Tema 2 met depl

of 54
-
Upload
alexandrugconstantin -
Category
Documents
-
view
24 -
download
0
description
aaa
Transcript of Tema 2 met depl
-
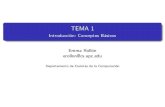
LUCRAREA NR.2
S se efectueze un calcul de interaciune teren-structur, lund n studiu
cadrul din figur.
1,5a
2a a
P
q
q
2a
Fig.1. Cadru static nedeterminat
Analiza presupune:
1. Predimensionarea cadrului,
2. Determinarea strii de eforturi din structur, sub aciunea ncrrilor, inclusiv
aflarea reaciunilor din reazeme;
3. Determinarea tasrii terenului de fundare sub aciunea reaciunilor, tasrile
devin cedri de reazeme, pentru cadru;
4. Calculul strii de eforturi din structur sub aciunea cedrilor de reazeme din
etapa anterioar, inclusiv aflarea reaciunilor din reazeme;
5. Continuarea calcului pn cnd dou stri consecutive se ncadreaz n
limitele erorilor relative admisibile (r%
-
a. b.
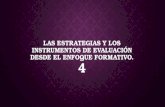
Fig. 2. Contururi nchise
ii. Un contur distinct are cel puin o bar care nu a fost cuprins n alte
contururi ale structurii, fig.3.(de exemplu - conturul 3).
1 2 3
Fig.3. Contururi distincte
iii. O articulai presupune o legtur lips, n raport cu continuitatea total, fig.4.
iv. O legtur simpl presupune dou legturi lips, n raport cu continuitatea
total, fig.4.
v. O ntrerupere presupune trei legturi lips, fig.4.
Articulaie, o legtur lips
Legtur simpl, lipsesc dou
legturi
ntrerupere, lipsesc
trei legturi
Continuitate
total
a. b.
c. d.
Fig.4. Legturi ntre elementele unei structuri
Aplicaie structura luat n studiu, fig.5.
Structura are dou contururi, notate pe figur, 1 i 2, deci:
K 2 Conturul numrul 1 are o articulaie n i i deci, o legtur lips. Conturul
numrul 2 are o articulaie n j i deci, o legtur lips. Prin urmare:
s 2 .
Aplicnd relaia de calcul a gradului de nedeterminare static (1) rezult:
GNS 3K s
3 2 2 4
-
21
i
j
Fig.5. Contururi i legturi lipsa
Prin cel de al doilea mod de calcul se folosete relaia
GNS (l r) 3C , (2)
unde: C reprezint numrul de corpuri (bare, elemente),
3 numrul de ecuaii de echilibru static care se pot scrie pentru un corp,
l numrul de legturi simple interioare (ntre corpurile structurii),
r numrul de legturi simple exterioare (ntre corpuri i reazeme, n
reazeme)
Observaii:
i. O legtur ncastrat ntre dou corpuri presupune trei legturi simple
interioare, fig.6.
I
II
i
Fig.6. Legtur ncastrat ntre dou corpuri (I i II),
notat i, presupune trei legturi simple
ii. O legtur ncastrat ntre mai mult de dou corpuri (bare, elemente),
presupune determinarea numrului de legturi ncastrate, egal cu numrul
barelor ce concur n nod minus o bar, care reprezint reperul fix. Dac
notm cu numrul de ncastrri i cu b numrul de bare (corpuri, elemente)
ce concur n nod, atunci:
b 1 (3)
i, deci numrul de legturi simple este dat de relaia:
l 3 (4)
Exemplu fig.7.
-
Fig.7. Nod cu patru bare ncastrate
b 4,
4 1 3
l 3 3 9
iii. O legtur articulat ntre mai mult de dou corpuri (bare, elemente),
presupune determinarea numrului de legturi articulate, egal cu numrul
barelor ce concur n nod minus o bar, care reprezint reperul fix. Dac
notm cu a numrul de ncastrri i cu b numrul de bare (corpuri, elemente)
ce concur n nod, atunci:
a b 1 (5)
i, deci numrul de legturi simple este dat de relaia:
l 2 a (6)
Exemplu fig.8.
Fig.8. Nod cu bare articulate
b 4,
a 4 1 3
l 2 3 6
iv. Referitor la legturile exterioare: o ncastrare presupune trei legturi simple,
o articulaie include dou legturi simple, iar un reazem simplu se identific
cu o legtur simpl, fig.9
Reazem
simplu, r=1
Reazem
ncastrat, r=3Reazem
articulat, r=2
Fig.9. Legturi exterioare, cu terenul
-
2.2. Calculul gradului de nedeterminare cinematico-elastic a structurii,
notat GNCE
Relaia de calcul are forma:
GNCE N GL (7)
Unde: N reprezint numarul de noduri rigide ale structurii,
GL gradul de libertate a structurii, care se determin cu formula:
GL 3 C (l r) (8)
Observaii:
i. Relaia (8) pentru aflarea gradelor de libertate, se aplic pe o structur
obinut din cadrul luat n studio, la care s-a introdus n toate
nodurile rigide i reazemele ncastrate de articulaii, prin suprimare
unor legturi simple;
ii. Notaiile: C, l i r sunt identice cu cele definite la punctual 2.1.
Aplicaie structura luat n studiu, fig.5.
2
1
4 5
6 7
3
Fig.10. Numerotarea nodurilor structurii
Analiznd structura se determin numrul de noduri rigide (nodurile 1, 3, 4 i 5). Deci:
N 4 Structura cu articulaii n nodurile rigide i n reazemul ncastrat este artat
n fig. 11.
VII
VI VIII
II III
I IV
Fig.11. Structura la care n nodurile rigide i n reazemul ncastrat
sau introdus articulaii
Din studiul fig.11 rezult:
-
- numrul corpurilor,
- numrul legturilor simple,
- gradele de libertate, relaia (8.9),
C 7,
l 2 6 2 2 18,
GL 3 7 18 3.
n final, pentru determinarea gradului de nedeterminare cinematic-elastic, se
utilizeaz relaia (7.), rezult:
GNCE 4 3 7
2.3. Alegerea metodei de calcul
Rezolvarea structurilor static nedeterminate se poate face prin dou metode
de calcul: metoda forelor i metoda deplasrilor.
2.4. Aplicarea metodei deplasrilor pentru aciuni
i. Numrul i semnificaia necunoscutelor
Numrul necunoscutelor este egal cu gradul de nedeterminare cinematic-
elastic a structurii.
n cazul structurii considerate, numrul necunoscutelor este egal cu 7.
