ITU-R M.1036-5 建议书 · 2015-11-06 · itu-r m.2092-0建议书 1 itu-r m.2092-0建议书∗,...
145
ITU-R M.2092-0 建议书 (10/2015) VHF水上移动频段内的VHF数据交换 系统的技术特性 M 系列 移动、无线电测定、业余无线电 以及相关卫星业务
Transcript of ITU-R M.1036-5 建议书 · 2015-11-06 · itu-r m.2092-0建议书 1 itu-r m.2092-0建议书∗,...

ITU-R M.2092-0 建议书(10/2015)
VHF水上移动频段内的VHF数据交换系统的技术特性
M 系列
移动、无线电测定、业余无线电
以及相关卫星业务

ii ITU-R M.2092-0建议书
前言
无线电通信部门的职责是确保卫星业务等所有无线电通信业务合理、平等、有效、经济地使用无线电频
谱,不受频率范围限制地开展研究并在此基础上通过建议书。
无线电通信部门的规则和政策职能由世界或区域无线电通信大会以及无线电通信全会在研究组的支持下履
行。
知识产权政策(IPR)
ITU-R的IPR政策述于ITU-R第1号决议的附件1中所参引的《ITU-T/ITU-R/ISO/IEC的通用专利政策》。专
利持有人用于提交专利声明和许可声明的表格可从http://www.itu.int/ITU-R/go/patents/en获得,在此处也可获取
《ITU-T/ITU-R/ISO/IEC的通用专利政策实施指南》和ITU-R专利信息数据库。
ITU-R 系列建议书 (也可在线查询http://www.itu.int/publ/R-REC/en)
系列 标题 BO 卫星传送 BR 用于制作、存档和播出的录制;电视电影 BS 广播业务(声音) BT 广播业务(电视) F 固定业务 M 移动、无线电测定、业余无线电以及相关卫星业务 P 无线电波传播 RA 射电天文 RS 遥感系统 S 卫星固定业务 SA 空间应用和气象 SF 卫星固定业务和固定业务系统间的频率共用和协调 SM 频谱管理 SNG 卫星新闻采集 TF 时间信号和频率标准发射 V 词汇和相关问题
注:本ITU-R建议书英文版已按ITU-R第1号决议规定的程序批准。
电子出版 2015年,日内瓦
国际电联 2015
版权所有。未经国际电联书面许可,不得以任何手段复制本出版物的任何部分。
ITU-R M.2092-0建议书 1
ITU-R M.2092-0建议书∗, ∗∗
VHF水上移动频段内的VHF数据交换系统的技术特性 (2015年)
范围
本建议书提供了一个集成VHF海上移动频段(156.025-162.025 MHz)中VHF数据交换
(VDE)、应用特定消息(ASM)和自动识别系统(AIS)功能的VHF数据交换系统
(VDES)的技术特性。
关键词
海上、VHF、VDES、ASM、数据、交换
词汇表
3GPP Third generation partnership project 第三代合作伙伴计划 ACK Acknowledgement 确认 ADDC Assigned data transfer 分配数据传输 ACPR Adjacent channel power ratio 相邻信道功率比 AIS Automatic identification system 自动识别系统 AOS Acquisition-of-signal 信号捕获 APSK Amplitude phase shift keying 幅度相移键控 ARQ Automatic repeat request 自动重复请求 ARSC Announcement response channel 公告响应信道 ASC Announcement signalling channel 公告信令信道 ASM Application-specific messages 应用特定消息 AWGN Additive white Gaussian noise 加性白高斯噪声 BBSC Bulletin board signalling channel 公告牌信令信道 BCH Bose Chaudhuri Hocquenghem(BCH) 一种纠错码 BER Bit error rate 误码率 BPSK Binary phase shift keying 二进制相移键控 BT Bandwidth-time 带宽-时间 CEPT European conference of postal and telecommunications administrations 欧洲邮电管理委员会 CDMA Code division multiple access 码分多址 CG Coding gain 编码增益 CIR Carrier to interference ratio 载波干扰比
∗ 本建议书包含的有关156-164MHz频段的使用不符合现行《无线电规则》,因此,不应将该建议书
视为对WRC-15决定的预先判断。请ITU-R第5研究组在考虑到WRC-15决定的情况下审议该建议
书。 ∗∗无线电通信局秘书处注 – 本建议书中的图仅有英文。其他语言将适时进行准备。

2 ITU-R M.2092-0建议书
C/M Carrier to multipath 载波多径比 CNR Carrier to noise ratio 载噪比 COMSTATE Communication state 通信状况 CPM Continuous phase modulation 连续相位调制 CQI Channel quality indicator 信道质量指示符 CR Code rate 码速率 CRC Cyclic redundancy check 循环冗余校验 CRL Configuration revision level 配置修订级别 CS Carrier sense 载波侦听 CIRM Comité international radio maritime 国际海事无线电委员会 CSTDMA Carrier sense time division multiple access 载波侦听时分多址 CW Continuous wave 连续波 DA Doherty amplifier Doherty放大器 DLS Data link service 数据链路业务 DPD Digital pre-distortion 数字预失真 EDN End delivery notification 送达通知 EDF End delivery failure 送达失败 EIRP Equivalent isotropic radiated power (e.i.r.p.) 等效全向辐射功率 ERP Effective radiated power (e.r.p.) 有效辐射功率 ET Envelope tracking 包络跟踪 FATDMA Fixed access time-division multiple access 固定接入时分多址 FCS Frame check sequence 帧校验序列 FEC Forward error correction 前向纠错 FIFO First-in first-out 先入先出 GMSK Gaussian-filtered minimum shift keying 高斯滤波最小频移键控 GNSS Global navigation satellite system 全球导航卫星系统 HS Hexslots 6时隙 IALA International association of marine aids to navigation and lighthouse authorities 国际海上助航与灯塔联合会 ICAO International civil aviation organization 国际民用航空组织 ID Identification 标识 IEC International electro technical commission 国际电工委员会 IMO International maritime organization 国际海事组织 IP Internet protocol 互联网协议 ITDMA Incremental time division multiple access 增量时分多址 LC Logical channels 逻辑信道 LEO Low-earth orbiting 低地球轨道 LFSR Linear feedback shift register 线性反馈移位寄存器 LME Link management entity 链路管理实体 LNA Low noise amplifier 低噪声放大器
ITU-R M.2092-0建议书 3
LOS Loss-of-signal 信号丢失 LSB Least significant bit 最低有效位 MEO Medium-earth orbiting 中地球轨道 MAC Media access control 媒体访问控制 MCS Modulation and coding scheme 调制和编码方式 MDC Multicast data channel 多播数据信道 MMSI Maritime mobile service identity 海上移动业务标识 MSB Most significant bit 最高有效位 NF Noise figure 噪声指数 NM Nautical mile 海里 NRZI Non-return to zero inversion 不归零反转 OFDM Orthogonal frequency division multiplexing 正交频分复用 OSI Open systems interconnection 开放系统互连 PAPR Peak to average power ratio 峰值平均功率比 PC Physical channels 物理信道 PL Physical layer 物理层 PFD Power flux-density 功率通量密度 ppm parts per million 百万分之一 PSK Phase shift keying 相移键控 QAM Quadrature amplitude modulation 正交调幅 QPSK Quadrature phase shift keying 正交相移键控 RADC Random access short messaging channel 随机接入短消息信道 RATDMA Random access time-division multiple access 随机接入时分多址 RAC Random access channel 随机接入信道 RF Radio frequency 射频 RSC Recursive systematic convolutional 递归系统卷积 RQSC Random access resource request 随机接入资源请求 RR Radio regulations 无线电规则 RSSI Received signal strength indication 接收信号强度指示 SCTDMA Slot carrier sense time division multiple access 时隙载波侦听时分多址 SFTP Secure file transfer protocol 安全文件传送协议 SI Selection interval 选择间隔 SMTP Simple mail transfer protocol 简单邮件传送协议 SNMP Simple network management protocol 简单网络管理协议 SNR Signal to noise ratio 信噪比 SOLAS Safety of life at sea convention 海上人命安全公约 SOTDMA Self-organized time division multiple access 自组织时分多址 SS Spreading sequences 扩频序列 Sym Symbol 符号

4 ITU-R M.2092-0建议书
SYNC Synchronisation 同步 TBB Terrestrial bulletin board 地面公告牌 TBBSC Terrestrial bulletin board signalling channel 地面公告牌信令信道 TDMA Time division multiple access 时分多址 UDC Unicast data channel 单播数据信道 UDP User data protocol 用户数据报协议 UTC Coordinated universal time 协调世界时 VDE VHF data exchange VHF数据交换 VDES VHFdata exchange system VHF数据交换系统 VDE-SAT VHF data exchange-satellite VHF数据交换卫星 VDL VHF data link VHF数据链路 VHF Very high frequency 甚高频
参考文献 {RD-1} ETSI EN 302 583 (V1.2.1): "Digital Video Broadcasting (DVB);Framing Structure,channel
coding and modulation for Satellite Services to Handheld devices (SH) below 3 GHz".
{RD-2} TM Synchronization and Channel Coding.Recommendation for Space Data System Standards,CCSDS 131.0-B-2.Blue Book.Issue 2. Washington,D.C.: CCSDS,August 2011.
{RD-3} R. Mueller,On Random CDMA with Constant Envelope,ISIT 2011
{RD-4} Recommendation ITU-R P.372 Radio Noise;
{RD-5} Recommendation ITU-T V.42 (03/2002) Series V: Data Communication over the Telephone Network – Error control - Error-correcting procedures for DCEs using asynchronous-synchronous conversions.
国际电联无线电通信全会,
考虑到
a) 国际海事组织(IMO)对通用船载自动识别系统(AIS)有一个持续的要求;
b) 采用通用船载AIS可以在船只之间和船只与岸上站之间进行有效的导航数据交换,因
此而改善导航的安全性;
c) VHF数据交换系统(VDES)应采用合适的接入方式,在有效利用频谱并接纳所有用
户的同时确保对AIS的保护;
d) 尽管AIS在船-船使用、船只报告和船舶交通服务应用中主要被用于监视和导航安全
性的目的,但是对其他海上安全性相关通信的不断增长需求已经展开;
e) VDES应对AIS给予优先考虑,并且还应适应未来用户数量的扩展和数据通信应用的
多样化,包括不符合IMO AIS装载要求的船舶,帮助导航和搜救;
f) VDES具有数据通信能力和支持在船上和岸上通过电子方式对海上信息的协调采集、
综合、交换、呈现和分析的技术特性,增强锚地到锚地导航与海上安全与保安和海洋环境保
护相关的业务,
ITU-R M.2092-0建议书 5
认识到
VDES的实施必须要保证数字选呼、AIS和语音遇险呼救、安全和呼叫通信(信道16)不会受到损害,
注意到
ITU-R M.[VDES-SELECT]报告描述了VDES的使用案例和要求,
建议
1 VDES应该按照附件1中所给出的运行特性和附件2至7中所给出的技术特性和实例来
设计;
2 如在ITU-R M.1371建议书中所规定,对利用为AIS而设计的应用特定消息(ASM)的
VDES的应用还应该考虑如由IMO维护和发布的IMO SN.1/Circ.289中所规定的国际应用标识
符分支;
3 VDES的设计和安装还应该考虑由IMO、IEC和IALA发布的相关技术要求、建议书和
导则。
附件1
在VHF海上移动频段中的VHF数据交换系统的运行特性
1 概述
1.1 该系统应该对自动识别系统(AIS)位置报告和安全性相关信息给予最高优先级。 1.2 该系统装置应该能够接收和处理数字消息和由本建议书所规定的询问呼叫。 1.3 该系统应该能够应要求传输附加安全性消息。 1.4 该系统装置应该能够在航行、停泊或抛锚期间连续工作。 1.5 该系统应该如附件中所规定以一种同步的方式对地面链路采用时分多址(TDMA)
技术、接入方式和数据传输方法。 1.6 该系统应该支持各种运行模式,包括自治、指定和轮询模式。 1.7 该系统应该为用户提供灵活性,以便对一些应用给予优先,并且因此在使系统复杂
性最小化的同时适配一些传输参数(强健性或容量)。 1.8 该系统应该致力于ITU-R M.[VDES-SELECT]中所确定的使用情形。
2 VHF数据交换系统功能和频率使用
在图A1-1中以绘图方式显示了VDES的功能和频率使用。
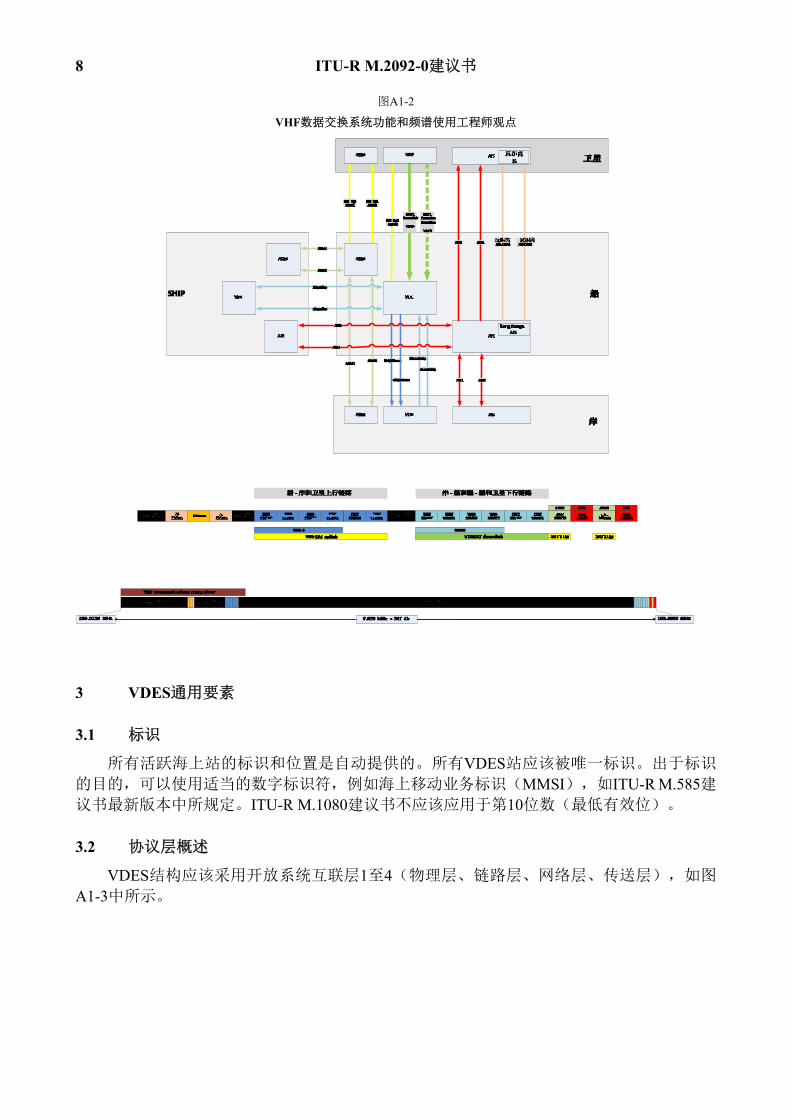
图A1-2从一个系统工程的观点说明了在本建议书中所定义的VDES。

6 ITU-R M.2092-0建议书
图A1-1
VHF数据交换系统功能和频率使用
注 – SAT上行仅仅由卫星接收。
2.1 符合无线电规则附录18的VHF数据交换系统信道使用
2.1.1 VHF数据交换系统:地面站之间的数据交换 – 按照ITU-R M.1371建议书,AIS 1(信道2087)和AIS 2(信道2088)是AIS信道; – ASM 1(信道2027)和ASM 2(信道2028)是用于应用特定消息(ASM)的信道; – VDE1-A下部分(信道1024、1084、1025、1085)是船 – 岸VDE; – VDE1-B上部分(信道2024、2084、2025、2085)是岸 – 船和船 – 船VDE。
2.1.2 VHF数据交换系统:卫星和地面站之间的数据交换 – AIS 1(信道2087)和AIS 2(信道2088)是地面AIS信道,它们也被卫星用作接收AIS
消息的上行链路; – 采用信道75和信道76的远距离AIS是用作由卫星接收AIS消息上行链路的指定信道。
SAT上行1(信道2027)和SAT上行2(信道2028)被用于卫星接收ASM; – SAT上行3(信道1024、1084、1025、1085、1026和1086)被用于船 – 卫星VDE上行
链路; – SAT下行链路(信道2024、2084、2025、2085、2026和2086)被用于卫星 – 船VDE下
行链路。
岸 -船 VDE 2
船 -岸 VDE 1 船 -船 VDE 2
卫星广播
船 - 船 VDE
岸-船和船-岸VDE
SAT上行链路
SAT2 下行链路
船的AIS-VDE接收带宽4.6 MHz间隔
SAT 上行1
船的VDE传输信道
SAT 上行2
远距离AIS SAT上行3
卫星检测AIS
ITU-R M.2092-0建议书 7
2.1.3 技术特性
2.1.3.1 船载VHF数据交换系统接收机受到保护
如在AIS中,船载VDES接收机是在无线电规则附录18的上部分,在下部分以上4.6 MHz,这通过由船的VHF无线电进行滤波来帮助保护接收机免受阻塞。
2.3.3.2 SAT下行链路
卫星下行链路符合在表A4-1中所描述的功率通量密度(PFD)掩模,使对地面业务的干
扰最小,且使船的DVES站接收最大。
2.1.3.3 VDE1采用双工信道的上下二部分
通过将下部分(VDE1-A)用于船 – 岸,而上部分(VDE1-B)用于岸 – 船和船 – 船数字
消息发送,信道容量被用于VDE1中的双工信道。
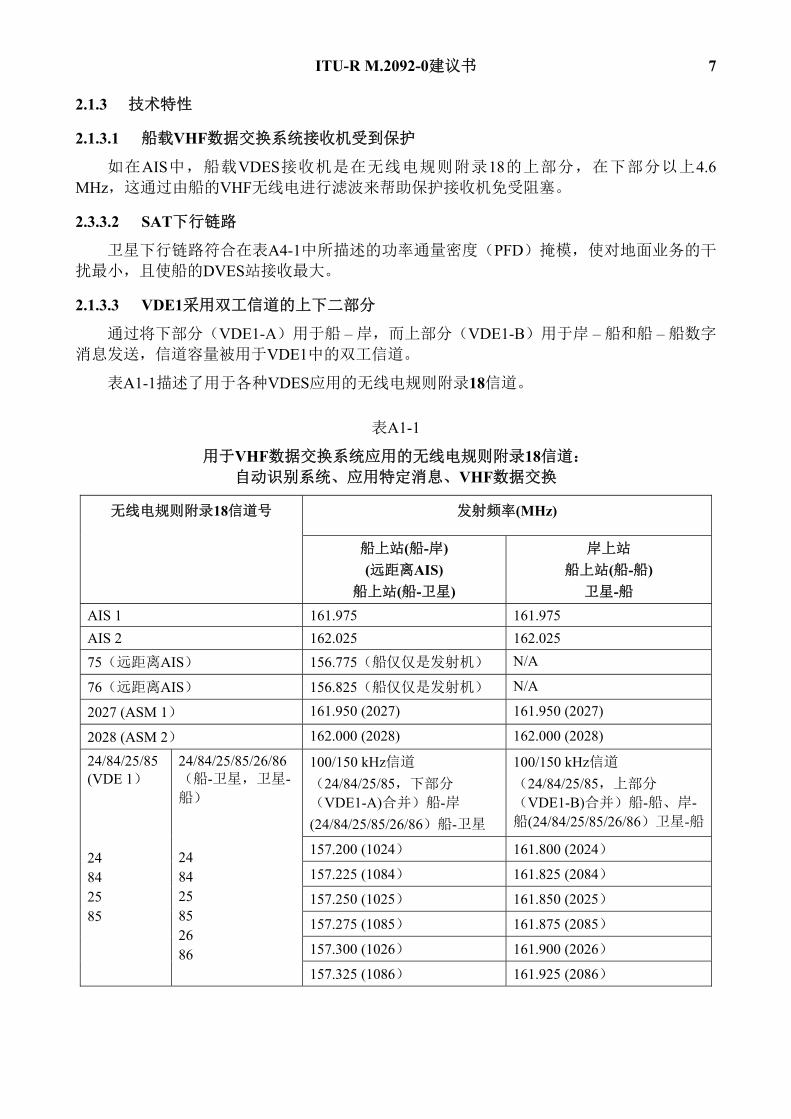
表A1-1描述了用于各种VDES应用的无线电规则附录18信道。
表A1-1
用于VHF数据交换系统应用的无线电规则附录18信道: 自动识别系统、应用特定消息、VHF数据交换
无线电规则附录18信道号 发射频率(MHz)
船上站(船-岸) (远距离AIS)
船上站(船-卫星)
岸上站 船上站(船-船)
卫星-船 AIS 1 161.975 161.975 AIS 2 162.025 162.025 75(远距离AIS) 156.775(船仅仅是发射机) N/A
76(远距离AIS) 156.825(船仅仅是发射机) N/A
2027 (ASM 1) 161.950 (2027) 161.950 (2027)
2028 (ASM 2) 162.000 (2028) 162.000 (2028)
24/84/25/85 (VDE 1) 24 84 25 85
24/84/25/85/26/86 (船-卫星,卫星-船) 24 84 25 85 26 86
100/150 kHz信道 (24/84/25/85,下部分
(VDE1-A)合并)船-岸 (24/84/25/85/26/86)船-卫星
100/150 kHz信道 (24/84/25/85,上部分
(VDE1-B)合并)船-船、岸-船(24/84/25/85/26/86)卫星-船
157.200 (1024) 161.800 (2024)
157.225 (1084) 161.825 (2084)
157.250 (1025) 161.850 (2025)
157.275 (1085) 161.875 (2085)
157.300 (1026) 161.900 (2026)
157.325 (1086) 161.925 (2086)
8 ITU-R M.2092-0建议书
图A1-2
VHF数据交换系统功能和频谱使用工程师观点
3 VDES通用要素
3.1 标识
所有活跃海上站的标识和位置是自动提供的。所有VDES站应该被唯一标识。出于标识
的目的,可以使用适当的数字标识符,例如海上移动业务标识(MMSI),如ITU-R M.585建议书最新版本中所规定。ITU-R M.1080建议书不应该应用于第10位数(最低有效位)。
3.2 协议层概述
VDES结构应该采用开放系统互联层1至4(物理层、链路层、网络层、传送层),如图
A1-3中所示。

ITU-R M.2092-0建议书 9
图A1-3
七层OSI模型
应用层
呈现层
会话层
传送层
网络层
链路层
物理层
各OSI层对准备传输VDES数据的责任:
3.2.1 传送层
此层保证在船之间、船和岸及船和卫星之间数据段的可靠传输,包括分段、确认和复
用。
3.2.2 网络层
此层负责对消息优先级指定、传输包在信道之间的分配和解决数据链路拥塞的管理。
3.2.3 链路层
此层保证船之间、船和岸及船和卫星之间数据帧的可靠传输。链路层被分为具有以下任
务的三个子层:
3.2.3.1 链路管理实体
将唯一字、格式头、物理层帧(PL-帧)头、导频音(卫星)和VDES消息比特组合成
包。
3.2.3.2 数据链路业务
计算和合计CRC校验和,并完成PL-帧/包。
3.2.3.3 媒体访问控制
提供允许数据传输访问的方法。
3.2.4 物理层
此层提供在一个物理媒体上对原始比特流的发射和接收,包括信号调制、滤波/根据传
输进行整形、和放大、滤波、时间和频率同步、解调制和根据接收进行解码。
3.3 帧结构
该系统采用ITU-R M.1371建议书的帧概念。一个帧等于1分钟,并被划分为2250个时
隙。默认对该数据链路的接入是在一个时隙的开始处进行。帧的开始和停止与UTC的分
一致。
10 ITU-R M.2092-0建议书
3.4 呈现接口协议
对VDES发射接收机: – 数据可以通过呈现接口输入,来由VDES站传输; – 由VDES站接收的数据应该通过呈现接口输出。
3.5 前向纠错
3.5.1 编码器结构
本段定义了用在VDES的卫星和地面组件上的前向纠错编码器的一般结构。总的结构遵
从ETSI EN 302 583标准{RD 1}中的规范。
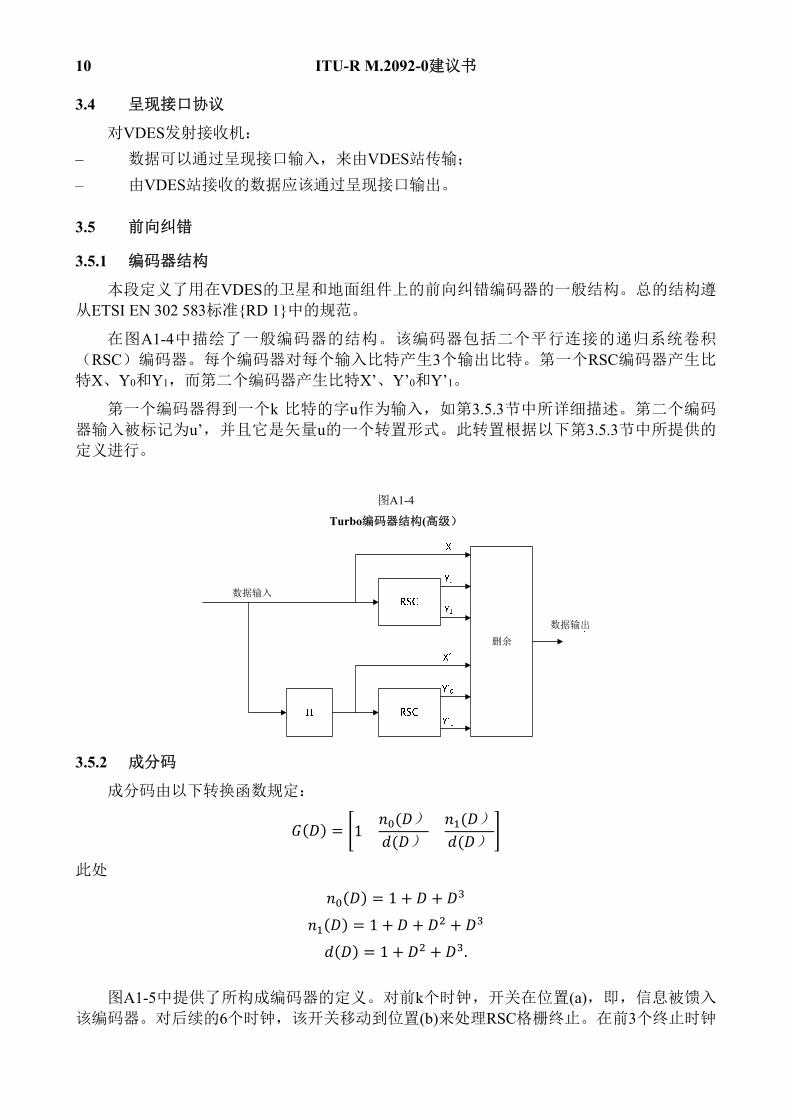
在图A1-4中描绘了一般编码器的结构。该编码器包括二个平行连接的递归系统卷积
(RSC)编码器。每个编码器对每个输入比特产生3个输出比特。第一个RSC编码器产生比
特X、Y0和Y1,而第二个编码器产生比特X’、Y’0和Y’1。
第一个编码器得到一个k 比特的字u作为输入,如第3.5.3节中所详细描述。第二个编码
器输入被标记为u’,并且它是矢量u的一个转置形式。此转置根据以下第3.5.3节中所提供的
定义进行。
图A1-4
Turbo编码器结构(高级)
3.5.2 成分码
成分码由以下转换函数规定: ( ) = 1 ( )( )
( )( )
此处 ( ) = 1 + + ( ) = 1 + + + ( ) = 1 + + .
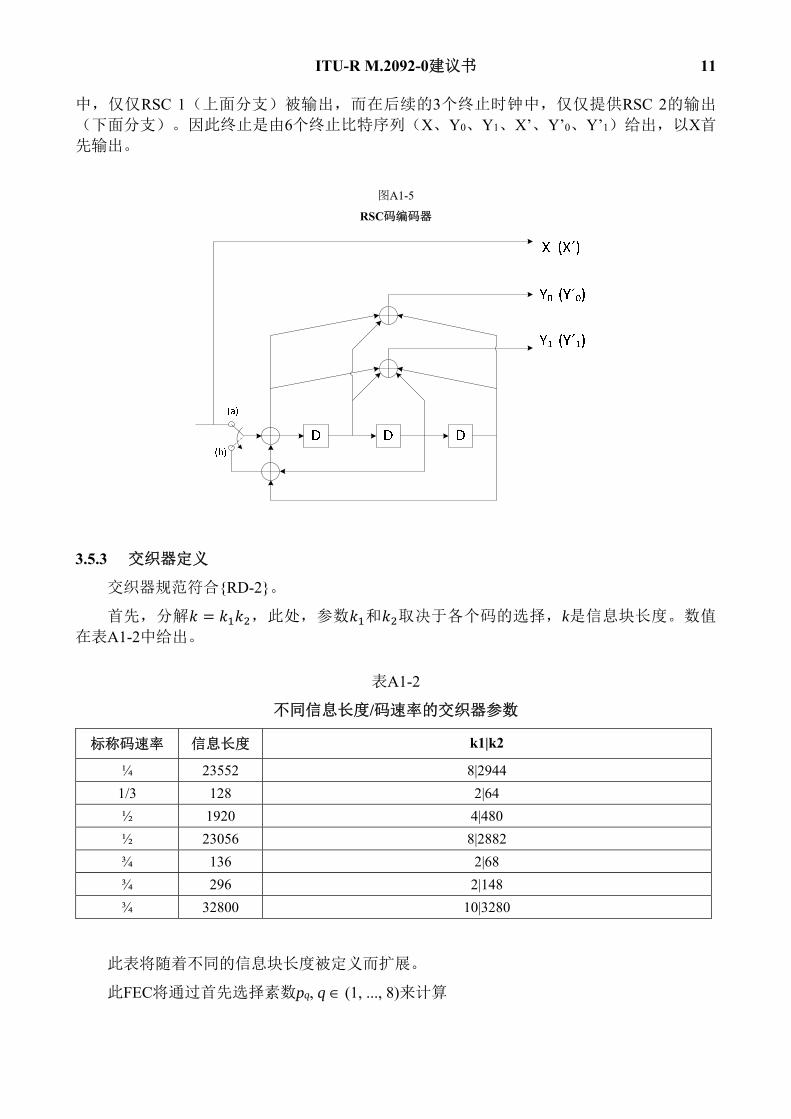
图A1-5中提供了所构成编码器的定义。对前k个时钟,开关在位置(a),即,信息被馈入
该编码器。对后续的6个时钟,该开关移动到位置(b)来处理RSC格栅终止。在前3个终止时钟
数据输入
删余
数据输出
ITU-R M.2092-0建议书 11
中,仅仅RSC 1(上面分支)被输出,而在后续的3个终止时钟中,仅仅提供RSC 2的输出
(下面分支)。因此终止是由6个终止比特序列(X、Y0、Y1、X’、Y’0、Y’1)给出,以X首
先输出。
图A1-5
RSC码编码器
3.5.3 交织器定义
交织器规范符合{RD-2}。
首先,分解 = ,此处,参数 和 取决于各个码的选择,k是信息块长度。数值
在表A1-2中给出。
表A1-2
不同信息长度/码速率的交织器参数
标称码速率 信息长度 k1|k2
¼ 23552 8|2944 1/3 128 2|64 ½ 1920 4|480 ½ 23056 8|2882 ¾ 136 2|68 ¾ 296 2|148 ¾ 32800 10|3280
此表将随着不同的信息块长度被定义而扩展。
此FEC将通过首先选择素数pq, q ∈ (1, ..., 8)来计算

12 ITU-R M.2092-0建议书
p1 = 31 p2 = 37 p3 = 43 p4 = 47 p5 = 53 p6 = 59 p7 = 61 p8 = 67
以下运算将对s ∈ (1, ..., k)计算,以得到转置数π(s): = ( − 1) 2 = (( − 1) /(2 )) = (( − 1) /2)) − = (19 + 1) ( /2) = 8 + 1 = + 21 ( ) = 2( + /2 + 1) −
应该解释转置数,以使在交织之后读出的第 个比特是输入信息块的第π(s)个比特。
3.5.4 速率适配
速率适配是通过按照{RD-1}的第5.3.1条对编码器输出进行删余来得到的,
如表A1-3中对前k个时钟的回顾,及如在{RD-1}中
在表A1- 3中给出了终止部分的删余表。该表的最后一行不是{RD-1}的一部分。
表A1-3用于终止。带有ID 8的最后一行被引入到本文件中来得到更高的速率,并且不是
{RD-1}的一部分。
表A1-3
数据比特周期的删余模式
删余模式ID 码速率 删余模式(X;Y0;Y1;X’;Y’0;Y’1 |X;Y0;Y1;X’;Y’0;Y’1 | …)
0 1/5 1;1;1;0;1;1 1 2/9 1;0;1;0;1;1 | 1;1;1;0;1;1 | 1;1;1;0;0;1 |
1;1;1;0;1;1 2 ¼ 1;1;1;0;0;1 | 1;1;0;0;1;1 3 2/7 1;0;1;0;0;1 | 1;0;1;0;1;1 | 1;0;1;0;0;1 |
1;1;1;0;0;1 4 1/3 1;1;0;0;1;0
ITU-R M.2092-0建议书 13
表A1-3(完)
删余模式ID 码速率 删余模式(X;Y0;Y1;X’;Y’0;Y’1 |X;Y0;Y1;X’;Y’0;Y’1 | …)
5 2/5 1;0;0;0;0;0 | 1;0;1;0;0;1 | 0;0;1;0;0;1 | 1;0;1;0;0;1 | 1;0;1;0;0;1 | 0;0;1;0;0;1 | 1;0;1;0;0;1 | 1;0;1;0;0;1 | 0;0;1;0;0;1 |
1;0;1;0;0;1 | 1;0;1;0;0;1 | 0;0;1;0;0;1 6 ½ 1;1;0;0;0;0 | 1;0;0;0;1;0 7 2/3 1;0;0;0;0;0 | 1;0;0;0;0;0 | 1;0;0;0;0;0 |
1;0;1;0;0;1 8 3/4 1;0;1;0;0;0 | 1;0;0;0;0;0 | 1;0;0;0;0;0 |
1;0;0;0;0;0 | 1;0;0;0;0;0 | 1;0;0;0;0;1
对每种速率,删余表应该首先从左向右读取,然后从上到下。
在一个删余模式内,一个‘0’意表示该符号应该被删除,而一个‘1’表示一个符号应该通
过。一个‘2’或一个‘3’表示2个或3个该符号的复制应该通过。这与终止周期相关。特别是 – 对速率1/5的 turbo码(Punct_Pat_ID=0),前三个尾部比特周期的每一个的尾部输出
符号应该是XXXY0Y1,而对最后三个尾部比特周期的每一个的尾部输出符号应该是
X’X’X’Y’0Y’1。 – 对速率2/9的turbo码(Punct_Pat_ID=1),第一和第二个输出周期的尾部输出符号应
该是XXXY0Y1,对第三个输出周期是XXY0Y1,对第四和第五个输出周期是
X’X’Y’0Y’1,而对第六个(最后一个)输出周期是X’X’X’Y’0Y’1。 – 对速率1/4的turbo码(Punct_Pat_ID=2),前三个尾部比特周期的每一个的尾部输出
符号应该是XXY0Y1,而对最后三个尾部比特周期的每一个的尾部输出符号应该是
X’X’ Y’0Y’1。
所有其他码速率应该类似于以上所给的实例采用从{RD-1}推导出来的实际删余模式进
行处理。
终止部分的删余表在表A1-4中给出。该表的最后一行被引入到本文件中,以得到更高的
速率,并且不是{RD-1}的一部分。
表A1-4
尾部比特周期(最后6个时钟)的删余和重复模式
删余模式 ID
码速率 删余/重复模式 (X;Y0;Y1;X’;Y’0;Y’1 |X;Y0;Y1;X’;Y’0;Y’1 | …)
0 1/5 3;1;1;0;0;0 | 3;1;1;0;0;0 | 3;1;1;0;0;0 | 0;0;0;3;1;1 | 0;0;0;3;1;1 | 0;0;0;3;1;1
1 2/9 3;1;1;0;0;0 | 3;1;1;0;0;0 | 2;1;1;0;0;0 | 0;0;0;2;1;1 | 0;0;0;2;1;1 | 0;0;0;3;1;1
2 ¼ 2;1;1;0;0;0 | 2;1;1;0;0;0 | 2;1;1;0;0;0 | 0;0;0;2;1;1 | 0;0;0;2;1;1 | 0;0;0;2;1;1
3 2/7 1;1;1;0;0;0 | 2;1;1;0;0;0 | 2;1;1;0;0;0 | 0;0;0;2;1;1 | 0;0;0;1;1;1 | 0;0;0;1;1;1
14 ITU-R M.2092-0建议书
表A1-4(完)
删余模式 ID
码速率 删余/重复模式 (X;Y0;Y1;X’;Y’0;Y’1 |X;Y0;Y1;X’;Y’0;Y’1 | …)
4 1/3 2;1;0;0;0;0 | 2;1;0;0;0;0 | 2;1;0;0;0;0 | 0;0;0;2;1;0 | 0;0;0;2;1;0 | 0;0;0;2;1;0
5 2/5 1;1;1;0;0;0 | 1;1;1;0;0;0 | 1;0;1;0;0;0 | 0;0;0;1;1;1 | 0;0;0;1;1;1 | 0;0;0;1;0;1
6 ½ 1;1;0;0;0;0 | 1;1;0;0;0;0 | 1;1;0;0;0;0 | 0;0;0;1;1;0 | 0;0;0;1;1;0 | 0;0;0;1;1;0
7 2/3 1;0;0;0;0;0 | 1;0;1;0;0;0 | 1;0;1;0;0;0 | 0;0;0;1;0;0 | 0;0;0;1;0;1 | 0;0;0;1;0;1
8 3/4 1;0;1;0;0;0 | 1;0;1;0;0;0 | 1;0;1;0;0;0 | 0;0;0;1;0;1 | 0;0;0;1;0;1 | 0;0;0;1;0;1
对每个速率,此删余表应该首先从左向右读取,然后从上到下。
3.6 CRC 32比特ITU-T V.42 {RD-5}多项式0x04C11DB7 CRC被附加到数据报的最后段。CRC是对
该数据报的所有段进行计算的。
F(x) = x32 + x26 + x23 + x22 + x16 + x12 + x11 + x10 + x8 + x7 + x5 + x4 + x2 + x + 1
初始状态:0xFFFFFFFF
3.7 VDES船上站的天线配置
3.7.1 天线增益
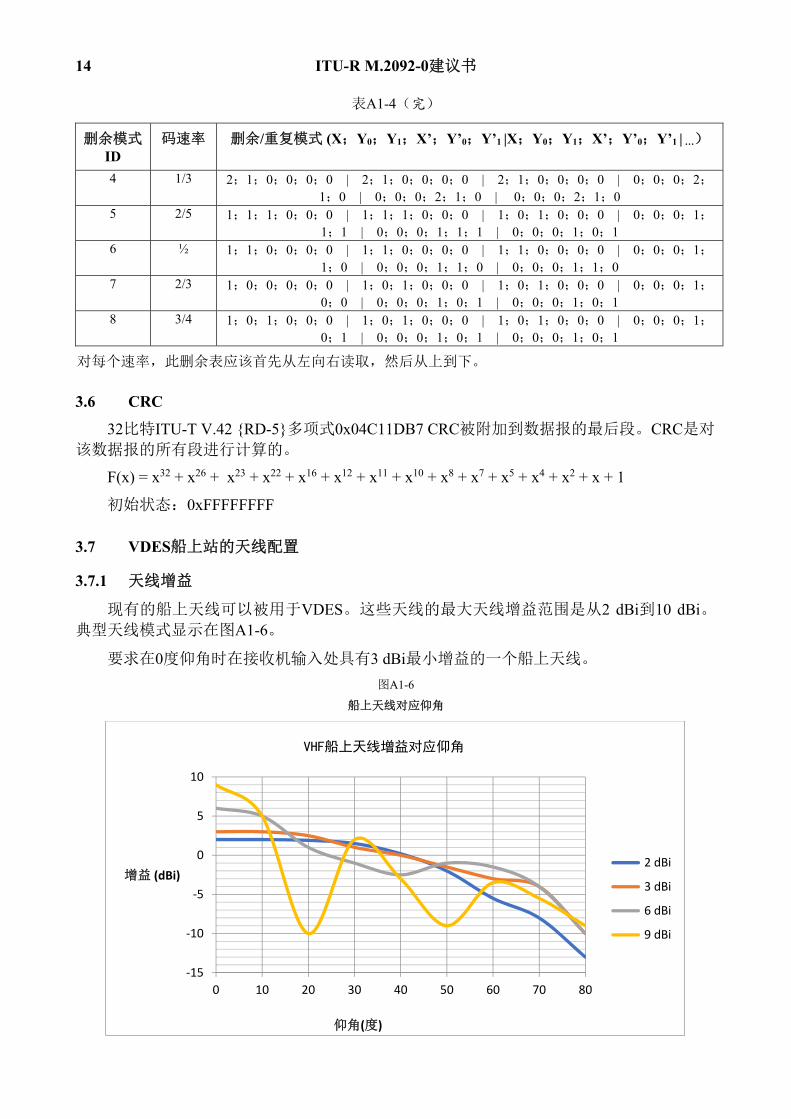
现有的船上天线可以被用于VDES。这些天线的最大天线增益范围是从2 dBi到10 dBi。典型天线模式显示在图A1-6。
要求在0度仰角时在接收机输入处具有3 dBi最小增益的一个船上天线。 图A1-6
船上天线对应仰角
-15
-10
-5
0
5
10
0 10 20 30 40 50 60 70 80
增益 (dBi)
仰角(度)
VHF ship antenna gain vs elevation angle
2 dBi
3 dBi
6 dBi
9 dBi
VHF船上天线增益对应仰角
ITU-R M.2092-0建议书 15
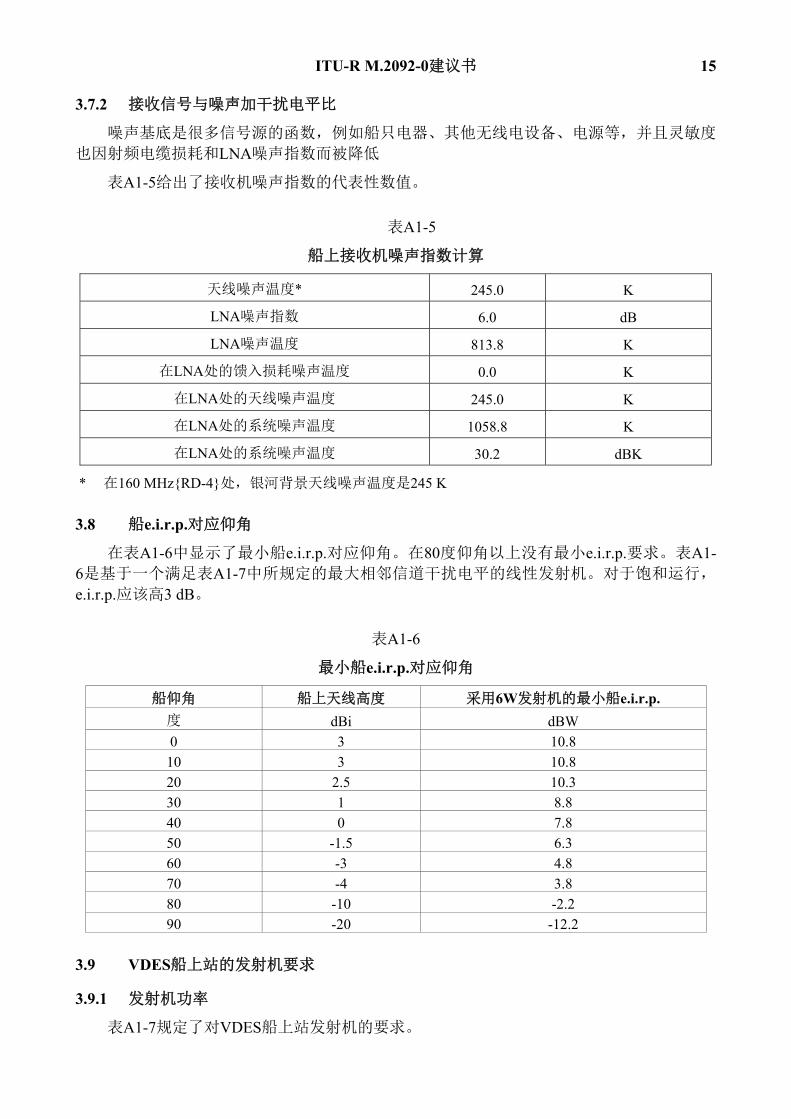
3.7.2 接收信号与噪声加干扰电平比
噪声基底是很多信号源的函数,例如船只电器、其他无线电设备、电源等,并且灵敏度
也因射频电缆损耗和LNA噪声指数而被降低
表A1-5给出了接收机噪声指数的代表性数值。
表A1-5
船上接收机噪声指数计算
天线噪声温度* 245.0 K
LNA噪声指数 6.0 dB
LNA噪声温度 813.8 K
在LNA处的馈入损耗噪声温度 0.0 K
在LNA处的天线噪声温度 245.0 K
在LNA处的系统噪声温度 1058.8 K
在LNA处的系统噪声温度 30.2 dBK
* 在160 MHz{RD-4}处,银河背景天线噪声温度是245 K
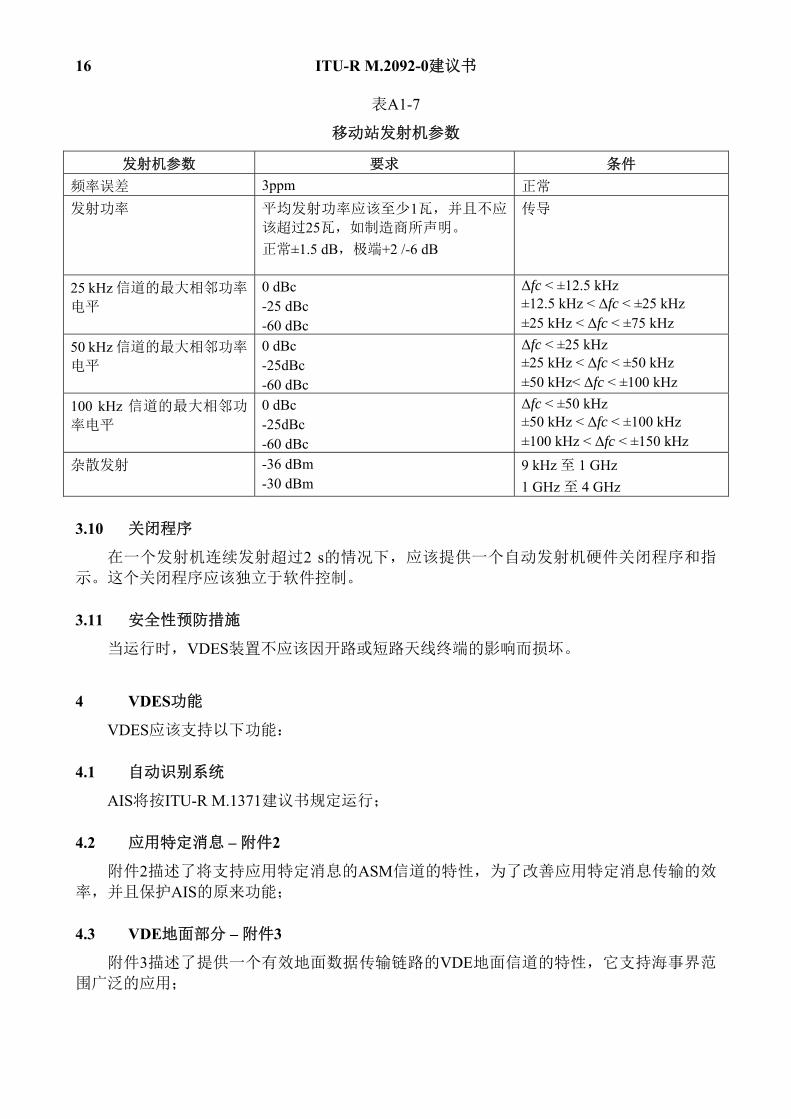
3.8 船e.i.r.p.对应仰角
在表A1-6中显示了最小船e.i.r.p.对应仰角。在80度仰角以上没有最小e.i.r.p.要求。表A1-6是基于一个满足表A1-7中所规定的最大相邻信道干扰电平的线性发射机。对于饱和运行,
e.i.r.p.应该高3 dB。
表A1-6
最小船e.i.r.p.对应仰角
船仰角 船上天线高度 采用6W发射机的最小船e.i.r.p. 度 dBi dBW 0 3 10.8 10 3 10.8 20 2.5 10.3 30 1 8.8 40 0 7.8 50 -1.5 6.3 60 -3 4.8 70 -4 3.8 80 -10 -2.2 90 -20 -12.2
3.9 VDES船上站的发射机要求
3.9.1 发射机功率
表A1-7规定了对VDES船上站发射机的要求。
16 ITU-R M.2092-0建议书
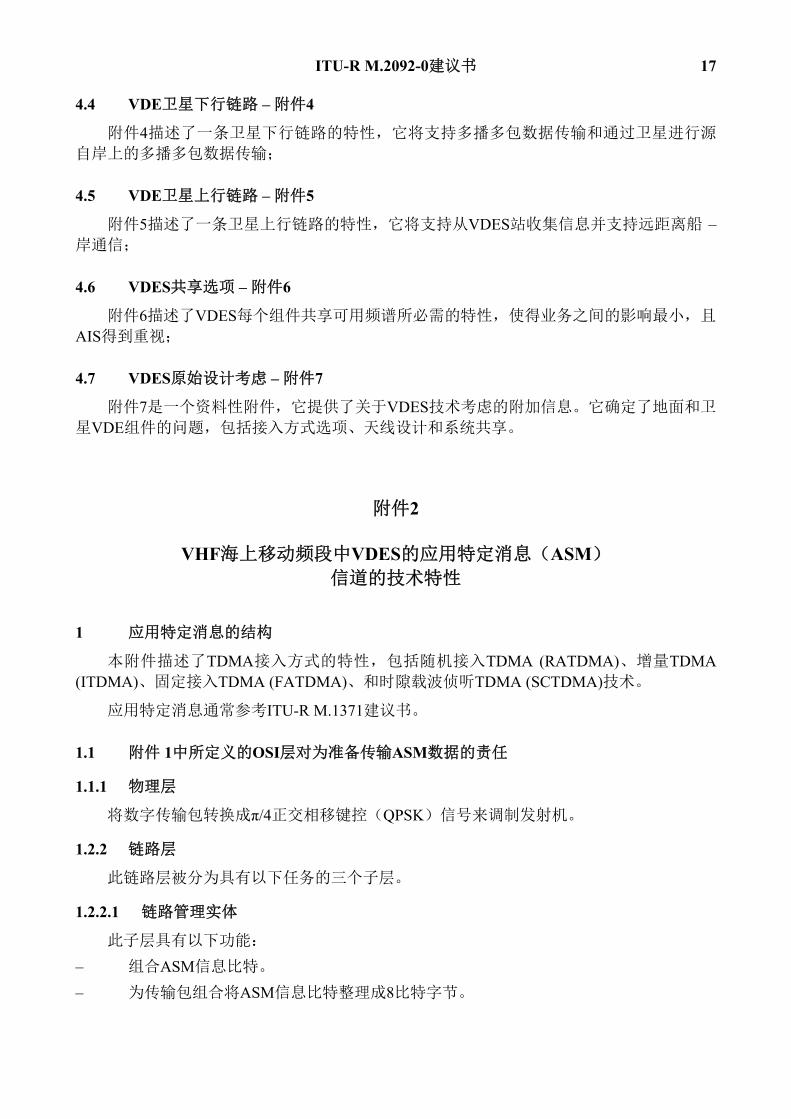
表A1-7
移动站发射机参数
发射机参数 要求 条件 频率误差 3ppm 正常 发射功率 平均发射功率应该至少1瓦,并且不应
该超过25瓦,如制造商所声明。 正常±1.5 dB,极端+2 /-6 dB
传导
25 kHz 信道的最大相邻功率
电平 0 dBc -25 dBc -60 dBc
Δfc < ±12.5 kHz ±12.5 kHz < Δfc < ±25 kHz ±25 kHz < Δfc < ±75 kHz
50 kHz 信道的最大相邻功率
电平 0 dBc -25dBc -60 dBc
Δfc < ±25 kHz ±25 kHz < Δfc < ±50 kHz ±50 kHz< Δfc < ±100 kHz
100 kHz 信道的最大相邻功
率电平 0 dBc -25dBc -60 dBc
Δfc < ±50 kHz ±50 kHz < Δfc < ±100 kHz ±100 kHz < Δfc < ±150 kHz
杂散发射 -36 dBm -30 dBm
9 kHz 至 1 GHz 1 GHz 至 4 GHz
3.10 关闭程序
在一个发射机连续发射超过2 s的情况下,应该提供一个自动发射机硬件关闭程序和指
示。这个关闭程序应该独立于软件控制。
3.11 安全性预防措施
当运行时,VDES装置不应该因开路或短路天线终端的影响而损坏。
4 VDES功能
VDES应该支持以下功能:
4.1 自动识别系统
AIS将按ITU-R M.1371建议书规定运行;
4.2 应用特定消息 – 附件2
附件2描述了将支持应用特定消息的ASM信道的特性,为了改善应用特定消息传输的效
率,并且保护AIS的原来功能;
4.3 VDE地面部分 – 附件3
附件3描述了提供一个有效地面数据传输链路的VDE地面信道的特性,它支持海事界范
围广泛的应用;
ITU-R M.2092-0建议书 17
4.4 VDE卫星下行链路 – 附件4
附件4描述了一条卫星下行链路的特性,它将支持多播多包数据传输和通过卫星进行源
自岸上的多播多包数据传输;
4.5 VDE卫星上行链路 – 附件5
附件5描述了一条卫星上行链路的特性,它将支持从VDES站收集信息并支持远距离船 – 岸通信;
4.6 VDES共享选项 – 附件6
附件6描述了VDES每个组件共享可用频谱所必需的特性,使得业务之间的影响最小,且
AIS得到重视;
4.7 VDES原始设计考虑 – 附件7
附件7是一个资料性附件,它提供了关于VDES技术考虑的附加信息。它确定了地面和卫
星VDE组件的问题,包括接入方式选项、天线设计和系统共享。
附件2
VHF海上移动频段中VDES的应用特定消息(ASM) 信道的技术特性
1 应用特定消息的结构
本附件描述了TDMA接入方式的特性,包括随机接入TDMA (RATDMA)、增量TDMA (ITDMA)、固定接入TDMA (FATDMA)、和时隙载波侦听TDMA (SCTDMA)技术。
应用特定消息通常参考ITU-R M.1371建议书。
1.1 附件 1中所定义的OSI层对为准备传输ASM数据的责任
1.1.1 物理层
将数字传输包转换成π/4正交相移键控(QPSK)信号来调制发射机。
1.2.2 链路层
此链路层被分为具有以下任务的三个子层。
1.2.2.1 链路管理实体
此子层具有以下功能: – 组合ASM信息比特。 – 为传输包组合将ASM信息比特整理成8比特字节。

