Formuleboekje Aandrijftechniek' - Vector-Sew
74
-
Upload
sloeber1970 -
Category
Documents
-
view
1.772 -
download
75
Transcript of Formuleboekje Aandrijftechniek' - Vector-Sew
Inhoud pagina
1. Inleiding 5
2. De draaistroomaandrijving met één of meer vastetoerentallen 6
2.1. Werkingsprincipe van de draaistroomkortsluitrotormotor 62.2. Nominale gegevens van de draaistroomkortsluitrotormotor 72.3. Rendement en cos � 82.4. Isolatieklassen 82.5. Toleranties 92.6. Vermogensvermindering afhankelijk van omgevingstemperatuur en
opstellingshoogte 102.7. Bedrijfsklassen 102.8. Beveiliging van de wikkelingen 112.9. Groottebepaling van de motor vanuit lastkoppel, massatraagheidsmoment
en schakelfrequentie 122.10. Zachte aanloop en een zachte omschakeling van asynchrone
draaistroomkortsluitrotormotoren 142.11. Remmotoren 142.11.1. Opbouw en werking 142.11.2. Remlichtaanspreek- en invaltijd 162.11.3. Remaansturing BSR en BUR 172.11.4. Remweg en positioneernauwkeurigheid 182.11.5. Langdurige lichting van de rem 192.11.6. Remverwarming 192.11.7. Remcontacten 192.11.8. Tegenstroomremming - gelijkstroomremming 192.12. Beschermingsklassen van SEW draaistroommotorreductoren resp.
remmotorreductoren 20
3. Draaistroomaandrijvingen met een variabeltoerental door een mechanische verstelling 21
3.1. Het SEW programma mechanische variatoren 213.2. Regelbaarheid, versteltijd 213.3. De groottebepaling van de variatorreductor 223.4. Keuze naar relatie lastkoppel-lasttoerental 223.4.1. Keuze naar een constant afneembaar koppel 223.4.2. Keuze naar een constant afneembaar vermogen 233.4.3. De keuze op basis van een deel van het toerentalbereik met een constant
vermogen en deel van het bereik met een constant koppel 243.5. Bedrijfsfactoren 243.6. Overbelastingsbeveiliging 25
4. Draaistroomaandrijvingen met een variabeltoerental door middel van frequentieregelaar 26
4.1. Typen frequentieregelaars 264.1.1. Frequentieregelaars zonder tussenkring (directe omvormers) 264.1.2. Frequentieregelaars met een gelijkspanningstussenkring (U-omvormers) 264.1.3. Frequentieregelaars met een gelijkstroom tussenkring (I-omvormers) 274.2. Kenmerkende gedragingen/frequentiebereik 284.3. Koeling/Motordimensionering 304.4. Selectie-aanwijzingen voor SEW-motorreductoren met een
frequentieregelaar 30
3
5. Reductoren 325.1. Motorreductoren 325.2. Uitgaand toerental, afneembaar koppel 325.3. Bedrijfsfactor 325.4. Toelichting op het verschijnsel bedrijfsfactoren 345.5. Smering 365.6. Woelingsverliezen 36
6. Remmen 376.1. Indeling naar vertragingsremmen en houdremmen 376.2. Waarom remmen en met welk koppel? 376.3. Warmte-ontwikkeling bij het remmen 376.4 De wrijvingscoëfficiënt van wrijvingsmateriaal 38
7. Koppelingen - beknopt overzicht 397.1. Soorten niet schakelende koppelingen 397.2. Torsietrillingsanalyse 427.3. Bepaling van de benodigde grootte van een koppeling 42
8. Formules in de aandrijftechniek 448.1. Eénparig versnelde/vertraagde beweging 448.2. Kracht, massa, wrijving en koppel 458.2.1. Kracht en massa 458.2.2. Wrijving en wrijvingscoëfficiënten 468.2.3. Koppel 478.2.4. Tapwrijving 478.2.5. Rolweerstand 488.3. Arbeid en energie 498.3.1. Vermogen (definitie) 518.4. Massatraagheidsmoment 528.4.1. Massatraagheidsmoment als basisgrootheid 528.4.2. Het verrekenen van massatraagheidsmomenten in een overbrengings-
verhouding 548.4.3. Het massatraagheidsmoment van enkele basisvormen 548.4.4. Het massatraagheidsmoment van enkele veel voorkomende
lichaamsvormen 568.5. Vermogen 57
9. Toepassingsberekeningen 589.1. Hijswerkberekening 589.2. Kraanrijwerkaandrijving 589.3. Wikkelsysteem 629.4. Transportband-vermogensberekening 629.5. Trommelaandrijving 649.6. Kruk-drijfstangmechanisme 659.7. Berekening aanlooptijd ventilator 66
10. SI-eenhedenstelstel 68
4
1 Inleiding
Over een formuleboekje wordt verschillend gedacht.Sommigen zien het liefst een A-4tje met alleen formules. De herkomst van de formulesvinden zij niet interessant. Wanneer het resultaat beneden de verwachting blijkt, wordtde rekenmethode-verschaffer beschuldigd. Immers deze had moeten aangeven binnenwelk kader het opgevoerde juist is.
Voor die categorie lezers is dit formuleboekje duidelijk niet geschreven.
Dit boekje is wel geschreven voor de technisch geïnteresseerde die het zowel te doen isom de formule als om de denktrant en de componentenkennis, die er aan ten grondslagligt. Elke berekeningsmethode heeft immers een aantal uitgangspunten die tevens hetkader inhouden waarin de beoordeling plaatsvindt.Met dit formuleboekje willen wij u behulpzaam zijn bij het vinden van een goede oplossing.Wij stellen met nadruk dat Vector Aandrijftechniek B.V. geen aansprakelijkheid aanvaar-den voor eventueel onjuist blijkende resultaten.
5

2 De draaistroomaandrijving met één of meervaste toerentallen
2.1 Werkingsprincipe van de draaistroomkortsluitrotormotor
Vanwege zijn eenvoudige en onderhoudsvrije constructie, zijn grote betrouwbaarheid engunstige prijs is de draaistroomkortsluitrotormotor de meest toegepaste elektromotor(zie figuur 1).
Fig. 1 Draaistroomkortsluitrotormotor.
Het aanloopgedrag van de draaistroomkortsluitrotormotor wordt met de koppel-toeren-kromme beschreven. De grootten van de geïnduceerde rotorstromen zijn afhankelijk vanhet verschil in rotorfrequentie en statorfrequentie (de slip). Het motorkoppel is dus o.a.afhankelijk van de slipfrequentie.Figuur 2 geeft de koppel-toerenkromme weer van een pooltalomschakelbare motor metzijn specifieke gedragingen.De motor doorloopt bij elke inschakeling deze koppel-toerenkromme tot zijn stabielewerkpunt. Werkpunten zijn die punten, waarbij de lastkoppelkarakteristiek en de koppel-toerenkromme elkaar snijden. Een stabiel werkpunt is het punt waarop de motor na hetdoorlopen van het aanloopproces telkens weer stabiliseert, wanneer het lastkoppel klei-ner is dan het aanloop- en het zadelmoment. Bij het omschakelen van de motor volgensfiguur 2 van de 2-polige naar de 8-polige wikkeling, werkt de motor gedurende korte tijdvanwege het oversynchrone toerental als generator.Door de omzetting van mechanische naar elektrische energie wordt zonder slijtage vande rem van het hoge naar het lage toerental vertraagd. Het voor het vertragen ter beschik-king staande gemiddelde omschakelkoppel wordt benaderd door:
Tu � (2.....2,5) � TA1waarinTu = omschakelkoppelTA1 = losbreekkoppel van de wikkelingen voor het lage toerentalTA = losbreekkoppelTS = zadelmomentTK = kipkoppelTnom = nominaal motorkoppelTL = lastkoppel
6
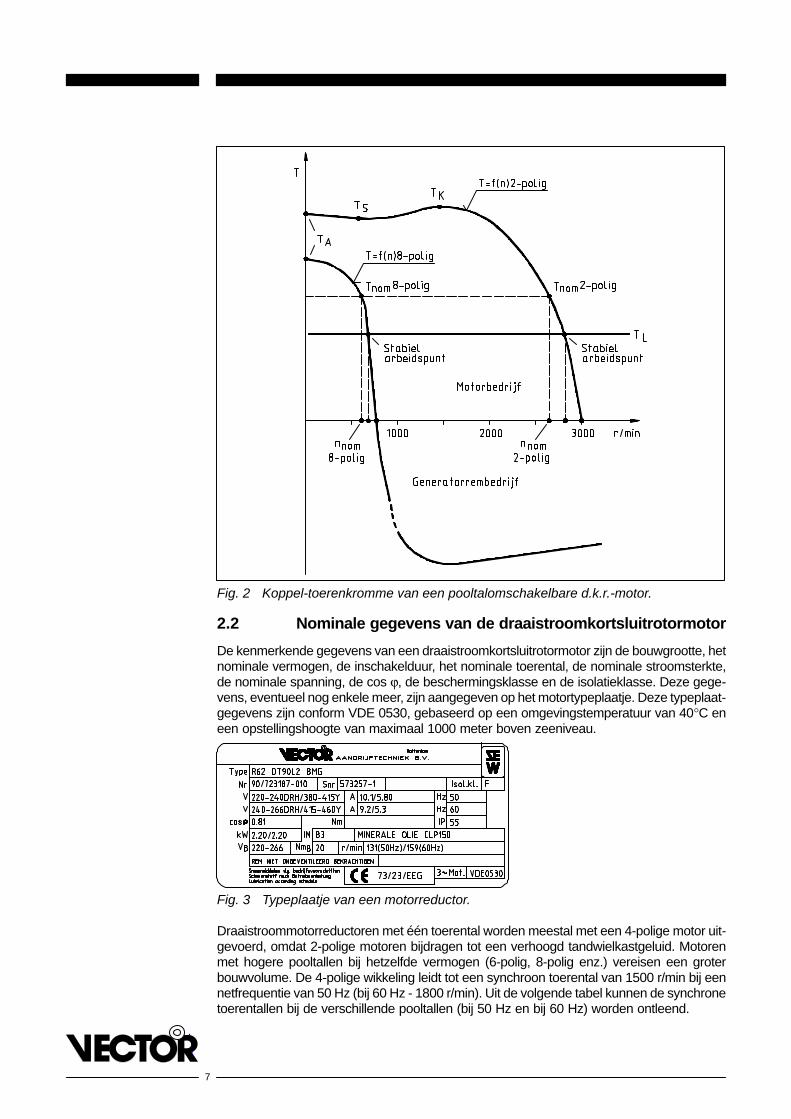
Fig. 2 Koppel-toerenkromme van een pooltalomschakelbare d.k.r.-motor.
2.2 Nominale gegevens van de draaistroomkortsluitrotormotor
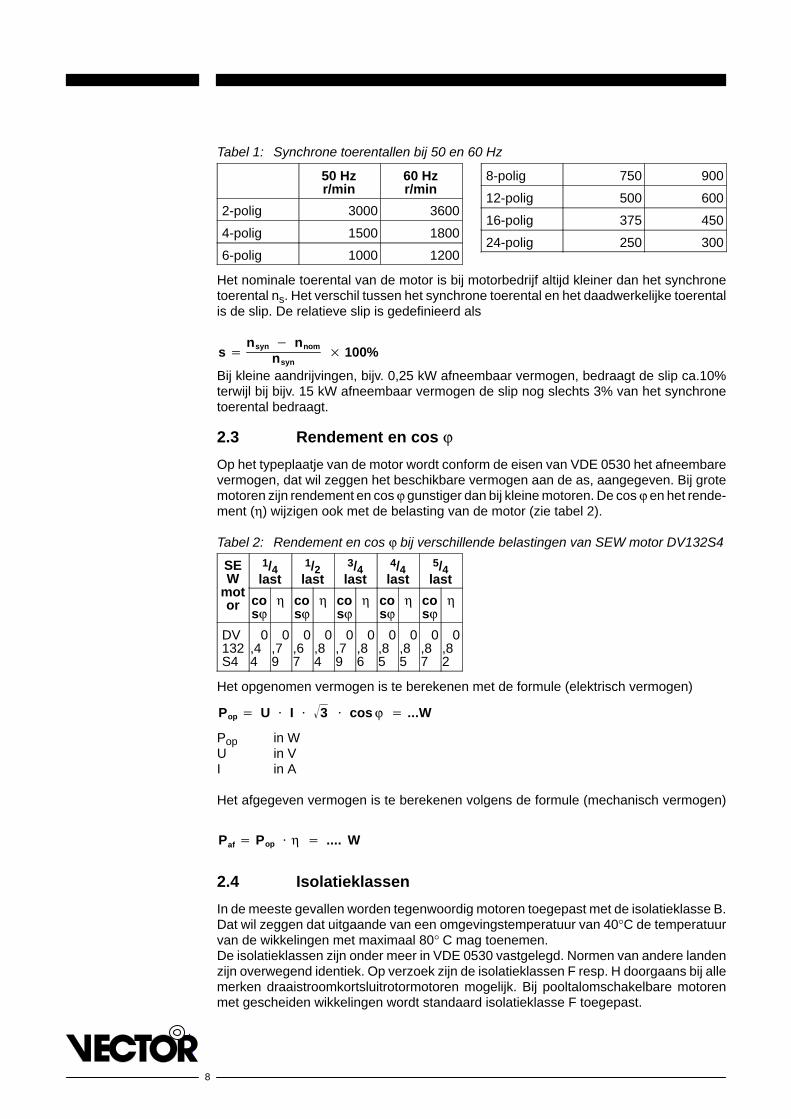
De kenmerkende gegevens van een draaistroomkortsluitrotormotor zijn de bouwgrootte, hetnominale vermogen, de inschakelduur, het nominale toerental, de nominale stroomsterkte,de nominale spanning, de cos ϕ, de beschermingsklasse en de isolatieklasse. Deze gege-vens, eventueel nog enkele meer, zijn aangegeven op het motortypeplaatje. Deze typeplaat-gegevens zijn conform VDE 0530, gebaseerd op een omgevingstemperatuur van 40°C eneen opstellingshoogte van maximaal 1000 meter boven zeeniveau.
Fig. 3 Typeplaatje van een motorreductor.
Draaistroommotorreductoren met één toerental worden meestal met een 4-polige motor uit-gevoerd, omdat 2-polige motoren bijdragen tot een verhoogd tandwielkastgeluid. Motorenmet hogere pooltallen bij hetzelfde vermogen (6-polig, 8-polig enz.) vereisen een groterbouwvolume. De 4-polige wikkeling leidt tot een synchroon toerental van 1500 r/min bij eennetfrequentie van 50 Hz (bij 60 Hz - 1800 r/min). Uit de volgende tabel kunnen de synchronetoerentallen bij de verschillende pooltallen (bij 50 Hz en bij 60 Hz) worden ontleend.
7
Tabel 1: Synchrone toerentallen bij 50 en 60 Hz
50 Hzr/min
60 Hzr/min
2-polig 3000 3600
4-polig 1500 1800
6-polig 1000 1200
8-polig 750 900
12-polig 500 600
16-polig 375 450
24-polig 250 300
Het nominale toerental van de motor is bij motorbedrijf altijd kleiner dan het synchronetoerental ns. Het verschil tussen het synchrone toerental en het daadwerkelijke toerentalis de slip. De relatieve slip is gedefinieerd als
s �
nsyn � nnom
nsyn� 100%
Bij kleine aandrijvingen, bijv. 0,25 kW afneembaar vermogen, bedraagt de slip ca.10%terwijl bij bijv. 15 kW afneembaar vermogen de slip nog slechts 3% van het synchronetoerental bedraagt. 2.3 Rendement en cos ϕ
Op het typeplaatje van de motor wordt conform de eisen van VDE 0530 het afneembarevermogen, dat wil zeggen het beschikbare vermogen aan de as, aangegeven. Bij grotemotoren zijn rendement en cos ϕ gunstiger dan bij kleine motoren. De cos ϕ en het rende-ment (η) wijzigen ook met de belasting van de motor (zie tabel 2).
Tabel 2: Rendement en cos ϕ bij verschillende belastingen van SEW motor DV132S4
SEW
1/4last
1/2last
3/4last
4/4last
5/4last
motor co
sϕη co
sϕη co
sϕη co
sϕη co
sϕη
DV132S4
0,44
0,79
0,67
0,84
0,79
0,86
0,85
0,85
0,87
0,82
Het opgenomen vermogen is te berekenen met de formule (elektrisch vermogen)
Pop � U � I � 3� � cos ϕ � ...W
Pop in WU in VI in A
Het afgegeven vermogen is te berekenen volgens de formule (mechanisch vermogen)
Paf � Pop � η � .... W
2.4 Isolatieklassen
In de meeste gevallen worden tegenwoordig motoren toegepast met de isolatieklasse B.Dat wil zeggen dat uitgaande van een omgevingstemperatuur van 40°C de temperatuurvan de wikkelingen met maximaal 80° C mag toenemen.De isolatieklassen zijn onder meer in VDE 0530 vastgelegd. Normen van andere landenzijn overwegend identiek. Op verzoek zijn de isolatieklassen F resp. H doorgaans bij allemerken draaistroomkortsluitrotormotoren mogelijk. Bij pooltalomschakelbare motorenmet gescheiden wikkelingen wordt standaard isolatieklasse F toegepast.
8
Indien de motor frequentiegeregeld is, dient deze isolatieklasse F te bezitten.
In VDE 0530, deel 1 worden aan de isolatieklassen de volgende waarden toegekend:Bij een temperatuur van de koellucht van 40�C:Isolatieklasse B 90 K maximaal toegestane temperatuurstijging van de wikkelingenIsolatieklasse F 110 K maximaal toegestane temperatuurstijging van de wikkelingenIsolatieklasse H 130 K maximaal toegestane temperatuurstijging van de wikkelingen
Meting volgens de weerstandsmethodeMet een daarvoor geschikte weerstandsmeter kan de temperatuurtoename van eenmotor met koperen wikkelingen via de weerstandstoename worden bepaald.
υ2 �R2 � R1
R1(235 � υ1) � υ1
υ1 = temperatuur van de koude wikkeling in �Cυ2 = temperatuur van de wikkeling het einde van de test in �CR1 weerstand van de wikkeling bij temperatuur υ1 in �.R2 weerstand van de wikkeling aan het einde van de test in �.
Er wordt vanuit gegaan dat de omgevingstemperatuur tijdens de meting constant blijft.
2.5 Toleranties
Volgens VDE 0530 zijn voor elektromotoren de volgende toleranties bij nominale span-ning toegelaten.rendement η: bij Pnom �50 kW⇒ 0,15.(1-η)
bij Pnom �50 kW⇒ 0,10.(1-η)
cos ϕ �1 � cos ϕ
6slip 20%*
aanloopstroom + 20%*
kipkoppel – 10%*
massatraagheidsmoment 10%*
* betrokken op de verstrekte waarden (typeplaatje)
Bij een onderspanning, bijvoorbeeld door een zwak net of te licht gedimensioneerdemotorkabels, kunnen de waarden volgens de catalogus zoals vermogen, koppel en toe-rental, niet gehaald worden. Dit geldt vooral bij het aanloopproces van de motor, waarbijde aanloopstroom het veelvoudige van de nominale stroom bedraagt. Hijswerkaandrijvin-gen kunnen door onderspanning bijvoorbeeld in hun zadelmoment blijven hangen en zotot storingen leiden.Met de dan gepaste overdimensionering van de motoren kan het effect van optredendeonderspanning vereffend worden.
9
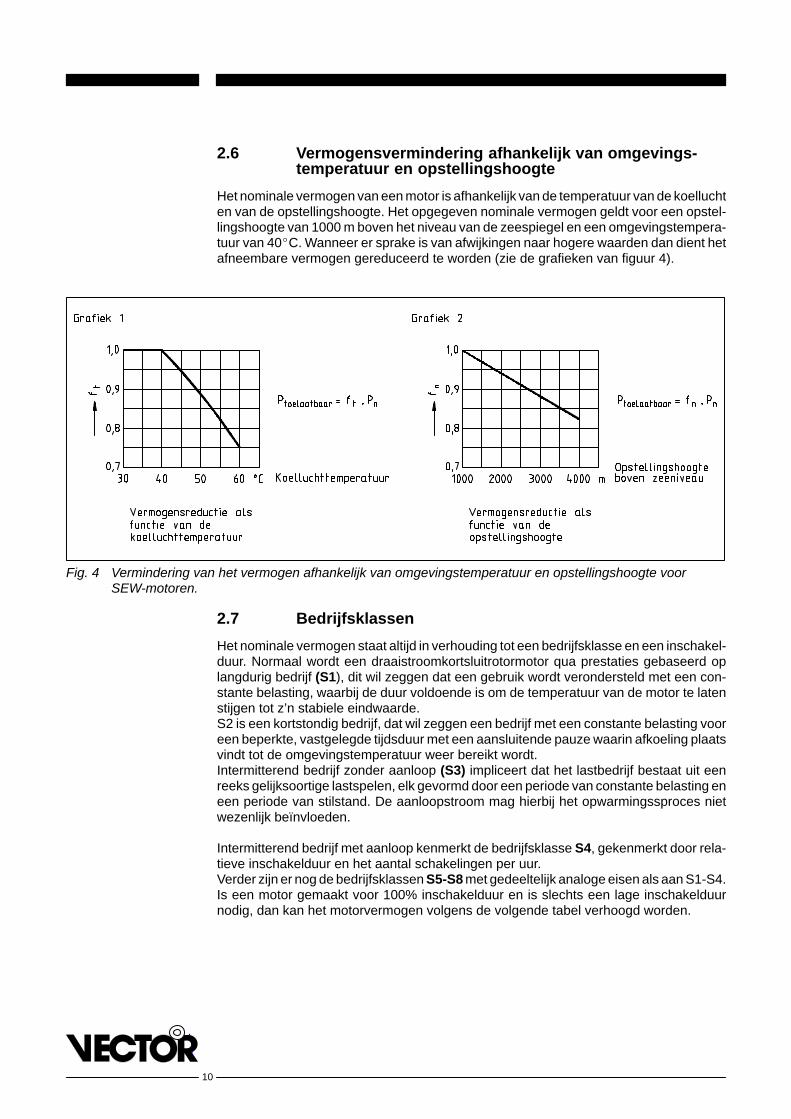
2.6 Vermogensvermindering afhankelijk van omgevings-temperatuur en opstellingshoogte
Het nominale vermogen van een motor is afhankelijk van de temperatuur van de koelluchten van de opstellingshoogte. Het opgegeven nominale vermogen geldt voor een opstel-lingshoogte van 1000 m boven het niveau van de zeespiegel en een omgevingstempera-tuur van 40�C. Wanneer er sprake is van afwijkingen naar hogere waarden dan dient hetafneembare vermogen gereduceerd te worden (zie de grafieken van figuur 4).
Fig. 4 Vermindering van het vermogen afhankelijk van omgevingstemperatuur en opstellingshoogte voorSEW-motoren.
2.7 Bedrijfsklassen
Het nominale vermogen staat altijd in verhouding tot een bedrijfsklasse en een inschakel-duur. Normaal wordt een draaistroomkortsluitrotormotor qua prestaties gebaseerd oplangdurig bedrijf (S1), dit wil zeggen dat een gebruik wordt verondersteld met een con-stante belasting, waarbij de duur voldoende is om de temperatuur van de motor te latenstijgen tot z’n stabiele eindwaarde.S2 is een kortstondig bedrijf, dat wil zeggen een bedrijf met een constante belasting vooreen beperkte, vastgelegde tijdsduur met een aansluitende pauze waarin afkoeling plaatsvindt tot de omgevingstemperatuur weer bereikt wordt.Intermitterend bedrijf zonder aanloop (S3) impliceert dat het lastbedrijf bestaat uit eenreeks gelijksoortige lastspelen, elk gevormd door een periode van constante belasting eneen periode van stilstand. De aanloopstroom mag hierbij het opwarmingssproces nietwezenlijk beïnvloeden.
Intermitterend bedrijf met aanloop kenmerkt de bedrijfsklasse S4, gekenmerkt door rela-tieve inschakelduur en het aantal schakelingen per uur.Verder zijn er nog de bedrijfsklassen S5-S8 met gedeeltelijk analoge eisen als aan S1-S4.Is een motor gemaakt voor 100% inschakelduur en is slechts een lage inschakelduurnodig, dan kan het motorvermogen volgens de volgende tabel verhoogd worden.
10
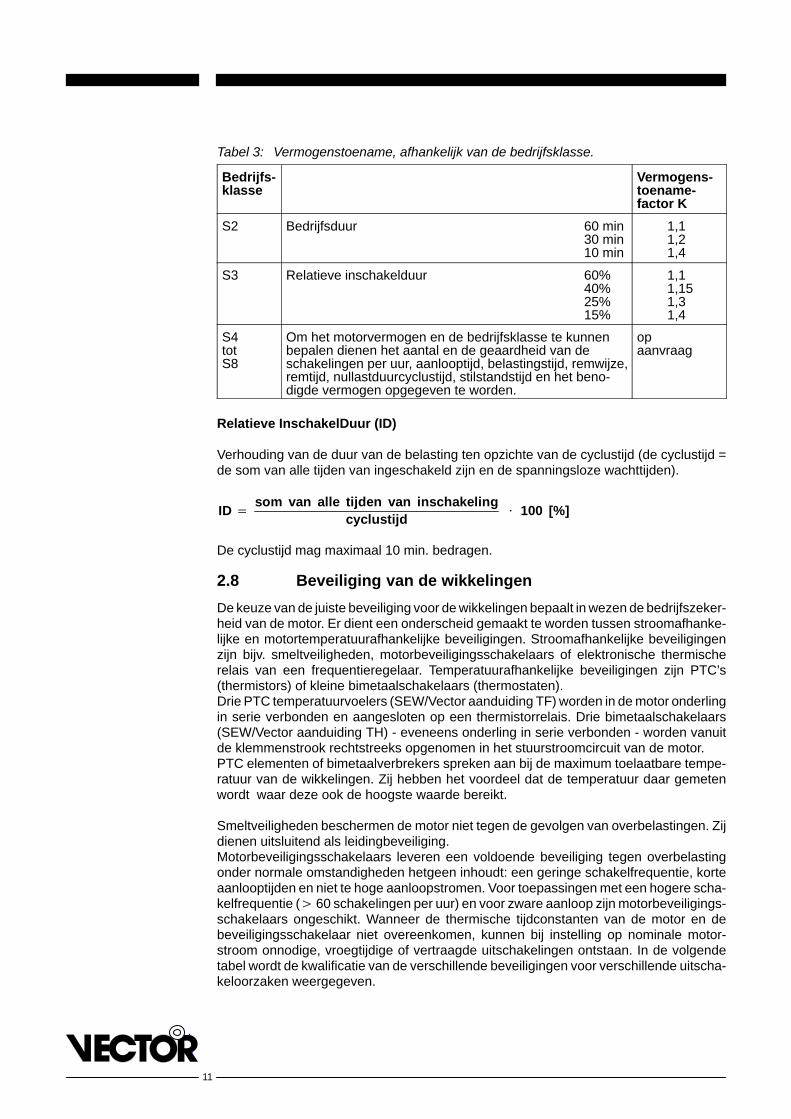
Tabel 3: Vermogenstoename, afhankelijk van de bedrijfsklasse.
Bedrijfs-klasse
Vermogens-toename-factor K
S2 Bedrijfsduur 60 min30 min10 min
1,11,21,4
S3 Relatieve inschakelduur 60%40%25%15%
1,11,151,31,4
S4totS8
Om het motorvermogen en de bedrijfsklasse te kunnenbepalen dienen het aantal en de geaardheid van deschakelingen per uur, aanlooptijd, belastingstijd, remwijze,remtijd, nullastduurcyclustijd, stilstandstijd en het beno-digde vermogen opgegeven te worden.
opaanvraag
Relatieve InschakelDuur (ID)
Verhouding van de duur van de belasting ten opzichte van de cyclustijd (de cyclustijd =de som van alle tijden van ingeschakeld zijn en de spanningsloze wachttijden).
ID �som van alle tijden van inschakeling
cyclustijd� 100 [%]
De cyclustijd mag maximaal 10 min. bedragen.
2.8 Beveiliging van de wikkelingen
De keuze van de juiste beveiliging voor de wikkelingen bepaalt in wezen de bedrijfszeker-heid van de motor. Er dient een onderscheid gemaakt te worden tussen stroomafhanke-lijke en motortemperatuurafhankelijke beveiligingen. Stroomafhankelijke beveiligingenzijn bijv. smeltveiligheden, motorbeveiligingsschakelaars of elektronische thermischerelais van een frequentieregelaar. Temperatuurafhankelijke beveiligingen zijn PTC’s(thermistors) of kleine bimetaalschakelaars (thermostaten).Drie PTC temperatuurvoelers (SEW/Vector aanduiding TF) worden in de motor onderlingin serie verbonden en aangesloten op een thermistorrelais. Drie bimetaalschakelaars(SEW/Vector aanduiding TH) - eveneens onderling in serie verbonden - worden vanuitde klemmenstrook rechtstreeks opgenomen in het stuurstroomcircuit van de motor.PTC elementen of bimetaalverbrekers spreken aan bij de maximum toelaatbare tempe-ratuur van de wikkelingen. Zij hebben het voordeel dat de temperatuur daar gemetenwordt waar deze ook de hoogste waarde bereikt.
Smeltveiligheden beschermen de motor niet tegen de gevolgen van overbelastingen. Zijdienen uitsluitend als leidingbeveiliging.Motorbeveiligingsschakelaars leveren een voldoende beveiliging tegen overbelastingonder normale omstandigheden hetgeen inhoudt: een geringe schakelfrequentie, korteaanlooptijden en niet te hoge aanloopstromen. Voor toepassingen met een hogere scha-kelfrequentie (� 60 schakelingen per uur) en voor zware aanloop zijn motorbeveiligings-schakelaars ongeschikt. Wanneer de thermische tijdconstanten van de motor en debeveiligingsschakelaar niet overeenkomen, kunnen bij instelling op nominale motor-stroom onnodige, vroegtijdige of vertraagde uitschakelingen ontstaan. In de volgendetabel wordt de kwalificatie van de verschillende beveiligingen voor verschillende uitscha-keloorzaken weergegeven.