Sistemul de baz, n metoda deplasrilor, fig. 11, se obine prin blocarea
deplasrilor nodurilor: opt deplasri unghiulare i deplasri liniare (mpiedicarea
celor patru noduri s se roteasc i s se produc deplasri liniare n cele trei grade
de libertate). Blocajul de nod este semnificat printr-un ptrat, iar blocajul
corespunztor unui grad de libertate, printr-un reazem simplu. n cadrul sistemului
de baz, barele structurii devin grinzi dublu ncastrate i/sau grinzi ncastrate-simplu
rezemate.
Semnificaia necunoscutelor: rotiri ale nodurilor i deplasri liniare ale
nodurilor, corespunztoare gradelor de libertate, notate - iz
ii. Ecuaii de echilibru
Ecuaiile exprim echilibrul static al nodurilor i al lanurilor cinematice.
Forma general a sistemului de ecuaii de echilibru este urmtoarea:
ij j ipr z R 0 , (9)
n care: ijr este matricea coeficienilor,
jz - vectorul necunoscutelor,
ipR - vectorul termenilor liberi.
-
Sistem de
baz
1z 2z
3z 4z5z
6z
7z
Fig.11. Sistem de baz i necunoscute - deplasri distincte
n cazul structurii luate n studiu, sistemul de ecuaii are forma:
11 12 13 14 15 16 17 1
21 22 23 24 25 26 27 1
31 32 33 34 25 36 37 1
41 42 43 44 45 46 47 4
51 41 53 54 55 56 57 5
61 62 63 64 65 66 67 1
71 72 73 74 75 76 77 7
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
1p
2p
3p
4p
5p
6p
7p
R0
R0
R 0
R 0
0R
0R
0R ,
unde: 11 47r r reprezint reaciunile moment din blocajele de nod, determinate pe
sistemul de baz, corespunztor metodei deplasrilor, pentru rotiri de noduri, 1 4z z
fig.11;
51 77r r - reaciunile din blocajele grade de libertate, pentru deplasri liniare
corespunztoare, 5 7z -z . iii. Calculul coeficienilor
Deformatele sistemului de baz, desenate pentru deplasri unghiulare (rotiri),
egale cu unitatea, ale nodurilor, sunt prezentate n fig. 12, 29, 29, 33. Pe fiecare
deformat, n extremitile barelor sunt figurate momentele ncovoietoare produse de
rotirile nodurilor, iz . Echilibrul static, al fiecrui nod, se exprim ntre momentele
din extremitile barelor ce concur n noduri i reaciunea - moment, care apare prin
suprimarea blocajului de nod.
-
Deformata sistemului
de baza pentru
1z 1
21r11r
16 16t k
211
34
6 7
5
15k
13k
13 13t k
31r 41r
51r
61r
71r16k
Fig.12. Deformata sistemului de baz pentru rotirea 1z 1
Se determin coeficienii: 11 41r r .
Exprimm echilibrul celor patru noduri, notate - 1, 2, 3 i 4, conform fig. 12:
11 111
r r
( i ) reprezint rigiditatea la rotire a barei dublu ncastrate,
se determin cu relaia - =4EI/L,
13 15 16
ij 13 16
ij
ij
M 0; k k k 0 ;
unde : k k k
k
k ( ) reprezint rigiditatea la rotire a barei ncastrate - simplu rezemat,
se determin cu relaia - =3EI/L,
EI - reprezint modului de rigiditate al seciunii transversa
15
ij
k
k
le la solicitarea
de ncovoiere,
L - lungimea barei.
21
2
rM 0; 0;
31 313
r r
reprezint factorul de transmitere a momentului ncovoietor din captul j
al barei ctre captul i (la bara cu momentul de inerie, I = consta
13 13
ij
M 0; t k 0;
unde : t
nt, este egal cu 0,5).
-
41
4
rM 0; 0;
n continuare, se determin coeficienii: 51 61 71r , r i r .
n cazul deplasrilor liniare, produse pe direcia gradelor de libertate, este
necesar s se efectueze, initial, analize cinematice pentru determinare centrelor
instantanee i relative de rotaie i s se traseze digrame de deplasri, pentru a se
msura rotirile barelor structurii.
Pentru calculul coeficientului 51r , se consider structura din fig. 11 la care
s-au blocat deplasrile liniare pe direcia gradelor de libertate, notate 6 i 7, rmne
liber deplasarea liniar dup direcia orizontal.
VII
VI VIII
II III
I IV
Fig.13. Model pentru calculul coeficientului 51r
Pentru trasarea diagramele de deplasare, corespunztoare modelului din fig.
13, n raport cu dou linii de referint, se efectueaz, mai nti, o analiza cinematic.
Analiza cinematic const n determinarea centrelor instantanee de rotire i a
centrelor relative de rotire. Pentru aceasta, se folosesc teoremele coliniaritii i
unele informaii principiale. Analiza cinematic i diagramele de deplasare sunt
prezentate n fig.14.
Obs.:
1. Sistemele cu grade de libertate sunt alctuite din mai multe corpuri (bare)
rigide.
2. Deplasarea infinit mic a unui corp, n plan, poate fi considerate ca o
rotire n jurul unui anumit punct din plan, numit centru instantaneu.
3. Deplasrile diferitelor punct sunt normale pe razele duse de la centrul
instantaneu la punctual respective.
4. Poziia unui centru instantaneu se poate gsi cunoscnd direciile
deplasrilor pentru dou puncte ale corpului rigid; el se gsete la
intersecia normalelor duse pe direciile acestor deplasri, n punctele
respective.
5. Considernd dou corpuri rigide din sistem, deplasarea lor relative se
produce n jurul unui centru relativ de rotire.
6. Teoremele coliniaritii:
-
a. Pentru dou corpuri rigide ale sistemului, centrele instantanee de
rotire i centru lor relative de rotire, sunt coliniare,
b. Pentru trei corpuri rigide ale sistemului, considerate dou cte
dou, central lor relative de rotire sunt coliniare.