18 ITU-R M.2092-0建议书
1.2.2.2 数据链路业务
此子层具有以下功能: – 计算ASM消息比特的帧校验序列(FCS)(见第3.2.2.3节)。 – 将FCS附加到ASM信息上,完成传输包内容的创建。 – 完成传输包的组合。
1.2.2.3 媒体访问控制
媒体访问控制提供一种允许访问到VHF数据链路(VDL)的数据传输的方法。所使用的
方法是一种采用公共时间参考的TDMA方式。
1.2.3 网络层
网络层负责消息优先级分配的管理、信道间传输包的分配和数据链路阻塞解决方案。
1.2.4 传输层
传输层负责将数据转换成合适长度的传输包和对数据包排序。
2 物理层
2.1 参数
2.1.1 概述
物理层负责来自一个始发源的比特率流传输,输出到数据链路上。对物理层性能的要求
汇总在表 A2-1至A2-3中。
对每个参数的低设置和高设置独立于其他参数。
表A2-1
最低要求时分多址发射机特性
参数名称 单位 低设置 高设置
信道间隔(按照带有脚注的无线电规则附录18编码)(1)
kHz 25 25
ASM 1 (2027)(1) MHz 161.950 161.950
ASM 2 (2028)(1) MHz 162.000 162.000
发射输出功率 W 1 12.5 (1) 见ITU-R M.1084建议书附件4。
2.1.3 传输媒体
数据传输在VHF海上移动频段中进行。数据传输应该采用ASM 1和/或ASM 2信道。
ITU-R M.2092-0建议书 19
2.1.4 多信道运行
ASM应该能够在二个平行信道上接收,并在二个独立信道上发射。应该采用二个分开
的TDMA接收程序来同时在二个独立频率信道上接收。一个TDMA发射机可以用来在二个独
立频率信道之一上进行TDMA传输。
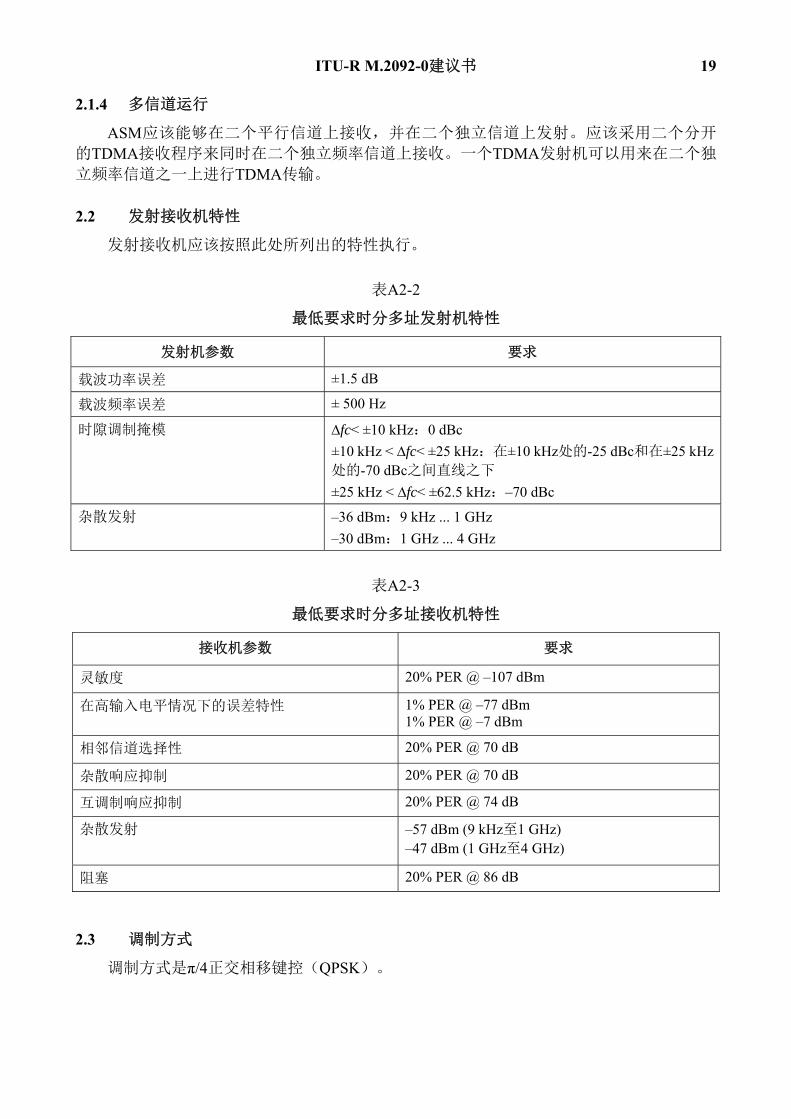
2.2 发射接收机特性
发射接收机应该按照此处所列出的特性执行。
表A2-2
最低要求时分多址发射机特性
发射机参数 要求
载波功率误差 ±1.5 dB
载波频率误差 ± 500 Hz
时隙调制掩模 ∆fc< ±10 kHz:0 dBc ±10 kHz < ∆fc< ±25 kHz:在±10 kHz处的-25 dBc和在±25 kHz处的-70 dBc之间直线之下 ±25 kHz < ∆fc< ±62.5 kHz:–70 dBc
杂散发射 –36 dBm:9 kHz ... 1 GHz –30 dBm:1 GHz ... 4 GHz
表A2-3
最低要求时分多址接收机特性
接收机参数 要求
灵敏度 20% PER @ –107 dBm
在高输入电平情况下的误差特性 1% PER @ –77 dBm 1% PER @ –7 dBm
相邻信道选择性 20% PER @ 70 dB
杂散响应抑制 20% PER @ 70 dB
互调制响应抑制 20% PER @ 74 dB
杂散发射 –57 dBm (9 kHz至1 GHz) –47 dBm (1 GHz至4 GHz)
阻塞 20% PER @ 86 dB
2.3 调制方式
调制方式是π/4正交相移键控(QPSK)。
20 ITU-R M.2092-0建议书
2.3.1 π/4正交相移键控(π/4 QPSK)
用于数据传输的调制器发射机滚降应该最大为0.35(最高标称值)。
用于数据接收的解调制器应该设计为一个最大0.35的接收机滚降(最高标称值)。
2.3.2 频率稳定性
VHF无线电发射机/接收机的频率稳定性应该是± 500 Hz或更好。
2.4 数据传输比特率
π/4 QPSK的传输比特率应该是19.2 kbit/s ± 10 ppm。
2.5 训练序列
训练序列是111111001101010000011001010。
2.6 信号信息
信号信息应该跟随在训练序列之后。
信号信息包括采用Hamming (7,4)码编码成7比特序列的4比特。信号信息选择调制,并采
用编码方式,且允许在将来添加新的调制和编码方式。
信号信息“XXXX” – 选择调制方式和编码:
0000 – 无编码π/4 QPSK;
0001 –1/2码速率π/4 QPSK;
0010 –3/4码速率π/4 QPSK;
0011 –5/6码速率π/4 QPSK;
0100 - 1111 – 留待将来使用。
2.7 数据编码
不采用数据编码。
2.8 前向纠错
当采用前向纠错时,将按附件1中定义使用。使用交织和比特扰码,如信号信息中指定
的FEC所定义。
2.9 发射机瞬态响应
2.9.1 切换时间
从发射切换到接收条件和从接收切换到发射条件所需要的时间不应超过发射发起或释放
时间。应该有可能接收来自紧邻自己发射之后或之前时隙的消息。
该设备在信道切换操作期间应该不能发射。

ITU-R M.2092-0建议书 21
2.10 发射机功率
功率电平由链路层的链路管理实体(LME)确定。
2.10.1 应该按照一些应用的要求对标称功率的二个电平(高功率、低功率)进行配置。
ASM站的默认运行应该是在高标称功率电平。
2.10.2 二个功率设置的标称电平应该是1 W和12.5 W(平均功率);容限应该在±1.5 dB之
内。
3 链路层
链路层规定数据如何打包,以便对数据传输应用错误检测和修正。链路层被分为三个子
层。
3.1 子层1–媒体访问控制
媒体访问控制(MAC)子层提供一个允许对数据传输媒体接入的方法,例如,VHF数据链路。接入方式是采用一个公时间参考的TDMA。
3.1.1 TDMA同步
TDMA同步是采用一种基于如以下所描述的同步状态的算法来实现的。在ITDMA通信
状态中的同步状态标记指示了一个站的同步状态。
TDMA接收处理不应同步于时隙边界。
直接UTC以外的同步可以由AIS系统提供。
3.1.1.1 直接协调世界时
以要求的精度直接接入到协调世界时(UTC)定时的一个站应该通过将其同步状态设置
为直接UTC来对此进行指示。
3.1.1.2 非直接协调世界时
不能够获得到UTC的直接连接,但是具有到AIS系统接入的一个站可以从该AIS系统获
得其同步。然后,它应该修改其同步状态,以指示正由AIS系统提供的同步类型。
3.1.2 时分
时隙和帧如附件1所定义。对数据链路的接入默认是在一个时隙的开始处提供。帧开始
和停止与UTC的分一致,当UTC不可用时,AIS系统可以提供帧同步。
3.1.3 时隙相位和帧同步
时隙相位同步和帧同步是通过采用来自UTC或来自AIS系统的信息完成的。
3.1.3.1 时隙相位同步
时隙相位同步是时隙边界以高级别同步稳定性进行同步的方法,因此保证没有消息边界
重叠或消息损伤。

22 ITU-R M.2092-0建议书
3.1.3.2 帧同步
帧同步是帧的当前时隙数已知时的方法。
3.1.4 时隙标识
每个时隙由其指数(0-2249)来标识。时隙0应该被定义为帧的开始。
3.1.5 时隙接入
发射机应该通过在时隙开始处接通射频功率来开始传输。
发射机应该在传输包的最后比特已经离开发射单元之后关闭。这个事件必须发生在为自己
传输分配的时隙之内。一个传输的默认长度占用一个时隙。时隙接入如图A2-1中所示进行。
图A2-1
时隙接入
3.1.6 时隙状态
在一个ASM信道上的每个时隙可以是以下状态之一: – 空闲:意味着该时隙在自己站的接收范围之内未用于信道上。 – 内部分配:意味着该时隙被自己站分配用于ASM传输的目的。 – 外部分配:意味着该时隙被另外一个站分配用于ASM传输的目的。
3.2 子层2 – 数据链路业务
数据链路业务(DLS)子层为以下目的提供方法: – 数据链路激活和释放; – 数据传输;或 – 错误检测、纠正和控制。
射频功率
时隙开始 时隙开始
时间
ITU-R M.2092-0建议书 23
3.2.1 数据链路激活和释放
基于MAC子层,DLS将侦听、激活或释放该数据链路。一个标记为空闲或外部分配的
时隙表示自己的设备应该在接收模式,并侦听其他数据链路用户。
3.2.2 数据传输
数据传输应该采用一个面向比特的协议,并应该符合此标准。
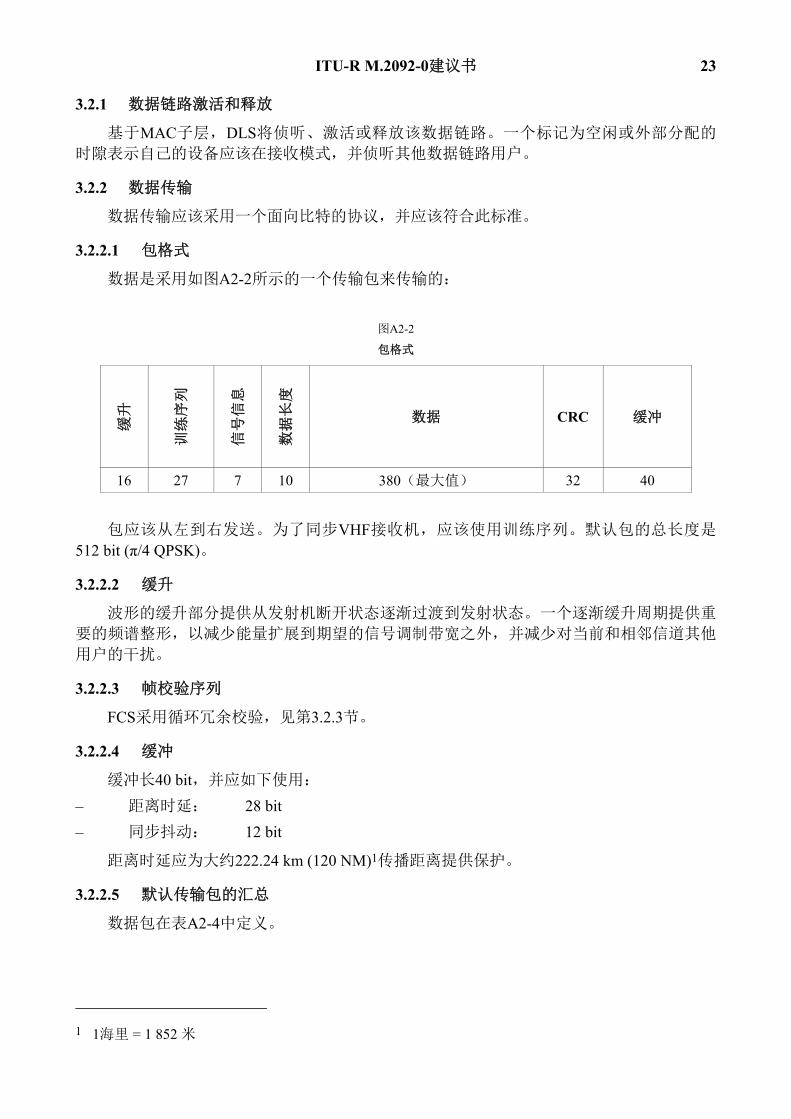
3.2.2.1 包格式
数据是采用如图A2-2所示的一个传输包来传输的:
图A2-2
包格式
缓升
训练
序列
信号
信息
数据
长度
数据 CRC 缓冲
16 27 7 10 380(最大值) 32 40
包应该从左到右发送。为了同步VHF接收机,应该使用训练序列。默认包的总长度是
512 bit (π/4 QPSK)。
3.2.2.2 缓升
波形的缓升部分提供从发射机断开状态逐渐过渡到发射状态。一个逐渐缓升周期提供重
要的频谱整形,以减少能量扩展到期望的信号调制带宽之外,并减少对当前和相邻信道其他
用户的干扰。
3.2.2.3 帧校验序列
FCS采用循环冗余校验,见第3.2.3节。
3.2.2.4 缓冲
缓冲长40 bit,并应如下使用: – 距离时延: 28 bit – 同步抖动: 12 bit
距离时延应为大约222.24 km (120 NM)1传播距离提供保护。
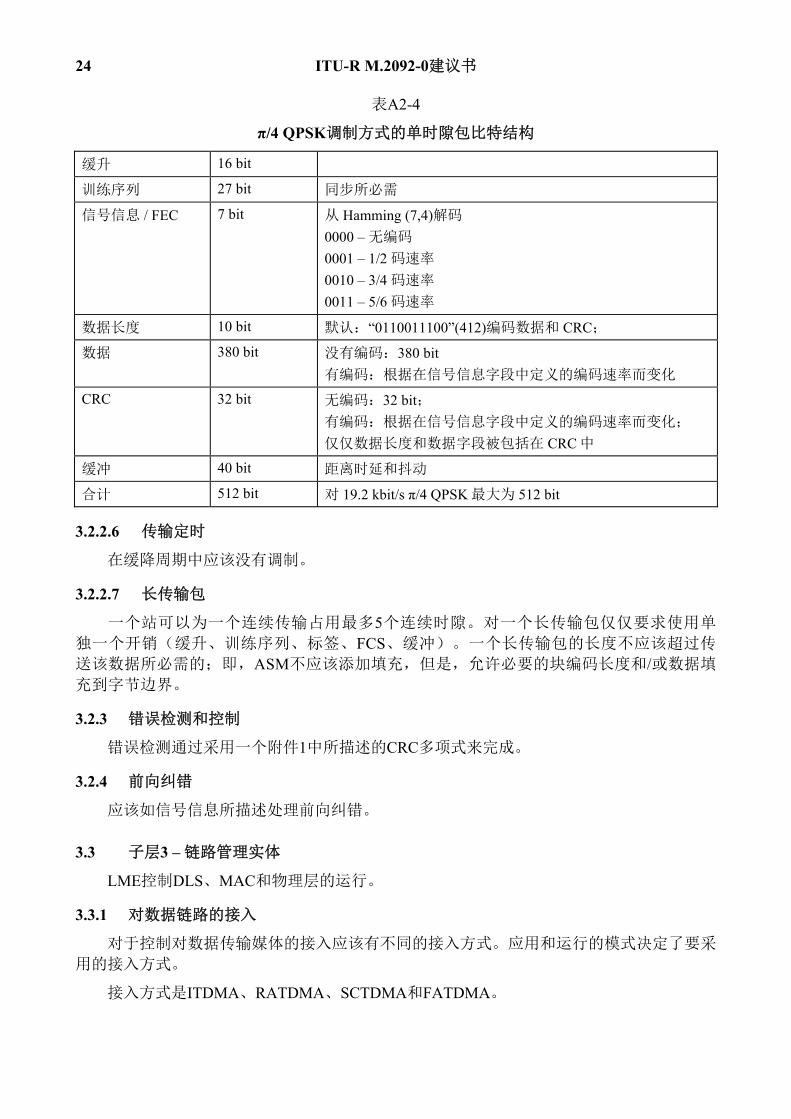
3.2.2.5 默认传输包的汇总
数据包在表A2-4中定义。
1 1海里 = 1 852 米
24 ITU-R M.2092-0建议书
表A2-4
π/4 QPSK调制方式的单时隙包比特结构
缓升 16 bit
训练序列 27 bit 同步所必需
信号信息 / FEC 7 bit 从 Hamming (7,4)解码 0000 – 无编码 0001 – 1/2 码速率 0010 – 3/4 码速率 0011 – 5/6 码速率
数据长度 10 bit 默认:“0110011100”(412)编码数据和 CRC;
数据 380 bit 没有编码:380 bit 有编码:根据在信号信息字段中定义的编码速率而变化
CRC 32 bit 无编码:32 bit; 有编码:根据在信号信息字段中定义的编码速率而变化; 仅仅数据长度和数据字段被包括在 CRC 中
缓冲 40 bit 距离时延和抖动
合计 512 bit 对 19.2 kbit/s π/4 QPSK 最大为 512 bit
3.2.2.6 传输定时
在缓降周期中应该没有调制。
3.2.2.7 长传输包
一个站可以为一个连续传输占用最多5个连续时隙。对一个长传输包仅仅要求使用单
独一个开销(缓升、训练序列、标签、FCS、缓冲)。一个长传输包的长度不应该超过传
送该数据所必需的;即,ASM不应该添加填充,但是,允许必要的块编码长度和/或数据填
充到字节边界。
3.2.3 错误检测和控制
错误检测通过采用一个附件1中所描述的CRC多项式来完成。
3.2.4 前向纠错
应该如信号信息所描述处理前向纠错。
3.3 子层3 – 链路管理实体
LME控制DLS、MAC和物理层的运行。
3.3.1 对数据链路的接入
对于控制对数据传输媒体的接入应该有不同的接入方式。应用和运行的模式决定了要采
用的接入方式。
接入方式是ITDMA、RATDMA、SCTDMA和FATDMA。
ITU-R M.2092-0建议书 25
3.3.1.1 在数据链路上的合作
接入方式连续运行且平行在相同的物理数据链路上。它们都符合TDMA所设定的规则。
当接入该物理数据链路时,ASM系统必须给予AIS系统高优先级。
3.3.1.2 候选时隙
用于传输的时隙是从定义为150个时隙的选择间隔(SI)中的候选时隙选取。
选择处理采用从AIS和ASM接收到的数据。
至少应该有一组4个候选时隙来从中选择。
候选时隙主要是从AIS和ASM上空闲的时隙中选取。
可用的时隙如ITU-R M.1371建议书中所定义,且必须仅仅取自SI内最远的站。
如果候选时隙组包含少于4个时隙,可以通过使用以下规则和顺序(规则1之后跟随规 则2)来得到附加的候选时隙:
规则1:在一个AIS信道上的可用时隙,且在所有其他AIS和ASM信道上空闲;
规则2:在二个AIS信道上的可用时隙,且在所有ASM信道上空闲。
当为长于1个时隙的消息选择候选时隙时,一个候选时隙应该是在一个符合以上所述选
择标准的连续时隙块的第一个时隙。
如果该站不能找到足够数量的候选时隙,该站不应该发射,并应该重新安排传输。
候选时隙的选择过程还必须要考虑为接收公告牌所保留的时间周期。
在用于传输的相同概率中维持一个最小4个候选时隙的目的是要提供对该链路接入的高
概率。
3.3.2 运行模式
应该有三种运行模式。默认的模式应该是自治,且可以和其他模式相互切换。
3.3.2.1 自治
一个连续工作的站应该确定其自己的传输时刻表。该站应该自动解决与其他站的时刻安
排冲突。
3.3.2.2 指定
一个工作于指定模式的站在确定它应该何时发射时考虑指定消息的传输时刻表。
3.3.2.3 轮询
一个工作在轮询模式的站应该自动响应询问消息。在轮询模式的运行不应该与其他二种
模式的运行相冲突。该响应应该在接收到询问消息的信道上发射。
3.3.3 初始化
在上电时,一个站应该监视TDMA信道1分钟,以确定信道的活跃性、其他参与者的
ID、当前的时隙分配和岸上站的可能存在。在此时间段内,应该发布一个工作在此系统中所
有站的动态目录。应该建立一个帧的图,反映TDMA信道的活跃性。在经过1分钟之后,该
站可以按照其自己的时刻表传输ASM信息。
26 ITU-R M.2092-0建议书
3.3.4 信道接入方式
如以下所定义,接入方式应该共同存在且同时工作在TDMA信道上。接入方式
ITDMA、RATDMA和FATDMA如ITU-R M.1371建议书中所定义。
3.3.4.1 时隙载波侦听时分多址(SCTDMA)
SCTDMA可以被用于卫星上行链路传输。
3.3.4.2 时隙载波侦听时分多址算法
对数据链路的接入应该参考采用直接UTC的帧开始来实现。
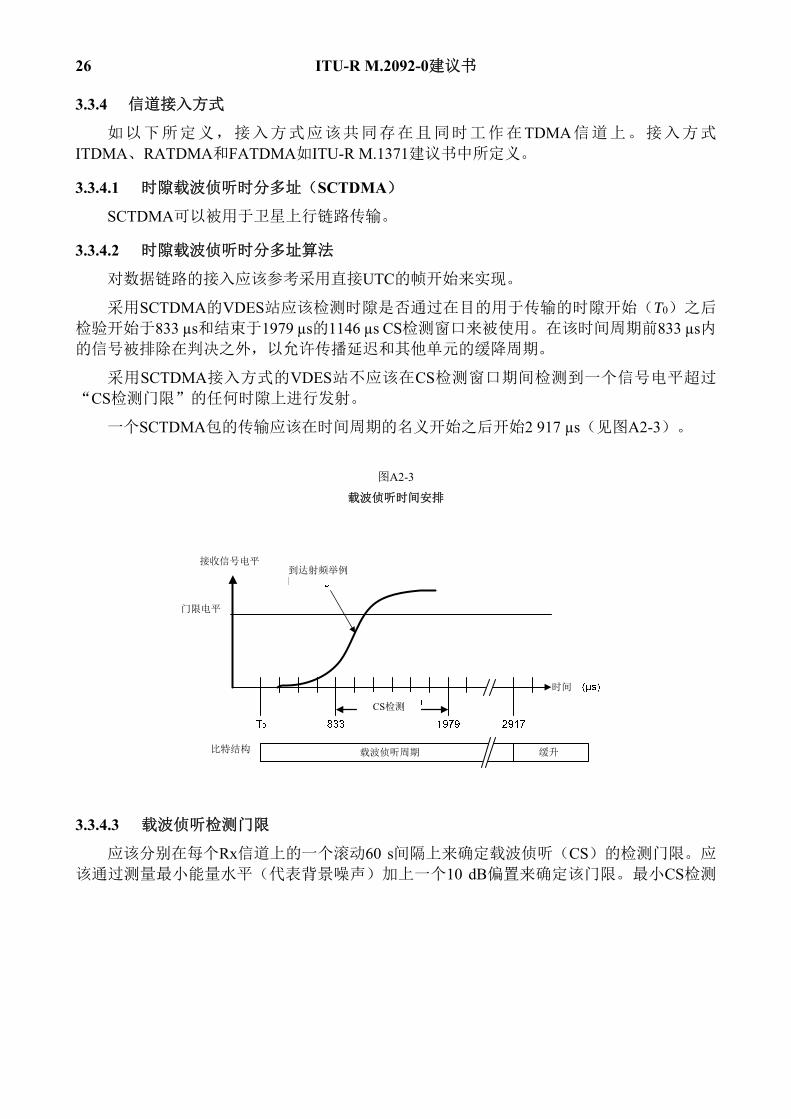
采用SCTDMA的VDES站应该检测时隙是否通过在目的用于传输的时隙开始(T0)之后
检验开始于833 µs和结束于1979 µs的1146 µs CS检测窗口来被使用。在该时间周期前833 µs内的信号被排除在判决之外,以允许传播延迟和其他单元的缓降周期。
采用SCTDMA接入方式的VDES站不应该在CS检测窗口期间检测到一个信号电平超过
“CS检测门限”的任何时隙上进行发射。
一个SCTDMA包的传输应该在时间周期的名义开始之后开始2 917 µs(见图A2-3)。
图A2-3
载波侦听时间安排
3.3.4.3 载波侦听检测门限
应该分别在每个Rx信道上的一个滚动60 s间隔上来确定载波侦听(CS)的检测门限。应
该通过测量最小能量水平(代表背景噪声)加上一个10 dB偏置来确定该门限。最小CS检测
接收信号电平
门限电平
到达射频举例
CS检测
比特结构 载波侦听周期 缓升
时间
ITU-R M.2092-0建议书 27
门限应该是–107 dBm,且应该对至少30 dB范围跟踪背景噪声(这导致一个–77 dBm的最大
门限电平)2。
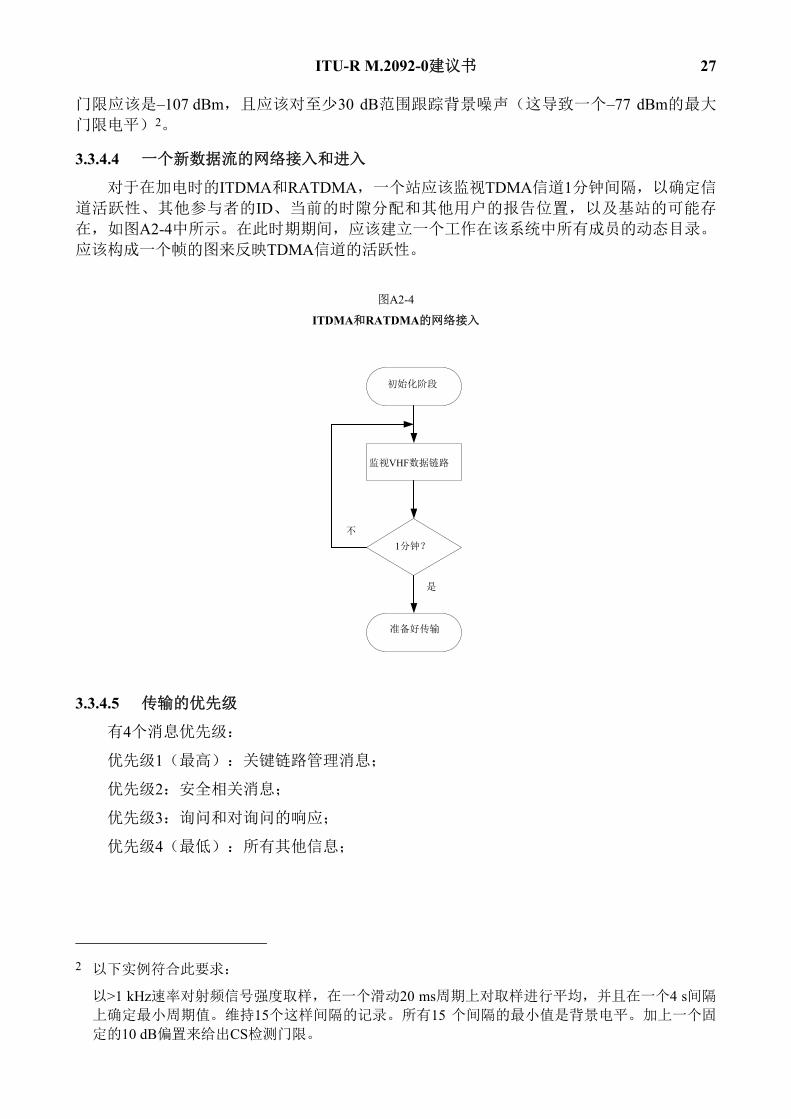
3.3.4.4 一个新数据流的网络接入和进入
对于在加电时的ITDMA和RATDMA,一个站应该监视TDMA信道1分钟间隔,以确定信
道活跃性、其他参与者的ID、当前的时隙分配和其他用户的报告位置,以及基站的可能存
在,如图A2-4中所示。在此时期期间,应该建立一个工作在该系统中所有成员的动态目录。
应该构成一个帧的图来反映TDMA信道的活跃性。
图A2-4
ITDMA和RATDMA的网络接入
3.3.4.5 传输的优先级
有4个消息优先级:
优先级1(最高):关键链路管理消息;
优先级2:安全相关消息;
优先级3:询问和对询问的响应;
优先级4(最低):所有其他信息;
2 以下实例符合此要求:
以>1 kHz速率对射频信号强度取样,在一个滑动20 ms周期上对取样进行平均,并且在一个4 s间隔
上确定最小周期值。维持15个这样间隔的记录。所有15 个间隔的最小值是背景电平。加上一个固
定的10 dB偏置来给出CS检测门限。
初始化阶段
监视VHF数据链路
不 1分钟?
准备好传输
是

28 ITU-R M.2092-0建议书
3.3.5 消息结构
该消息应该具有如以下图A2-5中显示的一个数据包数据部分内的结构。
图A2-5
消息结构
每个消息采用从上到下所列出的参数字段的一个表来描述。以最高有效位在前来定义每
个参数字段。
包含子字段(例如,通信状态)的参数字段在分别的表中定义,子字段从上到下列出,
在每个子字段内首先是最高有效位。
字符串呈现从左到右,首先是最高有效位。所有未用的字符应该用@符号来表示,且它
们应该放置在字符串的末尾。
当数据是在VHF数据链路上输出时,它应该以8 bit的字节在与每个消息相关的表中从上
到下分组。每个字节应该以最低有效位在前输出。
在表A2-5中提供了一个消息表的一般实例。
表A2-5
一般消息表
参数 符号 比特数 描述
P1 T 6 参数1
P2 D 1 参数2
P3 I 1 参数3
P4 M 27 参数4
P5 N 2 参数5
未使用 0 3 未用比特
在表A2-6中提供了数据的逻辑视图。
MSG 标识
训练序列 信号信息 数据 长度 数据 缓存

ITU-R M.2092-0建议书 29
表A2-6
数据的逻辑视图
比特顺序 M----L-- M------- -------- -------- --LML000
符号 TTTTTTDI MMMMMMMM MMMMMMMM MMMMMMMM MMMNN000
字节顺序 1 2 3 4 5
在表A2-7中提供了到VHF数据链路的输出顺序。
表A2-7
到VHF数据链路的输出顺序
比特顺序 --L----M -------M -------- -------- 000LML--
符号 IDTTTTTT MMMMMMMM MMMMMMMM MMMMMMMM 000NNMMM
字节顺序 1 2 3 4 5
3.3.5.1 消息标识
消息ID应该长6 bit,且应该遵守ITU-R M.1371建议书中为AIS定义的消息ID的当前定义。
3.3.5.2 增量时分多址消息结构
ITDMA消息结构提供为了按照ITU-R M.1371建议书运行所必要的信息。消息结构显示
在图A2-6中:
图A2-6
ITDMA消息结构
3.3.5.2.1 用户标识
用户ID应该是一个唯一标识符,且长30 bit。
用户标识 通信状态
MSG 标识
训练序列 信号信息 缓存 数据 数据 长度
30 ITU-R M.2092-0建议书
3.3.5.2.2 增量时分多址通信状态
通信状态提供以下功能: – 它包含ITDMA概念中时隙分配算法所使用的信息; – 它还指示同步状态。
ITDMA通信状态如ITU-R M.1371建议书中所定义来构成。ITDMA通信状态应该仅仅应
用于相关传输发生的信道中的时隙。ASM 1和ASM 2是独立信道。
4 网络层
网络层应该被用于: – 建立和维持信道连接; – 消息的管理和优先级指定; – 传输包在信道之间的分布; – 数据链路拥塞解决方案。
5 传输层
传输层负责: – 将数据转换为适当长度的传输包; – 对数据包排序; – 对上层的接口协议。
传输层和上层之间的接口应该由呈现接口来执行。
5.1 传输包的定义
一个传输包是最终可以对外部系统通信的一些信息的一个内部呈现。确定传输包的长度
来使它符合数据传输的规则。
5.2 传输包
5.2.1 编址消息
编址消息是VDES站之间的点对点通信。编址的消息可以要求一个确认。当要求一个确
认而没有收到时,VDES站可以重新传输该消息。
5.2.2 广播消息
一个广播消息缺少一个目的标识符ID。因此接收站不应该确认一个广播消息。
5.2.3 到呈现接口消息的变换
每个接收的传输包应该被变换到一个相应的呈现接口消息并按它们被接收的顺序来呈
现,而不考虑消息的分类。按照要求,使用呈现接口的应用应该负责它们自己的顺序编号方
式。对一个移动台,如果目的用户ID(目的MMSI)不同于自己站的ID(自己的MMSI),
编址消息不应该输出到呈现接口。
ITU-R M.2092-0建议书 31
5.2.4 数据到传输包的变换
传输层应该将从呈现接口接收到的数据变换到传输包。
5.3 呈现接口协议
要由该站传输的数据应该通过呈现接口输入;由该站接收的数据应该通过呈现接口输
出。用于此数据流的格式和协议由IEC 61162系列定义。
6 卫星上行链路消息
卫星上行链路可以由 VDES 设备提供。它还可以由采用时隙载波侦听 TDMA(SCTDMA)接入方式的专用设备来提供,以加强AIS通信和地面ASM通信。
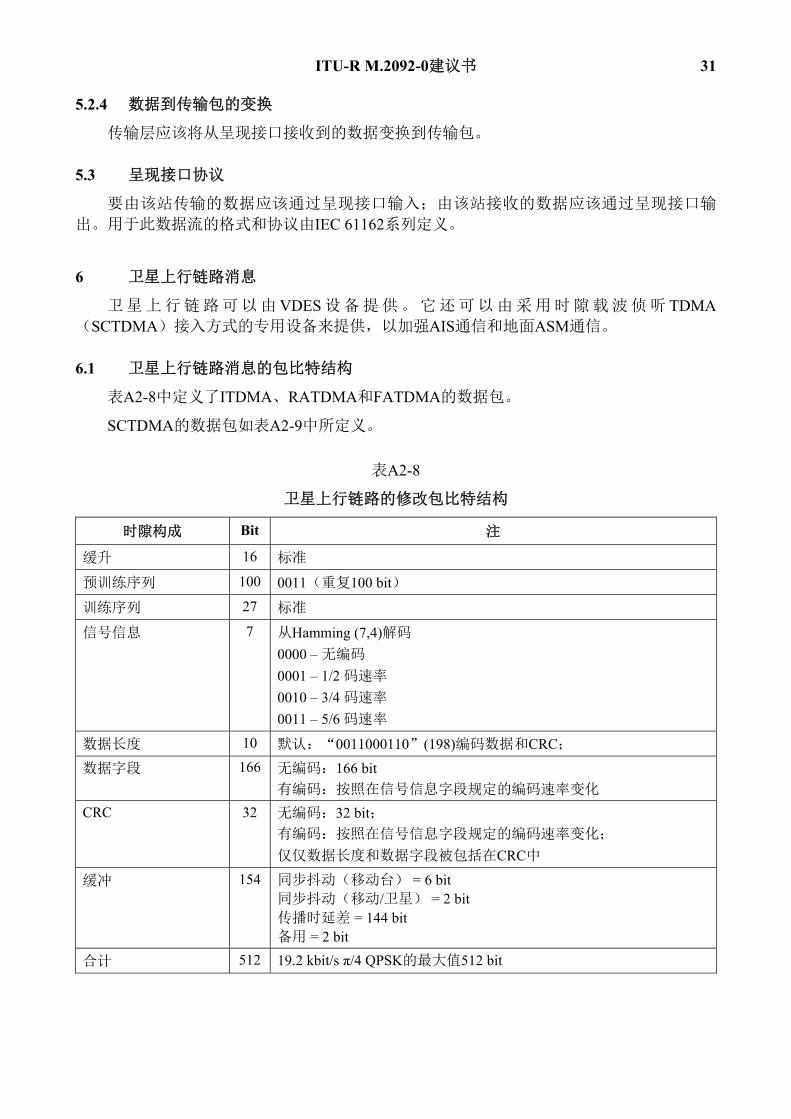
6.1 卫星上行链路消息的包比特结构
表A2-8中定义了ITDMA、RATDMA和FATDMA的数据包。
SCTDMA的数据包如表A2-9中所定义。
表A2-8
卫星上行链路的修改包比特结构
时隙构成 Bit 注
缓升 16 标准
预训练序列 100 0011(重复100 bit)
训练序列 27 标准
信号信息 7 从Hamming (7,4)解码 0000 – 无编码 0001 – 1/2 码速率 0010 – 3/4 码速率 0011 – 5/6 码速率
数据长度 10 默认:“0011000110”(198)编码数据和CRC; 数据字段 166 无编码:166 bit
有编码:按照在信号信息字段规定的编码速率变化 CRC 32 无编码:32 bit;
有编码:按照在信号信息字段规定的编码速率变化; 仅仅数据长度和数据字段被包括在CRC中
缓冲 154 同步抖动(移动台) = 6 bit 同步抖动(移动/卫星) = 2 bit 传播时延差 = 144 bit 备用 = 2 bit
合计 512 19.2 kbit/s π/4 QPSK的最大值512 bit
32 ITU-R M.2092-0建议书
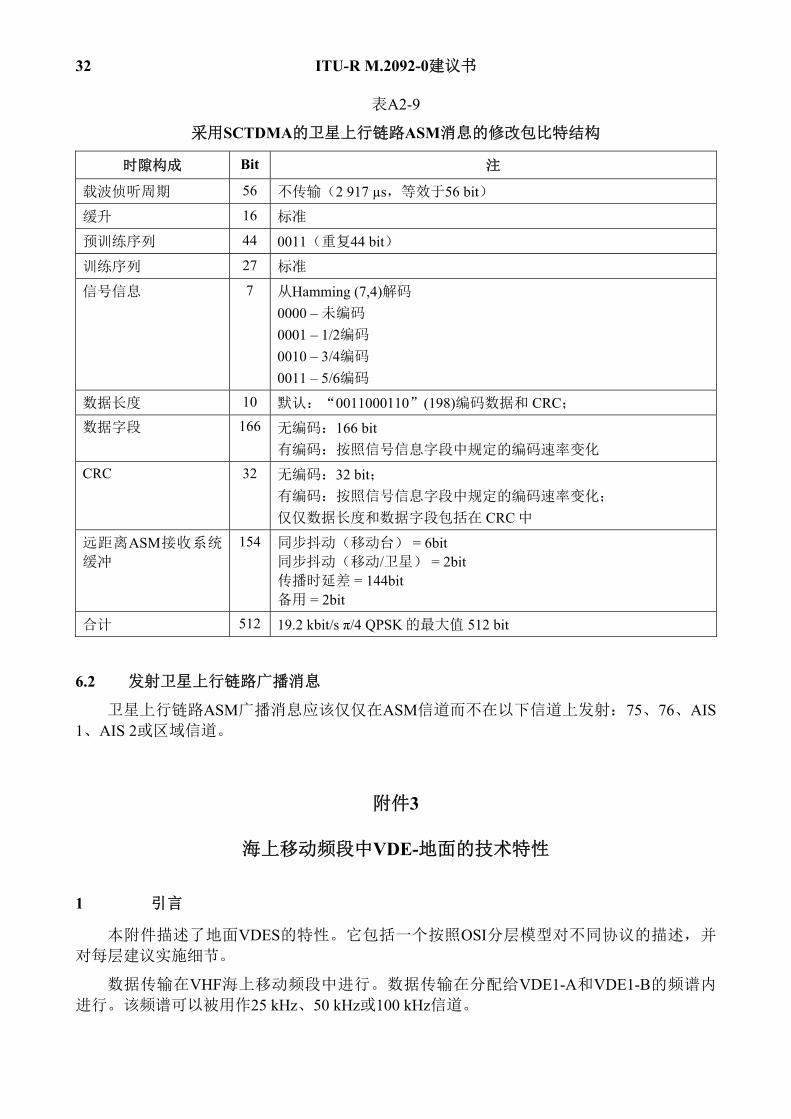
表A2-9
采用SCTDMA的卫星上行链路ASM消息的修改包比特结构
时隙构成 Bit 注
载波侦听周期 56 不传输(2 917 µs,等效于56 bit)
缓升 16 标准
预训练序列 44 0011(重复44 bit)
训练序列 27 标准
信号信息 7 从Hamming (7,4)解码 0000 – 未编码 0001 – 1/2编码 0010 – 3/4编码 0011 – 5/6编码
数据长度 10 默认:“0011000110”(198)编码数据和 CRC; 数据字段 166 无编码:166 bit
有编码:按照信号信息字段中规定的编码速率变化 CRC 32 无编码:32 bit;
有编码:按照信号信息字段中规定的编码速率变化; 仅仅数据长度和数据字段包括在 CRC 中
远距离ASM接收系统
缓冲 154 同步抖动(移动台) = 6bit
同步抖动(移动/卫星) = 2bit 传播时延差 = 144bit 备用 = 2bit
合计 512 19.2 kbit/s π/4 QPSK 的最大值 512 bit
6.2 发射卫星上行链路广播消息
卫星上行链路ASM广播消息应该仅仅在ASM信道而不在以下信道上发射:75、76、AIS 1、AIS 2或区域信道。
附件3
海上移动频段中VDE-地面的技术特性
1 引言
本附件描述了地面VDES的特性。它包括一个按照OSI分层模型对不同协议的描述,并
对每层建议实施细节。
数据传输在VHF海上移动频段中进行。数据传输在分配给VDE1-A和VDE1-B的频谱内
进行。该频谱可以被用作25 kHz、50 kHz或100 kHz信道。
ITU-R M.2092-0建议书 33
该系统应该采用同步方式的TDMA技术。
2 OSI层
参见附件1。
3 物理层
3.1 范围
地面VDE的通信范围通常是20-50 NM。
3.2 发射机参数设置
移动台发射机参数设置请参见附件1。
岸上站发射机参数设置在表A3-1中定义。
表A3-1
岸上站发射机参数
发射机参数 要求 条件
频率误差 3 ppm 正常 发射功率 平均发射功率至少应该是12.5瓦,且
不超过50瓦,如制造商所声明。 正常±1.5 dB,极端 +2 / -6 dB
传导
调制频谱 25 kHz 信道
0 dBc -25 dBc -60 dBc
Δfc < ±12.5 kHz ±12.5 kHz < Δfc < ±25 kHz ±25 kHz < Δfc < ±75 kHz
调制频谱 50 kHz信道
0 dBc -25dBc -60 dBc
Δfc < ±25 kHz ±25 kHz < Δfc < ±50 kHz ±50 kHz< Δfc < ±100 kHz
调制频谱 100 kHz信道
0 dBc -25 dBc -60 dBc
Δfc < ±50 kHz ±50 kHz < Δfc < ±100 kHz ±100 kHz < Δfc < ±150 kHz
杂散发射 -36 dBm -30 dBm
9 kHz ... 1 GHz 1 GHz ... 4 GHz
3.3 天线
地面VDE可以与其他子系统AIS、ASM、VDE-SAT共享相同的天线。
参见附件1。
34 ITU-R M.2092-0建议书
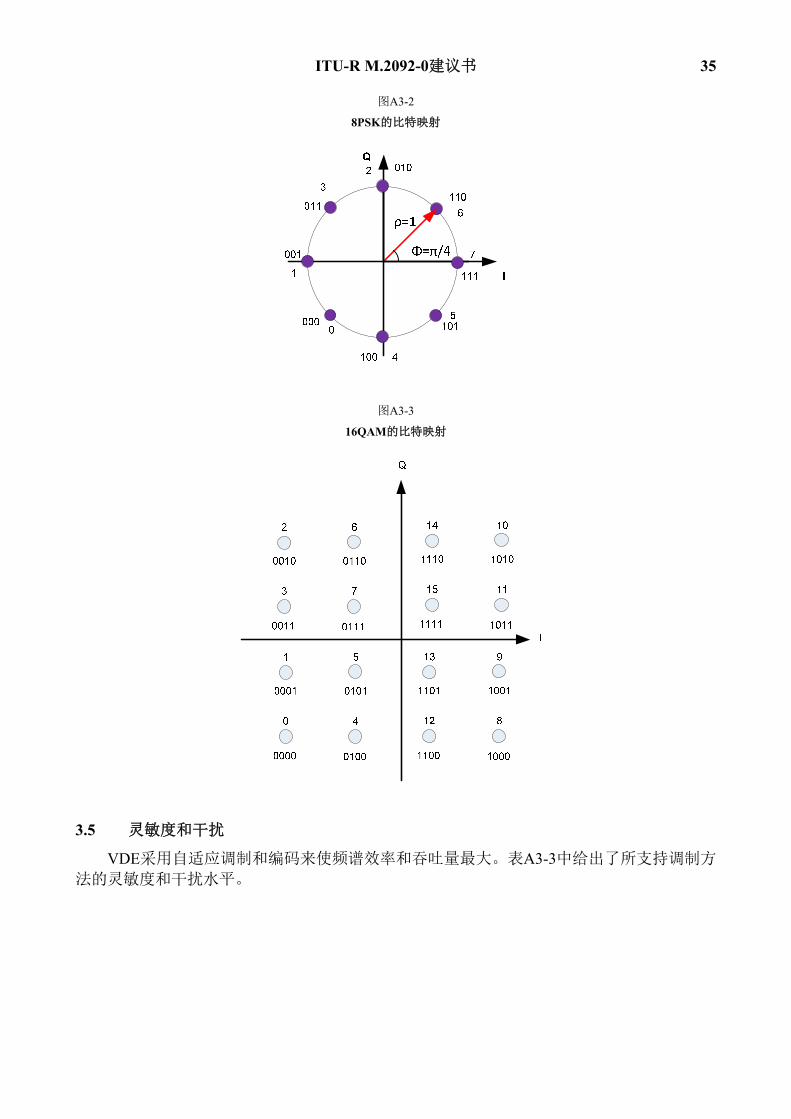
3.4 调制
3.4.1 波形
波形在表A3-2中定义。调制和编码选项和原始信道吞吐速率是对广泛的带宽和调制和编
码方式(MCS)提出的。详细说明了三种MCS,而其他13种留待将来扩展。
表A3-2
调制和编码方式
调制和编码方式 信号信息D0、
D1、D2、D3值CQI值
总吞吐 比特率
(kbit/s)* 25 kHz
总吞吐 比特率
(kbit/s)** 50 kHz
总吞吐 比特率
(kbit/s)***100 kHz
无传输 0 - - - MCS-1
(π/4 QPSK,CR=1/2) 0,0,0,1 1 38.4 76.8 153.6
MCS-2 0,0,1,0 2 将来MCS的占位符 MCS-3
(8PSK,CR=3/4) 0,0,1,1 3 57.6 115.2 230.4
MCS-4 0,1,0,0 4 将来MCS的占位符 MCS-5
(16QAM,CR=3/4) 0,1,0,1 5 76.8 153.6 307.2
将来MCS的占位符 X,X,X,X 将来MCS的占位符 * 一个假设:19.2 ksym/s,25 kHz带宽(滚降因子:0.3) ** 一个假设:38.4 ksym/s,50 kHz带宽(滚降因子:0.3) *** 一个假设:76.8 ksym/s,100 kHz带宽(滚降因子:0.3)
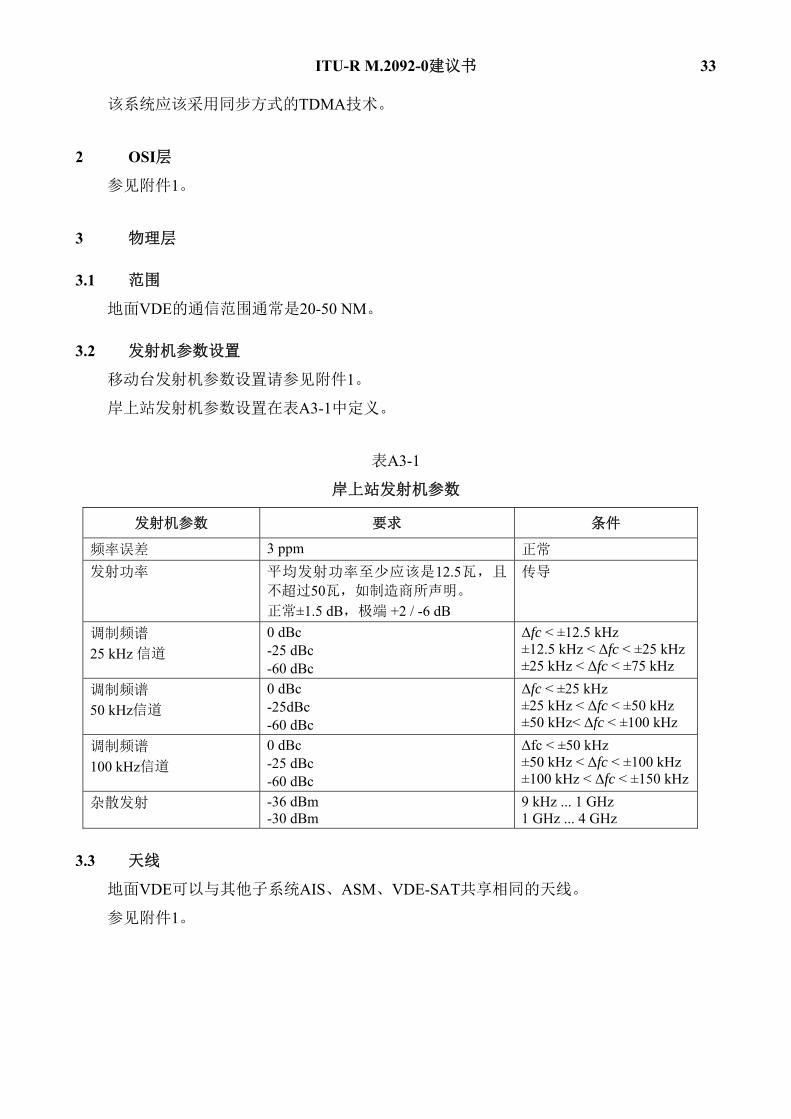
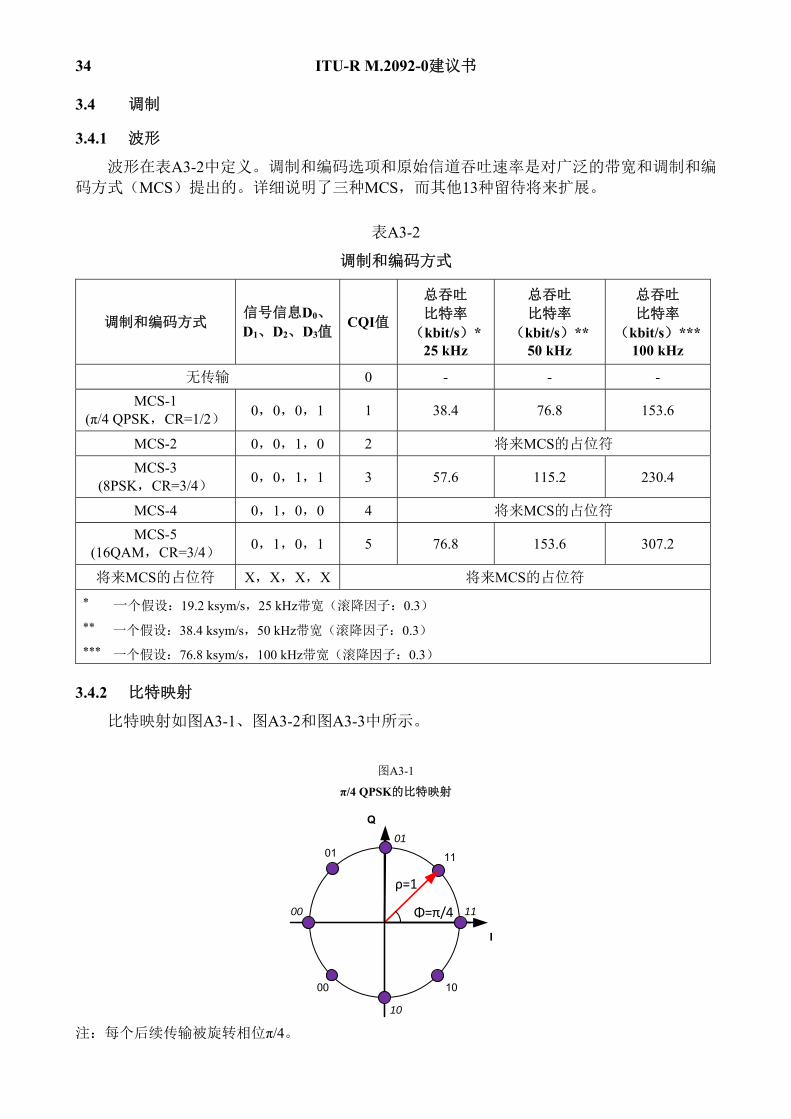
3.4.2 比特映射
比特映射如图A3-1、图A3-2和图A3-3中所示。
图A3-1
π/4 QPSK的比特映射
Φ=π/4
ρ=1
Q
I
11
1000
01
11
01
00
10 注:每个后续传输被旋转相位π/4。
ITU-R M.2092-0建议书 35
图A3-2
8PSK的比特映射
图A3-3
16QAM的比特映射
3.5 灵敏度和干扰
VDE采用自适应调制和编码来使频谱效率和吞吐量最大。表A3-3中给出了所支持调制方
法的灵敏度和干扰水平。
36 ITU-R M.2092-0建议书
表A3-3
灵敏度和载波干扰比
调制编码 方式
25 kHz 50 kHz 100 kHz 灵敏度
(dBm) CIR
(dB) 灵敏度
(dBm) CIR
(dB) 灵敏度
(dBm) CIR
(dB)
MCS-1* −110 8 −107 8 −104 8
MCS-3* −104 14 −101 14 −98 14
MCS-5* −102 16 −99 16 −96 16 * 调制编码方式,见表A3-2
3.6 符号定时精度
符号定时精度小于百万分之5秒(ppm)。
3.7 发射机定时抖动
小于5%符号间隔(峰值)。
3.8 输出处的时隙传输精度
对于船上站,小于100 µs,相对于UTC参考时间的峰值。
对于岸上站,小于50 µs,相对于UTC参考时间的峰值。
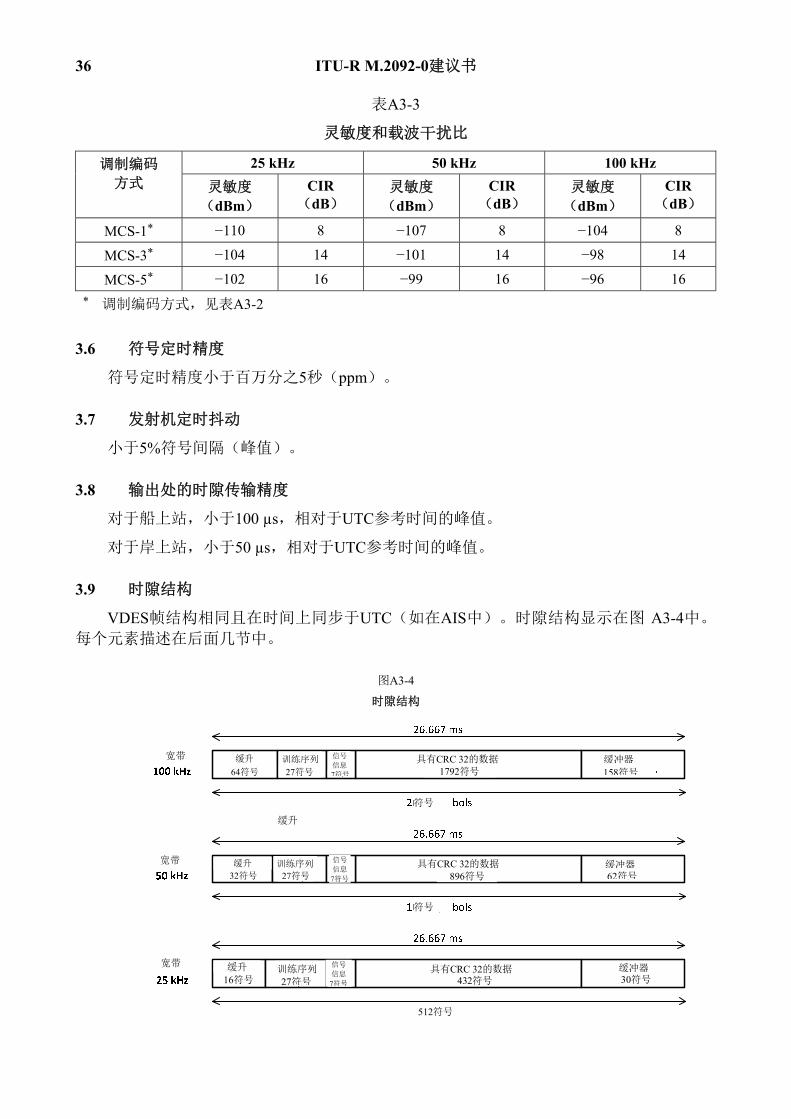
3.9 时隙结构
VDES帧结构相同且在时间上同步于UTC(如在AIS中)。时隙结构显示在图 A3-4中。
每个元素描述在后面几节中。
图A3-4
时隙结构
宽带 缓升 训练序列 信号
信息具有CRC 32的数据 缓升
缓升
宽带
宽带
缓升
缓升
训练序列
训练序列
符号
符号
512符号
信号
信息
7符号
信号
信息
7符号
64符号
32符号
16符号
27符号
27符号
27符号
7符号 1792符号
896符号
432符号
158符号
62符号
30符号
具有CRC 32的数据
具有CRC 32的数据
缓冲器
缓冲器
缓冲器
ITU-R M.2092-0建议书 37
3.9.1 缓升
功率从-50 dBc到-1.5 dBc的缓升时间应该发生在少于或等于832 µs中。这是维持与相邻
信道干扰要求相符的一种方法。
3.9.2 训练序列
训练序列是111111001101010000011001010。
3.9.3 信号信息
信号信息携带接收机的MCS ID。
信号信息应跟随传输的训练序列,见表A3-2。
信号信息包含采用Hamming (7,4)码编码成一个7比特序列的4比特(D0、D1、D2、D3)。
3.9.4 训练序列和信号信息的比特映射
对于训练和信号信息,适用以下映射: – 1映射到QPSK符号3 (1,1)(见图A3-1); – 0映射到QPSK符号l 0 (0,0)。
QPSK比特映射参见第3.4.2节。
3.9.5 带有CRC-32的数据
带有其附加CRC-32的数据负载被交织、编码并且之后扰码和比特映射。
3.9.6 前向纠错
参见附件1。
3.9.7 比特扰码
要求对用户数据进行扰码,以避免功率谱密度集中在狭窄的频带内。
3.9.8 缓冲
缓冲包括小于或等于832 µs的从全功率到-50 dBc的缓降时间。剩余时间用于时延和抖动。
4 链路层
4.1 接入方式
VDE地面系统应该支持以下TDMA接入方式: – FATDMA; – RATDMA; – ITDMA
38 ITU-R M.2092-0建议书
4.2 数据封装
数据字段包括多个可变长度的数据报,且这些数据报被封装。每个数据报包括以下封装
字段: – 数据报类型; – 数据报长度; – 目的地(可选); – 事物ID(可选); – 数据报序列号(对多段数据报); – 源ID; – 数据报负载(可变); – 数据填充; – CRC(4字节)。
4.3 循环冗余校验
参见附件1。
4.4 自动重复请求(ARQ)
数据报可能或可能不采用ARQ,这对每种数据报类型进行定义。一个ARQ可以请求对
一个特定丢失数据报段进行选择性重传。
4.5 确认(ACK)
应该带有一个接受信号信道质量指示符(CQI)来发送在VDE链路上确认的无CRC错误
的单播数据报。
4.6 送达通知(EDN)
被成功地传送到目的地的所有要求传送通知的数据报应该被通知给源。
4.7 送达失败(EDF)
在超时时间或重试限制之内没有被成功地传送的所有要求传送通知的数据报应该通知给
源。
4.8 帧的层结构
参见附件6。