11
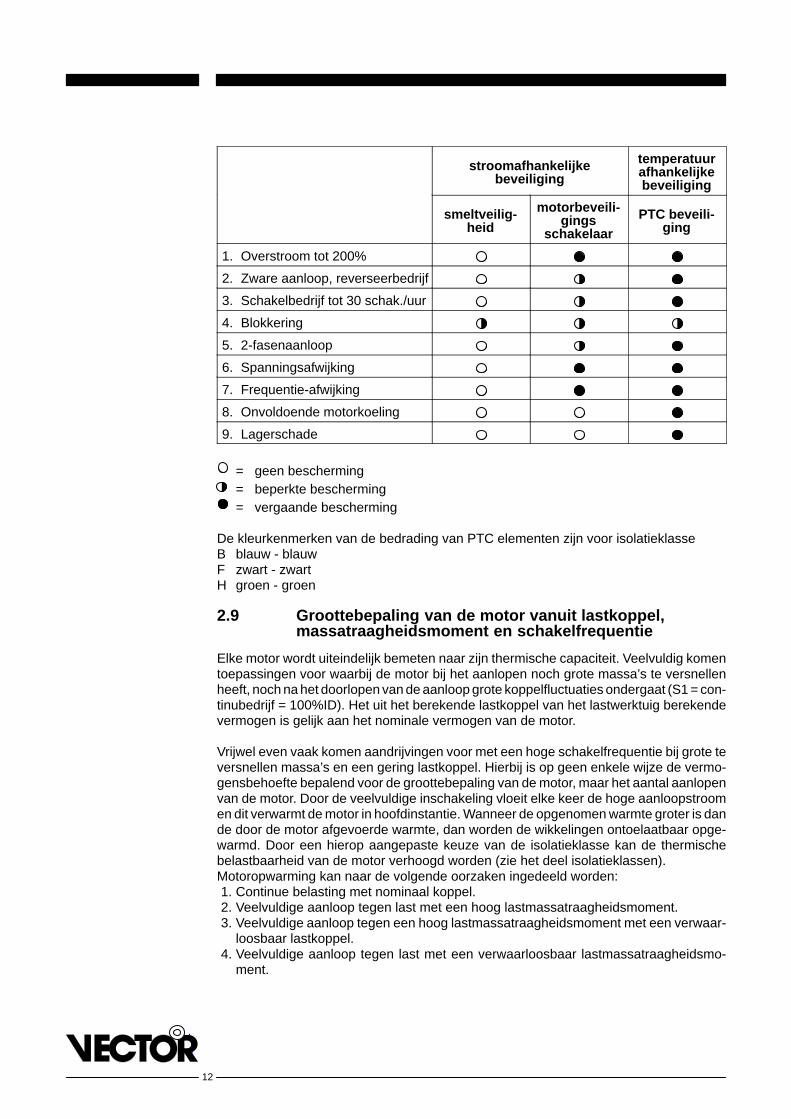
stroomafhankelijkebeveiliging
temperatuurafhankelijkebeveiliging
smeltveilig-heid
motorbeveili-gings
schakelaarPTC beveili-
ging
1. Overstroom tot 200%
2. Zware aanloop, reverseerbedrijf
3. Schakelbedrijf tot 30 schak./uur
4. Blokkering
5. 2-fasenaanloop
6. Spanningsafwijking
7. Frequentie-afwijking
8. Onvoldoende motorkoeling
9. Lagerschade
= geen bescherming= beperkte bescherming= vergaande bescherming
De kleurkenmerken van de bedrading van PTC elementen zijn voor isolatieklasseB blauw - blauwF zwart - zwartH groen - groen
2.9 Groottebepaling van de motor vanuit lastkoppel,massatraagheidsmoment en schakelfrequentie
Elke motor wordt uiteindelijk bemeten naar zijn thermische capaciteit. Veelvuldig komentoepassingen voor waarbij de motor bij het aanlopen noch grote massa’s te versnellenheeft, noch na het doorlopen van de aanloop grote koppelfluctuaties ondergaat (S1 = con-tinubedrijf = 100%ID). Het uit het berekende lastkoppel van het lastwerktuig berekendevermogen is gelijk aan het nominale vermogen van de motor.
Vrijwel even vaak komen aandrijvingen voor met een hoge schakelfrequentie bij grote teversnellen massa’s en een gering lastkoppel. Hierbij is op geen enkele wijze de vermo-gensbehoefte bepalend voor de groottebepaling van de motor, maar het aantal aanlopenvan de motor. Door de veelvuldige inschakeling vloeit elke keer de hoge aanloopstroomen dit verwarmt de motor in hoofdinstantie. Wanneer de opgenomen warmte groter is dande door de motor afgevoerde warmte, dan worden de wikkelingen ontoelaatbaar opge-warmd. Door een hierop aangepaste keuze van de isolatieklasse kan de thermischebelastbaarheid van de motor verhoogd worden (zie het deel isolatieklassen).Motoropwarming kan naar de volgende oorzaken ingedeeld worden:1. Continue belasting met nominaal koppel.2. Veelvuldige aanloop tegen last met een hoog lastmassatraagheidsmoment.3. Veelvuldige aanloop tegen een hoog lastmassatraagheidsmoment met een verwaar-
loosbaar lastkoppel.4. Veelvuldige aanloop tegen last met een verwaarloosbaar lastmassatraagheidsmo-
ment.
12
De toelaatbare schakelfrequentie van een motor wordt door de leverancier als de zoge-naamde leegloopschakelfrequentie Z0 bij 50% ID opgegeven.De leegloopschakelfrequentie geeft aan hoe vaak de motor het massatraagheidsmomentvan zijn eigen rotor zonder tegenkoppel bij 50% ID per uur kan versnellen naar zijn maxi-male werksnelheid.
Wanneer een toegevoegd massatraagheidsmoment versneld wordt, of wanneer tijdenshet versnellen een tegenkoppel optreedt, dan wordt hierdoor de aanlooptijd van de motorverlengd. Omdat gedurende die aanlooptijd een verhoogde stroom loopt (de aanloop-stroom), wordt de motor thermisch hoger belast en neemt de toelaatbare schakelfrequen-tie af.
Een extra opwarming ervaart de pooltalomschakelbare motor bij de omschakeling vanhet hoge naar het lage toerental. Deze opwarming vormt echter slechts een gering deelten opzichte van de warmte die ontstaat door het versnellen van het lage naar het hogetoerental.
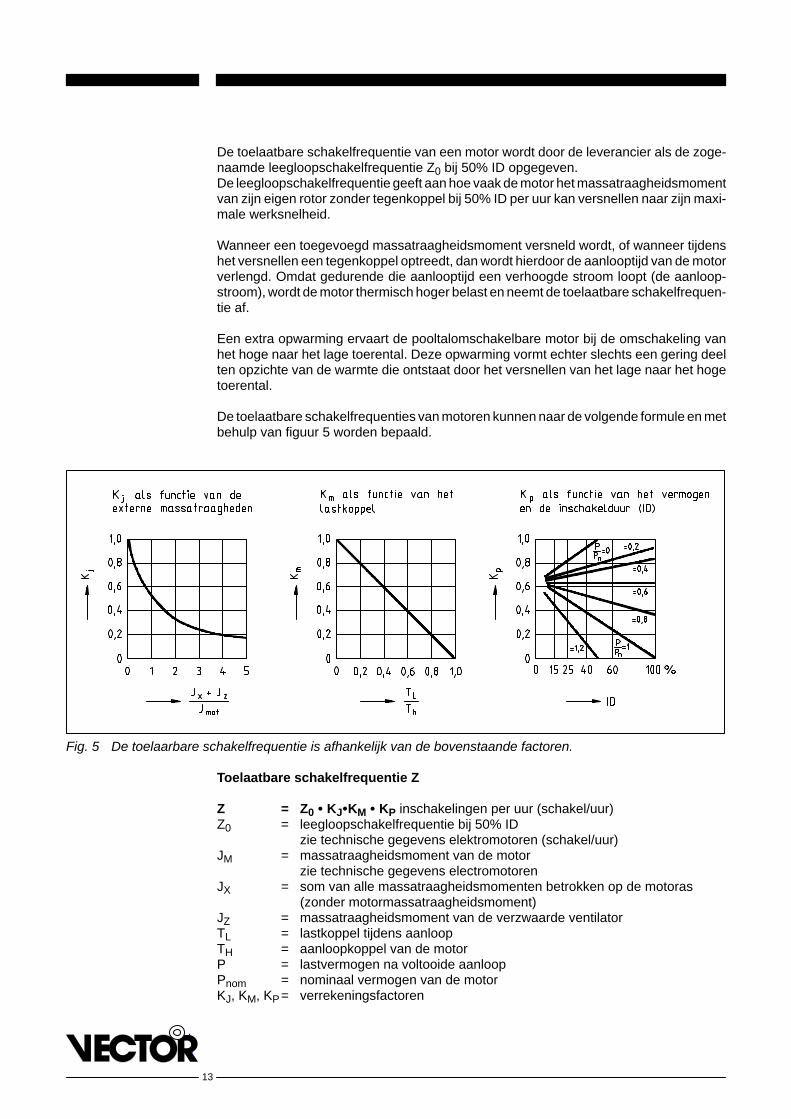
De toelaatbare schakelfrequenties van motoren kunnen naar de volgende formule en metbehulp van figuur 5 worden bepaald.
Fig. 5 De toelaarbare schakelfrequentie is afhankelijk van de bovenstaande factoren.
Toelaatbare schakelfrequentie Z
Z = Z0 � KJ�KM � KP inschakelingen per uur (schakel/uur)Z0 = leegloopschakelfrequentie bij 50% ID
zie technische gegevens elektromotoren (schakel/uur)JM = massatraagheidsmoment van de motor
zie technische gegevens electromotorenJX = som van alle massatraagheidsmomenten betrokken op de motoras
(zonder motormassatraagheidsmoment)JZ = massatraagheidsmoment van de verzwaarde ventilatorTL = lastkoppel tijdens aanloopTH = aanloopkoppel van de motorP = lastvermogen na voltooide aanloopPnom = nominaal vermogen van de motorKJ, KM, KP= verrekeningsfactoren
13
2.10 Zachte aanloop en een zachte omschakeling vanasynchrone draaistroomkortsluitrotormotoren
Het koppel van een asynchrone draaistroommotor kan door externe schakeling vansmoorspoelen of weerstanden worden beïnvloed. Eveneens is er een mogelijkheid doorspanningsvermindering een lager koppel te bereiken.De eenvoudigste vorm hiervoor is de zogenaamde ster-driehoekschakeling. Wanneer dewikkelingen van de motor zijn uitgelegd voor een aansluiting in driehoek aan een 400 Vnet, maar de motor tijdens het aanlopen in ster is aangesloten aan het 400 V net, dan volgthieruit een koppel van ca. 1/3 van het nominale koppel. De stromen en vooral de aanloop-stroom bereiken eveneens nog slechts 1/3 van hun waarde bij driehoekschakeling.Door een aanlooptransformator, passende smoorspoelen of weerstanden, wordt eenvergelijkbaar effect als bij de ster-driehoekschakeling bereikt, waarbij de grootte van desmoorspoelen resp. de weerstanden gewijzigd kan worden.Bij motoren met meerdere toerentallen is het soms noodzakelijk om bij het omschakelenvan het hoge naar het lage toerental een koppelreducerende schakelwijze te hanteren,omdat de omschakelkoppels groter zijn dan de aanloopkoppels. Hier biedt zich, naast demogelijkheid van smoorspoelen en voorschakelweerstanden, de goedkopere oplossingaan van omschakelen op 2 fasen.Omschakeling via 2 fasen betekent dat de motor tijdens het omschakeltijdstip gedurendeeen bepaalde tijd (instelbaar door middel van een tijdrelais) de wikkeling voor het lagetoerental slechts op 2 fasen ingeschakeld is. Door deze schakelwijze wordt het normalitersymmetrische draaiveld vervormd en krijgt de motor een kleiner omschakelkoppel.
Tu2ph = 0,5 � Tu of Tu2ph (1.....1,25) �TA1
Tu2ph = gemiddeld omschakelkoppel op 2 fasenTu = gemiddeld omschakelkoppel op 3 fasenTA1 = losbreekkoppel voor de wikkelingen van het lage toerental
Een vermindering van de aanloopversnelling en remvertraging en daarmee een zachteaanloop resp. een zachte afremming kan bij bepaalde toepassingen ook door het toege-voegde massatraagheidsmoment van een ventilator van gietijzer worden bereikt. Hierbijis het noodzakelijk de schakelfrequentie te controleren.Elektronische apparatuur voor de zachte aanloop of omschakeling maakt een traplozeaanpasssing van de aanloop of omschakeling naar de gewenste verhoudingen mogelijk.
2.11 Remmotoren
2.11.1 Opbouw en werking
Voor veel toepasssingen waarbij een nauwkeurige positionering noodzakelijk is, of bijhijswerktoepassingen, dient de motor met een mechanische rem te zijn uitgevoerd. SEW-EURODRIVE bouwt remmotoren in de bouwgrootten D63B03 en DT71BM(G) totDV225BM(G) (figuur 6).
14

Fig. 6 SEW-d.k.r.-remmotor en platenrem BM(G).
De remmen B03 en BM(G) zijn als platenrem in de motor geïntegreerd. De remmen wer-ken volgens het ruststroomprincipe, d.w.z. dat bij afschakeling van de motor of span-ningsuitval de rem vanzelf invalt. De schijfrem wordt door een gelijkspanning gelicht.De remspoel van de BM(G) rem bestaat uit 2 deelspoelen, die afhankelijk van de toepas-sing met aangepaste gelijkrichters resp. stuurapparatuur vanuit de klemmenkast van demotor of vanuit de schakelkast gevoed worden.De remmotoren D63B03 worden uitsluitend met de gelijkrichter BG geleverd en de remmoto-ren van de grootten 71 - 100 worden standaard met de enkelzijdige gelijkrichter BG geleverd.Voor bijzonder korte remlichtaanspreektijden en hoge schakelfrequenties in combinatiemet een korte invaltijd en hoge positioneernauwkeurigheid is voor motoren van de groot-ten 71-100 naar behoefte en voor motoren van de grootten 112...225 als standaard degelijkrichter BGE voor aansluitspanningen van 42-500 V beschikbaar. BGE is een enkel-zijdige gelijkrichter met een elektronische omschakeling van de lichtspoel naar de houd-spoel.Het lichten van de rem wordt versneld door een magnetisering met een extra excitatie-stoot waarna omgeschakeld wordt op een gereduceerde magnetisering om de remgelicht te houden.De met een BGE aangestuurde BM(G) rem vermindert onderhouds- en energiekostenbij de gebruiker door minimale slijtage en een maximale standtijd van de rem, alsmedeverwaarloosbare aanloopverliezen in de frequent geschakelde motor.BMH is een BGE met remverwarming en is voor alle motoren beschikbaar voor de inbouwin de schakelkast.De remgelijkrichters worden in de regel aangesloten aan het beschikbare wisselspan-ningsnet. Bij remmotoren met één toerental kan dit ook direct aan de motorklemmenplaatsvinden. De gelijkrichters dienen daarentegen bij pooltalomschakelbare motoren enbij door een frequentieregelaar gevoede motor met een afzonderlijke leiding vanuit deschakelkast aangestuurd te worden.
15
Het remkoppel van de platenrem is door keuze en aantal van de remveren te wijzigen.Dit is noodzakelijk om bijv. bij rijwerkaandrijvingen een remgedrag te verkrijgen dat gelijkis aan het versnellingsgedrag.Vanuit de fabriek worden de remmen met een nauwkeurig bepaalde remlichtspleet inge-steld geleverd. Door het remmen ontstaat slijtage. De rem dient overeenkomstig de hand-leiding nagesteld worden.
2.11.2 Remlichtaanspreek- en invaltijd
De BM(G) remmotoren met een BGE of BSG worden met een bijzonder korte veldopbou-wintegratietijd t1 (aanspreektijd) gelicht. Apparatuur voor een versnelde remlichting wordtdoor het systeem van BM(G) met BGE volledig vervangen.
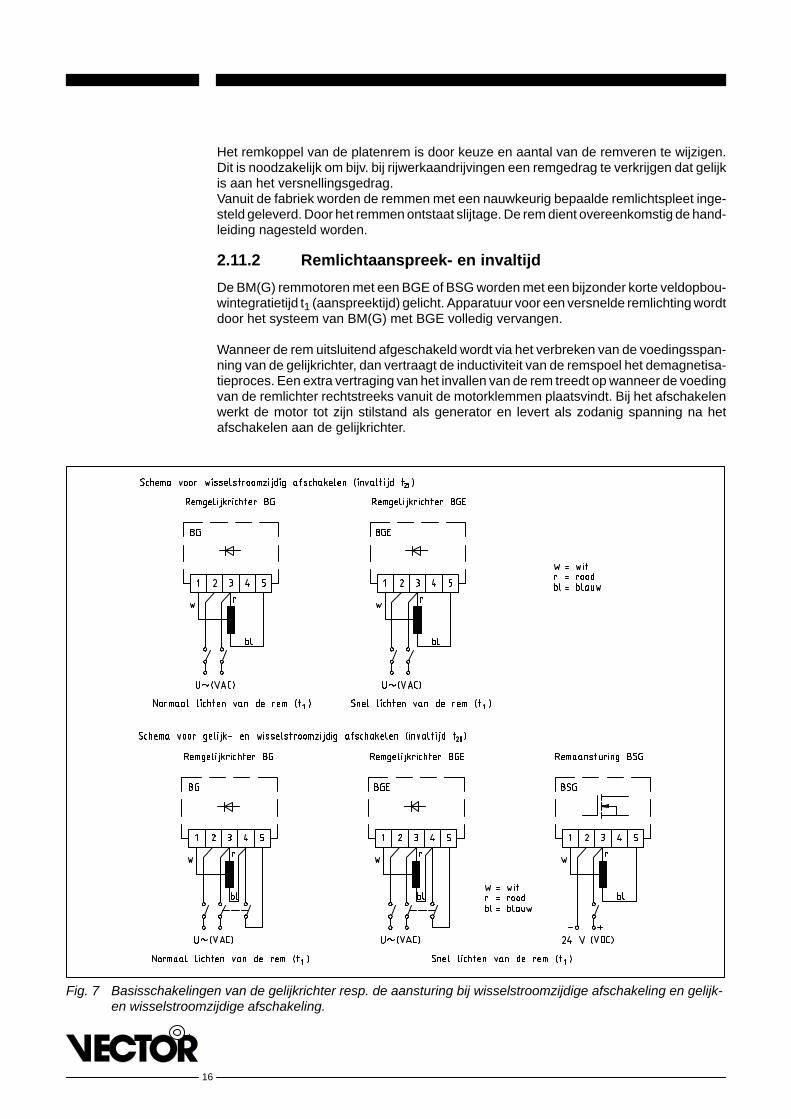
Wanneer de rem uitsluitend afgeschakeld wordt via het verbreken van de voedingsspan-ning van de gelijkrichter, dan vertraagt de inductiviteit van de remspoel het demagnetisa-tieproces. Een extra vertraging van het invallen van de rem treedt op wanneer de voedingvan de remlichter rechtstreeks vanuit de motorklemmen plaatsvindt. Bij het afschakelenwerkt de motor tot zijn stilstand als generator en levert als zodanig spanning na hetafschakelen aan de gelijkrichter.
Fig. 7 Basisschakelingen van de gelijkrichter resp. de aansturing bij wisselstroomzijdige afschakeling en gelijk-en wisselstroomzijdige afschakeling.
16
Ter verkorting van de invaltijd kan men enerzijds de gelijkrichter van de rem separaat van-uit de schakelkast voeden. In dat geval wordt de reminvaltijd t2l bij wisselstroomzijdigeafschakeling verkregen (zie figuur 7 en 8). Om ook de reminvalvertraging door inductivi-teit in het gelijkspanningscircuit tot een minimum te beperken, wordt de wissel- en gelijk-stroomzijdige afschakeling toegepast. De hieruit volgende invaltijd is t2ll.Voor de remsystemen B03 en BM(G) treft u de hierbij behorende remreactietijden als-mede verdere technische gegevens aan de Vector/SEW catalogi.
Fig. 8 Aanspraak- en invaltijden van de rem.
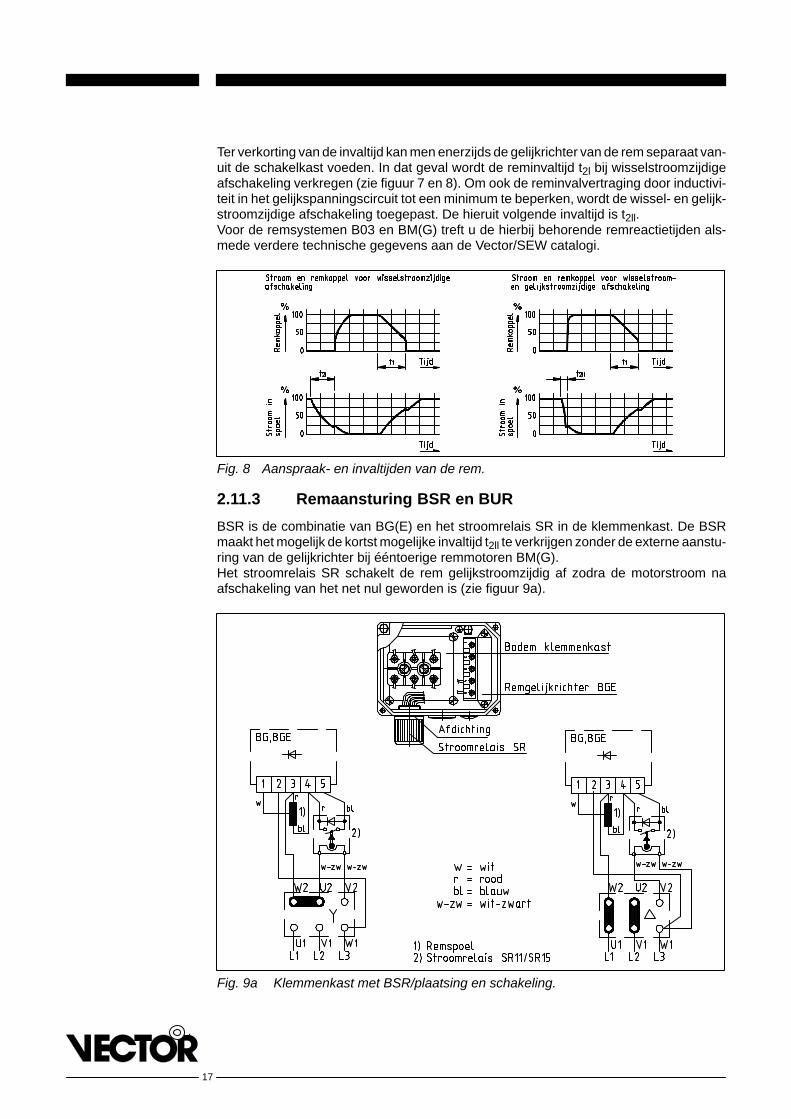
2.11.3 Remaansturing BSR en BUR
BSR is de combinatie van BG(E) en het stroomrelais SR in de klemmenkast. De BSRmaakt het mogelijk de kortst mogelijke invaltijd t2ll te verkrijgen zonder de externe aanstu-ring van de gelijkrichter bij ééntoerige remmotoren BM(G).Het stroomrelais SR schakelt de rem gelijkstroomzijdig af zodra de motorstroom naafschakeling van het net nul geworden is (zie figuur 9a).
Fig. 9a Klemmenkast met BSR/plaatsing en schakeling.
17
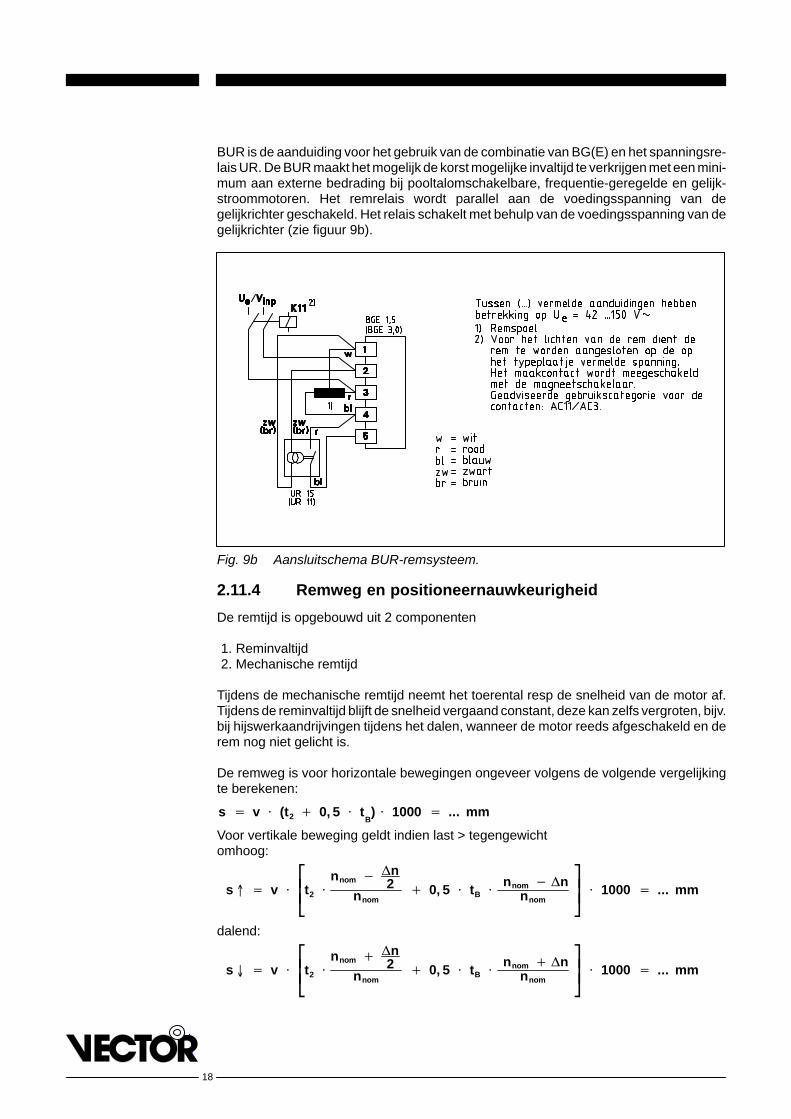
BUR is de aanduiding voor het gebruik van de combinatie van BG(E) en het spanningsre-lais UR. De BUR maakt het mogelijk de korst mogelijke invaltijd te verkrijgen met een mini-mum aan externe bedrading bij pooltalomschakelbare, frequentie-geregelde en gelijk-stroommotoren. Het remrelais wordt parallel aan de voedingsspanning van degelijkrichter geschakeld. Het relais schakelt met behulp van de voedingsspanning van degelijkrichter (zie figuur 9b).
Fig. 9b Aansluitschema BUR-remsysteem.
2.11.4 Remweg en positioneernauwkeurigheid
De remtijd is opgebouwd uit 2 componenten
1. Reminvaltijd2. Mechanische remtijd
Tijdens de mechanische remtijd neemt het toerental resp de snelheid van de motor af.Tijdens de reminvaltijd blijft de snelheid vergaand constant, deze kan zelfs vergroten, bijv.bij hijswerkaandrijvingen tijdens het dalen, wanneer de motor reeds afgeschakeld en derem nog niet gelicht is.
De remweg is voor horizontale bewegingen ongeveer volgens de volgende vergelijkingte berekenen:
s � v � (t2 � 0, 5 � tB) � 1000 � ... mm
Voor vertikale beweging geldt indien last > tegengewichtomhoog:
s � � v ��
�
t2 �
nnom ��n2
nnom� 0, 5 � tB �
nnom � �nnnom
��
�
� 1000 � ... mm
dalend:
s � � v ��
�
t2 �
nnom ��n2
nnom� 0, 5 � tB �
nnom � �nnnom
��
�
� 1000 � ... mm
18
met
�n �
9, 55 � Tlast � t2
�J� ... r�min
De tolerantie voor de remweg bij ongewijzigde omstandigheden bedraagt ca. 12%. Bijzeer kleine remtijden kan een grotere invloed van de elektrische sturing (relais- of ver-breektijden) de remweg verlengen. Bij PLC’s kunnen toegevoegde tijden door program-madoorloop en uitgangsprioriteit ontstaan.
Opmerking:Door strooiing kunnen de remwegen van de mechanische remmen individuele afwijkin-gen vertonen binnen één typenreeks tot 30%.
2.11.5 Langdurige lichting van de rem
De BM(G) platenrem kan mechanisch of elektrisch gelicht worden. Bij de mechanischelichting wordt een remlichthefboom, ofwel zelf-terugspringend of vastzetbaar, geleverd.Bij de elektrische lichting van de rem zonder dat hierbij de motor ingeschakeld wordt dienter op gelet te worden dat dit alleen in combinatie met de gelijkrichter BGE of het stuurap-paraat BSG toelaatbaar is (geldt uiteraard ook bij zeer lage motortoerentallen en onvol-doende remkoeling).
2.11.6 Remverwarming
Voor bijzondere omgevingsomstandigheden zoals bijv. het gebruik in de buitenlucht of ineen diepvriesruimte is het noodzakelijk de rem tegen vastvriezen te beschermen. De spe-ciale remgelijkrichter BMH maakt zowel de kortst mogelijke aanspreektijd als ook de ver-warming tijdens stilstand mogelijk.
2.11.7 Remcontacten
Omdat bij de remspoel gelijkstromen met een inductief aandeel geschakeld worden, die-nen de schakelcontacten overeenkomstig gedimensioneerd te zijn. Hier is het nodig omgeschikte schakelcontacten, zoals deze in de handel te verkrijgen zijn te gebruiken.Goede ervaringen zijn ook opgedaan met wisselstroomschakelcontacten, die voor AC3bedrijf toegelaten zijn.Hulpcontacten van vermogensschakelaars voldoen daarentegen niet. Te vermijdenbedrijfsstoringen door verbrande contacten zijn het gevolg.
