Inleiding in de lineaire algebra · De cursus lineaire algebra bestaat uit een aantal colleges in...
103
Inleiding in de lineaire algebra (SV 0.9) W.Oele P.J. den Brok 16 maart 2014
Transcript of Inleiding in de lineaire algebra · De cursus lineaire algebra bestaat uit een aantal colleges in...
Inleiding in de lineaire algebra(SV 0.9)
W.OeleP.J. den Brok
16 maart 2014

Inleiding
De cursus lineaire algebra bestaat uit een aantal colleges in de matrix- en de vectorreke-ning. De colleges over – en de oefenopdrachten uit – de matrixrekening zijn bedoeld alsvoorbereiding voor het oplossen van stelsels lineaire vergelijkingen die bijvoorbeeld op-treden bij optimalisatieproblemen. De vectorrekening is vooral bedoeld als voorbereidingop het vak ‘computer graphics’.
Een optimalisatieprobleem met vectoren.
Aan de student wordt uitdrukkelijk het advies gegeven tijdens het bestuderen van de stofwekelijks de opgaven te maken van de behandelde stof. De ervaring leert, dat de vol-gende hoofdstukken alleen begrepen worden als de vorige hoofdstukken geoefend zijn.Studenten die te laat beginnen met oefenen bouwen al snel een moeilijk te overbruggenachterstand op.
W. Oele en P.J. den Brok (Rotterdam, februari 2014)
1
Inhoudsopgave
1 Matrix- en vectorrekening 5
1.1 Elementaire bewerkingen . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.1 Optellen en aftrekken . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.2 Het product van een scalair en een matrix . . . . . . . . . . . . . 7
1.1.3 Nulmatrices, nulvectoren, negatieve matrices en rekenregels . . . 7
1.1.4 Het inproduct van twee vectoren . . . . . . . . . . . . . . . . . . 8
1.1.5 Het vectorproduct . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.6 Het matrixproduct . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.7 Het transponeren van een matrix . . . . . . . . . . . . . . . . . . 11
1.1.8 De symmetrische matrix . . . . . . . . . . . . . . . . . . . . . . 12
1.1.9 De identiteitsmatrix . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2 Stelsels van lineaire vergelijkingen 16
2.1 Het oplossen van stelsels van lineaire vergelijkingen . . . . . . . . . . . . 20
2.2 Lineaire stelsels van het type Ax = c . . . . . . . . . . . . . . . . . . . . 21
2.2.1 De coefficientenmatrix . . . . . . . . . . . . . . . . . . . . . . . 22
2.2.2 De toegevoegde matrix . . . . . . . . . . . . . . . . . . . . . . . 22
2.2.3 Een matrix in echelonvorm . . . . . . . . . . . . . . . . . . . . . 23
2.2.4 De rijcanonieke matrix . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 De veegmethodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.1 De veegmethode van Gauss . . . . . . . . . . . . . . . . . . . . 25
2.3.2 Het oplossen van een lineair stelsel uit de echelonvorm . . . . . . 27
2.3.3 De veegmethode van Gauss/Jordan . . . . . . . . . . . . . . . . 28
2
2.3.4 Overzicht van de veegmethodes . . . . . . . . . . . . . . . . . . 30
2.4 De oplosbaarheid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4.1 Het lineair onafhankelijke stelsel . . . . . . . . . . . . . . . . . . 31
2.4.2 Het lineair tegenstrijdige stelsel . . . . . . . . . . . . . . . . . . 31
2.4.3 Het lineair afhankelijke stelsel . . . . . . . . . . . . . . . . . . . 33
2.4.4 Overzicht oplosbaarheid . . . . . . . . . . . . . . . . . . . . . . 34
2.5 De inverse matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6 Lineaire stelsels oplossen met de inverse matrix . . . . . . . . . . . . . . 37
2.7 De determinant: eigenschappen en gebruik . . . . . . . . . . . . . . . . . 40
2.7.1 De determinant van een 2 ∗ 2 matrix . . . . . . . . . . . . . . . . 40
2.7.2 De determinant van strijdige 2D-vergelijkingen . . . . . . . . . . 40
2.7.3 De determinant van afhankelijke 2D-vergelijkingen . . . . . . . . 41
2.7.4 De determinant van oplosbare 2D-vergelijkingen . . . . . . . . . 41
2.7.5 De determinant van een 3 ∗ 3 matrix . . . . . . . . . . . . . . . . 41
2.7.6 De determinant ‘recursief’ berekenen . . . . . . . . . . . . . . . 45
2.7.7 De regel van Cramer . . . . . . . . . . . . . . . . . . . . . . . . 46
2.8 Bijzondere lineaire stelsels . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.8.1 Lineaire stelsels van het type Ax = o . . . . . . . . . . . . . . . . 47
2.8.2 Lineaire stelsels van het type Ax = λx . . . . . . . . . . . . . . . 48
2.9 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3 Vectormeetkunde 50
3.1 De vectorruimte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2 De affiene ruimte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2.1 De affiene 2D-ruimte . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2.2 Lijnen in de affiene 2D-ruimte . . . . . . . . . . . . . . . . . . . 54
3.2.3 De affiene 3D-ruimte . . . . . . . . . . . . . . . . . . . . . . . . 55
3.2.4 Een lijn in de affiene 3D-ruimte . . . . . . . . . . . . . . . . . . 56
3.2.5 Een vlak in de affiene 3D ruimte . . . . . . . . . . . . . . . . . . 56
3.3 De Euclidische ruimte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.3.1 Het inproduct v • w in de Euclidische ruimte . . . . . . . . . . . 59
3.3.2 Het uitproduct v×w in de Euclidische 3D-ruimte . . . . . . . . . 62
3
3.3.3 De normaalvergelijking van een vlak . . . . . . . . . . . . . . . 66
3.3.4 De normaalvergelijking van een lijn . . . . . . . . . . . . . . . . 68
3.3.5 Het tripleproduct u • (v×w) in de Euclidische 3D-ruimte . . . . . 69
3.4 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4 Transformaties 74
4.1 Affiene transformaties . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.1.1 Translatie van een punt . . . . . . . . . . . . . . . . . . . . . . . 75
4.1.2 Rotatie om de oorsprong . . . . . . . . . . . . . . . . . . . . . . 75
4.1.3 Schaalverandering . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.1.4 Shearing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.1.5 Het toepassen van affiene transformaties . . . . . . . . . . . . . . 80
4.2 Homogene coordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.2.1 Transformaties van homogene coordinaten . . . . . . . . . . . . 85
4.2.2 Samengestelde homogene transformaties . . . . . . . . . . . . . 86
4.2.3 Homogene 2D en 3D transformaties . . . . . . . . . . . . . . . . 88
4.3 Opgaven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
A Hoeken, cirkels en goniometrie 92
B Enkele veel voorkomende waarden in de goniometrie 95
C Afleiding van de regel van Cramer voor twee onbekenden 96
D Het Euclidische in- en uitproduct 97
E Algemene richtlijnen voor het practicum 100
‘
4

Hoofdstuk 1
Matrix- en vectorrekening
Een matrix is een schema van elementen in rijen en kolommen. De rijen leest men ho-rizontaal, de kolommen verticaal. Het aantal rijen en kolommen van een matrix wordtde afmeting van een matrix genoemd. In volgende voorbeeld zien we een matrix met deafmeting 3 ∗ 4 bestaande uit 3 rijen en 4 kolommen:
1 2 3 4√
2 −4 23 4
6 3 0 −2
Een rijvector met n elementen is vergelijkbaar met een 1 ∗ n matrix. Een kolomvector metm elementen is vergelijkbaar met een m ∗ 1 matrix. Een n ∗ m matrix is te beschouwenals een kolom van n rijvectoren met m elementen of een rij van m kolomvectoren met nelementen. De elementen van een matrix of vector zijn meestal scalair van aard. Scalairenzijn gewone constanten, variabelen of functies met een reele waarde, aangegeven met nor-male letters en cijfers. Anders dan scalairen worden matrices met vetgedrukte hoofdlettersen vectoren met vetgedrukte kleine letters genoteerd:
k =
123...
r =(
1 2 3 . . .)
A =
1 2 3 4√
2 −4 23 4
6 3 0 −2
Wanneer we een specifiek element in de 2e rij en 3e kolom van de matrix A bedoelen,dan geven we dat aan als a2,3. De matrix A uit het vorige voorbeeld heeft bijvoorbeeld deelementen a2,3 = 2
3 en a2,2 = −4. Als 1 ≤ r ≤ n en 1 ≤ k ≤ m dan is het element ar,k
zonder meer te adresseren in een n ∗ m matrix:
A =
a1,1 a1,2 a1,3 . . . a1,m
a2,1 a2,2 a2,3 . . . a2,m...
....... . .
...an,1 an,2 an,3 . . . an,m
5

Een vierkante matrix is een matrix, waarvan het aantal rijen gelijk is aan het aantal ko-lommen. 1 2 3
6 −2 412 2 5
(
4 85 2
) (5
)
De hoofddiagonaal van een matrix is een denkbeeldige lijn die begint bij element1,1 enschuin naar beneden loopt. In de volgende matrices loopt de hoofddiagonaal langs deelementen met de waarde 1:
1 3 27 1 36 2 1
1 2 84 1 93 12 14 2 9
(
1 7 30 1 2
)
Alleen een vierkante matrix wordt door de hoofddiagonaal in een gelijkvormige linkerbenedenhelft en een rechter bovenhelft gesplitst. In de volgende vierkante matrix wordtde hoofddiagonaal gevormd door de elementen 3, 5, -4 en 2:
3 7 −2 59 5 x 862 1 −4 89 5 3 2
1.1 Elementaire bewerkingen
1.1.1 Optellen en aftrekken
Twee matrices kunnen bij elkaar worden opgeteld en van elkaar worden afgetrokken alszij dezelfde afmetingen hebben.
Dit betekent dat het aantal rijen van de ene matrix gelijk moet zijn aan het aantal rijen vande andere. Voor de kolommen geldt hetzelfde. Een n ∗ m matrix mag dus alleen wordenopgeteld bij een andere n ∗ m matrix.
Voorbeeld 1.11 2 3 4√
2 −4 23 4
6 3 0 −2
+
4 1 −3 5√
2 −6 23 12
16 2 0 −2
=
5 3 0 9
2√
2 −10 43 16
376 5 0 −4
6

1.1.2 Het product van een scalair en een matrix
Het product van een scalair en een matrix is de vermenigvuldiging van alle elementen ineen matrix met een getal, de scalair, waarbij het resultaat ook de matrixvorm heeft:
A =
(1 2 32 −1 10
)→ 5A =
(5 10 15
10 −5 50
)
1.1.3 Nulmatrices, nulvectoren, negatieve matrices en rekenregels
Een aparte groep zijn de nulmatrices O, matrices waarvan alle elementen gelijk zijn aan0. Nulmatrices O spelen bij het optellen en aftrekken van matrices een vergelijkbare rolals het getal 0 bij van gewone getallen. Een n ∗m nulmatrix ontstaat door het product vande scalaire nul en een n ∗ m matrix. Merk op dat in 0A = O de scalaire 0 en de nulmatrixO verschillend genoteerd worden.
O =
0 0 0 00 0 0 00 0 0 00 0 0 0
O =
0 00 00 0
Een bijzondere groep nulmatrices zijn de nulvectoren, vectoren waarvan alle elementen 0zijn. Een nulvector wordt symbolisch genoteerd als o:
o =
000
o =(
0 0 0 0 0)
Een negatieve matrix −A ontstaat als het product −1A = −A. Een voorbeeld van eennegatieve matrix:
A =
(1 2 32 −1 10
)→ −A =
(−1 −2 −3−2 1 −10
)Het aftrekken van matrix komt overeen met het optellen met een negatieve matrix:
A − B = A + (−1B) = A + (−B)
De rekenregels voor het optellen van matrices en producten van scalairen met matriceszijn:
1) (A + B) + C = A + (B + C) 5) α(A + B) = αA + αB2) A + O = A 6) (α + β)A = αA + βA3) A − A = O 7) (αβ)A = α(βA)4) A + B = B + A 8) αA = Aα
7

1.1.4 Het inproduct van twee vectoren
Het inproduct tussen twee vectoren a en b wordt genoteerd als a • b. Deze notatie magniet verward worden met het product van twee scalairen α · β.
a • b = a1 · b1 + a2 · b2 + . . . + an · bn
Het resultaat van het inproduct is een scalaire waarde, de som van de paarsgewijs verme-nigvuldigde overeenkomstige elementen uit beide vectoren. Het inproduct is dus alleenmogelijk als het aantal elementen van beide vectoren gelijk is. Het is wel commutatief, devolgorde in het inproduct mag omgekeerd worden:
a • b = b • a
Een inproduct van een vector met zichzelf is zonder meer mogelijk:
a • a = a21 + a2
2 + . . . + a2n
Voorbeeld 1.2
a =
123
b =(
3 2 0)
→ a•b = 1·3+2·2+3·0 = b•a = 3·1+2·2+0·3 = 7
a • a = 1 · 1 + 2 · 2 + 3 · 3 = 14 b • b = 3 · 3 + 2 · 2 + 0 · 0 = 13
1.1.5 Het vectorproduct
Het vectorproduct ab heeft een andere notatie dan het inproduct a • b. Hoewel het vec-torproduct gebruik maakt van het inproduct is het niet-commutatief, de regel ab = bageldt dus niet. Ook is het vectorproduct alleen mogelijk met een n rijvector en een nkolomvector of met een n kolomvector en een n rijvector.
In het geval van een vectorproduct van een n rijvector a met een n kolomvector b is hetresultaat van ab een scalair, het inproduct tussen beide vectoren:
ab = (a1 a2 . . . an)
b1
b2
. . .bn
= a1 · b1 + a2 · bk + . . . + an · bn = a • b
Daarentegen geeft het vectorproduct van een kolomvector b met n elementen (een kolommet n rijvectoren van een element) en een rijvector a met n elementen (een rij met n
8

kolomvectoren van een element), een vierkante n ∗ n matrix. In de resulterende matrixzijn de scalaire elementen de inproducten van overeenkomstige rij- en kolomvectorenmet elk een element:
ba =
b1
b2
. . .bn
(a1 a2 . . . an) =
b1 · a1 b1 · a2 . . . b1 · an
b2 · a1 b2 · a2 . . . b2 · an
. . . . . . . . . . . .bn · a1 bn · a2 . . . bn · an
In tegenstelling tot het inproduct is het vectorproduct van twee rijvectoren – of van tweekolomvectoren – niet mogelijk, ook al hebben ze een gelijk aantal elementen. Het vec-torproduct komt daarmee overeen met het matrixproduct dat een soortgelijke beperkingheeft.
1.1.6 Het matrixproduct
Het matrixproduct van vierkante en niet-vierkante matrices kunnen we verklaren aan dehand van de vectorproducten van de rij- en kolomvectoren die matrices vormen.
De n ∗ m matrix A en de m ∗ p matrix B, geven bij AB = C de n ∗ p matrix C. Om dezevermenigvuldiging toe te lichten worden de matrices in een schema geplaatst zodanig datde horizontale lijnen door de rijen uit de A matrix snijden met de verticale lijnen doorde kolommen van de B-matrix. Op de snijpunten bevinden zich de elementen van de C-matrix:
b1,1 b1,2 . . . b1,p
b2,1 b2,2 . . . b2,p
. . . . . . . . . . . .bm,1 bm,2 . . . bm,p
a1,1 a1,2 . . . a1,m
a2,1 a2,2 . . . a2,m
. . . . . . . . . . . .an,1 an,2 . . . an,m
c1,1 c1,2 . . . c1,p
c2,1 c2,2 . . . c2,p
. . . . . . . . . . . .cn,1 cn,2 . . . cn,p
Elk snijpunt – element cr,k – is het vectorproduct tussen rijvector r in de A-matrix enkolomvector k in de B-matrix. In dit geval mogen we het inproduct gebruiken om hetresulterende element cr,k te berekenen:
cr,k =(ar,1 ar,2 . . . ar,m
)•
b1,k
b2,k
. . .bm,k
= ar,1 · b1,k + ar,2 · b2,k + . . . + ar,m · bm,k
9
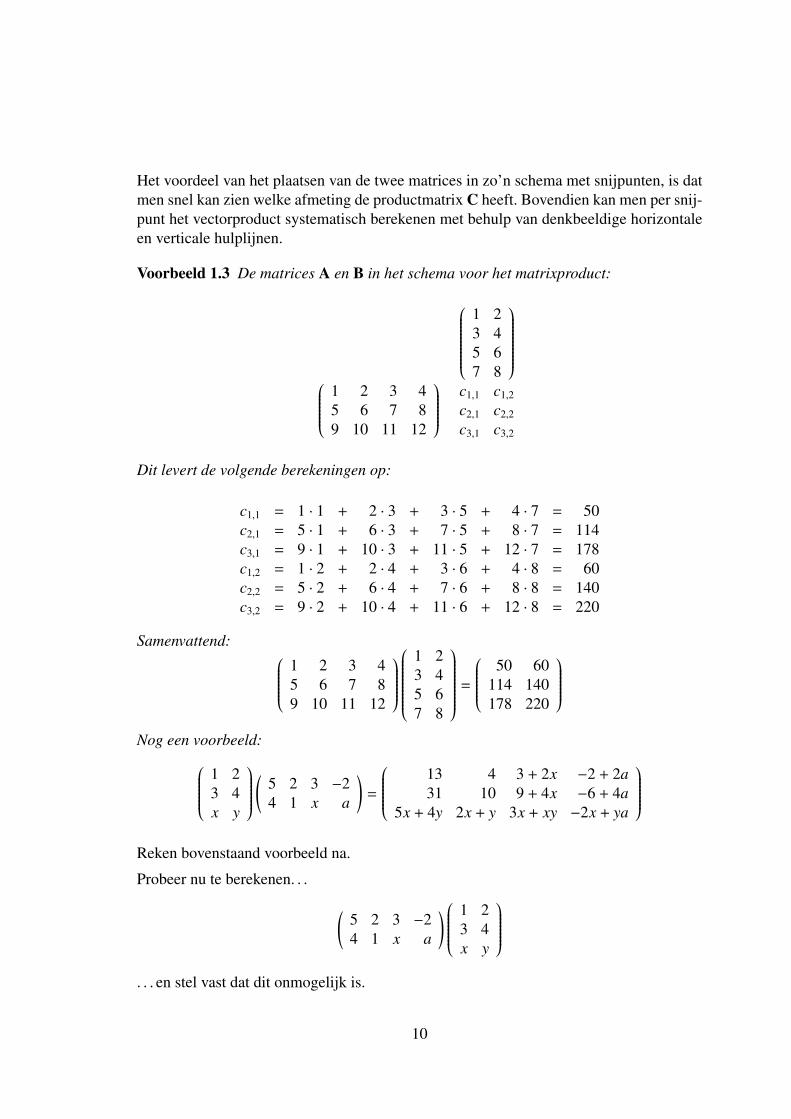
Het voordeel van het plaatsen van de twee matrices in zo’n schema met snijpunten, is datmen snel kan zien welke afmeting de productmatrix C heeft. Bovendien kan men per snij-punt het vectorproduct systematisch berekenen met behulp van denkbeeldige horizontaleen verticale hulplijnen.
Voorbeeld 1.3 De matrices A en B in het schema voor het matrixproduct:
1 23 45 67 8
1 2 3 45 6 7 89 10 11 12
c1,1 c1,2
c2,1 c2,2
c3,1 c3,2
Dit levert de volgende berekeningen op:
c1,1 = 1 · 1 + 2 · 3 + 3 · 5 + 4 · 7 = 50c2,1 = 5 · 1 + 6 · 3 + 7 · 5 + 8 · 7 = 114c3,1 = 9 · 1 + 10 · 3 + 11 · 5 + 12 · 7 = 178c1,2 = 1 · 2 + 2 · 4 + 3 · 6 + 4 · 8 = 60c2,2 = 5 · 2 + 6 · 4 + 7 · 6 + 8 · 8 = 140c3,2 = 9 · 2 + 10 · 4 + 11 · 6 + 12 · 8 = 220
Samenvattend: 1 2 3 45 6 7 89 10 11 12
1 23 45 67 8
=
50 60114 140178 220
Nog een voorbeeld: 1 2
3 4x y
(
5 2 3 −24 1 x a
)=
13 4 3 + 2x −2 + 2a31 10 9 + 4x −6 + 4a
5x + 4y 2x + y 3x + xy −2x + ya
Reken bovenstaand voorbeeld na.
Probeer nu te berekenen. . . (5 2 3 −24 1 x a
) 1 23 4x y
. . . en stel vast dat dit onmogelijk is.
10

Het vectorproduct dus is een bijzonder geval van het matrixproduct. Mits zij voldoet aande afmetingsvoorwaarde van het matrixproduct, is product van een vector en een matrixmogelijk. Het product van een 1 ∗ n rijvector met een n ∗ m matrix geeft als resultaateen 1 ∗ m rijvector. Het product van n ∗ m matrix met een m ∗ 1 kolomvector geeft alsresultaat een n ∗ 1 kolomvector. Resumerend gelden voor alle vector- en matrixproductende volgende regels:
Regel Een a ∗ b matrix kan alleen vermenigvuldigd worden met een b ∗ c matrix. Indat geval ontstaat een a ∗ c matrix. Twee matrices kunnen dus alleen met elkaarvermenigvuldigd worden wanneer het aantal kolommen van de eerste matrix gelijkis aan het aantal rijen van de tweede matrix;
Regel De commutatieve eigenschap van het vermenigvuldigen van gewone getallen(ab = ba) geldt niet voor matrices en vectoren, de regels ab = ba en AB = BAen aB = Ba zijn ongeldig;
De rekenregels voor het vermenigvuldigen van matrices (en vectoren) zijn:
1) (AB)C = A(BC)2) A(B + C) = AB + AC3) (B + C)A = BA + CA4) α(AB) = (αA)B = A(αB)
1.1.7 Het transponeren van een matrix
De getransponeerde matrix AT ontstaat uit matrix A door met behoud van volgorde, allerijvectoren in kolomvectoren – of alle kolomvectoren in rijvectoren – te veranderen. Dezeverwisseling spiegelt de posities van de elementen ten opzichte van de hoofddiagonaal.
A =
1 2 34 5 67 8 9
10 11 12
AT =
1 4 7 102 5 8 113 6 9 12
Het transponeren van een a ∗ b matrix resulteert in een b ∗ a matrix. M.a.w. de afmetingvan een matrix worden bij het transponeren verwisseld.
A =
1 24 57 8
AT =
(1 4 72 5 8
)
Wanneer men een rijvector transponeert, verkrijgt men een kolomvector en vice versa:
11

b =(
1 2 3 4)
bT =
1234
bTT=
(1 2 3 4
)
Bij het transponeren verwisselen de elementen alleen van positie (er,k → ek,r). Elkelement er=k,k=r op de hoofddiagonaal blijft op dezelfde plaats.
Voor het transponeren gelden de volgende rekenregels:
1) (A + B)T = AT + BT 3) (αA)T = αAT
2) (AT)T = A 4) (AB)T = BTAT
5) αT = α
1.1.8 De symmetrische matrix
Een symmetrische matrix is een vierkante matrix waarvoor A = AT geldt, zoals:
A =
1 2 32 4 53 5 6
AT =
1 2 32 4 53 5 6
1.1.9 De identiteitsmatrix
Een matrix die we nog vaak zullen tegenkomen is de zogenaamde identiteitsmatrix. Eenidentiteitsmatrix is een vierkante matrix, waarvan alle elementen gelijk zijn aan 0, behalvede elementen op de hoofddiagonaal. De hoofddiagonaal is gevuld met 1-en.
1 0 0 00 1 0 00 0 1 00 0 0 1
(
1 00 1
)
De identiteitsmatrix is zo belangrijk dat men de letter I ervoor heeft gereserveerd. Merkop dat de identiteitsmatrix symmetrisch is en dat I = IT geldt.
We merken nu op dat wanneer we een identiteitsmatrix vermenigvuldigen met een rijvec-tor, het resultaat dezelfde vector is.
(2 3 4
) 1 0 00 1 00 0 1
=(
2 3 4)
12

Het vermenigvuldigen van een identiteitsmatrix met een rijvector heeft dus geen effect.Voor vermenigvuldiging van de identiteitsmatrix met een kolomvector geldt hetzelfde:
1 0 00 1 00 0 1
1
52
=
152
Voor het product van een n ∗ n identiteitsmatrix I met een 1 ∗ n (rij)vector r geldt:
rI = r IrT = rT
Voor het product van een n ∗ n identiteitsmatrix I met een n ∗ 1 (kolom)vector k geldt:
Ik = k kTI = kT
Voor het product van een n ∗ n identiteitsmatrix I met een n ∗ n matrix M geldt:
MI = IM = M MTI = IMT = MT
13
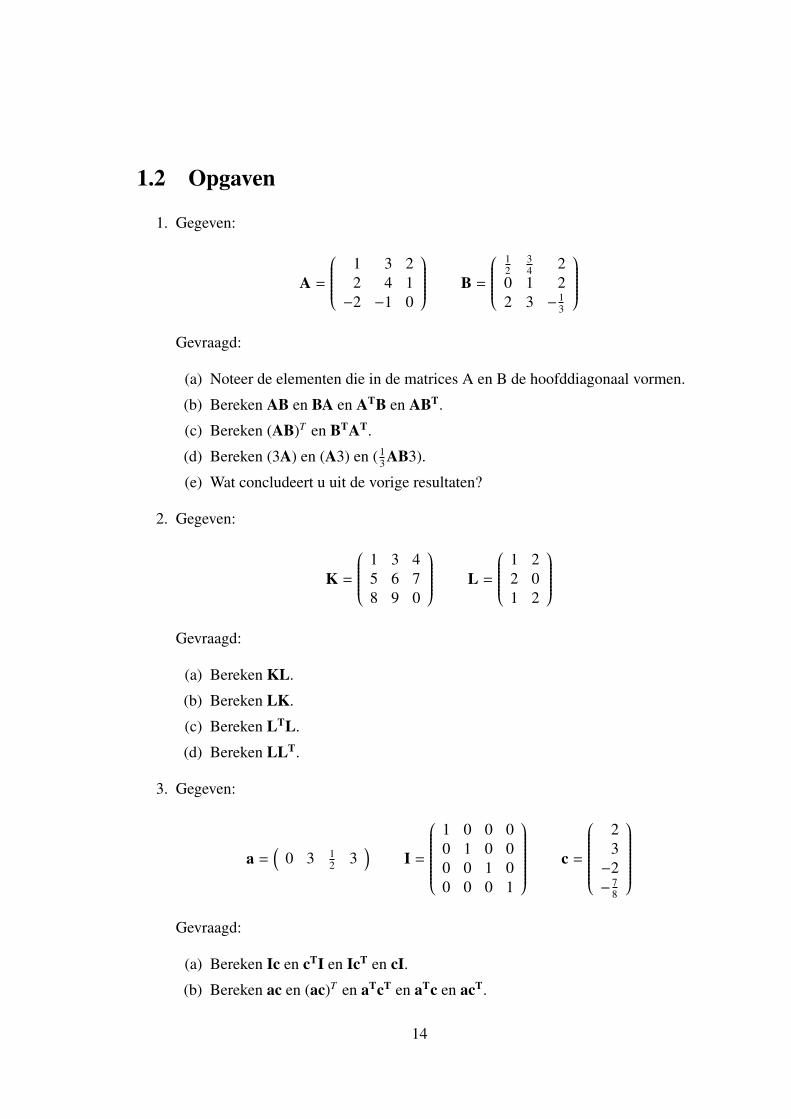
1.2 Opgaven
1. Gegeven:
A =
1 3 22 4 1−2 −1 0
B =
12
34 2
0 1 22 3 −1
3
Gevraagd:
(a) Noteer de elementen die in de matrices A en B de hoofddiagonaal vormen.
(b) Bereken AB en BA en ATB en ABT.
(c) Bereken (AB)T en BTAT.
(d) Bereken (3A) en (A3) en ( 13AB3).
(e) Wat concludeert u uit de vorige resultaten?
2. Gegeven:
K =
1 3 45 6 78 9 0
L =
1 22 01 2
Gevraagd:
(a) Bereken KL.
(b) Bereken LK.
(c) Bereken LTL.
(d) Bereken LLT.
3. Gegeven:
a =(
0 3 12 3
)I =
1 0 0 00 1 0 00 0 1 00 0 0 1
c =
23−2−7
8
Gevraagd:
(a) Bereken Ic en cTI en IcT en cI.
(b) Bereken ac en (ac)T en aTcT en aTc en acT.
14
(c) Bereken ca en (ca)T en cTaT en caT en cTa.
(d) Bereken ccT en cTc en cc en cTcT.
(e) Wat concludeert u uit deze resultaten?
4. Gegeven:
A =
1 3 22 −4 1−2 −1 0
e =
111
Gevraagd:
(a) Bereken Ae en eTA.
(b) Wat concludeert u uit deze resultaten?
5. Gegeven:
A =
(1 2 32 1 3
)B =
(1 2 33 2 1
)C =
3 12 31 1
Gevraagd:
(a) Bereken ((A + B)C)T .
(b) Bereken (2C(ABT))T .
15
Hoofdstuk 2
Stelsels van lineaire vergelijkingen
Een lineaire vergelijking bestaat uit termen met constanten en producten van constan-ten en onbekenden. Het ‘=’ teken scheidt de termen van de lineaire vergelijking in tweekanten. Een lineaire vergelijking is voor de onbekenden opgelost als deze kanten gelijk-waardig zijn. Een eenvoudig voorbeeld met de coefficienten 2 en 3, de onbekenden x en yen de constante term 12 is:
2x + 3y = 12
Hoewel in vergelijkingen vaak de onbekenden x en y worden gebruikt, kunnen ook onbe-kenden met andere namen optreden:
2a + 3b = 12 2p + 3q = 12
Bij lineaire vergelijkingen met veel onbekenden, zoals in dit hoofdstuk, worden meestalgeındexeerde namen gebruikt:
6x1 + 3x2 + x3 − 5x4 = −102
De twee kanten van een lineaire vergelijking zijn te beschouwen als twee schalen vaneen weegschaal, die in een bepaalde stand staat (niet perse in evenwicht). Zoals de standvan een weegschaal niet verandert bij het plaatsen of verwijderen van gelijke gewichtenop beide schalen, zo blijft een vergelijking hetzelfde als ze herschreven wordt door beidekanten:
• met dezelfde term (bijv. 4) te verhogen :
2x1 + 3x2 = 12 ↔ 2x1 + 3x2 + 4 = 16
16