V, VII
VI
VII
I
7T
6T
7T
15,6
5T
6,7
5
V5
VII
6,7
5,6
II III
IV
V
DD2211
3 4
67
Fig. 14. Sistem pentru calculul centrelor de rotire
i trasarea diagramei de deplasare
Analiza cinematic a sistemului desenat n fig.14: corpurile I, II, III i IV
constituie un sistem fix n plan, se deplaseaz numai corpurile V, VI i VII. Centrele
instantanee de rotire ale barelor rigide V i VII sunt n articulaiile 1 i 2, notate 5T
i 7T, centrele relative de rotire se gsesc n articulaiile comune dintre bare
(punctele 3 i 4), notate 5,6 i 6,7. Centrul instantaneu de rotire al corpului VI se
gsete la interseciile direciilor formate prin unirea centrelor: 5T i 5,6 i respectiv:
7T i 6,7. Rezult c centrul se gsete la infinit pe direcie vertical, corpul se
deplaseaz, prin urmare, pe direcie orizontal.
n continuare, se consider o linie de referin vertical. n raport cu aceast
linie, se traseaz diagrama de deplasare. Centrele instantanee de rotire se gsesc pe
linia pe referint, prin coborrea de perpendiculare, din centrele instantanee de
rotire, pe linia de referin. Pe direcia gradului de libertate (orizontal), din nodul 4
se produce o deplasare egal cu unitatea, corpurile V i VII se rotesc n jurul
centrelor instantanee de rotire, cu rotirile - 5V i 5
VII . Diagrama de deplasare este
trasat n raport cu linia de referin considerat i este notat DD2.
-
Deplasata sistemului pentru gradul de libertate considerat este desenat n
fig. 15.
1
2
11
3 4
67
5
5
V
VI
VIIV
I
II III
IV
5
VII
Fig.15. Deplasata sistemului pentru primul grad de libertate (notat 5)
Reaciunea din blocajul grad de libertate pentru rotirea nodului 1,
reprezentnd coeficientul r51, se determin aplicnd principiul lucrului mecanic
virtual. Se ncarc deplasata sistemului, trasat pentru gradul de libertate, notat 5, cu
momentele din extremitile barelor, conform deformatei prezentate n fig.12.
Situaia de ncrcare este prezentat n fig. 16.
Momentele spre bar i reaciunea r51, parcurgnd deplasrile virtuale conduc
la un lucru mecanic egal cu zero, deoarece deformata sistemului, pentru rotirea z1=0,
se gsea n echilibru, prin urmare:
55 13 13 13 V 51 51LMV 0; (k t k ) r 1 0 r Pentru calculul coeficientul r61 este necesar s eliberm blocajul grad de
libertate, notat 6 i pe sistemul cu barele rigide, din fig. 17, s efectum o analiz
cinematic i s trasm diagramele de deplasari.
-
1Deplasata sistemului
acionat de momentele spre bar
din deformata
5z 1
51r
2
11
3
4
67
5
5
V5
VII
13 13t k
13k
Fig.16. Deplasata sistemului pentru calculul coeficientului r51
VII
VI VIII
II III
I IV
Fig.17. Model pentru calculul coeficientului 61r
Centrele instananee i relative de rotire i diagramele de deplasri sunt
prezentate n fig.18.
Se determin centrele instantanee ale corpurilor I i IV. Acestea se gsesc n
articulaii 1 i 7., i centrele relative de rotire, care se afl n articulaiile dintre
corpuri. Centrul 3T se gsete la intersecia liniei care unete centreler 4T i 3,4
(comun este punctual 4) i direcia reazemului simplu din nodul 5. Centrul 7T se
afl la intersecia liniei care unete centrele 3,7 i 3T i direcia reazemului simplu
din nodul 4.
Diagrama de deplasare, n raport cu o linie de referin vertical se traseaz
prima, deoarece se produce pe direcia blocajului grad de libertate suprimat (notat
6) o deplasare egal cu unitatea, iar rotirile corpurile corpurilor I i IV se determin
direct: 6 6
I IV I1/h ,
-
unde h1 reprezint lungimea corpului I.
V, VII
DD2
4,7
1,5
I, IVI
II III
VI
VIIV
90 o
6T 7T
1
3T6T 4T
VIIII
IV
6
VI
6
III
6
IV1
2
4T
1
1/2
IV
6
V
6
VII
6
I
6
IV
1T
4T
1,2
1,5
2,5
3,4
3,7
4,7
5,6 6,7
3T
5,T7,T
6,T
DD1
5,T
2
11
34
6 7
5
3,4
Fig. 18. Sistem pentru calculul centrelor de rotire
i trasarea diagramelor de deplasari
Pe corpurile I i IV, rotite n diagrama de deplasare se gsesc i centrele
relative de rotire 1,5 i 4.7. Cum centrele instantanee de rotire 5T i 7T se gsesc
pe linia de referin, prin unire cu centrele relative 1,5 i 4,7 se traseaz barele
(corpurile) V i VII, rotite n diagrama de deplasare.
Diagrama de deplasare trasat n raport cu linia de referin orizontal se
obine prin trasarea corpului IV, pentru care se cunoate centrul instantaneu de
rotire, 4T, care este proiectat pe linia de referin i, deasemene este perpendiculat
pe coepul IV desenat n diagrama de deplasare trasat n raport cu lina de referi
vertical. Analiza continua lund n considerare centrele instantanee i relatve de
rotire.
Din considerente geometrice se determin deplasrile liniare i rotirile
corpurilor. Acestea sunt nominalizate pe diagrame.
Deplasata sistemului pentru cel de al doilea grad de libertate (notat 6) este
prezenzat n fig.19.
-
11
I
II
III
VI
VIIV
IV
6
IV1
1/23
2
4
67
5
6
III
6
VI
6
VII
6
I
6
V
Fig.19. Deplasata sistemului pentru cel de al doilea grad de libertate (notat 6)
Reaciunea din blocajul grad de libertate pentru rotirea nodului 1,
reprezentnd coeficientul r61, se determin aplicnd principiul lucrului mecanic
virtual. Se ncarc deplasata sistemului, trasat pentru gradul de libertate, notat 6, cu
momentele din extremitile barelor, conform deformatei prezentate n fig.12.
Situaia de ncrcare este prezentat n fig. 20.
11
I
II
III
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
67
561r
16 16t k
13k
13 13t k
16k
6
V
6
I6
IV
6
III
Fig.20. Deplasata sistemului pentru calculul coeficientului r61
-
Momentele spre bar i reaciunea r61, parcurgnd deplasrile virtuale conduc
la un lucru mecanic egal cu zero, deoarece deformata sistemului, pentru rotirea z1=0,
se gsea n echilibru, prin urmare:
6 66 13 13 13 I 16 16 16 I 61 61LMV 0; (k t k ) (k t k ) r 1 0 r Conform procedurii expuse anterior se calculeaz i coeficientul r71.
