. act.
Max. hulpmid.
32 000
32 000
8
8
n.a.
n.a.
1 miljoen
1 miljoen
99 999
20 000
Geg.Uitwisseling
ODBC, OLE,
DDE, SQL
ODBC, OLE,
DDE, DAO
ODBC, DDE ODBC, OLE,DDE
ODBC, OLE,DDE, FTP
Import/exportformaten
MPX, CSV,ASCII, Arriba,DBF, HTML
MPX, XLS,CSV, TXT,dBaseIII, WK1,Sylk
MPX, P3, CSV MPX, XLS,CSV, MDB,TXT
MPX, SAP R/3
Figuur 1. 15: technische gegevens van vijf verschillende softwarepakketten
(Bron: Resource Allocation with project management software, OR Spektrum, 2001, vol 23, p. 385)
Liberatore et al (2001) realiseerden voor het Project Management Instituut (PMI) een empirisch
onderzoek bij projectmanagement professionelen in de bouwnijverheid. Dit onderzoek had een
35% antwoordgraad, wat uiteindelijk neerkwam op 240 antwoorden, waaronder 42 uit de
bouwnijverheid. Deze studie toonde aan dat bouwdeskundigen andere karakteristieken, behoeftes
en voorkeuren hebben in vergelijking met de volledige steekproef. Zij zouden aan minder projecten
met meer activiteiten werken en zouden hevige gebruikers zijn van CPM en hulpmiddelenplanning.
In de bouwsector zou men opvallend meer gebruik maken van Primavera dan van Microsoft
Project.
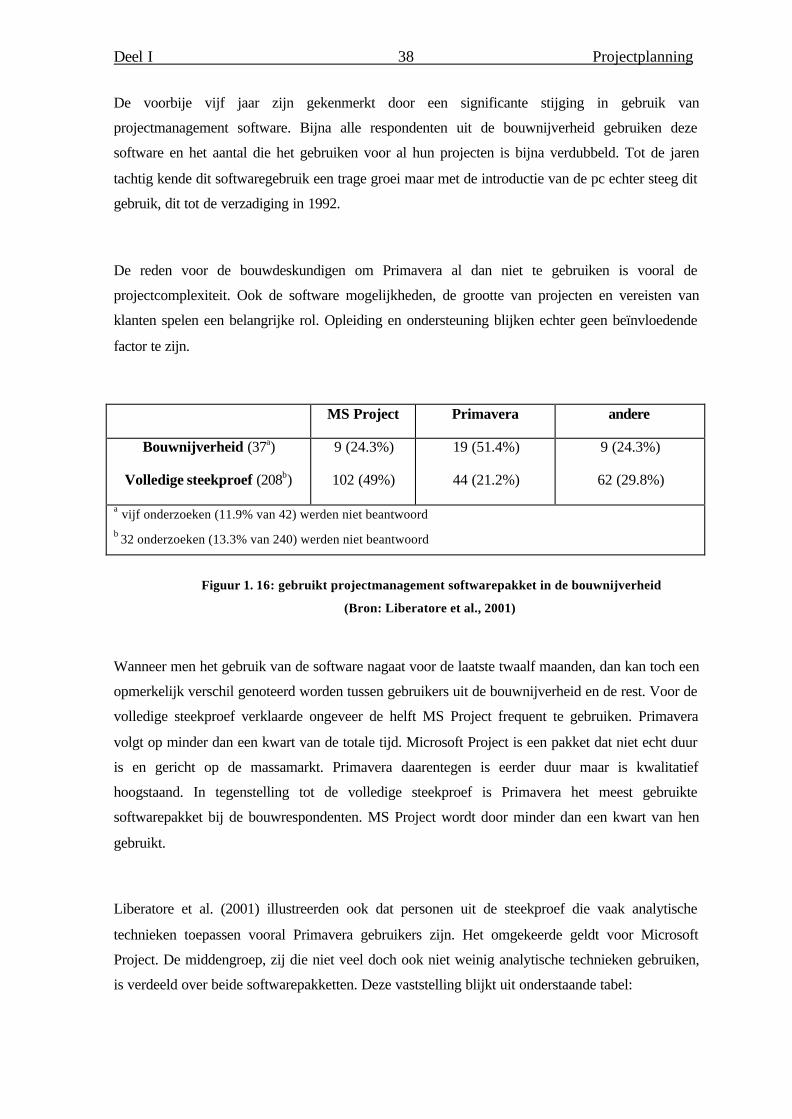
Deel I Projectplanning38
De voorbije vijf jaar zijn gekenmerkt door een significante stijging in gebruik van
projectmanagement software. Bijna alle respondenten uit de bouwnijverheid gebruiken deze
software en het aantal die het gebruiken voor al hun projecten is bijna verdubbeld. Tot de jaren
tachtig kende dit softwaregebruik een trage groei maar met de introductie van de pc echter steeg dit
gebruik, dit tot de verzadiging in 1992.
De reden voor de bouwdeskundigen om Primavera al dan niet te gebruiken is vooral de
projectcomplexiteit. Ook de software mogelijkheden, de grootte van projecten en vereisten van
klanten spelen een belangrijke rol. Opleiding en ondersteuning blijken echter geen beïnvloedende
factor te zijn.
MS Project Primavera andere
Bouwnijverheid (37a)
Volledige steekproef (208b)
9 (24.3%)
102 (49%)
19 (51.4%)
44 (21.2%)
9 (24.3%)
62 (29.8%)
a vijf onderzoeken (11.9% van 42) werden niet beantwoordb 32 onderzoeken (13.3% van 240) werden niet beantwoord
Figuur 1. 16: gebruikt projectmanagement softwarepakket in de bouwnijverheid
(Bron: Liberatore et al., 2001)
Wanneer men het gebruik van de software nagaat voor de laatste twaalf maanden, dan kan toch een
opmerkelijk verschil genoteerd worden tussen gebruikers uit de bouwnijverheid en de rest. Voor de
volledige steekproef verklaarde ongeveer de helft MS Project frequent te gebruiken. Primavera
volgt op minder dan een kwart van de totale tijd. Microsoft Project is een pakket dat niet echt duur
is en gericht op de massamarkt. Primavera daarentegen is eerder duur maar is kwalitatief
hoogstaand. In tegenstelling tot de volledige steekproef is Primavera het meest gebruikte
softwarepakket bij de bouwrespondenten. MS Project wordt door minder dan een kwart van hen
gebruikt.
Liberatore et al. (2001) illustreerden ook dat personen uit de steekproef die vaak analytische
technieken toepassen vooral Primavera gebruikers zijn. Het omgekeerde geldt voor Microsoft
Project. De middengroep, zij die niet veel doch ook niet weinig analytische technieken gebruiken,
is verdeeld over beide softwarepakketten. Deze vaststelling blijkt uit onderstaande tabel:
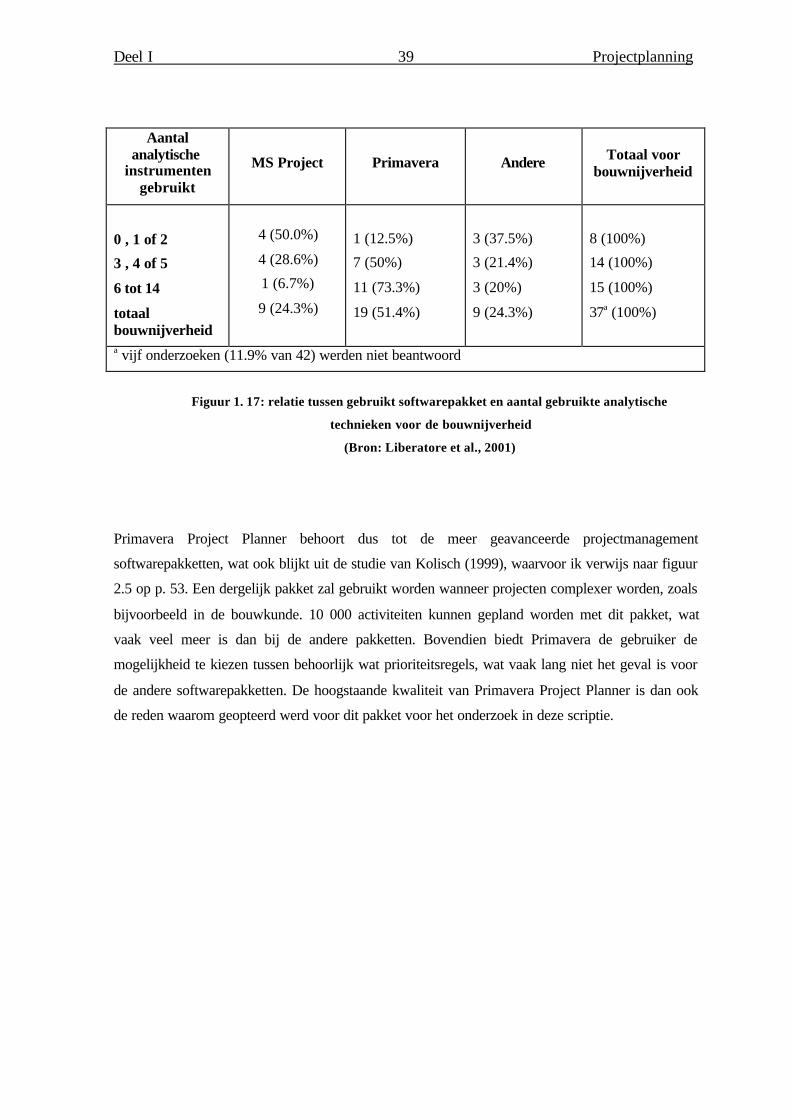
Deel I Projectplanning39
Aantalanalytische
instrumentengebruikt
MS Project Primavera Andere Totaal voorbouwnijverheid
0 , 1 of 2
3 , 4 of 5
6 tot 14
totaalbouwnijverheid
4 (50.0%)
4 (28.6%)
1 (6.7%)
9 (24.3%)
1 (12.5%)
7 (50%)
11 (73.3%)
19 (51.4%)
3 (37.5%)
3 (21.4%)
3 (20%)
9 (24.3%)
8 (100%)
14 (100%)
15 (100%)
37a (100%)
a vijf onderzoeken (11.9% van 42) werden niet beantwoord
Figuur 1. 17: relatie tussen gebruikt softwarepakket en aantal gebruikte analytische
technieken voor de bouwnijverheid
(Bron: Liberatore et al., 2001)
Primavera Project Planner behoort dus tot de meer geavanceerde projectmanagement
softwarepakketten, wat ook blijkt uit de studie van Kolisch (1999), waarvoor ik verwijs naar figuur
2.5 op p. 53. Een dergelijk pakket zal gebruikt worden wanneer projecten complexer worden, zoals
bijvoorbeeld in de bouwkunde. 10 000 activiteiten kunnen gepland worden met dit pakket, wat
vaak veel meer is dan bij de andere pakketten. Bovendien biedt Primavera de gebruiker de
mogelijkheid te kiezen tussen behoorlijk wat prioriteitsregels, wat vaak lang niet het geval is voor
de andere softwarepakketten. De hoogstaande kwaliteit van Primavera Project Planner is dan ook
de reden waarom geopteerd werd voor dit pakket voor het onderzoek in deze scriptie.
Deel II Fasetransities in projectplanning40
Aan de hand van de complexiteitstheorie kan bepaald worden of berekeningsproblemen
‘gemakkelijk’ al dan niet ‘moeilijk’ oplosbaar zijn, respectievelijk P of NP-hard (NP-compleet)
zijn. Onderzoekers in het domein van artificiële intelligentie hebben recentelijk aangetoond dat
veel NP-harde problemen fasetransities vertonen.
Herroelen en De Reyck (1998) waren de eersten om aan te tonen dat gelijkaardige fasetransities
bestaan voor NP-harde problemen in het domein van RCPSP.
Een fasetransitie van een complex systeem is een plotse verandering van een systeemeigenschap
wanneer een ordeparameter een kritisch waarde overschrijdt (Herroelen en De Reyck, 1998).
Vele NP-complete problemen vertonen zogenoemde fasetransities, die resulteren in een plotse en
opvallende verandering in de berekeningscomplexiteit. Zo variëren probleeminstanties vaak van
gemakkelijk naar moeilijk oplosbaar en terug naar gemakkelijk oplosbaar wanneer hun
karakteristieken gewijzigd worden. Het zijn de ordeparameters, kenmerkend voor het gehele
systeem, die deze transities bepalen.
Zowel morfologische als hulpmiddelen gerelateerde maatstaven dienen als ordeparameters. Terwijl
de morfologische maatstaven continue gemakkelijk-moeilijk of continue moeilijk-gemakkelijk
fasetransities vertonen, is gemakkelijk-moeilijk-gemakkelijk transitiegedrag vooral het gevolg van
hulpmiddelen gerelateerde maatstaven.
Al sinds midden de jaren zestig ontstond de interesse in activiteitennetwerken en de effecten van
een probleemstructuur op de prestatie van algoritmes. Indien een maatstaf bestond voor
netwerkcomplexiteit dan zou dit de keuze tussen de algoritmes of de efficiëntiebepaling van een
welbepaald algoritme enorm vergemakkelijken. Vandaar dat in de literatuur reeds vele maatstaven
voorgesteld werden. Deze proberen vooral informatie te vatten betreffende de grootte van het
projectnetwerk, de topologische structuur (morfologie) van het projectnetwerk en de
beschikbaarheid in relatie tot de vereiste van de verschillende types hulpmiddelen.
III. FASETRANTSITIES IN PROJECTPLANNING
Deel II 41 Fasetransities in projectplanning
1. Morfologie van netwerken
Tavarez (1999) stelt dat de morfologie of vorm van een projectnetwerk drie basiskenmerken bevat:
§ De grafische voorstelling van het netwerk, aan de hand van een knooppuntenvoorstelling.
§ Het aantal niet overbodige, directe volgorderelaties, D. Normaliter is een netwerk met een
hoger aantal van deze relaties complexer.
§ De lengte, L, van de niet overbodige, directe volgorderelaties van het netwerk.
Om de morfologische structuur van een netwerk te beschrijven, wil ik mij niet beperken tot de drie
meest gekende complexiteitsmaatstaven, namelijk de coëfficiënt van netwerk complexiteit (CNC),
de ordekracht (order strength: OS) en de complexiteitsindex (CI). Tot nu toe hebben onderzoekers
zich vooral op data met één van deze complexiteitsmaatstaven gericht tijdens het ontwikkelen van
efficiënte oplossingsprocedures. Onlangs werden echter nog zes morfologische indicatoren
voorgesteld door Vanhoucke et al. (2003), die deels gebaseerd zijn op die van Tavares et al. (1989).
Ook deze indicatoren zullen hier besproken worden en zullen in deel III gebruikt worden voor het
onderzoek.
1.1. Coëfficiënt van netwerkcomplexiteit (CNC)
Deze meeteenheid voor de morfologische structuur van een netwerk in pijlenvoorstelling is
wellicht de bekendste complexiteitsmaatstaf. Pascoë definieerde deze meeteenheid in 1966 als de
ratio van het aantal volgorderelaties (pijlen) over het aantal activiteiten (knooppunten). Davis
(1975) heeft de CNC aangepast voor de knooppuntenvoorstelling van netwerken. De maatstaf
stelde nu het aantal directe volgorderelaties (pijlen) over het aantal activiteiten (knooppunten) voor.
Kolisch et al (1995) zijn van mening dat, voor een gegeven aantal activiteiten in een
knooppuntenvoorstelling, een groter aantal volgorderelaties en dus een grotere verbondenheid zal
leiden tot een hogere complexiteit.
Verscheidene literatuurstudies, onder andere die van Kolish e.a.(1995), komen tot de vaststelling
dat problemen gemakkelijker oplosbaar zijn naarmate de waarde van de CNC stijgt (Herroelen en
De Reyck, 1999).
Deel II 42 Fasetransities in projectplanning
1.2. Ordekracht (OS)16
Mastor (1970) definieerde deze meeteenheid voor de topologische structuur van een
knooppuntenvoorstelling als het aantal volgorderelaties (uitgezonderd deze voor de dummy start-
en eindactiviteit) gedeeld door het theoretische maximale aantal volgorderelaties n(n-1)/2, waar n
staat voor het aantal niet-dummy activiteiten in het netwerk.
Herroelen en De Reyck (1999) kwamen tot de conclusie dat verschillende maatstaven uit de
literatuur, OS, densiteit, restrictiviteit, en 1- flexibiliteitratio, één en dezelfde complexiteitsmaatstaf
vormen.
1.3. Complexiteitsindex (CI)
Deze maatstaf werd oorspronkelijk door Bein et al (1992) gedefinieerd als ‘reductiecomplexiteit’
voor een niet cyclische pijlenvoorstelling met twee uiteinden. Ze komt overeen met het minimale
aantal reducties van knooppunten die voldoende zijn om een niet cyclisch netwerk met twee
uiteinden te reduceren tot een enkelvoudig uiteinde.
De complexiteitsindex meet dus in welke mate een netwerk in serie of in parallel is opgebouwd. In
tegenstelling tot de CNC, werd deze maatstaf niet aangepast voor de knooppuntenvoorstelling.
1.4. Morfologische indicatoren I1 tot I6.
Vanhoucke et al. (2003) stellen acht complexiteitsparameters voor die de morfologische structuur
van een netwerk beschrijven. Zes van de maatstaven ontleenden zij aan Tavares et al. (1999),
waarna zij deze geheel of gedeeltelijk aanpasten. In aanvulling op deze zes indicatoren kozen zij
voor de ordekracht OS, voorgesteld door Mastor (1970) en de coëfficiënt voor netwerkcomplexiteit
CNC (Pascoë 1966; Davis 1975). De zes indicatoren en OS integreerden zij in hun
netwerkgenerator RanGen 2. Daarop zal in deel III tijdens het onderzoek dieper op ingegaan
worden.
16 Deze term is meer bekend onder de Engelstalige benaming, nl. order strenght (OS). In overeenstemmingmet de literatuur zal verder dan ook deze afkorting gebruikt worden.

Deel II 43 Fasetransities in projectplanning
I1 : probleemgrootte Aantal activiteiten (n)
I2 : serie/parallel indicator Meet de dichtheid van een netwerk tot eenserie/parallel grafiek voor knooppuntnetwerken
I3 : activiteitsdistributie Beschrijving verdeling van activiteitendoorheen netwerk
I4 : korte, directe voorrangsrelatie Meet het aantal korte, onmiddellijk voorgaanderelaties (l = 1)
I5 : lange, direct voorrangsrelatie Meet het aantal lange, onmiddellijk voorgaanderelatie (l > 1)
I6 : morfologische slack Bepaalt morfologische slack voor elke activiteit
OS : Ordekracht Zie 1.2.
CNC : coëfficiënt voor netwerkcomplexiteit Zie 1.1.
Voor de verklaring van deze indicatoren wordt uitgegaan van netwerken in knooppuntvoorstelling.
De notatie Pi wordt gebruikt om de set van onmiddellijke voorgangers van activiteit i aan te duiden,
Si voor de onmiddellijke opvolgers. P’i en S’i stellen dan de set van alle directe en indirecte
voorgangers en opvolgers voor.
Tavares et al. (1999) definieerden het progressief niveau PLi en het regressieve niveau RLi voor
elke activiteit i ∈ N:
Pi = Ø ⇒ 1
PLi = Pi & Ø ⇒ max PLj + 1 j ? S i
Si = Ø ⇒ m
RLi = Si & Ø ⇒ min. RLj – 1 j ? Si
I2 meet net zoals CI de dichtheid van een netwerk tot een serie-parallel gerichte grafiek. In
tegenstelling tot CI, die toepasselijk is voor de pijlenvoorstelling, gebeurt dit voor I2 voor de
knooppuntvoorstelling. Parameter m staat voor het maximale progressieve niveau voor alle
activiteiten. Indicator I2 kan als volgt voorgesteld worden:
n = 1 ⇒ 1
I2 = n > 1 ⇒ m – 1 n – 1

Deel II 44 Fasetransities in projectplanning
I2 varieert tussen 0 en 1. Wanneer alle activiteiten in het netwerk in serie voorkomen dan is m = n
en I2 = 1. Wanneer ze echter in parallel voorkomen is m gelijk aan 1 en I2 gelijk aan nul.
Indicator I3 is gebaseerd op standaardafwijkingen. I3 is gelijk aan nul wanneer ook de s
gelijk is aan nul. Dit is het geval bij een uniforme verdeling. I3 is daarentegen gelijk aan 1 bij een
extreme verdeling. De formule voor I3 gaat als volgt:
std.afw. (s ) van de breedte (w) – verdeling over de PN’s s I3 = –––––––––––––––––––––––––––––––––––––––––––––––––––––– = –––––––
max. std.afw. mogelijk voor gegeven m en n smax
De maximale standaardafwijking voor gegeven n en m komt overeen met een verdeling met (m–1)
progressieve niveaus met w=1 en één progressief niveau met w = n – (m–1).
Deze formule voor I3 geldt wanneer m ∈ ]1,n[, zoniet is I3 = 0.
De maximale morfologische lengte van een netwerk is gelijk aan m – 1, gezien de lengte
van een onmiddellijk voorgaande relatie (i,j) gedetermineerd wordt door het verschil tussen het
progressieve niveau van het eindknooppunt (activiteit) j en het beginknooppunt i. Vanhoucke et al.
(2003) stelden n’ voor als een parameter voor de structuur van voorgaande relaties, die
gedefinieerd wordt als: n’l = # {(i,j) ∈ A| PLj – PLi = l}, waarbij A staat voor de set van
volgorderelaties, n voor het aantal activiteiten en n’ l voor het aantal volgorderelaties met lengte l.
Indicator I , de indicator de de aanwezigheid van korte onmiddellijk voorafgaande volgorderelaties
meet wordt als volgt gedetermineerd:
D = n – w1
I4 = D > n – w1 ⇒ n’l – n + w1
D – n + w1
I varieert wederom tussen 0 en 1. D vormt het maximaal aantal korte voorgaande relaties in een
netwerk voor een gegeven breedte van elk niveau:
m-1
D = ∑ wa ∗ wa+1a=1
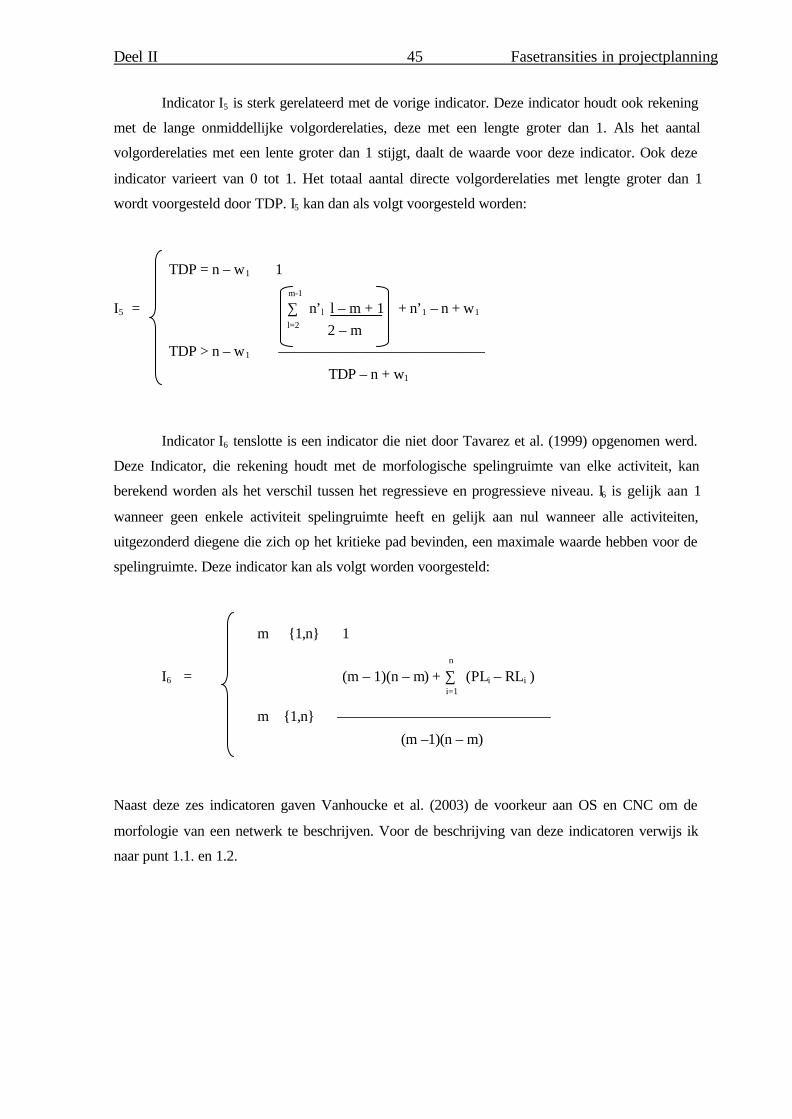
Deel II 45 Fasetransities in projectplanning
Indicator I5 is sterk gerelateerd met de vorige indicator. Deze indicator houdt ook rekening
met de lange onmiddellijke volgorderelaties, deze met een lengte groter dan 1. Als het aantal
volgorderelaties met een lente groter dan 1 stijgt, daalt de waarde voor deze indicator. Ook deze
indicator varieert van 0 tot 1. Het totaal aantal directe volgorderelaties met lengte groter dan 1
wordt voorgesteld door TDP. I5 kan dan als volgt voorgesteld worden:
TDP = n – w1 ⇒ 1 m-1
I5 = ∑ n’l l – m + 1 + n’1 – n + w1
l=2 2 – m TDP > n – w1 ⇒ ––––––––––––––––––––––––––––
TDP – n + w1
Indicator I6 tenslotte is een indicator die niet door Tavarez et al. (1999) opgenomen werd.
Deze Indicator, die rekening houdt met de morfologische spelingruimte van elke activiteit, kan
berekend worden als het verschil tussen het regressieve en progressieve niveau. I6 is gelijk aan 1
wanneer geen enkele activiteit spelingruimte heeft en gelijk aan nul wanneer alle activiteiten,
uitgezonderd diegene die zich op het kritieke pad bevinden, een maximale waarde hebben voor de
spelingruimte. Deze indicator kan als volgt worden voorgesteld:
m ∈ {1,n} ⇒ 1
n
I6 = (m – 1)(n – m) + ∑ (PLi – RLi ) i=1
m ∉{1,n} ⇒ –––––––––––––––––––––––––––––
(m –1)(n – m)
Naast deze zes indicatoren gaven Vanhoucke et al. (2003) de voorkeur aan OS en CNC om de
morfologie van een netwerk te beschrijven. Voor de beschrijving van deze indicatoren verwijs ik
naar punt 1.1. en 1.2.
Deel II 46 Fasetransities in projectplanning
2. Topologische maatstaven en RCPSP
RCPSP, het probleem om een project te plannen wanneer hulpmiddelen beperkt zijn, is een NP-
hard probleem. Recente berekeningen bieden meer inzicht in de invloed van de topologische
maatstaven op de hardheid van dit probleem. De maatstaven voor netwerkstructuur, zoals OS, CNC
en CI, vertonen typisch een ononderbroken hard-gemakkelijk complexiteitspatroon.Idealiter
zouden zulke maatstaven de hardheid van problemen, zoals gemeten aan de hand van de CPU-tijd,
moeten voorspellen. Desalniettemin zijn meerdere onderzoekers tot de conclusie gekomen dat deze
maatstaven niet altijd tot een correcte inschatting komen van de complexiteit van een netwerk.
Elmaghraby en Herroelen (1980) bijvoorbeeld hebben het nut van de coëfficiënt van
netwerkcomplexiteit (CNC) in vraag getrokken gezien het perfect mogelijk is netwerken op te
bouwen met een zelfde CNC-waarde maar met een verschillende graad van complexiteit. De
coëfficiënt voor netwerkcomplexiteit op zich slaagt er niet in een onderscheid te maken tussen
gemakkelijke en moeilijke problemen en kan bijgevolg niet dienen als een goede maatstaf om de
impact te beschrijven van de netwerkstructuur op de hardheid van een project planningsprobleem.
Kolisch et al (1995) kwamen tot de conclusie dat RCPS-problemen gemakkelijker oplosbaar
worden naarmate de waarden van de CNC stijgen, zonder rekening te houden met de
complexiteitsindex (CI). De Reyck en Herroelen (1996) daarentegen vinden het dubbelzinnig om
een probleem enkel en alleen met de CNC te verklaren. Zij geloven in een positieve correlatie
tussen de CNC en de CI. Deze laatste zou volgens hen dus wel belangrijk zijn om de vereiste
berekeningsinspanning te voorspellen om een RCPS-probleem op te lossen. Wanneer de CPU-tijd
dan uitgezet wordt in functie van de complexiteitsindex, komt een nogal continu hard-gemakkelijk-
hard complexiteitspatroon te voorschijn. Hoe hoger dus de CI, hoe gemakkelijker het RCPS-
probleem.
Volgens De Reyck (1998) is de ordekracht (OS), naast de CI, een goed maatstaf voor
netwerkcomplexiteit. Wanneer hij de CPU-tijd uitzette ten opzichte van deze parameter, verkreeg
hij een lineaire hard-gemakkelijk complexiteitstransitie. De Reyck kwam in 1998 zelfs tot het
besluit dat de OS de krachtigste maatstaf was om variaties in de CPU-tijd te verklaren. De Reyck
en Herroelen (1996) bewezen dat de complexiteitsindex (CI) de coëfficiënt van

Deel II 47 Fasetransities in projectplanning
netwerkcomplexiteit (CNC) overtreft. Daarenboven concludeerden zij dat de ordekracht (OS) de CI
overtreft.