ITU-R M.2092-0建议书 39
图A3-5
帧的层结构
4.9 VDE地面的信道资源和媒体访问控制
VDE频谱(和逻辑信道)资源通过接收岸上(或星基)媒体访问控制消息(例如,岸上
站采用公告牌业务来执行此操作)来分配。在船只接收星载和岸基站二者的情况下,岸基资
源分配应该优先。
双工模式是以上资源分配以及运行模式的一个功能。
4.9.1 单工模式 – 船 – 船
同样的信道资源被用于通信的双方向。
4.9.2 双工模式 – 岸 – 船 – 船 – 岸
上部和下部频谱被分别用于船到岸或岸到船,在一个时刻仅仅一侧发射。
频率分配的细节请参见附件1。
4.10 物理和逻辑信道
VDES使用多个信道来携带数据。这些信道被分为物理和逻辑信道。岸基站应该发射一
个信道地面公告牌(TBB)消息,它规定VDE信道的配置。
1帧 = 5子帧 = 2250 时隙(= 60 s)
1子帧 =1 5超级时隙 =450时隙(=12 s)
1超级时隙 =5个6时隙 =30时隙(=800m s)
1个6时隙 = 6时隙(=160m s)
1时隙(时隙) ≈ 26.667 ms
40 ITU-R M.2092-0建议书
缺少公告牌消息时,船载站应该使用一个在地面VDES上的50 kHz信道的默认信道配置
(组合的信道2024和2084),以一个单工专用接入方式工作。用于船 – 船通信的单工专用接
入方式应该是ITDMA(当可能时)或者RATDMA。
4.11 物理信道
物理信道(PC)由中心频率和带宽确定。
4.12 逻辑信道
逻辑信道(LC)被分为信令和业务信道。这些在下面描述。逻辑信道定义可以根据物
理信道和消息时间信息(帧的层结构、开始时间等)来确定。
信令信道: – 地面公告牌(TBB),见第4.12.1节; – 公告,见第4.12.2节; – 随机接入,见4.12.5。
所有信令信道采用最强健的调制和编码方式。
业务信道: – 多播,见第4.12.3节; – 单播,见第4.12.4节; – 随机接入,见第4.12.5节。
业务信道可以使用一个强健和更高比特率调制与编码方式的组合。
4.12.1 地面公告牌(TBB)信令信道
每个VDE岸上站应该为TBB使用一个固定的逻辑信道。所有TBB逻辑信道将基于很多预
先定义的帧层结构50 kHz岸到船物理信道(组合的2024和2084)结构之一。这些被定义来仅
仅占用帧(60秒,2250个时隙)的一部分,以允许可能的与卫星的频谱和时间共享,见附件 6。
TBB规定网络配置参数,例如信令信道(控制信道)和数据信道、协议版本和将来的网
络配置。TBB在频谱(逻辑信道)资源分配中优先。这可以与卫星公告牌信令信道相协调来
促进共同频谱资源的共享。
逻辑信道通常根据VDES帧层结构来重复。
用于VDE岸上站服务区的VDE地面信道使用由TBB规定,见附件1。
TBB信息包括适用的区域。TBB不经常改变,并且应该以规则的间隔发送。
4.12.2 公告信令信道(ASC)
此信道通常将携带公告、MAC信息、VDE前转和返回资源分配、CQI、ARQ和ACK。
公告还包括单播和多播(广播)数据报的协调。
ITU-R M.2092-0建议书 41
MAC信息包括网络版本的改变、拥塞控制(随机化间隔(保持)和最小优先等级)。
这些参数的一些将周期性地反映在TBB中。
ASC逻辑信道将在TBB中指定,且包括多个帧层结构50 kHz岸到船物理信道(组合的
2024和2084)的规定结构。这些被规定来仅仅占用帧(60秒,2250帧)的一部分,以允许可
能的与卫星的频谱和时间共享,见附件 6。
ASC在一个资源请求之后规定对个别一条船的物理信道使用(逻辑信道,即,频率和时
隙)。VDE岸上站使用来自船终端的CQI信息来选择具有适当链路余量的最高吞吐量格式。
4.12.3 多播数据信道(MDC)
此业务信道被用来发送要被大量船只接收的消息。默认多播消息地址被设置到所有站 (即,广播)。
4.12.4 单播数据信道(UDC)
此业务信道在一个单播数据报期间被分配给一条特定的船。
此信道在一条船响应一个公告并且此响应包括接收的信道质量信息(CQI)之后被设
定,以便让岸上站使吞吐量最大。
4.12.5 随机接入信道(RAC)
此信道具有一个时隙化Aloha信道的特性,采用一种随机接入方式并将从一个逻辑信道
的预定义表中选取。
4.12.5.1 用于船 – 岸和岸 – 船通信
一个船上站使用此信道来接入网络或发送一个短消息。
4.12.5.2 当船在一个VDE岸上站控制区之内时用于船 – 船
一个船上站使用此信道来直接与其他船通信。这个逻辑信道由岸上站通过TBB或ASC来分配。
4.12.5.3 当在一个岸上VDE站控制区之外时用于船 – 船
一个船上站使用这些信道来通过短消息直接与其他船上站通信,并还将使用这些随机接
入信道来协调与其他船的更大信息的通信。这些逻辑信道将基于多个预先定义船-船物理信
道的帧层结构(组合的2024和2084)。船-船随机接入信道应该具有固定的物理信道分配,
并采用最强健的调制和编码方式。这些逻辑信道不同于TBB逻辑信道。
5 网络层
5.1 地面数据传送协议
应该支持以下的传输类型: – 来自岸上站的公告牌传输(网络配置); – 来自岸上站的多播(例如,冰地图、天气信息、给船员的通知);
42 ITU-R M.2092-0建议书
– 来自岸上站的单播(例如,岸 – 船文件传输); – 来自船-船的多播(例如,冰地图、天气信息、给船员的通知); – 来自船-岸的单播(例如,船 – 岸文件传输); – 来自船-船的单播(例如,船 – 船文件传输); – 源自岸上的轮询(例如,岸 – 船 – 岸)。
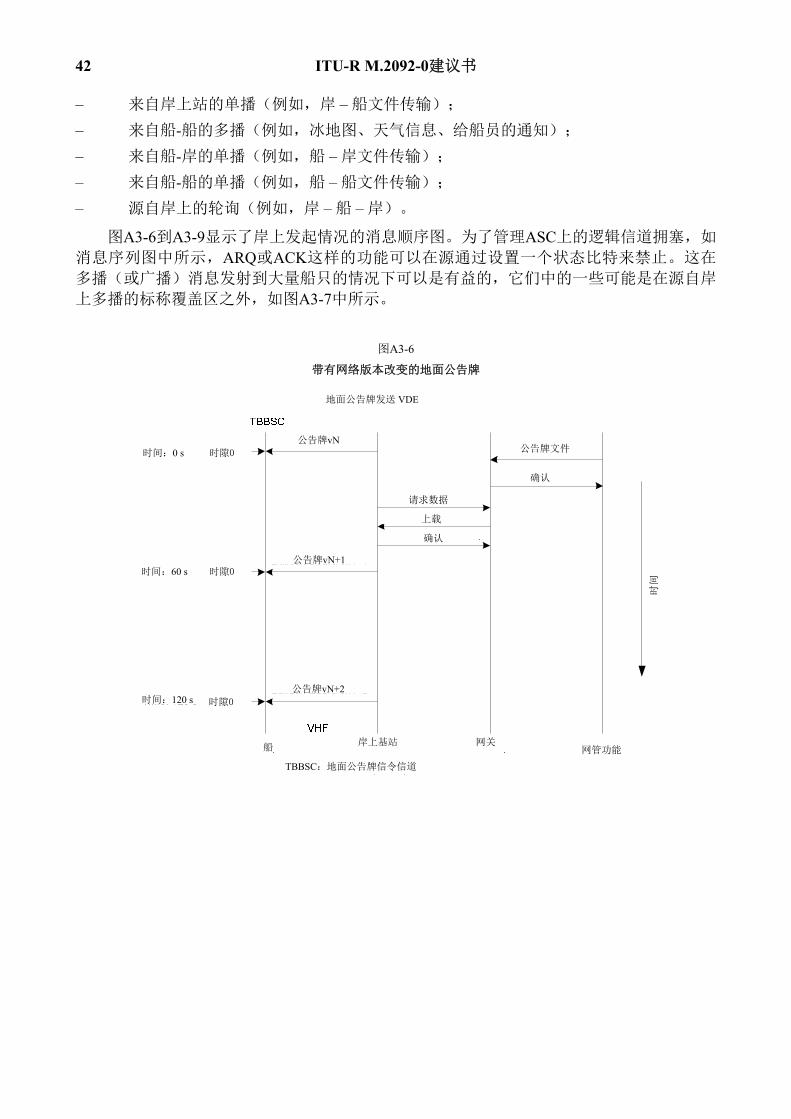
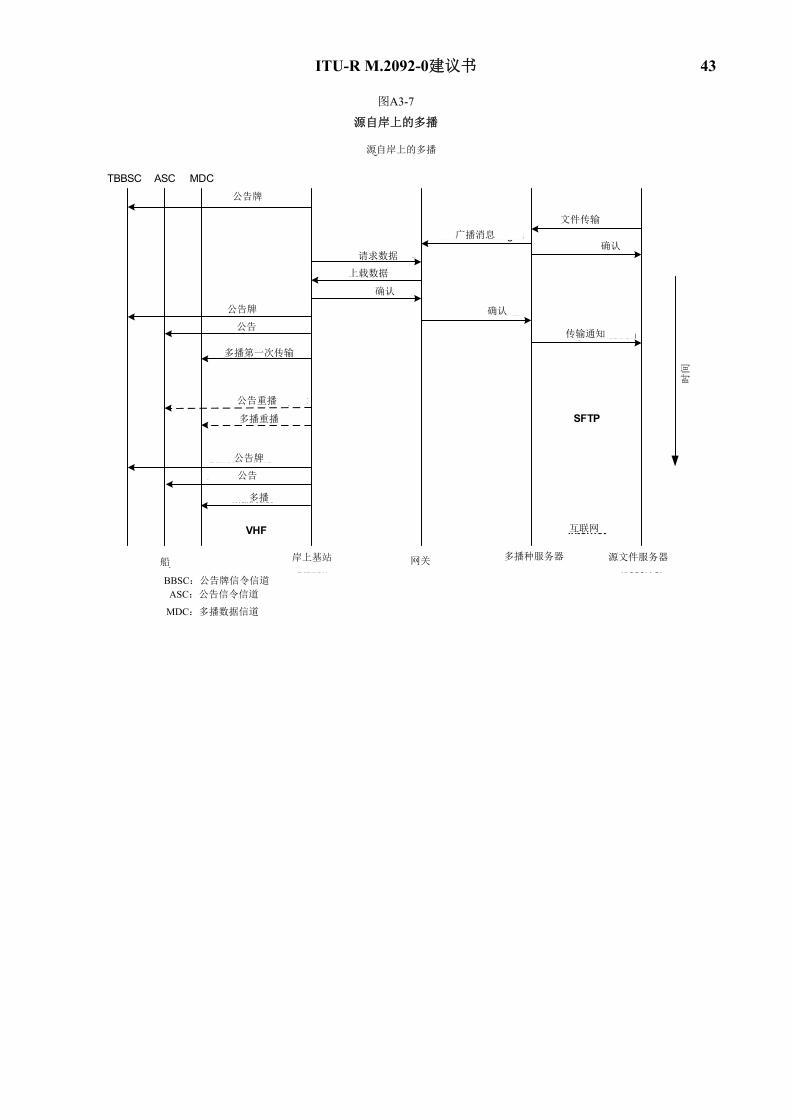
图A3-6到A3-9显示了岸上发起情况的消息顺序图。为了管理ASC上的逻辑信道拥塞,如
消息序列图中所示,ARQ或ACK这样的功能可以在源通过设置一个状态比特来禁止。这在
多播(或广播)消息发射到大量船只的情况下可以是有益的,它们中的一些可能是在源自岸
上多播的标称覆盖区之外,如图A3-7中所示。
图A3-6
带有网络版本改变的地面公告牌
时间:0 s 时隙0
时间:60 s
时间:120 s
时隙0
公告牌vN公告牌文件
确认
请求数据
上载
确认
时间
船 岸上基站 网关 网管功能
TBBSC:地面公告牌信令信道
公告牌vN+1
公告牌vN+2时隙0
地面公告牌发送 VDE
ITU-R M.2092-0建议书 43
图A3-7
源自岸上的多播
TBBSC ASC MDC
Announcements
Bulletin Board
Multicast repeat
Ack
Upload messages
Request data
Broadcast messagesFile transfer
Ack
Announcement repeat
SFTP
Shore Originated Multicast
Bulletin Board
Ack
Delivery notification
Multicast first transmission
AnnouncementsBulletin Board
BBSC: Bulletin Board Signalling ChannelASC: Announcement Signalling ChannelMDC: Multicast Data Channel
Tim
e
Shore Base Station Gateway Multicast
ServerSource
fileserver
InternetVHF
Ship
Multicast
源自岸上的多播
公告牌
文件传输 广播消息
确认
确认
确认
请求数据
上载数据
公告牌
公告 传输通知
时间
多播第一次传输
公告重播
多播重播
公告牌
公告
多播
互联网
船 岸上基站 源文件服务器多播种服务器 网关
BBSC:公告牌信令信道 ASC:公告信令信道
MDC:多播数据信道

44 ITU-R M.2092-0建议书
图A3-8
源自岸上的单播(文件传输)协议
公告牌
时间
互联网
船 岸上基站 网关 邮件服务器 邮件客户端
TBBSC:陆地公告牌信令信道 ASC:公告信令信道 UDC:单播数据信道
确认
确认
请求数据
上载
公告牌
公告
响应
资源分配
文件传输 段1
段N
请求数据
下载/确认 传输通知
带有附件的邮件
确认/ARQ 最多重复3次
确认
确认/ARQ
源自岸上的单薄
文件
ITU-R M.2092-0建议书 45
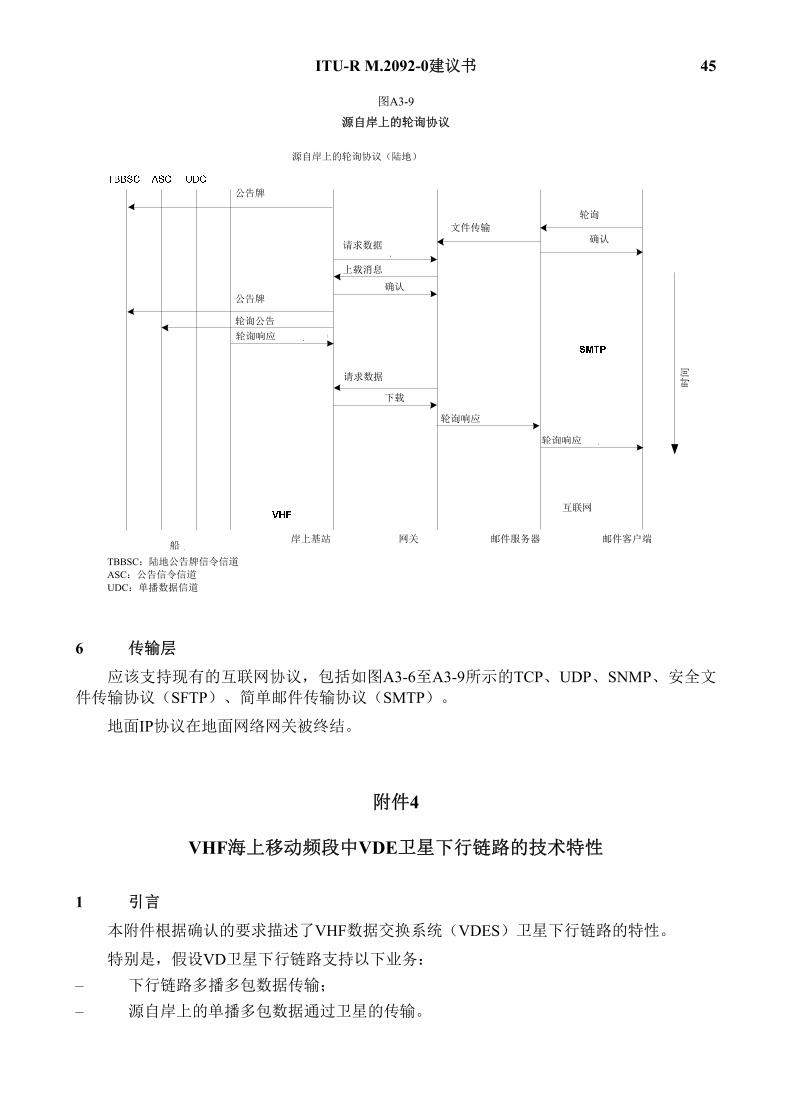
图A3-9
源自岸上的轮询协议
6 传输层
应该支持现有的互联网协议,包括如图A3-6至A3-9所示的TCP、UDP、SNMP、安全文
件传输协议(SFTP)、简单邮件传输协议(SMTP)。
地面IP协议在地面网络网关被终结。
附件4
VHF海上移动频段中VDE卫星下行链路的技术特性
1 引言
本附件根据确认的要求描述了VHF数据交换系统(VDES)卫星下行链路的特性。
特别是,假设VD卫星下行链路支持以下业务: – 下行链路多播多包数据传输; – 源自岸上的单播多包数据通过卫星的传输。
源自岸上的轮询协议(陆地)
公告牌
公告牌
请求数据
请求数据
轮询 文件传输
时间
互联网
确认
确认
轮询公告 轮询响应
上载消息
下载
轮询响应
轮询响应
船 岸上基站 网关 邮件服务器 邮件客户端
TBBSC:陆地公告牌信令信道 ASC:公告信令信道 UDC:单播数据信道
46 ITU-R M.2092-0建议书
在本附件中,具有600 km高度的低地球轨道(LEO)卫星被认为呈现了VDE卫星下行链
路解决方案的典型实例。应该注意,根据总体系统设计考虑,也有可能选择其他轨道。
本附件的重点是要描述OSI模型的下4层(如在附件1中所描述):物理、链路、网络和
传输层。
2 VDE-SAT下行链路物理层
2.1 VDE-SAT下行链路关键参数
本节概述了关于VDE-SAT下行链路系统参数的假设,它们在本附件中被用作代表性
实例。
2.1.1 卫星到地面的距离范围
轨道高度决定了卫星范围的变化。例如,对一个600 km LEO,最大的距离是2 830 km。
为了定时,将使用一个3 000 km的最大距离。
最小距离等于轨道高度。对一个在600 km高度的LEO卫星,最小距离将是600 km。这个
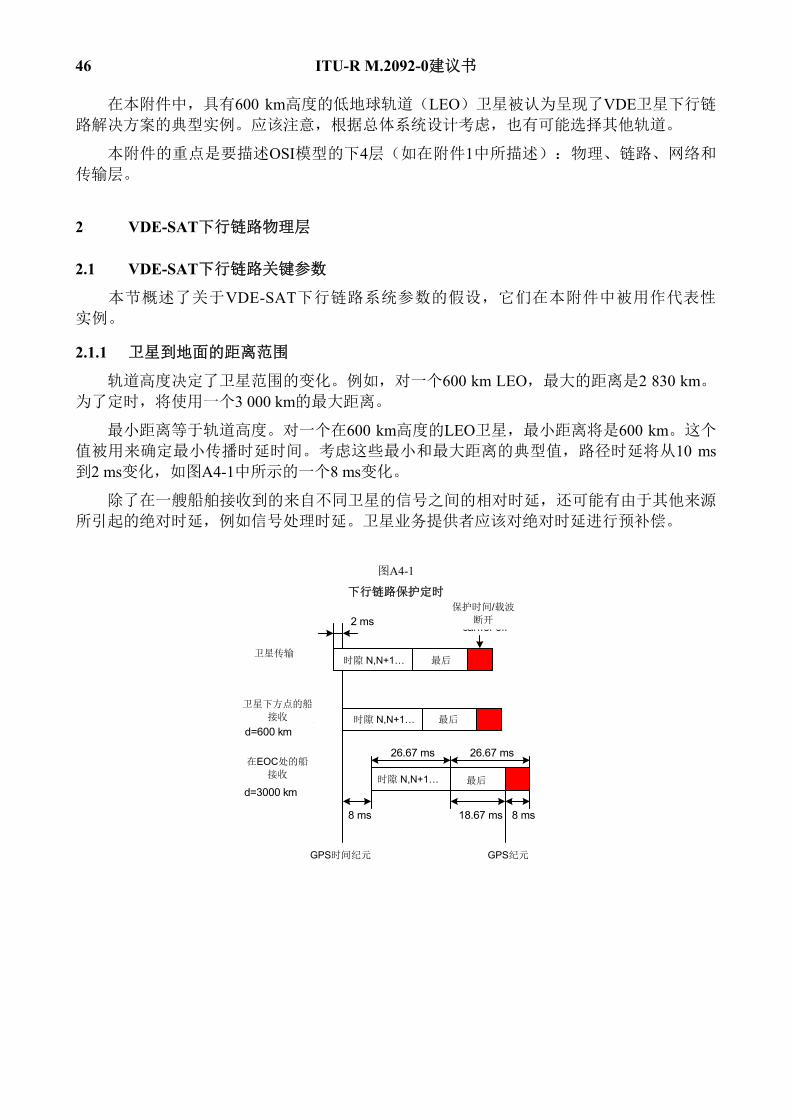
值被用来确定最小传播时延时间。考虑这些最小和最大距离的典型值,路径时延将从10 ms到2 ms变化,如图A4-1中所示的一个8 ms变化。
除了在一艘船舶接收到的来自不同卫星的信号之间的相对时延,还可能有由于其他来源
所引起的绝对时延,例如信号处理时延。卫星业务提供者应该对绝对时延进行预补偿。
图A4-1
下行链路保护定时
Slot N,N+1...
Slot N,N+1...
Slot N,N+1... Last
Last
Last
26.67 ms26.67 ms
18.67 ms 8 ms8 ms
2 ms
Satellite transmission
Ship reception at subsat point d=600 km
Ship receptionat EOC d=3000 km
GPS time epoch GPS epoch
Guard time / carrier off
卫星传输
保护时间/载波
断开
卫星下方点的船
接收
在EOC处的船
接收
GPS时间纪元 GPS纪元
时隙 N,N+1…
时隙 N,N+1…
最后
最后
时隙 N,N+1… 最后
ITU-R M.2092-0建议书 47
2.1.2 载波频率误差
频率误差是卫星传输频率误差和多普勒以及接收机处频率不确定性之和。在卫星处的发
射频率误差应小于1 ppm,即,+/- 160 Hz。
一颗LEO卫星将以一个大约8 km/s的速度移动,且这将在VHF引起一个+/- 4 kHz的最大
多普勒。
2.1.3 下行链路预算分析
链路C/N0由卫星e.i.r.p.、路径损耗、接收机灵敏度/品质因数和当地干扰电平决定。链路
预算分析的实例在以下几节中提供。
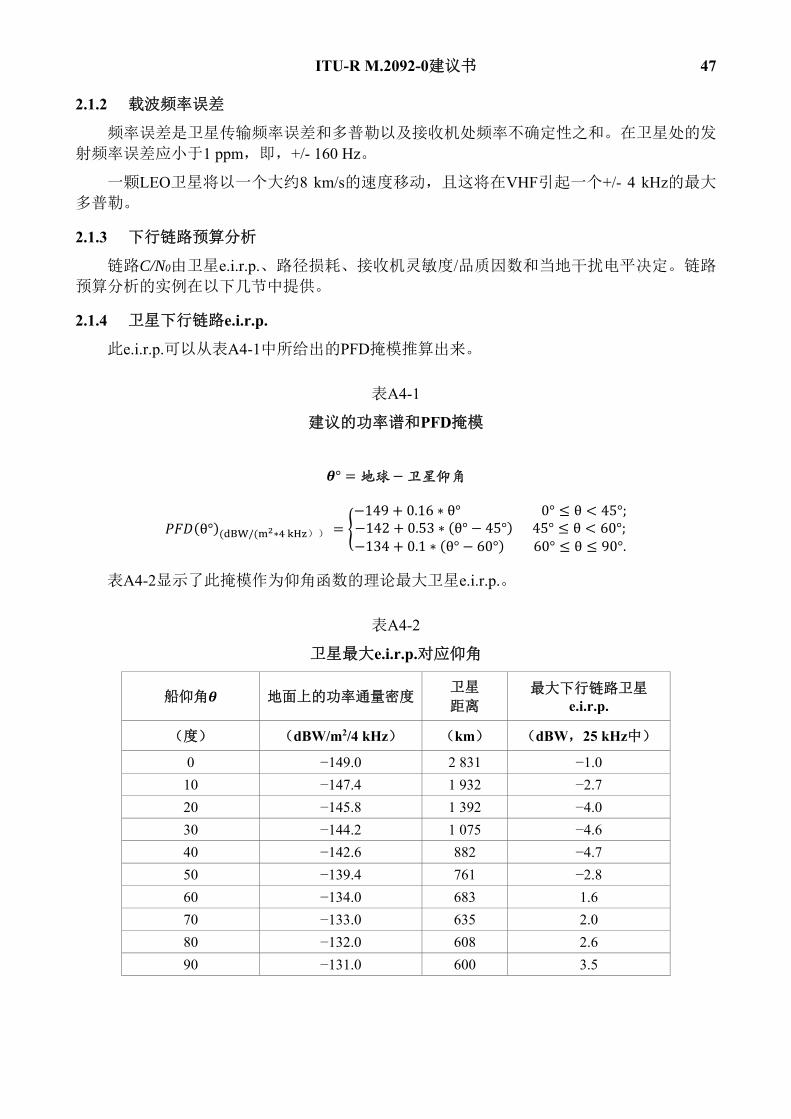
2.1.4 卫星下行链路e.i.r.p.
此e.i.r.p.可以从表A4-1中所给出的PFD掩模推算出来。
表A4-1
建议的功率谱和PFD掩模 ° = 地球 − 卫星仰角
(θ°)( /( ∗ )) = −149 + 0.16 ∗ θ° 0° ≤ θ < 45°;−142 + 0.53 ∗ (θ° − 45°) 45° ≤ θ < 60°;−134 + 0.1 ∗ (θ° − 60°) 60° ≤ θ ≤ 90°. 表A4-2显示了此掩模作为仰角函数的理论最大卫星e.i.r.p.。
表A4-2
卫星最大e.i.r.p.对应仰角
船仰角 地面上的功率通量密度 卫星 距离
最大下行链路卫星e.i.r.p.
(度) (dBW/m2/4 kHz) (km) (dBW,25 kHz中)
0 −149.0 2 831 −1.0 10 −147.4 1 932 −2.7 20 −145.8 1 392 −4.0 30 −144.2 1 075 −4.6 40 −142.6 882 −4.7 50 −139.4 761 −2.8 60 −134.0 683 1.6 70 −133.0 635 2.0 80 −132.0 608 2.6 90 −131.0 600 3.5

48 ITU-R M.2092-0建议书
2.1.5 卫星e.i.r.p.对应仰角
大部分卫星覆盖区域和可见时间将是在低仰角,且可以牺牲高仰角覆盖而没有明显的系
统容量损失。
以下二种卫星天线已经被分析,并且是可接受的。 1) 八木天线:对于这种天线,链路预算是对0度船仰角优化的,采用了一个三单元八木
天线,卫星指向地平线,在表A4-3中给出。假设一个8 dBi的峰值天线增益,一个在
25 kHz中的-12.4 dBW发射射频功率将保证符合PFD限值。卫星e.i.r.p.对应船仰角显示
在表 A4-3中。
表A4-3
采用一个八木天线的卫星e.i.r.p.对应仰角
船仰角 最低点 偏离角 瞄准偏离 卫星天线
增益 圆极化卫
星e.i.r.p. 卫星 距离 PFD 表A4-1
PFD限值 PFD 容限
度 度 度 dBi dBW km dBW/m2/
4 kHz dBW/m2/
4 kHz dB
0 66.1 0 8 −4.4 2 830 −152.4 −149.0 3.4 10 64.2 1.9 8 −4.4 1 932 −149.1 −147.4 1.7 20 59.2 6.9 8 −4.4 1 392 −146.2 −145.8 0.4 30 52.3 13.8 7.8 −4.6 1 075 −144.2 −144.2 0.0 40 44.4 21.7 6.9 −5.5 882 −143.4 −142.6 0.8 50 36 30.1 5.5 −6.9 761 −143.5 −139.4 4.1 60 27.2 38.9 3.6 −8.8 683 −144.5 −134.0 10.5 70 18.2 47.9 0.7 −11.7 635 −146.7 −133.0 13.7 80 9.1 57 −2.2 −14.6 608 −149.2 −132.0 17.2 90 0 66.1 −5.5 −17.9 600 −152.4 −131.0 21.4
2) 等通量天线:此天线设计指向最低点方向,提供一个相对指向方向的对称辐射方向
图。假设一个2 dBi峰值天线增益,一个25 kHz中-5 dBW的发射射频功率将保证符合
PFD限值。卫星e.i.r.p.对应船仰角显示在表 A4-4中。
表A4-4
采用一个等通量天线的卫星e.i.r.p对应仰角
船仰角 最低点偏
离角 瞄准偏离 卫星天线
增益 圆极化卫
星e.i.r.p. 卫星 距离 PFD 表A4-1
PFD限值 PFD容限
度 度 度 dBi dBW km dBW/m2/4 kHz
dBW/m2/4 kHz dB
0 66.1 0 2 −3.0 2 830 −151.0 −149.0 2.0 10 64.2 1.9 1.5 −3.5 1 932 −148.2 −147.4 0.8 20 59.2 6.9 1 −4.0 1 392 −145.8 −145.8 0.0
ITU-R M.2092-0建议书 49
表A4-4(完)
船仰角 最低点偏
离角 瞄准偏离 卫星天线
增益 圆极化卫
星e.i.r.p. 卫星 距离 PFD 表A4-1
PFD限值 PFD容限
度 度 度 dBi dBW km dBW/m2/4 kHz
dBW/m2/4 kHz dB
30 52.3 13.8 −0.5 −5.5 1 075 −145.1 −144.2 0.9 40 44.4 21.7 −2 −7.0 882 −144.9 −142.6 2.3 50 36 30.1 −4 −9.0 761 −145.6 −139.4 6.2 60 27.2 38.9 −5 −10.0 683 −145.7 −134.0 11.7 70 18.2 47.9 −7 −12.0 635 −147.0 −133.0 14.0 80 9.1 57 −8 −13.0 608 −147.6 −132.0 15.6 90 0 66.1 −8.5 −13.5 600 −148.0 −131.0 17.0
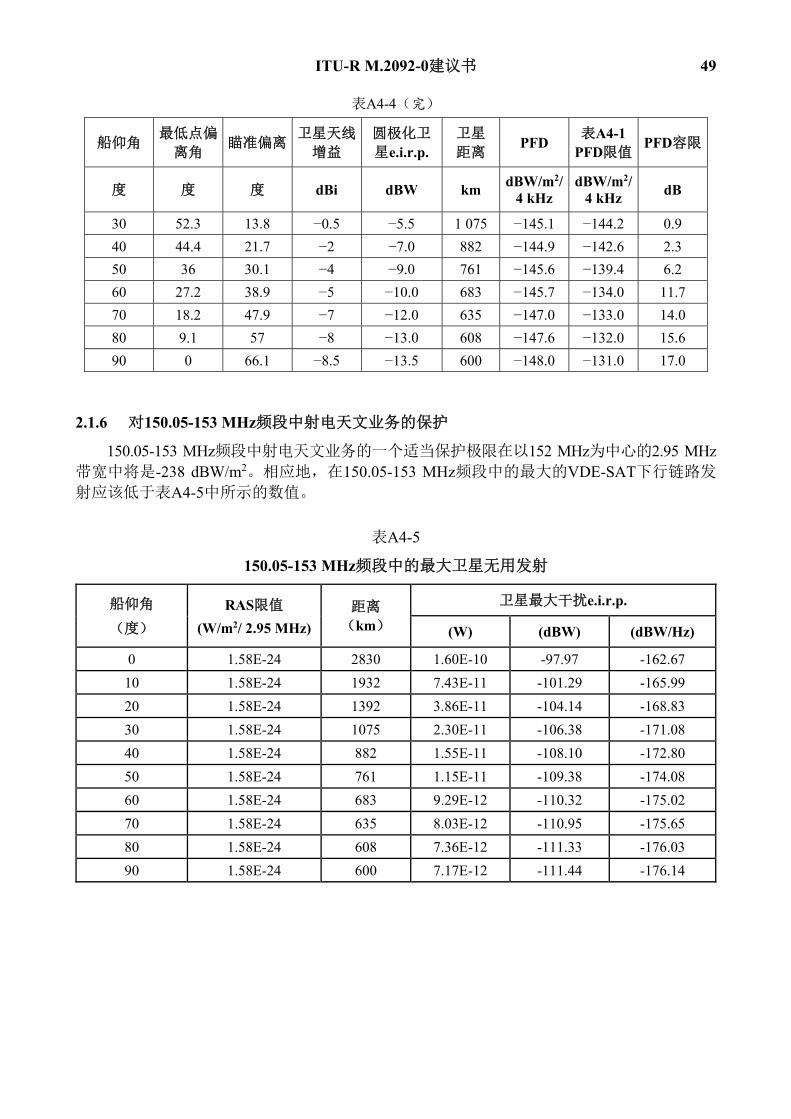
2.1.6 对150.05-153 MHz频段中射电天文业务的保护
150.05-153 MHz频段中射电天文业务的一个适当保护极限在以152 MHz为中心的2.95 MHz带宽中将是-238 dBW/m2。相应地,在150.05-153 MHz频段中的最大的VDE-SAT下行链路发
射应该低于表A4-5中所示的数值。
表A4-5
150.05-153 MHz频段中的最大卫星无用发射
船仰角 (度)
RAS限值 (W/m2/ 2.95 MHz)
距离 (km)
卫星最大干扰e.i.r.p.
(W) (dBW) (dBW/Hz)
0 1.58E-24 2830 1.60E-10 -97.97 -162.67 10 1.58E-24 1932 7.43E-11 -101.29 -165.99 20 1.58E-24 1392 3.86E-11 -104.14 -168.83 30 1.58E-24 1075 2.30E-11 -106.38 -171.08 40 1.58E-24 882 1.55E-11 -108.10 -172.80 50 1.58E-24 761 1.15E-11 -109.38 -174.08 60 1.58E-24 683 9.29E-12 -110.32 -175.02 70 1.58E-24 635 8.03E-12 -110.95 -175.65 80 1.58E-24 608 7.36E-12 -111.33 -176.03 90 1.58E-24 600 7.17E-12 -111.44 -176.14

50 ITU-R M.2092-0建议书
2.1.7 接收天线增益
参见附件1。
2.1.8 接收信号与噪声加干扰电平之比
参见附件1。
2.1.9 链路C/(N0+I0)
在表A4-3和表A4-4中提供了八木和等通量船载天线的一个25 kHz信道的标称信号电平和
C/(N0+I0)对应仰角。假设的船上天线增益是3 dBi,且系统噪声温度是30.2 dBK,如表A1-5(附件1)中所示。
因为下行链路是PFD受限,将信道带宽增加到50 kHz或100 kHz将分别使信号电平和
C/(N0+I0)增加3和6 dB。将业务区限制在10到55度船仰角之间也使链路改善3 dB。
等通量天线在低仰角改善链路预算,并提供一个更宽的对称覆盖区,但是要求大5倍的
卫星发射机功率。
采用一个卫星八木天线的链路预算结果显示在表A4-6中。等通量天线显示在表A4-7中。
应该注意,分析是基于单卫星可见度。
表A4-6
采用卫星八木天线的链路预算(发射射频功率=-12.4 dBW/25 kHz)
船仰角 圆极化 卫星
e.i.r.p.
卫星 距离
路径 损耗
极化
损耗 船天线
增益 天线信
号电平 C/N0
25 kHz带宽中
的噪声
电平
C/(N0+I0)
(度) (dBW) (km) (dB) (dB) (dBi) (dBm) (dBHz) (dBm) (dBHz)
0 −4.4 2 830 145.6 3 3 −120.0 48.4 −116 40.0 10 −4.4 1 932 142.2 3 3 −116.7 51.7 −116 43.3 20 −4.4 1 392 139.4 3 2.5 −114.3 54.1 −116 45.7 30 −4.6 1 075 137.2 3 1 −113.8 54.6 −116 46.2 40 −5.5 882 135.4 3 0 −114.0 54.4 −116 46.0 50 −6.9 761 134.2 3 −1.5 −115.6 52.8 −116 44.4 60 −8.8 683 133.2 3 −3 −118.0 50.4 −116 41.9 70 −11.7 635 132.6 3 −4 −121.3 47.1 −116 38.7 80 −14.6 608 132.2 3 −10 −129.8 38.6 −116 30.2 90 −17.9 600 132.1 3 −20 −143.0 25.4 −116 17.0