• met dezelfde term (bijv. -12) te verlagen:
2x1 + 3x2 = 12 ↔ 2x1 + 3x2 − 12 = 0
• met dezelfde factor (bijv. 5) te vermenigvuldigen:
2x1 + 3x2 = 12 ↔ 10x1 + 15x2 = 60
• door dezelfde factor ongelijk aan 0, (bijv. 3) te delen:
2x1 + 3x2 = 12 ↔23
x1 + x2 = 4
Naar analogie van de weegschaal blijft een vergelijking ook hetzelfde als de termen aandezelfde kant in een andere volgorde herschreven worden:
2x1 + 3x2 = 12 ↔ 3x2 + 2x1 = 12
Hoewel de herschreven vergelijkingen hetzelfde zijn als de originele vergelijking, wordtalleen bij bepaalde gewichtswaarden van de onbekenden x1 en x2 een vergelijking in even-wicht gebracht. Deze waarden worden de oplossingen genoemd van de vergelijking.
Omdat een lineaire vergelijking op diverse manieren kan worden herschreven, wordt bijvoorkeur een notatie gekozen waarin de termen met de onbekenden gescheiden zijn van determen zonder onbekenden. Bovendien wordt bij het gebruik van geındexeerde variabelenrekening gehouden met de volgorde van de indices:
a1x1 + a2x2 + · · · + anxn = c
Gegeven de lineaire vergelijking:
2x1 + 3x2 = 12
We gaan nu de oplossingen zoeken voor deze vergelijking, de waarden voor x1 en x2 diede weegschaal in een horizontaal evenwicht brengen. Wanneer we na wat proberen voorx1 de waarde 3 en voor x2 de waarde 2 invullen, dan is een situatie ontstaan waarin devergelijking in evenwicht is:
2 · 3 + 3 · 2 = 12
Het tweetal x1 = 3 en x2 = 2 vormen samen een oplossing van de vergelijking 2x1 +3x2 =
12. Daarentegen is het tweetal x1 = 1 en x2 = 2 geen oplossing. Controleren of een
17

oplossing voldoet, is eenvoudig het vervangen van de onbekenden door de waarden vande oplossing en het verschil in waarden tussen beide kanten bepalen.
Een tweetal waarden kan op een systematische manier als oplossing gevonden wordendoor een willekeurige waarde voor een van de onbekenden te kiezen, bijvoorbeeld x1 = 3.Door de vergelijking met de gekozen waarde in een vereenvoudigde vorm te herschrijven,is de waarde voor de andere onbekende x2 gemakkelijk te bepalen:
2 · 3 + 3 · x2 = 12 ↔ 6 + 3 · x2 = 12↔ 3 · x2 = 6↔ x2 = 2
Deze oplossing, het tweetal x1 = 3 en x2 = 2, is volledig door de keuze van x1 bepaald,een andere keuze geeft een ander tweetal. Uit de keuze van x1 = 0 volgt x2 met nogminder stappen:
2 · 0 + 3 · x2 = 12 ↔ 3 · x2 = 12 ↔ x2 =123
De oplossing is het tweetal x1 = 0 en x2 = 4. We kunnen ook voor de andere onbekendeeen waarde kiezen, bijvoorbeeld x2 = 0:
2 · x1 + 3 · 0 = 12 ↔ 2 · x1 = 12 ↔ x1 = 6
De oplossing is nu het tweetal x1 = 6 en x2 = 0.
Er zijn blijkbaar meer oplossingen mogelijk voor deze vergelijking, in principe oneindigveel tweetallen. Kenmerkend voor deze oneindige verzameling tweetallen is de meetkun-dige relatie die ze met elkaar hebben. Ze liggen op een lijn in het xy-vlak. Dat kan menzien als de oplossingen worden uitgezet in een assenstelsel.
De vergelijking 2x1 + 3x2 = 12 heeft twee variabelen: x1 en x2. Dit betekent dat we tweeassen nodig hebben, waarin we de oplossingen als tweetallen aangeven, de x1-as en dex2-as. We kiezen er nu voor de x1-as horizontaal te tekenen en de x2-as verticaal. (Ditkan overigens ook andersom. In dat geval verandert de tekening, maar blijft deze wel deoplossingen van vergelijking weergeven.)
Vervolgens gaan we de snijpunten van de vergelijking met de x1- en x2-as berekenen:
Voor alle coordinaten op de x1-as geldt dat de waarde van x2 gelijk is aan 0. Wanneer wein de vergelijking 2x1 + 3x2 = 12 de x2 variabele gelijk stellen aan 0 verkrijgen we:
2x1 + (3 · 0) = 12 → 2x1 = 12 → x1 = 6
Het snijpunt met de x1-as ligt dus op het punt (6, 0). Het snijpunt met de x2-as ligt ophet punt (0, 4). Met deze gegevens kunnen we een grafiek tekenen, zoals weergegeven infiguur 2.1.
18
−1 0 1 2 3 4 5 6
0
1
2
3
4
−1
−2
−3
X1
X2
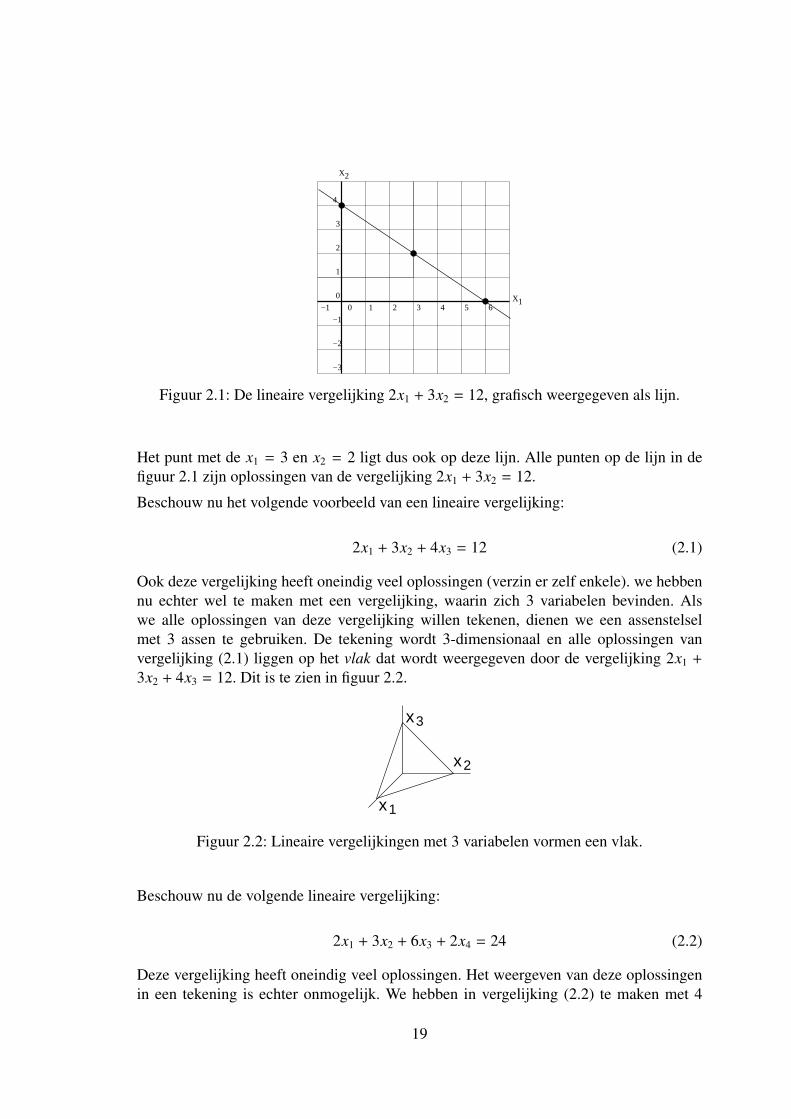
Figuur 2.1: De lineaire vergelijking 2x1 + 3x2 = 12, grafisch weergegeven als lijn.
Het punt met de x1 = 3 en x2 = 2 ligt dus ook op deze lijn. Alle punten op de lijn in defiguur 2.1 zijn oplossingen van de vergelijking 2x1 + 3x2 = 12.
Beschouw nu het volgende voorbeeld van een lineaire vergelijking:
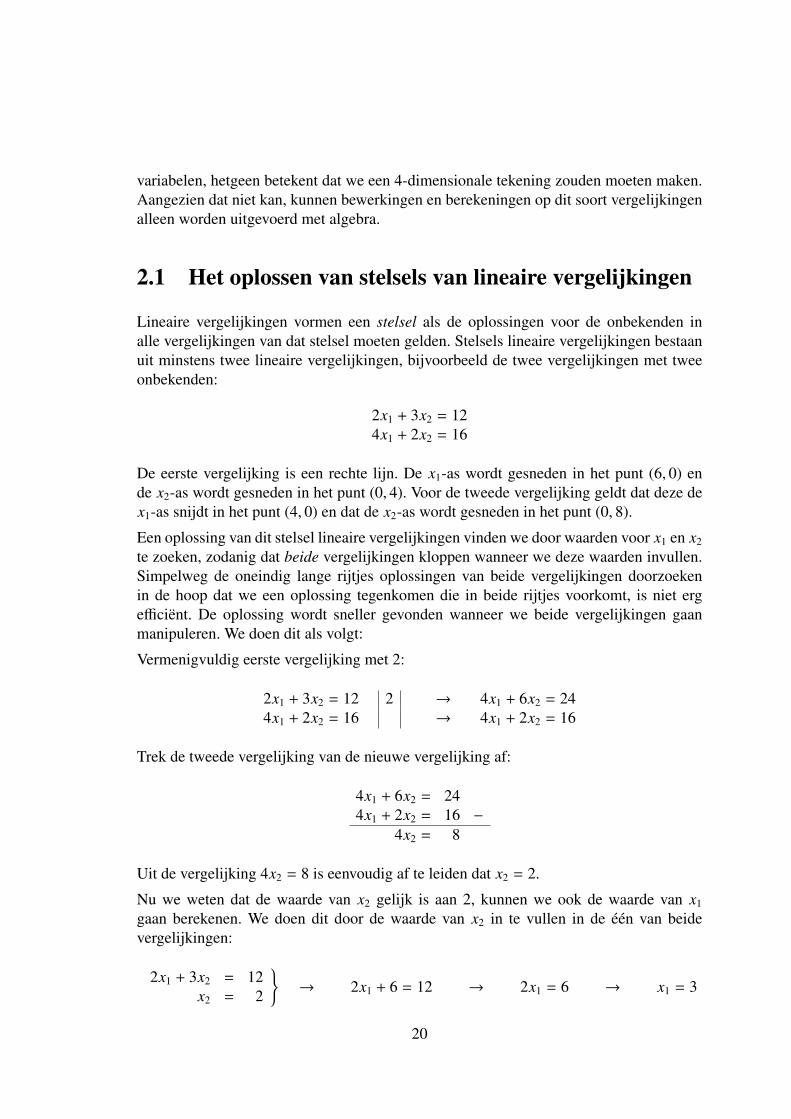
2x1 + 3x2 + 4x3 = 12 (2.1)
Ook deze vergelijking heeft oneindig veel oplossingen (verzin er zelf enkele). we hebbennu echter wel te maken met een vergelijking, waarin zich 3 variabelen bevinden. Alswe alle oplossingen van deze vergelijking willen tekenen, dienen we een assenstelselmet 3 assen te gebruiken. De tekening wordt 3-dimensionaal en alle oplossingen vanvergelijking (2.1) liggen op het vlak dat wordt weergegeven door de vergelijking 2x1 +
3x2 + 4x3 = 12. Dit is te zien in figuur 2.2.
x
x3
2x
1
Figuur 2.2: Lineaire vergelijkingen met 3 variabelen vormen een vlak.
Beschouw nu de volgende lineaire vergelijking:
2x1 + 3x2 + 6x3 + 2x4 = 24 (2.2)
Deze vergelijking heeft oneindig veel oplossingen. Het weergeven van deze oplossingenin een tekening is echter onmogelijk. We hebben in vergelijking (2.2) te maken met 4
19
variabelen, hetgeen betekent dat we een 4-dimensionale tekening zouden moeten maken.Aangezien dat niet kan, kunnen bewerkingen en berekeningen op dit soort vergelijkingenalleen worden uitgevoerd met algebra.
2.1 Het oplossen van stelsels van lineaire vergelijkingen
Lineaire vergelijkingen vormen een stelsel als de oplossingen voor de onbekenden inalle vergelijkingen van dat stelsel moeten gelden. Stelsels lineaire vergelijkingen bestaanuit minstens twee lineaire vergelijkingen, bijvoorbeeld de twee vergelijkingen met tweeonbekenden:
2x1 + 3x2 = 124x1 + 2x2 = 16
De eerste vergelijking is een rechte lijn. De x1-as wordt gesneden in het punt (6, 0) ende x2-as wordt gesneden in het punt (0, 4). Voor de tweede vergelijking geldt dat deze dex1-as snijdt in het punt (4, 0) en dat de x2-as wordt gesneden in het punt (0, 8).
Een oplossing van dit stelsel lineaire vergelijkingen vinden we door waarden voor x1 en x2
te zoeken, zodanig dat beide vergelijkingen kloppen wanneer we deze waarden invullen.Simpelweg de oneindig lange rijtjes oplossingen van beide vergelijkingen doorzoekenin de hoop dat we een oplossing tegenkomen die in beide rijtjes voorkomt, is niet ergefficient. De oplossing wordt sneller gevonden wanneer we beide vergelijkingen gaanmanipuleren. We doen dit als volgt:
Vermenigvuldig eerste vergelijking met 2:
2x1 + 3x2 = 12 2 → 4x1 + 6x2 = 244x1 + 2x2 = 16 → 4x1 + 2x2 = 16
Trek de tweede vergelijking van de nieuwe vergelijking af:
4x1 + 6x2 = 244x1 + 2x2 = 16 −
4x2 = 8
Uit de vergelijking 4x2 = 8 is eenvoudig af te leiden dat x2 = 2.
Nu we weten dat de waarde van x2 gelijk is aan 2, kunnen we ook de waarde van x1
gaan berekenen. We doen dit door de waarde van x2 in te vullen in de een van beidevergelijkingen:
2x1 + 3x2 = 12x2 = 2
}→ 2x1 + 6 = 12 → 2x1 = 6 → x1 = 3
20
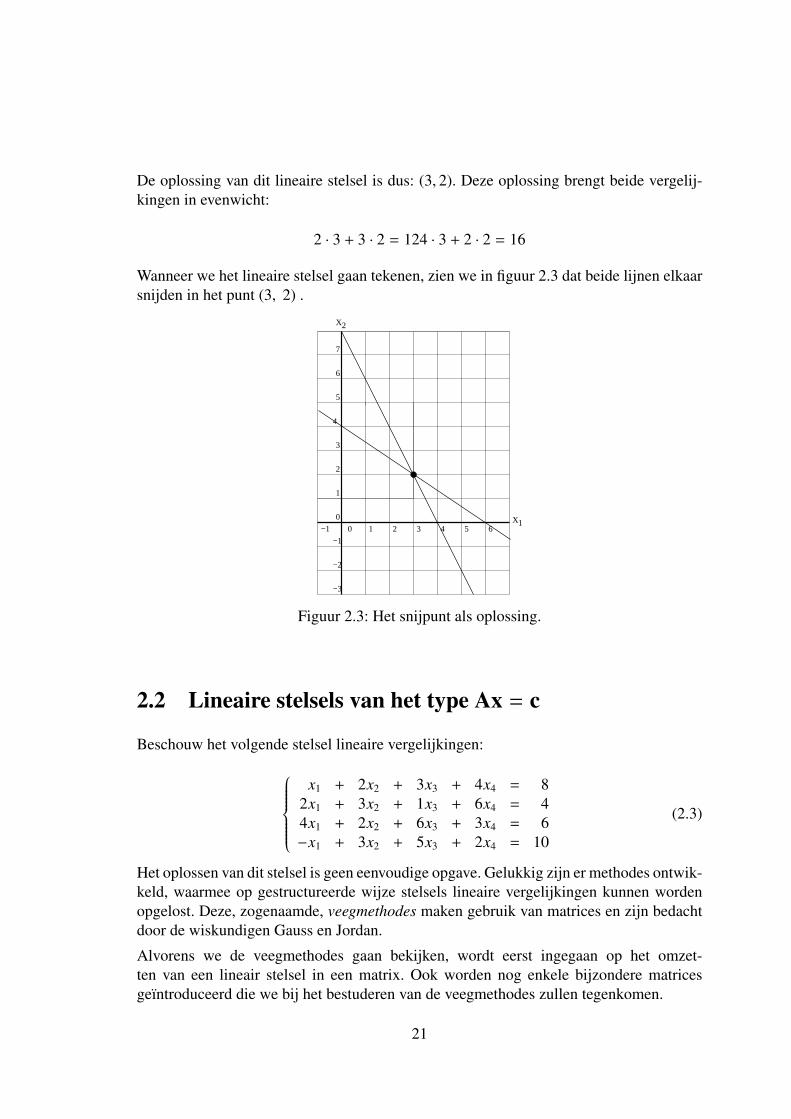
De oplossing van dit lineaire stelsel is dus: (3, 2). Deze oplossing brengt beide vergelij-kingen in evenwicht:
2 · 3 + 3 · 2 = 124 · 3 + 2 · 2 = 16
Wanneer we het lineaire stelsel gaan tekenen, zien we in figuur 2.3 dat beide lijnen elkaarsnijden in het punt (3, 2) .
−1 0 1 2 3 4 5 6
0
1
2
3
4
−1
−2
−3
X1
2
5
6
7
X
Figuur 2.3: Het snijpunt als oplossing.
2.2 Lineaire stelsels van het type Ax = c
Beschouw het volgende stelsel lineaire vergelijkingen:x1 + 2x2 + 3x3 + 4x4 = 8
2x1 + 3x2 + 1x3 + 6x4 = 44x1 + 2x2 + 6x3 + 3x4 = 6−x1 + 3x2 + 5x3 + 2x4 = 10
(2.3)
Het oplossen van dit stelsel is geen eenvoudige opgave. Gelukkig zijn er methodes ontwik-keld, waarmee op gestructureerde wijze stelsels lineaire vergelijkingen kunnen wordenopgelost. Deze, zogenaamde, veegmethodes maken gebruik van matrices en zijn bedachtdoor de wiskundigen Gauss en Jordan.
Alvorens we de veegmethodes gaan bekijken, wordt eerst ingegaan op het omzet-ten van een lineair stelsel in een matrix. Ook worden nog enkele bijzondere matricesgeıntroduceerd die we bij het bestuderen van de veegmethodes zullen tegenkomen.
21
2.2.1 De coefficientenmatrix
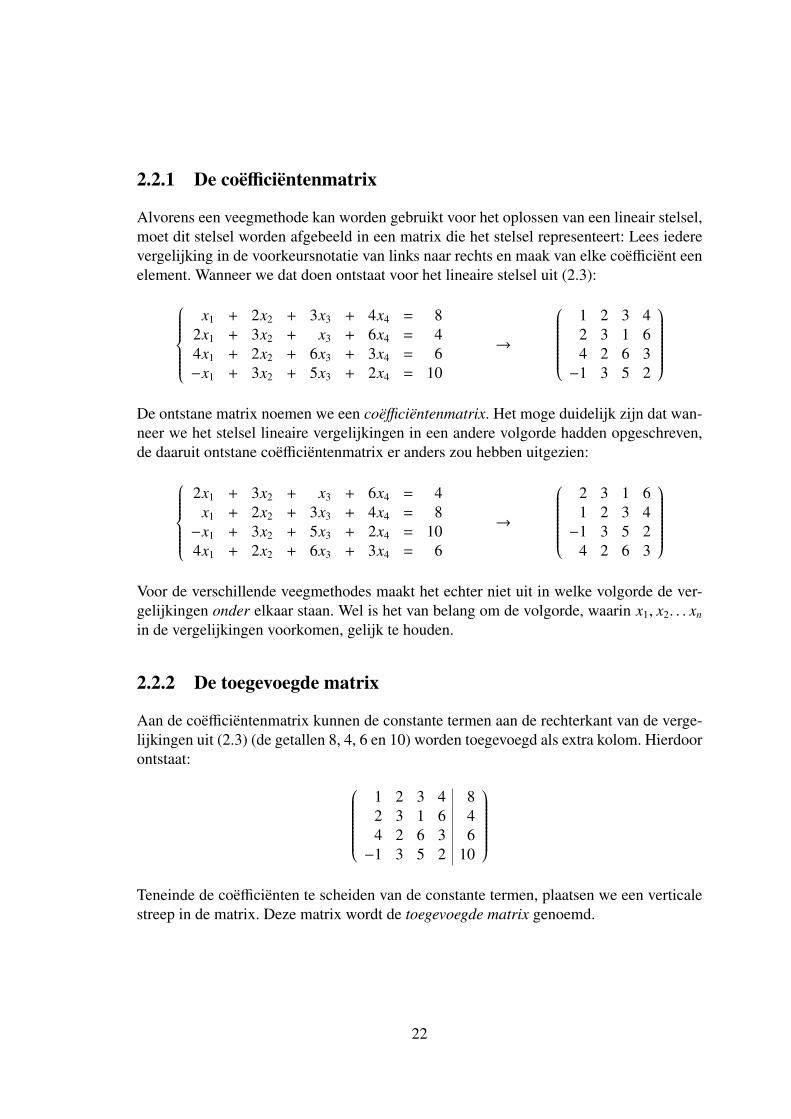
Alvorens een veegmethode kan worden gebruikt voor het oplossen van een lineair stelsel,moet dit stelsel worden afgebeeld in een matrix die het stelsel representeert: Lees iederevergelijking in de voorkeursnotatie van links naar rechts en maak van elke coefficient eenelement. Wanneer we dat doen ontstaat voor het lineaire stelsel uit (2.3):
x1 + 2x2 + 3x3 + 4x4 = 82x1 + 3x2 + x3 + 6x4 = 44x1 + 2x2 + 6x3 + 3x4 = 6−x1 + 3x2 + 5x3 + 2x4 = 10
→
1 2 3 42 3 1 64 2 6 3−1 3 5 2
De ontstane matrix noemen we een coefficientenmatrix. Het moge duidelijk zijn dat wan-neer we het stelsel lineaire vergelijkingen in een andere volgorde hadden opgeschreven,de daaruit ontstane coefficientenmatrix er anders zou hebben uitgezien:
2x1 + 3x2 + x3 + 6x4 = 4x1 + 2x2 + 3x3 + 4x4 = 8−x1 + 3x2 + 5x3 + 2x4 = 104x1 + 2x2 + 6x3 + 3x4 = 6
→
2 3 1 61 2 3 4−1 3 5 2
4 2 6 3
Voor de verschillende veegmethodes maakt het echter niet uit in welke volgorde de ver-gelijkingen onder elkaar staan. Wel is het van belang om de volgorde, waarin x1, x2. . . xn
in de vergelijkingen voorkomen, gelijk te houden.
2.2.2 De toegevoegde matrix
Aan de coefficientenmatrix kunnen de constante termen aan de rechterkant van de verge-lijkingen uit (2.3) (de getallen 8, 4, 6 en 10) worden toegevoegd als extra kolom. Hierdoorontstaat:
1 2 3 4 82 3 1 6 44 2 6 3 6−1 3 5 2 10
Teneinde de coefficienten te scheiden van de constante termen, plaatsen we een verticalestreep in de matrix. Deze matrix wordt de toegevoegde matrix genoemd.
22
2.2.3 Een matrix in echelonvorm
Zonder in te gaan op de betekenis of het gebruik van een matrix in echelonvorm, definierenwe nu eerst wat er onder een echelonmatrix wordt verstaan:
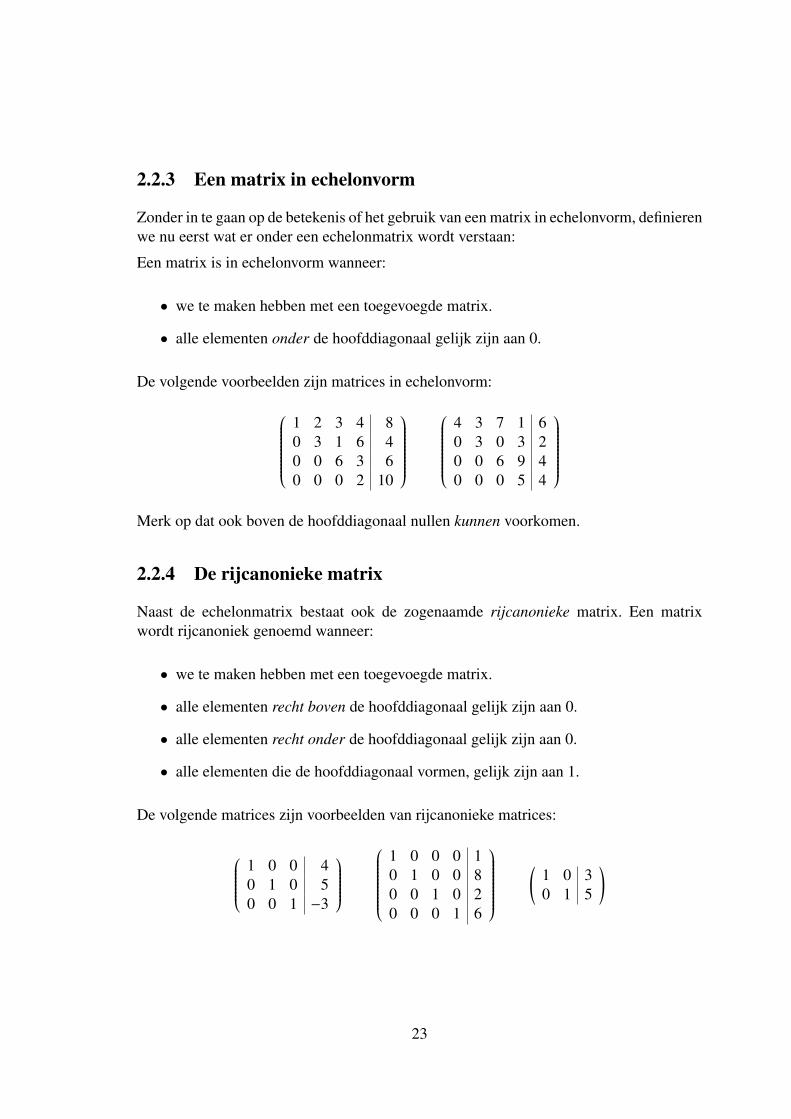
Een matrix is in echelonvorm wanneer:
• we te maken hebben met een toegevoegde matrix.
• alle elementen onder de hoofddiagonaal gelijk zijn aan 0.
De volgende voorbeelden zijn matrices in echelonvorm:
1 2 3 4 80 3 1 6 40 0 6 3 60 0 0 2 10
4 3 7 1 60 3 0 3 20 0 6 9 40 0 0 5 4
Merk op dat ook boven de hoofddiagonaal nullen kunnen voorkomen.
2.2.4 De rijcanonieke matrix
Naast de echelonmatrix bestaat ook de zogenaamde rijcanonieke matrix. Een matrixwordt rijcanoniek genoemd wanneer:
• we te maken hebben met een toegevoegde matrix.
• alle elementen recht boven de hoofddiagonaal gelijk zijn aan 0.
• alle elementen recht onder de hoofddiagonaal gelijk zijn aan 0.
• alle elementen die de hoofddiagonaal vormen, gelijk zijn aan 1.
De volgende matrices zijn voorbeelden van rijcanonieke matrices:
1 0 0 40 1 0 50 0 1 −3
1 0 0 0 10 1 0 0 80 0 1 0 20 0 0 1 6
(
1 0 30 1 5
)
23
2.3 De veegmethodes
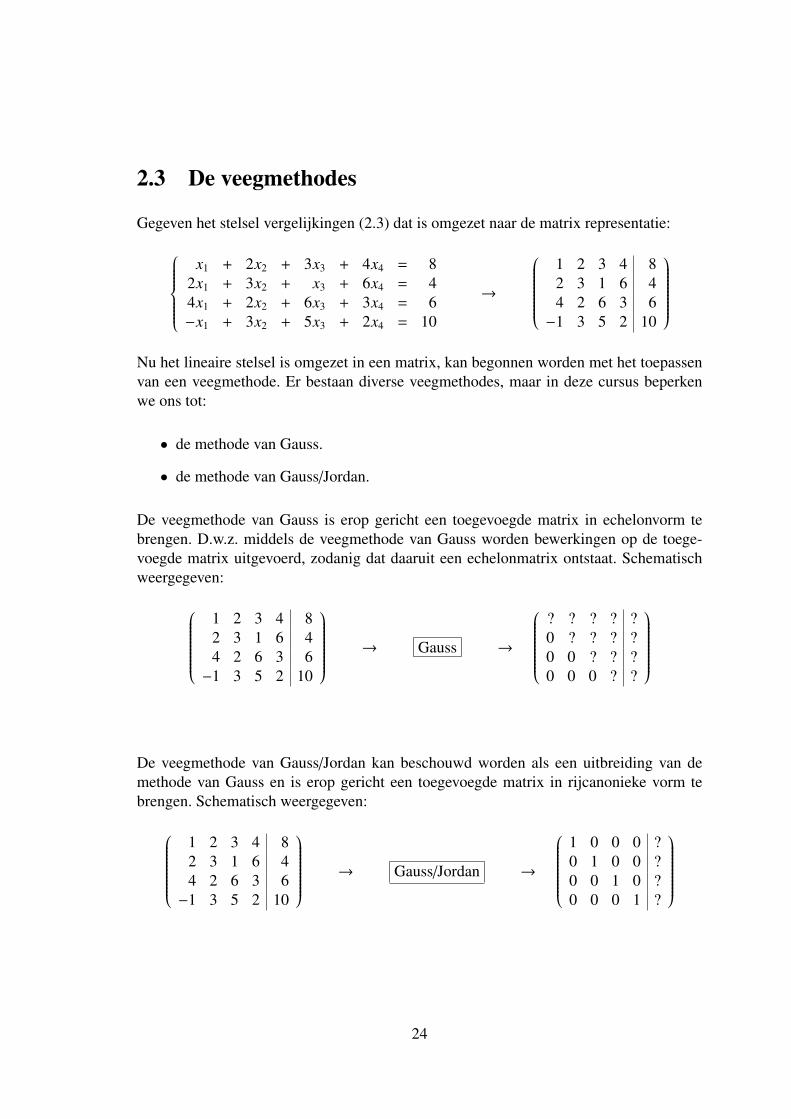
Gegeven het stelsel vergelijkingen (2.3) dat is omgezet naar de matrix representatie:x1 + 2x2 + 3x3 + 4x4 = 8
2x1 + 3x2 + x3 + 6x4 = 44x1 + 2x2 + 6x3 + 3x4 = 6−x1 + 3x2 + 5x3 + 2x4 = 10
→
1 2 3 4 82 3 1 6 44 2 6 3 6−1 3 5 2 10
Nu het lineaire stelsel is omgezet in een matrix, kan begonnen worden met het toepassenvan een veegmethode. Er bestaan diverse veegmethodes, maar in deze cursus beperkenwe ons tot:
• de methode van Gauss.
• de methode van Gauss/Jordan.
De veegmethode van Gauss is erop gericht een toegevoegde matrix in echelonvorm tebrengen. D.w.z. middels de veegmethode van Gauss worden bewerkingen op de toege-voegde matrix uitgevoerd, zodanig dat daaruit een echelonmatrix ontstaat. Schematischweergegeven:
1 2 3 4 82 3 1 6 44 2 6 3 6−1 3 5 2 10
→ Gauss →
? ? ? ? ?0 ? ? ? ?0 0 ? ? ?0 0 0 ? ?
De veegmethode van Gauss/Jordan kan beschouwd worden als een uitbreiding van demethode van Gauss en is erop gericht een toegevoegde matrix in rijcanonieke vorm tebrengen. Schematisch weergegeven:
1 2 3 4 82 3 1 6 44 2 6 3 6−1 3 5 2 10
→ Gauss/Jordan →
1 0 0 0 ?0 1 0 0 ?0 0 1 0 ?0 0 0 1 ?
24