2.11.8 Tegenstroomremming - gelijkstroomremming
Tegenstroomremming of reverseerbedrijf, d.w.z. het ompolen van de motor bij het maxi-mum toerental, levert voor de motor een grote mechanische en thermische belasting op.De hoge mechanische belasting geldt ook voor de in de aandrijfketen opgenomen tand-wielkast en verdere overbrengingsorganen. Hier dient in ieder geval ruggespraak gehou-den te worden met de leverancier van de aandrijving.Met een gelijkstroomremming kunnen motoren zonder rem al naar gelang de hoogte vande gelijkstroom meer of minder snel afgeremd worden. Omdat deze wijze van motor-afremming tot extra warmte ontwikkeling leidt, dient ook hier overleg met de leverancierplaats te vinden.
19

2.12 Beschermingsklassen van SEW draaistroommotor-reductoren resp. remmotorreductoren
Afhankelijk van de omgevingsomstandigheden - hoge luchtvochtigheid, aggressievestoffen, spuit- of druipwater, stofafzetting enz. - worden draaistroommotoren, al dan nietuitgevoerd met rem, standaard in de beschermingsklassen IP54, IP55, IP 65 en IP 56geleverd.Een verhoogde bestendigheid tegen corrosie van metalen delen en een extra impregne-ring van de wikkelingen (vocht- en zurenbescherming) zijn evenzeer mogelijk als de leve-ring van door een erkend keuringsinstituut goedgekeurde motoren, zoals verminderdexplosiegevaarlijke motoren en remmotoren volgens beschermingsklassre EExe (ver-hoogde veiligheid, EExed (motor verhoogde veiligheid, rem in drukvaste omhulling),resp. EExd (drukvaste omhulling).
20
3 Draaistroomaandrijvingen met een variabeltoerental door een mechanische verstelling
3.1 Het SEW programma mechanische variatoren
Veel bewegingsprocessen vragen om een aandrijving met een verstelbaar toerental meteen klein instelbereik zonder dat er bijzondere eisen gesteld worden aan de mate waarinhet toerental op een gelijke waarde dient te blijven, bijv. transportbanden in de verpak-kings- of drankindustrie. Hier wordt uitsluitend het toerental van de afzonderlijke bandenop een gunstige transportsnelheid ingesteld.De mechanische variatoren worden vaak uitgevoerd met een reductiekast na het varia-tordeel. De variatoren worden aangedreven door een draaistroomkortsluitrotormotor (ziehoofdstuk 2, pagina 6 e.v.).SEW-EURODRIVE bouwt 2 reeksen mechanische variatoren:1. Wrijvingsschijfvariatoren, bouwreeks VARIMOT� met een maximaal over te brengen
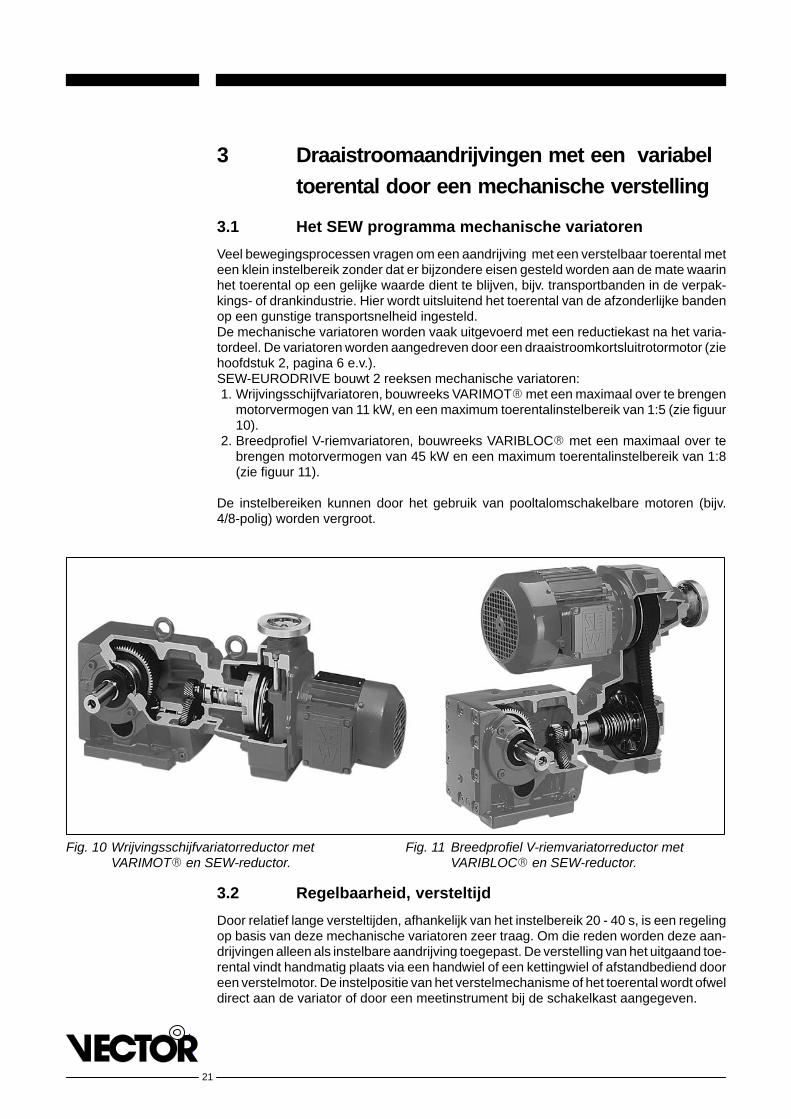
motorvermogen van 11 kW, en een maximum toerentalinstelbereik van 1:5 (zie figuur10).
2. Breedprofiel V-riemvariatoren, bouwreeks VARIBLOC� met een maximaal over tebrengen motorvermogen van 45 kW en een maximum toerentalinstelbereik van 1:8(zie figuur 11).
De instelbereiken kunnen door het gebruik van pooltalomschakelbare motoren (bijv.4/8-polig) worden vergroot.
Fig. 10 Wrijvingsschijfvariatorreductor met Fig. 11 Breedprofiel V-riemvariatorreductor met VARIMOT� en SEW-reductor. VARIBLOC� en SEW-reductor.
3.2 Regelbaarheid, versteltijd
Door relatief lange versteltijden, afhankelijk van het instelbereik 20 - 40 s, is een regelingop basis van deze mechanische variatoren zeer traag. Om die reden worden deze aan-drijvingen alleen als instelbare aandrijving toegepast. De verstelling van het uitgaand toe-rental vindt handmatig plaats via een handwiel of een kettingwiel of afstandbediend dooreen verstelmotor. De instelpositie van het verstelmechanisme of het toerental wordt ofweldirect aan de variator of door een meetinstrument bij de schakelkast aangegeven.
21
3.3 De groottebepaling van de variatorreductor
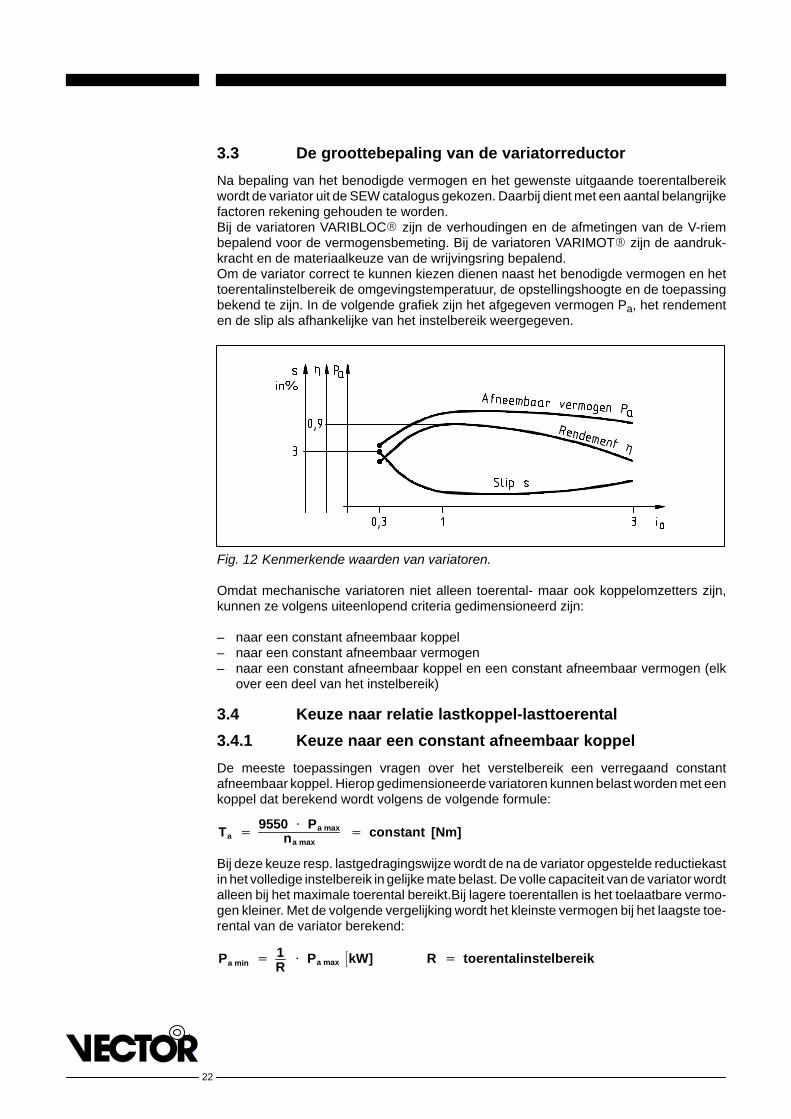
Na bepaling van het benodigde vermogen en het gewenste uitgaande toerentalbereikwordt de variator uit de SEW catalogus gekozen. Daarbij dient met een aantal belangrijkefactoren rekening gehouden te worden.Bij de variatoren VARIBLOC� zijn de verhoudingen en de afmetingen van de V-riembepalend voor de vermogensbemeting. Bij de variatoren VARIMOT� zijn de aandruk-kracht en de materiaalkeuze van de wrijvingsring bepalend.Om de variator correct te kunnen kiezen dienen naast het benodigde vermogen en hettoerentalinstelbereik de omgevingstemperatuur, de opstellingshoogte en de toepassingbekend te zijn. In de volgende grafiek zijn het afgegeven vermogen Pa, het rendementen de slip als afhankelijke van het instelbereik weergegeven.
Fig. 12 Kenmerkende waarden van variatoren.
Omdat mechanische variatoren niet alleen toerental- maar ook koppelomzetters zijn,kunnen ze volgens uiteenlopend criteria gedimensioneerd zijn:
– naar een constant afneembaar koppel– naar een constant afneembaar vermogen– naar een constant afneembaar koppel en een constant afneembaar vermogen (elk
over een deel van het instelbereik)
3.4 Keuze naar relatie lastkoppel-lasttoerental
3.4.1 Keuze naar een constant afneembaar koppel
De meeste toepassingen vragen over het verstelbereik een verregaand constantafneembaar koppel. Hierop gedimensioneerde variatoren kunnen belast worden met eenkoppel dat berekend wordt volgens de volgende formule:
Ta �9550 � Pa max
na max� constant [Nm]
Bij deze keuze resp. lastgedragingswijze wordt de na de variator opgestelde reductiekastin het volledige instelbereik in gelijke mate belast. De volle capaciteit van de variator wordtalleen bij het maximale toerental bereikt.Bij lagere toerentallen is het toelaatbare vermo-gen kleiner. Met de volgende vergelijking wordt het kleinste vermogen bij het laagste toe-rental van de variator berekend:
Pa min � 1R
� Pa max �kW] R � toerentalinstelbereik
22
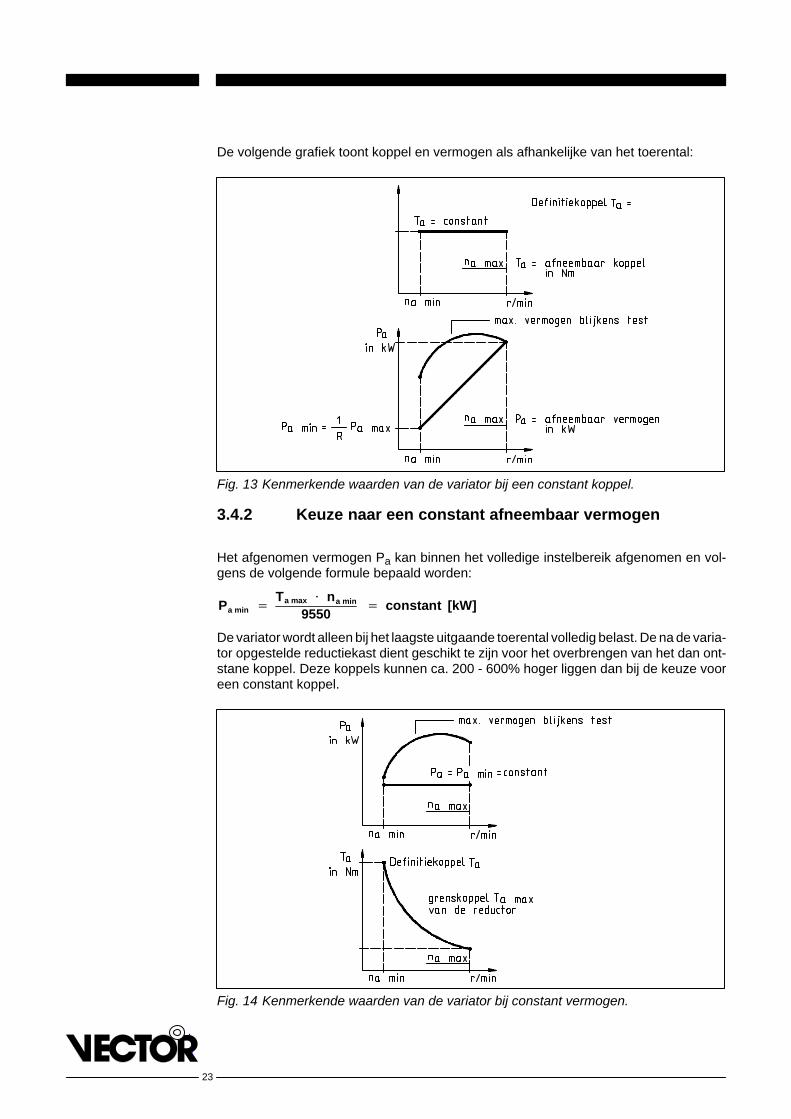
De volgende grafiek toont koppel en vermogen als afhankelijke van het toerental:
Fig. 13 Kenmerkende waarden van de variator bij een constant koppel.
3.4.2 Keuze naar een constant afneembaar vermogen
Het afgenomen vermogen Pa kan binnen het volledige instelbereik afgenomen en vol-gens de volgende formule bepaald worden:
Pa min �Ta max � na min
9550� constant [kW]
De variator wordt alleen bij het laagste uitgaande toerental volledig belast. De na de varia-tor opgestelde reductiekast dient geschikt te zijn voor het overbrengen van het dan ont-stane koppel. Deze koppels kunnen ca. 200 - 600% hoger liggen dan bij de keuze vooreen constant koppel.
Fig. 14 Kenmerkende waarden van de variator bij constant vermogen.
23
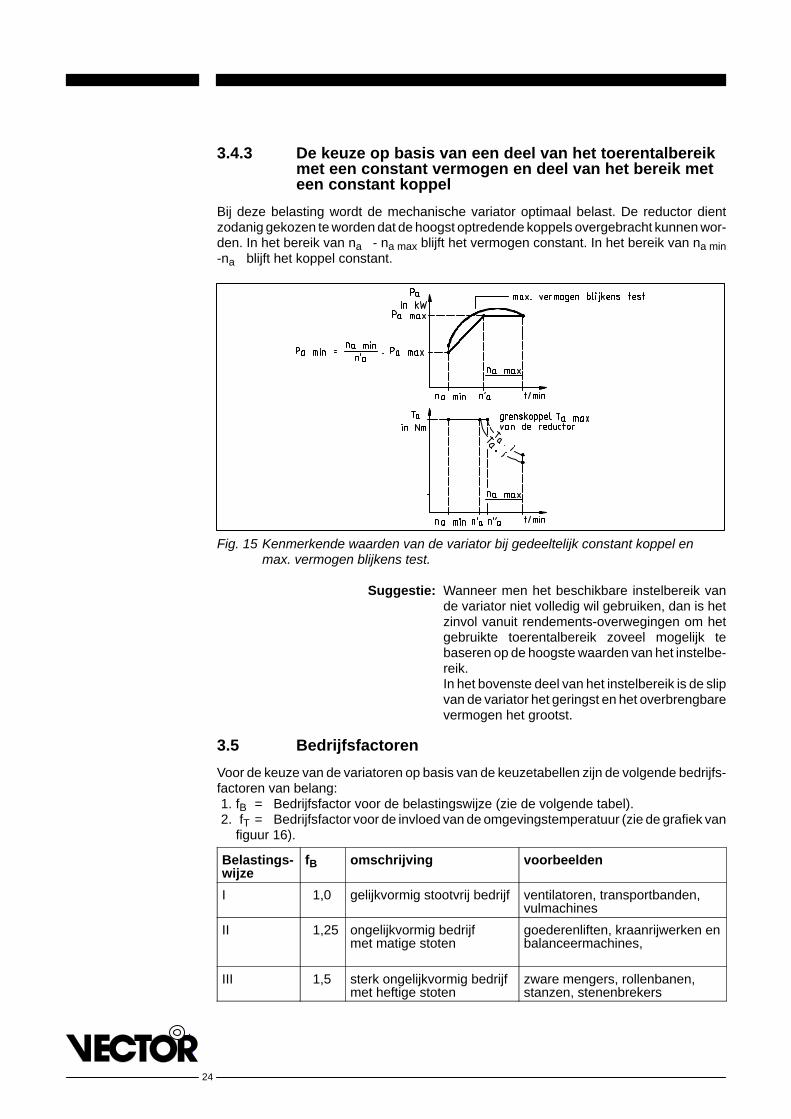
3.4.3 De keuze op basis van een deel van het toerentalbereikmet een constant vermogen en deel van het bereik meteen constant koppel
Bij deze belasting wordt de mechanische variator optimaal belast. De reductor dientzodanig gekozen te worden dat de hoogst optredende koppels overgebracht kunnen wor-den. In het bereik van na - na max blijft het vermogen constant. In het bereik van na min-na blijft het koppel constant.
Fig. 15 Kenmerkende waarden van de variator bij gedeeltelijk constant koppel enmax. vermogen blijkens test.
Suggestie: Wanneer men het beschikbare instelbereik vande variator niet volledig wil gebruiken, dan is hetzinvol vanuit rendements-overwegingen om hetgebruikte toerentalbereik zoveel mogelijk tebaseren op de hoogste waarden van het instelbe-reik.In het bovenste deel van het instelbereik is de slipvan de variator het geringst en het overbrengbarevermogen het grootst.
3.5 Bedrijfsfactoren
Voor de keuze van de variatoren op basis van de keuzetabellen zijn de volgende bedrijfs-factoren van belang:1. fB = Bedrijfsfactor voor de belastingswijze (zie de volgende tabel).2. fT = Bedrijfsfactor voor de invloed van de omgevingstemperatuur (zie de grafiek van
figuur 16).
Belastings-wijze
fB omschrijving voorbeelden
I 1,0 gelijkvormig stootvrij bedrijf ventilatoren, transportbanden,vulmachines
II 1,25 ongelijkvormig bedrijfmet matige stoten
goederenliften, kraanrijwerken enbalanceermachines,
III 1,5 sterk ongelijkvormig bedrijfmet heftige stoten
zware mengers, rollenbanen,stanzen, stenenbrekers
24
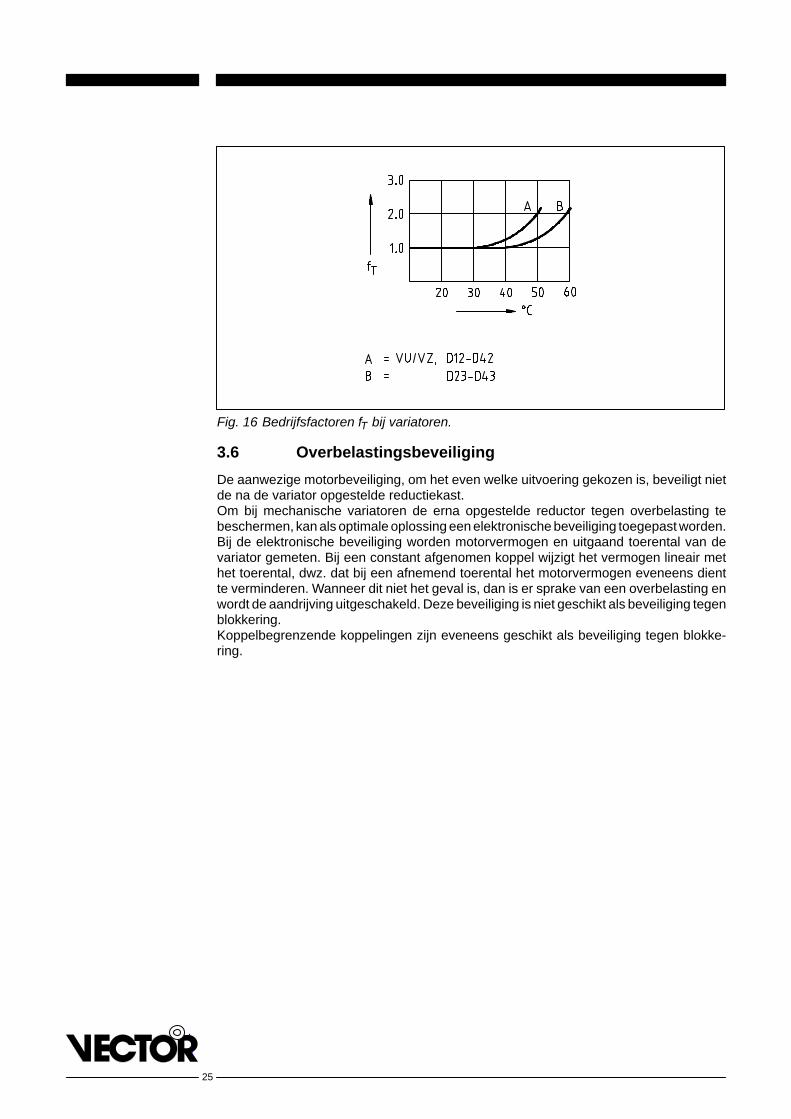
Fig. 16 Bedrijfsfactoren fT bij variatoren.
3.6 Overbelastingsbeveiliging
De aanwezige motorbeveiliging, om het even welke uitvoering gekozen is, beveiligt nietde na de variator opgestelde reductiekast.Om bij mechanische variatoren de erna opgestelde reductor tegen overbelasting tebeschermen, kan als optimale oplossing een elektronische beveiliging toegepast worden.Bij de elektronische beveiliging worden motorvermogen en uitgaand toerental van devariator gemeten. Bij een constant afgenomen koppel wijzigt het vermogen lineair methet toerental, dwz. dat bij een afnemend toerental het motorvermogen eveneens dientte verminderen. Wanneer dit niet het geval is, dan is er sprake van een overbelasting enwordt de aandrijving uitgeschakeld. Deze beveiliging is niet geschikt als beveiliging tegenblokkering.Koppelbegrenzende koppelingen zijn eveneens geschikt als beveiliging tegen blokke-ring.
25
4 Draaistroomaandrijvingen met een variabeltoerental door middel van frequentieregelaar
Nieuwe ontwikkelingen op het gebied van de vermogenshalfgeleiders (vermogens-transistoren, GTO thyristoren, RTL thyristoren) en de digitale technieken (microproces-soren) maken in toenemende mate de economische toepassing van door een frequentie-regelaar gevoede draaistroommotoren mogelijk.Een frequentieregelaar levert een variabele instelbare uitgangsfrequentie met een zichevenredig aanpassende uitgangsspanning. Hierdoor zijn draaistroomkortsluitrotormoto-ren instelbaar in hun toerental.
4.1 Typen frequentieregelaars
Frequentieregelaars voor asynchroonmotoren kunnen verdeeld worden in 3 groepen:1. Frequentieregelaars zonder tussenkring (directe omvormers).2. Frequentieregelaars met een gelijkspannings-tussenkring (U-omvormers).3. Frequentieregelaars met een gelijkstroom-tussenkring (I-omvormers).
4.1.1 Frequentieregelaars zonder tussenkring(directe omvormers)
De directe omvormer is in wezen uit drie enkelfasige 2-weg omvormers opgebouwd. Doorop de juiste manier te chopperen in de primaire voedingsspanningscurve afwisselend inhet gelijkrichter en wisselrichterbereik, wordt een nieuwe sinusvormige spanningsgolfgecreëerd met een variabele amplitude, waarvan de maximale frequentie 40% van denetfrequentie bedraagt. Bij een 50 Hz net is de bereikbare uitgangsfrequentie dus maxi-maal 20 Hz.Dit type omvormer wordt vooral bij hogere vermogens vanaf ca. 500 kVA toegepast, bijv.bij grote cementmolens en walsaandrijvingen.
4.1.2 Frequentieregelaars met een gelijkspannings-tussenkring (U-omvormers)
Dit type frequentieregelaar is door z’n universele toepasbaarheid de meest gebruikelijke.Deze kan zowel voor de voeding van één individuele motor als voor meerdere motorentoegepast worden. Door de eigenschap van de vastgelegde spanning in de gelijkspan-ningstussenkring is de regelaar geschikt voor onbelast bedrijf, hij kan dus zonderbezwaar gescheiden worden van de belasting.
Algemene eigenschappenEénkwadrantbedrijf, vierkwadrantbedrijf door elektronisch omkering van het draaiveld enremchopper, of net-terugvoedingswisselrichter met aanpassingstrafo is mogelijk.
Typische toepassingsgebiedenVermogensbereik 0,1....500 kVA, roerwerken, ventilatoren, pompen, textiel-, houtbe-werkings- en slijpmachines, transportaandrijvingen; met name wanneer een grotemate van onderhoudsvrijheid en/of een hoge beschermingsklasse en/of hoge toeren-tallen gewenst zijn.
UitvoeringsvariantenIngangskring en tussenkring en het wisselrichterdeel worden in verschillende variantenaangeboden.
Frequentieregelaar met een vaste tussenkringspanning
26
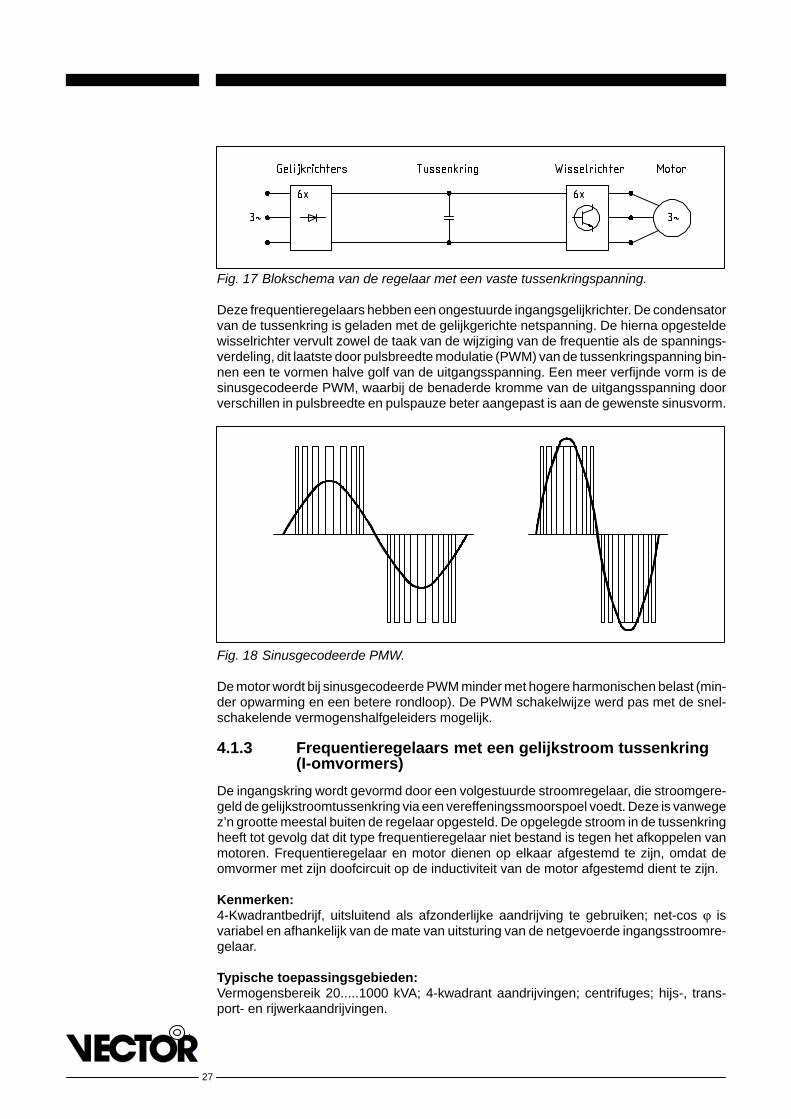
Fig. 17 Blokschema van de regelaar met een vaste tussenkringspanning.
Deze frequentieregelaars hebben een ongestuurde ingangsgelijkrichter. De condensatorvan de tussenkring is geladen met de gelijkgerichte netspanning. De hierna opgesteldewisselrichter vervult zowel de taak van de wijziging van de frequentie als de spannings-verdeling, dit laatste door pulsbreedte modulatie (PWM) van de tussenkringspanning bin-nen een te vormen halve golf van de uitgangsspanning. Een meer verfijnde vorm is desinusgecodeerde PWM, waarbij de benaderde kromme van de uitgangsspanning doorverschillen in pulsbreedte en pulspauze beter aangepast is aan de gewenste sinusvorm.
Fig. 18 Sinusgecodeerde PMW.
De motor wordt bij sinusgecodeerde PWM minder met hogere harmonischen belast (min-der opwarming en een betere rondloop). De PWM schakelwijze werd pas met de snel-schakelende vermogenshalfgeleiders mogelijk.