ITU-R M.2092-0建议书 51
表A4-7
采用等通量天线的链路预算(发射射频功率=-5.0 dBW/25 kHz)
船仰角 卫星e.i.r.p.
路径
损耗 极化
损耗 船天线
增益 船
G/T 无干扰
C/N0 天线电平 25 kHz中的
噪声电平 C/(N0+I0)
度 dBW dB dB dBi dB/K dBHz dBm dBm dBHz
0 −3.0 145.6 3 3 −27.2 49.8 −118.6 −116 41.4 10 −3.5 142.2 3 3 −27.2 52.7 −115.7 −116 44.2 20 −4.0 139.4 3 2.5 −27.7 54.5 −113.9 −116 46.1 30 −5.5 137.2 3 1 −29.2 53.7 −114.7 −116 45.3 40 −7.0 135.4 3 0 −30.2 53.0 −115.4 −116 44.5 50 −9.0 134.2 3 −1.5 −31.7 50.7 −117.7 −116 42.3 60 −10.0 133.2 3 −3 −33.2 49.2 −119.2 −116 40.8 70 −12.0 132.6 3 −4 −34.2 46.8 −121.6 −116 38.4 80 −13.0 132.2 3 −10 −40.2 40.2 −128.2 −116 31.8 90 −13.5 132.1 3 −20 −50.2 29.8 −138.6 −116 21.4
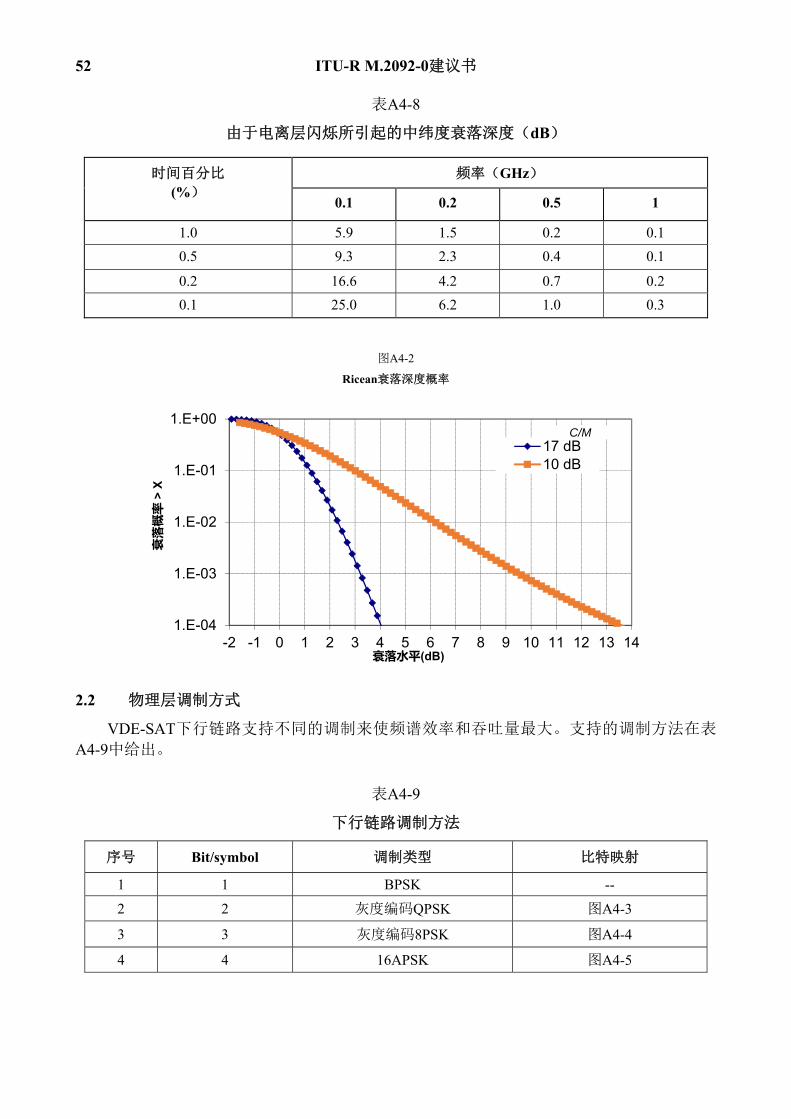
2.1.10 传播效应
在一条船上的接收信号电平将因为表A4-7中所示的多个因素影响而变化。假设具有10 dB载波多径(C/M)比和3 Hz衰落带宽的一个莱斯分布(见图A4-2),但是,该系统应该可适
和处理显著更差和更好的传播条件。由于电离层闪烁所引起的中纬度衰落深度显示在表A4-8中。
表A4-7
大约30°仰角单向穿越的电离层效应 (从ITU-R P.531建议书中获得)
效应 频率相关性 0.1 GHz 0.25 GHz 1 GHz
法拉第旋转 1/ƒ 2 30转 4.8转 108°
传播时延 1/ƒ 2 25 µs 4 µs 0.25 µs
折射 1/ƒ 2 < 1° < 0.16° < 0.6′
到达方向上的变化(r.m.s.) 1/ƒ 2 20′ 3.2′ 12″
吸收(极光和/或极冠) ≈1/ƒ 2 5 dB 0.8 dB 0.05 dB
吸收(中纬度) 1/ƒ 2 < 1 dB < 0.16 dB < 0.01 dB
色散 1/ƒ 3 0.4 ps/Hz 0.026 ps/Hz 0.0004 ps/Hz
闪烁(1) 见ITU-R.P.531 建议书
见ITU-R P.531建议书
见ITU-R P.531 建议书
> 20 dB 峰峰值
* 这个估算是基于一个1018电子/m2的TEC,它是在高太阳活动时白天低纬度所遇见的高TEC值。 (1) 高太阳黑子数量条件下在春分点夜晚早期(当地时间)靠近地理赤道的观察值。
52 ITU-R M.2092-0建议书
表A4-8
由于电离层闪烁所引起的中纬度衰落深度(dB)
时间百分比 (%)
频率(GHz)
0.1 0.2 0.5 1
1.0 5.9 1.5 0.2 0.1 0.5 9.3 2.3 0.4 0.1
0.2 16.6 4.2 0.7 0.2 0.1 25.0 6.2 1.0 0.3
图A4-2
Ricean衰落深度概率
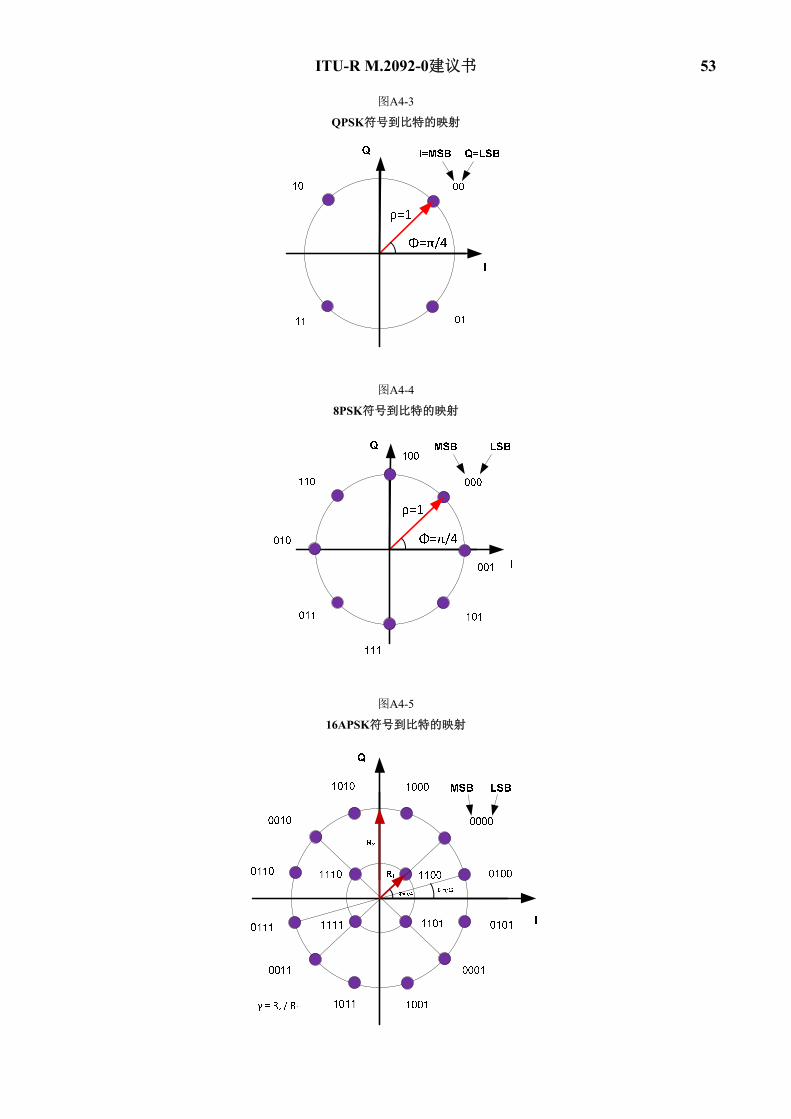
2.2 物理层调制方式
VDE-SAT下行链路支持不同的调制来使频谱效率和吞吐量最大。支持的调制方法在表
A4-9中给出。
表A4-9
下行链路调制方法
序号 Bit/symbol 调制类型 比特映射
1 1 BPSK -- 2 2 灰度编码QPSK 图A4-3
3 3 灰度编码8PSK 图A4-4
4 4 16APSK 图A4-5
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
-2 -1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
衰落
概率
> X
衰落水平(dB)
17 dB10 dB
C/M
ITU-R M.2092-0建议书 53
图A4-3
QPSK符号到比特的映射
图A4-4
8PSK符号到比特的映射
图A4-5
16APSK符号到比特的映射
54 ITU-R M.2092-0建议书
16 APSK调制星座图由均匀间隔的4和12个PSK点的二个同心环构成,分别在半径R1的
内环和半径R2的外环上。
外圆半径与内圆半径之比(γ =R2/R1)应该等于3。为了使平均信号能量等于1,R1应该设
置为1/√7,R2应该设置为3/√7。
类似于AIS,当数据在VHF数据链路上输出时,它应该按照ISO/IEC 13239:2002,以 8 比特字节在与每个消息相关的表中从上到下分组。每个字节应该以最低有效位在前输出。
2.3 基带整形和正交调制
应该对基带符号进行平方根升余弦滤波。滚降因子应为= 0.25。
2.4 传输精度值
2.4.1 符号定时精度(在卫星输出处)
卫星处发射信号的定时精度应该好于5 ppm。
2.4.2 发射机定时抖动
定时抖动应该好于符号间隔的5%(峰值)。
2.4.3 卫星输出处的时隙传输精度
时隙传输精度应该好于50 µs(峰值),例如相对于GNSS参考定时。
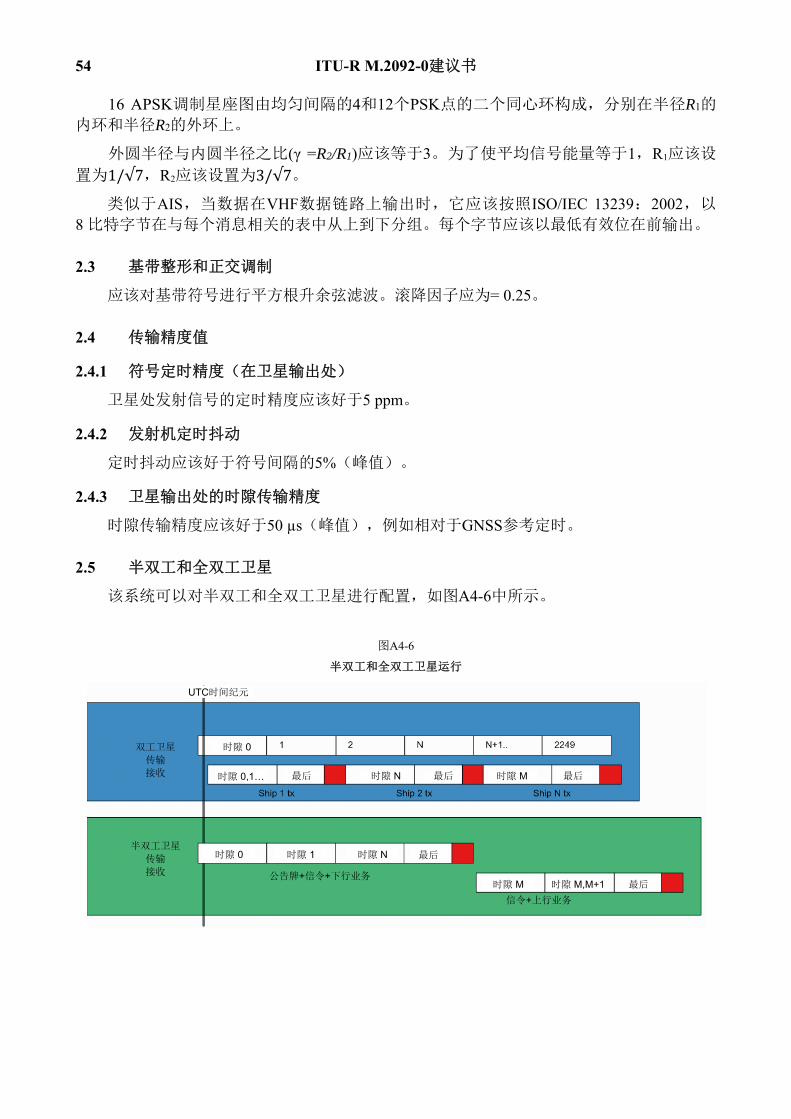
2.5 半双工和全双工卫星
该系统可以对半双工和全双工卫星进行配置,如图A4-6中所示。
图A4-6
半双工和全双工卫星运行
UTC时间纪元
双工卫星 传输 接收 时隙 0,1…
时隙 0
时隙 N 时隙 M 最后 最后最后
半双工卫星 传输 接收 公告牌+信令+下行业务
信令+上行业务
时隙 0 时隙 1 时隙 N 最后
时隙 M 时隙 M,M+1 最后
ITU-R M.2092-0建议书 55
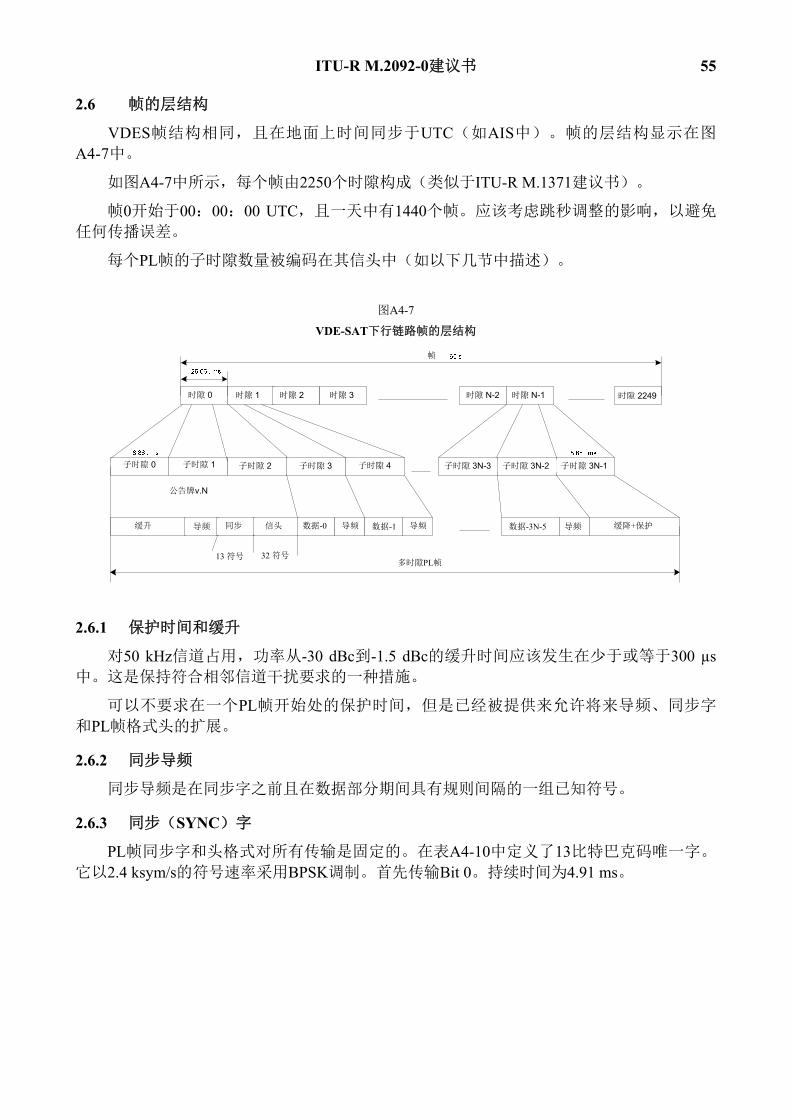
2.6 帧的层结构
VDES帧结构相同,且在地面上时间同步于UTC(如AIS中)。帧的层结构显示在图 A4-7中。
如图A4-7中所示,每个帧由2250个时隙构成(类似于ITU-R M.1371建议书)。
帧0开始于00:00:00 UTC,且一天中有1440个帧。应该考虑跳秒调整的影响,以避免
任何传播误差。
每个PL帧的子时隙数量被编码在其信头中(如以下几节中描述)。
图A4-7
VDE-SAT下行链路帧的层结构
公告牌v.N
帧
时隙 0 时隙 1 时隙 2 时隙 3 时隙 N-2 时隙 N-1 时隙 2249
子时隙 0 子时隙 1 子时隙 2 子时隙 3 子时隙 4 子时隙 3N-3 子时隙 3N-2 子时隙 3N-1
缓升 导频 同步 信头 数据-0 导频 数据-1 导频 数据-3N-5 导频 缓降+保护
13 符号 32 符号 多时隙PL帧
2.6.1 保护时间和缓升
对50 kHz信道占用,功率从-30 dBc到-1.5 dBc的缓升时间应该发生在少于或等于300 µs中。这是保持符合相邻信道干扰要求的一种措施。
可以不要求在一个PL帧开始处的保护时间,但是已经被提供来允许将来导频、同步字
和PL帧格式头的扩展。
2.6.2 同步导频
同步导频是在同步字之前且在数据部分期间具有规则间隔的一组已知符号。
2.6.3 同步(SYNC)字
PL帧同步字和头格式对所有传输是固定的。在表A4-10中定义了13比特巴克码唯一字。
它以2.4 ksym/s的符号速率采用BPSK调制。首先传输Bit 0。持续时间为4.91 ms。
56 ITU-R M.2092-0建议书
表A4-10
巴克序列唯一字
比特号
0 1 2 3 4 5 6 7 8 9 10 11 12
1 1 1 1 1 −1 −1 1 1 −1 1 −1 1
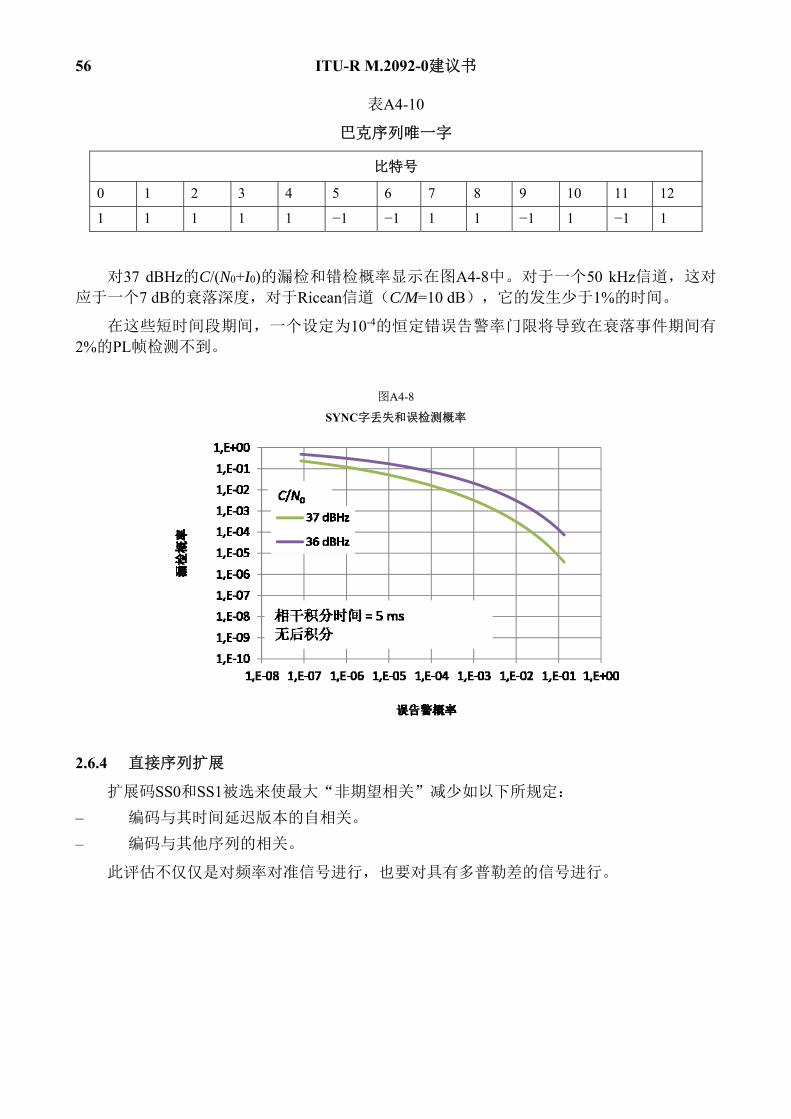
对37 dBHz的C/(N0+I0)的漏检和错检概率显示在图A4-8中。对于一个50 kHz信道,这对
应于一个7 dB的衰落深度,对于Ricean信道(C/M=10 dB),它的发生少于1%的时间。
在这些短时间段期间,一个设定为10-4的恒定错误告警率门限将导致在衰落事件期间有
2%的PL帧检测不到。
图A4-8
SYNC字丢失和误检测概率
2.6.4 直接序列扩展
扩展码SS0和SS1被选来使最大“非期望相关”减少如以下所规定: – 编码与其时间延迟版本的自相关。 – 编码与其他序列的相关。
此评估不仅仅是对频率对准信号进行,也要对具有多普勒差的信号进行。
ITU-R M.2092-0建议书 57
选定的码是表A4-11中所示的SS0和SS1。
最前面的导频和BPSK符合被采用一个8比特序列来扩展到一个19.2 kchip/s的码片速率,
来适配到一个50 kHz信道中。来自表A4-11的扩展序列SS0被使用。
表A4-11
扩展序列
序列名称 码片号
0 1 2 3 4 5 6 7 SS0 (0b1001010) 1 -1 -1 -1 1 -1 1 -1 SS1 (0b10100011) 1 -1 1 -1 -1 -1 1 1 SS2 (0b01101100) -1 1 1 -1 1 1 -1 -1 SS3 (0b 01111001) -1 1 1 1 1 -1 -1 1
2.6.5 PL帧头
该头是BPSK以与以上描述的同步字相同的方法来调制的和扩展的。这个PL帧头规定了
以下与每个PL帧相关的参数:
PL帧持续时间(一个子时隙长度的整数倍)
每个PL帧的数据子时隙数量(N) – 符号速率; – 调制类型; – FEC类型; – FEC速率; – 交织器类型; – 扰码器类型; – 扩展因子(1或更高); – 扩展序列(1或按定义)。
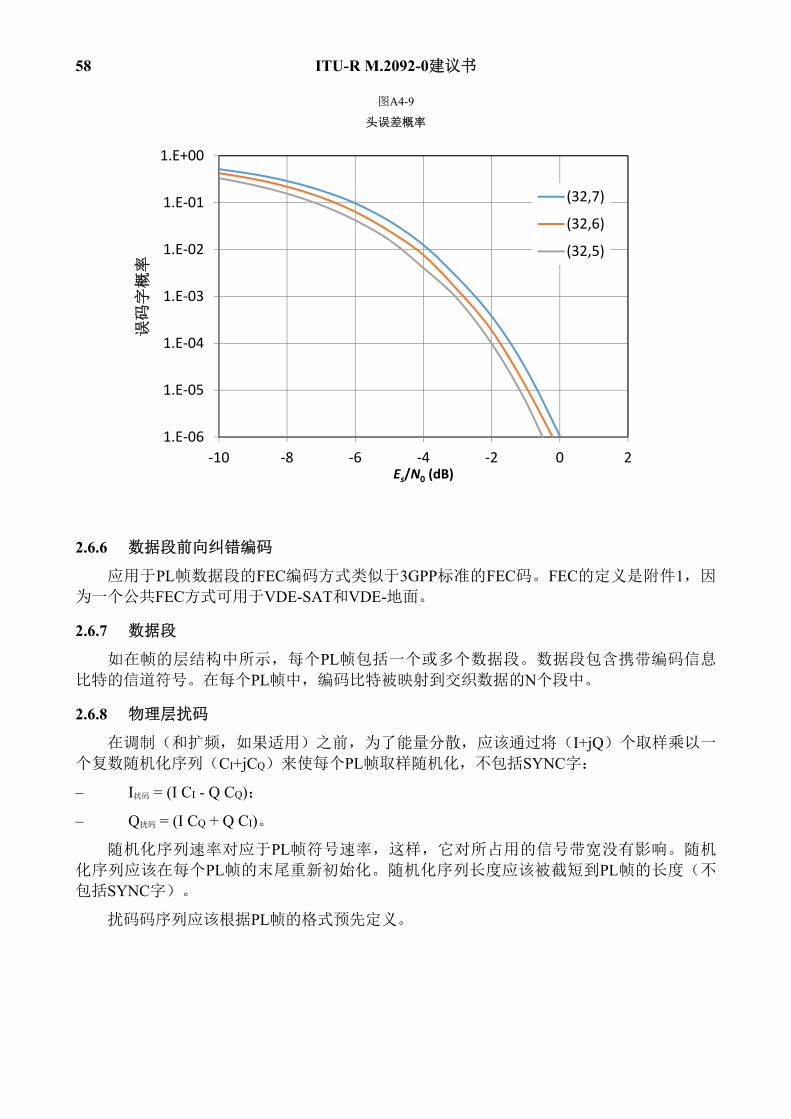
该头提供7比特来定义高达128的PL帧格式。PL帧头采用(32,7)四正交前向纠错编码来
编码。此FEC的性能显示在图A4-9中。
58 ITU-R M.2092-0建议书
图A4-9
头误差概率
2.6.6 数据段前向纠错编码
应用于PL帧数据段的FEC编码方式类似于3GPP标准的FEC码。FEC的定义是附件1,因
为一个公共FEC方式可用于VDE-SAT和VDE-地面。
2.6.7 数据段
如在帧的层结构中所示,每个PL帧包括一个或多个数据段。数据段包含携带编码信息
比特的信道符号。在每个PL帧中,编码比特被映射到交织数据的N个段中。
2.6.8 物理层扰码
在调制(和扩频,如果适用)之前,为了能量分散,应该通过将(I+jQ)个取样乘以一
个复数随机化序列(CI+jCQ)来使每个PL帧取样随机化,不包括SYNC字:
– I扰码 = (I CI - Q CQ);
– Q扰码 = (I CQ + Q CI)。
随机化序列速率对应于PL帧符号速率,这样,它对所占用的信号带宽没有影响。随机
化序列应该在每个PL帧的末尾重新初始化。随机化序列长度应该被截短到PL帧的长度(不
包括SYNC字)。
扰码码序列应该根据PL帧的格式预先定义。
1.E-06
1.E-05
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
-10 -8 -6 -4 -2 0 2
误码
字概
率
Es/N0 (dB)
(32,7)
(32,6)
(32,5)
ITU-R M.2092-0建议书 59
2.6.9 信道交织器
为了减少信道短阻塞(例如,由于来自船舶的AIS传输或快速衰落情况)的影响,在
VDE-SAT下行链路上考虑一个块信道交织器。该信道交织器在编码器的输出处被应用于码
字。
交织器可以通过列置换应用在数据块上(只要列的数量可以构成2的一个整数幂)。在
此情况下,交织器的存储器(从发射机的观点看)按行写入,而在应用了列间转置后按列读
出。建议的列转置是按相反的顺序(比特混排)读出列指数所致,即,指数为i5、i4、i3、
i2、i1、i0的列变为列i0、i1、i2、i3、i4、i5,此处i0、i1、i2、i3、i4和i5是表示一个给定数字的
比特。
在更普遍的情况下(其中,列的数量不是2的一个整数幂),可以使交织器指数像查询
表那样可用。
2.6.10 缓降
缓降发生在每个PL帧的最后一个子时隙中(如图A4-7中所示),后面跟随着保护时
间。缓降和保护时间的总持续时间是8.88 ms(一个子时隙持续时间),尽管功率从90%到
10%的缓降时间应该发生在少于300 µs中。
2.6.11 保护时间
保护时间被添加到每个PL帧的末尾,以防止与VDES地面传输重叠。保护时间的持续时
间是8.88 ms,对应于一个子时隙的持续时间。此时间适合于覆盖在一个600 km高度(或者更
低)LEO卫星覆盖区中最短和最长传播时间的差分时延。
2.7 VDE-SAT下行链路PL帧格式
如在图A4-7中所演示,PL帧是用于VDE-SAT下行链路和上行链路的自包含传输单元。
本节定义了多种用于在VDE-SAT下行链路信道上信令和数据传输的PL帧格式。根据PL帧头,有可能为VDE-SAT下行链路和上行链路定义128个不同的PL帧格式。
2.7.1 PL帧格式1
在表A4-12中提供了PL帧格式1。
60 ITU-R M.2092-0建议书
表A4-12
PL帧格式1
下行链路格式 1 功能 多址,可靠的单向传输 用途 公告牌 头数值 ´01 十六进制
信道带宽 50 kHz
未衰落C/N0 43.0 dBHz
突发持续时间 90 时隙
突发持续时间 2400 ms
缓降 0.3 ms
保护时间 8.0 ms
信道速率 33.6 kchip/s
扩展因子 8
扩展码 SS0 表 29 调制 BPSK
信道bit/symbol 1
FEC速率 0.50
FEC类型 3GPP 附件 1
信息速率/用户 2.10 kbit/s
同时用户数量 8 Eb/N0 9.8 dB 信道莱斯因子(C/M) 10 dB
信道衰落带宽 3 Hz
目标帧差错率 1 %
突发的导频和数据持续时间 2371 ms
导频持续时间 237.1 ms
数据持续时间 2133.9 ms
信息比特数量 4480 bit
编码比特数量 8960 bit
块交织器宽度 128 bit
块交织器高度 70 bit
交织器长度 8960 bit
信息字节数量 560 byte
ITU-R M.2092-0建议书 61
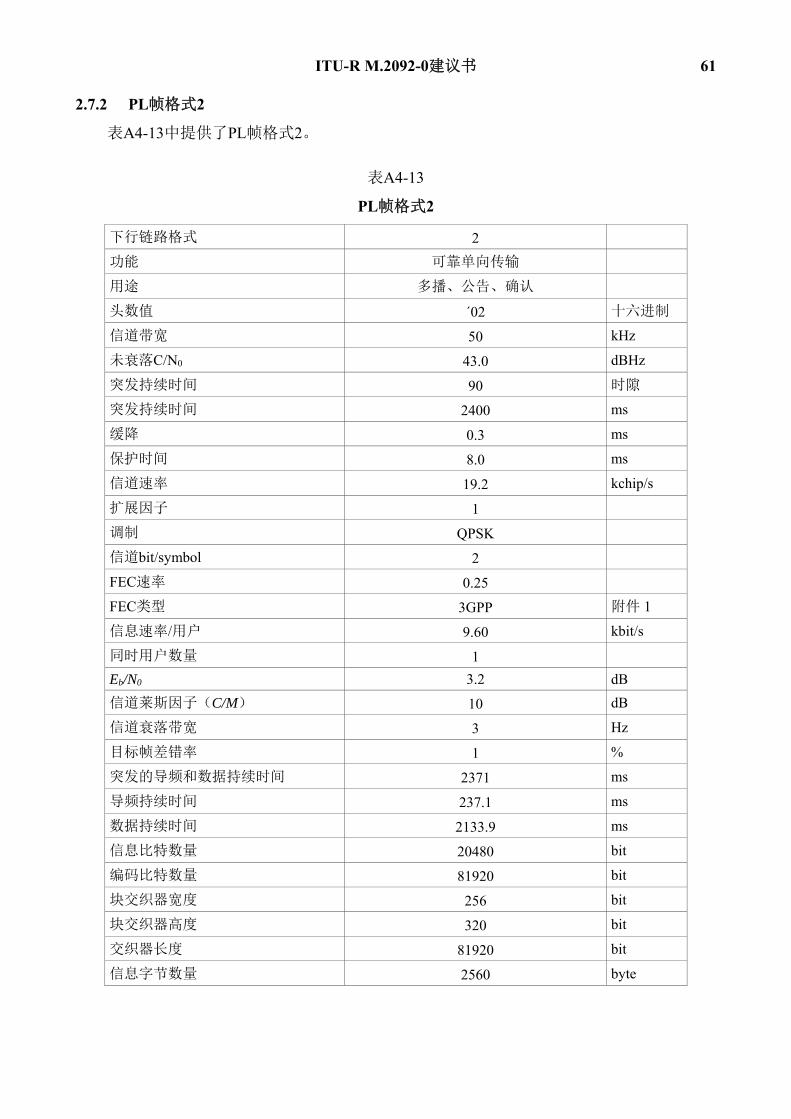
2.7.2 PL帧格式2
表A4-13中提供了PL帧格式2。
表A4-13
PL帧格式2
下行链路格式 2 功能 可靠单向传输 用途 多播、公告、确认 头数值 ´02 十六进制
信道带宽 50 kHz
未衰落C/N0 43.0 dBHz
突发持续时间 90 时隙 突发持续时间 2400 ms
缓降 0.3 ms
保护时间 8.0 ms
信道速率 19.2 kchip/s
扩展因子 1
调制 QPSK
信道bit/symbol 2
FEC速率 0.25
FEC类型 3GPP 附件 1
信息速率/用户 9.60 kbit/s
同时用户数量 1 Eb/N0 3.2 dB 信道莱斯因子(C/M) 10 dB
信道衰落带宽 3 Hz
目标帧差错率 1 %
突发的导频和数据持续时间 2371 ms
导频持续时间 237.1 ms
数据持续时间 2133.9 ms
信息比特数量 20480 bit
编码比特数量 81920 bit
块交织器宽度 256 bit
块交织器高度 320 bit
交织器长度 81920 bit
信息字节数量 2560 byte
62 ITU-R M.2092-0建议书
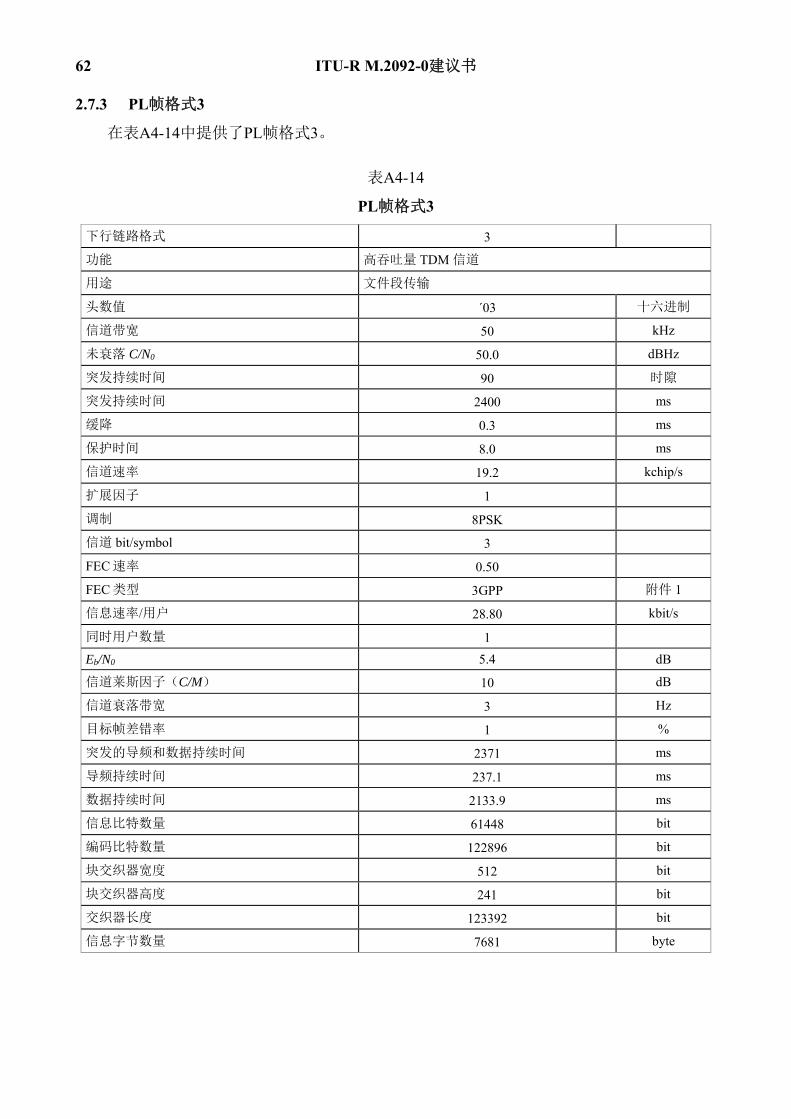
2.7.3 PL帧格式3
在表A4-14中提供了PL帧格式3。
表A4-14
PL帧格式3
下行链路格式 3
功能 高吞吐量 TDM 信道
用途 文件段传输
头数值 ´03 十六进制
信道带宽 50 kHz
未衰落 C/N0 50.0 dBHz
突发持续时间 90 时隙
突发持续时间 2400 ms
缓降 0.3 ms
保护时间 8.0 ms
信道速率 19.2 kchip/s
扩展因子 1
调制 8PSK
信道 bit/symbol 3
FEC 速率 0.50
FEC 类型 3GPP 附件 1
信息速率/用户 28.80 kbit/s
同时用户数量 1
Eb/N0 5.4 dB
信道莱斯因子(C/M) 10 dB
信道衰落带宽 3 Hz
目标帧差错率 1 %
突发的导频和数据持续时间 2371 ms
导频持续时间 237.1 ms
数据持续时间 2133.9 ms
信息比特数量 61448 bit
编码比特数量 122896 bit
块交织器宽度 512 bit
块交织器高度 241 bit
交织器长度 123392 bit
信息字节数量 7681 byte

ITU-R M.2092-0建议书 63
3 VDE-SAT链路层
3.1 数据封装
每个PL帧的数据段包含多个可变长度封装的数据报。每个数据报包含以下封装字段: – 数据报类型(1 byte); – 数据报长度(3 byte); – 船ID(4 byte); – 事务ID(4 byte,可选); – 数据报序列号(2 byte,用于多段数据报); – 源ID(8 byte,可选); – 数据报负载(可变); – 数据填充(可变,少于8 bit); – CRC(4 byte)。
3.2 循环冗余校验
参见附件1。
3.3 自动重复请求(ARQ)
数据报可以或可以不使用ARQ,这对每种数据报类型进行规定。一个ARQ将请求对一
个特定丢失数据报段进行选择性重传。
3.4 确认(ACK)
所有没有CRC错误的数据报被通过卫星链路确认。
3.5 送达通知(EDN)
将向源通知成功传输到目的地的所有数据报。
3.6 送达失败(EDF)
将向源通知在超时或重试限制之内的没有成功传输的所有数据报。
3.7 物理和逻辑信道
VDE-SAT协议使用多个信道来携带数据。这些信道被分成物理和逻辑信道。每颗卫星
传输一个规定这些信道配置的公告牌。
3.7.1 物理信道
物理信道(PC)由中心频率和带宽决定。
3.7.2 逻辑信道
逻辑信道(LC)被分成以下所描述的信令和数据信道。
64 ITU-R M.2092-0建议书
3.8 信令逻辑信道
以下下行链路信令信道被使用: – 公告牌信令信道(BBSC); – 公告信令信道(ASC); – 多播数据信道(MDC); – 单播数据信道(UDC)。
3.8.1 公告牌信令信道
公告牌规定网络配置参数,例如信令信道(控制信道)和数据信道、协议版本和将来的
网络配置。
一个逻辑信道由功能、中心频率、PL帧格式和第一个时隙的开始来定义。逻辑信道通
常每帧重复,除非已经发生一个网络配置变化来优化容量。
还提供卫星参数和网络ID。可以提供关于其他卫星和网络的信息。公告牌消息不经常变
化,且对一个小的LEO卫星,每次经过接收一次公告牌是足够的,每分钟一次的重复率对大
多数经过是足够的。
BBSC使用在表A4-12中定义的PL帧格式1,并应该每分钟在VDE卫星下行链路专用信道
(信道2046和2086)中传输一次,开始于时隙0,持续时间是2.4 s(对应于90个时隙)。一
个码分多址方式被用来允许具有重叠覆盖的多颗卫星在相同时间发射公告牌。船上接收机应
该能够同时接收来自高达8颗卫星的公告牌。
完整的公告牌消息可以在多个帧上传送。公告牌的必要信息将在每个帧上(每60 s)重
复。
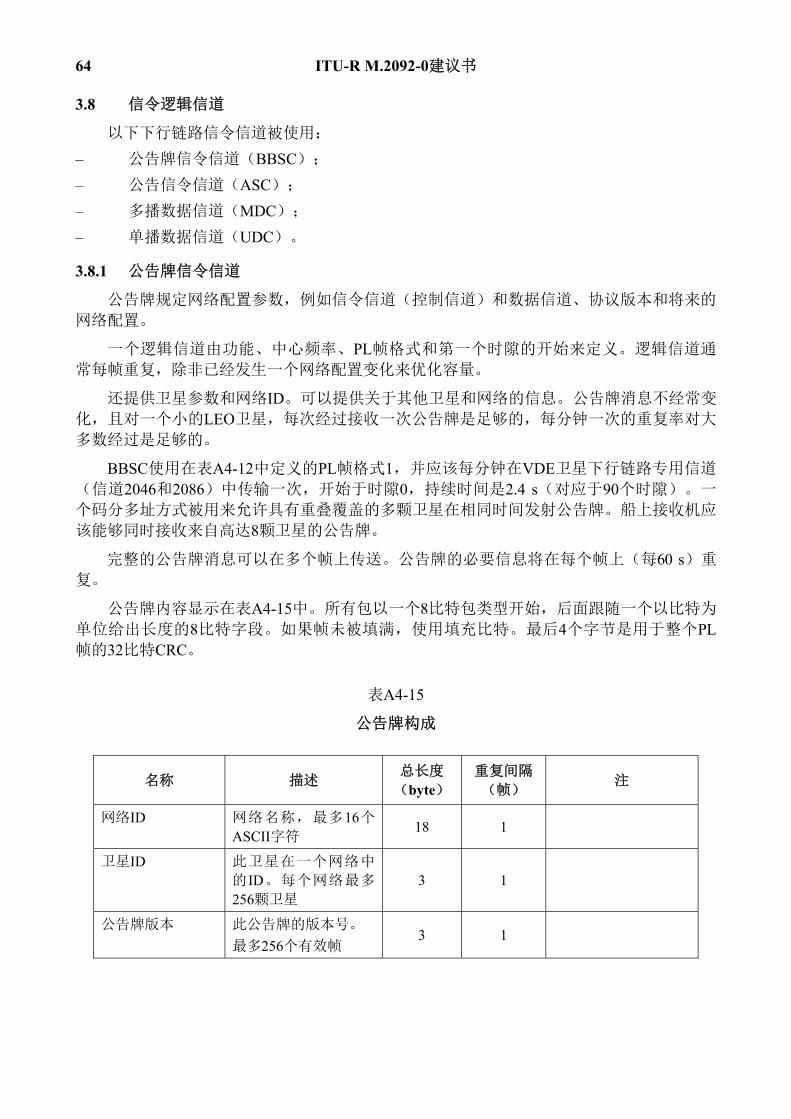
公告牌内容显示在表A4-15中。所有包以一个8比特包类型开始,后面跟随一个以比特为
单位给出长度的8比特字段。如果帧未被填满,使用填充比特。最后4个字节是用于整个PL帧的32比特CRC。
表A4-15
公告牌构成
名称 描述 总长度 (byte)
重复间隔
(帧) 注
网络ID 网络名称,最多16个 ASCII字符 18 1
卫星ID 此卫星在一个网络中
的ID。每个网络最多
256颗卫星 3 1
公告牌版本 此公告牌的版本号。 最多256个有效帧
3 1
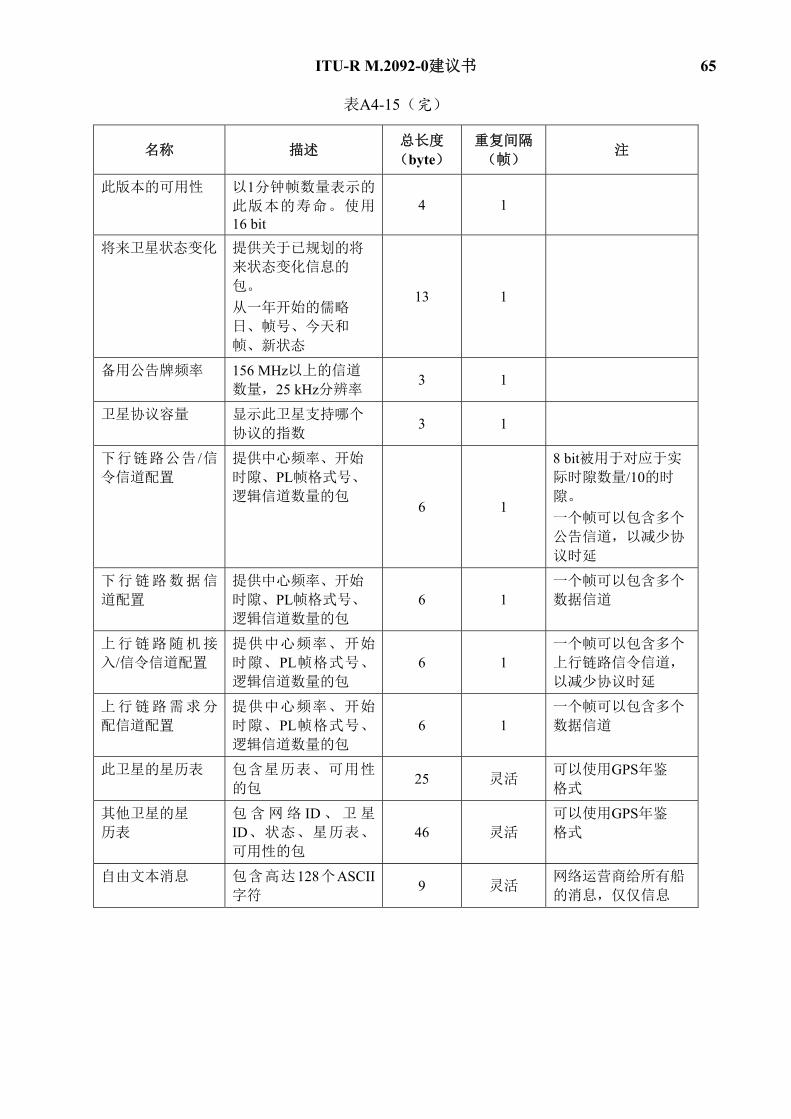
ITU-R M.2092-0建议书 65
表A4-15(完)
名称 描述 总长度 (byte)
重复间隔
(帧) 注
此版本的可用性 以1分钟帧数量表示的
此版本的寿命。使用16 bit
4 1
将来卫星状态变化 提供关于已规划的将
来状态变化信息的
包。 从一年开始的儒略
日、帧号、今天和
帧、新状态
13 1
备用公告牌频率 156 MHz以上的信道
数量,25 kHz分辨率 3 1
卫星协议容量 显示此卫星支持哪个
协议的指数 3 1
下行链路公告 /信令信道配置
提供中心频率、开始
时隙、PL帧格式号、
逻辑信道数量的包 6 1
8 bit被用于对应于实
际时隙数量/10的时
隙。 一个帧可以包含多个
公告信道,以减少协
议时延
下行链路数据信
道配置 提供中心频率、开始
时隙、PL帧格式号、
逻辑信道数量的包 6 1
一个帧可以包含多个
数据信道
上行链路随机接
入/信令信道配置 提供中心频率、开始
时隙、PL帧格式号、
逻辑信道数量的包 6 1
一个帧可以包含多个
上行链路信令信道,
以减少协议时延
上行链路需求分
配信道配置 提供中心频率、开始
时隙、PL帧格式号、
逻辑信道数量的包 6 1
一个帧可以包含多个
数据信道
此卫星的星历表 包含星历表、可用性
的包 25 灵活 可以使用GPS年鉴 格式
其他卫星的星 历表
包含网 络 ID 、 卫星
ID、状态、星历表、
可用性的包 46 灵活
可以使用GPS年鉴 格式
自由文本消息 包含高达128个ASCII字符 9 灵活 网络运营商给所有船
的消息,仅仅信息
66 ITU-R M.2092-0建议书
BBSC支持将消息划分为BBSC中消息类型的逻辑类别。
BBSC消息的不同分类属于以下类别之一: 1) 卫星系统静态配置/状态: 卫星系统静态配置和状态包括诸如卫星数量、星座图中分配的数量(用于卫星星座
图)、声明格式的星历表数据、固件版本等参数。 2) 卫星系统动态配置信息
a) BBSC管理信息: 与BBSC用途有关的卫星系统动态配置,包括用于BBSC自己的信息,例如,如果
要传输的下一个消息包的时分双工、时隙和 /或时间信息(类似于AIS中
COMSTATE的作用)、下一个传输的物理信道分配(如果信道被改变,或者物
理信道必须变化来允许自己或系统间的信道资源共享)。 b) 其他物理和逻辑信道的配置: 所有其他信道的其他动态配置参数,包括公告信令信道(ASC)、多播数据信道
(MDC)、单播数据信道(UDC)
注意,第二个类别的指定可能经常改变,例如,一个卫星经过(10-15分钟)时间段中
的变化。
为了效率和便于处理BBSC上的信息,所有消息类型具有一个配置修改级别CRL(或其
他数值序号),指示该信息的相对新鲜度,这样地面接收机就将可以确定在当前传输中是否
已经有变化,如果有,发射接收机应接收整个数据传输,并对动态参数进行任何要求的更
新,例如逻辑信道定义。但是,如果配置修改级别被改变,剩余的数据包不是无误差的接
收,发射接收机将停止任何VDES传输活动,直到更新的动态配置信息被无误差地接收。
在配置修改级别未从以前接收的状态改变的情况下,接收机不需要侦听BBSC传输的
剩余部分。
3.8.1.1 对配置修正级别参数的注。
一个配置修正级别(CRL)在任何单或多时隙BBSC传输中应该非常早。也有可能在一
个长传输中有多于一个的CRL,例如,在一个BBSC传输开始处的CRL,反映与此BBSC一起
的所有消息的变化级别。消息的每个分类也可以采用一个CRL,反映它们的更新级别。
实际中,每次任何消息被更新时,其CRL被增加,且如果在一个BBSC中任何消息的
CRL被增加,最高级别CRL也被增加。
后一种方式允许通过要改变的消息类型对改变进行一个快速的全局观察,以及然后一个
较低的颗粒度级别。这样一种方式在低SNR和衰落信道中有益处,允许仅仅接收部分消息,
具有实现对配置中一个变化高信任度确认的优点。
3.8.2 公告信令信道(ASC)
此信道通常将携带公告、MAC信息、上行/下行链路资源分配、ARQ、ACK和EDN。
该信道被大量船接收,且使用一个高容限PL帧格式。

ITU-R M.2092-0建议书 67
为了减少协议时延,ASC可以在一个帧期间被重复多次(不同内容)。公告包括单播和
多播(广播)数据报。
ASC使用PL帧格式1或2。开始时隙的格式在公告牌中规定。
MAC信息包括网络版本、拥塞控制 (随机化间隔、保持和最小优先级)。
上行链路资源分配跟随在一个主要请求之后向个别一条船提供上行链路数据信道信息,
该卫星进行一个C/ (N0+I0)估算,它被用来选择具有适当链路容限的最高吞吐量格式。
表A4-16至表A4-20为不同的用途提供多个ASC模板。
表A4-16
媒体访问控制(ASC的开始)
字段名称 长度 (byte)
注 附加信息
包类型 1 规定包内容。此包地址是对所有
船,子地址为0。
包长度 1 此包的总长度 该长度在大多数包类型中
可以是隐式的,但是一些
包类型可以是可变长度。
帧数量 2 在24小时中1440 帧
网络版本 1 在公告牌上规定的版本。旧版本
被存储并按要求检索。
卫星网络状态 1 定义卫星的健康度、繁忙度、减
少的容量、高时延
上行链路接入优
先级 1 船消息有不同的优先级,遇险最
高。仅仅具有等于和高于此数字
的优先级消息被接受
重试间隔 1 在随机接入超时之前在时隙中的
等候时间。 分辨率是10个时隙
最大消息长度 1 在拥塞期间,长消息可能不被
允许。 此字段是对最大离散文件长度的
一个指数
68 ITU-R M.2092-0建议书
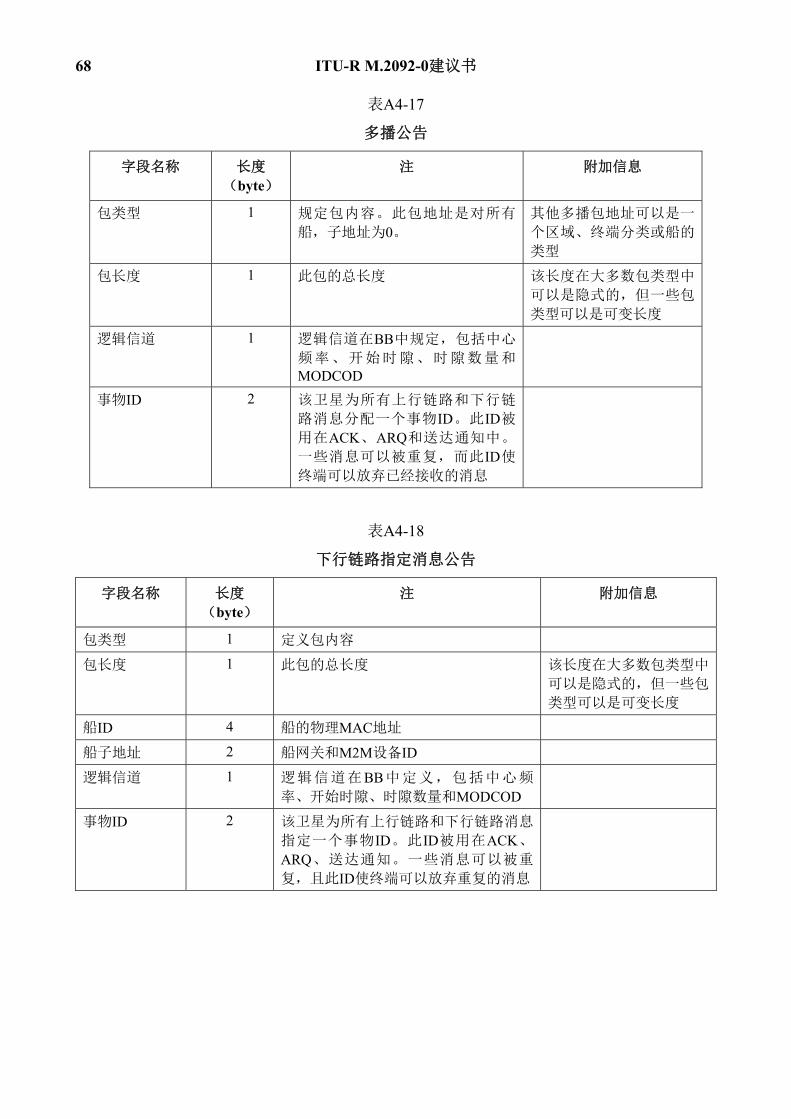
表A4-17
多播公告
字段名称 长度 (byte)
注 附加信息
包类型 1 规定包内容。此包地址是对所有
船,子地址为0。 其他多播包地址可以是一
个区域、终端分类或船的
类型
包长度 1 此包的总长度 该长度在大多数包类型中
可以是隐式的,但一些包
类型可以是可变长度
逻辑信道 1 逻辑信道在BB中规定,包括中心
频率、开始时隙、时隙数量和MODCOD
事物ID 2 该卫星为所有上行链路和下行链
路消息分配一个事物ID。此ID被
用在ACK、ARQ和送达通知中。
一些消息可以被重复,而此ID使
终端可以放弃已经接收的消息
表A4-18
下行链路指定消息公告
字段名称 长度 (byte)
注 附加信息
包类型 1 定义包内容
包长度 1 此包的总长度 该长度在大多数包类型中
可以是隐式的,但一些包
类型可以是可变长度
船ID 4 船的物理MAC地址
船子地址 2 船网关和M2M设备ID
逻辑信道 1 逻辑信道在BB中定义,包括中心频
率、开始时隙、时隙数量和MODCOD
事物ID 2 该卫星为所有上行链路和下行链路消息
指定一个事物ID。此ID被用在ACK、
ARQ、送达通知。一些消息可以被重
复,且此ID使终端可以放弃重复的消息
ITU-R M.2092-0建议书 69
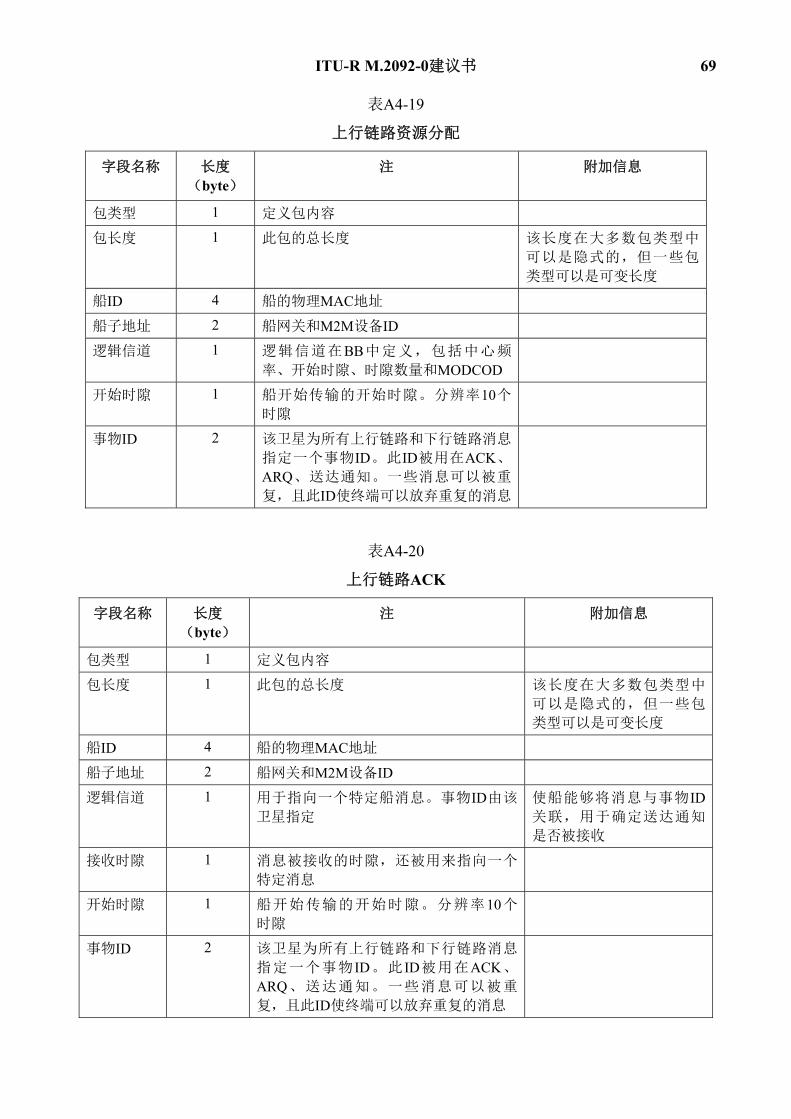
表A4-19
上行链路资源分配
字段名称 长度 (byte)
注 附加信息
包类型 1 定义包内容
包长度 1 此包的总长度 该长度在大多数包类型中
可以是隐式的,但一些包
类型可以是可变长度
船ID 4 船的物理MAC地址
船子地址 2 船网关和M2M设备ID
逻辑信道 1 逻辑信道在BB中定义,包括中心频
率、开始时隙、时隙数量和MODCOD
开始时隙 1 船开始传输的开始时隙。分辨率10个时隙
事物ID 2 该卫星为所有上行链路和下行链路消息
指定一个事物ID。此ID被用在ACK、
ARQ、送达通知。一些消息可以被重
复,且此ID使终端可以放弃重复的消息
表A4-20
上行链路ACK
字段名称 长度 (byte)
注 附加信息
包类型 1 定义包内容
包长度 1 此包的总长度 该长度在大多数包类型中
可以是隐式的,但一些包
类型可以是可变长度
船ID 4 船的物理MAC地址
船子地址 2 船网关和M2M设备ID
逻辑信道 1 用于指向一个特定船消息。事物ID由该
卫星指定 使船能够将消息与事物ID关联,用于确定送达通知
是否被接收
接收时隙 1 消息被接收的时隙,还被用来指向一个
特定消息
开始时隙 1 船开始传输的开始时隙。分辨率10个时隙
事物ID 2 该卫星为所有上行链路和下行链路消息
指定一个事物 ID。此 ID被用在ACK、
ARQ、送达通知。一些消息可以被重
复,且此ID使终端可以放弃重复的消息
70 ITU-R M.2092-0建议书
3.8.3 多播数据信道(MDC)
此下行链路信道被很多船接收,并且使用一个高容限的PL帧格式。
3.8.4 单播数据信道(UDC)
此下行链路信道在一个单播数据报期间被分配给一条特定的船。此信道在一条船响应一
个公告后建立,且该响应包括接收的信号质量信息,允许该卫星使吞吐量最大。
4 网络层
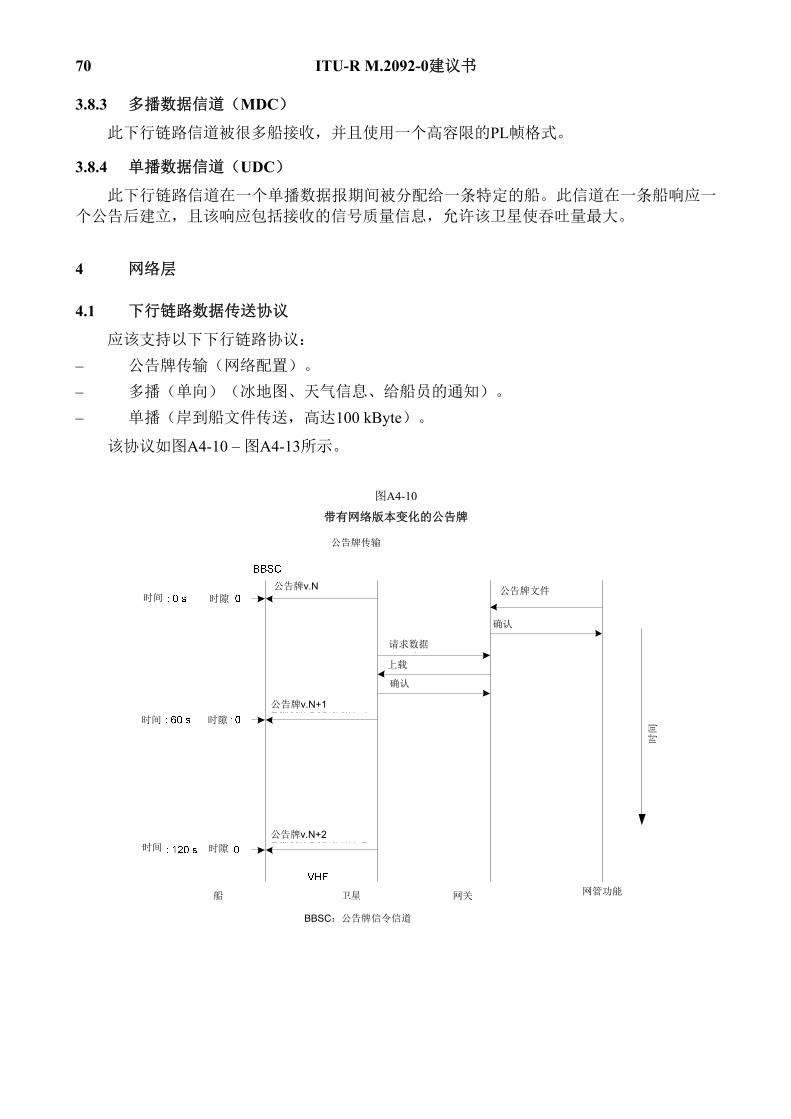
4.1 下行链路数据传送协议
应该支持以下下行链路协议: – 公告牌传输(网络配置)。 – 多播(单向)(冰地图、天气信息、给船员的通知)。 – 单播(岸到船文件传送,高达100 kByte)。
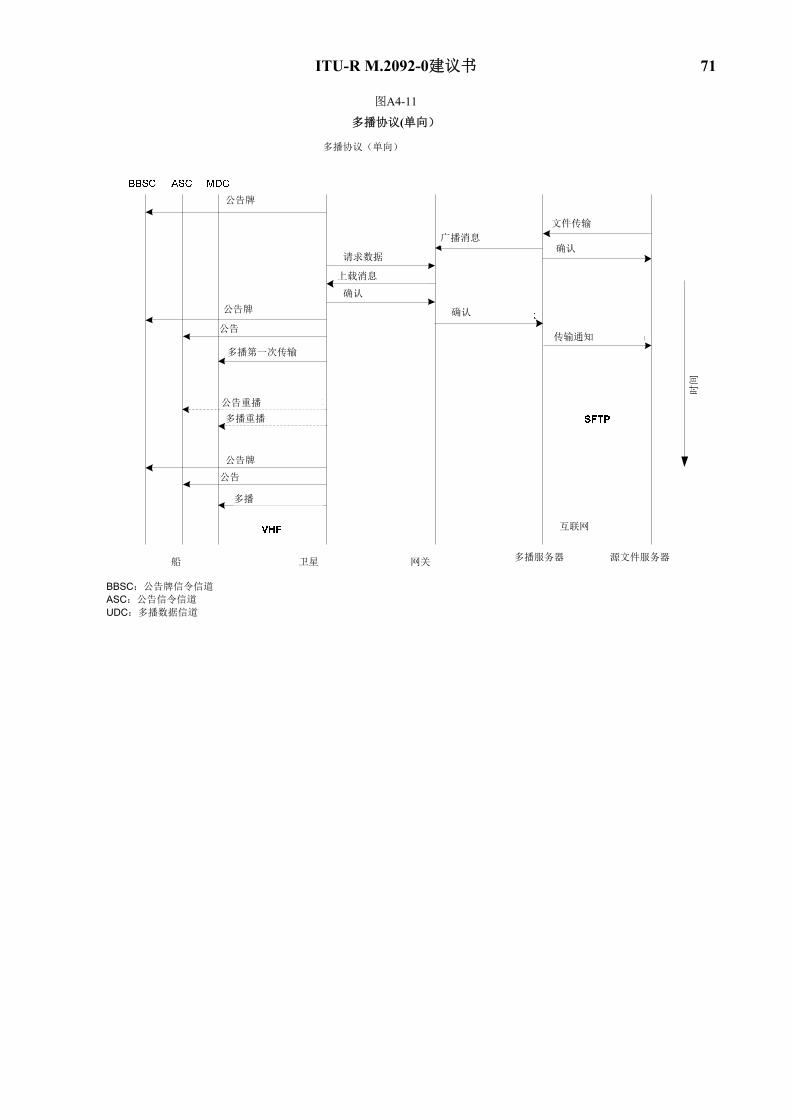
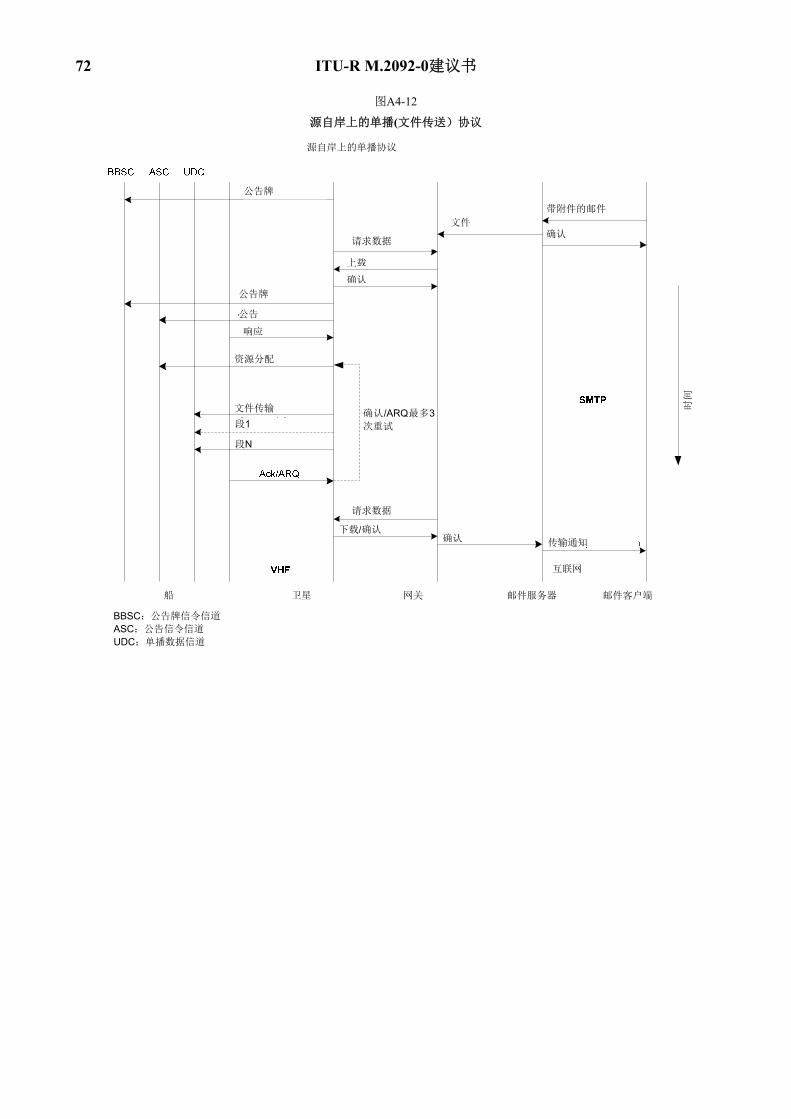
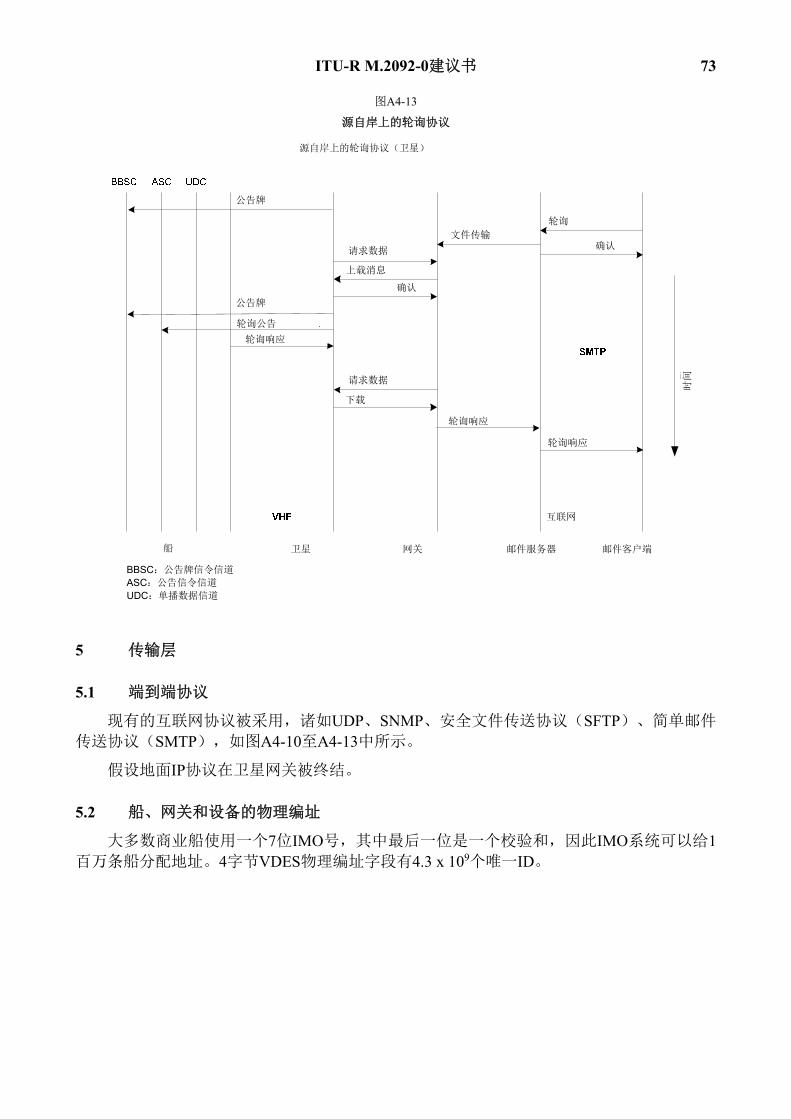
该协议如图A4-10 – 图A4-13所示。
图A4-10
带有网络版本变化的公告牌
船 卫星 网关
公告牌v.N
公告牌传输
时间
公告牌文件
请求数据
确认
确认
上载
公告牌v.N+1
公告牌v.N+2
网管功能
BBSC:公告牌信令信道
时间
时间
时间
时隙
时隙
时隙
ITU-R M.2092-0建议书 71
图A4-11
多播协议(单向)
公告牌
多播协议(单向)
公告牌
时间
确认
确认
确认
船 卫星 网关 多播服务器 源文件服务器
BBSC:公告牌信令信道 ASC:公告信令信道 UDC:多播数据信道
互联网
文件传输 广播消息
请求数据
上载消息
公告牌
公告 传输通知
多播第一次传输
公告重播 多播重播
多播
公告
72 ITU-R M.2092-0建议书
图A4-12
源自岸上的单播(文件传送)协议
带附件的邮件
公告牌
公告牌
时间
船 卫星 网关 邮件服务器 邮件客户端
BBSC:公告牌信令信道 ASC:公告信令信道 UDC:单播数据信道
互联网
文件 确认
源自岸上的单播协议
确认
确认
请求数据
公告
上载
响应
资源分配
确认/ARQ最多3次重试
请求数据
文件传输 段1
段N
下载/确认
传输通知
ITU-R M.2092-0建议书 73
图A4-13
源自岸上的轮询协议
5 传输层
5.1 端到端协议
现有的互联网协议被采用,诸如UDP、SNMP、安全文件传送协议(SFTP)、简单邮件
传送协议(SMTP),如图A4-10至A4-13中所示。
假设地面IP协议在卫星网关被终结。
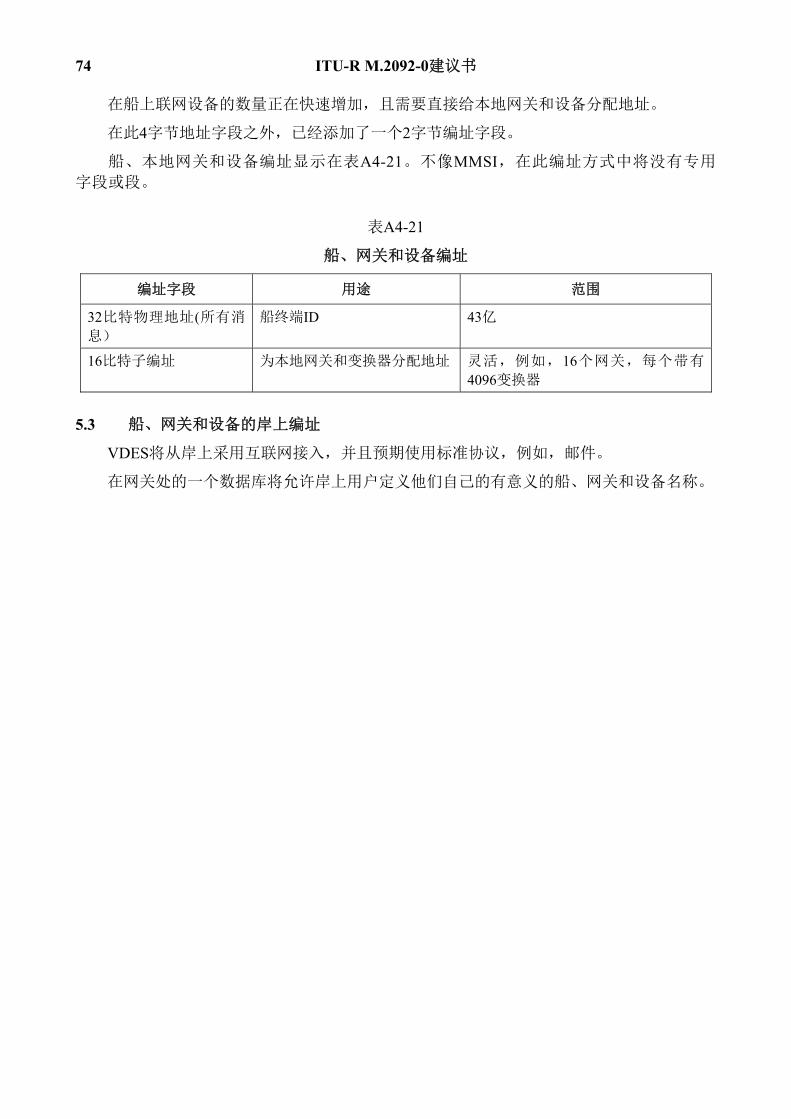
5.2 船、网关和设备的物理编址
大多数商业船使用一个7位IMO号,其中最后一位是一个校验和,因此IMO系统可以给1百万条船分配地址。4字节VDES物理编址字段有4.3 x 109个唯一ID。
源自岸上的轮询协议(卫星)
公告牌
轮询 文件传输
确认 请求数据
上载消息
轮询公告 轮询响应
公告牌 确认
请求数据
下载
时间
互联网
船 卫星 网关 邮件服务器 邮件客户端
轮询响应
轮询响应
BBSC:公告牌信令信道 ASC:公告信令信道 UDC:单播数据信道
74 ITU-R M.2092-0建议书
在船上联网设备的数量正在快速增加,且需要直接给本地网关和设备分配地址。
在此4字节地址字段之外,已经添加了一个2字节编址字段。
船、本地网关和设备编址显示在表A4-21。不像MMSI,在此编址方式中将没有专用
字段或段。
表A4-21
船、网关和设备编址
编址字段 用途 范围
32比特物理地址(所有消
息) 船终端ID 43亿
16比特子编址 为本地网关和变换器分配地址 灵活,例如,16个网关,每个带有
4096变换器
5.3 船、网关和设备的岸上编址
VDES将从岸上采用互联网接入,并且预期使用标准协议,例如,邮件。
在网关处的一个数据库将允许岸上用户定义他们自己的有意义的船、网关和设备名称。