2.3.1 De veegmethode van Gauss
Zoals eerder beschreven, heeft de veegmethode van Gauss tot doel een toegevoegde ma-trix via een aantal bewerkingen om te zetten in een echelonmatrix. Deze omzetting voerenwe niet in een keer uit, maar in een aantal losse stappen. Het aantal stappen dat nodig is,hangt af van de dimensies van de matrix. Hoe meer elementen zich in de matrix bevinden,hoe groter het aantal stappen dat nodig is om de matrix in echelonvorm te brengen.
De eerste stap in de veegmethode van Gauss, vormt het aanwijzen van een veegelement.We noteren dit door in de matrix een kader om dat element te plaatsen, zodat duidelijkis met welk element geveegd gaat worden. Bij de eerste serie veegoperaties, wordt altijdelement11 als veegelement aangewezen:
1 2 3 4 82 3 1 6 44 2 6 3 6−1 3 5 2 10
De bedoeling is nu om element21 middels een (nog uit te leggen) bewerking gelijk temaken aan 0. Dat gaat als volgt:
We vermenigvuldigen het veegelement met een getal dat we zelf kiezen. De uitkomst vandeze vermenigvuldiging dient zodanig te zijn dat wanneer we deze uitkomst optellen bijelement21, hier de waarde 0 uitkomt. Wiskundig uitgedrukt:
(element11 · zelfgekozen getal) + element21 = 0
Deze vergelijking is gemakkelijk op te lossen:
(element11 · zelfgekozen getal) = −element21
Dus:zelfgekozen getal = −
element21
element11
Voor deze matrix wordt dit:
zelfgekozen getal = −21
= −2
Het zelf te kiezen getal dient de waarde -2 te krijgen, immers:
(1 · −2) + 2 = 0
Nu gaan we daadwerkelijk vegen. We nemen element11, vermenigvuldigen dit met -2 entellen het op bij element21. Met alle overige elementen uit de eerste rij doen we hetzelfde:Vermenigvuldigen met -2 en optellen bij de overeenkomstige elementen uit de tweede rij.
25

We verkrijgen:1 2 3 4 82 3 1 6 44 2 6 3 6−1 3 5 2 10
→
1 2 3 4 80 −1 −5 −2 −124 2 6 3 6−1 3 5 2 10
Reken dit zelf na.
Nu gaan we de procedure herhalen. D.w.z. we nemen wederom element11 als veegele-ment, maar nu gebruiken we het om van element31 een 0 maken:
(1 · zelf te kiezen getal) + 4 = 0
Het zelf te kiezen getal dient de waarde -4 te krijgen. Wanneer we alle elementen uit deeerste rij vermenigvuldigen met -4 en optellen bij de overeenkomstige elementen uit dederde rij, ontstaat:
1 2 3 4 80 −1 −5 −2 −124 2 6 3 6−1 3 5 2 10
→
1 2 3 4 80 −1 −5 −2 −120 −6 −6 −13 −26−1 3 5 2 10
We gaan verder: Wederom gebruiken we element11 als veegelement, maar deze keer vegenwe rij 4 schoon. Controleer zelf dat we het veegelement moeten vermenigvuldigen methet getal 1 en dat het vegen naar rij 4 oplevert:
1 2 3 4 80 −1 −5 −2 −120 −6 −6 −13 −26−1 3 5 2 10
→
1 2 3 4 80 −1 −5 −2 −120 −6 −6 −13 −260 5 8 6 18
Nu zijn alle elementen in de kolom onder het veegelement gereduceerd tot 0. We herhalennu de totale procedure, echter: het veegelement wordt nu element22 en we vegen van rij 2naar rij 3:
1 2 3 4 80 -1 −5 −2 −120 −6 −6 −13 −260 5 8 6 18
→
1 2 3 4 80 -1 −5 −2 −120 0 24 −1 460 5 8 6 18
We vervolgen door te vegen van rij 2 naar rij 4:
26

1 2 3 4 80 -1 −5 −2 −120 0 24 −1 460 5 8 6 18
→
1 2 3 4 80 -1 −5 −2 −120 0 24 −1 460 0 −17 −4 −42
Weer zijn alle elementen onder het veegelement gereduceerd tot 0 en kunnen we het vol-gende element op de hoofddiagonaal aanwijzen als veegelement. We houden deze proce-dure net zo lang vol, totdat de echelonvorm is bereikt.
In ons voorbeeld wijzen we nu element32 aan als veegelement en vegen we van rij 3 naarrij 4:
1 2 3 4 80 −1 −5 −2 −120 0 24 −1 460 0 −17 −4 −42
→
1 2 3 4 80 −1 −5 −2 −120 0 24 −1 460 0 0 −113
24 −11312
Hiermee hebben we de echelonvorm bereikt: alle elementen onder de hoofddiagonaal zijngereduceerd tot 0.
2.3.2 Het oplossen van een lineair stelsel uit de echelonvorm
Na het toepassen van de veegmethode van Gauss hebben we een matrix verkregen die inde echelonvorm staat. Kijk nu eens naar de laatste rij uit deze matrix. Daar staat:
0 0 0 −11324 −113
12
Dit betekent:0x1 + 0x2 + 0x3 −
11324
x4 = −11312
Oftewel:
−11324
x4 = −11312
→ −113x4 = −226 → x4 = 2
We hebben nu de waarde van x4 gevonden. Kennelijk is x4 gelijk aan 2. Met deze we-tenschap kunnen we verder rekenen en wel door te kijken naar rij 3 uit de matrix. Daarstaat:
0x1 + 0x2 + 24x3 − x4 = 46 → 24x3 − x4 = 46
Aangezien we weten dat de waarde van x4 gelijk is aan 2 kunnen we deze waarde gaaninvullen in de vergelijking:
27

24x3 − x4 = 46x4 = 2
}24x3 − 2 = 46 → 24x3 = 48 → x3 = 2
Nu hebben we al twee van de vier variabelen uit het lineair stelsel uitgerekend. We ver-volgen door de waarden van x4 en x3 in te vullen in de tweede rij uit de matrix:
−x2 − 5x3 − 2x4 = −12x3 = 2x4 = 2
− x2 − 10 − 4 = −12 → x2 = −2
Tenslotte vullen we de waarden van de variabelen x4, x3 en x2 in de eerste rij van dematrix:
x1 + 2x2 + 3x3 + 4x4 = 8x2 = −2x3 = 2x4 = 2
x1 + 10 = 8 → x1 = −2
Hiermee hebben we het stelsel lineaire vergelijkingen opgelost. De oplossing luidt:
x1 = −2x2 = −2x3 = 2x4 = 2
Men kan dit controleren door de gevonden waarden in te vullen in een van de oorspron-kelijke vergelijkingen.
2.3.3 De veegmethode van Gauss/Jordan
We hebben gezien dat de veegmethode van Gauss een elegante methode vormt voor hetoplossen van stelsels lineaire vergelijkingen. Na toepassing van de veegmethode is eenmatrix in echelonvorm ontstaan, waaruit de oplossing van het stelsel kan worden bere-kend.
Er bestaat echter een uitbreiding van de veegmethode van Gauss die ervoor zorgt dat hetterugrekenen van het lineaire stelsel niet meer nodig is. Deze uitbreiding is ontwikkelddoor de wiskundige Jordan. De door hem ontwikkelde uitbreiding wordt tegenwoordig deveegmethode van Gauss/Jordan genoemd.De methode komt erop neer dat na het bereiken van de echelonvorm, doorgegaan wordtmet vegen. Er wordt nu niet met element11 begonnen, maar met het laatste element van
28
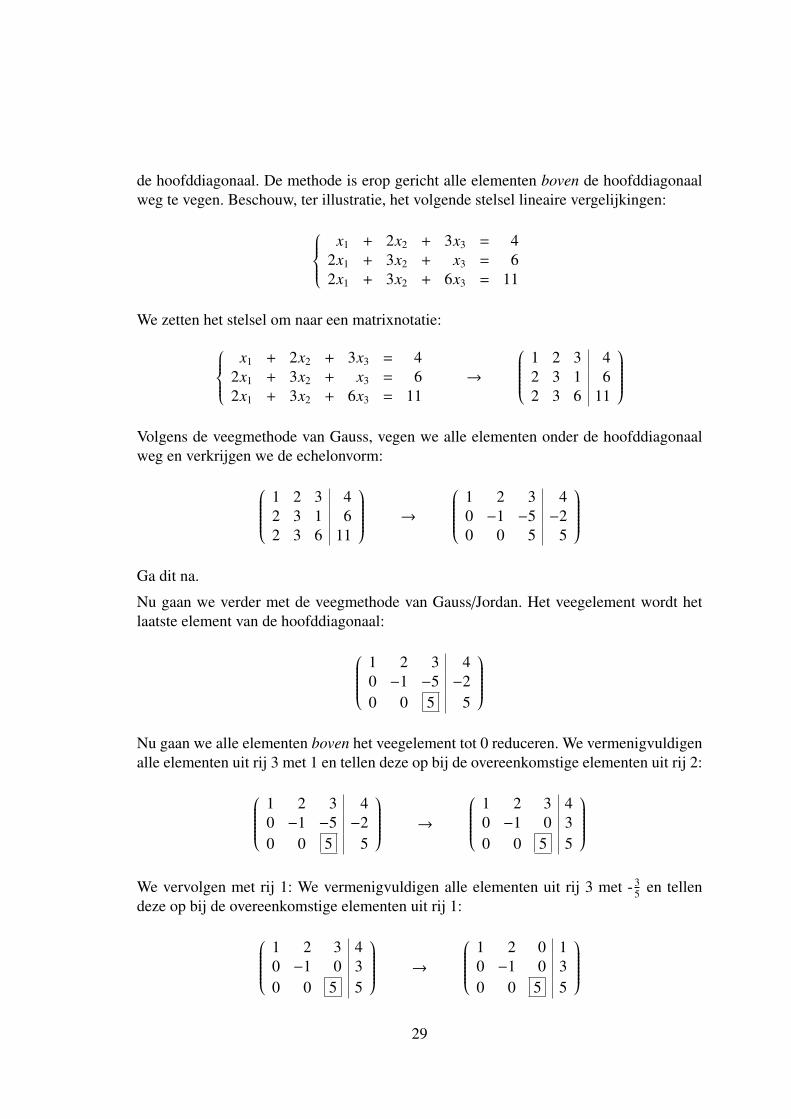
de hoofddiagonaal. De methode is erop gericht alle elementen boven de hoofddiagonaalweg te vegen. Beschouw, ter illustratie, het volgende stelsel lineaire vergelijkingen:
x1 + 2x2 + 3x3 = 4
2x1 + 3x2 + x3 = 62x1 + 3x2 + 6x3 = 11
We zetten het stelsel om naar een matrixnotatie:x1 + 2x2 + 3x3 = 4
2x1 + 3x2 + x3 = 62x1 + 3x2 + 6x3 = 11
→
1 2 3 42 3 1 62 3 6 11
Volgens de veegmethode van Gauss, vegen we alle elementen onder de hoofddiagonaalweg en verkrijgen we de echelonvorm:
1 2 3 42 3 1 62 3 6 11
→
1 2 3 40 −1 −5 −20 0 5 5
Ga dit na.
Nu gaan we verder met de veegmethode van Gauss/Jordan. Het veegelement wordt hetlaatste element van de hoofddiagonaal:
1 2 3 40 −1 −5 −20 0 5 5
Nu gaan we alle elementen boven het veegelement tot 0 reduceren. We vermenigvuldigenalle elementen uit rij 3 met 1 en tellen deze op bij de overeenkomstige elementen uit rij 2:
1 2 3 40 −1 −5 −20 0 5 5
→
1 2 3 40 −1 0 30 0 5 5
We vervolgen met rij 1: We vermenigvuldigen alle elementen uit rij 3 met - 3
5 en tellendeze op bij de overeenkomstige elementen uit rij 1:
1 2 3 40 −1 0 30 0 5 5
→
1 2 0 10 −1 0 30 0 5 5
29

Tenslotte maken we van element22 het veegelement, opdat we element12 tot 0 kunnenreduceren:
1 2 0 10 -1 0 30 0 5 5
→
1 0 0 70 -1 0 30 0 5 5
Als laatste stap gaan we, indien nodig, ieder element op de hoofddiagonaal vermenigvul-digen met een zelfgekozen getal, opdat alle elementen op de hoofddiagonaal de waarde 1krijgen. In ons voorbeeld betekent dit dat we de elementen uit rij 2 vermenigvuldigen met-1 en dat we de elementen uit rij 3 vermenigvuldigen met 1
5 :
1 0 0 70 −1 0 30 0 5 5
→
1 0 0 70 1 0 −30 0 1 1
Hiermee eindigt de veegmethode van Gauss/Jordan. We hebben de matrix in de rijcano-nieke vorm gebracht. De oplossing van het lineaire stelsel is zonder verder rekenwerk afte lezen uit de matrix:
x1 = 7x2 = −3x3 = 1
Merk op dat het coefficientengedeelte van de verkregen matrix een identiteitsmatrixvormt.
2.3.4 Overzicht van de veegmethodes
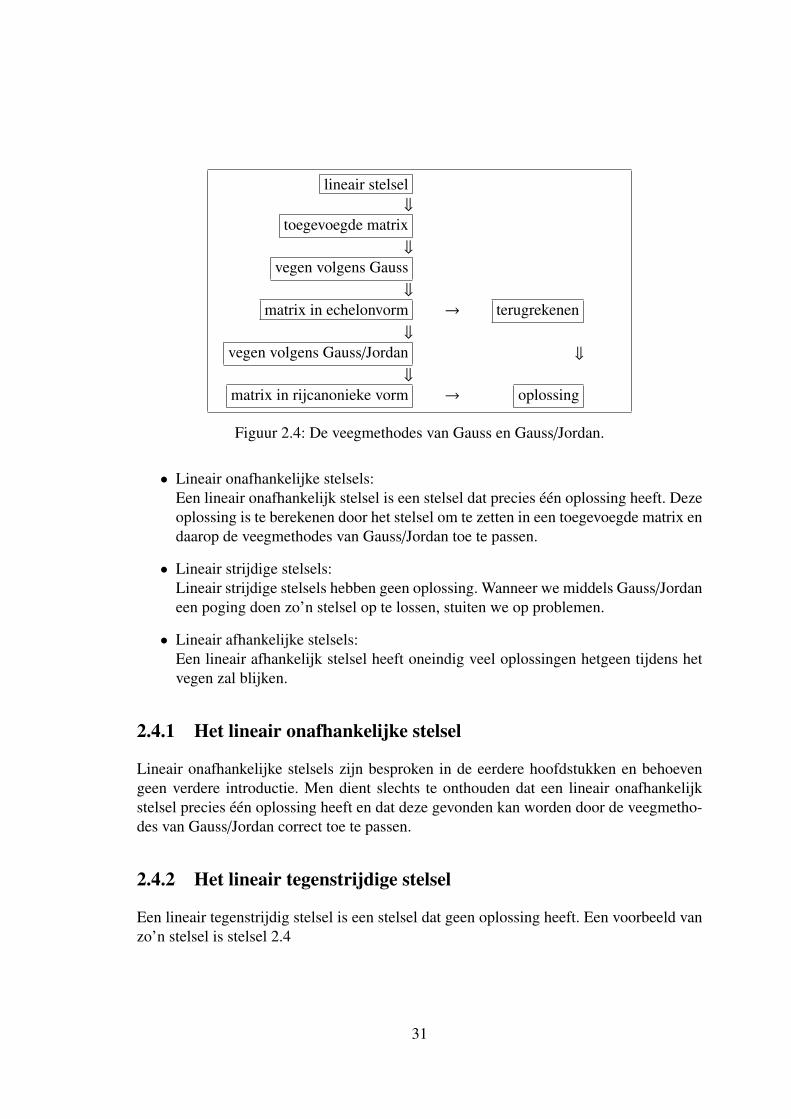
Een schematische samenvatting van de veegmethodes van Gauss en Gauss/Jordan is weer-gegeven in figuur 2.4.
2.4 De oplosbaarheid
Bij de introductie van de veegmethodes van Gauss/Jordan zijn lineaire stelsels gebruiktdie precies een oplossing hebben. Lineaire stelsels hebben echter niet altijd een oplossing.In dit hoofdstuk worden verschillende soorten stelsels geıntroduceerd en zal bekeken wor-den wat hun eigenschappen zijn. Ook bekijken we wat voor gevolgen deze eigenschappenhebben voor de veegmethodes van Gauss/Jordan.
In totaal onderscheiden we drie verschillende soorten lineaire stelsels:
30
lineair stelsel⇓
toegevoegde matrix⇓
vegen volgens Gauss⇓
matrix in echelonvorm → terugrekenen⇓
vegen volgens Gauss/Jordan ⇓
⇓
matrix in rijcanonieke vorm → oplossing
Figuur 2.4: De veegmethodes van Gauss en Gauss/Jordan.
• Lineair onafhankelijke stelsels:Een lineair onafhankelijk stelsel is een stelsel dat precies een oplossing heeft. Dezeoplossing is te berekenen door het stelsel om te zetten in een toegevoegde matrix endaarop de veegmethodes van Gauss/Jordan toe te passen.
• Lineair strijdige stelsels:Lineair strijdige stelsels hebben geen oplossing. Wanneer we middels Gauss/Jordaneen poging doen zo’n stelsel op te lossen, stuiten we op problemen.
• Lineair afhankelijke stelsels:Een lineair afhankelijk stelsel heeft oneindig veel oplossingen hetgeen tijdens hetvegen zal blijken.
2.4.1 Het lineair onafhankelijke stelsel
Lineair onafhankelijke stelsels zijn besproken in de eerdere hoofdstukken en behoevengeen verdere introductie. Men dient slechts te onthouden dat een lineair onafhankelijkstelsel precies een oplossing heeft en dat deze gevonden kan worden door de veegmetho-des van Gauss/Jordan correct toe te passen.
2.4.2 Het lineair tegenstrijdige stelsel
Een lineair tegenstrijdig stelsel is een stelsel dat geen oplossing heeft. Een voorbeeld vanzo’n stelsel is stelsel 2.4
31

x1 + 2x2 + 3x3 = 8
2x1 + 3x2 + 1x3 = 42x1 + 4x2 + 6x3 = 6
(2.4)
Laten we stelsel 2.4 eens proberen op te lossen middels Gauss/Jordan:
x1 + 2x2 + 3x3 = 8
2x1 + 3x2 + 1x3 = 42x1 + 4x2 + 6x3 = 6
→
1 2 3 82 3 1 42 4 6 6
→
1 2 3 82 3 1 42 4 6 6
→
1 2 3 80 −1 −5 −122 4 6 6
→
1 2 3 80 −1 −5 −120 0 0 −10
(2.5)
in de laatste regel van matrix 2.5 is iets vreemds te zien. In feite staat daar:
0x1 + 0x2 + 0x3 = −10
Het moge duidelijk zijn dat dit niet kan: 0 kan niet gelijk zijn aan −10. We zijn nu op eentegenstrijdigheid gestuit. Hieruit kunnen we twee dingen afleiden:
• Verder vegen met Gauss/Jordan heeft geen zin.
• Stelsel 2.4 heeft geen oplossing. D.w.z. we kunnen geen waarden voor x1,x2 en x3
vinden, zodanig dat alle vergelijkingen kloppen wanneer we deze waarden zoudeninvullen.
Hoewel het mogelijk is de strijdigheid van een lineair stelsel aan te tonen m.b.v. de veeg-methodes van Gauss/Jordan, is in voorbeeld 2.4 eenvoudig in te zien dat we met eentegenstrijdig stelsel te maken hebben. We kunnen ”zien” dat we met een tegenstrijdigstelsel te maken hebben wanneer we de eerste en derde vergelijking uit stelsel 2.4 eenswat beter bekijken:
x1 + 2x2 + 3x3 = 82x1 + 4x2 + 6x3 = 6
Wanneer we de onderste vergelijking links en rechts van het = teken door 2 delen (ja, datis toegestaan), is te zien dat beide vergelijkingen veel op elkaar lijken:
32

x1 + 2x2 + 3x3 = 82x1 + 4x2 + 6x3 = 6
112
→x1 + 2x2 + 3x3 = 8x1 + 2x2 + 3x3 = 3
Nu is duidelijk waarom stelsel 2.4 tegenstrijdig is: als we de eerste en derde vergelijkinguit stelsel 2.4 grafisch weergeven, zien we twee vlakken die evenwijdig zijn aan elkaar.Dit is weergegeven in figuur 2.5.
x
x
x1
2
3
Figuur 2.5: Twee evenwijdige vlakken vormen een lineair tegenstrijdig stelsel.
Daar twee evenwijdige vlakken elkaar nooit zullen snijden, kan een oplossing voor eendergelijk stelsel niet gevonden worden.
2.4.3 Het lineair afhankelijke stelsel
Een lineair afhankelijk stelsel is eens stelsel vergelijkingen dat oneindig veel oplossingenheeft. Een voorbeeld van een dergelijk stelsel is stelsel 2.6:
x1 + 2x2 + 3x3 = 10
2x1 + 3x2 + x3 = 62x1 + 4x2 + 6x3 = 20
(2.6)
Ook nu gaan we proberen stelsel 2.6 op te lossen middels de veegmethode vanGauss/Jordan: 1 2 3 10
2 3 1 62 4 6 20
→
1 2 3 100 −1 −5 −142 4 6 20
→
1 2 3 100 −1 −5 −140 0 0 0
33
In de onderste regel is te lezen: 0 = 0. Daar schieten we niet zoveel mee op. Het lijkt eropdat de onderste regel net zo goed had kunnen worden weggelaten. Wat in stelsel2.6 aande hand is, wordt duidelijk wanneer we de bovenste vergelijking en de onderste eens watbeter bekijken:
x1 + 2x2 + 3x3 = 102x1 + 4x2 + 6x3 = 20
Wanneer we de bovenste vergelijking met 2 vermenigvuldigen, ontstaat:
x1 + 2x2 + 3x3 = 102x1 + 4x2 + 6x3 = 20
21
2x1 + 4x2 + 6x3 = 202x1 + 4x2 + 6x3 = 20
Nu is duidelijk te zien dat in stelsel 2.6 twee maal dezelfde vergelijking staat, zij het datze net iets anders zijn opgeschreven, waardoor niet meteen opvalt dat ze hetzelfde zijn.Wanneer we stelsel 2.6 weergeven in een grafiek, moeten we twee vlakken tekenen dieprecies op elkaar liggen. Beide vlakken ‘snijden’ elkaar op oneindig veel punten. Daaromheeft dit stelsel oneindig veel oplossingen.
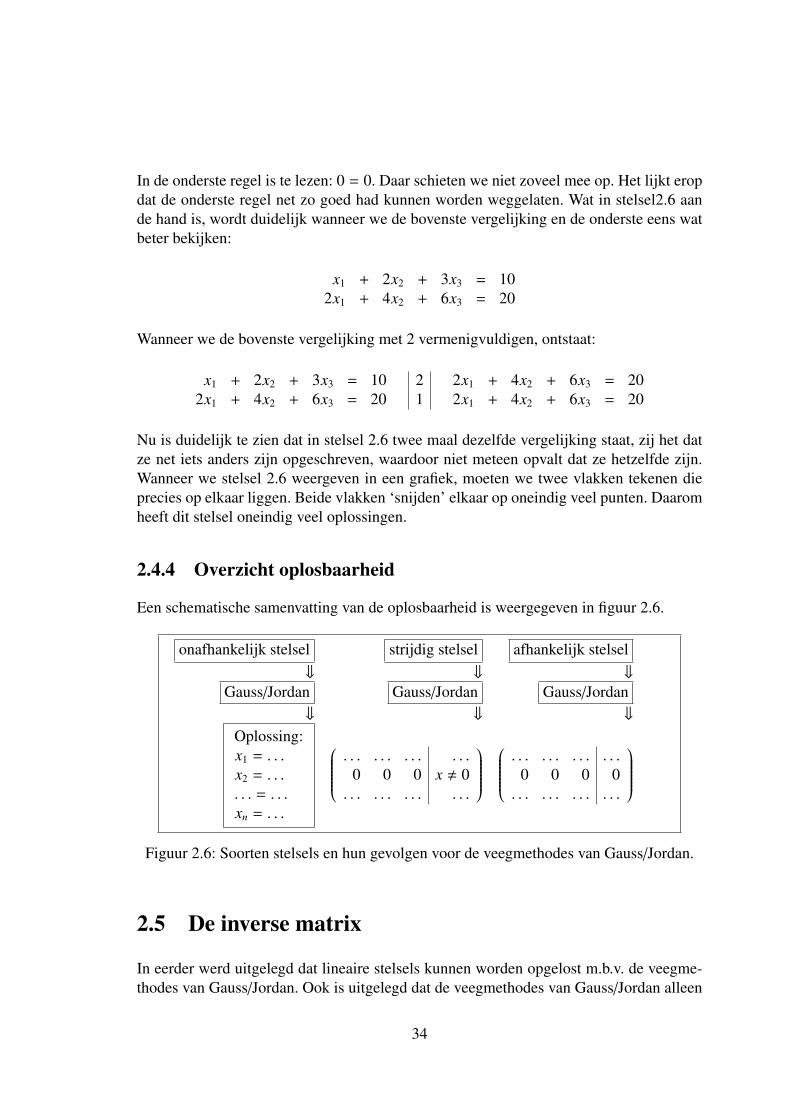
2.4.4 Overzicht oplosbaarheid
Een schematische samenvatting van de oplosbaarheid is weergegeven in figuur 2.6.
onafhankelijk stelsel strijdig stelsel afhankelijk stelsel⇓ ⇓ ⇓
Gauss/Jordan Gauss/Jordan Gauss/Jordan⇓ ⇓ ⇓
Oplossing:x1 = . . .x2 = . . .. . . = . . .xn = . . .
. . . . . . . . . . . .0 0 0 x , 0. . . . . . . . . . . .
. . . . . . . . . . . .
0 0 0 0. . . . . . . . . . . .
Figuur 2.6: Soorten stelsels en hun gevolgen voor de veegmethodes van Gauss/Jordan.
2.5 De inverse matrix
In eerder werd uitgelegd dat lineaire stelsels kunnen worden opgelost m.b.v. de veegme-thodes van Gauss/Jordan. Ook is uitgelegd dat de veegmethodes van Gauss/Jordan alleen
34

slagen wanneer men ze toepast op een lineair onafhankelijk stelsel. Nu wordt een tweedemethode beschreven voor het oplossen van lineaire stelsels. Deze methode maakt gebruikvan de zogenaamde inverse matrix. Eerst zullen enkele eigenschappen van de inverse ma-trix worden beschreven. Daarna wordt uitgelegd hoe men een inverse matrix berekent.Tenslotte wordt uitgelegd hoe men m.b.v. de inverse matrix een lineair stelsel kan oplos-sen.
Eigenschappen van de inverse matrix:
• Voor een n ∗ n matrix A en zijn inverse n ∗ n matrix A−1 geldt:
AA−1 = A−1A = I
Niet alle vierkante matrices hebben een inverse. Een bekend voorbeeld is de vier-kante nulmatrix O. Voor alle n ∗ n matrices A en O geldt:
OA = AO = O , I
• De vierkante identiteitsmatrix I is de inverse van zichzelf:
I I−1 = I−1I = I
• Voor het product van twee vierkante matrices A en B geldt, mits A−1 en B−1 bestaan:
(AB)(B−1A−1) = A(BB−1)A−1 = AIA−1 = AA−1 = I → (AB)−1 = (B−1A−1)
Beschouw het stelsel lineaire vergelijkingen:
2x1 + 3x2 + x3 = 43x1 + 4x2 + x3 = 22x1 + 2x2 + 4x3 = 8
(2.7)
We zetten stelsel 2.7 om in een coefficientenmatrix: 2 3 13 4 12 2 4
Vervolgens creeren we een identiteitsmatrix met dezelfde dimensies als decoefficientenmatrix: 1 0 0
0 1 00 0 1
35
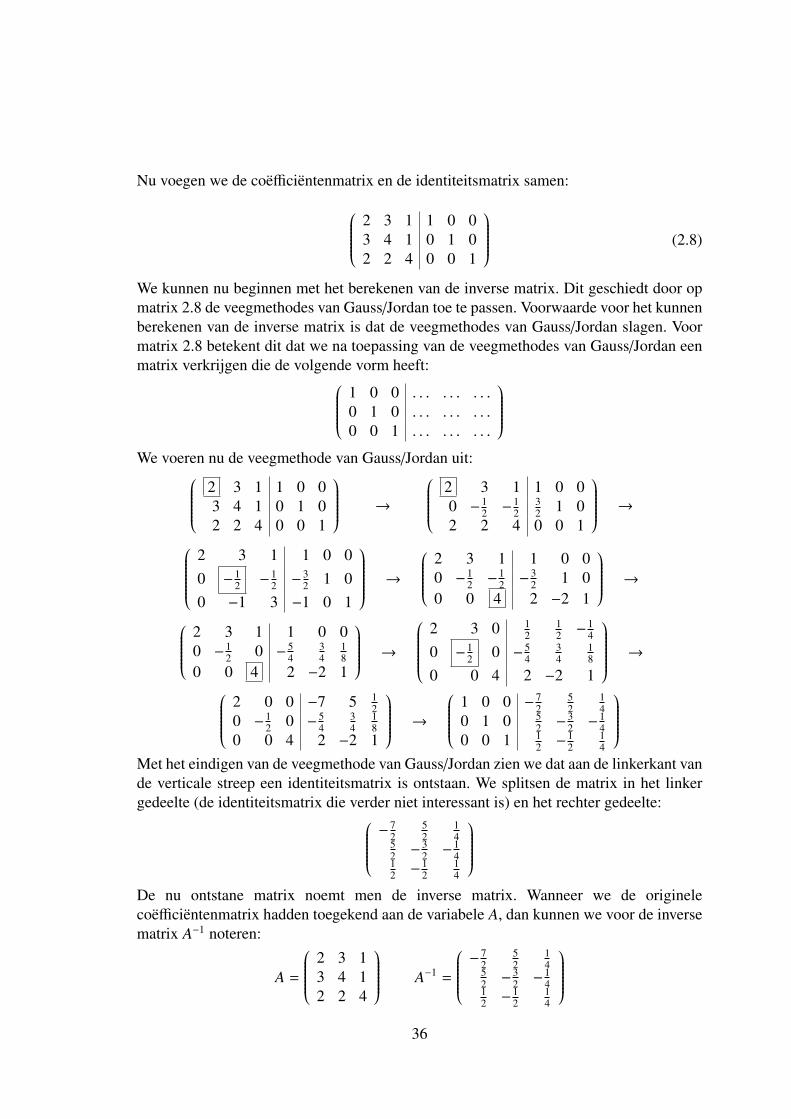
Nu voegen we de coefficientenmatrix en de identiteitsmatrix samen: 2 3 1 1 0 03 4 1 0 1 02 2 4 0 0 1
(2.8)
We kunnen nu beginnen met het berekenen van de inverse matrix. Dit geschiedt door opmatrix 2.8 de veegmethodes van Gauss/Jordan toe te passen. Voorwaarde voor het kunnenberekenen van de inverse matrix is dat de veegmethodes van Gauss/Jordan slagen. Voormatrix 2.8 betekent dit dat we na toepassing van de veegmethodes van Gauss/Jordan eenmatrix verkrijgen die de volgende vorm heeft: 1 0 0 . . . . . . . . .
0 1 0 . . . . . . . . .0 0 1 . . . . . . . . .
We voeren nu de veegmethode van Gauss/Jordan uit: 2 3 1 1 0 0
3 4 1 0 1 02 2 4 0 0 1
→
2 3 1 1 0 00 −1
2 −12
32 1 0
2 2 4 0 0 1
→
2 3 1 1 0 00 −1
2 −12 −3
2 1 00 −1 3 −1 0 1
→
2 3 1 1 0 00 −1
2 −12 −3
2 1 00 0 4 2 −2 1
→
2 3 1 1 0 00 −1
2 0 −54
34
18
0 0 4 2 −2 1
→
2 3 0 1
212 −1
4
0 −12 0 −5
434
18
0 0 4 2 −2 1
→
2 0 0 −7 5 12
0 −12 0 −5
434
18
0 0 4 2 −2 1
→
1 0 0 −72
52
14
0 1 0 52 −3
2 −14
0 0 1 12 −1
214
Met het eindigen van de veegmethode van Gauss/Jordan zien we dat aan de linkerkant vande verticale streep een identiteitsmatrix is ontstaan. We splitsen de matrix in het linkergedeelte (de identiteitsmatrix die verder niet interessant is) en het rechter gedeelte: −
72
52
14
52 −3
2 −14
12 −1
214
De nu ontstane matrix noemt men de inverse matrix. Wanneer we de originelecoefficientenmatrix hadden toegekend aan de variabele A, dan kunnen we voor de inversematrix A−1 noteren:
A =
2 3 13 4 12 2 4
A−1 =
−72
52
14
52 −3
2 −14
12 −1
214
36