4.1.3 Frequentieregelaars met een gelijkstroom tussenkring(I-omvormers)
De ingangskring wordt gevormd door een volgestuurde stroomregelaar, die stroomgere-geld de gelijkstroomtussenkring via een vereffeningssmoorspoel voedt. Deze is vanwegez’n grootte meestal buiten de regelaar opgesteld. De opgelegde stroom in de tussenkringheeft tot gevolg dat dit type frequentieregelaar niet bestand is tegen het afkoppelen vanmotoren. Frequentieregelaar en motor dienen op elkaar afgestemd te zijn, omdat deomvormer met zijn doofcircuit op de inductiviteit van de motor afgestemd dient te zijn.
Kenmerken:4-Kwadrantbedrijf, uitsluitend als afzonderlijke aandrijving te gebruiken; net-cos ϕ isvariabel en afhankelijk van de mate van uitsturing van de netgevoerde ingangsstroomre-gelaar.
Typische toepassingsgebieden:Vermogensbereik 20.....1000 kVA; 4-kwadrant aandrijvingen; centrifuges; hijs-, trans-port- en rijwerkaandrijvingen.
27
4.2 Kenmerkende gedragingen/frequentiebereik
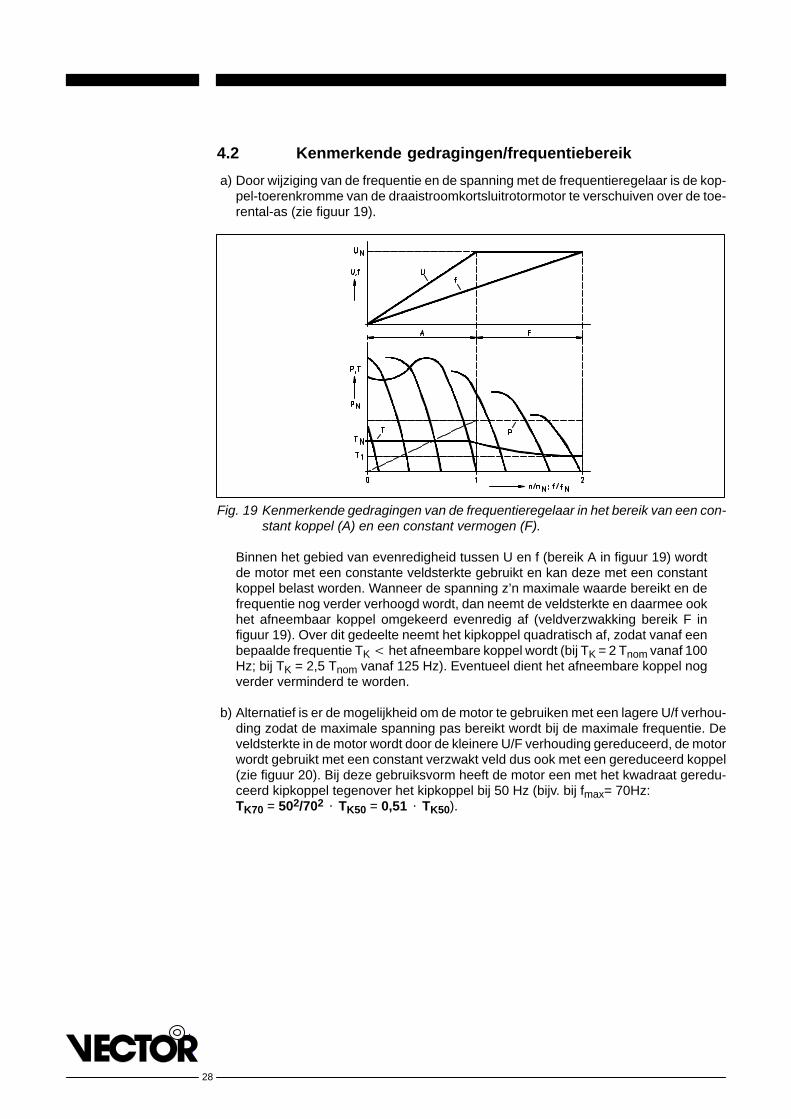
a) Door wijziging van de frequentie en de spanning met de frequentieregelaar is de kop-pel-toerenkromme van de draaistroomkortsluitrotormotor te verschuiven over de toe-rental-as (zie figuur 19).
Fig. 19 Kenmerkende gedragingen van de frequentieregelaar in het bereik van een con-stant koppel (A) en een constant vermogen (F).
Binnen het gebied van evenredigheid tussen U en f (bereik A in figuur 19) wordtde motor met een constante veldsterkte gebruikt en kan deze met een constantkoppel belast worden. Wanneer de spanning z’n maximale waarde bereikt en defrequentie nog verder verhoogd wordt, dan neemt de veldsterkte en daarmee ookhet afneembaar koppel omgekeerd evenredig af (veldverzwakking bereik F infiguur 19). Over dit gedeelte neemt het kipkoppel quadratisch af, zodat vanaf eenbepaalde frequentie TK � het afneembare koppel wordt (bij TK = 2 Tnom vanaf 100Hz; bij TK = 2,5 Tnom vanaf 125 Hz). Eventueel dient het afneembare koppel nogverder verminderd te worden.
b) Alternatief is er de mogelijkheid om de motor te gebruiken met een lagere U/f verhou-ding zodat de maximale spanning pas bereikt wordt bij de maximale frequentie. Develdsterkte in de motor wordt door de kleinere U/F verhouding gereduceerd, de motorwordt gebruikt met een constant verzwakt veld dus ook met een gereduceerd koppel(zie figuur 20). Bij deze gebruiksvorm heeft de motor een met het kwadraat geredu-ceerd kipkoppel tegenover het kipkoppel bij 50 Hz (bijv. bij fmax= 70Hz:TK70 = 502/702 � TK50 = 0,51 � TK50).
28
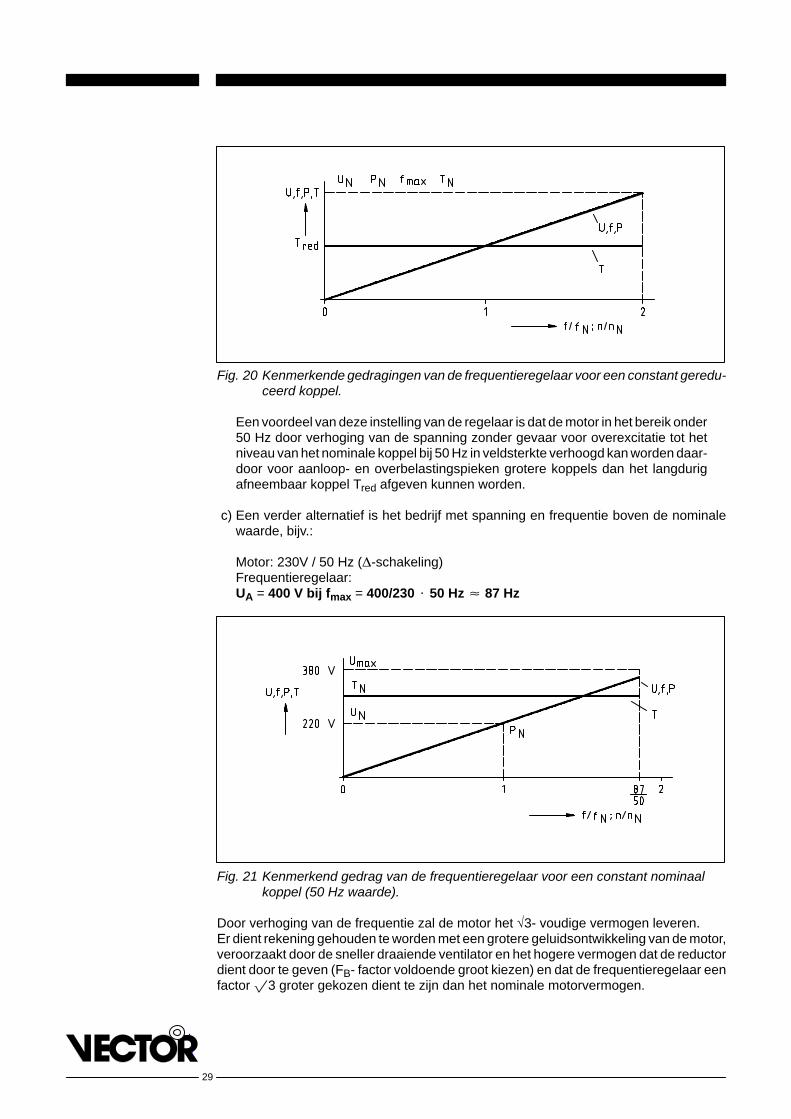
Fig. 20 Kenmerkende gedragingen van de frequentieregelaar voor een constant geredu-ceerd koppel.
Een voordeel van deze instelling van de regelaar is dat de motor in het bereik onder50 Hz door verhoging van de spanning zonder gevaar voor overexcitatie tot hetniveau van het nominale koppel bij 50 Hz in veldsterkte verhoogd kan worden daar-door voor aanloop- en overbelastingspieken grotere koppels dan het langdurigafneembaar koppel Tred afgeven kunnen worden.
c) Een verder alternatief is het bedrijf met spanning en frequentie boven de nominalewaarde, bijv.:
Motor: 230V / 50 Hz (�-schakeling)Frequentieregelaar:UA = 400 V bij fmax = 400/230 � 50 Hz � 87 Hz
Fig. 21 Kenmerkend gedrag van de frequentieregelaar voor een constant nominaalkoppel (50 Hz waarde).
Door verhoging van de frequentie zal de motor het √3- voudige vermogen leveren.Er dient rekening gehouden te worden met een grotere geluidsontwikkeling van de motor,veroorzaakt door de sneller draaiende ventilator en het hogere vermogen dat de reductordient door te geven (FB- factor voldoende groot kiezen) en dat de frequentieregelaar eenfactor �3 groter gekozen dient te zijn dan het nominale motorvermogen.
29
4.3 Koeling/Motordimensionering
Een voorwaarde voor de afname van een constant koppel is een gelijkblijvende koeling,ook in het onderste toerentalbereik. Dit is echter bij motoren met een zelfstandige koelingniet mogelijk, omdat met een afnemend toerental de koeling eveneens vermindert. Wan-neer geen afzonderlijk aangedreven ventilator wordt toegepast dan dient het koppel gere-duceerd te worden.
Van een afzonderlijk aangedreven ventilator kan alleen bij een constant koppel afgezienworden wanneer de motor overgedimensioneerd wordt. Door het in vergelijking met hetafgegeven vermogen nu grotere motoroppervlak wordt de verlies-energie ook bij delagere toerentallen afgevoerd.
Eveneens van invloed op de dimensionering van de motor is de wijze waarop de uitgangs-stroom tot stand komt. Naarmate deze in meerdere mate de ideale sinusvorm benadert,zoveel gunstiger is de belasting van de motor.
Bij de keuze van de maximale frequentie dienen ook de belangen van de motorreductorin het oog gehouden te worden. De hoge omtrekssnelheid van het ingaande tandwielstelmet de hiermee samenhangende gevolgen (woelingsverliezen, lager- en keerring-beïnvloeding alsmede geluidsvorming) begrenzen het hoogst toelaatbare toerental.
De ondergrens van het frequentiebereik wordt door de frequentieregelaar zelf bepaald.De rondloopkwaliteit bij lage toerentallen wordt bepaald door de kwaliteit van de tot standgebrachte sinusvormige uitgangsstroom. De stabiliteit van het toerental onder belastingdoor de kwaliteit van de slip- en de IxR compensatie of alternatief door een toerenregelingmet gebruik van een aan de motor gebouwde encoder.
4.4 Selectie-aanwijzingen voor SEW-motorreductoren meteen frequentieregelaar
Het gebruik van draaistroommotorreductoren in combinatie met een frequentiereglaarvraagt bij de keuze van de motoren om het in acht nemen van het volgende:
1. Het koelend effect van een door de motor zelf aangedreven ventilator neemt af bijafnemend toerental zodat bij langdurig bedrijf in een deeltoerental het afgegeven ver-mogen (koppel) gereduceerd of de motor afzonderlijk gekoeld dient te worden.
2. Afhankelijk van de werkingswijze van de frequentieregelaar wekt deze een span-ningsvorm op, die een min of meer sinusvormig stroomverloop tot gevolg heeft. Hetaandeel hogere harmonischen van de stroom ontwikkelt in de motor extra verliezen.
3. Het bedrijf via een frequentieregelaar betekent t.o.v. netbedrijf een meer dwangmatigbedrijf met wat verminderde spanning (spanningsverliezen in de frequentieregelaaralsmede intrinsiek verbonden aan het gebruik van PWM) en daarmee verhoogde slip-verliezen in de motor.
Welke richtlijnen geeft Vector?Een algemene keuze voor isolatieklasse F en het inbouwen van temperatuurvoelers TFof thermostaten TH.
Vanwege het toerentalbereik,het rendement en de cos ϕ dienen alleen 4-polige motorentoegepast te worden.
Bij de keuze van het maximum toerental in het gebied van veldverzwakking dient overde keuze van de maximale frequentie bedacht te worden dat het nominale koppel Tnom(betrokken op de nominale frequentie, bijv. 50 Hz) bij een toenemende frequentieafneemt. Om een kipveilig bedrijf te garanderen, dient de verhouding TK/Tnom �1 blijven.
30
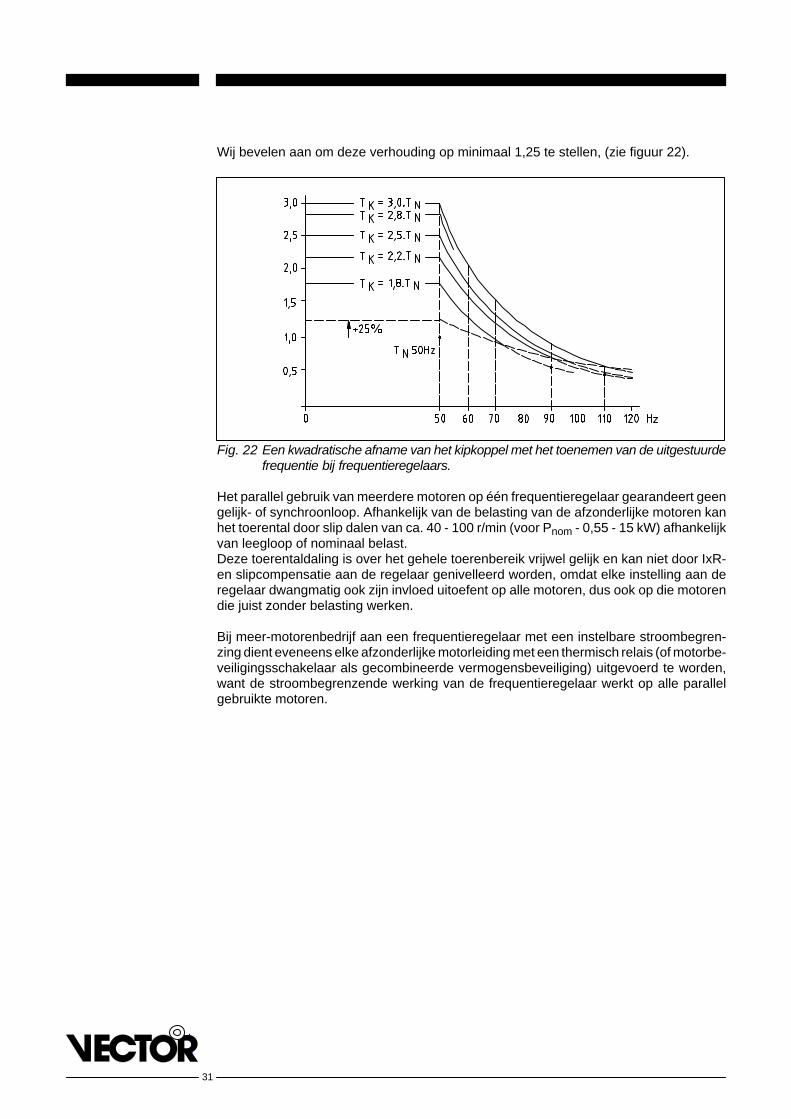
Wij bevelen aan om deze verhouding op minimaal 1,25 te stellen, (zie figuur 22).
Fig. 22 Een kwadratische afname van het kipkoppel met het toenemen van de uitgestuurdefrequentie bij frequentieregelaars.
Het parallel gebruik van meerdere motoren op één frequentieregelaar gearandeert geengelijk- of synchroonloop. Afhankelijk van de belasting van de afzonderlijke motoren kanhet toerental door slip dalen van ca. 40 - 100 r/min (voor Pnom - 0,55 - 15 kW) afhankelijkvan leegloop of nominaal belast.Deze toerentaldaling is over het gehele toerenbereik vrijwel gelijk en kan niet door IxR-en slipcompensatie aan de regelaar genivelleerd worden, omdat elke instelling aan deregelaar dwangmatig ook zijn invloed uitoefent op alle motoren, dus ook op die motorendie juist zonder belasting werken.
Bij meer-motorenbedrijf aan een frequentieregelaar met een instelbare stroombegren-zing dient eveneens elke afzonderlijke motorleiding met een thermisch relais (of motorbe-veiligingsschakelaar als gecombineerde vermogensbeveiliging) uitgevoerd te worden,want de stroombegrenzende werking van de frequentieregelaar werkt op alle parallelgebruikte motoren.
31
5 Reductoren
5.1 Motorreductoren
Een motorreductor is de constructieve eenheid van een elektromotor en een reductie-kast. Motorreductoren worden aangeboden in diverse uitvoeringsvormen. Beschikbaarzijn: tandwielkasten met een co-axiale ligging van de uitgaande as ten opzichte van deingaande (motor)as, vlakke tandwielkasten met een ligging van de uitgaande as die even-wijdig is aan die van de ingaande as en kegelwiel- en wormwielkasten waarbij de uit-gaande as haaks geplaatst is op de ingaande as.Criteria voor de keuze hieruit zijn onder andere plaatsruimte, bevestigingsmogelijkhedenen de verbinding met het lastwerktuig.Het rendement van de vertanding van alle genoemde typen aandrijvingen, met uitzonde-ring van de wormwielkasten, is relatief hoog en bedraagt afhankelijk van het aantal tand-wieltrappen tussen 94 en 98%. Bij wormwielkasten is het rendement van de vertandingal naar het aantal gangen van de worm (1, 2 of 5-gangig) verschillend. Dit rendement ligttussen 30 en 90%. Wanneer het rendement van een wormwieloverbrenging onder de50% ligt, is de reductor statisch zelfremmend. Dergelijke aandrijvingen mogen alleen dangebruikt worden wanneer er geen kans is op het leveren van koppels door het lastwerk-tuig naar de motor, of deze zodanig gering zijn dat de reductor hierdoor geen schade kanondervinden.
5.2 Uitgaand toerental, afneembaar koppel
De keuze van de toe te passen reductorgrootte richt zich naar het afneembaar koppel aande uitgaande as van de reductor. Dit afneembaar koppel TA is te berekenen uit het aandrij-vend motorvermogen Pnom en het uitgaande toerental van de reductor na.
Ta = Pnom � η � 9550/na ..... NmPnom in kWna in r/minη = rendement van de reductor
De in de catalogus opgenomen SEW motorreductoren worden ofwel door het afgegevenvermogen of door het afneembaar koppel bij een gegeven uitgaand toerental beschre-ven. Een verdere keuze-invloedsfactor is hierbij de bedrijfsfactor.
5.3 Bedrijfsfactor
Reductoren zijn altijd berekend op basis van een gelijkmatige belasting en een geringaantal inschakelingen. Het is noodzakelijk om bij afwijkingen van deze kondities het bere-kende theoretische aandrijfkoppel te vermenigvuldigen met een bedrijfsfactor. Dezebedrijfsfactor wordt bepaald door de schakelfrequentie, de verhouding van de massa-traagheidsmomenten en de dagelijkse bedrijfstijd (zie figuur 23).
32
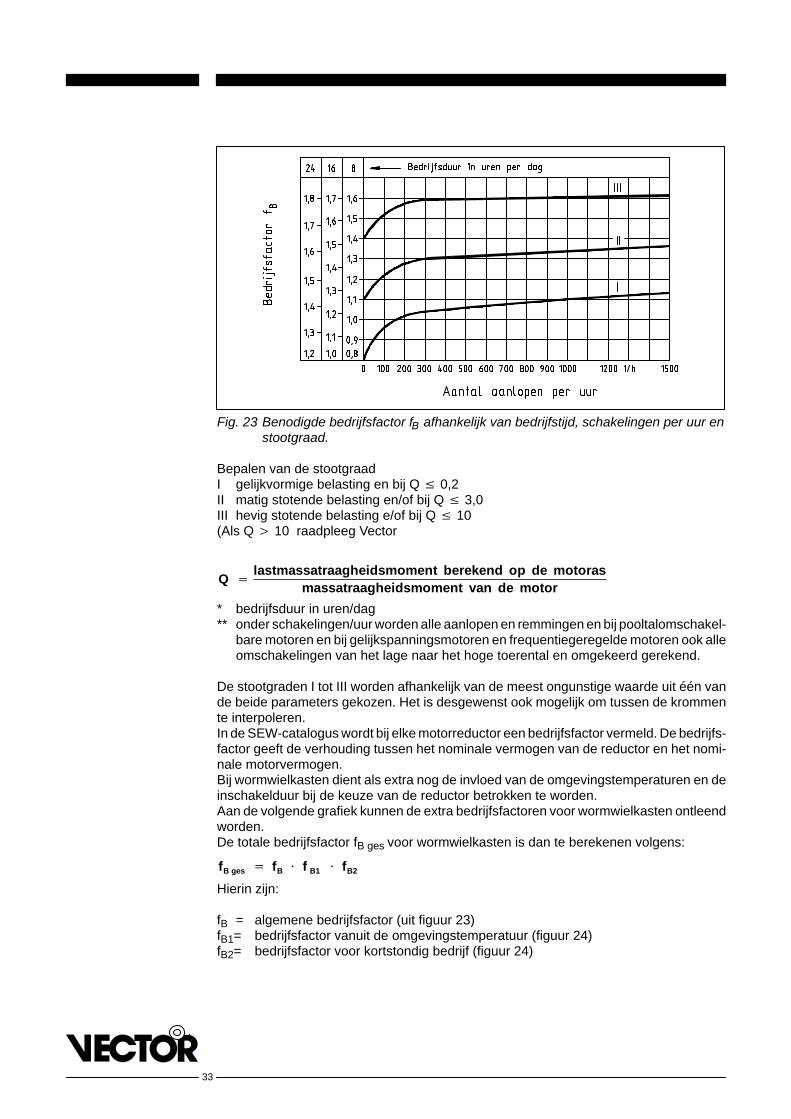
Fig. 23 Benodigde bedrijfsfactor fB afhankelijk van bedrijfstijd, schakelingen per uur enstootgraad.
Bepalen van de stootgraadI gelijkvormige belasting en bij Q � 0,2II matig stotende belasting en/of bij Q � 3,0III hevig stotende belasting e/of bij Q � 10(Als Q � 10 raadpleeg Vector
Q �
lastmassatraagheidsmoment berekend op de motorasmassatraagheidsmoment van de motor
* bedrijfsduur in uren/dag** onder schakelingen/uur worden alle aanlopen en remmingen en bij pooltalomschakel-
bare motoren en bij gelijkspanningsmotoren en frequentiegeregelde motoren ook alleomschakelingen van het lage naar het hoge toerental en omgekeerd gerekend.
De stootgraden I tot III worden afhankelijk van de meest ongunstige waarde uit één vande beide parameters gekozen. Het is desgewenst ook mogelijk om tussen de krommente interpoleren.In de SEW-catalogus wordt bij elke motorreductor een bedrijfsfactor vermeld. De bedrijfs-factor geeft de verhouding tussen het nominale vermogen van de reductor en het nomi-nale motorvermogen.Bij wormwielkasten dient als extra nog de invloed van de omgevingstemperaturen en deinschakelduur bij de keuze van de reductor betrokken te worden.Aan de volgende grafiek kunnen de extra bedrijfsfactoren voor wormwielkasten ontleendworden.De totale bedrijfsfactor fB ges voor wormwielkasten is dan te berekenen volgens:
fB ges � fB � f B1 � fB2
Hierin zijn:
fB = algemene bedrijfsfactor (uit figuur 23)fB1= bedrijfsfactor vanuit de omgevingstemperatuur (figuur 24)fB2= bedrijfsfactor voor kortstondig bedrijf (figuur 24)
33
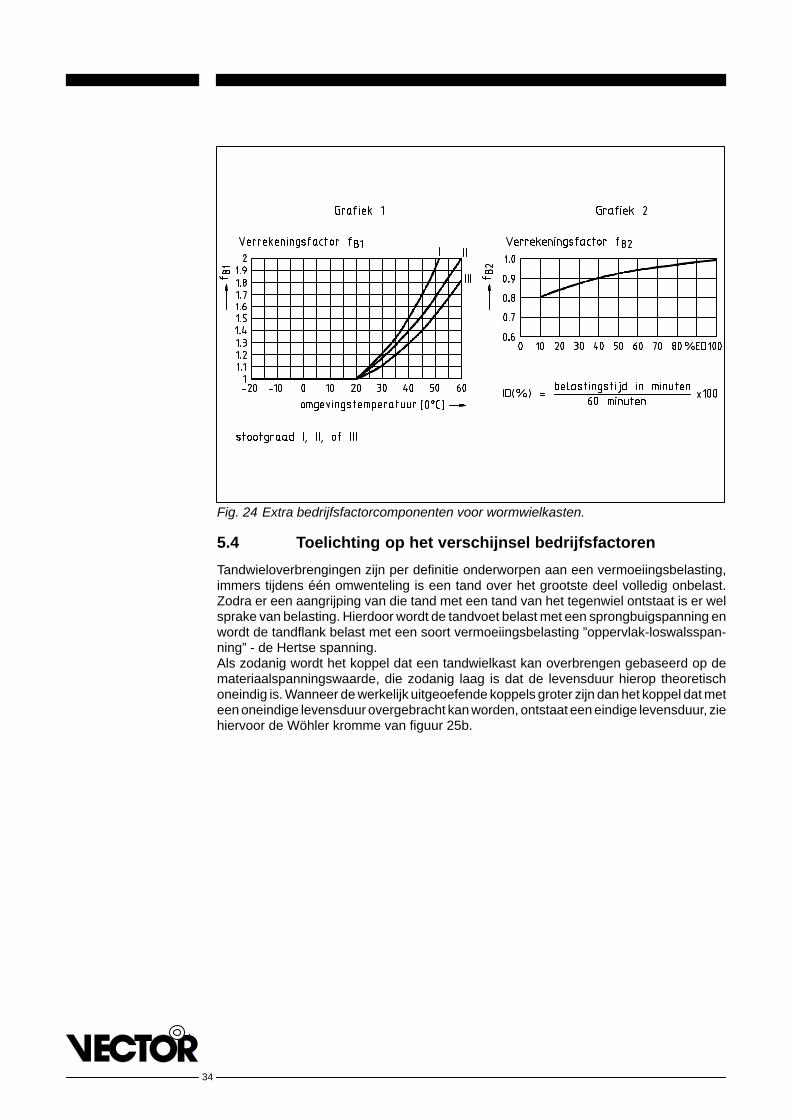
Fig. 24 Extra bedrijfsfactorcomponenten voor wormwielkasten.
5.4 Toelichting op het verschijnsel bedrijfsfactoren
Tandwieloverbrengingen zijn per definitie onderworpen aan een vermoeiingsbelasting,immers tijdens één omwenteling is een tand over het grootste deel volledig onbelast.Zodra er een aangrijping van die tand met een tand van het tegenwiel ontstaat is er welsprake van belasting. Hierdoor wordt de tandvoet belast met een sprongbuigspanning enwordt de tandflank belast met een soort vermoeiingsbelasting ”oppervlak-loswalsspan-ning” - de Hertse spanning.Als zodanig wordt het koppel dat een tandwielkast kan overbrengen gebaseerd op demateriaalspanningswaarde, die zodanig laag is dat de levensduur hierop theoretischoneindig is. Wanneer de werkelijk uitgeoefende koppels groter zijn dan het koppel dat meteen oneindige levensduur overgebracht kan worden, ontstaat een eindige levensduur, ziehiervoor de Wöhler kromme van figuur 25b.
34
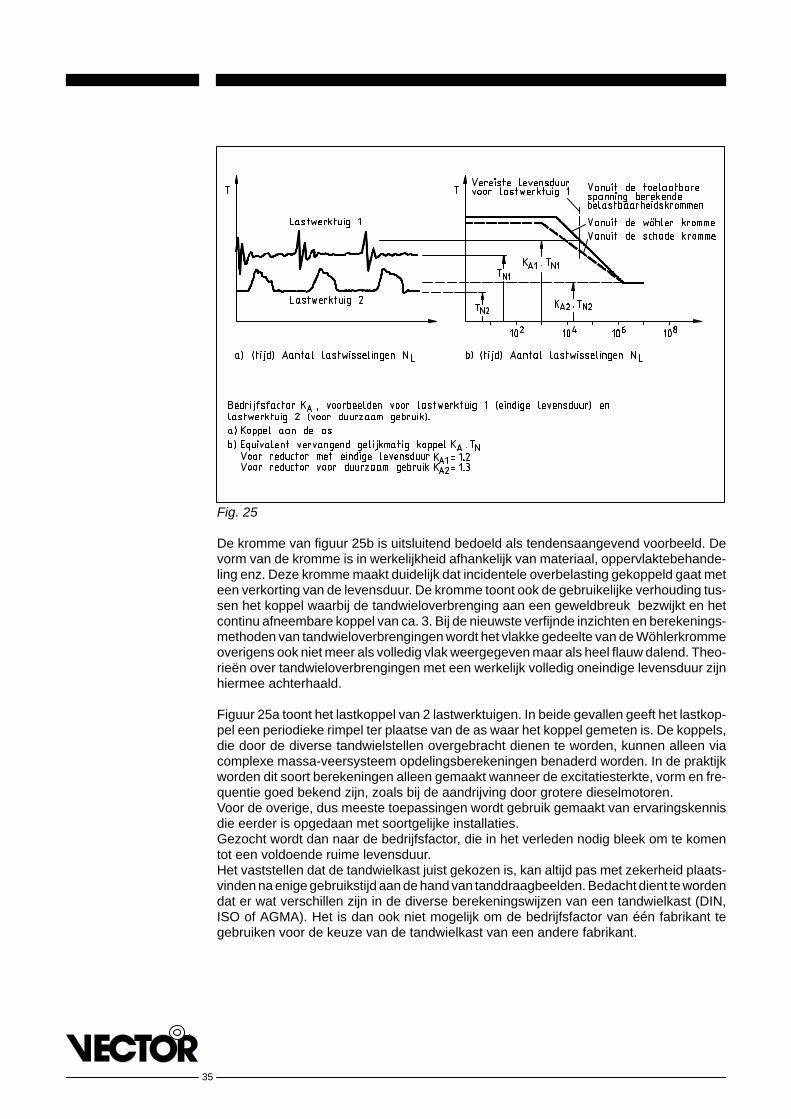
Fig. 25
De kromme van figuur 25b is uitsluitend bedoeld als tendensaangevend voorbeeld. Devorm van de kromme is in werkelijkheid afhankelijk van materiaal, oppervlaktebehande-ling enz. Deze kromme maakt duidelijk dat incidentele overbelasting gekoppeld gaat meteen verkorting van de levensduur. De kromme toont ook de gebruikelijke verhouding tus-sen het koppel waarbij de tandwieloverbrenging aan een geweldbreuk bezwijkt en hetcontinu afneembare koppel van ca. 3. Bij de nieuwste verfijnde inzichten en berekenings-methoden van tandwieloverbrengingen wordt het vlakke gedeelte van de Wöhlerkrommeoverigens ook niet meer als volledig vlak weergegeven maar als heel flauw dalend. Theo-rieën over tandwieloverbrengingen met een werkelijk volledig oneindige levensduur zijnhiermee achterhaald.