ITU-R M.2092-0建议书 75
附件5
VHF海上移动频段中VDE卫星上行链路的技术特性
1 引言
本附件描述了VDE卫星上行链路的特性。在本文中,展望了以下功能类型: – 双向通信:
– 来自船的岸上发起的信息轮询; – 来自岸上的船上发起的信息查询; – 船上发起的到岸上的数据传送。
– 仅仅发射: – 从仅仅发射的VDES终端收集信息。这既可以是事件驱动,也可以是周期性的。
此业务的时隙和频带应该由公告牌和公告信令信道指定。
在本附件中,600 km高度的低地球轨道(LEO)卫星被认为代表了VDE卫星解决方案的
典型范例。应该注意,根据总体系统设计考虑,也有可能选择其他轨道。
本附件的重点是要描述附件1中定义的OSI模型的物理层和链路层。在附件4中提供了网
络和传输层的总体描述。
2 VDE-SAT上行链路物理层
2.1 VDE-SAT上行链路关键参数
本节概述了关于VDE-SAT上行链路系统参数的假设,在本附件中它们被用作代表性实
例。
2.1.1 卫星到地面的距离范围
轨道高度决定了卫星距离变化。例如,对一个600 km的LEO,最大距离是2 830 km。出
于定时的目的,将使用一个3000 km的最大距离。
最小距离等于轨道高度。对在600 km高度的一个LEO卫星,最小距离将是600 km。此数
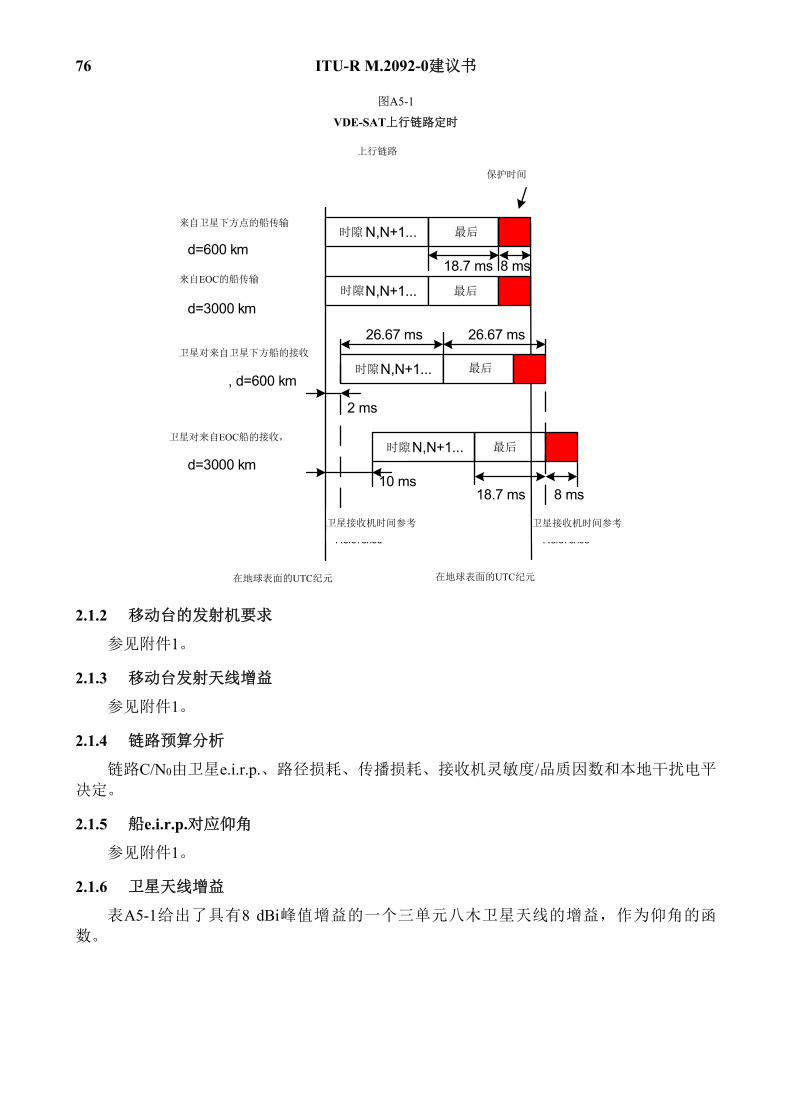
值被用来确定最小传播时延时间。考虑到这些最小和最大距离的举例值,路径时延将从2 ms到10 ms变化,如图A5-1中所示的一个8 ms变化。
76 ITU-R M.2092-0建议书
图A5-1 VDE-SAT上行链路定时
Last
Slot N,N+1...
Slot N,N+1...
Slot N,N+1...
Last
Last
18.7 ms 8 ms10 ms
Ship transmission from EOCd=3000 km
Satellite reception from ship at subsat, d=600 km
Satellite receptionfrom ship at EOC, d=3000 km
UTC epoch at the Earth’s Surface
Slot N,N+1... Last
2 ms
Ship transmission from subsat pointd=600 km
Guard time
26.67 ms26.67 ms
Uplink
18.7 ms 8 ms
UTC epoch at the Earth’s Surface
Satellite Receiver Time
Reference
Satellite Receiver Time
Reference
2.1.2 移动台的发射机要求
参见附件1。
2.1.3 移动台发射天线增益
参见附件1。
2.1.4 链路预算分析
链路C/N0由卫星e.i.r.p.、路径损耗、传播损耗、接收机灵敏度/品质因数和本地干扰电平
决定。
2.1.5 船e.i.r.p.对应仰角
参见附件1。
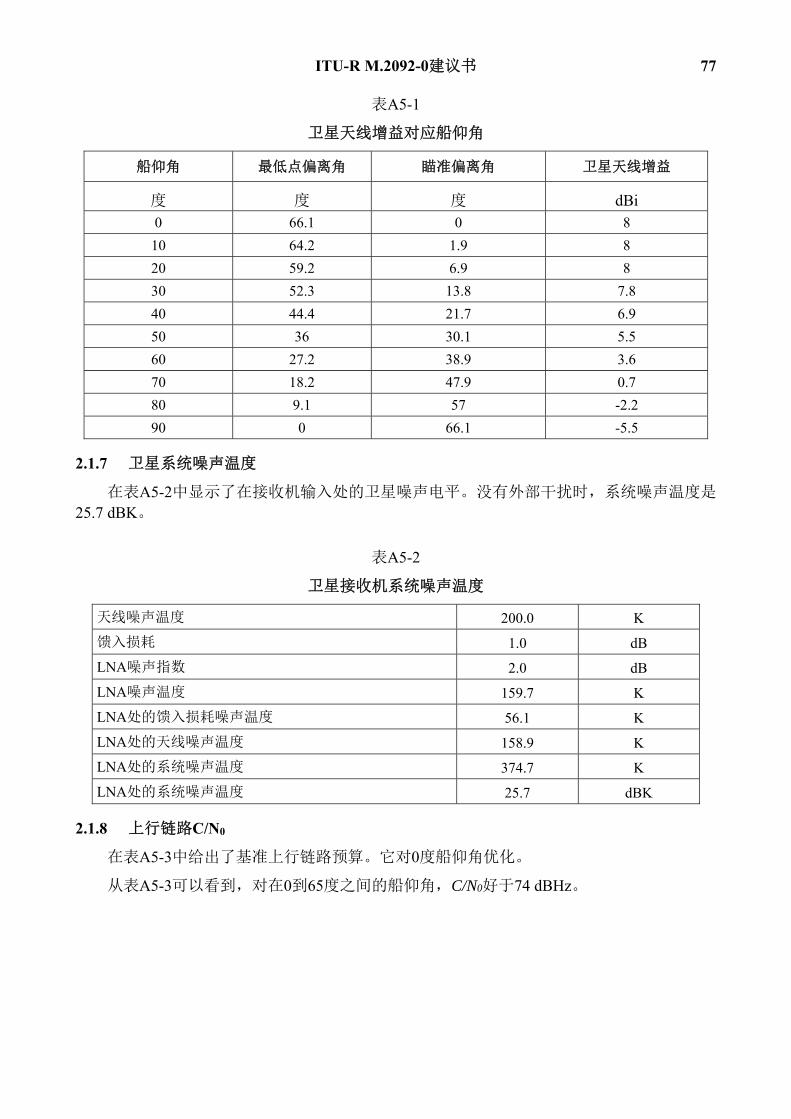
2.1.6 卫星天线增益
表A5-1给出了具有8 dBi峰值增益的一个三单元八木卫星天线的增益,作为仰角的函
数。
上行链路
保护时间
来自卫星下方点的船传输
来自EOC的船传输
卫星对来自卫星下方船的接收
卫星对来自EOC船的接收,
卫星接收机时间参考 卫星接收机时间参考
在地球表面的UTC纪元 在地球表面的UTC纪元
时隙
时隙
时隙
时隙
最后
最后
最后
最后
ITU-R M.2092-0建议书 77
表A5-1
卫星天线增益对应船仰角
船仰角 最低点偏离角 瞄准偏离角 卫星天线增益
度 度 度 dBi 0 66.1 0 8 10 64.2 1.9 8 20 59.2 6.9 8 30 52.3 13.8 7.8 40 44.4 21.7 6.9 50 36 30.1 5.5 60 27.2 38.9 3.6 70 18.2 47.9 0.7 80 9.1 57 -2.2 90 0 66.1 -5.5
2.1.7 卫星系统噪声温度
在表A5-2中显示了在接收机输入处的卫星噪声电平。没有外部干扰时,系统噪声温度是
25.7 dBK。
表A5-2
卫星接收机系统噪声温度
天线噪声温度 200.0 K 馈入损耗 1.0 dB LNA噪声指数 2.0 dB LNA噪声温度 159.7 K LNA处的馈入损耗噪声温度 56.1 K LNA处的天线噪声温度 158.9 K LNA处的系统噪声温度 374.7 K LNA处的系统噪声温度 25.7 dBK
2.1.8 上行链路C/N0
在表A5-3中给出了基准上行链路预算。它对0度船仰角优化。
从表A5-3可以看到,对在0到65度之间的船仰角,C/N0好于74 dBHz。
78 ITU-R M.2092-0建议书
表A5-3
VDE-SAT上行链路预算,6 W船发射功率
船仰角 船天线 增益
船e.i.r.p. 极化损耗 距离 路径损耗 卫星天线
增益 卫星G/T C/N0
度 dBi dBW dB km dB dBi dB/K dBHz
0 3 10.8 3 2830 145.56 8 -17.6 73.2 10 3 10.8 3 1932 142.25 8 -17.6 76.5 20 2.5 10.3 3 1392 139.40 8 -17.6 78.9 30 1 8.8 3 1075 137.16 7.8 -17.8 79.4 40 0 7.8 3 882 135.44 6.9 -18.7 79.2 50 -1.5 6.3 3 761 134.16 5.5 -20.1 77.6 60 -3 4.8 3 683 133.22 3.6 -22 75.2 70 -4 3.8 3 635 132.58 0.7 -24.9 71.9 80 -10 -2.2 3 608 132.21 -2.2 -27.8 63.4 90 -20 -12.2 3 600 132.09 -5.5 -31.1 50.2
2.1.9 传播效应
见附件4的第2.1.10节。
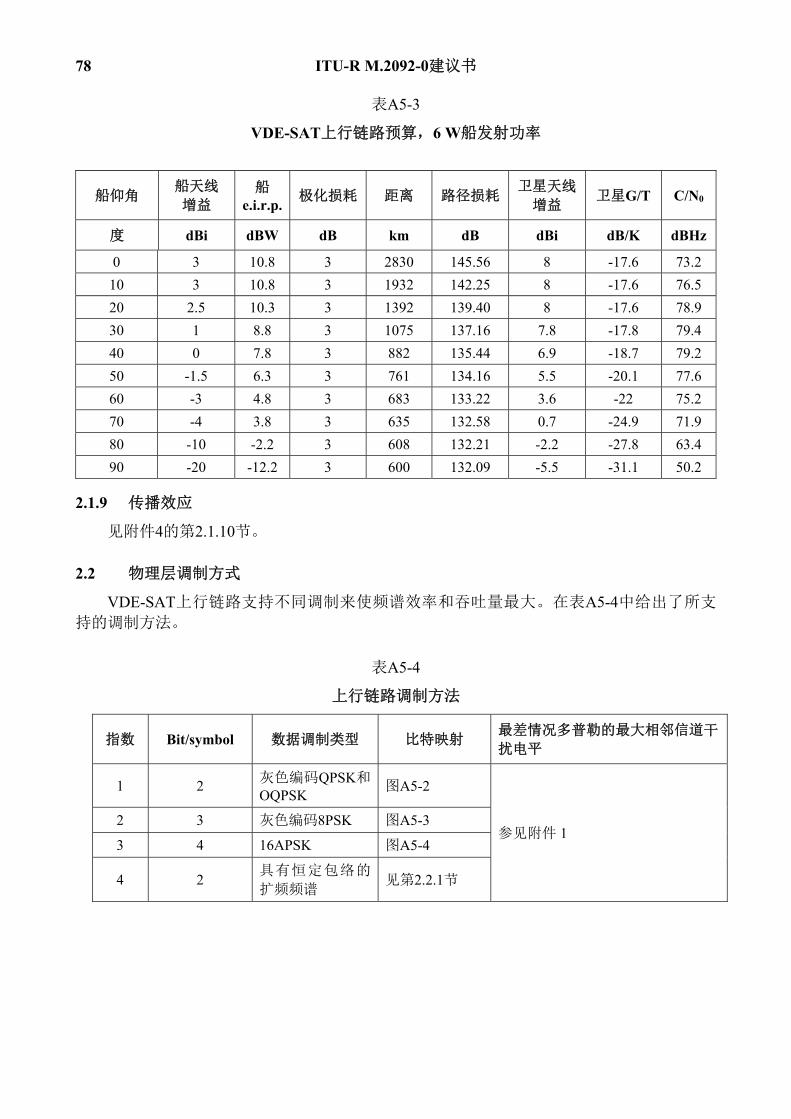
2.2 物理层调制方式
VDE-SAT上行链路支持不同调制来使频谱效率和吞吐量最大。在表A5-4中给出了所支
持的调制方法。
表A5-4
上行链路调制方法
指数 Bit/symbol 数据调制类型 比特映射 最差情况多普勒的最大相邻信道干
扰电平
1 2 灰色编码QPSK和OQPSK 图A5-2
参见附件 1 2 3 灰色编码8PSK 图A5-3
3 4 16APSK 图A5-4
4 2 具有恒定包络的
扩频频谱 见第2.2.1节
ITU-R M.2092-0建议书 79
图A5-2
QPSK符号到比特映射
图A5-3
8PSK符号到比特映射
图A5-4
16APSK比特到符号映射

80 ITU-R M.2092-0建议书
16 APSK调制星座图由均匀间隔的4和12个PSK点的二个同心环构成,分别在半径R1的
内环和半径R2的外环上。
外圆半径与内圆半径之比(γ =R2/R1)应该等于3。为了使平均信号能量等于1,R1应
该设置为1/√7, 2应该设置为3/√7。
类似于AIS,当数据在VHF数据链路上输出时,它应该按照ISO/IEC 13239:2002,以8 比特字节在与每个消息相关的表中从上到下分组。每个字节应该以最低有效位在前输出。
2.2.1 具有恒定包络的扩展频谱
具有恒定包络的直接序列扩展可以按照扩展策略{RD-3}实施。这提供了一个在允许使
用线性调制(即,用于数据调制的BPSK或QPSK)的同时产生恒定包络信号的方法。在这种
方式中,选定了CPM扩展序列,这样即使在从一个符号过渡到下一个的时候,扩展符号也保
持准连续相位。在图A5-5中提供了CPM扩展的原理。
图A5-5
CPM扩展原理
为了避免数据符号过渡处的相位不连续,建议的解决方案要使扩展序列适配到调制数
据。换句话说,在每个符号边缘的CPM扩展序列被根据新输入调制符号值进行适配,以避
免任何相位不连续。这样一个解决方案在接收机产生一个小的损耗,因为接收机不知道所
用CPM扩展序列的边缘符号部分。对一个16或更高的扩展因子,由于此问题使接收机经受
造成的相关损失小于0.25 dB。只要采用SF= 16或更大,相对于常规扩展的性能损失将因此
完全可忽略。
CPM扩展序列被离线计算和优化,并且然后存储在终端和接收机的存储器中。单独一
个扩展码对该系统中的所有用户是足够的。因此没有必要存储多个扩展序列,而是仅仅单
独一个扩展序列。
然后,存储的扩展序列从前导码开始应用,并在数据部分继续(如图A5-6中所示)。
应该注意,为了保证调制符号改变时信号相位的连续性,实际的扩展序列实际上部分地依
靠调制符号(图A5-5)。扩展取样是根据当前的调制符号和以前的调制符号来计算的。对
于QPSK调制,对这二个符号的相位差,有4个可能值。从0到3的一个指数可以指向可能的
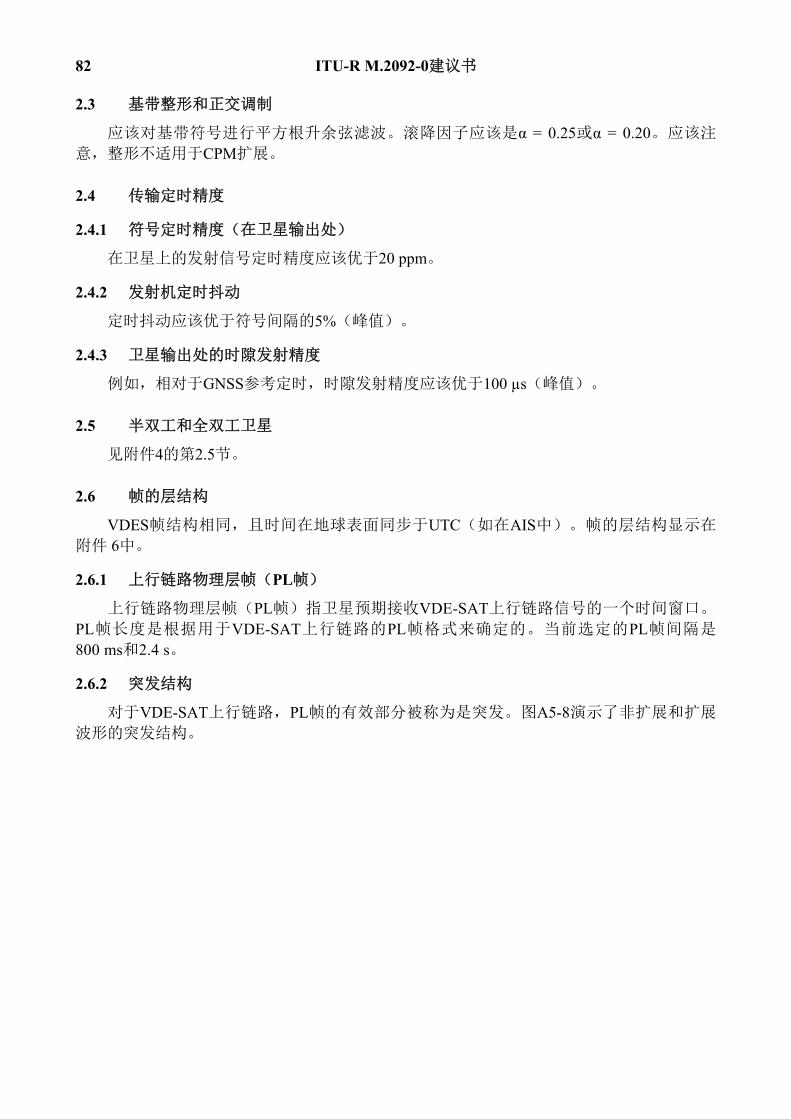
相位差,并被用来涉及4个可能扩展序列的哪一个被实际用于计算输出信号。图A5-7演示
了所建议调制方式(扩展因子16)的功率谱特性。由于其恒定的包络特性,此调制方式可
以与一个接近饱和工作的发射功率放大器一起工作,同时保持对相邻信道低的功率泄露。
数据 调制映射器
CPM扩频序列
ITU-R M.2092-0建议书 81
图A5-6
建议的CPM中的扩展
图A5-7
具有恒定包络的扩展频谱的功率谱特性
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
-100 -80 -60 -40 -20 0 20 40 60 80 100
功率
谱(
dB)
频率(kHz)
CPM扩频SF=16码片速率 = 36 kchips/s
已知符号 数据部分
扩频序列 扩频分组
82 ITU-R M.2092-0建议书
2.3 基带整形和正交调制
应该对基带符号进行平方根升余弦滤波。滚降因子应该是α = 0.25或α = 0.20。应该注
意,整形不适用于CPM扩展。
2.4 传输定时精度
2.4.1 符号定时精度(在卫星输出处)
在卫星上的发射信号定时精度应该优于20 ppm。
2.4.2 发射机定时抖动
定时抖动应该优于符号间隔的5%(峰值)。
2.4.3 卫星输出处的时隙发射精度
例如,相对于GNSS参考定时,时隙发射精度应该优于100 µs(峰值)。
2.5 半双工和全双工卫星
见附件4的第2.5节。
2.6 帧的层结构
VDES帧结构相同,且时间在地球表面同步于UTC(如在AIS中)。帧的层结构显示在
附件 6中。
2.6.1 上行链路物理层帧(PL帧)
上行链路物理层帧(PL帧)指卫星预期接收VDE-SAT上行链路信号的一个时间窗口。
PL帧长度是根据用于VDE-SAT上行链路的PL帧格式来确定的。当前选定的PL帧间隔是 800 ms和2.4 s。
2.6.2 突发结构
对于VDE-SAT上行链路,PL帧的有效部分被称为是突发。图A5-8演示了非扩展和扩展
波形的突发结构。

ITU-R M.2092-0建议书 83
图A5-8
VDE-SAT上行链路突发结构(a)无扩展(b)有扩展
2.6.3 保护时间和缓升
对于50 kHz信道占用,功率从-30 dBc到-1.5 dBc的缓升应该发生在小于或等于300 µs中。
这是保持符合相邻信道干扰要求的一种措施。
可以不要求在一个突发开始处的保护时间,但是已经提供来允许导频、同步字和PL帧格式头的将来扩展。
2.6.4 前导码
一个如图A5-8所示的固定格式前导码被用于非扩展突发,并可选用于扩展突发。它包括
一个CW(未调制载波)导频、一个唯一同步字和一个格式头。前导码持续时间显示在表
A5-5中。
帧 = 60 s
时隙 0 时隙 0 时隙 1 时隙 2 时隙 3 时隙 M 时隙 M+1 时隙 2249
时隙 0 时隙 1 时隙 2 时隙 3 时隙 M 时隙 M+1 时隙 2249
PL帧(M 个时隙)
单时隙突发
多时隙突发
缓升 头导频 同步 信头 数据-0 导频 数据-1 导频 数据-N 导频 缓降+保护
2.4 ksps BPSK调制 非扩频前导码 20.72 ms 非扩频突发结构
PL帧(M 个时隙)
扩频突发
随机化传输时间
非扩频前导码 扩频前导码 数据-0 导频 数据-1 导频 数据-N 导频 缓降
帧 = 60 s
非扩频前导码 非扩频前导码 20.72 ms
扩频区域
扩频突发结构
84 ITU-R M.2092-0建议书
表A5-5
前导码持续时间
参数 数值 单位
缓升 0.30 ms
符号速率 2.4 ksym/s
调制 BPSK
CW导频持续时间 4 symbol
CW导频持续时间 1.67 ms
(SYNC)UW长度 13 bit
(SYNC)UW持续时间 5.42 ms
头长度 32 bit
头持续时间 13.33 ms
2.6.5 同步导频
导频符号(一个或多个)被周期地插入到数据符号之中。每个导频字段的已知符号数量
和二个连续导频字段之间的距离(以符号表示)是根据每个情况(根据每个PL帧的格式)
而定。
2.6.6 同步(SYNC)唯一字
PL帧同步字和头格式被固定用于所有传输。(它被定义为扩展突发的非扩展前导码和
被考虑的可选字段的一部分,如图A5-8中所示)。13比特的巴克码唯一字是如附件4(表A4-10)中所定义采用2.4 ksym/s符号速率的BPSK进行调制。
2.6.7 PL帧头
此头采用与以上所描述的同步字相同的方法进行BPSK调制和扩展。此PL帧头定义了以
下与每个PL帧相关的参数: – PL帧持续时间(一个时隙持续时间的整数倍); – 突发持续时间; – 每PL帧的数据时隙数量(M); – 符号速率; – 调制类型; – FEC类型; – FEC速率; – 交织器类型; – 扰码器类型; – 扩展因子(1或更高); – 扩展序列(1或按定义)。
ITU-R M.2092-0建议书 85
该头提供7比特来定义最多128个PL帧格式。PL帧头被编码到32比特。它采用2.4 ksym/s符号速率的BPSK调制。更多细节参见附件4。
2.6.8 直接序列扩展
VDE-SAT扩展突发显示在图A5-8 (b)中。扩展突发可以选择包含一个类似于非扩展突发
的非扩展字段。这个可选字段可以包含已知符号、SYNC和PL帧头,所有都是BPSK调制,
且是2.4 ksym/s符号速率。
一个扩展突发应该携带一个扩展前导码,使得在非常低的C/(N0+I0)条件下能够检测到该
突发。数据字段和导频字段也被扩展。
每个导频字段包含一个或多个已知QPSK符号。导频字段距离是根据PL帧格式规定的。
一个扩展突发的传输时间是在PL帧持续时间中随机选择的(保持容限,使完整突发适配
到PL帧间隔之内)。实际的PL帧长度和突发长度是根据PL帧格式规定的。
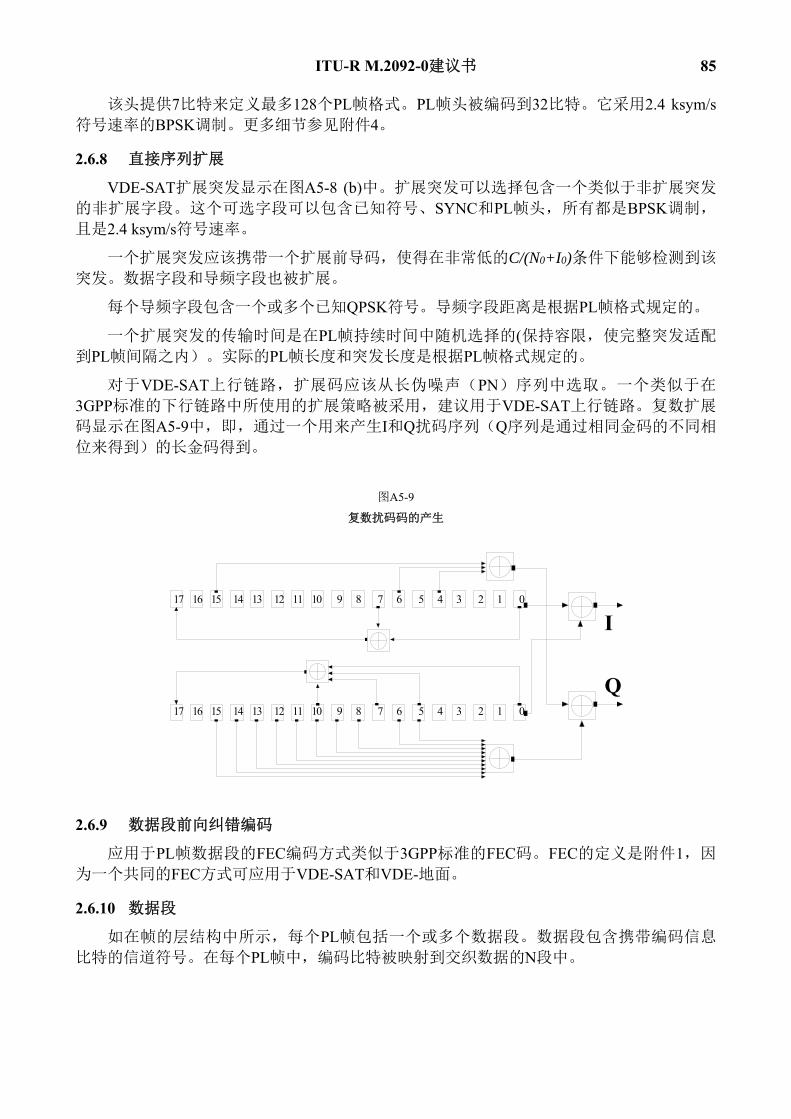
对于VDE-SAT上行链路,扩展码应该从长伪噪声(PN)序列中选取。一个类似于在
3GPP标准的下行链路中所使用的扩展策略被采用,建议用于VDE-SAT上行链路。复数扩展
码显示在图A5-9中,即,通过一个用来产生I和Q扰码序列(Q序列是通过相同金码的不同相
位来得到)的长金码得到。
图A5-9
复数扰码码的产生
I
Q
1
1 0
02
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
17
17
16
16
15
15
14
14
13
13
12
12
11
11
10
10
2.6.9 数据段前向纠错编码
应用于PL帧数据段的FEC编码方式类似于3GPP标准的FEC码。FEC的定义是附件1,因
为一个共同的FEC方式可应用于VDE-SAT和VDE-地面。
2.6.10 数据段
如在帧的层结构中所示,每个PL帧包括一个或多个数据段。数据段包含携带编码信息
比特的信道符号。在每个PL帧中,编码比特被映射到交织数据的N段中。
86 ITU-R M.2092-0建议书
2.6.11 物理层扰码
在调制(和扩展,如果适用)之前,应该为了能量分散而通过以一个复数随机序列(CI
+ jCQ)乘以(I + jQ)取样来随机化每个PL帧取样,不包括SYNC字:
– I扰码 = (I CI - Q CQ);
– Q扰码 = (I CQ + Q CI)。
随机化序列速率对应于PL帧符号速率,因此它对占用的信号带宽没有影响。随机序列
应该在每个突发的末尾被重新初始化。随机序列长度应该截短到突发的长度(不包括SYNC字)。
扰码码序列应该根据PL帧格式预先定义。
2.6.12 信道交织器
在VDE-SAT上考虑一个块信道交织器,以减少信道短阻塞(例如,由于来自船舶的AIS传输或快速衰落事件所引起)的影响。信道交织器在编码器的输出处被应用于码字。
该交织器是一个由Nr行和Nc列构成的块交织器。在此情况下的交织器存储器(从发射机
的观点看)是按行写入,并在应用了一个列间转置后按列读出。建议的列转置是通过以相反
的顺序读出列指数(比特混排)来形成的,即,具有指数i5、i4、i3、i2、i1、i0的列变成i0、
i1、i2、i3、i4、i5列,此处,i0、i1、i2、i3、i4和i5是代表一个给定数字的比特。
在更普遍的情况下(其中,列的数量不是2的一个整数幂),可以使交织器指数像查询
表那样可用。
2.6.13 缓降
缓降发生在每个突发的末尾(如图A5-8中所示),后面跟随着保护时间。缓降和保护时
间的总持续时间是8.88 ms,尽管功率从90%到10%的缓降时间应该发生在少于300 µs中。
2.6.14 保护时间
保护时间被添加到每个PL帧的末尾。保护时间持续时间是8.88 ms。这个时间适合于覆
盖一个600 km(或更低)高度LEO卫星覆盖区中最短和最长传播时间之间的差分时延。
2.7 VDE-SAT上行链路PL帧格式
本节定义了多个被用于在VDE-SAT上行链路信道上传输信令和数据的PL帧格式。所有
格式包括一个固定的前导码和一个数据部分,如图A5-8中所示。数据部分在下表中定义。导
频持续时间是每9个数据符号之后一个符号。
2.7.1 VDE-SAT上行链路PL帧格式1
在表A5-6中提供了VDE-SAT上行链路PL帧格式1。
在上行链路PL帧格式2中,使用了可选的非扩展前导码字段。每个导频字段仅仅包括1个符号。二个连续导频符号之间的距离是9个数据符号。在每个突发中总共有24个导频符
号。扩展前导码字段包括14个已知符号。

