· Abstract automata DFAs Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7 property...
32
Categorical Automata Learning Framework Gerco van Heerdt Matteo Sammartino Alexandra Silva LiVe @ ETAPS 2017 calf-project.org
Transcript of · Abstract automata DFAs Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7 property...

CategoricalAutomataLearningFramework
Gerco van Heerdt Matteo Sammartino Alexandra Silva
LiVe @ ETAPS 2017
calf-project.org

Our team
Alexandra Silva UCL
Gerco van Heerdt UCL
Joshua Moerman Radboud University
Maverick Chardet ENS Lyon
Collaborators:
Bartek Klin Warsaw University
Michal Szynwelski Warsaw University
Matteo Sammartino UCL

Automata learning
Learnerqueries
answers
builds
Systemblack-box
S
automatonmodel of
S

Automata learning
Learnerqueries
answers
builds
Systemblack-box
S
automatonmodel of
S
No formal specification available? Learn it!

set of system behaviors is a regular language
Finite alphabet of system’s actions A
L � A�
L* algorithm (D.Angluin ’87)

set of system behaviors is a regular language
Finite alphabet of system’s actions A
L � A�
L* algorithm (D.Angluin ’87)
Learner TeacherL

set of system behaviors is a regular language
Finite alphabet of system’s actions A
L � A�
L* algorithm (D.Angluin ’87)
Learner TeacherL
Q:w � L?A: Y/N

set of system behaviors is a regular language
Finite alphabet of system’s actions A
L � A�
L* algorithm (D.Angluin ’87)
Learner TeacherL
Q:w � L?A: Y/N
L(H) = L?Q:A: Y / N + counterexample
H = hypothesis automatonH

set of system behaviors is a regular language
Finite alphabet of system’s actions A
L � A�
L* algorithm (D.Angluin ’87)
Learner TeacherL
Q:w � L?A: Y/N
Minimal DFA accepting L L
builds
L(H) = L?Q:A: Y / N + counterexample
H = hypothesis automatonH

Non-deterministic
Weighted
Register
Mealy Machines
A zoo of automata
AlternatingUniversal
Probabilistic

Non-deterministic
Weighted
Register
Mealy Machines
Algorithms Correctness proofs
involved and hard to check
A zoo of automata
AlternatingUniversal
Probabilistic

Non-deterministic
Weighted
Register
Mealy Machines
Algorithms Correctness proofs
involved and hard to check
A zoo of automata
AlternatingUniversal
Probabilistic
Category theory comes to the rescue!

Abstract automata
DFAs
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Endofunctor = automaton typeF : C � C
Category = universe of state-spacesC

Abstract automata
DFAs
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Endofunctor = automaton typeF : C � C
Category = universe of state-spacesC
DFAs
F = (�)⇥A
C = Set

Abstract automata
DFAs
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Endofunctor = automaton typeF : C � C
Category = universe of state-spacesC
Q⇥ADFAs
F = (�)⇥A
C = Set

Abstract automata
DFAs
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Endofunctor = automaton typeF : C � C
Category = universe of state-spacesC
Q⇥A
1
DFAs
F = (�)⇥A
C = Set

Abstract automata
DFAs
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Endofunctor = automaton typeF : C � C
Category = universe of state-spacesC
Q⇥A
1q0 2 Q
DFAs
F = (�)⇥A
C = Set

Abstract automata
DFAs
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Endofunctor = automaton typeF : C � C
Category = universe of state-spacesC
Q⇥A
1q0 2 Q
2
DFAs
F = (�)⇥A
C = Set

Abstract automata
DFAs
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Endofunctor = automaton typeF : C � C
Category = universe of state-spacesC
Q⇥A
1q0 2 Q F ✓ Q
2
DFAs
F = (�)⇥A
C = Set

Abstract learning
Abstract observation data structure

Abstract learning
Abstract observation data structure
approximates
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Target minimal automaton

Abstract learning
Abstract observation data structure
approximates
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Target minimal automaton
Hypothesis automaton
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FH
H
I Y
”H
outHinitH
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
abstract closedness and consistency

Abstract learning
Abstract observation data structure
General correctness theorem=Guidelines for implementation
approximates
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Target minimal automaton
Hypothesis automaton
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FH
H
I Y
”H
outHinitH
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
abstract closedness and consistency