We kunnen controleren of we in het berekenen van de inverse matrix geen fouten gemaakthebben. Zoals eerder beschreven geldt voor een matrix en zijn inverse de regel: AA−1 = I.In ons voorbeeld zou dus moeten gelden: 2 3 1
3 4 12 2 4
−
72
52
14
52 −3
2 −14
12 −1
214
=
1 0 00 1 00 0 1
Controle eerste kolom:
2 · − 72 + 3 · 5
2 + 1 · 12 = 1
3 · − 72 + 4 · 5
2 + 1 · 12 = 0
2 · − 72 + 2 · 5
2 + 4 · 12 = 0
Controle tweede kolom:2 · 5
2 + 3 · − 32 + 1 · − 1
2 = 03 · 5
2 + 4 · − 32 + 1 · − 1
2 = 12 · 5
2 + 2 · − 32 + 4 · − 1
2 = 0
Controle derde kolom:2 · 1
4 + 3 · − 14 + 1 · 1
4 = 03 · 1
4 + 4 · − 14 + 1 · 1
4 = 02 · 1
4 + 2 · − 14 + 4 · 1
4 = 1
Controleer nu zelf dat ook geldt: A−1A = I, oftewel: −72
52
14
52 −3
2 −14
12 −1
214
2 3 1
3 4 12 2 4
=
1 0 00 1 00 0 1
Tenslotte nog enkele opmerkingen:
• Een inverse matrix kan alleen worden berekend wanneer de originele matrix eencoefficienten matrix representeert van een lineair onafhankelijk stelsel.
• Indien we de inverse matrix willen berekenen van een coefficientenmatrix die geba-seerd is op een strijdig of afhankelijk stelsel, zal op zeker moment de veegmethodevan Gauss/Jordan falen.
2.6 Lineaire stelsels oplossen met de inverse matrix
We keren terug naar het lineaire stelsel aan het begin van dit hoofdstuk:
2x1 + 3x2 + x3 = 43x1 + 4x2 + x3 = 22x1 + 2x2 + 4x3 = 8
37

Eerder is beschreven dat we dit stelsel kunnen representeren met een matrix door hetstelsel om te zetten in een toegevoegde matrix. Er bestaat echter ook een andere manier,waarop we stelsel 2.7 met vectoren en een matrix kunnen weergeven. Deze manier staatbekend als de matrix-vector representatie en zit als volgt in elkaar:
We maken van stelsel 2.7 een coefficientenmatrix: 2 3 13 4 12 2 4
Vervolgens vermenigvuldigen we de coefficientenmatrix met een kolomvector, waarin wede variabelen x1, x2, . . . , xn plaatsen:
2 3 13 4 12 2 4
x1
x2
x3
Deze vermenigvuldiging moeten de oplossingen van de onbekenden van het lineaire stel-sel opleveren. Deze oplossingen plaatsen we eveneens in een kolomvector:
2 3 13 4 12 2 4
x1
x2
x3
=
428
(2.9)
Reken zelf na dat deze vergelijking een correcte manier vormt voor het weergeven vaneen lineair stelsel.
Welnu:
• De coefficientenmatrix noemen we A.
• De kolomvector met geındexeerde variabelen (x1, x2, . . . , xn) noemen we x.
• De kolomvector met de constante termen noemen we c.
Vergelijking 2.9 kan dus als volgt worden weergegeven:
Ax = c (2.10)
Het oplossen van lineair stelsel 2.7 geschiedt door vergelijking 2.10 aan beide kanten metde inverse matrix te vermenigvuldigen:
Ax = c → AA−1x = A−1c
38

Op basis van de regel AA−1 = I verkrijgen we:
Ix = A−1c
We herinneren ons dat het vermenigvuldigen van een rij- of kolomvector met een identi-teitsmatrix geen effect had. Daarom verkrijgen we:
Ix = A−1c → x = A−1c
We kunnen de oplossing van lineair stelsel 2.7 dus berekenen door de vector met de con-stante termen te vermenigvuldigen met de inverse van de coefficientenmatrix.
Daar we de inverse matrix reeds eerder in dit hoofdstuk hadden berekend, zou dus moetengelden:
x1
x2
x3
=
−72
52
14
52 −3
2 −14
12 −1
214
4
28
Berekening x1:
−72· 4 +
52· 2 +
14· 8 = −7
Berekening x2:
52· 4 −
32· 2 −
14· 8 = 5
Berekening x3:
12· 4 −
12· 2 +
14· 8 = 3
Voer nu zelf de volgende controle uit:
2 3 13 4 12 2 4
−7
53
=
428
39

2.7 De determinant: eigenschappen en gebruik
Van een lineair stelsel kan men de zogenaamde determinant berekenen. De determinantwordt berekent door op de coefficientenmatrix A van een lineair stelsel een specifiekeprocedure uit te voeren. Deze procedure levert een specifiek getal op. Dit getal, de deter-minant, vertelt ons of we te maken hebben met een lineair onafhankelijk stelsel of niet.Het getal vertelt ons dus of het gegeven stelsel lineaire vergelijkingen precies een oplos-sing heeft of niet. De determinant heeft de volgende eigenschappen:
• De determinant det(A) van een n ∗ n matrix A is een scalair;
• Als det(A) = 0 dan heeft de matrix A geen inverse matrix A−1;
• Als de determinant wordt berekend uit de coefficientenmatrix A van een lineairstelsel en det(A) = 0 dan is het lineaire stelsel afhankelijk of strijdig. Als det(A) , 0dan is het lineaire stelsel onafhankelijk en niet strijdig;
• Voor het berekenen van een determinant bestaan verschillende methodes.
2.7.1 De determinant van een 2 ∗ 2 matrix
In zijn algemeenheid wordt de determinant van een 2 ∗ 2 matrix als volgt berekend:
A =
(a bc d
)→ det(A) =
∣∣∣∣∣∣ a bc d
∣∣∣∣∣∣ = a · d − b · c
Voorbeeld met getallen: ∣∣∣∣∣∣ 3 −27 5
∣∣∣∣∣∣ = 3 · 5 − (−2 · 7) = 29
2.7.2 De determinant van strijdige 2D-vergelijkingen
De lijnen ax + by = c1 en ax + by = c2 lopen evenwijdig als c1 , c2. Zij hebben geen ge-meenschappelijke punten dus ook geen gemeenschappelijke oplossingen. De determinantvan de coefficienten is: ∣∣∣∣∣∣ a b
a b
∣∣∣∣∣∣ = ab − ba = 0
40

2.7.3 De determinant van afhankelijke 2D-vergelijkingen
De lijnen ax+by = c en α(ax+by) = αc zijn afhankelijk van elkaar en hebben alle puntengemeenschappelijk en oneindig veel oplossingen. De determinant van de coefficienten is;∣∣∣∣∣∣ a b
αa αb
∣∣∣∣∣∣ = aαb − bαa = 0
2.7.4 De determinant van oplosbare 2D-vergelijkingen
Als de determinant van de coefficienten ongelijk 0 is, dan snijden de lijnen ax + by = c endx + ey = f elkaar: ∣∣∣∣∣∣ a b
d e
∣∣∣∣∣∣ = ae − bd , 0
Opmerking: De waarden −∞ < c < +∞ en −∞ < f < +∞ zijn geen criteria voor hetbestaan van een snijpunt.
2.7.5 De determinant van een 3 ∗ 3 matrix
De procedure om van een 3∗3 matrix de determinant te berekenen, is op het eerste gezichtniet erg duidelijk. Een handige manier om het berekenen van de determinant gemakkelij-ker te onthouden is de som van de producten van diagonaalelementen:
A =
a1,1 a1,2 a1,3
a2,1 a2,2 a2,3
a3,1 a3,2 a3,3
→ det(A) =
∣∣∣∣∣∣∣∣a1,1 a1,2 a1,3
a2,1 a2,2 a2,3
a3,1 a3,2 a3,3
∣∣∣∣∣∣∣∣ =
+a1,1a2,2a3,3 − a1,1a2,3a3,2
+a1,2a2,3a3,1 − a1,2a2,1a3,3
+a1,3a2,1a3,2 − a1,3a2,2a3,1
=
+a1,1(a2,2a3,3 − a2,3a3,2)−a1,2(a2,1a3,3 − a2,3a3,1)+a1,3(a2,1a3,2 − a2,2a3,1)
Als we dit stap voor stap uitleggen:
1. De twee eerste kolomvectoren uit de coefficientenmatrix worden rechts naast dezematrix erbij geplaatst:
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
41
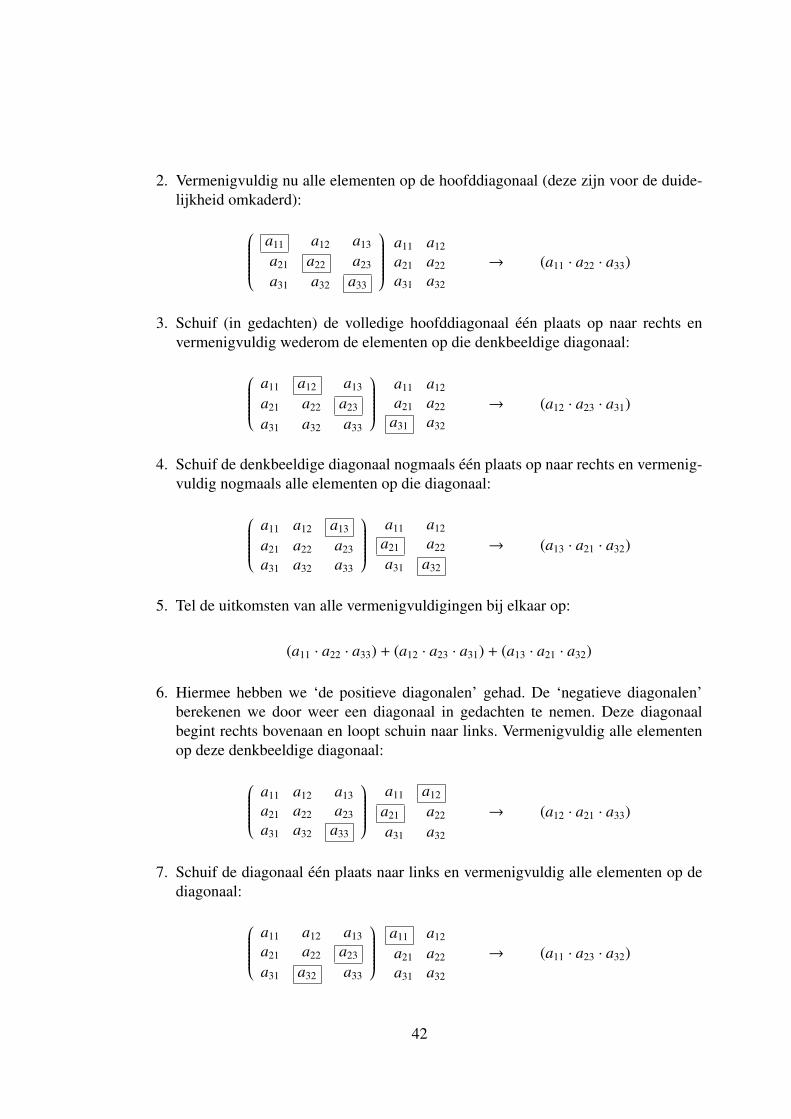
2. Vermenigvuldig nu alle elementen op de hoofddiagonaal (deze zijn voor de duide-lijkheid omkaderd):
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
→ (a11 · a22 · a33)
3. Schuif (in gedachten) de volledige hoofddiagonaal een plaats op naar rechts envermenigvuldig wederom de elementen op die denkbeeldige diagonaal:
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
→ (a12 · a23 · a31)
4. Schuif de denkbeeldige diagonaal nogmaals een plaats op naar rechts en vermenig-vuldig nogmaals alle elementen op die diagonaal:
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
→ (a13 · a21 · a32)
5. Tel de uitkomsten van alle vermenigvuldigingen bij elkaar op:
(a11 · a22 · a33) + (a12 · a23 · a31) + (a13 · a21 · a32)
6. Hiermee hebben we ‘de positieve diagonalen’ gehad. De ‘negatieve diagonalen’berekenen we door weer een diagonaal in gedachten te nemen. Deze diagonaalbegint rechts bovenaan en loopt schuin naar links. Vermenigvuldig alle elementenop deze denkbeeldige diagonaal:
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
→ (a12 · a21 · a33)
7. Schuif de diagonaal een plaats naar links en vermenigvuldig alle elementen op dediagonaal:
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
→ (a11 · a23 · a32)
42

8. En nogmaals opschuiven en vermenigvuldigen:
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
→ (a13 · a22 · a31)
9. Tel alle uitkomsten van de vermenigvuldigingen bij elkaar op:
(a12 · a21 · a33) + (a11 · a23 · a32) + (a13 · a22 · a31)
10. Nu hebben we de producten van de elementen in de ‘negatieve diagonalen’ uitge-rekend. Ons rest nog slechts de positieve en de negatieve diagnaalproducten vanelkaar af te trekken:
det(A) =
(a11 · a22 · a33)+(a12 · a23 · a31)+(a13 · a21 · a32)
︸ ︷︷ ︸positieve diagonalen
−
(a12 · a21 · a33)+(a11 · a23 · a32)+(a13 · a22 · a31)
︸ ︷︷ ︸negatieve diagonalen
Het resultaat van het optellen van alle vermenigvuldigingen van diagonaalelementen indezelfde richting en het aftrekken van alle vermenigvuldigingen van diagonaalelementenin de andere richting, blijft hetzelfde als alle elementen getransponeerd worden. Daaromgeldt det(A) = det(AT). Voorbeeld:
det(A) =
∣∣∣∣∣∣ a cb d
∣∣∣∣∣∣ = ad − cb = ad − bc =
∣∣∣∣∣∣ a bc d
∣∣∣∣∣∣ = det(AT)
Dit geldt ook voor de determinant een n ∗ n matrix en de getransponeerde daarvan, bij-voorbeeld de 3 ∗ 3 determinant:
det(A) =
(a11 · a22 · a33)+(a12 · a23 · a31)+(a13 · a21 · a32)
− (a12 · a21 · a33)+
(a11 · a23 · a32)+(a13 · a22 · a31)
=
(a11 · a22 · a33)+(a21 · a32 · a13)+(a31 · a12 · a23)
− (a21 · a12 · a33)+
(a11 · a32 · a23)+(a31 · a22 · a13)
= det(AT)
Voorbeeld 2.1 Beschouw het volgende stelsel lineaire vergelijkingen:{2x1 + 3x2 = 84x1 + 5x2 = 6 (2.11)
43

Teneinde de determinant van stelsel 2.11 te kunnen berekenen, bepalen we van stelsel2.11 de coefficientenmatrix:
A =
(2 34 5
)De determinant wordt als volgt berekend:
det(A) =
∣∣∣∣∣∣ 2 34 5
∣∣∣∣∣∣ = (2 · 5) − (3 · 4) = −2
De determinant is niet gelijk aan 0, derhalve hebben we te maken met een lineair onaf-hankelijk stelsel. Stelsel 2.11 heeft dus precies een oplossing.
Voorbeeld 2.2 Beschouw het stelsel lineaire vergelijkingen:3x1 + 2x2 + 4x3 = 42x1 + 4x2 + x3 = 52x1 + 2x2 + 4x3 = 8
(2.12)
Wederom bepalen we ter berekening van de determinant eerst de coefficientenmatrix vanstelsel 2.12: 3 2 4
2 4 12 2 4
De determinant van deze matrix wordt met het product van de diagonaal elementen, alsvolgt berekend:
A =
3 2 42 4 12 2 4
→ det(A) =
∣∣∣∣∣∣∣∣3 2 42 4 12 2 4
∣∣∣∣∣∣∣∣ =((3 · 4 · 4) + (2 · 1 · 2) + (4 · 2 · 2))−((4 · 4 · 2) + (2 · 2 · 4) + (3 · 1 · 2))
→ det(A) = (48 + 4 + 16) − (32 + 16 + 6) = 14
De determinant is weer niet gelijk aan 0, daarom heeft ook dit stelsel precies een oplos-sing.
44

2.7.6 De determinant ‘recursief’ berekenen
De methode waarbij een determinant wordt berekend als de som van producten van diago-naalelementen is ook een recursieve wijze voor te stellen. Zonder daarvoor de elementenar,k = a1,1, a1,2, a1,3 (de eerste rijvector) af uit de determinant:
det(A) =
∣∣∣∣∣∣∣∣a1,1 a1,2 a1,3
a2,1 a2,2 a2,3
a3,1 a3,2 a3,3
∣∣∣∣∣∣∣∣ =
+a1,1(a2,2a3,3 − a2,3a3,2)−a1,2(a2,1a3,3 − a2,3a3,1)+a1,3(a2,1a3,2 − a2,2a3,1)
→
det(A) = +a1,1
∣∣∣∣∣∣ a2,2 a2,3
a3,2 a3,3
∣∣∣∣∣∣ − a1,2
∣∣∣∣∣∣ a2,1 a2,3
a3,1 a3,3
∣∣∣∣∣∣ + a1,3
∣∣∣∣∣∣ a2,1 a2,2
a3,1 a3,2
∣∣∣∣∣∣Opmerkingen:
1. Als van het keuze-element +ar,k de som r + k even is, neem dan +ar,k, anders −ar,k,zoals +a1,1 − a1,2 + a1,3;
2. De ‘recursieve rekenmethode’ werkt voor alle n ∗ n determinanten met 1 < n. De1 ∗ 1 determinant van 1 element is gelijk aan dit element;
3. De eigen kolommen en rijen van de n keuze-elementen doen niet mee om de nkleine determinanten te bepalen;
4. Elke kolom of rij mag gebruikt worden om de n keuze-elementen te leveren. Dekeuze-elementen komen wel uit dezelfde kolom of rij;
5. De rekentijd T (n) om een n ∗ n determinant met n kleinere (n − 1) ∗ (n − 1) deter-minanten – of met de eerder behandelde diagonaalmethode – te bepalen, neemt toemet n!: T (1) = 1 ∧ T (n) = n · T (n − 1) → T (n) = O(n!)
Voorbeeld 2.3
De ‘telefoonmatrix’:
1 2 34 5 67 8 9
Bereken de determinant met een rij:∣∣∣∣∣∣∣∣
1 2 34 5 67 8 9
∣∣∣∣∣∣∣∣ = +1
∣∣∣∣∣∣ 5 68 9
∣∣∣∣∣∣ − 2
∣∣∣∣∣∣ 4 67 9
∣∣∣∣∣∣ + 3
∣∣∣∣∣∣ 4 57 8
∣∣∣∣∣∣ = −3 + 12 − 9 = 0
Of met een kolom:∣∣∣∣∣∣∣∣1 2 34 5 67 8 9
∣∣∣∣∣∣∣∣ = +1
∣∣∣∣∣∣ 5 68 9
∣∣∣∣∣∣ − 4
∣∣∣∣∣∣ 2 38 9
∣∣∣∣∣∣ + 7
∣∣∣∣∣∣ 2 35 6
∣∣∣∣∣∣ = −3 + 24 − 21 = 0
45

2.7.7 De regel van Cramer
Een stelsel lineaire vergelijkingen Ax = c kan worden opgelost met behulp van deter-minanten, zonder dat een inverse matrix A−1 of een veegprocedure noodzakelijk is. Deoplossing voor xi wordt berekend met de regel van Cramer:
xi =det(Ai)det(A)
∧ det(A) , 0
De determinant det(Ai) ontstaat door de i-de kolom van det(A) te vervangen door dekolom in c. Het stelsel is echter alleen oplosbaar als A een inverse A−1 heeft, dus alsdet(A) , 0. Voorbeeld:
ax1 + cx2 = ebx1 + dx2 = f
A =
(a cb d
)c =
(ef
)Van de coefficientenmatrix A wordt de determinant bepaald:
det(A) =
∣∣∣∣∣∣ a cb d
∣∣∣∣∣∣ = ad − cb
Voor het vinden van de oplossingen x1 en x2 moeten we eerst det(A1) en det(A2) bereke-nen:
det(A1) =
∣∣∣∣∣∣ e cf d
∣∣∣∣∣∣ = ed − c f det(A2) =
∣∣∣∣∣∣ a eb f
∣∣∣∣∣∣ = a f − eb
Als det(A) , 0 dan zijn de oplossingen van de onbekenden x1 en x2:
xi =det(Ai)det(A)
→ x1 =ed − c fad − cb
∧ x2 =a f − ebad − cb
Hoewel de regel van Cramer het vinden van een oplossing heeft teruggebracht tot eeneenvoudig rekenschema, is het berekenen van determinanten van een n ∗ n matrix inef-ficienter naarmate n groter is (O(n!)). Een veegmethode geeft bij grote n sneller de oplos-sing (O(n2,3727)). De regel van Cramer wordt daarom vooral gebruikt bij kleine stelsels met2 a 3 onbekenden met functies van andere variabelen als coefficienten, zoals het volgendestelsel:
x cos φ − y sin φ = ax sin φ + y cos φ = b → det(A) =
∣∣∣∣∣∣ + cos φ − sin φ+ sin φ + cos φ
∣∣∣∣∣∣De coefficientendeterminant det(A) = cos2 φ + sin2 φ = 1 is voor elke waarde van devariabele φ ongelijk aan 0. Dit betekent dat voor elke hoek φ een oplossing is te vindenvoor x en y. Deze oplossingen volgen direct uit de regel van Cramer: x = a cos φ + b sin φen y = −a sin φ + b cos φ.
46

2.8 Bijzondere lineaire stelsels
Zoals in paragraaf 2.4 is opgemerkt, geven niet alle stelsels lineaire vergelijkingen nor-male oplossingen. De tegenstrijdige stelsels geven geen oplossingen, afhankelijke stelselsgeven oneindig veel oplossingen.
2.8.1 Lineaire stelsels van het type Ax = o
Een stelsel lineaire vergelijkingen van het type Ax = o waarbij o de nulvector is, wordthomogeen stelsel genoemd.
Elk homogeen stelsel waarvoor det(A) , 0, heeft uitsluitend de triviale oplossing Ao = o.
Voorbeeld 2.42x1 + 3x2 + x3 = 03x1 + 4x2 + x3 = 02x1 + 2x2 + 4x3 = 0
→ det(A) =
∣∣∣∣∣∣∣∣2 3 13 4 12 2 4
∣∣∣∣∣∣∣∣ = −4
Dit stelsel is oplosbaar en heeft de nulvector o als triviale oplossing, zie de Gauss/Jordangeveegde toegevoegde matrix: 2 3 1 0
3 4 1 02 2 4 0
→
1 0 0 00 1 0 00 0 1 0
Als det(A) = 0 dan kan het homogene stelsel alleen een afhankelijk stelsel zijn (strij-digheid is onmogelijk). Een afhankelijk stelsel is oplosbaar en heeft naast de triviale ooplossing ook oneindig veel niet-triviale oplossingen (snijlijnen of vlakken in 3D).
Voorbeeld 2.52x1 + 3x2 + x3 = 03x1 + 4x2 + x3 = 04x1 + 6x2 + 2x3 = 0
→ det(A) =
∣∣∣∣∣∣∣∣2 3 13 4 14 6 2
∣∣∣∣∣∣∣∣ = 0
De Gauss/Jordan geveegde toegevoegde matrix is: 2 3 1 03 4 1 04 6 2 0
→
1 0 −1 00 1 1 00 0 0 0
Het overeenkomstige afhankelijke stelsel is:{
x1 − x3 = 0x2 + x3 = 0
De resulterende vergelijkingen zijn twee vlakken in de oorsprong die een snijlijn hebben.
47

De niet-triviale oplossing van een 3D-homogeen stelsel is een vlak of een snijlijn vanvlakken.
2.8.2 Lineaire stelsels van het type Ax = λx
Een stelsel lineaire vergelijkingen van het type Ax = λx waarbij x de vector is die eenveelvoud van zijn eigen waarden λx als oplossing heeft, wordt op de volgende wijzeopgelost:
Ax = λx → Ax = λIx → Ax − λIx = o → (A − λI)x = o
Het homogene stelsel (A − λI)x = o heeft altijd de triviale oplossing x = o en alsdet(A − λI) = 0 extra niet-triviale oplossingen.
Voorbeeld 2.6 Gegeven het stelsel lineaire vergelijkingen:{4x1 − 5x2 = λx1
2x1 − 3x2 = λx2
Bepaal de waarden λ waarbij det(A − λI) = 0:
det(A − λI) =
∣∣∣∣∣∣ 4 − λ −52 −3 − λ
∣∣∣∣∣∣ = (4 − λ)(−3 − λ) + 10 = λ2 − λ − 2 = 0
De vergelijking λ2 − λ − 2 = (λ + 1)(λ − 2) = 0 wordt de karakteristieke vergelijking vanmatrix A genoemd. De oplossingen zijn de eigenwaarden van de vergelijking λ′ = −1 enλ′′ = 2.
Per eigenwaarde worden nu de niet-triviale oplossingen van de vectoren berekend met deformule (A− λI)x = o. De oplossingen in vectorvorm worden de eigenvectoren genoemd:{
(4 + 1)x1 −5x2 = 02x1 (−3 + 1)x2 = 0 → x′ =
(11
)voor λ′ = −1
{(4 − 2)x1 −5x2 = 0
2x1 (−3 − 2)x2 = 0 → x′′ =
(52
)voor λ′′ = 2
De eigenvectoren van A zijn x′ =
(11
)en x′′ =
(52
), zij voldoen aan de vergelijkingen
Ax′ = λ′x′ en Ax′′ = λ′′x′′ .(4 −52 −3
) (11
)= −1
(11
)=
(−1−1
) (4 −52 −3
) (52
)= 2
(52
)=
(104
)
48