ITU-R M.2092-0建议书 87
表A5-6
VDE-SAT上行链路PL帧格式1
上行链路格式 1 功能 直接序列扩展随机接入 用途 请求、响应、确认和短消息 头数值 41 十六进制
信道带宽 50 kHz 可用于RA的时隙 30 时隙
未衰落C/N0 73.0 dBHz 突发持续时间 5 时隙
突发持续时间 133.33 ms 缓降 0.30 ms 保护时间 8.0 ms 信道速率 19.2 kchip/s 扩展因子 8 调制 QPSK 信道bit/symbol 2 FEC速率 1/3 信息速率/用户 1.60 kbit/s Eb/N0 41.0 dB 信道莱斯因子(C/M) 10 dB 信道衰落带宽 3 Hz 目标帧差错率 1.00 % 导频持续时间 9 ms (扩展)前导码持续时间 5.83 ms 数据持续时间 90 ms 信息比特数量 144 bit 块交织器宽度 16 bit 块交织器高度 27 bit 信息字节数量 18 byte 包类型字段 1 byte 船ID字段 4 byte 目的地短地址 2 byte 重复传输偏移字段 2 byte 接收C/N0字段 1 byte
88 ITU-R M.2092-0建议书
表A5-6(完)
包序列号 0 byte 事物ID 0 byte CRC 4 byte 负载 4 byte
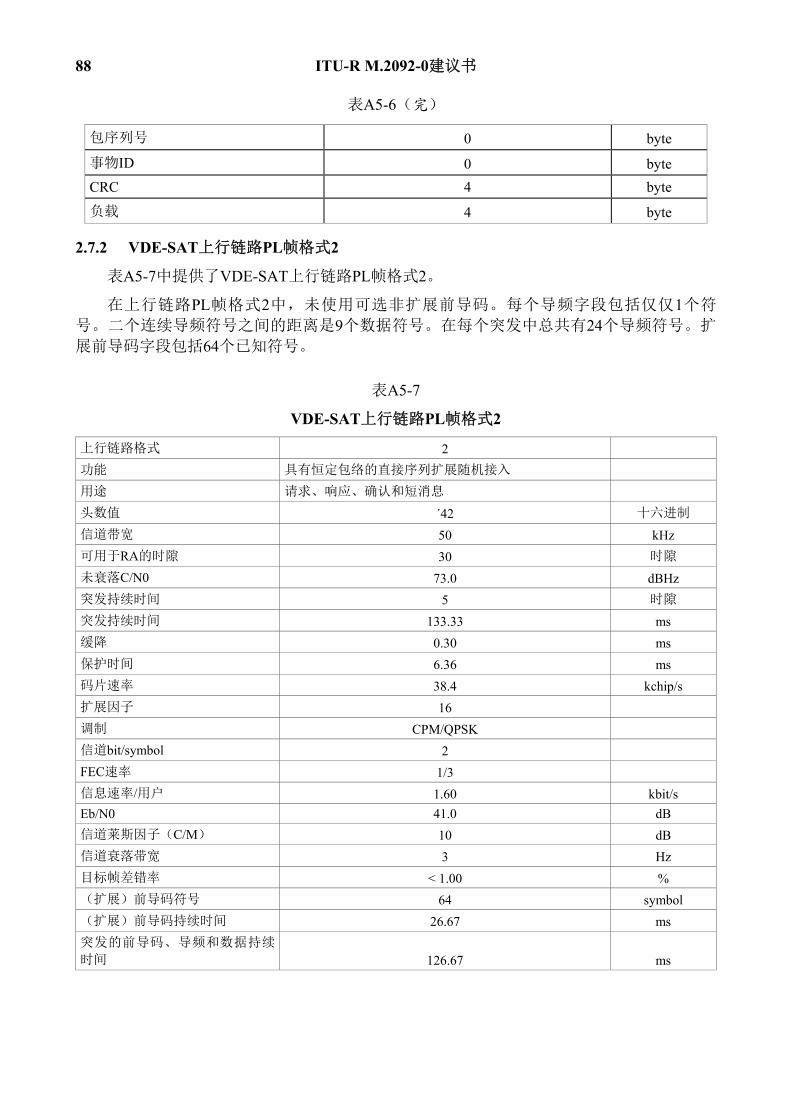
2.7.2 VDE-SAT上行链路PL帧格式2
表A5-7中提供了VDE-SAT上行链路PL帧格式2。
在上行链路PL帧格式2中,未使用可选非扩展前导码。每个导频字段包括仅仅1个符
号。二个连续导频符号之间的距离是9个数据符号。在每个突发中总共有24个导频符号。扩
展前导码字段包括64个已知符号。
表A5-7
VDE-SAT上行链路PL帧格式2
上行链路格式 2 功能 具有恒定包络的直接序列扩展随机接入 用途 请求、响应、确认和短消息 头数值 ´42 十六进制 信道带宽 50 kHz 可用于RA的时隙 30 时隙 未衰落C/N0 73.0 dBHz 突发持续时间 5 时隙 突发持续时间 133.33 ms 缓降 0.30 ms 保护时间 6.36 ms 码片速率 38.4 kchip/s 扩展因子 16 调制 CPM/QPSK 信道bit/symbol 2 FEC速率 1/3 信息速率/用户 1.60 kbit/s Eb/N0 41.0 dB 信道莱斯因子(C/M) 10 dB 信道衰落带宽 3 Hz 目标帧差错率 < 1.00 % (扩展)前导码符号 64 symbol (扩展)前导码持续时间 26.67 ms 突发的前导码、导频和数据持续
时间 126.67 ms
ITU-R M.2092-0建议书 89
表A5-7(完)
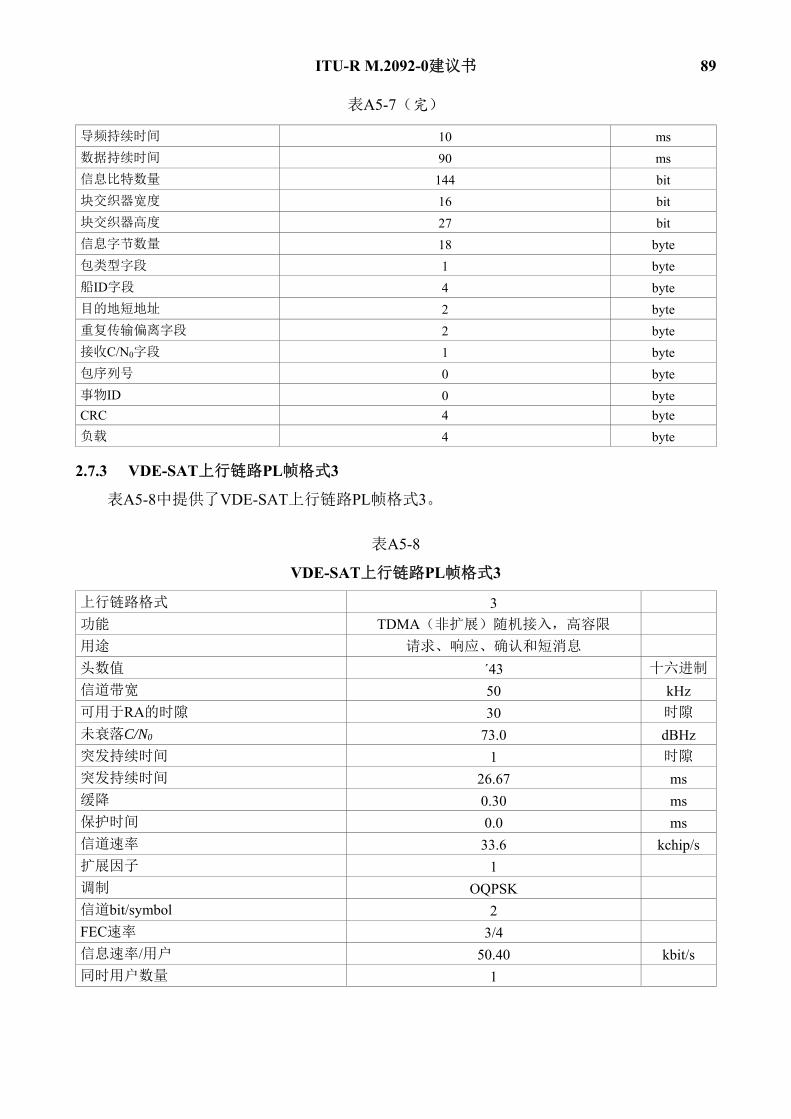
2.7.3 VDE-SAT上行链路PL帧格式3
表A5-8中提供了VDE-SAT上行链路PL帧格式3。
表A5-8
VDE-SAT上行链路PL帧格式3
上行链路格式 3 功能 TDMA(非扩展)随机接入,高容限 用途 请求、响应、确认和短消息 头数值 ´43 十六进制 信道带宽 50 kHz 可用于RA的时隙 30 时隙 未衰落C/N0 73.0 dBHz 突发持续时间 1 时隙 突发持续时间 26.67 ms 缓降 0.30 ms 保护时间 0.0 ms 信道速率 33.6 kchip/s 扩展因子 1 调制 OQPSK 信道bit/symbol 2 FEC速率 3/4 信息速率/用户 50.40 kbit/s 同时用户数量 1
导频持续时间 10 ms 数据持续时间 90 ms 信息比特数量 144 bit 块交织器宽度 16 bit 块交织器高度 27 bit 信息字节数量 18 byte 包类型字段 1 byte 船ID字段 4 byte 目的地短地址 2 byte 重复传输偏离字段 2 byte 接收C/N0字段 1 byte 包序列号 0 byte 事物ID 0 byte CRC 4 byte 负载 4 byte
90 ITU-R M.2092-0建议书
表A5-8(完) Eb/N0 26.0 dB 信道莱斯因子(C/M) 10 dB 信道衰落带宽 3 Hz 目标帧差错率 1.00 % 突发的导频和数据持续时间 5.65 ms 导频持续时间 0.57 ms 数据持续时间 5.09 ms 信息比特数量 256 bit 块交织器宽度 24 bit 块交织器高度 15 bit 信息字节数量 32 byte 包类型字段 1 byte 船ID字段 4 byte 目的地短地址 2 byte 重复传输偏离字段 2 byte 接收C/N0字段 1 byte 包序列号 0 byte 事物ID 0 byte CRC 4 byte 负载 18 byte
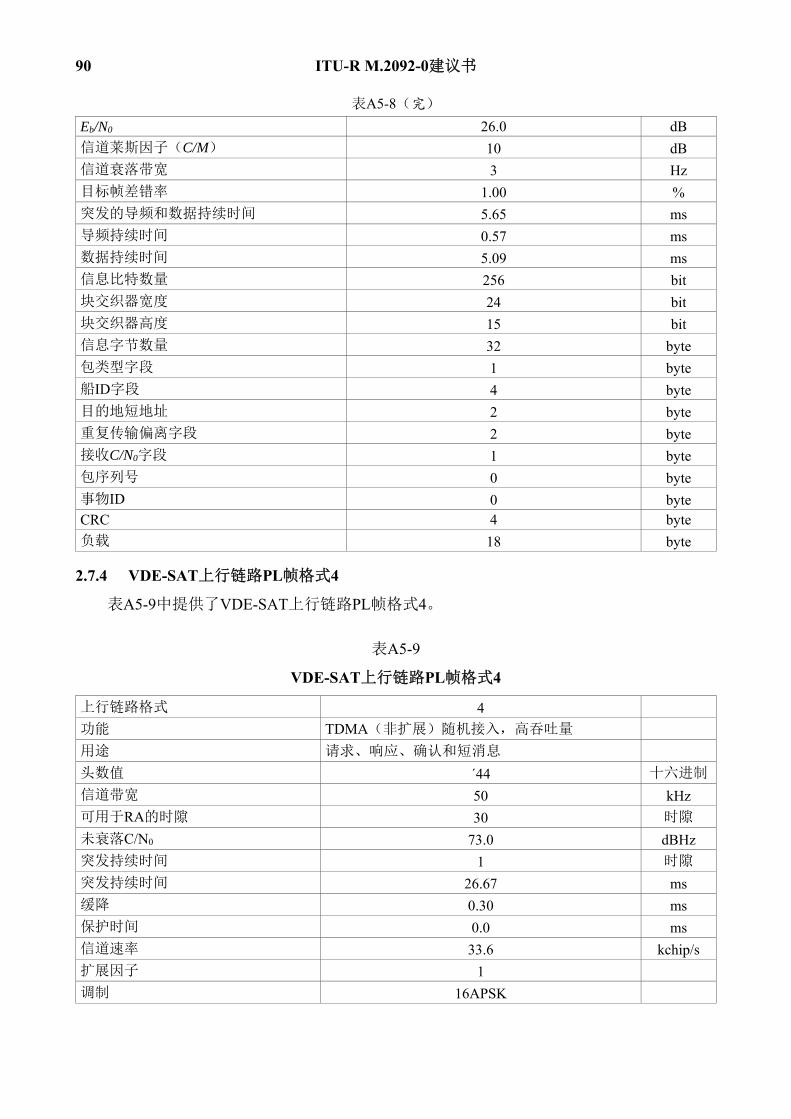
2.7.4 VDE-SAT上行链路PL帧格式4
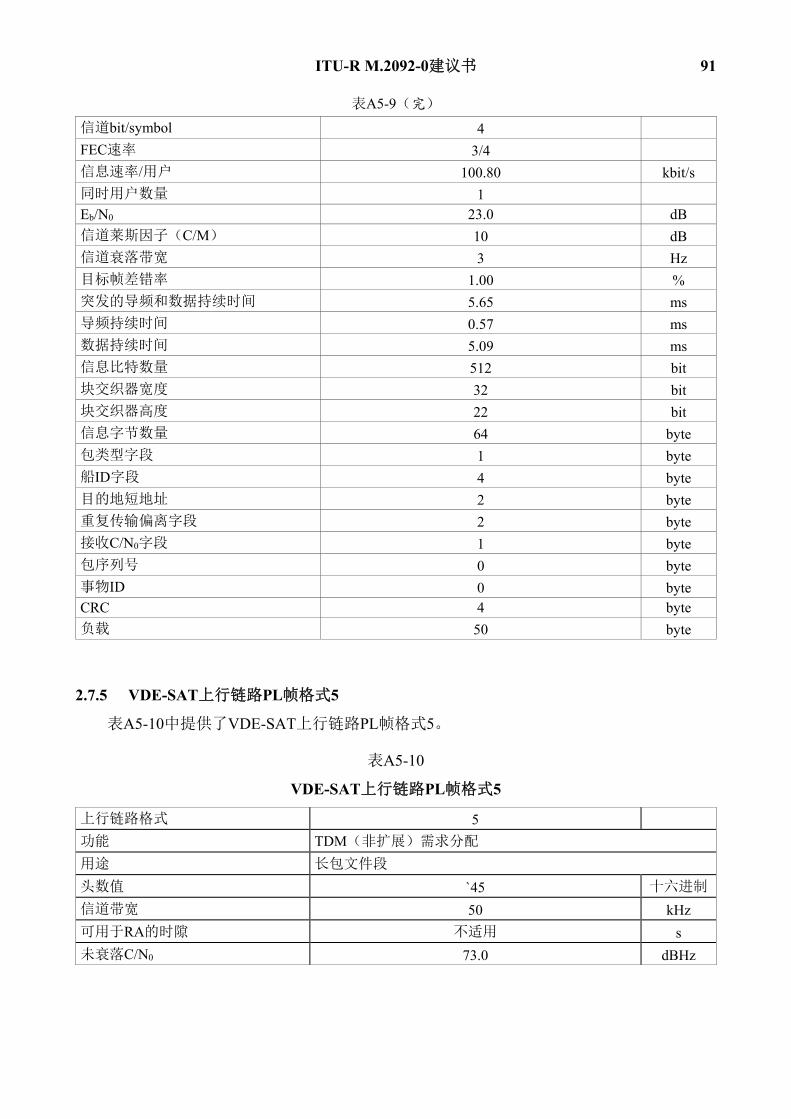
表A5-9中提供了VDE-SAT上行链路PL帧格式4。
表A5-9
VDE-SAT上行链路PL帧格式4
上行链路格式 4 功能 TDMA(非扩展)随机接入,高吞吐量 用途 请求、响应、确认和短消息 头数值 ´44 十六进制 信道带宽 50 kHz 可用于RA的时隙 30 时隙 未衰落C/N0 73.0 dBHz 突发持续时间 1 时隙 突发持续时间 26.67 ms 缓降 0.30 ms 保护时间 0.0 ms 信道速率 33.6 kchip/s 扩展因子 1 调制 16APSK
ITU-R M.2092-0建议书 91
表A5-9(完) 信道bit/symbol 4 FEC速率 3/4 信息速率/用户 100.80 kbit/s 同时用户数量 1 Eb/N0 23.0 dB 信道莱斯因子(C/M) 10 dB 信道衰落带宽 3 Hz 目标帧差错率 1.00 % 突发的导频和数据持续时间 5.65 ms 导频持续时间 0.57 ms 数据持续时间 5.09 ms 信息比特数量 512 bit 块交织器宽度 32 bit 块交织器高度 22 bit 信息字节数量 64 byte 包类型字段 1 byte 船ID字段 4 byte 目的地短地址 2 byte 重复传输偏离字段 2 byte 接收C/N0字段 1 byte 包序列号 0 byte 事物ID 0 byte CRC 4 byte 负载 50 byte
2.7.5 VDE-SAT上行链路PL帧格式5
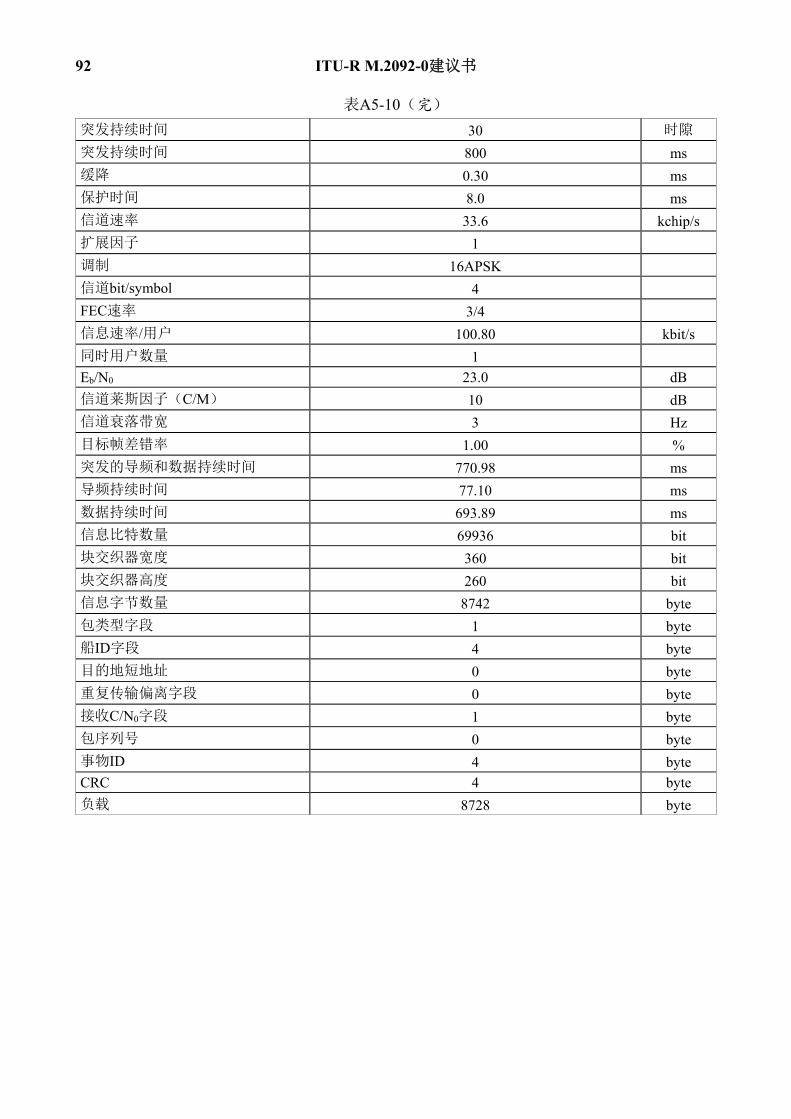
表A5-10中提供了VDE-SAT上行链路PL帧格式5。
表A5-10
VDE-SAT上行链路PL帧格式5
上行链路格式 5 功能 TDM(非扩展)需求分配 用途 长包文件段 头数值 `45 十六进制 信道带宽 50 kHz 可用于RA的时隙 不适用 s 未衰落C/N0 73.0 dBHz
92 ITU-R M.2092-0建议书
表A5-10(完)
突发持续时间 30 时隙 突发持续时间 800 ms 缓降 0.30 ms 保护时间 8.0 ms 信道速率 33.6 kchip/s 扩展因子 1 调制 16APSK 信道bit/symbol 4 FEC速率 3/4 信息速率/用户 100.80 kbit/s 同时用户数量 1 Eb/N0 23.0 dB 信道莱斯因子(C/M) 10 dB 信道衰落带宽 3 Hz 目标帧差错率 1.00 % 突发的导频和数据持续时间 770.98 ms 导频持续时间 77.10 ms 数据持续时间 693.89 ms 信息比特数量 69936 bit 块交织器宽度 360 bit 块交织器高度 260 bit 信息字节数量 8742 byte 包类型字段 1 byte 船ID字段 4 byte 目的地短地址 0 byte 重复传输偏离字段 0 byte 接收C/N0字段 1 byte 包序列号 0 byte 事物ID 4 byte CRC 4 byte 负载 8728 byte
ITU-R M.2092-0建议书 93
3 VDE-SAT链路层
3.1 数据封装
每个PL帧的数据段包括多个可变长度封装的数据报。每个数据报包括以下封装字段: – 数据报类型(1 byte); – 数据报长度(3 byte); – 目的地(可变,最多254 byte,可选); – 事物ID(4 byte,可选); – 数据报序列号(2 byte,用于多段数据报); – 源ID(6 byte,可选); – 数据报负载(可变); – 数据填充(可变,少于8 bit); – CRC(4 byte)。
3.2 循环冗余校验
参见附件1。
3.3 自动重复请求(ARQ)
数据报可以或可以不使用ARQ,这是对每种数据报类型定义的。一个ARQ将请求对一
个特定丢失数据报段的选择性重传。
3.4 确认(ACK)
在卫星链路上确认所有没有CRC错误的数据报。
3.5 送达通知(EDN)
将向源通知所有成功传送到目的地的数据报。
3.6 送达失败(EDF)
将向源通知在超时或重试限制之内的所有未成功传输的数据报。
3.7 物理和逻辑信道
VDE-SAT协议使用多个信道来携带数据。这些信道被分成物理和逻辑信道。每颗卫星
发射一个公告牌,它定义这些信道的配置。
3.8 物理信道
物理信道(PC)由中心频率和带宽确定。
94 ITU-R M.2092-0建议书
3.8.1 逻辑信道
逻辑信道(LC)被分为如下所描述的信令和数据信道。
3.9 信令逻辑信道
以下上行链路信令信道被使用: – 随机接入资源请求; – 公告响应 – 确认; – 自动重复请求。
3.9.1 随机接入资源请求(RQSC)
船使用此信道来接入网络。船将在公告牌上为此信道分配的时隙内随机选取传输时间。
下行链路公告信道提供拥塞控制参数,例如重试间隔和消息优先级。
该请求包括一个下行链路C/N0估算和消息长度。
3.9.2 公告响应信道(ARSC)
船使用此信道来通知卫星它已经准备好接收一个消息。该响应包括一个下行链路C/N0估
算。
3.9.3 确认(ACK)
船使用此信道来通知卫星它已经正确地接收了一个消息(CRC匹配)。
3.9.4 自动重复请求信令信道(ARQSC)
船使用此信道来通知卫星它尚未正确接收一个消息(CRC失败)。该船可以请求整个消
息或最多4段重传。该确认包括一个下行链路C/N0估算。
3.10 数据逻辑信道
以下数据信道被使用: – 随机接入短消息; – 指定的(专用)数据传送。
3.10.1 随机接入短消息信道(RADC)
此信道被用于适配到单独一个传输中的短消息。地面编址可以要求最多254 byte,且每
条船因此将一个在海岸地球站的2字节检索表用于地址翻译。
3.10.2 指定的数据传送信道(ADDC)
此信道在一个来自船的资源请求之后由卫星指定。其目的是用于更长的消息,并优化来
达到一个更高的吞吐量。
ITU-R M.2092-0建议书 95
4 网络层
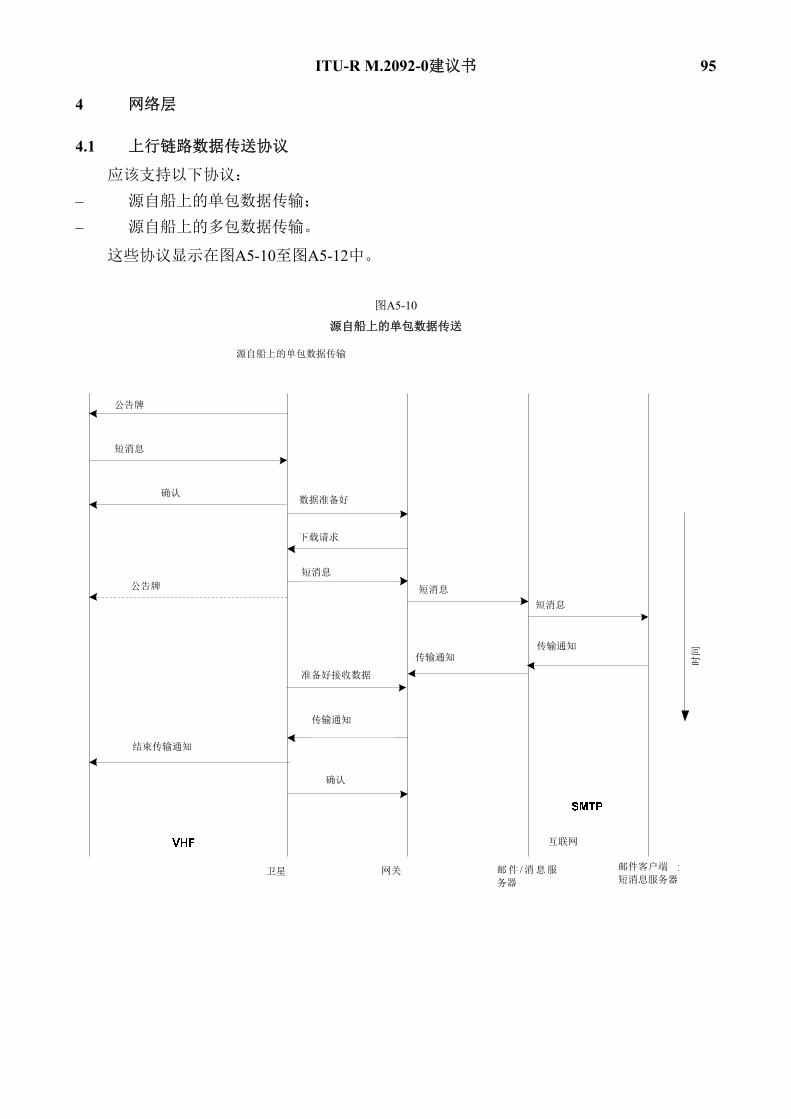
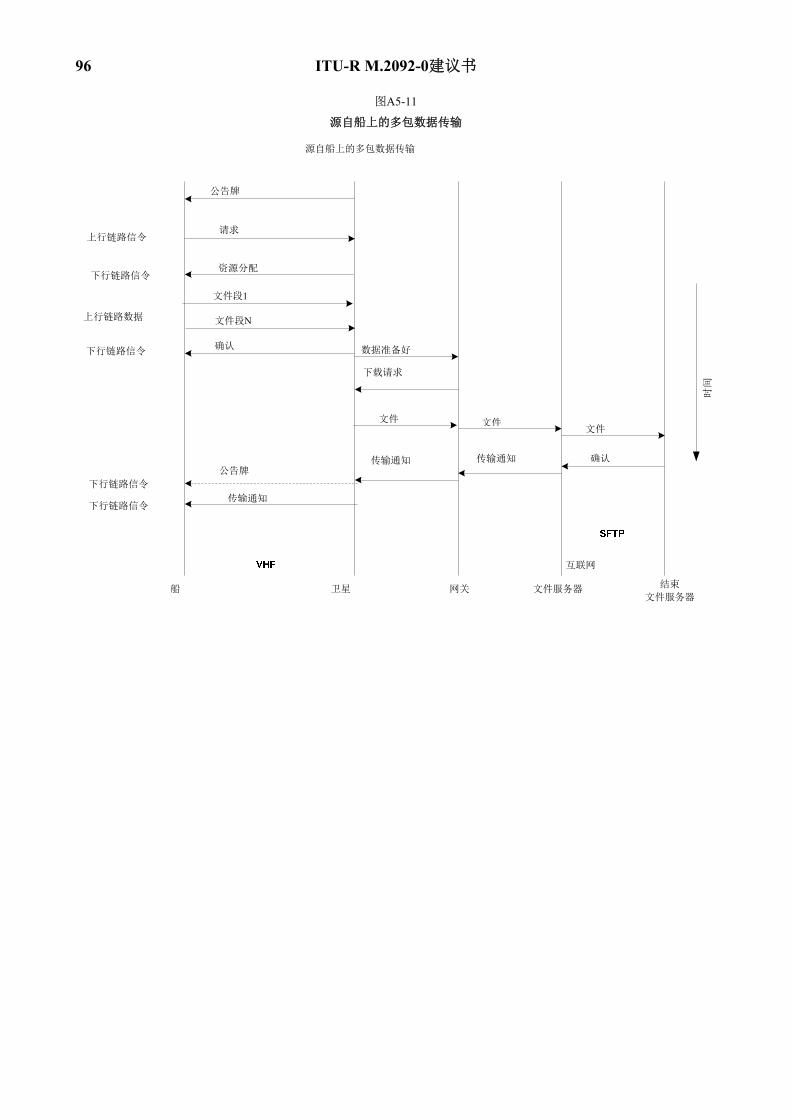
4.1 上行链路数据传送协议
应该支持以下协议: – 源自船上的单包数据传输; – 源自船上的多包数据传输。
这些协议显示在图A5-10至图A5-12中。
图A5-10
源自船上的单包数据传送
源自船上的单包数据传输
公告牌
短消息
确认
数据准备好
下载请求
短消息
短消息 短消息
时间
公告牌
确认
准备好接收数据
传输通知 传输通知
结束传输通知
传输通知
互联网
卫星 网关 邮件 /消息服
务器 邮件客户端 短消息服务器
96 ITU-R M.2092-0建议书
图A5-11
源自船上的多包数据传输
源自船上的多包数据传输
公告牌
上行链路信令 请求
下行链路信令 资源分配
上行链路数据
文件段1
文件
下行链路信令
确认
数据准备好
下载请求
时间
文件文件
公告牌 传输通知
结束 文件服务器
卫星 网关 文件服务器 船
下行链路信令
下行链路信令
文件段N
确认
传输通知
互联网
传输通知
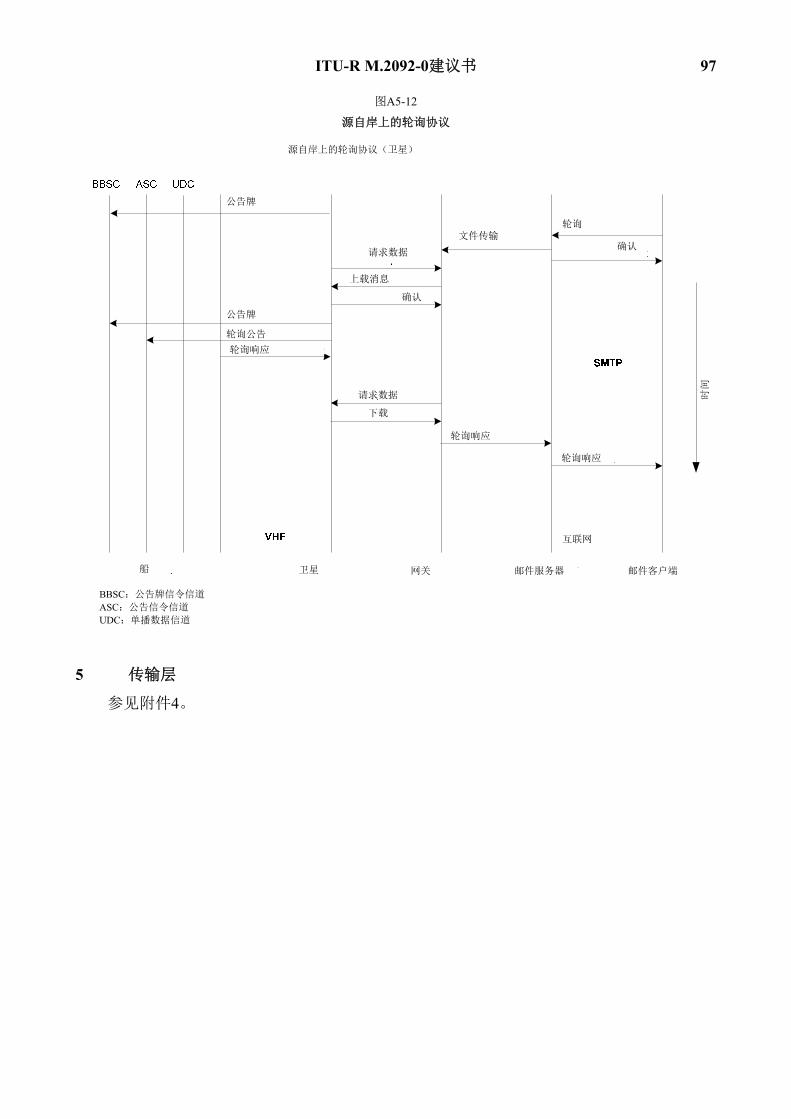
ITU-R M.2092-0建议书 97
图A5-12
源自岸上的轮询协议
5 传输层
参见附件4。
源自岸上的轮询协议(卫星)
公告牌
轮询 文件传输
确认 请求数据
上载消息
确认
公告牌
轮询公告 轮询响应
请求数据
下载
时间
船 卫星 网关 邮件服务器 邮件客户端
BBSC:公告牌信令信道 ASC:公告信令信道 UDC:单播数据信道
轮询响应
轮询响应
互联网
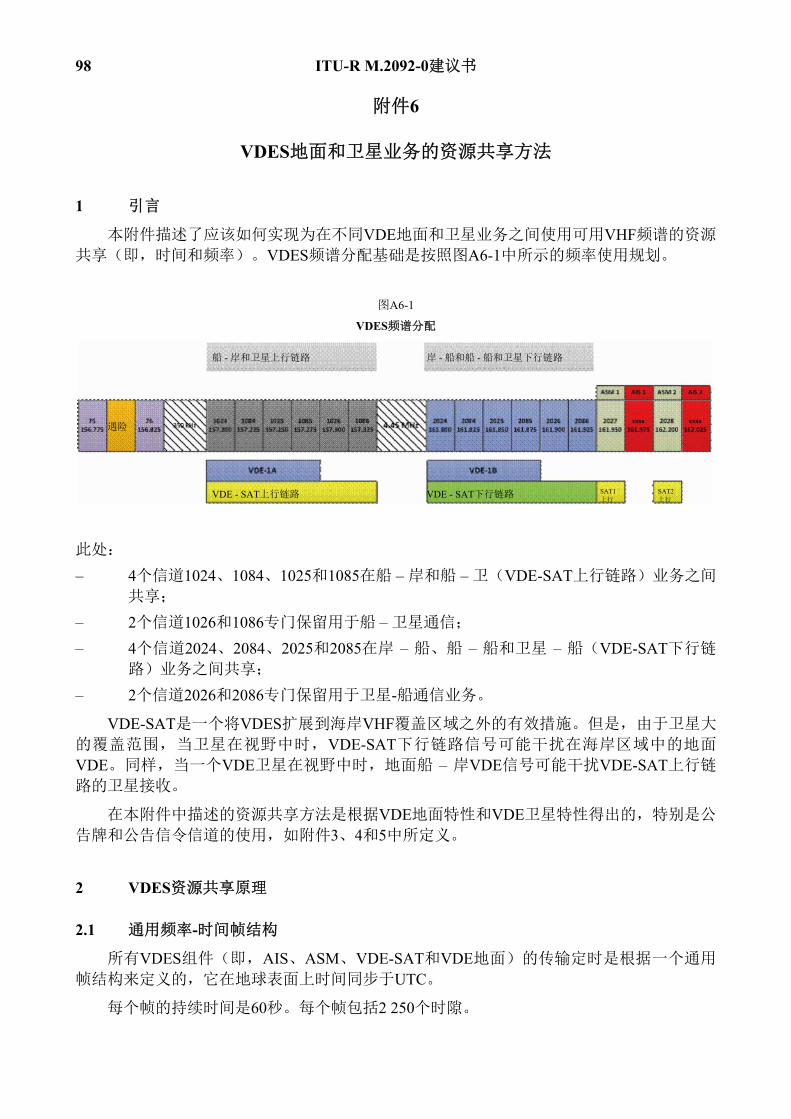
98 ITU-R M.2092-0建议书
附件6
VDES地面和卫星业务的资源共享方法
1 引言
本附件描述了应该如何实现为在不同VDE地面和卫星业务之间使用可用VHF频谱的资源
共享(即,时间和频率)。VDES频谱分配基础是按照图A6-1中所示的频率使用规划。
图A6-1
VDES频谱分配
此处: – 4个信道1024、1084、1025和1085在船 – 岸和船 – 卫(VDE-SAT上行链路)业务之间
共享; – 2个信道1026和1086专门保留用于船 – 卫星通信; – 4个信道2024、2084、2025和2085在岸 – 船、船 – 船和卫星 – 船(VDE-SAT下行链
路)业务之间共享; – 2个信道2026和2086专门保留用于卫星-船通信业务。
VDE-SAT是一个将VDES扩展到海岸VHF覆盖区域之外的有效措施。但是,由于卫星大
的覆盖范围,当卫星在视野中时,VDE-SAT下行链路信号可能干扰在海岸区域中的地面
VDE。同样,当一个VDE卫星在视野中时,地面船 – 岸VDE信号可能干扰VDE-SAT上行链
路的卫星接收。
在本附件中描述的资源共享方法是根据VDE地面特性和VDE卫星特性得出的,特别是公
告牌和公告信令信道的使用,如附件3、4和5中所定义。
2 VDES资源共享原理
2.1 通用频率-时间帧结构
所有VDES组件(即,AIS、ASM、VDE-SAT和VDE地面)的传输定时是根据一个通用
帧结构来定义的,它在地球表面上时间同步于UTC。
每个帧的持续时间是60秒。每个帧包括2 250个时隙。
船 - 岸和卫星上行链路 岸 - 船和船 - 船和卫星下行链路
遇险
VDE - SAT上行链路 VDE - SAT下行链路 SAT1 上行
SAT2 上行
ITU-R M.2092-0建议书 99
所有VDES发射机应该同步于此通用帧结构,并使用一个帧成分(即,子帧和时隙)的
通用编址,这样使每个时隙可以对每帧来唯一地识别。帧0开始于00:00:00 UTC,且一天
中有1440个不同的帧。应该考虑跳秒的影响来避免任何误差的传播。
帧和时隙边界应该独立于频段地符合一个VDE业务。
应该对由于传播时延或多普勒效应所引起的不确定性进行补偿或予以考虑(例如,保护
时间定义见附件 3和4,保护频段见附件4)。
2.2 AIS优先级
理解到,当传输发生时,一个具有单独一个天线的VDES移动台将经历降低的接收机灵
敏度,必须注意对AIS发射和接收按最高优先级来对待。
2.3 与ASM的协调
类似于所有VDES的组件,ASM传输符合一个通用帧结构。
对于ASM信道和对于在VDE-1B频段上的VDE船到船通信,传输是通过利用候选时隙选
择来实现,如附件2中第3.3.1.2节所描述。
2.4 岸上站VDES控制区
岸上站附近的VDES资源分配受到一个岸上站的监视和控制。岸上站使用地面公告牌
(TBB)和公告信令信道(ASC)来在该控制区内协调资源分配。该岸上站可以将涉及VDE卫星通信的信息包含在TBB和ASC之内。该岸上站可以直接从VDE-卫星下行链路(卫星公
告牌和ASC)获得VDE卫星信息,或与卫星业务提供者协调。
有用于TBB和ASC的专用时隙和频段,它们被保留用来向在一个岸上站控制区中的每条
船只传送所要求的信息。默认(或初始)分配在本附件的第4节中描述。
2.5 VDE-SAT资源分配
每颗卫星应该使用公告牌和公告信道(如附件4中所定义)来向在覆盖区中的船只传送
VDE-SAT资源分配(下行链路和上行链路)。
有用于卫星公告牌和公告信道的专用时隙和频段,它们被保留用于向在一颗卫星视野中
的每条船只传送所要求的信息。
因为卫星覆盖可以包括多个岸上站控制区,VDE-SAT资源分配应该符合在任何指定时
刻在视野内的岸上控制区的所有要求。在每个卫星轨道内,涉及资源分配的信息应该根据在
该卫星视野中的岸上站控制区来更新。
一个默认(或初始)VDE-SAT资源分配在以下第4节中定义,作为资源共享的出发点。
100 ITU-R M.2092-0建议书
3 帧的层结构定义
帧的层结构显示在图A7-2中。帧的层结构定义与给VDE信道的指定带宽无关。
3.1 时隙:
时隙是一个大约26.667 ms (60 000 / 2 250 = 80/3 ≈ 26.667)的时间间隔。
3.2 6时隙:
6个时隙应该构成一个6时隙(HS)。HS具有160 ms的持续时间。
HS应该从0到4循环编号。HS应该在每6个时隙后增加。
3.3 时隙编号
一个6时隙内的时隙应该从0到5编号,且一个特定时隙应该通过其时隙号(TN)来被引
用。
3.4 超级时隙
5个6时隙应该构成一个超级时隙(US)。US应该具有800 ms的持续时间。
US应该采用一个US号来编号。US应该从0到14循环编号。当6时隙返回0时,US应该增
加。
3.5 子帧
15个US应该构成一个子帧。该子帧应该具有12秒的持续时间。应该采用一个子帧号对
子帧编号。PL帧应该从0到4循环编号。当US返回0时,子帧应该增加。

ITU-R M.2092-0建议书 101
图A6-2
共享频率的帧的层结构
4 VDE地面和VDE-SAT下行链路资源共享
图A6-3显示了VDE岸 – 船、船 – 船和卫星下行链路系统之间频率和时隙协调的方法。
按照频率使用规划,信道2026和2086专门用于卫星VDE下行链路。在这些专用VDE-SAT频段中,有分配给卫星公告牌和公告信令信道的专用时隙。图A6-3显示了每个帧中这些
时隙的位置。在每个子帧中有90个连续时隙(1/5子帧持续时间)被分配给信令信道和公告
牌(此分配在每个帧中重复5次)。在专用VDE-SAT频段中的其他时隙分配根据公告牌和公
告信令信道的内容进行管理。
分配可以动态改变(按照卫星覆盖或临时需求)。
信道2024、2084、2025和2085在VDE-SAT下行链路和VDE地面之间共享。根据卫星覆盖
区和海岸控制区,资源分配可以改变。
在信道2024和2084中有专用时隙,分配给地面信令信道和地面公告牌,如图A6-3中所示。
这些时隙不应该被VDE-SAT下行链路使用。在每个子帧中,90个时隙被分配给信令。当船
在一个岸上VDE站的控制区之外时,为船-船考虑了相同的时隙。
当在视野中没有发射VDE卫星时,一个岸上站可以将VDE-1B的所有时隙分配给地面业
务。
1帧 = 5子帧 = 2250 时隙(= 60 s)
1子帧 = 15超级时隙 = 450 时隙(= 12 s)
1超级时隙 = 5个6时隙 = 30 时隙(= 800)
1个6时隙 = 6时隙(= 160 ms)
1时隙(时隙)≈ 26.667ms
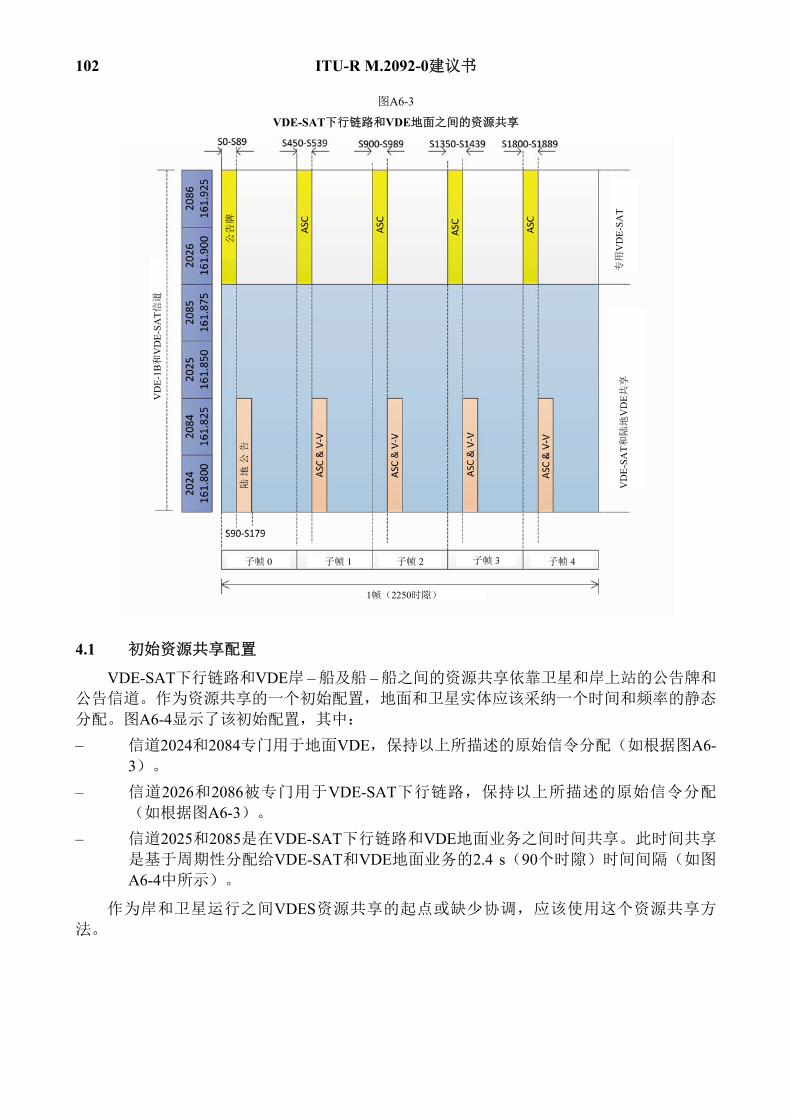
102 ITU-R M.2092-0建议书
图A6-3
VDE-SAT下行链路和VDE地面之间的资源共享
4.1 初始资源共享配置
VDE-SAT下行链路和VDE岸 – 船及船 – 船之间的资源共享依靠卫星和岸上站的公告牌和
公告信道。作为资源共享的一个初始配置,地面和卫星实体应该采纳一个时间和频率的静态
分配。图A6-4显示了该初始配置,其中: – 信道2024和2084专门用于地面VDE,保持以上所描述的原始信令分配(如根据图A6-
3)。 – 信道2026和2086被专门用于VDE-SAT下行链路,保持以上所描述的原始信令分配
(如根据图A6-3)。 – 信道2025和2085是在VDE-SAT下行链路和VDE地面业务之间时间共享。此时间共享
是基于周期性分配给VDE-SAT和VDE地面业务的2.4 s(90个时隙)时间间隔(如图
A6-4中所示)。
作为岸和卫星运行之间VDES资源共享的起点或缺少协调,应该使用这个资源共享方
法。
VD
E-1B
和V
DE-
SAT信
道
公告牌
专用
VD
E-SA
T V
DE-
SAT和
陆地
VD
E共享
陆地
公告
牌
子帧 1 子帧 2 子帧 3 子帧 4 子帧 0
1帧(2250时隙)
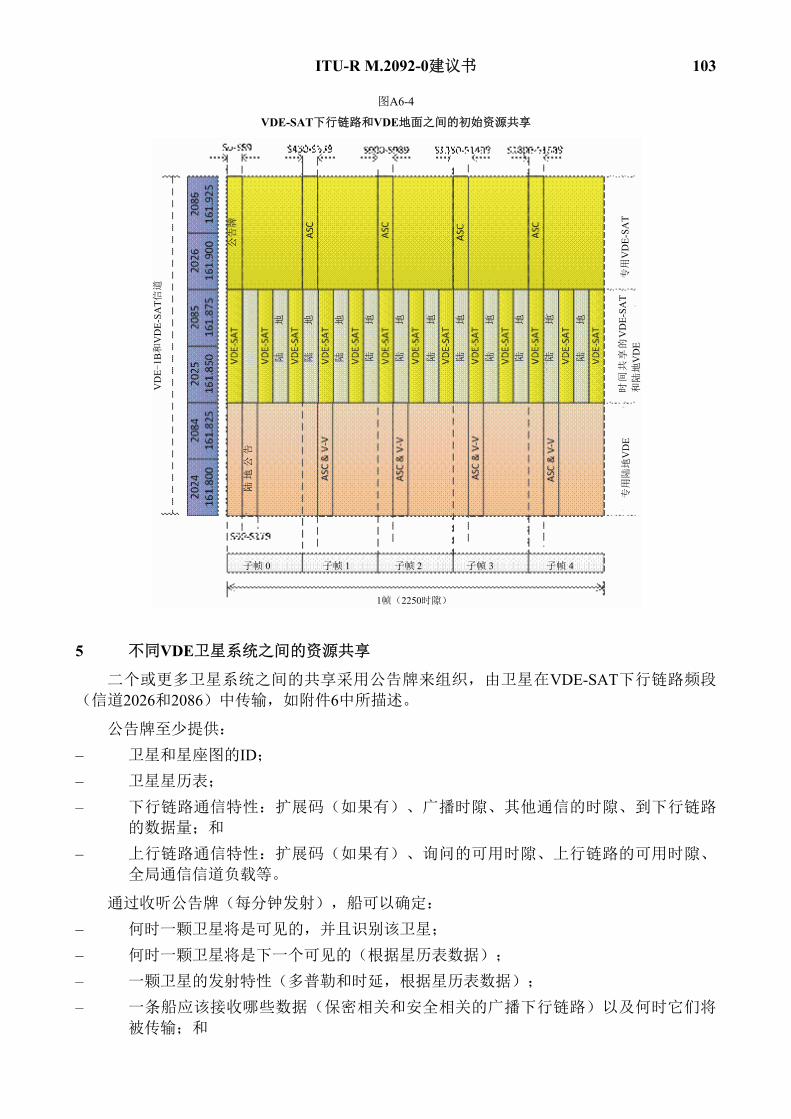
ITU-R M.2092-0建议书 103
图A6-4
VDE-SAT下行链路和VDE地面之间的初始资源共享
5 不同VDE卫星系统之间的资源共享
二个或更多卫星系统之间的共享采用公告牌来组织,由卫星在VDE-SAT下行链路频段
(信道2026和2086)中传输,如附件6中所描述。
公告牌至少提供: – 卫星和星座图的ID; – 卫星星历表; – 下行链路通信特性:扩展码(如果有)、广播时隙、其他通信的时隙、到下行链路
的数据量;和 – 上行链路通信特性:扩展码(如果有)、询问的可用时隙、上行链路的可用时隙、
全局通信信道负载等。
通过收听公告牌(每分钟发射),船可以确定: – 何时一颗卫星将是可见的,并且识别该卫星; – 何时一颗卫星将是下一个可见的(根据星历表数据); – 一颗卫星的发射特性(多普勒和时延,根据星历表数据); – 一条船应该接收哪些数据(保密相关和安全相关的广播下行链路)以及何时它们将
被传输;和
公告牌
专用
VD
E-SA
T 时
间共
享的
VD
E-SA
T和陆地
VD
E
陆地
公告
牌
陆地
陆地
陆地
陆地
陆地
陆地
陆地
陆地
陆地
陆地
陆地
VD
E-1B
和V
DE-
SAT信
道
专用陆地
VD
E
子帧 1 子帧 2 子帧 3 子帧 4 子帧 0
1帧(2250时隙)

104 ITU-R M.2092-0建议书
– 何时它可以为数据的上行链路或下行链路发起一个通信,以及全局中这个初始通信
将在帧的哪个部分发生。
用于公告牌的物理信道应该能够对从多颗卫星接收的重叠信号进行检测。使用如附件4中定义的直接序列扩展能够对最多8个重叠的信号进行检测。
6 VDE-1A地面和VDE-SAT上行链路资源共享
在较低频段,信道1026和1086专用于VDE-SAT上行链路,而信道1024、1084、1025和1085被共享用于地面和卫星通信。
专用VDE-SAT上行链路信道可以被用于对卫星的专用(按需求分配)或随机接入。因
为在这二个信道上没有VDE地面干扰,这些信道应该被用于更高优先级的消息(安全、遇
险、确认等)。
VDE地面(船 – 岸)和VDE-SAT上行链路之间的协调是采用如在VDE-SAT下行链路中
所规定的公告牌信令信道来实现的。
直接序列扩展用于VDE-SAT上行链路信道可以在有VDE船 – 岸干扰信号存在的情况下
提供一个更高级别的适应性。
ITU-R M.2092-0建议书 105
附件7
使VDES概念生效的原始设计考虑
1 引言
本附件提供关于VDES技术考虑的附加信息。它确定了地面和卫星VDE组件方面的问
题,包括接入方式选项、天线设计和系统共享。
本附件反映了用来制定附件2至6的所有原始材料。
2 运行能力和性能摘要
本附件显示了以下运行能力和性能: – 对GMDSS和AIS的保护,即,确认VDES的实施必须保证数字选择呼叫、AIS和语音
遇险、安全和呼叫通信(信道16)的功能不受损害; – 缓解AIS VDL拥塞; – 以28.8 kbit/s进行原始ASM数据传输; – 以307.2 kbit/s进行船 – 船、船 – 岸和岸 – 船的原始VDE数据传输; – 以最高240 kbit/s进行原始VDE卫星数据传输; – 满足PFD掩模要求的VDE卫星下行链路; – 到85 km(46 NM)的VDE岸 – 船和船 – 岸业务; – 组织链路和缓解冲突的信道接入和共享方式; – 来自单独一个船载天线的完全VDES卫星和地面功能。
3 VHF数据交换系统接入方式的技术考虑
本节为VDE地面、VDE卫星及这些VDES组件之间互动设计接入方式提供技术考虑。
从A1-1中,卫星下行链路与地面船-船和岸-船链路共享频谱,而卫星上行链路与地面船-岸链路共享频谱。因此,应该考虑接入方式来缓解这些链路之间的潜在冲突。
4 用于VHF数据交换地面业务的时分多址接入方式
VDES地面业务包括ASM、VDE船 – 岸、VDE岸 – 船和VDE船 – 船。在图A7-1中展示了
船载VDES发射接收机实施的一个实例。注意,在此实施实例中,包括AIS接收机的所有接
收机采用衰减来自无线电规则附录18频段较低端信号的带通滤波器来针对来自船载VHF无线
电阻塞进行保护。AIS接收机阻塞问题和AIS可以与其他VDES功能共享同相同天线的情况对
制造商为他们的VDES系统设计而考虑这种实施是个鼓励。

106 ITU-R M.2092-0建议书
图A7-1
VHF数据交换系统发射接收机实施的实例
4.1 时分多址方式
4.1.1 用于VHF数据交换系统应用特定消息信道的时分多址方式
注意,ITU-R M.1371建议书规定了在AIS信道上AIS消息的接入方式,包括ITDMA。它
还为这些消息规定了ASM的结构和内容选项。VDES提供专用ASM信道来缓解AIS信道上的
拥塞。在VDES下,采用ASM信道的接入方式对一个帧中的第一次传输初始可以是载波侦听
TDMA (CSTDMA),随后对在该帧中的后续传输采用ITDMA。此方式缓解了船上和/或岸上
站在ASM信道上的同时传输。一个ASM传输不应该超过5个连续时隙。
4.1.2 用于VHF数据交换系统船-岸链路的时分多址方式
VDE1-A船 – 岸链路的TDMA接入方式可以是通过预留从在任意一个ASM信道上的一个
ASM通过ITDMA,如第4.1.1节所描述。一个VDE1-A船 – 岸传输不应该超过5个连续时隙。
4.1.3 用于VHF数据交换系统船-船链路的时分多址方式
用于VDE1-B船 – 船链路的TDMA接入方式可以与用于ASM信道的相同,即,开始对一
个帧中的第一次传输采用CSTDMA,随后对在该帧中的后续传输采用ITDMA。此方式缓解
了同时的船-船传输。一个VDE1-B船 – 船传输不应该超过5个连续时隙。
4.1.4 用于VHF数据交换系统岸 – 船链路的时分多址方式
用于VDE-1B岸-船链路的TDMA接入方式可以与用于VDE1船-岸链路的相同,即,通过
预留从在任意一个ASM信道上的一个ASM通过ITDMA。这是必要的,因为岸上站通常具有
一个与船相比非常宽的覆盖区,并且它需要在其覆盖区中有优先权接入VDE1信道。一个
VDE1-B岸-船传输不应该超过5个连续时隙。
VHF天线 AIS-VDE多功能
发射机
T/R开关
AIS/ASM接收机
4通道 AIS-VDE多功能收/发处理器
GPS天线
HMI/显示
带通滤波器
VDE/SAT接收机
2通道
*例如,可以使用SDR(软件定义无线电)技术
ITU-R M.2092-0建议书 107
4.2 VHF数据交换地面和VHF数据交换卫星业务的共享选项
4.2.1 在上部分上的VHF数据交换地面链路(VDE1-B)和VHF数据交换卫星下行链路
表A4-1提供来自从0°到90°的各种仰角的卫星下行链路的在地球表面的PFD。尽管PFD掩
模被选择来使对陆地移动业务的干扰最小,并使船上VDES站接收最大,但是当卫星在视野中
时,在卫星VDE下行链路传输期间对地面VDES链路的接收仍有升高噪声基底的潜在影响。
对共享VDE1-B频率和VDE-SAT下行链路所要考虑的问题是: – 当船载VDES发射接收机是单工时,它们在发射时不能接收。 – 由于升高噪声基底,VDE-SAT下行链路传输电平将潜在地影响船-船和岸-船VDES的
接收。 – 取决于距离,由于共信道干扰,船 – 船和岸 – 船VDES传输将潜在地干扰VDE-SAT下
行链路的接收。
4.2.1.1 频分多址
频分多址(FDMA)是通过对VDE-SAT下行链路采用仅仅上50 kHz来完成的,即,二个
信道2026和2086。FDMA将缓解以上所述的最后二个问题。与以下所建议的其他技术相比,
FDMA的实现将是最直截了当的。但是,这将导致带宽减少到1/3,并且引起VDE-SAT下行
链路对相同负载的传输持续三倍长,而且它将不缓解以上所述的第一个问题。
4.2.1.2 时分多址
用于岸 – 船/船 – 船和VDE-SAT下行链路业务的TDMA方式将使得能够以时间共享的方
式充分使用分配给每个业务的频谱。时间共享可以缓解在以上第4.2.1节所述的所有三个问 题。但是,它将对VDE-SAT组件提出一些设计挑战,并在VDE-SAT下行链路的吞吐量上让
步。
被用于VDES的基于AIS的TDMA时隙结构(2250时隙/分/帧)和接入方式(ITDMA、
CSTDMA和FATDMA)在ITU-R M.1371建议书中定义。此TDMA组织方式保护AIS的完整
性,并被用于组织和同步ASM和VDE传输。
4.2.1.3 完全频率重用(同时传输)
以这种方式,允许地面和卫星组件同时使用信道2024、2084、2025和2085。VDE-SAT下行链路将额外地使用信道2026和2086。VDE-SAT下行链路可以连续广播来使对在其视野
中大量船的数据分发最大。这将允许VDE-SAT接收机的更有效实施。原则上,仅仅在卫星
通过期间,VDE-SAT下行链路在VDE地面上所引起的干扰可以通过在地面链路中使用更多
的保护编码方式来补偿。
对一个最可能的具有越极轨道的低地球轨道卫星场景,对于纬度在±50度之内的地理位
置,卫星干扰的影响可以被限制到少于仅仅每天每颗卫星15分钟,如图A7-2中所示。
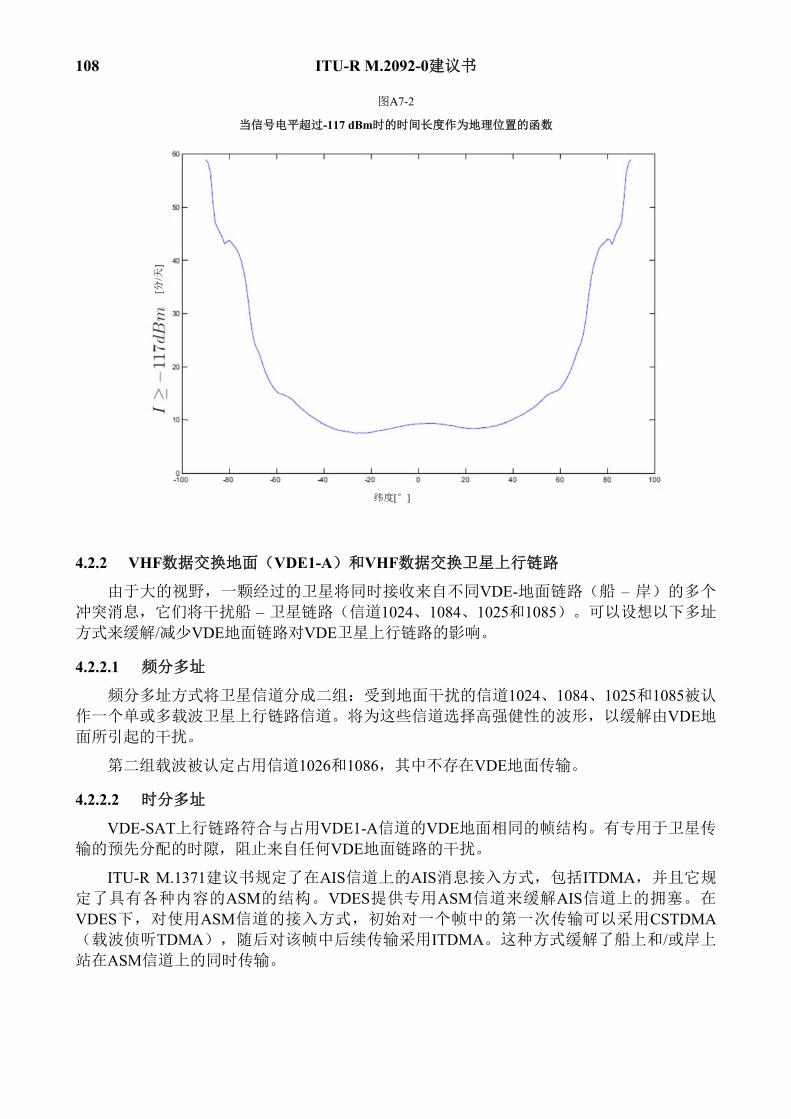
108 ITU-R M.2092-0建议书
图A7-2
当信号电平超过-117 dBm时的时间长度作为地理位置的函数
4.2.2 VHF数据交换地面(VDE1-A)和VHF数据交换卫星上行链路
由于大的视野,一颗经过的卫星将同时接收来自不同VDE-地面链路(船 – 岸)的多个
冲突消息,它们将干扰船 – 卫星链路(信道1024、1084、1025和1085)。可以设想以下多址
方式来缓解/减少VDE地面链路对VDE卫星上行链路的影响。
4.2.2.1 频分多址
频分多址方式将卫星信道分成二组:受到地面干扰的信道1024、1084、1025和1085被认
作一个单或多载波卫星上行链路信道。将为这些信道选择高强健性的波形,以缓解由VDE地面所引起的干扰。
第二组载波被认定占用信道1026和1086,其中不存在VDE地面传输。
4.2.2.2 时分多址
VDE-SAT上行链路符合与占用VDE1-A信道的VDE地面相同的帧结构。有专用于卫星传
输的预先分配的时隙,阻止来自任何VDE地面链路的干扰。
ITU-R M.1371建议书规定了在AIS信道上的AIS消息接入方式,包括ITDMA,并且它规
定了具有各种内容的ASM的结构。VDES提供专用ASM信道来缓解AIS信道上的拥塞。在
VDES下,对使用ASM信道的接入方式,初始对一个帧中的第一次传输可以采用CSTDMA (载波侦听TDMA),随后对该帧中后续传输采用ITDMA。这种方式缓解了船上和/或岸上
站在ASM信道上的同时传输。
[分/天
]
纬度[°]
ITU-R M.2092-0建议书 109
4.2.2.3 完全频率重用
允许地面和卫星组件同时使用信道1024、1084、1025和1085。VDE-SAT上行链路将使用
适当设计的占用VDE-SAT上行链路信道的波形来使VDE地面传输所引起干扰的影响最小。
5 VHF数据交换 – 地面
5.1 用于VHF数据交换的波形
5.1.1 用于VHF数据交换地面链路的传输波形
在ITU-R M.1842建议书中描述了ITU批准的用于VHF海上频段中高频谱效率数据传输的
波形。这些波形已经示范在陆地移动业务中和海上实验中,以在强烈电磁环境中扩展的传播
距离上提供强健的数据业务和缓解多径劣化。以下表 A7-1提供当前AIS标准、ITU-R M.1371建议书和为地面VDES链路、ASM和VDE引入的新应用之间的性能比较。注意,AIS的频谱
效率比VDES的低得多,但是AIS调制具有优越的共信道抑制,为船只提供更好的距离鉴别
和改善的导航安全性。每种调制类型旨在最好地适合其特定的应用(AIS、ASM和VDE)。
在附件3中按照ITU传播标准ITU-R P.1546-5建议书提供了地面链路传播距离预测。
表A7-1
用于自动识别系统、应用特定消息和VHF数据交换 地面链路的ITU标准传输波形
25 kHz信道 用于AIS
25 kHz信道 用于ASM
25 kHz信道 用于VDE
ITU标准 ITU-R M.1371 ITU-R M.1842-1 附件1
ITU-R M.1842-1 附件4 ***
数字调制 GMSK, 单载波
π/4 DQPSK, 单载波
16-QAM,32多载波,2.7 kHz间隔
数据速率(原始)* 9.6 kbit/s (1X) 28.8 kbit/s (3X) 307.2 kbit/s (32X)
灵敏度** -107 dBm(最小) -112 dBm(典型)
-107 dBm(最小) -112 dBm(典型)
-98 dBm(船) -103 dBm(基站)
共信道抑制(CCR)**
10 dB 19 dB 19 dB
AIS消息类型 1、2、3、5、18、19、27…
6、7、8、12、13、14、25、26和ASM
VDE消息
基本原理 用于在一个船-船导航
安全环境中位置报告
的最佳选择(更好的
CCR)
提供比AIS更高的(3倍)数据传输。与AIS相比较差的CCR(+9 dB)和距离鉴别
提供比AIS更高的(32倍)数据
传输。与AIS相比较差的CCR (+9 dB)和距离鉴别
* 这些数值是原始的空中比特传输速率。由于编码、包结构和前向纠错(FEC),数据速率更小。
** 这些数值是基于发布的标准。对于AIS,标准是IEC 61993-2,而对于VDE,标准是ETSI EN 300 392-2版本 3.4.1,它涉及一个陆地移动应用TETRA。
*** 对于在需要时的更高强健性,可以使用ITU-R M.1842-1附件 1。
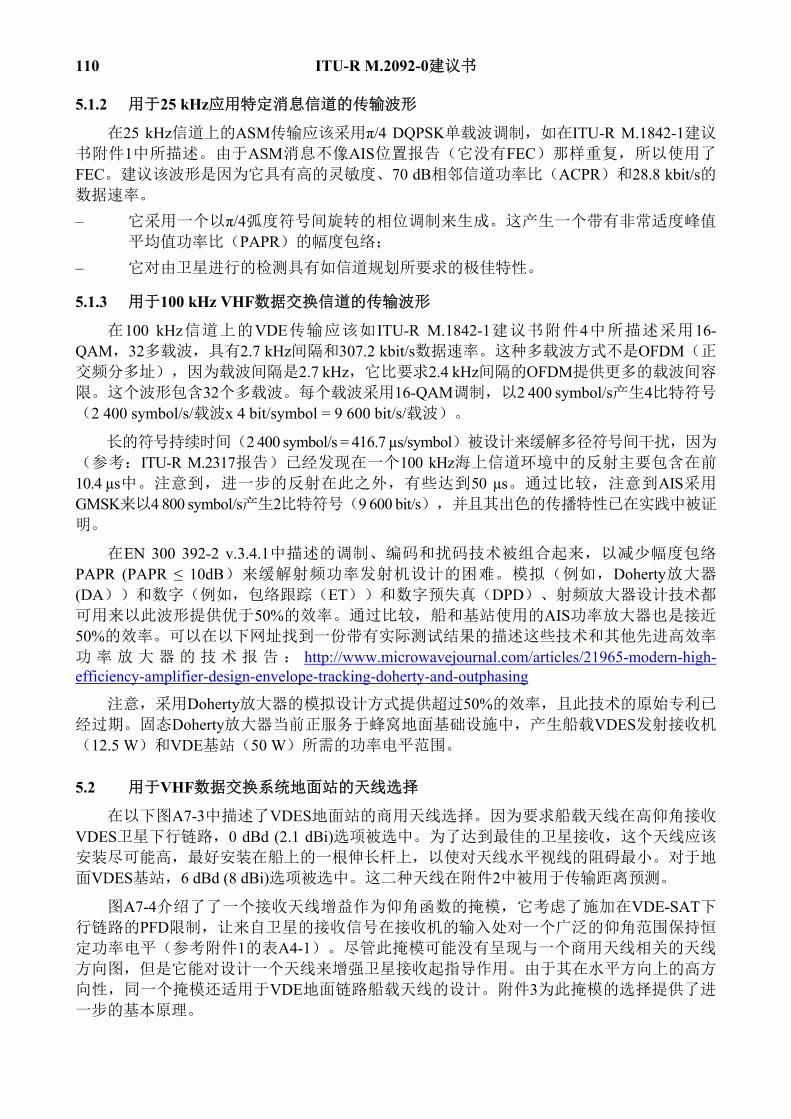
110 ITU-R M.2092-0建议书
5.1.2 用于25 kHz应用特定消息信道的传输波形
在25 kHz信道上的ASM传输应该采用π/4 DQPSK单载波调制,如在ITU-R M.1842-1建议
书附件1中所描述。由于ASM消息不像AIS位置报告(它没有FEC)那样重复,所以使用了
FEC。建议该波形是因为它具有高的灵敏度、70 dB相邻信道功率比(ACPR)和28.8 kbit/s的数据速率。 – 它采用一个以π/4弧度符号间旋转的相位调制来生成。这产生一个带有非常适度峰值
平均值功率比(PAPR)的幅度包络; – 它对由卫星进行的检测具有如信道规划所要求的极佳特性。
5.1.3 用于100 kHz VHF数据交换信道的传输波形
在100 kHz信道上的VDE传输应该如 ITU-R M.1842-1建议书附件4中所描述采用16-QAM,32多载波,具有2.7 kHz间隔和307.2 kbit/s数据速率。这种多载波方式不是OFDM(正
交频分多址),因为载波间隔是2.7 kHz,它比要求2.4 kHz间隔的OFDM提供更多的载波间容
限。这个波形包含32个多载波。每个载波采用16-QAM调制,以2 400 symbol/s产生4比特符号
(2 400 symbol/s/载波x 4 bit/symbol = 9 600 bit/s/载波)。
长的符号持续时间(2 400 symbol/s = 416.7 µs/symbol)被设计来缓解多径符号间干扰,因为
(参考:ITU-R M.2317报告)已经发现在一个100 kHz海上信道环境中的反射主要包含在前
10.4 µs中。注意到,进一步的反射在此之外,有些达到50 µs。通过比较,注意到AIS采用
GMSK来以4 800 symbol/s产生2比特符号(9 600 bit/s),并且其出色的传播特性已在实践中被证
明。
在EN 300 392-2 v.3.4.1中描述的调制、编码和扰码技术被组合起来,以减少幅度包络
PAPR (PAPR ≤ 10dB)来缓解射频功率发射机设计的困难。模拟(例如,Doherty放大器
(DA))和数字(例如,包络跟踪(ET))和数字预失真(DPD)、射频放大器设计技术都
可用来以此波形提供优于50%的效率。通过比较,船和基站使用的AIS功率放大器也是接近
50%的效率。可以在以下网址找到一份带有实际测试结果的描述这些技术和其他先进高效率
功 率 放 大 器 的 技 术 报 告 : http://www.microwavejournal.com/articles/21965-modern-high-efficiency-amplifier-design-envelope-tracking-doherty-and-outphasing
注意,采用Doherty放大器的模拟设计方式提供超过50%的效率,且此技术的原始专利已
经过期。固态Doherty放大器当前正服务于蜂窝地面基础设施中,产生船载VDES发射接收机
(12.5 W)和VDE基站(50 W)所需的功率电平范围。
5.2 用于VHF数据交换系统地面站的天线选择
在以下图A7-3中描述了VDES地面站的商用天线选择。因为要求船载天线在高仰角接收
VDES卫星下行链路,0 dBd (2.1 dBi)选项被选中。为了达到最佳的卫星接收,这个天线应该
安装尽可能高,最好安装在船上的一根伸长杆上,以使对天线水平视线的阻碍最小。对于地
面VDES基站,6 dBd (8 dBi)选项被选中。这二种天线在附件2中被用于传输距离预测。
图A7-4介绍了了一个接收天线增益作为仰角函数的掩模,它考虑了施加在VDE-SAT下行链路的PFD限制,让来自卫星的接收信号在接收机的输入处对一个广泛的仰角范围保持恒
定功率电平(参考附件1的表A4-1)。尽管此掩模可能没有呈现与一个商用天线相关的天线
方向图,但是它能对设计一个天线来增强卫星接收起指导作用。由于其在水平方向上的高方
向性,同一个掩模还适用于VDE地面链路船载天线的设计。附件3为此掩模的选择提供了进
一步的基本原理。
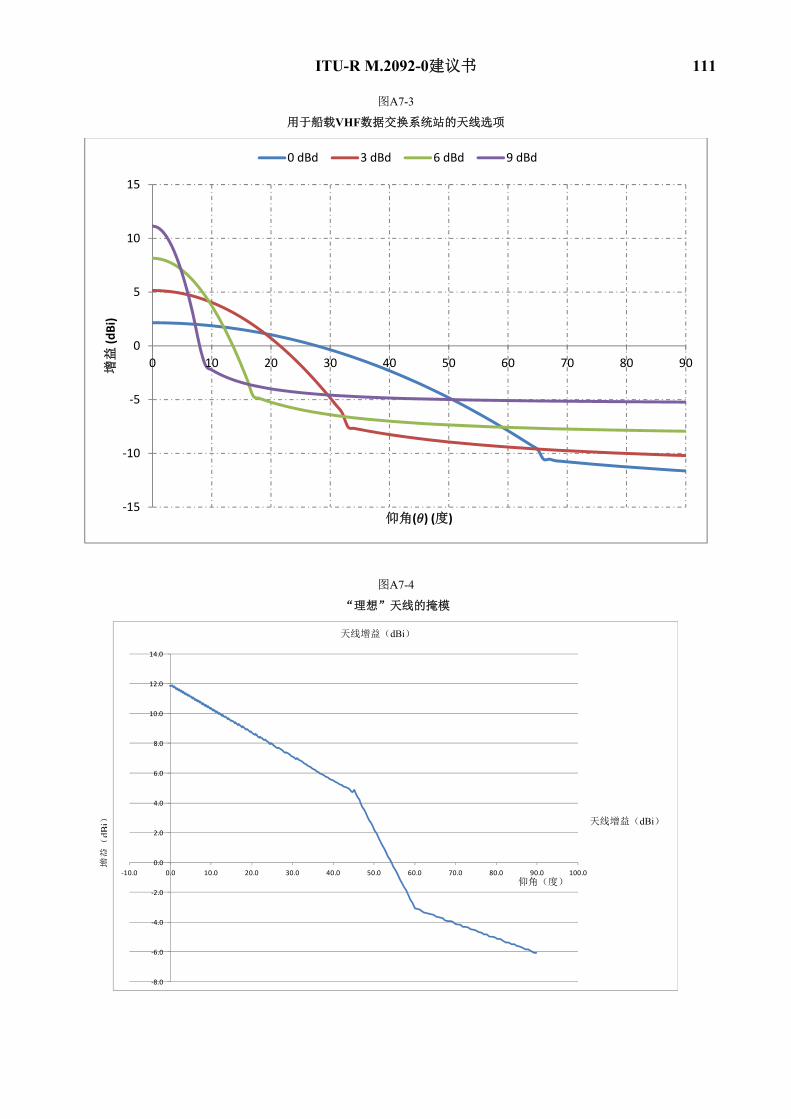
ITU-R M.2092-0建议书 111
图A7-3
用于船载VHF数据交换系统站的天线选项
图A7-4
“理想”天线的掩模
-15
-10
-5
0
5
10
15
0 10 20 30 40 50 60 70 80 90
增益
(dBi
)
仰角( ) (度)
0 dBd 3 dBd 6 dBd 9 dBd
-8.0
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
-10.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0 100.0
Gain Antenne dBi
Gain Antenne dBi
Antenna gain dBi
仰角(度)
增益(
dBi) Antenna gain
in dBi
天线增益(dBi)
天线增益(dBi)
112 ITU-R M.2092-0建议书
6 卫星进行的VHF数据交换
卫星进行的VHF数据交换应该使用附件1的表A1-1中为卫星指定的信道,并且应该符合
本建议书。这将在下面进一步描述。
6.1 概述
6.1.1 VHF数据交换系统卫星组件
VHF数据交换VDE卫星组件是一种将VDES扩展到海岸VHF覆盖之外的高效方法。此
后,卫星组件被称为VDE-SAT。
卫星通信能够以一个广播、多播或单播模式向众多船只传送信息,即,使用仅仅最少的
无线电频谱资源有效地顾及很多船只。
VDE-SAT提供一个通信信道,它是对VDES系统地面组件的补充(即,与地面VDE、ASM和AIS功能及它们的支撑系统相协调)。
6.1.2 应用
与海事界的持续交流将对未来VDES业务的优先级、服务质量、安全性、完整性和其他
要求提供进一步的了解。
有大量的较小尺寸船只,它们在船上没有卫星通信设备,但却有常规的VHF/AIS接收设
备,可以受益于以上所提到的业务。这将对在具有有限岸上基站基础设施区域中的船只群体
特别有益。
采用低成本卫星接收技术,VDE-SAT可以顾及大量船只并对小型船只、渔船和休闲船
只提供服务。
6.2 总体结构、运行特性和假设
6.2.1 结构
在以下图A7-5中显示了VHF数据交换系统的结构。VDE-SAT由一颗或多颗在海上VHF频带中发射和接收的卫星构成。这是空间段。
由于所用的频率,很可能VDE-SAT将包括低地球轨道(LEO)或中地球轨道(MEO)
卫星。VDE-SAT还可能包括在这样轨道上的宇宙飞船承载的负载。
VDE-SAT用户终端可以被集成在船载VDES设备中。这被称为用户段。这些终端可以与
ASM和AIS功能一起集成在地面VDE设备中。还可以考虑仅仅接收VDE-SAT的终端:这些将
提供一个非常高效益的方式来向地面VHF覆盖之外的较小船只传播信息,例如,在具有有限
岸基基础设施的区域中。
将会有一个包括一个或多个地面站的地面段,它将为了进一步处理或传播通过空间段向
船只发送和从船只接收海事信息。海岸VDE站、海事信息提供者、VDE-SAT地面站和馈送
链路之间的通信不是VDES结构的一部分。
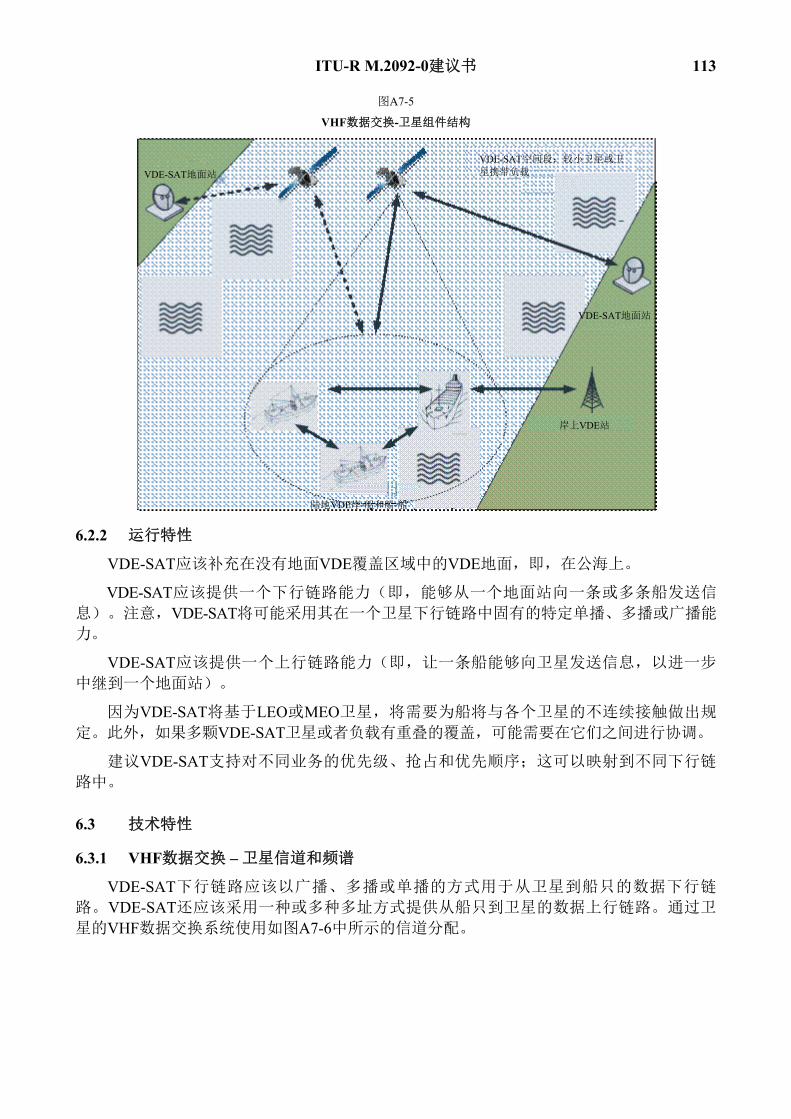
ITU-R M.2092-0建议书 113
图A7-5
VHF数据交换-卫星组件结构
6.2.2 运行特性
VDE-SAT应该补充在没有地面VDE覆盖区域中的VDE地面,即,在公海上。
VDE-SAT应该提供一个下行链路能力(即,能够从一个地面站向一条或多条船发送信
息)。注意,VDE-SAT将可能采用其在一个卫星下行链路中固有的特定单播、多播或广播能
力。
VDE-SAT应该提供一个上行链路能力(即,让一条船能够向卫星发送信息,以进一步
中继到一个地面站)。
因为VDE-SAT将基于LEO或MEO卫星,将需要为船将与各个卫星的不连续接触做出规
定。此外,如果多颗VDE-SAT卫星或者负载有重叠的覆盖,可能需要在它们之间进行协调。
建议VDE-SAT支持对不同业务的优先级、抢占和优先顺序;这可以映射到不同下行链
路中。
6.3 技术特性
6.3.1 VHF数据交换 – 卫星信道和频谱
VDE-SAT下行链路应该以广播、多播或单播的方式用于从卫星到船只的数据下行链
路。VDE-SAT还应该采用一种或多种多址方式提供从船只到卫星的数据上行链路。通过卫
星的VHF数据交换系统使用如图A7-6中所示的信道分配。
VDE-SAT地面站 VDE-SAT空间段:较小卫星或卫
星携带负载
VDE-SAT地面站
岸上VDE站
陆地VDE岸-船和船-船
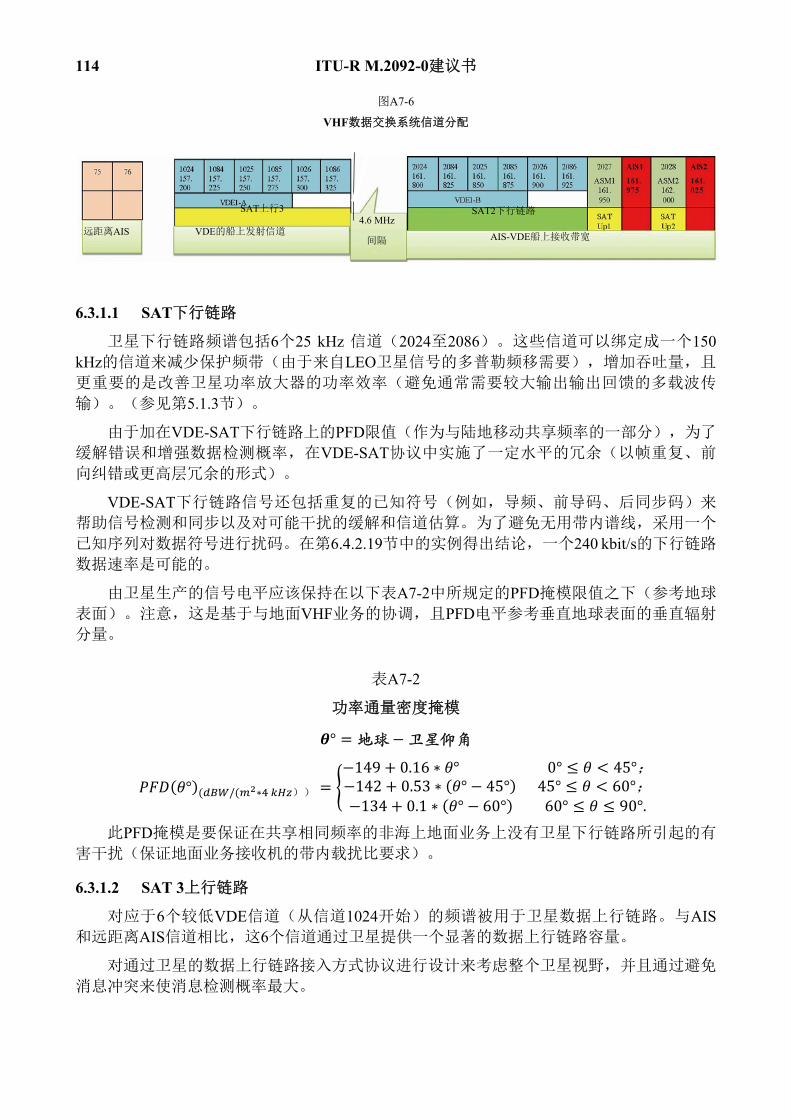
114 ITU-R M.2092-0建议书
图A7-6
VHF数据交换系统信道分配
6.3.1.1 SAT下行链路
卫星下行链路频谱包括6个25 kHz 信道(2024至2086)。这些信道可以绑定成一个150 kHz的信道来减少保护频带(由于来自LEO卫星信号的多普勒频移需要),增加吞吐量,且
更重要的是改善卫星功率放大器的功率效率(避免通常需要较大输出输出回馈的多载波传
输)。(参见第5.1.3节)。
由于加在VDE-SAT下行链路上的PFD限值(作为与陆地移动共享频率的一部分),为了
缓解错误和增强数据检测概率,在VDE-SAT协议中实施了一定水平的冗余(以帧重复、前
向纠错或更高层冗余的形式)。
VDE-SAT下行链路信号还包括重复的已知符号(例如,导频、前导码、后同步码)来
帮助信号检测和同步以及对可能干扰的缓解和信道估算。为了避免无用带内谱线,采用一个
已知序列对数据符号进行扰码。在第6.4.2.19节中的实例得出结论,一个240 kbit/s的下行链路
数据速率是可能的。
由卫星生产的信号电平应该保持在以下表A7-2中所规定的PFD掩模限值之下(参考地球
表面)。注意,这是基于与地面VHF业务的协调,且PFD电平参考垂直地球表面的垂直辐射
分量。
表A7-2
功率通量密度掩模 ° = 地球 − 卫星仰角
( °)( /( ∗ )) = −149 + 0.16 ∗ ° 0° ≤ < 45°;−142 + 0.53 ∗ ( ° − 45°) 45° ≤ < 60°;−134 + 0.1 ∗ ( ° − 60°) 60° ≤ ≤ 90°.
此PFD掩模是要保证在共享相同频率的非海上地面业务上没有卫星下行链路所引起的有
害干扰(保证地面业务接收机的带内载扰比要求)。
6.3.1.2 SAT 3上行链路
对应于6个较低VDE信道(从信道1024开始)的频谱被用于卫星数据上行链路。与AIS和远距离AIS信道相比,这6个信道通过卫星提供一个显著的数据上行链路容量。
对通过卫星的数据上行链路接入方式协议进行设计来考虑整个卫星视野,并且通过避免
消息冲突来使消息检测概率最大。
VDE的船上发射信道 远距离AIS
SAT上行3 4.6 MHz
间隔 AIS-VDE船上接收带宽
SAT2下行链路
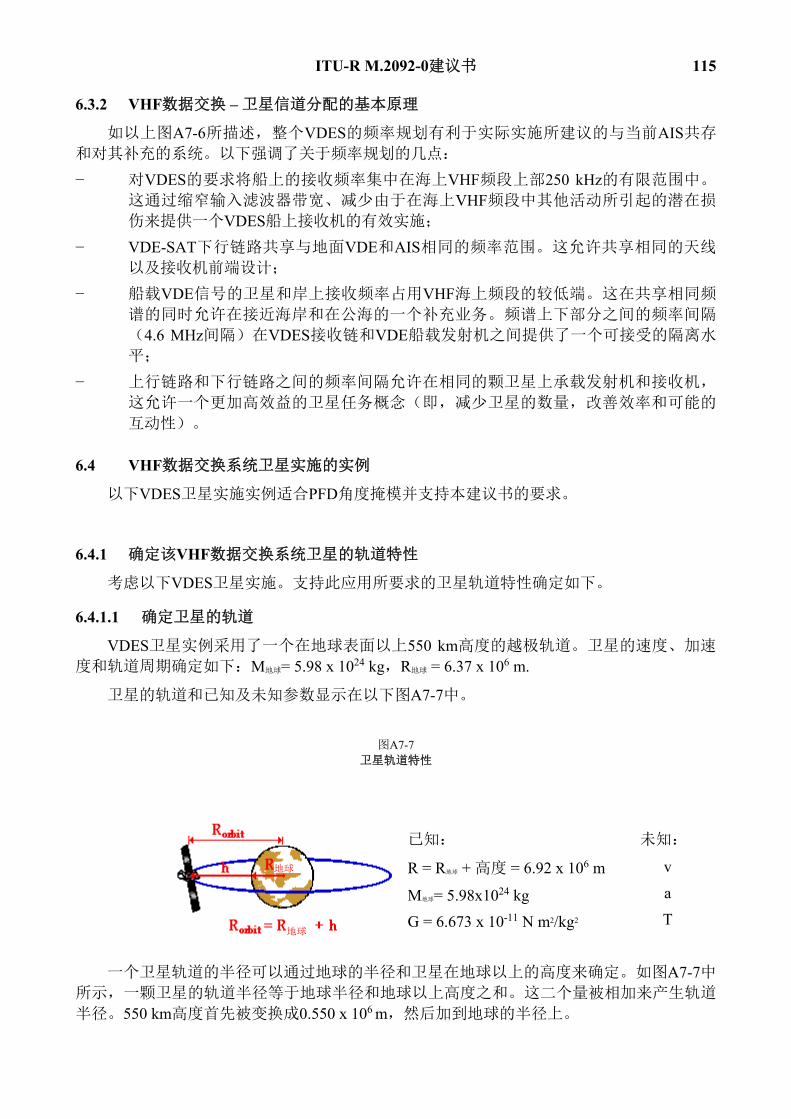
ITU-R M.2092-0建议书 115
6.3.2 VHF数据交换 – 卫星信道分配的基本原理
如以上图A7-6所描述,整个VDES的频率规划有利于实际实施所建议的与当前AIS共存
和对其补充的系统。以下强调了关于频率规划的几点: − 对VDES的要求将船上的接收频率集中在海上VHF频段上部250 kHz的有限范围中。
这通过缩窄输入滤波器带宽、减少由于在海上VHF频段中其他活动所引起的潜在损
伤来提供一个VDES船上接收机的有效实施; − VDE-SAT下行链路共享与地面VDE和AIS相同的频率范围。这允许共享相同的天线
以及接收机前端设计; − 船载VDE信号的卫星和岸上接收频率占用VHF海上频段的较低端。这在共享相同频
谱的同时允许在接近海岸和在公海的一个补充业务。频谱上下部分之间的频率间隔
(4.6 MHz间隔)在VDES接收链和VDE船载发射机之间提供了一个可接受的隔离水
平; − 上行链路和下行链路之间的频率间隔允许在相同的颗卫星上承载发射机和接收机,
这允许一个更加高效益的卫星任务概念(即,减少卫星的数量,改善效率和可能的
互动性)。
6.4 VHF数据交换系统卫星实施的实例
以下VDES卫星实施实例适合PFD角度掩模并支持本建议书的要求。
6.4.1 确定该VHF数据交换系统卫星的轨道特性
考虑以下VDES卫星实施。支持此应用所要求的卫星轨道特性确定如下。
6.4.1.1 确定卫星的轨道
VDES卫星实例采用了一个在地球表面以上550 km高度的越极轨道。卫星的速度、加速
度和轨道周期确定如下:M地球= 5.98 x 1024 kg,R地球 = 6.37 x 106 m.
卫星的轨道和已知及未知参数显示在以下图A7-7中。
图A7-7 卫星轨道特性
一个卫星轨道的半径可以通过地球的半径和卫星在地球以上的高度来确定。如图A7-7中所示,一颗卫星的轨道半径等于地球半径和地球以上高度之和。这二个量被相加来产生轨道
半径。550 km高度首先被变换成0.550 x 106 m,然后加到地球的半径上。
已知:
R = R地球 + 高度 = 6.92 x 106 m
M地球= 5.98x1024 kg G = 6.673 x 10-11 N m2/kg2
未知:
v a T
地球
地球