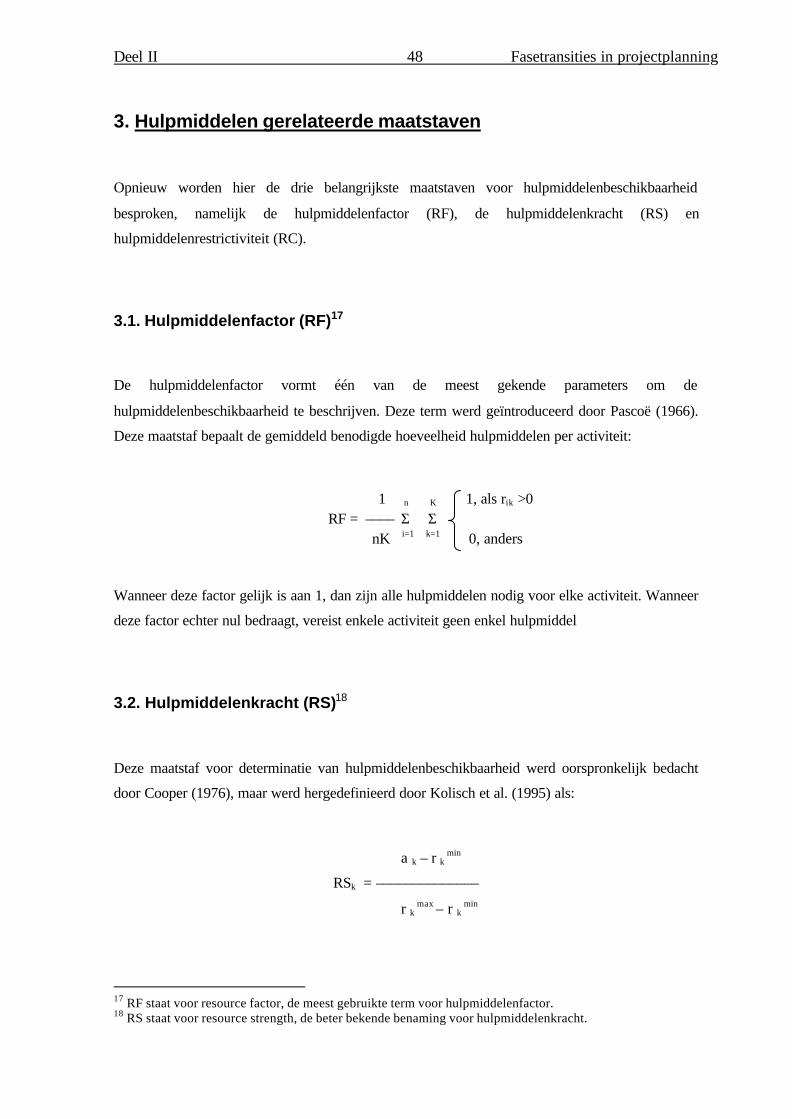
Deel II 48 Fasetransities in projectplanning
3. Hulpmiddelen gerelateerde maatstaven
Opnieuw worden hier de drie belangrijkste maatstaven voor hulpmiddelenbeschikbaarheid
besproken, namelijk de hulpmiddelenfactor (RF), de hulpmiddelenkracht (RS) en
hulpmiddelenrestrictiviteit (RC).
3.1. Hulpmiddelenfactor (RF)17
De hulpmiddelenfactor vormt één van de meest gekende parameters om de
hulpmiddelenbeschikbaarheid te beschrijven. Deze term werd geïntroduceerd door Pascoë (1966).
Deze maatstaf bepaalt de gemiddeld benodigde hoeveelheid hulpmiddelen per activiteit:
1 n K 1, als rik >0 RF = –––– Σ Σ
nK i=1 k=1 0, anders
Wanneer deze factor gelijk is aan 1, dan zijn alle hulpmiddelen nodig voor elke activiteit. Wanneer
deze factor echter nul bedraagt, vereist enkele activiteit geen enkel hulpmiddel
3.2. Hulpmiddelenkracht (RS)18
Deze maatstaf voor determinatie van hulpmiddelenbeschikbaarheid werd oorspronkelijk bedacht
door Cooper (1976), maar werd hergedefinieerd door Kolisch et al. (1995) als:
a k – r k min
RSk = ––––––––––––––
r k max – r k
min
17 RF staat voor resource factor, de meest gebruikte term voor hulpmiddelenfactor.18 RS staat voor resource strength, de beter bekende benaming voor hulpmiddelenkracht.
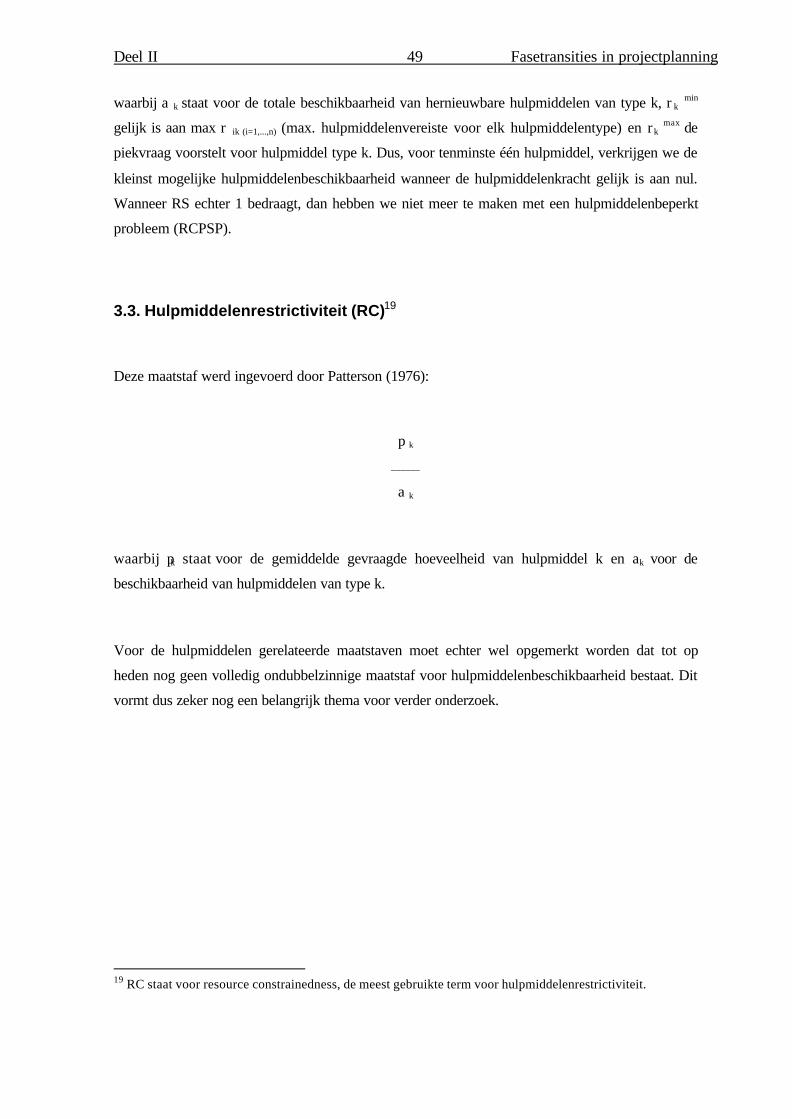
Deel II 49 Fasetransities in projectplanning
waarbij a k staat voor de totale beschikbaarheid van hernieuwbare hulpmiddelen van type k, r k min
gelijk is aan max r ik (i=1,...,n) (max. hulpmiddelenvereiste voor elk hulpmiddelentype) en r k max de
piekvraag voorstelt voor hulpmiddel type k. Dus, voor tenminste één hulpmiddel, verkrijgen we de
kleinst mogelijke hulpmiddelenbeschikbaarheid wanneer de hulpmiddelenkracht gelijk is aan nul.
Wanneer RS echter 1 bedraagt, dan hebben we niet meer te maken met een hulpmiddelenbeperkt
probleem (RCPSP).
3.3. Hulpmiddelenrestrictiviteit (RC)19
Deze maatstaf werd ingevoerd door Patterson (1976):
p k
––––––
a k
waarbij pk staat voor de gemiddelde gevraagde hoeveelheid van hulpmiddel k en ak voor de
beschikbaarheid van hulpmiddelen van type k.
Voor de hulpmiddelen gerelateerde maatstaven moet echter wel opgemerkt worden dat tot op
heden nog geen volledig ondubbelzinnige maatstaf voor hulpmiddelenbeschikbaarheid bestaat. Dit
vormt dus zeker nog een belangrijk thema voor verder onderzoek.
19 RC staat voor resource constrainedness, de meest gebruikte term voor hulpmiddelenrestrictiviteit.
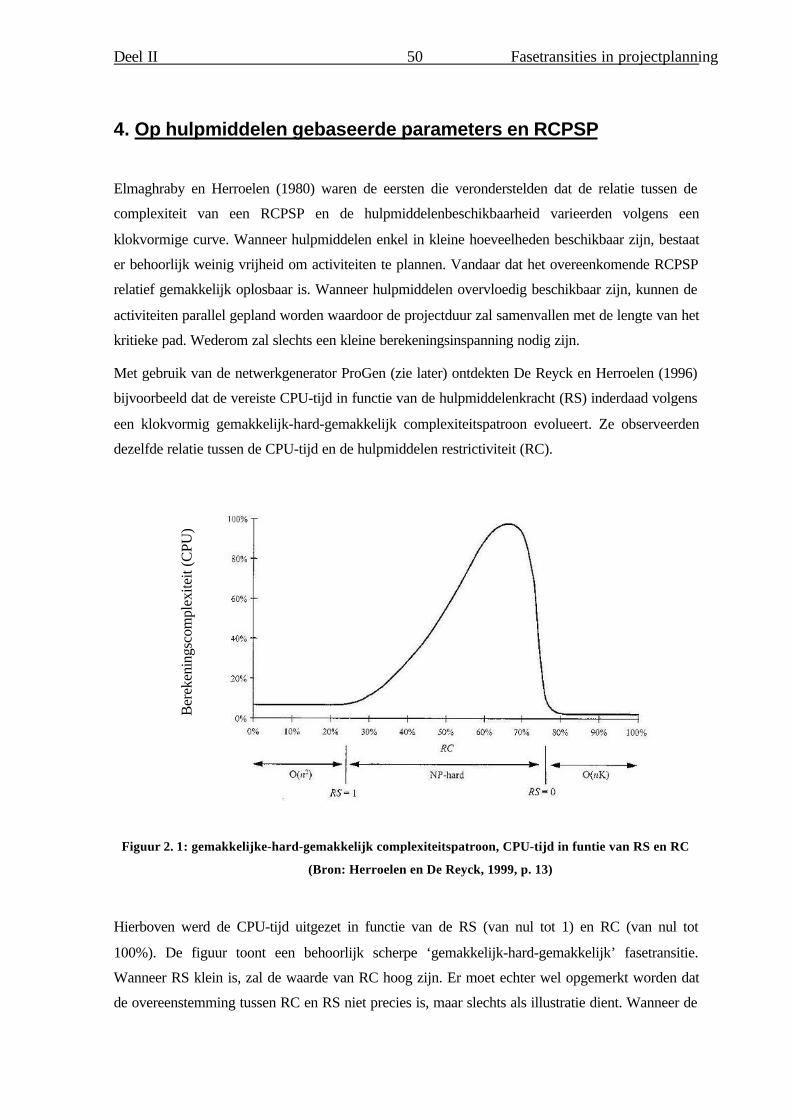
Deel II Fasetransities in projectplanning 50
4. Op hulpmiddelen gebaseerde parameters en RCPSP
Elmaghraby en Herroelen (1980) waren de eersten die veronderstelden dat de relatie tussen de
complexiteit van een RCPSP en de hulpmiddelenbeschikbaarheid varieerden volgens een
klokvormige curve. Wanneer hulpmiddelen enkel in kleine hoeveelheden beschikbaar zijn, bestaat
er behoorlijk weinig vrijheid om activiteiten te plannen. Vandaar dat het overeenkomende RCPSP
relatief gemakkelijk oplosbaar is. Wanneer hulpmiddelen overvloedig beschikbaar zijn, kunnen de
activiteiten parallel gepland worden waardoor de projectduur zal samenvallen met de lengte van het
kritieke pad. Wederom zal slechts een kleine berekeningsinspanning nodig zijn.
Met gebruik van de netwerkgenerator ProGen (zie later) ontdekten De Reyck en Herroelen (1996)
bijvoorbeeld dat de vereiste CPU-tijd in functie van de hulpmiddelenkracht (RS) inderdaad volgens
een klokvormig gemakkelijk-hard-gemakkelijk complexiteitspatroon evolueert. Ze observeerden
dezelfde relatie tussen de CPU-tijd en de hulpmiddelen restrictiviteit (RC).
Ber
eken
ings
com
plex
iteit
(CPU
)
Figuur 2. 1: gemakkelijke-hard-gemakkelijk complexiteitspatroon, CPU-tijd in funtie van RS en RC
(Bron: Herroelen en De Reyck, 1999, p. 13)
Hierboven werd de CPU-tijd uitgezet in functie van de RS (van nul tot 1) en RC (van nul tot
100%). De figuur toont een behoorlijk scherpe ‘gemakkelijk-hard-gemakkelijk’ fasetransitie.
Wanneer RS klein is, zal de waarde van RC hoog zijn. Er moet echter wel opgemerkt worden dat
de overeenstemming tussen RC en RS niet precies is, maar slechts als illustratie dient. Wanneer de
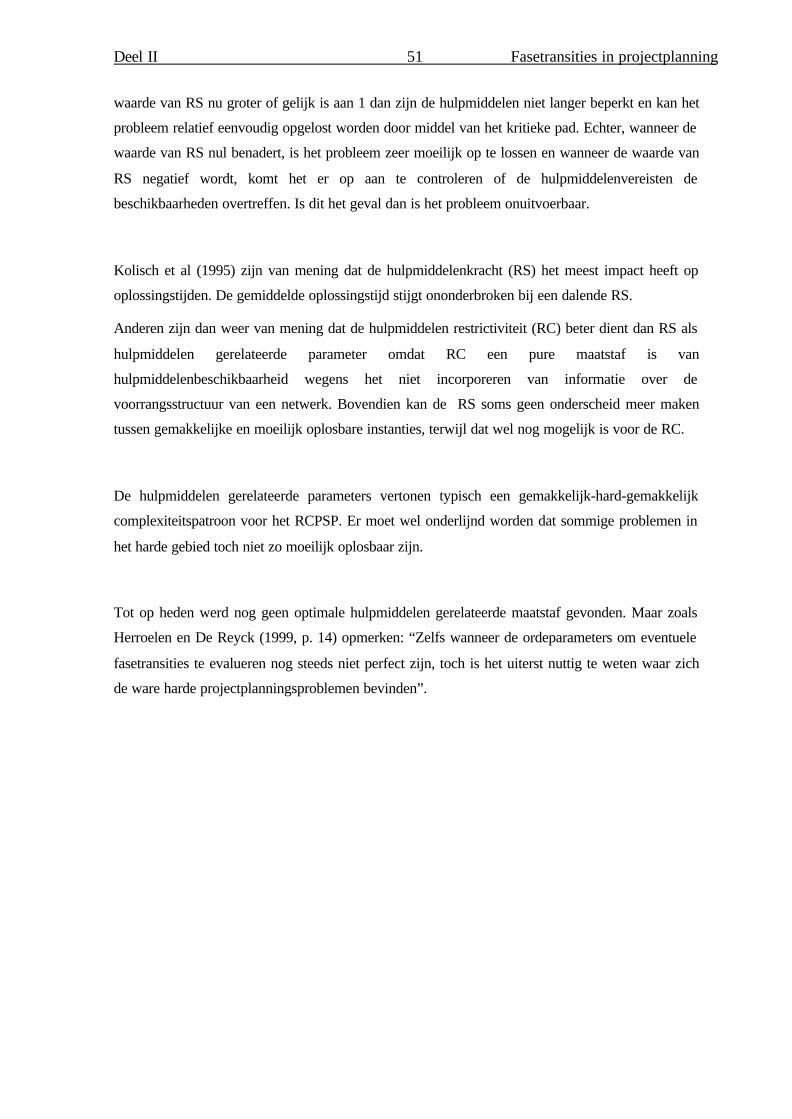
Deel II 51 Fasetransities in projectplanning
waarde van RS nu groter of gelijk is aan 1 dan zijn de hulpmiddelen niet langer beperkt en kan het
probleem relatief eenvoudig opgelost worden door middel van het kritieke pad. Echter, wanneer de
waarde van RS nul benadert, is het probleem zeer moeilijk op te lossen en wanneer de waarde van
RS negatief wordt, komt het er op aan te controleren of de hulpmiddelenvereisten de
beschikbaarheden overtreffen. Is dit het geval dan is het probleem onuitvoerbaar.
Kolisch et al (1995) zijn van mening dat de hulpmiddelenkracht (RS) het meest impact heeft op
oplossingstijden. De gemiddelde oplossingstijd stijgt ononderbroken bij een dalende RS.
Anderen zijn dan weer van mening dat de hulpmiddelen restrictiviteit (RC) beter dient dan RS als
hulpmiddelen gerelateerde parameter omdat RC een pure maatstaf is van
hulpmiddelenbeschikbaarheid wegens het niet incorporeren van informatie over de
voorrangsstructuur van een netwerk. Bovendien kan de RS soms geen onderscheid meer maken
tussen gemakkelijke en moeilijk oplosbare instanties, terwijl dat wel nog mogelijk is voor de RC.
De hulpmiddelen gerelateerde parameters vertonen typisch een gemakkelijk-hard-gemakkelijk
complexiteitspatroon voor het RCPSP. Er moet wel onderlijnd worden dat sommige problemen in
het harde gebied toch niet zo moeilijk oplosbaar zijn.
Tot op heden werd nog geen optimale hulpmiddelen gerelateerde maatstaf gevonden. Maar zoals
Herroelen en De Reyck (1999, p. 14) opmerken: “Zelfs wanneer de ordeparameters om eventuele
fasetransities te evalueren nog steeds niet perfect zijn, toch is het uiterst nuttig te weten waar zich
de ware harde projectplanningsproblemen bevinden”.

Deel II Fasetransities in projectplanning 52
5. impact van hulpmiddelen gerelateerde en morfologische
maatstaven op projectmanagement software.
Tavares (1999) merkt op dat ondertussen zowat alle projectmanagement softwarepakketten de
studie van projectnetwerken incorporeren maar dat sommige belangrijke thema’s nog steeds
verwaarloosd worden, zoals:
§ analyse en indeling van de morfologie van elke projectnetwerk.
§ automatische aanmaak van gemakkelijk te interpreteren grafieken van netwerken om een
beter zicht te krijgen in de morfologie van een netwerk.
§ De relatie tussen de morfologie en de onzekerheid omtrent de totale duur van het project.
Een groter inzicht in deze relatie zou de projectmanager immers in staat stellen de
moeilijkheidsgraad te bepalen om het project tijdig te beëindigen in termen van het
projectnetwerk.
Niettegenstaande dat weinig softwarepakketten de invloed van hulpmiddelen gerelateerde en
morfologische karakteristieken in rekening brengen, werd in de literatuur toch enig onderzoek
daaromtrent uitgevoerd.
Kolisch (1999) bijvoorbeeld bestudeerde de kwaliteit van zeven commerciële projectmanagement
softwarepakketten wat betreft hulpmiddelenallocatie. De onderzochte pakketten zijn:
§ Artemis Scheduler Publisher 4.1 § Project Manager Workbench 1.1.02w
§ CA SuperProject 3.0 C § Project Scheduler 6.0 1.02
§ Microsoft Project 4.0 § Time Line 6.0.0
§ Primavera Project Planner 1.0
Projecten zijn gekenmerkt door verschillende niveaus van probleemparameters. Kolisch meent dat
het type probleem, dat uitgedrukt wordt door deze niveaus, de oplosbaarheid beïnvloedt. De
verschillende probleemparameters om projecten te rangschikken werden gehaald uit het onderzoek
van Kolisch et al. (1995):
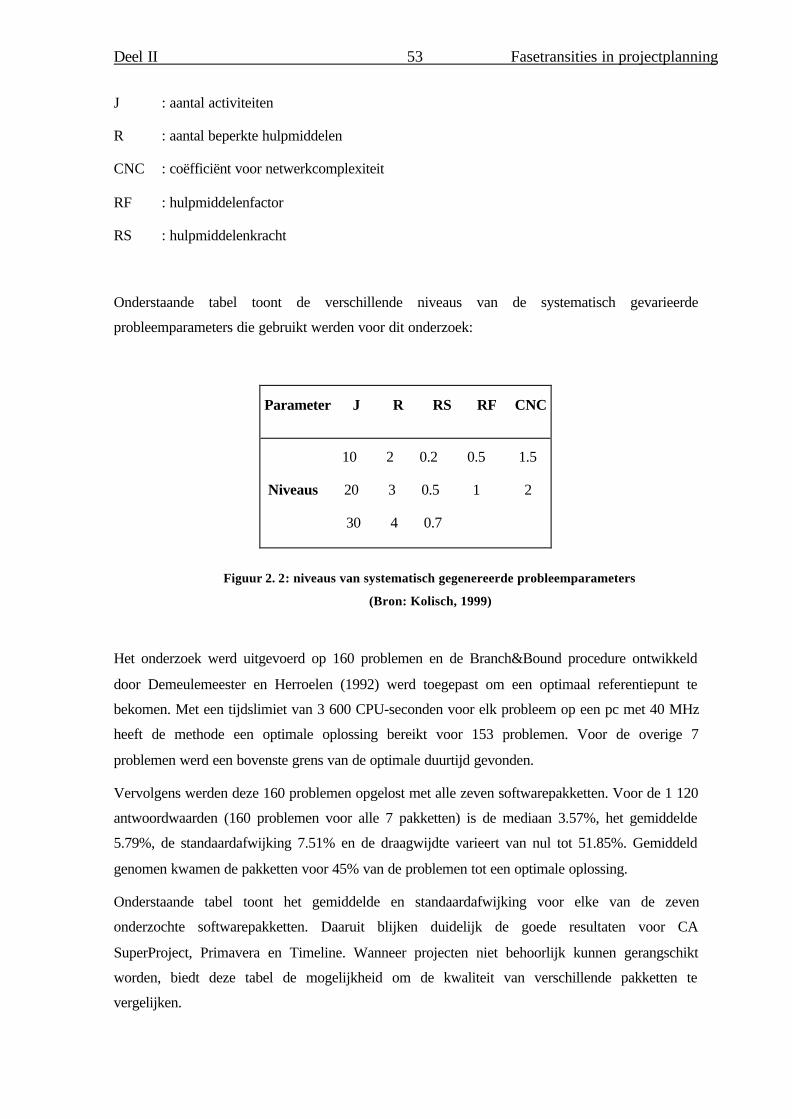
Deel II 53 Fasetransities in projectplanning
J : aantal activiteiten
R : aantal beperkte hulpmiddelen
CNC : coëfficiënt voor netwerkcomplexiteit
RF : hulpmiddelenfactor
RS : hulpmiddelenkracht
Onderstaande tabel toont de verschillende niveaus van de systematisch gevarieerde
probleemparameters die gebruikt werden voor dit onderzoek:
Parameter J R RS RF CNC
10 2 0.2 0.5 1.5
Niveaus 20 3 0.5 1 2
30 4 0.7
Figuur 2. 2: niveaus van systematisch gegenereerde probleemparameters
(Bron: Kolisch, 1999)
Het onderzoek werd uitgevoerd op 160 problemen en de Branch&Bound procedure ontwikkeld
door Demeulemeester en Herroelen (1992) werd toegepast om een optimaal referentiepunt te
bekomen. Met een tijdslimiet van 3 600 CPU-seconden voor elk probleem op een pc met 40 MHz
heeft de methode een optimale oplossing bereikt voor 153 problemen. Voor de overige 7
problemen werd een bovenste grens van de optimale duurtijd gevonden.
Vervolgens werden deze 160 problemen opgelost met alle zeven softwarepakketten. Voor de 1 120
antwoordwaarden (160 problemen voor alle 7 pakketten) is de mediaan 3.57%, het gemiddelde
5.79%, de standaardafwijking 7.51% en de draagwijdte varieert van nul tot 51.85%. Gemiddeld
genomen kwamen de pakketten voor 45% van de problemen tot een optimale oplossing.
Onderstaande tabel toont het gemiddelde en standaardafwijking voor elke van de zeven
onderzochte softwarepakketten. Daaruit blijken duidelijk de goede resultaten voor CA
SuperProject, Primavera en Timeline. Wanneer projecten niet behoorlijk kunnen gerangschikt
worden, biedt deze tabel de mogelijkheid om de kwaliteit van verschillende pakketten te
vergelijken.
Deel II 54 Fasetransities in projectplanning
softwarepakket gemiddelde standaardafwijking
Artemis Schedule Publisher
CA SuperProject
Microsoft Project
Primavera Project Planner
Project Manager Workbench
Project Scheduler 6
Time Line
9.76
4.41
5.35
4.39
6.69
5.43
4.49
9.82
6.02
6.53
6.04
8.60
7.98
5.09
Figuur 2. 3: gemiddelde en standaardafwijking van het percentage afwijking bekomen door
zeven projectmanagement softwarepakketten
(Bron: Kolisch, 1999)
Kolisch onderzocht de invloed van de verschillende parameters (N, R, RS, RF, CNC) op het
percentage afwijking van het optimale referentiepunt. Tabellen met de resultaten van deze
bevindingen zijn terug te vinden in bijlage 1.1.
Tijdens dit onderzoek kwam hij onder andere tot de conclusie dat de kwaliteit van de oplossing
achteruit gaat naarmate het aantal activiteiten (N) stijgt. Artemis Schedule Publisher vormt daar
enige uitzondering gezien er voor dertig activiteiten betere resultaten bekomen werden dan voor
twintig.
Alle zeven onderzochte pakketten vertonen slechtere resultaten voor drie beperkte hulpmiddelen
dan voor slechts één. Drie pakketten, namelijk MS Project, Project Manager Workbench en Time
Line, vertonen steeds slechtere resultaten wanneer het aantal beperkte hulpmiddelen toeneemt. Drie
andere pakketten, namelijk CA SuperProject, Primavera Project Planner en Project Scheduler 6
kennen kleine verbeteringen wanneer het aantal onbeperkte hulpmiddelen stijgt van twee tot drie.
Wanneer de capaciteit van hulpmiddelen daalt, dus wanneer de hulpmiddelenkracht (RS) daalt,
verslechteren de planningsresultaten van alle pakketten aanhoudend. Het omgekeerde geldt voor de
hulpmiddelenfactor (RF). Een stijgend aantal vereiste hulpmiddelen leidt tot een lagere kwaliteit
van oplossingen. Een softwarepakket zal echter betere resultaten behalen wanneer meer
volgorderelaties aanwezig zijn, dus wanneer een hoge waarde voor de coëfficiënt van
netwerkcomplexiteit (CNC).
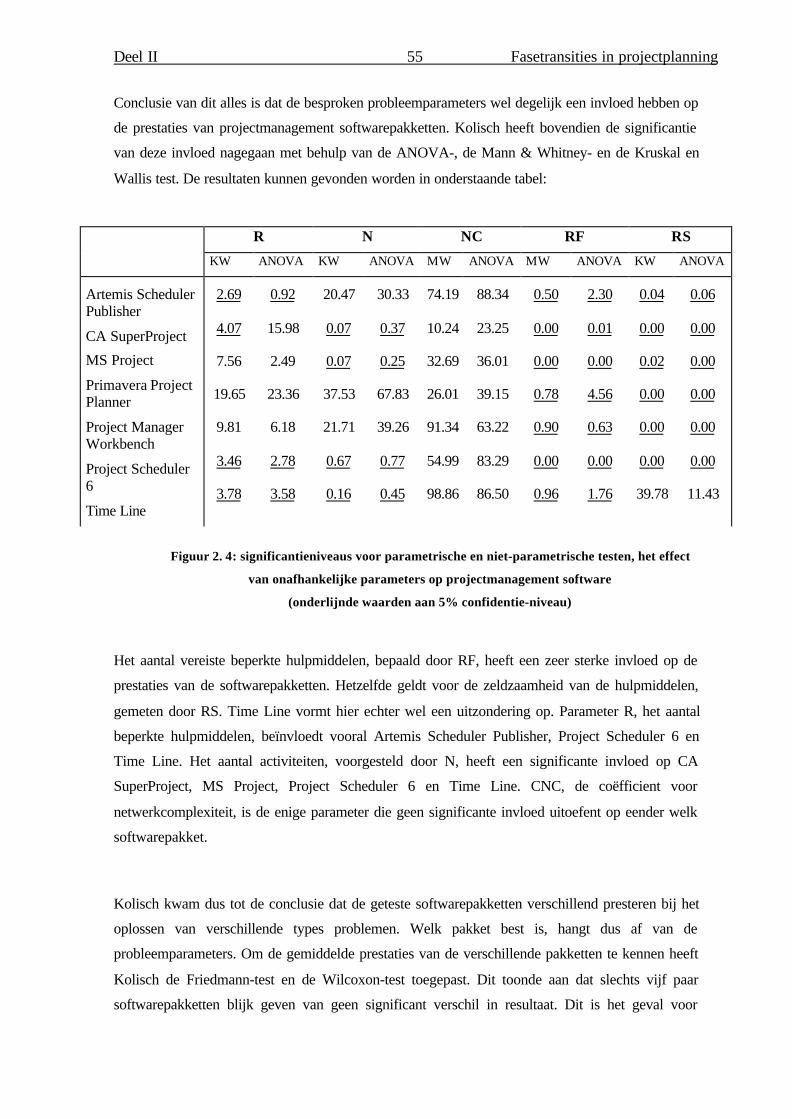
Deel II 55 Fasetransities in projectplanning
Conclusie van dit alles is dat de besproken probleemparameters wel degelijk een invloed hebben op
de prestaties van projectmanagement softwarepakketten. Kolisch heeft bovendien de significantie
van deze invloed nagegaan met behulp van de ANOVA-, de Mann & Whitney- en de Kruskal en
Wallis test. De resultaten kunnen gevonden worden in onderstaande tabel:
Figuur 2. 4: significantieniveaus voor parametrische en niet-parametrische testen, het effect
van onafhankelijke parameters op projectmanagement software
(onderlijnde waarden aan 5% confidentie-niveau)
Het aantal vereiste beperkte hulpmiddelen, bepaald door RF, heeft een zeer sterke invloed op de
prestaties van de softwarepakketten. Hetzelfde geldt voor de zeldzaamheid van de hulpmiddelen,
gemeten door RS. Time Line vormt hier echter wel een uitzondering op. Parameter R, het aantal
beperkte hulpmiddelen, beïnvloedt vooral Artemis Scheduler Publisher, Project Scheduler 6 en
Time Line. Het aantal activiteiten, voorgesteld door N, heeft een significante invloed op CA
SuperProject, MS Project, Project Scheduler 6 en Time Line. CNC, de coëfficient voor
netwerkcomplexiteit, is de enige parameter die geen significante invloed uitoefent op eender welk
softwarepakket.