VII
VI VIII
II III
I IV
Fig.21. Model pentru calculul coeficientului 71r
II III
2T
3T
7
II
1
2T 3T
2,3
DD1
I
V
VI
VI
I
IV
7
III Fig. 22. Sistem pentru calculul centrelor de rotire
i trasarea diagramelor de deplasari
-
II III
7
II
7
III
2
11
3 4
V
VI
VII
IIV
6 7
15
Fig.23. Deplasata sistemului pentru cel de al trilea grad de libertate (notat 7)
II III
2
11
3 4
V
VI
VII
IIV
6 7
1
71r
15k7
III7
II
Fig.24. Deplasata sistemului pentru calculul coeficientului r71
Momentele spre bar i reaciunea r61, parcurgnd deplasrile virtuale conduc
la un lucru mecanic egal cu zero, deoarece deformata sistemului, pentru rotirea z1=0,
se gsea n echilibru, prin urmare:
77 15 II 71 71LMV 0; k r 1 0 r Se determin coeficienii: 12 42r r
.
Exprimm echilibrul celor patru noduri, notate - 1, 2, 3 i 4, conform fig. 25:
-
121
rM 0; 0;
22 222
r r
( ) reprezint rigiditatea la rotire a barei dublu ncastrate,
se determin cu relaia - =4EI/L,
(
25 27 24
ij 24
ij
ij 25
M 0; k k k 0 ;
unde : k k
k
k k i ) reprezint rigiditatea la rotire a barei ncastrate - simplu
rezemat, se determin cu relaia - =3EI/L,
EI - reprezint modului de rigiditate al seciunii transvers
27
ij
k
k
ale la solicitarea
de ncovoiere,
L - lungimea barei.
32
3
r M 0; 0;
42 424
r r
reprezint factorul de transmitere a momentului ncovoietor din captul j
al barei ctre captul i (la bara cu momentul de inerie, I = consta
24 24
ij
M 0; t k 0;
unde : t
nt, este egal cu 0,5).
Deformata sistemului
de baza pentru
2z 1
22r
12r
211
34
6 7
5 52k24k
24 24t k
32r 42r52r
62r
72r27k
Fig.25. Deformata sistemului de baz pentru rotirea
2z 1 n continuare, se determin coeficienii: 52 62 72r , r i r .
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru z2 = 1 i prin utilizarea lucrului mecanic
-
virtual se obin coeficienii 52 62 72r , r i r .
1
Deplasata sistemului
acionat de momentele spre bar
din deformata
2z 1
52r
2
11
3
4
67
5
5
V5
VII
24 24t k
24k
Fig.26. Deplasata sistemului pentru calculul coeficientului r52
55 24 24 24 VII 52 52LMV 0; (k t k ) r 1 0 r
11
I
IIIII
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
67
562r
6
V
6
I6
IV
6
III
52k
24k
24 24t k
27k
Fig.27. Deplasata sistemului pentru calculul
coeficientului r62 - 6 66 24 24 24 VII 27 IV 62 62LMV 0; (k t k ) (k ) r 1 0 r
-
11
II III
2
3 4
V
VI
VII
IIV
6 7
1
72r
7
III7
II
52k
Fig.28. Deplasata sistemului pentru calculul coeficientului r72
- 77 25 III 72 72LMV 0; k r 1 0 r Se determin coeficienii: 13 43r r
.
Exprimm echilibrul celor patru noduri, notate - 1, 2, 3 i 4, conform fig. 29:
Deformata sistemului
de baza pentru
3z 1
23r13r
13 31t k
211
3
4
6 7
5
31k
33r43r
53r
63r
73r
34k34 34t k
Fig.29. Deformata sistemului de baz pentru rotirea
3z 1
-
13 131
r r13 31M 0; t k 0;
232
r M 0; 0
33 33
3
r r34 31M 0; k k 0;
43 434
r r34 34M 0; t k 0;
n continuare, se determin coeficienii: 53 63 73r , r i r .
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru z3 = 1 i prin exprimarea echilibrului prin
lucrului mecanic virtual se obin coeficienii 53 63 73r , r i r .
1
Deplasata sistemului
acionat de momentele spre bar
din deformata
5z 1
53r
2
11
3
4
67
513 31t k
31k
5
VII
5
V
Fig.30. Deplasata sistemului pentru calculul coeficientului r53
55 31 13 31 V 53 53LMV 0; (k t k ) r 1 0 r
-
11
I
IIIII
VI
VIIV
IV
6
VI
6
III
6
IV6
I
6
VII
1
1/23
2
4
67
5
31k
63r
34k
6
V
34 34t k
13 31t k
Fig.31. Deplasata sistemului pentru calculul coeficientului r63
- 6 66 31 13 31 V 34 34 34 IV 63 63LMV 0; (k t k ) (k t k ) r 1 0 r
II III
7
II
2
11
3 4
V
VI
VII
IIV
6 7
1
73r
7
III
Fig.32. Deplasata sistemului pentru calculul coeficientului r73
7 73LMV 0; r 0
-
Se determin coeficienii: 14 44r r .
Exprimm echilibrul celor patru noduri, notate - 1, 2, 3 i 4, conform fig. 33:
Deformata sistemului
de baza pentru
4z 1
24r14r 24 42
t k
211
3 4
6 7
5
42k
34r44r
54r
64r
74r
43k34 43t k
Fig.33. Deformata sistemului de baz pentru rotirea 4z 1
141
r M 0; 0;
34 342
r r34 43M 0; t k 0
34 34
3
r r43 42M 0; k k 0;
24 244
r r24 24M 0; t k 0;
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru z4 = 1 i prin utilizarea lucrului mecanic
virtual se obin coeficienii 54 64 74r , r i r .
-
1Deplasata sistemului
acionat de momentele spre bar
din deformata
5z 1
54r
2
11
3
4
67
5 24 42t k
42k
5
VII
5
V
Fig.34. Deplasata sistemului pentru calculul coeficientului r54
55 42 24 42 V 54 54LMV 0; (k t k ) r 1 0 r
11
I
IIIII
VI
VIIV
IV
6
VI
6
III
6
IV
6
I
6
VII
1
1/23
2
4
67
5
24 42t k
42k
64r
43k34 43t k
6
V
Fig.35. Deplasata sistemului pentru calculul coeficientului r64
- 6 66 43 34 43 VI 42 24 42 VII 64 64LMV 0; (k t k ) (k t k ) r 1 0 r
-
II III
7
II
2
11
3 4
V
VI
VII
IIV
6 7
1
74r
7
III
Fig.36. Deplasata sistemului pentru calculul coeficientului r74
7 74LMV 0; r 0
Se determin coeficienii: 15 45r r .