Figuur 25a toont het lastkoppel van 2 lastwerktuigen. In beide gevallen geeft het lastkop-pel een periodieke rimpel ter plaatse van de as waar het koppel gemeten is. De koppels,die door de diverse tandwielstellen overgebracht dienen te worden, kunnen alleen viacomplexe massa-veersysteem opdelingsberekeningen benaderd worden. In de praktijkworden dit soort berekeningen alleen gemaakt wanneer de excitatiesterkte, vorm en fre-quentie goed bekend zijn, zoals bij de aandrijving door grotere dieselmotoren.Voor de overige, dus meeste toepassingen wordt gebruik gemaakt van ervaringskennisdie eerder is opgedaan met soortgelijke installaties.Gezocht wordt dan naar de bedrijfsfactor, die in het verleden nodig bleek om te komentot een voldoende ruime levensduur.Het vaststellen dat de tandwielkast juist gekozen is, kan altijd pas met zekerheid plaats-vinden na enige gebruikstijd aan de hand van tanddraagbeelden. Bedacht dient te wordendat er wat verschillen zijn in de diverse berekeningswijzen van een tandwielkast (DIN,ISO of AGMA). Het is dan ook niet mogelijk om de bedrijfsfactor van één fabrikant tegebruiken voor de keuze van de tandwielkast van een andere fabrikant.
35
5.5 Smering
Het smeermiddel in een tandwielkast heeft een aantal functies:– Het vermijden van wrijving en slijtage op de tandflanken.
De hydro-dynamisch gevormde smeerfilm scheidt onder normale omstandigheden demet elkaar samenwerkende tandfanken. Om dit onder hoge vlaktedrukken te kunnen,worden aan de olie Extreme Pressure dopes toegevoegd. Bij het proces van het toteen smeerfilm uitwalsen van het smeermiddel ontstaat warmte in het smeermiddel.
– Het afvoeren van warmte van de plaats waar deze ontstaat naar het warmte-afvoe-rende oppervlak van de behuizing.
– Het smeren en koelen van de lagers.
5.6 Woelingsverliezen
Onder woelingsverliezen in een tandwielkast verstaan we de verliezen als gevolg van hetin stroming brengen van het smeermiddel. (De andere verliezen ontstaan door de tandbe-lasting en de lagerkrachten).Vaak is er bij de keuze van een tandwielkast rekening te houden met woelingsverliezen.Vooral bij kleine overbrengingsverhoudingen dus een grote diameter van het sneldraai-ende rondsel en een hoog ingaand toerental kunnen woelingsverliezen tot een belangrijkextra opwarmingsmechanisme leiden. De grote warmte-ontwikkeling door woelingsver-liezen kan bij 1- of 2- trapskasten vaak niet zonder extra voorzieningen afgevoerd wordenomdat het koelend huisopppervlak hiervoor te klein is.Om een vorm van woelingsproblematiek op te lossen kunnen één of meerdere hulpmid-delen gebruikt worden:– Om het olieniveau en daarmee de woelingsverliezen te verminderen wordt een vorm
van druksmering toegepast (bij tandomtrekssnelheden � 15 m/s is druksmeringnodig vanuit het wegslingeren van het smeermiddel door centrifugaalkracht).
– Om de viscositeit van de olie bij het opstarten vanuit lagere temperaturen te verbete-ren (het smeermiddel dunvloeibaarder te maken), wordt een verwarming toegepast.
– Om de viscositeit van de olie bij hogere temperaturen te verbeteren wordt een koelergebruikt (om het smeermiddel niet te dunvloeibaar te laten worden en om de veroude-ringssnelheid laag te houden).
36
6 Remmen
6.1 Indeling naar vertragingsremmen en houdremmen
Remmen kunnen al naar hun gebruiksdoel onderscheiden worden naar vertragingsrem-men en houdremmen.Vertragingsremmen dienen in staat te zijn om de warmte die ontstaat tijdens het remmente kunnen verwerken. Ook mag verwacht worden dat de slijtage van het wrijvingsmate-riaal binnen redelijke perken blijft als gevolg van deze vertragingsremmingen.Bij houdremmen worden minder hoge eisen gesteld aan de warmte-afvoerende en de slij-tageverwerkende capaciteit van de rem. Meestal kan de houdrem daardoor goedkopergeconstrueerd worden dan de vertragingsrem.
6.2 Waarom remmen en met welk koppel?
– In sommige toepassingen, waarbij het lastwerktuig uit zichzelf ook tot stilstand zoukomen, wordt een rem gebruikt om de uitlooptijd te bekorten en daarmee de producti-viteit te verhogen. Het gewenste remkoppel is doorgaans 0,8 - 1,2 � Tnom.motor.
– Om een lastwerktuig dat zonder rem ook tot stilstand zou komen in een of op eengewenste positie te laten stoppen (stopnauwkeurigheidsoverwegingen).Het gewenste remkoppel doorgaans 0,8 - 1,2 � Tnom.
– Een aantal lastwerktuigen komt onder bepaalde condities niet tot stilstand, bijv. de rij-werkaandrijving van een windvangende kraan. Het gewenste remkoppel is ca. 1,2 -1,6 Tnom.
– Lastwerktuigen met een doortrekkende last, bijv. hijswerkremmen. Volgens NEN2020 Hijskranen. De mechanische uitrusting dient de hijswerkremrem het 1,6-voudigevan het lastkoppel zonder meerekening van rendementsverliezen te kunnen leveren.De ervaring heeft geleerd dat een hijswerkrem, die gebaseerd is op het 2-voudige vanhet lastkoppel te prefereren valt.
6.3 Warmte-ontwikkeling bij het remmen
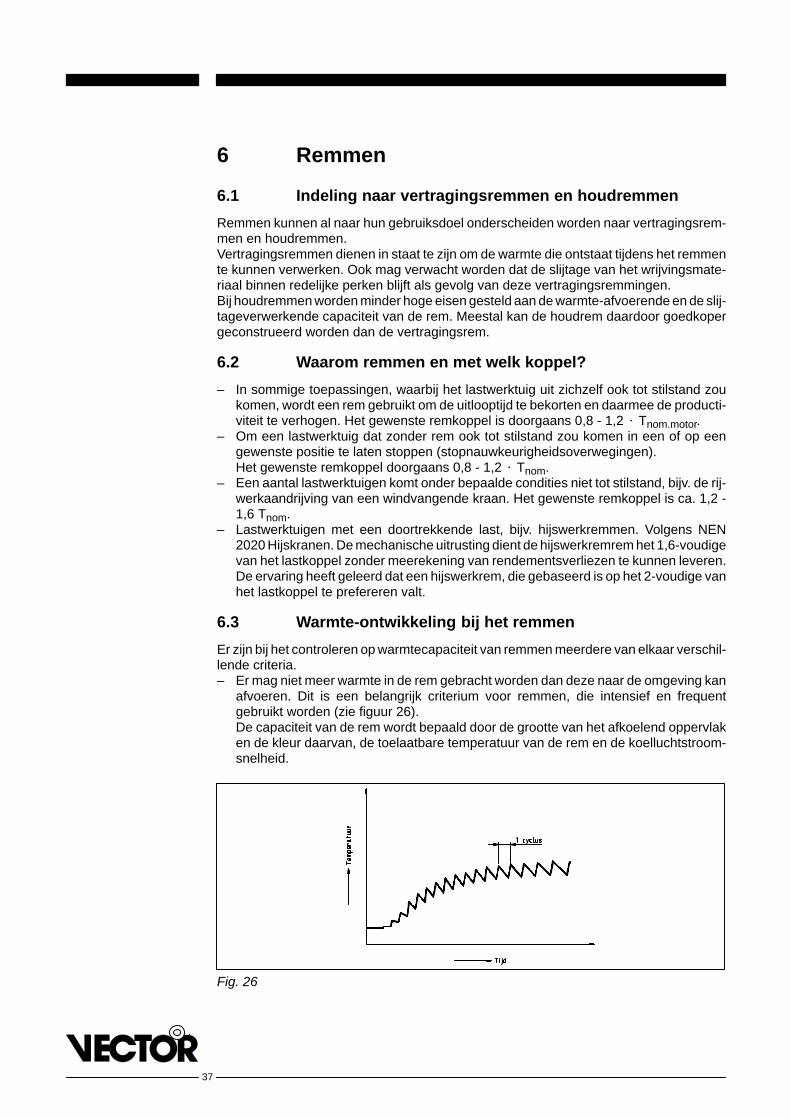
Er zijn bij het controleren op warmtecapaciteit van remmen meerdere van elkaar verschil-lende criteria.– Er mag niet meer warmte in de rem gebracht worden dan deze naar de omgeving kan
afvoeren. Dit is een belangrijk criterium voor remmen, die intensief en frequentgebruikt worden (zie figuur 26). De capaciteit van de rem wordt bepaald door de grootte van het afkoelend oppervlaken de kleur daarvan, de toelaatbare temperatuur van de rem en de koelluchtstroom-snelheid.
Fig. 26
37
– Voor incidentele remmingen mag niet meer warmte in de rem gebracht worden dandeze kan accumuleren. Bij deze zienswijze wordt de warmteafvoer naar de omgevingtijdens het remmen als verwaarloosbaar beschouwd. Bepalend voor de capaciteit vande rem in dit opzicht is de massa en de soortelijke warmte en de maximum tempera-tuurtoename van alle metalen delen die door het remmen in temperatuur zullen stij-gen.
– Voor incidentele remmingen met veel weg te remmen energie in een korte remtijd engrote blokken- of schijfremmen dient een correctie op de zienswijze van de bovenbeschreven incidentele remmingsbelasting plaats te vinden. Het is dan immers nietrealistisch om te veronderstellen dat in de korte beschikbare tijd de warmte gelijkmatigverdeeld is. Soms wordt dan ook voor deze thermische belasting een waarde opgege-ven die maximaal per seconde geaccumuleerd kan worden. In twijfelgevallen is hetraadzaam de leverancier te raadplegen.
6.4 De wrijvingscoëfficiënt van wrijvingsmateriaal
De wrijvingscoëfficiënt van wrijvingsmateriaal wordt ten onrechte als zeer stabiel veron-dersteld. In werkelijkheid is deze echter aan sterke spreidingen onderhevig. Voor de “nor-male” spreiding dient u rekening te houden met afwijkingen van +30% tot -30%.– Een volledig nieuwe nog niet ingelopen koppeling of rem levert slechts ca. 50% van
het koppel na inlopen. Alleen bij platenkoppelingen of remmen is het mogelijk dezein de fabriek te laten inlopen. Bij de SEW motorremmen zijn deze in de fabriek reedsingelopen. Bij vernieuwing van de wrijvingsonderdelen van een koppeling of rem dientrekening gehouden te worden met dit inloopproces.
– De wrijvingscoëfficiënt is afhankelijk van de temperatuur op het wrijvingsvlak. Bij veelwrijvingsmaterialen is er een tendens dat deze bij toenemende temperatuur stijgt.Boven een bepaalde temperatuur neemt de wrijvingscoëfficiënt dan sterk af. Het isnoodzakelijk om een voldoende marge in acht te nemen tot die temperatuur. In twijfel-gevallen dient u navraag te doen.
– De wrijvingscoëfficiënt is afhankelijk van de conditie van het tegenmateriaal. Wanneerdit vettig is kan de wrijvingscoëfficiënt verminderen tot 20%. Wanneer dit roestig is,kunnen afhankelijk van de mate van roest/of materiaaltype totaal verschillende gevol-gen verwacht worden. Bij een lichte mate van roesten zal het “roestveegsel” als eensoort glijmiddel gaan fungeren. De wrijvingscoëfficiënt daalt tot ca. 50%. Bij zwareroest van vooral stalen wrijvingsvlakken werkt dit op het wrijvingsmateriaal in als eenfrees. De wrijvingscoëfficiënt kan toenemen tot ca. 150%. Het is belangrijk dat u maat-regelen treft om roestvorming van het met de remvoering samenwerkende oppervlakte voorkomen.
– De wrijvingscoëfficiënt is afhankelijk van het tegenmateriaal. Meestal wordt de wrij-vingscoëfficiënt opgegeven voor de samenwerking met een gietijzeren oppervlak.Wanneer in plaats hiervoor een kwaliteit roestvrij staal gekozen wordt zal de wrijvings-coëffiënt met ca. 1/3 verminderen. Veel wrijvingsmaterialen zijn echter niet geschiktom in combinatie met roestvrijstaal gebruikt te worden.
38

7 Koppelingen - beknopt overzicht
7.1 Soorten niet schakelende koppelingen
– Starre koppelingen, zoals de klemkoppelbus volgens DIN 115 en de flenskoppelingvolgens DIN 116, worden toegepast als koppelverbinding om een as star te verlengen,bijvoorbeeld om een roerwerkas te verbinden met de uitgaande as van een tandwiel-kast.
Fig. 27 Klemkoppelbus en flenskoppeling.
– Elastisch flexibele koppelingen zijn qua meest dominante eigenschap flexibel.Deze flexibiliteit (beweeglijkheid) is het gevolg van de in de koppeling aanwezige elas-ticiteit. Ze zijn doorgaans bedoeld als as-verbindingselementen, waarbij kleine uitlij-ningsgebreken verwerkt kunnen worden. Meestal zullen de uitlijningsgebreken leidentot slijtage van de elastische elementen. Bij de Hadeflex FW (figuur 28 links) zal eente ver gevorderde slijtage van de elastische elementen leiden tot het verbreken vande verbinding. Deze koppeling is niet doorslagveilig zoals de Hadeflex XW (figuur 28rechts). Bij toepassing met een doortrekkende last is de doorslagveilige koppeling teprefereren.
Fig. 28 Hadeflex elastisch flexibele koppelingen.
39

– Elastische koppelingen zijn qua meest dominante eigenschap elastisch, hoeweldoorgaans de toelaatbare uitlijningsgebreken groter zijn dan die van elastisch flexi-bele koppelingen. De uitlijningsgebreken worden verwerkt in vervorming van de elasti-sche elementen. Hier treedt dus geen slijtage op. Tevens is het elastisch gedrag nauw-keurig bekend en gelijkblijvend. Dergelijke koppelingen, zoals de Renold Hi-Tec RBvan figuur 29, worden toegepast in torsietrillingskritische installaties (zie Hoofdstuk7.2. torsietrillingsanalyse). De elastische elementen van deze koppelingen zijn lever-baar in verschillende rubberkwaliteiten en hardheden. Ze kunnen vervangen wordenzonder de uitlijning van de koppeling te verbreken.
Fig. 29 Renold Hi-Tec elastische koppeling type RB.
– Membraankoppelingen verwerken de uitlijningsgebreken door vervorming van hetuit (doorgaans roestvrij) stalen platen opgebouwde membraanpakket. Om radialeasafwijkingen te kunnen verwerken dient de koppeling twee van deze membraanpak-ketten te bevatten. De in figuur 30 weergegeven Autoflex membraankoppeling bevatéén membraanpakket. Membraankoppelingen hebben als eigenschappen: onder-houdsvrij, geschikt voor hoge temperaturen, geschikt voor aggressieve omgevings-omstandigheden, torsiestijf, spelingsvrij en een relatief klein massatraagheidsmo-ment.
Fig. 30 Autoflex membraankoppeling type ED.
40
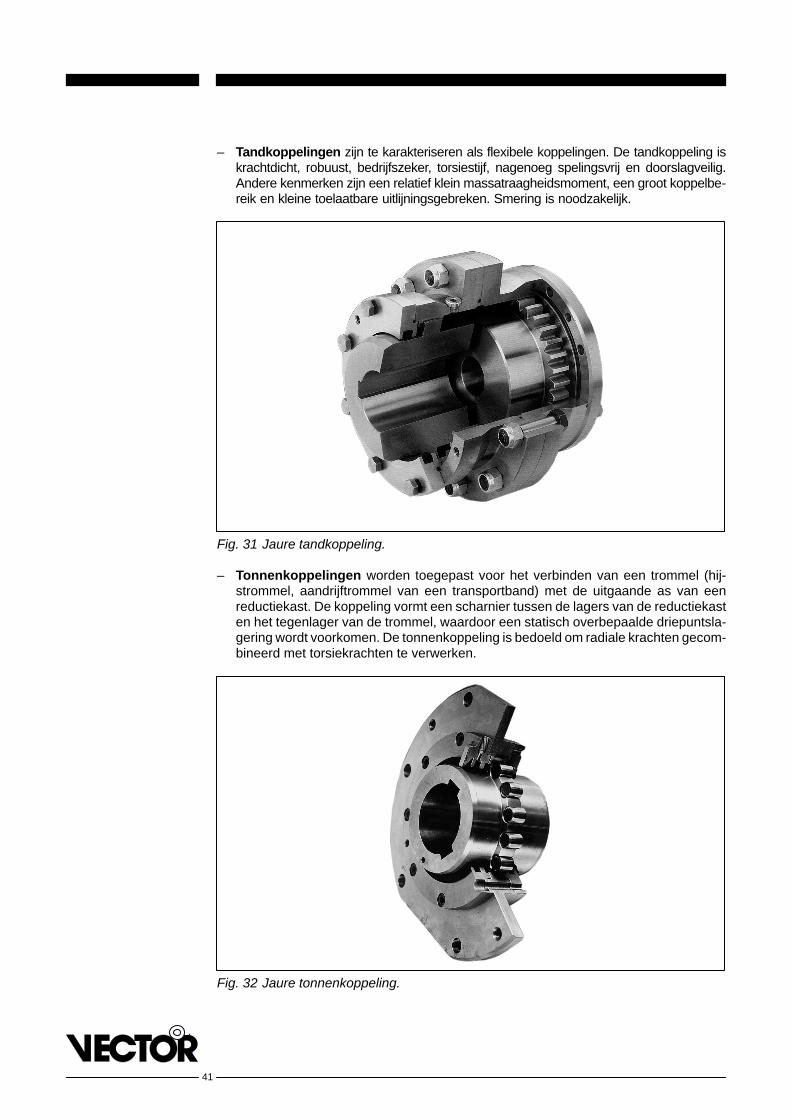
– Tandkoppelingen zijn te karakteriseren als flexibele koppelingen. De tandkoppeling iskrachtdicht, robuust, bedrijfszeker, torsiestijf, nagenoeg spelingsvrij en doorslagveilig.Andere kenmerken zijn een relatief klein massatraagheidsmoment, een groot koppelbe-reik en kleine toelaatbare uitlijningsgebreken. Smering is noodzakelijk.
Fig. 31 Jaure tandkoppeling.
– Tonnenkoppelingen worden toegepast voor het verbinden van een trommel (hij-strommel, aandrijftrommel van een transportband) met de uitgaande as van eenreductiekast. De koppeling vormt een scharnier tussen de lagers van de reductiekasten het tegenlager van de trommel, waardoor een statisch overbepaalde driepuntsla-gering wordt voorkomen. De tonnenkoppeling is bedoeld om radiale krachten gecom-bineerd met torsiekrachten te verwerken.
Fig. 32 Jaure tonnenkoppeling.
41
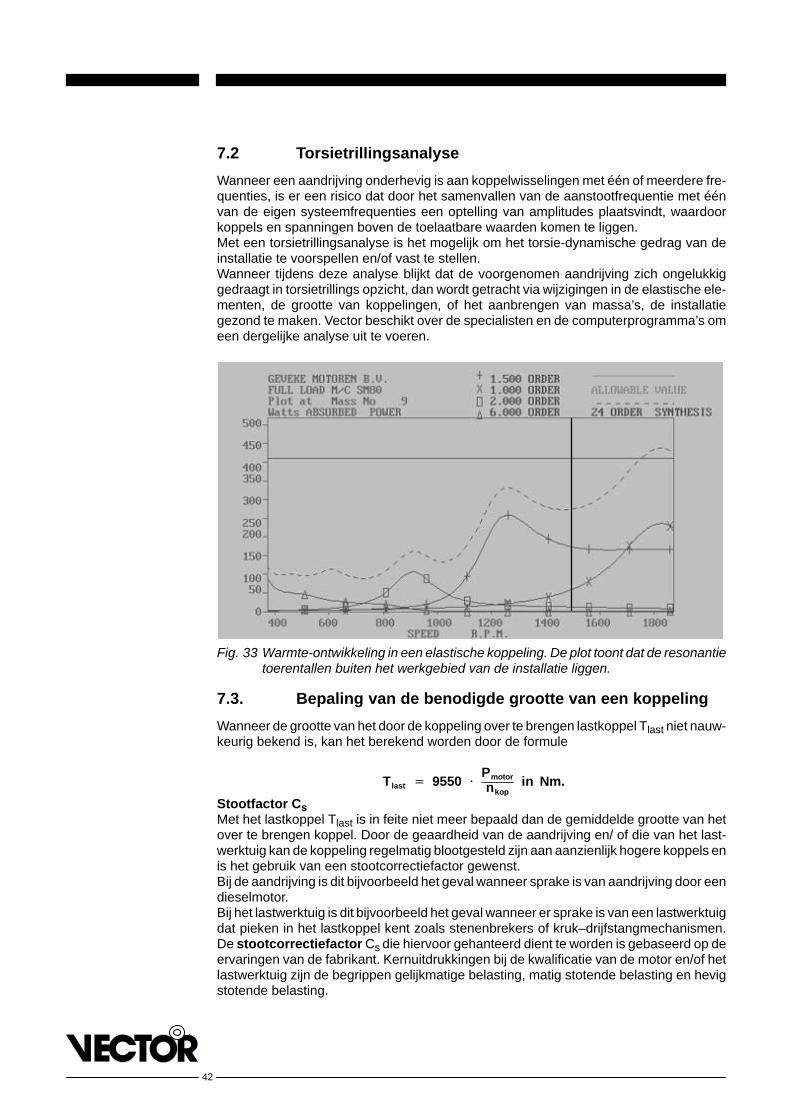
7.2 Torsietrillingsanalyse
Wanneer een aandrijving onderhevig is aan koppelwisselingen met één of meerdere fre-quenties, is er een risico dat door het samenvallen van de aanstootfrequentie met éénvan de eigen systeemfrequenties een optelling van amplitudes plaatsvindt, waardoorkoppels en spanningen boven de toelaatbare waarden komen te liggen.Met een torsietrillingsanalyse is het mogelijk om het torsie-dynamische gedrag van deinstallatie te voorspellen en/of vast te stellen.Wanneer tijdens deze analyse blijkt dat de voorgenomen aandrijving zich ongelukkiggedraagt in torsietrillings opzicht, dan wordt getracht via wijzigingen in de elastische ele-menten, de grootte van koppelingen, of het aanbrengen van massa’s, de installatiegezond te maken. Vector beschikt over de specialisten en de computerprogramma’s omeen dergelijke analyse uit te voeren.
Fig. 33 Warmte-ontwikkeling in een elastische koppeling. De plot toont dat de resonantietoerentallen buiten het werkgebied van de installatie liggen.
7.3. Bepaling van de benodigde grootte van een koppeling
Wanneer de grootte van het door de koppeling over te brengen lastkoppel Tlast niet nauw-keurig bekend is, kan het berekend worden door de formule
Tlast � 9550 �
Pmotor
nkopin Nm.
Stootfactor CsMet het lastkoppel Tlast is in feite niet meer bepaald dan de gemiddelde grootte van hetover te brengen koppel. Door de geaardheid van de aandrijving en/ of die van het last-werktuig kan de koppeling regelmatig blootgesteld zijn aan aanzienlijk hogere koppels enis het gebruik van een stootcorrectiefactor gewenst.Bij de aandrijving is dit bijvoorbeeld het geval wanneer sprake is van aandrijving door eendieselmotor.Bij het lastwerktuig is dit bijvoorbeeld het geval wanneer er sprake is van een lastwerktuigdat pieken in het lastkoppel kent zoals stenenbrekers of kruk–drijfstangmechanismen.De stootcorrectiefactor Cs die hiervoor gehanteerd dient te worden is gebaseerd op deervaringen van de fabrikant. Kernuitdrukkingen bij de kwalificatie van de motor en/of hetlastwerktuig zijn de begrippen gelijkmatige belasting, matig stotende belasting en hevigstotende belasting.
42
Aanloopfrequentiefactor CfWanneer de koppeling veelvuldig het aanloopkoppel van de motor door dient te geven,is in feite sprake van een door te leiden koppel dat hoger is dan het nominale koppel vande motor. Veel fabrikanten van koppelingen geven een correctiefactor voor de aanloop-frequentie. Wanneer dit door de fabrikant wordt nagelaten, zult u naar eigen inzicht moe-ten besluiten om toch wel zelf een correctie uit te voeren.
Temperatuurcorrectiefactor CcOok is de belastbaarheid van de elastomeren in een elastisch flexibele koppeling afhan-kelijk van de temperatuur. Een hogere temperatuur leidt tot een verminderde koppelbe-lastbaarheid. Om de invloed van de temperatuur te compenseren wordt een tempera-tuurcorrectiefactor Cc toegepast voor de omgevingstemperatuur.
Bepaling selectiekoppelDe grootte van het koppel waarop de betreffende koppeling geselecteerd dient te worden
Tselectie = Tlast �Cs � Cf � Cc
(Voor de correctiefactoren worden per fabrikant verschillende waarden en letteraandui-dingen gebruikt).
43
8 Formules in de aandrijftechniek
8.1 Eénparig versnelde/vertraagde beweging
a) Lineaire beweging
vt � v0 � a � t m/s
vt : snelheid op tijdstip t m/sv0 : snelheid op tijdstip t = o m/st : aantal seconden waarin versneld of vertraagd wordt sa : versnelling of vertraging in m/s2
(bij versnelling a � 0, bij vertraging a � 0)
St � v0 � t � 1 �2 a � t2 m
St = afgelegde weg na t seconden m
b) Roterende beweging
ωt � ω0 � q � t rad/s
ωt : hoeksnelheid op tijdstip t rad/sω0 : hoeksnelheid op tijdstip t = 0 rad/st : aantal seconden waarin versneld of vertraagd wordt sq : hoekversnelling of vertraging in rad/s2
(bij versnelling q � 0, bij vertraging q � 0)
�t � ω0 � t � 1 �2 q � t2 rad
�t : afgelegde hoek na t seconden rad
c) Verband tussen grootheden bij linatie en rotatie
Hoeksnelheid en omtreksnelheid
ω � vr rad
ω : hoeksnelheid rad/sv : omtrekssnelheid m/sr : straal m
v � π � d � n60
m/s
d : diameter mn : toerental t/min
ω � 2 � π � n60
� n9, 55 rad/s
Hoekversnelling en omtrekversnelling
q � ar rad/s2
q : hoekversnelling rad/s2
a : omtrekversnelling m/s2
44
8.2 Kracht, massa, wrijving en koppel
8.2.1 Kracht en massa
De massa wordt uitgedrukt in kg.Het internationale kilogramprototype wordt bewaard in Sèvres (Frankrijk).
De kracht wordt uitgedrukt in N (Newton).De ”Newton” is gedefinieerd als de kracht, die nodig is om aan het internationale kilogram-prototype een versnelling te geven van 1 m/s2.
Om een lichaam te verplaatsen is een kracht nodig, in de eerste plaats om wrijvings- ofweerstandskrachten of de aantrekkingskracht van de aarde te overwinnen en ten tweedeom een gewenste versnelling te verkrijgen.