Kolisch kwam dus tot de conclusie dat de geteste softwarepakketten verschillend presteren bij het
oplossen van verschillende types problemen. Welk pakket best is, hangt dus af van de
probleemparameters. Om de gemiddelde prestaties van de verschillende pakketten te kennen heeft
Kolisch de Friedmann-test en de Wilcoxon-test toegepast. Dit toonde aan dat slechts vijf paar
softwarepakketten blijk geven van geen significant verschil in resultaat. Dit is het geval voor
R N NC RF RS
KW ANOVA KW ANOVA MW ANOVA MW ANOVA KW ANOVA
Artemis SchedulerPublisher
CA SuperProject
MS Project
Primavera ProjectPlanner
Project ManagerWorkbench
Project Scheduler6
Time Line
2.69
4.07
7.56
19.65
9.81
3.46
3.78
0.92
15.98
2.49
23.36
6.18
2.78
3.58
20.47
0.07
0.07
37.53
21.71
0.67
0.16
30.33
0.37
0.25
67.83
39.26
0.77
0.45
74.19
10.24
32.69
26.01
91.34
54.99
98.86
88.34
23.25
36.01
39.15
63.22
83.29
86.50
0.50
0.00
0.00
0.78
0.90
0.00
0.96
2.30
0.01
0.00
4.56
0.63
0.00
1.76
0.04
0.00
0.02
0.00
0.00
0.00
39.78
0.06
0.00
0.00
0.00
0.00
0.00
11.43
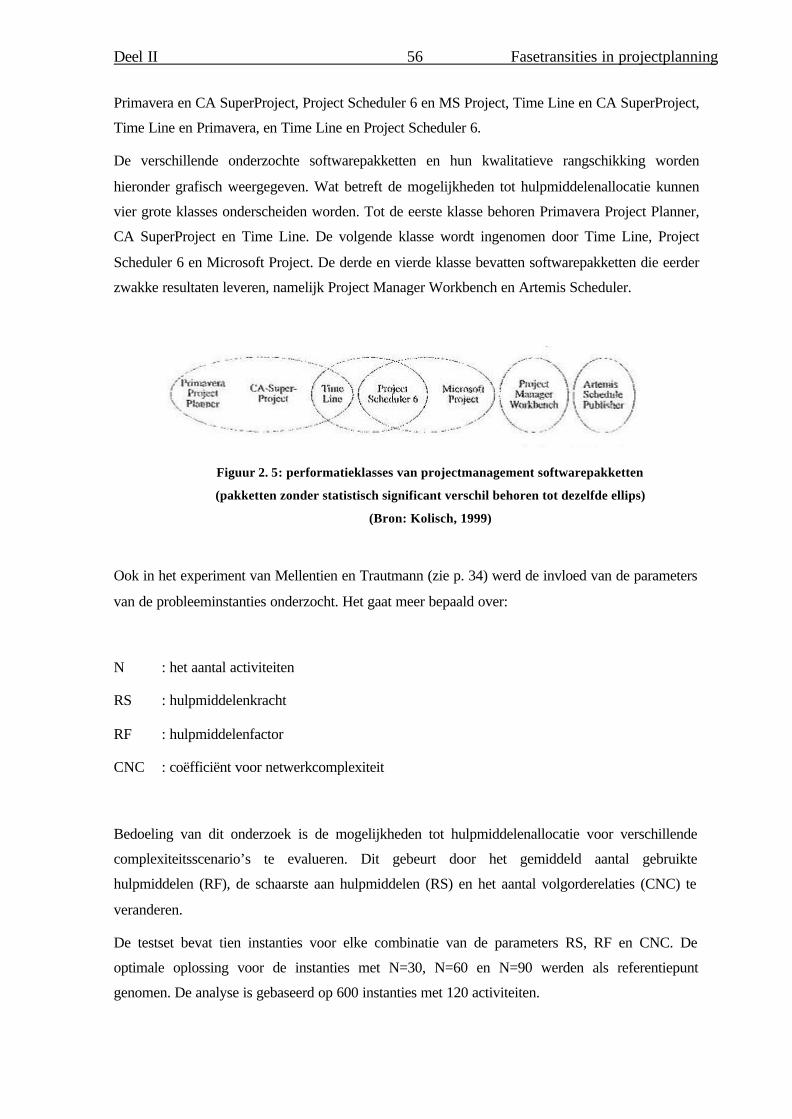
Deel II 56 Fasetransities in projectplanning
Primavera en CA SuperProject, Project Scheduler 6 en MS Project, Time Line en CA SuperProject,
Time Line en Primavera, en Time Line en Project Scheduler 6.
De verschillende onderzochte softwarepakketten en hun kwalitatieve rangschikking worden
hieronder grafisch weergegeven. Wat betreft de mogelijkheden tot hulpmiddelenallocatie kunnen
vier grote klasses onderscheiden worden. Tot de eerste klasse behoren Primavera Project Planner,
CA SuperProject en Time Line. De volgende klasse wordt ingenomen door Time Line, Project
Scheduler 6 en Microsoft Project. De derde en vierde klasse bevatten softwarepakketten die eerder
zwakke resultaten leveren, namelijk Project Manager Workbench en Artemis Scheduler.
Figuur 2. 5: performatieklasses van projectmanagement softwarepakketten
(pakketten zonder statistisch significant verschil behoren tot dezelfde ellips)
(Bron: Kolisch, 1999)
Ook in het experiment van Mellentien en Trautmann (zie p. 34) werd de invloed van de parameters
van de probleeminstanties onderzocht. Het gaat meer bepaald over:
N : het aantal activiteiten
RS : hulpmiddelenkracht
RF : hulpmiddelenfactor
CNC : coëfficiënt voor netwerkcomplexiteit
Bedoeling van dit onderzoek is de mogelijkheden tot hulpmiddelenallocatie voor verschillende
complexiteitsscenario’s te evalueren. Dit gebeurt door het gemiddeld aantal gebruikte
hulpmiddelen (RF), de schaarste aan hulpmiddelen (RS) en het aantal volgorderelaties (CNC) te
veranderen.
De testset bevat tien instanties voor elke combinatie van de parameters RS, RF en CNC. De
optimale oplossing voor de instanties met N=30, N=60 en N=90 werden als referentiepunt
genomen. De analyse is gebaseerd op 600 instanties met 120 activiteiten.
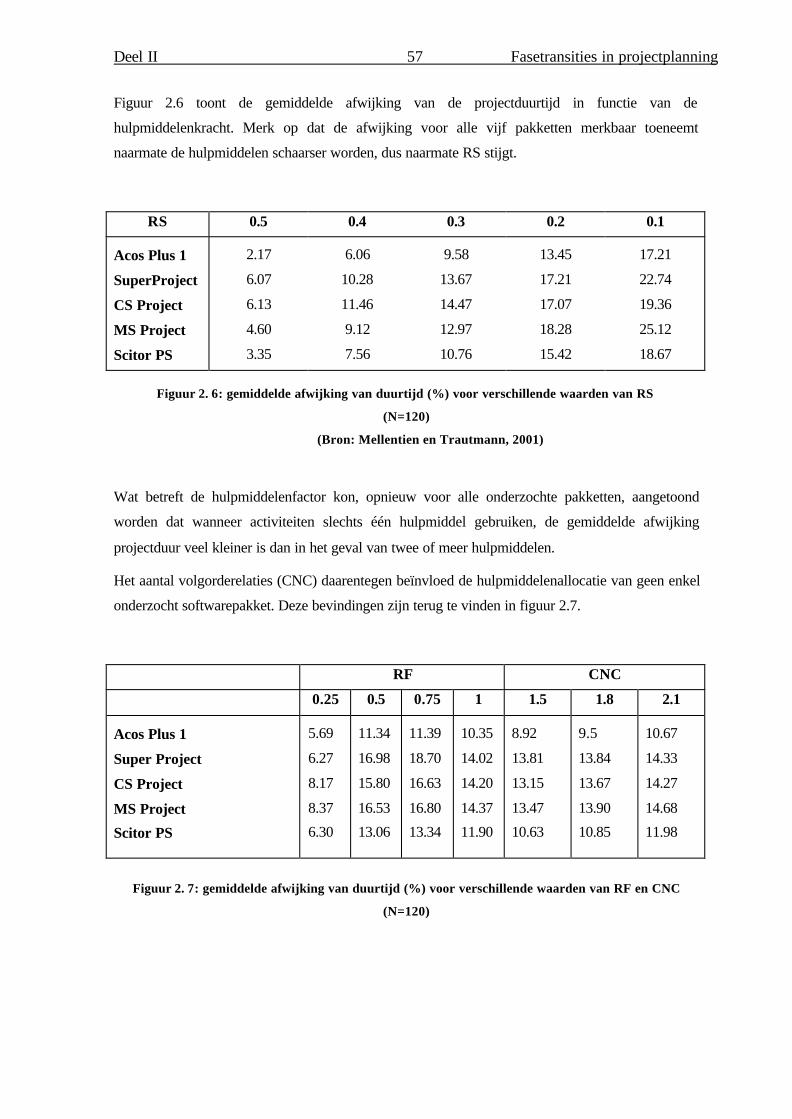
Deel II 57 Fasetransities in projectplanning
Figuur 2.6 toont de gemiddelde afwijking van de projectduurtijd in functie van de
hulpmiddelenkracht. Merk op dat de afwijking voor alle vijf pakketten merkbaar toeneemt
naarmate de hulpmiddelen schaarser worden, dus naarmate RS stijgt.
RS 0.5 0.4 0.3 0.2 0.1
Acos Plus 1
SuperProject
CS Project
MS Project
Scitor PS
2.17
6.07
6.13
4.60
3.35
6.06
10.28
11.46
9.12
7.56
9.58
13.67
14.47
12.97
10.76
13.45
17.21
17.07
18.28
15.42
17.21
22.74
19.36
25.12
18.67
Figuur 2. 6: gemiddelde afwijking van duurtijd (%) voor verschillende waarden van RS
(N=120)
(Bron: Mellentien en Trautmann, 2001)
Wat betreft de hulpmiddelenfactor kon, opnieuw voor alle onderzochte pakketten, aangetoond
worden dat wanneer activiteiten slechts één hulpmiddel gebruiken, de gemiddelde afwijking
projectduur veel kleiner is dan in het geval van twee of meer hulpmiddelen.
Het aantal volgorderelaties (CNC) daarentegen beïnvloed de hulpmiddelenallocatie van geen enkel
onderzocht softwarepakket. Deze bevindingen zijn terug te vinden in figuur 2.7.
RF CNC
0.25 0.5 0.75 1 1.5 1.8 2.1
Acos Plus 1
Super Project
CS Project
MS Project
Scitor PS
5.69
6.27
8.17
8.37
6.30
11.34
16.98
15.80
16.53
13.06
11.39
18.70
16.63
16.80
13.34
10.35
14.02
14.20
14.37
11.90
8.92
13.81
13.15
13.47
10.63
9.5
13.84
13.67
13.90
10.85
10.67
14.33
14.27
14.68
11.98
Figuur 2. 7: gemiddelde afwijking van duurtijd (%) voor verschillende waarden van RF en CNC
(N=120)
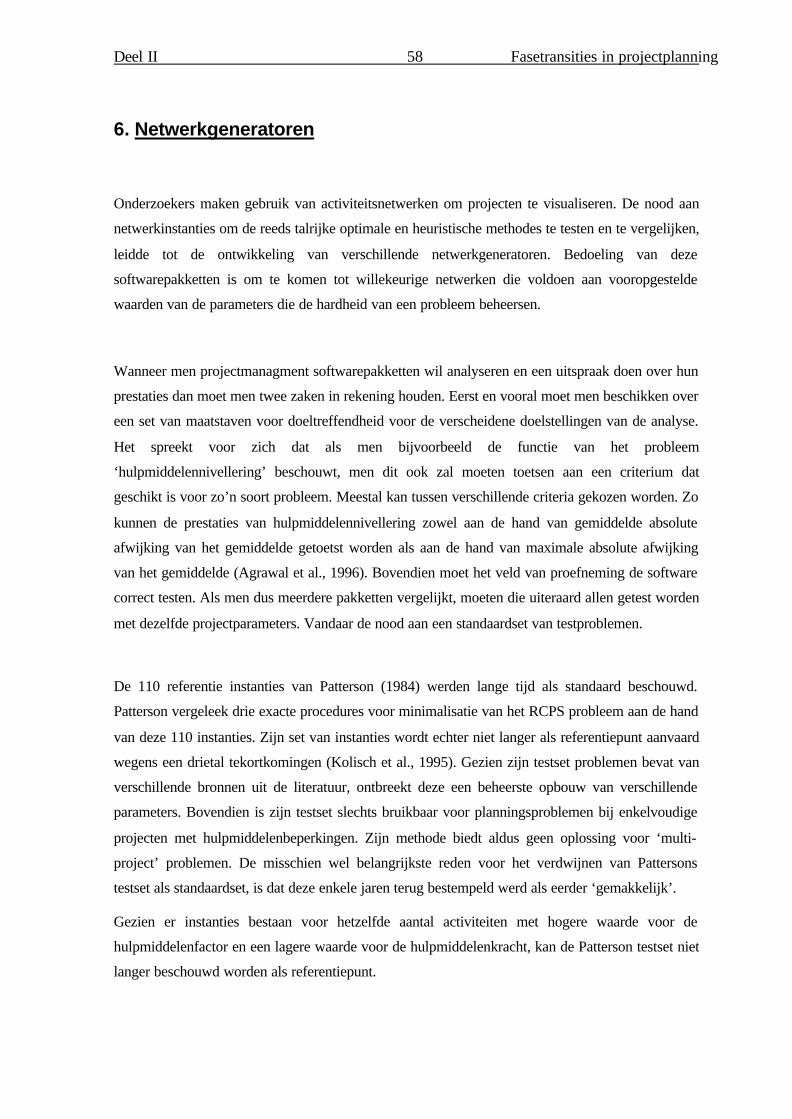
Deel II Fasetransities in projectplanning 58
6. Netwerkgeneratoren
Onderzoekers maken gebruik van activiteitsnetwerken om projecten te visualiseren. De nood aan
netwerkinstanties om de reeds talrijke optimale en heuristische methodes te testen en te vergelijken,
leidde tot de ontwikkeling van verschillende netwerkgeneratoren. Bedoeling van deze
softwarepakketten is om te komen tot willekeurige netwerken die voldoen aan vooropgestelde
waarden van de parameters die de hardheid van een probleem beheersen.
Wanneer men projectmanagment softwarepakketten wil analyseren en een uitspraak doen over hun
prestaties dan moet men twee zaken in rekening houden. Eerst en vooral moet men beschikken over
een set van maatstaven voor doeltreffendheid voor de verscheidene doelstellingen van de analyse.
Het spreekt voor zich dat als men bijvoorbeeld de functie van het probleem
‘hulpmiddelennivellering’ beschouwt, men dit ook zal moeten toetsen aan een criterium dat
geschikt is voor zo’n soort probleem. Meestal kan tussen verschillende criteria gekozen worden. Zo
kunnen de prestaties van hulpmiddelennivellering zowel aan de hand van gemiddelde absolute
afwijking van het gemiddelde getoetst worden als aan de hand van maximale absolute afwijking
van het gemiddelde (Agrawal et al., 1996). Bovendien moet het veld van proefneming de software
correct testen. Als men dus meerdere pakketten vergelijkt, moeten die uiteraard allen getest worden
met dezelfde projectparameters. Vandaar de nood aan een standaardset van testproblemen.
De 110 referentie instanties van Patterson (1984) werden lange tijd als standaard beschouwd.
Patterson vergeleek drie exacte procedures voor minimalisatie van het RCPS probleem aan de hand
van deze 110 instanties. Zijn set van instanties wordt echter niet langer als referentiepunt aanvaard
wegens een drietal tekortkomingen (Kolisch et al., 1995). Gezien zijn testset problemen bevat van
verschillende bronnen uit de literatuur, ontbreekt deze een beheerste opbouw van verschillende
parameters. Bovendien is zijn testset slechts bruikbaar voor planningsproblemen bij enkelvoudige
projecten met hulpmiddelenbeperkingen. Zijn methode biedt aldus geen oplossing voor ‘multi-
project’ problemen. De misschien wel belangrijkste reden voor het verdwijnen van Pattersons
testset als standaardset, is dat deze enkele jaren terug bestempeld werd als eerder ‘gemakkelijk’.
Gezien er instanties bestaan voor hetzelfde aantal activiteiten met hogere waarde voor de
hulpmiddelenfactor en een lagere waarde voor de hulpmiddelenkracht, kan de Patterson testset niet
langer beschouwd worden als referentiepunt.
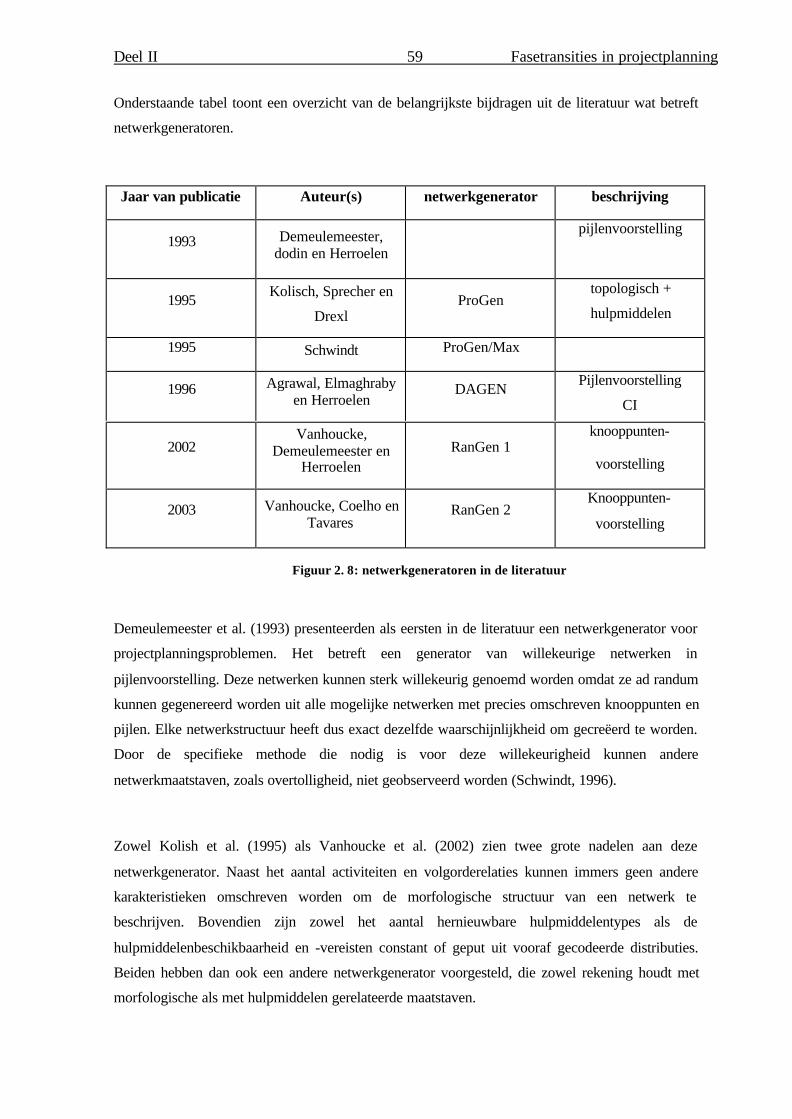
Deel II 59 Fasetransities in projectplanning
Onderstaande tabel toont een overzicht van de belangrijkste bijdragen uit de literatuur wat betreft
netwerkgeneratoren.
Jaar van publicatie Auteur(s) netwerkgenerator beschrijving
1993 Demeulemeester,dodin en Herroelen
pijlenvoorstelling
1995 Kolisch, Sprecher en
DrexlProGen
topologisch +
hulpmiddelen
1995 Schwindt ProGen/Max
1996 Agrawal, Elmaghrabyen Herroelen
DAGEN Pijlenvoorstelling
CI
2002Vanhoucke,
Demeulemeester enHerroelen
RanGen 1knooppunten-
voorstelling
2003 Vanhoucke, Coelho enTavares
RanGen 2Knooppunten-
voorstelling
Figuur 2. 8: netwerkgeneratoren in de literatuur
Demeulemeester et al. (1993) presenteerden als eersten in de literatuur een netwerkgenerator voor
projectplanningsproblemen. Het betreft een generator van willekeurige netwerken in
pijlenvoorstelling. Deze netwerken kunnen sterk willekeurig genoemd worden omdat ze ad randum
kunnen gegenereerd worden uit alle mogelijke netwerken met precies omschreven knooppunten en
pijlen. Elke netwerkstructuur heeft dus exact dezelfde waarschijnlijkheid om gecreëerd te worden.
Door de specifieke methode die nodig is voor deze willekeurigheid kunnen andere
netwerkmaatstaven, zoals overtolligheid, niet geobserveerd worden (Schwindt, 1996).
Zowel Kolish et al. (1995) als Vanhoucke et al. (2002) zien twee grote nadelen aan deze
netwerkgenerator. Naast het aantal activiteiten en volgorderelaties kunnen immers geen andere
karakteristieken omschreven worden om de morfologische structuur van een netwerk te
beschrijven. Bovendien zijn zowel het aantal hernieuwbare hulpmiddelentypes als de
hulpmiddelenbeschikbaarheid en -vereisten constant of geput uit vooraf gecodeerde distributies.
Beiden hebben dan ook een andere netwerkgenerator voorgesteld, die zowel rekening houdt met
morfologische als met hulpmiddelen gerelateerde maatstaven.
Deel II 60 Fasetransities in projectplanning
ProGen (Kolisch et al., 1995), een netwerkgenerator voor netwerken in knooppuntenvoorstelling, is
geschikt voor de meervoudige RCPS-problemen. Drie concepten, namelijk de morfologische
structuur, de hulpmiddelenfactor (RF) en de hulpmiddelenkracht (RS), worden in achting genomen.
Deze drie parameters laten toe gemakkelijk en moeilijk oplosbare problemen van elkaar te
onderscheiden. De gegenereerde instanties worden opgelost door middel van de geavanceerde
Branch&Bound procedure. De resultaten weerspiegelen de sterke impact van de gebruikte
parameters en de mogelijkheid om gemakkelijk en moeilijk oplosbare problemen van elkaar te
onderscheiden. Kolisch et al. (1995) ontdekten dat, in het algemeen, de belovende resultaten uit
vroegere gepubliceerde studies niet meer geldden. Zelfs de kleinste probleeminstanties blijken
onoplosbaar met de optimale oplossingsalgoritmes uit de literatuur.
Schwindt (1996) heeft deze netwerkgenerator uitgebreid tot ProGen/Max dat drie verschillende
types RCPS problemen aankan met minimale en maximale tijdspeling. Wat betreft het genereren
van gegevens en construeren van niet cyclische netwerkstructeren hanteert ProGen/Max dezelfde
methode als ProGen. Het genereren van vraag naar en beschikbaarheid van hulpmiddelen wordt
bijna zonder enige aanpassing overgenomen van ProGen.
Agrawal et al. (1996) legden de nadruk op de complexiteitsindex (CI) als meeteenheid voor de
netwerkcomplexiteit. Als gevolg ontwikkelden zij DAGEN, een netwerkgenerator gebaseerd op de
pijlenvoorstelling, waarbij de meeteenheid van complexiteit op voorhand dient ingesteld worden.
CI is een meeteenheid van de niet-conformiteit van een netwerk tot de serie/parallel topologie.
Agrawal et al. Geloven dat de CI een belangrijke parameter is die een dimensie toevoegt aan de
maatstaf voor de hardheid van een netwerk. Dit werd reeds bevestigd door De Reyck en Herroelen
(1993).
DAGEN volgt een methode in drie stappen (Herroelen en Demeulemeester, 1996). Eerst wordt het
zogenoemde skeletnetwerk gegenereerd voor de gespecifieerde complexiteitsindex (CI).
Vervolgens worden modules voor extra knopen en pijlen (activiteiten en volgorderelaties)
achtereenvolgens in het skelet of in het laatste netwerk gevoegd zodat de CI van het resulterende
netwerk ongewijzigd blijft. Uiteindelijk worden dan de waarden voor de verschillende parameters
toegevoegd, zoals duurtijd en hernieuwbare of niet hernieuwbare hulpmiddelen.
Demeulemeester et al. (2002) menen dat zowel ProGen, ProGen/Max als DAGEN niet sterk
willekeurig kunnen worden genoemd. Deze netwerkgeneratoren garanderen immers niet dat de
Deel II 61 Fasetransities in projectplanning
morfologische structuur een willekeurige selectie betreft van de ruimte van alle mogelijke
netwerken die voldoen aan de vooraf omschreven inputparameters. Zij stelden dan ook een nieuwe
knooppunt netwerkgenerator voor, namelijk RanGen 1. Deze bevat een betrouwbare set van
complexiteitsmaatstaven (CNC), die in sterke relatie staan met de hardheid van verschillende
planningsproblemen. Deze generator garandeert netwerken met vooraf bepaalde ordekracht (OS).
Ze slaagden er bovendien in een willekeurige knooppuntnetwerkgenerator te creëren met vooraf
gespecificeerde waarden voor de complexiteitsindex (CI).
Vanhoucke et al. (2002) ontwikkelden RanGen 2, gebaseerd op acht complexiteitsmaatstaven die
de morfologische structuur van een netwerk beschrijven. Zes daarvan werden ontleend aan Tavares
et al; (1999), maar werden deels of volledig aangepast. Het betreft de volgende maatstaven:
I1 : probleemgrootte Aantal activiteiten (n)
I2 : serie/parallel indicator Meet de dichtheid van een netwerk tot eenserie/parallel grafiek voor knooppuntnetwerken
I3 : activiteitsdistributie Beschrijving verdeling van activiteitendoorheen netwerk
I4 : korte, directe voorrangsrelatie Meet het aantal korte, onmiddellijk voorgaanderelaties (l = 1)
I5 : lange, direct voorrangsrelatie Meet het aantal lange, onmiddellijk voorgaanderelatie (l > 1)
I6 : morfologische slack Bepaalt morfologische slack voor elke activiteit
OS : Ordekracht Zie 1.2.
CNC : coëfficiënt voor netwerkcomplexiteit Zie 1.1.
Het ontwikkelingsproces van RanGen 1 steunt op vooraf gespecificeerde waarden voor I1en OS. Voor RanGen 2 geldt dit voor I1 en I 2. Beide netwerkgeneratoren volgen dezelfdelogica, namelijk het verwijderen van volgorderelaties om netwerken te genereren. Hetfundamentele verschil is dat RanGen 2, wanneer reeds een netwerk gevonden werd metvooropgestelde waarden voor I1 en I 2, deze verwijdering nog een tijdje blijft doorvoerenwaardoor netwerken gegenereerd worden met zelfde waarden voor I1 en I 2 maar met eenandere morfologische structuur.
Deel III Onderzoek62
Bedoeling hier is de prestaties van enkele prioriteitsregels, zowel enkele opgenomen in het
projectmanagement softwarepakket Primavera Project Planner 3.1 als enkele sterk aanbevolen in de
literatuur, te onderzoeken. Bovendien zal ook de impact van de zes eerder besproken
morfologische indicatoren nagegaan worden.
In een eerste sectie wordt een beschrijving gegeven van de werking van en opties in Primavera
Project Planner 3.1. Onder meer de opties ingeval van hulpmiddelenbeperkingen en de
verschillende aangeboden prioriteitsregels worden besproken. Vooreerst werd een testset van 3040
problemen gegenereerd met behulp van de netwerkgenerator RanGen 2. De gebruikte
parametersettings worden weergegeven in sectie 2. De geprogrammeerde prioriteitsregels werden
vervolgens toegepast om de gegenereerde probleeminstanties op te lossen. De optimale oplossing
werd berekend aan de hand van de branch&Bound-procedure van Demeulemeester en Herroelen
(1992) De normale en maximale hulpmiddelenbeschikbaarheid dient vooraf ingesteld te worden.
Dit wordt voorgesteld door het interval k, waarbij k=0 de normale beschikbaarheid betreft en k=1
de maximale. Dit zal gedaan worden voor verschillende waarden om de invloed daarvan na te gaan.
Bovendien wordt ook de impact nagegaan van de hulpmiddelenrestricitiviteit.
Voor het onderzoek werd een Intel PC Pentium II gebruikt, onder het operatiesysteem MS
Windows 1998.
IV. ONDERZOEK
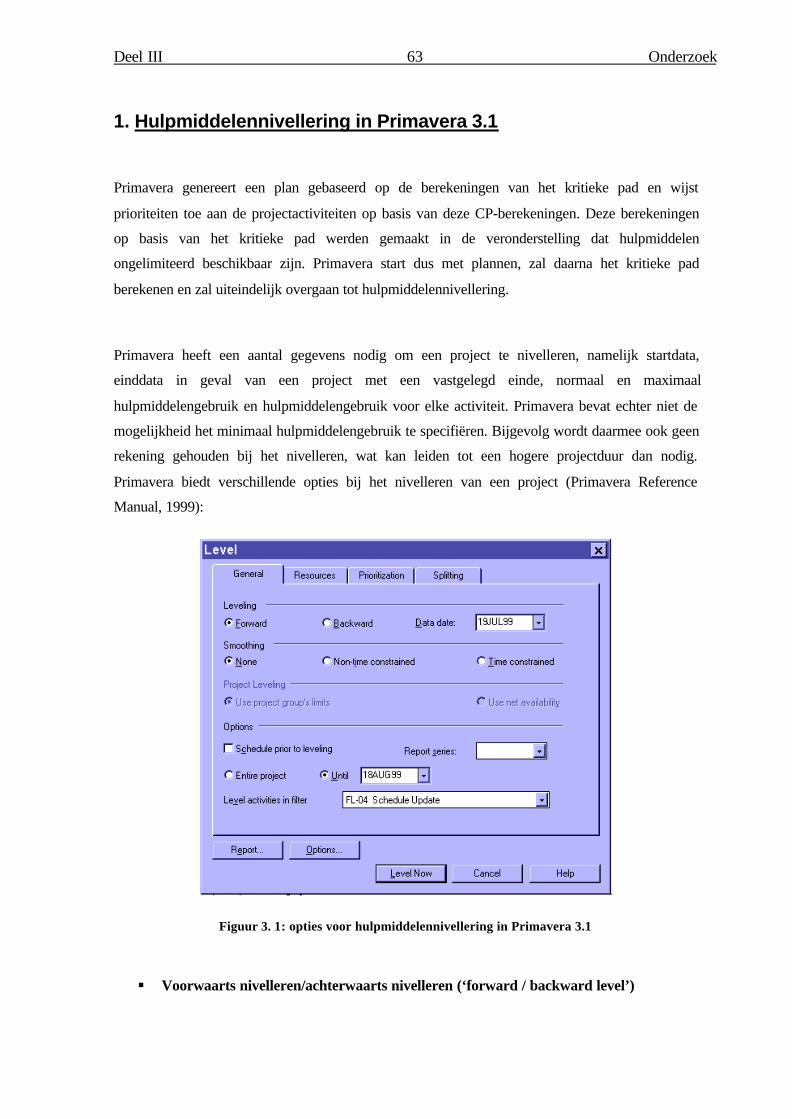
Deel III Onderzoek63
1. Hulpmiddelennivellering in Primavera 3.1
Primavera genereert een plan gebaseerd op de berekeningen van het kritieke pad en wijst
prioriteiten toe aan de projectactiviteiten op basis van deze CP-berekeningen. Deze berekeningen
op basis van het kritieke pad werden gemaakt in de veronderstelling dat hulpmiddelen
ongelimiteerd beschikbaar zijn. Primavera start dus met plannen, zal daarna het kritieke pad
berekenen en zal uiteindelijk overgaan tot hulpmiddelennivellering.