Conform reprezentrii grafice din fig.15, semnificnd deplasata sistemului cu
nodurile articulate, reazemul ncastrat articulat i primul grad de libertate (notat 5)
eliberat, s-a trasat deformata sistemului de baz, desenat n fig. 37.
1
Deformata sistemului
de baza pentru
deplasare
5z 1
25r15r
13k
35r 45r55r
65r
13k
2
11
3
4
67
5
24k
24k
75r
Fig.37. Deformata sistemului de baz pentru rotirea 5z 1
-
Exprimm echilibrul celor patru noduri, notate - 1, 2, 3 i 4, conform fig. 37:
15 151
2
r r
( ) reprezint rigiditatea la deplasare a barei dublu ncastrate,
se determin cu relaia: =6EI/L ,
EI - reprezint
13
13ij
ij
M 0; k 0 ;
unde : k k
k
modului de rigiditate al seciunii transversale la solicitarea
de ncovoiere,
L - lungimea barei.
25 252
2
r r
( ) reprezint rigiditatea la deplasare a barei dublu ncastrate,
se determin cu relaia: =6EI/L ,
EI - reprezint
24
24ij
ij
M 0; k 0 ;
unde : k k
k
modului de rigiditate al seciunii transversale la solicitarea
de ncovoiere,
L - lungimea barei.
35 353
r r13M 0; k 0 ;
45 454
r r24M 0; k 0 ;
n continuare, se determin urmtorii coeficienii: 55 65 75r , r i r .
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru z5 = 1 i prin utilizarea lucrului mecanic
virtual se obin coeficienii 55 65 75r , r i r . Rezult sistemele din fig. 38, 39 i 40.
- 5 513 13 24 245 V VII 55 55LMV 0; (k k ) (k k ) r 1 0 r
6 613 13 24 246 V VII 65 65LMV 0; (k k ) (k k ) r 1 0 r
7 75LMV 0; r 0
-
155r
2
11
3
4
67
5
5
VII
5
V
13k
13k
24k
24k
Fig.38. Deplasata sistemului pentru calculul coeficientului r55
11
I
IIIII
VI
VIIV
IV
6
VI
6
III
6
IV
6
I
6
VII
1
1/23
2
4
67
5 65r
6
V
13k
13k
24k
24k
Fig.39. Deplasata sistemului pentru calculul coeficientului r65
-
II III
7
II
2
3 4
V
VI
VII
IIV
6 7
1
75r
7
III
Fig.40. Deplasata sistemului pentru calculul coeficientului r75
Se determin coeficienii: 16 46r r .
Conform reprezentrii grafice din fig.19, semnificnd deplasata sistemului cu
nodurile articulate, reazemul ncastrat articulat i cel de al doilea grad de libertate
(notat 6) eliberat, s-a trasat deformata sistemului de baz, desenat n fig. 41.
1
1/2
Deformata sistemului
de baza pentru
6z 1
26r16r
27k
13k
36r 51r
66r
76r
16k
13k
211
3 4
67
5
25k
24k
24k
34k34k
16k
46r
Fig.41. Deformata sistemului de baz pentru deplasarea liniar
6z 1
-
Exprimm echilibrul celor patru noduri, notate - 1, 2, 3 i 4, conform fig. 41:
16 161
r r13 16M 0; k k 0 ;
26 262
r r24 27 25M 0; k k k 0 ;
36 363
r r34 13M 0; k k 0 ;
46 464
r r34 24M 0; k k 0 ;
n continuare, se determin urmtorii coeficienii: 56 66 76r , r i r .
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru z6 = 1 i prin utilizarea lucrului mecanic
virtual se obin coeficienii 56 66 76r , r i r . Rezult sistemele din fig. 42, 43 i 44.
156r
2
11
3
4
67
5
5
VII
5
V
13k
13k
24k
24k
Fig.42. Deplasata sistemului pentru calculul coeficientului r56
-
11
I
IIIII
VI
VIIV
IV
6
VI
6
III
6
IV
6
I
6
VII
1
1/23
2
4
67
5 66r
6
V
27k
13k
16k
13k 25k
24k
24k
34k34k
16k
Fig.43. Deplasata sistemului pentru calculul coeficientului r66
11II III
7
II
2
3 4
V
VI
VII
IIV
6 7
17
III 25k
76r
Fig.44. Deplasata sistemului pentru calculul coeficientului r76
- 5 513 13 24 245 V VII 56 56LMV 0; (k k ) (k k ) r 1 0 r
6 6 6 634 34 13 13 24 24 256 VI V VII III
6 616 16 27VI IV 66 66
LMV 0; (k k ) (k k ) (k k ) k
(k k ) k r 1 0 r
7257 III 76 76LMV 0; k r 0 r
-
Se determin coeficienii: 17 47r r .
Conform reprezentrii grafice din fig.23, semnificnd deplasata sistemului cu
nodurile articulate, reazemul ncastrat articulat i cel de al treilea grad de libertate
(notat 7) eliberat, s-a trasat deformata sistemului de baz, desenat n fig. 45.
1
27r17r
2
11
34
5
15k
37r 47r
57r
67r
77r
25k
Deformata sistemului
de baza pentru
7z 1
Fig.44. Deformata sistemului de baz pentru deplasarea
7z 1 Exprimm echilibrul celor patru noduri, notate - 1, 2, 3 i 4, conform fig. 44:
17 171
r r15M 0; k 0 ;
27 272
r r25M 0; k 0 ;
373
r M 0; 0 ;
474
r M 0; 0 ;
n continuare, se determin urmtorii coeficienii: 57 67 77r , r i r .
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru z7 = 1 i prin utilizarea lucrului mecanic
virtual se obin coeficienii 57 67 77r , r i r . Rezult sistemele din fig. 46, 47 i 48.