Aantrekkingskracht van de aarde
Fg � m � g N
Fg : aantrekkingskracht van de aarde (gewichtskracht) Nm : massa van het lichaam kgg : versnelling ten gevolge van de aantrekkingskracht 9,81»10m/s2
Kracht nodig voor versnelling/vertraging
Lineaire beweging
F � m � a N
F : kracht nodig voor de versnelling Nm : massa van het lichaam kga : versnelling a � 0 / vertraging a � 0 m/s2
Roterende beweging
T � J � q Nm
T : koppel nodig voor de versnelling NmJ : massatraagheidsmoment kgm2
q : hoekversnelling q � 0 / vertraging q � 0 rad/s2
45
8.2.2 Wrijving en wrijvingscoëfficiënten
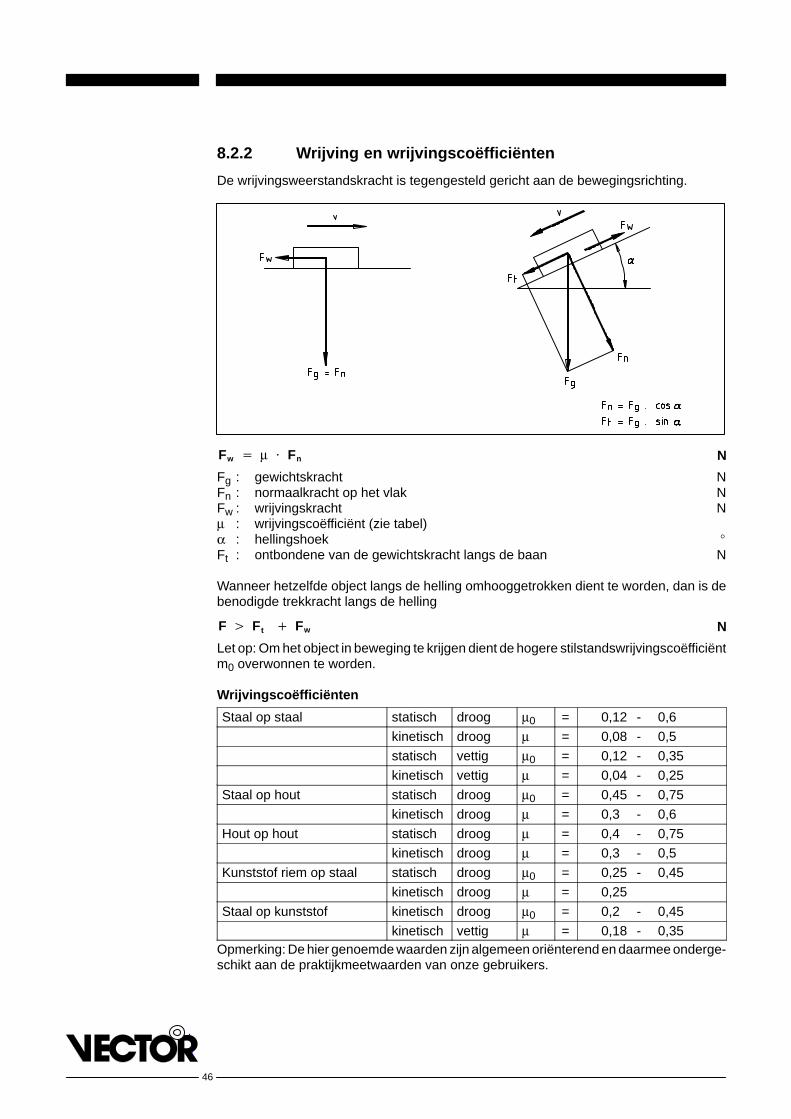
De wrijvingsweerstandskracht is tegengesteld gericht aan de bewegingsrichting.
Fw � µ � Fn N
Fg : gewichtskracht NFn : normaalkracht op het vlak NFw : wrijvingskracht Nµ : wrijvingscoëfficiënt (zie tabel)α : hellingshoek �
Ft : ontbondene van de gewichtskracht langs de baan N
Wanneer hetzelfde object langs de helling omhooggetrokken dient te worden, dan is debenodigde trekkracht langs de helling
F � Ft � Fw N
Let op: Om het object in beweging te krijgen dient de hogere stilstandswrijvingscoëfficiëntm0 overwonnen te worden.
Wrijvingscoëfficiënten
Staal op staal statisch droog µ0 = 0,12 - 0,6
kinetisch droog µ = 0,08 - 0,5
statisch vettig µ0 = 0,12 - 0,35
kinetisch vettig µ = 0,04 - 0,25
Staal op hout statisch droog µ0 = 0,45 - 0,75
kinetisch droog µ = 0,3 - 0,6
Hout op hout statisch droog µ = 0,4 - 0,75
kinetisch droog µ = 0,3 - 0,5
Kunststof riem op staal statisch droog µ0 = 0,25 - 0,45
kinetisch droog µ = 0,25
Staal op kunststof kinetisch droog µ0 = 0,2 - 0,45
kinetisch vettig µ = 0,18 - 0,35Opmerking: De hier genoemde waarden zijn algemeen oriënterend en daarmee onderge-schikt aan de praktijkmeetwaarden van onze gebruikers.
46
8.2.3 Koppel
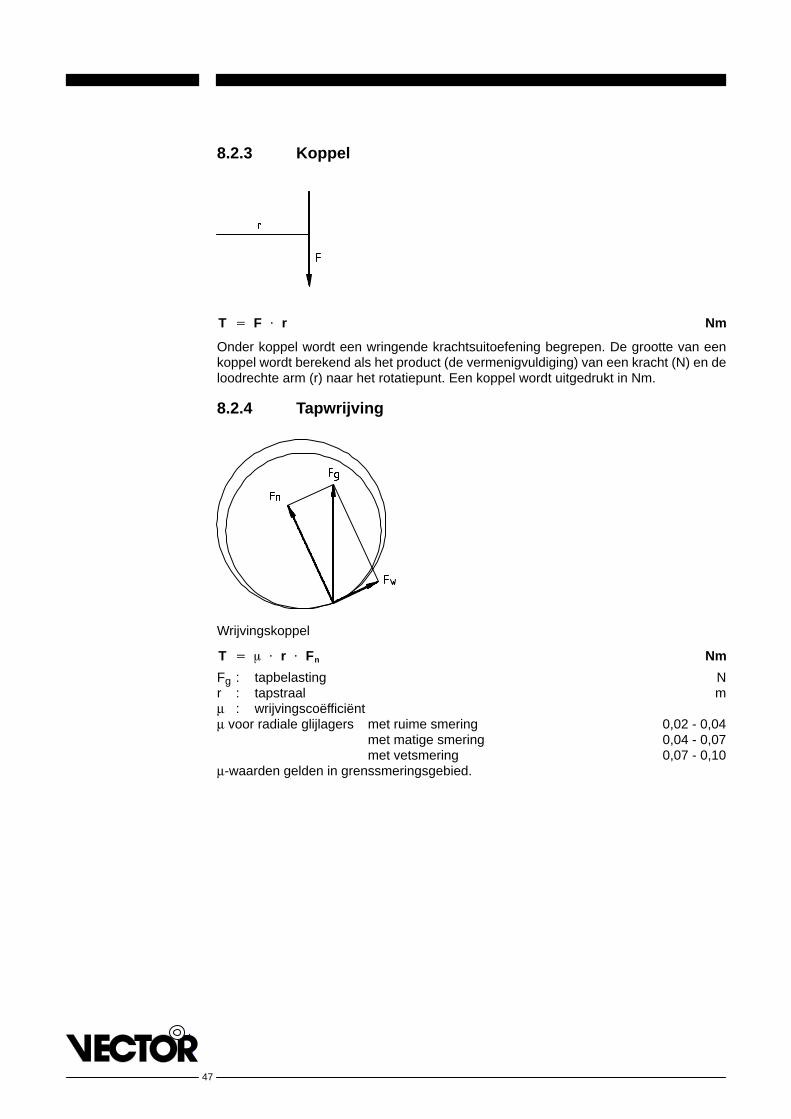
T � F � r Nm
Onder koppel wordt een wringende krachtsuitoefening begrepen. De grootte van eenkoppel wordt berekend als het product (de vermenigvuldiging) van een kracht (N) en deloodrechte arm (r) naar het rotatiepunt. Een koppel wordt uitgedrukt in Nm.
8.2.4 Tapwrijving
Wrijvingskoppel
T � � � r � Fn Nm
Fg : tapbelasting Nr : tapstraal mµ : wrijvingscoëfficiëntµ voor radiale glijlagers met ruime smering 0,02 - 0,04
met matige smering 0,04 - 0,07met vetsmering 0,07 - 0,10
µ-waarden gelden in grenssmeringsgebied.
47
8.2.5 Rolweerstand
λ
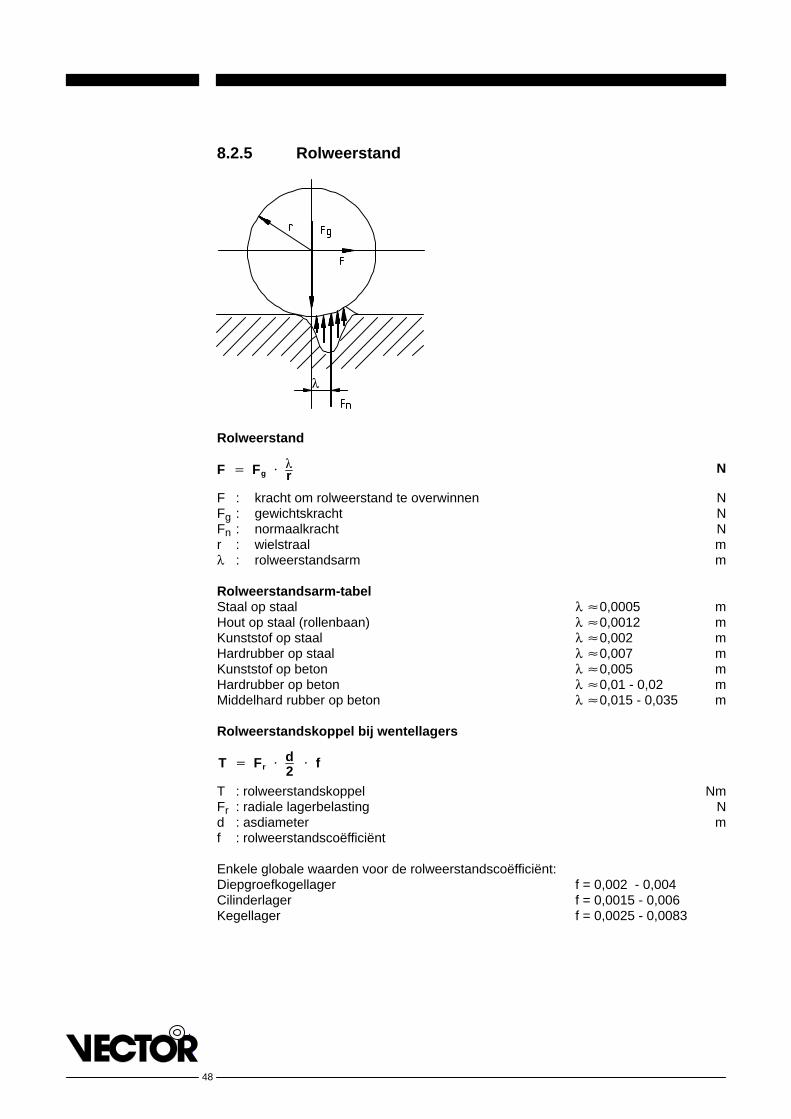
Rolweerstand
F � Fg � �
r N
F : kracht om rolweerstand te overwinnen NFg : gewichtskracht NFn : normaalkracht Nr : wielstraal mλ : rolweerstandsarm m
Rolweerstandsarm-tabelStaal op staal λ �0,0005 mHout op staal (rollenbaan) λ �0,0012 mKunststof op staal λ �0,002 mHardrubber op staal λ �0,007 mKunststof op beton λ �0,005 mHardrubber op beton λ �0,01 - 0,02 mMiddelhard rubber op beton λ �0,015 - 0,035 m
Rolweerstandskoppel bij wentellagers
T � Fr � d2
� f
T : rolweerstandskoppel NmFr : radiale lagerbelasting Nd : asdiameter mf : rolweerstandscoëfficiënt
Enkele globale waarden voor de rolweerstandscoëfficiënt:Diepgroefkogellager f = 0,002 - 0,004Cilinderlager f = 0,0015 - 0,006Kegellager f = 0,0025 - 0,0083
48
8.3 Arbeid en energie
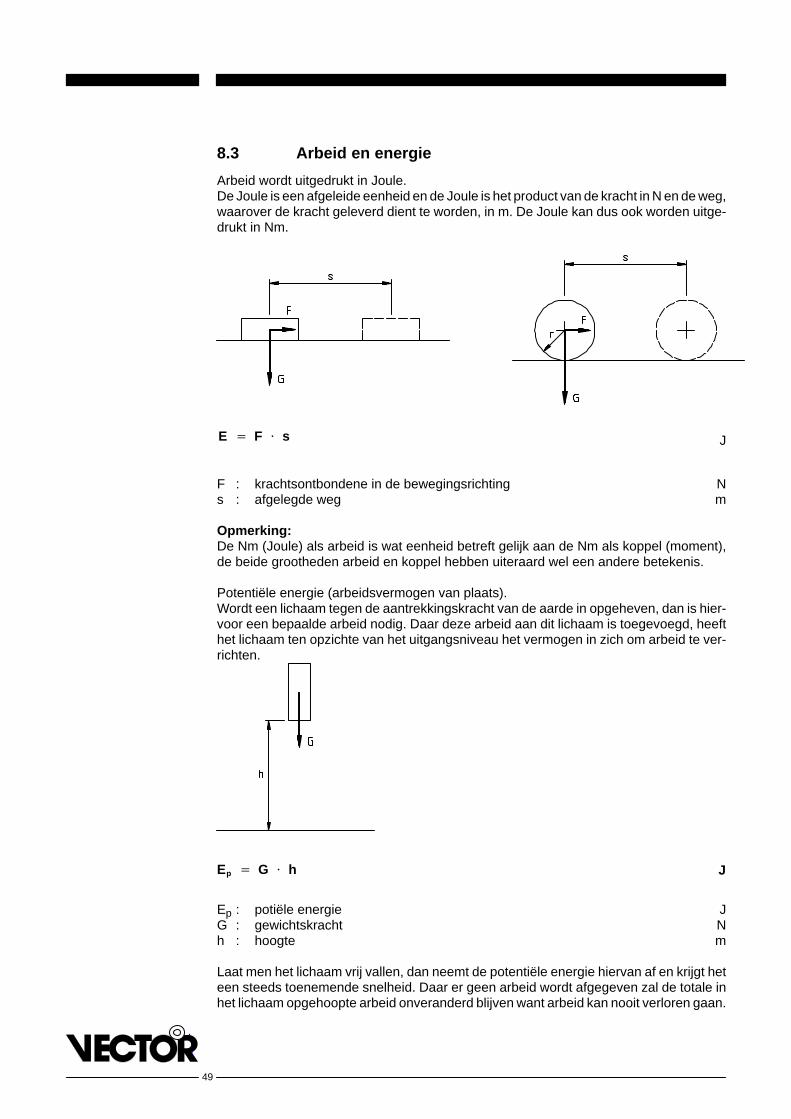
Arbeid wordt uitgedrukt in Joule.De Joule is een afgeleide eenheid en de Joule is het product van de kracht in N en de weg,waarover de kracht geleverd dient te worden, in m. De Joule kan dus ook worden uitge-drukt in Nm.
E � F � s J
F : krachtsontbondene in de bewegingsrichting Ns : afgelegde weg m
Opmerking:De Nm (Joule) als arbeid is wat eenheid betreft gelijk aan de Nm als koppel (moment),de beide grootheden arbeid en koppel hebben uiteraard wel een andere betekenis.
Potentiële energie (arbeidsvermogen van plaats).Wordt een lichaam tegen de aantrekkingskracht van de aarde in opgeheven, dan is hier-voor een bepaalde arbeid nodig. Daar deze arbeid aan dit lichaam is toegevoegd, heefthet lichaam ten opzichte van het uitgangsniveau het vermogen in zich om arbeid te ver-richten.
Ep � G � h J
Ep : potiële energie JG : gewichtskracht Nh : hoogte m
Laat men het lichaam vrij vallen, dan neemt de potentiële energie hiervan af en krijgt heteen steeds toenemende snelheid. Daar er geen arbeid wordt afgegeven zal de totale inhet lichaam opgehoopte arbeid onveranderd blijven want arbeid kan nooit verloren gaan.
49
De vermindering van potentiële energie moet dus in een andere energievorm zijn omge-zet en nog in het lichaam aanwezig zijn. Deze nieuwe energievorm is de kinetische ener-gie.
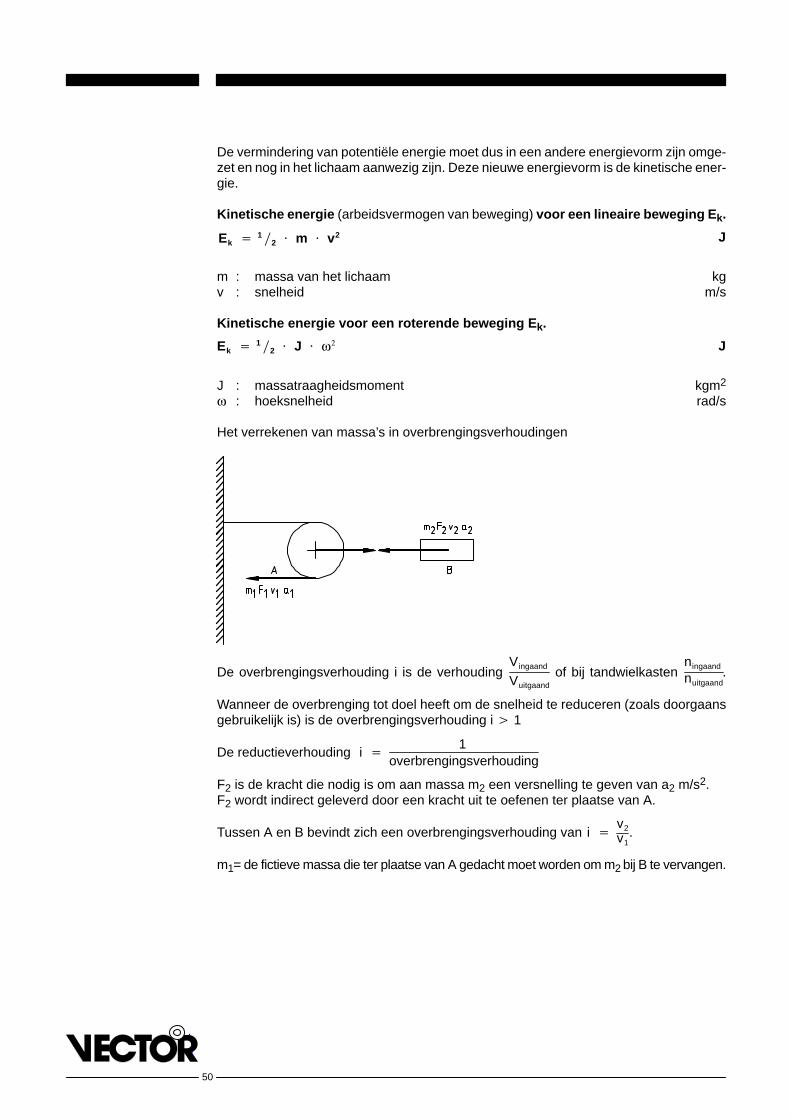
Kinetische energie (arbeidsvermogen van beweging) voor een lineaire beweging Ek.
Ek � 1 �2 � m � v2 J
m : massa van het lichaam kgv : snelheid m/s
Kinetische energie voor een roterende beweging Ek.
Ek � 1 �2 � J � ω2 J
J : massatraagheidsmoment kgm2
ω : hoeksnelheid rad/s
Het verrekenen van massa’s in overbrengingsverhoudingen
De overbrengingsverhouding i is de verhouding Vingaand
Vuitgaand of bij tandwielkasten
ningaand
nuitgaand.
Wanneer de overbrenging tot doel heeft om de snelheid te reduceren (zoals doorgaansgebruikelijk is) is de overbrengingsverhouding i � 1
De reductieverhouding i �1
overbrengingsverhouding
F2 is de kracht die nodig is om aan massa m2 een versnelling te geven van a2 m/s2.F2 wordt indirect geleverd door een kracht uit te oefenen ter plaatse van A.
Tussen A en B bevindt zich een overbrengingsverhouding van i �v2
v1.
m1= de fictieve massa die ter plaatse van A gedacht moet worden om m2 bij B te vervangen.
50
(1)F1 �F2
i
(2)a1 � a2 � i
F1 � m1 � a1 (3)
(1) en (2) in (3).
(4)F2 � m1 � a2 � i2F2
i� m1 � a2 � i
tevens is F2 � m2 � a2 (5)
(4) in (5) m1 �m2
i2
Conclusie: Om de grootte van een massa in een overbrenging om te rekenen naareen fictieve massa bij de andere snelheid, dient de massa gedeeld te worden doorde overbrengingsverhouding in het kwadraat.
8.3.1 Vermogen (definitie)
Vermogen wordt uitgedrukt in Watt (W).
Het vermogen is gedefinieerd als kracht N snelheid in m/s.
Qua dimensie Nms � Watt
Volgens de Internationale afspraken over het gebruik van het SI wordt aan het vermogenhet symbool P toegekend.In vergelijking met de eerder besproken dimensie energie in Joule = Nm is er de tijd aantoegevoegd. Vermogen is dus energie per tijdseenheid. Verwarrend in dit opzicht is ookdat het koppel in Nm wordt uitgedrukt.
Voorbeeld:Wanneer om een object te verslepen een kracht nodig is van 1200 N en de gewenstesleepsnelheid = 0,5 m/s, dan is hiervoor een vermogen P nodig van
1200 N � 0, 5m�s � 600 W.
Het berekenen van een vermogen uitgaande van een bekend koppel en eenbekend toerental:
Het vermogen in de bovenstaande figuur is te berekenen volgens
P � Fomtrek � vomtrek
51
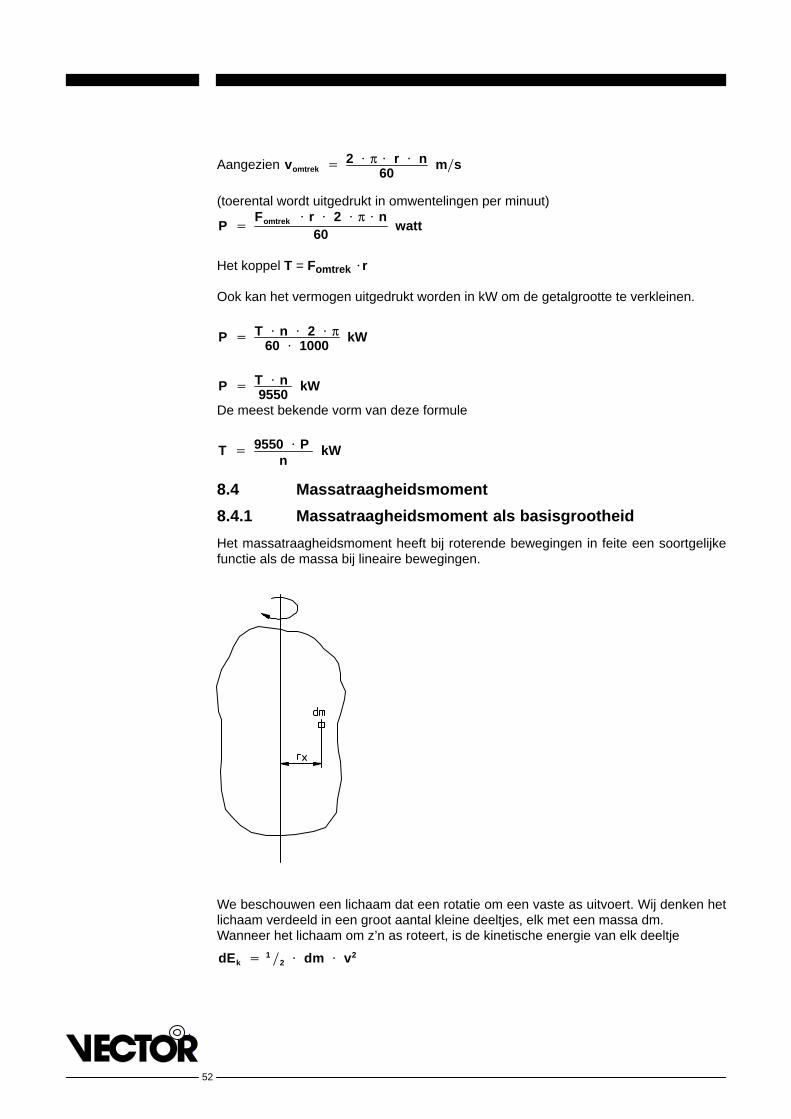
Aangezien vomtrek � 2 � π � r � n60
m�s
(toerental wordt uitgedrukt in omwentelingen per minuut)
P �Fomtrek � r � 2 � π � n
60watt
Het koppel T = Fomtrek �r
Ook kan het vermogen uitgedrukt worden in kW om de getalgrootte te verkleinen.
P � T � n � 2 � π60 � 1000
kW
P � T � n9550
kW
De meest bekende vorm van deze formule
T � 9550 � Pn
kW
8.4 Massatraagheidsmoment
8.4.1 Massatraagheidsmoment als basisgrootheid
Het massatraagheidsmoment heeft bij roterende bewegingen in feite een soortgelijkefunctie als de massa bij lineaire bewegingen.
We beschouwen een lichaam dat een rotatie om een vaste as uitvoert. Wij denken hetlichaam verdeeld in een groot aantal kleine deeltjes, elk met een massa dm.Wanneer het lichaam om z’n as roteert, is de kinetische energie van elk deeltje
dEk � 1 �2 � dm � v2
52

Aangezien v � r � ω (omtrekssnelheid = straal �hoeksnelheid) kunnen wij ook schrij-ven dEk = � � dm � r2 � �2
e totale hoeveelheid kinetische energie = � � hoeksnelheid in het kwadraat � de som vanhet product van de massa van alle deeltjes en hun respectievelijke afstand tot de rota-tie-as in het kwadraat.
Ek � 12
� �dm � r 2x� � (ω2)
De uitdrukking � dm � r 2x noemt men het massatraagheidsmoment van het lichaam
aangeduid door de letter J. In de praktijk wordt deze somfunctie vaak geschreven als hetm � r2
m is de totale massa van het lichaam, r is de traagheidsstraal (gereduceerde straal) voorhet betreffende voorwerp.De traagheidsstraal is de straal waarop de massa van het lichaam geconcentreerdgedacht kan worden. Deze traagheidsstraal is dus niet gelijk aan de helft van de buiten-diameter van het lichaam.De dimensie van een massatraagheidsmoment is die van een massa � een lengte-een-heid in het kwadraat .... dus .. kg.m2 (SI = Systeme International).In het Technische Stelsel werd in plaats van massatraagheidsmoment vaak gesprokenvan het GD2. Met G wordt het gewicht in kgf bedoeld en in plaats van de traagheidsstraalheeft men gekozen voor een traagheidsdiameter. De dimensie is dus kgf.m2.
Omrekening van GD2 uit het Technisch Stelsel naar massatraagheidsmoment van hetSI:Aangezien de kilogramkracht van het Technisch Stelsel in waarde gelijk is aan de kilo-grammassa is omrekening alleen nodig ten aanzien van de traagheidsdiameter - straal-verhouding.
J � G � D2
4
De constante ”4” is terug te vinden in de verhouding diameterstraal
�2
.
Regelmatig duikt als omrekenfactor naar J ook 4g op. Bij deze factor is er dan inderdaadsprake van een massatraagheidsmoment, maar dan uitgedrukt in de eenheden van het
Technisch Stelsel. Als eenheid van massa is dan de ”Groot Massaal” Gg ingevoerd.
Dit massatraagheidsmoment, dat wordt uitgedrukt in kgf.s2.m wordt wel eens opgevoerdin oudere Duitse literatuur.
53
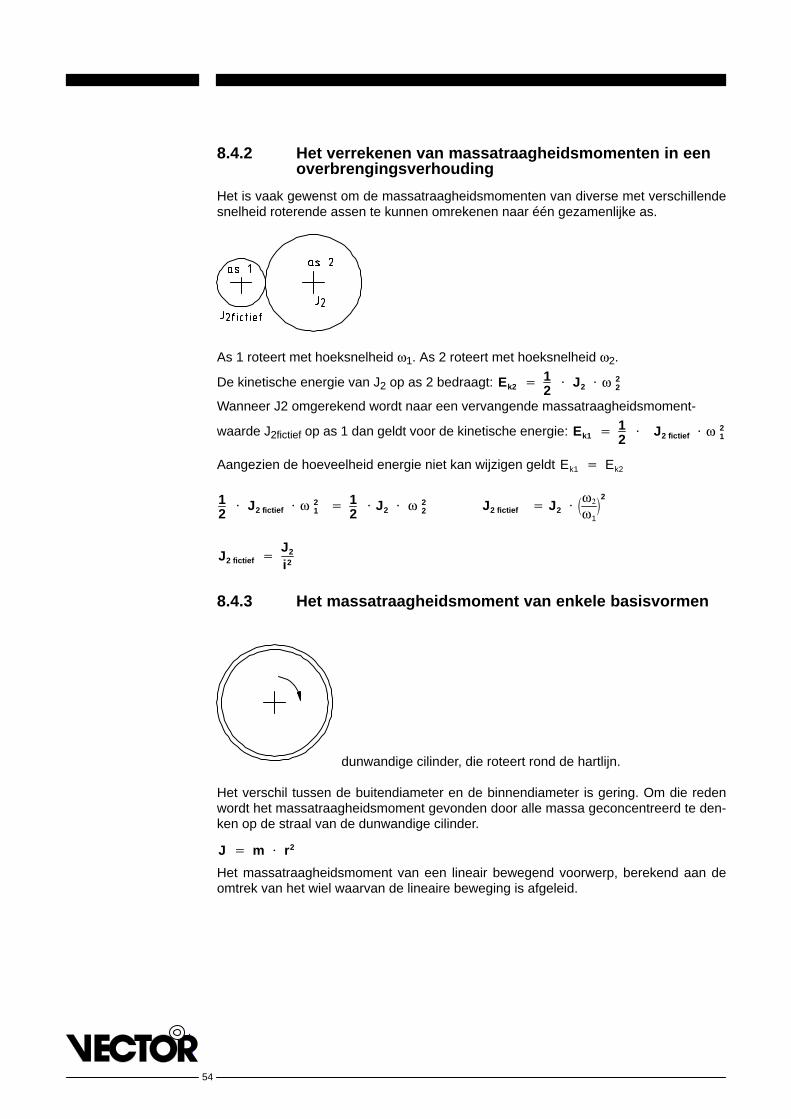
8.4.2 Het verrekenen van massatraagheidsmomenten in eenoverbrengingsverhouding
Het is vaak gewenst om de massatraagheidsmomenten van diverse met verschillendesnelheid roterende assen te kunnen omrekenen naar één gezamenlijke as.
As 1 roteert met hoeksnelheid ω1. As 2 roteert met hoeksnelheid ω2.
De kinetische energie van J2 op as 2 bedraagt: Ek2 � 12
� J2 � ω 22
Wanneer J2 omgerekend wordt naar een vervangende massatraagheidsmoment-
waarde J2fictief op as 1 dan geldt voor de kinetische energie: Ek1 � 12
� J2 fictief � ω 21
Aangezien de hoeveelheid energie niet kan wijzigen geldt Ek1 � Ek2
12
� J2 fictief � ω 21 � 1
2� J2 � ω 2
2 J2 fictief � J2 � ω2
ω1
�2
J2 fictief �J2
i2
8.4.3 Het massatraagheidsmoment van enkele basisvormen
dunwandige cilinder, die roteert rond de hartlijn.