116 ITU-R M.2092-0建议书
确定卫星的速度,
v = SQRT ((G x M中心) / R);
v = SQRT ((6.673 x 10-11 N m2/kg2) x (5.98 x 1024 kg)/ (6.92 x 106 m));
v = 7.594 x 103 m/s。
确定卫星的加速度,
a = (G x M中心)/R2;
a = (6.673 x 10-11 N m2/kg2) x (5.98 x 1024 kg) / (6.92 x 106 m)2;
a = 8.333 m/s2.
确定卫星的轨道周期,
T = SQRT ((4 x π2 x R3) / (G x M中心)) ;
T = SQRT ((4 x (3.1415)2 x (6.92 x 106 m)3 / (6.673 x 10-11 N m2/kg2) x (5.98 x 1024 kg));
T = 5725.7 s = 1.59 h。
6.4.2 VHF数据交换系统卫星天线和下行链路特性
一个定向垂直极化八木天线被用于与船的垂直天线通信,并且还要符合PFD角度掩模。
6.4.2.1 确定每个卫星轨道之间地球在赤道处的旋转:
地球的周期Te 近似为24小时(86.4 x 103 s),地球的半径Re是6.37 x 106 m,而地球的周
长(环绕赤道的距离)是C中心= 2 x (3.1415)x (6.37 x 106 m) = 40.0239 x 106 m。因此,在卫星
的每次经过中,地球将已经在赤道旋转了ROT赤道 = C地球 x T / Te= 40.0239 x 106 m x 5725.7 s /86.4 x 103 s = 2.6524 x 106 m = 2652.4 km。
6.4.2.2 确定到地球水平面的倾斜距离:
从卫星到地球水平面的倾斜距离Ds是Ds = SQRT (R2 – Re2) = SQRT ((6.92 x 106 m)2 – (6.37 x 106 m)2) = 2.7036 x 106 m = 2703.6 km。
6.4.2.3 确定对地球水平面的斜面下倾角:
卫星对地球水平面的下倾角是:
θd = 90° - sin-1 (Re / R) = 90° - sin-1(6.37 x 106 m / 6.92 x 106 m) = 90° - 67° = 23度。
6.4.2.4 确定天线覆盖路径的宽度:
VDES卫星天线方向图实例显示在以下图A7-8中。天线的波束宽度(+/- 3 dB)是80度。
卫星天线覆盖路径的宽度是:
Wc= 2(Ds cos (90°-θa/2))
Wc = 2 x 2.7036 x 106 m x cos (90°-80°/2) = 3.4757 x 106 m = 3475.6 km。 注:从第4.2.1节,因为ROT赤道= 2 652.4 km,此天线波束宽度(θa = 80°)对由一颗卫星每24小时连续
覆盖地球是足够宽的。这个垂直极化八木天线以一个最佳的下倾角指向朝前的方向来为由船的垂直
双极天线进行接收提供辐射的垂直分量。
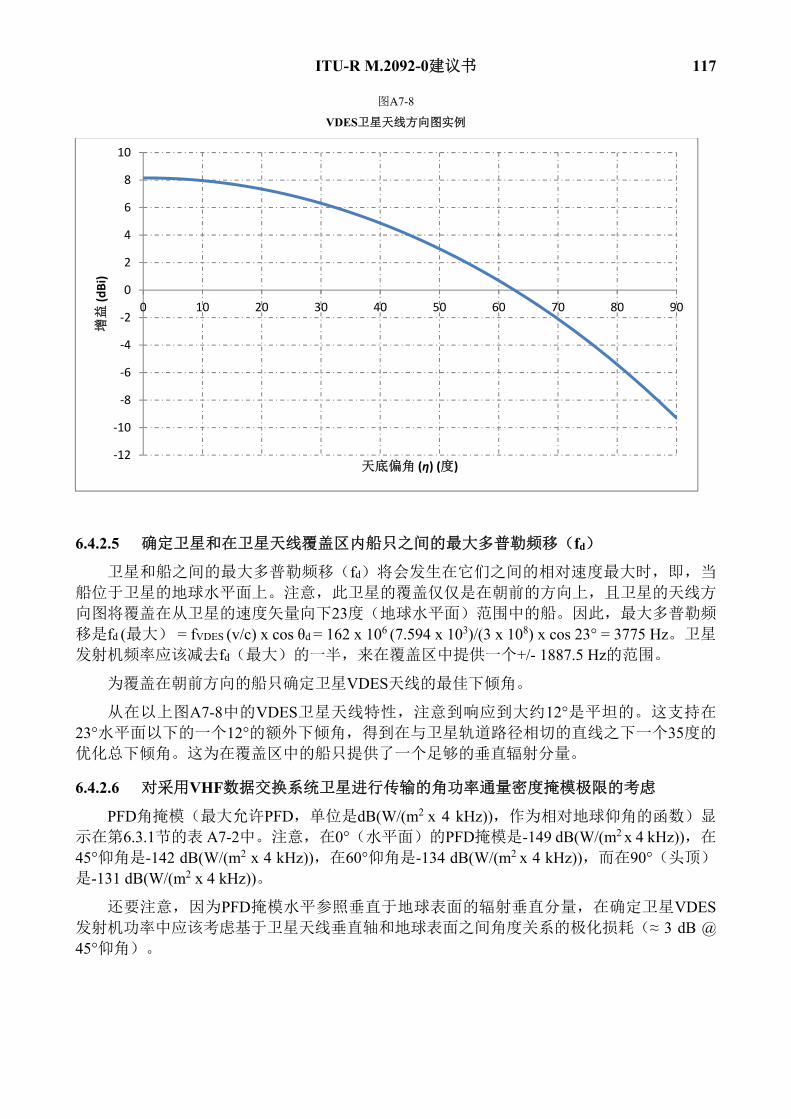
ITU-R M.2092-0建议书 117
图A7-8
VDES卫星天线方向图实例
6.4.2.5 确定卫星和在卫星天线覆盖区内船只之间的最大多普勒频移(fd)
卫星和船之间的最大多普勒频移(fd)将会发生在它们之间的相对速度最大时,即,当
船位于卫星的地球水平面上。注意,此卫星的覆盖仅仅是在朝前的方向上,且卫星的天线方
向图将覆盖在从卫星的速度矢量向下23度(地球水平面)范围中的船。因此,最大多普勒频
移是fd (最大) = fVDES (v/c) x cos θd = 162 x 106 (7.594 x 103)/(3 x 108) x cos 23° = 3775 Hz。卫星
发射机频率应该减去fd(最大)的一半,来在覆盖区中提供一个+/- 1887.5 Hz的范围。
为覆盖在朝前方向的船只确定卫星VDES天线的最佳下倾角。
从在以上图A7-8中的VDES卫星天线特性,注意到响应到大约12°是平坦的。这支持在
23°水平面以下的一个12°的额外下倾角,得到在与卫星轨道路径相切的直线之下一个35度的
优化总下倾角。这为在覆盖区中的船只提供了一个足够的垂直辐射分量。
6.4.2.6 对采用VHF数据交换系统卫星进行传输的角功率通量密度掩模极限的考虑
PFD角掩模(最大允许PFD,单位是dB(W/(m2 x 4 kHz)),作为相对地球仰角的函数)显
示在第6.3.1节的表 A7-2中。注意,在0°(水平面)的PFD掩模是-149 dB(W/(m2 x 4 kHz)),在
45°仰角是-142 dB(W/(m2 x 4 kHz)),在60°仰角是-134 dB(W/(m2 x 4 kHz)),而在90°(头顶)
是-131 dB(W/(m2 x 4 kHz))。
还要注意,因为PFD掩模水平参照垂直于地球表面的辐射垂直分量,在确定卫星VDES发射机功率中应该考虑基于卫星天线垂直轴和地球表面之间角度关系的极化损耗(≈ 3 dB @ 45°仰角)。
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 10 20 30 40 50 60 70 80 90
增益
(dBi
)
天底偏角 (η) (度)
118 ITU-R M.2092-0建议书
6.4.2.7 确定当在45°仰角处的功率通量密度被设定为-142 dB(W/(m2 x 4 kHz))时在0°、10°、30°、60°和90°仰角处的功率通量密度水平
本节确认45°的仰角是PFD掩模和实际辐射VDES空间-地球下行链路信号之间的CPA(接
近的最近点)。
来自以前计算的倾斜距离和仰角计算值记录了从卫星地球水平面的倾斜距离是2 703.6 km。这些计算的结果显示在以下表 A7-3中。注意,“轨道角”(在地球以上的卫星轨道旋
转角度)被用作几何计算(角度和距离)和计时(从水平面到旋转点流逝的时间)的参考。
从卫星到一个地球站的倾斜距离是从余弦定理确定的(c = SQRT (a2 + b2 + c2 - 2ab cos (C)),此处,c = 倾斜距离,a = Re + h,b = Re及C = 卫星轨道角。计算以C = 23°(到水平面的角
度)开始,且进行到C = 0°(正上/下方位置),显示在表A7-3中。
为了找到仰角,参考角从反余弦定理(C = cos-1 ((a2 + b2 + c2)/(2ab))确定,此处C = 倾斜距
离(观测线)和地球半径(从地球站到地球中心的直线)之间的参考角,a = 倾斜距离,b = 地球半径及c = Re + h。地球站的仰角是通过从参考角减去90°确定的,也显示在以下表A7-3中。
6.4.2.8 根据45°仰角确定参考电平
从表 A7-2,对在45°仰角卫星的倾斜距离是748.3 km,而在45°仰角的PFD被设定为 -142 dB(W/(m2 x 4 kHz))的掩模极限。因为卫星天线的相对角(下倾35°)在那个方向上近似
(45° – 35°) = 10°,从图A7-19,卫星天线在那个方向上的增益是8 dB。这些值被用作设定点
值(0 dB参考电平)来计算其他仰角的PFD电平。
6.4.2.9 确定0°仰角的功率通量密度水平
在0°(水平)的倾斜距离是2703.6 km,卫星对水平面的相对角是-23°,带有一个35°下倾角的卫星天线相对角是(35° - 23°) = 12°,且从图A7-19得出增益是8 dB。因为相对距离损耗
是(20 log (748.3/2703.6)) = -11.2 dB,在0°的PFD是在45°水平以下11.2 dB,(-142 – 11.2) = -153.2 dB(W/(m2 x 4 kHz)),这是在0°掩模极限之下(-149 - (-153.2)) = 4.2 dB。
6.4.2.10 确定10°仰角的功率通量密度水平
在10°仰角的倾斜距离是1 818.4 km,卫星对水平面的相对角是-23°,带有一个35°下倾角
的卫星天线相对角是(35° - 23° - 10°) = 2°,且从图A7-19得出增益是8 dB(与参考值相同),相
对距离损耗是20 log (748.3/1818.4) = -7.7 dB,且因此在10°的PFD是(-142 – 7.7) = -149.7 dB(W/( m2 x 4 kHz)),它是在10°掩模极限-147.4 dB(W/( m2 x 4 kHz))以下2.3 dB。
6.4.2.11 确定30°仰角的功率通量密度水平
在30°仰角的倾斜距离是993.5 km,卫星对水平面的相对角是-23°,带有一个35°下倾角
的卫星天线相对角是(35°-30°) = 5°,从图 A7-19得出增益是8 dB(与参考值相同),相对距
离损耗是20 log (748.3/993.5) = -2.5 dB,且因此在30°的PFD是(-142 – 2.5) = -144.5 dB(W/( m2 x 4 kHz)),是在10°掩模极限-144.2 dB(W/( m2 x 4 kHz))以下0.3 dB。
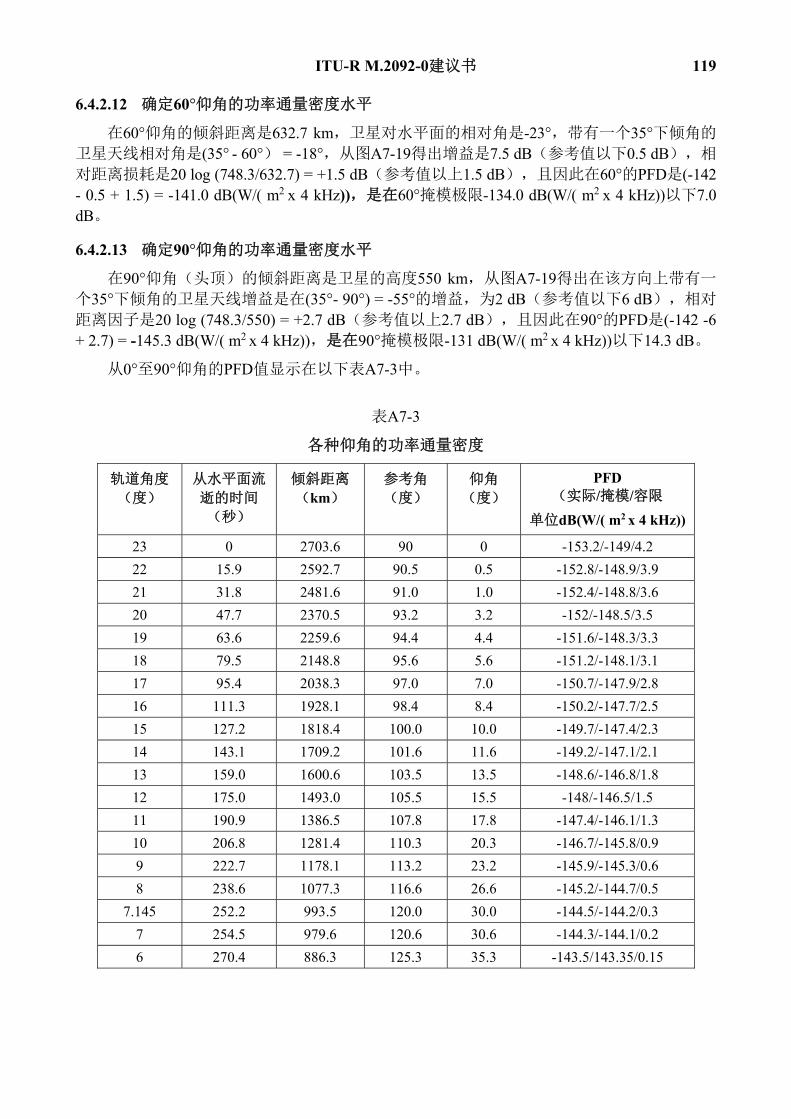
ITU-R M.2092-0建议书 119
6.4.2.12 确定60°仰角的功率通量密度水平
在60°仰角的倾斜距离是632.7 km,卫星对水平面的相对角是-23°,带有一个35°下倾角的
卫星天线相对角是(35° - 60°) = -18°,从图A7-19得出增益是7.5 dB(参考值以下0.5 dB),相
对距离损耗是20 log (748.3/632.7) = +1.5 dB(参考值以上1.5 dB),且因此在60°的PFD是(-142 - 0.5 + 1.5) = -141.0 dB(W/( m2 x 4 kHz)),是在60°掩模极限-134.0 dB(W/( m2 x 4 kHz))以下7.0 dB。
6.4.2.13 确定90°仰角的功率通量密度水平
在90°仰角(头顶)的倾斜距离是卫星的高度550 km,从图A7-19得出在该方向上带有一
个35°下倾角的卫星天线增益是在(35°- 90°) = -55°的增益,为2 dB(参考值以下6 dB),相对
距离因子是20 log (748.3/550) = +2.7 dB(参考值以上2.7 dB),且因此在90°的PFD是(-142 -6 + 2.7) = -145.3 dB(W/( m2 x 4 kHz)),是在90°掩模极限-131 dB(W/( m2 x 4 kHz))以下14.3 dB。
从0°至90°仰角的PFD值显示在以下表A7-3中。
表A7-3
各种仰角的功率通量密度
轨道角度 (度)
从水平面流
逝的时间
(秒)
倾斜距离
(km) 参考角 (度)
仰角 (度)
PFD (实际/掩模/容限
单位dB(W/( m2 x 4 kHz))
23 0 2703.6 90 0 -153.2/-149/4.2 22 15.9 2592.7 90.5 0.5 -152.8/-148.9/3.9 21 31.8 2481.6 91.0 1.0 -152.4/-148.8/3.6 20 47.7 2370.5 93.2 3.2 -152/-148.5/3.5 19 63.6 2259.6 94.4 4.4 -151.6/-148.3/3.3 18 79.5 2148.8 95.6 5.6 -151.2/-148.1/3.1 17 95.4 2038.3 97.0 7.0 -150.7/-147.9/2.8 16 111.3 1928.1 98.4 8.4 -150.2/-147.7/2.5 15 127.2 1818.4 100.0 10.0 -149.7/-147.4/2.3 14 143.1 1709.2 101.6 11.6 -149.2/-147.1/2.1 13 159.0 1600.6 103.5 13.5 -148.6/-146.8/1.8 12 175.0 1493.0 105.5 15.5 -148/-146.5/1.5 11 190.9 1386.5 107.8 17.8 -147.4/-146.1/1.3 10 206.8 1281.4 110.3 20.3 -146.7/-145.8/0.9 9 222.7 1178.1 113.2 23.2 -145.9/-145.3/0.6 8 238.6 1077.3 116.6 26.6 -145.2/-144.7/0.5
7.145 252.2 993.5 120.0 30.0 -144.5/-144.2/0.3 7 254.5 979.6 120.6 30.6 -144.3/-144.1/0.2 6 270.4 886.3 125.3 35.3 -143.5/143.35/0.15
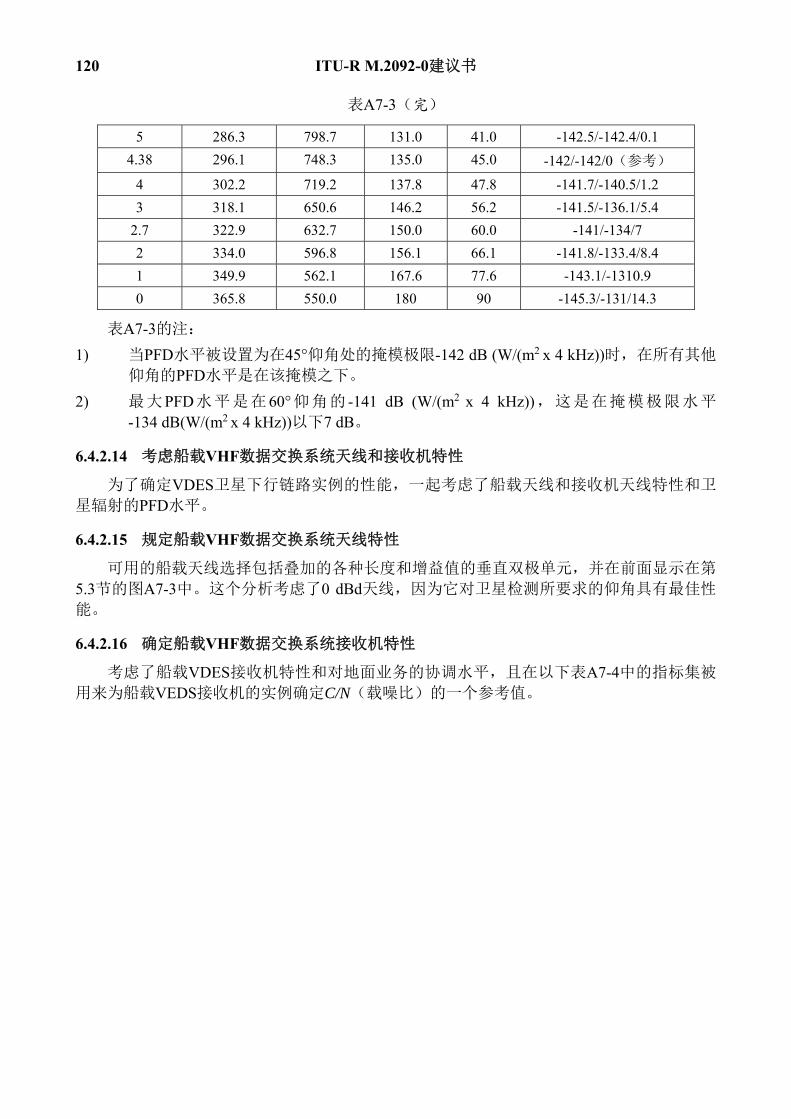
120 ITU-R M.2092-0建议书
表A7-3(完)
5 286.3 798.7 131.0 41.0 -142.5/-142.4/0.1 4.38 296.1 748.3 135.0 45.0 -142/-142/0(参考)
4 302.2 719.2 137.8 47.8 -141.7/-140.5/1.2 3 318.1 650.6 146.2 56.2 -141.5/-136.1/5.4
2.7 322.9 632.7 150.0 60.0 -141/-134/7 2 334.0 596.8 156.1 66.1 -141.8/-133.4/8.4 1 349.9 562.1 167.6 77.6 -143.1/-1310.9 0 365.8 550.0 180 90 -145.3/-131/14.3
表A7-3的注: 1) 当PFD水平被设置为在45°仰角处的掩模极限-142 dB (W/(m2 x 4 kHz))时,在所有其他
仰角的PFD水平是在该掩模之下。 2) 最大PFD水平是在60°仰角的 -141 dB (W/(m2 x 4 kHz)),这是在掩模极限水平
-134 dB(W/(m2 x 4 kHz))以下7 dB。
6.4.2.14 考虑船载VHF数据交换系统天线和接收机特性
为了确定VDES卫星下行链路实例的性能,一起考虑了船载天线和接收机天线特性和卫
星辐射的PFD水平。
6.4.2.15 规定船载VHF数据交换系统天线特性
可用的船载天线选择包括叠加的各种长度和增益值的垂直双极单元,并在前面显示在第
5.3节的图A7-3中。这个分析考虑了0 dBd天线,因为它对卫星检测所要求的仰角具有最佳性
能。
6.4.2.16 确定船载VHF数据交换系统接收机特性
考虑了船载VDES接收机特性和对地面业务的协调水平,且在以下表A7-4中的指标集被
用来为船载VEDS接收机的实例确定C/N(载噪比)的一个参考值。
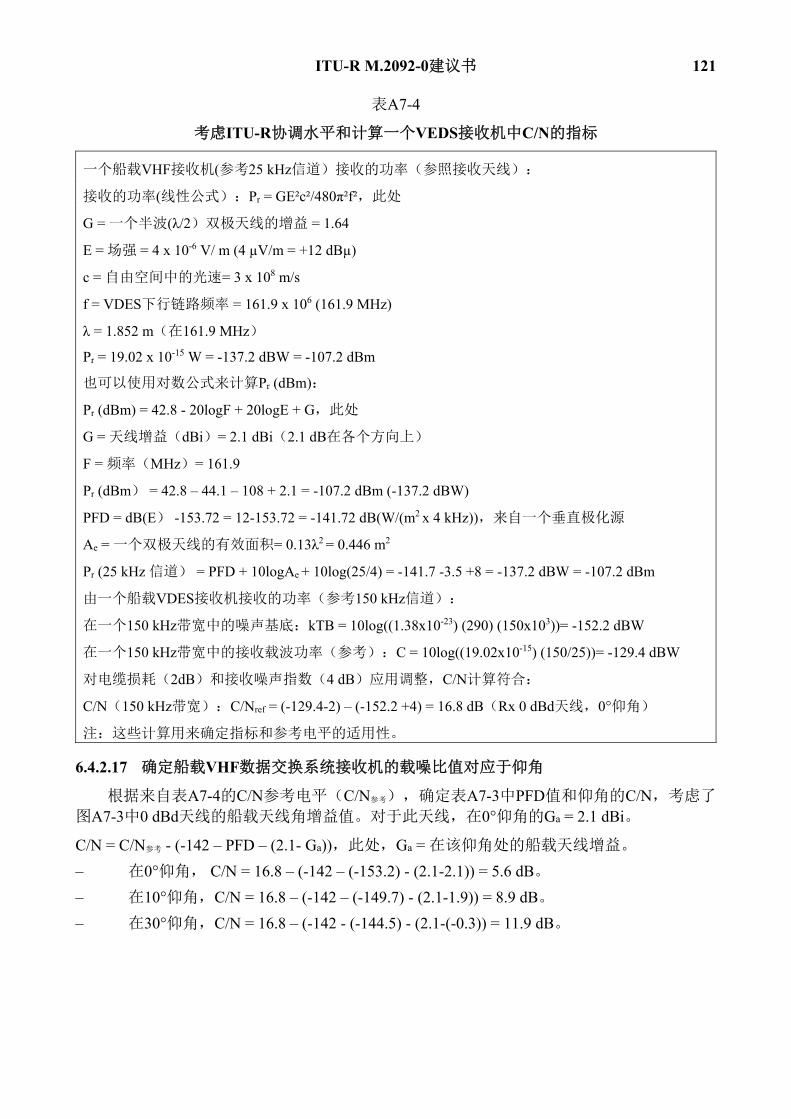
ITU-R M.2092-0建议书 121
表A7-4
考虑ITU-R协调水平和计算一个VEDS接收机中C/N的指标
一个船载VHF接收机(参考25 kHz信道)接收的功率(参照接收天线):
接收的功率(线性公式):Pr = GE²c²/480π²f²,此处
G = 一个半波(λ/2)双极天线的增益 = 1.64
E = 场强 = 4 x 10-6 V/ m (4 µV/m = +12 dBµ)
c = 自由空间中的光速= 3 x 108 m/s
f = VDES下行链路频率 = 161.9 x 106 (161.9 MHz)
λ = 1.852 m(在161.9 MHz)
Pr = 19.02 x 10-15 W = -137.2 dBW = -107.2 dBm
也可以使用对数公式来计算Pr (dBm):
Pr (dBm) = 42.8 - 20logF + 20logE + G,此处
G = 天线增益(dBi)= 2.1 dBi(2.1 dB在各个方向上)
F = 频率(MHz)= 161.9
Pr (dBm) = 42.8 – 44.1 – 108 + 2.1 = -107.2 dBm (-137.2 dBW)
PFD = dB(E) -153.72 = 12-153.72 = -141.72 dB(W/(m2 x 4 kHz)),来自一个垂直极化源
Ae = 一个双极天线的有效面积= 0.13λ2 = 0.446 m2
Pr (25 kHz 信道) = PFD + 10logAe + 10log(25/4) = -141.7 -3.5 +8 = -137.2 dBW = -107.2 dBm
由一个船载VDES接收机接收的功率(参考150 kHz信道):
在一个150 kHz带宽中的噪声基底:kTB = 10log((1.38x10-23) (290) (150x103))= -152.2 dBW
在一个150 kHz带宽中的接收载波功率(参考):C = 10log((19.02x10-15) (150/25))= -129.4 dBW
对电缆损耗(2dB)和接收噪声指数(4 dB)应用调整,C/N计算符合:
C/N(150 kHz带宽):C/Nref = (-129.4-2) – (-152.2 +4) = 16.8 dB(Rx 0 dBd天线,0°仰角)
注:这些计算用来确定指标和参考电平的适用性。
6.4.2.17 确定船载VHF数据交换系统接收机的载噪比值对应于仰角
根据来自表A7-4的C/N参考电平(C/N参考),确定表A7-3中PFD值和仰角的C/N,考虑了
图A7-3中0 dBd天线的船载天线角增益值。对于此天线,在0°仰角的Ga = 2.1 dBi。
C/N = C/N参考 - (-142 – PFD – (2.1- Ga)),此处,Ga = 在该仰角处的船载天线增益。 – 在0°仰角, C/N = 16.8 – (-142 – (-153.2) - (2.1-2.1)) = 5.6 dB。 – 在10°仰角,C/N = 16.8 – (-142 – (-149.7) - (2.1-1.9)) = 8.9 dB。 – 在30°仰角,C/N = 16.8 – (-142 - (-144.5) - (2.1-(-0.3)) = 11.9 dB。
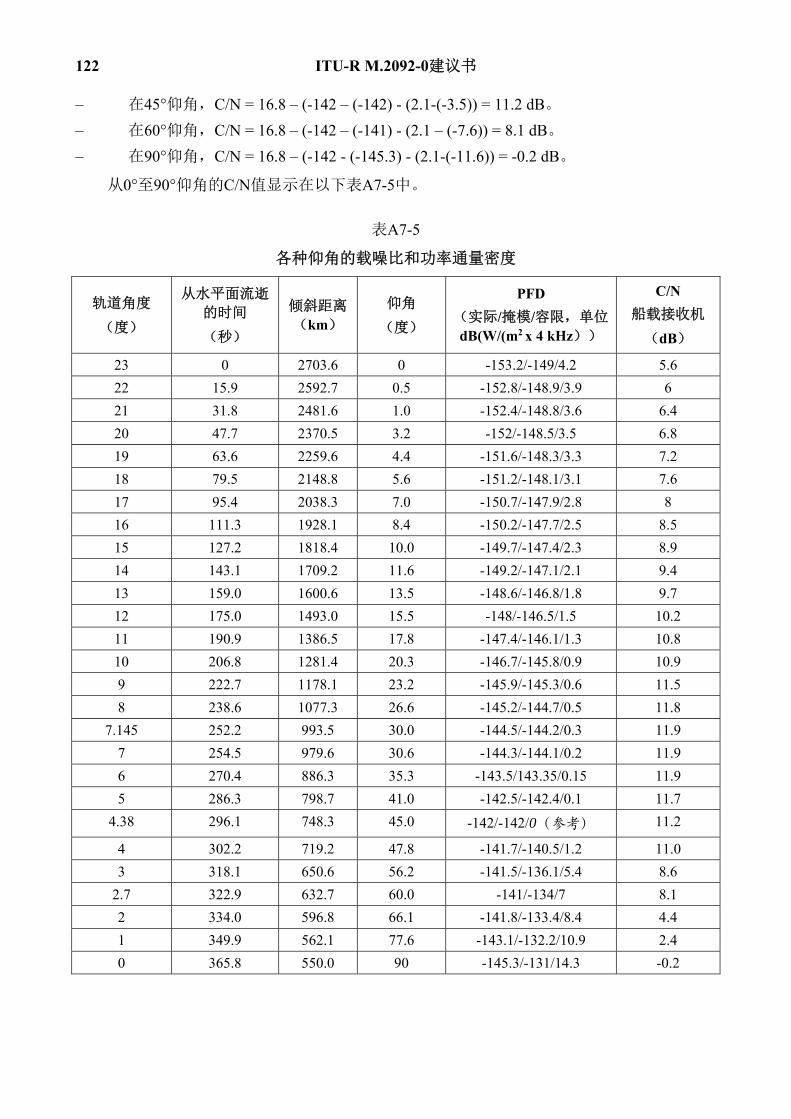
122 ITU-R M.2092-0建议书
– 在45°仰角,C/N = 16.8 – (-142 – (-142) - (2.1-(-3.5)) = 11.2 dB。 – 在60°仰角,C/N = 16.8 – (-142 – (-141) - (2.1 – (-7.6)) = 8.1 dB。 – 在90°仰角,C/N = 16.8 – (-142 - (-145.3) - (2.1-(-11.6)) = -0.2 dB。
从0°至90°仰角的C/N值显示在以下表A7-5中。
表A7-5
各种仰角的载噪比和功率通量密度
轨道角度 (度)
从水平面流逝
的时间 (秒)
倾斜距离
(km) 仰角
(度)
PFD (实际/掩模/容限,单位
dB(W/(m2 x 4 kHz))
C/N 船载接收机 (dB)
23 0 2703.6 0 -153.2/-149/4.2 5.6 22 15.9 2592.7 0.5 -152.8/-148.9/3.9 6 21 31.8 2481.6 1.0 -152.4/-148.8/3.6 6.4 20 47.7 2370.5 3.2 -152/-148.5/3.5 6.8 19 63.6 2259.6 4.4 -151.6/-148.3/3.3 7.2 18 79.5 2148.8 5.6 -151.2/-148.1/3.1 7.6 17 95.4 2038.3 7.0 -150.7/-147.9/2.8 8 16 111.3 1928.1 8.4 -150.2/-147.7/2.5 8.5 15 127.2 1818.4 10.0 -149.7/-147.4/2.3 8.9 14 143.1 1709.2 11.6 -149.2/-147.1/2.1 9.4 13 159.0 1600.6 13.5 -148.6/-146.8/1.8 9.7 12 175.0 1493.0 15.5 -148/-146.5/1.5 10.2 11 190.9 1386.5 17.8 -147.4/-146.1/1.3 10.8 10 206.8 1281.4 20.3 -146.7/-145.8/0.9 10.9 9 222.7 1178.1 23.2 -145.9/-145.3/0.6 11.5 8 238.6 1077.3 26.6 -145.2/-144.7/0.5 11.8
7.145 252.2 993.5 30.0 -144.5/-144.2/0.3 11.9 7 254.5 979.6 30.6 -144.3/-144.1/0.2 11.9 6 270.4 886.3 35.3 -143.5/143.35/0.15 11.9 5 286.3 798.7 41.0 -142.5/-142.4/0.1 11.7
4.38 296.1 748.3 45.0 -142/-142/0(参考) 11.2
4 302.2 719.2 47.8 -141.7/-140.5/1.2 11.0 3 318.1 650.6 56.2 -141.5/-136.1/5.4 8.6
2.7 322.9 632.7 60.0 -141/-134/7 8.1 2 334.0 596.8 66.1 -141.8/-133.4/8.4 4.4 1 349.9 562.1 77.6 -143.1/-132.2/10.9 2.4 0 365.8 550.0 90 -145.3/-131/14.3 -0.2
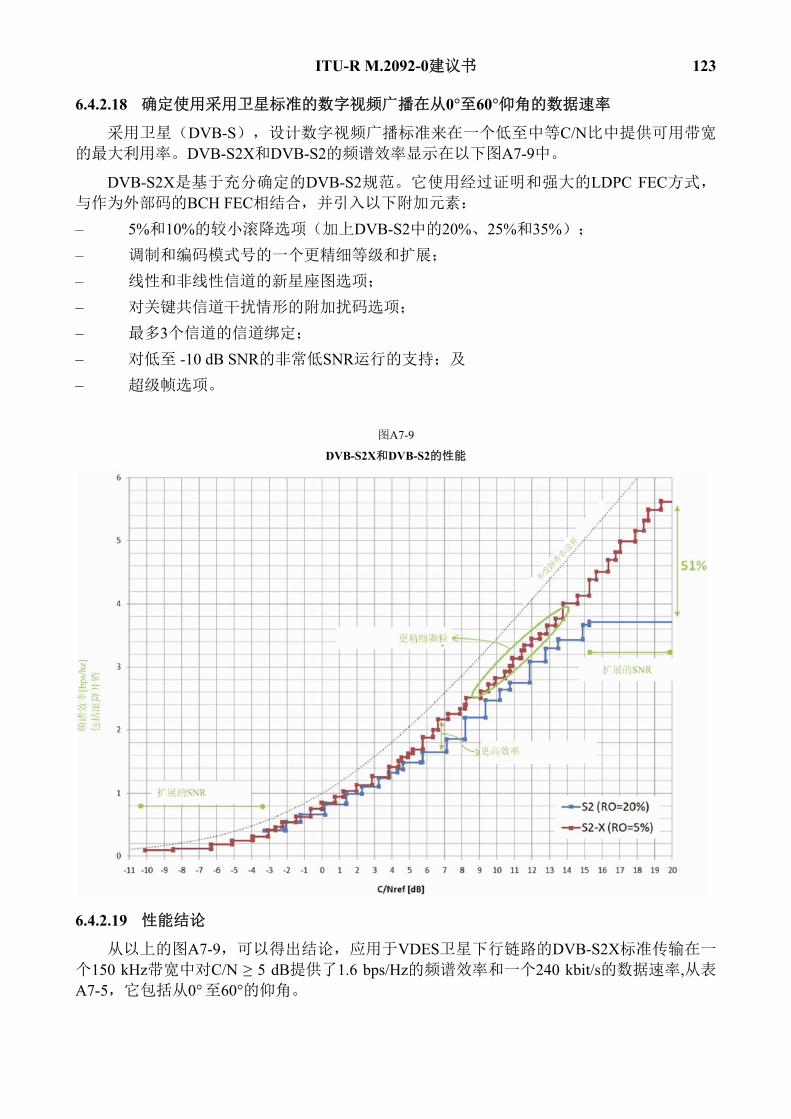
ITU-R M.2092-0建议书 123
6.4.2.18 确定使用采用卫星标准的数字视频广播在从0°至60°仰角的数据速率
采用卫星(DVB-S),设计数字视频广播标准来在一个低至中等C/N比中提供可用带宽
的最大利用率。DVB-S2X和DVB-S2的频谱效率显示在以下图A7-9中。
DVB-S2X是基于充分确定的DVB-S2规范。它使用经过证明和强大的LDPC FEC方式,
与作为外部码的BCH FEC相结合,并引入以下附加元素: – 5%和10%的较小滚降选项(加上DVB-S2中的20%、25%和35%); – 调制和编码模式号的一个更精细等级和扩展; – 线性和非线性信道的新星座图选项; – 对关键共信道干扰情形的附加扰码选项; – 最多3个信道的信道绑定; – 对低至 -10 dB SNR的非常低SNR运行的支持;及 – 超级帧选项。
图A7-9
DVB-S2X和DVB-S2的性能
6.4.2.19 性能结论
从以上的图A7-9,可以得出结论,应用于VDES卫星下行链路的DVB-S2X标准传输在一
个150 kHz带宽中对C/N ≥ 5 dB提供了1.6 bps/Hz的频谱效率和一个240 kbit/s的数据速率,从表
A7-5,它包括从0° 至60°的仰角。
124 ITU-R M.2092-0建议书
7 VHF数据交换系统地面链路的传播距离预测
7.1 引言
这是一个资料性附件。AIS的最佳传播特性被充分确定和重视。预期ASM将有类似于
AIS的性能。下面是对100 kHz VDE船 – 岸和岸 – 船链路的传播距离预测。
7.1.1 船-岸应用
7.1.1.1 覆盖评估的基本参数
此覆盖评估基于ITU-R P.1546-5建议书(假设没有波导效应),考虑了天线高度和海
水传播路径:
天线高度(基站): 75 m(各种高度见图) 船的发射机功率: 12.5 W 船的发射天线增益: 2 dBi (0 dBd) 岸上接收天线增益: 8 dBi (6 dBd) Pr: -103 dBm(VDE岸上站的灵敏度)
7.1.1.2 使用ITU-R P.1546-5建议书传播曲线的目的
ITU-R P.1546-5建议书描述了传播曲线的使用(ITU-R P.1546-5附件 5的§3和附件2的图
4),见以下本附件的图A7-10和A7-11,假设没有波导效应和一个平滑的地球/海面。此分析
可以被用作现场测试的一个参考点,现场测试通常包括一些波导效应,取决于天气、大气条
件和其他因素。
7.1.1.3 确定发射/基站天线高度h1
ITU-R P.1546-5建议书(附件5的§3)规定了发射/基站天线的高度h1,将根据路径的类型
和长度用于计算。对于海上路径,h1是平均海平面以上的天线高度;对于陆地路径,h1是平
均地形以上的高度。 注:船上站的参考天线高度h2 是10 m。
7.1.1.4 确定在VHF数据交换接收站址处的最小场强(灵敏度门限)
对于船 – 岸:
接收功率(线性公式):Pr = Gr Er²c²/480π²f²
重新整理:Er = √ (480π²f² Pr /Gr c2),此处
Er = 场强(V/m)
Gr = 接收天线的增益 = 6.3 = 8 dBi
c = 自由空间中的光速 = 3 x 108 m/s
f = VDE船-岸频率 = 1.57 x 108 (157 MHz)
Pr = 5 x 10-14W = -133 dBW = -103 dBm
因此,
Er = 3.21 x 10-6 = 3.21 µV/m = +10.1dB µV/m
ITU-R M.2092-0建议书 125
也可以使用对数公式来计算Pr (dB):
Pr (dBm) = 42.8 – 20 log F + 20 log E + G,此处
G = 天线增益(dBi) = 8 dBi
F = 频率(MHz) = 157
Pr (dBm) = 42.8 – 43.9 – 109.9 + 8 = -103 dBm (-133 dBW)
7.1.1.5 确定一个海水传播路径到+10.1 dBµ (-103 dBm)覆盖极限的距离
计算有效辐射功率:
Ps = Pt + G
Pt = 10 log 12.5 – 30 = -19 dBkW (1 kW 以下19 dB)
G = 2 dBi = +0 dBd(在一个双极以上0 dB)
因此,Ps = -19 +0 = -19 dBkW e.r.p.
Fe = F – Ps (图A7-10中传播图的垂直度量参考)
F = +10.1 dBµ Ps = -19 dBkW
因此,Fe = 10.1 – (-19) = +29.1 dB
7.1.1.6 从图A7-10确定向海方向的船-岸覆盖距离
+10.1 dBµ (-103 dBm)距离是85 km,即46 NM(使用h1 = 75 m)。
7.1.1.7 确定各种其他距离的接收信号强度指示值
以上确定了在85 km (46 NM)距离的参考点接收信号强度指示(RSSI) = -103 dBm。对
于其他距离,RSSI值是针对假设75 m天线高度从传播曲线(图A7-10)确定的。灵敏度门限
以上的RSSI值以10 dB的增量显示在以下表A7-6中。
表A7-6
VHF数据交换基站接收信号强度指示值对应船-岸距离
-103 dBm 85 km (46 NM) -93 dBm 60 km -83 dBm 40 km -73 dBm 25 km -63 dBm 15 km -53 dBm 8 km -43 dBm 4.5 km
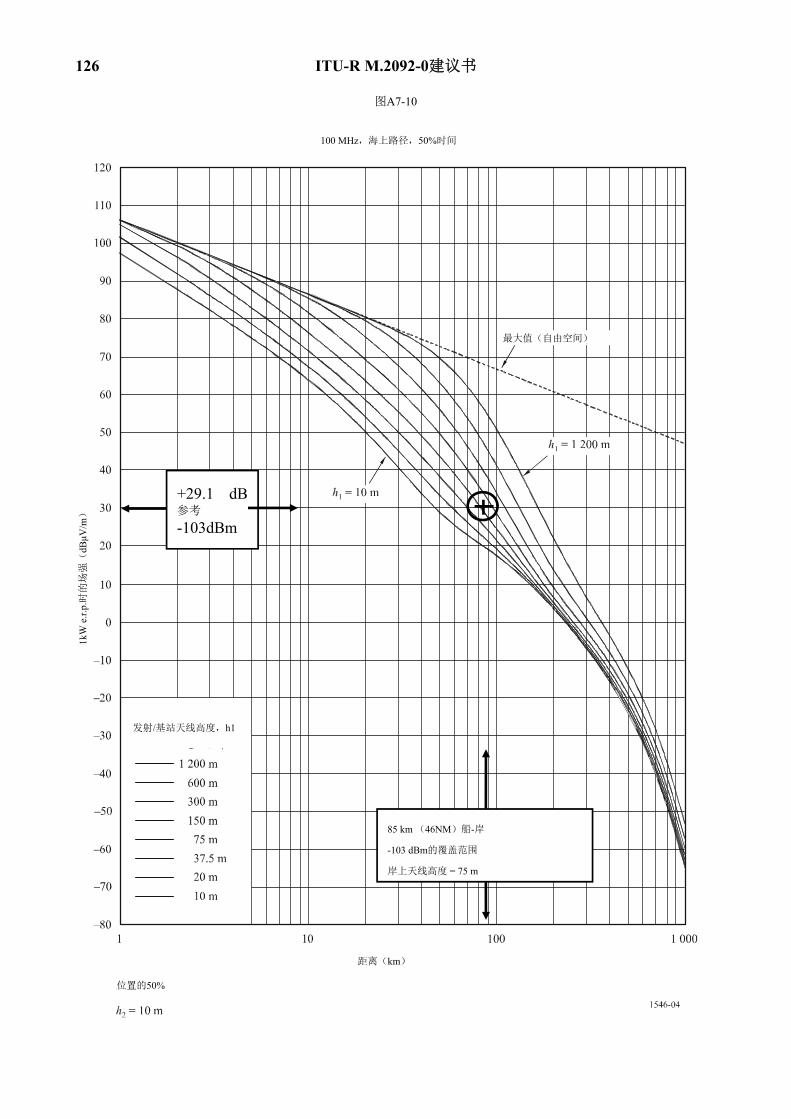
126 ITU-R M.2092-0建议书
图A7-10
+29.1 dB 参考 -103dBm
85 km (46NM)船-岸
-103 dBm的覆盖范围
岸上天线高度 = 75 m
发射/基站天线高度,h1
1kW
e.r.
p.时的场强(
dBμV
/m)
100 MHz,海上路径,50%时间
最大值(自由空间)
位置的50%
距离(km)