Primavera heeft een aantal gegevens nodig om een project te nivelleren, namelijk startdata,
einddata in geval van een project met een vastgelegd einde, normaal en maximaal
hulpmiddelengebruik en hulpmiddelengebruik voor elke activiteit. Primavera bevat echter niet de
mogelijkheid het minimaal hulpmiddelengebruik te specifiëren. Bijgevolg wordt daarmee ook geen
rekening gehouden bij het nivelleren, wat kan leiden tot een hogere projectduur dan nodig.
Primavera biedt verschillende opties bij het nivelleren van een project (Primavera Reference
Manual, 1999):
Figuur 3. 1: opties voor hulpmiddelennivellering in Primavera 3.1
§ Voorwaarts nivelleren/achterwaarts nivelleren (‘forward / backward level’)
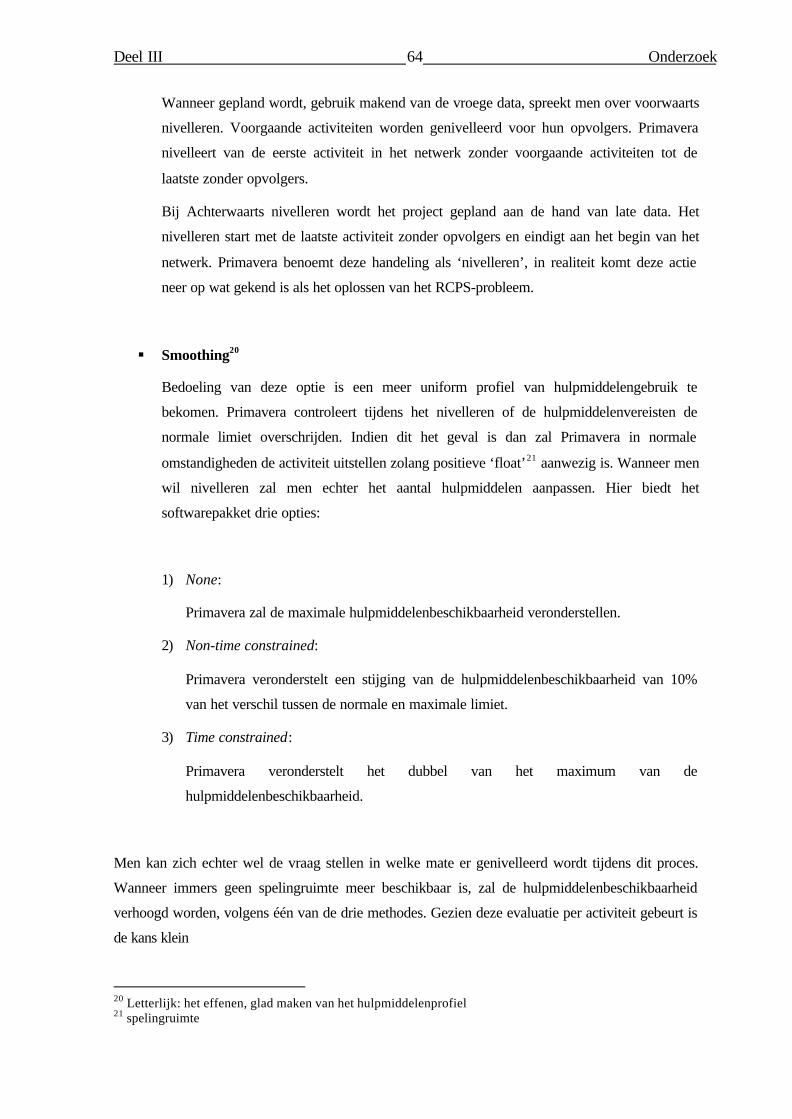
Deel III 64 Onderzoek
Wanneer gepland wordt, gebruik makend van de vroege data, spreekt men over voorwaarts
nivelleren. Voorgaande activiteiten worden genivelleerd voor hun opvolgers. Primavera
nivelleert van de eerste activiteit in het netwerk zonder voorgaande activiteiten tot de
laatste zonder opvolgers.
Bij Achterwaarts nivelleren wordt het project gepland aan de hand van late data. Het
nivelleren start met de laatste activiteit zonder opvolgers en eindigt aan het begin van het
netwerk. Primavera benoemt deze handeling als ‘nivelleren’, in realiteit komt deze actie
neer op wat gekend is als het oplossen van het RCPS-probleem.
§ Smoothing20
Bedoeling van deze optie is een meer uniform profiel van hulpmiddelengebruik te
bekomen. Primavera controleert tijdens het nivelleren of de hulpmiddelenvereisten de
normale limiet overschrijden. Indien dit het geval is dan zal Primavera in normale
omstandigheden de activiteit uitstellen zolang positieve ‘float’21 aanwezig is. Wanneer men
wil nivelleren zal men echter het aantal hulpmiddelen aanpassen. Hier biedt het
softwarepakket drie opties:
1) None:
Primavera zal de maximale hulpmiddelenbeschikbaarheid veronderstellen.
2) Non-time constrained:
Primavera veronderstelt een stijging van de hulpmiddelenbeschikbaarheid van 10%
van het verschil tussen de normale en maximale limiet.
3) Time constrained:
Primavera veronderstelt het dubbel van het maximum van de
hulpmiddelenbeschikbaarheid.
Men kan zich echter wel de vraag stellen in welke mate er genivelleerd wordt tijdens dit proces.
Wanneer immers geen spelingruimte meer beschikbaar is, zal de hulpmiddelenbeschikbaarheid
verhoogd worden, volgens één van de drie methodes. Gezien deze evaluatie per activiteit gebeurt is
de kans klein
20 Letterlijk: het effenen, glad maken van het hulpmiddelenprofiel21 spelingruimte
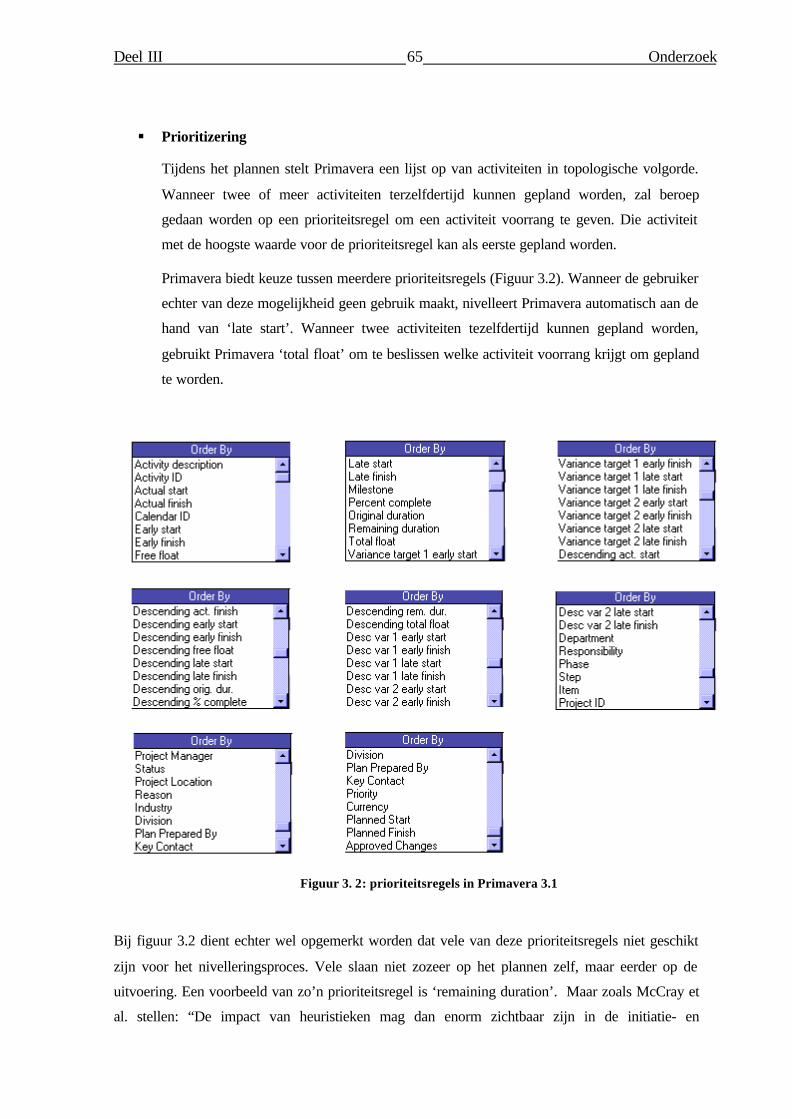
Deel III 65 Onderzoek
§ Prioritizering
Tijdens het plannen stelt Primavera een lijst op van activiteiten in topologische volgorde.
Wanneer twee of meer activiteiten terzelfdertijd kunnen gepland worden, zal beroep
gedaan worden op een prioriteitsregel om een activiteit voorrang te geven. Die activiteit
met de hoogste waarde voor de prioriteitsregel kan als eerste gepland worden.
Primavera biedt keuze tussen meerdere prioriteitsregels (Figuur 3.2). Wanneer de gebruiker
echter van deze mogelijkheid geen gebruik maakt, nivelleert Primavera automatisch aan de
hand van ‘late start’. Wanneer twee activiteiten tezelfdertijd kunnen gepland worden,
gebruikt Primavera ‘total float’ om te beslissen welke activiteit voorrang krijgt om gepland
te worden.
Figuur 3. 2: prioriteitsregels in Primavera 3.1
Bij figuur 3.2 dient echter wel opgemerkt worden dat vele van deze prioriteitsregels niet geschikt
zijn voor het nivelleringsproces. Vele slaan niet zozeer op het plannen zelf, maar eerder op de
uitvoering. Een voorbeeld van zo’n prioriteitsregel is ‘remaining duration’. Maar zoals McCray et
al. stellen: “De impact van heuristieken mag dan enorm zichtbaar zijn in de initiatie- en
Deel III 66 Onderzoek
planningsfase, de positieve invloed van deze heuristieken mag niet onderschat worden in de
uitvoerings-, controle- en eindfase”.
Tijdens het plannen van hulpmiddelen plan Primavera enkel activiteiten wanneer de
hulpmiddelenvereisten kunnen voldaan worden. Om dit te bereiken is het mogelijk activiteiten uit
te stellen of naar voren te brengen. Dit proces gebeurt door middel van de voorwaartse procedure.
De gebruiker kan echter ook opteren voor de achterwaartse methode. Primavera maakt gebruik van
een algoritme om dit proces door te voeren.
In een eerste stap worden de activiteiten zonder conflicten gesorteerd. Indien deze tegelijkertijd
klaar zijn om gepland te worden, wordt een prioriteitsregel toegepast. Wanneer deze laatste nog
steeds een gelijke situatie oplevert, geeft Primavera voorrang aan de hand van het
activiteitsnummer. Initieel worden de normale hulpmiddelen beschouwd (stap 2). Hulpmiddelen
die gebruikt worden door de bezige activiteiten worden uit de beschikbare hulpmiddelenpool
gehaald. Vervolgens wordt gecontroleerd of er voldoende reserves hulpmiddelen aanwezig zijn
voor de volledige duur van de activiteiten (stap 3). Indien dit het geval is, wordt de activiteit
gepland en wordt terug overgegaan naar de eerste stap van het algoritme. Zoniet wordt nagegaan of
de activiteit enige spelingruimte kent. Zo kan de start van de activiteit immers uitgesteld worden
met één werkperiode, waarna de hulpmiddelenbeschikbaarheid opnieuw dient nagegaan worden Is
die voldoende kan terug overgegaan worden naar stap 1. Is dit niet het geval wordt stap 4 herhaald.
Wanneer de activiteiten geen of niet voldoende spelingruimte bevatten zal men overgaan tot het
verhogen van de van de hulpmiddelenbeschikbaarheid. Hoe hoog die wordt ingesteld hangt af van
de gekozen ‘smoothing’ optie. Daarna kan terug overgegaan worden naar stap 3. Indien stap 5
bereikt wordt en deze reeds eerder bereikt werd wordt onmiddellijk overgegaan tot stap 6. Het
blijkt niet mogelijk te zijn de activiteit te plannen binnen de spelingruimte, zelfs niet met maximale
hulpmiddelenbeschikbaarheid. De activiteit wordt dus uitgesteld voorbij de spelingruimte, vanaf
het moment dat voldoende hulpmiddelen voorhanden zijn. Wanneer echter nooit voldoende
hulpmiddelen gevonden werden, wordt de activiteit gepland op de oorspronkelijke vroege
startdatum en komt een waarschuwingsboodschap met de melding dat de activiteit niet kon gepland
worden.
Kathab en Søyland (1998) toonden aan dat de standaard procedure gevolgd door Primavera bij het
nivelleren van projectactiviteiten in het geval van beperkte hulpmiddelen niet steeds de beste
oplossing biedt. Zij onderzochten dit aan de hand van vier bouwprojecten, elk met een
Deel III 67 Onderzoek
verschillende grootte, complexiteit en hulpmiddelenbeschikbaarheid. Elk van de projecten werd
genivelleerd op basis van ‘algemeen arbeidsinspanning’.
Als resultaat vonden zij dat hun gebruikte prioriteitsregel significant beter scoorde dan de op CPM-
gebaseerde standaard prioriteitsregel uit Primavera. Voor één van hun projecten, met een
hulpmiddelenniveau van vijf man, was het met hun prioriteitsregel bijvoorbeeld mogelijk het
project 18 dagen eerder te voltooien dan met de standaard prioriteitsregel uit Primavera. Voor een
hulpmiddelenniveau van zes man bedroeg dit 30 dagen.
Kathab en Søyland concludeerden dan ook dat projecten niet zouden mogen genivelleerd worden
op basis van de standaard aangeboden prioriteitsregels in Primavera. De resultaten hangen sterk af
van de gekozen prioriteitsregels en bijgevolg van de ervaring van de projectplanner
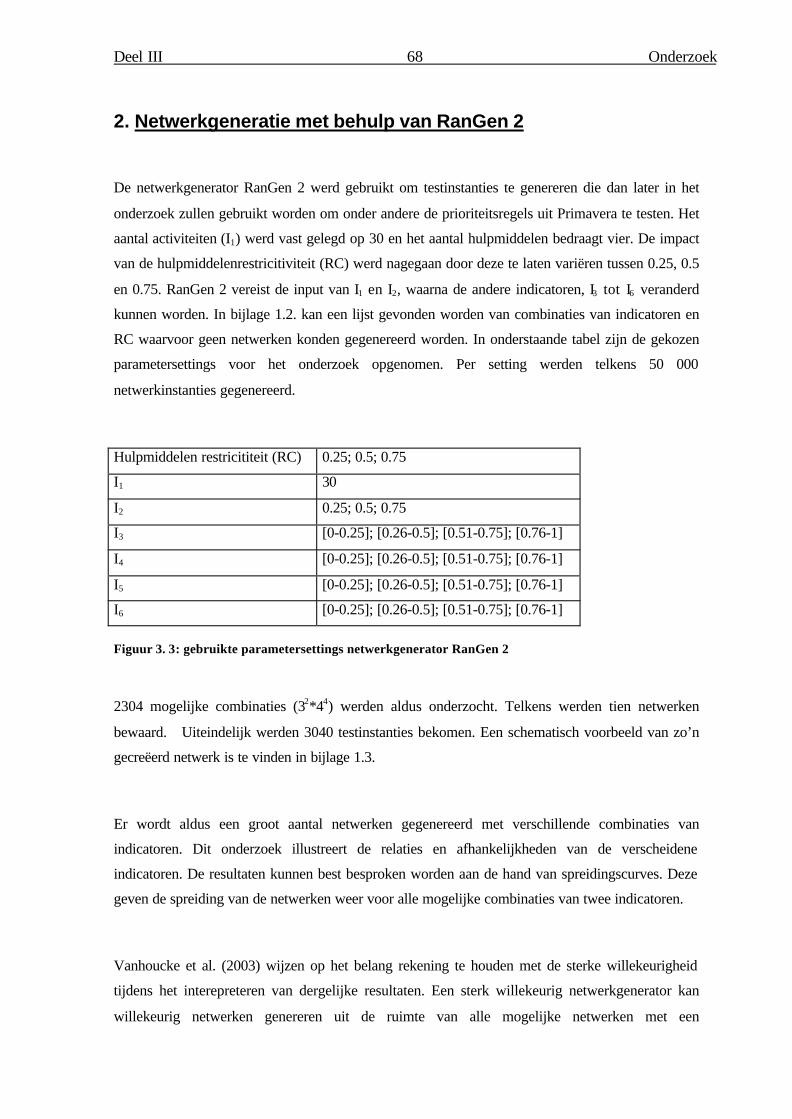
Deel III Onderzoek68
2. Netwerkgeneratie met behulp van RanGen 2
De netwerkgenerator RanGen 2 werd gebruikt om testinstanties te genereren die dan later in het
onderzoek zullen gebruikt worden om onder andere de prioriteitsregels uit Primavera te testen. Het
aantal activiteiten (I1) werd vast gelegd op 30 en het aantal hulpmiddelen bedraagt vier. De impact
van de hulpmiddelenrestricitiviteit (RC) werd nagegaan door deze te laten variëren tussen 0.25, 0.5
en 0.75. RanGen 2 vereist de input van I1 en I2, waarna de andere indicatoren, I3 tot I6 veranderd
kunnen worden. In bijlage 1.2. kan een lijst gevonden worden van combinaties van indicatoren en
RC waarvoor geen netwerken konden gegenereerd worden. In onderstaande tabel zijn de gekozen
parametersettings voor het onderzoek opgenomen. Per setting werden telkens 50 000
netwerkinstanties gegenereerd.
Hulpmiddelen restricititeit (RC) 0.25; 0.5; 0.75
I1 30
I2 0.25; 0.5; 0.75
I3 [0-0.25]; [0.26-0.5]; [0.51-0.75]; [0.76-1]
I4 [0-0.25]; [0.26-0.5]; [0.51-0.75]; [0.76-1]
I5 [0-0.25]; [0.26-0.5]; [0.51-0.75]; [0.76-1]
I6 [0-0.25]; [0.26-0.5]; [0.51-0.75]; [0.76-1]
Figuur 3. 3: gebruikte parametersettings netwerkgenerator RanGen 2
2304 mogelijke combinaties (32*44) werden aldus onderzocht. Telkens werden tien netwerken
bewaard. Uiteindelijk werden 3040 testinstanties bekomen. Een schematisch voorbeeld van zo’n
gecreëerd netwerk is te vinden in bijlage 1.3.
Er wordt aldus een groot aantal netwerken gegenereerd met verschillende combinaties van
indicatoren. Dit onderzoek illustreert de relaties en afhankelijkheden van de verscheidene
indicatoren. De resultaten kunnen best besproken worden aan de hand van spreidingscurves. Deze
geven de spreiding van de netwerken weer voor alle mogelijke combinaties van twee indicatoren.
Vanhoucke et al. (2003) wijzen op het belang rekening te houden met de sterke willekeurigheid
tijdens het interepreteren van dergelijke resultaten. Een sterk willekeurig netwerkgenerator kan
willekeurig netwerken genereren uit de ruimte van alle mogelijke netwerken met een
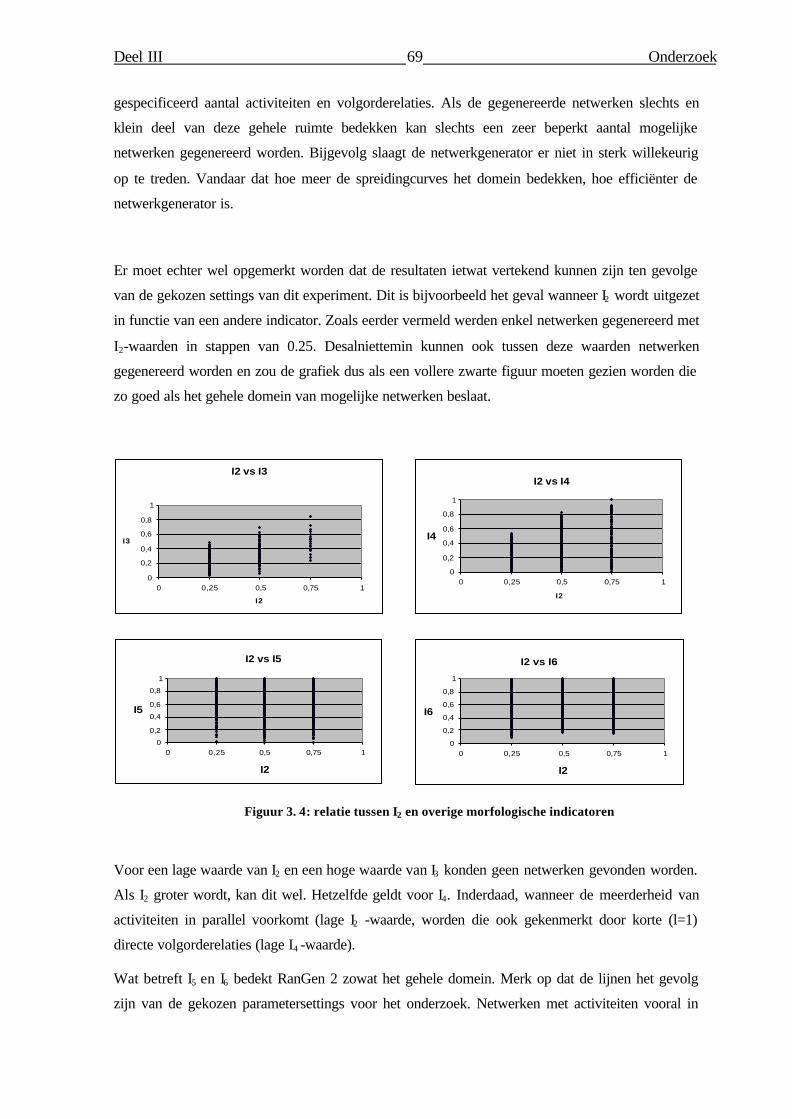
Deel III 69 Onderzoek
gespecificeerd aantal activiteiten en volgorderelaties. Als de gegenereerde netwerken slechts en
klein deel van deze gehele ruimte bedekken kan slechts een zeer beperkt aantal mogelijke
netwerken gegenereerd worden. Bijgevolg slaagt de netwerkgenerator er niet in sterk willekeurig
op te treden. Vandaar dat hoe meer de spreidingcurves het domein bedekken, hoe efficiënter de
netwerkgenerator is.
Er moet echter wel opgemerkt worden dat de resultaten ietwat vertekend kunnen zijn ten gevolge
van de gekozen settings van dit experiment. Dit is bijvoorbeeld het geval wanneer I2 wordt uitgezet
in functie van een andere indicator. Zoals eerder vermeld werden enkel netwerken gegenereerd met
I2-waarden in stappen van 0.25. Desalniettemin kunnen ook tussen deze waarden netwerken
gegenereerd worden en zou de grafiek dus als een vollere zwarte figuur moeten gezien worden die
zo goed als het gehele domein van mogelijke netwerken beslaat.
I2 vs I3
0
0,2
0,4
0,6
0,8
1
0 0,25 0,5 0,75 1
I2
I3
I2 vs I4
0
0,2
0,4
0,6
0,8
1
0 0,25 0,5 0,75 1
I2
I4
I2 vs I5
0
0,2
0,4
0,6
0,8
1
0 0,25 0,5 0,75 1
I2
I5
I2 vs I6
0
0,2
0,4
0,6
0,8
1
0 0,25 0,5 0,75 1
I2
I6
Figuur 3. 4: relatie tussen I2 en overige morfologische indicatoren
Voor een lage waarde van I2 en een hoge waarde van I3 konden geen netwerken gevonden worden.
Als I2 groter wordt, kan dit wel. Hetzelfde geldt voor I4. Inderdaad, wanneer de meerderheid van
activiteiten in parallel voorkomt (lage I2 -waarde, worden die ook gekenmerkt door korte (l=1)
directe volgorderelaties (lage I4 -waarde).
Wat betreft I5 en I6 bedekt RanGen 2 zowat het gehele domein. Merk op dat de lijnen het gevolg
zijn van de gekozen parametersettings voor het onderzoek. Netwerken met activiteiten vooral in
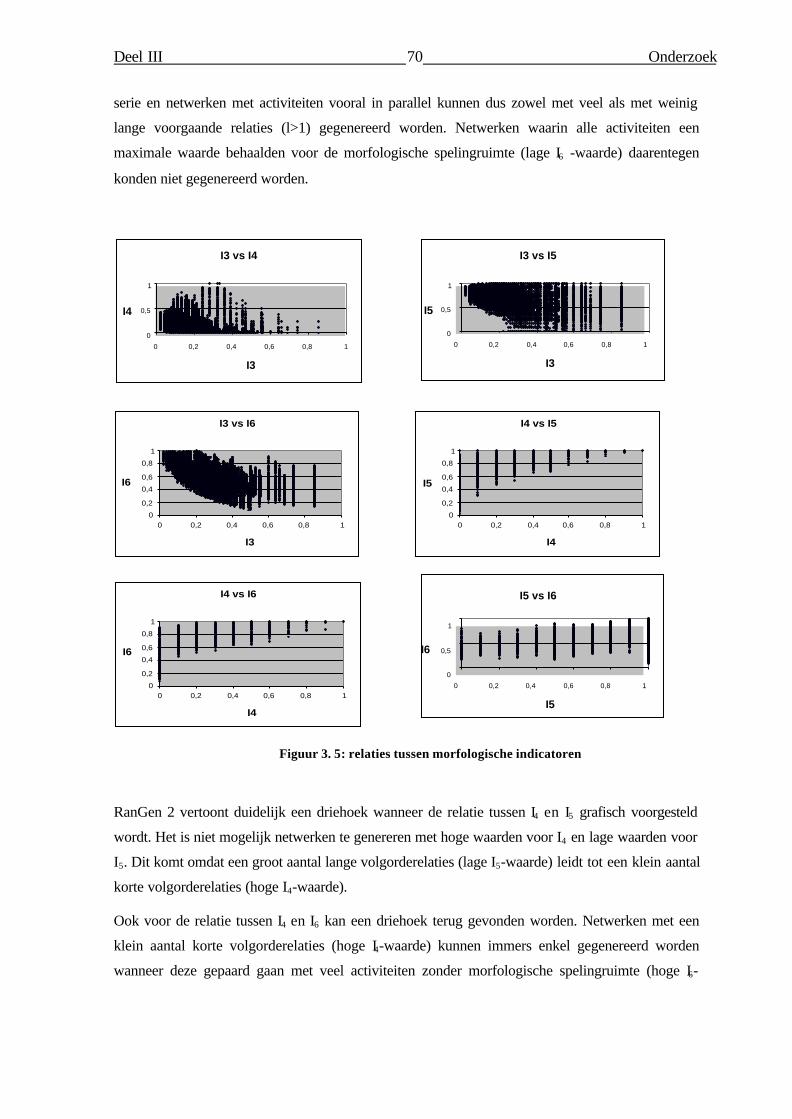
Deel III 70 Onderzoek
serie en netwerken met activiteiten vooral in parallel kunnen dus zowel met veel als met weinig
lange voorgaande relaties (l>1) gegenereerd worden. Netwerken waarin alle activiteiten een
maximale waarde behaalden voor de morfologische spelingruimte (lage I6 -waarde) daarentegen
konden niet gegenereerd worden.
I3 vs I4
0
0,5
1
0 0,2 0,4 0,6 0,8 1
I3
I4
I3 vs I5
0
0,5
1
0 0,2 0,4 0,6 0,8 1
I3
I5
I3 vs I6
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
I3
I6
I4 vs I5
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
I4
I5
I4 vs I6
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
I4
I6
I5 vs I6
0
0,5
1
0 0,2 0,4 0,6 0,8 1
I5
I6
Figuur 3. 5: relaties tussen morfologische indicatoren
RanGen 2 vertoont duidelijk een driehoek wanneer de relatie tussen I4 en I5 grafisch voorgesteld
wordt. Het is niet mogelijk netwerken te genereren met hoge waarden voor I4 en lage waarden voor
I5. Dit komt omdat een groot aantal lange volgorderelaties (lage I5-waarde) leidt tot een klein aantal
korte volgorderelaties (hoge I4-waarde).
Ook voor de relatie tussen I4 en I6 kan een driehoek terug gevonden worden. Netwerken met een
klein aantal korte volgorderelaties (hoge I4-waarde) kunnen immers enkel gegenereerd worden
wanneer deze gepaard gaan met veel activiteiten zonder morfologische spelingruimte (hoge I6-

Deel III 71 Onderzoek
waarde). Wat betreft de relatie tussen I5 en I6, kunnen we zien dat RanGen 2 bijna het gehele
domein van mogelijke netwerken bedekt.
Merk echter op dat de netwerken voor de drie laatste grafieken slechts in stappen van 0.1 uitgezet
werden. Deze grafieken dienden dus als meer doorlopend beschouwd te worden.