-
157r
2
11
3
4
67
5
5
VII
5
V
Fig.46. Deplasata sistemului pentru calculul coeficientului r57
11
I
IIIII
VI
VIIV
IV
6
VI
6
III
6
IV
6
I
6
VII
1
1/23
2
4
67
5 67r
6
V
25k
Fig.47. Deplasata sistemului pentru calculul coeficientului r67
-
II III
7
II
2
3 4
V
VI
VII
IIV
6 7
1
77r
7
III15k 25k
Fig.48. Deplasata sistemului pentru calculul coeficientului r77
5 57LMV 0; r 0
6256 III 67 67LMV 0; k r 1 0 r
7 715 257 II III 77 77LMV 0; k k r 1 0 r
iv. Calculul termenilor liberi: 1pR
, 2pR
, 3pR
, 4pR
Pentru calculul termenilor liberi: 1pR , 2pR , 3pR , 4pR se ncarc sistemul de baz
cu aciunile exterioare i funcie de defprmata sistemului, fig.49, se figureaz
momentele de ncrcare perfecta. Prin exprimarea echilibrului static al nodurilor se
determin termenii liberi.
1p 1p1
R R p15M 0; M 0 ;
2p 2p2
R R p25M 0; M 0 ;
3p 3p3
R R p34M 0; M 0 ;
4p 4p4
R R p43M 0; M 0 ;
-
2pR1pR
3pR4pR
5pR
6pR
2
11
3
6 7
5
7pR
pM15
4
Deformata sistemului
de baza
q
q
pM25
pM34
pM43
produs de aciuni
P
Fig.49. Deformata sistemului de baz sub ncrcri
Calculul termenilor liberi: 5pR , 6pR , 7pR
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru z7 = 1. Rezult sistemele din fig. 50, 51 i
51 i prin utilizarea lucrului mecanic virtual se obin termenii liberi 5pR , 6pR , 7pR .
1
211
3
4
67
5
5
V5
VII
5pR
P
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de aciuni
Fig.50. Deplasata sistemului pentru calculul termenului liber 5pR
-
611
I
IIIII
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
7
5
6
VII
6
I6
IV
6
III
6pR
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de aciuni
pM25
pM34
pM43
P
2aq1/4
aq
1/4
Fig.51. Deplasata sistemului pentru calculul termenului liber 6pR
11
II III
2
3 4
V
VI
VII
IIV
6 7
1
7
III
7
II
7pR
pM15
pM25
Paq
1/2 1/2
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de aciuni
Fig.52. Deplasata sistemului pentru calculul termenului liber 7pR
R 5 5pLMV 0; 0
p p p
34 43 25 (M M M 6 66 VI III 6P 6P
1 1LMV 0; ) 2aq aq P 1 R 1 0 R
4 4
p p
15 25 -M M 7 76 II III 7P 7P
1 1LMV 0; aq aq R 1 0 R
2 2
-
unde: a=L/2,
L reprezint jumtate di lungimea barei 3,4 sau lungimea barei 1,5 sau
a barei 2,5.
v. Calculul necunoscutelor
jz
Dup ce s-au calculate coeficienii i termenii liberi ai ecuaiei matriceale
(9), se rezolvnd sistemul de ecuaii de echilibrul static i se afl valorile
necunoscutelor jz . Cu aceste necunoscute se traseaz diagrama final de momente
novoietoare.
Pentru aceasta, se nmulesc diagramele de momente din fig. 12, 25, 29, 33,
37, 41 i 45, cu necunoscutele jz i prin sumare ntre ele i cu diagrama din fig. 49
se obine diagram final de moment.
Un moment novoietor dintr-o seciune, n diagrama final, se determin cu
relaia:
=
f 1 2 3 4 5
ij ij 1 ij 2 ij 3 ij 4 ij 5
6 7 p
ij 6 ij 7 ij p
M M z M z M z M z M z
M z M z M z
Unde: e
ijM reprezint momentul dintr-o seciune a barei ij msurat n diagrama
produs de aciunea ze asupra sistemului de baz,
p
ijM reprezint momentul dintr-o seciune a barei ij msurat n diagrama
produs de aciunile exterioare asupra sistemului de baz.
vi. Calculul reaciunilor
Dup trasarea diagramelor final de momente ncovoietor se determin
reaciunile din cele dou reazeme, notate 6 i 7.
Reaciunea moment din reazemul ncastrat, notat 6, este egal cu momentul
ncovoietor din extremitatea 6, a barei 16.
Reaciunile fore din reazemele 6 i 7, notate V6 i H6, respectiv V7 i H7, se
determin folosind principiul lucrului mecanic virtual.
Pentru aceasta, se consider cadrul cu nodurile rigide i reazemul ncastrat
articulate, iar n reazemul n care dorim s calculm reaciunea, se suprim legtura
corespunztoare, care este nlocuit cu reaciunea specific. Sistemul astfel obinut
se ncarc cu momentele din extremirile barelor, corespunztoare diagramei finale.
Sistemului i se aplic o deplasare virtual compatibil cu legturile, iar echilibrul
staic se exprim printr-o ecuaie de lucru mechanic virtual, n care necunoscuta este
reaciunea pe care o determin. Prin rezolvarea ecuaiei, se afl valoarea reaciunii.
n fig. 53, 54, 55 i 56 sunt desenate sistemele pentru calculul reaciunilor, n fig. 57,
58, 59 i 60 sunt efectuate analizele cinamatice i trasate diagramele de deplasri
-
necesare construirii deplasatelor sistemelor, iar n fig. 61, 62, 63 i 64 sunt
prezentate deplasatele celor patru sisteme, care vor fi acionate de momentele
ncovoietoare din diagramele finale, pentru determinarea reaciunilor: V6 i H6,
respectiv V7 i H7.
VII
VI VIII
II III
I IV
Fig. 53. Sistem pentru calculul reaciunii V6
VII
VI VIII
II III
I IV
Fig. 54. Sistem pentru calculul reaciunii H6
VII
VI VIII
II III
I IV
Fig. 55. Sistem pentru calculul reaciunii V7
VII
VI VIII
II III
I IV
Fig. 56. Sistem pentru calculul reaciunii H7
-
DD1
I
II
VI
V
1,5
5,6
2,5
1,2
VI
6T
II
VI
2T
2T 6T
1T
5T
1
1
II
Fig. 57. Sistem pentru calculul centrelor de rotire
i trasarea diagramelor de deplasari
u6
I
I
1T
DD2
I
1T
1
Fig. 58. Sistem pentru calculul centrelor de rotire
i trasarea diagramelor de deplasari
-
2,5
IIIIV
6TVI
1T
VI III3T
1
I
II III
IV
VI
VIIV
2,3 3,7
4,7
1,5
5,65T
1,2
3,4
6,7
3T
6T
4T
2,5
Fig. 59. Sistem pentru calculul centrelor de rotire
i trasarea diagramelor de deplasari
7T
III
IV
VI
VII
3,7
4,7
3,4
6,7
3T
6T
4T
1
IV
IV
1
IIIIV
1/2
6TVI
VI III3T IV
Fig. 60. Sistem pentru calculul centrelor de rotire i trasarea diagramelor de deplasari
-
I
II
VI
V
1
1
1
VI
II
Fig.61. Deplasata sistemului pentru calculul reaciunii V6
I
1
I
Fig.62. Deplasata sistemului pentru calculul reaciunii H6
-
I
II
III
IV
VI
VIIV
VI
III
1
1
1
Fig.63. Deplasata sistemului pentru calculul reaciunii V7
III
IV
VI
1
I
II
V
VI
III
IV
1/2
1/2
Fig.64. Deplasata sistemului pentru calculul reaciunii H7
-
vii. Calculul cedrilor de reazeme
Terenul de fundare sub aciunea reaciunilor se va deforma punnd n
eviden cedri de reazeme. Terenul de fundare se va modela prin intermediul
coeficienilor elastici. Coeficienii elastici ai terenului de fundare sunt:
Cz coeficient elastic pentru translaie vertical,
Cx - coeficient elastic pentru translaie orizontal,
C
- coeficient elastic pentru rotaie n jurul unei axe orizontale.