Het verschil tussen de buitendiameter en de binnendiameter is gering. Om die redenwordt het massatraagheidsmoment gevonden door alle massa geconcentreerd te den-ken op de straal van de dunwandige cilinder.
J � m � r2
Het massatraagheidsmoment van een lineair bewegend voorwerp, berekend aan deomtrek van het wiel waarvan de lineaire beweging is afgeleid.
54
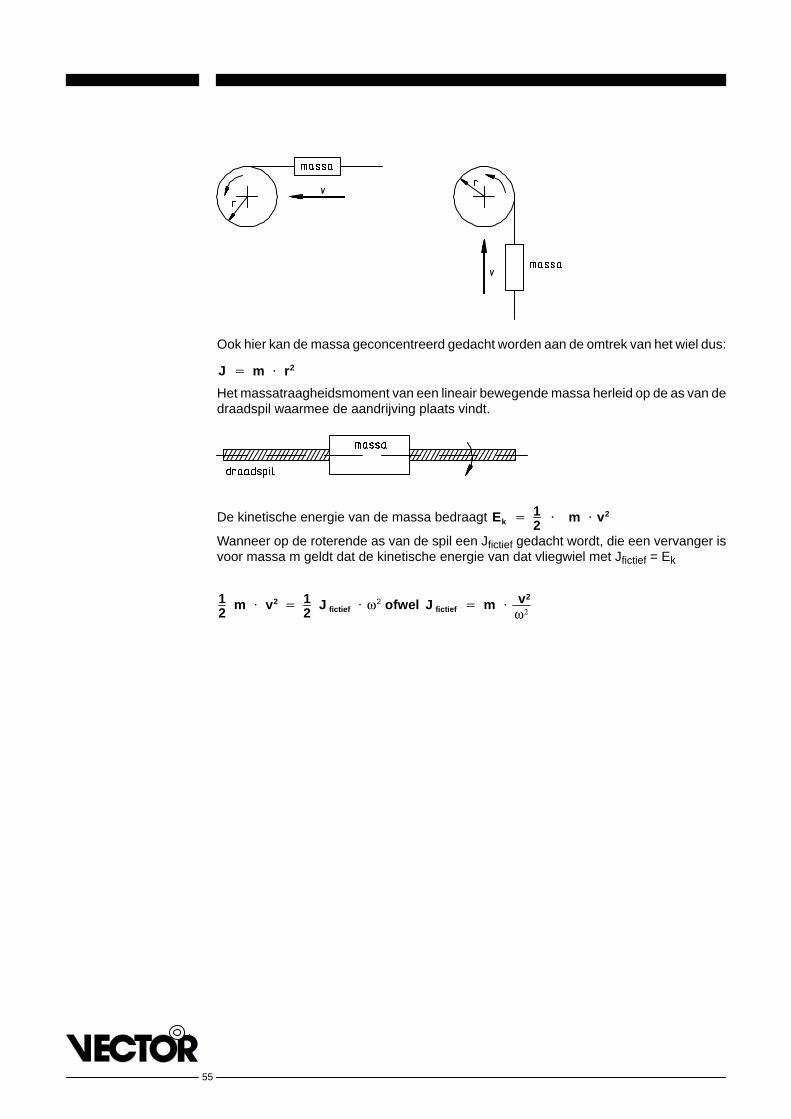
Ook hier kan de massa geconcentreerd gedacht worden aan de omtrek van het wiel dus:
J � m � r2
Het massatraagheidsmoment van een lineair bewegende massa herleid op de as van dedraadspil waarmee de aandrijving plaats vindt.
De kinetische energie van de massa bedraagt Ek � 12
� m � v2
Wanneer op de roterende as van de spil een Jfictief gedacht wordt, die een vervanger isvoor massa m geldt dat de kinetische energie van dat vliegwiel met Jfictief = Ek
12
m � v2 � 12
J fictief � ω2 ofwel J fictief � m � v2
ω2
55
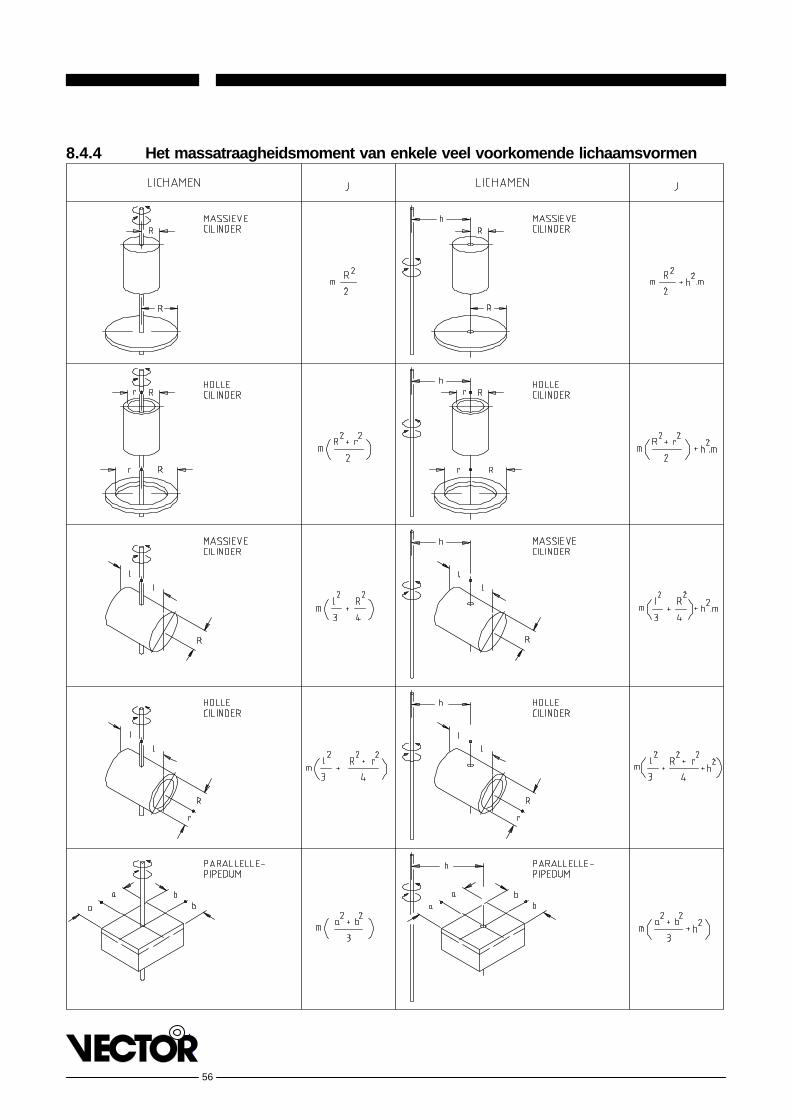
8.4.4 Het massatraagheidsmoment van enkele veel voorkomende lichaamsvormen
56
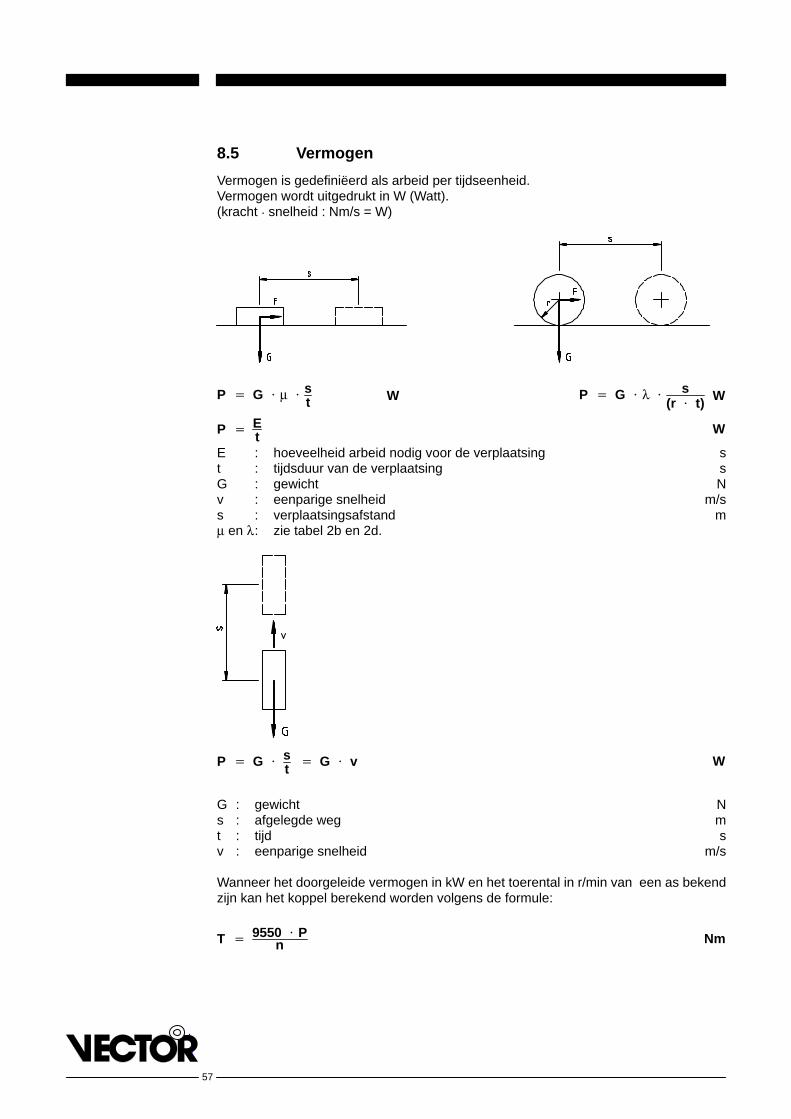
8.5 Vermogen
Vermogen is gedefiniëerd als arbeid per tijdseenheid.Vermogen wordt uitgedrukt in W (Watt).(kracht � snelheid : Nm/s = W)
P � G � µ � st W P � G � λ � s
(r � t) W
P � Et
W
E : hoeveelheid arbeid nodig voor de verplaatsing st : tijdsduur van de verplaatsing sG : gewicht Nv : eenparige snelheid m/ss : verplaatsingsafstand mµ en λ: zie tabel 2b en 2d.
P � G � st � G � v W
G : gewicht Ns : afgelegde weg mt : tijd sv : eenparige snelheid m/s
Wanneer het doorgeleide vermogen in kW en het toerental in r/min van een as bekendzijn kan het koppel berekend worden volgens de formule:
T � 9550 � Pn Nm
57
9 Toepassingsberekeningen
9.1 Hijswerkberekening
P � G � vη W
G : last gewichtskracht Nv : hijssnelheid m/s
Voorbeeld:Te hijsen last 10 ton, hijssnelheid 0,5 m/s, ηtotaal = 0,95Berekening benodigd vermogen:lastkracht 10 ton = 10.000 kg � 100.000 N
Pbenodigd = 100.000 ∗ 0,5η = 52.630 Watt = 52,63 kW
9.2 Kraanrijwerkaandrijving
Deze berekeningswijze geldt eveneens voor:– de aandrijving voor traversewagens.– een rollenbaan met stalen rollen om objecten te verplaatsenOpmerking: De rijwerkberekening dient doorgaans enkele malen herhaald te worden metgewijzigde gegevens voordat een bevredigend resultaat gevonden is. Soms is hetgewenste resultaat alleen te bereiken door het gebruik van een geregelde aandrijving.1. De rijweerstand per eenheid te verplaatsen massa : K
K1 � 0, 196D�f � d
0, 02� �
0, 01� � 0, 196
D�f � d
0, 02� 0, 05�
D = Loopwieldiameter in m.d = diameter astap in m.f = lagerwrijvingscoëfficiënt.
Doorgaans f = 0,005 voor rollagers en 0,1 voor glijlagersλ = rolweerstandsarm in m (zie 8.2.5) Voor een gietijzeren wiel op een stalen rail
λ = 0,0005 m
K2 is de eenheidsweerstand voor het schranken van de wielflenzen tegen de rail. K2is afhankelijk van de wiellagering en bedraagt 0,03 N/kg bij rollagers en 0,05 N/kg bijglijlagers op de wielas.K = K1 + K2
Indien de baan hellend is met h% is hiervoor een extra eenheidskracht K3 nodig :
K3 � 9, 81 � h1 � 1h2
1� � 1
� ........ N � kg Waarbij h1 � h100
2. Slipvrij aanlopen zonder last amax:
amax � 1, 47 � Xc
XB K m�s2.
De factor 1,47 is samengesteld uit de zwaartekrachtversnelling van 9,81 m/s2 en eenwrijvingscoëfficient tussen wiel en rail van 0,15.De onder 15 en 19 te berekenen versnelling en vertraging dienen hieronder te blijven.XC = het aantal aangedreven loopwielenXB = het aantal loopwielen
58
3. Totale rijweerstrand : FrKraan/ kat/ wagen Leeg : Fr1 = K*(m1 + m2) = NKraan/ kat/ wagen Belast : Fr2 = K* mt NKraan/ kat/ wagen t.g.v. helling : Fr3 = K3 * mt = N
4. Vereist vermogen voor het overwinnen van de rijweerstand bij onbelaste en belastekraan (totaal benodigd vermogen).
P1 �Fr1 � v
�� W
P2 �Fr2 � v
�� W
P3 �(Fr2 � Fr3) � v
�� W
P4 �(Fr2 � Fr3 Fw) � v
�� W
v = rijsnelheid in m/sη = rendement van de totale overbrengingFw = windstuwkracht in N. De grootte hiervan wordt bepaald door de windsnelheid, het windvangend oppervlaken een aerodynamische weerstandscoëfficiënt, die afhangt van de vorm van degetroffen oppervlakken. De daartoe te volgen werkwijze en waarden worden aange-geven in NEN 2018. (Een veel gebruikte stuwdrukwaarde is 250 N/m2. Deze stuw-drukwaarde is gebaseerd op windkracht 8 volgens de Beaufort schaal).
5. Vereist motorvermogen per zijde bij extreem éénzijdige opstelling van de loopkat Pmax
Pmax �P3
2�
m2 � 2(m2 � mL)mt
.P4 P3
2� W
6. Geselecteerde motor:Aantal: XA Type:Vermogen: / kW Toerental(len) nmot : / t/minPmot = totaal geïnstalleerd motorvermogen Remkoppel TR : NmNominaal koppel Tnom : NmGemiddeld aanloopkoppel TH : NmMassatraagheidsmoment motor Jmot : kgm2
Jmot+Z : kgm2
Jmot+Z = massatraagheidsmoment van de motor met verzwaarde ventilator ofeen ander toegevoegd massatraagheidsmoment (bijvoorbeeld een koppeling op de motoras).
7. Vereiste overbrengingsverhouding tussen wiel en motor:
itot �nmot � � � D
v � 60wanneer na de reductiekast een open overbrenging wordt toegepast met een over-brengingsverhouding iopen dan is een overbrengingsverhouding in de reductiekast iredgewenst van:
ired �Itot
Iopen�
8. Geselecteerde reductiekast:Aantal: Type:
59
Overbrengingsverhouding:Indien een wormwielkast wordt toegepast dient deze met minimaal een 3–gangigeworm te zijn uitgevoerd.Uitgaande toerental(len) reductiekast: nuitgaand = / t/min
Wieltoerental(len) nwiel �nuitgaand
iopen� r/min
9. Aandrijfkracht tijdens aanlopen FA:
FA � TH �nmot � �
v � 9, 55� XA � N
10. Het massatraagheidsmoment van de motoras + evt. Z omgerekend als een lineairbewegende last:
mmotor � Jmot(�Z)
n2 � �
v2 � 91, 2� XA � kg
11. Kraan/ kat/ wagenmassa: m1 + m2 = kg+
12. Totaal-som van vaste massa’s mF = kg13. Massa van de last mL = kg
+14. Totaal-som van alle massa’s: mε = mF + mL = kg
15. Versnellingswaarde van de kraan / kat / wagen; onbelast aA1 , resp. belast aA2:
aA1 �FA � Fr1
mF� m�s2
aA2 �FA ( Fr2 � Fr3 � Fw)
mg� m�s2
Deze waarden dienen te liggen onder het niveau van punt 2 anders treedt wielslip op.
16. Aanlooptijd van kraan/ kat/ wagen; onbelast ta1 , resp. belast ta2:
ta1 � vaA1
� s
ta2 � vaA2
� s
Volgens de VDE voorschriften dienen kortsluitrotormotoren standaard binnen 5 s aante lopen. In de praktijk dient een waarde aangehouden te worden van ca. 3,6 – 3,8 som de motor niet thermisch over te belasten en enige reserve te houden.
17. Afgelegde weg:
s1 � 12
� v � ta! � m
s2 � 12
� v � ta2 � m
18. De aandrijfkracht tijdens het remmen FB:
60

FB � TR �nmot
� � v � 9, 55� XA � N
19. Vertragingswaarde van de kraan / kat/ wagen; onbelast aB1 , resp. belast aB2
aB1 �FB � Fr1
mF� m�s2
aB2 �FB � Fr3 � Fr2 � Fw
mt� m�s2
Deze waarden dienen te liggen onder het niveau van punt 2 , anders treedt wielslipop.
20. Remtijd van kraan / kat / wagen; onbelast tB1, resp. belast tB2 :
tB1 � v aB1
� s
tB2 � v aB2
� s
21. Remweg kraan / kat / wagen ; onbelast sB1 , belast sB2 :
sB1 � 12
� v � tB1 � s
sB2 � 12
� v � tB2 � s
22. De lineair bewegende last omgerekend als een massatraagheidsmoment op de moto-ras:
J� �91, 2 � m� � v2
n2mot
� XA � kgm2
23. Toelaatbaar aantal schakelingen/h onder last: Z:
Z � Z0 �FA
J�
� kp � schak�h
1 Fr2
Jmot � XA
Z0 = toelaatbare nullastschakelfrequentie van de motor.kp = correctiefactor afhankelijk van de belasting en inschakelduur van de motor.
61
9.3 Wikkelsysteem
Hierbij wordt aangenomen, dat een constante trekkracht en een constante baansnelheidvereist zijn, alsmede dat gebruikt gemaakt wordt van een type regelbare motor met eenover het gehele toerentalbereik gelijkblijvend koppel. (Dit geldt voor gelijkstroom-shunt-motoren, wervelstroomaandrijvingen en frequentiegeregelde motoren).
Pwikkel � Fmax � vmax � rmax
(rmin � η)W
Fmax : trekkracht in de baan Nvmax : maximum wikkelsnelheid m/srmax : maximum wikkelrolstraal mrmin : minimum wikkelrolstraal mη : rendement van de installatie
Meestal is er sprake van lichtlopende rollen. Wanneer dit niet het geval is dient nog eenextra vermogenscomponent geleverd te worden voor het overwinnen van de wrijving inde lagering van de rollen.Deze extra component Prolwrijving wordt berekend volgens:
Prolwrijving � 0, 052 � µ � G � d � n W
G : gewicht van de volle rol Nd : diameter van de astap mn : toerental van de kleinste rol mµ : wrijvingscoëfficiënt
Voor het wikkelen dient dan een totaal aan vermogen geïnstalleerd te worden van
Ptotaal � Pwikkel � Prolwrijving W
9.4 Transportband-vermogensberekening
Deze berekening is een vereenvoudigde uitvoering van de transportbandberekening vol-gens DIN 22101 en geldt voor een door rollen ondersteunde transportband voor stort-goed.
P � L � f � c102
� (mm � v � Q) � Q � H102
kW
P : benodigd vermogen aan de aangedreven trommel van de transportband in kWL : hartafstand van de eindtrommels mf : weerstandscoëfficiënt
• gunstige bedrijfsomstandigheden (lichtlopende rollen en belading met geringeinwendige wrijving) f = 0,017
• normale omstandigheden f = 0,02• ongunstige omstandigheden (stoffige omgeving, lage temperaturen,
overbelading mogelijk f = 0,023 - 0,027• extreme omstandigheden (zeer lage temperatuur) f = 0,035
c : factor afhankelijk van de lengte L (in meters)
62
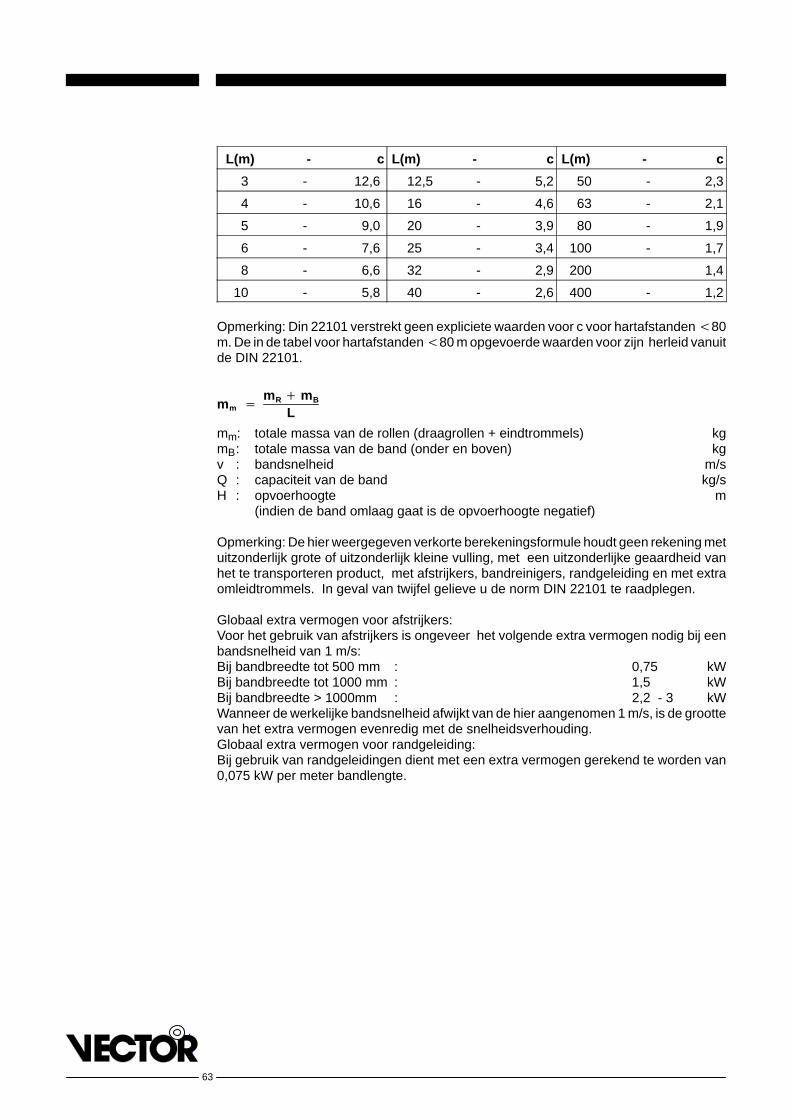
L(m) - c L(m) - c L(m) - c
3 - 12,6 12,5 - 5,2 50 - 2,3
4 - 10,6 16 - 4,6 63 - 2,1
5 - 9,0 20 - 3,9 80 - 1,9
6 - 7,6 25 - 3,4 100 - 1,7
8 - 6,6 32 - 2,9 200 1,4
10 - 5,8 40 - 2,6 400 - 1,2
Opmerking: Din 22101 verstrekt geen expliciete waarden voor c voor hartafstanden 80m. De in de tabel voor hartafstanden 80 m opgevoerde waarden voor zijn herleid vanuitde DIN 22101.
mm �mR � mB
L
mm: totale massa van de rollen (draagrollen + eindtrommels) kgmB: totale massa van de band (onder en boven) kgv : bandsnelheid m/sQ : capaciteit van de band kg/sH : opvoerhoogte m
(indien de band omlaag gaat is de opvoerhoogte negatief)
Opmerking: De hier weergegeven verkorte berekeningsformule houdt geen rekening metuitzonderlijk grote of uitzonderlijk kleine vulling, met een uitzonderlijke geaardheid vanhet te transporteren product, met afstrijkers, bandreinigers, randgeleiding en met extraomleidtrommels. In geval van twijfel gelieve u de norm DIN 22101 te raadplegen.
Globaal extra vermogen voor afstrijkers:Voor het gebruik van afstrijkers is ongeveer het volgende extra vermogen nodig bij eenbandsnelheid van 1 m/s:Bij bandbreedte tot 500 mm : 0,75 kWBij bandbreedte tot 1000 mm : 1,5 kWBij bandbreedte > 1000mm : 2,2 - 3 kWWanneer de werkelijke bandsnelheid afwijkt van de hier aangenomen 1 m/s, is de groottevan het extra vermogen evenredig met de snelheidsverhouding.Globaal extra vermogen voor randgeleiding:Bij gebruik van randgeleidingen dient met een extra vermogen gerekend te worden van0,075 kW per meter bandlengte.
63
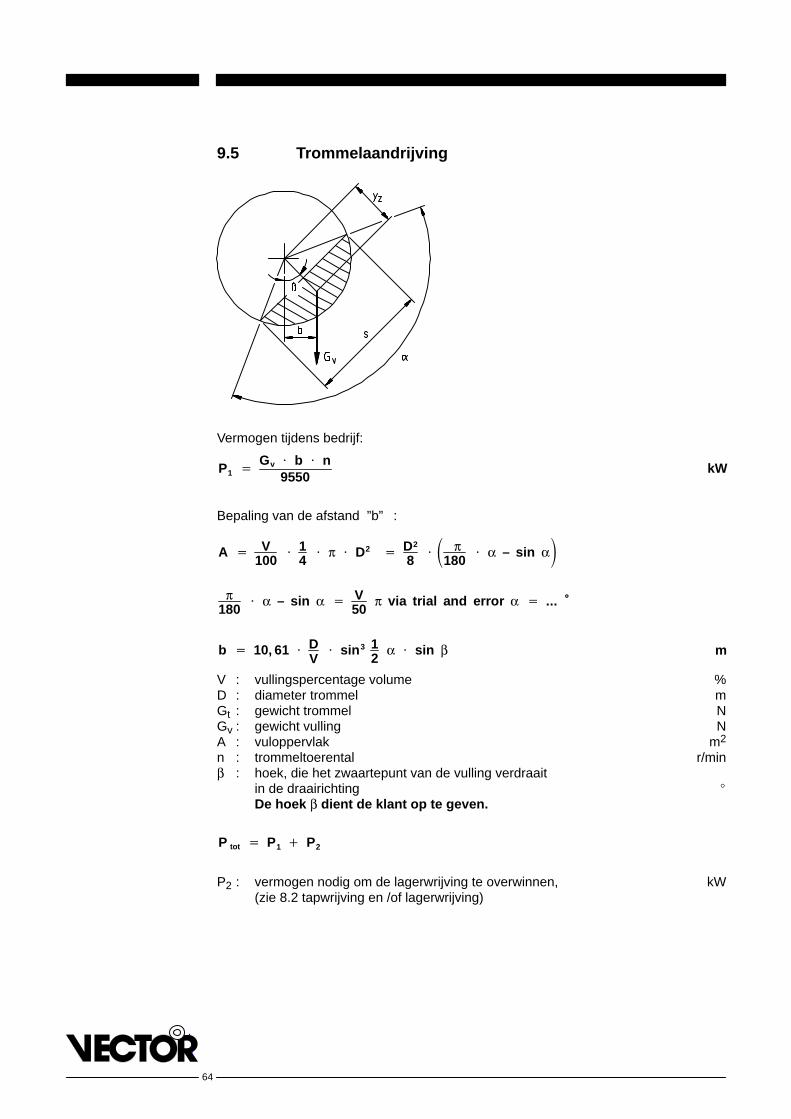
9.5 Trommelaandrijving
Vermogen tijdens bedrijf:
P1 � Gv � b � n9550
kW
Bepaling van de afstand ”b” :
A � V100
� 14
� π � D2 � D2
8� � π
180� α – sin α�
π180
� α – sin α � V50
π via trial and error α � ... �
b � 10, 61 � DV
� sin3 12
α � sin β m
V : vullingspercentage volume %D : diameter trommel mGt : gewicht trommel NGv : gewicht vulling NA : vuloppervlak m2
n : trommeltoerental r/minβ : hoek, die het zwaartepunt van de vulling verdraait
in de draairichting �
De hoek β dient de klant op te geven.
P tot � P1 � P2
P2 : vermogen nodig om de lagerwrijving te overwinnen, kW(zie 8.2 tapwrijving en /of lagerwrijving)
64
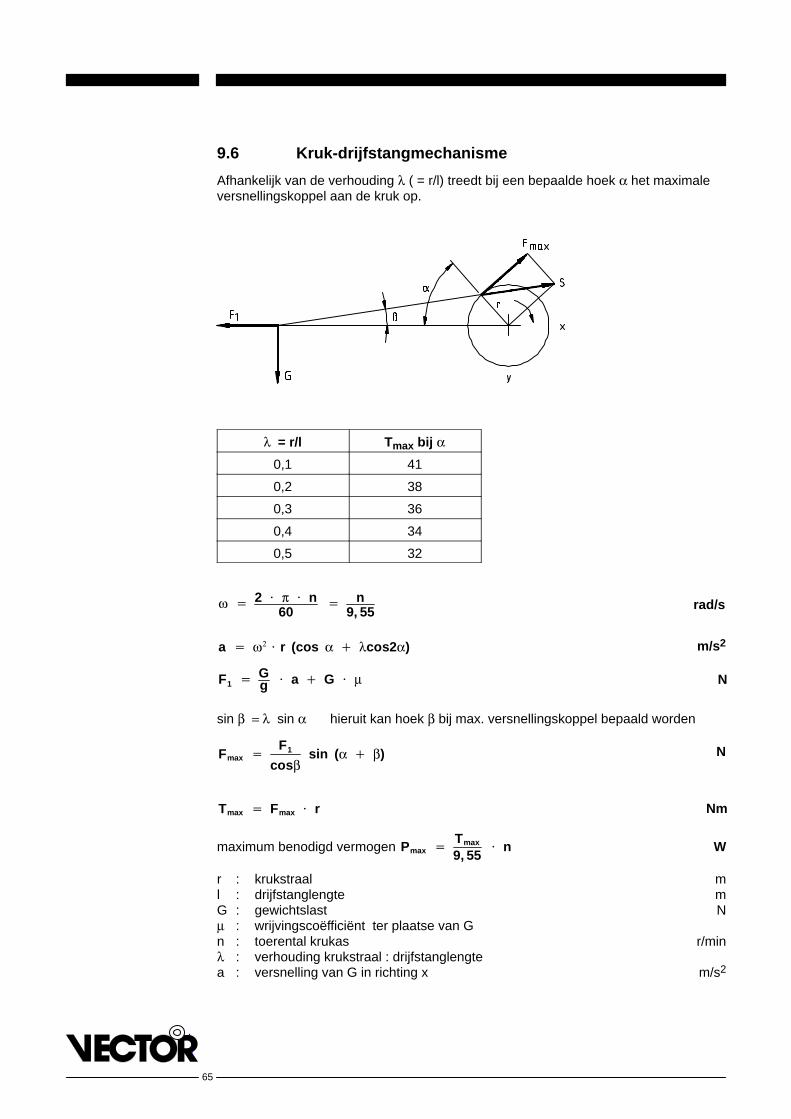
9.6 Kruk-drijfstangmechanisme
Afhankelijk van de verhouding λ ( = r/l) treedt bij een bepaalde hoek α het maximaleversnellingskoppel aan de kruk op.