ITU-R M.2092-0建议书 127
7.1.2 岸 – 船应用
7.1.2.1 覆盖评估的基本参数
参考以上第2节,我们考虑了相反的方向岸-船、在船上接收站址的信号电平、50 W的岸
上发射机功率和162 MHz的岸-船频率:
天线高度(VDES基站): 75 m(各种高度见图)
岸上VDES的发射机功率: 50 W(在岸上天线底部)
岸上发射天线增益: 8 dBi(6 dBd)
船上接收天线增益: 2 dBi(0 dBd)
Pr: -98 dBm(VDE船上站灵敏度)
7.1.2.2 确定VHF数据交换船上接收点处的最小场强(灵敏度门限)
对于岸 – 船:
接收功率(线性公式):Pr = Gr Er²c²/480π²f²
重新整理:Er = √ (480π²f² Pr /Gr c2),此处
Er = 场强(V/m)
Gr = 接收天线增益= 1.62 = 2.1 dBi
c = 自用空间中的光速 = 3 x 108 m/s
f = VDE岸-船频率 = 1.62 x 108 (162 MHz)
Pr = 1.58 x 10-13 W = -128 dBW = -98 dBm
因此,Er = 11.61 x 10-6 V/m = 11.61 µV/m = +21.3 dB µV/m
也可以采用对数公式来计算Pr (dBm):
Pr (dBm) = 42.8 - 20logF + 20logE + G,此处
G = 天线增益(dBi) = 2.1 dBi
F = 频率(MHz) = 162
Pr (dBm)= 42.8 – 44.1 – 98.7 + 2.1 = -98 dBm (-128 dBW)
7.1.2.3 确定一个海水传播路径到+21.3 dBµ (-98 dBm)覆盖极限的距离
计算有效辐射功率:
Ps = Pt + G
Pt = 10 log 50 – 30 = -13 dBkW (1 kW以下13 dB)
G = 8 dBi = +6 dBd(双极以上6 dB)
128 ITU-R M.2092-0建议书
因此,Ps = -13 + 6 = -7 dBkW e.r.p.
Fe = F – Ps (图A7-11中传播图的垂直度量参考)
F = +21.3 dBµ Ps = -7 dBkW
因此,Fe = 21.3 – (-7) = +28.3 dB 注:因为由于船上站降低的灵敏度得到了岸上基站更高功率和天线增益的补偿,因此这个Fe值是在
第7.1.1.5节中所计算值的1 dB之内。
7.1.2.4 从图A7-11确定向海方向岸-船覆盖距离
+28.3 dBµ (-98 dBm)距离是85 km,即46 NM(使用h1 = 75 m)。这与船 – 岸覆盖距离
相同,一个理想的平衡双向覆盖,这确认了对船载和岸上VDES站天线和接收机功率值建议
的选择。
7.1.2.5 确定各种其他距离的接收信号强度指示值
参考点:在一个85 km (46 NM)距离处的RSSI = -98 dBm在以上第7.1.1.6节中确定。对
于其他距离,RSSI值是针对假设的75 m天线高度从传播曲线(图A7-11)确定的。船载VDE接收机在-98 dBm门限灵敏度之上和以下的RSSI值以10 dB的增量显示在以下表A7-7中。
表A7-7
VHF数据交换船上站接收信号强度指示值对应岸-船距离
-118 dBm 170 km -108 dBm 130 km -98 dBm 85 km (46 NM) -88 dBm 60 km -78 dBm 40 km
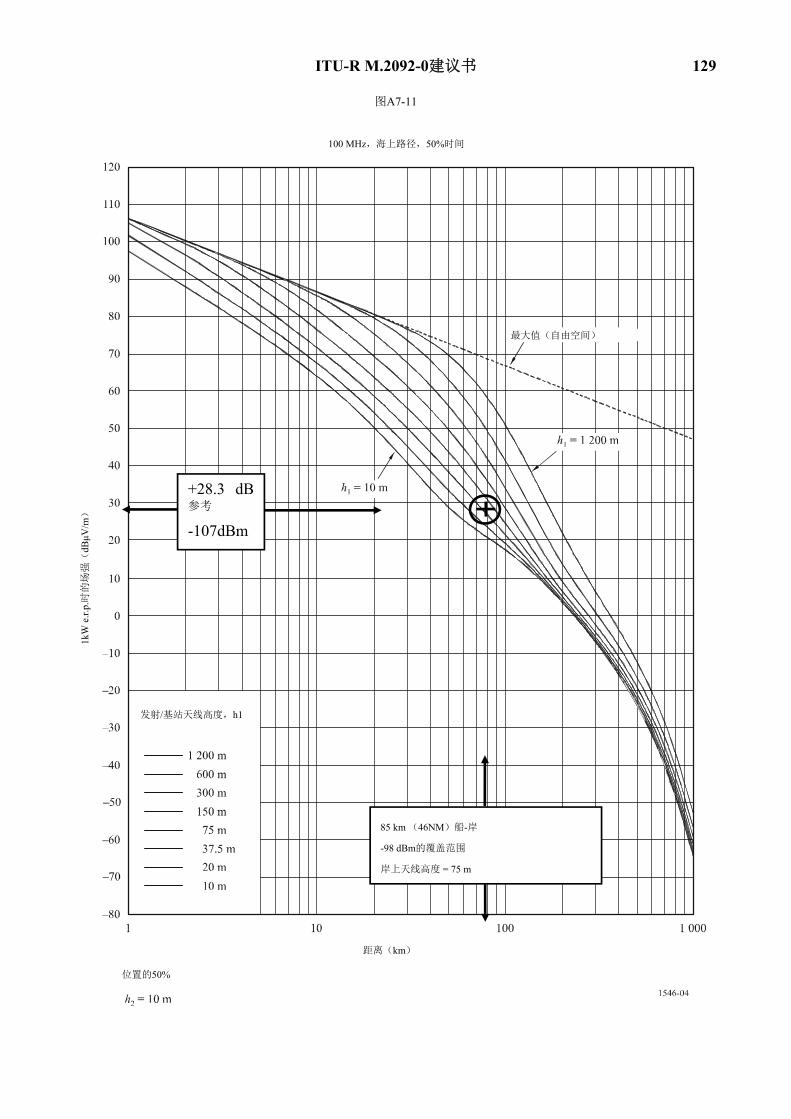
ITU-R M.2092-0建议书 129
图A7-11
85 km (46NM)船-岸
-98 dBm的覆盖范围
岸上天线高度 = 75 m
+28.3 dB参考 -107dBm
100 MHz,海上路径,50%时间
最大值(自由空间)
1kW
e.r.
p.时的场强(
dBμV
/m)
发射/基站天线高度,h1
位置的50%
距离(km)
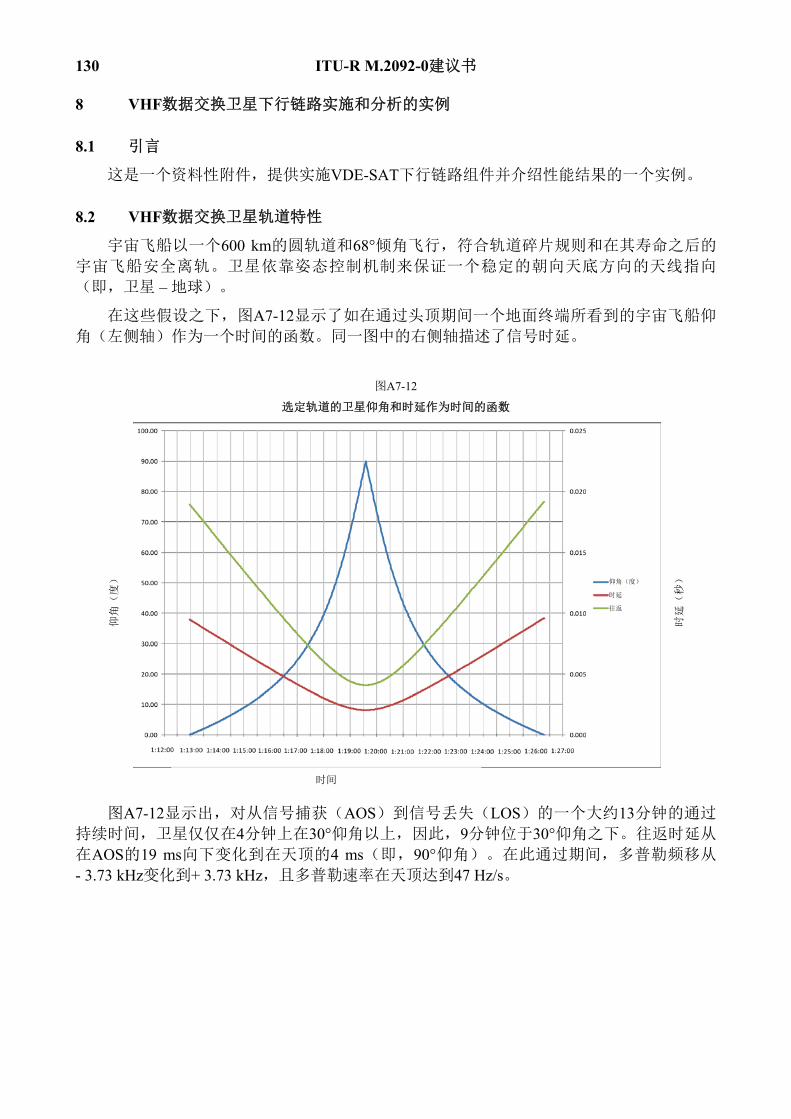
130 ITU-R M.2092-0建议书
8 VHF数据交换卫星下行链路实施和分析的实例
8.1 引言
这是一个资料性附件,提供实施VDE-SAT下行链路组件并介绍性能结果的一个实例。
8.2 VHF数据交换卫星轨道特性
宇宙飞船以一个600 km的圆轨道和68°倾角飞行,符合轨道碎片规则和在其寿命之后的
宇宙飞船安全离轨。卫星依靠姿态控制机制来保证一个稳定的朝向天底方向的天线指向
(即,卫星 – 地球)。
在这些假设之下,图A7-12显示了如在通过头顶期间一个地面终端所看到的宇宙飞船仰
角(左侧轴)作为一个时间的函数。同一图中的右侧轴描述了信号时延。
图A7-12
选定轨道的卫星仰角和时延作为时间的函数
图A7-12显示出,对从信号捕获(AOS)到信号丢失(LOS)的一个大约13分钟的通过
持续时间,卫星仅仅在4分钟上在30°仰角以上,因此,9分钟位于30°仰角之下。往返时延从
在AOS的19 ms向下变化到在天顶的4 ms(即,90°仰角)。在此通过期间,多普勒频移从 - 3.73 kHz变化到+ 3.73 kHz,且多普勒速率在天顶达到47 Hz/s。
仰角
(度
)
时延
(秒
)
时间
仰角(度)
时延
往返
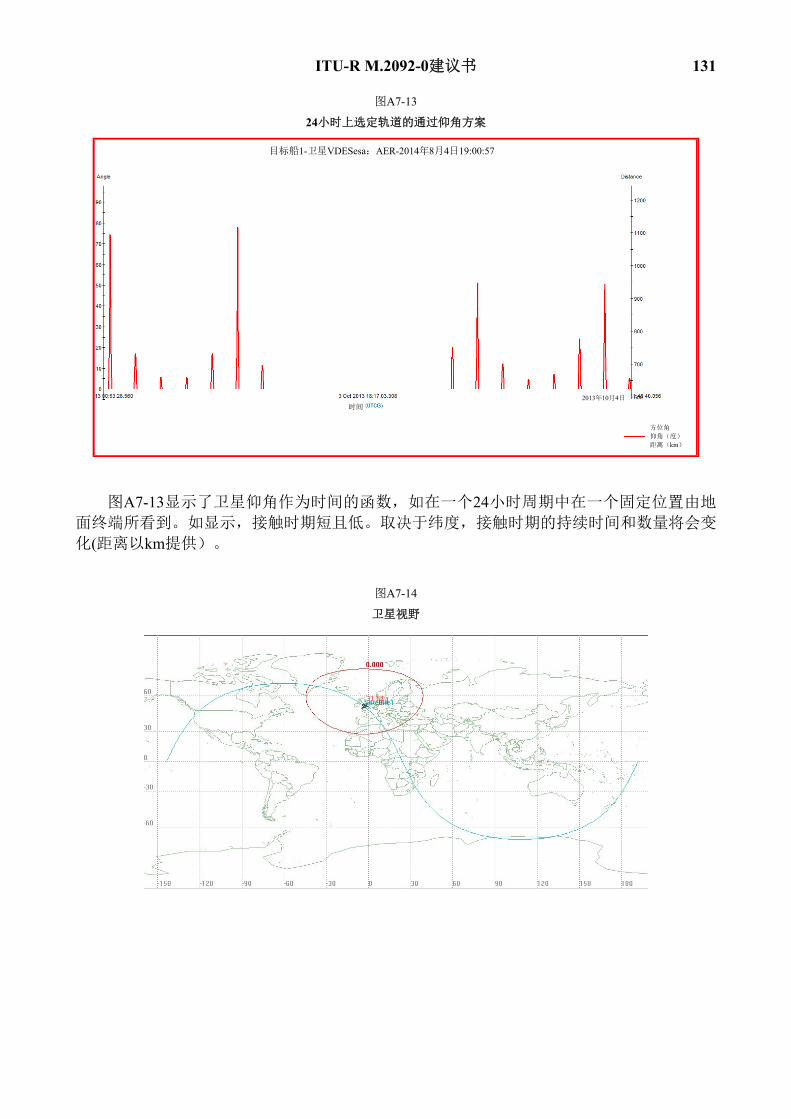
ITU-R M.2092-0建议书 131
图A7-13
24小时上选定轨道的通过仰角方案
图A7-13显示了卫星仰角作为时间的函数,如在一个24小时周期中在一个固定位置由地
面终端所看到。如显示,接触时期短且低。取决于纬度,接触时期的持续时间和数量将会变
化(距离以km提供)。
图A7-14
卫星视野
目标船1-卫星VDESesa:AER-2014年8月4日19:00:57
时间
2013年10月4日
方位角 仰角(度) 距离(km)
卫星1
132 ITU-R M.2092-0建议书
图A7-14呈现了卫星的视野。在轨道任何给定点的卫星视野覆盖了一个广泛的地理区
域。对于此区域,平均即时船数分别是22 000,如在图A7-15中所示。船的数量是基于组合
的AIS等级A地面和卫星接收数据。
图A7-15
船即时数量的视野情形
图A7-15是示意图,地面站接收的AIS以蓝色显示,而卫星接收的AIS以红色显示。
8.2.1 VHF数据交换卫星下行链路特性
要求符合的功率通量密度掩模是(还如附件4的表A4-1所描述)
( °)( /( ∗ )) = −149 + 0.16 ∗ ° 0° ≤ < 45°;−142 + 0.53 ∗ ( ° − 45°) 45° ≤ < 60°;−134 + 0.1 ∗ ( ° − 60°) 60° ≤ ≤ 90°.
此处,θ是在海平面以上入射波的到达角(度),列表如下:
表A7-8
PFD掩模表
dBW Δ = -36.0 dB Δ = +14.0 dB θ 通量 /4 kHz 通量 / 1 Hz 通量100 kHz 0 -149.00 -185.00 -135.00 5 -148.20 -184.20 -134.20
10 -147.40 -183.40 -133.40 15 -146.60 -182.60 -132.60 20 -145.80 -181.80 -131.80 25 -145.00 -181.00 -131.00
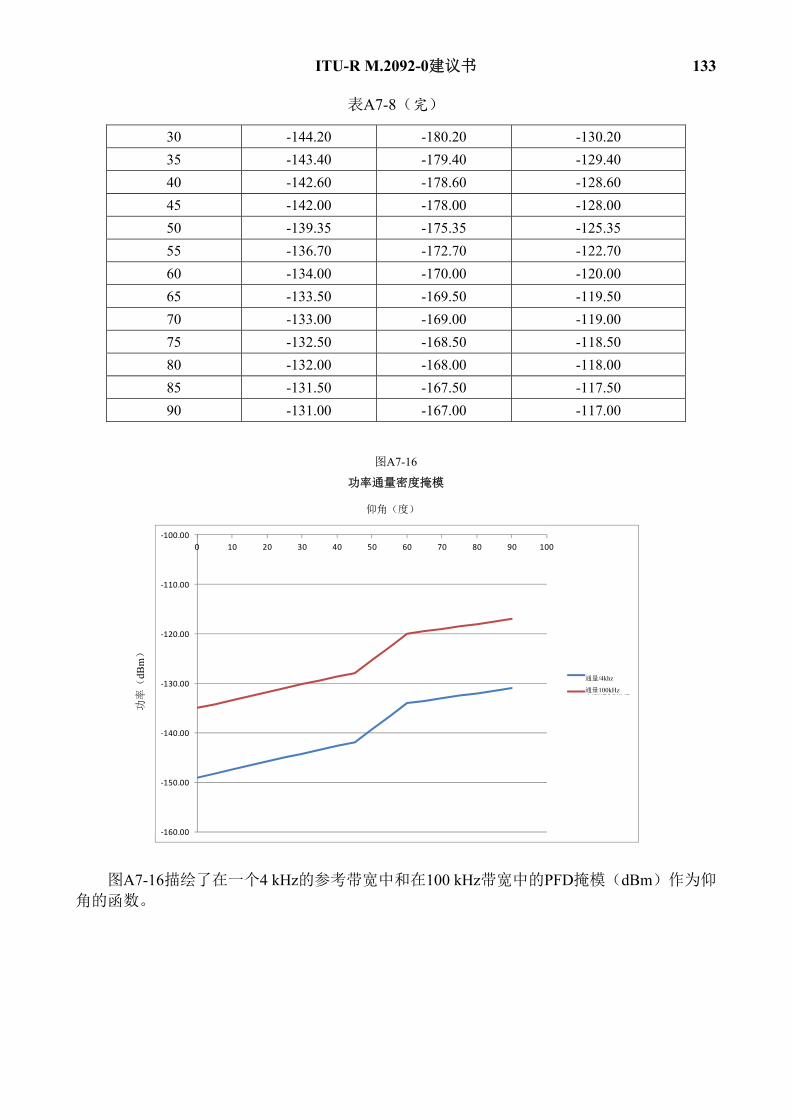
ITU-R M.2092-0建议书 133
表A7-8(完)
30 -144.20 -180.20 -130.20 35 -143.40 -179.40 -129.40 40 -142.60 -178.60 -128.60 45 -142.00 -178.00 -128.00 50 -139.35 -175.35 -125.35 55 -136.70 -172.70 -122.70 60 -134.00 -170.00 -120.00 65 -133.50 -169.50 -119.50 70 -133.00 -169.00 -119.00 75 -132.50 -168.50 -118.50 80 -132.00 -168.00 -118.00 85 -131.50 -167.50 -117.50 90 -131.00 -167.00 -117.00
图A7-16
功率通量密度掩模
图A7-16描绘了在一个4 kHz的参考带宽中和在100 kHz带宽中的PFD掩模(dBm)作为仰
角的函数。
-160.00
-150.00
-140.00
-130.00
-120.00
-110.00
-100.000 10 20 30 40 50 60 70 80 90 100
Flux / 4khz
Flux100kHz
仰角(度)
功率
(dB
m)
通量/4khz
通量100kHz
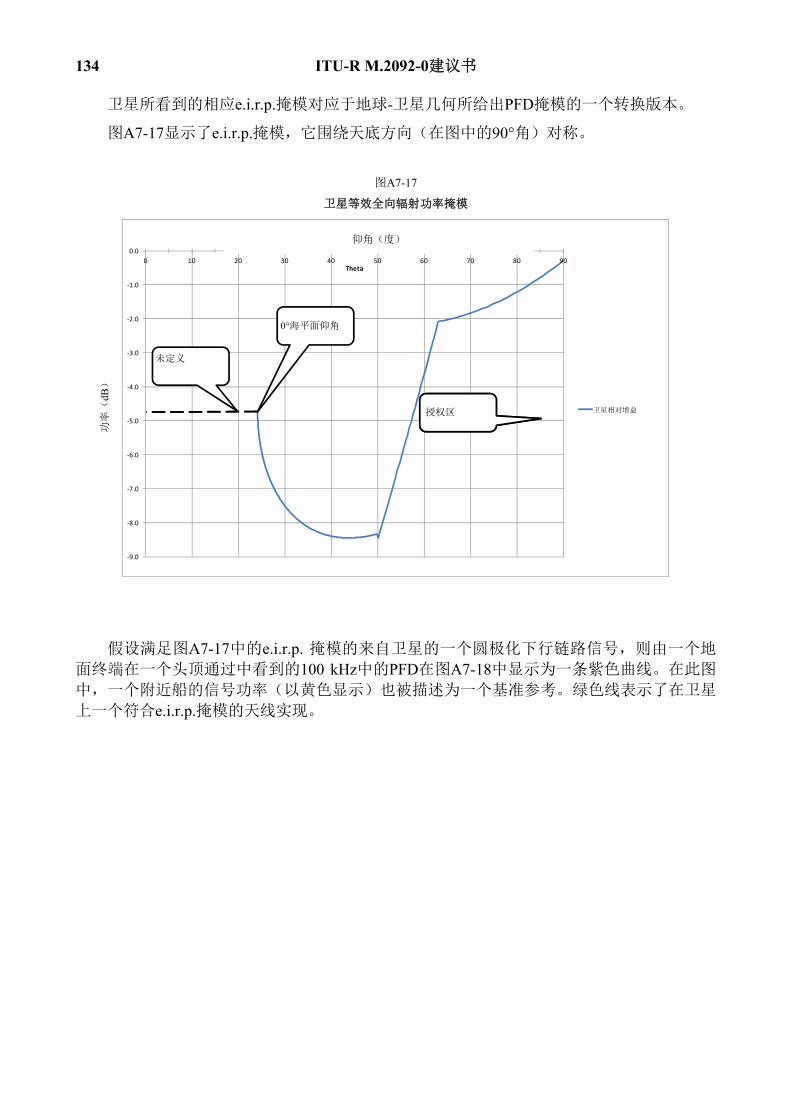
134 ITU-R M.2092-0建议书
卫星所看到的相应e.i.r.p.掩模对应于地球-卫星几何所给出PFD掩模的一个转换版本。
图A7-17显示了e.i.r.p.掩模,它围绕天底方向(在图中的90°角)对称。
图A7-17
卫星等效全向辐射功率掩模
假设满足图A7-17中的e.i.r.p. 掩模的来自卫星的一个圆极化下行链路信号,则由一个地
面终端在一个头顶通过中看到的100 kHz中的PFD在图A7-18中显示为一条紫色曲线。在此图
中,一个附近船的信号功率(以黄色显示)也被描述为一个基准参考。绿色线表示了在卫星
上一个符合e.i.r.p.掩模的天线实现。
-9.0
-8.0
-7.0
-6.0
-5.0
-4.0
-3.0
-2.0
-1.0
0.00 10 20 30 40 50 60 70 80 90
Theta
Relative Gain Satellite
Relative Gain SatelliteAutorized zoneAutorized zone
Undefined
0° Elevation sea level
仰角(度)
功率(
dB)
卫星相对增益
未定义
0°海平面仰角
授权区
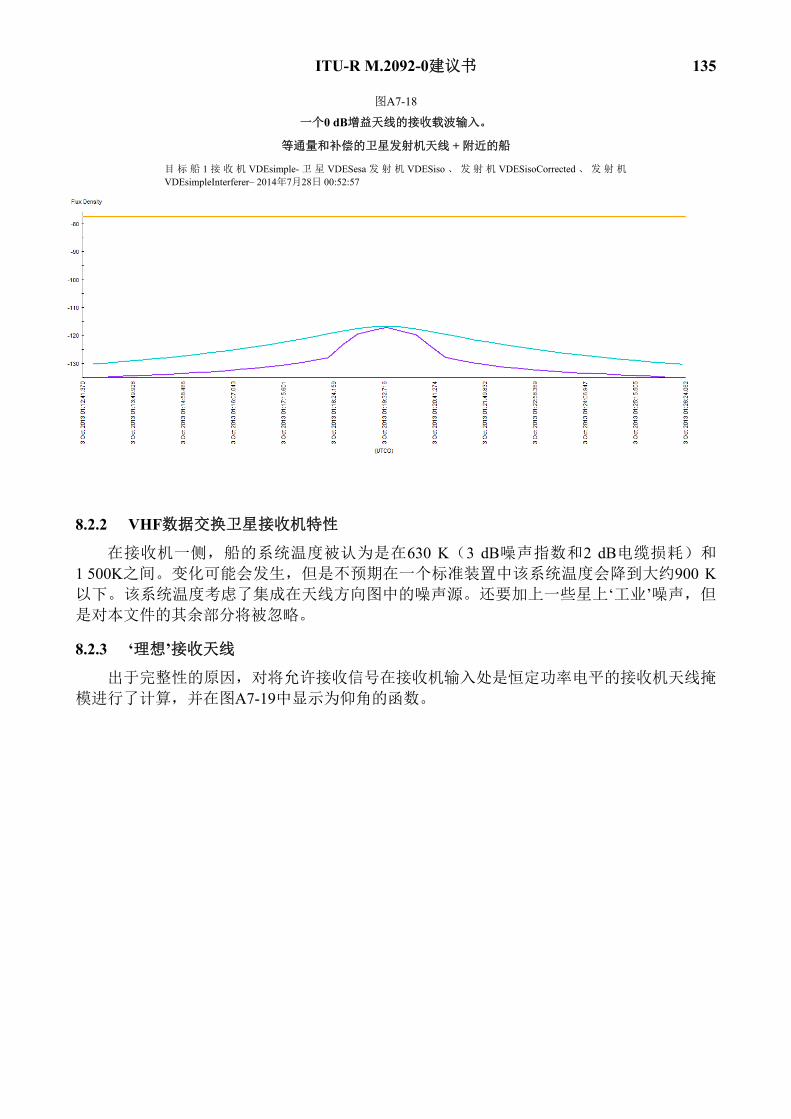
ITU-R M.2092-0建议书 135
图A7-18
一个0 dB增益天线的接收载波输入。
等通量和补偿的卫星发射机天线 + 附近的船
8.2.2 VHF数据交换卫星接收机特性
在接收机一侧,船的系统温度被认为是在630 K(3 dB噪声指数和2 dB电缆损耗)和
1 500K之间。变化可能会发生,但是不预期在一个标准装置中该系统温度会降到大约900 K以下。该系统温度考虑了集成在天线方向图中的噪声源。还要加上一些星上‘工业’噪声,但
是对本文件的其余部分将被忽略。
8.2.3 ‘理想’接收天线
出于完整性的原因,对将允许接收信号在接收机输入处是恒定功率电平的接收机天线掩
模进行了计算,并在图A7-19中显示为仰角的函数。
目 标 船 1 接 收 机 VDEsimple- 卫 星 VDESesa 发 射 机 VDESiso 、 发 射 机 VDESisoCorrected 、 发 射 机
VDEsimpleInterferer– 2014年7月28日 00:52:57
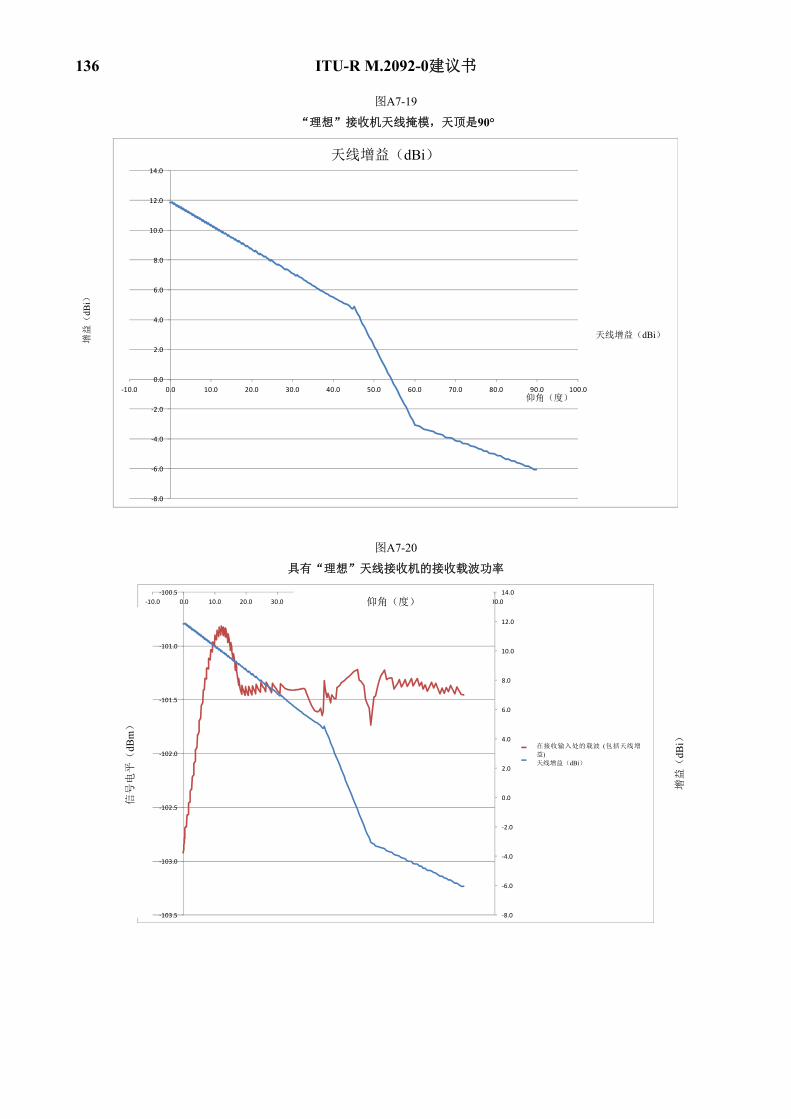
136 ITU-R M.2092-0建议书
图A7-19
“理想”接收机天线掩模,天顶是90°
图A7-20
具有“理想”天线接收机的接收载波功率
-8.0
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
-10.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0 100.0
Gain Antenne dBi
Gain Antenne dBi
-8.0
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
-103.5
-103.0
-102.5
-102.0
-101.5
-101.0
-100.5-10.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0 100.0
Carrier at Rx input (with antenna gain)
Gain Antenne dBi
仰角(度)
增益(
dBi)
信号电
平(
dBm)
在接收输入处的载波 (包括天线增
益) 天线增益(dBi)
天线增益(dBi)
仰角(度)
增益
(dB
i)
天线增益(dBi)

ITU-R M.2092-0建议书 137
图A7-20显示了在一个具有“理想”接收天线的接收机输入处的接收信号功率(dBm)
作为仰角的函数。此链路分析是采用考虑了信号传播损伤的专业商用卫星通信软件工具进
行计算的。
但是,该软件工具未考虑在非常低仰角处(<1°)可能的功率强度损失。由于海水的反
射表面,该功率损失可能高达6 dB,主要是圆或水平极化。值得注意的是,在接收机输入处
的信号功率大约是-101 dBm,且这比ITU-R M.1842建议书建议的船上站16-QAM灵敏度低
3 dB。
图A7-21
“理想”天线的Eb/N0补偿方向图
图A7-21显示了“理想”天线在一个头顶通过中对100 kHz载波观察到的相应Eb/N0。
8.2.4 实际接收天线
对4种不同天线进行了考虑: − 在ITU-R F.1336建议书天线方向图和垂直极化(天线1)中的0 dBd点。 − 一个1.25 λ垂直天线(商用天线,当安装在一个200 m长油轮驾驶室顶上时计算的方
向图),垂直极化(天线2)。 − 一个卫星专用旋转天线,右旋圆极化(RHCP)(天线3)。 − 一个半球面0 dBi增益天线,垂直极化(天线4)。
采用卫星通信的专业软件工具,已经进行了模拟来确定在接收机输入处的载波功率电平
并将确定以下情形的Eb/N0: − 头顶通过; − 侧面通过; − 非常低的通过。
Eb/N
0 in
dB
目标船1接收机VDESrxCompPattern-卫星VDESesa接收机VDESisoCorrected – 2014年8月22日 00:33:54
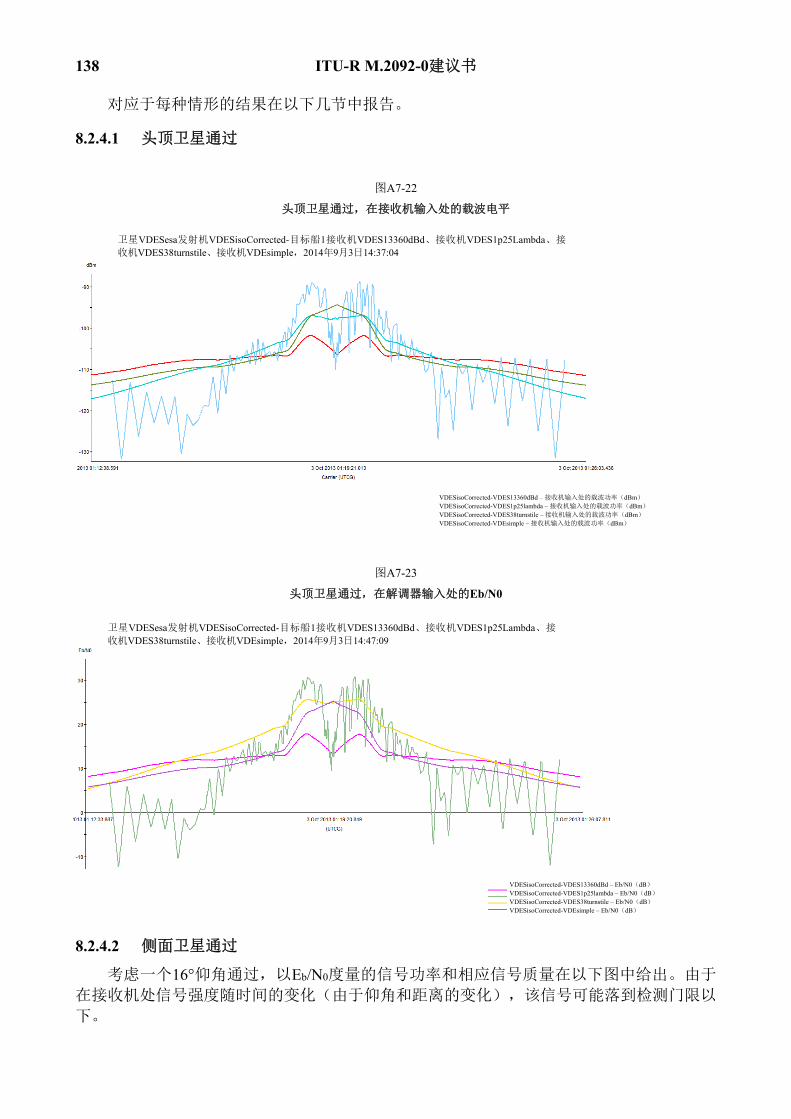
138 ITU-R M.2092-0建议书
对应于每种情形的结果在以下几节中报告。
8.2.4.1 头顶卫星通过
图A7-22
头顶卫星通过,在接收机输入处的载波电平
图A7-23
头顶卫星通过,在解调器输入处的Eb/N0
8.2.4.2 侧面卫星通过
考虑一个16°仰角通过,以Eb/N0度量的信号功率和相应信号质量在以下图中给出。由于
在接收机处信号强度随时间的变化(由于仰角和距离的变化),该信号可能落到检测门限以
下。
Antenna 1 Antenna 2 Antenna 3 Antenna 4
VDESisoCorrected-VDES13360dBd – 接收机输入处的载波功率(dBm) VDESisoCorrected-VDES1p25lambda – 接收机输入处的载波功率(dBm) VDESisoCorrected-VDES38turnstile – 接收机输入处的载波功率(dBm) VDESisoCorrected-VDEsimple – 接收机输入处的载波功率(dBm)
卫星VDESesa发射机VDESisoCorrected-目标船1接收机VDES13360dBd、接收机VDES1p25Lambda、接
收机VDES38turnstile、接收机VDEsimple,2014年9月3日14:37:04
VDESisoCorrected-VDES13360dBd – Eb/N0(dB) VDESisoCorrected-VDES1p25lambda – Eb/N0(dB) VDESisoCorrected-VDES38turnstile – Eb/N0(dB) VDESisoCorrected-VDEsimple – Eb/N0(dB)
卫星VDESesa发射机VDESisoCorrected-目标船1接收机VDES13360dBd、接收机VDES1p25Lambda、接
收机VDES38turnstile、接收机VDEsimple,2014年9月3日14:47:09
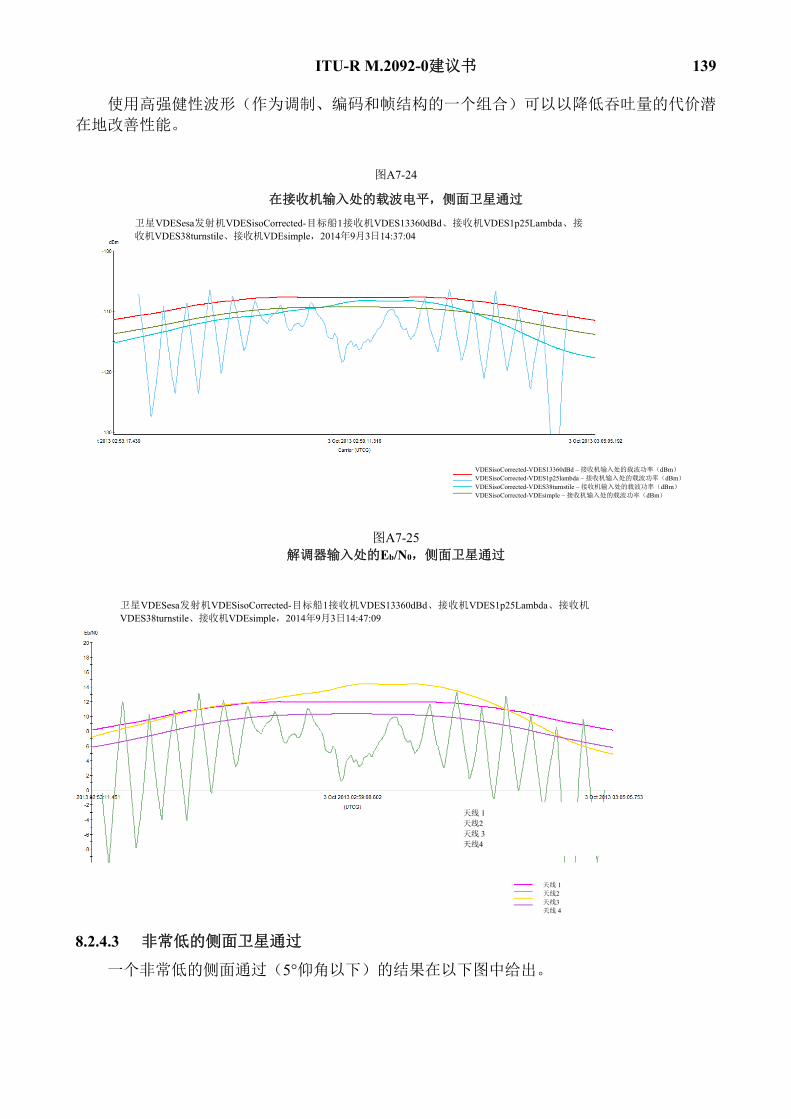
ITU-R M.2092-0建议书 139
使用高强健性波形(作为调制、编码和帧结构的一个组合)可以以降低吞吐量的代价潜
在地改善性能。
图A7-24
在接收机输入处的载波电平,侧面卫星通过
图A7-25 解调器输入处的Eb/N0,侧面卫星通过
8.2.4.3 非常低的侧面卫星通过
一个非常低的侧面通过(5°仰角以下)的结果在以下图中给出。
天线 1 天线2 天线 3 天线4
Antenna 1 Antenna 2 Antenna 3 Antenna 4
VDESisoCorrected-VDES13360dBd – 接收机输入处的载波功率(dBm) VDESisoCorrected-VDES1p25lambda – 接收机输入处的载波功率(dBm) VDESisoCorrected-VDES38turnstile – 接收机输入处的载波功率(dBm) VDESisoCorrected-VDEsimple – 接收机输入处的载波功率(dBm)
卫星VDESesa发射机VDESisoCorrected-目标船1接收机VDES13360dBd、接收机VDES1p25Lambda、接
收机VDES38turnstile、接收机VDEsimple,2014年9月3日14:37:04
卫星VDESesa发射机VDESisoCorrected-目标船1接收机VDES13360dBd、接收机VDES1p25Lambda、接收机
VDES38turnstile、接收机VDEsimple,2014年9月3日14:47:09
VDESisoCorrected-VDES13360dBd – Eb/N0(dB) VDESisoCorrected-VDES1p25lambda – Eb/N0(dB) VDESisoCorrected-VDES38turnstile – Eb/N0(dB) VDESisoCorrected-VDEsimple – Eb/N0(dB)
天线 1 天线2 天线3 天线 4
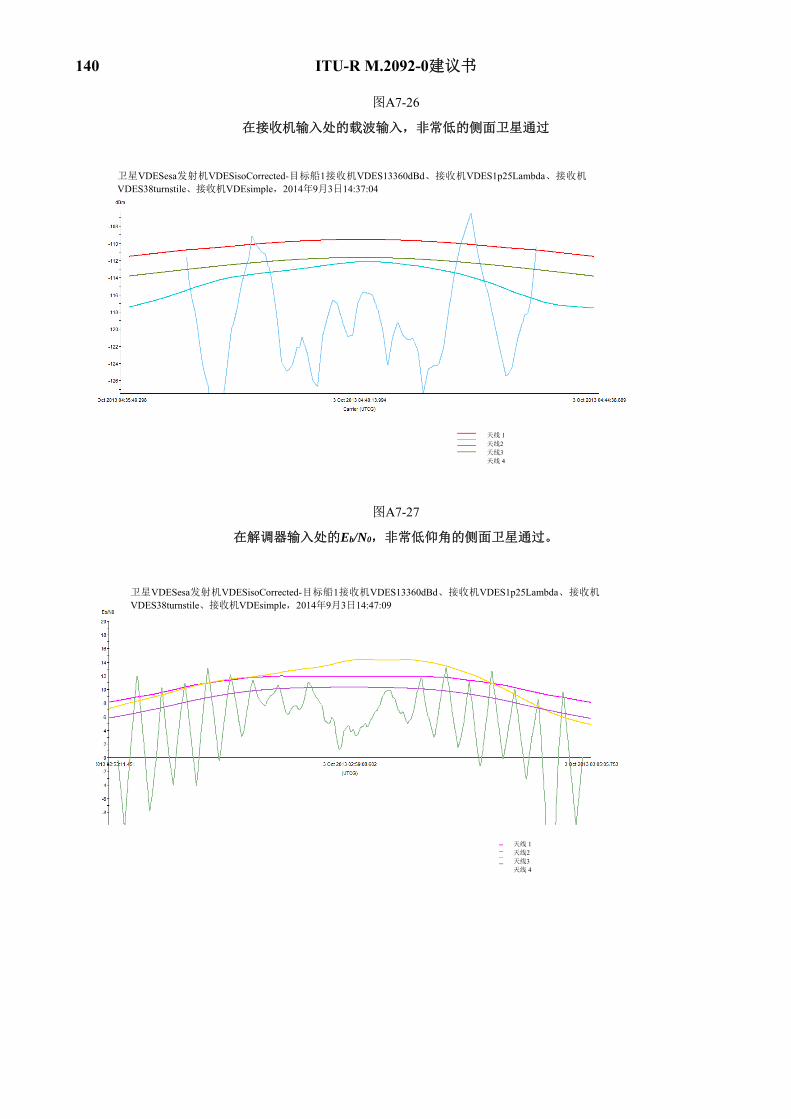
140 ITU-R M.2092-0建议书
图A7-26
在接收机输入处的载波输入,非常低的侧面卫星通过
图A7-27
在解调器输入处的Eb/N0,非常低仰角的侧面卫星通过。
天线 1 天线2 天线3 天线 4
卫星VDESesa发射机VDESisoCorrected-目标船1接收机VDES13360dBd、接收机VDES1p25Lambda、接收机
VDES38turnstile、接收机VDEsimple,2014年9月3日14:37:04
卫星VDESesa发射机VDESisoCorrected-目标船1接收机VDES13360dBd、接收机VDES1p25Lambda、接收机
VDES38turnstile、接收机VDEsimple,2014年9月3日14:47:09
天线 1 天线2 天线3 天线 4
ITU-R M.2092-0建议书 141
8.2.5 波形选择
如前面各节中所显示,对于一个实际天线,在接收机输入处的信噪比作为仰角的函数可
以变化相当大。对波形调制、编码和帧结构的选择对链路吞吐量及其可用性上有很大的影
响。
对连续对比间歇信号传输的决定将影响VDE卫星广播的捕获、跟踪和总体性能 (比特
率、误差概率等)。在系统级别,一个基于时隙的传输(时分)可以增加卫星-地面系统互
动的复杂性并且降低总体效率。但是,VDE广播和地面岸 – 船或船 – 船的共存也可以影响地
面信号的检测性能。
对调制方式的选择对卫星承载功率放大器的效率有影响。使用(准)恒定包络减少了峰
值-平均功率比,并使发射机工作在一个具有更少信号失真的更高功效的模式。
为了有助于在接收机处的同步和信号检测,作为空中接口定义的一部分,使用已知符号
(作为导频或前导码)是必要的。
使用数据序列随机化(扰码)有助于同步和缓解频谱异常。
允许多于一种编码速率(和调制方式)的系统能力可以在系统规模和业务可用性上提供
更多的灵活性。
有很多具有空中接口规范的现有开放标准,例如通过卫星DVB-S2x、DVB-SH和DVB-RCS2的数字视频广播,它们提供成熟的技术解决方案作为这样设计权衡的出发点。DVB-RCS2波形的性能特性在表A7-8中描述。图A7-28介绍了频谱效率(信息bit/symbol)作为这
些波形Es/N0的函数。 注 – DVB-RCS2参考:ETSI TS 101 545-1 V1.2.1 (2014-04)可以在以下网址得到: http://www.etsi.org/deliver/etsi_ts/101500_101599/10154501/01.02.01_60/ts_10154501v010201p.pdf
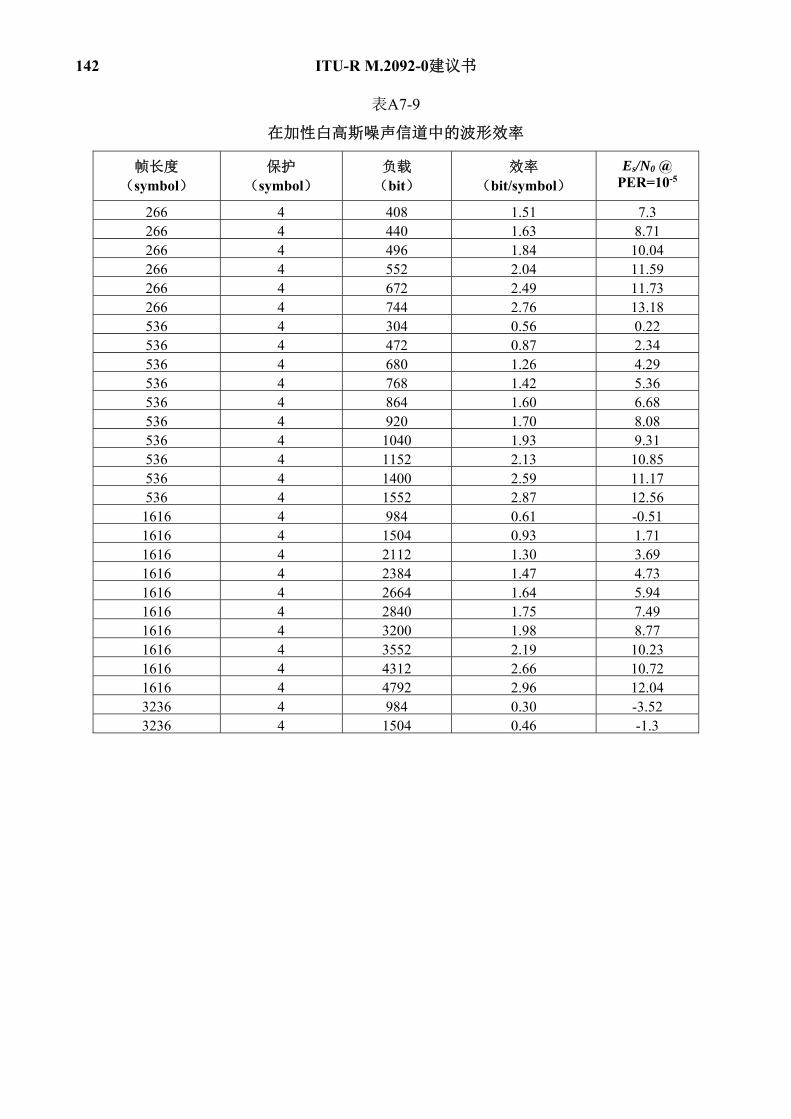
142 ITU-R M.2092-0建议书
表A7-9
在加性白高斯噪声信道中的波形效率
帧长度 (symbol)
保护 (symbol)
负载 (bit)
效率 (bit/symbol)
Es/N0 @ PER=10-5
266 4 408 1.51 7.3266 4 440 1.63 8.71266 4 496 1.84 10.04266 4 552 2.04 11.59266 4 672 2.49 11.73266 4 744 2.76 13.18536 4 304 0.56 0.22536 4 472 0.87 2.34536 4 680 1.26 4.29536 4 768 1.42 5.36536 4 864 1.60 6.68536 4 920 1.70 8.08536 4 1040 1.93 9.31536 4 1152 2.13 10.85536 4 1400 2.59 11.17536 4 1552 2.87 12.56
1616 4 984 0.61 -0.511616 4 1504 0.93 1.711616 4 2112 1.30 3.691616 4 2384 1.47 4.731616 4 2664 1.64 5.941616 4 2840 1.75 7.491616 4 3200 1.98 8.771616 4 3552 2.19 10.231616 4 4312 2.66 10.721616 4 4792 2.96 12.043236 4 984 0.30 -3.523236 4 1504 0.46 -1.3
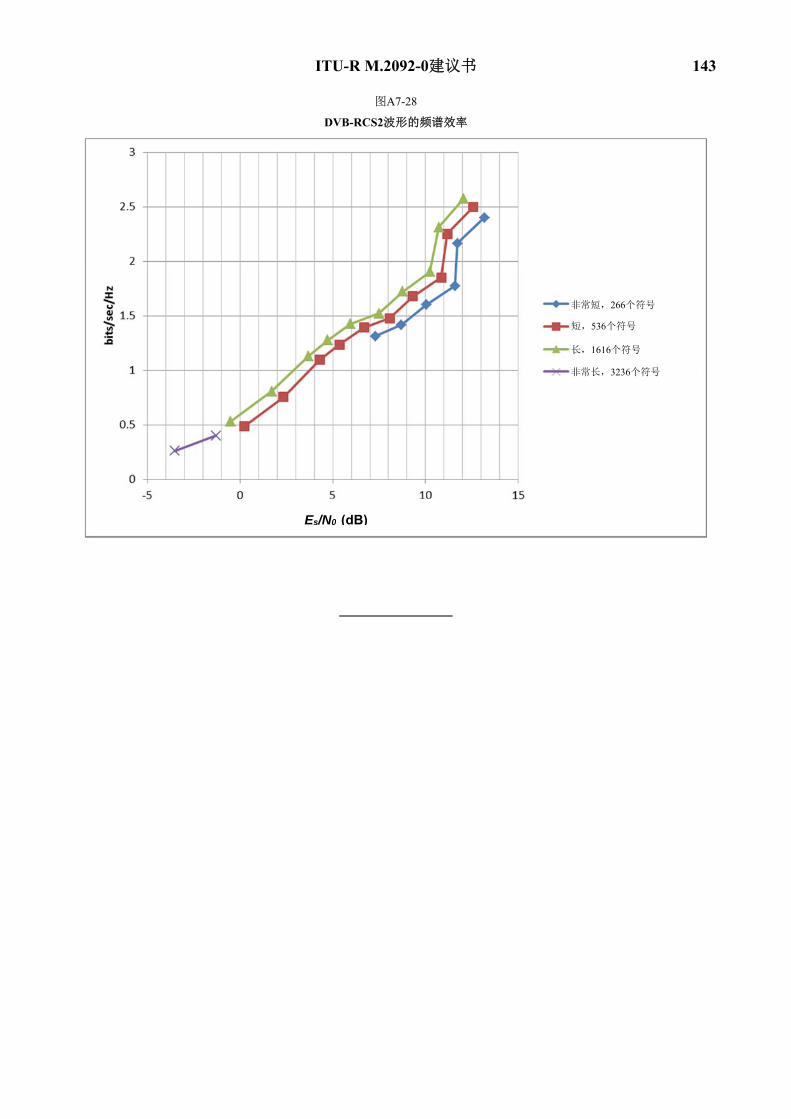
ITU-R M.2092-0建议书 143
图A7-28
DVB-RCS2波形的频谱效率
Es/N0 (dB)
非常短,266个符号
短,536个符号
长,1616个符号
非常长,3236个符号