Deel III Onderzoek72
3. De onderzochte prioriteitsregels
Eerder werd reeds opgemerkt dat vele beschikbare prioriteitsregels uit Primavera niet geschikt zijn
voor het RCPS-probleem. Vele dienen ook ingezet te worden tijdens uitvoering en controle van het
project. Om deze reden werden enkel de meest relevante prioriteitsregels uit dit softwarepakket
geselecteerd. Ze werden vervolgens aangevuld door enkele prioriteitsregels waarvan we uit de
literatuur weten dat ze bij de best presterende behoren. In totaal werden 11 verschillende
prioriteitsregels toegepast om de activiteiten te plannen:
P1. : laagste duurtijd eerst
P2. : hoogste duurtijd eerst
P3. : hoogste hulpmiddelenvraag eerst
P4. : laagste hulpmiddelenvraag eerst
P5. : laatste starttijd eerst
P6. : laatste eindtijd eerst
P7. : willekeurig
P8. : laagste totale spelingruimte (‘float’) eerst
P9. : meest totale (direct+indirect) voorafgaande activiteiten eerst
P10. : meest totale direct voorafgaande activiteiten eerst
P11. : grootste gewicht van positie in rangschikking eerst
De werking en voorbeelden van prioriteitsregels tijdens het plannen werden reeds uitvoerig
beschreven in deel II. Ik verwijs dan ook graag naar dit deel voor enkele analyses van
prioriteitsregels voorgesteld in de literatuur. Voor een overzicht van de meest gebruikte en beste
prioriteitsregels voorgesteld in de literatuur verwijs ik naar Kolisch (1996).
Vooreerst werden de algemene prestaties van de elf prioriteitsregels nagegaan. Zowel het aantal
bereikte oplossingen en de gemiddelde afwijking van de optimale oplossing werden onderzocht
wanneer de hulpmiddelenbeschikbaarheid ingesteld wordt op maximaal ingeval van conflict (none)
en met k tussen 0 en 1. Telkens wordt een onderscheid gemaakt tussen de prestatie van de
prioriteitsregels voor de voorwaartse procedure en de achterwaartse (FH en BH). De resultaten
blijken uit onderstaande grafieken.
Deel III 73 Onderzoek
Uit deze grafieken blijkt dat doorgaans de voorwaartse prioriteitsregels (FH) beter scoren dan de
achterwaartse. Slechts drie prioriteitsregels vormen daar een uitzondering op. De zevende
prioriteitsregel die gebaseerd is op willekeurigheid levert geen groot verschil tussen beide
procedures. De negende en elfde prioriteitsregel scoren echter klaarblijkelijk beter voor de
achterwaartse procedure.
In bijlage 1.4 is een rangschikking van de prestaties van de 11 heuristieken terug te vinden. Daaruit
blijkt dat, algemeen beschouwd, de prioriteitsregel ‘laagste duurtijd eerst’ de meest optimale is.
Deze levert zowel voor de voorwaartse als achterwaartse prioriteitsregel de kleinste afwijking van
de optimale oplossing, berekend aan de hand van de Branch&Bound procedure van
Demeulemeester en Herroelen (1992). Deze prioriteitsregel bereikte voor 861 van de 3040 een
optimale oplossing voor de voorwaartste procedure. Wat betreft de achterwaartse komt deze
prioriteitsregel slechts op de tweede plaats. Daar neemt prioriteitsregel 9, gebaseerd op het totaal
aantal volgorderelaties, de eerste plaats in. Plannen aan de hand van de hoogste duurtijd eerst blijkt
in voor geen enkel geval een goede keuze te zijn.
Deel III 74 Onderzoek
4. Impact van de morfologische indicatoren
Zoals eerder gezien heeft de morfologische structuur van een netwerk invloed op de
oplossingsmogelijkheden van het RCPS-probleem. In dit onderzoek werd de impact van vijf
morfologische indicatoren en de hulpmiddelenrestricitiviteit onderzocht.
Voor elke indicator werd telkens de gemiddelde afwijking van het optimum en het percentage
optimale oplossingen onderzocht voor de verschillende waarden van die indicator. De
cijfergegevens bevinden zich in bijlage.
Voor k=[0,1] en optie ‘none’, bereikt I2 percentueel het meest aantal oplossingen wanneer die
ingesteld is op 0.25, zowel voor de voorwaartse als de achterwaartse procedure. Hetzelfde geldt
voor de gemiddelde afwijking van het optimum. Hoe groter de waarde van I2, hoe minder optimale
oplossingen gevonden werden en hoe groter de afwijking van het optimum wordt.
I3 bereikt eveneens het meest aantal optimale oplossingen en de kleinste gemiddelde afwijking van
het optimum voor een kleine waarde (<0.25), zowel voor de voorwaartse als de achterwaartse
procedure. Dezelfde conclusies kunnen getrokken voor I4en I6. I5 daarentegen biedt percentueel het
meest aantal optimale oplossingen voor waarden binnen het interval [0.26,0.5] wat betreft de
voorwaartse procedure en voor waarden binnen het interval [0.51,0.75] wat betreft de
achterwaartse. Ook voor de gemiddelde afwijking van het optimum bekomt I5 de beste oplossing
wanneer die zich tussen 0.25 en 0.5 bevindt.
In tegenstelling tot I2 kent de hulpmiddelenrestricitiviteit de kleinst gemiddelde afwijking van het
optimum voor een hoge waarde (0.75), dit voor beide procedures. Het meest aantal optimale
oplossing voor de voorwaartse procedure worden eveneens gevonden wanneer RC=0.75. Voor de
achterwaartse procedure is dit echter het geval wanneer RC=0.25.
In een tweede fase van het onderzoek werd de impact van k, de parameter die de
hulpmiddelenbeschikbaarheid bepaalt, nagegaan. De gemiddelde afwijking van het optimum werd
nagegaan voor zowel een lage waarde voor k (<0.5) als een hoge waarde voor k (>0.5). De
cijfergegevens zijn terug te vinden in bijlage.
De hulpmiddelenrestrictiviteit presteert wederom het best voor een hoge waarde, 0.75. Voor de
voorwaartse prioriteitsregel werd daar een gemiddelde afwijking van het optimum gevonden van
13.48. Voor de achterwaartse is die gelijk aan 13.02. Het valt op dat deze cijfers serieus hoger
Deel III 75 Onderzoek
liggen dan het geval was voor k ∈[0,1]. Dit is een logisch resultaat. Hoe minder hulpmiddelen
beschikbaar, hoe moeilijker het plannen en hoe groter de projectduur. De gemiddelde afwijking van
het optimum is dan ook voor alle indicatoren hoger dan de vorige bekomen resultaten voor k
∈[0,1].
I2 wordt duidelijk beïnvloed door de hulpmiddelenbeschikbaarheid. Wanneer weinig hulpmiddelen
beschikbaar zijn, biedt deze parameter de beste oplossing voor een hoge waarde, 0.75. Het
omgekeerde geldt wanneer veel hulpmiddelen beschikbaar zijn. Dan is de gemiddelde afwijking
van het optimum het kleinst wanneer I2 waarde 0.25 aanneemt.
I3 toont toch een verschil met wat aangetoond kon worden voor het algemeen beeld. Daar werden
de beste resultaten behaald voor I3<0.25. Wanneer k een grote waarde heeft, dus hoger dan 0.5,
bereikt I3 de kleinste gemiddelde afwijking van het gemiddelde wanneer die tussen 0.51 en 0.75
bedraagt.
In overeenstemming met het algemeen beeld (k ∈ [0,1]) bereikt I4 de kleinste gemiddelde afwijking
van het optimum voor waarden lager dan 0.25.Voor een lage waarde van k is er een onderscheid
tussen de prestaties voor de voorwaartse en achterwaartse prioriteitsregels. De voorwaartse
presteren best voor een waarde van I4 groter dan 0.75, de achterwaartse voor waarden van I4 tussen
0.5 en 0.75.
Eveneens in overeenstemming met de resultaten voor een waarde van k tussen 0 en 1, bereikt I5 de
kleinste gemiddelde afwijking van het optimum voor een waarde van I5 tussen 0.25 en 0.5 voor
hoge waarden van k. Voor lage waarden van k is dit het geval voor waarden van I5 tussen 0.25 en
0.5.
I tenslotte presteert goed voor hoge waarden (>0.75) wanneer veel hulpmiddelen beschikbaar zijn
en voor lage waarden wanneer weinig hulpmiddelen voorhanden zijn.
Voor elke van de indicatoren dient opgemerkt te worden dat de gemiddelde afwijking van het
optimum een stuk hoger ligt wanneer weinig hulpmiddelen beschikbaar zijn dan wanneer die
overvloedig aanwezig zijn.
76 Besluit
Projectmanagement is geen recent fenomeen, doch gekenmerkt door een enorme evolutie. Reeds in
de jaren 1950 werden methodes ontwikkeld om planning van projecten te ondersteunen zoals
PERT en de methode van het kritieke pad. Deze laatste is een techniek waarbij het langst mogelijke
pad in het activiteitennetwerk gezocht wordt. Deze activiteiten worden kritisch genoemd en kennen
geen spelingruimte. Zij vormen samen aldus de kortst mogelijke projectduur. PERT daarentegen
veronderstelt onzekere tijdsduur van activiteiten en zal dus aan de hand van een drietijdenschatting,
namelijk de pessimistische, verwachte, en optimistische tijdsduur, een planning opstellen. Nadeel
van deze twee methodes is echter dat beide uitgaan van onbeperkte hulpmiddelen, wat nogal vaak
strookt met de realiteit. Vandaar dat steeds meer aandacht uitgaat naar wat men in de literatuur
benoemt als RCPSP22, het probleem van plannen onder hulpmiddelenbeperkingen.
RCPS houdt het rangschikken van projectactiviteiten in, rekening houdend met volgorde- en
hulpmiddelenbeperkingen, teneinde het vooraf bepaalde doel te bereiken, wat nogal vaak een zo
kort mogelijke projectduur is. Het klassieke RCPS-probleem is gekenmerkt door een constante
beschikbaarheid van hernieuwbare hulpmiddelen, een constante activiteitsduur eind-start
volgorderelaties zonder tijdsintervallen. Daarbij wordt het activiteitennetwerk voorgesteld in de
knooppuntvoorstelling waarbij activiteiten gevormd worden door knooppunten en de
volgorderelaties voorgesteld worden door pijlen. Er zijn echter reeds vele varianten op dit probleem
ontwikkeld. Zo kan men onderscheid maken tussen enkelvoudige en meervoudige RCPS-
problemen, wat bepaald wordt door het al dan niet op meer dan één manier uitvoerbaar zijn.
Daarenboven kunnen verschillende soorten volgorderelaties bestaan, namelijk start-start, start-
einde, einde-start en einde-einde relaties. Bovendien kan het tijdsinterval tussen het begin (einde)
van de ene activiteit en het einde (begin) van de volgende activiteit verschillen. Ook de
beschikbaarheid en het gebruik van hulpmiddelen kunnen variëren. Tenslotte kan nog een
onderscheid gemaakt worden tussen activiteiten die al dan niet kunnen onderbroken worden.
Wanneer dit probleem nog eens nagegaan wordt voor een groep van projecten dan leidt dit
vanzelfsprekend tot een waaier van varianten.
Voor het oplossen van dit probleem werden reeds meerdere procedures voorgesteld. Enerzijds
exacte procedures die leiden tot optimaliteit maar eerder complex zijn en een omvangrijke
22 ‘resource constrained project scheduling problem’
V. BESLUIT
77 Besluit
oplossingstijd vergen, anderzijds heuristische procedures die leiden tot suboptimale oplossingen
maar gemakkelijk en vlot toepasbaar zijn. Voorbeelden van de eerste zijn lineair en integer
programmeren, beide wiskundige beslissingstechnieken. Wat betreft de heuristische procedures
moet een onderscheid gemaakt worden tussen meta-heuristieken en heuristieken gebaseerd op
prioriteitsregels. De genetische algoritmes, ‘Tabu Search’ en ‘Simulated Annealing’ behoren tot de
meta-heuristieken en zijn varianten op de lokale zoekmethodes, die toegepast worden om initële
oplossingen te verbeteren. Dit gebeurt aan de hand van opeenvolgende bewerkingen die een
oplossing omzetten in een andere. De focus van deze scriptie ligt echter op de heuristieken die
gebaseerd zijn op prioriteitsregels, wat ook de meest voorkomende zijn.
De heuristische procedures gebaseerd op prioriteitsregels bestaan uit twee componenten, het (de)
planningsschema(s) en de prioriteitsregel(s). Een planningsschema bepaalt hoe een plan wordt
opgebouwd en vertrekt van een deelplan dat stapsgewijze wordt verhoogd. Tijdens elke fase
bepaalt het plan de set van activiteiten die in aanmerking komen om gepland te worden. Het
parallelle planningsschema zal, in tegenstelling tot het seriële, de set activiteiten herordenen