λ = r/l Tmax bij α
0,1 41
0,2 38
0,3 36
0,4 34
0,5 32
ω � 2 � π � n60
� n9, 55 rad/s
a � ω2 � r (cos α � λcos2α) m/s2
F1 � Gg � a � G � µ N
sin β = λ sin α hieruit kan hoek β bij max. versnellingskoppel bepaald worden
Fmax �F1
cosβsin (α � β) N
Tmax � Fmax � r Nm
maximum benodigd vermogen Pmax � Tmax
9, 55� n W
r : krukstraal ml : drijfstanglengte mG : gewichtslast Nµ : wrijvingscoëfficiënt ter plaatse van Gn : toerental krukas r/minλ : verhouding krukstraal : drijfstanglengtea : versnelling van G in richting x m/s2
65
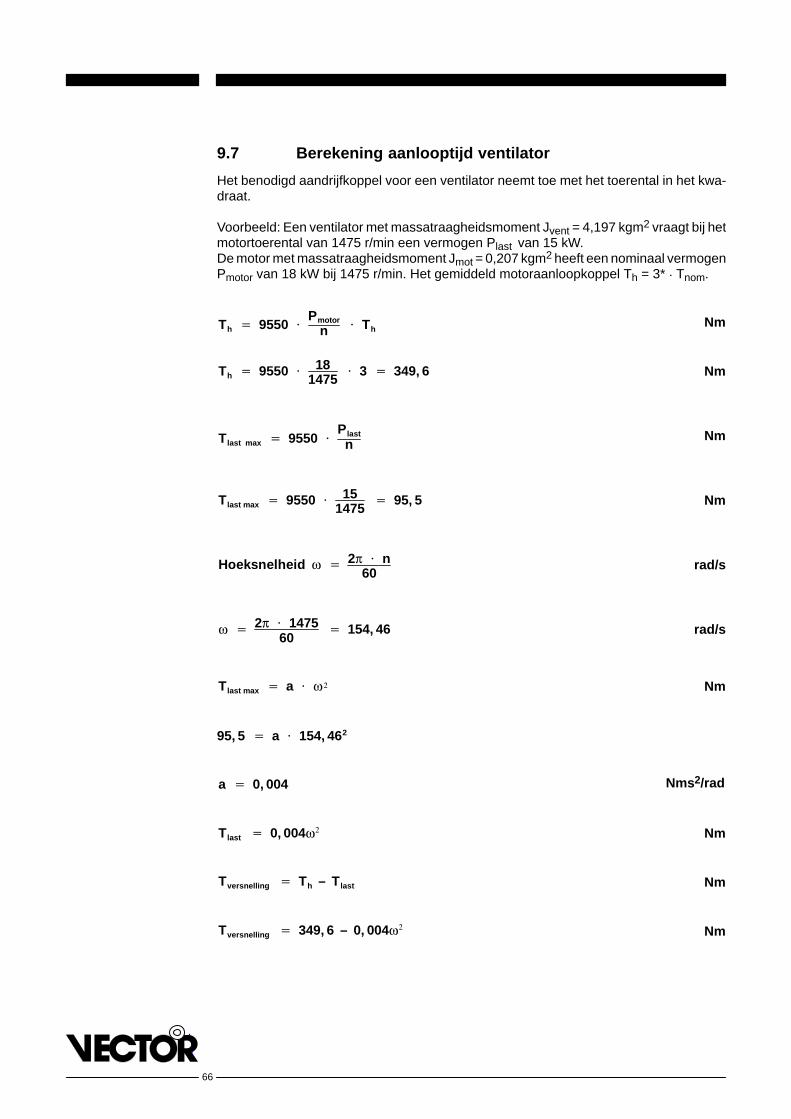
9.7 Berekening aanlooptijd ventilator
Het benodigd aandrijfkoppel voor een ventilator neemt toe met het toerental in het kwa-draat.
Voorbeeld: Een ventilator met massatraagheidsmoment Jvent = 4,197 kgm2 vraagt bij hetmotortoerental van 1475 r/min een vermogen Plast van 15 kW.De motor met massatraagheidsmoment Jmot = 0,207 kgm2 heeft een nominaal vermogenPmotor van 18 kW bij 1475 r/min. Het gemiddeld motoraanloopkoppel Th = 3* � Tnom.
Th � 9550 �Pmotor
n � ThNm
Th � 9550 � 181475
� 3 � 349, 6 Nm
Tlast max � 9550 �Plast
nNm
Tlast max � 9550 � 151475
� 95, 5 Nm
Hoeksnelheid ω � 2π � n60
rad/s
ω � 2π � 147560
� 154, 46 rad/s
Tlast max � a � ω2 Nm
95, 5 � a � 154, 462
a � 0, 004 Nms2/rad
Tlast � 0, 004ω2 Nm
Tversnelling � Th – Tlast Nm
Tversnelling � 349, 6 – 0, 004ω2 Nm
66

Ook is Tversnelling � J � q
q � dωdt
rad/s2
massatraagheidsmoment Jtot = Jlast + Jmotor = 4,197 + 0,207 = 4,404 kgm2
349, 6 – 0, 004ω2 � 4, 404 � dωdt
t � �ω
0
4, 404349, 6 – 0, 004ω2
dω
t � �ω
0
4, 4040, 004
� � 187400 – ω2
� dω 87400� � 295, 63
t � 4.4040, 004
� 12 � 295, 63
In �295, 63 � 154, 46295, 63 – 154, 46
�
t � 1, 8621 � ln450, 09141, 17
t � 2, 16 s
67
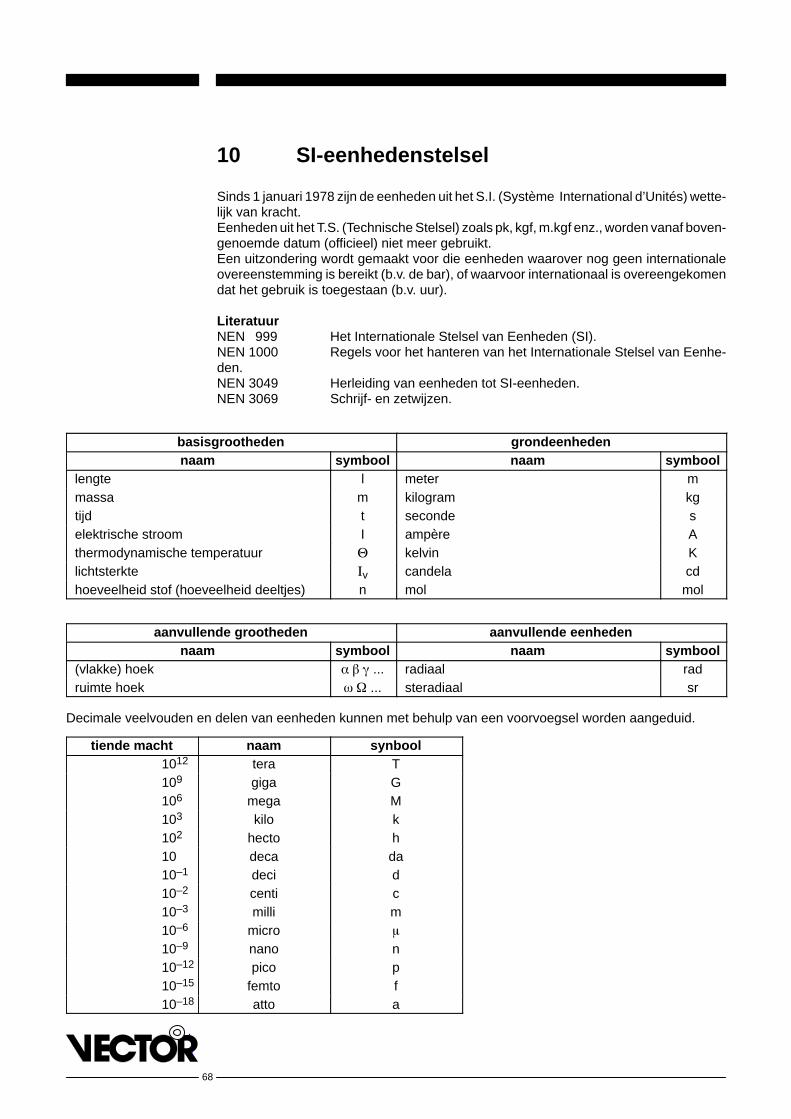
10 SI-eenhedenstelsel
Sinds 1 januari 1978 zijn de eenheden uit het S.I. (Système International d’Unités) wette-lijk van kracht.Eenheden uit het T.S. (Technische Stelsel) zoals pk, kgf, m.kgf enz., worden vanaf boven-genoemde datum (officieel) niet meer gebruikt.Een uitzondering wordt gemaakt voor die eenheden waarover nog geen internationaleovereenstemming is bereikt (b.v. de bar), of waarvoor internationaal is overeengekomendat het gebruik is toegestaan (b.v. uur).
LiteratuurNEN 999 Het Internationale Stelsel van Eenheden (SI).NEN 1000 Regels voor het hanteren van het Internationale Stelsel van Eenhe-den.NEN 3049 Herleiding van eenheden tot SI-eenheden.NEN 3069 Schrijf- en zetwijzen.
basisgrootheden grondeenhedennaam symbool naam symbool
lengte l meter mmassa m kilogram kgtijd t seconde selektrische stroom I ampère Athermodynamische temperatuur � kelvin Klichtsterkte �v candela cdhoeveelheid stof (hoeveelheid deeltjes) n mol mol
aanvullende grootheden aanvullende eenhedennaam symbool naam symbool
(vlakke) hoek � � � ... radiaal radruimte hoek � � ... steradiaal sr
Decimale veelvouden en delen van eenheden kunnen met behulp van een voorvoegsel worden aangeduid.
tiende macht naam synbool1012 tera T109 giga G106 mega M103 kilo k102 hecto h10 deca da10–1 deci d10–2 centi c10–3 milli m10–6 micro �
10–9 nano n10–12 pico p10–15 femto f10–18 atto a
68
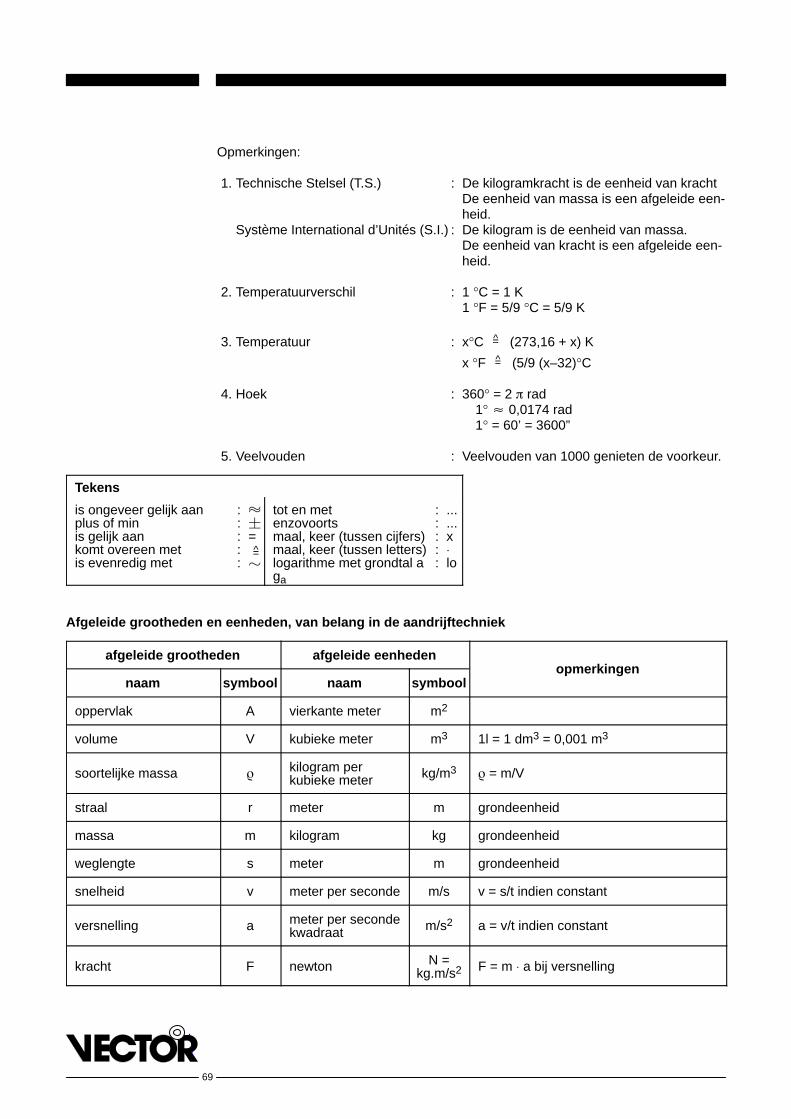
Opmerkingen:
1. Technische Stelsel (T.S.) : De kilogramkracht is de eenheid van krachtDe eenheid van massa is een afgeleide een-heid.
Système International d’Unités (S.I.) : De kilogram is de eenheid van massa.De eenheid van kracht is een afgeleide een-heid.
2. Temperatuurverschil : 1 °C = 1 K1 °F = 5/9 °C = 5/9 K
3. Temperatuur : x°C =̂ (273,16 + x) K
x °F =̂ (5/9 (x–32)°C
4. Hoek : 360° = 2 � rad1° � 0,0174 rad1° = 60’ = 3600”
5. Veelvouden : Veelvouden van 1000 genieten de voorkeur.
Tekens
is ongeveer gelijk aan : �plus of min : �is gelijk aan : =komt overeen met :is evenredig met : �
=̂
tot en met : ...enzovoorts : ...maal, keer (tussen cijfers) : xmaal, keer (tussen letters) : ⋅logarithme met grondtal a : loga
Afgeleide grootheden en eenheden, van belang in de aandrijftechniek
afgeleide grootheden afgeleide eenheden
naam symbool naam symboolopmerkingen
oppervlak A vierkante meter m2
volume V kubieke meter m3 1l = 1 dm3 = 0,001 m3
soortelijke massa kilogram perkubieke meter kg/m3 = m/V
straal r meter m grondeenheid
massa m kilogram kg grondeenheid
weglengte s meter m grondeenheid
snelheid v meter per seconde m/s v = s/t indien constant
versnelling a meter per secondekwadraat m/s2 a = v/t indien constant
kracht F newton N =kg.m/s2 F = m ⋅ a bij versnelling
69
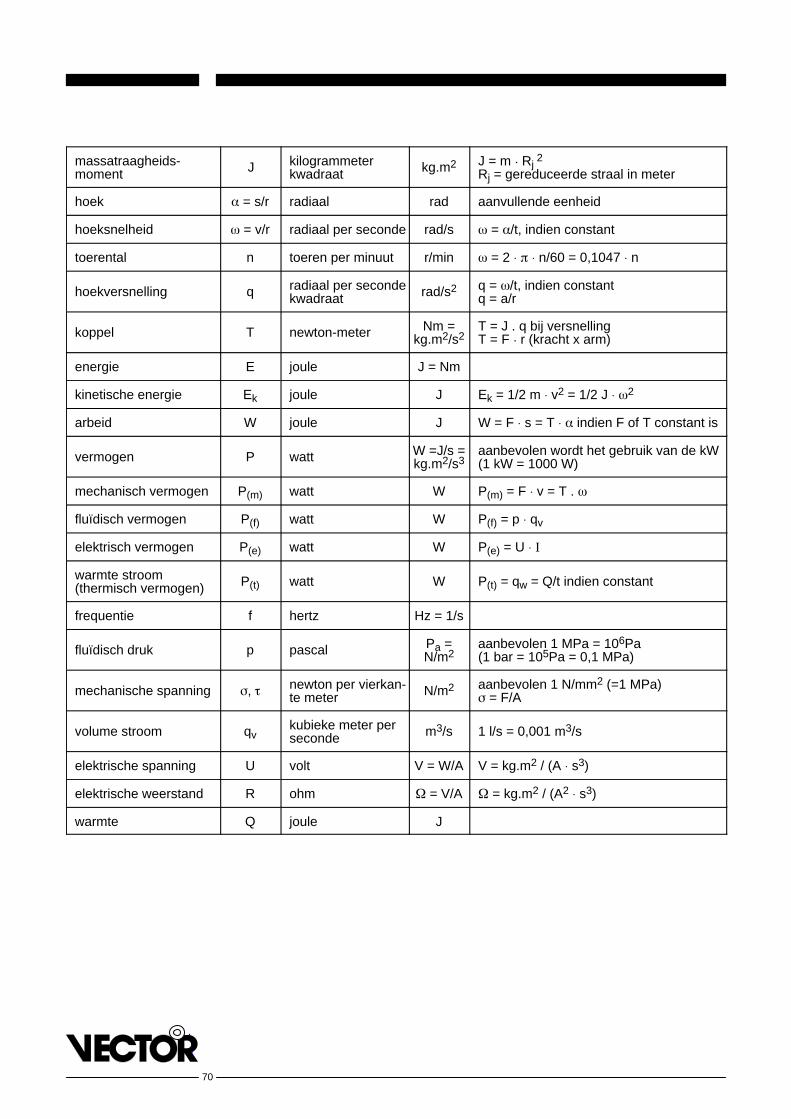
massatraagheids-moment J kilogrammeter
kwadraat kg.m2 J = m � Rj 2
Rj = gereduceerde straal in meter
hoek � = s/r radiaal rad aanvullende eenheid
hoeksnelheid � = v/r radiaal per seconde rad/s � = �/t, indien constant
toerental n toeren per minuut r/min � = 2 ⋅ � ⋅ n/60 = 0,1047 ⋅ n
hoekversnelling q radiaal per secondekwadraat rad/s2 q = �/t, indien constant
q = a/r
koppel T newton-meter Nm =kg.m2/s2
T = J . q bij versnellingT = F � r (kracht x arm)
energie E joule J = Nm
kinetische energie Ek joule J Ek = 1/2 m ⋅ v2 = 1/2 J ⋅ �2
arbeid W joule J W = F ⋅ s = T ⋅ � indien F of T constant is
vermogen P watt W =J/s =kg.m2/s3
aanbevolen wordt het gebruik van de kW(1 kW = 1000 W)
mechanisch vermogen P(m) watt W P(m) = F ⋅ v = T . �
fluïdisch vermogen P(f) watt W P(f) = p ⋅ qv
elektrisch vermogen P(e) watt W P(e) = U ⋅ I
warmte stroom(thermisch vermogen) P(t) watt W P(t) = qw = Q/t indien constant
frequentie f hertz Hz = 1/s
fluïdisch druk p pascal Pa =N/m2
aanbevolen 1 MPa = 106Pa(1 bar = 105Pa = 0,1 MPa)
mechanische spanning , � newton per vierkan-te meter N/m2 aanbevolen 1 N/mm2 (=1 MPa)
= F/A
volume stroom qvkubieke meter perseconde m3/s 1 l/s = 0,001 m3/s
elektrische spanning U volt V = W/A V = kg.m2 / (A ⋅ s3)
elektrische weerstand R ohm � = V/A � = kg.m2 / (A2 ⋅ s3)
warmte Q joule J
70
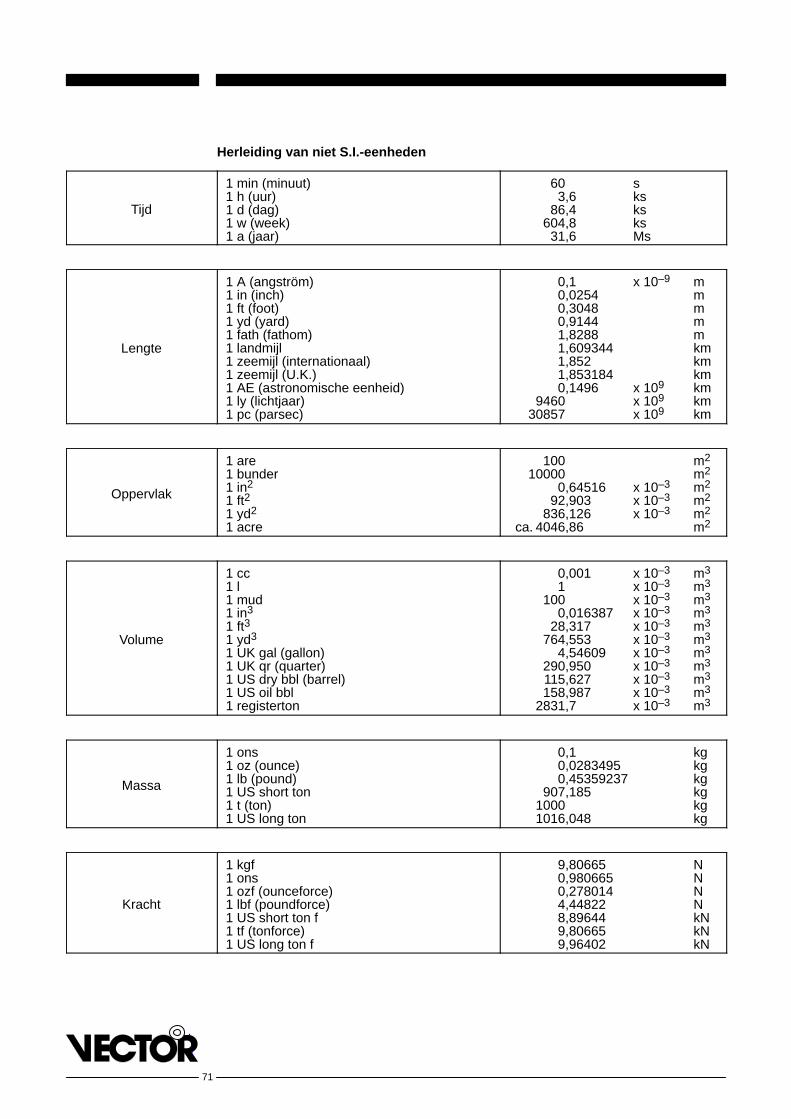
Herleiding van niet S.I.-eenheden
Tijd
1 min (minuut)1 h (uur)1 d (dag)1 w (week)1 a (jaar)
60 s3,6 ks
86,4 ks604,8 ks31,6 Ms
Lengte
1 A (angström)1 in (inch)1 ft (foot)1 yd (yard)1 fath (fathom)1 landmijl1 zeemijl (internationaal)1 zeemijl (U.K.)1 AE (astronomische eenheid)1 ly (lichtjaar)1 pc (parsec)
0,1 x 10–9 m0,0254 m0,3048 m0,9144 m1,8288 m1,609344 km1,852 km1,853184 km0,1496 x 109 km
9460 x 109 km30857 x 109 km
Oppervlak
1 are1 bunder1 in2
1 ft21 yd2
1 acre
100 m2
10000 m2
0,64516 x 10–3 m2
92,903 x 10–3 m2
836,126 x 10–3 m2
ca. 4046,86 m2
Volume
1 cc1 l1 mud1 in3
1 ft31 yd3
1 UK gal (gallon)1 UK qr (quarter)1 US dry bbl (barrel)1 US oil bbl1 registerton
0,001 x 10–3 m3
1 x 10–3 m3
100 x 10–3 m3
0,016387 x 10–3 m3
28,317 x 10–3 m3
764,553 x 10–3 m3
4,54609 x 10–3 m3
290,950 x 10–3 m3
115,627 x 10–3 m3
158,987 x 10–3 m3
2831,7 x 10–3 m3
Massa
1 ons1 oz (ounce)1 lb (pound)1 US short ton1 t (ton)1 US long ton
0,1 kg0,0283495 kg0,45359237 kg
907,185 kg1000 kg1016,048 kg
Kracht
1 kgf1 ons1 ozf (ounceforce)1 lbf (poundforce)1 US short ton f1 tf (tonforce)1 US long ton f
9,80665 N0,980665 N0,278014 N4,44822 N8,89644 kN9,80665 kN9,96402 kN
71
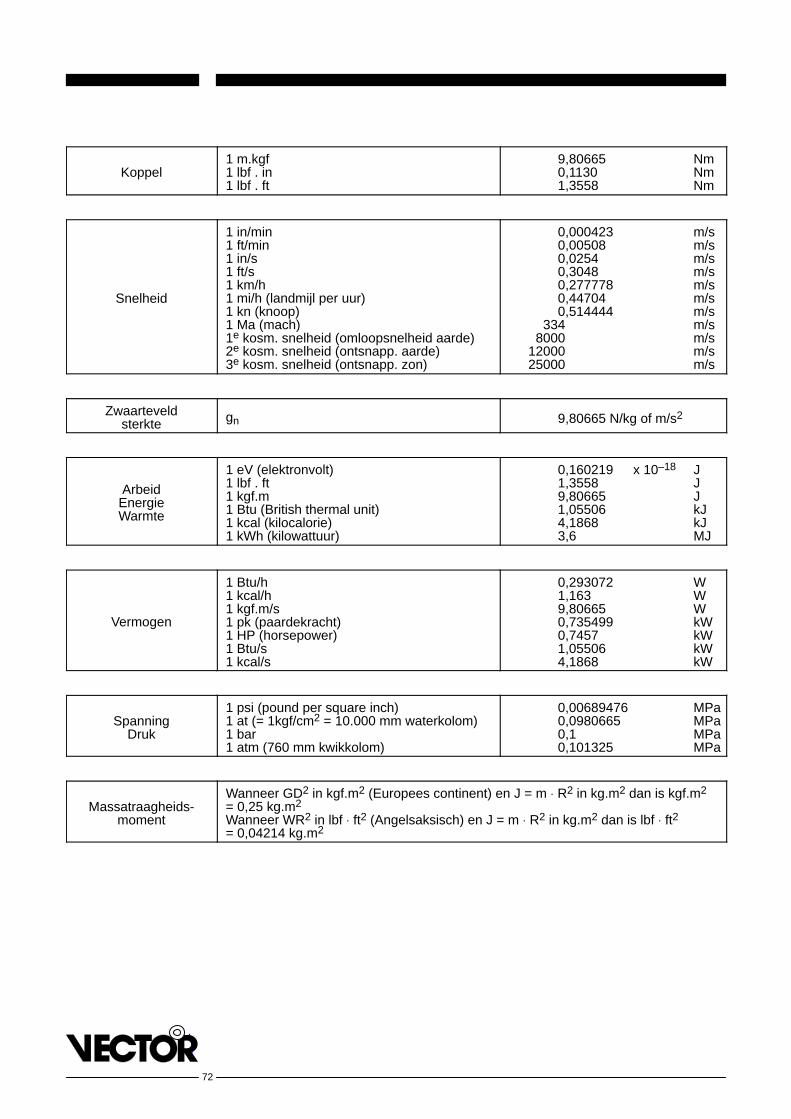
Koppel1 m.kgf1 lbf . in1 lbf . ft
9,80665 Nm0,1130 Nm1,3558 Nm
Snelheid
1 in/min1 ft/min1 in/s1 ft/s1 km/h1 mi/h (landmijl per uur)1 kn (knoop)1 Ma (mach)1e kosm. snelheid (omloopsnelheid aarde)2e kosm. snelheid (ontsnapp. aarde)3e kosm. snelheid (ontsnapp. zon)
0,000423 m/s0,00508 m/s0,0254 m/s0,3048 m/s0,277778 m/s0,44704 m/s0,514444 m/s
334 m/s8000 m/s
12000 m/s25000 m/s
Zwaarteveldsterkte gn 9,80665 N/kg of m/s2
ArbeidEnergieWarmte
1 eV (elektronvolt)1 lbf . ft1 kgf.m1 Btu (British thermal unit)1 kcal (kilocalorie)1 kWh (kilowattuur)
0,160219 x 10–18 J1,3558 J9,80665 J1,05506 kJ4,1868 kJ3,6 MJ
Vermogen
1 Btu/h1 kcal/h1 kgf.m/s1 pk (paardekracht)1 HP (horsepower)1 Btu/s1 kcal/s
0,293072 W1,163 W9,80665 W0,735499 kW0,7457 kW1,05506 kW4,1868 kW
SpanningDruk
1 psi (pound per square inch)1 at (= 1kgf/cm2 = 10.000 mm waterkolom)1 bar1 atm (760 mm kwikkolom)
0,00689476 MPa0,0980665 MPa0,1 MPa0,101325 MPa
Massatraagheids-moment
Wanneer GD2 in kgf.m2 (Europees continent) en J = m ⋅ R2 in kg.m2 dan is kgf.m2
= 0,25 kg.m2
Wanneer WR2 in lbf ⋅ ft2 (Angelsaksisch) en J = m ⋅ R2 in kg.m2 dan is lbf ⋅ ft2= 0,04214 kg.m2
72
Aantekeningen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
Volgcode: VTH028-02Vervaardigingsdatum: 1999-12Vervangt volgcode: VTH028-01
Vector Aandrijftechniek B.V. Telefax 010-41 55 552Industrieweg 175 - 3044 AS Rotterdam Service-telefoon 010-44 63 800Postbus 10085 - 3004 AB Rotterdam Internet: http://www.vector-aandrijftechniek.nlTelefoon 010-44 63 700 E-mail: [email protected]