2.9 Opgaven
1. Bepaal met Gauss-Jordan de oplossing van het volgende stelsel vergelijkingen:
x1 + 3x2 − x3 = 3
3x1 + 10x2 − 2x3 = 114x1 + 9x2 − 8x3 = 5
2. Bepaal met Gauss-Jordan de oplossing van het volgende stelsel vergelijkingen:
x1 − x2 + 2x3 = 1
2x1 + x2 + 3x3 = 14x1 + 2x2 + 4x3 = 1
3. Bepaal met Gauss-Jordan de oplossing van het volgende stelsel vergelijkingen:
x1 − x2 + 2x3 = 0
2x1 + x2 + 3x3 = 04x1 + 2x2 + 4x3 = 0
4. Bepaal met Gauss-Jordan de oplossing van het volgende stelsel vergelijkingen:
x1 − x2 + 2x3 = 0
2x1 + 2x2 + 4x3 = 04x1 + 2x2 + 4x3 = 0
5. Gegeven:
A =
(e3 +2−1 +e−3
)c =
(12
)Bereken de determinant det(A) en vindt de oplossing voor x in stelsel Ax = c.
6. Gegeven:
A =
(1 17 9
)Bereken: de eigenwaarden λ′ en λ′′.
49
Hoofdstuk 3
Vectormeetkunde
Omdat in dit hoofdstuk meer de nadruk ligt op de meetkundige aspecten van vectoren danop de stelsels lineaire vergelijkingen, worden de namen van de elementen v1 v2 en v3 vaneen vector v geındexeerd met de namen van de basisvectoren van de vectorruimte, zoalsvx, vy en vz. Bij voorkeur wordt een vector als een kolomvector geschreven, de samenstel-lende componenten zijn dan gemakkelijk te herkennen. Incidenteel worden rijvectorengebruikt.
Scalaire constanten en variabelen worden aangegeven met dun gedrukte cijfers, Latijnseof Griekse letters. Vectoren worden met vetgedrukte kleine letters aangegeven, matricesmet vetgedrukte hoofdletters.
3.1 De vectorruimte
De vectorruimte bevat twee soorten elementen: vectoren en scalairen. Een scalair is eenreele constante of variabele waarde. Een vector v is voor te stellen als een pijl met eenorientatie en een lengte |v|. De orientatie van een vector is vergelijkbaar met een stand vaneen kompasnaald of een klokwijzer, niet te verwarren met het begrip ‘richting’. Evenwij-dige lijnen hebben dezelfde richting, de orientatie is dan niet relevant.
Het product van een reele scalair α en een vector v resulteert altijd in een vector αv. Zelfshet product 0v resulteert in de nulvector o, de vector zonder lengte |o| = 0, orientatie ofrichting. Elke vector αv met α , 0 heeft dezelfde richting als v. Als 1 < |α| is de lengtevan de vector |αv| groter dan de vector |v|. Als 0 < |α| < 1 is de lengte kleiner dan delengte van de originele vector. Bij 0 < α heeft de resulterende vector dezelfde orientatieals de originele vector. Bij α < 0 krijgt de resulterende vector een omgekeerde orientatie.
Voor de vector v en de scalairen α en β geldt:
50
2 v
− 0,5wv
w−w
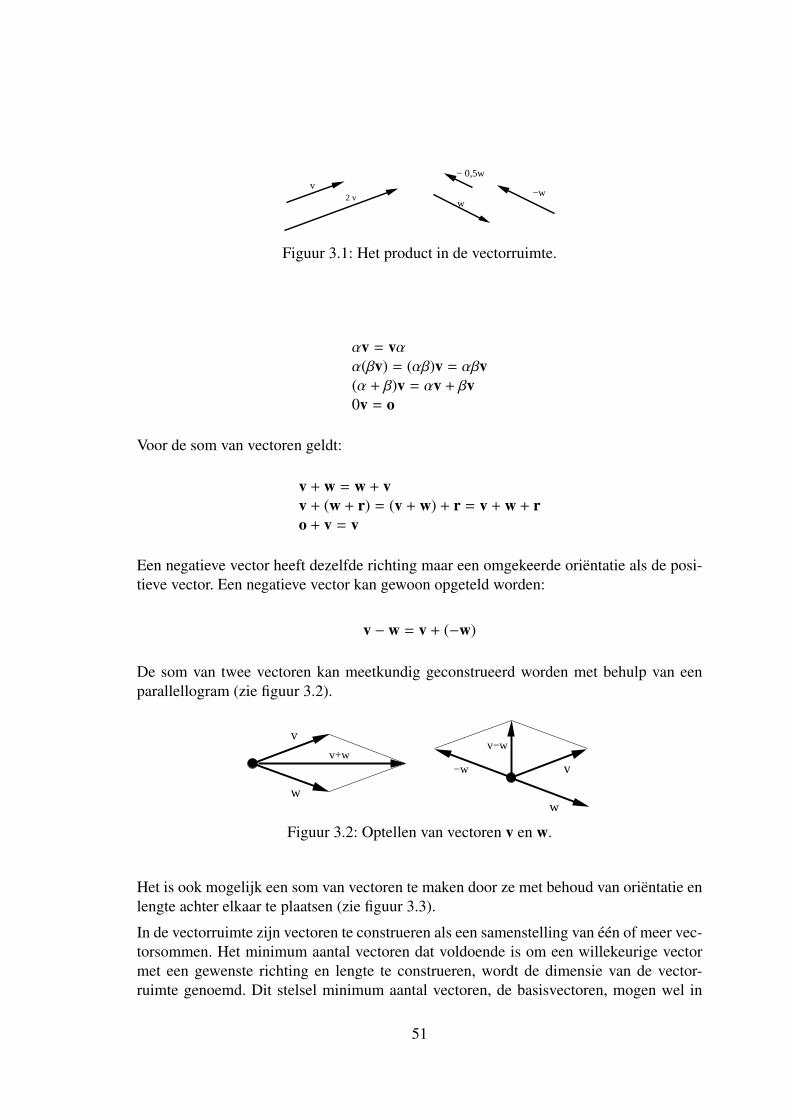
Figuur 3.1: Het product in de vectorruimte.
αv = vαα(βv) = (αβ)v = αβv(α + β)v = αv + βv0v = o
Voor de som van vectoren geldt:
v + w = w + vv + (w + r) = (v + w) + r = v + w + ro + v = v
Een negatieve vector heeft dezelfde richting maar een omgekeerde orientatie als de posi-tieve vector. Een negatieve vector kan gewoon opgeteld worden:
v − w = v + (−w)
De som van twee vectoren kan meetkundig geconstrueerd worden met behulp van eenparallellogram (zie figuur 3.2).
v
w
v+wv−w
−w v
w
Figuur 3.2: Optellen van vectoren v en w.
Het is ook mogelijk een som van vectoren te maken door ze met behoud van orientatie enlengte achter elkaar te plaatsen (zie figuur 3.3).
In de vectorruimte zijn vectoren te construeren als een samenstelling van een of meer vec-torsommen. Het minimum aantal vectoren dat voldoende is om een willekeurige vectormet een gewenste richting en lengte te construeren, wordt de dimensie van de vector-ruimte genoemd. Dit stelsel minimum aantal vectoren, de basisvectoren, mogen wel in
51

v w
v+w
v−w
v
w
v−w
−w
v
Figuur 3.3: Rechtstreeks optellen van v en w.
lengte verschillen maar geen nulvector zijn. Zij moeten bovendien lineair onafhankelijkvan elkaar zijn.
Basisvectoren zijn lineair onafhankelijk van elkaar als elke basisvector scalair met nulvermenigvuldigd moet worden om de nulvector te verkrijgen. In de tweedimensionale(2D) vectorruimte geldt voor lineair onafhankelijke basisvectoren:
αu + βv = o → α = β = 0
Indien dat niet zo is, dan is zijn u en v afhankelijk van elkaar en hebben in de 2D-vectorruimte dezelfde richting:
αu + βv = o ∧ α , 0 → u = −β
αv
Als twee lineaire onafhankelijke vectoren u en v de basis van een 2D-vectorruimte vor-men, dan kan elke vector p in deze 2D-vectorruimte geconstrueerd worden uit de basis-vectoren u en v:
p = αu + βv
u
v
pp
v
u−0,5v
0,6u
Figuur 3.4: De constructie van p = 0, 6u − 0, 5v.
Lineaire onafhankelijkheid in de 3D-vectorruimte betekent dat de 3 basisvectoren niet ineen gemeenschappelijk vlak mogen liggen. Voor grotere n-dimensionale vectorruimteszijn dit soort verboden moeilijk meetkundig voor te stellen, maar ook daar geldt voor den lineair onafhankelijke basisvectoren de volgende relatie:
β1b1 + β2b2 + . . . + βnbn = o → β1 = β2 = . . . = βn = 0
52
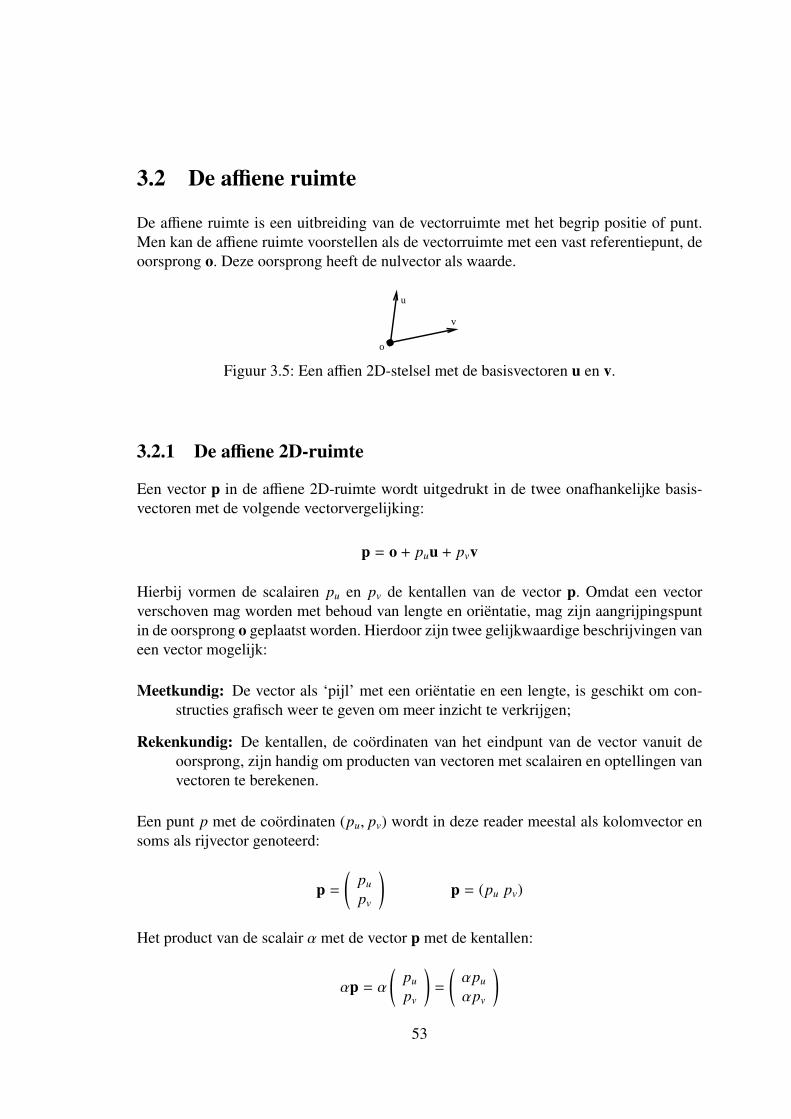
3.2 De affiene ruimte
De affiene ruimte is een uitbreiding van de vectorruimte met het begrip positie of punt.Men kan de affiene ruimte voorstellen als de vectorruimte met een vast referentiepunt, deoorsprong o. Deze oorsprong heeft de nulvector als waarde.
o
v
u
Figuur 3.5: Een affien 2D-stelsel met de basisvectoren u en v.
3.2.1 De affiene 2D-ruimte
Een vector p in de affiene 2D-ruimte wordt uitgedrukt in de twee onafhankelijke basis-vectoren met de volgende vectorvergelijking:
p = o + puu + pvv
Hierbij vormen de scalairen pu en pv de kentallen van de vector p. Omdat een vectorverschoven mag worden met behoud van lengte en orientatie, mag zijn aangrijpingspuntin de oorsprong o geplaatst worden. Hierdoor zijn twee gelijkwaardige beschrijvingen vaneen vector mogelijk:
Meetkundig: De vector als ‘pijl’ met een orientatie en een lengte, is geschikt om con-structies grafisch weer te geven om meer inzicht te verkrijgen;
Rekenkundig: De kentallen, de coordinaten van het eindpunt van de vector vanuit deoorsprong, zijn handig om producten van vectoren met scalairen en optellingen vanvectoren te berekenen.
Een punt p met de coordinaten (pu, pv) wordt in deze reader meestal als kolomvector ensoms als rijvector genoteerd:
p =
(pu
pv
)p = (pu pv)
Het product van de scalair α met de vector p met de kentallen:
αp = α
(pu
pv
)=
(αpu
αpv
)53

De som van de vector p en vector q met kentallen:
p + q =
(pu
pv
)+
(qu
qv
)=
(pu + qu
pv + qv
)
o
p
q
p − q
p − q
Figuur 3.6: Het vectorverschil.
Als in figuur 3.6 de vectoren p en q de kentallen(
pu
pv
)en
(qu
qv
)hebben, dan heeft het
verschil p − q de kentallen(
pu − qu
pv − qv
).
Voorbeeld 3.1
3(
2−1
)=
(6−3
)(
2−1
)+
(−42
)=
(−21
)(
2−1
)−
(−42
)=
(6−3
)
3.2.2 Lijnen in de affiene 2D-ruimte
In de affiene 2D-ruimte kunnen punten met vaste vectoren en lijnen met variabele vectorenworden aangegeven. Een lijn door de oorsprong wordt volledig bepaald door zijn richting.Deze richting wordt bepaald door een richtingsvector r.
De lijn door de oorsprong o (figuur 3.7A) heeft de vectorvergelijking:
lijn = αr = α
(ru
rv
)=
(αru
αrv
)Door de variabele vector lijn met een reele waarde van de parameter in het waardebereik−∞ < α < ∞ vast te leggen, kan elk punt op de lijn aangegeven worden. In de grafi-sche programmatuur noteert men bij voorkeur de variabele vector lijn als functie van het
54

rr
p
q
p−q
oo B CA
o
p+r
p
Figuur 3.7: Lijnen als variabele vectoren.
type vector met de formele reele parameter α. De definitie van deze vectorfunctie is danlijn[α] = αr. Het aanroepen van deze vectorfunctie met actuele waarden voor α zijn danpunten op de lijn, zoals lijn[0] en lijn[−5, 66].
Een lijn die niet door de oorsprong gaat (figuur 3.7B), maar wel door p in de richting vanr heeft de vectorvergelijking:
lijn = p + αr =
(pu
pv
)+ α
(ru
rv
)=
(pu + αru
pv + αrv
)Als twee punten p en q op een lijn bekend zijn (zie figuur 3.7C), dan heeft de richtings-vector r dezelfde richting als de verschilvectoren p−q en q−p. Als we de richtingsvectorvervangen door een van de verschilvectoren r = p − q, dan is de vectorvergelijking vande lijn door p en q:
lijn = p + α(p − q) =
(pu
pv
)+ α
(pu − qu
pv − qv
)=
(pu + α(pu − qu)pv + α(pv − qv)
)
3.2.3 De affiene 3D-ruimte
Een vector p in de affiene 3D-ruimte wordt uitgedrukt in de drie onafhankelijke basisvec-toren met de volgende vectorvergelijking:
p = o + puu + pvv + pww
Hierbij vormen de scalairen pu, pv en pw de coordinaten of vertex (pu, pv, pw) van het puntp. De vector p van het punt p met de scalairen (pu, pv, pw) wordt als kolomvector of alsrijvector genoteerd:
p =
pu
pv
pw
p = (pu pv pw)
55

3.2.4 Een lijn in de affiene 3D-ruimte
In de affiene 3D-ruimte worden lijnen op dezelfde manier geconstrueerd als lijnen in de2D-ruimte. Alleen wordt er gebruik wordt gemaakt van 3D-vectoren in plaats van 2D-vectoren:
lijn = p + αr
Als twee verschillende punten p en q op de lijn bekend zijn, dan kan de richtingsvectorr vervangen worden door een van de verschilvectoren p − q en q − p. De parametrischevectorvergelijking van de lijn is:
lijn = p + α(p − q) =
pu
pv
pw
+ α
pu − qu
pv − qv
pw − qw
=
pu + α(pu − qu)pv + α(pv − qv)pw + α(pw − qw)
3.2.5 Een vlak in de affiene 3D ruimte
In de 2D-ruimte is maar een vlak, het vlak waarin alle vectoren liggen. In de 3D-ruimtezijn oneindig veel vlakken. Al deze vlakken hebben de eigenschap dat ze evenwijdig zijnmet een vlak door de oorsprong. De parametrische voorstelling van zo’n vlak v door deoorsprong o wordt bepaald door twee onafhankelijke vectoren r en s is:
v = λr + γs = λ
ru
rv
rw
+ γ
su
sv
sw
=
λru + γsu
λrv + γsv
λrw + γsw
Beide vectoren r en s liggen in het vlak, zij worden daarom opspannende vectoren van hetvlak genoemd (zie figuur 3.8). De scalairen λ en γ mogen elke reele waarde aannemen,elk punt op het vlak is bepaald door een waarde van λ en van γ.
o
s
r
w
v
u
����
Figuur 3.8: Een vlak door de oorsprong.
Als we dit vlak evenwijdig verplaatsen met de vector p, dan is de vergelijking van eenvlak v dat een punt p omvat (zie figuur 3.9):
56

v = p + λr + γs =
pu
pv
pw
+ λ
ru
rv
rw
+ γ
su
sv
sw
=
pu + λru + γsu
pv + λrv + γsv
pw + λrw + γsw
o
w
v
u
r
s
p
����
����
Figuur 3.9: Een evenwijdig verplaatst vlak.
3.3 De Euclidische ruimte
Als alle basisvectoren een loodrechte hoek ten opzichte van elkaar maken, dan wordtzo’n stelsel een orthogonaal coordinatenstelsel genoemd. Als de basisvectoren ooknog even lang zijn en de eenheidsafstand hebben, dan wordt het een orthonormaalcoordinatenstelsel of Euclidische ruimte genoemd. De namen en kentallen van de ortho-normale 2D-basisvectoren zijn:
x =
(10
)y =
(01
)De namen en kentallen van de orthonormale 3D-basisvectoren zijn:
x =
100
y =
010
z =
001
Hoewel in het affiene stelsel al sprake is van rudimentaire coordinaten, zijn afstanden ende hoeken nog niet echt kwantificeerbaar omdat de basisvectoren ongelijke lengtes kun-nen hebben en scheef op elkaar kunnen staan. In de Euclidische ruimte met orthonormalebasisvectoren zijn kwantificeerbare afstanden en hoeken wel mogelijk. De afstand tussentwee punten is gedefinieerd als de lengte van het lijnstuk tussen de twee punten uitgedruktin de eenheidslengte. Hoeken tussen lijnen worden uitgedrukt in graden of radialen.
Enkele toepassingen in de Euclidische ruimten:
57

����
��
��
������������������������������������������
������������������������������������������
b
aa−b
1/2(a−b)m
o
����
����
��
b
a
m
o
Figuur 3.10: Het midden van een lijnstuk.
• Het midden van een lijnstuk tussen de punten a en b:
De verschilvector a − b heeft dezelfde lengte en richting als het lijnstuk.
De halve lengte is 12 (a − b), het punt m in het midden van het lijnstuk is:
m = b +12
(a − b) =12
(a + b)
Voorbeeld:
a =
123
b =
54−1
→ m =12
(a + b) =
331
• Het zwaartepunt m van de driehoek met de hoekpunten a, b en c (zonder bewijs):
m =13
(a + b + c)
Voorbeeld:
a =
123
b =
54−1
→ b =
034
→ (m) =13
(a + b + c) =
232
Voor n punten kan deze formule worden uitgebreid tot:
m =1n
(p1 + p2 + . . . + pn)
Zwaartepunten zijn belangrijk bij bewegende objecten. Het zwaartepunt volgt exactde baan waarmee een object zich verplaatst door de Euclidische ruimte. Het is ookhet middelpunt van een roterend object.
58
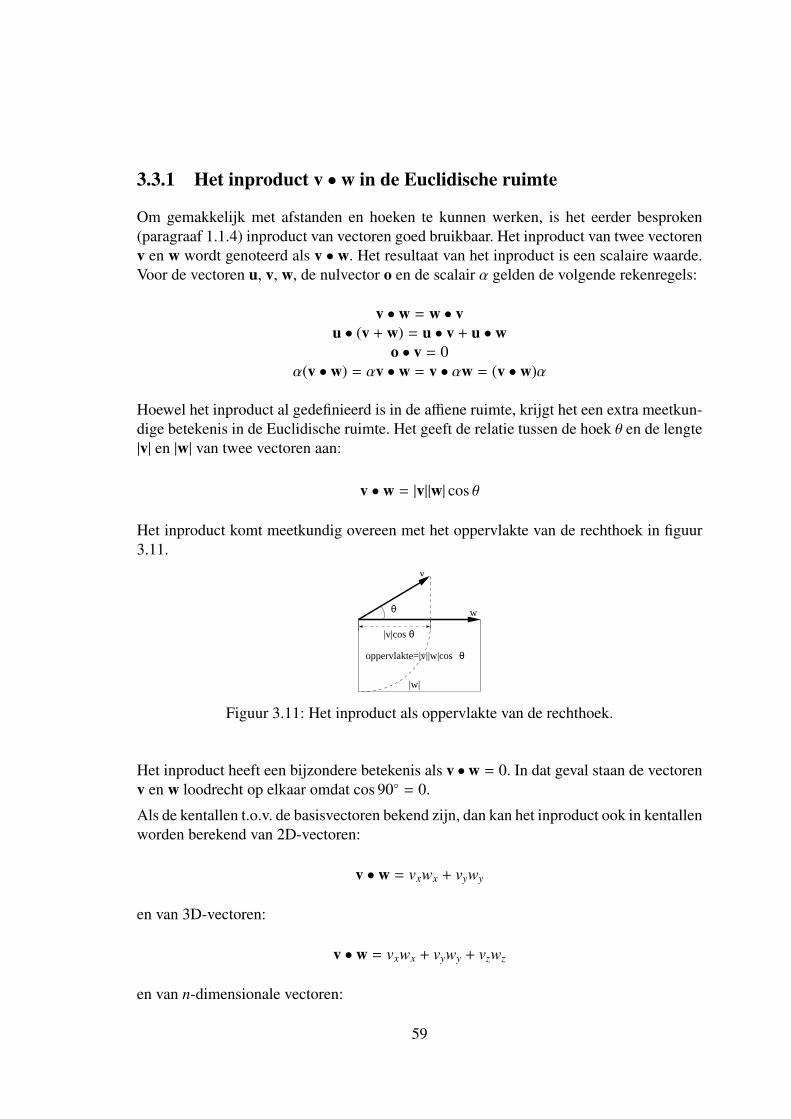
3.3.1 Het inproduct v • w in de Euclidische ruimte
Om gemakkelijk met afstanden en hoeken te kunnen werken, is het eerder besproken(paragraaf 1.1.4) inproduct van vectoren goed bruikbaar. Het inproduct van twee vectorenv en w wordt genoteerd als v • w. Het resultaat van het inproduct is een scalaire waarde.Voor de vectoren u, v, w, de nulvector o en de scalair α gelden de volgende rekenregels:
v • w = w • vu • (v + w) = u • v + u • w
o • v = 0α(v • w) = αv • w = v • αw = (v • w)α
Hoewel het inproduct al gedefinieerd is in de affiene ruimte, krijgt het een extra meetkun-dige betekenis in de Euclidische ruimte. Het geeft de relatie tussen de hoek θ en de lengte|v| en |w| van twee vectoren aan:
v • w = |v||w| cos θ
Het inproduct komt meetkundig overeen met het oppervlakte van de rechthoek in figuur3.11.
v
w
|w|
|v|cos
θ
oppervlakte=|v||w|cos θ
θ
Figuur 3.11: Het inproduct als oppervlakte van de rechthoek.
Het inproduct heeft een bijzondere betekenis als v •w = 0. In dat geval staan de vectorenv en w loodrecht op elkaar omdat cos 90◦ = 0.
Als de kentallen t.o.v. de basisvectoren bekend zijn, dan kan het inproduct ook in kentallenworden berekend van 2D-vectoren:
v • w = vxwx + vywy
en van 3D-vectoren:
v • w = vxwx + vywy + vzwz
en van n-dimensionale vectoren:
59

v • w = v1w1 + v2w2 + . . . + vnwn
Het inproduct heeft enkele belangrijke toepassingen:
• De mogelijkheid om de lengte van een vector te bepalen:
v • v = |v||v| cos 0◦ = |v|2
Daaruit volgt de lengte zoals die in de Euclidische ruimte met de stelling van Pyt-hagoras gedefinieerd is:
|v| =√
v • v =
√v2
x + v2y
• De vector n die loodrecht op de vector r staat, noemen we de normaalvector van r.In de 2D-ruimte is met het inproduct n • r = 0 gemakkelijk zo’n normaalvector tevinden:
r =
(ab
)→ n =
(−b
a
)→
(ab
)•
(b−a
)= ab − ba = 0
r =
(23
)→ n =
(−3
2
)• Omdat in de 3D-ruimte een vector n oneindig veel loodrechte vectoren in verschil-
lende richtingen heeft, geeft de vergelijking v • n = 0 geen vector, maar een vlak vdat loodrecht op n staat en door de oorsprong o gaat. In dit geval is n de normaal-vector van dat vlak v.
• Om in de 2D-ruimte de loodlijn te vinden die loodrecht op een lijn = p + λrin punt p staat, bepalen we eerst de richtingsvector r van de lijn. Met n • r = 0vinden we n. Hieruit volgt de vectorvergelijking voor de loodlijn door de oorsprong:loodlijn = µn. De loodlijn door punt p wordt: loodlijn = p + µn.
• Uit de algemene vergelijking van een 2D-cirkel c = (x, y) met het middelpunt m =
(mx,my) en een straal r volgt:
(x − mx)2 + (y − my)2 = (c −m) • (c −m) = |c −m|2 = r2 → |c −m| = r
De vectorvoorstelling van een 2D-cirkel c met middelpunt m en straal r is dus:
|c −m| = r
60

r
o
m
c
c−m
Figuur 3.12: De cirkel c met middelpunt m en straal r.
• Een eenheidsvector is een vector ve met de lengte |ve| = 1. Uit elke niet-nulvectorv kan een eenheidsvector ve in dezelfde orientatie geconstrueerd worden door dezescalair te delen door zijn lengte:
ve =v|v|
=v
√v • v
Van de vector v =
vx
vy
vz
is de lengte |v| =√
v2x + v2
y + v2z . Daaruit volgt:
ve =1√
v2x + v2
y + v2z
vx
vy
vz
• De hoek θ tussen een vector v en een andere vector w kan uitgedrukt worden in de
lengte en het inproduct van beide vectoren:
cos θ =v • w|v||w|
↔ θ = arccos(v • w|v||w|
)In de 3D-ruimte is de hoek tussen v en w in het vlak waarin beide vectoren liggen.
• Het inproduct wordt ook gebruikt om vectoren op elkaar te projecteren. In figuur3.13 is de lengte van de projectie van vector v op vector w gelijk aan:
projectielengte = ||v| cos φ| = ||v||we| cos φ| =|v • w||w|
Omdat cos φ negatief kan zijn en de lengte van een lijnstuk altijd groter of gelijkaan nul is, is de absolute waarde van |v| cos φ genomen.
61

v
φ we
|v|cos φ w
Figuur 3.13: De projectie van v op w.
v
w
θ
Figuur 3.14: De hoek θ tussen v en w.
Voorbeeld 3.2 De hoek θ tussen de vectoren v =
(11
)en w =
(12
)in figuur 3.14:
cos θ =v • w|v||w|
=3
√2 ·√
5= 0, 9486833
θ = ± arccos(cos θ)= ± arccos(0, 9486833)= ±0, 3218 in radialen= ±18◦26′ in graden
Omdat cos θ = cos−θ is de polariteit van de orientatie ± niet belangrijk voor het inpro-duct. Daarom wordt de positieve hoek gekozen: θ = 18◦26′.
Opmerking: Omdat het inproduct van twee vectoren een scalair resultaat geeft, wordt hetsoms het scalairproduct genoemd. Deze naam wordt in deze reader niet gebruikt omdathet vaak verwarring schept met het product van een scalair en een vector.
3.3.2 Het uitproduct v×w in de Euclidische 3D-ruimte
De Euclidische 3D-ruimte kent het uitproduct n = v×w van twee onafhankelijke vectorenv en w, resulterend in een normaalvector n loodrecht op het vlak van v en w, zie figuur3.15.
62
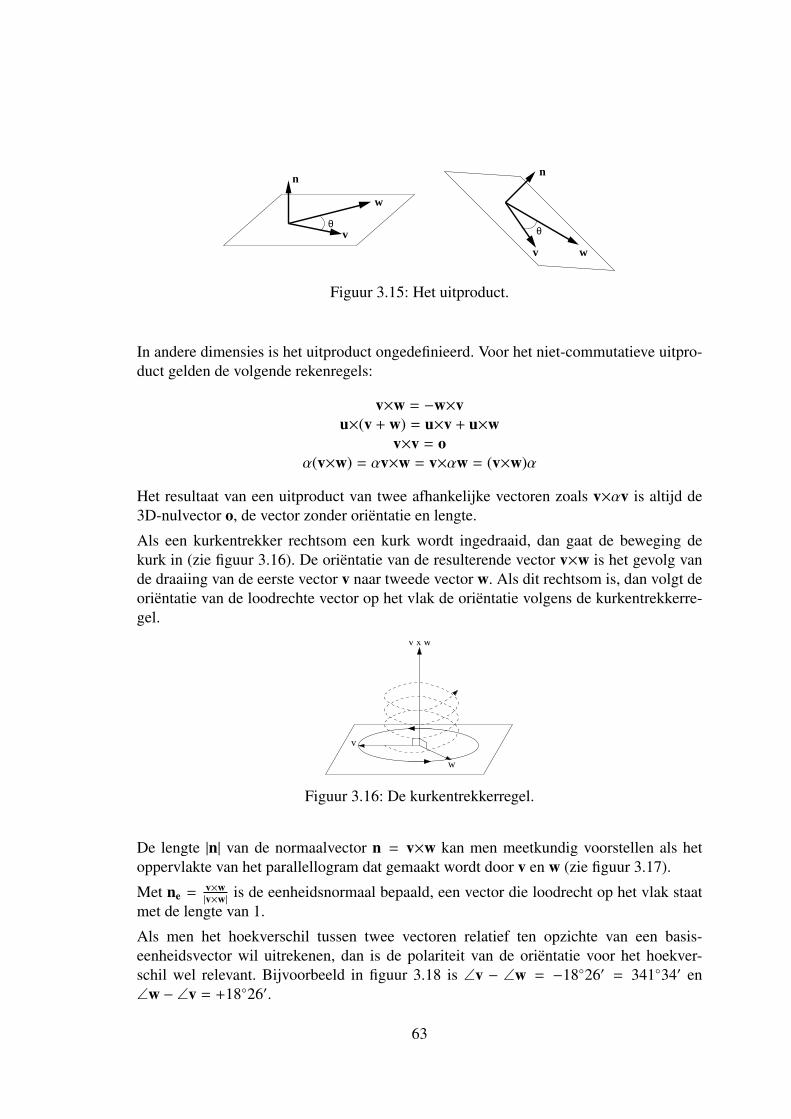
θθv
w
v w
nn
Figuur 3.15: Het uitproduct.
In andere dimensies is het uitproduct ongedefinieerd. Voor het niet-commutatieve uitpro-duct gelden de volgende rekenregels:
v×w = −w×vu×(v + w) = u×v + u×w
v×v = oα(v×w) = αv×w = v×αw = (v×w)α
Het resultaat van een uitproduct van twee afhankelijke vectoren zoals v×αv is altijd de3D-nulvector o, de vector zonder orientatie en lengte.
Als een kurkentrekker rechtsom een kurk wordt ingedraaid, dan gaat de beweging dekurk in (zie figuur 3.16). De orientatie van de resulterende vector v×w is het gevolg vande draaiing van de eerste vector v naar tweede vector w. Als dit rechtsom is, dan volgt deorientatie van de loodrechte vector op het vlak de orientatie volgens de kurkentrekkerre-gel.
v
w
v x w
Figuur 3.16: De kurkentrekkerregel.
De lengte |n| van de normaalvector n = v×w kan men meetkundig voorstellen als hetoppervlakte van het parallellogram dat gemaakt wordt door v en w (zie figuur 3.17).
Met ne = v×w|v×w| is de eenheidsnormaal bepaald, een vector die loodrecht op het vlak staat
met de lengte van 1.
Als men het hoekverschil tussen twee vectoren relatief ten opzichte van een basis-eenheidsvector wil uitrekenen, dan is de polariteit van de orientatie voor het hoekver-schil wel relevant. Bijvoorbeeld in figuur 3.18 is ∠v − ∠w = −18◦26′ = 341◦34′ en∠w − ∠v = +18◦26′.
63

|w|sin
w
v
θ
n = v x w
Figuur 3.17: Meetkundige voorstelling van |n| = |v×w| = |v||w| sin θ.
X 21
1
2
Y
O
w
v
vw
θ
Figuur 3.18: Het hoekverschil θ = v − w
In een orthonormaalstelsel is het hoekverschil 0◦ ≤ θ = ∠v−∠w < 360◦ ten opzichte vande basisorientatie X met behulp van cos θ = |v•w|
|v||w| en sin θ = |v×w||v||w| te bepalen:
θ =
{+ arccos(cos θ) als sin θ ≥ 0− arccos(cos θ) als sin θ < 0
Als de kentallen bekend zijn, dan wordt het uitproduct van twee vectoren v en w uitge-drukt in de basisvectoren van de Euclidische 3D-ruimte:
x =
100
y =
010
z =
001
met behulp van de determinant:
n = v×w =
∣∣∣∣∣∣∣∣x vx wx
y vy wy
z vz wz
∣∣∣∣∣∣∣∣ →
nx
ny
nz
= +
100
∣∣∣∣∣∣ vy wy
vz wz
∣∣∣∣∣∣ − 0
10
∣∣∣∣∣∣ vx wx
vz wz
∣∣∣∣∣∣ +
001
∣∣∣∣∣∣ vx wx
vy wy
∣∣∣∣∣∣ =
+vywz − vzwy
−vxwz + vzwx
+vxwy − vywx
Voorbeelden:
64
∣∣∣∣∣∣∣∣x 1 0y 0 1z 0 0
∣∣∣∣∣∣∣∣ =
001
∣∣∣∣∣∣∣∣
x 0 1y 1 0z 0 0
∣∣∣∣∣∣∣∣ =
00−1
∣∣∣∣∣∣∣∣
x 1 1y 1 2z 0 3
∣∣∣∣∣∣∣∣ =
3−3
1
Enkele toepassingen van het uitproduct:
• Het bepalen van de eenheidsnormaalvector op de driehoek op met hoekpunten:
a =
111
b =
221
c =
231
Dit is het uitproduct van de verschilvectoren (b − a) en (c − a), gedeeld door delengte van de normaal |(b − a)×(c − a)|:
(b − a)×(c − a) =
∣∣∣∣∣∣∣∣x 2 − 1 2 − 1y 2 − 1 3 − 1z 1 − 1 1 − 1
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣x 1 1y 1 2z 0 0
∣∣∣∣∣∣∣∣ =
001
Het resultaat is in dit geval de basisvector z die ook een eenheidsvector is omdat|z| =
√02 + 02 + 12 = 1.
• Het bepalen van een vlak door de oorsprong met een normaalvector.
Een vlak door de oorsprong is een verzameling punten die voldoet aan de vector-vergelijking v = λr +γs, waarbij r en s de opspannende vectoren worden genoemd.De scalairen λ en γ mogen elke reele waarde aannemen, elk punt op het vlak isbepaald door een waarde van λ en γ.
De normaalvector van een vlak is een vector die loodrecht op dit vlak staat. Om denormaalvector n te bepalen nemen we het uitproduct van de opspannende vectorenq en r:
n = r×s
Als n , o dan is de hoek tussen de normaalvector en het vlak loodrecht. De vector nstaat dus ook loodrecht op de opspannende vectoren r en s, daarom zijn de volgendeinproducten dus 0:
n • r = 0 ∧ n • s = 0 → n • (λr + γs) = 0
Uit de vergelijking van het vlak v = p + λr + γs volgt λr + γs = v − p. Als ditgecombineerd wordt met het vorige resultaat, dan volgt de normaalvergelijking vaneen vlak:
n • (λr + γs) = n • (v − p) = 0
65