wanneer hulpmiddelenbeperkingen geëvalueerd worden. Het zijn de prioriteitsregels die vervolgens
voorrang verlenen aan een bepaalde activiteit wanneer meerdere tegelijk klaar zijn om gepland te
worden. Uit meerdere studies bleek dat het parallelle planningsschema tot betere resultaten leidt
dan het seriële.
Vanzelfsprekend dient bij het plannen van activiteiten rekening gehouden worden met bepaalde
volgorderelaties. Bepaalde activiteiten vereisen immers soms andere, voorbereidende activiteiten.
Wanneer activiteiten terzelfdertijd kunnen gepland worden maar niet voldoende hulpmiddelen
aanwezig zijn, dient beroep gedaan te worden op prioriteitsregels. In de literatuur werden deze
reeds uitvoerig geanalyseerd. Minimale spelingruimte, late eindtijd en vroege starttijd van
activiteiten zijn voorbeelden van vaak toegepaste en goed presterende prioriteitsregels.
Alle commerciële projectmanagement softwarepakketten wijzen hulpmiddelen toe met behulp van
een oplossingmethodologie gebaseerd op prioriteitsregels. Men is er echter tot op heden nog niet in
geslaagd om op een objectieve manier een passende prioriteitsregel te selecteren om
hulpmiddelenbeperkte projecten in te delen en er bestaan geen echte richtlijnen bij het selecteren
van de beste prioriteitsregel voor een gegeven netwerk.
Naast het RCPS-probleem werd ook het probleem van hulpmiddelennivellering besproken.
Hulpmiddelennivellering doet zich voor wanneer voldoende hulpmiddelen voorhanden zijn maar
wanneer de schommelingen in het gebruik ervan afgevalkt dienen te worden. De meeste
78 Besluit
softwarepakketten gaan om met hulpmiddelennivellering en –planning op een simplistische manier.
Vaak steunen ze op nogal onduidelijke heuristieken waarvan de details meestal niet voldoende
uitgelegd worden in de handleiding.
Dit werk bevat een indeling en enkele vergelijkende studies van de verschillende
projectmanagement softwarepakketten. De eenvoudige planningspakketten zijn vooral gericht op
tijdplanning. De meer uitgebreide gaan ook dieper in op hulpmiddelenplanning en bevatten enkele
aanvullende functionaliteiten, zoals risicoanalyse, links met spreadsheet programma’s en
simulatiemogelijkheden. De meest geavanceerde pakketten maken naast tijd- en
hulpmiddelenplanning een koppeling mogelijk met MRP- en ERP-systemen. Uit de vergelijkende
studies bleek dat het softwarepakket Primavera Project Planner tot de best presterende behoort,
vandaar ook de keuze voor dit pakket voor het onderzoek van deze scriptie.
Deel III van deze scriptie gaat dieper in op de mogelijke fasetransities in projectplanning. De
berekeningscomplexiteit van bepaalde problemen, zoals het RCPSP, kunnen variëren. Het zijn de
ordeparameters van het netwerk die deze transities bepalen. Zowel morfologische als hulpmiddelen
gerelateerde maatstaven dienen als ordeparameters. De eerste vertonen doorgaans continue
‘gemakkelijk-moeilijk oplosbaar’-fasetransities. De hulpmiddelen gerelateerde vertonen doorgaans
‘gemakkelijk-moeilijk-gemakkelijk oplosbaar’ fasetransities. Activiteitennetwerken en effecten van
een probleemstructuur hebben een aanzienlijke invloed op de prestaties van algoritmes. Indien een
maatstaf bestond voor de netwerkcomplexiteit zou dit de keuze tussen de algoritmes enorm
vergemakkelijken. Vandaar dat in de literatuur reeds vele maatstaven voorgesteld werden. Deze
proberen vooral informatie te verzamelen betreffende de grootte en morfologische structuur van het
projectnetwerk en de beschikbaarheid van de verschillende types hulpmiddelen in relaties tot de
vereiste hoeveelheid. Voorbeelden van de voorgestelde morfologische parameters zijn de
coëfficiënt van de netwerkcomplexiteit, de ordekracht, en de complexiteitsindex. Wat betreft de
invloed van deze parameters op het RCPS-probleem nemen auteurs soms een verschillende mening
in. Voorbeelden van hulpmiddelen gerelateerde parameters zijn de hulpmiddelenfactor, de
hulpmiddelenkracht en de hulpmiddelenrestricitiviteit. Opnieuw werd de impact weergegeven op
het planningsprobleem onder hulpmiddelenbeperkingen.
Meerdere auteurs gingen de impact na van deze morfologische en hulpmiddelengerelateerde
maatstaven op verschillende projectmanagement softwarepakketten. De resultaten van enkele van
deze studies werden geïntegreerd in deze scriptie. Gezien de nogal uiteenlopende resultaten verwijs
ik dan ook graag naar punt 5, deel III. Het onderzoek binnen deze scriptie gaat eveneens de impact
79 Besluit
na van enkele morfologische parameters, die uitvoerig beschreven worden in punt 1, deel III.
Daartoe werden eerst probleeminstanties gegenereerd met behulp van de netwerkgenerator RanGen
2. Op die manier konden de waarden voor zes verschillende morfologische parameters en de
hulpmiddelenrestricitiviteit ingesteld worden. Vervolgens werden elf prioriteitsregels, enkele uit
Primavera Project Planner 3.1 en enkele voorgesteld in de literatuur, geprogrammeerd om deze
probleeminstanties op te lossen.
Het onderzoek werd gevoerd voor de optie ‘none’ uit Primavera. Deze optie houdt in dat
overgegaan wordt van normale naar maximale hoeveelheid hulpmiddelen wanneer zich conflicten
voordoen. Eerst werd een globaal beeld geschetst van de prestaties van de elf prioriteitsregels.
Daaruit bleek dat de prioriteitsregel ‘laagste duurtijd eerst’ zowel voor aantal optimale oplossingen
als voor de gemiddelde afwijking van het minimum best scoorde. Deze heuristiek kwam echter op
de tweede plaats qua aantal optimale oplossingen aan de hand van de achterwaartse procedure en
werd voorgegaan door de prioriteitsregel gebaseerd op het aantal totale volgorderelaties.
Daarenboven werd de impact van de morfologische indicatoren nagegaan. Eerst gebeurde dit voor
waarden van k, een parameter voor hulpmiddelenbeschikbaarheid, tussen 0 en 1. Daarbij zagen we
dat voor I2, I3, I4 en I6 de beste resultaten behaald werden voor een lage waarde van deze
indicatoren. I scoort het best voor waarden tussen 0.25 en 0.5. In tegenstelling tot de vijf
morfologische indicatoren bereikte de hulpmiddelenrestrictiviteit het meest aantal optimale
oplossingen en de kleinste gemiddelde afwijking van het optimum voor een hoge waarde (0.75).
Wanneer een vergelijking uitgevoerd werd tussen de resultaten voor lage en hoge waarden voor k,
werd duidelijk dat naarmate k kleiner wordt, de probleeminstanties moeilijker op te lossen zijn. Er
werden veel minder optimale oplossingen bereikt en de kleinste gemiddelde afwijking van het
optimum ligt behoorlijk hoger wanneer weinig hulpmiddelen beschikbaar zijn. Voor de exacte
resultaten verwijs ik graag naar deel III en de bijlages.
80 Bijlage
Bijlagen
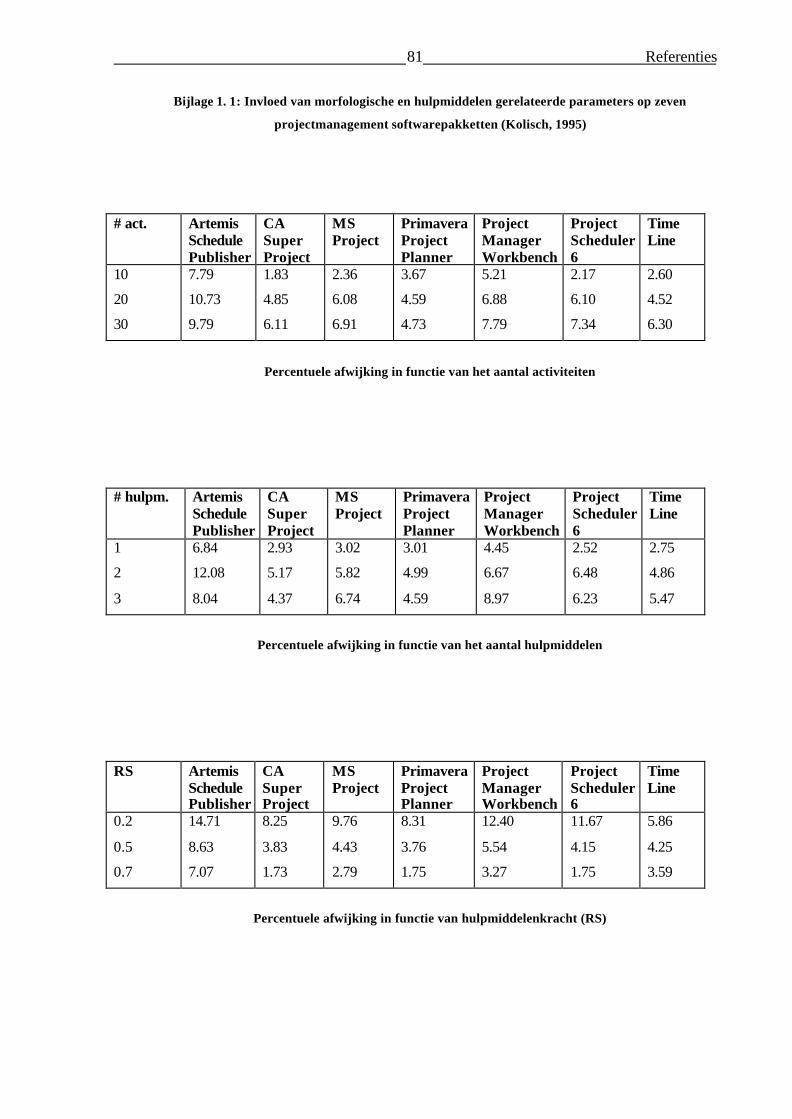
81 Referenties
Bijlage 1. 1: Invloed van morfologische en hulpmiddelen gerelateerde parameters op zeven
projectmanagement softwarepakketten (Kolisch, 1995)
# act. ArtemisSchedulePublisher
CASuperProject
MSProject
PrimaveraProjectPlanner
ProjectManagerWorkbench
ProjectScheduler6
TimeLine
10
20
30
7.79
10.73
9.79
1.83
4.85
6.11
2.36
6.08
6.91
3.67
4.59
4.73
5.21
6.88
7.79
2.17
6.10
7.34
2.60
4.52
6.30
Percentuele afwijking in functie van het aantal activiteiten
# hulpm. ArtemisSchedulePublisher
CASuperProject
MSProject
PrimaveraProjectPlanner
ProjectManagerWorkbench
ProjectScheduler6
TimeLine
1
2
3
6.84
12.08
8.04
2.93
5.17
4.37
3.02
5.82
6.74
3.01
4.99
4.59
4.45
6.67
8.97
2.52
6.48
6.23
2.75
4.86
5.47
Percentuele afwijking in functie van het aantal hulpmiddelen
RS ArtemisSchedulePublisher
CASuperProject
MSProject
PrimaveraProjectPlanner
ProjectManagerWorkbench
ProjectScheduler6
TimeLine
0.2
0.5
0.7
14.71
8.63
7.07
8.25
3.83
1.73
9.76
4.43
2.79
8.31
3.76
1.75
12.40
5.54
3.27
11.67
4.15
1.75
5.86
4.25
3.59
Percentuele afwijking in functie van hulpmiddelenkracht (RS)

82
RF ArtemisSchedulePublisher
CASuperProject
MSProject
PrimaveraProjectPlanner
ProjectManagerWorkbench
ProjectScheduler6
TimeLine
0.5
1
8.00
11.52
2.60
6.22
2.89
7.82
3.44
5.35
4.85
8.53
2.29
8.57
3.53
5.44
Percentuele afwijking in functie van de hulpmiddelenfactor (RF)
CNC ArtemisSchedulePublisher
CASuperProject
MSProject
PrimaveraProjectPlanner
ProjectManagerWorkbench
ProjectScheduler6
TimeLine
1.5
2
9.87
9.65
4.98
3.84
5.83
4.88
4.80
3.98
7.01
6.36
5.56
5.29
4.55
4.42
Percentuele afwijking in functie van de netwerkcomplexiteit (CNC)
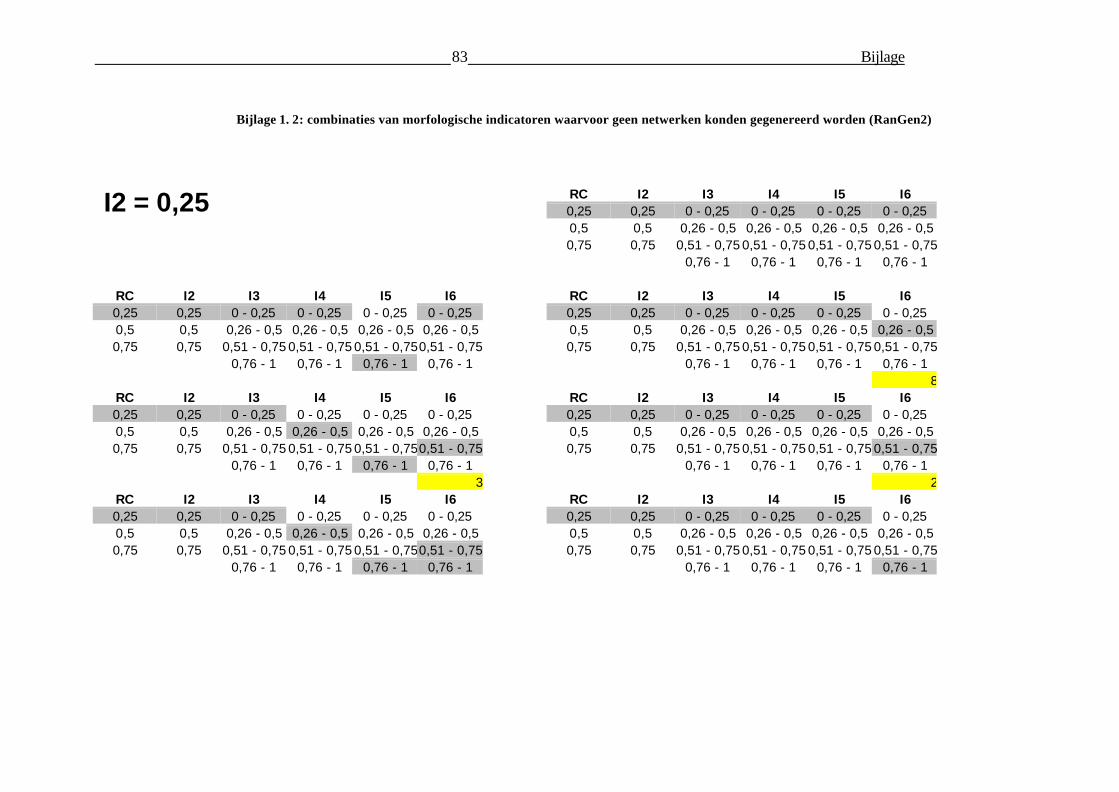
83 Bijlage
Bijlage 1. 2: combinaties van morfologische indicatoren waarvoor geen netwerken konden gegenereerd worden (RanGen2)
RC I2 I3 I4 I5 I6I2 = 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 18
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 13 2
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
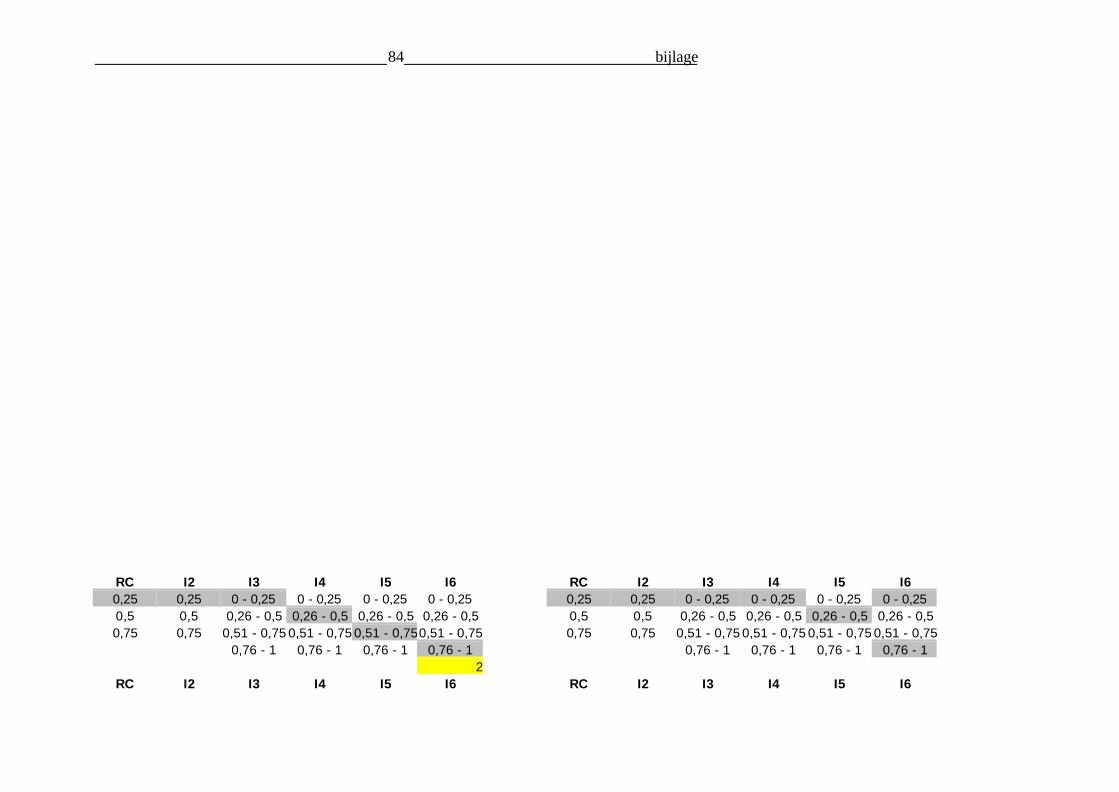
84 bijlage
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 12
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I6
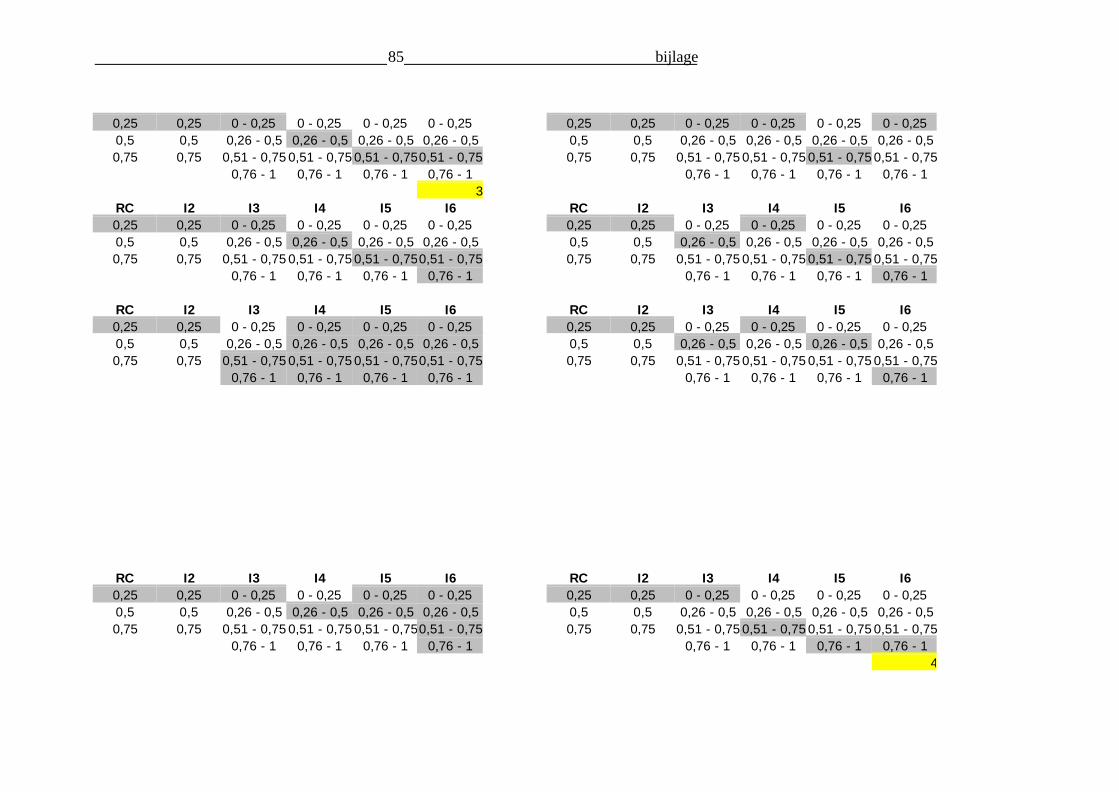
85 bijlage
0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 13
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 14
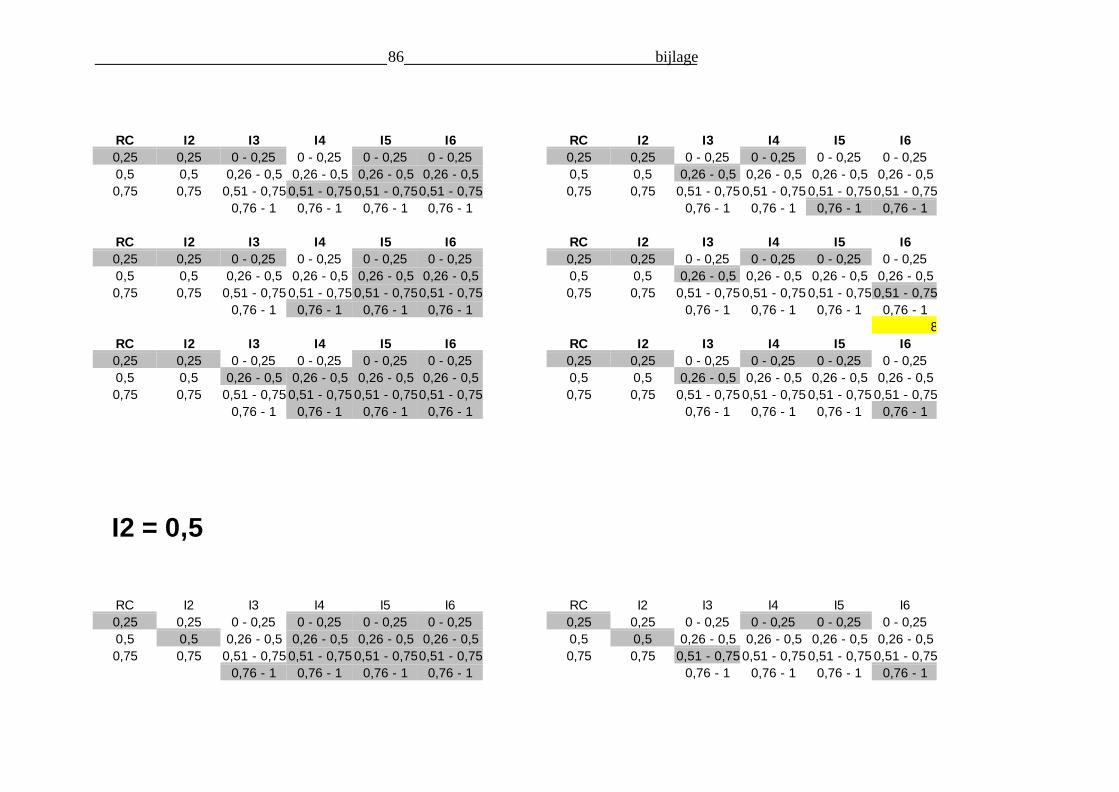
86 bijlage
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 18
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
I2 = 0,5
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
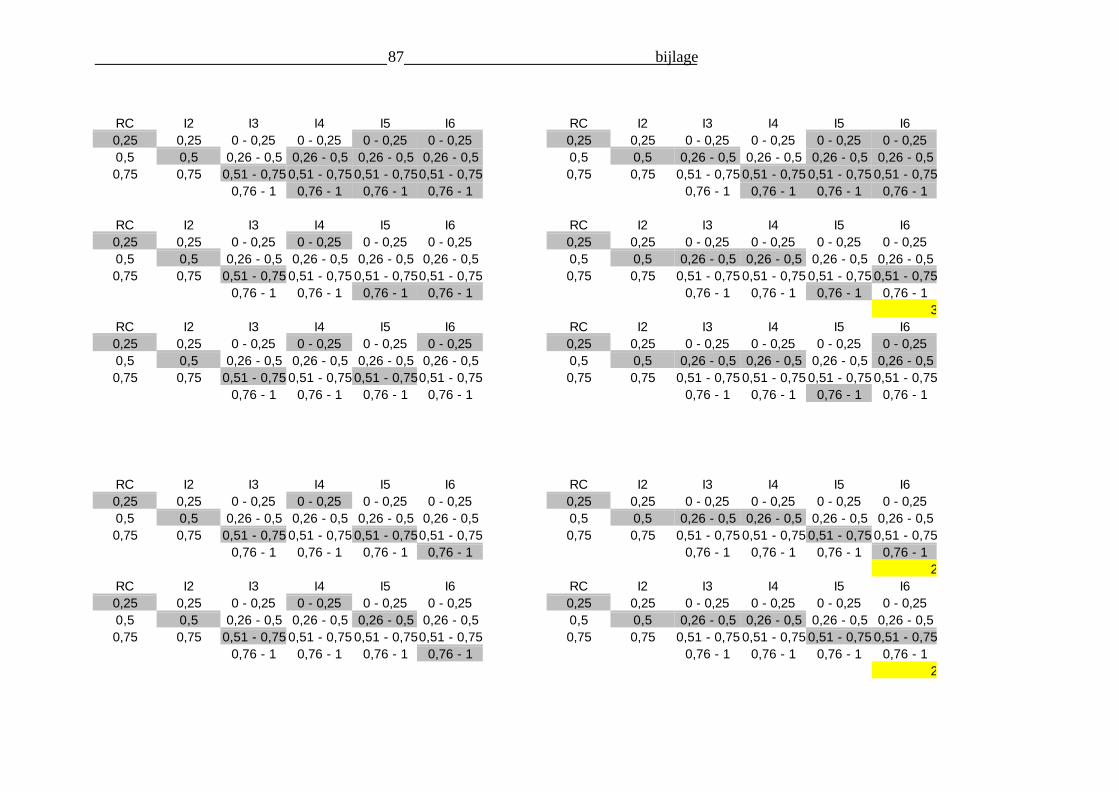
87 bijlage
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 13
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 12
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 12
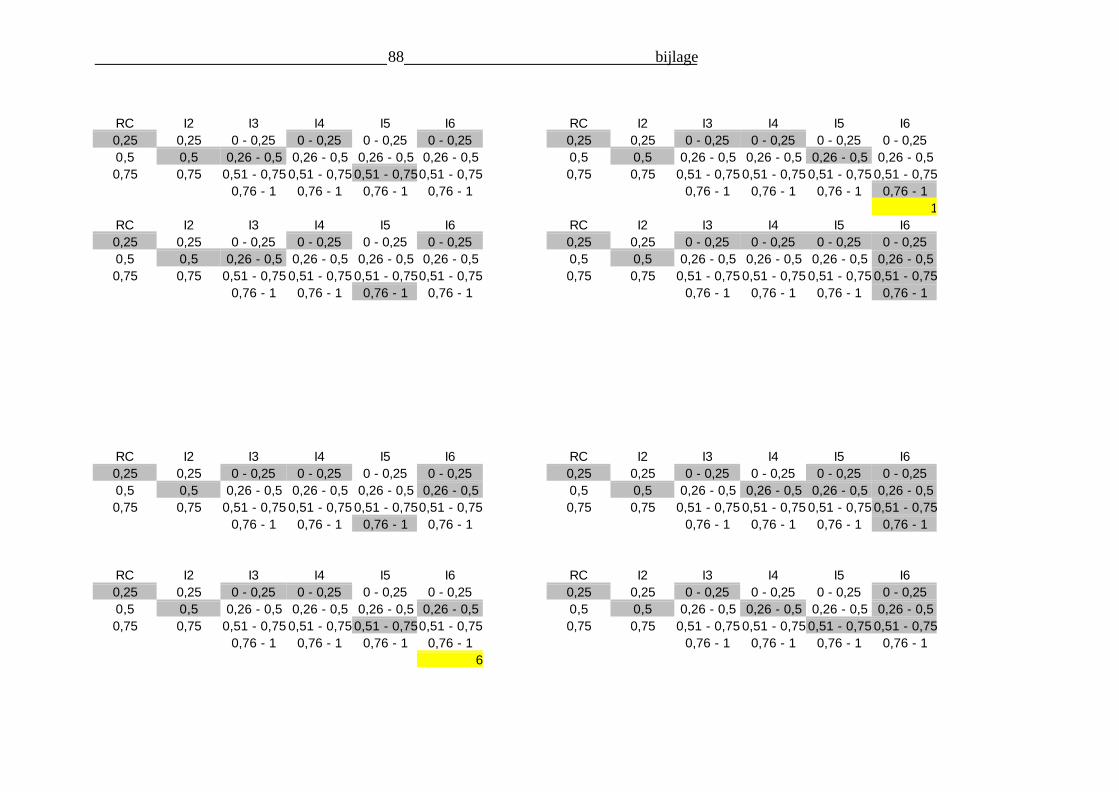
88 bijlage
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 11
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 16
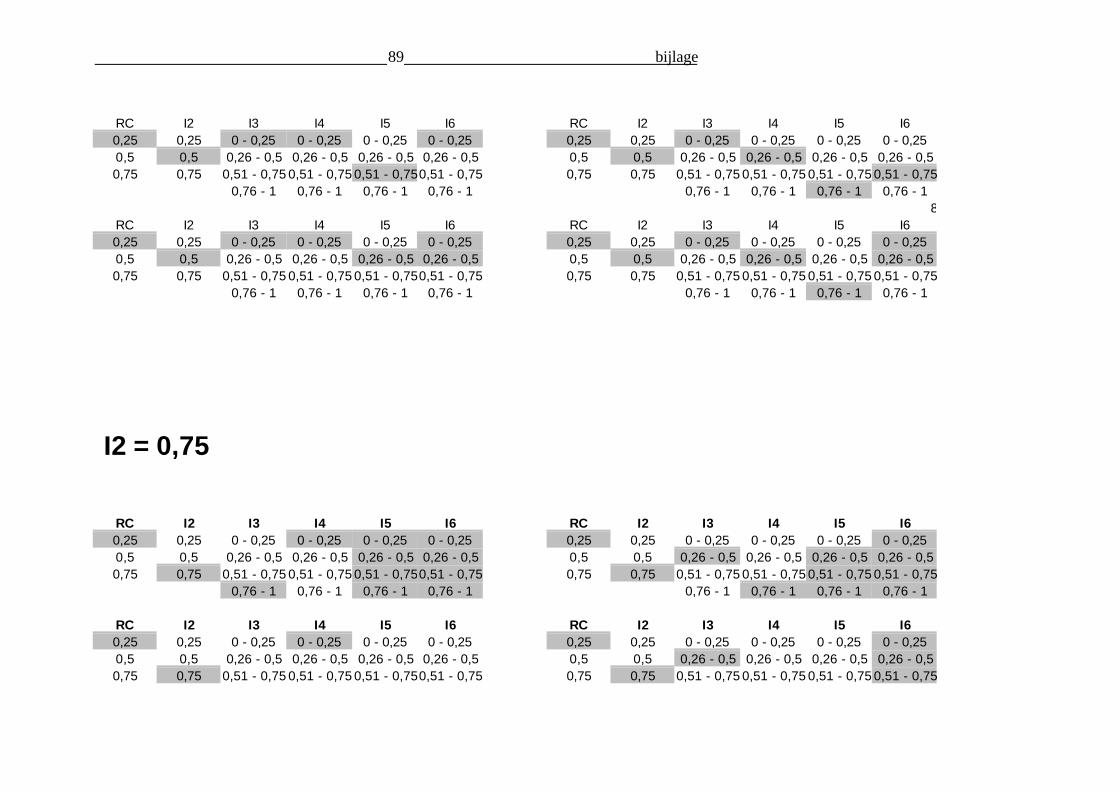
89 bijlage
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 18
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
I2 = 0,75
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
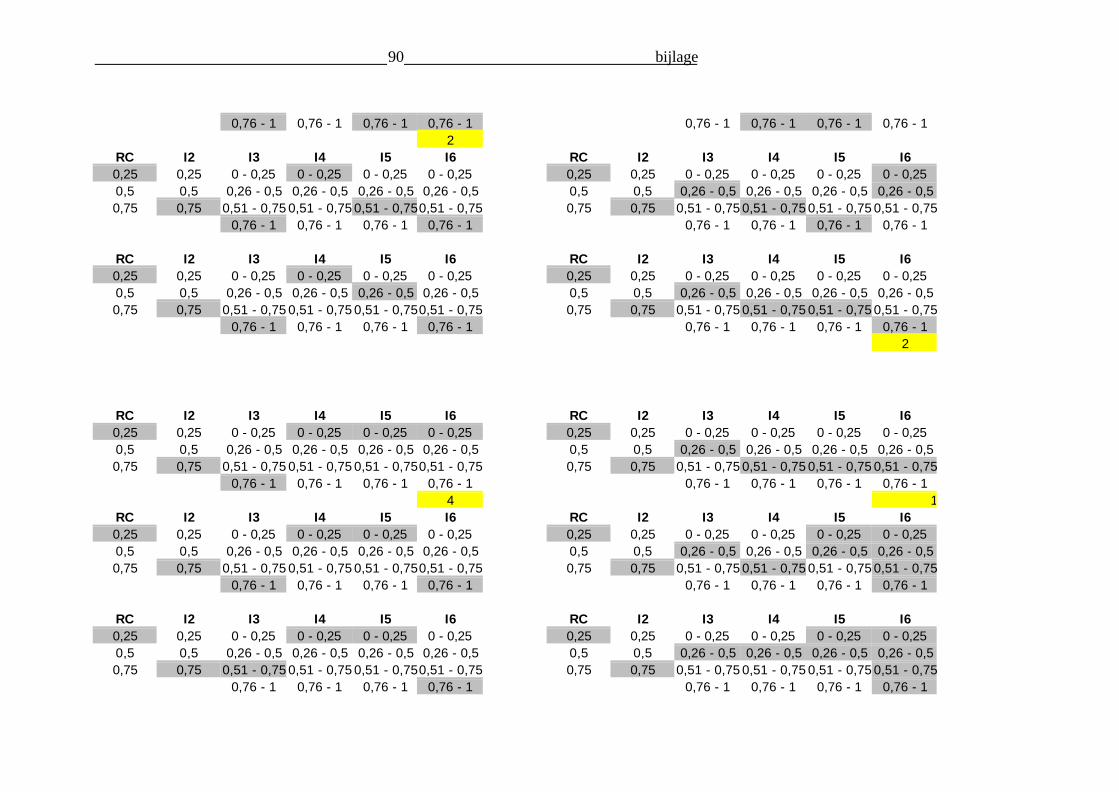
90 bijlage
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 12
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 12
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 14 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
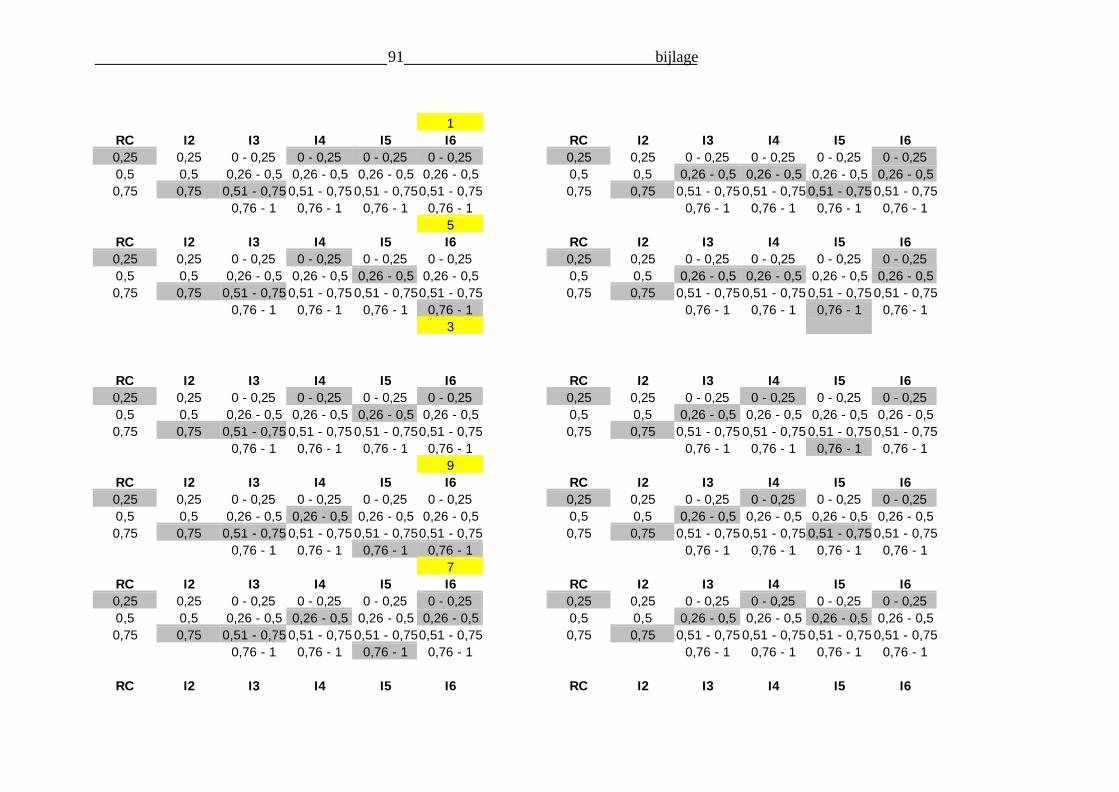
91 bijlage
1RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 15
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 13
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 19
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 17
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I6
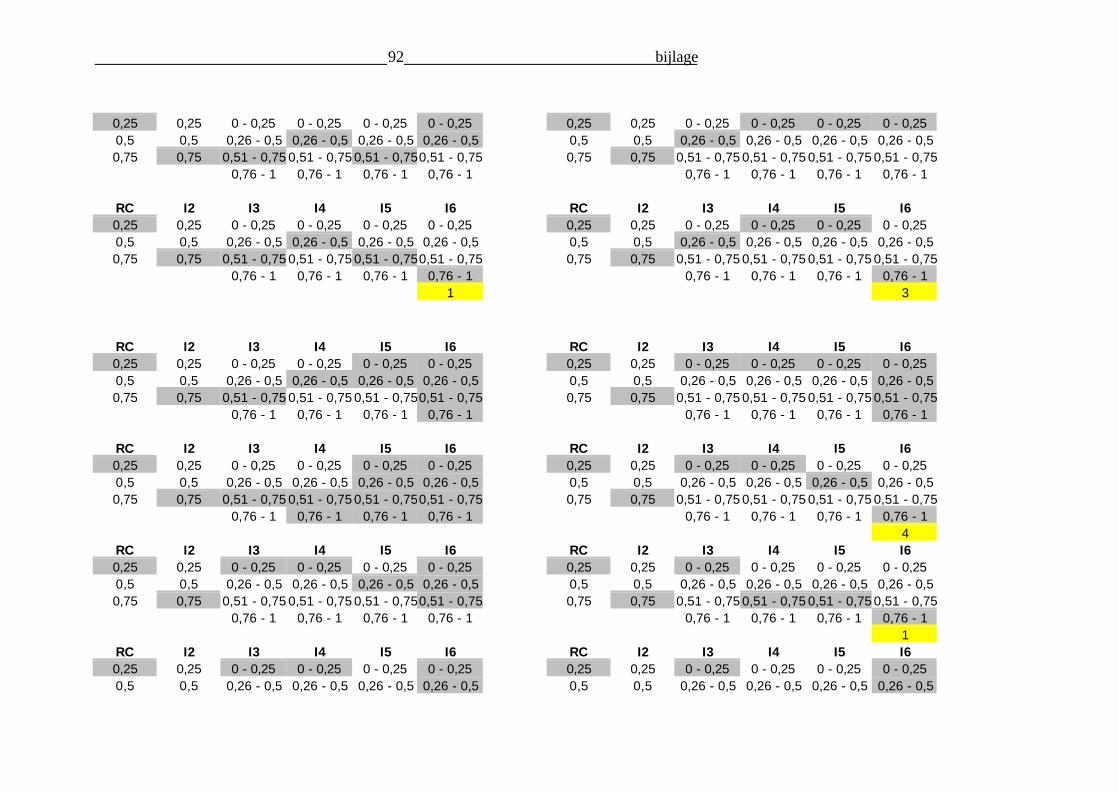
92 bijlage
0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 11 3
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 14
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 11
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5
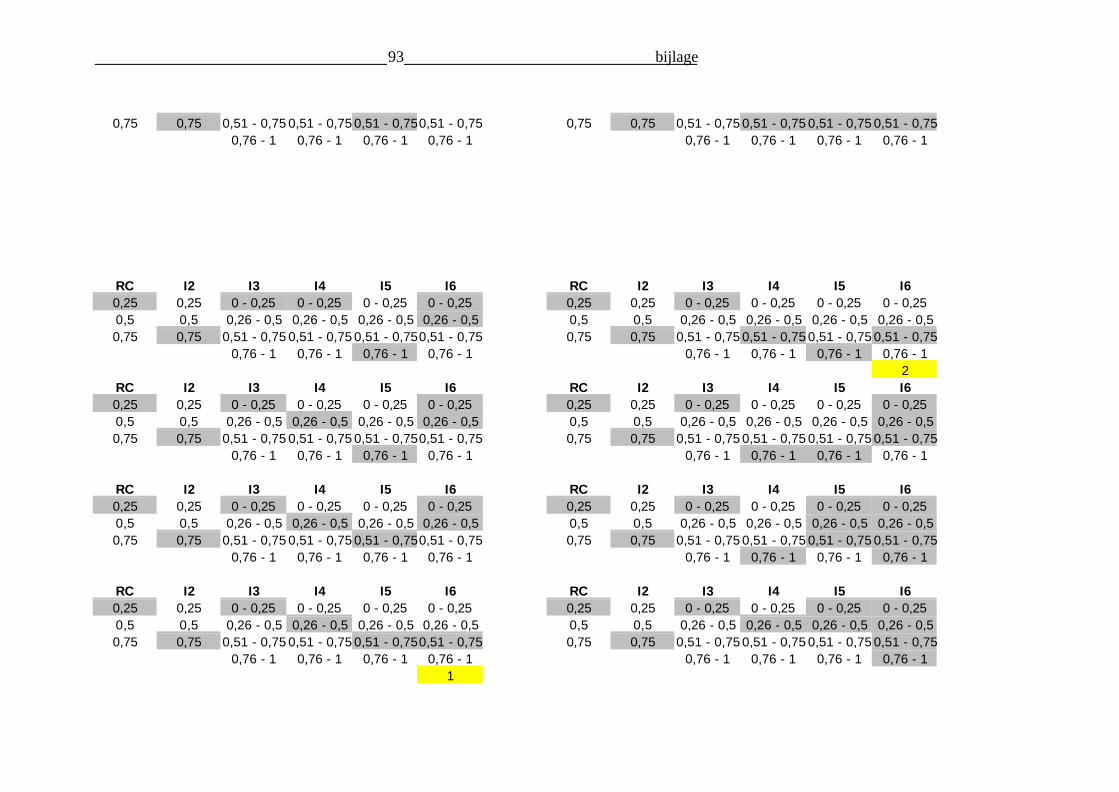
93 bijlage
0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 12
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
RC I2 I3 I4 I5 I6 RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,750,51 - 0,75 0,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 11
94 bijlage
RC I2 I3 I4 I5 I60,25 0,25 0 - 0,25 0 - 0,25 0 - 0,25 0 - 0,250,5 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,5 0,26 - 0,50,75 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75 0,51 - 0,75
0,76 - 1 0,76 - 1 0,76 - 1 0,76 - 1
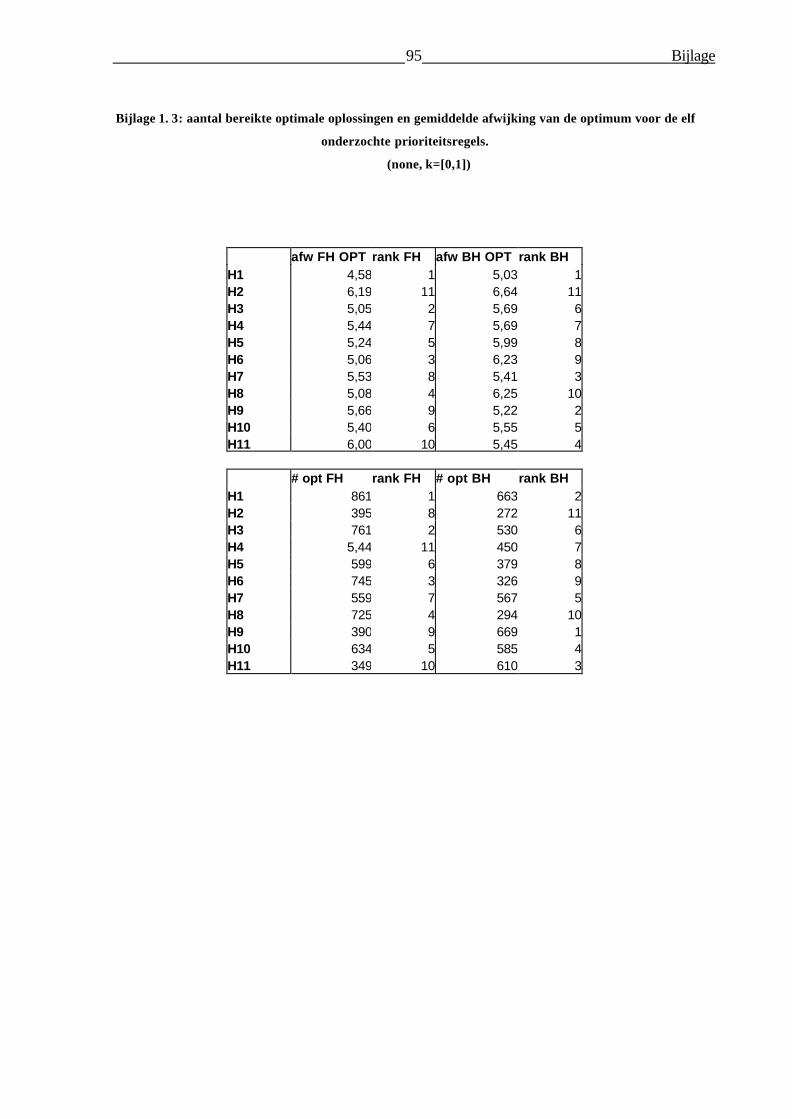
95 Bijlage
Bijlage 1. 3: aantal bereikte optimale oplossingen en gemiddelde afwijking van de optimum voor de elf
onderzochte prioriteitsregels.