Abstract learning
Abstract observation data structure
General correctness theorem=Guidelines for implementation
approximates
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FQ
Q
I Y
”Q
outQinitQ
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
Target minimal automaton
Hypothesis automaton
Gerco van Heerdt, Matteo Sammartino, and Alexandra Silva 7
property stating that for all s1
, s2
œ S such that ›(s1
) = ›(s2
) we must have L(s1
) = L(s2
).The Lı algorithm ensures this by having Á œ E, using that L(s) = ›(s)(Á) for any s œ S.
4 A General Correctness Theorem
In this section we work towards a general correctness theorem. We then show how it appliesto the ID algorithm, to the algorithm by Arbib and Zeiger and to Lı.
S T
H P
‡
e fi„
m
S H
T P
e
‡ mÂ
fi
(3)
The key observation for the correctness theoremis the following. Let w = (S ୾ T, T
fi≠æ P ) bea wrapper with minimization (S e≠æ H, H
m≠æ P ).If ‡ œ E , then the factorization system gives us aunique diagonal „ in the left square of (3), which by (the dual of) Proposition ?? satisfies„ œ E . Similarly, if fi œ M, we have  in the right square of (3), with  œ M. Composing thetwo diagrams and using again the diagonal property, one sees that „ and  must be mutuallyinverse. We can conclude that H and T are isomorphic. Now, if w is a wrapper producedby a learning algorithm and T is the state space of the target minimal automaton, as inExample 2, our reasoning hints at a correctness criterion: ‡ œ E and fi œ M upon terminationensure that H is (isomorphic to) T . Of course, the criterion will have to guarantee that theautomata, not just the state spaces, are isomorphic.
We first show that the argument above lifts to F -algebras f : FT æ T , for an arbitraryendofunctor F : C æ C preserving E .
I Lemma 11. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E, then w is f -closed; iffi œ M, then w is f-consistent.
Proof. If ‡ œ E , then let „ be as in (3) and define closef = „ ¶ f ¶ F‡; if fi œ M, then let Âbe as in (3) and define consf = fi ¶ f ¶ FÂ. J
I Proposition 12. For a wrapper w = (‡, fi) and an F -algebra f , if ‡ œ E and w is f-consistent, then „ as given in (3) is an F -algebra homomorphism (T, f) æ (H, ◊f ); if fi œ Mand w is f-closed, then  as given in (3) is an F -algebra homomorphism (H, ◊f ) æ (T, f).Proof. Assume that ‡ œ E and w is FT T H
FS P
FT FH H
f „
fi m›f
F ‡ F e closef
F ‡ 1
2
F „
3
4
5
◊f
m
1 definition of ›f
2 (3)3 functoriality, (3)4 definition of ◊f
5 closedness
f -consistent. The proof for the otherpart is analogous. Using Lemma 11 wesee that ◊f indeed exists. Because F‡is epic and m monic, it su�ces to showm¶„¶f ¶F‡ = m¶◊f ¶F„¶F‡, whichis done on the right. (The definition of◊f can be found in the proof of Proposition 9.) J
I Corollary 13. If ‡ œ E and fi œ M, then „ as given in (3) is an F -algebra isomorphism(T, f) æ (H, ◊f ).
Now we enrich F -algebras with initial and final states, obtaining a notion of automaton in acategory. Then we give the full correctness theorem for automata. We fix objects I and Y inC, which will serve as initial state selector and output of the automaton, respectively.I Definition 14 (Automaton). An automaton in C is an object Q FH
H
I Y
”H
outHinitH
of C equipped with an initial state map initQ : I æ Q, an outputmap outQ : Q æ Y , and dynamics ”Q : FQ æ Q. An input systemis an automaton without an output map; an output system is anautomaton without an initial state map.
abstract closedness and consistency
CALF: Categorical Automata Learning FrameworkGerco van Heerdt, Matteo Sammartino, Alexandra Silva
(arXiv:1704.05676)

Other automata & optimizations

NomVect
Set DFAsNominal automataWeighted automata
Change base category
Other automata & optimizations

NomVect
Set DFAsNominal automataWeighted automata
Change base category
Other automata & optimizations
Side-effects (via monads)NFAs
Partial automata
Universal automataAlternating automata
PowersetPowerset with intersection
Double powersetMaybe monad

NomVect
Set DFAsNominal automataWeighted automata
Change base categoryObservation tables
Discrimination trees
Change main data structure
Other automata & optimizations
Side-effects (via monads)NFAs
Partial automata
Universal automataAlternating automata
PowersetPowerset with intersection
Double powersetMaybe monad

NomVect
Set DFAsNominal automataWeighted automata
Change base categoryObservation tables
Discrimination trees
Change main data structureLearning Nominal Automata (POPL ’17)
Joshua Moerman, Matteo Sammartino, Alexandra Silva, Bartek Klin, Michal Szynwelski
Other automata & optimizations
Side-effects (via monads)NFAs
Partial automata
Universal automataAlternating automata
PowersetPowerset with intersection
Double powersetMaybe monad

NomVect
Set DFAsNominal automataWeighted automata
Change base categoryObservation tables
Discrimination trees
Change main data structureLearning Nominal Automata (POPL ’17)
Joshua Moerman, Matteo Sammartino, Alexandra Silva, Bartek Klin, Michal Szynwelski
Other automata & optimizations
Side-effects (via monads)NFAs
Partial automata
Universal automataAlternating automata
PowersetPowerset with intersection
Double powersetMaybe monad
Learning Automata with Side-effectsGerco van Heerdt, Matteo Sammartino, Alexandra Silva
(arXiv:1704.08055)

Automaton type
Optimizations
Minimization algorithms Testing algorithms
Automata Learning algorithms
Connections with other algorithms

Ongoing and future work
• Library & tool to learn control + data-flow models (as nominal automata)
• Applications:
• Specification mining • Network verification, with • Verification of cryptographic protocols • Ransomware detection




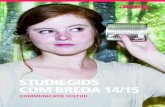






![Examen micro s1 [ economie.com]](https://static.fdocuments.nl/doc/165x107/58728bdf1a28ab36118b52c5/examen-micro-s1-wwwcours-economiecom.jpg)