ntre aceti coeficieni s-au determinat urmtoarele relaii de legtur:
x z
z
C 0.7C
C 2C (10)
Coeficienii de rigiditate ai terenului de fundare se determin cu relaiile:
z z f
x x f
y
K C A
K C A
K C I (11)
unde: Af reprezint aria suprafeei fundaiei,
If - momentul de inerie al suprafeei fundaiei n raport cu o ax
orizontal de rotaie.
S-au stabilit, ntre reaciuni i coeficienii de rigiditi, urmtoarele expresii
de calcul:
z
x
V K v
H K u
M K
,
(12)
unde: v reprezint tasarea terenului de fundare pe direcia axei OZ(vertical),
u deplasarea fundaiei (terenului) pe direcia orizontal.
- rotirea fundaiei sub aciunea reaciunii din reazem.
Pentru calculul interaciunii dintre structur i terenul de findare urmtoarele
valori numerice pentru coeficienii elastici ai terenului, incluse n tabelul urmtor.
Categoria
terenului Felul terenului
Cz
daN/cm3
I Terenuri slabe (argil n stare plastic, pmnt nisipos)
pn la 3
II Terenuri de rezisten mijlocie (argil la limita de plasticitate, nisipuri)
pn la 6
III Terenui rezistente (argil tare, nisip cu pietri, loess, argil cu loess)
pn la 10
IV Terenuri stncoase peste la 10
-
Cunoscnd coeficienii de rigiditate i reaciunile, cu ajutorul relaiilor (12)
se calculeaz cedrile de reazem:
u
u
6 6 66 6 6
z x
7 77 7
z x
V H Mv , ,
K K K
V Hv , ,
K K (13)
2.5.Aplicarea metodei deplasrilor pentru cedri de reazeme
i. Ecuaii de echilibru
Ecuaiile exprim echilibrul static al nodurilor i al lanurilor cinematice.
Forma general a sistemului de ecuaii de echilibru este urmtoarea:
ij j icr z R 0 , (9)
n care: ijr este matricea coeficienilor,
jz - vectorul necunoscutelor,
icR - vectorul termenilor liberi.
Sistem de
baz
1z 2z
3z 4z5z
6z
7z
Fig.65. Sistem de baz i necunoscute - deplasri distincte
n cazul structurii luate n studiu, sistemul de ecuaii are forma:
-
11 12 13 14 15 16 17 1
21 22 23 24 25 26 27 1
31 32 33 34 25 36 37 1
41 42 43 44 45 46 47 4
51 41 53 54 55 56 57 5
61 62 63 64 65 66 67 1
71 72 73 74 75 76 77 7
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
r r r r r r r z
1c
2c
3c
4c
5c
6c
7c
R 0
R 0
R 0
R 0
R 0
R 0
R 0,
unde: 11 47r r reprezint reaciunile moment din blocajele de nod, determinate pe
sistemul de baz, corespunztor metodei deplasrilor, pentru rotiri de noduri, 1 4z z
fig.11; 51 77r r - reaciunile din blocajele grade de libertate, pentru deplasri liniare
corespunztoare, 5 7z -z . ii. Calculul coeficienilor
Coeficienii sunt identici cu cei calculai n cazul aciunilor. iii. Calculul termenilor liberi
Pentru calculul termenilor liberi, se acioneaz sistemul de baz cu cedarea
de reazem, care se produce ntr-un reazem, se deseneaz deformata i se calculeaz
momentele ncovoietoare rezultante. n unele cazuri momentele de ncastrare
perfecta pot fi determinate direct, ca n situaia cedrii de reazem 6 , fig. 66.
Deformata sistemului
de baza pentru
cedarea pe vertical a reazemului 6,
2
11
6 7
5
cM61
6
5cR3
cM16
6
1cR
6
4cR
6
6cR
6
2cR
6
3cR
6
7cR
6
6
Fig.66. Deformata sistemului de baz
Momentelec
M61 ic
M61 se calculeaz cu relaiile:
i c c61 6 16 64EI 2EI
M ML L
-
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru cedarea de reazem 6 . Rezult sistemele
din fig. 67, 68 i 69 i prin utilizarea lucrului mecanic virtual se obin termenii
liberi: 6
5cR , 6
6cR , 6
7cR . Ceilali termini liberi se determin prin exprimarea echilibrului
static al nodurilor.
1
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
2
11
3
4
67
5
5
V5
VII
6
5cR
6
Fig.67
11
I
IIIII
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
7
5
6
VII
6
I6
IV
6
IIIcM16
cM61
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
6
6cR
6
FIG.68
-
11
II III
2
3 4
V
VI
VII
IIV
6 7
17
III7
II
52k
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
6
7cR
6
Fig.69
Pentru celelalte cedri de reazem se folosesc sistemele din fig. 53, 54, 55, i
56, cu analizele cinematice pretentate n fig. 57, 58, 59 i 60. Deplasatele sistemelor,
conform deplasrilor msurate n deplasrile de deplasri, sunt prezentate n fig. 61,
62, 63 i 64.
n cazul cedrii de reazem v6, deformata sistemului de baz este desenat n
fig. 70.
Momentelec
M34 ic
M43 i c
M15 se calculeaz cu relaiele:
i c c c34 43 6 15 62 26EI 3EI
M M v M vL (L / 2)
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru cedarea de reazem
v6 . Rezult sistemele
din fig. 71, 72 i 73 i prin utilizarea lucrului mecanic virtual se obin termenii
liberi: 6
5cR , 6
6cR , 6
7cR .