• De oppervlakte van een driehoek tussen de hoekpunten a = (ax, ay, az), b =
(bx, by, bz) en c = (cx, cy, cz) kan worden uitgedrukt als het halve oppervlakte vanhet parallellogram |b − a||c − a| sin θ van het uitproduct |(b − a)×(c − a)|:
opp(∆) = 12 |(b − a)×(c − a)|
= 12
√√√√√ +(bxcy − bxay − cxby + cxay − axcy + axby)2
+(axcz + bxaz + cxbz − cxaz − bxcz − axbz)2
+(bycz − byaz − aycz − bzcy + bzay + azcy)2
• De kortste afstand d van een punt q tot de lijn = p + λr, zie figuur 3.19:
qp−q
d r
θ
lijn
p
O
Figuur 3.19: Kortste afstand d van punt q tot lijn
d = ||p − q| sin θ| = |re×(p − q)| =|r×(p − q)||r|
• De kortste afstand d tussen twee kruisende lijnen lijn1 = p + λr en lijn2 = q + γsis de projectie van p − q op de eenheidsnormaal van het vlak door o dat door beidelijnen bepaald wordt:
d =|(r×s) • (p − q)|
|r×s|
Het lijnstuk met de kortste afstand tussen twee lijnen staat loodrecht op beide lijnen,de normaal r×s van het gecombineerde vlak heeft dezelfde richting.
3.3.3 De normaalvergelijking van een vlak
Een willekeurig vlak v = p + λr + γs kan met behulp van een normaalvergelijking be-schreven worden.
Om deze normaalvergelijking te bepalen wordt eerst het uitproduct van de twee opspan-nende vectoren r en s de normaalvector bepaald: r×s. Het evenwijdige vlak door de oor-sprong heeft nu de vergelijking (r×s) • v = 0. Verplaats dit evenwijdige vlak met vectorp. Het verplaatste vlak v heeft de vergelijking (r×s) • (v − p) = 0.
Een alternatieve zienswijze is dat elke verschilvector v− p die in het vlak v ligt, een hoekvan 90◦ maakt met de normaalvector van dat vlak, dus (r×s) • (v − p) = 0.
66

Voorbeeld 3.3 Een vlak v is opgespannen door de vectoren r =
123
en s =
−104
en
gedragen door vector p =
321
. Bepaal de normaalvergelijking van het vlak v.
Eerst bepalen we de normaalvergelijking van het vlak evenwijdig aan v dat door de oor-sprong o gaat:
r×s =
123
× −1
04
=
∣∣∣∣∣∣∣∣x 1 −1y 2 0z 3 4
∣∣∣∣∣∣∣∣ =
8−7
2
→ 8x − 7y + 2z = 0.
Het is gebruikelijk om in normaalvergelijkingen voor de variabele vector v, de symboli-sche kentallen x,y en z te gebruiken in plaats van vx,vy en vz. De normaalvergelijking vanhet vlak v door punt p wordt nu:
(r×s)•(v−p) =
8−7
2
• x − 3
y − 2z − 1
= 8x−24−7y+14+2z−2 = 0 → 8x−7y+2z = 12
Enkele eigenschappen van de normaalvergelijking van een vlak:
• De normaalvergelijking ax + by + cz = 0 van een vlak door o is gemakkelijk te afte leiden uit de kentallen van de normaal op dit vlak en omgekeerd:
n =
abc
↔ ax + by + cz = 0
Voorbeeld:
16x − 14y + 4z = 0 → 8x − 7y + 2z = 0 → n =
8−7
2
Elk vlak door de oorsprong is een-eenduidig bepaald door de richting loodrecht opdat vlak. Een normaalvector n , o in deze richting bepaalt dus het vlak door deoorsprong, de lengte en orientatie daarvan zijn irrelevant.
• De kortste afstand d van een vlak v = p + λr + γs tot de oorsprong is de lengte vande vector van een punt p op dit vlak geprojecteerd op de eenheidsnormaal van ditvlak:
d =|(r×s) • (p)||r×s|
67
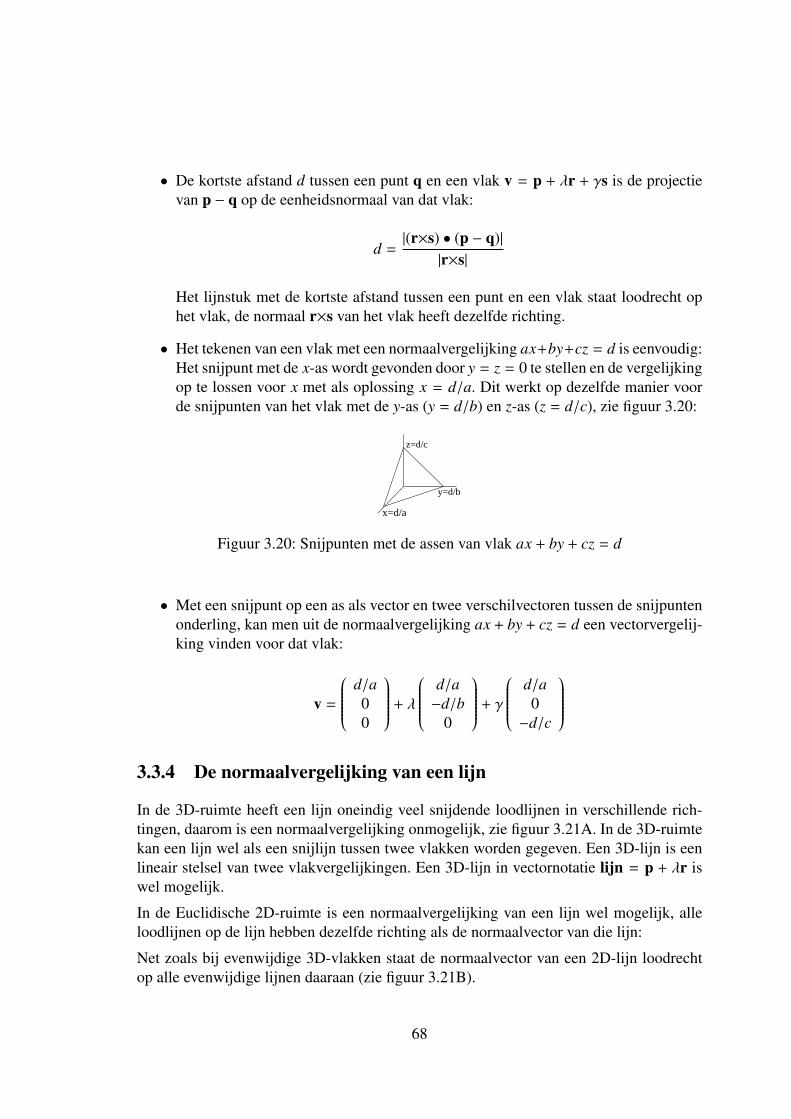
• De kortste afstand d tussen een punt q en een vlak v = p + λr + γs is de projectievan p − q op de eenheidsnormaal van dat vlak:
d =|(r×s) • (p − q)|
|r×s|
Het lijnstuk met de kortste afstand tussen een punt en een vlak staat loodrecht ophet vlak, de normaal r×s van het vlak heeft dezelfde richting.
• Het tekenen van een vlak met een normaalvergelijking ax+by+cz = d is eenvoudig:Het snijpunt met de x-as wordt gevonden door y = z = 0 te stellen en de vergelijkingop te lossen voor x met als oplossing x = d/a. Dit werkt op dezelfde manier voorde snijpunten van het vlak met de y-as (y = d/b) en z-as (z = d/c), zie figuur 3.20:
z=d/c
y=d/b
x=d/a
Figuur 3.20: Snijpunten met de assen van vlak ax + by + cz = d
• Met een snijpunt op een as als vector en twee verschilvectoren tussen de snijpuntenonderling, kan men uit de normaalvergelijking ax + by + cz = d een vectorvergelij-king vinden voor dat vlak:
v =
d/a00
+ λ
d/a−d/b
0
+ γ
d/a0−d/c
3.3.4 De normaalvergelijking van een lijn
In de 3D-ruimte heeft een lijn oneindig veel snijdende loodlijnen in verschillende rich-tingen, daarom is een normaalvergelijking onmogelijk, zie figuur 3.21A. In de 3D-ruimtekan een lijn wel als een snijlijn tussen twee vlakken worden gegeven. Een 3D-lijn is eenlineair stelsel van twee vlakvergelijkingen. Een 3D-lijn in vectornotatie lijn = p + λr iswel mogelijk.
In de Euclidische 2D-ruimte is een normaalvergelijking van een lijn wel mogelijk, alleloodlijnen op de lijn hebben dezelfde richting als de normaalvector van die lijn:
Net zoals bij evenwijdige 3D-vlakken staat de normaalvector van een 2D-lijn loodrechtop alle evenwijdige lijnen daaraan (zie figuur 3.21B).
68
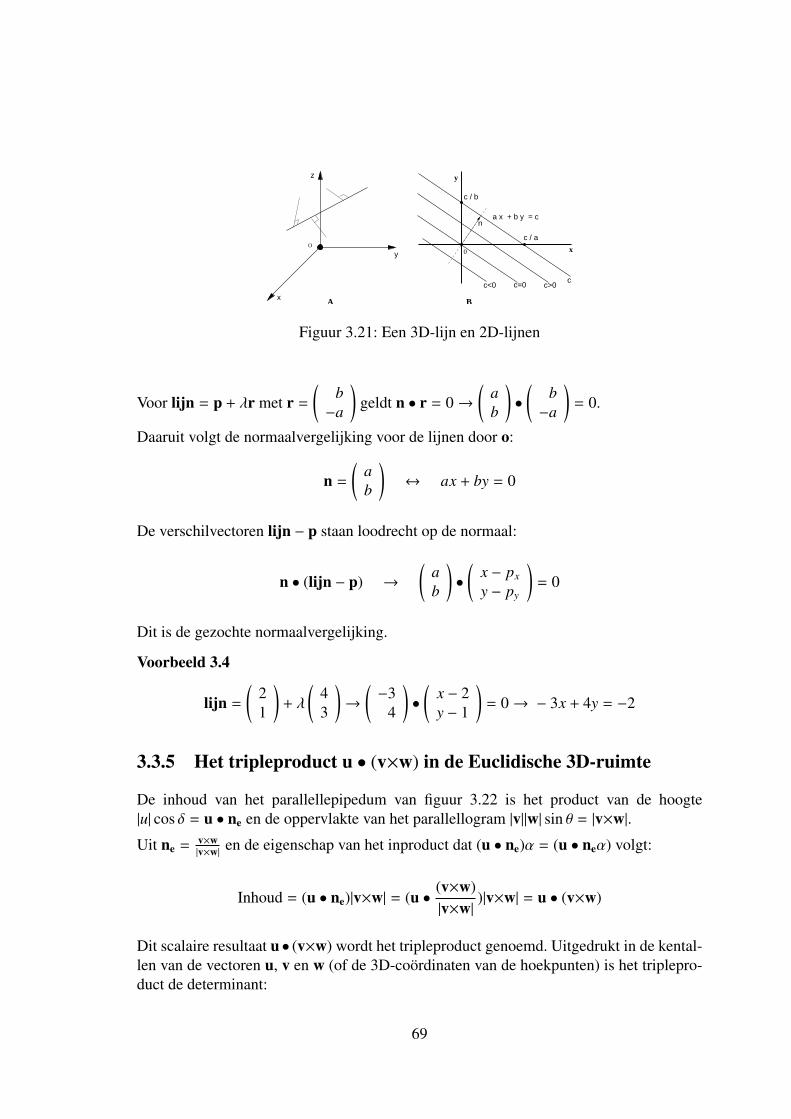
O
y
a x + b y = c
c / b
c / a
c>0c=0c<0
0
c
x
y
n
z
x A B
Figuur 3.21: Een 3D-lijn en 2D-lijnen
Voor lijn = p + λr met r =
(b−a
)geldt n • r = 0→
(ab
)•
(b−a
)= 0.
Daaruit volgt de normaalvergelijking voor de lijnen door o:
n =
(ab
)↔ ax + by = 0
De verschilvectoren lijn − p staan loodrecht op de normaal:
n • (lijn − p) →
(ab
)•
(x − px
y − py
)= 0
Dit is de gezochte normaalvergelijking.
Voorbeeld 3.4
lijn =
(21
)+ λ
(43
)→
(−3
4
)•
(x − 2y − 1
)= 0→ − 3x + 4y = −2
3.3.5 Het tripleproduct u • (v×w) in de Euclidische 3D-ruimte
De inhoud van het parallellepipedum van figuur 3.22 is het product van de hoogte|u| cos δ = u • ne en de oppervlakte van het parallellogram |v||w| sin θ = |v×w|.
Uit ne = v×w|v×w| en de eigenschap van het inproduct dat (u • ne)α = (u • neα) volgt:
Inhoud = (u • ne)|v×w| = (u •(v×w)|v×w|
)|v×w| = u • (v×w)
Dit scalaire resultaat u• (v×w) wordt het tripleproduct genoemd. Uitgedrukt in de kental-len van de vectoren u, v en w (of de 3D-coordinaten van de hoekpunten) is het triplepro-duct de determinant:
69
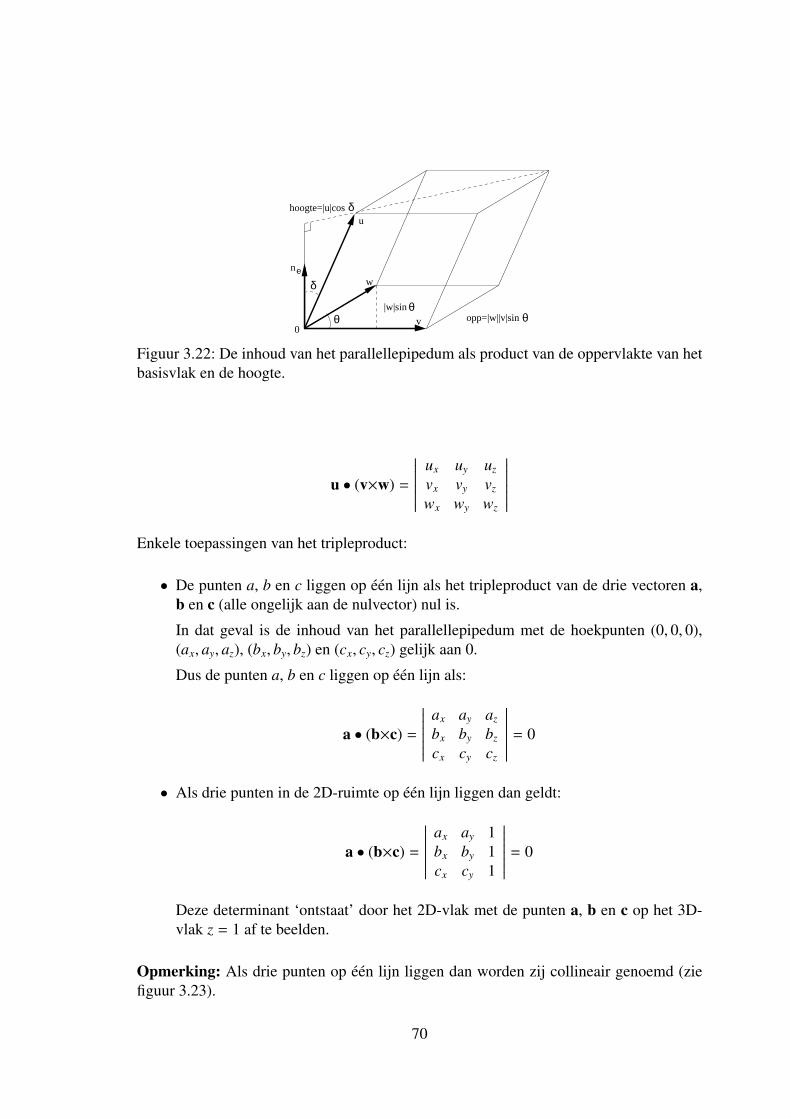
u
opp=|w||v|sin|w|sin
hoogte=|u|cos
n
w
v0
θ θθ
δ
δ
e
Figuur 3.22: De inhoud van het parallellepipedum als product van de oppervlakte van hetbasisvlak en de hoogte.
u • (v×w) =
∣∣∣∣∣∣∣∣ux uy uz
vx vy vz
wx wy wz
∣∣∣∣∣∣∣∣Enkele toepassingen van het tripleproduct:
• De punten a, b en c liggen op een lijn als het tripleproduct van de drie vectoren a,b en c (alle ongelijk aan de nulvector) nul is.
In dat geval is de inhoud van het parallellepipedum met de hoekpunten (0, 0, 0),(ax, ay, az), (bx, by, bz) en (cx, cy, cz) gelijk aan 0.
Dus de punten a, b en c liggen op een lijn als:
a • (b×c) =
∣∣∣∣∣∣∣∣ax ay az
bx by bz
cx cy cz
∣∣∣∣∣∣∣∣ = 0
• Als drie punten in de 2D-ruimte op een lijn liggen dan geldt:
a • (b×c) =
∣∣∣∣∣∣∣∣ax ay 1bx by 1cx cy 1
∣∣∣∣∣∣∣∣ = 0
Deze determinant ‘ontstaat’ door het 2D-vlak met de punten a, b en c op het 3D-vlak z = 1 af te beelden.
Opmerking: Als drie punten op een lijn liggen dan worden zij collineair genoemd (ziefiguur 3.23).
70
VO
c
b
a
Figuur 3.23: Collineaire punten.
3.4 Opgaven
1. (a) Bepaal het inproduct van de vectoren(
23
)en
(−2
5
);
(b) Bepaal het inproduct van de vectoren
23−2
en
−253
.2. (a) Bepaal de lengte van de vectoren
(23
)en
(−2
5
);
(b) Bepaal de lengte van de vectoren
23−2
en
−253
.3. (a) Bepaal de hoek tussen de vectoren
(23
)en
(−2
5
);
(b) Bepaal de hoek tussen de vectoren
23−2
en
−253
.4. Gegeven de punten p en q:
p =
23−2
q =
−253
Bepaal de parametrische vergelijking van de lijn[λ].
(a) door het punt o en punt p.
(b) door het punt p in dezelfde richting als vector q.
(c) door de punten p en q.
71
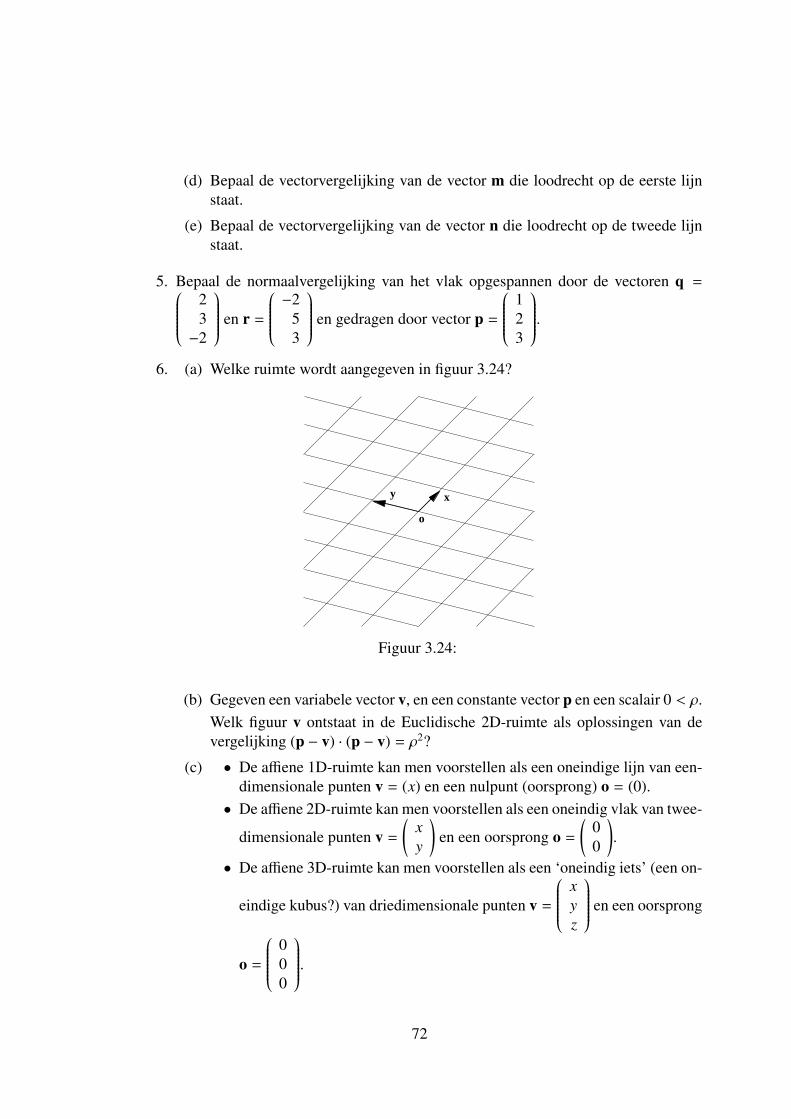
(d) Bepaal de vectorvergelijking van de vector m die loodrecht op de eerste lijnstaat.
(e) Bepaal de vectorvergelijking van de vector n die loodrecht op de tweede lijnstaat.
5. Bepaal de normaalvergelijking van het vlak opgespannen door de vectoren q = 23−2
en r =
−253
en gedragen door vector p =
123
.6. (a) Welke ruimte wordt aangegeven in figuur 3.24?
o
xy
Figuur 3.24:
(b) Gegeven een variabele vector v, en een constante vector p en een scalair 0 < ρ.Welk figuur v ontstaat in de Euclidische 2D-ruimte als oplossingen van devergelijking (p − v) · (p − v) = ρ2?
(c) • De affiene 1D-ruimte kan men voorstellen als een oneindige lijn van een-dimensionale punten v = (x) en een nulpunt (oorsprong) o = (0).
• De affiene 2D-ruimte kan men voorstellen als een oneindig vlak van twee-
dimensionale punten v =
(xy
)en een oorsprong o =
(00
).
• De affiene 3D-ruimte kan men voorstellen als een ‘oneindig iets’ (een on-
eindige kubus?) van driedimensionale punten v =
xyz
en een oorsprong
o =
000
.72

Wat zou de parametrische vectorvoorstelling van zo’n ‘oneindig iets’ zijn inde 4D-ruimte?
73
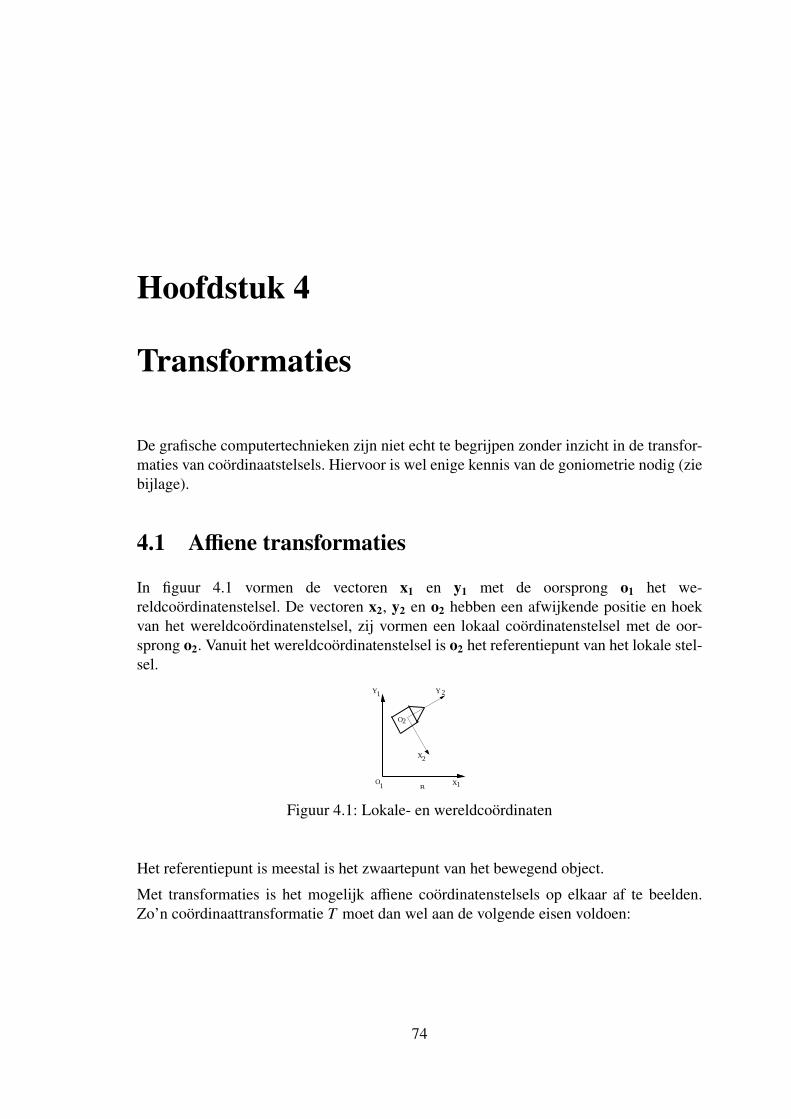
Hoofdstuk 4
Transformaties
De grafische computertechnieken zijn niet echt te begrijpen zonder inzicht in de transfor-maties van coordinaatstelsels. Hiervoor is wel enige kennis van de goniometrie nodig (ziebijlage).
4.1 Affiene transformaties
In figuur 4.1 vormen de vectoren x1 en y1 met de oorsprong o1 het we-reldcoordinatenstelsel. De vectoren x2, y2 en o2 hebben een afwijkende positie en hoekvan het wereldcoordinatenstelsel, zij vormen een lokaal coordinatenstelsel met de oor-sprong o2. Vanuit het wereldcoordinatenstelsel is o2 het referentiepunt van het lokale stel-sel.
11
O
X
Y1
X2
2
2Y
BO
Figuur 4.1: Lokale- en wereldcoordinaten
Het referentiepunt is meestal is het zwaartepunt van het bewegend object.
Met transformaties is het mogelijk affiene coordinatenstelsels op elkaar af te beelden.Zo’n coordinaattransformatie T moet dan wel aan de volgende eisen voldoen:
74