(none, k=[0,1])
afw FH OPT rank FH afw BH OPT rank BHH1 4,58 1 5,03 1H2 6,19 11 6,64 11H3 5,05 2 5,69 6H4 5,44 7 5,69 7H5 5,24 5 5,99 8H6 5,06 3 6,23 9H7 5,53 8 5,41 3H8 5,08 4 6,25 10H9 5,66 9 5,22 2H10 5,40 6 5,55 5H11 6,00 10 5,45 4
# opt FH rank FH # opt BH rank BHH1 861 1 663 2H2 395 8 272 11H3 761 2 530 6H4 5,44 11 450 7H5 599 6 379 8H6 745 3 326 9H7 559 7 567 5H8 725 4 294 10H9 390 9 669 1H10 634 5 585 4H11 349 10 610 3
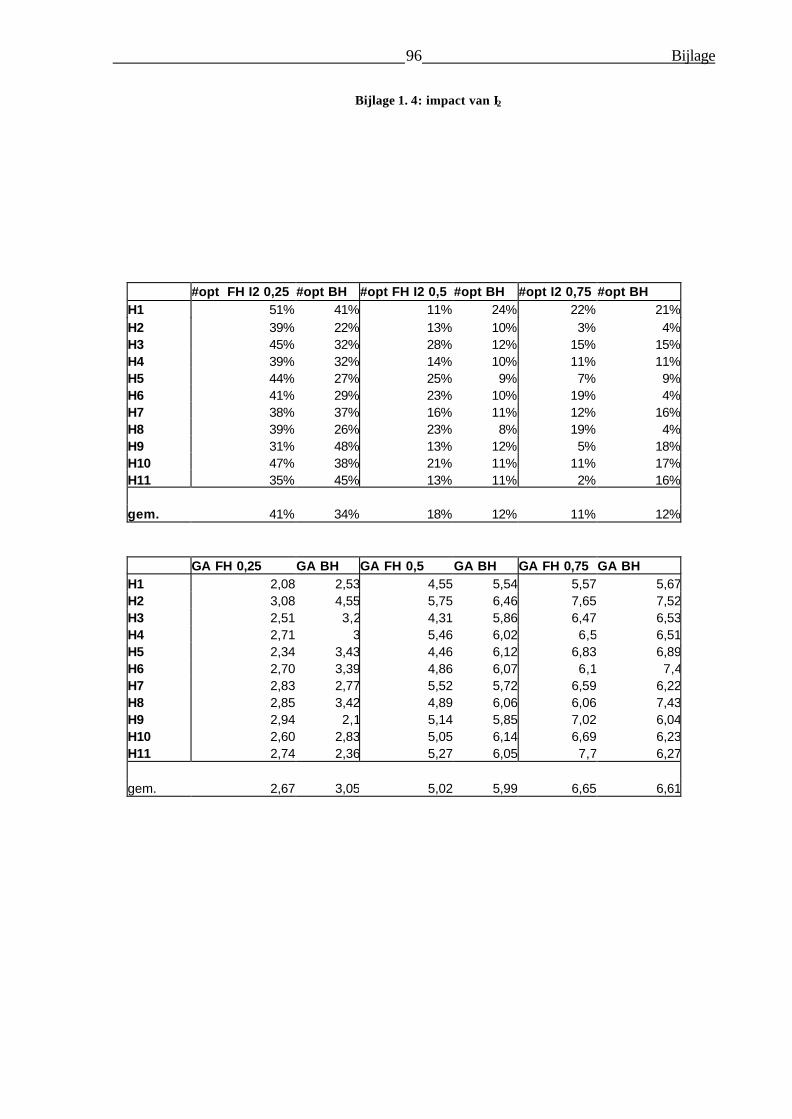
96 Bijlage
Bijlage 1. 4: impact van I2
#opt FH I2 0,25 #opt BH #opt FH I2 0,5 #opt BH #opt I2 0,75 #opt BHH1 51% 41% 11% 24% 22% 21%H2 39% 22% 13% 10% 3% 4%H3 45% 32% 28% 12% 15% 15%H4 39% 32% 14% 10% 11% 11%H5 44% 27% 25% 9% 7% 9%H6 41% 29% 23% 10% 19% 4%H7 38% 37% 16% 11% 12% 16%H8 39% 26% 23% 8% 19% 4%H9 31% 48% 13% 12% 5% 18%H10 47% 38% 21% 11% 11% 17%H11 35% 45% 13% 11% 2% 16% gem. 41% 34% 18% 12% 11% 12% GA FH 0,25 GA BH GA FH 0,5 GA BH GA FH 0,75 GA BHH1 2,08 2,53 4,55 5,54 5,57 5,67H2 3,08 4,55 5,75 6,46 7,65 7,52H3 2,51 3,2 4,31 5,86 6,47 6,53H4 2,71 3 5,46 6,02 6,5 6,51H5 2,34 3,43 4,46 6,12 6,83 6,89H6 2,70 3,39 4,86 6,07 6,1 7,4H7 2,83 2,77 5,52 5,72 6,59 6,22H8 2,85 3,42 4,89 6,06 6,06 7,43H9 2,94 2,1 5,14 5,85 7,02 6,04H10 2,60 2,83 5,05 6,14 6,69 6,23H11 2,74 2,36 5,27 6,05 7,7 6,27 gem. 2,67 3,05 5,02 5,99 6,65 6,61
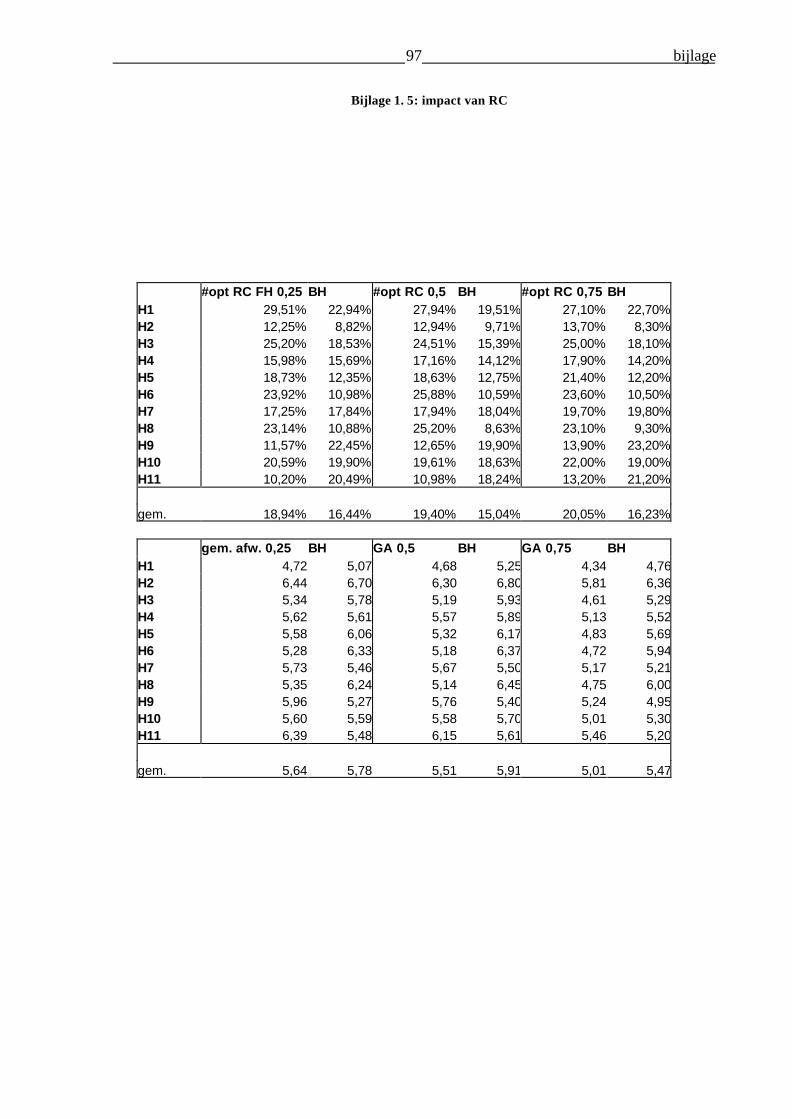
97 bijlage
Bijlage 1. 5: impact van RC
#opt RC FH 0,25 BH #opt RC 0,5 BH #opt RC 0,75 BHH1 29,51% 22,94% 27,94% 19,51% 27,10% 22,70%H2 12,25% 8,82% 12,94% 9,71% 13,70% 8,30%H3 25,20% 18,53% 24,51% 15,39% 25,00% 18,10%H4 15,98% 15,69% 17,16% 14,12% 17,90% 14,20%H5 18,73% 12,35% 18,63% 12,75% 21,40% 12,20%H6 23,92% 10,98% 25,88% 10,59% 23,60% 10,50%H7 17,25% 17,84% 17,94% 18,04% 19,70% 19,80%H8 23,14% 10,88% 25,20% 8,63% 23,10% 9,30%H9 11,57% 22,45% 12,65% 19,90% 13,90% 23,20%H10 20,59% 19,90% 19,61% 18,63% 22,00% 19,00%H11 10,20% 20,49% 10,98% 18,24% 13,20% 21,20% gem. 18,94% 16,44% 19,40% 15,04% 20,05% 16,23% gem. afw. 0,25 BH GA 0,5 BH GA 0,75 BHH1 4,72 5,07 4,68 5,25 4,34 4,76H2 6,44 6,70 6,30 6,80 5,81 6,36H3 5,34 5,78 5,19 5,93 4,61 5,29H4 5,62 5,61 5,57 5,89 5,13 5,52H5 5,58 6,06 5,32 6,17 4,83 5,69H6 5,28 6,33 5,18 6,37 4,72 5,94H7 5,73 5,46 5,67 5,50 5,17 5,21H8 5,35 6,24 5,14 6,45 4,75 6,00H9 5,96 5,27 5,76 5,40 5,24 4,95H10 5,60 5,59 5,58 5,70 5,01 5,30H11 6,39 5,48 6,15 5,61 5,46 5,20 gem. 5,64 5,78 5,51 5,91 5,01 5,47
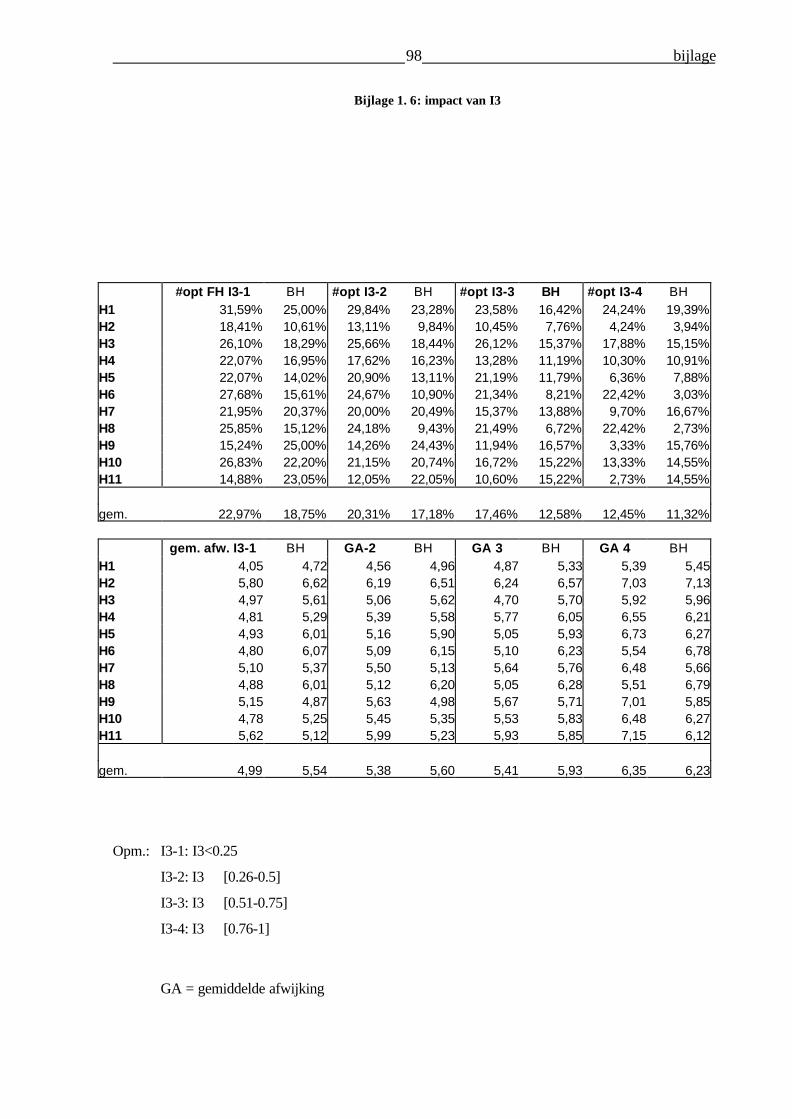
98 bijlage
Bijlage 1. 6: impact van I3
#opt FH I3-1 BH #opt I3-2 BH #opt I3-3 BH #opt I3-4 BHH1 31,59% 25,00% 29,84% 23,28% 23,58% 16,42% 24,24% 19,39%H2 18,41% 10,61% 13,11% 9,84% 10,45% 7,76% 4,24% 3,94%H3 26,10% 18,29% 25,66% 18,44% 26,12% 15,37% 17,88% 15,15%H4 22,07% 16,95% 17,62% 16,23% 13,28% 11,19% 10,30% 10,91%H5 22,07% 14,02% 20,90% 13,11% 21,19% 11,79% 6,36% 7,88%H6 27,68% 15,61% 24,67% 10,90% 21,34% 8,21% 22,42% 3,03%H7 21,95% 20,37% 20,00% 20,49% 15,37% 13,88% 9,70% 16,67%H8 25,85% 15,12% 24,18% 9,43% 21,49% 6,72% 22,42% 2,73%H9 15,24% 25,00% 14,26% 24,43% 11,94% 16,57% 3,33% 15,76%H10 26,83% 22,20% 21,15% 20,74% 16,72% 15,22% 13,33% 14,55%H11 14,88% 23,05% 12,05% 22,05% 10,60% 15,22% 2,73% 14,55% gem. 22,97% 18,75% 20,31% 17,18% 17,46% 12,58% 12,45% 11,32% gem. afw. I3-1 BH GA-2 BH GA 3 BH GA 4 BHH1 4,05 4,72 4,56 4,96 4,87 5,33 5,39 5,45H2 5,80 6,62 6,19 6,51 6,24 6,57 7,03 7,13H3 4,97 5,61 5,06 5,62 4,70 5,70 5,92 5,96H4 4,81 5,29 5,39 5,58 5,77 6,05 6,55 6,21H5 4,93 6,01 5,16 5,90 5,05 5,93 6,73 6,27H6 4,80 6,07 5,09 6,15 5,10 6,23 5,54 6,78H7 5,10 5,37 5,50 5,13 5,64 5,76 6,48 5,66H8 4,88 6,01 5,12 6,20 5,05 6,28 5,51 6,79H9 5,15 4,87 5,63 4,98 5,67 5,71 7,01 5,85H10 4,78 5,25 5,45 5,35 5,53 5,83 6,48 6,27H11 5,62 5,12 5,99 5,23 5,93 5,85 7,15 6,12 gem. 4,99 5,54 5,38 5,60 5,41 5,93 6,35 6,23
Opm.: I3-1: I3<0.25
I3-2: I3 ∈ [0.26-0.5]
I3-3: I3 ∈ [0.51-0.75]
I3-4: I3 ∈ [0.76-1]
GA = gemiddelde afwijking
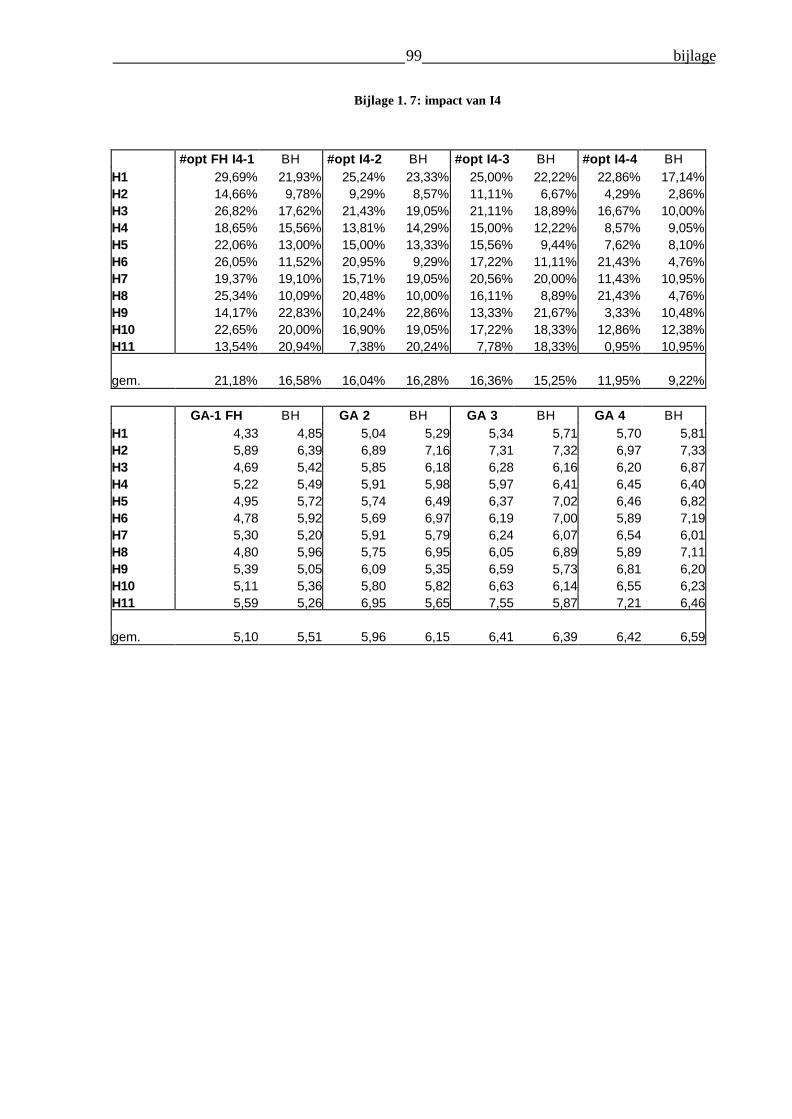
99 bijlage
Bijlage 1. 7: impact van I4
#opt FH I4-1 BH #opt I4-2 BH #opt I4-3 BH #opt I4-4 BHH1 29,69% 21,93% 25,24% 23,33% 25,00% 22,22% 22,86% 17,14%H2 14,66% 9,78% 9,29% 8,57% 11,11% 6,67% 4,29% 2,86%H3 26,82% 17,62% 21,43% 19,05% 21,11% 18,89% 16,67% 10,00%H4 18,65% 15,56% 13,81% 14,29% 15,00% 12,22% 8,57% 9,05%H5 22,06% 13,00% 15,00% 13,33% 15,56% 9,44% 7,62% 8,10%H6 26,05% 11,52% 20,95% 9,29% 17,22% 11,11% 21,43% 4,76%H7 19,37% 19,10% 15,71% 19,05% 20,56% 20,00% 11,43% 10,95%H8 25,34% 10,09% 20,48% 10,00% 16,11% 8,89% 21,43% 4,76%H9 14,17% 22,83% 10,24% 22,86% 13,33% 21,67% 3,33% 10,48%H10 22,65% 20,00% 16,90% 19,05% 17,22% 18,33% 12,86% 12,38%H11 13,54% 20,94% 7,38% 20,24% 7,78% 18,33% 0,95% 10,95% gem. 21,18% 16,58% 16,04% 16,28% 16,36% 15,25% 11,95% 9,22% GA-1 FH BH GA 2 BH GA 3 BH GA 4 BHH1 4,33 4,85 5,04 5,29 5,34 5,71 5,70 5,81H2 5,89 6,39 6,89 7,16 7,31 7,32 6,97 7,33H3 4,69 5,42 5,85 6,18 6,28 6,16 6,20 6,87H4 5,22 5,49 5,91 5,98 5,97 6,41 6,45 6,40H5 4,95 5,72 5,74 6,49 6,37 7,02 6,46 6,82H6 4,78 5,92 5,69 6,97 6,19 7,00 5,89 7,19H7 5,30 5,20 5,91 5,79 6,24 6,07 6,54 6,01H8 4,80 5,96 5,75 6,95 6,05 6,89 5,89 7,11H9 5,39 5,05 6,09 5,35 6,59 5,73 6,81 6,20H10 5,11 5,36 5,80 5,82 6,63 6,14 6,55 6,23H11 5,59 5,26 6,95 5,65 7,55 5,87 7,21 6,46 gem. 5,10 5,51 5,96 6,15 6,41 6,39 6,42 6,59
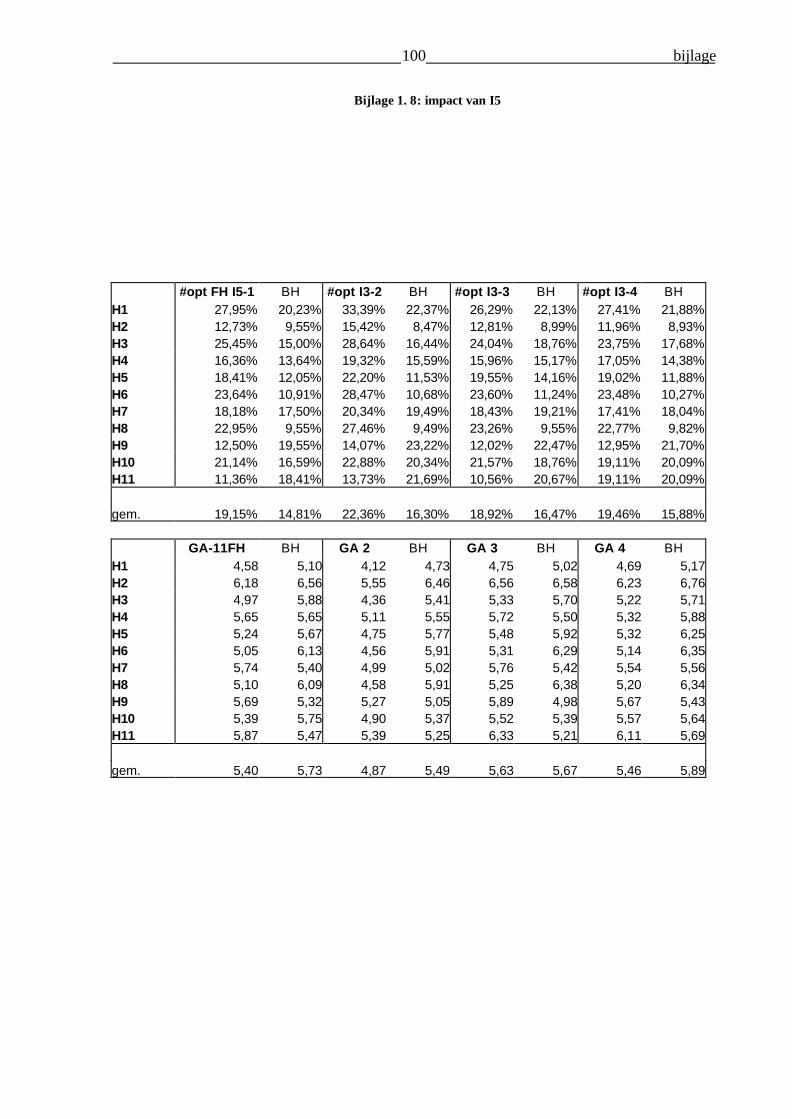
100 bijlage
Bijlage 1. 8: impact van I5
#opt FH I5-1 BH #opt I3-2 BH #opt I3-3 BH #opt I3-4 BHH1 27,95% 20,23% 33,39% 22,37% 26,29% 22,13% 27,41% 21,88%H2 12,73% 9,55% 15,42% 8,47% 12,81% 8,99% 11,96% 8,93%H3 25,45% 15,00% 28,64% 16,44% 24,04% 18,76% 23,75% 17,68%H4 16,36% 13,64% 19,32% 15,59% 15,96% 15,17% 17,05% 14,38%H5 18,41% 12,05% 22,20% 11,53% 19,55% 14,16% 19,02% 11,88%H6 23,64% 10,91% 28,47% 10,68% 23,60% 11,24% 23,48% 10,27%H7 18,18% 17,50% 20,34% 19,49% 18,43% 19,21% 17,41% 18,04%H8 22,95% 9,55% 27,46% 9,49% 23,26% 9,55% 22,77% 9,82%H9 12,50% 19,55% 14,07% 23,22% 12,02% 22,47% 12,95% 21,70%H10 21,14% 16,59% 22,88% 20,34% 21,57% 18,76% 19,11% 20,09%H11 11,36% 18,41% 13,73% 21,69% 10,56% 20,67% 19,11% 20,09% gem. 19,15% 14,81% 22,36% 16,30% 18,92% 16,47% 19,46% 15,88% GA-11FH BH GA 2 BH GA 3 BH GA 4 BHH1 4,58 5,10 4,12 4,73 4,75 5,02 4,69 5,17H2 6,18 6,56 5,55 6,46 6,56 6,58 6,23 6,76H3 4,97 5,88 4,36 5,41 5,33 5,70 5,22 5,71H4 5,65 5,65 5,11 5,55 5,72 5,50 5,32 5,88H5 5,24 5,67 4,75 5,77 5,48 5,92 5,32 6,25H6 5,05 6,13 4,56 5,91 5,31 6,29 5,14 6,35H7 5,74 5,40 4,99 5,02 5,76 5,42 5,54 5,56H8 5,10 6,09 4,58 5,91 5,25 6,38 5,20 6,34H9 5,69 5,32 5,27 5,05 5,89 4,98 5,67 5,43H10 5,39 5,75 4,90 5,37 5,52 5,39 5,57 5,64H11 5,87 5,47 5,39 5,25 6,33 5,21 6,11 5,69 gem. 5,40 5,73 4,87 5,49 5,63 5,67 5,46 5,89
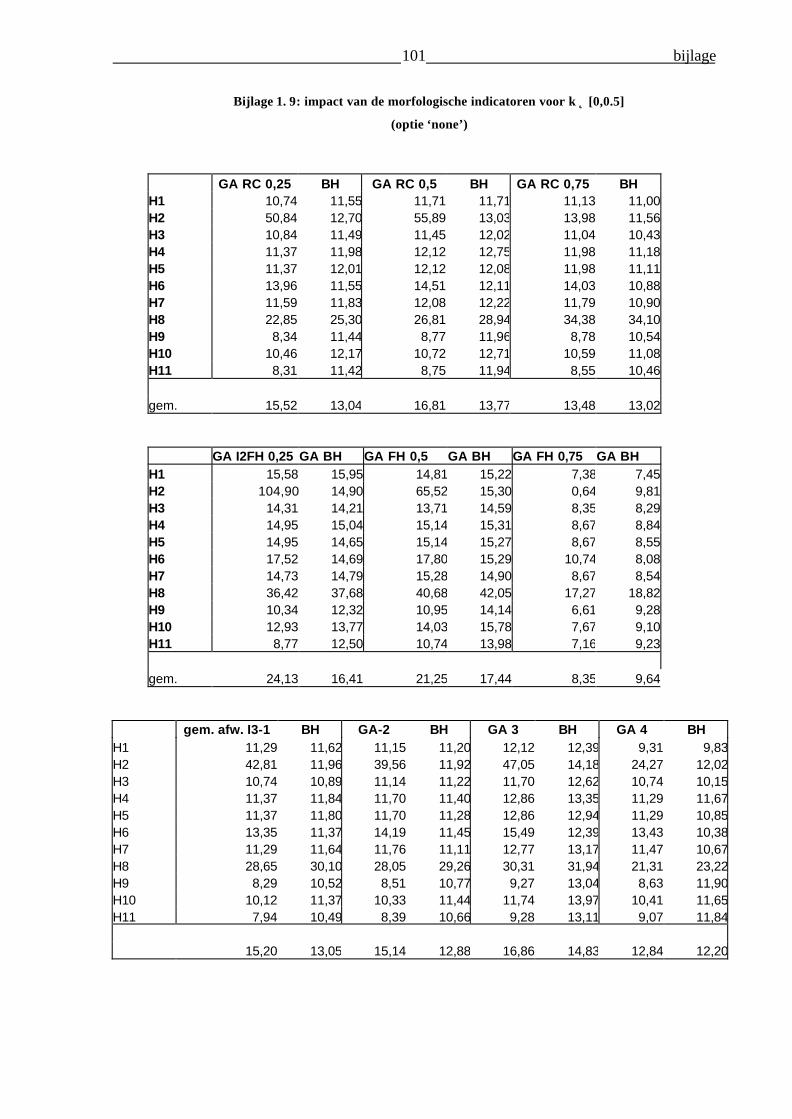
101 bijlage
Bijlage 1. 9: impact van de morfologische indicatoren voor k ∈[0,0.5]
(optie ‘none’)
GA RC 0,25 BH GA RC 0,5 BH GA RC 0,75 BHH1 10,74 11,55 11,71 11,71 11,13 11,00H2 50,84 12,70 55,89 13,03 13,98 11,56H3 10,84 11,49 11,45 12,02 11,04 10,43H4 11,37 11,98 12,12 12,75 11,98 11,18H5 11,37 12,01 12,12 12,08 11,98 11,11H6 13,96 11,55 14,51 12,11 14,03 10,88H7 11,59 11,83 12,08 12,22 11,79 10,90H8 22,85 25,30 26,81 28,94 34,38 34,10H9 8,34 11,44 8,77 11,96 8,78 10,54H10 10,46 12,17 10,72 12,71 10,59 11,08H11 8,31 11,42 8,75 11,94 8,55 10,46 gem. 15,52 13,04 16,81 13,77 13,48 13,02
GA I2FH 0,25 GA BH GA FH 0,5 GA BH GA FH 0,75 GA BHH1 15,58 15,95 14,81 15,22 7,38 7,45H2 104,90 14,90 65,52 15,30 0,64 9,81H3 14,31 14,21 13,71 14,59 8,35 8,29H4 14,95 15,04 15,14 15,31 8,67 8,84H5 14,95 14,65 15,14 15,27 8,67 8,55H6 17,52 14,69 17,80 15,29 10,74 8,08H7 14,73 14,79 15,28 14,90 8,67 8,54H8 36,42 37,68 40,68 42,05 17,27 18,82H9 10,34 12,32 10,95 14,14 6,61 9,28H10 12,93 13,77 14,03 15,78 7,67 9,10H11 8,77 12,50 10,74 13,98 7,16 9,23 gem. 24,13 16,41 21,25 17,44 8,35 9,64
gem. afw. I3-1 BH GA-2 BH GA 3 BH GA 4 BHH1 11,29 11,62 11,15 11,20 12,12 12,39 9,31 9,83H2 42,81 11,96 39,56 11,92 47,05 14,18 24,27 12,02H3 10,74 10,89 11,14 11,22 11,70 12,62 10,74 10,15H4 11,37 11,84 11,70 11,40 12,86 13,35 11,29 11,67H5 11,37 11,80 11,70 11,28 12,86 12,94 11,29 10,85H6 13,35 11,37 14,19 11,45 15,49 12,39 13,43 10,38H7 11,29 11,64 11,76 11,11 12,77 13,17 11,47 10,67H8 28,65 30,10 28,05 29,26 30,31 31,94 21,31 23,22H9 8,29 10,52 8,51 10,77 9,27 13,04 8,63 11,90H10 10,12 11,37 10,33 11,44 11,74 13,97 10,41 11,65H11 7,94 10,49 8,39 10,66 9,28 13,11 9,07 11,84 15,20 13,05 15,14 12,88 16,86 14,83 12,84 12,20
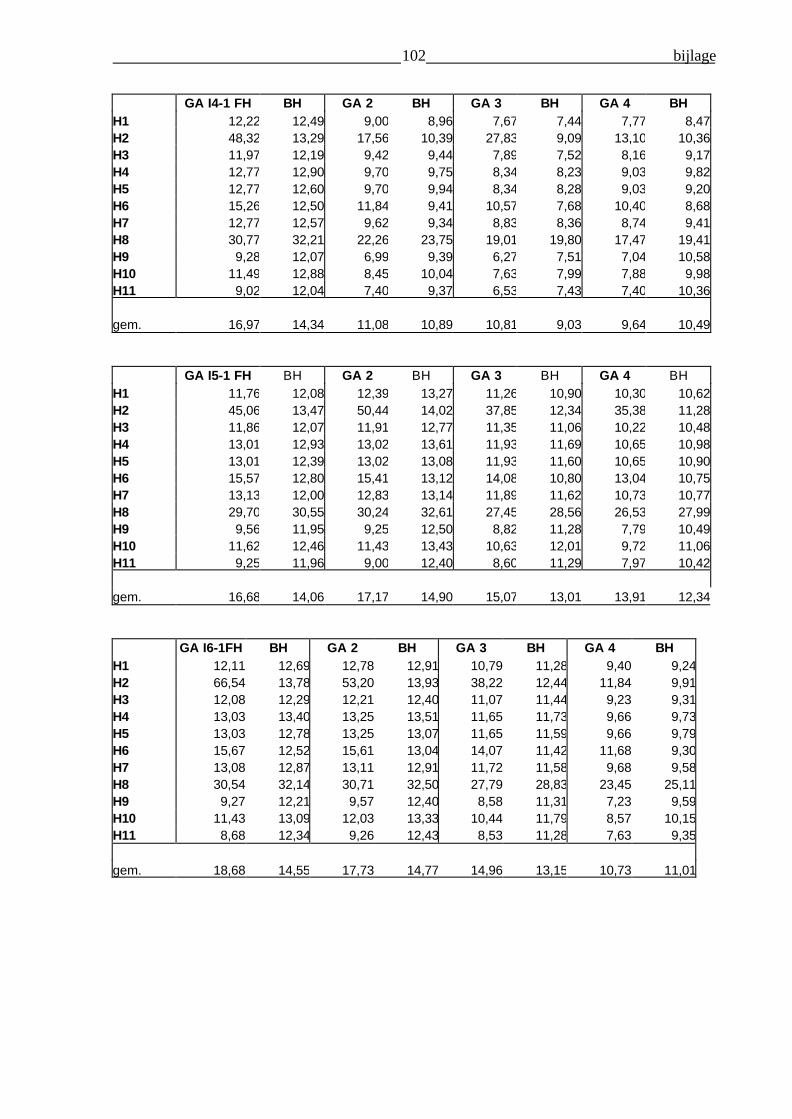
102 bijlage
GA I4-1 FH BH GA 2 BH GA 3 BH GA 4 BHH1 12,22 12,49 9,00 8,96 7,67 7,44 7,77 8,47H2 48,32 13,29 17,56 10,39 27,83 9,09 13,10 10,36H3 11,97 12,19 9,42 9,44 7,89 7,52 8,16 9,17H4 12,77 12,90 9,70 9,75 8,34 8,23 9,03 9,82H5 12,77 12,60 9,70 9,94 8,34 8,28 9,03 9,20H6 15,26 12,50 11,84 9,41 10,57 7,68 10,40 8,68H7 12,77 12,57 9,62 9,34 8,83 8,36 8,74 9,41H8 30,77 32,21 22,26 23,75 19,01 19,80 17,47 19,41H9 9,28 12,07 6,99 9,39 6,27 7,51 7,04 10,58H10 11,49 12,88 8,45 10,04 7,63 7,99 7,88 9,98H11 9,02 12,04 7,40 9,37 6,53 7,43 7,40 10,36 gem. 16,97 14,34 11,08 10,89 10,81 9,03 9,64 10,49
GA I5-1 FH BH GA 2 BH GA 3 BH GA 4 BHH1 11,76 12,08 12,39 13,27 11,26 10,90 10,30 10,62H2 45,06 13,47 50,44 14,02 37,85 12,34 35,38 11,28H3 11,86 12,07 11,91 12,77 11,35 11,06 10,22 10,48H4 13,01 12,93 13,02 13,61 11,93 11,69 10,65 10,98H5 13,01 12,39 13,02 13,08 11,93 11,60 10,65 10,90H6 15,57 12,80 15,41 13,12 14,08 10,80 13,04 10,75H7 13,13 12,00 12,83 13,14 11,89 11,62 10,73 10,77H8 29,70 30,55 30,24 32,61 27,45 28,56 26,53 27,99H9 9,56 11,95 9,25 12,50 8,82 11,28 7,79 10,49H10 11,62 12,46 11,43 13,43 10,63 12,01 9,72 11,06H11 9,25 11,96 9,00 12,40 8,60 11,29 7,97 10,42 gem. 16,68 14,06 17,17 14,90 15,07 13,01 13,91 12,34
GA I6-1FH BH GA 2 BH GA 3 BH GA 4 BHH1 12,11 12,69 12,78 12,91 10,79 11,28 9,40 9,24H2 66,54 13,78 53,20 13,93 38,22 12,44 11,84 9,91H3 12,08 12,29 12,21 12,40 11,07 11,44 9,23 9,31H4 13,03 13,40 13,25 13,51 11,65 11,73 9,66 9,73H5 13,03 12,78 13,25 13,07 11,65 11,59 9,66 9,79H6 15,67 12,52 15,61 13,04 14,07 11,42 11,68 9,30H7 13,08 12,87 13,11 12,91 11,72 11,58 9,68 9,58H8 30,54 32,14 30,71 32,50 27,79 28,83 23,45 25,11H9 9,27 12,21 9,57 12,40 8,58 11,31 7,23 9,59H10 11,43 13,09 12,03 13,33 10,44 11,79 8,57 10,15H11 8,68 12,34 9,26 12,43 8,53 11,28 7,63 9,35 gem. 18,68 14,55 17,73 14,77 14,96 13,15 10,73 11,01
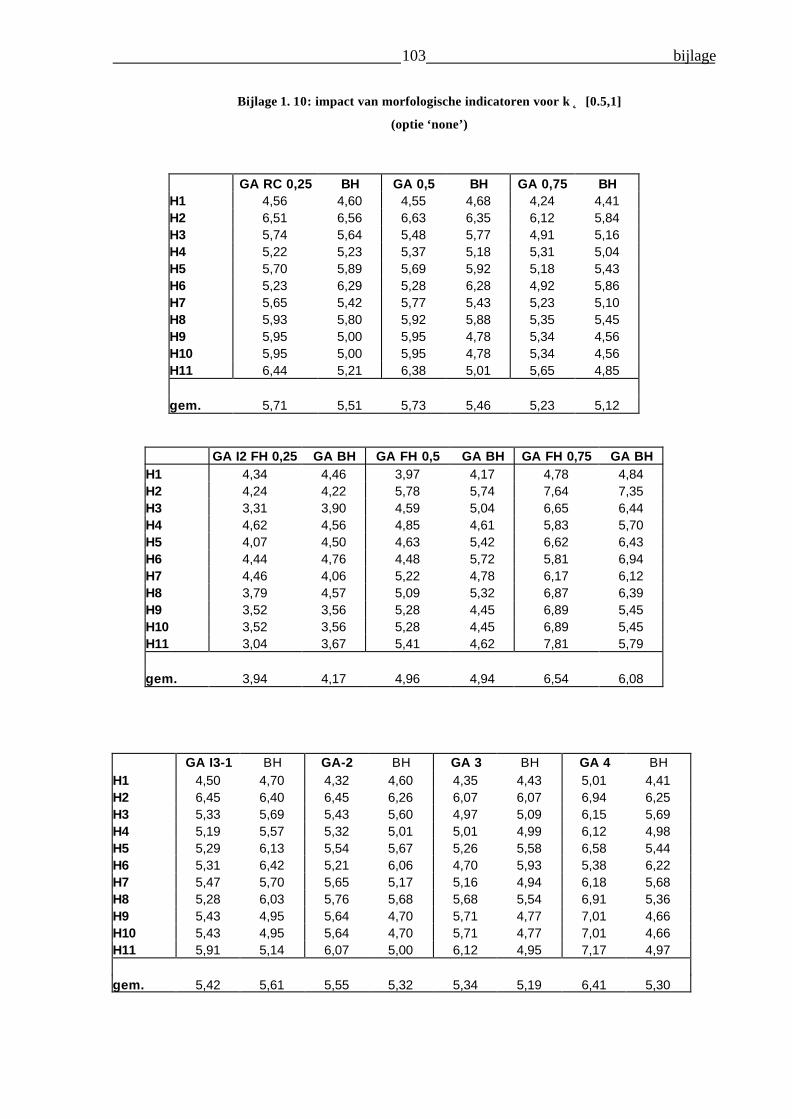
103 bijlage
Bijlage 1. 10: impact van morfologische indicatoren voor k ∈ [0.5,1]
(optie ‘none’)
GA RC 0,25 BH GA 0,5 BH GA 0,75 BHH1 4,56 4,60 4,55 4,68 4,24 4,41H2 6,51 6,56 6,63 6,35 6,12 5,84H3 5,74 5,64 5,48 5,77 4,91 5,16H4 5,22 5,23 5,37 5,18 5,31 5,04H5 5,70 5,89 5,69 5,92 5,18 5,43H6 5,23 6,29 5,28 6,28 4,92 5,86H7 5,65 5,42 5,77 5,43 5,23 5,10H8 5,93 5,80 5,92 5,88 5,35 5,45H9 5,95 5,00 5,95 4,78 5,34 4,56H10 5,95 5,00 5,95 4,78 5,34 4,56H11 6,44 5,21 6,38 5,01 5,65 4,85 gem. 5,71 5,51 5,73 5,46 5,23 5,12
GA I2 FH 0,25 GA BH GA FH 0,5 GA BH GA FH 0,75 GA BHH1 4,34 4,46 3,97 4,17 4,78 4,84H2 4,24 4,22 5,78 5,74 7,64 7,35H3 3,31 3,90 4,59 5,04 6,65 6,44H4 4,62 4,56 4,85 4,61 5,83 5,70H5 4,07 4,50 4,63 5,42 6,62 6,43H6 4,44 4,76 4,48 5,72 5,81 6,94H7 4,46 4,06 5,22 4,78 6,17 6,12H8 3,79 4,57 5,09 5,32 6,87 6,39H9 3,52 3,56 5,28 4,45 6,89 5,45H10 3,52 3,56 5,28 4,45 6,89 5,45H11 3,04 3,67 5,41 4,62 7,81 5,79 gem. 3,94 4,17 4,96 4,94 6,54 6,08