Ceilali termini liberi 6 6 6 6
4c1c 2c 3cR , R ,R ,R se determin prin exprimarea
echilibrului static al nodurilor.
-
v6
Deformata sistemului
de baza pentru
cedarea pe vertical a reazemului 6, v6
2
11
67
5
15c
M
6v
5cR3
34c
M43c
M
6v
1cR
6v
4cR
6v
6cR
6v
2cR
6v
3cR
6v
7cR
v6
v6
Fig. 70
1
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
2
11
3
4
67
5
5
V5
VII
6
5cR
6
Fig. 71
-
11
I
IIIII
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
7
5
6
VII
6
I6
IV
6
IIIcM16
cM61
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
6
6cR
6
Fig. 71
11
II III
2
3 4
V
VI
VII
IIV
6 7
17
III7
II
52k
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
6
7cR
6
Fig. 72
n cazul cedrii de reazem u6, deformata sistemului de baz este desenat n
fig. 73.
Momentelec
M61 ic
M61 se calculeaz cu relaia:
c c61 16 626EI
M M uL
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
-
din deformata sistemului de baz pentru cedarea de reazem
v6 . Rezult
sistemele din fig. 74, 75 i 76 i prin utilizarea lucrului mecanic virtual se obin
termenii liberi: 6
u5cR ,
6u6cR ,
6u7cR . Ceilali termini liberi
6 6 6 6u u u u
4c1c 2c 3cR , R ,R ,R se determin
prin exprimarea echilibrului static al nodurilor.
Deformata sistemului
de baza pentru
cedarea pe orizontal a reazemului 6, u6
2cR
6u
5cR
2
11
3
4
67
5
cM61
cM16
u6
6u
7cR
6u
6cR
6u
1cR
6u
3cR6u
4cR
Fig.73
1
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de u6
2
11
3
4
67
5
5
V5
VII
6u
5cR
Fig.74
-
11
I
IIIII
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
7
5
6
VII
6
I6
IV
6
IIIcM16
cM61
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de u6
6u
6cR
Fig.75
11
II III
2
3 4
V
VI
VII
IIV
6 7
17
III7
II
52k
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de u6
6u
7cR
Fig.76
n cazul cedrii de reazem v7, deformata sistemului de baz este desenat n
fig. 77.
Momentelec
M34 ,c
M43 i c
M25 se calculeaz cu relaia:
i c c c34 43 7 25 72 26EI 3EI
M M v M vL (L / 2)
-
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
din deformata sistemului de baz pentru cedarea de reazem
v6 . Rezult
sistemele din fig. 78, 79 i 80 i prin utilizarea lucrului mecanic virtual se obin
termenii liberi: 7
v5cR ,
7v6cR ,
7v7cR . Ceilali termini liberi
7 7 7 7v v v v
4c1c 2c 3cR , R ,R ,R se determin
prin exprimarea echilibrului static al nodurilor.
Deformata sistemului
de baza pentru
cedarea reazemului
7 pe vertical,
7v
6cR
2
11
3
4
67
5
7cR
34c
M43c
M
25c
M
v7
v7
v7
v7
7v
6cR
7v
4cR7v
3cR
7v
1cR7v
2cR
Fig.77.
1
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
2
11
3
4
67
5
5
V5
VII
7v
5cR
v7
Fig.78.
-
11
I
IIIII
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
7
5
6
VII
6
I6
IV
6
III
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
7v
6cR
34c
M 43c
M
25c
M
v7
Fig.79.
11
II III
2
3 4
V
VI
VII
IIV
6 7
17
III7
II
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
25c
M
7v
7cR
v7
n cazul cedrii de reazem u7, deformata sistemului de baz este desenat n
fig. 81.
Momentelec
M34 ,c
M43 , c
M25 i
cM57
se calculeaz cu relaia:
, i c c c c7 734 43 25 57 72 2 257
u u6EI 3EI 3EIM M M M u
2 2L (L / 2) L
Deplasatele din fig. 15, 19 i 23 se ncarc succesiv cu momentele spre bare
-
din deformata sistemului de baz pentru cedarea de reazem
u7. Rezult
sistemele din fig. 82, 83 i 84 i prin utilizarea lucrului mecanic virtual se obin
termenii liberi: 7
u5cR ,
7u6cR ,
7u7cR . Ceilali termini liberi
7 7 7 7u u u u
4c1c 2c 3cR , R ,R ,R se determin
prin exprimarea echilibrului static al nodurilor.
Deformata sistemului
de baza pentru
cedarea pe vertical a reazemului 7, u
6u
3cR
2
11
3
4
67
5
34c
M43c
M
25c
M
u7/2
cM57
6u
4cR
6u
5cR
6u
6cR6u
7cR
6u
1cR6u
2cR
u7/2
u7
Fig.81.
1
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
2
11
3
4
67
5
5
V5
VII
7u
5cR
u7
Fig.82.
-
11
I
IIIII
VI
VIIV
IV
VI
6
VII
1
1/23
2
4
7
5
6
VII
6
I6
IV
6
III
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
7u
6cR
34c
M 43c
M
25c
M
cM57
u7
Fig.83.
11
II III
2
3 4
V
VI
VII
IIV
6 7
17
III7
II
Deplasata sistemului
acionat de momentele spre bar
din deformata
produs de
25c
M
7u
7cR
u7
Fig.84.
iv. Calculul necunoscutelor
jz
Dup ce s-au calculate coeficienii i termenii liberi ai ecuaiei matriceale
(10), se rezolvnd sistemul de ecuaii de echilibrul static i se afl valorile
-
necunoscutelor jz . Cu aceste necunoscute se traseaz diagrama final de momente
novoietoare.
v. Calculul reaciunilor
Dup trasarea diagramelor final de momente ncovoietor se determin
reaciunile din cele dou reazeme, notate 6 i 7.
vi. Calculul cedrilor de reazeme
Terenul de fundare sub aciunea reaciunilor se va deforma punnd n
eviden cedri de reazeme. Terenul de fundare se va modela prin intermediul
coeficienilor elastici.
Obs.:
1. Calculul la cedri de reareme continu pn cnd dou cedri
succesive sunt n limita erorii admisibile.
2. Diagrama final de moment ncovoietor se obine prin sumarea
diagramei din aciuni i a diagramelor din cedri de reazeme.