I referentiepunten moeten op elkaar afgebeeld worden: T (oa) = ob,II transformaties moeten lineair zijn:
T (αv + βw) = αT (v) + βT (w) α, β ∈ R,III punten moeten punten blijven,IV lijnen moeten lijnen blijven,V parallelle lijnen moeten parallel blijven,VI verhoudingen moeten ongewijzigd blijven.
Deze eisen verbieden niet dat posities, hoeken en afmetingen veranderen. Behalve aande eis dat referentiepunten op elkaar afgebeeld moeten zijn, voldoen de volgende affienetransformaties wel aan alle andere eisen.1 de translatie of verplaatsing,2 de rotatie of draaiing,3 de schaalverandering of vergroten of verkleinen,4 de shearing of proportioneel verschuiven.
Als een referentiepunt bij een coordinaattransformatie betrokken is, dan kan dat tot extratransformaties leiden. Stel bijvoorbeeld dat het object in figuur 4.1 gedraaid moet wordenrond het lokale referentiepunt o2 binnen het kader van het wereldcoordinatenstelsel metde oorsprong o1. Dan is het noodzakelijk om eerst het object met behoud van richting enlengte te verplaatsen naar o1 en vervolgens te draaien en tenslotte met de nieuwe richtingen ongewijzigde afmeting terug te schuiven naar de positie o2.
4.1.1 Translatie van een punt
Translatie is het verschuiven van een coordinatenstelsel over een vaste afstand in eengegeven richting en orientatie. Met vectoren zijn translaties gemakkelijk voor te stellen.
Bij een translatie, een lineaire verplaatsing van een afbeelding, wordt elk punt p =
(px
py
)naar een punt p′ =
(p′xp′y
)geplaatst door een transformatie (met tx als verplaatsing in de
x richting en ty als verplaatsing in de y-richting) t =
(tx
ty
). De translatie kan geschreven
worden als p′ = p + t.
Voorbeeld 4.1 In figuur 4.2 is de translatie van punt p =
(12
)met verplaatsing t =
(21
)naar punt p′ =
(33
)aangegeven.
4.1.2 Rotatie om de oorsprong
De standaard rotatie is gedefinieerd als een verdraaiing rond de oorsprong. Een punt pmet de coordinaten (px, py) wordt over een hoek φ geroteerd rond de oorsprong naar punt
75
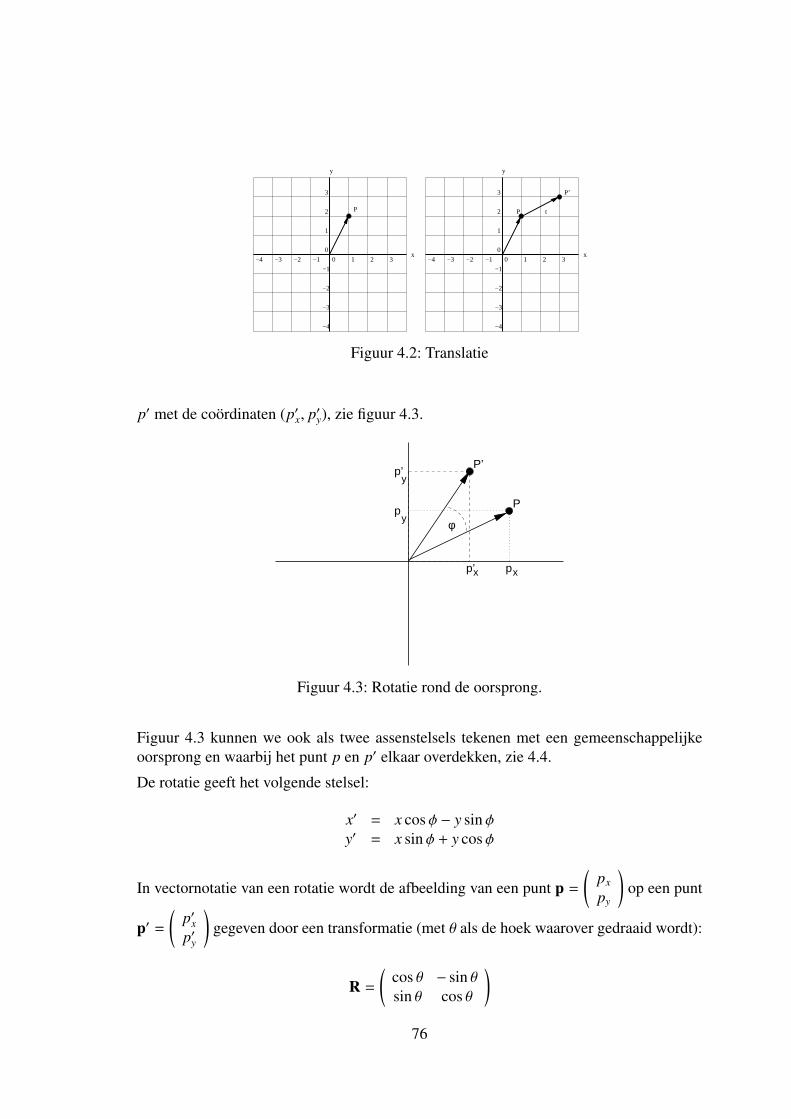
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
P
P’
P t
Figuur 4.2: Translatie
p′ met de coordinaten (p′x, p′y), zie figuur 4.3.
φ
P
P’
p’ p
y
yp’
p
x x
Figuur 4.3: Rotatie rond de oorsprong.
Figuur 4.3 kunnen we ook als twee assenstelsels tekenen met een gemeenschappelijkeoorsprong en waarbij het punt p en p′ elkaar overdekken, zie 4.4.
De rotatie geeft het volgende stelsel:
x′ = x cos φ − y sin φy′ = x sin φ + y cos φ
In vectornotatie van een rotatie wordt de afbeelding van een punt p =
(px
py
)op een punt
p′ =
(p′xp′y
)gegeven door een transformatie (met θ als de hoek waarover gedraaid wordt):
R =
(cos θ − sin θsin θ cos θ
)76
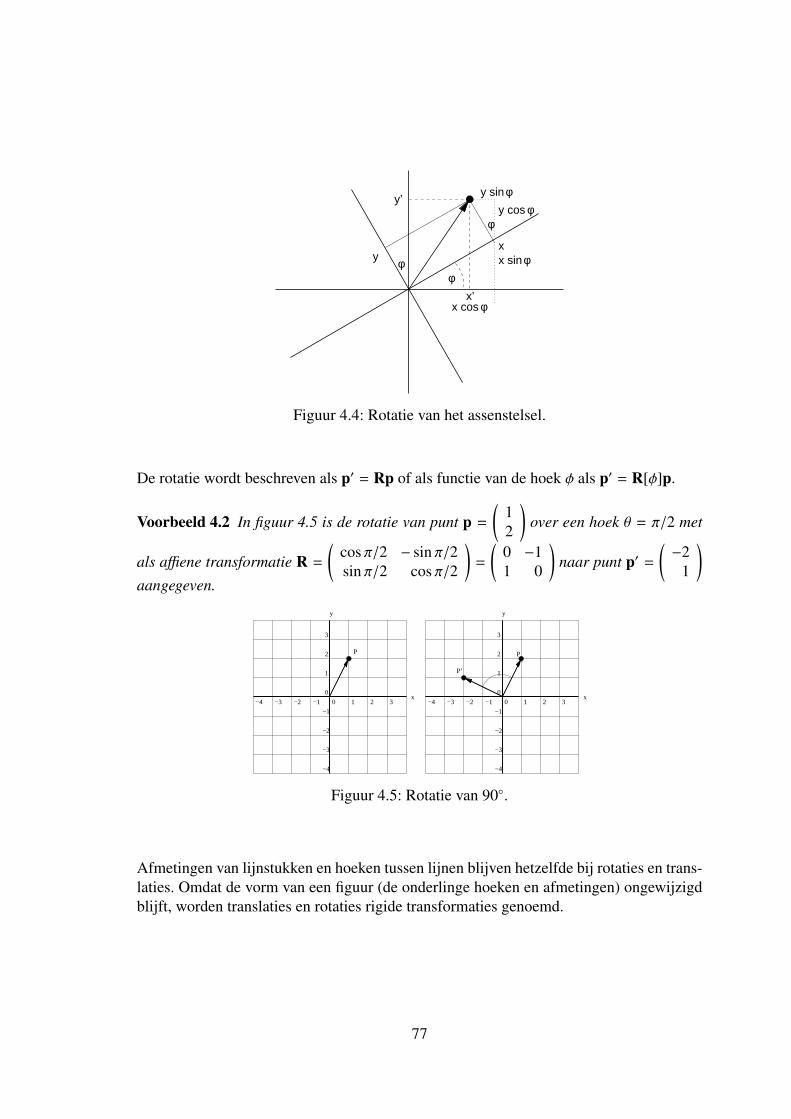
φ
φφ
φφ
φ
y cos
x sinx
x’x cos
y
y’y sinφ
Figuur 4.4: Rotatie van het assenstelsel.
De rotatie wordt beschreven als p′ = Rp of als functie van de hoek φ als p′ = R[φ]p.
Voorbeeld 4.2 In figuur 4.5 is de rotatie van punt p =
(12
)over een hoek θ = π/2 met
als affiene transformatie R =
(cos π/2 − sin π/2sin π/2 cos π/2
)=
(0 −11 0
)naar punt p′ =
(−2
1
)aangegeven.
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
P P
P’
Figuur 4.5: Rotatie van 90◦.
Afmetingen van lijnstukken en hoeken tussen lijnen blijven hetzelfde bij rotaties en trans-laties. Omdat de vorm van een figuur (de onderlinge hoeken en afmetingen) ongewijzigdblijft, worden translaties en rotaties rigide transformaties genoemd.
77
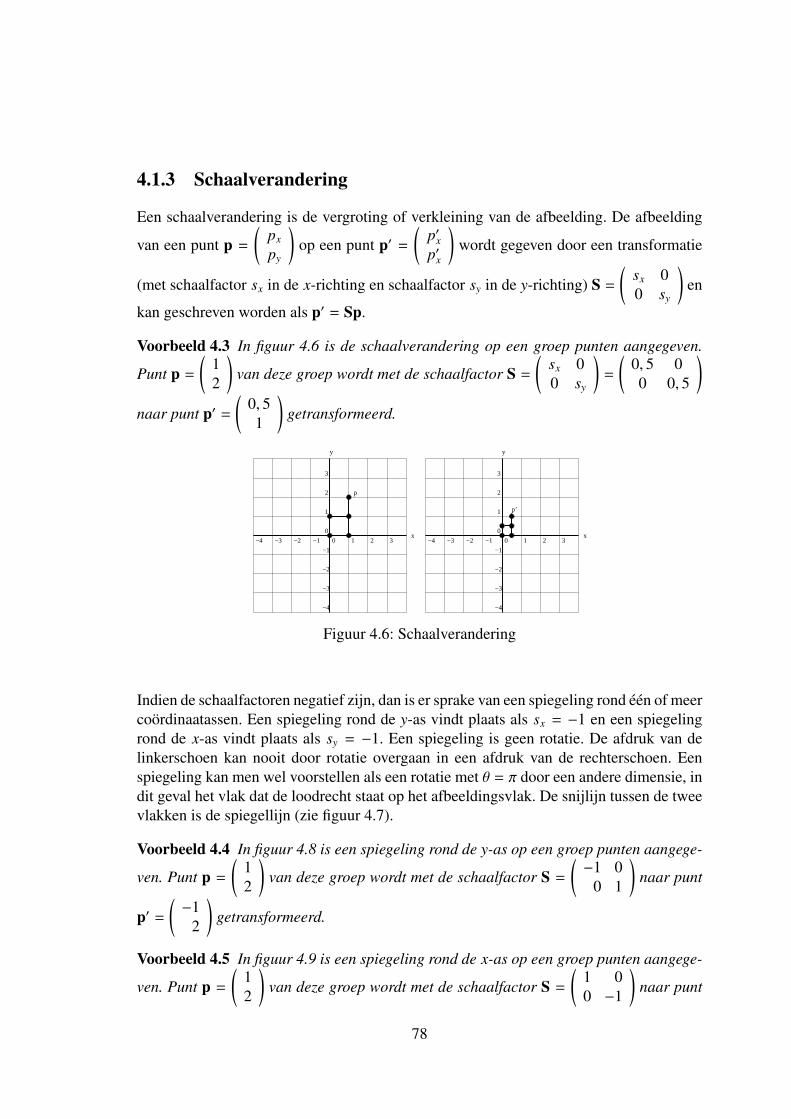
4.1.3 Schaalverandering
Een schaalverandering is de vergroting of verkleining van de afbeelding. De afbeelding
van een punt p =
(px
py
)op een punt p′ =
(p′xp′x
)wordt gegeven door een transformatie
(met schaalfactor sx in de x-richting en schaalfactor sy in de y-richting) S =
(sx 00 sy
)en
kan geschreven worden als p′ = Sp.
Voorbeeld 4.3 In figuur 4.6 is de schaalverandering op een groep punten aangegeven.
Punt p =
(12
)van deze groep wordt met de schaalfactor S =
(sx 00 sy
)=
(0, 5 00 0, 5
)naar punt p′ =
(0, 51
)getransformeerd.
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
p
p’
Figuur 4.6: Schaalverandering
Indien de schaalfactoren negatief zijn, dan is er sprake van een spiegeling rond een of meercoordinaatassen. Een spiegeling rond de y-as vindt plaats als sx = −1 en een spiegelingrond de x-as vindt plaats als sy = −1. Een spiegeling is geen rotatie. De afdruk van delinkerschoen kan nooit door rotatie overgaan in een afdruk van de rechterschoen. Eenspiegeling kan men wel voorstellen als een rotatie met θ = π door een andere dimensie, indit geval het vlak dat de loodrecht staat op het afbeeldingsvlak. De snijlijn tussen de tweevlakken is de spiegellijn (zie figuur 4.7).
Voorbeeld 4.4 In figuur 4.8 is een spiegeling rond de y-as op een groep punten aangege-
ven. Punt p =
(12
)van deze groep wordt met de schaalfactor S =
(−1 0
0 1
)naar punt
p′ =
(−1
2
)getransformeerd.
Voorbeeld 4.5 In figuur 4.9 is een spiegeling rond de x-as op een groep punten aangege-
ven. Punt p =
(12
)van deze groep wordt met de schaalfactor S =
(1 00 −1
)naar punt
78
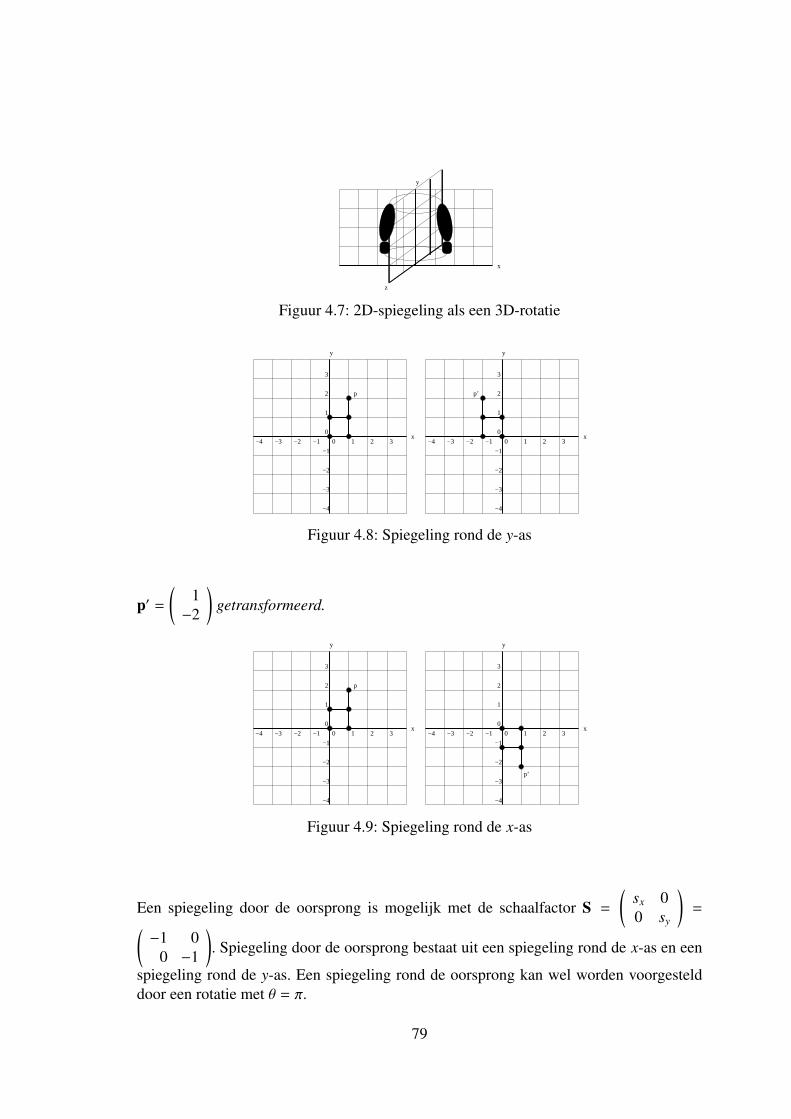
x
y
z
Figuur 4.7: 2D-spiegeling als een 3D-rotatie
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
p p’
Figuur 4.8: Spiegeling rond de y-as
p′ =
(1−2
)getransformeerd.
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
p
p’
Figuur 4.9: Spiegeling rond de x-as
Een spiegeling door de oorsprong is mogelijk met de schaalfactor S =
(sx 00 sy
)=(
−1 00 −1
). Spiegeling door de oorsprong bestaat uit een spiegeling rond de x-as en een
spiegeling rond de y-as. Een spiegeling rond de oorsprong kan wel worden voorgestelddoor een rotatie met θ = π.
79
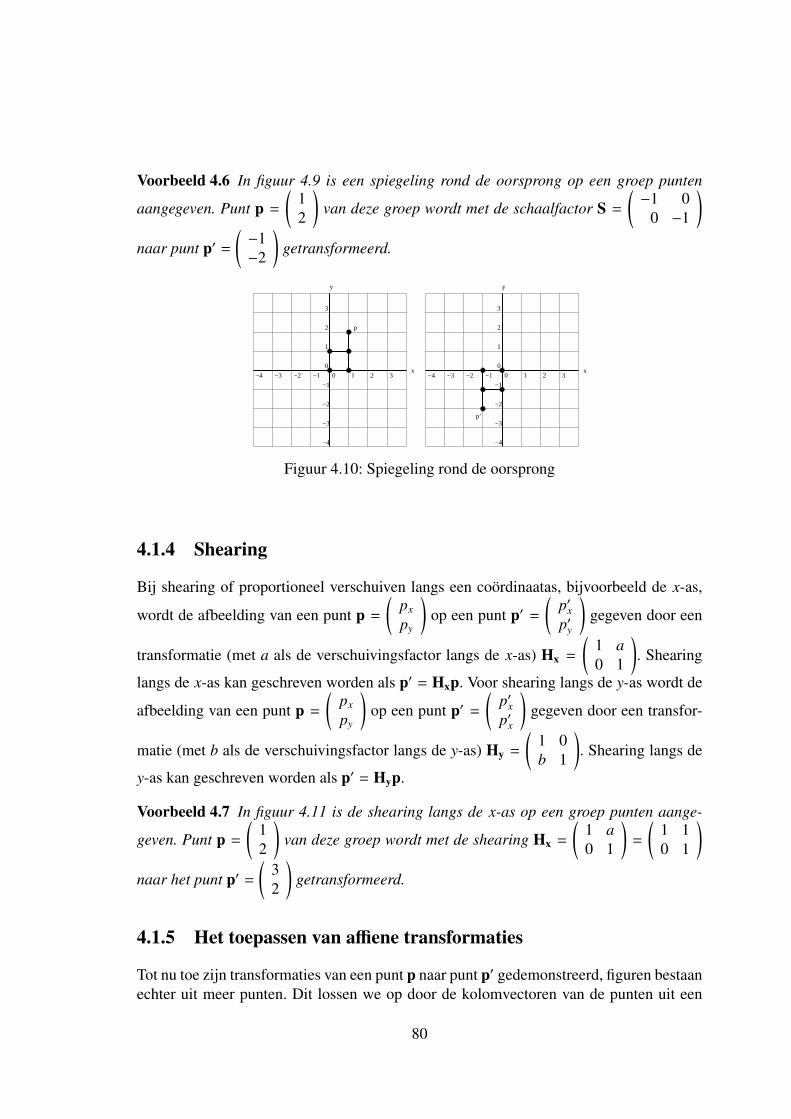
Voorbeeld 4.6 In figuur 4.9 is een spiegeling rond de oorsprong op een groep punten
aangegeven. Punt p =
(12
)van deze groep wordt met de schaalfactor S =
(−1 0
0 −1
)naar punt p′ =
(−1−2
)getransformeerd.
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
p
p’
Figuur 4.10: Spiegeling rond de oorsprong
4.1.4 Shearing
Bij shearing of proportioneel verschuiven langs een coordinaatas, bijvoorbeeld de x-as,
wordt de afbeelding van een punt p =
(px
py
)op een punt p′ =
(p′xp′y
)gegeven door een
transformatie (met a als de verschuivingsfactor langs de x-as) Hx =
(1 a0 1
). Shearing
langs de x-as kan geschreven worden als p′ = Hxp. Voor shearing langs de y-as wordt de
afbeelding van een punt p =
(px
py
)op een punt p′ =
(p′xp′x
)gegeven door een transfor-
matie (met b als de verschuivingsfactor langs de y-as) Hy =
(1 0b 1
). Shearing langs de
y-as kan geschreven worden als p′ = Hyp.
Voorbeeld 4.7 In figuur 4.11 is de shearing langs de x-as op een groep punten aange-
geven. Punt p =
(12
)van deze groep wordt met de shearing Hx =
(1 a0 1
)=
(1 10 1
)naar het punt p′ =
(32
)getransformeerd.
4.1.5 Het toepassen van affiene transformaties
Tot nu toe zijn transformaties van een punt p naar punt p′ gedemonstreerd, figuren bestaanechter uit meer punten. Dit lossen we op door de kolomvectoren van de punten uit een
80
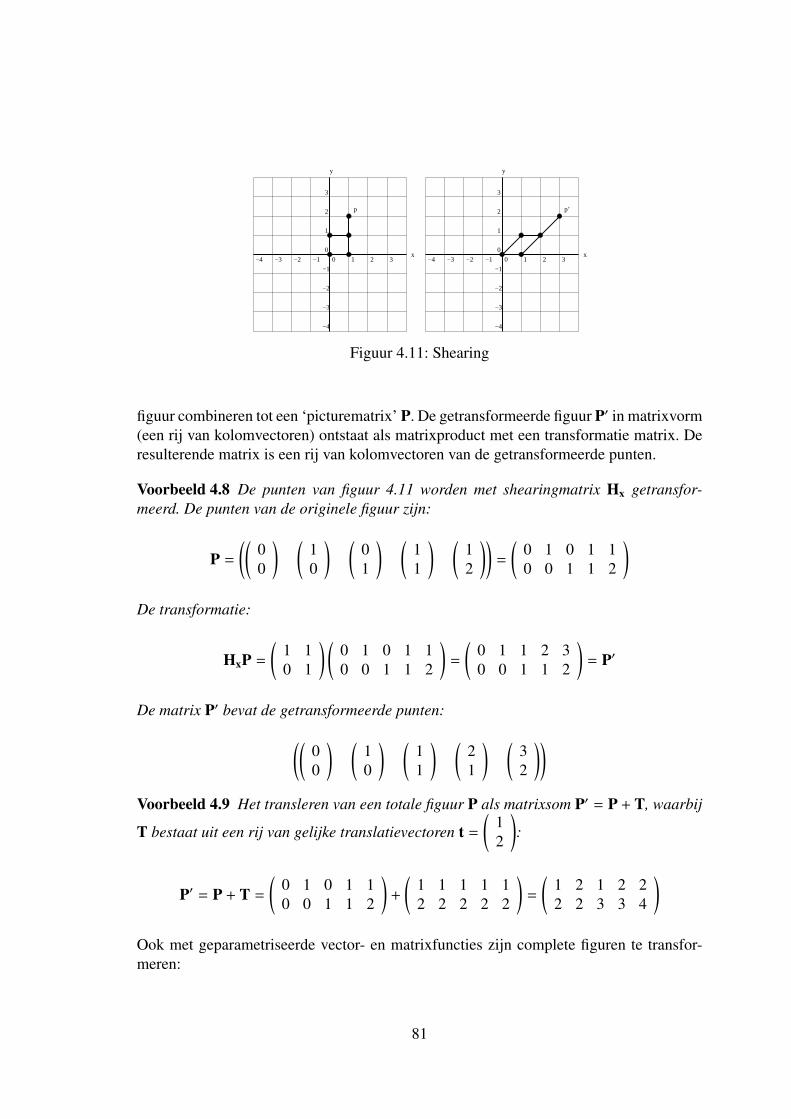
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
−1
−2
−3
−4
1
2
3
1 2 30−1−2−3−4
0x
y
p p’
Figuur 4.11: Shearing
figuur combineren tot een ‘picturematrix’ P. De getransformeerde figuur P′ in matrixvorm(een rij van kolomvectoren) ontstaat als matrixproduct met een transformatie matrix. Deresulterende matrix is een rij van kolomvectoren van de getransformeerde punten.
Voorbeeld 4.8 De punten van figuur 4.11 worden met shearingmatrix Hx getransfor-meerd. De punten van de originele figuur zijn:
P =
((00
) (10
) (01
) (11
) (12
))=
(0 1 0 1 10 0 1 1 2
)De transformatie:
HxP =
(1 10 1
) (0 1 0 1 10 0 1 1 2
)=
(0 1 1 2 30 0 1 1 2
)= P′
De matrix P′ bevat de getransformeerde punten:((00
) (10
) (11
) (21
) (32
))Voorbeeld 4.9 Het transleren van een totale figuur P als matrixsom P′ = P + T, waarbij
T bestaat uit een rij van gelijke translatievectoren t =
(12
):
P′ = P + T =
(0 1 0 1 10 0 1 1 2
)+
(1 1 1 1 12 2 2 2 2
)=
(1 2 1 2 22 2 3 3 4
)Ook met geparametriseerde vector- en matrixfuncties zijn complete figuren te transfor-meren:
81

Voorbeeld 4.10 De punten van de originele figuur, een lijn p[t] in geparametriseerdevectorvorm:
p[t] =
(αt + γβt + δ
)wordt met behoud van afstand tot oorsprong met hoek θ geroteerd rond de oorsprong:
R[θ]p =
(cos θ − sin θsin θ cos θ
) (αt + γβt + δ
)=
((αt + γ) cos θ + (βt + δ) sin θ(αt + γ) sin θ − (βt + δ) cos θ
)= p′[θ, t]
Hoewel in dit voorbeeld alleen t en θ als parameters gebruikt zijn, mogen ook andereparameters gekozen worden zoals α,β,γ en δ.
De eigenschap dat punten en lijnen na affiene transformaties punten en lijnen blijven, is erverantwoordelijk voor dat twee opeenvolgende affiene transformaties vervangen kunnenworden door een affiene transformatie, die dezelfde afbeelding geeft. Omgekeerd kan eenaffiene transformatie opgesplitst worden in meerdere affiene transformaties, die na elkaaruitgevoerd dezelfde afbeelding geven. Bijvoorbeeld de samengestelde transformatie Mbestaande uit het product van de transformaties HSR toegepast op de ‘picturematrix’ Pgeeft als resultaat P′:
MP = (HSR)P = P′
De inverse transformatie transformeert P′ terug naar M−1P′ = P. De inverse transforma-tiematrix M−1 is gemakkelijk uit het product van de samenstellende transformatiematricesaf te leiden met:
M−1 = (HSR)−1 = R−1S−1H−1
Een affiene transformatie heeft altijd een basisvorm p′ = Mp + t of p = M−1p′ + t′ ,waarbij M een samenstelling van een of meer elementaire transformaties (inclusief deinversen daarvan) is en zowel t als t′ samenstellingen zijn van nul of meer elementairetranslaties:
• De identiteitstransformatie heeft de basisvorm: p′ = Ip + o;
• De elementaire translatie heeft de basisvorm: p′ = Ip + t;
• De elementaire rotatie (en shearing en spiegeling): p′ = Rp + o;
• De affiene transformatie als een zuiver product van matrices: p′ = Mp + o;
82

Samenstellingen van elementaire affiene transformaties zoals de rotatie van een punt p omeen referentiepunt d. Deze samengestelde affiene transformatie zal als eerste een transla-tie naar de oorsprong uitvoeren, vervolgens een rotatie om de oorsprong en tenslotte eentranslatie terug naar de oorspronkelijke positie. In deze samengestelde affiene transforma-tie is de basisvorm p′ = Mp + t duidelijk te herkennen:
p′ = R(p − d) + d = Rp︸︷︷︸Mp
−Rd + d︸ ︷︷ ︸+t
De basisvorm p = M−1p′ + t′ is ook in de inverse transformatie aanwezig:
p = R−1(p′ − d) + d = R−1p′︸︷︷︸M−1p′
−R−1d + d︸ ︷︷ ︸+t′
Opmerkingen:
• De basisvorm p′ = Mp + t is inefficient door de translatieterm t. Als deze termontbreekt dan kunnen alle transformaties en hun inversen als matrixproducten ge-makkelijker samengesteld en (her)gebruikt worden;
• Affiene transformaties en coordinaten worden gebruikt bij 2D- en 3D-tekenen vanlijnen, hoeken en figuren met behoud van de exacte afmetingen zoals bij CAD-software;
• Het weergeven realistische afbeeldingen met perspectieven, projecties en schaduw-en lichteffecten is met affiene transformaties en coordinaten minder goed mogelijk.Daarvoor is de projectieve 3D-ruimte noodzakelijk en het gebruik van homogenecoordinaten.
4.2 Homogene coordinaten
Om een 2D-afbeelding vanuit een perspectief te zien, is het handig deze afbeelding tevast te leggen op het vlak z = 1 in de 3D-ruimte. Voor het waarnemingspunt wordt deoorsprong o van de 3D-ruimte gekozen, zoals in figuur 4.12 met een afbeelding van eenpunt op het z = 1 vlak.
De 3D-lijn door de oorsprong o en het punt p′, de projectielijn, heeft de richting van de3D-vector p′. In principe maakt een willekeurige lengte groter dan nul van de 3D-vectorp niets uit voor de richting van deze projectielijn.
Het vertalen van de beeldpunten in de 2D-ruimte naar de 3D-ruimte, geschiedt door het2D-punt p af te beelden op het z = 1 vlak als p′ in de 3D-ruimte zoals in figuur 4.12 isaangegeven.
83
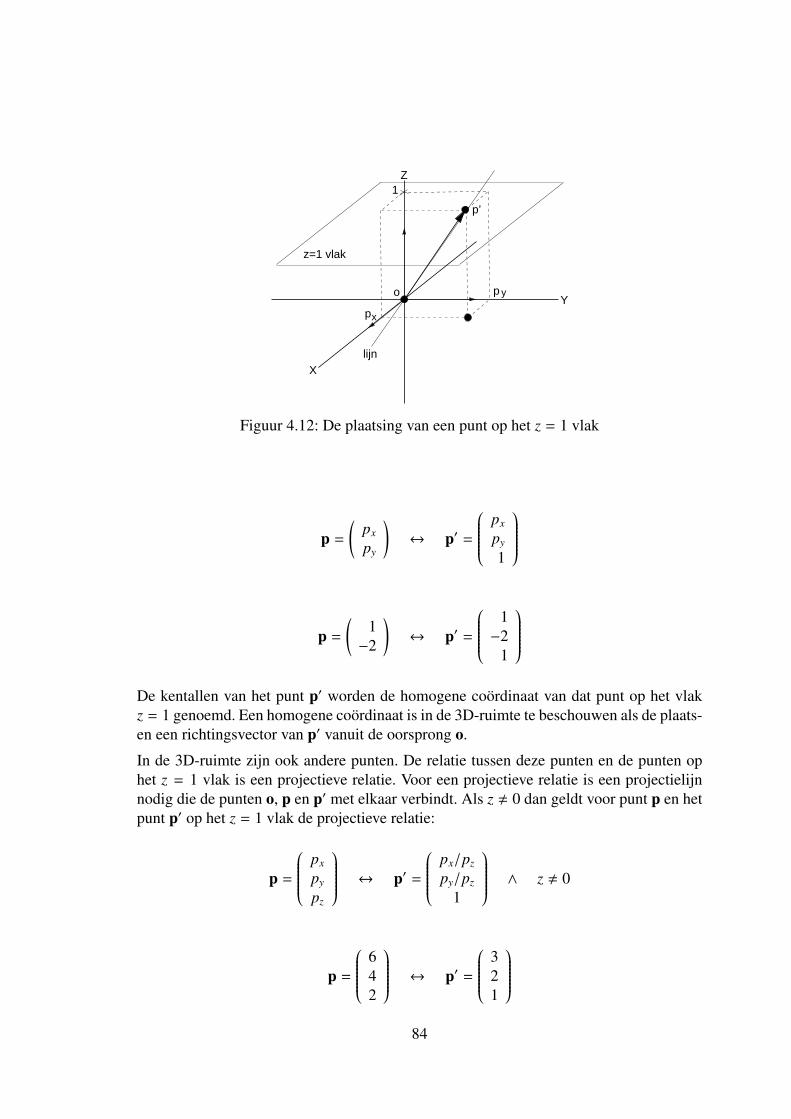
Z
Y
Xlijn
z=1 vlak
o
1
p
p
y
x
p’
Figuur 4.12: De plaatsing van een punt op het z = 1 vlak
p =
(px
py
)↔ p′ =
px
py
1
p =
(1−2
)↔ p′ =
1−2
1
De kentallen van het punt p′ worden de homogene coordinaat van dat punt op het vlakz = 1 genoemd. Een homogene coordinaat is in de 3D-ruimte te beschouwen als de plaats-en een richtingsvector van p′ vanuit de oorsprong o.
In de 3D-ruimte zijn ook andere punten. De relatie tussen deze punten en de punten ophet z = 1 vlak is een projectieve relatie. Voor een projectieve relatie is een projectielijnnodig die de punten o, p en p′ met elkaar verbindt. Als z , 0 dan geldt voor punt p en hetpunt p′ op het z = 1 vlak de projectieve relatie:
p =
px
py
pz
↔ p′ =
px/pz
py/pz
1
∧ z , 0
p =
642
↔ p′ =
321
84