GA I3-1 BH GA-2 BH GA 3 BH GA 4 BHH1 4,50 4,70 4,32 4,60 4,35 4,43 5,01 4,41H2 6,45 6,40 6,45 6,26 6,07 6,07 6,94 6,25H3 5,33 5,69 5,43 5,60 4,97 5,09 6,15 5,69H4 5,19 5,57 5,32 5,01 5,01 4,99 6,12 4,98H5 5,29 6,13 5,54 5,67 5,26 5,58 6,58 5,44H6 5,31 6,42 5,21 6,06 4,70 5,93 5,38 6,22H7 5,47 5,70 5,65 5,17 5,16 4,94 6,18 5,68H8 5,28 6,03 5,76 5,68 5,68 5,54 6,91 5,36H9 5,43 4,95 5,64 4,70 5,71 4,77 7,01 4,66H10 5,43 4,95 5,64 4,70 5,71 4,77 7,01 4,66H11 5,91 5,14 6,07 5,00 6,12 4,95 7,17 4,97 gem. 5,42 5,61 5,55 5,32 5,34 5,19 6,41 5,30
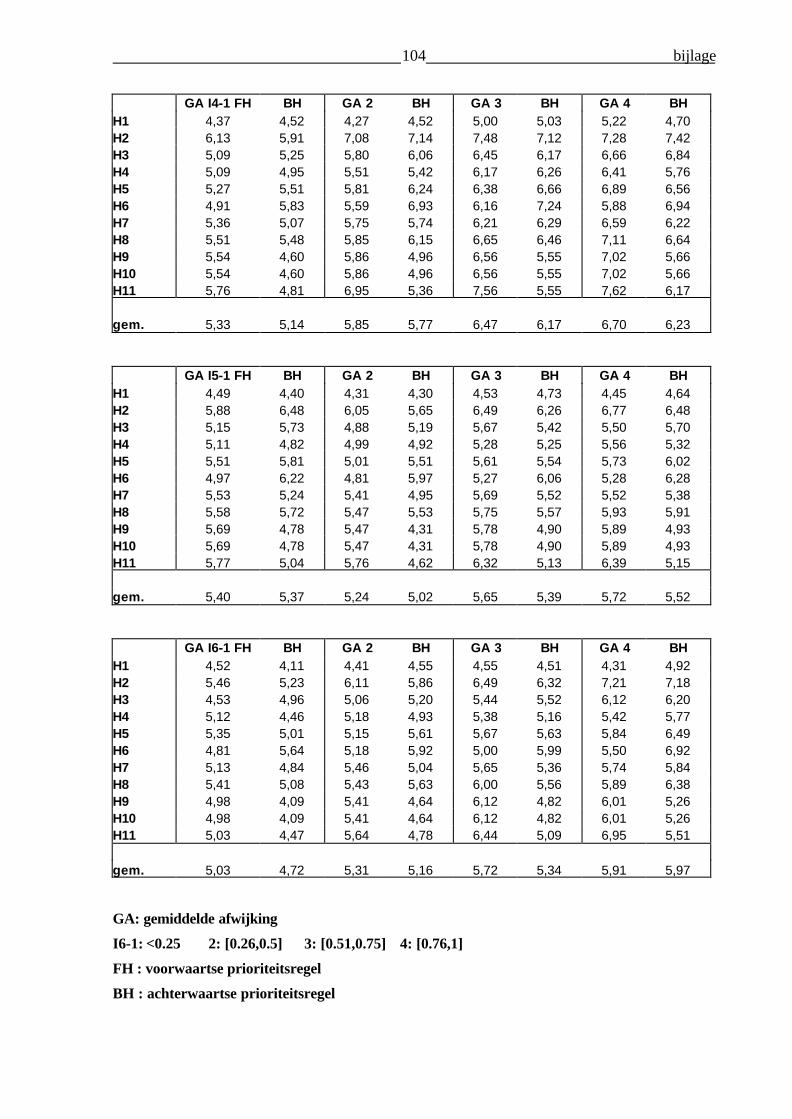
104 bijlage
GA I4-1 FH BH GA 2 BH GA 3 BH GA 4 BHH1 4,37 4,52 4,27 4,52 5,00 5,03 5,22 4,70H2 6,13 5,91 7,08 7,14 7,48 7,12 7,28 7,42H3 5,09 5,25 5,80 6,06 6,45 6,17 6,66 6,84H4 5,09 4,95 5,51 5,42 6,17 6,26 6,41 5,76H5 5,27 5,51 5,81 6,24 6,38 6,66 6,89 6,56H6 4,91 5,83 5,59 6,93 6,16 7,24 5,88 6,94H7 5,36 5,07 5,75 5,74 6,21 6,29 6,59 6,22H8 5,51 5,48 5,85 6,15 6,65 6,46 7,11 6,64H9 5,54 4,60 5,86 4,96 6,56 5,55 7,02 5,66H10 5,54 4,60 5,86 4,96 6,56 5,55 7,02 5,66H11 5,76 4,81 6,95 5,36 7,56 5,55 7,62 6,17 gem. 5,33 5,14 5,85 5,77 6,47 6,17 6,70 6,23
GA I5-1 FH BH GA 2 BH GA 3 BH GA 4 BHH1 4,49 4,40 4,31 4,30 4,53 4,73 4,45 4,64H2 5,88 6,48 6,05 5,65 6,49 6,26 6,77 6,48H3 5,15 5,73 4,88 5,19 5,67 5,42 5,50 5,70H4 5,11 4,82 4,99 4,92 5,28 5,25 5,56 5,32H5 5,51 5,81 5,01 5,51 5,61 5,54 5,73 6,02H6 4,97 6,22 4,81 5,97 5,27 6,06 5,28 6,28H7 5,53 5,24 5,41 4,95 5,69 5,52 5,52 5,38H8 5,58 5,72 5,47 5,53 5,75 5,57 5,93 5,91H9 5,69 4,78 5,47 4,31 5,78 4,90 5,89 4,93H10 5,69 4,78 5,47 4,31 5,78 4,90 5,89 4,93H11 5,77 5,04 5,76 4,62 6,32 5,13 6,39 5,15 gem. 5,40 5,37 5,24 5,02 5,65 5,39 5,72 5,52
GA I6-1 FH BH GA 2 BH GA 3 BH GA 4 BHH1 4,52 4,11 4,41 4,55 4,55 4,51 4,31 4,92H2 5,46 5,23 6,11 5,86 6,49 6,32 7,21 7,18H3 4,53 4,96 5,06 5,20 5,44 5,52 6,12 6,20H4 5,12 4,46 5,18 4,93 5,38 5,16 5,42 5,77H5 5,35 5,01 5,15 5,61 5,67 5,63 5,84 6,49H6 4,81 5,64 5,18 5,92 5,00 5,99 5,50 6,92H7 5,13 4,84 5,46 5,04 5,65 5,36 5,74 5,84H8 5,41 5,08 5,43 5,63 6,00 5,56 5,89 6,38H9 4,98 4,09 5,41 4,64 6,12 4,82 6,01 5,26H10 4,98 4,09 5,41 4,64 6,12 4,82 6,01 5,26H11 5,03 4,47 5,64 4,78 6,44 5,09 6,95 5,51 gem. 5,03 4,72 5,31 5,16 5,72 5,34 5,91 5,97
GA: gemiddelde afwijking
I6-1: <0.25 2: [0.26,0.5] 3: [0.51,0.75] 4: [0.76,1]
FH : voorwaartse prioriteitsregel
BH : achterwaartse prioriteitsregel
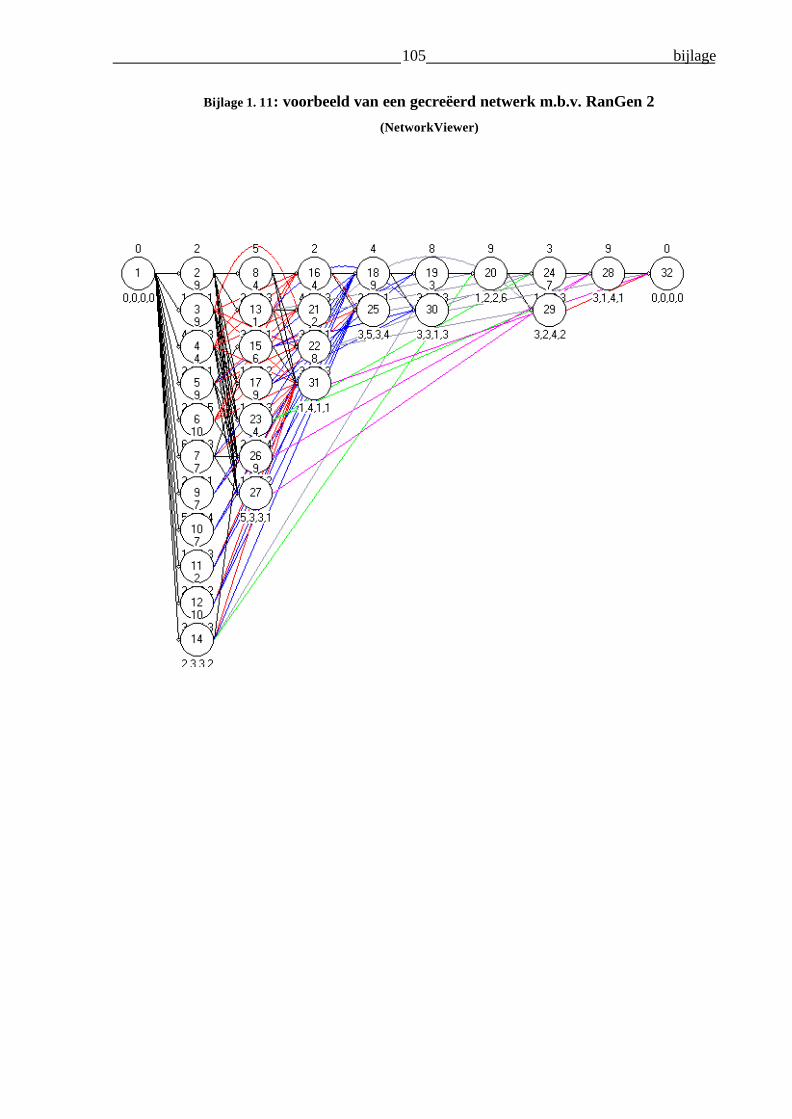
105 bijlage
Bijlage 1. 11: voorbeeld van een gecreëerd netwerk m.b.v. RanGen 2
(NetworkViewer)
106 Referenties
Referenties
107 Referenties
§ Agrawal M. Elmaghraby S. en Herroelen W., 1996, DAGEN: A generator of testsets forproject activity nets, European Journal of Operational Research, vol. 90, nr. 20, p. 376-382.
§ Bein W., Kamburowski J. en Stallmann M., 1992, Optimal reduction of two-terminaldirected acyclic graphs, SIAM Journal on Computing, vol. 21, p. 1112-1129.
§ Brucker P. et al., 1999, Resource-constrained project scheduling: Notation, classification,models, and methods, European Journal of Operational Research, vol. 112, nr. 1, p. 3-41.
§ Chanas S., Dubois D. en Zielinski P., 2002, On the sure criticality of tasks in Activitynetworks with imprecise durations, IEEE Transactions on systems, man, and cybernetics-part B: cybernetics, vol. 32, nr. 4, p. 393-407.
§ Cooper D.F., 1976, Heuristics for scheduling resource-constrained projects: anexperimental investigation, Management Science, vol. 22, nr. 11, p. 1186-1194.
§ Corder S. en Ruby Jr. R., 1993, Microcomputer-based software alternatives for projectmanagement, Journal of Education for Business, vol. 69, Nr. 1, p. 56-60.
§ Davis E.W. en Heidorn G.E., 1971, Optimal project scheduling under multiple resourceconstraints, Management Science, vol. 17, nr. 12, p. 803-816.
§ Davis E.W., 1975, Project network summary measures constrained-resource scheduling,AIIE Transactions, vol. 7, nr. 2, p. 132-142.
§ Davis E.W. en Patterson J., 1975, A comparison of heuristic and optimal solutions inresource constrained project scheduling, Management Science, vol. 21, nr. 8, p. 944-955.
§ Demeulemeester E. en Herroelen W., 1992, A branch-and-bound procedure for themultiple resource constrained project scheduling problem, Management Science, vol. 38,nr. 12, December 1992, p. 1803-1818.
§ Demeulemeester E., Dodin B. en Herroelen W., 1993, A random activity networkgenerator, Operations Research, vol. 41, nr. 5, p. 972-980.
§ Demeulemeester E. en Herroelen W., 1996, An efficient optimal solution procedure for thepreemtive resource-constrained project scheduling problem, European Journal ofOperational Research, vol. 90, nr. 2, p. 334-348.
§ De Reyck B. en Herroelen W., 1996, On the use of the complexity index as a measure ofcomplexity in activity networks, European Journal of Operational Research, vol. 91, nr. 2,p. 347-366.
§ De Reyck B. en Herroelen W., 1999, Bieden projectplanningspakketten de oplossing?Projectmanagement en –scheduling, Business Logistics, p. 46-57.
§ De Reyck B. en Herroelen W., 1999, Complex samenspel tussen tijd-, volgorde- enhulpmiddelenbeperkingen, Business Logistics, p. 19-28.
§ De Wit J. en Herroelen Willy, 1990, An evaluation of microcomputer-based softwarepackages for project management, European Journal of Operational Research, vol. 49, nr.1, p. 102-139.
§ East W. en Liu L., 1993, Infrastructure in projectmanagement: dynamic multiprojectscheduling with limited resources, Working paper, University of Illionois.
108 Referenties
§ Elmaghraby S.E. en Herroelen W., 1980, On the measurement of complexity in activitynetworks, European Journal of Operational Research, vol. 5, nr. 4, p. 223-234.
§ Elmaghraby S.E. en Kamburowski J., 1992, The analysis of activity networks undergeneralized precedence relations, Management Science, vol. 38, nr. 9, p. 1245-1263.
§ Farrington et al., 1999, Activity scheduling in the dynamic, multi-project setting: choosingheuristics through deterministic simulation, Proceedings of the 1999 Winter SimulationConference.
§ Focken T., 2002, Review of the development of the project management technology,ENMG 604 Desk Research Project, University of Canterbury, Christchurch, New Zealand.
§ Gemmil D.D. en Edwards M.L., 1999, Improving resource-constrained project scheduleswith look-ahead techniques, Project Management Journal, vol. 30, nr. 3, p. 44-55.
§ Hartmann S. en Kolisch R., 2000, Experimental evaluation of state-of-the-art heuristics forthe resource constrained project scheduling problem, European Journal of OperationalResearch, vol. 127, nr. , p. 394-407.
§ Hegazy T., 1999, Optimization of Resource Allocation and Leveling Using GeneticAlgorithms, Journal of construction and engineering and management, vol. 125, nr. 3, p.167-175.
§ Herroelen W. en Demeulemeester E., 1996, Project management and scheduling, EuropeanJournal of Operational Research, vol. 90, nr. 2, p. 197-199.
§ Herroelen W. en De Reyck B., 1998, A branch-and-bound procedure for the resource-constrained scheduling problem with generalized precedence relations, European Journalof Operational Research, vol. 111, nr. 1, p. 152-174.
§ Herroelen W. en De Reyck B., 1999, Phase Transitions in Project Scheduling,Journal of the Operational Research Quarterly, vol. 50, nr. ?, p. 148-156.
§ Khamooshi H., 1996, Net-work-based project planning and scheduling, IndustrialManagement & Data Systems, vol. 96, nr. 8, p. 13-22.
§ Khattab M. en Soyland K., 1998, Limited resource allocation in construction projects, ASCProceedings of the 34the Annual Conference, 15-18 april 1998, p. 273-280.
§ Kirkpatrick S., Gelatt Jr. C.D. en Vecchi M.P., 1983, Science, Optimization by simulatedannealing, vol. 220, nr. 4598, p. 671-771.
§ Klein R., 2000, Bi-directional planning – improving priority rule based heuristics forscheduling resource-constrained projects, European Journal of operational Research, vol.127, nr. 3, p. 619-638.
§ Klein R., 2000, Project scheduling with time-varying resource constraints, InternationalJournal of Production Research, vol. 38, nr. 16, p. 3937-3957.
§ Kolisch R. et al., 1995, Characterization and generation of a general class of resource-constrained project scheduling problems, Management Science, vol. 41, nr.10, p. 1693-1703.
109 Referenties
§ Kolisch R., 1996, Efficient priority rules for the resource constrained project schedulingproblem, Journal of Operations management, vol. 14, nr. 3, p. 179-192.
§ Kolisch R., 1996, Serial and parallel resource-constrained project scheduling methodsrevisited: Theory and computation, European Journal of Operational Research, vol. 90, nr.2, p. 320-333.
§ Kolisch R., 1999, Resource Allocation Capabilities of Commercial Project ManagementSoftware Packages, Interfaces, vol. 29, nr. 4, p. 19-31.
§ Liberatore M.J., Pollack-Johnson B. en Smith C.A., 2001, Project Management inConstruction: Software Use and Research Directions, Journal of Construction Engineeringand Management, vol. 127, nr. 2, p. 101-107.
§ Mastor A.A., 1970, An experimental and comparative evaluation of production linebalancing techniques, Management Science, vol. 16, nr. 2, p. 728-746.
§ McCray G.E., Purvis R.L. en McCray C.G., 2002, Project management under uncertainty:The impact of heuristics and biases, Project Management Journal, vol. 33, nr. 1, mart 2002,p. 49-57.
§ Mellentien C. en Trautmann N., 2001, Resource allocation with project managementsoftware, OR Spektrum, vol. 23, nr.3, p. 383-394.
§ Neumann K. en Zimmerman J., 1999, Resource levelling for projects with schedule-dependent time windows, European Journal of Operational Research, vol. 117, nr. 3, p.591-605.
§ Patterson J. en Roth G., 1976, Scheduling a project under multiple resource constraints: Azero one programming approach, AIIE Transactions, vol. 8, nr; 4, p. 449-456.
§ Patterson J., 1984, A comparison of exact approaches for solving the multiple constrainedresource project scheduling problem, Management Science, vol. 30, nr. 7, p. 854-867.
§ Project Management Institute, A guide to the Project Management Body of Knowledge(PMBOK®Guide) – 2000 Edition, 216 p.
§ Primavera Project Planner (P3), 1999, Planning and control guide, Primavera Systems,Philadelphia.
§ Primavera Project Planner (P3), 1999, Reference Manual, Primavera Systems,Philadelphia.
§ Schirmer A., 1998, Advanced biased random sampling in serial and parallel scheduling,Institut für Betriebswirtshaftslehre, Lehrstuhl für Produktion und Logistik.
§ Schwindt C., 1996, Generation of resource-constrained project scheduling problems withminimal and maximal time lags, WIOR-Report-489, Institut für Wirtschaftstheorie undOperations Research, Universität Karlsruhe, 52 p.
§ Tavares L.V., Ferreira J.A. en Coelho J.S., 1999, The risk of delay of a project in terms ofthe morphology of its network, European Journal of Operational Research, vol. 119, nr.2,p. 510-537.

110 Referenties
§ Tormos P., Barber F. en Lova A., 2002, An integration model for planning and schedulingproblems with constrained resources, Proceedings of the 8the international workshop onproject management and scheduling, p. 354-358.
§ Vanhoucke M., Demeulemeester E. en Herroelen W., 2001, A new random networkgenerator for activity-on-the-node networks, Journal of Scheduling,
§ Vanhoucke M., Coelho J. en Tavares L., 2003, On the morphological structure of anetwork,
§ Yang B. en Geunes J., 2001, Resource-constrained project scheduling: past work and newdirections, Research Report 2001-6, Department of Industrial Engineering, University ofFlorida.
Top Related