In principe hebben alle punten op de projectielijn een projectieve relatie met hetzelfdesnijpunt p′ op het z = 1 vlak.
Projectievectoren in de 3D-oorsprong zijn te vergelijken met de lichtstralen uit een pro-jector die een beeld (het z = 1 vlak) op het projectievlak v projecteren (zie figuur 4.13).
z=1 vlak
V
p"= λ px
o z
y
p’
p’
Figuur 4.13: Projecteren van de punten op het z = 1 vlak op een projectievlak v
Het snijpunt van p′′ = λpp′ op het projectievlak n • (v − d) = 0 met de projectielijntussen o en p′ wordt gevonden door de vergelijking n • (λp′ − d) = 0 op te lossen voor deonbekende λ = λp.
4.2.1 Transformaties van homogene coordinaten
Alle affiene 2D-transformaties zoals de translatie, rotatie, schaalverandering en shearingzijn met projectievectoren voor te stellen als rotaties van de projectievectoren vanuit het3D-zichtpunt. Als de projectievectoren genormaliseerd zijn tot eenheidsvectoren, dan zijnde geroteerde projectievectoren ook eenheidsvectoren.
Een tweedimensionaal punt (x, y) wordt in homogene coordinaten weergegeven door een
driedimensionaal punt
αxαyα
waarbij α niet gelijk aan nul mag zijn. Omdat een translatie
een rotatie van 3D projectievectoren is vanuit het 3D-zichtpunt o, is een 2D translatie ophet projectievlak nu matrixproduct i.p.v. een optelling.
Als α = 1 genomen wordt, kan een translatie T[tx, ty] van p =
(px
py
)op een punt p′ =(
p′xp′y
)weergegeven worden door:
p′ = T[tx, ty]p ofwel
p′xp′y1
=
1 0 tx
0 1 ty
0 0 1
px
py
1
Op dezelfde wijze kunnen rotatie, schaalverandering en shearing weergegeven worden:
85

p′ = R[θ]p met R[θ] =
cos θ − sin θ 0sin θ cos θ 0
0 0 1
p′ = S[sx, sy]p met S[sx, sy] =
sx 0 00 sy 00 0 1
p′ = Hx[a]p met Hx[a] =
1 a 00 1 00 0 1
p′ = Hy[b]p met Hy[b] =
1 0 0b 1 00 0 1
4.2.2 Samengestelde homogene transformaties
Door het invoeren van homogene transformaties kan een samenstelling van verschillendeaffiene transformaties worden teruggebracht tot een productmatrix, wat erg veel reken-tijd bespaart. Het transformeren van een punt p naar een punt p′ met een samengesteldehomogene transformatie M heeft altijd de eenvoudige basisvorm:
p′ = Mp
Als een homogene transformatie M uitgevoerd kan worden, dan wordt met een inversehomogene transformatie M−1 de verandering ongedaan gemaakt.
p′ = Mp → M−1p′ = M−1Mp → M−1p′ = p
De inverse matrix van een matrixproduct M = RST is het product van de inverse matricesin omgekeerde volgorde M−1 = T−1S−1R−1.
Als gebruik wordt gemaakt van de transformatieparameters is het tamelijk eenvoudig omde inverse matrices van de elementaire transformaties, translatie, rotatie, schaalverande-ring 1 en shearing te vinden.
1In het geval van schaalverandering met de beperking dat de schaalfactor niet gelijk aan nul mag zijn.
86

T−1[tx, ty] = T[−tx,−ty]R−1[θ] = R[−θ]
S−1[sx, sy] = S[ 1sx, 1
sy]
H−1x [a] = Hx[−a]
H−1y [b] = Hy[−b]
Voorbeeld 4.11 Als voorbeeld van het uitvoeren van een complexe transformatie, opge-bouwd uit een aantal transformaties, wordt hier de rotatie over hoek θ rond een punt pbuiten de oorsprong o genomen. Om deze rotatie uit te voeren kunnen bijvoorbeeld devolgende transformaties gebruikt worden:
• transleer het rotatiepunt p naar de oorsprong (zie figuur 4.14A en 4.14B),
• roteer over hoek θ rond de oorsprong o (zie figuur 4.14C),
• transleer van de oorsprong naar het rotatiepunt p (zie figuur 4.14D).
C D
BA
P
O
O
O
O
P
P
P
Figuur 4.14: Rotatie rond een punt p buiten de oorsprong o.
Als p de coordinaten (x1, y1) heeft, dan levert de bovengenoemde samenstelling de trans-formatiematrix M op die een punt p in een punt p′ over doet gaan:
p′ = T−1RTp
ofwelp′ = Mp
87
waarbijM = T−1RT
De totale transformatie waarmee een figuur rond een punt (px, py) een hoek θ geroteerdkan worden, is de matrix M[x, y, θ]:
M[x, y, θ] = T[x, y]R(θ)T[−x,−y]
=
1 0 x0 1 y0 0 1
cos θ − sin θ 0
sin θ cos θ 00 0 1
1 0 −x
0 1 −y0 0 1
=
cos θ − sin θ x(1 − cos θ) + y sin θsin θ cos θ y(1 − cos θ) − x sin θ
0 0 1
4.2.3 Homogene 2D en 3D transformaties
Het afbeelden van realistische 3D-voorwerpen op een 2D-projectievlak is ingewikkelderdan de projectie van de 2D-voorwerpen op een projectievlak.
Figuur 4.15: Projectie van een 3D-ruimte
Door de extra dimensie is het projecteren van 3D-voorwerpen veel rekenintensiever danhet projecteren van 2D-voorwerpen, er worden zware eisen aan de rekensnelheid van desoft- en hardware gesteld. Bovendien zijn extra bewerkingen nodig, zoals het wegsnijdenvan de niet-zichtbare delen van ondoorzichtige voorwerpen, het bepalen van oppervlaktestructuren, kleur-, transparantie-, reflectie- en schaduweffecten.
Bij het werken in een driedimensionale ruimte kan de z-as twee verschillende orientatiesten opzichte van het xy-assenstelsel hebben. Meestal wordt gekozen voor de richting dieeen kurkentrekker maakt als de x-as rechtsom naar de y-as wordt gedraaid (zie paragraaf3.3.2).
88

De 3D-transformaties zijn bijna hetzelfde als de 2D-transformaties: de translatie, de ro-taties rond de x, de y en de z-as, het schaalveranderen (inclusief het spiegelen) en deshearing.
Net zoals een punt op het 2D-vlak een homogene coordinaat krijgt als het geprojecteerdwordt in de 3D ruimte, krijgt een punt in de 3D-ruimte een homogene coordinaat als hetgeprojecteerd wordt in de 4D-ruimte (dit is niet in een plaatje weer te geven).
In de 3D-ruimte heeft een punt p de homogene coordinaat:px
py
pz
1
=
w · px
w · py
w · pz
w
Affiene transformaties in 3D kunnen, analoog aan affiene transformaties in 2D, metvierdimensionale homogene transformaties uitgevoerd worden. Uitgaande van een punt
p =
px
py
pz
1
dat door een affiene transformatie overgaat in een punt p′ =
p′xp′yp′z1
, kunnen
er transformatiematrices opgesteld worden voor translatie, rotatie, schaalverandering enshearing (voor de x-as in y- en z-richting en voor de x- en y-as in de z-richting):
p′ = T[tx, ty, tz]p met T[tx, ty, tz] =
1 0 0 tx
0 1 0 ty
0 0 1 tz
0 0 0 1
p′ = Rz[θ]p met Rz[θ] =
cos θ − sin θ 0 0sin θ cos θ 0 0
0 0 1 00 0 0 1
p′ = Rx[ψ]p met Rx[ψ] =
1 0 0 00 cosψ − sinψ 00 sinψ cosψ 00 0 0 1
p′ = Ry[φ]p met Ry[φ] =
cos φ 0 sin φ 0
0 1 0 0− sin φ 0 cos φ 0
0 0 0 1
89
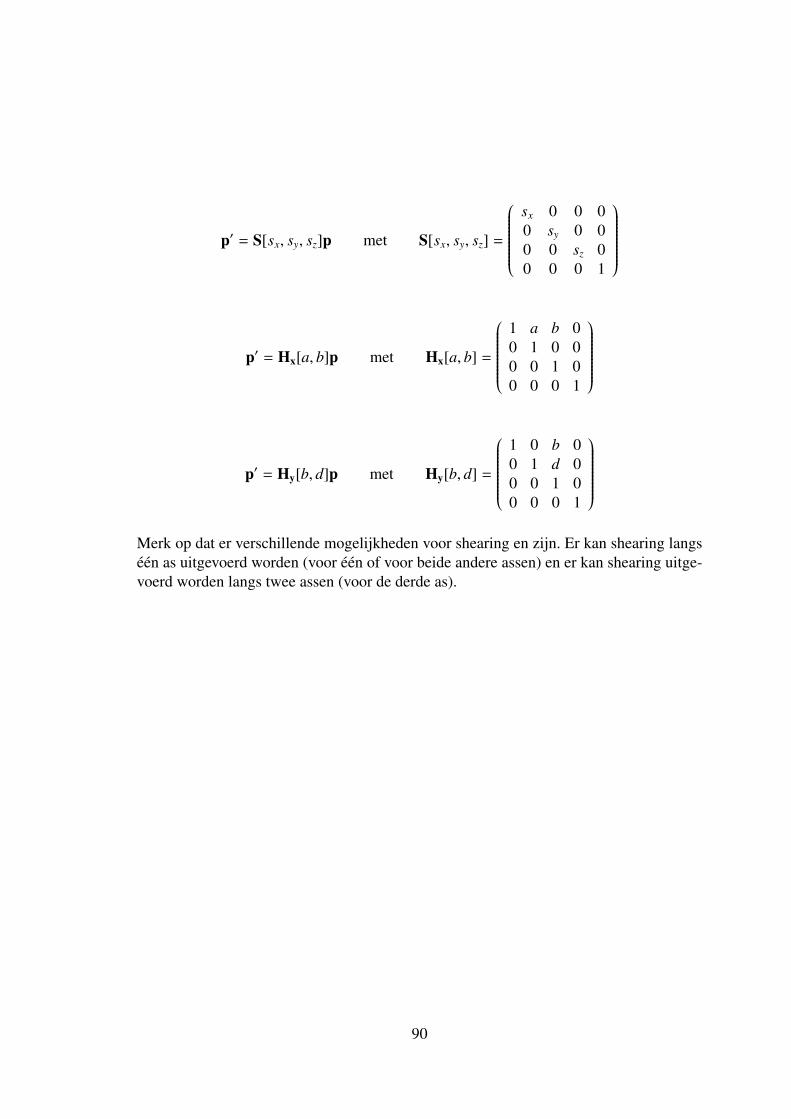
p′ = S[sx, sy, sz]p met S[sx, sy, sz] =
sx 0 0 00 sy 0 00 0 sz 00 0 0 1
p′ = Hx[a, b]p met Hx[a, b] =
1 a b 00 1 0 00 0 1 00 0 0 1
p′ = Hy[b, d]p met Hy[b, d] =
1 0 b 00 1 d 00 0 1 00 0 0 1
Merk op dat er verschillende mogelijkheden voor shearing en zijn. Er kan shearing langseen as uitgevoerd worden (voor een of voor beide andere assen) en er kan shearing uitge-voerd worden langs twee assen (voor de derde as).
90
4.3 Opgaven
1. Geef een voorbeeld waarbij het duidelijk is dat een andere volgorde van dezelfdehomogene transformaties een ander resultaat oplevert.
2. Vergroot een driehoek D met de hoekpunten a =
(01
), b =
(23
)en c =
(42
)met 3 voor de x-richting en met 2 in de y-richting vanuit punt c. Gebruik homogenetransformaties om de resulterende driehoek D′ te bepalen.
3. Bepaal de samengestelde homogene 3D-rotaties Rzyx[θ, φ, ψ] = Rz[θ]Ry[φ]Rx[ψ]rond de assen x, y en z in de oorsprong o.
4. Indien twee punten in de 3D-ruimte hetzelfde 2D-projectiepunt hebben, hoe kanmen dan bepalen welk 3D-punt het andere ‘overdekt’?
5. (a) Hoe zou een spiegeling in de 2D-ruimte rond een willekeurige lijn gemaaktkunnen worden? Zou dit kunnen door alleen gebruik te maken van rotaties entranslaties in de 2D-ruimte?
(b) Hoe zou een spiegeling in de 3D-ruimte rond een vlak met alleen rotaties entranslaties gemaakt kunnen worden?
6. Een baan in de homogene 3D-ruimte wordt gegeven met de vectorfunctie:
baan[α, β, t] =
α cos tα sin tβ · t1
(a) Als α = 1 beschrijf de banen als functie van t die ontstaan dan bij β = 1, bij
β = −1 en bij β = 0.
(b) Als β = 1 beschrijf de banen als functie van t die ontstaan dan bij α = −1 enbij α = 0.
91

Bijlage A
Hoeken, cirkels en goniometrie
De omtrek van een cirkel, de lengte van een cirkelboog, de oppervlakte van cirkel en deoppervlakte van een sector (‘taartpunt’):
• De omtrek van een cirkel met een straal r is 2πr, waarbij π ≈
3, 14159265358979323846;
• De lengte van de cirkelboog b van een sector met een hoek φ graden is b = πr180φ.
Deze formule is afgeleid uit de verhouding b2πr =
φ
360 ;
• Uit de verhouding rad2π =
grad360 volgen de omzettingsformules van graden naar radia-
len en omgekeerd:
radialen =π · graden
180en graden =
180 · radialenπ
• De oppervlakte van een cirkel met een straal r is πr2;
• De oppervlakte van een cirkelsector o met een hoek φ in graden is o = πr2
360φ. Dezeformule is afgeleid uit de verhouding o
πr2 =φ
360 .
De definities van de ‘sinus’, ‘cosinus’, ‘tangens’ en de ‘cotangens’ m.b.v. de eenheidscir-kel met een straal van de lengte 1 (zie figuur A.1). Enkele belangrijke eigenschappen vandeze goniometrische functies en het periodieke gedrag van de sinus, cosinus, tangens encotangens aan de hand van de gedefinieerde lijnstukken in de eenheidscirkel:
1. −1 ≤ sin x ≤ 1;
2. −1 ≤ cos x ≤ 1;
3. tan x = sin xcos x = 1
cot x ;
92

tan φ
φ
−sinφ
cos φ
sinφ
φ−cos
1 φcot
1−1
−1
Figuur A.1: De eenheidscirkel met sin φ, cos φ, tan φ en cot φ als lijnstukken.
4. cot x = cos xsin x = 1
tan x ;
5. −∞ < tan x < ∞;
6. −∞ < cot x < ∞;
7. sin2 x + cos2 x = 1;
8. sin−x = − sin x;
9. sin x = sin (π − x);
10. cos−x = cos x.
De verschuivingen van de hoek x met k-veelvouden van 2π radialen voor de sinus encosinus en met k-veelvouden van π radialen voor de tangens:
1. sin x = sin (x ± k2π) waarbij k = 1, 2, 3, . . . is;
2. cos x = cos (x ± k2π) waarbij k = 1, 2, 3, . . . is;
3. tan x = tan (x ± kπ) waarbij k = 1, 2, 3, . . . is;
4. cot x = cot (x ± kπ) waarbij k = 1, 2, 3, . . . is;
5. sin x = cos (π2 − x) = − cos (π2 + x);
6. cos x = sin (π2 + x) = sin (π2 − x).
De formules voor de sinus en de cosinus van de som-, het verschil-, de dubbele- en halve-hoeken a en b afgeleid in de eenheidscirkel met een meetkundige constructie.
93

1. sin (a + b) = sin a cos b + cos a sin b;
2. cos (a + b) = cos a cos b − sin a sin b;
3. sin (a − b) = sin a cos b − cos a sin b;
4. cos (a − b) = cos a cos b + sin a sin b;
5. tan (a + b) = tan a+tan b1−tan a·tan b ;
6. tan (a − b) = tan a−tan b1+tan a·tan b ;
7. sin a + sin b = 2 sin ( a+b2 ) cos ( a−b
2 );
8. sin a − sin b = 2 cos ( a+b2 ) sin ( a−b
2 );
9. cos a + cos b = 2 cos ( a+b2 ) cos ( a−b
2 );
10. cos a − cos b = −2 sin ( a+b2 ) sin ( a−b
2 );
11. sin 2a = 2 sin a cos a;
12. cos 2a = cos2 a − sin2 a = 1 − 2 sin2 a = 2 cos2 a − 1;
13. tan 2a = 2 tan a1−tan2 a ;
14. sin a2 = ±
√12 (1 − cos a);
15. cos a2 =
√12 (1 + cos a);
16. tan a2 = sin a
1+cos a = 1−cos asin a .
Formules 3 t/m 16 zijn afgeleid uit formules 1 en 2 met behulp van de eigenschappensin−a = − sin a en cos−a = cos a en de stelling van Pythagoras cos2 a + sin2 a = 1 in deeenheidscirkel.
94
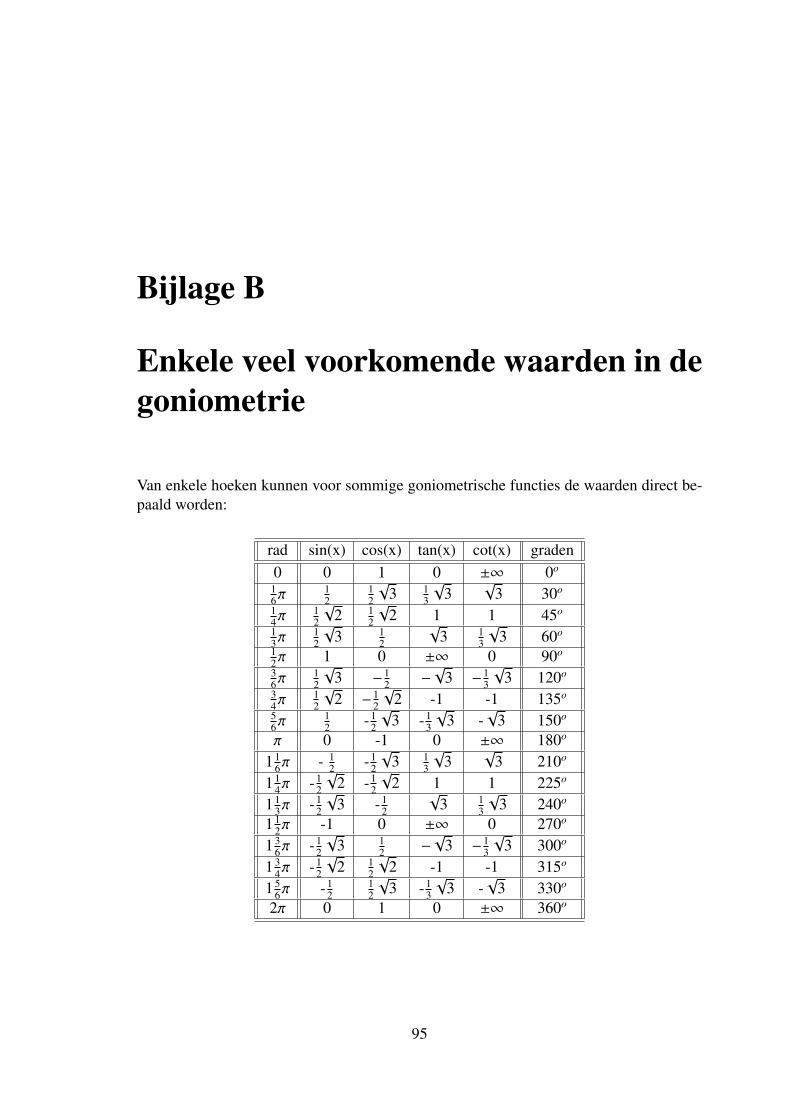
Bijlage B
Enkele veel voorkomende waarden in degoniometrie
Van enkele hoeken kunnen voor sommige goniometrische functies de waarden direct be-paald worden:
rad sin(x) cos(x) tan(x) cot(x) graden0 0 1 0 ±∞ 0o
16π
12
12
√3 1
3
√3
√3 30o
14π
12
√2 1
2
√2 1 1 45o
13π
12
√3 1
2
√3 1
3
√3 60o
12π 1 0 ±∞ 0 90o
36π
12
√3 −1
2 −√
3 −13
√3 120o
34π
12
√2 −1
2
√2 -1 -1 135o
56π
12 - 1
2
√3 - 1
3
√3 -
√3 150o
π 0 -1 0 ±∞ 180o
116π - 1
2 - 12
√3 1
3
√3
√3 210o
114π - 1
2
√2 - 1
2
√2 1 1 225o
113π - 1
2
√3 -1
2
√3 1
3
√3 240o
112π -1 0 ±∞ 0 270o
136π - 1
2
√3 1
2 −√
3 −13
√3 300o
134π - 1
2
√2 1
2
√2 -1 -1 315o
156π -1
212
√3 - 1
3
√3 -
√3 330o
2π 0 1 0 ±∞ 360o
95
Bijlage C
Afleiding van de regel van Cramer voortwee onbekenden
Hoewel het geen volledig bewijs is, kan met de methode van Gauss de regel van Cramerafgeleid worden voor een stelsel lineaire vergelijkingen met twee onbekenden:
ax1 + cx2 = e −bbx1 + dx2 = f +a
−abx1 − cbx2 = −eb+abx1 + adx2 = +a f →
(ad − cb)x2 = a f − eb → x2 =a f − ebad − cb
→ x1 =ed − c fad − cb
Dit resultaat kan met determinanten geschreven en onthouden worden:
det(A) =
∣∣∣∣∣∣ a cb d
∣∣∣∣∣∣ = ad−cb det(A1) =
∣∣∣∣∣∣ e cf d
∣∣∣∣∣∣ = ed−c f det(A2) =
∣∣∣∣∣∣ a eb f
∣∣∣∣∣∣ = a f−eb
xi =det(Ai)det(A)
→ x1 =ed − c fad − cb
∧ x2 =a f − ebad − cb
Op dezelfde wijze kan de regel van Cramer afgeleid worden voor stelsels lineaire verge-lijkingen met drie of meer onbekenden.
96
Bijlage D
Het Euclidische in- en uitproduct
Het Euclidische inproduct is gedefinieerd als een scalair:
v • w = |v||w| cos θ
De relatie tussen het inproduct v • w en |v||w| cos θ wordt duidelijk met de verschilvectoru = v − w:
|u|2 = u • u= (v − w) • (v − w)= v • v + w • w − 2v • w= |v|2 + |w|2 − 2|v||w| cos θ
→ v • w = |v||w| cos θ
Deze relatie is de bekende cosinusregel u2 = v2 + w2 − 2vw cos θ uit de planimetrie vooreen driehoek met de zijden u, v en w, waar de lengtes van v en w en hun onderlinge hoekθ gegeven zijn. Het inproduct is in elke Euclidische ruimte gedefinieerd.
In de Euclidische 3D-ruimte zijn de basisvectoren:
x =
100
y =
010
z =
001
Het inproduct betekent voor de basisvectoren in de Euclidische 3D-ruimte (cos 0◦ = 1):
x • x = y • y = z • z = 1
Voor basisvectoren die loodrecht op elkaar staan (cos 90◦ = 0):
x • y = y • x = x • z = z • x = y • z = z • y = 0
97
Het uitproduct is alleen gedefinieerd in de 3D-Euclische ruimte als een vector n loodrechtop de onafhankelijke vectoren v en w, met de orientatie volgens de kurkentrekkerregel:
v×w = n waarvoor geldt: |n| = |v||w| sin θ
Het uitproduct van twee afhankelijke vectoren (sin 0◦ = 0) resulteert in de nulvector o.Dit geldt dus ook voor het uitproduct van een basisvector met zichzelf:
x×x = y×y = z×z = o
Voor basisvectoren die loodrecht op elkaar staan (sin 90◦ = 1) geeft het Euclidische uit-product volgens de kurkentrekkerregel de volgende resultaten:
x×y = z ∧ y×x = −zz×x = y ∧ x×z = −yy×z = x ∧ z×y = −x
Gegeven twee vectoren:
v =
vx
vy
vz
= vxx + vyy + vzz w =
wx
wy
wz
= wxx + wyy + wzz
Het algebraısch product vw van deze twee veeltermen met vectorcomponenten is:
vxx +vyy +vzzwxx +wyy +wzz ×
+vxwzxz +vywzyz +vzwzzz+vxwyxy +vywyyy +vzwyzy
vxwxxx +vywxyx +vzwxzx +
vxwxxx +vxwyxy +vywxyx +vywyyy +vxwzxz +vzwxzx +vywzyz +vzwyzy +vzwzzz
Als de algebraısche vermenigvuldiging van de basisvectoren wordt beschouwd als eenEuclidisch inproduct dan komt het overeen met het inproduct uit de vectorrekening (zieparagraaf 1.1.4), de som van het product van de overeenkomstige kentallen:
v • w = vxwx1 + vxwy0 + vywx0 + vywy1 + vxwz0 + vzwx0 + vywz0 + vzwy0 + vzwz1= vxwx + vywy + vzwz
Indien de algebraısche vermenigvuldiging van de basisvectoren wordt beschouwd als eenEuclidisch uitproduct:
v×w = vxwxo + vxwyz + vywx(−z) + vywyo + vxwz(−y) + vzwxy + vywzx + vzwy(−x) + vzwzo= (vxwy − vywx)z − (vxwz − vzwx)y + (vywz − vzwy)x + (vxwx + vywy + vzwz)o= (vywz − vzwy)x − (vxwz − vzwx)y + (vxwy − vywx)z
98
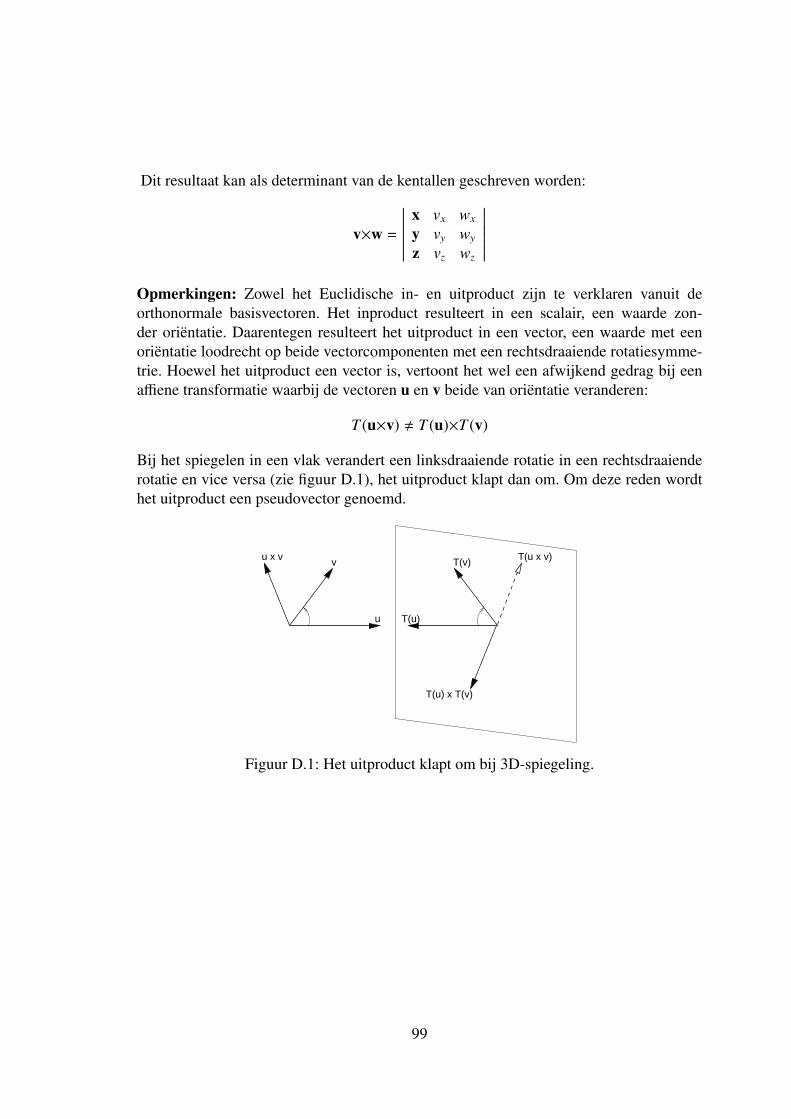
Dit resultaat kan als determinant van de kentallen geschreven worden:
v×w =
∣∣∣∣∣∣∣∣x vx wx
y vy wy
z vz wz
∣∣∣∣∣∣∣∣Opmerkingen: Zowel het Euclidische in- en uitproduct zijn te verklaren vanuit deorthonormale basisvectoren. Het inproduct resulteert in een scalair, een waarde zon-der orientatie. Daarentegen resulteert het uitproduct in een vector, een waarde met eenorientatie loodrecht op beide vectorcomponenten met een rechtsdraaiende rotatiesymme-trie. Hoewel het uitproduct een vector is, vertoont het wel een afwijkend gedrag bij eenaffiene transformatie waarbij de vectoren u en v beide van orientatie veranderen:
T (u×v) , T (u)×T (v)
Bij het spiegelen in een vlak verandert een linksdraaiende rotatie in een rechtsdraaienderotatie en vice versa (zie figuur D.1), het uitproduct klapt dan om. Om deze reden wordthet uitproduct een pseudovector genoemd.
v
u T(u)
T(v) T(u x v)
T(u) x T(v)
u x v
Figuur D.1: Het uitproduct klapt om bij 3D-spiegeling.
99
Bijlage E
Algemene richtlijnen voor hetpracticum
Iedere week krijgt de student 2 uur hoorcollege en 2 uur practicum. Tijdens de practi-cumlessen werkt de student aan de opdrachten zoals deze zijn verstrekt door de docent.De student dient deze opgaven persoonlijk te maken volgens de instructies zoals die in deopdrachten worden gegeven. In de verplichte practicumlessen levert de student de voor-geschreven opdrachten in bij de begeleidende docent. Het inleveren van opdrachten isgebonden aan een aantal regels:
• DeadlinePractica dienen te worden ingeleverd voor de door de docent gestelde deadline.Opgaven die na de deadline worden ingeleverd, worden niet nagekeken en als on-voldoende beschouwd.
• PapierAlle practicumopdrachten worden op papier ingeleverd en dus niet via e-mail.
• gegevensIedere practicumopdracht is voorzien van:
– Studentnummer
– Naam
– Klas
– Datum
– Weeknummer
• Leesbaarheid en overzichtelijkheidDe vraag of een student leesbaar en overzichtelijk werk inlevert, wordt beantwoorddoor de docent.
100
Index
affiene ruimte, 53afmeting, 5afstand, 57assenstelsel, 18
basisvector, 51, 52
coefficient, 16coordinaattransformatie, 74coordinaten, 53, 55collineair, 70commutatief, 8
dimensie, 51, 78
eenheidsvector, 61eigenvectoren, 48eigenwaarden, 48elementen, 5Euclidische ruimte, 57
factor, 17functie, 54
hoek, 57homogeen stelsel, 47homogene coordinaat, 89homogene coordinaten, 83hoofddiagonaal, 6
identiteitsmatrix, 12inproduct, 8, 59
karakteristieke vergelijking, 48kentallen, 53kolommen, 5kolomvector, 53, 55kortste afstand, 66–68
kurkentrekkerregel, 63, 88
lengte, 50lengte van een lijnstuk, 61lengte van een vector, 60lineair onafhankelijk, 52lineaire vergelijking, 16lokaal coordinatenstelsel, 74
matrix, 5matrixproduct, 9methode van Gauss, 24methode van Gauss/Jordan, 24
niet-commutatief, 8normaalvector, 60, 62, 65normaalvergelijking, 65, 67nulmatrix, 7nulvector, 7, 50, 52, 63
oorsprong, 53, 74oplossing, 17opspannende vectoren, 56orientatie, 50, 63, 88orthogonaal coordinatenstelsel, 57orthonormaal coordinatenstelsel, 57
parameter, 54parametrische voorstelling, 56picturematrix, 81polariteit, 62positie, 53projecteren, 85projectie, 61projectielijn, 83projectieve 3D-ruimte, 83projectievlak, 85
101
pseudovector, 99punt, 53
referentiepunt, 53, 74regel van Cramer, 46richting, 50rigide transformaties, 77rijcanoniek, 23rijen, 5rijvector, 53, 55rotatie, 75, 76
scalair, 5, 7, 50scalairproduct, 62schaalverandering, 75, 78shearing, 75, 80, 90spiegeling, 78spiegellijn, 78stelsel, 20, 51
translatie, 75tripleproduct, 69triviale oplossing, 47
uitproduct, 62, 64
variabele vector, 54vector, 50vectorfunctie, 55vectorproduct, 8vectorruimte, 50vertex, 55vierkante matrix, 6
wereldcoordinatenstelsel, 74
zwaartepunt, 58
102